Eduardo Liz Marz an
27
Problemas resueltos de sistemas de ecuaciones lineales Eduardo Liz Marz ´ an Los problemas que se incluyen en esta colecci´ on se han extra´ ıdo de pruebas parciales y ex´ amenes finales de la asignatura ´ Algebra lineal de las titulaciones de Ingenier´ ıa de la energ´ ıa e Ingenier´ ıa de los recursos mineros y energ´ eticos en la Universidad de Vigo. Septiembre de 2020
Transcript of Eduardo Liz Marz an

Problemas resueltos de sistemas de ecuacioneslineales
Eduardo Liz Marzan
Los problemas que se incluyen en esta coleccion se han extraıdo de pruebas parciales y examenesfinales de la asignatura Algebra lineal de las titulaciones de Ingenierıa de la energıa e Ingenierıa de losrecursos mineros y energeticos en la Universidad de Vigo.
Septiembre de 2020


Indice general
1. Discusion y resolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2. Conjuntos de soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3. Mınimos cuadrados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3


Capıtulo 1
Discusion y resolucion
1) Se considera el sistema de ecuaciones linealesλx+ 3y + z = λ
x+ λy + λz = −λ
x+ y − z = −λ
a) Calcular los valores de λ para los que el sistema tiene solucion unica.b) Probar que para λ = −1 el sistema tiene mas de una solucion y hallar la solucion que esta en
el plano de ecuacion x+ y + z = 0.
Solucion:
a) El determinante de la matriz de coeficientes es
|A| =
∣∣∣∣∣∣λ 3 11 λ λ1 1 −1
∣∣∣∣∣∣ = (1 + λ)(4− 2λ).
El sistema tiene solucion unica cuando |A| 6= 0, es decir para todo λ ∈ R excepto λ = −1 y λ = 2.
b) Para λ = −1 la matriz de coeficientes tiene rango 2 y la matriz ampliada tambien:
rg
−1 3 11 −1 −11 1 −1
= rg
−1 3 1 −11 −1 −1 11 1 −1 1
= 2 < 3 = numero de incognitas.
Por tanto, el sistema es compatible indeterminado y tiene infinitas soluciones.
Eliminando la tercera ecuacion y sumando a la segunda la primera, se obtiene el sistema equivalente{−x+ 3y + z = −1
2y = 0
Por tanto las soluciones son los vectores de la forma (x, 0, x− 1), x ∈ R.
5

6 Capıtulo 1. Discusion y resolucion
Imponiendo la ecuacion x+ y + z = 0 se tiene 2x− 1 = 0 y por tanto x = 1/2. La solucion pedida esel vector v = (1/2, 0,−1/2).
2) Se considera el sistema de ecuaciones lineales dependiente del parametro λ:x− y + z = 4λ
y + z = −4
x+ 2z = λ2
a) Probar que el sistema no tiene solucion unica para ningun valor de λ ∈ R.b) Determinar el valor de λ para el que el sistema tiene al menos una solucion.
Solucion:
a) La expresion matricial del sistema es 1 −1 10 1 11 0 2
xyz
=
4λ−4λ2
.
Hacemos operaciones elementales en la matriz ampliada (primero restamos la primera fila a la terceray luego la segunda fila a la tercera):
rg(A|b) = rg
1 −1 1 4λ0 1 1 −41 0 2 λ2
= rg
1 −1 1 4λ0 1 1 −40 1 1 λ2 − 4λ
= rg
1 −1 1 4λ0 1 1 −40 0 0 λ2 − 4λ+ 4
.
Como rg(A) = 2 < 3 = numero de incognitas, el sistema no puede tener solucion unica.
b) El sistema tiene al menos una solucion si y solo si el rango de A coincide con el rango de (A|b). Esclaro que rg(A) = rg(A|b)⇐⇒ λ2 − 4λ+ 4 = 0⇐⇒ λ = 2.
3) Para cada valor de λ ∈ R se considera la matriz
A =
λ 1 −21 λ 2−2 2 λ− 3
a) Probar que |A| = (λ+ 1)2(λ− 5).b) Calcular los valores de λ para los que el sistema Ax = 0 es compatible indeterminado.
Solucion:
a) Desarrollando el determinante de A y la expresion (λ+ 1)2(λ− 5), se obtiene:
|A| = λ3 − 3λ2 − 9λ− 5 = (λ+ 1)2(λ− 5).

