Diseño e Implementación de un Sistema de Control de...
98
Diseño e Implementación de un Sistema de Control de Humedad Relativa y Absoluta en un Invernadero. EDINSON RODOLFO RIOS SUAREZ 20052283024 UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS FACULTAD TECNOLOGICA INGENIERÍA EN CONTROL BOGOTA D.C 2015
Transcript of Diseño e Implementación de un Sistema de Control de...
Diseño e Implementación de un Sistema de Control de Humedad Relativa y Absoluta en un Invernadero.
EDINSON RODOLFO RIOS SUAREZ
20052283024
UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS FACULTAD TECNOLOGICA INGENIERÍA EN CONTROL
BOGOTA D.C 2015
Diseño e Implementación de un Sistema de Control de Humedad Relativa y Absoluta en un Invernadero.
EDINSON RODOLFO RIOS SUAREZ 20052283024
Trabajo de grado para optar al título de Ingeniero en Control
Director: ING. Frank Giraldo
UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS FACULTAD TECNOLOGICA INGENIERÍA EN CONTROL
BOGOTA D.C 2015
Nota de Aceptación _________________________________ _________________________________ _________________________________ _________________________________ _________________________________ _________________________________ _________________________________ Presidente del Jurado _________________________________ Jurado _________________________________ Jurado BOGATA D.C, _________________ de 2015

DEDICATORIA En primer lugar a Dios quien ha sido mi eje y punto de apoyo en mi vida y el cual ha hecho posible el alcanzar cada una de las metas propuestas y el haber culminado con éxito el proyecto, agradezco también de corazón a mis padres y mi familia quienes muy unida siempre me brindaron su apoyo incondicional en cada etapa de mi vida, a mis amigos compañeros, a los docentes ingenieros quienes me brindaron y compartieron parte de sus conocimientos e hicieron posible mi formación como profesional y todas las personas las cuales estuvieron presentes en la realización del proyecto. De corazón un millón de gracias. EDINSON RODOLFO RIOS SUAREZ
RESUMEN
TITULO: Diseño e Implementación de un Sistema de Control de Humedad Relativa y Absoluta en un Invernadero.
AUTOR: EDINSON RODOLFO RIOS SUAREZ
PALABRAS CLAVE: Invernadero, programación, comunicación, instrumentación, lógica difusa.
CONTENIDO: Este proyecto está desarrollado para la mejora de condiciones ambientales de un cultivo, disminuyendo los costos de producción y mejorando la calidad del producto mediante el control de temperatura, humedad relativa, absoluta y gestión de riego para un invernadero en la zona Santander, usando lógica difusa MAMDANI. De forma que el productor se involucre gradualmente en la utilización de tecnología en el campo. Para el control difuso MAMDANI, se identifican las principales variables a controlar, se hace la adaptación de los sensores que permitan obtener medidas exactas del entorno en sitio para así dar las condiciones del medio ambiente al interior del invernadero, conociendo así los valores del ambiente de temperatura, humedad relativa, los cuales serán las variables a controlar; al obtener la información de las medidas se efectúa el control difuso MAMDANI, por esta razón se utiliza la lógica difusa ya que el funcionamiento del sistema no varía entre dos estados como sucede en los controladores ON/OFF, sino se pueden encontrar valores intermedios de control. Es por esto y por la sencillez de manejar este tipo de control, que fue implementado para este sistema en particular. Para este caso se optó por un sistema de riego por goteo, que al ser implementado proporciona ventajas adicionales como la de llegar directamente a las raíces de la planta de tomate. Para el sistema de riego, el control difuso activa el actuador (electroválvula) de acuerdo a las reglas implementadas en el controlador, ya que solo se dará la activación o disparo (ON/OFF) de la electroválvula al cumplir las condiciones, cuando exista el cambio brusco de la temperatura y humedad relativa de la noche del día anterior a la salida del sol del día siguiente, se realiza el riego por goteo que suministra los 1.5 litros de agua que necesitan las plantas de tomate. La implementación de este sistema permite adecuar las condiciones ambientales del cultivo bajo invernadero, obteniendo resultados favorables para el libre desarrollo del producto (tomate) y mejorando las condiciones normales de producción al aire libre.
1
TABLA DE CONTENIDO
TABLA DE CONTENIDO ........................................................................................................... 1
INTRODUCCIÓN ............................................................................................................. 5
1. EL PROBLEMA ............................................................................................................ 6
1.1 DESCRIPCIÓN DEL PROBLEMA .................................................................................. 6
1.2 FORMULACIÓN DE LA PREGUNTA ............................................................................. 7
1.3 OBJETIVOS ............................................................................................................... 7
1.3.1 Objetivos General.......................................................................................................... 7
1.3.2 Objetivos Específicos ..................................................................................................... 7
1.4 JUSTIFICACION ......................................................................................................... 8
1.5 METODOLOGIA PROPUESTA ..................................................................................... 8
2. MARCO REFERENCIAL .............................................................................................. 10
2.1 MARCO TEÓRICO ................................................................................................... 10
2.1.1 Tomate Lycopersicon .................................................................................................. 10
2.1.2 Principales Tipos de Tomates ..................................................................................... 11
2.1.3 Condiciones Ideales para el Cultivo de Tomate ......................................................... 12
2.1.4 Sensores ..................................................................................................................... 14
2.1.5 Sistemas Difusos ......................................................................................................... 15
2.1.6 Sistema Difuso Mamdani ........................................................................................... 15
2.1.7 Comunicación Serial ................................................................................................... 21
2.2 MARCO CONCEPTUAL ............................................................................................ 22
2.2.1 Invernadero ................................................................................................................. 22
2.2.2 Tipos de invernaderos ................................................................................................. 22
2.2.3 Señales Analógicas y Digitales .................................................................................... 27
2.2.4 Variables Principales a Controlar ................................................................................ 28
2.3 MARCO HISTORICO ................................................................................................ 28
3. DISEÑO INGENIERIL .................................................................................................. 30
3.1 DISEÑO Y CONSTRUCCION DEL INVERNADERO. ...................................................... 30
3.1.1 Descripción de la Distribución de los Sensores y Actuadores ................................... 32
3.1.2 Descripción de la Distribución del Sistema de Riego por Goteo y del Sembradío .... 35
3.2 TOMA DE DATOS DE RANGOS DE MEDIDA DE TEMPERATURA Y HUMEDAD AL INTERIOR DEL INVERNADERO ...................................................................................... 39
3.3 SELECCIÓN DE SENSORES, ACTUADORES Y DESCRIPCION DEL CONTROL DIFUSO MAMDANI ................................................................................................................... 39
3.3.1 Descripción y Elección de la Etapa de Instrumentación ............................................. 39
3.3.2 Descripción y Elección de Actuadores ........................................................................ 44
2
3.3.3 Selección de Elementos para la Visualización y Programación .................................. 46
3.3.4 Descripción General del Control MAMDANI ............................................................... 47
3.4 DISEÑO E IMPLEMENTACION DEL HARDWARE ........................................................ 49
3.4.1 Diseño Físico e Implementación de la Carcasa en cada Tarjeta Impresa ................... 49
3.4.2 Implementación del Hardware Modulo de Control .................................................... 51
3.5 DISEÑO E IMPLEMENTACION DEL CONTROL DIFUSO ............................................... 59
3.5.1 Creación de los conjuntos difusos (fuzzificacion) ....................................................... 60
3.5.2 Creación de Reglas ..................................................................................................... 63
3.6 DIAGRAMA DE FLUJO ............................................................................................. 65
3.7 DISEÑO DEL CIRCUITO IMPRESO ............................................................................. 68
4. PRUEBAS Y ANÁLISIS DE RESULTADOS ...................................................................... 69
PRUEBA 1. TOMA DE DATOS AL INTERIOR DEL INVERNADERO ...................................... 69
PRUEBA 2. TOMA DE DATOS AL INTERIOR DEL INVERNADERO CON ACTUADORES IMPLEMENTADOS Y VENTANAS ABIERTAS. .................................................................. 72
PRUEBA 3. REPRESENTACIÓN GRAFICA DEL VWC (CONTENIDO EN AGUA VOLUMÉTRICO) PARA UNA MUESTRA DEL SUELO. ................................................................................ 75
CONCLUSIONES ........................................................................................................... 77
Bibliografía .................................................................................................................. 78
Apéndice ..................................................................................................................... 81
APÉNDICE 1: HOJA DE DATOS ELECTROVÁLVULA, 2WNC, 24VAC. ................................. 81
APÉNDICE 2: HOJA DE DATOS SENSOR DE TEMPERATURA Y HUMEDAD RELATIVA RHT03..................................................................................................................................... 83
APÉNDICE 3: GRAFICAS TOMA DE DATOS SENSOR DE TEMPERATURA Y HUMEDAD RELATIVA. .................................................................................................................... 89
APÉNDICE 4: GRAFICA TOMA DE DATOS SENSOR DEL SUELO VEGETRONIX VH400. ...... 93
LISTA DE FIGURAS
FIGURA 1 TOMATE LYCOPERSICON ............................................................................................................................ 10 FIGURA 2 SISTEMA DIFUSO MAMDANI, PROCESAMIENTO GENERAL ................................................................................ 16 FIGURA 3 VISUALIZACIÓN DE UNA DE LAS ENTRADAS FUZZIFICADAS DE EJEMPLO, PROPINA EN UN RESTAURANTE ...................... 16 FIGURA 4 EJEMPLO PROPINA EN UN RESTAURANTE NIVELES DE PERTENENCIA, APOYADO EN LA BASE DE REGLAS ....................... 17 FIGURA 5 PARTES DE LAS REGLAS O BASE DE CONOCIMIENTO.......................................................................................... 17 FIGURA 6 EJEMPLO PROPINA EN UN RESTAURANTE, CONSECUENTE DE CADA REGLA Y EL VALOR DEL ANTECEDENTE OBTENIDO ..... 18 FIGURA 7 PROCESAMIENTO DETALLADO, SISTEMA DIFUSO MAMDANI ............................................................................. 19 FIGURA 8 EJEMPLO PROPINA EN UN RESTAURANTE RESULTADO DEFUZZIFICADO ............................................................... 19 FIGURA 9 EJEMPLO PROPINA EN UN RESTAURANTE, RESULTADO DEFUZZIFICADO MEDIANTE EL CENTROIDE.............................. 20 FIGURA 10 INVERNADERO TIPO TÚNEL ...................................................................................................................... 23 FIGURA 11 INVERNADERO TIPO CAPILLA .................................................................................................................... 24
3
FIGURA 12 INVERNADERO DIENTE DE SIERRA .............................................................................................................. 24 FIGURA 13 INVERNADERO CAPILLA MODIFICADO ........................................................................................................ 25 FIGURA 14 INVERNADERO TECHO CURVO ................................................................................................................... 25 FIGURA 15 INVERNADERO TIPO PARRAL .................................................................................................................... 26 FIGURA 16 INVERNADERO HOLANDÉS ....................................................................................................................... 26 FIGURA 17 SEÑAL ANALÓGICA .................................................................................................................................. 27 FIGURA 18 SEÑAL DIGITAL ....................................................................................................................................... 27 FIGURA 19 ESQUEMA Y MEDIDAS DE INVERNADERO TIPO CAPILLA IMPLEMENTADO ............................................................ 30 FIGURA 20 ESTRUCTURA VISTA DESDE AFUERA. COSTADO IZQUIERDO .............................................................................. 30 FIGURA 21 ESTRUCTURA VISTA DESDE AFUERA. COSTADO DERECHO ................................................................................ 31 FIGURA 22 ESTRUCTURA VISTA DESDE AFUERA. FRONTAL IZQUIERDA ............................................................................... 31 FIGURA 23 ESTRUCTURA VISTA DESDE AFUERA. FRONTAL DERECHA ................................................................................. 32 FIGURA 24 DISTRIBUCIÓN DE LOS SENSORES Y ACTUADORES ........................................................................................... 33 FIGURA 25 DISTRIBUCIÓN REAL DE LOS SENSORES Y ACTUADORES .................................................................................... 34 FIGURA 26 DISTRIBUCIÓN DEL SISTEMA DE RIEGO POR GOTEO Y DEL SEMBRADÍO ................................................................ 35 FIGURA 27 DISTRIBUCIÓN REAL DEL SISTEMA DE RIEGO POR GOTEO Y DEL SEMBRADÍO ......................................................... 36 FIGURA 28 TANQUE ABASTECIMIENTO DE AGUA (1000 LITROS) ..................................................................................... 37 FIGURA 29 DIMENSIONES DE SENSOR DE HUMEDAD RELATIVA Y TEMPERATURA RHT03 ..................................................... 40 FIGURA 30 SECUENCIA DE LOS PINES DEL SENSOR DE TEMPERATURA Y HUMEDAD RELATIVA ................................................. 41 FIGURA 31 DIMENSIONES DEL SENSOR DE HUMEDAD DEL SUELO VH400 ......................................................................... 42 FIGURA 32 RESPUESTA CONTENIDO VOLUMÉTRICO DEL AGUA (VWC EN %) DEL SENSOR HUMEDAD DEL SUELO VH400 .......... 44 FIGURA 33 ELECTROVÁLVULA BACCARA, 2WNC, A 24VAC ........................................................................................ 45 FIGURA 34 EXTRACTO DE 10” A 110VAC .................................................................................................................. 46 FIGURA 35 DISPLAY LCD 2X16 ................................................................................................................................ 47 FIGURA 36 PC HACER ASPIRE BAJO SISTEMA OPERATIVO W7 ....................................................................................... 47 FIGURA 37 DIAGRAMA DE BLOQUES DEL SISTEMA ........................................................................................................ 48 FIGURA 38 CONTROLADORES DIFUSOS MAMDANI A IMPLEMENTAR .............................................................................. 49 FIGURA 39 DISEÑO DE CARCASA PROTECTORA ............................................................................................................. 50 FIGURA 40 ASIGNACIÓN DE PINES, MICROCONTROLADOR MC9S08QE32 ....................................................................... 52 FIGURA 41 ETAPA DE PROCESAMIENTO ...................................................................................................................... 53 FIGURA 42 ETAPA DE COMUNICACIÓN ...................................................................................................................... 54 FIGURA 43 BORNES DE CONEXIONES ......................................................................................................................... 55 FIGURA 44 DIAGRAMA DE CONEXIONES ENTRE TARJETAS ............................................................................................... 56 FIGURA 45 COMUNICACIÓN, CANAL DE BAJADA .......................................................................................................... 57 FIGURA 46 COMUNICACIÓN, CANAL DE SUBIDA ........................................................................................................... 58 FIGURA 47 ETAPA DE POTENCIA ............................................................................................................................... 58 FIGURA 48 CONTROLADOR DIFUSO PARA LA ELECTROVÁLVULA ....................................................................................... 59 FIGURA 49 CONTROLADOR DIFUSO PARA EXTRACTOR #1 .............................................................................................. 59 FIGURA 50 CONTROLADOR DIFUSO PARA EXTRACTOR #2 .............................................................................................. 60 FIGURA 51 VALORES DE PERTENENCIA TEMPERATURA .................................................................................................. 60 FIGURA 52 VALORES DE PERTENENCIA HUMEDAD RELATIVA .......................................................................................... 61 FIGURA 53 VALORES DE PERTENENCIA HUMEDAD DEL SUELO ......................................................................................... 61 FIGURA 54 VALORES DE PERTENENCIA Δ (DELTA) PROMEDIO TEMPERATURA AIRE 1 Y 2 ..................................................... 62 FIGURA 55 VARIABLES DE SALIDA EXTRACTOR #1 Y #2 .............................................................................................. 63 FIGURA 56 VARIABLE DE SALIDA ELECTROVALVULA.................................................................................................. 63 FIGURA 57 DISEÑO DEL DIAGRAMA DE FLUJO DEL SISTEMA DE CONTROL ........................................................................... 66 FIGURA 58 CONTINUACIÓN DISEÑO DEL DIAGRAMA DE FLUJO DEL SISTEMA DE CONTROL ...................................................... 67 FIGURA 59 PLACA BASE DEL CIRCUITO ........................................................................................................................ 68 FIGURA 60 COMPORTAMIENTO DE LA TEMPERATURA Y HUMEDAD RELATIVA AL INTERIOR DEL INVERNADERO .......................... 71 FIGURA 61 COMPORTAMIENTO DE LA TEMPERATURA CON ACTUADORES Y VENTANAS AL INTERIOR DEL INVERNADERO .............. 73
4
FIGURA 62 COMPORTAMIENTO DE LA HUMEDAD RELATIVA CON ACTUADORES Y VENTANAS AL INTERIOR DEL INVERNADERO ...... 75 FIGURA 63 COMPORTAMIENTO DEL CONTENIDO EN AGUA VOLUMÉTRICO DEL SENSOR HUMEDAD DEL SUELO VH400. ............. 76 FIGURA 64 COMPORTAMIENTO DELTA DE TEMPERATURA SENSOR #1 Y #2 ....................................................................... 89 FIGURA 65 COMPORTAMIENTO DELTA DE TEMPERATURA SENSOR #1 Y #2 ....................................................................... 89 FIGURA 66 COMPORTAMIENTO DE LA TEMPERATURA SENSOR #1 Y #2 ............................................................................ 90 FIGURA 67 COMPORTAMIENTO HUMEDAD RELATIVA SENSOR #1 Y #2 ............................................................................ 90 FIGURA 68 COMPORTAMIENTO DE LA TEMPERATURA SENSOR #1 Y #2 ............................................................................ 91 FIGURA 69 COMPORTAMIENTO HUMEDAD RELATIVA SENSOR #1 Y #2 ............................................................................ 91 FIGURA 70 COMPORTAMIENTO DE LA TEMPERATURA SENSOR #1 Y #2 ............................................................................ 92 FIGURA 71 COMPORTAMIENTO HUMEDAD RELATIVA SENSOR #1 Y #2 ............................................................................ 92 FIGURA 72 COMPORTAMIENTO HUMEDAD DE LA TIERRA SENSOR HUMEDAD DEL SUELO ..................................................... 93
LISTA DE TABLAS
TABLA 1 CARACTERÍSTICAS TÍPICAS DEL CULTIVO DE TOMATE. ......................................................................................... 12 TABLA 2 CARACTERÍSTICAS DEL SENSOR TEMPERATURA Y HUMEDAD RELATIVA .................................................................... 41 TABLA 3 ESPECIFICACIONES DEL SENSOR HUMEDAD DEL SUELO, VH400 .......................................................................... 43 TABLA 4 ESPECIFICACIONES DEL CABLEADO, CONEXIÓN DEL SENSOR HUMEDAD DEL SUELO, VH400 ...................................... 43 TABLA 5 CARACTERÍSTICAS DE OPERACIÓN EXTRACTOR 10” ............................................................................................ 46 TABLA 6 CONJUNTOS LINGÜÍSTICOS VARIABLE DE ENTRADA TEMPERATURA ...................................................................... 61 TABLA 7 CONJUNTOS LINGÜÍSTICOS VARIABLE DE ENTRADA HUMEDAD RELATIVA .............................................................. 61 TABLA 8 CONJUNTOS LINGÜÍSTICOS VARIABLE DE ENTRADA HUMEDAD DEL SUELO ............................................................. 62 TABLA 9 CONJUNTOS LINGÜÍSTICOS VARIABLES DE ENTRADA Δ TEMPERATURA .................................................................. 62 TABLA 10 REGLAS PARA LA OPERACIÓN DE LA ELECTROVÁLVULA (HUMEDAD DEL SUELO, CONDICIÓN SECO) ........................... 64 TABLA 11 REGLAS PARA LA OPERACIÓN DE LA ELECTROVÁLVULA (HUMEDAD DEL SUELO, CONDICIÓN IDEAL) .......................... 64 TABLA 12 REGLAS PARA LA OPERACIÓN DE LA ELECTROVÁLVULA (HUMEDAD DEL SUELO, CONDICIÓN HÚMEDO) ..................... 65 TABLA 13 REGLAS PARA LA OPERACIÓN DE LA EXTRACTORES #1 Y #2 .............................................................................. 65 TABLA 14 DATOS AL INTERIOR DEL INVERNADERO ........................................................................................................ 70 TABLA 15 DATOS AL INTERIOR DEL INVERNADERO CON ACTUADORES Y VENTANAS .............................................................. 73
5
INTRODUCCIÓN
Por los factores climatológicos y la fertilidad de sus tierras y la visita realizada en la Corporación Colombiana de Investigación Agropecuaria (Corpoica) de Bucaramanga quienes nos informan la falta de construcción de invernaderos en el municipio de Santander, podría ser un buen desarrollo de cultivos de tomate bajo cubierta (invernadero) aprovechando las bondades que este tipo de tecnología ofrece. Sin embargo las ventajas que trae controlar las variables al interior de estos invernaderos no son tenidas en cuenta. El controlar la humedad, la temperatura y manejar un sistema de riego, en una cubierta bajo techo permite un crecimiento óptimo de la planta, reduciendo así problemas como hongos y demás enfermedades que atacan al cultivo, permite además una producción fuera de temporada, dando una indicación de los recursos necesarios como nutrientes, abonos y fungicidas, lo que da como resultado mayor calidad en la producción con menos inversión para su desarrollo. Entre la diversa gama de sistemas de irrigación, el sistema por goteo es el más adecuado para plantaciones en ambientes cerrados (Posada 2007). Lo que lo hace ideal para ser implementado en este proyecto ya que no se necesita controlar variables como el caudal y la presión si no solo el tiempo durante el cual este activo el sistema teniendo en cuenta la lectura del sensor de humedad del suelo. De lo anterior se vislumbra que para poder desarrollar un cultivo en óptimas condiciones bajo cubierta (invernadero), se debe mantener la humedad y la temperatura en unos rangos adecuados, como también activar diariamente el sistema de riego por goteo. Los parámetros riego, temperatura y humedad relativa, son definidos por las características propias del cultivo de tomate. Lograr un control adecuado de las variables temperatura y humedad relativa en el proceso, permitirá un desarrollo adecuado de la planta. El trabajo se estructura como sigue: en la sección 2 se orienta al lector dando conocimiento del tipo de cultivo, tipos de invernaderos, variables a controlar que son utilizadas para el desarrollo del proyecto. En la siguiente sección se comenta todo lo relacionado con el diseño ingenieril del proyecto que comprende el diseño y construcción del invernadero, diseño e implementación del hardware con el algoritmo de control, sensores y actuadores utilizados y el diseño del circuito impreso y el control utilizado con la respectiva comunicación utilizado en este proyecto. En la sección 4 se identifican las pruebas y análisis de resultados que se obtuvieron en la culminación y presentación del proyecto y finalmente, en la sección 5 se incluyen las conclusiones y discusiones obtenidas en este proyecto.
6
1. EL PROBLEMA
1.1 DESCRIPCIÓN DEL PROBLEMA
El problema de investigación se da al cambio climático de temperatura y humedad relativa y absoluta dentro de una cubierta bajo techo (invernadero) que es muy elevado y cuyo objetivo es adecuar el ambiente a niveles óptimos de temperatura y humedad para el cultivo y así aumentar la productividad y disminuir los costos de producción en el cultivo a largo plazo y aprovechar por medio del sistema de riego por goteo el uso de los recursos naturales. Parte esencial del problema es la creciente demanda de alimentos la cual requiere gran cantidad de agua o fuentes hídricas, fibra y energía, esto está desestabilizando los agro ecosistemas, erosionando la biodiversidad y agotando la tierra y los recursos hídricos, por ello en este proyecto se minimizo el consumo y gasto del agua, por medio de nuevas tecnologías como lo son los invernaderos automatizados. Los recursos naturales deben utilizarse de modo que puedan satisfacer las necesidades actuales y conservarse para las generaciones futuras. Para ello, se requerirá emprender medidas que fomenten las capacidades de los países, a escala mundial y de las explotaciones, con miras a alcanzar la ordenación y regulación sostenibles (Programa de la FAO s.f.). El enorme desarrollo de nuevas tecnologías con diseño de circuitos electrónicos, controles, controladores entre otros, en el campo, ha permitido muchas mejoras en la producción de plantas hortícolas. Siguiendo esta tendencia, actualmente se hace posible realizar el proceso de creación de algoritmos de control difuso MAMDANI de una forma más natural e intuitiva a través del uso de métodos relacionados con los conceptos de la Lógica Difusa. Esta nueva metodología es sencilla de manejar y permite encontrar valores intermedios de control. Dada la necesidad de ahorro de los recursos hídricos y mejoras de producción de las plantas hortícolas, este proyecto desarrollo un control difuso MAMDANI de humedad relativa, temperatura y gestión de riego para un invernadero usando lógica difusa, utilizando sensores de temperatura y humedad relativa, sensor de humedad del suelo y la activación de riego por goteo. Se realizó la toma de lecturas de las variables de medidas a controlar, para dar el uso del control difuso MAMDANI que acondiciona el ambiente que debe tener el tipo de cultivo hortícola, para así obtener una buena producción de alta calidad.
7
1.2 FORMULACIÓN DE LA PREGUNTA
¿Es posible mediante la implementación de un sistema de control difuso MAMDANI basado en lógica difusa gestionar el clima y riego en un invernadero para obtener aumento de productividad y calidad de los cultivos hortícolas?
1.3 OBJETIVOS
1.3.1 Objetivos General
Diseñar e implementar un sistema de control en un invernadero utilizando humedad relativa y absoluta en un cultivo en Santander.
1.3.2 Objetivos Específicos
2 Estudio de sistemas de control de humedad relativa y absoluta.
3 Seleccionar e implementar los sensores de humedad relativa y absoluta en el invernadero.
4 Tomar las medidas necesarias para desarrollar un algoritmo de control de humedad relativa y absoluta.
5 Realización de prueba piloto en el cultivo.
8
1.4 JUSTIFICACION
Debido a la falta de nuevas tecnologías en cultivos hortícolas y agrícolas bajo cubierta (Invernadero) en Santander y aprovechando la fertilidad de las tierras y las bondades que este tipo de tecnología ofrece ( Control Difuso MAMDANI), se realizó este proyecto para la construcción de un invernadero dando como beneficio el aumento de productividad y disminución de costos en cultivos a largo plazo y de esta forma demostrar al agricultor las nuevas tecnologías de instrumentación de un proceso en un invernadero, optimizando recursos como el agua, mejorando la calidad de producción, previniendo enfermedades y reduciendo el uso de fertilizantes. Con el fin de apreciar mejor el comportamiento de las variables más características en un invernadero para el cultivo de tomate se realiza un control de te temperatura y humedad (Microclima) en invernadero usando controlador difuso MAMDANI, mediante el uso de las diferentes herramientas con las que cuenta la Ingeniería en control electrónico de la UDI.
1.5 METODOLOGIA PROPUESTA
FASE 1: Localización del invernadero
Estudio del terreno y localización de fuentes de recursos hídricos.
Instalación del tanque de abastecimiento de líquidos hídricos.
Instalación de mangueras y transporte de la fuente de líquido hídrico por gravedad al tanque de abastecimiento.
Estudio de los diferentes sistemas de riego a utilizar en los invernaderos.
Adecuación de sistemas de riego por goteo.
FASE 2: Identificación de variables, selección de sensores, actuadores y elección del sistema difuso a utilizar.
Estudio de dispositivos de control difuso MAMDANI a usar, revisando previamente el entorno en el que se implementó el prototipo al igual que su viabilidad económica.

