Diseño de un banco - Red de Revistas Científicas … de calor, termocupla, bomba, válvula de...
17
El Hombre y la Máquina ISSN: 0121-0777 [email protected] Universidad Autónoma de Occidente Colombia Chamorro R., Cristian David; Meneses G., Luis Daladier Diseño de un banco de pruebas para el control de temperatura y flujo El Hombre y la Máquina, núm. 31, julio-diciembre, 2008, pp. 130-145 Universidad Autónoma de Occidente Cali, Colombia Disponible en: http://www.redalyc.org/articulo.oa?id=47803111 Cómo citar el artículo Número completo Más información del artículo Página de la revista en redalyc.org Sistema de Información Científica Red de Revistas Científicas de América Latina, el Caribe, España y Portugal Proyecto académico sin fines de lucro, desarrollado bajo la iniciativa de acceso abierto
Transcript of Diseño de un banco - Red de Revistas Científicas … de calor, termocupla, bomba, válvula de...

El Hombre y la Máquina
ISSN: 0121-0777
Universidad Autónoma de Occidente
Colombia
Chamorro R., Cristian David; Meneses G., Luis Daladier
Diseño de un banco de pruebas para el control de temperatura y flujo
El Hombre y la Máquina, núm. 31, julio-diciembre, 2008, pp. 130-145
Universidad Autónoma de Occidente
Cali, Colombia
Disponible en: http://www.redalyc.org/articulo.oa?id=47803111
Cómo citar el artículo
Número completo
Más información del artículo
Página de la revista en redalyc.org
Sistema de Información Científica
Red de Revistas Científicas de América Latina, el Caribe, España y Portugal
Proyecto académico sin fines de lucro, desarrollado bajo la iniciativa de acceso abierto
130 El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
Resumen
El enfoque de este artículo está en el desarrollo de una herra-mienta para la educación. En el presente trabajo, el diseño de una planta de procesos está presenta-do para el control de temperatura en un intercambiador de calor, usando el proceso de flujo como variable manipulada. El fluido de trabajo es agua común, esta con el propósito de simplificar el diseño y reducir los costos de operación y mantenimiento.
Palabras clave: Intercambia-dor de calor, termocupla, bomba, válvula de control, punto de refe-rencia, cambio en la transferencia de calor, número de Reynolds.
Abstract
The focus of this paper is on the development of an educatio-nal tool. In the present work, the design of a plant of processes is
Diseño de un banco de pruebas para el control de temperatura y flujo
CriStian DaviD ChamOrrO r.*
luiS DalaDier meneSeS G.**
* Grupo de investigación NOBUS, Departamento de Diseño, Universidad del Valle, [email protected]. Profesor Hora.cátedra del Departamento de Energetico Universidad Autónoma de Occidente.
** Especialista, Ingeniero Mecánico, Popayán, Cauca.Fecha de recepción: septiembre 5 de 2007 Fecha de aceptación: agosto 28 de 2008
Válvula de control tipo bola
131El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
presented for the control of temperature in an heat exchanger, using the process fl ow like the manipula-ted variable. The work fl uid is ordinary water, it with the purpose of to simplify the design and to reduce the operation costs and maintenance.
Key words: Heat exchanger, thermocouple, pump, control valve, set point, pressure drop, heat transfer rate, Reynolds number.
1. Introducción
Ante la necesidad que se presenta hoy en día en las instituciones de educación superior y en la industria de tener a la mano dispositivos de simulación de los dife-rentes procesos industriales para capacitar el personal e implementar nuevas estrategias de control, se presenta el diseño de un banco de pruebas para el control de temperatura en un intercambiador de calor.
Para poder desarrollar el sistema de diseño de con-trol de esta planta se debió obtener diferentes modelos matemáticos de los elementos que en ella intervienen; de esta misma forma se emplearon métodos numéricos para la aproximación de comportamientos físicos a modelos matemáticos.
El diseño del banco de pruebas consta de los cálcu-los, planos hidráulicos, planos eléctricos y diagramas de control.
La operación de la planta consiste en mantener la temperatura del fl uido de proceso en un valor cercano a la temperatura deseada. La variable que se ajusta para controlar la temperatura del agua de proceso a la salida del intercambiador de calor es el fl ujo proveniente del proceso ya que éste determina la cantidad de energía que se suministra al fl uido de enfriamiento. El funcionamiento de control por retroalimentación es como sigue: La tem-peratura del agua a la salida del intercambiador de calor es medida por un termopar, éste genera una señal eléctrica proporcional a la temperatura, la cual se envía al controla-dor, donde se compara contra el punto de control. La señal de salida del controlador se conecta luego al actuador de la válvula de control. La función del actuador es modifi car la posición de la válvula según lo ordene la señal de control para conseguir que el valor de temperatura real se acerque al punto de consigna del controlador.
2. Elementos que intervienen en el banco.
2.1 Bomba de alimentación
Para la circulación del agua a través de la planta se decidió utilizar una bomba de alimentación sumergible, debido a que ésta cuenta con las características que se
1.2
1
0.8
0.6
0.4
0.2
00 20 60
Tiempo (segundos)Vo
lum
en (l
itros
)
10040 80 120
14
12
10
8
6
4
2
00 20 60
Tiempo (segundos)
Volu
men
(litr
os)
10040 80 120
Figura 1b. Gráfi ca de caudal vs. tiempo
Figura 1a. Gráfi ca de volumen vs. tiempo
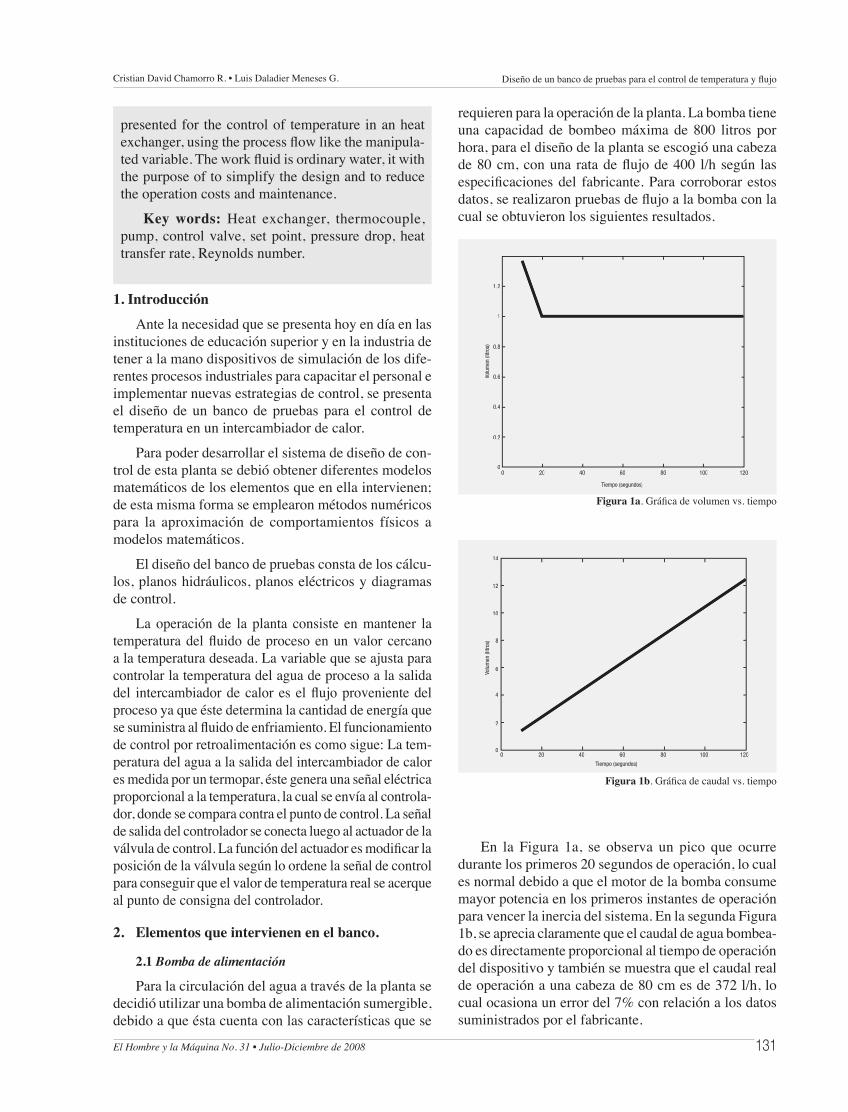
requieren para la operación de la planta. La bomba tiene una capacidad de bombeo máxima de 800 litros por hora, para el diseño de la planta se escogió una cabeza de 80 cm, con una rata de fl ujo de 400 l/h según las especifi caciones del fabricante. Para corroborar estos datos, se realizaron pruebas de fl ujo a la bomba con la cual se obtuvieron los siguientes resultados.
En la Figura 1a, se observa un pico que ocurre durante los primeros 20 segundos de operación, lo cual es normal debido a que el motor de la bomba consume mayor potencia en los primeros instantes de operación para vencer la inercia del sistema. En la segunda Figura 1b, se aprecia claramente que el caudal de agua bombea-do es directamente proporcional al tiempo de operación del dispositivo y también se muestra que el caudal real de operación a una cabeza de 80 cm es de 372 l/h, lo cual ocasiona un error del 7% con relación a los datos suministrados por el fabricante.
