ESCUELA POLITÉCNICA NACIONAL - Repositorio...
331
ESCUELA POLITÉCNICA NACIONAL ESCUELA DE INGENIERÍA ESTUDIO DEL SISTEMA DE NAVEGACIÓN AEREO SATELITAL CNS/ATM Y SU FACTIBILIDAD DE IMPLEMENTACIÓN EN EL ECUADOR PROYECTO PREVIO A LA OBTENCIÓN DEL TITULO DE INGENIERO EN ELECTRÓNICA Y TELECOMUNICACIONES ARMAS QUILES CARLOS DANIEL NEACATO ITURRALDE EDGAR SANTIAGO DIRECTOR: Msc. Tañía Pérez Quito, Junio del 2003
-
Upload
nguyenlien -
Category
Documents
-
view
228 -
download
0
Transcript of ESCUELA POLITÉCNICA NACIONAL - Repositorio...

ESCUELA POLITÉCNICA NACIONAL
ESCUELA DE INGENIERÍA
ESTUDIO DEL SISTEMA DE NAVEGACIÓN AEREO SATELITALCNS/ATM Y SU FACTIBILIDAD DE IMPLEMENTACIÓN EN EL
ECUADOR
PROYECTO PREVIO A LA OBTENCIÓN DEL TITULO DE INGENIERO ENELECTRÓNICA Y TELECOMUNICACIONES
ARMAS QUILES CARLOS DANIELNEACATO ITURRALDE EDGAR SANTIAGO
DIRECTOR: Msc. Tañía Pérez
Quito, Junio del 2003

DECLARACIÓN
Nosotros, Carlos Daniel Armas Quiles, Edgar Santiago Neacato Iturraldedeclaramos bajo juramento que el trabajo aquí descrito es de nuestra autoría;que no ha sido previamente presentada para ningún grado o calificaciónprofesional; y, que hemos consultado las referencias bibliográficas que seincluyen en este documento.
A través de la presente declaración cedemos nuestros derechos de propiedadintelectual correspondientes a este trabajo, a la Escuela Politécnica Nacional,según lo establecido por la Ley de Propiedad Intelectual, por su Reglamento ypor la normatividad institucional vigente.
arlos Daniel Armas Quiles Edgar Santiago Neacato Iturralde

CERTIFICACIÓN
Certifico que el presente trabajo fue desarrollado por Carlos Daniel ArmasQuiles y Edgar Santiago Neacato Iturralde, bajo mi supervisión.
mMsc. Tania Pérez
DIRECTOR DE PROYECTO

AGRADECIMIENTO
A mi padre, la persona que admiro y respeto por su sacrificio y dedicación, quien me
ha brindado siempre su apoyo incondicional para que pueda culminar con éxito esta
etapa de mi vida, a mí madre que con su paciencia y amor han sabido guiarme por el
camino del bien y la sabiduría inculcándome valores y principios. A mis hermanos,
por compartir conmigo todas las alegrías y tristezas del diario vivir. A Geovanny, Beto
y Pato, por demostrarme su verdadera amistad. Al Ing. Ivan Salas por su valiosa
ayuda en la realización del presente trabajo; y, a todas las personas que me
brindaron su apoyo en los momentos difíciles por los que he atravesado.
Daniel Armas
AGRADECIMIENTO
A mi madre que con su inmenso amor ha estado a
mi lado en todos los momentos de mi vida. A mi
padre que ha sido un ejemplo para mi y que me ha
dado su apoyo incondicional en cualquier
circunstancia. A mis hermanos por su compañía,
por su cariño y comprensión. A todas las personas
que comparten mi vida, y a todas las personas que
fueron importantes en mi camino y que se
marcharon para siempre.
Edgar Neacato Iturralde

DEDICATORIA
El presente trabajo de tesis, va dedicado a mis padres Jorge H. Armas M. y Magali
Quiles, pero principalmente a mi madre] quien con su esfuerzo y sacrificio me ha
brindado su apoyo, y que a pesar de estar tan lejos siempre ha estado pendiente de
mí como ninguna otra persona. A mi hijo, Daniel Alejandro, quien es mi motivación y
la razón para seguir siempre adelante.
Daniel Armas

DEDICATORIA
A mis mejores amigos de toda la vida, mis
padres. Porque siempre han estado conmigo,
porque siempre me han dado ánimos para
seguir adelante. Porque siempre he podido
confiar en ustedes y se que siempre estarán
conmigo, por eso, todos mis triunfos son por
y para ustedes. ;
Edgar Neacato Iturralde
RESUMEN
El espacio aéreo, que disminuye día a día ante el incremento de las aeronaves
que lo utilizan y la preocupación de la comunidad aeronáutica a nivel mundial para
superar las congestiones y deficiencias de los sistemas convencionales para
atender la demanda proyectada por servicios aeronáuticos, obliga a establecer un
nuevo sistema de navegación aérea. La OAC1 ha elaborado el concepto de los
Sistemas de Comunicación, Navegación, Vigilancia y Gestión del Tránsito Aéreo
(CNS/ATM) basado en satélites, como una respuesta al crecimiento de la aviación
civil internacional.
Los nuevos sistemas comprenden, comunicaciones con las aeronaves, tanto
orales como de datos, a través de enlaces digitales y la utilización de satélites
geoestacionarios, complementado con la Red de Telecomunicaciones
Aeronáutica (ATN) que es una especie de Internet de los servicios de
aeronavegación; navegación para las operaciones en ruta y también para las de
área terminal, de aproximación y aterrizaje, a través del Sistema Global de
Navegación por Satélite (GNSS); vigilancia, proporciona control en todas las
áreas, incluso aquellas remotas que no pueden ser cubiertas por las estaciones
actuales.
Se prevé que con la introducción gradual de los sistemas satelitales (CNS/ATM),
habrá menos necesidad de volar sobre instalaciones de ayudas para la
navegación ubicadas en tierra; con lo que en un futuro próximo estas ayudas
serán eliminadas. Esto significará grandes beneficios económicos, debido a
eliminación de los costos que supone la operación y el mantenimiento de las
radioayudas; además, con los nuevos sistemas se tendrá trayectorias de vuelo
más directas y menos demoras por la congestión del espacio aéreo, reduciendo el
tiempo de viaje y la utilización de combustible para un vuelo.
La principal ventaja de los nuevos sistemas, es la mayor eficiencia en la Gestión
del Tránsito Aéreo (ATM), que brindará un mejor servicio a todas los usuarios de
la aviación civil y permitirá mayor control en los vuelos, reduciéndose de esta
manera el número de accidentes y la pérdida de miles de vidas humanas.

ABSTRACT
The air space, that diminishes day to day before the increment of the airships that utilize it
and the worry of the community aeronautics to world level to surpass the congestions and
defíciencies of the conventional systems to attend the demand projected by aeronantic
services, obliges to establish a new air system of navigation. The OACI has elaborated the
concept of the Systems of Communication, Navigation, Caution and Management of the
Air Traffic (CNS ATM) based on satellites, as an answer al growth of the intemational
civil aviation.
The new systems tmderstand, Communications with the airships, so much oral as of data,
through digital links and the geosynchronous utilization of satellites, complemented with
the Aeronautics Telecommunications Network (ATN) that is a species of Internet of the
services of aeronavegation; navigation for the operations in route and also for those of área
terminal, of approximation and landing, through the Global System of Navigation by
Satellite (GNSS);It provides control in all the áreas, even those remote that cannot be
covers by the present stations.
It is foreseen that with the gradual introduction of íhe satellite systems (CNS ATM), there
will be less need to fly on installations of aids for the navigation located in land; with what
in a next future these aids will be eliminated. This it will signify large economic benefits,
due to elimination of the costs that supposes the operation and the maintenance of the
radioayudas; besides, with the new systems will have more direct paths of flight and less
you delay by the congestión of the air space, reducing the time of trip and the utilization of
fu el for a flight.
The main advantage of the new systems, is the greater effíciency in the Management of the
' Air Traffíc (ATM) the one that will offer a better service to all the users of the civil
aviation and will permit greater control in the flights, being reduced in this manner the
number of accidents and the loss of thousands of human lives.

INTRODUCCIÓN
El transporte aéreo constituye uno de los sectores que mayor desarrollo ha tenido
en las últimas décadas. Nos encontramos en un mundo donde conceptos como
globalización, internacionalización, regionalización, etc., están impulsando al
sector hacia una integración y consolidación como nunca antes había existido.
Esto ha provocado un continuo crecimiento de la transportación de pasajeros,
carga y correo, alcanzando tai nivel, que los actuales sistemas de comunicación,
navegación, vigilancia y gestión del tránsito aéreo están llegando al punto de
saturación.
Si no se toman las medidas necesarias, además de presentarse una grave
saturación en las rutas aéreas, se tendrán retrasos en los vuelos y lo más
preocupante es que aumentaría el número de accidentes fatales, la cifra podría
llegara cuatro accidentes mensuales durante los próximos veinte años.
Para enfrentar estos problemas, nació el sistema CNS/ATM (Comunicación,
Navegación, Vigilancia y Gestión del Tráfico Aéreo) como una solución para ser
adoptada en todos los países y líneas aéreas del mundo, que tendrían los mismos
sistemas de navegación, comunicación y vigilancia por satélite. El sistema fue
concebido por la Organización de Aviación Civil Internacionai (OACI), quien creó
el Comité FANS (Comité de Sistemas de Aeronavegación para el Futuro) que
estudió las condiciones de aviónica y administración del tráfico aéreo necesarias
para operar en la nueva demanda.
El sistema presenta muchas ventajas comparado con el sistema actual, como
mejor control del espacio aéreo, disminución de la distancia entre aviones en
vuelo, asignación de rutas directas disminuyendo el tiempo de vuelo y uso de
combustible, además disminuirá el ruido en las inmediaciones de los aeropuertos
gracias a los acercamientos de los aviones en la trayectoria para aterrizar, algo
imposible con los sistemas tradicionales.

La comunicación se realiza por medio de transmisión de datos entre el satélite, la
computadora del avión y la estación en tierra, que tendrá información sobre todos
los aspectos del vuelo mediante la Red de Telecomunicaciones Aeronáuticas
(ATN), que es una especie de Internet de los servicios aerocomerciales.
Los sistemas de navegación por satélite determinan la posición de cualquier
aeronave según las tres coordenadas de posición (x, y, z), y tiempo (t), de
acuerdo a referencias dadas por el propio sistema. Para esto, se utiliza una
constelación de satélites en la que cada uno difunde señales de información de
posición y tiempo de la aeronave. Al unir estas señales, el piloto puede determinar
su posición, tiempo de llegada, tomar la ruta que más le convenga y en tierra se
podrá tener información permanente sobre su ruta.
Las radioayudas desaparecen-'y 'cualquier vuelo puede ser controlado con el
sistema mundial de navegación por satélite (GNSS), consistente en más de
cuarenta satélites colocados por Estados Unidos, los GPS (Sistema de
Posicionamiento Global), y por Rusia, los GLONNAS, Los datos de posición son
recibidos en las estaciones en tierra, para corregir el margen de error de
trescientos metros en la información que envían los satélites, así estas
disminuyen el error a un margen no superior de siete metros y envían
nuevamente la información a los equipos del avión.
El sistema CNS/ATM busca disminuir al máximo las comunicaciones radiales o
por voz entre controladores y pilotos, pues la información está disponible en
computadoras que trabajan con datos durante todo el vuelo, a través de la Red de
Telecomunicaciones Aeronáuticas (ATN).
Teniendo en cuenta todo lo anteriormente expuesto, el presente trabajo presenta
las características del sistema CNS/ATM, las ventajas sobre los sistemas
actuales, los elementos a ser considerados para su implementación y la forma
como debería darse la transición de los sistemas actuales hacia los nuevos
sistemas dentro del espacio aéreo asignado al Ecuador, denominado FIR
Guayaquil.

Por lo tanto se ha elaborado un trabajo conciso, resaltando los conceptos más
importantes que abarcan el estudio de los nuevos sistemas, de la siguiente
manera.
En el Capítulo 1, se describe el funcionamiento del actual sistema de navegación
basado en radioayudas terrestres] definiendo las características de cada uno de
los elementos que comprenden el sistema. Además se analizan las limitaciones
que presenta, lo que determina la razón para emplear los nuevos sistemas de
navegación satelital que superan las [imitaciones actuales.
En el Capítulo 2, se detalla los elementos y los principios básicos que presentan
los sistemas CNS/ATM. Se presenta también los sistemas de aumentación
desarrollados hasta el momento. Asimismo se da a conocer las ventajas de los
nuevos sistemas de navegación aérea «yí-como estos ayudan a mejorar las
deficiencias de los sistemas convencionales y los problemas que se esperan a
futuro.
Para iniciar el proceso de transición, en el Capítulo 3, se han identificado las
principales aerovías de la FIR Guayaquil y las principales corrientes de tránsito
nacional e internacional. Mediante proyecciones de movimientos de tránsito aéreo
en cada una de las rutas, se determina el nivel de precisión que las aeronaves
necesitan para volar sobre una región del espacio aéreo, basándose en el
concepto de desempeño de navegación requerida (RNP).
Por último, se detallan los sistemas a ser implementados en el Ecuador y los
cronogramas de implantación de estos, tomando en cuenta la coexistencia
temporal con los sistemas actuales.
Las características generales y técnicas que tendrán estos sistemas son
presentadas en el Capítulo 4.
Las nuevas tecnologías que surjan sustentarán diversos diseños y opciones de
implantación de los nuevos sistemas.

CONTENIDO
INTRODUCCIÓN
CAPITULO 1
Sistema de Navegación Aérea Actual y sus Limitaciones 1
1.1 Estructuración del Espacio Aéreo 3
1.2 El Sistema de Navegación Aérea 6
1.3 Comunicación 8
1.3.1 Servicio Fijo Aeronáutico 8
1.3.2 Servicio Móvil Aeronáutico 9
1.4 Vigilancia 9
1.4.1 Radar Primario de Vigilancia (PSR) 10
1.4.2 Radar Secundario de Vigilancia (SSR) 11
1.4.2.1 Radiofaro de Respuesta 11
1.4.3 Radar Meteorológico 12
1.4.4 Aplicaciones de (os Radares 13
1.5 Radioayudas para la Navegación 14
1.5.1 Tipos de Radioayudas para la Navegación Aérea 15
1.5.2 Descripción de Radioayudas 17
1.5.2.1 Radiofaro Omnidireccional de VHF (VOR) 18
1.5.2.1.1 Principio de funcionamiento 21
1.5.2.1.2 Equipo a bordo 22
1.5.2.1.3 Frecuencias VOR 26
1.5.2.1.4 Ventajas del VOR como ayuda a la navegación 26
1.5.2.1.5 Inconvenientes del VOR como ayuda a la navegación 26
1.5.2.2 Equipo Medidor de Distancias (DME) 27
1.5.2.2.1 Principios fundamentales 28
15.2.2,2 Equipo de a bordo 29
1.5.2.2.3 Equipo de la estación terrestre 30
1.5.2.2.4 Ventajas del DME 30
1.5.2.3 Localizador Direccional Automático (ADF) 31
1.5.2.3.1 Principio de Funcionamiento. 32
1.5.2.3.2 Indicaciones del ADF. 32
1.5.2.4 Sistema de Aterrizaje por Instrumentos (ILS) 33
1.5.2.4.1 Principio de Funcionamiento 34
1.5.2.4.2 Estructura de ILS 35
1.5.2.4.3 Las Balizas marcadoras 37
1.5.2.4.4 Equipo a bordo 37
1.5.2.4.5 Frecuencias 38
1.5.2.4.6 Inconvenientes del sistema ILS 38
1.6 Requisitos de Desempeño 39
1.7 Limitaciones de los Sistemas Convencionales 40
CAPITULO 2
Principios del Sistema de Navegación Aérea Satelital (CNS/ATM)
2.1 Introducción 43
2.2 Sistema de Comunicaciones 46
2.2.1 Características del Sistema de Comunicaciones 47
2.2.2 Red de Telecomunicaciones Aeronáuticas (ATN) 48
2.2.2.1 Objetivos y Beneficios de la ATN 50
2.2.2.2 Las capas superiores ATN 51
2.2.2.3 Aplicaciones CNS/ATM 52
2.2.2.4 La Internet ATN 53
2.2.2.5 Topología de abordo ATN 56
2.2.2.6 Movilidad y Comunicación de Datos 56
2.3 Navegación 60
2.3.1 Determinación de la posición mediante satélites 61
2.3.2 Sistema GPS 64
2.3.2.1 Descripción del Sistema 66
2.3.2.1.1 El Sector Espacial 66
2.3.2.12 El Sector de Control 67
2.3.2.1.3 El Sector de Usuarios 68
2.3.2.1.4 Señal de los Satélites 68
2.3.2.1.5 El Sistema de Referencia DATUM WGS-84 69
2.3.3 Sistema GLONASS 69
2.3.3.1 Descripción del Sistema. 70
2.3.3.1.1 El Sector Espacial 70
2.3.3.12 Sector de Control. 72
2.3.3.1.3 Sector Usuario. 73
2.3.3.1.4 Características de las Señales GLONASS. 74
2.3.3.1.5 Sistema de Referencia. DATUM PZ-90. 76

2.3.4 GPS versus GLONASS 76
2.3.5 Uso del GPS y el GLONASS conjuntamente 77
2.3.5.1 Errores del GPS y el GLONASS 78
2.3.6 Sistemas de Aumentación para el GNSS 79
2.3.6.1 Sistema de Aumentación Basado en Satélites (SBAS) 80
2.3.6.1.1 Sistema de Aumentación de Área Amplia 81
2.3.6.12 EGA/OS 84
2.3.6.1.3 JAPAÑES MSAS 85
2.3.6.2 Sistema de Aumentación Basado en Tierra (GBAS) 85
2.3.6.2.1 Sistema de Aumentación de Área Local 86
2.3.6.3 Sistema de Aumentación Basado en Aeronave (ABAS) 87
2.4 Vigilancia 88
2.4.1 EL Sistema ADS 89
2.4.1.1 ADS por Contrato (ADS-C) 90
2.4.1.2 ADS-B (ADS Broadcast) 92
2.4.2 Sistema Anticolisión de Abordo (ACAS) 94
2.4.3 Principios básicos del ACAS 95
2.5 Gestión de Tráfico Aéreo (ATM) 95
2.5.1 ATM portases de vuelo de la aeronave 96
2.5.1.1 Operaciones aeroportuarias 96
2.5.1.2 Operaciones en Área Terminal y en Ruta 97
2.6 Ventajas de los Sistemas CNS/ATM 97
2.6.1 Beneficios para los Estados 99
CAPITULO 3
Transición de los sistemas actuales a los sistemas CNS/ATM 101
3.1 Análisis de Tráfico Aéreo 102
3.1.1 Análisis de Tráfico Aéreo en el Ecuador 104
3.1.1.1 Áreas Homogéneas y sus pronósticos 106
3.1.1.2 Principales Rutas Homogéneas 108
3.2 RNP (Desempeño Requerido de Navegación) 110
3.2.1 Tipos de RNP 111
3.2.2 Equipo RNAV (Navegación de Área / Área Navigation) 113
3.3 Factibilidad de Implantación del Sistema CNS/ATM 114
3.3.1 Descripción del Sistema Vigente 115
3.3.2 Tipos de RNP que se utilizarán en el Ecuador 116

3.3.2.1 RNP 10 117
3.3.2.2 RNP 4 117
3.3.2.3 RNP 1 118
3.3.3 Factíbilidad Técnica 118
3.4 Comunicaciones 121
3.4.1 Comunicaciones Aire/Tierra 121
3.4.2 Comunicaciones Tierra/Tierra 122
3.4.3 Tiempo estimado para la implementación de los Sistemas de
Comunicaciones 123
3.5 Navegación 126
3.5.1 Sistema de Coordenadas RNP (WGS-84) 126
3.5.2 Evolución operacional y tiempo estimado para la implementación
deIGNSS 127
3.5.3 Requisitos de desempeño operacional 128
3.5.4 Estrategia de implantación 128
3.6 Vigilancia 131
3.6.1 Radar Primario de Vigilancia (PSR) 131
3.6.2 Radar Secundario de Vigilancia (SSR) 131
3.6.3 Vigilancia Dependiente Automática (ADS) 132
3.6.4 Tiempo Estimado para la Implantación de los Sistemas de
Vigilancia 132
3.7 Gestión del Tránsito Aéreo (ATM) 135
3.7.1 Evolución de la ATM en la FIR Guayaquil 135
3.7.2 Evolución de La ATM en Áreas Terminales y Aeropuertos 136
3.8 Desarrollo de Recursos Humanos y Necesidades de Instrucción 136
3.8.1 Instrucción Básica 138
CAPITULO 4
Requerimientos técnicos para la implementación de los sistemas CNS/ATM
en el Ecuador.
4.1 Introducción 140
4.2 Análisis Operacional del Sistema CNS/ATM 142
4.3 Requerimientos para los Sistemas de Comunicación 145
4.3.1 Requerimientos para la Comunicación Aire/Tierra 145
4.3.1.1 Sistema Móvil Aeronáutico por Satélite (AMSS/SMAS) 146
4.3.1.1.1 El segmento espacial de comunicaciones por satélite 148
4.3.1.1.2 El segmento terrestre de comunicaciones por satélite 151
4.3.1.1.3 El segmento de abordo de comunicaciones por satélite 152
4.3.1.2 HF y VHF (analógica) 152
4.3.1.3 Enlace de datos HF (HDL) 154
4.3.1.4 Enlace de Datos VHF (VDL) en Modo 2 154
4.3.2 Requerimientos para las Comunicaciones Tierra-Tierra 155
4.3.2.1 Red de Telecomunicaciones Aeronáuticas (ATN) 15.5
4.3.3 Futuras Tendencias 157
4.4 Requerimientos para los Sistemas de Navegación 158
4.4.1 DME/DME 159
4.4.2 GNSS 159
4.4.2.1 Componentes de la señal del GPS 160
4.4.2.1.1 Estructuras de las señales transmitidas 161
4.4.2.1.2 Mensaje de navegación (NAVDATA) 163
4.4.2.1.3 Órbitas del sistema GPS 164
4.4.2.1.4 Precisión del sistema GPS 164
4.4.2.2 Aplicaciones del GNSS 165
4.4.2.3 GPS para el Ecuador. 166
4.5 Requerimientos para los Sistemas de Vigilancia 170
4.5.1 Requisitos Técnicos para la ADS 170
4.5.1.1 I nterfaz del piloto 171
4.5.1.2 Mensajes ADS • 171
4.6 Gestión de Trafico Aéreo (ATM) 173
4.6.1 Elementos de la Gestión del Tránsito Aéreo 176
CAPITULO 5
Conclusiones y Recomendaciones
5.1 CONCLUSIONES 178
5.2 RECOMENDACIONES 185

ANEXOS
Anexo A : Cartas de Navegación en Ruta
Anexo B ; Boletín Estadístico de Tráfico Aéreo (DAC)
Anexo C: Proyecciones de Tráfico Aéreo
Anexo D: RNP en la F1R Guayaquil
Anexo E: Descripción de las Radioayudas en el Ecuador
Anexo F : Recomendaciones de la Organización de Aviación Civil Internacional
Anexo G: Plan Nacional de Frecuencias
Anexo H: Protocolo X.25
Anexo I: Equipos GPS
Anexo J: Recopilación de accidentes.


CAPITULO 1
Sistema de Navegación Aérea Actual y sus Limitaciones
El objetivo de este capítulo, es el estudio de] Sistema de Navegación Aérea que
se apoya en el uso de las redes terrestres de radioayudas, que definen a su vez,
la estructura de rutas (aerovías1) por donde transitan las aeronaves. Por lo cual es
necesario conocer algunos conceptos fundamentales sobre Navegación Aérea,
estructuración del espacio aéreo y normas generales sobre comunicaciones,
como un antecedente para la inserción del Nuevo Sistema de Navegación Aérea
por Satélites.
Existen dos tipos de navegación que rigen la actividad aeronáutica:
1- VFR (Visual Flight Rules) o Reglas de Vuelo visual
2- IFR (Instrument Flight Rules) o Reglas de Vuelo por Instrumentos
VFR (Visual Flight Rules) o Reglas de Vuelo visual
Las reglas de vuelo visual son utilizadas mayoritariamente por aviones privados
de pequeño tamaño y ultralivianos, que vuelan a un nivel de altura bajo. Estas,
consisten en guiarse por referencias visuales para llegar a su destino (por
ejemplo; caminos, puentes, vías, edificios, etc.). Existen mapas para este tipo de
navegación donde se marcan los aeropuertos y aeródromos2, además la
geografía del suelo y lugares por donde no se puede sobrevolar (por ejemplo
zonas militares).
Este tipo de navegación presenta varias restricciones:
- La navegación debe ser diurna
- Las condiciones climáticas deben ser relativamente buenas.
- Se debe estar atento al tráfico aéreo que esté volando en las mismas
condiciones.
Generalmente hay restricciones de altura.
1 Ver concepto en página 22 Ver Glosario de Términos
IFR (Instrument Flight Rules) o Reglas de Vuelo por Instrumentos
Las reglas de vuelo IFR se diferencian de las VFR en que al piloto se le permite
volar a gran altura a través de las nubes y realizar aproximaciones al aeropuerto
mediante instrumentos, es la de mayor uso.
Para la navegación aérea mediante reglas IFR se utilizan mapas denominados
"cartas de navegación"3, donde figuran todas las radioayudas, aerovías, alturas
mínimas de vuelo, aeropuertos y frecuencias necesarias para poder navegar. La
publicación de las cartas está a cargo de cada país. En el Ecuador estas son
publicadas por la Dirección de Aviación Civil (DAC).
Aerovías
Las aerovías, a modo de carreteras aéreas, son corredores o pasillos dotados de
ayudas a la navegación y de dimensiones perfectamente definidas. Estas
carreteras se cruzan siempre sobre una RADIOAYUDA y sus límites varían según
se trate de aerovías en el espacio aéreo inferior4 (que abarca desde tierra hasta el
nivel de vuelo FL250, 25000 pies de altura), en cuyo caso tendrá una anchura de
10 NM5 o en el superior6, a partir del FL 250, en cuyo caso su dimensión en
anchura es de 14 NM.
FL (Flight Leve!) quiere decir Nivel de Vuelo y se usa para indicar altitudes por
encima de 18.000 pies respecto el nivel del mar. La lectura de la altitud va
precedida de las letras FL y los dos últimos ceros se omiten. Por ejemplo, 25.000
pies sería FL 250.
1.1 ESTRUCTURACIÓN DEL ESPACIO AÉREO
El espacio aéreo es el medio en el que se desenvuelve el transporte aéreo; está
fragmentado en zonas o regiones, que a su vez se dividen en volúmenes de
espacio determinados, los Sectores de Control, en los que a su vez se definen
zonas de espacio aéreo controlado limitadas; resulta evidente que el espacio
aéreo útil para la circulación es limitado.
Ver Anexo AVer Anexo ANM: millas náuticas (1NM = 1,85 Km)
Los Sistemas de Navegación Aérea tiene por misión, proporcionar una gestión
eficiente del espacio aéreo, es decir, obtener máximo rendimiento del binomio
Fluidez-Seguridad en el transporte aéreo.
Cabe destacar que cada estado tiene asignado un determinado espacio aéreo
sobre el cual ejerce soberanía y tiene la responsabilidad de brindar los servicios
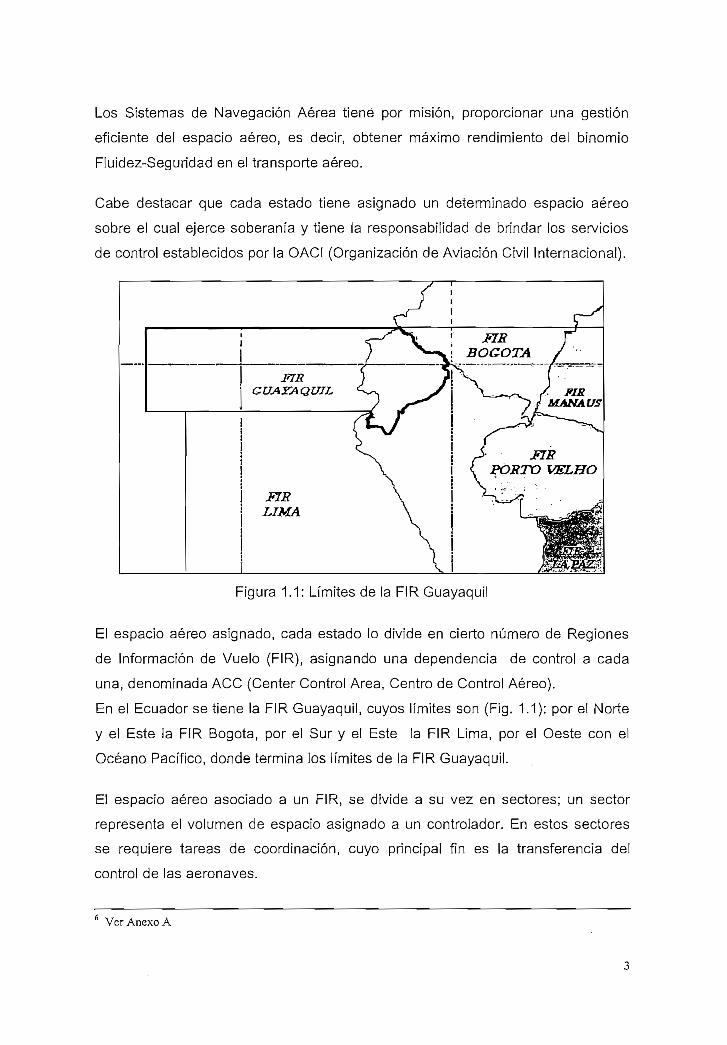
de control establecidos por la OACI (Organización de Aviación Civil Internacional).
Figura 1.1: Límites de la FIR Guayaquil
El espacio aéreo asignado, cada estado lo divide en cierto número de Regiones
de Información de Vuelo (FIR), asignando una dependencia de control a cada
una, denominada ACC (Center Control Área, Centro de Control Aéreo).
En el Ecuador se tiene la FIR Guayaquil, cuyos límites son (Fig. 1.1): por el Norte
y el Este la FIR Bogotá, por el Sur y el Este la FIR Lima, por el Oeste con el
Océano Pacífico, donde termina los límites de la FIR Guayaquil.
El espacio aéreo asociado a un FIR, se divide a su vez en sectores; un sector
representa el volumen de espacio asignado a un controlador. En estos sectores
se requiere tareas de coordinación, cuyo principal fin es la transferencia del
control de las aeronaves.
Ver Anexo A

Las regiones de información de vuelo (FIR) están divididas en zonas de control
claramente marcadas (Fig. 1.2):
• ATZ (Aerodrome Traffic Zone, Zona de Tránsito del Aeródromo).- En estas
zonas se proporciona control desde las torres de control a todas las aeronaves
que se encuentran volando en las inmediaciones de un aeropuerto y las que
circulan en el área de maniobras (pistas y calles de rodaje) del mismo. Para
esto cuenta con dos dependencias TWR (Tower Control, Torre de Control) y
GCC (Ground Control Center, Centro de Control de Tierra)
El controlador aplica y vigila que se cumplan las separaciones prescritas para
las operaciones de rodaje en pista (dependencia GCC), despegue y aterrizaje
(dependencia TWR) y establecerá las prioridades de control correspondientes
en el ordenamiento del flujo del tránsito aéreo.
• TMA (Terminal Área, Área de Control Terminal).- Es el espacio aéreo
controlado que se extiende hacia arriba desde un margen especificado sobre
el terreno y cuyos límites comprenden el espacio aéreo necesario para permitir
las trayectorias de vuelo de las aeronaves en ruta y de vuelos IFR a los que se
suministra control de tránsito aéreo. Sus límites verticales son:
Inferior: Altura sobre el terreno (tierra o agua) no inferior a 300 m. (1000 pies).
Superior: designado por la región superior de control.
• CTR (Control Región, Zonas de Control).- Es el espacio aéreo controlado
asociado a un aeródromo, que tiene por objeto proteger a todas las aeronaves
con plan de vuelo por instrumentos que se encuentren volando a lo largo de
las rutas aéreas, así como las trayectorias de vuelo (aerovías) de las
aeronaves.
Las zonas de control TMA y CTR, están vigiladas por la dependencia de control
APP (Approach Control Center, Centro de Control de Aproximación).

K
ATGCC
^ ,'-ir
En pista
zTWR
..-i
,
Despegue
TMA - CTAPP
Ascenso
F l RACC
R
En Ruta
TMA - CTRAPP
í
Aproxima cid n
•^
Aterrizaje
ATZTWR
_\
En pista
Figura 1.2: Zonas de control de la F!R
De esta manera, nada se escapa a la vigilancia del servicio de control de vuelo,
que va pasando, durante el mismo, de uno a otro centro, siempre con la
correspondiente autorización del que lo recibe y la consiguiente comunicación
entre unos y oíros.
1.2 EL SISTEMA DE NAVEGACIÓN AEREA
El Sistema de Navegación Aérea está integrado por un conjunto de elementos y
estructuras, cuyo fin es procurar un medio adecuado para el desarrollo del
transporte aéreo.
El transporte aéreo es un servicio que se manifiesta en forma de tráfico de
aeronaves en constante crecimiento, y que desde el punto de vista social se
valora normalmente, en términos de fluidez y seguridad.
Fluidez significa, mantener los flujos de tráfico aéreo sin demoras. Mientras que
seguridad, mantener en su mínima expresión el riesgo de accidentes.

El Sistema de Navegación Aérea tiene una serie de funciones y servicios, los
cuales serían imposibles de brindar sin la existencia de medios eficientes de
comunicaciones.
Estas funciones son:
- Generar información sobre ei estado operativo de los aeródromos,
infraestructura y peligros que presentan para la Navegación Aérea.
- Generar información sobre la situación meteorológica actual o prevista en la
FIR y en los aeródromos.
- Prestar los servicios de alerta, búsqueda y salvamento.
- Dar información de vuelo y control a las aeronaves.
Ofrecer información de navegación o guiado a las aeronaves.
Para que la comunicación sea eficaz, se cuenta con distintos medios, como son:
- La Red de Telecomunicaciones Fijas Aeronáuticas (AFTN, Aeronáutica! Fixed
Telecommunications Network)
- Las Redes Telegráficas de Información Meteorológica (MET, Meteorológica!)
- Los circuitos de difusión de cartas meteorológicas
- Los circuitos de comunicación oral Tierra-Tierra / Tierra-Aire
Los circuitos de datos Tierra-Tierra / Tierra-Aire
Los servicios que ofrece el Sistema de Navegación Aérea (Fig. 1.3) se pueden
clasificar en:
- Servicio de Información Aeronáutica (AIS, Aeronáutica! Information Service),
con una oficina central AIS en cada estado, y que genera las Cartas
Aeronáuticas, Publicación de Información Aeronáutica (AIP, Aeronautical
Information Publication), y Avisos para Aviadores (NOTAM, Notice For
Airmen).
- Servicio Meteorológico Aeronáutico (MET), con estación meteorológica
aeronáutica en cada estado, oficina meteorológica de aeródromo, centro de
predicción de área y estación de radiodifusión.
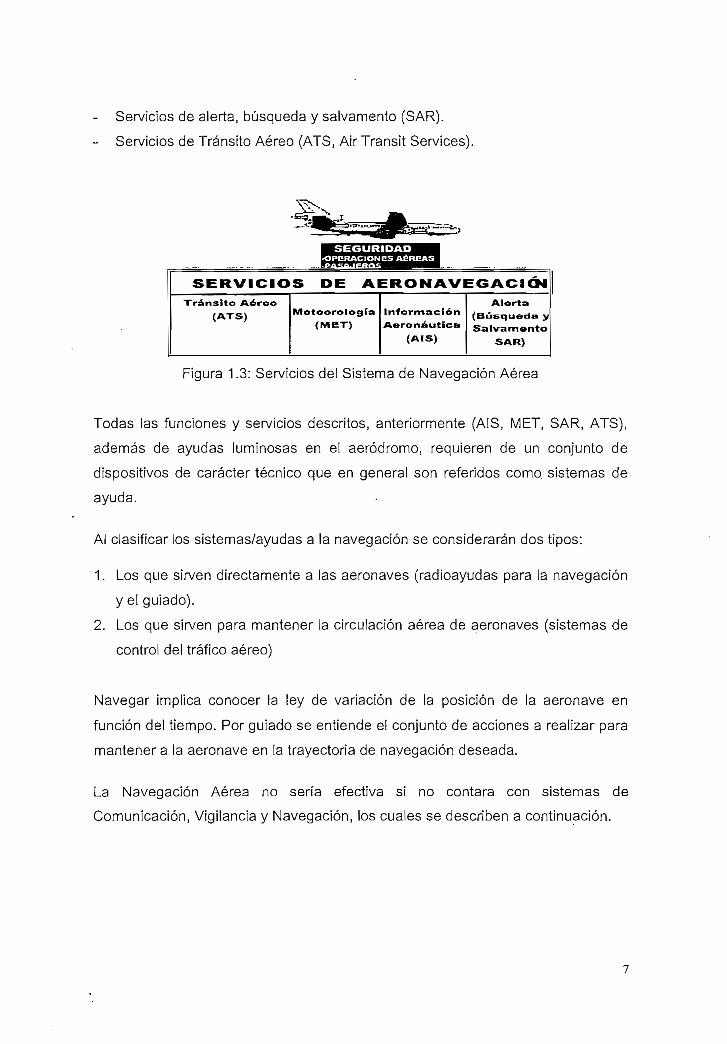
Servicios de alerta, búsqueda y salvamento (SAR).
Servicios de Tránsito Aéreo (ATS, Air Transit Services).
SEGURIDAD•OPERACIONES AÉREAS
SERVICIO
Tránsito Aéreo(ATS)
S DE Al
Meteorología(MET)
ERONAVI
InformaciónAeronáutica
(AIS)
EGACICN
Alorta(Búsqueda ySalvamanto
SAR)
Figura 1.3: Servicios del Sistema de Navegación Aérea
Todas las funciones y servicios descritos, anteriormente (AIS, MET, SAR, ATS),
además de ayudas luminosas en ei aeródromo, requieren de un conjunto de
dispositivos de carácter técnico que en general son referidos como sistemas de
ayuda.
Al clasificar los sistemas/ayudas a la navegación se considerarán dos tipos:
1. Los que sirven directamente a las aeronaves (radíoayudas para la navegación
y el guiado).
2. Los que sirven para mantener la circulación aérea de aeronaves (sistemas de
control del tráfico aéreo)
Navegar implica conocer la ley de variación de la posición de la aeronave en
función del tiempo. Por guiado se entiende el conjunto de acciones a realizar para
mantener a la aeronave en la trayectoria de navegación deseada.
La Navegación Aérea no sería efectiva si no contara con sistemas de
Comunicación, Vigilancia y Navegación, los cuales se describen a continuación.

1.3 COMUNICACIÓN
Los Sistemas de Comunicaciones cumplen un papel muy importante dentro del
Sistema de Navegación Aérea actual. Los Servicios de Comunicaciones
Aeronáuticas, son suministrados dentro del territorio nacional por distintos medios
a cada una de las ATM que hacen parte del Servicio Fijo y Móvil Aeronáutico.
1.3.1 SERVICIO FIJO AERONÁUTICO
El Servicio Fijo Aeronáutico (AFS, Aeronáutica! Fixed Service) facilita las
comunicaciones orales y de datos entre dependencias terrestres (comunicación
Tierra/Tierra) ATS, MET, SAR y AIS, para cuyo efecto dispone de la red de
circuitos de voz ATS, Red de Telecomunicaciones Fijas Aeronáuticas (AFTN) y
redes HF-SSB (Single Side Band o Banda Lateral Única).
Algunos de los servicios fijos aeronáuticos tienen por objeto satisfacer un requisito
especial de comunicación entre diferentes estaciones de comunicaciones, como la
transmisión de mensajes entre un mismo estado o entre diversos estados.
El encaminamiento de los mensajes entre puntos fijos se aceptan y cursan solo si
van dirigidos a estaciones y centros de comunicaciones que forman parte de la
Red de Telecomunicaciones Fijas Aeronáuticas (AFTN).
La AFTN es una red de telecomunicaciones dedicada al intercambio de mensajes
entre las empresas aéreas, las estaciones nacionales e internacionales y en
general el medio aeronáutico. En el Ecuador la AFTN comprende nodos X.25,
sistemas VSAT, enlaces VHF y HF.
Los transmisores y receptores son las herramientas con las que los controladores
de vuelo pueden comunicarse con los pilotos de las aeronaves, para el
intercambio de mensajes del control de aeronaves; para este fin se utilizan
canales de comunicación VHF (circuitos de voz ATS) en la banda de la aviación
civil que se encuentran en cada torre de control y las estaciones remotas que
enlazan a los centros de control y las torres de control.
1.3.2 SERVICIO MÓVIL AERONÁUTICO
El Servicio Móvil Aeronáutico (AMS, Aeronáutica! Mobile Service), posibilita las
comunicaciones verbales entre los pilotos de las aeronaves y los coníroladores de
tránsito aéreo en tierra. (Comunicaciones Aire/Tierra).
Este servicio se brinda a través de sistemas VHF-AM y HF-SSB instalados en las
torres de control de los aeropuertos, en el Centro de Control de Área (ACC, Área
Control Center) y en varias estaciones remotas.
Para las comunicaciones orales entre las torres de control y las aeronaves se
utiliza el VHF-AM. Las torres de control disponen de varias frecuencias VHF-AM,
provocando ocasionales interferencias debido a la proximidad física entre algunos
aeropuertos.
Las torres de control y el ACC, disponen de equipos VHF para casos de
emergencia (inoperatividad de los equipos normales y/o falla de suministro
eléctrico), no obstante su cobertura es limitada (10 vatios de potencia).
1.4 VIGILANCIA
Los sistemas de vigilancia utilizados actualmente pueden dividirse en dos tipos
principales: vigilancia dependiente y vigilancia independiente. En los sistemas de
vigilancia dependiente, la posición de la aeronave está determinada a bordo y
luego se transmite al ATC (Control de Tránsito Aéreo).
La notificación actual de la posición de voz es un sistema de vigilancia
dependiente, en el cual la posición de la aeronave se determina desde el equipo
de navegación de a bordo y luego el piloto la transmite al ATC por radiotelefonía.
La vigilancia independiente es un sistema que mide la posición de la aeronave
desde tierra.
La vigilancia actual se basa en la notificación de posición verbal o en radar PSR o
SSR, que mide el radio de acción y el azimut de la aeronave desde la estación
terrestre.
1.4.1 RADAR PRIMARIO DE VIGILANCIA (PSR)
El PSR, ubicado en tierra, es un sistema electrónico que permite detectar objetos
fuera del alcance visual que suministra información sobre ei rumbo y la distancia
de la aeronave, proyectando sobre ellos ondas de radio, las cuales regresan en
forma de eco hacia el radar. El PSR es un radar pasivo, pues no requiere que la
aeronave transporte ningún equipo y es capaz de detectar casi cualquier blanco
móvil.
Los radares primarios se usan actualmente para detectar la presencia y distancia
de un objeto remoto, denominado objetivo, y fijar su posición en el espacio, su
tamaño y su forma, así como su velocidad y la dirección de desplazamiento.
Aunque en sus orígenes fue un instrumento bélico, hoy se utiliza ampliamente
para fines pacíficos, como la navegación, el control del tráfico aéreo, la detección
de fenómenos meteorológicos y el seguimiento de aeronaves. Se suele utilizar
como radar panorámico en las torres de control de los aeropuertos.
Uno de los inconvenientes del radar primario es que para obtener ecos de aviones
volando a baja altura, lanza impulsos a un ángulo bajo, y parte de la energía es
absorbida por la tierra y edificios cercanos, lo que produce que aparezcan
perturbaciones en la pantalla, lo cual dificulta valorar donde está el eco. Además
en el caso de precipitaciones (lluvias) las gotas devuelven ecos a la pantalla y en
zonas de mucho tráfico ecos de diferentes aviones pueden confundirse.
1.4.2 RADAR SECUNDARIO DE VIGILANCIA (SSR)
El SSR es un radar activo, esto significa que envía un mensaje de interrogación al
equipo de transpondedor (respondedor) instalado en la aeronave, el cual emite
impulsos de RF, los mismos que son captados por el Tx/Rx del radar secundario.
El SSR tiene dos modos de operación, Modo A y Modo C, por lo cual también se
le conoce como SSR A-C. En el Modo A, el transpondedor de la aeronave
suministra información de identificación, rumbo y distancia de la aeronave y en el
Modo C proporciona información sobre presión y altitud.
10

Se usa para contrarrestar los inconvenientes del radar primario, es un sistema
independiente de [os equipos de radar tradicionales. Sin embargo el control de
tráfico aéreo lo usa interconectándolo con el sistema de radar primario . Su
alcance es de unas 200 NM y cubre un área de entre 0,5° y 45° de elevación
hasta una altitud de 100.000 pies.
El SSR se utiliza ampliamente en muchas partes del mundo y en algunas zonas
en que los sistemas de vigilancia terrestres de alcance óptico son apropiados. En
varios países, la precisión y eficacia general de la información de posición se
perfecciona mediante la aplicación de técnicas de monopulso (incluyendo antenas
de amplia apertura vertical) y otras técnicas avanzadas de tratamiento de datos.
1.4.2.1 Radiofaro de Respuesta
Un faro de radar, es un equipo secundario de radar que emite un impulso cada
vez que recibe otro. Estos faros amplían en gran medida el alcance de los
radares, ya que un impulso emitido, aunque proceda de un transmisor de baja
potencia, siempre es mucho más potente que el eco.
El transmisor de radar que emite el impulso inicial se denomina el interrogador y
la acción de este impulso sobre el faro recibe el nombre de disparo. El radiofaro
en su versión más sencilla emite, casi instantáneamente un único impulso de la
misma frecuencia recibida, que actúa como un potente eco.
Los radiofaros pueden presentar muchas variantes; por ejemplo, el faro puede
responder con una frecuencia distinta o puede incorporar un retardo, de manera
que parezca hallarse a mayor distancia del interrogador. Estos retardos se utilizan
en los sistemas de aterrizaje asistido para medir la distancia desde la pista de
aterrizaje en vez de desde el radiofaro.
El radiofaro puede estar diseñado para que sólo se dispare por impulsos dentro
de una estrecha gama de frecuencias, con una longitud determinada o cualquier
otra característica; los radiofaros también pueden devolver una respuesta
codificada, garantizando que el navegante no pueda confundir el punto que
aparece en su pantalla.
n

En tiempos de paz los radiofaros más sencillos resultan de gran utilidad como
ayudas a la navegación, sobre todo si se emplean junto con equipos de radar de
baja potencia.
1.4.3 RADAR METEOROLÓGICO
El Radar meteorológico es una aplicación del equipo primario de radar que
suministra información meteorológica de apoyo en la aviación civil. La información
meteorológica se proporciona a los pilotos, entre otras formas, mediante una
notificación verbal en una oficina meteorológica de aeródromo (MET), o
comunicaciones en radiotelefonía entre el controlador y el piloto, y a través de
radiodifusiones en HF/VHF.
En el Ecuador esta aplicación (información meteorológica) está organizada
jerárquicamente con una oficina meteorológica específica, designada para
vincularse con cada centro de control de área (ACC), dependencia de control de
aproximación (APP) y torre de control de tránsito aéreo (TWR). Las oficinas
meteorológicas asociadas suministran la información meteorológica selectiva
necesaria para permitir que cada una de las dependencias de los servicios de
tránsito aéreo cumplan con sus diversas obligaciones.
El Radar Meteorológico, presenta información acerca de áreas tormentosas a lo
largo de una aerovía, con el fin de que el piloto pueda evitarlas. El granizo y la
turbulencia son de las situaciones de mayor peligro y no pueden ser detectadas
en la pantalla de este radar. Este sistema consta de un equipo Rx/Tx, una antena
y un indicador en el panel de control de tierra.
La presentación en la pantalla es por código de colores: VERDE ( nivel 1 ) - zonas
de poca intensidad de lluvia, AMARILLO ( nivel 2 ) - zona de intensidad de lluvia
media y ROJA ( NIVEL 3 ) - zona de gran intensidad de precipitaciones ( podría
encontrar granizo y turbulencia ).
12
1.4.4 APLICACIONES DE LOS RADARES
Una de las aplicaciones principales del radar es el control del tráfico aéreo, a fin
de guiar los aviones hasta las pistas de aterrizaje y tener controlados a los que se
encuentran en vuelo. El sistema de aproximación controlado desde tierra se
compone de dos rayos de radar diferentes, uno que efectúa el barrido en vertical y
el otro en horizontal.
El piloto dispone de un receptor de radio, y de hecho es conducido totalmente por
los técnicos de tierra. A este fin también se utilizan los faros de radar. Se
diferencian de los primeros por cuanto precisan de un radar a bordo del avión.
La mayoría de los radares van equipados con un conmutador para pasar de la
función de búsqueda a la de faro. Los impulsos de éste son relativamente
prolongados; cuando son emitidos por el avión, los capta el faro de radar que
comunica al avión su posición, apareciendo en la pantalla.
Los últimos avances, entre los que se incluyen la mejora de las técnicas para
aumentar el contraste entre las señales buenas en el radar y las de ruido
aleatorio, han ampliado de manera notable el alcance operativo del radar,
ampliando su aplicación a la observación de la exploración espacial de los misiles
de gran altitud y los satélites artificiales.
1.5 RADIOAYUDAS PARA LA NAVEGACIÓN
Las radioayudas son equipos electrónicos implantados en tierra, que trabajan en
la banda de VHF y UHF, utilizados para dar servicio de orientación, rumbo y
distancia de las aeronaves con respecto a la posición de los diferentes
aeropuertos. Se encuentran dentro del tipo de navegación IFR, el cual es el más
utilizado. Las radioayudas se denominan también Sistemas Convencionales.
Una radioayuda es una estación de radío terrestre que emite señales en distintas
frecuencias (radiofrecuencias) que son interceptadas por los instrumentos de
navegación que posee el avión a bordo, permitiendo que cada aeronave calcule
su posición.
13

Los pilotos de aviones las sintonizan por medio de canales y con los instrumentos
de navegación pueden salir o llegar a sus destinos sin dificultad. Por ejemplo, por
medio del RADAR, el controlador puede ver a las aeronaves a diferentes altitudes
e identificar con precisión a cada una, por medio de los codificadores o
transpondedores de los aviones.
La ayuda electrónica y la precisión en la mayoría de los casos han incrementado
la seguridad de la navegación suministrando información importante y rápida en
períodos de baja visibilidad. El navegante moderno hace hoy gran uso de estos
dispositivos.
La radio proporciona al navegante información auxiliar, que incluye las señales
horarias de radio, los informes meteorológicos, los anuncios de tormentas y los
anuncios de navegación general con respecto a los riesgos de colisión que
suponen aviones en tráfico. Gran parte de las radioayudas se encuentran
localizadas cerca de los aeropuertos para suministrar a las aeronaves información
que permita dirigir sus vuelos y efectuar aproximaciones por instrumentos.
También se utilizan ayudas luminosas para el aterrizaje de la aeronave, estas se
encuentran en la pista de los aeropuertos.
1.5.1 TIPOS DE RADIOAYUDAS PARA LA NAVEGACIÓN AEREA
De acuerdo al servicio que prestan y la técnica utilizada, se puede tener los
siguientes tipos de radioayudas;
I. Sistemas Radiales de Navegación
Radioayudas de navegación de corto alcance y aproximación;
a) VOR (VHF Omnidirectional Range, Radiofaro Omnidireccional de VHF). El
VOR es una de las radioayudas más utilizadas en la navegación aérea.
Consta de dos equipamientos, un transmisor fijo en tierra que se ubica
generalmente cerca de los aeropuertos y el receptor a bordo del avión; los
cuales se enlazan mediante ondas de radio de muy alta frecuencia
14

comprendidas entre (os 108,0 y 118,0 Mhz. En la parte 1.5.2.1 se describe
esta radioayuda con mayor profundidad.
b) DME (Distance Measuring Equipement, Equipo Medidor de Distancia).
Consta de una estación en tierra localizada cerca de los aeropuertos, el
DME tiene las características del Radar Secundario, es decir que requiere
respuesta de la aeronave, lo cual se realiza a través del trasnpondedor
instalado a bordo de la aeronave. El DME consiste en un emisor-receptor
UHF, que indica numéricamente la distancia en millas náuticas, desde la
aeronave a la estación DME en tierra. Más detalles sobre esta radioayuda
se presenta en la parte 1.5.2.2.
c) ADF/NDB (Automatic Directional Finder / Non Directional Beacons;
Localizador Direccional Automático / Faro No Direccional). El sistema consta
de un equipo receptor a bordo de la aeronave (ADF) y de una estación en
tierra (NDB). La estación NDB se ubica cerca de los aeropuertos y en
lugares estratégicos, trabaja en la banda LF/HF con una potencia de emisión
de 25 w a 10 Kw, y proporciona el vector de dirección de la aeronave
respecto de la estación en tierra. Mayor profundidad sobre esta radioayuda
se presenta en la parte 1.5.2.4.
Sistemas Hiperbólicos
Sistemas radiales de largo alcance para la navegación aérea sobre océanos.
a) LORAN. Es una ayuda a la navegación de largo alcance utilizado en vuelos
trans-oceánicos. Las ayudas están situadas a cientos de kilómetros entre sí,
ubicadas estratégicamente en la costa de algunos países (cercana a los
océanos). La posición de la aeronave se obtiene mediante intersección de
hipérbolas, siendo los focos un par de estaciones en tierra. EE.UU. es el
país encargado de suministrar esta ayuda a la navegación.
15

b) OMEGA. Es un sistema mundial de navegación, consta de ocho
transmisores localizados en tierra alrededor del mundo. Los aviones y los
barcos utilizan las señales provenientes de ios transmisores para
determinar su posición respecto de ellos. Utilizado para navegación a largo
alcance. La OACI es la encargada del control de esta ayuda a la
navegación.
I I I . Sistemas de Aproximación, Aterrizaje y Despegue
a) ILS (Instrument Landing System, Sistema de Aterrizaje por Instrumentos).
Permite el aterrizaje sin visibilidad o con visibilidad reducida. Se trata de un
sistema de guiado similar a los de navegación, pero de mayor precisión. El
sistema consta de dos equipos uno al final de la pista de cada aeropuerto
llamado Localizador, que le indica al piloto el eje de la pista, ésta parte
trabaja en la banda de VHF. El otro equipo se encuentra en el umbral de la
pista y se llama trayectoria de planeo, envía la señal con un ángulo de 3
grados respecto de la pista que es la forma correcta con la cual descienden
las aeronaves para poder aterrizar de una forma segura, este equipo trabaja
en la banda de UHF. Mas detalles se presenta en la parte 1.5.2.3.
a) MLS (Microwave Landing System, Sistema de Aterrizaje por Microondas).
Sistema de aterrizaje por microondas, brinda mayor seguridad en los
aterrizajes, su funcionamiento es similar al ILS, pero no es muy utilizado.
IV. Sistemas de Radares
Son sistemas para la localización de objetos por medio de ondas
electromagnéticas. Están ideados para recoger información de la presencia de
objetos distantes por medio de la reflexión de ondas de radio sobre ellos. Los
radares que a continuación se citan fueron descritos en la parte de Vigilancia.
a) Radar Primario. El cual no requiere respuesta del avión para ser identificado.
b) Radar Secundario (SSR - Secondary Surveillance Radar o Radar de Vigilancia
Secundario). El cual requiere de respuesta, la cual se hace mediante el
Transponder (Tx).
16

c) Radar Meteorológico. El cual identifica las condiciones atmosféricas bajo
condiciones visuales.
V. Radiocomunicaciones
Consiste en emisoras de comunicaciones, las cuales se encuentran
generalmente acopladas con el equipo de cada radioayuda a bordo de la
aeronave.
a) Emisora de Comunicaciones (COMM Radio). La emisora de comunicaciones
es el nexo que tiene la aeronave con tierra, es el "teléfono" a través del cual
se obtiene información o instrucciones de vuelo, provenientes tanto de los
ATIS (Automatic Terminal Information System, Sistemas de Información
Terminal Automática), de torres de control o de los radares de control aéreo.
b) Emisoras de Navegación (NAV Radios). Las emisoras de navegación son de
vital importancia a la hora de orientarse en el cielo. Son instrumentos
electrónicos que se encuentran a bordo del avión, se utilizan para sintonizar
las frecuencias de las radioayudas para la navegación (VOR, DME). A través
de ellas se obtiene información acerca de la posición en vuelo.
c) Emisora de Direccionamiento (ADF Radio). Esta es la tercera emisora que
posee el avión que permite orientarse en vuelo. Es un equipo con el que se
sintoniza la frecuencia emitida por estaciones en tierra, NDB en este caso.
1.5.2 DESCRIPCIÓN DE RADIOAYUDAS
De los sistemas de radioayudas citados, se describirá el funcionamiento de los
más utilizados en el Ecuador, siendo estos:
VOR (Radiofaro Omnidireccional de VHF)
DME (Equipo Medidor de Distancia)
ADF/NDB (Localizador Direccional Automático / Faro NO Direccional))
ILS (Sistema de Aterrizaje por Instrumentos)
También son utilizados como ayuda complementaria a la navegación, los
sistemas de Radar, los cuales se describieron en la parte de vigilancia.
17

1.5.2.1 Radiofaro Omnidireccional deVHF (VOR)
El VOR (Very High Frecuency Omnidirectional Range) es una de las radioayudas
más utilizadas en tierra. Su nombre quiere decir:
VHF
Omni-directional
Radio Range
pues transmite en la banda de VHF (30-300 MHz)
su señal se transmite en todas las direcciones
es un sistema basado en radio
El VOR es un instrumento indicador de dirección de muy alta frecuencia.
Transmite en la banda de VHF, y por lo tanto tiene las ventajas y desventajas
propias del comportamiento de las ondas de radio en esta banda.
Consta de dos equipamientos, un transmisor fijo en tierra y el receptor montado
en el avión enlazados por ondas de radio de muy alta frecuencia comprendidas
éntrelos 108,0 y 118,0 Mhz.
Radial 0°Alineado con el norte magnético
190*180"
170* leo* 150*
Radiales
Posición del avión
Figura 1.4: Transmisión de una estación VOR.
is
La estación de tierra es un transmisor omnidireccional, esto quiere decir que
transmite en todas las direcciones como los rayos de la rueda de una bicicleta,
captándose, si se esta dentro del alcance, sus señales, independientemente de la
ubicación de la aeronave aunque esta se encuentre al sur, norte, este u oeste,
como muestra la figura 1,4.
La información transmitida es tal que tras ser decodificada por el sistema de
recepción a bordo en el avión, puede determinarse en que posición se encuentra
el avión respecto de la estación de tierra.
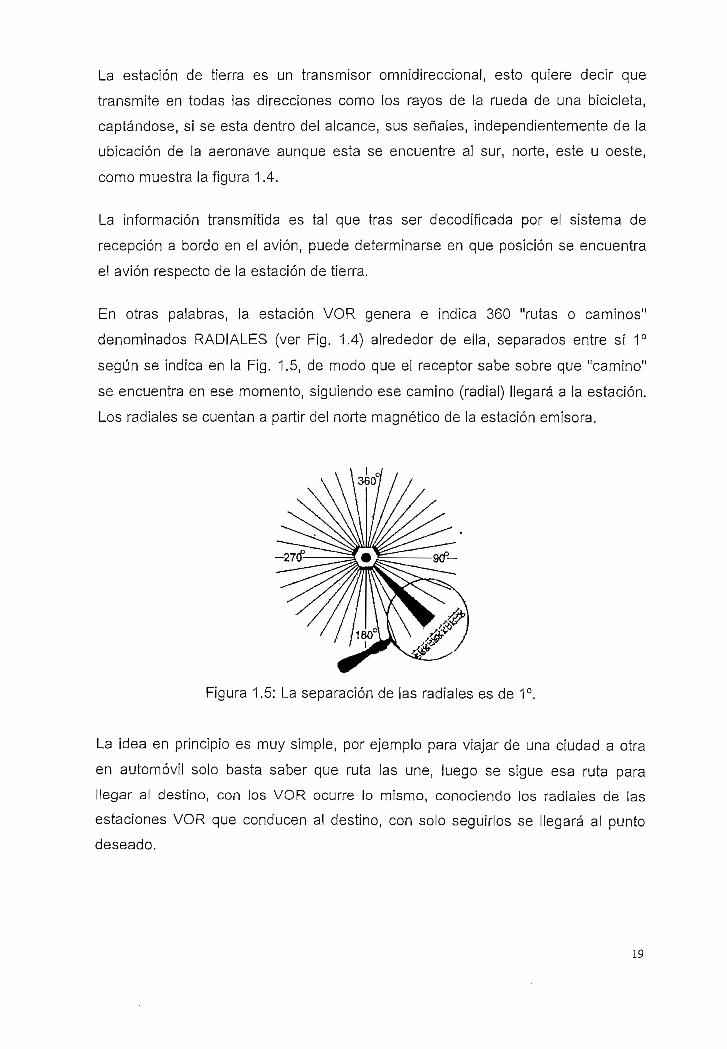
En otras palabras, la estación VOR genera e indica 360 "rutas o caminos"
denominados RADIALES (ver Fig. 1.4) alrededor de ella, separados entre sí 1°
según se indica en la Fig. 1.5, de modo que el receptor sabe sobre que "camino"
se encuentra en ese momento, siguiendo ese camino (radial) llegará a la estación.
Los radiales se cuentan a partir del norte magnético de la estación emisora.
Figura 1.5: La separación de las radiales es de 1°.
La idea en principio es muy simple, por ejemplo para viajar de una ciudad a otra
en automóvil solo basta saber que ruta las une, luego se sigue esa ruta para
llegar al destino, con los VOR ocurre lo mismo, conociendo los radiales de las
estaciones VOR que conducen al destino, con solo seguirlos se llegará al punto
deseado.
19

Como se hace evidente, todo parece muy fácil, pero si no se conoce la posición
en tierra de la estación y sus radiales nada se puede hacer, por tal motivo se
utilizan las cartas de navegación aérea, en las cuales se tiene toda la información
acerca de las estaciones en fierra, su frecuencia y distancia.
Las estaciones se las ubica de tal forma que la radial 0° o 360° corresponde al
norte magnético (el radial 360 y O es el mismo) y se las numera como en una
brújula es decir que si se vuela en la radial 90° se esta al este, en la 180° al sur,
etc.
Los equipos VOR se instalan en cada aeropuerto y en lugares estratégicos, pues
determinan las aerovías, su cobertura es de 100 NM (millas náuticas), como ya se
mencionó en forma omnidirecciona! cubriendo los 360 grados al rededor de la
estación.
Figura 1.6: Estación T-VOR ubicada en un aeropuerto
La potencia normal de emisión es de 200 vatios, sin embargo, se instalan
estaciones VOR de aproximadamente 50 vatios de salida. Los primeros se llaman
estaciones VOR de navegación, y los segundos se llaman T-VOR o de terminal.
El primero está pensado para navegara lo largo de rutas aéreas. El segundo para
facilitar la maniobra de entrada en área terminal (ver Fig. 1.6).
20

Cuando un vuelo parte de un destino remoto debe seguir una ruta definida por
una serie de radioayudas en tierra. El VOR es una ayuda de navegación que
forma la base del sistema de aerovías y están geográficamente localizadas de
forma tal que proveen una red de rutas entre faros o estaciones VOR alineadas
con las principales aerovías, (ver Fig. 1.7)
Figura 1.7: Aviones atravesando una estación VOR
El VOR le indica al piloto su rumbo o dirección exactas hacia o desde la estación
que le envía la señal electrónica. La ruta de vuelo que el piloto seleccione se
basará en esta estructura de aerovías. La mejor ruta será la que provea el camino
más corto entre los aeropuertos de partida y destino.
1.5.2.1.1 Principio de funcionamiento
El VOR basa su funcionamiento en el hecho de que, al transmitir dos señales con
diferencia de fase, es posible identificar la situación de 360 líneas (radiales),
simplemente analizando en cuánto están desfasadas dichas señales.
La primera señal (portadora) se transmite en todas las direcciones y
constantemente en la misma fase, la segunda señal es rotativa, y se emite a una
velocidad de rotación de 1800 r.p.m. (revoluciones por minuto). Por lo tanto, se
21

emiten realmente dos señales. La primera es fija y se denomina "señal de
referencia" y la segunda móvil, cambiando un grado de fase con cada grado de
rotación, con relación al norte magnético.
En otras palabras, la estación VOR para informar el radial a la aeronave, emite
dos señales una fija y estable en 0° y la variable la va desfasando de acuerdo a
los grados de la radial, es decir que para la radial O las señales estarán en fase,
para la radial de 2° la variable estará desfasada en 2°, para la radial 90 habrá 90°
de defasaje, para la de 100 habrá 100° y así por los 360°.
El equipo en el avión lo que hace es medir el grado de defasaje entre la señal fija
y la variable para determinar la radial correspondiente, o sea si hay un defasaje
de 90° se encuentra en la radial 90, si el defasaje es de 180° la radial será la 180,
etc.
1.5,2,1.2 Equipo a bordo
Un sistema VOR consta de dos partes, una estación transmisora en tierra (Ver
Fig. 1.6) y el receptor a bordo del avión con su instrumental asociado (Brújula de
VOR).
Frecuencia sintonizada en elequipo primario (WAV 1)
PUU • *^ PUUTt5T IOÍWT
Cíf •CHAM PU>..;3KTIMfO i
•MODÍ PUiLúss
Frecuencia sintonizada en elequipo secundario (NAV 2)
Figura 1.8: Receptores VOR de abordo con sus emisoras de comunicaciones
22
En la figura 1.8, se muestran los equipos receptores VOR que vienen en algunas
aeronaves, las frecuencias marcadas con líneas rojas corresponden a las
frecuencias de funcionamiento del VOR y suelen señalizárselas con NAV1 y
NAV2, mientras que las frecuencias no marcadas sobre el costado izquierdo
(COMM1 y COMM2) corresponden a las transmisiones de radio de la nave. Se
ven dos paneles, pues hay dos equipos VOR abordo, lo que brinda mayor
seguridad por su redundancia, facilidad para verificar el correcto funcionamiento
de los equipos y mayor precisión en la navegación.
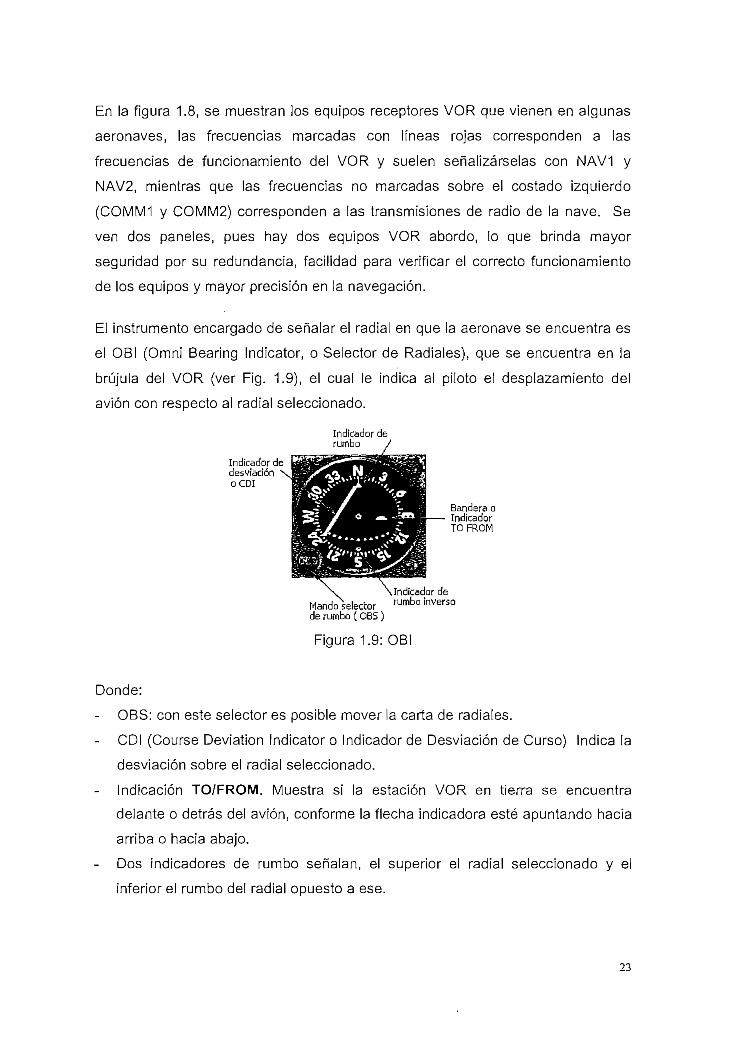
El instrumento encargado de señalar el radial en que la aeronave se encuentra es
el OBI (Omni Bearing Indicator, o Selector de Radiales), que se encuentra en la
brújula del VOR (ver Fig. 1.9), el cual le indica al piloto el desplazamiento del
avión con respecto al radial seleccionado.
Indicador derumbo
Indicador dedesviaciónoCDI
Bandera oIndicadorTO FROM
\Indicador deMando selector rumbo inversode rumbo (085)
Figura 1.9: OBI
Donde:
- OBS: con este selector es posible mover la carta de radiales.
CDI (Course Deviation Indicator o Indicador de Desviación de Curso) Indica la
desviación sobre el radial seleccionado.
Indicación TO/FROM. Muestra si la estación VOR en tierra se encuentra
delante o detrás del avión, conforme la flecha indicadora esté apuntando hacia
arriba o hacia abajo.
- Dos indicadores de rumbo señalan, el superior el radial seleccionado y el
inferior el rumbo del radial opuesto a ese.
23

El elemento más notorio es el indicador de desviación de rumbo o CDI, se trata de
una aguja que se desvía según la ubicación del radial seleccionado, es decir que
si se desvía a la izquierda el radial estará a la izquierda como en la figura 1.9, si lo
hace a derecha el radial estará a la derecha siempre y cuando se este volando
hacia la estación VOR. Si el CDI se encuentra centrado se esta volando sobre el
radial seleccionado.
La bandera o indicador TO/FROM (Hacia/Desde), se puede presentar de dos
formas, una directamente con carteles de TO (hacia) y FROM (desde) según se
vuele hacia el VOR o desde el mismo. La segunda forma es con flechas como en
la figura1.9, si está apuntando hacia arriba indica que se vuela hacia el VOR
mientras que si lo hace hacia abajo se esta volando desde la estación.
En ciertos momentos del vuelo, cuando no se recibe señal o cuando se pasa
sobre la estación, el instrumento no puede distinguir si se vuela hacia o desde la
estación, en ese caso la indicación es nula (OFF) representándose con una banda
blanca con rayas rojas en el indicador TO-FROM.
Dado que las aerovías son generadas en su mayoría por radiales de VOR, para
volar a lo largo de un radial, es necesario primero interceptarlo, para luego,
mantenerse volando sobre el; realmente sobre esto no hay muchos secretos
siendo el principal y único, la práctica y experiencia.
OBI
^I^K* -^^K^
OBI
RadialSeleccionado
Figura 1.10: Indicación de la posición del radial.
24

Antes de intentar interceptar cualquier radial es necesario saber la posición en
referencia a la estación VOR originadora del radial, esto se hace con las cartas de
navegación; conocido esto y determinado el radial sobre el que se encuentra la
aeronave, se sabrá hacia que lado virar, para interceptar el radial buscado; el OBI
directamente indicará hacia que lado virar como se muestra en la figura 1.10.
Para interceptar ei radial, la aeronave hará un viraje y pondrá el rumbo que será,
el rumbo del radial al que se le sumará o restará el ángulo con que se hará la
intercepción.
Esta idea se ve claramente en el siguiente ejemplo: Una aeronave vuela hacia
una estación VOR; desde el NorOeste, y quiere volar por el radial de 90°, si se
elige un rumbo de 90° magnéticos, la aeronave volará paralela al radial elegido,
pero para interceptar este radial se pondrá un rumbo de 120° para alcanzar el
radial 90° con un ángulo de 30°, el calculo es simple 90°+30° = 120° como se
indica en la figura 1.11.
Rumbo de 90°
Figura 1.11: Curso de intercepción
Otro caso sería que la aeronave se encuentre al SurOeste, también dirigiéndose
hacia la estación VOR, entonces se tendrá que virar a la izquierda y para llegar al
radial con un ángulo de 30° se debe elegir un rumbo de 60° resultante de 90°-30°
= 60°. En pocas palabras, cuando el viraje es hacia la izquierda el ángulo de
intercepción se resta mientras que si el viraje es a la derecha se suma.
1.5.2.1.3 Frecuencias VOR
25

Los equipos VOR funcionan en la banda de 108 a 117,95 MHz, distribuidas como
sigue:
• Banda de 108 a 112 MHz.- En principio esta banda se encuentra asignada a!
ILS, pero la OACl prescribe que puede compartirse con el VOR-T si no está
completa. Por eso, nominalmente esta banda está compartida entre los
localizadores ILS y los VOR-T (terminal). El VOR usa frecuencias con
decimales pares (108,2; 108,4; etc.), en tanto que ILS utiliza los decimales
impares (108,1; 108,3; etc.).
• Banda de 112 a 117,95 MHz.- VOR (decimales pares e impares). La
separación entre canales se da por incremento de 50 Khz., en relación con la
frecuencia asignable más alta. Entonces los equipos VOR funcionan en
frecuencias de 112,30; 112,35 y así sucesivamente.
1.5.2.1.4 Ventajas del VOR como ayuda a la navegación
(a) El VOR da indicaciones en una forma fácil de ver y seguir.
(b) En teoría proporciona un número infinito de pistas.
(c) Carece de efecto nocturno y está prácticamente libre de estáticos.
(d) Por tratarse de un elemento de VHF, sus alcances pueden preverse antes
de instalar los radiofaros, evitando así las interferencias.
(e) Su indicador izquierda-derecha también puede presentar señales ILS.
(f) Incorpora un dispositivo de aviso contra fallos del equipo.
(h) Por estar en la banda de VHF, su antena es menor.
1.5.2.1.5 Inconvenientes del VOR como ayuda a la navegación
(a) Sólo se dispone de líneas de posición.
(c) Los obstáculos elevados, naturales o artificiales, pueden obstruir, reflejar o
atenuar las señales.
(d) Para cubrir una región grande se necesitan muchos VOR de tierra.
(e) Sólo tiene alcance óptico.
26
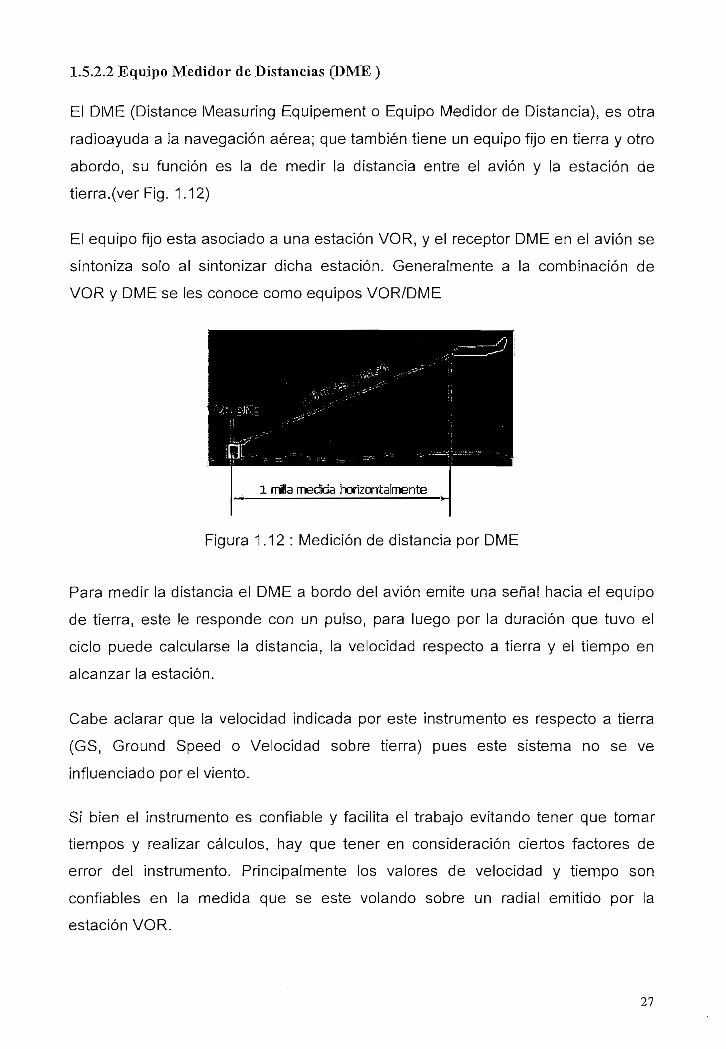
1.5.2.2 Equipo Medidor de Distancias
El DME (Distance Measuring Equipement o Equipo Medidor de Distancia), es otra
radioayuda a la navegación aérea; que también tiene un equipo fijo en tierra y otro
abordo, su función es la de medir la distancia entre el avión y la estación de
tierra.(ver Fig. 1.12)
El equipo fijo esta asociado a una estación VOR, y el receptor DME en el avión se
sintoniza solo al sintonizar dicha estación. Generalmente a la combinación de
VOR y DME se les conoce como equipos VOR/DME
1 mia medida horfeontalrnente
Figura 1.12 : Medición de distancia por DME
Para medir la distancia el DME a bordo del avión emite una señal hacia el equipo
de tierra, este le responde con un pulso, para luego por la duración que tuvo el
ciclo puede calcularse la distancia, la velocidad respecto a tierra y el tiempo en
alcanzar la estación.
Cabe aclarar que la velocidad indicada por este instrumento es respecto a tierra
(GS, Ground Speed o Velocidad sobre tierra) pues este sistema no se ve
influenciado por el viento.
Si bien el instrumento es confiable y facilita el trabajo evitando tener que tomar
tiempos y realizar cálculos, hay que tener en consideración ciertos factores de
error del instrumento. Principalmente los valores de velocidad y tiempo son
confiables en la medida que se este volando sobre un radial emitido por la
estación VOR.
27

En lo que respecta a la distancia, hay que considerar que el instrumento mide la
distancia en línea recta desde la nariz del avión a la estación de tierra por lo que
se ve afectada por el nivel de vuelo o altitud como muestra la figura 1.12.
Este es el motivo por el cual cerca de la estación el error es importante, mientras
que lejos de la estación o volando a baja altitud el error disminuye. El error se
hace despreciable si se está a mas de 1 NM por cada 1000 ft de altura sobre la
elevación de la estación VOR/DME.
1.5.2.2.1 Principios fundamentales
El sistema consta de dos partes, una instalada en tierra llamada respondedor y
otra en la aeronave llamada interrogador, o sea que el avión le pregunta a la
estación en tierra a que distancia se encuentra, ésta le contesta, y el avión
elabora el cálculo, de esta forma sabe a que distancia se encuentra de la estación
VOR/DME.
Figura 1.13: Respondedor DME
El ¡nterrogador del avión pregunta al respondedor en una frecuencia portadora
determinada, enviando una serie continua de impulsos en pares. La distancia
entre los dos impulsos de cada par es de 12 microsegundos y el intervalo de
tiempo entre los pares se altera al azar, técnica ésta denominada transmisión al
azar PRF (Pulse Repetition Frequency, o Frecuencia Repetitiva de Pulso).
28

Al mismo tiempo que se efectúa la interrogación, el receptor del avión empieza a
computar el tiempo y a buscar la respuesta del respondedor, éste replica a la
interrogación enviando pares de impulsos en una portadora separada de la de
interrogación en 63 MHz. El receptor capta todas las respuestas que envía el
respondedor a los diferentes aviones, pero sólo acepta la que corresponde a su
propia PRF.
Una vez encontrada una respuesta, el receptor se "enclava" en ella y empieza el
seguimiento. Se llama así a la situación existente cuando el interrogador ha
conseguido respuesta a su propia interrogación y muestra constantemente la
distancia a que se encuentra la estación terrestre.
Esta distancia se calcula basándose en el conocimiento de la velocidad de las
ondas de radio y el tiempo invertido por los impulsos en ir y volver.
Para saber con qué estación DME se establece el proceso de comunicación,
éstas envían un identificativo de 3 letras en MORSE con una frecuencia de 1350
Hz cada 37.5 ó cada 75 segundos.
1.5,2.2.2 Equipo de a bordo
Se dispone de un circuito telemétrico cuya misión es encontrar las respuestas a
las interrogaciones propias y el cálculo de distancias. Los equipos tienen una
potencia de transmisión que oscila entre los 50 y los 2000 W .
Un ejemplo de equipo comercial se presenta en la Fig. 1.14, que presenta un
display triple donde se indican la distancia desde la aeronave a la estación DME,
la velocidad de vuelo y el tiempo estimado de llegada a la estación.
Distancia Velocidad Tiempo\a 1.14 : Receptora bordo DME
29

1.5.2.2.3 Equipo de la estación terrestre
La función del equipo de la estación terrestre, es la detección, regeneración y
retransmisión de los pulsos enviados por los aviones sumando un retardo total de
50 microsegundos entre todas las fases.
Se utiliza polarización vertical y se emplea un tipo especial de antenas llamadas
de cosecante al cuadrado (COSEC2), cuyo diagrama de radiación tiene la
particularidad de tener igual ganancia para una misma altura.
El sistema DME presenta un cierto error debido a imprecisiones en el retardo de
50 microsegundos antes de la retransmisión y en la detección del.pulso, así como
distorsiones del pulso al transmitirlo. Además hay que remarcar que la posición
del avión no es la misma en el instante de envío del pulso y en el de recepción de
la respuesta, lo cuál supone otro factor de error a añadir a la lista.
1.5.2.2.4 Ventajas del DME
Las ventajas de este tipo de radar son:
a) Se reducen las interferencias debidas al tiempo atmosférico.
b) Las exigencias en cuanto a potencia de transmisión son únicamente las
necesarias para llevar la señal hasta la estación. Es decir, que las señales no
necesitan tener la potencia suficiente para resistir el camino de ida y vuelta.
c) El radiofaro de tierra utiliza una frecuencia distinta de la usada por el avión, lo
que evita el auto disparo.
d) Su indicación de distancia es muy útil cuando se realiza aproximación con
instrumentos.
e) Cuando dos aviones usan DME y vuelan en la misma vía, las distancias
positivas de ambos permiten al ATC mantener una separación segura.
f) Las distancias precisas para el descenso se tienen cuando un traspondedor
funciona junto con ILS.
g) Proporciona la base para mejores patrones de acercamiento.

