DISEÑO DE UN ALGORITMO PARA RECONOCIMIENTO DE ÁREA DE...
100
DISEÑO DE UN ALGORITMO PARA RECONOCIMIENTO DE ÁREA DE CRECIMIENTO URBANO UTILIZANDO IMÁGENES QUICKBIRD Julieth Paola Parada Gómez Cód.: 20121032253 Gabriel Ignacio Veloza Rodríguez Cód.: 20121032267 BOGOTÁ 2015
Transcript of DISEÑO DE UN ALGORITMO PARA RECONOCIMIENTO DE ÁREA DE...

-1-
DISEÑO DE UN ALGORITMO PARA RECONOCIMIENTO DE ÁREA DE
CRECIMIENTO URBANO UTILIZANDO IMÁGENES QUICKBIRD
Julieth Paola Parada Gómez
Cód.: 20121032253
Gabriel Ignacio Veloza Rodríguez
Cód.: 20121032267
BOGOTÁ
2015

-2-
DISEÑO DE UN ALGORITMO PARA RECONOCIMIENTO DE ÁREA DE
CRECIMIENTO URBANO UTILIZANDO IMÁGENES QUICKBIRD
Julieth Paola Parada Gómez
Cód.: 20121032253
Gabriel Ignacio Veloza Rodríguez
Cód.: 20121032267
Director
ING. GERMAN TORRIJOS CADENA
UNIVERSIDAD DITRITAL FRANCISCO JOSE DE CALDAS
FACULTAD DEL MEDIO AMBIENTE Y RECURSOS NATURALES
INGENIERIA EN TOPOGRAFIA
Bogotá
2015

-3-
La universidad no será responsable de las ideas expuestas por los graduandos en
el trabajo de grado.
Artículo 117, Capítulo 5, acuerdo 029 de 1998.
-4-
El consejo de carrera del Proyecto Curricular de Ingeniería en Topografía
de la Universidad Distrital Francisco José de Caldas aprueba el trabajo de
grado titulado, “DISEÑO DE UN ALGORITMO PARA RECONOCIMIENTO
DE ÁREA DE CRECIMIENTO URBANO UTILIZANDO IMÁGENES
QUICKBIRD” En cumplimiento de los requisitos para obtener el título de
Ingeniero en Topografía.
________________ Nota de aceptación
____________________________________ ING. GERMAN TORRIJOS CADENA
Director del Proyecto
____________________________________ ROSE MARIE ALDANA BOUTIN
Jurado
BOGOTA D.C. 2015, COLOMBIA Universidad Distrital Francisco José de caldas

-5-
AGRADECIMIENTOS
Agradecemos a nuestros padres por su amor, comprensión, paciencia y apoyo
que nos brindaron durante toda nuestra carrera.
Al director de proyecto, revisores y jurados la colaboración de manera más
amable, por la dedicación y entrega de sus conocimientos permitiendo así la
realización del trabajo.
Agradecemos especialmente al ingeniero Oscar Leonardo García Navarrete por su
entrega y guía que ofreció durante la realización del proyecto entregándonos sus
ideas y conocimientos para lograr culminar el proyecto.

-6-
CONTENIDO
Pág.:
LISTA DE CUADROS .............................................................................................. 9
LISTA DE IMAGENES ........................................................................................... 10
LISTA DE ECUACIONES ...................................................................................... 11
LISTA DE GRAFICAS ............................................................................................ 12
GLOSARIO ............................................................................................................ 13
RESUMEN ............................................................................................................. 16
ABSTRACT ............................................................................................................ 17
INTRODUCCION ................................................................................................... 18
1. OBJETIVOS .................................................................................................... 19
1.1. Objetivo general ........................................................................................ 19
1.2. Objetivos específicos ................................................................................ 19
2. MARCO TEÓRICO .......................................................................................... 20
2.1. Localización, extensión y características geográficas ............................... 20
2.1.1. El suelo urbano. ................................................................................. 21
2.1.2. Crecimiento urbano. ........................................................................... 21
2.1.3. Licencias de construcción. ................................................................. 26
2.2. Teledetección............................................................................................ 26
2.2.1 Principales aplicaciones. .................................................................... 27
2.3. Bases para la interpretación de imágenes en teledetección espacial ....... 28
2.3.1. Fijación de objetivos: escala y leyenda de trabajo. ............................ 29
2.3.2. Soporte de imágenes. ........................................................................ 29
2.3.3. Selección del método de análisis ¿tratamiento visual o digital? ......... 30

-7-
2.4. Interpretación visual de una imagen ......................................................... 31
2.4.1. Tono ................................................................................................... 31
2.4.2. Color ................................................................................................... 31
2.4.3. Textura. .............................................................................................. 32
2.5. Tipos de clasificación ................................................................................ 32
2.5.1. Clasificación supervisada. .................................................................. 33
2.5.2. Clasificación no supervisada. ............................................................. 33
2.5.3. Reglas de decisión de clasificación .................................................... 34
2.6. Tratamiento digital de imágenes ............................................................... 35
2.6.1. La matriz de imagen de datos de una imagen digital. ........................ 35
2.6.2. Obtención y presentación de resultados ............................................ 36
2.7. Verificación de resultados ......................................................................... 36
2.7.1. Tipos de muestreo. ............................................................................. 36
2.7.2. Matriz de confusión. ........................................................................... 37
2.8. Tipos de errores ........................................................................................ 38
2.8.1. Error de omisión ................................................................................. 38
2.8.1. Error de comisión ............................................................................... 38
2.9. Análisis categórico multivariante ............................................................... 39
2.10. Historia google earth ................................................................................. 40
2.10.1. Función imágenes históricas ........................................................... 41
2.11. Digital-Globe ............................................................................................. 41
2.12. Matlab ....................................................................................................... 43
2.12.1. Características principales .............................................................. 43
2.12.2. Programación y desarrollo de algoritmos. ....................................... 44

-8-
3. PROCEDIMIENTO .......................................................................................... 46
3.1. Funcionalidad del algoritmo ...................................................................... 46
3.2. Administración de proyecto ....................................................................... 46
3.2.1. Fase de Análisis ................................................................................. 47
3.2.2. Fase de Diseño .................................................................................. 47
3.2.3. Fase de Desarrollo ............................................................................. 48
3.3. Diagrama de flujo ...................................................................................... 54
4. ANÁLISIS Y RESULTADOS ............................................................................ 55
4.1. Verificación niveles digitales ..................................................................... 55
4.2. Índice estadística kappa ........................................................................... 60
CONCLUSIONES .................................................................................................. 97
BIBLIOGRAFÍA ...................................................................................................... 99

-9-
LISTA DE CUADROS
Cuadro 1. Coordenadas del cuadrado de la zona de trabajo. .............................. 20
Cuadro 2. Crecimiento urbano ciudad de Bogotá – Colombia. ............................. 22
Cuadro 3. Coeficiente Kappa de desempeño de clasificación. ............................ 40
Cuadro 4. Puesta en órbita de los Satélites ......................................................... 42
Cuadro 5. Especificaciones técnicas de los Satélites .......................................... 42
Cuadro 6. Diccionario Pseudocodigo ................................................................... 48
Cuadro 7. Coordenadas longitud y latitud de la malla Google Earth ..................... 50
Cuadro 8. Verificación niveles digitles imágenes año 2005 .................................. 56
Cuadro 9. Verificación niveles digitales imágenes año 2015 ................................ 59
Cuadro 10. Porcentaje de verificación de las imágenes ....................................... 60
Cuadro 11. Imágenes seleccionadas para verificación por índice Kappa ............. 61

-10-
LISTA DE IMAGENES
Ilustración 1. Imágenes de prueba en Paint. .......................................................... 49
Ilustración 2. Malla de puntos Google Earth} ......................................................... 50
Ilustración 3. Antes del corte de la imagen. ........................................................... 52
Ilustración 4. Después del corte de la imagen. ...................................................... 52

-11-
LISTA DE ECUACIONES
Ecuación 1, Error de omisión. ................................................................................ 38
Ecuación 2, Error de comisión. .............................................................................. 38
Ecuación 3, índice estadístico Kappa. ................................................................... 39

-12-
LISTA DE GRAFICAS
GRÁFICA 1. Crecimiento urbano ciudad de Bogotá – Colombia. .......................... 22
GRÁFICA 2. Media aritmética 2005 y Actual ........................................................ 55
GRÁFICA 3. Promedio aritmética 2005 y Actual ................................................... 57
GRÁFICA 4. Mediana aritmética 2005 y Actual .................................................... 58

-13-
GLOSARIO
CRECIMIENTO URBANÍSTICO: El crecimiento urbano es la urbanización
extendida fuera de los centros de las ciudades, por lo general, en terrenos
sin urbanizar. Se caracteriza por una baja densidad de población, donde
las casas están separadas de las zonas comerciales e industriales y por
patrones de calles ramificadas. El crecimiento urbano, también llamado
crecimiento urbano, a menudo se desencadena al urbanizar terrenos
agrícolas, bosques y zonas húmedas.1
CLASIFICACIÓN NO SUPERVISADA: método basado en búsqueda
automática de grupos de valores homogéneos dentro de la imagen.2
CLASIFICACIÓN SUPERVISADA: método realizado con previo
conocimiento del terreno a partir del cual se seleccionan muestras para
cada una de las categorías. 3
DANE: el Departamento Administrativo Nacional de Estadística (DANE) es
la entidad responsable de la planeación, levantamiento, procesamiento,
análisis y difusión de las estadísticas oficiales de Colombia.4
GOOGLE EARTH: es una aplicación gratuita que permite visualizar
información geográfica del mundo, combinando fotografías satelitales,
mapas, imágenes en 3D.5
1 Martinez, S. M. (2007). sintesis de la problematica de las areas de desarrollo informalmente. 2 Chuvieco, E. (1996). fundamentos de teledeteccion espacial. España: RIALP S.A., p. 424 3 Ibid.,P. 424 4 DA (M s.f.)NE. (15 de 01 de 2015). Departamento Administrativo Nacional de Estadística. p. 1 5 Earth, G. (s.f.). Google Earth -Funciones. Recuperado el 09 de 11 de 2013. P. 1

-14-
IMAGEN SATELITAL: es el producto obtenido por un sensor instalado a
bordo de un satélite artificial mediante la captación de la radiación
electromagnética emitida o reflejada por un cuerpo celeste, producto que
posteriormente se transmite a estaciones terrenas para su visualización,
procesamiento y análisis.6
NIVEL DIGITAL: valor entero que traduce numéricamente la intensidad
radiométrica recibida por un sensor óptico-electrónico.7
PIXEL: distancia que corresponde al tamaño mínimo de unidad de
información incluida en una imagen.8
QUICKBIRD: satélite comercial de teledetección propiedad de
Digitalglobe.9
RESOLUCIÓN: es la medida de la habilidad de un sistema sensor para
discriminar información dentro de una imagen.10
TELEDETECCIÓN: los sensores de teledetección miden la intensidad de
dicha radiación electromagnética y de acuerdo con el establecimiento de
rangos de frecuencia de respuesta de los objetos, así recogen información
a través de diferentes dispositivos de un objeto concreto o un área.11
6 Chuvieco, Op. cit., p. 426 7 Chuvieco, Op. cit., p. 427 8 Chuvieco, Op.cit., p. 428 9 Earth, G. (s.f.). Google Earth -Funciones. Recuperado el 09 de 11 de 2013. p. 2 10 Chuvieco, E. (1996). fundamentos de teledetección espacial. España: RIALP S.A., p. 429 11 Prosis, 2005. Comercializadora de imágenes de satélite para Colombia.

-15-
FIRMA ESPECTRAL: al afectar la cantidad de radiación reflejada o emitida
por una superficie con una longitud de onda existente en el espectro
electromagnético se obtiene la firma espectral.12
SENSORES: Son los que absorben, transmiten y reflejan energía a los
objetos, esta energía proviene del sol, la tierra u otras fuentes de energía.13
LICENCIA DE CONSTRUCCIÓN: Instrumento de control administrativo
público, cuyo propósito es controlar cordialmente el crecimiento de las
ciudades. 14
12 IMGSAT, 2005. 13 Ibid., P 20 14 DIMPE 2014. Direccion de metodologia y produccion estadistica

-16-
RESUMEN
El presente trabajo tiene como finalidad diseñar un algoritmo para reconocimiento
de área de crecimiento urbano. En la actualidad el terreno para la construcción de
viviendas de la ciudad de Bogotá se está agotando debido al crecimiento
mesurado de la población, acabando así con los humedales y zonas verdes de la
ciudad. La localidad de Engativá ubicada al noroccidental de la ciudad, en los
últimos diez años ha tenido un crecimiento urbanístico considerable. Para dar
cumplimiento al diseño se plantío un objetivo específico el cual es realizar un
algoritmo que identifique las características de zonas de acuerdo a sus firmas
espectrales determinadas y evaluar los resultados arrojados en campo sobre el
resultado del algoritmo. Para el desarrollo del algoritmo se utilizará lógica de
programación por medio del software Matlab, donde se empleara una metodología
basada en cuatro fases las cuales son: Análisis, Diseño, Desarrollo e
Implementación; estas fases proporcionaran los pilares para poder alcanzar el
objetivo propuesto. El proyecto contendrá una malla de 25 puntos de control sobre
Google Earth con una extensión KML, las imágenes que este algoritmo podrá pos
procesar serán tomadas de las pantalla por medio del software Google Earth las
cuales provienen del satélite Quickbird guardándolas principalmente con las
extensiones TIF y JPEG, también tendrá la posibilidad de realizar el procedimiento
con imágenes ajenas a este con las extensiones anteriormente mencionadas. El
pos proceso se realizar por medio de comparación de niveles digitales entre las
imágenes de la zona actual y de la zona en años anteriores, este algoritmo pos
procesara dos imágenes satelitales para conocer el cambio que estas han tenido a
nivel de construcción de vivienda esperando como producto un aplicativo semi
automático donde el usuario solo tendrá que interpretar las imágenes arrojadas
por el algoritmo.

