Ecuaciones-Cap5
74
Cap´ ıtulo 5 ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES 5.1. INTRODUCCIÓN Una ecuación diferencial de coeficientes variables presenta la forma geneeral: [a n (x)D n + a n−1 (x)D n−1 + a n−2 (x)D n−2 + ··· + a 1 D + a 0 ]y(x)= f (x) De acuerdo con lo estudiado previamente, la solución general de la ecuación diferencial es de la forma: y(x)= C 1 y 1 (x)+ C 2 y 2 (x)+ ··· + C n y n (x)+ y ss (x) En la expresión anterior se tiene que: {y 1 ,y 2 ,...,y n } es un conjunto fundamental de soluciones de la homogénea asociada mientras que y ss es la solución particular de la no homogénea. Para el caso de coeficientes constantes es relativamente simple determinar la solución general sin embargo, para coeficientes variables la situación puede ser bastante complicada. Algunas ecuaciones diferenciales tienen un tratamiento similar al de las de coeficientes constantes, tal es el caso de la ecuación diferencial de Euler. Para los otros casos se verá que el método adecuado de solución mediante series de potencias. 5.2. LA ECUACIÓN DIFERENCIAL DE EULER La ecuación diferencial de Euler 1 de orden n presenta la forma general: [a n x n D n + a n−1 x n−1 D n−1 + a n−2 x n−2 D n−2 + ··· + a 1 xD + a 0 ]y(x)= f (x) 1 Leonhard Paul Euler (1707-1783): matemático suizo, reconocido como uno de los más grandes de todos los tiempos. Con su prolija obra, hizo grandes aportes a las matemáticas, cálculo, teoría de grafos, mecánica, óptica y astronomía. 297
-
Upload
josegarciacastro -
Category
Documents
-
view
37 -
download
5
description
ecuaciones diferenciales
Transcript of Ecuaciones-Cap5

Capıtulo 5ECUACIONES DIFERENCIALES DE
COEFICIENTES VARIABLES
5.1. INTRODUCCIÓN
Una ecuación diferencial de coeficientes variables presenta la forma geneeral:
[an(x)Dn + an−1(x)D
n−1 + an−2(x)Dn−2 + · · ·+ a1D + a0]y(x) = f(x)
De acuerdo con lo estudiado previamente, la solución general de la ecuación diferencial es dela forma:
y(x) = C1y1(x) + C2y2(x) + · · ·+ Cnyn(x) + yss(x)
En la expresión anterior se tiene que: {y1, y2, . . . , yn} es un conjunto fundamental de solucionesde la homogénea asociada mientras que yss es la solución particular de la no homogénea.Para el caso de coeficientes constantes es relativamente simple determinar la solución generalsin embargo, para coeficientes variables la situación puede ser bastante complicada. Algunasecuaciones diferenciales tienen un tratamiento similar al de las de coeficientes constantes, tales el caso de la ecuación diferencial de Euler. Para los otros casos se verá que el métodoadecuado de solución mediante series de potencias.
5.2. LA ECUACIÓN DIFERENCIAL DE EULERLa ecuación diferencial de Euler1 de orden n presenta la forma general:
[anxnDn + an−1x
n−1Dn−1 + an−2xn−2Dn−2 + · · ·+ a1xD + a0]y(x) = f(x)
1
Leonhard Paul Euler (1707-1783): matemático suizo, reconocido como uno de los más grandes de
todos los tiempos. Con su prolija obra, hizo grandes aportes a las matemáticas, cálculo, teoría de
grafos, mecánica, óptica y astronomía.
297

298 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
La homogénea asociada admite soluciones de la forma y = xλ; con λ ∈ C. Así las cosas, alreemplazar idénticamente en la homogénea resulta una ecuación polinómica conocida comoecuación característica, así:
P (λ) = anλ(λ−1)(λ−2) · · · (λ−(n−1))+an−1λ(λ−1)(λ−2) · · · (λ−(n−2))+· · ·+a1λ+a0 = 0
Resolviendo la ecuación resulta un conjunto fundamental de soluciones de la homogénea.En cuanto a la solución particular se aplica el método de variación de parámetros, previamen-te desarrollado.
Un método alterno para encontrar el conjunto fundamental de soluciones de la homogéneaconsiste en realizar el cambio de variables: x = et. Se puede demostrar que la nueva ecuacióndiferencial resultante es una ecuación de coeficientes constantes de la forma:
(anD(D − 1)(D − 2) · · · (D − (n− 1)) + · · ·+ a1D + a0) y(t) = f(t)
La cual se soluciona con los métodos estudiados en la sección 2.3.
Para facilitar la comprensión del método se iniciará con la ecuación diferencial de Eulerde segundo orden.
5.2.1. La ecuación diferencial de Euler de segundo ordenLa ecuación diferencial de Euler de segundo orden presenta la forma general:
x2y��(x) + pxy�(x) + qy(x) = x2r(x) con p, q constantes
El intervalo de validez de la solución de la homogénea es I = {x ∈ R / x �= 0}. Para determinarel conjunto fundamental de soluciones de la homogénea se supone que admite soluciones dela forma y = xλ, con lo que resulta la ecuación característica:
λ(λ− 1) + pλ+ q = 0
Al resolver la ecuación se pueden presentar los siguientes casos:
1. Las raíces son reales y distintas: En este caso, el conjunto fundamental de solucionesde la homogénea es:
CFS = {xλ1 , xλ2}
2. Las raíces son reales e iguales: En este caso, tenemos: λ1 = λ2 = α y el CFS es:
CFS = {xα, xα ln(x)}
3. Las raíces son complejas conjugadas: En este caso, tenemos: λ1,λ2 = α ± jω ypuede demostrarse que el CFS es:
CFS = {xα sin (ω ln(x)) , xα cos (ω ln(x))}

5.2. LA ECUACIÓN DIFERENCIAL DE EULER 299
Ejemplo: 5.1. Encuentre la solución general de la siguiente ecuación diferencial en elintervalo: x > 0
2x2y��(x)− xy�(x) + y(x) = 4x3✞✝ ☎✆Solución: Primero que todo se escribe la ecuación característica, así:
2λ(λ− 1)− λ+ 1 = 0
La ecuación se puede escribir en forma factorizada, así:
(2λ− 1)(λ− 1) = 0
En consecuencia, un conjunto fundamental de soluciones de la homogénea es:
CFS = {x,√x }
Para determinar la solución particular se escribe la ecuación diferencial dada en su formanormalizada, así:
y��(x)− 1
2xy�(x) +
1
2x2y(x) = 2x
Usando el método de variación de parámetros, la solución particular es de la forma: yss =µ1y1 + µ2y2.La aplicación del método conduce al siguiente sistema de ecuaciones:
x
√x
11
2√x
·�
µ�1
µ�2
�=
�02x
�
El Wronskiano del sistema es: W (x) = −√x
2Aplicando la regla de Cramer, se tiene:
−√x
2µ�1 = −2x
√x ⇒ µ�
1 = 4x ⇒ µ1 = 2x2
−√x
2µ�2 = 2x2 ⇒ µ�
2 = −4x32 ⇒ µ2 = −8
5x
52
Entonces la solución particular nos queda:
yss = 2x2(x)− 8
5x
52 (x
12 ) =
2
5x3
Por tanto, la solución general de la ecuación diferencial es:
y(x) = C1x+ C2
√x +
2
5x3

300 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Usando el método alternativo, mediante del cambio de variables x = et, la ecuación diferencialnos queda:
[2D(D − 1)−D + 1]y(t) = 4e3t
Factorizando, tenemos: (2D − 1)(D − 1)y(t) = 4e3t.De donde el conjunto fundamental de soluciones es:
CFS = {et, e 12 t}
Y la solución particular, mediante el método de operador inverso es:
yss(t) =4e3t
5(2)=
2
5e3t
Retornando a la variable original, la solución general nos queda:
y(x) = C2eln(x) + C2e
12 ln(x) +
2
5e3 ln(x)
= C1x+ C2
√x +
2
5x3
5.2.2. La ecuación diferencial de Euler de tercer ordenLa ecuación diferencial de Euler de tercer orden presenta la forma general:
x3y���(x) + px2y��(x) + qxy�(x) + sy(x) = x3r(x) con p, q, s constantes
La ecuación característica de la homogénea asociada es:
λ(λ− 1)(λ− 2) + pλ(λ− 1) + qλ+ s = 0
Al resolver la ecuación se pueden presentar los siguientes casos:
1. Las tres raíces son reales y diferentes: λ1,λ2,λ3
En este caso, el conjunto fundamental de soluciones es:
CFS = {xλ1 , xλ2 , xλ3}
2. Las tres raíces son reales, pero dos de ellas son iguales: λ1,λ2 = λ3 = αEn este caso, el conjunto fundamental de soluciones es:
CFS = {xλ1 , xα, xα ln(x)}
3. Las tres raíces son reales e iguales: λ1 = λ2 = λ3 = αEn este caso, el conjunto fundamental de soluciones es:
CFS = {xα, xα ln(x), xα ln2(x)}

5.2. LA ECUACIÓN DIFERENCIAL DE EULER 301
4. Dos raíces son complejas conjugadas y la otra es real: λ1,λ2,λ3 = α± jωEn este caso, el conjunto fundamental de soluciones es:
CFS = {xλ1 , xα sin (ln(x)) , xα cos (ln(x))}
Ejemplo: 5.2. Encuentre la solución general de la siguiente ecuación diferencial en elintervalo: x > 0.
x3y���(x)− 2xy�(x) + 4y(x) = x2✞✝ ☎✆Solución: Primero que todo se escribe la ecuación característica, así:
λ(λ− 1)(λ− 2)− 2λ+ 4 = 0
La ecuación se puede escribir en forma factorizada, así:
(λ+ 1)(λ− 2)2 = 0
En consecuencia, un conjunto fundamental de soluciones de la homogénea es:
CFS = {x−1, x2, x2 ln(x)}
Para determinar la solución particular se escribe la ecuación diferencial dada en su formanormalizada, así:
y���(x)− 2
x2y�(x) +
4
x3y(x) = x−1
El método de variación de parámetros, conduce al siguiente sistema de ecuaciones:
x−1 x2 x2 ln(x)−x−2 2x 2x ln(x) + x2x−3 2 2 ln(x) + 3
·
µ�1
µ�2
µ�3
=
00
x−1
El Wronskiano del sistema es W (x) = 9 . Aplicando la regla de Cramer, se tiene:
9µ�1 = x2 ⇒ 9µ1 =
x3
3
9µ�2 = −3x−1 ln(x)− x−1 ⇒ 9µ2 = −3
2ln2(x)− ln(x)
9µ�3 = 3x−1 ⇒ 9µ3 = 3 ln(x)
La solución particular es de la forma: yss = µ1y1 + µ2y2 + µ3y3, por tanto:
9yss = x−1
�x3
3
�− x2
�3
2ln2(x) + ln(x)
�+ x2 ln(x) (3 ln(x))
9yss =1
3x2 − x2 ln(x) +
3
2x2 ln2(x)

302 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Los dos primeros términos son linealmente independientes con la homogénea, por lo tanto lasolución particular nos queda:
yss =1
6x2 ln2(x)
Y la solución general es:
y(x) = C1x−1 + C2x
2 + C3x2 ln(x) +
1
6x2 ln2(x)
El procedimiento alternativo, mediante la sustitución x = et, arroja la ecuación diferencial:
(D + 1)(D − 2)2y(t) = e2t
De donde: CFS = {e−t, e2t, te2t}Y la solución particular es:
yss(t) =e2t
(D + 1)(D − 2)2|D=2
=te2t
3D2 − 6D|D=2
=t2e2t
6(D − 1)|D=2
=t2e2t
6
Regresando a la variable original, la solución general nos queda:
y(x) = C1x−1 + C2x
2 + C3x2 ln(x) +
1
6x2 ln2(x)
Ejemplo: 5.3. Encuentre un conjunto fundamental de soluciones para cada una de lassiguientes ecuaciones diferenciales:
1. x2y�� + xy� − y = 0
2. x2y�� + xy� + y = 0
3. x2y�� − xy� + y = 0
4. x2y�� + 3xy� + 2y = 0
5. x3y��� + 3x2y�� + xy� − 8y = 0✞✝ ☎✆Solución:
1. La ecuación característica es:
λ(λ− 1) + λ− 1 = 0 ⇒ (λ− 1)(λ+ 1) = 0
El conjunto fundamental de soluciones es: CFS = {x, x−1}
2. La ecuación característica es:
λ(λ− 1) + λ+ 1 = 0 ⇒ λ2 + 1 = 0
El conjunto fundamental de soluciones es: CFS = {sin(ln(x)), cos(ln(x))}

5.2. LA ECUACIÓN DIFERENCIAL DE EULER 303
3. La ecuación característica es:
λ(λ− 1)− λ+ 1 = 0 ⇒ (λ− 1)2 = 0
El conjunto fundamental de soluciones es: CFS = {x, x ln(x)}
4. La ecuación característica es:
λ(λ− 1) + 3λ+ 2 = 0 ⇒ λ2 + 2λ+ 2 = 0
De donde: λ1,λ2 = −1± jEl conjunto fundamental de soluciones es: CFS = {x−1 sin(ln(x)), x−1 cos(ln(x))}
5. La ecuación característica es:
λ(λ− 1)(λ− 2) + 3λ(λ− 1) + λ− 8 = 0 ⇒ λ3 − 3λ2 + 2λ+ 3λ2 − 3λ+ λ− 8 = 0
Simplificando, se tiene: λ3 − 8 = (λ− 2)(λ2 + 2λ+ 4) = 0 . De donde:
λ1 = 2 λ2,λ3 = −1± j√3
El conjunto fundamental de soluciones es:
CFS =�x2, x−1 sin
�√3 ln(x)
�, x−1 cos
�√3 ln(x)
��
5.2.3. Ecuaciones diferenciales reducibles a EulerAlgunas ecuaciones diferenciales se pueden reducir a ecuaciones de Euler mediante un cambiode la variable dependiente, tal es el caso de la ecuación diferencial:
(ax+ b)2y��(x) + c(ax+ b)y�(x) + dy(x) = f(x) con a, b, c, d constantes
Con base en lo estudiado previamente, el intervalo de validez de la solución es:
I = {x ∈ R / ax+ b �= 0}
Para convertirla en una ecuación diferencial de Euler se hace el cambio de variable: z = ax+b.
Con el cambio de la variable independiente se aplica la regla de la cadena para obtener:
y�(x) =dy
dz
dz
dx⇒ y�(x) = ay�(z)
y��(x) =dy�
dz
dz
dx⇒ y��(x) = a2y��(z)

304 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Así las cosas, la ecuación diferencial para la nueva variable es:
a2z2y��(z) + aczy�(z) + dy(z) = f
�z − b
a
�
Ejemplo: 5.4. Encuentre la solución general de la ecuación diferencial:
(2x+ 1)2y��(x) + 2(2x+ 1)y�(x)− 4y(x) = 2x+ 2✞✝ ☎✆Solución: Al efectuar el cambio de variable z = 2x+ 1 resulta la ecuación diferencial:
4z2y��(z) + 4zy�(z − 4y(z) = z + 1 ⇒ z2y��(z) + zy�(z)− y(z) =z + 1
4
La ecuación característica es:
λ(λ− 1) + λ− 1 = 0 ⇒ λ2 − 1 = 0 ⇒ (λ− 1)(λ+ 1) = 0
El conjunto fundamental de soluciones de la homogénea es:
CFS = {z, z−1}
Para la solución particular, hacemos el cambio de variable z = et con lo que la ecuación nosqueda:
(D2 − 1)z(t) =et + 1
4La solución particular, mediante operador inverso es:
yss(t) =1
4
tet
2+
1
4
1
(−1)=
tet
8− 1
4
Retornando a la variable z, nos queda:
yss(z) =z ln(z)
8− 1
4
Y finalmente regresando a la variable original, la solución general es:
y(x) = C1(2x+ 1) + C2(2x+ 1)−1 +(2x+ 1) ln(2x+ 1)
8− 1
4con x > −1
2

5.2. LA ECUACIÓN DIFERENCIAL DE EULER 305
EJERCICIOS 5.1.
Encuentre un conjunto fundamental de soluciones para cada una de las siguientes ecuacionesdiferenciales:
1. x2y�� + xy� − 4y = 0
2. x2y�� + xy� + 4y = 0
3. x2y�� − 3xy� + 4y = 0
4. x2y�� + 3xy� + 10y = 0
5. x3y��� + 3x2y�� + xy� = 0
6. x3y��� + 3x2y�� − xy� = 0
7. x3y��� + 2x2y�� − xy� + y = 0
8. x3y��� + 6x2y�� + 5xy� − 5y = 0
9. (2x− 3)2y�� + 8(2x− 3)y� + 8y = 0
10. (2x+ 3)2y�� + 10(2x+ 3)y� + 8y = 0
Resuelva cada uno de los siguientes problemas de valor inicial.
11. x2y�� + xy� − 4y = x y(1) = 0 , y�(1) = 0
12. x2y�� − 3xy� + 4y = x2 y(1) = 0 , y�(1) = 0
13. x2y�� + xy� + 4y = x3 y(1) = 0 , y�(1) = 0
14. x3y��� + 3x2y�� + xy� = 0 y(1) = 0 , y�(1) = 1 , y��(1) = 0
15. x3y��� + 3x2y�� − xy� = 0 y(1) = 0 , y�(1) = 0 , y��(1) = 1
Encuentre la solución general para cada una de las siguientes ecuaciones diferenciales:
16. (2x− 3)2y�� + 8(2x− 3)y� + 8y = 2x
17. x2y��� + 3xy�� + y� = x2
18. x3y��� + 2x2y�� − xy� + y = x3
19. x3y��� + 6x2y�� + 5xy� − 5y = x2
20. x2y��� + 3xy�� + y� = x ln(x)

