Detección de barras rotas en motores de inducción usando ...
102
Detección de barras rotas en motores de inducción usando la Transformada Wavelet Discreta de Máximo Traslape Por: Mónica López Hernández Tesis sometida como resquisito parcial para obtener el grado de Maestro en Ciencias en la Especialidad de Electrónica por el Instituto Nacional de Astrofísica, Óptica y Electrónica Febrero 2019 Tonantzintla, Puebla Supervisada por: Dr. José de Jesús Rangel Magdaleno c INAOE 2019 Derechos Reservados El autor otorga al INAOE el persiso de reproducir y distribuir copias en su totalidad o parcial de esta tesis
Transcript of Detección de barras rotas en motores de inducción usando ...

Detección de barras rotas en motores deinducción usando la Transformada
Wavelet Discreta de Máximo Traslape
Por:
Mónica López Hernández
Tesis sometida como resquisito parcial para obtener el grado deMaestro en Ciencias en la Especialidad de Electrónica
por el
Instituto Nacional de Astrofísica, Óptica y ElectrónicaFebrero 2019
Tonantzintla, Puebla
Supervisada por:
Dr. José de Jesús Rangel Magdaleno
c©INAOE 2019Derechos Reservados
El autor otorga al INAOE el persiso de reproducir y distribuircopias en su totalidad o parcial de esta tesis


Índice general
Resumen xv
1. Introducción 1
1.1. Descripción del problema . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Justificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3. Hipótesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4.1. Objetivo general . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4.2. Objetivos específicos . . . . . . . . . . . . . . . . . . . . . . . 4
1.5. Diagrama a bloques general . . . . . . . . . . . . . . . . . . . . . . . 4
1.6. Organización de la tesis . . . . . . . . . . . . . . . . . . . . . . . . . 5
2. Marco teórico 7
2.1. Motores de inducción . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1. Elementos básicos . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.2. Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.3. Funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.4. Clasificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
III

2.2. Teoria de Wavelets . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1. Transformada Wavelet Discreta . . . . . . . . . . . . . . . . . 12
2.2.2. Transformada Wavelet Discreta de Máximo Traslape . . . . . 13
2.3. Análisis de las señales de corriente y vibraciones . . . . . . . . . . . . 15
3. Trabajo relacionado 17
3.1. Principales fallas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2. Métodos de diagnóstico . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.1. Dominio del tiempo . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.2. Dominio de la frecuencia . . . . . . . . . . . . . . . . . . . . . 20
3.2.3. Análisis Wavelet . . . . . . . . . . . . . . . . . . . . . . . . . 21
4. Metodología 25
4.1. Metodología propuesta . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2. Adquisición de señales . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3. Procesamiento de señales . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4. Extracción de características . . . . . . . . . . . . . . . . . . . . . . . 31
4.4.1. Desviación estándar . . . . . . . . . . . . . . . . . . . . . . . . 31
4.4.2. Entropía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.4.3. Homogeneidad . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5. Resultados 35
5.1. Resultados bajo el criterio de la desviación estándar . . . . . . . . . . 35
5.1.1. Media carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.1.2. Carga completa . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.2. Resultados bajo el criterio de entropía . . . . . . . . . . . . . . . . . 37
5.2.1. Media carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.2.2. Carga completa . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.3. Homogeneidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.3.1. Media carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.3.2. Carga completa . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6. Implemetación HLS 67
6.1. Diagrama a bloques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.2. Resultados HLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7. Conclusiones 73
A. Artículo 75
Bibliografía 86


Índice de figuras
1.1. Comparación del rotor y una jaula de ardilla . . . . . . . . . . . . . . 2
1.2. Metodología basica para la detección de fallas . . . . . . . . . . . . . 5
2.1. Elementos de un Motor de inducción. . . . . . . . . . . . . . . . . . . 8
2.2. Clasificación de los motores elécticos. . . . . . . . . . . . . . . . . . . 10
2.3. Funciones base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4. Proceso de descomposición wavelet en tres niveles de una señal x. . . 14
2.5. Proceso de reconstrucción wavelet en el nivel j. . . . . . . . . . . . . 14
2.6. Proceso de descomposición wavelet en tres niveles de una señal x. . . 14
2.7. Señales de vibraciones y corriente para un motor con 3/4 de carga . . 16
3.1. Clasifiación de las fallas en los MI según el origen. . . . . . . . . . . . 18
4.1. Metodología propuesta. . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.2. Sistema de adquisición de las señales de corriente y vibraciones. . . . 27
4.3. Descomposición de la señal del Eje Z de un MI en estado transitoriocon carga completa y una barra rota. . . . . . . . . . . . . . . . . . . 29
4.4. Coeficientes de aproximación del nivel 4 de la DWT del Eje Z de unMI con carga al 75 % . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.5. Coeficientes de aproximación del nivel 4 de la MODWT del Eje Z deun MI con carga al 75 % . . . . . . . . . . . . . . . . . . . . . . . . . 30
VII

4.6. Histograma del vector de diferencias del eje Y para un MI sano, concarga completa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.1. Evaluación de los coeficientes de aproximación del nivel 4 de la DWTbajo el criterio de la desviación estándar. . . . . . . . . . . . . . . . . 40
5.2. Evaluación de los coeficientes de aproximación del nivel 4 de la MODWTbajo el criterio de la desviación estándar. . . . . . . . . . . . . . . . . 41
5.3. Clasificación de la condición de la barra bajo el criterio de la des-viación estándar de los coeficientes de aproximación del nivel 4 de ladescomposición wavelet de la señal de corriente. . . . . . . . . . . . . 42
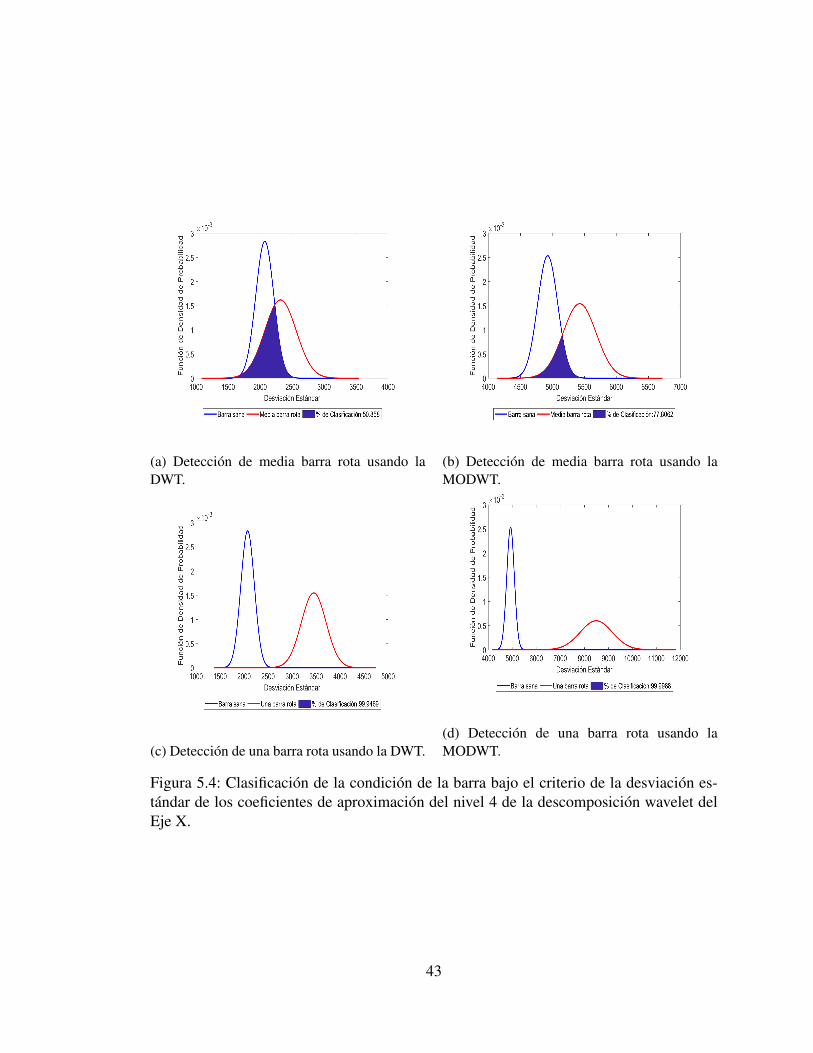
5.4. Clasificación de la condición de la barra bajo el criterio de la des-viación estándar de los coeficientes de aproximación del nivel 4 de ladescomposición wavelet del Eje X. . . . . . . . . . . . . . . . . . . . . 43
5.5. Clasificación de la condición de la barra bajo el criterio de la des-viación estándar de los coeficientes de aproximación del nivel 4 de ladescomposición wavelet del Eje Y. . . . . . . . . . . . . . . . . . . . . 44
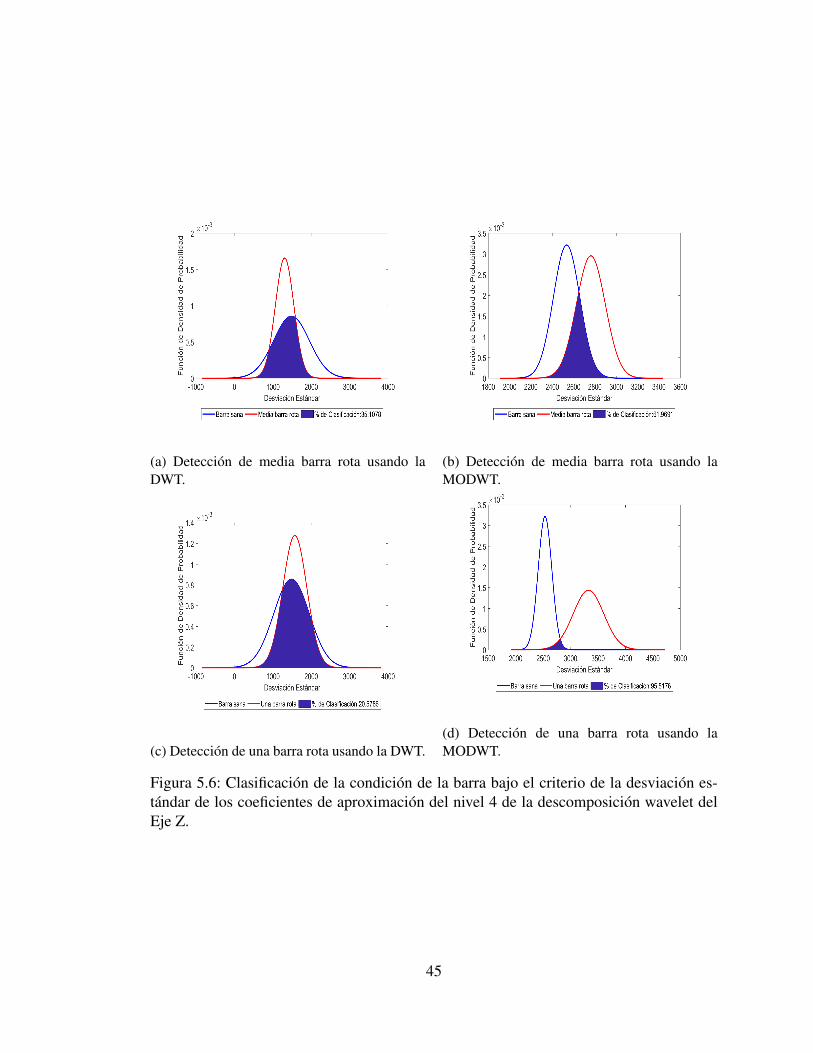
5.6. Clasificación de la condición de la barra bajo el criterio de la des-viación estándar de los coeficientes de aproximación del nivel 4 de ladescomposición wavelet del Eje Z. . . . . . . . . . . . . . . . . . . . . 45
5.7. Evaluación de los coeficientes de aproximación del nivel 4 de la DWTde un MI con carga completa bajo el criterio de la desviación estándar. 46
5.8. Evaluación de los coeficientes de aproximación del nivel 4 de la MODWTde un MI con carga completa bajo el criterio de la desviación estándar. 47
5.9. Clasificación de la condición de la barra bajo el criterio de la des-viación estándar de los coeficientes de aproximación del nivel 4 de ladescomposición wavelet de la señal de corriente de un MI con cargacompleta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
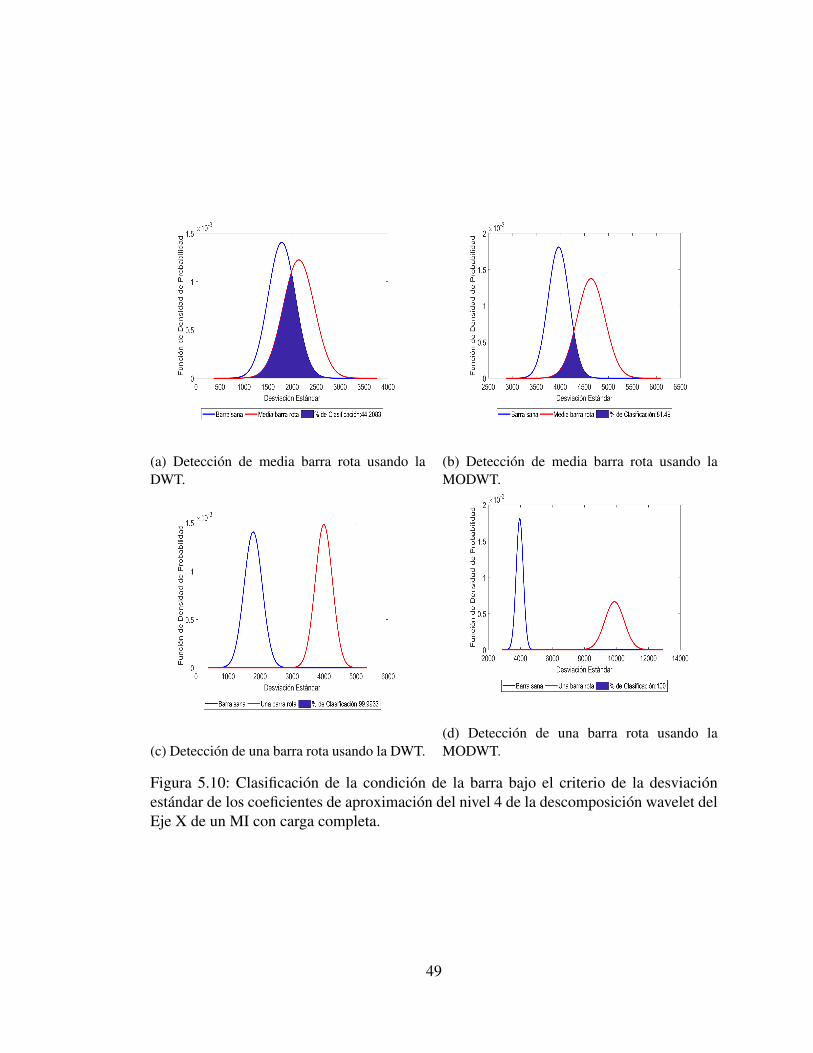
5.10. Clasificación de la condición de la barra bajo el criterio de la des-viación estándar de los coeficientes de aproximación del nivel 4 de ladescomposición wavelet del Eje X de un MI con carga completa. . . . 49

5.11. Clasificación de la condición de la barra bajo el criterio de la des-viación estándar de los coeficientes de aproximación del nivel 4 de ladescomposición wavelet del Eje Y de un MI con carga completa. . . . 50
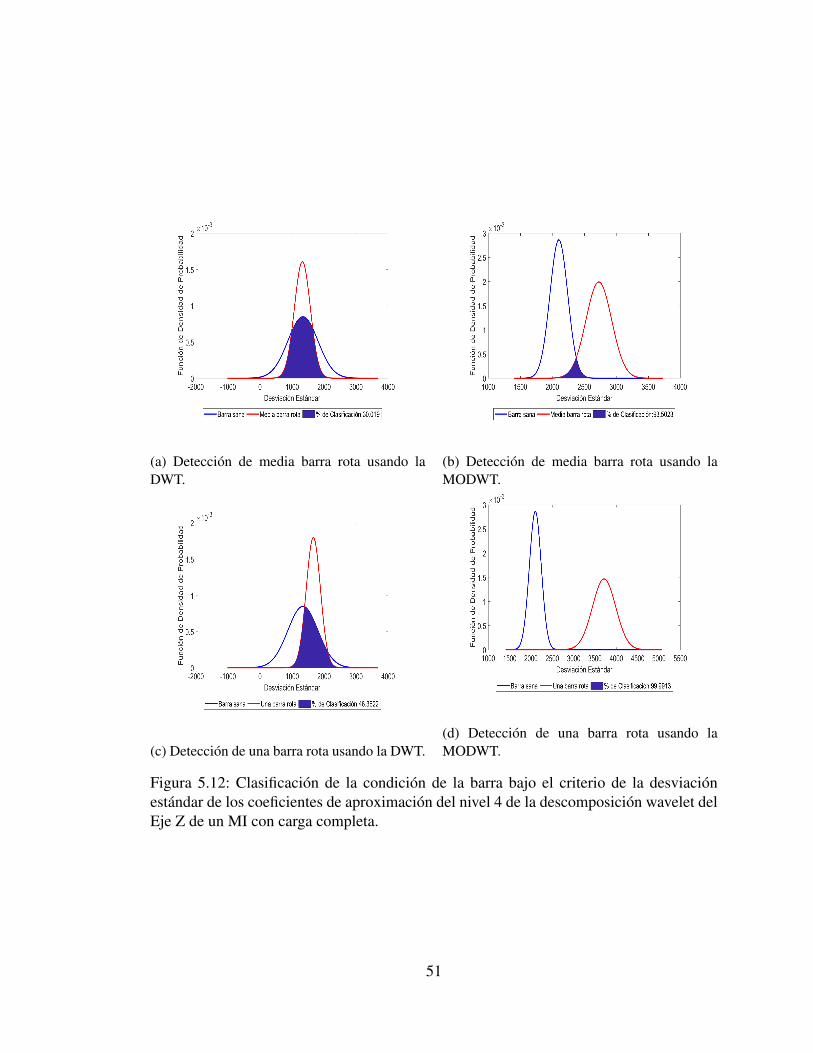
5.12. Clasificación de la condición de la barra bajo el criterio de la des-viación estándar de los coeficientes de aproximación del nivel 4 de ladescomposición wavelet del Eje Z de un MI con carga completa. . . . 51
5.13. Evaluación de los coeficientes de aproximación del nivel 4 de la DWTbajo el criterio de entropiar para un MI con media carga. . . . . . . . 52
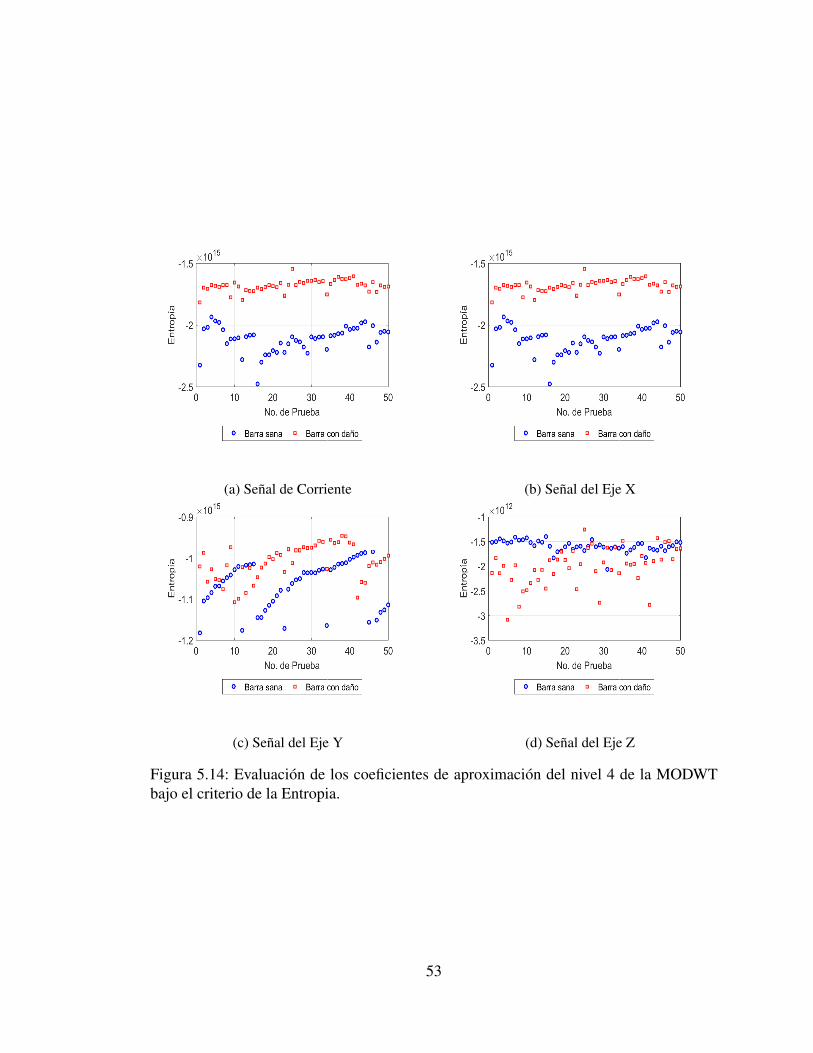
5.14. Evaluación de los coeficientes de aproximación del nivel 4 de la MODWTbajo el criterio de la Entropia. . . . . . . . . . . . . . . . . . . . . . . 53
5.15. Clasificación de la condición de la barra bajo el criterio de entropiade los coeficientes de aproximación del nivel 4 de la descomposiciónwavelet de la señal de corriente. . . . . . . . . . . . . . . . . . . . . . 54
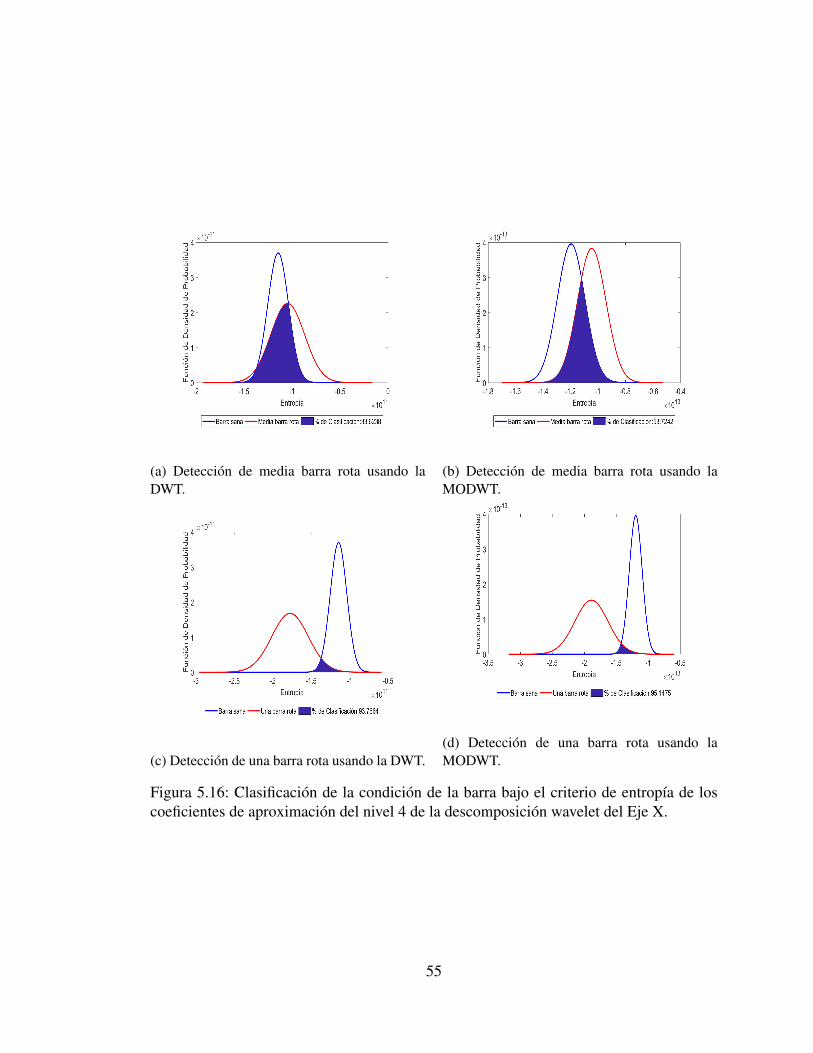
5.16. Clasificación de la condición de la barra bajo el criterio de entropíade los coeficientes de aproximación del nivel 4 de la descomposiciónwavelet del Eje X. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.17. Clasificación de la condición de la barra bajo el criterio de Entropíade los coeficientes de aproximación del nivel 4 de la descomposiciónwavelet del Eje Y. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.18. Clasificación de la condición de la barra bajo el criterio de entropíade los coeficientes de aproximación del nivel 4 de la descomposiciónwavelet del Eje Z. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.19. Evaluación de los coeficientes de aproximación del nivel 4 de la DWTde un MI con carga completa bajo el criterio de entropía. . . . . . . . 58
5.20. Evaluación de los coeficientes de aproximación del nivel 4 de la MODWTde un MI con carga completa bajo el criterio de entropía. . . . . . . . 59
5.21. Clasificación de la condición de la barra bajo el criterio de entropíade los coeficientes de aproximación del nivel 4 de la descomposiciónwavelet de la señal de corriente de un MI con carga completa. . . . . 60