1.5.2.3 Localizador Direccional Automático (ADF)
El ADF (Automatic Directional Finder, Localizador Direccional Automático) es un
instrumento muy básico. De una forma simple, es una aguja o flecha colocada en
un compás de carátula fija que apunta a una estación NDB (Non Directional
Beacon, Emisoras No Direccionables). (Ver Fig. 1.14)
El ADF se utiliza para cinco diferentes propósitos:
1. Fijar posición del avión con respecto a tierra.
2. Navegación en Ruta.
3. Aproximación por Instrumentos.
4. Para procedimientos de Espera (Holding).
5. Indica el inicio de un procedimiento de aproximación complejo.
Los primeros dos Ítems se utilizan básicamente por los pilotos tanto bajo
condiciones VFR como IFR. Los tres últimos se utilizan exclusivamente para
procedimientos IFR. Se debe comprender que el ADF es el instrumento que se
encuentra en la aeronave y el NDB es la radioayuda o faro que se encuentra
localizada en tierra y a la que el ADF apunta.
¿SintonizadorADF
COÍTJ ,p»$ deCaí a tula Ftya
Cola
FJccíw
Punía
La Piocha del ADF apunta a uniKon Non Qírectional Beacon (NDB]
Figura 1.14: Sistema ADF/NDB
E! NDB es la estación en tierra que emite la señal que se sintoniza con el ADF. La
señal se emite en todas las direcciones, así que no importa en que posición
relativa se encuentra la aeronave con respecto al NDB, el ADF sintonizará la
señal siempre que se encuentre en el área de alcance de la misma.
31

En la figura 1.14 se ilustra como funciona el ADF. Como se puede apreciar éste
consiste de una aguja que tiene una cabeza o punta y una cola, y se encuentra
sobre una carátula fija (no tiene rotación) de compás. Este tipo particular de ADF
se llama pues de carátula fija.
1.5.2.3.1 Principio de Funcionamiento.
Trabaja con estaciones emisoras llamadas NDB en la banda LF/HF con una
potencia de emisión de 25 W a 10 KW. Proporciona automáticamente el vector de
dirección de la estación emisora en tierra. Opera en un rango de frecuencia de
190 Khz a 400 Khz. y su señal es transmitida en todas las direcciones
Cuando el ADF se sintoniza en la frecuencia del NDB, la aguja del ADF apunta o
señala la dirección hacia donde se encuentra la estación NDB. La dirección a la
que apunta es relativa a la nariz del avión. Para interpretar el ADF, la dirección de
la nariz es 0° y la flecha debe estar apuntando al NDB en una dirección relativa a
la nariz del avión (0°).
El NDB se sintoniza utilizando el radio de navegación ADF representado por un
pequeño cuadrado con tres dígitos tal como se muestra en la Fig. 1.14. Para
sintonizar el NDB se debe colocar en esta casilla la frecuencia correspondiente e
inmediatamente (si se encuentra dentro del radio de cobertura de la señal) la
flecha apuntará en la dirección en que éste se encuentra.
La señal de un NDB generalmente tiene un alcance de unas 50 NM, pero también
depende de la altitud y de la potencia de la estación NDB que genera la señal.
1.5,2.3.2 Indicaciones del ADF.
En la fig. 1.15 se observa varios ejemplos de lo que indica el ADF desde varias
posiciones del avión con respecto al NDB. Como se puede ver, si la aeronave
desea dirigirse hacia la estación, debe hacer que la flecha apunte hacia la nariz
del avión. Si sigue suficiente tiempo en esa dirección llegará a pasar sobre la
estación.
32
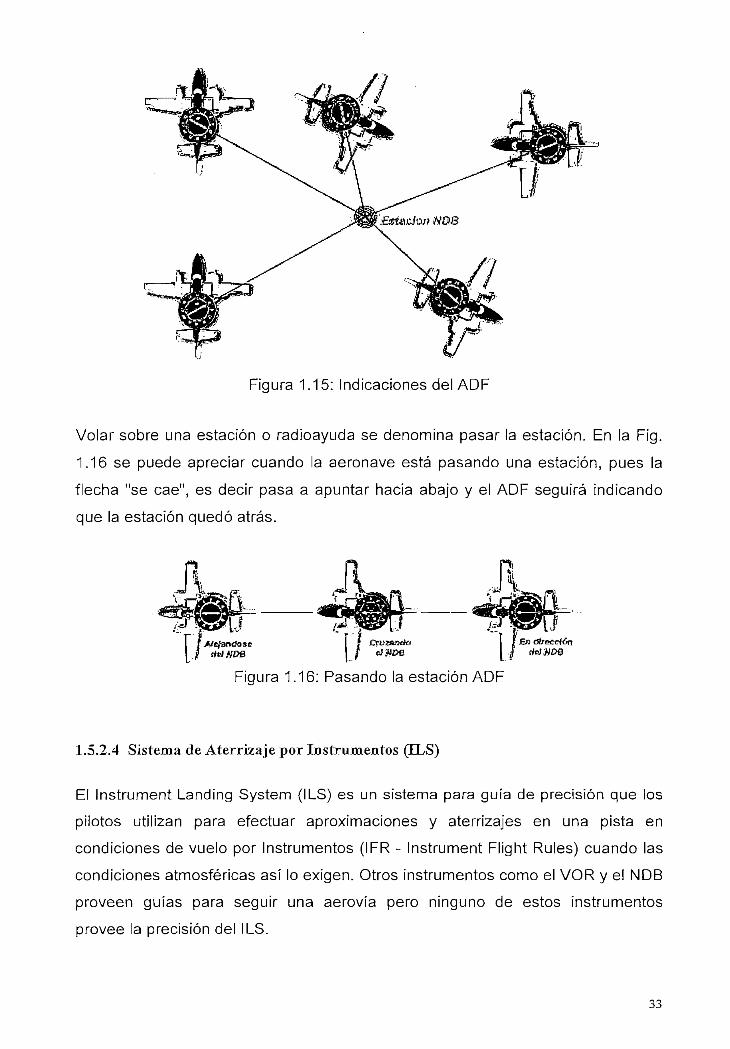
Figura 1.15: Indicaciones del ADF
Volar sobre una estación o radioayuda se denomina pasar la estación. En la Fig.
1.16 se puede apreciar cuando la aeronave está pasando una estación, pues la
flecha "se cae", es decir pasa a apuntar hacia abajo y el ADF seguirá indicando
que la estación quedó atrás.
Figura 1.16: Pasando la estación ADF
1.5.2.4 Sistema de Aterrizaje por Instrumentos (ELS)
El Instrument Landing System (ILS) es un sistema para guía de precisión que los
pilotos utilizan para efectuar aproximaciones y aterrizajes en una pista en
condiciones de vuelo por Instrumentos (IFR - Instrument Flight Rules) cuando las
condiciones atmosféricas así lo exigen. Otros instrumentos como el VOR y el NDB
proveen guías para seguir una aerovía pero ninguno de estos instrumentos
provee la precisión del ILS.

Le indica al piloto el rumbo de la pista y el ángulo de descenso que debe tomar
para aterrizar en el aeropuerto, (ver Fig. 1.17)
Figura 1.17: Sistema de aterrizaje por instrumentos (ILS)
El sistema consta de dos equipos uno al final de la pista de cada aeropuerto
llamado Localizador, que le indica al piloto el eje de la pista, esta parte trabaja en
la banda de VHF. El otro equipo se encuentra en ei umbral de la pista y se llama
senda de planeo7, le envía la señal con un ángulo de 3 grados respecto de la
pista que es la forma correcta con la cual descienden para poder aterrizar de una
forma segura, este equipo trabaja en la banda de UHF. (ver Fig. 1.18)
1.5.2.4.1 Principio de Funcionamiento
Se trata de un transmisor de radio ubicado cerca de la pista de aterrizaje.
Transmite una señal de navegación horizontal (transmisor ubicado al final de la
pista sobre su eje) y una vertical (transmisor ubicado al lado de zona de contacto
de la pista) que se proyectan desde la pista para formar un cono imaginario por el
cual el avión debe dirigirse a la pista.
Los ILS con DME (Distance Measuring Equipment, Equipo Medidor de Distancia)
manejan un tercer eje coordenado en la trayectoria del avión hacia la pista, que
indican la distancia desde el transmisor hasta el avión, lo que permite obtener
información de la locafización y velocidad real del avión con respecto a la
cabecera de la pista de aterrizaje.
7 Senda de planeo: Ver página 36
34

La señal horizontal se denomina el localizador y la señal vertical se denomina
glldeslope (patrón de descenso) o senda de planeo. La señal lateral (a los lados)
ayuda al piloto a mantenerse alineado con el eje de la pista; durante la
aproximación, la senda de planeo provee una pendiente muy exacta
generalmente de 3° para efectuar un descenso seguro, libre de obstáculos.
loe-líudor
Figura 1.18: Estructura del ILS: localizador, senda de planeo y balizas
marcadoras.
56
1.5.2.4.2 Estntctura de ILS
ILS está formado portres subsistemas independientes:
a.- Localizador.
b.- Senda de planeo.
c.- Balizas marcadoras.
En la Figura 1.18 se puede ver cómo se sitúan los distintos elementos, que
conforman la estructura del ILS.
a.- El localizador
Su misión es generar en el espacio el plano vertical que contenga al eje de la
pista (plano de acercamiento).
35

Estos son algunos datos adicionales respecto al funcionamiento del localizador;
BANDA DE FRECUENCIAS; 108 MHz - 112 MHz
POTENCIA DE TRANSMISIÓN: 200 W
ALCANCE: 25 millas náuticas
POLARIZACIÓN: Horizontal
El avión identifica al localizador gracias a que demodula un código en alfabeto
Morse que viaja en una señal que le envía dicho localizador.
b.- La senda de planeo
Su objetivo es producir en e! espacio un plano perpendicular al de acercamiento
con una inclinación aproximada de 3 grados respecto a la pista. Este es el plano
de descenso (Figura 1.19). A continuación unos datos adicionales respecto al
funcionamiento de la senda de planeo:
BANDA DE FRECUENCIAS: 328,6 MHz - 335,4 MHz
POTENCIA DE TRANSMISIÓN: 50 W
POLARIZACIÓN: Horizontal
Para conseguir este plano de descenso, se debe generar una onda
electromagnética de tal forma que por la parte superior de ese plano se reciba
una portadora UHF modulada en AM por un tono de 90 Hz. y por la parte inferior
reciba esa portadora pero modulada con un tono de 150 Hz.
Figura 1.19: Senda de Planeo (Glideslope)
Cuando el avión se encuentre en el plano de descenso detectará con la misma
intensidad (igual amplitud) ambos tonos.
La senda de planeo consta de dos (o tres en algunas ocasiones) antenas, que
son dipolos horizontales.
36

La antena inferior estará alimentada por una señal CSB (Carrier Side Band o
Portadora en Banda Lateral) y la superior (a aproximadamente el doble de altura
que la inferior) con una señal SBO (Side Band Only o Banda Lateral Única).
1.5.2.3.4 Las balizas marcadoras
Marcan el paso de las aeronaves por encima de ellas. Están constituidas por
transmisores de VHF que emiten una señal audible de algunos vatios de potencia
y ayudan al piloto a determinar su posición en la aproximación ILS. Transmiten la
señal por un sistema de antenas que forman un diagrama de radiación en forma
de abanico. Puede haber dos o tres balizas marcadoras:
• Dos son obligatorias: OM (Outer Marker o Marcador Externo) a 8 km del
inicio de la pista y MM (Middle Marker o Marcador Central) a 1 km del inicio
de la pista.
• Una es optativa: IM (Inner Marker o Marcador interno) a 300 m del inicio de
la pista.
Conforme un avión va pasando por encima de estas balizas se encienden en la
cabina del piloto unas luces de color púrpura (OM), ámbar (MM) y blanco (IM). Se
transmite un código morse que es decodificado en el receptor del avión, lo que
produce el encendido de las luces correspondientes.
1.5.2.4.5 Equipo a bordo
La radio de NAV1 además de ser un receptor de señal de VOR también es un
receptor de la señal del ILS. Consiste de una aguja horizontal indicadora de la
posición del avión con respecto a la senda de planeo (glideslope) y una aguja
vertical indicadora de la posición del avión con respecto al patrón de descenso
(localizador).
Estas agujas funcionan como una cruz cuando el piloto esta efectuando una
aproximación ILS. La aguja del localizador indica donde se encuentra la pista y la
aguja del patrón de descenso (glideslope) indica donde esta ía posición de altura
correcta.
37

En la Fig. 1.20 se indica como interpretar el instrumento. El principio básico es
tratar de mantener centradas las dos agujas sobre el punto central de! instrumento
durante todo el procedimiento de aproximación de ILS
MUY ALTO MUY BAJO MUY BAJO MUY ALTO O.K.A LA DERECHA A LA IZQUIERDA
Figura 1.20 Interpretación del ILS en la aeronave
El equipo a bordo consta de:
1. Caja de control del canal
2. Receptor de localizador, de VHF
3. Receptor de trayecto de bajada, de UHF
- receptor de marcador, de 75 MHz
- medidor de ILS o indicador VOR/ILS
- tres antenas separadas para los tres receptores.
1.5.2.4.5 Frecuencias
Para el Localizador.- Las frecuencias asignadas al ILS en la banda de VHF son:
108 a 112 MHz, con decimales impares, es decir, 108,1; 109,3; etc.
Senda de Planeo o Trayecto de bajada.- La transmisión se efectúa en la banda de
UHF, en 20 puntos de frecuencias desde 329,3 a 335 MHz, con separación de
300 Khz. El empleo de la UHF se debe a la necesidad de conseguir haces más
precisos.
1.5.2.4.6 Inconvenientes del sistema ILS
Existen varios inconvenientes:
La frecuencia de trabajo: VHF y UHF son frecuencias que le hacen a ILS
muy sensible a las reflexiones del entorno, lo cual le convierte en un
38

Además, presenta bastante atenuación a los hidrometeoros (lluvia, nieve,
etc...)-
• La pobre precisión: los sectores de navegación proporcional son muy
pequeños y siempre se requiere visibilidad en la fase final del aterrizaje.
• La única línea de descenso: el sistema sólo nos indica una línea para el
aterrizaje, obligando a que aeronaves con características dinámicas muy
distintas realicen la maniobra de igual manera.
• La [imitación en el número de canales: sólo 40 canales, lo cual está
provocando problemas en aeropuertos con muchas pistas.
1.6 REQUISITOS DE DESEMPEÑO
Para que un sistema de navegación sea adoptado para su uso en la aviación civil,
•Uene-que cumplir con rigurosos criterios de segundad. Estos criterios se reflejan
en procedimientos de normalización y certificación para cada pieza del equipo
instalado en la cabina del avión y/o desplegado en los aeropuertos o cualquier
otro lugar de uso para la aviación.
Entre los requerimientos que la aviación exige a los sistemas de navegación se
pueden mencionar: la precisión, la disponibilidad, la integridad y la continuidad.
Donde:
La precisión significa el nivel de conformidad entre la posición estimada de una
aeronave y su posición verdadera.
La disponibilidad es la proporción de tiempo durante el cual el sistema no debe
interrumpirse.
La integridad es la función de un sistema que advierte a los usuarios de una
manera oportuna cuando no debe ser usado dicho sistema. El principal objetivo
es que un usuario pueda ser capaz de confiar en la posición estimada dada por el
sistema.

La continuidad es la probabilidad que un sistema seguirá disponiéndose durante
una fase determinada.
Luego que un sistema de navegación cumpla con todos o parte de estos
requerimientos podrá ser categorizado como: medio único, medio primario o
principal, y medio suplementario.
La OACI ha definido a los sistemas de navegación aérea como:
Medio suplementario.- Sistema de navegación que debe utilizarse
conjuntamente con un sistema certificado como medio único. Debe satisfacer los
requisitos de exactitud y de integridad para una determinada operación o fase del
vuelo, pero no es necesario satisfacer los requisitos de disponibilidad y de
continuidad.
'tí.1*.,'i ' • • : --. . •i.i'v!' » ••*. -*••
Medio principal.- Sistema de navegación aprobado para determinada operación
o fase de vuelo que debe satisfacer los requisitos de exactitud y de integridad
pero que no es necesario que satisfaga los requisitos de plena disponibilidad y
continuidad del servicio.
Se mantiene la seguridad limitando los vuelos a períodos específicos de tiempo, y
mediante restricciones reglamentarias apropiadas.
Medio único.- Sistema de navegación para determinada operación o fase del
vuelo que debe posibilitar satisfacer, en dicha operación o fase del vuelo, los
cuatro requisitos de performance: exactitud, integridad, disponibilidad y
continuidad de servicio.
1.7 LIMITACIONES DE LOS SISTEMAS CONVENCIONALES
La navegación aérea actual se apoya en el seguimiento terrestre de los aparatos
en vuelo, es decir, en la infraestructura de radares en tierra que localizan los
aparatos en vuelo y transmiten su posición tanto a las estaciones terrestres
(centros de control) como a los propios aviones.
40
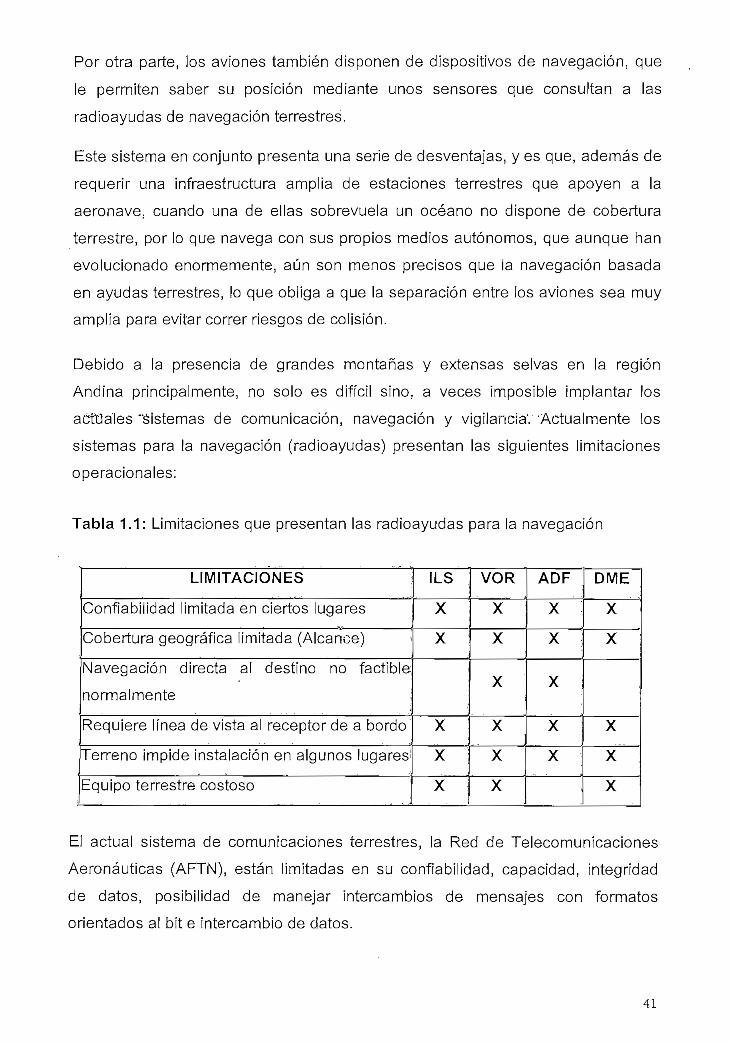
Por otra parte, los aviones también disponen de dispositivos de navegación, que
le permiten saber su posición mediante unos sensores que consultan a las
radioayudas de navegación terrestres.
Este sistema en conjunto presenta una serie de desventajas, y es que, además de
requerir una infraestructura amplia de estaciones terrestres que apoyen a la
aeronave, cuando una de ellas sobrevuela un océano no dispone de cobertura
terrestre, por lo que navega con sus propios medios autónomos, que aunque han
evolucionado enormemente, aún son menos precisos que la navegación basada
en ayudas terrestres, lo que obliga a que la separación entre los aviones sea muy
amplia para evitar correr riesgos de colisión.
Debido a la presencia de grandes montañas y extensas selvas en la región
Andina principalmente, no solo es difícil sino, a veces imposible implantar los
actuales "Sistemas de comunicación, navegación y vigilancia'. 'Actualmente los
sistemas para la navegación (radioayudas) presentan las siguientes limitaciones
operacionales:
Tabla 1.1: Limitaciones que presentan las radioayudas para la navegación
LIMITACIONES
Confiabilidad limitada en ciertos lugares
Cobertura geográfica limitada (Alcance)
Navegación directa al destino no factible
normalmente
Requiere línea de vista al receptor de a bordo
Terreno impide instalación en algunos lugares
Equipo terrestre costoso
ILS
X
X
X
X
X
VOR
X
X
X
X
X
X
ADF
X
X
X
X
X
DME
X
X
X
X
X
El actual sistema de comunicaciones terrestres, la Red de Telecomunicaciones
Aeronáuticas (AFTN), están limitadas en su confiabilidad, capacidad, integridad
de datos, posibilidad de manejar intercambios de mensajes con formatos
orientados al bit e intercambio de ciatos.
41

Los actuales sistemas de vigilancia presentan una serie de limitaciones, entre
estas cabe destacar:
• Cobertura limitada a la propagación por línea de vista (Radar primario y
secundario). En algunos casos, (vuelos oceánicos), esta limitación lleva
consigo la necesidad de control mediante informes de voz.
• Imposibilidad de intercambio de datos con la aeronave.
• Agotamiento de códigos del modo A (emplea 12 bits, por lo que sólo existen
212, 4096, disponibles), lo que conlleva cambios de código a lo largo del vuelo.
• Falta de capacidad para soportar las aplicaciones previstas de información de
tráfico en cabina, puesto que la tripulación carece de los datos de vigilancia
necesarios.
• Falta de capacidad para soportar efectivamente la vigilancia de movimiento en
superficie^era aeropuerto. „„,.,.
• Elevado costo de la infraestructura.
Estos inconvenientes, a los que se suma la saturación del espacio aéreo
internacional, el alcance (cobertura) limitado de las radioayudas, hacen necesario
la incorporación de un nuevo sistema que mejore las prestaciones actuales de
navegación aérea basado en la utilización de radioayudas.
La tecnología satelital es capaz de proporcionar en forma eficaz y flexible la
herramienta que se requiere para superarías [imitaciones del actual sistema de
navegación aérea.
El sistema ya está definido, la tecnología disponible y las normas de la OACI se
están elaborando para completar su inclusión global. La descripción del futuro
sistema de navegación por medio de satélites, denominado CNS/ATM se
presenta en el siguiente capítulo.
42

CAPITULO 2
Principios del Sistema de Navegación Aérea Satelital (CNS/ATM)
2.1 INTRODUCCIÓN
El concepto CNS/ATM (Communication, Navigation, Surveillance / Air Traffic
Management, o sea, Comunicaciones, Navegación, Vigilancia / Gestión del
Tráfico Aéreo) se originó en la década de los 80, a partir de la preocupación de la
comunidad aeronáutica mundial para superar las limitaciones de los sistemas
convencionales, y gozar de las ventajas de tecnologías modernas para enfrentar
el crecimiento proyectado para la aviación.
En 1983, el Consejo de la Organización de Aviación Civil Internacional (OACI),
creó el Comité Especial sobre Sistemas de" Navegación'Aérea del Futuro (FANS)
con el objetivo de recomendar-mediante estudios técnicos- los nuevos conceptos
y tecnologías que se deberán aplicar para mejorar el sistema. Este comité resolvió
que la única solución viable para resolver las restricciones del sistema y las
necesidades de los usuarios del espacio aéreo, es el aprovechamiento de la
tecnología satelital.
En el año 1991, la décima conferencia de la OACI, ratificó el concepto de
CNS/ATM, de manera que este nuevo sistema de aeronavegación deberá ser
adoptado por todos los países y líneas aéreas del mundo, con el fin de lograr un
mejor aprovechamiento del espacio aéreo y aumentar los niveles de seguridad.
Los objetivos que se alcanzarán con la implantación de los nuevos sistemas
CNS/ATM a nivel mundial se presentan en la tabla 2.1
El sistema permitirá, entre otras cosas, disminuir ios intervalos de despegue en
los aeropuertos, bajar los tiempos para cada recorrido y acortar la distancia entre
los aviones en vuelo. Todo esto, gracias a la utilización de satélites y un
mejoramiento en las redes de comunicación.
Se estima que con este nuevo sistema, a corto plazo desaparecerá el contacto
radial entre las bases terrestres y las naves.
En su reemplazo, se establecerá un enlace digital, es decir, la información que
proporciona actualmente el controlador de tránsito aéreo (como altura, velocidad o
instrucciones para aterrizar) será recibida en una pantalla o impresora a bordo del
avión. Con esto se espera superar la posibilidad de errores de comunicación o
interpretación.
Pero, para lograr que las comunicaciones sean aún más expeditas, se necesitará
de una Red de Telecomunicaciones Aeronáuticas (ATN, Aeronautic
Telecomunication Network), una especie de Internet de los servicios
aerocomerciales. Desde un computador en tierra, la línea aérea podrá contactarse
directamente con el sistema del avión y saber, por ejemplo, cómo funcionan las
turbinas o el estado general de la máquina, informándose en tiempo real de lo que
ocurre en el vuelo.
El sistema será complementado con la utilización del Sistema Global de
Navegación por Satélite (Global Navigation Satellite System - GNSS): 48 satélites
de determinación de posición, que fueron puestos en órbita por rusos y
norteamericanos. La idea es que estos satélites envíen directamente a los
equipos del avión, datos sobre la posición del vuelo, lo que le permitirá tomar una
ruta directa a su destino sin tener que seguir el camino marcado. por las
radioayudas. Esta información será recibida, además, por las estaciones
terrestres, las cuales la devolverán corregida al avión.
Se prevé una introducción gradual de los sistemas satelitales para la navegación,
primero para su empleo como sistema complementario de navegación, más
adelante como sistema principal y finalmente como único sistema.
Debido a que la información satelital se recibe con un margen de error de 300
metros en la posición, los datos también llegarán hasta la red de estaciones
terrestres, estas reducen el error a un margen no superior a los siete metros.
La seguridad en vuelo será controlada mediante el sistema de Vigilancia
Dependiente Automática (ADS, Automatic Dependent Surveillance) y mediante el
uso de radares; así las estaciones en tierra y el sistema de la aeronave sabrán
siempre los datos de ubicación y condiciones de vuelo.
44
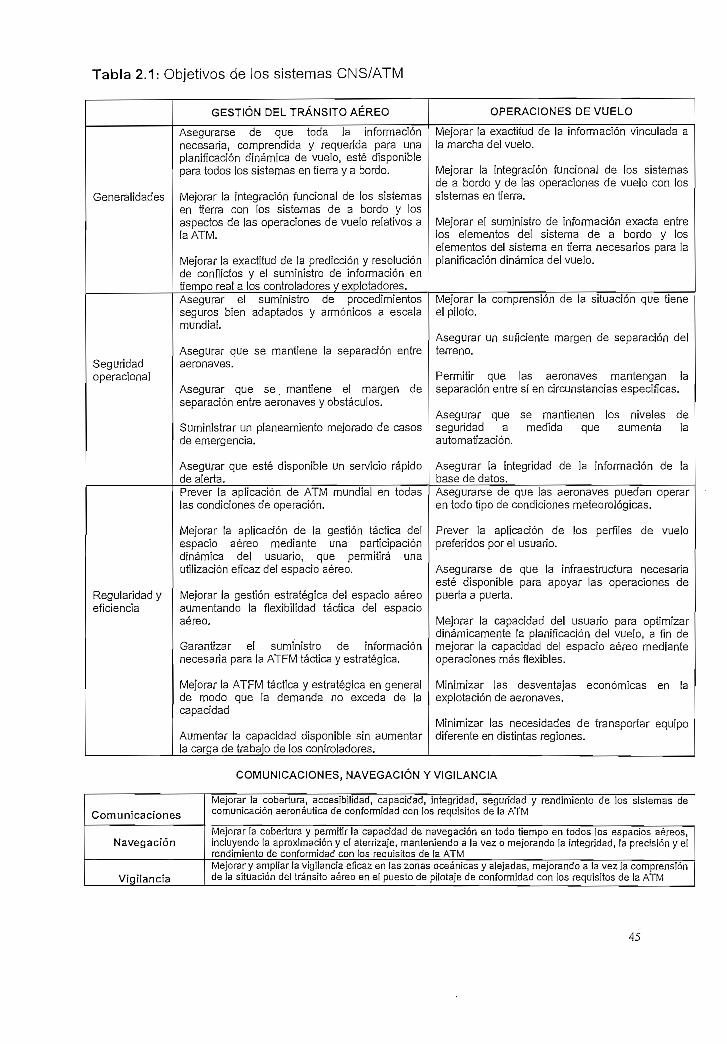
Tabla 2.1: Objetivos de los sistemas CNS/ATM
GESTIÓN DEL TRANSITO AEREO OPERACIONES DE VUELO
Generalidades
Asegurarse de que toda la informaciónnecesaria, comprendida y requerida para unaplanificación dinámica de vuelo, esté disponiblepara iodos [os sistemas en tierra y a bordo.
Mejorar la integración funcional de los sistemasen tierra con los sistemas de a bordo y losaspectos de las operaciones de vuelo relativos ala ATM.
Mejorar la exactitud de la predicción y resoluciónde conflictos y el suministro de información entiempo real a los controladores y explotadores.
Mejorar la exactitud de la información vinculada ala marcha del vuelo.
Mejorar la integración funcional de los sistemasde a bordo y de las operaciones de vuelo con lossistemas en tierra.
Mejorar el suministro de información exacta entrelos elementos del sistema de a bordo y loselementos del sistema en tierra necesarios para laplanificación dinámica del vuelo.
Seguridadoperación a I
Asegurar el suministro de procedimientosseguros bien adaptados y armónicos a escalamundial.
Asegurar que se mantiene la separación entreaeronaves.
Asegurar que se _ mantiene el margen deseparación entre aeronaves y obstáculos.
Suministrar un planeamiento mejorado de casosde emergencia.
Asegurar que esté disponible un servicio rápidode alerta.
Mejorar la comprensión de la situación que tieneel piloto.
Asegurar un suficiente margen de separación delterreno.
Permitir que las aeronaves mantengan laseparación entre sí en circunstancias especificas.
Asegurar que se mantienen los niveles deseguridad a medida que aumenta laautomatización.
Asegurar la integridad de la información de labase de datos.
Regularidad yeficiencia
Prever la aplicación de ATM mundial en todaslas condiciones de operación.
Mejorar la aplicación de [a gestión táctica delespacio aéreo mediante una participacióndinámica del usuario, que permitirá unautilización eficaz del espacio aéreo.
Mejorar la gestión estratégica del espacio aéreoaumentando la flexibilidad táctica del espacioaéreo.
Garantizar el suministro de informaciónnecesaria para la ATFM táctica y estratégica.
Mejorar la ATFM táctica y estratégica en generalde modo que la demanda no exceda de lacapacidad
Aumentar la capacidad disponible sin aumentarla carga de trabajo de los controladores.
Asegurarse de que las aeronaves puedan operaren todo tipo de condiciones meteorológicas.
Prever la aplicación de los perfiles de vuelopreferidos por el usuario.
Asegurarse de que la infraestructura necesariaesté disponible para apoyar las operaciones depuerta a puerta.
Mejorar la capacidad del usuario para optimizardinámicamente la planificación del vuelo, a fin demejorar la capacidad del espacio aéreo medianteoperaciones más flexibles.
Minimizar las desventajas económicas en laexplotación de aeronaves.
Minimizar las necesidades de transportar equipodiferente en distintas regiones.
COMUNICACIONES, NAVEGACIÓN Y VIGILANCIA
Comunicaciones
Navegación
Vigilancia
Mejorar la cobertura, accesibilidad, capacidad, integridad, seguridad y rendimiento de los sistemas decomunicación aeronáutica de conformidad con los requisitos de la ATM
Mejorar la cobertura y permitir la capacidad de navegación en todo tiempo en todos los espacios aéreos,incluyendo la aproximación y el aterrizaje, manteniendo a la vez o mejorando la integridad, la precisión y elrendimiento de conformidad con los requisitos de ia ATMMejorar y ampliar la vigilancia eficaz en las zonas oceánicas y alejadas, mejorando a la vez la comprensiónde la situación del tránsito aéreo en el puesto de pilotaje de conformidad con los requisitos de la ATM
45
2.2 SISTEMA DE COMUNICACIONES
Las comunicaciones son un componente imprescindible dentro de la arquitectura
del sistema del espacio aéreo. Así mismo, dentro del Concepto CNS/ATM se da
especial atención a los diferentes medios de comunicación, por los cuales se
pueden establecer enlaces de datos requeridos por aplicaciones aire-tierra, tierra-
tierra y aire-aire.
El sistema CNS/ATM busca disminuir al máximo las comunicaciones radiales o
por voz entre controladores y pilotos, pues las comunicaciones tanto orales como
de datos, se realizarán mediante enlaces directos aeronave-satélite (Sistema
Móvil Aeronáutico por Satélite, AMSS), con los centros de control de tránsito
aéreo, enlazando éstos con las estaciones de comunicaciones mediante redes de
comunicaciones en tierra. Además permitirá tener información a cada momento
sobre todos los aspectos del vuelo mediante la Red de Telecomunicaciones
Aeronáuticas (ATN, Aeronautic Telecomunication Network), que es una especie
de Internet de los servicios aerocomerciales.
En las áreas terminales, donde las comunicaciones de alcance óptico no
constituyen ningún problema, se utilizará VHF complementado con el enlace de
datos del radar secundario en modo S8. El sistema de comunicaciones por satélite
eliminará en última instancia la necesidad de comunicaciones de fonía en HF,
aunque podrá seguir usándose en zonas polares, hasta que se complete la
cobertura con satélites.
Las comunicaciones dentro del sistema CNS/ATM cuenta con los siguientes
elementos:
• El VDL (VHF Data Link) y el HDL (HF Data Link), elementos que facilitan
las comunicaciones tierra aire, para un efectivo control del tránsito aéreo.
• La red de telecomunicación aeronáutica (ATN), que permitirá la
interconexión en el ámbito mundial entre usuarios finales, sobre diferentes
enlaces de comunicaciones aire/tierra y tierra/tierra.
8 Funcionamiento del RADAR Secundario en forma totalmente dígita!, refiérase a la parte 2.2.2.6. Movilidady Comunicación de datos.
46

• El Sistema Móvil Aeronáutico Satelital (AMSS), para comunicaciones de
voz y datos, tendrá capacidad de enlaces directos aeronave/satélite para la
mayor parte de estados.
• Las frecuencias de VHF permanecerán en uso para las comunicaciones de
voz y datos en las áreas continentales y terminales.
• El enlace de datos mediante radar de vigilancia secundario (SSR Modo S)
será utilizado para propósito del Servicio de Tránsito Aéreo (ATS - Air
Transit Services) en espacios de alta densidad.
El elemento de comunicaciones de los sistemas CNS/ATM suministra el
intercambio de datos y mensajes aeronáuticos entre los usuarios aeronáuticos y/o
sistemas automáticos.
También se usan los sistemas de comunicación en apoyo de funciones
específicas de navegación y vigilancia.
2.2.1 CARACTERÍSTICAS DEL SISTEMA DE COMUNICACIONES
Existen diferencias fundamentales entre los sistemas convencionales de
comunicaciones aeronáuticas y los que forman parte de los nuevos sistemas
CNS/ATM.
La diferencia radical entre uno y otro sistema, es que los sistemas que apoyan al
concepto CNS/ATM posibilitaran la automatización de la ATM y la transmisión de
datos entre sistemas terrestres; y entre éstos y los sistemas del avión para
aprovechar en forma óptima las funciones de automatización implantadas tanto en
el ambiente del avión como en las dependencias ATM terrestres.
En las regiones CAR/SAM (Caribe y Sur América), en la medida que estén
disponibles sistemas comerciales para un empleo inicial de la ATN, se
establecerán sub-redes de datos, en arquitectura WAN y/o LAN en los
Estados/Territorios, tales como X.25, Frame Relay, ISDN, Ethernet, etc. En base
a estas estructuras de red, los Estados/Territorios podrán llevar a la práctica el
segmento terrestre de la ATN.
47

Aplicaciones como el servicio de mensajes ATS-AMSS (Aeronautical Mobile-
S ate I lite Service, Servicio Móvil Aeronáutico por Satélite) y A1DC (ATS Interfacility
Data Communications, Comunicaciones de Datos entre Instalaciones ATS)
podrán ser progresivamente implantadas, mientras que las comunicaciones AFTN
(Aeronautical Fixed Telecommunications Network) y orales de coordinación ATS
para operaciones aéreas en ruta serían mantenidas en lugares en los que se
estime necesario dentro del período de transición.
Los enlaces de datos VDL interoperarán con la parte terrestre mediante la interred
ATN, que se espera esté disponible a partir del 2005 en algunas FIRs de la región
CAR/SAM.
Para las áreas remotas y oceánicas sin cobertura VHF, se deberán planificar
enlaces de datos aire-tierra por satélite para el AMSS empleando los actuales
sistemas de satélites geoestacionarios. Es necesario notar que el enlace de datos
HF (HFDL) puede ser un complemento para el AMSS y proporcionar también una
sub-red compatible con la ATN.
2.2.2 RED DE TELECOMUNICACIONES AERONÁUTICAS (ATN;
AERONAUTICAL TELECOMMÜNICATIONS NETWORK)
La ATN es una red interna de comunicación de datos que:
1. Proporciona un servicio común para todas las aplicaciones de
Comunicaciones de los Servicios de Tráfico Aéreo (ATSC) y las
Comunicaciones de los Servicios Industriales Aeronáuticos (AINSC) que
requieran servicios de comunicaciones de datos Tierra/Tierra o Aire/Tierra.
2. Integra y utiliza redes e infraestructura existentes de comunicaciones
donde sea posible.
3. Proporciona un servicio de comunicaciones que satisface los requisitos de
seguridad de las aplicaciones de ATSC y de AINSC.
Mientras que lo anteriormente citado, parezca ambicioso, la realidad es que para
los usuarios de ia ATN, la red interna será directa y simple de utilizar.
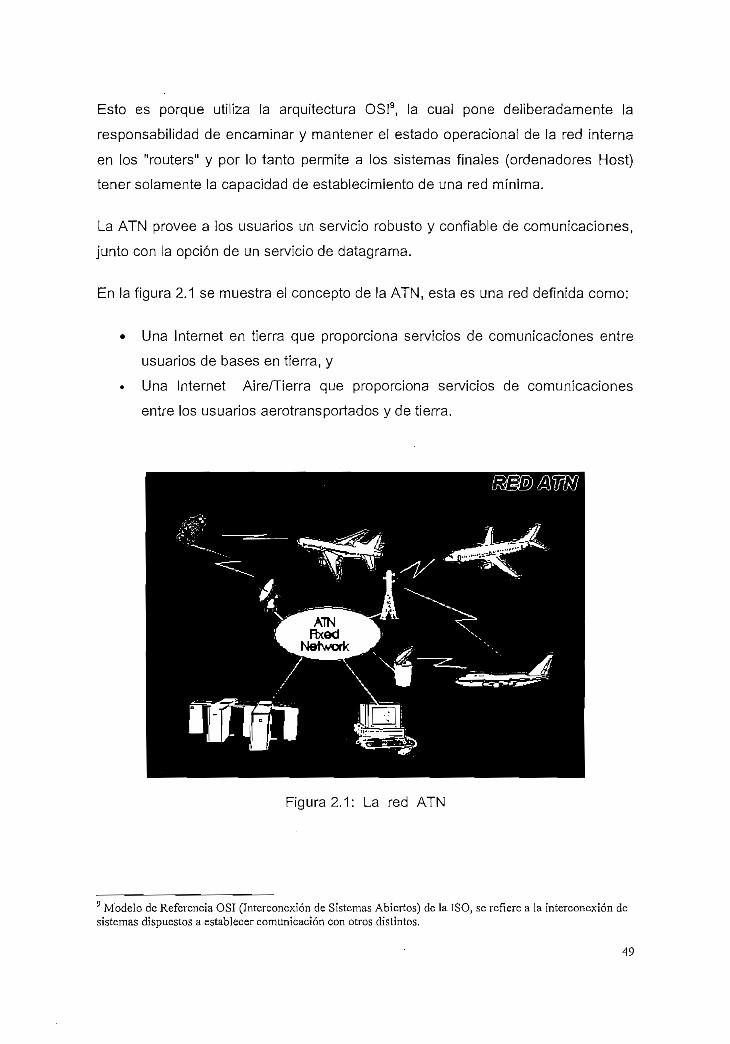
Esto es porque utiliza la arquitectura OS19, la cual pone deliberadamente la
responsabilidad de encaminar y mantener el estado operacionai de la red interna
en los "routers" y por lo tanto permite a los sistemas finales (ordenadores Host)
tener solamente la capacidad de establecimiento de una red mínima.
La ATN provee a los usuarios un servicio robusto y confiable de comunicaciones,
junto con la opción de un servicio de datagrama.
En la figura 2.1 se muestra el concepto de la ATN, esta es una red definida como;
• Una Internet en tierra que proporciona servicios de comunicaciones entre
usuarios de bases en tierra, y
• Una Internet Aire/Tierra que proporciona servicios de comunicaciones
entre los usuarios aerotransportados y de tierra.
Figura 2.1: La red ATN
9 Modelo de Referencia OSI (Interconexión de Sistemas Abiertos) de la ISO, se refiere a la interconexión desistemas dispuestos a establecer comunicación con otros distintos.
49

2.2.2.1 Objetivos y Beneficios de la ATN
La ATN se ha especificado para resolver los requisitos de la comunidad de
aviación civil con los siguientes objetivos técnicos:
• Uso de la infraestructura existente.- La ATN es una red interna construida
sobre redes existentes con el uso de routers y gateways entre esas redes. La
inversión en LANs existentes, líneas arrendadas, y redes X.25 se preserva.
Además, la ATN puede hacer uso completo de tecnologías de red que emergen
tales como Frame Relay y ATM (Asynchronous Transfer Mode).
• Alta Disponibilidad,- La ATN ha sido diseñada para proporcionar una alta
disponibilidad de red asegurándose que no hay punto de pérdida, y permitiendo
la disponibilidad de múltiples rutas alternativas al mismo destino usando
conmutación dinámica entre las alternativas.
• Comunicaciones Móviles.- La ATN soporta completamente comunicaciones
móviles sobre una variedad amplia de redes de comunicaciones móviles
incluyendo AMSS, VDL y radar secundario en modo S. Con la ATN, es posible
que un sistema de tierra se comunique con aeroelectrónica transportada en
cualquier parte del mundo.
• Gerencia de recursos end-to-end (de acuerdo a la prioridad).- Todos los datos
del usuario de,, la ATN se dan con una prioridad relativa en la red. para
asegurarse que los datos de prioridad baja no impidan el flujo de datos de alta
prioridad. Las técnicas de administración de congestión avanzadas permiten el
cierre hacia atrás para los datos de prioridad baja cuando la red se encuentra
cerca de saturación, se aseguran que los datos de alta prioridad consigan
siempre un retardo bajo de tráfico.
Las técnicas de congestión usadas en la ATN serán muy superiores a las
usadas en el Internet de TCP/IP. En la ATN, la carga de tráfico es balanceada
a la disponibilidad de los recursos de las comunicaciones, mientras que en el
Internet de TCP/IP, una red saturada se empuja regularmente en un estado
sobrecargado con pérdida consecuente de los datos.
50

2.2.2.2 Las capas superiores ATN
El servicio proporcionado a los usuarios por el Internet de la ATN, es un servicio
de comunicaciones de bajo-nivel implementado por la capa transporte del modelo
OSI.
Pero para explotar esto y para permitir que las aplicaciones de ATN sean
basados en componentes funcionales comunes, se necesita una arquitectura para
las funciones de las comunicaciones sobre la capa de transporte y la
especificación de las funciones comunes. Esta arquitectura se conoce como
Arquitectura de Capa Superior (ULA, Upper Layer Architecture).
El diseño de ATN esta basado en el Modelo de Referencia OSI de la ISO
(International Standard Organitation) asociados con los protocolos de
comunicaciones estandarizados por la ISO.
Arquitectura de red basada en el modelo O SI
Capa
Protocolo tU lúr/elde aplicación
AplicaciónJ
Presentación
íSesión
íTransporte
íRed
4Enlace
4-Física
Protocolo dfi ni-^d,pr«.^i5n
*
Protocolo denir.ielde sesióai
Protocolo de irá'ilde transporte
Siibred de c oiimü: 4c ion
"Rprl
Enlace —
"Rpfi
— Enlace
Aplicación
tPresentación
j
Sesióní
Transporte
íRed
4"Enlace
4-Física
Figura 2.2: Arquitectura de red basada en el modelo OSI
51

Las 7 capas del modelo son mostradas en la figura 2.2, la que ¡lustra uno de los
principios dominantes del modelo de OSI que es "peerto peer".10
El modelo de referencia es un edificio del modelo de capas de la arquitectura
introducida con ei estándar X.25 e identifica dos tipos de sistemas:
a) End Systems (Sistemas Terminales): que son los ordenadores host, los
usuarios de los servicios de red, y todos los que comprenden las siete capas
del protocolo que juntos proporcionan un servicio de comunicaciones para las
aplicaciones de usuarios.
b) intermedíate Systems (Sistemas Intermedios): los cuáles se refieren
típicamente a los Routers y comprenden las tres capas más bajas que se
refieren al encaminamiento, conmutación e interconexión de diferentes tipos de
subredes.
En la ATN, las funciones comunes de las capas superiores son utilizadas para el
establecimiento y la liberación de la conexión, y para la codificación de mensajes.
2.2.2.3 Aplicaciones CNS/ATM
Las Aplicaciones CNS/ATM especificadas para la primera fase del despliegue de
ATN tienen los siguientes propósitos:
• La Gestión del Contexto (CM Context Management), proporciona los medios
para descubrir los servicios de comunicaciones dentro de una región dada de
vuelo, y para que un sistema o controlador de tierra ordene su utilización en
una aeronave que está por entrar en contacto con una región diversa del vuelo
(como preliminar al cambio de mando). La CM es la forma como los Estados
brindan el servicio de comunicaciones a la aeronave que ingresa en una
determinada FIR.
• Vigilancia Dependiente Automática (ADS, Automatic Dependent Surveillance),
diseñada para dar informes automáticos de un avión a un sistema en tierra.
' Comunicación entre sistemas, procesos pares (igual a igual).
52

La posición y la trayectoria del avión, así como los datos meteorológicos son
aplicaciones típicas de este servicio.
• Las comunicaciones por enlace de datos entre Controlador-Piloto (CPDLC
Controller-Pilot Data Link Communications), prevén dos caminos para orientar
los mensajes de comunicaciones incluyendo un sistema de mensajes de
borrado/información/respuesta que corresponden a la fraseología actual de la
voz empleada por los procedimientos de ATC.
• Los servicios de información de vuelo (FIS, Flight Information Services),
pueden apoyar una variedad de servicios informativos, proporcionando la
información desde tierra a un avión.
• El sistema de tramitación aeronáutico de mensaje (AHMS - Aeronautical
MeS'sa'g'é Handling System), prevé el intercambio y la distribucióYr'dé mensajes
del tráfico orientado entre las unidades de servicio de tráfico aéreo. Es un
reemplazo de la AFTN que se puede utilizar además para proporcionar nuevos
servicios de mensajería incluyendo correo electrónico y datos electrónicos
intercambiables.
Todas las aplicaciones anteriores utilizan servicios de comunicaciones orientadas
a conexión.
2.2.2.4 La Internet ATN
La ATN es usada para intercambiar mensajes entre usuarios que se comunican *
sin importar el lugar donde se encuentren; los usuarios de la ATN pueden ser
localizados por sistemas fijos y móviles.
La ATN abarca los siguientes componentes funcionales (Ver Fig.2.3):
• Sistemas Finales (ESs)
• Sistemas Intermedios (ISs)
• Subredes Tierra-Tierra
• Subredes Aeroterrestres
53

ATMApplicauon JT ATM Application
Figura 2.3: Componentes de la Internet ATN
La función de un ES (End System) "Sistema Final de la ATN" (ordenador Host) es
proveer las aplicaciones finales a los usuarios. De acuerdo con el modelo OSI se
permite una comunicación remota entre usuarios.
La función de un IS (Intermedíate System) "Sistema intermedio de ATN" (Router)
es retransmitir los datos entre diversas subredes de ATN (aire-tierra o tierra-
tierra), de tal manera que los sistemas de extremo de la ATN pueden
intercambiar datos incluso cuando no se unen directamente a la misma subred.
Actualmente dos tecnologías están disponibles para el establecimiento de la red:
La primera se realiza alrededor de los circuitos virtuales e incluye X.25, ATM y
Frame Relay. La otra es el acercamiento de la red Internet que utiliza
conmutación de paquetes.
La ATN debe ser construida sobre una tecnología existente y no inventar nuevas
plataformas. El uso del Internet fue considerado como la mejor opción y
seleccionado para el uso de la ATN.
Todos los sistemas finales ATN y los Routers deben soportar un protocolo de red
sin conexión11. Este es el Protocolo de Internet (IP) de la ATN que proporciona un
formato común para todos los paquetes intercambiados por la red.
No se establece la conexión entre dos sistemas distintos. La recepción de los datos no está garantizada.
54

Como un servicio sin conexión es intrínsecamente no fiable - es decir, la red no
ofrece ninguna garantía de la entrega acertada - un protocolo end-to-end de
transporte12 se requiere para apoyar "comunicaciones confiables para transmitir
datos".
Cada sistema dentro de una red como la ATN debe tener una dirección única.
Esta dirección se puede utilizar para identificar el origen y el destino de un
paquete enviado a través de la red. Los Routers de la ATN utilizan la dirección
destino de un paquete para determinar la manera en que el paquete se encamina
a su destino.
El formato de la dirección ATN es ilustrado en la figura 2.4:
AFI Utf VES.
AFI:IDI:VER:
ADM
RDF:
ARS:LOC;SYS:SEL:
ADM R&JF A&S LOC SYS SEL
Authority and Format Identifier (1 octet)
InfóaJ Domain Identifier (2 ocíete)Versión Identrfier (1 octet)
Administraron Identifier (3 octets)
Routing Domain Format (1 octet)
Administrativa Región Selector (3 octets)
Location Identifier (2 octets)
System Identifier (6 Octets}NSAP Selector (1 octet)
Figura 2.4: Formato de dirección ATN
Los primeros cuatro octetos de esta sintaxis de la dirección son fijos y han sido
asignados por ISO a la OACI, Estos garantizan que las direcciones de ATN sean
globales y únicas.
!2 Capa de transporte. Capa del Modelo OSI, es la encargada de determinar la comunicación entre un sistemay otro remoto.
55

Los cuatro octetos siguientes son utilizados para proporcionar un prefijo único de
la dirección para cada administración de la OACI, la línea aérea del IATA
(Asociación Internacional de Transporte Aéreo) y otras organizaciones que
participan en la ATN.
Cada Administración u organización pueden entonces asignar direcciones de ATN
a sus propios sistemas de una administración central o para futuras
responsabilidades dentro de su organización.
2.2.2.5 Topología de abordo ATN
El equipo de comunicaciones de datos a bordo de un avión también incluirá un
router; en este caso, el router enlaza el equipo de comunicaciones de cada línea
de datos aire/tierra a una LAN interna de la aeroelectrónica.
2.2.2.6 Movilidad y Comunicación de Datos
Un requisito importante de la ATN es apoyar las redes de datos móviles de la
OACI y los sistemas (típicamente en el avión) que usen ellos. La ATN utilizará tres
tipos de redes:
1. Enlace de datos Modo S.
El radar secundario de vigilancia en modo S (SSR - Secondary Surveillance
Radar), es un sistema completamente digital que proporciona vigilancia general
(broadcast13) y vigilancia específica (a un avión dado). Este sistema digital de
vigilancia tiene la capacidad de llevar datos que se utilicen para la ATN.
Una vez que un avión esté bajo vigilancia, la transferencia de datos se puede
combinar con datos de vigilancia.
Una visión general de lo que es el SSR en modo S se muestra en la figura 2.5,
que es lo que se espera alcanzar con esta nueva tecnología incorporada al radar
secundario
13 En Broadcast, se envía datos a todos los receptores. Un sistema envía información a todos los demás.
56

Figura 2,5: Enlace de Datos con Radar Secundario en Modo S
2. The VHF Data Link(VDL).
Existen cuatro modos de VDL:
• VDL Modo 1: Este modo tiene baja capacidad, pero es de bajo riesgo. Utiliza
tecnología de radio existente y se asegura de que los SARPs7 (Standard and
Recommended Practices) de la OACI puedan ser validados fácilmente y
permita la disponibilidad directa del producto. Su funcionamiento es poco
satisfactorio para los usos de CNS/ATM y la expectativa de usar este modo es
reducida comparada con modos mas perfeccionados de VDL disponibles.
• VDL Modo 2: es superior al modo 1, usa las mismas bandas de frecuencia,
pero utiliza un mejor módem de codificación de datos. Aplica la codificación
Diferencial D8PSK con una transferencia de datos de 31.5kbps. Sin embargo,
CSMA (Carrier Senser Múltiple Access, Acceso Múltiple por detección de
Portadora) todavía se utiliza como el procedimiento de acceso ai canal y,
mientras que el modo 2 da un funcionamiento aceptable en niveles bajos de
utilización, como la carga aplicada en la red es superior, el tiempo de acceso
aumentará exponencialmente y no es aplicable que se retrase ninguno de los
requisitos operacionales en una conexión más larga.
57

• VDL Modo 3: es un procedimiento que usa TOMA (Time División Múltiple
Access/Acceso Múltiple por División de Tiempo) para ei acceso al canal,
funciona con la misma tasa de transferencia de datos que el canal en modo 2.
También apoya comunicaciones de voz en los mismos canales. Sin embargo,
la ayuda por voz de VDL ha agregado un riesgo técnico significativo.
Actualmente, no hay codificadores de voz disponibles que cubran los
requisitos del modo 3.
• VDL Modo 4: es diferente a los otros modos de VDL. Utiliza las mismas bandas
de frecuencia que los demás, y codifica sus datos usando D8PSK a 31.5kbps.
También utiliza TDMA. Sin embargo, mientras que ei modo 3 confía en una
estación de tierra para proporcionar el canal que sincroniza la señal para
TDMA, el modo 4 permite la comunicación aire-aire en ausencia de las
estaciones de tierra. Los procedimientos de transmisión de datos proporcionan
un servicio sin conexión. Éste es el servicio de transmisión de datos más
eficiente para el uso de ATN.
3. AMSS (Aeronautical Mobile Satellite Service, Servicio Móvil SatelitalAeronáutico).
El AMSS actualmente utiliza satélites geoestacionarios de Inmarsat para
proporcionar un servicio global de comunicaciones al avión (no obstante con
limitaciones de la cobertura cerca de los polos). Un sistema dedicado de
frecuencias se pone a disposición de los sistemas móviles aeronáuticos y éstos
son dados por la multiplexación por división de frecuencia (FDMA / Frecuency
División Múltiple Access) en un número de canales discretos:
• Un canal P, que proporciona un canal unidireccional de comunicaciones
desde una estación terrestre de tierra (GES - Ground Earth Station) hacia el
avión. Los paquetes de datos son transmitidos en difusión sobre este canal
para un avión específico.
14 Normas y Recomendaciones Prácticas, dadas por la OACI.
58

• Un canal R, que proporciona un canal unidireccional de comunicaciones
dedicado del avión a un GES. Accede a este canal en modo de contención
usando el procedimiento ranurado de Aloha, con la señal que mide el tiempo
(para las ranuras de la transmisión) que es proporcionada por el Canal P.
• Un número de Canales T, cada uno proporciona un canal de comunicaciones
dedicado unidireccional del avión a un GES. Un número N de Canales T se
utilizan para transportar mensajes más largos sin el riesgo del conflicto que se
presenta en el Canal R, Los Canales T son asignados por un GES que sigue
una petición recibida del Canal-R.
• Un número de Canales C, cada uno proporciona un canal de comunicaciones
bidireccional entre tierra y el aire. Los Canales C se utilizan típicamente para
las comunicaciones de voz.
En la figura 2.6 se muestra el AMSS, la aeronave se comunica con un satélite
geoestacionario y este a su vez se comunica con una estación en tierra; todo esto
lo hace a través de canales dedicados.
iil tefií^S . iféiftü /AW í
Figura 2.6: Servicio Satelital Móvil Aeronáutico
El AMSS ofrece cobertura casi global y es actualmente la única opción realista en
el espacio aéreo oceánico (aunque la transmisión de datos del HF probablemente
desafía esto). Sin embargo, es costoso instalar y utilizar.
59

2.3 NAVEGACIÓN
El sistema CNS/ATM considera para [a navegación el uso del GNSS15 (Global
Navigation Satellite System / Sistema Global de Navegación por Satélite), el cual
es un sistema mundial para la determinación de la posición y de la hora en forma
precisa, fiable y continua, mediante la introducción de navegación aeronáutica
basada en satélites.
Los sistemas de navegación por satélite proporcionarán un gran soporte a la
aeronavegación, con lo que el usuario podrá determinar su posición a partir de la
información recibida de transmisiones difundidas por diversos satélites, los que
brindarán una cobertura mundial altamente fiable, precisa y de gran integridad en
forma independiente.
Se está implantando el sistema GNSS de una manera evolutiva; a medida que
esté preparado para acoger el gran volumen del tráfico aéreo civil existente en la
actualidad, y pueda responder a las necesidades de segundad que requiere el
sector, uno de los más exigentes del mundo.
Cuando el sistema GNSS esté completamente desarrollado, se lo podrá utilizar
sin requerir ayuda de cualquier otro sistema de navegación.
El GNSS es un término general que comprende a todos los sistemas de
navegación por satélites, los que ya han sido desarrollados (GPS, GLONASS) y
los que serán desarrollados en el futuro (p. ej. EGNOS.GALILEO).
En estos momentos el Sistema de Posicionamiento Global (GPS, Global Position
System) de los Estados Unidos de América y el Sistema Orbital Mundial de
Navegación por Satélite (GLONASS) de la Federación Rusa forman parte del
concepto GNSS.
El GNSS es el término usado para todos los sistemas de ayuda a la aeronavegación, que utilizan comomedio principal de ayuda, los satélites.

2.3.1 DETERMINACIÓN DE LA POSICIÓN MEDIANTE SATÉLITES
Aunque los sistemas GPS y GLONASS emplean una tecnología compleja y
avanzada, los principios básicos de operación de los sistemas son sencillos. La
determinación de la posición se basa en la medición de las distancias a los
satélites y el conocimiento de la posición de cada satélite en todo momento.
Todos los satélites en el sistema emiten constantemente señales de navegación y
temporización, compartiendo la misma frecuencia sin interferirse unos a otros.
Cada satélite posee su propio código PRN (pseudo-random noise, ruido
pseudoaleatorio) distintivo.
Cuando se utiliza la señal de un sólo satélite, este proporciona al receptor la
posición del satélite y la información necesaria para calcular la distancia a este
satélite. Luego, la posición del receptor estará en alguna parte de la superficie de
una esfera centrada en la posición del satélite.
Si se utilizan las señales emitidas por dos satélites (Figura 2.7), estos
proporcionarían al receptor la información necesaria para ubicar la posición del
receptor en alguna parte de la circunferencia resultante de la intersección de las
dos esferas.
*"•'.>,:„
Circulo formado por laintercepción de tas dos
Esferas
Figura 2.7: Ubicación de un receptor mediante señales emitidas por dos satélites.
61

Mediante el uso de una tercera medición (Figura 2.8), a un tercer satélite, se
puede obtener dos posiciones que corresponde a la intersección de las tres
esferas centradas en cada satélite y con radios iguales a las distancias al
receptor. Una de las 2 soluciones de posición es generalmente un valor absurdo
que la computadora del receptor descarta automáticamente al compararlo con el
modelo de la esfera formada por la superficie de la tierra, quedando solamente
una solución que es la correcta posición del receptor (Figura 2.9).
Hay dosintersecciones
Solución BSolución A
Figura 2.8; Ubicación de un receptor mediante señales emitidas por tres satélites.
Distancia A
Figura 2.9: Ubicación real de un receptor.
62

Para que funcione este sistema, las mediciones de tiempo deben ser muy
precisas y los relojes deben ser muy exactos. Dentro de los satélites, se logra
esta exactitud mediante el uso de relojes atómicos que tienen precisiones
medidas en nanosegundos.
El uso de un reloj atómico en un receptor no solo sería impracticable, sino que
sería muy costoso; por lo que los receptores emplean un modelo matemático para
obtener una hora precisa del sistema de satélites y determinar así una posición
exacta.
Para obtener una posición y un tiempo preciso, el receptor utiliza adicionalmente
una medición de distancia a un cuarto satélite (Figura 2.10). En caso de que el
reloj del receptor se adelante o atrase, no habría ningún punto en el espacio en el
que se crucen todas las mediciones de distancia.
No hayintersecciones
1/EX1-XHY1-YNZ1-Z} * C¿T = Rl
CAT = RZ
= R3
CuartoSatélite
El error de reloy del sistema GPSintroduce el mismo error en cadaecuación correspondiente a cadasatélite, siendo necesario recurrira una cuarta ecuación paraencontrar una solución en elsistema de ecuaciones.
+ CAT = Ri
Figura 2.10; Corrección al reloj del receptor.