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
1.2
1
0.8
0.6
0.4
0.2
00 20 60
Tiempo (segundos)Vo
lum
en (l
itros
)
10040 80 120
14
12
10
8
6
4
2
00 20 60
Tiempo (segundos)
Volu
men
(litr
os)
10040 80 120
132 El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
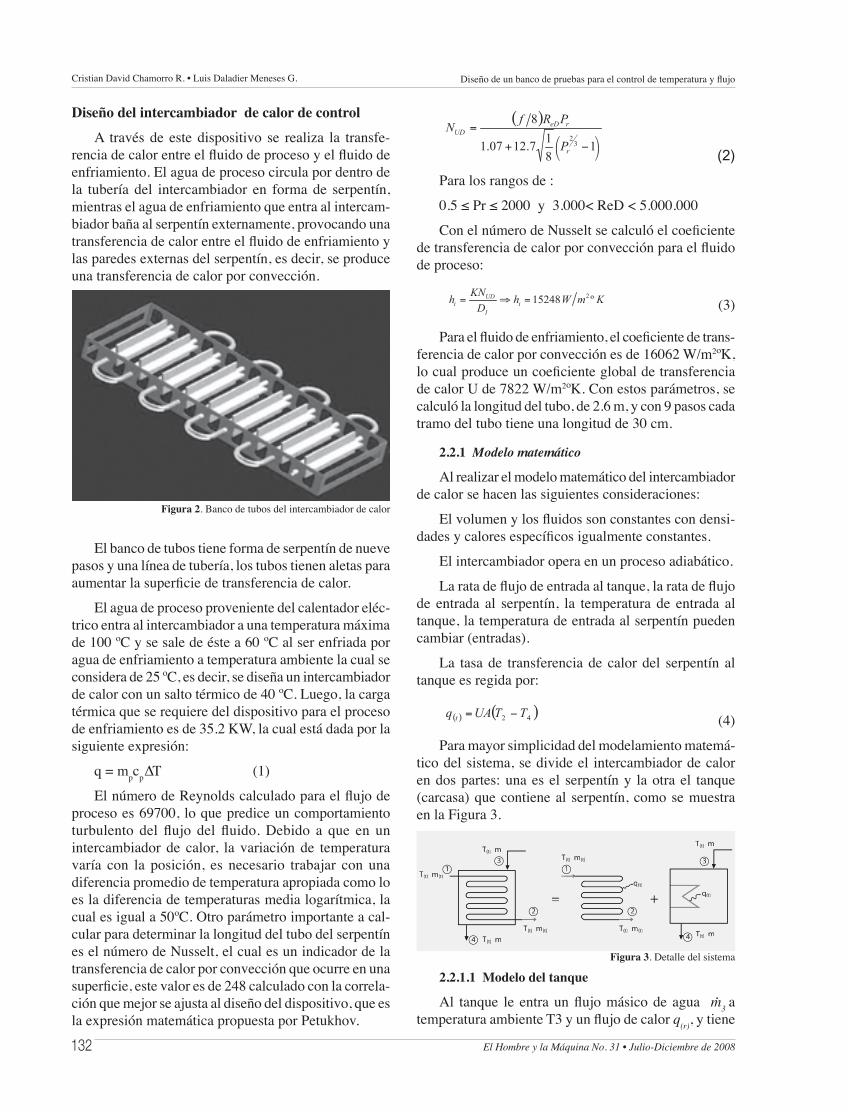
Diseño del intercambiador de calor de control
A través de este dispositivo se realiza la transfe-rencia de calor entre el fl uido de proceso y el fl uido de enfriamiento. El agua de proceso circula por dentro de la tubería del intercambiador en forma de serpentín, mientras el agua de enfriamiento que entra al intercam-biador baña al serpentín externamente, provocando una transferencia de calor entre el fl uido de enfriamiento y las paredes externas del serpentín, es decir, se produce una transferencia de calor por convección.
Figura 2. Banco de tubos del intercambiador de calor
(2)
Para los rangos de :
0.5 ≤ Pr ≤ 2000 y 3.000< ReD < 5.000.000
Con el número de Nusselt se calculó el coefi ciente de transferencia de calor por convección para el fl uido de proceso:
El banco de tubos tiene forma de serpentín de nueve pasos y una línea de tubería, los tubos tienen aletas para aumentar la superfi cie de transferencia de calor.
El agua de proceso proveniente del calentador eléc-trico entra al intercambiador a una temperatura máxima de 100 ºC y se sale de éste a 60 ºC al ser enfriada por agua de enfriamiento a temperatura ambiente la cual se considera de 25 ºC, es decir, se diseña un intercambiador de calor con un salto térmico de 40 ºC. Luego, la carga térmica que se requiere del dispositivo para el proceso de enfriamiento es de 35.2 KW, la cual está dada por la siguiente expresión:
q = mpcp∆T (1)
El número de Reynolds calculado para el fl ujo de proceso es 69700, lo que predice un comportamiento turbulento del fl ujo del fl uido. Debido a que en un intercambiador de calor, la variación de temperatura varía con la posición, es necesario trabajar con una diferencia promedio de temperatura apropiada como lo es la diferencia de temperaturas media logarítmica, la cual es igual a 50ºC. Otro parámetro importante a cal-cular para determinar la longitud del tubo del serpentín es el número de Nusselt, el cual es un indicador de la transferencia de calor por convección que ocurre en una superfi cie, este valor es de 248 calculado con la correla-ción que mejor se ajusta al diseño del dispositivo, que es la expresión matemática propuesta por Petukhov.
( )
⎠⎞
⎝⎛ −+
=
18
17.1207.1
8
32
r
reDUD
P
PRfN
KmWhD
KNh i
I
UDi º15248 2=⇒=
(3)
Para el fl uido de enfriamiento, el coefi ciente de trans-ferencia de calor por convección es de 16062 W/m2ºK, lo cual produce un coefi ciente global de transferencia de calor U de 7822 W/m2ºK. Con estos parámetros, se calculó la longitud del tubo, de 2.6 m, y con 9 pasos cada tramo del tubo tiene una longitud de 30 cm.
2.2.1 Modelo matemático
Al realizar el modelo matemático del intercambiador de calor se hacen las siguientes consideraciones:
El volumen y los fl uidos son constantes con densi-dades y calores específi cos igualmente constantes.
El intercambiador opera en un proceso adiabático.
La rata de fl ujo de entrada al tanque, la rata de fl ujo de entrada al serpentín, la temperatura de entrada al tanque, la temperatura de entrada al serpentín pueden cambiar (entradas).
La tasa de transferencia de calor del serpentín al tanque es regida por:
( ) ( )42 TTUAq t −= (4)
Para mayor simplicidad del modelamiento matemá-tico del sistema, se divide el intercambiador de calor en dos partes: una es el serpentín y la otra el tanque (carcasa) que contiene al serpentín, como se muestra en la Figura 3.
T(t)1
m(t)
T(t)
q(t)
q(t)
m(t)
T(t) m(t)T(t) m(t)
T(t) m
T(t) m
13
T(t) m
3
4T(t) m4
2 2= +
Figura 3. Detalle del sistema
2.2.1.1 Modelo del tanque
Al tanque le entra un fl ujo másico de agua m3 a temperatura ambiente T3 y un fl ujo de calor q(r), y tiene
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
T(t)1
m(t)
T(t)
q(t)
q(t)
m(t)
T(t) m(t)T(t) m(t)
T(t) m
T(t) m
13
T(t) m
3
4T(t) m4
2 2= +

133El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
una salida de fl ujo másico de agua m4 a temperatura T4 como se ilustra en la Figura 5.
Figura 4. Tanque del intercambiador de calor.
q(t)
T(t) m
3
T(t) m4
Balance de masa
La acumulación de fl ujo de masa dentro del reci-piente es igual a la masa que entra, menos la que sale del sistema, así se obtiene:
∑ ∑ ∂
∂=−
tm
mm se && (5)
La masa en el balance se puede obtener a partir de diferentes confi guraciones de volumen: volúmenes variables o volúmenes constantes.
Para volúmenes constantes:
∑ ∑ ==→=− Rse mmmmm &&&&& 430 (6)
Balance de energía
Primero se establece todo el intercambiador de calor como el sistema a tratar, en él no se encuentran momentos que involucren trabajo, por tal razón la energía cinética y potencial son cero, y el balance de energía se simplifi ca al desarrollo de la energía interna del sistema.
( ) ( ) ( )( )
( ) ( ) ( )( )tttt
VtpRtpRt TTUAqt
TcVTcmTcmq 42
443 ; −=
∂
∂=−+ ρ&&
( ) ( ) ( )( ) ( )
t
TcVcmUATTcmUAT t
VpRttpRt ∂
∂=+−+ 4
432 ρ&&
( )( ) ( ) ( )ttt
t TCTCTt
T32214
41 +=+
∂
∂τ
pR
pR
pRpR
v
cmUA
cmC
cmUA
UAC
cmUA
cV&
&
&& +=
+=
+= 211
ρτ
(7)
(8)
(9)
Donde:
Al obtener la transformada de Laplace, se tiene:
( ) ( ) ( )[ ]SSS TCTCs
T 32211
4 1
1+
+=τ (10)
2.2.1.2 Modelo del serpentín
El serpentín es simplemente un tubo doblado en ocho partes, al cual le entra un fl ujo de masa m(t) a temperatura T1 y sale de este un fl ujo a temperatura T2, también sale un fl ujo de calor q(t), tal como se muestra en el esquema de la Figura 5.
T(t)
q(t)
m(t)
T(t) m(t)
1
2
Balance de masa
Figura 5. Serpentín del intercambiador de calor
( ) ( ) ( ) ( ) ( )∑ ∑ ==→=− ttttste mmmmm &&&&& 210 (11)
Balance de energía
( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( )( )tttt
Vttpttpt TTUAqt
TcVqTcmTcm 42
221 ; −=
∂
∂=−− ρ&&
(12)
(13)( )( ) ( ) ( ) ( )tttt
t TCmCTCTt
T487162
22 ++=+
∂
∂&τ
Donde:
(14)38
3
547
3
36
32 CUA
UAC
CUA
CCC
CUA
CC
CUA
cV v
+=
−
−=
−=
−=
ρτ
C2
C1
C7 C6
1
1 2 B
3
4 5
AT1 .s- 1
T1(s)
T3(s)
PERTURBACIÓN
ENTRADA 1 ENTRADA 2
SALIDA
M(s)
T2(s)++ ++ ++1
T1 .s+ 1
La función de transferencia de la temperatura a la salida del serpentín con respecto a la temperatura de entrada al serpentín es:
Figura 6. Diagrama de bloques del sistema
( )( )
( )⎥⎦
⎤⎢⎣
⎡
+++
++==
652
43
3
22
16
1
2 1
KsKsKsK
sKsKC
T
TG
S
S
ST
(15)
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
En la Figura 6 se esquematiza el diagrama de blo-ques para el intercambiador de calor, el cual se obtiene del encadenamiento de las ecuaciones [10] y [14].
