DISEÑO DE SISTEMA AUTOMÁTICO PARA ALIMENTACIÓN Y TRANSPORTE DE...
127
DISEÑO DE SISTEMA AUTOMÁTICO PARA ALIMENTACIÓN Y TRANSPORTE DE MATERIA PRIMA EN UN PROCESO DE CONFECCIÓN DE PRODUCTOS DE TRABAJO EN ALTURA, DE LA EMPRESA EPI LTDA. ANDRÉS FELIPE CARACAS NÚÑEZ DIANA MARCELLA RIASCOS VIVEROS UNIVERSIDAD AUTONOMA DE OCCIDENTE FACULTAD DE INGENIERIA DEPARTAMENTO DE AUTOMÁTICA Y ELECTRÓNICA PROGRAMA DE INGENIERIA MECATRONICA SANTIAGO DE CALI 2012
Transcript of DISEÑO DE SISTEMA AUTOMÁTICO PARA ALIMENTACIÓN Y TRANSPORTE DE...

DISEÑO DE SISTEMA AUTOMÁTICO PARA ALIMENTACIÓN Y TRANSPORTE DE MATERIA PRIMA EN UN PROCESO DE CONFECCIÓN DE PRODUCTOS
DE TRABAJO EN ALTURA, DE LA EMPRESA EPI LTDA.
ANDRÉS FELIPE CARACAS NÚÑEZ DIANA MARCELLA RIASCOS VIVEROS
UNIVERSIDAD AUTONOMA DE OCCIDENTE FACULTAD DE INGENIERIA
DEPARTAMENTO DE AUTOMÁTICA Y ELECTRÓNICA PROGRAMA DE INGENIERIA MECATRONICA
SANTIAGO DE CALI 2012

2
DISEÑO DE SISTEMA AUTOMÁTICO PARA ALIMENTACIÓN Y TRANSPORTE DE MATERIA PRIMA EN UN PROCESO DE CONFECCIÓN DE PRODUCTOS
DE TRABAJO EN ALTURA, DE LA EMPRESA EPI LTDA.
ANDRÉS FELIPE CARACAS NÚÑEZ
DIANA MARCELLA RIASCOS VIVEROS
Pasantía Institucional para optar al título de Ingeniero Mecatrónico
Director
ANDRÉS FELIPE NAVAS ESCOBAR.
Ingeniero Mecatrónico.
UNIVERSIDAD AUTONOMA DE OCCIDENTE FACULTAD DE INGENIERIA
DEPARTAMENTO DE AUTOMÁTICA Y ELECTRÓNICA PROGRAMA DE INGENIERIA MECATRONICA
SANTIAGO DE CALI 2012

3
Santiago de Cali, 2 de agosto de 2012
Nota de Aceptación Aprobado por el comité de grado en cumplimiento
de los requisitos exigidos por la Universidad
Autónoma de Occidente para optar al título de
Ingeniero Mecatrónico
JIMMY TOMBE ANDRADE
Jurado
JESUS ALFONSO LOPEZ
Jurado

4
Culmina una de las etapas más esperadas e importantes de mi vida en la que agradezco y dedico a Dios, por haberme permitido llegar hasta este punto y haberme dado salud para lograr mis objetivos, además de su infinita bondad y amor. A mi padre Heberth Riascos Urbano, por los ejemplos de constancia y perseverancia que lo caracterizan y que me ha inculcado siempre, por el valor mostrado para salir adelante y por su cariño; a mi madre Daicy Viveros Martínez, por haberme apoyado en todo momento, por sus valores, por la motivación y constantes consejos, que me han permitido ser una persona de bien, pero más que nada, por su amor. A mis familiares; a mi hermano Heberth, a mi hermano Michael, a mi sobrinos Luisa y Sebastián, a mi tía Adíela, A mi tía Doris, A mi tía Mari, A mi tía Lito, A mi tía Jaqueline, A mi tía Yajaira, A mi tía Sandra, A mi tío John, A mis primos Yurani, Paola, Yorleni, Juan Manuel ,Jeremías David, Laura, amia abuelos y bisabuelos, a todos ellos y muchos otros miembros de mi gran familia que si nombrara sobrepasarían esta y muchas páginas más, que participaron directa o indirectamente en la elaboración de este proyecto de grado, por ser el ejemplo de una familia unida y llena de valores de la cual aprendí demasiado. ¡Gracias a ustedes! A mis maestros; por su gran apoyo y motivación para la culminación de nuestros estudios profesionales y para la elaboración de este proyecto de grado. A mis amigos; que nos apoyamos mutuamente en nuestra formación profesional y que hasta ahora, seguimos siendo amigos y compartiendo grandes aventuras, sonrisas y triunfos: Oscar Mauricio Vélez, Verónica Gonzales, Fernando Pantoja, Loly Ardila, Diana Araujo, Heydy Mosquera, Víctor Vidal, Claudia Valencia. A mi compañero de pasantía Andrés Felipe Caracas por su gran amistad y su perseverancia participando de forma directa en la elaboración de este trabajo de grado.
DIANA MARCELLA RIASCOS VIVEROS

5
A Dios, por brindarme la oportunidad de vivir y por estar conmigo en cada paso que dado, por iluminar mi mente y fortalecer mi corazón, por haber puesto en mi camino a aquellas personas que han sido mi apoyo y compañía durante todo este periodo de estudio.
A mi madre Gladis María Núñez Camacho por haberme apoyado en todo momento, por sus valores y consejos, por la constante motivación que me ha permitido ser una persona de bien, pero más que nada, por su amor.
A mi padre Miguel Enrique Caracas Montaño por los ejemplos de constancia y perseverancia que lo caracterizan y que me ha infundado siempre, por confiar en mi, y sobre todo, por el valor mostrado para salir adelante ante las situaciones mas difíciles.
A mis hermanas Paola Lorena y Lina Susana, por su amor incondicional que ha servido en los momentos más difíciles de mi vida, para mi superación personal, porque siempre me han apoyado incondicionalmente.
A todos mis familiares, que con algún consejo o palabra de aliento, hicieron que no perdiera de vista las metas propuestas al inicio de mi carrera universitaria.
A mis amigos por su constante motivación y perseverancia.
A mis maestros por su gran apoyo y motivación en todo momento.
ANDRÉS FELIPE CARACAS

6
AGRADECIMIENTOS
Expresamos nuestros más sinceros agradecimientos a todos aquellos que, de alguna u otra manera, contribuyeron en la realización del presente trabajo. Profesor Andrés Felipe Navas, Ingeniero Mecatrónico de la Universidad Autónoma de Occidente, Director de Trabajo de Grado. Profesor Jesús Alfonso López, Ingeniero Electricista, Director del Programa de Ingeniería mecatrónica de la Universidad Autónoma de Occidente. Ingeniera industrial Sandra Ángel, Jefe de Producción de la empresa E.P.I. L.T.D.A. Freddy Morcillo, Administrador de Empresas, Propietario de E.P.I. L.T.D.A. Juan Guillermo Álvarez, Ingeniero Mecatrónico, encargado de Ingeniería y Desarrollo de la empresa E.P.I. L.T.D.A. Carolina Capote, supervisora de la empresa E.P.I. L.T.D.A. Colaboradores E.P.I. L.T.D.A.

7
CONTENIDO
pág.
GLOSARIO
13
RESUMEN
14
INTRODUCCIÓN
15
1. PLANTEAMIENTO DEL PROBLEMA
17
2. OBJETIVOS 18
2.1 OBJETIVO GENERAL 18
2.2 OBJETIVO ESPECIFICO 18
3. JUSTIFICACIÓN
19 4. MARCO TEÓRICO
20
4.1 UNA BANDA TRANSPORTADORA 21
4.2 CINTAS AÉREAS DE CARROS 23
4.3 ALIMENTADOR VIBRATORIO 24
4.4 ERGONOMÍA 25
4.4.1 Puntos que hay que recordar. 25
4.4.2 Lesiones y enfermedades habituales. 26
4.4.3 Normalmente, las lesiones se desarrollan 26
4.4.4 Las lesiones y enfermedades más habituales. 27
4.4.5 Las lesiones son costosas 29
5. ANTECEDENTES
30 5.1 LOCAL 30 5.2 EXTERNO 30
5.2.1 Cintas con rodillos 31
5.2.2 Cintas con ruedas 31

8
5.2.3 Cintas planas 31
5.2.4 Cintas con cadenas 32
5.2.5 Cintas con listones 32
5.2.6 Cintas aéreas de carros 32
5.2.7 Cintas por cable enterrado 32
5.2.8 Cintas de carro sobre raíles 33
5.2.9 Alimentador Vibratorio 33
6. METODOLOGÍA
36 7. PLANTEAMIENTO DE LA MISIÓN DEL PROYECTO
38
7.1 OBTENCIÓN DE LOS DATOS PRIMARIOS 38
7.2 CLIENTE PRIMARIO 38
7.3 CLIENTES SECUNDARIOS 39
7.4 PREMISAS Y RESTRICCIONES 39
8. IDENTIFICACIÓN E LAS NECESIDADES
40
8.1 MÉTRICAS 41
8.2 QFD 41
9. GENERACIÓN DE CONCEPTOS
42
9.1 CAJA NEGRA 42
9.2 DESCOMPOSICIÓN FUNCIONAL 43
9.3 DISEÑO DE CONCEPTOS 44
9.3.1 ¿Cómo se transporta la materia prima? 44
9.3.2 ¿Como el sistema suministra la materia prima en movimiento al operario?
47
9.3.3 ¿Como el sistema suministra la materia prima fija al operario?
50
9.3.4 ¿Como se transporta el producto final? 51
9.4 SELECCIÓN DE CONCEPTOS 52
9.5 SELECCIÓN DE DISPOSITIVOS Y/O MATERIALES 56
10. DISTRIBUCIÓN GEOMÉTRICA
61
10.1 LISTA DE COMPONENTES 61
10.2 DESCRIPCIÓN DE LOS COMPONENTES 61

9
11. DISEÑO DE LAS SECUENCIAS LOGICAS PARA LA PROGRAMACION DEL SISTEMA.
65
12. DISTRIBUCION DE LA PLANTA.
74
13. PRESUPUESTO.
75 14. ANALISIS ORGANIZACIONAL.
76 15. BENEFICIOS GENERADOS POR EL PROYECTO
81 16. ESTUDIO DE VIABILIDAD DEL PROYECTO.
82
16.1 COSTOS MONTAJE. 83
16.2 COSTOS DE PRODUCCIÓN. 84
16.3 INGRESOS. 84
16.4 FLUJO DE FONDOS. 84
16.5 INDICADORES DE RENTABILIDAD. 85
16.6 ECUACIONES. 85
16.7 RESULTADOS. 85
17. CRONOGRAMA.
86 18. CONCLUSIONES.
88 19. RECOMENDACIONES.
90 BIBLIOGRAFÍA.
91
ANEXOS
93

10
TABLA DE FIGURAS
Pág.
Figura 1. Banda (Cinta) transportadora (A) 21
Figura 2. Cinta aérea de carros (A) 22
Figura 3. Alimentador vibratorio (A) 23
Figura 4. Controladores industriales. (A) 35
Figura 5. Controladores industriales.(A) 35
Figura 6. Caja Negra (A). 42
Figura 7. Descomposición Funcional (A). 43
Figura 8. Primer concepto de diseño (A). 44
Figura 9. Segundo concepto de diseño (A). 45
Figura 10. Tercer concepto de diseño. 46
Figura 11. Sistema de suministro de materia prima en movimiento Opción 1(A).
47
Figura12. Sistema de suministro de materia prima en movimiento Opción 2 (A).
48
Figura 13. Sistema de suministro de materia prima en movimiento Opción 3 (A) (B).
49
Figura 14. Dispensador (A). 50
Figura 15. Alimentadores Vibratorios Circulares (A). 51
Figura 16. Banda Transportadora Auxiliar (A) 51
Figura 17. Distribución Geométrica (A) 61
Figura 18. Foto Puesto de trabajo de operario (A) 78 Figura 19. Foto suministro de materia prima de operarios (A) 78 Figura 20. Suministro de materia prima de operarios (A) 79 Figura 21. Foto Espacio que recorre el patinador (A) 80 Figura 22. Foto de Recorrido de un operario a sitio de envió (ascensor) (A)
80
Figura 23. Foto de proceso de producción de arneses (A) 96 Figura 24. Foto proceso de producción de arneses (A) 96 Figura 25. Foto puesto de trabajo de operario (A) 97

11
LISTA DE CUADROS
Pág.
Cuadro 1. Lesiones y enfermedades más habituales. 27
Cuadro 2. Identificación de las Necesidades. 40 Cuadro 3. Especificaciones técnicas preliminares. 41
Cuadro 4. Combinación de conceptos. 52
Cuadro 5. Ponderación de Conceptos. 53
Cuadro 6. Matriz De Evaluación De Conceptos. 54
Cuadro 7. Especificaciones técnicas. 55
Cuadro 8. Concepto Seleccionado. 55
Cuadro 9. Selección de componentes para el movimiento.
57
Cuadro 10. Selección del tipo de control. 57
Cuadro 11. Selección de pistón. 59
Cuadro 12. Explicación del GRAFCET 68 Cuadro 13. Presupuesto. 75 Cuadro 14. Funciones operativas y propuesta realizada.
80
Cuadro 15. Cantidad de arneses producidas actualmente.
82
Cuadro 16. Ingresos. 82
Cuadro 17. Producción. 82
Cuadro 18. Mano de obra actualmente mes. 82
Cuadro 19. Mano de obra propuesta mes. 83
Cuadro 20. Costos Montaje. 83
Cuadro 21. Flujo de Fondos. 84 Cuadro 22. Cronograma de actividades. 86 Cuadro 23. Producción de arneses. 96 Cuadro 24. Dimensiones de los elementos. 97

12
LISTA DE ANEXOS
Pág.
Anexo A. QFD 93
Anexo B. Puesto de trabajo actual en torno a el proyecto. 94
Anexo C. Normas de seguridad. 101
Anexo D. Dispositivos recomendados. 102
Anexo E. Ensamble banda transportadora auxiliar 108
Anexo F. Cubre motor de banda transportadora auxiliar 109
Anexo G. Base 2 banda transportadora auxiliar 110
Anexo H. Chaveta de banda transportadora auxiliar 111
Anexo I. Mesa de inspección de banda transportadora 112
Anexo J. Rodillo banda transportadora auxiliar 113
Anexo K. Cinta de banda transportadora auxiliar 114
Anexo L. Cadena transportadora de tiempos 115
Anexo M. Mesa de trabajo 116
Anexo Ñ. Alimentador vibratorio 117
Anexo O. Diente de cadena transportadora 118
Anexo P. Cotizaciones 119
Anexo Q. Manual PLC 120
Anexo R. Manual HMI y mantenimiento. 121
Anexo S. Manual de instalación de pistón neumático. 122
Anexo T. Manual de instalación de la unidad de mantenimiento.
123
Anexo U. Características técnicas de banda transportadora auxiliar.
124
Anexo V. Electro válvulas 125
Anexo W. Servo motor 126
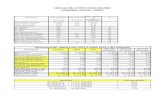
Anexo X. Cadena transportadora 127

13
GLOSARIO
ARNESES: conjunto de correas o tirantes que se ajustan a el cuerpo y se utilizan como sujeción.
AUTOMATIZACIÓN: aplicación de las máquinas o de procedimientos automáticos en la realización de un proceso o en una industria.
CINAR: siglas de cinturones y arneses.
DISEÑO: actividad que tiene como fin proyectar objetivos, donde se realiza un modelo para posteriormente fabricarlos.
EFICAZ: que produce el efecto esperado o que va bien para determinadas cosas.
ENSAMBLE: la unión de dos o más piezas que forman parte de una estructura y han diseñadas para que ajusten entre si perfectamente.
E.P.I: siglas de Elementos de Protección Individual.
ESLINGAS: cuerda fuerte con ganchos que se utiliza para levantar grandes pesos.
FACTIBILIDAD: algo que puede ser realizado.
HARDWARE: conjunto de elementos que conforma un sistema.
INTERFAZ: conjunto de dispositivos y canales que permiten conectar unidades distintas entre si.
MANTENIMIENTO: conjunto de operaciones necesarias para el funcionamiento correcto de algo.
MAQUINA: conjunto de elementos acoplados entre si que forman un todo para realizar un trabajo determinado.
OPERARIO: persona que se dedica a realizar un trabajo de tipo manual.
PLANTA: instalación industrial en el que se transforman materiales o se fabrican cosas.
SISTEMA: conjunto de partes o elementos organizados y relacionados que interactúan entre si para logara un objetivo.
SUMINISTRO: proporcionar algo que se necesita.
VIABILIDAD: posibilidad de llevarse a cabo un proyecto.