306 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
5.3. SERIES DE POTENCIAConsideremos una función de variable real y = f(x) tal que la función y todas sus derivadasson continuas en un intervalo I ⊆ R y sea x0 ∈ I. Una serie infinita de potencias, conocidatambién como serie de Taylor, centrada en el punto x0, es una expresión de la forma:
s(x) =∞�
k=0
ck(x− x0)k =
N�
k=0
ck(x− x0)k +
∞�
k=N+1
ck(x− x0)k
En su forma expandida es:
s(x) = c0 + c1(x− x0) + c2(x− x0)2 + · · ·+ cN(x− x0)
N + cN+1(x− x0)N+1 + · · ·
Concepto de convergenciaSe dice que una serie de potencias s(x) converge a una función f(x) en un entorno del puntox0 si se verifica que f(x) ≡ s(x) . El intervalo de convergencia de la serie viene dado por:
I = {x ∈ R/|x− x0| < ρ}
Donde ρ es el es el radio de convergencia de la serie. La convergencia significa que la serie esidéntica a la función en cada punto del intervalo de convergencia. De acuerdo con lo anteriorpodemos escribir:
f(x) = c0 + c1(x− x0) + c2(x− x0)2 + · · ·+ cN(x− x0)
N +∞�
k=N+1
ck(x− x0)k
En la expresión anterior, aparece un polinomio de grado N que se utiliza para aproximar lafunción en el intervalo de convergencia. Intuitivamente, el polinomio de aproximación es mejoren la medida en que el grado del polinomio sea mayor. El resido de la serie viene dado por:
RN(x, x0) =∞�
k=N+1
ck(x− x0)k
La convergencia implica que:lım
N→∞RN(x, x0) = 0
Cálculo de los coeficientes de la serieDado que la serie es convergente a la función en cada punto del intervalo de convergencia,todas las derivadas de la función coincidirán con todas las derivadas de la serie, es decir, se

5.3. SERIES DE POTENCIA 307
verifican las siguientes identidades:
f(x) = c0 + c1(x− x0) + c2(x− x0)2 + c3(x− x0)
3 + c4(x− x0)4 + c5(x− x0)
5 + · · ·Df(x) = c1(x− x0) + 2c2(x− x0) + 3c3(x− x0)
2 + 4c4(x− x0)3 + 5c5(x− x0)
4 + · · ·D2f(x) = 2c2 + 2 · 3c3(x− x0) + 3 · 4c4(x− x0)
2 + 4 · 5c5(x− x0)3 + · · ·
D3f(x) = 2 · 3c3 + 2 · 3 · 4c4(x− x0) + 3 · 4 · 5c5(x− x0)2 + · · ·
D4f(x) = 2 · 3 · 4 + 2 · 3 · 4 · 5c5(x− x0) + · · ·...
Evaluando en el punto x = x0, resulta:
c0 = f(x0) c1 = Df(x0) c2 =D2f(x0)
2!c3 =
D3f(x0)
3!. . . cn =
Dnf(x0)
n!
Criterio de la razónEl criterio de la razón, que es el cociente entre dos términos consecutivos de la serie y permitedeterminar el intervalo de convergencia de una serie, así:
lımn→∞
����cn+1(x− x0)n+1
cn(x− x0)n
���� < 1
En la expresión anterior se supone que la diferencia, en grado, entre dos términos consecutivoses la unidad. Lo anterior no es necesariamente cierto en todos los casos.
Series de MaclaurinCuando el punto alrededor del cual se hace el desarrollo de la serie es x0 = 0 , la serie deTaylor recibe el nombre de serie de Maclaurin.A continuación se muestra una tabla con las series asociadas a las funciones de mayor interésen ingeniería. Se indica, en cada caso, el intervalo de convergencia.
Función exponencial
ex =∞�
k=0
xk
k!= 1 + x+
x2
2!+
x3
3!+ · · · ; I = R
Función seno
sin(x) =∞�
k=0
(−1)kx2k+1
(2k + 1)!= x− x3
3!+
x5
5!− x7
7!+ · · · ; I = R

308 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Función coseno
cos(x) =∞�
k=0
(−1)kx2k
(2k)!= 1− x2
2!+
x4
4!− x6
6!+ · · · ; I = R
Función1
1− x
1
1− x=
∞�
k=0
xk = 1 + x+ x2 + x3 + x4 + · · · ; I = {x ∈ R/|x| < 1}
Función ln(1− x)
ln(1− x) =∞�
k=0
xk+1
k + 1= x+
x2
2+
x3
3+
x4
4+
x5
5+ · · · ; I = {x ∈ R/|x| < 1}
Es posible determinar la serie de Maclaurin de cualquier función mediante el cálculo directode los coeficientes o haciendo uso de las series de funciones conocidas.
Ejemplo: 5.5. Escriba la serie de Maclaurin para la función f(x) = ln(2x + 3) , indi-cando el intervalo de convergencia.✞✝ ☎✆Solución: La función dada se puede escribir en la forma:
f(x) = ln(2x+ 3) = ln
�3
�1 +
2x
3
��= ln(3) + ln
�1 +
2x
3
�= ln(3) + ln
�1− −2x
3
�
Haciendo uso de la serie de la función ln(1− x), resulta:
ln(2x+ 3) = ln(3) +∞�
k=0
�−2x3
�k+1
k + 1= ln(3)− 2x
3+
4x2
2 · 32 − 8x3
3 · 33 +16x4
4 · 34 − 32x4
5 · 35 + · · ·
El intervalo de convergencia viene dado por:
I =�x ∈ R/
����2x
3
���� < 1
�=
�x ∈ R/|x| < 3
2
�
� Solución de ejemplo 5.5 con Máxima: Para expandir la función ln(2x + 3) en po-linomios de Taylor de grado 8, entorno al punto x0 = 0, mediante Máxima, se ejecuta elcomando:

5.3. SERIES DE POTENCIA 309
(%i1) taylor(log(2*x+3),x,0,8);
Cuyo resultado es:
( %o1) log (3) +2 x
3− 2 x2
9+
8 x3
81− 4 x4
81+
32 x5
1215− 32 x6
2187+
128 x7
15309− 32 x8
6561+ ...
Si deseamos encontrar la expresión en series de potencias, ejecutamos el comando:
(%i2) powerseries(log(2*x+3), x, 0);
Obteniendo:( %o2) 2
∞�i=0
3−i−1 (−2)i xi+1
i+ 1
� Solución de ejemplo 5.5 con Matlab: Usando MATLAB es comando es el mismo,pero los argumentos de entrada difieren. En este caso se define el número de términos de laserie deseados y el punto entorno al cual se desarrollará. La secuencia de comandos a ejecutares:
>> syms x ; pretty(taylor(log(2*x+3),9,0))
8 7 6 5 4 3 232 x 128 x 32 x 32 x 4 x 8 x 2 x 2 x
- ----- + ------ - ----- + ----- - ---- + ---- - ---- + --- + log(3)6561 15309 2187 1215 81 81 9 3
Multiplicación de series de potenciasSe desea encontrar la serie de Maclaurin del producto de dos funciones conocidas las seriesindividuales, así:
f(x) =∞�
k=0
anxn g(x) =
∞�
m=0
bmxm
El producto se obtiene de multiplicar cada término de la primera serie por la segunda, así:
f(x)g(x) = a0
∞�
m=0
bmxm+a1x
∞�
m=0
bmxm+a2x
2∞�
m=0
bmxm+a3x
3∞�
m=0
bmxm+· · ·+anx
n∞�
m=0
bmxm
La expresión anterior se puede escribir en la forma:
f(x)g(x) =∞�
m=0
a0bmxm+
∞�
m=0
a1bmxm+1+
∞�
m=0
a2bmxm+2+
∞�
m=0
a3bmxm+3+ · · ·+
∞�
m=0
anbmxm+n
Un análisis detallado de la expresión anterior nos permite decir que la serie correspondienteal producto es de la forma:
f(x)g(x) = c0 + c1x+ c2x2 + c3x
3 + · · · =∞�
i=0
cixi

310 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Donde:
c0 = a0b0c1 = a0b1 + a1b0c2 = a0b2 + a1b1 + a2b0
...
ci =i�
j=0
ajbi−j
El intervalo de convergencia del producto es la intersección de los intervalos de convergenciaindividuales.
Ejemplo: 5.6. Encuentre la serie de Maclaurin de la función f(x) = e−xx sin(2x), indi-cando el intervalo de convergencia.✞✝ ☎✆Solución: Partimos de las series de cada uno de los factores, así:
ex =∞�
k=0
(−x)k
k!= 1− x+
x2
2!− x3
3!+ · · · ; I = R
sin(2x) =∞�
k=0
(−1)k(2x)2k+1
(2k + 1)!= 2x− (2x)3
3!+
(2x)5
5!− (2x)7
7!+ · · · ; I = R
Con base en lo presentado, resulta:
e−x sin(2x) = 2x− 2x2 − 1
3x3 + x4 − 19
60x5 + · · · ; I = R
� Solución de ejemplo 5.6 con Máxima:
(%i1) taylor(exp(-x)*sin(2*x),x,0,8);
( %o1) 2 x− 2 x2 − x3
3+ x4 − 19 x5
60− 11 x6
180+
139 x7
2520− x8
120+ ...
� Solución de ejemplo 5.6 con Matlab:
>> syms x; pretty(taylor(exp(-x)*sin(2*x),9,0))
8 7 6 5 3x 139 x 11 x 19 x 4 x 2
- --- + ------ - ----- - ----- + x - -- - 2 x + 2 x120 2520 180 60 3

5.3. SERIES DE POTENCIA 311
División de series de potenciasPara dividir dos series de potencias se usa el algoritmo de división de polinomios. El procesopuede resultar bastante tedioso, pero no hay otra alternativa. En cuanto al intervalo de con-vergencia, se debe garantizar que el denominador no se anule en el mismo.
Ejemplo: 5.7. Encuentre la serie de Maclaurin de la función f(x) = tan(x), indicandoel intervalo de convergencia.✞✝ ☎✆Solución: Puesto que la tangente es el cociente entre la función seno y la función coseno,se concluye que el intervalo de convergencia de la serie de Maclaurin es:
I =�x ∈ R/|x| < π
2
�
El cociente indicado es:
tan(x) =
�∞k=0
(−1)kx2k+1
(2k + 1)!�∞
k=0
(−1)kx2k
(2k)!
=x− x3
3!+
x5
5!− x7
7!+ · · ·
1− x2
2!+
x4
4!− x6
6!+ · · ·
Efectuando la división, resulta:
tan(x) = x+1
3x3 +
2
15x5 +
17
315x7 + · · ·
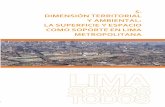
En la figura 5.1 se muestra la función tan(x) en linea sólida junto con los polinomios de apro-ximación de grados n = 3, 5 y 7 en lineas punteadas. Puede verse que la convergencia paran = 7 es perfecta en el intervalo: [−1, 1].
� Solución de ejemplo 5.7 con Máxima: Calculamos el polinomio de Taylor de gra-do 15, entorno de x0 = 0:
(%i1) taylor(tan(x),x,0,15);
( %i1) x+x3
3+
2 x5
15+
17 x7
315+
62 x9
2835+
1382 x11
155925+
21844 x13
6081075+
929569 x15
638512875+ ...
Si queremos encontrar la expresión en series de potencias:
(%i2) powerseries(tan(x),x,0);
Cuyo resultado es:
( %o2)∞�i=0
(−1)i−1 (22 i − 1) 22 i bern (2 i) x2 i−1
(2 i)!

312 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
-1 0 1
-4
-3
-2
-1
1
2
3
4
n =3
n =5
n =7
Figura 5.1: Gráfica de tan(x) y polinomios de aproximación de grados n = 3, 5 y 7
Donde bern son los números de Bernoulli2.
� Solución de ejemplo 5.7 con Matlab:
>> syms x; pretty(taylor(tan(x),16,0))
15 13 11 9 7 5 3929569 x 21844 x 1382 x 62 x 17 x 2 x x---------- + --------- + -------- + ----- + ----- + ---- + -- + x638512875 6081075 155925 2835 315 15 3
EJERCICIOS 5.2.
Escriba la serie de Maclaurin para cada una de las siguientes funciones, indicando el intervalode convergencia:
1. f(x) =sin(x)
1 + x
2. f(x) = sinh(x)
3. f(x) =cos(2x)
(1 + x)2
4. f(x) = ln
�1 + x
1− x
�
2Remítase al Apéndice A.3.

5.4. SOLUCIÓN POR SERIES DE ECUACIONES DIFERENCIALES 313
5. f(x) = x cot(x)
6. f(x) = tan−1(x)
7. f(x) =cosh(x)
1− x2
8. f(x) =ln(3x+ 5)
1− x2
9. f(x) =√x+ 1
10. f(x) =1√
x+ 1
5.4. SOLUCIÓN POR SERIES DE ECUACIONES DI-FERENCIALES
Consideremos una ecuación diferencial lineal de segundo orden, así:
y��(x) + p(x)y�(x) + q(x)y(x) = r(x)
De acuerdo con lo estudiado previamente, si {y1, y2} es un conjunto fundamental de solucionesde la homogénea y yss es una solución particular de la no homogénea, la solución general dela ecuación diferencial viene dada por:
y(x) = C1y1 + C2y2 + yss
5.4.1. Teoría general de solución por seriesSe considerará, en primera instancia, la ecuación diferencial homogénea, es decir, la ecuacióndiferencial:
y��(x) + p(x)y�(x) + q(x)y(x) = 0
Las siguientes definiciones nos orientarán para encontrar un conjunto fundamental de solu-ciones de la ecuación diferencial.
Función analíticaSe dice f(x) es una función analítica o función regular en un entorno del punto x0 siadmite un desarrollo en series de potencias en dicho entorno. Una condición necesariapara que la función sea analítica es que el siguiente límite exista:
lımx→x0
{f(x)}
Las funciones elementales tratadas previamente: exponencial, seno y coseno, son fun-ciones analíticas en los reales. La función: f(x) =
√x no es analítica en un entorno de
x0 = 0 ya que sus diferentes derivadas no están definidas en dicho punto.Cuando la función es el cociente de dos funciones analíticas, la analiticidad de la fun-ción está sujeta a la existencia del límite previamente establecido. Esto significa que unacondición suficiente, para que el cociente de dos funciones analíticas en un intervalo sea

314 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
analítico, es que el límite exista.
La función f(x) =sin(x)
x, por ejemplo, es analítica en x0 = 0 ya que:
lımx→0
sin(x)
x= 1
Punto ordinarioSe dice que x0 es un punto ordinario de la ecuación diferencial homogénea si las funcionesp(x) y q(x) son analíticas entorno de dicho punto.
Punto singularSe dice que x0 es un punto singular de la ecuación diferencial homogénea si una de lasfunciones p(x) o q(x) no es analítica en un entorno de dicho punto.
En general los puntos singulares o singularidades de la ecuación diferencial son númeroscomplejos y se representan mediante cruces en dicho plano.
Ejemplo: 5.8. Determine las singularidades de las siguientes ecuaciones diferenciales:
1. (x− x3)y�� + sin(x)y� + xy = 0
2. (8 + x3)y�� + xy� + 2y = 0
3. (x2 + 2x+ 10)y�� + xy� + 2y = 0✞✝ ☎✆Solución:
1. A partir de la ecuación se tiene que:
p(x) =sin(x)
x(1− x2)q(x) =
1
1− x2
Por simple inspección, las singularidades son x = ±1.
2. En este caso, se tiene:
p(x) =x
(x+ 2)(x2 − 2x+ 4)q(x) =
2
(x+ 2)(x2 − 2x+ 4)
Por simple inspección se tiene que: x = −2 es una singularidad y las otras dos singula-ridades, son: x = 1± j
√3 .
3. El estudiante puede mostrar que las singularidades son: x = −1± j3

5.4. SOLUCIÓN POR SERIES DE ECUACIONES DIFERENCIALES 315
5.4.2. Soluciones entorno a un punto ordinario
Consideremos la ecuación diferencial homogénea:
y��(x) + p(x)y�(x) + q(x)y(x) = 0
Si x0 es un punto ordinario de la ecuación diferencial y la singularidad más cercana a dichopunto es xs, la ecuación admite soluciones de la forma de Taylor en un intervalo I, dado por:
I = {x ∈ R/|x− x0| < |xs − x0|}
Así las cosas, la serie: y(x) =∞�k=0
ck(x − x0)k es solución de la ecuación diferencial y, en
consecuencia, la debe satisfacer idénticamente. Expandiendo la serie, se tiene:
y(x) = c0 + c1(x− x0) + c2(x− x0)2 + · · ·+ cN(x− x0)
N + cN+1(x− x0)N+1 + · · ·
De acuerdo con lo estudiado previamente, los coeficientes de la serie se determinan de lasiguiente manera:
c0 = y(x0) c1 = y�(x0) c2 =y��(x0)
2!. . . cn =
yn(x0)
n!
Puesto que y(x0) y y�(x0) son las condiciones iniciales de la ecuación diferencial, es decir, sonconocidas, entonces las otras constantes se pueden obtener a partir de ellas, de la siguientemanera:Para hallar la constante: c2 =
y��(x0)
2!, se despeja y��(x) de la ecuación diferencial:
y��(x) = −q(x)y(x)− p(x)y�(x) (5.1)
Y se evalúa en x0, resultando:
c2 =−q(x0)y(x0)− p(x0)y�(x0)
2!=
−q(x0)c0 − p(x0)c12!
Para la constante c3 =y���(x0)
3!, se deriva la ecuación (5.1) resultando:
y���(x) = −q�(x)y(x)− [q(x) + p(x)]y�(x)− p(x)y��(x)
Evaluando en x0, nos queda:
c3 =−[q�(x0) + p(x0)]c0 + [−q(x0)− p(x0) + p2(x0)]c1
3!

