Elementos de transmisión
45
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
-
Upload
veronica-flores -
Category
Education
-
view
6.279 -
download
0
Transcript of Elementos de transmisión
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
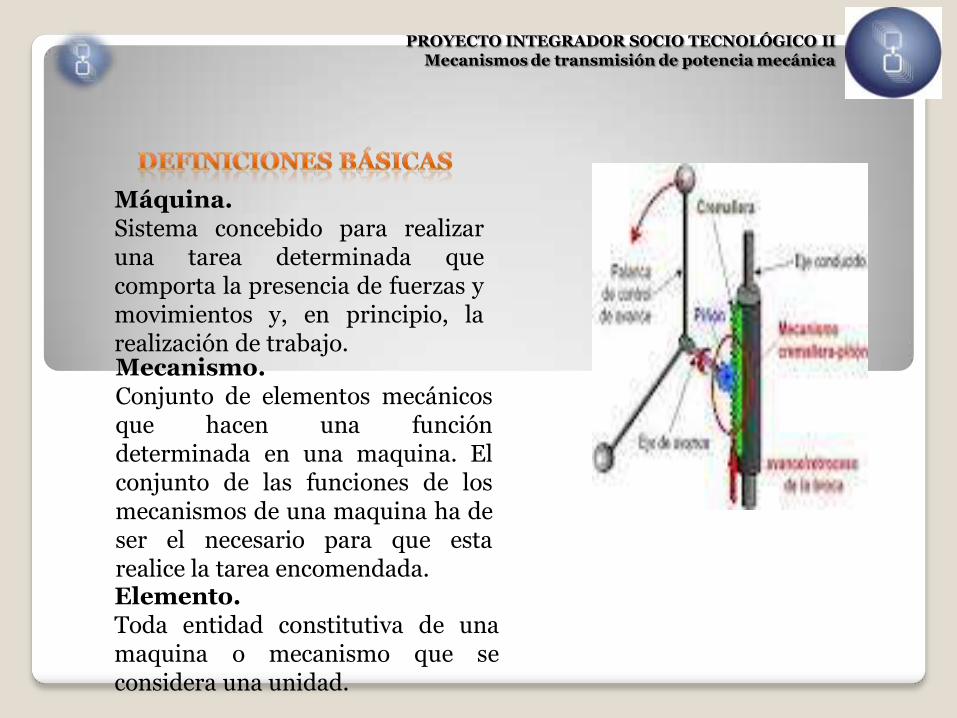
Máquina. Sistema concebido para realizar una tarea determinada que comporta la presencia de fuerzas y movimientos y, en principio, la realización de trabajo. Mecanismo. Conjunto de elementos mecánicos que hacen una función determinada en una maquina. El conjunto de las funciones de los mecanismos de una maquina ha de ser el necesario para que esta realice la tarea encomendada. Elemento. Toda entidad constitutiva de una maquina o mecanismo que se considera una unidad.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Junta. Acople entre dos miembros de un mecanismo que se realiza mediante elementos intermedios.
Restricción o enlace. Condición impuesta a la configuración, condición de enlace geométrica o al movimiento del mecanismo condición de enlace cinemática. En estas condiciones puede aparecer el tiempo explícitamente o no.
Carga. Conjunto de fuerzas conocidas, función del estado mecánico y/o explícitamente del tiempo, que actúan sobre los miembros del mecanismo.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
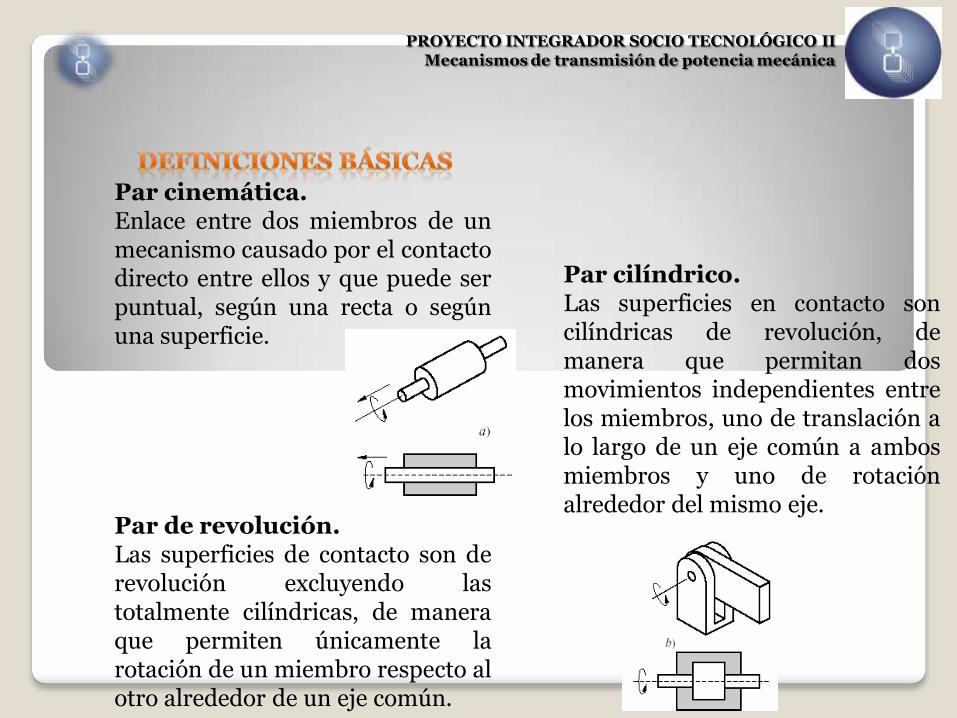
Par cinemática. Enlace entre dos miembros de un mecanismo causado por el contacto directo entre ellos y que puede ser puntual, según una recta o según una superficie.
Par cilíndrico. Las superficies en contacto son cilíndricas de revolución, de manera que permitan dos movimientos independientes entre los miembros, uno de translación a lo largo de un eje común a ambos miembros y uno de rotación alrededor del mismo eje.
Par de revolución. Las superficies de contacto son de revolución excluyendo las totalmente cilíndricas, de manera que permiten únicamente la rotación de un miembro respecto al otro alrededor de un eje común.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
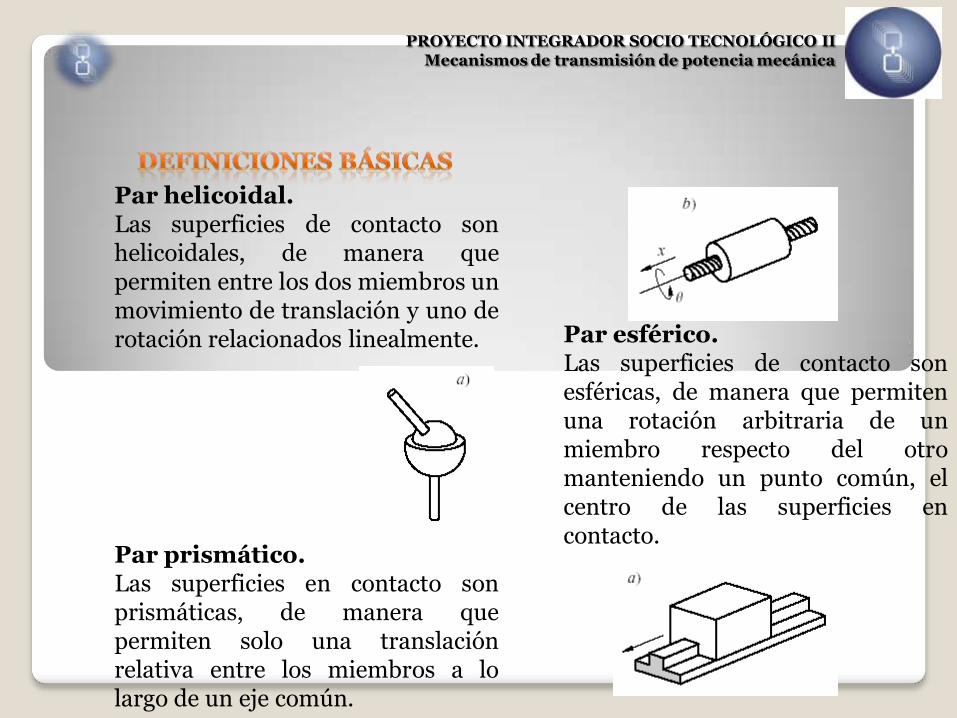
Par prismático. Las superficies en contacto son prismáticas, de manera que permiten solo una translación relativa entre los miembros a lo largo de un eje común.
Par helicoidal. Las superficies de contacto son helicoidales, de manera que permiten entre los dos miembros un movimiento de translación y uno de rotación relacionados linealmente. Par esférico.
