
Electromagnetismo 2018 -...
24
Electromagnetismo 2018 7 – Aplicaciones magnéticas Modelo numéricos cuasi-estáticos
Transcript of Electromagnetismo 2018 -...

Electromagnetismo 2018
7 – Aplicaciones magnéticas
Modelo numéricos cuasi-estáticos

Electromagnetismo 2018 Plan de la clase:
Aplicaciones magnéticas 1 – Materiales magnéticos modernos 2 – Aplicaciones: Magnetorresistencia 3 – Aplicaciones: Refrigeración Magnética 4 – Aplicaciones: Levitación diamagnética
Modelo numéricos cuasi-estáticos
1 – Métodos integrales 2 – Métodos diferenciales 3 – Diferencias finitas (DF) 4 – Elementos finitos (FEM)
2
Materiales magnéticos 1 – Materiales magnéticos modernos
Alnico
La aleación de aluminio, níquel, cobalto y hierro conocida como Alnico se desarrolló en la década de 1930-1940 y fue el primer paso para crear imanes más potentes y de mejores propiedades metalúrgicas que el hierro y las variantes de aceros usados hasta entonces.
Los imanes de Alnico se fabrican habitualmente por conformado con moldes desde la aleación fundida o por técnicas metalúrgicas cerámicas que parten de la aleación en polvo fino y construyen la pieza por conformado a presión y sinterizado. El producto de la energía para imanes de Alnico varía entre 1.5 y 7.5 MGOe.
Alnico tiene baja resistencia a la desmagnetización, pero soporta altas temperaturas (hasta 550°C). Puede usarse en aplicaciones que requieren estabilidad de sus propiedades magnéticas sobre un amplio rango de temperatura.
3

Materiales magnéticos Materiales magnéticos modernos Ferritas cerámicas
Los imanes permanentes de ferrita aparecieron en la década de 1950. El proceso de producción consiste en mezclar óxido de hierro con estroncio o bario para mejorar el alineamiento.
Se muele la mezcla a un polvo muy fino. Este polvo se mezcla con una base cerámica y se conforma. Luego se coloca en una horno para completar el proceso cerámico. El tipo de base cerámica puede ser un polímero, lo que otorga flexibilidad a la llamada ferrita moldeada.
El imán resiste el maltrato, humedad y pequeñas fisuras sin perder sus propiedades. El proceso de producción es barato y flexible.
El máximo producto de la energía es del orden de 1 a 3.5 MGOe y debe usarse a temperaturas por debajo de 300° C.
4