Cada medición tendría un error que es ocasionado por la diferencia en la hora del
reloj del receptor con respecto a la hora del reloj del satélite. El error sería igual
para todas las mediciones, por lo que la computadora del receptor podría
entonces efectuar matemáticamente una corrección que permitiría que todas las
mediciones de distancia se intercepten en un solo punto. Al efectuar esto, puede
calcularse el error del reloj y aplicar la corrección apropiada.
Los satélites de los sistemas GPS y GLONASS están ubicados en órbitas muy
precisas (que son también muy predecibles), giran alrededor de la Tierra
aproximadamente en doce horas16 y pasan sobre una de las estaciones de control
dos veces al día.
Las estaciones cuentan con equipos para calcular con exactitud la posición del
satélite, su altura y velocidad, además envían esta información de regreso al
satélite, el cual transmite al receptor (del satélite) su información de posición con
respecto al centro de la Tierra, además de las señales de tiempo. El receptor
utiliza entonces esta información y mediante su propio modelo matemático
interno, calcula la posición con relación a la superficie de la Tierra, que entonces
puede mostrarse en términos de latitud y longitud.
2.3.2 SISTEMA GPS
El GPS (Sistema de Posicionamiento Global) fue creado por el Departamento de
Defensa de los Estados Unidos (DoD) como un sistema de navegación preciso
con fines militares que sustituye al antiguo sistema utilizado, que no era otro que
las mediciones Doppler sobre la constelación Transit.
Para ello, aprovecharon las condiciones de la propagación de las ondas de radio
de la banda L en el espacio, así como la posibilidad de modular las ondas para
que en ellas se pueda incluir la información necesaria que permita posicionar un
objeto en el sistema de referencia apropiado.
16 GPS ; 11 horas, 58 minutosGLONASS : 11 horas, 16 minutos
64

El gobierno de los Estados Unidos se ha comprometido con la OACl para poner a
disposición el sistema GPS para uso civil, sin cargo alguno, por un mínimo de diez
años y que dará aviso con seis años de anticipación sobre cualquier intención de
concluir la operación del sistema para uso civil.
2.3.2.1 Descripción del Sistema
2.3.2.1.1 El Sector Espacial
Constituido por 24 satélites de la constelación NAVSTAR (Navegación por Satélite
en Tiempo y Distancia) colocados en seis planos orbitales elípticos casi circulares
donde se alojan los satélites regularmente distribuidos. Los planos tienen una
inclinación de 55° respecto al plano del ecuador, y se nombran como A, B, C, D, E
y F. Cada órbita contiene al menos cuatro satélites, aunque pueden contener más
(Figura 2.11),
Los satélites se sitúan a una distancia de 20200 Km. respecto del geocentro. El
período orbital de cada uno de estos satélites es de 11 horas y 58 minutos.
Con estos fundamentos, se garantiza la presencia de al menos cuatro satélites
sobre el horizonte en todos los lugares de la superficie de la Tierra.
Figura 2.11: Constelación de Satélites GPS
65
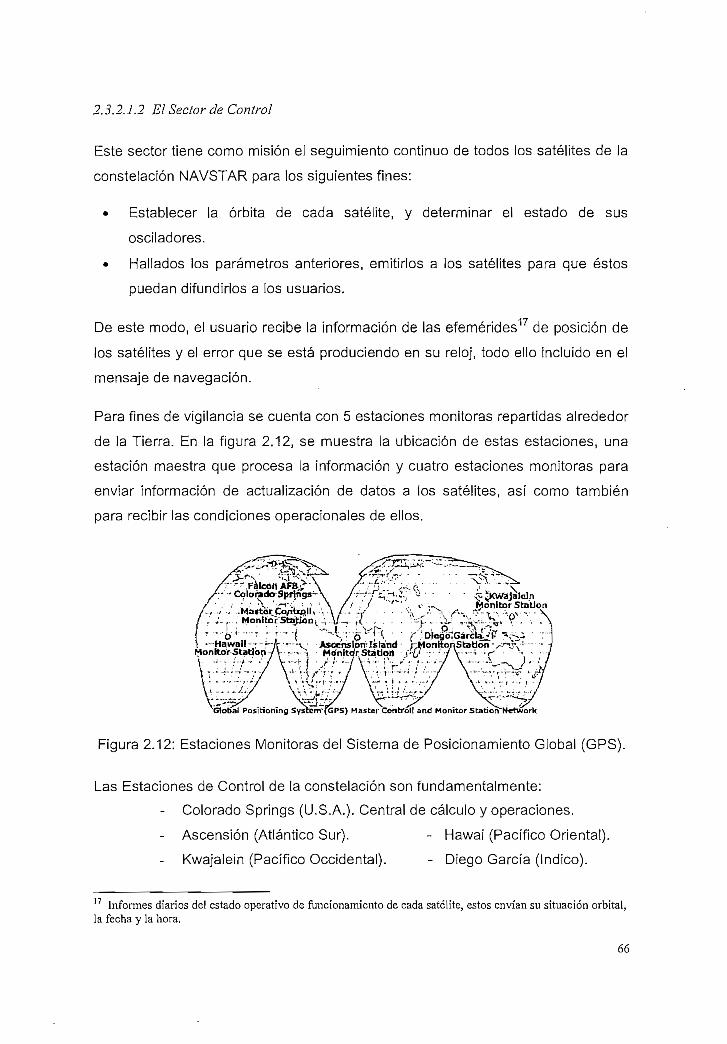
2.3.2.1.2 SI Sector de Control
Este sector tiene como misión el seguimiento continuo de todos los satélites de la
constelación NAVSTAR para los siguientes fines:
• Establecer la órbita de cada satélite, y determinar el estado de sus
osciladores.
• Hallados los parámetros anteriores, emitirlos a los satélites para que éstos
puedan difundirlos a los usuarios.
De este modo, el usuario recibe la información de las efemérides17 de posición de
los satélites y el error que se está produciendo en su reloj, todo ello incluido en el
mensaje de navegación.
Para fines de vigilancia se cuenta con 5 estaciones monitoras repartidas alrededor
de la Tierra. En la figura 2.12, se muestra la ubicación de estas estaciones, una
estación maestra que procesa la información y cuatro estaciones monitoras para
enviar información de actualización de datos a los satélites, así como también
para recibir las condiciones operacionales de ellos.
;^7^T'.7j£~--i^,:r•?' v'"'"™1 .
í/..-¿*V."". '.. , --fe-^V-/ // '^"' v ;-^ JlonítofStaÜon
/ J J.^/Moníto^Statíoni J'-V^'-Jif . . . . 'L../iVOú-L-V. '£/ ¿ ' J . L ' ' : , ;' ~x I ' ' Vr-r 'i • P-i • vi í-^-í'; 'I T • - - ¿ ) - | - ' , - - • - - , r -' ^ • -<'V Q "" T - t , • • j' ,Dlcgo|GarCta¿í7 T5-;-^ ,1 —Hawolí-7-r~/r ^--\ Asccnstori-Islatid nMonítonStatíon V'Kiv ! - • "rrlonfcor-StatIonVV-r>-^ Moníto/rStátíon -" - ' ' v- - '- : J -
V^T- 7 ••-\ _» Li-:.:-..^/
vrrr?"'Global Posítíoning System'fGPS) Master Controll and MonítorStatiofíi"Netwórk
Figura 2.12: Estaciones Monitoras del Sistema de Posicionamiento Global (GPS).
Las Estaciones de Control de la constelación son fundamentalmente;
- Colorado Springs (U.S.A.). Central de cálculo y operaciones.
- Ascensión (Atlántico Sur). - Hawai (Pacífico Oriental).
Kwajalein (Pacífico Occidental). - Diego García (Indico).
Informes diarios del estado operativo de funcionamiento de cada satélite, estos envían su situación orbital,la fecha y la hora.
66
2.3.2.1.3 El Sector de Usuarios
Los receptores GPS consisten de una antena y un receptor-procesador (o
navegador) que recibe los datos de cada satélite GPS disponible, los procesa y
calcula las soluciones de navegación (posición, altitud, velocidad y tiempo).
Los receptores GPS son los que predominan actualmente, y existen del tipo
portátiles (de mano), para montaje en vehículos (aviones, yates, automóviles, etc.)
e integrados dentro de otros equipos (cámaras fotográficas, unidades de
referencia de tiempo, teléfonos celulares, etc.).
Los receptores de las aeronaves deben ser continuos o de varios canales, ya que
el receptor secuencial o el de canales multiplexados tendrían demasiado retardo
en el cálculo de la posición.
Los receptores continuos incorporan cuatro o más canales físicos de seguimiento
para seguir simultáneamente al menos a cuatro satélites. Los canales adicionales
son asignados para seguir más satélites visibles a otra frecuencia.
2.3.2.1.4 Señal de los Satélites
Los satélites de la constelación NAVSTAR constan de un oscilador que genera
una frecuencia fundamental fo de 10,23 MHz. A partir de esta frecuencia
fundamental se generan dos portadoras en la banda L de radiofrecuencia,
denominadas L1 y L2.
Además, existen dos formas de código pseudoaleatorio que se modulan sobre
estas portadoras, son los códigos C/A (Clear/Access) y P (Precisión), además de
un mensaje, que da la información de los parámetros orbitales del satélite y del
estado del reloj.
Los códigos son una secuencia de +1 y -1, correspondientes a los valores binarios
de O y 1 respectivamente. Los componentes de la señal y sus frecuencias son
presentadas el la tabla 2.2.
67

El código C/A se repite cada milisegundo, dando como resultado un código de
1023 chips18, siendo (a longitud aproximada de cada chip de unos 300 m.,está
declarado de uso civil para todos los usuarios.
Tabla 2.2: Componentes de la seña del GPS.
COMPONENTE
Frecuencia Fundamenta!
Portadora L1
Portadora L2
Código P
Código C/A
Código W
FRECUENCIA (MHz)
fo
154-fo
120- f0
fo
fo/10
fo/20
10,23
1.575,42
1.227,60
10,23
1,023
0,5115
El código preciso P se compone de 2,3547-1014 bits y se repite aproximadamente
cada 266,4 días. El código P es secreto y de uso militar, se origina a partir de la
combinación de dos secuencias de bits, generados a partir de dos registros. La
longitud de cada chip es de 30 m. Con el fin de proteger el código P, este se
encripta usando un código W, dando lugar al código Y. Si el código W está en
uso, se habla de que está conectado el A/S19 (Anti-Spoofing, Anticopiado)
El mensaje de navegación es enviado por los satélites, y consta esencialmente de
información sobre el reloj de los satélites, parámetros orbitales (efemérides),
estado operacional de los satélites y otros datos de corrección. El mensaje consta
de 25 grupos de 1500 bits cada uno, divididos en cinco celdas.
Cada grupo se transmite con una frecuencia de 50 Hz y tarda 30 s. Esto supone
que el mensaje modulado completo sobre ambas portadoras tiene una duración
de 12min. 30 s.
191 Código diferente cada cierta longitud (Aplicaciones Civiles, cada 300 m; Militares cada 30 m)
A-S: Es un método de degradación de la señal del GPS, consiste en encriptar el código P mediante el usodel llamado código protegido Y. Solamente usuarios autorizados tienen acceso al código P cuando el A-S esactivado. El objetivo es negar a los usuarios el uso apropiado del sistema.

2.3.2.1.5 El Sistema de Referencia DÁTUM WGS-84
Las coordenadas, tanto de los satélites como de ios usuarios que se posicionan
con el sistema GPS, están referidas al sistema WGS84. Estas coordenadas
pueden ser cartesianas en el espacio respecto al centro de masas de la Tierra (X,
Y, Z) o geodésicas (cp, X, h).
El sistema tiene las siguientes características:
- Origen en el Centro de Masas de la Tierra.
- El eje Z es paralelo al polo medio.
- El eje X es la intersección del meridiano de Greenwich y el piano del
ecuador.
- El eje Y es perpendicular a los ejes Z y X, y coincidente con ellos en el
Centro de Masas terrestre.
- Las coordenadas geodésicas están referidas a un elipsoide de revolución
con las siguientes características:
Semieje mayor (a): 6.378.137 m.
Velocidad angular de rotación (03): 7.292.115 • 10 "11 rad As.
La transformación de las coordenadas WGS84 a otro sistema de referencia, y
viceversa, es posible con transformaciones tridimensionales de siete parámetros,
ya sean calculadas (donde se debe conocer al menos las coordenadas de tres
puntos en ambos sistemas) o establecidas por algún organismo con una gran
base de datos.
2.3.3 SISTEMA GLONASS
A principio de los 70s, quizá como una respuesta al desarrollo del Sistema GPS,
el antiguo Ministerio de Defensa Soviético desarrolló el "Global'naya
Navigatsionnaya Sputnikova Sistema" o "Sistema Global de Navegación por
Satélite" (GLONASS). El Sistema GLONASS es similar al GPS en muchos
aspectos, aunque como se verá también hay muchas diferencias.
69

En el año 1993, oficialmente el Gobierno Ruso colocó el programa GLONASS en
manos de Fuerzas Espaciales Militares Rusas (RSF). Este organismo es el
responsable del desarrollo de satélites GLONASS, de su mantenimiento y puesta
en órbita, y certificación a los usuarios.
Los planes de GLONASS son ofrecer dos niveles de servicio:
- El Channel of Standard Accuracy (CSA, Canal Estándar de Exactitud),
similar al Standar Positioning Service (SPS, Servicio de Posicionamiento
Estándar) del Sistema GPS, disponible para uso civil.
- El Channel of High Accuracy (CHA, Canal de Alta Exactitud), similar al
Precise Positioning Service (PPS, Servicio de Posicionamiento Preciso)
del Sistema GPS, disponible solo para usuarios autorizados.
La Organización de Aviación Civil Internacional (OACI) aceptó formalmente en
Julio 1996, el uso de GLONASS/CSA para la aviación civil, como ya se hizo en
1994 con el GPS/SPS.
2.3.3.1 Descripción del Sistema.
El Sistema GLONASS, al igual que el Sistema GPS, está formado por tres
sectores fundamentales: el Sector de Control, el Sector Espacial y el Sector
Usuario.
2.3.3,1,1 El Sector Espacial
El Sector Espacial está formado por una constelación de 24 satélites colocados
en tres planos orbitales. Cada plano contiene 8 satélites espaciados
regularmente. Los planos están inclinados 64,8° respecto al ecuador terrestre.
Los satélites GLONASS se encuentran a una distancia de aproximadamente
19100 Km. y se sitúan en órbitas casi circulares con semieje mayor de
aproximadamente 25510 Km., siendo el período orbital de 675,8 minutos, es
decir, 11 horas y 15 minutos.
70

Esto garantiza, con la constelación completa, la visibilidad de un mínimo de 5
satélites en todo el mundo con adecuada geometría, es decir, la constelación
GLONASS proporciona una cobertura de navegación continua y global para la
ejecución satisfactoria de observaciones de navegación. Cada satélite transmite
una señal de navegación de radiofrecuencia, conteniendo un mensaje de
navegación para ios usuarios.
Los planos se numeran del 1 al 3, Cada satélite, según el plano en el que esté, 1,
2 ó 3, se numera del 1 al 8, del 9 al 16 y del 17 al 24 respectivamente.
23
-/15
11n
10 3 20
Figura 2,13: Constelación de Satélites del Sistema GLONASS
Cada satélite GLONASS dispone de un pequeño reflector, que es usado para el
seguimiento de los satélites por láser desde las estaciones de control.
Cada subsiguiente generación de satélites contiene equipamientos más modernos
y tienen un mayor período de vida. El Gobierno Ruso desarrolló un nuevo
prototipo de satélites que han ido sustituyendo a los antiguos para formar la nueva
Constelación GLONASS-M. Los test con los satélites GLONASS-M comenzaron
en 1996.
71

Las principales características de la Constelación GLONASS-M son;
La esperanza de vida de los satélites será de 5 años, frente a los 3
años de los satélites actuales.
- Transmisión del código C/A en L2 para uso civil.
- Estabilidad en los relojes de 1-10"13 s frente a la actual de 5-10"13 s.
- Mejora de las precisiones de las efemérides.
- Capacidad del Sector de Control para establecer la mala salud de
los satélites a los 10s de producirse el fallo.
- Transmisión instantánea del desfase entre las escalas de tiempo
GPSyGLONASS.
2.3.3.12 Sector de Control.
El Sector de Control está formado por un Sistema Central de Control (SCC,
System Central Control) en la región de Moscú (GoIitsyno-2) y una red de
Estaciones de Seguimiento y Control (Command Tracking Stations, CTS),
emplazadas por toda el área alrededor de Rusia.
Este sector, al igual que el de GPS debe seguir y vigilar el estado de sus satélites,
determinar las efemérides y errores de sus relojes, es decir, la diferencia entre el
tiempo GLONASS y la escala de tiempo UTC (Universal Coordinated Time,
Tiempo Universa] Coordinado).
Las estaciones de control (CTSs) realizan el seguimiento de los satélites y
almacenan los datos de distancias y telemetría a partir de las señales emitidas
por estos. La información obtenida en las CTSs es procesada en el Sistema
Central de Control (SCC) para determinar los estados de las órbitas y de los
relojes de los satélites, además de actualizar el mensaje de navegación de cada
uno. Esta información es enviada a cada satélite por medio de las CTSs, las
cuales calibran periódicamente los datos de distancias a los satélites mediante
láser. Para ello, los satélites GLONASS van provistos de unos reflectores
especiales.
72
La sincronización de todos estos procesos en el Sistema GLONASS es muy
importante. Para conseguir esta sincronización, se dispone de un reloj atómico de
hidrógeno de alta precisión, el cual determina la escala de tiempo GLONASS.
A todas estas estaciones de control se debe añadir otras estaciones de
seguimiento que se utilizan para obtener los parámetros de transformación del
Sistema GLONASS PZ-9020 al Sistema GPS WGS-84, además de la
determinación de las órbitas y observación y análisis de las anomalías de los
satélites. Estos parámetros de transformación se aplican cuando se trabaja con el
sistema combinado GPS/GLONASS.
Estas estaciones están repartidas por todo el mundo y utilizan técnicas láser,
radar y ópticas. Estos parámetros son calculados por mínimos cuadrados
utilizando 9 días de datos de seguimiento.
2.3.3.1.3 Sector Usuario.
El Sistema GLONASS es un sistema militar y civil. Todos los usuarios militares y
civiles constituyen el Sector Usuario. El desarrollo y diseño de nuevos receptores
por parte de los fabricantes está en continua evolución.
Un equipo de recepción de señales GLONASS, al igual que uno de GPS, está
formado por una antena y un receptor. La antena suele llevar un plano de tierra
para evitar el efecto multipath21, es decir, la recepción de señales reflejadas en el
suelo u otros objetos, que empeoran la precisión. Los receptores disponen de un
reloj para sincronizar las señales recibidas.
Existen dos generaciones de receptores GLONASS. La primera generación
contenían 1, 2 y 4 canales. La segunda generación, ya mucho más compactos y
ligeros, incluyendo 5, 6 y 12 canales, usados para aplicaciones civiles y capaces
de operar con las dos constelaciones GPS/GLONASS.
20 Datum Geodésico Parametry Zemli 1990 (PZ-90)21 Trayectoria Múltiple. Refiérase a la parte 2.3.5.1 Errores del GPS y GLONASS
73

El receptor GLONASS recibe señales de navegación de al menos cuatro satélites
y mide sus pseudodistancias y velocidades (Figura 2.14). Simultáneamente
selecciona y procesa el mensaje de navegación incluido en la señal de
navegación. El ordenador del receptor procesa toda la información recibida y
calcula las tres coordenadas de posición, las tres componentes dei vector
velocidad y el tiempo.
Figura 2.14; Señales de Navegación de 4 satélites (GLONASS).
2.3.3.2.4 Características de las Señales GLONASS.
Los satélites GLONASS llevan a bordo relojes de atómicos de Cesio con un
oscilador de frecuencia fundamental de 5 MHz. A partir de esta frecuencia
fundamental se pueden obtener o modular los códigos C/A y P, de frecuencias
0.511 MHz y 5.11 MHz respectivamente.
En la señal también se introduce un mensaje de 50 bits por segundo. La banda L1
funciona en la frecuencia 1602 + 0.5625 x k MHz, donde k es el canal (O a 24), lo
genera un rango de frecuencias que van desde 1602 a 1615.5 MHz. La banda L2
funciona en la frecuencia 1246 + 0.4375 x k MHz, lo que genera un rango de
frecuencias que van desde 1246 a 1256.5 MHz.
Algunas transmisiones GLONASS crean interferencias con las señales
astronómicas de radio, que usan las bandas de frecuencia de 1610.6 a 1613.8 y
1660 a 1670 MHz, que corresponden a los canales GLONASS del 15 al 20.
74

Además, las transmisiones GLONASS de frecuencias superiores 1610 MHz
tienen interferencias con (as señales del sen/icio de satélites para comunicaciones
móviles en las frecuencias que van desde 1610 a 1626.5 MHz.
Para solucionar esto, y por la necesidad de minimizar las interferencias, fas
autoridades encargadas del Sistema GLONASS decidieron reducir el número de
frecuencias usadas (y por lo tanto el número de canales), y bajar el intervalo de
frecuencias utilizadas. Así, el sistema constará de 12 canales de frecuencia, más
dos adicionales para los test de control. De esta forma la banda L1 se encontrará
entre 1598.0625 a 1604.25 MHz y la banda L2 se encontrará entre 1242.9375 a
1247.75 MHz.
Pero la cuestión que se plantea es cómo introducir los 24 satélites de la
constelación completa en sólo 12 canales. Lo que se intenta es introducir dos
satélites antipodales de un mismo plano en el mismo canal, esto es, satélites
separados 180° de argumento de latitud, de forma que un usuario colocado en
cualquier punto de la Tierra nunca recibirá señales simultáneas de los dos
satélites sitiados en el mismo canal.
Los satélites GLONASS transmiten dos señales de ruido pseudoaleatorio.
Transmite el código P en ambas bandas L1 y L2 y el código C/A, de momento
sólo en la banda L1, pero está programado que la Constelación GLONASS-M lo
transmita también en la banda L2 para uso civil.
A diferencia de los satélites GPS, todos los satélites GLONASS transmiten los
mismos códigos. Esto es así porque en GLONASS la identificación de los satélites
se hace por la frecuencia de las portadoras y no por el PRN de los códigos como
se hace en GPS.
Los errores que se pueden cometer en el posicíonamiento absoluto de un punto
con el código C/A utilizando el Sistema GLONASS son de unos 60 m (99.7%) en
horizontal y de unos 75 m (99.7%) en vertical.

2.3.3.1.5 Sistema de Referencia. DATUMPZ-90.
Las efemérides GLONASS están referidas al "Datum Geodésico Parametry Zemli
1990" o PZ-90, o en su traducción Parámetros de la Tierra 1990 o PE-90.
El sistema PZ-90 es un sistema de referencia terrestre con coordenadas definidas
de ia misma forma que el Sistema de Referencia Internacional Terrestre (ITRF).
Las constantes y parámetros del PZ-90 se muestran en la tabla 2.3:
Tabla 2.3: Parámetros del Datum PZ-90.
Parámetro
Rotación de ¡a Tierra (Velocidad)
Constante Gravitacionai
Constante Gravitacionai de la atmósfera
Velocidad de la luz
Semieje mayor del elipsoide
Valor
72.92115- 10-6rad/s
398600.44- 109 m3/s2
0.35- 109m3/s2
299792458 m/s
63781 36 m
La realización del Sistema PZ-90 por medio de la adopción de coordenadas de
estaciones de referencia ha dado como resultado el desfase en el origen y
orientación de los ejes, así como la diferencia en escala con respecto al ITRF
y al Sistema WGS-84.
2.3.4 GPS VERSUS GLONASS
En la tabla 2.4, se puede apreciar las diferencias entre las dos constelaciones,
la estructura de la señal y las especificaciones del GPS y GLONASS para un
posicionamiento preciso. Como se observará, los dos sistemas son muy
similares.
En Diciembre de 1993, GPS completó su Capacidad Operativa Inicial logrando
cobertura mundial, con 24 satélites operativos en órbita. Estos satélites no han
tenido ningún problema y han superado su vida útil planeada de 5 años,
llegando incluso a los 11 años de vida útil. Ellos continúan lanzándose
periódicamente y cada vez con nuevas características que robustecen al
sistema GPS.

Sin embargo, GLONASS ha tenido problemas importantes con la prematura
pérdida de servicio de sus satélites, y el tamaño de la constelación ha
quedado en cerca de 12 satélites.
Tabla 2.4. Diferencias entre GPS y GLONASS
CONSTELACIÓN
Número de SatélitesNúmero de Planos Orbitales
Inclinación de la órbita (en grados)Radio de la órbita (en Km.)Periodo de órbita (hh:mm)Retransmisión del seguimientoSeparación de los planos orbitalesCARACTERÍSTICAS DE LA SEÑAL
Seña! portadora (Mhz)
Código
Frecuencia del código (Mhz)
GPS
24
GLONASS
24
6 J 3
55° | 65.8°
26560 2551011:58 ] 11:16
Día sideral
60°
L1 : 1575.42L2 : 1227.60
COMAC/A en LlP en L1 y L2
C/A: 1.023P: 10.23
NORMAS DE REFERENCIA j
Sistema de coordenadas j WGS84Tiempo j UTCESPECIFICACIÓN DE PRECISIÓN
(95%)
Horizontal (mts.) j • 10-25
8 días siderales
120°
L1 : 1602+0.5625n*L2: 1246+0.4375n*
FDMAC/A en L1P en L1 y L2
C/A: 0.511P: 5.11
PZ90
UTC
50-70Vertical (mts.) ] 140 | 150
* Donde: n =1,2,3,..,...,24
2.3.5 USO DEL GPS Y EL GLONASS CONJUNTAMENTE
Los receptores duales GPS-GLONASS ofrecen mejor señal que ios receptores
individuales de cada sistema. Con los dos sistemas integrados se tiene una
mayor rapidez de recepción de señales debido al mayor número de satélites
en un tiempo dado y en cualquier parte. Asimismo se tiene una mayor
cobertura en ambientes con algunas obstrucciones.
77
Un receptor con capacidad de operar con los dos sistemas ofrecerá lo mejor
de ambos. Como consecuencia del aumento en el número de satélites
disponibles, y a la mejora de la geometría.
2.3.5.1 Errores del GPS y el GLONASS
Los sistemas GPS y GLONASS están sujetos a varios errores que afectan la
precisión de la posición calculada. Estos errores en conjunto pueden estar en
el rango de 10 á 25 metros, dependiendo del tipo de receptor, la posición
relativa del satélite y la magnitud de otros errores.
Error ionosférico.- El error más significativo se ocasiona durante el paso de la
señal del satélite a través de la ionosfera de la Tierra, La ionosfera es una
capa de partículas cargadas eléctricamente, que cubre a la tierra entre!>:.-.' ' - • • - • •„;. n'Hit ' *i' '-»•
aproximadamente 130 y 190 Km. sobre la superficie. Al desplazarse las
señales de radiofrecuencia a través de la ionosfera, se hacen más lentas en
una magnitud que varía dependiendo de la hora del día, la actividad solar y
otros factores.
Error atmosférico.-- Se introduce otro error cuando la señal pasa a través de la
atmósfera. El vapor de agua de la atmósfera hace más lentas a las señales de
radiofrecuencia y reduce adicionalmente la exactitud del sistema.
Disponibilidad selectiva.- Desde la puesta en servicio del sistema GPS, el DoD
de los Estados Unidos ha introducido intencionalmente un error en el sistema,
llamado disponibilidad selectiva (SA), con el objeto de negar los beneficios de
la exactitud del sistema GPS en situaciones bélicas (error de ± 100 mts.). A
partir del 01-Mayo-2000 el gobierno de los Estados Unidos de América decidió
retirar esta disponibilidad selectiva, por lo que el error de posición ahora esta
en el rango de 10 á 25 metros para cualquier usuario, y teniendo la capacidad
de activar la disponibilidad selectiva para que afecte a una determinada región
del mundo, en caso de ser necesario.
78

Error del receptor.- El receptor de a bordo puede introducir una cierta'cantidad
de error durante las diversas etapas del procesamiento de las señales
recibidas de los satélites. Estos errores pueden ser causados por el ruido
térmico, la precisión del software, y el error de vías entre canales de recepción.
Error de efemérides (posi'ción) del satélite.- Este error se refiere a que un
satélite puede estar realmente en una posición un poco distinta a la que viene
transmitiendo hacia los receptores.
Cuando se requiere de mayor exactitud se recurre a diferentes técnicas de
corrección (o aumentación), las cuales comparan la posición calculada versus
la posición real de un punto de referencia (medido) obteniéndose una cantidad
de error reducida que es retransmitida (generalmente por radiofrecuencias) a
los usuarios para que se hagan los ajustes del caso.
2.3.6 SISTEMAS DE AUMENTACIÓN PARA EL GNSS
Debido a que el GNNS presenta ciertas limitaciones y que por si solo (sin
aumentación) no cumple con todos los requerimientos que la navegación aérea
civil exige, se ha estado investigando sistemas de aumentación que den ai GNNS
la total capacidad de navegación
Para superar las limitaciones intrínsecas del sistema y satisfacer los requisitos de
performance (exactitud, integridad, disponibilidad y continuidad) para todas las
etapas de vuelo, el GNSS requiere diversos grados de aumentación.
Las aumentaciones se clasifican en tres amplias categorías:
- Basadas en satélites (SBAS, Satellite Based Augmentaron System,
Sistema de Aumentación Basado en Satélites),
- Basadas en tierra (GBAS, Ground Based Augmentation System, Sistema
de Aumentación Basado en Tierra); y,
- Basadas en aeronaves (ABAS, Aircraft Based Augmentation System,
Sistema de Aumentación Basado en Aeronave).
79

Aunque se están realizando ensayos en algunos países desarrollados sobre estos
sistemas, cabe recalcar que algunos de ellos se encuentran en fase de estudio y
desarrollo.
2.3.6.1 Sistema de Aumentación Basado en Satélites (SBAS)
Una manera de suministrar cobertura de aumentación en grandes extensiones,
consiste en usar los satélites para transmitir información sobre la aumentación.
Esto se conoce como aumentación basada en satélites (SBAS).
SiSTEMADE AUMENTACIÓN BASADO EN SATÉLITES
Saleaste
S '
/ M - i InformaciónMemujede jonnsfWfM y d
Auiiwitodiui Jíavosiadón
GOSEsiocíónMaestra
t¡^
D ¿
?K
.mimá
Erna clonils
RoTonmcto
Figura 2,15: Arquitectura de! SBAS
La arquitectura básica de todos los sistemas SBAS esta conformado por una red
de estaciones terrestres que determinan el error total de posición en una
determinada región. Esas correcciones son transmitidas al avión por medio de
satélites geoestacionarios. Luego el receptor de a bordo ajusta la información
recibida directamente de los satélites GPS con las correcciones recibidas de los
satélites geoestacionarios, para así navegar con más precisión. (VerFíg. 2.15)
80

El SBAS, utiliza satélites geoestacionarios (Ver Fig. 2.16) que presentan algunas
limitaciones y por lo tanto no puede preverse que sustentará todas las etapas de
vuelo, especialmente la aproximación y el aterrizaje. Como estos satélites giran
en órbita por encima del ecuador, sus señales no serían perceptibles en las
regiones polares y pueden quedar enmascaradas por la estructura de la aeronave
o el terreno. Esto sugiere que quizá sea necesario estudiar otras órbitas de
satélites para aumentación GNSS o aumentación basada en tierra para atenuar
estos defectos.
CIÓflr ESRidA-L BEL SSIS3J
\3
3 0 C:t>
Figura 2.16: Aumentación del SBAS con satélites geoestacionarios
SBAS es un término que comprende todos los sistemas de aumentación basadas
en satélites que están en desarrollo actualmente, más cualquier otro que sea
desarrollado en el futuro. Las entidades que han desarrollando actualmente
sistemas SBAS son la FAA (Administración Federal de Aviación de los Estados
Unidos) (el WAAS), un consorcio europeo (el EGNOS) y el Estado Japonés (el
MSAS).
2.3.6,1.1 Sistema de Aumentación de Área Amplia (WAAS / Wide Área Aiigmentation
System).
El sistema dado por la FAA, es denominado Sistema de Aumentación de Área
Amplia o WAAS y es desarrollado para obtener, a nivel regional, la exactitud,
integridad, disponibilidad y continuidad necesaria para usar el GNNS como medio
principal para aproximaciones de vuelo en ruta y área terminal.
81
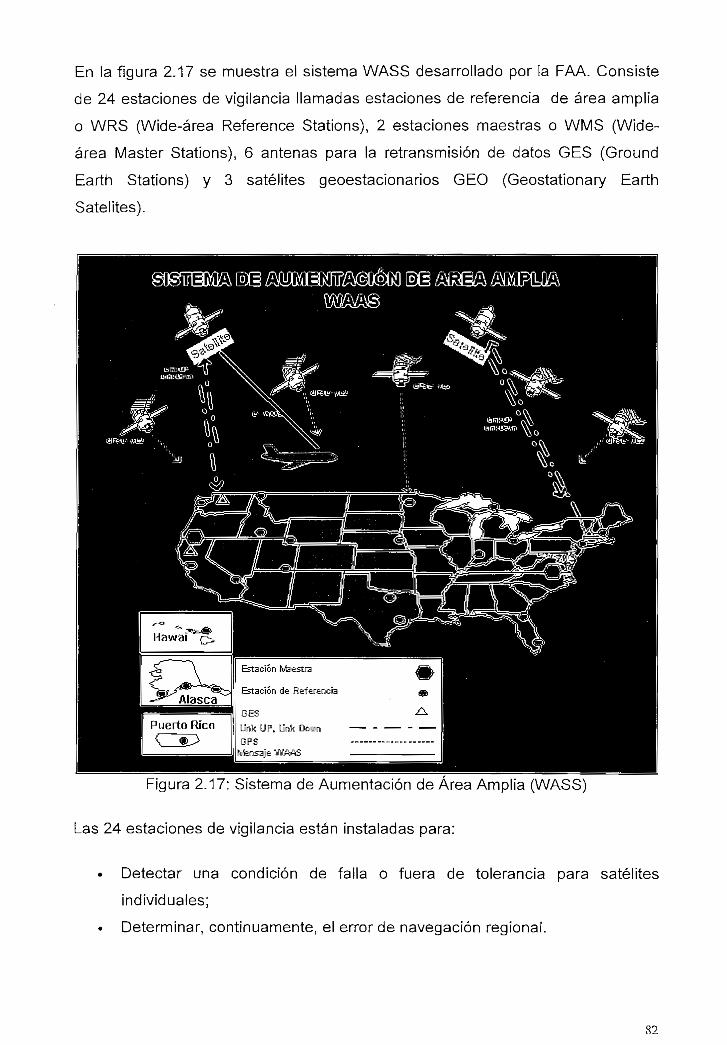
En la figura 2,17 se muestra el sistema WASS desarrollado por la FAA. Consiste
de 24 estaciones de vigilancia llamadas estaciones de referencia de área amplia
o WRS (Wide-área Reference Stations), 2 estaciones maestras o WMS (Wide-
área Master Stations), 6 antenas para la retransmisión de datos GES (Ground
Earth Stations) y 3 satélites geoestacionarios GEO (Geostationary Earth
Satélites).
Estación Maestra
Estación de Referencia
GES
Link UP. ü'nk Doum
GPStofensaje WAAS
Figura 2,17: Sistema de Aumentación de Área Amplia (WASS)
Las 24 estaciones de vigilancia están instaladas para:
• Detectar una condición de falla o fuera de tolerancia para satélites
individuales;
• Determinar, continuamente, el error de navegación regional.
82
Cuando se detecta una condición de falla de un satélite, se transmitirá
inmediatamente una notificación a los receptores de a bordo mediante los
satélites geoestacionarios.
Al recibir la señal de un satélite GPS, el sistema WAAS compara la posición real
de una estación monitora con la posición indicada por los satélites GPS que están
visibles. Un procesador calcula la diferencia entre la posición real y la indicada,
esta diferencia es transmitida al receptor GPS de la aeronave. La aviónica GPS
incorpora esta información diferencial en el cálculo de la posición de la aeronave,
así se logra navegar de una manera más precisa.
Los elementos que componen el Sistema WAAS son:
Estaciones de Referencia de Área Amplía (WRS).- Lo que hace cada estación es
observarlas señales GPS y la señal de corrección WAAS y transmitir los datos a
las estaciones maestras. Todas las WRS contienen al menos un receptor de
frecuencia dual (L1 y L2) conectado a un oscilador de Cesio, (reloj de gran
precisión), un sensor meteorológico, un procesador y hardware de red para
transmisión de datos en red hacia las estaciones maestras.
Estaciones Maestras de Área Amplia (WMS).- Toman los datos de las estaciones
de referencia (WRS), verifican las señales de corrección anteriores y generan una
nueva señal de corrección WAAS. Esta señal de corrección es transmitida a
través de las estaciones terrenas a los satélites geoestacionarios, como p.ej los
de InMarSat o satélites exclusivos, para ser enviadas a los receptores a bordo de
las aeronaves.
Estaciones de Comunicaciones (GES).- Son estaciones terrenas o UpLink's,
estas se encargaran de recibir la señal de corrección WAAS de la WMS y
retransmitirla a los satélites Geoestacionarios, los que en forma broadcasting
transmitirán las correcciones hacia los receptores WAAS.
Satélites Geoestacionaríos (GEOs).- Transmiten la señal de corrección en la
banda de frecuencia L1 del GPS, pero usan un código pseudo-aleatorio diferente
al de los satélites GPS. Las antenas receptoras del WAAS podrían ser
incorporadas directamente en el receptor GPS.
83

Receptores del WAAS.- Son equipos receptores GPS con la capacidad de poder
recibir la información de corrección WAAS de los satélites Geoestacionarios del
sistema WAAS.
Estos equipos pueden integrar las nuevas ayudas de navegación basadas en la
señal de satélite reemplazando a las actuales ayudas para la navegación de largo
alcance, tales como Loran y Omega.
El WAAS, reduce las posibilidades de accidentes contra tierra durante vuelos
controlados y aproximaciones, eliminará los costos asociados en el
mantenimiento de los instrumentos de navegación más antiguos con base
terrestre tal como los NDB, VOR, DME y los ILS., reducirá el número de piezas de
equipos a bordo de la aeronave y requerirá sólo un pequeño receptor montado en
la cabina y una antena.t*•:<! - -. - r* tsn*? ' • » • • •**•
Además permitirá reducir los estándares que gobiernan la separación entre
aeronaves en vuelo, permitiendo alojar un mayor número de ellas en un espacio
dado, sin aumentar los riesgos.
2.3.6.1.2 EGNOS (Servicio de superposición de navegación global europeo / European
Global Navigation Overlay Service).
La Agencia Espacial Europea, La Comisión Europea y la Organización Europea
por la seguridad de la Navegación Aérea (Eurocontrol) se unieron para desarrollar
el EGNOS, Sistema de Aumentación de Europa para navegación por satélite.
Este proyecto dará a los usuarios civiles del GPS o GLONASS en tierra, en el mar
o en el aire la precisión, integridad y disponibilidad mejorada.
EGNOS ofrecerá múltiples ventajas a sus usuarios, proporcionando mejoras
considerables en cuanto a calidad de servicio, eficiencia y seguridad en todos los
modos de transporte. Además permitirá nuevas aplicaciones en diferentes
campos como la agricultura, la pesca, la geodesia, etc.
2.3.6.1.3 JAPANES MSÁS (Multi-Functional Satellite Augnientatión System)
Japón está desarrollando un sistema de aumentación llamado Sistema de
Aumentación Basado en Satélites MTSAT (MSAS). MSAS está basado en un
satélite multifuncional (MTSAT), el cual tiene también una función metereológica.
Aunque el sistema de software del MSAS esta basado en el WAAS presenta
diferentes capacidades que los sistemas WAAS, porque incluirá dos modos de
comunicación, voz y datos. Esta capacidad de comunicación será usada para
brindar Vigilancia Automática Dependiente (ADS). Específicamente, MSAS esta
basado en el concepto de la OACI incluyendo: GNSS para navegación; y Servicio
Satelital Móvil Aeronáutico (AMSS) para dos modos voz/datos incluyendo ADS.
2.3.6.2 Sistema de Aumentación Basado en Tierra (GBAS)
El funcionamiento básico del GBAS es el siguiente:
Una estación diferencial es instalada cerca de un aeropuerto, con un
conocimiento muy preciso de su posición. Forman parte de la estación GBAS un
receptor y un procesador que comparan la posición real de la estación con la
posición obtenida por ios satélites visibles. Las correcciones diferenciales son
transmitidas directamente al receptor de a bordo de la aeronave mediante un
enlace de datos VHF.
Se están desarrollando los sistemas GBAS para uso local con coberturas de
hasta aproximadamente 20 o 30 millas de la estación en tierra. Esto hace posible
una precisión más exacta que la ofrecida por el sistema SBAS. Si no hay terreno
ni obstáculos que impidan la vista libre a la estación, se pueden desarrollar
aproximaciones con más precisión para todas las cabeceras de las pistas de
aterrizaje dentro del área de cobertura.
Los sistemas GBAS se diferencian de los Sistemas de Aumentación Basados en
Satélites (SBAS), en que ellos no dependen de los satélites Geoestacionaríos,
debido a que el GBAS no esta diseñado para brindar su servicio sobre amplias
regiones geográficas.
85

Las correcciones que el sistema GBAS envía a las aeronaves pierden validez a
medida que las aeronaves se alejan de los aeropuertos donde los equipos GBAS
están instalados. Sin embargo, la performance del sistema GBAS en las
inmediaciones del aeropuerto (20 a 30 millas) es mucho mejor que la del SBAS.
Actualmente la FAA se encuentra desarrollando este sistema con el nombre deLAAS.
r r
2.3.6.2.1 Sistema de Aumentación de Área Local (LAAS/Local Área Augmentation
System)
El sistema LAAS es un sistema de aumentación basado en tierra; debe ser
instalado en aeropuertos donde los sistemas SBAS tengan mayores exigencias o
limitaciones tales como: zonas polares, lugares donde las señales de los satélites
sean difícilmente recibidas por los receptores.
HAAS
L1.L2
GIPS
IL1.IU2'GPS
LH, U2 / \a 2.18: Sistema de Aumentación de Área Local (LASS)
86

Sus aplicaciones se pueden dar en aeropuertos ubicados en zonas remotas
como son las islas donde solo una estación de referencia censa las señales GPS,
o en una extensa área de red SBAS muy amplia y dispersa. El LAAS puede
también ser usado en aeropuertos donde la demanda del tráfico justifique su
disponibilidad, y en lugares donde es esencial la alta calidad de los sistemas de
navegación pero que no pueden ser suministrados por los sistemas
convencionales. Tal es el caso de los aeropuertos situados en valles y que están
rodeados por áreas extremadamente montañosas.
El sistema LASS es mostrado en la figura 2.18 y las partes de este sistema son:
Estaciones de Referencia de Área Local.- Reciben y recolectan la información de
posición del GPS. Esta es luego enviada a la estación de proceso central.
Estación de Proceso Central de Área Local.- Recibe la información de las
estaciones de referencia y las compara con posiciones conocidas calculadas en
forma precisa, determinando el error del sistema GPS.
Transmisor de Datos de Área Local.- Son transmisores VHF de datos que operan
en la banda aeronáutica de 118 Mhz hasta 136 Mhz, también pueden operar en
banda C; ellos reciben la información de corrección de la estación de Proceso
Central y la transmiten omnidireccionalmente22.
Pseudolites de Área Local.- Pseudolite o Pseudo-satélite trabaja con el principio
del GPS diferencial, esta estación es emplazada en tierra y transmite señales
GPS al igual que los satélites GPS actuales siendo usado por las aeronaves que
se encuentren en la cobertura para calcular su posición, garantizando la
disponibilidad del sistema en todo momento.
2.3.6.3 Sistema de Aumentación Basado en Aeronave (ABAS)
La necesidad de que los sistemas GPS/GLONASS cumplan con el desempeño
de navegación exigida por la Aviación Civil en las distintas fases de vuelo, obliga
a los usuarios a usar los receptores GPS/GLONASS conjuntamente con sistemas
de aumentación que les otorguen el desempeño requerido.
La transmisión de datos es enviada en todas las direcciones.
87

Entre los sistemas que otorgan esta aumentación a los receptores a bordo de la
aeronave se tiene: el de Monitoreo de Integridad Autónoma en el Receptor (RAIM
/ Receiver Autonomous Integrity Monitoring), y el de Identificación y Exclusión de
Fallas (FDE / Fault Detection and Exclusión). Ellos proporcionan la integridad
requerida para utilizar el GNSS como medio único suplementario y principal de
navegación durante las distintas fases de vuelo.
a) Sistema Monitor de Integridad Autónoma del Receptor (RAIM).- El sistema
RAIM detecta la falla de la señal de un satélite del GNSS, comparando la
información sobre posición y tiempo obtenida de diversas combinaciones de
cuatro satélites en un conjunto de por lo menos cinco satélites visibles. De esta
manera, puede detectarse un satélite defectuoso y dar una advertencia al
piloto.
Puesto qué el sistema RAIM no incorpora la capacidad de cancelar la señal de
un satélite defectuoso, no debe seguir usándose la navegación GNNS cuando
el RAIM detecta un satélite defectuoso. El sistema FDE es el que efectúa la
cancelación de un satélite defectuoso.
b) Sistema de Identificación y Exclusión de Fallas (FDE).- El sistema FDE es una
técnica aprobada por la FAA de los E.E.U.U. para excluir un satélite defectuoso
y así permitir que se siga navegando con el GNSS, siempre y cuando existan
suficientes satélites disponibles. Aunque esta técnica no requiere la
incorporación del sistema FDE en los equipos GPS de a bordo, la mayoría de
los nuevos receptores incorporan funcionalidad FDE.
2.4 VIGILANCIA
La vigilancia es la herramienta básica para que el controlador pueda verificar la
separación correcta entre aeronaves, gerenciar el espacio aéreo y asistir al piloto
en su navegación. Está basado en 3 sistemas:
1.- ADS (Automatic Dependent Surveillance, ó Vigilancia Dependiente
Automática).- La aeronave transmite automáticamente su posición a una estación
en tierra, y puede recibir datos digitales por la misma vía.

2.- SSR Mode S (Secondary Surveillance Radar Mode S, o Radar Secundario de
Vigilancia en Modo S).- La aeronave notifica automáticamente su posición, y
también puede recibir datos digitales. El uso de técnicas "monopulso" aumenta
considerablemente la precisión del sistema.
3.- ACAS (Airborne Colusión Avoidance System, o Sistema para Evitar Colisiones
instalado a bordo).- Este sistema alerta al piloto de peligros de colisión
potenciales, e indica el camino más apropiado para evadir el riesgo.
La OAC1 ha identificado al ADS como el sistema clave en torno al que se
construirá el futuro sistema de vigilancia y que posibilitará los cambios requeridos
por el Concepto Operacional ATM en general y por cada usuario particular del
Sistema de Vigilancia.
2.4.1 EL SISTEMA ADS
La OACI define el ADS como "una técnica de vigilancia en la que la aeronave
suministra automáticamente, mediante enlace de datos, información obtenida a
partir de los sistemas de posicionamiento y navegación, incluidas la identificación
de la aeronave, y cualquier otra información adicional que sea necesaria"23.
Por tanto, mediante el empleo del ADS, la aeronave envía la información del
mensaje de vigilancia (informe ADS) a otros sistemas por medio del enlace de
datos. A diferencia de los sistemas convencionales de vigilancia, en los que la
posición de la aeronave se determina directamente desde la estación de tierra,
con el ADS las medidas de posición se realizan a bordo a través de la información
de navegación y posteriormente se envían a los centros de vigilancia.
La implantación del ADS gracias a enlaces de datos más fiables y sistemas de
navegación más precisos, permite proporcionar servicios de vigilancia en áreas no
continentales o carentes de cobertura radar. Además, también se obtendrán
ventajas en vuelos continentales en ruta, en el área terminal o en la superficie de
aeródromo.
23 Circular de OACI 256-ANI152

En vista de esto, el ADS ofrece la posibilidad de:
• Vigilancia basada en tierra. Por ejemplo, vigilancia de aeronaves en vuelo
por sistemas terrestres.
• Vigilancia del entorno. Por ejemplo, tareas de vigilancia llevadas a cabo
desde la propia aeronave. Esto permitiría presentar a la tripulación
directamente la información de vigilancia, mejorando la percepción que se
tiene en la cabina del estado del tráfico.
• Vigilancia en el aeródromo. Por ejemplo, vigilancia de los vehículos
desplazándose en el aeródromo, incluidas las propias aeronaves, llevada a
cabo tanto desde la torre propiamente como desde los equipos
embarcados, previéndose importantes mejoras respecto a las técnicas
convencionales empleadas hasta el momento.
Como se puede apreciar, el ADS permite extender el concepto de vigilancia a
todas las etapas del vuelo, lo que comúnmente se denomina "gate-to-gate", desde
el primer movimiento de la aeronave en pista, pasando por las distintas fases de
vuelo hasta llegar de nuevo a tierra e incluyendo el tramo de rodadura para
alcanzarla puerta.
Para implantar este concepto se han definido dos técnicas de envío de
información a las estaciones terrestres, el ADS-Contract o Addressed (ADS-C o
ADS-A), por contrato24, y el ADS-Broadcast25 (ADS-B).
2.4.1.1 ADS por Contrato (ADS-C)
El ADS por Contrato o ADS-C implica la transmisión de la posición, identidad y
cualquier otra información acerca de la aeronave a una estación terrena. Todas
las comunicaciones entre los sistemas terrestres y los de la aeronave son punto a
punto, produciéndose un flujo de comunicaciones bidireccional entre la función
terrena y la aeronave.
Conocido simplemente como ADS, transmite datos desde la aeronave hacia todas las estaciones en tierracon quienes tenga un contrato preestablecido..
Implica la radiodifusión sobre la posición a múltiples aeronaves o a múltiples dependencias.
90

La función terrena establece un contrato en el que se especifican las
características de los informes transmitidos por la aeronave tales como el ritmo al
que la aeronave transmite la información, el tipo de información enviada y las
condiciones en que debe transmitirse la misma. Dicho contrato es iniciado por la
función terrena y debe ser ratificado por el equipo ADS embarcado en la
aeronave.
Durante el vuelo la aeronave puede establecer simultáneamente diversos
contratos con diferentes estaciones terrenas, los cuales pueden ser modificados o
cancelados a lo largo del vuelo.
En la figura 2,19 se muestra el funcionamiento del ADS-C
Sírvlclo d*comunicación»! *ír»ai
,,
ATSP
Figura 2.19: Funcionamiento del ADS-C
Existen tres tipos básicos de contrato:
> Periódicos: La aeronave transmite los informes ADS-C a intervalos regulares.
> Por evento: La aeronave transmite los informes cuando ocurre cierto suceso.
Dicho suceso puede ser, por ejemplo, un cambio en altitud o velocidad o una
desviación de la ruta prevista.
> A demanda: La aeronave transmite un único informe ADS-C como respuesta
a una petición del ATC.
91

Además de los anteriores, una aeronave también puede transmitir en modo de
emergencia. Dicho modo es iniciado por los sistemas de abordo y no es
realmente un contrato. Así, la aeronave transmite ios informes con una tasa de
repetición determinada a todas las estaciones terrestres con (as que tenga
establecido un contrato previo.
Debido ai enlace de datos punto a punto (transmisión orientada a conexión), la
recepción del mensaje ADS-C está garantizada y es fiable a menos que se
produzca una pérdida total del enlace de datos, y aún en este caso se notificaría
tal circunstancia al emisor. Por tanto, el usuario del ADS-C tiene la certeza de que
o bien los datos serán entregados o bien será notificado del posible fallo en las
comunicaciones.
Las primeras implantaciones del AEDS-0 se han basado en las comunicaciones
por satélite como forma de conseguir el enlace de datos, puesto que el principal
beneficio del ADS surge en aquellas áreas en las que se carece de infraestructura
de vigilancia, por ejemplo áreas oceánicas o continentales con escasa densidad
de tráfico y escasez de infraestructuras disponibles en tierra.
Aunque es técnicamente posible que el ADS-C sea usado para proporcionar
informes de posición en TMAs muy congestionadas y en superficie de aeródromo,
el estado actual de los enlaces de datos disponibles hace que no sea por el
momento un método factible, puesto que la capacidad es insuficiente para
satisfacer los elevados requisitos de velocidad de información impuestos por el
TMA y el control en superficie.
2.4.1.2 ADS-B (ADS Broadcast)
La OACI define el ADS-B como "una técnica de vigilancia en la que se transmiten
parámetros, tales como la posición, velocidad respecto al suelo, mediante un
enlace de datos Broadcast (a todos) y a intervalos de tiempo específicos de tal
modo que puedan ser empleados por cualquier usuario tanto en tierra como en el
aire que los requiera".
92

El ADS-B se basa principalmente en la transmisión frecuente y regular de
informes ADS por medio de un enlace de datos Broadcast. Los informes ADS-B
son enviados periódicamente por la aeronave sin intervención alguna de la
función terrena. Estos informes pueden ser recibidos y procesados por cualquier
receptor en el entorno de la aeronave. En el caso de una unidad terrena de
adquisición de datos, el informe ADS-B se procesará junto a otros datos de
vigilancia y será empleado tanto para funciones ATM como no-ATM.
Figura 2,20: Funcionamiento ADS-B.
El ADS-B ofrece la posibilidad del envío de información de vigilancia aire-aire o
aire-tierra. La transmisión directa aire-aire hace que no sea necesaria la
intervención de un segmento terrestre para la realización de las tareas de
vigilancia a bordo de la aeronave.
Además, el empleo de informes ADS-B procedentes de las aeronaves del entorno
permite la presentación en la cabina de una imagen clara del estado del tráfico.
Cabe señalar que esta aplicación de vigilancia directa aire-aire es característica
del ADS-B y no es ofrecida actualmente por el ADS-C.
93

Los datos de vigilancia transmitidos por el ADS-B incluyen, entre otros, el
identificador de vuelo, la posición, el tiempo y la categoría de emisor; aunque
también se puede informar del vector terrestre, vector aéreo, maniobras
inmediatas de la aeronave, radios de giro, tipo de aeronave o actuaciones
esporádicas ante sucesos puntuales.
Los informes ADS-B carecen de acuse de recibo. Por tanto, la aeronave
desconoce qué receptores, si es que existe alguno, han recibido y están
procesando sus informes, dado que cualquier aeronave o equipo de tierra en el
entorno puede recibir y procesar la información.
En este sentido, el ADS está estrechamente vinculado con la transmisión de
información de vigilancia de tierra a aire, servicio conocido habitualmente como
Traffic Information Service (TIS Servicio de Información de Tráfico) o TIS
Broadcast (TIS-B). En particular, para el caso'del TIS-B, la estación terrena
encargada de generar el mensaje no tiene conocimiento de qué sistemas están
recibiendo su señal, que puede ser procesada por cualquier aeronave o estación
convenientemente equipada.
2.4.2 SISTEMA ANTICOLISIÓN DE A BORDO (ACAS)
El objetivo fundamental del ACAS (Airborne Colusión Avoidance System) es
mejorar la seguridad aérea a través de un "último recurso" que evite la colisión
entre aeronaves o situaciones próximas a la colisión.
El sistema ACAS se basa en la utilización de las señales de transpondedor del
radar secundario de vigilancia (SSR), funcionando independientemente de las
radioayudas instaladas en tierra y del control de tránsito aéreo (ATC).
El sistema proporciona avisos de alerta al piloto sobre posibles conflictos entre
aeronaves dotadas de transpondedores SSR.
94

2.4.2.1 Principios básicos del ACAS
El Sistema ACAS es un sistema autónomo de la aeronave que funciona
independientemente de los equipos de navegación y radioayudas utilizadas para
los servicios de tránsito aéreo.
El sistema está basado en las señales transmitidas a 1030 MHz por el
transpondedor de radar secundario de vigilancia (SSR), llamadas interrogaciones,
similares a las de los radares de control de tránsito aéreo.
Una vez que la señal es recibida por el transpondedor de una aeronave próxima,
ésta envía una respuesta. Mientras se envían interrogaciones y se reciben las
respuestas transmitidas a 1060 MHz, el ordenador del ACAS calcula la distancia a
la que se encuentran las aeronaves y gracias a las antenas direccionales se
" determina la dirección de las mismas. Si el transpondedor de la aeronave
proporciona también datos de altitud, el sistema presenta en pantalla la altitud
relativa e indica si está subiendo o descendiendo.
La principal característica del ACAS es que funciona de acuerdo a criterios de
tiempo y no de distancia. De las distintas respuestas sucesivas, ACAS calcula el
tiempo para alcanzar el punto de aproximación más cercano con el intruso (CPA,
Closest Point of Approach), dividiendo la distancia por la velocidad de
acercamiento. Este valor en tiempo es el principal parámetro para emitir las
alertas, cuyo tipo depende de su valor.
2.5 GESTIÓN DE TRAFICO AÉREO (ATM)
El término Gestión del Tránsito Aéreo es usado para describir las actividades
relacionadas con la administración del espacio aéreo y del manejo de tránsito,
ejecutadas en forma integrada por las autoridades aeronáuticas de cada Estado.
Se relaciona con la planificación, organización y uso efectivo del espacio aéreo,
así como del movimiento seguro y ordenado de las aeronaves en los espacios
aéreos que corresponda.
95

La gestión del tráfico aéreo tiene como uno de sus objetivos fundamentales
asegurar que la capacidad del Sistema de Navegación Aérea pueda hacer frente
a la demanda de tráfico aéreo existente en cada momento.
El objetivo general de la ATM consiste en que los explotadores de las aeronaves
puedan cumplir con las horas previstas de salida y llegada y seguir perfiles de
vuelo preferidos con un mínimo de limitaciones y sin que se comprometa el nivel
convenido de seguridad.
Para lograr este objetivo, el sistema debe evolucionar a partir del sistema actual
de modo que satisfaga las necesidades de los usuarios en la mayor medida
posible, aprovechando al mismo tiempo los beneficios potenciales de la aplicación
de las nuevas tecnologías que ofrecen los sistemas CNS, mediante una
armonización internacional de las normas y procedimientos ATM.
2.5.1 ATM POR FASES DE VUELO DE LA AERONAVE
2.5.1.1 Operaciones aeroportuarias
Aumentar la capacidad de los aeropuertos es un objetivo importante del sistema
ATM del futuro. El diseño de este sistema contribuirá a este objetivo implantando
técnicas, procedimientos y tecnologías que utilizarán- plenamente los escasos
recursos de capacidad, permitiendo un mayor rendimiento del tránsito y
maximizando las eficiencias operacionales, tanto para la aproximación como para
la salida.
Además, gracias a niveles superiores de colaboración y de información
compartida entre los usuarios y proveedores de ATM, se obtendrá un cuadro más
realista de la demanda de salidas y llegadas en el aeropuerto, permitiendo a los
usuarios adoptar decisiones en cuanto a programación de horarios y planificación
de los vuelos.
96

2.5.1.2 Operaciones en Área Terminal y en Ruta
El Sistema ATM supervisará los recursos y demanda de capacidad en los
aeropuertos, en el espacio aéreo terminal y en ruta. Aplicará estrategias de
gestión de la afluencia, cuando sea necesario, para impedir que se produzcan
niveles excesivos de congestión.
Mediante instrumentos mejorados que facilitarán la decisión en los casos de
detección y solución de conflictos, así como para la gestión de la afluencia, se
obtendrá mayor capacidad para admitir los perfiles de vuelo y los horarios
preferidos por los usuarios. Se integraran las funciones de la ATM en área
terminal y en ruta, para proporcionar un sistema en el cual las corrientes de
tránsito entren y salgan fluidamente de las áreas terminales.
Se ampliaranj!'ías;-estructuras de rutas de salida y de llegada para permitir-una
mayor utilización de rutas RNAV (Navegación de Área) basadas en requisitos
RNP (Performance de Navegación Requerida).
2.6 VENTAJAS DE LOS SISTEMAS CNS/ATM
El objetivo final del sistema CNS/ATM es el de proporcionar un sistema rentable y
eficaz, adaptable a todo tipo de operaciones en la mayor libertad
cuatridimensional (en el espacio y en el tiempo).
Así, se reconoció que el sistema general de navegación aérea existente y sus
subsistemas adolecían de varias deficiencias de carácter técnico, operacionales,
de procedimientos, económicas y en su aplicación.
Debido a esto, es necesario encontrar nuevos enfoques, mediante los cuales se
pudieran superar las limitaciones y que además, estos permitieran la evolución de
los sistemas ATS hacía un sistema ATM que respondiera mejor a las necesidades
de los usuarios. Por lo tanto, los sistemas CNS/ATM tendrían que permitir
importantes mejoras en materia de seguridad operacional, eficacia y flexibilidad a
escala mundial.
97

A continuación se resumen las ventajas de los cuatro elementos principales de los
sistemas CNS/ATM.
En Comunicaciones, los beneficios que se prevén de los futuros sistemas residen
en el hecho de que permitirán una vinculación más directa y eficaz entre los
sistemas automáticos de tierra y de a bordo, conjuntamente con las
comunicaciones entre el piloto y el controlador. En realidad, los enlaces de datos
digitales pueden considerarse como la clave del desarrollo de nuevos conceptos
ATM que permitirán lograr verdaderos beneficios.
En Navegación, el GNSS ofrecerá un servicio de navegación mundial de alta
integridad, alta precisión y utilizable en todo tiempo. La implantación exitosa del
GNSS permitiría que las aeronaves vuelen en todo tipo de espacio aéreo en
cualquier parte del mundo, lo cual ofrecerá a muchos Estados la posibilidad de^ r V. . -H* • --•-• -T- * -MÍUJ» ' '-5' T*'
desmantelar parte de su infraestructura terrestre existente para la navegación
aérea, o quizás toda ella. Sin embargo debería precederse con precaución en
cuanto a retirar las radioayudas para la navegación tradicionales y esto después
de que una evaluación de la seguridad haya demostrado que puede lograrse un
nivel aceptable de la misma.
En Vigilancia, la mayor novedad es la implantación de la vigilancia dependiente
automática (ADS). El ADS permite que las aeronaves transmitan
automáticamente su posición y otros datos, tales como el rumbo, la velocidad y
demás información valiosa contenida en el sistema de gestión de vuelo (FMS3
Flight Managment System), a través de satélites o por otros enlaces de
comunicaciones, a una dependencia de control de tránsito aéreo (ATC) en la cual
la posición de la aeronave se presentará de modo semejante a una pantalla radar.
También puede verse la ADS como una aplicación que representa la verdadera
fusión de las tecnologías de comunicaciones y navegación y, junto con las
mejoras en la automatización de los sistemas terrestres, permitirá introducir
progresos importantes para la ATM, especialmente en el espacio aéreo oceánico.
Actualmente se está elaborando soporte lógico que permitiría usar estos datos
directamente en computadoras en tierra y para detectar y resolver conflictos. Por
último, esto podría permitir que se tramiten autorizaciones entre computadoras de
a bordo y en tierra, con poca o ninguna intervención de seres humanos.
En lo que se refiere a Gestión de! Tránsito Aéreo (ATM), al considerar la
implantación de ios nuevos sistemas de comunicaciones, navegación y vigilancia
y de todas (as mejoras previstas, puede verse que el principal beneficiario en
general será la ATM.
Cuando se hace referencia a la ATM en el concepto del futuro, significa mucho
más que control del tránsito aéreo. En realidad, ATM se refiere a un concepto de
organización del sistema en una escala mucho más amplia, que incluye el ATS, la
organización de la afluencia del tránsito aéreo (ATFM), la gestión del espacio
aéreo (ASM) y las operaciones'de vuelo.
En última instancia, esto permitiría a los explotadores de aeronaves efectuar sus
vuelos de conformidad con sus trayectorias preferidas, ajustadas dinámicamente,
del modo más óptimo y eficiente en cuanto al costo. En la Figura 2.21 se muestra
cómo beneficiará a la ATM la utilización de las tecnologías CNS.
2.6.1 BENEFICIOS PARA LOS ESTADOS
Para los Estados que suministran y mantienen amplias infraestructuras en tierra,
se prevé una reducción en el costo general de la explotación y mantenimiento de
las instalaciones, a medida que los sistemas tradicionales en tierra se vuelvan
obsoletos y se emplee cada vez más la tecnología basada en satélites. También
se beneficiarán con una mejor seguridad operacional.
Los sistemas CNS/ATM brindan a los Estados en desarrollo una oportunidad
conveniente de mejorar su infraestructura para atender más tránsito con una
mínima inversión. Muchos de esos Estados poseen grandes extensiones de
espacio aéreo disponible pero inutilizable, debido sobre todo a los gastos que
suponen la adquisición, explotación y mantenimiento de las infraestructuras
necesarias en tierra.
99

GESTIÓN DEL TRÁNSITO AEREO (ATM)
Mayor seguridad en los vuelos.Mayor capacidad del sistema; utilización másóptima de la capacidad del aeropuerto.Menos retrasos en los vuelos.Reducción de los costos de explotación de losvuelos.Reducción del consumo de combustible y de lasemisiones de gases.Mayor eficiencia en la utilización de! espacioaéreo; más flexibilidad; separación reducida entrelas aeronaves.Planificación más dinámica de los vuelos; másfacilidad para dar cabida a los perfiles de vuelosóptimos.Menos carga de trabajo del controlador/aumentode productividad.
COMUNICACIONES
. Enlaces.áerótiáÉÉi Pi• • '••-;*' '.><xtí^^$£m/í&t&-directos y ftcie;nMs»f ''
jcanales.Menoscomunicaciones; ;-,:':í§?tóij', L -r •* •- ?.-'&^iim3$&$m
• InterfuncLpnamJ .ra^^p.s^díStintaS arilí^á/Sf^ras^f^-,-.ly. ai/;1.
Menor
NAVEGACIÓN VIGILANCIA
Menos errores en losinformes de posición.Vigilancia en losespacios aéreos nodotados de radar.Ahorros de costosMayor capacidad derespuesta delcontrolador a loscambios en el perfil devuelo.Mejor asistencia encasos de emergencia.
Figura 2.19sistemas.26
Visión panorámica de los beneficios que reportarán los nuevos
1 Plan Mundial de Navegación de los sistemas CNS/ATM (Biblioteca DAC)
100

CAPITULO 3
Transición de los sistemas actuales a los sistemas CNS/ATM
Los sistemas actuales para comunicaciones, navegación y vigilancia, han sido
implantados y operados en su mayoría por cada Estado/Territorio de acuerdo a
las reglamentaciones establecidas por la OACI. Sin embargo, los nuevos sistemas
CNS/ATM son de carácter mundial y como tales, se deben planificar e implantar a
nivel regional o mundial.
La implantación de los sistemas CNS/ATM exige una considerable inversión en el
área de gestión del tránsito aéreo (ATM), así como en la infraestructura necesaria
para la comunicación y navegación. La magnitud de las inversiones involucradas
y la capacidad que se proporcionará suelen ser tales, que no resultaría posible,
factible, ni práctico para un Estado/Territorio implantar tales sistemas únicamente
para su uso exclusivo.
Por tal motivo, la OACI recomienda una implantación regional/mundial, que
puede ser llevada a cabo por entidades regionales colectivas o proveedores de
servicios comerciales. Como resultado, muchos Estados/Territorios pueden
simplemente adquirir los servicios CNS con una mínima inversión en la
implantación local de los sistemas.
De acuerdo a lo expuesto, en el presente capítulo se va a realizar el estudio del
proceso de transición para el Ecuador, y no para la Región CAR/SAM (Países del
Caribe y Sudamérica) como lo recomienda la OACI, pues tal proceso requiere la
coordinación y planificación a nivel internacional.
La implantación de los sistemas CNS/ATM, implica una etapa de transición de los
actuales sistemas basados en tierra a los nuevos sistemas basados en satélites,
debiéndose destacar un período de coexistencia entre ambos sistemas. Portante
se prevé una introducción gradual de los sistemas satelitales, primero para su
empleo como sistema complementario de navegación, más adelante como
sistema principal y finalmente como único sistema.
101

Para introducir los sistemas CNS/ATM en el Ecuador, dentro de su espacio aéreo
designado y denominado como FIR Guayaquil, se tiene que realizar una
planificación estratégica; considerando pronósticos de tráfico aéreo, y realizando
un análisis de los sistemas con los que actualmente se cuenta; para de esta
manera poder implantar el Nuevo Sistema de Navegación Aérea, desarrollado por
la OACI, el cual mejorará la eficacia y capacidad del sistema de navegación aérea
actual.
Es necesario que durante la transición se asegure como mínimo el nivel de
seguridad que se ha alcanzado hoy en día, incorporando progresivamente
mejoras en la. navegación aérea. También se contemplará no recargar
innecesariamente a las aeronaves con la necesidad de llevar una multiplicidad de
equipos GNS, los existentes y otros nuevos, durante el prolongado ciclo de
transición. .
3.1 ANÁLISIS DE TRAFICO AEREO
A medida que aumentan los volúmenes de tránsito aéreo en todo el mundo, se
intensifican las demandas sobre los proveedores de ATS (Servicios de Tránsito
Aéreo / Air Traffic Services) en un espacio aéreo determinado y se hace más
compleja la gestión del tránsito aéreo.
Con el incremento de la densidad de tránsito aéreo, aumenta la cantidad de
vuelos que no pueden seguir una trayectoria de vuelo óptima. Esto crea una
presión para mejorar el nivel de ATS, reduciendo las normas de separación, entre
otras cosas.
La Fig. 3.1, muestra los Servicios de Aeronavegación actuales, que comprenden
el Servicio de Tránsito Aéreo (ATS), Meteorología (MET), Información Aeronáutica
(AIS) y Alerta (SAR), los cuales están soportados por Sistemas de
Comunicaciones, Navegación, Vigilancia, Ayudas luminosas y Energía; además
indica los cambios que se deben realizar para introducir los nuevos sistemas
CNS/ATM. El control de calidad de estos servicios y sistemas se realiza mediante
un área de Inspección en Vuelo.
102