Las superficies de contacto son esféricas, de manera que permiten una rotación arbitraria de un miembro respecto del otro manteniendo un punto común, el centro de las superficies en contacto.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
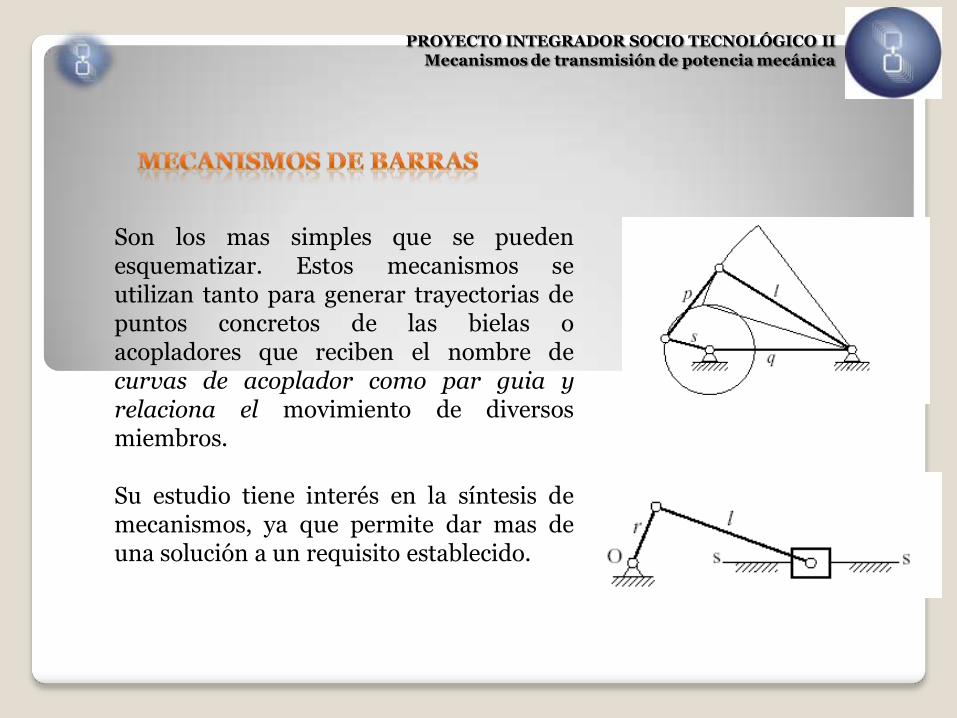
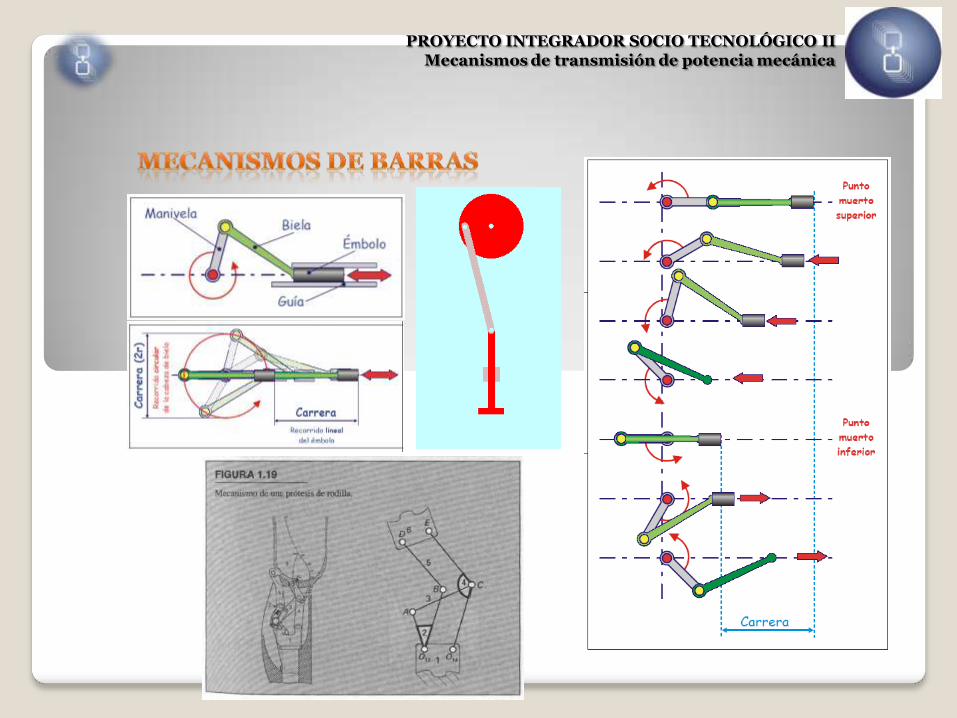
Son los mas simples que se pueden esquematizar. Estos mecanismos se utilizan tanto para generar trayectorias de puntos concretos de las bielas o acopladores que reciben el nombre de curvas de acoplador como par guia y relaciona el movimiento de diversos miembros. Su estudio tiene interés en la síntesis de mecanismos, ya que permite dar mas de una solución a un requisito establecido.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
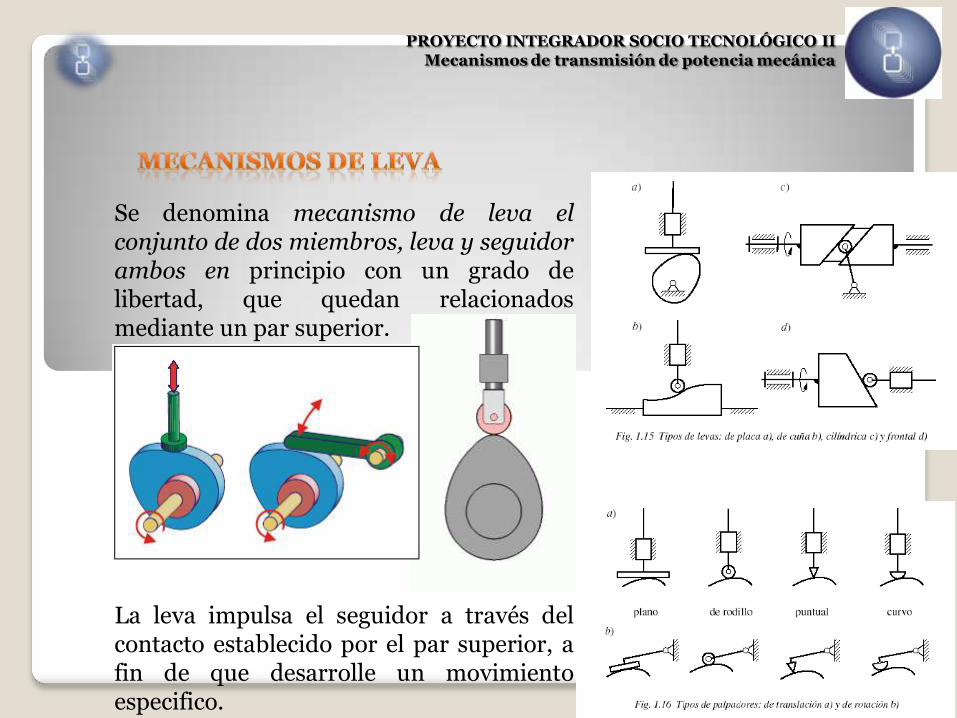
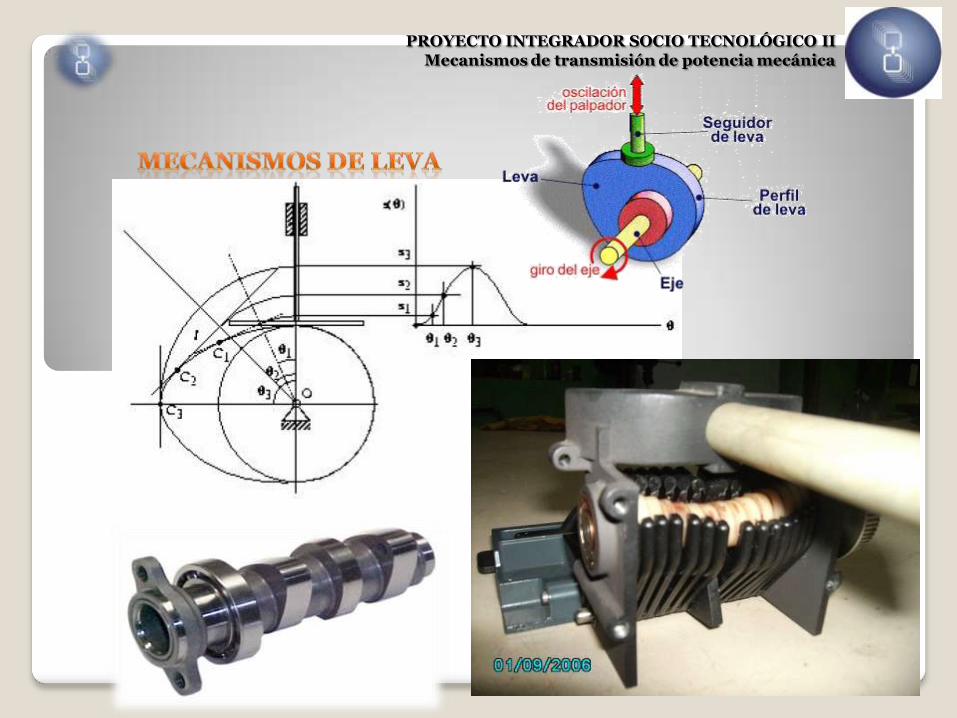
Se denomina mecanismo de leva el conjunto de dos miembros, leva y seguidor ambos en principio con un grado de libertad, que quedan relacionados mediante un par superior. La leva impulsa el seguidor a través del contacto establecido por el par superior, a fin de que desarrolle un movimiento especifico.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Fallas y causa posible.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
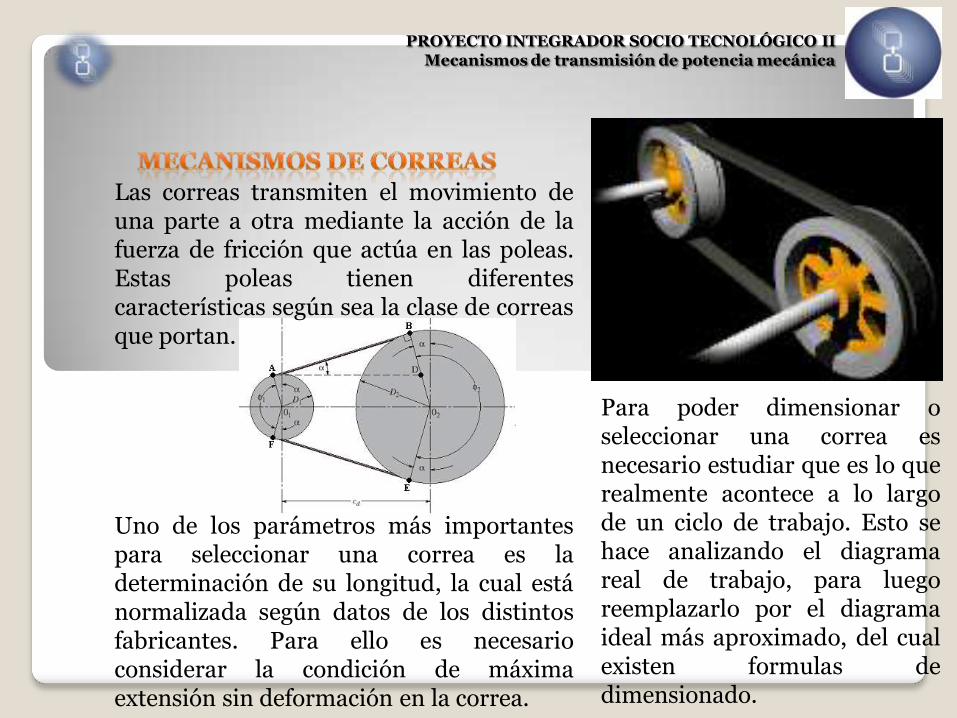
Las correas transmiten el movimiento de una parte a otra mediante la acción de la fuerza de fricción que actúa en las poleas. Estas poleas tienen diferentes características según sea la clase de correas que portan.
