Elasticidad lineal -...
37
Cap´ ıtulo 4 Elasticidad lineal En anteriores cap´ ıtulos se ha estudiado el equilibrio y la deformaci´ on locales en los cuerpos deformables. Se vio, en primer lugar que al someter un cuerpo de este tipo a fuerzas exteriores aparecen a nivel local fuerzas cuyo valor, por unidad de ´ area, definimos como tensiones. Posteriormente, se estudi´ o que la deformaci´ on puede caracterizarse de forma precisa, tambi´ en a nivel local, a trav´ es del concepto de deformaci´ on. Pues bien, en los cuerpos, las tensiones y las deformaciones en cada punto no son independientes, sino que (al menos en condiciones isotermas) una siempre acompa˜ na a la otra. La relaci´ on local entre tensiones y deformaciones es el problema central de la mec´ anica de s´ olidos. Si bien las ecuaciones de equilibrio y la relaci´ on desplazamiento-deformaci´ on son resultados matem´ aticos que no son discu- tibles una vez aceptadas las hip´ otesis de partida, la relaci´ on entre tensi´ on y deformaci´ on, las llamadas leyes constitutivas , dependen del tipo de ma- terial, de los procesos que se quieran modelar, etc. Aunque las relaciones constitutivas m´ as sencillas y ´ utiles son bien conocidas y est´ an descritas en todos los libros, todav´ ıa se siguen proponiendo otras nuevas que mejor mo- delan el comportamiento de nuevos materiales. La formulaci´ on de modelos constitutivos es especialmente complejo cuan- do las deformaciones son grandes [9]. En este cap´ ıtulo nos centraremos, sin embargo, en el caso m´ as sencillo posible, el de la elasticidad lineal. Este modelo, aparentemente trivial, est´ a en la base de la mayor parte de c´ alculos en mec´ anica de s´ olidos y de estructuras. Servir´ a adem´ as como introducci´ on para otros modelos m´ as complejos que estudiaremos en cap´ ıtulos posteriores. 4.1. Los modelos el´ asticos El problema fundamental de la mec´ anica de s´ olidos es la formulaci´ on de modelos constitutivos , es decir, expresiones funcionales que permitan calcular el valor de la tensi´ on σ en un punto a partir del valor de la defor- maci´ on " en ese instante y en todos los anteriores. Por tanto, en general y de 75
Transcript of Elasticidad lineal -...

Capıtulo 4
Elasticidad lineal
En anteriores capıtulos se ha estudiado el equilibrio y la deformacion
locales en los cuerpos deformables. Se vio, en primer lugar que al someter
un cuerpo de este tipo a fuerzas exteriores aparecen a nivel local fuerzas
cuyo valor, por unidad de area, definimos como tensiones. Posteriormente,
se estudio que la deformacion puede caracterizarse de forma precisa, tambien
a nivel local, a traves del concepto de deformacion. Pues bien, en los cuerpos,
las tensiones y las deformaciones en cada punto no son independientes, sino
que (al menos en condiciones isotermas) una siempre acompana a la otra.
La relacion local entre tensiones y deformaciones es el problema central
de la mecanica de solidos. Si bien las ecuaciones de equilibrio y la relacion
desplazamiento-deformacion son resultados matematicos que no son discu-
tibles una vez aceptadas las hipotesis de partida, la relacion entre tension y
deformacion, las llamadas leyes constitutivas, dependen del tipo de ma-
terial, de los procesos que se quieran modelar, etc. Aunque las relaciones
constitutivas mas sencillas y utiles son bien conocidas y estan descritas en
todos los libros, todavıa se siguen proponiendo otras nuevas que mejor mo-
delan el comportamiento de nuevos materiales.
La formulacion de modelos constitutivos es especialmente complejo cuan-
do las deformaciones son grandes [9]. En este capıtulo nos centraremos, sin
embargo, en el caso mas sencillo posible, el de la elasticidad lineal. Este
modelo, aparentemente trivial, esta en la base de la mayor parte de calculos
en mecanica de solidos y de estructuras. Servira ademas como introduccion
para otros modelos mas complejos que estudiaremos en capıtulos posteriores.
4.1. Los modelos elasticos
El problema fundamental de la mecanica de solidos es la formulacion
de modelos constitutivos, es decir, expresiones funcionales que permitan
calcular el valor de la tension � en un punto a partir del valor de la defor-
macion " en ese instante y en todos los anteriores. Por tanto, en general y de
75

76 Mecanica de solidos I. Romero
acuerdo a la experiencia practica, es la historia completa de la deformacion
en un cuerpo la que permite conocer la tension en los puntos del mismo (o
viceversa).
Se dice que un material es simple cuando el estado de la tension � en
un punto depende solo de la historia de la deformacion en ese mismo punto.Ademas, es posible es posible que la tension � en un punto x 2 ⌦ en el
instante de tiempo t solo dependa de la deformacion " en ese mismo punto
e instante, es decir,�(x, t) = f("(x, t)) . (4.1)
siendo f : V2 ! V2
una funcion que describe el modelo constitutivo. Cuando
esto ocurre, decimos que el comportamiento del material en el punto x es
elastico. La importancia de este tipo de modelos es doble: por un lado
son los mas sencillos y, sobre todo, reflejan muy bien el comportamiento de
muchos materiales cuando las deformaciones son pequenas.
Claramente no todos los materiales se comportan elasticamente. Es bien
sabido, por ejemplo, que las propiedades mecanicas de los metales dependen
de su proceso de fabricacion (su historia de deformacion y temperatura);
tambien la experiencia habitual nos dice que los muchos materiales tienen
un comportamiento reologico.
Dentro de todos los materiales elasticos, un subconjunto de ellos consiste
en aquellos en los que la funcion f de la ecuacion (4.1) es lineal, es decir
�(x, t) = C"(x, t) , (4.2)
donde C es un tensor de cuarto orden. Este tipo de modelos, llamados elasti-cos lineales proporciona una aproximacion muy buena al comportamiento
de muchos materiales cuando la deformacion es pequena y dedicaremos el
resto del capıtulo a su estudio.
Una consecuencia inmediata de la hipotesis de linealidad es lo que se
conoce como el principio de superposicion : la tension debida a la super-
poscion de dos deformaciones es la suma de las tensiones correspondientes,
es decir, que para toda pareja ↵,� 2 R
f(↵"1
+ �"2
) = ↵f("1
) + �f("2
) , (4.3)
lo cual se demuestra trivialmente a partir de (4.2).
4.2. Elasticidad lineal isotropa
Estudiamos, en primer lugar, la relacion constitutiva elastica mas sen-
cilla que existe, a saber, la de los cuerpos isotropos, aquellos en los que
la respuesta no depende de la direccion. La formulacion de las ecuaciones
constitutivas se logra mediante ensayos experimentales en los que se somete
un cuerpo a un estado de tension/deformacion homogeneo y se deducen a
partir de ahı consecuencias puntuales.

Capıtulo 4. Elasticidad lineal 77
x
y
z
L0
r0
L
r
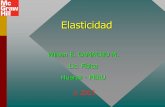
Figura 4.1: Esquema del ensayo a traccion.
4.2.1. El ensayo uniaxial de traccion
El unico ensayo que se necesita para caracterizar materiales isotropos
es el de traccion uniaxial. Una barra recta, cilındrica de longitud L0
, se
tracciona aplicando un tension normal en las caras rectas del cilindro y se
mide la longitud L de la barra deformada (ver figura 4.1). Si se coloca un
sistema de coordenadas cartesiano con el eje x alineado con el eje de la barra,
los estados de tension y deformacion en cualquier punto de misma, son
[�] =
2
4�xx
0 0
0 0 0
0 0 0
3
5 , ["] =
2
4"xx
0 0
0 "yy
0
0 0 "zz
3
5(4.4)
La deformacion longitudinal "x
se puede calcular mediante la expresion "x
=
(L � Lo
)/Lo
y se define el modulo de Young del material mediante la
relacion
E =
�xx
"xx
. (4.5)
De la expresion anterior se deduce que el modulo de Young es la pendiente
de la recta �x
vs. "x
que se obtiene en un ensayo de traccion y que tiene
dimensiones de presion. En el apendice ?? se recogen los valores del modulo
de Young para algunos materiales.
Como se indica en la figura 4.1, al traccionar una barra el alargamiento
axial se ve acompanado de un acortamiento transversal y por tanto, si el
radio original del cilindro era ro
, despues de deformarse toma el valor r, quepuede medirse.
En el caso de un solido cilındrico como el de la figura, este acortamiento
se cuantifica con deformaciones "yy
e "zz
en las direcciones transversales
cuya valor es "yy
= "zz
= (r � r0
)/r0
, y que es negativo. El coeficiente dePoisson se define como
⌫ = �"yy"xx
= � "zz"xx
, (4.6)
y es por tanto un propiedad del material sin dimensiones. La igualdad en
la expresion anterior se debe a la isotropıa del material. En el apendice ??