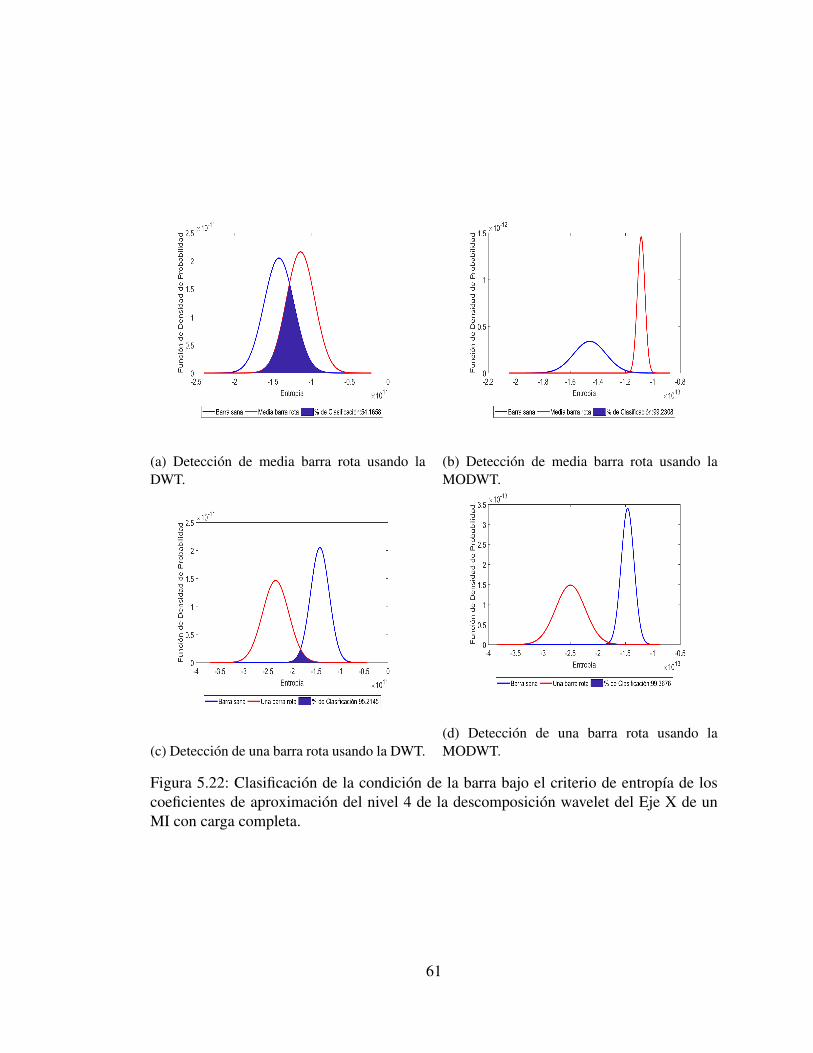
5.22. Clasificación de la condición de la barra bajo el criterio de entropíade los coeficientes de aproximación del nivel 4 de la descomposiciónwavelet del Eje X de un MI con carga completa. . . . . . . . . . . . . 61
5.23. Clasificación de la condición de la barra bajo el criterio de entropíde los coeficientes de aproximación del nivel 4 de la descomposiciónwavelet del Eje Y de un MI con carga completa. . . . . . . . . . . . . 62
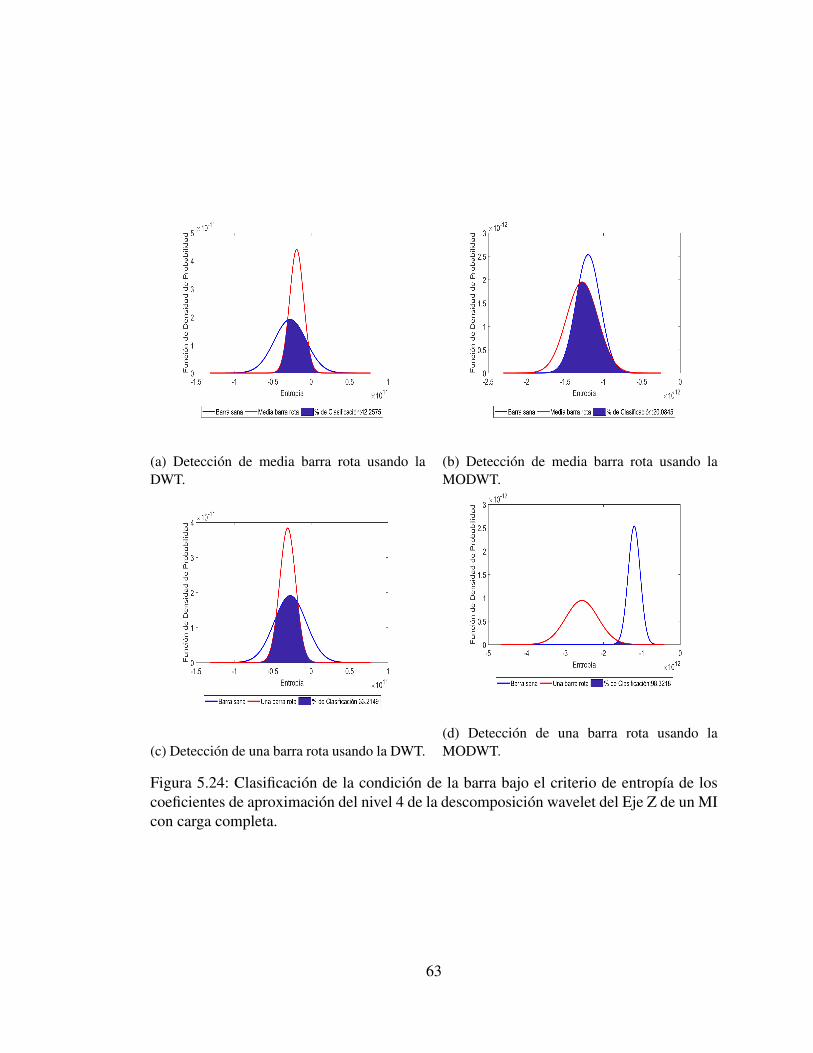
5.24. Clasificación de la condición de la barra bajo el criterio de entropíade los coeficientes de aproximación del nivel 4 de la descomposiciónwavelet del Eje Z de un MI con carga completa. . . . . . . . . . . . . 63
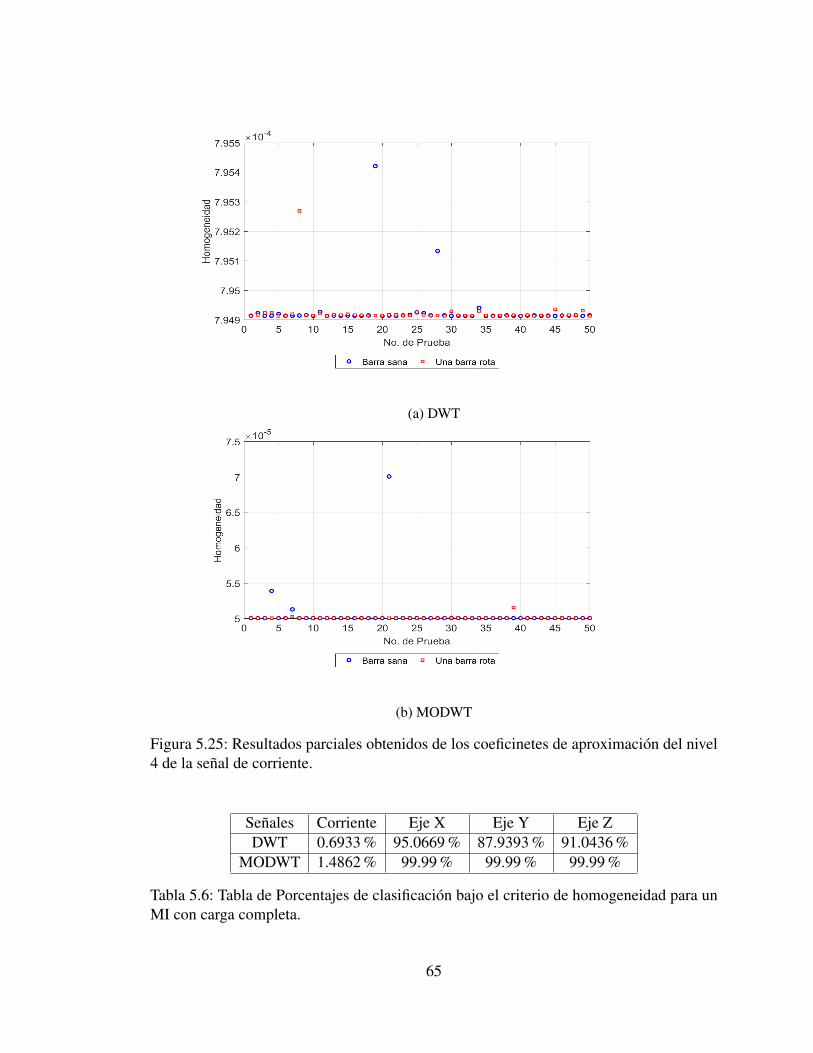
5.25. Resultados parciales obtenidos de los coeficinetes de aproximación delnivel 4 de la señal de corriente. . . . . . . . . . . . . . . . . . . . . . 65
5.26. Clasificación usando los coeficientes de aproximación del nivel 4 dedescomposición de la MODWT. . . . . . . . . . . . . . . . . . . . . . 66
6.1. Diagrama a bloques de la implementación de la DWT en HLS. . . . . 68
6.2. Diagrama a bloques de la implementación de la MODWT en HLS. . . 68
6.3. Representación de la función wavelet en coeficientes de filtros pasa-altas y pasa-bajas.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.4. Diagrama a bloques de la MAC. . . . . . . . . . . . . . . . . . . . . . 69
6.5. Coeficientes de la DWT del nivel 4 de descomposición obtenidos conVivado HLS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.6. Coeficientes de la MODWT del nivel 4 de descomposición obtenidoscon Vivado HLS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6.7. Diagrama a bloques de la MAC. . . . . . . . . . . . . . . . . . . . . . 71

Índice de tablas
3.1. Principales fallas en los MI. . . . . . . . . . . . . . . . . . . . . . . . 19
3.2. Estado del arte para detección de barras rotas en el dominio del tiempo. 22
3.3. Estado del arte para detección de barras rotas en el dominio de lafrecuencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.4. Estado del arte para detección de barras rotas usando TransformadaWavelet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.1. Bandas de frecuencia . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
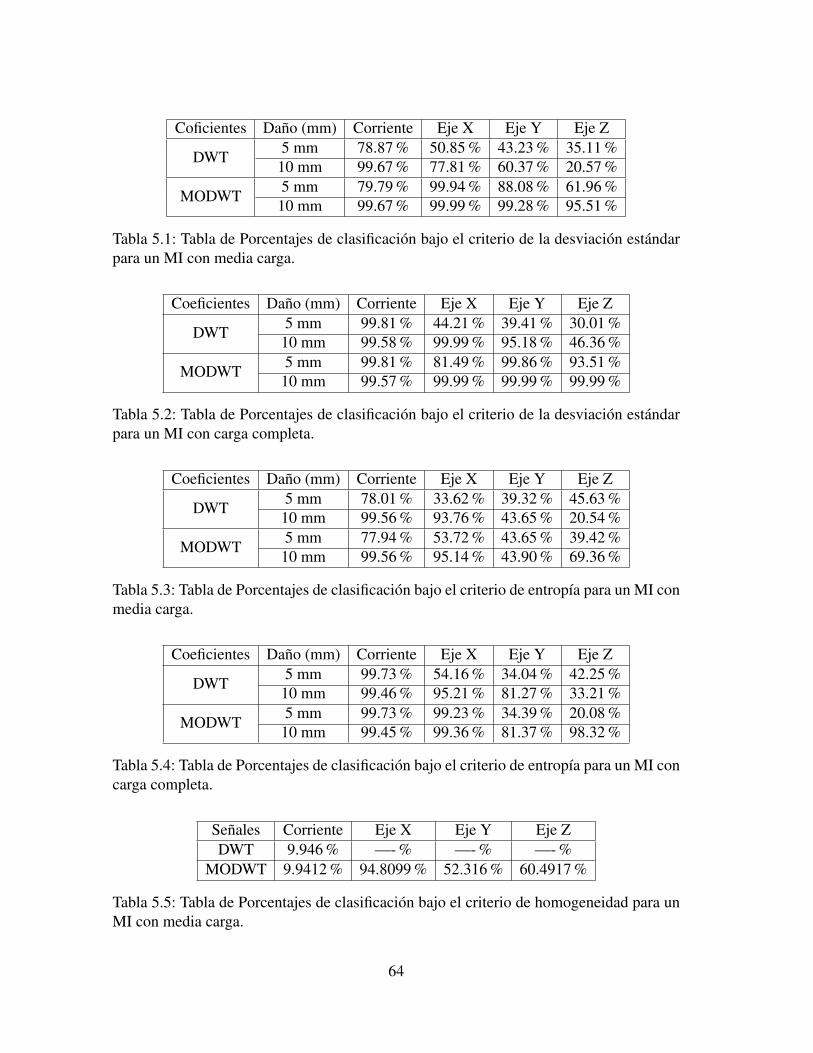
5.1. Tabla de Porcentajes de clasificación bajo el criterio de la desviaciónestándar para un MI con media carga. . . . . . . . . . . . . . . . . . 64
5.2. Tabla de Porcentajes de clasificación bajo el criterio de la desviaciónestándar para un MI con carga completa. . . . . . . . . . . . . . . . . 64
5.3. Tabla de Porcentajes de clasificación bajo el criterio de entropía paraun MI con media carga. . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.4. Tabla de Porcentajes de clasificación bajo el criterio de entropía paraun MI con carga completa. . . . . . . . . . . . . . . . . . . . . . . . . 64
5.5. Tabla de Porcentajes de clasificación bajo el criterio de homogeneidadpara un MI con media carga. . . . . . . . . . . . . . . . . . . . . . . . 64
5.6. Tabla de Porcentajes de clasificación bajo el criterio de homogeneidadpara un MI con carga completa. . . . . . . . . . . . . . . . . . . . . . 65
XI

6.1. Funciones y características de las variables y constantes utilizadaspara la implementación de la Transformada wavelet en HLS . . . . . 68
6.2. Recursos utilizados para la implementación de la DWT y MODWTen Vivado HLS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70


Resumen
Los MI tipo "jaula de ardilla", son las máquinas rotatoria más utilizas en laindustria y por tanto la detección de las barras rotas se ha convertido en una tareaobligada, esto con el fin de evitar daño en los sistemas adjuntos y con esto parosimprevistos en las lineas de producción. En este trabajo de tesis se presenta unametodología para la detección de barras rotas utilizando las señales de corriente yvibraciones del MI. Se utiliza la Transformada Wavelet en sus versiones discreta ydiscreta de máximo traslape para extraer las características de las señales. Poste-riormente , se hace uso de parametros estadísticos como la desviación estándar y laentropía para realizar la clasificación de la condición de la barra. Con la metodologíapropuesta es posible realizar la detección aun cuando el MI solo presenta el 50 % dela carga mecánica, esto es posible utilizando los coeficientes de la MODWT.
XV


Capítulo 1
Introducción
Los motores de inducción (MI) son máquinas eléctricas capaces de convertirla energía eléctrica en mecánica por medio de la inducción de campos magnéticos.Estos elementos son de vital importancia en diversas aplicaciones industriales debidoa su configuración robusta, bajo costo, versatilidad, tamaño razonablemente pequeñoy capacidad para operar con una fuente de alimentación fácilmente disponible, enespecial el motor tipo “Jaula de ardilla”, su nombre se deriva de la semejanza entrela jaula del rotor formada por una serie de barras unidad a los extremos por anillosy una rueda para hámster, en la Figura 1.1 es mostrada dicha comparación.
Cuando el motor de inducción ha estado en funcionamiento en condiciones se-veras y complejas a largo plazo, como un entorno corrosivo, fuerte impacto, cargaspesadas o altas temperaturas, algunos componentes fundamentales del motor inevi-tablemente presentan fallas. Una vez que la falla aparece puede provocar accidentescatastróficos y enormes pérdidas económicas. Por lo tanto, es necesario identificar eltipo de falla y el nivel de daño. Detectar con precisión la falla en etapas tempranasayuda a proteger la operación segura del motor y sistemas acoplados al sistema.
1
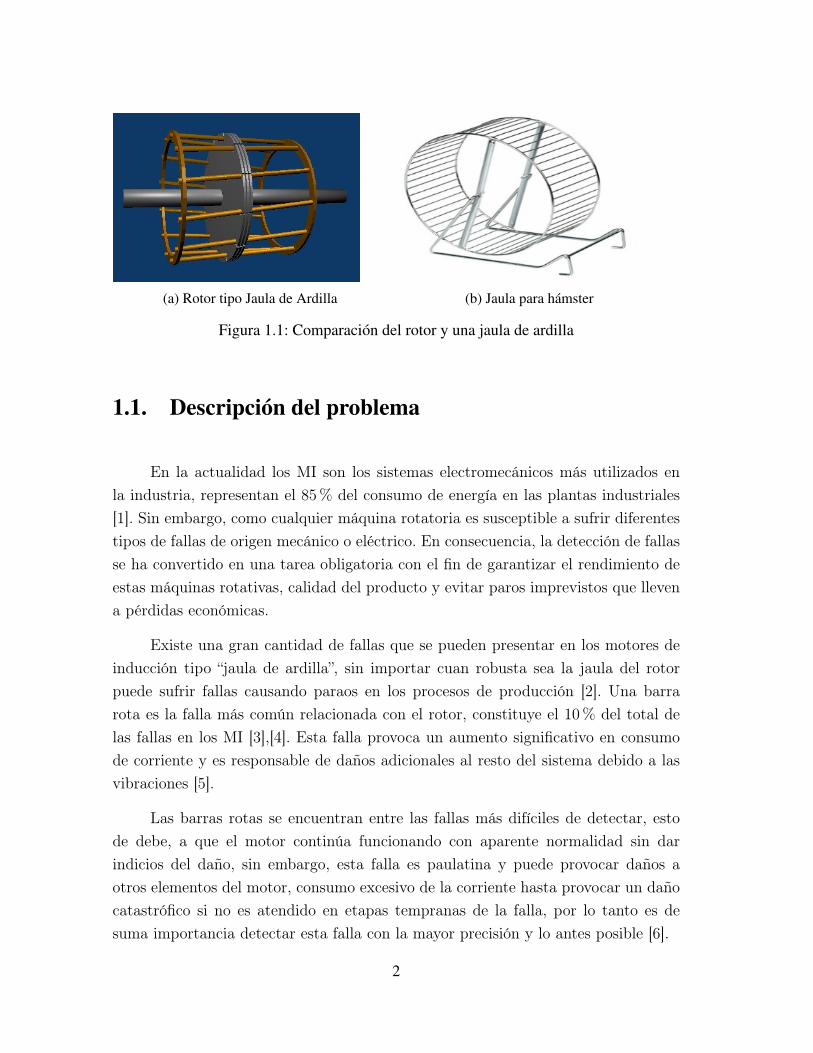
(a) Rotor tipo Jaula de Ardilla (b) Jaula para hámster
Figura 1.1: Comparación del rotor y una jaula de ardilla
1.1. Descripción del problema
En la actualidad los MI son los sistemas electromecánicos más utilizados enla industria, representan el 85% del consumo de energía en las plantas industriales[1]. Sin embargo, como cualquier máquina rotatoria es susceptible a sufrir diferentestipos de fallas de origen mecánico o eléctrico. En consecuencia, la detección de fallasse ha convertido en una tarea obligatoria con el fin de garantizar el rendimiento deestas máquinas rotativas, calidad del producto y evitar paros imprevistos que llevena pérdidas económicas.
Existe una gran cantidad de fallas que se pueden presentar en los motores deinducción tipo “jaula de ardilla”, sin importar cuan robusta sea la jaula del rotorpuede sufrir fallas causando paraos en los procesos de producción [2]. Una barrarota es la falla más común relacionada con el rotor, constituye el 10% del total delas fallas en los MI [3],[4]. Esta falla provoca un aumento significativo en consumode corriente y es responsable de daños adicionales al resto del sistema debido a lasvibraciones [5].
Las barras rotas se encuentran entre las fallas más difíciles de detectar, estode debe, a que el motor continúa funcionando con aparente normalidad sin darindicios del daño, sin embargo, esta falla es paulatina y puede provocar daños aotros elementos del motor, consumo excesivo de la corriente hasta provocar un dañocatastrófico si no es atendido en etapas tempranas de la falla, por lo tanto es desuma importancia detectar esta falla con la mayor precisión y lo antes posible [6].
2