7
b) Utilizando el apartado anterior, se tiene:
Ax = 0 es compatible indeterminado ⇐⇒ |A| = 0⇐⇒ (λ+ 1)2(λ− 5) = 0⇐⇒ λ = −1 o λ = 5.
4) Se considera el sistema de ecuaciones linealesx− z = 0
x+ y + z = 2
x− y − 3z = −2
a) Probar que el sistema es compatible indeterminado.b) Calcular la solucion del sistema que es perpendicular al vector v = (1, 2, 7).
Solucion:
a) La expresion matricial del sistema es 1 0 −11 1 11 −1 −3
xyz
=
02−2
.
El sistema es compatible indeterminado ya que
rg
1 0 −11 1 11 −1 −3
= rg
1 0 −1 01 1 1 21 −1 −3 −2
= 2 < 3 = numero de incognitas.
b) Eliminando la tercera ecuacion y restando a la segunda la primera, se obtiene el sistema equivalente{x− z = 0
y + 2z = 2
}⇐⇒
{x = z
y = 2− 2z.
Por tanto las soluciones son los vectores de la forma (z, 2− 2z, z), z ∈ R.Para que un vector solucion u = (z, 2− 2z, z) sea perpendicular a v = (1, 2, 7), el producto escalar deu por v debe ser cero, es decir:
ut v = (z, 2− 2z, z)
127
= 0⇐⇒ z + 2(2− 2z) + 7z = 0⇐⇒ 4 + 4z = 0⇐⇒ z = −1.
Sustituyendo z = −1 en el vector generico (z, 2− 2z, z), obtenemos la solucion u = (−1, 4,−1).

8 Capıtulo 1. Discusion y resolucion
5) Se considera el siguiente sistema de ecuaciones lineales:
(S)
{x− y + z = 0
2x+ 3y − z = 3
a) Determinar los valores de α y β para el que al anadir la ecuacion
x+ αy + 4z = β
al sistema (S) se obtenga un sistema con las mismas soluciones.b) Calcular la solucion del sistema (S) para la que la suma de los valores de las incognitas sea 6.
Solucion:
a) La condicion para que el sistema formado por las tres ecuaciones sea equivalente al que tiene unicamentelas dos primeras es que el rango de la matriz ampliada
M =
1 −1 1 02 3 −1 31 α 4 β
sea 2.Utilizando determinantes u operaciones elementales por filas se llega a que los unicos valores para losque se cumple esta condicion son α = −6 y β = −3.
b) Anadiendo la condicion de que x+ y + z = 6, resulta el sistema de 3 ecuaciones con 3 incognitasx− y + z = 0
2x+ 3y − z = 3
x+ y + z = 6
Este sistema es compatible determinado y su solucion es (x, y, z) = (−1, 3, 4).
6) Se considera el sistema de ecuaciones homogeneo dependiente del parametro real λ:(λ− 1)x+ 2y − 2z = 0
(λ− 2)y + z = 0
x+ z = 0
a) Calcular los valores de λ para los que el sistema tiene mas de una solucion.b) Para λ = 0, calcular la solucion (x, y, z) del sistema cuyas coordenadas suman 2.
Solucion:
a) La expresion matricial del sistema es

9λ− 1 2 −20 λ− 2 11 0 1
xyz
=
000
.
Desarrollando el determinante de la matriz de coeficientes, se obtiene
|A| = λ2 − λ = λ(λ− 1)
y por tanto el sistema tiene mas de una solucion (es compatible indeterminado) si λ = 0 o λ = 1.
b) Para λ = 0 el sistema es −1 2 −20 −2 11 0 1
xyz
=
000
.
Como el rango de A es 2, podemos suprimir la primera ecuacion, de modo que el conjunto de solucioneses
S =
{(x, y, z) ∈ R3 /
−2y + z = 0x+ z = 0
}=
={
(x, y, z) ∈ R3 / z = 2y = −x}
= {(−2y, y, 2y) / y ∈ R} .
Como −2y + y + 2y = 2, se deduce que y = 2 y por tanto la solucion buscada es v = (−4, 2, 4).


Capıtulo 2
Conjuntos de soluciones
1) Se considera el sistema de ecuaciones lineales Ax = b, donde
A =
1 1 20 β 1α −3 −3
; b =
1−1
0
.
a) Hallar los valores de α y β para que el vector u = (0,−1, 1) sea solucion del sistema y no seala unica solucion.
b) Para los valores calculados en el apartado a), determinar el conjunto de soluciones del sistemahomogeneo Ax = 0.
Solucion:
a) El vector u = (0,−1, 1) es solucion del sistema si Au = b: 1 1 20 β 1α −3 −3
0−1
1
=
1−1
0
⇐⇒ 1
1− β0
=
1−1
0
⇐⇒ β = 2.
La solucion no es unica cuando el rango de A es 2, es decir, cuando el determinante de A vale cero.Para β = 2, |A| = −3− 3α, y por tanto |A| = 0 para α = −1.
b) El conjunto de soluciones es el nucleo de A. Haciendo operaciones elementales en las filas de A, seobtiene el sistema equivalente
x− 3y = 0 ; 2y + z = 0.
Por tanto,
Ker(A) ={
(x, y, z) ∈ R3 / x = 3y , z = −2y}
= {(3y, y,−2y) / y ∈ R} =< {(3, 1,−2)} > .
11