Uno de los parámetros más importantes para seleccionar una correa es la determinación de su longitud, la cual está normalizada según datos de los distintos fabricantes. Para ello es necesario considerar la condición de máxima extensión sin deformación en la correa.
Para poder dimensionar o seleccionar una correa es necesario estudiar que es lo que realmente acontece a lo largo de un ciclo de trabajo. Esto se hace analizando el diagrama real de trabajo, para luego reemplazarlo por el diagrama ideal más aproximado, del cual existen formulas de dimensionado.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
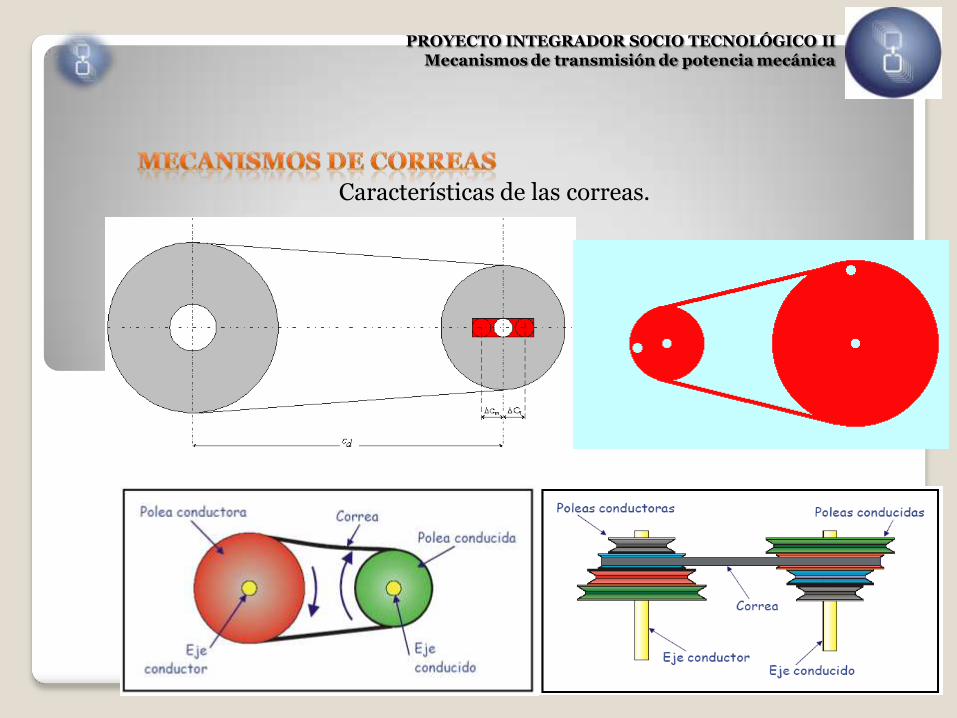
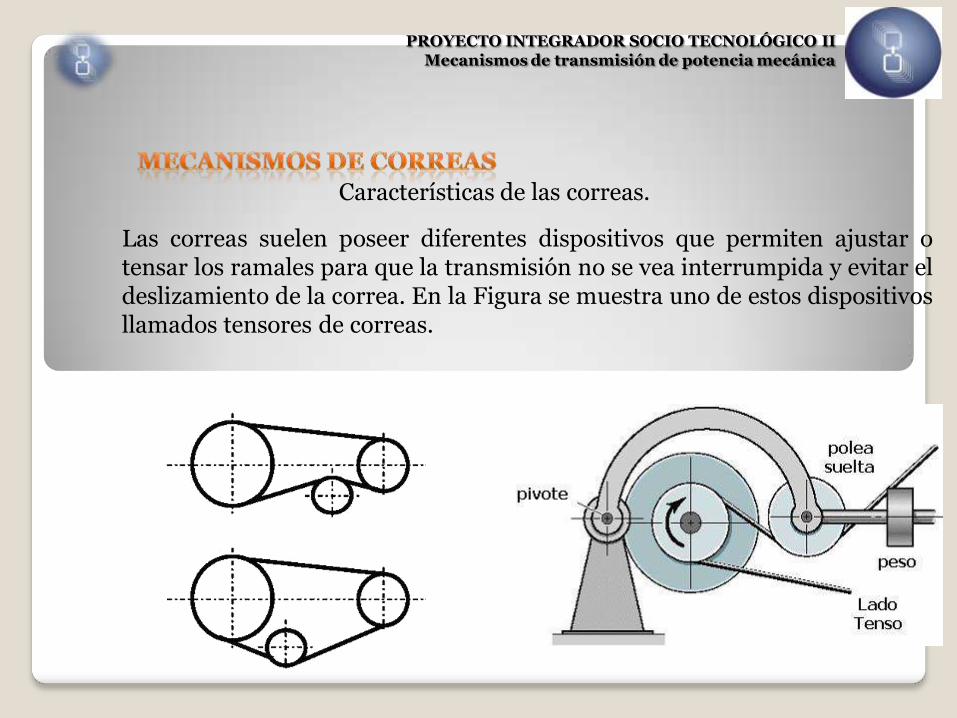
Características de las correas.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
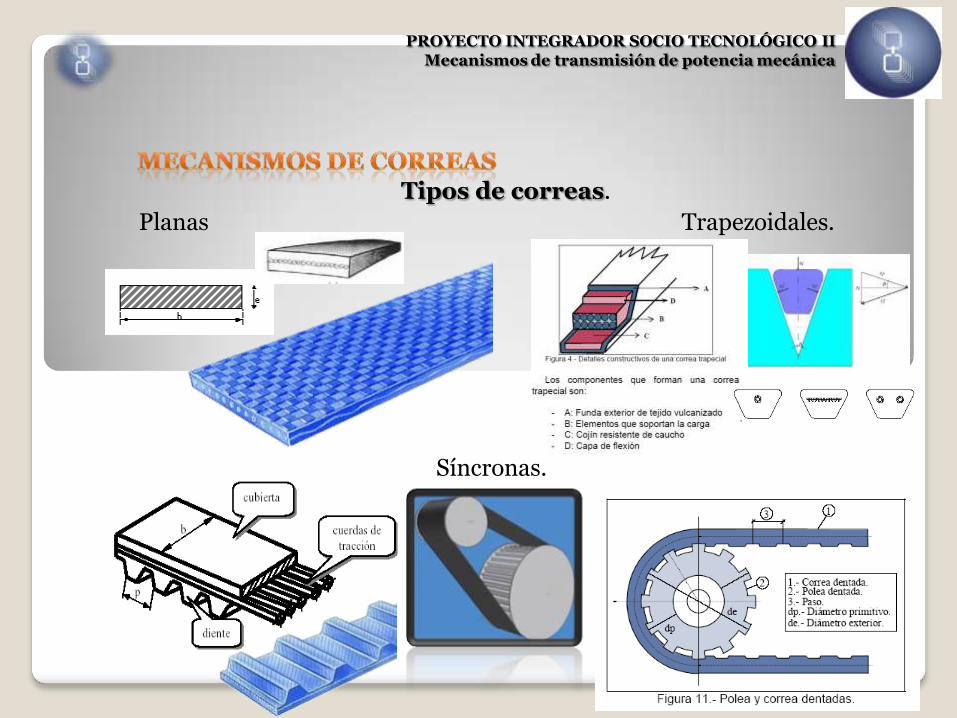
Planas Trapezoidales.
Síncronas.
Tipos de correas.

PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Designación de la correa.

PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Designación de la correa.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Las correas suelen poseer diferentes dispositivos que permiten ajustar o tensar los ramales para que la transmisión no se vea interrumpida y evitar el deslizamiento de la correa. En la Figura se muestra uno de estos dispositivos llamados tensores de correas.
Características de las correas.
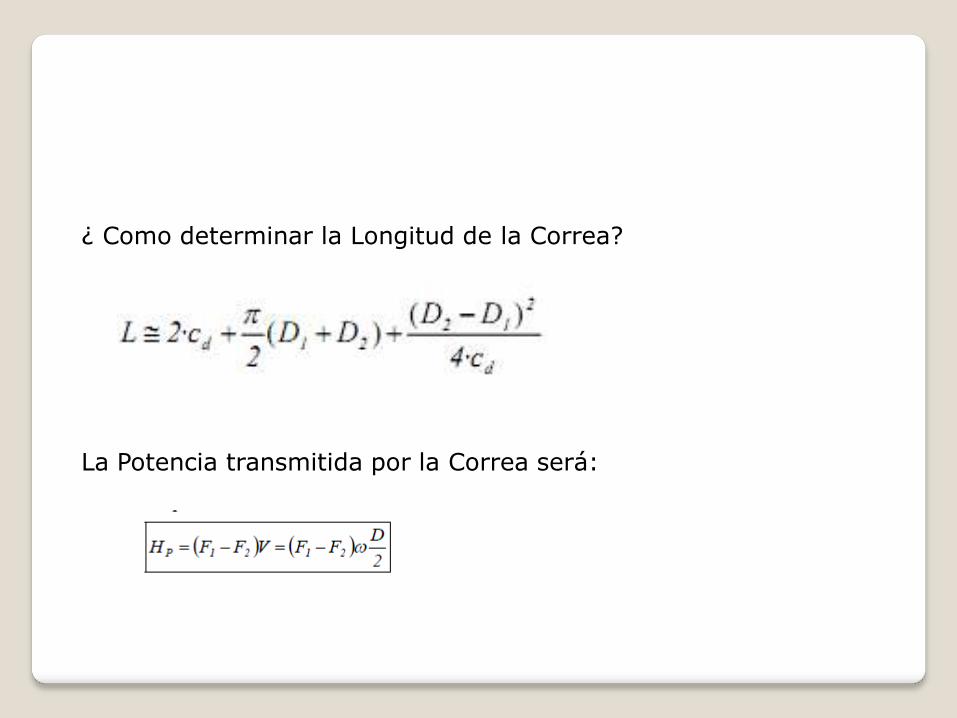
¿ Como determinar la Longitud de la Correa?