316 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Procediendo de manera iterativa se determinan las demás constantes. Todas las constantesdependen de las constantes arbitrarias c0, c1. Lo anterior nos permite escribir la solución dela ecuación diferencial en la forma:
y(x) =c0 + c1(x− x0)2 +
�−q(x0)c0 − p(x0)c1
2!
�(x− x0)
2+
�−[q�(x0) + p(x0)]c0 + [−q(x0)− p(x0) + p2(x0)]c1
3!
�(x− x0)
3 + · · ·
La expresión anterior se puede escribir en la forma: y(x) = c0y1(x) + c1y2(x), con:
y1(x) = 1 +
�−q(x0)
2!
�(x− x0)
2 +
�−[q�(x0) + p(x0)]
3!
�(x− x0)
3 + · · ·
y2(x) = (x− x0) +
�−p(x0)
2!
�(x− x0)
2 +
�[−q(x0)− p(x0) + p2(x0)]
3!
�(x− x0)
3 + · · ·
Para que las dos funciones descritas conformen un conjunto fundamental de soluciones de lahomogénea se requiere que el Wronskiano sea diferente de cero en cada punto del intervalo deconvergencia.Recordando la fórmula de Abel (2.2), se tiene: W (x) = Ke−
�p(x)dx .
Puesto que p(x) es analítica en el intervalo de convergencia, el Wronskiano es diferente de ce-ro en el mismo, con lo cual: {y1, y2} es un conjunto fundamental de soluciones de la homogénea.
El procedimiento descrito para resolver la ecuación diferencial homogénea puede hacerse ex-tensivo a la ecuación diferencial no homogénea, sólo que el intervalo de convergencia debetener en cuenta a la función r(x).
Ejemplo: 5.9. Encuentre un conjunto fundamental de soluciones, entorno de x0 = 0para la ecuación diferencial de Airy, indicando el intervalo de convergencia.
y��(x)− xy(x) = 0
✞✝ ☎✆Solución: De acuerdo con lo planteado previamente, x0 = 0 es un punto ordinario de laecuación diferencial y dado que no hay singularidades, la ecuación admite dos soluciones dela forma de Maclaurin en el dominio de los reales, así:
y(x) = c0 + c1x+ c2x2 + c3x
3 + c4x4 + · · ·+ cNx
N + cN+1xN+1 + · · ·

5.4. SOLUCIÓN POR SERIES DE ECUACIONES DIFERENCIALES 317
Tal como acabamos de ver, c0, c1 son constantes arbitrarias. Por otro lado, se tiene:
y��(x) = xy(x) ⇒ y��(0) = 0 ⇒ c2 = 0
D3y(x) = xy�(x) + y(x) ⇒ D3y(0) = y(0) = c0 ⇒ c3 =c03!
D4y(x) = xy��(x) + 2y�(x) ⇒ D4y(0) = 2y�(0) = 2c1 ⇒ c4 =2c14!
D5y(x) = xD3y(x) + 3y��(x) ⇒ D5y(0) = 0 ⇒ c5 = 0
D6y(x) = xD4y(x) + 4D3y(x) ⇒ D6y(0) = 4D3y(0) = 4c0 ⇒ c6 =4c06!
De manera similar puede mostrarse que c7 =10c17!
. Con base en los resultados, se tiene:
y(x) = c0 + c1x+1
3!c0x
3 +2
4!c1x
4 +4
6!c0x
6 +10
7!c1x
7 + · · ·
El resultado puede escribirse en la forma:
y(x) = c0
�1 +
1
3!x3 +
4
6!x6 + · · ·
�+ c1
�x+
2
4!x4 +
10
7!x7 + · · ·
�
Ejemplo: 5.10. Encuentre la solución general en un entorno de x0 = 0 de la siguienteecuación diferencial, indicando el intervalo de validez.
(x2 + 4)y��(x) + y(x) = x✞✝ ☎✆Solución: Las singularidades de la ecuación diferencial son: x = ±j2.En consecuencia, el intervalo de convergencia de la solución es:
I = {x ∈ R/|x| < 2}
Para resolver la ecuación diferencial se parte de las constantes arbitrarias c0, c1 y se procedecomo en el ejemplo 5.9, así:
D2y(x) =x− y(x)
x2 + 4⇒ D2y(0) =
−y(0)
4= −c0
4⇒ c2 = − c0
4 · 2!
D3y(x) =4− x2 − (x2 + 4)y�(x)− 2xy(x)
(x2 + 4)2⇒ D3y(0) =
4− 4c116
⇒ c3 =1− c14 · 3!
D4y(x) =−4xDy(x)− 3D2y(x)
x2 + 4⇒ D4y(0) =
−3D2y(0)
4=
3c042 · 2! ⇒ c4 =
3c042 · 2!4!
D5y(x) =−6xD4y(x)− 7D3y(x)
x2 + 4⇒ D5y(0) =
−7D4y(0)
4⇒ c5 =
7(c1 − 1)
42 · 3!5!...

318 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Como puede notarse, es bastante laborioso el proceso de derivación sucesiva en este caso.Después de hacer el trabajo, resulta:
y(x) = c0 + c1x+�− c04 · 2!
�x2 +
�1− c14 · 3!
�x3 +
�3c0
42 · 2!4!
�x4 +
�7(c1 − 1)
42 · 3!5!
�x5 + · · ·
Reorganizando términos, podemos ver que además de las dos soluciones homogéneas tenemosla solución particular. La solución general es: y(x) = c0y1(x) + c1y2(x) + yss(x).Donde:
y1(x) = 1− x2
4 · 2! +3x4
42 · 2!4! − · · ·
y2(x) = x− x3
4 · 3! +7x4
42 · 3!5! − · · ·
yss(x) =x3
4 · 3! −7x5
42 · 3!5! + · · ·
Ejemplo: 5.11. Encuentre un conjunto fundamental de soluciones, entorno de x0 = 2para la siguiente ecuación diferencial, indicando el intervalo de convergencia.
xy��(x)− y�(x)− y(x) = 0✞✝ ☎✆Solución: De acuerdo con lo planteado previamente, x0 = 2 es un punto ordinario de laecuación diferencial, mientras que x0 = 0 es un punto singular de la misma.Por tanto, la ecuación admite dos soluciones de la forma de Taylor:
y(x) = c0 + c1(x− 2) + c2(x− 2)2 + c3(x− 2)3 + · · ·+ cN(x− 2)N + cN+1(x− 2)N+1 + · · ·
En el intervalo: I = {x ∈ R/|x− 2| < 2}Para facilitar el trabajo se hace el cambio de variable z = x − 2 y se efectúa el desarrolloentorno de z0 = 0. Para la nueva variable, la ecuación diferencial es:
(z + 2)y��(z)− y�(z)− y(z) = 0
Realizando el procedimiento, tenemos:
D2y(z) =y(z) + y�(z)
z + 2⇒ D2y(0) =
y(0) + y�(0)
2⇒ c2 =
c0 + c12 · 2!
D3y(z) =y�(z)
z + 2⇒ D3y(0) =
c12
⇒ c3 =c1
2 · 3!
D4y(z) =y�(z)−D3y(z)
z + 2⇒ D4y(0) =
y�(0)−D3y(0)
2⇒ c4 =
c14 · 4!
D5y(z) =D2y(z)− 2D4y(z)
z + 2⇒ D5y(0) =
c04
⇒ c5 =c0
4 · 5!

5.4. SOLUCIÓN POR SERIES DE ECUACIONES DIFERENCIALES 319
Con base en los resultados, la solución es:
y(z) = c0 + c1z +
�c0 + c12 · 2!
�z2 +
c12 · 3!z
3 +c1
4 · 4!z4 +
c04 · 5!z
5 + · · ·
y(z) = c0
�1 +
z2
2 · 2! +z5
4 · 5! + · · ·�+ c1
�z +
z2
2 · 2! +z3
2 · 3! +z4
4 · 4! + · · ·�
Retornando a la variable original, resulta:
y(x) = c0
�1 +
(x− 2)2
2 · 2! +(x− 2)5
4 · 5! + · · ·�+c1
�(x− 2) +
(x− 2)2
2 · 2! +(x− 2)3
2 · 3! +(x− 2)4
4 · 4! + · · ·�
5.4.3. Método de los coeficientes indeterminadosDe acuerdo con lo estudiado hasta el momento, es claro que puede resultar muy engorroso elcálculo de los coeficientes de la serie por el método de la derivación sucesiva de la ecuacióndiferencial. El método de los coeficientes indeterminados nos permite obviar ese inconveniente,veamos:Dada la ecuación diferencial:
a2(x)y��(x) + a1(x)y
�(x) + a0(x)y(x) = f(x)
Se parte de suponer que la ecuación diferencial admite una solución de la forma de Maclaurin,es decir, se resolverá la ecuación en un entorno de x0 = 0 , así:
y(x) =∞�
k=0
ckxk
Las dos primeras derivadas de la función vienen dadas por:
y�(x) =∞�
k=0
kckxk−1 y��(x) =
∞�
k=0
ck(k − 1)xk−2
Sustituyendo idénticamente en la ecuación diferencial, resulta:
a2(x)∞�
k=0
ck(k − 1)xk−2 + a1(x)∞�
k=0
kckxk−1 + a0(x)
∞�
k=0
ckxk ≡ f(x)
Es bueno precisar que los coeficientes de la ecuación diferencial y el término independien-te admiten desarrollos en series de Maclaurin. Preferentemente nos ocuparemos de resolverecuaciones diferenciales cuyos coeficientes sean polinómicos, lo cual facilita el procedimiento.

320 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Ejemplo: 5.12. Resuelva la ecuación diferencial del ejemplo 5.9 por el método de loscoeficientes indeterminados.✞✝ ☎✆Solución: La ecuación diferencial a resolver es la ecuación diferencial de Airy:
y��(x)− xy(x) = 0
Al sustituir las series correspondientes a la función y su segunda derivada, resulta la identidad:
∞�
k=0
k(k − 1)ckxk−2 −
∞�
k=0
ckxk+1 ≡ 0
Para poder agrupar las sumatorias en una sola, es necesario que sus índices coincidan, paraque los términos agrupados correspondan a las mismas potencias de la variable. Para esto,hacemos los cambios de variables n = k−2 enla primera sumatoria y n = k+1 en la segunda.Así las cosas, la identidad anterior queda en la forma:
∞�
n=−2
(n+ 2)(n+ 1)cn+2xn −
∞�
n=1
cn−1xn ≡ 0
Desarrollando los tres primeros términos de la primera sumatoria, resulta:
0 · c0x−2 + 0 · c1x−1 + 2c2x0 +
∞�
n=0
[(n+ 2)(n+ 1)cn+2 − cn−1]xn ≡ 0
A partir de la identidad se concluye que todos los coeficientes deben ser iguales a cero, estoes:
0 · c0 = 0 0 · c1 = 0 2c2 = 0 (n+ 2)(n+ 1)cn+2 − cn−1 = 0 para n = 1, 2, 3, . . .
De la expresión anterior se sigue que: c0 �= 0, c1 �= 0 y c2 = 0. Por otro lado, resulta unaecuación que permite hallar los demás coeficientes, conocida como ecuación de recurrencia yviene dada por:
cn+2 =cn−1
(n+ 1)(n+ 2)para n = 1, 2, 3, . . .
A partir de la ecuación de recurrencia, se obtienen los coeficientes:
c3 =c02 · 3 c4 =
c13 · 4 c5 =
c24 · 5 = 0, c6 =
c35 · 6 =
c02 · 3 · 5 · 6 , c7 =
c46 · 7 =
c13 · 4 · 6 · 7 , c8 = 0, . . .
La solución se puede escribir como:
y(x) = c0 + c1x+c03!x3 +
2c14!
x4 +4c06!
x6 +2 · 5c17!
x7 + · · ·

5.4. SOLUCIÓN POR SERIES DE ECUACIONES DIFERENCIALES 321
Finalmente, la solución queda en la forma:
y(x) = c0
�1 +
1
3!x3 +
4
6!x6 + · · ·
�+ c1
�x+
2
4!x4 +
2 · 57!
x7 + · · ·�
Los productos sucesivos 1·4·7 · · · y 2·5·8 · · · se pueden escribir más compactamente mediantela notación Pochhammer3 así:
3k�α +
1
3
�
k
= (3α + 1) · (3α + 4) · · · (3α + 3k − 2) con α = 0, 1
Con esto, la solución encontrada se puede escribir como:
y1 = 1 +1
3!x3 +
1 · 46!
x6 +1 · 4 · 7
9!x9 + · · · =
∞�
k=0
3k�1
3
�
k
x3k
(3k)!
y2 = x+2
4!x4 +
2 · 57!
x7 +2 · 5 · 810!
x10 + · · · =∞�
k=0
3k�2
3
�
k
x3k+1
(3k + 1)!
Las soluciones de la ecuación de Airy son conocidas como funciones de Airy y se suelenescribirse como combinaciones lineales de las funciones y1 y y2, así:
Ai(x) = k1y1 − k2y2 Bi(x) =√3 [k1y1 + k2y2]
Donde:
k1 = Ai(0) = Bi(0)√3
= 3−2/3Γ(23) ≈ 0.35503
k2 = −Ai�(0) = −Bi�(0)√3
= 3−1/3Γ(13) ≈ 0.25882
De tal forma que la solución de la ecuación diferencial es:
y(x) = c1Ai(x) + c2Bi(x)
La figura 5.2 ilustra las gráficas de las funciones de Airy Ai(x) en línea continua y Bi(x) enlínea punteada.
3Remítase al apéndice A.2

322 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Figura 5.2: Funciones de Airy Ai(x), Bi(x)
Ejemplo: 5.13. Encuentre la solución general de la ecuación diferencial:
y��(x) + xy(x) = sin(x) , entorno de x0 = 0✞✝ ☎✆Solución: Al aplicar el método, resulta:
∞�
k=0
k(k − 1)ckxk−2 +
∞�
k=0
ckxk+1 ≡
∞�
k=0
(−1)kx2k+1
(2k + 1)!
Realizando los cambios de variables: n = k − 2 en la primera sumatoria y n = k + 1 en lasegunda, nos queda:
∞�
n=−2
(n+ 2)(n+ 1)cn+2xn +
∞�
n=1
cn−1xn ≡ x− x3
3!+
x5
5!− x7
7!+ · · ·
Desarrollando los tres primeros términos de la primera sumatoria, resulta:
0 · c0x−2 + 0 · c1x−1 + 2c2x0 +
∞�
n=1
[(n+ 1)(n+ 2)cn+2 + cn−1]xn ≡ x− x3
3!+
x5
5!− x7
7!+ · · ·
A partir de la identidad se concluye que los tres primeros coeficientes deben ser iguales a cero,esto es:
0 · c0 = 0 0 · c1 = 0 2c2 = 0

5.4. SOLUCIÓN POR SERIES DE ECUACIONES DIFERENCIALES 323
Por otro lado se tiene que:
n = 1 ⇒ 2 · 3c3 + c0 = 1 ⇒ c3 =1− c02 · 3 =
1− c03!
n = 2 ⇒ 3 · 4c4 + c1 = 0 ⇒ c4 = − c13 · 4 = −2c1
4!
n = 3 ⇒ 4 · 5c5 + c2 = − 1
3!⇒ c5 = − 1
4 · 5 · 3! = − 1
5!
n = 4 ⇒ 5 · 6c6 + c3 = 0 ⇒ c6 = − c35 · 6 = − 1− c0
2 · 3 · 5 · 6 = −4(1− c0)
6!
n = 5 ⇒ 6 · 7c7 + c4 =1
5!⇒ c7 =
1
7!+
2c16 · 7 · 4! =
1
7!+
2 · 5c17!
n = 6 ⇒ 7 · 8c8 + c5 = 0 ⇒ c8 = − c57 · 8 =
6
8!
n = 7 ⇒ 8 · 9c9 + c6 =1
7!⇒ c9 =
1
9!+
4 · 7(1− c0)
9!...
La solución general nos queda:
y(x) = c0 + c1x+
�1− c03!
�x3 − 2c1
4!x4 − 1
5!x5 +
4(1− c0)
6!x6 +
�1
7!+
2 · 5c17!
�x7
+6
8!x8 +
�1
9!+
4 · 7(1− c0)
9!
�x9 + · · ·
Reorganizando términos, nos queda:
y(x) = c0
�1− x3
3!− 4x6
6!− 4 · 7x9
9!+ · · ·
�
+ c1
�x− 2x4
4!+
2 · 5x7
7!+ · · ·
�
+
�x3
3!− x5
5!− 4x6
6!+
x7
7!+
6x8
8!− 27x9
9!+ · · ·
�
Como puede verse, la solución obtenida son las funciones de Airy más una serie de términosindependientes que corresponden a la solución particular, esto es:
y(x) = c1Ai(x) + c2Bi(x) +
�x3
3!− x5
5!− 4x6
6!+
x7
7!+
6x8
8!− 27x9
9!+ · · ·
�

324 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Ejemplo: 5.14. Encuentre la solución general de la siguiente ecuación diferencial entornode x0 = 0.
y��(x) + exy(x) = x2✞✝ ☎✆Solución: La ecuación se puede expresar en la forma:
y��(x) +
� ∞�
k=0
xk
k!
�y(x) = x2
Puesto que admite soluciones de la forma de Maclaurin, se tiene:∞�
k=0
k(k − 1)ckxk−2 +
�1 + x+
x2
2!+
x3
3!+ · · ·
� ∞�
k=0
ckxk ≡ x2
Expandiendo algunos términos, resulta:∞�
k=0
k(k − 1)ckxk−2 +
∞�
k=0
ckxk +
∞�
k=0
ckxk+1 +
1
2!
∞�
k=0
ckxk+2 +
1
3!
∞�
k=0
ckxk+3 + · · ·
+1
N !
∞�
k=0
ckxk+N + · · · ≡ x2
Se realiza el cambio de variable: n = k − 2 en la primera sumatoria, n = k en la segunda,n = k + 1 en la tercera y así sucesivamente. Con los cambios resulta:
∞�
n=−2
(n+ 2)(n+ 1)cn+2xn +
∞�
n=0
cnxn +
∞�
n=1
cn−1xn +
1
2!
∞�
n=2
cn−2xn +
1
3!
∞�
n=1
cn−3xn + · · ·
1
N !
∞�
n=1
cn−Nxn + · · · ≡ x2
Desarrollando término a término e igualando los coeficientes, se obtiene:
n = −2 ⇒ 0 · c0 = 0 ⇒ c0 �= 0
n = −1 ⇒ 0 · c1 = 0 ⇒ c1 �= 0
n = 0 ⇒ 2c2 + c0 = 0 ⇒ c2 = −c02
n = 1 ⇒ 3 · 2C3 + c1 + c0 = 0 ⇒ c3 = −(c0 + c1)
3!
n = 2 ⇒ 3 · 4c4 + c2 + c1 +c02!
= 1 ⇒ c4 =1− c13 · 4 =
2(1− c1)
4!
n = 3 ⇒ 4 · 5c5 + c3 + c2 +c12!
+c03!
= 0 ⇒ c5 =3c0 − 2c1
5!
n = 4 ⇒ 5 · 6c6 + c4 + c3 +c22!
+c13!
+c04!
= 0 ⇒ c6 =9c0 − 2c1 + 2
6!...