-17-
ABSTRACT
This paper aims to design an algorithm for recognition of urban growth area.
Currently the land for construction of houses in the city of Bogota is running low
due to moderate population growth, ending wetlands and green areas of the city.
The Engativa located in northwest of the city, in the last ten years has had a
considerable urban growth. To comply to design a specific objective which is to
perform an algorithm to identify the characteristics of areas according to their
specific spectral signatures and evaluate the results obtained in field on the result
of the algorithm is planting. To develop the algorithm they used logic programming
by means of Matlab software, where a methodology based on four phases which
are employed are: Analysis, Design, Development and Implementation; these
stages provide the pillars to achieve the objective. The project contains a grid of 25
checkpoints on Google Earth with a KML extension, the images that this algorithm
can post processing will be taken from the screen using the Google Earth software
which come from the satellite Quickbird keeping them mainly with the TIF
extension and JPEG, also will be able to perform the procedure with images
beyond this with the above extensions. The post process is performed by means of
comparison of digital levels between the images of the current zone and the area in
previous years, this algorithm processed after two satellite images to know that
these changes have had a level of housing construction waiting like a semi
automatic product application where the user only have to interpret the images
thrown by the algorithm.

-18-
INTRODUCCION
El suelo urbano del territorio distrital lo constituyen las áreas que cuenten con
Infraestructura vial, redes de energía, acueducto y alcantarillado.
En Bogotá entre los años de 1990 a 2000 las áreas urbanas dispuestas para el
desarrollo de la ciudad se estaban agotando. Para finales del año 2000 las áreas
libres al interior del perímetro urbano sumaban 7000 Hectáreas aproximadamente,
sin embargo los controles y las sanciones se fortalecen al punto que la acción de
urbanización ilegalmente es declarada delito penal a través de la ley 308 de 1996
en la cual se tipifica como conducta delictiva la invasión de tierras o edificaciones y
la urbanización de esta manera en el código penal
En los últimos años la ciudad de Bogotá ha tenido un crecimiento urbanístico
notablemente en varias localidades, un ejemplo significativo se encuentra en la
localidad de Engativá. El suelo urbano de Engativá comprende un total de 3.588
hectáreas (ha), de las cuales 671 corresponden en áreas protegidas; En este
suelo urbano se localizan 4.342 manzanas, que ocupan un total de 2.701 ha.15, el
área de interés se encuentran limitado al norte por las vías Av calle 80 al sur calle
72 F al oriente calle 104 y al occidente por el rio Bogotá, donde se analizará los
cambios a través del tiempo por factores de construcción en diferentes sectores.
Se presenta en este proyecto el diseño de un algoritmo que permita ver las
diferencias entre las imágenes en una zona en común las cuales son de fechas
diferentes y permita identificar cambios entre ellas.
15 Ríos, Carmela Serna (2009). Conocimiento de la localidad de Engativá

-19-
1. OBJETIVOS
1.1. Objetivo general
Diseñar y ejecutar un algoritmo para reconocimiento del área de
crecimiento urbano utilizando imágenes Quickbird.
1.2. Objetivos específicos
Diseñar un algoritmo que identifique las características de zonas de
acuerdo con la evaluación multitemporal de una zona determinada.
Identificar en las imágenes los rangos de la cobertura de las zonas de
construcción para ajustar el algoritmo en reconocimiento de áreas.
Analizar los resultados arrojados del algoritmo por medio del índice kappa.

-20-
2. MARCO TEÓRICO
2.1. Localización, extensión y características geográficas
El área de la localidad de Engativá, se encuentra ubicada en la zona occidental de
la ciudad, limita al norte, con el río Juan Amarillo que la separa de la localidad de
Suba; al sur, con la avenida El dorado y el antiguo camino de Engativá que la
separan de la localidad de Fontibón; al oriente, con la Avenida calle 68 y las
localidades de Barrios Unidos y Teusaquillo, y al occidente, con el río Bogotá y el
municipio de Cota. 16
La zona de trabajo se representa en el cuadro 1 con las coordenadas
consignadas. Donde se escogió 25 puntos de control debido que la zona aumento
el crecimiento urbanístico más de un 50% y así realizar un seguimiento más
amplio.
Cuadro 1. Coordenadas del cuadrado de la zona de trabajo.
Nombre Latitud longitud
Esq-Sup-Der 4°43'35.00"N 74° 7'21.47"O
Esq_sup_Izq 4°43'35.00"N 74° 8'15.30"O
Esq_Inf_Der 4°43'5.10"N 74° 7'21.47"O
Esq_Inf_Izq 4°43'5.10"N 74° 8'15.30"O
16, Alcaldía mayor de Bogotá, 2004. Diagnostico físico y socioeconómico de las localidades de Bogotá

-21-
2.1.1. El suelo urbano.
El suelo urbano de la ciudad de Bogotá son las áreas que cuentan con
infraestructura vial, redes primarias de energía, acueducto y alcantarillado, hacen
posible la urbanización o edificación. En Engativá el suelo urbano tiene un total de
3.439,23 ha, dentro del cual se ubican 365,81 ha de áreas protegidas. En este
suelo urbano se localizan 278,79 ha de áreas por desarrollar, que son terrenos
que no han sido urbanizados. El suelo urbanizado totaliza 3.160.44 ha, que
equivale al suelo urbano menos la superficie de los terrenos sin desarrollar. En
suelo urbano se localizan 3.550 manzanas, que equivalen a 1.888,11 hectáreas17
2.1.2. Crecimiento urbano.
El objetivo del plan de ordenamiento territorial es delimitar las zonas donde es
seguro y hay accesibilidad para las empresas de servicios públicos, pero esto se
está viendo comprometido debido a los asentamientos ilegales donde no se
proporcionan las condiciones de seguridad.
La localidad de Engativá tiene una extensión total de 3556,30 ha y no posee suelo
rural. Según las proyecciones del departamento administrativo de planeación
distrital (DAPD) en el 2002, la población local llego a 726.259 habitantes, cifra que
representa una participación aproximada del 11.6% dentro del total de la población
distrital; en la localidad del 46.8% de la población eran hombres y 53,2% mujeres.
Engativá es la segunda localidad con mayor número de habitantes en el distrito,
después de la localidad de Kennedy. Como se muestra en la Gráfica 1.
17 Ibid., P.12

-22-
GRÁFICA 1. Crecimiento urbano ciudad de Bogotá – Colombia.
Fuente: Elaborada con datos de Departamento Administrativo Nacional Estadístico
El siguiente cuadro 2 muestra el Crecimiento urbano de la ciudad de Bogotá desde
el año 2007 hasta abril del 2015.
Cuadro 2.Crecimiento urbano ciudad de Bogotá – Colombia.
Año Mes Municipio Departamento Vivienda
2007 Enero Bogotá Bogotá, D.C. 373.929
2007 Febrero Bogotá Bogotá, D.C. 441.561
2007 Marzo Bogotá Bogotá, D.C. 352.988
2007 Abril Bogotá Bogotá, D.C. 304.721
2007 Mayo Bogotá Bogotá, D.C. 373.654
2007 Junio Bogotá Bogotá, D.C. 305.193
2007 Julio Bogotá Bogotá, D.C. 546.837
2007 Agosto Bogotá Bogotá, D.C. 495.743
2007 Septiembre Bogotá Bogotá, D.C. 487.640
2007 Octubre Bogotá Bogotá, D.C. 396.693
2007 Noviembre Bogotá Bogotá, D.C. 292.202
2007 Diciembre Bogotá Bogotá, D.C. 414.294
0
1,000,000
2,000,000
3,000,000
4,000,000
5,000,000
6,000,000
2007
2008
2009
2010
2011
2012
2013
2014
CRECIMIENTO URBANO
CONSTRUCCION

-23-
Año Mes Municipio Departamento Vivienda
2008 Enero Bogotá Bogotá, D.C. 353.727
2008 Febrero Bogotá Bogotá, D.C. 322.028
2008 Marzo Bogotá Bogotá, D.C. 223.766
2008 Abril Bogotá Bogotá, D.C. 310.817
2008 Mayo Bogotá Bogotá, D.C. 379.675
2008 Junio Bogotá Bogotá, D.C. 262.194
2008 Julio Bogotá Bogotá, D.C. 376.133
2008 Agosto Bogotá Bogotá, D.C. 338.395
2008 Septiembre Bogotá Bogotá, D.C. 466.655
2008 Octubre Bogotá Bogotá, D.C. 335.992
2008 Noviembre Bogotá Bogotá, D.C. 372.075
2008 Diciembre Bogotá Bogotá, D.C. 192.957
2009 Enero Bogotá Bogotá, D.C. 169.115
2009 Febrero Bogotá Bogotá, D.C. 206.478
2009 Marzo Bogotá Bogotá, D.C. 223.052
2009 Abril Bogotá Bogotá, D.C. 259.695
2009 Mayo Bogotá Bogotá, D.C. 185.740
2009 Junio Bogotá Bogotá, D.C. 160.846
2009 Julio Bogotá Bogotá, D.C. 231.108
2009 Agosto Bogotá Bogotá, D.C. 226.246
2009 Septiembre Bogotá Bogotá, D.C. 306.134
2009 Octubre Bogotá Bogotá, D.C. 185.963
2009 Noviembre Bogotá Bogotá, D.C. 178.440
2009 Diciembre Bogotá Bogotá, D.C. 290.701
2010 Enero Bogotá Bogotá, D.C. 229.898
2010 Febrero Bogotá Bogotá, D.C. 252.086
2010 Marzo Bogotá Bogotá, D.C. 243.657
2010 Abril Bogotá Bogotá, D.C. 236.903
2010 Mayo Bogotá Bogotá, D.C. 327.780
2010 Junio Bogotá Bogotá, D.C. 273.419

-24-
Año Mes Municipio Departamento Vivienda
2010 Julio Bogotá Bogotá, D.C. 259.014
2010 Agosto Bogotá Bogotá, D.C. 301.244
2010 Septiembre Bogotá Bogotá, D.C. 384.991
2010 Octubre Bogotá Bogotá, D.C. 306.658
2010 Noviembre Bogotá Bogotá, D.C. 573.626
2010 Diciembre Bogotá Bogotá, D.C. 936.677
2011 Enero Bogotá Bogotá, D.C. 502.998
2011 Febrero Bogotá Bogotá, D.C. 313.350
2011 Marzo Bogotá Bogotá, D.C. 518.808
2011 Abril Bogotá Bogotá, D.C. 578.883
2011 Mayo Bogotá Bogotá, D.C. 1.033.240
2011 Junio Bogotá Bogotá, D.C. 646.857
2011 Julio Bogotá Bogotá, D.C. 530.656
2011 Agosto Bogotá Bogotá, D.C. 389.363
2011 Septiembre Bogotá Bogotá, D.C. 200.367
2011 Octubre Bogotá Bogotá, D.C. 152.384
2011 Noviembre Bogotá Bogotá, D.C. 183.895
2011 Diciembre Bogotá Bogotá, D.C. 193.707
2012 Enero Bogotá Bogotá, D.C. 206.120
2012 Febrero Bogotá Bogotá, D.C. 238.269
2012 Marzo Bogotá Bogotá, D.C. 142.013
2012 Abril Bogotá Bogotá, D.C. 273.356
2012 Mayo Bogotá Bogotá, D.C. 383.808
2012 Junio Bogotá Bogotá, D.C. 411.135
2012 Julio Bogotá Bogotá, D.C. 330.446
2012 Septiembre Bogotá Bogotá, D.C. 381.493
2012 Octubre Bogotá Bogotá, D.C. 232.960
2012 Noviembre Bogotá Bogotá, D.C. 201.850
2012 Diciembre Bogotá Bogotá, D.C. 248.992
2013 Enero Bogotá Bogotá, D.C. 342.860