78 Mecanica de solidos I. Romero
tambien se recogen valores caracterısticos de este coeficiente para distintos
materiales.
4.2.2. Respuesta general
A partir del modulo de Young y el coeficiente de Poisson se puede obtener
la relacion tension-deformacion en un punto sometido a un estado tensio-
nal arbitrario, encontrando la llamada ley de Hooke generalizada , puesextiende al continuo la relacion elastica de los resortes.
Para obtener dicha relacion partimos primero de la siguiente observacion:
el estado tensional mas complejo que puede ejercerse sobre un diferencial
de volumen es un estado triaxial de traccion/compresion. Efectivamente,
cualquier estado tensional puede expresarse, en la base principal de tension,
como un estado triaxial de traccion/compresion. En dicho estado las tres
tensiones normales se denominan �1
,�2
,�3
y coinciden con las tensiones
principales.
Debido a la hipotesis de linealidad, se puede aplicar el principio de su-
perposicion y se puede obtener la respuesta al estado triaxial de tension
superponiendo tres estados de traccion/compresion uniaxial. Comenzando
por la traccion/compresion sobre un plano perpendicular a la direccion prin-
cipal primera, el estado de tension y deformacion correspondiente es:
[�
(1)
] =
2
4�1
0 0
0 0 0
0 0 0
3
5["
(1)
] =
2
4�1E
0 0
0 �⌫ �1E
0
0 0 �⌫ �1E
3
5 . (4.7)
Estudiando a continuacion un estado de traccion/compresion uniaxial en
la direccion principal de tension segunda obtenemos un nuevo estado de
deformacion
[�
(2)
] =
2
40 0 0
0 �2
0
0 0 0
3
5 , ["
(1)
] =
2
4�⌫ �2
E
0 0
0
�2E
0
0 0 �⌫ �2E
3
5 . (4.8)
Finalmente, considerando el tercer estado de tension posible se obtiene que
la tension y deformacion son
[�
(3)
] =
2
40 0 0
0 0 0
0 0 �3
3
5 , ["
(3)
] =
2
4�⌫ �3
E
0 0
0 �⌫ �3E
0
0 0
�3E
3
5 . (4.9)
Por el principio de superposicion, la deformacion debida a un estado
tensional � = �
(1)
+�
(2)
+�
(3)
es la suma " = "
(1)
+ "
(2)
+ "
(3)
, o en forma
de matriz:
["] =
2
4�1E
� ⌫ �2E
� ⌫ �3E
0 0
0
�2E
� ⌫ �1E
� ⌫ �3E
0
0 0
�3E
� ⌫ �1E
� ⌫ �2E
3
5 . (4.10)

Capıtulo 4. Elasticidad lineal 79
La primera conclusion que se obtiene de (4.10) es que, en un material
elastico isotropo, las bases principales de tension y deformacion coinciden.
Sobre todo, esta expresion indica la relacion mas general posible entre ten-
sion y deformacion de un material de estas caracterısticas cuando estas dos
cantidades se expresan en componentes de la base principal. Para hallar la
expresion intrınseca, valida para cualquier sistema de coordenadas, no ne-
cesariamente cartesiano reformulamos la anterior expresion de la siguiente
manera:
["] =
1 + ⌫
E
2
4�1
0 0
0 �2
0
0 0 �3
3
5� ⌫
E(�
1
+ �2
+ �3
)
2
41 0 0
0 1 0
0 0 1
3
5
=
1 + ⌫
E[�]� ⌫
Etr(�) [I] .
(4.11)
Esta ultima expresion depende solo de operadores intrınsecos, pues en ningun
lugar se hace referencia a componentes o sistemas de coordendas, ası que
se puede formular de manera completamente general la siguiente ley deHooke generalizada :
" =
1 + ⌫
E� � ⌫
Etr(�) I (4.12)
Para la resolucion de problemas resulta util recoger la expresion en com-
ponentes cartesianas de (4.12). Definimos para ello el modulo de cortanteo cizalla G =
E
2(1+⌫)
y escribimos
"xx
=
�xx
E� ⌫
E(�
yy
+ �zz
) , �xy
=
⌧xy
G,
"yy
=
�yy
E� ⌫
E(�
zz
+ �xx
) , �xz
=
⌧xz
G,
"zz
=
�zz
E� ⌫
E(�
xx
+ �yy
) , �yz
=
⌧yz
G.
(4.13)
En estas expresiones se puede leer un resultado adicional importante: en
los materiales elasticos isotropos las tensiones normales solo producen defor-
maciones longitudinales (en las tres direcciones debido al efecto Poisson) y
las tensiones cortantes solo produce deformaciones angulares (cada tension
cortante produce una deformacion angular desacoplada del resto).
4.2.3. Las ecuaciones de Lame
La ecuacion (4.12) permite calcular la deformacion " en funcion de la
tension � y en esta seccion invertimos esta expresion para encontrar una
formula de la tension en funcion de la deformacion. Para ello, comenzamos
amplicando el operador “traza” a ambos lados de la igualdad (4.12) resul-

80 Mecanica de solidos I. Romero
tando en
tr(") =
1 + ⌫
Etr(�)� ⌫
Etr(�) tr(I)
=
✓1 + ⌫
E� 3
⌫
E
◆tr(�)
=
1� 2⌫
Etr(�) .
(4.14)
En el capıtulo 3 se escogio el sımbolo ✓ para indicar la traza de la deforma-
cion, ası pues
tr(�) =
E
1� 2⌫✓ . (4.15)
Sustituyendo este ultimo resultado en la ecuacion (4.12) obtenemos
" =
1 + ⌫
E� � ⌫
E
E
1� 2⌫✓ I . (4.16)
Despejando el tensor de tension de esta expresion se obtiene
� =
E
1 + ⌫"+
E⌫
(1 + ⌫)(1� 2⌫)✓ I . (4.17)
Para poder escribir esta expresion de forma mas compacta definimos elprimer y segundo coeficiente de Lame
� =
E⌫
(1 + ⌫)(1� 2⌫), µ =
E
2(1 + ⌫). (4.18)
Ambos coefiecientes de Lame tienen dimensiones de F/L2
, como el modulo
de Young, puesto que son rigideces. Ademas, el segundo coeficiente de Lame
es igual al modulo de cortante G. Finalmente, escribimos la expresion (4.17)
como
� = 2µ "+ � tr(")I (4.19)
Esta ultima expresion se conoce como la ecuacion de Lame y permite
obtener la tension a partir de la deformacion. Como se trata de una ecuacion
intrınseca es valida en cualquier sistema de coordendas. En particular, si se
expresan todos los tensores en coordendas cartesianas se obtiene
�xx
= 2µ "xx
+ � ✓ , ⌧xy
= µ �xy
,
�yy
= 2µ "yy
+ � ✓ , ⌧xz
= µ �xz
,
�zz
= 2µ "zz
+ � ✓ , ⌧yz
= µ �yz
,
✓ = "xx
+ "yy
+ "zz
.
(4.20)

Capıtulo 4. Elasticidad lineal 81
4.2.4. Deformaciones y tensiones proporcionales
En un ensayo uniaxial, una tension de traccion provoca una deformacion
en direccion de las tensiones aplicadas. En general esto no es ası y un punto
sometido a un estado tensional � experimenta una deformacion " que no
es proporcional a la tension, es decir, " 6= !�, para ningun escalar !. Porejemplo, un punto sometido a traccion uniaxial sufre deformaciones en las
direcciones perpendiculares a al traccion aplicada debidas al “efecto Pois-
son”. Sin embargo, un punto sometido a un estado de tension de cortante
puro solo experimenta deformacion angular y se comprueba facilmente que
" = (2µ)�1
�. Pretendemos estudiar a continuacion cuantos casos existen de
solicitaciones que provocan estados de deformacion proporcionales a estos.
Teorema 4.2.1. En un solido elastico isotropo solo los estados de tensionesfericos y los puramente desviadores causan estados de deformacion pro-porcionales a ellos mismos. En el primer caso, cuando � es esferico,
" = (3)�1
� ,
siendo = �+ 2
3
µ el modulo de rigidez volumetrica, y en el segundo, cuando� es desviador,
" = (2µ)�1
� .
Demostracion. Supongamos que en para un estado tensional �, la deforma-
cion provocada en un punto es tal que " = !�. Entonces, por las ecuacionesde Lame,
� = 2µ!� + �!tr(�)
3
I .
Esta ecuacion se puede reescribir como
(1� 2µ!)� = �!tr(�)
3
I .
Para que esta ecuacion se cumpla para algun escalar ! solo existen dos
posibilidades: o bien � =
tr(�)
3
I, o bien ambos lados de la igualdad se
anulan. En el primer caso la tension es esferica y se cumple
(1� 2µ!)tr(�)
3
I = �!tr(�)
3
I =) 1� 2µ! = 3�! =) ! = (3)�1 .
En el segundo caso la tension es desviadora, tr(�) = 0, y el parentesis
en la ecuacion (4.2.4) debe de anularse, para lo cual es necesario que ! =
(2µ)�1
.
Usando la definicion de la rigidez volumetrica, las ecuaciones de Lame
se pueden escribir tambien de la siguiente manera
� = tr(")I + 2µ e (4.21)

