Elevador de 4 Niveles

If you can't read please download the document
-
Upload
derlis-romero -
Category
Documents
-
view
24.847 -
download
15
description
Informe sobre la construcción de la maqueta de un ascensor de 4 niveles utilizando un microcontrolador PIC 16F877
Transcript of Elevador de 4 Niveles
UNIVERSIDAD NACIONAL DE ASUNCIN FACULTAD POLITCNICA
ELEVADOR DE CUATRO NIVELES CON TRES MODOS DE FUNCIONAMIENTO
Autores: Yo Ana Chen Jos Miguel Barboza Derlis Romero Segovia Orientador: Ing. Lucas Frutos
Palabras claves: elevador, ascensor, microcontrolador,
1. INTRODUCCIN Un ascensor o elevador, es un sistema de transporte vertical diseado para movilizar personas o bienes entre pisos definidos, Estos aparatos consisten en una cabina o plataforma que se desplazan dentro de un hueco, y se deslizan por unas guas verticales, constando de mecanismos de seguridad y una fuente de energa elctrica para su funcionamiento mecnico y electrnico. En 1.853 se exhibi un ascensor equipado con un dispositivo (llamado seguro) para parar la cabina si la cuerda se rompa. En este caso, un resorte hara funcionar dos trinquetes sobre la cabina, forzndolos a engancharse a los soportes de los lados del hueco as como al soporte de la cabina. Este invento impuls la construccin de ascensores. Los elevadores verticales los hay de muchos tipos, ya sean de varias velocidades, diferentes tipos de cabina, diferentes decoraciones de cabina, iluminacin, etc [1]. Los elevadores hidrulicos, se distinguen de los otros porque llevan un pistn que por dentro tiene aceite, y es lo que le propulsa para poder subir. La mquina que lleva esta llena de aceite, y cuando el elevador hidrulico quiere bajar, la mquina absorbe el aceite que est en ese momento en el pistn y en ese instante empieza a bajar hacia abajo. Este tipo de maniobra es recomendable para edificios con pocas alturas, aunque tambin se pueden instalar en edificios de mayores alturas.[2] Las puertas exteriores pueden ser tambin de varios tipos, puertas manuales, puertas semiautomticas o automticas. Los elevadores verticales pueden llevar diferente carga de personas, dependiendo del peso que acepte la cabina, que hay desde dos personas en adelante, dependiendo del tipo de carga que acepte. En edificios de gran altura se hace la necesidad de la instalacin de elevadores verticales ya que nos evita tener que subir o bajar escaleras de modo que nos hacen la vida ms fcil y nos hace utilizar menos esfuerzo. Por su especificacin tcnica debe disminuir la velocidad cuando alcanza cierta altura por causa de la gravedad, para esto se utiliza variadores de velocidad controlados por PLC [3]. Estos elevadores verticales, nos hacen la vida ms fcil, ya que nos evita tener que subir escaleras en edificios de una gran altura.
1.1 Elementos constitutivos 1.1.1 Cabina La cabina es el elemento mediante el cual son transportados los bienes o personas del sistema de ascensores. Se halla conformada por dos elementos principales: el bastidor y la caja. El bastidor de acero es el elemento al que se fijan los cables de traccin y el mecanismo de paracadas. Su coeficiente de seguridad debe estar calculado para resistir las cargas normales y las que se produzcan en el momento en que entre en funcionamiento el sistema paracadas y quede acuada bruscamente la cabina. La caja, fijada sobre el bastidor, debe estar construida por materiales de alta resistencia mecnica, que adems sean incombustibles y que no provoquen gases ni humos. El techo de la cabina debe soportar sin romperse ni deformarse con el peso de dos hombres. Sobre el mismo se han de colocar los controles del equipo en maniobra manual.