1.2. Justificación
Las barras rotas se encuentran entre las principales fallas de los MI, constituyenaproximadamente el 5-10% del total de fallas y conduce a un mal funcionamiento,así como la reducción del ciclo útil del motor. Las barras de un motor tipo jaula deardilla no pueden repararse debido a las características de fabricación [7]. Un motorbajo esta condición puede operar con aparente normalidad debido a que esta falla espaulatina y puede llegar a provocar la ruptura de barras adyacentes, incrementandolos daños hasta la pérdida total del motor de manera repentina [8].
Debido a lo anterior surge la necesidad de contar con una herramienta que per-mita analizar la condición actual de las barras del rotor. Por otra parte, es importantela detección de esta falla sea no invasiva, ya que, desarmar el motor puede provocarpérdidas económicas debido a los pararos de producción, además la garantía puedeser anulada.
Por lo tanto, se propone el desarrollo de una herramienta capaz de analizar lasseñales producidas por el motor, y a partir de esto determinar el estado de la barra.Con el mantenimiento correctivo pueden ser más eficientes, debido a que los motorespodrían ser sacados de operación cuando lo necesiten realmente.
1.3. Hipótesis
El monitoreo de la condición de estas máquinas es una de las principales preo-cupaciones de la industria, con el objetivo de mejorar la productividad, eficiencia yreducción de costos, además de aumentar la disponibilidad y óptimo funcionamientodel MI y sistemas acoplados.
En la actualidad existen diversos métodos para la detección de barras rotasen los MI, entre las técnicas más usadas se encuentran el análisis de las señales secorriente y vibraciones. Estos métodos se basan en la identificación de componentesespectrales causadas por las fallas. Sin embargo, presentan dependencia de la cargamecánica, es decir requieren un nivel mínimo de carga para realizar una detecciónconfiable [9].
En este proyecto de tesis se proponer la detección de barras rotas mediante
3

la Transformada Wavelet y la extracción de características mediante parámetrosestadísticos que permitan discernir cuando un MI se encuentra en buen estado y unocon una barra rota.
1.4. Objetivos
1.4.1. Objetivo general
Por lo descrito anteriormente, en este trabajo de tesis se propone hace usode la MODWT (por sus siglas en inglés Maximal Overlap Discrete Wavelet Trans-form) para extraer características de las señales de corriente y vibraciones del MI yposteriormente calcular los parámetros estadísticos que permitan detectar si un MIpresenta una barra rota.
1.4.2. Objetivos específicos
Implementar en software (Matlab) la MODWT.
Obtener los valores estadísticos que permitan determinar la condición de labarra.
Implementación en HLS (por sus siglas en inglés, High Level Systesis) laMODWT.
1.5. Diagrama a bloques general
El diagnóstico es el arte de identificar la condición del MI a partir de sus signos,es decir, de las señales, para determinar la causa y efecto de la falla. En la Figura 1.2,se presenta el diagrama a bloques para la detección de barras rotas. Como primeraetapa se obtienen las señales de corriente y vibraciones del MI, las cuales pasaránpor una etapa de procesamiento. Tomando los datos del obtenidos de la técnicade procesamiento se realiza la interpretación de dichos datos para determinar lacondición de la barra.
4
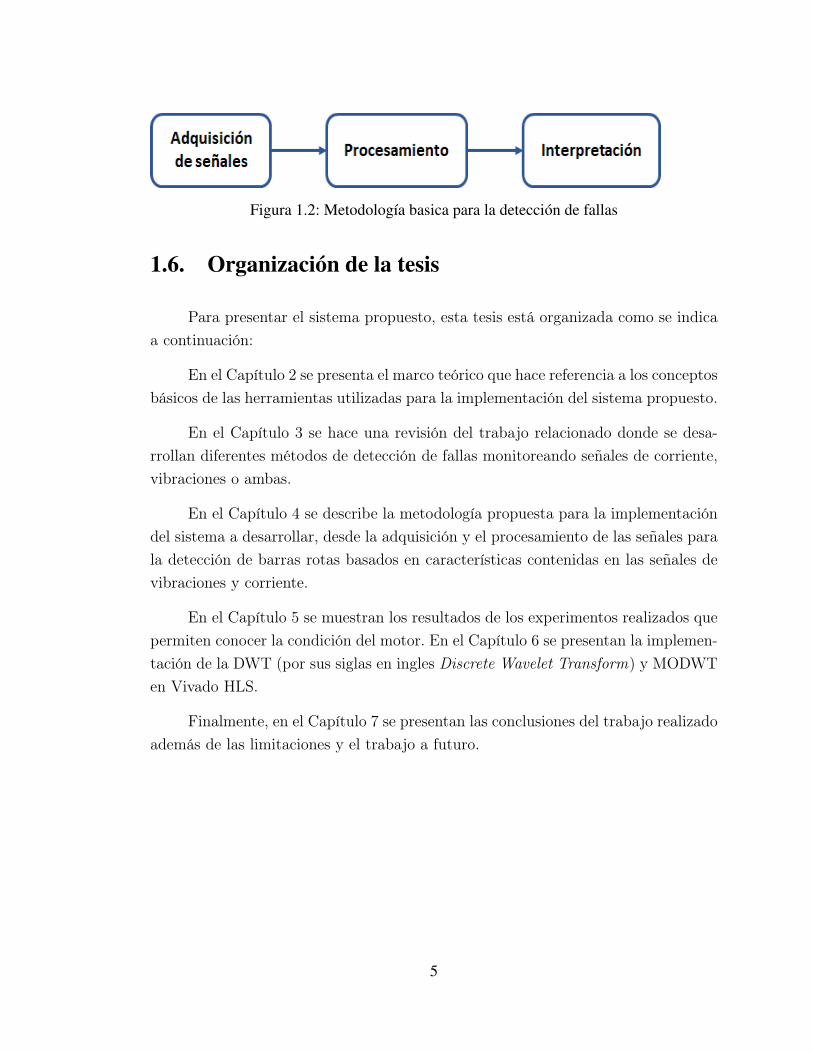
Figura 1.2: Metodología basica para la detección de fallas
1.6. Organización de la tesis
Para presentar el sistema propuesto, esta tesis está organizada como se indicaa continuación:
En el Capítulo 2 se presenta el marco teórico que hace referencia a los conceptosbásicos de las herramientas utilizadas para la implementación del sistema propuesto.
En el Capítulo 3 se hace una revisión del trabajo relacionado donde se desa-rrollan diferentes métodos de detección de fallas monitoreando señales de corriente,vibraciones o ambas.
En el Capítulo 4 se describe la metodología propuesta para la implementacióndel sistema a desarrollar, desde la adquisición y el procesamiento de las señales parala detección de barras rotas basados en características contenidas en las señales devibraciones y corriente.
En el Capítulo 5 se muestran los resultados de los experimentos realizados quepermiten conocer la condición del motor. En el Capítulo 6 se presentan la implemen-tación de la DWT (por sus siglas en ingles Discrete Wavelet Transform) y MODWTen Vivado HLS.
Finalmente, en el Capítulo 7 se presentan las conclusiones del trabajo realizadoademás de las limitaciones y el trabajo a futuro.
5


Capítulo 2
Marco teórico
En este capítulo se presentan las bases teóricas, para comprender el funciona-miento del motor asíncrono tipo jaula de ardilla. También se exponen los conceptosbase de la Transformada Wavelet, la manera en que realiza la descomposición delas señales, así como las ventajas que tiene sobre la Transformada de Fourier. Deigual forma se explican los fundamentos del análisis de las señales de vibraciones ycorriente.
2.1. Motores de inducción
Las máquinas eléctricas son el resultado de la aplicación de los principios delelectromagnetismo y en particular la ley de inducción de Faraday, se caracterizan portener circuitos eléctricos y magnéticos entrelazados que realizan la conversión de laenergía de una forma a otra, una de las cuales es eléctrica. Estas máquinas pueden ser:generadores, transformadores y motores. Un motor transforma la energía eléctricaen energía mecánica, la acción se desarrolla induciendo una corriente en la máquinapor medio de una fuente externa que interacciona con el campo produciendo unmovimiento de las máquinas, apareciendo una fuerza electromotriz. En consecuencia,el motor necesita energía eléctrica de entrada para producir la energía mecánica.Tiene un acceso mecánico y por ello son máquinas de movimiento rotatorio [10].
7
2.1.1. Elementos básicos
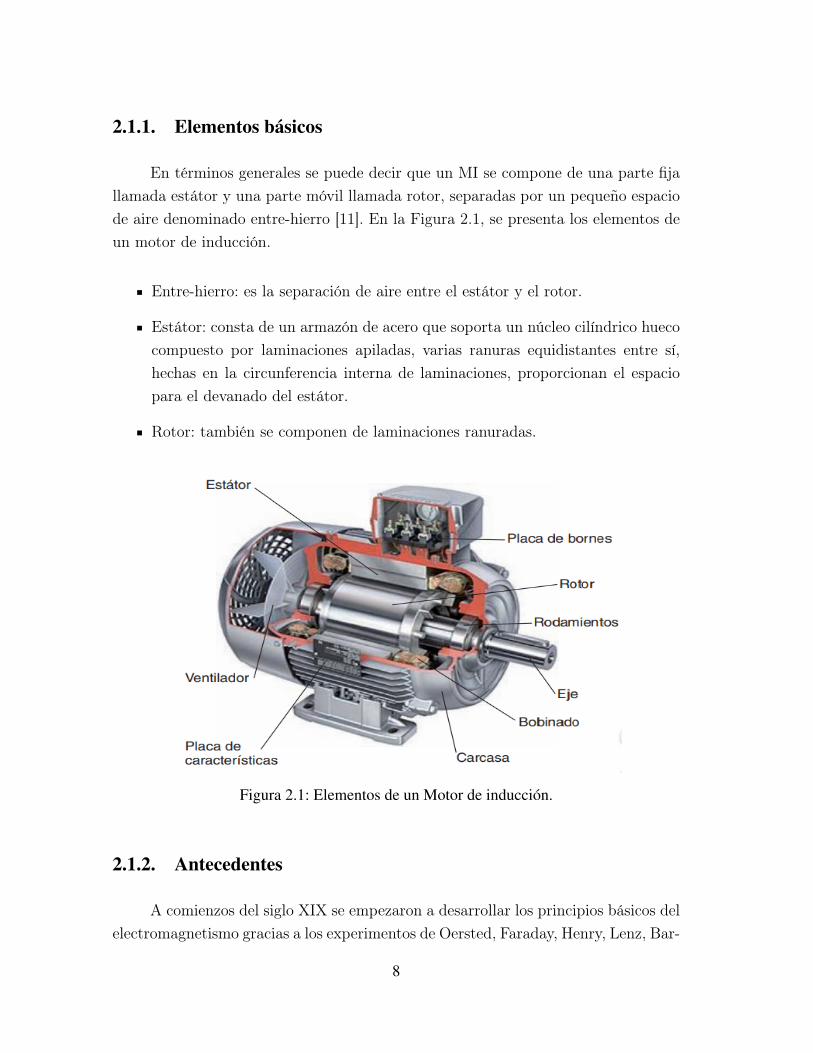
En términos generales se puede decir que un MI se compone de una parte fijallamada estátor y una parte móvil llamada rotor, separadas por un pequeño espaciode aire denominado entre-hierro [11]. En la Figura 2.1, se presenta los elementos deun motor de inducción.
Entre-hierro: es la separación de aire entre el estátor y el rotor.
Estátor: consta de un armazón de acero que soporta un núcleo cilíndrico huecocompuesto por laminaciones apiladas, varias ranuras equidistantes entre sí,hechas en la circunferencia interna de laminaciones, proporcionan el espaciopara el devanado del estátor.
Rotor: también se componen de laminaciones ranuradas.
Figura 2.1: Elementos de un Motor de inducción.
2.1.2. Antecedentes
A comienzos del siglo XIX se empezaron a desarrollar los principios básicos delelectromagnetismo gracias a los experimentos de Oersted, Faraday, Henry, Lenz, Bar-
8
low y Maxwell. Son Faraday y Maxwell los que aportan las claves para el desarrollode la máquina de inducción.
En 1879 Walter Baily desmostró ante la Phisical Society de Londres, la posibili-dad de producir la rotación de un disco de cobre mediante corrientes inducidas.
En 1885 Ferris descubrió el campo magnético giratorio. También creó un dis-positivo generador de un campo giratorio a partir de un bobinado bifásico decuatro polos.
En 1887 Nikola Tesla construyó y patentó los motores de inducción.
En 1889 Mikhail Dolivo-Dobrowolsky, ingeniero de la empresa alemana AEG,inventó el motor de inducción trifásico de rotor bobinado.
En 1891 se creó el motor de inducción de rotor de jaula de ardilla.
2.1.3. Funcionamiento
El motor se conecta a la corriente alterna trifásica, pero la corriente circula ex-clusivamente por las bobinas inductoras del estátor. Esto genera un campo magnéticogiratorio, como consecuencia del campo magnético giratorio en los conductores delrotor se inducen corrientes eléctricas. Estas corrientes interactúan con el campo mag-nético del estátor, provocando fuerzas electromagnéticas que dan lugar al par motorque obliga a girar al rotor. Las corrientes que circulan por el rotor son producidaspor el fenómeno de inducción electromagnética, conocida como Ley de Faraday, queestablece que si una corriente espira es atravesada por un campo magnético variableen el campo magnético variable en el tiempo se establece entre sus extremos unadiferencia de potencial dado por la ecuación 2.1.
e = −dΦ
dt(2.1)
Donde e es la diferencia de potencial inducida en la espira en volts, Φ es elflujo que corta a la espira en Weber y t es el tiempo en segundos. El signo menos dela ecuación es una expresión de la Ley de Lenz. Esta establece que la polaridad delvoltaje inducido en la bobina es tal que, si sus extremos se pusieran en cortocircuito,
9
producirían una corriente que causaría un flujo para oponerse al cambio del flujooriginal. Puesto que el voltaje inducido se opone al cambio que lo causa, se incluyeel signo menos en la ecuación. Si se distribuye espacialmente alrededor del estátor deun motor los bobinados de un sistema de tensiones trifásicos desfasados 120 gradosse genera un campo magnético giratorio. La velocidad de sincronismo, viene dadapor la ecuación 2.2.
n =60 ∗ fp
(2.2)
Donde, n es la velocidad de giro del campo magnético en revoluciones por mi-nuto (r.p.m), es la frecuencia de la corriente eléctrica de alimentación de la máquinay es el número de pares de polos magnéticos establecidos en el bobinado del estátor.En los motores eléctricos, la velocidad de giro del rotor es ligeramente inferior a lavelocidad de giro del campo magnético del estátor, debido a la fricción del rotor enlos cojinetes rozamiento con el aire y a la carga acoplada al eje del rotor, por talmotivo se les conoce a estos motores con el nombre de motores asíncronos [12].
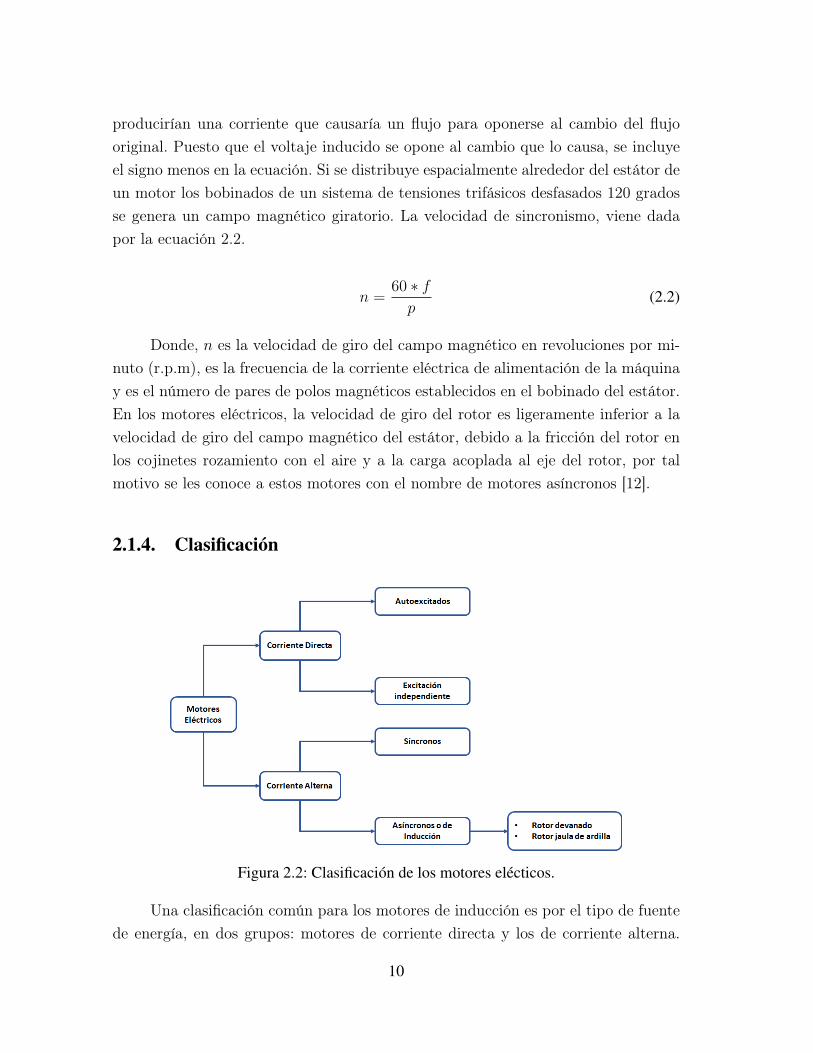
2.1.4. Clasificación
Figura 2.2: Clasificación de los motores elécticos.
Una clasificación común para los motores de inducción es por el tipo de fuentede energía, en dos grupos: motores de corriente directa y los de corriente alterna.
10

En el grupo de los motores de corriente directa se encuentran los autoexcitadosy los excitación independiente. Por otro lado, los motores de corriente alterna sedividen en síncronos y asíncronos. Estos últimos se dividen dos grupos, dependiendode la construcción del rotor, estos pueden ser: rotor devanado y rotor de jaula deardilla. En la Figura 2.2, se presenta la clasificación antes mencionada. Los motorestipo jaula de ardilla está formado por una serie de barras longitudinales de materialconductor las cuales se encuentran unidos en los extremos por anillos.
2.2. Teoria de Wavelets
Una wavelet es una onda de duración finita que tiene un valor promedio de cero,lo contrario a una onda sinusoidal que teóricamente se extiende de menos infinitohasta infinito, las wavelets tienen un comienzo y un fin. Las ondas sinusoidales sonideales para describir señales estacionarias, debido a que son suaves y predecibles.Por otro lado, las wavelets son irregulares y por lo general asimétricas, siendo idealespara detectar anomalías, pulsos y eventos con un inicio y un final dentro de unaseñal [13]. En la Figura 2.3, se muestran las características antes mencionadas de lasfunciones sinusoidales y wavelet.
(a) Función seno (b) Función wavelet db6
Figura 2.3: Funciones base
La Transformada Wavelet es similar a la Transformada de Fourier excepto quela función wavelet es usada como función base para reemplazar las funciones seno ycoseno. Dado que las funciones wavelet contiene dos parámetros, transformar una se-ñal con dicha función significa que la señal será proyectada en un plano bidimensional
11

a diferencia de la Transformada de Fourier.
La TransformadaWavelet de una señal se puede realizar a través de la operaciónde convolución entre la señal x(t) y el complejo conjugado de la función wavelet. Lafórmula de la Transformada Wavelet esta descrita en la ecuación 2.3.
WT (ς, τ) =1√ς
∫x(t)ψ∗(
t− τς
)dt (2.3)
Donde ς, τ son los parámetros de escala y traslación respectivamente. ψ∗ es elcomplejo conjugado de la función wavelet escalada y trasladada.
2.2.1. Transformada Wavelet Discreta
La DWT (por sus siglas en inglés, Discrete Wavelet Transform) fue desarro-llada como una alternativa para dar solución a los problemas de resolución de laSTFT(por sus siglas en inglés, Short-Time Fourier Transform), haciendo una buenarepresentación de la señal tanto en tiempo como en frecuencia de forma simultánea.La DWT es una herramienta poderosa para el procesamiento de señales, se basa en elMRA (por sus siglas en inglés, Multiresolution Analysis). Es ampliamente utilizadopara la caracterización de señales no estacionarias. Realiza una representación de laseñal como una combinación de pequeñas señales wavelet a diferente localización yescala [14].
El proceso de transformación del dominio del tiempo al dominio tiempo-escalaes conocido como descomposición o análisis de la señal, mientras que el procesoinverso es llamando reconstrucción de la señal.
La DWT proporciona una representación compacta de la señal en tiempo yfrecuencia, se calcula de manera eficiente a través del algoritmo de Mallat [15], queconsiste en un filtro pasa-altas y pasa-bajas para descomponer la señal en sub-bandas o niveles wavelet. La señal está representada en estos niveles por medio delas componentes de alta y baja frecuencia (coeficientes de aproximación y detallerespectivamente).
Prácticamente la DWT puede ser implementada por medio de un par de fil-tros h(k) y g(k), estos filtros son conocidos como QMF (por sus siglas en inglés,
12