82 Mecanica de solidos I. Romero
Esta expresion muestra que la constante relaciona la respuesta volumetri-
ca con las cargas volumetricas, y la deformacion desviadora (el cambio de
forma), con las cargas desviadoras. En otras palabras, las respuestas vo-
lumetrica y desviadora de materiales isotropos estan desacopladas.
Existe un ultimo caso, degenerado, y es cuando el coeficiente de Poisson
es nulo. En este caso, � se anula yterminar
4.2.5. Restricciones en las constantes elasticas
Las constantes que caracterizan el comportamiento elastico de los cuer-
pos isotropos no pueden tener valores aleatorios. Existen algunas restric-
ciones que siempre deben de cumplir, unas basadas en argumentos mas o
menos fısicos y otras en argumentos de tipo matematico.
Un camino “fısico” consiste en considerar los ensayos mas sencillos: el
de traccion uniaxial, el de cortante puro y el de compresion volumetrica.
En el primero, nuestra experiencia nos dice que al estirar una barra de
material elastico, esta siempre se alarga, ası que concluimos que E > 0.
En el segundo ensayo, tambien tenemos la experiencia de que al cizallar
un cuerpo, este se deforma en el sentido de la tension, ası pues µ > 0. Por
ultimo, al comprimir (sin cambio de forma) un cuerpo, su volumen disminuye
siempre, ası que > 0. A partir de estas tres experiencias y las relaciones
entre las constantes elasticas podemos deducir las restricciones de las demas
constantes elasticas. Por ejemplo, a partir de las relaciones
µ =
E
2(1 + ⌫)y =
E
3(1� 2⌫), (4.22)
se deduce que �1 < ⌫ < 1
2
. Si se considera la definicion
� =
⌫E
(1� 2⌫)(1 + ⌫), (4.23)
se concluye que � > 0.
Existen argumentos mas rigurosos, basados en la existencia de solucion
al problema elastico, o al estudio de la velocidad de propagacion de las ondas
en estos materiales, y estos se pueden encontrar en tratados mas avanzados
de elasticidad [3].
4.3. Hiperelasticidad
Como se vera mas adelante, los modelos elasticos mas interesantes desde
el punto de vista termodinamico son los que derivan de un potencial. Ası
definimos:

Capıtulo 4. Elasticidad lineal 83
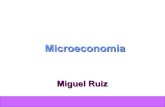
W
W ⇤
"
�
Figura 4.2: Energıa elastica y energıa elastica complementaria como areas
bajo y sobre la curve de tension-deformacion.
Definicion 4.3.1. Se dice que un material es hiperelastico cuando existe
una funcion escalar W = W ("), llamada la funcion de energıa elastica o
interna, tal que
� =
@W (")
@"(4.24)
En el caso general se sigue que W (") =
1
2
" : C" y, en particular, para
modelos elasticos isotropos
Wiso
(") =
�
2
( tr("))
2
+ µ " : " =
2
( tr("))
2
+ µ e : e . (4.25)
Cuando la funcion W es convexa, la relacion (4.24) se puede invertir y
definiendo la energıa elastica complementaria W ⇤= W ⇤
(�) como la
transformada de Legendre de la energıa interna, y por tanto se verifica
" =
@W ⇤(�)
@�(4.26)
Para materiales elasticos isotropos, la energıa interna complementaria tiene
la expresion
W ⇤(�) =
tr(�)
2
18+
1
4µs : s =
1 + ⌫
2E� : � � ⌫
2Etr(�)
2 . (4.27)
En el caso de un material elastico lineal, el valor de W (") y W ⇤(�) coincide
cuando � = C". Esta coincidencia es muy util a la hora de resolver proble-
mas y se aprovecha, sobre todo, en el calculo de estructuras elasticas. Sin
embargo, en general, como ilustra la figura 4.2, esto no ocurre.
. Ejemplo 4.3.2. Para ilustrar el concepto de energıa interna, consideramos
el modelo mas sencillo que es el de un resorte elastico de constante K. Segun

84 Mecanica de solidos I. Romero
la ley de Hooke, la fuerza que estira del resorte N y la elongacion � del mismo
estan relacionadas por la expresion N = K�. La energıa elastica asociada es
por tanto
W (�) =
Z�
0
N(x) dx =
Z�
0
Kx dx =
1
2
K�2 .
De la misma manera, al energıa elastica complementaria se puede calcular
como
W ⇤(N) =
ZN
0
�(x) dx =
ZN
0
x
Kdx =
1
2KN2 .
/
4.4. Simetrıas
En las secciones anteriores estudiamos la respuesta constitutiva de los
materiales isotropos. Muchos materiales son anisotropos y son mas difıciles
de caracterizar. A continuacion estudiamos los distintos tipos de simetrıas
posibles a partir del concepto de simetrıa material y concluimos las diferentes
simetrıas que el tensor C puede heredar. Mas detalles sobre los calculos
omitidos se pueden encontrar, por ejemplo, en [6].
4.4.1. Simetrıas menores y mayores
En primer lugar, debe de indicarse, que el tensor C tiene dos simetrıas,
independientemente del tipo de material elastico que modele. Como " y �
son tensores simetricos y � = C", CA = CAT
, para cualquier tensor A y
ademas CA = (CA)
T
, es decir, C solo actua sobre la parte simetrica de un
tensor y solo devuelve tensores simetricos. Estas son las llamadas simetrıasmenores del tensor de elasticidades.
Se dice ademas que el tensor de elasticidades tiene simetrıas mayoressi A·CB = B ·CA, para cualquier pareja de tensores A,B o, en notacion de
Voigt, que la matriz [C] es simetrica. Esto ocurre, por ejemplo, siempre que
el material sea hiperelastico. Cuando un material tiene todas las simetrıas
menores (siempre) y las mayores, de las 81 componentes que tiene el tensor
de constantes elasticas, solo 21 de ellas son independientes.
4.4.2. El concepto de simetrıa material
Consideremos todos los tensores ortogonales Q (las rotaciones y reflexio-
nes). Igual que Qa es el vector que resulta de rotar (y/o reflejar) el vector
a, el tensor Q"Q
T
es el resultado de rotar el tensor de deformacion. El con-
cepto de simetrıa material esta relacionado con la invarianza de la respuesta
constitutiva en relacion a los efectos de algunas rotaciones.

Capıtulo 4. Elasticidad lineal 85
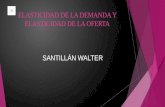
Figura 4.3: Materiales monoclınicos. En formaciones rocosas estratificadas el
comportamiento es (macroscopicamente) como el de un material monoclıni-
co, siendo el plano de simetrıa, en cada punto, el del estrato.
Definicion 4.4.1. Se dice que el tensor Q ortogonal es una simetrıa ma-terial en un punto cuando la energıa de deformacion W es invariante frente
a la rotacion de la deformacion. Es decir, si definiendo
¯
" = Q"Q
T
, se verifica
W (
¯
") = W (") (4.28)
para cualquier deformacion ". La coleccion de todas las simetrıas posibles
en un punto se denomina el grupo de simetrıa del mismo.
El concepto de simetrıa material esta definido, por tanto, localmente y
pueden existir cuerpos que posean simetrıas distintas en regiones separadas.
Que las simetrıas en un punto tienen la estructura de grupo se sigue de que
si Q
1
y Q
2
son dos simetrıas, tambien lo es Q
1
Q
2
, de que Q
�1
tambien es
una simetrıa, y de que el tensor identidad tambien lo es siempre.
4.4.3. Materiales monoclınicos
Un material monoclınico tiene un plano de simetrıa que suponemos, sin
perder generalidad, que es el perpendicular al eje e
3
. Por ello, el tensor
ortogonal Q
3
= e
1
⌦e
1
+e
2
⌦e
2
�e
3
⌦e
3
, que geometricamente representa la
reflexion respecto al plano de simetrıa, debe de estar en el grupo de simetrıa
del punto. Dada una deformacion arbitraria ", el resultado de reflejar este
tensor con Q
3
tiene por matriz
2
4"11
"12
"13
"21
"22
"23
"31
"32
"33
3
5=
2
41 0 0
0 1 0
0 0 �1
3
5T
2
4"11
"12
"13
"21
"22
"23
"31
"32
"33
3
5
2
41 0 0
0 1 0
0 0 �1
3
5
=
2
4"11
"12
�"13
"21
"22
�"23
�"31
�"32
"33
3
5
. (4.29)

