
DESARROLLO DE UN SISTEMA DE CONTROL PARA EL LAZO DE ... · puente rectificador o puente de Graetz,...
99
DESARROLLO DE UN SISTEMA DE CONTROL PARA EL LAZO DE CORRIENTE DE UN CONVERTIDOR AC-DC TIPO BOOST BRIDGELESS Fernando Jesús Regino Ubarnes Universidad Nacional de Colombia Facultad de Ingeniería Departamento de Ingeniería Eléctrica y Electrónica Bogotá D. C. 2016
-
Upload
vuongthuan -
Category
Documents
-
view
216 -
download
0
Transcript of DESARROLLO DE UN SISTEMA DE CONTROL PARA EL LAZO DE ... · puente rectificador o puente de Graetz,...
DESARROLLO DE UN SISTEMA DE CONTROL PARA
EL LAZO DE CORRIENTE DE UN CONVERTIDOR
AC-DC TIPO BOOST BRIDGELESS
Fernando Jesús Regino Ubarnes
Universidad Nacional de Colombia
Facultad de Ingeniería
Departamento de Ingeniería Eléctrica y Electrónica
Bogotá D. C.
2016
DESARROLLO DE UN SISTEMA DE CONTROL PARA
EL LAZO DE CORRIENTE DE UN CONVERTIDOR
AC-DC TIPO BOOST BRIDGELESS
Fernando Jesús Regino Ubarnes
Tesis presentada como requisito parcial para obtener el título de:
Magister en Ingeniería - Automatización Industrial
Director:
Germán Andrés Ramos Fuentes, Ph.D. Profesor Asociado Departamento de Ingeniería Eléctrica y Electrónica
Universidad Nacional de Colombia
Facultad de Ingeniería
Departamento de Ingeniería Eléctrica y Electrónica
Bogotá D. C.
2016

¿No sabéis que los que corren en el
estadio, todos a la verdad corren,
pero uno solo se lleva el premio?
Corred de tal manera que lo
obtengáis. Todo aquel que lucha, de
todo se abstiene.
2 corintios 9: 24
Dedicatoria
A Dios.
Por haberme permitido llegar hasta
este punto y haberme dado todo para
lograr mis objetivos, además de su
infinita gracia y amor.
A mi madre Betty Cecilia.
Por haberme apoyado en todo
momento, por sus consejos, sus
valores, por la motivación constante
que me ha permitido ser una persona
de bien, pero más que nada, por su
amor incondicional.
A mi hermana Carmen Cecilia.
Por haberme apoyado en todo
momento, por ser mí ejemplo y
modelo a seguir.
A mi Abuela Camila María.
Por ser la cómplice de todas mis
locuras.
Reconocimientos
El autor desea expresar su reconocimiento a:
Al Ing. Germán Andrés Ramos por su paciencia, dedicación y entrega al
transmitirme su conocimiento.
A mis compañeros de laboratorio que con su compañía y colaboración
hicieron de la elaboración de esta tesis algo más ameno.
A mi familia en la fe, esas personas especiales en mi vida que con su ayuda,
sus oraciones y esa voz de aliento que siempre me ayudó a salir adelante.

i
Resumen
DESARROLLO DE UN SISTEMA DE CONTROL PARA EL LAZO DE
CORRIENTE DE UN CONVERTIDOR AC-DC TIPO BOOST
BRIDGELESS
Por:
Fernando Jesús Regino Ubarnes
Maestría en Ingeniería – Automatización Industrial
UNIVERSIDAD NACIONAL DE COLOMBIA
Facultad de Ingeniería
Director: Germán Andrés Ramos Fuentes, Ph.D.
Este documento describe el análisis comparativo entre las técnicas de Control
Proporcional Integral, Control Proporcional Integral Generalizado, control basado
en Observador GPI y Control Resonante. Esta comparación se da en el contexto
de corrección de factor de potencia y disminución del porcentaje de distorsión
armónica total. Las técnicas de control mencionadas se aplicaron a un convertidor
AC-DC tipo Boost Bridgeless, se realizaron simulaciones y experimentaciones en
condiciones nominales. Se encontró que el control basado en Observador GPI
presentó un mejor desempeño ya que logra un porcentaje de distorsión armónica
total de 1.9% y un factor de potencia de 1, siendo este el mejor resultado.
Palabras claves: control proporcional, control proporcional integral
generalizado, control resonante, factor de potencia, distorsión armónica total

ii
Abstract
This document describes the comparative analysis of four control techniques:
Proportional Integral Control, Generalized Proportional Integral Control,
Generalized Proportional Integral observer-based Control and Resonant Control.
The comparison was made on the context of power factor correction and total
harmonic distortion reduction. These control techniques were tested on AC-DC
Boost bridgeless converter. Simulations and experiments were made and it was
found the Generalized Proportional Integral observer-based Control has the best
performance since it is capable of reducing the THD to 1.9% and achieves a
unitary power factor.
Keywords: Proportional Integral Control, Generalized Proportional Integral
Control, Generalized Proportional Integral observer-based Control, Resonant
Control, power factor, total harmonic distortion.
iii
Contenido
Resumen ............................................................................................................................... i
Abstract ............................................................................................................................... ii
Contenido ........................................................................................................................... iii
Lisa De Figuras .................................................................................................................... v
Lista de tablas .................................................................................................................... vii
1. Introducción.................................................................................................................. 1
2. Descripción del convertidor AC-DC tipo Boost Bridgeless ........................................ 5
2.1. Sensores de medida de corriente y tensión ......................................................... 7
2.2. Plataforma de implementación de estrategias de control: xPC Target ............... 9
3. Modelo Matemático de la planta ............................................................................. 12
4. Objetivos y estrategias de control. .......................................................................... 18
4.2. Objetivos de control ........................................................................................ 18
4.3. Estrategias de control ..................................................................................... 18
4.3.1. Control Proporcional Integral ........................................................................ 18
4.3.2. Control proporcional integral generalizado (GPI) .......................................... 20
4.3.3 Control basado en observador Proporcional Integral Generalizado (GPI) ...... 22
4.3.4 Control Resonante .......................................................................................... 25
5. Diseño y resultados de las estrategias de control ......................................................... 27
5.1. Control Proporcional Integral ........................................................................ 28
5.2. Control proporcional integral generalizado (GPI) .......................................... 33
5.3. Control basado en observador proporcional integral generalizado (GPI) ...... 38
5.4. Control Resonante. ......................................................................................... 43
5.5. Comparaciones ............................................................................................... 51
6. Conclusiones ............................................................................................................... 56
7. Bibliografía ................................................................................................................. 58
iv
ANEXOS ............................................................................................................................ 61
Anexo 1 Caracterización del sensor de corriente ................................................................ 62
Anexo 2 Caracterización sensor de voltaje ......................................................................... 66
Anexo 3 Circuito acondicionador de señales. ..................................................................... 70
Anexo 4 MOSFET IRFP260n ............................................................................................. 75
Anexo 5 Tarjeta de adquisición de datos NI6040E .............................................................. 77
v
Lisa De Figuras
Figura 1 a) Convertidor AC-DC con puente rectificador, b) Convertidor AC-DC conmutado 2
Figura 2 Señales de entrada y salida del puente rectificador -------------------------------------- 2
Figura 3 Voltaje del en el Condensador vs Corriente de Entrada --------------------------------- 3
Figura 4 Implementación del convertidor AC-DC Boost Bridgeless ------------------------------ 5
Figura 5 Resistencia de carga del PFC Boost Bridgeless ------------------------------------------- 6
Figura 6 Diagrama esquemático del PFC Boost Bridgeless --------------------------------------- 7
Figura 7 Diagrama del sensor de corriente LA 55-P ------------------------------------------------ 7
Figura 8 Diagrama del sensor de tensión LV 25-P -------------------------------------------------- 8
Figura 9 Señales provenientes del PFC y salidas PWM-------------------------------------------- 10
Figura 10 Señales provenientes del PFC y salidas PWM ------------------------------------------ 10
Figura 11 Diagrama básico de un PFC --------------------------------------------------------------- 12
Figura 12 Diagrama esquemático del PFC Boost Bridgeless ------------------------------------- 13
Figura 13 recorrido de la corriente en el semi-ciclo positivo con Q1 y Q2 apagados -------- 13
Figura 14 recorrido de la corriente en el semi-ciclo positivo con Q1 encendido y Q2
apagado ---------------------------------------------------------------------------------------------------- 14
Figura 15 recorrido de la corriente en el semi-ciclo negativo con Q1 y Q2 apagados ------- 14
Figura 16 recorrido de la corriente en el semi-ciclo negativo con Q1 apagado y Q2
encendido--------------------------------------------------------------------------------------------------- 14
Figura 17 Diagrama de bloques del PFC ------------------------------------------------------------ 17
Figura 18 Diagrama de bloques del control PI. ----------------------------------------------------- 19
Figura 19 Diagrama de bloques del control GPI para m=1. -------------------------------------- 22
Figura 20 Diagrama de bloques del control basado en Observador GPI. ---------------------- 24
Figura 21 Diagrama de bloques del control resonante. -------------------------------------------- 26
Figura 22 Diagrama de bode lazo abierto. ----------------------------------------------------------- 29
Figura 23 Simulación de corriente y referencia del control PI ----------------------------------- 30
Figura 24 Referencia de corriente vs corriente de entrada del sistema control PI ------------ 30
Figura 25 Datos medidos con el Analizador de redes al implementar control PI ------------ 31
Figura 26 Armónicos de la corriente (simulación) ----------------------------------------------- 32
Figura 27 Armónicos de la corriente (Implementación) ---------------------------------------- 32
Figura 28 Simulación de la corriente y la referencia de corriente Control GPI --------------- 35
vi
Figura 29 Referencia de corriente vs corriente de entrada del sistema control GPI ---------- 35
Figura 30 Datos medidos con el Analizador de redes al implementar control GPI ---------- 36
Figura 31 Armónicos de la corriente (Simulación) ---------------------------------------------- 37
Figura 32 Armónicos de la corriente (Implementación) ---------------------------------------- 37
Figura 33 Simulación de la corriente y la referencia de corriente Control basado en
observador GPI ------------------------------------------------------------------------------------------- 40
Figura 34 Referencia de corriente vs corriente de entrada del sistema Control basado en
observador GPI ------------------------------------------------------------------------------------------- 40
Figura 35 Datos Analizador de redes Control basado en observador GPI --------------------- 41
Figura 36 Armónicos de la corriente (Simulación) ---------------------------------------------- 42
Figura 37 Armónicos de la corriente (implementación) ---------------------------------------- 42
Figura 38 Diagrama de Bode control Resonante ---------------------------------------------------- 44
Figura 39 a) Diagrama de Nyquist control Resonante con márgenes de estabilidad b) D
Diagrama de Nyquist control Resonante -------------------------------------------------------------- 46
Figura 40 Simulación de la corriente y la referencia de corriente ------------------------------- 47
Figura 41 Referencia de corriente vs corriente de entrada del sistema implementación
control Resonante ----------------------------------------------------------------------------------------- 48
Figura 42 Datos Analizador de redes implementación control Resonante ---------------------- 48
Figura 43 Armónicos de la corriente (Simulación) ---------------------------------------------- 49
Figura 44 Armónicos de la corriente (Implementación) ---------------------------------------- 50
Figura 45 Diagrama de Bode en lazo cerrado de las cuatro estrategias de control. ---------- 52
Figura 46 Diagrama de Bode de la función de sensibilidad. -------------------------------------- 53
Figura 47 Armónicos de la corriente para las cuatro estrategias de control
(Implementación) ----------------------------------------------------------------------------------------- 54
Figura 48 Grafica de la ganancia del sensor de corriente ----------------------------------------- 62
Figura 49 Grafica de la ganancia del sensor de voltaje -------------------------------------------- 66
Figura 50 Circuito de acondicionamiento de señales. ---------------------------------------------- 70
Figura 51 PINOUT NI6040E --------------------------------------------------------------------------- 77
vii
Lista de tablas
Tabla 1 Valores nominales del sensor de corriente. -------------------------------------- 8
Tabla 2 Precisión y desempeño dinámico del sensor de corriente. --------------------- 8
Tabla 3 Valores nominales del sensor de tensión. ---------------------------------------- 9
Tabla 4 Precisión y desempeño dinámico del sensor de tensión. ----------------------- 9
Tabla 5 Características del ADC de la tarjeta PCI6040E ------------------------------- 11
Tabla 6 Parámetros de la planta ----------------------------------------------------------- 27
Tabla 7 Simulación e Implementación control PI ---------------------------------------- 33
Tabla 8 Simulación e Implementación control GPI -------------------------------------- 38
Tabla 9 Simulación e Implementación control basado en Observador GPI ----------- 43
Tabla 10 Parámetros del control basado en resonadores ------------------------------- 45
Tabla 11 Simulación e Implementación control Resonante ----------------------------- 50
Tabla 12 Comparación de resultados de las estrategias de control -------------------- 55
1
Capítulo 1. 1. Introducción
Gran parte de las aplicaciones de electrónica de potencia tienen un convertidor AC-
DC con corrección de factor de potencia (PFC). El factor de potencia (FP) y la
distorsión armónica total (THD) son criterios que se tienen en cuenta para evaluar la
calidad de la energía. Las cargas que afectan la calidad de la energía suministrada por
la red por lo general son no lineales, aumentando cada más vez las pérdidas [1].
Las cargas no lineales crean corrientes armónicas que se propagan en las redes de
transmisión y distribución eléctrica, lo cual es nocivo para algunos equipos y cargas
sensibles (ej. dispositivos de protección, bancos de condensadores, motores,
computadoras, variadores de velocidad ajustables, entre otros). Además causan
sobrecalentamiento en las líneas y transformadores de distribución [2][3].
Existen estándares para la regulación de armónicos en la línea de alimentación,
como el IEC 1000-3-2 [4], el EN61000-3-2 [5] y el estándar IEEE519 que regulan
los armónicos en la red eléctrica, este último limita el porcentaje del THD de la señal
de corriente de entrada a un 5% como máximo [6]. Los métodos de control utilizados
en fuentes de alimentación AC-DC conmutadas en su gran mayoría han adoptado
controladores con corrector de factor de potencia (PFC) cuyo objetivo es maximizar
la potencia activa consumida por la carga llevando el FP a la unidad, debido a que el
factor de potencia es una medida que indica la razón entre la potencia aparente y la
potencia activa, la cual se transforma en calor o trabajo (Potencia Real) [1].
La configuración básica de los convertidores AC-DC (figura 1a) utiliza diodos para
transformar la energía eléctrica de corriente alterna (CA) a corriente continua (CC).
Los convertidores AC-DC conmutados usan elementos semiconductores que actúan
como switches (BJT, IGBT, Mosfet, entre otros), estos permiten controlar el flujo de
2
la corriente (figura 1b). La principal desventaja de estos convertidores conmutados,
es la generación de armónicos y un alto porcentaje de THD [7].
a)
b)
Figura 1 a) Convertidor AC-DC con puente rectificador, b) Convertidor AC-DC conmutado
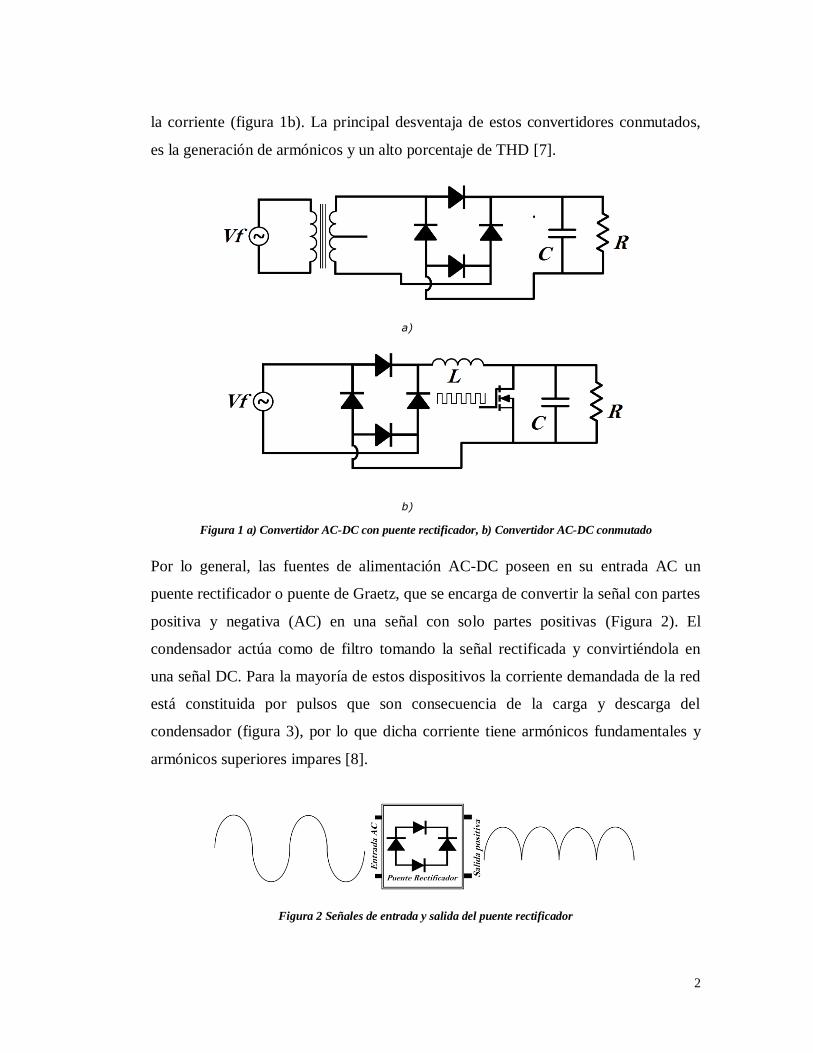
Por lo general, las fuentes de alimentación AC-DC poseen en su entrada AC un
puente rectificador o puente de Graetz, que se encarga de convertir la señal con partes
positiva y negativa (AC) en una señal con solo partes positivas (Figura 2). El
condensador actúa como de filtro tomando la señal rectificada y convirtiéndola en
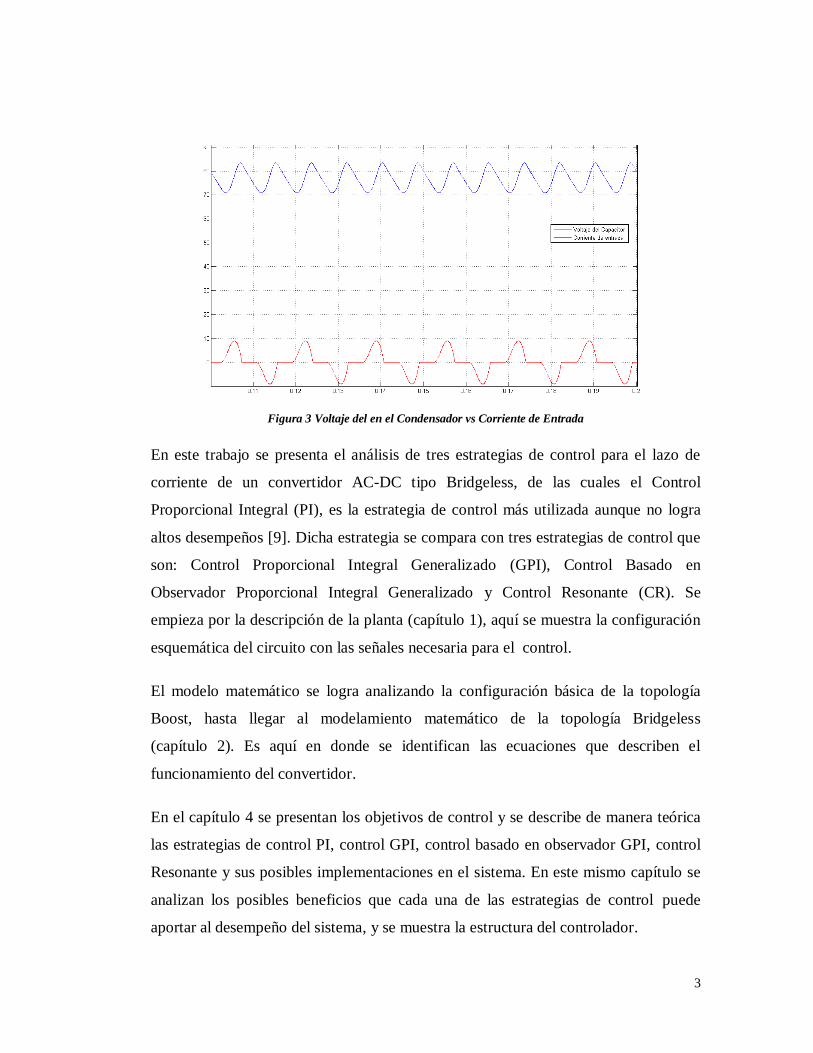
una señal DC. Para la mayoría de estos dispositivos la corriente demandada de la red
está constituida por pulsos que son consecuencia de la carga y descarga del
condensador (figura 3), por lo que dicha corriente tiene armónicos fundamentales y
armónicos superiores impares [8].
Figura 2 Señales de entrada y salida del puente rectificador
3
Figura 3 Voltaje del en el Condensador vs Corriente de Entrada
En este trabajo se presenta el análisis de tres estrategias de control para el lazo de
corriente de un convertidor AC-DC tipo Bridgeless, de las cuales el Control
Proporcional Integral (PI), es la estrategia de control más utilizada aunque no logra
altos desempeños [9]. Dicha estrategia se compara con tres estrategias de control que
son: Control Proporcional Integral Generalizado (GPI), Control Basado en
Observador Proporcional Integral Generalizado y Control Resonante (CR). Se
empieza por la descripción de la planta (capítulo 1), aquí se muestra la configuración
esquemática del circuito con las señales necesaria para el control.
El modelo matemático se logra analizando la configuración básica de la topología
Boost, hasta llegar al modelamiento matemático de la topología Bridgeless
(capítulo 2). Es aquí en donde se identifican las ecuaciones que describen el
funcionamiento del convertidor.
En el capítulo 4 se presentan los objetivos de control y se describe de manera teórica
las estrategias de control PI, control GPI, control basado en observador GPI, control
Resonante y sus posibles implementaciones en el sistema. En este mismo capítulo se
analizan los posibles beneficios que cada una de las estrategias de control puede
aportar al desempeño del sistema, y se muestra la estructura del controlador.
4
En el capítulo 5 se presentan las características de diseño y los resultados de la cada
una de las estrategias de control. Se presenta en esta sección las gráficas para el
análisis, las evidencias de los resultados obtenidos y una tabla comparativa de cada
uno de los controladores.
Finalmente se presentan las conclusiones (capítulo 6) del trabajo teniendo en cuenta
las los objetivos planteados en la propuesta, las recomendaciones y la bibliografía.
5
Capítulo 2.
2. Descripción del convertidor AC-DC tipo Boost
Bridgeless
Una de las topologías más utilizadas en circuitos de corrección de factor potencia es
el convertidor tipo Boost, debido a que en su configuración tiene el inductor ubicado
en la entrada, lo que reduce en gran manera las distorsiones armónicas de corriente
[10]. Otra característica favorable de la topología tipo Boost es que tiene un voltaje
más alto en la salida [11]. Debido a que esta topología inicialmente se planteó como
un convertidor DC-DC a la hora de implementarla como AC-DC es necesario utilizar
un puente rectificador a la entrada lo cual constituye una desventaja pues disminuye
la eficiencia y aumenta los costos del convertidor. A causa de estas desventajas los
convertidores elevadores tipo Boost Bridgeless se utilizan en un medio de mediana
potencia como cargadores de baterías de vehículos eléctricos [12].
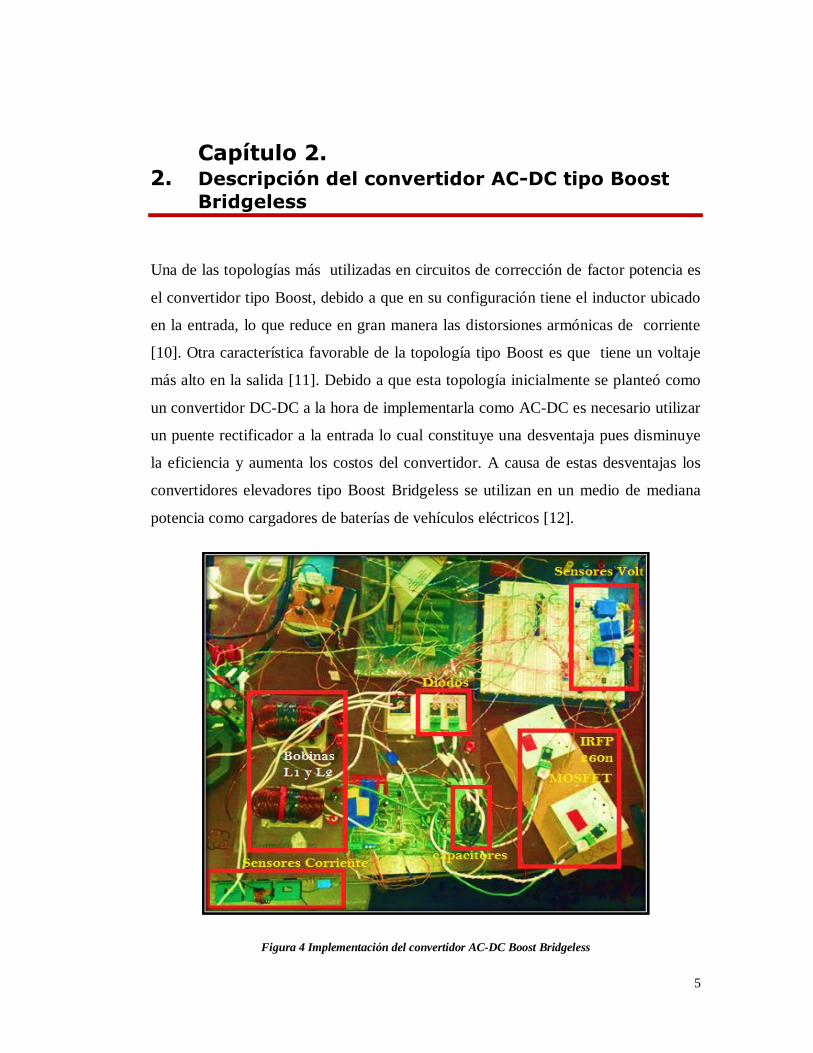
Figura 4 Implementación del convertidor AC-DC Boost Bridgeless
6
En la figura 4 se muestra el convertidor Boost Bridgeless utilizado en la
implementación, este funciona a una potencia nominal alrededor de 400W y está
formado por:
- Dos bobinas de 707µH, 0.5Ω a 20kHz medidas con un puente de impedancias
FLUKE-PM6306 de 1MHz.
- Dos capacitores electrolíticos de 330µF que en paralelo dan una capacitancia
total de 660µF.
- Dos diodos de potencia Fast Recovery.
- Dos MosFet IRFP260n.
- Tres sensores, uno de corriente y dos de tensión, los cuales se describen en la
siguiente sección.
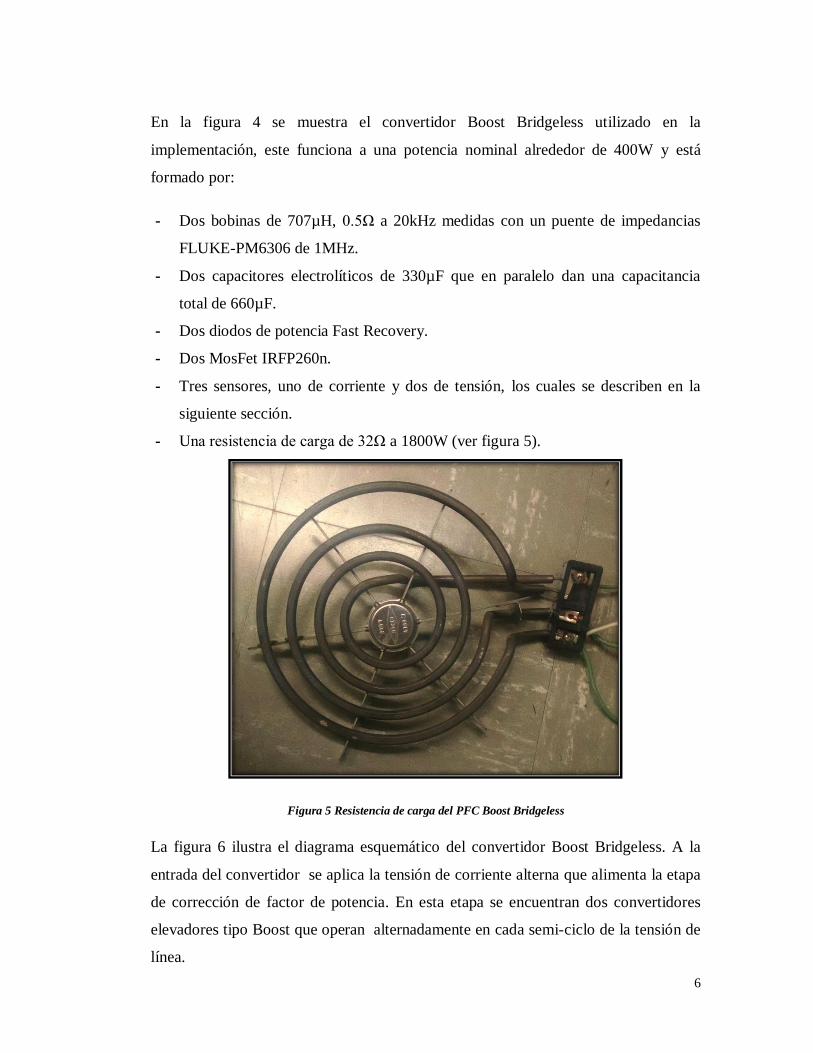
- Una resistencia de carga de 32Ω a 1800W (ver figura 5).