14
RESUMEN
En la empresa E.P.I L.T.D.A Equipos de Protección Individual se realizó el proyecto denominado DISEÑO DE SISTEMA AUTOMÁTICO PARA ALIMENTACIÓN Y TRANSPORTE DE MATERIA PRIMA EN UN PROCESO DE CONFECCIÓN DE PRODUCTOS DE TRABAJO EN ALTURA, a través de un convenio realizado con la UNIVERSIDAD AUTÓNOMA DE OCCIDENTE, para reconocer las necesidades que se presentan en la planta CINAR (cinturones y arneses) en el proceso de producción de arneses, y lograr planteamientos de diseños apoyados en el desarrollo de un sistema mecatrónico. En la empresa se identificaron las dificultades de obtener y trasladar la materia prima necesaria para la elaborar los productos de trabajo en alturas, desde el área de corte hasta el puesto de trabajo del operario. De igual forma el trabajo repetitivo que se está ejerciendo en la planta esta generando problemas de salud en los empleados como bursitis y celulitis. De lo anterior se consigue elaborar el planteamiento de la misión del proyecto, a través de un análisis adecuado de la planta, el puesto de trabajo, las características ergonomía, entre otros, estableciendo así las premisas y restricciones. Posteriormente se realizo el diseño de conceptos, donde se derivan cuatro subsistemas que efectúan diferentes funciones, desarrollando combinaciones de conceptos para la elección de un sistema. Esto se logra trabajando con la metodología concurrente, a fin de generar un concepto solido que cumpla con los objetivos planteados. Para seleccionar el concepto sobre el cual se va ha trabajar, se realizo un estudio económico para estimar el presupuesto de implementación, de igual forma se presento una solución y los estudios realizados para el caso, que reafirman la importancia del proyecto para el mejoramiento de producción de arneses en planta CINAR. Palabras clave: automático, conceptos, diseño, ergonomía, mejoramiento, metodología, procesos, producción, sistema.

15
INTRODUCCIÓN
A partir de la revolución industrial en el siglo XIX, se generan numerosos avances tecnológicos, difundiendo el uso de las máquinas para reducir tiempo y costos de producción; gracias a esto la industria logró multiplicarse con el resultado en un cambio de producción, consumo de bienes y transformación social, mejorando la calidad de vida para quienes se encuentran en el manejo de las máquinas industriales; estos cambios se realizaron con nuevos diseños de sistemas implementando la automatización, con el fin de elevar los estándares de productividad, repetitividad, control de calidad, eficiencia e integración con los sistemas.1
En la actualidad las empresas de equipos de protección, en la parte de confección de productos de trabajo en altura, donde se realiza el proceso de cosido y ensamble, el subministro y transporte de material prima se realiza de forma manual, produciendo un trabajo repetitivo generando en el transcurso de tiempo problemas de salud como bursitis y celulitis. Al realizarse el proceso de forma manual la producción no se realiza de forma eficiente, generando perdidas para la empresa y riesgo en el puesto de trabajo de los operarios. Para estos ambientes laborales es de suma importancia el mejoramiento de las condiciones de trabajo humano en función de las facultades y limitaciones reales, a esto lo denominamos ergonomía, la cual propone la adaptación óptima en el ambiente laboral, evitando diferentes problemas de salud, mejorando la eficiencia de quienes desarrollan los distintos trabajos. La problemática que se presenta en la empresa EPI LTDA, en el área de producción de arneses se encuentra específicamente en el suministro y transporte de materia prima, así como el trasporte del producto final, que conllevan a presentar problemas de ergonomía en el puesto de trabajo, para este proyecto el principal propósito es mejorar las condiciones nombradas anteriormente, en donde se realizan las investigaciones necesarias utilizando la metodología de diseño concurrente, teniendo en cuenta el espacio de trabajo y las opiniones de quienes se encuentran involucrados en el proceso, entre otros, donde se presentan opciones de solución que posteriormente son analizadas con el fin de llegar al diseño mas adecuado para la planta CINAR la cual se encarga de la producción de arneses, es por esto que se plantea el proyecto en diseño de sistema automático para alimentación y transporte de materia prima en un proceso de
1 REVOLUCIÓN INDUSTRIAL [En línea].[consultado Febrero 14 de 2012], Disponible en internet :
www.profesorenlinea.cl/universalhistoria/RevolucionIndustrial.htmntic.educacion.es/w3//eos/MaterialesEducativos/bachillerato/historia/rev_industrial/factores.htm

16
confección de productos de trabajo en altura, de la empresa EPI LDTA, utilizando los conocimientos y las competencias adquiridas en el proceso de aprendizaje se desea llevar a cabo el proyecto logrando así realizar un diseño que cumpla con todos los requerimientos.

17
1. PLANTEAMIENTO DEL PROBLEMA
En la empresa EPI LTDA, existe una línea de producción que se dedica a la confección de artículos de trabajo en alturas como arneses, líneas de vida y eslingas. En el proceso de elaboración, los operarios tienen que levantarse de su puesto de trabajo y caminar hasta donde se encuentra la materia prima que es necesaria en la fabricación de los anteriores artículos, esta operación ocasiona pérdidas en el tiempo de trabajo del operador, lo cual afecta económicamente a la empresa, adicionalmente los trabajadores están empezando a sufrir enfermedades profesionales por la repetitividad del proceso como bursitis y celulitis. Cuando el producto se encuentra terminado, un supervisor debe recolectar el elemento para una revisión visual del mismo, y posteriormente debe llevar el producto al área de despacho, la cual se encuentra retirada del área de producción, ocasionando un desgaste físico y pérdidas en tiempo, ya que sólo puede llevar un producto a la vez.
Para asegurar y controlar el flujo prolongado en la entrada de materia prima, y salida del producto terminado en los puestos de trabajo se plantea el siguiente interrogante ¿Cual es el mejor diseño de un sistema automático para desarrollar los procesos y procedimientos de las actividades de recepción, elaboración y almacenamiento en la línea de producción de elementos de trabajo en alturas de la empresa EPI LTDA?

18
2. OBJETIVOS
2.1 OBJETIVO GENERAL
Diseñar un sistema automático para la alimentación y transporte de materia prima en el proceso de confección de productos de trabajo en altura, de la empresa EPI LTDA.
2.2 OBJETIVOS ESPECÍFICOS
Evaluar los métodos y prácticas implementados para la operación de confección de artículos de trabajo en alturas.
Realizar el estudio de los equipos necesarios para el proceso de confección.
Diseñar un sistema mecatrónico que suministre a los operarios los materiales necesarios para la elaboración de los elementos de trabajo en alturas, sin necesidad de movilizarse de su puesto de trabajo.
Diseñar un sistema de transporte, que permita a los operarios trasladar el producto en proceso de un punto a otro, sin necesidad de movilizarse de su puesto de trabajo.
Generar los planos y simulaciones de los diseños realizados, requeridos para una posible ejecución.
Realizar un presupuesto del proyecto, teniendo en cuenta limitaciones y precios actuales, con el fin de realizar un estudio de viabilidad de este.

19
3. JUSTIFICACIÓN
Con este proyecto, se busca diseñar para la empresa EPI LTDA, un modelo que facilite la labor de confección de la línea de productos de trabajo en alturas, con el fin de aumentar su competitividad y calidad de producción. El diseño beneficiara a la empresa y a sus trabajadores, ya que incrementa la seguridad, mejora la disponibilidad de los productos, disminuye el desgaste físico y la repetitividad en los procesos de elaboración por parte de los operarios. Este ultimo punto esta afectando bastante a los trabajadores, debido a que algunos de ellos están empezando a sufrir enfermedades como bursitis y celulitis por el trabajo repetitivo. De igual forma, se busca que el diseño que se realice, sea amigable con el medio ambiente, que tenga una interfaz agradable para el trabajador, y sea de fácil mantenimiento. Con el fin de que el control del proceso de transporte de la materia prima en la planta, elaboración y almacenamiento de los productos de trabajo en alturas se desarrolle de una manera más sencilla. La propuesta presentada, también pretende dar solución a un problema ergonómico, que tiene consecuencias tanto en la salud de los operarios como en la productividad, por ende es importante para la empresa E.P.I. Ltda. Su consecución. Este proyecto es pionero en el campo textil local, ya que en la mayoría de empresas cuentan con problemas similares al de EPI LTDA, por tanto el diseño beneficiará a las empresas que no pueden acceder a tecnología de punta en el suministro de materia prima para la elaboración de productos textiles, por su alto precio. Con este diseño, se pretende poner en práctica los conocimientos adquiridos durante la formación académica universitaria, es el primer encuentro laboral que permitirá tener una relación teórico-práctica, que genere el cambio de información con el fin de adquirir un crecimiento profesional, por medio de experiencias y relaciones interpersonales.

20
4. MARCO TEÓRICO
Las bandas transportadoras y alimentadores vibratorios son implementados en gran parte de las empresas y compañías alrededor del mundo, la importancia de la implementación de dicho mecanismo radica en el incremento de la demanda de los productos que fabrican, es decir el incremento de las ventas de los productos de empresas en particular exige que el tiempo de producción de los elementos se haga de forma más rápida y controlada por lo cual es indispensable contar con mecanismos automatizados que se encarguen de esto. Cuando un proceso de automatización se realiza sin la intervención humana decimos que se trata de un proceso automatizado. La automatización permite la eliminación “total” o parcial de la intervención del hombre. Los automatismos son dispositivos de realizar tareas sin la intervención humana. Algunas maquinas coma las lavadoras tienen programadores y las ordenes que proporcionan se llaman programas2.
Existen diversos tipos de automatizado entre los cuales encontramos: ELECTRICOS: son aquellos que funcionan mediante corriente eléctrica. Ejemplo: vídeo. HIDRAULICOS: son aquellos que se transmiten a través de líquidos cuando son presionados. Ejemplo: grúa. NEUMATICOS: son aquellos que funcionan mediante la fuerza de aire comprimido. Ejemplo: lavacoches. Generalmente la mayoría de las máquinas automáticas utilizan combinaciones de mecanismos. Así pues existen automatismos electro neumáticos, automatismos electrohidráulicos e hidroneumáticos. Dentro de los procesos de automatización encontramos lo que es conocido como automatización a pequeña escala, teniendo que se puede producir: Automatización de proceso: es la automatización en la cual intervienen diferentes maquinas para obtener un fin, por ejemplo un proceso de envasado. Sistemas de automatismos programables: representan el grado más elevado de la automatización y en ellos intervienen equipos informáticos y robotizados.
2OSCAR JAVIER, Herrera Melo. Neumática e Hidráulica [En línea].México D.F, 2008. [Consultado
11 de Febrero de 2012]. Disponible en internet: www.monografias.com/trabajos-pdf/neumatica-hidraulica/neumatica-hidraulica.pdf

21
El proceso de automatización cuenta con ventajas como: Reducir los gastos de mano de obra directos en un porcentaje más o menos alto según el grado de automatización. Puesto que los productos son más competitivos, aumentan los beneficios, es decir si reducimos costes se puede fabricar más barato y por lo tanto aumentar las ventas. Aumentar la capacidad de producción de la instalación utilizando las mismas maquinas y los trabajadores. Aumentar la calidad de producción ya que las maquinas automáticas son mas precisas. Mejorar el control de la producción ya que pueden introducir sistemas automáticos de verificación. Permitir programar la producción. A mediano y a largo plazo, y gracias a la constancia y a la uniformidad de la producción se garantizan plazos de entrega más fiables. Reducir las incidencias laborales puesto que las maquinas automáticas realizan todo tipo de trabajos perjudiciales para el hombre. Uno de los procesos más empleados en las empresas, que complementan la automatización de la producción, empaque, manejo, control, suministró de materia prima, entre otras tareas, es la implementación de bandas transportadoras y alimentadores vibratorios. Al aplicarse un determinado control electrónico para el proceso de automatización con las bandas transportadoras, se garantiza en las compañías una producción más eficiente y eficaz, lo que disminuye costos e incrementa ganancias. 4.1 UNA BANDA (CINTA) TRANSPORTADORA
Es un sistema de transporte continuo formado por una banda continua que se mueve entre dos tambores, es impulsada por medio de la fricción que genera uno de los tambores, que se acciona por un motor.
Esta cinta es llevada por lo rodillos que se encuentran en los tambores; Debido al movimiento de la banda el material depositado sobre la banda es transportado hacia el tambor de accionamiento donde la banda gira y da la vuelta en sentido contrario. En esta zona el material depositado sobre la banda es vertido fuera de la misma debido a la acción de la gravedad.3
3 BANDAS TRANSPORTADORAS, Departamento de Ingeniería Mecánica. [En línea] Madrid.
Universidad Carlos III de Madrid [Consultado 12 de febrero de 2012]. Disponible en:

22
Figura 1. Banda (Cinta) transportadora (A)
Las ventajas son: realizar el transporte de material a grandes distancias, capacidad de transporte, facilidad de cargue y descargue en algún lugar de la línea y no produce alteraciones en el materia que se encuentre transportando.
http://ocw.uc3m.es/ingenieria-mecanica/ingenieria-de-transportes/material-de-clase-1/bandas_transportadoras.pdf
Número Parte
1 Tambor de renvió.
2 Estación de impacto.
3 Estación ascendente superior.
4 Estación superior.
5 Capotaje.
6 Tambor motriz.
7 Motor reductor.
8 Rascador recto de cabeza.
9 Tambor.
10 Tambor.
11 Tambor de tensión para contra peso.
12 Cajón de contra peso.
13 Estación de retorno.
14 Estación auto ascendente de retorno.
15 Rascador en V.
A

23
4.2 CINTAS AÉREAS DE CARROS
Soporte con ruedas las cuales se coloca en un riel elevado para soportar distintas cargas. Esta Cinta se encuentra integrada por múltiples carros con el mismo espacio de separación entre ellos, a lo largo de rieles en una cadena sin fin o cable; La cadena se encuentra unida a una rueda que es la que proporciona la energía del sistema. El recorrido que realiza esta Cinta está determinado por el sistema de rieles, en el cual se le pueden implementar giros y cambio de elevación formando un lazo sin fin. Los carros que se encuentran integrados en la cinta se suspenden ganchos, cestas, entre otros donde se puede colocar la materia prima o producto en curso.4
Figura 2. Cinta aérea de carros (A), Tesis de escuela superior politécnica del litoral.
4ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL. Tesis en “DISEÑO DE DOS BANDAS
TRANSPORTADORAS DE 100X10CM Y DOS DE 30X10CM CON MOTORES CONTROLADOS CON DSPICS” [En línea]. Litoral. [consultado 13 de febrero de 2012]. Disponible en internet en: http://www.dspace.espol.edu.ec/bitstream/123456789/7282/1/D-399101112131415394.pdf
A