86 Mecanica de solidos I. Romero
Por definicion de lo que se entiende por ser una simetrıa, se debe de verificar
" · C" =
¯
" · C¯" . (4.30)
para cualquier deformacion. En componentes,
3X
ijkl=1
Cijkl
"ij
"kl
=
3X
ijkl=1
Cijkl
"ij
"kl
. (4.31)
Si suponemos que todas las componentes de la deformacion son nulas excepto
"11
y "13
se sigue que
C1113
"11
"13
= C1113
"11
"13
. (4.32)
Como "11
= "11
y "13
= �"13
, concluimos que C1113
= 0 y tambien todos
los coeficientes que resultan de las simetrıas menores y mayores. Repitiendo
el mismo proceso para otros combinaciones de deformaciones se sigue que
C1113
= C1123
= C2213
= C2223
= C3313
= C3323
= C2312
= C1312
= 0 ,(4.33)
ası como todas sus permutaciones. De las 21 constantes independientes que
tiene un material elastico anisotropo, se sigue que solo 13 de ellas son inde-
pendientes para un material monoclınico.
4.4.4. Materiales ortotropos
Un punto tiene simetrıa ortotropa si tiene tres plano ortogonales de si-
metrıa. En terminos de tensores de rotacion, los tensores Q
1
,Q2
,Q3
estan
en el grupo de simetrıa del punto.
Para encontrar las consecuencias de estas simetrıas, y tomando como
planos de simetrıa los perpendiculares a los vectores de la base, podemos
repetir en analisis de los materiales monoclınicos. Ademas de las simetrıas
identificadas en la ecuacion (4.33), se pueden identificar como simplificacio-
nes adicionales
C1112
= C2212
= C3312
= C2313
(4.34)
y todas sus permutaciones menores y mayores. En total, teniendo en cuen-
ta la restricciones identificadas, solo puede haber nueve constantes elasti-
cas independientes en los materiales ortotropos. Estas simetrıas se dan, por
ejemplo, en las maderas y materiales compuestos.
4.4.5. Materiales transversalmente isotropos
Un punto tiene simetrıa ortotropa si existe un eje (supongamos que coin-
cide con el vector e
3
) tal que las matrices de la forma
2
4cos ✓ sin ✓ 0
� sin ✓ cos ✓ 0
0 0 1
3
5(4.35)

Capıtulo 4. Elasticidad lineal 87
son la expresion matricial de tensores en el grupo de simetrıa, para cual-
quier valor del angulo ✓. En este caso, se puede demostrar que las unicas
componentes del tensor de elasticidades que no son nulas son
C1111
= C2222
, C3333
, C1122
, C1133
= C2233
, C2323
= C1313
, (4.36)
C1212
= (C1111
� C1122
)/2, (4.37)
y como se puede comprobar solo cinco de ellas son independientes.
4.4.6. Materiales isotropos
Por ultimo, los materiales con el grupo de simetrıa mas grande son aque-
llos en los que cualquier rotacion y/o reflexion es una simetrıa. Si conside-
ramos que estos materiales son aquellos que tienen tres ejes ortogonales
alrededor de los cuales cualquier rotacion es una simetrıa, el analisis de los
materiales transversalmente isotropos concluye que los terminos no nulos del
tensor C son
C1111
= C2222
= C3333
, C1122
= C1133
= C2233
(4.38)
C2323
= C1313
= C1212
= (C1111
� C1122
)/2 , (4.39)
que solo incluye dos constantes independientes. En notacion de Voigt, la
matriz de elasticidades tiene la expresion:
[C]iso
=
2
6666664
�+ 2µ � � 0 0 0
� �+ 2µ � 0 0 0
� � �+ 2µ 0 0 0
0 0 0 µ 0 0
0 0 0 0 µ 0
0 0 0 0 0 µ
3
7777775(4.40)
Como los materiales isotropos se pueden describir mediante dos constan-
tes independientes, todas las que hemos descrito estan relacionadas entre sı.
El cuadro 4.1 resume todas estas relaciones.
4.5. Enunciado completo del problema elastico
Combinando los conceptos de equilibrio, deformacion y modelo consti-
tutivo se consigue la formulacion completa de un problema de contorno que
ya tiene solucion y que, aunque puede ser muy difıcil de obtener, es unica.
En el caso de la elasticidad, el problema completo es:
Un cuerpo elastico deformable es un dominio ⌦ ⇢ R3
con contorno @⌦ =
�u
[�t
. En �u
el cuerpo esta sujeto, y en �t
hay unas fuerzas de superficie
¯
t
conocidas. Todo el cuerpo esta sometido a fuerzas volumetricas
¯
f . Si el
cuerpo esta en equilibrio, es isotropo y elastico, y solo se consideran pequenas

88 Mecanica de solidos I. Romero
E ⌫ µ ⌘ G � k
E, ⌫ E
2(1+⌫)
⌫E
(1+⌫)(1�2⌫)
E
3(1�2⌫)
E,G E�2G
2G
(2G�E)G
E�3G
GE
3(3G�E)
E,� �E���A
4�
E�3�+A
4
E+3�+A
6
E, k 3k�E
6k
3Ek
9k�E
3k(3k�E)
9k�E
⌫, G 2G(1 + ⌫) 2G⌫
1�2⌫
2G(1+⌫)
3(1�2⌫)
⌫,� �(1+⌫)(1�2⌫)
⌫
�(1�2⌫)
2⌫
�(1+⌫)
3⌫
⌫, k 3k(1� 2⌫) 3k(1�2⌫)
2(1+⌫)
3k⌫
1+⌫
G,� G(3�+2G)
�+G
�
2(�+G)
�+
2
3
G
G, k 9Gk
3k+G
3k�2G
6k+2G
k � 2
3
G
�, k 9k(k��)
3k��
�
3k��
3
2
(k � �)
Cuadro 4.1: Relacion entre todas las constates de los materiales lineales
isotropos. La constante A esta definida como A =
pE2
+ 2E�+ 9�2.
deformaciones, el desplazamiento u : ⌦ ! R3
, la deformacion " y la tension�
satisfacen el siguiente problema de valores de contorno:
div� +
¯
f = 0 en ⌦ ,
�n =
¯
t sobre �t
,
�
T
= � ,
u = 0 sobre �u
,
" = rS
u ,
� = � tr(")I + 2µ " .
(4.41)
Este sistema de ecuaciones en derivadas parciales es el objeto de la teorıa
de la elasticidad clasica. De hecho, simplemente reemplazando la ultima de
estas ecuaciones por una relacion constitutiva mas compleja se define el
problema de la mecanica de solidos deformables en pequenas deformaciones.
4.5.1. El principio de Saint Venant
La experiencia indica que para el estudio de la solucion a un problema
de un cuerpo deformable los detalles exactos de como estan aplicadas las

Capıtulo 4. Elasticidad lineal 89
fuerzas de superficie no son muy relevantes. Por ejemplo, cuando se realiza
un ensayo de traccion, la forma de las mordazas de la maquina de traccion,
aunque no puede ser completamente aleatoria, no afecta el resultado de los
ensayos. Lo mismo ocurre con las tensiones en el terreno bajo una zapata, o
en un piston cuando esta sometido a las presiones de los gases en el interior
de un cilindro.
El principio de Saint Venant establece que los campos de despla-
zamiento, deformacion y tension debidos a dos distribuciones de fuerzas de
superficie estaticamente equivalentes son iguales lejos de la zona de aplica-
cion. Esta definicion deja sin definir cuan lejos los efectos de los detalles
en la aplicacion de las fuerzas dejan de ser perceptibles, ası que resulta un
poco imprecisa. Como regla general, se puede estimar que esta distancia es
igual a la dimension caracterıstica de la zona de aplicacion de las cargas.
En cualquier caso, su aceptacion es fundamental en ingenierıa y siempre lo
daremos como valido.
El principo de Saint Venant data de 1855, aunque con el tiempo se ha
demostrado que no es un principio como tal sino que puede ser demostrado.
Parte de la dificultad en demostrarlo radica en que su definicion, como se
comento anteriormente, es algo imprecisa. Desde su formulacion inicial varios
autores han tratado de dar una demostracion rigurosa del mismo [4, 7, 8].
4.5.2. Las ecuaciones de Navier
En la formulacion completa del problema elastico (ver ecuaciones (4.41))
aparecen como incognitas los campos de desplazamiento u, de deformacion "
y de tension �. Para la resolucion analıtica de algunos problemas resulta
util plantear el problema de contorno unicamente en funcion del campode desplazamientos. Cuando esto se lleva a cabo para las ecuaciones de la
elasticidad lineal se obtienen unas formulas muy compactas que reciben en
nombre de ecuaciones de Navier .
Para obtener dichas ecuaciones, basta con sustituir la expresion de la ten-
sion � en funcion de la deformacion y esta del desplazamiento u resultando
en
div [� div[u] I + 2µ grad
s
[u]] +
¯
f = 0 ,
(� div[u]I + 2µ grad
s
[u])n =
¯
t , en �t
,
u = 0 , en �u
.
(4.42)
Simplificando la primera de estas ecuaciones mediante las relaciones
div[div[u] I] = grad[div[u]] ,
div[gradu] = 4u ,
div[grad
T
u] = grad[div[u]] ,
(4.43)