12 Capıtulo 2. Conjuntos de soluciones
2) Sean A ∈M3×3(R) y b ∈ R3. Sabiendo que
Ker(A) =< {(1, 1, 0), (0, 1,−1)} >
y que v = (2, 1, 2) es solucion del sistema Ax = b, se pide:a) Calcular el valor de γ para que el vector (3, 1, γ) sea solucion del sistema Ax = b.b) Hallar el determinante de A3.
Solucion:
a) El conjunto de soluciones del sistema Ax = b es S = p+ Ker(A), donde p es una solucion particular yKer(A) es el conjunto de soluciones del sistema homogeneo Ax = 0. En este caso la solucion particulares v = (2, 1, 2). Por tanto:
(3, 1, γ) ∈ S ⇐⇒ (3, 1, γ) = (2, 1, 2) + α(1, 1, 0) + β(0, 1,−1)⇐⇒
3 = 2 + α⇒ α = 11 = 1 + α+ β ⇒ β = −1γ = 2− β = 3
b) Como rg(A) = 3− dim(Ker(A)) = 3− 2 = 1, se deduce que |A| = 0 y por tanto
|A3| = |A|3 = 0.
3) Sea A ∈M3×4(R) una matriz tal que Ker(A) =< {(2, 3, 1, 0)} >.a) Calcular el rango de A.b) Justificar que el sistema de ecuaciones lineales Ax = b es compatible para cualquier b ∈ R3.
¿Puede ser compatible determinado para algun b?c) Razonar cual de las siguientes matrices es la forma escalonada reducida de filas de A:
R1 =
1 0 −2 00 1 −3 00 0 0 1
; R2 =
1 0 2 00 1 3 00 0 0 1
.
Solucion:
a) El rango de A se obtiene como la diferencia entre el numero de incognitas (numero de columnas de A)y el numero de soluciones independientes del sistema homogeneo Ax = 0, es decir, dim(Ker(A)). Eneste caso, rg(A) = 4− 1 = 3.
b) Como la matriz ampliada (A|b) tiene 3 filas y 5 columnas, su rango no puede ser mayor de 3. Portanto, rg(A|b) = rg(A) = 3 < 4 = numero de incognitas. De aquı se deduce que el sistema es siemprecompatible pero nunca compatible determinado.
c) Si denotamos R = rref(A), el conjunto de soluciones de Ax = 0 coincide con el conjunto de solucionesde Rx = 0, es decir, Ker(R) = Ker(A) =< {(2, 3, 1, 0)} >. Por tanto, rref(A) = R1 ya que

13
R1
2310
=
1 0 −2 00 1 −3 00 0 0 1
2310
=
000
, R2
2310
=
1 0 2 00 1 3 00 0 0 1
2310
=
460
6=0
00
.
4) Sea M ∈M3×3(R) y sean
v1 =
121
, v2 =
−112
, b1 =
111
, b2 =
222
.
Sabiendo que rg(M) = 2, Mv1 = b1, Mv2 = b2, se pide:a) Calcular la dimension del nucleo de M .b) Determinar el conjunto de soluciones del sistema homogeneo Mx = 0.
Solucion:
a) Como M ∈M3×3(R) y el rango de M es 2, se sigue que dim(Ker(M)) = 3− rg(M) = 1.
b) Como b2 = 2b1, se obtiene:
Mv2 = b2 = 2b1 = 2Mv1 =⇒Mv2 − 2Mv1 = 0 =⇒M(v2 − 2v1) = 0 =⇒ v2 − 2v1 ∈ Ker(M).
Como dim(Ker(M)) = 1, el conjunto de soluciones de Mx = 0 es
Ker(M) =< {v2 − 2v1} >=< {(−3,−3, 0)} >=< {(1, 1, 0)} > .
5) Sean A ∈ M3×3(R) y b ∈ R3. Sabiendo que el rango de A es 2 y que los vectores v1 = (−1, 2, 1)y v2 = (2, 1, 3) son soluciones del sistema de ecuaciones lineales Ax = b, se pide:a) Probar que Ker(A) =< {v2 − v1} >.b) Calcular la solucion x = (x1, x2, x3) del sistema Ax = b tal que x3 = −1.
Solucion:
a) Dado que v1 y v2 son soluciones de Ax = b, se cumple que Av1 = Av2 = b. Por tanto,
Av2 −Av1 = b− b = 0 =⇒ A(v2 − v1) = 0 =⇒ v2 − v1 ∈ Ker(A).
Por otra parte, dim(Ker(A)) = 3− rg(A) = 3−2 = 1, de modo que v2−v1 = (3,−1, 2) genera Ker(A).
b) El conjunto de soluciones S de Ax = b esta determinado por una solucion particular y las solucionesdel sistema homogeneo, es decir, Ker(A). Tomando v2 como solucion particular, se tiene:
S = v2 + Ker(A) = {v2 + λ(v2 − v1) / λ ∈ R} = {(2, 1, 3) + λ(3,−1, 2) / λ ∈ R} .