24
4.3 ALIMENTADOR VIBRATORIO
Este alimentador orienta las piezas unas tras otras saliendo de manera ordenada para ser transportadas en uno o más canales a través de alimentadores vibratorios lineales a las cintas transportadoras de las distintas estaciones de producción. 8
Los alimentadores vibratorios se utilizan cuando hay que alimentar piezas de sección intricada o en piezas de sección simples en media o alta producción dependiendo del tamaño de la misma.
Sus controles electrónicos están diseñados para controlar tensión y frecuencia pudiendo de este modo adecuar el mejor nivel de vibración y performance.
Figura 3. Alimentador vibratorio (A), Empresa Auting special automatic machines.
El reto de la seguridad y la salud de las empresas es un objetivo para prevenir los riesgos laborales. Cada vez existe una mayor concienciación sobre la importancia de la mejora de las condiciones de trabajo, con nuevas visiones y conceptos, desde puntos de vista que superan exclusivamente las condiciones físicas, de seguridad e higiénicas de los puestos de trabajo.8 Por este motivo, es fundamental tener en cuenta el factor humano y el diseño de su lugar de trabajo, recalcando la importancia de la ergonomía.
A

25
Los aspectos más significativos para crear con éxito un puesto de trabajo son: Situarlo en un emplazamiento adecuado. El tipo de actividad y cultura de empresa. El flujo de actividad productiva. Los metros cuadrados dedicados a cada sección. El número de puestos de trabajo. La instalación adecuada de equipos. Otros de los puntos a tener en cuenta son la configuración del puesto de trabajo, el mobiliario y la postura. Estos aspectos, diseñados de manera ergonómica, favorecen la seguridad y la eficacia, mejora las condiciones de trabajo y compensan los efectos adversos sobre la salud del ser humano.8 4.4 ERGONOMÍA Termino con el que se designa la moderna ciencia de mejoramiento de las condiciones de trabajo humano en función de las facultades y limitaciones reales de los hombres que trabajan.
La ergonomía se propone la adaptación optima de la vida de trabajo, operaciones físicas, maquinas, sistemas de mecanismos, métodos de organización, medio de ambiente laboral a las exigencias biológicas, físicas y psíquicas de los trabajadores, y reclama y propone un trabajo continuo de especialistas denla más diversas disciplinas. 5 4.4.1 Puntos que hay que recordar:
Muchos trabajadores padecen lesiones y enfermedades provocadas por el
trabajo manual y el aumento de la mecanización del trabajo. La ergonomía busca la manera de que el puesto de trabajo se adapte al
trabajador, en lugar de obligar al trabajador a adaptarse a aquél. Se puede emplear la ergonomía para mejorar unas condiciones laborales
deficientes. También para evitar que un puesto de trabajo esté mal diseñado si se aplica cuando se concibe un lugar de trabajo, herramientas o lugares de trabajo.
Si no se aplican los principios de la ergonomía, a menudo los trabajadores se ven obligados a adaptarse a condiciones laborales deficientes6.

26
4.4.2 Lesiones y enfermedades habituales. A menudo los trabajadores no pueden escoger y se ven obligados a adaptarse a unas condiciones laborales mal diseñadas, que pueden lesionar gravemente las manos, las muñecas, las articulaciones, la espalda u otras partes del organismo. Concretamente, se pueden producir lesiones a causa de: 5
El empleo repetido a lo largo del tiempo de herramientas y equipo vibratorios,
por ejemplo, martillos pilones; Herramientas y tareas que exigen girar la mano con movimientos de las
articulaciones, por ejemplo las labores que realizan muchos mecánicos; La aplicación de fuerza en una postura forzada; La aplicación de presión excesiva en partes de la mano, la espalda, las
muñecas o las articulaciones; Trabajar con los brazos extendidos o por encima de la cabeza; Trabajar echados hacia adelante; Levantar o empujar cargas pesadas. 4.4.3 Normalmente, las lesiones se desarrollan lentamente. Las lesiones y enfermedades provocadas por herramientas y lugares de trabajo mal diseñados o inadecuados se desarrollan habitualmente con lentitud a lo largo de meses o de años. Ahora bien, normalmente un trabajador tendrá señales y síntomas durante mucho tiempo que indiquen que hay algo que no va bien. Así, por ejemplo, el trabajador se encontrará incómodo mientras efectúa su labor o sentirá dolores en los músculos o las articulaciones una vez en casa después del trabajo. Además, puede tener pequeños tirones musculares durante bastante tiempo. Es importante investigar los problemas de este tipo porque lo que puede empezar con una mera incomodidad puede acabar en algunos casos en lesiones o enfermedades que incapaciten gravemente.5
5ORGANIZACIÓN INTERNACIONAL DEL TRABAJO. La Salud y la Seguridad en el trabajo [En
línea]. , Bogotá D.C [Consultado 11 de febrero de 2012] Disponible en internet: http://training.itcilo.it/actrav_cdrom2/es/osh/ergo/ergoa.htm.

27
4.4.4 Las lesiones y enfermedades más habituales que causan las labores repetitivas o mal concebidas5:
Cuadro 1. Lesiones y enfermedades más habituales.
LESIONES SINTOMAS CAUSAS TIPICAS
Bursitis: inflamación de la cavidad que existe entre la piel y el hueso o el hueso y el tendón. Se puede producir en la rodilla, el codo o el hombro.
Inflamación en el lugar de la lesión.
Arrodillarse, hacer presión sobre el codo o movimientos repetitivos de los hombros.
Celulitis: infección de la palma de la mano a raíz de roces repetidos.
Dolores e inflamación de la palma de la mano.
Empleo de herramientas manuales, como martillos y palas, junto con abrasión por polvo y suciedad.
Cuello u hombro tensos: Inflamación del cuello y de los músculos y tendones de los hombros.
Dolor localizado en el cuello o en los hombros.
Tener que mantener una postura rígida.
Dedo engatillado: inflamación de los tendones y/o las vainas de los tendones de los dedos.
Incapacidad de mover libremente los dedos, con o sin dolor.
Movimientos repetitivos. Tener que agarrar objetos durante demasiado tiempo, con demasiada fuerza o con demasiada frecuencia.
Epicondilitis: inflamación de la zona en que se unen el hueso y el tendón. Se llama "codo de tenista" cuando sucede en el codo.
Dolor e inflamación en el lugar de la lesión.
Tareas repetitivas, a menudo en empleos agotadores como ebanistería, enyesado o colocación de ladrillos.
Ganglios: un quiste en una articulación o en una vaina de tendón. Normalmente, en el dorso de la mano o la muñeca.
Hinchazón dura, pequeña y redonda, que normalmente no produce dolor.
Movimientos repetitivos de la mano.
Osteoartritis: lesión de las articulaciones que provoca cicatrices en la articulación y que el
Rigidez y dolor en la espina dorsal y el cuello y otras articulaciones.
Sobrecarga durante mucho tiempo de la espina dorsal y otras articulaciones.

28
hueso crezca en demasía.
Síndrome del túnel del carpo bilateral: presión sobre los nervios que se transmiten a la muñeca.
Hormigueo, dolor y entumecimiento del dedo gordo y de los demás dedos, sobre todo de noche.
Trabajo repetitivo con la muñeca encorvada. Utilización de instrumentos vibratorios. A veces va seguido de tenosinovitis (véase más abajo).
Tendinitis: inflamación de la zona en que se unen el músculo y el tendón.
Dolor, inflamación, reblandecimiento y enrojecimiento de la mano, la muñeca y/o el antebrazo. Dificultad para utilizar la mano.
Movimientos repetitivos.
Teno sinovitis: inflamación de los tendones y/o las vainas de los tendones.
Dolores, reblandecimiento, inflamación, grandes dolores y dificultad para utilizar la mano.
Movimientos repetitivos, a menudo no agotadores. Puede provocarlo un aumento repentino de la carga de trabajo o la implantación de nuevos procedimientos de trabajo.
Fuente: ERGONOMIA, Organización internacional del trabajo. La salud y la organización del trabajo. [En línea].Bogotá D.C.; [Consultado 11 de febrero de 2012]
El trabajo repetitivo es una causa habitual de lesiones y enfermedades del sistema óseo muscular (y relacionado con la tensión). Las lesiones provocadas por el trabajo repetitivo se denominan generalmente “Lesiones provocadas por Esfuerzos Repetitivos” (LER). Son muy dolorosas y pueden incapacitar permanentemente. En las primeras fases de una LER, el trabajador puede sentir únicamente dolores y cansancio al final del turno de trabajo. Ahora bien, conforme empeora, puede padecer grandes dolores y debilidad en la zona del organismo afectada. Esta situación puede volverse permanente y avanzar hasta un punto tal que el trabajador no pueda desempeñar ya sus tareas. Se pueden evitar las LER5: Suprimiendo los factores de riesgo de las tareas laborales; Disminuyendo el ritmo de trabajo; Trasladando al trabajador a otras tareas, o bien alternando tareas Repetitivas
con tareas no repetitivas a intervalos periódicos; Aumentando el número de pausas en una tarea repetitiva.

29
En algunos países industrializados, a menudo se tratan las LER con intervenciones quirúrgicas. Ahora bien, importa recordar que no es lo mismo tratar un problema que evitarlo antes de que ocurra. La prevención debe ser el primer objetivo, sobre todo porque las intervenciones quirúrgicas para remediar las LER dan malos resultados y, si el trabajador vuelve a realizar la misma tarea que provocó el problema, en muchos casos reaparecerán los síntomas, incluso después de la intervención.5
4.4.5 Las lesiones son costosas. Las lesiones causadas a los trabajadores por herramientas o puestos de trabajo mal diseñados pueden ser muy costosas por los dolores y sufrimientos que causan, por no mencionar las pérdidas financieras que suponen para los trabajadores y sus familias. Las lesiones son también costosas para los empleadores. Diseñar cuidadosamente una tarea desde el inicio, o rediseñarla, puede costar inicialmente a un empleador algo de dinero, pero, a largo plazo, normalmente el empleador se beneficia financieramente. La calidad y la eficiencia de la labor que se realiza pueden mejorar. Pueden disminuir los costos de atención de salud y mejorar la moral del trabajador. En cuanto a los trabajadores, los beneficios son evidentes. La aplicación de los principios de la ergonomía puede evitar lesiones o enfermedades dolorosas y que pueden ser invalidantes y hacer que el trabajo sea más cómodo y por lo tanto más fácil de realizar5.

30
5. ANTECEDENTES
5.1 LOCAL
En la empresa E.P.I LTDA (Equipos de protección individual), no existen
antecedentes de los diseños que se pretenden realizar en el proyecto.
5.2 EXTERNO
Desde años atrás y en la Actualidad, diversas empresas alrededor del mundo han optado por el uso de bandas transportadoras y dosificadores, con el fin de automatizar procesos de transporte, fabricación o empaque de productos que desarrollan y alimentación de materia prima, con el fin de optimizar la producción haciéndola más eficiente y eficaz lo que conlleva a la disminución en gastos, mejor calidad del ambiente laborar y al incremento de ganancias. Las compañías se han tomado a la tarea de implementar sistemas que se encarguen de llevar a cabo diversos procesos encaminados a la obtención de un producto final que tendrá como destino la comercialización y la utilización por parte de los usuarios, para realizar múltiples actividades o labores. Dichos sistemas están compuestos por diversas partes o subsistemas encargados de realizar una acción específica para obtener como resultado final el producto esperado. En las compañías las bandas transportadorasse emplean cuando los materiales deben ser desplazados en cantidades relativamente grandes entre posiciones específicas de un rutado fijo. La mayoría de estos sistemas son impulsados mecánicamente; algunos emplean la gravedad para trasladar la carga entre puntos de diferente altura. Estos sistemas comparten los siguientes atributos6:
6 GÓMEZ-ESTERN, Fabio. Cintas transportadoras en automatización de la producción [En línea].
Santiago de Chile, 2007. [Consultado 13 de Febrero de 2012]. Disponible en internet:
https://docs.google.com/viewer?a=v&q=cache:kRlzf3MpVEcJ:www.esi2.us.es/~fabio/cintas.pdf+FABIO+G%C
3%93MEZ-
ESTERN,+cintas+transportadoras+en+automatizaci%C3%B3n+de+la+producci%C3%B3n,+Santiago+de+Chil
e,+2007.&hl=es&gl=co&pid=bl&srcid=ADGEESjOgq0E8ekDQE1efjHhApFrDyUfNUKxQ66eJAKFjPX1-
JpBjWcEyJDwMlnyn_Hf3CfDZAn5lC6u0jdhmwcFf9hOMxxoIlMTHl_3olEWQiAw9ReCHIOUiu6YUu7o8dUDnU
cjnzQT&sig=AHIEtbQD6PWyqQuQFqYkf9i4mQgbTVmfmw

31
Son generalmente mecanizados y a veces automatizados. Ocupan posiciones fijas, estableciendo las rutas. Pueden estar montados sobre el suelo o suspendidos del techo. Casi siempre están limitados a un flujo unidireccional de materiales. Generalmente mueven cargas discretas, aunque algunos están preparados
para cargas voluminosas o continuas. Pueden emplearse sólo para transporte o para transporte más almacenamiento
automático de elementos. Una característica común es que el mecanismo de avance está construido sobre el mismo camino de la cinta. Los elementos transportadores individuales (si se usan carritos u otros receptáculos) no son impulsados individualmente. Dentro de los atributos listados arriba, encontramos gran variedad de hardware. Los tipos principales de cintas son:
5.2.1 Cintas con rodillos (Rollerconveyors). Es una forma muy común de cinta. El camino consiste en una serie de tubos (rodillos) perpendiculares a la dirección de avance. Los rodillos están contenidos en un armazón fijo que eleva la cinta del suelo desde varios decímetros a algo más de un metro. Los pallets planos o bandejas portando la carga unitaria son desplazados a medida que giran los rodillos. Las cintas con rodillos pueden ser impulsadas mecánicamente o gravitatorias. Los sistemas de tipo gravitatorio se disponen de tal modo que el camino desciende una pendiente suficiente para superar la fricción de los rodillos. Las cintas con rodillos pueden ser usadas para el reparto de cargas durante las operaciones de procesado, el reparto hacia y desde el lugar de almacenamiento y aplicaciones de distribución. Los sistemas de cintas automatizados son también útiles para operaciones de clasificación y combinado.
5.2.2 Cintas con ruedas (Skate-wheelconveyors). Operativamente son similares a los rodillos. Sin embargo en lugar de rodillos, pequeñas ruedas como las de los “patines” montadas sobre ejes rotatorios conectados al armazón se emplean para desplazar el pallet, bandeja, u otro contenedor a lo largo de la ruta. Las aplicaciones de este tipo de cintas son similares a las de los rodillos, excepto que las cargas deben ser en general más ligeras al estar los contactos entre carga y cinta mucho más concentrados. 5.2.3 Cintas planas (Beltconveyors). Este tipo esta disponible en dos formatos comunes: cintas planas para pallets, piezas o incluso ciertos tipos de materiales en masa; y cintas huecas para materiales en masa. Los materiales se sitúan en la