90 Mecanica de solidos I. Romero
se demuestra inmediatamente que (4.42) se puede escribir como
(�+ µ) grad[div[u]] + µ4u+
¯
f = 0 ,
(� div[u]I + 2µ grad
s
[u])n =
¯
t , en �t
,
u = 0 , en �u
.
(4.44)
4.6. Estados planos de tension y deformacion
El tratamiento analıtico de los problemas de cuerpos deformables es,
en general, muy complicado. Existen dos casos particulares que simplifican
mucho la descripcion matematica del problema y que, ademas, son muy
habituales. Estos son los casos de tension y deformacion plana en los que
algunas de las componentes de tensor de tension o deformacion son nulas en
todos los puntos del cuerpo. Como se vera a continuacion, esto es el resultado
de geometrıas y cargas muy particulares.
4.6.1. Estados de tension plana
Definicion 4.6.1. Un cuerpo se encuentra en un estado plano de tensioncuando existe un sistema de coordenadas (x
1
, x2
, x3
) tal que el tensor de
tensiones en todo punto del cuerpo tiene la expresion
[�] =
2
4�11
(x1
, x2
) �12
(x1
, x2
) 0
�21
(x1
, x2
) �22
(x1
, x2
) 0
0 0 0
3
5 . (4.45)
Este estado de tension aparece, de forma muy aproximada, en cuerpos
planos, muy delgados con cargas de superficie y volumen contenidas en dicho
plano como, por ejemplo, las membranas.
El tensor de deformacion en estados planos de tension tiene por expresion
["] =
1 + ⌫
E[�]� ⌫
Etr(�)[I] =
2
4�11�⌫�22
E
�12G
0
�21G
�22�⌫�11E
0
0 0
�⌫
E
(�11
+ �22
)
3
5 .
(4.46)
Notese que la deformacion "33
no se anula.
4.6.2. Estados de deformacion plana
Definicion 4.6.2. Un cuerpo se encuentra en un estado plano de de-formacion cuando existe un sistema de coordenadas (x
1
, x2
, x3
) tal que el
tensor de deformacion en todo punto del cuerpo tiene la expresion
["] =
2
4"11
(x1
, x2
) "12
(x1
, x2
) 0
"21
(x1
, x2
) "22
(x1
, x2
) 0
0 0 0
3
5 . (4.47)

Capıtulo 4. Elasticidad lineal 91
Este estado de deformacion aparece, de forma muy aproximada, en cuer-
pos con simetrıa axial y cargas ortogonales a dicho eje de simetrıa, que ha de
coincidir con el eje x3
del sistema de referencia indicado anteriormente. Los
cuerpos que se encuentran en un estado plano de deformacion tiene un cam-
po de desplazamientos que, empleando el sistema de referencia cartesiano
que se menciona, verifica
u = u(x1
, x2
) , u · e3
= 0 . (4.48)
En estos estados de deformacion, el tensor de tensiones tiene por expresion
matricial en la base {e1
, e2
, e3
}
[�] = 2µ ["] + � tr(")[I] =
2
42µ"
11
+ �✓ µ�12
0
µ�21
2µ"22
+ �✓ 0
0 0 �✓
3
5 . (4.49)
Notese que, en general, la componente �33
no se anula. De hecho, podemos
escribir
�11
+ �22
= 2µ("11
+ "22
) + 2�✓ = 2(�+ µ)✓ . (4.50)
Como � + µ =
�
2⌫
, la tension en la direccion x3
se puede expresar tambien
como
�33
= �✓ = 2⌫(�+ µ)✓ = ⌫(�11
+ �22
) . (4.51)
4.6.3. El diagrama de Mohr en estados planos
En un estado plano, la direccion que hemos denominado x3
es principal
y la tension asociada es una tension principal (que se anula en el caso de
tension plana). En el plano x1
x2
, existen dos tensiones principales que lla-
mamos �I
,�II
con sus direcciones principales correspondientes v
I
,vII
. Notese
que no se correspoden necesariamente con las dos tensiones principales ma-
yores en el punto, porque puede que la tension principal � = 0 sea la mayor
de la tres o la intermedia.
Para continuar, y por simplificar la notacion, supongamos que el sistema
coordenado x1
, x2
, x3
es el cartesiano x, y, z. Entonces, en cualquiera de los
dos tipos de estados planos las tensiones principales �I
y �II
son las raıces
del polinomio caracterıstico
0 =
����
�x
�xy
�xy
�y
�� �
1 0
0 1
����� = �2 � (�x
+ �y
)�+ �x
�y
� �2xy
. (4.52)
´
Estas se pueden escribir de forma explıcita como
� =
�x
+ �y
2
±s✓
�x
� �y
2
◆2
+ �2xy
. (4.53)

92 Mecanica de solidos I. Romero
�n
⌧m
�I�II
�I+�II2
2✓
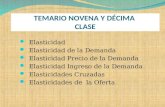
Figura 4.4: Diagrama de Mohr para estados planos.
Consideremos ahora las componentes intrınsecas de la tension t = �n
sobre planos de normal n contenida en el plano xy, es decir, tal que n·k = 0.
En la base principal BP
= {vI
,vII
,k} este vector se puede escribir como
n = cos ✓ vI
+ sin ✓ vII
, ası pues la tension normal sobre dicho plano es
�n
= n · �n =
8<
:
cos ✓sin ✓0
9=
; ·2
4�I
0 0
0 �II
0
0 0 �z
3
5
8<
:
cos ✓sin ✓0
9=
;
= �I
cos
2 ✓ + �II
sin
2 ✓
=
�I
+ �II
2
+
�I
� �II
2
cos(2✓) .
(4.54)
Para calcular la componente tangencial definimos el vector unitario m =
n ⇥ k. Este vector define, solo para problemas planos la unica direccion
tangencial posible sobre el plano de normal n donde puede haber tension
tangencial. Este vector ademas tiene expresion en la base principal m =
sin ✓ vI
� cos ✓ vII
ası que podemos definir la tension tangencial ⌧m
como la
proyeccion t ·m y calcularla explıcitamente de la siguiente manera
⌧m
= m · �n =
8<
:
sin ✓� cos ✓
0
9=
; ·2
4�I
0 0
0 �II
0
0 0 �z
3
5
8<
:
cos ✓sin ✓0
9=
;
= �I
sin ✓ cos ✓ � �II
sin ✓ cos ✓
=
�I
� �II
2
sin(2✓).
(4.55)

Capıtulo 4. Elasticidad lineal 93
x1
x2
(x1, x2)
�
(x1 + u1, x2 + u2)
�
S
m
n
Figura 4.5: Seccion transversal de un eje no circular
A partir de las expresiones (4.54) y (4.55) se interpreta que las componentes
intrınsecas (�n
, ⌧m
) de la tension en estados planos recorren un circunfe-
rencia en el plano como se indica en la 4.4. A diferencia del diagrama de
Mohr para estados de tension tridimensionales, en el caso plano tiene sen-
tido representar un cırculo completo, puesto que en este caso la tensiones
tangenciales ⌧m
sı que pueden ser negativas.
4.7. Aplicacion: torsion de ejes no circulares
Estudiamos a continuacion una aplicacion de la teorıa de la elasticidad li-
neal para el estudio de la torsion de ejes con seccion no circular de materiales
elasticos lineales isotropos.
El caso de ejes de seccion circular maciza o hueca se describe con la
teorıa de Coulomb, y es relativamente sencilla gracias a la simetrıa de revo-
lucion en la solucion. Como se estudia en cursos basicos de Resistencia de
Materiales, un eje circular macizo o hueco sometido a torsion pura de valor
Mt
experimenta un giro por unidad de longitud # cuyo valor es
# =
Mt
µ Io
, (4.56)
siendo Io
el momento polar de inercia de la seccion respecto de su centro de
gravedad. Ademas se puede deducir de forma sencilla que las tensiones sobre

94 Mecanica de solidos I. Romero
Figura 4.6: Barra sometida a torsion y alabeada, tal y como la dibujo Saint
Venant.
las secciones transversales del eje son unicamente tangenciales, en direccion
perpendicular a los radios de la misma y de modulo
|⌧ | = Mt
Io
r , (4.57)
siendo r la distancia del punto estudiado al centro de gravedad de la seccion.
Para ejes no circulares, sin embargo, la solucion es bastante mas compleja
y la propuso Saint-Venant. El metodo de obtencion, que se conoce como
semi-implıcito, es habitual en teorıa de elasticidad: se postula una expresion
para los desplazamientos que depende de algunos parametros; se encuentra
el valor de los parametros que hace valida esta ecuacion y se comprueba
finalmente que ademas esta solucion se corresponde con un estado de torsion
pura.
Para describir las hipotesis de la teorıa de Saint Venant, supondremos
que la seccion del eje esta contenida en el plano x1
, x2
de un sistema de
coordenadas x1
, x2
, x3
con origen en el centro de gravedad de la seccion y
con la direccion x3
perpendicular a la misma, como se indica en la figura 4.5.
Cuando se aplica un estado de torsion pura sobre el eje se supondra que:
Las secciones giran y se alabean, pero su proyeccion sobre el plano x1
, x2
permanece identica a la seccion sin deformar.
El alabeo de todas las secciones es el mismo, y ademas es proporcional
al giro por unidad de longitud #.
Como en la teorıa de Coulomb, el giro de una seccion es proporcional
al giro por unidad de longitud y la distancia a un extremo del eje.