Figura 5 Resistencia de carga del PFC Boost Bridgeless
La figura 6 ilustra el diagrama esquemático del convertidor Boost Bridgeless. A la
entrada del convertidor se aplica la tensión de corriente alterna que alimenta la etapa
de corrección de factor de potencia. En esta etapa se encuentran dos convertidores
elevadores tipo Boost que operan alternadamente en cada semi-ciclo de la tensión de
línea.
7
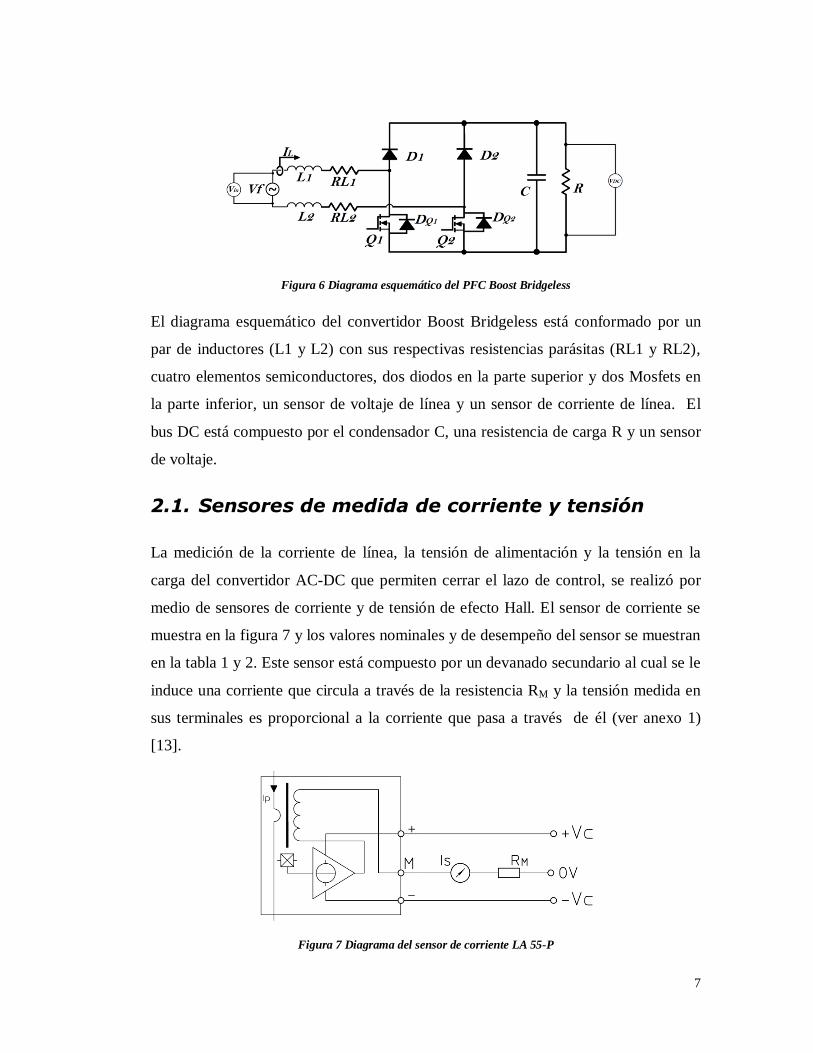
Figura 6 Diagrama esquemático del PFC Boost Bridgeless
El diagrama esquemático del convertidor Boost Bridgeless está conformado por un
par de inductores (L1 y L2) con sus respectivas resistencias parásitas (RL1 y RL2),
cuatro elementos semiconductores, dos diodos en la parte superior y dos Mosfets en
la parte inferior, un sensor de voltaje de línea y un sensor de corriente de línea. El
bus DC está compuesto por el condensador C, una resistencia de carga R y un sensor
de voltaje.
2.1. Sensores de medida de corriente y tensión
La medición de la corriente de línea, la tensión de alimentación y la tensión en la
carga del convertidor AC-DC que permiten cerrar el lazo de control, se realizó por
medio de sensores de corriente y de tensión de efecto Hall. El sensor de corriente se
muestra en la figura 7 y los valores nominales y de desempeño del sensor se muestran
en la tabla 1 y 2. Este sensor está compuesto por un devanado secundario al cual se le
induce una corriente que circula a través de la resistencia RM y la tensión medida en
sus terminales es proporcional a la corriente que pasa a través de él (ver anexo 1)
[13].
Figura 7 Diagrama del sensor de corriente LA 55-P
8
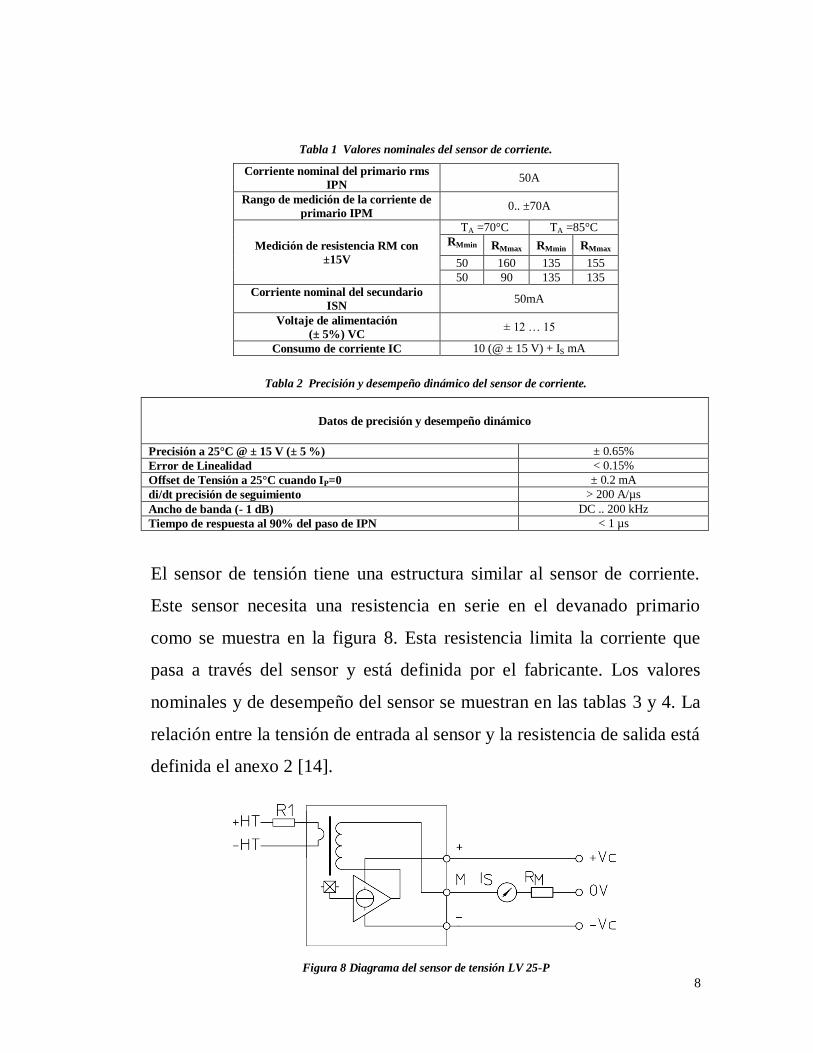
Tabla 1 Valores nominales del sensor de corriente.
Corriente nominal del primario rms
IPN 50A
Rango de medición de la corriente de
primario IPM 0.. ±70A
Medición de resistencia RM con
±15V
TA =70°C TA =85°C
RMmin RMmax RMmin RMmax
50 160 135 155
50 90 135 135
Corriente nominal del secundario
ISN 50mA
Voltaje de alimentación
(± 5%) VC ± 12 … 15
Consumo de corriente IC 10 (@ ± 15 V) + IS mA
Tabla 2 Precisión y desempeño dinámico del sensor de corriente.
Datos de precisión y desempeño dinámico
Precisión a 25°C @ ± 15 V (± 5 %) ± 0.65%
Error de Linealidad < 0.15%
Offset de Tensión a 25°C cuando IP=0 ± 0.2 mA
di/dt precisión de seguimiento > 200 A/µs
Ancho de banda (- 1 dB) DC .. 200 kHz
Tiempo de respuesta al 90% del paso de IPN < 1 µs
El sensor de tensión tiene una estructura similar al sensor de corriente.
Este sensor necesita una resistencia en serie en el devanado primario
como se muestra en la figura 8. Esta resistencia limita la corriente que
pasa a través del sensor y está definida por el fabricante. Los valores
nominales y de desempeño del sensor se muestran en las tablas 3 y 4. La
relación entre la tensión de entrada al sensor y la resistencia de salida está
definida el anexo 2 [14].
Figura 8 Diagrama del sensor de tensión LV 25-P
9
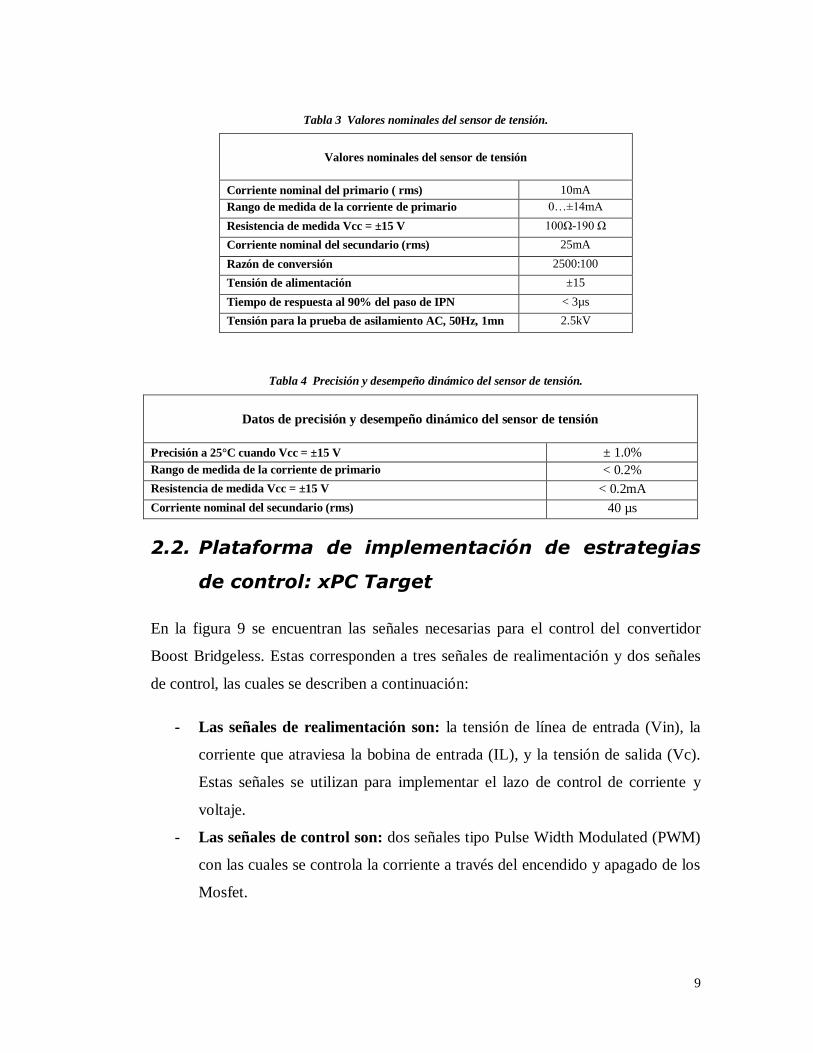
Tabla 3 Valores nominales del sensor de tensión.
Valores nominales del sensor de tensión
Corriente nominal del primario ( rms) 10mA
Rango de medida de la corriente de primario 0…±14mA
Resistencia de medida Vcc = ±15 V 100Ω-190 Ω
Corriente nominal del secundario (rms) 25mA
Razón de conversión 2500:100
Tensión de alimentación ±15
Tiempo de respuesta al 90% del paso de IPN < 3µs
Tensión para la prueba de asilamiento AC, 50Hz, 1mn 2.5kV
Tabla 4 Precisión y desempeño dinámico del sensor de tensión.
Datos de precisión y desempeño dinámico del sensor de tensión
Precisión a 25°C cuando Vcc = ±15 V ± 1.0%
Rango de medida de la corriente de primario < 0.2%
Resistencia de medida Vcc = ±15 V < 0.2mA
Corriente nominal del secundario (rms) 40 µs
2.2. Plataforma de implementación de estrategias
de control: xPC Target
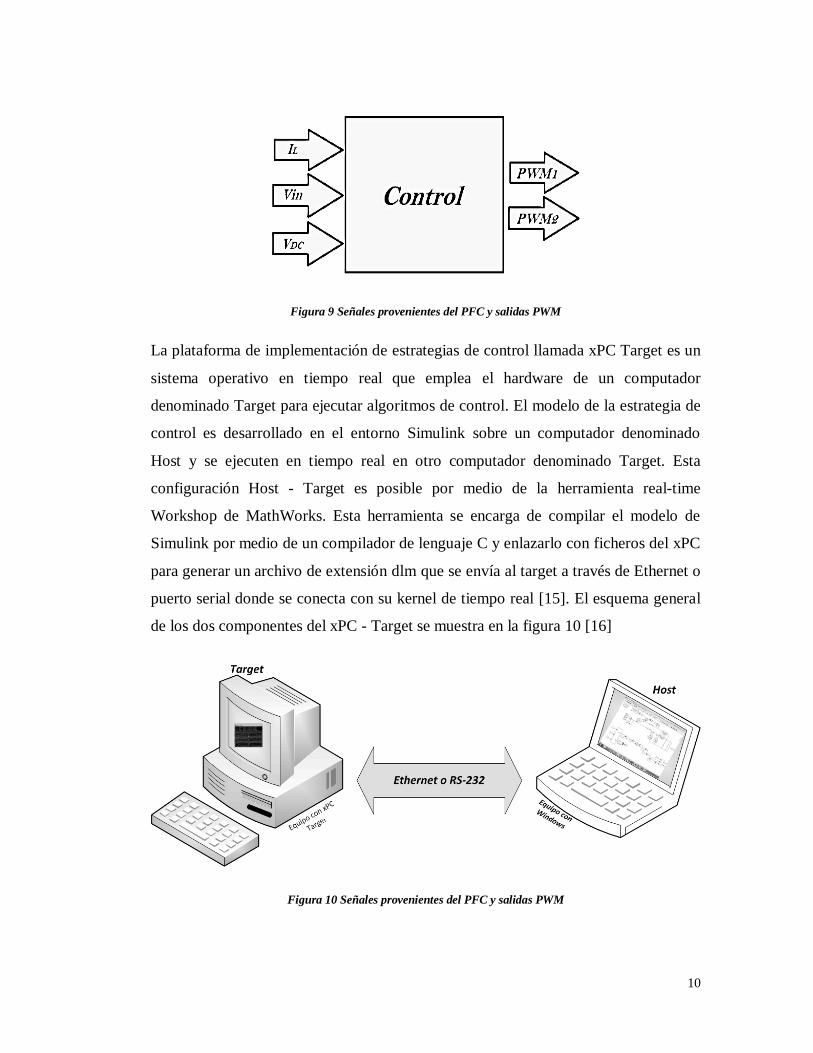
En la figura 9 se encuentran las señales necesarias para el control del convertidor
Boost Bridgeless. Estas corresponden a tres señales de realimentación y dos señales
de control, las cuales se describen a continuación:
- Las señales de realimentación son: la tensión de línea de entrada (Vin), la
corriente que atraviesa la bobina de entrada (IL), y la tensión de salida (Vc).
Estas señales se utilizan para implementar el lazo de control de corriente y
voltaje.
- Las señales de control son: dos señales tipo Pulse Width Modulated (PWM)
con las cuales se controla la corriente a través del encendido y apagado de los
Mosfet.
10
Figura 9 Señales provenientes del PFC y salidas PWM
La plataforma de implementación de estrategias de control llamada xPC Target es un
sistema operativo en tiempo real que emplea el hardware de un computador
denominado Target para ejecutar algoritmos de control. El modelo de la estrategia de
control es desarrollado en el entorno Simulink sobre un computador denominado
Host y se ejecuten en tiempo real en otro computador denominado Target. Esta
configuración Host - Target es posible por medio de la herramienta real-time
Workshop de MathWorks. Esta herramienta se encarga de compilar el modelo de
Simulink por medio de un compilador de lenguaje C y enlazarlo con ficheros del xPC
para generar un archivo de extensión dlm que se envía al target a través de Ethernet o
puerto serial donde se conecta con su kernel de tiempo real [15]. El esquema general
de los dos componentes del xPC - Target se muestra en la figura 10 [16]
Figura 10 Señales provenientes del PFC y salidas PWM

11
La tarjeta de adquisición de datos PCI6040E de National Instruments (ver anexo 5)
está integrada al Target, esta ejecuta el algoritmo de control, genera las señales PWM
y recibe las señales de medida para implementar la estrategia de control. Los puertos
utilizados fueron:
- CTR0 y CTR1 para generan las señales de PWM.
- AI4, AI5 y AI12 para recibir las señales analógicas de realimentación.
Las señales de realimentación se adquirieron a partir del bloque del convertidor
analógico digital de la tarjeta en el entorno de Simulink. Este bloque entrega el valor
analógico de la señal medida, esta señal debe ser de tensión y tiene un valor entre
con respecto a la tierra de la tarjeta. La frecuencia de muestreo del
sistema es de . El convertidor analógico Digital de la tarjeta es de 16 bits y las
características generales se muestran en la tabla 5.
Tabla 5 Características del ADC de la tarjeta PCI6040E
Rango de
medición (V)
Precisión % de
la lectura Offset (mV)
Ruido + error de
cuantización
(mV)
Deriva térmica
(%/°C)
Precisión
absoluta (mV)
±10V 0.0672 7.38 0.846 0.0010 15.373
12
Capítulo 3 3. Modelo Matemático de la planta
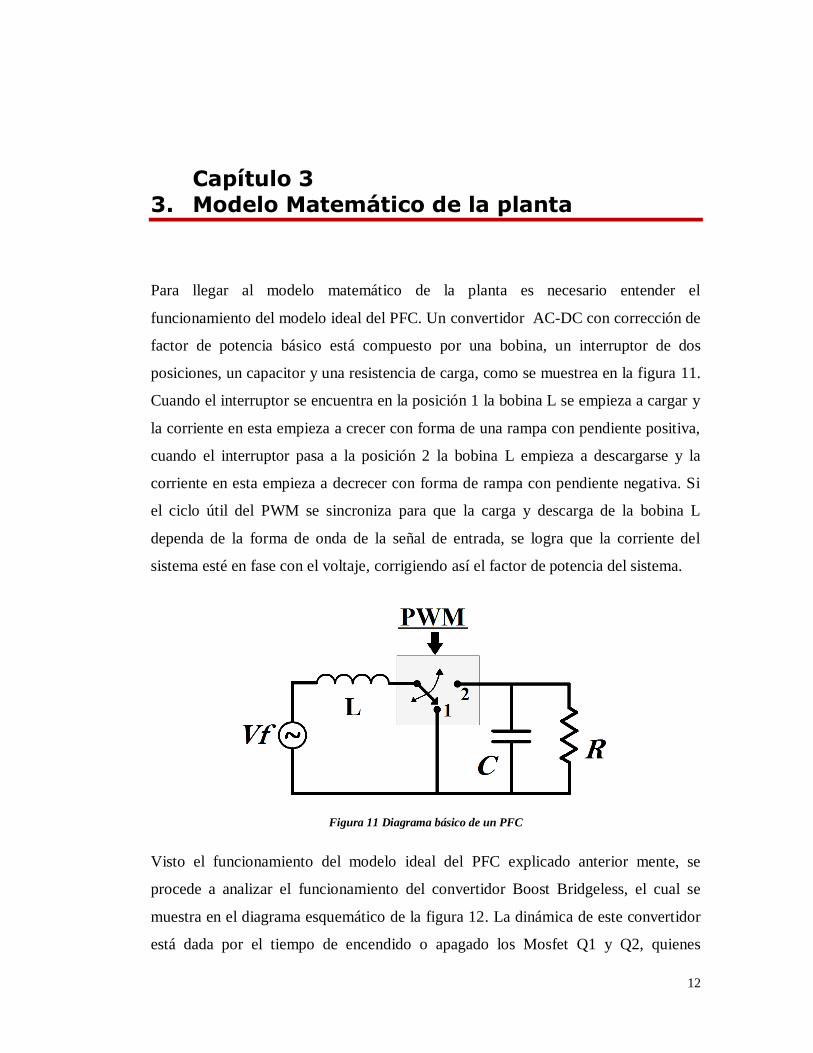
Para llegar al modelo matemático de la planta es necesario entender el
funcionamiento del modelo ideal del PFC. Un convertidor AC-DC con corrección de
factor de potencia básico está compuesto por una bobina, un interruptor de dos
posiciones, un capacitor y una resistencia de carga, como se muestrea en la figura 11.
Cuando el interruptor se encuentra en la posición 1 la bobina L se empieza a cargar y
la corriente en esta empieza a crecer con forma de una rampa con pendiente positiva,
cuando el interruptor pasa a la posición 2 la bobina L empieza a descargarse y la
corriente en esta empieza a decrecer con forma de rampa con pendiente negativa. Si
el ciclo útil del PWM se sincroniza para que la carga y descarga de la bobina L
dependa de la forma de onda de la señal de entrada, se logra que la corriente del
sistema esté en fase con el voltaje, corrigiendo así el factor de potencia del sistema.
Figura 11 Diagrama básico de un PFC
Visto el funcionamiento del modelo ideal del PFC explicado anterior mente, se
procede a analizar el funcionamiento del convertidor Boost Bridgeless, el cual se
muestra en el diagrama esquemático de la figura 12. La dinámica de este convertidor
está dada por el tiempo de encendido o apagado los Mosfet Q1 y Q2, quienes
13
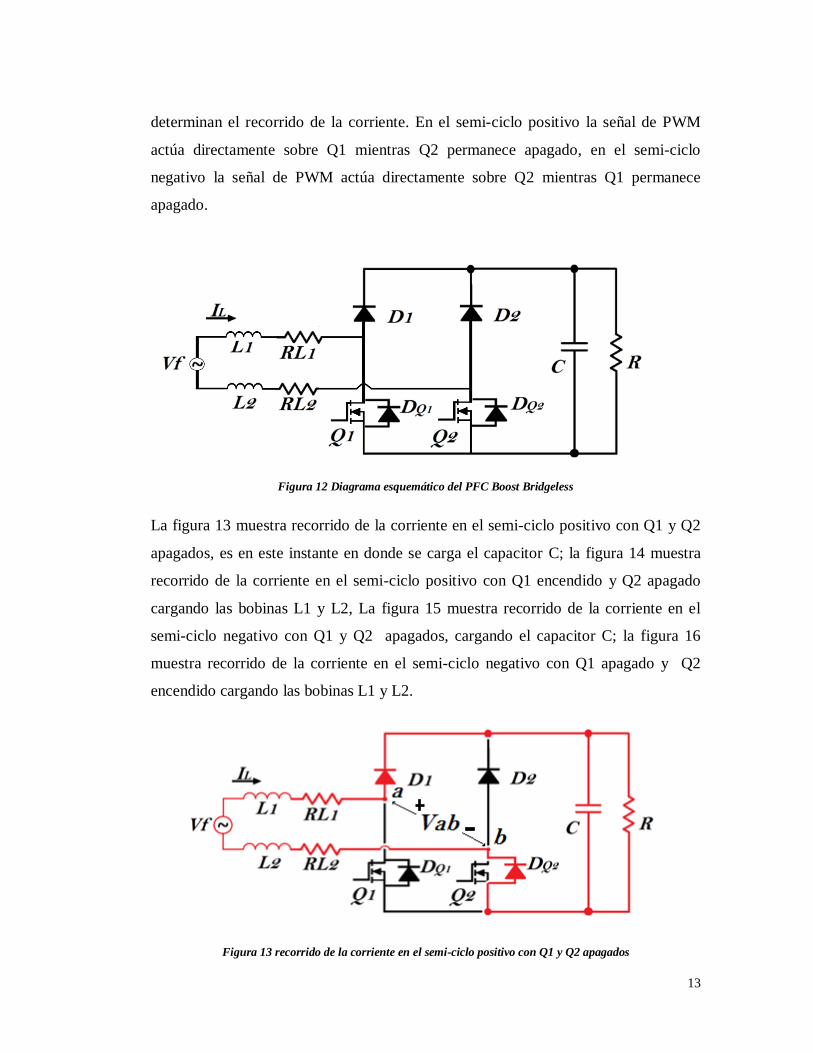
determinan el recorrido de la corriente. En el semi-ciclo positivo la señal de PWM
actúa directamente sobre Q1 mientras Q2 permanece apagado, en el semi-ciclo
negativo la señal de PWM actúa directamente sobre Q2 mientras Q1 permanece
apagado.
Figura 12 Diagrama esquemático del PFC Boost Bridgeless
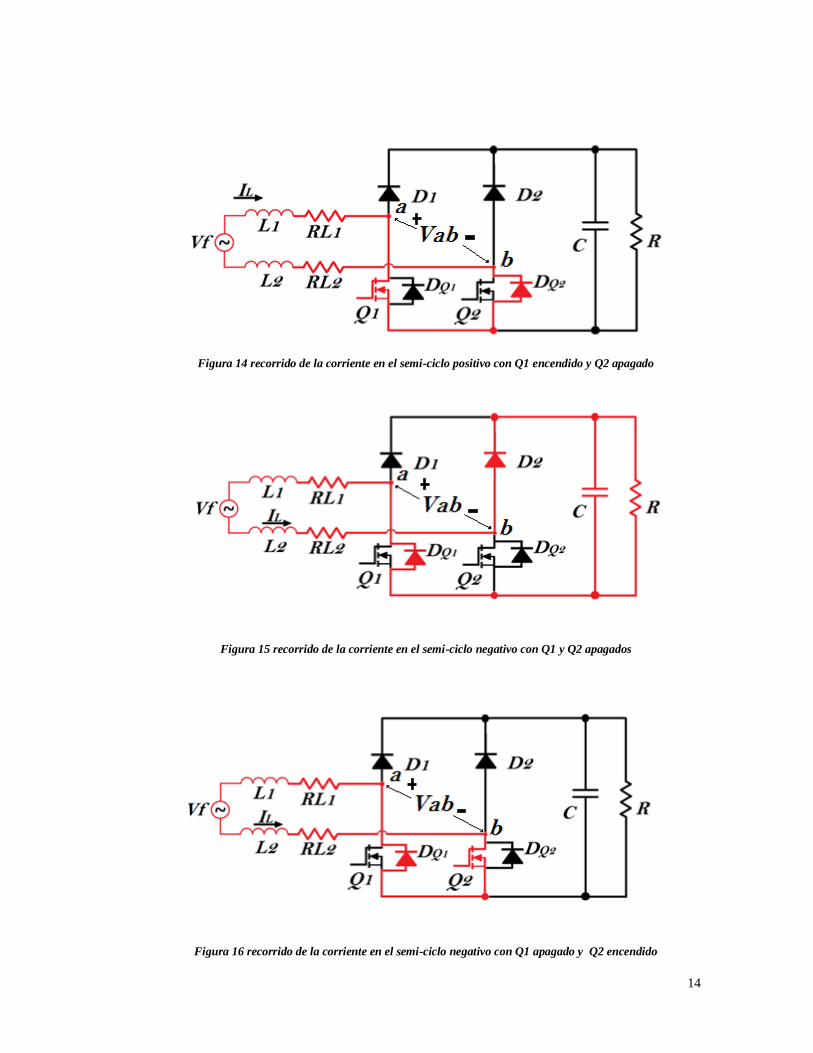
La figura 13 muestra recorrido de la corriente en el semi-ciclo positivo con Q1 y Q2
apagados, es en este instante en donde se carga el capacitor C; la figura 14 muestra
recorrido de la corriente en el semi-ciclo positivo con Q1 encendido y Q2 apagado
cargando las bobinas L1 y L2, La figura 15 muestra recorrido de la corriente en el
semi-ciclo negativo con Q1 y Q2 apagados, cargando el capacitor C; la figura 16
muestra recorrido de la corriente en el semi-ciclo negativo con Q1 apagado y Q2
encendido cargando las bobinas L1 y L2.