El objetivo final de estos servicios de aeronavegación es brindar fluidez y
seguridad a las operaciones aéreas y por lo tanto a los pasajeros.
SEGURIDAD-OPERACIONES AÉREAS
SERVICIOS DE AERONAVEGACIÓJ
Tránsito Aéreo
(ATS)••••••»•••»•»••••••••«••
G ostrón delTránsito Aéreo
ATM
Meteorología(MET)
Información
Aeronáutica
(AIS)
AJerta(Búsque-da ySalvamento
SAR)
^>S I S T E M A S
COMUNICACIÓN(Voz)
COMMUNI CATIÓNRcdATN(Datos )
NAVEGACIÓh(Radloayudas )
.NAVIGATIONGNSS
( Soto lita I)
VIGILANCIA
(Radar)
SURVEILLANCEADS
(Sal-VDL-Modcfi)
AYUDAS
LUMINOSAS
Sis
Inspección
en Vuelo
tomas/Scrv.
TI n TTENERGÍA ELÉCTRICA
ActualesNuevosCNS/ATM
Figura 3.1: Servicios y Sistemas de Aeronavegación
Se prevé que la implantación de ios sistemas CNS/ATM permitirá proporcionar
capacidad suficiente para satisfacer la creciente demanda de movimiento de
aeronaves, produciendo a la vez beneficios adicionales en términos de perfiles de
vuelo más eficaces y niveles superiores de seguridad operacional.
La transición debe prever los medios necesarios para identificar las necesidades
en materia de ATM, a partir de áreas homogéneas27 reconocidas y de los
principales flujos de tránsito aéreo, determinando luego los elementos del sistema
CNS necesarios para satisfacer las necesidades de la ATM.
Por tanto, para determinar la factibilidad que tiene el nuevo sistema de
navegación en el Ecuador, se realizará un análisis de tráfico aéreo, el cual se
basa en pronósticos del número de movimientos de aeronaves (vuelos) para cada
ruta en los próximos 10 años; de esta manera se definirá los requerimientos que
tiene el país, y la forma en que se implantará el nuevo sistema CNS.
Conjunto de rutas que siguen un mismo camino, las cuales forman la aerovía
103
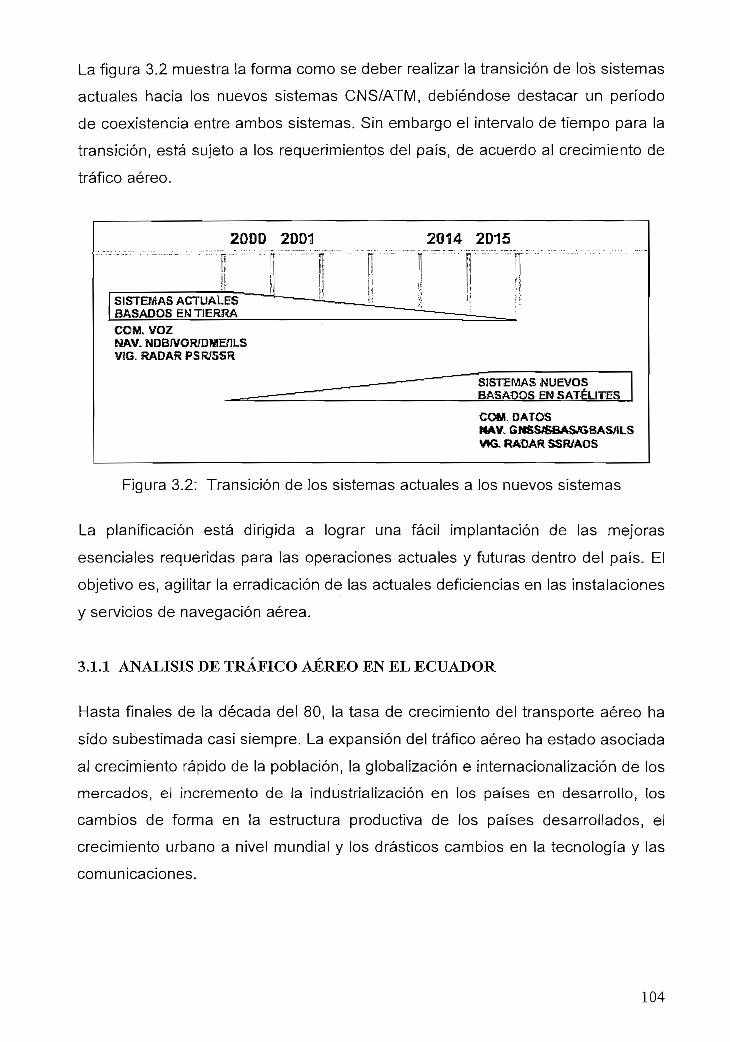
La figura 3.2 muestra la forma como se deber realizar la transición de los sistemas
actuales hacia los nuevos sistemas CNS/ATM, debiéndose destacar un período
de coexistencia entre ambos sistemas. Sin embargo el intervalo de tiempo para la
transición, está sujeto a los requerimientos del país, de acuerdo al crecimiento de
tráfico aéreo.
200D 2001 2014 2015
SISTEMAS ACTUALESBASADOS EN TIERRACOM. VOZMAV. NDBJVQR/DMBILSVJG. RADAR PSR/SSR
SISTEMAS NUEVOSBASADOS EN SATÉLITES
COM. DATOSHAV. GNSSíSBAS/GBAS/lLSVfó. RADAR SSR/AOS
Figura 3.2: Transición de los sistemas actuales a los nuevos sistemas
La planificación está dirigida a lograr una fácil implantación de las mejoras
esenciales requeridas para las operaciones actuales y futuras dentro del país. El
objetivo es, agilitar la erradicación de las actuales deficiencias en las instalaciones
y servicios de navegación aérea.
3.1.1 ANÁLISIS DE TRÁFICO AÉREO EN EL ECUADOR
Hasta finales de la década del 80, la tasa de crecimiento del transporte aéreo ha
sido subestimada casi siempre. La expansión del tráfico aéreo ha estado asociada
ai crecimiento rápido de la población, la globalización e internacionalización de los
mercados, el incremento de la industrialización en los países en desarrollo, los
cambios de forma en la estructura productiva de los países desarrollados, el
crecimiento urbano a nivel mundial y los drásticos cambios en la tecnología y las
comunicaciones.
104

Sin embargo, el crecimiento futuro del transporte aéreo, depende
fundamentalmente del crecimiento económico y del intercambio de comercio, así
como de la evolución de los costos de operación de las líneas aéreas, los mismos
que a su vez, dependen en gran parte del comportamiento de los precios del
combustible. Además, este también está sujeto al grado en que la industria haga
frente a problemas relacionados con la congestión en los aeropuertos y en el
espacio aéreo, así como con la protección del medio ambiente y la necesidad
creciente de inversiones de capital.
Por tal motivo, la predicción de la demanda del tráfico aéreo no es una tarea fácil,
y cuando ésta es incorrecta, queda afectada la capacidad de reacción de todo un
sistema de transporte ante los cambios de tráfico. A pesar de las dificultades
inherentes a la realización de pronósticos del transporte aéreo, estas son
necesarias, perlas siguientes razones:
• Para ayudara las líneas aéreas en sus planes de negocios e inversiones a
corto, mediano y largo plazo.
• Para colaborar con la administración central (D.G.A.C., Dirección General
de Aviación Civil) en el ordenado desarrollo de la red de aerovías
nacionales e internacionales; y,
Para ayudar en todos los niveles de la administración a la planificación de
las infraestructuras (incluyendo, por ejemplo instalaciones terminales, vías
de acceso, pistas de vuelo, calles de rodadura, estacionamientos y control
terminal de tráfico aéreo).
• Para determinar los requerimientos operacionales y técnicos que tiene el
país en cuanto a comunicaciones, navegación y vigilancia.
Por lo tanto, para planificar el proceso de transición a los nuevos sistemas
CNS/ATM en el Ecuador, es necesario conocer el crecimiento aproximado del
tráfico aéreo en la FIR Guayaquil durante los próximos 10 años. Esto servirá de
base para realizar una planificación estratégica en la implantación del nuevo
sistema de navegación satelital.
105
Para realizar el pronóstico del número de movimientos de aeronaves en el
Ecuador, en primer lugar se deben reconocer las Áreas Homogéneas de acuerdo
a la carta de navegación de la FIR Guayaquil, los principales flujos de tránsito
aéreo internacional y nacional; y, realizar el pronóstico de movimientos de
aeronaves en las diferentes rutas, aerovías, y en cada TMA28 (Terminal
Management Área / Área de Control Terminal) de la FIR Guayaquil.
De acuerdo a los pronósticos establecidos, se le asignará a cada ruta un valor
RNP29 (Desempeño Requerido de Navegación / Required Navigation
Performance), el cual indica la separación lateral y longitudinal de las aeronaves
en ruta y por consiguiente los requerimientos que tendrá a futuro en
Comunicación, Navegación y Vigilancia cada una de ellas.
3.1.1.1 Áreas Homogéneas y sus pronósticos
Una aerovía es considerada como un área homogénea, pues cada aerovía está
formada por un conjunto de rutas que siguen un mismo camino. La D.G.A.C.
(Dirección General de Aviación Civil) del Ecuador es la encargada de planificar las
aerovías, las mismas que se implementan de acuerdo a las necesidades de las
aerolíneas o la demanda de los usuarios.
En el Anexo A se presenta las Cartas de Navegación en Ruta Superior e Inferior
que se utilizan para poder volar dentro de la FIR Guayaquil, en ellas se muestran
todas las aerovías con las que se hace la planificación de un determinado vuelo.
Para tener claro, un ejemplo de aerovía es la UG-438, que se encuentra en la
Carta de Navegación Superior (Anexo A) y corresponde a los vuelos
internacionales que entran y salen desde la TMA (Terminal Management Área,
Área de Control Terminal ) Quito. Esta aerovía es utilizada por varias rutas, las
cuales van desde / hacia la FIR Guayaquil, y por varias rutas internacionales que
sobrevuelan la FIR por medio de esta aerovía.
Área de Control Terminal, definida en cada aeródromo (aeropuerto).29 Concepto definido por la OACI para determinar los requerimientos del CNS/ATM a implemeníar, en baseal crecimiento del tráfico aéreo.
106

cuales van desde / hacia la FIR Guayaquil, y por varias rutas internacionales que
sobrevuelan la FIR por medio de esta aerovía.
Las rutas más importantes que utilizan esta aerovía son:
AEROVÍA RUTAS
UG438 1. Quito-Bogotá2. Quito - Bogotá - Caracas3. Quito - Bogotá - New York4. Quito - Curacao - Ámsterdam5. Guayaquil - Quito - Curacao
Los pronósticos de los movimientos de aeronaves, han sido realizados tomando
como referencia el "Boletín Estadístico de Tráfico Aéreo3' de la DAC, desde el año
de 1990 hasta el año 2001, en el cual consta el registro de los movimientos de
aeronaves en 11 años para cada ruta internacional y nacional. A los datos
obtenidos se ajustaron curvas de tendencia para predecir el incremento del
número de movimientos de aeronaves en los próximos 10 años, aplicando el
criterio de cómo obtener el "peor de los casos3', y este se obtiene al considerar la
proyección más optimista para cada ruta y aerovía de la FIR Guayaquil. Además
se realizó un incremento porcentual en los pronósticos de aerovía, que
corresponde al número de aeronaves que sobrevuelan la FIR Guayaquil, es decir
atraviesan el espacio aéreo ecuatoriano, sin aterrizar.
Se considera la proyección más optimista, pues esta da el mayor crecimiento del
número de movimientos de aeronaves para cada ruta y aerovía, lo cual se
necesita para considerar los requerimientos operacionales y técnicos para
implantar el sistema CNAS/ATM en el Ecuador. Los resultados obtenidos son
presentados en el Anexo C.
A manera de ejemplo se presenta el pronóstico de los movimientos de aeronaves
obtenidos para la aerovía UG438, que involucra los pronósticos para cada ruta; y
el incremento en porcentaje de sobrevueles que atraviesan esta aerovía; todo
esto influye en el tráfico proyectado a diez años para la aerovía.
107

Tabla 3.1: Pronóstico de los movimientos de aeronaves para los próximos diez
años en una aerovía
AEROVÍA UG438
Rutas
UIO-BOG
UIO-BOG- CCS
UiO-BOG-NYC
UlO-CUR-AMS
G.YE-.UIO-CUR
TOTAL
%SOBREVUELOS
TOTAL
2002
4.380
1.333
956
837
742
8.247
5.278
13.526
2003
5.170
1.289
1.079
943
897
9.378
6.002
15.381
2004
6.033
1.247
1.207
1.041
1.068
10.596
6.782
17.378
2005
6.968
1.207
1.340
1.132
1.256
11.902
7.617
19.520
2006
7.975
1.167
1.478
1.217
1.459
13.297
8.510
21.807
2007
9.054
1.129
1.621
1.298
1.679
14.781
9.460
24.241
2008
10.205
1.093
1.770
1.373
1.915
16.356
10.468
26.823
2009
11.428
1.057
1.924
1.445
2.167,
18.021
11.533
29.554
2010
12.723
1.023
2.083
1.512
2.435
19.776
12.657
32.433
2011
14.090
989
2.247
1.577
2.719
21.623
13.839
35.462
2012
15.529
957
2.417
1.638
3.020
23.562
15.079
38.641
2013
17.040
926
2.592
1.697
3.337
25.592
16.379•
41.970
Se debe precisar que al no contar con datos exactos del número total de
sobrevueles en cada aerovía, han sido considerados como un porcentaje de la
proyección total que se tiene en la FIR Guayaquil. Esto debido a que los
sobrevueles generan una parte importante en el tráfico de cada aerovía] llegando
a representar un 64% del total de los vuelos de cada aerovía.
3.1.1.2 Principales Rutas Homogéneas
Las rutas son propuestas por las diferentes aerolíneas que vuelan desde y hacia
el Ecuador (de acuerdo a las aerovías establecidas por la DAC), estas pueden ser
mantenidas, cambiadas o eliminadas de acuerdo a la demanda que exista.
En el Anexo B, son presentados los resultados obtenidos del pronóstico de los
movimientos de aeronaves en las rutas internacionales y nacionales existentes en
el Ecuador hasta el año 2013; así como también se presentan ios datos reales
108

Los datos obtenidos constituyen el parámetro adecuado para realizar la
implantación de los nuevos sistemas, y son proyectados mediante una curva de
tendencia respecto a los datos reales. Para obtener las proyecciones en los
próximos diez años se aplicó el mismo criterio explicado anteriormente,
incluyendo datos proporcionados por la DAC del número de movimientos en las
TMA's de Quito y Guayaquil en la hora pico, para establecer un mejor criterio en
la separación lateral y longitudinal de las aeronaves en los próximos 10 años. Un
ejemplo de la proyección estimada a los próximos 10 años en cada ruta se
presenta en la Fig. 3.3, empleando la ruta Quito- Miami.
DATOS REALES
DATOS PROYECTADOS
QUITO-MIAMI
LINEA DE TENDENCIA
1990
19911992
19931994
1995
1996
19971998
1999
2000
2001
01234567891011
1.5941.6221.9342.3681.9982.6662.6482,6002.7083.8244.4524.136
20022003-
2004
2005
2006
2007
2008
2009
2010201120122013
121314151617181920212223
3.7733.8914.0034.1104.2134.3124.4074.4994.5894.6754.7594.841
5.000 -i4500 •4.0003500 --
2.000 -1-500 -1.000 -
500
0 10 12
CALCULO DE DATOS PROYECTADOS(por línea de tendencia)
Y=1456,8xB °'3839
Ejemplo:
Y = 1456,8 x (12) °'3839 = 3773
Donde B = 12,13,14,.....23.
Para el año 2002 se espera 3773 movimientos por esta ruta.
Figura 3.3: Cálculo de datos proyectados para los movimientos de aeronaves en lospróximos diez años en la ruta Quito-Miami.

Los datos obtenidos en la Figura 3.3, muestran los movimientos proyectados para
a ruta Quito-Miami. Estos datos son obtenidos a través de una línea de tendencia
y su respectiva ecuación para cada una de las rutas de la FIR Guayaquil; estos
datos son presentadas en el Anexo C.
3.2 RNP (REQUIRED NAVIGATION PERFORMANCE /
DESEMPEÑO REQUERIDO DE NAVEGACIÓN)
El crecimiento continuo de la aviación impone demandas en materia de capacidad
del espacio aéreo y hace resaltar la necesidad de que se utilice de manera óptima
el espacio aéreo disponible. Estos factores, unidos a la necesidad de lograr una
mayor eficiencia operacional, consistente en la utilización de rutas directas y en la
precisión de mantenimiento de la aerovía, y unidos también a la mayor precisión
que ofrecen los nuevos sistemas de navegación, han dado como resultado el
concepto de RNP, definido por la OACI como; "La indicación de la precisión de
Desempeño de navegación necesaria para las operaciones de vuelo en una
región determinada del espacio aéreo".30
Por lo que, el concepto RNP se aplica a la Desempeño de navegación dentro de
la FIR, por consiguiente, afecta tanto al espacio aéreo como a las aeronaves que
ocupan el mismo. Con el concepto RNP se desea caracterizar una parte del
espacio aéreo (aerovía), mediante una declaración de la precisión de Desempeño
de navegación (tipo de RNP) que ha de lograrse dentro de esa parte del espacio
aéreo.
De acuerdo con esto se definen diferentes tipos de RNP, los cuales para las
operaciones en ruta se identifican mediante un solo valor de exactitud, definido
como precisión de prestación mínima de navegación requerida (p.ej; RNP-10,
RNP-5, RNP-1).
30(Doc. OACI 9613-AN/937: "Manual on Kequired Navigation Performance (RNP)").
110
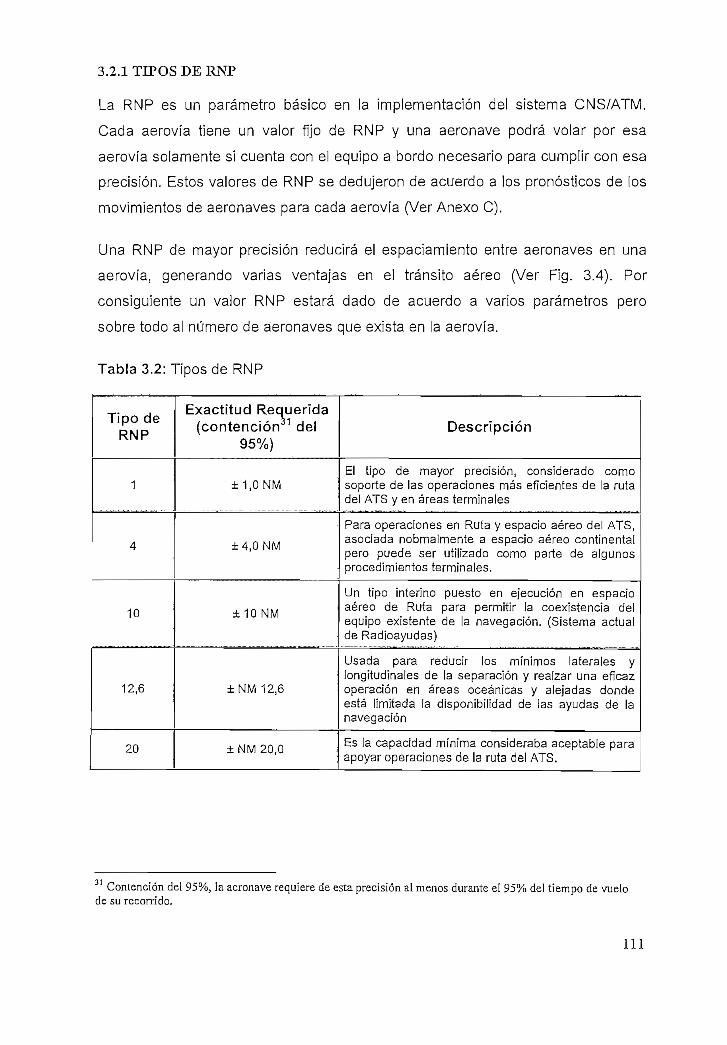
3.2.1 TITOS DE RNP
La RNP es un parámetro básico en la implementación del sistema CNS/ATM.
Cada aerovía tiene un valor fijo de RNP y una aeronave podrá volar por esa
aerovía solamente si cuenta con el equipo a bordo necesario para cumplir con esa
precisión. Estos valores de RNP se dedujeron de acuerdo a los pronósticos de los
movimientos de aeronaves para cada aerovía (Ver Anexo C).
Una RNP de mayor precisión reducirá el espaciamiento entre aeronaves en una
aerovía, generando varias ventajas en el tránsito aéreo (Ver Fig. 3.4). Por
consiguiente un valor RNP estará dado de acuerdo a varios parámetros pero
sobre todo al número de aeronaves que exista en la aerovía.
Tabla 3.2: Tipos de RNP
Tipo deRNP
Exactitud Requerida(contención 1 del
95%)Descripción
±1,ONMEl tipo de mayor precisión, considerado comosoporte de las operaciones más eficientes de la rutadel ATS y en áreas terminales
±4,ONM
Para operaciones en Ruta y espacio aéreo del ATS,asociada nobmalmente a espacio aéreo continentalpero puede ser utilizado como parte de algunosprocedimientos terminales.
10 ±10NM
Un tipo interino puesto en ejecución en espacioaéreo de Ruta para permitir la coexistencia delequipo existente de la navegación. (Sistema actualde Radioayudas)
12,6 ±NM 12,6
Usada para reducir los mínimos laterales ylongitudinales de la separación y realzar una eficazoperación en áreas oceánicas y alejadas dondeestá limitada la disponibilidad de las ayudas de lanavegación
20 ±NM 20,0 Es la capacidad mínima consideraba aceptable paraapoyar operaciones de la ruta del ATS.
31 Contención del 95%, la aeronave requiere de esta precisión al menos durante el 95% del tiempo de vuelode su recorrido.
111

En la tabla 3.2 se describen los tipos de RNP para ruta y área terminal, estos tipos
de RNP han sido propuestos por la OACI para que cada estado determine los
tipos de RNP que requiera de acuerdo a sus necesidades operacionales y
técnicas. Existen tipos de RNP con mayor precisión que la RNP 1, sin embargo,
estos son usados para áreas terminales de alta densidad de tráfico.
Los tipos de RNP se basan en un valor de la precisión de la Desempeño de
navegación que se espera satisfaga el incremento de aeronaves que vuele dentro
de esa parte del espacio aéreo, por lo menos el 95% del tiempo.
Los tipos de RNP para las operaciones de aproximación, aterrizaje y salida se
definen en términos de precisión, integridad, continuidad y disponibilidad de
navegación requerida.
Los tipos de RNP son asignados a cada región del espacio aéreo, considerando
las proyecciones de tránsito sobre esta y el número de movimientos en una hora
pico. En el Anexo C se detalla el tipo de RNP asociado a cada TMA y a cada
aerovía nacional e internacional de la FIR Guayaquil.
ICAO RNP A1RSPACE BUFFER REOUCTION RKP leáis to reducá) buffcrs for routc spacing andincreased traí flc capad ty (n Ihe same aVspace,
RMP
GClolÜOiuai.Separación Actúa/
nawlgfitítti {performance, routeSlructure, Iratflfc tímsiíj, sur-wiUance, A1C, conrounicatwn
lepen*
j
Figura 3.4 : Aplicación del concepto RNP
112
Por ejemplo, una aeronave se califica para funcionar en una aerovía de RNP-10 si
ha demostrado que la capacidad y el funcionamiento del sistema de navegación
con el que cuenta, dan lugar a que la aeronave este dentro de 10 NM de la
posición indicada respecto al sistema de navegación por lo menos el 95 por ciento
de las horas de vuelo. Fig. 3.4.
3.2.2 EQUIPO RNAV (NAVEGACIÓN DE ÁREA / ÁREA NAVIGATION).
Para que las aeronaves realicen operaciones en el entorno RNP, transportarán a
bordo algún tipo de equipo RNAV. "La RNAV se define como un método de
navegación que permite la operación de aeronaves en cualquier trayectoria de
vuelo deseada, dentro de la cobertura de las ayudas a la navegación (VOR/DME,
DME/DME, LORAN, GPS/GNSS), o de una combinación de varias
posibilidades".32
Los equipos RNAV de a bordo determinan automáticamente la posición de la
aeronave procesando los datos recibidos desde uno o más sensores, para luego
guiar a la aeronave de acuerdo con las instrucciones apropiadas de seguimiento
de la ruta.
Se dispone actualmente de diversos tipos de equipos de navegación que
satisfacen los requisitos de uno o más tipos de RNP. Este equipo abarca una
amplia gama de posibilidades y de complejidad.
Los sistemas de navegación VOR/DME y los sistemas sencillos de computadora
RNAV que pueden solamente aceptar datos de entrada del VOR/DME son los
equipos menos complejos.
Se considera que el equipo más moderno y complejo es el que contiene sistemas
RNAV y FMS (Flight Managment System, Sistema de Gestión de Vuelo)
modernos de los que estarán dotadas un número creciente de aeronaves.
(Doc. OACI9613-AN/937: "Manual on Required Navigation Performance (RNP)'1).
113

El FMS es un sistema integrado que consta de sensor, receptor y computadora de
abordo, con base de datos tanto para la navegación como para el desempeño de
la aeronave que proporciona guía óptima de desempeño a una pantalla de
presentación y a un sistema automático de mando de vuelo, aunque el término
FMS se utiliza frecuentemente para describir cualquiera de los sistemas que
proporcionan alguna clase de asesoramiento o la capacidad de mando directo
para la navegación (en sentido lateral y/o vertical), gestión de combustible,
planificación de rutas, etc.
3.3 FACTIBLIDAD DE IMPLANTACIÓN DEL SISTEMA CNS/ATM
"La industria aeronáutica día a día construye nuevas y sofisticadas aeronaves,
más veloces, con mayor capacidad de transporte de pasajeros y carga, pero esas
aeronaves, las actuales y las del futuro, operan dentro de un limitado espacio
aéreo, cuyas dimensiones siguen invariables. Los aviones de transporte de
pasajeros utilizan los mismos niveles de vuelo, por considerarlos óptimos para el
desarrollo de la aeronave; en consecuencia, a pesar de que el espacio aéreo
aparentemente es infinito, para la actividad aérea este espacio se encuentra a
punto de saturarse".33
La República de Ecuador, a través de los servicios de Navegación Aérea,
proporciona los servicios de control de tránsito aéreo dentro de la FIR Guayaquil,
que comprende la totalidad de su territorio continental y sus aguas
jurisdiccionales; estos servicios están administrados por la Dirección General de
Aviación Civil (DGAC).
El objetivo de la DGAC es garantizar la seguridad de las operaciones aéreas en
todas las fases de vuelo y proveer de adecuados servicios de tránsito aéreo
dentro del territorio ecuatoriano. El Ecuador presenta una serie de limitaciones
tanto económicas como técnicas, por estas razones y además por las
proyecciones de Tráfico Aéreo realizadas para los próximos 10 años, no es
probable la implantación de todos los sistemas CNS/ATM.
33 Análisis y evaluación de la situación tecnológica del servicio de navegación aérea en el Ecuador;CORPAQ. Boletín : Enero- Febrero 2003.
114

De acuerdo a las necesidades del país, serán determinadas la Desempeño
necesaria para cada ruta (es decir un tipo de RNP). Para esto, es necesario
determinar el.sistema de radioayudas vigentes en el Ecuador, para luego definir
que equipos CNS/ATM serán introducidos y cual de las actuales radioayudas a la
navegación serán mantenidas.
3.3.1 DESCRIPCIÓN DEL SISTEMA VIGENTE.
El entorno geográfico y las características climatológicas de! país han demandado
la ubicación de sistemas de radioayudas, vigilancia radar y comunicaciones en
zonas geográficas estratégicamente identificadas, con respecto a las cuales se
dispone de un sistema nacional de radioayudas para la navegación aérea.
En la Figura 3.5 se muestran las actuales ayudas a la navegación y su ubicación
dentro de la FIR Guayaquil.
FIGURA 3.5: Sistemas de Radioayudas en la FIR Guayaquil
115
El sistema nacional de radioayudas está compuesto por:
• 31 equipos no direccionales, NDB.
• 13 equipos de precisión y de largo alcance denominados VOR, los
cuales tienen asociado un equipo medidor de distancias, llamado
DME. Estos dos equipos toman el nombre de VOR/DME.
• 7 sistemas de aterrizaje por instrumentos, ILS.
• 2 sistemas radar.
Los radares se encuentran ubicados cerca de los principales aeropuertos
internacionales del país (Quito y Guayaquil).
Los radares que actualmente posee la Fuerza Aérea Ecuatoriana, están
dedicados al control y vigilancia militar, cubren todo el espacio aéreo ecuatoriano.
Si estos equipos se integran a los radares de aviación civil, se podrá ampliar la
cobertura radar al tráfico civil y militar que utiliza nuestro espacio aéreo.
Los sistemas de radioayudas de la Figura 3.5 son mostrados en detalle en el
Anexo E; en el se presentan todas las radioayudas existentes en el país, su
ubicación, su denominación y la frecuencia utilizada por cada una de ellas.
3.3.2 TIPOS DE RNP QUE SE UTILIZARÁN EN EL ECUADOR
La navegación aérea actual, descansa en el seguimiento terrestre de los aparatos
en vuelo, es decir, en la infraestructura de radioayuda en tierra que localizan los
aparatos en vuelo y transmiten su posición tanto a las estaciones terrestres
(centros de control) como a los propios aviones. Por otra parte, los aviones
también disponen de dispositivos de navegación, que le permiten saber su
posición mediante sensores que consultan a las ayudas de navegación
terrestres.
Este sistema en conjunto presenta una serie de desventajas, y es que, además de
requerir una infraestructura amplia de estaciones terrestres que apoyen a la
aeronave, esta es muy imprecisa, lo que obliga a que la separación entre los
aviones sea muy amplia para evitar riesgos de colisión.
116

En el Ecuador, el cambio a (os nuevos Sistemas CNS/ATM se dará en forma
evolutiva y de acuerdo ai concepto RNP. Este indica la precisión requerida en una
región específica de vuelo, con esto se podrá reducir la separación entre
aeronaves en el espacio aéreo de la FIR Guayaquil.
En base a los pronósticos de Tráfico Aéreo, las desventajas que posee el sistema
actual de navegación área, las necesidades que se tendrán a futuro en la FIR
Guayaquil, se han definido los tipos de RNP que se presentan a continuación.
3.3.2.1 RNP-10
RNP-10, significa el mantenimiento de una aerovía prevista con un error máximo
de 10 NM a cada lado de la aerovía, en un 95% de toda la ruta.
Esta fiabilidad se mantiene actualmente con estaciones VOR/DME, no existiendo
mayores problemas para navegar en una ruta sobre varios VOR's. Pero debido a
la complejidad del tráfico aéreo y el aumento progresivo en los últimos años del
mismo, no se puede mantener la actual red de aerovías como tal.
Para poder aumentar en aproximadamente un 30% la capacidad de movimientos
de aeronaves, está previsto cambiar poco a poco toda la red de aerovías,
utilizando puntos de sobrevuelo que no estén basados en ayudas VOR/DME.
Sin embargo, las regiones aéreas que requieran una tipo RNP-10, podrán seguir
usando las actuales ayudas a la navegación sin problemas. Para Ecuador este
tipo de RNP será usado en todas las aerovías nacionales y en las aerovías
internacionales de baja densidad de tráfico.
3.3.2.2 RNP 4
RNP-4, significa el mantenimiento de una aerovía prevista con un error máximo
de 4 NM a cada lado de la aerovía, en un 95% de toda la ruta. Para poder
mantener la precisión de 4 NM, es necesario que las aeronaves cuenten con
equipos RNAV basados en estaciones dobles DME/DME (además de las
VOR/DME) y equipos con tecnología satelital.
117

El GPS será introducido en este tipo de RNP, y utilizado como medio
suplementario de navegación. De tai manera que las aeronaves equipadas con
GPS recibirán información totalmente digital.
Las regiones aéreas que requieran una tipo RNP-4, en Ecuador serán
principalmente las aerovías internacionales con alta densidad de tráfico. Además
se prevé que en los próximos años todas las TMA's de la F1R Guayaquil tengan
los equipos necesarios para este tipo de precisión, es decir el RNP-4 será
utilizado principalmente para las áreas terminales.
3.3.2.3 RNP 1
RNP-1, significa el mantenimiento de un Track con un error máximo de 1 NM a
cada lado del Track, en un 95% de toda la ruta.
RNP-1 se puede alcanzar usando únicamente tecnología satelital, es decir el
sistema GPS pasará a ser utilizado como medio principal y único para la
navegación aérea.
En Ecuador este tipo de precisión será necesario en años futuros en las TMA's
con mayor tránsito aéreo (Quito y Guayaquil), en donde además las aeronaves
deberán estar equipadas con sistemas de aumentación al GNSS, especialmente
de ABAS.
3.3.3 FACTIBILIDAD TÉCNICA
De acuerdo al análisis de tráfico aéreo y al establecimiento del tipo de RNP para
cada aerovía y TMA de la FIR Guayaquil, se considera factible utilizar en un futuro
muy cercano en el Ecuador el sistema satelital GPS con el sistema de
aumentación en base de aeronaves (ABAS) en los lugares que se han definido
con el tipo de RNP-1
Se ha considerado el sistema GPS, por cuanto se tiene aerovías que en poco
tiempo tendrán mayor crecimiento de tráfico aéreo, por lo que pasarán de RNP-10
a un RNP-4, por lo que se requiere de mayor precisión en la separación lateral y
longitudinal de las aeronaves que vuelen dentro'de la FIR Guayaquil.
118

El sistema de aumentación ABAS, ha sido elegido porque su implementación y
operación requiere del equipamiento de las aeronaves con un tipo especial de
GPS denominado GPS-RAIM 34 o el DGPS (GPS diferencial), por lo cual es el
más económico comparado con los otros sistemas de aumentación descritos en el
capitulo anterior.
Satélite GPS Satélite GPSSatélite GPS Satélite GPS
Configuración SBAS para la Región SAM
Figura 3.6: Configuración SBAS para la Región SAM definida por la OACI
A manera de información se menciona que la OACI ha previsto, en el documento
denominado "Plan de Transición para la Región CAR/SAM", utilizar el sistema
SBAS para la región SAM (Sur América), el cual consta de 4 estaciones de
referencia al sur del continente (Chile, Argentina, Uruguay, Paraguay y sur de
Brasil), y otro numero similar de estaciones al norte del continente (Bolivia, Perú,
Ecuador, Colombia, Venezuela y norte de Brasil). En la Figura 3.6 se presenta el
SBAS definido por la OACI, de manera que se tenga una armonía y coordinación
en todos los países de la región SAM.
1 El GPS-RAIM se describe en el capitulo 4: Requerimientos Técnicos
119

Los tipos de RNP que se utilizarán en el Ecuador y los sistemas que cada uno de
ellos requiere han sido determinados de acuerdo a las proyecciones de tráfico que
se tendrá en los próximos 10 años para cada ruta y aerovía.
Tabla 3.3: Evolución del Sistema CNS/ATM
Espacio aéreooceánico/continental
En ruta de pocadensidad de tránsito
Espacio aéreocontinental
En ruta de grandensidad de tránsito
Áreas terminalesde gran
densidad de tránsito
Función Sistema Actual Sistema Futuro
Navegación
Comunicacionesaire - tierra
Comunicaciones
tierra - tierra
Vigilancia
Navegación
Comunicacionesaire - tierra
Comunicaciones
tierra - tierra
Vigilancia
Navegación
Comunicacionesaire - tierra
Comunicaciones
tierra - tierra
Vigilancia
ILSNDB
VOR/DME
En voz VHFEn voz HF
Circuitos AFTNCircuitos Orales
ATS
Radar Primario/SSR
NDB
VOR/DME
VozHF
Circuitos AFTNCircuitos Orales
ATS
Radar Primario/SSR
NDBVOR/DME
ILSVozVHF
Circuitos AFTNCircuitos Orales
ATS
Radar Primario/SSR
RNAV/RNPGNSS
Voz/datos VHF(VDL)Voz/datos SMAS
ATN
Enlace de datos HF
ADS
RNAV/RNPGNSSABAS
Voz/datos VHFVoz/datos SMAS
ATN
ADS
RNAV/RNPGNSS
ILS/NDBVOR/DME
voz/datos VHFFonía/datos SMAS
ATN
ADS
Los sistemas CNS/ATM que reemplazaran a los actuales sistemas de navegación
aérea se describen en la tabla 3.3.
120
La descripción de los sistemas de Comunicación, Navegación y Vigilancia se
realizan a continuación. Además se muestran los períodos necesarios para que
se dé la transición de los actuales sistemas a los sistemas CNS/ATM.
3.4 COMUNICACIONES
El elemento de comunicaciones de los sistemas CNS/ATM, será el encargado de
suministrar el intercambio de datos y mensajes entre los usuarios aeronáuticos
y/o sistemas automáticos. También se usan los sistemas de comunicación en
apoyo de funciones específicas de navegación y vigilancia. El elemento de
comunicaciones comprende el Servicio Fijo Aeronáutico (comunicación
tierra/tierra) y el Servicio Móvil Aeronáutico (comunicación aire/tierra), los que
están implantados para satisfacer los requerimientos nacionales e internacionales
de la aeronavegación.
La infraestructura de comunicaciones a implementarse, dará apoyo en forma
evolutiva al desarrollo del sistema de gestión de tránsito aéreo que brindará
capacidad para controlar todas las aeronaves dentro de la FIR Guayaquil,
utilizando información en tiempo real obtenida vía radar o ADS.
En el futuro, la interconexión de ios sistemas de comunicaciones de a bordo y los
sistemas de comunicaciones de tierra, será apoyada por la red mundial de datos,
llamada Red de Telecomunicaciones Aeronáuticas (ATN), la cual comprende
varias sub-redes aire/tierra y tierra/tierra.
3.4.1 COMUNICACIONES AIRE/TIERRA
El Servicio Móvil Aeronáutico (AMS) debe incluir todas las instalaciones
necesarias para satisfacer los requerimientos de comunicaciones aire/tierra para
una navegación aérea segura dentro del espacio aéreo nacional (FIR Guayaquil)
121
Para los fines de servicio del tránsito aéreo y los servicios de información de vuelo
en las comunicaciones aire/tierra se utilizará, a medida que se vaya migrando a la
tecnología digital, la comunicación por voz.
A pesar de que los actuales enlaces de comunicaciones por voz mediante HF y
VHF seguirán en uso donde sea necesario y apropiado, se espera utilizar enlaces
VHF para voz y datos, incluyendo el uso de VHF con alcance ampliado. Cuando
las aeronaves estén más allá del alcance VHF, debe emplearse HF-SSB hasta
que el AMSS se encuentre disponible y las aeronaves estén debidamente
equipadas,
A medida que el AMSS se desarrolle, las comunicaciones en voz HF debe
disminuir dentro del área de cobertura de dicho AMSS. La calidad de la voz por
satélite debe ser tan buena o mejor que la calidad de la voz en VHF, y puede ser
distribuida en forma digital desde su inicio hasta el fin. Además debe tenerse la
capacidad de dar prioridad y automatizar las comunicaciones por satélite para y
desde la aeronave.
En el futuro, las comunicaciones por voz deben estar disponibles sólo para casos
de emergencia y para mensajes (que no sean de rutina) relacionados con la
seguridad.
3.4.2 COMUNICACIONES TIERRA/TIERRA
El Servicio Fijo Aeronáutico (AFS) debe diseñarse para cumplir con los requisitos
de AIS, ATS, MET, SAR y de las agencias explotadoras de aeronaves para
comunicaciones en voz, mensajes y datos.
Cualquier esquema de interconexión propuesto dentro de la FIR Guayaquil debe
tomar en cuenta el desarrollo de la Red de Telecomunicaciones Aeronáuticas
(ATN). Sin embargo, solo podrán utilizar los servicios de interconexión ATN las
redes que empleen técnicas de conmutación por paquetes y sean compatibles
con el modelo OS1 de la ISO.
122
Con la implantación gradual de la ATN, disminuirá el uso de la AFTN, pero
durante el período de transición, será posible la interconexión de los terminales de
la AFTN con la ATN a través de cabezas de línea (gateways) especiales.
Las comunicaciones de voz entre las dependencias ATS seguirán siendo
necesarias para los casos de emergencia.
Considerando el uso relativo de las comunicaciones de voz, los circuitos orales
directos exclusivos serán reemplazados gradualmente por redes conmutadas
aeronáuticas capaces de transmitir tanto voz como datos.
En el futuro el intercambio de datos tierra/tierra debe estar de acuerdo con los
estándares y protocolos recomendados por la OACI.
3.4.3 TIEMPO ESTIMADO PARA LA EMPLEMENTACIÓN DE LOS SISTEMAS
DE COMUNICACIONES
La implementación de los sistemas de comunicaciones para datos en la FIR
Guayaquil por medio de enlaces aire-tierra y/o terrestres se efectuará
progresivamente, y en la medida que el Estado pueda aplicar la nueva tecnología
de comunicaciones de datos dentro del período de transición establecido.
Como primer paso, el Estado debería emplear nuevas estructuras de
comunicaciones con tecnología digital para poder dar apoyo a todas las mejoras
de funcionamiento de los sistemas convencionales y proporcionar la plataforma
necesaria para establecer las redes de datos aire-tierra y terrestres que permitan
el desarrollo evolutivo de la ATN y su interfase con los sistemas actuales de datos
como la AFTN. Esto permitiría una mejora sustancial de los actuales servicios de
navegación aérea y obtener la transferencia de tecnología que permita establecer
y operar los enlaces de datos.
Aplicaciones como el servicio de mensajes ATS (AMHS) y A1DC podrán ser
progresivamente implantadas, mientras que las comunicaciones AFTN y orales de
coordinación ATS para operaciones aéreas en ruta, serían mantenidas en lugares
en los que se estime necesario dentro del período de transición.
123

La capacidad de comunicación por voz se seguiría manteniendo por medio de los
sistemas actuales.
Para las áreas remotas y oceánicas sin cobertura VHF, se debe planificar enlaces
de datos aire-tierra por satélite para el AMSS (Servicio Móvil Aeronáutico por
Satélite) empleando los actuales sistemas de satélites geoestacionarios. El
enlace de datos HF (HFDL) puede ser un complemento para el AMSS y
proporcionar también una sub-red compatible con la ATN.
Por otra parte en los enlaces vía satélite, se debe tener en cuenta la viabilidad de
servicios para seguridad de la aviación que la nueva generación de sistemas de
satélites (GNSS) no estacionarios, tales como los de órbita terrestre baja y media
(LEOs y MEOs) puedan brindar en el futuro próximo a la aviación.
Las escalas de tiempo en cuanto a la implantación y uso operacional significan
que dentro de las mismas se ejecutarán los nuevos sistemas de comunicaciones,
coexistiendo en la medida necesaria, con el sistema actual hasta el año 2015.
La Tabla 3.4 muestra la forma en que se tiene que realizar el proceso de
transición, y la implantación del nuevo Sistema de Comunicaciones en la FIR
Guayaquil.
124

TAB
LA 3
.4
IMP
LA
NT
AC
IÓN
DE
L S
IST
EM
A D
E C
OM
UN
ICA
CIO
NE
S C
NS
EN
LA
FIR
GU
AY
AQ
UIL
EN
SA
YO
S Y
DE
MO
ST
RA
CIO
NE
S20
0020
0120
0220
0320
0420
0820
0920
1020
1120
1220
1320
1420
15
AM
SS
DA
TO
S P
OR
HF
DA
TO
S P
OR
VH
FA
TN
IMP
LA
NT
AC
IÓN
DE
LO
S N
UE
VO
S S
IST
EM
AS
/ D
ES
AC
TIV
AC
IÓN
DE
LO
S S
IST
EM
AS
AC
TU
AL
ES
2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
CO
MU
NIC
AC
ION
ES
PO
R D
ATO
S
AM
SS
(Á
rea
Oce
ánic
a)D
ATO
S P
OR
HF
(Á
rea
Oce
ánic
a)D
AT
OS
PO
R V
HF
GA
TE
WA
Y A
FT
N/A
TN
AT
N (
serv
idor
de
men
saje
s A
TS
/enc
amm
ador
)R
ETI
RO
DE
LA
AF
TN
CO
MU
NIC
AC
ION
ES
PO
R V
OZ
RE
TIR
O D
E L
A H
F O
CE
ÁN
ICA
VH
F D
IGIT
AL
VH
F A
MA
LOG
O (
Esp
acia
mie
nto
de
25 K
hz.
)R
ETI
RO
DE
LA
HF
CO
NT
INE
NT
AL
DE
SA
CTI
VA
CIÓ
N V
OLl
ViE
T
DE
SA
CTI
VA
CIÓ
N A
TIS
125

3.5 NAVEGACIÓN
Eí elemento de navegación de los sistemas CNS/ATM es el GNSS, el cual es un
sistema mundial para la determinación de la posición y de la hora en forma
precisa, fiable y continua, mediante la introducción de navegación aeronáutica
basada en satélites.
El Ecuador debe establecer el sistema GNSS de acuerdo a sus necesidades y
definir si así lo requiera un sistema de aumentación que se adapte a cada
territorio. Estos sistemas pueden ser basados en satélites (SBAS), basados en
tierra (GBAS) o basados en aeronaves (ABAS).
Sin embargo debe considerarse, que la aumentación SBAS requerirá de un
arreglo regional, ya que las estaciones de aumentación requeridas, cubren
grandes porciantes despacios aéreos que en muchos casos exceden cocvmucbo
los límites de los espacios de un Estado, Por lo tanto, es muy difícil justificar un
sistema SBAS nacional debido a los altos costos que su implantación involucra.
Así, la nueva planificación de navegación en ruta y aproximación debe basarse en
el sistema GNSS a fin de permitir niveles más altos de precisión en la navegación.
Además deberá definir los niveles de desempeño necesarios para cada una de
las rutas ATS.
Este desempeño de navegación debe estar unida* a los criterios de Desempeño
Requerido de Navegación (RNP), para lo cual se realizo los pronósticos de
movimientos de aeronaves en cada ruta y aerovía del espacio aéreo ecuatoriano.
3.5.1 SISTEMA DE COORDENADAS RNP (WGS-84)
Se utilizan los puntos de referencia geodésicos para establecer con precisión la
posición y la elevación de los accidentes geográficos sobre la superficie de la
tierra.
126
La OACI ha seleccionado el Sistema Geodésico Mundial (WGS)-84 como
sistema común de referencia debido a que existe la necesidad de;
- Convertir las coordenadas de posición clave del aeropuerto y de las ayudas
para la navegación de base terrestre a un sistema de referencia geodésica
común.
- Asegurarse de que se efectúa un levantamiento topográfico en todos los
lugares respecto a una norma común que proporcione una precisión
óptima.
Se espera que en el Ecuador, se complete la implantación de este nuevo sistema
geodésico para fines del año 2004, gracias a un Proyecto Especial de
Implantación de la OACI y a un proyecto auspiciado por el Gobierno. Los dos
proyectos tienen por objetivo el levantamiento de los datos geodésicos WGS-84
en los Estados/Territorfósfque han tenido dificultades para su establecimiento. *"
3.5.2 EVOLUCIÓN OPERACIONAL Y TIEMPO ESTIMADO PARA LA
B1PLEMENTACIÓN DEL GNSS
La OACI reconoció que la constelación de satélites del Sistema GLONASS aún se
encontraba en la fase de ensayo y que el GPS estaba siendo ampliamente
utilizado. En este sentido, se acordó considerar únicamente al GPS como primer
paso en la evolución operacional del GNSS, y que, cuando el GLONASS
estuviera listo para su utilización operacional, éste sería incluido con el GPS como
segunda fase. De acuerdo con lo anterior, se adoptó la siguiente evolución
operacional del GNSS:
a) GPS;
b)GPS y GLONASS;
c) GPS/GLONASS +AUMENTACION;
d) GPS + GLONASS + GNSS CIVILES; y
e) GNSS CIVIL
127

En la FIR Guayaquil, las aplicaciones del GNSS serán implantadas de acuerdo al
cronograma previsto para la transición, el cual se muestra en la Tabla 3.5.
De acuerdo a las necesidades del país, se utilizarán alternativamente el GPS con
las actuales ayudas a la navegación en las rutas de baja densidad; únicamente el
GPS en rutas de alta densidad y el GPS con el sistema de aumentación basado
en aeronave (ABAS) en las regiones terminales (TMA's).
3.5.3 REQUISITOS DE DESEMPEÑO OPERACIONAL
Para satisfacer los requisitos de desempeño operacional (precisión, integridad,
disponibilidad y continuidad) en todas las fases de vuelo, el GNSS debe tener
diversos grados de aumentación y para ello se requerirá del establecimiento de
parámetros que deberán ser definidos por la OACI.
Para la navegación en ruta, éf'sistéma GNSS sólo, no cumple los requisitos de
desempeño del sistema de navegación para operar como sistema único, por lo
que se requiere de sistemas de aumentación con Base en la Aeronave (ABAS) y
con Base en Satélites (SBAS), para cumplir con los requisitos de exactitud,
integridad, disponibilidad y continuidad del servicio.
En la FIR Guayaquil, para los Sistemas GNSS se prevé utilizar el sistema ABAS,
debido a los costos que supone la implantación del sistema SBAS. La transición al
nuevo sistema se detalla en la tabla 3.5.
Los procedimientos de aproximación y aterrizaje deben continuar basándose en
los sistemas VOR, NDB e ILS hasta que se complete la instalación del nuevo
sistema GNSS y sus aumentaciones.
3.5.4 ESTRATEGIA DE IMPLANTACIÓN
El sistema mundial de navegación por satélite (GNSS) se irá introduciendo en la
FIR Guayaquil de manera evolutiva. La mayoría de los Estados/Territorios
consideran utilizar a corto plazo el sistema GPS como ayuda suplementaria y
algunos Estados/Territorios ya lo han establecido como ayuda primaria en áreas
oceánicas y remotas continentales de baja densidad de tránsito.
128
El tiempo estimado para la implantación y uso operacional significan que dentro
de las mismas se ejecutará el nuevo sistema de navegación y sus
aumentaciones, coexistiendo en la medida necesaria, con el sistema actual hasta
el año 2015.
Es probable que si se lleva-a cabo en la práctica, la planificación realizada para la
FIR , en el año 2015 muchos sistemas convencionales ya estén desactivados y en
gran medida eí nuevo sistema de navegación este atendiendo los requisitos
operacionales ATM.
129
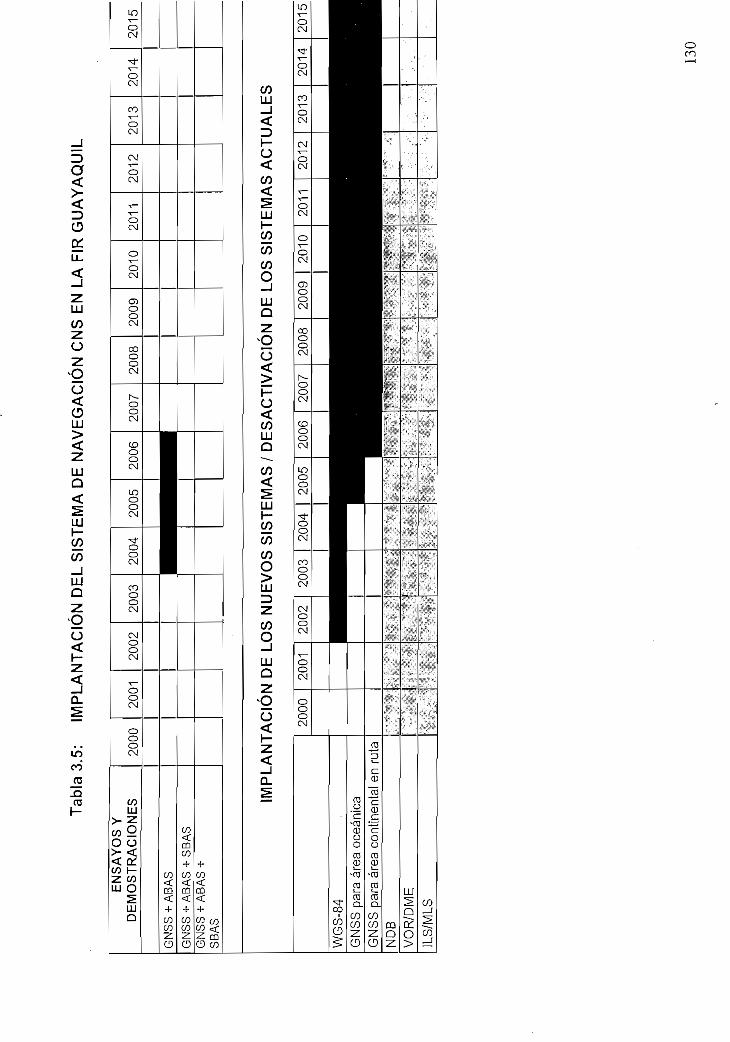
Tab
la 3
.5:
IMP
LA
NT
AC
IÓN
DE
L S
IST
EM
A D
E N
AV
EG
AC
IÓN
CN
S E
N L
A F
IR G
UA
YA
QU
IL
EN
SA
YO
S Y
DE
MO
ST
RA
CIO
NE
S20
0020
0120
0220
0320
0420
0520
0620
0720
0820
0920
1020
1120
1220
1320
1420
15
GN
SS
+ A
BA
S
GN
SS
+ A
BA
S+
SB
AS
GN
SS
+ A
BA
S +
SB
AS
IMP
LA
NT
AC
IÓN
DE
LO
S N
UE
VO
S S
IST
EM
AS
/ D
ES
AC
TIV
AC
IÓN
DE
LO
S S
IST
EM
AS
AC
TU
AL
ES
WG
S-8
4G
NS
S p
ara
área
oce
ánic
a
GN
SS
para
áre
a co
ntin
enta
l en
rut
aN
DB
VO
R/D
ME
ILS/
ML
S
130
3.6 VIGILANCIA
El sistema de vigilancia en la FIR Guayaquil, actualmente se basa en la
notificación de posición por voz, en radar de vigilancia primario (PSR) o
secundario (SSR).
3.6.1 RADAR PRIMARIO DE VIGILANCIA (PSR)
El uso del radar primario para la aviación civil internacional disminuirá con el uso
creciente de sistemas de vigilancia más avanzados que se contemplan dentro del
concepto de los sistemas CMS/ATM.
Aunque el radar primario ya se está utilizando menos, seguirá siendo necesario
en aquellas partes del espacio aéreo en que se mezclen aeronaves equipadas
con transpondedores SSR y aeronaves no equipadas con transpondedores SSR,.
junto con los servicios compatibles proporcionados a ambas clases de aeronaves.
3.6.2 RADAR SECUNDARIO DE VIGILANCIA (SSR)
El SSR se utiliza ampliamente en muchas partes del mundo y en algunas FIRs en
las que los sistemas de vigilancia terrestres de alcance óptico son apropiados. En
varios países, la precisión y eficacia general de la información de posición serán
perfeccionadas mediante la aplicación de técnicas de monopulso (incluyendo
antenas de amplia apertura vertical) y otras técnicas avanzadas de tratamiento de
datos.
En la FIR Guayaquil se usará ampliamente la vigilancia con SSR en modos A/C.
No se ha visualizado antes del año 2015 la vigilancia de radar con el SSR en
Modo S, el cual permite la interrogación selectiva de la aeronave mediante una
dirección única de 24 bits.
El SSR en Modo A/C podrá ser reemplazado por el SSR en Modo S cuando el
tráfico en ciertas áreas terminales, que en la actualidad presentan la tendencia de
transformarse en áreas de alta densidad de tráfico, se incremente.
131

Por lo tanto, para la FIR Guayaquil y de acuerdo a los pronósticos establecidos de
tráfico aéreo, no se considera factible implantar sistemas de vigilancia con
requisitos de SSR en Modo S.
3.6.3 VIGILANCIA DEPENDIENTE AUTOMÁTICA (ADS)
Teóricamente se consideran dos tipos de vigilancia dependiente automática, la
por contrato (ADS-C) y la por radiodifusión (ADS-B). La primera, más conocida
simplemente por ADS, se ha tomado como aplicación de vigilancia dentro del
periodo de planificación hasta el año 2015 para la FIR Guayaquil. Esta forma de
vigilancia se puede implantar por enlaces de datos en sub-redes compatibles con
la interred ATN.
Para ADS-B se prevé su uso futuro en una fecha a ser determinada por la OACI,
ya que todavía sigue en estudio. Esta forma de vigilancia es una aplicación no-
ATN y podría ser implantada por medio de enlace de datos VHF y por el radar
secundario en Modo S.
3.6.4 TIEMPO ESTIMADO PARA LA IMPLANTACIÓN DE LOS SISTEMAS DE
VIGILLANCIA
En los próximos años, la cobertura del radar seguirá siendo la herramienta de
vigilancia en la FIR Guayaquil, en consecuencia la planificación futura debe incluir
la instalación de más radares secundarios en la medida que se cuente con los
recursos económicos para tal inversión.
Además en los lugares donde sea posible y necesario, debe brindarse la
vigilancia ADS como parte integral del Servicio de Control de Tránsito Aéreo, a fin
de mejorar la seguridad, eficiencia y economía de las operaciones, especialmente
en aquellas áreas donde la densidad del tránsito aéreo y/o la complejidad de las
rutas ATS crean limitaciones.
132

El radar debe utilizarse como una herramienta de vigilancia en las áreas más
pobladas, el sistema ADS deberá utilizarse para vigilancia en áreas remotas y
oceánicas, y cuando sea necesario, la información ADS y SSR serán
complementadas con notificación de posición por voz.
Las escalas de tiempo en cuanto a la implantación y uso operacional, significan
que dentro de estos límites se implantarán las funciones de vigilancia (ADS-C) en
correspondencia a la disponibilidad de los enlaces de datos, coexistiendo en la
medida necesaria, con el sistema actual hasta el año 2015.
Es probable que, de llevarse a la practica la planificación realizada por FIR
Guayaquil, en el año 2015 los métodos actuales de vigilancia, principalmente los
de notificación de posición por voz, ya estén desactivados y en gran medida las
nuevas técnicas de vigilancia estén atendiendo los requisitos operacionales ATM.
La Tabla 3.6 muestra la forma en que se tiene que realizar el proceso de
transición, y la implantación del nuevo Sistema de Vigilancia en la FIR Guayaquil.
133

TA
BLA
3.6
; IM
PLA
NT
AC
IÓN
DE
L S
IST
EM
A D
E V
IGIL
AN
CIA
CN
S E
N L
A F
IR G
UA
YA
QU
IL
EN
SA
YO
SY
DE
MO
ST
RA
CIO
NE
SA
DS
AD
S-B
SS
R M
OD
OS
2000
2001
2002
20
03
2004
20
05
20
06
•i
2007
••
2008
2009
2010
2011
2012
2012
2013
2014
2015
IMP
LAN
TA
CIÓ
N D
E L
OS
NU
EV
OS
SIS
TE
MA
S /
DE
SA
CT
IVA
CIÓ
N D
E L
OS
SIS
TE
MA
S A
CT
UA
LES
AD
S (
Oce
ánic
a)A
DS
(C
ontin
enta
l)P
SR
(E
n ru
ta)
PS
R (T
erm
inal
)
2000
** * .
* 5
.
s »r">&
r
2001
',
2002
i~< r>
-*\
2003
fc>
~"-w
«V
B
2004
tli
^Wi-
J,.
^
2005
i£S ::
~*~*ij-&
> •>
2006
*.#
*?•>
* "-
'^
^* " *^
2007
^'
V3^
"ít^tA
*T^
N»
W-
20
08
•i
^X
i-
« J,""
,~*
2009
•.i
2010
lf .
*;
201!
2012 •-
2012 •"
2013 •
2014 •
2015 •
134

3.7 GESTIÓN DEL TRÁNSITO AÉREO (ATM)
"El objetivo general de un sistema ATM consiste en que los explotadores de
aeronaves puedan cumplir con las horas previstas de salida y llegada; y, seguir
sus perfiles de vuelo preferidos con un mínimo de limitaciones sin que se
comprometa el nivel convenido de seguridad "35.
Para lograr este objetivo, el nuevo sistema debe planificarse de modo que
satisfaga las necesidades de ios usuarios en la mayor medida posible,
aprovechando al mismo tiempo los beneficios potenciales de la aplicación de las
nuevas tecnologías que ofrecen los sistemas CNS.
En el diseño de la futura estructura del espacio aéreo, los límites y divisiones de
este espacio no deberían impedir la utilización eficaz de las técnicas
automatizadas de detección y resolución de conflictos ni ía explotación del equipo
de aviónica de tecnología avanzada con que cuenten las aeronaves modernas.
La planificación e implantación de funciones ATM mejoradas deberían incluir el
examen de sus repercusiones y requisitos en materia de factores humanos.
Algunos de los beneficios que se espera obtener de la implantación de estas
funciones son el aumento de la seguridad, la reducción de los costos del
combustible, la reducción de las demoras y el aumento de la capacidad del
sistema.
3.7.1 EVOLUCIÓN DE LA ATM EN LA FIR GUAYAQUIL
Aunque los cambios en el sistema ATM serán evolutivos, el diseño para el futuro
sistema debe ofrecer una serie de mejoras bien pensadas, factibles y con una
buena relación costo / beneficio, que satisfaga las necesidades de los usuarios y
culmine en un sistema que cumpla con las exigencias de seguridad, capacidad,
eficiencia, regularidad y protección del medio ambiente.
3:5 Plan Regional CAR/SAM para la Implantación de los Sistemas CNS/ATM, Cap. 4, OACI
135

Dicho diseño debe prever la implantación del sistema en varios grados de
perfeccionamiento para proporcionar servicios que se ajusten a determinadas
aplicaciones y regiones asegurando un servicio homogéneo, continuo y eficaz
desde la etapa previa al vuelo hasta la finalización del mismo. También es
esencial garantizar que los sistemas adyacentes puedan estar en interfaz de tai
manera que los límites no sean observables por los usuarios del espacio aéreo.
3.7.2 EVOLUCIÓN DE LA ATM EN ÁREAS TERMINALES Y AEROPUERTOS
La evolución ha sido planificada de tal forma que las propias administraciones
identifiquen su nivel de demanda / densidad en cada una de las áreas terminales
y de los aeropuertos principales que componen su sistema de navegación aérea y
a partir de allí examinen las mejoras ATM que pudieran ser aplicables a cada
TMA/aeropuerto en particular, tomando en cuenta además de su densidad de' ' •'•*>** " • • ' . - * . ' • s&if- < • • : • . ,
tránsito, aspectos tales como tipo de espacio aéreo y su organización, capacidad
total del sistema, condiciones geográficas y meteorológicas, etc., con el fin de
ajustarse a las necesidades de los usuarios y evitar demoras excesivas en las
operaciones aéreas.
Además de lo anterior, es obvio que toda mejora de la ATM debe ser
acompañada de una evolución en la infraestructura de los aeropuertos más
importantes del país, como ser, pistas acordes con las necesidades del transporte
aéreo internacional, calles de rodaje de salida rápida, suficientes áreas de
estacionamiento, etc.
3.8 DESARROLLO DE RECURSOS HUMANOS Y NECESIDADES DE
INSTRUCCIÓN
La introducción de los nuevos sistemas CNS/ATM tendrá un gran impacto en el
personal aeronáutico, no solo en el personal de tierra sino que también en las
tripulaciones de vuelo. Es por ello que la instrucción es uno de los asuntos claves
para el éxito de la transición.
136
En el pasado, la evolución de las tecnologías aeronáuticas fue gradual y en su
mayor parte los instructores han podido afrontar los desafíos que representaba el
cambio, aun cuando no siempre tuvieran a su disposición metodologías e
instrumentos de capacitación refinados. Pero los nuevos sistemas CNS/ATM se
basan en muchos conceptos nuevos, los que afectan a casi todas las áreas de
servicios de navegación aérea, por lo tanto, su implantación presenta un desafío
aún más serio a los instructores.
La OACI emprendió un estudio inicial para evaluar las consecuencias de los
sistemas CNS/ATM sobre la instrucción. El objetivo del estudio fue obtener una
rápida comprensión de la magnitud de instrucción que se requeriría, analizando el
grado en que cambiarán las disciplinas básicas de trabajo en el sistema
aeronáutico con la introducción de las nuevas tecnologías. Si bien se trataba sólo
de un estudio preliminar los resultados indicaron que:
1) muchas disciplinas aeronáuticas se modificarán como resultado de la
introducción de las tecnologías CNS/ATM, y es probable que se requiera una
nueva instrucción para varias de esas disciplinas. Los cambios más importantes
parecen ser consecuencia de un mayor uso de computadoras, las
comunicaciones de datos y la automatización;
2) el cambio de la tecnología de tierra a la basada en satélites significará que
varias disciplinas aeronáuticas ya no serán necesarias. Al mismo tiempo, como
resultado de la introducción de los sistemas CNS/ATM surgirán nuevas disciplinas
aeronáuticas. Desde el punto de vista del planeamiento de recursos humanos,
será necesario redistribuir y capacitar al personal; y
3) la necesidad de instrucción y preparación de cursos será especialmente
elevada durante la etapa de transición. No sólo habrá que entrenar o reciclar una
gran cantidad de personal en nuevas tecnologías, equipos y procedimientos, sino
que una cantidad suficiente de personal calificado tendrá que conservar su
competencia en las destrezas necesarias para hacer funcionar y mantener los
sistemas más antiguos.
137

Puede considerarse que las necesidades de instrucción de los sistemas
CNS/ATM quedan comprendidas en tres categorías fundamentales:
1) Instrucción de base. Se necesita una rápida instrucción en los fundamentos de
la automatización, las comunicaciones digitales, las comunicaciones por satélite y
las redes de computadoras, para suministrar a todo eí personal de la aviación civil
la competencia que constituirá un requisito previo para recibir la capacitación
específica necesaria para su tarea;
2) Instrucción para los planificadores de la implantación. Se necesita instrucción a
nivel de gestión superior para proporcionar a los encargados de tomar decisiones
la información básica necesaria para comenzar a planificar la implantación de los
sistemas CNS/ATM. Se necesita este tipo de instrucción para el personal directivo
que planificará la implantación de los sistemas CNS, así como para quienes serán
responsables de calificar los aspectos operacionales ATM de los sistemas; y
3) Instrucción específica para las tareas. La tercera categoría de instrucción que
se necesita es la requerida para que el personal maneje, opere y mantenga los
sistemas en forma continua. Esta categoría representa la mayor parte de las
necesidades de instrucción y es la más compleja de proyectar y desarrollar.
3.8.1 INSTRUCCIÓN BÁSICA
Además de los temas habituales que se tratan en los centros de instrucción
típicos para la aviación civil, será necesario organizar otra instrucción, básica o
con carácter de requisito previo. Esta capacitación asegurará que todo el personal
que tenga que participar en la planificación, la implantación, la gestión, la
operación y el mantenimiento de los nuevos sistemas cuente con fundamentos
apropiados sobre los conceptos y tecnologías fundamentales. Esa capacitación
básica debería elaborarse de modo que atienda a las necesidades concretas de
los planificadores técnicos y operacionales, así como de todo el personal que
pueda participar eventualmente en el funcionamiento, mantenimiento y gestión de
los nuevos sistemas.
138

Las necesidades de instrucción incluyen las siguientes áreas generales;
a) sistemas CNS/ATM;
b) comunicaciones digitales;
c) fundamentos de computación;
d) comunicaciones por computadora, incluso redes locales de área amplia;
e) modelo de referencia OSI de la ISO;
f) sistemas de comunicaciones por satélite empleados para las aplicaciones
fijas y móviles;
g) sistemas de navegación por satélite;
h) cuestiones de automatización;
i) fundamentos de la gestión del tránsito aéreo; y -
j) bases de datos aeronáuticos.
Como los sistemas existentes se operarán, durante cierto lapso, paralelamente
con los nuevos sistemas, la planificación de recursos humanos y la instrucción
constituirán un desafío importante durante el período de transición.
Los sistemas CNS/ATM provocarán un mayor uso de automatización en muchas
de las funciones de control de tránsito aéreo que antes se ejercían manualmente.
Como resultado, las interacciones entre los controladores y las tripulaciones de
vuelo asumirán una dimensión diferente.
Por lo tanto, es importante que los planificadores operacionales reciban pronta
instrucción sobre estas cuestiones, incluso todas las repercusiones de la
automatización, y los procedimientos de reserva que se usarán en el caso de
disfuncíones del sistema.
139

CAPITULO 4
Requerimientos técnicos para la implementación de los sistemasCNS/ATM en el Ecuador.
4.1 INTRODUCCIÓN
En el capítulo anterior, se describe la forma y los plazos de tiempo para implantar
los nuevos sistemas CNS/ATM en el país, así como también se dan a conocer los
elementos que se necesitará incorporaren la FIR Guayaquil.
El criterio aplicado para determinar las necesidades del país, como ya se explicó,
se basa en los pronósticos de tráfico aéreo en los próximos 10 años para las
rutas, aerovías y áreas terminales de la FIR Guayaquil. También se utilizó el
concepto RNP definido por la OACI, el cual indica la disminución de la distancia
longitudinal y horizontal entre aeronaves en una parte del espacio aéreo (aerovía),
que permitirá la incursión de un mayor número de aeronaves.
Tomando en cuenta que la aviación desde el campo técnico, se ve soportada a
través de sistemas de Comunicación (C), Navegación (N) y Vigilancia (S), cada
uno de vital importancia para suministrar el producto final que es el Servicio de
Navegación Aérea, y que la tecnología necesaria para el funcionamiento de los
sistemas CNS/ATM se encuentra aun en desarrollo; en este capítulo se presentan
estándares técnicos y tecnologías actuales para soportar el funcionamiento de los
sistemas del futuro (CNS/ATM).
Las tecnologías descritas, son el resultado del análisis de los requerimientos
técnicos necesarios para el funcionamiento de los sistemas CNS y su influencia
en una eficiente labor de la ATM (Gestión del Tráfico Aéreo) para la FIR
Guayaquil, según los períodos de tiempo establecidos en el capítulo anterior.
Por lo tanto, el país debe afrontar grandes retos para implementar la
infraestructura de Navegación por Satélite, ya que no solo se requiere el diseño e
140

¡mplementación de los sistemas GNSS sino también la preparación y adaptación
de los futuros usuarios a los nuevos servicios que estos sistemas proporcionarán.
El uso operacional de estos sistemas por [a Aviación Civií (uno de los usuarios
más críticos, no tanto por su volumen, sino, especialmente, por la exigencia sobre
seguridad que impone a los sistemas de navegación) necesita de un largo y
complicado proceso que permita la adaptación plena de los procedimientos
existentes, así como la validación operacional del sistema y su certificación.
Parte esencial de dicho proceso se basa en la experimentación con aeronaves
equipadas con receptores GNSS que permitan ensayar los distintos
procedimientos y adquirir experiencia en el uso de los nuevos sistemas en un
entorno realista.
La infraestructura del nuevo sistema incluye tanto equipos de tierra, como el
equipamiento de la aeronave con la más moderna aviónica digital que se
encuentre disponible en el momento de implantación, así como equipos
específicos GNSS que reciben la señal de los futuros sistemas de Navegación por
Satélite.
Una vez que la nueva infraestructura se encuentre en operación, se llevará a cabo
un plan exhaustivo de experimentación que permita, entre otros objetivos, analizar
las prestaciones reales del sistema, apoyar su validación y adaptar los
procedimientos de vuelo que optimicen la explotación de esos nuevos sistemas.
En el Ecuador, la implantación de los nuevos sistemas CNS se realizará en forma
gradual, los aeropuertos y las aeronaves no se equiparán con sistemas CNS/ATM
completos, pues el espacio aéreo que comprende la FIR Guayaquil y el tráfico de
aeronaves pronosticado para este en los próximos 10 años, no requiere de toda la
capacidad de los nuevos sistemas CNS/ATM mundiales.
Un objetivo principal de los sistemas CNS/ATM consiste en crear un sistema
permanente de control a la navegación aérea.
141
4.2 ANÁLISIS OPERACIONAL DEL SISTEMA CNS/ATM
Dadas las dificultades con las que se enfrenta la tentativa de determinar ios
requisitos operacionales a largo plazo para los diversos elementos del sistema de
navegación aérea, no es realmente una ciencia exacta la elaboración de los
requisitos en base al análisis operacional. Es difícil y se presta a errores mirar
hacia un futuro lejano y tratar de incorporar sus necesidades definitivas, en vista
de la índole evolutiva de los sistemas CNS/ATM y de las soluciones tecnológicas
rápidamente cambiantes.
Para implementar los sistemas CNS/ATM, se debe seguir un proceso evolutivo;
en Ecuador, los equipos CNS/ATM serán implantados de acuerdo a los requisitos
RNP para cada TMA y aerovías de la FIR Guayaquil.
En la tabla 4.1, se presentan los tipos de RNP (valores RNP) que necesitarán las
aerovías nacionales (espacio aéreo inferior), internacionales (espacio aéreo
superior) y cada TMA de la FIR Guayaquil.
El concepto RNP, actualmente tiene relación para todo el sistema CNS/ATM y de
acuerdo a este, se dan los requerimientos técnicos para los sistemas de
Comunicación, Navegación y Vigilancia que se requieren en las aerovías
nacionales e internacionales y en los terminales de tránsito aéreo (TMA's) de la
FIR Guayaquil.
• Aerovías Nacionales
Las Aerovías Nacionales son presentadas en la Carta de Navegación del Espacio
Aéreo Inferior del Anexo A. De acuerdo a las proyecciones futuras, estas aerovías
no tendrán un aumento significativo y no será necesario adquirir nuevos equipos
por lo menos en los próximos 10 años.
Dentro del concepto RNP, las aerovías nacionales requieren un RNP 10. Este tipo
de RNP indica que para volar sobre estas rutas no es necesario cambiar ninguna
de las ayudas a la navegación actuales, y toda aeronave que cuente con equipo
de RNP 10, podrá navegar sobre este espacio aéreo.
142