14 Capıtulo 2. Conjuntos de soluciones
Para que la tercera coordenada sea −1: x3 = 3 + 2λ = −1 =⇒ λ = −2. Por tanto, la solucion buscadaes
(x1, x2, x3) = (2, 1, 3)− 2(3,−1, 2) = (−4, 3,−1).
6) Sean A ∈M3×3(R) y b ∈ R3. Sabiendo que
A
1−1
1
= b y Ker(A) =
(x, y, z) ∈ R3 /3x− y − 4z = 02x− y − 2z = 0x− y = 0
,
se pide:
a) Calcular la dimension y una base de Ker(A).b) Calcular las soluciones del sistema Ax = b que tienen modulo
√3.
Solucion:
a) Sustituyendo y = x en las dos primeras ecuaciones se obtiene la ecuacion y = 2z. Por tanto,
Ker(A) ={
(x, y, z) ∈ R3 / x = y = 2z}
= {(2z, 2z, z) / z ∈ R} =< {(2, 2, 1)} > .
La dimension de Ker(A) es 1 y una base es B1 = {(2, 2, 1)}.
b) Sabemos por el enunciado y por el apartado a) que el vector (1,−1, 1) es una solucion particular delsistema Ax = b y Ker(A) =< {(2, 2, 1)} >. Por tanto, el conjunto de soluciones del sistema es
S = {(1,−1, 1) + z(2, 2, 1) / z ∈ R} = {(1 + 2z,−1 + 2z, 1 + z) / z ∈ R} .
Los vectores de S que tienen modulo√
3 deben cumplir
‖(1 + 2z,−1 + 2z, 1 + z)‖2 = 3⇐⇒ (1 + 2z)2 + (−1 + 2z)2 + (1 + z)2 = 3⇐⇒ z(9z + 2) = 0.
Las soluciones pedidas son (1,−1, 1) (para z = 0) y (5/9,−13/9, 7/9) (para z = −2/9).
7) Sean A ∈M3×3(R) y b ∈ R3 tales que el conjunto de soluciones del sistema de ecuaciones linealesAx = b es
S = {(1 + λ+ µ, 2− λ+ 2µ, µ) / λ, µ ∈ R} .
a) Calcular de forma razonada el rango de la matriz de coeficientes A y el rango de la matrizampliada (A|b).
b) Estudiar si el vector v = (1, 5, 1) es solucion del sistema Ax = b.
Solucion:
a) La solucion del sistema se puede escribir como

15
S = p+ Ker(A) = (1, 2, 0)+ < {(1,−1, 0), (1, 2, 1)} > .
Como dim(Ker(A)) = 3 − rg(A) = 2, se deduce que rg(A) = 1. Por otra parte, como el sistema escompatible (tiene infinitas soluciones), se cumple que rg(A|b) = rg(A) = 1.
b) Planteando la igualdad (1, 5, 1) = (1 + λ+ µ, 2− λ+ 2µ, µ), se obtiene que existe una solucion λ = −1,µ = 1. Por tanto, v es solucion del sistema.
8 Sea M ∈ M3×3(R) y sea b ∈ R3 un vector no nulo. Sabiendo que v1 = (1, 1, 1) es solucion delsistema Mx = b y v2 = (2, 1, 0) es solucion del sistema homogeneo Mx = 0, razonar brevementesi las siguientes afirmaciones son verdaderas o falsas:
a) El rango de M coincide con el rango de la matriz ampliada (M |b).b) El determinante de M es 0.c) Si el rango de M es 1 entonces el conjunto de soluciones del sistema Mx = b es una recta de
R3.d) El vector v3 = 2v1 + v2 es solucion del sistema Mx = b.
Solucion:
a) Verdadera: como v1 es solucion, el sistema es compatible y por tanto rg(M) = rg(M |b).
b) Verdadera: como el sistema homogeneo Mx = 0 no tiene solucion unica (0, 0, 0), el rango de M esmenor que 3 y por tanto |M | = 0.
c) Falsa: si rg(M) = 1 entonces dim(Ker(M)) = 3 − 1 = 2 y por tanto el conjunto de soluciones es unplano de R3.
d) Falsa: Mv3 = M(2v1 + v2) = 2Mv1 +Mv2 = 2b 6= b. Por tanto, v3 no es solucion del sistema Mx = b.


Capıtulo 3
Mınimos cuadrados
1) Se consideran los siguientes puntos de R2:
p1 = (−1, 1) ; p2 = (0, 2) ; p3 = (1, α) .
a) Calcular el valor de α para que los tres puntos esten alineados.b) Para α = −1, obtener la recta de ajuste de los tres puntos en el sentido de mınimos cuadrados.
Solucion:
a) Los puntos estan alineados si estan sobre la misma recta y = a+ bx. Primero calculamos la recta quepasa por p1 y p2 sustituyendo en la ecuacion:
1 = a+ b · (−1)2 = a+ b · 0
}⇒{a = 2b = 1
Por tanto la recta es y = 2 + x. El punto p3 = (1, α) esta alineado con los otros dos si esta sobre estarecta, es decir, α = 2 + 1 = 3.
b) Para α = −1 resulta el sistema
1 = a+ b · (−1)2 = a+ b · 0−1 = a+ b · 1
⇐⇒ 1 −1
1 01 1
︸ ︷︷ ︸
M
(ab
)︸ ︷︷ ︸
x
=
12−1
︸ ︷︷ ︸
B
.
Planteamos el sistema de mınimos cuadrados:
M tMx = M tB ⇐⇒(
3 00 2
)(ab
)=
(2−2
)⇐⇒
{3a = 2
2b = −2
}⇐⇒
a =2
3
b = −1
Por tanto la recta de ajuste es y =2
3− x.
17