Figura 13 recorrido de la corriente en el semi-ciclo positivo con Q1 y Q2 apagados
14
Figura 14 recorrido de la corriente en el semi-ciclo positivo con Q1 encendido y Q2 apagado
Figura 15 recorrido de la corriente en el semi-ciclo negativo con Q1 y Q2 apagados
Figura 16 recorrido de la corriente en el semi-ciclo negativo con Q1 apagado y Q2 encendido
15
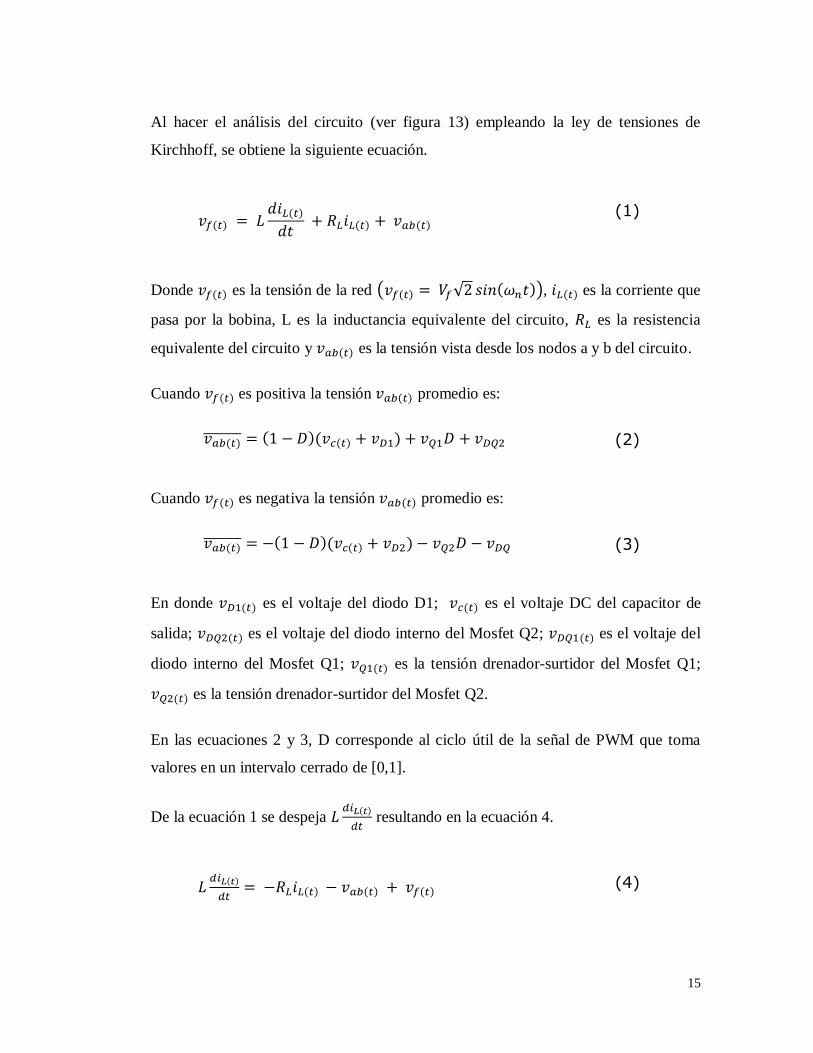
Al hacer el análisis del circuito (ver figura 13) empleando la ley de tensiones de
Kirchhoff, se obtiene la siguiente ecuación.
( ) ( )
( ) ( ) (1)
Donde ( ) es la tensión de la red ( ( ) √ ( )), ( ) es la corriente que
pasa por la bobina, L es la inductancia equivalente del circuito, es la resistencia
equivalente del circuito y ( ) es la tensión vista desde los nodos a y b del circuito.
Cuando ( ) es positiva la tensión ( ) promedio es:
Cuando ( ) es negativa la tensión ( ) promedio es:
En donde ( ) es el voltaje del diodo D1; ( ) es el voltaje DC del capacitor de
salida; ( ) es el voltaje del diodo interno del Mosfet Q2; ( ) es el voltaje del
diodo interno del Mosfet Q1; ( ) es la tensión drenador-surtidor del Mosfet Q1;
( ) es la tensión drenador-surtidor del Mosfet Q2.
En las ecuaciones 2 y 3, D corresponde al ciclo útil de la señal de PWM que toma
valores en un intervalo cerrado de [0,1].
De la ecuación 1 se despeja ( )
resultando en la ecuación 4.
( )
( ) ( ) ( ) (4)
( ) ( )( ( ) ) (2)
( ) ( )( ( ) ) (3)

16
Para el semi-ciclo positivo:
Se reemplaza la ecuación 2 en la ecuación 4 y se multiplica toda la expresión por
dando como resultado la ecuación 5.
( )
( )
( )
( )( ( ) )
(5)
Al despreciar la caída de tensión en los diodos y los Mosfet, la ecuación 5 se puede
escribir como:
( )
( )
( )
( ) ( )
(6)
Para el semi-ciclo negativo:
Se reemplaza la ecuación 3 en la ecuación 4 y se multiplica toda la expresión por
dando como resultado la ecuación 7.
( )
( )
( )
( )( ( ) )
(7)
Al despreciar la caída de tensión en los diodos y los Mosfet, la ecuación 7 se puede
escribir como:
( )
( )
( )
( ) ( )
(8)
De acuerdo al análisis anterior es posible afirmar que el modelo
promediado/simplificado de la planta es:

17
( )
( )
( )
(9)
Donde es:
{
( ) ( )
( ) ( )
(10)
Aplica la transformada de Laplace a la ecuación 9, y tomando como una
perturbación se obtiene la ecuación 11.
(11)
De la ecuación 11 se despeja
y da como resultado el modelo
promediado/simplificado a la frecuencia de conmutación de la planta (Ecuación 12).
( )
(12)
En la figura 17 se muestra el diagrama de bloques básico del sistema realimentado.
El objetivo del controlador tomar las acciones necesarias para hacer que la señal de
error tienda a cero.
Figura 17 Diagrama de bloques del PFC
18
Capítulo 4. 4. Objetivos y estrategias de control.
4.2. Objetivos de control
Los requisitos mínimos que deben cumplir las cuatro estrategias de control
seleccionadas para garantizar el funcionamiento adecuado del sistema son:
- Garantizar la estabilidad del sistema en lazo cerrado.
- Garantizar un FP mayor a 0.9.
- Garantizar un PORCENTAJE DE THD menor al 5%.
Lo anterior se traduce en que la corriente esté en fase con el voltaje de entrada, y
además que rechace las perturbaciones correspondientes a las frecuencias armónicas
de la frecuencia fundamental (60Hz) los cuales son introducidos por las distorsiones
presentes en el voltaje de la red.
4.3. Estrategias de control
En un sistema de lazo cerrado el compensador es el elemento que decide que acción
tomar cuando se recibe una señal de error. El compensador tiene como entrada la
señal de error y como salida la acción de control, esta lleva la información al actuador
el cual inicia la acción para eliminar el error [17].
4.3.1. Control Proporcional Integral
Para este tipo de convertidores generalmente se utiliza el control Proporcional
Integral (PI), debido a la simplicidad de su diseño, su fácil implementación, y si se
calcula bien puede producir resultados favorables [18]. Su desventaja radica en que
su implementación no produce altos desempeños.
19
Este controlador se sintoniza generalmente teniendo en cuenta el margen de fase y el
margen de ganancia, garantizando la estabilidad del sistema realimentado, este
controlador consta de un integrador, un cero y una ganancia proporcional como se
muestra en la ecuación 13. El cero del compensador está relacionado con la respuesta
transitoria, ya que al aumentar su valor esta es más rápida, pero el margen de fase
disminuye; la ganancia proporcional se establece de tal forma que a la frecuencia de
cruce por cero garantice un buen margen de fase; el integrador lleva a cero el error
para señales constantes [17][19].
( )
( )
(13)
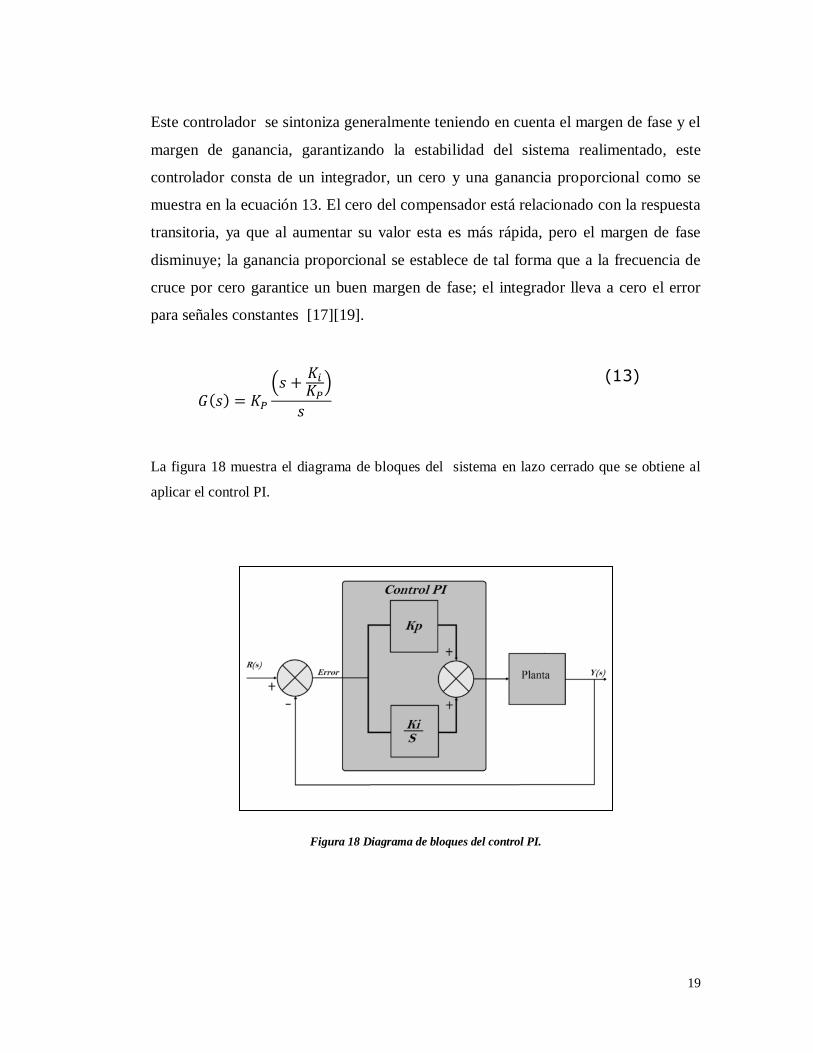
La figura 18 muestra el diagrama de bloques del sistema en lazo cerrado que se obtiene al
aplicar el control PI.
Figura 18 Diagrama de bloques del control PI.
20
4.3.2. Control proporcional integral generalizado (GPI)
La estrategia de control GPI, provee una herramienta de diseño de controladores
capaces de rechazar diferentes tipos de perturbaciones estructuradas que se suman a
la respuesta del sistema, siendo más robusto frente a las constantes desconocidas [20].
Este tipo de controlador utiliza el modelo simplificado del sistema y rechaza las
dinámicas no modeladas (perturbaciones de carácter endógeno y exógeno del
sistema). Se diseña en el marco del “rechazo activo de perturbaciones” [21], e
incluye un modelo polinomial en el tiempo de las perturbaciones dependientes del
estado y de aquellas que son de carácter exógeno sin estructura especial alguna [22].
Esta estrategia nos permite ver la planta a controlar como una cadena de integradores,
en donde el orden del polinomio y de la cadena de integradores determina el número
de parámetros de la ganancia integral de una manera simple [23].
El objetivo de control es lograr la eliminación de las perturbaciones aditivas, que para
este caso son las frecuencias múltiplos de la frecuencia fundamental de trabajo del
sistema (60Hz), y cuya amplitud va decreciendo conforme aumenta el múltiplo
(Armónicos). Estas perturbaciones son causadas por distorsiones presentes en el
voltaje de la red [24].
Se consideran sistemas lineales perturbados cuando su modelo puede representarse de
la forma de la ecuación 14.
( )( ) ( ) ( ( )) ( ) (14)
Donde agrupa la incertidumbre del sistema, es decir, las dinámicas lineales no
modeladas o desconocidas y representa la perturbación externa [25]. Desde el
enfoque del rechazo activo de perturbaciones, estas dos funciones se consolidan en un
solo término y se maneja como una señal de carácter desconocido pero acotado
(Ecuación 15).

21
( )( ) ( ) ( ) (15)
Donde ( ) es m-diferenciable y uniformemente acotada, i.e. | ( )( )| , con
K real finito. El sistema es controlable (para K ≠0) y también puede ser catalogado
como un sistema diferencialmente plano con salida plana ( ) [26].
Teniendo en cuenta que el modelo matemático del convertidor es el que se muestra
en la siguiente ecuación.
( )
( )
( )
(16)
Es posible afirmar que dicho modelo tiene la forma del sistema descrito por la
ecuación 15. Donde ( )
( )
( )
y ( )
En la ecuación 17 se muestra la estructura del control GPI, en donde es ⁄ y la
salida del sistema es la corriente que atraviesa las bobinas L1 y L2; es el orden
del polinomio con el que se aproxima la perturbación; es el orden del
sistema; corresponden las ganancias del polinomio del numerador; y
es la señal de referencia que para este caso equivale a una senoidal con frecuencia
de 60Hz y amplitud 10 amperios pico.
Para el caso de estudio la estructura del control GPI se puede escribir como:
* ( ) (
( )
) ( )+ (17)
[ ( ) (
)( )] (18)
22
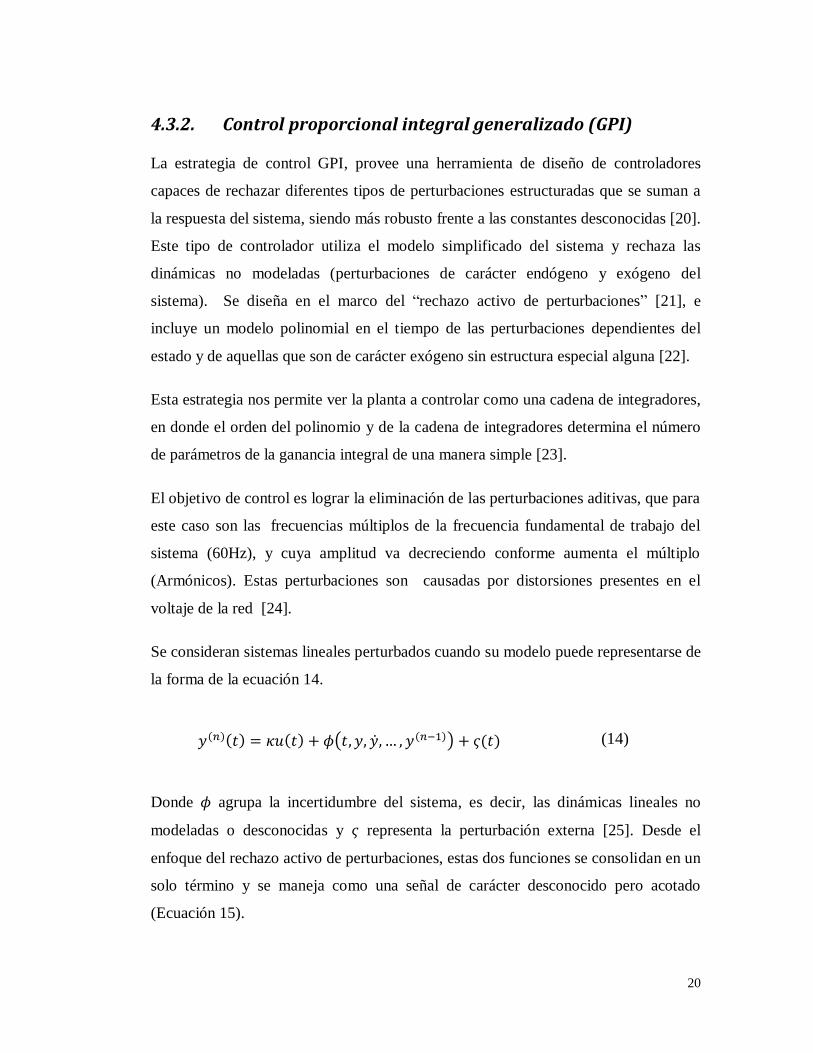
En la figura 19 se muestra el diagrama de bloques del sistema que se obtiene en lazo
cerrado al aplicar el control GPI que se describe en la ecuación 18.
Figura 19 Diagrama de bloques del control GPI para m=1.
4.3.3 Control basado en observador Proporcional
Integral Generalizado (GPI)
El control basado en observador GPI, está sustentado en un observador de Luenberger
extendido, que se utiliza para estimar las perturbaciones de carácter exógeno y
endógeno de la planta. Si se tiene un sistema de primer orden cuyo modelo
matemático puede escribirse como:
Entonces es posible llevar a cabo una realización en variables de estado del sistema
descrito en la ecuación 19, de tal forma que uno de los estados corresponda a la
( ) ( ) ( ) (19)
23
estimación de ( ). Al completar dicho proceso se obtiene la representación del
sistema que se muestra en la ecuación 20. En esta última representación, se puede
apreciar que la variable de estado ( ) corresponde a la salida de la planta, ( )
corresponde a la perturbación de la planta y que ( ) corresponde a la primera
derivada de la perturbación de la planta.
Ahora bien, es posible construir un observador de estados para el sistema descrito
por la ecuación 20. Dicho observador es el que se muestra en la ecuación 21.
Donde ( ) es el estimado de la perturbación y ( ( ) ( )) es el error de
estimación.
La dinámica del error de estimación del observador de la ecuación 21está dada por
la ecuación (22).
Si ( )( ) es acotada y si los coeficientes ( ), se escogen de tal forma
que las raíces del polinomio de la ecuación 22 estén en el lado izquierdo complejo, el
error de seguimiento será acotado y la cota puede hacerse tan pequeña como se quiera
al alejar las raíces de la ecuación 23 del eje imaginario.
( ) ( ) ( )
( ) ( )
( ) ( )( )
(20)
( ) ( ) ( ) ( ( ) ( ))
( ) ( ) ( ( ) ( ))
( ) ( ( ) ( ))
(21)
( ) ( ) (22)
(23)
24
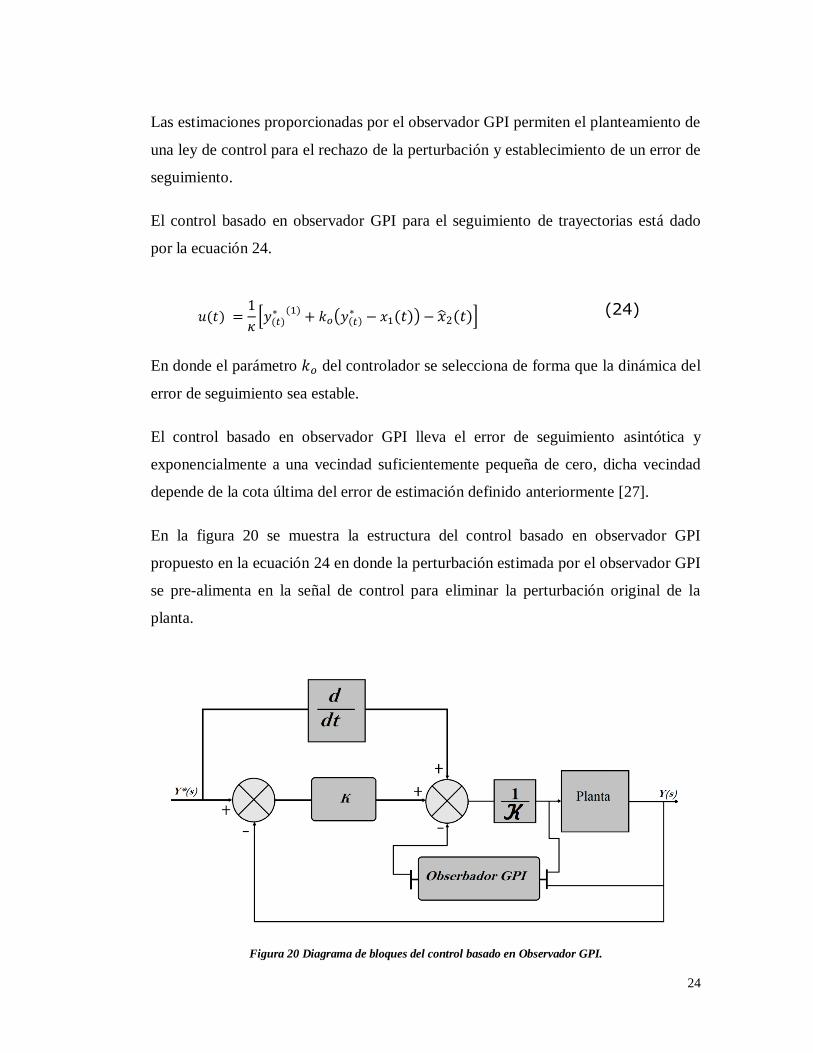
Las estimaciones proporcionadas por el observador GPI permiten el planteamiento de
una ley de control para el rechazo de la perturbación y establecimiento de un error de
seguimiento.
El control basado en observador GPI para el seguimiento de trayectorias está dado
por la ecuación 24.
( )
* ( ) ( )
( ( ) ( )) ( )+
(24)
En donde el parámetro del controlador se selecciona de forma que la dinámica del
error de seguimiento sea estable.
El control basado en observador GPI lleva el error de seguimiento asintótica y
exponencialmente a una vecindad suficientemente pequeña de cero, dicha vecindad
depende de la cota última del error de estimación definido anteriormente [27].
En la figura 20 se muestra la estructura del control basado en observador GPI
propuesto en la ecuación 24 en donde la perturbación estimada por el observador GPI
se pre-alimenta en la señal de control para eliminar la perturbación original de la
planta.
Figura 20 Diagrama de bloques del control basado en Observador GPI.

25
4.3.4 Control Resonante
La estrategia de control resonante, puede reducir el error de seguimiento (Entrada
menos Salida) a cero para la frecuencia fundamental de la señal de CA de entrada y
compensar la perturbación causada por la distorsión presente en la fuente de
alimentación. Dicho seguimiento/rechazo se realiza de forma exacta e independiente
de la variación de los parámetros de la planta, siempre que el sistema en lazo
realimentado sea estable. Esto demuestra la robustez de este tipo de estrategia de
control a la frecuencia fundamental de red, aunque ante pequeñas variaciones de
dicha frecuencia la robustez se reduce drásticamente [28].
El control resonante proporciona el seguimiento/rechazo de señales periódicas basado
en el principio del modelo interno, el cual establece que para lograr el rechazo y/o
seguimiento de una señal, el modelo interno o generador de dicha señal debe incluirse
en el lazo de control [29] [30]. En el modelo interno van implícitos los llamados
resonadores, los cuales corresponden a modelos de señales sinusoidales de
frecuencias determinadas. De esta manera, el seguimiento y rechazo de una señal
periódica se realiza mediante la inclusión de una cantidad de resonadores,
dependiendo del número de armónicos que se desea representar en el modelo interno
[31]. El modelo del resonador para cada frecuencia se puede expresar a partir de la
ecuación 25.
( )
( ) ( )
(25)
Donde es una ganancia real positiva, es el corrimiento de fase de ( ) a la
frecuencia y define el componente armónico representado.
26
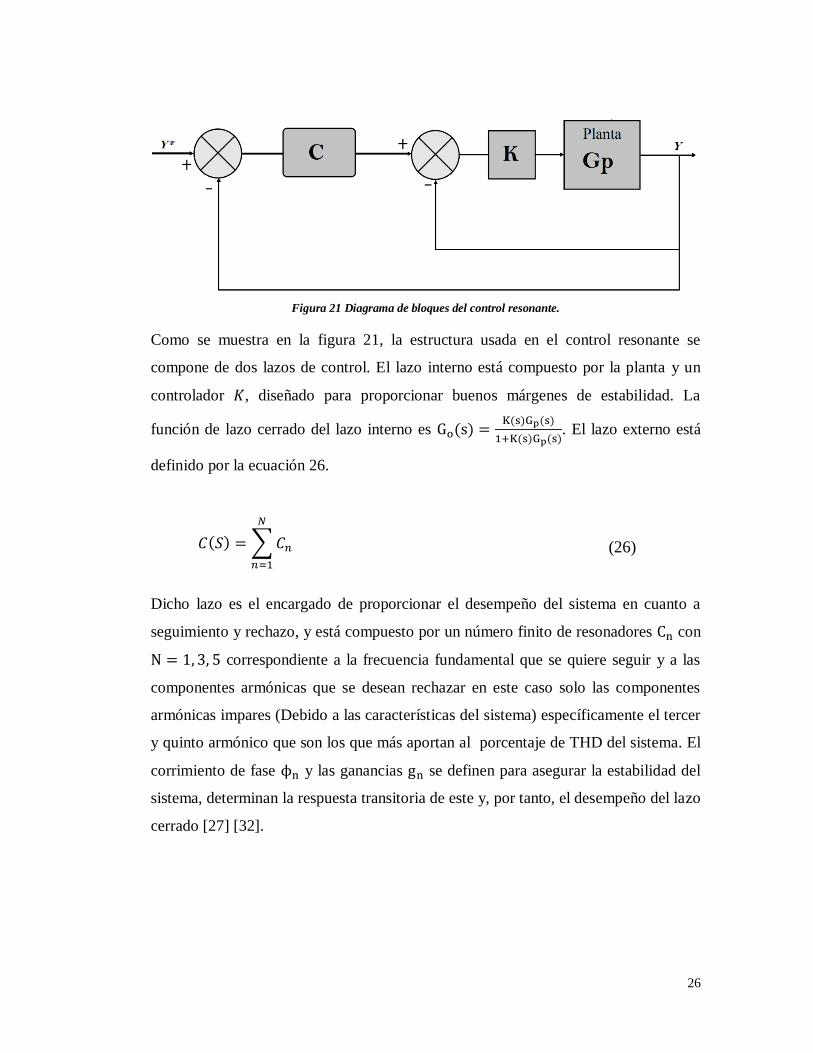
Figura 21 Diagrama de bloques del control resonante.
Como se muestra en la figura 21, la estructura usada en el control resonante se
compone de dos lazos de control. El lazo interno está compuesto por la planta y un
controlador , diseñado para proporcionar buenos márgenes de estabilidad. La
función de lazo cerrado del lazo interno es ( ) ( ) ( )
( ) ( ). El lazo externo está
definido por la ecuación 26.
( ) ∑
(26)
Dicho lazo es el encargado de proporcionar el desempeño del sistema en cuanto a
seguimiento y rechazo, y está compuesto por un número finito de resonadores con
correspondiente a la frecuencia fundamental que se quiere seguir y a las
componentes armónicas que se desean rechazar en este caso solo las componentes
armónicas impares (Debido a las características del sistema) específicamente el tercer
y quinto armónico que son los que más aportan al porcentaje de THD del sistema. El
corrimiento de fase y las ganancias se definen para asegurar la estabilidad del
sistema, determinan la respuesta transitoria de este y, por tanto, el desempeño del lazo
cerrado [27] [32].
27
Capítulo 5 5. Diseño y resultados de las estrategias de
control
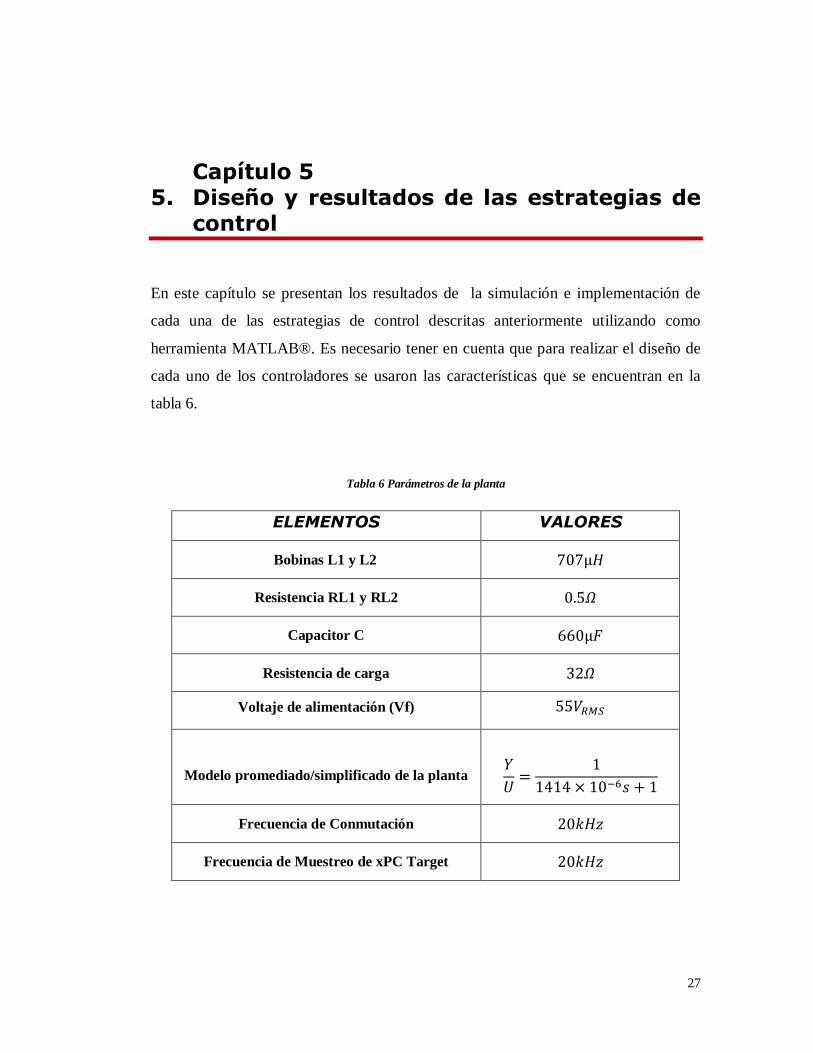
En este capítulo se presentan los resultados de la simulación e implementación de
cada una de las estrategias de control descritas anteriormente utilizando como
herramienta MATLAB®. Es necesario tener en cuenta que para realizar el diseño de
cada uno de los controladores se usaron las características que se encuentran en la
tabla 6.