1.1.2 Grupo tractor Los grupos tractores para ascensores estn normalmente formados por un motor acoplado a un reductor de velocidad, en cuyo eje de salida va montada la polea acanalada que arrastra los cables por adherencia. Los motores ms utilizados son trifsicos, del tipo de rotor de jaula de ardilla. El reductor est formado por un sinfn de acero engranado con una corona de bronce. En el mismo eje del sinfn del reductor va generalmente montado el tambor del freno, acoplado por un enlace mecnico a la polea de traccin.[4]
1.1.3 Maniobras de control El control de los sistemas de ascensores es llevado adelante por maniobras electrnicas, encargadas de operar la direccin de movimiento de la cabina y de seleccionar los pisos en los que esta deba detenerse. Actualmente, los controles de ascensores son microprocesadores que mediante algoritmos de inteligencia artificial determinan la forma de disminuir los tiempos de espera de los
pedidos de llamadas coordinando los distintos equipos para trabajar en conjunto; Tambin se utilizan PLC para el control de giro del motor, puertas de cabina, puertas de piso, velocidad de inicio de movimiento y velocidad de parada. 1.2 Dispositivos de seguridad La seguridad del sistema es un elemento clave en los ascensores. Para maximizarla se emplean varios dispositivos especficos: 1.2.1 Enclavamiento mecnico de las puertas En el acceso a los pisos, que hace imposible la apertura de todas las puertas de acceso excepto la del piso en que se halla detenida la cabina. 1.2.2 Enclavamiento elctrico de las cerraduras Tambin en los pisos, que impide el movimiento del ascensor en caso de que alguna puerta se encuentre abierta. 1.2.3 Paracadas de rotura o desequilibrio de cables de traccin Dispositivo capaz de detener el ascensor an con plena carga, acundose sobre las guas, que se utiliza para detener al ascensor cuando la velocidad de la cabina excede cierto lmite establecido o cuando se rompe uno de los cables de suspensin. 1.2.4 Limitador de velocidad Se trata de una polea instalada en la parte alta del elevador conectada a la cabina a travs de un cable de acero el cual transmite el movimiento para monitorear la velocidad. En caso de aumento de velocidad, el dispositivo utiliza el principio de energa centrfuga para activar un segundo dispositivo instalado en la cabina que acta como una cua y detiene el movimiento. 1.2.5 Finales de carrera Sensores que interrumpen la alimentacin cuando la cabina rebasa los extremos en ascenso o en descenso. 1.2.6 Dispositivo de parada de emergencia Interrumpe la maniobra, corta la alimentacin del grupo tractor y acta el freno. Permite la detencin del ascensor dejando sin efecto los mandos de cabina y pisos.
1.2.7 Timbre de alarma Para que lo utilicen los pasajeros en caso de avera o emergencia, y recibir asistencia lo ms pronto posible. 1.2.8 Luz de emergencia Ilumina la cabina en caso de que el alumbrado normal sea interrumpido por alguna falla o corte de energa.[5] 2 OBJETIVOS 2.1 Objetivo General: Disear un sistema electrnico utilizando un microcontrolador PIC, capaz de ejecutar operaciones de forma automtica o decidir sus prximas operaciones mediante seales externas previstas por un operador, para determinar la lgica del programa. 2.2 Objetivos Especficos: 2.2.1 Montar los circuitos correspondientes para la unidad de control y la unidad de potencia. 2.2.2 Realizar la interconexin de los perifricos del microcontrolador con los respectivos sensores y actuadores. 2.2.3 Demostrar las diversas aplicaciones que tiene el microcontrolador PIC 16F877A. 2.2.4 Disear el software del microcontrolador en lenguaje de programacin C.
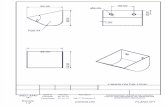
3 MATERIALES Y MTODOS La estructura fsica del sistema diseado est constituido por una maqueta de la fosa de un elevador, construida por cuatro vigas en H de latn, unidas por varillas planas de hierro sujetadas con tornillos y unidas a una base de madera mediante piezas metlicas en forma de L. El motor de corriente continua de 24 Vatios, est posicionado en la parte superior de la estructura para efectuar la traccin de la caja y el contrapeso mediante una correa industrial. Las partes mviles, la cabina del elevador y el contrapeso, estn encastradas a ejes que sirven para que stas se deslicen hacia arriba y abajo sin que se balanceen lateralmente. Se utilizaron dos ejes para la caja del elevador y uno para el contrapeso. Los sensores magnticos (reed switch) estn adheridos a las varillas planas que indican los pisos del edificio, que son cuatro en total, planta baja, primero, segundo y tercer piso. El sistema posee un panel de mando donde se encuentran los pulsadores para llamada a los respectivos pisos y parada de emergencia y unos interruptores para la seleccin del modo de operacin.
Tambin consta de un display de cristal lquido (LCD) de matriz de puntos de 40 por 2 lneas que sirve para indicar la posicin del elevador en un instante determinado [6]. El control electrnico del elevador se consigue mediante el microcontrolador PIC 16F877A montado en un placa que tiene como perifricos los buses de datos que se conectan a los respectivos puertos del PIC, consta de un cristal de 4 MHz para el oscilador interno del PIC y en las entradas de la alimentacin estn conectados capacitores para la reduccin de ruido elctrico, incluye un circuito de reset conectado al respectivo pin del PIC para restablecer el sistema [7]. A continuacin, se describen los bloques que componen el prototipo desarrollado.
Interfaz de potencia Motor Circuito de control
Fuente de Alimentacin
Sensores
Circuito de Mando
Display LCD
Figura 1 Diagrama de bloques del sistema.