18 Capıtulo 3. Mınimos cuadrados
2 Se consideran
A =
1 1 11 −1 1−1 1 −1
, b =
101
.
a) Probar que el sistema de ecuaciones lineales Ax = b es incompatible.b) Calcular una solucion del sistema Ax = b en el sentido de mınimos cuadrados cuya primera
coordenada sea cero.
Solucion:
a) Realizando operaciones elementales sobre las filas de la matriz ampliada (A|b), tenemos:
(A|b) =
1 1 1 11 −1 1 0−1 1 −1 1
F21(−1)
−→F31(1)
1 1 1 10 −2 0 −10 2 0 2
F32(1)−→
1 1 1 10 −2 0 −10 0 0 1
= (A′|b′).
Como rg(A′) = 2 6= rg(A′|b′) = 3, el sistema es incompatible.
b) Las soluciones de Ax = b en el sentido de mınimos cuadrados son las soluciones del sistema AtAx = Atb,que resulta 3 −1 3
−1 3 −13 −1 3
xyz
=
020
⇐⇒ {3x− y + 3z = 0
−x+ 3y − z = 2
Como buscamos la solucion con x = 0, se tiene:
x = 0
−y + 3z = 0
3y − z = 2
⇐⇒x = 0
y =3
4
z =1
4
La solucion buscada es (0, 3/4, 1/4).
3) Determinar el plano de ecuacion ax + by + cz = 1 que mejor ajusta los siguientes puntos de R3
en el sentido de mınimos cuadrados:
P1 = (1, 0, 0) , P2 = (0, 1, 1) , P3 = (−1, 0, 1) , P4 = (0,−1, 2) .
Solucion:Imponiendo que los puntos P1, P2, P3 y P4 esten sobre el plano, se obtiene el sistema de ecuaciones
lineales

19
a = 1b+ c = 1−a+ c = 1−b+ 2c = 1
⇐⇒
1 0 00 1 1−1 0 1
0 −1 2
︸ ︷︷ ︸
A
abc
︸ ︷︷ ︸
x
=
1111
︸ ︷︷ ︸
B
.
Para hallar el plano que ajusta mejor los datos en el sentido de mınimos cuadrados, planteamos elsistema AtAx = AtB, que resulta 2 0 −1
0 2 −1−1 −1 6
abc
=
004
La unica solucion del sistema es a = b =
2
5, c =
4
5, y por tanto el plano es
2
5x+
2
5y +
4
5z = 1.
4) Paula y Andres se pesan en una bascula por separado y el resultado es 20 Kg y 45 Kg, respec-tivamente. A continuacion se pesan juntos y el resultado es 80 Kg. Ante la perplejidad de loschicos, su tıo matematico estima los pesos de Paula y Andres minimizando el error en el sentidode mınimos cuadrados. ¿Que pesos aproximados obtiene?
Solucion:Denotemos por x el peso de Paula y por y el peso de Andres. Las 3 pesadas se escriben como:
x = 20
y = 45
x+ y = 80
⇐⇒ 1 0
0 11 1
︸ ︷︷ ︸
A
(xy
)=
204580
︸ ︷︷ ︸
b
.
El sistema claramente es incompatible. Las soluciones de Ax = b en el sentido de mınimos cuadradosson las soluciones del sistema AtAx = Atb, que resulta(
2 11 2
)(xy
)=
(100125
)⇐⇒
{2x+ y = 100
x+ 2y = 125
La unica solucion del sistema es (x, y) = (25, 50), ası que el peso aproximado de Paula es x = 25 Kg y elde Andres es y = 50 Kg.

20 Capıtulo 3. Mınimos cuadrados
5) Se consideran los puntos (2, 1, 1), (−1, 0, 1), (1, 0, 0) y (0, 1, α).a) Calcular el valor de α para que los puntos esten sobre un mismo plano de ecuacion ax+by+cz =
1.b) Para α = 0, usar el metodo de mınimos cuadrados para hallar la ecuacion del plano ax+ by+
cz = 1 que pase mas cerca de los 4 puntos.
Solucion:
a) Imponiendo que los tres primeros puntos cumplan la ecuacion del plano ax + by + cz = 1, se obtieneel sistema
2a+ b+ c = 1
−a+ c = 1
a = 1,
cuya unica solucion es a = 1, b = −3, c = 2. Por tanto, el plano es x− 3y + 2z = 1.
Para que (0, 1, α) este en el mismo plano, debe cumplirse que 0− 3 + 2α = 1, es decir, α = 2.
b) Para α = 0, tenemos el siguiente sistema:
2a+ b+ c = 1
−a+ c = 1
a = 1
b = 1
⇐⇒
2 1 1−1 0 1
1 0 00 1 0
︸ ︷︷ ︸
C
abc
=
1111
︸ ︷︷ ︸
d
.
El sistema Cx = d es incompatible. Las soluciones de Cx = d en el sentido de mınimos cuadrados sonlas soluciones del sistema CtCx = Ctd, que resulta6 2 1
2 2 11 1 2
abc
=
222
.
La unica solucion del sistema es (a, b, c) = (0, 2/3, 2/3), ası que la ecuacion del plano es
2
3y +
2
3z = 1.