( ) ( ) ( ) ( )[ ]SSSS TCMCTCs
T 487162
2 1
1++
+= &τ

134 El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
La función de transferencia de la temperatura a la salida del serpentín con respecto al flujo másico de entrada al serpentín es:
( )( )
( )827
622
17
3
2 1CCK
KsKsKK
T
TG
S
SSR =→⎥
⎦
⎤⎢⎣
⎡
++==
(16)
La función de transferencia de la temperatura a la salida del serpentín con respecto a la perturbación del sistema es:
( )( )
( )⎥⎦
⎤⎢⎣
⎡
+++
++==
652
43
3
22
17
2 1
KsKsKsK
sKsKC
M
TG
S
SSM &
(17)
Para el control de temperatura a la salida del inter-cambiador de calor de control se utiliza la función de transferencia de la temperatura de salida respecto al flujo de masa de proceso que entra al sistema, para ello se cuantifica la función de transferencia de la ecuación (16) y se tiene:
( ) ⎥⎦
⎤⎢⎣
⎡
+++
++=
05.125.14167.4
16.138.799
23
2
SSS
SSG SM
(18)
2.3 Diseño del calentador eléctrico
El calentador es un dispositivo que se utiliza para calentar el fluido de proceso, y a su vez simulará el proceso que se realiza en una caldera. Éste tiene una capacidad máxima de 14 litros, pero su capacidad de operación es de 10.5 litros a un nivel de 30 cm. Para controlar el nivel del agua en el calentador se diseñó un controlador de nivel que realiza el control de arranque y parada de la bomba con base en “el control de nivel capacitivo”. (Smith,1997:441)
El tanque se encuentra abierto a la atmósfera para facilitar la supervisión del nivel de líquido en el calen-tador. Como fuente de calor se utiliza una resistencia eléctrica industrial de 4.4 Kw de potencia, con recubri-miento, para ser sumergida en el agua de proceso. El tiempo que tarda el agua en alcanzar un salto térmico de 75 ºC, es decir, de pasar de una temperatura de 25 ºC a la temperatura de saturación de 100 ºC es de aproxi-madamente 12 minutos.
W
TTHCRt ap
60
)( 02 −
=ρπ (19)
Los terminales de la resistencia se conectan a un termostato, el cual se encarga de abrir el circuito eléc-trico una vez se alcance la temperatura de saturación y cerrar éste cuando se obtenga la temperatura mínima de operación (60 ºC).
2.3.1 Controlador de nivel
El control de arranque y parada de la bomba para el llenado del calentador eléctrico con control de nivel capacitivo es de dos posiciones, el cual tiene como ele-mento de actuación una leva que acciona uno de los dos interruptores de encendido y apagado de la bomba de ali-mentación. El flotador se encuentra en contacto directo con el agua de proceso, éste tiene una carrera de 20 cm, el movimiento rectilíneo del flotador es transformado en movimiento circular por medio de una inversión del mecanismo de manivela-corredera de Grashof, donde la manivela está representada por un disco, y en el eje de éste se encuentra la leva. Este tipo de inversión con el eslabón fijo (riel o guía) y su corredera (flotador) en translación pura, es la más común y se utiliza en motores de pistón y bombas de pistón (Norton, 1999:184).
2.4 Válvula de control
La válvula de control en estudio es de tipo bola, tal como se muestra en la Figura 8.
Figura 7. Controlador de nivel
Figura 8. Válvula de control tipo bola
Diseño de un banco de pruebas para el control de temperatura y flujoCristian David Chamorro R. • Luis Daladier Meneses G.
135El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
La válvula tiene un comportamiento de caudal carac-terístico antes y otro diferente después de su instalación, todo depende del diseño de la geometría y mecanizado del obturador de la válvula. La forma de la curva ca-racterística obtenida del caudal Q, de una válvula de control con respecto a la carrera θ, cuando la caída de presión en la válvula es constante a lo largo de todo el recorrido del vástago se denomina característica de caudal inherente, es decir, antes de instalar la válvula en la planta. Esta condición tiene diferentes tipos de curvas características, entre las más signifi cativas están: La de apertura rápida, la lineal y de igual porcentaje. Para determinar las ecuaciones que rigen el comportamiento característico de la válvula de control antes y después de su instalación, se realizó una regresión lineal por los métodos de mínimos cuadrados y expansión de series de Taylor (Chapra, 2002: 76).
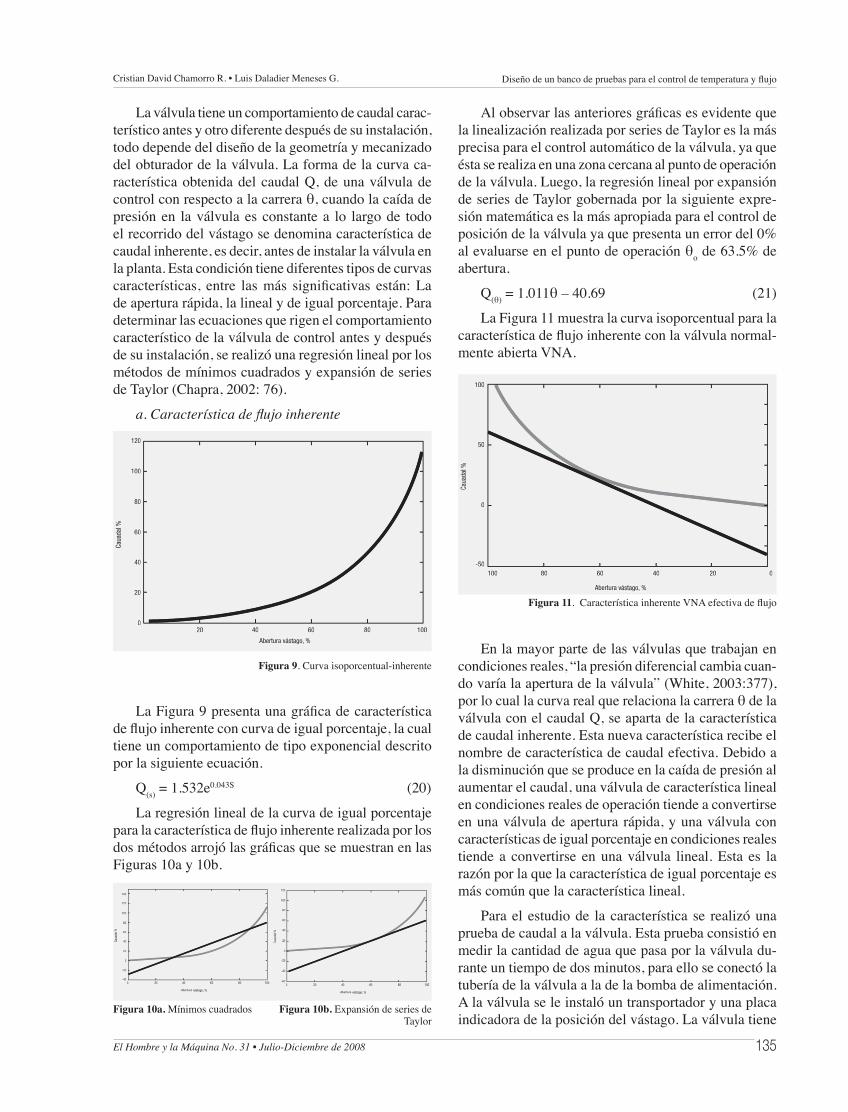
a. Característica de fl ujo inherente
0
20
40
60
80
100
120
20 60
Abertura vástago, %
Caua
dal %
10040 80
La Figura 9 presenta una gráfi ca de característica de fl ujo inherente con curva de igual porcentaje, la cual tiene un comportamiento de tipo exponencial descrito por la siguiente ecuación.
Q(s) = 1.532e0.043S (20)
La regresión lineal de la curva de igual porcentaje para la característica de fl ujo inherente realizada por los dos métodos arrojó las gráfi cas que se muestran en las Figuras 10a y 10b.
Figura 9. Curva isoporcentual-inherente
Figura 10a. Mínimos cuadrados Figura 10b. Expansión de series de Taylor
20
0
-20
-40
40
60
80
100
120
140
200 60
Abertura vástago, %
Caua
dal %
10040 80
0
-20
-40
-60
20
40
60
80
100
120
Caua
dal %
200 60
Abertura vástago, %
10040 80
Al observar las anteriores gráfi cas es evidente que la linealización realizada por series de Taylor es la más precisa para el control automático de la válvula, ya que ésta se realiza en una zona cercana al punto de operación de la válvula. Luego, la regresión lineal por expansión de series de Taylor gobernada por la siguiente expre-sión matemática es la más apropiada para el control de posición de la válvula ya que presenta un error del 0% al evaluarse en el punto de operación θo de 63.5% de abertura.
Q(θ) = 1.011θ – 40.69 (21)
La Figura 11 muestra la curva isoporcentual para la característica de fl ujo inherente con la válvula normal-mente abierta VNA.
Figura 11. Característica inherente VNA efectiva de fl ujo
100
50
0
-50
Caua
dal %
80100 40
Abertura vástago, %
060 20
En la mayor parte de las válvulas que trabajan en condiciones reales, “la presión diferencial cambia cuan-do varía la apertura de la válvula” (White, 2003:377), por lo cual la curva real que relaciona la carrera θ de la válvula con el caudal Q, se aparta de la característica de caudal inherente. Esta nueva característica recibe el nombre de característica de caudal efectiva. Debido a la disminución que se produce en la caída de presión al aumentar el caudal, una válvula de característica lineal en condiciones reales de operación tiende a convertirse en una válvula de apertura rápida, y una válvula con características de igual porcentaje en condiciones reales tiende a convertirse en una válvula lineal. Esta es la razón por la que la característica de igual porcentaje es más común que la característica lineal.