9
Toma de datos de rangos de medidas de temperatura y humedad en sitio para selección de Sensores.
Estudio de sensores a usar, teniendo en cuenta su implementación su costo, entre
otras características.
Selección y compra de Sensores temperatura y humedad, elementos electrónicos, microcontrolador, etc.
Implementación de los sensores, adecuándolos al dispositivo de control difuso
MAMDANI principal.
Programación del Microcontrolador, diseño del programa en su respectivo software.
Diseño e implementación del controlador Difuso MAMDANI. FASE 3: Diseño e implementación de hardware y algoritmo de control difuso MAMDANI.
Implementación de la carcasa y diseños físicos exteriores de cada dispositivo.
Estudio del sistema de comunicación a utilizar con base en el ambiente que se implementó en el prototipo, definiendo el tipo de medio a usar.
Implementar los dispositivos de acuerdo a la selección.
Adaptar a la parte de control.
Desarrollo del algoritmo difuso MAMDANI, diseño del programa, la compilación en su respectivo software con sus previas simulaciones.
Adaptar a la parte de comunicación.
Estudio de Normas técnicas y de instrumentación para diseño. FASE 4: Implementación y análisis de resultados
Implementación del prototipo y diseño de exteriores.
El invernadero fue sometido a ensayos para asegurar el correcto funcionamiento de todos los instrumentos y del control difuso MAMDANI implementado.
Entrega de resultados: compilación de resultados y documentación realizada a través de las distintas etapas llevadas a cabo en la ejecución del proyecto.

10
2. MARCO REFERENCIAL
2.1 MARCO TEÓRICO
A medida que se incrementa la automatización, los procesos se han hecho más eficientes, demandando sistemas de control con redes industriales que permitan supervisar las variables que intervienen en el mismo. Por lo anterior, en diferentes cultivos de tomates se han enfocado sus líneas de inversión en adquirir sistemas de control, sensores y actuadores de mayor precisión, que permitan un control en las variables que intervienen en su producción de tomate. En un invernadero de tomate los parámetros esenciales son la temperatura y humedad relativa, para que todo este conjunto de variables circulen lo mejor posible y se pueda obtener un cultivo de tomate en condiciones aptas para el comercio.
2.1.1 Tomate Lycopersicon
Las frutas y hortalizas son productos principales en la alimentación diaria. El tomate no es la excepción y es ampliamente utilizado en la preparación de muchos platos. A continuación se verán las condiciones del fruto, métodos de producción y elementos electrónicos que se pueden utilizar para mejorar la producción de tomate. Figura 1 Tomate Lycopersicon
Fuente http://www.infoagro.com/hortalizas/tomate.htm

11
El origen del tomate (Lycopersicon) se localiza en la región Andina desde el sur de Colombia hasta el norte de Chile. Siendo los mexicanos los primeros en verla como fruto, ya que se consideraba como una mala hierba entre los huertos. En otros países europeos solo se utilizaban en farmacia y así se mantuvieron en Alemania hasta comienzos del siglo XIX. El tomate es una de las hortalizas más demandadas por los consumidores colombianos, es usado como ingrediente de sopas, ensaladas y como condimento. El tomate es una verdura muy popular, está disponible en diversos tamaños, formas y colores incluyendo rojo, amarillo, y verde. Los tomates son bajos en calorías y son una buena fuente de vitamina C y antioxidantes. Los tomates son plantas pequeñas, compactas que florecen y dan todo su fruto dentro de un período de tiempo corto de dos a tres meses. Las plantas de tomate son altas, de crecimiento rastrero tipo enredadera que se producen bien cuando se soportan con una estructura o una reja de alambre alta. La raíz principal es corta y débil, las secundarias son numerosas y potentes especializadas en tomar agua y nutrientes. El Tallo principal tiene un grosor que oscila entre 2 á 4cm. en su base, sobre el que se van desarrollando hojas, tallos secundarios, flores y frutos. Las hojas se disponen de forma alternativa sobre el tallo, la Flor es regular y consta de 5 o más sépalos, de igual número de pétalos de color amarillo y dispuesto de forma helicoidal. El Fruto alcanza un peso que oscila entre unos pocos miligramos y 600 gramos.
2.1.2 Principales Tipos de Tomates
En el mundo se han producido distintos tipos o variedades de tomate, teniendo en cuenta principalmente el tamaño, el color y el sabor. En Colombia las que tienen mayor acogida son las siguientes: 2.1.2.1 Tipo Marmande Plantas poco vigorosas que emiten de 4 a 6 ramilletes aprovechables. El fruto se caracteriza por su buen sabor y su forma achatada y multilocular, que puede variar en función de la época de cultivo. 2.1.2.2 Tipo Cereza Plantas vigorosas de crecimiento indeterminado. Frutos de pequeño tamaño y de piel fina con tendencia al rajado, que se agrupan en ramilletes de 15 a más de 50 frutos. Sabor dulce y agradable. En cualquier caso se persigue un tomate resistente a virosis y al rajado, ya que es muy sensible a los cambios bruscos de temperatura. 2.1.2.3 Tipo Larga Vida (utilizado y cultivado en el proyecto) La introducción de genes es la responsable de su larga vida, confiriéndole mayor consistencia y gran conservación de los frutos de cara a su comercialización, en el sabor. Generalmente se buscan frutos de calibres G, M o MM de superficie lisa y coloración uniforme anaranjada o roja (infroAgro.com s.f.).
12
2.1.2.4 Tipo Ramillete Cada vez más presente en los mercados, resulta difícil definir qué tipo de tomate es ideal para ramillete, aunque generalmente se buscan las siguientes características: frutos de calibre M, de color rojo vivo, insertados en ramilletes en forma de espina de pescado, etc. (infroAgro.com s.f.).
2.1.3 Condiciones Ideales para el Cultivo de Tomate
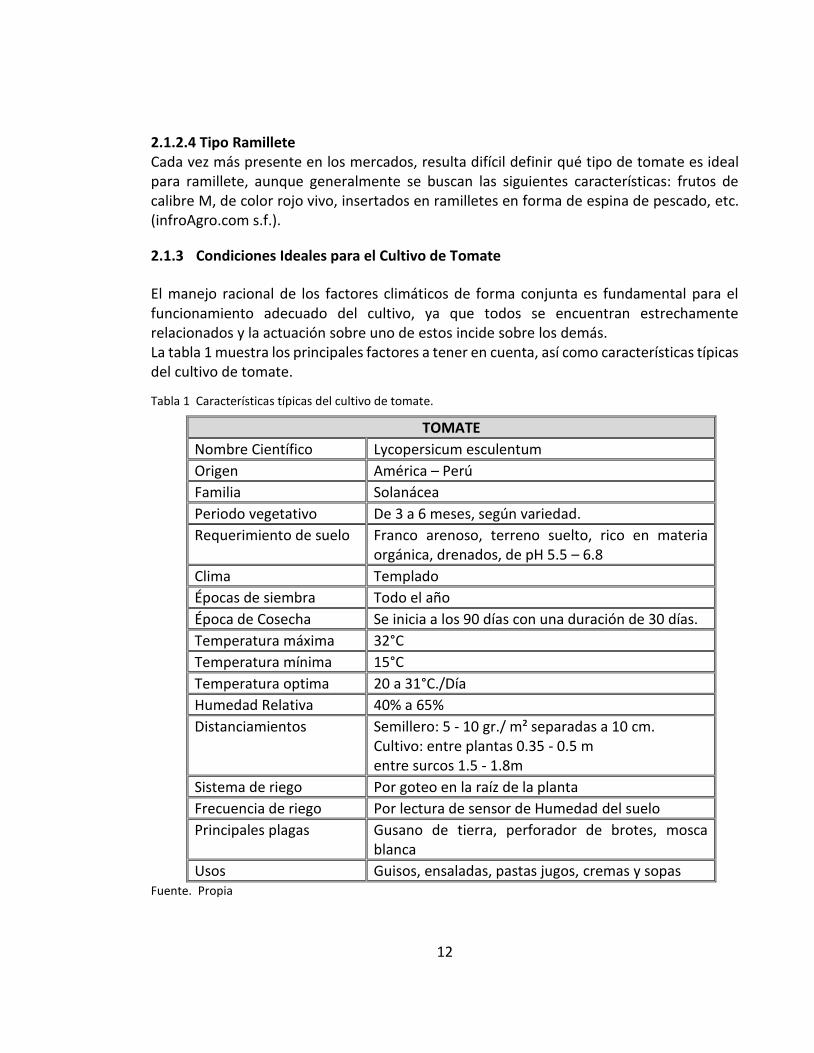
El manejo racional de los factores climáticos de forma conjunta es fundamental para el funcionamiento adecuado del cultivo, ya que todos se encuentran estrechamente relacionados y la actuación sobre uno de estos incide sobre los demás. La tabla 1 muestra los principales factores a tener en cuenta, así como características típicas del cultivo de tomate. Tabla 1 Características típicas del cultivo de tomate.
TOMATE
Nombre Científico Lycopersicum esculentum
Origen América – Perú
Familia Solanácea
Periodo vegetativo De 3 a 6 meses, según variedad.
Requerimiento de suelo Franco arenoso, terreno suelto, rico en materia orgánica, drenados, de pH 5.5 – 6.8
Clima Templado
Épocas de siembra Todo el año
Época de Cosecha Se inicia a los 90 días con una duración de 30 días.
Temperatura máxima 32°C
Temperatura mínima 15°C
Temperatura optima 20 a 31°C./Día
Humedad Relativa 40% a 65%
Distanciamientos Semillero: 5 - 10 gr./ m² separadas a 10 cm. Cultivo: entre plantas 0.35 - 0.5 m entre surcos 1.5 - 1.8m
Sistema de riego Por goteo en la raíz de la planta
Frecuencia de riego Por lectura de sensor de Humedad del suelo
Principales plagas Gusano de tierra, perforador de brotes, mosca blanca
Usos Guisos, ensaladas, pastas jugos, cremas y sopas Fuente. Propia
13
2.1.3.1 Temperatura El tomate es un cultivo capaz de crecer y desarrollarse en condiciones climáticas variadas. La temperatura óptima para el desarrollo vegetativo durante el día debe estar entre 18-22°C y en la noche no superior a 16ºC. Para el desarrollo productivo es necesaria una temperatura diurna entre 20 y 31°C y en la noche, entre 15 y 22°C. Cuando las temperaturas son mayores de 25°C y menores de 12°C, la fecundación es defectuosa o nula, porque se disminuye la cantidad y calidad del polen, produciendo caída de flores y deformación de frutos. Con temperaturas menores de 12°C, se producen ramificaciones en las inflorescencias. A nivel del fruto, este se puede amarillear si se presentan temperaturas mayores de 30ºC y menores de 10°C. En general, la diferencia de temperatura entre el día y la noche no debe ser mayor de 10°C- 12°C (JARAMILLO NOREÑA, y otros 2006). 2.1.3.2 Humedad La humedad relativa (H.R) óptima para el desarrollo del cultivo de tomate debe estar entre un 40 y un 65%. Cuando la humedad relativa es alta, favorece el desarrollo de enfermedades, se presentan una serie de desordenes que afectan la calidad de los frutos, como son: manchado, grietas, malformación del fruto y frutos huecos, se dificulta la fecundación por la compactación del polen y además las flores pueden caerse. Cuando la humedad relativa es baja, aumenta la transpiración de la planta, se reduce la fotosíntesis y se seca el polen, produciéndose igualmente anomalías en la fecundación (JARAMILLO NOREÑA, y otros 2006). 2.1.3.3 Ventilación Los métodos o formas de aireamiento varían de acuerdo con el modelo de invernadero empleado. Dentro de un invernadero el ambiente es cerrado, la circulación del aire es limitada y la temperatura es más alta que en el exterior, alcanzándose niveles máximos en el día. En las horas de la noche, la temperatura baja a niveles mínimos y la humedad relativa generalmente se incrementa alcanzando sus niveles máximos hacia la madrugada y sus niveles más bajos en las horas del medio día. Estos cambios extremos de temperatura y humedad relativa al interior del invernadero son la principal causa de bajas en la productividad, resultado de un incremento en la incidencia de enfermedades, baja polinización, bajo cuajamiento del fruto y deformación de frutos. Para ello se instalaron ventanales utilizando la dirección de los vientos naturales el cual permite la circulación del aire al interior del invernadero. Los principales propósitos para la ventilación dentro del invernadero son:
Remover la humedad al interior del invernadero. Eliminar el exceso de calor.
14
2.1.3.4 Luminosidad El tomate es exigente en luminosidad; requiere de días soleados y entre 8 a 16 horas de luz, para un buen desarrollo de las plantas y poder lograr una coloración uniforme en el fruto. La luz y la temperatura están directamente correlacionadas. A mayores niveles de luz hay mayor temperatura, y a mayores niveles de temperatura hay mayor transpiración y consumo de agua. La baja luminosidad afecta los procesos de floración, fecundación y desarrollo vegetativo de la planta, y reduce la absorción de agua y nutrientes (JARAMILLO NOREÑA, y otros 2006). 2.1.3.5 Suelo El tomate prospera en diferentes tipos de suelo, siendo los más indicados, los suelos sueltos, bien aireados y con buen drenaje interno y que a su vez tengan capacidad de retener humedad, de texturas francas a franco arcillosas; con contenidos de materia orgánica altos, por encima del 5%, y buen contenido de nutrientes. El pH del suelo debe oscilar entre 5,8 a 6,8. (JARAMILLO NOREÑA, y otros 2006).
2.1.4 Sensores Un sensor es un dispositivo que detecta o mide manifestaciones de cualidades o fenómenos físicos, químicos o biológicos como por ejemplo la energía, velocidad, tamaño, aceleración, cantidad, etc. Un sensor es dispositivo que transforma la magnitud que se quiere medir, en otra, que facilita su medida. Pueden ser de indicación directa (termómetro de mercurio) o pueden estar conectados a un indicador (posiblemente a través de un convertidor analógico a digital, un ordenador y un display) de modo que los valores medidos puedan ser leídos por un humano y/o almacenados en formato digital. La medición de temperatura y humedad es un aspecto muy utilizado en la industria en general así como en la vida diaria de las personas, las aplicaciones electrónicas no se quedan atrás en la medición de esta variable, debido a que la implementación de sistemas electrónicos hace los procesos más eficientes y baratos. El gran auge de la electrónica en la industria ha llevado al desarrollo de una gran cantidad de dispositivos como los sensores de temperatura y humedad los cuales se pueden encontrar desde los más básicos hasta los más complejos y costosos.
2.1.4.1 Sensor de Temperatura La temperatura es un parámetro termodinámico del estado de un sistema que caracteriza el calor. Por tanto, el sensor de temperatura es un elemento que posibilitará medir la cantidad de calor que hay en un ambiente determinado.
15
2.1.4.2 Sensores de Humedad Relativa, Absoluta La humedad relativa (H.R) es la relación entre la cantidad de vapor de agua contenido en el aire, en relación con la máxima que sería capaz de contener a la misma temperatura. Existe una relación inversa de la temperatura con la humedad, por lo que a elevadas temperaturas aumenta la capacidad de contener vapor de agua y por tanto disminuye la humedad relativa (H.R). Con temperaturas bajas, el contenido en humedad relativa (H.R) aumenta. La humedad relativa se expresa en porcentaje, así, cuando la humedad relativa llega al 100% significa que el aire está saturado de agua.
Humedad relativa (H.R): relación entre la humedad absoluta y la cantidad de saturación. Normalmente se expresa en %. UR = UA/cantidad de saturación
Humedad absoluta (H.A): cantidad de vapor de agua contenida en un m³ de aire. Puede expresarse en g/m³.
2.1.5 Sistemas Difusos
Los fundamentos de los sistemas difusos se encuentran en la lógica difusa. La lógica difusa o borrosa es una técnica de computación flexible que le permite a un computador clasificar información del mundo real en una escala infinita acotada por los valores falso y verdadero; tiene por objetivo proporcionar un soporte matemático formal al razonamiento basado en el lenguaje natural, el cual se caracteriza por tratarse de un razonamiento de tipo aproximado que hace uso de proposiciones que expresan información de carácter impreciso (CHAHUARA QUISPE 2005).
Algunas características de la lógica difusa que la hacen de tanto interés son:
Es fácil de entender, los conceptos matemáticos son bastante sencillos. Es flexible, su escalamiento es sencillo. Es tolerante a datos imprecisos. Puede modelar funciones no-lineales de complejidad arbitraria. Puede ser construida sobre la información de la experiencia de los operarios que
manejan el sistema que se desea automatizar. Puede ser complementaria a las técnicas de control convencionales. Está basada en el lenguaje utilizado por los humanos.
2.1.6 Sistema Difuso Mamdani
El sistema utilizado en el proyecto es el tipo Mamdani; este método fue uno de los primeros sistemas de control construidos utilizando la teoría de conjuntos difusos. Se propuso en 1975 por Ebrahim Mamdani (Mamdani y Assilian 1975) como un intento de controlar una

16
máquina de vapor y la combinación de la caldera mediante la síntesis de un conjunto de reglas de control lingüísticas obtenidas a partir de experimentados operadores humanos. Figura 2 Sistema Difuso Mamdani, Procesamiento General
Autor. Propia En un sistema difuso Mamdani se distinguen las siguientes partes: 2.1.6.1 Fuzzyficador La entrada de un sistema de lógica difusa tipo Mamdani normalmente es un valor numérico proveniente, por ejemplo, de un sensor; para que este valor pueda ser procesado por el sistema difuso se hace necesario convertirlo a un "lenguaje" que el mecanismos de inferencia pueda procesar. Esta es la función del fuzzificador, que toma los valores numéricos provenientes del exterior y los convierte en valores "difusos" que pueden ser procesados por el mecanismo de inferencia. Estos valores difusos son los niveles de pertenencia de los valores de entrada a los diferentes conjuntos difusos en los cuales se ha dividido el universo de discurso de las diferentes variables de entrada al sistema (Fuzzy Inference Proceess 2012). Si se toma como ejemplo el problema de la propina en un restaurante, esta sería una de las entradas: véase Figura 3. Figura 3 Visualización de una de las entradas Fuzzificadas de ejemplo, propina en un restaurante
Fuente. http://www.mathworks.com/help/toolbox/fuzzy/fp351dup8.html

17
2.1.6.2 Mecanismo de inferencia difusa Teniendo los diferentes niveles de pertenencia arrojados por el fuzzificador, los mismos deben ser procesados para generar una salida difusa. La tarea del sistema de inferencia es tomar los niveles de pertenencia y apoyado en la base de reglas generar la salida del sistema difuso (Fuzzy Inference Proceess 2012). Figura 4 Ejemplo propina en un restaurante niveles de pertenencia, apoyado en la base de reglas
Fuente. http://www.dma.fi.upm.es/java/fuzzy/fuzzyinf/mamdani.htm
2.1.6.3 Base de Reglas Difusas La base de reglas es la manera que tiene el sistema difuso de guardar el conocimiento lingüístico que le permiten resolver el problema para el cual ha sido diseñado. Estas reglas son del tipo IF – THEN . Una regla de la base de reglas o base de conocimiento tiene dos partes, el antecedente y el consecuente como se observa en la siguiente Figura 5 y un breve ejemplo de las bases de reglas difusas, véase la Figura 6: Figura 5 Partes de las reglas o base de conocimiento
Fuente. Propia.

18
Figura 6 Ejemplo propina en un restaurante, consecuente de cada regla y el valor del antecedente obtenido
Fuente. http://www.dma.fi.upm.es/java/fuzzy/fuzzyinf/mamdani.htm
Es la etapa principal del controlador difuso, ya que emula la toma de decisiones en un humano experto mediante las reglas de inferencia difusa. El antecedente y consecuente de cada regla puede tener muchas partes, en tal caso se evalúa la veracidad de todas las partes del antecedente simultáneamente y se transforman en números utilizando operadores lógicos. Teniendo en cuenta las reglas se deduce la veracidad de cada uno de los consecuentes los cuales son afectados de igual forma por el antecedente. En un sistema difuso tipo Mamdani tanto el antecedente como el consecuente de las reglas están dados por expresiones lingüísticas (Fuzzy Inference Proceess 2012). 2.1.6.4 Defuzzificador La salida que genera el mecanismo de inferencia es una salida difusa, lo cual significa que no puede ser interpretada por un elemento externo (por ejemplo un controlador) que solo manipule información numérica. Para lograr que la salida del sistema difuso pueda ser interpretada por elementos que solo procesen información numérica, hay que convertir la salida difusa del mecanismos de inferencia; este proceso lo realiza el fuzzificador (Fuzzy Inference Proceess 2012).
En los siguientes gráficos se muestra de manera más detallada como es el funcionamiento de un sistema difuso Mamdani y el breve ejemplo gráfico que corresponde al resultado Defuzzificado y procesamiento detallado del Sistema Difuso Mamdani:

19
Figura 7 Procesamiento Detallado, Sistema Difuso Mamdani
Fuente. http://members.tripod.com/jesus_alfonso_lopez/FuzzyIntro2.html Figura 8 Ejemplo propina en un restaurante resultado Defuzzificado
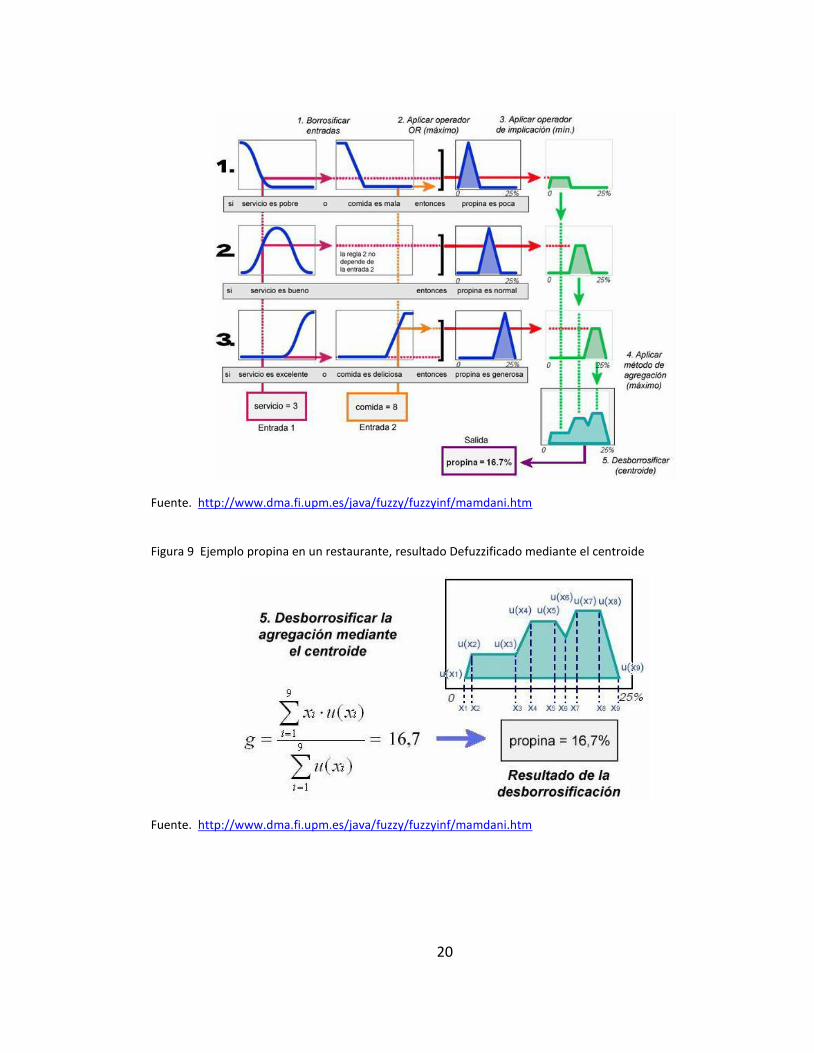
20
Fuente. http://www.dma.fi.upm.es/java/fuzzy/fuzzyinf/mamdani.htm Figura 9 Ejemplo propina en un restaurante, resultado Defuzzificado mediante el centroide
Fuente. http://www.dma.fi.upm.es/java/fuzzy/fuzzyinf/mamdani.htm