-25-
Año Mes Municipio Departamento Vivienda
2013 Febrero Bogotá Bogotá, D.C. 437.029
2013 Marzo Bogotá Bogotá, D.C. 321.469
2013 Abril Bogotá Bogotá, D.C. 224.430
2013 Mayo Bogotá Bogotá, D.C. 587.426
2013 Junio Bogotá Bogotá, D.C. 311.611
2013 Julio Bogotá Bogotá, D.C. 415.986
2013 Agosto Bogotá Bogotá, D.C. 506.480
2013 Septiembre Bogotá Bogotá, D.C. 349.663
2013 Octubre Bogotá Bogotá, D.C. 215.235
2013 Noviembre Bogotá Bogotá, D.C. 318.558
2013 Diciembre Bogotá Bogotá, D.C. 216.469
2014 Enero Bogotá Bogotá, D.C. 381.559
2014 Febrero Bogotá Bogotá, D.C. 518.145
2014 Marzo Bogotá Bogotá, D.C. 608.810
2014 Abril Bogotá Bogotá, D.C. 483.303
2014 Mayo Bogotá Bogotá, D.C. 269.707
2014 Junio Bogotá Bogotá, D.C. 169.322
2014 Julio Bogotá Bogotá, D.C. 221.809
2014 Agosto Bogotá Bogotá, D.C. 287.812
2014 Septiembre Bogotá Bogotá, D.C. 207.801
2014 Octubre Bogotá Bogotá, D.C. 203.667
2014 Noviembre Bogotá Bogotá, D.C. 210.399
2014 Diciembre Bogotá Bogotá, D.C. 239.398
2015 Enero Bogotá Bogotá, D.C. 183.999
2015 Febrero Bogotá Bogotá, D.C. 431.142
2015 Marzo Bogotá Bogotá, D.C. 239.045
2015 Abril Bogotá Bogotá, D.C. 162.557
Fuente: Departamento Administrativo Nacional de Estadística18
18 DANE. (15 de 01 de 2015). Departamento Administrativo Nacional de Estadística. p. 1

-26-
2.1.3. Licencias de construcción.
Las licencias de construcción son utilizadas como mecanismo de control
administrativo público cuyo objetivo es controlar el crecimiento de las ciudades.
Para poder tener un control de la actividad constructora en el país en 1948 se crea
la investigación de licencias de construcción (ELIC). La investigación, en la
actualidad usa una fuente de información de las licencias de construcción
otorgadas por las curadurías urbanas, oficinas de planeación y valoración,
secretaria de obras públicas, las alcaldías y las personerías municipales de los
municipios que se investigan. 19
2.2. Teledetección.
El hombre desde sus principios como ser racional a tratado de entender su
entorno y en busca de este objetivo ha experimentado llegando a lograr métodos
e instrumentos que han permitido comprender y analizar la superficie terrestre. En
la historia de la teledetección su primer paso fue elevar la toma de imágenes, esto
según empezó con la toma desde un globo en el año 1959, esto provocó que al
año siguiente se hicieran nuevas pruebas en la ciudad de Boston para
conocimiento detallado de la organización urbana.20 Como siempre todo va
evolucionando llego a la aviación, pero se produce un notable desarrollo técnico
en la segunda guerra mundial, en mejorar no solo en lo óptico de las cámaras si a
probar las películas infrarrojas y radar, para las investigaciones no pararon hay
puesto que con la llegada de la llamada “guerra fría” se desarrollan los sistema de
navegación que permitió la exploración espacial no solo a la tierra si no también
resto del universo, en 1965 la misión Gemini-Titá realiza los primeros
experimentos formales de fotografía espacial para recursos geológicos y
meteorológicos. La nasa por su parte en 1969 en la misión Apolo 9 realiza la
19 M. GOMEZ. Análisis de crecimiento Urbano de Bogotá con imágenes satelitales. 20 Hyatt,E, (1988). Keyguide to information sources in remote sensing, London

-27-
primera práctica multiespectral compuesta por cuatro cámaras con distintos filtros
y todo lo anterior conllevo a proyectos dedicados exclusivamente a cartografía y
evaluación de los recursos naturales.
La teledetección es la técnica que nos permite obtener información sobre un
objeto, área o fenómeno a través del análisis de los datos adquiridos por un
instrumento que no está en contacto con el objeto, área o fenómeno bajo
investigación.21
2.2.1 Principales aplicaciones.
Para comprender un poco el campo de trabajo de esta técnica se presentara a
continuación sus principales aplicaciones citado en el informe de la OFFlCE OF
TECHNOLOGY ASSESSMENT (OTA) 1984 las cuales se enumeran a
continuación:
Estudio de la erosión de playas y arenales
Inventario regional del medio ambiente para preparar estudios de
impactos ambientales
Cartografía geológica para la exploración minera y petrolífera
Cartografía de nuevos depósitos volcánicos.
Control de la acumulación nivel, de la fusión y de los cambios
previsibles en la disponibilidad de energía hidroeléctrica.
Control del movimiento de icebergs en zonas polares
Inventario del agua superficial
Análisis en tiempo real de masas nubosas de escala media y
pequeña.
medidas de aguas superficiales y humedales para evaluar la
situación del habitad para aves acuáticas
21 Chuvieco, E. (1996). fundamentos de teledetección espacial. España: RIALP S.A., p. 14,41

-28-
verificación de contenidos de salinidad en las principales corrientes
de agua
cartografía térmica del mar.
Verificación y control de la calidad física del agua, turbidez y
contenido de algas.
Control de los movimientos del Gulf-Stream y otras corrientes
marinas.
Rápida evaluación de condiciones de estrés en la vegetación, por
efecto de la sequía y deforestación.
Cartografía de área quemada y seguimiento de los ritmos de
repoblación natural.
Contribución a la cartografía e inventario de la cobertura y uso del
suelo.
Realización de inventarios forestales.
Selección de rutas óptimas para nuevas vías de comunicación.
Control de pastizales efímeros para estudiar efectos de la sequía y
excesivo pastoreo.
Cartografía e inventario de cultivos por especies.
Predicción del rendimiento de cultivos. 22
2.3. Bases para la interpretación de imágenes en teledetección
espacial
Los objetivos del trabajo orientan la mayor parte de las decisiones consiguientes,
como son las relativas al tipo de información necesaria a su precisión, escala y
nivel de desagregación.
22 Chuvieco, E. (1996). fundamentos de teledetección espacial. España: RIALP S.A., p. 14,41

-29-
2.3.1. Fijación de objetivos: escala y leyenda de trabajo.
Cualquier usuario con conocimientos básicos de la Teledetección debería tener
presente que es una técnica con limitaciones, válida para resolver un determinado
número de problemas. La escala de trabajo condiciona la unidad mínima de
información que se debe incluir en el mapa, que suele denominarse mínima
unidad cartografiable (MIC)
Las clases más repetidas son agua la más fácil de discriminar a partir de sensores
espaciales, área urbanizada, cultivas y forestal, aunque en estas últimas se
realizan múltiples divisiones, según objetivos específicos del inventario
Los sistemas de teledetección solo permiten realizar cartografía de la ocupación
del suelo, ya que la señal detectada por el sensor corresponde a los materiales
que aparecen en la superficie terrestre y no al uso al que se destina. 23
2.3.2. Soporte de imágenes.
El soporte sobre el que puede realizarse la interpretación depende del tipo de
tratamiento que se aplique. El análisis visual se necesita tres pasos:
Soporte material de la imagen.
Escala.
Numero de banda o combinación de bandas seleccionadas.
El número de bandas más adecuadas para un estudio depende directamente del
fenómeno que se desea estudiar. Si la imagen se requiere para un estudio global,
23 Ibid., P 130-140

-30-
de diversos tipos de cobertura, puede ser una buena opción, adquirir los negativos
correspondientes a todas las bandas del sensor. 24
2.3.3. Selección del método de análisis ¿tratamiento visual o digital?
Análisis visual emplea criterios de interpretación similares a la foto-interpretación
clásica (tono, textura tamaño, localización, etc) por lo que no requiere un
tratamiento muy especializado.
El tratamiento digital requiere mayor inversión económica y entrenamiento que el
análisis visual. Como contrapartida, proporciona mayor versatilidad, rapidez y
exactitud. Estas ventajas no son absolutas, sino muy dependientes de la
configuración del equipo disponible, del concepto y experiencia del personal al
momento del estudio del área.
El proceso de áreas urbanas es mucho más claro, porque estas zonas se
mezclan tejados, aceras, asfaltos, jardines y espacios abiertos o deportivos. Esta
complejidad puede indicarse visualmente gracias a criterios muy difícilmente
traducibles a la clasificación digital: localización, textura, tamaño, formas, etc. Por
lo que la interpretación visual ofrecerá en este caso más exactitud que la digital.
En otras categorías la relación resulta contraria, ya que el ojo humano no es capaz
de detectar variaciones de tonalidades que si son diferenciables numéricamente
(humedales, vegetación, etc)25
En tratamiento digital basta en realizar un cálculo de frecuencia del número de
pixeles incluidos en cada clase para conocer la superficie ocupada por cada una
de ellas.
24 Chuvieco, E. (1996). fundamentos de teledetección espacial. España: RIALP S.A., p. 130-140 25 Toll. (1984). An Evaluation of simulated thematic mapper data and landsat MSS data for discriminating suburban and regional land use and land cover, p 1713-1724

-31-
2.4. Interpretación visual de una imagen
Las pautas visuales manejadas en teledetección espacial, algunas son comunes
con la fotografía áreas tono, textura, estructura, sombras, contexto, etc., otras son
más propias de las imágenes especiales, principalmente en lo que se refiere a la
dimensión multi-espectral y multi-temporal de las observaciones severamente
limitada en fotografía áreas, y un último grupo correspondiente a criterios
tradicionales en fotointerpretación que aún no resultan accesibles a imágenes
espaciales, como es el caso de la cobertura estereoscópica. 26
2.4.1. Tono
El tono hace referencia a la intensidad de energía recibida por el sensor para una
determinada banda del espectro. En un producto fotográfico, los pixeles con tonos
oscuros indican aquellas áreas sobre las que el sensor detecto una señal baja,
mientras que las zonas claras son testigos de altos valores de radiancia. El tono
es una de los principales criterios de interpretación visual.27
2.4.2. Color
El ojo humano es más sensible a las variaciones cromáticas que la intensidad
luminosa.28 Si se le añade el aumento de información que supone la mezcla de
varias de espectro, fácilmente se comprende que el color resulta un elemento
básico en la interpretación visual de imágenes.
Entre las multiples combinaciones de color que se han empleado en análisis
visual, la más destacada es falso color o infrarrojo color.
26 Chuvieco, E. (1996). fundamentos de teledetección espacial. España: RIALP S.A., p. 146 27 Ibid., P 157 28 Barret (1974). Climatology from satellites.

-32-
Una composición de color puede conseguirse de acuerdo a dos procesos,
denominados aditivos y sustractivo. En el proceso aditivo, cualquier color se
obtiene por suma de los tres colores elementales: azul, verde y rojo. La suma de
los tres colores primarios permiten lograr un color completamente azul + verde,
cian; azul+ rojo, magenta y verde + rojo amarillo, mientras las tres suman el
blanco. Por el contrario el proceso sustractivo se basa en la absorción de la luz
que ejercen los colores complementarios: el cian absorbe la luz roja, el magenta
absorbe el verde, y el amarillo el azul. Los tres en combinación suponen por lo
tanto es negro. 29
2.4.3. Textura.
La textura de la imagen procede de la relación entre el tamaño de los objetos y la
resolución del sensor.
De esta forma se distingue:
Textura grosera cuando los objetos están comprendidos entre 0.25 y 1
mm2 a la escala de la imagen.
Textura media. Objetos comprendidos entre 0.04 y 0.25 mm2
Textura fina, objetos inferiores a 0.04mm2
2.5. Tipos de clasificación
La clasificación busca una caracterización particular para una zona o área
determinada. En el cual se busca medidas digitales, en un momento dado, y tipo
de cubierta. En este sentido la clasificación supone un enfoque más cualitativo,
por tratarse de un proceso numérico, incorpora un aparato estadístico ciertamente
29 Chuvieco, Op. Cit ., p. 157

-33-
importante. Estas se dividen en dos métodos de clasificación; supervisada y no
supervisada dependiendo del método estadístico.
Se puede hablar para poder entrar a definir cada una de las anteriores
clasificaciones que hay tipo de categorías o dos tipos de clases: informales y
espectrales.
Informales: Son las que constituyen la leyenda de trabajo que pretende deducir el
intérprete (tipos de ocupación del suelo, por ejemplo). Las categorías
informacionales se establecen por el usuario
Espectrales: Corresponden a los grupos de valores espectrales homogéneos
dentro de la imagen, en función de ofrecer una reflectividad similar, para las
bandas consideras y en la fecha concreta de la imagen, las espectrales se
deducen de los niveles digitales (ND) presentes en la imagen.30
2.5.1. Clasificación supervisada.
El método supervisado parte de un conocimiento previo del terreno, a partir del
cual se seleccionan las muestras para cada una de las categorías. Es el más
habitual por cuanto se identifican sobre un fotograma-tipo las características de
cada clase para luego delimitar en el resto de las zonas que se ajustan a esta
característica 31
2.5.2. Clasificación no supervisada.
El método no supervisado procede a una búsqueda automática de grupos de
valores homogéneos dentro de la imagen. Queda al usuario en este caso la labor
de encontrar correspondencias entre esos grupos y sus categorías de interés. El
método no supervisado supondría en primer lugar identificar sobre la imagen
30-31 Chuvieco, E. (1996). fundamentos de teledeteccion espacial.