Materiales magnéticos Materiales magnéticos modernos Samario-cobalto
Los imanes de tierras raras aparecieron a fines de la década de 1960. Las tierras raras tienden a formar compuestos intermetálicos con metales de transición como Fe, Ni o Co, y la teoría predice que los elementos más livianos –en particular el samario– se combina con el cobalto para producir una alta anisotropía cristalina.
Los imanes de SmCo se producen por presión de aleaciones en polvo y luego por sinterización en un horno. El polvo también puede mezclarse con polímeros para fabricar imanes moldeados.
SmCo tiene excelentes características térmicas y puede crear campos muy intensos. Tienen un producto de energía mucho mayor que los imanes de Alnico o ferritas previos, entre 16 y 32 MGOe. Su principal desventaja es su costo, por lo que sus aplicaciones se reducen a laboratorios o aplicaciones militares.
5
Materiales magnéticos Materiales magnéticos modernos Neodimio-hierro-boro
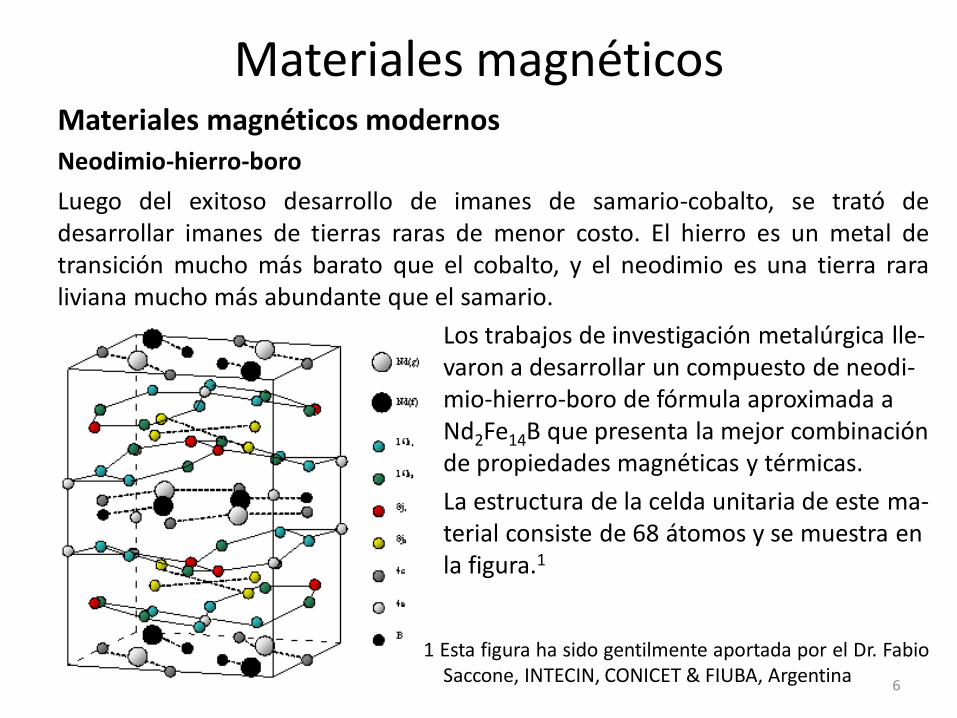
Luego del exitoso desarrollo de imanes de samario-cobalto, se trató de desarrollar imanes de tierras raras de menor costo. El hierro es un metal de transición mucho más barato que el cobalto, y el neodimio es una tierra rara liviana mucho más abundante que el samario.
Los trabajos de investigación metalúrgica lle-varon a desarrollar un compuesto de neodi-mio-hierro-boro de fórmula aproximada a Nd2Fe14B que presenta la mejor combinación de propiedades magnéticas y térmicas.
La estructura de la celda unitaria de este ma-terial consiste de 68 átomos y se muestra en la figura.1
1 Esta figura ha sido gentilmente aportada por el Dr. Fabio Saccone, INTECIN, CONICET & FIUBA, Argentina
6

Materiales magnéticos Materiales magnéticos modernos Neodimio-hierro-boro (cont.)
Se puede fabricar por los mismos procedimientos que las ferritas: conformado por presión y sinterizado o conformado con polímeros cerámicos. Existen además dos técnicas propias de estos materiales: templado rápido (melt-spinning) y HDDR (Hidrogenación, Desproporcionación, Desorpción y Recombi-nación). Los imanes sinterizados producirán las más altos valores de las propiedades magnéticas.
NdFeB es sensible al calor, por lo que debe usarse por debajo de los 150°C. Además es frágil, por lo que debe usarse con cuidado.
Aunque de mayor costo que los materiales más comunes, es más barato que el samario-cobalto, y provee los mayores productos de energía disponibles al presente, entre 26 y 48 MGOe, por lo que es el material de elección para la construcción de imanes de alta remanencia y gran prestación energética.
Se usan en todo tipo de aplicaciones donde se requiera un efecto intenso en pequeños volúmenes.
7

Materiales magnéticos Materiales magnéticos modernos Comparación de propiedades de compuestos comerciales
La siguiente tabla presenta las propiedades de distintos compuestos comerciales de las distintas familias producidos por el mismo fabricante:
8
Material Máxima T de
Operación
Máxima Energía Magnética
Costo Relativo
Resistencia a la Desmagnetización
NdFeB 150° C 48 MGOe Alto Alta
SmCo 300° C 32 MGOe Muy Alto Muy Alta
NeoForm-B NdFeB moldeado
150° C 10 MGOe Alto Alta
Alnico 550° C 7.5 MGOe Moderado Baja
Ferrita Cerámica
300° C 4 MGOe Muy Bajo Moderada