21
6) Se desea ajustar a una conica de ecuacion ax2 + by2 + cxy = 1 la siguiente tabla de datosexperimentales:
x −1 0 1 2
y 1 2 1 0
a) Probar que los datos no estan sobre ninguna conica definida por esa ecuacion.b) Hallar la conica de ecuacion ax2 + by2 + cxy = 1 que mejor ajuste los datos en el sentido de
mınimos cuadrados.
Solucion:
a) Imponiendo que los puntos (−1, 1), (0, 2), (1, 1) y (2, 0) esten sobre la grafica de la conica, se obtieneel sistema de ecuaciones lineales
a+ b− c = 14b = 1
a+ b+ c = 14a = 1
⇐⇒
1 1 −10 4 01 1 14 0 0
︸ ︷︷ ︸
A
abc
︸ ︷︷ ︸
x
=
1111
︸ ︷︷ ︸
z
.
El sistema Ax = z es incompatible porque rg(A) = 3 6= 4 = rg(A|z). En consecuencia, los datos noestan sobre ninguna conica definida por la ecuacion ax2 + by2 + cxy = 1.
b) Para hallar la conica que ajusta mejor los datos en el sentido de mınimos cuadrados, planteamos elsistema AtAx = Atz, que resulta 18 2 0
2 18 00 0 2
abc
=
660
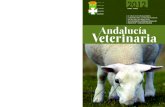
La unica solucion del sistema es a = b =
3
10, c = 0, y por tanto la conica buscada tiene por ecuacion
3
10x2 +
3
10y2 = 1.
Esta es la ecuacion de una circunferencia centrada en (0, 0), que se representa junto con los datos enla figura.
-2 -1 0 1 2
-2
-1
0
1
2

22 Capıtulo 3. Mınimos cuadrados
7) Se considera un cobertizo de base cuadrada con vertices
P1 = (0, 0, 0), P2 = (1, 0, 0), P3 = (1, 1, 0), P4 = (0, 1, 0) .
Se desea construir un techo plano con alturas en los vertices z1 = 1, z2 = 1, z3 = 2, z4 = 4,respectivamente.
a) Probar que no es posible resolver el problemab) Determinar la altura que debe tener el techo en cada vertice para que el error sea mınimo en
el sentido de mınimos cuadrados.Indicacion: La ecuacion del plano del techo debe ser de la forma z = ax+ by + c.
Solucion:
a) Imponiendo que los puntos Q1 = (0, 0, 1), Q2 = (1, 0, 1), Q3 = (1, 1, 2) y Q4 = (0, 1, 4) esten en elplano de ecuacion z = ax+ by + c, se obtiene el sistema de ecuaciones lineales
c = 1a+ c = 1
a+ b+ c = 2b+ c = 4
⇐⇒
0 0 11 0 11 1 10 1 1
︸ ︷︷ ︸
A
abc
︸ ︷︷ ︸
x
=
1124
︸ ︷︷ ︸
z
.
El sistema Ax = z es incompatible porque rg(A) = 3 6= 4 = rg(A|z). En consecuencia, no es posibleconstruir un techo plano que pase por Q1, Q2, Q3 y Q4.
b) Para hallar el plano que ajusta mejor los puntos en el sentido de mınimos cuadrados, planteamos elsistema AtAx = Atz, que resulta 2 1 2
1 2 22 2 4
abc
=
368
La unica solucion del sistema es a = −1, b = 2, c =3
2, y por
tanto el plano buscado tiene por ecuacion
z = −x+ 2y +3
2.
Ası, las alturas buscadas son:
P1 = (0, 0, 0) 7→ z∗1 =3
2, P2 = (1, 0, 0) 7→ z∗2 =
1
2,
P3 = (1, 1, 0) 7→ z∗3 =5
2, P4 = (0, 1, 0) 7→ z∗4 =
7
2.
La base cuadrada y el techo plano se representan junto con losdatos en la figura.