21
2.1.7 Comunicación Serial
La comunicación serial es un protocolo muy común para la comunicación entre dos dispositivos. El concepto de comunicación serial consiste en el envió de un bit de información de manera secuencial, esto es, un bit a la vez y a un ritmo acordado entre el emisor y el receptor. Este método de comunicación es más sencillo y puede alcanzar mayores distancias. Típicamente, la comunicación serial se utiliza para transmitir datos en formato ASCII. Para realizar la comunicación se utilizan 3 líneas de transmisión: (1) Tierra (o referencia), (2) Transmitir, (3) Recibir. Debido a que la transmisión es asincrónica, es posible enviar datos por una línea mientras se reciben datos por otra. Las características más importantes de la comunicación serial son la velocidad de transmisión, los bits de datos, los bits de parada, y la paridad. Para que dos puertos se puedan comunicar, es necesario que las características sean iguales (INSTRUMENTS 2006). 2.1.7.1 Velocidad de transmisión (baud rate) Indica el número de bits por segundo que se transfieren, y se mide en baudios (bauds). Por ejemplo, 300 baudios representan 300 bits por segundo. Cuando se hace referencia a los ciclos de reloj se está hablando de la velocidad de transmisión. 2.1.7.2 Bits de datos Se refiere a la cantidad de bits en la transmisión. Cuando la computadora envía un paquete de información, el tamaño de ese paquete no necesariamente será de 8 bits. Las cantidades más comunes de bits por paquete son 5, 7 y 8 bits. El número de bits que se envía depende en el tipo de información que se transfiere. Un paquete se refiere a una transferencia de byte, incluyendo los bits de inicio/parada, bits de datos, y paridad. Debido a que el número actual de bits depende en el protocolo que se seleccione. 2.1.7.3 Bit de parada Usado para indicar el fin de la comunicación de un solo paquete. Los valores típicos son 1, 1.5 o 2 bits. Debido a la manera como se transfiere la información a través de las líneas de comunicación y que cada dispositivo tiene su propio reloj, es posible que los dos dispositivos no estén sincronizados. Por lo tanto, los bits de parada no sólo indican el fin de la transmisión sino además dan un margen de tolerancia para esa diferencia de los relojes. Mientras más bits de parada se usen, mayor será la tolerancia a la sincronía de los relojes, sin embargo la transmisión será más lenta. 2.1.7.4 Paridad Es una forma sencilla de verificar si hay errores en la transmisión serial. Existen cuatro tipos de paridad: par, impar, marcada y espaciada. La opción de no usar paridad alguna también está disponible. Para paridad par e impar, el puerto serial fijará el bit de paridad (el último
22
bit después de los bits de datos) a un valor para asegurarse que la transmisión tenga un número par o impar de bits en estado alto lógico. Por ejemplo, si la información a transmitir es 011 y la paridad es par, el bit de paridad sería 0 para mantener el número de bits en estado alto lógico como par. Si la paridad seleccionada fuera impar, entonces el bit de paridad sería 1, para tener 3 bits en estado alto lógico. La paridad marcada y espaciada en realidad no verifican el estado de los bits de datos; simplemente fija el bit de paridad en estado lógico alto para la marcada, y en estado lógico bajo para la espaciada. Esto permite al dispositivo receptor conocer de antemano el estado de un bit, lo que serviría para determinar si hay ruido que esté afectando de manera negativa la transmisión de los datos, o si los relojes de los dispositivos no están sincronizados.
2.2 MARCO CONCEPTUAL
2.2.1 Invernadero
Un invernadero es toda aquella estructura cerrada cubierta por materiales transparentes, dentro de la cual es posible obtener unas condiciones artificiales de microclima, y con ello cultivar plantas fuera de estación en condiciones óptimas. Las ventajas del empleo de los invernaderos son:
Precocidad en los frutos. Aumento de la calidad y del rendimiento. Producción fuera de época. Ahorro de agua y fertilizantes. Mejora del control de insectos y enfermedades. Posibilidad de obtener más de un ciclo de cultivo al año.
Inconvenientes:
Alta inversión inicial. Alto costo de operación. Requiere personal especializado, de experiencia práctica y conocimientos teóricos.
2.2.2 Tipos de invernaderos
Los invernaderos se pueden clasificar de distintas formas, según se atienda a determinadas características de sus elementos constructivos (por su perfil externo, según su fijación o movilidad, por el material de cubierta, según el material de la estructura, etc.). La elección de un tipo de invernadero está en función de una serie de factores o aspectos técnicos:
23
Tipo de suelo: Se deben elegir suelos con buen drenaje y de alta calidad aunque con los sistemas modernos de riego es posible utilizar suelos pobres con buen drenaje o sustratos artificiales (InfoAgro.com s.f.).
Topografía: Son preferibles lugares con pequeña pendiente orientados de norte a sur. Vientos: Se tomarán en cuenta la dirección, intensidad y velocidad de los vientos
dominantes. Exigencias bioclimáticas de la especie en cultivo. Características climáticas de la zona o del área geográfica donde vaya a construirse el
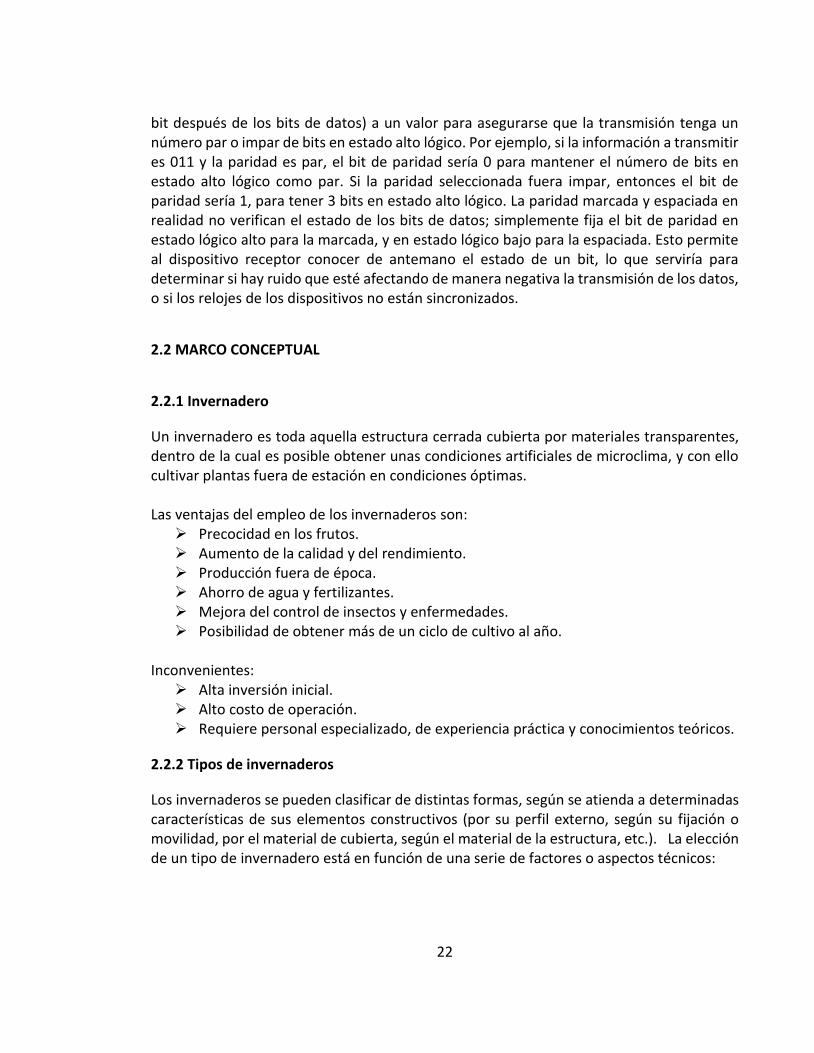
invernadero. Disponibilidad de mano de obra (factor humano). Imperativos económicos locales (mercado y comercialización). Según la conformación estructural, los invernaderos se pueden clasificar en: 2.2.2.1 Invernadero Tipo Túnel Es difícil establecer una línea divisoria entre lo que es un invernadero y un macrotunel, por no existir un parámetro definido. No obstante, se ha optado como medida de clasificación el volumen de aire encerrado por cada metro cuadrado de suelo. En general, de acuerdo a diferentes opciones al respecto, podemos definir como invernadero aquella estructura que se supera los 2.75 – 3m 3/m². Se trata de invernaderos que tienen una altura y anchura variables, esto da resistencia a los vientos y fácil instalación (recomendable para productores que se inician en el cultivo protegido) (SENA VIRTUAL 2012). Figura 10 Invernadero Tipo Túnel
Fuente. http://www.sabelotodo.org/agricultura/generalidades/consideraciones_constructivas.html

24
2.2.2.2 Invernadero Tipo Capilla (Construido y utilizado en el proyecto) Es una de las estructuras más antiguas, empleadas en el forzado de los cultivos, muy usados en nuestro país. La pendiente del techo (cabio) es variable según la redacción y pluviometría (variando normalmente entre 15° y 35°). Las dimensiones del ancho varían entre 6 y 12m (incluso mayores), por largo variable. Las alturas de los laterales entre 2.0 – 2.5m y de la cumbrera 3.0 – 3.5m (también se constituyen más bajos que los señalados pero no son recomendables), utilizan materiales de bajo costo, según la zona (postes y maderos de eucaliptus, pinos etc.) Estos tipos de invernaderos son aptos tanto para materiales de cobertura flexibles como rígidos (SENA VIRTUAL 2012). Figura 11 Invernadero Tipo Capilla
Fuente. http://www.flickr.com/photos/pablobotero/6832643491/
2.2.2.3 Invernadero Diente de Sierra Estos invernaderos cuentan con una techumbre única inclinada en ángulos que variaban entre 5° y 15° (orientados en sentido este-oeste y con presentación del techo hacia la posición del sol-norte para el hemisferio sur). El acoplamiento lateral de este tipo de invernaderos dio origen a los conocidos como dientes de sierra. La necesidad de evacuar el agua de precipitación, determino una inclinación en las zonas de recogida desde la mitad hacia ambos extremos. Su construcción es de mediana complejidad y el empleo de materiales es de bajo costo (SENA VIRTUAL 2012). Figura 12 Invernadero Diente de Sierra
Fuente. http://www.hydroenv.com.mx/catalogo/index.php?main_page=page&id=44
25
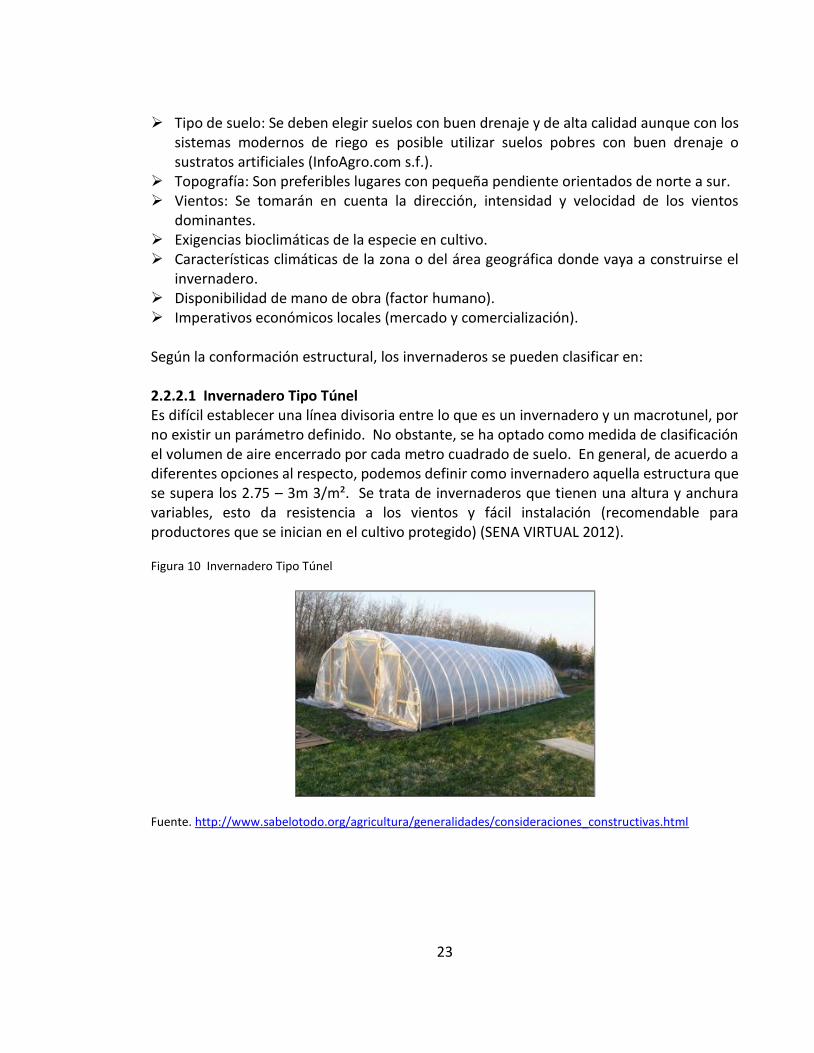
2.2.2.4 Invernadero Capilla Modificado Es una variante de los invernaderos tipo capilla, la modificación respecto al tipo capilla normal, consiste en el ensamble diferentes alturas de cada cambio, lo que permite generar un espacio para la ventana cenital (lucarna). Las dimensiones más comunes de estos invernaderos son: Ancho de cada modulo: 6,0m – Altura lateral: 2,4m – Altura cenital: 3,6m – Abertura cenital 0,3 – 0,5m. Este tipo de invernadero tiene excelente ventilación (al igual que el diente de sierra), siendo muy adecuados para la conformación de baterías y su construcción es de mediana complejidad (SENA VIRTUAL 2012). Figura 13 Invernadero Capilla Modificado
Fuente. http://www.invernaderoschile.cl/2008/12/27/invernadero-tipo-capilla/
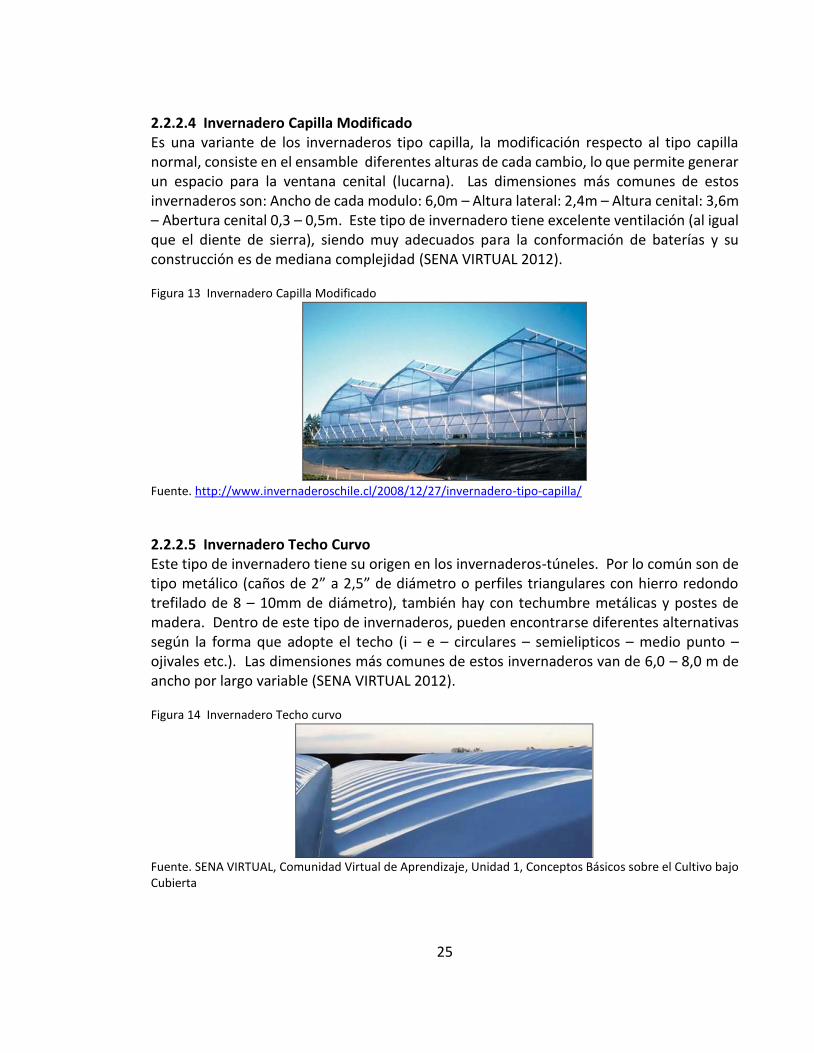
2.2.2.5 Invernadero Techo Curvo
Este tipo de invernadero tiene su origen en los invernaderos-túneles. Por lo común son de tipo metálico (caños de 2” a 2,5” de diámetro o perfiles triangulares con hierro redondo trefilado de 8 – 10mm de diámetro), también hay con techumbre metálicas y postes de madera. Dentro de este tipo de invernaderos, pueden encontrarse diferentes alternativas según la forma que adopte el techo (i – e – circulares – semielipticos – medio punto – ojivales etc.). Las dimensiones más comunes de estos invernaderos van de 6,0 – 8,0 m de ancho por largo variable (SENA VIRTUAL 2012). Figura 14 Invernadero Techo curvo
Fuente. SENA VIRTUAL, Comunidad Virtual de Aprendizaje, Unidad 1, Conceptos Básicos sobre el Cultivo bajo Cubierta

26
2.2.2.6 Invernadero Tipo Parral. Actualmente existe una versión moderna a los originales, que se construyen con caños galvanizados como sostenes interiores, permaneciendo el uso de postes para los laterales de tensión, para la sujeción de los vientos, constituidos por doble alambre calibre 8. Estos invernaderos suelen tener una altura “n” la cumbrera de 3.0 – 3.5m, la anchura variable, pudiendo oscilar en 20m o más, por lo largo variable. La pendiente es casi inexistente, o bien (en zonas con pluviometría de riego) suele darse 10° - 15°, lo que representa altura de los laterales del orden de 2.0 – 2.3m. Se ventila solamente a través de las aberturas laterales. En la techumbre solo se utiliza un doble entramado de alambre, por entre el cual se coloca la lámina de polietileno, sino otra sujeción (SENA VIRTUAL 2012). Figura 15 Invernadero Tipo Parral
Fuente. http://www.hydroenv.com.mx/catalogo/index.php?main_page=page&id=44
2.2.2.7 Invernadero Holandés Son invernaderos de vidrio, los paneles descansan sobre los canales de recogida del agua pluvial. La anchura de cada modulo es de 3.2m y la separación entre postes en el sentido longitudinal es de 3m. Estos invernaderos carecen de ventanas laterales (puede ser debido a que en Holanda no existen demasiado exigencias en cuanto a ventilación). En vez, tiene ventanas cenitales, alternadas en su apertura (una hacia un lado y la siguiente hacia el otro) cuyas dimensiones son de 1,5m de largo por 0,8m de ancho (SENA VIRTUAL 2012). Figura 16 Invernadero Holandés
Fuente. http://jardinplantas.com/tag/invernadero/

27
2.2.3 Señales Analógicas y Digitales
2.2.3.1 Señales Analógicas El comportamiento de la naturaleza es analógico: la intensidad (amplitud) de los fenómenos que en ella se producen cambian continuamente a través del tiempo. La presión atmosférica, la temperatura, la humedad etc., por ejemplo, están cambiando continuamente de un valor a otro y en el interior registran millones de valores. Otro ejemplo de señal analógica es la que envía nuestra voz. Las señales analógicas son por ende señales eléctricas de variación continua en intensidad o amplitud en el tiempo, como se puede apreciar en la figura 17. Hasta hace poco, la forma dominante de transmisión de señales de radio y televisión ha sido analógica. La gran desventaja de ese tipo de transmisión es que el ambiente genera también señales del tipo analógico, conocidas como ruido, que generalmente interfieren con las que acarrean información y crean complicaciones resultando en una señal de menor calidad. (tecnociencia-tecnopedia 2009) Figura 17 Señal Analógica
Fuente.http://tecnociencia-tecnopedia.blogspot.com/2009/11/senales-analogicas-y-digitales.html
2.2.3.2 Señales Digitales Las señales digitales adquieren uno de dos valores a través del tiempo, como se puede apreciar en la figura 18. Su comportamiento se puede equiparar al de un interruptor (o switch) que tiene uno de dos estados: encendido o apagado. Las ventajas de este tipo de transmisión es, primero, su inmunidad a las interferencias ya que al digitalizar una señal se elimina el “ruido” producido por el medio ambiente, produciendo una señal más pura y de mayor resolución (si se cumplen otros requisitos que no son importantes en este momento); y, segundo, que puede codificarse usando el sistema binario que se basa en los dígitos 1 (encendido) y 0 (apagado). Ese tipo de código se presta al almacenamiento; o sea, se puede guardar en memorias de las utilizadas en cámaras digitales y discos duros de computadoras. (tecnociencia-tecnopedia 2009) Figura 18 Señal Digital
28
Fuente. http://tecnociencia-tecnopedia.blogspot.com/2009/11/senales-analogicas-y-digitales.html
2.2.4 Variables Principales a Controlar
Las variables a controlar son tres:
2.2.4.1 Temperatura, Humedad Relativa, Absoluta Habrá que controlar la temperatura del Ambiente del Invernadero. Para regular la temperatura del Ambiente, se cuentan con dos Sensores de Temperatura y Humedad Relativa, que están ubicado sobre la línea central del invernadero a cada uno de los lados y con actuadores que consiste de extractores para extraer el aire caliente en el interior del invernadero, de esta forma permite que la temperatura y humedad relativa, absoluta alcance los valores óptimos de temperatura y humedad relativa, absoluta para el cultivo. 2.2.4.2 Humedad del Suelo Habrá que controlar la humedad del suelo en los surcos al interior del Invernadero. Para regularla se cuenta con un Sensor de Humedad del Suelo (Vegetronix VH400) quien determina la cantidad de agua que se encuentra en la tierra en donde el goteo humedifica la raíz de la planta en el terreno y con la apertura y cierre de la Electroválvula quien es la encargada de humidificar la tierra por medio de las cintas de goteo del Sistema de Riego.
2.3 MARCO HISTORICO
El trabajo en la Automatización utilizando lógica difusa y Control de Invernaderos no es algo nuevo, dado que ya en las décadas pasadas se han escrito trabajos acerca del tema y en años recientes se han ensayado avanzados algoritmos de control aplicados a invernaderos.
29
El Tecnológico de Monterrey, Campus Ciudad de México, realizo el análisis, diseño y el desarrollo de tres sistemas de control inteligentes abiertos: (1) la temperatura, (2) humedad relativa, y (3) conductividad eléctrica - implementado en un invernadero sostenible. Los controladores inteligentes se basan en un "Fuzzy" este tipo de control se realiza con el fin de hacer frente a las condiciones ambientales no lineales y variables en el interior del invernadero. El sistema propuesto por el Tecnológico de Monterrey del control abierto se ha desarrollado utilizando un kit de herramientas de Control Inteligente para LabVIEW ™. El control inteligente se basa en un sistema de control de bucle abierto que podría ser usado en los diferentes cultivos. Por último los resultados experimentales se adjuntaron en el documento con el fin de validar el correcto rendimiento de los controladores (CEPEDA, y otros 2011). Por otra parte la Unidad de Ciencias Agrícolas Aplicadas a la Horticultura, Universidad de Picardie Jules Verne de Francia, realizó un control de lógica difusa (FLC) de lazo cerrado, con una arquitectura descentralizada que fue aplicada a una unidad de aire acondicionado pasivo. El objetivo de este artículo expuesto es garantizar un microclima con una temperatura controlada y puntos de referencia de humedad relativa para cámaras de crecimiento de los cultivos. A medida que el proceso involucra variables en el tiempo y los parámetros distribuidos, se propone el uso de la lógica difusa para implementar un sistema de reglas basadas en el cuidado de los diferentes contextos de la gestión de la temperatura del aire acondicionado. Con el objetivo de obtener un rendimiento eficiente local y global, el proyecto de arquitectura de FLC descentralizada se aplica en dos subsistemas principales que componen esta unidad global. Una mejora significativa en el rendimiento del sistema en las condiciones de operación (R., y otros 2007). La Universidad de Kaiserslautem, Alemania, aplico un sistema de control difuso de temperatura y humedad en sistemas de refrigeración para la preservación de la calidad de los productos en almacenes frigoríficos, así como el consumo de energía de sistemas de refrigeración. Esto fue realizado en conjunto con ingenieros de refrigeración, utilizando el método de lógica difusa la cual tuvieron en cuenta el acoplamiento complejo de las variables de temperatura dinámica y humedad el cual por medio de ellas trazaron las reglas de control que el sistema de refrigeración requería para su cumplimiento. El diseño con lógica difusa permite tener en cuenta el acoplamiento complejo de las variables temperatura dinámica y la humedad de una manera sencilla (M., y otros 1994). Como una aplicación para regular la temperatura y la humedad relativa en oficinas, la UKACC “Conferencia Internacional sobre el Control”, desarrolla un control con lógica difusa (FL), basado para su uso en aplicaciones de calefacción, ventilación y aire, para regular la temperatura y la humedad relativa en las oficinas ocupadas. Los controladores de FL dan buenos resultados en comparación con un P+I comercial controlador sintonizado (G. S., A. B. y D. 1996).
30
3. DISEÑO INGENIERIL
3.1 DISEÑO Y CONSTRUCCION DEL INVERNADERO.
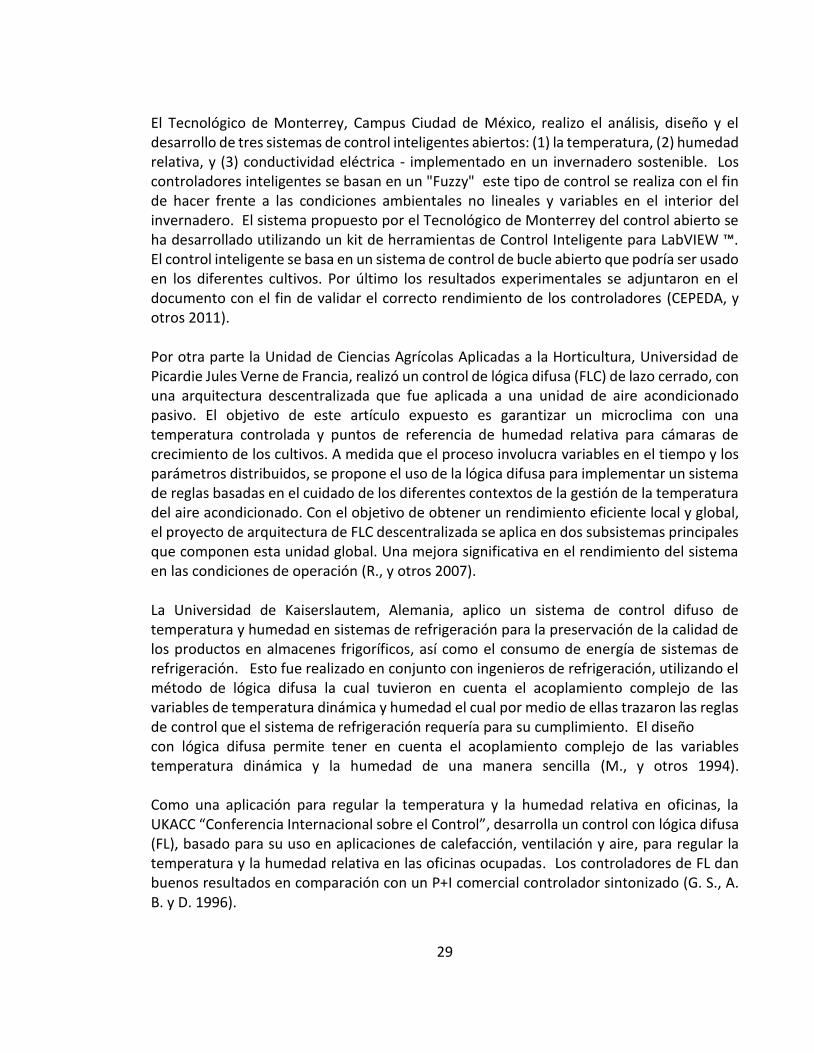
Dentro del desarrollo del proyecto, en primera instancia se realizó la selección del tipo de tomate, y crear el ambiente propicio dentro de sus especificaciones nominales. El tipo de planta seleccionada es el tomate larga vida de la familia Lycopersicom. Sus características más sobresalientes son la humedad relativa y la temperatura en el ambiente y la humedad del suelo en la tierra para el sistema de riego por goteo, estas serán las variables principales que fueron registradas y controladas tanto por el controlador de temperatura y el controlador de humedad los dos controladores difuso MAMDANI. La implementación del invernadero, fue de tipo capilla, ya que su construcción es sencilla, económica y de fácil conservación. Se caracteriza por una capacidad del control de los factores climáticos, su gran resistencia a fuertes vientos y su rapidez de construcción de su estructura(es uno de los más antiguos). El material utilizado para la estructura, está compuesto de tubo metálico calibre 20, la altura de este invernadero será de 3.60mts al centro con cumbrera y 3mts a los laterales, ancho será de 4mts con longitud de 6mts, el tipo de plástico para la cubierta del techo del invernadero es de AGROLENE categoría 7 color amarillo, alrededor del invernadero se forraran las paredes con polisombra para no permitir el ingreso de plagas ni aves en el cultivo. Figura 19 Esquema y medidas de Invernadero tipo capilla implementado
Fuente. Propia, obtenido apartir de Autocad
Figura 20 Estructura vista desde afuera. Costado Izquierdo