32
superficie de la cinta y viajan a lo largo del recorrido de la misma. La cinta forma un lazo continuo de manera que una mitad de su longitud puede emplearse para el reparto del material y la otra mitad para el retorno (generalmente vacío). La cinta se soporta con un armazón con rodillos u otros soportes espaciados entre sí varios decímetros. A cada extremo de la cinta están los rodillos motores (“poleas”) que impulsan la cinta. 5.2.4 Cintas con cadenas (chainconveyors). Están formadas por lazos de cadena sin fin en una configuración arriba-abajo alrededor de ruedas dentadas motorizadas, en los extremos del camino. Puede haber una o más cadenas operando en paralelo para formar la cinta. Las cadenas viajan a lo largo de canales que proporcionan soporte para las secciones flexibles de la cadena. O bien las cadenas se desplazan por el canal o usan rodillos para montarse al canal. Las cargas generalmente se montan sobre las cadenas.
5.2.5 Cintas con listones (Slatconveyors). Este sistema emplea plataformas individuales, llamadas listones o tablillas, conectadas a una cadena continua en movimiento. Aunque el mecanismo impulsor es la cadena, funciona en gran medida como una cinta plana. Las cargas se sitúan sobre la superficie plana de las tablillas y se desplazan con ellas. Los caminos son generalmente en línea recta, pero al ser movidas por cadenas y la posibilidad de introducir curvas en el camino mediante ruedas dentadas, las cintas con listones pueden tener giros en su lazo continuo. 5.2.6 Cintas aéreas de carros (Overheadtrolleyconveyors). Cuando hablamos de movimiento del material, un carro es un soporte con ruedas moviéndose en un rail elevado del que puede colgar la carga. Una cinta con carritos es una serie de múltiples carros igualmente espaciados a lo largo de los raíles mediante una cadena sin fin o cable. La cadena o cable está unida a una rueda que proporciona energía al sistema. El camino está determinado por el sistema de raíles; tiene giros y cambios en elevación formando un lazo sin fin. En los carros se suspenden ganchos, cestas u otros receptáculos para la carga. Los sistemas de carros aéreos se emplean a menudo en fábricas para mover piezas y conjuntos de ensamblaje entre los principales departamentos de producción. Pueden emplearse tanto para reparto como para almacenamiento.
5.2.7 Cintas por cable enterrado (In-floortowlineconveyors). Estos sistemas emplean vehículos con ruedas impulsados por medio de cadenas o cables en movimiento situados en zanjas en el suelo. Las rutas están definidas por las zanjas y cables. Es posible el cambio desde un segmento impulsado a otro

33
diferente, proporcionando cierta flexibilidad en el rutado. Los carros emplean clavijas reforzadas de acero para acoplarse ala cadena. Dichas clavijas de pueden extraer de la zanja para liberar al carro del avance de la cadena y realizar las operaciones de carga/descarga. 5.2.8 Cintas de carro sobre raíles (Cart-on-track). Estos sistemas emplean carros individuales montados en una pista de dos raíles en una estructura que sitúa la cinta unos decímetros sobre el suelo. Los carros no son impulsados individualmente; en su lugar, avanzan mediante un tubo rotatorio entre los dos raíles. Debido a ello también se llaman cintas de tubo rotatorio (Spinning tube). Una rueda motriz, en la parte inferior del carro y formando un ángulo con el tubo, se apoya en él y convierte el giro del tubo en avance del carro. La velocidad del carro es controlada regulando el ángulo de contacto entre la rueda motriz y el tubo. Una de las ventajas de este sistema con respecto a los vistos es que con él se logra bastante precisión en el posicionamiento. Esto los permite usar para posicionar piezas para el procesado. Las aplicaciones para este sistema incluyen las líneas de soldadura robótica y sistemas de ensamblaje automático. De igual forma los alimentadores vibratorios se emplean para la alimentación de materia prima a un proceso o una maquina; donde la gravedad es utilizada para determinar la dirección y la vibración para el movimiento del material. En estos sistemas se deben considerar el caudal o flujo de alimentación para no afectar su funcionamiento: Humedad en el material. Distribución de tamaños. Voltaje en la línea. Cantidad del material. 5.2.9 Alimentador Vibratorio. Orienta las piezas unas tras otras saliendo de manera ordenada para ser transportadas en uno o más canales a través de alimentadores vibratorios lineales a las cintas transportadoras de las distintas estaciones de producción, son utilizados para alimentar piezas de sección intricada o en piezas de sección simples en media o alta producción dependiendo del tamaño de la misma. 7
7 AUSTING. Alimentador Vibratorio [En línea] San Martin, Buenos Aires-Argentina. [Consultado en
febrero 14 de 2012]. Disponible en internet: http://www.auting.com/es/transportadores.html

34
Para lograr dicha automatización es importante, el tipo de controlador, la cual compara el valor real de la salida de una planta con la entrada de referencia, determina la desviación y produce una señal de control que reducirá la deviación o cero o a un valor pequeño. La manera en el cual el controlador automático produce la señal de control se denomina control de acción. Los controladores industriales emplean como fuente de energía la electricidad o fluido presurizado, tal como el aceite o el aire. Los controladores también pueden clasificarse, de acuerdo con el tipo de energía que utilizan en su operación como neumáticos hidráulicos o eléctricos. El tipo de controlador que se use debe decidirse con base en la naturaleza de la planta y las condiciones operaciones, incluyendo condiciones como seguridad, costo, disponibilidad, confiabilidad, precisión, peso y tamaño.8 En la industria podemos encontrar controladores tales como: Dos posiciones (Encendido- Apagado). Proporcionales. Integrales. Proporcionales-Integrales. Proporcionales-Derivativos. Proporcionales-Integrales-Derivativos. Las ventajas de los controladores son9: Flexibilidad en el diseño de sistema de control. Mejora del rendimiento de control, trabajando aproximadamente al punto de
operación. Seguridad al poder comparar cada variable entre sus límites prefijados.
8 CONTROLADORES. Tipos De Controladores [En línea].[ Consultado 17 de Febrero de 2012].
Disponible en interne: http://es.scribd.com/doc/17702998/Tipos-de-Controladores 9 VELÁZQUEZ, Iván. Controladores, Tipos De Controlador [En línea]. [Consultado en 17 de febrero
de 2012]. Disponible en internet: http://www.inele.ufro.cl/apuntes/Instrumentacion_y_Control/Ivan_Velazquez/Catedra/Capitulo%204.%20Controladores.pdf

35
Figura 4. Controladores industriales. (A)
Figura 5. Controladores industriales.(A)
A
A

36
6. METODOLOGÍA
Para este proyecto, se ha estipulado una duración de 6 meses, tiempo en donde este deberá ser finalizado y entregado. El proceso de desarrollo consta de los siguientes ítems: Planeación del proyecto. Identificar las oportunidades del proyecto, escoger una y verificar la viabilidad de la misma, es parte del diseño considerar la arquitectura y la plataforma de los productos, para evaluar nuevas tecnologías y soluciones ya existentes. En producción se identifican las restricciones del proceso y definir la línea de suministro.
Desarrollo conceptual. Para esta parte del proyecto, se utiliza la metodología del diseño concurrente, con el fin de identificar las necesidades del cliente, investigar y analizar la factibilidad de los conceptos anteriormente mencionados, desarrollar el diseño industrial, definir costos de manufactura y la evaluación de una posible implementación.
Diseño a nivel de sistema. Con los requerimientos definidos, se procede a generar diferentes conceptos usando para ello una tabla morfológica, con el fin de seleccionar el mejor de los anteriores, aplicando pruebas de conceptos y filtros de selección.
Diseño detallado. En este punto del diseño, se realiza el diseño del sistema en forma detallada, estableciendo la forma exterior del producto, seleccionando los materiales y componentes, con el fin de establecer el proceso de producción de partes y piezas.

37
Prueba y refinamiento. Se modela y simula el diseño, realizando un análisis de fiabilidad, desempeño y tiempo de vida, para obtener las aprobaciones regulatorias. Adicionalmente se implementan los cambios en el diseño que se consideren necesarios, para que el proceso de producción de las piezas, el manual de ensamble y las cotizaciones queden con los cambios anteriormente mencionados.
División del proyecto en etapas para su consecución. Con el fin de que este proyecto tenga un desarrollo ordenado, se ha dividido en 8 etapas las cuales continúan el modelo de ingeniería concurrente: Etapas:
Análisis y diagrama de flujo del proceso de fabricación de productos de trabajo
en alturas.
Fundamentación teórica y estudio del componente ergonómico.
Estudio de instrumentación, selección de dispositivos y análisis de los
estándares corporativos (que deben cumplir los equipos, las instalaciones, etc.)
vigentes en E.P.I. LTDA.
Formulación de conceptos y/o propuestas para el diseño.
Diseño del sistema mecatrónico del transporte y suministro de materia prima.
Modelado de las piezas, el sistema y el ensamble en 3D.
Simulación 3D del sistema funcionando, pruebas al prototipo virtual, detección
de errores y posibles soluciones.
Manual de ensamble y Mantenimiento.

38
7. PLANTEAMIENTO DE LA MISIÓN DEL PROYECTO
Diseño de un sistema automático que suministre y transporte de forma ordenada la materia prima y producto finalizado a los operarios, en el proceso de confección de productos de trabajo en alturas para la empresa EPI LDTA, con el fin de evitar las enfermedades en los operarios por causas de los movimientos repetitivos en el puesto de trabajo.
7.1 OBTENCIÓN DE LOS DATOS PRIMARIOS Lo primero que se realizo fue una investigación descriptiva para entender el funcionamiento de la planta de elaboración de productos de trabajos en alturas, se realizaron entrevistas a los operarios, supervisores, ingenieros de producción, gerente y colaboradores, con el fin de entender su participación en el proceso, con la recopilación de los datos anteriores, obtuvimos los siguientes datos: El diseño del sistema debe suministrar la materia prima a los operarios. El sistema debe transportar el producto en proceso de un puesto de trabajo al
otro, sin afectar la labor de operario. El diseño debe acoplarse a un espacio definido por los puestos de trabajo
donde están los operarios, sin que se vean afectados los pasillos y las salidas de emergencia.
El sistema debe transportar el producto terminado al área de despacho. El sistema debe tener protección para evitar que los operarios sufran
accidentes por causas de este. El sistema debe soportar el peso de los arneses sin que se afecte la velocidad
de funcionamiento. El sistema debe abastecerse de las redes existentes en las instalaciones, la
eléctrica es de 110v a 220v, Vdc 0-10v y la neumática es de 70psi a 100psi. El sistema debe tener un plan de mantenimiento general.
7.2 CLIENTE PRIMARIO El principal cliente de este sistema es E.P.I. LTDA. Al cual se le presentara el diseño de un sistema automático que suministre y transporte de forma ordenada la materia prima y producto finalizado a los operarios, en el proceso de confección de productos de trabajo en alturas, con el fin de evitar de que los operarios contraigan enfermedades laborales, sin que se vea afectada la producción.

39
7.3 CLIENTES SECUNDARIOS Las empresas textiles que tengan un procedimiento de ensamble de piezas y requieran que el transporte de estas, dentro de la línea de producción sea autónomo, y mejore las condiciones de trabajo de los operarios. El objetivo de esto seria adaptar nuestro diseño a las necesidades y requerimientos del cliente. La producción de este diseño pertenece a la empresa EPI LTDA. Por tanto, cualquier tipo de reproducción en otra empresa, debe llevar los respectivos permisos y premisas de la empresa dueña del sistema.
7.4 PREMISAS Y RESTRICCIONES En la actualidad, no se encuentra un diseño que cumpla los parámetros y requerimientos que exige la elaboración de los artículos de trabajos en alturas. Los limitantes se presentan en el espacio de trabajo y la alimentación del sistema, ya que solo pueden ser los mencionados anteriormente (obtención de datos primarios).

40
8. IDENTIFICACIÓN E LAS NECESIDADES
Cuadro 2. Identificación de las Necesidades.
# IMP
PLANTEAMIENTO DE LOS CLIENTES IDENTIFICACIÓN DE LAS NECESIDADES
1
5
El sistema debe suministrar todas las materias primas a los operarios.
El sistema suministra la materia prima a los operarios.
2
4
El sistema debe tener un stand para que los insumos sean más fáciles de coger.
El sistema proporciona facilidad para adquirir las materias primas.
3
3
El suministro de materia prima en el sistema no debe ocupar mucho espacio.
El suministro de materia prima ocupa un espacio definido y limitado.
4
4
El sistema debe procurar que el operario se levante lo menos posible de su puesto de trabajo.
El sistema realiza las operaciones necesarias que eviten el traslado de operarios.
5
5
El sistema debe tener medio de transporte para materia prima de forma organizada.
El sistema transporta la materia prima de forma organizada.
6
5
El sistema debe tener medio de transporte para el producto terminado y entregarlo en el sitio previamente definido.
El sistema transporta el producto terminado y lo entrega en el sitio previamente definido.
7
3
El sistema debe ocupar un espacio definido para cada operario, sin afectar procesos que se encuentren alrededor de este.
El sistema ocupa un espacio de finido y limitado.
8
5
El sistema debe protegerme de las partes móviles de este.
El sistema presenta protección para así evitar posibles accidentes.
9
3
El sistema debe actuar de acuerdo al proceso y velocidad de trabajo.
El sistema se adapta al proceso y velocidad de la línea.
10
4
El sistema debe alimentarse de las redes de la plata, eléctrica de 110V y 220V,0 a 5V DC neumática de 70-90 Psi.
El sistema se adapta a la alimentación de la planta.
11
3
Fácil mantenimiento El sistema es de fácil mantenimiento.

41
8.1 MÉTRICAS
A continuación se conectan las necesidades del cliente con las especificaciones técnicas para poder realizar un desarrollo del sistema. 8.1.1 Especificaciones preliminares.
Cuadro 3. Especificaciones técnicas preliminares.
# NECESIDAD ESPECIFICACIONES TÉCNICAS
IMP UNIDADES
1 3,8,11 Normas de seguridad industrial.
4 Lista
2 1,2,4,5,6,8,9,10,11 Eficiencia. 5 %
3 8,10,11 Tiempo de respuesta. 4 Seg.
4 1,5,6,8,9,10,11 Tipo de control. 5 Lista.
5 9,10 Compatibilidad. 3 Lista.
6 1,2,4,8 Ergonomía. 5 Subjetivo.
7 1,5,6 Cantidad de piezas. 3 # De piezas.
8 1,6 Peso. 5 Kg.
9 1,5,8,10 Tipo de actuador. 5 Lista.
10 1,2,6 Tipo de sensor. 4 Lista.
11 1,2,5,6,9 Velocidad. 4 Und/min.
12 3,7,8 Materiales 3 Lista
13 1,3,6,7 Dimensiones 4 mm
14 2,5,6,8,10 Fuente Eléctrica 4 Vol.
15 1,2 Alimentación Neumática
4 Psi
8.2 QDF. Ver anexo 1
La mayor importancia se la llevan la eficiencia y la velocidad, por eso se tiene que empezar a diseñar desde estas dos premisas. La dificultad para este proyecto se va a presentar en la compatibilidad, material y cantidad de piezas, que se ven representada en la velocidad del proceso y el tiempo de respuesta de la maquina.