23
8) En un sistema de control automatico la variable de salida y(t) en cada instante t depende delos valores de la variable de entrada x en el instante t y en un instante anterior t − 1, segun larelacion lineal
y(t) = a0x(t) + a1x(t− 1). (*)
Se hacen varias medidas, obteniendose para los valores de entrada
x(0) = 1, x(1) = 1, x(2) = 2, x(3) = 0
los valores de saliday(1) = 2, y(2) = 2, y(3) = 1.
a) Usar el metodo de mınimos cuadrados para aproximar de modo optimo los coeficientes a0 ya1 de la expresion (*).
b) Usar el resultado del apartado a) para predecir el valor de y(4) si x(4) = 7.
Solucion:
a) Imponiendo que se cumpla la relacion (*) para t = 1, 2, 3, se obtiene el sistema de ecuaciones lineales
2 = y(1) = a0x(1) + a1x(0) = a0 + a1
2 = y(2) = a0x(2) + a1x(1) = 2a0 + a1
1 = y(3) = a0x(3) + a1x(2) = 0a0 + 2a1
⇐⇒ 1 1
2 10 2
︸ ︷︷ ︸
A
(a0a1
)︸ ︷︷ ︸
x
=
221
︸ ︷︷ ︸
b
.
Para aproximar los coeficientes en el sentido de mınimos cuadrados, planteamos el sistema AtAx = Atb,que resulta: (
5 33 6
)(a0a1
)=
(66
)⇐⇒
{5a0 + 3a1 = 6
3a0 + 6a1 = 6.
La unica solucion del sistema es: (a0a1
)=
(6/74/7
).
b) Utilizando el resultado del apartado a), se tiene:
y(4) = a0x(4) + a1x(3) ≈ 6
7x(4) +
4
7x(3) =
6
7· 7 +
4
7· 0 = 6.

24 Capıtulo 3. Mınimos cuadrados
9) En R3 se consideran las rectas r1 y r2 dadas en forma parametrica por las siguientes ecuaciones:
r1) (x, y, z) = P + λu, λ ∈ R,
r2) (x, y, z) = Q+ µv, µ ∈ R,
donde P = (1, 1, 1) , Q = (−1, 0,−2) , u = (1,−1, 0) , v = (2, 0, 1).Las rectas se cortan si existen valores de λ y µ para los cuales P + λu = Q+ µv.
a) Plantear el problema de encontrar un punto de corte de r1 y r2 como un sistema de ecuacioneslineales.
b) Probar que las rectas r1 y r2 no se cortan.c) Utilizar el metodo de mınimos cuadrados para calcular los puntos P1 y Q1 de las rectas r1 y
r2 que estan mas proximos.d) Usar el resultado del apartado anterior para calcular la distancia mınima entre las rectas r1 y
r2.
Solucion:
a) Imponiendo que se cumpla la relacion P + λu = Q+ µv, se obtiene el sistema de ecuaciones lineales
P + λu = Q+ µv ⇐⇒ (1 + λ, 1− λ, 1) = (−1 + 2µ, 0,−2 + µ)⇐⇒
λ− 2µ = −2
λ = 1
µ = 3.
b) Las rectas no se cortan porque el sistema es incompatible: sustituyendo λ = 1, µ = 3 en la primeraecuacion queda −5 = −2, que es falso.
c) Escribimos el sistema en forma matricial:1 −21 00 1
︸ ︷︷ ︸
A
(λµ
)︸ ︷︷ ︸
x
=
−213
︸ ︷︷ ︸
b
.
Para aproximar los valores de λ y µ en el sentido de mınimos cuadrados, planteamos el sistemaAtAx = Atb, que resulta: (
2 −2−2 5
)(λµ
)=
(−1
7
)⇐⇒
{2λ− 2µ = −1
−2λ+ 5µ = 7.
La unica solucion del sistema es: (λµ
)=
(3/22
).
De este modo, los puntos mas proximos son
P1 = P + (3/2)u = (5/2,−1/2, 1) ; Q1 = Q+ 2v = (3, 0, 0).

25
d) Utilizando el resultado del apartado anterior, se tiene que la distancia mınima entre r1 y r2 esd(P1, Q1) = ‖Q1 − P1‖ = ‖(1/2, 1/2,−1)‖ =
√3/2.
10) Se sabe teoricamente que la trayectoria f(t) de un dispositivo mecanico en funcion del tiempo tdebe cumplir las siguientes condiciones iniciales:
f(0) = 1 ; f ′(0) = 0 ; f ′′(0) = 3.
Se ha obtenido experimentalmente una trayectoria de la forma
f(t) = αet + βe2t + 3 sen(t).
a) Probar que no existe ningun par de valores reales (α, β) para los que la funcion obtenidaexperimentalmente cumpla las condiciones iniciales.
b) Encontrar los valores de α y β y la expresion correspondiente de la trayectoria para que elerror al verificar las condiciones iniciales sea mınimo en el sentido de mınimos cuadrados.
Solucion:
a) Si f(t) = αet + βe2t + 3 sen(t), entonces
f ′(t) = αet + 2βe2t + 3 cos(t) ; f ′′(t) = αet + 4βe2t − 3 sen(t).
Imponiendo las condiciones iniciales, se obtiene:f(0) = α+ β = 1
f ′(0) = α+ 2β + 3 = 0
f ′′(0) = α+ 4β = 3
⇐⇒α+ β = 1
α+ 2β = −3
α+ 4β = 3
El sistema no tiene solucion. Las dos primeras ecuaciones proporcionan α = 5, β = −4, que obviamenteno cumplen la tercera ecuacion.
b) Escribimos el sistema en forma matricial: 1 11 21 4
︸ ︷︷ ︸
M
(αβ
)︸ ︷︷ ︸
x
=
1−3
3
︸ ︷︷ ︸
b
.
Para encontrar los valores de α y β que minimizan el error en el sentido de mınimos cuadrados,planteamos el sistema M tMx = M tb, que resulta:(
3 77 21
)(αβ
)=
(17
).
La unica solucion del sistema es α = −2, β = 1, de modo que la expresion de la trayectoria es
f(t) = −2et + e2t + 3 sen(t).