Materiales magnéticos 2 – Aplicaciones: Magnetorresistencia La resistencia eléctrica de ciertos materiales sumergidos en un campo magnético depende del ángulo entre la dirección de la corriente y la del campo. Este efecto fue descubierto por William Thomson (luego Lord Kelvin) en 1857.
Tipos de magnetorresistencia:
Lectoras magnéticas:
Este efecto se usa desde hace años en cabezas magnéticas lectoras y el material más usado es el permalloy (Ni81Fe19) que tiene las características:
Magnetización de saturación:
Resistividad eléctrica:
Coeficiente magneto-resistivo:
9
Tipo de MR % aumento en la resistencia
MR 1%
AMR 20%
GMR 200%
CMR 100,000%
72 10 m
1satM T
4%
2
0 1 cos
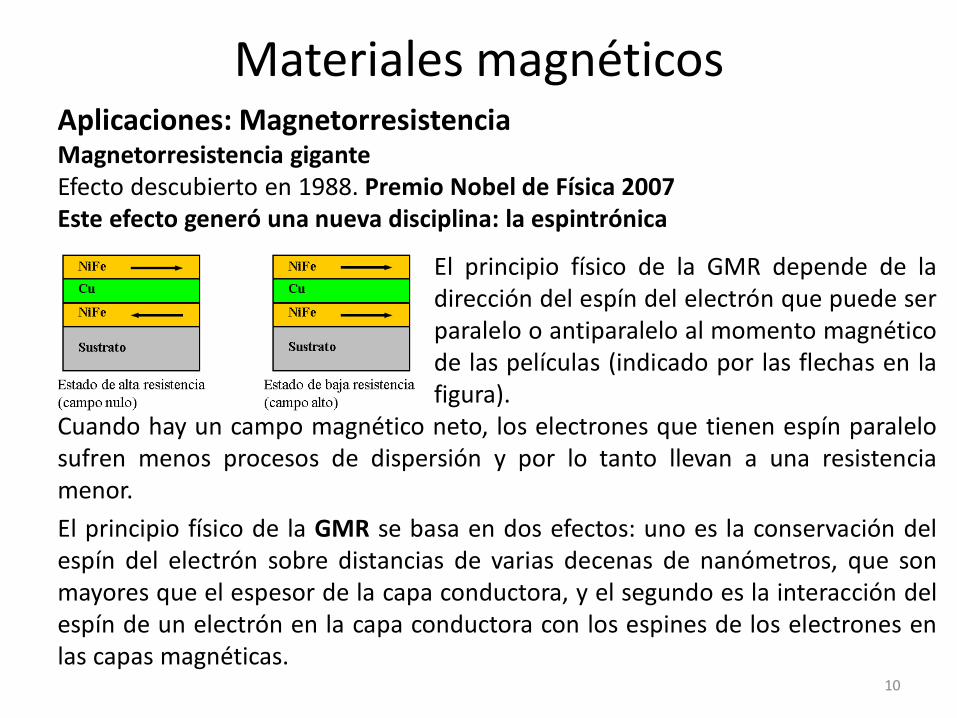
Materiales magnéticos Aplicaciones: Magnetorresistencia Magnetorresistencia gigante Efecto descubierto en 1988. Premio Nobel de Física 2007 Este efecto generó una nueva disciplina: la espintrónica
El principio físico de la GMR depende de la dirección del espín del electrón que puede ser paralelo o antiparalelo al momento magnético de las películas (indicado por las flechas en la figura).
Cuando hay un campo magnético neto, los electrones que tienen espín paralelo sufren menos procesos de dispersión y por lo tanto llevan a una resistencia menor.
El principio físico de la GMR se basa en dos efectos: uno es la conservación del espín del electrón sobre distancias de varias decenas de nanómetros, que son mayores que el espesor de la capa conductora, y el segundo es la interacción del espín de un electrón en la capa conductora con los espines de los electrones en las capas magnéticas.
10

Materiales magnéticos Aplicaciones de materiales magnéticos: Magnetorresistencia Magnetorresistencia gigante. Válvulas de espín y HDDs
Una aplicación del efecto GMR es la construcción de dispositivos integrados de alta sensibilidad a los campos magnéticos, las válvulas de espín (spin valves).
Una estructura básica consiste de cuatro capas: una capa antiferromagnética de “fijación” (pinning) y dos películas delgadas magnéticas separadas por un espa-ciador no magnético. La película superior tiene su magnetización fija por el aco-plamiento con la capa de pinning, mientras que la película inferior (capa sensora) se deja libre para alinearse paralela o antiparalela a de campos magnéticos exter-nos. La delgadez de la capa sensora la hace sensible a campos de valor muy bajo. El espesor de la capa espaciadora no magnética es suficiente-mente grande para hacer despreciable el acoplamiento entre las dos películas magnéticas.
En 1991 IBM presentó un disco de 1Gb con cabeza MR y en 1997 un disco de 16.8 Gb con cabeza GMR (estructura de válvula de espín).
En 2008 Fujitsu presentó un disco duro de 500 Gb de capacidad usando GMR con una densidad areal de 400 Gb/in2. En el momento de escribir estas líneas ya se ha superado en discos comerciales de costo accesible la capacidad del terabyte (1 Tb = 1000 Gb).
11