5.4. SOLUCIÓN POR SERIES DE ECUACIONES DIFERENCIALES 325
La solución de la ecuación diferencial es:
y(x) =c0
�1− x
2− x3
3!+
3x5
5!+
32x6
6+ · · ·
�+ c1
�x− x3
3!− 2x4
4!− 2x5
5!+
2x6
6!+ · · ·
�
+
�2x4
4!− 2x6
6!+ · · ·
�
Otra forma de resolver la ecuación diferencial es la siguiente:
y =∞�
n=0
cnxn ex =
∞�
n=0
xn
n!⇒ ex · y =
∞�
n=0
bnxn con bn =
n�
k=0
cn−k
k!
Así las cosas, al sustituir idénticamente en la ecuación diferencial resulta:
∞�
n=2
n(n− 1)cnxn−2 +
∞�
n=0
bnxn ≡ x2
Haciendo los cambios correspondientes en los índices de las sumatorias, se tiene:
∞�
m=0
(m+ 2)(m+ 1)cm+2xm +
∞�
m=0
bmxm ≡ x2
Se obtiene, la ecuación de recurrencia:
cm+2 = −
m�k=0
cm−k
k!
(m+ 2)(m+ 1)para m �= 2
Particularmente, para m = 2, resulta:
c4 =1− b23 · 4 = 2
1− (c2 + c1 +c02 )
4!
El estudiante puede verificar que al desarollar los términos se llega al mismo resultado.
EJERCICIOS 5.3.
Resuelva, por los dos métodos, cada una de las siguientes ecuaciones diferenciales en unentorno del punto dado, indicando el intervalo de convergencia.
1. y��(x)− xy�(x)− y(x) = x , x0 = 0.
2. (1−x)y��(x)−xy�(x)−y(x) = 0 , x0 = 0.
3. xy��(x)− xy�(x)− y(x) = x , x0 = −1.
4. y��(x)− sin(x)y(x) = x , x0 = 0.

326 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
5. (1 − x2)y��(x) − 2xy�(x) + 2y(x) = 0 ,x0 = 0.
6. y��(x)− e−xy(x) = sin(x) , x0 = 0.
7. (x+ 2)y��(x)− xy(x) = x , x0 = 0.
8. xy��(x)− y�(x) + xy(x) = 0 , x0 = 1.
9. exy��(x)− y(x) = x , x0 = 0.
10. y��(x) + xy�(x)− y(x) = x2 , x0 = 0.
5.5. SOLUCIONES ENTORNO DE UN PUNTO SIN-GULAR
Consideremos la ecuación diferencial lineal homogénea de segundo orden:
y��(x) + p(x)y�(x) + q(x)y(x) = 0
Supongamos que: x0 ∈ R es un punto singular de la ecuación diferencial, esto es, al menos unade las funciones p(x), q(x) no es analítica en un entorno de dicho punto. Lo anterior significaque la ecuación diferencial no admite, necesariamente, soluciones de la forma de Taylor.
5.5.1. Puntos singulares regularesSe dice que x0 es un punto singular regular de la ecuación diferencial si las siguientes funcionesmodificadas son analíticas en un entorno de dicho punto:
P (x) = (x− x0)p(x) Q(x) = (x− x0)2q(x)
Lo anterior significa que dichas funciones tienen desarrollos en series de Taylor en algúnentorno de dicho punto, así:
P (x) = (x− x0)p(x) = a0 + a1(x− x0) + a2(x− x0)2 + a3(x− x0)
3 + · · ·Q(x) = (x− x0)
2q(x) = b0 + b1(x− x0) + b2(x− x0)2 + b3(x− x0)
3 + · · ·
La ecuación diferencial modificada es:
(x− x0)2y��(x) + (x− x0)P (x)y�(x) +Q(x)y(x) = 0
Como puede verse, la ecuación modificada es muy similar a la ecuación diferencial de Euler.Precisamente, debido a la analogía, George Frobenius4 propuso como solución de la ecuacióndiferencial una serie de la forma:
y(x) = (x− x0)λ
∞�
k=0
ck(x− x0)k =
∞�
k=0
ck(x− x0)k+λ (5.2)
4
Ferdinand Georg Frobenius (1849-1917): Matemático alemán reconocido por sus aportes a la teoría
de las ecuaciones diferenciales y a la teoría de grupos.

5.5. SOLUCIONES ENTORNO DE UN PUNTO SINGULAR 327
La serie es una modificación de la serie de Taylor en la que λ es un número complejo.Al sustituir en la ecuación diferencial, se obtiene:∞�
k=0
(k+λ)(k+λ−1)ck(x−x0)k+λ+P (x)
∞�
k=0
(k+λ)ck(x−x0)k+λ+Q(x)
∞�
k=0
ck(x−x0)k+λ ≡ 0
La identidad anterior se puede escribir en la forma:∞�
k=0
[(k + λ)(k + λ− 1) + P (x)(k + λ) +Q(x)] ck(x− x0)k+λ ≡ 0
La expresión anterior se verifica para todo valor de k . Particularmente se cumple cuandotoma el valor cero, así:
[λ(λ− 1) + P (x)λ+Q(x)] c0(x− x0)λ ≡ 0
Puesto que el primer coeficiente debe ser diferente de cero, para obtener soluciones diferentesde la trivial y dado que: P (x) y Q(x) son analíticas en x0, resulta una ecuación conocida comoecuación indicial que tiene dos soluciones para λ. La ecuación indicial es:
λ(λ− 1) + P (x0)λ+Q(x0) = 0 (5.3)
Realmente, la ecuación indicial debe escribirse en la forma:
λ(λ− 1) +
�lımx→x0
(x− x0)p(x)
�λ+
�lımx→x0
(x− x0)2q(x)
�= 0
A partir de la ecuación indicial resultan dos soluciones para la ecuación diferencial, así:
y1 =∞�
k=0
ak(x− x0)k+λ1 y2 =
∞�
k=0
bk(x− x0)k+λ2
Las dos soluciones obtenidas no forman, necesariamente, un conjunto fundamental de solu-ciones. Evidentemente, sí las raíces de la ecuación indicial son iguales sólo se obtiene unasolución. La otra solución puede obtenerse por reducción de orden, aunque se estudiará unmétodo alternativo más adelante.En cuanto al intervalo de convergencia de la solución, si x1 es la singularidad más próxima ax0, el intervalo de convergencia es:
{x ∈ R/x0 < x < |x− x1|}
Para simplificar el análisis se supondrá que x0 = 0, es decir, las dos soluciones de la ecuacióndiferencial están dadas por:
y1 =∞�
k=0
akxk+λ1 y2 =
∞�
k=0
bkxk+λ2

328 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
En este caso, La ecuación diferencial, se puede escribir en la forma:
x2y��(x) + xP (x)y�(x) +Q(x)y(x) = 0
Donde:
P (x) =P (0) + P �(0)x+P ��(0)x2
2!+
P ���(0)x3
3!+ · · ·
Q(x) =Q(0) +Q�(0)x+Q��(0)x2
2!+
Q���(0)x3
3!+ · · ·
Puesto que se suponen soluciones de la forma: y =∞�k=0
ckxk+λ, al sustituir la solución en la
ecuación diferencial, resulta la identidad:∞�
k=0
ck(k + λ)(k + λ− 1)xk+λ +
�P (0) + P �(0)x+
P ��(0)
2!x2 +
P ���(0)
3!x3 + · · ·
� ∞�
k=0
ck(k + λ)xk+λ+
�Q(0) +Q�(0)x+
Q��(0)
2!x2 +
Q���(0)
3!x3 + · · ·
� ∞�
k=0
ckxk+λ ≡ 0
Sacando factor común xλ y desarrollando la expresión anterior, se tiene:∞�
k=0
[(k + λ)(k + λ− 1) + P (0)(k + λ) +Q(0)]ckxk +
∞�
k=0
[(k + λ)P �(0) +Q�(0)]ckxk+1+
∞�
k=0
�P ��(0) +Q��(0)
2!
�ckx
k+2 + · · ·+∞�
k=0
�Pm(0) +Qm(0)
m!
�ckx
k+m ≡ 0
Se hace el cambio de variable n = k en la primera sumatoria, n = k + 1 en la segunda,n = k + 2 en la tercera, n = k +m en la m-ésima y así sucesivamente. Con esto, resulta:
∞�
n=0
[(n+ λ)(n+ λ− 1) + P (0)(k + λ) +Q(0)]cnxn +
∞�
n=1
[(n− 1 + λ)P �(0) +Q�(0)]cn−1xn+
∞�
n=2
�P ��(0) +Q��(0)
2!
�cn−2x
n + · · ·+∞�
n=m
�Pm(0) +Qm(0)
m!
�cn−mx
n ≡ 0
Expandiendo los términos de las sumatorias, tenemos:
[λ(λ− 1) + P (0)λ+Q(0)]c0x0
+ [[(λ+ 1)λ+ P (0)(λ+ 1) +Q(0)]c1 + [P �(0)λ+Q�(0)]c0] x
+
�[(λ+ 2)(λ+ 1) + P (0)(λ+ 2) +Q(0)]c2 + [P �(0)(λ+ 1) +Q�(0)]c1 +
�P ��(0) +Q��(0)
2!
�c0
�x2
+ · · · ≡ 0

5.5. SOLUCIONES ENTORNO DE UN PUNTO SINGULAR 329
Puesto que todos los coeficientes deben ser iguales a cero, se obtienen las siguientes ecuaciones:
[λ(λ− 1) + P (0)λ+Q(0)]c0 = 0
[[(λ+ 1)λ+ P (0)(λ+ 1) +Q(0)]c1 + [P �(0)λ+Q�(0)]c0] = 0�[(λ+ 2)(λ+ 1) + P (0)(λ+ 2) +Q(0)]c2 + [P �(0)(λ+ 1) +Q�(0)]c1 +
�P ��(0) +Q��(0)
2!
�c0
�= 0
... . . . = 0
Si definimos las funciones:
f(λ) = λ(λ− 1) + P (0)λ+Q(0) gm(λ) =Pm(0)λ+Qm(0)
m!
El conjunto de ecuaciones anteriores se puede escribir como:
f(λ) = [λ(λ− 1) + P (0)λ+Q(0)]c0 = 0...
f(λ+ n)cn +n�
m=1
gm(λ+ n−m)cn−m = 0
Con lo que resulta la ecuación de recurrencia:
cn = −
n�m=1
gm(λ+ n−m)cn−m
f(λ+ n)para n = 1, 2, 3, 4 . . . (5.4)
Puesto que estamos interesados en soluciones no triviales, se impone la condición co �= 0, conlo que resulta la ecuación indicial:
f(λ) = λ(λ− 1) + P (0)λ+Q(0) = 0 (5.5)
5.5.2. Naturaleza de las raíces de la ecuación indicialLas soluciones de la ecuación indicial (5.5) son:
λ1,λ2 =−P (0) + 1±
�(P (0)− 1)2 − 4Q(0)
2(5.6)
A partir de la ecuación de recurrencia dada en (5.4) se tiene:
cn =
−n�
m=1gm(λ+ n−m)cn−m
(λ+ n)(λ+ n− 1) + P (0)(λ+ n) +Q(0)para n = 1, 2, 3, 4 . . .

330 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Reemplazando la ecuación indicial (5.5) en la ecuación anterior, nos queda:
cn =
−n�
m=1gm(λ+ n−m)cn−m
n(n+ P (0)− 1 + 2λ)para n = 1, 2, 3, 4 . . .
Para los valores obtenidos en la (5.6), resulta la ecuación de recurrencia:
cn =
−n�
m=1gm(λ+ n−m)cn−m
n(n±�
(P (0)− 1)2 − 4Q(0) )para n = 1, 2, 3, 4 . . . (5.7)
Cuando las raíces de la ecuación indicial son iguales, el discriminante se anula y la ecuaciónde recurrencia, nos queda:
cn =
−n�
m=1gm(λ+ n−m)cn−m
n2para n = 1, 2, 3, 4 . . .
Y expandiendo los coeficientes, resulta:
c1 = −g1(λ)c0
c2 = − [g1(λ+ 1)c1 + g2(λ)c0]
22=
−g2(λ) + g1(λ+ 1)g1(λ)
4c0
...
Lo cual indica que sólo se encuentra una solución.
Supongamos ahora que las raíces son diferentes y que el discriminante�
(P (0)− 1)2 − 4Q(0) =√a no es un número natural. La ecuación de recurrencia queda:
cn =
−n�
m=1gm(λ+ n−m)cn−m
n(n±√a )
para n = 1, 2, 3, 4 . . .
Como puede verse, el denominador nunca se anula y, en consecuencia, resultan dos soluciones,una por cada valor de λ.
Supongamos ahora que las raíces son diferentes pero difieren en un entero, es decir, la raízcuadrada del discriminante es un número natural: N , así:
cn =
−n�
m=1gm(λ+ n−m)cn−m
n(n±N)para n = 1, 2, 3, 4 . . .
Como puede verse, el denominador no se anula para la mayor de las raíces, es decir, la mayorde las raíces proporciona una solución. Por otro lado, el denominador se anula para n = N ,caso en el cual se presentan dos posibilidades, así:

5.5. SOLUCIONES ENTORNO DE UN PUNTO SINGULAR 331
1. El numerador es diferente de cero.En este caso, el coeficiente: cN no se puede determinar.
2. El numerador es cero.En este caso, el coeficiente: cN es una constante arbitraria y, por tanto, resultan dossoluciones para la ecuación diferencial. Los demás coeficientes se obtienen a partir de laecuación de recurrencia que resulte de aplicar el método.
5.5.3. Método de Frobenius para resolver la ecuación diferencialDada la ecuación diferencial: a2(x)y��(x) + a1(x)y�(x) + a0(x)y(x) = 0, si x0 = 0 es un puntosingular regular de la ecuación diferencial y x1 es la singularidad más próxima a x0 = 0, laecuación diferencial admite, al menos, una solución de la forma:
y =∞�
k=0
ckxk+λ = xλ[c0 + c1x+ c2x
2 + c3x3 + c4x
4 + · · · ]
Las soluciones son válidas en el intervalo: I = {x ∈ R/0 < x < x1} .Para encontrar la solución se procede conforme a lo presentado previamente.
Ejemplo: 5.15. Encuentre la solución general de la siguiente ecuación diferencial, indi-cando el intervalo de convergencia:
xy��(x) + y�(x) + xy(x) = 0✞✝ ☎✆Solución: Por simple inspección, se tiene que p(x) = 1x y q(x) = 1 De donde: xp(x) = 1 y
x2q(x) = x2.Con base en lo estudiado, el punto x0 = 0 es la única singularidad de la ecuación diferencialy, además, es un punto singular regular. En consecuencia, la ecuación diferencial admite, almenos, una solución de la forma de Frobenius en el intervalo x > 0.Para resolver la ecuación diferencial partimos de las series correspondientes a la función y susdos primeras derivadas, así:
y =∞�
k=0
ckxk+λ y� =
∞�
k=0
(k + λ)ckxk+λ−1 y�� =
∞�
k=0
(k + λ)(k + λ− 1)ckxk+λ−2
Sustituyendo idénticamente en la ecuación diferencial, resulta:∞�
k=0
(k + λ)(k + λ− 1)ckxk+λ−2 +
∞�
k=0
(k + λ)ckxk+λ−1 +
∞�
k=0
ckxk+λ+1 ≡ 0
Sacando xλ de factor común y agrupando las dos primeras sumatorias, se tiene:
xλ
� ∞�
k=0
[(k + λ)(k + λ− 1) + (k + λ)]ckxk−1 +
∞�
k=0
ckxk+1
�≡ 0

332 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Puesto que xλ �= 0, la expresión anterior se puede escribir en la forma:∞�
k=0
(k + λ)2ckxk−1 +
∞�
k=0
ckxk+1 ≡ 0
Realizando los cambios de variable: n = k − 1 en la primera sumatoria y n = k + 1 en lasegunda, nos queda:
∞�
n=1
(n+ 1 + λ)2cn+1xn +
∞�
n=1
cn−1xn ≡ 0
Al desarrollar los dos primeros términos de la primera sumatoria resulta:
λ2c0x−1 + (λ+ 1)2c1x
0 +∞�
n=1
�(n+ 1 + λ)2cn+1 + cn−1
�xn ≡ 0
De la expresión anterior se concluye que, si c0 �= 0, la ecuación indicial es: λ2 = 0 y por tantolas raíces son iguales a cero. Como puede verse c1 = 0.La ecuación de recurrencia, para el valor hallado de λ viene dada por:
cn+1 = − cn−1
(n+ 1)2n = 1, 2, 3, 4, . . .
Asignando valores, resulta:
c0 �= 0 c1 = 0 c2 = − c022
c3 = 0 c4 = − c242
=c0
22 · 42 c5 = 0 c6 = − c022 · 42 · 62 · · ·
Se obtiene una solución de la forma:
y(x) = c0
�1− x2
22+
x4
22 · 42 − x6
22 · 42 · 62 + · · ·�
La otra solución se puede determinar por el método de reducción de orden estudiado en elcapítulo 2.4.1. Remítase al ejemplo 5.17.
Ejemplo: 5.16. Encuentre la solución general de la siguiente ecuación diferencial, indi-cando el intervalo de convergencia:
xy��(x) + 2y�(x) + xy(x) = 0✞✝ ☎✆Solución: Por simple inspección, se tiene que Con base en lo estudiado, el punto: x0 = 0es la única singularidad de la ecuación diferencial y, además, es un punto singular regular.En consecuencia, la ecuación diferencial admite, al menos, una solución de la forma de Fro-benius en el intervalo x > 0 . Para resolver la ecuación diferencial partimos de las seriescorrespondientes a la función y sus dos primeras derivadas, así:
y =∞�
k=0
ckxk+λ y� =
∞�
k=0
(k + λ)ckxk+λ−1 y�� =
∞�
k=0
(k + λ)(k + λ− 1)ckxk+λ−2

5.5. SOLUCIONES ENTORNO DE UN PUNTO SINGULAR 333
Sustituyendo idénticamente en la ecuación diferencial, resulta:∞�
k=0
(k + λ)(k + λ− 1)ckxk+λ−1 + 2
∞�
k=0
(k + λ)ckxk+λ−1 +
∞�
k=0
ckxk+λ+1 ≡ 0
Sacando xλ de factor común y agrupando las dos primeras sumatorias, se tiene:
xλ
� ∞�
k=0
[(k + λ)(k + λ− 1) + 2(k + λ)]ckxk−1 +
∞�
k=0
ckxk+1
�≡ 0
Puesto que xλ �= 0, la expresión anterior se puede escribir en la forma:∞�
k=0
(k + λ)(k + λ+ 1)ckxk−1 +
∞�
k=0
ckxk+1 ≡ 0
Realizando los cambios de variable: n = k − 1 en la primera sumatoria y n = k + 1 en lasegunda, nos queda:
∞�
n=1
(n+ 1 + λ)(n+ λ+ 2)cn+1xn +
∞�
n=1
cn−1xn ≡ 0
Al desarrollar los dos primeros términos de la primera sumatoria resulta:
λ(λ+ 1)c0x−1 + (λ+ 1)(λ+ 2)c1x
0 +∞�
n=1
[(n+ 1 + λ)(n+ 2 + λ)cn+1 + cn+1] xn ≡ 0
De la expresión anterior se concluye que, si c0 �= 0, la ecuación indicial es: λ(λ + 1) = 0 ypor tanto las raíces son λ1 = 0,λ2 = −1. Como puede verse, cuando se toma la menor de lasraíces resulta que c1 �= 0. La ecuación de recurrencia, para el valor tomado de λ viene dadapor:
cn+1 = − cn−1
n(n+ 1)n = 1, 2, 3, 4, . . .
Asignando valores, resulta:
c0 �= 0 c1 �= 0 c2 = −c02
c3 = −c13!
c4 = − c23 · 4 =
c04!
c5 = − c34 · 5 =
c15!
c6 = − c45 · 6 =
c06!
· · ·
Se obtiene la solución:
y(x) = x−1
�c0
�1− x2
2!+
x4
4!− x6
6!+ · · ·
�+ c1
�x− x3
3!+
x5
5!− x7
7!+ · · ·
��
Con base en lo estudiado previamente en la sección 5.3, se tiene:
y(x) = c0cos(x)
x+ c1
sin(x)
xpara x > 0
Como puede verse, la menor de las raíces de la ecuación indicial nos proporciona dos solucioneslinealmente independientes.