La Potencia transmitida por la Correa será:
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
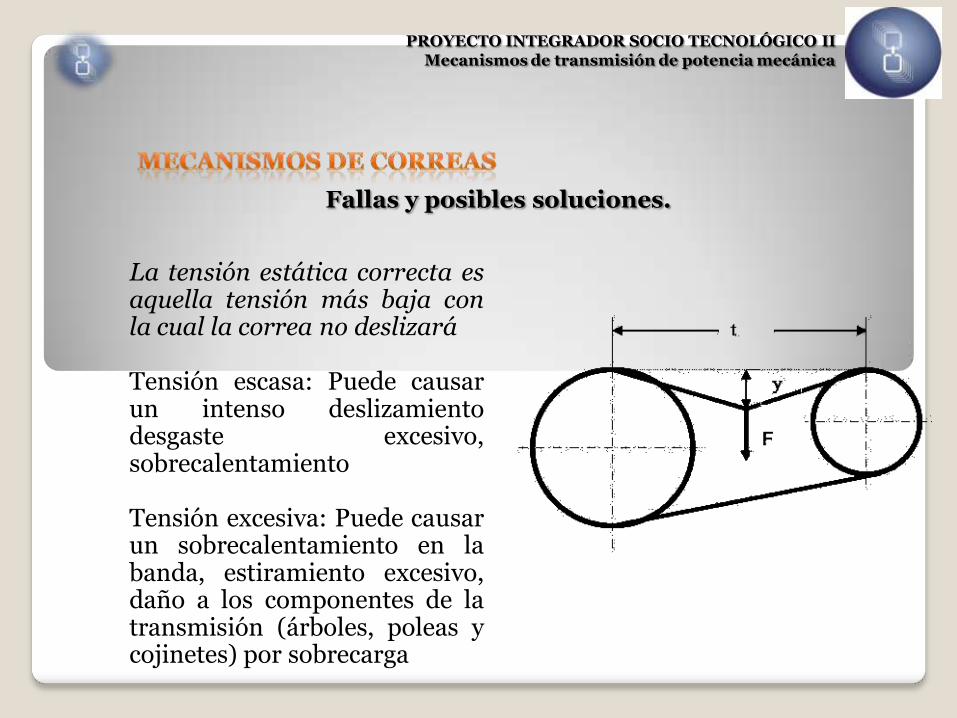
Fallas y posibles soluciones.
La tensión estática correcta es aquella tensión más baja con la cual la correa no deslizará Tensión escasa: Puede causar un intenso deslizamiento desgaste excesivo, sobrecalentamiento Tensión excesiva: Puede causar un sobrecalentamiento en la banda, estiramiento excesivo, daño a los componentes de la transmisión (árboles, poleas y cojinetes) por sobrecarga

PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Agrietada (Craked)
Pelada (Peeling)
Engrasada (Greasy)
Cristalizada (glazed)
Fallas y causa posible.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
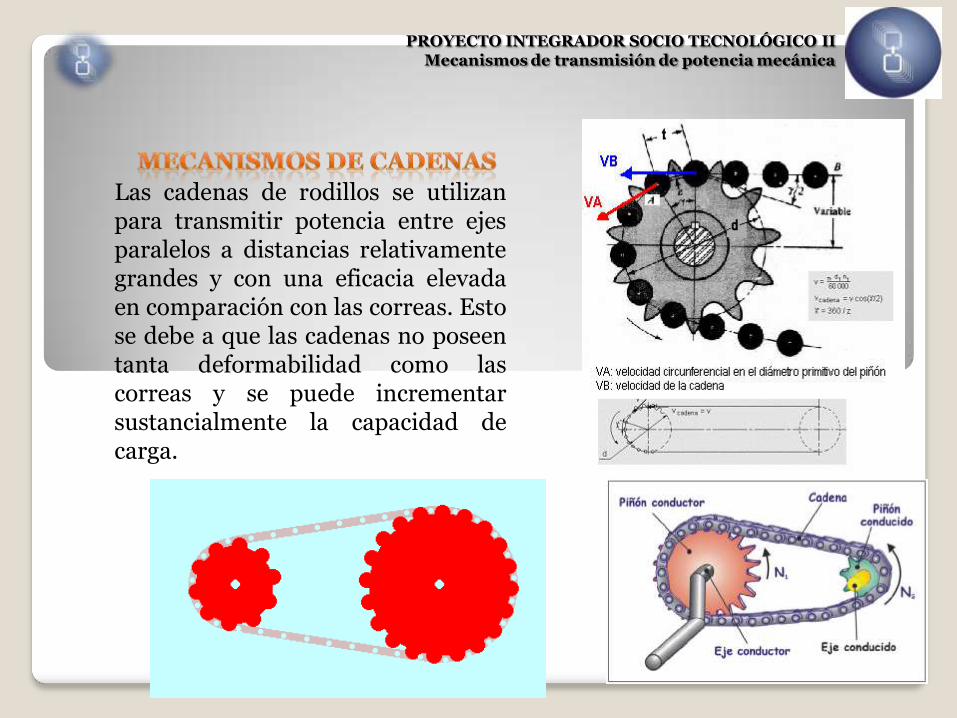
Las cadenas de rodillos se utilizan para transmitir potencia entre ejes paralelos a distancias relativamente grandes y con una eficacia elevada en comparación con las correas. Esto se debe a que las cadenas no poseen tanta deformabilidad como las correas y se puede incrementar sustancialmente la capacidad de carga.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
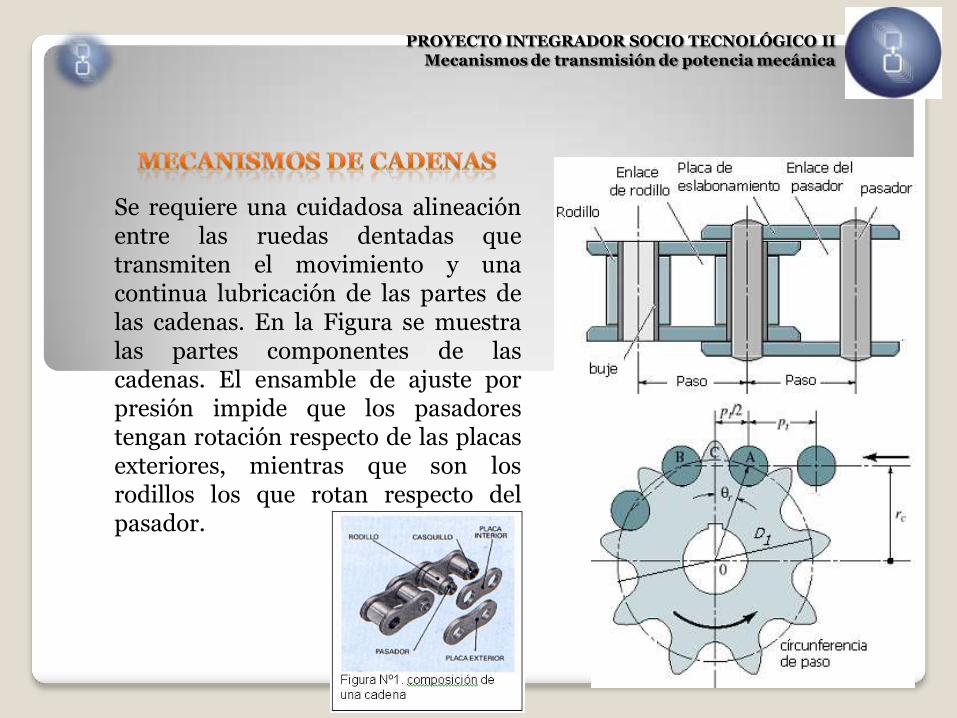
Se requiere una cuidadosa alineación entre las ruedas dentadas que transmiten el movimiento y una continua lubricación de las partes de las cadenas. En la Figura se muestra las partes componentes de las cadenas. El ensamble de ajuste por presión impide que los pasadores tengan rotación respecto de las placas exteriores, mientras que son los rodillos los que rotan respecto del pasador.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
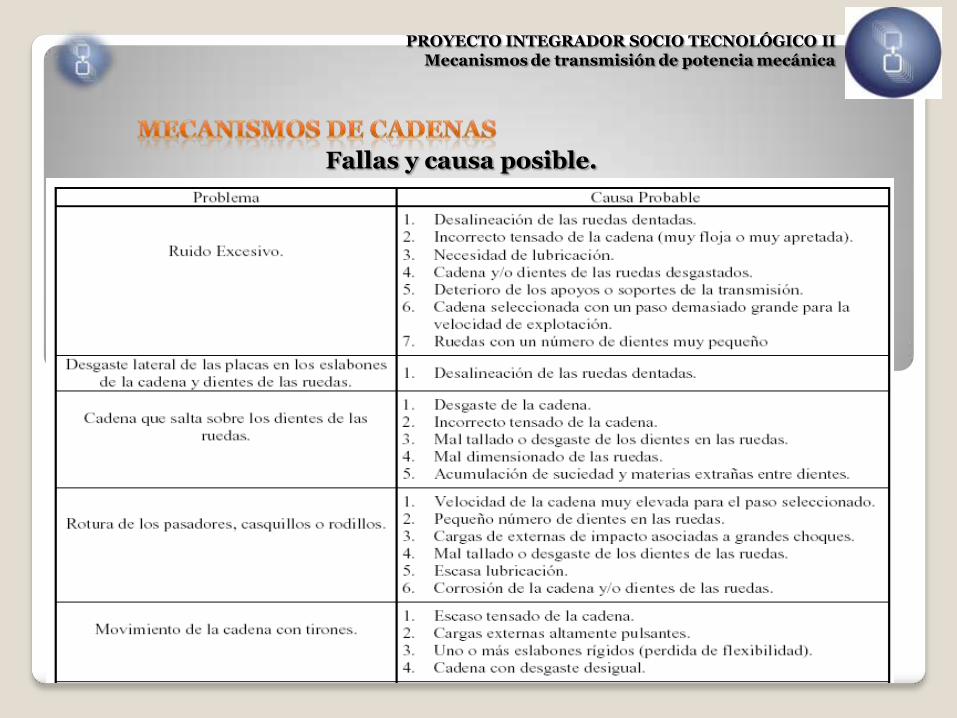
Fallas y causa posible.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
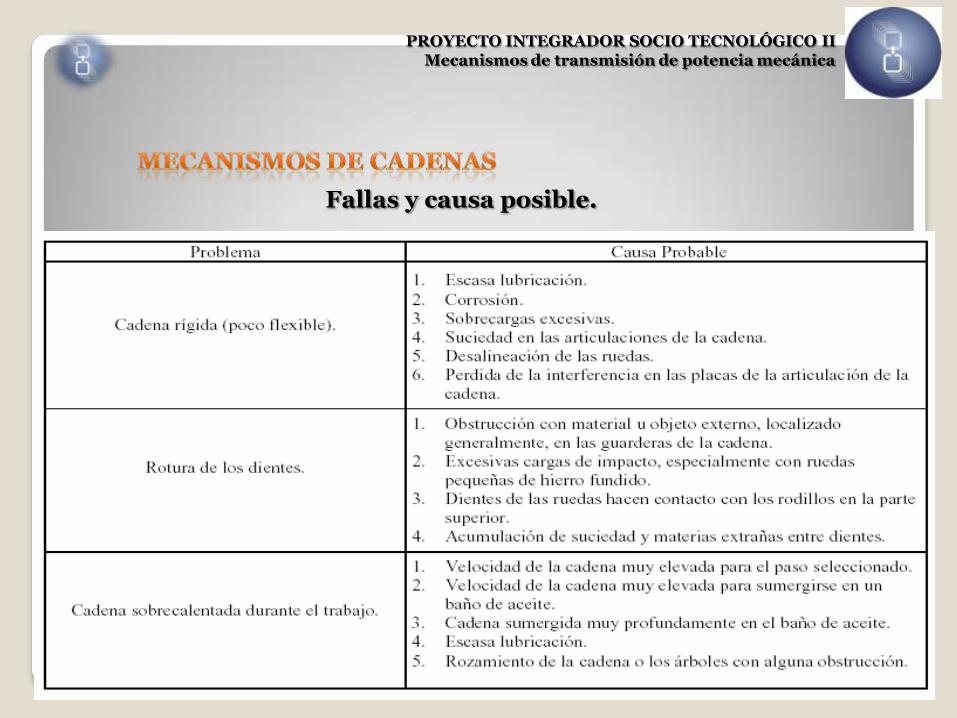
Fallas y causa posible.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