42
9. GENERACIÓN DE CONCEPTOS
A continuación se desarrolla la descomposición del problema en las funciones más importantes evidenciando el sistema, con esto se logra identificar los problemas y sub problemas para realizar el diseño del sistema.
9.1 CAJA NEGRA
Se realiza el planteamiento del problema de forma general, sin especificar el comportamiento interno del sistema, denominándolo como Diagrama de Caja Negra.
Para ello se identifican entradas y salidas de dicho sistema, en el cual se pueda descomponer al mismo en sub problemas de manera más detallada, realizando un análisis interno mediante la descomposición funcional.
Figura 6. Caja Negra (A).
A

43
9.2 DESCOMPOSICIÓN FUNCIONAL
Realizado el diagrama de la caja negra, continúa el desarrollo de la descomposición funcional, donde se representa el problema con entradas y salidas definidas, subdividiendo dicha caja negra en sud funciones que describan específicamente el trabajo de cada elemento dentro del sistema, para así enfocarse en sub problemas críticos.
Figura 7. Descomposición Funcional (A).
Identificadas las sub funciones, el siguiente paso a realizar es la generación de conceptos, evidenciando el problema con ayuda de la identificación de necesidades, caja negra y descomposición funcional. Como se va a realizar un diseño de sistema automático para alimentación y transporte, los conceptos de diseño se trabajan en sud sistemas que son: transportar materia prima, suministro de materia prima, transporte de producto final. Para realizar el diseño de conceptos se estudia, analiza y evalúa el puesto de trabajo del proceso actual de producción de arneses en torno al proyecto; toda la información se encuentra en ANEXO 1 “PUESTO DE TRABAJO ACTUAL EN TORNO A EL PROYECTO”
A

44
9.3 DISEÑO DE CONCEPTOS
9.3.1 ¿Cómo se transporta la materia prima? 9.3.1.1 Primer concepto. El primer concepto de diseño, se concibe de una generación de ideas que involucro a todo el personal que esta relacionado con la fabricación de los arneses, la cual consistió en trasladar la materia prima entre operarios con un peso conocido y características de los materiales por medio de un riel que se encuentran a una altura estipulada, utilizando como impulso de traslado la fuerza que ejerce el operario frete a el riel. Figura 8. Primer concepto de diseño (A).
El concepto tiene un riel en el cual se deslizan ruedas que trasladan la materia prima. Se definió así por que el diseño se basa en transportar el material mediante un gancho que se encuentra ubicado en la rueda, donde el movimiento es generado por el impulso del operario al terminar su acción correspondiente; la velocidad con la que se produce el desplazamiento varía de acuerdo a la fuerza del operario.
A

45
9.3.1.2 Segundo concepto. El segundo concepto de diseño, consiste en trasladar la materia prima entre operarios por medio de una cadena transportadora que se encuentra a una atura estipulada, utilizando un motor para realizar el movimiento de la cadena, con el fin de eliminar labores de desplazamiento a los operarios que se encuentran en la línea de trabajo. Este movimiento se realiza de forma lineal a velocidades controladas.
Figura 9. Segundo concepto de diseño (A).
Ventajas de este concepto: Movimiento autónomo. Elimina trabajo a operarios. Excelente organización. 9.3.1.3 Tercer concepto. El Tercer concepto de diseño se genera a partir de la búsqueda de mejorar el primer concepto, para este diseño se utiliza cadenas transportadoras de tiempos de trabajo, donde el desplazamiento es generado por un servomotor eliminando así labores a operarios que se encuentran en la línea de trabajo, este desplazamiento se realiza de forma lineal y a velocidades controladas.
A

46
Figura 10. Tercer concepto de diseño (A) Cadena Completa, (B) Diente de la Cadena.
Ventajas de este concepto: Movimiento autónomo. Excelente velocidad de respuesta. Elimina trabajo a operarios. Excelente organización. Precisión.
A
B

47
9.3.2 ¿Cómo el sistema suministra la materia prima en movimiento al operario? Para dar respuesta a esta pregunta, se determina como el operario va adquirir la materia prima que se encuentra en movimiento, donde se generan ideas que se combinan con los conceptos anteriores y surge: 9.3.2.1 Opción 1. Para que el sistema suministre la materia prima en movimiento, se plantea que los tres conceptos propuestos anteriormente, sea cadena transportadora o riel descienda la estructura completa a la altura del puesto de trabajo del operario, cuando este termine su labor, coloca la materia prima en el gacho, lo que hace que la estructura vuelva a la altura estipulada y siga trasladando los materiales. Para lograr el descenso y posteriormente el ascenso de los conceptos nombrados, se plantea dos cilindros neumáticos con embolo de doble efecto uno en cada extremo, que se activan cuando el operario termine su proceso y coloque la materia prima en el gancho.
Figura 11. Sistema de suministro de materia prima en movimiento Opción 1(A).
A

48
9.3.2.2 Opción 2. Se plantea un cilindro neumático con embolo de doble efecto, este se encarga de expulsar la materia prima en el punto donde se encuentra el operario sin necesidad de levantarse de su puesto de trabajo, así mismo cuando el operario termine su labor coloca la materia prima y el embolo se contrae para seguir con la línea de trabajo.
Figura 12. Sistema de suministro de materia prima en movimiento Opción 2 (A).
9.3.2.3 Opción 3. Se plantea una banda transportadora de movimiento continuo que desplaza la materia prima, cuando el operario completa su operación coloca la materia prima sobre la banda, esta la lleva a el siguiente operario donde la adquiere levantándose de su puesto de trabajo para realizar su labor.
B

49
Figura 13. Sistema de suministro de materia prima en movimiento Opción 3 (A) (B).
Ventajas: Movimiento continúo. Desventajas: El operario tiene que levantarse de su puesto de trabajo para adquirir la
materia prima. Que a pesar de ser un movimiento continuo se necesita que realice paradas
especificas para que el la materia prima no siga de largo sin ser adquirida por el operario correspondiente.
A
B

50
9.3.3 ¿Cómo el sistema suministra la materia prima fija al operario? Para dar respuesta a esta pregunta, se determina como el operario va adquirir la materia prima que se encuentra fija, donde se generan las siguientes ideas: 9.3.3.1 Dispensador. Se plantea el concepto de un dispensador de forma rectangular con medidas específicas en el cual de colocaran una cantidad de hebillas o ganchos determinados, donde el operario adquiere la materia prima de forma manual para realizar e proceso de cosido.
Figura 14. Dispensador (A).
9.3.3.2 Alimentadores vibratorios. Se plantea el concepto de alimentadores vibratorios que consisten en una base vibratoria que se mueve a una cuba vibrante que contiene la materia prima (Ganchos y Hebillas), que son transportadas por pistas con trampas ubicando las piezas en una misma posición para ser entregado al operario.
A

51
Figura 15. Alimentadores Vibratorios Circulares (A).
9.3.4 ¿Cómo se transporta el producto final? Para el transporte del producto final (Arneses) se genera la idea de una banda transportadora con medidas específicas, motorreductor, variador de velocidad y rodillos que traslada una distancia determinada después que el operador realiza la verificación y empaque del arnés. Figura 16. Banda Transportadora Auxiliar (A).
A
A

52
9.4 SELECCIÓN DE CONCEPTOS
Cuadro 4. Combinación de conceptos.
CRITERIOS DE CALIFICACIÓN PARA LA SELECCIÓN.
1 Normas de seguridad industrial.
2 Eficiencia.
3 Tiempo de respuesta.
4 Tipo de control.
5 Compatibilidad.
6 Ergonomía.
7 Cantidad de piezas.
8 Peso.
9 Tipo de actuador.
10 Tipo de sensor.
11 Velocidad.
12 Material.
13 Dimensiones.
14 Neumático.
15 Eléctrico.

53
Cuadro 5. Ponderación de Conceptos.
Cristerios de seleción
Sistema A
Sistema B
Sistema C
Sistema D
Sistema E
Sistema F
Sistema G
Normas de
seguridad
industrial.
+ + + + + + +
Eficiencia. 0 0 - + 0 - -
Tiempo de
respuesta.
+ 0 - + 0 - -
Tipo de control. - + - + - - 0
Compatibilidad. + + + + + + +
Ergonomía. + + + + + - -
Cantidad de
piezas.
0 0 0 0 0 0 0
Peso. 0 0 0 0 0 0 0
Tipo de
actuador.
0 + 0 + 0 0 +
Tipo de sensor. - - - + + - -
Velocidad. + 0 0 + + - -
Material. 0 0 0 0 0 0 0
Dimensiones. 0 0 0 0 0 0 0
Neumático. + - - + - - -
Eléctrico. + + + + + + +
Puntaje 7 6 4 11 6 3 4
SISTEMA A DESARROLLAR
MATRIZ DE EVALUACIÓN DE CONCEPTOS.
Para realizar la matriz de evaluacion de conceptos , se plantearon las necesidades del cliente y las especificaciones tecnicas y se realizo una relacion entre ellas , posteriormente se realiza el QFD indicando la importancia de cada especificacion y necesidad, donde nos arroja los valores que se encuentran representados en el cuadro 5.

54
Cuadro 6. Matriz De Evaluación De Conceptos.
Concepto
Criterio de
selección
(%) Ponderación Nota Criterio de
porcentaje
Normas de
seguridad industrial.
4% 4 0,145
Eficiencia. 14% 5 0,490
Tiempo de
respuesta.
4% 4 0,142
Tipo de control. 10% 5 0,358
Compatibilidad. 3% 3 0,97
Ergonomía. 10% 5 0,365
Cantidad de piezas. 3% 3 0,103
Peso. 4% 5 0,129
Tipo de actuador. 8% 5 0,300
Tipo de sensor. 6% 4 0,222
Velocidad. 11% 4 0,380
Material. 3% 3 0,119
Dimensiones. 5% 4 0,188
Neumático. 5% 4 0,190
Eléctrico. 9% 4 0,311
Total 4,412
Continua? Desarrollar
Con el análisis realizado, el concepto B obtuvo una calificación alta, con resultado este es el apropiado para desarrollar.

55
DESCRIPCIÓN DE LAS ESPECIFICACIONES TÉCNICA.
Cuadro 7. Especificaciones tecnicas.
# ESPECIFICACIONES
TÉCNICAS
IMP UNIDADES DESCRIPCIÓN
1 Normas de seguridad
industrial.
4 Lista Ver. Anexo 2
2 Eficiencia. 5 %
3 Tiempo de respuesta. 4 Mili-Seg.
0.05 ms
4 Tipo de control. 5 Lista. Segundo orden
5 Compatibilidad. 3 Lista. HMI
6 Ergonomía. 5 Subjetivo. Ver. Cuadro 1.
7 Cantidad de piezas. 3 # De piezas.
8 Peso. 5 Kg.
9 Tipo de actuador. 5 Lista. Ver. Anexo 5
10 Tipo de sensor. 4 Lista. Ver. Anexo 5
11 Velocidad. 4 Unid/min. 15,71 min
12 Material 3 Lista Acero Aluminio
13
Dimensiones
4
mm
Ver cuadro: Dimensiones de los elementos.
14 Fuente eléctrica Vol. 110-220 V
15 Alimentación neumática
Psi 70-100 Psi
CONCEPTO SELECCIONADO.
Sistema D
Cuadro 8. Concepto Seleccionado. Sistema D
Como se transporta la materia prima. Tercer concepto
Como el sistema suministra la materia prima en movimiento
al operario.
Opción 2
Como el sistema suministra la materia prima fija al operario. Alimentador vibratorio
Como se transporta el producto final. Banda transportadora

56
9.5 SELECCIÓN DE DISPOSITIVOS Y/O MATERIALES
Según el concepto seleccionado anteriormente, se eligen los dispositivos y/o materiales para el sistema. 9.5.1 ¿Cómo se transporta la materia prima? Para la selección del modelo de transporte de materia prima, se partió del concepto escogido anteriormente, el cual se basa en una cadena transportadora de tiempos. Los componentes propuestos para esta cadena son: Movimiento: Servo motor Motor. Control: PLC. Interfaz: HMI. Tablero de mandos análogo.
Para seleccionar el mejor componente, los criterios de selección son: Tipo de control. Mantenimiento. Velocidad. Dimensiones. Seguridad. Tiempo de respuesta. Compatibilidad con la alimentación de la planta y con el concepto
seleccionado.

57
Cuadro 9. Selección de componentes para el movimiento.
Criterio de selección de movimiento
Criterios de selección
Servo motor Motor. Referencia.
Tipo de control + - 0
Mantenimiento - + 0
Velocidad - + 0
Dimensiones. + - 0
Seguridad. + - 0
Tiempo de respuesta
+ - 0
Compatibilidad con la alimentación de la planta
0 - 0
Positivos 4 2
Iguales 1 0
Negativos 2 5
Total 2 -3
Orden 1 2
¿Selección? Si No
Cuadro 10. Selección del tipo de control.
Criterio de selección de control
Criterios de selección
HMI. Tablero de mando Referencia.
Tipo de control 0 0 0
Mantenimiento + - 0
Velocidad 0 0 0
Dimensiones. + - 0
Seguridad. + - 0
Tiempo de respuesta
+ - 0
Compatibilidad con la alimentación de la planta
+ + 0
Positivos 5 1
Iguales 0 2
Negativos 0 4
Total 5 -3
Orden 1 2
¿Selección? Si No

58
Los componentes seleccionados para la cadena transportadora de tiempo fueron: Movimiento:
Servo motor. Control:
PLC. Interfaz:
HMI. Sensores:
Sensor emisor. Sensor receptor.
9.5.2 ¿Cómo el sistema suministra la materia prima en movimiento al operario? Para entregar la materia prima que esta en la cadena transportadora de tiempos, se tomo en cuenta el criterio seleccionado para este movimiento (opción 2). Los materiales propuestos para esta operación son los siguientes: Neumática: Pistón neumático. Pistón hidráulico. Electro Válvula. Unidad de mantenimiento del aire. Para seleccionar el mejor material, los criterios de selección son: Tipo de control. Mantenimiento. Velocidad. Dimensiones. Seguridad. Tiempo de respuesta. Compatibilidad con la alimentación de la planta y con el concepto seleccionado.

59
Cuadro 11. Selección de pistón.
Criterio de selección de pistón
Criterios de selección
Pistón Neumático Pistón hidráulico. Referencia.
Tipo de control + 0 0
Mantenimiento + 0 0
Velocidad + 0 0
Dimensiones. + - 0
Seguridad. + 0 0
Tiempo de respuesta
+ 0 0
Compatibilidad con la alimentación de la planta
+ - 0
Positivos 7 0
Iguales 0 5
Negativos 0 2
Total 7 -2
Orden 1 2
¿Selección? Si No
Los elementos seleccionados para esta aplicación fueron: Pistón neumático. Electro Válvula. Unidad de mantenimiento del aire.
9.5.3 ¿Cómo el sistema suministra la materia prima fija al operario? Para la selección de los materiales que están involucrados en el suministro de materia fija en el puesto de trabajo del operario, se partió del criterio seleccionado (alimentador vibratorio). Los elementos que contiene este dispositivo son: Motor 110v-220v Botón On-Off. Cable de conexión de alta hacia el controlador. Bandeja en acero inoxidable calibre 16 y recubrimiento en caucho.

60
9.5.4 ¿Cómo se transporta el producto final? Para realizar el transporte del producto terminado, desde la línea de producción hasta el área de envió (ascensor). Se determino buscar una banda transportadora convencional, encontrando una propuesta que va acorde con los requerimientos anteriormente mencionados. Los componentes de este sistema son los siguientes:
Moto reductor y Variador 220 voltios Estructura: En Viga en “U” de 3” Soportes: Tipo “H”, en acero inoxidable calibre 14, con ruedas giratorias y freno. Banda: En PVC
Rodillos: En acero inoxidable de Ø2” calibre 16, con eje inoxidable de Ø1/2” y balineras plásticas en Acetal y Balines Inoxidables.