31
Fuente. Propia Fotografia.
Figura 21 Estructura vista desde afuera. Costado Derecho
Fuente. Propia Fotografia.
Figura 22 Estructura vista desde afuera. Frontal Izquierda

32
Fuente. Propia Fotografia.
Figura 23 Estructura vista desde afuera. Frontal Derecha
Fuente. Propia Fotografia.
3.1.1 Descripción de la Distribución de los Sensores y Actuadores

33
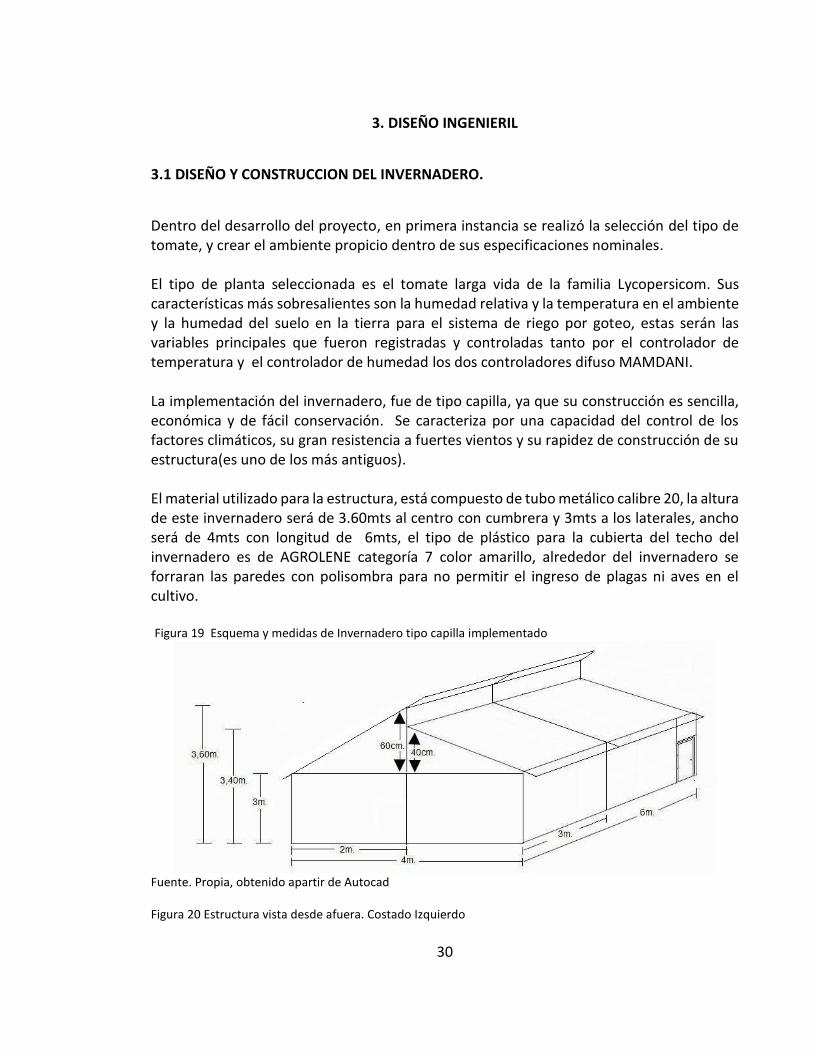
En las paredes laterales izquierda y derecha se encuentran dos actuadores, la ventilación será por dos extractores de 10” como sistema de extracción quienes son los encargados de la ventilación y ambiente del lugar, estos regulan la temperatura y la humedad interna (relativa), activándose de acuerdo a sus respectivas señales y condiciones programadas, hacia el rincón lateral derecho en la parte inferior se encuentra otro actuador, la electroválvula BACCARA 2WNC de 1” a 24VAC (ON/OFF) quien controlara la apertura y cierre del sistema de riego por goteo. La distribución de los sensores de temperatura y humedad relativa y sensor de humedad del suelo están ubicados en sitios centrales del invernadero, en el poste o tubo central metálico están ancladas la cajas que contienen el controlador principal que es el control difuso MAMDANI.
Figura 24 Distribución de los sensores y actuadores
Fuente. Propia, obtenido apartir de Autocad
De acuerdo a la descripción vista en las Figuras 24 y 25, hace referencia a los siguientes instrumentos: 1 __Extractor, numero 1 2 __Extractor, numero 2 3 __Electroválvula BACCARA 2WNC de 1” a 24VAC 4 __Sensor de temperatura y humedad relativa para el aire, RHT03, numero 1 5 __Sensor de temperatura y humedad relativa para el aire, RHT03, numero 2 6 __Sensor de humedad del suelo para la tierra, VH400
34
7 __Cajas principales, Controlador Difuso MAMDANI + interface de usuario
Figura 25 Distribución real de los sensores y actuadores
Fuente. Propia Fotografia.

35
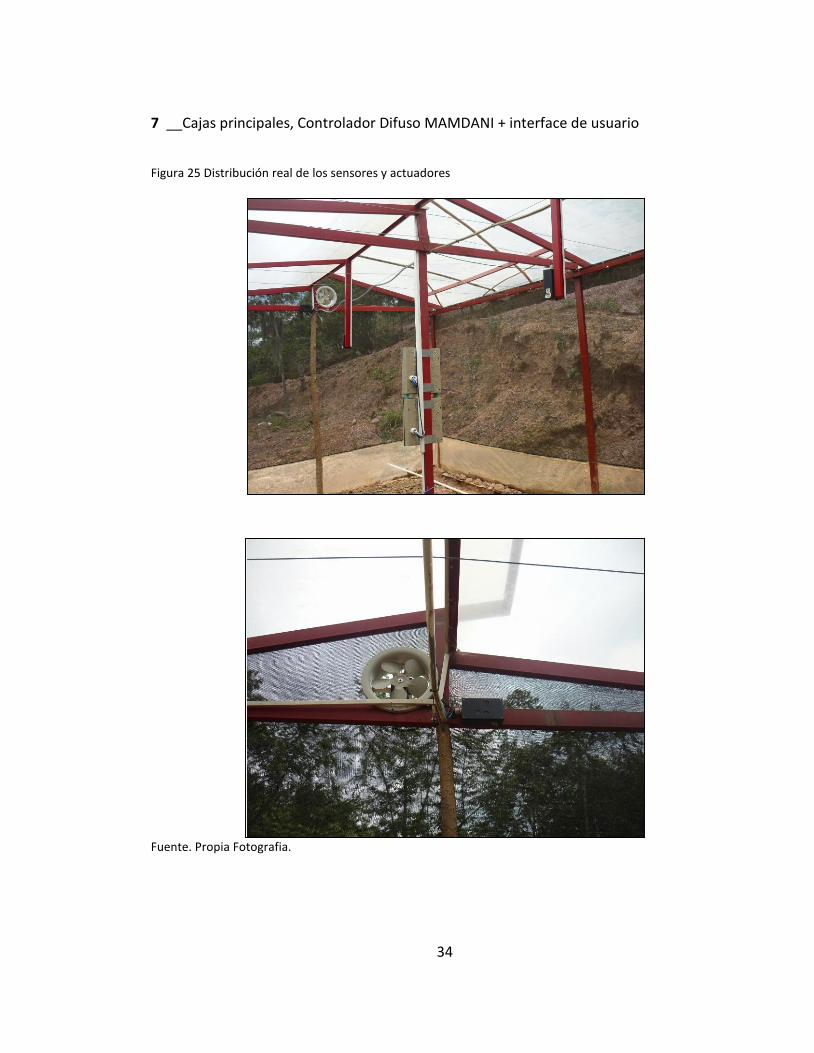
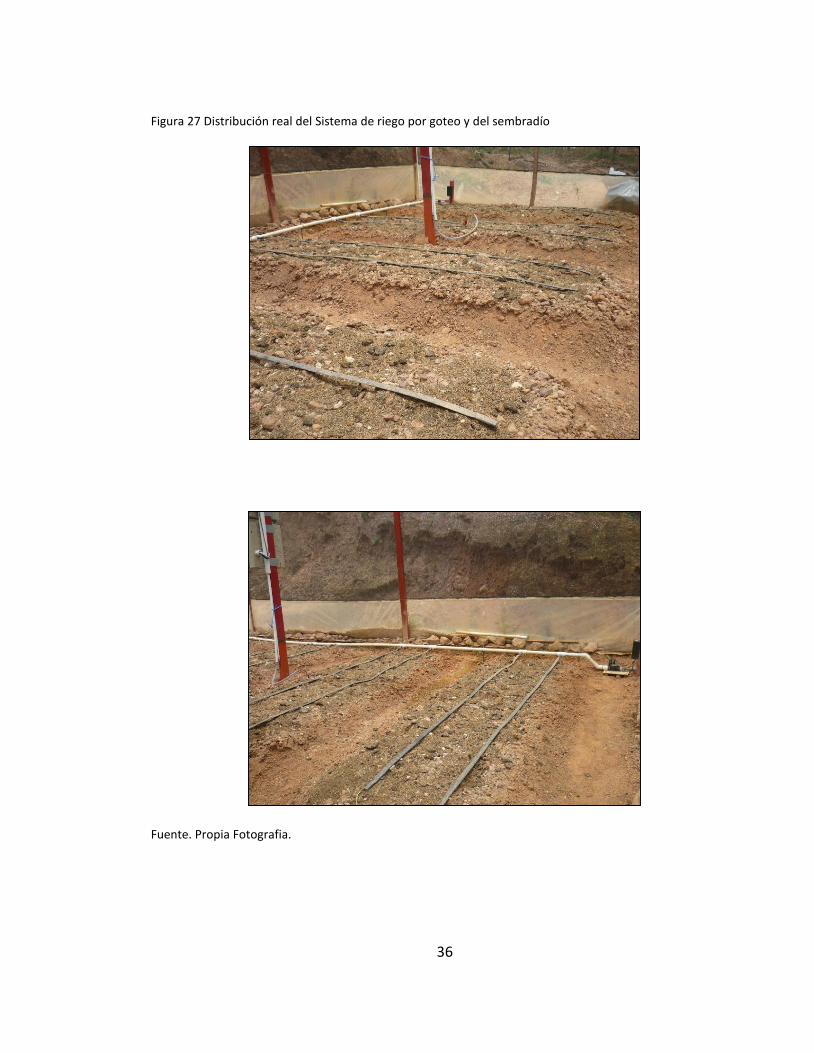
3.1.2 Descripción de la Distribución del Sistema de Riego por Goteo y del Sembrado El riego es un procedimiento artificial que pretende proporcionar el agua a las plantas para que estas reciban la humedad suficiente con el fin de que esas mismas plantas se desarrollen y optimicen su ciclo vital. Una vez más conviene repetir que el agua es un elemento vital y escaso. El riego por goteo surge como respuesta a esta necesidad. Este sistema consiste en aportar gota a gota el agua necesaria para el desarrollo de la planta de manera localizada. Se encargan de ello los goteros o emisores (constituidos por las cintas de goteo). A diferencia del riego tradicional y de la aspersión, aquí el agua se conduce desde el depósito o la fuente de abastecimiento a través de tuberías y en su destino se libera gota a gota justo en el lugar donde se ubica la planta. El agua se infiltra en el suelo produciendo una zona húmeda restringida a un espacio concreto. El autentico avance del Riego por Goteo ha sido conseguir mantener la humedad necesaria en la zona donde radica cada planta, y sólo en esa zona, por consiguiente no se moja todo el suelo sino parte del mismo, y sólo en la parte necesaria para el desarrollo de las raíces. (EURORECIDENTES.COM s.f.).
Figura 26 Distribución del Sistema de riego por goteo y del sembradío
Fuente. Propia, obtenido apartir de Autocad
36
Figura 27 Distribución real del Sistema de riego por goteo y del sembradío
Fuente. Propia Fotografia.

37
Figura 28 Tanque Abastecimiento de Agua (1000 Litros)
Fuente. Propia Fotografia.

38
De acuerdo a la descripción vista en las Figuras 26, 27 y 28, hace referencia a los siguientes instrumentos y materiales: 1 __Tubo 1” de 6mts PVC (PAVCO) 2 __ Electroválvula BACCARA 2WNC de 1” a 24VAC 3 __ Cinta de Goteo RODRIP calibre 8mm 4 __ Filtro de anillos para ducto de 1” 5 __ Tanque de abastecimiento de agua de 1000 litros La construcción y funcionalidad del sistema de riego por goteo está conformado por el tanque de abastecimiento, de allí se acopla al sistema de filtrado quien utiliza un filtro de anillos con acoplamiento para ducto de 1”, junto con las tuberías de PVC se instala la electroválvula quien permite el paso de agua dependiendo de los registros de humedad del suelo y la programación definida. Se instala un tramo de 6mts de tubo 1” PVC dentro del invernadero quien es la red única principal, de acuerdo a los surcos diseñados por el espacio del terreno se instalan las uniones donde serán conectadas las líneas de distribución o emisores cintas de goteo calibre 8mm, se acondicionaran dos cintas de goteo por cada surco diseñado. El riego por goteo tiene las siguientes ventajas:
Se mantienen un nivel de humedad en el suelo constante, sin encharcamiento. Con el riego por goteo se puede aplicar fertilizantes disueltos y productos
fitosanitarios directamente a la zona radicular de las plantas. Ahorro entre el 40 y el 60% de agua respecto a los sistemas tradicionales de riego. Reducción muy significativa en mano de obra. No sólo en la vigilancia del riego sino,
y sobre todo, por la menor incidencia de las malas hierbas en el cultivo. Economía importante en productos fitosanitarios y abonos. Incremento notable en la producción. Adaptación a todo tipo de superficies y desniveles en su relieve natural sin inversión
en la nivelación y transporte de tierras. En cuanto a la distribución del sembrado la distancia entre las plantas será de 60cm (0.6mts), cada surco tendrá una medida de ancho de 90cm por longitud de 3mts, se colocó pasillos entre los surcos de 50cm para poder trabajar la planta de tomate, en cada hilera o surco se sembraran 4 plantas con el espacio mencionado anteriormente. En total en el invernadero habrá un total de 28 plantas de tomate larga vida.
39
3.2 TOMA DE DATOS DE RANGOS DE MEDIDA DE TEMPERATURA Y HUMEDAD AL INTERIOR DEL INVERNADERO
Es necesario observar el comportamiento del invernadero en condiciones naturales, ya que al encontrarse al aire libre, las condiciones externas como clima, vientos, radiación solar y hora del día, que además varían aleatoriamente según la época del año, hacen muy difícil determinar cómo cambia el sistema al efectuar los mecanismos de control de las variables temperatura, humedad relativa y humedad del suelo, por ello se recopilan datos para determinar el comportamiento de las variables de temperatura humedad relativa y humedad del suelo para así determinar opciones de respuesta que tiene el sistema y generar así mecanismos de control.
3.3 SELECCIÓN DE SENSORES, ACTUADORES Y DESCRIPCION DEL CONTROL DIFUSO MAMDANI
3.3.1 Descripción y Elección de la Etapa de Instrumentación
Para poder realizar el control de las variables de temperatura, humedad relativa y humedad del suelo, se deben poseer dispositivos que arrojen datos de su comportamiento en tiempo real. Las tres variables principales de temperatura, humedad relativa y humedad del suelo, son explicadas a continuación: En este proyecto se tiene en cuenta medir y controlar las variables de temperatura, humedad relativa y humedad del suelo. Se define HUMEDAD como la medida del contenido de agua en la atmósfera. La atmósfera contiene siempre algo de agua en forma de vapor. El peso del vapor de agua contenido en un volumen de aire se conoce como HUMEDAD ABSOLUTA y se expresa en unidades de masa de agua por unidades de masa o de volumen de aire seco. Frecuentemente se utiliza la medida de gramos de vapor de agua por metro cúbico de aire.
La HUMEDAD RELATIVA, dada en los informes meteorológicos, es la razón entre el contenido efectivo de vapor en la atmósfera y la cantidad de vapor que saturaría el aire a la misma temperatura. Si la temperatura atmosférica aumenta y no se producen cambios en el contenido de vapor, la humedad absoluta no varía mientras que la relativa disminuye. Una caída de la temperatura incrementa la humedad relativa produciendo rocío por condensación del vapor de agua sobre las superficies sólidas. La temperatura a la cual se empieza a formar el rocío en el aire que contiene una cantidad conocida de vapor de agua se llama PUNTO DE ROCÍO (HERNANDEZ RANGEL, PINEDA y BAYONA RUIZ s.f.).

40
3.3.1.1 Sensor de Temperatura y Humedad Relativa RHT03 En este sistema difuso MAMDANI se implementan dos sensores de temperatura y humedad relativa para registrar ambas lecturas, que se visualizara a través de un LCD, para tener una referencia.
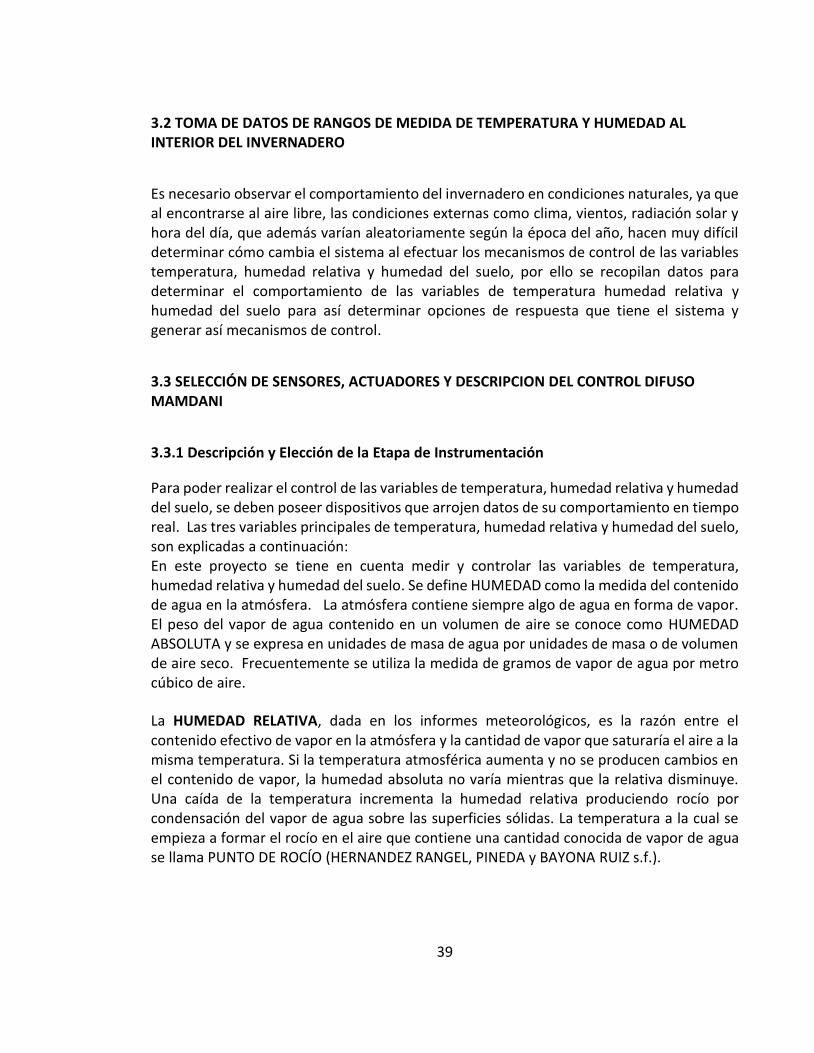
El instrumento utilizado es el RHT03 (figura 29), es un sensor de humedad y temperatura de muy bajo costo con una interfaz serie integrada. Puede transmitir hasta 100 metros de distancia. El sensor esta calibrado y no requiere componentes adicionales, se pueden obtener medidas correctas de humedad relativa y temperatura. Ver apéndice 2. Figura 29 Dimensiones de Sensor de Humedad Relativa y Temperatura RHT03
Fuente http://www.tiendaderobotica.com/tienda/Sensores/Humedad/SensorHumedadTemperaturaDHT22
Las funciones y aplicación del sensor son de alta precisión. Sus elementos de detección están conectados con único chip de 8-bits. Cada sensor de este modelo es compensado en temperatura y con calibración exacta, la calibración del coeficiente se guarda en el tipo de programa en la memoria, cuando el sensor está detectando, se citan coeficiente de la memoria. El bajo consumo de energía y la distancia de transmisión, hasta (100 metros), permiten al RHT03 que se adapte en todo tipo de ambientes difíciles. Una fila de cuatro pines, hacen que la conexión sea muy conveniente (MaxDetect Technology Co. s.f.). Véase Figura 30:
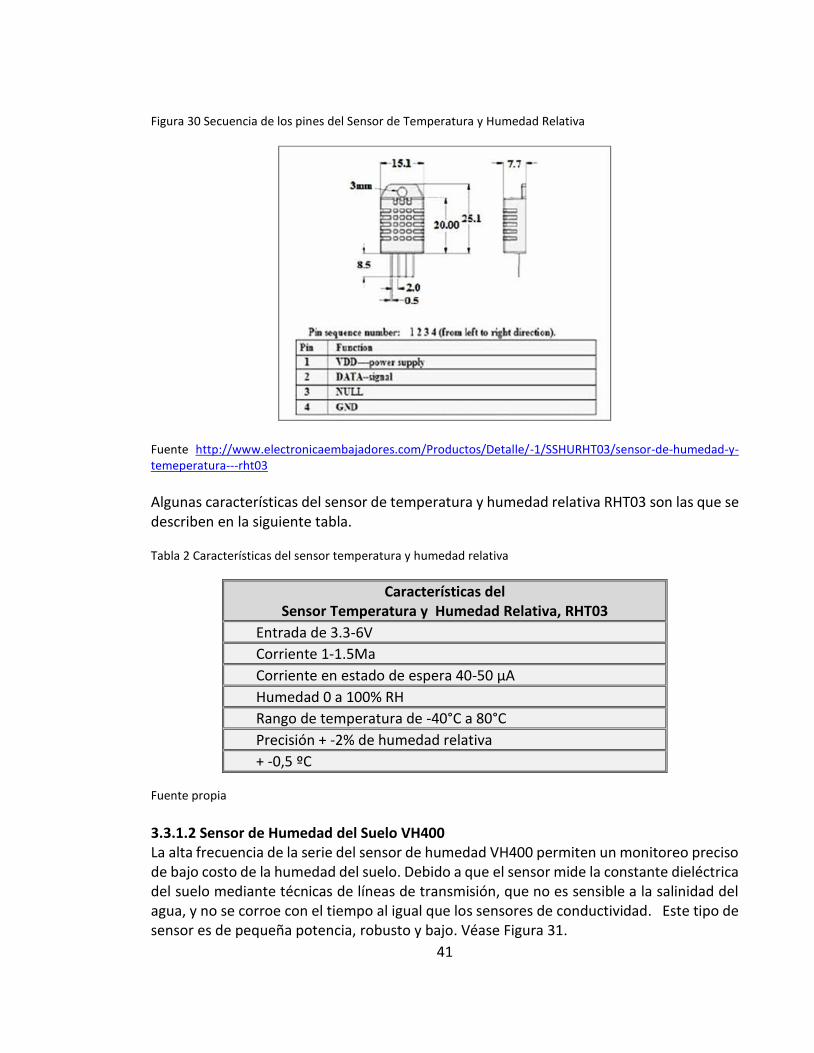
41
Figura 30 Secuencia de los pines del Sensor de Temperatura y Humedad Relativa
Fuente http://www.electronicaembajadores.com/Productos/Detalle/-1/SSHURHT03/sensor-de-humedad-y-temeperatura---rht03
Algunas características del sensor de temperatura y humedad relativa RHT03 son las que se describen en la siguiente tabla. Tabla 2 Características del sensor temperatura y humedad relativa
Fuente propia
3.3.1.2 Sensor de Humedad del Suelo VH400
La alta frecuencia de la serie del sensor de humedad VH400 permiten un monitoreo preciso de bajo costo de la humedad del suelo. Debido a que el sensor mide la constante dieléctrica del suelo mediante técnicas de líneas de transmisión, que no es sensible a la salinidad del agua, y no se corroe con el tiempo al igual que los sensores de conductividad. Este tipo de sensor es de pequeña potencia, robusto y bajo. Véase Figura 31.
Características del Sensor Temperatura y Humedad Relativa, RHT03
Entrada de 3.3-6V
Corriente 1-1.5Ma
Corriente en estado de espera 40-50 µA
Humedad 0 a 100% RH
Rango de temperatura de -40°C a 80°C
Precisión + -2% de humedad relativa
+ -0,5 ºC