26 Capıtulo 3. Mınimos cuadrados
11) Se considera el siguiente sistema de ecuaciones lineales:
x− y = 02x+ y + 2z = 1x+ y − 2z = 2
a) Probar que no hay soluciones del sistema en el subespacio
U ={
(x, y, z) ∈ R3 / x+ y = 0}.
b) Calcular el vector de U que mejor aproxima la solucion del sistema en el sentido de mınimoscuadrados.
Solucion:
a) Si (x, y, z) ∈ U entonces x+ y = 0. Junto con la primera ecuacion x− y = 0, se obtiene que x = y = 0.Sustituyendo en las dos ultimas ecuaciones, se tiene 2z = 1, −2z = 2, lo que es imposible. Por tanto,no puede haber ninguna solucion del sistema en U .
b) Los vectores de U cumplen la condicion x+ y = 0. Sustituyendo la condicion y = −x en el sistema, seobtiene: 2x = 0
x+ 2z = 1−2z = 2
⇐⇒ 2 0
1 20 −2
︸ ︷︷ ︸
M
(xz
)︸ ︷︷ ︸
x
=
012
︸ ︷︷ ︸
b
.
Para encontrar los valores de x y z que minimizan el error en el sentido de mınimos cuadrados,planteamos el sistema M tMx = M tb, que resulta:(
5 22 8
)(xz
)=
(1−2
).
La unica solucion del sistema es x = 1/3, z = −1/3, de modo que el vector de U que mejor aproximala solucion del sistema en el sentido de mınimos cuadrados es
v = (x,−x, z) = (1/3,−1/3,−1/3) .
12) Dados dos numeros reales x e y, se consideran los puntos P = (x, x, 1) y Q = (y,−y, x + 4) deR3.
a) Probar que no existen valores de x e y para los cuales P = Q.b) Plantear la igualdad P = Q como un sistema de ecuaciones lineales y utilizar el metodo de
mınimos cuadrados para calcular los valores de x e y para los cuales la distancia entre P y Qes la menor posible.

27
Solucion:
a) La igualdad P = Q conduce al sistema de ecuaciones linealesx = yx = −yx+ 4 = 1
De las dos primeras ecuaciones se obtiene que x = y = 0, que no cumple la tercera ecuacion.
b) La expresion matricial del sistema esx− y = 0x+ y = 0x = −3
⇐⇒ 1 −1
1 11 0
︸ ︷︷ ︸
M
(xy
)︸ ︷︷ ︸
x
=
00−3
︸ ︷︷ ︸
b
.
Para encontrar los valores de x e y que minimizan el error en el sentido de mınimos cuadrados,planteamos el sistema M tMx = M tb, que resulta:(
3 00 2
)(xy
)=
(−3
0
).
La unica solucion del sistema es x = −1, y = 0, de modo que los puntos son P = (−1,−1, 1) yQ = (0, 0, 3).
13) Un servicio meteorologico indica que las lluvias que se esperan para el martes y el miercolessuman 13 litros por metro cuadrado, otro dice que el martes caeran 9 litros mas que el miercolesy la prevision de un tercer servicio es que el martes llovera el doble que el miercoles. Suponiendoque los tres servicios tienen igual fiabilidad, utilizar el metodo de mınimos cuadrados para estimarcuantos litros por metro cuadrado caeran el martes y cuantos el miercoles.
Solucion:Denotemos por x la estimacion del numero de litros por metro cuadrado que caeran el martes y por
y la de los litros que caeran el miercoles. Las previsiones conducen al sistema de ecuaciones linealesx+ y = 13
x = y + 9
x = 2y
⇐⇒x+ y = 13
x− y = 9
x− 2y = 0
⇐⇒ 1 1
1 −11 −2
︸ ︷︷ ︸
A
(xy
)=
1390
︸ ︷︷ ︸
b
.
El sistema Ax = b es incompatible. Las soluciones de Ax = b en el sentido de mınimos cuadradosson las soluciones del sistema AtAx = Atb, que resulta(
3 −2−2 6
)(xy
)=
(224
).
La unica solucion del sistema es (x, y) = (10, 4), ası que la estimacion es que caeran 10 litros por metrocuadrado el martes y 4 litros el miercoles.