334 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
5.5.4. Método para calcular la segunda soluciónComo se sugirió en la sección 5.5.2, la determinación de la segunda solución de la ecuacióndiferencial depende de la naturaleza de las raíces de la ecuación indicial. Únicamente en loscasos en que las raíces son iguales o difieren en un entero el proceso de solución conlleva auna sola solución y1 de la ecuación diferencial. Veamos el procedimiento en cada caso:
1. Las raíces de la ecuación indicial son igualesEn este caso, la otra raíz se determina mediante el método de reducción orden, estudiadoen el capítulo 2.4.1, así:
y2 = y1
�e−
�p(x)dx
y21dx
La aplicación de la fórmula conlleva un trabajo operativo bastante arduo, sobre todocuando la solución conocida no es una función elemental.A continuación se muestra una alternativa que facilita los cálculos.Se parte de la ecuación diferencial modificada, así:
x2y��(x) + xP (x)y�(x) +Q(x)y(x) = 0�x2D2 + xP (x)D +Q(x)
�y(x) = 0
Usando la notación L(x,D) = x2D2+xP (x)D+Q(x) , la ecuación diferencial se escribecomo: L(x,D)y(x) = 0.
Se supone una solución de la forma: y(λ, x) =∞�k=0
ck(λ)xk+λ y se sustituye idénticamente
en la ecuación diferencial, obteniéndose:
[λ(λ− 1) + P (0)λ+Q(0)] c0xλ + [[(λ+ 1)λ+ P (0)(λ+ 1) +Q(0)]c1 + [P �(0)λ+Q�(0)] xλ+1
+
�[(λ+ 2)(λ+ 1) + P (0)(λ+ 2) +Q(0)]c2 + [P �(0)(λ+ 1) +Q�(0)]c1
+
�P ��(0) +Q��(0)
2!
�c0
�xλ+2 + · · · ≡ 0
La expresión anterior se puede escribir en la forma:
f(λ)c0xλ + [f(λ+ 1)c1 + g1(λ)c0]x
λ+1 + [f(λ+ 2)c2 + g1(λ+ 1)c1 + g2(λ)c0]xλ+2 + · · ·
+
�f(λ+ n)cn +
n�
m=1
gm(λ+ n−m)cn−m
�xn+λ ≡ 0
Cuando las raíces de la ecuación característica son iguales, es decir λ1 = λ2, se tieneque f(λ) = (λ − λ1)2 . En este caso todos los coeficientes de la combinación lineal soniguales a cero, excepto el primero, con lo cual la ecuación diferencial modificada es:
�x2D2 + xP (x)D +Q(x)
�y(λ, x) = (λ− λ1)
2c0xλ

5.5. SOLUCIONES ENTORNO DE UN PUNTO SINGULAR 335
Equivalentemente se tiene:L(x,D)y(λ, x) = (λ− λ1)2c0xλ.
Derivando parcialmente con respecto a λ, se tiene:
∂L(x,D)y(λ, x)
∂λ=
∂(λ− λ1)2c0xλ
∂λ=
�(λ− λ1)
2 ln(x) + 2(λ− λ1)�c0x
λ
Ya que el operador L(x,D) no depende de λ, la expresión anterior es equivalente a lasiguiente:
L(x,D)
�∂y(λ, x)
∂λ
�=
�(λ− λ1)
2 ln(x) + 2(λ− λ1)�c0x
λ
Evaluando en el valor conocido para λ, resulta:
L(x,D)
�∂y(λ, x)
∂λ
�����λ=λ1
= 0
Lo anterior significa que la función:∂y(λ, x)
∂λtambién es solución de la ecuación diferen-
cial.
Ya que y(λ, x) =∞�k=0
ck(λ)xk+λ, derivando con respecto a λ resulta:
∂y(λ, x)
∂λ=
∞�
n=1
c�k(λ)xk+λ + y(λ, x) ln(x)
En conclusión, las dos soluciones de la ecuación diferencial son:
y1 = y(λ, x) y2 =∂y(λ1, x)
∂λ
En la práctica se supone que la segunda solución es de la forma:
y2 =∞�
k=0
bkxk+λ + Cy1 ln(x)
Donde la constante C se escoge convenientemente.
2. Las raíces de la ecuación indicial difieren en un entero
Cuando las raíces difieren en un entero, la mayor de ellas proporciona una solución.La otra solución puede determinarse por un procedimiento similar al desarrollado previamente.Omitiendo los detalles, la segunda solución presenta la forma:
y2 =∞�
k=0
bkxk+λ2 + Cy1 ln(x)

336 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Ejemplo: 5.17. Encuentre una segunda solución para la ecuación diferencial del ejemplo5.15.✞✝ ☎✆Solución: La ecuación diferencial a resolver es: xy��(x) + y�(x) + xy(x) = 0 .Tal como se procedió en el ejemplo 5.15, una de las soluciones hallada con λ = 0 es:
y1 = 1− x2
22+
x4
22 · 42 − x6
22 · 42 · 62 + · · ·
En cuanto a la segunda solución, se deriva dos veces y se sustituye en la ecuación diferencial,así:
y2 =∞�
k=0
bkxk + Cy1 ln(x) y�2 =
∞�
k=0
kbkxk−1 + C
�y1x
+ y�1 ln(x)�
y��2 =∞�
k=0
k(k − 1)bkxk−2 + C
�−y1x2
+2y�1x
+ y��1 ln(x)
�
Al sustituir en la ecuación diferencial, resulta:
C
�−y1x2
+2y�1x
+ y��1 ln(x)
�+
∞�
k=0
k(k − 1)bkxk−2+
C�y1x
+ y�1 ln(x)�+
∞�
k=0
kbkxk−1 +
∞�
k=0
bkxk + Cy1 ln(x) ≡ 0
La expresión anterior se puede escribir en la forma:
C ln(x)[xy��1 + y�1 + xy1] + 2Cy�1 +∞�
k=0
k(k − 1)bkxk−1 +
∞�
k=0
kbkxk−1 +
∞�
k=0
bkxk+1 ≡ 0
Ahora, dado que y1 es solución de la ecuación diferencial, el primer término de la expresiónanterior es idénticamente nulo. Con esto y simplificando la expresión, nos queda:
∞�
k=0
k2bkxk−1 +
∞�
k=0
bkxk+1 ≡ −2Cy�1
Haciendo el cambio de variables n = k−1 en la primera sumatoria y n = k+1 en la segunda,se tiene:
∞�
n=1
(n+ 1)2bn+1xn +
∞�
n=1
cn−1xn ≡ −2C
dx
�1− x2
22+
x4
22 · 42 − x6
22 · 42 · 62 + · · ·�
Al expandir los dos primeros términos de la primera sumatoria, se tiene:
0.b0x−1 + b1x
0 +∞�
n=2
(n+ 1)2[bn+1 + bn−1]xn ≡ −2C
�0− 2x
22+
4x3
22 · 42 − 6x5
22 · 42 · 62 + · · ·�

5.5. SOLUCIONES ENTORNO DE UN PUNTO SINGULAR 337
De lo anterior se sigue que b0 �= 0 y b1 = 0. Por otro lado, si se hace 2C = 1, resulta laidentidad:
∞�
n=2
(n+ 1)2[bn+1 + bn−1]xn ≡
�2x
22− 4x3
22 · 42 +6x5
22 · 42 · 62 − · · ·�
Asignamos valores a n para determinar los coeficientes bk de la solución:
n = 1 ⇒ 4b2 + b0 =1
2⇒ b2 =
1
8− b0
4n = 2 ⇒ 9b3 + b1 = 0 ⇒ b3 = 0
n = 3 ⇒ 16b4 + b2 = − 1
16⇒ b4 = − 1
256− 1
16
�1
8− b0
4
�⇒ b4 =
1
256+
b064
n = 4 ⇒ b5 = 0
n = 5 ⇒ b6 = − 1
27650− b0
2304
En consecuencia, la segunda solución es:
y2 =1
2y1 ln(x) + b0 +
�1
8− b0
4
�x2 +
�1
256+
b064
�x4 −
�1
27650+
b02304
�x6 + · · ·
1
2y1 ln(x) +
x2
8+
x4
256+
x6
27650+ · · ·+ b0
�1− x2
4+
x4
64− x6
2304+ · · ·
�
Puesto que la serie que acompaña a la constante b0 es la primera solución, entonces, la segundasolución es:
y2 =1
2y1 ln(x) +
x2
8+
x4
256+
x6
27650+ · · ·
Ejemplo: 5.18. Encuentre la solución general de la siguiente ecuación diferencial entornode x0 = 0, indicando el intervalo de convergencia.
�x− x2
�y��(x)− 2y�(x) + 6y(x) = 0
✞✝ ☎✆Solución: Por simple inspección, se tiene que p(x) = − 2
x(1− x)y q(x) =
6
x(1− x). Se
sigue que:
P (x) = xp(x) = − 2
1− xQ(x) = x2q(x) =
6
1− x
En consecuencia x0 = 0 es un punto singular regular y la singularidad más cercana es x1 = 1.Por tanto, el intervalo de validez es:
I = {x ∈ R/0 < x < 1}

338 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Para resolver la ecuación diferencial se suponen soluciones de la forma de Frobenius, así:
y =∞�
k=0
ckxk+λ
Siguiendo el procedimiento usual, resulta:
∞�
k=0
(k + λ)(k + λ− 1)ckxk+λ−1 −
∞�
k=0
(k + λ)(k + λ− 1)ckxk+λ−1 − 2
∞�
k=0
(k + λ)ckxk+λ−1
+ 6∞�
k=0
ckxk+λ ≡ 0
Agrupando en dos sumatorias y sacando xλ como factor común, resulta:
∞�
k=0
(k + λ)(k + λ− 3)ckxk−1 −
∞�
k=0
[(k + λ)(k + λ− 1)− 6]ckxk ≡ 0
La expresión anterior se puede escribir en la forma:
∞�
k=0
(k + λ)(k + λ− 3)ckxk−1 −
∞�
k=0
(k + λ− 3)(k + λ+ 2)ckxk ≡ 0
Haciendo los cambios de variable adecuados, se tiene:
∞�
n=−1
(n+ λ+ 1)(n+ λ− 2)cn+1xn −
∞�
n=0
(n+ λ− 3)(n+ λ+ 2)cnxn ≡ 0
De donde la ecuación indicial es: f(λ) = λ(λ− 3) = 0.Y la ecuación de recurrencia es:
cn+1 =(n+ λ− 3)(n+ λ+ 2)
(n+ λ+ 1)(n+ λ− 2)cn n = 0, 1, 2, 3, . . .
De acuerdo con lo estudiado, la mayor de las raíces λ = 3 proporciona una solución, así:
y1 =∞�
k=0
ckxk+3 = x3
�c0 + c1x+ c2x
2 + c3x3 + · · ·
�
Donde c0 �= 0 y la ecuación de recurrencia queda: cn+1 =n(n+ 5)
(n+ 4)(n+ 1)cn n = 0, 1, 2, . . .
De donde se obtiene: c1 = 0, c2 = 0, c3 = 0, . . . , cn = 0.Por lo tanto una solución de la ecuacón diferencial es: y1 = x3.

5.5. SOLUCIONES ENTORNO DE UN PUNTO SINGULAR 339
Para la menor de las raíces λ = 0, la ecuación de recurrencia nos queda:
cn+1 =(n− 3(n+ 2)
(n+ 1)(n− 2)cn n = 0, 1, 2, . . .
Como puede verse, la constante c3 no se puede determinar y por tanto es necesario hallar lasegunda solución por otro método.
a.) Por reducción de orden:
y2 = x3
�e−
� −2x(1−x)dx
x6dx =
�e2 ln(x)−2 ln(1−x)
x6dx = x3
�1
x4(1− x)2dx
Efectuando las operaciones, tenemos:
y2 =x3
� �4
x+
3
x2+
2
x3+
1
x4+
4
1− x− 1
(1− x)2
�dx
=x3
�4 ln(x)− 4 ln(1− x)− 3
x− 1
x2− 1
3x3+
1
1− x
�
=4x3 ln(x)− 4x3 ln(1− x)− x− 1
3+
x3
1− x
=4x3 ln(x)− 4x3∞�
k=0
xk+1
k + 1− x− 1
3+ x3
∞�
k=0
xk
Desarrollando los términos de las series de potencia y simplificando, obtenemos:
y2 = 4x3 ln(x)− 1
3− x− 3x2 + x3 + 5x4 + 3x5 +
7x6
3+ 2x7 +
9x8
5+ · · ·
La cual se puede escribir como:
y2 = 4
�x3 ln(x)− 1
12− x
4− 3x2
4+
x3
4+
5x4
4+
3x5
4+
7x6
12+
x7
2+
9x8
20+ · · ·
�
b.) Suponiendo solución de la forma y2 =∞�k=0
bkxk+λ2 + Cy1 ln(x) :
Para λ = 0 se tiene:
y2 =∞�
k=0
bkxk + Cx3 ln(x)
Tomando las dos primeras derivadas, resulta:
y�2 =∞�
k=0
kbkxk−1 + C[x2 + 3x2 ln(x)] y��2 =
∞�
k=0
k(k − 1)bkxk−2 + C[5x+ 6x ln(x)]

340 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Al sustituir en la ecuación diferencial: (x− x2) y��(x)− 2y�(x) + 6y(x) = 0, nos queda:
C[5x2 + 6x2 ln(x)] +∞�
k=0
k(k − 1)bkxk−1 − C[5x3 + 6x3 ln(x)]−
∞�
k=0
k(k − 1)bkxk
− 2C[x2 + 3x2 ln(x)]− 2∞�
k=0
kbkxk−1 + 6Cx3 ln(x) + 6
∞�
k=0
bkxk ≡ 0
Simplificando, tenemos:
C(3x2 − 5x3) +∞�
k=0
[k(k − 1)− 2k]bkxk−1 −
∞�
k=0
[6− k(k − 1)]bkxk ≡ 0
La expresión anterior se puede escribir en la forma:
∞�
k=0
k(k − 3)bkxk−1 −
∞�
k=0
(k − 3)(k + 2)bkxk ≡ −C(3x2 − 5x3)
Realizando los cambios adecuados, se tiene:
∞�
n=−1
(n+ 1)(n− 2)bn+1xn −
∞�
n=0
(n− 3)(n+ 2)bnxn ≡ −C(3x2 − 5x3)
Expandiendo el primer términos de la primera sumatoria, obtenemos:
0 · (−3)b0x0 +
∞�
n=0
[(n+ 1)(n− 2)bn+1 − (n− 3)(n+ 2)bn]xn ≡ −C(3x2 − 5x3)
De la identidad anterior se sigue que b0 �= 0. Por otro lado, si se hace C = 1, resulta:
∞�
n=0
[(n+ 1)(n− 2)bn+1 − (n− 3)(n+ 2)bn]xn ≡ −3x2 + 5x3
Por lo tanto, la ecuación de recurrencia es:
bn+1 =(n− 3)(n+ 2)
(n+ 1)(n− 2)bn para n �= 2, 3

5.5. SOLUCIONES ENTORNO DE UN PUNTO SINGULAR 341
n = 0 ⇒ b1 = 3b0n = 1 ⇒ b2 = −3b1
n = 2 ⇒ (3 · 0)b3 − (−4)b2 ≡ −3 ⇒ b2 = −3
4
n = 3 ⇒ 4b4 − 0 · b3 ≡ 5 ⇒ b4 =5
4
n = 4 ⇒ b5 =6
5 · 2b4 =3
4
n = 5 ⇒ b6 =2 · 76 · 3b5 =
7
12
n = 6 ⇒ b7 =3 · 87 · 4b6 =
1
2
n = 7 ⇒ b8 =4 · 98 · 5b7 =
9
20...
Se puede observar que b3 �= 0 y que b1 =b2−3
=1
4, b0 =
1
12.
Por tanto, la solución es:
y2 =x3 ln(x) + b0 + b1x+ b2x2 + b3x
3 + b4x4 + b5x
5 + · · ·
y2 =x3 ln(x) +1
12+
x
4− 3x2
4+ b3x
3 +5x4
4+
3x5
4+
7x6
12+
x7
2+
9x8
20+ · · ·
Como puede verse la solución obtenida es la solución general y = c1y1+ c2y2 que incluyela primera solución y1 = x3. Los términos restantes corresponden a la segunda soluciónque es equivalente a la obtenida con el primer procedimiento (dividida por 4).
EJERCICIOS 5.4.
Encuentre un conjunto fundamental de soluciones para cada una de las siguientes ecuacionesdiferenciales, indicando el intervalo de validez.
1. xy��(x)− 2y�(x) + xy(x) = 0
2. 2xy��(x) + y�(x)− xy(x) = 0
3. xy��(x)− (x− 1)y�(x) + y(x) = 0
4. xy��(x)− y�(x) + 4x2y(x) = 0
5. x2y��(x) + xy�(x) + (x2 + 4)y(x) = 0
6. x(x2 + 2)y��(x)− y�(x)− 6xy(x) = 0
7. x(1− x)y��(x) + 2y�(x) + xy(x) = 0
8. 4x2y��(x) + 4xy�(x) + (4x2 − 1)y(x) = 0
9. x2y��(x) + (x2 + x)y�(x)− y(x) = 0
10. 2xy��(x) + (1− 2x)y�(x)− y(x) = 0
11. x(1− x)y��(x)− 2y�(x) + 2y(x) = 0
12. xy��(x) + (2− x)y�(x) + y(x) = 0

342 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
13. xy��(x)− y�(x) + 4x3y(x) = 0
14. 2x2y��(x) + (x2 − x)y�(x) + y(x) = 0
15. 2x2y��(x)+(2x2−3)y�(x)+(x+2)y(x) =0
Mediante el cambio de variable z =1
x, encuentre la solución general para las siguientes
ecuaciones diferenciales:
16. xy��(x)− y�(x) + 4x3y(x) = 0
17. 4x3y��(x) + 10x2y�(x) + (2x+ 1)y(x) = 0
18. x4y��(x) + 2x3y�(x) + y(x) = 0
19. x4y��(x) + 2x2(x+ 1)y�(x) + y(x) = 0
Suponga solución de la forma: y =∞�n=0
cnx−n+λ para resolver la ecuación diferencial:
20. x2y��(x)− y�(x)− 2y(x) = 0
5.6. ECUACIONES DIFERENCIALES NOTABLESEn diversas aplicaciones de ingeniería y ciencias resultan ecuaciones diferenciales de coeficien-tes variables que merecen un tratamiento especial. Esta ecuaciones aparecen en problemasde la físca mecánica como en las vibraciones de membranas en un tambor, en la mecánicacuántica en la determinación de los momentos angulares y funciones de energía de la funciónde onda de los osciladores armónicos, entre otras.
Las soluciones de estas ecuaciones dan origen a funciones especiales como los polinomiosde Legendre, Chebyshev, Hermite, Laguerre y Bessel, que constituyen conjuntos ortogonalesen el plano de los reales, mediante los cuales se pueden interpolar funciones en un intervalode convergencia.
A continuación presentaremos algunas de las ecuaciones diferenciales notables con el pro-cedimiento para su solución mediante series de potencias.
5.6.1. Ecuación diferencial de LegendreLa ecuación diferencial de Legendre5 presenta la forma general:
(1− x2)y��(x)− 2xy�(x) + p(p+ 1)y(x) = 0 p /∈ R−
5
Adrien-Marie Legendre(1752-1833): matemático francés reconocido por sus aportes a la estadística y
teoría de números. Investigó sobre las funciones elípticas. Sus trabajos sobre raíces de los polinomios
inspiró la teoría de Galois y demostró el último teorema de Fermat.