Tabla 6 Parámetros de la planta
ELEMENTOS VALORES
Bobinas L1 y L2
Resistencia RL1 y RL2
Capacitor C
Resistencia de carga
Voltaje de alimentación (Vf)
Modelo promediado/simplificado de la planta
Frecuencia de Conmutación
Frecuencia de Muestreo de xPC Target
28
En la ecuación 27, se presenta la fórmula del porcentaje de error cuadrático medio
entre la señal de referencia (Iref) y la corriente medida (I), este se aplica a los datos
obtenidos en la simulación e implementación de cada una de las estrategias de
control.
√ ∑ ( )
√ ∑ ( )
(27)
5.1. Control Proporcional Integral
El control proporcional Integral se diseñó teniendo en cuenta un margen de fase
mayor a 60°, el cual asegura la estabilidad del sistema previendo las incertidumbres
del modelo. En la ecuación 28 se presenta la función de transferencia de este control.
El diseño del control PI se realizó ubicando los polos en lazo cerrado en
[-18000 -500], obteniendo como resultado el siguiente polinomio característico:
( )
(28)
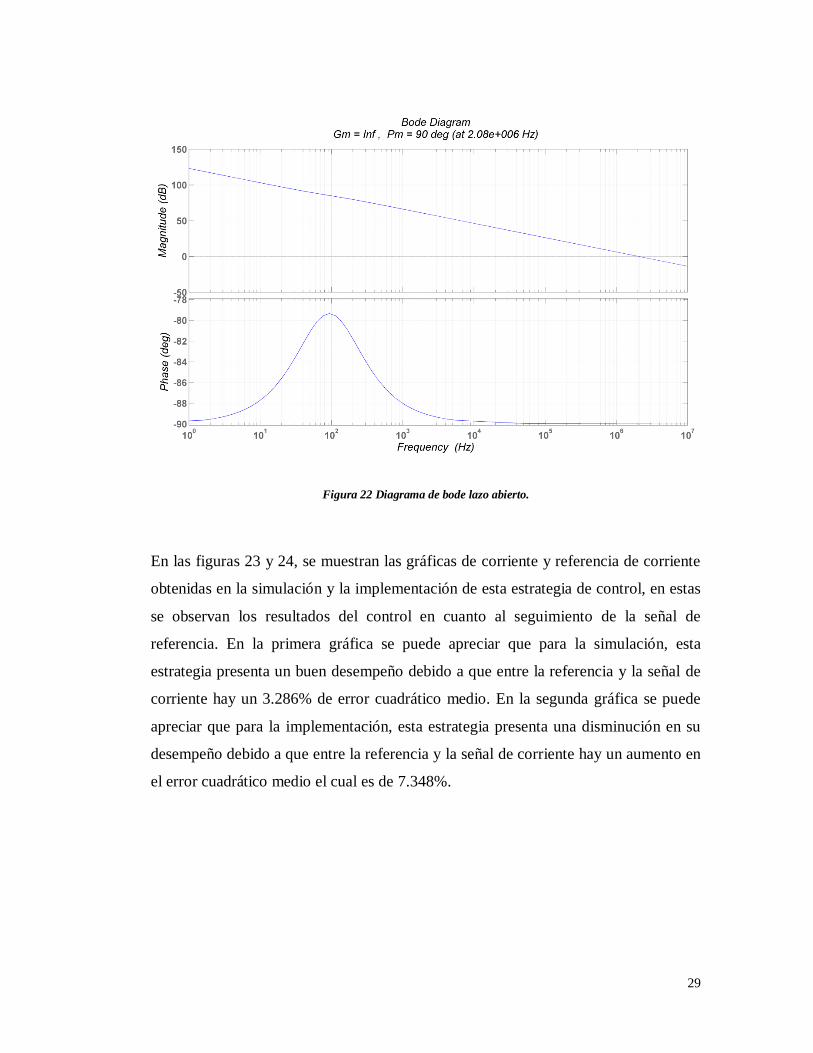
En la figura 22 se muestra el diagrama de bode de lazo abierto del sistema. Como se
observa, presenta un margen de ganancia infinito pues la curva de fase nunca corta
los -180°, adicionalmente la gráfica de fase tiende asintóticamente a -90° lo que
resulta en un margen de fase de 90°, pues la curva de magnitud corta los 0dB en una
frecuencia mucho mayor a la frecuencia de trabajo del sistema.
29
Figura 22 Diagrama de bode lazo abierto.
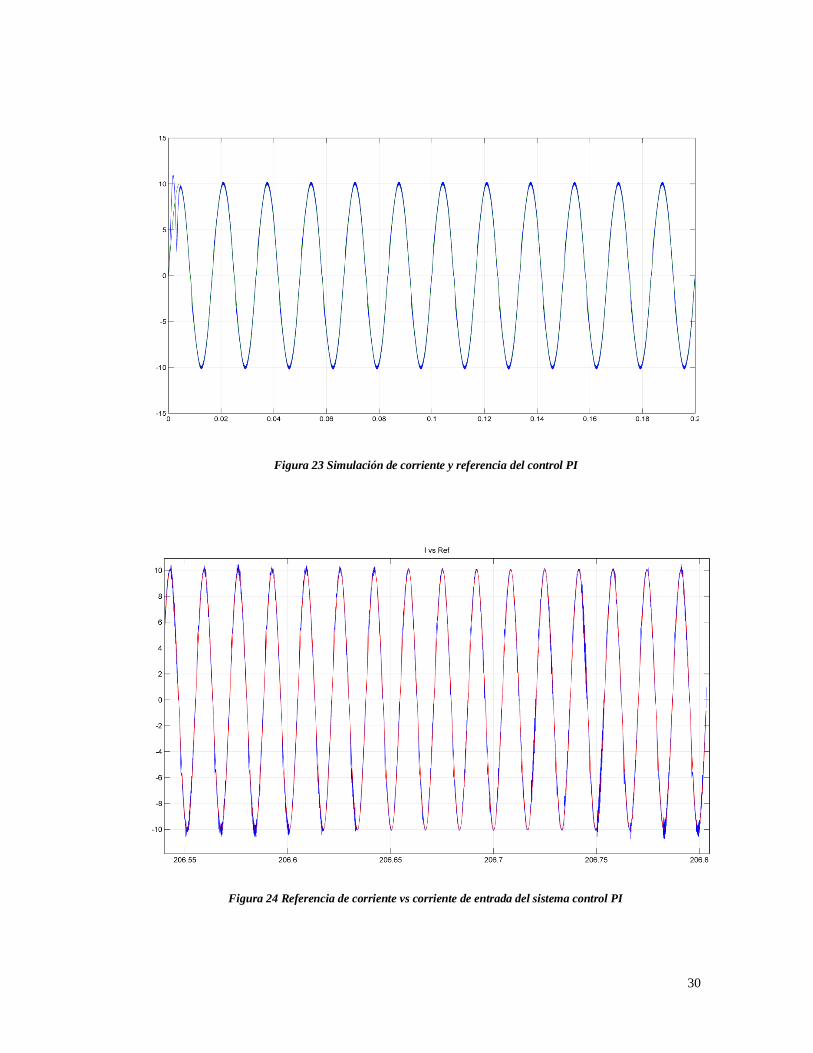
En las figuras 23 y 24, se muestran las gráficas de corriente y referencia de corriente
obtenidas en la simulación y la implementación de esta estrategia de control, en estas
se observan los resultados del control en cuanto al seguimiento de la señal de
referencia. En la primera gráfica se puede apreciar que para la simulación, esta
estrategia presenta un buen desempeño debido a que entre la referencia y la señal de
corriente hay un 3.286% de error cuadrático medio. En la segunda gráfica se puede
apreciar que para la implementación, esta estrategia presenta una disminución en su
desempeño debido a que entre la referencia y la señal de corriente hay un aumento en
el error cuadrático medio el cual es de 7.348%.
30
Figura 23 Simulación de corriente y referencia del control PI
Figura 24 Referencia de corriente vs corriente de entrada del sistema control PI
31
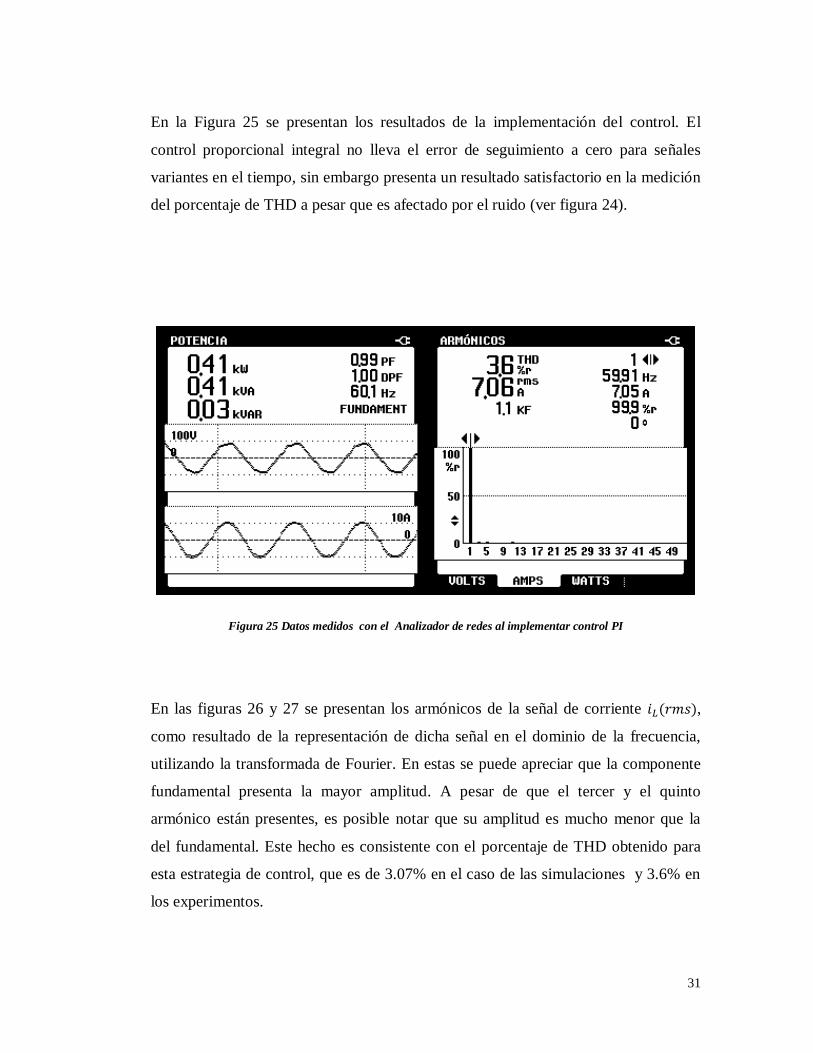
En la Figura 25 se presentan los resultados de la implementación del control. El
control proporcional integral no lleva el error de seguimiento a cero para señales
variantes en el tiempo, sin embargo presenta un resultado satisfactorio en la medición
del porcentaje de THD a pesar que es afectado por el ruido (ver figura 24).
Figura 25 Datos medidos con el Analizador de redes al implementar control PI
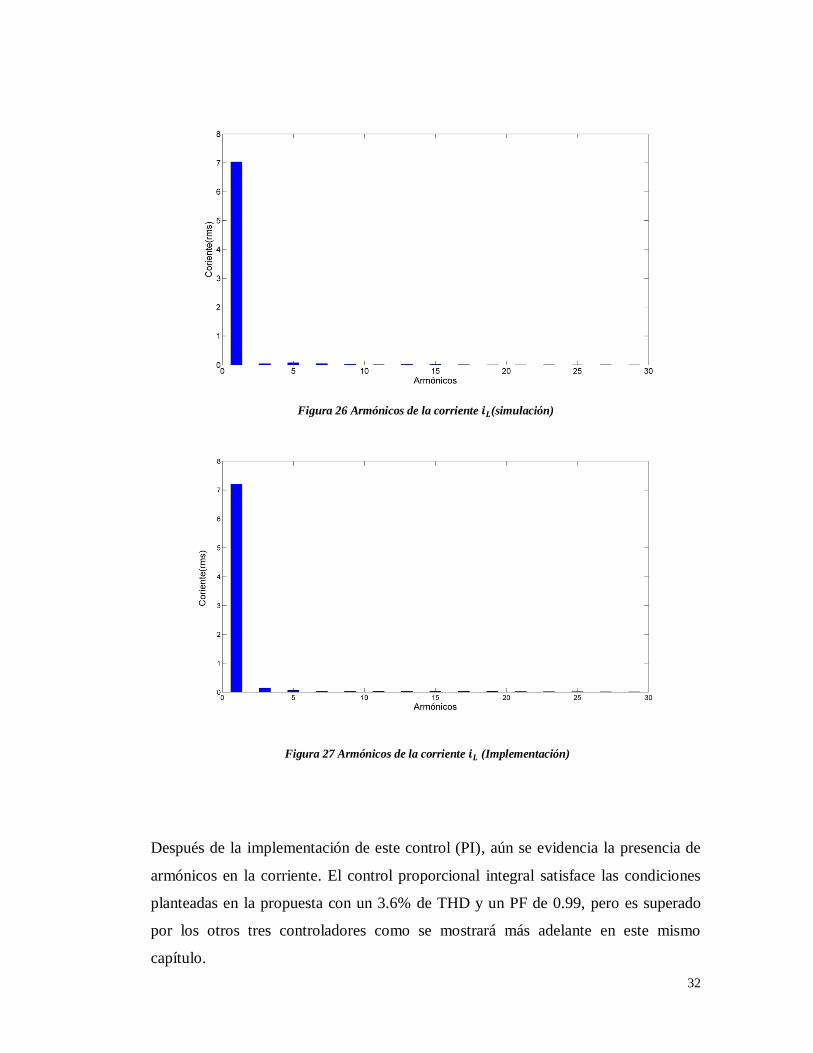
En las figuras 26 y 27 se presentan los armónicos de la señal de corriente ( ),
como resultado de la representación de dicha señal en el dominio de la frecuencia,
utilizando la transformada de Fourier. En estas se puede apreciar que la componente
fundamental presenta la mayor amplitud. A pesar de que el tercer y el quinto
armónico están presentes, es posible notar que su amplitud es mucho menor que la
del fundamental. Este hecho es consistente con el porcentaje de THD obtenido para
esta estrategia de control, que es de 3.07% en el caso de las simulaciones y 3.6% en
los experimentos.
32
Figura 26 Armónicos de la corriente (simulación)
Figura 27 Armónicos de la corriente (Implementación)
Después de la implementación de este control (PI), aún se evidencia la presencia de
armónicos en la corriente. El control proporcional integral satisface las condiciones
planteadas en la propuesta con un 3.6% de THD y un PF de 0.99, pero es superado
por los otros tres controladores como se mostrará más adelante en este mismo
capítulo.

33
En la tabla 7 se comparan los resultados de la simulación y la implementación. Se
evidencia que la medición del porcentaje de THD en la simulación es menor que en la
implementación y que el factor de potencia es mayor. Esto se debe a la incertidumbre
de la planta, el ruido en la medición y el rizado de la tensión de salida.
Tabla 7 Simulación e Implementación control PI
Control PI THD FACTOR DE POTENCIA
% error
cuadrático
medio
SIMULACIÓN 3.07% 1 3.286%
IMPLEMENTACIÓN 3.6% 0.99 7.348%
5.2. Control proporcional integral generalizado (GPI)
Cuando se emplea el control GPI la estructura de la señal de control es la que se
estableció previamente en numeral 4.3.2 en la ecuación 18. Para este diseño se parte
del supuesto que la derivada de la perturbación con respecto al tiempo es
cero y se toma la ecuación 15 se puede escribir como:
Reemplazando la ecuación 18 en la ecuación 29 y aplicando la transformada de
Laplace, da como resultado la ecuación 30.
(
) ( )
(30)
De la ecuación 30 se despeja resultando en la ecuación 31.
( ) (
) ( )
(31)
En la ecuación 32 se establece el error y la derivada del error ( ).
(29)

34
( ) ( ) (32)
Reemplazando el error y la derivada del error ( ) en la ecuación 31, resulta en la
ecuación 33.
(
)
(33)
De la ecuación 33 se despeja y resulta la ecuación 34.
( ) (34)
La ecuación 34 muestra la dinámica del error, si ( )( ) es acotada y si los
coeficientes se escogen de tal forma que las raíces del polinomio de la
ecuación 34 estén en el lado izquierdo del plano complejo, el error de seguimiento
será acotado y la cota puede hacerse tan pequeña como se quiera al alejar las raíces de
la ecuación 35 del eje imaginario.
(35)
Para encontrar los valores de se ubican los polos en lazo cerrado en
[-18000 -70], de esta forma se garantiza la estabilidad del sistema y un buen
desempeño.
En las figuras 28 y 29, se muestran las gráficas de corriente y referencia de corriente
obtenidas en la simulación y la implementación de esta estrategia de control, en estas
se observan los resultados del control en cuanto al seguimiento de la señal de
referencia. En la primera gráfica se puede apreciar que para la simulación, esta
estrategia presenta un buen desempeño debido a que entre la referencia y la señal de
corriente hay un 1.920% de error cuadrático medio. En la segunda gráfica se puede
apreciar que para la implementación, esta estrategia presenta una disminución en su
desempeño debido a que entre la referencia y la señal de corriente hay un aumento en
el error cuadrático medio el cual es de 3.335%.

35
Figura 28 Simulación de la corriente y la referencia de corriente Control GPI
Figura 29 Referencia de corriente vs corriente de entrada del sistema control GPI
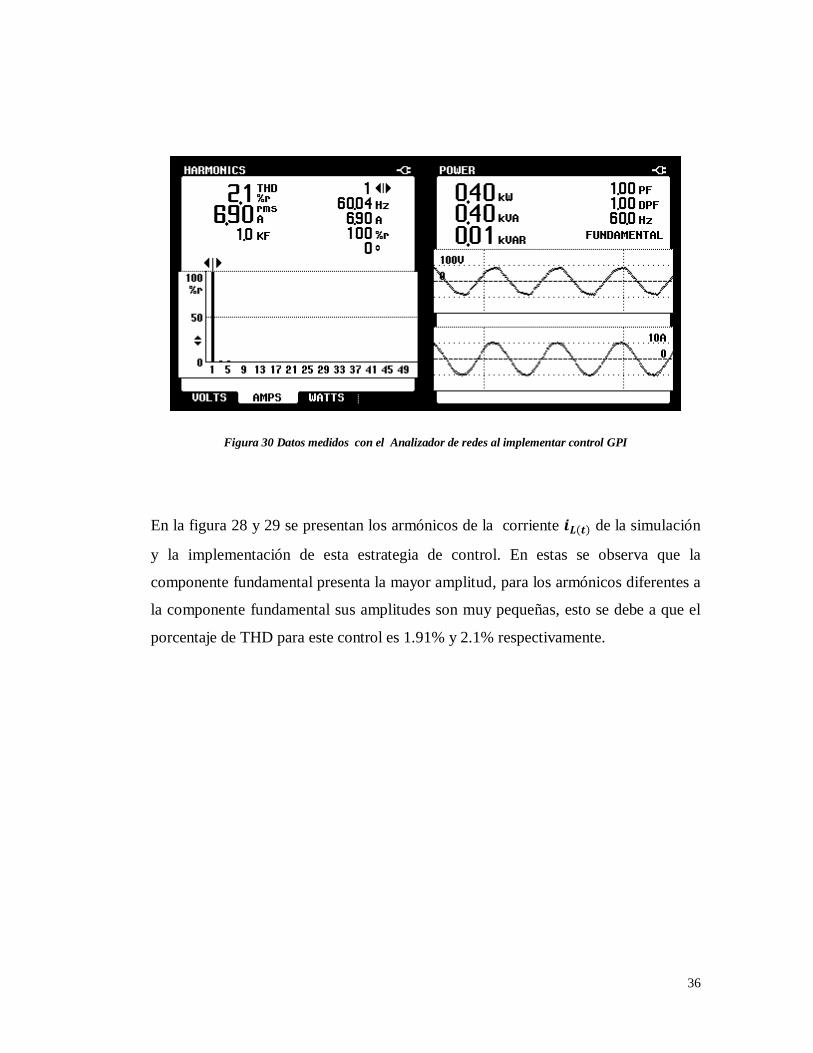
En la Figura 30 se presentan los resultados de la implementación del control. En esta
se evidencia que la estrategia de control produjo un buen desempeño, que se ve
reflejado en la medición del porcentaje de THD, el cual satisface las condiciones
planteadas en la propuesta (porcentaje de THD menor al 5% y factor de potencia
mayor a 0.9) con un 2.1% de THD y un PF de 1. Es necesario anotar que el resultado
de este control cuenta con menos armónicos que en la figura 25 (control PI).
36
Figura 30 Datos medidos con el Analizador de redes al implementar control GPI
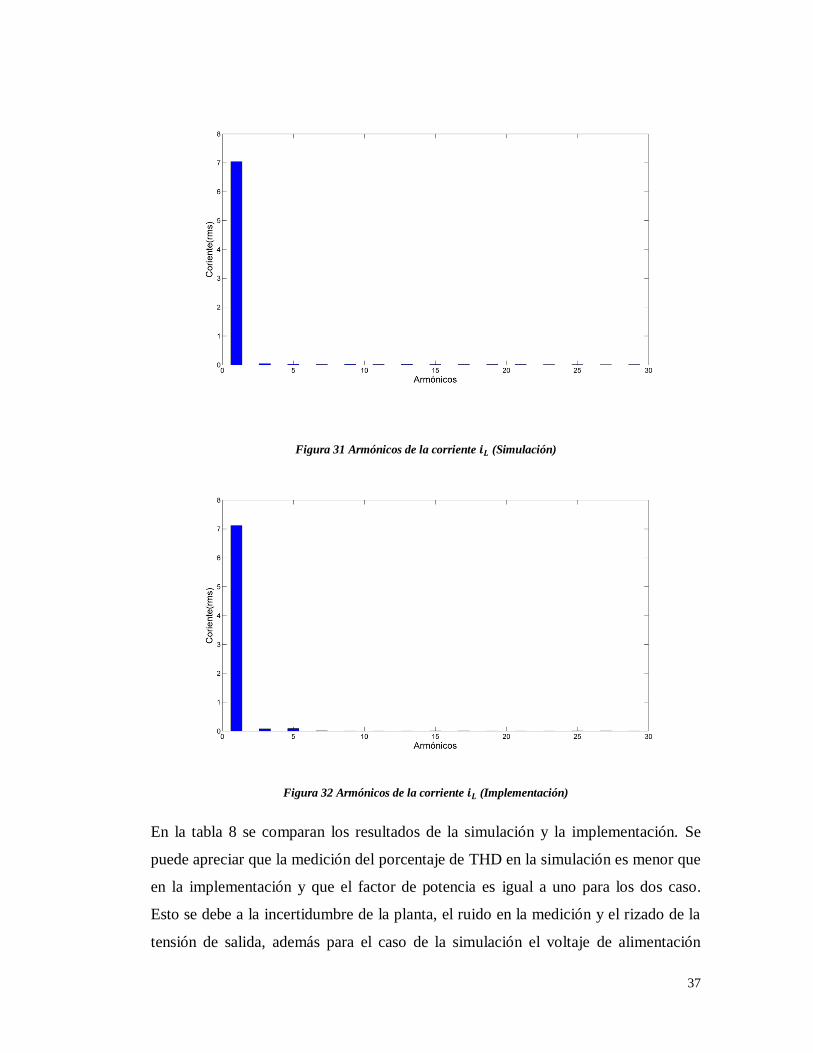
En la figura 28 y 29 se presentan los armónicos de la corriente ( ) de la simulación
y la implementación de esta estrategia de control. En estas se observa que la
componente fundamental presenta la mayor amplitud, para los armónicos diferentes a
la componente fundamental sus amplitudes son muy pequeñas, esto se debe a que el
porcentaje de THD para este control es 1.91% y 2.1% respectivamente.
37
Figura 31 Armónicos de la corriente (Simulación)
Figura 32 Armónicos de la corriente (Implementación)
En la tabla 8 se comparan los resultados de la simulación y la implementación. Se
puede apreciar que la medición del porcentaje de THD en la simulación es menor que
en la implementación y que el factor de potencia es igual a uno para los dos caso.
Esto se debe a la incertidumbre de la planta, el ruido en la medición y el rizado de la
tensión de salida, además para el caso de la simulación el voltaje de alimentación
38
( ) solo contó con el tercer y quinto armónico por lo que el control no tuvo que
actuar sobre los armónicos mayores del voltaje de alimentación.
Tabla 8 Simulación e Implementación control GPI
Control GPI THD FACTOR DE POTENCIA
% error
cuadrático
medio
SIMULACIÓN 1.91% 1 1.920%
IMPLEMENTACIÓN 2.1% 1 3.335%
5.3. Control basado en observador proporcional
integral generalizado (GPI)
Cuando se emplea el control basado en observador GPI la estructura de la señal de
control es la que se estableció previamente en numeral 4.3.3 en la ecuación 24.
Partiendo del supuesto que la derivada de la perturbación con respecto al
tiempo es cero.
Si se toma ( ) como la derivada de la corriente, , ( ) es la acción de
control y ( ) es la perturbación la ecuación 19 se puede escribir como:
Partiendo del observador planteado en la ecuación 20, se toman como variables de
estado: ( ) ( ), ( ) ( ), ( ) ( ) y ( ) ( )( )
Se construye un observador de estados para el sistema descrito por la ecuación 36, el
cual se muestra en la ecuación 37.
( ) ( ) ( ) (36)
( ) ( ) ( ) ( ( ) ( )) (37)
39
Los coeficientes se seleccionaron para obtener las siguientes raíces del polinomio
característico:
Teniendo en cuenta la ecuación 24, el controlador adquiere la forma simple de la
ecuación 38 con valores de .
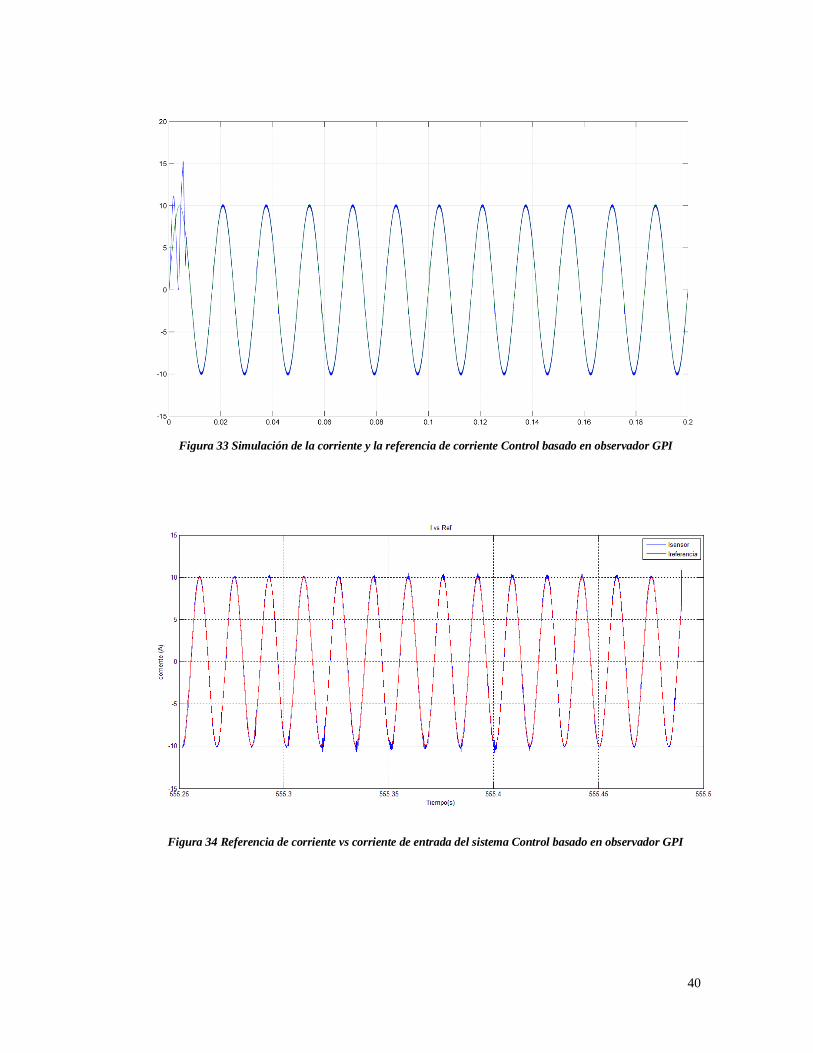
En las figuras 33 y 34, se muestran las gráficas de corriente y referencia de corriente
obtenidas en la simulación y la implementación de esta estrategia de control, en estas
se observan los resultados del control en cuanto al seguimiento de la señal de
referencia. En la primera gráfica se puede apreciar que para la simulación, esta
estrategia presenta un buen desempeño debido a que entre la referencia y la señal de
corriente hay un 1.779% de error cuadrático medio. En la segunda gráfica se puede
apreciar que para la implementación, esta estrategia presenta una disminución en su
desempeño debido a que entre la referencia y la señal de corriente hay un aumento en
el error cuadrático medio el cual es de 3.209%.