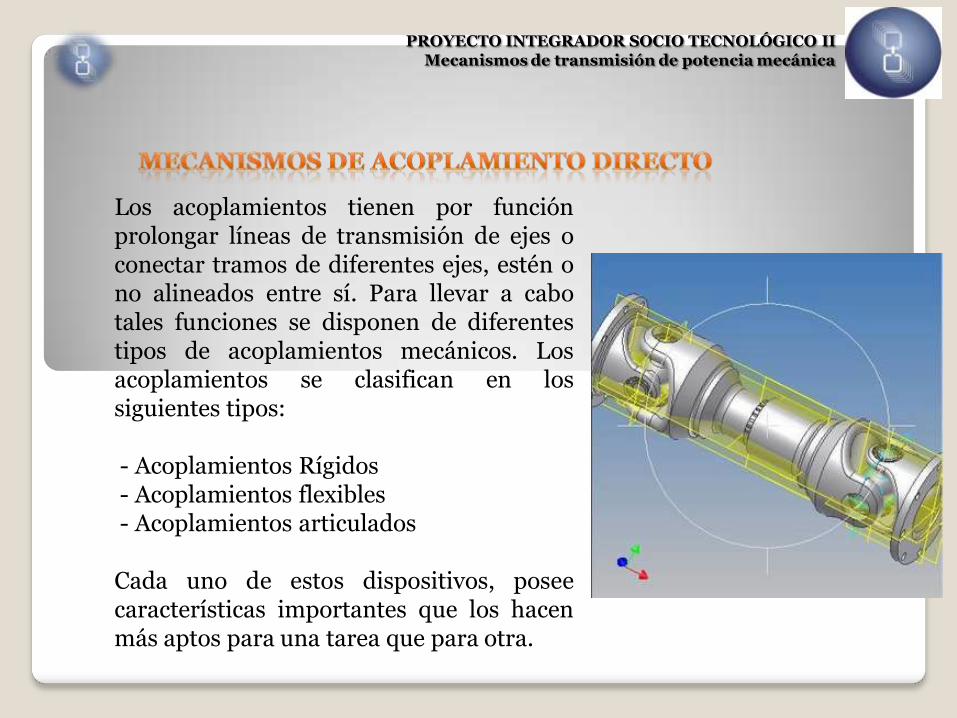
Los acoplamientos tienen por función prolongar líneas de transmisión de ejes o conectar tramos de diferentes ejes, estén o no alineados entre sí. Para llevar a cabo tales funciones se disponen de diferentes tipos de acoplamientos mecánicos. Los acoplamientos se clasifican en los siguientes tipos: - Acoplamientos Rígidos - Acoplamientos flexibles - Acoplamientos articulados Cada uno de estos dispositivos, posee características importantes que los hacen más aptos para una tarea que para otra.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
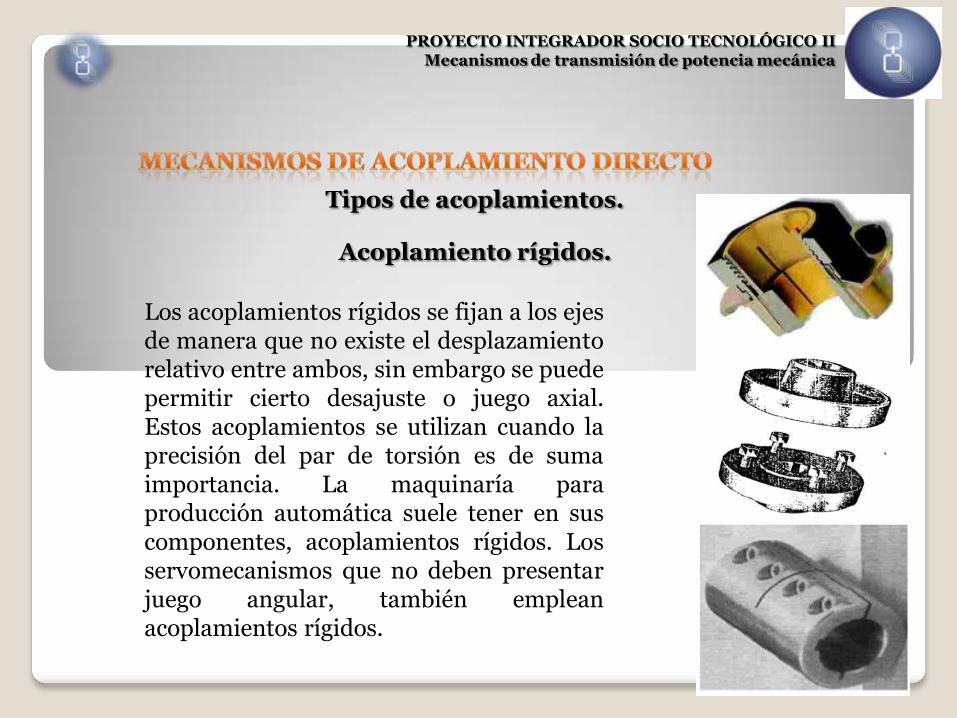
Acoplamiento rígidos.
Tipos de acoplamientos.
Los acoplamientos rígidos se fijan a los ejes de manera que no existe el desplazamiento relativo entre ambos, sin embargo se puede permitir cierto desajuste o juego axial. Estos acoplamientos se utilizan cuando la precisión del par de torsión es de suma importancia. La maquinaría para producción automática suele tener en sus componentes, acoplamientos rígidos. Los servomecanismos que no deben presentar juego angular, también emplean acoplamientos rígidos.

PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Acoplamiento flexibles.
Tipos de acoplamientos.
Un eje como cuerpo rígido posee seis grados de libertad, con respecto a un segundo eje. Sin embargo por razones de simetría, tan solo quedarán cuatro que generan una posible desalineación. Estas condiciones de desalineación pueden ser axial, angular, paralela y torsional.

PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Acoplamiento articulados.
Tipos de acoplamientos.
Junta eslabonada de desplazamiento lateral. Este tipo de acoplamiento conecta dos ejes con desalineación paralela muy grande sin que por ello se pierda capacidad de transmisión de par torsor. Existen diversos modelos como la junta Schmidt o la denominada junta Oldham.