-34-
zonas homogéneas en cuanto a tonos, textura, disposición, etc, para luego
asignarlas a una de las clases temáticas establecidas.
2.5.3. Reglas de decisión de clasificación
Una vez que un número considerable de firmas ha sido creado y evaluado, el
siguiente paso es realizar la clasificación de los datos. Cada píxel es analizado
independientemente. El vector de medidas para cada píxel es comparado con
cada firma, de acuerdo con la regla de decisión o el algoritmo. Los píxeles que
cumplen el criterio establecido por la regla de decisión son asignados a la clase
de la firma. 32
Si no existe una regla no paramétrica, el píxel es clasificado utilizando únicamente
la regla de decisión paramétrica. Todas las firmas paramétricas son examinadas.
Si una regla no paramétrica está definida, entonces se evalúan todas las firmas
con las definiciones no paramétricas. Estas reglas tienen las siguientes
condiciones:
• Si la evaluación no paramétrica resulta en una sola clase, el píxel es asignado a
dicha clase.
• Si la evaluación no paramétrica resulta en clases cero (0), (es decir, el píxel está
por fuera de todas las reglas de decisión no paramétricas) entonces se aplica la
regla sin clasificación. Con esta regla, el píxel es clasificado por la regla
paramétrica o se queda sin clasificar.
• Si el píxel cae en más de una clase como resultado de la evaluación no
paramétrica, se aplica la regla de superposición. Con esta regla, el píxel es
clasificado por la regla paramétrica, el orden del procesamiento o se queda sin
clasificar.
32 Chuvieco, E. (1996). fundamentos de teledetección espacial. España: RIALP S.A., p. 205.206

-35-
2.6. Tratamiento digital de imágenes
2.6.1. La matriz de imagen de datos de una imagen digital.
El proceso de adquisición de una imagen digital difiere sustancialmente del
empleado en la fotografía aérea. El sistema fotográfico, la energía procedente de
los objetos se registra sobre una superficie sensible a la luz. Este puede
componerse de una o varias capas, formando, respectivamente, una película
pancromática o en color.
El sensor explora secuencialmente la superficie terrestre, adquiriendo a intervalos
regulares, la radiación que proviene de los objetivos sobre ellos situados. La
cadencia con que el sensor realiza ese muestreo de la superficie terrestre define
precisamente la resolución espacial del mismo. El tamaño del pixel, unidad visual
más pequeña que aparece en una imagen. Este valor medio se traduce por el
sensor de un valor numérico a partir del cual se realiza el tratamiento digital de
imágenes. Es consecuencia que cada pixel de la imagen viene definido por un
número entero, traducido de la radiación recibida por el sensor para una
determinada parcela de la superficie terrestre y en una determinada banda del
espectro. Este valor numérico se denomina nivel digital ND. El nombre se debe
por tratarse de un valor numérico no visual, pero que puede traducir a una
intensidad visual de un nivel de gris, mediante cualquier convertidor digital-
análogo.
En conclusión, la unidad mínima de información en una imagen digital se
denomina pixel, definido por un número entero, el ND que puede convertirse en
una intensidad luminosa o nivel de gris. 33
33 Chuvieco, E. (1996). fundamentos de teledetección espacial. España: RIALP S.A., p. 205.206

-36-
2.6.2. Obtención y presentación de resultados
Independientemente del método empleado en la clasificación digital, los resultados
se almacenan en una nueva imagen, similar a las originales, en cuanto a
estructura y tamaño, pero la importante diferencia de que el ND de cada pixel es
diferente a la categoría a la que se asignó. En definitiva, se obtendrá una matriz
numérica, similar a la original aunque de dos dimensiones, pues se ha
condensado la información espectral (varias bandas) en una sola clase temática.
Esa nueva imagen puede ser el producto final de trabajo, o servir como estadio
intermedio de un proyecto más amplio, en donde la Teledetección se combine con
otro tipo de variables espaciales.
2.7. Verificación de resultados
2.7.1. Tipos de muestreo.
Los esquemas más empleados en el proceso de verificación son:
Aleatorio simple: los elementos a verificar se eligen de tal forma que todos cuenten
con la misma probabilidad de ser seleccionados y que la elección de uno no
influya en la siguiente. Al realizar el muestreo aleatorio estadísticamente es más
sólido.
Aleatorio estratificado: la muestra se realiza dividiendo la población o
regiones o estratos, de acuerdo a una variable auxiliar.
Sistemático: la muestra se distribuye a intervalos regulares, a partir de un
punto de origen señalado aleatoriamente. Garantiza un muestreo completo
de la superficie a verificar, pero puede facilitar estimaciones erróneas si
existe algún tipo de patrón periódico en el área observada.
Sistemático no alineado: modifica el esquema anterior, ya que varía
aleatoriamente una de las dos coordenadas.

-37-
Por conglomerados: se selecciona como unidad de muestreo un grupo de
observaciones, denominado conglomerado (cluster), en lugar de individuos
aislados. 34
2.7.2. Matriz de confusión.
Consecuencia de la fase de muestreo un listado de puntos test, para los que se
posee tanto su cobertura real como la deducida por la clasificación. Con estos
datos puede formarse una matriz denominada de confusión puesto que recoge
con los conflictos que se presentan entre categorías. Se trata de una matriz
tridimensional, en donde las filas se ocupan por las cuales de referencias, y las
columnas por las categorías reducidas de la clasificación. Lógicamente ambas
tendrán el mismo número y significado se trata su suma de una matriz cuadrada
n*n donde n indica el número de categoría.
La diagonal de esta matriz expresa el número de puntos verificación en donde se
produce acuerdo entre las dos fuentes (mapa y realidad), mientras las marginales
suponen errores de asignación. La relación entre el número de puntos
correctamente asignados y el total expresa la finalidad global del mapa. Los
residuales en filas indican tipos de cobertura real que se influyeron en el mapa,
mientras los residuos en columnas indican cubiertas del mapa que no se ajusta a
la realidad. En definitiva presenta errores de omisión y comisión,
respectivamente.35
34 Rosenfeld. (1982) Sample desing for estimating change in land use and land cover. 35 Aronoff. (1982) Classification accuracy;a user approach. Pp 761-767

-38-
2.8. Tipos de errores
2.8.1. Error de omisión
Se produce cuando, cierta pixel que pertenece una categoría especifica es
catalogada en otra a esto se le denomina error de omisión (Eo) o riesgo del
producto, como se presenta a continuación en la ecuación 136
Ecuación 1, Error de omisión.
𝐸𝑂𝑖 = 𝑋𝑖𝑗 − 𝑋𝑗𝑗
𝑋𝑖𝑗
Fuente: Fundamento de teledetección (Chuvieco 1996)
Dónde:
Xij=marginal de la fila j
Xjj=diagonal dicha fila
2.8.1. Error de comisión
Se produce cuando un pixel es incluido en una categoría perteneciendo a otra a
esta se le conoce como error de Comisión (Ec) o riesgo del usuario, como se
presenta en la Ecuación 2.37
Ecuación 2, Error de comisión.
𝐸𝑂𝑖 = 𝑋𝑖𝑗 − 𝑋𝑖𝑖
𝑋𝑖𝑗
36 Chuvieco, E. (1996). fundamentos de teledeteccion espacial. 37 Chuvieco, E. (1996). fundamentos de teledeteccion espacial.

-39-
Fuente: Fundamentos de teledetección (Chuvieco 1996)
Dónde:
Xij=marginal de la columna j
Xjj=diagonal dicha columna
2.9. Análisis categórico multivariante
Es un análisis de las relaciones múltiples entre las categorías, idóneas para el
estudio global de matrices de confusión38
Uno de los más usados es el estadístico Kappa (k) o Khat que mide entre mapa-
realidad y el que se espera por azar como se presenta en la ecuación 3.
El coeficiente Kappa expresa la reducción proporcional en el error generada por
un proceso de clasificación comparado con el error de una clasificación
completamente al azar. Por ejemplo, un valor de 0.82 implica que el proceso de
clasificación está evitando 82 por ciento de los errores que genera una
clasificación completamente al azar, como se observa en la ecuación 3.15
Ecuación 3, índice estadístico Kappa.
𝐾 =𝑁 ∑ 𝑋𝑖𝑖 − ∑ (𝑋𝑖+ ∗ 𝑋+𝑖) 𝑛
𝑖=𝑙 𝑛𝑖=𝑙
𝑁2 ∑ (𝑋𝑖+ ∗ 𝑋+𝑖)𝑛𝑖=𝑙
FUENTE: Fundamentos de teledetección. (Chuvieco 1996)
Dónde:
n = Número de clases;
38 Congalton, R. G. (1983). Assessing Landsat Classification Accuracy Using Discrete Multivariate Analysis Statistical Techniques 15 Erdas Field Guide. (s.f.). Clasificacion.

-40-
xii = Número de elementos clasificados correctamente;
Xi+ = Total de elementos clasificados para una categoría i;
X+i = Total de elementos de referencia de la muestra para una categoría i;
N = Número total de muestra
Los datos después de tener un índice estadístico calculado se le puede asignar un
desempeño de acuerdo al cuadro 3
Cuadro 3. Coeficiente Kappa de desempeño de clasificación.
Coeficiente Kappa Desempeño
<0,00 Pésimo
0,00 < K< ,0,20 Malo
0,20 < K< ,0,40 Razonable
0,40 < K< ,0,60 Bueno
0,60 < K< ,0,80 Muy bueno
0,80 < K< ,1,00 Excelente
Fuente: Adaptada de Landis e Koch (1977).
2.10. Historia google earth
Como su nombre indica, fue desarrollado para explorar el planeta Tierra (Earth)
mediante un globo terráqueo virtual, creado en 2001 por la empresa Keyhole Inc.,
bajo el nombre de EarthViewer 3D, la cual fue adquirida por Google en 2004.
Reeditado como Google Earth en 2005. En la actualidad Google Earth nos permite
visualizar a cualquier lugar de la Tierra y ver imágenes de satélite, mapas, relieve

-41-
y edificios 3D, así como explorar un amplio contenido geográfico, guardar los
lugares visitados. 39
Google Earth incluye imágenes de satélite de todo el mundo (que abarcan a un
75% de la población mundial en alta resolución), cientos de ciudades en 3D y
archivos de imágenes históricas, todo ello a disposición de los usuarios.40
2.10.1. Función imágenes históricas
Google Earth ofrece imágenes de todo el mundo de los últimos años. En Estados
Unidos y en algunas otras ubicaciones específicas, hay imágenes muy antiguas,
algunas de las cuales datan incluso de la Segunda Guerra Mundial. Muchas de las
ciudades principales ofrecen alrededor de una docena de vistas a lo largo del
tiempo y en diferentes estaciones del año.41
2.11. Digital-Globe
DigitalGlobe es un proveedor de productos y servicios de Imágenes de la Tierra
comerciales de alta resolución. Las imágenes son tomadas de la constelación de
satélites y tienen una gran variedad de usos en defensa e inteligencia, agencias
civiles, cartografía y análisis, monitoreo ambiental, exploración de petróleo y gas,
administración de infraestructuras, portales de Internet y tecnología de
navegación. Parte de la historia del lanzamiento de sus satélites se encuentra en
el cuadro 4.
39 Eskola 2.0. (10 de 06 de 2010). p. 1 40 Earth, G. (s.f.). Google Earth -Funciones. p. 1 41 Earth, G. (s.f.). Google Earth -Funciones.

-42-
Cuadro 4 Puesta en órbita de los Satélites
QUICKBIRD WORLDVIEW-1 WORLDVIEW-2 WORLDVIEW-3
Fue el primer
satélite de la
constelación
submétrica en
ofrecer
imágenes de la
Tierra de alta
precisión y alta
resolución.
Lanzado en
septiembre del
2007, es el primero
de la nueva
generación de
satélites y el más
ágil satélite
comercial hasta el
momento.
Lanzado en
Octubre del 2009,
es el primer satélite
comercial de alta
resolución con 8
bandas.
Lanzado el 13 de
agosto de 2014 , de la
Base Aérea de
Vandenberg, capaces
de realizar imágenes
en 16 bandas
espectrales
Fuente. Google Earth –Funciones
El gran archivo de imágenes de DigitalGlobe (contiene más de 4 mil millones de
kilómetros cuadrados de Imágenes de la Tierra), ofrece una gama de productos y
servicios en línea diseñados para permitir un acceso fácil a las imágenes.
Cuadro 5 Especificaciones técnicas de los Satélites
Satélite QUICKBIRD WORDLVIEW-1 WORLDVIEW-2 WORLDVIEW-3
Resolución 60cm 50cm 50cm 31 cm
Swath Width 16.5 km 17.6 km 17.4 km 13,1 k
Revisita
Promedio
2.4 días 1.7 días 1.1 días
Tiempo de
Giro
62 seg. 9 seg. 9 seg. 4-5 seg
Bandas
Espectrales
PAN + 4 MS PAN PAN + 8 MS PAN + 16
Precisión 25 m CE90 5 m CE90 5 M CE90
Fuente. Google Earth -Funciones

-43-
Posee y opera la constelación de satélites de Alta-Resolución submétrica más ágil
y sofisticado. QuickBird de 60cm, WorldView-1, WorldView-2 de 50cm y
WorldView-3 de 31cm sus fechas de lanzamientos se encuentran detalladas en el
cuadro 1, son unos de los satélites comerciales más ágiles, permitiendo la revisita
diaria alrededor del mundo, teniendo una capacidad de captura de 700 millones de
km2 anuales de imágenes de alta calidad. 8
2.12. Matlab
MATLAB es un lenguaje de alto nivel y un entorno interactivo para el cálculo
numérico, visualización y programación. Sirve para analizar los datos, desarrollar
algoritmos y crear modelos y aplicaciones. El lenguaje, las herramientas y
funciones integradas de matemáticas le permiten explorar múltiples enfoques para
una variada gama de aplicaciones, incluyendo el procesamiento de señales y
comunicaciones, procesamiento de imágenes y de vídeo, sistemas de control,
prueba y medición, finanzas computacionales, y la biología computacional. 42
2.12.1. Características principales
Lenguaje de alto nivel para el cálculo numérico, visualización y desarrollo
de aplicaciones
Entorno interactivo para la exploración iterativa, el diseño y la resolución de
problemas
Funciones matemáticas para álgebra lineal, estadística, análisis de Fourier,
filtrado, optimización, integración numérica y resolución de ecuaciones
diferenciales ordinarias
42 MathWords. MATLAB el lenguaje de la informática técnica.