En la totalidad de las Aerovías Nacionales se seguirán usando los sistemas
tradicionales, no será necesario realizar una inversión mayor para estas aerovías.
• Aerovías Internacionales
En las Aerovías internacionales existen rutas de alta y baja densidad de tráfico
aéreo. Al igual que para las rutas nacionales, las rutas internacionales de baja
densidad seguirán usando las ayudas convencionales es decir RNP 10.
Las rutas con alta densidad deberán ofrecer mayor seguridad y mejores requisitos
de desempeño. Para estas rutas se utiliza RNP 5 o RNP 4, estos tipos son
utilizados para vuelos continentales en los que se requiere mayor precisión de
navegación.
Es necesario indicar que el Ecuador no utilizará el tipo de RNP 12.6, debido a
que este es usado para rutas extensas donde no existen ayudas a la navegación
en tierra. Tampoco se utilizará el RNP 20, por cuanto este considera un
espaciamiento no aplicable a la extensión de las aerovías en la FIR Guayaquil.
• TMA's
Para las TMA's es necesario un nivel de desempeño mayor, debido a que se está
considerando zonas de aeródromos (aeropuertos), y en ellas se requiere mayor
precisión en el control de las aeronaves.
Para estas áreas y tomando en cuenta los pronósticos de tráfico aéreo se
requieren dos tipos de RNP. Para las TMA's de aeropuertos nacionales se aplica
RNP 4, los requerimientos para este tipo de RNP hacen que sea suficiente para
estas áreas por lo menos en los 10 años que se implantará el sistema CNS/ATM.
Para los aeropuertos internacionales (TMA's de Quito y Guayaquil, Manta) y
tomando como base los pronósticos de tráfico, será necesario implantar un RNP 4
en los próximos años. Sin embargo, a futuro será necesario implantar sistemas de
mayor precisión, es decir, RNP1 que incluye el Sistema de Aumentación Basado
en Aeronave (ABAS).
143

Tab
la 4
. 1:
Tip
os
de R
NP
en
las
aero
vías
y T
MA
s de
la F
IR G
ua
yaq
uil
RN
P2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
Aer
ovía
s N
acio
nale
sM
OV
*;\>
10.^
-••
Mó:
-.-, "
io:"-
. ' '
''lo'
rv10
1010'
1010
10
Aer
ovía
s In
tern
acio
nale
s
UG
438
UA
550
UG
437
(N)
UG
437
(S)
UG
426
UG
439
UG
564
10 '
10
•
10 , 10
.!io
£H
oií
viK
10 ';
10 10
~ JO
-
•M^T
íV&
f^- M
U
J4
S<*
-•«•
.• -
^
^ v.
•^doj
10 4
, 10 .
\0 v
.V
*ii6
^^i
of<
*'ááíb
ií
10 4 10
s 10
-V
sSlO
^v
.';*>,
; 10
:
\>510^,V
10 4
'10 10
-,M
O-.
s
%^o
H^íí<
ióM
4 4 10 10
• 10
;."io
•%
MO
,
4 4 4 10 10 10
'•
10 - '
4 4 4 10 10 10
-,
-10
4 4 4 10 10 10
, ~
10
4 4 4 4 10 10 10
4 4 4 4 10
'
10 •10
144

4.3 REQUERIMIENTOS PARA LOS SISTEMAS DECOMUNICACIÓN
Los requerimientos técnicos para los sistemas de comunicación que se van a
implantar a futuro en la FIR Guayaquil, han sido determinados de acuerdo al
criterio de separación que tendrán las aeronaves en un espacio aéreo (RNP), sin
embargo a futuro serán determinados de acuerdo al criterio RCP36 (Performance
Comunication Required, Desempeño de Comunicación Requerida).
En el capítulo anterior se determinó que para la FIR Guayaquil se introducirá el
Sistema Móvil Aeronáutico por Satélites para áreas oceánicas y remotas, los
enlaces de datos en HF y VHF, y la introducción gradual de la ATN, conservando
los actuales sistemas analógicos mientras se llegue a una operabilidad total de los
nuevos sistemas. Por lo tanto se presenta los requerimientos técnicos para estos
sistemas.
4.3.1 REQUERIMIENTOS PARA LA COMUNICACIÓN AIRE/TDERRA
Se prevé que la mayor parte de las comunicaciones aire-tierra habituales en la
etapa de vuelo y en ruta se harán por intercambio de datos, por lo que se
necesitará migrar paulatinamente de la actual tecnología analógica a la tecnología
digital, que ofrece muchos beneficios.
El sistema CNS/ATM busca disminuir las comunicaciones radiales o por voz entre
controladores y pilotos, pues la información estará disponible en computadoras
que trabajan con datos durante todo el vuelo, a través de la red de
telecomunicaciones aeronáuticas (ATN), Con esto se reducen los errores de
comunicación e interpretación y se tiene información constante sobre las
condiciones del vuelo por enlaces digitales,
En las áreas terminales de intensa actividad, probablemente se preferirá el
empleo de comunicaciones por voz, para las comunicaciones de emergencia y
que no sean habituales.
36 Concepto Tecnológico en desarrollo por la OACI
145

La transmisión por voz seguirá siendo el medio primordial de comunicaciones
aire-tierra, mientras se digitalice completamente el sistema de comunicaciones
actual en la FIR Guayaquil.
Los enlaces de datos aire-tierra modernos, en cambio, son inmunes a los errores
de entendimiento o interpretación de los mensajes. Algunas de las técnicas
utilizadas en los enlaces de datos para asegurar la integridad de los mensajes
son:
• Técnicas robustas de modulación digital que resisten al ruido y a la
interferencia.
• Corrección del error que se efectúa añadiendo bits adicionales redundantes
a la corriente de datos con la finalidad de corregir errores ocasionales de
bits aislados.
• Técnicas de detección de errores, en que se incluyen algunos bits
adicionales en un paquete o trama de datos de manera que si ocurren
errores y quedan sin corregir el paquete o trama puede descartarse y
solicitarse su retransmisión. La más común de las técnicas de detección de
errores en los enlaces es la verificación cíclica de la redundancia que
puede identificar muchas combinaciones de errores en una trama dada de
datos.
La transmisión de mensajes aire-tierra que se ha planificado para la FIR
Guayaquil se efectuará por uno de los siguientes enlaces radioeléctricos:
4.3.1.1 Sistema Móvil Aeronáutico por Satélite (AMSS/SMAS)
La finalidad del AMSS es conseguir la comunicación entre una estación móvil
ubicada en la aeronave y una estación fija ubicada en tierra. El AMSS transmite
datos y voz digitalmente, mejorando sensiblemente la eficiencia y la efectividad
debido a una mayor flexibilidad y desempeño de procesamiento.
Está basado en satélites de comunicación geoestacionarios, diseñados
especialmente para las comunicaciones móviles, que ofrecen una cobertura
amplia y canales de comunicaciones tanto de voz como de datos (Ver Figura 4.1).
146
Está basado en satélites de comunicación geoestacionarios, disenados
especialmente para las comunicaciones móviles, que ofrecen una cobertura
amplia y canales de comunicaciones tanto de voz como de datos (Ver Figura 4.1).
El rango de frecuencias óptimo para la transmisión vía satélite está en el intervalo
comprendido entre 1 y 10 GHz, Por debajo de 1 GHz, el ruido producido por
causas naturales es apreciable, incluyendo el ruido galáctico, solar, atmosférico y
el producido por interferencias con otros dispositivos electrónicos. Por encima de
los 10 GHz, la señal se ve severamente afectada por la absorción atmosférica y
por las precipitaciones.
El AMSS utiliza la banda de frecuencias de 1544 - 1555 MHz. (espacio-tierra) y
1646,5 - 1656,5 MHz (tierra-espacio), con una velocidad de datos del canal de
comunicación digital de 600 bps.
Figura 4.1: Sistema Móvil Aeronáutico por Satélite
Para el sistema AMSS se utilizará la tecnología VSAT (Very Small Aperture
Termináis), cuya infraestructura se encuentra actualmente en funcionamiento y es
más rentable, dentro de la FIR Guayaquil.
Los elementos principales del AMSS, son el segmento espacial, el segmento
terrestre y el segmento de abordo.
147
• Un canal P, que proporciona un canal unidireccional de comunicaciones
desde una estación terrestre de tierra (GES) hacia el avión.
• Un canal R, que proporciona un canal unidireccional de comunicaciones
dedicado dei avión a un GES.
• Un número de Canales T, cada uno proporciona un canal de
comunicaciones dedicado unidireccional del avión a un GES.
• Un número de Canales C, cada uno proporciona un canal de
comunicaciones bidireccional entre tierra y el aire. Los Canales C se
utilizan típicamente para las comunicaciones de voz.
4.3,1.1.1 El segmento espacial de las comunicaciones por satélite
El segmento espacial mínimo necesario para establecer un sistema de
telecomunicaciones mundial, consta de una constelación de tres satélites
equipados con antenas de cobertura de la Tierra, dispuestos en órbitas
geoestacionarias y separados entre sí 120° en longitud. Los componentes
principales de los sistemas de comunicación por satélite, consisten en
respondedores que reciben señales procedentes de tierra y las retransmiten a las
aeronaves.
Otros respondedores reciben las señales procedentes de las aeronaves y las
transmiten a tierra. Los demás componentes de los satélites se ocupan de la
generación y el empleo de energía de la gestión del respondedor y de la
corrección de la posición orbital.
Para implantar el AMSS en la FIR Guayaquil, además de utilizar la tecnología
VSAT, existe otra posibilidad que es la de utilizar los satélites de Inmarsat, debido
a que estos cumplen las especificaciones SARPS (Standards and Recommended
Practices) publicados por la OACI para las comunicaciones móviles vía satélite.
Inmarsat ofrece comunicaciones vía satélite a la navegación aérea gracias a
Inmarsat-Aero38, con servicios de telefonía, fax y transmisión de datos tanto a
pasajeros como a operadores de comunicaciones y personal administrativo,
38 Uno de los estándares que proporciona Inmarsat en la actualidad(más información en htíp;//wvvw.upv.es/satelite/trabajos/Grupo2_98.99/index3.html)
148

además de información de control de tráfico aéreo. Los servicios de Inmarsat-
Aero son ofrecidos por cuatro sistemas:
Aero-C
Este estándar es la versión aeronáutica de Inmarsat-C: comunicación
bidireccional a 600 bps de datos con el método store-and-forward. Aunque Aero-C
resulta útil para las comunicaciones a baja velocidad necesarias en los vuelos
aéreos, no cumple las especificaciones SARPS de la OACI, y por tanto no puede
ser utilizada para aplicaciones de seguridad.
Aero-L (Low-speed)
Este estándar ofrece transmisión de datos en tiempo real a baja velocidad (600
bits/s). Con este servicio, se accede a las redes de conmutación de paquetes
tanto públicas como privadas.
Las principales características de este estándar son:
• Comunicaciones bidireccionales en tiempo real 600 bits/s.
• Interfaces con las redes internacionales establecidas X.25/PSTN/PSDN.
• Compatible con el estándar ISO 820837 de Internet.
• Satisface los requisitos de la OACI sobre seguridad y control de tráfico aéreo.
• Antenas omnidireccionales en las aeronaves.
Aero-H (High-speed)
Este estándar ofrece un servicio de alta velocidad, hasta 10,5 kbits/s, con
transmisión de voz multicanal, fax y transmisión de datos tanto para pasajeros
como para aplicaciones administrativas y operacionales de la compañía, gracias
al uso de una antena directiva de 12 dBi de ganancia.
Accede tanto a las redes de conmutación de paquetes como de conmutación de
circuitos. Las principales características de este estándar son;
• Compatible con el estándar ISO 8208 de Internet en las redes de conmutación
de paquetes
149

• En (as redes de conmutación de circuitos, la comunicación se puede
establecer con cualquier protocolo.
• Satisface los requisitos de (a OACI sobre seguridad y control de tráfico aéreo.
• Se utiliza una antena de haz de seguimiento que apunta siempre hacia el
satélite a medida que la aeronave avanza.
Todas las aplicaciones ofrecidas por Aero-L están también cubiertas por este
estándar, que además posibilita servicios interactivos para pasajeros.
Aero-l (Intermediate-gain)
Aero-l permite al aparato volar siempre dentro de la cobertura de un haz puntual y
ofrecer así los mismos servicios que Aero-H con unos terminales más baratos y
ligeros. Así, la antena de haz de seguimiento sólo requiere 6 dB¡ (frente a 12 dBi
de su predecesor) y cuesta entre un tercio y un medio del precio de una antena
Aero-H. Este estándar ofrece un servicio de transmisión de datos a 4,8 kbps
conectando con redes de conmutación de paquetes, 2,4 kbps para fax y 4,8 kbps
para los servicios de voz, los cuales, gracias a un algoritmo de codificación de
voz, reduce el ancho de banda de un canal de 17,5 kHz hasta 5 kHz.
Debido a las necesidades de tráfico aéreo del Ecuador, el más conveniente sería
el Inmarsat Aero-L (Low-speed), que utiliza la banda L (entre 1 y 2 GHz.) y
transmite a una velocidad en tiempo real de 600 bps., llevando mensajes de
señalización en forma de paquete. Esto sería suficiente para satisfacer las
necesidades del sector aéreo.
Este servicio puede proporcionar sólo servicios de datos de baja velocidad, los
cuáles incluyen servicios de control operacional aeronáutico (AOC) y
comunicación administrativa aeronáutica (AAC) debido al uso de una antena de
baja ganancia (O dBi).
' Interconexión de Sistemas Homogéneos a través del protocolo X.25 (Ver Anexo H).
150

Tabla 4.2.- Características técnicas del Inmarsat-Aero
Servicio:Telefonía, fax, datos Suministrado en Aviones
Especificaciones del servicio:
G/T
PIRE
Antena
Polarización
Peso típico de la antena:
Peso típico del terminaltranportable:
-13dBK(Aero-H)-26 dBK (Aero-L)
25,5 dBW (Aero-H)13,5dBW(Aero-L)
Phased array
Circular
30 kg
40 kg
Modulación:
Voz
Datos
CODEC de voz
A-QPSK40
(21 kpbs)A-BPSK41
(0,6/1 ,2/2,4) kbpsMultipulso-LPC 9,6 kbps
Codificación FEC:Convolucional/
Viterbi(R=1/2, k=7)Bandas de frecuencias (MHz):Móvíl=>CES/GESCES/GES=>Móvil
1626,5—1660,51525,0—1559,0
En tanto que para las comunicaciones de voz se seguirá usando la tecnología
VSAT actualmente instalada.
4.3.1.1.2 El segmento terrestre de las comunicaciones por satélite
El segmento terrestre del sistema de comunicaciones por satélite consta de
estaciones terrenas en tierra (GES) y de la infraestructura terrestre de
comunicaciones que le presta apoyo.
40 Una A-QPSK es una forma de O-QPSK (Offset Quadrature Phase Shift Keying), que consiste en asignar ala fase de la portadora uno de cuatro valores posibles. Con esta modulación se consigue reducir lainterferencia con canales contiguos.41 A-BPSK es una forma de codificar diferencial mente BPSK en la cual los símbolos se transmiten en fase ylos canales en cuadratura.
151
Con un mínimo de una estación terrena en tierra por cada región de cobertura
satelital, se posibilita la prestación, por medio de satélites, de servicios de voz y
datos a las aeronaves. En la práctica, por razones de integridad del sistema, las
comunicaciones con determinada aeronave son posibles mediante dos estaciones
terrenas como mínimo.
Las estaciones terrenas sirven también de interconexión por cuyo medio las
terminales de comunicaciones de vuelo acceden a los sistemas de
comunicaciones terrestres, entre los cuales se cuenta la Red de
Telecomunicaciones Aeronáuticas (ATN).
4.3.1.1.3 El segmento de abordo de las comunicaciones por satélite
El segmento aerotransportado del sistema consta de estaciones terrenas de
aeronave (AES) y sus sistemas de apoyo de abordo. Una estación terrena de
aeronave consta de una antena de alta ganancia, de componentes electrónicos
de orientación del haz, un transmisor - receptor, y la unidad de gestión de las
comunicaciones la que sirve de interfaz con los sistemas de abordo que
encaminan los mensajes de datos y con los sistemas de audio que permiten las
comunicaciones por voz.
4.3.1.2 HF y VHF (analógica)
Las comunicaciones mantenidas a través de las Bandas aeronáuticas en HF,
tienen lugar cuando las aeronaves están en pleno vuelo, a gran distancia de los
centros de control. Pero cuando la aeronave está próxima a su destino y se
dispone a iniciar el procedimiento de descenso, se utiliza la banda aérea de VHF
para las comunicaciones entre el piloto y las estaciones en tierra.
Las comunicaciones aeronáuticas operan dentro del espectro de la onda corta
(HF) entre las siguientes frecuencias asignadas por la Unión Internacional de
Telecomunicaciones42:
2 Anexo G: Plan Nacional de Frecuencias
152
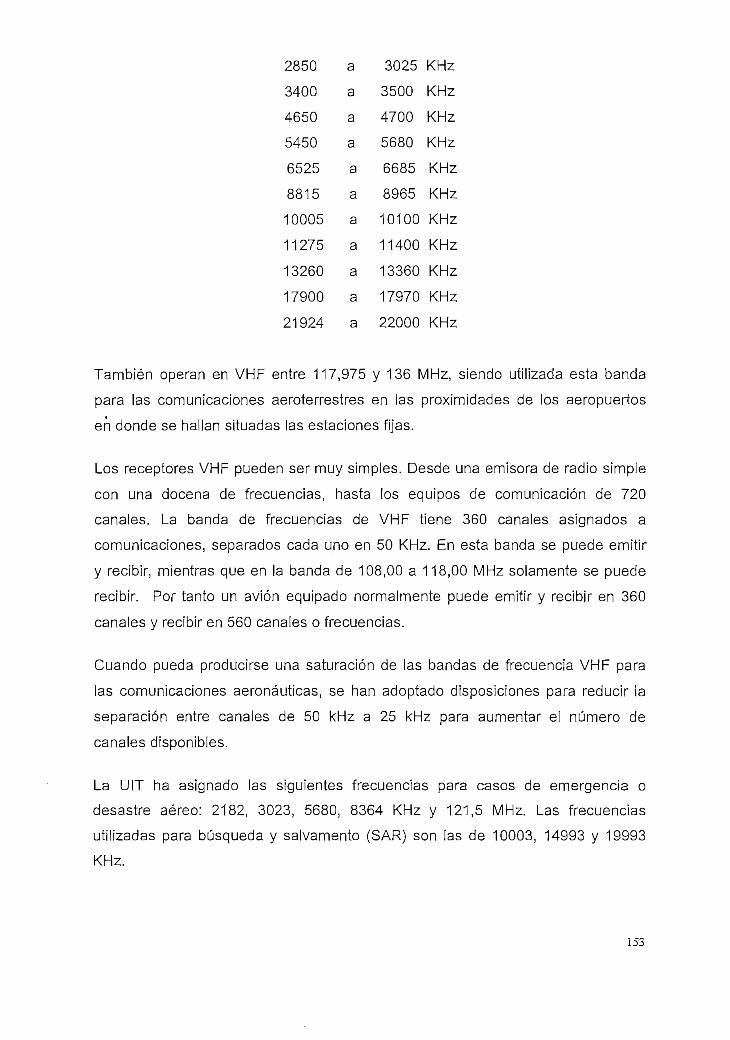
2850
3400
4650
5450
6525
8815
10005
11275
13260
17900
21924
a
a
a
a
a
a
a
a
a
a
a
3025 KHz
3500 KHz
4700 KHz
5680 KHz
6685 KHz
8965 KHz
10100 KHz
11400 KHz
13360 KHz
17970 KHz
22000 KHz
También operan en VHF entre 117,975 y 136 MHz, siendo utilizada esta banda
para las comunicaciones aeroterrestres en las proximidades de los aeropuertos
en donde se hallan situadas las estaciones fijas.
Los receptores VHF pueden ser muy simples. Desde una emisora de radio simple
con una docena de frecuencias, hasta los equipos de comunicación de 720
canales. La banda de frecuencias de VHF tiene 360 canales asignados a
comunicaciones, separados cada uno en 50 KHz. En esta banda se puede emitir
y recibir, mientras que en la banda de 108,00 a 118,00 MHz solamente se puede
recibir. Por tanto un avión equipado normalmente puede emitir y recibir en 360
canales y recibir en 560 canales o frecuencias.
Cuando pueda producirse una saturación de las bandas de frecuencia VHF para
las comunicaciones aeronáuticas, se han adoptado disposiciones para reducir la
separación entre canales de 50 kHz a 25 kHz para aumentar el número de
canales disponibles.
La UIT ha asignado las siguientes frecuencias para casos de emergencia o
desastre aéreo: 2182, 3023, 5680, 8364 KHz y 121,5 MHz. Las frecuencias
utilizadas para búsqueda y salvamento (SAR) son las de 10003, 14993 y 19993
KHz.
153
4.3.1.3 Enlace de datos HF (HDL)
El HDL (HF Data Link / Enlace de Datos en HF) proporciona un enlace de datos
aire-tierra compatible con la ATN y prímordialmente considerado para
complementar el SMAS en áreas oceánicas y remotas. El enlace de datos en HF
utiliza el mismo ancho de banda asignado a las comunicaciones HF analógicas
(De acuerdo con el Plan Nacional de Frecuencias43).
4.3.1.4 Enlace de Datos VHF (VDL) en Modo 2
El VDL (VHF Data Link, Enlace de Datos en VHF) en este modo proporciona un
enlace de datos aire-íierra compatible con la ATN, se emplean técnicas
radioeléctricas digitales. La velocidad nominal de transmisión de datos de 31,5
kbps es compatible con la separación entre canales de 50 kHz utilizada en la
radio analógica VHF.
El VDL Modo 2 opera en la banda VHF del Servicio Móvil Aeronáutico44 (en ruta),
que se extiende desde los 117,975 MHZ a los 136 MHz. Emplea una técnica de
Acceso Múltiple por División de Tiempo (TDMA), de manera que en cada
frecuencia y en un segundo se definen 75 slots, cada uno con un tamaño de 256
bits.
El SMAS, el VDL y los enlaces de datos HF utilizan diferentes técnicas de
transmisión de datos, pero como redes individuales, todas usan el mismo
protocolo de acceso a la red de conformidad con la Organización Internacional de
Normalización (ISO) - Interconexión de sistemas abiertos (OSI), como modelo de
referencia. Esto permite su interconexión con otras redes terrestres también
basados en el modelo de referencia OSI.
El servicio de comunicaciones que permite que las subredes de datos en tierra,
aeroterrestres y de aviónica se intercomuniquen para las aplicaciones específicas
aeronáuticas es la ATN. Los enlaces de datos aeroterrestres mencionados son
compatibles con la ATN y por lo tanto pueden constituir subredes de ella.
Anexo G: Plan Nacional de frecuencias
154

4.3.2 REQUERIMIENTOS PARA LAS COMUNICACIONES TIERRA-TIERRA
Se prevé que la mayor parte de las comunicaciones habituales entre usuarios y
sistemas aeronáuticos en tierra se realizarán por intercambio de datos. Los
intercambios entre entidades tales como las oficinas meteorológicas, las oficinas
NOTAM (Aviso al personal encargado de las operaciones de vuelo), los bancos
de datos aeronáuticos, las dependencias ATS, etc., pueden adoptar cualquiera de
las formas siguientes;
a. Mensajes de texto libre;
b. Mensajes de datos preseleccionados (con algunas partes agregadas
manualmente); e
c. Intercambio de datos automático entre sistemas computarizados.
Considerando el uso relativamente escaso de las comunicaciones por voz, los
circuitos de voz directos exclusivos serán reemplazados gradualmente por redes
conmutadas aeronáuticas capaces de transmitir tanto voz digitaliza como datos.
Las comunicaciones tierra-tierra serán proporcionadas por la red ATN.
4.3.2.1 Red De Telecomunicaciones Aeronáuticas (ATN)
La ATN y los correspondientes procedimientos de aplicación han sido
específicamente diseñados para suministrar de una manera imperceptible para el
usuario final, un servicio de comunicaciones de extremo a extremo (ES, End
Systems, Sistemas Finales) por diferentes redes en apoyo a los servicios de
tránsito aéreo.
Las redes que podrán utilizar los servicios de interconexión de la ATN deberán
emplear técnicas de conmutación de paquetes y deben ser compatibles con el
modelo de referencia OSI45.
44 Anexo G: Plan Nacional de frecuencias45 La estructura de la Red de Telecomunicaciones Aeronáutica, se describió con más detalle en el Capítulo 2.
155

Con la implantación gradual de la ATN, disminuirá el uso de la red de
telecomunicaciones fijas aeronáuticas (AFTN). Sin embargo durante el período de
transición, será posible la interconexión de las terminales AFTN con la ATN a
través de cabezas de línea (gateway's) especiales.
En la Figura 4.2 se muestra un diagrama del segmento en tierra de la red de
comunicaciones ATN. Los enlaces de datos pueden configurarse como subredes
cuando un número de terminales intercambian paquetes de datos entre ellos. No
obstante, una característica particular de los enlaces de datos AMSS, HDL, VDL
es que todos utilizan un protocolo común ISO para efectuar la ¡nterfaz con el
equipo terminal de datos que está conectado a los mismos.
Figura 4.2: ATN en Tierra
En la figura 4.2, las entidades de red llamadas encaminadoras (router) están
conectadas a la subred a través de un equipo terminal de circuitos de datos. Cada
encaminador puede ser parte de una terminal de usuario o puede conectarse al
usuario a través de alguna otra red.
La función principal del encaminador es hacerse cargo del encaminamiento de los
mensajes, desentendiéndose de su contenido. Los datos de entrada a estos
encaminadores contienen mensajes de la aplicación para asegurar un rendimiento
satisfactorio de extremo a extremo en un medio de mulíired.
156
El empleo de la norma ISO 8208 para la interfaz entre el equipo terminal de datos
y el equipo terminal de circuitos en las diferentes subredes aporta varias ventajas,
siendo la más importante [a utilización del protocolo X.2546 de amplia utilización,
para facilitar la interconexión a la Red Pública de Conmutación de Datos (PSDN,
Public Swiíched Data Network).
Algunas otras características de la ATN son;
a) Una mayor seguridad de los datos;
b) Se basa en normas de comunicaciones de datos internacionalmente
reconocidas;
c) Admite diferentes servicios (por ejemplo, una subred aeroterrestre
preferida);
d) Permite la integración de redes públicas y privadas; y
e) Hace un uso eficaz del ancho de banda, que es un recurso limitado en los
enlaces de datos aeroterrestres.
4.3.3 FUTURAS TENDENCIAS
Como resultado de una tecnología avanzada, los nuevos sistemas de
comunicación ofrecen más servicios, mejores y más económicos. Se está
investigando el empleo de nuevos sistemas para las aplicaciones de la aviación
civil internacional. Algunos sistemas de comunicaciones del futuro, que tienen
posibilidades de suministrar el nivel de servicio necesario para la comunidad
aeronáutica, son:
a) Sistemas de satélites que no sean geoestacionarios (en órbitas más bajas),
que cubran todo el planeta y requieran menos energía; y
b) Nuevas tecnologías de red que suministren servicios integrados de voz y
datos.
La cuestión más importante que hay que plantearse al considerar los nuevos
sistemas es si satisfarán las necesidades operacionales y las de los usuarios ya
existentes o que surjan más adelante. Otros factores que hay que considerar son
46 Ver Anexo H
157

la normalización, la certificación, el despliegue armonioso por parte de diversos
usuarios y consideraciones de costo/beneficios.
4.4 REQUERIMIENTOS PÁRALOS SISTEMAS DE NAVEGACIÓN
Los sistemas de navegación a implantarse en la FIR Guayaquil, fueron
mencionados en el capítulo anterior, los cuales dependiendo del tipo de RNP
seleccionado para cada aerovía y área terminal (Ver Tabla 4.1) necesitarán de
ciertos requerimientos técnicos que garanticen el nivel óptimo de operatividad.
En el entorno RNP, las aeronaves transportarán a bordo algún tipo de equipo
RNAV (Navegación de Área). Con este equipo es posible volar en cualquier
región del espacio aéreo, dentro de las tolerancias de precisión prescritas, sin
necesidad de volar directamente por encima de las instalaciones de navegación
de base terrestre.
Uno de los sistemas para la navegación que se está implementando es el FMS
(Flight Managmení System, Sistema de Gestión de Vuelo) cuya instalación forma
parte integral del sistema de aviónica.
El FMS es un sistema integrado que consta de sensor, receptor y computadora de
abordo con base de datos tanto para la navegación como para la desempeño de
la aeronave, esta proporciona guía óptima de desempeño a una pantalla de
presentación y a un sistema automático de mando de vuelo. El término FMS se
utiliza frecuentemente para describir cualquiera de los sistemas que proporcionan
alguna clase de asesoramiento o la capacidad de mando directo para la
navegación (en sentido lateral y/o vertical), gestión de combustible, planificación
de rutas, etc.
El núcleo del FMS es una computadora, que para la navegación aérea cuenta con
una amplia base de datos de aerovías y ayudas a la navegación, que permite
preprogramar muchas rutas e introducirlas en el sistema mediante un cargador de
datos. Cuando está en funcionamiento, el sistema actualiza constantemente la
precisión de la posición de una aeronave y gracias a la base de datos
perfeccionada, se logra la selección automática de las ayudas a la navegación
más apropiadas.
158

Para determinar la posición de la aeronave con los equipos RNAV de a bordo, los
datos de entrada pueden ser obtenidos de ios siguientes sistemas de navegación:
• VOR/DME• DME/DME• GPS
4.4.1 DME/DME
El método más preciso de que se dispone actualmente, para actualizar el equipo
RNAV y el equipo del sistema de gestión de vuelo (FMS) dentro del espacio aéreo
continental, consiste en hacer referencia a múltiples DME, necesitándose un
mínimo de dos instalaciones adecuadamente situadas para proporcionar un punto
de referencia de posición.
La calidad de la información sobre la posición depende de la geometría relativa
del DME y de su distancia con respecto a la aeronave y por lo tanto, el sistema
dispondrá de una rutina de reserva que permita la utilización de otras
combinaciones de ayudas.
El Ecuador cuenta con estaciones VOR/DME, por lo cual se tendría que asociar
otro DME para cumplir con el tipo de RNP, y así poder utilizarlo en las Aerovías
Internacionales de alta densidad de tráfico aéreo y en terminales aeroportuarias
donde se requiere mayor precisión de navegación y seguridad.
4.4.2 GNSS
El GNSS proporciona medios independientes de navegación, por los que el
usuario determina su posición a bordo y partir de la información recibida de
transmisiones de radiodifusión de una serie de satélites, con lo que se obtendrá
una cobertura mundial de elevada disponibilidad, precisión e integridad.
Aunque el concepto de RNP permite el uso simultáneo de más de un sistema de
navegación por satélite, desde el punto de vista de equipo de aeronave, es
esencial mantener la máxima interfuncionalidad pues ésta simplificaría
notablemente el equipo de aviónica y reduciría por consiguiente.su costo.
159

El GPS será el principal sistema de navegación que se usará en el Ecuador,
debido a que su desarrollo se encuentra avanzado, pero sobre todo a que
nuestra dependencia tecnológica occidental.
4.4.2.1 Componentes de la señal del GPS
Los osciladores a bordo de los satélites GPS generan una frecuencia fundamental
fo con una estabilidad en el rango de 10"13. Dos señales portadoras en la banda L
(llamadas L1 y L2) se generan medíante la multiplicación entera de fo de la
siguiente manera47:
fo = 10.23 Mhz
Portadora L1 = 154 fo = 1575.42 Mhz
Portadora L2 = 120 fo = 1227.60 Mhz
Para lograr obtener las lecturas de los relojes, se hace uso de dos códigos. Estos
códigos se caracterizan por contener en ellos un ruido pseudo aleatorio (PRN).
El primero es el llamado código C/A (Coarse adquisition) generado con una
frecuencia igual a fo/10, el cual se repite cada milisegundo. El segundo es el
llamado código P (o código Preciso) generado mediante una frecuencia igual a fo
la cual es repetida aproximadamente cada 266.4 días.
Las señales portadoras L1 y L2 son moduladas con el código P mientras que el
código C/A es modulado para la L1 solamente;
Código P : fo10 = 10.23 Mhz en L1 y L2
Código C/A ; fo = 1.023 Mhz en L1
Las componentes y las frecuencias de las señales del sistema de posicionamiento
global (GPS) son mostradas en la tabla 4.3.
47 Hoffman-Wellenhof, üchtenegger y Collins, 1993
160

Tabla 4.3.- Componentes de la señal del GPS
COMPONENTE
Frecuencia Fundamental
Portadora L1
Portadora L2
Código P
Código C/A
Código W
FRECUENCIA (MHz)
fO
154-fO
120-fO
fO
FO/10
fO/20
10,23
1.575,42
1.227,60
10,23
1,023
0,5115
4.4.2.1.1 Estructuras de las señales transmitidas
• Códigos pseudoaleatorios
Estos códigos están formados por una serie impar de n bits con una duración de T
segundos. Su espectro es similar al ruido (tienen componentes frecuenciales en
todo el rango de frecuencias).
Se caracterizan por la función de autocorrelación:» = 0 Pico
O Lóbulos secundarios
Cada uno de estos códigos pseudoaleatorios se asigna a cada satélite. El
receptor, para separar la señal de un satélite del resto, correlaciona las series
recibidas con el código que desea detectar.
El código que se quiere detectar superará un determinado umbral:
•v7-""^ 'v-^Marca <f= itcmpo j i
Umbral
_¿\_.£vyvV^ V

Para lo cual es importante que el receptor y el satélite estén sincronizados para
que la correlación comience cuando llega la señal procedente del satélite. De esta
forma se puede calcular el retardo.
• Código C/A
Para obtenerlo se multiplica la salida de dos códigos de 1023 bits.
La frecuencia de reloj que se emplea es de 1.023 MHz.
El tiempo de duración del código es:
11=1023- = l m s1.023
Hay varios códigos transmitiéndose simultáneamente, se habla de una distancia
máxima no ambigua que se refiere a la distancia recorrida por la señal en el
tiempo de duración del código.
mas no ambigua ~~ c
Satélite
Receptor
La distancia equivalente a la duración de un bit es,
• Código P
Para obtenerlo se multiplica la salida de dos códigos (P1, P2)
La frecuencia de reloj que se emplea es de 10.23 MHz
La longitud de los dos códigos que se multiplican para obtener el código P es de:
P1: 15345000 bits
P2: 15345034 bits
162
donde, n es el identificativo de cada satélite
T es el tiempo de duración de 1 bit (1CT6/10.23 s)
El periodo de estos códigos es de 267 días, aunque únicamente se emplean 7
días y al cabo de la semana se resetea este código, asignando secuencias
semanales distintas a cada satélite.
Así, en este caso no hay ningún tipo de ambigüedad.
El receptor únicamente correlaciona una determinada parte del código.
La distancia asociada a la duración de 1 bit es de:
4.4.2.L2 Mensaje de navegación (NÁVDATÁ)
El mensaje de navegación es enviado por los satélites, y consta esencialmente de
información sobre el reloj de los satélites, parámetros orbitales (efemérides),
estado operacional de los satélites y otros datos de corrección. El mensaje consta
de 25 grupos de 1500 bits cada uno, divididos en cinco celdas.
E! mensaje de navegación está constituido por los siguientes elementos:
• Efemérides (son los parámetros orbitales del satélite).
• Información del tiempo (horario) y estado del reloj del satélite.
• Modelo para correguir los errores del reloj del satélite.
• Modelo para correguir los errores producidos por la propagación en la
ionosfera y la troposfera.
• Información sobre el estado de salud del satélite.
• Almanaque, que consiste en información de los parámetros orbitales
(constelación de satélites).
Se transmite a un régimen binario de 50 bps y se tarda 12.5 min en enviarlo
completamente.
163

4.4.2.1.3 Órbitas del sistema GPS
Las órbitas de los satélites son casi circulares, con una excentricidad de 0.03 a
0.3. Están situadas a una altura de 20180 km. con una inclinación respecto al
plano del ecuador de 55°. La separación entre las órbitas es de 60°, con un
período de rotación de 11 h 58m.
Ec
Las características de la antena del satélite son:
• Tienen un array helicoidal.
• Ganancia de 15dB.
• Incorporan un reloj atómico muy estable y preciso.
• Con una vida media es de aproximadamente 7.5 años.
4.4.2.1.4 Precisión del sistema GPS
La precisión depende de dos parámetros: Exactitud en la determinación de las
pseudodistancias y la geometría de los satélites.
La precisión del sistema GPS es obtenida en la tabla 4.4, esta depende de si la
medida es tomada un una, dos o tres dimensiones y si el sistema cuenta con
disponibilidad selectiva, en cuyo caso el error producido será mayor.
Tabla 4.4.- Precisión del GPS
3D-
2D~
Vertical
C/A (con disp select)
75.7 m
43 m
49.7 m
P
13. 5 m
7.7 m
8.8m
En cuanto a la precisión en la referencia temporal tenemos:

En cuanto a la precisión en la referencia temporal tenemos:
Sin disponibilidad selectiva: 50 ~ 100 ns
Con disponibilidad selectiva: 300 ns
4.4.2.2 Aplicaciones del GNSS
Las aplicaciones del GNSS están destinadas a permitir una pronta introducción de
la navegación en ruta basada en satélites, utilizando los sistemas de satélites
existentes (GPS y GLONASS) y aumentaciones basadas primordialmente en las
aeronaves (ABAS) para la FIR Guayaquil.
Generalmente se aceptan tres niveles para la introducción de las operaciones
basadas en el GNSS:
a) El GNSS como medio suplementario debe satisfacer los requisitos de exactitud
e Integridad para determinada operación o etapa del vuelo; quizá no se cumpla
con los requisitos de disponibilidad y continuidad. Deben instalarse a bordo otros
sistemas de navegación que sustenten determinada operación o fase del vuelo;
b) El GNSS como medio primario debe satisfacer los requisitos de exactitud, pero
no es necesario que satisfaga plenamente los requisitos de disponibilidad y
continuidad del servicio para determinada operación o etapa del vuelo. La
seguridad operacional se logra limitando las operaciones a períodos específicos y
mediante restricciones apropiadas en los procedimientos.
c) El GNSS como medio único debe permitir que la aeronave satisfaga, para una
operación o etapa de vuelo determinada, los cuatro requisitos de exactitud,
integridad, disponibilidad y continuidad de servicio.
Esta terminología se aplica a la condición requerida del equipamiento de aviónica
y a la capacidad de las aeronaves de satisfacer los requisitos RNP, sin ningún
otro equipo de navegación a bordo, en el caso de "medio único".
Puede concederse la aprobación a varias aeronaves para navegación con GNSS
como medio único respecto a determinadas operaciones o fases del vuelo. Sin
embargo, el proveedor de servicios de tránsito aéreo debe suministrar un servicio
165

de navegación a todos los usuarios en apoyo de todas las fases del vuelo. Por
consiguiente, es necesario armonizar el retiro de las radioayudas convencionales
para la navegación y la introducción del servicio de navegación GNSS.
4.4.2.3 GPS para el Ecuador.
Con la adopción de los sistemas CNS/ATM por la comunidad de aviación civil
internacional, han surgido nuevos requisitos para servicios de información y cartas
aeronáuticas, impulsados por el crecimiento del tráfico aéreo y la búsqueda de
soluciones rentables. Otros factores incidentes han sido la necesidad de mejores
datos y las importantes mejoras tecnológicas en computación y
telecomunicaciones.
Para apoyar y facilitar la implantación de la navegación de área (RNAV), la OACI
adoptó el Sistema Geodésico Mundial - 1984 (WGS-84) como marco de
referencia geodésica común para la Aviación Civil. Por lo que, el Ecuador debe
empezar a implementar este sistema que es el requisito indispensable para la
utilización de todas las ventajas del nuevo sistema satelital.
Figura 4.3: Aplicación del sistema WGS-84.
En la figura 4.3, se presenta la aplicación del sistema WGS-84. En este se
muestra el perfil topográfico y la carta de navegación en una pantalla con el fin de
guiar a la aeronave mediante el GNSS.
Con la implantación de los equipos RNAV, la función y la importancia de la
información aeronáutica cambian considerablemente el desempeño de
166

navegación requerida (RNP), y los sistemas de navegación de a bordo por
computadora.
Las clases de equipos GPS48 que se presentan a continuación se establecen
tomando como base las recomendaciones de la OACI para (a implantación del
sistema de navegación basado en GPS.
Equipos GPS Clase A.- Equipos que incorporan un sensor GPS y capacidad de
navegación. Estos equipos disponen de la función RAIM49 (Receiver Autonomous
Integrity Monitoring / Monitoreo e Integridad Autónoma del Receptor).
Equipos GPS Clase B.- Equipos que consisten en un sensor GPS que
proporciona datos a un sistema de navegación integrado (p.ej. FMS, sistema de
navegación multisensor).
Equipos GPS Clase C.- Equipos que consisten en un sensor GPS que
proporciona datos a un sistema de navegación integrado (p.ej. FMS, sistema de
navegación multisensor) que suministra señales de guiado mejoradas a un
sistema de piloto automático o director de vuelo, con objeto de reducir el error
técnico de vuelo (FTE).
En Ecuador se prevé utilizar a corto plazo el sistema GNSS con el receptor GPS
como medio principal para la navegación aérea. Además de la implantación del
Sistema de Aumentación Basado en Aeronave (ABAS). Por lo que el uso del
GPS/ABAS constituye una de las ventajas del servicio GNSS para operaciones en
ruta y en área terminal para la FIR Guayaquil, en la que no existe o es limitada la
cobertura de las ayudas para la navegación de base terrestre.
En la figura 4.4 se presenta el sistema FMS (GPS clase B). Este sistema brinda
una solución completa GPS/RNAV para la navegación de la aeronave en todo el
mundo y en cuatro dimensiones (espacio (x,y,z) y tiempo), en las fases del vuelo
oceánico/remoto, en ruta, área terminal y aproximación. Incluye un conjunto de
: Equipos GPS, Ver Anexo I
167

dispositivos de navegación y planeamiento del vuelo, con posibilidades de
programar puntos de reportes definidos por el usuario y posee una gran base de
datos de rutas, aeropuertos y ayudas para la navegación, teniendo también
capacidad para la creación y modificación del plan de vuelo.
Provee capacidad de navegación de área multimodo automática basada en
navegación satelital, y tiene posibilidad de recibir ayudas para la navegación de
corto y largo alcance (VOR, DME) .
A partir de estas ayudas para la navegación y de los datos de ruta obtenidos de la
base de datos de navegación, toda la información del progreso de vuelo de guía e
información de curso, es relacionada con los puntos de reporte del plan de vuelo
activado.
La ayuda a la navegación utilizada normalmente es seleccionada
automáticamente por el sistema de navegación, dependiendo de la fase de vuelo
y de la disponibilidad y calidad de cada ayuda. El operador puede seleccionar o
descartar cualquier ayuda a la navegación disponible.
Cuando se utiliza el equipo FMS como medio primario o suplementario de
navegación GNSS (teniendo información de la integridad GNSS disponible), el
GPS será [a fuente preferida de navegación. Cuando la integridad GPS no sea la
suficiente, la navegación GPS continuará; no obstante eso, la posición obtenida
del GPS será comparada con aquélla obtenida de las ayudas aprobadas para la
fase del vuelo en cuestión, y un mensaje de alerta aparecerá cuando sea
detectada una diferencia de posición que exceda los límites predeterminados para
dicha fase del vuelo.
49 RAIM es un algoritmo residente en el receptor GPS y/o GLONASS capaz de detectar y eliminar delproceso de cálculo satélites en mal estado que provocan errores en la solución de navegación, aportando asíun mecanismo básico de integridad a GPS y/o GLONASS.
168

Emisoras deComunicaciones
FrecuenciaVOR origen
FrecuenciaVOR destino
Figura 4.4: Sistema FMS incorporado en la aeronave
También, se pueden verificar las radíoayudas en uso y su estado de operación
cuando esté activado el modo de radionavegación. Cuando la posición de la
aeronave, obtenida del GPS u otras ayudas para la navegación, no cumpla con el
Desempeño de Navegación Requerida (RNP) para la fase del vuelo que se
efectúa, aparecerá un mensaje de alerta .
Como se puede ver en la figura 4.4, el FMS incorpora un receptor GPS y otros
elementos que permiten sintonizar las frecuencias para comunicaciones y
navegación de las estaciones de origen/destino. Esto proporciona la reducción del
espacio físico en el panel de control de la aeronave, debido al retiro de algunos
instrumentos actuales.
Con este sistema, es posible la operabilidad de los sistemas actuales con los
nuevos sistemas (CNS/ATM). Este equipo permite ingresar las frecuencias de las
radioayudas de los aeropuertos de origen y destino, determinando una ruta
directa de vuelo.
169

4.5 REQUERIMIENTOS PARA LOS SISTEMAS DE VIGILANCIA
Como se describió en el capítulo 3, en el Ecuador se implantará en un futuro y a
medida que se migre a la tecnología digital, el Sistema de Vigilancia Automático
(ADS) para cubrir las áreas continental y oceánica de la FIR Guayaquil.
Los requerimientos técnicos en cuanto a vigilancia, han sido determinados de
acuerdo al criterio de separación que tendrán las aeronaves en un espacio aéreo
(RNP) determinado, en las aerovías y áreas terminales (TMAs), establecidos
según los pronósticos de movimiento de aeronaves obtenidos para el año 2013.
La OACI se encuentra desarrollando el concepto RSP (Performance Surveillance
Required, Desempeño de Vigilancia Requerida), el cual servirá para desarrollar a
futuro los requerimientos técnicos de los sistemas de vigilancia.
4.5.1 REQUISITOS TÉCNICOS PARA LA ADS
La introducción de los enlaces a ero terrestres de datos, junto con sistemas de
navegación de aeronaves suficientemente exactos y fiables, ofrece la oportunidad
de proporcionar servicios de vigilancia en zonas que en su infraestructura actual
carecen de tales servicios, en particular las áreas oceánicas y otras en que los
sistemas actuales resultan difíciles, antieconómicos o incluso imposibles de
implantar.
Los requisitos de vigilancia de acuerdo al espacio aéreo de que se trate pueden
ser categorizados de la siguiente manera:
- El sistema de vigilancia suministra la posición actualizada de la aeronave para
asegurar una separación segura:
1) en espacios aéreos oceánicos/ remotos de baja densidad de tránsito, la
información de posición se actualiza cada 12 segundos;
2) en espacios aéreos de alta densidad de tránsito (rutas y áreas
terminales), la información de posición se actualiza cada 4 segundos;
170

- El sistema de vigilancia permite que los usuarios puedan elegir la trayectoria de
vuelo preferida en ruta y ajustarse completamente a ios procedimientos de
emergencia;
- El sistema de vigilancia asiste a las operaciones de búsqueda y salvamento; y
- La precisión del sistema de vigilancia permite la aplicación de la separación en
un espacio aéreo definido
Por medio de la ADS, la aeronave transmite automáticamente por enlace de datos
su identificación y posición tridimensional (proporcionada por los sistemas de
navegación de abordo, que la obtienen del GNSS) a las dependencias de control
de tránsito aéreo.
La ADS le permite a los consoladores observar la posición de las aeronaves, así
como las posibles desviaciones de las trayectorias de vuelo asignadas.
4.5.1.1 Interfaz del piloto50
La interfaz del piloto dispone de medios para monitorear el funcionamiento del
sistema. La transferencia de comunicaciones para otra Estación Terrena es
automática, pero se dispone de una capacidad para que esta la realice el piloto
manualmente cuando las circunstancias así lo requieran.
Para situaciones de emergencia, existe un sistema de reportes que indica la
causa de la misma y un reporte ADS básico (identificación de la aeronave).
También se dispone de una capacidad de voz en caso de tener que enviar
mensajes de emergencia o especiales
4.5.1.2 Mensajes ADS
Los mensajes ADS contienen los siguientes datos:
- latitud y longitud;
- altura;
- hora;
- velocidad terrestre (G/S);
- régimen vertical (ascenso/descenso);
171

- rumbo magnético;
- próximo punto de reporte de la ruta;
- altura estimada en el próximo punto de reporte;
- segundo próximo punto de reporte;
- dirección del viento en altura;
- velocidad del viento en altura; y
- temperatura
La ADS es una aplicación para uso de los ATS (Servicios de Tránsito Aéreo), en
la cual las aeronaves transmiten automáticamente, por enlace de datos,
información derivada de los sistemas de navegación de a bordo; como mínimo,
esos datos incluyen la posición en cuatro dimensiones (el tiempo como la cuarta
dimensión), pero pueden transmitirse otros datos, si se requiere.
Se necesitará un sistema ATC (Control de Tráfico Aéreo) automático que integre
tecnología digital, el cual utilizará los datos ADS para presentar información al
controlador en el interior de la torre de control.
Figura 4.5: Tareas de Vigilancia en el interior de una torre de control
La ADS se aprovecha plenamente sustentando comunicaciones complementarias
bidireccionales de datos o voz entre el piloto y el controlador (Figura 4.5).
La implantación de la ADS requiere:
a) Implementación de las aeronaves con equipo ADS de abordo.
50 Manual Guía para la Capacitación de Recursos Humanos sobre ios Sistemas CNS/ATM
172
b) Datos de posición suministrados por el equipo de navegación de a bordo;
c) Enlace aire-tierra de datos;
d) Una infraestructura en tierra que suministre la información al ATC;
e) Procedimientos apropiados de los servicios de tránsito aéreo.
En el caso de la ADS, se requiere una capacidad de enlace aire-tierra de datos
bidireccional, además, se recomienda categóricamente utilizar la hora
sincronizada, como la hora GNSS, para el funcionamiento de la ADS.
4.6 GESTIÓN DE TRAFICO AÉREO (ATM)
La correcta implantación de los sistemas CNS, dará como resultado una ATM
(Gestión de Tráfico Aéreo) más eficiente. Los sistemas de Comunicación,
Navegación y Vigilancia a implementarse, unidos a una correcta planificación de
la transición a los nuevos equipos, darán como resultado un mejor servicio a
todos los usuarios y grandes beneficios para toda la comunidad. ) J>
Se asegurará que la capacidad del Sistema de Navegación Aérea pueda hacer
frente a la demanda de tráfico aéreo existente en cada momento, además, los
explotadores de las aeronaves podrán cumplir con las horas previstas de salida y
llegada y seguir perfiles de vuelo preferidos con un mínimo de limitaciones y sin
que se comprometa el nivel convenido de seguridad.
Con la implementación de los nuevos sistemas CNS, se reducirán
significativamente el número de accidentes producidos por las deficiencias de los
sistemas actuales.
173

Tabla 4.5 : Estadística de accidentes51
AÑO:
1990
1991
1992
1993
1994
1995
1996
1997
1998
1999
PROMEDIOANUAL
N°DEACCIDENTES;
39
54
57
53
54
51
57
40
40
43
49
N°DEMUERTES
(*)
803 (22)
1166(5)
1612(60)
1281 (6)
1498 (5)
1173(6)
2213 (349)
1238 (3)
1357(32)
707 (33)
1305
(*) Muertos en tierra, a consecuencia del accidente.
De acuerdo a datos de la tabla 4.5 se puede apreciar que e! peor año para la
aviación civil fue 1996. Para este año en la tabla 4.6 se presenta los accidentes y
víctimas fatales por región;
Tabla 4.6: Estadística de accidentes por región (1996)
REGIÓN (AÑO 1996)
LATINOAMÉRICA
ÁFRICA
ASIA
NORTEAMÉRICA
EUROPA
OCEANÍA
TOTAL MUNDIAL
ACCIDENTESFATALES
18 (31.6%)
11 (19.3%)
9(15.8%)
8 (14.0%)
8 (14.0%)
3 (5,3%)
57(100%)
VÍCTIMASFATALES
644(29.1%)
548 (24.8%)
399 (18.0%)
369(16.7%)
227(10.3%)
26(1.2%)
2213(100%)
Se observa, como "Latinoamérica encabeza la lista: en accidentes y muertes' i52
51 Boletín Bstadístico de la OACI (Organización de Aviación Civil Internacional), año 200052 Revista de la OACI, volumen 89. Mayo del 2001
174

Generalmente los accidentes ocurren en las fases de despegue y aterrizaje, como
se puede apreciar en la tabla 4.7.
Tabla 4.7; Porcentajes de accidentes portases de vuelo
FASES:
DESPEGUE Y ATERRIZAJE.
EN TIERRA, RODANDO Y EN RUTA.
TOTAL:
%
88
12
100
Los 'Errores Humanos inciden; en el 80 %' de todos los accidentes (errores de:
tripulación, mantenimiento, control de tránsito aéreo, inspecciones,
adiestramiento, etc.). Es decir que el 20 % restante se producen por otras causas
entre ias que se encuentran (as deficiencias de los sistemas convencionales.
En nuestro país, con la implementación de ios nuevos sistemas propuestos en el
presente trabajo, se pueden evitar accidentes que ocurren, en parte, por la falta
de una tecnología más moderna de navegación, como por ejemplo, el accidente
ocurrido el 28 de enero del 2002, cuando un Boeing 727 de TAME se estrelló
contra el volcán El Cumbal en Colombia mientras trataba de aterrizar en Tulcán o
el avión de Petroecuador que se estrelló en el cerro El Tigre cuando se dirigía con
destino a Lago Agrio. En ambos casos los accidentes fueron producidos por
fallas en los sistemas de radioayudas a la navegación, estos provocaron la
pérdida de cientos de vidas humanas.53
Por lo que, para la FIR Guayaquil, serán objetivos principales del sistema ATM:
a. Mantener o aumentar el nivel actual de seguridad;
1 Anexo J: Recopilación de accidentes provocados por deficiencias de los sistemas actuales
175
a. Mantener o aumentar el nivel actual de seguridad;
b. Aumentar la capacidad del sistema y utilizarla plenamente según sea
necesario para satisfacer la demanda de tráfico proyectada y futura;
c. Incorporar dinámicamente las trayectorias de vuelo que prefiera el usuario
en tres o cuatro dimensiones (tiempo como la cuarta dimensión);
d. Dar cabida a todos los tipos de aeronave y de posibilidades del equipo de a
bordo;
e. Dar mejor información al usuario, por ejemplo, condiciones meteorológicas,
situación del tránsito, instalaciones y servicios disponibles;
f. Aumentar la participación del usuario al tomar decisiones en la ATM,
recurriendo inclusive al diálogo aeroterrestre de computadoras para
negociaciones de vuelo;
g. Crear, hasta donde ser posible, un solo espacio aéreo continuo, en el que
el usuario no perciba las divisiones entre FIRs adyacentes;
h. Reducir al mínimo las demoras y circuitos de espera en el aire y ajustar la
programación de los vuelos para lograr un movimiento eficiente del tránsito
y una utilización eficaz del espacio aéreo y de los aeropuertos;
4.6.1 Elementos de la Gestión del Tránsito Aéreo
La ATM está compuesta de dos partes, una en tierra y otra a bordo de la
aeronave, ambas son importantes para garantizar un movimiento de aeronaves
seguro y eficiente durante todas las fases de vuelo. La realización de la ATM
demanda la integración de ambas partes con el aeropuerto a través de
procedimientos e interfaces bien definidas.
La parte de a bordo de la ATM está compuesta por los elementos funcionales del
sistema de la aeronave (pilotos, equipo FMS, equipo RNAV, etc.) interconectados
con la parte en tierra, a fin de lograr los objetivos generales de la ATM. La parte
en tierra incluye servicios de tránsito aéreo (ATS) y gestión del espacio aéreo,
considerando como componente principal el área del ATS. El servicio ATS se
divide en tres unidades: el control del tránsito aéreo (ATC), el servicio de
información de vuelo (FIS) y el servicio de alerta (SAR).
176

El principal objetivo del ATC es prever colisiones entre aeronaves que se
encuentren en el aire o en tierra; y, entre aeronaves y cualquier tipo de
obstrucción (p.ej. montañas).
El objetivo del FIS es brindar consejo e información útil para conducir a las
aeronaves en forma segura y eficiente.
El objetivo del servicio de alerta es notificar a las organizaciones apropiadas, de
información sobre la búsqueda y salvamento de una aeronave y brindarles
asistencia en lo que se requiera.
177

CAPITULO 5
Conclusiones y Recomendaciones
5.1 CONCLUSIONES
> La navegación aérea utilizada actualmente se basa en los sistemas de
radioayudas, los cuales constan de estaciones terrenas ubicadas
generalmente cerca de los aeropuertos y en lugares estratégicos, estas emiten
señales en distintas frecuencias (VHF y UHF) que son interceptadas por los
instrumentos de navegación que posee el avión a bordo, permitiendo que cada
aeronave calcule su posición con respecto a ellas.
> Las aerovías se trazan sobre las radioayudas, que envían señales a los
equipos del avión 'para darle indicaciones sobre su destino. Aunque este
sistema es considerado "seguro", presenta varias limitaciones, entre éstas, las
dificultades de cobertura por alcance (cuando un obstáculo se interpone entre
el avión y la radioayuda, por ejemplo) o la falta de radares terrestres, lo que
impide que el avión sea vigilado en cada momento.
Todo esto influye en una escasa flexibilidad en la asignación de rutas y, por
consiguiente, en que el espacio aéreo no pueda ser bien aprovechado. Así,
por ejemplo, cuando los aviones están en ruta, pero dentro de la cobertura de
los radares, conservan una distancia de entre ocho y diez kilómetros de
separación; pero cuando están fuera de alcance, la separación entre las naves
aumenta a 180 kilómetros, lo que repercute en un sobre-espaciamiento del
espacio aéreo.
> El tráfico aéreo se ha incrementado en un cincuenta por ciento durante la
última década y de no tomarse las medidas necesarias, podría presentarse
una grave saturación en las rutas aéreas, retrasos en los vuelos y lo más
preocupante es que, según un estudio internacional de la empresa "Fiight
International", aumentaría el número de accidentes fatales, la cifra podría
llegar a cuatro accidentes mensuales durante los próximos veinte años debido
a la saturación del espacio aéreo.
172

Para enfrentar estos problemas, nació el sistema CNS/ATM (Comunicación,
Navegación, Vigilancia y Gestión del Tráfico Aéreo) como una solución para
ser adoptada en todos los países y líneas aéreas del mundo. El sistema fue
concebido por la Organización de Aviación Civil Internacional (OACI), quien
creó el Comité FANS (Comité de Sistemas de Aaeronavegacíón para el
Futuro) que estudió las condiciones de aviónica y administración del tráfico
aéreo necesarias para operaren la nueva demanda.
La navegación aérea se encuentra en estos momentos pasando por una fase
histórica y decisiva sobre lo que será el futuro de la aviación. Desde la
recomendación de la navegación satelitai GNSS por parte del FANS, como los
sistemas del futuro es grande el esfuerzo y son muchos los proyectos,
inversión de los países miembros, empresa privada y sinnúmero de
instituciones, para hacer realidad las bondades que ofrece este medio para su
uso en la aviación civil.
La República de Ecuador, a través de los servicios de Navegación Aérea,
proporciona ios servicios de control de tránsito aéreo dentro de la FIR
Guayaquil, que comprende la totalidad de su territorio continental y sus aguas
territoriales; estos servicios están administrados por la Dirección General de
Aviación Civil (DAC). El objetivo de la DAC es garantizar la seguridad de las
operaciones aéreas en todas las fases de vuelo y proveer de adecuados
servicios de tránsito aéreo dentro del territorio ecuatoriano.
Considerando que la densidad y la complejidad del tránsito aéreo está
alcanzando un punto a partir del cual ya no es conveniente la utilización de
métodos convencionales (radioayudas a la navegación), la DAC ha decidido la
integración de los radares de Quito y Guayaquil en conjunto con ios de la
Fuerza Aérea, a fin de aumentar la cobertura del control radar en el territorio
ecuatoriano y parte del mar territorial, en un proyecto que se encuentra en
plena ejecución.
173
> En el Ecuador, la aeronavegación funciona con una infraestructura de 31
estaciones de radioayudas tipo NDB, 13 tipo VOR/DME, siete tipo ILS para
aterrizaje por instrumentos, y 5 radares, contando las estaciones militares,
dispuestos en diferentes lugares para cubrir todo el país.
> En las directrices proporcionadas por la OACI para la transición hacia los
futuros sistemas, se alienta a los usuarios a equiparse con nuevos sistemas
para acumular lo más rápido posible las ventajas de estos. Aunque suele ser
necesario un período de transición de doble equipamiento, tanto a bordo como
en tierra, para garantizar la fiabilidad y disponibilidad de un nuevo sistema, las
directrices están destinadas a minimizar este período en la medida de lo
posible.
> La transición hacia la navegación basada en tecnologías satelitales en nuestro
territorio permitirá entre otros ¡a aceleración de introducción de últimos
conceptos operacionales de navegación (RNP, RNAV) que pretenden un uso y
organización óptimo del espacio aéreo, trayectos de vuelo mas directos,
rápidos y eficientes (navegación independiente de puntos fijos) y mayor
capacidad del espacio aéreo (reducción de separaciones entre aeronaves).
> La planificación para introducir los sistemas CNS/ATM en la FIR Guayaquil
(Ecuador) se ha desarrollado en base a la determinación de Áreas
Homogéneas (Aerovías) y Flujos Principales de Tránsito (Rutas) tanto para el
espacio aéreo inferior (rutas nacionales) como para el espacio aéreo superior
(rutas internacionales).
> La determinación de los requerimientos del nuevo sistema para el país, se ha
realizado de acuerdo a las proyecciones de movimientos de aeronaves para
los próximos 10 años, y la determinación del número de vuelos que se tiene
para cada ruta y TMA en una hora pico. En base a lo cual se determinó el tipo
de RNP (Performance de Navegación Requerida), que define los
requerimientos para los sistemas de comunicación , navegación y vigilancia a
implantarse en el Ecuador.
174
> De acuerdo al análisis estadístico efectuado, se estima que el crecimiento de
los movimientos de aeronaves en los próximos diez años será del 7,24 % en la
FIR Guayaquil, por lo cual es necesario mejorar el sistema de navegación
aérea actual.
> Los tipos de RNP que se utilizarán en el país, se han determinado en base a
los pronósticos anteriormente citados y las condiciones geográficas del país,
por lo que se consideró factible implantar los RNP's 1, 4 y 10.
> No se consideró factible aplicar el RNP-12.6 por que está determinado para
satisfacer requerimientos en grandes áreas como aerovías sobre océanos,
además el RNP-20 por que este considera un espaciamiento demasiado
grande comparado con el tamaño longitudinal de las aerovías dentro de la FIR
Guayaquil.
> En consecuencia, se concluyó que no es factible para el Ecuador ¡mplementar
todo el sistema, sino más bien una parte de él. Es así, que una vez que se
migre a un ambiente digital, las comunicaciones se harán por medio de
transmisión de datos entre el satélite , la computadora del avión y la estación
en tierra, que en todo momento tendrá información sobre todos los aspectos
del vuelo mediante la introducción de la red de telecomunicaciones
aeronáuticas (ATN), que es una especie de Internet de los servicios
aerocomerciales.
En navegación se requiere la implementación de aviónica con receptores GPS
con función RAIM (denominado GPS/ABAS); además, se requerirá un sistema
de aumentación para mejorar la performance del GPS basada en aeronaves
(ABAS) para lo cual se requiere el mismo equipo, con lo que no se necesitaría
una inversión muy grande. Al unir estas señales, el piloto puede determinar su
posición, tiempo de llegada, tomar la ruta que más le convenga y en tierra se
podrá tener información permanente sobre su ruta.
[ 75

La segundad en vuelo será controlada mediante el sistema de vigilancia
dependiente automática (ADS) y radares operando en modo A/C, así las
estaciones en tierra y el sistema centralizado de aviónica de la aeronave
saben siempre los datos de ubicación y condiciones de vuelo.
> Con estos sistemas se pueden evitar accidentes como los que ocurrieron, en
parte, por la falta de una tecnología más moderna de navegación, como por
ejemplo, el accidente ocurrido el 28 de enero del 2002, cuando un Boeing 727
de Tame se estrelló contra el volcán El Cumbal en Colombia mientras trataba
de aterrizar en Tulcán o el avión de Petroecuador que se estrelló en el cerro El
Tigre cuando se dirigía con destino a Lago Agrio. En ambos casos los
accidentes fueron producidos por fallas en los sistemas de radioayudas a la
navegación, estos provocaron la pérdida de cientos de vidas humanas.
> Una vez que las autoridades de navegación aérea del Ecuador se decidan a
implantar los sistemas antes señalados, se notarán muchos beneficios, debido
a que al disponer de tecnologías de punta en el manejo de la Navegación, a
futuro se reducirán los costos operacionales por la disminución evolutiva de
utilización e inversión en sistemas convencionales.
> Los costos del sector aéreo disminuirán con la utilización de los nuevos
sistemas, como consecuencia del ahorro en tiempos de vuelo (rutas más
directas, reducción de gasto de combustible, reducción de gasto de-
aeronaves, mejoramiento del servicio al usuario, etc.).
> La posibilidad que estos sistemas ofrecen de compartir y proveer el servicio de
navegación, posicionamiento y sincronización de tiempo a otros sectores de la
economía nacional (marítimo, militar, transporte terrestre, construcción,
búsqueda y rescate, etc.), redundaría en una posible disminución de costos
para la DAC en el servicio de navegación gracias a la potencial repartición de
costos entre los interesados y suministro de nuevas facilidades para otros
campos de la economía nacional en su desarrollo.
176

> Los proyectos de navegación cumplen un papel importante en lo relacionado
con la inversión social por cuanto el transporte aéreo, debido a factores como:
problemas de conflicto interno por los que pasa el país, geografía y topografía
ecuatoriana, carencia y precariedad de vías terrestres (en algunas zonas),
etc., se convierte en el principal y en algunos sitios único medio para la
integración, comunicación, asistencia, desarrollo y transporte con demás
zonas del estado.
Estos sitios por lo general son las zonas alejadas del país en donde se
concentra la población más pobre y vulnerable.
> Existen sectores del país que por sus condiciones geográficas resulta oneroso,
difícil y en algunos casos imposible soportar el servicio de navegación con
ayudas convencionales (oceánicos, selváticos, montañosos), dificultándose la
apropiada seguridad en vuelo, generando deficiencias en la prestación del
servicio para estos sectores que en cierta medida produce el aislamiento de
las mismas.
> El trabajo hacia la implementación de nuevas tecnologías de navegación
basadas en satélites pretende igualmente subsanar estas deficiencias en el
servicio, facilitando la llegada del desarrollo a estas zonas al brindar mayor
seguridad a las aerolíneas en sus vuelos que se realizan hacia estos
sectores..
> El aspecto ambiental juega igualmente un papel importante en la justificación
de la inversión en sistemas de Navegación, dado que la reducción de tiempos
de vuelo disminuirá en gran medida la contaminación debida a emisión de
gases por combustión de carburantes; igualmente la flexibilidad en la
elaboración de procedimientos de despegue, aproximación y aterrizaje
permitirá definir trayectorias que reduzcan el nivel de ruido sobre las zonas
aledañas a los aeropuertos, con el respectivo alivio a la población involucrada.
177
Corresponde a las entidades administradoras de aviación civil participar
activamente en el proceso de modernización y mejoramiento de los medios e
infraestructura aeronáutica preparándose y actuando ante las deficiencias
actuales y futuras que ponen en riesgo la seguridad] al igual que optimizar los
servicios y estar al día con los avances en materia aeronáutica.
El sistema CNS/ATM, está siendo considerado en el Ecuador para su futura
implantación, puesto que las autoridades ya han dispuesto la construcción de
nuevos aeropuertos internacionales en Quito y Guayaquil, los cuales contarán
con las condiciones necesarias para implantar las nuevas tecnologías aquí
descritas, de acuerdo con las recomendaciones y directrices dadas por ia
OACI.
Debe tomarse en cuenta que puede existir un riesgo financiero para algunos
Estados, debido a la desviación del tránsito de sobrevuelo internacional en su
espacio aéreo como resultado de la implantación regional de los sistemas
CNS/ATM. Desde una perspectiva regional, una redistribución de las
corrientes de tránsito vinculadas con los sistemas CNS/ATM debería contribuir
al beneficio económico general de los nuevos sistemas. Sin embargo, desde la
perspectiva de un solo Estado, la repercusión de la redistribución podría
resultar bastante compleja, con consecuencias positivas o negativas. Por
ejemplo, si el esquema geográfico de tránsito fuera tal que el realineamiento
de las trayectorias de vuelo redujera el tránsito en el espacio aéreo del Estado,
los ingresos de ese Estado disminuirían. La pérdida de ingresos podría ser
mayor aún si el Estado no se decidiera a implantar los nuevos sistemas
satelitales.
178

5.2 RECOMENDACIONES
> Se recomienda a las autoridades aeronáuticas realizar un análisis
costo/beneficio que permitan establecer la inversión que significaría la
implantación de los sistemas elegidos, y de los equipos involucrados, de tal
manera que responda a las necesidades económicas e institucionales del
país.
> Se debe asegurar que la arquitectura planificada del sistema de navegación
por satélite cumpla con todos los requerimientos operacionales antes de su
integración y uso público dentro del espacio aéreo, controlado por el Ecuador,
a través de pruebas operacionales y ensayos,.
> Se recomienda la participación activa del país en las labores de investigación y
desarrollo del sistema CNS/ATM para una adecuada aprehensión de
tecnología y preparación del personal (técnico, operacíonal y administrativo)
en todos los aspectos para que sea capaz de soportar la introducción de
nuevas capacidades de navegación por satélite.
> Involucrar a las universidades y centros de investigación del Ecuador en las
actividades de investigación y desarrollo de los proyectos de navegación por
satélite, logrando así un verdadero aporte científico nacional en el desarrollo
de estas tecnologías.
> Brindar a la aeronáutica civil de Ecuador y a su personal, la suficiente
experiencia y dominio de los sistemas CNS/ATM, que además la proyecte a
escala internacional en el manejo e investigación de estas tecnologías.
> Llegar a las aerolíneas e interesarlas en el uso de navegación satelital a través
de la demostración de los beneficios tangibles que se pueden obtener a través
de la misma.
> Ecuador debe empezar lo antes posible a utilizar los sistemas de enlace de
datos, una vez que estos estén disponibles.
179

> La transición al SMAS debería efectuarse primeramente en el espacio aéreo
oceánico y en el espacio aéreo continental en ruta con poca densidad de
tránsito. Se debe garantizar que cuando se proceda a la introducción de las
aplicaciones ATC con apoyo de! SMAS, su implantación se lleve a cabo
simultáneamente en las FIR contiguas por las que circulen corrientes
importantes de tránsito. Durante el período de transición que siga a la
introducción del SMAS, deben mantenerse los niveles de integridad, fiabilidad
y disponibilidad de los actuales sistemas de comunicaciones HF.
> Deberían establecerse, si no existen, redes de comunicaciones entre las
instalaciones y servicios ATC situados dentro del Ecuador y las instalaciones y
servicios situados en los Países vecinos.
> El GNSS debería introducirse de manera evolutiva, proporcionando cada vez
más ventajas en consonancia con las mejoras del servicio de navegación.
Estas ventajas deberían elevarse a un máximo cuando se realicen
operaciones GNSS como medio único.
> La infraestructura terrestre de los actuales sistemas de navegación aérea debe
seguir estando disponible durante el período de transición.
> Se debe considerar la posibilidad de separar el tránsito según la capacidad de
navegación y otorgar rutas preferentes a las aeronaves que dispongan de
mejor performance de navegación. Es decir, sería conveniente establecer un
nuevo sistema de rutas en la FIR Guayaquil,
> Al planificar la transición al GNSS deberían tenerse en cuenta los siguientes
asuntos;
a. Programar el suministro o adopción de un servicio GNSS incluidos
los procesos de aprobación de aeronaves y explotadores;
180

b. Amplitud de los actuales servicios de radionavegación de base
terrestre;
c. Nivel apropiado de equipamiento de usuario con capacidad GNSS;
d. Suministro de otros servicios de tránsito aéreo (es decir, vigilancia y
comunicaciones);
e. Densidad del tránsito y frecuencia de las operaciones; y
f. Mitigación de los riesgos correspondientes a interferencia de
radiofrecuencias.
> El Ecuador debe elaborar, en la medida de lo necesario, procedimientos
operacionales conforme a los procedimientos y orientaciones de la OACI para
la implantación de la ADS dentro del espacio aéreo sujeto a su control.
> :li-a' transición a la ADS debería comenzar en primer lugar en los espacios
aéreos oceánicos y en los espacios aéreos en ruta continentales con escasa
densidad de tránsito.
> Cuando se utilicen métodos de vigilancia distintos en FIR adyacentes, debería
garantizarse una comunidad o compatibilidad de los sistemas para que el
servicio prestado sea imperceptible para los usuarios.
> Durante el período de transición en el cual se introduzca la notificación de
posición ADS, deben mantenerse los niveles actuales de integridad, Habilidad
y disponibilidad de los sistemas existentes de notificación de la posición.
> Con la idea, de que de alguna manera en el país se vaya insertando los
nuevos sistemas de navegación aérea por satélite y con el propósito de
acercarse en lo posible al desarrollo tecnológico que introducen estos
sistemas, se recomienda realizar un sondeo permanente de los nuevos
sistemas que se introducen progresivamente a nivel mundial, con el propósito
de ir generando la reglamentación necesaria y la normativa técnica pertinente,
para que se tenga una posibilidad mayor de aprovechar los beneficios que
ofrecen los nuevos sistemas.
181