Juntas universales . Este tipo de juntas permite una desalineación angular sustancial. Existen varios tipos, la denominada junta Cardan o Hooke y que no posee velocidad constante y la junta Rzeppa que si tiene velocidad constante. Los primeros se montan de a pares para poder garantizar transmisión de velocidad constante cancelando el efecto de error de velocidad.

PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
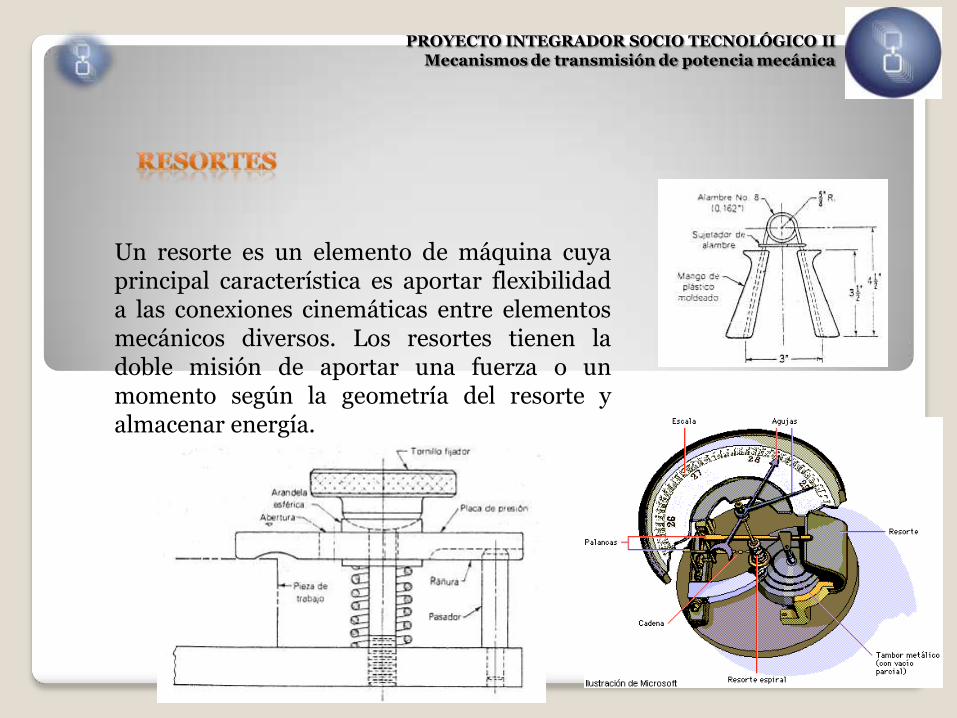
Un resorte es un elemento de máquina cuya principal característica es aportar flexibilidad a las conexiones cinemáticas entre elementos mecánicos diversos. Los resortes tienen la doble misión de aportar una fuerza o un momento según la geometría del resorte y almacenar energía.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
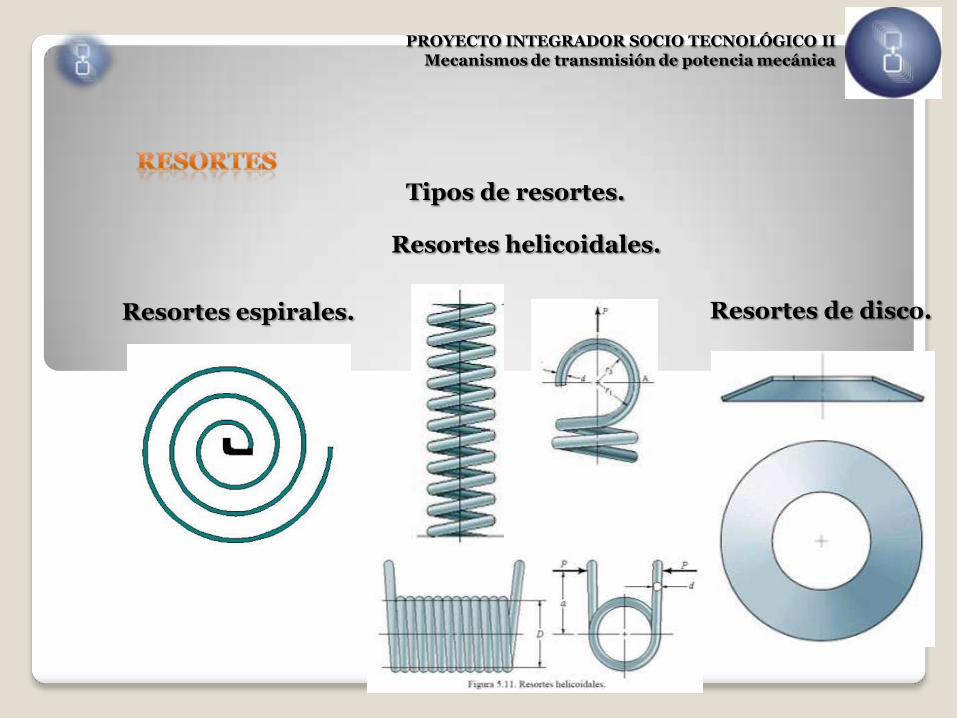
Tipos de resortes.
Resortes helicoidales.
Resortes espirales. Resortes de disco.

PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
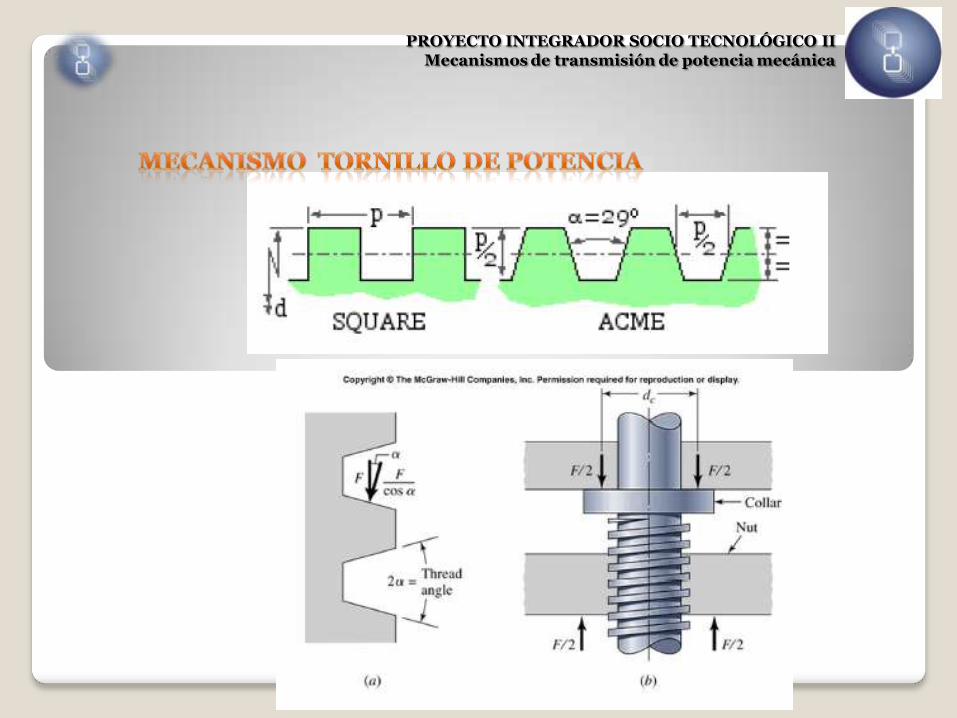
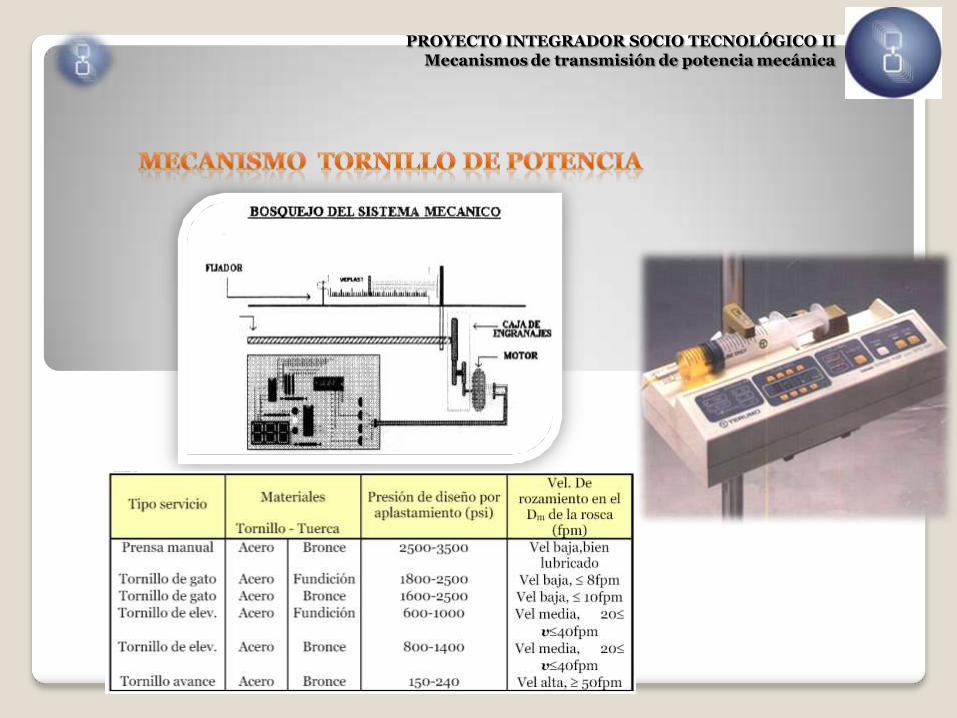
Los tornillos de potencia sirven para cambiar movimiento angular por lineal
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
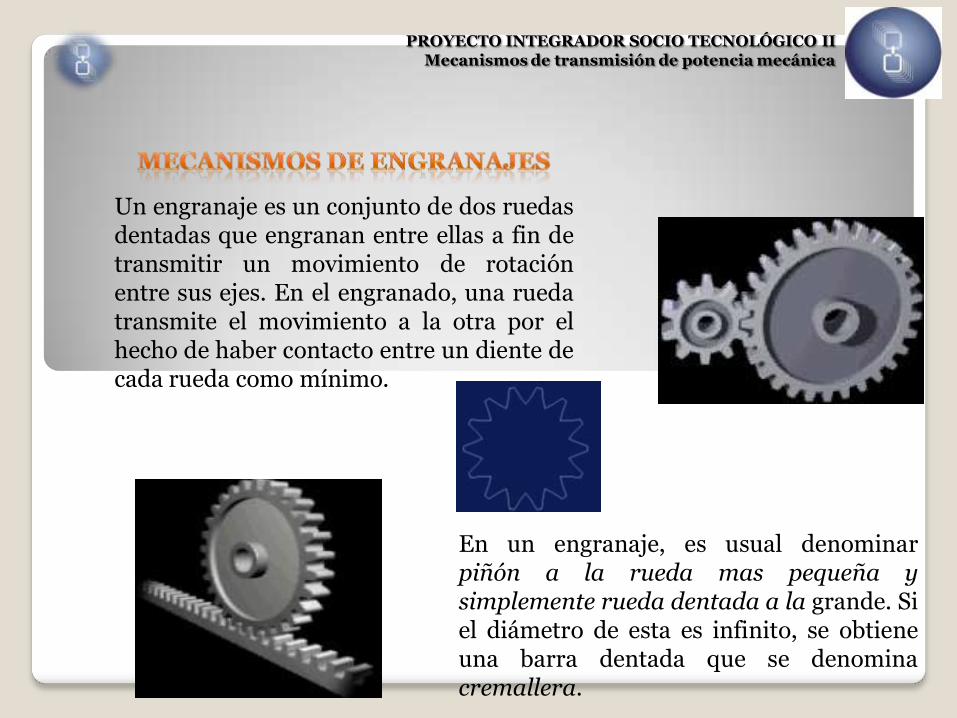
Un engranaje es un conjunto de dos ruedas dentadas que engranan entre ellas a fin de transmitir un movimiento de rotación entre sus ejes. En el engranado, una rueda transmite el movimiento a la otra por el hecho de haber contacto entre un diente de cada rueda como mínimo.