61
10. DISTRIBUCIÓN GEOMÉTRICA
Figura 17. Distribución geométrica. (A), Diseño propio
En la imagen anterior se muestra la distribución geométrica de la planta CINAR
con la propuesta de diseño, se indica donde se encuentran ubicados cada uno de
los mecanismos o maquinas que se realizaron en el diseño tales como el cilindro
neumático, la cadena transportadora de tiempos, la mesa de trabajo, los vibro
alimentadores y la banda transportadora auxiliar.
10.1 LISTA DE COMPONENTES
MATERIALES CANTIDAD MARCA
Pistones Neumáticos 7 Festo
Sistema cadena transportadora
1 Conasfor S.A.S
Electro válvula 7 Festo
Silenciador 1 Festo
Sensores receptores 7 Festo
Sensores emisores 7 Festo
PLC CPU 1214C 1 SIEMENS
HMI KPT400 1 SIEMENS
CM1214 1 SIEMENS
A

62
Tubo flexible A 2 Festo
Banda transportadora auxiliar
1 Distriband S.A.S
Récord rápido 2 Festo
Fuente 24vdc 1 Dr Suministro e Ing.
Cables de potencia 4 Baldor
Cable de feedback uso Microflex
1 Baldor
Fuente unidad tratamiento aire
2 Festo
Caja de enchufe 7 Festo
Minibreaker 2x3A. 2 Dr Suministro e Ing.
Minibreaker 2x1A. 2 Dr Suministro e Ing.
Lámpara Rotativa 1 Portal Internet
10.2 DESCRIPCIÓN DE LOS COMPONENTES 10.2.1 Sensor. Detecta cuando se encuentre un arnés en la entrada o salida del puesto de trabajo. Para esta aplicación usaremos un sensor emisor y otro receptor. La referencia de el primero es SOEG-S-M18-K-L #537691, es un sensor opto eléctrico con una barrera fotoeléctrica, con alcance máximo de 20.000mm, tipo de luz roja. El sensor receptor es el SOEG-E-M18-PA-K-2L-#537692, con una salida de tipo PNP anti variante, su alcance es de 20.000mm y posee una barrera fotoeléctrica. El proveedor de los anteriores sensores es Festo. El respectivo datasheet del equipo de encuentra en el Anexo 17.
10.2.2 PLC. El PLC escogido es el SIMATIC S7-1200, CPU 12/14C AC/DC/relé de Siemens, ya que posee las entradas y salidas digitales necesarias para el diseño (14 entradas y 10 salidas digitales), apto para realizar las tareas de control, además de su potentes funciones, su costo de funcionamiento es bajo. Para la programación se debe usar STEP 7. Para la comunicación dl modulo en los servo drive es el CM1241, ya que este permite una comunicación directa mediante el puerto RS-485. Ver Anexo 17.
Lista de componentes (continuación)

63
Las características técnicas Anexo 17 y manual de instalación del PLC, se encuentran en el anexo 18. 10.2.3 HMI. Para generar una buena interacción entre los operarios y el sistema, se opto por la interfaz SIMATIC KPT400 BASIC (HMI), de Siemens, posee un display es de 3.8”, con una interfaz Ethernet adaptable con Step 7 Basic. Su grado de protección es de IP65, NEMA 4, NEMA4x y NEMA14 en el frente. El manual del HMI y su respectivo mantenimiento se encuentra en el Anexo 18. 10.2.4 Pistón neumático. La presión promedio que se maneja en la planta es de 5,8 bares, pero no posee unidad de mantenimiento. El pistón neumático permite descargar los productos que esta conduciendo la banda, hasta el puesto de trabajo, sin necesidad de que el operario se levante del anterior, el código es ADN-12-40-A-P-A- #536210 de Festo, es un cilindro compacto, la carrera es de 40mm, y el diámetro del embolo de 12mm, la presión de funcionamiento de 0.6 a 10 bares y es de vástago simple. Las características técnicas Anexo 17 y manual de instalación de los pistones neumáticos, se encuentran en el Anexo 19. 10.2.5 Unidad De Mantenimiento. Para garantizar el buen funcionamiento y alargar la vida útil de todo el sistema neumático, es necesario tratar el aire comprimido que esta entrando al sistema, por eso se opto por una unidad de mantenimiento de aire, la referencia seleccionada es la FRC-1/2-D-MIDI-A-#159591, la evacuación del condensado de este sistema es completamente automático, la cantidad máxima de condensado es de 43cm3. Y su presión de funcionamiento va desde 0.5bar hasta 12 bar. El caudal nominal es de 2,600l/min. Las características técnicas Anexo 17 y manual de instalación de la unidad de mantenimiento, se encuentran en el Anexo 20. 10.2.6 Banda Transportadora Auxiliar. Debido a costos de fabricación, se determino que para la operación de empaque, supervisión y despacho, se comprara una banda transportadora estándar, provista por DISTRIBAND SAS. Las características técnicas son las siguientes: Ver Anexo 21.

64
Longitud: 6.50m. Ancho: 0.40m. Altura: 0.90m. Motorreductor y variador de ¼ H.P a 220 voltios y salida 40:1 Proveedor
Siemens. Estructura: En viga en “U” de 3” x 1.1/4 y capacidad para 70 kg, proveedor
Distriband SAS. Soportes: Tipo H, en acero inoxidable calibre 14, con ruedas giratorias y freno,
capacidad para 90kg. Proveedor: Distriband SAS. Banda: En PVC Marca “Esbelt”, ref. Febor Rodillos: en acero inoxidable de diámetro 2” calibre 16, con eje inoxidable de
diámetro ½”, y balineras plásticas en acetal y balines inoxidables.
10.2.7 Electro válvulas. Las electro-válvulas permiten dar control del aire sobre los pistones, la referencia seleccionada es VUVB-L-M42-AZD-Q6-3AC1- #537566 de Festo, presión de control de 2 bar a 9 bar, con un par de apriete máximo en el sistema de fijación de la válvula de 2N/m, caudal nominal normal de 500L/min. Las características técnicas y manual de instalación del electro válvulas, se encuentran en el Anexo 22.
10.2.8 Servo motor cadena transportadora. Para la cadena transportadora se selecciono el servo motor de referencia 1FK7032-5AK71-1HG0 marca SIEMENS, de 0.5 hp, y 6.000 rpm. Las características técnicas y manual de instalación del servomotor de la cadena, se encuentran en el Anexo 23.
10.2.9 Cadena transportadora. Cadena de longitud 14 metros, con sistema de alimentación neumática y eléctrica. Las características técnicas y manual de instalación del servomotor de la cadena, se encuentran en el Anexo 24.

65
11. DISEÑO DE LAS SECUENCIAS LOGICAS PARA LA PROGRAMACION
DEL SISTEMA
A través de los diagramas lógicos GRAFCET caracterizado como estándar de la lógica programable, se realiza la descripción de la lógica general ya que la implementación de este no se encuentra en el alcance del proyecto.
DIAGRAMAS LOGICOS

66

67

68
11.1 EXPLICACIÓN DEL GRAFCET
Cuadro 12. Explicación del GRAFCET
ESTADO FORMULA DESCRIPCION
X1 Estado de espera el estado inicial del sistema, donde la maquina espera una acción seleccionada por el usuario
Y1 Automático En esta transición, el sistema espera a que sea seleccionado el modo automático por parte del usuario
Y2 Manual En esta transición, el sistema espera a que sea seleccionado el modo manual por parte del usuario
Y3 Verificar En esta transición, el

69
sistema espera a que sea seleccionado el modo de verificación por parte del usuario
Y4 Home En esta transición, el sistema espera a que sea seleccionado el modo inicio por parte del usuario
X10 Estado de espera Es un estado de espera en selección de modo automático
X20 Estado de espera Es un estado de espera en selección de modo manual
X40 Estado en espera Es un estado de espera en selección de modo de verificación
X60 Estado en espera Es un estado de espera en selección de modo home
Y5 X10 Transición que adoptara el valor del estado que tenga X10, ya sea su valor de transición en 1 o 0.
X11 (ACT.VA)xPE Este estado activa los vibro alimentadores y tiene pendiente un paro de emergencia.
Y6 SS1 OR SS2 OR SS3 OR SS4 OR SS5 OR SS6 OR SS7
En esta transición, se esperan la llegada de las señales de cualquiera de los sensores de salida
X12 (AMP=1)Xpe este estado activa el motor principal de la cadena y tiene pendiente un paro de emergencia.
Y7 SE1 OR SE2 OR SE3 OR SE4 OR SE5 OR SE6 OR SE7
En esta transición, se esperan la llegada de las señales de cualquiera de los sensores de entrada
X13 AMP=0 Desactiva el Motor principal de la cadena
Cuadro 12 (continuación)

70
Y8 T=1SEG Tiempo de 1 segundo para continuar con la operación
X14 ACT(SP1,SP2,SP3,SP4,SP5,SP6,SP7)xPE
Activa los pistones neumáticos del sistema, y tiene una variable pendiente de paro de emergencia
Y9 T=3SEG Tiempo de 3 segundos para continuar con la operación
X15 DES(SP1,SP2,SP3,SP4,SP5,SP6,SP7)xPE
Desactiva los pistones neumáticos del sistema, y tiene una variable pendiente de paro de emergencia
Y10 Y=SAE1 En esta transición, se espera la señal de entrada del sensor de la banda auxiliar
X16 (MBA=1)xPE Activa el motor de la banda auxiliar, y tiene una variable pendiente de paro de emergencia
Y11 Y=SAS2 OR T=5Seg. Espera la entrada del sensor auxiliar de salida 2, o un tiempo de 5 segundos
X17 (MBA=0)Xpe Desactiva el motor de la banda auxiliar, y tiene una variable pendiente de paro de emergencia
Y12 X20 AND ACT Es un estado de transición entre el automático y el manual que activa el motor principal
X21 AMP=1 Activa el motor principal
Y13 (DESACTIVAR) OR (T/X22/5s) Condición donde el sistema espera el botón desactivar o un temporizador de 5 segundo
X22 AMP=0 AND X=20 Desactiva el motor principal y vuelve al
Cuadro 12 (continuación)

71
estado 20
Y14 X20 AND ACTIVAR Es un estado de transición entre el automático y el manual que activa el motor de la banda auxiliar
X23 MBA=1 Activa el motor de la banda auxiliar
Y15 (DESACTIVAR)OR(T/X24/5s) Condición donde el sistema espera el botón desactivar o un temporizador de 5 segundo
X24 MBA=0 AND X=20 Desactiva el motor de la banda auxiliar y vuelve al estado 20
Y16 X20 AND ACTIVAR Es un estado de transición entre el automático y el manual que activa el pistón neumático 1
X25 PS1=1 Activa el pistón neumático numero 1
Y17 (DESACTIVAR)OR(T/X26/5s) Condición donde el sistema espera el botón desactivar o un temporizador de 5 segundo
X26 PS1=0 AND X=20 Desactiva el pistón neumático 1 y vuelve al estado 20
Y18 X20 AND ACTIVAR Es un estado de transición entre el automático y el manual que activa el pistón neumático 2
X27 PS2=1 Activa el pistón neumático numero 2
Y19 (DESACTIVAR)OR(T/X28/5s) Condición donde el sistema espera el botón desactivar o un temporizador de 5 segundo
X28 PS2=0 AND X=20 Desactiva el pistón neumático 2 y vuelve al estado 20
Cuadro 12 (continuación)

72
Y20 X20 AND ACTIVAR Es un estado de transición entre el automático y el manual que activa el pistón neumático 3
X29 PS3=1 Activa el pistón neumático numero 3
Y21 (DESACTIVAR)OR(T/X30/5s) Condición donde el sistema espera el botón desactivar o un temporizador de 5 segundo
X30 PS3=0 AND X=20 Desactiva el pistón neumático 3 y vuelve al estado 20
Y22 X20 AND ACTIVAR Es un estado de transición entre el automático y el manual que activa el pistón neumático 4
X31 PS4=1 Activa el pistón neumático numero 4
Y23 (DESACTIVAR)OR(T/X32/5s) Condición donde el sistema espera el botón desactivar o un temporizador de 5 segundo
X32 PS4=0 AND X=20 Desactiva el pistón neumático 4 y vuelve al estado 20
Y24 X20 AND ACTIVAR Es un estado de transición entre el automático y el manual que activa el pistón neumático 5
X33 PS5=1 Activa el pistón neumático numero 5
Y25 (DESACTIVAR)OR(T/X34/5s) Condición donde el sistema espera el botón desactivar o un temporizador de 5 segundo
X34 PS5=0 AND X=20 Desactiva el pistón neumático 5 y vuelve al estado 20
Y26 X20 AND ACTIVAR Es un estado de
Cuadro 12 (continuación)

73
transición entre el automático y el manual que activa el pistón neumático 6
X35 PS6=1 Activa el pistón neumático numero 6
Y27 (DESACTIVAR)OR(T/X36/5s) Condición donde el sistema espera el botón desactivar o un temporizador de 5 segundo
X36 PS6=0 AND X=20 Desactiva el pistón neumático 6 y vuelve al estado 20
Y28 X20 AND ACTIVAR Es un estado de transición entre el automático y el manual que activa el pistón neumático 7
X37 PS7=1 Activa el pistón neumático numero 7
Y29 (DESACTIVAR)OR(T/X38/5s) Condición donde el sistema espera el botón desactivar o un temporizador de 5 segundo
X38 PS7=0 AND X=20 Desactiva el pistón neumático 7 y vuelve al estado 20
Cuadro 12 (continuación)

74
12. DISTRIBUCION DE LA PLANTA.
Plano 1. Distribución de planta CINAR actual (A), (Daniel Matabajoy /Diseño Industrial) de artículos de protección individual (Propiedad de E.P.I. L.T.D.A Cali).
Plano 2. Distribución de planta CINAR propuesta (A), Andrés Felipe Caracas y Diana Marcella Riascos estudiantes de la Universidad Autónoma de Occidente para planta CINAR en producción de arneses de E.P.I L.t.d.a (Propiedad de E.P.I L.t.d.a Cali).
A
A

75
13. PRESUPUESTO
De acuerdo a los requerimientos del cliente, algunas de las cotizaciones de los elementos se realizo por medio del portal alibaba.com Cuadro 13. Presupuesto. MATERIALES CANTIDAD MARCA PRECIO
UNID. PRECIO TOTAL
Pistones Neumáticos 7 Festo $ 142.341,03 $ 996.387,21
Sistema cadena transportadora
1 Conasfor S.A.S $ 64.985.345,09
$ 64.985.345,09
Electro válvula 7 Festo $ 243.209,12 $ 1.702.463,84
Silenciador 1 Festo $ 21.272,28 $ 21.272,28
Sensores receptores 7 Festo $ 163.047,46 $ 1.141.332,22
Sensores emisores 7 Festo $ 113.104,99 $ 791.734,93
PLC CPU 1214C 1 SIEMENS $ 1.964.200,00 $ 1.964.200,00
HMI KPT400 1 SIEMENS $ 1.600.000,00 $ 1.600.000,00
CM1214 1 SIEMENS $ 665.700,00 $ 665.700,00
Tubo flexible A 2 Festo $ 12.982,74 $ 25.965,48
Banda transportadora auxiliar
1 Distriband S.A.S $ 10.556.000,00
$ 10.556.000,00
Record rápido 2 Festo $ 19.920,24 $ 39.840,48
Fuente 24vdc 1 Dr Suministro e Ing.
1.003.410 $ 1.003.410,00
Cables de potencia 4 Baldor $ 142.800,00 $ 571.200,00
Cable de feedback uso Microflex
1 Baldor 417.600 $ 417.600,00
fuente unidad tratamiento aire
2 Festo $ 699.535,01 $ 1.399.070,02
caja de enchufe 7 Festo $ 7.912,01 $ 55.384,07
Minibreaker 2x3A. 2 Dr Suministro e Ing.
$ 280.000,00 $ 560.000,00
Minibreaker 2x1A. 2 Dr Suministro e Ing.
$ 70.000,00 $ 140.000,00
Lámpara Rotativa 1 Portal Internet $ 15.750,00 $ 15.750,00
Total
83124129,97 $ 88.652.655,62

76
14. ANALISIS ORGANIZACIONAL
Teniendo en cuenta las funciones y/o cargos que se suprimen, se realiza un análisis organizacional de ¿Cómo se pueden sustituir las responsabilidades o funciones? Se suprime el patinador, las responsabilidades operativas son:
Responsabilidades operativas cargo patinador:
Transporta el producto final al lugar de carga de acuerdo a las unidades terminadas.
Traslada la materia prima entre operarios cuando estos hayan terminado su labor, este traslado también es efectuado por los mismos operarios de acuerdo a la ocupación en la que se encuentren el patinador.
Suministra la materia prima a los operarios.
Se suprime trabajos que realizan los operarios de la planta, las responsabilidades operativas son:
Responsabilidades operativas cargo operario:
Traslada la materia prima a el operario siguiente cuando haya terminado su labor, este traslado también es efectuado por los el patinador de acuerdo a la ocupación en la que se encuentren el operario.
Realiza esfuerzos para adquirir la materia prima en su puesto de trabajo, es decir que el operario tiene que descender una altura ya determinada para tomar la materia prima en repetidas ocasiones en las horas laborales.
La supervisión del producto final es realizada por una de las operadoras que a su vez se encuentra realizando labores de costura.
Cuando el operario termina su labor, esta materia prima es introducida en tarros de ropa, los cuales son pasados a el siguiente operario, es hay donde se presenta la dificultad de que dicha materia prima llega de forma desorganizada y enredada por el tipo de material aumentando el tiempo en realizar su labor y ocasionando retrasos a sus compañeros.