( ) ( ) ( ( ) ( ))
( ) ( ( ) ( ))
( ) ( ( ) ( ))
( )
* ( )
( ) ( ( ) ( )) ( )+
(38)
40
Figura 33 Simulación de la corriente y la referencia de corriente Control basado en observador GPI
Figura 34 Referencia de corriente vs corriente de entrada del sistema Control basado en observador GPI
41
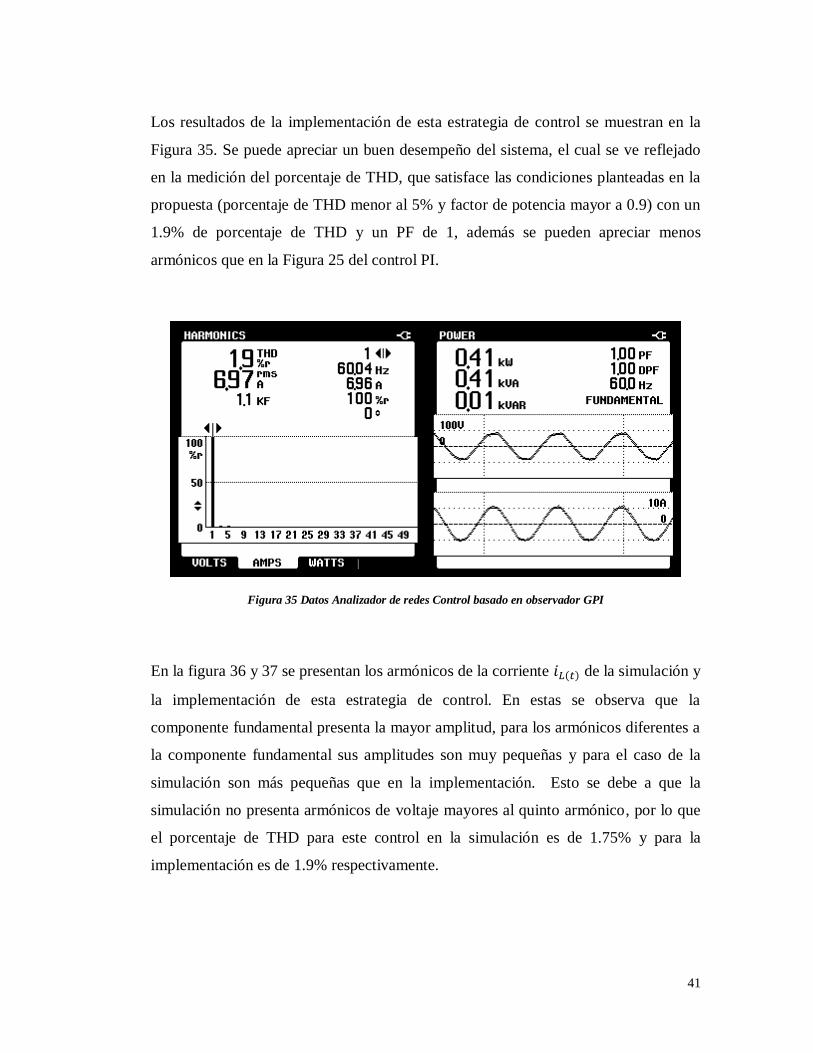
Los resultados de la implementación de esta estrategia de control se muestran en la
Figura 35. Se puede apreciar un buen desempeño del sistema, el cual se ve reflejado
en la medición del porcentaje de THD, que satisface las condiciones planteadas en la
propuesta (porcentaje de THD menor al 5% y factor de potencia mayor a 0.9) con un
1.9% de porcentaje de THD y un PF de 1, además se pueden apreciar menos
armónicos que en la Figura 25 del control PI.
Figura 35 Datos Analizador de redes Control basado en observador GPI
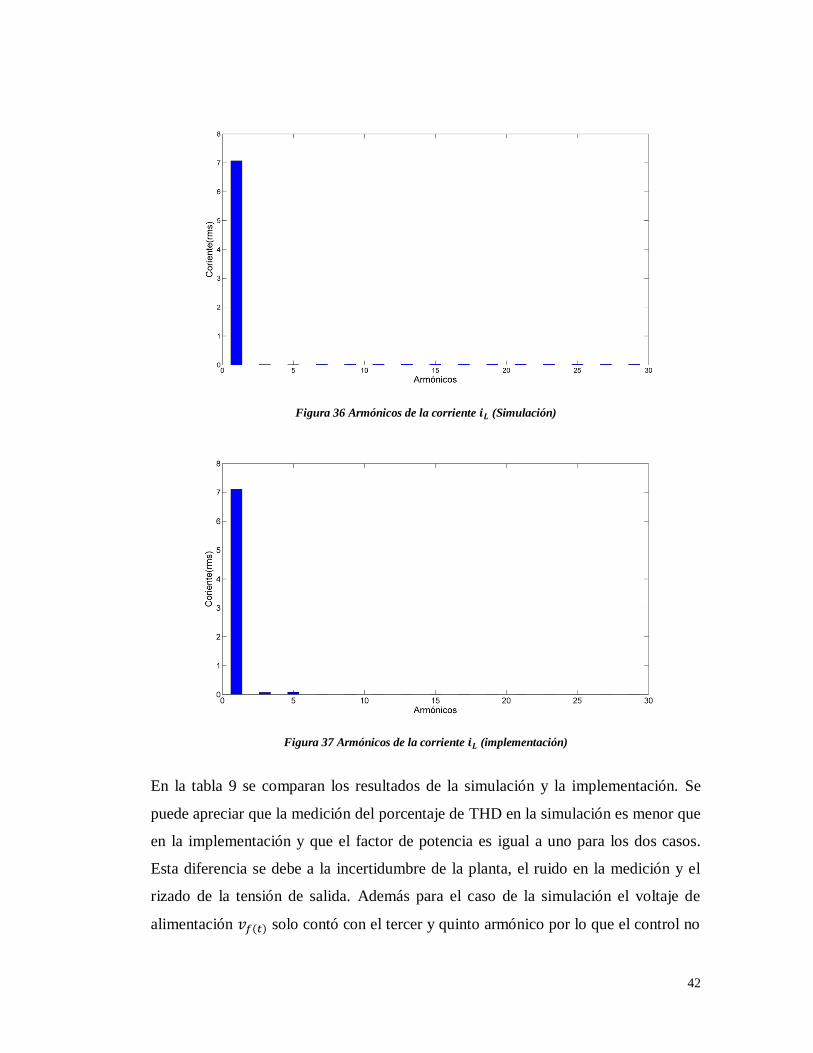
En la figura 36 y 37 se presentan los armónicos de la corriente ( ) de la simulación y
la implementación de esta estrategia de control. En estas se observa que la
componente fundamental presenta la mayor amplitud, para los armónicos diferentes a
la componente fundamental sus amplitudes son muy pequeñas y para el caso de la
simulación son más pequeñas que en la implementación. Esto se debe a que la
simulación no presenta armónicos de voltaje mayores al quinto armónico, por lo que
el porcentaje de THD para este control en la simulación es de 1.75% y para la
implementación es de 1.9% respectivamente.
42
Figura 36 Armónicos de la corriente (Simulación)
Figura 37 Armónicos de la corriente (implementación)
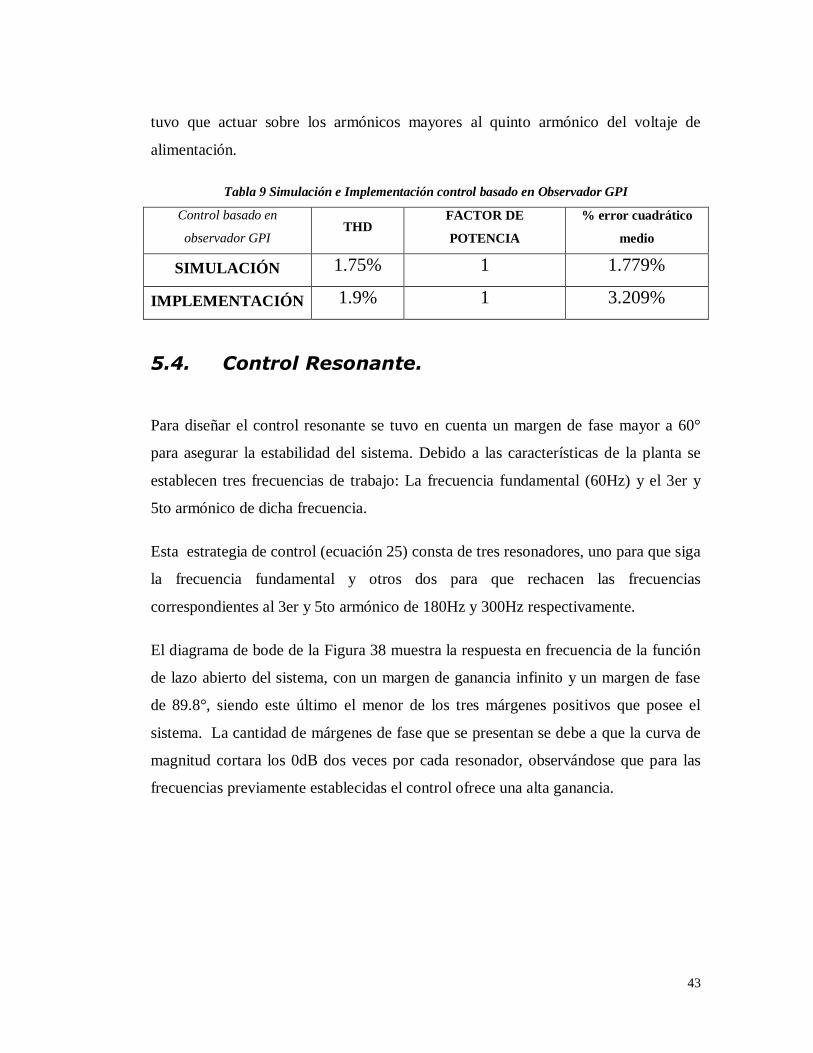
En la tabla 9 se comparan los resultados de la simulación y la implementación. Se
puede apreciar que la medición del porcentaje de THD en la simulación es menor que
en la implementación y que el factor de potencia es igual a uno para los dos casos.
Esta diferencia se debe a la incertidumbre de la planta, el ruido en la medición y el
rizado de la tensión de salida. Además para el caso de la simulación el voltaje de
alimentación ( ) solo contó con el tercer y quinto armónico por lo que el control no
43
tuvo que actuar sobre los armónicos mayores al quinto armónico del voltaje de
alimentación.
Tabla 9 Simulación e Implementación control basado en Observador GPI
Control basado en
observador GPI THD
FACTOR DE
POTENCIA
% error cuadrático
medio
SIMULACIÓN 1.75% 1 1.779%
IMPLEMENTACIÓN 1.9% 1 3.209%
5.4. Control Resonante.
Para diseñar el control resonante se tuvo en cuenta un margen de fase mayor a 60°
para asegurar la estabilidad del sistema. Debido a las características de la planta se
establecen tres frecuencias de trabajo: La frecuencia fundamental (60Hz) y el 3er y
5to armónico de dicha frecuencia.
Esta estrategia de control (ecuación 25) consta de tres resonadores, uno para que siga
la frecuencia fundamental y otros dos para que rechacen las frecuencias
correspondientes al 3er y 5to armónico de 180Hz y 300Hz respectivamente.
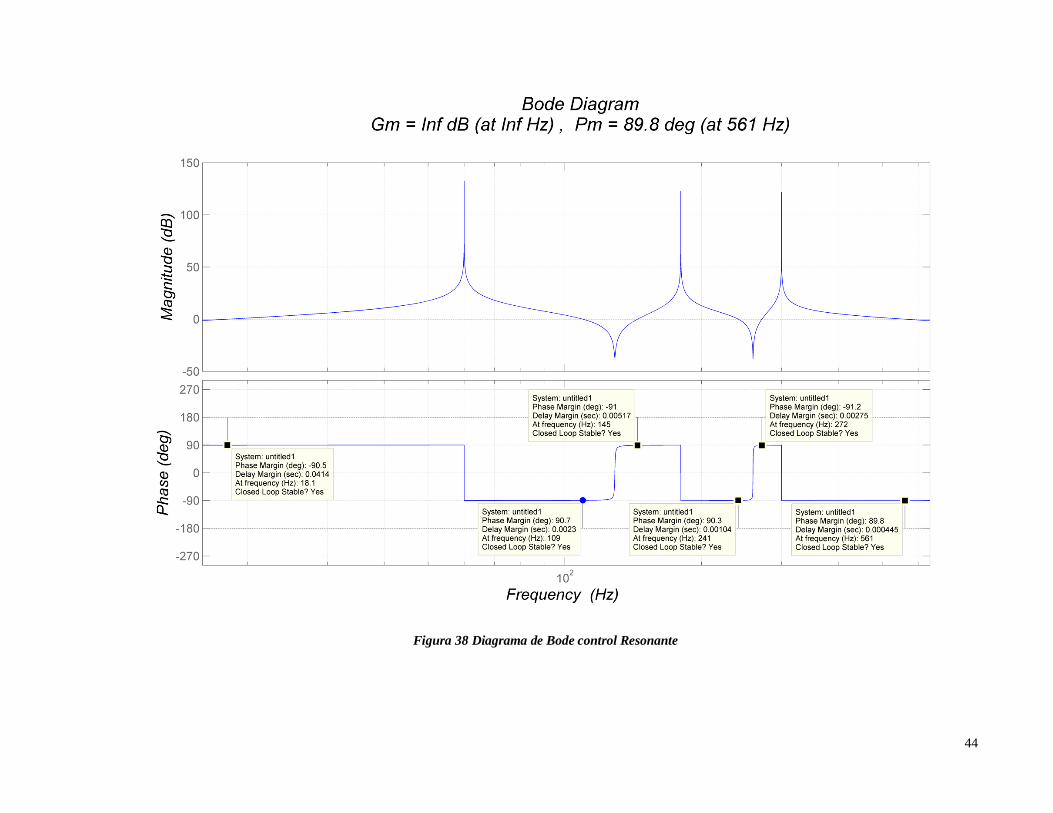
El diagrama de bode de la Figura 38 muestra la respuesta en frecuencia de la función
de lazo abierto del sistema, con un margen de ganancia infinito y un margen de fase
de 89.8°, siendo este último el menor de los tres márgenes positivos que posee el
sistema. La cantidad de márgenes de fase que se presentan se debe a que la curva de
magnitud cortara los 0dB dos veces por cada resonador, observándose que para las
frecuencias previamente establecidas el control ofrece una alta ganancia.
44
Figura 38 Diagrama de Bode control Resonante
45
Los márgenes de fase del sistema son: [-90.51 90.66 -91.04 90.33 -91.17 89.81], lo
que evidencia que la gráfica de fase se encuentra centrada en el rango de -90° y 90°
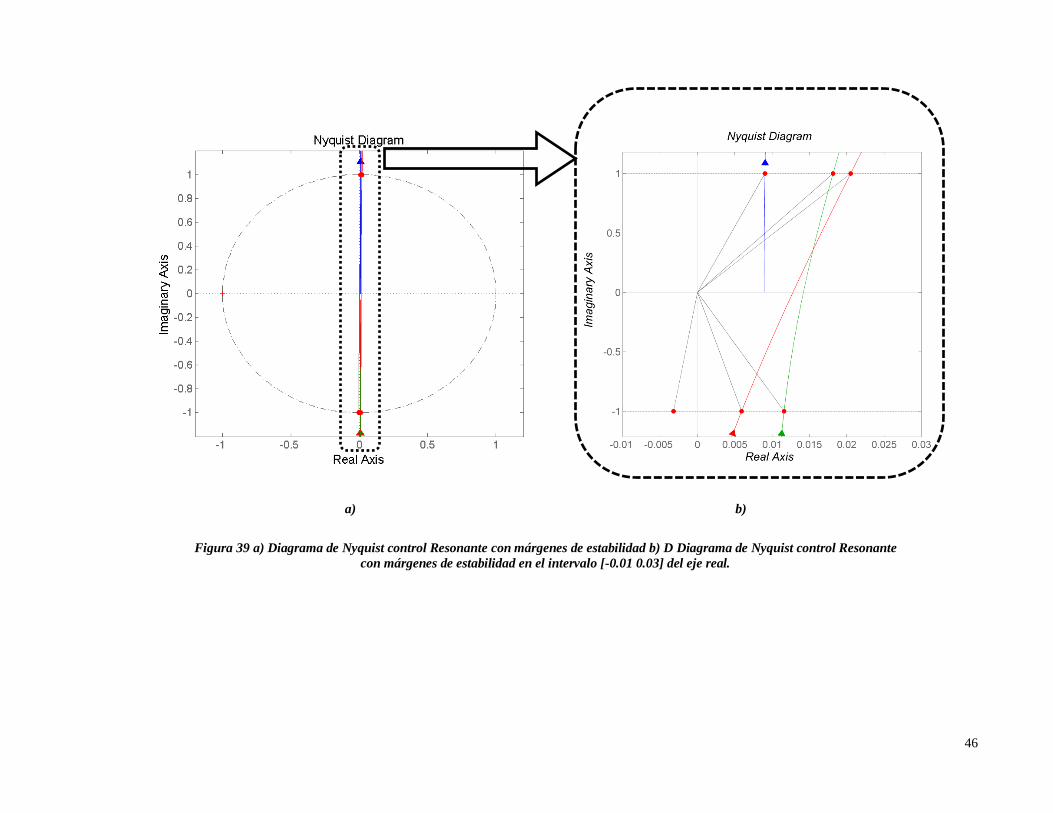
aproximadamente, esto garantiza la estabilidad del sistema. Es necesario aclarar que
se presentan márgenes de fase negativos sin implicar inestabilidad del sistema, puesto
que el diagrama de Nyquist muestra que la gráfica nunca encierra el punto (-1,0) del
plano complejo (figura 39a). En la en la figura 39b se puede apreciar que la gráfica de
Nyquist arranca en el eje real para un valor de (línea azul) y va
hasta cortando el circulo unitario por arriba, luego regresa de cortando el
circulo unitario por debajo y vuele a (línea verde), para regresar nuevamente de
cortando el circulo unitario por debajo e ir nuevamente a (línea roja) lo que
da como resultado márgenes de fase positivos y negativos.
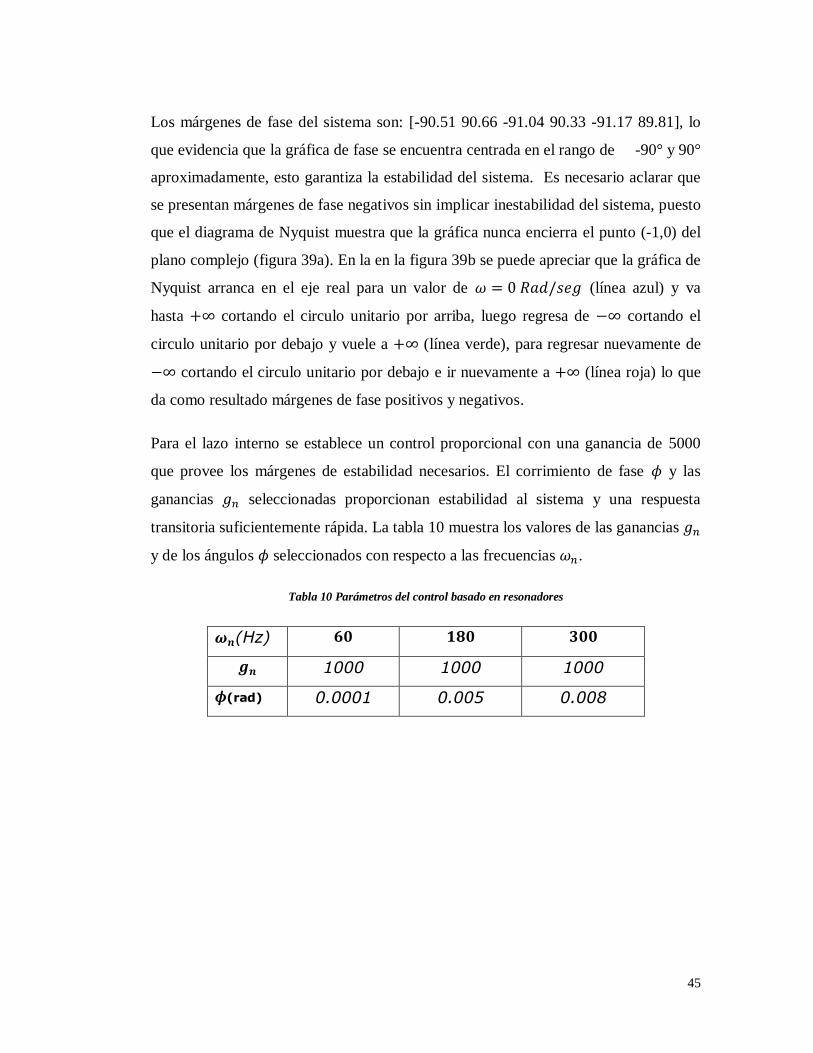
Para el lazo interno se establece un control proporcional con una ganancia de 5000
que provee los márgenes de estabilidad necesarios. El corrimiento de fase y las
ganancias seleccionadas proporcionan estabilidad al sistema y una respuesta
transitoria suficientemente rápida. La tabla 10 muestra los valores de las ganancias
y de los ángulos seleccionados con respecto a las frecuencias .
Tabla 10 Parámetros del control basado en resonadores
(Hz)
1000 1000 1000
(rad) 0.0001 0.005 0.008
46
a) b)
Figura 39 a) Diagrama de Nyquist control Resonante con márgenes de estabilidad b) D Diagrama de Nyquist control Resonante
con márgenes de estabilidad en el intervalo [-0.01 0.03] del eje real.
47
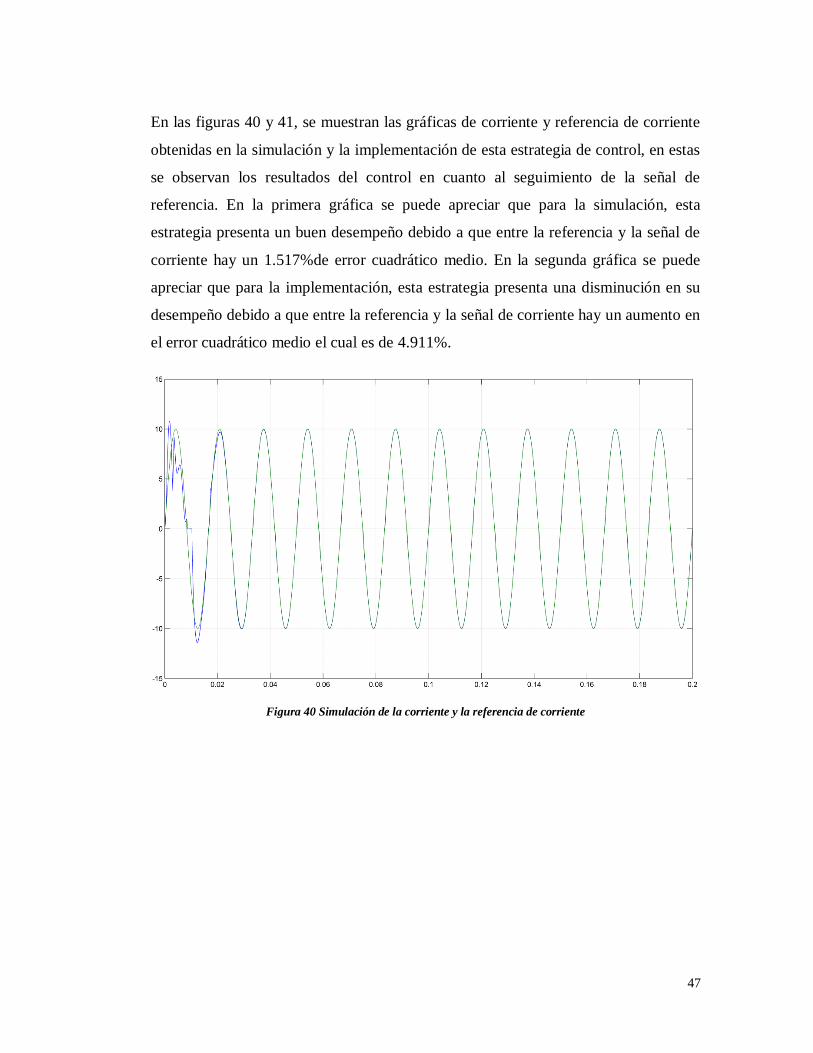
En las figuras 40 y 41, se muestran las gráficas de corriente y referencia de corriente
obtenidas en la simulación y la implementación de esta estrategia de control, en estas
se observan los resultados del control en cuanto al seguimiento de la señal de
referencia. En la primera gráfica se puede apreciar que para la simulación, esta
estrategia presenta un buen desempeño debido a que entre la referencia y la señal de
corriente hay un 1.517%de error cuadrático medio. En la segunda gráfica se puede
apreciar que para la implementación, esta estrategia presenta una disminución en su
desempeño debido a que entre la referencia y la señal de corriente hay un aumento en
el error cuadrático medio el cual es de 4.911%.
Figura 40 Simulación de la corriente y la referencia de corriente
48
Figura 41 Referencia de corriente vs corriente de entrada del sistema implementación control Resonante
Los resultados de la implementación del control resonante se muestran en la Figura
42. En esta se puede apreciar un buen desempeño del sistema, el cual se ve reflejado
en la medición del porcentaje de THD, que satisface las condiciones planteadas en la
propuesta (porcentaje de THD menor al 5% y factor de potencia mayor a 0.9) con un
2.4% y un PF de 1, además se pueden apreciar menos armónicos que en la Figura 25
del control PI.