Para el estudio de la característica se realizó una prueba de caudal a la válvula. Esta prueba consistió en medir la cantidad de agua que pasa por la válvula du-rante un tiempo de dos minutos, para ello se conectó la tubería de la válvula a la de la bomba de alimentación. A la válvula se le instaló un transportador y una placa indicadora de la posición del vástago. La válvula tiene
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
0
20
40
60
80
100
120
20 60
Abertura vástago, %
Caua
dal %
10040 80
20
0
-20
-40
40
60
80
100
120
140
200 60
Abertura vástago, %
Caua
dal %
10040 80
0
-20
-40
-60
20
40
60
80
100
120
Caua
dal %
200 60
Abertura vástago, %
10040 80
100
50
0
-50
Caua
dal %
80100 40
Abertura vástago, %
060 20
136 El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
120
100
80
60
40
-20
-40
20
0
Caua
dal %
80100 40
Abertura vástago, %
060 20
100
80
60
40
-20
-40
-60
-80
20
0
Caua
dal %
80100 40
Abertura vástago, %
060 20
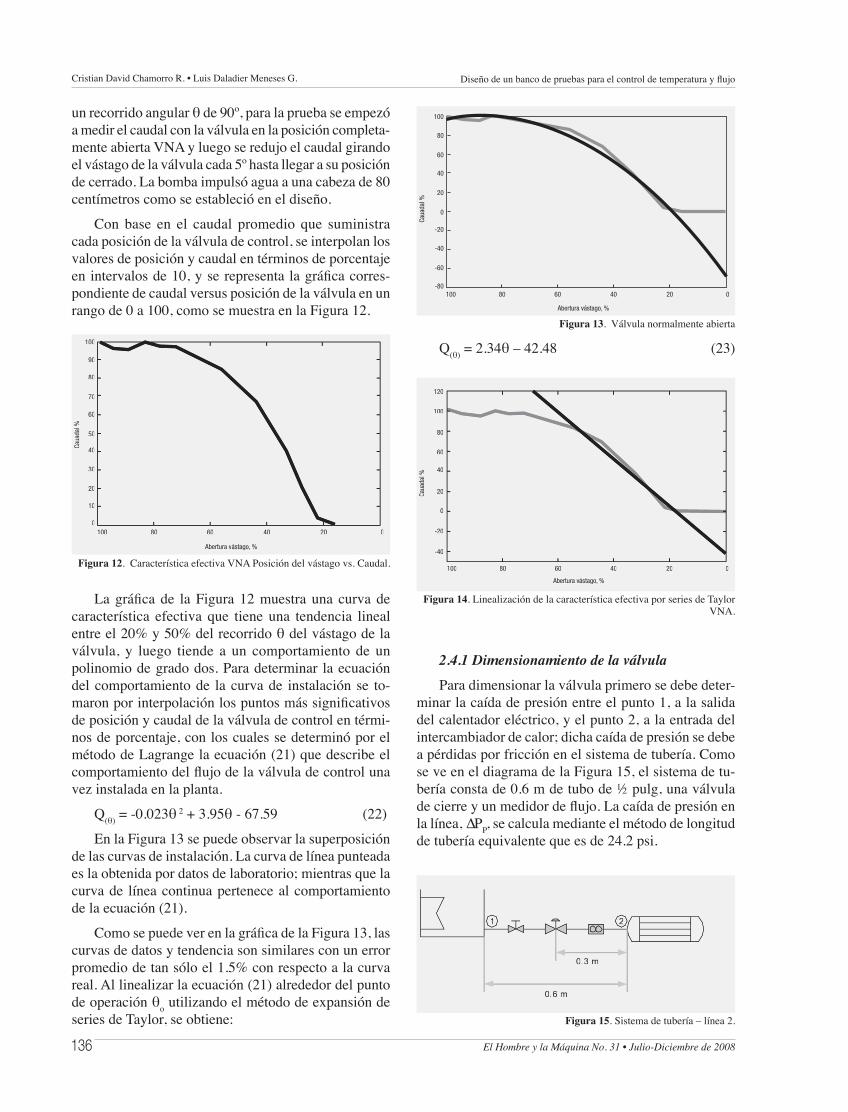
un recorrido angular θ de 90º, para la prueba se empezó a medir el caudal con la válvula en la posición completa-mente abierta VNA y luego se redujo el caudal girando el vástago de la válvula cada 5º hasta llegar a su posición de cerrado. La bomba impulsó agua a una cabeza de 80 centímetros como se estableció en el diseño.
Con base en el caudal promedio que suministra cada posición de la válvula de control, se interpolan los valores de posición y caudal en términos de porcentaje en intervalos de 10, y se representa la gráfi ca corres-pondiente de caudal versus posición de la válvula en un rango de 0 a 100, como se muestra en la Figura 12.
Figura 12. Característica efectiva VNA Posición del vástago vs. Caudal.
100
90
80
70
60
50
40
30
20
10
0
Caua
dal %
80100 40
Abertura vástago, %
060 20
La gráfi ca de la Figura 12 muestra una curva de característica efectiva que tiene una tendencia lineal entre el 20% y 50% del recorrido θ del vástago de la válvula, y luego tiende a un comportamiento de un polinomio de grado dos. Para determinar la ecuación del comportamiento de la curva de instalación se to-maron por interpolación los puntos más signifi cativos de posición y caudal de la válvula de control en térmi-nos de porcentaje, con los cuales se determinó por el método de Lagrange la ecuación (21) que describe el comportamiento del fl ujo de la válvula de control una vez instalada en la planta.
Q(θ) = -0.023θ 2 + 3.95θ - 67.59 (22)
En la Figura 13 se puede observar la superposición de las curvas de instalación. La curva de línea punteada es la obtenida por datos de laboratorio; mientras que la curva de línea continua pertenece al comportamiento de la ecuación (21).
Como se puede ver en la gráfi ca de la Figura 13, las curvas de datos y tendencia son similares con un error promedio de tan sólo el 1.5% con respecto a la curva real. Al linealizar la ecuación (21) alrededor del punto de operación θo utilizando el método de expansión de series de Taylor, se obtiene:
Figura 13. Válvula normalmente abierta
Q(θ) = 2.34θ – 42.48 (23)
Figura 14. Linealización de la característica efectiva por series de Taylor VNA.
2.4.1 Dimensionamiento de la válvula
Para dimensionar la válvula primero se debe deter-minar la caída de presión entre el punto 1, a la salida del calentador eléctrico, y el punto 2, a la entrada del intercambiador de calor; dicha caída de presión se debe a pérdidas por fricción en el sistema de tubería. Como se ve en el diagrama de la Figura 15, el sistema de tu-bería consta de 0.6 m de tubo de ½ pulg, una válvula de cierre y un medidor de fl ujo. La caída de presión en la línea, ∆PP, se calcula mediante el método de longitud de tubería equivalente que es de 24.2 psi.
Figura 15. Sistema de tubería – línea 2.
0.6 m
0.3 m
1 2
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
100
90
80
70
60
50
40
30
20
10
0
Caua
dal %
80100 40
Abertura vástago, %
060 20
120
100
80
60
40
-20
-40
20
0
Caua
dal %
80100 40
Abertura vástago, %
060 20
0.6 m
0.3 m
1 2

137El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
Una vez conocida la caída dinámica de presión, se puede elegir la caída de presión en la válvula, ∆PV, para lo cual se elige el criterio de tener una caída de presión en la válvula igual al 25% de la caída dinámica de presión total.
(24)
Por lo tanto, la caída de presión en la válvula ∆PV es 8 psi. Al dimensionar la válvula para dos veces el flujo nominal se tiene.
(25)
Por otro lado, se requiere una caída de presión de diseño del 25% de la caída dinámica de presión total o 10 psi, lo que sea mayor, entonces, ∆PV = 10 psi. Lue-go, al dimensionar la válvula para dos veces el flujo nominal se tiene.
(26)
Es de vital importancia tener en cuenta que se trabaja con el agua de proceso a su temperatura de saturación, por ello, se realiza un nuevo dimensionamiento de la válvula con el fin de evitar el fenómeno de vaporización en ésta.
2.4.1.1 Vaporización
25.0=Δ+Δ
Δ
PPP
VP
V
5.2
1
8
7==CVm·x
2.2
1
10
7==CVm·x
∆P
P1 P 2
T1 T2
Para evitar la vaporización se debe tener en cuenta dos aspectos; primero, si la temperatura de entrada es inferior en 2.8º C, a la temperatura de saturación del agua, es decir: CT º8.2≤Δ la pérdida máxima de carga admisible es:
(27)
La cual es la máxima caída de presión admisible en la válvula. Ahora, en el segundo caso, si la temperatura de entrada es inferior en más de 2.8 ºC, a la temperatura de saturación del agua, es decir: CT º8.2>Δ la pérdida máxima de carga admisible es:
(28)
Figura 16. Vaporización en la válvula de control
106.0 PVA =ΔΡ
( )1
19.0
TTT
PPP
Sat
SatVA
−=Δ
−=Δ
Donde TSat es la temperatura de saturación a la pre-sión de entrada P1, y PSat la presión de saturación a la temperatura de entrada.
Para evitar el problema de vaporización, es indis-pensable verificar si la caída de presión de diseño de la válvula de control es la correcta de acuerdo con el método de vaporización y con este valor determinar nuevamente el tamaño de válvula a utilizar. Por consi-guiente, se determina el coeficiente de la válvula que cumpla las siguientes condiciones:
( )
AguaLíquido
psiKPacmKgP
CT
absKPacmKgP
gpmhmQ
VD
M¡X
⇒
⇒⇒=Δ
=
⇒=
⇒=
1095.687.0
∫100
72.103058.1
5.38.0
2
1
21
3
La experiencia recomienda que el caudal de diseño Q sea 25 a 30% mayor que el caudal máximo QMÁX.
(29)
Debido a la temperatura alta hay que chequear si hay vaporización con la caída de presión de diseño de la válvula ∆PVD y con la presión de entrada P1.
Para la presión de entrada se tiene de las tablas de vapor la temperatura de saturación.
(30)
Por lo tanto, CT º8.2<Δ . Luego, la caída de presión máxima admisible ∆PVA es:
(31)
Para evitar el fenómeno de cavitación, se selecciona la menor caída de presión en la válvula entre el ∆PVD y el ∆PVA. Por lo tanto, con 2063.0 cmKgPVA =Δ , todavía no se presenta el problema de flashing.
(32)
2.4.2 Modelo matemático
La ganancia de la válvula, al igual que la de cual-quier otro dispositivo, es la razón de cambio en estado estable de la salida con respecto a la entrada. La Figura 17, muestra que la salida de la válvula es el flujo F(t) y que su entrada es la señal de salida del controlador expresada en forma porcentual өV(t).
La ganancia de la válvula KV se define como la variación del flujo respecto a la variación del porcen-taje de apertura de la válvula. Para la determinación
( ) hmhmQQM¡X
33 18.025.125.1 ===
( ) CCTTT
iˆnInterpolacCT
KPaKPacmKgP
Sat
Sat
57.0º º10057.100
∫57.100
72.10307.98058.1
1
21
=−=−=Δ
→=
=×=
KPaPPVA 18.606.0 1 →=Δ
()
6.416.1
4063.01
1
=→=
==Δ
=
VVV
VA
fV
CKC
P
GQK
Diseño de un banco de pruebas para el control de temperatura y flujoCristian David Chamorro R. • Luis Daladier Meneses G.