42
En comparación con otros sensores de bajo costo, tales como sensores de bloque de yeso, este sensor VH400 ofrece un rápido tiempo de respuesta. Se puede insertar y tener una lectura precisa en menos de 1 segundo (VEGETRONIX 2008). La serie del sensor humedad VH400 viene con un cable de 2 metros. Figura 31 Dimensiones del Sensor de Humedad del Suelo VH400
Fuente: http://www.vegetronix.com/Products/VH400/
Algunas especificaciones del sensor de humedad del suelo VH400 son las siguientes, ver tabla 3 y 4:
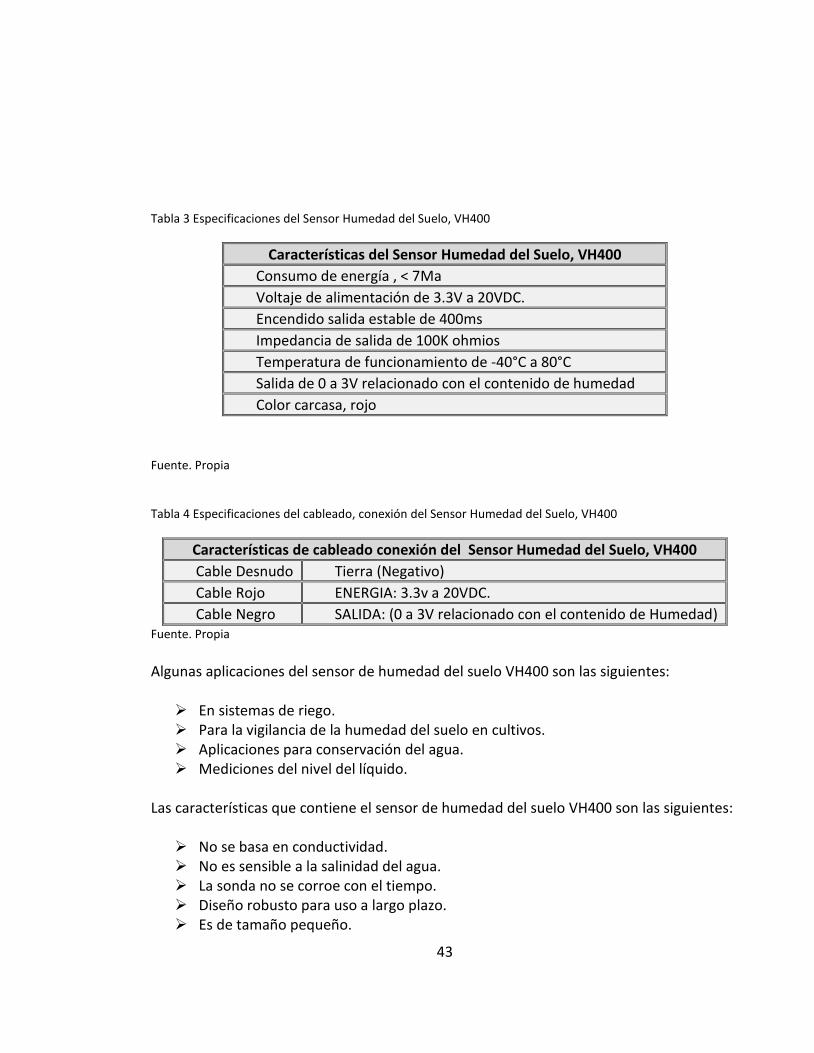
43
Tabla 3 Especificaciones del Sensor Humedad del Suelo, VH400
Fuente. Propia Tabla 4 Especificaciones del cableado, conexión del Sensor Humedad del Suelo, VH400
Fuente. Propia
Algunas aplicaciones del sensor de humedad del suelo VH400 son las siguientes:
En sistemas de riego. Para la vigilancia de la humedad del suelo en cultivos. Aplicaciones para conservación del agua. Mediciones del nivel del líquido.
Las características que contiene el sensor de humedad del suelo VH400 son las siguientes:
No se basa en conductividad. No es sensible a la salinidad del agua. La sonda no se corroe con el tiempo. Diseño robusto para uso a largo plazo. Es de tamaño pequeño.
Características del Sensor Humedad del Suelo, VH400
Consumo de energía , < 7Ma
Voltaje de alimentación de 3.3V a 20VDC.
Encendido salida estable de 400ms
Impedancia de salida de 100K ohmios
Temperatura de funcionamiento de -40°C a 80°C
Salida de 0 a 3V relacionado con el contenido de humedad
Color carcasa, rojo
Características de cableado conexión del Sensor Humedad del Suelo, VH400
Cable Desnudo Tierra (Negativo)
Cable Rojo ENERGIA: 3.3v a 20VDC.
Cable Negro SALIDA: (0 a 3V relacionado con el contenido de Humedad)
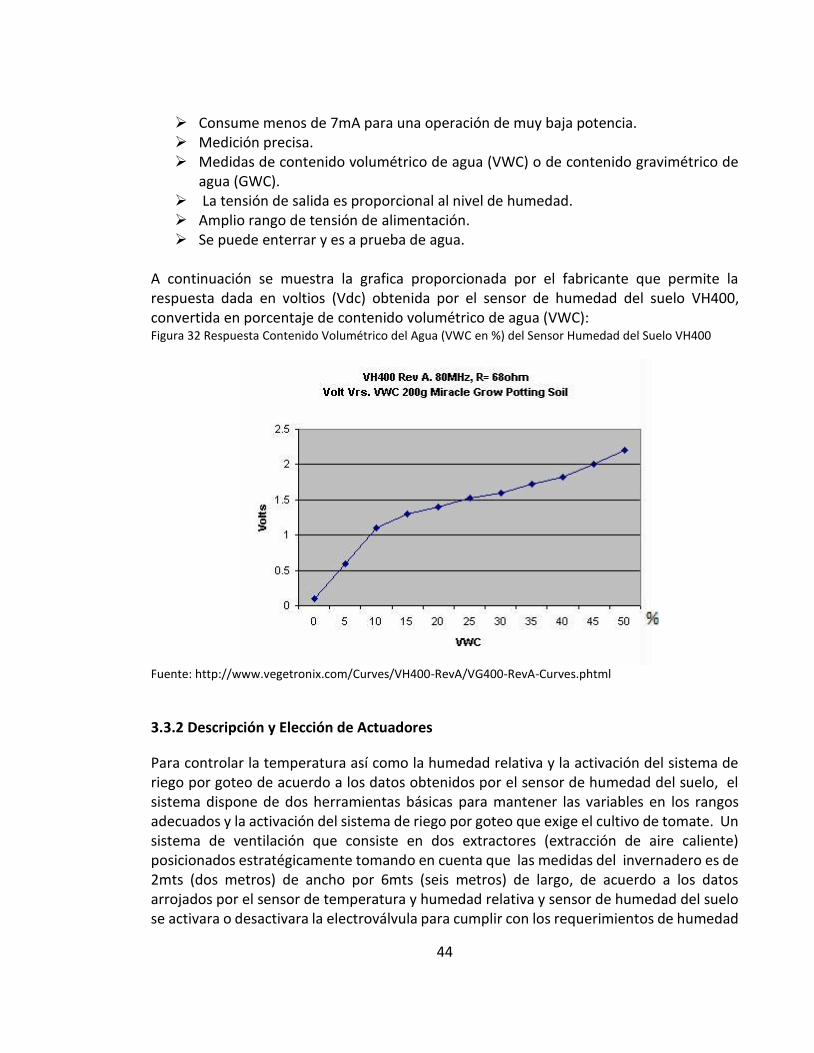
44
Consume menos de 7mA para una operación de muy baja potencia. Medición precisa. Medidas de contenido volumétrico de agua (VWC) o de contenido gravimétrico de
agua (GWC). La tensión de salida es proporcional al nivel de humedad. Amplio rango de tensión de alimentación. Se puede enterrar y es a prueba de agua.
A continuación se muestra la grafica proporcionada por el fabricante que permite la respuesta dada en voltios (Vdc) obtenida por el sensor de humedad del suelo VH400, convertida en porcentaje de contenido volumétrico de agua (VWC): Figura 32 Respuesta Contenido Volumétrico del Agua (VWC en %) del Sensor Humedad del Suelo VH400
Fuente: http://www.vegetronix.com/Curves/VH400-RevA/VG400-RevA-Curves.phtml
3.3.2 Descripción y Elección de Actuadores
Para controlar la temperatura así como la humedad relativa y la activación del sistema de riego por goteo de acuerdo a los datos obtenidos por el sensor de humedad del suelo, el sistema dispone de dos herramientas básicas para mantener las variables en los rangos adecuados y la activación del sistema de riego por goteo que exige el cultivo de tomate. Un sistema de ventilación que consiste en dos extractores (extracción de aire caliente) posicionados estratégicamente tomando en cuenta que las medidas del invernadero es de 2mts (dos metros) de ancho por 6mts (seis metros) de largo, de acuerdo a los datos arrojados por el sensor de temperatura y humedad relativa y sensor de humedad del suelo se activara o desactivara la electroválvula para cumplir con los requerimientos de humedad

45
de la tierra en las raíces de la planta del cultivo de tomate. A continuación se explican los actuadores que son instalados en el invernadero: 3.3.2.1 Electroválvula BACCARA_2WNC a 24VAC (ON/OFF) para el Riego Se escoge este tipo de electroválvula (ON/OFF) para apertura y cierre del riego por goteo de acuerdo al controlador difuso MAMDANI que será el encargado de controlar la humedad por medio de las lecturas tomadas del sensor de humedad del suelo, quien permitirá el paso de agua para el respectivo riego por goteo en cada una de las raíces de las plantas (hortalizas). Figura 33 Electroválvula BACCARA, 2WNC, a 24VAC
Fuente. Propia Fotografía
3.3.2.2 Tipo de Extractor a Utilizar Partiendo de la propiedad del aire caliente pesa menos que el frio y por tanto tiende a elevarse, por lo cual para el sistema de ventilación, utilizaremos un sistema de ventilación natural, apoyada de dos extractores. Así se renovara rápidamente el aire al interior del invernadero, eliminando el aire caliente que se acumulan en la parte superior. Se utilizan dos extractores de 10” para la ventilación del invernadero, cuando el controlador difuso MAMDANI de temperatura detecte que la temperatura se elevo entraran en marcha los extractores para acondicionar el lugar a optima temperatura del cultivo.
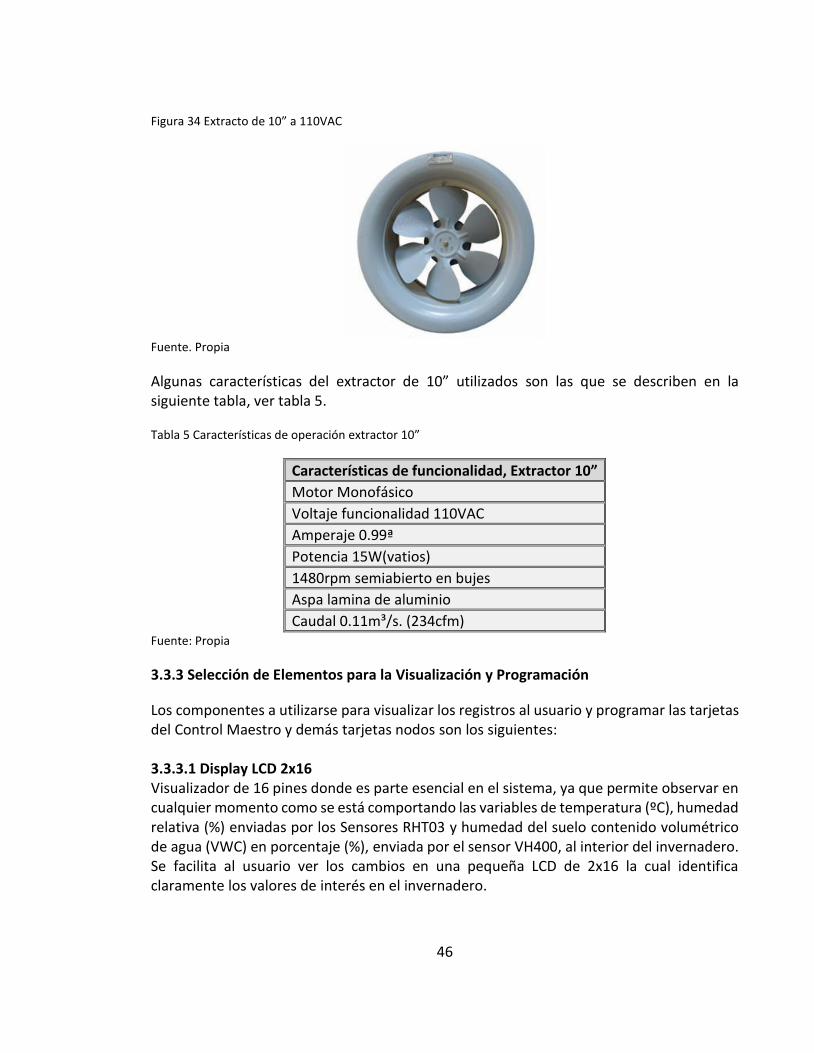
46
Figura 34 Extracto de 10” a 110VAC
Fuente. Propia
Algunas características del extractor de 10” utilizados son las que se describen en la siguiente tabla, ver tabla 5. Tabla 5 Características de operación extractor 10”
Características de funcionalidad, Extractor 10”
Motor Monofásico
Voltaje funcionalidad 110VAC
Amperaje 0.99ª
Potencia 15W(vatios)
1480rpm semiabierto en bujes
Aspa lamina de aluminio
Caudal 0.11m³/s. (234cfm) Fuente: Propia
3.3.3 Selección de Elementos para la Visualización y Programación
Los componentes a utilizarse para visualizar los registros al usuario y programar las tarjetas del Control Maestro y demás tarjetas nodos son los siguientes: 3.3.3.1 Display LCD 2x16 Visualizador de 16 pines donde es parte esencial en el sistema, ya que permite observar en cualquier momento como se está comportando las variables de temperatura (ºC), humedad relativa (%) enviadas por los Sensores RHT03 y humedad del suelo contenido volumétrico de agua (VWC) en porcentaje (%), enviada por el sensor VH400, al interior del invernadero. Se facilita al usuario ver los cambios en una pequeña LCD de 2x16 la cual identifica claramente los valores de interés en el invernadero.

47
Figura 35 Display LCD 2x16
Fuente: Propia Fotografía.
3.3.3.2 Computador Portátil para Programación Un computador portátil para la programación, para llevar a cabo los cambios y configuraciones requeridas. Figura 36 PC Hacer ASPIRE bajo sistema operativo W7
Fuente propia. Fotografía
3.3.4 Descripción General del Control MAMDANI
En la figura 37 se puede observar el esquema del proyecto por medio de un esquema de bloques que consta de un controlador difuso MAMDANI, tres sensores y tres actuadores. El controlador difuso MAMDANI ejecutara tres lazos de control separados, los cuales serán implementados por medio del controlador difuso. Las variables a controlar son la temperatura, humedad relativa y la humedad del suelo. Los parámetros de control serán establecidos dependiendo del cultivo a sembrar. Las entradas, serán comunes para los dos controladores, y censarán variables tanto en el aire como en la tierra. Estos sensores son sensor de temperatura y humedad relativa del aire, sensor de humedad del suelo o tierra. Dichos sensores serán distribuidos a lo largo del invernadero. Por otra parte, los actuadores serán dos extractores y una electroválvula para agua (ON/OFF). La cantidad de agua vertida será sujeta a la apertura y cierre de la electroválvula.
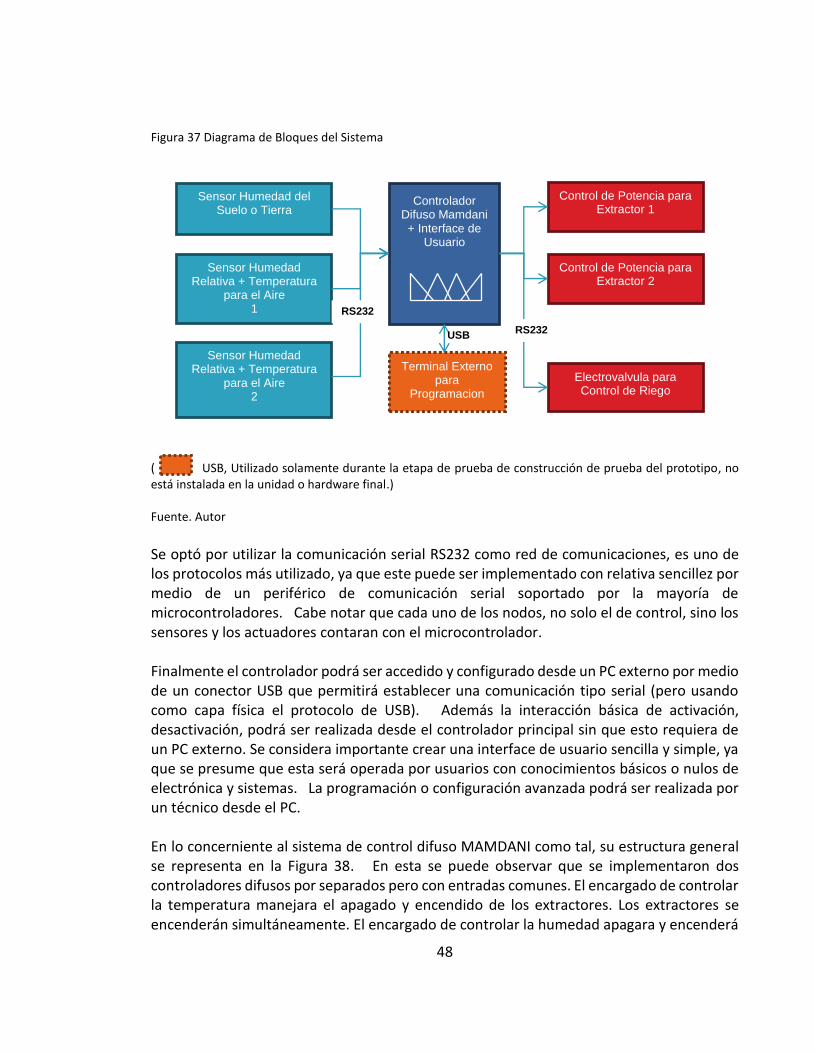
48
Figura 37 Diagrama de Bloques del Sistema
Externo ( USB, Utilizado solamente durante la etapa de prueba de construcción de prueba del prototipo, no está instalada en la unidad o hardware final.) Fuente. Autor
Se optó por utilizar la comunicación serial RS232 como red de comunicaciones, es uno de los protocolos más utilizado, ya que este puede ser implementado con relativa sencillez por medio de un periférico de comunicación serial soportado por la mayoría de microcontroladores. Cabe notar que cada uno de los nodos, no solo el de control, sino los sensores y los actuadores contaran con el microcontrolador. Finalmente el controlador podrá ser accedido y configurado desde un PC externo por medio de un conector USB que permitirá establecer una comunicación tipo serial (pero usando como capa física el protocolo de USB). Además la interacción básica de activación, desactivación, podrá ser realizada desde el controlador principal sin que esto requiera de un PC externo. Se considera importante crear una interface de usuario sencilla y simple, ya que se presume que esta será operada por usuarios con conocimientos básicos o nulos de electrónica y sistemas. La programación o configuración avanzada podrá ser realizada por un técnico desde el PC. En lo concerniente al sistema de control difuso MAMDANI como tal, su estructura general se representa en la Figura 38. En esta se puede observar que se implementaron dos controladores difusos por separados pero con entradas comunes. El encargado de controlar la temperatura manejara el apagado y encendido de los extractores. Los extractores se encenderán simultáneamente. El encargado de controlar la humedad apagara y encenderá
Controlador Difuso Mamdani + Interface de
Usuario
Sensor Humedad Relativa + Temperatura
para el Aire 1
Sensor Humedad Relativa + Temperatura
para el Aire 2
Sensor Humedad del Suelo o Tierra
Electrovalvula para Control de Riego
Control de Potencia para Extractor 1
Control de Potencia para Extractor 2
Terminal Externo para
Programacion
RS232
RS232 USB
Terminal Externo para
Programacion
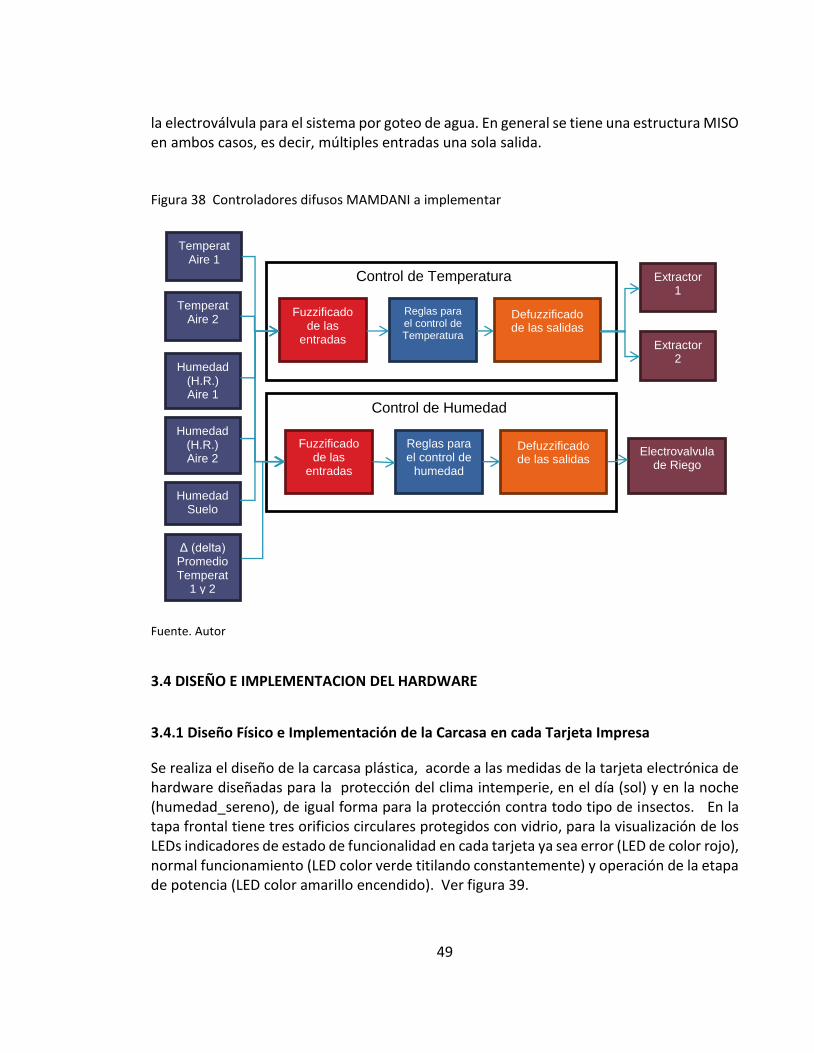
49
la electroválvula para el sistema por goteo de agua. En general se tiene una estructura MISO en ambos casos, es decir, múltiples entradas una sola salida. Figura 38 Controladores difusos MAMDANI a implementar
Fuente. Autor
3.4 DISEÑO E IMPLEMENTACION DEL HARDWARE
3.4.1 Diseño Físico e Implementación de la Carcasa en cada Tarjeta Impresa
Se realiza el diseño de la carcasa plástica, acorde a las medidas de la tarjeta electrónica de hardware diseñadas para la protección del clima intemperie, en el día (sol) y en la noche (humedad_sereno), de igual forma para la protección contra todo tipo de insectos. En la tapa frontal tiene tres orificios circulares protegidos con vidrio, para la visualización de los LEDs indicadores de estado de funcionalidad en cada tarjeta ya sea error (LED de color rojo), normal funcionamiento (LED color verde titilando constantemente) y operación de la etapa de potencia (LED color amarillo encendido). Ver figura 39.
Fuzzificado de las
entradas
Control de Temperatura
Reglas para el control de Temperatura
Defuzzificado de las salidas
Fuzzificado de las
entradas
Control de Humedad
Reglas para el control de
humedad
Defuzzificado de las salidas
TemperatAire 1
Temperat Aire 2
Humedad (H.R.) Aire 1
Humedad (H.R.) Aire 2
Humedad Suelo
Extractor 1
Extractor 2
Electrovalvula de Riego
Δ (delta) Promedio Temperat
1 y 2