5.6. ECUACIONES DIFERENCIALES NOTABLES 343
Puede verse que la ecuación diferencial admite soluciones de la forma de Maclaurin en elintervalo:
I = {x ∈ R/− 1 < x < 1}
En efecto, si se suponen soluciones de la forma: y =∞�k=0
ckxk, resulta:
∞�
k=0
k(k − 1)ckxk−2 −
∞�
k=0
k(k − 1)ckxk − 2
∞�
k=0
kckxk + p(p+ 1)
∞�
k=0
ckxk ≡ 0
Agrupando términos semejantes, se tiene:∞�
k=0
k(k − 1)ckxk−2 +
∞�
k=0
[k2 + k − p(p+ 1)]ckxk ≡ 0
⇒∞�
k=0
k(k − 1)ckxk−2 +
∞�
k=0
(k + p+ 1)(k − p)ckxk ≡ 0
Realizando el cambio de variable m = k − 2 en la primera sumatoria y m = k en la segunda,resulta:
∞�
m=−2
(m+ 2)(m+ 1)cm+2xm +
∞�
m=0
(m+ p+ 1)(m− p)cnxm ≡ 0
Sacando los dos primeros términos de la primera sumatoria, nos queda:
0 · (−1)c0x−2 + 0 · c1x−1 +
∞�
m=0
(m+ 2)(m+ 1)cm+2xm +
∞�
m=0
(m+ p+ 1)(m− p)cmxm ≡ 0
De la identidad anterior se sigue que:
c0 �= 0 c1 �= 0 cm+2 =(m+ p+ 1)(m− p)
(m+ 1)(m+ 2)cm con m = 0, 1, 2, . . .
Asignando algunos valores a m se tiene:
m = 0 ⇒ c2 =(0− p)(1 + p)
1 · 2 c0 =(0− p)(1 + p)
2!c0
m = 1 ⇒ c3 =(1− p)(2 + p)
2 · 3 c1 =(1− p)(2 + p)
3!c1
m = 2 ⇒ c4 =(2− p)(3 + p)
3 · 4 c2 =(0− p)(2− p)(1 + p)(3 + p)
4!c0
m = 3 ⇒ c5 =(3− p)(4 + p)
4 · 5 c3 =(1− p)(3− p)(2 + p)(4 + p)
5!c1
m = 4 ⇒ c6 =(4− p)(5 + p)
5 · 6 c4 =(0− p)(2− p)(4− p)(1 + p)(3 + p)(5 + p)
6!c0
m = 5 ⇒ c7 =(5− p)(6 + p)
6 · 7 c5 =(1− p)(3− p)(5− p)(2 + p)(4 + p)(6 + p)
7!c1

344 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
La solución de la ecuación diferencial es:
y(x) =c0
�1 +
(0− p)(1 + p)
2!x2 +
(0− p)(2− p)(1 + p)(3 + p)
4!x4 + · · ·
�
c1
�x+
(1− p)(2 + p)
3!x3 +
(1− p)(3− p)(2 + p)(4 + p)
5!x5 + · · ·
�
Como era de esperarse, aparecen dos soluciones linealmente independientes.Un caso de particular de interés es aquel en el que el parámetro p es un entero no negativo, esdecir p = n con n = 0, 1, 2, 3, . . ., en el cual una de las soluciones es un polinomio de grado n,conocido como polinomio de Legendre de primera especie y grado n, denotada como Ln(x),mientras que la otra solución es una serie infinita llamada función de Legendre de segundaespecie y grado n, denotada como Qn(x). De esta forma, la solución general de la ecuación deLegendre es:
y = c1Ln(x) + c2Qn(x)
A continuación se ilustran algunos casos particulares:
n = 0 ⇒ y1 =1 y2 = x+ 13x
3 + 15x
5 + 17x
7 + · · · = 12 ln
�1+x1−x
�
n = 1 ⇒ y1 =x y2 = 1− x2 − 13x
4 − 15x
6 − 17x
8 − · · · = −�x2 ln
�1+x1−x
�− 1
�
n = 2 ⇒ y1 =1− 3x2 y2 = x− 23x
3 − 15x
5 − 435x
7 − · · · = −2�
3x2−14 ln
�1+x1−x
�− 3x
2
�
n = 3 ⇒ y1 =x− 5x3
3y2 = 1− 6x2 + 3x4 + 4
5x6 + 3
7x8 · · · = 3
2
�5x3−3x
4 ln�1+x1−x
�− 5x2
2 + 23
�
Los polinomios normalizados de Legendre corresponden a normalizaciones de los obtenidospreviamente de tal manera que pasen por el punto (1, 1). La tabla 5.1 muestra algunos po-linomios normalizados de Legendre. Las figuras 5.3(a) y 5.3(b) ilustran las gráficas de lospolinomios de Legendre de grados n = 1, 2, 3, 4 de primera y segunda especie.Los polinomios de Legendre se pueden obtener a partir de la siguiente fórmula, conocida comofórmula de Rodrigue.
Pn(x) =1
2nn!
dn
dxn(x2 − 1)n
La siguiente fórmula de recurrencia6 se puede usar para determinar los polinomios de Legendrea partir de P (x) = 1 y P (x) = x:
Pn+1(x) =2n+ 1
n+ 1xPn(x)−
n
n+ 1Pn−1(x) n = 1, 2, 3, . . .
Puede demostrarse que: �Pn(x)dx =
Pn+1(x)− Pn−1(x)
2n+ 1
Los polinomios de Legendre presentan ciertas propiedades, entre las que son dignas de desta-car, las siguientes:
6También es válida para Qn(x)

5.6. ECUACIONES DIFERENCIALES NOTABLES 345
n Pn(x)
0 1
1 x
2 12(3x
2 − 1)
3 12(5x
3 − 3x)
4 18(35x
4 − 30x2 + 3)
5 18(63x
5 − 70x3 + 15x)
6 116(231x
6 − 315x4 + 105x2 − 5)
7 116(429x
7 − 693x5 + 315x3 − 35x)
Tabla 5.1: Polinomios normalizados de Legendre
Un polinomio de Legendre es estrictamente par o impar, esto es: Pn(−x) = (−1)nPn(x).
Los polinomios pares pasan por los puntos: (−1, 1) y (1, 1).
Los polinomios impares pasan por los puntos: (−1,−1) y (1, 1).
Todas las raíces de los polinomios de grado mayor o igual que uno son reales y están enel intervalo: −1 < x < 1.
Los polinomios son ortogonales en el intervalo: −1 < x < 1. Esto implica que:
� 1
−1
Pn(x)Pm(x)dx =
0 , si m �= n
2
2n+ 1, si m = n
La función generadora de los polinomios de Legendre es:
1√1− 2xt+ t2
=∞�
n=0
tnPn(x)
Los polinomios de Legendre se usan para interpolar funciones seccionalmente continuas en unintervalo, es decir, funciones que no necesariamente se pueden representar en series de Taylor.
Desarrollo de una función mediante polinomios de Legendre
Sabemos que para desarrollar una función mediante una serie de potencias se requiere quedicha función sea continua y tenga todas sus derivadas continuas en un entorno de cualquier

346 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
-1 0 1
1P0(x)
P1(x)
P2(x)
P3(x) P4(x)
(a) Polinomios normalizados de Legendre.
-1 0 1
-1
1
Q0(x)
Q4(x)
Q1(x)
Q2(x)Q3(x)
(b) Polinomios de Legendre de segunda especie.
Figura 5.3: Gráficas de polinomios de Legendre de primera y segunda especie
punto de su dominio.Lo anterior significa que una función seccionalmente continua no se puede expresar en términosde series de potencias de Taylor. Veremos a continuación que una función seccionalmentecontinua en el intervalo −1 < x < 1 se puede expresar en términos de los polinomios deLegendre.
f(x) = c0P0(x) + c1P1(x) + c2P2(x) + · · ·+ cnPn(x) =∞�
n=0
cnPn(x)
Este desarrollo es conocido como desarrollo Fourier-Legendre. Los coeficientes se determinancon base en la propiedad de ortogonalidad, así: si se multiplica la función por Pm(x) tenemos:
f(x)Pm(x) = c0P0(x)Pm(x) + c1P1(x)Pm(x) + c2P2(x)Pm(x) + · · ·+ cnPn(x)Pm(x)
Integrando en el intervalo y aplicando la propiedad de ortogonalidad, resulta:� 1
−1
f(x)Pm(x)dx =
� 1
−1
cnPn(x)Pm(x)dx para n = m
Despejando, tenemos:
cn =2n+ 1
2
� 1
−1
f(x)Pn(x)dx
Cuando la función no está definida en el intervalo −1 < x < 1 sino en un intervalo cualquiera,se puede hacer la siguiente conversión: Si f(x) está definida en el intervalo (a, b), tenemos
a < x < b. Si hacemos el cambio de variable x =b− a
2t +
b+ a
2t, la nueva variable t estará
en el intervalo (−1, 1).

5.6. ECUACIONES DIFERENCIALES NOTABLES 347
Ejemplo: 5.19. Considere la función:
f(x) =
0 , si x < −1
|x| , si − 1 < x < 1
0 , si x > 1
Exprese la función mediante un desarrollo de Legendre de orden cuatro.✞✝ ☎✆Solución: Puesto que la función es par, su desarrollo de Legendre de orden cuatro es:
P (x) = c0 + c2P2(x) + c4P4(x)
Los coeficientes se calculan, como:
c0 =1
2
� 1
−1
|x|dx =1
2
c2 =5
2
� 1
−1
|x|12(3x2 − 1)dx =
5
2
�2
8
�=
5
8
c4 =9
2
� 1
−1
|x|18(35x4 − 30x2 + 3)dx =
9
2
�−2
48
�=
−3
16
La interpolación de la función f(x) es:
P (x) =1
2+
5
8
�1
2(3x2 − 1)
�+
−3
16
�1
8(35x4 − 30x2 + 3)
�
=15
128+
105
64x2 − 105
128x4
� Solución de ejemplo 5.19 con Máxima: Máxima contiene el paquete orthopoly7 queincluye los polinomios Chebyshev, Laguerre, Hermite, Legendre, entre otros.A continuación se muestra la secuencia de comandos que calcula la interpolación de una fun-ción f(x) en polinomios de Legendere de orden 16, usando integración numérica de Romberg.
(%i1) f(x):=abs(x); M:16;P:0;for n:0 thru M step 1 do(c[n]:((2*n+1)/2)*romberg(f(x)*legendre_p(n,x),x,-1,1),P:P+c[n]*legendre_p(n,x));
7Para cargar el paquete es necesario ejecutar el comando load(orthopoly)

348 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Para visualizar el polinomio resultante:
(%i5) expand(P);
( %o5) − 220.1447292686608 x16 + 923.6828712923015 x14 − 1602.221581272252 x12
+1485.582153939406 x10 − 795.846016388275 x8 + 249.576757650896 x6 − 45.21306748726688 x4
+5.536278278436516 x2 + .03642276678281531
La figura 5.4 muestra las gráficas de P (x) de orden 4 y orden 16 comparadas con la fun-ción original f(x) = |x|.
-1 1
0
1
f(x) =|x|
P(x) de orden 4
P(x) de orden 16
Figura 5.4: Interpolación de |x| en polinomios de Legendre
Como ejemplo adicional se interpola la función f(x) = sin(x) en polinomio de orden 7:( %o10) − 429 x7
2226799+ 7529558253 x5
903982414844− 2276213711509795 x3
13657366323463152+ 14672563068765029853 x
14672563886840579632

5.6. ECUACIONES DIFERENCIALES NOTABLES 349
5.6.2. Ecuación diferencial de HermiteLa ecuación diferencial de Hermite8 presenta la forma general:
y��(x)− 2xy�(x) + 2py(x) = 0 p /∈ R−
Por simple inspección se deduce que x0 = 0 es un punto ordinario de la ecuación diferencialy, en consecuencia, admite dos soluciones de la forma de Maclaurin, así:
y =∞�
k=0
ckxk
Derivando dos veces y sustituyendo en la ecuación, resulta:∞�
k=0
k(k − 1)ckxk−2 − 2
∞�
k=0
kckxk + 2p
∞�
k=0
ckxk ≡ 0
La identidad anterior se puede escribir en la forma:∞�
k=0
k(k − 1)ckxk−2 − 2
∞�
k=0
(k − p)ckxk ≡ 0
Expandiendo los dos primeros términos en la primera sumatoria, nos queda:
0 · (−1)c0x−2 + 0 · c1x−1 +
∞�
k=2
k(k − 1)ckxk−2 − 2
∞�
k=0
(k − p)ckxk ≡ 0
Cambiando los índices de la primera y segunda serie por m = k−2 y m = k respectivamente,se sigue que:
c0 �= 0 c1 �= 0 cm+2 =2(m− p)
(m+ 2)(m+ 1)cm para m = 0, 1, 2, 3, . . .
Al evaluar algunos de los términos de la serie, resultan dos soluciones que forman un conjuntofundamental, así:
y1 = 1 +2(0− p)
2!x2 +
22(0− p)(2− p)
4!x4 +
23(0− p)(2− p)(4− p)
6!x6 + · · ·
y2 = x+2(1− p)
3!x3 +
22(1− p)(3− p)
5!x5 +
23(1− p)(3− p)(5− p)
7!x7 + · · ·
8
Charles Hermite(1822-1901): matemático francés reconocido por sus aportes a la teoría de números.
Investigó sobre interpolación polinómica, formas cuadráticas, funciones elípticas y fue el primero
en demostrar que e es un número transcendente, es decir, que no es raíz de ningún polinomio de
coeficientes racionales.