138 El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
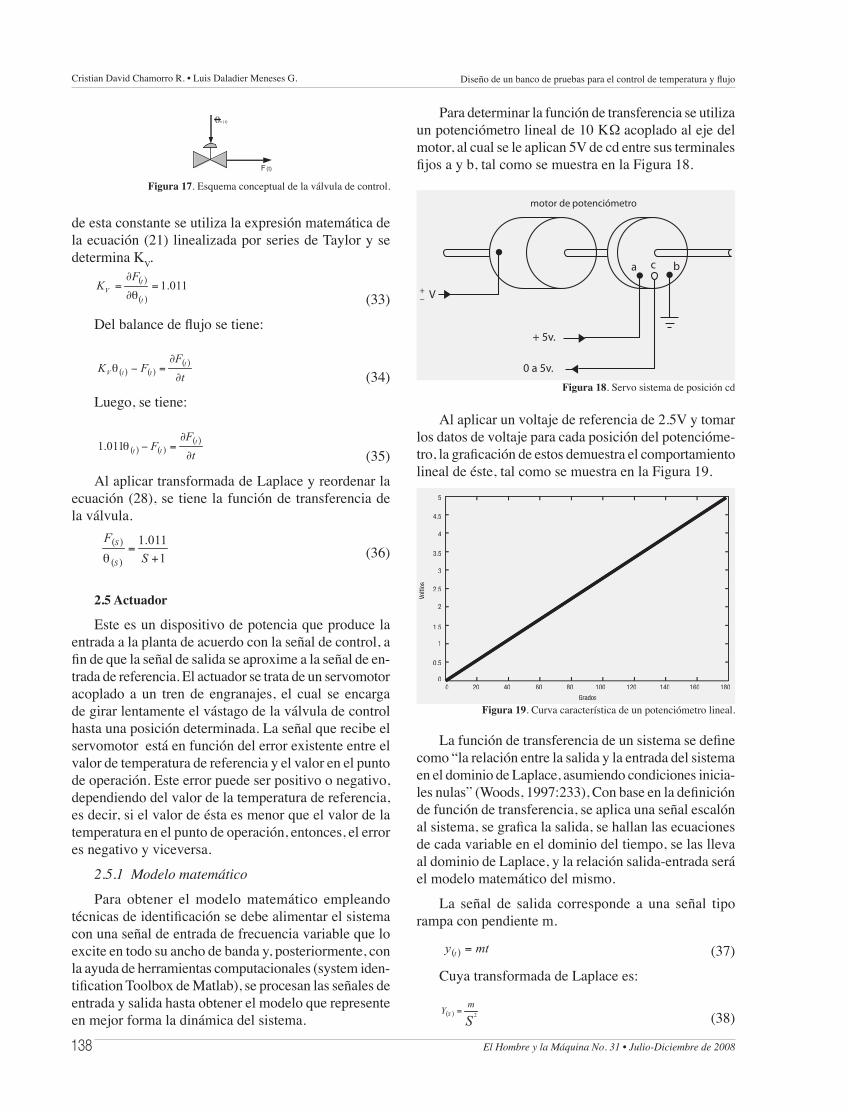
Para determinar la función de transferencia se utiliza un potenciómetro lineal de 10 KΩ acoplado al eje del motor, al cual se le aplican 5V de cd entre sus terminales fi jos a y b, tal como se muestra en la Figura 18.
Figura 17. Esquema conceptual de la válvula de control.
F(t)
0v ( t)
de esta constante se utiliza la expresión matemática de la ecuación (21) linealizada por series de Taylor y se determina KV.
(33)
Del balance de fl ujo se tiene:
(34)
Luego, se tiene:
(35)
Al aplicar transformada de Laplace y reordenar la ecuación (28), se tiene la función de transferencia de la válvula.
( )
( )011.1=
∂
∂=
t
tV
FK
θ
( ) ( )( )
t
FFK t
ttV ∂
∂=−θ
( ) ( )( )
t
FF t
tt ∂
∂=−θ011.1
( )
( ) 1
011.1
+=
S
F
S
S
θ (36)
2.5 Actuador
Este es un dispositivo de potencia que produce la entrada a la planta de acuerdo con la señal de control, a fi n de que la señal de salida se aproxime a la señal de en-trada de referencia. El actuador se trata de un servomotor acoplado a un tren de engranajes, el cual se encarga de girar lentamente el vástago de la válvula de control hasta una posición determinada. La señal que recibe el servomotor está en función del error existente entre el valor de temperatura de referencia y el valor en el punto de operación. Este error puede ser positivo o negativo, dependiendo del valor de la temperatura de referencia, es decir, si el valor de ésta es menor que el valor de la temperatura en el punto de operación, entonces, el error es negativo y viceversa.
2.5.1 Modelo matemático
Para obtener el modelo matemático empleando técnicas de identifi cación se debe alimentar el sistema con una señal de entrada de frecuencia variable que lo excite en todo su ancho de banda y, posteriormente, con la ayuda de herramientas computacionales (system iden-tifi cation Toolbox de Matlab), se procesan las señales de entrada y salida hasta obtener el modelo que represente en mejor forma la dinámica del sistema.
Figura 18. Servo sistema de posición cd
motor de
V
+ 5v.
a c b
0 a 5v.
potenciómetro
+_
Al aplicar un voltaje de referencia de 2.5V y tomar los datos de voltaje para cada posición del potencióme-tro, la grafi cación de estos demuestra el comportamiento lineal de éste, tal como se muestra en la Figura 19.
Figura 19. Curva característica de un potenciómetro lineal.
200 40 60 140 18080 100 120 1600
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Volti
os
Grados
La función de transferencia de un sistema se defi ne como “la relación entre la salida y la entrada del sistema en el dominio de Laplace, asumiendo condiciones inicia-les nulas” (Woods, 1997:233), Con base en la defi nición de función de transferencia, se aplica una señal escalón al sistema, se grafi ca la salida, se hallan las ecuaciones de cada variable en el dominio del tiempo, se las lleva al dominio de Laplace, y la relación salida-entrada será el modelo matemático del mismo.
La señal de salida corresponde a una señal tipo rampa con pendiente m.
(37)
Cuya transformada de Laplace es:
(38)
( ) mty t =
( )Sm
Y S 2=
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
200 40 60 140 18080 100 120 1600
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Volti
os
Grados
139El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
La señal de entrada (señal de control) corresponde a una señal escalón de amplitud igual a la de voltaje cd aplicado.
(39)
Cuya transformada de Laplace es:
(40)
Por lo tanto, el modelo matemático será la función de transferencia del sistema, es decir:
(41)
Al reemplazar los valores de la pendiente m y el voltaje de referencia, se tiene:
(42)
Análisis del modelo matemático
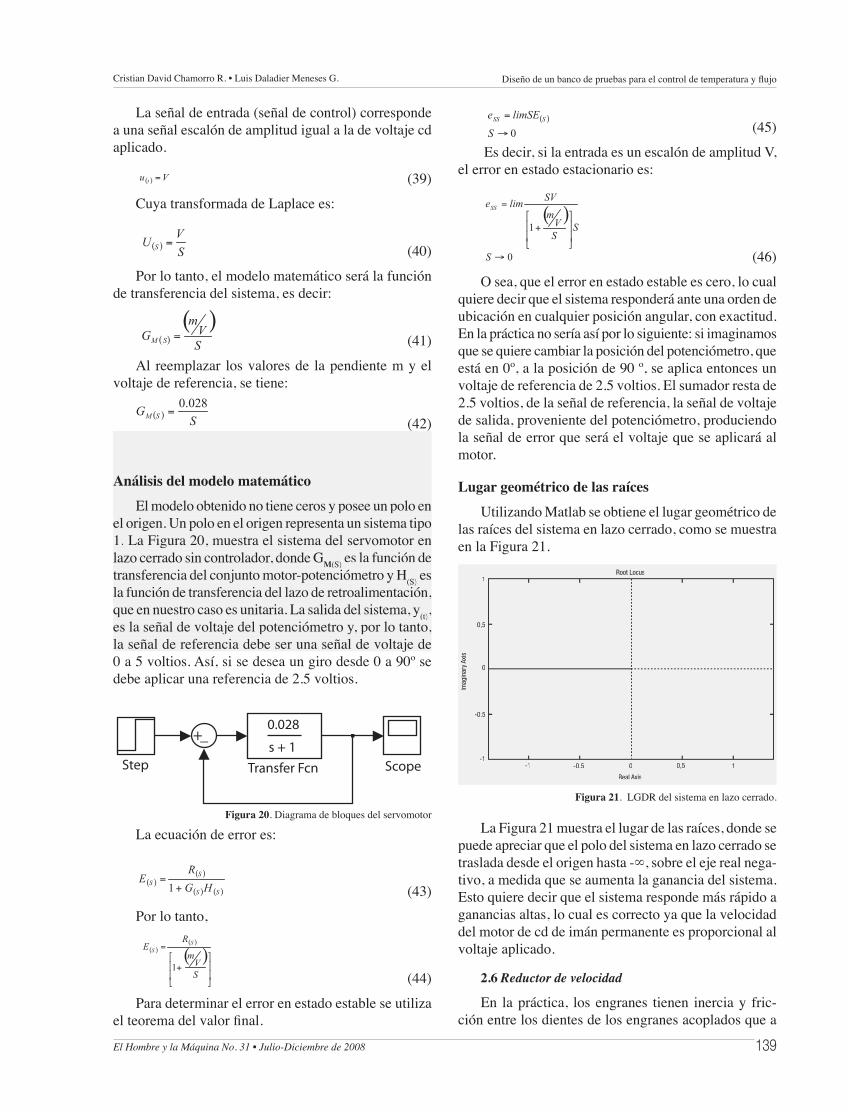
El modelo obtenido no tiene ceros y posee un polo en el origen. Un polo en el origen representa un sistema tipo 1. La Figura 20, muestra el sistema del servomotor en lazo cerrado sin controlador, donde GM(S) es la función de transferencia del conjunto motor-potenciómetro y H(S) es la función de transferencia del lazo de retroalimentación, que en nuestro caso es unitaria. La salida del sistema, y(t), es la señal de voltaje del potenciómetro y, por lo tanto, la señal de referencia debe ser una señal de voltaje de 0 a 5 voltios. Así, si se desea un giro desde 0 a 90º se debe aplicar una referencia de 2.5 voltios.
( ) Vu t =
( ) S
VU S =
( )
( )SV
mG SM =
( ) SG SM
028.0=
Figura 20. Diagrama de bloques del servomotor
+
Step Scope
0.028
Transfer Fcns + 1
_
La ecuación de error es:
(43)
Por lo tanto,
(44)
Para determinar el error en estado estable se utiliza el teorema del valor fi nal.