Quadrature Mirror Filters) son construidos de la selección de la función wavelet yla correspondiente función de escala. Usando la función wavelet la señal se descom-pone en componentes de baja y alta frecuencia, representados por los coeficientes deaproximación y detalle respectivamente, estos conjuntos de coeficientes son descritosen las ecuaciones 2.4 y 2.5.
aj,k =∑
m
h(2k −m)) (2.4)
dj,k =∑
m
g(2k −m)) (2.5)
La Figura 2.4 muestra la descomposición de una señal x de longitud N , esteproceso consiste en convolucionar x con los filtros pasa-bajas h(k) y pasa-altas g(k),seguido de una decimación, dando como resultado a1 y d1 coeficientes de aproxima-ción y coeficientes de detalle, respectivamente. El siguiente paso es dividir a1 en dos,siguiendo el mismo esquema, reemplazando x por a1 para producir a2 y d2.
El proceso de reconstrucción se muestra en la Figura 2.5. Este proceso iniciacon los coeficientes de aproximacion y detalle del nivel j, la IDWT (por sus siglasen inglés Inverse Discrete Wavelet Transform), reconstruye los aj−1, invirtiendo elproceso de descomposición, insertando ceros y convolucionando el resultado con losfiltros de reconstrucción.
2.2.2. Transformada Wavelet Discreta de Máximo Traslape
La MODWT (por sus siglas en inglés, Maximal Overlap Discret Wavelet Trans-form) es una versión modificada de la DWT, que puede implementarse para cualquierlongitud de la señal, a diferencia de la DWT, la cual esta limitada. La diferencia ra-dica en que MODWT no submuestrea la señal después de aplicar los filtros, por lotanto, la respuesta a la transformada son dos señales de la misma longitud de laseñal original. En otras palabras, los coeficientes de la MODWT son el resultadode cambiar el algoritmo implementado en los coeficientes DWT al no submuestrearla señal sino agregando ceros a los filtros de descomposición [16]. El algoritmo dedescomposición de una señal con la MODWT es mostrado en la Figura 2.6.
13
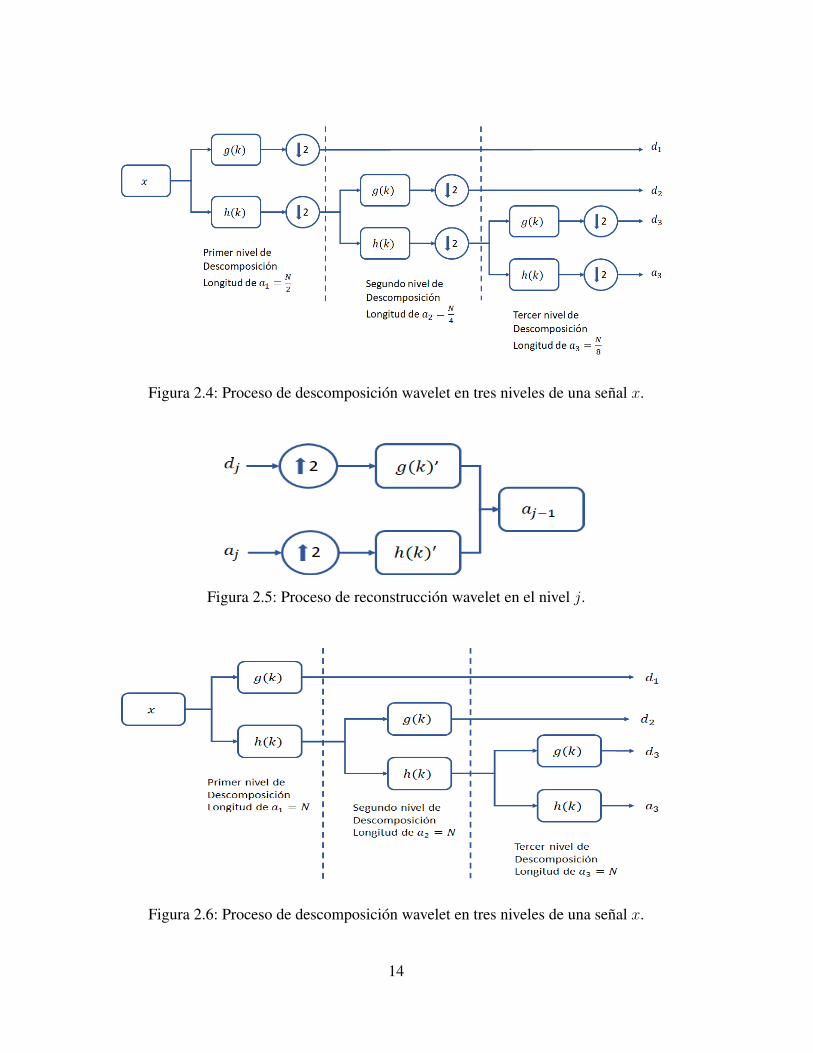
Figura 2.4: Proceso de descomposición wavelet en tres niveles de una señal x.
Figura 2.5: Proceso de reconstrucción wavelet en el nivel j.
Figura 2.6: Proceso de descomposición wavelet en tres niveles de una señal x.
14

2.3. Análisis de las señales de corriente y vibraciones
Durante el funcionamiento de los motores, las vibraciones están directamentevinculadas a problemas en el rotor. Las señales de vibraciones de un MI son mostra-das en la Figura 2.7.
Una barra rota en un MI produce componentes de frecuencias indeseadas alre-dedor de la frecuencia fundamental, esta componente puede ser detectada por mediode la señales de corriente y vibraciones, MCSA (por sus siglas en ingles, MotorCurrent Signature Analysis) y MVSA (por sus siglas en inglés, Motor VibrationsSignature Analysis) respectivamente, estas técnicas son las más usadas para la de-tección de barras rotas [17].
Ambas técnicas están basadas en identificar las componentes de frecuenciaparásitas, las cuales bajo ciertas condiciones de carga se encuentran muy cercana a lacomponente de frecuencia fundamental de operación. Las componentes de frecuenciacausada por una barra rota esta dada por la ecuación 2.6.
fBRB = fs(1± 2ks), (2.6)
donde fs es la frecuencia de alimentación, s es el desplazamiento y k es unentero.
La principal desventaja de estos métodos es la dependencia de la carga, yaque, estos método no son válidos para el MI descargado, y también la fluctuación devoltaje puede provocar diagnósticos erróneos. La amplitud de la frecuencia parásitaestá relacionada con el número de barras rotas en el motor, y también cambia amedida que aumenta el daño en la barra [18].
15
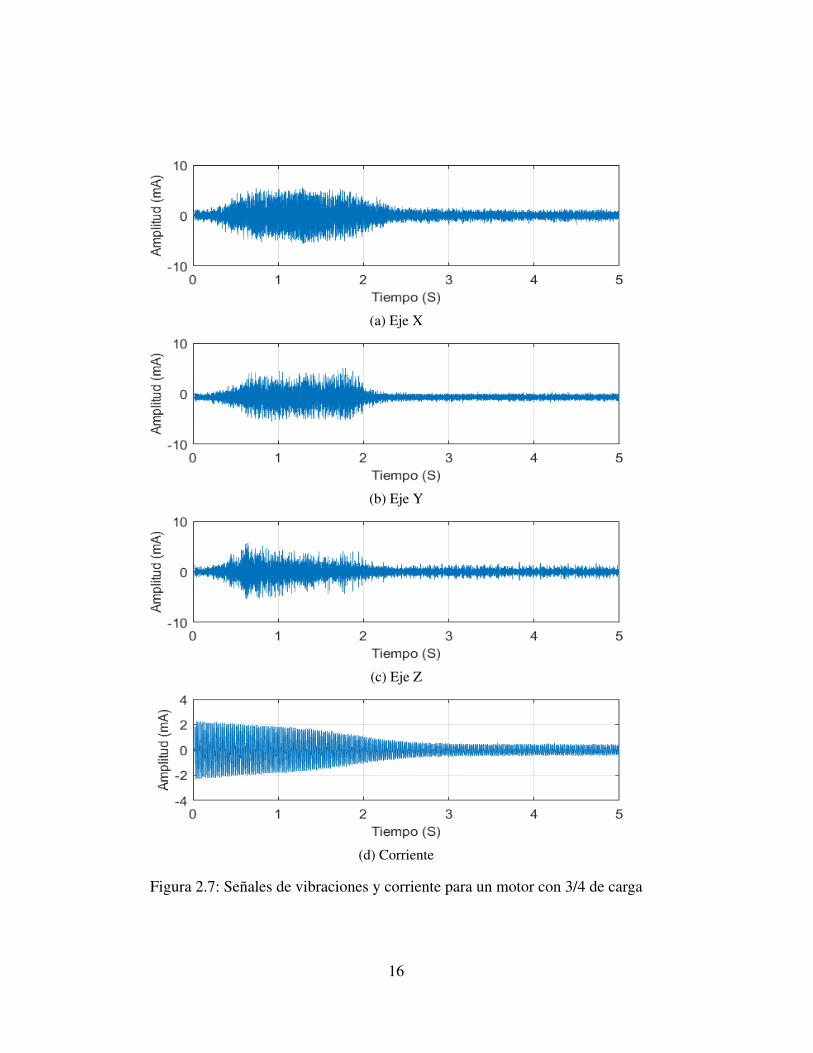
(a) Eje X
(b) Eje Y
(c) Eje Z
(d) Corriente
Figura 2.7: Señales de vibraciones y corriente para un motor con 3/4 de carga
16
Capítulo 3
Trabajo relacionado
En este capítulo se describen las principales fallas en los MI, así como losmétodos más usados en los dominios del tiempo y frecuencia resaltando las ventajasy desventajas. Por ultimo se presenta una breve descripción de los trabajos másrecientes donde se utiliza el análisis wavelet como método de procesamiento de lasseñales de eléctricas y mecánicas de los MI.
3.1. Principales fallas
El rendimiento de los MI esta sujeto a diferentes restricciones, como las con-diciones ambientales y operativas que pueden causar fallas en los diferentes compo-nentes de los MI [19]. Las fallas en las máquinas rotatorias se puede clasificar enfallas mecánicas y eléctricas [20]. En la Figura 1 se presentan las principales fallas deacuerdo al origen de la falla. Los rodamientos proporcionan soporte al eje giratoriocolocado en los extremos del rotor. Esta falla se puede clasificar en fallas localizada ydistribuidas. Una de las principales fallas del rotor son las barras rotas, estas abarcanla longitud del rotor y están conectadas a través de un anillo en cada extremo. Porotro lado las excentricidades crean un espacio de aire no uniforme entre el rotor y elestátor. Existen tres tipos de excentricidades: estática, dinámica, y mixta [21].
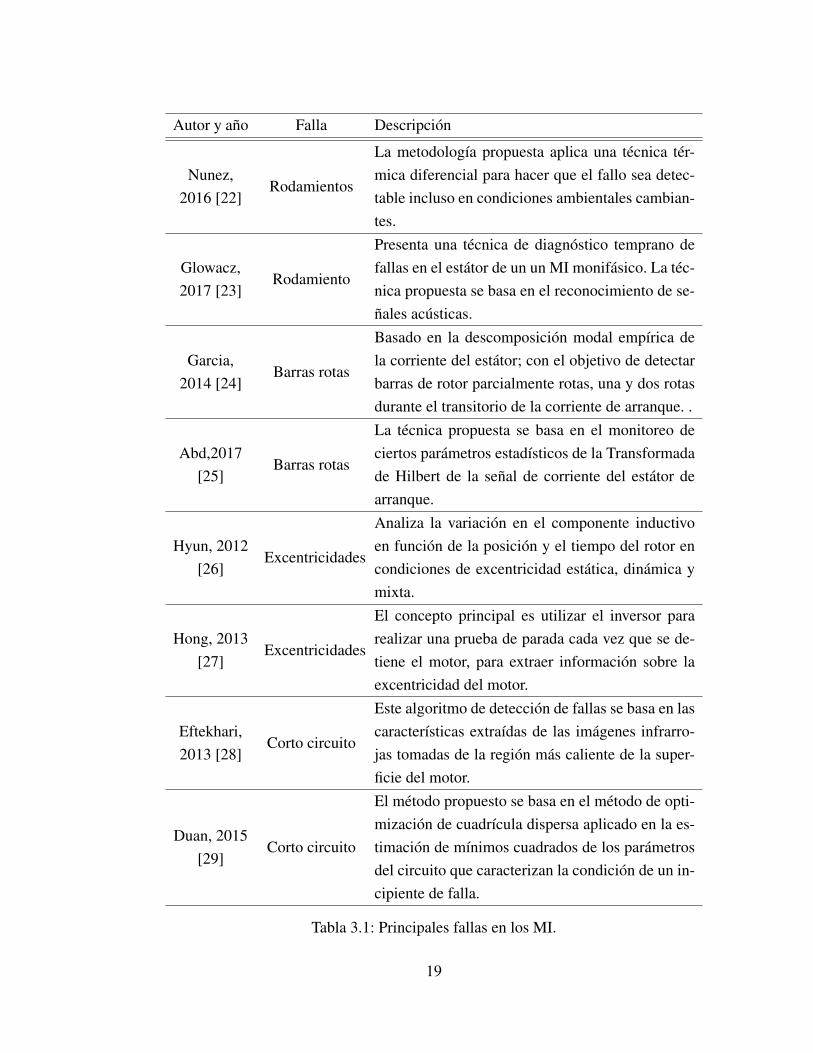
En la Tabla 3.1 se presentan algunos trabajos a cerca de la detección de lasprincipales fallas.
17
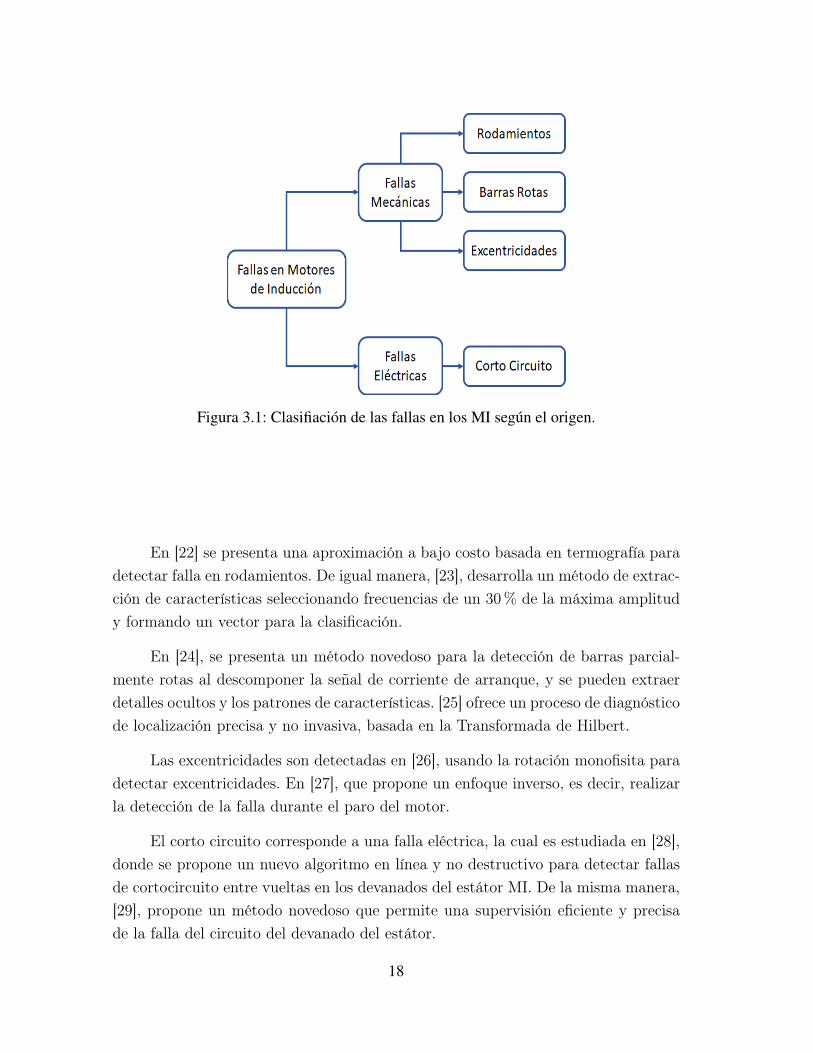
Figura 3.1: Clasifiación de las fallas en los MI según el origen.
En [22] se presenta una aproximación a bajo costo basada en termografía paradetectar falla en rodamientos. De igual manera, [23], desarrolla un método de extrac-ción de características seleccionando frecuencias de un 30% de la máxima amplitudy formando un vector para la clasificación.
En [24], se presenta un método novedoso para la detección de barras parcial-mente rotas al descomponer la señal de corriente de arranque, y se pueden extraerdetalles ocultos y los patrones de características. [25] ofrece un proceso de diagnósticode localización precisa y no invasiva, basada en la Transformada de Hilbert.
Las excentricidades son detectadas en [26], usando la rotación monofisita paradetectar excentricidades. En [27], que propone un enfoque inverso, es decir, realizarla detección de la falla durante el paro del motor.
El corto circuito corresponde a una falla eléctrica, la cual es estudiada en [28],donde se propone un nuevo algoritmo en línea y no destructivo para detectar fallasde cortocircuito entre vueltas en los devanados del estátor MI. De la misma manera,[29], propone un método novedoso que permite una supervisión eficiente y precisade la falla del circuito del devanado del estátor.
18
Autor y año Falla Descripción
Nunez,2016 [22]
Rodamientos
La metodología propuesta aplica una técnica tér-mica diferencial para hacer que el fallo sea detec-table incluso en condiciones ambientales cambian-tes.
Glowacz,2017 [23]
Rodamiento
Presenta una técnica de diagnóstico temprano defallas en el estátor de un un MI monifásico. La téc-nica propuesta se basa en el reconocimiento de se-ñales acústicas.
Garcia,2014 [24]
Barras rotas
Basado en la descomposición modal empírica dela corriente del estátor; con el objetivo de detectarbarras de rotor parcialmente rotas, una y dos rotasdurante el transitorio de la corriente de arranque. .
Abd,2017[25]
Barras rotas
La técnica propuesta se basa en el monitoreo deciertos parámetros estadísticos de la Transformadade Hilbert de la señal de corriente del estátor dearranque.
Hyun, 2012[26]
Excentricidades
Analiza la variación en el componente inductivoen función de la posición y el tiempo del rotor encondiciones de excentricidad estática, dinámica ymixta.
Hong, 2013[27]
Excentricidades
El concepto principal es utilizar el inversor pararealizar una prueba de parada cada vez que se de-tiene el motor, para extraer información sobre laexcentricidad del motor.
Eftekhari,2013 [28]
Corto circuito
Este algoritmo de detección de fallas se basa en lascaracterísticas extraídas de las imágenes infrarro-jas tomadas de la región más caliente de la super-ficie del motor.
Duan, 2015[29]
Corto circuito
El método propuesto se basa en el método de opti-mización de cuadrícula dispersa aplicado en la es-timación de mínimos cuadrados de los parámetrosdel circuito que caracterizan la condición de un in-cipiente de falla.
Tabla 3.1: Principales fallas en los MI.
19
3.2. Métodos de diagnóstico
Existe un interés reciente en el desarrollo de sistemas confiables para el moni-toreo y diagnóstico de fallas en los MI, este interés no solo está en fase final, si notambién en etapas iniciales. Las fallas generan características anormales en los dife-rentes dominios, que son utilizados como indicadores de las diferentes fallas. Estascaracterísticas pueden ser extraídas de las señales de voltaje, corriente, vibraciones,magnéticas y acústicas [30].
3.2.1. Dominio del tiempo
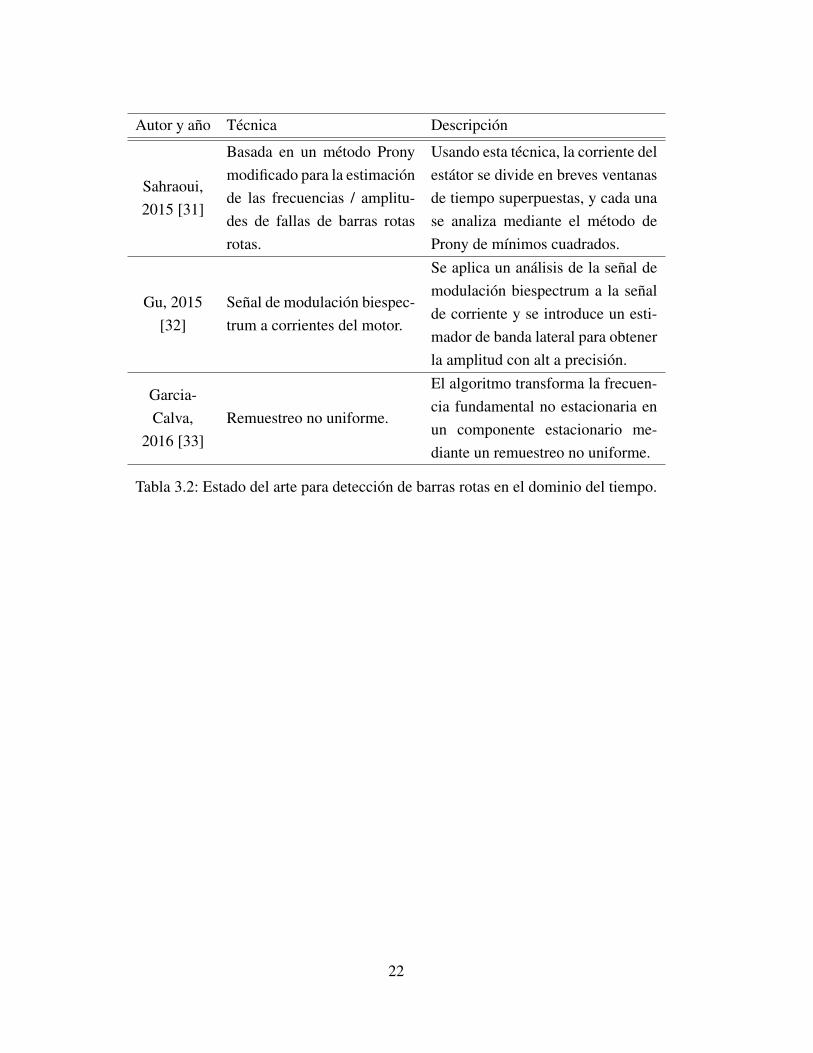
Estos métodos tienen ventajas de cálculo e implementación pero tiene bajasensibilidad a las fallas en etapas iniciales o en ambientes ruidosos. En [31], pro-porciona una representación lineal de tiempo-frecuencia / amplitud con resoluciónde alta frecuencia y resolución de tiempo ajustable. Por otro lado, [32], ha desarro-llado un modelo para las señales de corriente del motor en condiciones de falla yun método efectivo para desacoplar la corriente de la barra rota. En [33], proponeun método efectivo que permite la detección de barras rotas en MI alimentados porinversor durante un transitorio de inicio suave basado en un algoritmo de remuestreono uniforme. Lo antes mencionado se resume en la Tabla 3.2.
3.2.2. Dominio de la frecuencia
La forma más sencilla de explorar las propiedades espectrales es usar la FFT(por sus siglas en inglés, Fast Fourier Transform). Sin embargo, la baja resoluciónes la principal desventaja que impide el uso en condiciones no estacionarias paradetectar las componentes de frecuencia causadas por la falla. En [34] propone unmétodo para la detección de barras rotas usando la FFT y el analisis ICA, (porsus siglas en ingles,Independent Component Analysis). En [35], presenta un métodoefectivo de análisis de la señal de corriente de motor para detectar fallas de barrasrotas en MI de jaula de ardilla en diversas condiciones de carga y velocidades. En[36], se propone un nuevo método para el diagnóstico de la falla de la barra rotadel motor de inducción basada en la Transformada de Fourier Discreta de ventanadeslizante. Estos Trabajos se describen en la Tabla 3.3.
20