Figura 42 Datos Analizador de redes implementación control Resonante
49
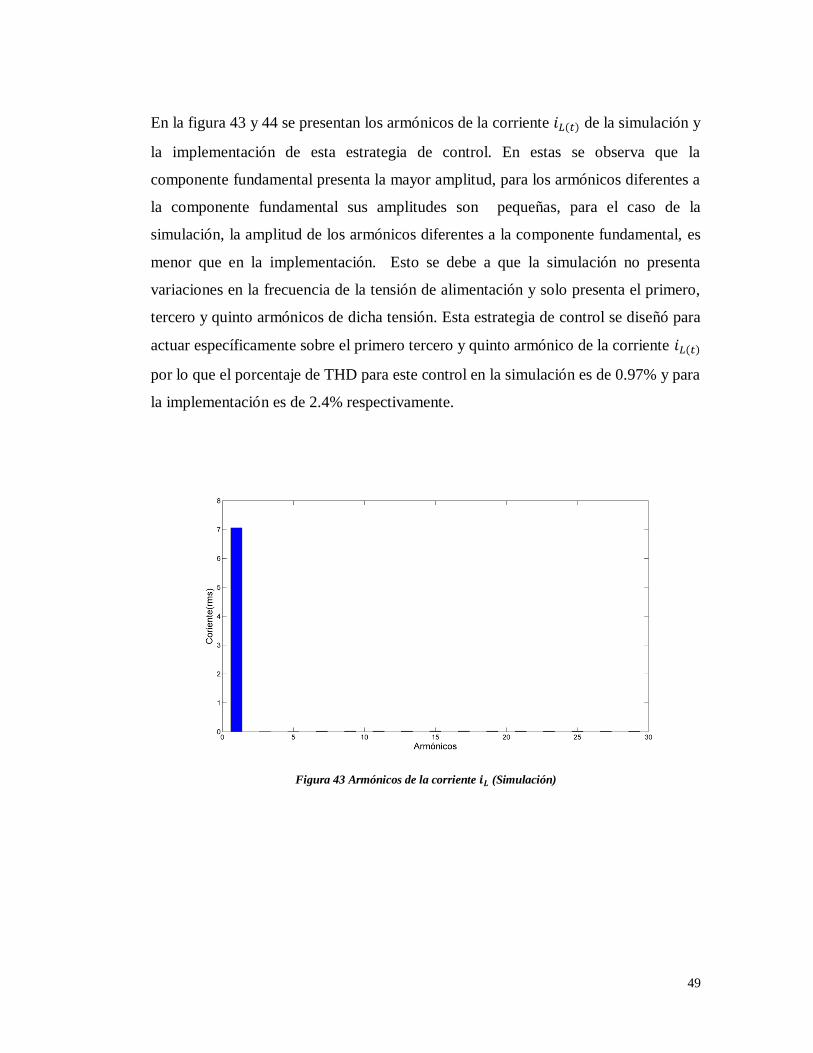
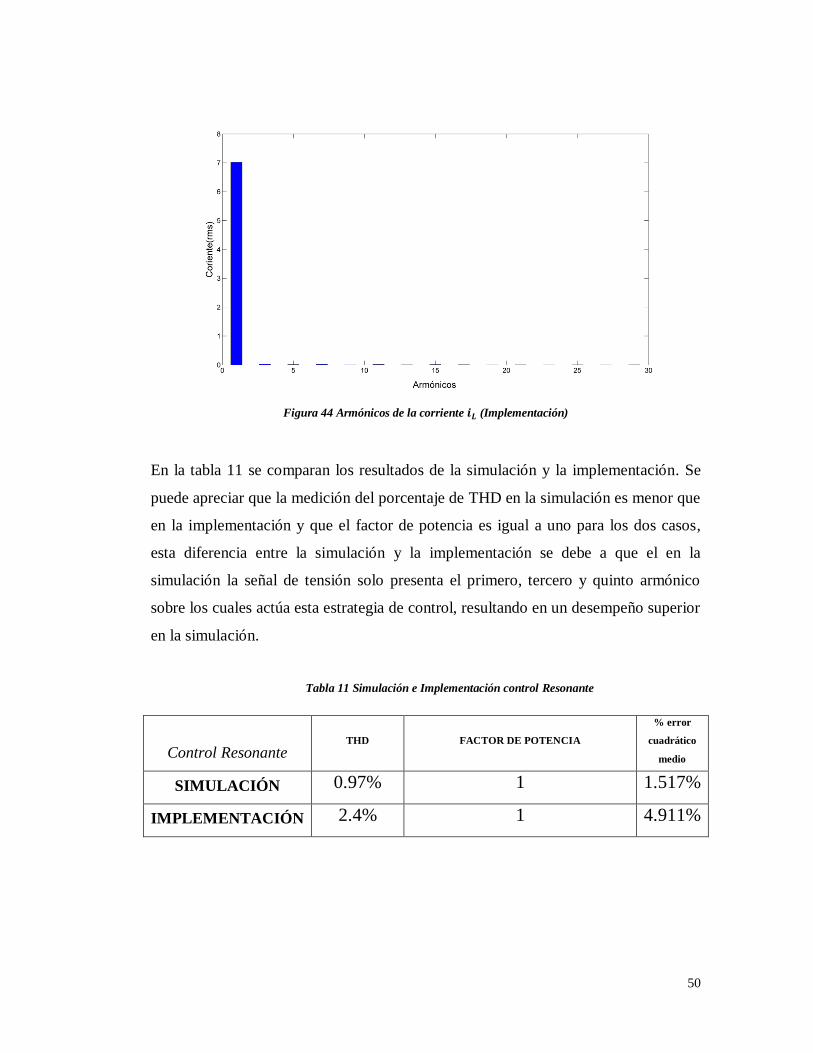
En la figura 43 y 44 se presentan los armónicos de la corriente ( ) de la simulación y
la implementación de esta estrategia de control. En estas se observa que la
componente fundamental presenta la mayor amplitud, para los armónicos diferentes a
la componente fundamental sus amplitudes son pequeñas, para el caso de la
simulación, la amplitud de los armónicos diferentes a la componente fundamental, es
menor que en la implementación. Esto se debe a que la simulación no presenta
variaciones en la frecuencia de la tensión de alimentación y solo presenta el primero,
tercero y quinto armónicos de dicha tensión. Esta estrategia de control se diseñó para
actuar específicamente sobre el primero tercero y quinto armónico de la corriente ( )
por lo que el porcentaje de THD para este control en la simulación es de 0.97% y para
la implementación es de 2.4% respectivamente.
Figura 43 Armónicos de la corriente (Simulación)
50
Figura 44 Armónicos de la corriente (Implementación)
En la tabla 11 se comparan los resultados de la simulación y la implementación. Se
puede apreciar que la medición del porcentaje de THD en la simulación es menor que
en la implementación y que el factor de potencia es igual a uno para los dos casos,
esta diferencia entre la simulación y la implementación se debe a que el en la
simulación la señal de tensión solo presenta el primero, tercero y quinto armónico
sobre los cuales actúa esta estrategia de control, resultando en un desempeño superior
en la simulación.
Tabla 11 Simulación e Implementación control Resonante
Control Resonante THD FACTOR DE POTENCIA
% error
cuadrático
medio
SIMULACIÓN 0.97% 1 1.517%
IMPLEMENTACIÓN 2.4% 1 4.911%
51
5.5. Comparaciones
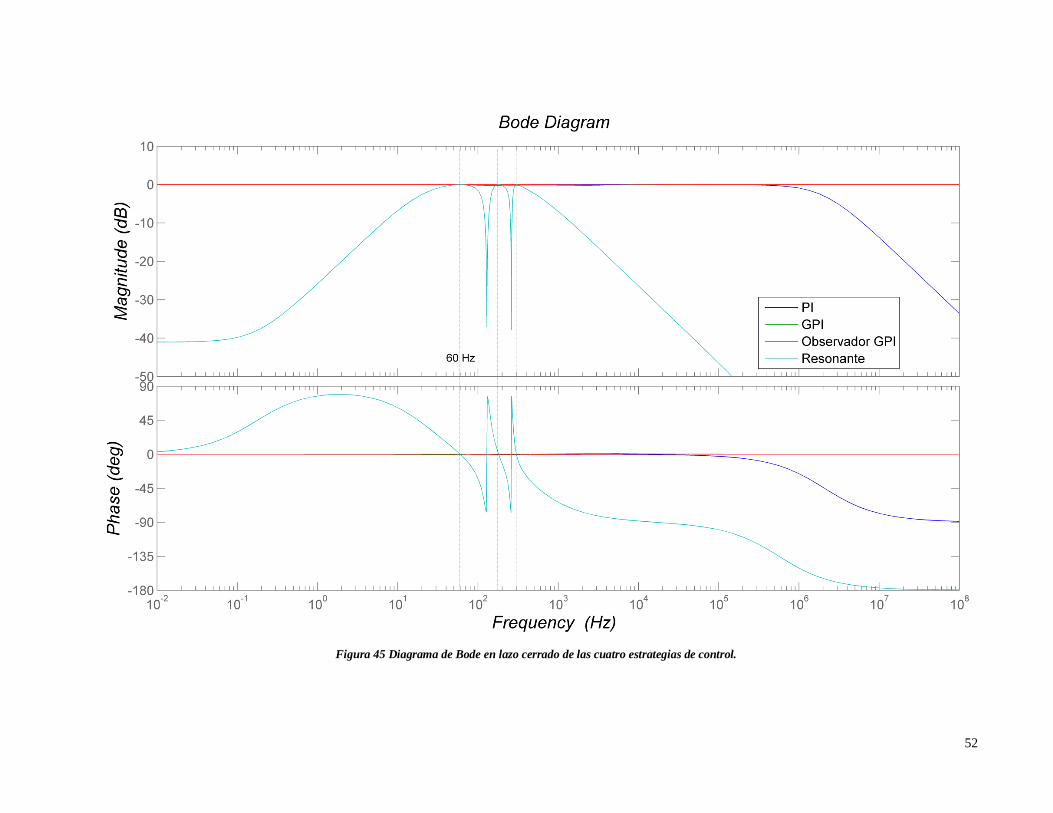
En la Figura 45 se muestra el diagrama de bode en lazo cerrado de los cuatro
controladores. Se puede apreciar que todos las estrategias de control presentan buen
desempeño respecto a las frecuencias de interés, se entiende entonces por qué los
cuatro cumplen con los objetivos propuestos, ya que a 60 Hz presentan una ganancia
cercana a los 0dB y una fase cercana a los 0°, lo que resulta en un bajo error de
seguimiento.
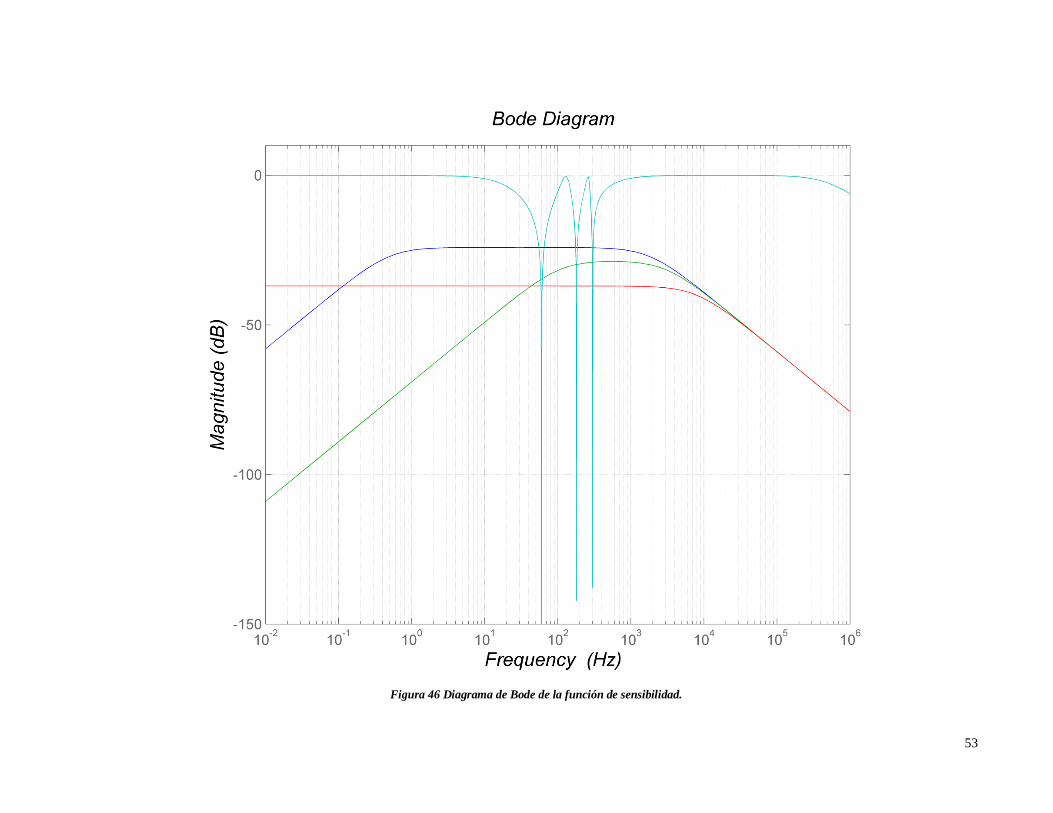
En el diagrama de bode de la función de sensibilidad para cada una de las estrategias
de control (figura 46) se aprecia la atenuación de las perturbaciones de por parte de
cada una de estas estrategias. El control resonante presenta mayor atenuación en las
frecuencias de interés, seguido por el control basado en observador GPI, control GPI
y por ultimo control PI.
52
Figura 45 Diagrama de Bode en lazo cerrado de las cuatro estrategias de control.
53
Figura 46 Diagrama de Bode de la función de sensibilidad.
54
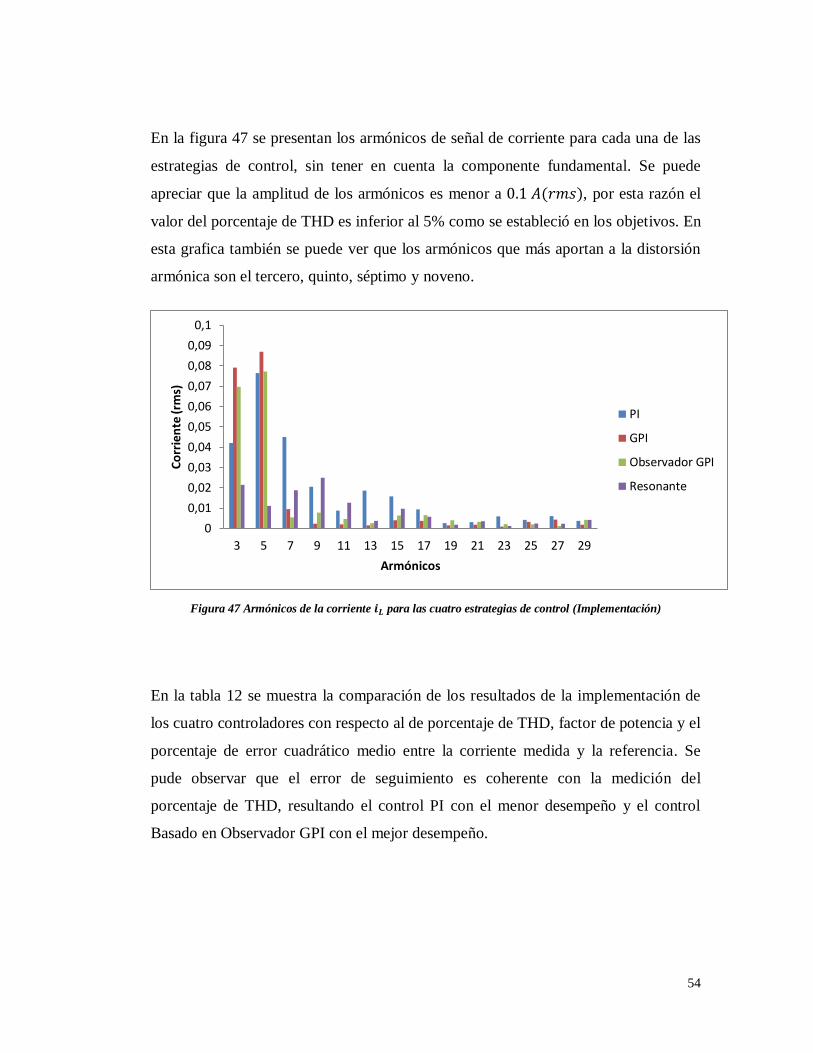
En la figura 47 se presentan los armónicos de señal de corriente para cada una de las
estrategias de control, sin tener en cuenta la componente fundamental. Se puede
apreciar que la amplitud de los armónicos es menor a ( ), por esta razón el
valor del porcentaje de THD es inferior al 5% como se estableció en los objetivos. En
esta grafica también se puede ver que los armónicos que más aportan a la distorsión
armónica son el tercero, quinto, séptimo y noveno.
Figura 47 Armónicos de la corriente para las cuatro estrategias de control (Implementación)
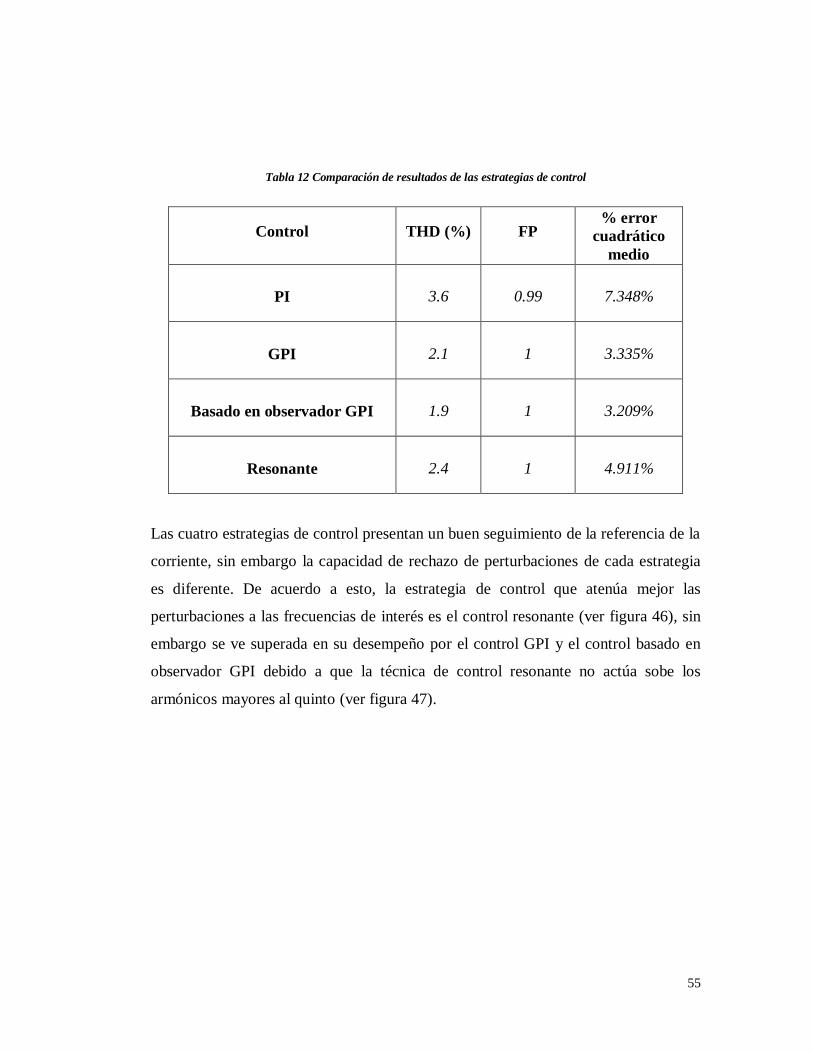
En la tabla 12 se muestra la comparación de los resultados de la implementación de
los cuatro controladores con respecto al de porcentaje de THD, factor de potencia y el
porcentaje de error cuadrático medio entre la corriente medida y la referencia. Se
pude observar que el error de seguimiento es coherente con la medición del
porcentaje de THD, resultando el control PI con el menor desempeño y el control
Basado en Observador GPI con el mejor desempeño.
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
0,09
0,1
3 5 7 9 11 13 15 17 19 21 23 25 27 29
Co
rrie
nte
(rm
s)
Armónicos
PI
GPI
Observador GPI
Resonante
55
Tabla 12 Comparación de resultados de las estrategias de control
Control THD (%) FP % error
cuadrático
medio
PI 3.6 0.99 7.348%
GPI 2.1 1 3.335%
Basado en observador GPI 1.9 1 3.209%
Resonante 2.4 1 4.911%
Las cuatro estrategias de control presentan un buen seguimiento de la referencia de la
corriente, sin embargo la capacidad de rechazo de perturbaciones de cada estrategia
es diferente. De acuerdo a esto, la estrategia de control que atenúa mejor las
perturbaciones a las frecuencias de interés es el control resonante (ver figura 46), sin
embargo se ve superada en su desempeño por el control GPI y el control basado en
observador GPI debido a que la técnica de control resonante no actúa sobe los
armónicos mayores al quinto (ver figura 47).
56
Capítulo 6 6. Conclusiones
1) Las estrategias de control GPI, control basado en Observador GPI y
Resonante, presentan un mejor desempeño frente al control PI, ya que el
porcentaje de THD de esta es mucho mayor que las otras tres. Sin embargo
las cuatro estrategias hacen que el sistema cumpla con los objetivos
planteados donde se propuso un porcentaje máximo de porcentaje de THD del
5% y un FP mayor a 0.9 como se ve en la tabla 12 de la sección 5.5.
2) Las cuatro estrategias de control presentan un buen seguimiento de la
referencia de la corriente de acuerdo al diagrama de bode en lazo cerrado
presentado en la figura 34, sin embargo la capacidad de rechazo de
perturbaciones de cada estrategia es diferente, como se muestra en el
diagrama de bode de la figura 35. De acuerdo a esto, la estrategia que atenúa
mejor las perturbaciones a las frecuencias de interés es el control resonante,
sin embargo esta estrategia no actúa sobre los armónicos mayores al quinto,
por esta razón es posible afirmar que el control basado en observador GPI
posee la mejor capacidad para rechazar perturbaciones ya que presenta la
mayor atenuación.
3) A pesar de que el control resonante está diseñado para rechazar y seguir
señales de las frecuencias de interés, no presenta el mejor desempeño, esto se
debe a que esta estrategia de control sólo presenta alta ganancia en el
armónico fundamental y en el tercer y quito armónico. Teniendo en cuenta la
figura 47, es posible aumentar el desempeño del control resonante si en el
modelo interno de este se agregan resonadores que actúen sobre el séptimo y
noveno armónico.
57
4) La presencia de armónicos en la red afecta el desempeño de los controladores,
debido a que el voltaje y sus armónicos entran como una perturbación al
sistema. Entonces es válido decir que como el controlador basado en el
observador GPI conduce el error de seguimiento hacia una vecindad cercana a
cero y tiene mayor atenuación de perturbaciones en un amplio rango de
frecuencias que incluye las frecuencias de interés, esta estrategia de control es
la que mejor se adapta a los criterios de operación del convertidor AC-DC tipo
Bridgeless planteado.
5) Es posible que al aumentar la cantidad de resonadores, esta estrategia de
control supere en desempeño al control basado en observador GPI, debido a
su capacidad de rechazo de perturbaciones. Sin embargo no se recomienda la
implementación de esta técnica de control en este tipo de convertidores si
existen variaciones fuertes de la frecuencia de la red eléctrica puesto que esta
técnica no es robusta ante pequeñas variaciones de la frecuencia.
58
7. Bibliografía
[1] R. Etz, T. Patarau, and D. Petreus, “Comparison between digital average
current mode control and digital one cycle control for a bridgeless PFC boost
converter,” in 2012 IEEE 18th International Symposium for Design and
Technology in Electronic Packaging (SIITME), 2012, pp. 211–215.
[2] J. a Suárez, G. F. Di Mauro, and D. A. C. Agüero, “Análisis De La Distorción
Armónica Y Los EfecDe Atenuación Y Diversidad En Áreas Residenciales,”
America (NY)., vol. 3, no. 5, pp. 429–435, 2005.
[3] a E. Emannuel, W. F. Horton, W. T. Jewel, and D. J. Phileggi, “Effects of
Harmonics on Equipment Report of the IEEE Task Force on the Effects of
Harmonics on Equipment,” IEEE Trans. Power Deliv., vol. 8, no. 2, pp. 672–
680, 1993.
[4] “Compliance Testing to the IEC 1000-3-2 (EN 61000-3-2) and IEC 1000-3-3
(EN 61000-3-3) Standards.” [Online]. Available:
http://cp.literature.agilent.com/litweb/pdf/5964-1917E.pdf. [Accessed: 07-
Nov-2015].
[5] A. Lazaro, A. Barrado, M. Sanz, V. Salas, and E. Olias, “New Power Factor
Correction AC-DC Converter With Reduced Storage Capacitor Voltage,”
IEEE Trans. Ind. Electron., vol. 54, no. 1, pp. 384–397, Feb. 2007.
[6] “IEEE Std 519-1992,” IEEE Std 519-1992. pp. 1–112, 1993.
[7] J. R. Rodriguez, J. W. Dixon, J. R. Espinoza, J. Pontt, and P. Lezana, “PWM
regenerative rectifiers: state of the art,” IEEE Trans. Ind. Electron., vol. 52, no.
1, pp. 5–22, Feb. 2005.
[8] K. Mahmud and L. Tao, “Power Factor Correction by PFC Boost Topology
Using Average Current Control Method,” Glob. High Tech Congr. Electron.
(GHTCE), 2013 IEEE, pp. 16–20, 2013.
[9] L. Huber, Y. Jang, and M. M. Jovanović, “Performance evaluation of
bridgeless PFC boost rectifiers,” IEEE Trans. Power Electron., vol. 23, no. 3,
pp. 1381–1390, 2008.
59
[10] F. Musavi, W. Eberle, and W. G. Dunford, “A high-performance single-phase
bridgeless interleaved PFC converter for plug-in hybrid electric vehicle battery
chargers,” IEEE Trans. Ind. Appl., vol. 47, no. 4, pp. 1833–1843, 2011.
[11] K. Mahmud, “Power factor correction by PFC boost topology using average
current control method,” in 2013 IEEE Global High Tech Congress on
Electronics, 2013, pp. 16–20.
[12] F. Musavi, W. Eberle, and W. G. Dunford, “A high-performance single-phase
AC-DC power factor corrected boost converter for plug in hybrid electric
vehicle battery chargers,” Energy Convers. Congr. Expo. ECCE 2010 IEEE,
pp. 3588–3595, 2010.
[13] I. a Pn, “Current Transducer LA 205-S,” Data Sheet, pp. 1–3, 1997.
[14] Lem, “Voltage Transducer LV 25-P I PN = 10 mA V PN = 10 .. 500 V,” Data
Sheet, pp. 18–20, 2013.
[15] T. MathWorks, “xPC Target For Use with Real-Time Workshop - Selecting
Hardware Guide,” 2002.
[16] “Introduction to xPC Target and xPC Target Turnkey - Simulink Video.”
[Online]. Available: http://www.mathworks.com/videos/introduction-to-xpc-
target-and-xpc-target-turnkey-68908.html?s_tid=srchtitle. [Accessed: 07-Nov-
2015].
[17] W. Bolton, Ingeniería de Control, 2da ed. 2001.
[18] Q. Bo, H. Xiao-yuan, and L. Ü. Zheng-yu, “A study of startup inrush current
of three-phase voltage source PWM rectifier with PI controller,” 2009 IEEE
6th Int. Power Electron. Motion Control Conf., vol. 3, pp. 980–983, 2009.
[19] F. Inthamoussou, “Nociones de control robusto,” pp. 1–19, 2011.
[20] E. W. Zurita-Bustamante, J. Linares-Flores, E. Guzmán-Ramírez, and H. Sira-
Ramírez, “A comparison between the GPI and PID controllers for the
stabilization of a dc-dc „buck‟ converter: A field programmable gate array
implementation,” IEEE Trans. Ind. Electron., vol. 58, no. 11, pp. 5251–5262,
2011.
[21] H. Coral-enriquez, G. a Ramos, and J. Cort, “Power factor correction and
harmonic compensation in an active filter application through a discrete-time
active disturbance rejection control approach,” pp. 5318–5323, 2015.
[22] J. A. Cortés-romero, “Control GPI-repetitivo para sistemas lineales con
incertidumbre / variación en los parámetros GPI-repetitive control for linear
60
systems with parameter uncertainty / variation,” vol. 18, no. 34, pp. 13–24,
2015.
[23] A. Luviano-Juarez, J. Cortes-Romero, and H. Sira-Ramirez, “Chaotic
synchronization between oscillators using robust GPI control,” 2008 5th Int.
Conf. Electr. Eng. Comput. Sci. Autom. Control, no. Cce, pp. 114–119, 2008.
[24] Y. L. Erickson and H. K. R. W., “Design of EMI Filters Having Low
Harmonic Distortion in High-Power-Factor Converters,” Power Electronics,
IEEE Transactions on. [Online]. Available:
http://ieeexplore.ieee.org.ezproxy.unal.edu.co/xpls/icp.jsp?arnumber=6594916.
[Accessed: 21-Nov-2015].
[25] M. Fliess, J. Lévine, P. Martin, and P. Rouchon, “Flatness and defect of non-
linear systems: introductory theory and examples,” Int. J. Control, vol. 61, no.
6, pp. 1327–1361, 1995.
[26] H. Sira-Ramírez and S. K. Agrawal, Differentially Flat Systems. 2004.
[27] G. a. Ramos, J. Cortes-Romero, and A. J. Triana, “Control proporcional
integral generalizado para señales periódicas,” Tecnura, vol. 17, pp. 18–32,
2013.
[28] R. Keil, P. Mutschler, and J. van der Weem, “Advanced control scheme for a
single-phase PWM rectifier in traction applications,” in 38th IAS Annual
Meeting on Conference Record of the Industry Applications Conference, 2003.,
vol. 3, pp. 1558–1565.
[29] Y. Lu, “Sliding-mode controller design with internal model principle for
systems subject to periodic signals,” in American Control Conference, 2004.
Proceedings of the 2004, 2004, pp. 1952–1957.
[30] B. Francis, O. A. Sebakhy, and W. M. Wonham, “Synthesis of multivariable
regulators: The internal model principle,” Appl. Math. Optim., vol. 1, no. 1, pp.
64–86, Mar. 1974.
[31] R. Costa-Castelló, R. Griñó, and E. Fossas, “Resonant control of a single-
phase full-bridge unity power factor boost rectifier,” Proc. IEEE Int. Conf.
Control Appl., no. October, pp. 599–604, 2007.
[32] M. F. Byl, S. J. Ludwick, and D. L. Trumper, “A loop shaping perspective for
tuning controllers with adaptive feedforward cancellation,” Precis. Eng., vol.
29, no. 1, pp. 27–40, 2005.