( )( )
( ) ( )SS
SS HG
RE
+=
1
( )( )
( )⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+
=
SV
m
RE S
S
1
(45)
Es decir, si la entrada es un escalón de amplitud V, el error en estado estacionario es:
(46)
O sea, que el error en estado estable es cero, lo cual quiere decir que el sistema responderá ante una orden de ubicación en cualquier posición angular, con exactitud. En la práctica no sería así por lo siguiente: si imaginamos que se quiere cambiar la posición del potenciómetro, que está en 0º, a la posición de 90 º, se aplica entonces un voltaje de referencia de 2.5 voltios. El sumador resta de 2.5 voltios, de la señal de referencia, la señal de voltaje de salida, proveniente del potenciómetro, produciendo la señal de error que será el voltaje que se aplicará al motor.
lugar geométrico de las raíces
Utilizando Matlab se obtiene el lugar geométrico de las raíces del sistema en lazo cerrado, como se muestra en la Figura 21.
( )
0→
=
S
limSEe SSS
( )
0
1
→
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+
=
S
SSV
m
SVlimeSS
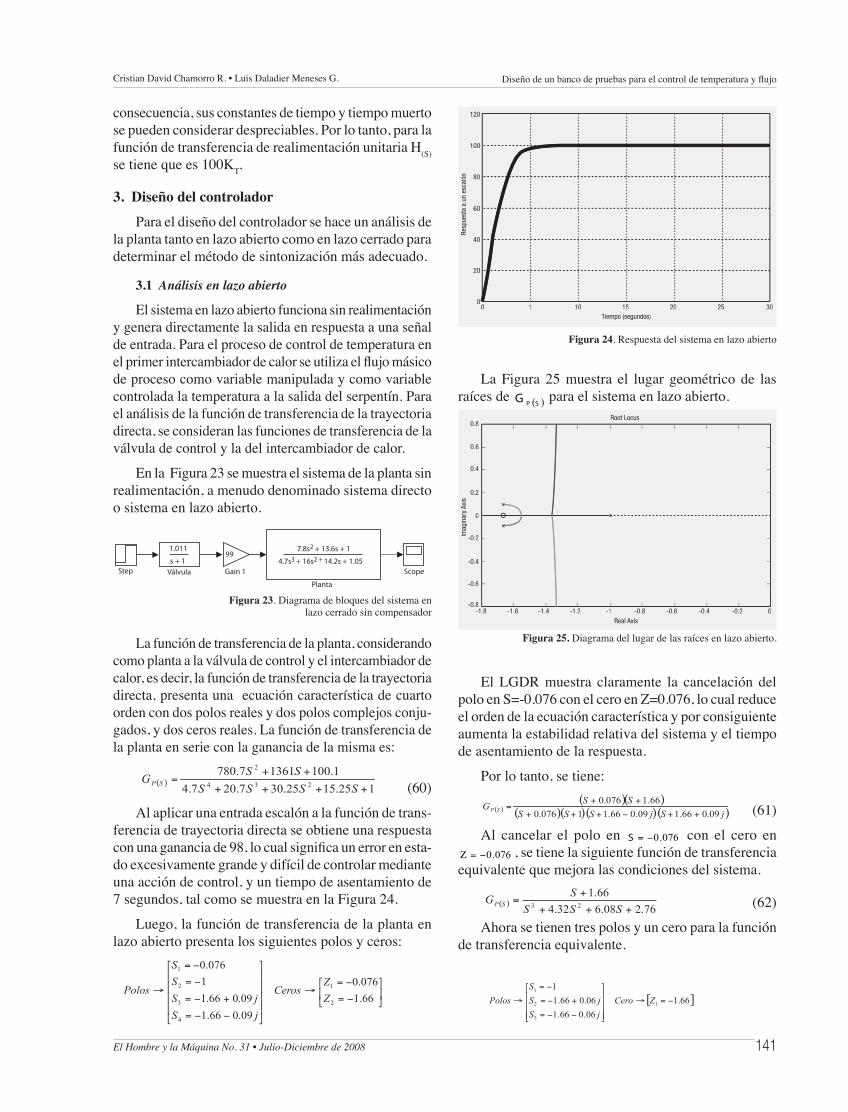
La Figura 21 muestra el lugar de las raíces, donde se puede apreciar que el polo del sistema en lazo cerrado se traslada desde el origen hasta -∞, sobre el eje real nega-tivo, a medida que se aumenta la ganancia del sistema. Esto quiere decir que el sistema responde más rápido a ganancias altas, lo cual es correcto ya que la velocidad del motor de cd de imán permanente es proporcional al voltaje aplicado.
2.6 Reductor de velocidad
En la práctica, los engranes tienen inercia y fric-ción entre los dientes de los engranes acoplados que a
Figura 21. LGDR del sistema en lazo cerrado.
1
1
0,5
0,5
0
0
-0.5
-0.5-1
-1
Imag
inar
y Ax
is
Real Axis
Root Locus
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
Análisis del modelo matemático
El modelo obtenido no tiene ceros y posee un polo en el origen. Un polo en el origen representa un sistema tipo 1. La Figura 20, muestra el sistema del servomotor en lazo cerrado sin controlador, donde GM(S) es la función de transferencia del conjunto motor-potenciómetro y H(S) es la función de transferencia del lazo de retroalimentación, que en nuestro caso es unitaria. La salida del sistema, y(t), es la señal de voltaje del potenciómetro y, por lo tanto, la señal de referencia debe ser una señal de voltaje de
1
1
0,5
0,5
0
0
-0.5
-0.5-1
-1
Imag
inar
y Ax
is
Real Axis
Root Locus

140 El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
Tabla 1. Límites de entrada y salida
Tensión Entrada (mV) Salida (V)Mínimo 0.000507 0Máximo 0.005872 1
Donde estos valores se pueden representar por me-dio de un sistema de ecuaciones lineales de la siguiente forma:
(55)
Por lo tanto, la señal de voltaje de realimentación se puede expresar mediante la Ecuación [6.1].
(56)
Debido a que la ganancia de 186.5 aún es grande, entonces, se utiliza un amplifi cador diferencial con una ganancia de -100 que produce un voltaje intermedio, V1=-100V. Luego, la expresión matemática de la señal de realimentación queda de la siguiente manera.
(57)
Como 0.00054 es una cantidad pequeña, entonces, se lo puede despreciar, teniendo fi nalmente la expresión:
VR = 1.86V1 (58)
Por lo tanto, la ganancia del elemento de realimen-tación KT es 0.05 V/ºC.
(59)
La respuesta dinámica de la mayoría de los sensores/transmisores es mucho más rápida que la del proceso; en
menudo no se pueden despreciar. La Figura 22 repre-senta el equivalente del tren de engranajes con fricción viscosa, fricción de Coulomb e inercia, considerados como parámetros concentrados, en donde TM denota el par del motor o par aplicado, T1 y T2 son los pares de torsión transmitidos, FC1 y FC2, son los coefi cientes de fricción de Coulomb, y B1 y B2 son los coefi cientes de fricción viscosa.
Figura 22. Elemento fi nal de control.
ServomotorJ1
VálvulaJ2
Tm.B1T2
N2
B2FC2, 0VT1, FC2
N1
0m.
Ecuación del par para el engrane 2.
(47)
Ecuación del par para el engrane 1.
(48)
Finalmente, se tiene.
(49)
Donde,
(50)
(51)
(52)
2.7 Sensor de temperatura
Se selecciona una termocupla tipo J, la cual opera en una escala de temperatura de 10 a 110 ºC. Para una entrada de 10 ºC, la termocupla registra un valor de 0.507 mV y para 110 ºC el voltaje es de 5.812 mV (según
( )( ) ( )
2
22222
2
22 ω
ωθθC
tVtVt F
tB
tJ +
∂
∂+
∂
∂=Τ
( )( ) ( )
1
122
2
1 ω
ωθθCL
tML
tMtM F
tB
tJT +
∂
∂+
∂
∂=
( )( ) ( )
FtM
etM
etM tB
tJ Τ+
∂
∂+
∂
∂=Τ 2121
θθ
2
2
2
111 J
N
NJJ e ⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
2
2
2
111 B
N
NBB e ⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
2
22
2
1
1
11 ω
ω
ω
ωCCF F
N
NF +=Τ
tablas). Por lo tanto, se tiene que la ganancia del sensor es KS es 0.05 mV/ºC.
(53)
Lo cual indica que tiene una buena sensibilidad, y esto es importante en un sensor de temperatura.
2.7.1 Acondicionamiento de señal
Se desarrolla un sistema de medida para una escala de temperatura de 0 a 1 volts. Para el termopar tipo J con temperatura de referencia de 0 ºC se tendrá una salida de 5.872 mV a 110 ºC, por tanto, la ganancia mínima requerida Kmín es 170.3.
(54)
Ahora, se puede calcular la ganancia KT del elemen-to sensor-transmisor utilizando los valores de voltaje máximo y mínimo de la señal de realimentación.
( )( ) C
mVK S º10110
507.0872.5
−
−=
VV
KmÌn 005872.01
=
1005872.0
0000507.0
=+
=+
O
O
Vm
Vm
09.05.186 −= VVR
( )09.086.1 1 −= VVR
( )( ) C
V
C
V
º01.0
10110
01=Κ→
°−
−=Κ ΤΤ
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
ServomotorJ1
VálvulaVálvulaVJ2
Tm.Tm.BB1T2
N2
B2FC2, 0VT1, FC2
N1
0m.