Capıtulo 4. Elasticidad lineal 95
La expresion matematica de las hipotesis es:
u1
= r cos(� + �)� r cos�
u2
= r sin(� + �)� r sin�
u3
= # (x1
, x2
)
(4.58)
Si el giro � es pequeno, es inmediato comprobar que los desplazamientos se
pueden aproximar por las funciones
u1
= �x2
x3
# ,
u2
= x1
x3
# ,
u3
= # (x1
, x2
) .
(4.59)
A partir del campo de desplazamiento se deduce que las tres deformaciones
longitudinales "11
, "22
y "33
son nulas y que las deformaciones angulares son
"12
= 0 , "13
=
#
2
( ,1
� x2
) , "23
=
#
2
( ,2
+ x1
) . (4.60)
A partir de estas, y empleando las ecuaciones de Lame, se sigue que las
tensiones �11
, �22
y �33
son nulas y las tensiones tangenciales valen
�12
= 0 , �13
= µ#( ,1
� x2
) , �23
= µ#( ,2
+ x1
) . (4.61)
Suponiendo que no existen fuerzas volumetricas sobre el eje, o que su
valor es despreciable, la ecuacion del equilibrio de fuerzas, div� = 0, expre-
sada en la base escogida implica que se debe satisfacer
µ#( ,11
+ ,22
) = 0 (4.62)
o, equivalentemente,
4 = 0 (4.63)
en todos los puntos del interior de la seccion. Para encontrar la expresion de
la ecuacion del equilibrio de fuerzas en el contorno de la seccion supongamos
que este se puede parametrizar con una funcion diferenciable x = x(s),siendo el parametro s la longitud de arco del contorno. En este caso, el
vector tangente al contorno es m = x
0y el vector normal n = m ⇥ e
3
.
Como el contorno de la seccion esta libre de tensiones se sigue que 0 = �n.
Si la normal al contorno se expresa como n = n1
e
1
+ n2
e
2
, entonces la
condicion de contorno implica dos igualdades escalares triviales y ademas
0 = ( ,1
� x2
)n1
+ ( ,2
+ x1
)n2
. (4.64)
La funcion de alabeo es por tanto una funcion armonica que satisface la
identidad anterior en el contorno y el campo de desplazamientos (4.58) es
la solucion a un problema elastico.

96 Mecanica de solidos I. Romero
Falta por comprobar que, efectivamente, la solucion encontrada corres-
ponde a un estado de torsion pura. Es sencillo comprobar que no existe
ninguna fuerza resultante sobre la seccion, ası pues no hay sobre ella ni es-
fuerzo axial ni de cortante. Ademas, como no hay tensiones normales �33
,
tampoco existen momentos flectores sobre esta. Sin embargo, el momento
resultante en direccion del eje x3
es
Mt
=
Z
S(x
1
�23
� x2
�13
) dS
=
Z
Sµ#(x2
1
+ x22
+ x1
,2
� x2
,1
) dS .
(4.65)
De esta identidad se sigue que la relacion entre el par torsor y el giro por
unidad de longitud # se puede escribir como
# =
Mt
µ It
(4.66)
si It
, la inercia a torsion de la seccion, se calcula como
It
=
Z
S(x2
1
+ x22
+ x1
,2
� x2
,1
) dS . (4.67)
Observaciones:
a) Comparando la expresion (4.66) con (4.56) concluimos que la inercia
a torsion juega el mismo papel que el momento polar de inercia en la
torsion de ejes circulares, cuantificando la contribucion geometrica a
la rigidez torsional.
b) Ademas, se verifica que si la seccion es circular la funcion de alabeo es
identicamente nula y por tanto It
= I0
.
c) Por ultimo, se puede comprobar que para cualquier seccion It
Io
,
siendo cierta la identidad unicamente para las secciones circulares.
Esto apunta a que las secciones no circulares sometidas a torsion se
alabean como mecanismo para reducir su rigidez torsional, pero man-
teniendo una solucion valida al problema elastico, y ası disminuir su
energıa potencial.
4.7.1. Teorıa de Prandtl
Las unicas componentes no nulas del tensor de tensiones, en el sistema de
referencia escogido, son �31
y �32
. Para intentar comprender mejor como son
estas componentes de la tension tangencial sobre el plano de las secciones

Capıtulo 4. Elasticidad lineal 97
x1
x2 r�
Figura 4.7: Isolıneas de nivel de la funcion de Prandtl.
transversales del eje supongamos que existe una funcion diferenciable � =
�(x1
, x2
), llamada funcion de Prandtl, tal que
�13
= �,2
, �23
= ��,1
. (4.68)
En primer lugar se observa que si esta funcion existe, entonces el tensor
de tensiones satisface div� = 0, es decir, verifica las ecuaciones de equi-
librio. En segundo lugar, utilizando las expresiones (4.61) de las tensiones
tangenciales se sigue que
�13
= �,2
= #µ( ,1
� x2
) ,
�23
= ��,1
= #µ( ,2
+ x1
) .(4.69)
Derivando la primera de estas identidades con respecto a x2
, la segunda con
respecto a x1
y restando el resultado de ambas operaciones concluimos que
�4� = 2µ# . (4.70)
Finalmente, si como anteriormente suponemos que el contorno de la seccion
viene dado por una curva x = x(s), entonces, la condicion de que el lateral
del eje no esta sometido a tension se expresa como �n = 0 o tambien
0 = �,2
n1
� �,1
n2
= �,2
x02
+ �,1
x01
=
@�
@s, (4.71)
es decir, que la funcion � es contante a lo largo del contorno de la seccion.

98 Mecanica de solidos I. Romero
El momento torsor se puede calcular como
Mt
=
Z
S(x
1
�23
� x2
�13
) dS
=
Z
S�(x
1
�,1
+ x2
�,2
) dS
=
Z
Sgrad� · (x
1
e
1
+ x2
e
2
) dS
=
Z
S� div(x
1
e
1
+ x2
e
2
) dS �Z
@S� (x
1
e
1
+ x2
e
2
) · n d� .
(4.72)
Si la seccion S no tiene agujeros, podemos fijar arbitrariamente el valor de �en el contorno y escogiendo � = 0 en @S concluimos que
Mt
= 2
Z
S� dS . (4.73)
Igual que en el caso de la teorıa de Saint Venant, podemos encontrar la
inercia a torsion a partir de la expresion anterior y la relacion (4.66):
It
=
2
RS � dS
µ#. (4.74)
Ademas de una herramienta para calcular la rigidez a torsion, la funcion
de Prandtl sirve para obtener conclusiones cualitativas sobre la distribucion
de tensiones tangenciales en la seccion. Como esta tension es de la forma
⌧ = �13
e
1
+ �23
e
2
= �,2
e
1
� �,1
e
2
y podemos deducir
|⌧ | = |grad�| , ⌧ · grad� = 0 , (4.75)
es decir, que los vectores tension sobre las secciones transversales del eje
son perpendiculares al gradiente de � y tiene el mismo modulo que grad�.A partir de las curvas de nivel de �, podemos deducir que las maximas
tensiones tangenciales ocurriran allı donde estas esten mas juntas, y que si
direccion sera la tangente a las curva de nivel.
4.7.2. Ejemplo: torsion de secciones elıpticas
Como ejemplo de aplicacion de la teorıa de esta seccion calculamos la
funcion de alabeo y la funcion de Prandtl de una seccion elıptica con las di-
mensiones indicadas en la figura 4.8. En primer lugar, buscamos una funcion
: S ! R que satisfaga las ecuaciones (4.63) y (4.64). Para ello, emplea-
mos el llamado metodo semi-inverso que consiste en proponer una solucion
conocida parcialmente. En este caso, se propone
(x1
, x2
) = kx1
x2
, (4.76)