50
Figura 39 Diseño de carcasa protectora
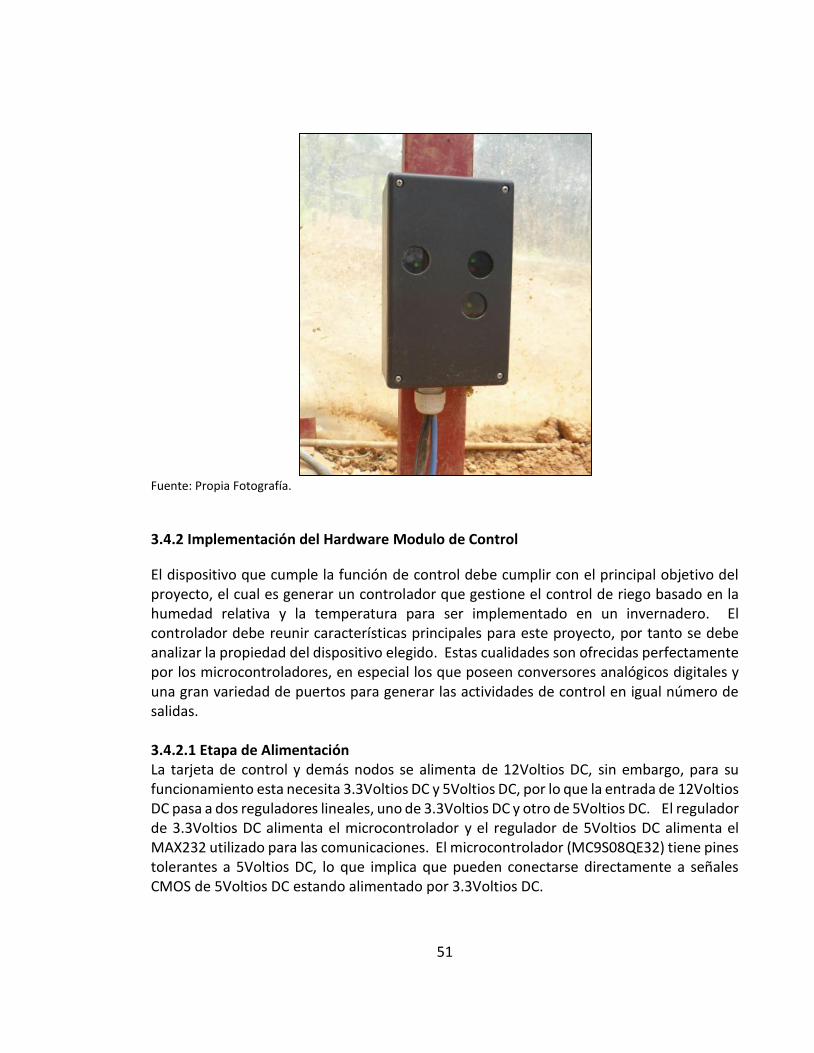
51
Fuente: Propia Fotografía.
3.4.2 Implementación del Hardware Modulo de Control
El dispositivo que cumple la función de control debe cumplir con el principal objetivo del proyecto, el cual es generar un controlador que gestione el control de riego basado en la humedad relativa y la temperatura para ser implementado en un invernadero. El controlador debe reunir características principales para este proyecto, por tanto se debe analizar la propiedad del dispositivo elegido. Estas cualidades son ofrecidas perfectamente por los microcontroladores, en especial los que poseen conversores analógicos digitales y una gran variedad de puertos para generar las actividades de control en igual número de salidas. 3.4.2.1 Etapa de Alimentación La tarjeta de control y demás nodos se alimenta de 12Voltios DC, sin embargo, para su funcionamiento esta necesita 3.3Voltios DC y 5Voltios DC, por lo que la entrada de 12Voltios DC pasa a dos reguladores lineales, uno de 3.3Voltios DC y otro de 5Voltios DC. El regulador de 3.3Voltios DC alimenta el microcontrolador y el regulador de 5Voltios DC alimenta el MAX232 utilizado para las comunicaciones. El microcontrolador (MC9S08QE32) tiene pines tolerantes a 5Voltios DC, lo que implica que pueden conectarse directamente a señales CMOS de 5Voltios DC estando alimentado por 3.3Voltios DC.

52
3.4.2.2 Etapa de Procesamiento La etapa de procesamiento digital se basa en el microcontrolador de 8bits MC9S08QE32 de la empresa Freescale Semiconductor (ver figura 40), este contiene el programa diseñado, el cual reside en la memoria flash interna y se encarga de manejar las comunicaciones, LEDs indicadores utilizados para mostrar el estado en el cual se encuentra la tarjeta, sensores y etapa de potencia, ver figura 41. El microcontrolador MC9S08QE32 se alimenta de 3.3V utiliza un cristal de 4MHz y una frecuencia interna de 16MHz. Dependiendo de los sensores, este puede hacer uso del conversor analógico digital o de pines de GPIO (E/S de propósito general). Los actuadores siempre son pines GPIO y las comunicaciones se implementan por medio del protocolo SCI (serial controller interface) dictada por el microcontrolador. Las principales conexiones utilizadas en el presente proyecto son CPU_RX2, CPU_TX2, CPU_RX1, CPU_TX1, POW_AC y ADC0, estas señales representan los canales de entrada y salida de comunicaciones basado en protocolo serial, la señal del actuador de potencia y el canal de lectura del sensor. El microcontrolador cuenta con varios conversores analógicos digitales internos, al igual que un reloj, sin embargo, el diseño agrego un oscilador externo basado en un cristal de 4MHz y un regulador de 3.3V requerido por el microcontrolador. Figura 40 Asignación de pines, Microcontrolador MC9S08QE32
Fuente. Fotografía Data Sheet Freescale Semiconductor

53
Figura 41 Etapa de Procesamiento
Fuente. Propia
3.4.2.3 Etapa de Comunicaciones Las comunicaciones utilizan los dos canales del MAX232, utilizado como driver de capa física para el protocolo RS232 (los voltajes), y el protocolo SCI (serial controller interface) como capa de datos para comunicar los módulos entre sí, los módulos están conectados en serie para el caso del sistema implementado, la comunicación se realiza a 4800bps, 8bits sin bit de paridad, se utilizan dos canales, el denominado canal de "subida" y el de "bajada". El canal de bajada es utilizado para transmitir datos del nodo maestro a todos los nodos esclavos, cada nodo esclavo recibe la comunicación, la procesa, e igualmente envía una copia de la misma por el canal de bajada al siguiente nodo en la red, el canal de subida es utilizado para regresar datos de los nodos esclavos al nodo maestro, no existe colisión ya que se utiliza un canal separado. Cuando un nodo en la red recibe un dato por el canal de subida, este es automáticamente enviado al nodo (anterior) en la red, sin procesar dicha comunicación, ya que esta última tiene como único fin el nodo maestro. Las resistencias observadas se concibieron para hacer una adecuación de los niveles de voltaje, ya que esta etapa funciona con 5V, mientras que el microcontrolador utiliza 3.3V. Ver figura 42.

54
Figura 42 Etapa de Comunicación
Fuente. Propia
3.4.2.3.1 Conexiones entre Tarjeta Maestra y Tarjeta Nodos Su propósito es tomar lecturas de los sensores (del suelo por medio de ADC y el de temperatura y humedad relativa por protocolo propio). Además de esto maneja una etapa de potencia de 110VAC y 24VAC, está basado en el microcontrolador MC9S08QE32 de freescale, micro de 8 bits, con una frecuencia de reloj de 16MHz. Se utilizan como periféricos internos varios pines de GPIO para indicadores LEDs y un pulsador de emergencia al igual que la etapa de potencia, además de esto se utiliza la interrupción de tiempos, el conversor ADC y dos puertos de comunicación serial asíncrona (SCI), estos pueden ser programados dentro de la tarjeta. La tarjeta de los nodos se alimenta de 12VDC, los cuales son regulados a 5V para el MAX232 y a 3.3V para el MC9S08QE32, el microcontrolador en cuestión tiene pines tolerantes de 5V y el MAX232 entradas TTL para las cuales cualquier voltaje por encima de 2.2V se considera un alto, por esta razón la interface funciona sin problemas, sin embargo se adicionaron resistores a los pines para evitar potenciales inconvenientes. El microcontrolador se conecta por medio de dos puertos SCI al MAX232, este último permite que la tarjeta tenga dos puertos seriales, los cuales son utilizados como dos puertos de comunicaciones, uno de subida (upload) y otro de bajada (download).

55
Los datos que ingresan por el puerto de subida son analizados para determinar si poseen algún comando, de igual forma si el microcontrolador requiere regresar datos al maestro lo realiza por medio del puerto de subida, cada dato que ingresa por el puerto de subida independiente que este destinado o no, a el nodo que lo recibe, es copiado y pasado al siguiente nodo, esto se realiza por medio del puerto de bajada, este último se conecta al puerto de subida del siguiente nodo y así sucesivamente. Los datos que ingresan al nodo por el puerto de bajada no son procesados, e inmediatamente son propagados al siguiente nodo por medio del puerto de subida. Resumiendo, la tarjeta tiene dos puertos de comunicación: uno de subida y uno de bajada, cualquier dato que ingrese por ellos es automáticamente copiado al otro puerto, los datos que ingresan por el de subida son procesados para determinar si hay mensajes y los datos que se necesiten transmitir son igualmente enviados por el puerto de subida. Ambos puerto de bajada y de subida son bidireccionales, sus conexiones son cruzadas, es decir, el TX2 del nodo 1 se conecta con el RX1 del nodo 2, y el RX2 del nodo 1 se conecta con el TX1 del nodo 2, la figura 43 y el diagrama de la figura 44, explica lo mencionado anteriormente. Figura 43 Bornes de Conexiones
Fuente. Propia
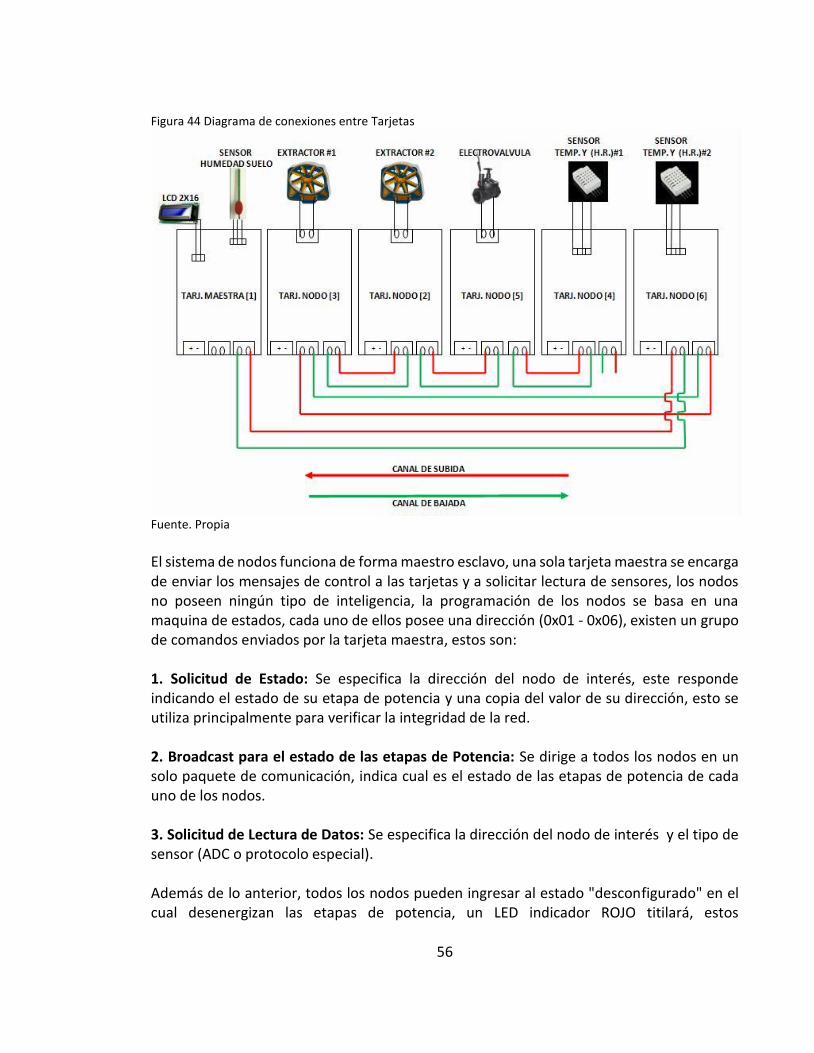
56
Figura 44 Diagrama de conexiones entre Tarjetas
Fuente. Propia
El sistema de nodos funciona de forma maestro esclavo, una sola tarjeta maestra se encarga de enviar los mensajes de control a las tarjetas y a solicitar lectura de sensores, los nodos no poseen ningún tipo de inteligencia, la programación de los nodos se basa en una maquina de estados, cada uno de ellos posee una dirección (0x01 - 0x06), existen un grupo de comandos enviados por la tarjeta maestra, estos son: 1. Solicitud de Estado: Se especifica la dirección del nodo de interés, este responde indicando el estado de su etapa de potencia y una copia del valor de su dirección, esto se utiliza principalmente para verificar la integridad de la red. 2. Broadcast para el estado de las etapas de Potencia: Se dirige a todos los nodos en un solo paquete de comunicación, indica cual es el estado de las etapas de potencia de cada uno de los nodos. 3. Solicitud de Lectura de Datos: Se especifica la dirección del nodo de interés y el tipo de sensor (ADC o protocolo especial). Además de lo anterior, todos los nodos pueden ingresar al estado "desconfigurado" en el cual desenergizan las etapas de potencia, un LED indicador ROJO titilará, estos
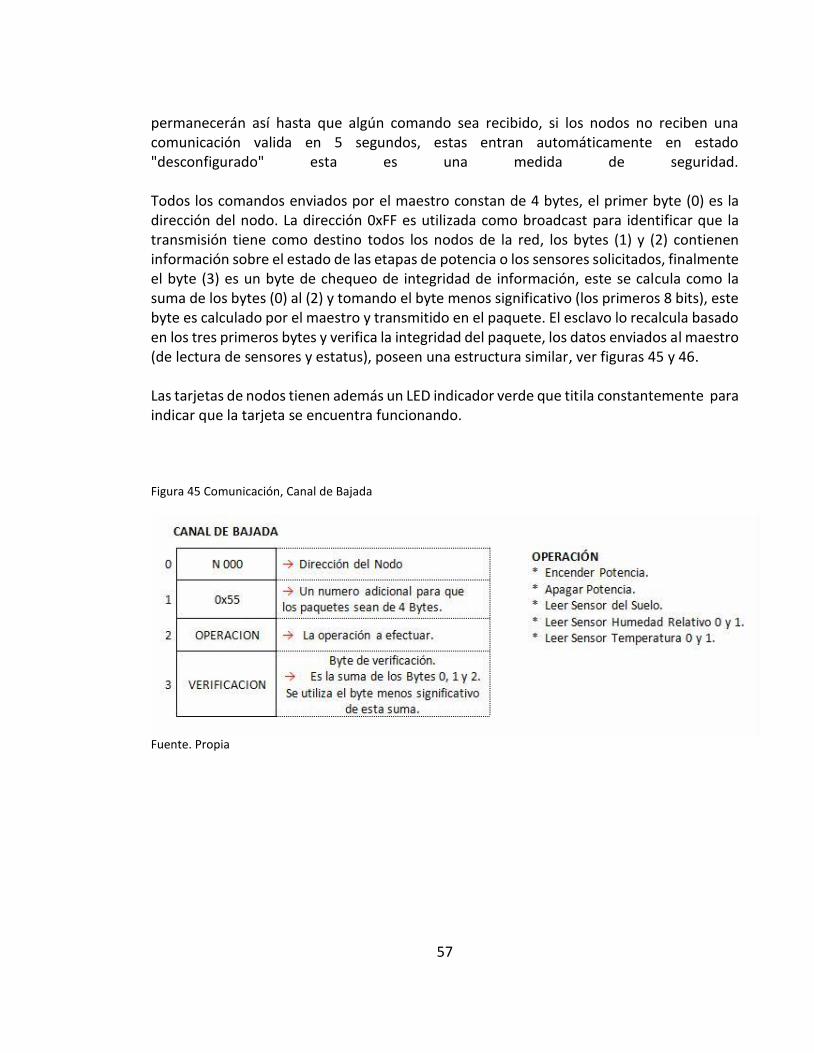
57
permanecerán así hasta que algún comando sea recibido, si los nodos no reciben una comunicación valida en 5 segundos, estas entran automáticamente en estado "desconfigurado" esta es una medida de seguridad. Todos los comandos enviados por el maestro constan de 4 bytes, el primer byte (0) es la dirección del nodo. La dirección 0xFF es utilizada como broadcast para identificar que la transmisión tiene como destino todos los nodos de la red, los bytes (1) y (2) contienen información sobre el estado de las etapas de potencia o los sensores solicitados, finalmente el byte (3) es un byte de chequeo de integridad de información, este se calcula como la suma de los bytes (0) al (2) y tomando el byte menos significativo (los primeros 8 bits), este byte es calculado por el maestro y transmitido en el paquete. El esclavo lo recalcula basado en los tres primeros bytes y verifica la integridad del paquete, los datos enviados al maestro (de lectura de sensores y estatus), poseen una estructura similar, ver figuras 45 y 46. Las tarjetas de nodos tienen además un LED indicador verde que titila constantemente para indicar que la tarjeta se encuentra funcionando. Figura 45 Comunicación, Canal de Bajada
Fuente. Propia

58
Figura 46 Comunicación, Canal de Subida
Fuente. Propia
3.4.2.4 Etapa del Sensado y Potencia Para la etapa de sensado dependiendo del nodo, se le puede conectar el sensor de humedad del suelo al ADC o el sensor de temperatura y humedad relativa a un puerto GPIO que implementa el protocolo de lectura. El canal de potencia es una etapa optocoplada que maneja un TRIAC y por ende conmuta una línea de 110VAC para los extractores (Extractor #1 y Extractor #2), y otra línea de 24VAC para la electroválvula. Su propósito es controlar una carga de 110VAC por medio de un pulso proveniente del microcontrolador, para este propósito se utiliza un transistor para no manejar la carga directamente, nótese que esto implica que la señal se encuentra invertida pero debido a que el optocoplador se activa al permitir el paso a tierra, lo que implica que su configuración también esta invertida, el pulso proveniente de POW_AC es activo en alto (un nivel de 3.3V en este caso lo activa). El dispositivo de potencia solo requiere colocar su fase en serie con esta etapa, y el actuador AC podrá ser controlado. Ver figura 47. Figura 47 Etapa de Potencia
Fuente. Propia

59
3.5 DISEÑO E IMPLEMENTACION DEL CONTROL DIFUSO
El controlador difuso se diseña para que opere tal como lo haría un experto humano, quien decide intuitivamente que información usar como entradas para tomar decisiones en el proceso, en este sistema se tiene como variables de entradas, la temperatura, humedad relativa, humedad del suelo y el delta (Δ) de temperatura y como variables de salida los actuadores (electroválvula y extractores 1 y 2). Teniendo ya definidas todas las entradas y salidas del controlador difuso, se puede especificar el sistema de control difuso, como se muestran en las figuras 48, 49 y 50. Figura 48 Controlador Difuso para la Electroválvula
Fuente Propia
Figura 49 Controlador Difuso para Extractor #1
Fuente. Propia

60
Figura 50 Controlador Difuso para Extractor #2
Fuente. Propia
3.5.1 Creación de los conjuntos difusos (fuzzificacion)
La primera etapa en el diseño del controlador difuso es la interface de fuzzificacion que convierte las entradas del controlador en información para que el mecanismo de inferencia la use fácilmente para activar y aplicar las reglas. Para fuzzificar, primero se cuantifica el significado de los valores lingüísticos usando “funciones de membresía”. De acuerdo a lo anterior se crean los conjuntos difusos de las variables de temperatura, humedad relativa y humedad del suelo, en los rangos que se desea manejar, creando los conjuntos en los cuales se debe efectuar cada uno de los controles. Como se muestra en las figura 38 se determinan seis variables de entrada (temperatura aire 1, humedad relativa (H.R) aire 1, temperatura aire 2, humedad relativa (H.R) aire 2, humedad del suelo y delta (Δ) promedio de la temperatura aire 1 y 2) y tres variables de salida electroválvula, extractores #1 y #2, véase las figuras 51, 52, 53 y 54 donde se muestran los valores de pertenencia o membresía, basadas en los conjuntos lingüísticos los cuales están consignados en las tablas 6, 7, 8 y 9. Figura 51 Valores de Pertenencia Temperatura
Fuente. Propia

61
Tabla 6 Conjuntos Lingüísticos Variable de Entrada Temperatura
CONJUNTOS LINGUISTICOS DE LA VARIABLE DE TEMPERATURA
FRIO MENOR A 10°C
IDEAL ENTRE 20°C Y 31°C
CALIENTE MAYOR A 40°C Fuente. Propia
Figura 52 Valores de Pertenencia Humedad Relativa
Fuente. Propia
Tabla 7 Conjuntos Lingüísticos Variable de Entrada Humedad Relativa
CONJUNTOS LINGUISTICOS DE LA VARIABLE DE HUMEDAD RELATIVA (H.R)
SECO MENOR DEL 30%
IDEAL ENTRE 40% Y 65%
HUMEDO MAYOR A 80% Fuente. Propia
Figura 53 Valores de Pertenencia Humedad del Suelo
Fuente. Propia

62
Tabla 8 Conjuntos Lingüísticos Variable de Entrada Humedad del Suelo
CONJUNTOS LINGUISTICOS DE LA VARIABLE DE HUMEDAD DEL SUELO
SECO MENOR DEL 2%
IDEAL ENTRE 30 Y 40%
HUMEDO MAYOR A 45% Fuente. Propia
Figura 54 Valores de Pertenencia Δ (Delta) Promedio Temperatura Aire 1 y 2
Fuente. Propia Tabla 9 Conjuntos Lingüísticos Variables de Entrada Δ Temperatura
CONJUNTOS LINGUISTICOS DE LA VARIABLE Δ (DELTA) PROMEDIO TEMPERATURA 1 Y 2
BAJO MENOR DE 1
MEDIO ENTRE 2 Y 4
ALTO MAYOR A 8 Fuente. Propia Después de haberse determinado los rangos de las variables de entrada se procede a determinar las variables de salida con sus correspondientes valores de pertenencia. Es importante aclarar que los valores de salida representan, como alteran al sistema de Temperatura y Humedad Relativa, teniendo en cuenta que estos dos factores están directamente relacionados. En las figuras 55 y 56 se indican las variables de salidas para el tipo de respuesta y funcionalidad de los actuadores, extractores quienes controlan la temperatura y humedad relativa al interior del invernadero y electroválvula para el sistema de riego por goteo.
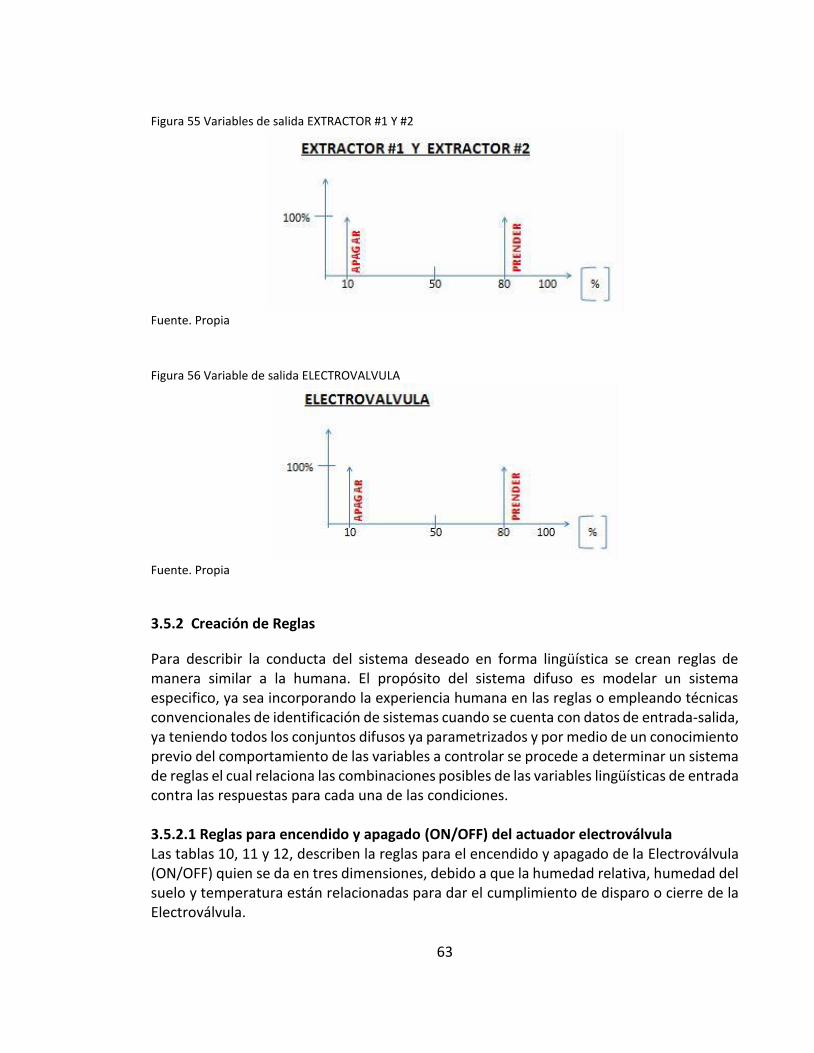
63
Figura 55 Variables de salida EXTRACTOR #1 Y #2
Fuente. Propia Figura 56 Variable de salida ELECTROVALVULA
Fuente. Propia
3.5.2 Creación de Reglas
Para describir la conducta del sistema deseado en forma lingüística se crean reglas de manera similar a la humana. El propósito del sistema difuso es modelar un sistema especifico, ya sea incorporando la experiencia humana en las reglas o empleando técnicas convencionales de identificación de sistemas cuando se cuenta con datos de entrada-salida, ya teniendo todos los conjuntos difusos ya parametrizados y por medio de un conocimiento previo del comportamiento de las variables a controlar se procede a determinar un sistema de reglas el cual relaciona las combinaciones posibles de las variables lingüísticas de entrada contra las respuestas para cada una de las condiciones. 3.5.2.1 Reglas para encendido y apagado (ON/OFF) del actuador electroválvula Las tablas 10, 11 y 12, describen la reglas para el encendido y apagado de la Electroválvula (ON/OFF) quien se da en tres dimensiones, debido a que la humedad relativa, humedad del suelo y temperatura están relacionadas para dar el cumplimiento de disparo o cierre de la Electroválvula.