141El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
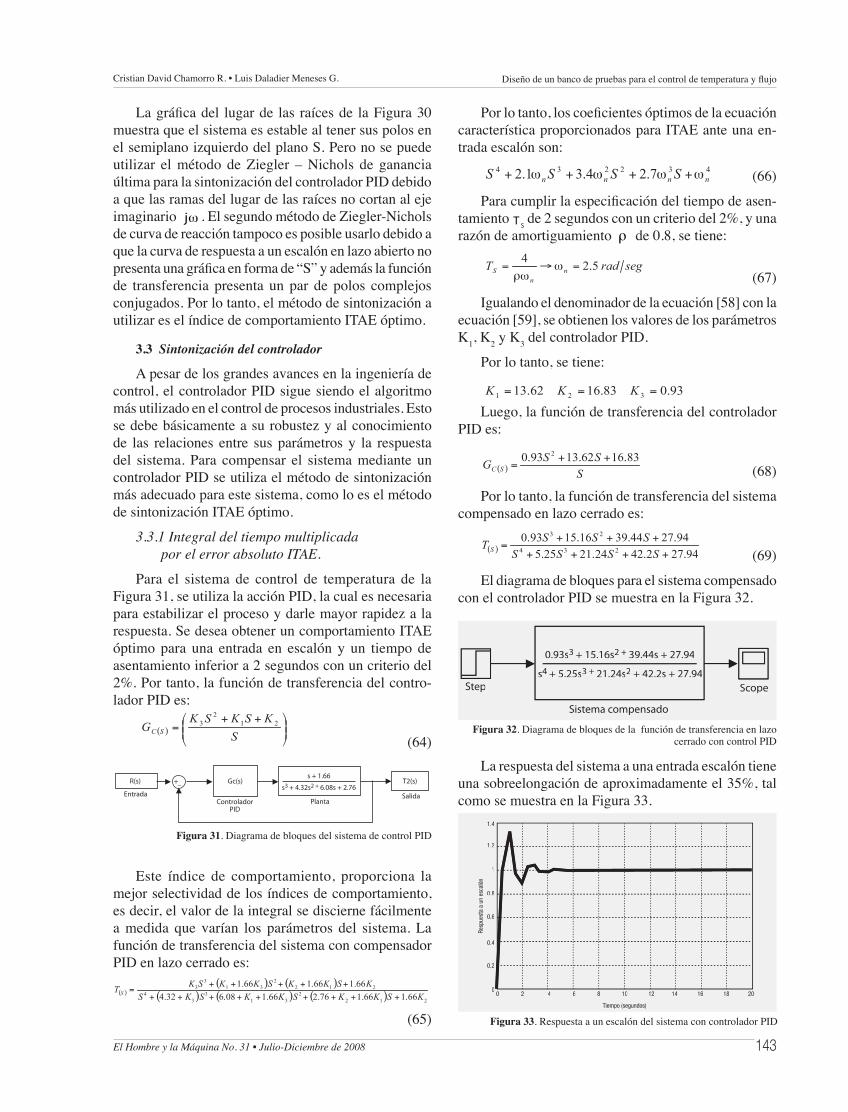
consecuencia, sus constantes de tiempo y tiempo muerto se pueden considerar despreciables. Por lo tanto, para la función de transferencia de realimentación unitaria H(S) se tiene que es 100KT.
3. Diseño del controlador
Para el diseño del controlador se hace un análisis de la planta tanto en lazo abierto como en lazo cerrado para determinar el método de sintonización más adecuado.
3.1 Análisis en lazo abierto
El sistema en lazo abierto funciona sin realimentación y genera directamente la salida en respuesta a una señal de entrada. Para el proceso de control de temperatura en el primer intercambiador de calor se utiliza el fl ujo másico de proceso como variable manipulada y como variable controlada la temperatura a la salida del serpentín. Para el análisis de la función de transferencia de la trayectoria directa, se consideran las funciones de transferencia de la válvula de control y la del intercambiador de calor.
En la Figura 23 se muestra el sistema de la planta sin realimentación, a menudo denominado sistema directo o sistema en lazo abierto.
Figura 23. Diagrama de bloques del sistema en lazo cerrado sin compensador
Step Válvula Gain 1
Planta
997.8s2 + 13.6s + 1
4.7s3 + 16s2 + 14.2s + 1.05Scope
1.011
s + 1
La función de transferencia de la planta, considerando como planta a la válvula de control y el intercambiador de calor, es decir, la función de transferencia de la trayectoria directa, presenta una ecuación característica de cuarto orden con dos polos reales y dos polos complejos conju-gados, y dos ceros reales. La función de transferencia de la planta en serie con la ganancia de la misma es:
(60)
Al aplicar una entrada escalón a la función de trans-ferencia de trayectoria directa se obtiene una respuesta con una ganancia de 98, lo cual signifi ca un error en esta-do excesivamente grande y difícil de controlar mediante una acción de control, y un tiempo de asentamiento de 7 segundos, tal como se muestra en la Figura 24.
Luego, la función de transferencia de la planta en lazo abierto presenta los siguientes polos y ceros:
( )125.1525.307.207.4
1.10013617.780234
2
++++
++=
SSSS
SSG SP
Figura 24. Respuesta del sistema en lazo abierto
00
20
40
60
80
100
120
Tiempo (segundos)
Resp
uest
a a
un e
scal
ón
1 10 15 3020 25
⎥⎦
⎤⎢⎣
⎡
−=
−=→
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−=
+−=
−=
−=
→66.1
076.0
09.066.1
09.066.1
1
076.0
2
1
4
3
2
1
Z
ZCeros
jS
jS
S
S
Polos
La Figura 25 muestra el lugar geométrico de las raíces de ( )SPG para el sistema en lazo abierto.
-0.8
-0.4
0
-0.6
-0.2
0.2
0.4
0.6
0.8
-1.8 -1.4 -0.4 0-1-1.6 -1.2 -0.6 -0.2-0.8
Imag
inar
y Ax
is
Real Axis
Root Locus
x
xx
El LGDR muestra claramente la cancelación del polo en S=-0.076 con el cero en Z=0.076, lo cual reduce el orden de la ecuación característica y por consiguiente aumenta la estabilidad relativa del sistema y el tiempo de asentamiento de la respuesta.
Por lo tanto, se tiene:
(61)
Al cancelar el polo en 076.0−=S con el cero en 076.0−=Ζ , se tiene la siguiente función de transferencia
equivalente que mejora las condiciones del sistema.
(62)
Ahora se tienen tres polos y un cero para la función de transferencia equivalente.
Figura 25. Diagrama del lugar de las raíces en lazo abierto.
( )( )( )
( )( )( )( )jSjSSS
SSG SP
09.066.109.066.11076.0
66.1076.0
++−+++
++=
( )76.208.632.4
66.123 +++
+=
SSS
SG SP
[ ]66.1
06.066.1
06.066.1
1
1
3
2
1
−=→
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−=
+−=
−=
→ ZCero
jS
jS
S
Polos
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
00
20
40
60
80
100
120
Tiempo (segundos)
Resp
uest
a a
un e
scal
ón
1 10 15 3020 25
-0.8
-0.4
0
-0.6
-0.2
0.2
0.4
0.6
0.8
-1.8 -1.4 -0.4 0-1-1.6 -1.2 -0.6 -0.2-0.8
Imag
inar
y Ax
is
Real Axis
Root Locus
xx
xxxxx

142 El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
El lugar geométrico de las raíces para la función de transferencia equivalente se muestra en la Figura 26.
Figura 26. Lugar de las raíces para la función de transferencia equivalente
-0.4
-0.2
0
-0.3
-0.1
0.1
0.2
0.3
0.4
-1.8 -1.4 -0.4 0-1-1.6 -1.2 -0.6 -0.2-0.8
Imag
inar
y Ax
is
Real Axis
Root Locus
x
x
x
El diagrama del lugar de las raíces de la Figura 4 muestra que el sistema es estable para cualquier valor de ganancia proporcional a la hora de compensar el sistema con una acción de control.
Al aplicar una entrada escalón a la función de trans-ferencia equivalente de trayectoria directa se obtiene una respuesta con un error en estado estacionario del 40%, y un tiempo de asentamiento de 5 segundos, lo cual es un valor aceptable para aplicar una ley de control. En la Figura 27 se ilustra la respuesta al escalón de la función de transferencia equivalente en lazo abierto.
Figura 27. Respuesta de la función de transferencia equivalente en lazo abierto
00
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Tiempo (segundos)
Resp
uest
a a
un e
scal
ón
10 20 30 60 70 80 1009040 50
3.2 Análisis en lazo cerrado
Del análisis en lazo abierto se tiene que la función de transferencia de la planta más adecuada para el sistema de control es:
( )76.208.632.4
66.123 +++
+=
SSS
SG SP (63)
Las Figuras 28 y 29 muestran el diagrama de blo-ques del sistema en lazo cerrado sin compensación y la respuesta a un escalón unitario del sistema en lazo cerrado sin compensar, respectivamente.
Step
+_
Planta
s + 1.66
s3 + 4.32s2 + 6.08s + 2.76Scope
00
0.15
0.1
0.05
0.2
0.25
0.3
0.35
0.4
Tiempo (segundos)
Resp
uest
a a
un e
scal
ón
5 10 15 3020 25
La respuesta al escalón del sistema sin compensador en lazo cerrado de la Figura 29 muestra un error en es-tado estacionario de 63%, y un tiempo de asentamiento de 5 segundos. Por lo tanto, para minimizar el error en estado estacionario es necesario aplicar una ley de con-trol que garantice el buen funcionamiento del sistema. En la Figura 30 se muestra el lugar geométrico de las raíces del sistema en lazo cerrado.
Figura 28. Diagrama de bloques del sistema sin compensación
Figura 29. Respuesta a un escalón del sistema en lazo cerradosin compensador
Figura 30. Lugar de las raíces del sistema en lazo cerrado sin compensar
-6
-4
-2
0
2
4
6
Imag
inar
y Ax
is
-1.8 -1.4 -0.4 0-1-1.6 -1.2 -0.6 -0.2-0.8Real Axis
Root Locus
x
x
x
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
-0.4
-0.2
0
-0.3
-0.1
0.1
0.2
0.3
0.4
-1.8 -1.4 -0.4 0-1-1.6 -1.2 -0.6 -0.2-0.8
Imag
inar
y Ax
is
Real Axis
Root Locus
x
x
xxx
00
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Tiempo (segundos)
Resp
uest
a a
un e
scal
ón
10 20 30 60 70 80 1009040 50
-6
-4
-2
0
2
4
6
Imag
inar
y Ax
is
-1.8 -1.4 -0.4 0-1-1.6 -1.2 -0.6 -0.2-0.8Real Axis
Root Locus
x
xxxx
x
00
0.15
0.1
0.05
0.2
0.25
0.3
0.35
0.4
Tiempo (segundos)
Resp
uest
a a
un e
scal
ón
5 10 15 3020 25
Step
+_
Planta
s + 1.66
s3 + 4.32s2 + 6.08s + 2.76Scope
143El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
La gráfi ca del lugar de las raíces de la Figura 30 muestra que el sistema es estable al tener sus polos en el semiplano izquierdo del plano S. Pero no se puede utilizar el método de Ziegler – Nichols de ganancia última para la sintonización del controlador PID debido a que las ramas del lugar de las raíces no cortan al eje imaginario ωj . El segundo método de Ziegler-Nichols de curva de reacción tampoco es posible usarlo debido a que la curva de respuesta a un escalón en lazo abierto no presenta una gráfi ca en forma de “S” y además la función de transferencia presenta un par de polos complejos conjugados. Por lo tanto, el método de sintonización a utilizar es el índice de comportamiento ITAE óptimo.