350 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
n Hn(x)
0 1
1 2x
2 4x2 − 2
3 8x3 − 12x
4 16x4 − 48x2 + 12
5 32x5 − 160x3 + 120x
6 64x6 − 480x4 + 720x2 − 120
7 128x7 − 1344x5 + 3360x3 − 1680x
Tabla 5.2: Polinomios normalizados de Hermite
Cuando p = n, con n = 0, 1, 2, 3, . . ., una de las soluciones es un polinomio de grado: n cono-cido como polinomio de Hermite, mientras que la otra es una serie infinita.
Asignando algunos valores a n, se obtienen las soluciones:
n = 0 ⇒ y1 = 1 y2 = x+x3
3+
x5
10+
x7
42+ · · ·
n = 1 ⇒ y1 = x y2 = 1− x2 − x4
6− x6
30− · · ·
n = 2 ⇒ y1 = 1− 2x2 y2 = x− x3
3− x5
30− x7
210− · · ·
n = 3 ⇒ y1 = x− 2x3
3y2 = 1− 3x2 +
x4
2+
x6
30+ · · ·
La tabla 5.2 muestra algunos polinomios de Hermite. La figura 5.5 ilustra las gráficas de lospolinomios de Hermite de grados n = 1, 2, 3 y 4. Los polinomios de Hermite se pueden obtenerdirectamente de la siguiente fórmula, conocida como fórmula de Rodrigue:
Hn(x) = (−1)nex2 dn
dxne−x2
A partir de los polinomios de Hermite H0(x) = 1 y H1(x) = 2x, se pueden determinar losotros polinomios de Hermite, mediante la siguiente fórmula de recurrencia:
Hn+1(x) = 2xHn(x)− 2nHn−1(x)
Los polinomios de Hermite son ortogonales con respecto a la función de peso e−x2 , así:� +∞
−∞e−x2
Hn(x)Hm(x)dx =
�0 , si n �= m
2nn!√π , si n = m

5.6. ECUACIONES DIFERENCIALES NOTABLES 351
-1 0 1
-20
-10
10
H0(x)
H1(x) H2(x)
H3(x)
H4(x)
Figura 5.5: Polinomios de Hermite
Ya que los polinomios de Hermite forman un conjunto ortogonal en R2, una función f(x) sepuede desarrollar, en el dominio −∞ < x < +∞, como una superposición de éstos, de lasiguiente manera:
f(x) = c0H0(x) + c1H1(x) + c2H2(x) + . . .+ cnHn(x) =∞�
n=0
cnHn(x)
Este desarrollo se conoce como desarrollo Fourier-Hermite. Usando la propiedad de ortogona-lidad se encuentra que:
cn =1
2nn!√π
� +∞
−∞e−x2
f(x)Hn(x)dx
La función generadora de los polinomios de Hermite es:
e2tx−t2 =∞�
k=0
Hn(x)tk
k!
Ejemplo: 5.20. Encuentre la solución general de la ecuación diferencial de Hermite deprimer orden.
y��(x)− 2xy�(x) + 2y(x) = 0✞✝ ☎✆Solución: Tal como se acaba de ver, una solución es y1 = H1(x) = 2x. La segunda soluciónse puede determinar de dos maneras:
Haciendo uso de los resultados previos:
y2 = 1− x2 − x4
6− x6
30− · · ·

352 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Por el método de reducción de orden:
y2 =H1(x)
�e−
�p(x)dx
H21 (x)
dx = 2x
�e−
�−2xdx
(2x)2dx =
x
2
�ex
2
x2dx =
x
2
�1
x2
∞�
k=0
x2k
k!dx
=x
2
� �1
x2+ 1 +
x2
2!+
x4
3!+
x6
4!+ · · ·
�dx
=x
2
�−1
x+ x+
x3
2! · 3 +x5
3! · 5 +x7
4! · 7 + · · ·�
=− 1
2
�1− x2 − x4
2! · 3 − x6
3! · 5 − x8
4! · 7 − · · ·�
Como puede verse, la solución es la misma solución y2 hallada previamente multiplicadapor −1
2 .
� Solución de ejemplo 5.20 con Máxima: Para calcular la segunda solución me-diante Máxima, con 16 términos de la serie, digitamos los comandos:
(%i1) y2=expand(hermite(1,x)*integrate(taylor(exp(x^2)/hermite(1,x)^2,x,0,15),x));
Cuyo resultado es:( %o1) y2 = x16
1209600+ x14
131040+ x12
15840+ x10
2160+ x8
336+ x6
60+ x4
12+ x2
2− 1
2
Ejemplo: 5.21. Con ayuda de Máxima, interpole la función f(x) = |x| en el rango−∞ < x < +∞ mediante polinomios de Hermite de orden 14.✞✝ ☎✆Solución: Ejecutamos en siguiente código:
(%i1) f(x):=abs(x); M:15;H:0;for n:0 thru M step 1 do(c[n]:(1/(2^n*n!*sqrt(%pi)))*integrate(exp(-x^2)*f(x)*hermite(n,x),x,-inf,inf),H:H+c[n]*hermite(n,x));
Para visualizar el polinomio resultante:
(%i6) expand(H);
Resultando:( %o6) x14
65520√π − 13 x12
15840√π + 143 x10
8640√π − 143 x8
896√π + 1001 x6
1280√π − 1001 x4
512√π + 3003 x2
1024√π + 429
2048√π
La figura 5.6 muestra la función f(x) y su interpolación mediante el polinomio de hermi-te.

5.6. ECUACIONES DIFERENCIALES NOTABLES 353
-2 -1 1 2
0
1
2
f(x)=|x|
H(x)
Figura 5.6: Interpolación de f(x) = |x| mediante polinomios de Hermite de orden 14.
5.6.3. Ecuación diferencial de ChebyshevLa forma general de la ecuación diferencial de Chebyshev9 es la siguiente:
(1− x2)y��(x)− xy�(x) + p2y(x) = 0 p /∈ R−
Puesto que x0 = 0 es un punto ordinario de la ecuación diferencial y dado que las singularida-des más cercanas son x = ±1, se garantizan dos soluciones linealmente independientes en elintervalo I = {x ∈ R/x < 1}. Tal como se estudió previamente, la ecuación diferencial admite
soluciones de la forma: y =∞�k=0
ckxk .
Sustituyendo idénticamente en la ecuación diferencial se tiene:
∞�
k=0
k(k − 1)ckxk−2 −
∞�
k=0
k(k − 1)ckxk −
∞�
k=0
kckxk + p2
∞�
k=0
ckxk ≡ 0
Agrupando las tres últimas sumatorias se tiene:
∞�
k=0
k(k − 1)ckxk−2 −
∞�
k=0
(k2 − p2)ckxk ≡ 0
9
Pafnuti Lvóvich Chebyshev(1821-1894): matemático ruso reconocido por sus aportes en la proba-
bilidad y estadística. Su trabajo sobre el cálculo de las raíces de ecuaciones le valió la medalla de
plata de la Univesidad de Moscú. Entre sus aportes importantes está el teorema de la desigualdad
de Chebyshev, usado para demostrar la cantidad de números primos.

354 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Efectuando los cambios de variable adecuados resulta:∞�
m=−2
(m+ 2)(m+ 1)cm+2xm −
∞�
m=0
(m2 − p2)cmxm ≡ 0
Sacando los dos primeros de la primera sumatoria, nos queda:
0 · (−1)c0x−2 + 0 · c1x−1 +
∞�
m=0
(m+ 2)(m+ 1)cm+2xm −
∞�
m=0
(m2 − p2)cmxm ≡ 0
De la expresión anterior se sigue que:
c0 �= 0 c1 �= 0 cm+2 =m2 − p2
(m+ 2)(m+ 1)cm para m = 0, 1, 2, 3, . . .
Así las cosas, la solución de la ecuación diferencial es:
y(x) = c0 + c1x+−p2
2!c0x
2 +12 − p2
3!c1x
3 +−p2(22 − p2)
4!c0x
4 +(12 − p2)(32 − p2)
5!c1x
5 + · · ·
En consecuencia, las soluciones de la ecuación diferencial son:
y1 =1 +−p2
2!x2 +
−p2(2− p2)
4!x4 +
−p2(2− p2)(42 − p2)
6!x6 + · · ·
y2 =x+12 − p2
3!x3 +
(12 − p2)(32 − p2)
5!x5 +
(12 − p2)(32 − p2)(52 − p2)
7!x7 + · · ·
Particularmente, cuando p = n = 0, 1, 2, . . ., una de las soluciones es un polinomio Tn(x) degrado n conocido como polinomio de Chebyshev de primera especie y la otra es una serie infi-nita que se escribe en términos de unos polinomios conocidos como polinomios de Chebyshevde segunda especie.
Asignando algunos valores a n se obtiene:
n = 0 ⇒ y1 = 1 y2 = x+x3
6+
3x5
40+
5x7
112+ · · · = sin−1(x)
n = 1 ⇒ y1 = x y2 = 1− x2
2− x4
8− x6
16− 5x8
128− · · · = −
√1− x2
n = 2 ⇒ y1 = 1− 2x2 y2 = x− x3
2− x5
8− x7
16− 5x9
128· · · = x
√1− x2
n = 3 ⇒ y1 = x− 3
2x y2 = 1− 9x2
2+
15x4
8+
7x6
16+
27x8
128+ · · · = −(4x2 − 1)
√1− x2
n = 4 ⇒ y1 = 1− 8x2 + 8x4 y2 = x− 5x3
2+
9x5
8+
33x7
64+ · · · = −4(8x3 − 4x)
√1− x2

5.6. ECUACIONES DIFERENCIALES NOTABLES 355
n Tn(x) Un(x)
0 1 1
1 x 2x
2 1− 2x2 4x2 − 1
3 4x3 − 3x 8x3 − 4x
4 8x4 − 8x2 + 1 16x4 − 12x2 + 1
5 16x5 − 20x3 + 5x 32x5 − 32x3 + 6x
6 32x6 − 48x4 + 18x2 − 1 64x6 − 80x4 + 24x2 − 1
7 64x7 − 112x5 + 56x3 − 7x 128x7 − 192x5 + 80x3 − 8x
Tabla 5.3: Polinomios normalizados de Chebyshev de primera y de segunda especie.
La solución general de la ecuación diferencial de Chebyshev se escribe como:
y =
�c1Tn(x) + c2
√1− x2 Un−1(x) , para n = 1, 2, 3, . . .
c1Tn(x) + c2 sin−1(x) , para n = 0
Los polinomios de Chebyshev se pueden determinar a partir de la fórmula:
Tn(x) = cos�n cos−1(x)
�, si |x| � 1
√1− x2 Un(x) = sin
�(n+ 1) cos−1(x)
�, si |x| � 1
También se pueden expresar en la forma:
Tn(x) =xn −�n
2
�xn−2(1− x2) +
�n
4
�xn−4(1− x2)2 − · · ·
Un(x) =
�n+ 1
1
�xn −
�n+ 1
3
�xn−2(1− x2) +
�n+ 1
5
�xn−4(1− x2)2 − · · ·
Los polinomios normalizados de Chebyshev Tn(x) corresponden a normalizaciones de los ob-tenidos previamente de tal manera que pasen por el punto (1, 1).La tabla 5.3 muestra algunos polinomios normalizados de Chebyshev y las figuras 5.7(a) y5.7(b) ilustran las gráficas de los polinomios de grados n = 1, 2, 3 y 4 de primera y segunda es-pecie. La siguiente fórmula de recurrencia10 permite hallar cualquier polinomio de Chebysheva partir de T0(x) = 1 y T1(x) = x.
Tn+1(x) = 2xTn(x) + Tn−1(x) n = 1, 2, 3, . . .
10También se cumple para Un(x)

356 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
0 1
-1
1T0(x)
T1(x)
T2(x)
T3(x) T4(x)
(a) Polinomios normalizados de Chebyshev de primera
especie Tn(x).
0 1
-1
1!(1-x2)U0(x)
sin-1(x)
!(1-x2)U1(x)
!(1-x2)U2(x)
!(1-x2)U3(x)
(b) Soluciones sin−1(x) y√1− x2 Un(x).
Figura 5.7: Soluciones de la ecuación de Chebyshev
Las siguientes ecuaciones de recurrencia relacionan los polinomios de primera y segunda es-pecie:
Tn(x) = Un(x)− xUn−1(x)
(1− x2)Un(x) = xTn(x)− Tn+1(x)
Los polinomios de Chebyshev son ortogonales11 en el intervalo: −1 < x < 1 con respecto a lafunción de peso (1− x2)−
12 , así:
� 1
−1
Tn(x)Tm(x)√1− x2
dx =
0 , si n �= m
π , si n = m = 0π2 , si n = m
Al igual que los polinomios de Legendre, los polinomios de Chebyshev se pueden usar paradesarrollar funciones seccionalmente continuas en el intervalo −1 < x < 1, en la forma:
f(x) =c02T0(x) + c1T1(x) + c2T2(x) + · · ·+ cnTn(x) =
C0
2+
∞�
n=1
cnTn(x)
Este desarrollo se conoce como desarrollo Fourier-Chebyshev. Usando la propiedad de orto-gonalidad, se determinan los coeficientes de la serie, resultando:
cn =2
π
� 1
−1
f(x)Tn(x)√1− x2
dx para n=0,1,2,3,. . .
11Los Un(x) también son ortogonales pero con respecto a la función de peso
√1− x2

5.6. ECUACIONES DIFERENCIALES NOTABLES 357
Precisamente, se usan a menudo en el diseño de filtros pasivos.
La función generadora de los polinomios de Chebyshev es:
1− tx
1− 2tx+ t2=
∞�
k=0
Tn(x)tk
Los polinomios de Chebyshev presentan ciertas propiedades, entre las que son dignas dedestacar, las siguientes:
Un polinomio de Chebyshev es estrictamente par o impar, esto es: Tn(−x) = (−1)nTn(x).
Los polinomios pares pasan por los puntos: (−1, 1) y (1, 1).
Los polinomios impares pasan por los puntos: (−1,−1) y (1, 1).
Todas las raíces de los polinomios de grado mayor o igual que uno son reales y están enel intervalo −1 < x < 1.
Ejemplo: 5.22. Con ayuda de Máxima, interpole la función f(x) = |x| en el rango−1 < x < 1 mediante polinomios de Chebyshev de orden 15.✞✝ ☎✆Solución: Ejecutamos en siguiente código:
(%i1) f(x):=abs(x); M:15;I:(2/%pi)*quad_qags(f(x)*chebyshev_t(0,x)/sqrt(1-x^2),x,-1,1);c[0]:I[1];T:c[0]/2;for n:1 thru M step 1 do(I:(2/%pi)*quad_qags(f(x)*chebyshev_t(n,x)/sqrt(1-x^2),x,-1,1),c[n]:I[1],T:T+c[n]*chebyshev_t(n,x));
Para visualizar el polinomio resultante:
(%i6) expand(T);
Resultando:( %o6) .006893693852583105 x15
π + 168.0232459311857 x14
π − 0.025853012321044 x13
π − 645.3680780706402 x12
π + 0.0387824385700343 x11
π
+1001.158891636406 x10
π − .02962812580925847 x9
π − 804.5131024112843 x8
π + .01212190830198423 x7
π + 358.3795880970659 x6
π
− .002545940467880352 x5
π − 89.59659848209887 x4
π + 2.3577503940887526 10−4 x3
π + 14.93312077557788 x2
π − 6.316798858618144 10−6 xπ
+0.133335501789843π

358 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
-1 1
0
1
f(x)=|x|
T(x)
Figura 5.8: Interpolación de f(x) = |x| mediante polinomios de Chebyshev de orden 15.
La figura 5.8 muestra la función f(x) y su interpolación mediante el polinomio de Chebyshev.
Ejemplo: 5.23. Encuentre la solución general de la ecuación diferencial de Chebyshev deprimer orden.
(1− x2)y��(x)− xy�(x) + y(x) = 0✞✝ ☎✆Solución: Con base en lo estudiado previamente, las dos soluciones de la ecuación diferencialson:
y1 = T1(x) = x y2 = 1− x2
2− x4
8− x6
16− 5x8
128− · · ·
La segunda solución también se puede determinar mediante el método de reducción de ordenasí:
y2 =C1(x)
�e−
� −x√1−x2
dx
C21(x)
dx = x
�e−
12 ln(1−x2)
x2dx = x
�1
x2√1− x2
dx
=−√1− x2
La solución se puede expresar en series de potencias como:
−√1− x2 = −
�1− x2
2− x4
8− x6
16− 5x8
128− · · ·
�
La cual es la misma solución hallada previamente pero con signo negativo.
Finalmente la solución general de la ecuación de Chebyshev de primer orden es:
y = c1x+ c2√1− x2 = c1T1(x) + c2
√1− x2 U0(x)

5.6. ECUACIONES DIFERENCIALES NOTABLES 359
5.6.4. Ecuación diferencial de LaguerreLa ecuación diferencial de Laguerre12 presenta la forma general:
xy��(x) + (1− x)y�(x) + py = 0 p /∈ R−
Como puede verse, el punto: x0 = 0 es un punto singular regular de la ecuación diferencial y,en consecuencia, admite al menos una solución de la forma de Frobenius, así:
y =∞�
k=0
ckxk+λ
Derivando dos veces y sustituyendo en la ecuación diferencial se tiene:
∞�
k=0
(k + λ− 1)(k + λ)ckxk+λ−1 +
∞�
k=0
(k + λ)ckxk+λ−1 −
∞�
k=0
(k + λ)ckxk+λ +
∞�
k=0
pckxk+λ ≡ 0
Agrupando sumatorias y sacando como factor común xλ, resulta:
∞�
k=0
(k + λ)2ckxk−1 −
∞�
k=0
(k − λ− p)ckxk ≡ 0
Realizando los cambios de variables adecuados, obtenemos:
∞�
m=−1
(m+ λ+ 1)2cm+1xm −
∞�
m=0
(m− λ− p)cmxm ≡ 0
Expandiendo el primer término de la primera sumatoria y agrupando sumatorias, resulta:
λ2c0x−1 +
∞�
m=0
[(m+ λ+ 1)2cm+1 − (m+ λ− p)cm]xm ≡ 0
Para soluciones diferentes de la trivial, se toma c0 �= 0, con lo que resulta: λ1 = λ2 = 0 y, portanto se tiene una solución de la forma: y1 =
∞�m=0
cmxm.
Para el valor dado de λ la ecuación de recurrencia es:
cm+1 =m− p
(m+ 1)2cm m = 0, 1, 2, 3, . . .
12
Edmond Nicolas Laguerre(1834-1886):matemático francés reconocido por sus aportes en la geometría
y el análisis matemático. Hizo carrera militar y fue catedrático de física matemática en el Colegio de
Francia.