3.2.3. Análisis Wavelet
El análisis wavelet es cada vez más utilizada para el análisis de señales decorriente y vibraciones para la detección y monitoreo de la condición de los MI[37]. Es utilizada para analizar las señales no estacionarias , dado que es difícil elanálisis del estado transitorio en los dominios del tiempo y la frecuencia [38]. Es unaherramienta de procesamiento de señales, la cual proporciona información de tiempoy frecuencia al descomponer la señal en diferentes escalas y niveles de resoluciónmediante el ajuste de los anchos de tiempo a las frecuencias de una función base,llamada “wavelet madre” [39].
En los últimos años el uso de la Transformada Wavelet ha tomado gran impor-tancia debido a los buenos resultados que se han obtenido al combinarla con otrastécnicas de procesamiento. En la Tabla se describen algunos de los trabajos en loscuales se utiliza la Transformada Wavelet en particular la DWT para la detecciónde barras rotas.
En [1] desarrolla un algoritmo automático para el diagnóstico en linea de ba-rras rotas usando la DWT como procesamiento de la señal de corriente en estadotransitorio, el algoritmo es implementado en un FPGA (por sus siglas en ingles, FieldProgrammable Gate Array). En [40] propone el uso de una transformada discreta enparticular, el DWT, para evaluar la condición del rotor, considera varios métodos dearranque para evaluar la metodología basada en transitorios: arranque estrella-delta,arranque mediante resistencias del estátor y arranque suave. Los resultados demues-tran la solidez del enfoque que, no solo permite visualizar las evoluciones de loscomponentes de falla en esos arranques, sino también evaluar la gravedad de la falladel rotor con los indicadores mencionados anteriormente. Por otro lado, [4], presentaun estudio experimental de rotor parcialmente dañado con una barra rota, bajo di-ferentes condiciones de carga basadas en el análisis discreto del análisis wavelet. Deigual modo, [3] realiza la detección de varios niveles de daño de las barras del rotorbajo diferentes condiciones de carga se identifican mediante señales de vibración. Laimportancia de este trabajo se basa en un algoritmo de detección automática simplepero efectivo del daño antes de que ocurra una ruptura. En la Tabla 3.4, se resumenlos trabajados antes mencionados.
21
Autor y año Técnica Descripción
Sahraoui,2015 [31]
Basada en un método Pronymodificado para la estimaciónde las frecuencias / amplitu-des de fallas de barras rotasrotas.
Usando esta técnica, la corriente delestátor se divide en breves ventanasde tiempo superpuestas, y cada unase analiza mediante el método deProny de mínimos cuadrados.
Gu, 2015[32]
Señal de modulación biespec-trum a corrientes del motor.
Se aplica un análisis de la señal demodulación biespectrum a la señalde corriente y se introduce un esti-mador de banda lateral para obtenerla amplitud con alt a precisión.
Garcia-Calva,
2016 [33]Remuestreo no uniforme.
El algoritmo transforma la frecuen-cia fundamental no estacionaria enun componente estacionario me-diante un remuestreo no uniforme.
Tabla 3.2: Estado del arte para detección de barras rotas en el dominio del tiempo.
22
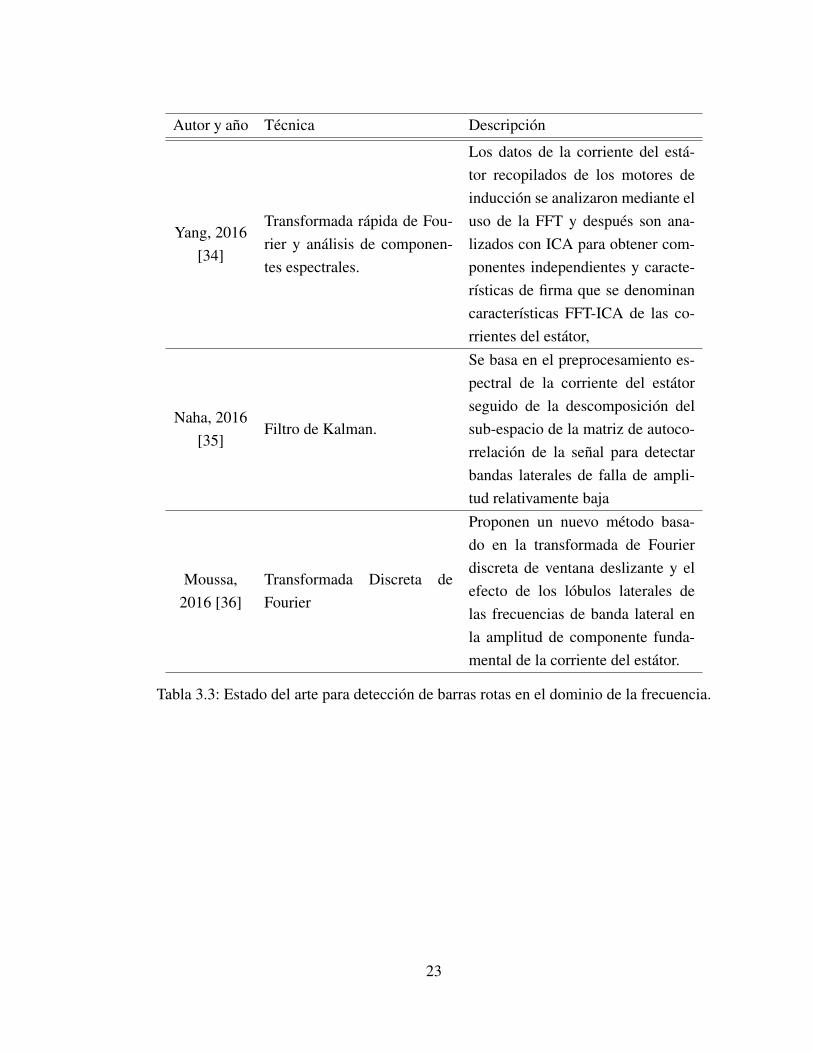
Autor y año Técnica Descripción
Yang, 2016[34]
Transformada rápida de Fou-rier y análisis de componen-tes espectrales.
Los datos de la corriente del está-tor recopilados de los motores deinducción se analizaron mediante eluso de la FFT y después son ana-lizados con ICA para obtener com-ponentes independientes y caracte-rísticas de firma que se denominancaracterísticas FFT-ICA de las co-rrientes del estátor,
Naha, 2016[35]
Filtro de Kalman.
Se basa en el preprocesamiento es-pectral de la corriente del estátorseguido de la descomposición delsub-espacio de la matriz de autoco-rrelación de la señal para detectarbandas laterales de falla de ampli-tud relativamente baja
Moussa,2016 [36]
Transformada Discreta deFourier
Proponen un nuevo método basa-do en la transformada de Fourierdiscreta de ventana deslizante y elefecto de los lóbulos laterales delas frecuencias de banda lateral enla amplitud de componente funda-mental de la corriente del estátor.
Tabla 3.3: Estado del arte para detección de barras rotas en el dominio de la frecuencia.
23

Autor y año Información Wavelet Descripción
Ordaz,2008 [1]
Transformada Wavelet Dis-creta.Coeficientes de aproxi-mación nivel 7 y coeficientesde detalle nivel 6 y 7.
Se basa en la aplicación transforma-da de wavelet discreta a la corrientede arranque; el error cuadrático me-dio determina una función de pon-deración que, de acuerdo con su va-lor, señala la condición del motorcomo saludable o dañado.
Antonino-Daviu,
2014 [40]
Transformada Wavelet Dis-creta. Niveles 6, 7 y 8 de des-composición.
Este artículo presenta un estudio so-bre la variación de diferentes indi-cadores de gravedad de fallas basa-dos en wavelets para diferentes ti-pos de métodos de arranque de mo-tores.
Rangel,2016 [4]
Transformada WaveletDiscreta. Uso de la auto-correlación como prepro-cesamiento. Nivel 3 dedescomposición.
El enfoque se basa en la extracciónde características de las señales devibración a diferentes niveles de da-ño y tres condiciones de carga me-cánica.
Cruz, 2017[3]
Transformada Wavelet Dis-creta. Tres niveles de descom-posición.
La extracción de características sebasa en análisis de wavelets discre-tos y autocorrelación. La clasifica-ción automática del grado de fallase lleva a cabo mediante un árbol declasificación binario.
Tabla 3.4: Estado del arte para detección de barras rotas usando Transformada Wavelet.
24
Capítulo 4
Metodología
En este capítulo, se describe la metodología propuesta para la detección deuna barra rota en un MI, bajo diferentes condiciones de media y carga completa,en estado transitorio. La gravedad de la falla se cuantifica con los milímetros deruptura que presenta la barra, donde 0 mm corresponde a una barra sana y 10mm a una barra rota. El banco de datos consiste en un conjunto de 400 señales,correspondientes a las dos condiciones de carga, es decir, 50 pruebas para cada señalen las bajo dos condiciones de carga.
4.1. Metodología propuesta
En la Figura 4.1, se presenta la metodología propuesta para la detección debarras rotas en los MI, esta consiste en una etapa de adquisición de señales, es decir,la captura de las señales del motor, la cual fue realizada durante un periodo de 10segundos aproximadamente, que corresponden a 32000 muestras. El transitorio tieneuna duración aproximada de 3 segundos y el resto corresponde al motor ya en estadoestable. Para el desarrollo de la metodología se utilizan solo 2048 muestras del estadotransitorio, es decir, se analiza desde 1 hasta 2048 muestras cuando el MI presentael 50 % de la carga y hasta 10000 cuando tiene una carga mecánica del 75 %. Lasiguiente etapa es el procesamiento de las señales de vibraciones y corriente, la cualconsiste en calcular los coeficientes de aproximación de la DWT y la MODWT. Elsiguiente paso se trata de la extracción de características, es decir, los valores de
25
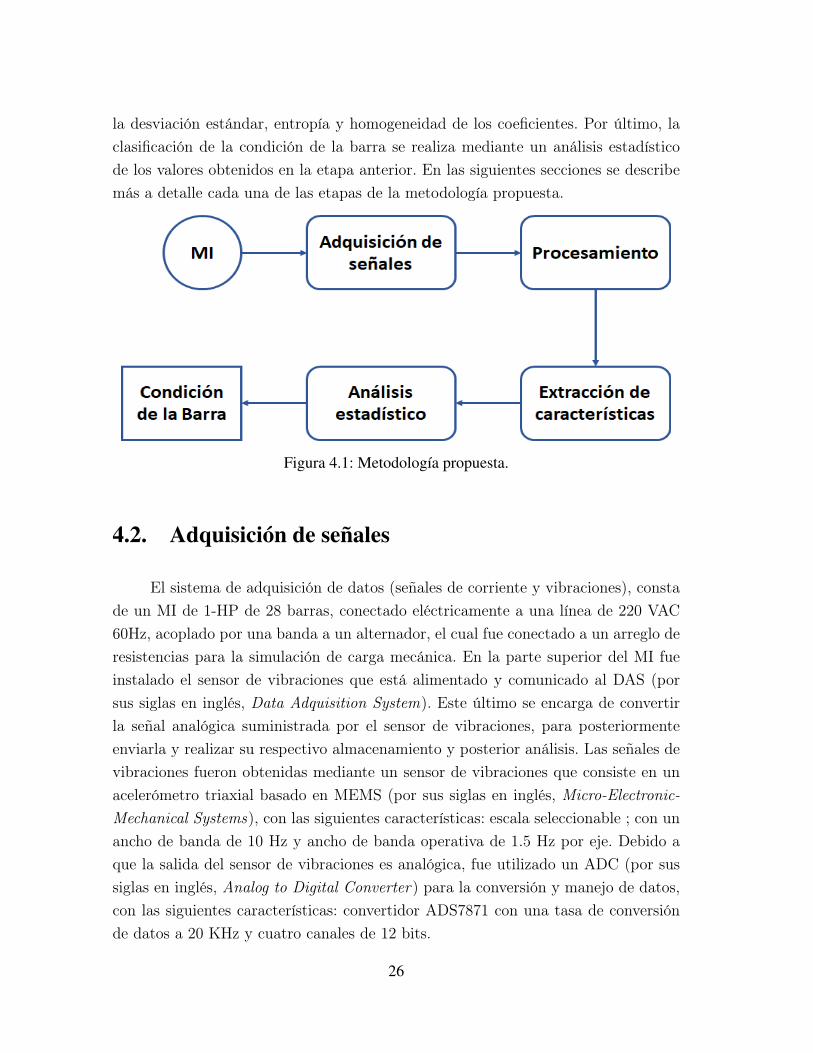
la desviación estándar, entropía y homogeneidad de los coeficientes. Por último, laclasificación de la condición de la barra se realiza mediante un análisis estadísticode los valores obtenidos en la etapa anterior. En las siguientes secciones se describemás a detalle cada una de las etapas de la metodología propuesta.
Figura 4.1: Metodología propuesta.
4.2. Adquisición de señales
El sistema de adquisición de datos (señales de corriente y vibraciones), constade un MI de 1-HP de 28 barras, conectado eléctricamente a una línea de 220 VAC60Hz, acoplado por una banda a un alternador, el cual fue conectado a un arreglo deresistencias para la simulación de carga mecánica. En la parte superior del MI fueinstalado el sensor de vibraciones que está alimentado y comunicado al DAS (porsus siglas en inglés, Data Adquisition System). Este último se encarga de convertirla señal analógica suministrada por el sensor de vibraciones, para posteriormenteenviarla y realizar su respectivo almacenamiento y posterior análisis. Las señales devibraciones fueron obtenidas mediante un sensor de vibraciones que consiste en unacelerómetro triaxial basado en MEMS (por sus siglas en inglés, Micro-Electronic-Mechanical Systems), con las siguientes características: escala seleccionable ; con unancho de banda de 10 Hz y ancho de banda operativa de 1.5 Hz por eje. Debido aque la salida del sensor de vibraciones es analógica, fue utilizado un ADC (por sussiglas en inglés, Analog to Digital Converter) para la conversión y manejo de datos,con las siguientes características: convertidor ADS7871 con una tasa de conversiónde datos a 20 KHz y cuatro canales de 12 bits.
26
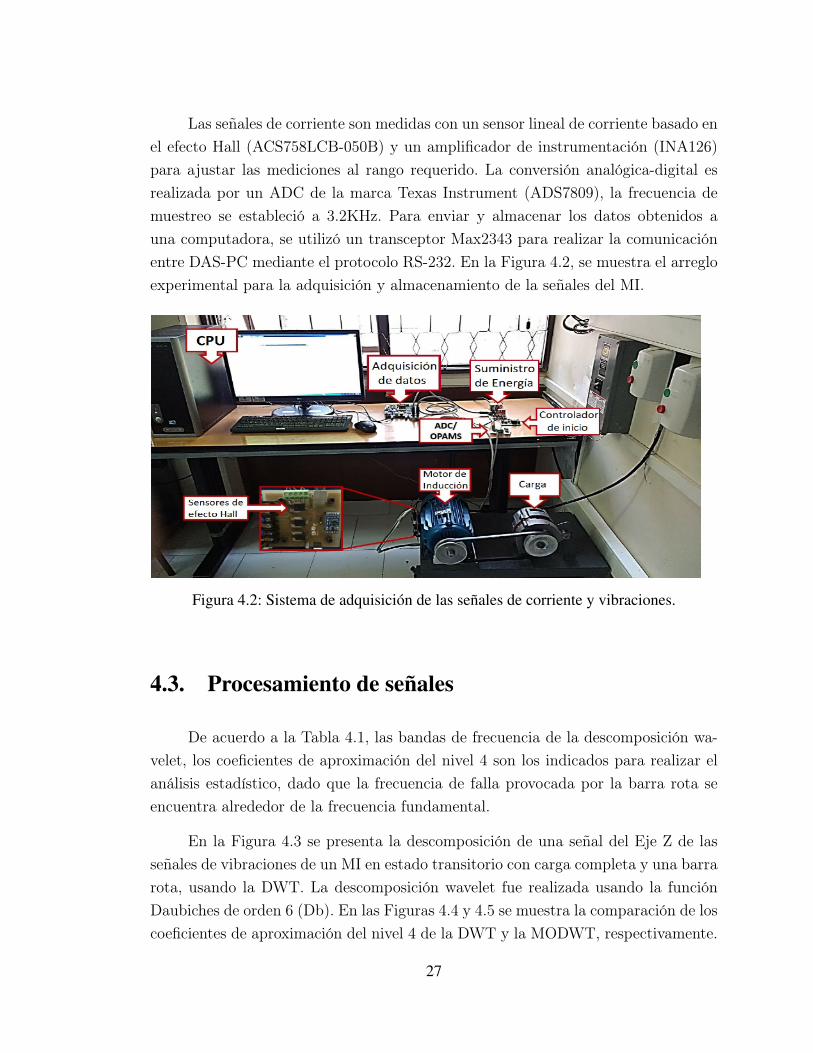
Las señales de corriente son medidas con un sensor lineal de corriente basado enel efecto Hall (ACS758LCB-050B) y un amplificador de instrumentación (INA126)para ajustar las mediciones al rango requerido. La conversión analógica-digital esrealizada por un ADC de la marca Texas Instrument (ADS7809), la frecuencia demuestreo se estableció a 3.2KHz. Para enviar y almacenar los datos obtenidos auna computadora, se utilizó un transceptor Max2343 para realizar la comunicaciónentre DAS-PC mediante el protocolo RS-232. En la Figura 4.2, se muestra el arregloexperimental para la adquisición y almacenamiento de la señales del MI.
Figura 4.2: Sistema de adquisición de las señales de corriente y vibraciones.
4.3. Procesamiento de señales
De acuerdo a la Tabla 4.1, las bandas de frecuencia de la descomposición wa-velet, los coeficientes de aproximación del nivel 4 son los indicados para realizar elanálisis estadístico, dado que la frecuencia de falla provocada por la barra rota seencuentra alrededor de la frecuencia fundamental.
En la Figura 4.3 se presenta la descomposición de una señal del Eje Z de lasseñales de vibraciones de un MI en estado transitorio con carga completa y una barrarota, usando la DWT. La descomposición wavelet fue realizada usando la funciónDaubiches de orden 6 (Db). En las Figuras 4.4 y 4.5 se muestra la comparación de loscoeficientes de aproximación del nivel 4 de la DWT y la MODWT, respectivamente.
27

Nivel de
descomposiciónCoef. de Aprox
HzCoef. de Detalle
Hz1 [0 - 800] [800 - 1600]2 [0 - 400] [400 - 800]3 [0 - 200] [200 - 400]4 [0 - 100] [100 - 200]5 [0 - 50] [50 - 100]6 [0 - 25] [25 - 50]
Tabla 4.1: Bandas de frecuencia
Para una señal del Eje Z de vibraciones de un MI con carga completa con 0 mm y10 mm.
28

Figura 4.3: Descomposición de la señal del Eje Z de un MI en estado transitorio con cargacompleta y una barra rota.
29
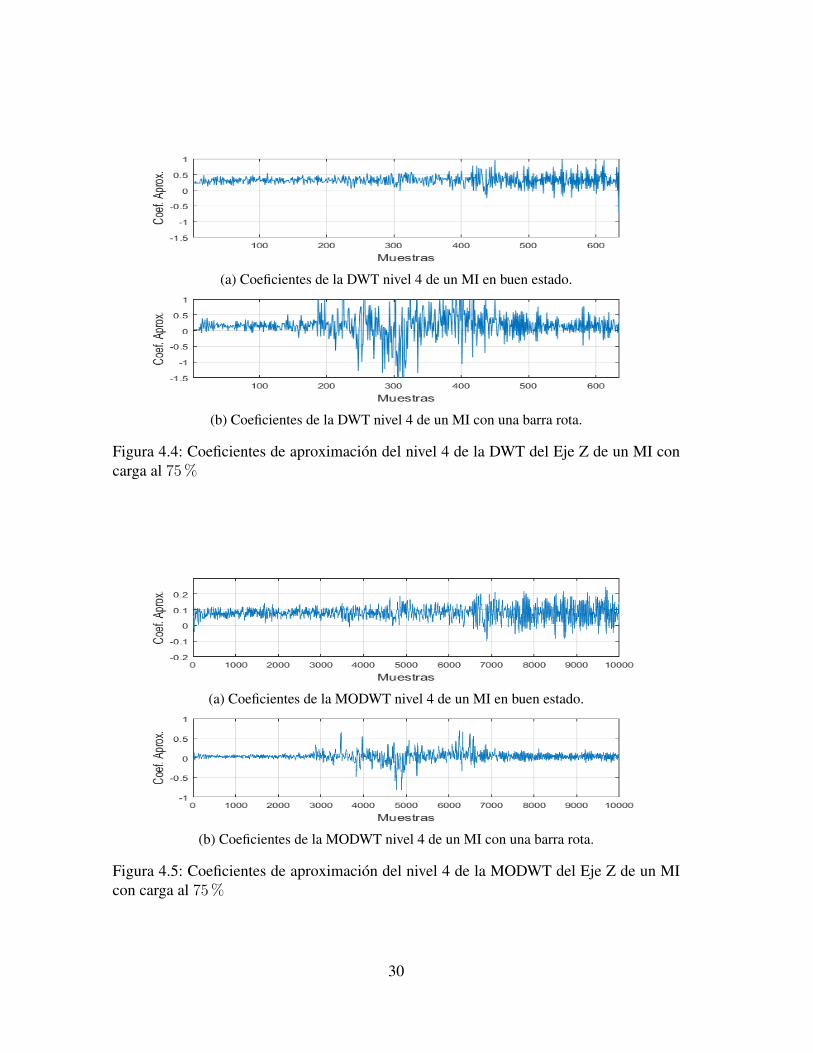
(a) Coeficientes de la DWT nivel 4 de un MI en buen estado.
(b) Coeficientes de la DWT nivel 4 de un MI con una barra rota.
Figura 4.4: Coeficientes de aproximación del nivel 4 de la DWT del Eje Z de un MI concarga al 75 %
(a) Coeficientes de la MODWT nivel 4 de un MI en buen estado.
(b) Coeficientes de la MODWT nivel 4 de un MI con una barra rota.
Figura 4.5: Coeficientes de aproximación del nivel 4 de la MODWT del Eje Z de un MIcon carga al 75 %
30

4.4. Extracción de características
4.4.1. Desviación estándar
La desviación estándar es una medida de dispersión que indica que tan dispersosse encuentran los valores respecto a la media.
s =
√√√√ 1
n
n∑
i=1
(xi − x̄)2 (4.1)
4.4.2. Entropía
Originalmente, entropía es un concepto usado en termodinámica. Shannon defi-nió la entropía de la información como una medida para describir cuánta informaciónes producida por una señal [41]. En otras palabras, la entropía es una medida delgrado de incertidumbre comúnmente entendido como desorden. El valor de entropíaes usado como parámetro para medir la energía de los coeficientes. Considerando unevento aleatorio X con posibles salidas [x1, x2, ..., xn] y dada una probabilidad paracada xi, la entropía de un evento aleatorio X esta dada por:
H(X) = −n∑
i=1
p(xi)log2[p(xi)] (4.2)
Si el total de las salidas del evento aleatorio X es N , la probabilidad p(xi) estadada por:
p(xi) =riN
(4.3)
donde ri es la incidencia de cada posible salida xi y el numero total de salidases:
N =n∑
i=1
ri (4.4)
31