-44-
Construido en los gráficos para la visualización de datos y las herramientas
para la creación de parcelas personalizados
Herramientas de desarrollo para mejorar la calidad del código y facilidad de
mantenimiento y maximizar el rendimiento
Herramientas para la creación de aplicaciones con interfaces gráficas
personalizadas
Funciones para integrar los algoritmos basados en MATLAB con
aplicaciones externas y lenguajes como C, Java, NET, y Microsoft Excel.43
2.12.2. Programación y desarrollo de algoritmos.
Proporciona un lenguaje y herramientas de desarrollo que permiten desarrollar y
analizar algoritmos y aplicaciones.
Con el lenguaje MATLAB, puede escribir programas y desarrollar algoritmos más
rápido que con los lenguajes tradicionales, ya no es necesario para realizar tareas
administrativas de bajo nivel, tales como la declaración de variables, especificando
los tipos de datos, y la asignación de memoria. En muchos casos, el apoyo para
las operaciones vectoriales y matriciales elimina la necesidad de para-
bucles. Como resultado, una línea de código MATLAB puede sustituir a menudo
varias líneas de código C o C ++.
MATLAB proporciona características de los lenguajes de programación
tradicionales, incluyendo el control de flujo, control de errores, y la programación
orientada a objetos (POO). Puede utilizar los tipos de datos fundamentales o
estructuras de datos avanzadas, o puede definir tipos de datos personalizados.
Incluye una variedad de herramientas para el desarrollo de algoritmos eficientes,
como:
43 MathWorks. Matlab características claves

-45-
Command Window- permite introducir datos de forma interactiva, ejecutar
comandos y programas, y mostrar los resultados
MATLAB Editor - Proporciona edición y depuración características, tales
como la definición de los puntos de interrupción y paso a paso a través de
las líneas individuales de código
Code Analyzer- comprueba automáticamente el código de problemas y
recomienda modificaciones para maximizar el rendimiento y facilidad de
mantenimiento
MATLAB Profiler - Medidas de desempeño de los programas de MATLAB e
identifica áreas de código para modificar de mejora
Integración con otros lenguajes y aplicaciones
El usuario puede integrar aplicaciones de MATLAB con las escritas en otros
idiomas. Puede llamar directamente el código escrito en C, C ++, Java y NET. Uso
de la biblioteca del motor de MATLAB.44
44 MathWorks. Matlab el lenguaje de la informática técnica..

-46-
3. PROCEDIMIENTO
Para el desarrollo del algoritmo fue necesaria la utilización de una herramienta de
lenguaje de programación, para el desarrollo del mismo se utilizó MATLAB
R2013a (MATRIX LABORATORY, "laboratorio de matrices").
3.1. Funcionalidad del algoritmo
El algoritmo tiene la capacidad de recibir información externa, guardarla,
mostrarla, pos procesarlá y guardar los resultados obtenidos para su posterior
análisis.
3.2. Administración de proyecto
Para seguir una idea lineal del proyecto, inicialmente se plantea una metodología
de 4 fases las cuales se presentan en este orden:
Análisis
Diseño
Desarrollo
Implementación
Con ésto se busca que el producto se soporte por investigación del campo de
aplicación y el diseño sea más rápido al tiempo que el desarrollo se encuentre
diferentes líneas para su ejecución y los resultados obtenidos sean óptimos para
los objetivos propuestos. Y permitan una implementación exitosa en área de
Percepción Remota.

-47-
3.2.1. Fase de Análisis
Lo primero es el acercamiento al área de conocimiento para ésto se realizó una
investigación sobre el tema por medio de diferentes autores tanto en Percepción
Remota como en crecimiento urbano en la ciudad de Bogotá.
3.2.2. Fase de Diseño
A partir de los resultados de la fase inicial se define que se debe realizar un
algoritmo base para lectura de imágenes bajo el lenguaje de programación de
Matlab, por motivos de costos de las imágenes satelitales interactuara con el
software de Google Earth.
Teniendo presente el objetivo del proyecto y la consulta realizada se concluyó que
las imágenes son matrices de n columnas por n filas, se realizá el procedimiento
aritmético en las imágenes digitales de una forma simple, sumando las imágenes y
determinando si son similares o diferentes.
En el software Matlab por medio de la GUIDE (interfaz gráfica de usuario) se
diseña el seudocódigo base el cual se presenta a continuación.
3.2.2.1. Pseudocodigo
Inicio
nrows = 630;
ncols = 1115;
A = ceros(nrows,ncols);
Para c = 1: hasta ncols
Para r = 1: hasta nrows
Si ((o2(r,c))>130) && ((o2(r,c))<256) && ((o1(r,c)) ==
(o2(r,c))) Entonces
A(r,c) = o2(r,c);

-48-
Si no ((o2(r,c))>130) && ((o2(r,c))<256) && ((o1(r,c)) ~=
(o2(r,c))) Entonces
A(r,c) = 0;
Si no Entonces
A(r,c) = o2(r,c);
Fin Si
Fin Para
c=0;
r=0;
fin Para
imprima Grafica3
Fin
A continuación se presenta el diccionario de datos Cuadro 6 del pseudocódigo para una mejor comprensión de las variables expuestas. . Cuadro 6 Diccionario Pseudocodigo
Categoría Atributo Descripción Tipo de dato
numéricos
nrows Numero de filas Numérico
ncols Numero de columnas Numérico
A Matriz de ceros Numérico bidimensional
c Inicio de ciclo Numérico
r Inicio segundo ciclo Numérico
o2 Imagen numero 2 Numérico bidimensional
o1 Imagen numero 1 Numérico bidimensional
En cuanto Google Earth para el caso del proyecto no era necesario la versión
completa, con la versión básica es suficiente, ya que solo se necesita el contenido
geográfico y su función de imágenes históricas permite la comparación multi
temporal de la zona de trabajo.
3.2.3. Fase de Desarrollo
Ya identificado el ámbito en el que se pretende aplicar el algoritmo y los diferentes
estudios realizados anteriormente para Percepción Remota por diferentes autores,

-49-
se construye el algoritmo sobre el sistema operativo Windows 7 en el software
MATLAB R2013a por medio de la aplicación GUIDE, se realiza una base grafica
para el usuario, en un principio solo contiene tres ventanas de visualización de las
imágenes de prueba y en cada una, un botón, para realizar pruebas para obtener
resultados de lo que pretende realizar el algoritmo.
En el editor de la ventana GUIDE se comienza con el desarrollo del código, la
comparación de niveles digitales de los imágenes de prueba, se debe tener en
cuenta que para este procedimiento las imágenes deben contener la misma
cantidad de valores tanto en filas como en columnas, para este procedimiento se
toman vistas de pantalla del computador se guardan y se verifican su tamaño con
el aplicativo Paint del sistema operativo Windows 7. Como se muestra en la
ilustración 1
Ilustración 1. Imágenes de prueba en Paint.
En el código de lectura, pixel a pixel se utilizaron dos ciclos, uno contenido dentro
del otro y una condicional que permita establecer en qué nivel se desea trabajar.
Es necesario tener las imágenes en escala de grises para un proceso más rápido.

-50-
Se desarrolla código de programación que permita realizar el manejo del programa
Google Earth remotamente y cargue punto a punto una zona específica.
La zona de trabajo contiene una malla de 25 puntos de control en el programa
Google Earth, se definió así porque eran una malla que abarca una zona de gran
cambio de expansión urbana mostrando cambio de usos de suelo en un corto
tiempo, estos están marcados en columnas alfabéticamente y en filas
numéricamente, en la ilustración 2 se presenta esta red de puntos y el cuadro 7 se
presenta las coordenadas de la misma. Esta malla se debe configurar para tener
las mismas características.
Ilustración 2. Malla de puntos Google Earth}
Cuadro 7. Coordenadas longitud y latitud de la malla Google Earth
Longitud 74°
8'10.00"O
74°
7'59.30"O
74°
7'48.60"O
74°
7'37.90"O
74°
7'27.20"O Latitud

-51-
4°43'32.00"N A1 B1 C1 D1 E1
4°43'26.00"N A2 B2 C2 D2 E2
4°43'20.00"N A3 B3 C3 D3 E3
4°43'14.00"N A4 B4 C4 D4 E4
4°43'08.00"N A5 B5 C5 D5 E5
Se desarrolla un código para la toma automática de la imagen de la pantalla este
incluye un reloj para que tome la imagen de la pantalla después de un tiempo de
abierta la vista y guarde automáticamente con un nombre específico para su
posterior análisis.
Al momento de realizar ésto se observa que las imágenes que se toman contienen
mucha información que no es necesaria para el trabajo; por esta razón se realizar
un código que recorta las imágenes automáticamente antes de pos procesarlas;
en la ilustración 3 se ve la imagen antes del recorte y la ilustración 4 como queda
después del procedimiento.

-52-
Ilustración 3. Antes del corte de la imagen.
Ilustración 4. Después del corte de la imagen.

-53-
La imágenes pasan de un tamaño de 1366 X 768 pixeles a 1115 X 630 pixeles
esto ayuda a procedimiento de la maquina más ágil puesto que no tiene que
analizar zonas que no son del interés del usuario.
El proceso a seguir durante el desarrollo de algoritmo es recoger los anteriores
códigos y organizarlos para que procedimiento lo realice en los 25 puntos de la
malla automático los guarde y los compare, para su posterior revisión.
Se realizar una interfaz gráfica más amable para el usuario de fácil acceso, como
son barras de comandos o menú, botones y ventanas para realizar determinadas
observaciones de las imágenes cargadas en el algoritmo.
3.2.4. Fase de Implementación
En esta fase se efectúa análisis con los datos obtenidos del algoritmo y revisión
para determinar la efectividad del mismo.

-54-
3.3. Diagrama de flujo

-55-
4. ANÁLISIS Y RESULTADOS
Se verificó los tamaños de pixeles de las imágenes con las que se están
trabajando y se obtuvo que el tamaño del pixel de la imagen es de 0,320 m esto
indica que el tamaño total de las imágenes trabajadas son de 356,800 metros por
201,600 metros, por lo que el tamaño final de las imágenes son de 1115 pixeles
por 630 pixeles.
GRÁFICA 2. Media aritmética 2005 y Actual
4.1. Verificación niveles digitales
Se realiza verificación de cada imagen en total 50, entre las imágenes actuales y
las trabajadas en años anteriores, estos datos se encuentran consignados en el
cuadro 8 para las imágenes del año 2005 y cuadro 9 para las imágenes del año
2015; en donde se tomaron de a cinco pixeles por imagen donde se identificaron
que sea de construcción para estar seguros que los niveles que se están
A1 A2 A3 A4 A5 B1 B2 B3 B4 B5 C1 C2 C3 C4 C5 D1 D2 D3 D4 D5 E1 E2 E3 E4
MEDIA 2005 165 132164 133175157164 205177188166193160241166147154158166
MEDIA ACTUAL 191193190198210216216215203208130214201213228186192168203205193153188198149
100120140160180200220240260
NIV
EL D
IGIT
AL
IMAGEN
GRAFICA DE MEDIA
MEDIA 2005 MEDIA ACTUAL