Materiales magnéticos 3 – Aplicaciones: Refrigeración Magnética El efecto magnetocalórico ocurre cuando un material ferromagnético blando se coloca en un campo exterior. Los espines tienden a alinearse paralelos al campo aplicado. Este efecto de orden disminuye la entropía del material. Si el material no puede intercambiar calor con el ambiente (evolución adiabática), la entropía debe permanecer constante, y el material se calienta. Al retirar el material del campo se desmagnetiza, porque la energía térmica desordena la orientación de los espines. Este desorden aumenta la entropía y en una evolución adiabática disminuye la temperatura del material.
Warburg descubrió este efecto en 1881 y Weiss y Piccard publicaron su teoría en 1918.
Se ha usado en laboratorio a partir de la década de 1920 para lograr temperaturas por debajo de 1K, pero hasta el presente no se contaban con materiales suficientemente sensibles y campos suficientemente fuertes para producir resultados de interés técnico.
12
Materiales magnéticos Aplicaciones: Refrigeración Magnética
Ventajas respecto de la tecnología tradicional:
• Es una tecnología de bajo impacto ambiental. No usa compuestos químicos que ataquen la capa de ozono (como los fluorocarbonos que se usan como fluido refrigerante en muchas instalaciones frigoríficas), ni otros compuestos peligrosos (como el amoníaco) ni gases de invernadero (como hidroclorofluorocarbonos e hidrofluorocarbonos).
• Es una tecnología de ciclo más eficiente. En el caso de los ciclos usuales que usan gas comprimido la eficiencia es a lo sumo del 40%, mientras que se ha demostrado que la eficiencia de ciclos que usan Gd (gadolinio) como material magnético llega al 60%.
• Se estima que el uso de refrigeradores magnéticos reducirá el consumo de combustibles fósiles, lo que contribuirá a reducir la liberación de dióxido de carbono a la atmósfera.
13

Materiales magnéticos Aplicaciones: Refrigeración Magnética
El gadolinio es el elemento de mayor efecto magnetoca-lórico de los lantánidos a temperaturas cercanas a la temperatura ambiente. En 1998 se halló el compuesto:
Gd5(SixGe1-x)4 con 0.2 x 0.5
que exhibe el llamado efecto magnetocalórico gigante (GME) a temperaturas variables entre 30K y 290K, según la proporción de germanio del compuesto. Estos compuestos permitieron construir prototipos de refrige-radores magnéticos.
14
Magnético Convencional
Magnetiza el
material:
aumenta T
Quita calor con
un fluido
refrigerante
Desmagnetiza y
enfría el material
Absorbe
calor del
material que
se enfría
Fluido caliente
Fluido frío
Fluido frío
Fluido frío
Fluido frío
Fluido frío
Fluido frío
Fluido caliente
Comprime el
gas:aumenta
T
Quita calor con
un fluido
refrigerante
Expande y
enfría el gas
Absorbe calor
del material
que se enfría

Materiales magnéticos 4 – Aplicaciones: Levitación diamagnética Se puede demostrar que un trozo de material diamagnético (para el que la susceptibilidad magnética es negativa) puede llegar al equilibrio en un campo magnético no uniforme. Se requieren campos magnéticos muy intensos, del orden de los 10 T, para lo que se usan imanes de NdFeB.El gradiente de campo necesario es proporcional a la densidad y no a la masa del objeto a levitar, de manera que, si se dispone de imanes de tamaño adecuado, cualquier tamaño y peso de objeto es utilizable.
En la figura se muestra un esquema del electroimán Bitter usado por Berry y Geim (Universidad de Nijmegen) para realizar experimentos de levitación diamagnética.
La marca roja indica la región de equilibrio estable. Aunque el electroimán usa una potencia de 4 MW, muy poca de esta potencia es necesaria para levantar los objetos. Los cálculos llevan a que la intensidad de campo en la región de equilibrio estable es del orden de 16 T.
15

Materiales magnéticos 11 – Aplicaciones: Levitación diamagnética Algunas demostraciones: Gota de agua Frutilla Grillo Rana
16
Métodos numéricos cuasi-estáticos 1 – Métodos integrales
En la condición cuasi-estática, donde las dimensiones del sistema en estudio son pequeñas frente a la longitud de onda de los campos, existen ecuaciones de cálculo de los campos basados en ecuaciones integrales:
En el caso de las corrientes cuasi-estacionarias, vale el modelo de Kirchhoff-Ohm donde se usa el concepto de impedancia en el dominio de la frecuencia:
17
1 ( , )( , ) ; ( , ) ( , )
4 ( )1 ( ) ( , )
( , ) ; ( , ) ( , )4
V
V
tt dV t t
Rt
t dV t tR
rr E r r
rr J r
A r B r A r
( ) ( ) ( )V Z I