4.4.3. Homogeneidad
El concepto de homogeneidad fue propuesto como una característica de texturapara la clasificación de imágenes, esta mide la variabilidad de los niveles de gris através de la superficie dada [5]. Es posible calcular el valor de homogeneidad parauna señal 1-D.
La homogeneidad es una técnica de procesamiento de señales que permite esti-mar una medida de auto-similitud de un patrón en una serie de tiempo digital, lo quesignifica que las variaciones que modifican la regularidad de la señal digital, comolos fenómenos no estacionario pueden ser asociados a un valor de homogeneidad. Elvalor de este parámetro varía de 0 a 1, dependiendo de la auto-similitud encontradaen la señal, donde 1 y 0 indican alta y baja similitud respectivamente [42].
La homogeneidad de una serie de tiempo digital se calcula de la siguientemanera:
1. Considerando x(n) = [x1, x2, ..., xn] con N número de muestras. Con K valorescuantizables en la señal x(n).
2. Calcular el vector de diferencias Dj,n.
Dj,n = x(n)− x(n− j) (4.5)
donde j represeta la diferencia y toma valores del 1 a 6.
3. Calcular el histograma de Dj,n, donde v = K + 1, ..., k − 1 y A representa elnúmero total de diferencias.
hm(v) = Dj,n (4.6)
En la Figura 4.6 se presenta un ejemplo de Dj,n con j = 1 y j = 6.
4. Calcular la función de probabilidad de las diferencias PD(v).
PD(v) =hm(j)
A(4.7)
32
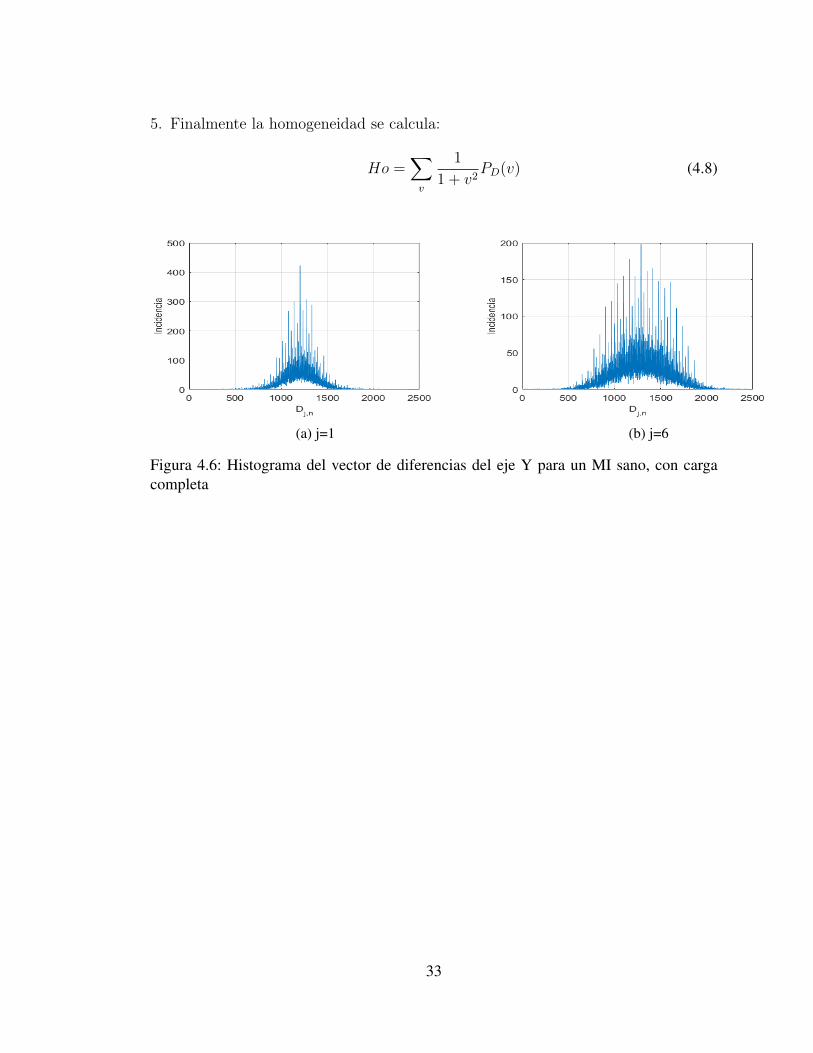
5. Finalmente la homogeneidad se calcula:
Ho =∑
v
1
1 + v2PD(v) (4.8)
(a) j=1 (b) j=6
Figura 4.6: Histograma del vector de diferencias del eje Y para un MI sano, con cargacompleta
33

Capítulo 5
Resultados
En este capítulo se presentan los resultados obtenidos con la metodología pro-puesta. La metodología fue probada con las señales de corriente y vibraciones deun MI con el 50% y 75% de carga mecánica en estado transitorio. Se utilizó loscoeficientes del nivel 4 de descomposición de la DWT y la MODWT, dado que elrango de frecuencias del nivel 4 de descomposición es de los 0-100 Hz, de acuerdo a laliteratura la frecuencia provocada por la ruptura de una barra se encuentra cercanaa la frecuencia de alimentación del motor, es decir, alrededor de los 60 Hz. Con lametodología propuesta es posible realizar la detección de media y una barra rotautilizando los valores de desviación estándar y entropía, el valor de homogeneidadlimita la detección de una barra rota, es decir, no permite la detección de la falla enetapas iniciales.
5.1. Resultados bajo el criterio de la desviación estándar
5.1.1. Media carga
Las Figuras 5.1 y 5.2 muestra el resultado de analizar 50 señales obtenidasde un motor en buen estado y 50 señales de un motor que presenta daño en lasbarras bajo el criterio de la desviación estándar. Puede observarse que es posible ladetección de la falla con buenos resultados debido a la dispersión de los valores de ladesviación estándar cuando el MI se encuentra sin barras rotas y cuando tiene una
35
barra con daño utilizando los coeficientes de aproximación del nivel 4 de la DWT yla MODWT respectivamente. Se puede observar que los coeficientes de la MODWTpresenta mejores resultados para la detección de barras rotas. La detección por mediode los de la DWT se ve limitada en los ejes Y y Z para un motor en buen estado yotro con una barra rota. Sin embargo la MODWT presenta mayor dispersión en losvalores de la desviación estándar, mejorando los resultados cuando el MI presentamedia carga.
Las Figuras 5.3, 5.4, 5.5 y 5.6, presentan los resultados de la clasificación demedia y una barra rota, esto se logra gracias a los diferentes valores de la desviaciónestándar cuando el MI presenta fractura parcial y total de la una barra.
Para el caso de la señal de corriente los resultados obtenidos con los coeficientesde la DWT y la MODWT presentan resultados similares tanto para la detección de5 mm como 10 mm, teniendo un porcentaje de 79% y del 99% respectivamente. Laseñal de vibraciones del eje X permite la separación de la condición de la falla con el50% y del 77% para media barra rota utilizando los a4 de la DWT y de la MODWTrespectivamente, mientras que la detección de 10 mm alcanza el 99% para amboscasos. Con la señal del eje Y los resultados obtenidos con la MODWT supera losobtenidos con la DWT tanto para fractura parcial y la ruptura total, esto se puedever en las Figuras 5.5b y 5.5d. De manera similar, el eje Z alcanza mejores resultadoslos coeficientes de la MODWT sobre los coeficientes de la DWT. Esto se muestra enlas Figuras 5.6b y 5.5d.
La Tabla 5.1, presenta los porcentajes para la detección de 5 y 10 mm utilizandolos coeficientes de la DWT y la MODWT, obtenidas de las señales de corriente yvibraciones.
5.1.2. Carga completa
En las Figuras 5.7 y 5.8, presentan los resultados parciales utilizando la des-viación estándar para la detección de una barra rota, mediante los coeficientes deaproximación del nivel 4 de la DWT y la MODWT. La detección de la falla es po-sible realizarla con altos porcentajes de clasificación utilizando los coeficientes de laDWT de la señal de corriente y los ejes X y Y de vibraciones, sin embargo, el ejeZ presenta traslape en las condiciones de la barra, lo que provoca que la detección
36

de barras rotas sea una tarea difícil. Por otro lado, los coeficientes de la MODWTmejora los resultados de la DWT cuando el MI presenta carga completa.
Los resultados obtenidos con los coeficientes de la señal de corriente son simi-lares tanto con la DWT y la MODWT, haciendo posible la detección de media y unabarra rota con porcentajes del 99%, como se puede ver en la Figura 5.9. En cuanto aleje X, la detección de 5 mm se ve limitada a un 44.20% debido al traslape existenteentre las condiciones del estado de la barra cuando se utiliza los coeficientes de laDWT, este porcentaje se eleva a un 81.49% cuando se utiliza los coeficientes de laMODWT. La detección de una barra rota se puede realizar con alto porcentaje declasificación tanto para la DWT y la MODWT, como se puede ver en las Figuras5.10. Por otro lado, el eje Y presenta resultados del 99% de clasificación para mediay una barra rota utilizando los coeficientes de la MODWT, presentando notablesmejoras sobre la DWT, como se aprecia en la Figura 5.11. De igual manera, el ejeZ muestra resultado superiores con los coeficientes de la MODWT sobre la DWT,obteniendo resultados del 80% y del 99% para 5 y 10 mm respectivamente, esto semuestra en el Figura 5.12.
La Tabla 5.2, presenta los porcentajes para la detección de 5 y 10 mm utilizandolos coeficientes de la DWT y la MODWT, obtenidas de las señales de corriente yvibraciones.
5.2. Resultados bajo el criterio de entropía
5.2.1. Media carga
Como se menciono en el capítulo anterior, la entropía mide el grado de desordenen las señales, por lo tanto, es un buen parámetro para la detección de una barrarota. En las Figuras 5.13, y 5.14, se presentan los resultados parciales, utilizando elvalor de la entropía como parámetro para la detección de barras rotas, tanto con loscoeficientes de la DWT y la MODWT respectivamente. Los coeficientes de la DWTpara las señales de corriente y eje X presentan buenos resultados, los resultados declasificación de la condición de la barra con la MODWT son similares a los de laDWT cuando el MI tiene el 50% de la carga mecánica.
Los coeficientes de la señal de corriente permiten la detección de media barra
37

rota con porcentajes del 77% y del 99% para una barra rota tanto con los coeficientesresultantes de la DWT y la MODWT, como se ve en la Figura 5.15. En el caso deleje X, clasificación de media barra rota respecto a una barra sana se ve limitadaa un 33% y 53.72% para los coeficientes de la DWT y MODWT respectivamente.Mientras que la clasificación de una barra totalmente fracturada es superior al 90%para ambos casos, esto de puede ver en la Figura 5.16. Para los ejes Y y Z la detecciónde la falla se ve limitada tanto para 5 como para 10 mm esto de ve en los traslapesque existe entre las condiciones de la barra de las Figuras 5.17 y 5.18.
La Tabla 5.3, presenta los porcentajes obtenidos utilizando la entropía de loscoeficientes de aproximación de la DWT y la MODWT, cuando el MI presenta mediacarga mecánica. Los porcentajes de efectividad de la señal de corriente y de los ejesX y Y, son similares en ambos casos.
5.2.2. Carga completa
Cuando el MI presenta carga mecánica completa la detección de media y unabarra rota es posible por medio de la entropía de los coeficientes de aproximación delnivel 4 de la descomposición DWT y MODWT. Los resultados parciales muestranque la detección de esta falla es posible por medio de los ejes X y Y ademas de laseñal de corriente para los coeficientes obtenidos de la DWT, como se muestra enla Figura 5.19, mientras que los coeficientes de la MODWT de la señal del eje Zpresenta notables mejoras y siendo una buena opción para la detección de la falla,esto esta mostrado en la Figura 5.20.
En la Figura 5.21, se muestran los resultados de la clasificación para 5 y 10mm de los coeficientes de la DWT y la MODWT, debido a que el traslape existenteentre las condiciones de la barra permiten tener porcentajes del 99% para amboscasos. Por otro lado, en la Figura 5.22, presenta los resultados del eje X, mediantelos coeficientes de la DWT la detección de media barra rota se ve limitada a un 54%,sin embargo una barra rota se puede detectar con el 95% de clasificación, usandolos coeficientes de la DWT, mientras que los coeficientes dela MODWT obtieneporcentajes del 99% para 5 y 10 mm. Para el eje Y la clasificación de media barrarota se ve limitada a un 34% debido al traslape existente entre la condiciones dela barra, este porcentaje aumenta al 81% cuando la barra presenta fractura total,como se aprecia en la Figura 5.23. La clasificación de la condición de la barra con
38

los coeficientes del eje Z son mostrados en la Figura 5.24, la detección de 5 mmse ve limitada a un 42% y 20% para la DWT y la MODWT respectivamente. Sinembargo, la detección de 10 mm se puede realizar con porcentaje de clasificación del88% con los coeficientes de la MODWT.
Los porcentajes de clasificación de la condición de la barra de un MI con cargacompleta bajo el criterio de entropía se presentan en la Tabla 5.4.
5.3. Homogeneidad
5.3.1. Media carga
La detección de barras rotas se ve limitada bajo el criterio de homogeneidadcuando el MI presenta media mecánica. La Tabla 5.5 muestra los porcentajes de efec-tividad, en el caso de las señales de vibraciones no es posible calcular la efectividadde la metodología debido al traslape que se presenta con los valores de homogeneidadde los coeficientes de aproximación del nivel 4 de la DWT, para las condiones de0mm y 10mm de la barra, esto se muesta en la Figura 5.25. Por otro lado, los coefi-cientes resultantes de la MODWT de las señales de vibraciones ofrecen porcentajesde detección del 94.80% para el eje X, La Figura 5.26, muesta los resultados de laclasificación para los ejes X y Y.
5.3.2. Carga completa
Cuando el MI presenta carga mecánica completa la detección de una barra rotaes posible por medio de los coeficientes de aproximación del nivel 4 de la descompo-sición DWT y MODWT. La Tabla 5.6 muestra los porcentajes de efectividad bajoel criterio de la homogeneidad.
39

(a) Señal de Corriente (b) Señal del Eje X
(c) Señal del Eje Y (d) Señal del Eje Z
Figura 5.1: Evaluación de los coeficientes de aproximación del nivel 4 de la DWT bajo elcriterio de la desviación estándar.
40

(a) Señal de Corriente (b) Señal del Eje X
(c) Señal del Eje Y (d) Señal del Eje Z
Figura 5.2: Evaluación de los coeficientes de aproximación del nivel 4 de la MODWTbajo el criterio de la desviación estándar.
41

(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.3: Clasificación de la condición de la barra bajo el criterio de la desviación es-tándar de los coeficientes de aproximación del nivel 4 de la descomposición wavelet de laseñal de corriente.
42
(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.4: Clasificación de la condición de la barra bajo el criterio de la desviación es-tándar de los coeficientes de aproximación del nivel 4 de la descomposición wavelet delEje X.
43

(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.5: Clasificación de la condición de la barra bajo el criterio de la desviación es-tándar de los coeficientes de aproximación del nivel 4 de la descomposición wavelet delEje Y.
44
(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.6: Clasificación de la condición de la barra bajo el criterio de la desviación es-tándar de los coeficientes de aproximación del nivel 4 de la descomposición wavelet delEje Z.
45

(a) Señal de Corriente (b) Señal del Eje X
(c) Señal del Eje Y (d) Señal del Eje Z
Figura 5.7: Evaluación de los coeficientes de aproximación del nivel 4 de la DWT de unMI con carga completa bajo el criterio de la desviación estándar.
46

(a) Señal de Corriente (b) Señal del Eje X
(c) Señal del Eje Y (d) Señal del Eje Z
Figura 5.8: Evaluación de los coeficientes de aproximación del nivel 4 de la MODWT deun MI con carga completa bajo el criterio de la desviación estándar.
47

(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.9: Clasificación de la condición de la barra bajo el criterio de la desviación es-tándar de los coeficientes de aproximación del nivel 4 de la descomposición wavelet de laseñal de corriente de un MI con carga completa.
48
(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.10: Clasificación de la condición de la barra bajo el criterio de la desviaciónestándar de los coeficientes de aproximación del nivel 4 de la descomposición wavelet delEje X de un MI con carga completa.
49

(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.11: Clasificación de la condición de la barra bajo el criterio de la desviaciónestándar de los coeficientes de aproximación del nivel 4 de la descomposición wavelet delEje Y de un MI con carga completa.
50
(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.12: Clasificación de la condición de la barra bajo el criterio de la desviaciónestándar de los coeficientes de aproximación del nivel 4 de la descomposición wavelet delEje Z de un MI con carga completa.
51

(a) Señal de Corriente (b) Señal del Eje X
(c) Señal del Eje Y (d) Señal del Eje Z
Figura 5.13: Evaluación de los coeficientes de aproximación del nivel 4 de la DWT bajoel criterio de entropiar para un MI con media carga.
52
(a) Señal de Corriente (b) Señal del Eje X
(c) Señal del Eje Y (d) Señal del Eje Z
Figura 5.14: Evaluación de los coeficientes de aproximación del nivel 4 de la MODWTbajo el criterio de la Entropia.
53

(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.15: Clasificación de la condición de la barra bajo el criterio de entropia de loscoeficientes de aproximación del nivel 4 de la descomposición wavelet de la señal decorriente.
54
(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.16: Clasificación de la condición de la barra bajo el criterio de entropía de loscoeficientes de aproximación del nivel 4 de la descomposición wavelet del Eje X.
55

(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.17: Clasificación de la condición de la barra bajo el criterio de Entropía de loscoeficientes de aproximación del nivel 4 de la descomposición wavelet del Eje Y.
56

(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.18: Clasificación de la condición de la barra bajo el criterio de entropía de loscoeficientes de aproximación del nivel 4 de la descomposición wavelet del Eje Z.
57

(a) Señal de Corriente (b) Señal del Eje X
(c) Señal del Eje Y (d) Señal del Eje Z
Figura 5.19: Evaluación de los coeficientes de aproximación del nivel 4 de la DWT de unMI con carga completa bajo el criterio de entropía.
58

(a) Señal de Corriente (b) Señal del Eje X
(c) Señal del Eje Y (d) Señal del Eje Z
Figura 5.20: Evaluación de los coeficientes de aproximación del nivel 4 de la MODWT deun MI con carga completa bajo el criterio de entropía.
59

(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.21: Clasificación de la condición de la barra bajo el criterio de entropía de loscoeficientes de aproximación del nivel 4 de la descomposición wavelet de la señal decorriente de un MI con carga completa.
60
(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.22: Clasificación de la condición de la barra bajo el criterio de entropía de loscoeficientes de aproximación del nivel 4 de la descomposición wavelet del Eje X de unMI con carga completa.
61

(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.23: Clasificación de la condición de la barra bajo el criterio de entropí de loscoeficientes de aproximación del nivel 4 de la descomposición wavelet del Eje Y de unMI con carga completa.
62
(a) Detección de media barra rota usando laDWT.
(b) Detección de media barra rota usando laMODWT.
(c) Detección de una barra rota usando la DWT.(d) Detección de una barra rota usando laMODWT.
Figura 5.24: Clasificación de la condición de la barra bajo el criterio de entropía de loscoeficientes de aproximación del nivel 4 de la descomposición wavelet del Eje Z de un MIcon carga completa.
63
Coficientes Daño (mm) Corriente Eje X Eje Y Eje Z
DWT5 mm 78.87 % 50.85 % 43.23 % 35.11 %
10 mm 99.67 % 77.81 % 60.37 % 20.57 %
MODWT5 mm 79.79 % 99.94 % 88.08 % 61.96 %
10 mm 99.67 % 99.99 % 99.28 % 95.51 %
Tabla 5.1: Tabla de Porcentajes de clasificación bajo el criterio de la desviación estándarpara un MI con media carga.
Coeficientes Daño (mm) Corriente Eje X Eje Y Eje Z
DWT5 mm 99.81 % 44.21 % 39.41 % 30.01 %
10 mm 99.58 % 99.99 % 95.18 % 46.36 %
MODWT5 mm 99.81 % 81.49 % 99.86 % 93.51 %
10 mm 99.57 % 99.99 % 99.99 % 99.99 %
Tabla 5.2: Tabla de Porcentajes de clasificación bajo el criterio de la desviación estándarpara un MI con carga completa.
Coeficientes Daño (mm) Corriente Eje X Eje Y Eje Z
DWT5 mm 78.01 % 33.62 % 39.32 % 45.63 %
10 mm 99.56 % 93.76 % 43.65 % 20.54 %
MODWT5 mm 77.94 % 53.72 % 43.65 % 39.42 %
10 mm 99.56 % 95.14 % 43.90 % 69.36 %
Tabla 5.3: Tabla de Porcentajes de clasificación bajo el criterio de entropía para un MI conmedia carga.
Coeficientes Daño (mm) Corriente Eje X Eje Y Eje Z
DWT5 mm 99.73 % 54.16 % 34.04 % 42.25 %
10 mm 99.46 % 95.21 % 81.27 % 33.21 %
MODWT5 mm 99.73 % 99.23 % 34.39 % 20.08 %
10 mm 99.45 % 99.36 % 81.37 % 98.32 %
Tabla 5.4: Tabla de Porcentajes de clasificación bajo el criterio de entropía para un MI concarga completa.
Señales Corriente Eje X Eje Y Eje ZDWT 9.946 % —- % —- % —- %
MODWT 9.9412 % 94.8099 % 52.316 % 60.4917 %
Tabla 5.5: Tabla de Porcentajes de clasificación bajo el criterio de homogeneidad para unMI con media carga.
64
(a) DWT
(b) MODWT
Figura 5.25: Resultados parciales obtenidos de los coeficinetes de aproximación del nivel4 de la señal de corriente.
Señales Corriente Eje X Eje Y Eje ZDWT 0.6933 % 95.0669 % 87.9393 % 91.0436 %
MODWT 1.4862 % 99.99 % 99.99 % 99.99 %
Tabla 5.6: Tabla de Porcentajes de clasificación bajo el criterio de homogeneidad para unMI con carga completa.
65