-56-
utilizando para los ciclos del algoritmo están dentro de los parámetros de las
construcciones.
Cuadro 8. Verificación niveles digitales imágenes año 2005
a1
x 139 300 742 1101 477 ME 165 b1
x 23 108 1091 794 482 ME 164
y 285 347 373 359 387 PR 166
y 356 354 184 77 198 PR 164
N 168 162 174 181 144 MED 168
N 172 173 145 173 159 MED 172
a2 x no tiene
b2 x no tiene
a3 x no tiene
b3 x no tiene
a4 x no tiene b4
x 658 496 817 906 1047 ME 133
a5
x 496 420 191 26 167 ME 132
y 360 527 414 432 527 PR 150
y 382 401 463 536 607 PR 143
N 130 120 85 184 231 MED 130
N 105 93 154 157 205 MED 154 b5
x 763 795 1056 806 717 ME 175
y 86 245 300 234 87 PR 192
c1
x 16 40 70 229 338 ME 157
N 228 205 253 171 105 MED 205
y 158 205 297 515 619 PR 158 N 167 156 155 151 159 MED 156 d1
x 1094 957 1103 553 597 ME 188
c2
x 501 827 508 1019 607 ME 164
y 158 21 245 550 94 PR 196
y 162 309 177 307 214 PR 165
N 150 232 255 172 169 MED 172
N 150 145 169 172 191 MED 169 d2
x 460 141 524 364 482 ME 166
c3 x no tiene
y 91 347 21 193 68 PR 167
c4
x 479 626 600 458 111 ME 205
N 179 136 174 177 171 MED 174
y 359 420 538 567 389 PR 213 d3
x 527 586 635 477 713 ME 193
N 242 174 250 242 158 MED 242
y 474 517 600 198 588 PR 198
c5
x 765 470 366 163 522 ME 177
N 171 219 215 231 152 MED 215
y 356 139 158 54 23 PR 181 d4
x 588 787 907 1061 1044 ME 160
N 144 215 198 183 163 MED 183
y 80 219 432 245 616 PR 166
N 154 180 145 127 223 MED 154
d5
x 720 857 1009 1039 867 ME 241
e1
x 323 122 822 1039 106 ME 166
y 278 545 65 368 200 PR 242
y 479 172 139 453 122 PR 180
N 249 248 226 254 232 MED 248
N 107 254 179 182 176 MED 179
e2
x 683 508 364 976 777 ME 147 e4
x 49 510 501 307 508 ME 158
y 304 115 63 533 276 PR 180
y 136 299 604 420 262 PR 164
N 245 78 223 119 237 MED 223
r 114 162 168 178 198 MED 168
e3
x 869 387 286 472 978 ME 132 e5
x 924 359 21 106 37 ME 166
y 91 264 543 250 104 PR 143
y 217 526 106 309 389 PR 186
N 176 152 107 185 186 MED 154
r 118 116 232 217 247 MED 217

-57-
Se presenta la gráfica 2, de media aritmética donde se encontró valores de
niveles digitales entre 132 como valor mínimo y 240 como máximo en las
imágenes del año 2005 y 130 como valor mínimo y 230 como valor máximo para
las imágenes actuales. Se puede definir que los niveles digitales entre las
imágenes del año 2005 y 2015 son similares y se puede realizar el trabajo
manejando estos rangos.
GRÁFICA 3. Promedio aritmética 2005 y Actual
La gráfica 3 de Promedios se encontró valores de niveles digitales entre 140 como
valor mínimo y 242 como máximo en las imágenes del año 2005 y 133 como
valor mínimo y 234 como valor máximo para las imágenes actuales. Se puede
observar la variación entre las imagen actuales y las adquiridas del 2005, pero no
tienen cambios significativos entre sus niéveles digitales, esto corrobora el uso de
estos valores para la realización del algoritmo.
A1 A2 A3 A4 A5 B1 B2 B3 B4 B5 C1 C2 C3 C4 C5 D1 D2 D3 D4 D5 E1 E2 E3 E4
PROMEDIO 2005 166 143164 150192158165 213181196167198166242180180161164186
PROMEDIO ACTUAL 195201192202218220218217206211133217207216234196195184206218204161203212160
100120140160180200220240260
NIV
EL D
IGIT
AL
IMAGEN
GRAFICA DE PROMEDIOS
PROMEDIO 2005 PROMEDIO ACTUAL

-58-
La gráfica de Mediana (Grafica 4) se encontró valores de niveles digitales entre
130 como valor mínimo y 248 como máximo en las imágenes del año 2005 y 123
como valor mínimo y 254 como valor máximo para las imágenes actuales. Al igual
que las anteriores la media y el promedio, la gráfica presenta niveles entre 130 y
250 respectivamente.
GRÁFICA 4. Mediana aritmética 2005 y Actual
Por esta razón para el algoritmo se utiliza como valor mínimo de nivel digital de
130 y como valor máximo de 255.
A1 A2 A3 A4 A5 B1 B2 B3 B4 B5 C1 C2 C3 C4 C5 D1 D2 D3 D4 D5 E1 E2 E3 E4
PROMEDIO ACTUAL 178216201197230235221220207213123227218224252214199161207247218153238254146
PROMEDIO 2005 168 154172 130205156169 242183172174215154248179223176168217
100120140160180200220240260
NIV
EL D
IGIT
AL
IMAGEN
GRAFICA DE MEDIANA
PROMEDIO ACTUAL PROMEDIO 2005

-59-
Cuadro 9. Verificación niveles digitales imágenes año 2015
a1
x 406 567 907 744 397 ME 191
d1
x 999 555 1039 1081 967 ME 186
y 510 569 458 600 569 PR 195
y 531 564 56 214 28 PR 196
N 176 178 174 193 255 MED 178
N 135 163 251 214 216 MED 214
a2
x 701 817 787 475 340 ME 193
d2
x 768 496 99 56 751 ME 192
y 153 510 597 489 387 PR 201
y 536 388 503 576 493 PR 195
N 240 198 216 220 133 MED 216
N 161 184 210 220 199 MED 199
a3
x 838 945 739 621 1068 ME 190
d3
x 85 54 985 167 612 ME 168
y 44 437 543 23 458 PR 192
y 146 481 507 479 25 PR 184
N 205 198 201 154 202 MED 201
N 251 161 123 252 135 MED 161
a4
x 867 888 1002 905 1084 ME 198
d4
x 127 782 80 730 1058 ME 203
y 89 271 505 47 122 PR 202
y 188 309 177 214 569 PR 206
N 172 197 250 217 174 MED 197
N 214 247 207 182 181 MED 207
a5
x 59 78 408 323 286 ME 210
d5
x 855 690 787 1047 980 ME 205
y 484 529 479 614 503 PR 218
y 545 302 89 389 120 PR 218
N 230 216 255 243 146 MED 230
N 253 247 136 255 197 MED 247
b1
x 926 831 553 673 931 ME 216
e1
x 432 134 92 983 836 ME 193
y 455 541 392 505 288 PR 220
y 562 342 219 415 136 PR 204
N 176 193 242 255 235 MED 235
N 232 186 218 255 129 MED 218
b2
x 940 352 666 484 820 ME 216
e2
x 706 399 876 985 616 ME 153
y 498 238 70 65 21 PR 218
y 323 80 590 526 231 PR 161
N 195 221 255 221 198 MED 221
N 213 198 118 125 153 MED 153
b3
x 274 174 23 621 954 ME 215
e3
x 865 652 302 321 106 ME 188
y 387 526 139 224 94 PR 217
y 110 486 604 278 403 PR 203
N 182 220 202 255 228 MED 220
N 246 252 149 238 130 MED 238
b4
x 229 789 167 89 390 ME 203
e4
x 905 605 160 106 278 ME 198
y 103 413 524 292 394 PR 206
y 340 529 562 311 434 PR 212
N 208 207 169 205 241 MED 207
N 254 254 255 138 160 MED 254
b5
x 742 342 938 943 1028 ME 208
e5
x 179 111 505 354 905 ME 149
y 108 200 205 496 444 PR 211
y 70 311 49 505 247 PR 160
N 248 207 222 213 166 MED 213
N 146 249 150 110 143 MED 146
c1
x 163 82 35 59 248 ME 130
c4
x 477 108 208 829 489 ME 213
y 614 578 420 266 562 PR 133
y 37 115 448 604 340 PR 216
N 130 117 118 177 123 MED 123
N 168 224 233 221 236 MED 224
c2
x 486 716 1039 475 28 ME 214
c5
x 980 387 947 1099 510 ME 228
y 444 529 559 337 91 PR 217
y 418 198 243 37 510 PR 234
N 240 231 211 176 227 MED 227
N 252 255 165 252 248 MED 252
c3
x 234 205 425 1004 1065 ME 201
y 58 304 519 460 162 PR 207
N 226 218 187 156 247 MED 218

-60-
4.2. Índice estadística kappa
Se realizó el análisis categórico multivariante a las imágenes resultantes del
algoritmo, con relaciones múltiples entre las categorías, usando el Índice
estadístico Kappa.
Para este caso se tomaron las 25 imágenes de salida y se eligió una proporción
esperada el 5 %, con una seguridad de 95 % y una precisión del 90%. Como se
muestra en la Cuadro 10, y arrojó que se tienen que verificar 11 imágenes de
salida.
Cuadro 10. Porcentaje de verificación de las imágenes
Al realizar una selección aleatoria de las imágenes, los resultados se encuentran
en la cuadro 11.
PROPORCION ESPERADA 5%
SEGURIDAD 95%
PRECISION 10%
COBERTURA IMÁGENES n
n = REGLA DE TRES SIMPLE
RED DE
PUNTOS 25 10.80
TOTAL 25 10.80 10.80

-61-
Cuadro 11. Imágenes seleccionadas para verificación por índice Kappa
No. Imagen P. COSNT P. OTROS Total puntos en la Imagen
1 A2 255852 446598 702450
2 A3 124745 577705 702450
3 B2 358781 343669 702450
4 B3 253758 448692 702450
5 B4 184993 517457 702450
6 C1 450776 251674 702450
7 C3 217471 484979 702450
8 C4 269409 433041 702450
9 E1 301738 400712 702450
10 E2 230524 471926 702450
11 E3 236356 466094 702450
Para analizar los resultados obtenidos se los errores de omisión y comisión,
mediante el análisis de cada imagen de salida del algoritmo y por medio de toma
de puntos aleatorios se realiza verificar si es cierto o no el resultado obtenido por
el algoritmo.

-62-
AÑO IMAGEN A1 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona verde
con especies
arbóreas y cero de
edificación
2
0
1
5
En esta imagen se
observa que al
trascurrir los años se
empiezan la
deforestación y el
crecimiento urbano.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015
mostrando las zonas
de construcción en
negro

-63-
AÑO IMAGEN A2 OBSERVACIÓN
2
0
0
5
En la imagen se observa
la zona verde con
especies arbóreas y cero
de edificación
2
0
1
5
En esta imagen se
observa que al trascurrir
los años el crecimiento
urbano fue bastante
notorio acabando con la
zona verde.
R
E
S
U
L
T
A
D
O
Es el resultado del post-
proceso de las dos
imágenes del año 2005 y
2015 mostrando las zonas
de construcción en negro.

-64-
Cálculo realizado a la imagen A2 por medo de la matriz confusión
MATRIZ CONFUSIÓN Imagen A2
COBERTURAS Ex.
Prod Err.
Omisión
const otro TOTAL
CO
BER
TUR
AS
const 21 2.00 23 91.3% 8.7%
otro 14.00 36 50 72.0% 28.0%
TOTAL 35 38
73
73
Err. Usu. 60.0% 94.7%
Err.
Comisión 40.0% 5.3%
805 1900
Exactitud= 78.08%
0.141
Error de muestreo= 5.44%
Intervalo de Confianza = 78.08% ± 5.44%
Fiabilidad Real Promedio 72.65% y 83.52%
N= 73
xii 57
xi 2705
K 0.5549
K = ( 73 * 57 )- 2705
= 0.55
K 55.49% 73 ² - 2705
En la imagen A2 se presentó la fiabilidad real promedio fue 72.65% y arrojo un
índice kappa 0.55% esto significa según el cuadro de coeficiente de desempeño
de clasificación es bueno.

-65-
AÑO IMAGEN A3 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona verde
con especies arbóreas
y cero de edificación
2
0
1
5
En esta imagen se
observa que al
trascurrir los años el
crecimiento urbano fue
bastante notorio
acabando con parte de
la zona verde.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015 mostrando
las zonas de
construcción en negro.

-66-
Cálculo realizado a la imagen A3 por medo de la matriz confusión
MATRIZ CONFUSIÓN Imagen A3
COBERTURAS Ex.
Prod Err.
Omisión
const otro TOTAL
CO
BER
TUR
AS
const 12 1.00 13 92.3% 7.7%
otro 8.00 52 60 86.7% 13.3%
TOTAL 20 53 73
73
Err. Usu. 60.0% 98.1%
Err. Comisión 40.0% 1.9%
260 3180
Exactitud= 87.67%
0.141
Error de muestreo= 5.76%
Intervalo de Confianza = 87.67% ± 5.76%
Fiabilidad Real Promedio 81.91% y 93.43%
N= 73
xii 64
xi 3440
K 0.6522 K =
( 73 * 64 )- 3440 =
0.65
K 65.22% 73 ² - 3440
En la imagen A3 se presentó la fiabilidad real promedio fue 72.65% y arrojo un
índice kappa 0.65% esto significa según el cuadro de coeficiente de desempeño
de clasificación es muy bueno.

-67-
AÑO IMAGEN A4 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona verde
con especies arbóreas
y cero de edificación
2
0
1
5
En esta imagen se
observa que al
trascurrir los años el
crecimiento urbano fue
bastante notorio
acabando con parte de
la zona verde.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015 mostrando
las zonas de
construcción en negro.