3.1 Software para visualizacin de pisos en Display El software para visualizacin del display fue desarrollado en lenguaje C, y compilado con el programa Mplab a lenguaje de mquina para ser gravado en ICprog que es el programa que ejecuta el grabador de PIC. 3.2 Software para funciones de movimiento y parada Al igual que el software de visualizacin para el display fue desarrollado en lenguaje C, compilado con MPlab y gravado en ICprog, esta vez teniendo en cuenta los mdulos de parada con deteccin de los sensores reed switch y tiempo de espera en parada hasta una siguiente seal o pedido externo mediante el circuito de mando. 3.3 Circuito de Control
Todo el sistema se encuentra gobernado por un solo circuito integrado, el microcontrolador PIC 16F877A, este PIC dispone de 40 pines, trabaja con 35 palabras de instrucciones, es un microcontrolador CMOS FLASH de 8 bits que posee seis puertos de entrada/salida configurables para que operen de diversas formas. Para la aplicacin del proyecto, se utilizan los seis puertos disponibles; el puerto A acta como entrada para las seales de seleccin de modo de operacin; el puerto B es la salida que se conecta a la unidad de potencia para controlar el movimiento del motor; el puerto C es la entrada de los sensores de pisos y de los pulsadores; el puerto D est configurado como salida para enviar puerto E enva las LCD. datos al LCD; y el seales de control al
Figura 2 Circuito de control.
3.4 Circuito de Mando El PIC 16F877A por un lado se pulsadores, a 2 interruptores, al salidas A y B; que junto con inversor de giro para controlar motor que mueve al ascensor. conecta a los sensores, a los pulsador stop, y posee dos GND se conectan al circuito todos los movimientos del
Figura 3. Circuito de mando.
3.5 Interfaz de potencia El interfaz de potencia se realizo mediante el diseo del circuito digital tipo puente H que hace posible la inversin de giro del motor cuando se requiera en la operacin del sistema; para esto se utilizaron los transistores TIP 122 y 127 transistores bipolares NPN 222 y capacitor para control de ruido de la alimentacin, el interfaz recibe pulsos del circuito de control uno para que gire en un sentido y otro para el sentido contrario, cuando no hay presencia de estos pulsos el motor permanece en reposo. La tierra del circuito de control de potencia, si la seal de el motor ubicado en el centro ser de 5 Voltios para que se tenga 0 y 5 gira en un otro sentido, los 5 Voltios tampoco habr giro. es comn a la tierra del circuito entrada es 0 Voltios y 0 Voltios no gira, una de las seales debe empiece a girar el motor, cuando sentido y si se tiene 5 y 0 gira en polarizan los transistores del
lado derecho o izquierdo del circuito, as tambin si ambos extremos estn polarizados
Figura 4. Circuito de control de giro de motor (Puente H).
4 RESULTADOS Y DISCUSIN El sistema diseado result ser robusto fsicamente, sin descuidar la esttica, pues soportaba el peso y el movimiento del motor sin que se aprecien vibraciones de la estructura. La caja del elevador se deslizaba de manera suave a travs de los ejes y al arrancar no se producan saltos ni sacudidas. Dicha caja se detena en el lugar indicado de subida y de bajada, por lo que concluimos que la eleccin y disposicin de los sensores fue
la correcta. Se realizaron pruebas en los modos de funcionamiento automtico y manual durante varias horas y el software no se colg y respondi adecuadamente, el motor no se calent ni tampoco lo hizo el microcontrolador o la interfaz de potencia (puente H), lo que indica que los componentes fueron dimensionados correctamente. Las placas impresas fueron diseadas mediante Eagle 4.17 y se manufacturaron mediante un proceso fotomecnico, perforadas tipo soldados punta emprica. dremmel y con fina de Para grabar con taladro los componentes soldador de forma el
microcontrolador se utiliz el grabador que es de propiedad del laboratorio de la Facultad Politcnica.
a)
b)
Figura 5. a) prototipo a prueba y simulacin de sensores en protoboard. b) prototipo teminado.
5 CONCLUSIONES El logro conseguido fue el de construir la maqueta de un elevador funcional, lo ms cercano posible a un ascensor real utilizado en la actualidad, que puede ser utilizado con fines didcticos para comprender su funcionamiento y para realizar el desarrollo del software que controla un ascensor real a fin alcanzar un nivel ptimo de ahorro de energa, reduccin de tiempo de espera del usuario y desempeo del motor en un modelo a escala bastante aproximado a uno real. Las limitaciones encontradas fueron en la construccin de la estructura y en la miniaturizacin de los dispositivos de seguridad que se encuentran en un ascensor real. 6 REFERENCIAS BIBLIOGRFICAS
[1] sistemas de ascensores y elevadores de carga. wikipedia. Enciclopedia Libre. www.wikipwdia.org/ascensores. [2] Electrohidrulica. Festo Didactic. D. Merkle, K. Rupp. [3] Motores Elctricos. Variacin de Velocidad. J. Roldn Viloria. Paraninfo. [4] Seleccin y aplicacin de motores elctricos. lebosco - Dias - siemens- tomo 1. McGRAW- HILL. [5] Revista del ascensor- octubre 2007 [6] datasheet del display [7] Microcontroladores PIC 16F87x. Diseo practico de aplicaciones. Segunda parte. Jos M. Angulo Usategui. Susan Romero Yesa. Ignacio Angulo Martines.