61
ANEXOS
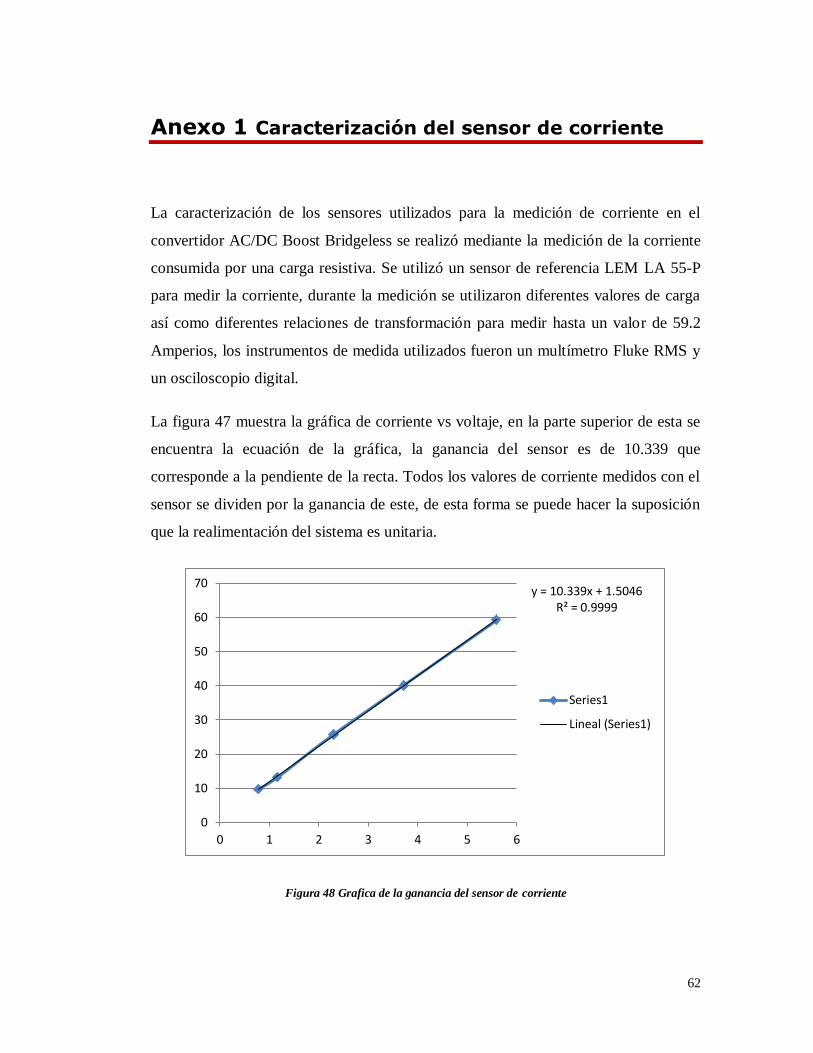
62
Anexo 1 Caracterización del sensor de corriente
La caracterización de los sensores utilizados para la medición de corriente en el
convertidor AC/DC Boost Bridgeless se realizó mediante la medición de la corriente
consumida por una carga resistiva. Se utilizó un sensor de referencia LEM LA 55-P
para medir la corriente, durante la medición se utilizaron diferentes valores de carga
así como diferentes relaciones de transformación para medir hasta un valor de 59.2
Amperios, los instrumentos de medida utilizados fueron un multímetro Fluke RMS y
un osciloscopio digital.
La figura 47 muestra la gráfica de corriente vs voltaje, en la parte superior de esta se
encuentra la ecuación de la gráfica, la ganancia del sensor es de 10.339 que
corresponde a la pendiente de la recta. Todos los valores de corriente medidos con el
sensor se dividen por la ganancia de este, de esta forma se puede hacer la suposición
que la realimentación del sistema es unitaria.
Figura 48 Grafica de la ganancia del sensor de corriente
y = 10.339x + 1.5046 R² = 0.9999
0
10
20
30
40
50
60
70
0 1 2 3 4 5 6
Series1
Lineal (Series1)
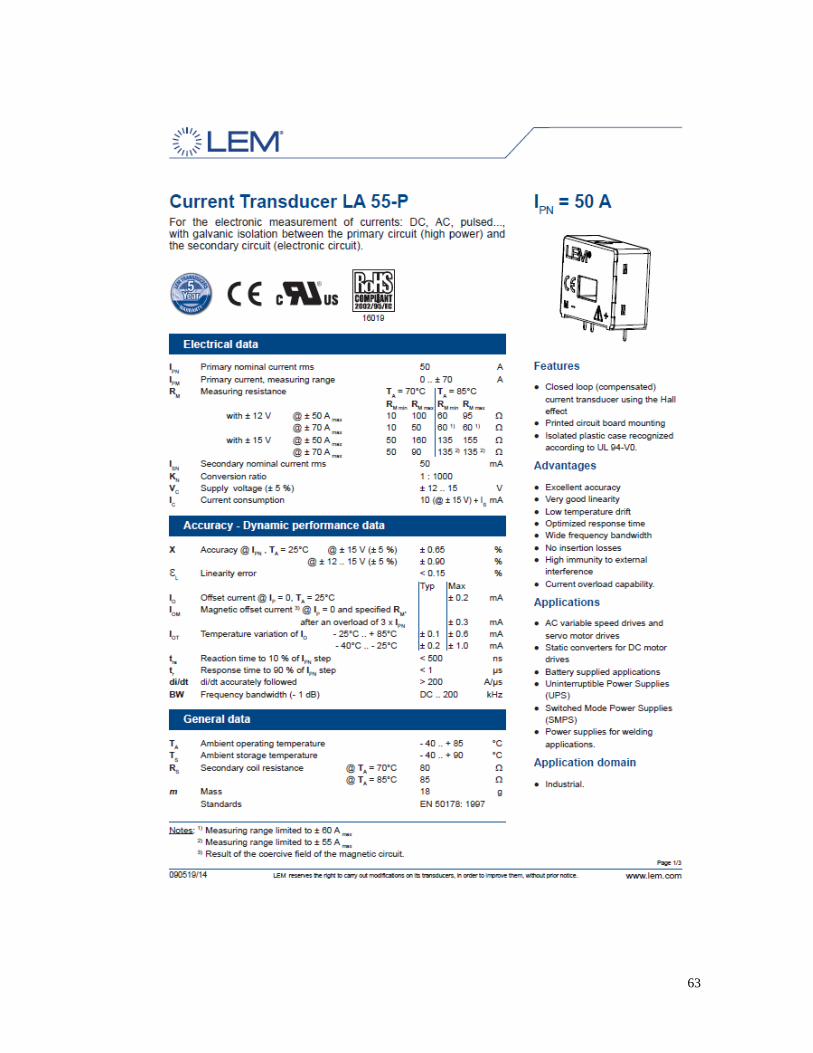
63
64
65
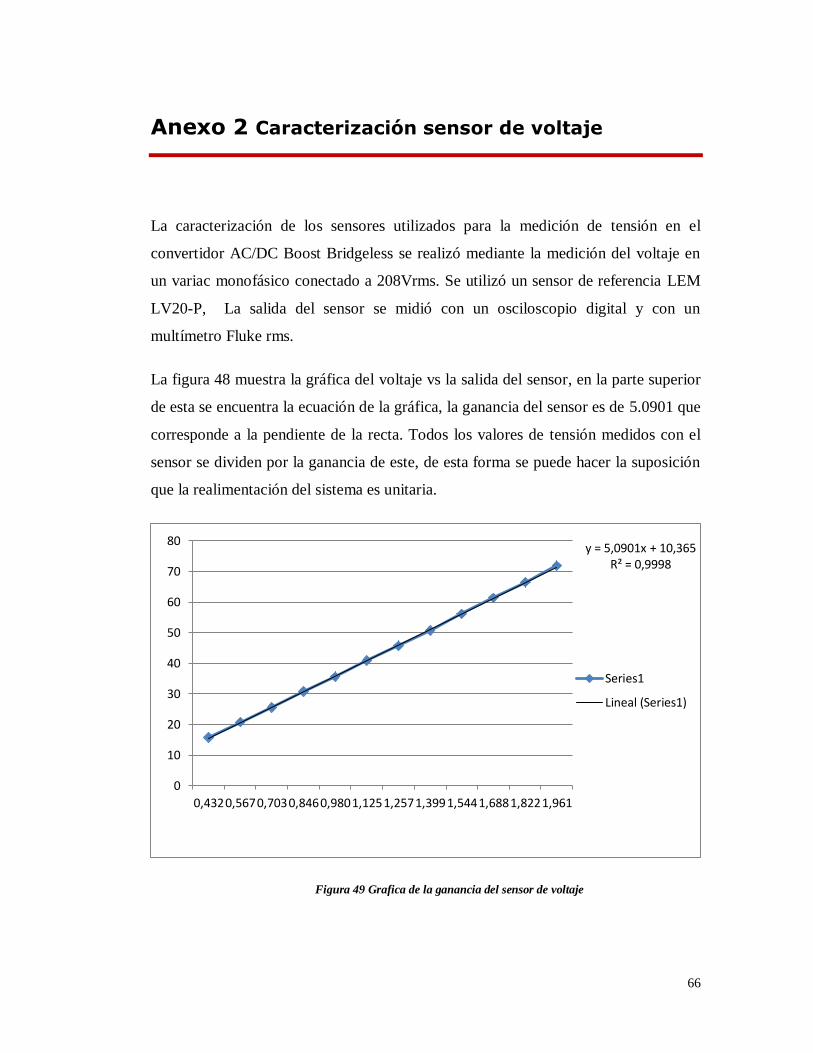
66
Anexo 2 Caracterización sensor de voltaje
La caracterización de los sensores utilizados para la medición de tensión en el
convertidor AC/DC Boost Bridgeless se realizó mediante la medición del voltaje en
un variac monofásico conectado a 208Vrms. Se utilizó un sensor de referencia LEM
LV20-P, La salida del sensor se midió con un osciloscopio digital y con un
multímetro Fluke rms.
La figura 48 muestra la gráfica del voltaje vs la salida del sensor, en la parte superior
de esta se encuentra la ecuación de la gráfica, la ganancia del sensor es de 5.0901 que
corresponde a la pendiente de la recta. Todos los valores de tensión medidos con el
sensor se dividen por la ganancia de este, de esta forma se puede hacer la suposición
que la realimentación del sistema es unitaria.
Figura 49 Grafica de la ganancia del sensor de voltaje
y = 5,0901x + 10,365 R² = 0,9998
0
10
20
30
40
50
60
70
80
0,4320,5670,7030,8460,9801,1251,2571,3991,5441,6881,8221,961
Series1
Lineal (Series1)

67
68
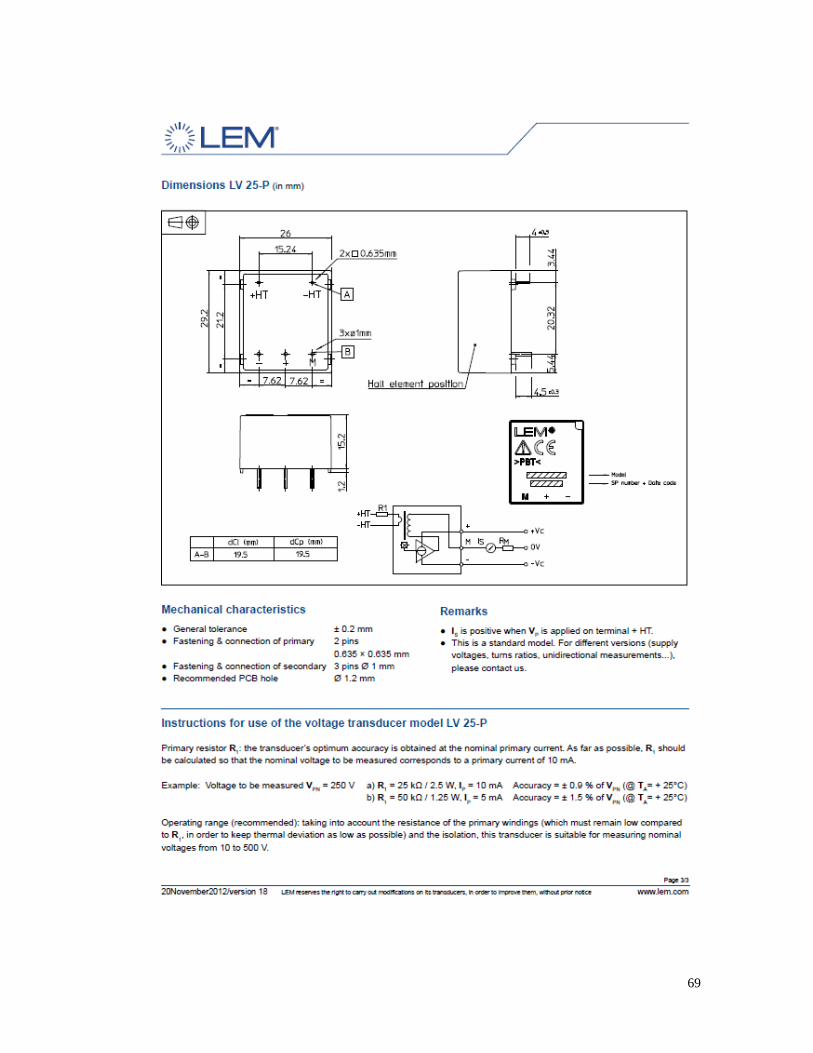
69
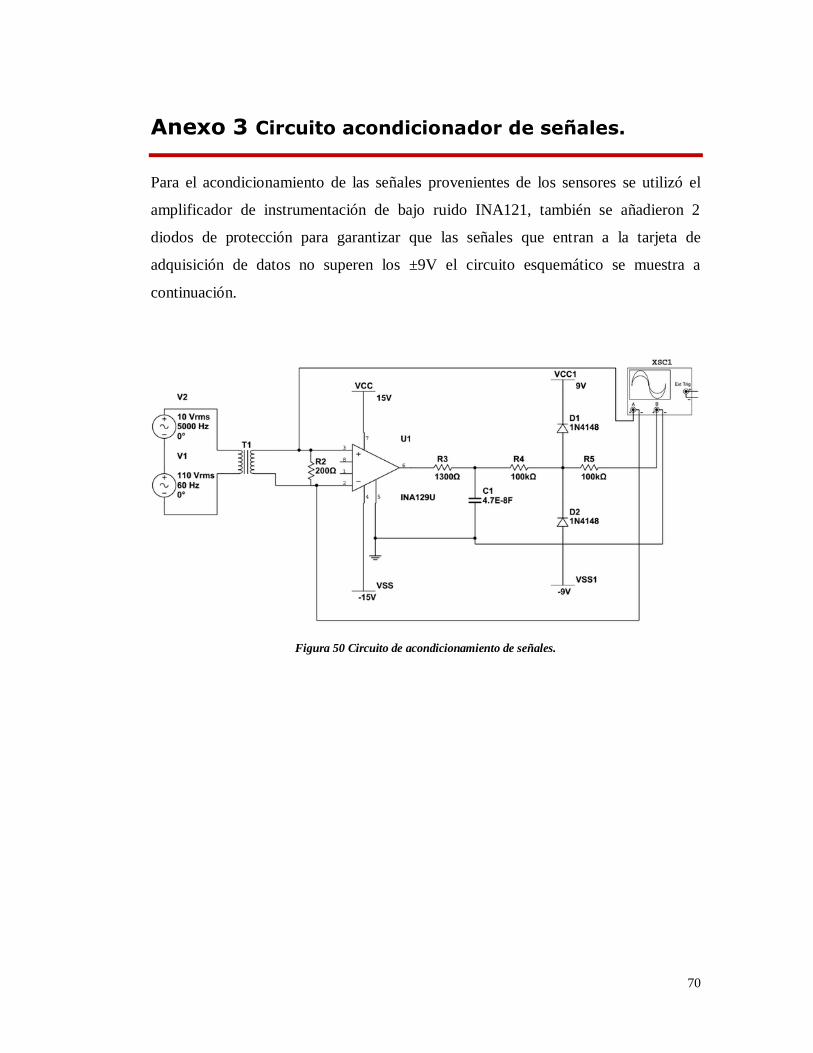
70
Anexo 3 Circuito acondicionador de señales.
Para el acondicionamiento de las señales provenientes de los sensores se utilizó el
amplificador de instrumentación de bajo ruido INA121, también se añadieron 2
diodos de protección para garantizar que las señales que entran a la tarjeta de
adquisición de datos no superen los ±9V el circuito esquemático se muestra a
continuación.
Figura 50 Circuito de acondicionamiento de señales.
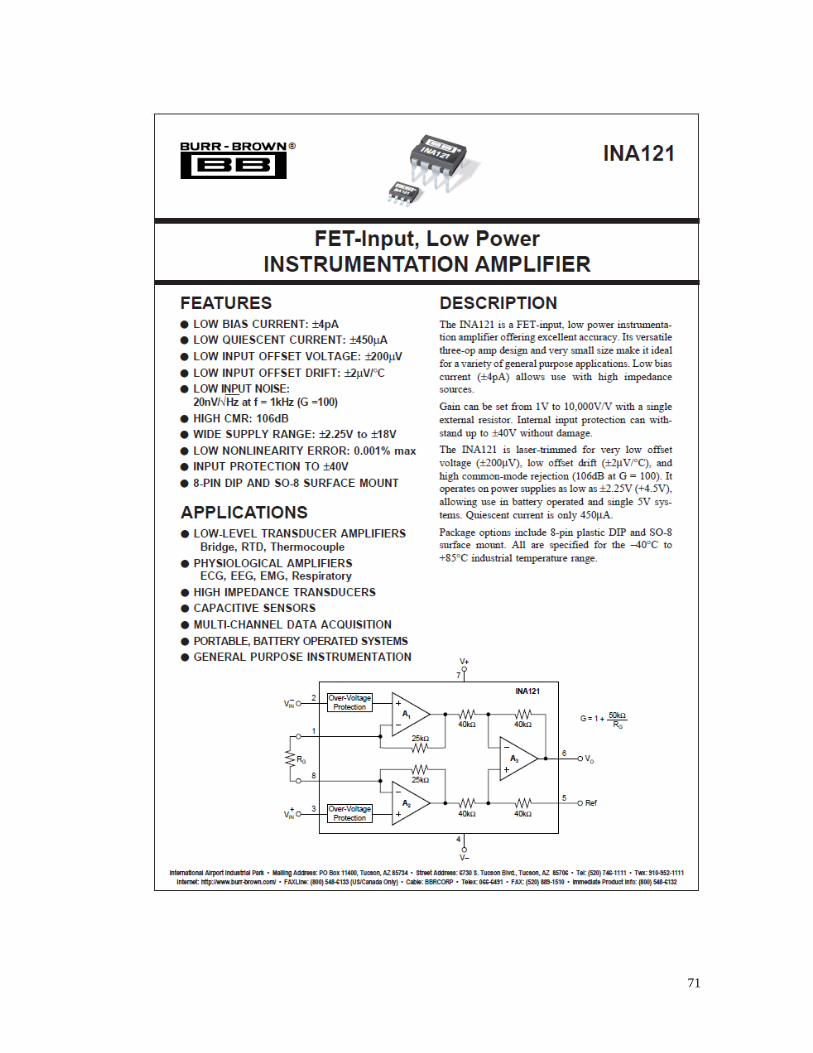
71
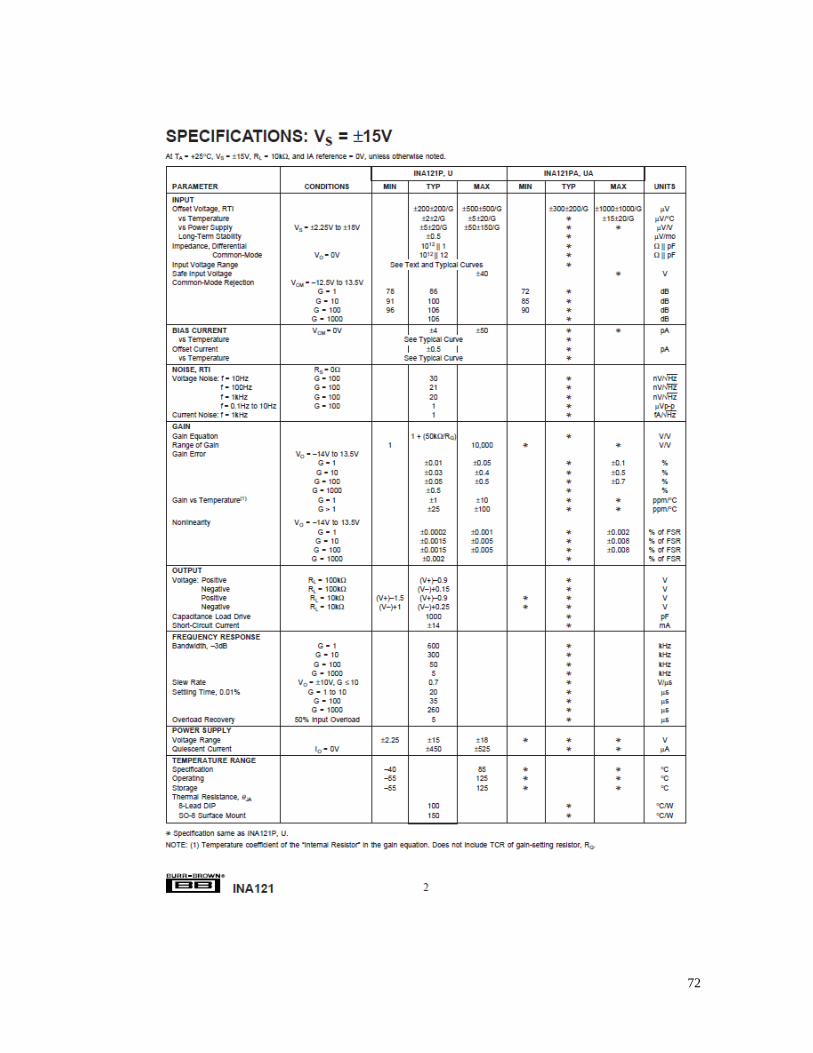
72
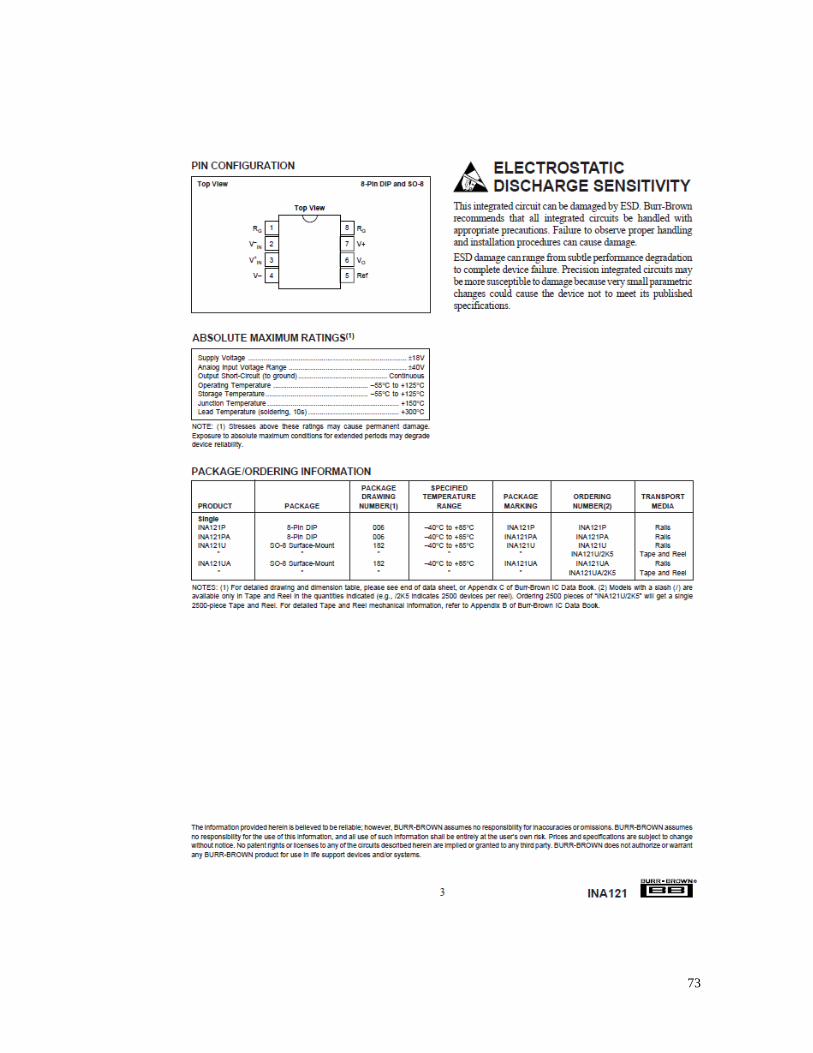
73
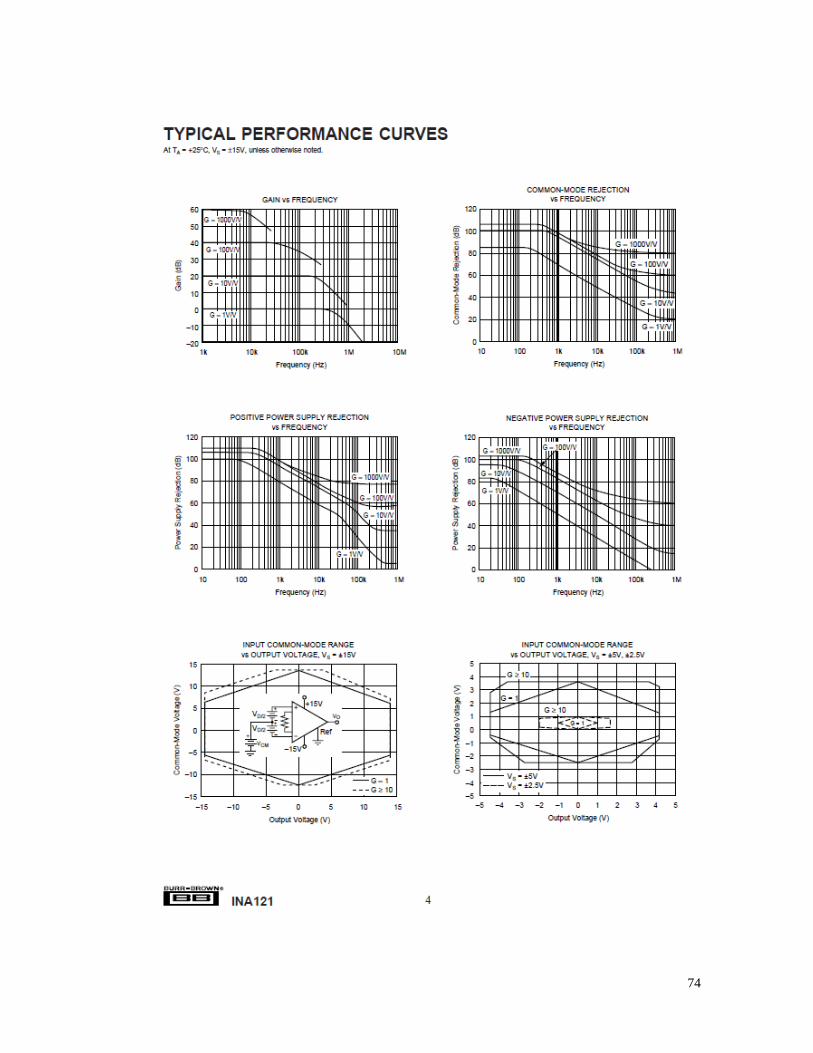
74
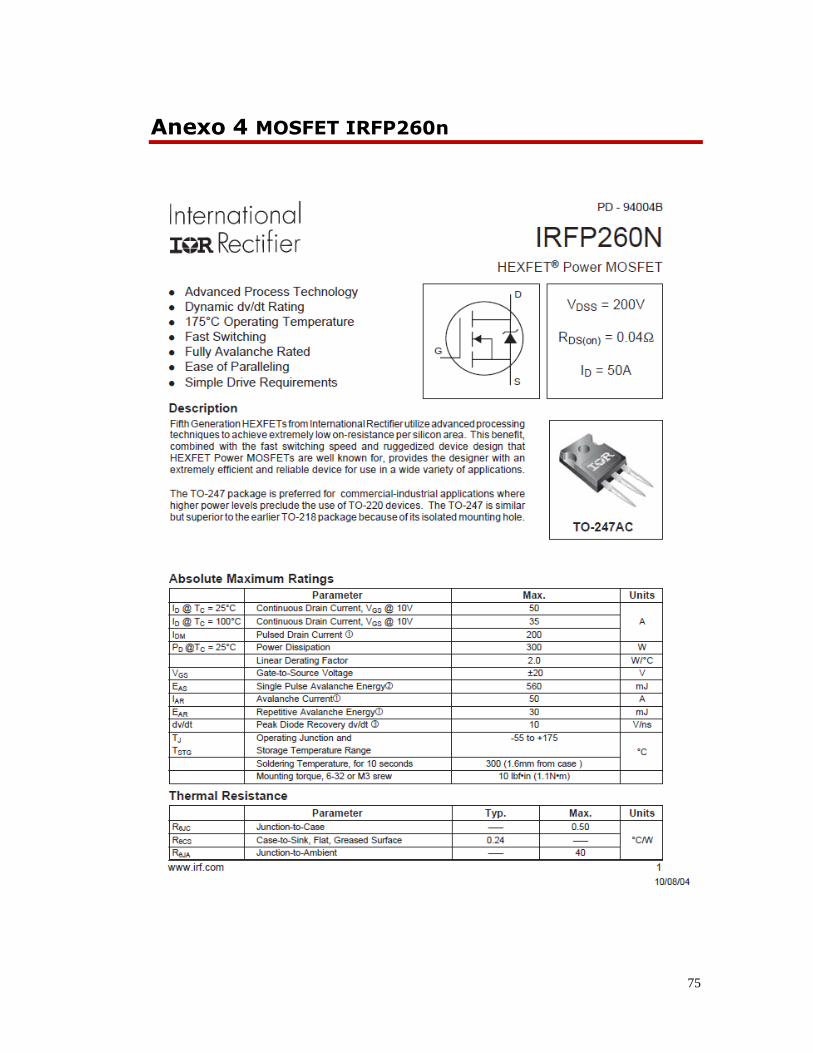
75
Anexo 4 MOSFET IRFP260n
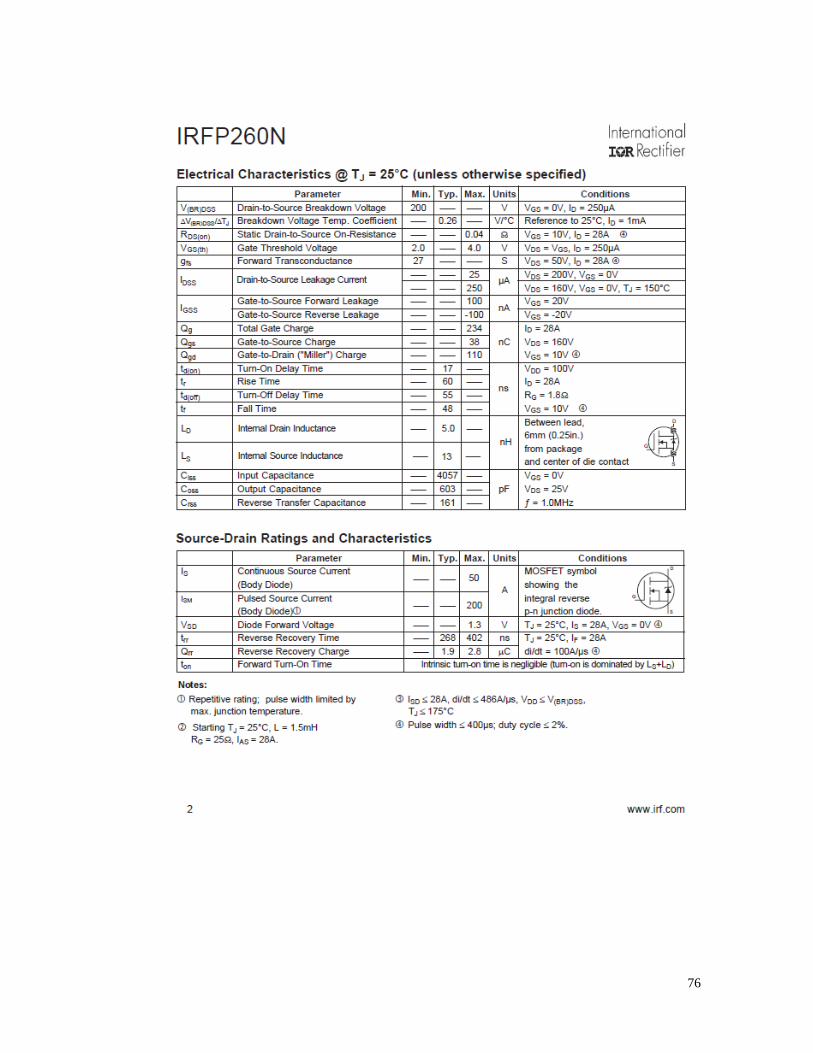
76
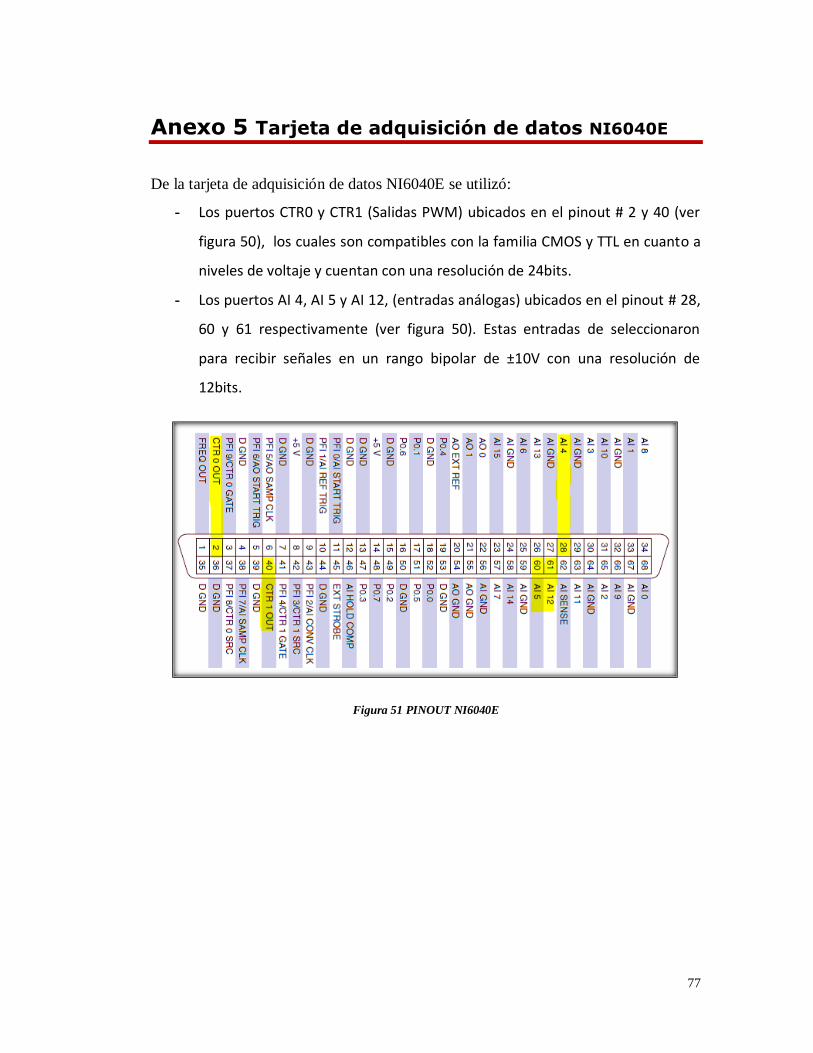
77
Anexo 5 Tarjeta de adquisición de datos NI6040E
De la tarjeta de adquisición de datos NI6040E se utilizó:
- Los puertos CTR0 y CTR1 (Salidas PWM) ubicados en el pinout # 2 y 40 (ver
figura 50), los cuales son compatibles con la familia CMOS y TTL en cuanto a
niveles de voltaje y cuentan con una resolución de 24bits.