(a) Eje X
(b) Eje Y
Figura 5.26: Clasificación usando los coeficientes de aproximación del nivel 4 de descom-posición de la MODWT.
66
Capítulo 6
Implemetación HLS
En este capítulo se presenta la descripción de los bloques que conforman laDWT y la MODWT. Además de la comparativa de los resultados obtenidos conVivado HLS y Matlab. Finalmente se presentan los resultados de la simulación, asícomo los recursos utilizados.
6.1. Diagrama a bloques
HLS (por sus siglas en inglés, High Level Synthesis) es una herramienta deXilinx capaz de transformar una especificación de C en una implementación de RTL(por sus siglas en inglés, Register Transfer Level) que puede sintetizar un FPGA(por sus siglas en inglés, Field Programmable Gate Array). Puede escribirse en C,C++ o System C y el FPGA proporciona una arquitectura paralela con beneficiosen rendimiento y costos. Para la simulación de la DWT y MODWT en Vivado HLS,fueron definidos dos tipos de datos, ambos son tipo punto fijo, uno corresponde a loscoeficientes de la función wavelet y otro para la señal y coeficientes de aproximacióny detalle, resultados de la Transformada Wavelet. En la Tabla 6.1 se presentan lasvariables utilizadas, además del tipo de dato y una descripción.
En las Figuras 6.1 y 6.2 se presentas los diagramas a bloques para la imple-mentación en HLS de la DWT y la MODWT respectivamente. El primer bloqueconsiste en la lectura de la función wavelet y la señal a analizar, estas deben estarpreviamente guardadas con extensión “.dat”. La función wavelet es representada por
67
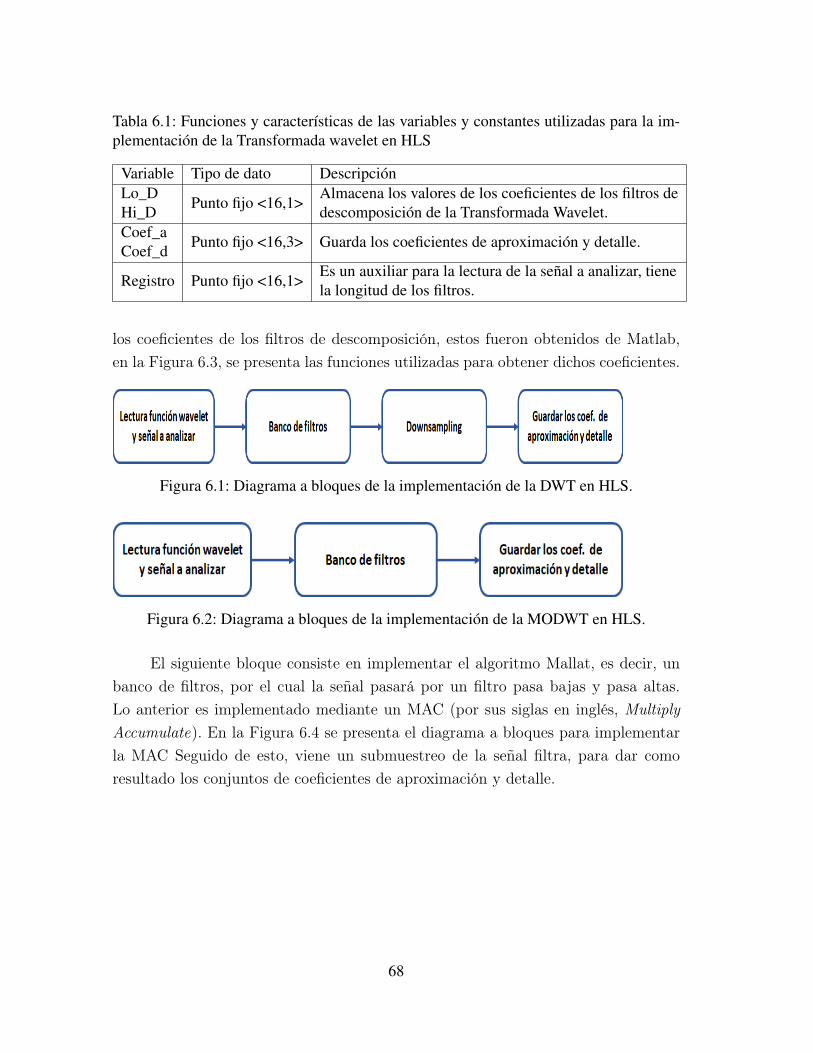
Tabla 6.1: Funciones y características de las variables y constantes utilizadas para la im-plementación de la Transformada wavelet en HLS
Variable Tipo de dato DescripciónLo_DHi_D Punto fijo <16,1>
Almacena los valores de los coeficientes de los filtros dedescomposición de la Transformada Wavelet.
Coef_aCoef_d Punto fijo <16,3> Guarda los coeficientes de aproximación y detalle.
Registro Punto fijo <16,1>Es un auxiliar para la lectura de la señal a analizar, tienela longitud de los filtros.
los coeficientes de los filtros de descomposición, estos fueron obtenidos de Matlab,en la Figura 6.3, se presenta las funciones utilizadas para obtener dichos coeficientes.
Figura 6.1: Diagrama a bloques de la implementación de la DWT en HLS.
Figura 6.2: Diagrama a bloques de la implementación de la MODWT en HLS.
El siguiente bloque consiste en implementar el algoritmo Mallat, es decir, unbanco de filtros, por el cual la señal pasará por un filtro pasa bajas y pasa altas.Lo anterior es implementado mediante un MAC (por sus siglas en inglés, MultiplyAccumulate). En la Figura 6.4 se presenta el diagrama a bloques para implementarla MAC Seguido de esto, viene un submuestreo de la señal filtra, para dar comoresultado los conjuntos de coeficientes de aproximación y detalle.
68

Figura 6.3: Representación de la función wavelet en coeficientes de filtros pasa-altas ypasa-bajas..
Figura 6.4: Diagrama a bloques de la MAC.
6.2. Resultados HLS
Una vez que los coeficientes fueron guardados, estos son leídos y analizados enMatlab. En la Figura 6.5, se presentan los coeficientes de aproximación y detalle dela DWT. Por otro lado, la Figura 6.6, muestra los coeficientes de aproximación ydetalle de la MODWT. En la Figura 6.7 se muestra una comparación de los resultadosobtenidos con Vivado HLS y Matlab, para los coeficientes de aproximación del nivel4 de descomposición de la DWT.
Los recursos utilizados para implementar un nivel de descomposición de laDWT y la MODWT en HLS son presentados en la Tabla 6.2.
69

Tabla 6.2: Recursos utilizados para la implementación de la DWT y MODWT en VivadoHLS.
Recursos DWT MODWTDSP 3 3FF 199 187
LUT 203 193
(a) DWT
(b) MODWT
Figura 6.5: Coeficientes de la DWT del nivel 4 de descomposición obtenidos con VivadoHLS.
70

(a) DWT
(b) MODWT
Figura 6.6: Coeficientes de la MODWT del nivel 4 de descomposición obtenidos conVivado HLS.
Figura 6.7: Diagrama a bloques de la MAC.
71


Capítulo 7
Conclusiones
En este trabajo fue descrita una metodología para la detección de barras rotasen motores de inducción tipo jaula de ardilla, mediante la aplicación de la DWT y laMODWT para obtener una señal en el rango de frecuencias en el que se encuentre lafrecuencia de falla, y posteriormente realizar la detección de la condición de la barrapor medio de parámetros estadísticos como la desviación estándar y la homogeneidad.
Para la detección de media y una barra rota cuando el MI presenta media cargamecánica, el mejor desempeño fue obtenido utilizando la desviación estándar comoparámetro para clasificar la condición de la barra, dado que se alcanzan porcentajesde hasta el 99 %. Cuando el MI tiene una carga mecánica del 75 % la desviaciónestándar de los coeficientes de la MODWT siguen siendo los ideales para el diag-nostico de esta falla. Por otro lado, la entropía de los DWT y la MODWT ofrecenresultados similares tanto para un MI con el 50 % y el 75 % de la carga. Sin embargo,el valor de la homogeneidad no permite la detección de la falla en etapas iniciales,y para una barra rota se ve limitada al eje X cuando MI solo presenta media carga,sin embargo cuando el MI tiene carga completa la detección de una barra rota esposible por medio de las señales de vibraciones.
Este trabajo se se desarrolló en lenguaje de programación C para ser imple-mentado en con el software de Xilinx, Vivado HLS. Sin embargo, el proyecto nollego a la implementación directa. Se tiene como trabajo a futuro implementar lametodología en tiempo real para la detección de barras rotas en un MI.
73


Apéndice A
Artículo
Artículo presentado en el IEEE International Instrumentation and Measure-ment Technology Conference 2018
75

Detection of Broken Bars on Induction Motors using MODWT
Monica Lopez-Hernandez, Jose Rangel-Magdaleno, Hayde Peregrina-Barreto, Juan Ramirez-CortesInstituto Nacional de Astrofisica, Optica y Electronica
Puebla, MexicoCorresponding author: [email protected]
Abstract— Broken bars are one of the most common faultsin induction motors. Current and vibration signals have beenstudied and analyzed with diverse mathematical tool, such asthe Fast Fourier Transform (FFT) that allows the analysis ofsignals in the frequency domain, or the Wavelet Transform(WT) that performs the analysis, maintaining the characteristicsof frequency and time in the transient state of the signals.In this paper we propose to use the Maximal Overlap Dis-crete Wavelet Transform (MODWT) wavelet coefficients andstatistical parameters such as entropy and standard deviation(STD) as classifiers to determine the half and one broken barin the Induction Motor (IM). Following this proposal, classi-fication percentages higher than 95% were achieved to detectone broken bar with vibration signals. Also the classificationpercentages for half broken bar with respect to the DiscreteWavelet Transform (DWT) are exceeded.
Index Terms— Broken bar diagnosis, DWT, Wavelet coeffi-cients, transient analysis.
I. INTRODUCTIONInduction motors are widely used in the industry due
to their reliability and low cost [1]. They are used asvariable speed drive motors in the industry to ensure processcontinuity and production chains [2]. The performance of theIM is subject to different restrictions, such as mechanical andelectrical failures [1]. Therefore, early detection of anomaliesof electrical and mechanical parts is important for safeoperation in industrial processes [3].
Mechanical failures include coupling defects and bearings.On the other hand, electrical faults are short circuits in themotor winding and broken bars [4]. Broken bars are themost common fault in IM, due to manufacturing defectsor irregular variations during operation. An engine with abroken bar can operate with apparent normality, however,the broken bar can cause the progressive fracture of othersproducing an excessive current consumption.
The analysis techniques can be classified as invasiveand non-invasive [5]. Among the non-invasive, it is themonitoring for the detection of faults that consist of themeasurement of vibration, flow, power and current signals[6]. Current monitoring is one of the most used techniques,because it is based on the detection of spectral componentsthat are present when the motor has one or several brokenbars [3],[4],[7],[8]. The study of vibrations for the diagnosisof IM has been gaining popularity due to its non-invasiveproperty and its simple implementation [9],[10].
Most of the research work is based on the analysis ofthe stable state of the signals [3],[7]. Although recent workshave shown the limitations for the detection of broken bars
when the load is minimal [7]. Alternate works are basedon the analysis of the transient state and demonstrate thatproblems of steady state can be solved even without load[3]. Transient Motor Current Signature Analysis (TMCSA)can be viewed as an extension of Motor Current SignatureAnalysis (MCSA) because it is based on the detection ofcomponents, but the signal analysis is made in the transientstate [11]. New approaches are based on the identification ofpatterns in currents and vibrations signals in transient stateand using mathematical tools such as DWT [11], in othercases the detection is done using statistical parameters orusing neurofuzzy algorithms. In this paper, it is proposed touse the value of the entropy and standard deviation, statisticalparameters of the MODWT detail coefficients, using level 5of the decomposition of current and vibration signals in thetransient state to detect 5 and 10 mm that correspond to halfand one broken bar.
This paper is organized as follows: Section II introducebasic concepts about current and vibration signals analysisand wavelet transform. Third section describe the proposedmethodology for the detection of broken bars. Section IVpresents results of the tests. Finally a brief conclusion ispresented.
II. BACKGROUND
A. Signals Analysis
The broken bars in the IM produce spurious frequenciesaround the supply frequency, these components can be de-tected through spectrum analysis of current with MCSA [12],and vibration using MVSA [8]. These techniques are themost used for the detection of broken bars. Both are based onthe detection of a spectral component that is present when themotor has one or several broken bars. Spurious frequenciesare given by:
fBRB = fs(1 ± 2ks), (1)
where fs is the supply frequency, s is the slip and k is aninteger. The diagnosis of rupture consists in evaluating theamplitude of the fundamental harmonic and the componentscaused by the fault. The main disadvantage of this method isthe dependencies of the load, additionally this method is notvalid for downloaded IM, and also voltage fluctuation canprovoke erroneous diagnoses [7],[8]. The amplitude of thespurious frequency is related to the number of broken bars
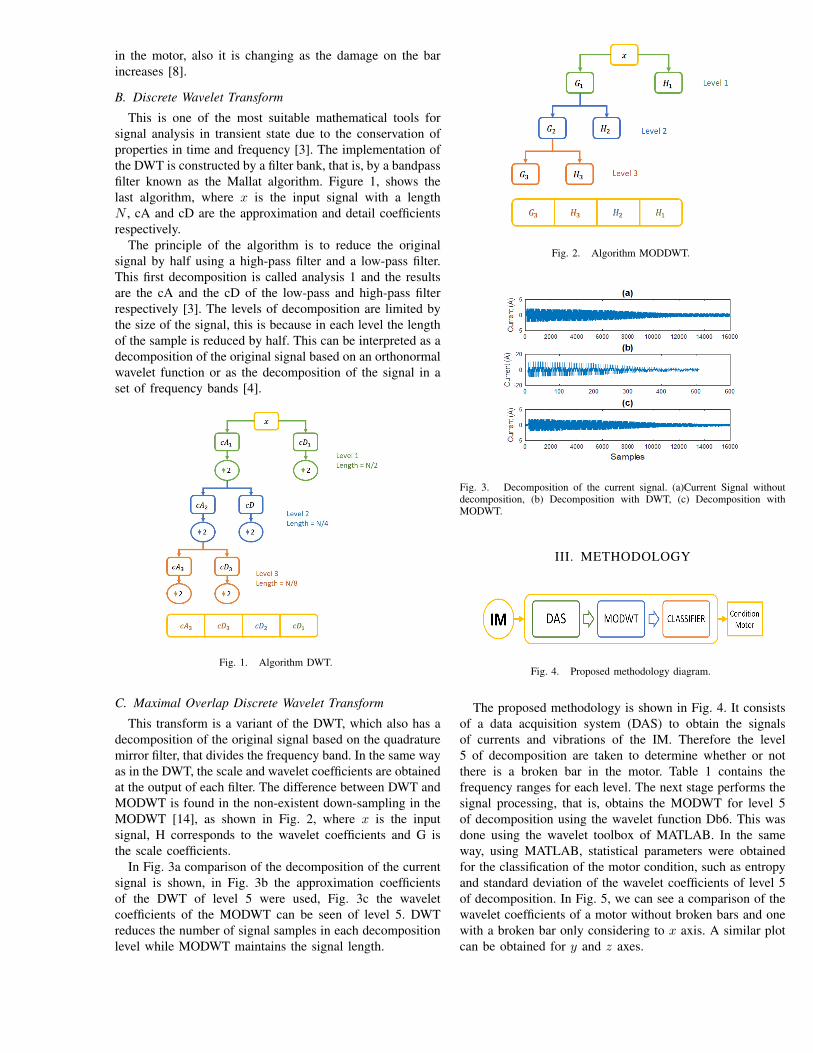
in the motor, also it is changing as the damage on the barincreases [8].
B. Discrete Wavelet Transform
This is one of the most suitable mathematical tools forsignal analysis in transient state due to the conservation ofproperties in time and frequency [3]. The implementation ofthe DWT is constructed by a filter bank, that is, by a bandpassfilter known as the Mallat algorithm. Figure 1, shows thelast algorithm, where x is the input signal with a lengthN , cA and cD are the approximation and detail coefficientsrespectively.
The principle of the algorithm is to reduce the originalsignal by half using a high-pass filter and a low-pass filter.This first decomposition is called analysis 1 and the resultsare the cA and the cD of the low-pass and high-pass filterrespectively [3]. The levels of decomposition are limited bythe size of the signal, this is because in each level the lengthof the sample is reduced by half. This can be interpreted as adecomposition of the original signal based on an orthonormalwavelet function or as the decomposition of the signal in aset of frequency bands [4].
Fig. 1. Algorithm DWT.
C. Maximal Overlap Discrete Wavelet Transform
This transform is a variant of the DWT, which also has adecomposition of the original signal based on the quadraturemirror filter, that divides the frequency band. In the same wayas in the DWT, the scale and wavelet coefficients are obtainedat the output of each filter. The difference between DWT andMODWT is found in the non-existent down-sampling in theMODWT [14], as shown in Fig. 2, where x is the inputsignal, H corresponds to the wavelet coefficients and G isthe scale coefficients.
In Fig. 3a comparison of the decomposition of the currentsignal is shown, in Fig. 3b the approximation coefficientsof the DWT of level 5 were used, Fig. 3c the waveletcoefficients of the MODWT can be seen of level 5. DWTreduces the number of signal samples in each decompositionlevel while MODWT maintains the signal length.
Fig. 2. Algorithm MODDWT.
Fig. 3. Decomposition of the current signal. (a)Current Signal withoutdecomposition, (b) Decomposition with DWT, (c) Decomposition withMODWT.
III. METHODOLOGY
Fig. 4. Proposed methodology diagram.
The proposed methodology is shown in Fig. 4. It consistsof a data acquisition system (DAS) to obtain the signalsof currents and vibrations of the IM. Therefore the level5 of decomposition are taken to determine whether or notthere is a broken bar in the motor. Table 1 contains thefrequency ranges for each level. The next stage performs thesignal processing, that is, obtains the MODWT for level 5of decomposition using the wavelet function Db6. This wasdone using the wavelet toolbox of MATLAB. In the sameway, using MATLAB, statistical parameters were obtainedfor the classification of the motor condition, such as entropyand standard deviation of the wavelet coefficients of level 5of decomposition. In Fig. 5, we can see a comparison of thewavelet coefficients of a motor without broken bars and onewith a broken bar only considering to x axis. A similar plotcan be obtained for y and z axes.
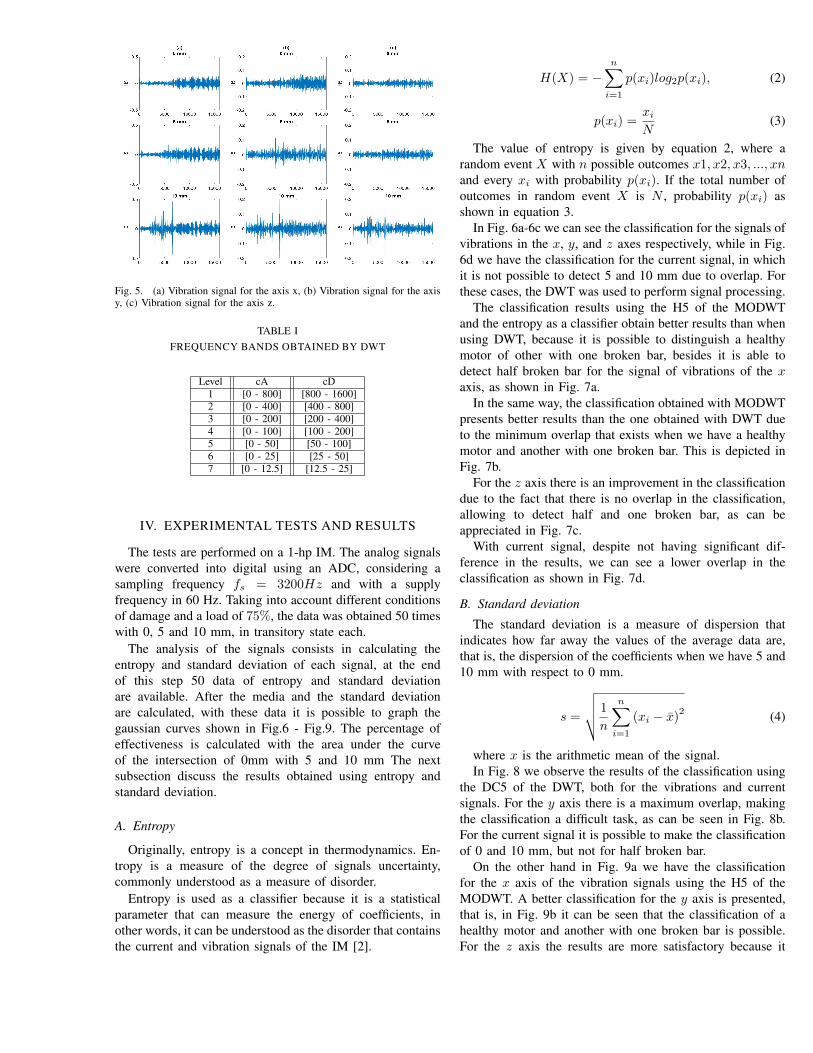
Fig. 5. (a) Vibration signal for the axis x, (b) Vibration signal for the axisy, (c) Vibration signal for the axis z.
TABLE IFREQUENCY BANDS OBTAINED BY DWT
Level cA cD1 [0 - 800] [800 - 1600]2 [0 - 400] [400 - 800]3 [0 - 200] [200 - 400]4 [0 - 100] [100 - 200]5 [0 - 50] [50 - 100]6 [0 - 25] [25 - 50]7 [0 - 12.5] [12.5 - 25]
IV. EXPERIMENTAL TESTS AND RESULTS
The tests are performed on a 1-hp IM. The analog signalswere converted into digital using an ADC, considering asampling frequency fs = 3200Hz and with a supplyfrequency in 60 Hz. Taking into account different conditionsof damage and a load of 75%, the data was obtained 50 timeswith 0, 5 and 10 mm, in transitory state each.
The analysis of the signals consists in calculating theentropy and standard deviation of each signal, at the endof this step 50 data of entropy and standard deviationare available. After the media and the standard deviationare calculated, with these data it is possible to graph thegaussian curves shown in Fig.6 - Fig.9. The percentage ofeffectiveness is calculated with the area under the curveof the intersection of 0mm with 5 and 10 mm The nextsubsection discuss the results obtained using entropy andstandard deviation.
A. Entropy
Originally, entropy is a concept in thermodynamics. En-tropy is a measure of the degree of signals uncertainty,commonly understood as a measure of disorder.
Entropy is used as a classifier because it is a statisticalparameter that can measure the energy of coefficients, inother words, it can be understood as the disorder that containsthe current and vibration signals of the IM [2].
H(X) = −n∑
i=1
p(xi)log2p(xi), (2)
p(xi) =xi
N(3)
The value of entropy is given by equation 2, where arandom event X with n possible outcomes x1, x2, x3, ..., xnand every xi with probability p(xi). If the total number ofoutcomes in random event X is N , probability p(xi) asshown in equation 3.
In Fig. 6a-6c we can see the classification for the signals ofvibrations in the x, y, and z axes respectively, while in Fig.6d we have the classification for the current signal, in whichit is not possible to detect 5 and 10 mm due to overlap. Forthese cases, the DWT was used to perform signal processing.
The classification results using the H5 of the MODWTand the entropy as a classifier obtain better results than whenusing DWT, because it is possible to distinguish a healthymotor of other with one broken bar, besides it is able todetect half broken bar for the signal of vibrations of the xaxis, as shown in Fig. 7a.
In the same way, the classification obtained with MODWTpresents better results than the one obtained with DWT dueto the minimum overlap that exists when we have a healthymotor and another with one broken bar. This is depicted inFig. 7b.
For the z axis there is an improvement in the classificationdue to the fact that there is no overlap in the classification,allowing to detect half and one broken bar, as can beappreciated in Fig. 7c.
With current signal, despite not having significant dif-ference in the results, we can see a lower overlap in theclassification as shown in Fig. 7d.
B. Standard deviation
The standard deviation is a measure of dispersion thatindicates how far away the values of the average data are,that is, the dispersion of the coefficients when we have 5 and10 mm with respect to 0 mm.
s =
√√√√ 1
n
n∑
i=1
(xi − x̄)2 (4)
where x is the arithmetic mean of the signal.In Fig. 8 we observe the results of the classification using
the DC5 of the DWT, both for the vibrations and currentsignals. For the y axis there is a maximum overlap, makingthe classification a difficult task, as can be seen in Fig. 8b.For the current signal it is possible to make the classificationof 0 and 10 mm, but not for half broken bar.
On the other hand in Fig. 9a we have the classificationfor the x axis of the vibration signals using the H5 of theMODWT. A better classification for the y axis is presented,that is, in Fig. 9b it can be seen that the classification of ahealthy motor and another with one broken bar is possible.For the z axis the results are more satisfactory because it
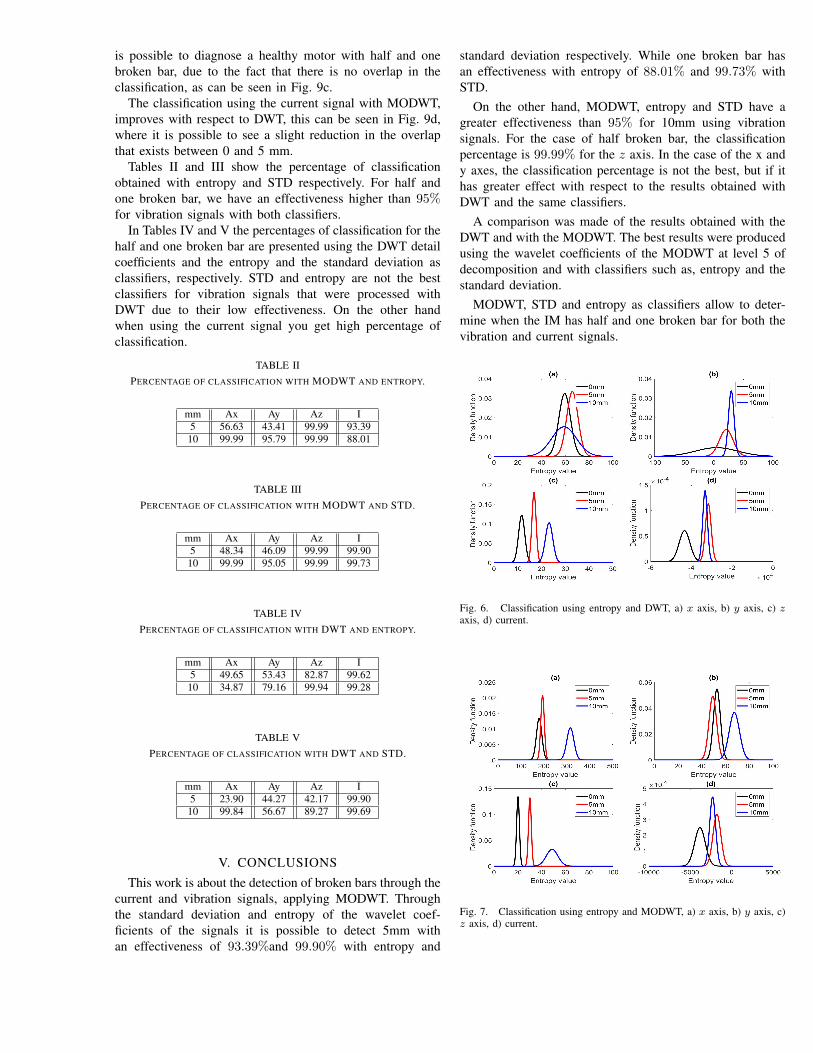
is possible to diagnose a healthy motor with half and onebroken bar, due to the fact that there is no overlap in theclassification, as can be seen in Fig. 9c.
The classification using the current signal with MODWT,improves with respect to DWT, this can be seen in Fig. 9d,where it is possible to see a slight reduction in the overlapthat exists between 0 and 5 mm.
Tables II and III show the percentage of classificationobtained with entropy and STD respectively. For half andone broken bar, we have an effectiveness higher than 95%for vibration signals with both classifiers.
In Tables IV and V the percentages of classification for thehalf and one broken bar are presented using the DWT detailcoefficients and the entropy and the standard deviation asclassifiers, respectively. STD and entropy are not the bestclassifiers for vibration signals that were processed withDWT due to their low effectiveness. On the other handwhen using the current signal you get high percentage ofclassification.
TABLE IIPERCENTAGE OF CLASSIFICATION WITH MODWT AND ENTROPY.
mm Ax Ay Az I5 56.63 43.41 99.99 93.39
10 99.99 95.79 99.99 88.01
TABLE IIIPERCENTAGE OF CLASSIFICATION WITH MODWT AND STD.
mm Ax Ay Az I5 48.34 46.09 99.99 99.90
10 99.99 95.05 99.99 99.73
TABLE IVPERCENTAGE OF CLASSIFICATION WITH DWT AND ENTROPY.
mm Ax Ay Az I5 49.65 53.43 82.87 99.62
10 34.87 79.16 99.94 99.28
TABLE VPERCENTAGE OF CLASSIFICATION WITH DWT AND STD.
mm Ax Ay Az I5 23.90 44.27 42.17 99.90
10 99.84 56.67 89.27 99.69
V. CONCLUSIONS
This work is about the detection of broken bars through thecurrent and vibration signals, applying MODWT. Throughthe standard deviation and entropy of the wavelet coef-ficients of the signals it is possible to detect 5mm withan effectiveness of 93.39%and 99.90% with entropy and
standard deviation respectively. While one broken bar hasan effectiveness with entropy of 88.01% and 99.73% withSTD.
On the other hand, MODWT, entropy and STD have agreater effectiveness than 95% for 10mm using vibrationsignals. For the case of half broken bar, the classificationpercentage is 99.99% for the z axis. In the case of the x andy axes, the classification percentage is not the best, but if ithas greater effect with respect to the results obtained withDWT and the same classifiers.
A comparison was made of the results obtained with theDWT and with the MODWT. The best results were producedusing the wavelet coefficients of the MODWT at level 5 ofdecomposition and with classifiers such as, entropy and thestandard deviation.
MODWT, STD and entropy as classifiers allow to deter-mine when the IM has half and one broken bar for both thevibration and current signals.
Fig. 6. Classification using entropy and DWT, a) x axis, b) y axis, c) zaxis, d) current.
Fig. 7. Classification using entropy and MODWT, a) x axis, b) y axis, c)z axis, d) current.
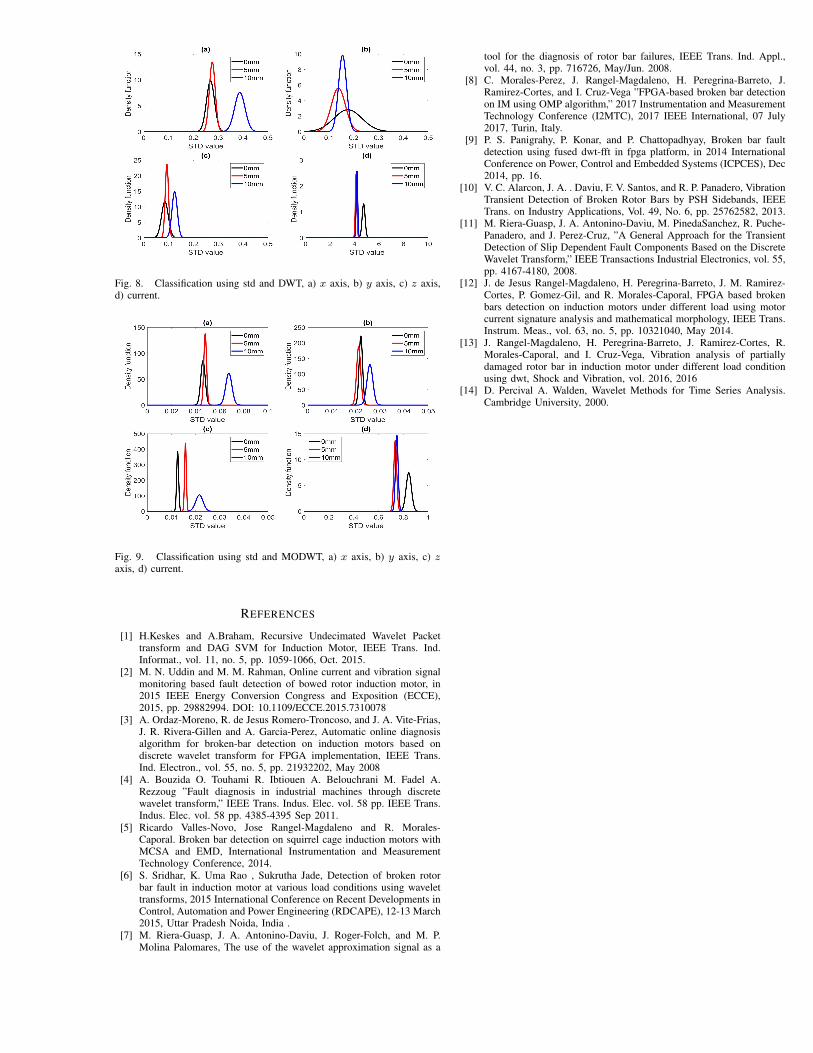
Fig. 8. Classification using std and DWT, a) x axis, b) y axis, c) z axis,d) current.
Fig. 9. Classification using std and MODWT, a) x axis, b) y axis, c) zaxis, d) current.
REFERENCES
[1] H.Keskes and A.Braham, Recursive Undecimated Wavelet Packettransform and DAG SVM for Induction Motor, IEEE Trans. Ind.Informat., vol. 11, no. 5, pp. 1059-1066, Oct. 2015.
[2] M. N. Uddin and M. M. Rahman, Online current and vibration signalmonitoring based fault detection of bowed rotor induction motor, in2015 IEEE Energy Conversion Congress and Exposition (ECCE),2015, pp. 29882994. DOI: 10.1109/ECCE.2015.7310078
[3] A. Ordaz-Moreno, R. de Jesus Romero-Troncoso, and J. A. Vite-Frias,J. R. Rivera-Gillen and A. Garcia-Perez, Automatic online diagnosisalgorithm for broken-bar detection on induction motors based ondiscrete wavelet transform for FPGA implementation, IEEE Trans.Ind. Electron., vol. 55, no. 5, pp. 21932202, May 2008
[4] A. Bouzida O. Touhami R. Ibtiouen A. Belouchrani M. Fadel A.Rezzoug ”Fault diagnosis in industrial machines through discretewavelet transform,” IEEE Trans. Indus. Elec. vol. 58 pp. IEEE Trans.Indus. Elec. vol. 58 pp. 4385-4395 Sep 2011.
[5] Ricardo Valles-Novo, Jose Rangel-Magdaleno and R. Morales-Caporal. Broken bar detection on squirrel cage induction motors withMCSA and EMD, International Instrumentation and MeasurementTechnology Conference, 2014.
[6] S. Sridhar, K. Uma Rao , Sukrutha Jade, Detection of broken rotorbar fault in induction motor at various load conditions using wavelettransforms, 2015 International Conference on Recent Developments inControl, Automation and Power Engineering (RDCAPE), 12-13 March2015, Uttar Pradesh Noida, India .
[7] M. Riera-Guasp, J. A. Antonino-Daviu, J. Roger-Folch, and M. P.Molina Palomares, The use of the wavelet approximation signal as a
tool for the diagnosis of rotor bar failures, IEEE Trans. Ind. Appl.,vol. 44, no. 3, pp. 716726, May/Jun. 2008.
[8] C. Morales-Perez, J. Rangel-Magdaleno, H. Peregrina-Barreto, J.Ramirez-Cortes, and I. Cruz-Vega ”FPGA-based broken bar detectionon IM using OMP algorithm,” 2017 Instrumentation and MeasurementTechnology Conference (I2MTC), 2017 IEEE International, 07 July2017, Turin, Italy.
[9] P. S. Panigrahy, P. Konar, and P. Chattopadhyay, Broken bar faultdetection using fused dwt-fft in fpga platform, in 2014 InternationalConference on Power, Control and Embedded Systems (ICPCES), Dec2014, pp. 16.
[10] V. C. Alarcon, J. A. . Daviu, F. V. Santos, and R. P. Panadero, VibrationTransient Detection of Broken Rotor Bars by PSH Sidebands, IEEETrans. on Industry Applications, Vol. 49, No. 6, pp. 25762582, 2013.
[11] M. Riera-Guasp, J. A. Antonino-Daviu, M. PinedaSanchez, R. Puche-Panadero, and J. Perez-Cruz, ”A General Approach for the TransientDetection of Slip Dependent Fault Components Based on the DiscreteWavelet Transform,” IEEE Transactions Industrial Electronics, vol. 55,pp. 4167-4180, 2008.
[12] J. de Jesus Rangel-Magdaleno, H. Peregrina-Barreto, J. M. Ramirez-Cortes, P. Gomez-Gil, and R. Morales-Caporal, FPGA based brokenbars detection on induction motors under different load using motorcurrent signature analysis and mathematical morphology, IEEE Trans.Instrum. Meas., vol. 63, no. 5, pp. 10321040, May 2014.
[13] J. Rangel-Magdaleno, H. Peregrina-Barreto, J. Ramirez-Cortes, R.Morales-Caporal, and I. Cruz-Vega, Vibration analysis of partiallydamaged rotor bar in induction motor under different load conditionusing dwt, Shock and Vibration, vol. 2016, 2016
[14] D. Percival A. Walden, Wavelet Methods for Time Series Analysis.Cambridge University, 2000.
Bibliografía
[1] A. Ordaz-Moreno, R. de Jesus Romero-Troncoso, J. A. Vite-Frias, J. R. Rivera-Gillen, and A. Garcia-Perez, “Automatic online diagnosis algorithm for broken-bar detection on induction motors based on discrete wavelet transform for fpgaimplementation,” IEEE Transactions on Industrial Electronics, vol. 55, no. 5,pp. 2193–2202, 2008.
[2] P. Karvelis, G. Georgoulas, I. P. Tsoumas, J. A. Antonino-Daviu, V. Climente-Alarcón, and C. D. Stylios, “A symbolic representation approach for the diagno-sis of broken rotor bars in induction motors,” IEEE Transactions on IndustrialInformatics, vol. 11, no. 5, pp. 1028–1037, 2015.
[3] I. Cruz-Vega, J. Rangel-Magdaleno, J. Ramirez-Cortes, and H. Peregrina-Barreto, “Automatic progressive damage detection of rotor bar in inductionmotor using vibration analysis and multiple classifiers,” Journal of MechanicalScience and Technology, vol. 31, no. 6, pp. 2651–2662, 2017.
[4] J. Rangel-Magdaleno, H. Peregrina-Barreto, J. Ramirez-Cortes, R. Morales-Caporal, and I. Cruz-Vega, “Vibration analysis of partially damaged rotor bar ininduction motor under different load condition using dwt,” Shock and Vibration,vol. 2016, 2016.
[5] R. A. Lizarraga-Morales, C. Rodriguez-Donate, E. Cabal-Yepez, M. Lopez-Ramirez, L. M. Ledesma-Carrillo, and E. R. Ferrucho-Alvarez, “Novel fpga-based methodology for early broken rotor bar detection and classification th-rough homogeneity estimation,” IEEE Transactions on Instrumentation andMeasurement, vol. 66, no. 7, pp. 1760–1769, 2017.
81