Métodos numéricos cuasi-estáticos 2 – Métodos diferenciales
Por otra parte, los campos cuasi-estáticos satisfacen las ecuaciones diferenciales:
Se trata en todos los casos de ecuaciones de Poisson/Laplce que, con sus condi-ciones de borde, configuran un problema de potencial.
Existen distintos métodos analíticos (p. ej., separación de variables) y numéricos que se utilizan para resolver este tipo de problemas.
Los métodos numéricos más usados son:
• el método de diferencias finitas, donde se aproximan las derivadas del laplaciano por diferencias finitas (FD).
• el método de elementos finitos, donde se postula una solución simple del potencial dentro de un pequeño elemento y luego se aplican las condiciones de borde entre elementos (FEM).
18
2
2
2
campo eléctrico cuasi-estático: ( , ) ( , ) ( )
campo magnético cuasi-estático: ( , ) ( ) ( , )
corriente cuasi-estacionaria: ( , ) 0
t t
t t
t
r r r
A r r J r
r

Métodos numéricos cuasi-estáticos 3 – Diferencias finitas (DF) Ventajas y características:
• Método en el dominio de la frecuencia. • Formulación simple, aplicable a problemas sencillos o como primera aproxi-
mación para una idea rápida de la solución. • Puede programarse en una hoja de cálculo.
En este método se reemplazan las derivadas por cocientes de incrementos. Por comodidad vamos a usar coordenadas cartesianas en 2D. Para expresar los incrementos de las variables independientes (de posición) se divide el recinto de integración en una malla o grilla, generalmente de intervalo fijo h, como se muestra en la figura. Ahora reemplazamos las derivadas por una represen-tación de diferencias finitas en términos de los potenciales en
los nodos de la malla. Por ejemplo, definimos la derivada primera tomando puntos a mitad de camino entre los nodos:
19
1 2, 1 2, , 1 2 , 1 2
, , ,
, ,
( , ) : ;
i j i j
i j i j i j i jx y
i j i j i j i j
x y x y
f f f ff ff x y f f f
x h y h

Métodos numéricos cuasi-estáticos DF
Repetimos para calcular la derivada segunda:
Entonces podemos escribir la ec. de Poisson general em 2D: Y finalmente:
Este sistema lineal de ecuaciones en las incógnitas fi,j puede resolverse:
- directamente, mediante técnicas del álgebra lineal;
- en forma iterativa, con la expresión:
20
1 2, 1 2, , 1 2 , 1 2
, , ,
, ,
( , ) : ;
i j i j
i j i j i j i jx y
i j i j i j i j
x y x y
f f f ff ff x y f f f
x h y h
21 2, 1 2, 1, , 1,
2 2
,
2, 1 2 , 1 2 , 1 , , 1
2 2
,
2
2
i j
i j
x x
i j i j i j i j i j
x y
y y
i j i j i j i j i j
x y
f f f f ff
x h h
f f f f ff
y h h
1, , 1, , 1 , , 12
,2 2
2 2( , ) ( , )
i j i j i j i j i j i j
i j
f f f f f ff x y g x y g
h h
2
1, 1, , 1 , 1 , ,4 0i j i j i j i j i j i jf f f f f h g
( 1) ( 1) ( 1) ( 1) 2
1, 1, , 1 , 1 ,( )
,4
n n n n
i j i j i j i j i jn
i j
f f f f h gf