No existe aún en el país una norma técnica aplicable al sistema descrito,
tampoco existen los estudios correspondientes de ingeniería de cada uno de
los componentes del sistema de navegación aérea (Comunicación,
Navegación y Vigilancia), por lo que se recomienda que se planteen temas de
tesis que abarquen cada componente de los nuevos sistemas, considerando
un análisis costo/beneficio.
Con seguridad inmerso en el proceso de Globalización que exige la
comunidad internacional, el país estará muy próximo a ser partícipe de los
beneficios que ofrecen estos tipos de sistemas de navegación aérea y para lo
cual las autoridades aeronáuticas deben estar preparadas.
188

GLOSARIO DE ACRONIMOS / ACRONYMS GLOSSARY
AAIM
ABAS
ACAS
ACC
ADL
ADUP-
ADS
ADS/B
ADS/C
AFS
AFTN
AIDC
AIS
AMSS
ANP
Autonomous aircraft ¡ntegrity managementGestión autónoma de la integridad de la aeronave
Sistema de aumentación basado en las aeronavesAircraft-based augmentation system
Sistema anticolisión de a bordoAirborne colusión avoidance system
Centro de control de áreaÁrea control center
Enlace de datos aeronáuticoAeronáutica! data link
Procesador de enlace de datos automático - - •;•Automatic data link processor
Vigilancia dependiente automáticaAutomatic dependent surveillance
Vigilancia dependiente automática-radiodifusiónAutomatic dependent surveillance-broadcasting
Vigilancia dependiente automática-contratoAutomatic dependent surveillance-contract
Servicio fijo aeronáuticoAeronáutica! fixed seivice
Red de telecomunicaciones fijas aeronáuticasAeronautical fixed telecomunication network
Comunicaciones de datos entre instalaciones ATSATS interfacility data Communications
Servicio de información aeronáuticaAeronautical information service
Servicio móvil aeronáutico por satélite [SMAS]Aeronautical mobile-satellite service panel
Plan navegación aéreaAir navigation plan

ANS
APP
ASM
ATC
ATCO
ATIS
ATM
ATN
ATS
ATSC
ATZ
COMA
CNS
CNS/ATM
CPDLC
CTR
Servicios de navegación aéreaAir navigation services
Oficina de control de aproximaciónApproach control office
Gestión del espacio aéreoAirspace management
Control de tránsito aéreoAirtraffic control
Controlador de tránsito aéreoAirtraffic controller
Servicio automático de información del área terminalAutomatic terminal information service
Gestión del tránsito aéreoAirtraffic management
Red de telecomunicaciones aeronáuticasAeronautical telecommunication network
Servicios de tránsito aéreoAirtraffic services
Comunicaciones de los servicios de tránsito aéreoAirtraffic services Communications
Zona de Tránsito del AeródromoAerodrome Traffic Zone
Acceso múltiple por división de códigoCode división múltiple access
Comunicaciones, navegación y vigilanciaCommunications, navigation and surveillance
Comunicaciones, navegación y vigilancia/gestión deltránsito aéreoCommunications, navigation, and surveillance/airtraffic management
Comunicaciones por enlace de datoscontroiador/pilotoController/pilot data link Communications
Región de ControlControl Región

DCPC
DME
DSB-AM
EGNOS
FAA
FANS
FAS ID
FAWP
FDE
FIC
FIR
FIS
FL
FMS
FPL
GBAS
Comunicaciones directas piloto/controladorDirect controller/pilot Communications
Equipo radiotelemétricoDistance measuring equipment
Doble banda de amplitud moduladaDouble sideband-amplitude modulated
Servicio de superposición de navegación globaleuropeoEuropean global navigation overlay service
Administración federal de aviaciónFederal aviation administration
Comité especial sobre sistemas de navegaciónaérea del futuroSpecial committee on future air navigation systems
Documento para la implantación de las Instalacionesy serviciosFacilities and services implementation document
Punto notificación de aproximación finalFinal approach way-point
Detección y eliminación de fallasFault detection and exclusión
Centro de información de vueloFlight information center
Región de información de vueloFlight information región
Servicio de información de vueloFlight ¡nformation service
Nivel de vueloFlight level
Sistema de gestión de vueloFlight management system
Plan de vueloFlight plan
Sistema de aumentación basado en tierraGround-based augmentaron system

GEO
GES
GIC
GLONASS
GMS
GNSS
GPS
HF
HFDL
HSI
I+D
IATA
ICC
IFR
ILS
INMARSAT
Satélite geoestacionarioGeoestationary earth orbit
Estación terrena de tierraGround earth station
Canal de integridad GNSSGNSS integrity channel
Sistema orbital mundial de navegación por satélite(Federación de Rusia)Global orbiting navigation satellite system (RussianFederation)
Estación terrestre de monitoreoGround monitoring station
Sistema mundial de navegación por satéliteGlobal navigation satellite system
Sistema mundial de determinación de la posición(Estados Unidos)Global positioning system
Altas frecuenciasHigh frequencies
Enlace de datos HFHF data link
Indicador horizontal de situaciónHorizontal situation indicator
Investigación y desarrolloResearch + development [R+D]
Asociación del transporte aéreo internacionalInternational airtransport association
Comunicaciones entre centros de controlInter-center Communications
Reglas de vuelo por instrumentosInstrument flight rules
Sistema de aterrizaje por instrumentosInstrument landing system
Consorcio s ate I ¡tal marítimo internacionalInternational Maritime Satellite Consortium

ISO
LAAS
LAT
LEO
LONG
MASPS
MCS
MES
MET
MEO
MF
MLS
MMR
NAV
NDB
NGSO
Organización internacional de normalizaciónInternational standardization organization
Sistema de aumentación de área localLocal área augmentation system
LatitudLatitud e
Sistema satelital de órbita terrena bajaLow earth orbit satellite system
LongitudLongitude
Especificaciones mínimas de performance delsistema de aeronaveMinimum aircraft system performance specifications.
Estación de control baseMaster control station
Estación terrena móvilMobile earth station
Servicios meteorológicos para la navegación aéreaMeteoroíogical services for air navigation
Sistema satelital de órbita terrena mediaMédium earth orbit satellite system
Frecuencia mediaMédium frequency
Sistema de aterrizaje por microondasMicrowave landing system
Receptor multimodoMulti-mode receptor
NavegaciónNavigation
Radiofaro no direccionalNon-directional radio beacon
Órbita no geosincrónicaNon-geosynchronous orbit

NGSS
NM
NOTAM
OACI
OSI
PAR
PRF
PSR
RAIM
RCP
RF
RGS
RNAV
RNAV Route
RNP
RNPC
Sistema satelital para la próxima generaciónNext generation satellite system
Millas marinasNautical miles
Aviso a los aviadoresNotice to airmen
Organización de aviación civil internacionalInternationa! civil aviation organizaron
Interconexión de sistemas abiertosOpen systems interconnection
Radar de aproximación de precisiónPrecisión approach radar
Frecuencia repetitiva de pulsoPulse repetition frequency
Radar primario de vigilanciaPrimary surveillance radar
Vigilancia autónoma de la integridad en el receptorReceiver autonomous integrity monitoring
Performance requerida de comunicaciónRequired communication performance
RadiofrecuenciaRadio frequency
Estación terrena remotaRemote ground station
Navegación de áreaÁrea Navigation
Ruta de navegación de áreaÁrea navigation route
Performance requerida de navegaciónRequired navigation performance
Capacidad de la performance requerida denavegaciónRequired navigation performance capacity

RSP
SA
SAM
SAR
SARPS
SATCOM
SBAS
SMAS
SSB
SSR
TOMA
TMA
TWR
UHF
UL
UM
UTC
Performance de vigilancia requeridaRequired surveiilance performance
Disponibilidad selectivaSelective availability
Sud AmericaSouth America
Búsqueda y salvamentoSearch and rescue
Normas y métodos recomendadosStandards and recomended practices
Comunicaciones por satéliteSatellite communication
Sistema de aumentación basado en satéliteSatellite-based augmentation system
Servicio móvil aeronáutico por satéliteAeronautical mobile sateilité service [AMSS]
Banda lateral únicaSingle sided band
Radar secundario de vigilanciaSecondary surveiilance radar
Acceso múltiple por división del tiempoTime división múltiple access
Área de control terminalTerminal management área
Torre de controlTower
Frecuencia ultra altaUltra high frequency
Enlace ascendenteUplink.
Mensaje de enlace ascendenteUplink message
Tiempo universal coordinadoUniversal time coordinated
VDL
VDL-4
VFR
VHF
VLF
VOLMET
VOR
VSM
WAAS
WGS-84
Enlace de datos VHFVHF data link
Enlace de datos VHF Modo 4VHF data link Mode 4
Reglas de vuelo visualVisual flight rules
Muy alta frecuenciaVery high frequency
Muy baja frecuenciaVery low frequency
Información meteorológica para aeronaves en vueloMeteorological information for aircraft in flight
Radiofaro omnidireccional VHFVHF omnidirectional radio range
Mínima de separación verticalVertical separation minimum
Sistema de aumentación de área ampliaWide área augmentation system
Sistema geodésico mundial -1984World geodetic system -1984

•'. '.;.-. '-^^"' V-^^OH^^^,!^,-',^. ; ^--V^^<-í.7ÍÍS!«íí¡i';^>'*-"';-ír:'lV' '"-U '. . vi «• T*>í,j..>-;Keit.-/¿i*J'tí'i.:-rfS>Tí(f'> « *'-,'*•**iJ «,'•• •
-n-r/T;1r rVrÁ L99;" nt 'TT.*™'ir /" i' i- T *r"-<'p' ^ r'~r i A "i- • ;-*^i •iWbiLui-1 L'ü .1 iíAK ií
1 3!
i iI Sí'
: F
i r- ;nif iHi{: /»íüí '
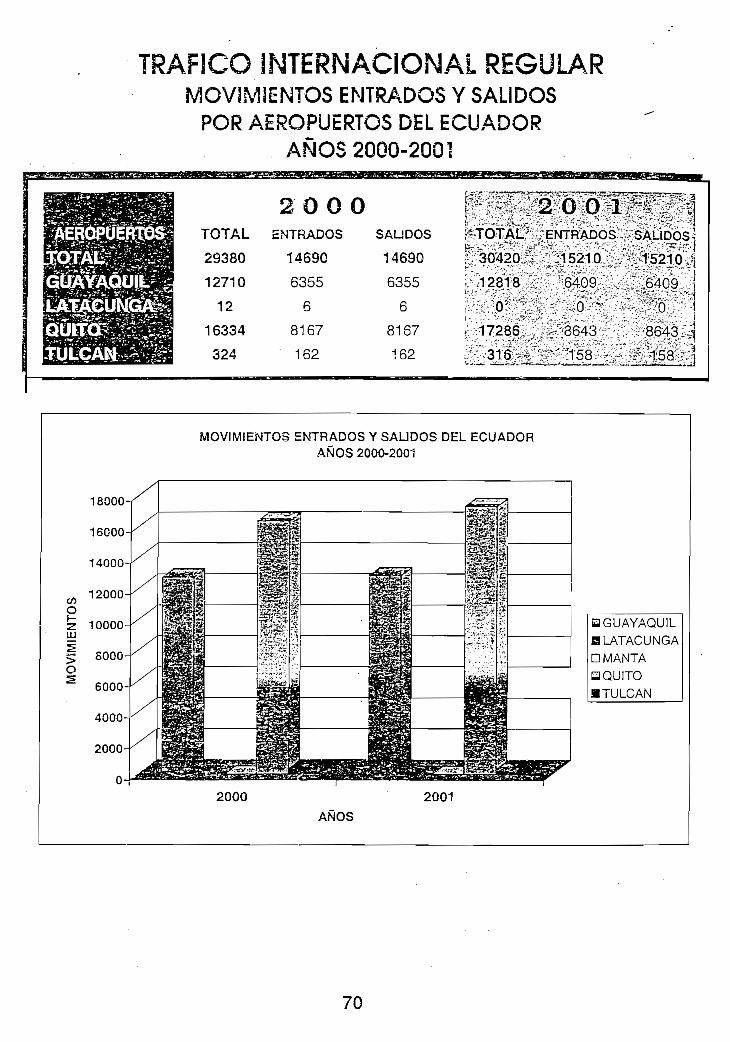
TRAFICO INTERNACIONAL REGULARMOVIMIENTOS ENTRADOS Y SALIDOS
POR AEROPUERTOS DEL ECUADORAÑOS 2000-2001
TOTAL
29380
12710
12
16334
324
2 0 0 0ENTRADOS SALIDOS
14690 14690
6355 6355
6 6
8167 8167
162 162
'-TOTAL-* AENTRADOS'.,-'SALIDOS-
V30'420.
12318i • ,o; ;
1 17286.
'•15210
6409 .
-<T*-•3643
J 158 «
.£409 J
-'"~° ' 1
•8643 í-jj..-/í
C/)O
zUJ
>o
MOVIMIENTOS ENTRADOS Y SAUDOS DEL ECUADORAÑOS 2000-2001
2000 2001
AÑOS
70

TRAFICO INTERNACIONAL NO REGULARNUMERO DE MOVIMIENTOS ENTRADOS Y SALIDOS
POR AEROPUERTOS DEL ECUADORAÑO 2001
AÉROPÜÉRTOSP
TOTALQUITO
LATACUNGA
TCXFÁt ENTRADOS
1052"617ü90
SALIDOS
.10526Í7
90
MOVIMIENTOS ENTRADOS Y SALIDOS DEL ECUADOR SERVICIONO REGULAR
AÑO 2001
QUITO GUAYAQUIL
AEROPUERTOS
LATACUNGA
71
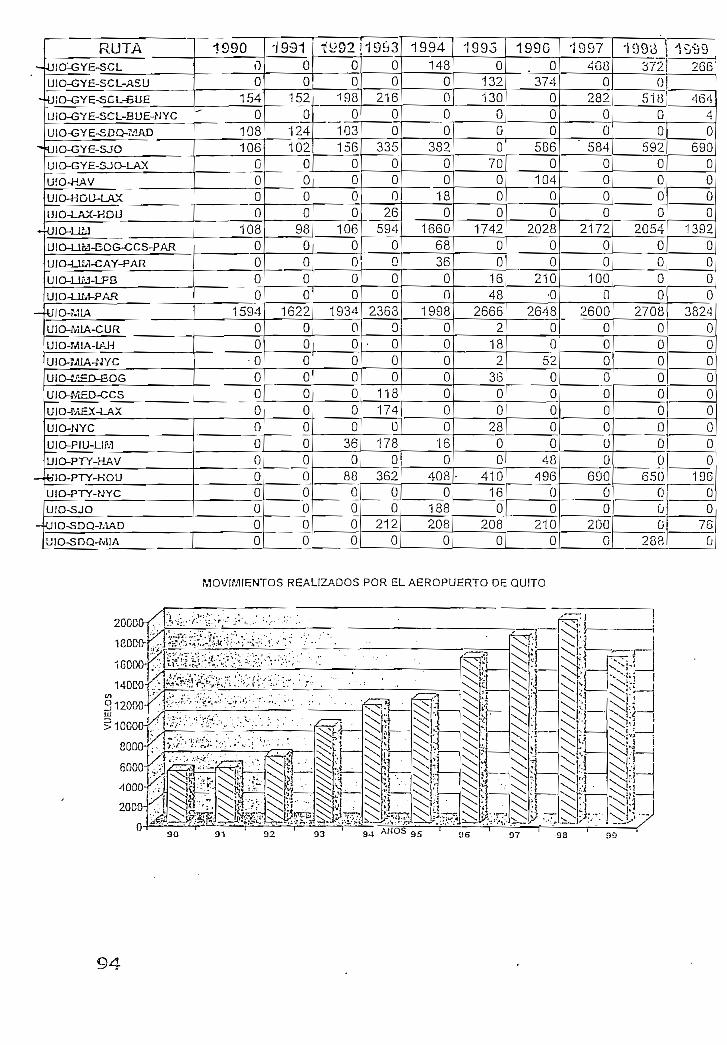
RUTA.U!O^GY£~SCL
U1O-GYE-SCL-ASU
•UIO-GYE-SCL-5UE
UíO-GYE-SCL-BUE-NYC
U1O-GYE~SDQ-?¿AD
U1Q-GYE-SJO
U1O-GYE-SJO-LAX
UÍO-HAV
UiO-^GU-LAX
UIO-LAX-KOU
•UIO-UL3
U!Q-4_i&3-EOG-CCS-PAR
UIO-L1U-CAY-PAR
UIO-LJ£J-1_FB
U1O-L_U¿-PAR
•UJO-M1A
UIO-MiA-CUR
UIO-M1A-IAH
U1O-TJ11A-WYC
UIO-Í.5ED-EOG
UJO-MED-CCS
UIO41AEX-LAX
UJO-NYC
UID-PIU-LJM
UJO-PTY HAV
-yiO-PTY-KOU
UIO-PTY-MYC
UÍO-SJO
•U1O-SDQ-MAD
U1O-SDQ-M1A
199000
1540
108106
0000
1030000
159400
• 000000000000
'¡99100
1520
124102
0000
980000
16220000000000000
0
-ÍL>9200
1980
103156
0000
1060000
193400
• 00000
360
880000
19b300
21600
335000
26594
0n
00
23630
• 000
118174
0178
0362
00
2120
1994148
0000
38200
18Oj
16606836
00
19980000000
160
4080
188208
0
19950
132130
000
70000
174200
1648
26662
182
3600
2800
41016
0208
0
1990. 0374
000
5860
10400
202800
210•0
264800
5200000
48496
00
2100
1997408
0282
00
584000Q
217200
1000
26000000000ü0
69000
2000
109S \9372
0518
00
5920000
20540
2G6
46440
6900000
13920
0| 000
00
2708| 38240000
0000
Oí 0OÍ 0.ü| 001 00
650000
288
0196
00
760
MOVIMIENTOS REALIZADOS POR EL AEROPUERTO DE QUITO
94

TRAFICO INTERNACIONAL(SERVICIO AEREO REGULAR)
MOVIMIENTOS ENTRADOS Y SALIDOS POR EL AEROPUERTO DE OUÍTGPERIODO 1990-1999
-»•
• .
RUTA
TOTALUIO-AMSUIO-BOGUIO-BOG-AMSUIO-BOG-CCSUIO-BOG-CCS-FRA
UIO-BOG-CCS-PARUIO-BOG-CUR-AMSUIO-BOG-NYC
UIO-BOG-PAR
•UIO-CAY-PAR
UIO-CCS-PAR
UIO-CIX-LIMUIO-CLOUIO-CLO-BOG
UIO-CLO-PTY
.UIO-CLO-MEDUIO-CURUIO-CUR-AMSUlO-GYE-AMS
UlO-GYE-ATL-AMSUIO-GYE-BOGUIO-GYE-BOG-CCS-FRA
UlO-GYE-BOG-MEDUIO-GYE-BUEUIO-GYE-CCSUIO-GYE-CUN-MEX-NYCUIO-GYE-CUR-AMS-UIO-GYE-HAV
UIO-GYE-HOUUIO-GYE-IAH-LAX•UIO-GYE-LIMUIO-GYE-MAD
UIO-GYE-MIAUIO-GYE-MIA-NYCUIO-GYE-MEX-LAXUIO-GYE-MEX-CUN
UIO-GYE-MNO-SAOUIO-GYE-MNO-SAO-RIOUIO-GYE-HOUJJIO-GYE-NYCUIO-GYE-PTYUIO-GYE-PTY-HAVUIO-GYE-PTY-MIA-NYC
UIO-GYE-PTY-MEXUIO-GYE-PTY-NYCUIO-GYE-RIO-SAOUIO-GYE-SAO
1990
51840
4000
586108
0000
104000
- - 1400
. 0000000
8000
98000
. 4520
6580
1020000
. 32400
9200
960
1991
55180
4330
658136
0000
112000.0000000000
6800
102000
4860
6980
1049000
32400
940
.11392
0
1992C606
0424
• o906145
0000
158000
16000000000000
193000
5740
783.0
1160000
36200
1020
103103
0
1993
95070
6170
12240
314ü000000
. 00000000
3140000
202000
5910
817000000
42800
1970
115105
0
19941 1 54G
0632
01682
7850
000
804298
00000
8400
46238
10000
12400
86754
01418
0132
0000
524- 242
0000
960
199512110
20866
161392312
058
0104136
00000020
240
3000000
23656
086
11720
12780000000
. 5900000
2080
199616200
1921466
02098
31400
' 370288124
0000
51600000000600
202000
6980
21740000
2800
' 0000
696188
84
199718358
01732
01884
1000
0GSñ312
00000
4160000
3040000
1420
390140
00
11300
2430144
00
168238
0708256
7800000
159519900
01760
1009'IG336
01566
o! o2748 2710
Oj 0Oj 0oí o
724 G6296 0
0¡ ü0Ü
000
002
00
220¡ 102Oí 000
3240000
860
456280
00
10520
249486
0
00
38800
• o002
424122626
0288260550
00
Oí 36416
090
958768
00
160
o00
20600
516666
00
218000
93
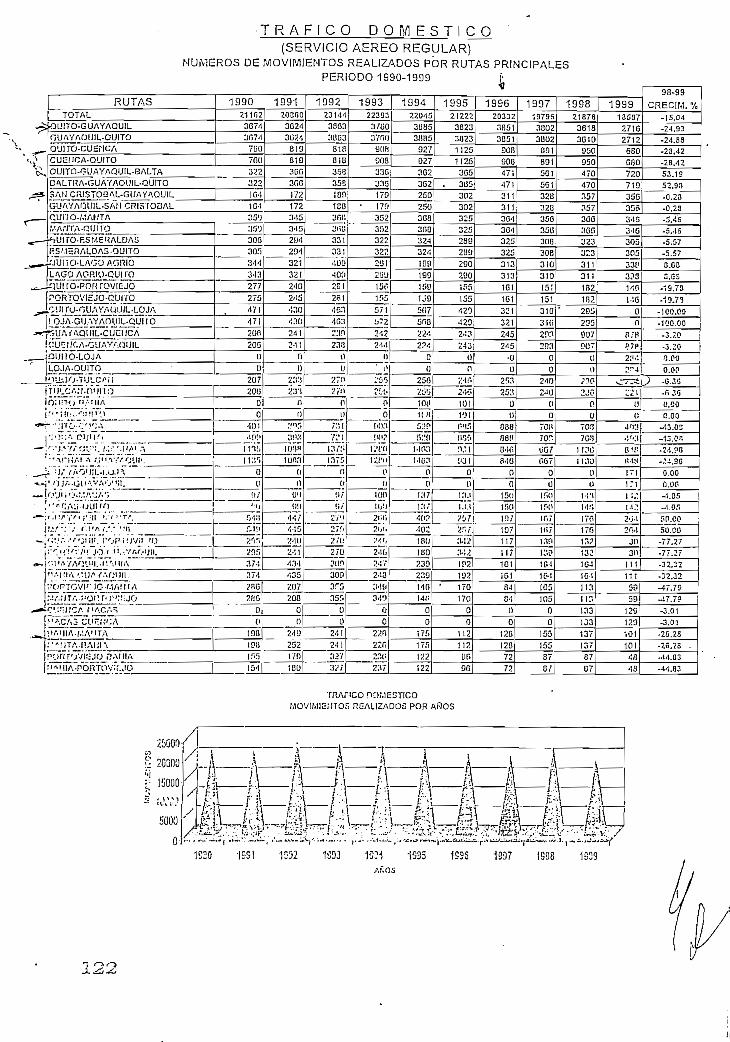
JT R A F I C O D O M E S T I C O
(SERVICIO AEREO REGULAR)NÚMEROS DE MOVIMIENTOS REALIZADOS POR RUTAS PRINCIPALES
PERIODO 1990-1999 j-
-'._
'vi.
^*
r 1
-i —
---
— -í
* r
—
^>
— .
-—
+Jt
a*
'•1
^r
RUTASTOTAL
(OUITO-GUAYAQUIL
OUAYAüUlU-aUlTO
QUI fO-CUENCA
CUEMfiA-QUITO
QUITO -GUAYAQUIL- ¿ALTA
DALTRA-GUAYAQUIL-QUJTO
SAN CRISTOBAL-GUAYAQUIL
GUAYAttUIL-SAM CRISTÓBAL
aun O.M ANTA/,'Af/TA -QUITO
-^UirO-F.SMEHALDAS
F.SMñRALOAS -QUITO
-'JUliO-LAGÜ AGRIO
LAGO AGRIO-QUITO
-quiro-ponrovicjoPQRTOVIEJO-CUITO.C'JITU.OUAYAÜUIL.LOJA
!. OJA-GUAYAOU1L-QUI I O
ríUACAQUlL-CULlJCA
KUCílCA-GUAYAQUIL
¿1UITO-LOJA
LOJA-OU1TO
OLu.rO-7Ul.Oil
T'iLCA.'l-niJilO
o: UTO ».MHA•"r!I.vM!!T-'.t
';•):;•*. fijiKif 'j^Y/o:.-. /.;r".;Mi .".••••\rhYti -i .'.;".v:vo'>.- :j/ íA'jiJIL-É.Ul'V
' o.i/-.e-u-v*'-v'j"¡i.ojii'.'.r.:A'JA".••«r:A'.HJUiro
';:.'.-. .vr;i;¡i. F'Oí'iOVii 'O
T'-.IÍ^V/'Í J O < ",,vr.O'J!l.
O-It,.i/AOU'l..ll'\i!|f\\. A-.OHJI.
"OPTCA'!'' JO-?.¡AÍJIA
r.if'.íírA.i'on.pr'ir-joC'.:"i:CA í'ACr.S
.'•V-.CA3 CUÍ-H'JA
'.'/••MIA-MA'ITA
roRr'jVi^Jo r'AiiiAMMIIA-PORTOVI.'.JO
1990211132
3G74
3074
700
700
322
322
IG4
104
35'J
35 'J
300
305
:J4-i343
277
275
471
471
208
200
(J
0
207
200
0
0
401
•W
lili*
na-,oo
ft;'•!)
/Hür.-i;t,„._
20P
374
374
2HO
28G
0
0
198
198
155
15-1
1091
20HRO
3G24
3024
819
819
300
300
172
172
345
340
21M
294
321
321
2-10
2'I5
430
430
241
241
íl
1)
2:C)
23'1
n0
•.!'>:,3!>.v.
10'}"
ion:tn0
O'l
!)!)
•M/
•Í45
241!
2-11
434
435
207
200
0
0
249
252
17!)
1SU
199223144
3803
3UG3
81 tí
81U
358
353
1í!9
ICO308
3'iü
331
331
4ÜÜ
4 Oí!
2SI
251
403
4G3
Ü3Ü
23.'j
0
lí
/Í7í'
Zf'i»
nu
?:iiv\ ii;i/:i1375
ño
u/ü/
t'/'i
2¡"fi
Z»'Ü
270
3DH
30£)
3.r5
35f.
0
0
241
241
357
327
199322333
3700
3700
90B
903
330
330
179
• 170
352
352
322
322
201
20U
15P
155
5?!
&2
242
244
1)
' 0
i-G1:-r-'/i-
0
ono.-t!'{!,->
K'í'íi
0
Í()il
ll/l
2Hri
2i..f.
^fí
24ti
?•! V
2-13
340
34')
0
0
22fi
22H
sr.n237
199422045
3ÜH5
3JIH5
927
927
302
302
250
250
308
300
324
324
199
199
15S
IJ9
507
508
'¿'¿A
??•',
0
í)250
'¿'•j'j
10U
1[flG.''P
fl:rpI4f.;i1-1 o:<
D(i
1:1;1:1;•iti?40^
18(1
180
239
239
140
I4(¡
0
0
175
175
122
122
19952I222
3823
3823
1125
1125
305
. 305
302
302
325
325
23»
2H£J
290
290
155
155
429
429
243
243
0
0
¿4*.»
101
191
[••'!;"
< ison.'iP3I
0
[)
13.!
¡.U
?ÍP?'¿!'.¡
,'t'lí
.*W¿
1Í'2
192
170
170
0
0
112
11?.
lili
90
199620332
3851
3051
908
908
471
471
311
311
304
304
325
325
313
313
1G1
101
321
321
245
245
•0
U
2r.3
253
0
0
088
8811
840
840
0
0
151)
150
197
197
117
117
101
161
B-i
84
0
0
128
128
72
72
199719796
3002
3802
801
89 1
501
501
328
328
356
350
308
30H
310
310
151
151
310
310
293
293
0
0
240
240
0
0
ron/onIÍÜ7
007
0
0
15u
ir-nir.rir, 7l.ip
13P10-t
164
105
105
0
0
155
155
87
07
1998
21878
3618
3C10
950
950
•170
470
357
357
3GG
300
323
323
311
311
1ÍÍ2
182
2P5
295
907
007
0
0
2W
2-'C
0
0
70-'í
70')
i I:HI1KW
0
0
M'i
M::17?
170
13?
13.7
1G-Í
134
113
113
133
133
137
137
87
07
199913537
2716
2712
650
000
720
719
35G
356
345
3-10
305
305
33t'
333
146
I.ÍG0
0
R;Hí?7P
2!' 4
.T'4
v^ ••"t.'t
Z'¿í
uí!
4T!
•:r':ie i;:(US
¡7(
1:1u.:i-t;:2 '.14
204
JO
30
111
111
5?
59
120
120
101
101
48
40
98-99
CRECIM. %
-15.04
-24.93
-24.03
-23.42
-28.42
53.19
52.93
•0.23
-0.23
-5.46
-5.4G
-5.57
-5.57
B.GS
C.GS
-19.73
-19.73
-100.00
-100.00
-3.7.0
-3.20
0.00
o.or
J -6. 35
•fi 35
Ü.OO
n.oo-13.05
-13.0R
-W.S6
0.00
0.00
-4.05
-4.9.1
50.00
50.00
-77.27
-77.27
-32.32
-32.32
-47.79
-47.7?
-3.01
-3.01
-2G.28
-25.23 -
-44.03
-44.33
í-v-r -j.--.-i ~é rm ?¿ w/mi MÍ pTl í '.i í'. ,— &H Jai m i-;ii fU(—i' [(¿fii Jr.^ ,£*$ r-;;.y .}-'--'~\.. r. ^H\ ,^'p fe'-M.. j
15S1 1393 1335 1S35 1SD7 1338
CEC
tf
K

BOLETÍN ESTADÍSTICODE TRAFICO AEREO
DIVISIÓN DE TRANSPORTEAEREO
AÑO 2001

MOVIMIENTOS
© Las operaciones en el 2001 que'se efectuaron fueron 18.352 vuelos, así
podemos observar que hasta el 2000 experimenta un crecimiento del
3.92%.
En el 2001 las rutas con mayor participación, o con un mayor número de
vuelos fueron: QUITO-GUAYAQU1L-QUITO, QUITO-GUAYAQUIL-
BALTRA-GUAYAQUiL-QLHTQ, y GUAYAQU1L-CUENCA-GUAYAQUIL
que en términos relativos representan el 39.76%, 8.16% y el 9.35%
respectivamente, mientras que el resto de rutas en conjunto representan el
42.73%.
JRAFICO DOMESTICO NUM'ERO DE M OV (M'lENTOS REALIZADOS POR- ' - . - • - RUTAS DEMÁYOR DEMANDA " ' ' . i • ¿ -
, "SO/00%-j
o2" '40/00%.tu ••'•
39,76% 8,16% 9,35% 42,73%
> 20,00% -
RUTAS
En el 2001 lo que respecta al número de vuelos por compañías de aviación
TAME es la que realizó el mayor número de movimientos, que en términos
relativos representa el 81,15% y el resto de compañías en conjunto
representan el 18.85%.
TRAFICO DOMESTICO MOVIMIENTOS REALIZADOS
POR COMPAÑÍAS
16

TRAFICO DOMESTICO REGULARNUMERO DE MOVIMIENTOS REALIZADOS POR LOS AEROPUERTOS DEL ECUADOR
AÑO 200 1
•••5Í ^S;aUIIADESF-s' >« ENEtfrTFEB^ MART^ ABIT* * MAY^mUW ' JUt; AGO* *SEP^ flCT": NÜV DIC •-^
^ ¿TOTAL
,J QUITO-COCA^ COCA-QUITO^ QU1TO-CUENCA—) CUENCA-QUITO
QUITO-ESM ERA LOASQ ESMERALDAS-QUITO
QUITO-GUAYAQUIL-BALTRA-3 BALTRA-GUAYAQUIL-QUITO
-— \ ' jQUifO-GÜAYÁQUIL
-~) . .GUAYAQUIL-QUITOfQUfTO-LAGO AGRIO
3 ;LAGO AGRIO-QUITO^ ;QUITO-LOJA) ÍLOJA-QUITO
—} lourro-MACAs -• 'MACAS-QUITO
3QUITO-MANTA
O MANTA-QUITOQUITO-PORTOVIEJO
-W PORTOVIEJO-QUITO— j QUITO-TULCAN
TULCAN-QUITO3 GUAYAQUIL-CUENCA
CUENCA-GUAYAQUIL
O_. GLJÁYÁQU1LÍLOJA .,'t Í11-J LOJA^GUAYÁQUIL'T^f * *»— ) GUAYAQUIL-MACHALA"*V>tí
iMACHALA-GUAYAQUJLlíiiit
18352
691691624
.622
276276748
,749
.37053593
406406
'•518- . 517
110109
193191337337212212858
• 858
"J^PÍ&MÍ6|yr*!3$?%.'] i síiS* *,*** £4 d^oLr¿&4- ^
JÍ529
5757535325256363
312, 312
•34- - 34
- 3939
" " 1313
3333181823236766
£^~~t 8
5Se*^ ?0K '.'I»r!20'
1371 1625 1551 1 598.;'- -'1613 V 1541 r-1546.- ^1462 -1507' r1512 ::--1497J
50 62 59 63 65 65 64 59 31 .58 5850 62: 59 . 63 65 65 64" 59 31 " 58 5849 53 51 53 51 53 54 50 . •" 55 "51. . 5149 53 51 ' 53 51 53 . 54 50 ; 54 51 • 5122 24 26 25 25 2 2 - 2 3 - 2 0 22 21 2122 24 26 25 25 22 23 20 22 21 2156 ' 6 2 64 . 62 60 65. 65 . 60 64 62 6656 62 64' 62 60 65 65. . 60 64- 62 "". 66
267 320 308 312 319 322 318 (302 , 322 ' '301 * "302268 312 287 . 300 • 310 307 '- 301 284 ' 314 297*"» 301.
. 27 34 33 34 37 35" 36 3 3 - 3 6 ,34,; 332 7 - 3 4 33 , 34 37 35 v 36 33 / 36. 34 '- 33
-36 40 39 40 - 39 ,40 "-^45 -:':47; 49 "-54-"^'' 50- ' 36 41 39 40 39 * . 40 -1 ,45 "- 47 sí ", 49,'/54Ív:50
7 6 '10., 12 12 :2 .0 ' 12 13 ..12'' 11'. 7 6 10 12 ' 12, 2.' 0 12 * 13 12", 11
37 47 0 2 0 0 0 0 13 28 3337 47 0 2 0 0 0 0 13 - - 28 , - 33
9 0 43 41 43 43 44 42 32 '12 ' 109 0 43 41 43 43 4 4 - 4 2 - 3 2 12 .. . 10
18 21 21 22 21 15 17 12 13 13. . 1618 21 21 22 21 15 17 12 13 13. ' 1661 76 70 73 71 73 76 70 76 75 7063 76 70 73 71 73 75 70 76 75 70
* . '9 -. Í2~l~ . 1ÍÍ^T 10 ," 412 FS^^S^TWr lO 5$loSp*17j... , . ,. „ >«j . ,»,(l. , ,«. .,ív,.,yg'gi -" "— .-• %"'' "Q^S" ¿1-J«;f,*vi'i'l3s 1 n"^-^ V'ñl S*'ílir-7y i¿.- *n*A^"iu •" •'i¿ .43<¿uy¡w .y l \8f io^rioSK,,7t
O
MOVIMIENTOS REALIZADOS EN EL ECUADORAÑO 2001
NOV
115
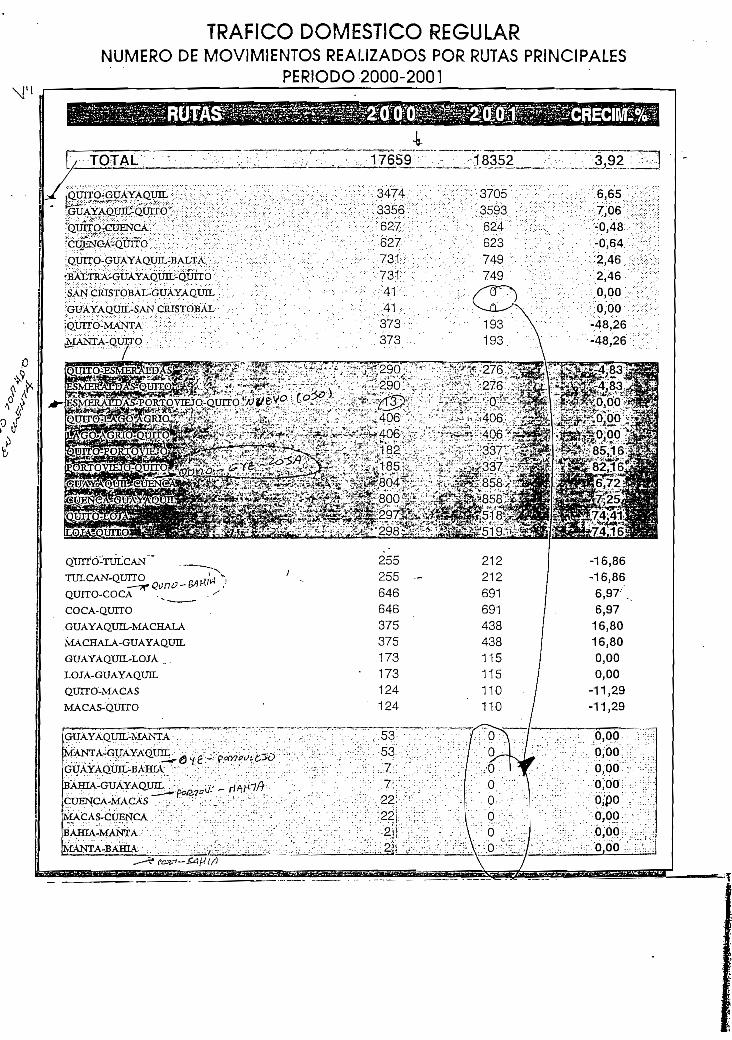
TRAFICO DOMESTICO REGULARNUMERO DE MOVIMIENTOS REALIZADOS POR RUTAS PRINCIPALES
PERIODO 2000-2001
*QUirO;GUAYAQUIL
feuAY^iuir-QurroQUITp,-CUENCA
^tíENGA-QUTTO
QUITO-GUAYAQUIL-BALTA
SAN CRISTOBAL-GUAYAQUIL
GUAYAQUIL-SAN CRISTÓBAL
IQUITO-MANTA
(MANTA-QUITO
^"^^\r;", - :J. 1SWS858/"r.V- í*- i *<"*'*r- 800 Vl* "4?^ i 858"*¿
-*' A «$•£&', *M4». nVi-rí'15- " VA^^^Xi^r-'Vrí2^fí ~-.¿# t V^^r2.9^ .V jgpffif SI 8 ¿i
j.;:.'.;. .. ¿igé j JraáHáA
í^Ur'-TULCAN
TULCAN-QUITO
COCA-QUITO
GUAYAQUIL-MA CHALA
MACHALA-GUAYAQUJX
GUAYAQUIL-LOJA .. .
LOJA-GUAYAQUIL
QUITO-MACAS
MACAS-QUITO
GUAYAQUIL-MANTA
MANTA-GUAYAQUn^ _ p6Wít;tC3¿>GUAYAQTJIL-BAHIA
BAHIA-GUAYAQUIL ,. , ríAH7/>^ fc/3,7^' r'nr-/CUENCA-MACAS ' "
ítfACAS-CUENCA ' - .
BAECLA-MANTA
MANTA-BAHIA /
' 5 3 f 0"\ 0,0053 / o J / 0,007 / ,0 l y 0,00 •
7 ° 1" 22' - 0
22, .' 02)1 \
0,00o,po0,000,00
2]í .. ' V 0 . / 0,00 ' ';
*afiii**iiiaiKii»^^
ANEXO C
Proyecciones de Tráfico Aéreo

TRAFICO INTERNACIONAL
Número de movimientos realizados POR RUTAS PRINCIPALES
Servicio Aéreo Regular
QUITO-MIAMI
1. DATOS REALES 2. LINEA DE TENDENCIA
199019911992199319941995199619971998199920002001
01234567891011
1.5941.6221.9342.3681.9982.6662.6482.6002.7083.8244.4524.136
= 1456,8x°'3839
3. DATOS PROYECTADOS
200220032004200520062007200820092010201120122013
121314151617181920212223
3.7733.8914.0034.1104.2134.3124.4074.4994.5894.6754.7594.841
1. Los datos reales son obtenidos del "Boltín Estadístico de Tráfico Aéreo" de la DAC2. A partir de estos datos se obtiene una línea de tendencia por medio de la ayuda del
paquete computacional EXCEL

3. Los datos proyectados son obtenidos con la ecuación de esta línea de tendencia.
QUITO-BOGOTA199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112131415161718 \9
20212223
400433424617632866
1.4661.7321.7601.5663.1764.010
- 4.3805.1706,0336.9687.975ao54
'10.205- - 11.328
Í2J2314.090
- -, 15,529" " 'f 7.040
,500y = 36.009X2 - 109,36x + 506,63
199019911992199319941995199619971998199920002001200220032004
200720082009201020112012
1011
"1$::~Í..#E$£
586658906
1.2241.6821.3922.0981.8842.7482.710810864
•:$J4£
QUITO-BOGOTA-CARACAS
= 1982,7e-°'0331x
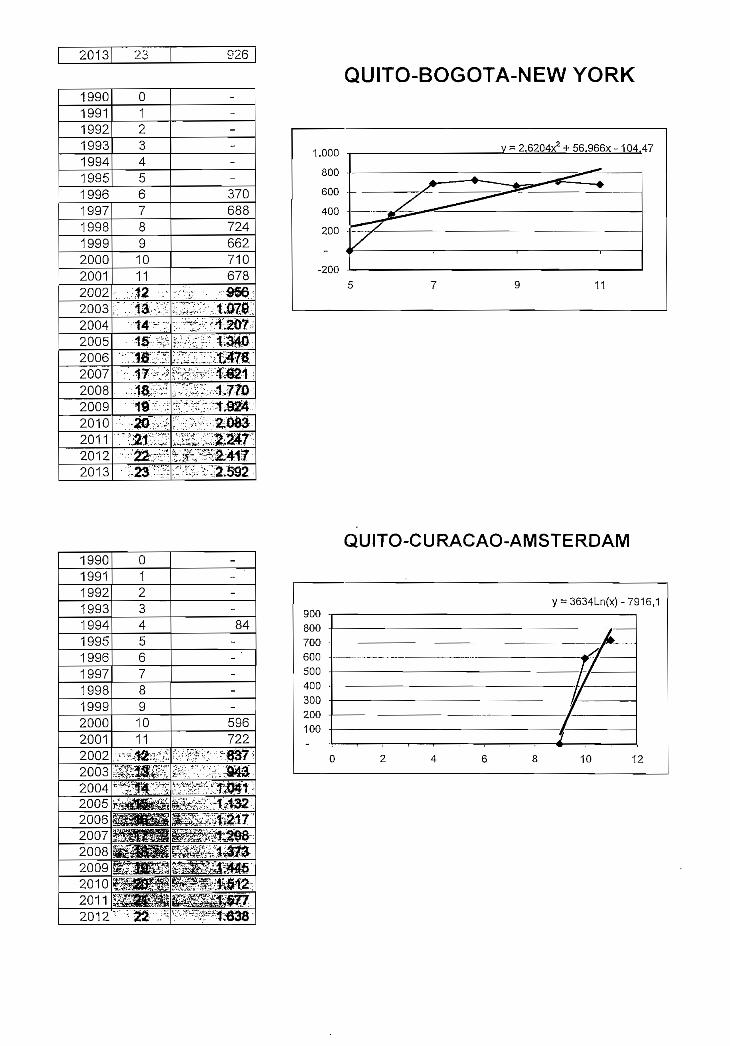
2013 23 926
QUITO-BOGOTA-NEW YORK199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213 .14-15 ~"n :ir-ía10
2021 ;22- *23
------370688724662710678966
,- 1.078~: i.2ü7
1.340- : _ I4?a-*- t«21
* 1.770- " 1&24
2.083.-* 2.247-r "2.41T
2,592
1.000 V = 2.62Q4X2 + 56.966x - 104.-
200 \0
11
19901991199219931994199519961997199819992000200120022003200420052006200720082009201020112012
1011
QUITO-CURACAO-AMSTERDAM
84
596722837943
1.132
900
800
700
600
500
400
300
200
100
y = 3634Ln(x)-7916,1
8 10 12

2013| 23' .6S7
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112 '13'14 "1516T7_1819 ,20~21 -.22 "23
00000560
140280122106102183;1741S6-198~ 210V"222.
~ - (294,, 24B
~ * 257269
H> ;.2$i293
QUITO-GUAYAQUIL-HAVANA
300
250
200
y = 11,857x-f-20,286
8 10 12
19901991199219931994199519961997199819992000200120022003200420052006200720082009201020112012
1011121914
452486574591754117269811301052288328932314831
332
S83
QUITO-GUAYAQUIL-LIMA
1400y = 16,836x+612,15

QUITO-GUAYAQUIL-MADRID199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112131415 '16 -"*17-t8 •*.13w ::21 ta2223
000000000
2604305927639111.047
- ' t-174~ ~t.203
,1.404t.510
- - 1:609-, 1.703, , , f 733
1J79" T.961
700
600
500
400
300
200
100
o
y =1840,4Ln(x)- 3809,9
QUITO-GUAYAQUIL-MIAMI199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111Z131416
t "v g at""1 *•--»-¿•¿fflB&áf''''jHKati-i--.'t'VfrTts?*-*'*r ^t&-MF"" }irw m* .-S"19 -20212223
658698783817
1.4181.2782.1742.4302.494550-496
f.200;1,218t,2281,237
WJ 1J246i— 1.255; v - 1.264'•**" t.273
a - 1.283U921,3011310
y = 9,1678x+1099,2
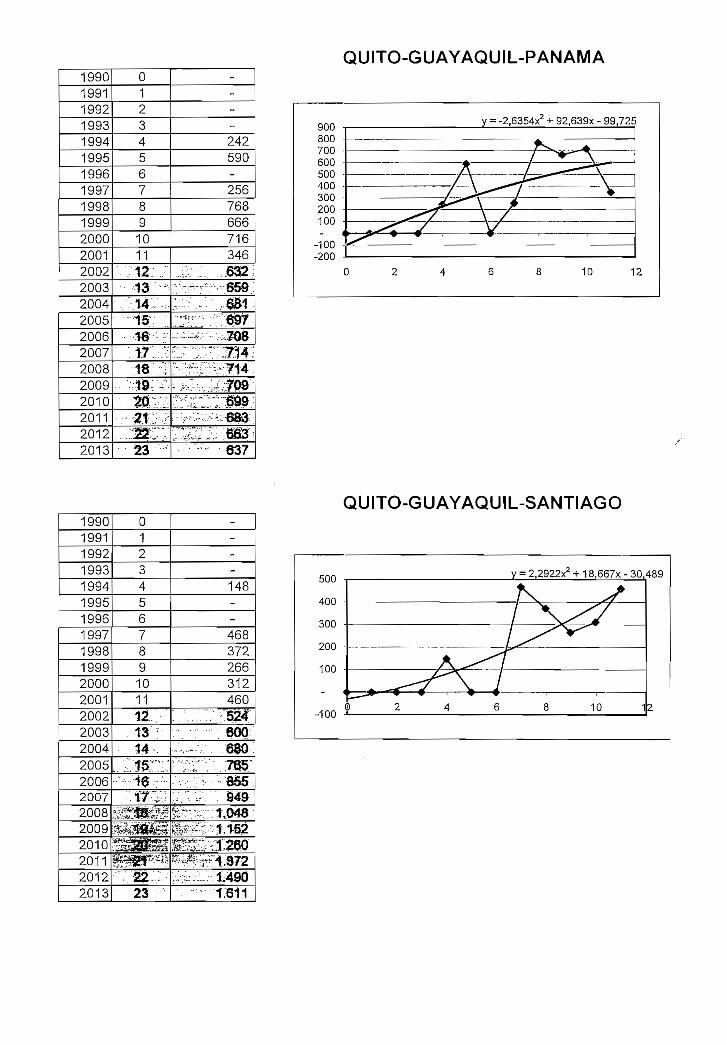
QUITO-GUAYAQUIL-PANAMA199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011121314~15161718 ,19 -2021.2$:23
----242590-256768666716346.6326696&1697?08
' ' "714- 714~ ros; 699
683""„,.„ 663
637
900 y - -2.6354X2 + 92.639x - 99.725
-100-200
8 10 12
QUITO-GUAYAQUIL-SANTIAGO199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112131415 .1617.
-rts^144*31
13383Kj&íggfv-f-
2223
----148--468372266312460524600600765655949
1.048&*> 1 152FT 1260"-" • 1672
14901.611
500
400
y = 2.2922X2 + 18.667X - 30.489
6 8 10 12
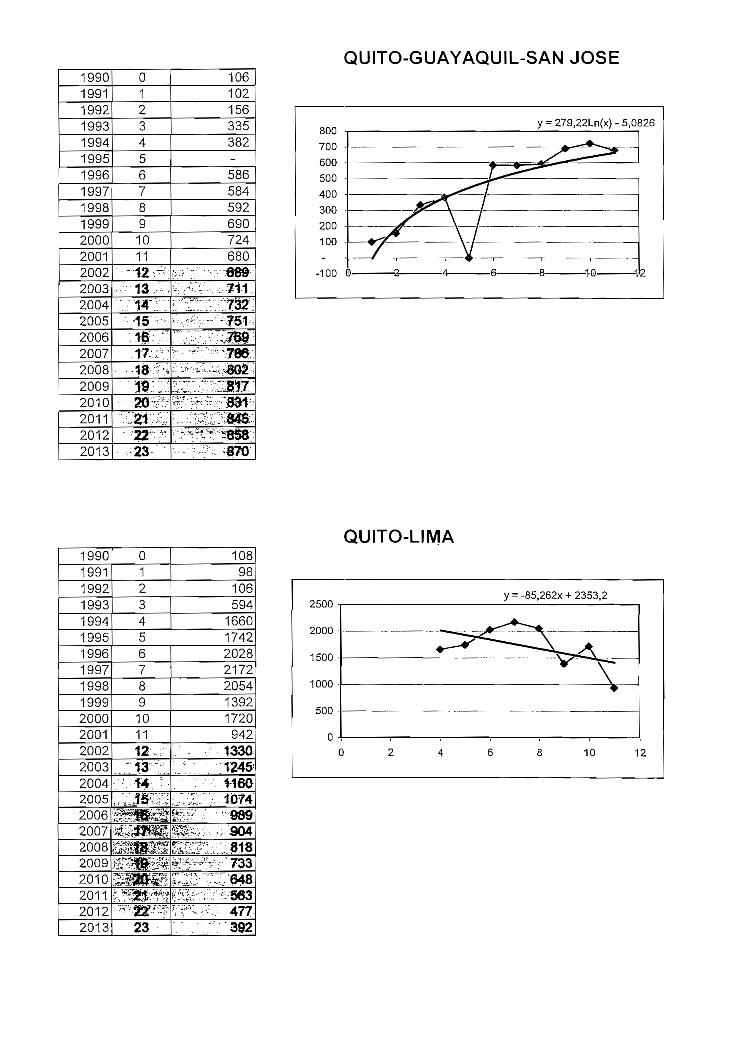
QUITO-GUAYAQUIL-SAN JOSÉ199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112 ~13141516 "1718 '-19 .2021n23
106102156335382-5865845926907246806-89711732-751\768
- 786- —802
V, LW7•*** ** * S3t
- S4S-^ -?8$8
070
y = 279,22Ln(x) - 5,0826
-100 0'
QUITO-LIMA199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112
'1314JS
JJ >¿«j|B8fV"jr'ir
í '«iUsiSEF?- s¡t-{~3mr<*- -'JMÍW*I™XU^- i4SÍ=i> -*,"~ ""SBtt '-1" * ^w" y^3Sft*r^>l*\S
23
10898
106594
1660174220282172205413921720
9421330124511601074
*r ^89^ 304Lrr sisv - - - 733I 648
; 563477392
2500y = -85,262x+ 2353,2
8 10 12

GUAYAQUIL-BOGOTA19901991
1992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112 ....131415:,;:.161718 '.19:;---2021- '"
. 22 -.,23
36825437123829014814815618684590858881 :. :
" - 1106'1359
-•'1642-- 1955
-, 229.6-,2667 :-3066-
: '.'349:6;: '- 395;4- .-•: 4441' "4958
1000900800
y = 14.606X2 - 140,59x + 464,92
10 12
GUAYAQUIL-HOUSTON199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112131415
wáK¿-'-,ffsf7, •&%&
,' fa&&~•1g-~
20212223
000200000724738708709703697*
- 692I - 687"~ ~ 683* . 678" * 674
670667663660
740
735
730
725
720
715
710
y = -76,009Ln(x) +898,09
705 -IO 10 12
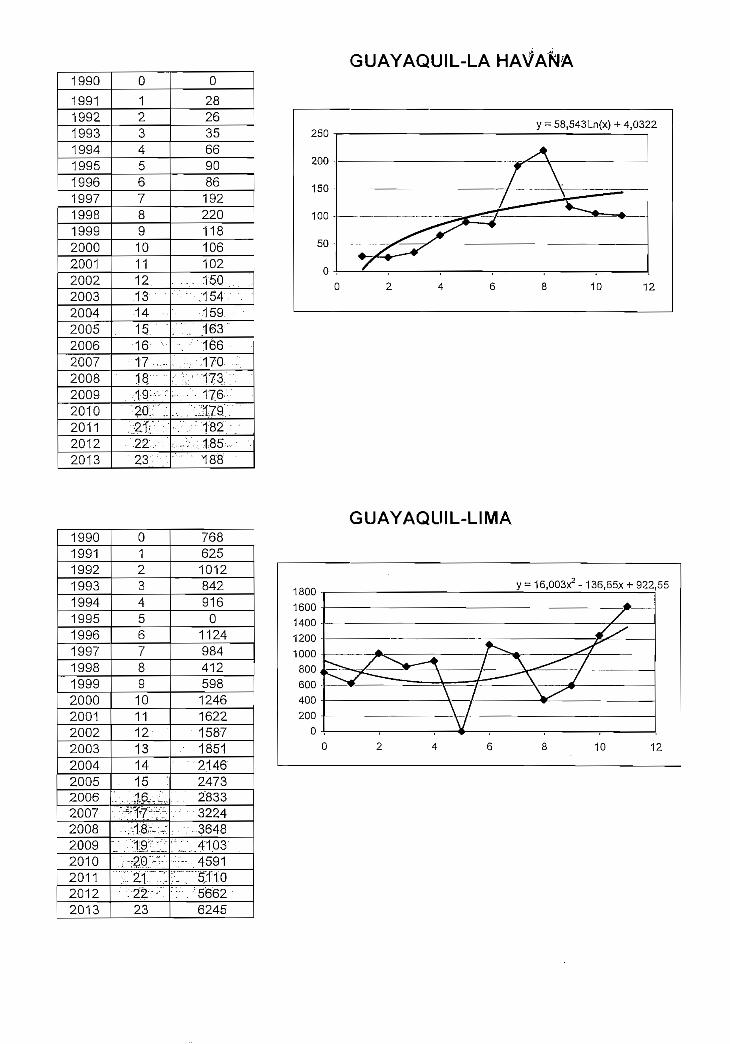
GUAYAQUIL-LA HAN/AÑA1990
19911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0
1234567891011121314151617151920
. zf.2223
0
282635669086192220118106102150154159163
, 166170173176179182
- 185.188
250y = 58,543Ln(x)+4,0322
10 12
GUAYAQUIL-LIMA199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112131415m -
-1718-1920-21"2223
76862510128429160
1124984412598124616221587
. 1851' "2146
247328333224364841034591
- 5f1056626245
1800
1600
y = 16.003X2 - 136,65x + 922,55
400200
10 12

GUAYAQUIL-LIMA-SANTIAGO199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011
. 121314151617181920 .212223
000220042236818262460135176221271324-382444511581656735818
500
400
y = 2,1094X2 + 11,699x - 28,456]
GUAYAQUIL-MADRID199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112 .13.1415
~ 6~ÍZ, .18 -"•
. 19v 20
212223
000000000288434594768.,915
. 105011761294
" 1405- 1509
1608170217911876 .1957
700
600
500
400
y = 1826,6Ln(x)-3770,5
300 -
200
100

GUAYAQUIL-MIAMI199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011121314'151617.; -1819 -2021 •.22.23
234225883138266827783092248428263592294428203346
. 317131923208 . .32193225
: 322632223212
. 31983179
•.3.155..3126
4000
3500 -
y = -2,49-lx2 + 83,1x + 2532J8I
GUAYAQUIL-NEW YORK199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112131415
~,ífr-ir-l8V--¿
- w -20212223
4864925264865561034629228564328362422 -4825536-35729833949
" ' 10761215136,415251697
700y = 5.6044X2 - 80,25x + 578,05

G U AYAQU I L-P AN AMA199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011.12 .13 '1415 .-16 ;17- .18 ~19 -20".:":r\Á . ..21
22 ...23
2423443422346880
107694061270613941444
. 1638
. 18872157
; .24492763309834553834
: " [42544oob
- "50995564
1600y = 10.811X2 - 21,443x + 338,62
GUAYAQUIL-PANAMA-NEW YORK199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112131415
Y*j6 -*íi¿\£? „"la: *192CL21 -2223
788656410118244796822072669882493310481170129814331573.1720187320332199'2371.
900800700600
y = 3,1496X2 + 30,414x + 5,3324

GUAYAQUIL-SANTIAGO199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011121314151617. ;181920'21 •2223
496524632598938608648334396408618564523 .518515.511507
•;.:. 504501.498-49649349.1.488
1000900800 -700
y = -52,753Ln(x) + 653,75
GUAYAQUIL-SAN JOSÉ199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011121314 .'15-
"¿tílWi,- :<>.:>fi77-TV .-Sí'••-.o _MiV.* .:
:;;, 8 -"":W""r
20212223
19822423825445400438660728728722832879
.:'." 923963
^•- ,-1.001-1037
,-•;•. 1071r:r -ít:02
ÍÍ33 ", 1161
•" 11891215
900y = 588,49ln(x) - 630,43
200 -)
100

GUAYAQUIL-QUITO-CURACAO-AMSTERDAM199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011Í213-14151617 •18 :
19 • '20'21 ••"22 ;-23 . -
106108112011016822220431262588672
.-742/-897V
10681256
."-.: 1459; .1679:
: ' . 19:15"-:: •21672435
.../ 273.9. '•'••: 3020.3337
800y = 8.0679X2 - 46,468x + 137,37
TULCAN-CALI-TULCAN199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213 .1415J6~. 17>-
" -18 3
19-20212223
0000180206208194168226162315285 ',305325345365385405426446466486506
350
300
= 20,lx + 43,633
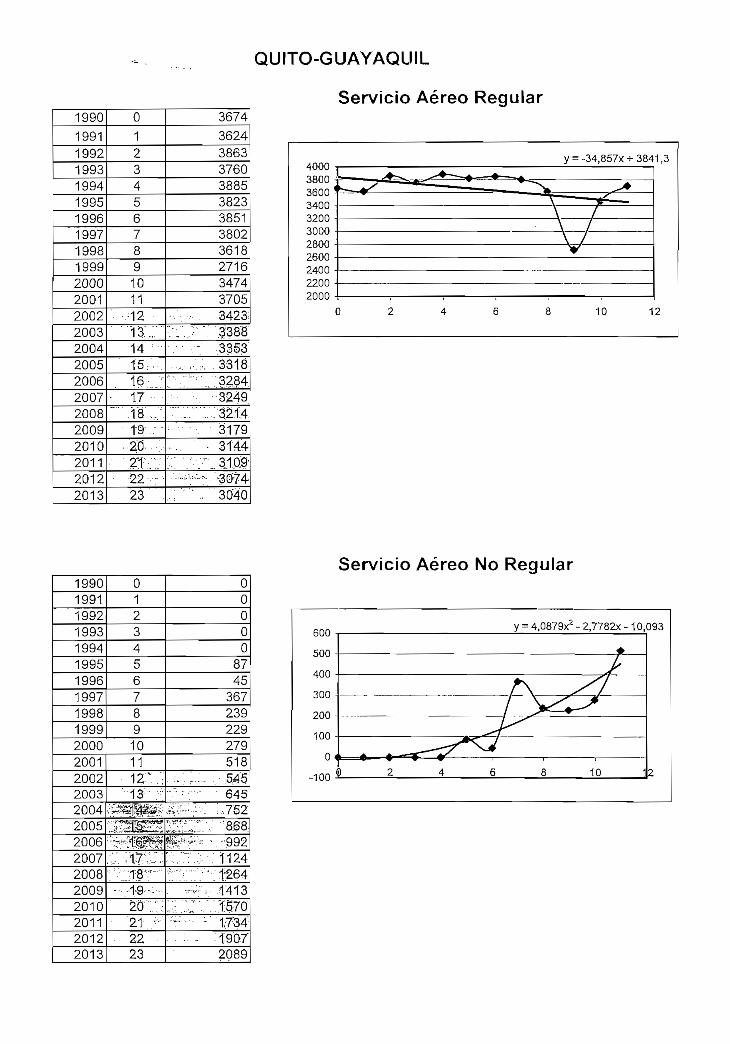
QUITO-GUAYAQUIL
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213 .14151617181920zi2223
3674
36243863376038853823385138023618271634743705342333883353331832843249321431793144. 3109
- -30743040
Servicio Aéreo Regular
40003800 -F*36003400 -3200
= -34,857x+384l,3
2000
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112'13
SáHUrf--~^r¿t~-c?tr&f*-a
~u£u~.~~T6f1718 *
- 19-20212223
000008745367239229279518545645752
17 - 868*&*- - ' 992
1124126414131570173419072089
Servicio Aéreo No Regular
600 y = 4.0879X2 - 2,7782x - 10,093
-100

QUITO-CUENCA
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112 ,1314151617 '181920212223
760819818908927
1125908891950680627624790785781777773
" 769766763760
^ - 7-57\ n 754
751
Servicio Aéreo Regular
y = -59,484Ln(x) +938,01
1200
400
10 12
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011121314
•°^ff f* -• **•*•«] hNsiJií?
- F*T ~X*f* '-t~ flílfnr -
T8 "1920212-223
000000
1178919
221876749963
120114641752
", v, 206424012763
. 31493560,39954455
Servicio Aéreo No Regular
1000
800
600
400
y = 12.299X2 - 93.523X + 99.951
200

QUITO-GUAYAQUIL-BALTRA
Servicio Aéreo Regular199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213141516 "17 -18-19 -.2021- -,2223
322366358336362365471561470720731749754796838879
7 " - 921,962
-1004" 1045
1087,"- :ff29- - - -1170
1212
800= 41,57x + 255,62
100
QUITO-LOJA
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112-13
X- -14 V,• - wywf*
r - ItV í i.
* i 'TP&St (DV ~
17"18192021 -2223 '
000000000
284297518600717834
:, „„ 951K--^- <jQ68
1185* 13021419
" 153616531770
. . . "1887
Servicio Aéreo Regular
600
500
400
300
200
y =!17x- 803,67
100 -
10 12.