-68-
AÑO IMAGEN A5 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona verde
con especies arbóreas
y con un leve
crecimiento urbanístico
2
0
1
5
En esta imagen se
observa un crecimiento
urbanístico.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015 mostrando
las zonas de
construcción en negro.

-69-
AÑO IMAGEN B1 OBSERVACIÓN
2
0
0
5
En la imagen se observa
la zona verde con
especies arbóreas y la
vía.
2
0
1
5
En esta imagen se
observa que al trascurrir
los años el crecimiento
urbano fue bastante
notorio acabando con
parte de la zona verde.
R
E
S
U
L
T
A
D
O
Es el resultado del post-
proceso de las dos
imágenes del año 2005 y
2015 mostrando las
zonas de construcción
en negro.

-70-
AÑO IMAGEN B2 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona verde
con especies arbóreas.
2
0
1
5
En esta imagen se
observa que al
trascurrir los años la
desforestación y la
zona en construcción,
acabando con la zona
verde.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015 mostrando
las zonas de
construcción en negro.

-71-
Cálculo realizado a la imagen B2 por medo de la matriz confusión.
MATRIZ CONFUSIÓN Imagen B2
COBERTURAS
Ex. Prod
Err. Omisión
const otro TOTAL
CO
BER
TUR
AS
const 23 3.00 26 88.5% 11.5%
otro 11.00 36 47 76.6% 23.4%
TOTAL 34 39
73
73
Err. Usu. 67.6% 92.3%
Err.
Comisión 32.4% 7.7%
884 1833
Exactitud= 80.82%
0.141
Error de muestreo= 5.53%
Intervalo de Confianza = 80.82% ± 5.53%
Fiabilidad Real Promedio 75.29% y 86.35%
N= 73
xii 59
xi 2717
K 0.6087
K = ( 73 * 59 )- 2717
= 0.61
K 60.87% 73 ² - 2717
En la imagen B2 se presentó la fiabilidad real promedio fue 72.29% y arrojo un
índice kappa 0.61% esto significa según el cuadro de coeficiente de desempeño
de clasificación es muy bueno

-72-
AÑO IMAGEN B3 OBSERVACIÓN
2
0
0
5
En la imagen se
observa desforestación
de la zona verde.
2
0
1
5
En esta imagen se
observa que al
trascurrir los años el
crecimiento urbano fue
bastante notorio
acabando con parte de
la zona verde.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las dos
imágenes del año 2005
y 2015 mostrando las
zonas de construcción
en negro.

-73-
Cálculo realizado a la imagen B3 por medo de la matriz confusión
MATRIZ CONFUSIÓN Imagen B3
COBERTURAS Ex.
Prod Err.
Omisión
const otro TOTAL
CO
BER
TUR
AS
const 23 9.00 32 71.9% 28.1%
otro 23.00 18 41 43.9% 56.1%
TOTAL 46 27
73
73
Err. Usu. 50.0% 66.7%
Err.
Comisión 50.0% 33.3%
1472 1107
Exactitud= 56.16%
0.141
Error de muestreo= 4.61%
Intervalo de Confianza = 56.16% ± 4.61%
Fiabilidad Real Promedio 51.55% y 60.78%
N= 73
xii 41
xi 2579
K 0.1505
K = ( 73 * 41 )- 2579
= 0.15
K 15.05% 73 ² - 2579
En la imagen B3 se presentó la fiabilidad real promedio fue 51,55% y arrojo un
índice kappa 0,15 % esto significa según el cuadro de coeficiente de desempeño
de clasificación es malo.

-74-
AÑO IMAGEN B4 OBSERVACIÓN
2
0
0
5
En la imagen se observa
desforestación de la
zona verde.
2
0
1
5
En esta imagen se
observa que al trascurrir
los años el crecimiento
urbano fue bastante
notorio acabando con la
zona verde.
R
E
S
U
L
T
A
D
O
Es el resultado del post-
proceso de las dos
imágenes del año 2005 y
2015 mostrando las
zonas de construcción
en color negro.

-75-
AÑO IMAGEN B5 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona verde
con especies arbóreas.
2
0
1
5
En esta imagen se
observa que al
trascurrir de los años el
crecimiento urbano fue
bastante notorio
acabando con la zona
verde.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015 mostrando
las zonas de
construcción en color
negro.

-76-
AÑO IMAGEN C1 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona verde
y vía de tercer orden.
2
0
1
5
En esta imagen se
observa la zona verde
y vía tercer orden.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015 donde
arroja construcción
cero.

-77-
Cálculo realizado a la imagen C1 por medo de la matriz confusión
MATRIZ Confusión Imagen C1
COBERTURAS Ex.
Prod Err.
Omisión
const otro TOTAL
CO
BER
TUR
AS
const 3 0.00 3 100.0% 0.0%
otro 2.00 68 70 97.1% 2.9%
TOTAL 5 68
73
73
Err. Usu. 60.0% 100%
Err.
Comisión 40.0% 0.0%
15 4760
Exactitud= 97.26%
0.141
Error de muestreo= 6.07%
Intervalo de Confianza = 97.26% ± 6.07%
Fiabilidad Real
Promedio 91.19% y 103.33%
N= 73
xii 71
xi 4775
K 0.7365 K =
( 73 * 71 )- 4775 =
0.74
K 73.65% 73 ² - 4775
En la imagen C1 se presentó la fiabilidad real promedio fue 91,19% y arrojo un
índice kappa 0.74% esto significa según el cuadro de coeficiente de desempeño
de clasificación es muy bueno.

-78-
AÑO IMAGEN C2 OBSERVACIÓN
2
0
0
5
En la imagen se observa
la zona verde y carretera
de primer y tercer orden.
2
0
1
5
En esta imagen se
observa la
desforestación de la
zona verde y al
trascurrir de los años el
crecimiento urbano fue
bastante notorio.
R
E
S
U
L
T
A
D
O
Es el resultado del post-
proceso de las dos
imágenes del año 2005 y
2015 mostrando las
zonas de construcción
en color negro.

-79-
AÑO IMAGEN C3 OBSERVACIÓN
2
0
0
5
En la imagen se observa
la zona verde y carretera
de tercer orden.
2
0
1
5
En esta imagen se
observa la desforestación
de la zona verde y al
trascurrir de los años el
crecimiento urbano fue
bastante notorio.
R
E
S
U
L
T
A
D
O
Es el resultado del post-
proceso de las dos
imágenes del año 2005 y
2015 mostrando las zonas
de construcción en color
negro.

-80-
Cálculo realizado a la imagen C3 por medo de la matriz confusión.
MATRIZ CONFUSIÓN Imagen C3
COBERTURAS
Ex. Prod
Err. Omisión
const otro TOTAL
CO
BER
TUR
AS
const 31 3.00 34 91.2% 8.8%
otro 29.00 10 39 25.6% 74.4%
TOTAL 60 13
73
73
Err. Usu. 51.7% 76.9%
Err.
Comisión 48.3% 23.1%
2040 507
Exactitud= 56.16%
0.141
Error de muestreo= 4.61%
Intervalo de Confianza = 56.16% ± 4.61%
Fiabilidad Real Promedio 51.55% y 60.78%
N= 73
xii 41
xi 2547
K 0.1603
K = ( 73 * 41 )- 2547
= 0.16
K 16.03% 73 ² - 2547
En la imagen C3 se presentó la fiabilidad real promedio fue 51,55% y arrojo un
índice kappa 0.16% esto significa según el cuadro de coeficiente de desempeño
de clasificación es malo.

-81-
AÑO IMAGEN C4 OBSERVACIÓN
2
0
0
5
En la imagen se observa
la zona verde, zona de
cultivos y zona urbana.
2
0
1
5
En esta imagen se
observa la
desforestación de la
zona verde y al
trascurrir de los años el
crecimiento urbano fue
bastante notorio.
R
E
S
U
L
T
A
D
O
Es el resultado del post-
proceso de las dos
imágenes del año 2005 y
2015 mostrando las
zonas de construcción
en color negro.

-82-
Cálculo realizado a la imagen C4 por medo de la matriz confusión
MATRIZ CONFUSIÓN Imagen C4
COBERTURAS Ex.
Prod Err.
Omisión
const otro TOTAL
CO
BER
TUR
AS
const 23 2.00 25 92.0% 8.0%
otro 18.00 30 48 62.5% 37.5%
TOTAL 41 32 73
73
Err. Usu. 56.1% 93.8%
Err. Comisión 43.9% 6.3%
1025 1536
Exactitud= 72.60%
0.141
Error de muestreo= 5.24%
Intervalo de Confianza = 72.60% ± 5.24%
Fiabilidad Real Promedio 67.36% y 77.85%
N= 73
xii 53
xi 2561
K 0.4725 K =
( 73 * 53 )- 2561 =
0.47
K 47.25% 73 ² - 2561
En la imagen C4 se presentó la fiabilidad real promedio fue 67,36% y arrojo un
índice kappa 0.47% esto significa según el cuadro de coeficiente de desempeño
de clasificación es bueno.
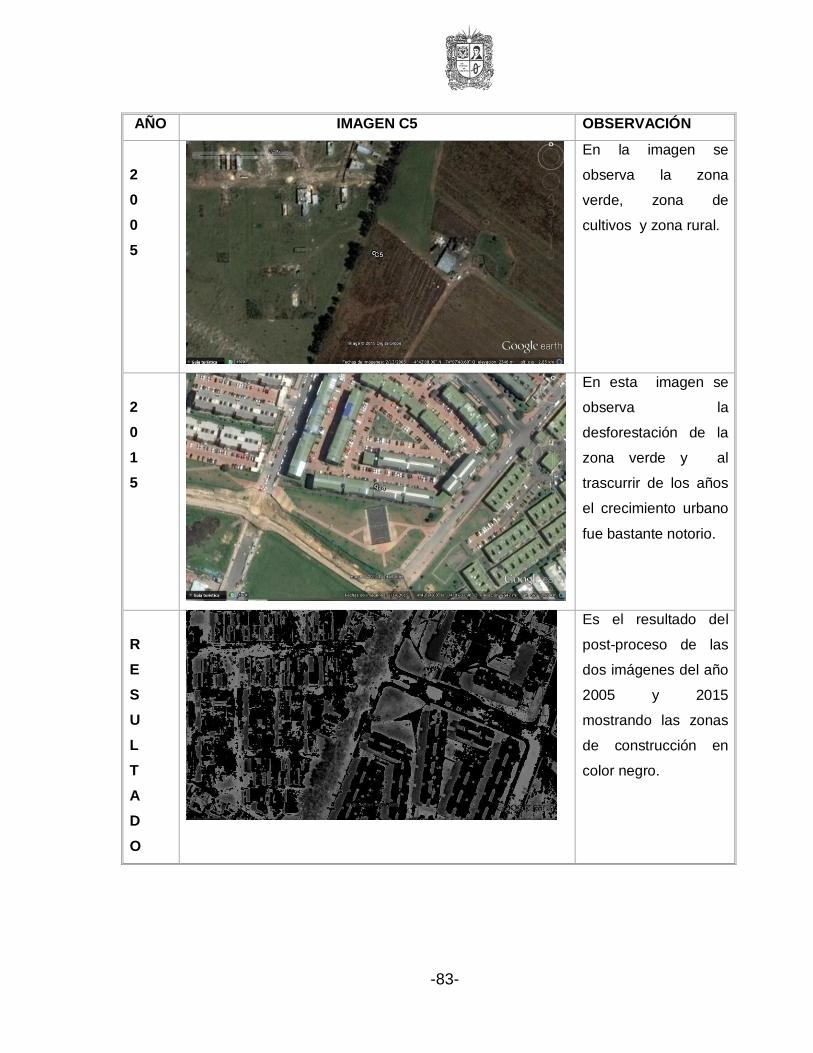
-83-
AÑO IMAGEN C5 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona
verde, zona de
cultivos y zona rural.
2
0
1
5
En esta imagen se
observa la
desforestación de la
zona verde y al
trascurrir de los años
el crecimiento urbano
fue bastante notorio.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015
mostrando las zonas
de construcción en
color negro.

-84-
AÑO IMAGEN D1 OBSERVACIÓN
2
0
0
5
En la imagen se observa
la zona verde y carrera
de primer.
2
0
1
5
En esta imagen se
observa la
desforestación de la
zona verde, vías y
construcción cero.
R
E
S
U
L
T
A
D
O
Es el resultado del post-
proceso de las dos
imágenes del año 2005 y
2015 mostrando las
zonas de construcción
en color negro.

-85-
AÑO IMAGEN D2 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona verde y
carrera de primer.
2
0
1
5
En esta imagen se
observa que al
trascurrir los años el
crecimiento urbano fue
bastante notorio
acabando con la zona
verde.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las dos
imágenes del año 2005
y 2015 mostrando las
zonas de construcción
en color negro.

-86-
AÑO IMAGEN D3 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona verde,
zona de construcción y
carrera de tercer.
2
0
1
5
En esta imagen se
observa que al
trascurrir los años el
crecimiento urbano fue
del 100% en la zona.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las dos
imágenes del año 2005
y 2015 mostrando las
zonas de construcción
en color negro.