Métodos numéricos cuasi-estáticos DF
En el método iterativo partimos de valores iniciales (posible-mente arbitrarios) y vamos calculando nuevos valores para cada punto de la grilla.
Se demuestra que este procedimiento es convergente, es decir:
salvo por errores de truncaje y redondeo y/o una mala elección del paso h. El método se puede programar en una planilla, como en el siguiente ejemplo:
Y se obtiene la gráfica de equipotenciales de la derecha.
21
( 1) ( 1) ( 1) ( 1) 2
1, 1, , 1 , 1 ,( )
,4
n n n n
i j i j i j i j i jn
i j
f f f f h gf
( ) ( 1)
, ,lim 0 ,n n
i j i jn
f f i j
A B C D E
1 0 0 0 0 0
2 0 (B1+B3+A2+C2)/4 (C1+C3+B2+D2)/4 (D1+D3+C2+E2)/4 0
3 0 (B2+B4+A3+C3)/4 (C2+C4+B3+D3)/4 (D2+D4+C3+E3)/4 0
4 0 (B3+B5+A4+C4)/4 (C3+C5+B4+D4)/4 (D3+D5+C4+E4)/4 0
5 0 100 100 100 0
Métodos numéricos cuasi-estáticos 4 – Elementos finitos (FEM) Ventajas y características :
• Método en el dominio de la frecuencia. • Formulación simple pero profesional, aplicable a problemas con recintos de
forma compleja. • Puede introducir características materiales, no-linealidades y hallar pérdidas
por efecto Joule. • Amplia experiencia en el uso y conocimiento de sus limitaciones.
Aplicaciones típicas en la Ingeniería Eléctrica • Cálculo de campos eléctricos y magnéticos y corrientes.
• Análisis de dispositivos y sistemas:
máquinas, relés, bobinas, transformadores, actuadores. modelado de campos en seres vivos y aplicaciones biomédicas. análisis y modelado de dispositivos semiconductores e integrados. optimización de dispositivos para reducción de peso, volumen, consumo
de potencia, ancho de banda y costos de producción.
22
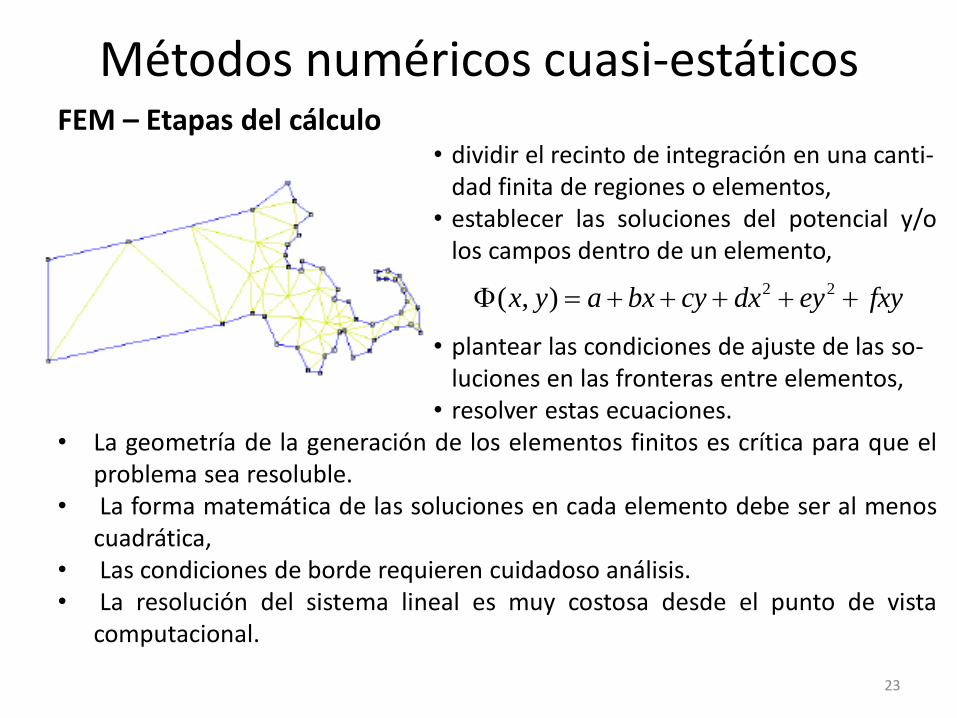
Métodos numéricos cuasi-estáticos FEM – Etapas del cálculo
• dividir el recinto de integración en una canti-dad finita de regiones o elementos,
• establecer las soluciones del potencial y/o los campos dentro de un elemento,
• plantear las condiciones de ajuste de las so-luciones en las fronteras entre elementos,
• resolver estas ecuaciones. • La geometría de la generación de los elementos finitos es crítica para que el
problema sea resoluble. • La forma matemática de las soluciones en cada elemento debe ser al menos
cuadrática, • Las condiciones de borde requieren cuidadoso análisis. • La resolución del sistema lineal es muy costosa desde el punto de vista
computacional.
23
2 2( , )x y a bx cy dx ey fxy

Métodos numéricos cuasi-estáticos
24


