3.3 Sintonización del controlador
A pesar de los grandes avances en la ingeniería de control, el controlador PID sigue siendo el algoritmo más utilizado en el control de procesos industriales. Esto se debe básicamente a su robustez y al conocimiento de las relaciones entre sus parámetros y la respuesta del sistema. Para compensar el sistema mediante un controlador PID se utiliza el método de sintonización más adecuado para este sistema, como lo es el método de sintonización ITAE óptimo.
3.3.1 Integral del tiempo multiplicada por el error absoluto ITAE.
Para el sistema de control de temperatura de la Figura 31, se utiliza la acción PID, la cual es necesaria para estabilizar el proceso y darle mayor rapidez a la respuesta. Se desea obtener un comportamiento ITAE óptimo para una entrada en escalón y un tiempo de asentamiento inferior a 2 segundos con un criterio del 2%. Por tanto, la función de transferencia del contro-lador PID es:
(64)
Figura 31. Diagrama de bloques del sistema de control PID
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛ ++=
S
KSKSKG SC
212
3
Entrada
R(s) Gc(s) T2(s)
PlantaSalida
ControladorPID
s + 1.66
s3 + 4.32s2 + 6.08s + 2.76+_
Este índice de comportamiento, proporciona la mejor selectividad de los índices de comportamiento, es decir, el valor de la integral se discierne fácilmente a medida que varían los parámetros del sistema. La función de transferencia del sistema con compensador PID en lazo cerrado es:
( )( ) ( )
( ) ( ) ( ) 2122
313
34
2122
313
3
66.166.176.266.108.632.4
66.166.166.1
KSKKSKKSKS
KSKKSKKSKT S +++++++++
+++++=
(65)
Por lo tanto, los coefi cientes óptimos de la ecuación característica proporcionados para ITAE ante una en-trada escalón son:
(66)
Para cumplir la especifi cación del tiempo de asen-tamiento
ST de 2 segundos con un criterio del 2%, y una razón de amortiguamiento ρ de 0.8, se tiene:
(67)
Igualando el denominador de la ecuación [58] con la ecuación [59], se obtienen los valores de los parámetros K1, K2 y K3 del controlador PID.
Por lo tanto, se tiene:
Luego, la función de transferencia del controlador PID es:
(68)
Por lo tanto, la función de transferencia del sistema compensado en lazo cerrado es:
(69)
El diagrama de bloques para el sistema compensado con el controlador PID se muestra en la Figura 32.
432234 7.24.31.2 nnnn SSSS ωωωω ++++
segradT nn
S 5.24
=→= ωρω
93.083.1662.13 321 === KKK
( ) SSS
G SC
83.1662.1393.0 2 ++=
( ) 94.272.4224.2125.594.2744.3916.1593.0
234
23
+++++++
=SSSS
SSST S
Steps4 + 5.25s3 + 21.24s2 + 42.2s + 27.94
0.93s3 + 15.16s2 + 39.44s + 27.94
Scope
Sistema compensado
La respuesta del sistema a una entrada escalón tiene una sobreelongación de aproximadamente el 35%, tal como se muestra en la Figura 33.
Figura 32. Diagrama de bloques de la función de transferencia en lazo cerrado con control PID
00
0.4
0.2
0.6
0.8
1
1.2
1.4
Tiempo (segundos)
Resp
uest
a a
un e
scal
ón
2 4 6 12 14 1816 208 10
Figura 33. Respuesta a un escalón del sistema con controlador PID
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
00
0.4
0.2
0.6
0.8
1
1.2
1.4
Tiempo (segundos)
Resp
uest
a a
un e
scal
ón
2 4 6 12 14 1816 208 10
Steps4 + 5.25s3 + 21.24s2 + 42.2s + 27.94
0.93s3 + 15.16s2 + 39.44s + 27.94
Scope
Sistema compensado

144 El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
Con el fi n de reducir la sobreelongación se seleccio-na un prefi ltro GF(s) de forma que se consiga la respuesta ITAE deseada.
(70)
Por lo tanto, se requiere que:
(71)
Al insertar un prefi ltro GF(S) al sistema, el diagrama de bloques del sistema queda como se muestra en la Figura 34.
( )( )
( )SPC
SFPCS
GG
GGGT
+=
1
( ) 304.423.16
3023 +++
==SSS
G SF
Figura 35. Respuesta a un escalón del sistema con controlador PID y prefi ltro
Figura 34. Diagrama de bloques del sistema de control PID con prefi ltro
Step
+_
Preltro
Gc(s)GF(s)
ControladorPID
Planta
s + 1.66
s3 + 4.32s2 + 6.08s + 2.76Scope
Luego, al colocar un prefi ltro al sistema de control se tiene la respuesta al escalón de la Figura 35.
00
0.4
0.2
0.6
0.8
1
1.2
1.4
Tiempo (segundos)
Resp
uest
a a
un e
scal
ón
2 4 6 12 14 1816 208 10
El sistema al aplicarle el prefi ltro presenta una pe-queña sobreelongación del 2%, el tiempo de asentamien-to es de 4 segundos y el error en estado estacionario es nulo. Además, para una perturbación
( ) SD S 1= , el valor máximo de ( )ty debido a la perturbación es de 65% de la magnitud de la perturbación. Por lo tanto, se obtiene un diseño muy favorable.
4. Conclusiones
Para el desarrollo de este proyecto se aplicaron conceptos vistos a lo largo de la formación como In-geniero Mecánico y conceptos de ingeniería de control que en estos momentos son tan útiles para el desarrollo de automatización industrial.
Como se puede ver, en el desarrollo de este trabajo se manejan conceptos de análisis numérico para poder analizar los modelos matemáticos, y de esta forma ver la importancia de esta herramienta en el trabajo de la ingeniería.
Se hizo además el diseño y la selección de los diferentes elementos que conforman el banco de pruebas, se seleccionó este tipo de planta porque ma-neja dos variables que se pueden controlar en forma independiente o las dos al tiempo, aplicando diferentes teorías de control lo que hace que esto sea un banco de pruebas didáctico y con aplicaciones a la ingeniería mecánica.
El diseño del banco de pruebas para el control de temperatura y fl ujo representó una experiencia altamente positiva, ya que se adquirió conocimientos prácticos y se aplicaron los conceptos ya adquiridos aumentando los criterios para la toma de decisiones en el campo profesional.
Este material es un elemento didáctico de consulta muy útil, el cual complementa la formación de los fu-turos ingenieros.
En el diseño de los intercambiadores de calor enfriados por agua, se deduce que la transferencia de calor utilizando agua como fl uido de enfriamiento ha demostrado ser más efi caz en cuanto fi abilidad en la regulación de la temperatura. Por tanto, se puede decir, que la energía en tránsito debido a una diferencia de temperaturas por convección es mayor entre líquido y líquido, que entre líquido y aire.
Las variaciones en válvulas y accesorios, alteran la carga total sobre la bomba, lo cual conlleva cambio de caudal, de la potencia necesaria para impulsar el fl uido y la efi ciencia de la bomba.
La válvula de control presenta comportamientos diferentes antes y después de su instalación debidos a la variación de la caída de presión con el cambio de apertura de la válvula.
El segundo intercambiador de calor es un elemento adicional que se diseña con el fi n de evitar el desperdicio de agua ya que esta se puede reutilizar y no se encuen-tra a una temperatura muy alta que pueda afectar las variables de control.
Mediante el uso de una adecuada ley de control se logró hacer nulo el error en estado estacionario, cumpliendo así con el objetivo de funcionamiento de la planta.
La sintonización del controlador presenta un buen desempeño, que se puede garantizar ya que éste depende
Diseño de un banco de pruebas para el control de temperatura y fl ujoCristian David Chamorro R. • Luis Daladier Meneses G.
Step
+_
Preltro
Gc(s)GF(s)
ControladorPID
Planta
s + 1.66
s3 + 4.32s2 + 6.08s + 2.76Scope
00
0.4
0.2
0.6
0.8
1
1.2
1.4
Tiempo (segundos)
Resp
uest
a a
un e
scal
ón
2 4 6 12 14 1816 208 10

145El Hombre y la Máquina No. 31 • Julio-Diciembre de 2008
del modelo de la planta, el cual representa a satisfacción las características dinámicas del proceso controlado.
En este artículo se ha presentado una estrategia de control basada en el método de sintonización ITAE para una planta de tercer orden. El esquema de control fue aplicado satisfactoriamente en la simulación. El resulta-do obtenido fue satisfactorio en cuanto al seguimiento de la referencia para la temperatura de proceso a la salida del intercambiador de calor de control, teniendo un buen rechazo a la perturbación (cambio de temperatura del agua de enfriamiento).
BibliografíaCreus Sole, Antonio. Instrumentación industrial. México, Al-
faomega. 1998.
Greene Walter, Richard. Válvulas, selección, uso y mantenimien-to. México, Editorial McGraw Hill. 1999.
Icropera P., Frank. De Wit, David. Fundamentos de transferencia de calor. México, Prentice may. 1996.
Beckwitch, J. Mechanical measurements. London, Macmillan. 1996.
Kern, Donald Q. Procesos de transferencia de calor. México, Compañía editorial Continental S.A.
Woods, Robert, Modeling and simulation of dynamics systems, United States of America, Prentice Hall, 521.
Munson, Bruce R. Okiishi, Theodore H. Fundamentos de mecáni-ca de fluidos. México, Editorial Limusa Willey. 1999.
Ogata, Katsuhiko. Ingeniería de control moderna. España, Edito-rial Prentice may. 2002.
Viejo Zubicata, Manuel, Álvarez Fernández, Javier. Bombas, teoría, diseño y aplicaciones. México, Editorial Limusa. 2003.
Smith A. Carlos., Corripio B. Armando. Principles and Practice of automatic Process Control.
Chapra, Steven C., Canale. Raymond P. Métodos numéricos para ingenieros.
Werner Leonhard. Introduction to Control Engineering and Linear Control Systems.
Shahian Bahran., Hassul Michael. Control System Design us-ing Matlab.
Dorf Richard C., Bishop Robert H. Sistemas de Control Mod-erno.
Diseño de un banco de pruebas para el control de temperatura y flujoCristian David Chamorro R. • Luis Daladier Meneses G.