-87-
AÑO IMAGEN D4 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona
desforestada, zona en
construcción y carrera
de tercer.
2
0
1
5
En esta imagen se
observa que al
trascurrir los años el
crecimiento urbano fue
del 100% en la zona.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015 mostrando
las zonas de
construcción en color
negro.

-88-
AÑO IMAGEN D5 OBSERVACIÓN
2
0
0
5
En la imagen se
observa la zona
desforestada y zona en
construcción.
2
0
1
5
En esta imagen se
observa reforestación y
construcción de vía
primeria.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las dos
imágenes del año 2005
y 2015 mostrando las
zonas de construcción
en color negro.
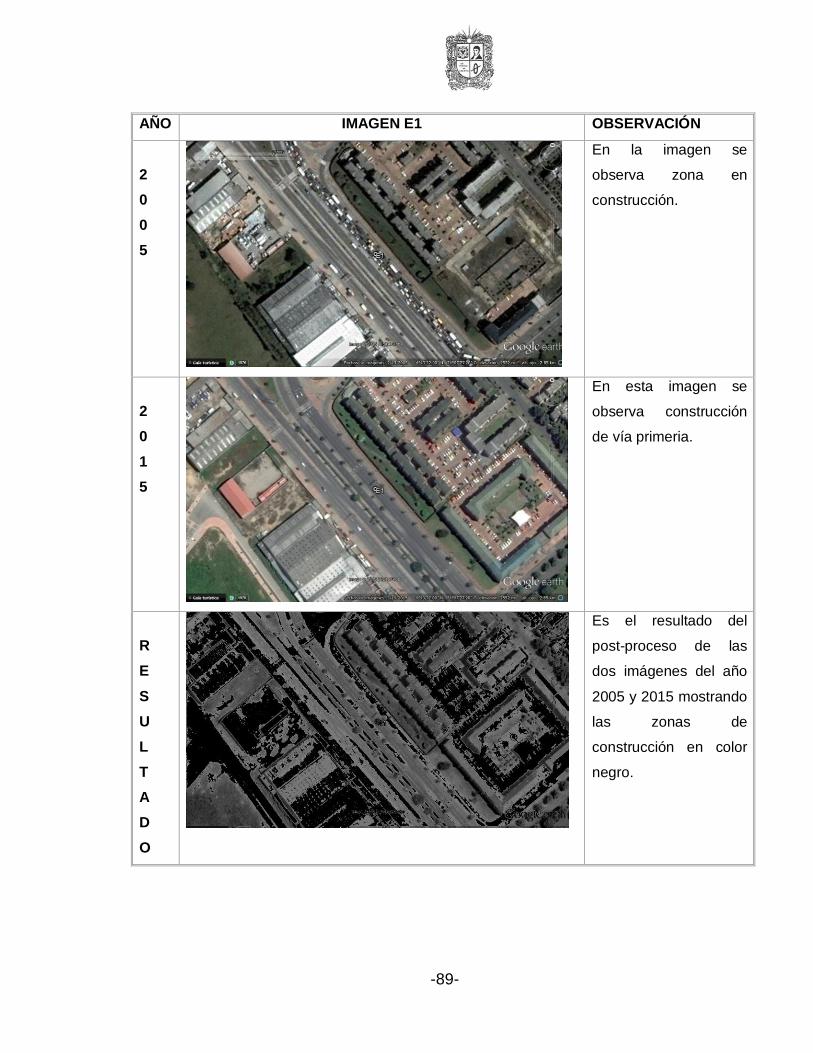
-89-
AÑO IMAGEN E1 OBSERVACIÓN
2
0
0
5
En la imagen se
observa zona en
construcción.
2
0
1
5
En esta imagen se
observa construcción
de vía primeria.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015 mostrando
las zonas de
construcción en color
negro.

-90-
Cálculo realizado a la imagen E1 por medo de la matriz confusión
MATRIZ CONFUSIÓN Imagen E1
COBERTURAS Ex. Prod
Err. Omisión
const otro TOTAL
CO
BER
TUR
AS
const 7 10.00 17 41.2% 58.8%
otro 12.00 44 56 78.6% 21.4%
TOTAL 19 54
73
73
Err. Usu. 36.8% 81.5%
Err.
comisión 63.2% 18.5%
323 3024
Exactitud= 69.86%
0.141
Error de muestreo= 5.14%
Intervalo de Confianza = 69.86% ± 5.14%
Fiabilidad Real Promedio 64.72% y 75.01%
N= 73
xii 51
xi 3347
K 0.1897 K =
( 73 * 51 )- 3347 =
0.19
K 18.97% 73 ² - 3347
En la imagen E1 se presentó la fiabilidad real promedio fue 64,72% y arrojo un
índice kappa 0.19% esto significa según el cuadro de coeficiente de desempeño
de clasificación es malo.

-91-
AÑO IMAGEN E2 OBSERVACIÓN
2
0
0
5
En la imagen se
observa zona en
urbana.
2
0
1
5
En esta imagen se
observa urbana y
vía primeria.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de
las dos imágenes
del año 2005 y
2015 mostrando
las zonas de
construcción en
color negro.

-92-
Cálculo realizado a la imagen E2 por medo de la matriz confusión
MATRIZ CONFUSIÓN Imagen E2
COBERTURAS Ex.
Prod Err.
Omisión
const otro TOTAL
CO
BER
TUR
AS
const 2 17.00 19 10.5% 89.5%
otro 13.00 41 54 75.9% 24.1%
TOTAL 15 58
73
73
Err. Usu. 13.3% 70.7%
Err.
comisión 86.7% 29.3%
285 3132
Exactitud= 58.90%
0.141
Error de muestreo= 4.72%
Intervalo de Confianza = 58.90% ± 4.72%
Fiabilidad Real Promedio 54.18% y 63.63%
N= 73
xii 43
xi 3417
K 0.1454 K =
( 73 * 43 )- 3417 =
0.15
K 14.54% 73 ² - 3417
En la imagen E2 se presentó la fiabilidad real promedio fue 54,18% y arrojo un
índice kappa 0.15% esto significa según el cuadro de coeficiente de desempeño
de clasificación es malo.

-93-
AÑO IMAGEN E3 OBSERVACIÓN
2
0
0
5
En la imagen se
observa zona en
urbana.
2
0
1
5
En esta imagen se
observa zonas nuevas
de construcción y vías
de primer orden.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las dos
imágenes del año 2005
y 2015 mostrando las
zonas de construcción
en color negro.

-94-
AÑO IMAGEN E4 OBSERVACIÓN
2
0
0
5
En la imagen se
observa zona en
urbana y vías de
segundo orden.
2
0
1
5
En esta imagen se
observa zonas
nuevas de
construcción y vías
de segundo orden.
R
E
S
U
L
T
A
D
O
Es el resultado del
post-proceso de las
dos imágenes del año
2005 y 2015
mostrando las zonas
de construcción en
color negro.

-95-
AÑO IMAGEN E5 OBSERVACIÓN
2
0
0
5
En la imagen se observa
zona en urbana y vías de
tercer orden.
2
0
1
5
En esta imagen se
observa zonas nuevas de
construcción y vías de
tercer orden.
R
E
S
U
L
T
A
D
O
Es el resultado del post-
proceso de las dos
imágenes del año 2005 y
2015 mostrando las zonas
de construcción en color
negro.

-96-
Cuadro 1. Resultados de las imágenes Índice Kappa.
Imagen Kappa
A2 0.55%
A3 0.65%
B2 0.61%
B3 0.15%
B4 0.29%
C1 0.74%
C3 0.16%
C4 0.47%
E1 0.19%
E2 0.15%
E3 0.47%
Promedio 0.40%
Los resultados del coeficiente Kappa se encuentran en la Cuadro 8, estos
resultados después de un análisis fueron muy diferentes, ya que por medio del
algoritmo no se puede separar los datos, para tener un mejor acercamiento a lo
que se esperaba. Pero se puede decir que por medio de este análisis tenemos
según la cuadro 10. Coeficiente Kappa de desempeño de clasificación Adaptada
de Landis e Koch. Un promedio de la muestra un desempeño entre razonable y
bueno.

-97-
CONCLUSIONES.
La ciudad de Bogotá ha tenido un importante crecimiento urbanístico
afectando a la movilidad, espacios públicos y zonas verdes de la ciudad, el
algoritmo reconoce zonas en construcción señalándolas y especificando los
cambios de las zonas en diferentes imágenes.
Las imágenes son obtenidas de aplicativo Google Earth a través de la
captura de pantallazo, al tomar las imágenes de esta manera no cuentan
con la verticalidad adecuada para poder realizar rectificaciones generando
así errores de comparación de pixel a pixel.
En el proceso de programación y comparación de imágenes se observó
que el programa reconoce zonas de deforestación, dejando así abierta la
posibilidad más delante de mejorar el algoritmo para realizar
comparaciones de imágenes satelitales de parques naturales o zonas de
protección ambiental del país.
Por medio del algoritmo se verifico los niveles digitales de los pixeles que
son construcciones, arrojando una media aritmética donde se encontró
valores de niveles digitales entre 132 como valor mínimo y 240 como
máximo en las imágenes del año 2005 y 130 como valor mínimo y 230
como valor máximo para las imágenes actuales, identificando los rangos de
cobertura de construcción para ajustar el algoritmo.
El Promedio se encontró valores de niveles digitales entre 140 como valor
mínimo y 242 como máximo en las imágenes del año 2005 y 133 como
valor mínimo y 234 como valor máximo para las imágenes actuales, se

-98-
identificó estos los rangos de cobertura de construcción para ajustar mejor
el algoritmo
La Mediana se encontró valores de niveles digitales entre 130 como valor
mínimo y 248 como máximo en las imágenes del año 2005 y 123 como
valor mínimo y 254 como valor máximo para las imágenes actuales,
concluyendo que los datos arrojados de la mediana son los valores de los
pixeles en las imágenes al momento del post proceso en las zonas de
construcción.
Se calculó el índice kappa donde arrojo un 40% de desempeño que a su
vez es razonable respecto al coeficiente de desempeño de clasificación,
donde este no arrojó un porcentaje más alto debido que el algoritmo no fue
posible separar los tipos de coberturas y la toma pixeles aleatoriamente es
difícil que escoja específicamente las zonas de construcción, por lo tanto no
es 100% confiable la comprobación del algoritmo por medio del cálculo del
índice kappa.
No fue posible que el algoritmo reconociera zonas sin licencia de
construcción ya que la resolución espacial de las imágenes es muy baja, y
dificulta separar las diferentes coberturas.
Se diseñó el algoritmo arrojando comparaciones en las imágenes
multitemporal donde se observó los cambios entre las dos imágenes.

-99-
BIBLIOGRAFÍA
ALCALDIA MAYOR DE BOGOTÁ, D.C. Secretaria de Hacienda. «RECORRIDO
ENGATIVA, Diagnostico fisico y socioeconomico de las localidades de Bogotá,
D.C.» 2004.
http://www.shd.gov.co/shd/sites/default/files/documentos/Recorriendo%20ENGATI
VA.pdf (último acceso: 9 de abril de 2015).
Aronoff, S. Classification accuracy;a user approach. 48 vols. photogrametric
engineering and remote sensing , 1982.
Barret, E.C. Climatology from satellites. london: Methuen , 1974.
Cambell, J.B. Introduction to Remote Sensing . New York, 1987.
Chuvieco, Emilio. fundamentos de teledeteccion espacial. España: RIALP S.A.,
1996.
DANE. «Estadisticas de edificacion licencias de construccion.» s.f.
http://www.dane.gov.co/ (último acceso: 3 de MAYO de 2015).
DIMPE, direccion de metodologia y produccion estadistica-.
«http://192.168.1.200/Anda_4_1/index.php.»
http://192.168.1.200/Anda_4_1/index.php. 13 de febrero de 2014. (último acceso:
02 de junio de 2015).
Hyatt, E. Keyguide to information sources in Remote Sensing. London: Marsell,
1988.
IMGSAT, 2005. s.f. http://www.com.uvigo.es/asignaturas/scvs/curso00-01.htm.
(último acceso: 7 de JULIO de 2015).
M, GOMEZ. «Análisis de crecimiento urbano en Bogotá con imágenes satelitales.»
s.f.
http://dspace.uniandes.edu.co/xmlui/bitstream/handle/1992/735/MI_ICYA_2005_02
5.pdf?sequence=1 (último acceso: 15 de ABRIL de 2015).
-100-
Ower, M y J. Ormsby. Improved classification of smail scale urban watershed using
thematic mapper simulator data. international journal of remote sensing, 1984.
Prosis, 2005. comercializadora de imágenes de satélite para Colombia. s.f.
http://www.prosis.com (último acceso: 6 de JULIO de 2015).
rosenfeld, G.H. Sample desing for estimating change in land use and land cover.
48 vols. photogrammetric engineering and remote sensing, 1982.
Toll, D.L. An Evaluation of simulated thematic mapper data and landsat MSS data
for discriminating suburban and regional land use and land cover, .
photogrammetric engineering and remote sensing , 1984.
Varela, Álvaro García. s.f. http://www.com.uvigo.es/asignaturas/scvs/curso00-
01.htm. (último acceso: 5 de JULIO de 2015).