64
Tabla 10 Reglas para la Operación de la Electroválvula (Humedad del Suelo, Condición Seco)
Humedad del Suelo, Condición Seco
Humedad Relativa
AND Seco Ideal Húmedo
Bajo Apagar Apagar Apagar
Medio Apagar Apagar Apagar
Alto Apagar Apagar Encender
Fuente. Propia
Tabla 11 Reglas para la Operación de la Electroválvula (Humedad del Suelo, Condición Ideal)
Humedad del Suelo, Condición Ideal
Humedad Relativa
AND Seco Ideal Húmedo
Bajo Apagar Apagar Apagar
Medio Apagar Apagar Apagar
Alto Apagar Apagar Encender
Fuente. Propia.
Δ T
em
pe
ratu
ra
Δ T
em
pe
ratu
ra
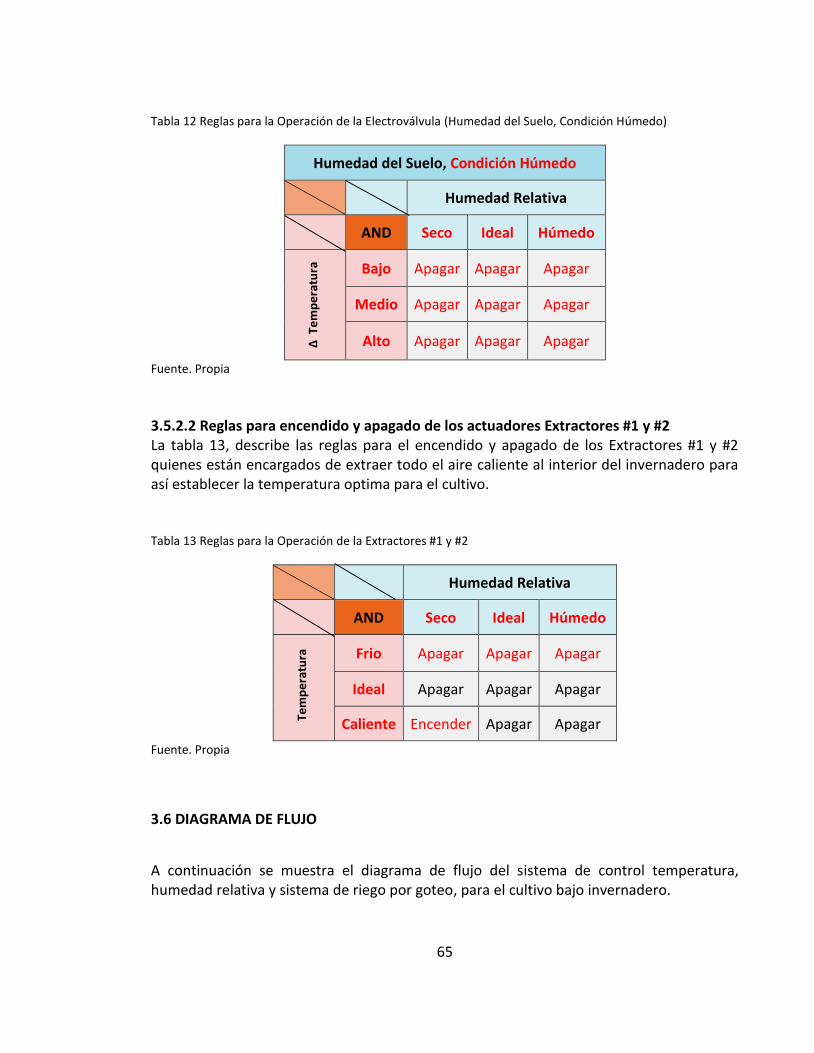
65
Tabla 12 Reglas para la Operación de la Electroválvula (Humedad del Suelo, Condición Húmedo)
Humedad del Suelo, Condición Húmedo
Humedad Relativa
AND Seco Ideal Húmedo
Bajo Apagar Apagar Apagar
Medio Apagar Apagar Apagar
Alto Apagar Apagar Apagar
Fuente. Propia
3.5.2.2 Reglas para encendido y apagado de los actuadores Extractores #1 y #2 La tabla 13, describe las reglas para el encendido y apagado de los Extractores #1 y #2 quienes están encargados de extraer todo el aire caliente al interior del invernadero para así establecer la temperatura optima para el cultivo. Tabla 13 Reglas para la Operación de la Extractores #1 y #2
Humedad Relativa
AND Seco Ideal Húmedo
Frio Apagar Apagar Apagar
Ideal Apagar Apagar Apagar
Caliente Encender Apagar Apagar
Fuente. Propia
3.6 DIAGRAMA DE FLUJO
A continuación se muestra el diagrama de flujo del sistema de control temperatura, humedad relativa y sistema de riego por goteo, para el cultivo bajo invernadero.
Te
mp
era
tura
Δ
Te
mp
era
tura
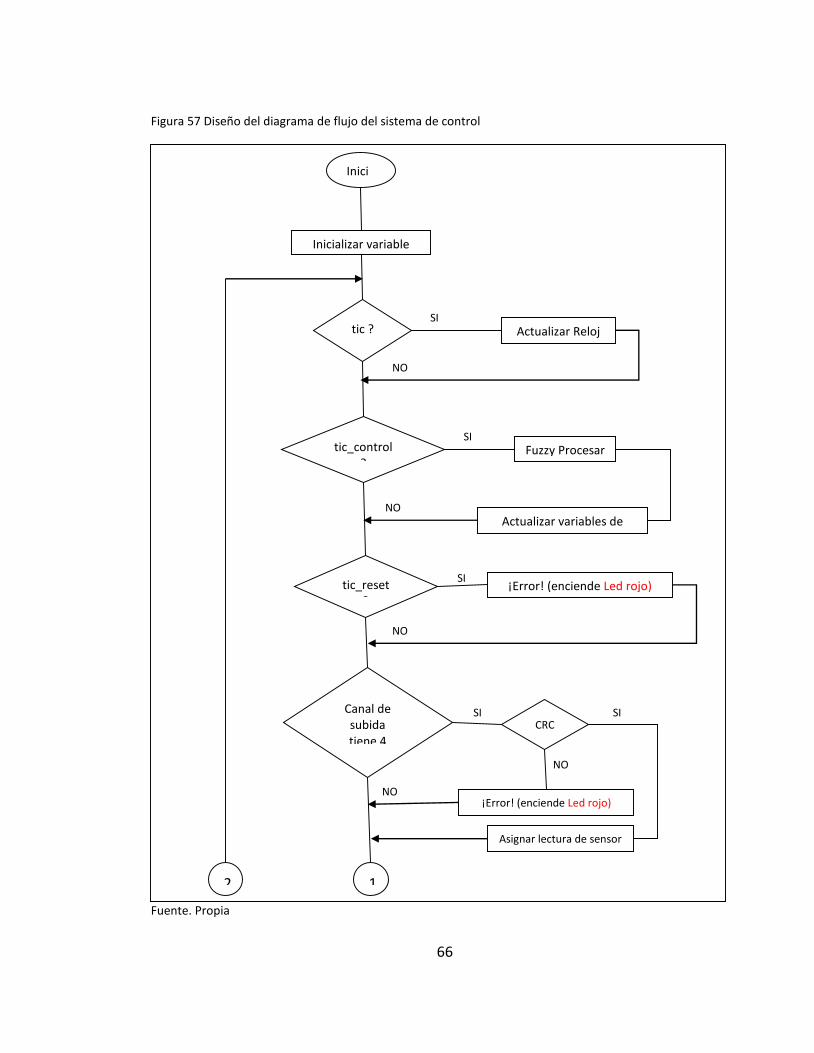
66
Figura 57 Diseño del diagrama de flujo del sistema de control
Fuente. Propia
Inicio
Inicializar variable
tic ? Actualizar Reloj
tic_control ?
tic_reset ?
Canal de subida tiene 4
SI
NO
Fuzzy Procesar
¡Error! (enciende Led rojo)
Actualizar variables de salida
¡Error! (enciende Led rojo)
Asignar lectura de sensor
CRC ?
SI
NO
SI
NO
SI SI
NO
1 2
NO

67
Figura 58 Continuación diseño del diagrama de flujo del sistema de control
Fuente. Propia
tic_refresco nodos
tic_reporte
Datos pendientes
por
Datos del PC ?
SI
NO
j
1 2
Envío estado Electroválvula
Envío estado Extractor #1
Solicitar lectura Temp.1 y H.R 1
Siguiente j
Mostrar siguiente mensaje en el display
Transmitir el dato al canal de bajada
Procesar comunicación al PC
0 1 4 ……
……
SI
NO
SI
NO
SI
NO

68
3.7 DISEÑO DEL CIRCUITO IMPRESO
El diseño del circuito impreso, es otro factor importante para la reducción de ruido en un circuito. En la figura 59 se observa el circuito impreso del sistema de control y demás nodos el cual tienen las siguientes dimensiones 9.5cm de alto por 5.5cm de ancho. Figura 59 Placa base del circuito
Fuente Propia
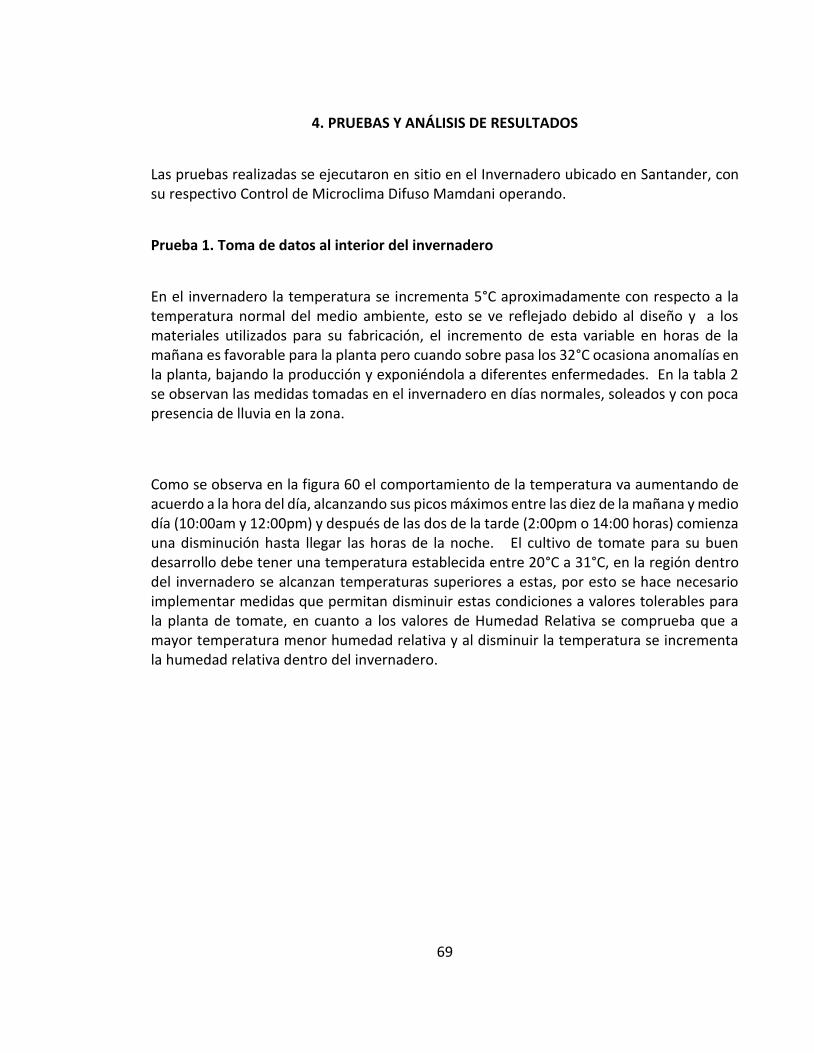
69
4. PRUEBAS Y ANÁLISIS DE RESULTADOS
Las pruebas realizadas se ejecutaron en sitio en el Invernadero ubicado en Santander, con su respectivo Control de Microclima Difuso Mamdani operando.
Prueba 1. Toma de datos al interior del invernadero
En el invernadero la temperatura se incrementa 5°C aproximadamente con respecto a la temperatura normal del medio ambiente, esto se ve reflejado debido al diseño y a los materiales utilizados para su fabricación, el incremento de esta variable en horas de la mañana es favorable para la planta pero cuando sobre pasa los 32°C ocasiona anomalías en la planta, bajando la producción y exponiéndola a diferentes enfermedades. En la tabla 2 se observan las medidas tomadas en el invernadero en días normales, soleados y con poca presencia de lluvia en la zona.
Como se observa en la figura 60 el comportamiento de la temperatura va aumentando de acuerdo a la hora del día, alcanzando sus picos máximos entre las diez de la mañana y medio día (10:00am y 12:00pm) y después de las dos de la tarde (2:00pm o 14:00 horas) comienza una disminución hasta llegar las horas de la noche. El cultivo de tomate para su buen desarrollo debe tener una temperatura establecida entre 20°C a 31°C, en la región dentro del invernadero se alcanzan temperaturas superiores a estas, por esto se hace necesario implementar medidas que permitan disminuir estas condiciones a valores tolerables para la planta de tomate, en cuanto a los valores de Humedad Relativa se comprueba que a mayor temperatura menor humedad relativa y al disminuir la temperatura se incrementa la humedad relativa dentro del invernadero.

70
Tabla 14 Datos al Interior del Invernadero
DATOS AL INTERIOR DEL INVERNADERO
HORA TEMP.°C R.H. %
7:00am 25.2 72
7:30am 29.2 67
8:00am 38.2 40
8:30am 41.5 39
9:00am 42.5 29
9:30am 43.8 24
10:00am 45.7 25
10:30am 40.9 30
11:00am 41.0 33
11:30am 41.1 33
12:00pm 44.2 37
12:30pm 40.0 34
1:00pm 39.7 33
1:30pm 38.5 35
2:00pm 38.1 35
2:30pm 36.2 37
3:00pm 34.7 41
3:30pm 32.3 43
4:00pm 29.8 54
4:30pm 28.7 57
5:00pm 28.1 58
5:30pm 27.1 62
6:30pm 26.6 69 Fuente. Propia

71
Figura 60 Comportamiento de la Temperatura y Humedad relativa al interior del Invernadero
Fuente. Propia Fotografia

72
DATOS AL INTERIOR DEL INVERNADERO CON ACTUADORES Y VENTANAS
HORA TEMP._°C R.H._ %
8:00am 27.9 50.6
8:15am 27.8 53.1
8:30am 26.9 55.7
8:45am 27.5 54.4
9:00am 28.3 50.0
9:15am 30.7 40.0
9:30am 30.4 42.0
9:45am 30.8 38.8
10:00am 32.1 36.7
10:15am 30.7 36.5
10:30am 30.9 37.9
10:45am 31.8 34.2
11:00am 34.2 31.5
11:15am 33.8 32.7
11:30am 33.4 32.1
11:45am 32.6 33.7
12:00pm 32.7 35.0
12:15pm 32.9 34.0
12:30pm 33.6 35.4
12:45pm 35.0 36.1
1:00pm 33.4 35.9
1:15pm 31.7 44.9
1:30pm 32.5 43.1
1:45pm 32.9 44.5
2:00pm 33.0 46.2
2:15pm 30.9 50.5
2:30pm 30.4 51.9
2:45pm 30.0 58.0
3:00pm 30.2 51.9
3:15pm 30.6 53.0
3:30pm 30.9 44.1
3:45pm 30.5 44.8
4:00pm 28.9 45.8
4:15pm 28.8 49.8

73
Prueba 2. Toma de datos al interior del invernadero con actuadores implementados y ventanas abiertas.
De acuerdo al Control Difuso que se implemento y al arrojo de las lecturas de los sensores de temperatura y humedad relativa y con la funcionalidad de los actuadores, se realizan mediciones de acuerdo al ambiente al interior del invernadero con las ventanas abiertas y los actuadores en operación (Extractor#1 y Extractor#2), para así nivelar el ambiente a la temperatura y humedad relativa ideal requerida para el cultivo al interior del invernadero y ver el margen de error verificando que no sea muy elevado. En la tabla 15 se refleja las mediciones con las ventanas abiertas y los actuadores en funcionalidad.
Tabla 15 Datos al Interior del Invernadero con actuadores y ventanas
Fuente. PropiaFigura 61 Comportamiento de la Temperatura con Actuadores y ventanas al interior del Invernadero
4:30pm 28.7 51.3
4:45pm 28.6 52.0
5:00pm 27.7 54.1
5:15pm 27.4 54.6
5:30pm 27.1 60.1
5:45pm 26.6 62.5
6:00pm 26.6 62.8
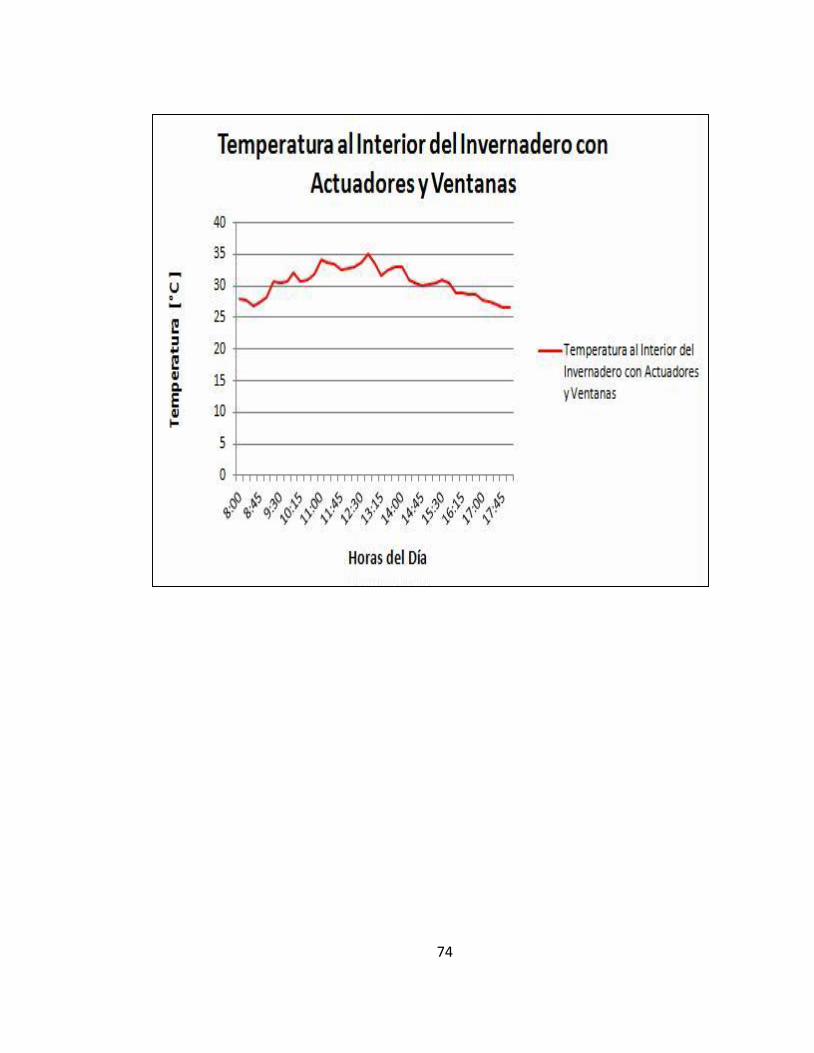
74
75
Fuente: Propia.
Figura 62 Comportamiento de la Humedad relativa con Actuadores y Ventanas al interior del Invernadero
Fuente: Propia.
Prueba 3. Representación Grafica del VWC (Contenido en agua Volumétrico) para una muestra del suelo.
El contenido en agua volumétrico es una medida de humedad del suelo. Es simplemente el cociente del volumen del agua al volumen del suelo. El procedimiento para medir la Humedad del Suelo es la siguiente; se recolecto 4309.1g del suelo en las ceras al interior del invernadero para proceder a realizar la deshidratación por 24Horas dentro de un horno, esto se debe a que el suelo o tierra tiene una humedad que por medio de ello arrojara una lectura erróneo al momento de realizar dicho procedimiento de medición. Pasado las 24 horas el suelo o tierra al interior del horno para su deshidratación y eliminación por completo de toda humedad que contenga se realizan las pruebas y arrojan la siguiente grafica:
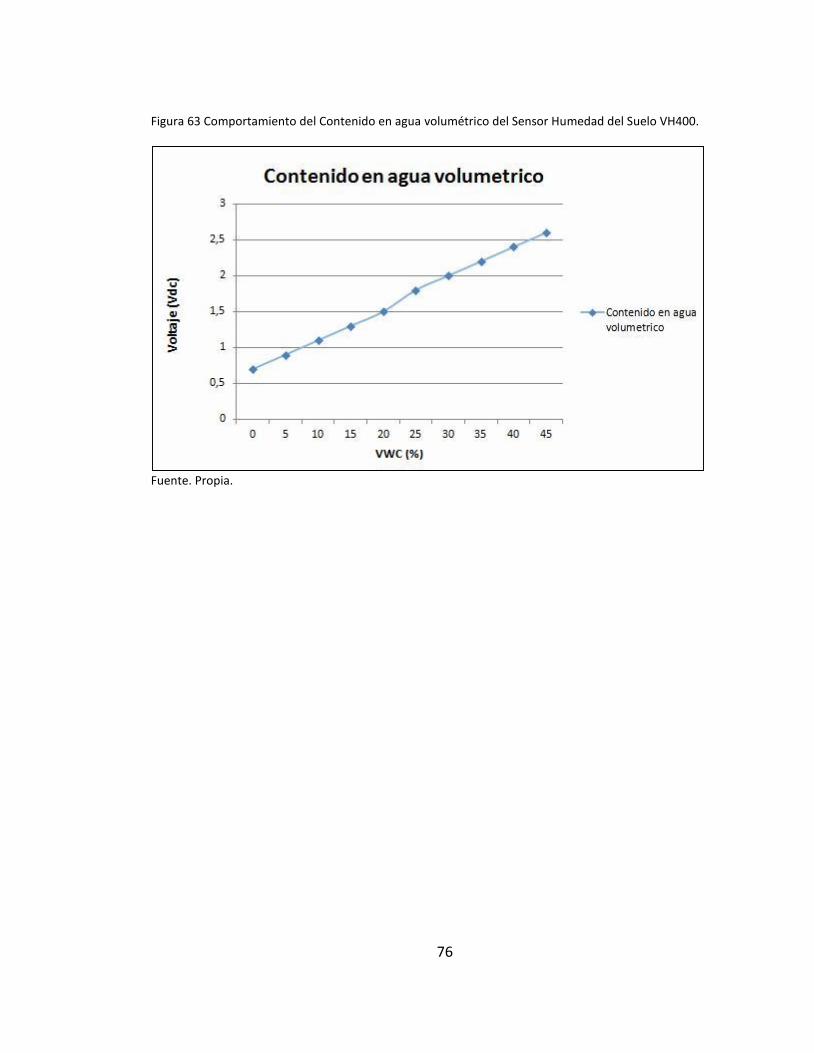
76
Figura 63 Comportamiento del Contenido en agua volumétrico del Sensor Humedad del Suelo VH400.
Fuente. Propia.
77
CONCLUSIONES
1. El comportamiento de la temperatura va aumentando de acuerdo a la hora del día, alcanzando sus picos máximos entre las diez de la mañana y medio día (10:00am y 12:00pm) y después de las dos de la tarde (2:00pm o 14:00pm horas) comienza una disminución hasta llegar las horas de la noche.
2. Mediante la implementación del Sistema de Control, se logra establecer y mantener una temperatura entre 20°C y 31°C con una humedad cercana entre 40% y 65% estos valores son óptimos para el desarrollo de las plantas de tomate bajo invernadero.
3. Por las dimensiones del invernadero que son 6mts de largo por 4mts de ancho, genera que la ventilación este en constante funcionamiento la mayor parte del día, para poder lograr estabilizar tanto la temperatura como la humedad, sin embargo el sistema implementado respondió a la condiciones que se presentan en el momento.
4. Con este Control Difuso Mamdani se logra apropiar al pequeño cultivador de una herramienta y a la industria agrícola, la cual le permite dedicar mayor tiempo a otras actividades, aprovechando mejor los recursos hídricos.
5. Los sensores (Temperatura y Humedad Relativa) y actuadores (Extractores y Electroválvula) respondieron satisfactoriamente de acuerdo al Control Difuso Mandani implementado para suplir la necesidad del cultivo del tomate bajo invernadero tanto en ambiente como en sistema de riego por goteo.