QUITO-MANTA
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112 -13141516*171819-20 -2122-23 -
359345368352368325364356366346373193289
' 281274267
" 26,0• 254
247'" .. ' 241• * ' 235
- 229223217
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213,14
4S 13Sfoís fcteH***,-¿» —J y?- _r *•S1'. J Í7,-:• ~\(¿~K?
. 18 ,1920-212223
00000372232349291424242323
r--1" " 2322
"" J. ."" 2222212121'20
Servicio Aéreo Regular
400
350
300
250
200 -
150 -I
= 392.77e-°-Q257x
O 10 12
Servicio Aéreo No Regular
60
50
40
30
20
y = -0,3214x +27,857
10 -
_1TL
10 12
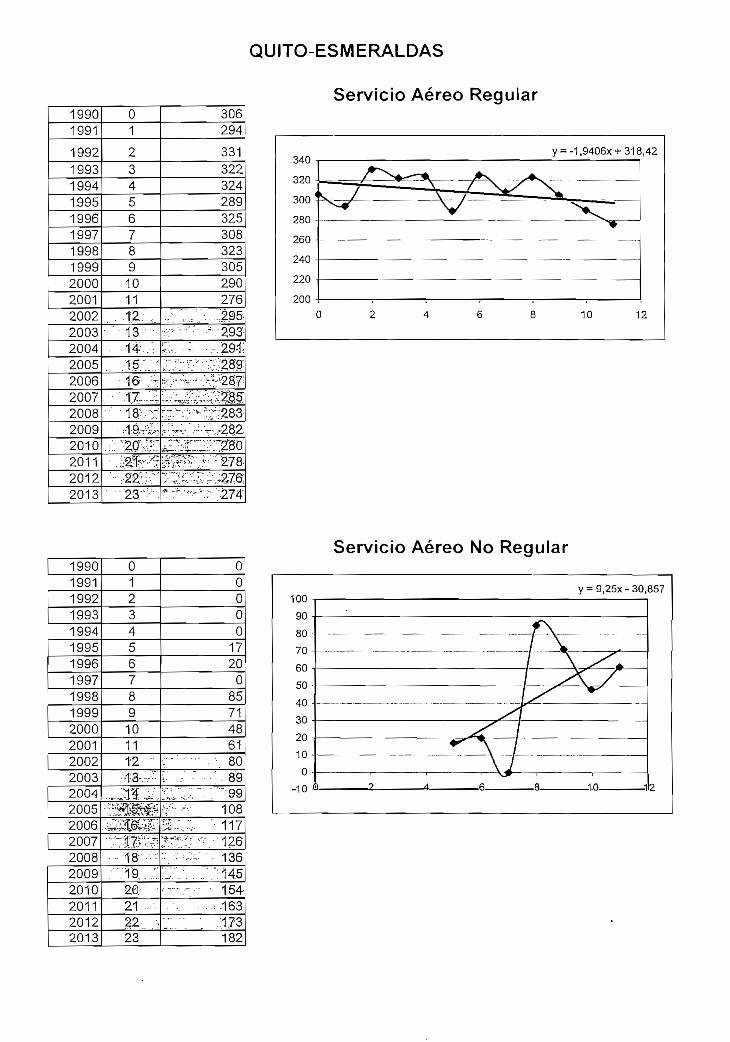
QUITO-ESMERALDAS
19901991
1992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01
2345678910111213H1516 -17 -18 -19-,"2Q" r
&-'2223
306294
331322324289325308323305290276295293
, - 294\289
- - ~1287- *.,/ £85
^ '283~. - -282
_",;",„ 7280r - ' 278" [ - 276*" • 274
Servicio Aéreo Regular
340
240
220
200
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213
. ,T4 .•[ip-- L6L"
-17- -181920212223
000001720085714861808999108117126136145154163173182
Servicio Aéreo No Regular
y = 9,25x-30,857

QUITO-LAGO AGRIO
Servicio Aéreo Recular199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011n .13141516Í7 *181920 J
-21 -"22. "23
344321409261199290313310311338406406.361366372377383388394399"405
S, - - -410..">.' ^"415
421
450y = 5,4406x +295,74
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213
- 14-. W _-•¿leP*17181920212223
0000026224969129127143172195218241
r~' 264287310333355378401424
Servicio Aéreo No Regular
160y = 22,893x-102,43
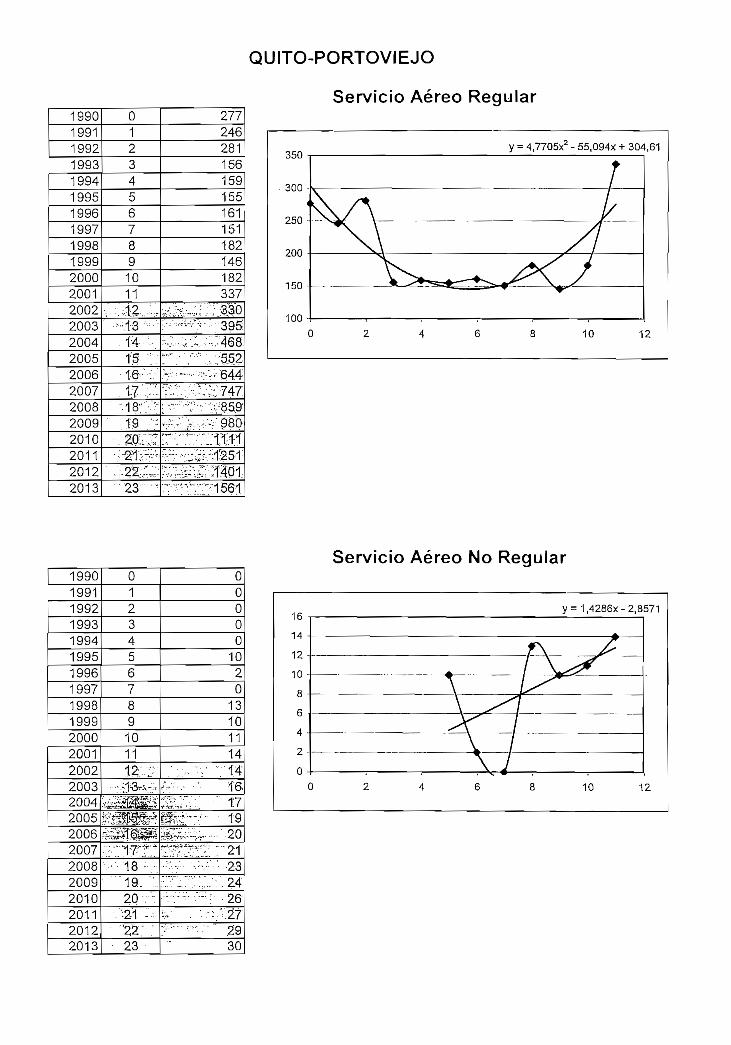
QUITO-PORTOVIEJO
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0 j123456789101112 -1314151617181920. "21 -22 '-23
277246281156159155161151182146182337330395
- , 468552
- - 644' * 747
859- ~ 980
" ñu,; 1251
ta -. . 714011561
Servicio Aéreo Regular
350
300
250
200 -
150
100 J
y = 4.7705X2 - 55,094x + 304,61
10 12
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112 .43-,-*t@&b'
* rSt *"~52T6y§£
17"""*18192021 -2223
00000102013101114141617
f£ • - 19-**-.- -.. 201 " T . 21
232426272930
Servicio Aéreo No Regular
y =1,4286x-2,8571

GUAYAQUIL-CUENCA
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213141516 17 '-18192021T~29.^23
2082412392422242432452939078788048581168135815661791
:7^~ ,2033-2%9-í
T ; , 256828613171
:: - 3499-" - 3843
4205
Servicio Aéreo Regular
1200
1000
800 -
600
400
200
y = 8.5579X2 - 23,424x + 216,47
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213 '
-H43P
^J-^jSJT^- f'A ££$%
*¡~e- T- *i
17""181920212223
0000000049693224317441
^ - 585*V . 748rW~ - 93-]
-' *'~ 1133135515961857213724372756
Servicio Aéreo No Regular
250
200
150 -
100
50
O -i
y = 9.75X2 - 119.55x + 347,85
8 10
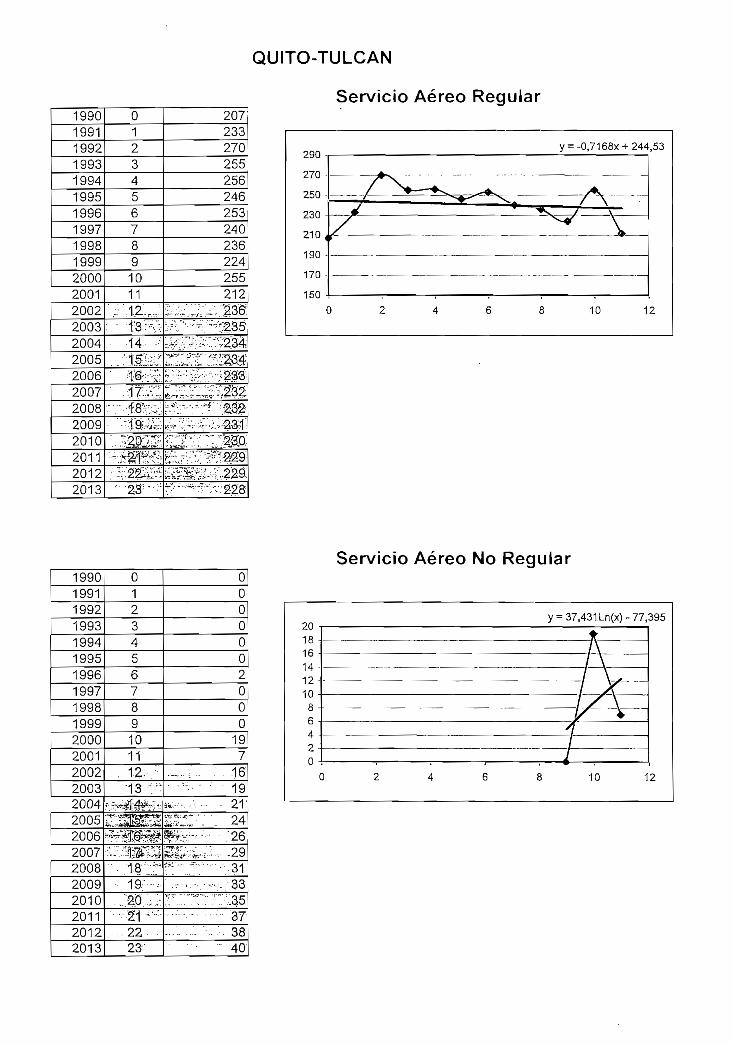
QUITO-TULCAN
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011121314151617.1819 ,"¿OJ1$f-22-,23
207233270255256246253240236224255212
- 236-235234
'~, ' " 234233
?-, - . ¿32' 232
- 231230
~"'229,- 5- 229
228
Servicio Aéreo Regular
y = -0,71 68x + 244,53
270 -
250 -
210 ,
190 •
170 -
1^0 -
/^V— *- -*^ /*
4 \ ^* \ 2 4 6 8 10 12
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213
* ¿44** -+v í rtrt*-**', " 4tó2í,*--7~<6
1#"418 -192021 -.22 .23
0000002000197161921
ir;; 24$b 26•T*' 9Q«I-*4-,.-' fr- « ¿-ZI
' ~ 313335373840
Servicio Aéreo No Regular
2018 -16 -14-12-:10-'
2 -;
O -
y = 37,431 Ln(x)- 77,395

QUITO-COCA
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011121314*1516171819-20 -"2Í -,22 -23
401395731903529685888708708403646691707
- 717727738748758
- 768~ ' 778
789799809819
Servicio Aéreo Regular
1000y = 10,203x +584,55
100 -
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213-lá*r.-"TTrfftT""— i>«S-*Jí*•"l'6-V
17 -'18*19
. 20212223
00000
5104134325676098801822146916491829
..I, . , 2009;<'- 2190
2370* 2550
27302911309132713451
Servicio Aéreo No Regular
20001800 •1600 -
y = 180,25x-694,43

GUAYAQUIL-MACHALA
19901991
1992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01
234567891011•12-13-1415 -1617 T18-
— '1l9r.-,-2(TX-av-~2O;23--
11351088
1375128014639318466671130848375438662
- • 636642590
- , 569LZV 550» 53Í^ -,, 514* rr~ - 4976&- - 482T,t ... "/1C-7«™\ AD/
-*•"- 452
Servicio Aéreo Regular
1600
1400
y=-321,79Ln(x) + 14G1,2
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01234567891011121314
J"T!?x".JL-** ffen¿M&T3&.
18" " v
1920212223
000002615857312431046787728605524459
fc _ 406& 362«r * 325
293266243223205189
Servicio Aéreo No Regular
1400
1200
1000
800
600
400 -
200 -
O
y =51151 x"1'786
10 12

GUAYAQUIL-LOJA
19901991
1992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
01
234567891011121314_:15 -~16,17- -18 *19: "20-y~-/22 '23-
00
0000000
171173115101
- - -, 8*3." . 68- -56
^ „ 1. 1 '6- -t - --37, 31
* ;:,"725, : s. -• 21
" " f 7V í- * V< «•" J /
" c* — """•«' f -I/Irft _ 1*T
- ¿ -' 11
Servicio Aéreo Regular
200
180 •
160
140 •
120 i
100
80 •
60
40 •
20 •
0
y = 1093,3e-°'1984x
*r\
3 2 4 6 8 10 12
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112Í3
J4-£*&1$#3¿¿
** -"WteJSft*^^ZLs£L«
-17- -181920212223
00000000002
15192531
>U ~ 36y- -V-, - .,XjAt- ' '
> » * - 4549
- 5357616467
Servicio Aéreo No Regular
1614 -12-10
6
42 -
-2 O--4Í-
y = 73,773Ln(x) - 163,95
—2~

QUITO-MACAS
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
0123456789101112 L
13141516T7181920 '•21 '2223
9799971001371331501501481421241101281261125124
- ' 123f22121120119118
" /- 117117
Servicio Aéreo Regular
160
199019911992199319941995199619971998199920002001200220032004200520062007200820092010201120122013
012345678910111213
-4á*- "•"aícSF»*'*
* 6»77-< |,I_ «n
18192021
, 22.23
-----132
---1510121416:
19¿"« 22
2528313539:4347
Servicio Aéreo No Regular
-2 ©.
V = Q.0999X2 - Q.2807X + 0.6648

ANEXO D
RNP en la FIR Guayaquil

AE
RO
VÍA
W-1
QU
ITO
-GU
AY
AQ
UIL
SA
R
EG
ULA
RS
.A.
NO
R
EG
ULA
RT
OT
AL
UIO
-GY
E-B
ALT
RA
SA
R
EG
ULA
RT
OT
AL
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
3.42
35
45
3.96
8
75
47
54
4.72
3 13
5
. -
10.
2003
3.38
86
45
4.03
3
79
67
96
4.82
9 13
5
ÍO
2004
3.35
3752
4.10
6
. 83
883
8
4.94
3 14
5
-eíP
J
2005
3.31
88
68
4.18
6
87
98
79
5.06
6 14
5
2006
3.28
49
92
4.27
6
921
921
5.19
6 14 5
fí-fítí
'v^t
-yj
2007
3.24
91.
124
4.37
3
96
29
62
5.33
5 15 6
2008
3.21
41.
264
4.47
8
1.00
41.
004
5.48
2 15 6
r.-íf-?
jP/
2009
3.17
91.
413
4.59
2
1.04
51.
045
5.63
7 15
6
2010
3.14
41.
570
4.71
4
1.08
71.
087
5.80
1 16 6
2011
3.10
91.
734
4.84
4
1.12
91.
129
5.97
2 16 6
flfc*
i$
2012
3.07
41.
907
4.98
2
1.17
01.
170
6.15
2 17 6
Z$*
m8,
-v
i ^
I U
2013
3.04
02.
089
5.12
8
1.21
21.
212
6.34
0 17 7
u;C*i<
rA
ER
OV
ÍA W
-2
UIO
-GY
E-B
ALT
RA
S.A
. R
EG
ULA
RT
OT
AL
GY
E-S
ALI
NA
SS
A
NO
RE
GU
LAR
'T
OT
AL
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
75
47
54
129
129
88
4 2 1
; '-
' 1
0
2003
79
67
96
132
132
92
8 3 1
,10'
2004
83
8
83
8
135
135
97
3 3 1
2005
879.
87
9
137
137
1.01
7 3 1
füü
2006
921
921
140
140
1.06
0 3 1
ÜP
l
2007
96
2
96
2
142
142
1.10
4 3 1
2008
1.00
41.
004
144
144
1.14
8 3 1
2009
1.04
51.
045
146
146
1.19
1 3 1
IMS
2010
1.08
71.
087
148
148
1.23
5 3 1
2011
1.12
91.
129
149
149
1.27
8 4 1
M£fó
2012
1.17
01.
170
151
151
1.32
1 4 1gtfj
V,1 .
4' ñ
Sfe
'WfV
2013
1.21
21.
212
153
153
1.36
4 4 1
lfe$S
í!£

AE
RO
VÍA
W-2
F
UIO
-GY
E-B
ALT
RA
SA
RE
GU
LAR
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
75
47
54 2 1
;feíj
;;fO
2003
79
67
96 2 1
ISlO
2004
83
88
38 2 1
ifátg
2005
87
987
9 2 1«•
'•"'•
,-!.i '
''•
•***£
$tíiíH
n'
•f-i^-ig^l U
,
2006
921
92
1 3 2'~
* 'V
.fjp
'i'".
fv'rt
iQ..
2007
962
96
2 3 2
^fsj^gtO
2008
1.00
41.
004 3 2
IftlÍQ
2009
1.04
51.
045 3 2
*p?iíF]
ív;
2010
1.08
71.
087 3 2
ÍSW
;Q'
2011
1.12
91.
129 3 2
rlp
i'd,;>
-;.v
rf>¿
7*¡
t*V
.-
2012
1.17
01.
170
3 2
¿^¿
'íi
ví'rY
w-;.»
fyfiy.
2013
1.21
21.
212 3 2
>&
^€>
v:r&
'Kíf^^J-P
/
AE
RO
VÍA
W-5
QU
ITO
-CU
EN
CA
S.A
. R
EG
ULA
RS
.A.
NO
R
EG
ULA
RT
OT
AL
QU
ITO
-LO
JAS
.A.
RE
GU
LAR
TO
TA
L
QU
ITO
-TU
LC
AN
S.A
. R
EG
ULA
RS
.A.
NO
R
EG
ULA
RT
OT
AL
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
79
07
49
1.53
9
600
60
0
23
616
25
2
2.39
1 7 3
.. ',1
0
2003
78
596
31.
748
717
717
23
5 192
54
2.71
9 7 3
^f¥H
O'¿
HÍíU
V U
2004
78
11.
201
1.98
2
834
83
4
23
421
25
6
3.0
72 8 4
$$
&&
2005
77
71.
464
2.24
1
951
951
234
242
58
3.45
0 9 4
2006
77
31.
752
2.52
5
1.06
81.
068
23
326
25
9
3.85
3 11 5
2007
76
9
2.0
64
2.8
34
1.18
51.
185
23
229
261
4.28
0 12 5
2008
76
62.
401
3.16
7 ¡1.
302
1.30
2
23
231
26
2
4.7
32 13 6
2009
763
2.76
33.
526
1.41
91.
419
231 33
264
5.20
9 14 6
2010
76
03.
149
3.90
9
1.53
61.
536
23
035
265
5.71
0 16 7
2011
757
3.56
04.
317
1.65
31.
653
229
372
66
6.23
6 17 7
ílliM
2012
75
43.
995
4,74
9
1.77
01.
770
229
38
267
6.78
7 19 8
ffiM
¡€
2013
75
14.
455
5.20
7
1.88
71.
887
228
40
268
7.3
62
20 9
íilll®

AE
RO
VÍA
W-6
QU
ITO
-MA
NT
AS
.A.
RE
GU
LAR
SA
NO
RE
GU
LAR
TO
TA
L
UIO
-PO
RT
OV
IEJO
S.A
. R
EG
ULA
RS
AN
O
RE
GU
LAR
TO
TA
L
GY
E-
MA
NT
AS
AN
O
RE
GU
LAR
TO
TA
L
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
20
02
28
9 24
313
330 14
34
5
670
670
1.32
7 4 2i
^á*/
?,5
Í¿-V
%10
;.*•
''-.,•,
•>!?
. &
•*-
2003
281
24
30
5
39
5 164
10
70
57
05
1.42
0 4 2
rlvio
20
04
274 23
297
46
8 174
85
73
87
38
1.52
1 4 2
^1t) -»w .
20
05
267 23
29
0
55
2 195
70
768
76
8
1.62
9 4 2
2006
260
23
283
64
4 206
64
797
797
1.74
4 5 2
2007
25
4 22
276
747 21
76
8
824
824
1.86
8 5 3
2008
247 22
269
859 23
88
1
849
849
2.00
0 5 3
2009
241 22
263
98
0 241.
004
873
873
2.14
0 6 3
2010
23
5 21256
1.11
1 261.
137
89
68
96
2.28
9 6 3
2011
22
9 212
50
1.25
1 271.
279
917
917
2.44
6 7 3
2012
22
321
24
4
1.40
1 291.
430
938
' 93
8
2.61
2 7 4
2013
217 20
237
1.56
1 301.
591
957
957
2.78
6 8 4
AE
RO
VÍA
G-4
39
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
UIO
-ES
ME
RA
LD
AS
SA
RE
GU
LAR
29
529
329
128
928
728
528
32
82
280
278
276
274
SA
NO
R
EG
ULA
R8
089
99
108
117
126
136
145
15
4163
173
182
TO
TA
L3
75
38
339
03
97
40
541
241
942
64
34
441
448
45
6
PR
OM
. D
IAR
IO
HO
RA
PIC
O1
RN
P-
. t
r 1
, • f
e. •
-*
*

AE
RO
VÍA
W-2
0F
UIO
-LA
GO
AG
RIO
S.A
. R
EG
ULA
RS
.A.
NO
R
EG
ULA
RT
OT
AL
PR
OM
. D
IAR
IO
HO
RA
PIC
OR
NP
2002
361
172
53
3 1 1
10
2003
36
6195
56
2 2 1
'10
20
04
372
218
590 2 1
, £
«1
0
2005
377
241
618 2 1
2006
383
26
464
7 2 1
2007
38
828
767
5 2 1
2008
39
43
10
70
3 2 1
iH§
2009
399
333
73
2 2 1
ysiEL
s
2010
40
53
55
76
0 2 1
llitñ
2011
410
378
78
8 2 1
Ittlt'IP
2012
415
401
817 2 1
je^í
'.* ;
10
2013
42
14
24
-84
5 2 1
*•'
• :!
*10
AE
RO
VÍA
A-5
66
GY
E-
CU
EN
CA
S.A
. R
EG
UL
AR
S.A
. N
O R
EG
UL
AR
TOTA
LP
RO
M.
DIA
RIO
HO
RA
P
ICO
RN
P
2002
1.16
831
71.
485 4 1 10
2003
1.35
844
11.
800 5 1
\°
2004
1.56
658
52.
151 6 1
•"?
*ü
n-;
«to
2005
1.79
174
82.
539 7 2
2006
2.03
393
12.
964 8 2
2007
2.29
11.
133
3.42
5 9 2-•
-Wtf
ítl'-
V-
•- '
•T
Í ""
"•}.•
*• J
f\8
2.56
81.
355
3.92
3 11
3
ÍSSf
|5ft)
2009
2.86
11.
596
4.45
7 12 3
2010
3.17
11.
857
5.02
8 14 3
ÍÍÜ
2011
3.49
92.
137
5.63
6 15 4
v$$^
io
2012
3.84
32.
437
6.28
0 17 4
llH
io
2013
4.20
52.
756
6.96
1 19 5
JV;V
xd;

AE
RO
VÍA
W-9
F
QU
ITO
-CO
CA
S.A
. R
EG
ULA
RS
.A.
NO
R
EG
ULA
RT
OT
AL
QU
ITO
-TA
RA
PO
AS
.A.
NO
R
EG
ULA
RT
OT
AL
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
707
1.46
92.
176
60
860
8
2.7
84 8 3
VM
'tí
2003
717
1.64
92.
366
66
26
62
3.0
28 8 3
*&/io
¿«Sí
T1 W
2004
727
1.82
92.
556
712
712
3.26
8 9 3
:tl1p
2005
73
82.0
09
2.74
7
75
97
59
3.50
6 10 4
2006
74
82.
190
2.93
7
80
28
02
3.74
0 10 4
Sfe
^ió
2007
75
82.
370
3.12
8
843
843
3.97
1 11 4
11© F
íl U
aSwF
-í-.sJ
asü
2008
76
82.
550
3.31
8
88
28
82
4.20
0 12 4
20
09
77
82.7
30
3.50
9
918
91
8
4.42
7 12 5
2010
78
92.
911
3.69
9
953
953
4.6
52 13
5
2011
79
93.
091
3.89
0
98
698
6
4.87
6 13
5
Mív
íÍP
2012
809
3.27
14
.08
0
1.01
81.
018
5.09
8 14 5
Hílf
ffui
2013
819
3.45
14.
271
1.04
81.
048
5.31
8 15
5
j&¿
"""'v
mH
T-
- -s
.**'
v
AE
RO
VÍA
W-2
2F
QU
ITO
-CO
CA
S.A
. R
EG
ULA
RS
.A.
NO
R
EG
ULA
RT
OT
AL
PR
OM
. D
IAR
IO
HO
RA
PIC
OR
NP
2002
707
1.46
92.
176 6 2
* *1
0
2003
717
1.64
92.
366 6 2
&&&L
Q
2004
' 727
1.82
92.
556 7 2
^üfflfelfl
2005
738
2.00
92.
747 8 2
2006
74
82.
190
2.93
7 8 3
*HVK
°<
2007
758
2.37
03.
128 9 3
"^•¿
¿^C
íff^
2008
768
2.55
03.
318 9 3
2009
778
2.7
30
3.50
9 10
3
2010
789
2.91
13.
699 10
3
2011
79
93.
091
3.89
0 11
4
\*"V
" -
Á r¡
^*"
* ¿
K¿
2012
809
3.27
14
.08
0 11
. 4
2013
819
3.45
14.
271 12 4
lliSlñ
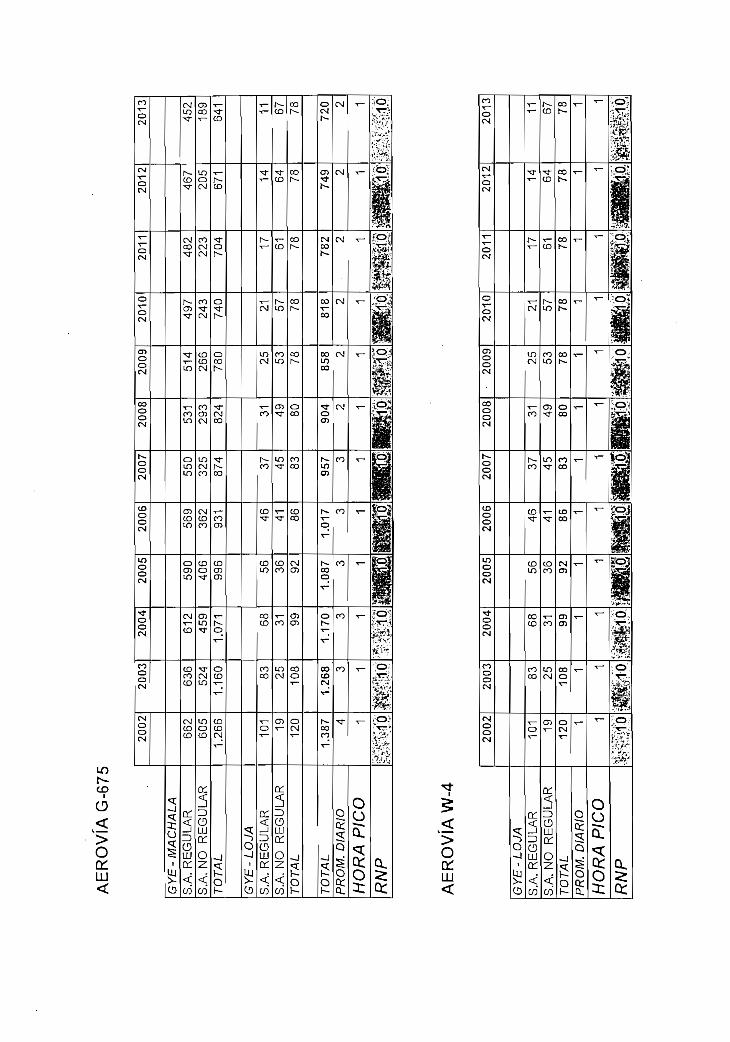
AE
RO
VÍA
G-6
75
GY
E-
MÁ
CH
ALA
S.A
. R
EG
ULA
RS
AN
O
RE
GU
LAR
TO
TA
L
GY
E -
LO
JA
S.A
. R
EG
ULA
RS
.A.
NO
R
EG
ULA
RT
OT
AL
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
66
26
05
1.26
6
101 19
120
1.38
7 4 1
-¿;M
°
2003
63
6
52
41.
160 83 25 108
1.26
8 3 1
Srii
o
20
04
612
45
91.
071 68 31 99
1.17
0 3 1>
'?
**
-¿lo
2005
59
04
06
99
6 56 36 92
1.08
7 3 1
2006
569
36
2931
46 41 86
1.01
7 3 1
2007
55
03
25
874 37 45 83
95
7 3 1
2008
531
29
38
24 31 49 80
90
4 2 1
2009
514
26
67
80 25 53 78
858 2 1
fl^S
o
2010
49
72
43
74
0 21 57 78
818 2 1
2011
48
22
23
70
4 17 61 78
78
2 2 1
IltS
líó
2012
46
72
05
671 14 64 78
74
9 2 1
áBW
efa
2013
45
218
9641 11 67 78
720 2 1
:*T
í '*'.
1P
AE
RO
VÍA
W-4
2002
2003
20
04
2005
2006
2007
2008
2009
2010
2011
2012
2013
GY
E-L
OJA
S.A
. R
EG
ULA
R10
183
68
5646
3731
2521
1714
11
S.A
. N
O R
EG
ULA
R19
2531
3641
4549
5357
6164
67T
OT
AL
120
108
999
286
8380
7878
7878
78
PR
OM
. D
IAR
IO
HO
RA
PIC
OR
NP
10
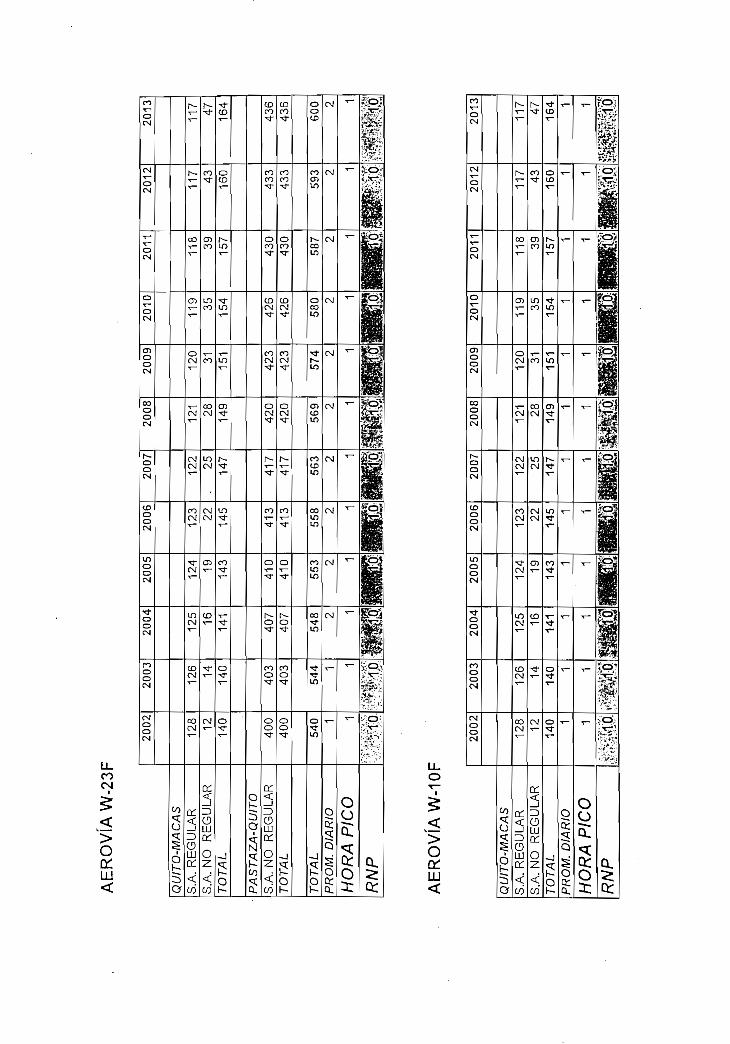
AE
RO
VÍA
W-2
3F
QU
ITO
-MA
CA
SS
.A.
RE
GU
LAR
S.A
. N
O
RE
GU
LAR
TOTA
L
PA
ST
AZ
A-Q
UIT
OS
AN
O
RE
GU
LAR
TO
TA
L
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
O
RN
P
20
02
128 12
140
40
04
00
54
0 1 1
'"•M
O
2003
126 14
140
40
34
03
54
4 1 1
^tH
b
2004
125 16 141
40
74
07
54
8 2 1
2005
124 19
143
41
04
10
55
3 2 1
2006
123 22
145
41
34
13
55
8 2 1
2007
122
25
147
417
417
56
3 2 1
2008
121 28 149
42
04
20
56
9 2 1
2009
120 31
151
42
34
23
57
4 2 1
2010
119 35
154
426
426
58
0 2 1
2011
118 39
157
43
04
30
58
7 2 1
2012
117 43
160
43
34
33
59
3 2 1
2013
117 47 164
43
64
36
60
0 2 1;
rí¿¿^M
CTS
i"V>^
AE
RO
VÍA
W-1
0F
2002
20
03
20
04
20
05
2006
20
07
20
08
2009
2010
2011
2012
2013
QU
ITO
-MA
CA
SS
.A.
RE
GU
LAR
128
126
125
124
123
122
121
120
119
118
117
117
S.A
. N
O R
EG
ULA
R12
1416
1922
2528
3135
3943
47
TO
TA
L14
014
014
114
314
514
714
915
1154
157
160
164
PR
OM
. D
IAR
IO
HO
RA
PIC
OR
NP
>ÍQw

AE
RO
VÍA
W-1
4F
PA
ST
AZ
A-V
ILLA
NO
S.A
. N
O
RE
GU
LAR
TO
TA
L
PA
ST
AZ
A-C
UR
AR
AY
S.A
. N
O
RE
GU
LAR
TO
TA
L
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
42
3423 67 67
490 1 1
"*
10
2003
43
44
34 69 69
503 1 1
fc»'
*x?'
f"ri
St^
fr-1^
2004
44
54
45
70
70
515 1 1
Síá
2005
45
44
54
72
72
526 1 1
2006
46
44
64 73 73
537 1 1
2007
47
2472 74 74 546 1 1
2008
48
04
80
75
75
556 2 1
2009
48
84
88 76
76
56
4 2 1
2010
49
54
95 77 77 573 2 1
2011
50
2502
78
78
581 2 1
2012
509
509 79 79 5
88 2 1
.ií'.Ü
-í'ÍE
.
**
íM
íí .
3 *1
í\&
1U<
2013
515
515 80 80
595 2 1
V/'-i
ío
AE
RO
VÍA
W-1
1F
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
PA
ST
AZ
A-A
RA
JUN
OS
.A.
NO
RE
GU
LAR
46
4442
40
3937
3534
3331
3029
TO
TA
L46
44
4240
3937
35
34
3331
30
29
TO
TA
L4
644
4240
3937
35
34
3331
30
29P
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP

AE
RO
VÍA
W-7
MA
NT
A -
SA
LIN
AS
S.A
. N
O R
EG
ULA
R
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002 6 6 1 1
ir:\0
2003 6 6 1 1
o'U
10
2004 6 6 1 1
110
2005 6 6 1 1
tl«* "
íBra
atw
s
2006 7 7 1 1
2007 7 7 1 1
2008 7 7 1 1
2009 7 7 1 1
t|Í&
4ñ
2010 8 8 1 1
2011 8 8 1 1
2012 8 8 1 1
2013 9 9 1 1
iSS
i^T
iKn-
^3'ji
^nu
AE
RO
VÍA
G-4
37
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
GY
E-E
SM
ER
ALD
AS
S.A
. N
O
RE
GU
LAR
5655
5453
5251
5049
4847
47
46
TO
TA
L56
555
453
5251
5049
48
47
474
6
PR
OM
. D
IAR
IO
HO
RA
PIC
OR
NP
,,10
LVIO
EM5

AE
RO
VÍA
U
G43
8
U/O
- B
OG
UiO
-BO
G-C
CS
UIO
-BO
G-N
YC
U ¡O
- C
UR
-AM
SG
YE
- U
IO-C
UR
TOTA
L%
SOB
RE
VU
ELO
S
TOTA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
4.38
01.
333
956
837
742
8.24
75.
278
13.5
26 37 7
10,
2003
5.17
01.
289
1.07
994
389
7
9.37
86.
002
15.3
81 42 8
-*,-"
io:
2004
6.03
31.
247
1.20
71.
041
1.06
8
10.5
966.
782
17.3
78 48 8
^K&
ÍÓÍ
2005
6.96
81.
207
1.34
01.
132
1.25
6
11.9
027.
617
19.5
20 53 10
2006
7.97
51.
167
1.47
81.
217
1.45
9
13.2
978.
510
21.8
07 60 11
2007
9.05
41.
129
1.62
11.
298
1.67
9
14.7
819.
460
24.2
41 66 12
;r 3
|3§:-
2008
10.2
051.
093
1.77
01.
373
1.91
5
16.3
5610
.468
26.8
23 73 13
2009
11.4
281.
057
1.92
41.
445
2.16
7
18.0
2111
.533
29.5
54 81 14 wL_
20
10
12.7
231.
023
2.08
31.
512
2.43
5
19.7
7612
.657
32.4
33 89 16
2011
14.0
90 989
2.24
71.
577
2.71
9
21.6
2313
.839
35.4
62 97 17
2012
15.5
29 957
2.41
71.
638
3.02
0
23.5
6215
.079
38.6
41.
106
19
2013
17.0
40 926
2.59
21.
697
3.33
7
25.5
9216
.379
41.9
70 115 20

.AE
RO
VÍA
U
A55
0
UIO
-GY
E-H
AV
UIO
-GYE
-MIA
UIO
-GY
E-P
TY
UIO
-GY
E-S
JOU
IO-G
YE
-LIM
L//
O-
GY
E-S
CL
GY
E-B
OG
GY
E-U
IO-C
UR
UIO
-GYE
-MA
D
TOTA
L%
SOB
RE
VU
ELO
S
TOTA
LP
RO
M.
DIA
RIO
HO
RA
PIC
O
RN
P
2002
163
1.20
963
268
981
452
488
1.
742
763
6.41
74.
107
10.5
23 29 10
5 10
.
2003
174
1.21
865
971
183
160
01.
106
897
911
7.10
74.
548
11.6
55 32 11
MHn
oí
2004
186
1.22
868
173
284
868
01.
359
1.06
81.
047
7.82
95.
010
12.8
39 35 12
/•**
-, 1
p'
2005
198
1.23
769
775
186
576
51.
642
1.25
61.
174
8.58
55.
494
14.0
79 39 13
2006
210
1.24
670
876
988
285
51.
955
1.45
91.
293
9.37
66.
001
15.3
77 42 14
2007
222
1.25
571
478
689
894
92.
296
1.67
91.
404
10.2
036.
530
16.7
34 46 15
2008
234
1.26
471
480
291
51.
048
2.66
71.
915
1.51
0
11.0
68'
7.08
4
18.1
52 50 16
2009
246
1.27
370
981
793
21.
152
3.06
62.
167
1.60
9
11.9
717.
662
19.6
33 54 18
2010
257
1.28
369
983
194
91.
260
3.49
62.
435
1.70
3
12.9
138.
264
21.1
77 58 19
2011
269
1.29
2683
845
966
1.37
23.
954
2.71
91.
793
13.8
948.
892
22.7
86 62 21
2012
281
1.30
166
385
898
31.
490
4.44
13.
020
1.87
9
14.9
159.
546
24.4
61 67 22
2013
293
1.31
063
787
099
91.
611
4.95
83.
337
1.96
1
15.9
7610
.225
26.2
01 72 24

AE
RO
VÍA
U
G43
7(N
)
UIO
-GY
E-H
AV
UIO
- G
YE
- M
ÍAL
//0
- G
YE
-PT
YU
IO-G
YE
-SJO
GY
E-B
OG
GY
E-H
AV
GY
E-H
OU
GY
E -
MÍA
GY
E-P
TY
GY
E-P
TY
-NY
CG
YE -
5 J
OU
IO-
GY
E-S
JOG
YE
-HO
UG
YE
-SJO
TO
TA
L%
SO
BR
EV
UE
LO
S
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
20
02
163
1.20
9632
68
98
81
150
70
93.
171
1.63
8824
832
68
97
09
832
13.1
288.
402
21.5
30 59 9
' 10
2003
174
1.21
865
9711
1.10
615
47
03
3.19
21.
887
933
879j
711
70
387
9
13.9
108.
903
22.8
13 63
9
•vlO
20
04
186
1.22
8681
73
21.
359
159
697
3.20
82.
157
1.04
8923
73
26
97
923
14.7
309.
427
24.1
57 66 10
A: 1
0> .
ti,».
*
20
05
198
1.23
7697
75
11.
642
163
692
3.21
92.
449
1.17
0963
75
16
92
963
15.5
88
9.9
77
25.5
65 70 10
'•**
áfe
l(¿
»iW
jfffi¿
HI
2006
210
1.24
6708
769
1.95
516
66
87
3.22
52.
763
1.29
81.
001
76
96
87
1001
16.4
86
'10.5
51
27.0
37 74 11
2007
222
1.25
5714
78
62.
296
170
68
33.
226
3.09
81.
433
1.03
77
86
68
3
1037
17.4
2411
.152
28.5
76 78 12
llifíP
!
2008
23
41.
264
714
80
22.
667
173
67
83.
222
3.45
51.
573
1.07
1802
67
810
71
18.4
0411
.778
30.1
82 83 12
2009
246
1.27
3709
817
3.06
617
66
74
3.21
23
.83
41.
720
1.10
281
7674
1102
19.4
25
12.4
32
31.8
57 87 13
2010
257
1.2
83699
83
13.
496
179
67
03 4 1 1
.198
.234
.873
.133 831
670
1133
20.4
88
13.1
13
33.6
01 92 14
¿jE
&*f£
Wmüi
2011
269
1.29
2683
845
3.9
54
182
667
3.17
94.
656
2.03
31.
161 84
5667
1161
21.5
95
13.8
21
35.4
15 97 14
iilüP
i
2012
281
1.30
1663
858
4.44
118
5
66
33.
155
5.09
92.
199
1.18
985
8663
1189
22.7
44
14.5
56
37.3
00 102
15
HÜ
&
2013
29
3
1.31
0637
870
4.95
818
86
60
3.12
65.
564
2.37
11.
215
87
0660
1215
23.9
3715
.320
39.2
57"1
08 16
j|Jj;
J|
4'.

AE
RO
VÍA
U
G4
37
(S)
U/O
- U
MU
IO-G
YE
-LIM
U/O
- G
YE
-SC
LG
YE
-LIM
GY
E-L
IM-S
CL
GY
E-S
CL
TO
TA
L
'%
SO
BR
EV
UE
LO
S
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
1330
814
524
1.58
713
552
3
4.91
33.
144
8.05
7 22
6
- -'-
10
2003
.
1245
831
60
01.
851
176
518
5.2
20
3.34
1
8.56
1 23
6
-V.M
O'
20
04
1160
84
8680
2.14
6221
515
5,5
69
3.5
64
9.13
4 25 7*>
• "í
^'A
*,:u
!(f.1
v/
2005
1074
L_
865
765
2.47
3271
511
5.95
93.
814
9.77
3 27 7
20
06
989
88
285
52.
833
324
507
6.39
04.
090
10.4
80 29
8
áíftíi
2007
904
89
8
94
93.
224
38
25
04
6.8
62
4.3
92
11.2
54 31 8
V^tí*
2008
818
915
1.04
83.
648
44
450
1
7.3
75
4.72
0
12.0
96 33 9
'«iN
^M n
\u;f
2009
733
93
21,
152
4.10
351
14
98
7,9
29
5.07
5
13.0
04 36 10
2010 648
949
1.26
04.
591
581
49
6
8.52
45.
456
13.9
80 38 10
2011 563
96
61.
372
5,11
06
56
49
3
9.16
05.
863
15.0
23 41 11
Sí^
-toJ
2012 477
98
31.
490
5.66
27
35
49
1
9.83
76.
296
16.1
33 44 12
2013 39
299
91.
611
6.24
581
84
88
10.5
556.
755
17.3
10 47 13
AE
RO
VÍA
U
G4
26
U/O
- M
ÍA
TO
TA
L%
SO
BR
EV
UE
LO
S
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
3773
3773
2.41
5
6.18
8 17 4
, . -
10
20
03
3891
3891
2.4
90
6.38
1 17
4
-V1
0-
2004
4003
40
03
2.5
62
6.56
5 18 4
^^^
íoT
2005
4110
4110
2.6
30
6.74
0 18 4
2006
4213
4213
2.6
96
6.90
9 19
4
2007
4312
4312
2.7
60
7.07
1 19
5v>
,"*
V1!V
íi>l^
'•"
•mS
MQ
tyr
*¿*$
tá\y
,'.;
2008
4407
44
07
2.82
1
7.2
28
20 • 5
llftt
2009
4499
44
99
2.8
80
7.3
79 20
5
2010
4589
45
89
2.93
7
7.5
26 21
5
2011
4675
46
75
2.9
92
7.6
67 21
5
ISpl
fof
2012
4759
47
59
3,04
6
7.8
05 21
5
!0S
$í
2013
4841
4841
3.09
8
7.9
39 22 5
lí-ííi
fc'&
'Vfn
fc£'•7
;! -O
í

AE
RO
VÍA
U
G 4
39
UtO
-GY
E-S
JO
GY
E-H
OU
GY
E-S
JO
TO
TA
L%
SO
BR
EV
UE
LO
S
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
68
97
09
832
22
30
1.42
7
3.65
7 10 7
:^SMQ
^
2003
711
70
3
879
2293
1.46
8
3.76
1 10 7
•.j^£
ííñ*.
' r--^;í
ym.\4
73
269
7923
23
52
1.50
5
3.85
7 11 7
IfíS
íQ?
2005
75
16
92
963
2407
1.54
0
3.94
7 11 7
/V
^M
'fft
¡v-;/
;/.
2006
76
968
7- 1
001
24
58
1.57
3
4.03
1 11 7
I8ÍIÍ
20
07
78
66
83
1037
2506
1.60
4
4.10
9 11 7
iliaí
2008 80
2678
1071
2551
1.63
3
4.18
3 11 8
ÍHIQ
I
2009
817
67
411
02
25
94
1.66
0
4.2
54 12 8
í|§W
lJ>;
2010 83
16
70
1133
26
34
1.68
6
4.32
0 12 8
lü?5!
2011 84
566
711
61
2673
1.71
1
4.38
4 12 8
iSé!
2012
85
86
63
1189
2710
1.73
4
4.4
44 12 8
W^S
ím*
;*''*i.
?M,H
|'M.'.i
2013 87
06
60
1215
2745
1.75
7
4.50
2 12
8
;-;
'ñ1
¿"••íV
'*'*•
*' i."
1!
AE
RO
VÍA
U
G 5
64
GY
E-N
YC
TO
TA
L%
SO
BR
EV
UE
LO
S
TO
TA
LP
RO
M.
DIA
RIO
HO
RA
PIC
OR
NP
2002
42
2
42
2270
69
2 2 1
%#$$
2003
48
2
48
2308
79
0 2 1
J".
íf?'^
Vnif
:. •
•'-^
íS'^
l-U
,;
2004
55
3
55
3354
907 2 2
i?
¿V
i •*•
*."
SM
¿9f
2005
63
5
63
5407
1.04
2 3 2
Ss-
iMf
2006
72
9
729
466
1.19
5 3 2
iÉ
Í'oí
it>í
>i*l
í,-,,.
2007
833
83
3533
1.36
7 4 2
JiMtsl
2008
94
9
94
9608
1.55
7 4 3
2009
1.07
6
1076
689
1.76
5 5 3
2010
1.21
5
1215
777
1.99
2 5 4
2011
1.36
4
1364
873
2.23
8 6 4• >
.*• T'
"*<•
*'-*£
• "'
""' '
*
r-,V
:i.;-1
Qíí
¡.1-í.
r-w
í'ífí
20
12
1.52
5
1525
976
2.50
1 7 5
ItfS
i'oí
^Pf'/
f '*L
2 jk
j* í
2013
1.69
7
1697
1.08
6
2.78
3 8 5
''.v
T;í*
'',4 r
»sw
^Mfe

ANEXO E
Descripción de las Radioayudas en el
Ecuador
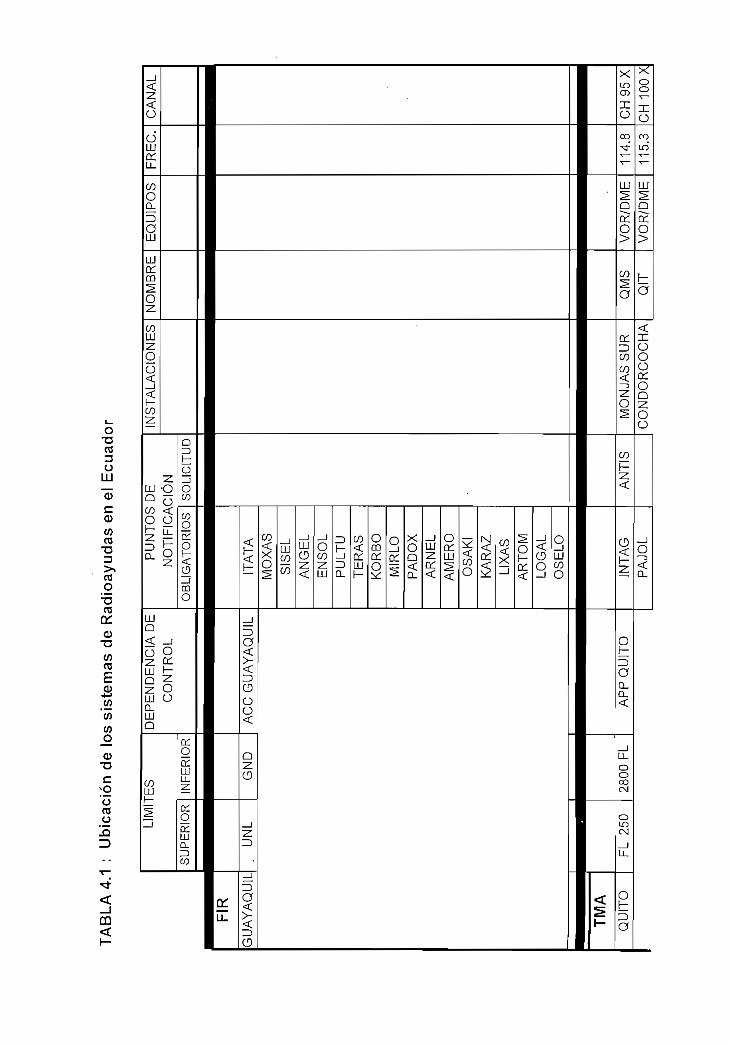
TA
BL
A 4
.1 :
Ub
icac
ión
de l
os s
iste
mas
de
Rad
ioay
ud
as e
n el
Ecu
ado
r
FIR
GU
AY
AQ
UIL
LIM
ITE
S
SU
PE
RIO
R
UN
L
INFE
RIO
R
GN
D
DE
PE
ND
EN
CIA
DE
CO
NT
RO
L
AC
C G
UA
YA
QU
IL
TM
A
QU
ITO
FL
250
2800
FL
AP
P Q
UIT
O
PU
NT
OS
DE
NO
TIF
ICA
CIÓ
NO
BLI
GA
TO
RIO
S
ITA
TA
MO
XA
S
SIS
EL
ÁN
GE
L
EN
SO
LP
ULT
UT
ER
AS
KO
RB
OM
IRLO
PA
DO
X
AR
NE
L
AM
ER
O
OS
AK
I
KA
RA
Z
LIX
AS
AR
TO
M
LOG
AL
OS
ELO
INT
AG
PA
JOL
SO
LIC
ITU
D
AN
TIS
INS
TA
LAC
ION
ES
MO
NJA
S S
UR
CO
ND
OR
CO
CH
A
NO
MB
RE
QM
S
QIT
EQ
UIP
OS
VO
R/D
ME
VO
R/D
ME
FR
EC
.
114.
8
115.
3
CA
NA
L
CH
95
X
CH
10
0X

GU
AY
AQ
UIL
LIM
ITE
S
SU
PE
RIO
R
FL
20
0
MA
NT
AF
L1
90
MÁ
CH
ALA
FL
70
CU
EN
CA
FL
20
0
INFE
RIO
R
DE
PE
ND
EN
CIA
DE
CO
NT
RO
L
2000
FT
AP
P G
UA
YA
QU
IL
3000
FT
AP
P M
AN
TA
3000
FT
AP
P M
ÁC
HA
LA
2700
FT
AP
P C
UE
NC
A
CA
YA
M
TE
JAR
TIP
DO
TA
CH
I
QU
ITO
AS
CA
ZU
BI
OLM
ED
O
UIO
ZU
IO
LM
ND
B
ND
B
ND
B
980
890
400
PU
NT
OS
DE
NO
TIF
ICA
CIÓ
NO
BLI
GA
TO
RIO
S
RE
KIN
CH
ILA
MIN
DO
PA
CT
O
PU
NA
S
SA
YA
RO
CE
N
AT
ÚN
AM
AR
IR
OC
AF
UE
RT
ELA
PIL
A
BA
CA
LAO
PIR
CA
GU
XA
D
CU
TC
HIL
GIR
ÓN
CH
AN
CH
AN
SO
LIC
ITU
D
INS
TA
LAC
ION
ES
NO
MB
RE
EQ
UIP
OS
FR
EC
.C
AN
AL
VU
LKY
CA
TA
RA
MA
SA
N J
UA
N
ÁN
GE
L
GU
AB
O
PA
SA
JE
SN
T R
OS
AP
AM
IS
GU
AY
AQ
UIL
GU
AY
AQ
UIL
CH
ON
GO
N
PA
LMA
MA
NT
AM
AN
TA
PO
RT
OV
IEJO
MÁ
CH
ALA
MÁ
CH
ALA
CU
EN
CA
CU
EN
CA
R
GY
V
SO
L
PA
L
MN
TM
NV
PT
N
MH
V
MH
L
CU
VC
UR
ND
B
VO
R/D
ME
ND
B
ND
B
ND
BV
OR
/DM
EN
DB
VO
R/D
ME
ND
B
VO
R/D
ME
ND
B
315
115.
9
200
395
205
113.
939
0
113.
1
250
114.
122
1
CH
10
6X
CH
86
X
CH
58
X
CH
92
X

PA
ST
AZ
AF
L150
3600
FT
LIM
ITE
S
SU
PE
RIO
RIN
FER
IOR
AP
P P
AS
TA
ZA
DE
PE
ND
EN
CIA
DE
CO
NT
RO
L
LOG
US
SA
NT
A C
LAR
A
RIO
AJU
NO
RIO
HU
AP
UN
O
RIO
VIL
LAN
O
LTL.
CA
NE
LOS
PIT
IRIS
HC
A
PU
NT
OS
DE
NO
TIF
ICA
CIÓ
NO
BLI
GA
TO
RIO
SS
OLI
CIT
UD
OT
RA
S I
NS
TA
LAC
ION
ES
PA
ST
AZ
A
PA
ST
AZ
A
INS
TA
LAC
ION
ES
SA
LIN
AS
SA
LIN
AS
ES
ME
RA
LDA
S
ES
ME
RA
LDA
S
BA
HÍA
LOJA
RIO
BA
MB
A
TU
LCA
N
AM
BA
TO
AM
BA
TO
LAT
AC
UN
GA
LAT
AC
UN
GA
MA
CA
S
TA
ISH
A
MO
NT
ALV
O
MA
CA
RA
CO
CA
PA
V
PT
Z
NO
MB
RE
SLS
SA
V
ES
V
ES
M
BC
N
LOJ
RIO
TLC
AM
V
AM
B
LTV
LAT
MA
S
TS
H
MT
L
MA
C
coc
VO
R/D
ME
ND
B
EQ
UIP
OS
ND
B
VO
R/D
ME
VO
R/D
ME
ND
B
ND
B
ND
B
ND
B
ND
B
VO
R/D
ME
ND
B
VO
R/D
ME
ND
B
ND
B
ND
B
ND
B
ND
B
ND
B
113.
1
340
FR
EC
.
416
114.
1
115.
7
215
316
414
212
418
112.
7
360
117.
1
260
408
210
351
285
322
CH
78
X
CA
NA
L
CH
88
X
CH
10
4X
CH
74
X
CH
11
8X
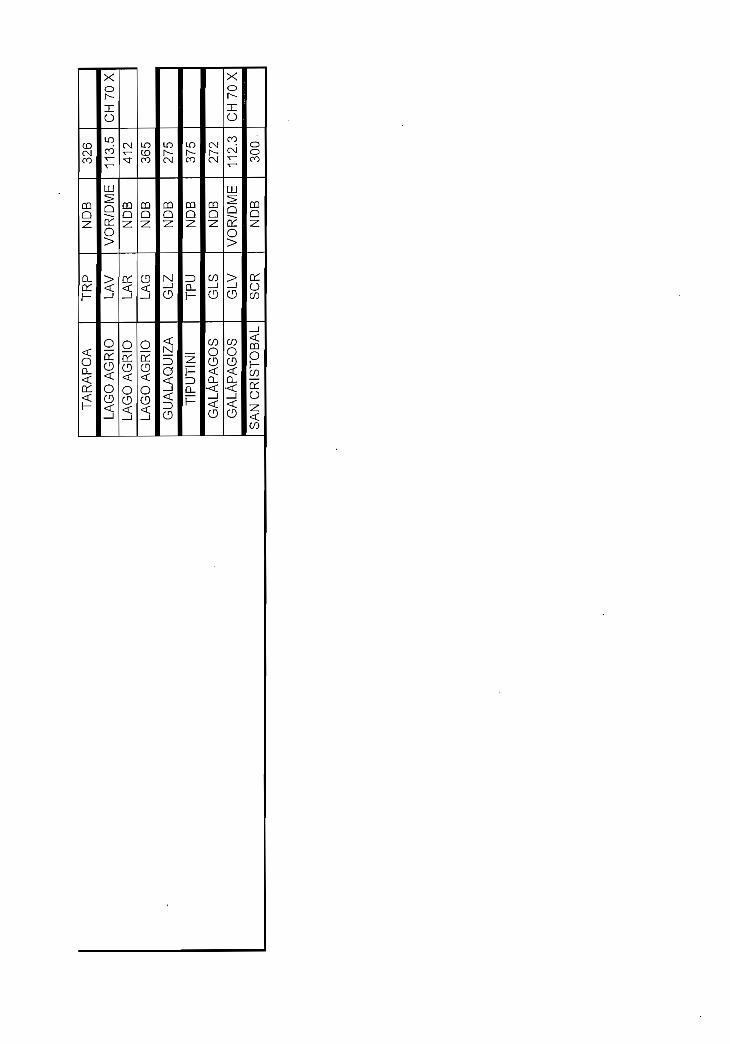
-
TA
RA
PO
A
LAG
O A
GR
IO
LAG
O A
GR
IOLA
GO
AG
RIO
GU
ALA
QU
IZA
TIP
UT
INI
GA
LÁP
AG
OS
GA
LÁP
AG
OS
SA
N C
RIS
TÓ
BA
L
TR
P
LAV
LAR
LAG
GLZ
TP
U
GLS
GLV
SC
R
ND
B
VO
R/D
ME
ND
B
ND
B
ND
B
ND
B
ND
B
VO
R/D
ME
ND
B
326
113.
541
2
365
275
375
272
112.
3
30
0-
CH
70
X
CH
70
X

ANEXO F
Recomendaciones de la Organización de
A vía don Civil In tern a don al

RECOMENDACIONES
Certificación
Recomendación 1
Los SARPS de la OACI sobre el GNSS deberían abarcar los criterios de
performance del sistema de los requisitos pertinentes de componentes de satélite,
seña! en el espacio, aviónica, instalaciones terrestres, instrucción y otorgamiento
de licencias, y el sistema en su totalidad.
Esos SARPS de la OACI deberían contener información apropiada sobre
performance y modos de falla del sistema, para que los Estados puedan
determinar razonablemente las repercusiones respecto a la seguridad en sus
servicios de tránsito aéreo.
Recomendación 2
Por lo que respecta a todos los SARPS de la OACI sobre el GNSS, los Estados
proveedores de señal en el espacio y las organizaciones internacionales
proveedoras deberían participar en el proceso de verificación y validación
propuesto por la OACI de forma que los SARPS y los documentos de apoyo de la
OACI sean completos y tengan un alto grado de perfección.
Recomendación 3
Los Estados que provean señales en el espacio, o bajo cuya jurisdicción se
provean dichas señales, certificarán la señal en e! espacio atestando que es
conforme a los SARPS.
El Estado que tenga jurisdicción en virtud del Convenio de Chicago debería
asegurar que la aviónica, las instalaciones terrestres y los requisitos de instrucción
y otorgamiento de licencias cumplen con los SARPS de la OACI,
Recomendación 4
Los Estados que provean señales en el espacio, o bajo cuya jurisdicción se
provean dichas señales, deberían asegurar la aplicación de los procedimientos de
gestión de la seguridad vigentes que demuestran el continuo cumplimiento de los
SARPS sobre señal en el espacio.
Recomendación 5
Los Estados que provean señales en el espacio, o bajo cuya jurisdicción se
provean dichas señales, deberían producir un documento sobre el sistema de
gestión de la seguridad utilizando el foro de la OACI mencionado en la
Recomendación 8. En la medida de lo posible, dicho documento debería ser
coherente por lo que respecta al formato y al contenido. La OACI debería
distribuir dicha documentación sobre el sistema de gestión de la segundad de la
señal en el espacio.
Recomendación 6
Cada Estado debería definir y asegurar la aplicación de reglamentos de seguridad
para la utilización de la señal en el espacio como parte de los servicios de tránsito
aéreo en su propio espacio aéreo.
Recomendación 7
Para los fines de autorización por un Estado del uso de la señal en el espacio en
su espacio aéreo, debería poder utilizarse y distribuirse por intermedio de la OACI
la información adicional que pueda requerirse para dicha autorización. Para
obtener dicha información pueden utilizarse otras fuentes incluyendo, entre otras,
arreglos bilaterales y multilaterales, caso de seguridad, y NOTAM.
Recomendación 8
Los Estados reconocen la función central de la OACI en la coordinación de la
implantación mundial del GNSS y en particular para:
a. Establecer normas, métodos recomendados y procedimientos apropiados
de conformidad con el Artículo 37 del Convenio de Chicago en la
implantación y explotación del GNSS;
b. Coordinar y supervisar la implantación del GNSS a escala mundial, de
conformidad con los planes regionales de navegación aérea y el plan
mundial coordinado para los sistemas CNS/ATM de la OACI;
c. Facilitar la provisión de asistencia técnica a los Estados con respecto a los
aspectos técnicos, financieros, jurídicos, de gestión y de cooperación de la
implantación del GNSS;
d. Coordinar con otras organizaciones todo asunto relacionado con el GNSS,
incluido el uso de las bandas del espectro de frecuencias en que los
elementos que componen el GNSS funcionan en apoyo de la aviación civil
internacional; y
e. Desempeñar toda otra función relativa al GNSS dentro de! marco del
Convenio de Chicago, incluyendo las funciones previstas en el Capitulo XV
del Convenio.
Responsabilidad civil
Recomendación 9
En relación con el régimen de responsabilidad respecto al GNSS, deberían
estudiarse más a fondo, entre otras cuestiones, los siguientes conceptos;
a) indemnización equitativa, pronta y adecuada;
b) cláusula exonerativa de responsabilidad;
c) inmunidad soberana respecto a la jurisdicción;
d) daño físico, pérdida económicay lesión mental;
e) responsabilidad conjunta y solidaria;
f) mecanismo de acción de regreso;
g) canalización de responsabilidad;
h) creación de un fondo internacional (como una posibilidad adicional);
i) concepto de dos niveles, es decir, responsabilidad incondicional hasta un limite
que habrá de definirse y responsabilidad basada en la culpa por encima del límite
sin establecer una cifra límite.
Recomendación 10
Por lo que respecta a la parte de responsabilidad basada en la culpa, las señales
deberían registrarse a los efectos de la prueba de conformidad con los SARPS de
ía OACl.-
Recomendación 11
En los estudios sobre el régimen de responsabilidad civil respecto al GNSS
mencionados en la Recomendación 9, deberían tenerse en cuenta, entre otras
cuestiones, las siguientes:
a) las disposiciones sobre responsabilidad civil relativas a la explotación, provisión
y uso de los servicios GNSS deberían fomentar el grado más alto de seguridad,
asegurando al mismo tiempo que los daños que tengan origen en dichos servicios
se indemnicen de una forma equitativa;
b) la.función fundamental de la señal transmitida por los satélites de navegación
para la seguridad de la aviación civil internacional plantearía la cuestión de si las
cláusulas exoneratívas de responsabilidad serían apropiadas en el caso de
satélites de navegación, particularmente en casos de muerte o lesiones
accidentales;

c) teniendo debidamente en cuenta los Principios 3 y 4 del Proyecto de Carta
sobre los derechos y obligaciones de los Estados con relación a los servicios
GNSS, si la doctrina de la inmunidad soberana debería excluirse de las
reclamaciones por responsabilidad civil originadas en el GNSS a fin de asegurar
una asignación de responsabilidad civil apropiada;
d) la experiencia práctica en la comercialización de los servicios GNSS;
e) deberían utilizarse métodos apropiados para cubrir los riesgos, a fin de evitar el
fracaso de las reclamaciones legítimas;
f) si, y en qué medida, las disposiciones sobre responsabilidad civil deberían
reflejar la responsabilidad conjunta de todas las partes involucradas en la
explotación y provisión de servicios GNSS;
g) las disposiciones sobre responsabilidad civil deberían tener debidamente en
consideración y, cuando sea necesario, deberían complementar ¡os principios de
derecho internacional y de derecho aeronáutico y espacial vigentes.
Administración, financiamiento y recuperación de costos
Recomendación 12
Los servicios GNSS deberían considerarse como un servicio internacional para
uso público con garantías para la accesibilidad, continuidad y calidad de los
servicios.
El principio de cooperación y asistencia mutua, enunciado en el Proyecto de Carta
sobre los derechos y obligaciones de los Estados con relación a los servicios
GNSS, debería ser aplicable, por consiguiente, a la recuperación de costos del
GNSS.
Recomendación 13

Ante la falta de un ambiente competitivo respecto a la provisión de servicios
GNSS, debería considerarse si serían convenientes mecanismos para impedir el
abuso del poder monopolístico por parte de los proveedores GNSS.
Los mecanismos administrativos para el GNSS deberían ser multilaterales,
regionales y nacionales. Los Acuerdos de financiamiento colectivo con Dinamarca
e Islandia podrían ser un modelo, pero esto no excluye la utilización de otros tipos
de mecanismos, incluidos los arreglos regionales vigentes.
Los planes de recuperación de costos, si los hubiera, deberían asegurar la
asignación razonable de los costos entre los usuarios de la aviación civil y entre
los usuarios de la aviación civil y otros usuarios del sistema.
Recomendación 14
Los derechos impuestos a ios usuarios que pueden utilizarse para el
financiamiento del GNSS incluyen las siguientes formas especificas de derechos:
a) derechos de suscripción anuales por explotador que lo usa;
b) derechos de suscripción anuales por aeronave que lo usa;
c) derechos de licencia anuales o mensuales;
d) derechos por vuelo;
e) derechos por fase de vuelo;
f) derechos basados en el total de pasajeros-kilómetros y toneladas-kilómetros;
g) derechos en ruta ordinarios;
h) o una combinación de los anteriores.
Futuras estructuras de explotación
Recomendación 15
Las estructuras de explotación futuras deberían incluir una función de coordinación
de la OACI respecto al sistema que provea las señales de navegación primarias
en el espacio.
El GNSS futuro debería ser objeto de un control civil, ejerciendo los Estados
usuarios un nivel apropiado de control sobre la administración y reglamentación de
los aspectos que se relacionan con la aviación civil.
En la medida posible, los sistemas futuros deberían hacer un uso óptimo de las
actuales estructuras institucionales, modificadas si fuese necesario, y deberían ser
explotados de acuerdo con los arreglos institucionales y reglamentos jurídicos
vigentes.
Recomendación 16
Inicialmente deberían elaborarse estructuras regionales de explotación del GNSS;
en esta etapa parece no ser necesaria una estructura de explotación centralizada
única, pero podría ser objeto de estudio en el futuro.
La coordinación internacional puede lograrse mediante organizaciones regionales
que actúen coordinadas por la OACI.
Son posibles los siguientes campos de actividad internacional:
a) auditoria internacional;
b) vigilancia de una red GNSS mundial continúa y uní versal mente accesible;
c) vigilancia de la disponibilidad estable de las señales en el espacio del GNSS
internacional;
d) seguimiento de la señal respecto a la disponibilidad, continuidad, exactitud e
integridad de las señales en el espacio del GNSS.
El Grupo de expertos recomienda al Consejo que;
• debería alentar el estudio del concepto de tratar la responsabilidad mediante una
cadena de contratos entre las partes del GNSS como un enfoque a escala regional
en particular;
un modelo para los futuros arreglos contractuales debería incorporar los
resultados de la labor realizada aplicando las Recomendaciones 9 y 11;
• debería iniciarse el estudio y la elaboración, en el foro apropiado de la OACI, de
un instrumento de derecho internacional en el contexto del marco jurídico e
institucional a largo plazo para el GNSS,

ANEXO G
Plan Nacional de Frecuencias

CONSEJO NACIONAL DE TELECOMUNICACIONES
C O N A T E L
SECRETARIA NACIONAL DE TELECOMUNICACIONES
DIRECCIÓN GENERAL DE RADIOCOMUNICACIONES
PLAN NACIONAL DE FRECUENCIAS
Ecuador
(Fuente: CONATEL)
Septiembre-2000

CUADRO NACIONAL DE ATRIBUCIÓN DE BANDAS DE FRECUENCIAS3230 - 5003 kHz
REGIÓN 2
Banda kHz
3230 - 3400
FIJO
MÓVIL salvo móvil aeronáutico
RADIODIFUSIÓN S5.113
S5.116 S5.118
3400 - 3500
MÓVIL AERONÁUTICO (R)
3500 - 3750
AFICIONADOS
35.119
3750 - 4000
AFICIONADOS
FIJO
MÓVIL salvo móvil aeronáutico (R)
S5.122 S5.125
4000 - 4063
FIJO
MÓVIL MARÍTIMO S5.127
4063 - 4438
MÓVIL MARÍTIMO S5.79A S5.109 S5.110 35.130
35.131 S5.132
35.128 S5.129
4438 - 4650
FIJO
MÓVIL salvo móvil aeronáutico (R)
4650 - 4700
MÓVIL AERONÁUTICO (R)
4700 - 4750
MÓVIL AERONÁUTICO (OR)
4750 - 4850
FIJO
MÓVIL salvo móvil aeronáutico (R)
RADIODIFUSIÓN S5.113
4850 - 4995
FIJO
MÓVIL TERRESTRE
RADIODIFUSIÓN S5.113
4995 - 5003
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
(5000 kHz)
ECUADORBanda kHz
3230 - 3400
FIJO
MÓVIL salvo móvil aeronáuíico
RADIODIFUSIÓN S5.113
S5.116
3400 - 3500
MÓVIL AERONÁUTICO (R)
3500 -3750
AFICIONADOS
3750 - 4000
AFICIONADOS
FIJO
MÓVIL salvo móvil aeronáutico (R)
S5.122
4000 - 4063
FIJO
MÓVIL MARÍTIMO S5.127
4063 - 4438
MÓVIL MARÍTIMO S5.79A S5.109 S5.110 35.130
35.131 35.132
35.129
4438 - 4650
FIJO
MÓVIL salvo móvil aeronáutico (R)
4650 - 4700
MÓVIL AERONÁUTICO (R)
4700 - 4750
MÓVIL AERONÁUTICO (OR)
4750 - 4850
FIJO
MÓVIL salvo móvil aeronáutico (R)
RADIODIFUSIÓN S5.113
4850 - 4995
FIJO
MÓVIL TERRESTRE
RADIODIFUSIÓN S5.113
4995 - 5003
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
(5000 kHz)
NOTAS
EQA.10
EQA.10
EQA.10
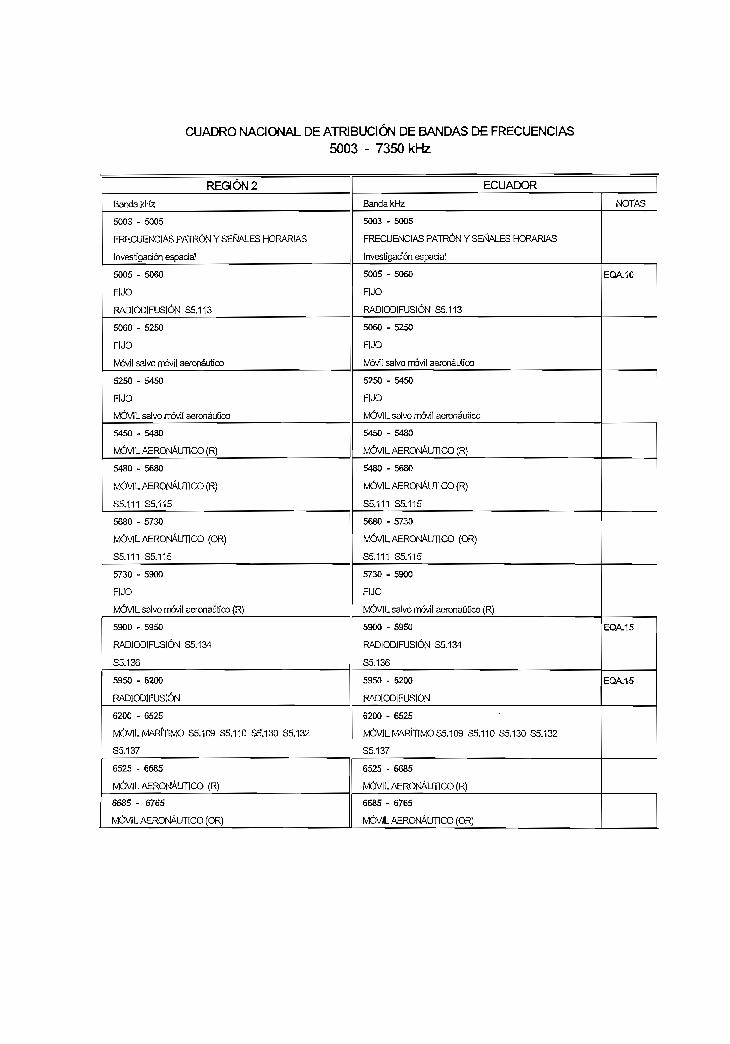
CUADRO NACIONAL DE ATRIBUCIÓN DE BANDAS DE FRECUENCIAS5003 - 7350 kHz
REGIÓN 2
Banda kHz
5003 - 5005
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
Investigador! espada!
5005 - 5060
FIJO
RADIODIFUSIÓN S5.113
5060 - 5250
FIJO
Móvil salvo móvil aeronáutico
5250 - 5450
FIJO
MÓVIL salvo móvil aeronáutico
5450 - 5480
MÓVIL AERONÁUTICO (R)
5480 - 5680
MÓVIL AERONÁUTICO (R)
S5.111 S5.115
5680 - 5730
MÓVILAERONÁUT1CO (OR)
S5.111 S5.115
5730 - 5900
FIJO
MÓVIL salvo móvil aeronáutico (R)
5900 - 5950
RADIODIFUSIÓN S5.134
S5.136
5950 - 6200
RADIODIFUSIÓN
6200 - 6525
MÓVIL MARÍTIMO S5.109 S5.110 S5.130 S5.132
S5.137
6525 - 6685
MÓVIL AERONÁUTICO (R)
6685 - 6765
MÓVIL AERONÁUTICO (OR)
ECUADOR
Banda kHz
5003 - 5005
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
Investigación espada!
5005 - 5060
FIJO
RADIODIFUSIÓN S5.113
5060 - 5250
FIJO
Móvil salvo rróvil aeronáutico
5250 - 5450
FIJO
MÓVIL salvo móvil aeronáutico
5450 - 5480
MÓVIL AERONÁUTICO (R)
5480 - 5680
MÓVIL AERONÁUTICO (R)
S5.111 S5.115
5680 - 5730
MÓVILAERONÁUnCO (OR)
S5.111 S5.115
5730 - 5900
FIJO
MÓVIL salvo móvil aeronáutico (R)
5900 - 5950
RADIODIFUSIÓN S5.134
S5.136
5950 - 6200
RADIODIFUSIÓN
6200 - 6525
MÓVIL MARÍTIMO S5.109 S5.110 35.130 S5.132
S5.137
6525 - 6685
MÓVIL AERONÁUTICO (R)
6685 - 6765
MÓVIL AERONÁUTICO (OR)
NOTAS
EQA.10
EQA.15
EQA.15
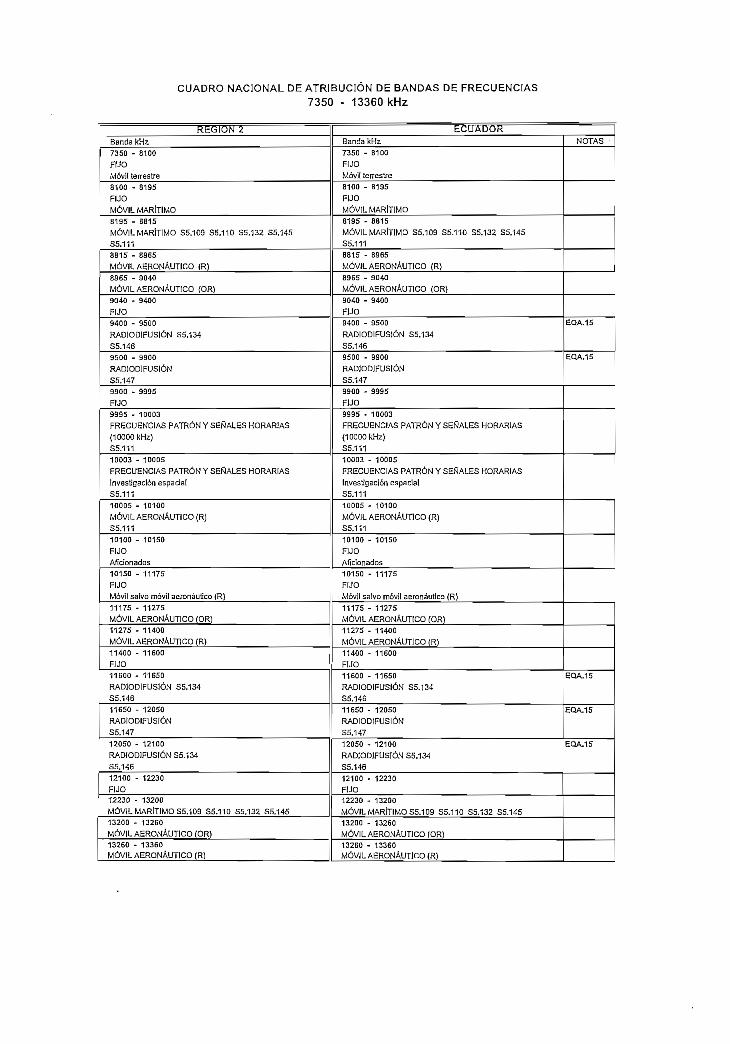
CUADRO NACIONAL DE ATRIBUCIÓN DE BANDAS DE FRECUENCIAS7350 - 13360 kHz
REGIÓN 2Banda kHz7350 - 8100
FIJOMóvil terrestre8100 - 8195
FIJO
MÓVIL MARÍTIMO8195 - 8815
MÓVIL MARÍTIMO S5.109 S5.110 S5.132 55.145S5.1118815 - 8965
MÓVIL AERONÁUTICO (R)8965 - 9040
MÓVIL AERONÁUTICO (QR)9040 - 9400
FIJO9400 - 9500
RADIODIFUSIÓN S5.134S5.1469500 - 9900
RADIODIFUSIÓN
S5.1479900 - 9995
FIJO
9995 - 10003FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
(10000 kHz)55.11110003 - 10005
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
Investigación espacialS5.111
10005 - 10100
MÓVIL AERONÁUTICO (R)S5.11110100 - 10150
FIJO
Aficionados10150 - 11175
FIJOMóvil salvo móvil aeronáutico (R)
11175 - 11275
MÓVIL AERONÁUTICO (OR)11275 - 11400
MÓVIL AERONÁUTICO (R)11400 - 11600
FIJO11600 - 11650
RADIODIFUSIÓN S5.134S5.14611650 - 12050
RADIODIFUSIÓN55.14712050 - 12100
RADIODIFUSIÓN S5.134S5.14612100 - 12230
FIJO12230 - 13200
MÓVIL MARÍTIMO 55.109 S5.110 S5.132 S5.14513200 - 13260
MÓVIL AERONÁUTICO (OR)13260 - 13360MÓVIL AERONÁUTICO (R)
ECUADOR
Banda kHz7350 - 8100
FIJOMóvil terrestre
8100 - 8195
FIJOMÓVIL MARÍTIMO
8195 - 8815
MÓVIL MARÍTIMO S5.109 S5.110 S5.132 55.145
S5.1118815 - 8965
MÓVIL AERONÁUTICO (R)8965 - 9040MÓVIL AERONÁUTICO (OR)
9040 - 9400
FIJO9400 - 9500
RADIODIFUSIÓN 55.13455.1469500 - 9900
RADIODIFUSIÓN
S5.1479900 - 9995
FIJO9995 - 10003FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
(100 00 kHz)
S5.11110003 - 10005
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
Investigación espacial55.111
10005 - 10100
MÓVIL AERONÁUTICO (R)S5.111
10100 - 10150
FIJOAficionados10150 - 11175
FIJOMóvil salvo móvil aeronáutico (R)
11175 - 11275MÓVIL AERONÁUTICO (OR)11275 - 11400
MÓVIL AERONÁUTICO (R)11400 - 11600
FIJO11600 - 11650
RADIODIFUSIÓN 55.134S5.14611650 - 12050
RADIODIFUSIÓN
55.14712050 - 12100
RADIODIFUSIÓN S5.13455.14612100 - 12230
FIJO12230 - 13200
MÓVIL MARÍTIMO S5.109 S5.110 S5.132 55.14513200 - 13260
MÓVIL AERONÁUTICO (OR)13260 - 13360MÓVIL AERONÁUTICO (R)
NOTAS
EQA.15
EQA.15
EQA.15
EQA.15
EQA.15