- Los puertos AI 4, AI 5 y AI 12, (entradas análogas) ubicados en el pinout # 28,
60 y 61 respectivamente (ver figura 50). Estas entradas de seleccionaron
para recibir señales en un rango bipolar de ±10V con una resolución de
12bits.
Figura 51 PINOUT NI6040E
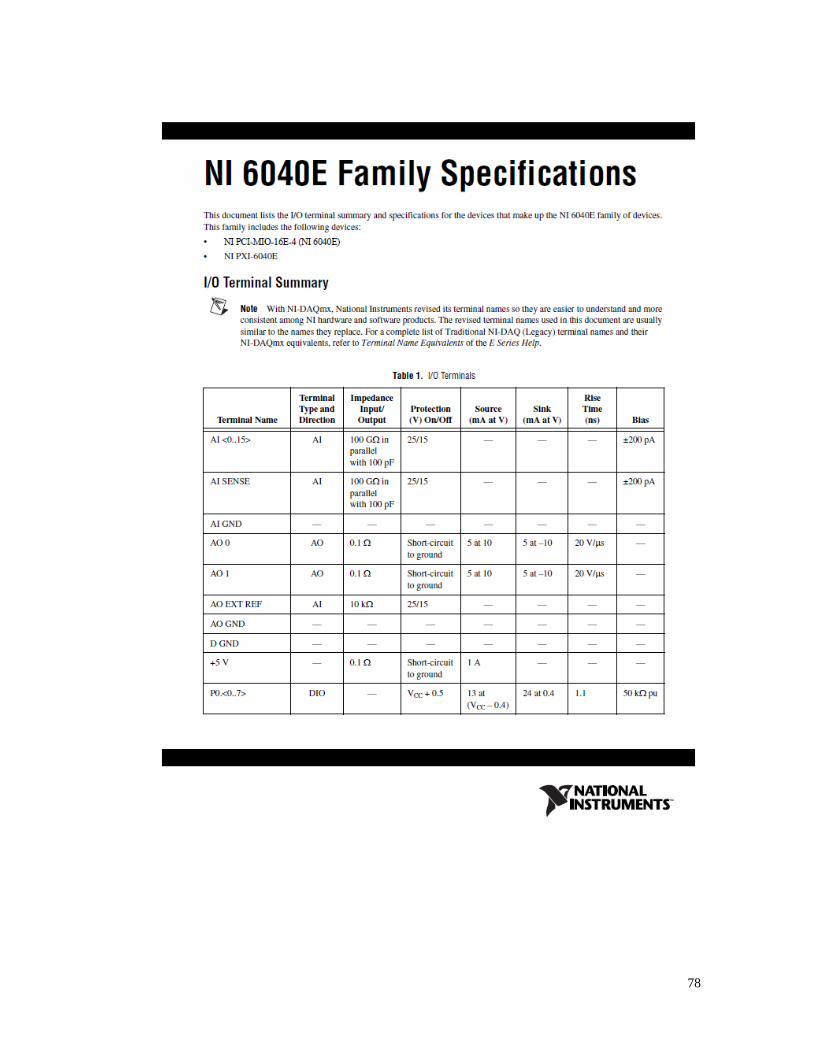
78
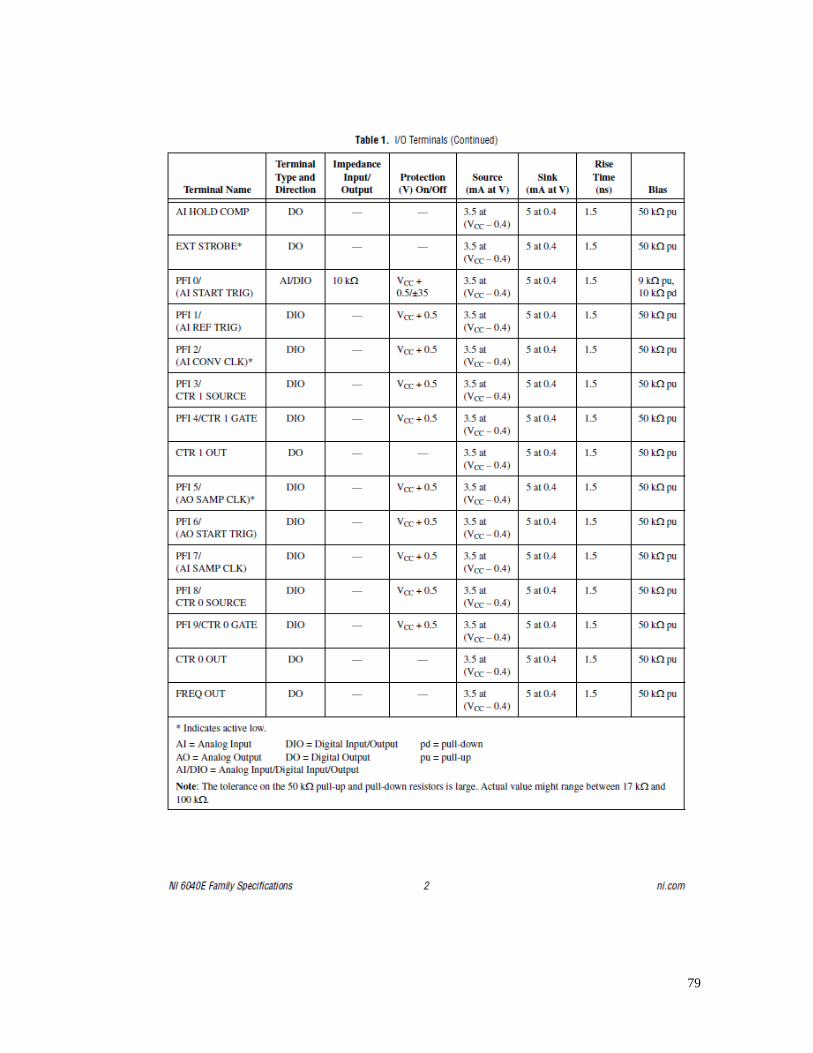
79
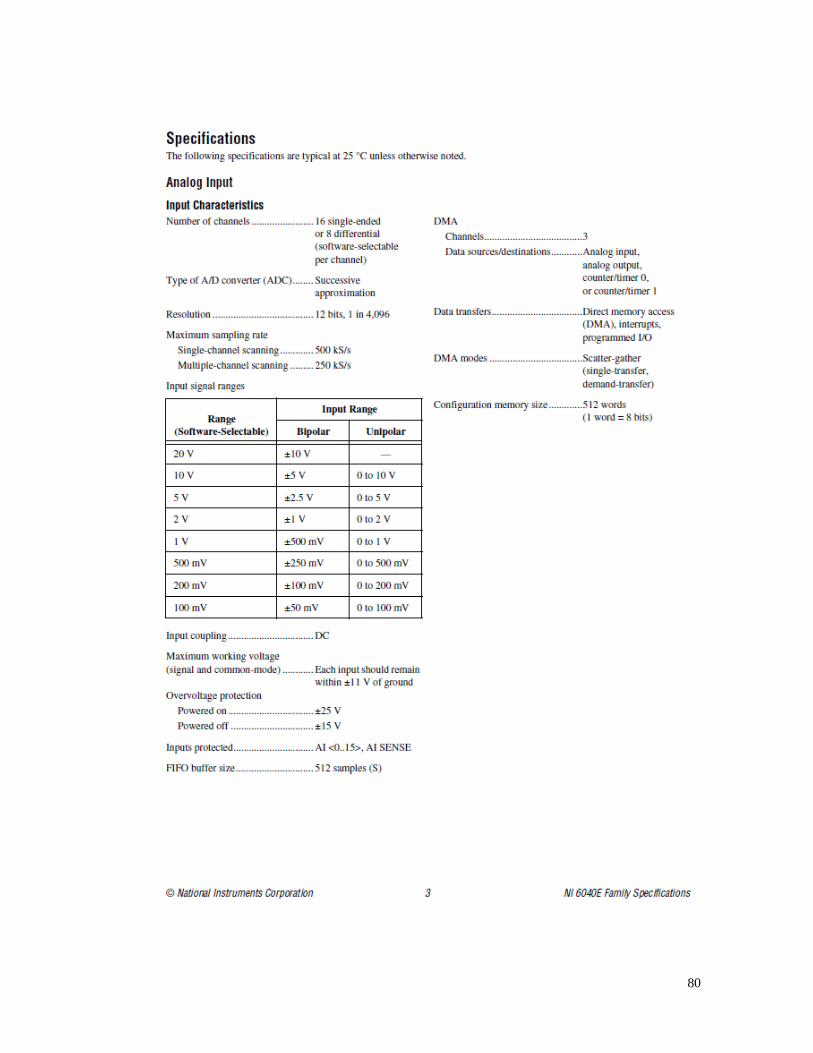
80
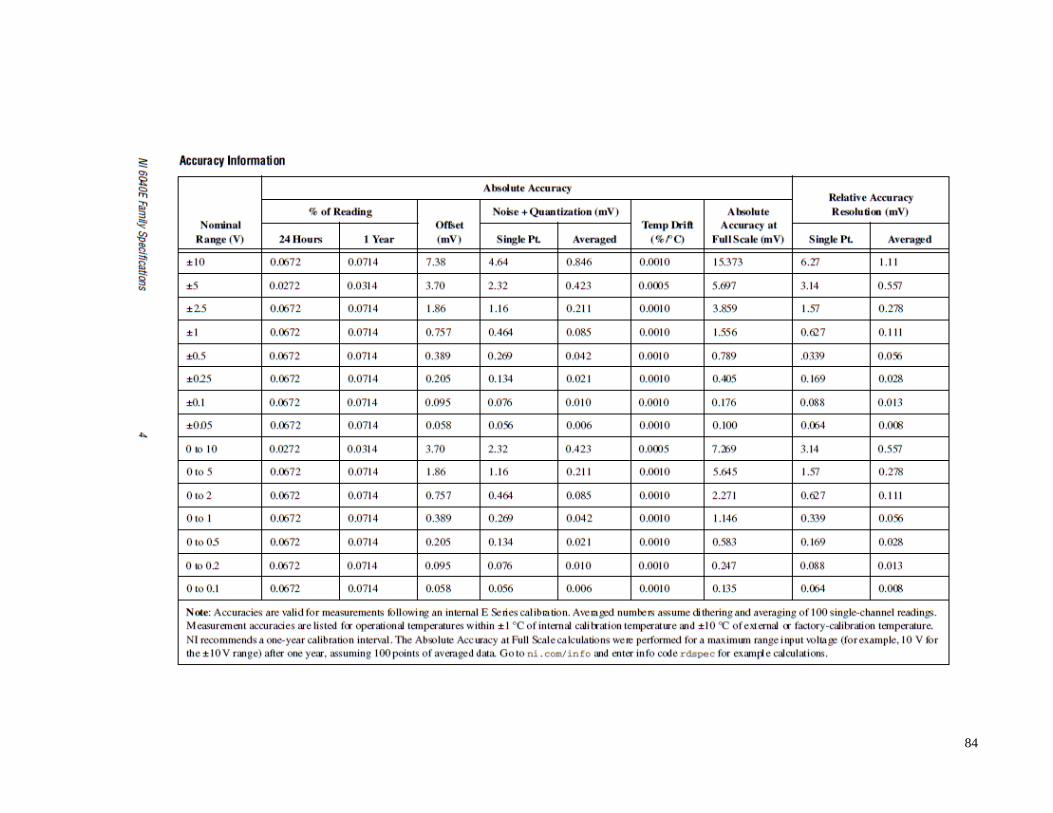
84

85
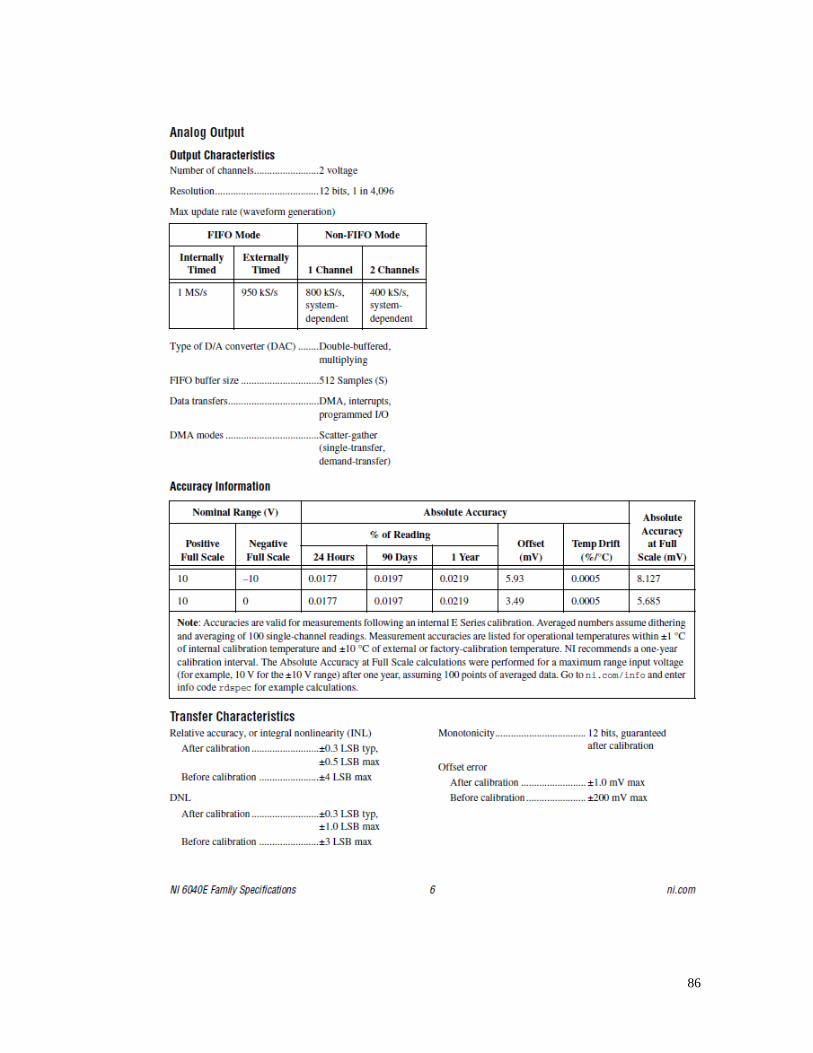
86

87
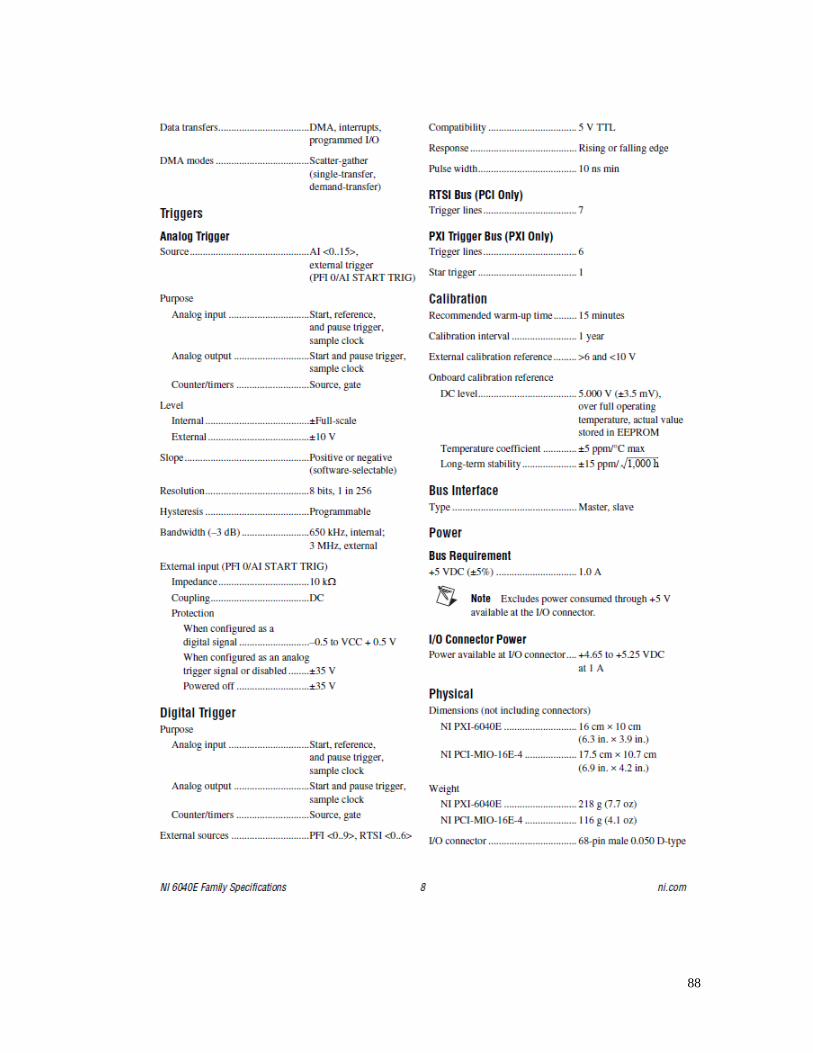
88
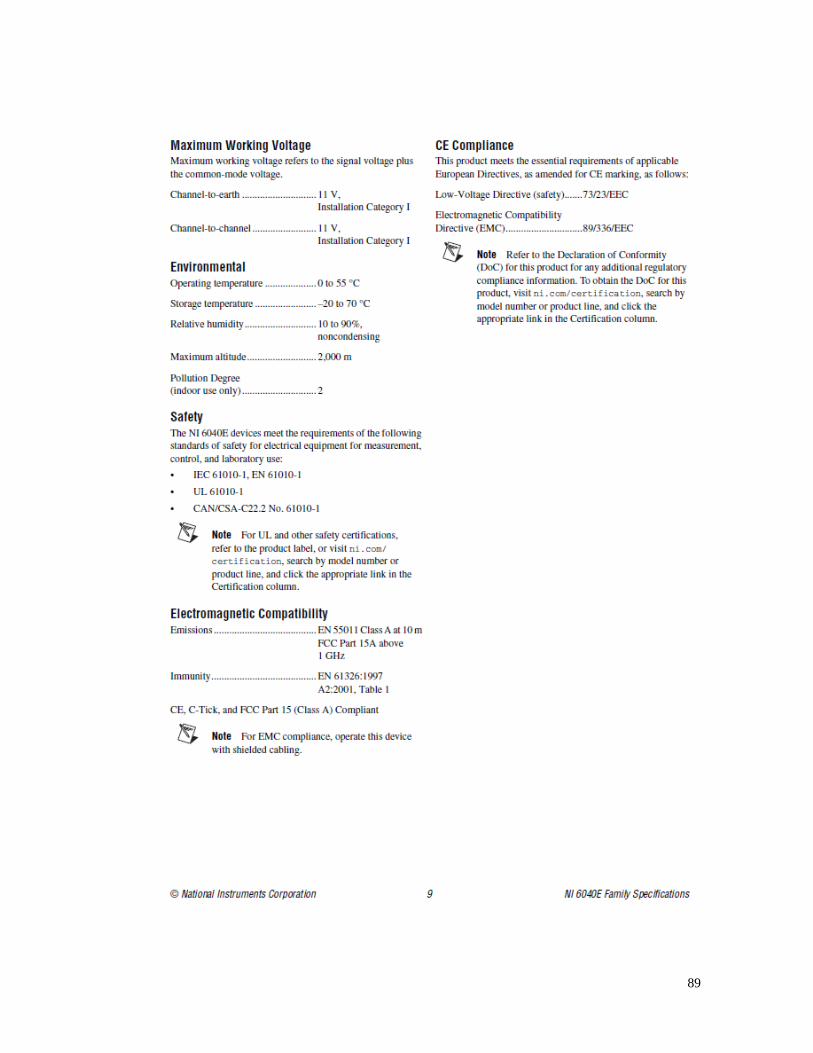
89
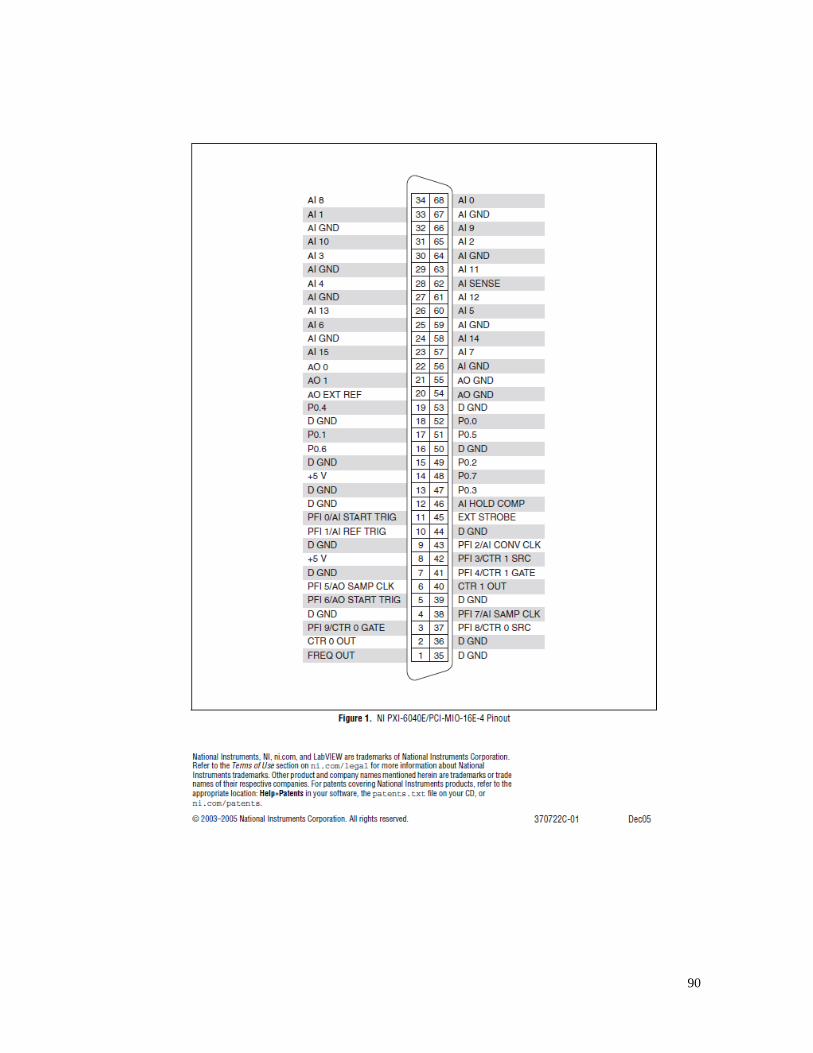
90


