78
Bibliografía
Castro, Javier. estudiomarhea.net. 2006. http://www.estudiomarhea.net/manualc09.htm/ (último acceso: 29 de Diciembre de 2012).
CEPEDA, Paul, David ROMERO, Pedro PONCE, y Arturo MOLINA. «IEEEXplore DIGITAL LIBRARY.» IEEEXplore DIGITAL LIBRARY. 2011. Fuzzy C-Means Clustering Technique Applied for Modeling Parameters of an Intelligent Greenhouse Open Control System (último acceso: 06 de Mayo de 2012).
CHAHUARA QUISPE, Jose Carlos. «cybertesis.edu.pe.» cybertesis.edu.pe. 2005. http://www.cybertesis.edu.pe/sisbib/2005/chahuara_qj/html/index-frames.html (último acceso: 17 de Marzo de 2012).
EURORECIDENTES.COM. «EURORECIDENTES .» Tecnologia de riego avanzado. http://www.euroresidentes.com/jardineria/sistemas_de_riego/riego/riego_por_goteo.htm (último acceso: 22 de Diciembre de 2012).
Fuzzy Inference Proceess, R2012b. mathworks.com. 2012. (último acceso: 07 de Abril de 2012).
G. S., Virk, Ghazali A. B., y Azzi D. «IEEEXplore DIGITAL LIBRARY.» IEEEXplore DIGITAL LIBRARY. 02-05 de Septiembre de 1996. http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=651444 (último acceso: 06 de Mayo de 2012).
HERNANDEZ RANGEL, Libardo Enrique, Wilman PINEDA, y Dariel Alexander BAYONA RUIZ. «edutecne.utn.edu.ar.» edutecne.utn.edu.ar. http://www.edutecne.utn.edu.ar/microcontrol_congr/comunicaciones/Sistema_control_humedad.pdf (último acceso: 05 de Mayo de 2012).
79
InfoAgro.com. «http://www.infoagro.com/industria_auxiliar/tipo_invernaderos.htm.» (último acceso: 12 de 04 de 2014).
infroAgro.com. http://www.infoagro.com/hortalizas/tomate.htm (último acceso: 16 de Junio de 2012).
INSTRUMENTS, NATIONAL. «http://digital.ni.com/public.nsf/allkb/039001258CEF8FB686256E0F005888D1.» 06 de 06 de 2006. (último acceso: 17 de 05 de 2014).
JARAMILLO NOREÑA, Jorge, Viviana PATRICIA RODRIGUEZ, Miriam GUZMAN A., y Miguel A. ZAPATA. «EL CULTIVO DE TOMATE BAJO INVERNADERO, Boletin Tecnico 21.» CORPOICA, 2006: 48.
M., Becker, Oestreich D., Hasse H., y Litz L. «IEEEXplore DIGITAL LIBRARY.» IEEEXplore DIGITAL LIBRARY. 1994. http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=381476 (último acceso: 06 de Mayo de 2012).
Mamdani, EH, y S. Assilian. «Un experimento en la sintesis linguistica con un controlador de logica difusa.» Revista Internacional de Estudios Hombre-Maquina, Vol.7, 1975: 1-13.
MaxDetect Technology Co., Ltd. «humiditycn.com.» humiditycn.com. http://dlnmh9ip6v2uc.cloudfront.net/datasheets/Sensors/Weather/RHT03.pdf (último acceso: 25 de Febrero de 2012).
Posada, Susana Gomez. «http://datateca.unad.edu.co/contenidos/302568/Material_didactico_definitivo/leccin_3_instalacin_de_cultivos.html.» UNAD (Universidad Nacional Abierta y a Distancia). 2007. (último acceso: 10 de Mayo de 2014).

80
Programa de la FAO, Recursos Naturales. Organizacion de la Naciones Unidas para la Alimentacion y Agricultura. http://www.fao.org/gender/gender-home/gender-programme/gender-natural/es/ (último acceso: 12 de Mayo de 2012).
R., Riadi, Tawegoum R., Rachid A., y Chasseriaux G. «IEEEXplore DIGITAL LIBRARY.» IEEEXplore DIGITAL LIBRARY. 27-29 de Julio de 2007. http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=4433949 (último acceso: 06 de Mayo de 2012).
REY, Stéphane. «docs.google.com/viewer, LIN (Local Interconnect Network).» docs.google.com/viewer, LIN (Local Interconnect Network). 13 de Mayo de 2003. https://docs.google.com/viewer?a=v&q=cache:rsWCAkqkProJ:www.68hc08.net/modules/newbb/dl_attachment.php?attachid%3D1131964542%26post_id%3D252+LIN+(Local+Interconnect+Network)+St%C3%A9phane+REY+Revision+1.0+-+May+13th,+2003&hl=es&gl=co&pid=bl&srcid=ADGEESia (último acceso: 15 de Diciembre de 2012).
SENA VIRTUAL, Comunidad Virtual de Aprendizaje. «Unidad 1, Conceptos Basicos sobre el Cultivo bajo Cubierta.» Curso Virtual, Cultivos Bajo Cubierta, Bucaramanga, 2012.
tecnociencia-tecnopedia. tecnociencia-tecnopedia.blogspot.com. 11 de 11 de 2009. http://tecnociencia-tecnopedia.blogspot.com/2009/11/senales-analogicas-y-digitales.html (último acceso: 29 de Diciembre de 2012).
VEGETRONIX, VH400 Soil Moisture Sensor Probes. vegetronix.com. 2008. http://www.vegetronix.com/Products/VH400/ (último acceso: 03 de Marzo de 2012).

81
Apéndice
Apéndice 1: Hoja de Datos Electroválvula, 2WNC, 24VAC.
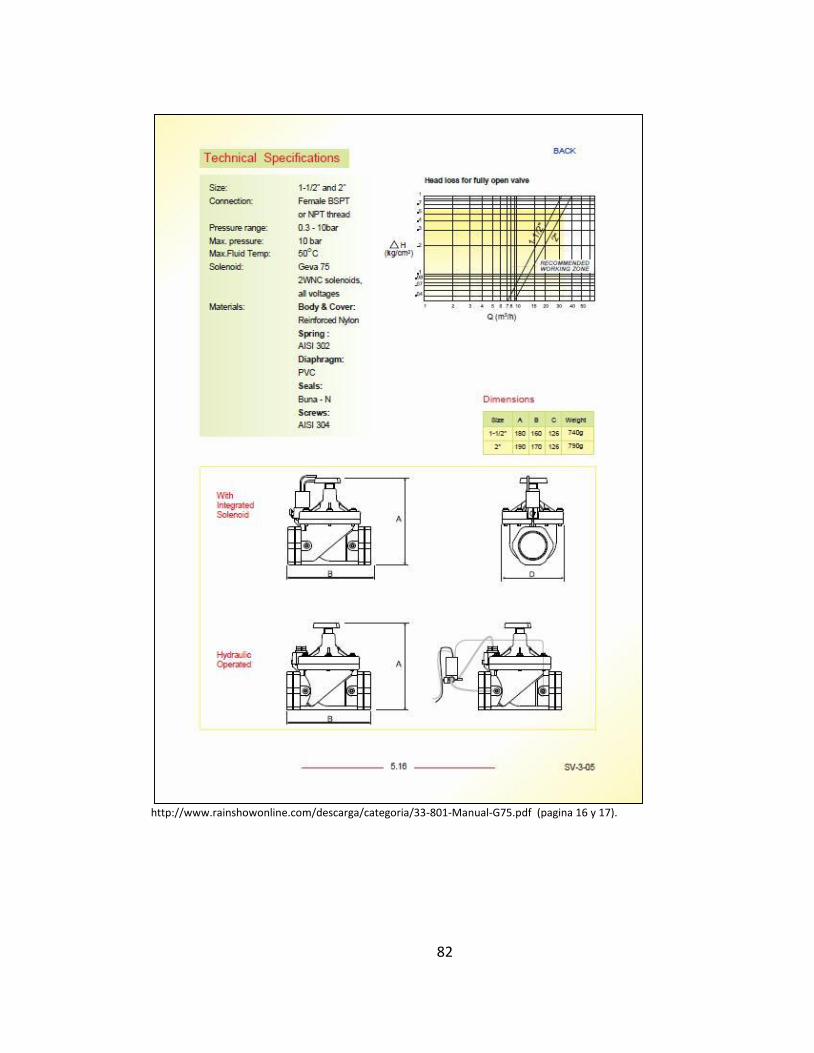
82
http://www.rainshowonline.com/descarga/categoria/33-801-Manual-G75.pdf (pagina 16 y 17).
83
Apéndice 2: Hoja de Datos Sensor de Temperatura y Humedad Relativa RHT03.
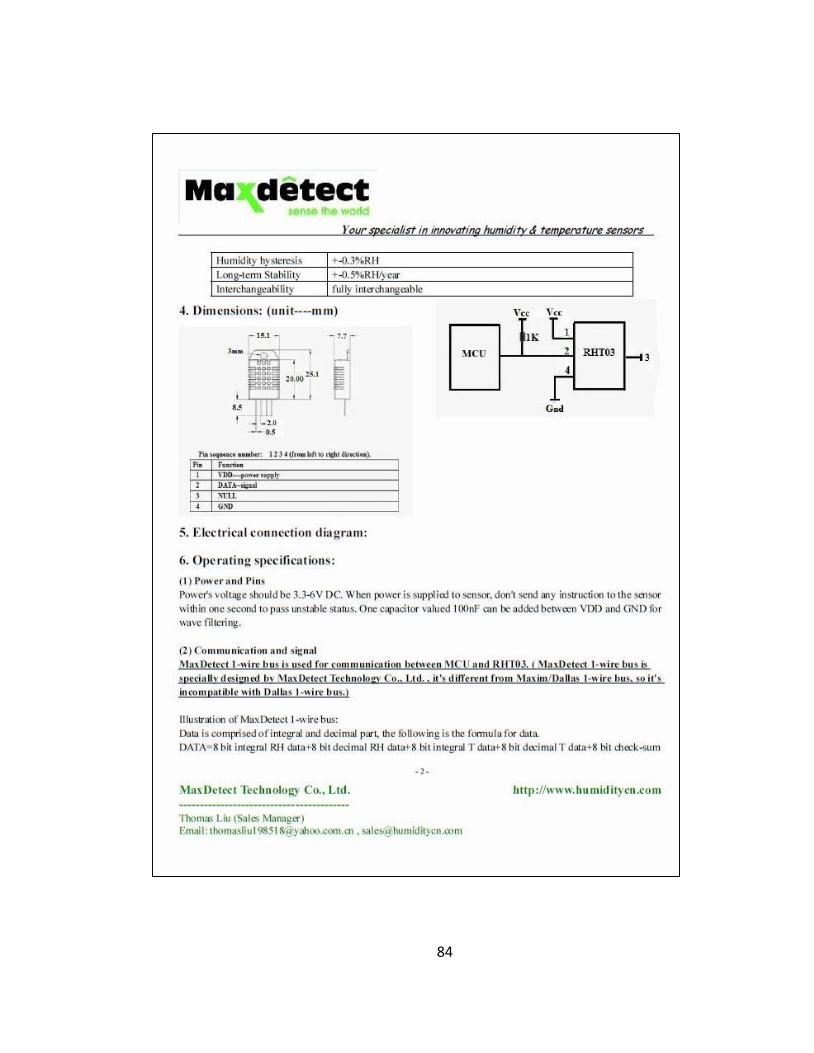
84

85
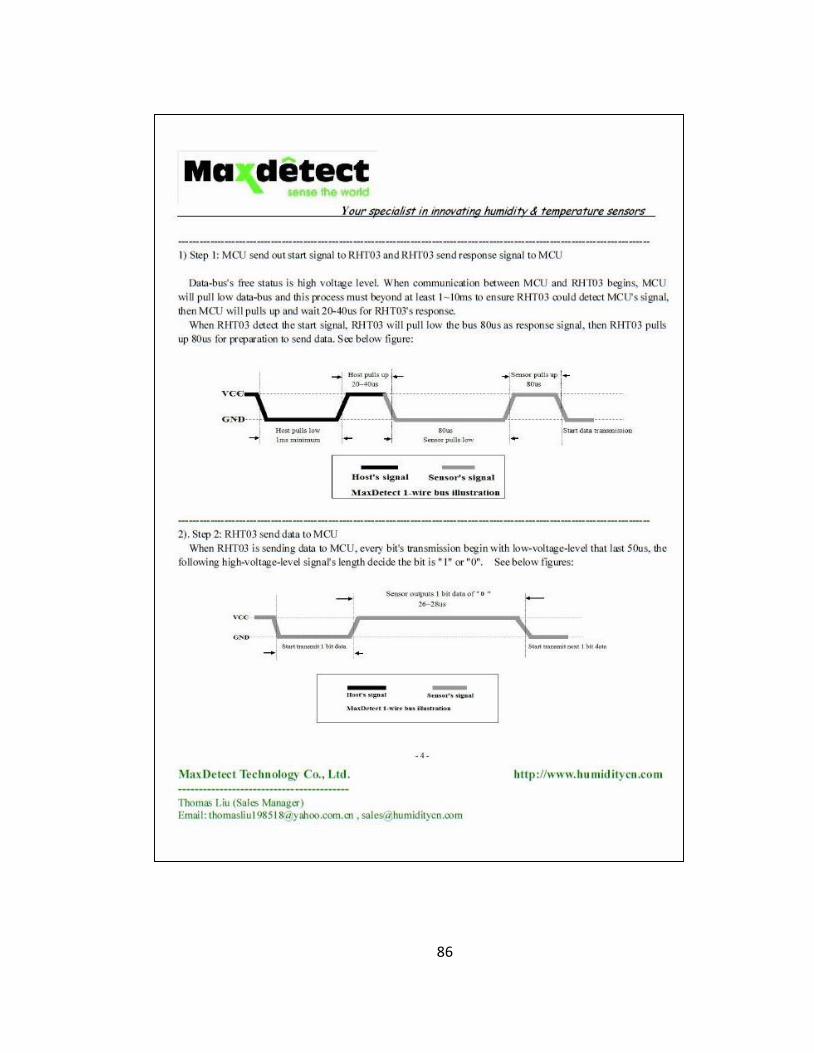
86

87
88
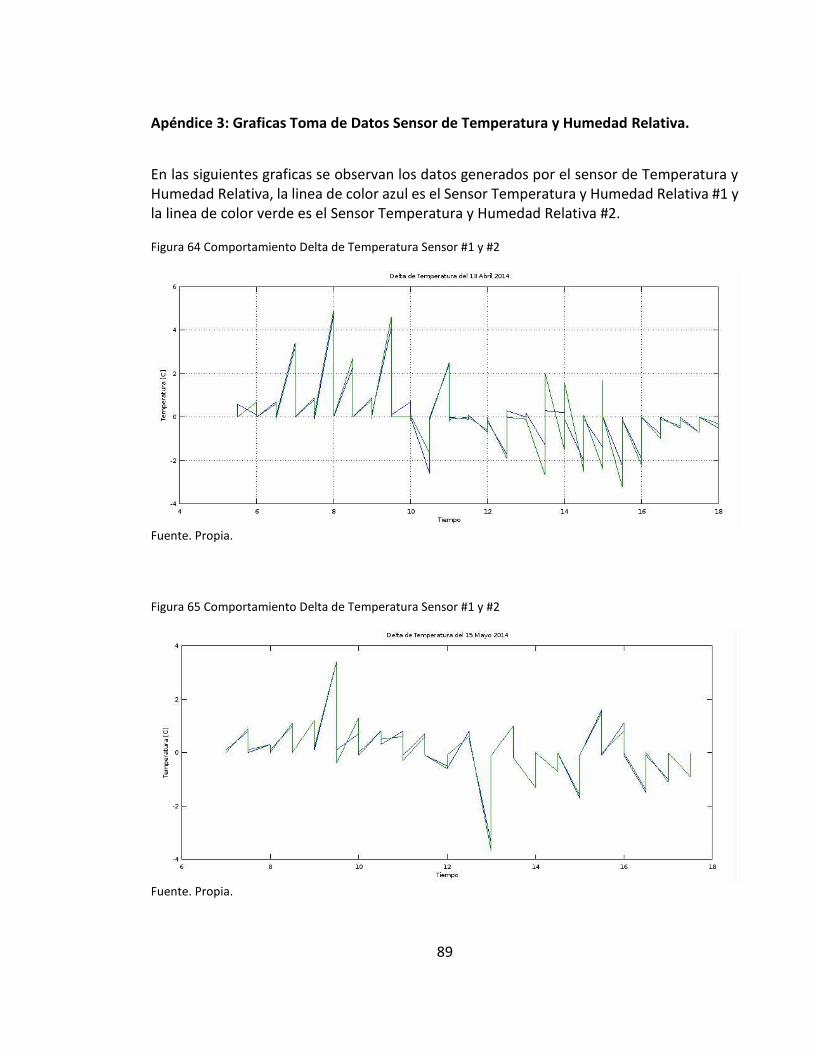
89
Apéndice 3: Graficas Toma de Datos Sensor de Temperatura y Humedad Relativa.
En las siguientes graficas se observan los datos generados por el sensor de Temperatura y Humedad Relativa, la linea de color azul es el Sensor Temperatura y Humedad Relativa #1 y la linea de color verde es el Sensor Temperatura y Humedad Relativa #2.
Figura 64 Comportamiento Delta de Temperatura Sensor #1 y #2
Fuente. Propia.
Figura 65 Comportamiento Delta de Temperatura Sensor #1 y #2
Fuente. Propia.

90
Figura 66 Comportamiento de la Temperatura Sensor #1 y #2
Fuente. Propia.
Figura 67 Comportamiento Humedad Relativa Sensor #1 y #2
Fuente. Propia.
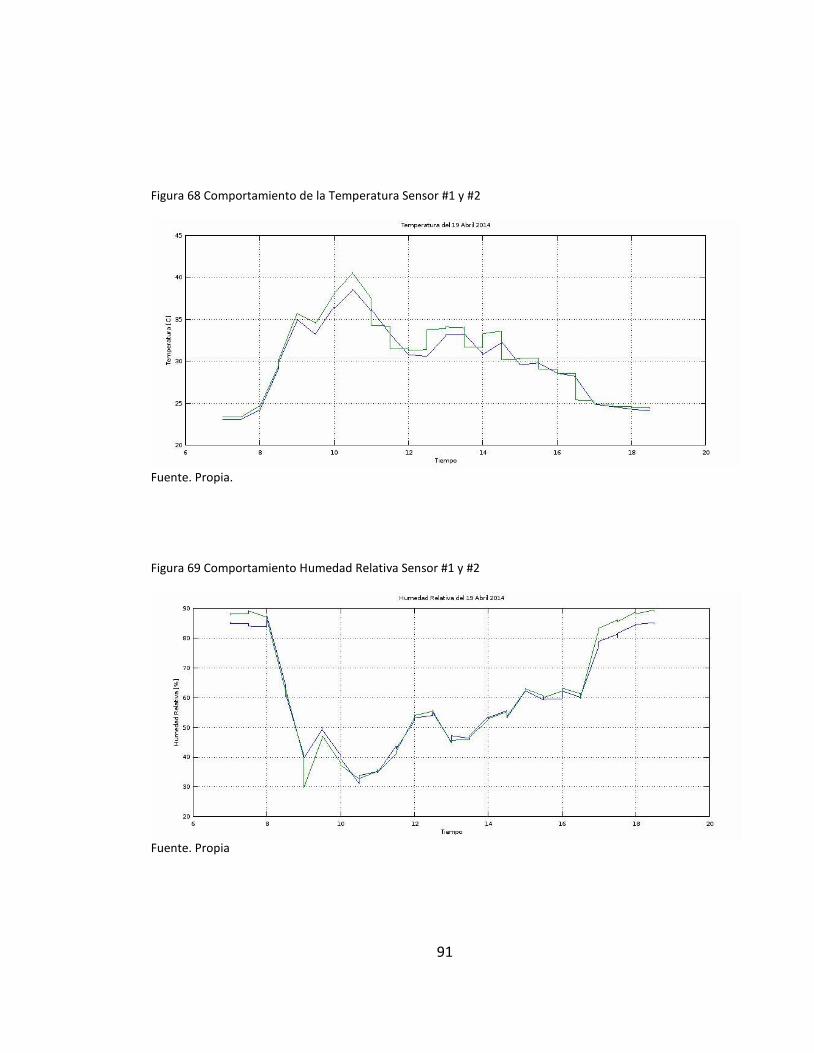
91
Figura 68 Comportamiento de la Temperatura Sensor #1 y #2
Fuente. Propia.
Figura 69 Comportamiento Humedad Relativa Sensor #1 y #2
Fuente. Propia
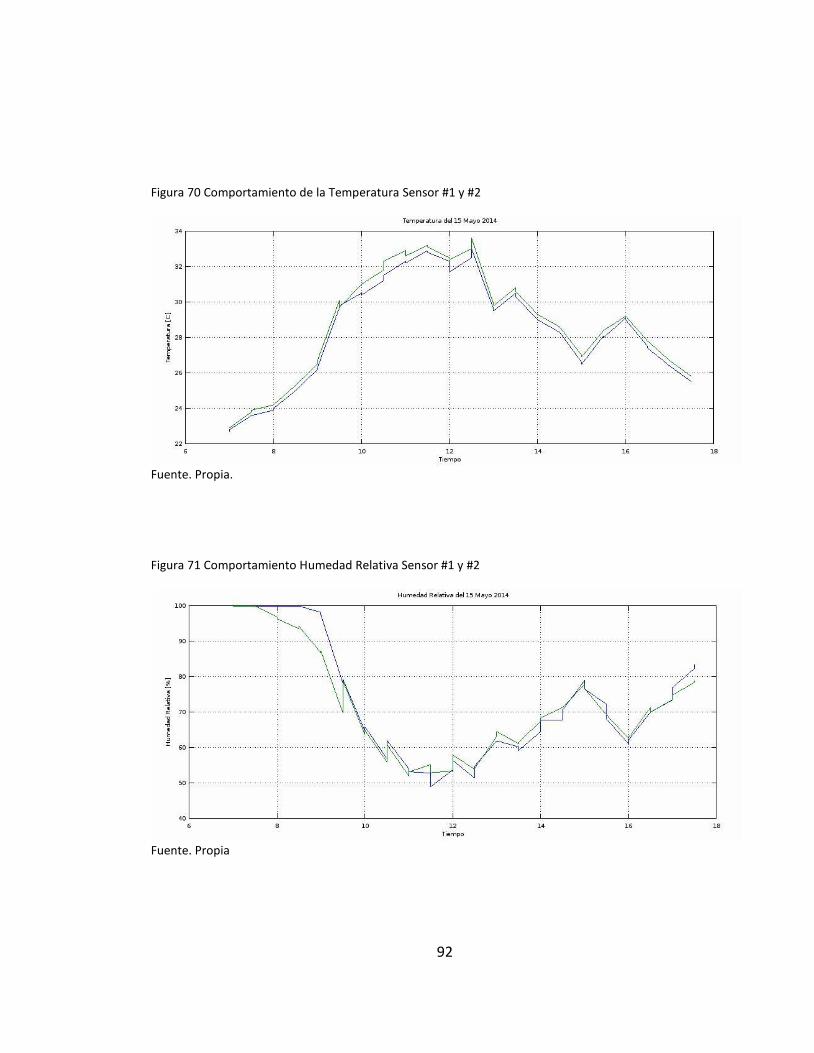
92
Figura 70 Comportamiento de la Temperatura Sensor #1 y #2
Fuente. Propia.
Figura 71 Comportamiento Humedad Relativa Sensor #1 y #2
Fuente. Propia
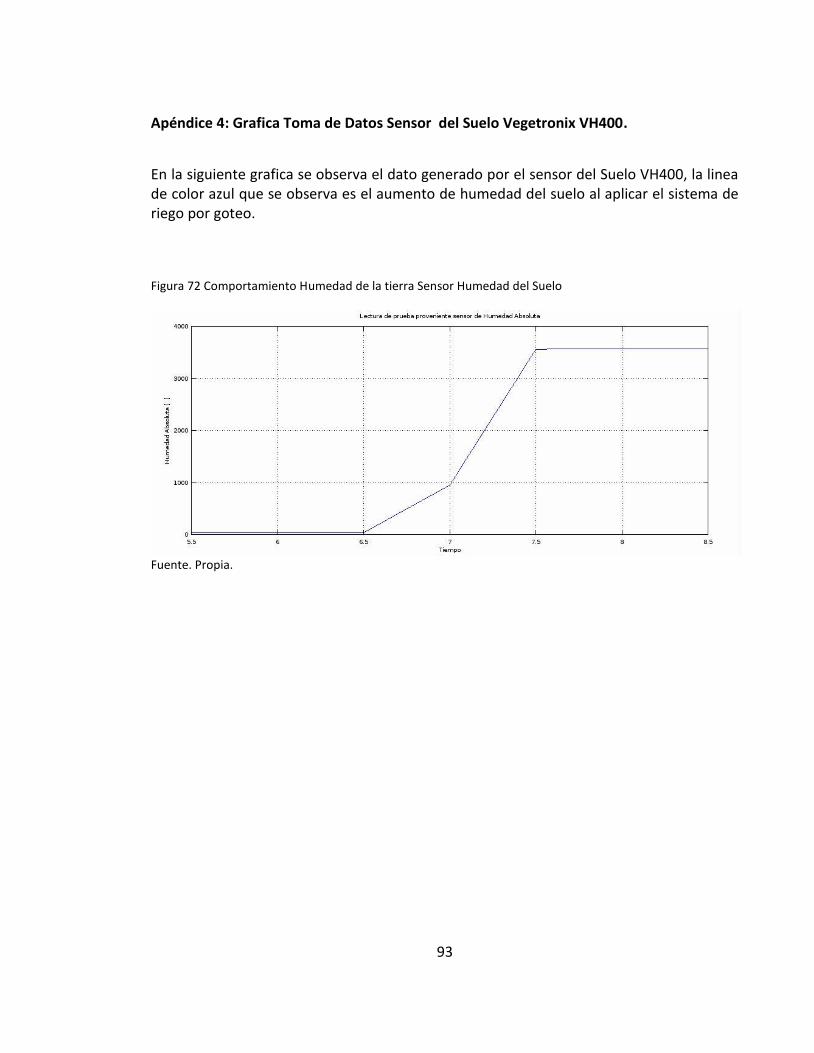
93
Apéndice 4: Grafica Toma de Datos Sensor del Suelo Vegetronix VH400.
En la siguiente grafica se observa el dato generado por el sensor del Suelo VH400, la linea de color azul que se observa es el aumento de humedad del suelo al aplicar el sistema de riego por goteo.
Figura 72 Comportamiento Humedad de la tierra Sensor Humedad del Suelo
Fuente. Propia.