77
A continuación se muestran el lugar de trabajo en la producción de arneses indicando las dificultades mencionas anteriormente: Figura 18. Foto Puesto de trabajo de operario (A), Cámara de estudiantes de la Universidad Autónoma de Occidente con autorización del ingeniero Juan Guillermo, tomada por Diana Marcella Riascos y Andrés Felipe Caracas (Propiedad de E.P.I. L.T.D.A Cali).
Figura 19. Foto suministro de materia prima de operarios (A), Cámara de estudiantes de la Universidad Autónoma de Occidente con autorización del ingeniero Juan Guillermo, tomada por Diana Marcella Riascos y Andrés Felipe Caracas (Propiedad de E.P.I. L.T.D.A Cali).
A
A

78
Figura 20. Suministro de materia prima de operarios (A), Cámara de estudiantes de la Universidad Autónoma de Occidente con autorización del ingeniero Juan Guillermo, tomada por Diana Marcella Riascos y Andrés Felipe Caracas (Propiedad de E.P.I. L.T.D.A Cali).
Como se observa en las figura y figura el suministro de materia prima de los operarios actualmente se realiza por medio baldes y canastas, en la canasta se encuentran las hebillas y ganchos y en el balde la materia prima que llega del operario anterior. El realizar ciertas operaciones como agacharse constantemente a adquirir el suministro con el tiempo deteriora la salud de operarios, además de que el desenredar las riatas que vienen del proceso anterior quita tiempo para realizar los diferentes trabajos. Es importante indicar que cuando el patinador se encuentra ocupado, el operario tiene que levantarse de su puesto de trabajo para suministrar a su compañero el trabajo que ya el a realizado y seguir con el cosido, esta labor de levantarse de su puesto se hace repetidamente en el día laboral.
A

79
Figura 21. Foto Espacio que recorre el patinador (A), Cámara de estudiantes de la Universidad Autónoma de Occidente con autorización del ingeniero Juan Guillermo, tomada por Diana Marcella Riascos y Andrés Felipe Caracas (Propiedad de E.P.I. L.T.D.A Cali).
En la figura se observa el espacio donde el patinador realizar el recorrido constantemente de trasladar los baldes y de suministrar la materia prima a los operarios, como se ve los baldes y canastas dificultan el recorrido y disminuyen el espacio de trabajo de esta planta. Figura 22. Foto de Recorrido de un operario a sitio de envió (ascensor) (A), Cámara de estudiantes de la Universidad Autónoma de Occidente con autorización del ingeniero Juan Guillermo, tomada por Diana Marcella Riascos y Andrés Felipe Caracas (Propiedad de E.P.I. L.T.D.A Cali).
A
A

80
Cuando el ultimo operario termina el proceso de armado de arnés y supervisión este lo traslada una distancia determina en los baldes que se encuentran ubicados al lado de la maquina (Figura) hasta el sitio de envío que es el ascensor. Esta tarea también es realizada por el patinador en caso de que el operador encargado de esta parte se encuentre supervisando otros puntos de cosido o en otro caso se encuentre realizando labores de cosido. El traslado y suministro de materia prima como de producto final en la actualidad en la empresa E.P.I. L.t.d.a. se encuentra de una forma muy manual, afectando el rendimiento y salud de operarios, y la producción de arneses. Las responsabilidades nombradas anteriormente se deben suplir o en su defecto otorgarlas a otros recursos con cargos dentro de la misma línea soportando alteraciones por los cambios que se realicen. En el siguiente cuadro se muestran las responsabilidades del patinador y operario y las propuestas realizadas por este proyecto:
Cuadro 14. Funciones operativas y propuesta realizada.
RESPONSABILIDADES
PROPUESTA
Suministro de materia prima fija. El sistema suplirá esta función.
Suministro de materia prima en movimiento.
El sistema suplirá esta función.
Transporte de materia prima. El sistema suplirá esta función.
Transporte de producto final. El sistema suplirá esta función.

81
15. BENEFICIOS GENERADOS POR EL PROYECTO
Mayor control sobre el proceso debido a que las tareas se encuentran asignadas de manera ordenada y se puede realizar supervisión antes de empacar el producto final.
Disminución de riesgos ergonómicos evitando la fatiga que generan las tareas
repetitivas cuando se realiza el proceso de producción de arneses.
Tecnificación del proceso de producción en la planta CINAR en la elaboración de eslingas.
Compatibilidad de elementos del sistema con otras plantas. Con la disminución de los riesgos ergonómicos y la tecnificación de la planta, el
trabajo elaborado por los operarios se realiza de forma satisfactoria generando mayor rendimiento laboral.
Con la automatización de la planta se reducen las labores en la parte de
supervisión del proceso. El sistema beneficia la organización de la planta obteniendo rendimiento en el
espacio de trabajo.

82
16. ESTUDIO DE VIABILIDAD DEL PROYECTO
Es importante realizar el estudio de viabilidad del proyecto para esto se requiere realizar: Costos de montaje. Costos de producción. Ingresos. Para lo anterior es necesario lo siguiente: Cuadro 15. Cantidad de arneses producidas actualmente.
Cantidad de arneses producidas actualmente
Cantidad diarias 35
Días trabajados 22
Total producción mensual actualmente 770
Cuadro 16. Ingresos.
Ingreso
Cantidad de arnés mensual 770
Precio venta 115000
Ingreso 88550000
Cuadro 17. Producción.
Producción
Cantidad de producción 770
Costo de producción 45000
Producción 34650000
Cuadro 18. Mano de obra actualmente mes.
Mano de obra actualmente mes
Mano de obra operario 566900
Cantidad de operarios 3
Mano de obra actualmente 1700700

83
Cuadro 19. Mano de obra propuesta mes.
Mano de obra propuesta mes
Mano de obra operario 566900
Cantidad de operarios 7
Mano de obra actualmente 3968300
16.1 COSTOS MONTAJE Los costos del montaje contienen los materiales del sistema y la mano de obra. Cuadro 20. Costos Montaje.
Materiales Precio total
Pistones Neumáticos $ 996.387,21
Sistema cadena transportadora
$ 64.985.345,09
electro válvula $ 1.702.463,84
Silenciador $ 21.272,28
sensores receptores $ 1.141.332,22
sensores emisores $ 791.734,93
PLC CPU 1214C $ 1.964.200,00
HMI KPT400 $ 1.600.000,00
CM1214 $ 665.700,00
Tubo flexible A $ 25.965,48
Banda transportadora auxiliar $ 10.556.000,00
Record rápido $ 39.840,48
Fuente 24vdc $ 1.003.410,00
Cables de potencia $ 571.200,00
Cable de feedback uso Microflex
$ 417.600,00
fuente unidad tratamiento aire $ 1.399.070,02
caja de enchufe $ 55.384,07
Minibreaker 2x3A. $ 560.000,00
Minibreaker 2x1A. $ 140.000,00
Lampara Rotativa $ 15.750,00
Total $ 88.652.655,62

84
La mano obra para el montaje del sistema la realizan tecnólogos de la empresa E.P.I. L.t.d.a. con valor de $2.700.000 y mano de obra proveedores. Mano de obra total: $9.200.000 aproximadamente. 16.2 COSTOS DE PRODUCCIÓN Los costos que intervienen en la producción de arneses como la materia prima y la mano de obra, actualmente para la producción se utilizan tres operarios después de la automatización se utilizan siete operarios , cada operario gana $566.900 y la materia prima tiene un costo por unidad de $45.000. La cantidad mensual de arneses cuando se duplique sabiendo que actualmente se producen 770 es de 1540 con un costo de producción de $69.300.000 16.3 INGRESOS La unidad de arnés tiene un precio de venta de $115.000 16.4 FLUJO DE FONDOS Cuadro 21. Flujo de Fondos.

85
16.5 INDICADORES DE RENTABILIDAD Con un costo de oportunidad de 5,25% el valor presente neto es $1.204.035.893 Con un costo de oportunidad de 70% el valor presente neto es $367.036.188 La tasa interna de retorno (TIR) es 41,60.
16.6 ECUACIONES
( )
16.7 RESULTADOS
Por medio de los indicadores de rentabilidad, la tasa de retorno (TIR) y el valor presente neto (VPN), se realiza la evaluación económica, la cual indica que implementar el proyecto es viable y se pueden obtener beneficios de este. Al realizar los cálculos adecuados para la tasa de retorno nos muestra que el costo de oportunidad con un 5,25% es menor que la tasa de retorno con un 41.6%, mostrando rentabilidad. Cuando se realiza el valor presente neto del proyecto, da un resultado positivo indicando un incremento equivalente a la cantidad del VPN.

86
17. CRONOGRAMA
Cuadro 22. Cronograma de actividades.

87
Fuente: Estudiantes de Ingeniería mecatrónica, Andrés Felipe Caracas y Diana Marcella Riascos de la Universidad Autónoma de Occidente.
Cuadro 22 (continuación)

88
18. CONCLUSIONES
Se realizo un diseño cumpliendo características de calidad coherente a los requerimientos planteados inicialmente por la empresa; generando el diseño de un sistema automático para alimentación y transporte de materia prima de forma ordenada, dentro de un proceso de confección de productos para trabajo en altura como lo son arneses, eslingas y líneas de vida, para la empresa E.P.I. Ltda.
En cumplimiento de lo anterior, las tareas que se desarrollaron fueron las siguientes:
Se evaluaron los métodos y prácticas implementados para la operación de confección de artículos de trabajo en alturas.
Se realizaron los estudios de los equipos necesarios para el proceso de confección.
Se diseño un sistema que suministra a los operarios los materiales necesarios para la elaboración de los elementos de trabajo en alturas, sin necesidad de movilizarse de su puesto de trabajo.
Se diseño un sistema de transporte, que permite a los operarios trasladar el producto en proceso de un punto a otro, sin necesidad de movilizarse de su puesto de trabajo
Se generaron los planos y simulaciones de los diseños realizados, requeridos para una posible ejecución.
Se realizo un presupuesto del proyecto, teniendo en cuenta limitaciones y precios actuales, con el fin de realizar el estudio de viabilidad de este.
Las tareas antes mencionadas se cumplieron gracias a la constante asesoría y aceptación del departamento de producción e ingeniería de la empresa, los cuales fueron fundamentales en el momento de sugerir ideas para realizar el diseño, toda esta intervención trajo como resultado un diseño bien

89
estructurado, solido y con beneficios principalmente en salud ocupacional, costos y producción.
Se realiza un estudio de la forma de producción de arneses de la empresa E.P.I. L.T.D.A, identificando la problemática en este proceso, de la cual se concluye la falta de herramientas que generan problemas de ergonomía en el puesto de trabajo por la obtención de materia prima y el traslado de esta, adicionalmente los resultados de producción no cumplen con las metas planeadas mensualmente.
Utilizando el método de ingeniería concurrente se logra encontrar las necesidades y requerimientos de la empresa con el fin de plantear diferentes soluciones, permitiendo realizar la documentación pertinente del proceso, donde se muestra la selección del diseño más adecuado.
Con este diseño, se pudo poner en práctica los conocimientos adquiridos durante la formación académica universitaria, permitiendo tener una relación teórico-práctica, que genero el cambio de información con el fin de adquirir un crecimiento profesional, por medio de experiencias y relaciones interpersonales.
El diseño realizado para empresa E.P.I. L.T.D.A, es un diseño que cuenta con diferentes elementos que forman un sistema de sumisito y transporte de materia prima, no se encontraron registros de que un sistema como este se encuentre implementado en ninguna planta de confección de productos de trabajo en altura.

90
19. RECOMENDACIONES
En el momento de hacer una posible implementación, es sugerirle revisar nuevamente las cotizaciones, ya que algunos precios de los proveedores solo tienen vigencia de 15 días, y los costos pueden variar.
De igual forma, es recomendable revisar el sistema de alimentación de la empresa (eléctrico y neumático), con el fin de verificar que no exista ninguna falla en este aspecto.

91
BIBLIOGRAFÍA
AUSTING. Alimentador Vibratorio [En línea] San Martin, Buenos Aires-Argentina.[Consultado en febrero 14 de 2012]. Disponible en internet: http://www.auting.com/es/transportadores.html
CONTROLADORES. Tipos De Controladores [En línea]. [Consultado en 17 de Febrero de 2012]. Disponible en interne: http://es.scribd.com/doc/17702998/Tipos-de-Controladores
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL. Tesis en “DISEÑO DE DOS BANDAS TRANSPORTADORAS DE 100X10CM Y DOS DE 30X10CM CON MOTORES CONTROLADOS CON DSPICS” [En línea]. Litoral. [consultado 13 de febrero de 2012]. Disponible en internet en: http://www.dspace.espol.edu.ec/bitstream/123456789/7282/1/D-399101112131415394.pdf.
GÓMEZ-ESTERN, Fabio. Cintas transportadoras en automatización de la producción [En línea]. Santiago de Chile, 2007. [Consultado 13 de Febrero de 2012]. Disponible en internet: https://docs.google.com/viewer?a=v&q=cache:kRlzf3MpVEcJ:www.esi2.us.es/~fabio/cintas.pdf+FABIO+G%C3%93MEZ-ESTERN,+cintas+transportadoras+en+automatizaci%C3%B3n+de+la+producci%C3%B3n,+Santiago+de+Chile,+2007.&hl=es&gl=co&pid=bl&srcid=ADGEESjOgq0E8ekDQE1efjHhApFrDyUfNUKxQ66eJAKFjPX1-JpBjWcEyJDwMlnyn_Hf3CfDZAn5lC6u0jdhmwcFf9hOMxxoIlMTHl_3olEWQiAw9ReCHIOUiu6YUu7o8dUDnUcjnzQT&sig=AHIEtbQD6PWyqQuQFqYkf9i4mQgbTVmfmw
Ing. Andrés Felipe Navas. Planeación de Productos. Diapositivas de la clase de Diseño de Productos mecatrónicos / Moodle /Universidad Autónoma de occidente Cali /Colombia. A cargo del profesor Andrés Felipe Navas.