En un engranaje, es usual denominar piñón a la rueda mas pequeña y simplemente rueda dentada a la grande. Si el diámetro de esta es infinito, se obtiene una barra dentada que se denomina cremallera.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
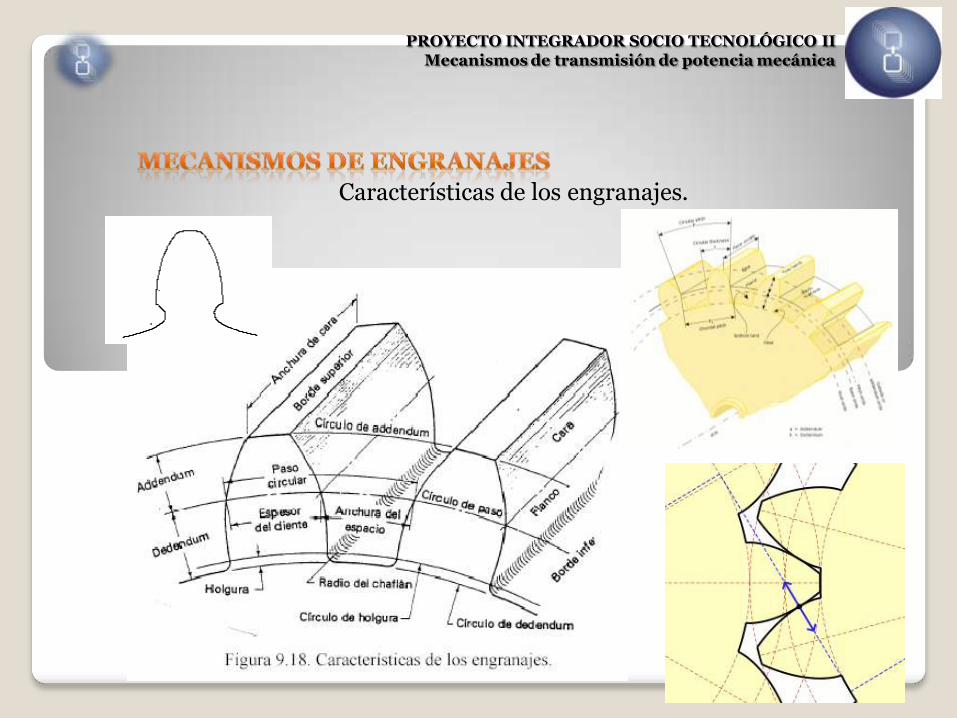
Características de los engranajes.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
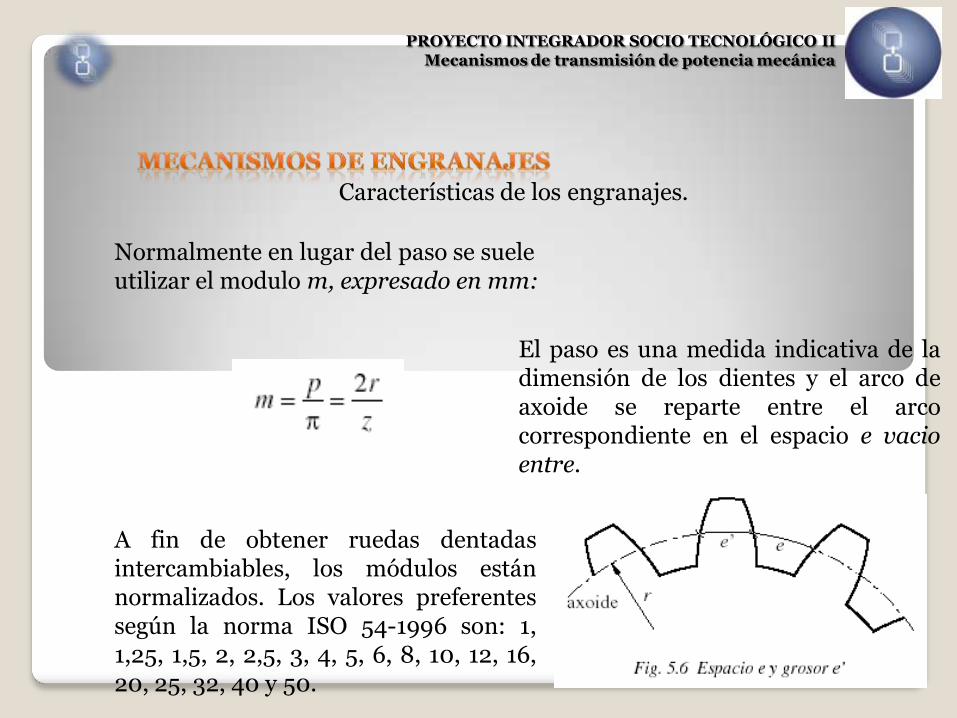
Características de los engranajes.
A fin de obtener ruedas dentadas intercambiables, los módulos están normalizados. Los valores preferentes según la norma ISO 54-1996 son: 1, 1,25, 1,5, 2, 2,5, 3, 4, 5, 6, 8, 10, 12, 16, 20, 25, 32, 40 y 50.
Normalmente en lugar del paso se suele utilizar el modulo m, expresado en mm:
El paso es una medida indicativa de la dimensión de los dientes y el arco de axoide se reparte entre el arco correspondiente en el espacio e vacio entre.

PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Tipos de engranajes.
Engranajes Cilíndricos.
Diente Recto. Diente Helicoidal.
Cremalleras.

PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Tipos de engranajes.
Engranajes Cónico.
Diente Recto. Diente Helicoidal.

PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Tipos de engranajes.
Engranajes Hiperbólicos.
Tornillo Sinfín. Diente Helicoidal y Eje cruzado.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
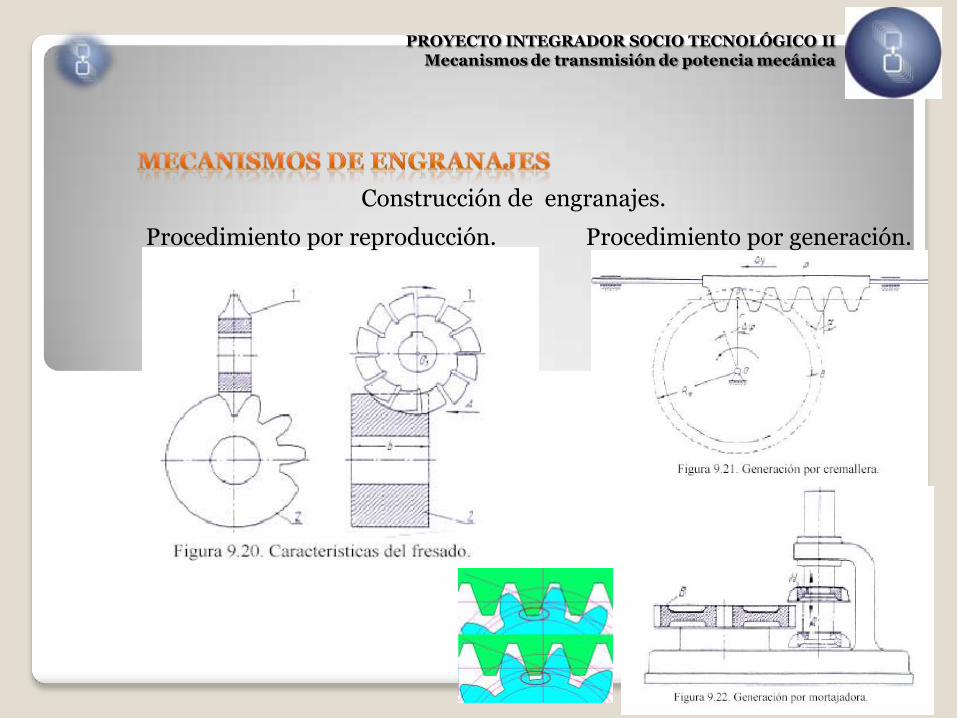
Construcción de engranajes.