360 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Evaluando algunos términos, resulta:
y1 = c0
�1− p
(1!)2x− p(1− p)
(2!)2x2 − p(1− p)(2− p)
(3!)2x3 − p(1− p)(2− p)(3− p)
(4!)2x4 − · · ·
�
La segunda solución se puede determinar mediante método propuesto en 5.5.4 o por reducciónde orden.Particularmente, cuando p = n = 0, 1, 2, 3, . . . la solución hallada es un polimonio de grado n,así:
n = 0 ⇒ y1 = 1
n = 1 ⇒ y1 = 1− x
n = 2 ⇒ y1 = 1− 2x+1
2x2
n = 3 ⇒ y1 = 1− 3x+3
2x2 − 1
6x3
n = 4 ⇒ y1 = 1− 4x+ 3x2 − 2
3x3 +
1
24x4
n = 5 ⇒ y1 = − x5
120+
5x4
24− 5x3
3+ 5x2 − 5x+ 1
n = 6 ⇒ y1 =x6
720− x5
20+
5x4
8− 10x3
3+
15x2
2− 6x+ 1
n = 7 ⇒ y1 = − x7
5040+
7x6
720− 7x5
40+
35x4
24− 35x3
6+
21x2
2− 7x+ 1
La solución polinómica recibe el nombre de polinomio de Laguerre de grado n. La tabla 5.4muestra algunos polinomios de Laguerre y la figura 5.9 ilustra las gráficas de los polinomiosde grados n = 1, 2, 3 y 4. Puede verse que todas las raíces de los polinomios se ubican enx > 0. Los polinomios de Laguerre se pueden determinar a partir de la siguiente fórmula,conocida como fórmula de Rodrigue:
Ln(x) = exdn
dxn(xne−x)
La siguiente fórmula de recurrencia permite hallar cualquier polinomio de Laguerre a partirde L0(x) = 1 y L1(x) = 1− x.
Ln+1(x) = (2n+ 1− x)Ln(x)− n2Ln−1(x) n = 1, 2, 3, . . .
Los polinomios de Laguerre son ortogonales para x > 0 con respecto a la función de peso e−x,así: � ∞
0
e−xLn(x)Lm(x)dx =
�0 , si n �= m
(n!)2 , si n = m

5.6. ECUACIONES DIFERENCIALES NOTABLES 361
n Ln(x)
0 1
1 −x+ 1
2 12(x
2 − 4x+ 2)
3 16(−x3 + 9x2 − 18x+ 6)
4 124(x
4 − 16x3 + 72x2 − 96x+ 24)
5 1120(−x5 + 25x4 − 200x3 + 600x2 − 600x+ 120)
6 1720(x
6 − 36x5 + 450x4 − 2400x3 + 5400x2 − 4320x+ 720)
7 15040(−x7 + 49x6 − 882x5 + 7350x4 − 29400x3 + 52920x2 − 35280x+ 5040)
Tabla 5.4: Polinomios de Laguerre
Los polinomios de Laguerre se pueden usar para desarrollar funciones en el intervalo x > 0,en la forma:
f(x) = c0L0(x) + c1L1(x) + c2L2(x) + · · ·+ cnLn(x) =∞�
n=0
cnLn(x)
Este desarrollo se conoce como desarrollo Fourier-Laguerre. Usando la propiedad de ortogo-nalidad, se determinan los coeficientes de la serie, resultando:
cn =1
(n!)2
� ∞
0
e−xf(x)Ln(x)dx
Ejemplo: 5.24. Usando el método de reducción de orden, determine la segunda soluciónde la ecuación:
xy��(x) + (1− x)y�(x) + y = 0✞✝ ☎✆Solución: La primera solución es: y1 = 1− x.
En cuanto a la segunda solución, tenemos:
y2 =(1− x)
�e�− 1−x
x dx
(1− x)2dx = (1− x)
�e− ln(x)+x
(1− x)2dx = (1− x)
�ex
x(1− x)2dx
=(1− x)
� �1
x+ 3 +
11x
2+
49x2
6+
87x3
8+
1631x4
120+
11743x5
720+ · · ·
�dx
=(1− x)
�ln(x) + 3x+
11x2
4+
49x3
18+
87x4
32+
1631x5
600+ · · ·
�
=(1− x) ln(x) + 3x− x2
4− x3
36− x4
288− x5
2400− x6
21600− · · ·

362 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
0 1 2 3 4 5 6
-1
1
2
L0(x)
L1(x)
L2(x)
L3(x)
L4(x)
Figura 5.9: Polinomios de Laguerre
5.6.5. Ecuación diferencial de Bessel
La ecuación diferencial de Bessel13 presenta la forma general:
x2y��(x) + xy�(x) + (x2 − p2)y(x) = 0 con p /∈ R−
Por simple inspección se ve que x0 = 0 es un punto singular regular de la ecuación diferencialy, en consecuencia, se garantiza al menos una solución de la forma: y =
∞�k=0
ckxk+λ.
La solución será válida en el intervalo: x > 0.
A sustituir idénticamente en la ecuación diferencial resulta:
∞�
k=0
(k + λ− 1)(k + λ)ckxk+λ +
∞�
k=0
(k + λ)ckxk+λ +
∞�
k=0
ckxk+λ+2 − p2
∞�
k=0
ckxk+λ ≡ 0
13
Friedrich Wilhelm Bessel(1784-1846): matemático y astrónomo alemán reconocido por sus aportes
en la medición y catalogación de más de 75mil estrellas, precisiones en la órbita del cometa Halley, en
la navegación marítima y en la sistematización de las funciones de Bessel, que llevan su nombre pese
a ser descubiertas por Daniel Bernoulli. De origen humilde paso de ser aprendiz en una compañia
mercantíl, a contador, y finalmente a director del observatorio de Kaliningrado, Rusia.

5.6. ECUACIONES DIFERENCIALES NOTABLES 363
Agrupando sumatorias y sacando como factor común xλ resulta:∞�
k=0
ckxk+2 +
∞�
k=0
[(k + λ)2 − p2]ckxk ≡ 0
Realizando los cambios de variable adecuados y factorizando, se tiene:∞�
m=0
cm−2xm +
∞�
m=0
[(m+ λ+ p)(k + λ− p)]cmxm ≡ 0
Equivalentemente se puede escribir, como:
(λ+p)(λ−p)c0x0+(1+λ+p)(1+λ−p)c1x
1+∞�
m=2
([(m+ λ+ p)(m+ λ− p)]cm + cm−2) xm ≡ 0
Para obtener soluciones no triviales se impone la condición c0 �= 0, con lo que resulta laecuación indicial:
(λ+ p)(λ− p) = 0
De donde las soluciones son λ1 = p y λ2 = −p. De acuerdo a lo estudiado en la sección 5.5.2,tomando la mayor raíz obtenemos una solución.Para λ1 = p la ecuación de recurrencia nos queda:
(1 + 2p)c1 = 0 cm = − cm−2
m(m+ 2p)para m = 2, 3, 4 . . .
De aquí se tiene que c1 = 0 si p �= −12 . Evaluando algunos términos, obtenemos:
m = 2 ⇒ c2 = − c02(2 + 2p)
= − c022(1 + p)
m = 3 ⇒ c3 = − c13(3 + p)
= 0 y consecuentemente: c3 = c5 . . . = 0
m = 4 ⇒ c4 = − c24(4 + 2p)
= − c223(2 + p)
=c0
242!(1 + p)(2 + p)
m = 6 ⇒ c6 = − c46(6 + 2p)
= − c4223!(2 + p)
= − c0263!(1 + p)(2 + p)(3 + p)
...
m = 2k ⇒ c2k =(−1)k
22kk!(p+ 1)(p+ 2)(p+ 3) · · · (p+ k)c0
Por tanto la solución nos queda:
y1 = c0xp
�1− x2
22(1 + p)+
x4
242!(1 + p)(2 + p)− x6
263!(1 + p)(2 + p)(3 + p)+ · · ·
�

364 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
La solución se puede escribir como:
y1 = c0xp
∞�
k=0
(−1)k
k!(p+ 1)(p+ 2)(p+ 3) · · · (p+ k)
�x2
�2k
El producto sucesivo (p+ 1)(p+ 2)(p+ 3) · · · (p+ k) se puede escribir en forma general paracualquier valor de p �= −1,−2,−3, . . . en términos de la función gamma14, así:
Γ(p+ k + 1) = (p+ k)(p+ k − 1)(p+ k − 2) · · · (p+ 3)(p+ 2)(p+ 1)Γ(p+ 1)
Con lo cual, la solución nos queda:
y1 =Γ(p+ 1)
2pc0
∞�
k=0
(−1)k
k!Γ(p+ k + 1)
�x2
�2k+p
La serie encontrada recibe el nombre de función de Bessel de primera especie de orden p y sedenota como:
Jp(x) =∞�
k=0
(−1)k
k!Γ(p+ k + 1)
�x2
�2k+p(5.8)
Por lo tanto, la primera solución es: y1 = Jp(x).Cuando p = n = 0, 1, 2, 3, . . ., la función gamma se convierte en factorial y la solución puedeescribirse como:
y1 = Jn(x) =∞�
k=0
(−1)k
k!(n+ k)!
�x2
�2k+n
En la figura 5.10 se ilustran algunos polinomios de Bessel para n = 0, 1, 2, 3, 4 y p = 14 ,
13 ,
12 .
Como puede verse, los polinomios de Bessel son funciones continuas oscilatorias que decrecen amedida que x aumenta. Si p es un negativo no entero, los polinomios de Bessel son oscilatoriospero con una discontinuidad en x = 0.En cuanto a la segunda solución, es decir, para λ2 = −p, se tiene:
(1− 2p)c1 = 0 cm = − cm−2
m(m− 2p)para m = 2, 3, 4 . . .
Como puede verse, si p = 12 la constante c1 es diferente de cero y en consecuencia resultan
dos soluciones linealmente independientes. Para cualquier otro valor de p se tiene que c1 = 0.
Analizando la ecuación de recurrencia se concluye que si p = n = 0, 1, 2, 3, . . ., es imposiblehallar una segunda solución, ya que el resultado es linealmente dependiente con la primera,de hecho se puede demostrar que: J−n(x) = (−1)nJn(x)15. En este caso la segunda solución,usando reducción de orden, está dada por:
y2 = Jn(x)
�1
xJ2n(x)
dx
14Remítase al apéndice A.2
15Remítase al ejemplo 5.25

5.6. ECUACIONES DIFERENCIALES NOTABLES 365
0 1 2 3 4 5
1J0(x)
J1(x) J2(x) J3(x) J4(x)
(a) Polinomios de Bessel de orden entero
0 1 2 3 4 5
J1/4(x)
J-1/2(x)
J-1/3(x)
J1/3(x)
J1/2(x)
J-1/4(x)
(b) Polinomios de Bessel de orden fraccionario
Figura 5.10: Polinomios de Bessel de primera especie y orden p
Esta solución se conoce como función de Bessel de segunda especie y orden n, denotada comoYn(x)16. Como se puede ver en la figura 5.11, dichas funciones divergen en x = 0. Usandoel método propuesto en la sección 5.5.4 se puede demostrar que la solución se puede escribircomo:
Yn(x) =2
πln�x2
�Jn(x)−
1
π
n−1�
k=0
(n− k − 1)!
k!
�x2
�2k−n
− 1
π
∞�
k=0
(−1)k
k!(n+ k)![ψ(k + 1) + ψ(n+ k + 1)]
�x2
�2k+n
Con ψ(n) = Γ�(n)Γ(n) = −γ +
n−1�k=1
1k conocida como la función Digamma.
También suelen escribirse más compactamente como:
Yn(x) = lımp→n
Jp(x) cos(πp)− J−p(x)
sin(πp)
Con esto, la solución general de la ecuación diferencial está dada por: y = c1Jn(x)+ c2Yn(x).
En otro caso, para p �= 0, 1, 2, 3, . . ., puede verse que la segunda solución es:
J−p(x) =∞�
k=0
(−1)k
k!Γ(−p+ k + 1)
�x2
�2k−p
16También conocida como función de Weber o Neumman

366 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
0 1 2 3 4 5 6 7 8 9
Y0(x) Y1(x) Y2(x) Y3(x) Y4(x)
Figura 5.11: Polinomios de Bessel de segunda especie y orden n
Por lo tanto, la solución general de la ecuación diferencial es:
y = c1Jp(x) + c2J−p(x)
En conclusión, dada la ecuación diferencial: x2y��(x) + xy�(x) + (x2 − p2)y(x) = 0 .La solución es:
y =
�c1Jp(x) + c2J−p(x) para p �= 0, 1, 2, 3, . . .
c1Jn(x) + c2Yn(x) para p = n = 0, 1, 2, 3, . . .
Los polinomios de Bessel son soluciones de diversos problemas en geometrias cilíndricas. Estosforman un conjunto ortogonal mediante el cual se puede desarrollar una función f(x). Existentres maneras de realizar el desarrollo, una de ellas es:
f(x) = a1Jn(λ1x) + a2Jn(λ2x) + a3Jn(λ3x) + · · ·+ akJn(λkx) =∞�
k=1
akJn(λkx)
Donde los valores λ1,λ2, . . . ,λk son las soluciones de la ecuación Jn(x) = 0, es decir, los inter-ceptos del polonimio Jn(x). En la tabla 5.5 se muestran algunos interceptos de los polinomiosde Bessel. Estos interceptos son de gran utilidad en Telecomunicaciones para el ajuste de ladesviación máxima de frecuencia de una señal modulada en frecuencia FM.
Y los coeficientes se calculan mediante:
ak =2
J2n+1(λk)
� 1
0
xf(x)Jn(λkx)dx
La función generadora de los polinomios de Bessel es:
ex2 (t−
1t ) =
∞�
k=−∞
Jn(x)tn

5.6. ECUACIONES DIFERENCIALES NOTABLES 367
Jn(x) λ1 λ2 λ3 λ4 λ5 λ6
J0(x) 2.4048 5.5201 8.6537 11.7915 14.9309 18.0711
J1(x) 3.8317 7.0156 10.1735 13.3237 16.4706 19.6159
J2(x) 5.1356 8.4172 11.6198 14.7960 17.9598 19.6159
J3(x) 6.3802 9.7610 13.0152 16.2235 19.4094 22.5827
J4(x) 7.5883 11.0647 14.3725 17.6160 20.8269 24.0190
J5(x) 8.7715 12.3386 15.7002 18.9801 22.2178 25.4303
J6(x) 9.9361 13.5893 17.0038 20.3208 23.5861 26.8202
Tabla 5.5: Interceptos de los polinomios de Bessel
Se puede demostrar que la transformada de Laplace de los polinomios de Bessel de primeraespecie es:
L {Jn(at)} =
�√s2 + a2 − s
�n
an√s2 + a2
con n ∈ Z+
Las funciones de Bessel poseen algunas propiedades importantes, entre las que podemos des-tacar las siguientes:
Relaciones integrales:
Jp(x) =
12π
� π
0 cos (pθ − x sin(θ))dθ − sin(pπ)
π
�∞0 e−x sinh(θ)−pθdθ , para p > −1
212π
� π
0 cos (nθ − x sin(θ))dθ , para p = n = 0, 1, 2, . . .
Jp(x) =1
Γ(p+ 12)√π 2p−1
� x
0 (x2 − θ2)p−12 cos(θ)dθ para p > −1
2
�∞0
Jα(x)Jβ(x)
xdx =
2
π
sin�π2 (α− β)
�
α2 − β2
�xJn(αx)Jn(βx)dx =
x [αJn(βx)J �n(αx)− βJn(αx)J �
n(βx)]
β2 − α2
�xnJn−1(x)dx = xnJn(x)
Ecuaciones de recurrencia:

368 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
Jp+1(x) =2p
xJp(x)− Jp−1(x)
d
dx[x±pJp(x)] = ±x±pJp∓1(x)
xJ �p(x) = xJp−1(x)− pJp(x)
xJ �p(x) = pJp(x)− xJp+1(x)
2J �p(x) = Jp−1(x)− Jp+1(x)
α−pJp(αx) =∞�k=0
1
k!
�(1− α2)
x
2
�kJp+n(x)
Relación con funciones trigonométricas:
J1/2(x) =
�2
πxsin(x)
Jn+ 12=
�2
πx
n+12�
k=0
(−1)n−k
��2
x
�n−2k (n− k)!
k!
�−1
2 − k
n− 2k
�sin(x)
−�2
x
�n+1−2k (n− k)!
k!k
�−1
2 − k
n+ 1− 2k
�cos(x)
�
J−1/2(x) =
�2
πxcos(x)
Ejemplo: 5.25. Demuestre la propiedad: Jn(x) = (−1)nJn(x)
✞✝ ☎✆Solución: Partimos de la función de Bessel: J−n(x) =∞�k=0
(−1)k
k!(−n+ k)!
�x2
�2k−n
Realizando el cambio de variable: j = k − n, nos queda:
Jn(x) =∞�
j=−n
(−1)j+n
(j + n)!j!
�x2
�2j+n
La expresión anterior se puede escribir en la forma:
Jn(x) =−1�
j=−n
(−1)j+n
(j + n)!j!
�x2
�2j+n+ (−1)n
∞�
j=0
(−1)j
(j + n)!j!
�x2
�2j+n
Teniendo en cuenta que el factorial de un número negativo tiende a ±∞, la primera sumatoriatiende a cero y, en consecuencia queda demostrada la propiedad.
Ejemplo: 5.26. Demuestre la propiedad:d
dx[xpJp(x)] = xpJp−1(x)

5.6. ECUACIONES DIFERENCIALES NOTABLES 369
✞✝ ☎✆Solución: Derivando la función xpJp(x) tenemos:
d
dx[xpJp(x)] =
d
dx
�xp
∞�
k=0
(−1)k
k!Γ(p+ k + 1)
�x2
�2k+p�=
d
dx
� ∞�
k=0
(−1)k
22k+pk!Γ(p+ k + 1)x2(k+p)
�
=∞�
k=0
(−1)k2(k + p)
22k+pk!(p+ k)Γ(p+ k)x2(k+p)−1 =
∞�
k=0
(−1)k
22k+p−1k!Γ(p+ k)x2(k+p)−1
= xp∞�
k=0
(−1)k
k!Γ(p+ k)
�x2
�2k+p−1= xpJp−1(x)
EJERCICIOS 5.5.Encuentre la solución general para las ecuaciones diferenciales:
1. (1− x2)y��(x)− 2xy�(x) + 6y(x) = 0
2. (1− x2)y��(x)− 2xy�(x) +3
4y(x) = 0
3. y��(x)− 2xy�(x) + 4y(x) = 0
4. y��(x)− 2xy�(x) + y(x) = 0
5. (1− x2)y��(x)− xy�(x) + 4y(x) = 0
6. (1− x2)y��(x)− xy�(x) +1
4y(x) = 0
7. xy��(x) + (1− x)y�(x) + 2y(x) = 0
8. xy��(x) + (1− x)y�(x) +1
2y(x) = 0
9. x2y��(x) + xy�(x) + (x2 − 4)y(x) = 0
10. x2y��(x) + xy�(x) + (x2 − 0.25)y(x) = 0
11. Use los polinomios normalizados de Legendre para aproximar la función f(x) = 1− |x|en el intervalo −1 ≤ x ≤ 1. Represente gráficamente la función original en un mismográfico con la aproximación.
12. Demuestre las siguientes propiedades:
a) xJ �p(x) = pJp(x)− xJp+1(x)
b) 2J �p(x) = Jp−1(x)− Jp+1(x)
c) Jp+1(x) =2p
xJp(x)− Jp−1(x)
13. Usando la propiedad de recurrencia, exprese J3(x) en términos de J0(x) y J1(x).
14. Evalúe las siguientes integrales:
a)�xJ0(x)dx b)
�x2J1(x)dx c)
�x4J1(x)dx d)
�xJ2
0 (x)dx
15. Considere la ecuación diferencial (1− x2)y��(x)+ xy�(x)+ (λ2x2− p2)y(x) = 0, conocidacomo ecuación paramétrica de Bessel con parámetro λ. Demuestre que la función: Jn(λx)es una solución de la ecuación diferencial.

370 CAPÍTULO 5. ECUACIONES DIFERENCIALES DE COEFICIENTES VARIABLES
16. Usando el hecho de que Γ(n + 12) =
(2n− 1)!
2n√π con n = 1, 2, 3, . . . y la fórmula de la
función de Bessel, demuestre que:
a) J1/2(x) =
�2
πsin(x) b) J−1/2(x) =
�2
πcos(x)
17. Usando las ecuaciones de recurrencia, exprese J3/2(x) y J5/2(x) en términos de J1/2(x)y J−1/2(x).