92
ORGANIZACIÓN INTERNACIONAL DEL TRABAJO. La Salud y la Seguridad en el trabajo [En línea]. , Bogotá D.C [Consultado 11 de febrero de 2012] Disponible en internet: http://training.itcilo.it/actrav_cdrom2/es/osh/ergo/ergoa.htm.
OSCAR JAVIER, Herrera Melo. Neumática e Hidráulica [En línea].México D.F, 2008. [Consultado 11 de Febrero de 2012]. Disponible en internet: www.monografias.com/trabajos-pdf/neumatica-hidraulica/neumatica-hidraulica.pdf
PACLINE OVERHEAD CONVEYORS Productos transportadores. [En línea] Estados Unidos[consultado 16 de febrero de 2012]Disponible en internet: http://translate.google.com.co/translate?hl=es&sl=en&u=http://www.pacline.com/&ei=D7VTT4mFA46Ttwf0qLC5DQ&sa=X&oi=translate&ct=result&resnum=1&ved=0CCgQ7gEwAA&prev=/search%3Fq%3DPACLINE%26hl%3Des%26biw%3D1024%26bih%3D499%26prmd%3Dimvns.
REVOLUCIÓN INDUSTRIAL [En línea] Santiago de Chile [consultado Febrero 14 de 2012], Disponible en internet: www.profesorenlinea.cl/universalhistoria/RevolucionIndustrial.htmntic.educacion.es/w3//eos/MaterialesEducativos/bachillerato/historia/rev_industrial/factores.htm
VELÁZQUEZ, Iván. Controladores, Tipos De Controlador [En línea]. Santiago de Chile [Consultado en 17 de febrero de 2012]. Disponible en internet: http://www.inele.ufro.cl/apuntes/Instrumentacion_y_Control/Ivan_Velazquez/Catedra/Capitulo%204.%20Controladores.pdf

93
ANEXOS
Anexo A. QFD

94
Anexo. B Puesto de trabajo actual en torno al proyecto
Dimensiones de espacio para el proyecto. Este proyecto va ser realizado en la planta de CINAR, donde se realiza el proceso de producción de arneses, que cuenta con un espacio definido de planta y del puesto de trabajo de cada operario. A continuación se muestran los espacios mediante el siguiente plano de la línea CINAR:
Plano 3. Superior Planta CINAR (A), (Daniel Matabajoy /Diseño Industrial) de artículos de protección individual (Propiedad de E.P.I. L.T.D.A Cali).
El plano muestra el espacio de trabajo para la producción de arneses en la planta CINAR, con métricas de 7 metros de ancho por 20 metros de largo aproximadamente, dentro de este espacio se encuentran el ascensor con medidas de 1,5 metros de ancho por 1,5 metros de largo aproximadamente y un baño de 1,4 metros de ancho por 1,9 metros de largo aproximadamente. Con esta métrica se tiene el espacio final aproximado definido en el que se realiza el proyecto.
A

95
Figura 23. Foto de proceso de producción de arneses (A),Cámara de estudiantes de la Universidad Autónoma de Occidente con autorización del ingeniero Juan Guillermo, tomada por Diana Marcella Riascos y Andrés Felipe Caracas (Propiedad de E.P.I. L.T.D.A Cali).
Figura 24. Foto proceso de producción de arneses (A), Cámara de estudiantes de la Universidad Autónoma de Occidente con autorización del ingeniero Juan Guillermo, tomada por Diana Marcella Riascos y Andrés Felipe Caracas (Propiedad de E.P.I. L.T.D.A Cali).
A
A

96
Figura 25: Foto puesto de trabajo de operario (A), Cámara de estudiantes de la Universidad Autónoma de Occidente con autorización del ingeniero Juan Guillermo, tomada por Diana Marcella Riascos y Andrés Felipe Caracas (Propiedad de E.P.I. L.T.D.A Cali).
En la figura anterior muestran las medidas de altura de el puesto de trabajo de operarios, la altura de las mesas de trabajo donde se encuentra la maquina es de 80 cm aproximadamente y la silla es de 45 cm aproximadamente. Velocidad de producción para el proyecto. La producción de arneses se encuentra estandarizada de acuerdo a cada proceso de cosido la cual se describe en el siguiente cuadro:
Cuadro 23. Producción de arneses. Proceso Tiempo
1. Coser indicador. 1,15 min
2. Coser etiqueta. 0,79 min
3. Coser hebilla pequeña en tira de 1,46. 0,73 min
4. Coser tira de 35 cm en tira de 1,46. 0,95 min
5. Coser hebilla en tira de 1,92. 0,73 min
6. Armar primera parte en la heb. Hexagonal. 0,77 min
7. Coser tira de 35 cm en tira de 1,92. 0,98 min
8. Armar segunda parte en la heb. Hexagonal. 0,9 min
9. Medir e introducir pasador. 0,9 min
10. Coser corredera. 1,88 min
A

97
11. Colocar hebilla frontal. 0,27 min
12. Marcar, doblar e introducir hebilla en tira de 3,30.
0,56 min
13. Coser hebilla en tira de 3,30. 0,59 min
14. Coser tira de 90 en la 3,30. 1 min
15. Coser tiras de 16 cm con hebilla en la de 3,30.
2,45 min
16. Hacer costura final debajo de las laterales. 1,43 min
17. Costura en cuadros. 2,57 min
18. Introducir pasador y hebilla tensora. 0,67 min
19. Hacer remate pectoral y pélvico. 1,17 min
20. Unir parte pectoral y pélvica. 2 min
21. Costura en Z. 2 min
22. Ensamble final e inspección. 1,27 min
Fuente: E.P.I. L.T.D.A Artículos de protección individual, planta CINAR, área de producción (Propiedad de E.P.I. L.T.D.A Cali). Tiempo total para realizar un arnés es de 15,71 min; esto se debe que algunos procesos se realizan de forma múltiple. Productos involucrados en el proyecto. El transporte y suministro de materia prima y producto final es el enfoque de este proyecto, por lo que el de vital importancia las métricas de todos los elementos que componen un arnés; A continuación se presentan las respectivas dimensiones de los elementos:
Cuadro 24: Dimensiones de los elementos. Elemento Peso Dimensiones
Hebilla 1 49 Gr 32,93 de largo aprox. Por 60,26 mm de ancho aprox.
Hebilla 2 164 Gr 49,43 mm de largo aprox. Por 74,99 mm de ancho aprox.
Gancho 1 795 Gr 60,30 mm de largo aprox. Por 63,66 mm de ancho aprox.
Gancho 2 318 Gr 105,80 mm de largo aprox. Por 83,87 mm de ancho aprox.
Arnés 1,9 Kg 86 cm de largo aprox. Por 45 cm de ancho aprox.
Fuente: E.P.I. L.T.D.A Artículos de protección individual, planta CINAR, área de producción (Propiedad de E.P.I. L.T.D.A Cali).

98
Proceso actual de producción de arneses.
Diagrama de Flujo 1. Proceso de producción parte pélvica.
Corte de tiras y
riatas
Maquina # 9: En la tira de 3.30 se cosen las hebillas.
Terminado el proceso de la maquina #9, pasa a
la maquina #3.
Maquina # 3:
Cose tiras de 90.
Cose los laterales.
Terminado el proceso de la maquina #3, pasa a
la maquina #9.
Maquina # 9: Realiza costura en cruz
Terminado el proceso de la maquina #9, pasa a
la maquina #3.
Maquina # 3:
Realiza costura en cuadros.
Realiza ensamble completo.
Inicio
Proceso pélvico
terminado.
Proceso parte pélvica de arneses.

99
Diagrama de Flujo 2. Proceso de producción parte pectoral.
Corte de tiras y
riatas.
Maquina #9: Sitúa y cose hebilla en riata en 192
Maquina #2: Coloca marquilla a
riata 192
Maquina #9: Coloca hebilla en
riata 146.
Maquina #2: Coloca indicar de
Impacto.
Maquina #9: Cose tira azul en
riata 146.
Maquina #2: Arma esqueleto.
Maquina #9: Cose tira azul en
tira de 192.
Maquina #2:
Coser corredera.
Arma arnés de la parte pectoral-
Inicio
Proceso pectoral
terminado.
Proceso parte pectoral de
arneses

100
Diagrama de Flujo 3. Proceso final de producción.
Terminado el proceso de maquina
#2 y maquina #3, pasan esta materia
prima a maquina #9 para realizar
proceso de ensamble.
Terminado el proceso de maquina
#9, pasa esta materia prima a
maquina #2 para realizar proceso de
ensamble y costura.
Terminado el proceso de maquina
#2, pasa esta materia prima a
maquina #3 para realizar proceso de
costura en z.
Terminado el proceso de maquina
#3, pasa esta materia prima a
maquina #2, para realizar proceso
de rectificado, ensamble y empaque.
Proceso de ensamble de parte pélvica
con parte pectoral
Fin del proceso de confección. Cliente

101
Anexo C. Normas de seguridad
Los requerimientos mínimos que deben de cumplir los equipos se encuentran estandarizados, regularizados y codificados para realizar instalaciones en plantas que se realicen procesos de productividad son: National Electrical Manufacturers Association (NEMA)
ICS 1-83 “General Standards for industrial Control and System”.
ICS 2-88 “Industrial Control Devices, Controllers and Assemblies”.
ICS 3-88 “Industrial System”.
ICS 4-83 “Terminal Blocks for industrial Use”.
ICS 6-88 “Enclosures for Industrial Controls and Systems” Instrumentation System and Automation society (ISA)
ISA S50.1-82 “Compatibility of analog signal for electric industrial process instruments”
International electrotechnical commission (IEC)
IEC61131 “programmable logic controllers”. American national standards institute (ANSI)
ANSI UL497 “Safety standards for protectors for communication circuits” Reglamento técnico de instalaciones eléctricas (RETIE)
Articulo 8 (Requerimientos generales de las instalaciones eléctricas).
Articulo 15 (Puesta a tierra).
Articulo 17(Requisitos de productos).
Articulo 37(Lineamientos aplicables a todas las instalaciones eléctricas para uso final).
LEY 9 DE 1979 (Enero 24) “Titulo de salud ocupacional”, articulo 80, articulo 82
y articulo 84. Norma Técnica Colombiana (NTC)
NTC 2050 “Código eléctrico Colombiano” Es de obligación utilizar la última revisión de los códigos y estándares industriales, si se encuentra algún desacuerdo debe aplicarse el respectivo cumplimiento o excediendo las selecciones vinculadas.

102
Anexo D. Dispositivos recomendados
Mantenimiento bandas transportadoras: El sistema de carga de la cinta tiene una notable importancia en relación con la duración de la misma, ya que el punto preciso de esta en el cual tiene lugar la carga del material, es el más perjudicado por lo que a abrasión se refiere. La carga puede efectuarse en cualquier punto del recorrido. En la zona de carga es preciso instalar dispositivos adecuados para aminorar el choque y con ello reducir lo más posible la abrasión consecuente de la caída del material sobre la cinta. El material no debe caer en el lugar medio entre dos rodillos portantes ni tampoco donde la cinta esta apoyada sobre el rodillo, sino un poco más allá de este ultimo. El material debe ser conducido con continuidad sobre la parte central de la cinta10. Marcha de la cinta: El periodo mas critico para el funcionamiento de una cinta se presenta cuando esta es nueva. Es importante que en tal periodo la cinta marche regularmente, ya sea cargada o sin cargar, y se deberá observar continuamente, procediendo si es necesario, a la eliminación de las causas que puedan provocar un funcionamiento irregular. De esta forma, una vez ajustada la cinta marchara regularmente, a menos que sobrevengan causas fortuitas o accidentales. También es aconsejable su examen cuando haya estado bastante tiempo sin funcionar. Frecuentes y regulares inspecciones en cara interna de la cinta deberán efectuarse periódicamente durante su funcionamiento, para asegurar que no existan: Excesivo deslizamiento de la cinta sobre las poleas. Presencia de aceites o grasas.
10
Mantenimiento de bandas transportadoras, consultado el 12 de julio de 2012, Disponible en:
www.martinezgambino.com.ar/catalogo_cintas_transportadoras.pdf

103
Presencia de material no deseado entre los rollos y cobertura inferior. Limpieza de la cinta: Es aconsejable precaverse de la caída de polvo o material sobre el tramo de retorno, que podría, con el tiempo, atascar los rodillos portantes. Evitar el contacto de la cinta con aceites, grasas y productos químicos. Si es posible cubrir la cinta para evitar los efectos nocivos de la humedad y del sol.
MANTENIMIENTO BANDA TRANSPORTADORA AUXILIAR
Concepto Cada cuanto Acciones
Revisión de grasa 48 horas Revisar engrase de las balineras y rodillos, y engrasar si es necesario
Revisión cinta Diariamente Revisar que no tenga cortaduras ni este desalineada de los rodillos. Y si
es así, alinear. Revisión cables de
energía 384 horas Revisar que los cables no estén
siendo molidos por la cinta ni por los rodillos,
Cambio de sentido de cinta
576 horas Sacar la cinta de los rodillos y ponerla a girar en sentido contrario del que se
encontraba Revisión rodillos 384 horas Revisar que se encuentren sin golpes
y correctamente alineados
Revisión panel control
192 horas Limpiar de suciedades como polvo y humedad.

104
Cinta transportadora:

105
Pistón Neumático:

106
Electro válvulas:

107

108
Anexo E. Ensamble banda transportadora auxiliar
Medidas acotadas en metros.

109
Anexo F. Cubre motor de banda transportadora auxiliar
Medidas acotadas en metros.

110
Anexo G. Base 2 banda transportadora auxiliar

111
Anexo H. Chaveta de banda transportadora auxiliar

112
Anexo I. Mesa de inspección de banda transportadora

113
Anexo J. Rodillo banda transportadora auxiliar

114
Anexo K. Cinta de banda transportadora auxiliar

115
Anexo L. Cadena transportadora de tiempos

116
Anexo M. Mesa de trabajo

117
Anexo N. Alimentador vibratorio

118
Anexo O. Diente de cadena transportadora

119
Anexo P.
(Para consultarlo de forma completa remitirse al archivo digital del anexo)
Cotizaciones

120
Anexo Q. Manual plc
(Para consultarlo de forma completa remitirse al archivo digital del anexo)

121
Anexo R. Manual hmi y mantenimiento.
(Para consultarlo de forma completa remitirse al archivo digital del anexo)

122
Anexo S. Manual de instalación de pistón neumático.
(Para consultarlo de forma completa remitirse al archivo digital del anexo)

123
Anexo T. Manual de instalación de la unidad de mantenimiento.
(Para consultarlo de forma completa remitirse al archivo digital del anexo)

124
Anexo U. Características técnicas de banda transportadora auxiliar.
(Para consultarlo de forma completa remitirse al archivo digital del anexo)

125
Anexo V. Electro válvulas
(Para consultarlo de forma completa remitirse al archivo digital del anexo)

126
Anexo W. Servo motor
(Para consultarlo de forma completa remitirse al archivo digital del anexo)

127
Anexo X. Cadena transportadora
(Para consultarlo de forma completa remitirse al archivo digital del anexo)