Procedimiento por reproducción. Procedimiento por generación.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
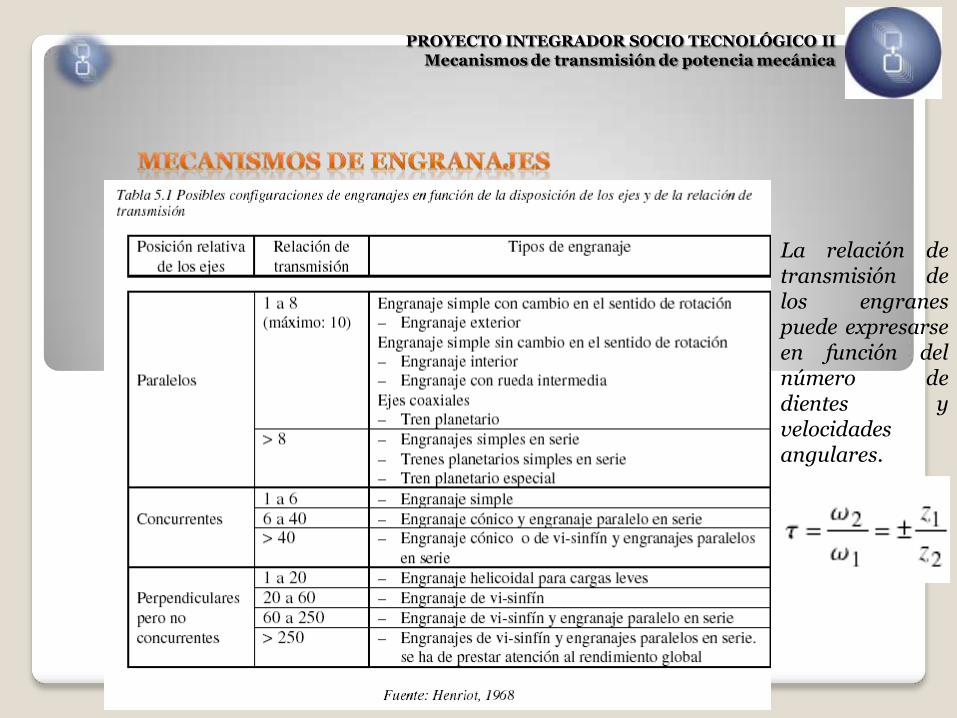
La relación de transmisión de los engranes puede expresarse en función del número de dientes y velocidades angulares.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
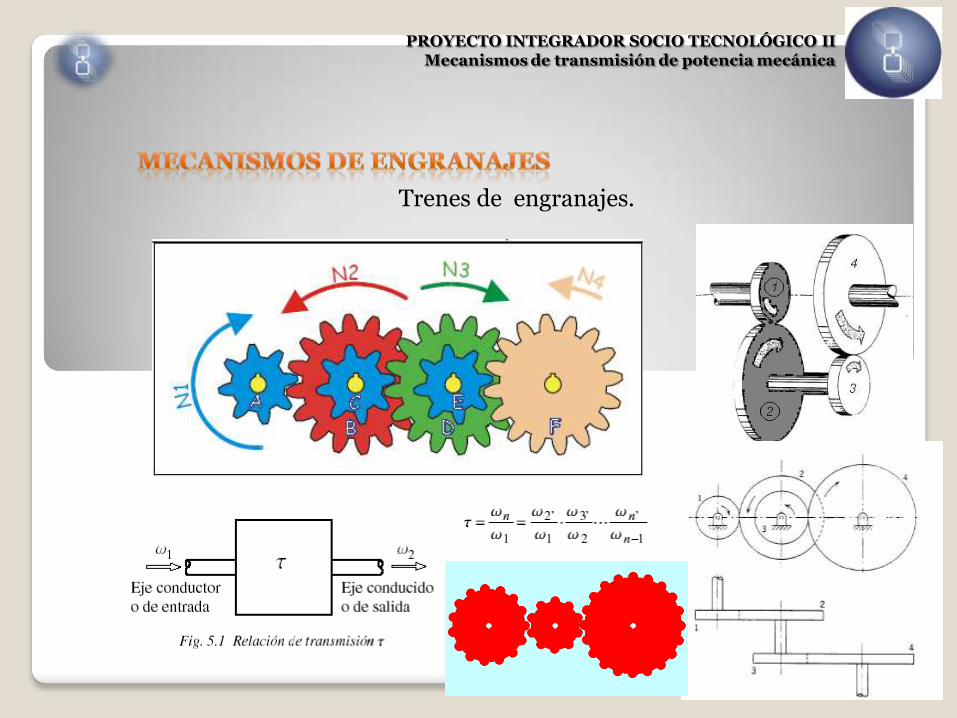
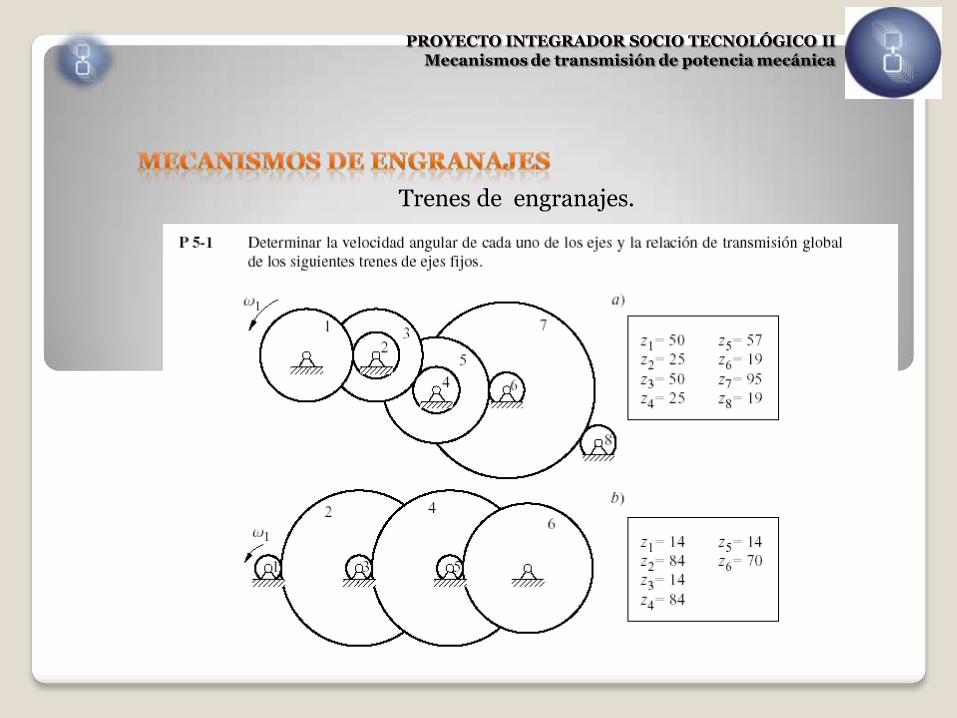
Trenes de engranajes.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
Trenes de engranajes.
PROYECTO INTEGRADOR SOCIO TECNOLÓGICO II Mecanismos de transmisión de potencia mecánica
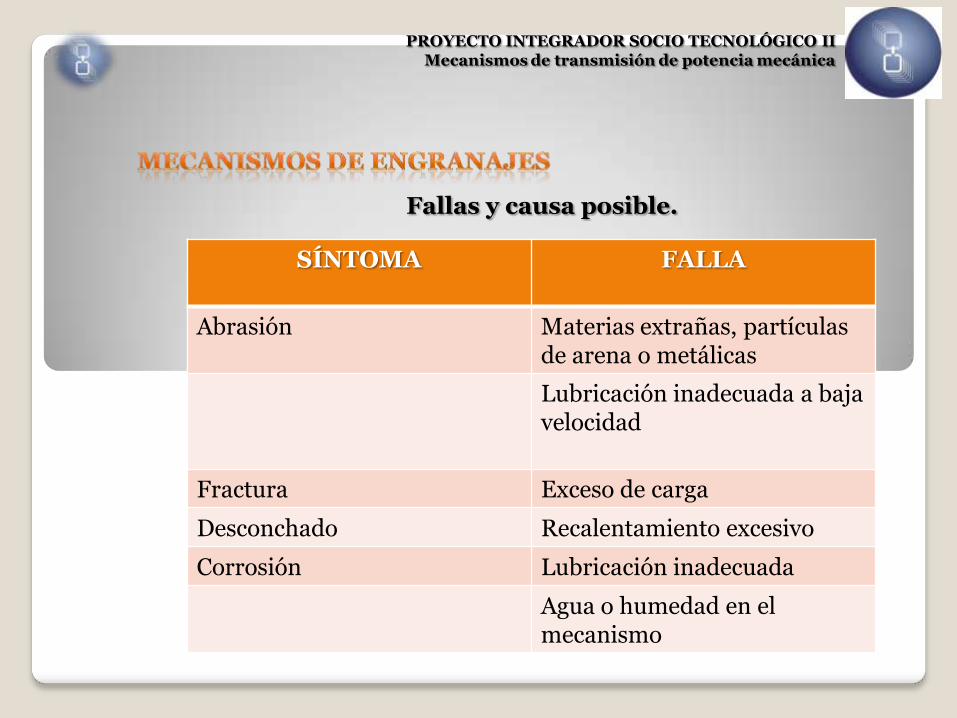
SÍNTOMA FALLA
Abrasión Materias extrañas, partículas de arena o metálicas
Lubricación inadecuada a baja velocidad
Fractura Exceso de carga
Desconchado Recalentamiento excesivo
Corrosión Lubricación inadecuada
Agua o humedad en el mecanismo
Fallas y causa posible.