Capıtulo 4. Elasticidad lineal 99
x1
x2
a
b
n
Figura 4.8: Seccion elıptica sometida a torsion pura.
siendo k una constante a determinar. Es inmediato comprobar que esta fun-
cion satisface la ecuacion (4.63). Para verificar si cumple la condicion (4.64)
en el contorno de la seccion recordamos la ecuacion parametrica de la elipse
x1
= a cos ✓ , x2
= b sin ✓ , (4.77)
y obtenemos a partir de esta la expresion del vector tangente al contorno
de S, que denominamos m y del vector normal n = m⇥ e
3
:
m = (x01
e
1
+ x02
e
2
)/C = (�a sin ✓e1
+ b cos ✓e2
)/C ,
n = (b cos ✓e1
+ a sin ✓e2
)/C = (
b
ax1
e
1
+
a
bx2
e
2
)/C ,(4.78)
siendo C una constante para normalizar el vector tangente y el normal.
Sustituyendo la expresion del vector normal en la ecuacion (4.64) se sigue
0 = (kx2
� x2
)
b
ax1
+ (kx1
+ x1
)
a
bx2
= (k � 1)
b
ax1
x2
+ (k + 1)
a
bx1
x2
(4.79)
que se verifica si k = (b2 � a2)/(b2 + a2) y por tanto
(x1
, x2
) =
b2 � a2
b2 + a2x1
x2
. (4.80)
Una vez conocida la funcion de alabeo, podemos calcular la inercia a torsion

100 Mecanica de solidos I. Romero
Figura 4.9: Funcion de alabeo para el eje de seccion elıptica.
de la seccion empleando la expresion (4.67):
It
=
Z
S(x2
1
+ x22
+ x1
,2
� x2
,1
) dA
=
Z
S(x2
1
+ x22
+ kx21
� kx22
) dA
= (1 + k)
Z
Sx21
dA+ (1� k)
Z
Sx22
dA
= (1 + k)I2
+ (1� k)I1
= (1 + k)⇡
4
ab3 + (1� k)⇡
4
a3b
=
⇡a3b3
a2 + b2.
(4.81)
Notese que It
= Io
+ k(I2
� I1
). Cuando a > b, k es negativo y I2
� I1
,
positivo, ası pues It
< Io
. Cuando a < b la conclusion es la misma. El unico
caso en el que It
= Io
es cuando la funcion de alabeo es identicamente nula,
es decir, en la seccion circular.
Para calcular la funcion de Prandtl, utilizamos tambien el metodo semi-
inverso y suponemos que esta es de la forma
�(x1
, x2
) = ⌘
✓x21
a2+
x22
b2� 1
◆, (4.82)
siendo ⌘ una constante cuyo valor determinaremos a continuacion. Las cur-
vas de nivel de la funcion � son elipses concentricas y esta es evidentemente
nula en el contorno de la seccion. La relacion (4.70) se satisface si ⌘ vale
⌘ = �µ#a2b2
a2 + b2. (4.83)

Capıtulo 4. Elasticidad lineal 101
Figura 4.10: Curvas de nivel de la funcion de Prandtl � de la viga de seccion
elıptica
Figura 4.11: Direccion (izda.) y modulo (dcha.) de los vectores de tension
tangencial en el eje de seccion elıptica sometido a torsion pura.
Esta funcion nos indica que la tensiones tangenciales sobre la seccion son
tangentes a elipses concentricas y que su modulo es maximo donde los se-
miejes cortan la elipse exterior. Dado que el momento torsor y la funcion de
Prandtl estan relacionados por la formula (4.73), podemos verificar que la
inercia torsional es
It
=
Mt
µ#=
2
RS �(x1, x2) dA
µ#=
⇡a3b3
a2 + b2, (4.84)
que coincide con el resultado obtenido mediante la funcion de alabeo.
4.8. Limitaciones de la teorıa lineal
En estas notas estudiamos unicamente la teorıa lineal de los solidos defor-
mables y en este capıtulo hemos descrito el caso particular de la elasticidad
lineal, por ser el mas sencillo y el de mas facil aplicacion. Este modelo tie-
ne, por un lado, innumerables aplicaciones a la mecanica estructural y de

102 Mecanica de solidos I. Romero
maquinas. Por otro, tambien adolece de graves limitaciones que impiden su
uso generalizado para problemas mas complejos, donde la hipotesis de pe-
quenas deformaciones es inaceptable. Mencionamos a continuacion alguna
de estas, dejando para cursos mas avanzados el estudio de la elasticidad no
lineal y de la teorıa no lineal de solidos deformables ([1, 5, 2]).
4.8.1. Limitaciones en la estatica
La ecuacion del equilibrio de fuerzas div� +
¯
f = 0 es estrictamente
cierta, incluso aunque las deformaciones sean enormes, siempre que se defina
con precision el tensor � y las fuerzas volumetricas
¯
f . La dificultad aparece
cuando un cuerpo, debido a su deformacion, cambia significativamente de
forma y tamano, de tal manera que las fuerzas por unidad de area inicial
y las fuerzas por unidad de area deformada no son parecidas. Entonces, es
necesario especificar a que area hace referencia el tensor de tensiones.
En particular, el tensor de tensiones de Cauchy � se define como la
fuerza que se hace, por unidad de area deformada a traves de un diferencial
de area. El razonamiento para llegar a la ecuacion del equilibrio en la llamada
configuracion deformada es identico al empleado en el Capıtulo 2.
Sin embargo, como la configuracion deformada no es conocida a priori
resulta que para poder definir el tensor de tensiones y expresar la ecuacion
del equilibrio es necesario haber resuelto el problema con anterioridad. Para
evitar este argumento circular, se proponen otros tensores de tension. Por
ejemplo, el (primer) tensor de Piola-Kirchho↵ es el tensor de tensio-
nes que expresa las fuerzas que se ejercen sobre un diferencial de area, por
unidad de area sin deformar. Pero este no es el unico tensor de tensiones
util en mecanica de solidos. Al contrario, existen varios mas que son utiles
y cuya descripcion se puede encontrar en libros mas avanzados. Como unica
aclaracion, indicamos que la fuerza por unidad de area sin deformar tambien
se llama tension nominal y es mas facil de calcular que la tension real.
4.8.2. Limitaciones en la cinematica
Como ya se ha explicado, el tensor de deformaciones infinitesimales "
solo mide deformaciones de forma exacta cuando estas y los desplazamien-
tos son infinitesimales. Cuando no lo son, el tensor " solo proporciona una
aproximacion a las autenticas deformaciones.
Los tensores de deformacion validos en cualquier situacion deben de cum-
plir, al menos, dos condiciones. La primera es que si el entorno de un punto
(deformado o no) sufre un desplazamiento de solido rıgido de magnitud ar-
bitraria, la deformacion no debe de alterarse. La segunda condicion es que
cuando las deformacion y desplazamientos sean muy pequenos, el tensor de
deformaciones coincida con ".
Bajo estas dos premisas existen infinitos tensores de deformacion validos.

Capıtulo 4. Elasticidad lineal 103
-2
-1
0
1
2
3
4
0.5 1 1.5 2 2.5 3
E(m
)
L/Lo
m = �2m = 0m = 1m = 2
Figura 4.12: Medidas de deformacion uniaxial.
El mas sencillo de comprender, el llamado tensor de deformacion de Green-
Lagrange, se define como
E =
1
2
((I + gradu)
T
(I + gradu)� I) , (4.85)
y ya aparecio en el Capıtulo 3 en el calculo de las deformaciones longitudina-
les, aunque eliminamos el termino cuadratico al suponer que los gradientes
gradu eran pequenos.
Para comprender el por que de esta variedad de medidas de deforma-
cion sin necesidad de comprender los detalles de la cinematica de medios
continuos podemos estudiar la deformacion (unidimensional) de una barra
de longitud Lo
al ser estirada o comprimida hasta una longitud L. En este
caso, las medidas de deformacion
E(m)
=
(log
L
L
o
si m = 0 ,1
m
⇣L
m
L
m
o
� 1
⌘si m 6= 0 ,
(4.86)
son todas ellas validas. En la figura se pueden comparar cuatro medidas de
deformacion del tipo (4.86): la llamada deformacion de Almansi (m =
�2), la deformacion de Hencky o logarıtmica (m = 0), la “ingenieril”
(m = 1) y la de Green-Lagrange (m = 2). Se puede observar como para
deformaciones pequenas (L/Lo
⇡ 1) todas ellas coinciden.
La deformacion de Hencky tiene una propiedad que la hace especial,
entre todas. Consideremos, para ver esto, la deformacion longitudinal de
una barra recta de longitud L0
tal y como aparece en la figura 4.13. Cuando
la barra se estira hasta alcanzar una longitud L1
, la deformacion que esta
experimenta es "0!1
= (L1
�L0
)/L0
. Si la viga se estira mas, hasta alcanzar

104 Mecanica de solidos I. Romero
L0
L1
L2
"0!1
"1!2
Figura 4.13: Deformacion longitudinal de una barra recta en dos fases.
L0 + u
L0 + u+ du d"
Figura 4.14: Deformacion infinitesimal entre dos configuraciones deformadas
de una barra recta.
la longitud L2
, la deformacion en este segundo paso es "1!2
= (L2
�L1
)/L1
.
Si calculamos la deformacion total "0!2
= (L2
�L0
)/L0
comprobamos que
"0!1
+ "1!2 6= "0!2 , (4.87)
es decir, que la deformacion no es aditiva y que por tanto no da igual como
se calcule (a menos que la deformacion total sea infinitesimal). Si repetimos
este mismo argumento, empleando esta vez la deformacion logarıtmica se
comprueba que
"0!1
+ "1!2
= log
L1
L0
+ log
L2
L1
= log
L2
L0
= "0!2, (4.88)
es decir, que sı es aditiva. Para comprender mejor esta propiedad, conside-
remos la deformacion infinitesimal que aparece cuando se deforma longitu-
dinalmente una barra recta de longitud L0
+u hasta L0
+u+du, tal y como
aparece en la figura 4.14. En este caso, se tiene que
d" =du
L0
+ u. (4.89)
Si sumamos todas las contribuciones diferenciales en una deformacion com-
pleta desde que u = 0 hasta que u = L� L0
concluimos que
" =
Zd" =
Zu
0
du
L0
+ u= log
L0
+ u
L0
= log
L� L0
L0
. (4.90)
Este resultado indica que la deformacion logarıtmica es la que se obtiene
al integrar, en cada incremento infinitesimal de deformacion, la medida de
deformacion estandar.