[6] A. Unsal and A. Kabul, “Detection of the broken rotor bars of squirrel-cageinduction motors based on normalized least mean square filter and hilbert en-velope analysis,” Electrical Engineering, vol. 98, no. 3, pp. 245–256, 2016.
[7] K. N. Gyftakis, D. V. Spyropoulos, J. C. Kappatou, and E. D. Mitronikas,“A novel approach for broken bar fault diagnosis in induction motors throughtorque monitoring,” IEEE Transactions on Energy Conversion, vol. 28, no. 2,pp. 267–277, 2013.
[8] R. Valles-Novo, J. de Jesus Rangel-Magdaleno, J. M. Ramirez-Cortes,H. Peregrina-Barreto, and R. Morales-Caporal, “Empirical mode decomposi-tion analysis for broken-bar detection on squirrel cage induction motors,” IEEETransactions on Instrumentation and Measurement, vol. 64, no. 5, pp. 1118–1128, 2014.
[9] M. Riera-Guasp, J. A. Antonino-Daviu, J. Roger-Folch, and M. P. M. Paloma-res, “The use of the wavelet approximation signal as a tool for the diagnosis ofrotor bar failures,” IEEE Transactions on Industry Applications, vol. 44, no. 3,pp. 716–726, 2008.
[10] J. F. Mora, Máquinas eléctricas, vol. 5. McGraw-Hill, 2008.
[11] T. Wildi, “Electrical machines, drives, and power systems,” New Jersey: UpperSaddle River, 2002.
[12] S. Chapman, Electric machinery fundamentals. Tata McGraw-Hill Education,2005.
[13] D. L. Fugal, Conceptual wavelets in digital signal processing: an in-depth, prac-tical approach for the non-mathematician. Space & Signals Technical Pub.,2009.
[14] D. B. Percival and A. T. Walden, Wavelet methods for time series analysis,vol. 4. Cambridge university press, 2006.
[15] F. Costa, B. Souza, and N. S. D. Brito, “Real-time detection of fault-inducedtransients in transmission lines,” Electronics letters, vol. 46, no. 11, pp. 753–755,2010.
82
[16] A. A. A. Dghais and M. T. Ismail, “A comparative study between discretewavelet transform and maximal overlap discrete wavelet transform for testingstationarity,” Int J Math Comput Sei Eng, vol. 7, pp. 1184–1188, 2013.
[17] C. Morales-Perez, J. Rangel-Magdaleno, H. Peregrina-Barreto, J. Ramirez-Cortes, and I. Cruz-Vega, “Fpga-based broken bar detection on im using omp al-gorithm,” in 2017 IEEE International Instrumentation and Measurement Tech-nology Conference (I2MTC), pp. 1–6, IEEE, 2017.
[18] M. Riera-Guasp, J. A. Antonino-Daviu, M. Pineda-Sanchez, R. Puche-Panadero, and J. Pérez-Cruz, “A general approach for the transient detectionof slip-dependent fault components based on the discrete wavelet transform,”IEEE transactions on Industrial electronics, vol. 55, no. 12, pp. 4167–4180, 2008.
[19] H. Keskes and A. Braham, “Recursive undecimated wavelet packet transformand dag svm for induction motor diagnosis,” IEEE Transactions on IndustrialInformatics, vol. 11, no. 5, pp. 1059–1066, 2015.
[20] A. Bouzida, O. Touhami, R. Ibtiouen, A. Belouchrani, M. Fadel, and A. Rez-zoug, “Fault diagnosis in industrial induction machines through discrete wa-velet transform,” IEEE Transactions on Industrial Electronics, vol. 58, no. 9,pp. 4385–4395, 2010.
[21] A. Choudhary, D. Goyal, S. L. Shimi, and A. Akula, “Condition monitoringand fault diagnosis of induction motors: A review,” Archives of ComputationalMethods in Engineering, pp. 1–18, 2018.
[22] J. Nunez, L. Velazquez, L. Hernandez, R. Troncoso, and R. Osornio-Rios, “Low-cost thermographic analysis for bearing fault detection on induction motors,”2016.
[23] A. Glowacz and Z. Glowacz, “Diagnosis of stator faults of the single-phase in-duction motor using acoustic signals,” Applied Acoustics, vol. 117, pp. 20–27,2017.
[24] A. Garcia-Perez, O. Ibarra-Manzano, and R. J. Romero-Troncoso, “Analysisof partially broken rotor bar by using a novel empirical mode decompositionmethod,” in IECON 2014-40th Annual Conference of the IEEE Industrial Elec-tronics Society, pp. 3403–3408, IEEE, 2014.
83

[25] M. Abd-el Malek, A. K. Abdelsalam, and O. E. Hassan, “Induction motor brokenrotor bar fault location detection through envelope analysis of start-up currentusing hilbert transform,” Mechanical Systems and Signal Processing, vol. 93,pp. 332–350, 2017.
[26] D. Hyun, S. Lee, J. Hong, S. B. Lee, and S. Nandi, “Detection of airgap eccentri-city for induction motors using the single-phase rotation test,” IEEE Transac-tions on Energy Conversion, vol. 27, no. 3, pp. 689–696, 2012.
[27] J. Hong, D. Hyun, S. B. Lee, and C. Kral, “Offline monitoring of airgap eccen-tricity for inverter-fed induction motors based on the differential inductance,”IEEE Transactions on Industry Applications, vol. 49, no. 6, pp. 2533–2542, 2013.
[28] M. Eftekhari, M. Moallem, S. Sadri, and M.-F. Hsieh, “A novel indicator of sta-tor winding inter-turn fault in induction motor using infrared thermal imaging,”Infrared Physics & Technology, vol. 61, pp. 330–336, 2013.
[29] F. Duan and R. Živanović, “Condition monitoring of an induction motor statorwindings via global optimization based on the hyperbolic cross points,” IEEETransactions on Industrial Electronics, vol. 62, no. 3, pp. 1826–1834, 2014.
[30] Y. Liu and A. M. Bazzi, “A review and comparison of fault detection and diag-nosis methods for squirrel-cage induction motors: State of the art,” ISA transac-tions, vol. 70, pp. 400–409, 2017.
[31] M. Sahraoui, A. J. M. Cardoso, and A. Ghoggal, “The use of a modified pronymethod to track the broken rotor bar characteristic frequencies and amplitudesin three-phase induction motors,” IEEE Transactions on Industry Applications,vol. 51, no. 3, pp. 2136–2147, 2014.
[32] F. Gu, T. Wang, A. Alwodai, X. Tian, Y. Shao, and A. Ball, “A new methodof accurate broken rotor bar diagnosis based on modulation signal bispectrumanalysis of motor current signals,” Mechanical Systems and Signal Processing,vol. 50, pp. 400–413, 2015.
[33] T. A. Garcia-Calva, D. Morinigo-Sotelo, and R. de Jesus Romero-Troncoso,“Non-uniform time resampling for diagnosing broken rotor bars in inverter-fedinduction motors,” IEEE Transactions on Industrial Electronics, vol. 64, no. 3,pp. 2306–2315, 2016.
84

[34] T. Yang, H. Pen, Z. Wang, and C. S. Chang, “Feature knowledge based faultdetection of induction motors through the analysis of stator current data,” IEEETransactions on Instrumentation and Measurement, vol. 65, no. 3, pp. 549–558,2016.
[35] A. Naha, A. K. Samanta, A. Routray, and A. K. Deb, “A method for detectinghalf-broken rotor bar in lightly loaded induction motors using current,” IEEETransactions on Instrumentation and Measurement, vol. 65, no. 7, pp. 1614–1625, 2016.
[36] M. A. Moussa, M. Boucherma, and A. Khezzar, “A detection method for induc-tion motor bar fault using sidelobes leakage phenomenon of the sliding discretefourier transform,” IEEE Transactions on Power Electronics, vol. 32, no. 7,pp. 5560–5572, 2016.
[37] W. K. Ngui, M. S. Leong, L. M. Hee, and A. M. Abdelrhman, “Wavelet analy-sis: mother wavelet selection methods,” in Applied mechanics and materials,vol. 393, pp. 953–958, Trans Tech Publ, 2013.
[38] A. P. Rodrigues, G. DaAZMello, et al., “Selection of mother wavelet for waveletanalysis of vibration signals in machining,” Journal of Mechanical Engineeringand Automation, vol. 6, no. 5A, pp. 81–85, 2016.
[39] S. Karmakar, S. Chattopadhyay, M. Mitra, and S. Sengupta, Induction motorfault diagnosis, vol. 25. Springer, 2016.
[40] J. A. Antonino-Daviu, J. Pons-Llinares, V. Climente-Alarcon, and H. Razik,“Evaluation of startup-based rotor fault severity indicators under different star-ting methods,” in IECON 2014-40th Annual Conference of the IEEE IndustrialElectronics Society, pp. 3361–3366, IEEE, 2014.
[41] E. Cabal-Yepez, R. d. J. Romero-Troncoso, A. Garcia-Perez, and C. Rodriguez-Donate, “Novel hardware processing unit for dynamic on-line entropy estimationof discrete time information,” Digital Signal Processing, vol. 20, no. 2, pp. 337–346, 2010.
[42] C. A. Perez-Ramirez, M. Valtierra-Rodriguez, A. Dominguez-Gonzalez, J. P.Amezquita-Sanchez, D. Camarena-Martinez, and R. J. Romero-Troncoso,“Homogeneity-based approach for bearing fault detection in induction motors by
85
means of vibrations,” in 2017 IEEE International Autumn Meeting on Power,Electronics and Computing (ROPEC), pp. 1–5, IEEE, 2017.
86