Capıtulo 4. Elasticidad lineal 105
4.8.3. Limitaciones del modelo constitutivo elastico
La relacion constitutiva elastica lineal, como se indicaba anteriormen-
te, es extremadamente util y se emplea en todos los calculos habituales de
estructuras y diseno de maquinas. Sin embargo presenta algunas paradojas
que senalan a que no puede ser completamente valido. La mas importante
se puede explicar incluso con un modelo unidimensional: en un ensayo de
traccion/compresion unidimensional se tiene que �xx
= E✏xx
. Esta expre-
sion indica que para obtener un alargamiento ✏ = 0,9 se require la misma
tension (en modulo) que para obtener un acortamiento ✏ = �0,9. Aunqueesto puede ser aproximadamente cierto para ✏ pequeno, claramente no puede
ser valido para valores grandes de la deformacion.
Problemas
4.1.
2
p3
6
2
p3
2
30
o
Dibuja sobre la hipotenusa del
triangulo rectangulo de la figura la
tension normal y tangencial corres-
pondiente a su estado tensional. Di-
buja ademas los ejes principales de
tension (Nota: las tensiones estan
expresadas en MPa).
4.2.
5 + 2p3
2
5
4
De un punto en un cuerpo deforma-
ble se extrae un triangulo equilatero
diferencial del cual se conoce el esta-
do tensional sobre alguna de sus ca-
ras. Dibuja el diagrama de Mohr del
estado tensional del punto y com-
pleta el valor de los vectores tension
de la figura, sabiendo que los valo-
res indicados estan en unidades de
MPa. Dibuja la posicion de los ejes
principales sobre el triangulo.

106 Mecanica de solidos I. Romero
4.3.
x
y
45
A
C
B
Se colocan tres galgas extensometri-
cas sobre la superficie de un cuerpo
deformable como se indica en la fi-
gura. Si las galgas miden:
"A
= 10
�3 , "B
= 2·10�3 , "C
= �3·10�3 ,
y se sabe que el solido esta en un es-
tado de tension plana, siendo z el ejede tension nula. Calcular el tensor
de deformacion completo en el pun-
to en el que las galgas realizan las
mediciones (E = 20000 Kp/mm
2
y
⌫ = 0,35).
4.4. Dados los estados tensionales A y B correspondientes a estados planos
de tension,
a) Considerar el estado C que resulta de sumar las tensiones que crean
los estados A y B. Dibujar el diagrama de Mohr correspodiente a este
tercer estado.
b) Determinar de forma grafica el valor de � para que el estado C sea un
estado de cortante puro.
c) Determinar de forma grafica el valor mınimo de � para que en el estado
C no haya compresion en ningun plano.
d) Determinar de forma grafica el valor maximo de � para que en el estado
C no haya traccion en ningun plano.
e) Resuelve analıticamente las tres preguntas anteriores.
(NOTA: las tensiones en el estado A estan expresadas en MPa).

Capıtulo 4. Elasticidad lineal 107
44
3
3
4
4
3
3
�
�
45
Estado A Estado B
Figura 4.15: Problema 4.4.
4.5.
1 2
5
5
1
A
B
(Tensiones en MPa)
Un punto de un cuerpo tiene un es-
tado tensional plano cuya represen-
tacion grafica se adjunta.
a) Dibuja el diagrama de Mohr
del estado tensional.
b) Identifica sobre la circunferen-
cia de Mohr el estado tensio-
nal de las caras A y B.
c) Calcula a partir de la figura el
valor de las tensiones princi-
pales.
d) Indica el angulo (y el sentido)
que forma la normal n
A
con la
direccion principal primera.

108 Mecanica de solidos I. Romero
4.6.
23
(Tensiones en MPa)
2
I
II
La figura indica el estado tensional
plano de un punto en un cuerpo de-
formable.
a) Halla el valor de la tension
normal � sabiendo que la ten-
sion cortante maxima en ese
punto es de 5 MPa.
b) Dibuja el cırculo de Mohr
correspondiente al estado de
tension resultante.
c) Identifica, sobre el cırculo, el
estado tensional de la cara I y
de la cara II.
4.7.
44
2
2
2
2
(Tensiones en MPa)
Un punto de un solido deformable
se encuentra sometido a un esta-
do plano de tension representado
por la figura de la izquierda. En-
contar graficamente las tensiones en
las tres caras del triangulo equilate-
ro diferencial de la derecha centrado
en el mismo punto.

Capıtulo 4. Elasticidad lineal 109
4.8.
x
y
Un solido elastico isotropo se en-
cuentra en un estado de tension pla-
na. Uno de sus puntos, que denomi-
namos P , tiene un estado tensional
que en el sistema de coordenadas xyde la figura (siendo z el eje normal
al plano de tension nula) tiene la si-
guiente respresentacion matricial:
[�]
xy
=
4 �1
�1 2
�MPa
a) Dibuja el diagrama de Mohr
del estado plano de tension en el punto P .
b) Calcula las componentes
intrınsecas del vector tension
sobre cada una de las caras
del triangulo diferencial de la
figura, si esta centrado en el
punto P .
4.9. Una viga de acero (E = 210 GPa, ⌫ = 0,3) esta sometida a una traccion
pura de 100 MPa. Calcular su deformacion volumetrica.
4.10. El estado tensional en un punto de un solido de acero, cuando se
refiere a una base ortonormal, tiene por expresion
� =
2
430 20 0
20 �10 0
0 0 70
3
5MPa
Calcular la energıa interna del punto por unidad de volumen de dos maneras
distintas:
a) Empleando la expresion directa de la energıa complementaria y
b) Calculando la deformacion asociada y, a partir de esta, la energıa elasti-
ca.
4.11. Un material ortotropo tiene la siguiente matriz de elasticidades
[C] =
2
6666664
100 10 15 0 0 0
10 40 5 0 0 0
15 5 8 0 0 0
0 0 0 6 0 0
0 0 0 0 7 0
0 0 0 0 0 4
3
7777775MPa

110 Mecanica de solidos I. Romero
Definimos la siguiente ley de Hooke generalizada
"11
=
�11
E11
� ⌫12
E22
�22
� ⌫13
E33
�33
"22
=
�22
E22
� ⌫21
E11
�11
� ⌫23
E33
�33
"33
=
�33
E33
� ⌫31
E11
�11
� ⌫32
E22
�22
"23
/2 =
�23
G23
"13
/2 =
�13
G13
"12
/2 =
�12
G12
,
sabiendo que para que la matriz de flexibilidades [C]�1
sea simetrica debera
verificarse ademas
⌫ij
Ejj
=
⌫ji
Eii
para toda pareja i 6= j. Determina el valor de las constantes E11
, E22
, E33
,
⌫12
, ⌫13
, ⌫23
, G12
, G13
, G23
.
4.12. Comprueba que, en problemas planos, las ecuaciones de Lame se pue-
den escribir como
� =
¯� tr(")I + 2µ "
siendo
¯� =
8<
:
� deformacion plana ,2�µ
�+ 2µtension plana .
Bibliografıa
[1] A E Green and W Zerna. Theoretical elasticity. Oxford University Press,
Oxford, England, 1968.
[2] G A Holzapfel. Nonlinear solid mechanics: a continuum approach forengineering. John Wiley & Sons, 2000.
[3] J E Marsden and T J R Hughes. Mathematical foundations of elasticity.Prentice-Hall Englewood Cli↵s, 1983.
[4] R v Mises. On Saint Venant’s principle. Bulletin of the American Mat-hematical Society, 51:555–562, 1945.
[5] R W Ogden. Non-linear elastic deformations. Dover, 1984.
[6] W S Slaughter. The linearized theory of elasticity. Birkhauser, Boston,
2002.

Bibliografıa 111
[7] R Sternberg. On Saint-Venant’s principle. Q J Appl Mech, 11:393–402,1954.
[8] R A Toupin. Saint- Venant’s Principle. Archive for Rational Mechanicsand Analysis, 18:221–232, 1965.
[9] C Truesdell and W Noll. The non-linear field theories of mechanics.Springer, second edition, 1992.