CUADRO NACIONAL DE ATRIBUCIÓN DE BANDAS DE FRECUENCIAS18030 - 23350 kHz
REGIÓN 2Banda kHz
18030 - 18052
FIJO18052 - 18068
FIJO
Investigación espacial18068 - 18168
AFICIONADOS
AFICIONADOS POR SATÉLITE18168 - 18780
FIJOMóvil salvo móvil aeronáutico18780 - 18900
MÓVIL MARÍTIMO18900 - 19020
RADIODIFUSIÓN S5.134
S5.14619020 - 19680
FIJO19680 - 19800
MÓVIL MARÍTIMO S5.13219800 - 19990
FIJO
19990 - 19995
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
Investigación espacial
S5.11119995 - 20010
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
(20000 kHz)
S5.11120010 - 21000
FIJO
Móvil21000 - 21450
AFICIONADOS
AFICIONADOS POR SATÉLITE21450 - 21850
RADIODIFUSIÓN21850 - 21870
FIJO
21870 - 21924
FIJO S5.155B21924 - 22000
MÓVIL AERONÁUTICO (R)22000 - 22855
MÓVIL MARÍTIMO S5.13222855 - 23000
FIJO23000 - 23200
FIJO
Móvil salvo móvil aeronáutico (R)23200 - 23350
FIJO S5.156AMÓVIL AERONÁUTICO (OR)
ECUADORBanda kHz18030 - 18052
FIJO18052 - 18068
FIJO
Investigación espacial18068 - 18168
AFICIONADOS
AFICIONADOS POR SATÉLITE18168 - 18780
FIJOMóvil salvo móvil aeronáutico
18780 - 18900
MÓVIL MARÍTIMO18900 - 19020
RADIODIFUSIÓN S5.134S5.146
19020 - 19680
FIJO
19680 - 19800
MÓVIL MARÍTIMO S5.13219800 - 19990
FIJO19990 - 19995
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
Investigación espacialS5.111
19995 - 20010
FRECUENCIAS PATRÓN Y SEÑALES HORARIAS
{20000 kHz)
S5.11120010 - 21000
FIJOMóvil
21000 - 21450
AFICIONADOS
AFICIONADOS POR SATÉLITE21450 - 21850
RADIODIFUSIÓN21850 - 21870
FIJO
21870 - 21924
FIJO S5.155B
21924 - 22000
MÓVIL AERONÁUTICO (R)22000 - 22855
MÓVIL MARÍTIMO S5.13222855 - 23000
FIJO23000 - 23200
FIJO
Móvil salvo móvil aeronáutico (R)23200 - 23350
FIJO S5.156AMÓVIL AERONÁUTICO (OR)
NOTAS
EQA.15
EQA.15

CUADRO NACIONAL DE ATRIBUCIÓN DE BANDAS DE FRECUENCIAS75,2 - 137,175 MHz
REGIÓN 2
Banda MHz
75,2 - 75,4
FIJO
MÓVIL
75,4 - 76
FIJO
MÓVIL
76 - 88
RADIODIFUSIÓN
Fijo
Móvil
S5.185
88 - 100
RADIODIFUSIÓN
100 - 108
RADIODIFUSIÓN
108 - 117,975
RADIONAVEGACIÓN AERONÁUTICA
117,975-137
MÓVIL AERONÁUTICO (R)
S5.111 S5.198 35.199 S5.200 S5.203
137 - 137,025
OPERACIONES ESPACIALES (espado-Tierra)
METEOROLOGÍA POR SATÉLITE (espado-Tíerra)
MÓVIL POR SATÉLITE (espacio-TIerra) S5.208A S5.209
INVESTIGACIÓN ESPACIAL (espacJo-Tierra)
Rjo
Móvil salvo móvil aeronáutico (R)
S5.204 S5.208
137,025 - 137,175
OPERACIONES ESPACIALES (espacío-Tierra)
METEOROLOGÍA POR SATÉLITE (espado-Tierra)
INVESTIGACIÓN ESPACIAL (espadc-Tierra)
Fijo
Móvil por satélite (espado-Tierra) S5.208A S5.209
Móvil salvo móvil aeronáutico (R)
S5.204 S5.208
ECUADOR
Banda MHz
75,2 - 75,4
FIJO
MÓVIL
75,4 - 76
FIJO
MÓVIL
76 - 88
RADIODIFUSIÓN
Fijo
Móvil
S5.185
88 - 108
RADIODIFUSIÓN
108 - 117,975
RADIONAVEGACIÓN AERONÁUTICA
117,975-137
MÓVILAERONÁUTICO (R)
S5.111S5.198S5.199S5.200 S5.203
137 - 137,025
OPERACIONES ESPACIALES (espado-Tierra)
METEOROLOGÍA POR SATÉLITE (espado-Tierra)
MÓVIL POR SATÉLITE (espacio-Tierra) S5.208A S5.209
INVESTIGACIÓN ESPACIAL (espado-Tierra)
Fijo
Móvil salvo móvil aeronáutico (R)
S5.208
137,025 - 137,175
OPERACIONES ESPACIALES (espado-Tierra)
METEOROLOGÍA POR SATÉLITE (espado-Tierra)
INVESTIGACIÓN ESPACIAL (espado-Tierra)
Fijo
Móvil por satélite (espado-Tierra) S5.208A S5.209
Móvil salvo móvil aeronáutico (R)
S5.208
NOTAS
EQA.30
EQA.35
EQA.40
EQA.40

CUADRO NACIONAL DE ATRIBUCIÓN DE BANDAS DE FRECUENCIAS
1525 - 1610 MHz
REGIÓN 2
Banda MHz,
1525 - 1530
OPERACIONES ESPACIALES
(espado-Tienra)
MÓVIL POR SATÉLITE
(espado-Tierra) S5.SSS
Exploración de (a Tierra por satélite
Fijo
Móvil S5.343
S5.341 S5.351 55.354
1530 - 1535
OPERACIONES ESPACIALES (espado-Tierra)
MCML POR SATÉLITE (espado-Tierra) S5.353A S5.SSS
Exploración de la Tierra por satélite
Fijo
Móvil S5.343
35.341 S5.351 35.354
1535 - 1559
MÓVIL POR SATÉLITE (espado-Tierra) S5.SSS
S5.341S5.351 S5.353A S5.354S5.356S5.357S5.357A
S5.362A
1559 - 1610
RADIONAVEGACIÓN AERONÁUTICA
RADIONAVEGACIÓN POR SATÉLITE (espado-Tierra)
(espaa'o-espado) S5.329A
S5.341
ECUADOR
Banda MHz:
1525 - 1530
OPERACIONES ESPACIALES
(espado-Tierra)
MÓVIL POR SATÉLITE
(espado-Tierra) S5.SSS
Exploradón de la Tierra por satélite
Fijo
Móvil S5.343
55.341 S5.351 S5.354
1530 - 1535
OPERACIONES ESPACIALES (espado-Tierra)
MÓVIL POR SATÉLITE (espado-Tierra) S5.353A S5.SSS
Exploradón de la Tierra por satélite
Fijo
Móvil S5.343
55.341 S5.351 S5.354
1535 - 1559
MÓVIL POR SATÉLITE (espado-Tierra) S5.SSS
S5.341 35.351 S5.353A 35.354 S5.356 35.357 S5.357A
1559 - 1610
RADIONAVEGACIÓN AERONÁUTICA
RADIONAVEGACIÓN POR SATÉLITE (espado-Tierra)
(espado-espado) S5.329A
S5.341
NOTAS
EQA40
EQA40
EQA.40
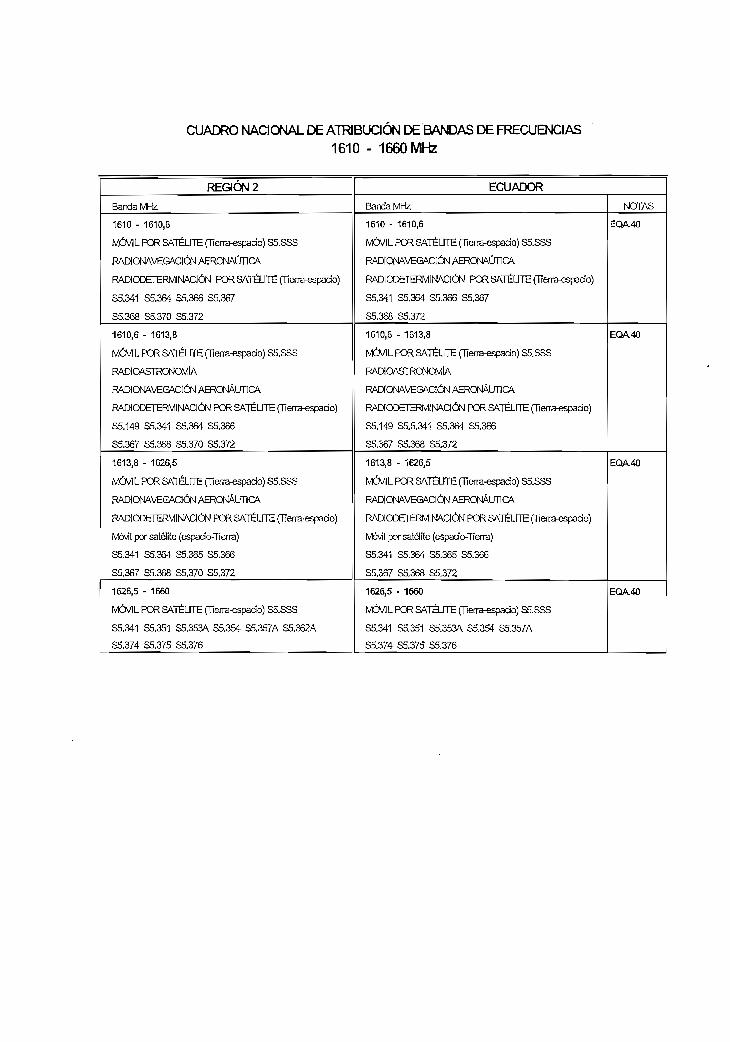
CUADRO NACIONAL DE ATRIBUCIÓN DE BANDAS DE FRECUENCIAS1610 - 1660 MHz
REGIÓN 2
Banda MHz
1610 - 1610,6
MÓVIL POR SATÉLITE (Tíerra-espado) S5.SSS
RADIONAVEGACIÓN AERONÁUTICA
RADIODETERMINACIÓN POR SATÉLITE (Tierra-espado)
55.341 S5.364 55,366 S5.367
S5.368 S5.370 S5.372
1610,6 - 1613,8
MÓVIL POR SATÉLITE (Tíerra-espado) S5.SSS
RAaOASTRCNOMÍA
RADIONAVEGACIÓN AERONÁLmCA
RADIODETERMINACION POR SATÉLITE (Tíerra-espado)
S5.149 S5.341 S5.364 S5.366
S5.367 S5.368 S5.370 S5.372
1613,8 - 1626,5
MÓVIL POR SATÉLITE (Tierra-espado) S5.SSS
RADIONAVEGACIÓN AERONÁUTICA
RADICÜETERMINACIÓN POR SATÉLITE- (Tienra-espado)
Móvil por satélite (espado-Tierra)
S5.341 S5.364 S5.365 S5.366
S5.367 S5.368 S5.370 S5.372
1626,5 - 1660
MÓVIL PCR SATÉLITE (Tíerra-espado) S5.SSS
S5.341 S5.351 S5.353A S5.354 S5.357A S5.362A
S5.374 S5.375 S5.376
ECUADOR
Banda MHz:
1610 - 1610,6
MÓVIL POR SATÉLITE (Tíerra-espado) S5.SSS
RADIONAVEGACIÓN AERONACmCA
RADICOETERMINACIÓN POR SATÉLITE (Tíerra-espado)
S5.341 S5.364 S5.366 S5.367
S5.368 S5.372
1610,6 - 1613,8
MÓVIL POR SATÉLITE fjierra-esoado) S5.SSS
RADIOASTRONOMÍA
RADIONAVEGACIÓN AERONÁUTICA
RADIODETERMINACICN POR SATÉLITE (Tíerra-espado)
S5.149 SS.5.341 55.364 S5.366
S5.367 S5.368 S5.372
1613,8 - 1626,5
MÓVIL POR SATÉLITE (Tíerra-espado) S5.SSS
RADIONAVEGACIÓN AERONÁUTICA
RADIODETERMINACIÓN POR SATÉLITE (Tietra^spado)
Móvil por satélite (espado-Tierra)
S5.341 S5.364 S5.365 S5.366
S5.367 S5.368 S5.372
1626,5 - 1660
MÓVIL POR SATÉLITE (Tierra-espado) S5.SSS
S5.341 S5.351 S5.353A S5.354 S5.357A
S5.374 S5.375 S5.376
NOTAS
EQA.40
EQA.40
EQA.40
EQA40
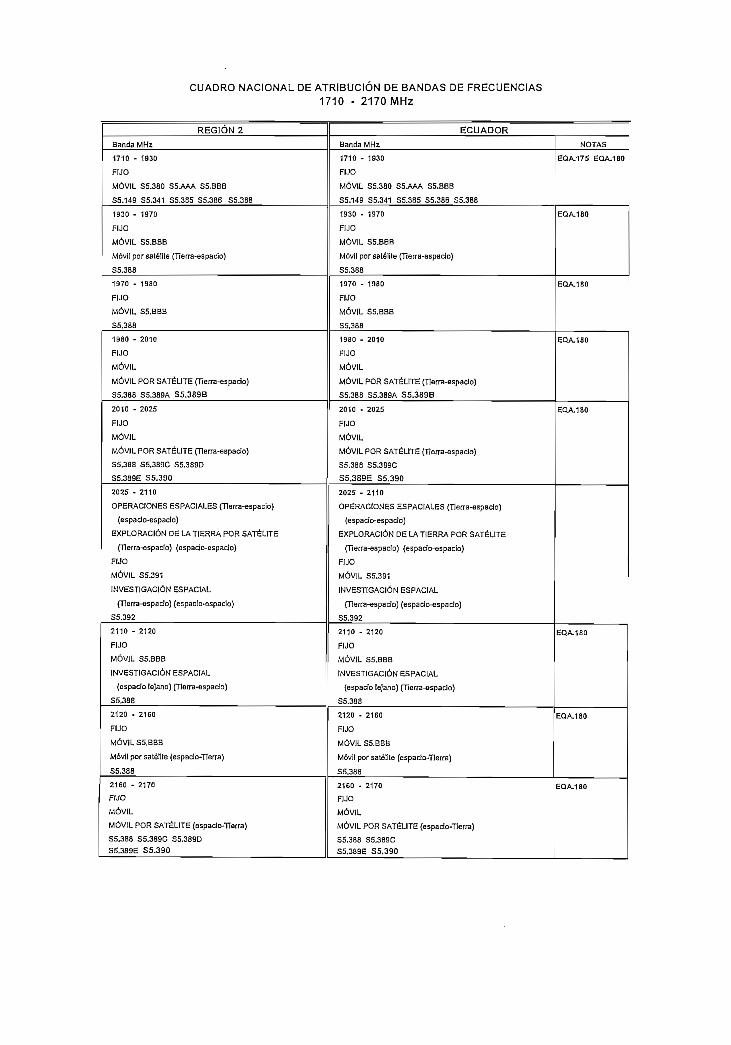
CUADRO NACIONAL DE ATRIBUCIÓN DE BANDAS DE FRECUENCIAS1710 - 2170 MHz
REGIÓN 2
Banda MHz
1710 - 1930
FIJO
MÓVIL S5.380 S5.AAA S5.BBB
S5.149 S5.341 S5.385 35,386 S5.388
1930 - 1970
FIJO
MÓVIL S5.BBB
Móvil por satélite (TIerra-espacio)
S5.388
1970 - 1980
FIJO
MÓVIL S5.BBB
S5.3B8
1980 - 2010
FIJO
MÓVIL
MÓVIL POR SATÉLITE {TIerra-espacio)
S5.388 S5.389A S5.389B
2010 - 2025
FIJO
MÓVIL
MÓVIL POR SATÉLITE (TTnrra-espado)
35.383 S5.389G S5.3S9D
S5.389E S5.390
2025 - 2110
OPERACIONES ESPACIALES {TIerra-espacio)
(espado-espaclo)
EXPLORACIÓN DE LA TIERRA POR SATÉLITE
{Tierra-aspado) (espado-espado)
FIJO
MÓVIL S5.391
INVESTIGACIÓN ESPACIAL
(Tíerra-espado) (espado-espacio)
S5.392
2110 - 2120
FIJO
MÓVIL S5.BBB
INVESTIGACIÓN ESPACIAL
(espacio lejano) (Tierra-espado)
S 5.38 8
2120 - 2160
FIJO
MÓVILS5.BBB
Móvil por satélite (espado-Tíerra)
S5.388
2160 - 2170
FIJO
MÓVIL
MÓVIL POR SATÉLITE {aspado-Tierra)
S5.388 S5.389C S5.389D
S5.389E S5.390
ECUADOR
Banda MHz
1710 - 1930
FIJO
MÓVIL S5.380 S5.AAA S5.BBB
S5.149 S5.341 S5.385 S5.386 S5.388
1930 - 1970
FIJO
MÓVIL S5.BBB
Móvil por satélite (Tierra-espado)
S5.388
1970 - 1980
FIJO
MÓVIL S5.BBB
35.388
1980 - 2010
FIJO
MÓVIL
MÓVIL POR SATÉLITE (Tierra-espado)
S5.388 S5.389A S5.389B
2010 - 2025
FIJO
MÓVIL
MÓVIL POR SATÉLITE (Tierra-espado)
S5.388 S5.389C
S5.389E S5.390
2025 - 2110
OPERACIONES ESPACIALES (Tierra-espado)
(espacio-espado)
EXPLORACIÓN DE LA TIERRA POR SATÉLITE
(Tierra-espado) {espado-espado)
FIJO
MÓVIL S 5.3 91
INVESTIGACIÓN ESPACIAL
(Tierra-espado) (espacio-espado)
35.392
2110 - 2120
FIJO
MÓVIL S5.BBB
INVESTIGACIÓN ESPACIAL
{espacio lejano) (Tierra-espacio)
S5.388
2120 - 2160
FIJO
MÓVIL S5.BBB
Móvil por satélite (espado-Tierra)
S5.388
2160 - 2170
FIJO
MÓVIL
MÓVIL POR SATÉLITE (espado-Tíerra)
S5.388 S5.389C
S5.389E S5.390
NOTAS
EQA.175 EQA.180
EQA.1BO
EQA.180
EQA.180
EQA.180
EQA.180
EQA.180
EQA.180

ANEXO H
Protocolo X.25

Protocolo X.25
Introducción.
X.25 es un estándar para el acceso a redes públicas de conmutación de paquetes. Noespecifica cómo está la red implementada interiormente aunque el protocolo interno suela serparecido a X.25.
El servicio que ofrece es orientado a conexión (previamente a usar el servicio es necesariorealizar una conexión y liberar (a conexión cuando se deja de usar el servicio), fiable, en elsentido de que no duplica, ni pierde ni desordena (por ser orientado a conexión), y ofrecemultiplexacíón, esto es, a través de un único interfaz se mantienen abiertas distintascomunicaciones. El servicio X.25 es un diálogo entre dos entidades DTE Y DCE.
FIGURA 1 Conexión a X.25. Imagen enlace.DTE DCE
módem rnódem
A Nivel Físico la conexiónse realiza según la normaX.21 o X.21 bis
A nivel de enlace, sistemas directamente conectados,se usa el protocolo LAP-B.
A nivel superior X.25 está implementado con elprotocolo PLP.
DTE (Data Terminal Equipment): Es lo que utiliza el usuario final (PC con placa X.25 porejemplo). Es el equipo terminal de datos. Incorpora los niveles 2 y 3.
DCE (Data Circuit Terminating Equipment): Podemos interpretarlo como un nodo local. A nivelde enlace (LAPB) las conexiones se establecen DTE-DCE. Ahora con el nivel de red,ampliamos las comunicaciones más allá del DCE, que hace de interconexión. Sólo incluye elnivel 1.
Con X.25 no hay conexiones muitipunto. Es un servicio punto a punto, por lo que sólo puedoconectar un DTE con otro DTE.
Nivel Físico.
La iníerfaz de nivel físico regula el diálogo entre el DCE y el DTE. Se describe desde 3 puntosde vista distintos; Mecánico, Eléctrico y Funcional.
Existen dos posibilidades para la interfaz a nivel físico:
> X.21: Se utiliza para el acceso a redes de conmutación digital. (Similares a las detelefonía digital.)
> X.21 bis: Se emplea para el acceso a través de un enlace punto a punto. (Similar a RS-232 en modo síncrono.)

En cuanto la ¡nterfaz mecánica, se usan conectores Canon DB15 (de 15 pines, para X.21) oDB25 (de 25 pines para X.21 bis).
En cuanto a la ¡nterfaz eléctrica X.21 utiliza X.26, que es una ¡nterfaz no balanceada, por lo quese suele usar mejor X.27 que es balanceada y, por tanto, permite tasas de transmisiónsuperiores. La ¡nterfaz eléctrica de X.21 bis está recogida en la norma V.28. Las velocidades semueven entre los 64kbps y los 2Mbps, velocidades que pueden parecer bajas y, de hecho, asíson. X.25 presenta un problema de baja eficiencia por la exagerada protección contra erroresque implementa y que con las redes de hoy en día no tienen sentido.
La interfaz funcional de X.21 se define mediante las distintas señales que intercambia el DB15.La interfaz funcional de X.21 bis está recogida en la norma V.24.X.21 no ha tenido mucho éxito. X.21 bis es más popular.
Nivel de Enlace (LAP-B)
El objeto del Nivel de Enlace es garantizar la comunicación entre dos equipos directamenteconectados. En X.25, este nivel queda ¡mplementado con el protocolo LAP-B (/Jnk AccessProcedure - B) que es un protocolo HDLC 2,8, es decir, con rechazo simple, indicado por el 2, yen el cual las tramas de información pueden ser utilizadas como tramas de control, indicadoesto último por el 8.
El servicio que ofrece el nivel 2 al nivel superior es orientado a conexión, fiable y en modopaquete. El nivel 2 sólo ofrece una conexión al nivel superior. El nodo local es el que prestaservicio al DTE conectado a él. El nivel de enlace no resuelve el servicio extremo a extremo.La comunicación extremo a extremo la resuelve el nivel de red. El diálogo entre entidades deenlace es salto a salto. Por tanto, existen tantas conexiones de enlace como unidadestengamos entre el DTE local y DTE remoto.
El nivel de enlace recibe peticiones del nivel de red, mediante primitivas, para que transmita unbloque de información, que le es opaco al nivel de enlace. Se pasa una SDU del nivel de red alnivel de enlace. El nivel de enlace le añade una cabecera y un trailer con objeto de detectar yevitar errores. Todo junto es una trama del nivel de enlace.
SDU
N2
Trama del nivel de enlace
Cabecera Traüer
SDU: bloque de información que se intercambian dos niveles consecutivos.PDU: estructura de datos que se intercambian dos entidades gemelas.
La trama del nivel de enlace pasa al nivel físico, quien la transforma en binario y la pasa comoseñal al medio físico, por donde se transmite.
Si la trama no sufre errores llega a destino perfectamente. La entidad gemela puede reconstruirla trama porque sabe donde empieza y termina gracias a la información de control que metimos

en la cabecera y el trailer. La parte central de la trama (campo de información) es extraída porla entidad de protocolo del nivel de enlace y se entrega al nivel superior. Esto ocurre enausencia de errores.
Por tanto el nivel de enlace permite que los niveles de red de las entidades gemelas puedanintercambiar PDUs.
Nivel 3 o nivel de red en la recomendación X.25.
Este nivel está especificado por el PLP (Packet Layer Protocol) que es un protocolo de accesoa nivel de red y que proporciona un servicio al nivel superior de subred (SNACP)
> modo paquete.> orientado a conexión.> fiable.> multiplexión: uso de una conexión para varias comunicaciones simultáneas. El DTE
origen dialoga con su nodo, pero virtualmente lo hace con todos los DTEsmultiplexados.
Circuitos virtuales (CV).
Podríamos definirlos como la asociación lógica entre usuarios para comunicarse entre ellos.En X.25 hay 2 tipos de CV:
Conmutados (CVC) : Hay que realizar un diálogo previo a la transmisión con el nodo local paraestablecerlos y para liberarlos.
Permanentes (CVP): Están establecidos de antemano (por contrato), así que no hace falta fasede establecimiento ni de liberación. Se preconfiguran los nodos de tal forma que, porcontratación, el cirtuito está permanentemente establecido. Son muy útiles si se transmitemucho y con mucha frecuencia hacia un mismo destino.
FIGURA 2. Los CVs y la multiplexión en terminología OSl
TRANSPORTE
NSAP
RED
LSAP
ENLACE
En la figura 2, se muestra como la multiplexión que se ofrece al nivel de transporte, no es tal anivel de enlace: en LAPB sólo hay una conexión.
La multiplexión se resuelve a nivel de red, aunando las diferentes conexiones (asimilables aCVs) que aparecen en el NSAP (Punto de Acceso al Servicio a Nivel de Red), en la que se vedesde el nivel de enlace en el LSAP.

Protocolo.
Nivel 3 A
Cali Request -^^,
Cali Conected* — "~
Data Request
a) ^Data Request
b) " ^-*
Clear Requesta) ^ -
Clear Confírmation
i \r~Npor In Hir'^f'innUL\l U lUlUdLIUI I*J,¡ 4 — —
Clear Confirmaron^
ÍRcíf
^ — —
— — — '
— —
^-— ^
^——~
'—-- — _
B Nivel 3
Establecimiento
^^Incoming Cali
* Cali Acepted
Transferencia^— ^ Data Indication^—- RR
^__Data Indication
Liberación^— Clear Indication4 — — - Clear Confírmation
^——+ Clear Indication^- — — Clear Confirmatior
FIGURA 3. Fases de la Transmisión.
Fase de Establecimiento: En la figura hemos supuesto que la llamada es aceptada, pero comoveremos más adelante, podría ser rechazada. Esta fase sólo tiene lugar para CVCs.
FIGURA 4. Gráfica esquemática con ¡os niveles OSl Involucrados
PLPEnlaceFísico
PLPEnlaceFísico
Los que dialogan son los dos PLPs. El nivel de enlace sólo sirve de mensajeroLas direcciones a nivel de enlace son distintas de las de nivel de red. Con la dirección de

enlace (que ya vimos que no se necesitaba realmente) llego al primer nodo. Allí sedesencapsula y se usa la de red para llegar a los demás.
Número de canal IÓQÍCO (NCL),
Es un número que permite identificar al CV involucrado en una determinada transferencia y quees distinto a cada lado de la comunicación, aunque el CV sea el mismo.El rango de NCL que pueden usarse, es algo a negociar con la empresa que ofrece el servicio(Telefónica, etc. ). Más NCL, mayor número de CVs establecibles. Un NCL se especifica con12bits, lo cual da lugar a que puedan usarse como máximo 4095 NCLs (el O tiene unsignificado especial).
Los NCLs se escogen por el DTE o por el DCE (la red en el fondo) cuando se necesitan,liberándolos cuando los acaban de usar. Ambos tienen una lista donde marcan los NCLs libresy ocupados (lo que se marca en una lista se refleja inmediatamente en la otra).
El DTE empieza a escoger por los NCLs de mayor numeración.El DCE (la red) empieza por los de menor numeración.
FIGURA 5. Ejemplos del uso de NCLs.
NCL=1Q
Lo coge el DTE NCL=10
Cali Request
Lo cógela red NCL=14—
Incoming Cali
En respuesta a un Calí Request anterior (que el DTE asignó sin problemas al NCL 6 porejemplo), el DCE trata de asignar el NCL 5 pues lo ve libre. Así el CV de esa conexión tendríaasociado el NCL 6 en el DTE y el 5 en el DCE. Al mismo tiempo el DTE ha visto libre el NCL 5 ytrata de establecer un nuevo CV asignándoselo. Como consecuencia de esto es la operacióndel DCE (de la red) la que se acepta, rechazándose el Cali Request del DTE.
Una posible solución para evitar colisiones de este tipo, es dividir por rangos la oferta de NCLs.Por ejemplo asignar una cierta cantidad de números para CVs entrantes, otra para salientes yotros que fuesen bivalentes. Así solo habría colisión en los bivalentes, pues los entrantes ysalientes sólo podrían ser elegidos por DTE y DCE respectivamente.
PDUs DEL NIVEL 3 EN X.25.
Los niveles de red de las entidades que quieren establecer la comunicación intercambian PDUs(o paquetes) mediante los servicios prestados por el nivel de enlace. Estos paquietes seestructuran en:
1. ESTABLECIMIENTO DE CONEXIONES.
Se definen 4 tipos de paquetes para el establecimiento:> Petición de llamada.> Llamada entrante.> Llamada aceptada.> Comunicación establecida.
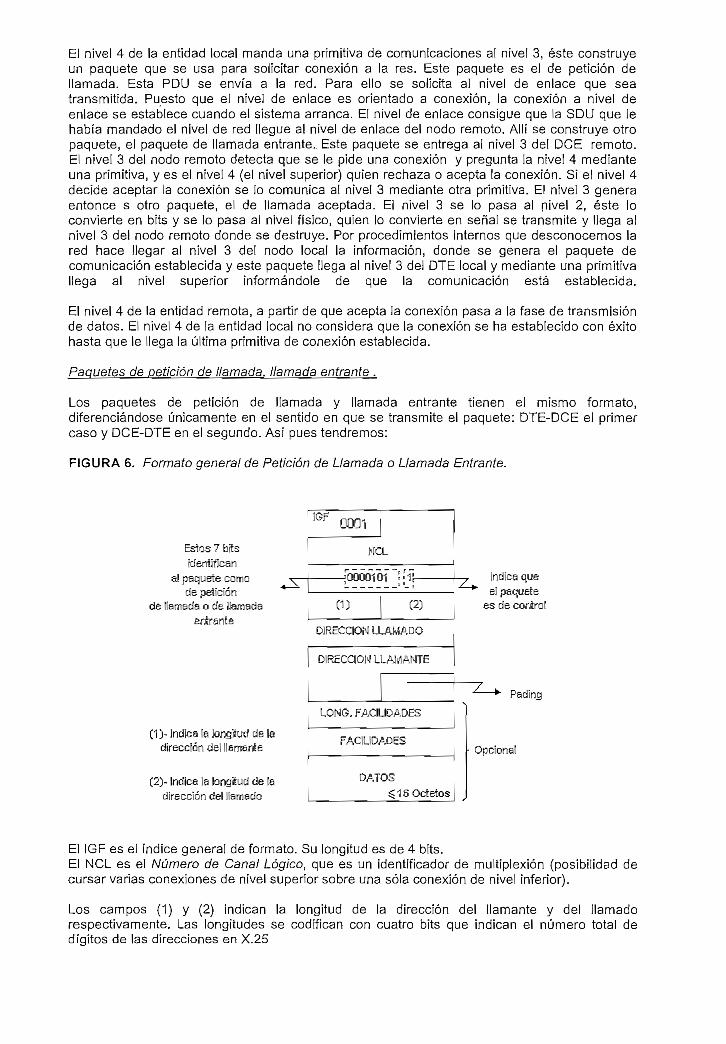
El nivel 4 de la entidad local manda una primitiva de comunicaciones al nivel 3, éste construyeun paquete que se usa para solicitar conexión a la res. Este paquete es el de petición dellamada. Esta PDU se envía a la red. Para ello se solicita al nivel de enlace que seatransmitida. Puesto que el nivel de enlace es orientado a conexión, la conexión a nivel deenlace se establece cuando el sistema arranca. El nivel de enlace consigue que la SDU que lehabía mandado el nivel de red llegue al nivel de enlace del nodo remoto. Allí se construye otropaquete, el paquete de llamada entrante. Este paquete se entrega al nivel 3 del DCE remoto.El nivel 3 del nodo remoto detecta que se le pide una conexión y pregunta la nivel 4 medianteuna primitiva, y es el nivel 4 (el nivel superior) quien rechaza o acepta la conexión. Si el nivel 4decide aceptar la conexión se lo comunica al nivel 3 mediante otra primitiva. El nivel 3 generaentonce s otro paquete, el de llamada aceptada. El nivel 3 se lo pasa al nivel 2, éste loconvierte en bits y se lo pasa al nivel físico, quien lo convierte en señal se transmite y llega alnivel 3 del nodo remoto donde se destruye. Por procedimientos internos que desconocemos lared hace llegar al nivel 3 del nodo local la información, donde se genera el paquete decomunicación establecida y este paquete llega al nivel 3 del DTE local y mediante una primitivallega al nivel superior informándole de que la comunicación está establecida.
El nivel 4 de la entidad remota, a partir de que acepta la conexión pasa a la fase de transmisiónde datos. El nivel 4 de la entidad local no considera que la conexión se ha establecido con éxitohasta que le llega la última primitiva de conexión establecida.
Paquetes de petición de llamada, llamada entrante .
Los paquetes de petición de llamada y llamada entrante tienen el mismo formato,diferenciándose únicamente en el sentido en que se transmite el paquete: DTE-DCE el primercaso y DCE-DTE en el segundo. Así pues tendremos:
FIGURA 6. Formato general de Petición de Llamada o Llamada Entrante.
Estos 7 bitsidentifican
al paquete comode petición
de llamada o de llamadaentrante
(1> Indica la longitud de ladirección del llamante
(2> Indica la longitud de ladirección del llamado
IGF 0001
NCL
-JQOOÜ101 !i1f-L i '„ ,
(2)
DIRECCIÓN LLAMADO
DIRECCIÓN LLAMANTE
LONG. FACILIDADES
FACILIDADES
DATOS¿ 16 Octetos
Indica queel paquete
es de control
Pading
- Opcional
El IGF es el índice general de formato. Su longitud es de 4 bits.El NCL es el Número de Canal Lógico, que es un ¡dentíficador de multíplexión (posibilidad decursar varias conexiones de nivel superior sobre una sola conexión de nivel inferior).
Los campos (1) y (2) indican la longitud de la dirección del llamante y del llamadorespectivamente. Las longitudes se codifican con cuatro bits que indican el número total dedígitos de las direcciones en X.25

Los puntos de acceso al servicio se identifican mediante el palno de numeración que asignadirecciones únicas a los usuarios de la red. Las direcciones se codifican en los dos campos dedirecciones.
Estos paquetes contienen datos de usuario del nivel superior, los cuales no llevan delante uncampo de longitud ya que acaban donde acaba la trama. Este campo transporta una SDU queha sido trnasmitida por el nivel superior al inmediatamente inferior. Esto contraddice que elservicio sea orientado a conexión, porque permite que antes de que se establezca la conexiónlas entidades de nivel superior intercambien datos.
Paquete de llamada aceptada y de comunicación establecida.
El paquete de llamada aceptada va del DTE al DCE y el de comunicación establecida del DCEal DTE.
El formato es el mismo para los dos:
FIGURA 7. Formato general de Llamada Aceptada o Comunicación Establecida.
OBLIGATORIO
OPTATIVO
IGF
NCL
ITP: 00001111
LONG. DIRECCIÓN
DIRECCIÓN
LONG. FACILIDADES
FACILIDADES
DATOS
El campo de control (ITP) nos permite saber si el paquete es de llamada aceptada o decomunicación establecida.
Sólo son imprescindibles los tres primeros octetos. La parte opcional está presente cuando hayalguna facilidad que justifique su presencia (si ponemos los campos opcionales de facilidades odatos, tengo que poner también los de longitud y direcciones, aunque puedo dejarlos acero).Las facilidades que justifican esta parte son:
Selecíón rápida (fast select): permite un campo de datos de hasta 128 octetos. Esto permite lapresencia de datos en los paquetes que se usan para aceptar o rechazar la llamada. Portanto,si una estación nada más recibir una Petición de Llamada manda una PDU dedesconexión, consigue una transferencia de datos sin haberse establecido la conexión.
Tanto estos paquetes como los de petición de llamada y los de llamada entrante, así como losde liberación de conexión y de indicación de liberación admiten la facilidad de selección rápida.X.25 facilita esta opción ya que hay aplicaciones que funcionan mejor en modo data grama(servicio no orientado a conexión) (que es lo que permite esta utilidad).
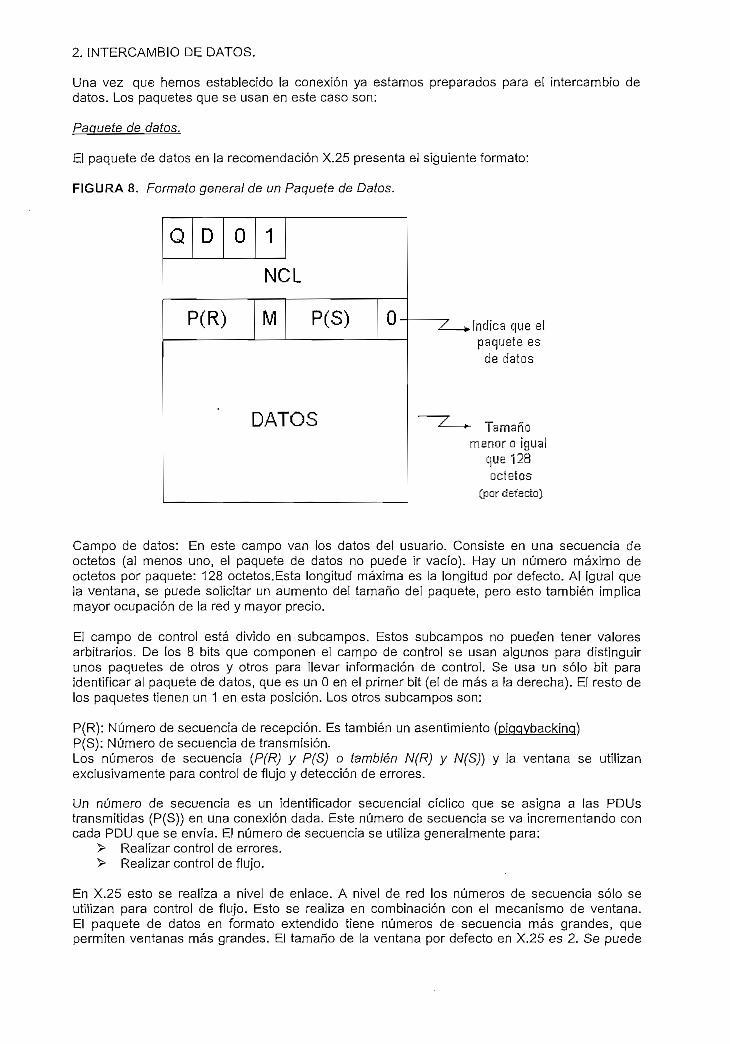
2. INTERCAMBIO DE DATOS.
Una vez que hemos establecido la conexión ya estamos preparados para el intercambio dedatos. Los paquetes que se usan en este caso son:
Paquete de datos.
El paquete de datos en la recomendación X.25 presenta el siguiente formato:
FIGURA 8. Formato general de un Paquete de Datos.
Q D O 1
NCL
P(R) M P(S) O
DATOS
~Z. Jndica que elpaquete es
de datos
Tamañomenor o igual
que 128octetos
(por defecto)
Campo de datos: En este campo van los datos del usuario. Consiste en una secuencia deoctetos (al menos uno, el paquete de datos no puede ir vacío). Hay un número máximo deoctetos por paquete: 128 octetos.Esta longitud máxima es la longitud por defecto. Al igual quela ventana, se puede solicitar un aumento del tamaño del paquete, pero esto también implicamayor ocupación de la red y mayor precio.
El campo de control está divido en subcampos. Estos subcampos no pueden tener valoresarbitrarios. De los 8 bits que componen el campo de control se usan algunos para distinguirunos paquetes de otros y otros para llevar información de control. Se usa un sólo bit paraidentificar al paquete de datos, que es un O en el primer bit (el de más a ía derecha). El resto delos paquetes tienen un 1 en esta posición. Los otros subcampos son:
P(R): Número de secuencia de recepción. Es también un asentimiento fpíqqvbackinq)P(S): Número de secuencia de transmisión.Los números de secuencia (P(R) y P(S) o también N(R) y N(S)) y la ventana se utilizanexclusivamente para control de flujo y detección de errores.
Un número de secuencia es un identificador secuencial cíclico que se asigna a las PDUstransmitidas (P(S)) en una conexión dada. Este número de secuencia se va incrementando concada PDU que se envía. El número de secuencia se utiliza generalmente para:
> Realizar control de errores.> Realizar control de flujo.
En X.25 esto se realiza a nivel de enlace. A nivel de red los números de secuencia sólo seutilizan para control de flujo. Esto se realiza en combinación con el mecanismo de ventana.El paquete de datos en formato extendido tiene números de secuencia más grandes, quepermiten ventanas más grandes. El tamaño de la ventana por defecto en X.25 es 2. Se puede

solicitar un aumento de ventana, pero será más caro, ya que se utilizan más recursos de la red.Este incremento viene limitado por el número de secuencia.
El campo NCL aparece para poder usar multiplexión (cursar varias conexiones de nivelsuperior sobre una única conexión de nivel inferior). En X.25 se permite que sobre la únicaconexión que nos ofrece el nivel de enlace se puedan establecer tantas conexiones comodesee el nivel de red. Estas conexiones puede que tengan el mismo destino o un destinodistinto (podemos tener tantas conexiones en paralelo como queramos).
El NCL es un identificador de multiplexión, que es un número que va en el campo de control yque en principio no tiene niguan estructura y que nos permite saber qué datos pertencen acada conexión. Por tanto es obligatorio que aparezca.
La longitud de este campo es de 12 bits, por lo que el número máximo de conexiones quepodemos establecer es 212. El NCL se asigna dinámicamente (a cada conexión se le asignadinámicamente un valor para el NCL). La asignación se realiza en la fase de establecimiento deconexión. Las entidades que se conectan usan un procedimiento para negociar un múmeropara el identificador. La entidad que pide la llamada selecciona un NCL que esté libre (haytablas de conexión en los sistemas que tienen registradas las conexiones establecidas).El paquete de petición de llamada se envía a través del nivel de enlace al nodo local, que lorecibe a nivel de red. El NCL que le propone la entidad que pide la llamada lo incluye en sustablas como una conexión ocupada. Esta información llega hasta el nodo local del abonadoremoto ( por procedimientos internos de la red que desconocemos). El nivel de red del nodoremoto de la red genera el paquete de llamada entrante. El NCL que genera es distinto alusado en el origen.
Para asignar el NCL se usa el mismo procedimiento que en origen, por lo que el NCL que estélibre para ese usuario lo añade a la tabla, lo codifica en el paquete de llamada entrante y loentrega al abonado, que apunta en sus tablas que tenemos un nuevo NCL correspondiente auna conexión remota. SÍ este procedimiento tiene éxito cuando se mande el paquete dellamada aceptada, éste irá con el mismo NCL que el de llamada entrante. Por eso en elpaquete de llamada aceptad la dirección de destino es opcional, puede ser suficiente con elNCL, El usar la dirección de destino puede resultar ambiguo, pero el uso del NCL nunca esambiguo.
Los NCLs están limitados por contratación. Aunque desde el punto de vista técnico puedenhaber hasta 212 , por motivos comerciales se limita los NCLs que pueden esta útiles. Se limitanpara que el operadordimensione la red.Se paga porcada NCL que contratemos. El límite a alacantidad de recursos de red que puede usar el usuario es la capcacidad del canal. Seestablecen rangos en todos los posibles valores de NCL.
El NCL número O está reservado para procedimientos de control. Los números 1 a X estánreservados para los circuitos viertuales permanentes. Luego hay otros reservados para lasllamadas entrantes salientes o ambas, que se determinan por contratación.
Hay dos modalidades de conexión en X.25;
> CVP: circuitos virtuales permanentes.> CVC: circuitos virtuales conmutados.
Los CVP no se establecen ni se liberan usando los paquetes de petición y liberación dellamada, sino por contratación. Se preconfiguran los nodos de tal forma que, por contratación,el circuito está permanentemente establecido.
Los CVC son laos que apra establecerse y liberarse necesitan del intercambio de paquetes deestablecimiento y liberación.

FIGURA 9. Formato general extendido de un Paquete de Datos.
Q C) 1 0
NCL
P(S)
P(R)
0
M
DATOS
Paquetes de supervisión,
Existen dos paquetes de supervisión:
> RR> RNR> Hay un tercero que es opcional (REJ)
La función de estos paquetes es:
> Realizar control de flujo XON/XOFF.> Realizar asentimientos explícitos.
El formato de los paquetes RR y RNR es el mismo, diferenciándose entre ellos solamente enun bit:
FIGURA 10. Formato general de Paquetes de asentimiento
IGF
NCL
P(R) 0 00
0 1RR
RNR
P(R) son 3 bits que indican el número de secuencia que se asiente (indica cuál es el siguienteque espera recibir).
X.25 es un protocolo para teleproceso, por lo que tiene conectado un terminal remoto. En elcaso de que el terminal se cuelgue, existe un carácter de interrupción para interrumpir elproceso. Este carácter se envía en el paquete de interrupción.
Hay dos paquetes más asociados a éste:> Confirmación de interrupción por parte del ETD.> Confirmación de interrupción por parte del ETCD.

Estos paquetes se utilizan porque el servicio de interrupción es un servicio confirmado.
Conflnt ETCD
El formato de estos paquetes es:
X
NCL
00011011
Existe una restricción, hay que esperar confirmación antes de enviar otra interrupción. Es decir,sólo puede haber un paquete de interrupción pendiente de confirmación en cada canal lógico.El efecto práctico de esta restricción es que el volumen de datos que podemos enviar conformato de interrupción es pequeño.
3. LIBERACIÓN DE CONEXIONES.
Se usan 4 paquetes:
Petición/Indicación de liberación.
El paquete de petición de liberación de conexión va del DTE al DCE y el de indicación deliberación del DCE al DTE. El campo de datos puede tener hasta 128 octetos.
FIGURA 11. Formato general de Liberación de Conexión e Indicación de Liberación.
OBLIGATORIO
OPTATIVO
IGF
NCL
ITP: 00010011
CAUSA LIBERACIÓN
DIAGNOSTICO
LONG. DIRECCIÓN
DIRECCIÓN
LONG. FACILIDADES
FACILIDADES
DATOS
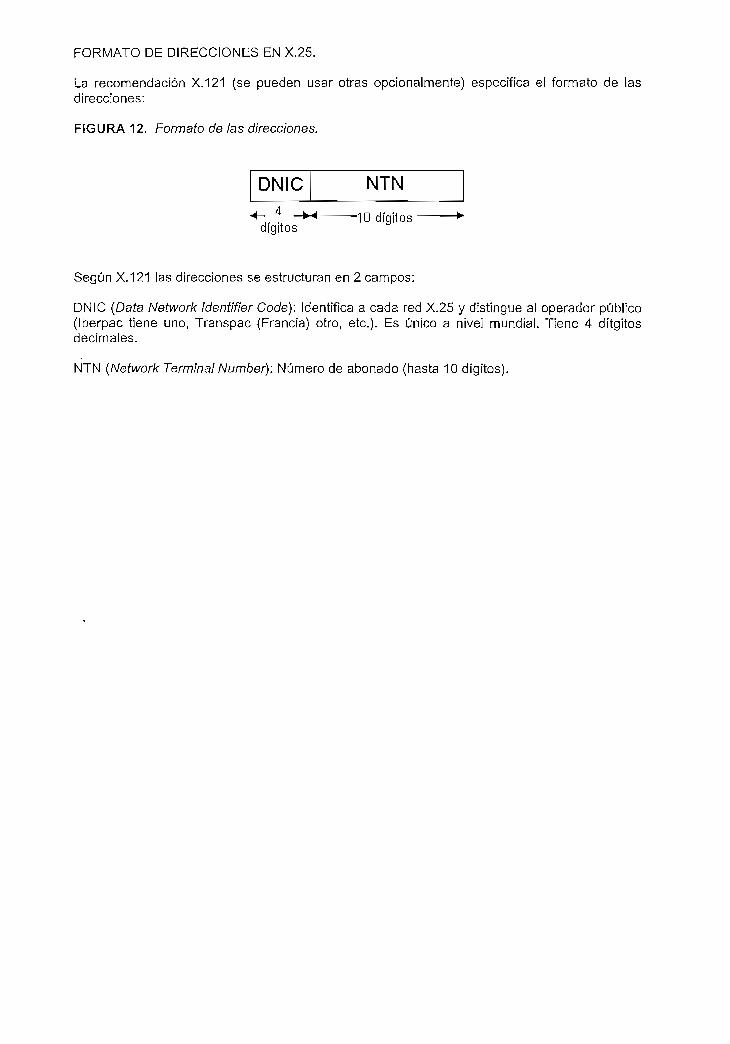
FORMATO DE DIRECCIONES EN X.25.
La recomendación X.121 (se pueden usar otras opcionalmente) específica el formato de lasdirecciones:
FIGURA 12. Formato de las direcciones.
DNIC NTN
^ „ . ** 10 diuilub *dígitos
Según X.121 las direcciones se estructuran en 2 campos:
DNIC (Data Network Identifier Code): Identifica a cada red X.25 y distingue al operador público(Iberpac tiene uno, Transpac (Francia) otro, etc.). Es único a nivel mundial. Tiene 4 dítgítosdecimales.
NTN (Network Terminal Number): Número de abonado (hasta 10 dígitos).

ANEXO I
Equipos GPS

Bendix/King KLN-89B GPS
Dimensiones: 15.87 x 5.08 x 28.91 cmPeso: 0.94 kg
FEATURESPanel-mount IFR GPS capable of performíng non-precision GPS approachesEasy-to-read map displayComprehensive Jeppesen datábase with SID and STAR waypointsEight-channel parallel GPS receiver"D¡rect-To" feature for easy navigationAltitude ¡nput for increased accuracyCan be ¡nterfaced to external CDI or HSI, RMI, some Shadin or ARNAV fuelmanagement systems, several external moving map displays, and certain Shadínair data systemsFront-loadíng datábase card available ¡n three optíons - Americas datábasecovering Canadá, US, Central and South America; Atlantic International and PacificIntl. datábaseDatábase can store up to 500 user-defined waypoints along with user commentsfor up to 200 airportsOperates on any voltage 1l-33VdcUpgrade available to improve KLN-89 units to KLN-89B statusUpgraDing available to improve GPS performance for B-RNAV complinace forEurope
SPECIFICATIONSDimensions: 6.31 "W x 2,00"H x Weight: 2.55 Ibs.
10.72"L
Temperatura Range: -40 to +55C TSO: C129 Class A1
Altitude: Up to 35,000 ft Power 11 to 33 VDC at 2.5AInputs: max
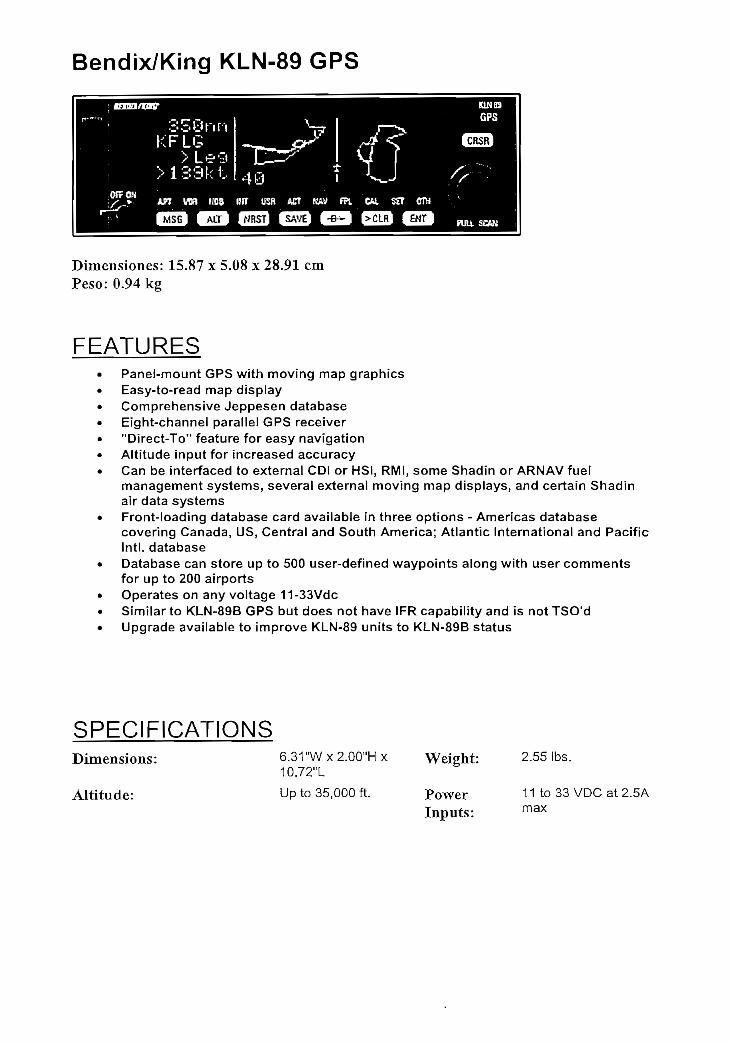
Bendix/King KLN-89 GPS
aSQnnKFLG
)• Le 9>139kt 40API vofi nos IMT USR ACT MV fpi CAI SCT cm
Dimensiones: 15.87 x 5.08 x 28.91 cmPeso: 0.94 kg
FEATURES• Panel-mount GPS with moving map graphics• Easy-ío-read map display• Comprehensive Jeppesen datábase• Eight-channel parallel GPS receiver• "Direct-To" feature for easy navigation• Altitude input for increased accuracy• Can be interfaced to external CDI or HSI, RMI, some Shadin or ARNAV fuel
management systems, several external moving map displays, and certain Shadinair data systems
• Front-loading datábase card available ¡n three options - Americas datábasecovering Canadá, US, Central and South America; Atlantic International and PacificIntl. datábase
• Datábase can store up to 500 user-defined waypoints along with user commentsfor up to 200 airports
• Operates on any voltage 11-33Vdc• Similar to KLN-89B GPS but does not have IFR capability and is not TSO'd• Upgrade available to improve KLN-89 units to KLN-89B status
SPECIFICATIONSDimensions:
Altitude:
6.31"Wx2.00"Hx10.72"L
Upto 35,000 ft.
Weight:
PowerInputs:
2.55 Ibs.
11 to 33 VDC at 2.5Amax

UPS Avlation Technologies GX-55
SPECIFICATIONSInput Voltage:
Input Current:
Width:
Weight:
Máximum Altitude:
Frequency:
Sensitivity (drop lock):
Lat/Lon position accuracy:
Acceleration:
Reacquisition:
Datum:
10 VDC to 40 VDC,reverse polarityprotected
500 mA typical, 750mAmax at 13.75VDC250mAtypicai, 375mA max at27.5VDC
6.25 ¡nches
2.6 Ib
Input Power:
Height:
35,000 ft
1575.42 MHzL1,C/A code
-142dBm
15 meters RMStypical25 meters, SEP,without SA100 meters 2DRMSwith SA
4G máximum
2.5 seconds typical
WGS-84
7 watts typical
2.00 inches
Depth:
OperatingTemper ature:
Number ofChannels:
Sensitivity(acquisition):
Dynamic Range:
Velocity:
11.452 inches
-20C to +55C
-135dBm
>20dB
1000 knots máximum
Time to FirstFix:
Position UpdateInterval:
CDIL/RVariation:
25 seconds typical
1 second typical
+/-150 mvfull scale,wiil drive up to 200ohm load

Ups Aviations GX 60
SPECIFICATIONS
Input Voltage:
Comm InputPower:
Width:Weight:
10VDCto40VDC,reverse polarity protected
3.7 watts typical receive28 watts typical transmít
6.25 ¡nches
3.1 ib
GPS Input Power:
Height:
Depth:Operating
7 watts typical
2.00 inches
11. 125 ¡nches
-20C to +55C
Máximum Alfitude: 35,000 ft
Frequency:
Sensitivity (droplock):
Lat/Lon positionaccuracy:
Acceleration:
Reacquisition:
Datum:
1575.42 MHzLl,C/Acode
-142dBm
Temper ature:
Number ofChannels:
Sensitivity(acquisition):
Dynamic Range:
15 meters RMS typical Velocity:25 meters, SEP, withoutSA100 meters 2DRMS withSA
-135dBm
>20dB
1000 knots máximum
4G máximum
2.5 seconds typical
WGS-84
Time to First Fix:
Position UpdateInterval:
Comm OutputPower:
GPS Approvals: TSO C129a Class A1 Comm Approvals:
25 seconds typical
1 second typical
8 watts mínimum carrierat> 12VDCinput6 watts mínimum carrierat lOVDCinput
TSO C37d transmitTSO C38d receiveTSO C128Stuckmic
UPS Aviation Technologies MX20
FEATURESMulti Function display with 6" diagonal active matrix LCD display readable ¡nsunlight and with wide viewing angleDisplay utilizes 640 x 480 pixels and over 65000 different color options for highdefinítion imagesAdjustable display back lighting6 main opearing functionsVFR Charting function reproduces sectional-like charts including aírports, VORs,NDBs, intersections, user waypoints, special use airspace, ground terrain, andactive flight planIFR Charting function displays enroute IFR map with navaids, airways, aírspaces,and active flight planTerrain Awareness Charting function combines worldwide terrain datábase withGPS position input to display terrain conflict advisories in four colorsLightning function provides full WX-500 compatibility and depicts lightning strikesrelative to track of aircraftCustom Overlay Charting function allows pilot to custom build display by addingsome or all of above features into one customized pageFlight Plan function provides summary page for active flight plan includingbearing, distance, time to all waypoints, as well as additional information for eachwaypointSupplied with user replaceable datacard and 3.4 gigabyte internal memorySix high-speed serial I/O ports to communicate with other IIMorrow avionics orother external sensors8 general purpose inout flags and 2 general purpose output flagsTSO'd to TSO-C113 and TSO-C110aClick Here to view the STC approvals for the MX-20
SPECIFICATIONSDimensions:
Input Voltage:
Temperatura:
5.00"H x 6,26"W x 8.00"D
10-40 VDC, reverse polarityprotected
-20 to 55C
Weight: 3.1 Ibs.
Input Power: 40 wattsmax
MaxAltitude:
35000 feet
Skyforce TRACKER II
SPECIFICATIONSS creen:
Weight:
Power Input:
Battery Life:
Languages:
Routes:
5" diagonalhigh contrastreflectívesupertwistback lit LCD
1.43lbs.
10to33VDC, 3 wattsmax
Dry celltypically up to4 hours
Dimensions: 6.2" x 4.5" 1.4"
Temperature:
Batteries:
Jeppesen:
Engíish,French &Germán orSpanish
Hoids up to99 reversibleroutes with upto 99 turningpoints
Waypoints:
-20 to +70C
6 AA dry/rechargeable
VORs, NDBs, airfields, runwayinfo and graphics, commfrequencies, intersections andapproach waypoints,restricted/danger áreas,airspace ¡ncluding upper andlower limíts, mínimum safealtitudes
Holds 500 user definedwaypoints, and up to 25 userconfigurabie airfields forthosethat are non ICAO Usted

Skyforce Skymap IIIC - Gps Portátil Display Color
Dimensiones: 11.5 x 15.8 x 6.5 cmPeso: 0.9 kg
SPECIFICATIONS
Screen:
Weight:
PowerInput:
Acquisition:
Accuracy:
Languages:
Routes:
Outputs:
5" diagonal active matrixTFT LCD
Dimensions: 6.2" x 4.5" 2.6"
2 Ibs. Temperature: -20 to +70C
10 to 32 VDC, 20 watts GPS 8 channel parallel, simultaneousmax
12 seconds (almanac,position, time &ephemris known)
15 meters; 1-5 meterswith differential option
Receiver:
Reacquire:
Jeppesen:
tracking
1.5 seconds
English, French &Germán or Spanish
Waypoints:
Hoids up to 99 reversible Inputs:routes with up to 99turning points
RS232 (to interface withauíopilot coupler,ARNAV ELTs, StormScopes and fuel flowsystems, NMEA0183,and an annunciatoroutput
VORs, NDBs, airfields, runway info andgraphics, comm frequencies,intersections and approach waypoints,restricted/danger áreas, special useand conírolled airspace including upperand ioweriimits, mínimum safealtitudes
Holds 500 user defined waypoints, andup to 25 user configurable airfields forthose that are non ICAO lisíed
Capable of receiving RTCM-104 formal(with differential option)

Skyforce SKYMAP II
Shy/vrre
SPECIFICATIONS
Screen:
Weight:
PowerInput:
BatteryLife:
Acquisition:
Accuracy:
5" diagonal high cbntrast Dimensions: G-2" x 4.5" 1,4"reflectíve superíwist backlit LCD
1.43Ibs. Temperature: -20 to +70C
10 to 33 VDC, 3 watts Batteries: 6 AA dry/rechargeablemax
Languages:
Routes:
Outputs:
Dry cell typically up to 4hours
12 seconds (almanac,position, time &ephemris known)
15 meters; 1-5 meterswith dífferential option
GPSReceiver:
Reacquire:
Jeppesen:
English, French &Germán orSpanish
Waypoints:
Holds up to 99 reversible Inputs:routes with up to 99turning points
RS232 (to interface withautopilot coupler,ARNAV ELTs and fuelflow systems, NMEA0183, andanannunciator output
8 channel parallel, simultaneoustracking
1,5 seconds
VORs, NDBs, airfields, runway ¡nfo andgraphics, comm frequencies,¡ntersections and approach waypoints,restricted/danger áreas, airspaceincluding upper and lower límiís,mínimum safe altitudes
Holds 500 user defined waypoints, andup to 25 user configurable airfields forthose that are non ICAO listed
Capable of receiving RTCM-104 format(with differential option)
Approaches: Non-precision and precisión approaches throughout the datábasecoverage
SIDs/STARs: Contains all pilot/nav SIDs/STARs
Airspaces: Class B & C with sectors, International CTA & TMA with sectors, allSUAs, including MOAs, prohibited and restricted áreas with controlling agencyand airport
Certification
GPS: TSO C129a, Class Al (en route, terminal, and approach)
VOR: TSO C40c
LOC: TSO C36e
GS: TSO C34e
VHF COM: TSO C37d, Class 4 and 6 (transmit) and TSO C38d, Class C and E(receiver)
GPS Performance
Receiver: twelve parallel channel receiver simultaneously tracks and uses up to 12satellites
Acquisition Time: 12 seconds (warm), 45 seconds (cold)
Update Rate: Once per second, continuous
Accuracy:
o Position: 15 meters (49 feet) RMS*3 1-5 meters with differential correctionso Velocity: 0.1 knot RMS steady state
Dynamics:
o Velocity: 999 knotso Acceleration: 6g's
Garmin GNS 530
SPECIFICATIONS
Jeppesen Datábase
Coverage: Americas, International, or Worldwide
Airports: Identifler, city/state, country, facility ñame, lat/lon, elevation, fuelservice, control., approach information
VORs: Identifier, city/state, country, facility ñame, lat/lon, frequency, co~locatedDME/TACAN, magnetic variation, weather broadcast indication
NDBs: Identifíer, city/state, country, facility name3 lat/lons frequency; weatherbroadcast indication
Intersections: Identifíer, country, lat/lon, nearest VOR
Frequencies: Approach, arrival, control área, departure, Class B, Class C3 TMA,TRSA (with sector, altitude, and text usage), ASOS, ATIS, AWOS, centerclearance delivery, tower, ground, unicom, pre-taxi, localizer, and ILS
Rumvays: Designation, length, width, snrface, lighting, pilot-controlled lightingfrequency
FSS: Identifíer, reference VOR, frequency, usage
ARTCC: Identifíer, frequency, nsage
MSA: Minimum safe altitude along and in proximity to active flight plan

VOR Freq. Range:
CDI Output:
Flag Sensitivity:
Audio Sensitivity:
GS Freq. Range:
LOC Freq. Range:
LOC Accuracy:
Size:
Display:
Comm TransmitPower:
Receiver Sensitivity:
Frequency Display:
Audio Output:
Humidity:
108.00 MHzto117.95 MHz
+-150mVFuI¡Scale
-103.5dBm
-103.5dBmfor6dB S/N with 1 kHz30% mod.
329.15 MHzto335.00 MHz
108.10 MHzto111.95 MHz
<4.5mV
6.25"W x 2.65H x
Color LCD
10 watts min.
2.0 microvolts for6dB S/N with 1kHz 30% mod.
Upper íeft córnerof active matrixLCD, 2-lines withactive freq. abovestandby
100mW min. into a500 ohm load;external amprequired
95% non-condensing
VOR/LOCComposite:
CenteringAccuracy:
DMEChanneling:
VOR AudioOutput:
GSCDIOutput:
LOC CDIOutput:
LOC FlagSens.:
Weight:
Power:
CommModulation:
CommChannels:
SquelchSensitivity:
0.50Vrms/0.35Vrms
+-2,0 deg.
2x5 available
-103.5 mW minimum ¡nto 500 ohmload; external amplifier required
+-150mVFull Scale
+~150mVFuII Scale
-103.5dBm
6.6 Ibs.
27.5 VDC(14V versión available Summer 1999)
70%
760 (25 Khz spacing); configuration for2280 channels (8.33 kHzspacing) alsoprovided
2.0 microvolts typical
Temperature:
AltitudeRange:
-20 to +55C operating
-1500 ft.to 50000 ft.

Garmin GNS 430
SPECIFICATIONS
Coverage:
VORs:
Intersections:
Runways:
ARTCC:
Approaches:
Waypoints:
Emergency Search:
Americas orInternational
Identifíer,city/state, country,facility ñame,lat/long, frequency,co-IocatedDME/TACAN,magnetic variation,weather broadcast
Identifier, country,lat/long, nearestVOR
Designation,length, wídth,surface, lighting,pilot-controlledlighting freq.
Identifier, freq.usage
Non-precision andprecisiónapproachesthroughtoutthedatábase coverage
1000 user-defined
9 nearest airports,VOR's, NDB's,intersectíons, oruser waypoints; 2nearest FSS withfrequncies; 2nearest ARTCCfrequencíes
Airports: Identifier, city/state, country, facilityñame, lat/long elevation, fuel service,control, approach information
NDBs: Identifer, city/state, country, facilityñame, lat/long, frequency, weatherbroadcast
Frequencies: Approach, arrival, control área,departure, Class B, Class C, TMA,TRSA-wíth sector, altítude and textusage info, also, ASOS, ATIS, AWOS,center, clearance delivery, ground, pre-taxi, tower, unicom, locaiizerand ILS
FSS: Identifier, reference VOR, freq. usage
MSA: Mínimum safe altitude along and inproximity to active flight plan
SlDs/STARs Contains all pilot-nav SIDs and STARs
Flight Plans: 20 reversible; up to 31 waypoints each
Alarms: Arrival and CDI, timers, SUAs less than10 min, 2NM and insude SUA

Size:
Certification:
Comm Features:
Planning Features:
Display:
Moving Map Features:
Weight:
VHFTransceivrPerformance:
NavigationFeatures:
6.25x2x5.8 ¡nches
TSOC37dClass4(VHFTransmítter)TSO C38d Class C (VHFReceiver)TSO C129a, Class A1(en route, terminal andapproach)
Auto squelch control,standard headset outputwith sidetone and audioleveling, stuck mictransmission timeout,emergency channelselect, "autotune"frequency selectíon
True airspeed, density Dynamics:altítude, wínds aloft, RAIMavailabílity,Sunrise/Sunsetcalculations, and trip, fueland VNAV planning
PowerSource:
80 x 240 double supertwist nematic wiíh sixtimes the contract oftypical DSTN displays.Automatic contrastadjustment with reversevideo díspíay mode forexceptional readability indirect sunlight or at night
14 map scales from 0.5 to Data Storage:300 nm, with nearbywaypoints, navaids andsectorized airspace,runway, and navigationdata displayed. Autozoomfeature automaticallykeeps present positionand destination on themap, with user-selectabletrack up, north up or DTKup display, mapdecluttering by Ítem andscale
41 ounces
760-channeI 118-136.975 MHz5 watt mínimumtransmitter power
Search andrescue operation(laddersearch),pilot-definedcourse selectionand waypointhold, closest pointof appraoch,departure andarrival frequencies
Velocity; 999knotsAcceleration: 3G
10-15 VDC,optionalrechargeablebattery, 115-230VAC wíth optionalAC adpaterforGPS simulatoroperation
Internal batteryretains storeddata up to 5 years

Carmín GNC 300XL
FEATURESIFR certified GPS/Comm with moving map760 channel comm with 5 watt mínimum transmitter powerComm features ¡nclude auto squelch control, stanadard headsetoutput with sidetone and audio leveling, stuck mike transmissiontimeout, emergency channel select, 'autotune' frequency selectionfrom datábase cardFront loading data card entry12 parallel channel GPS receiverInterfaces with most flight control, EFIS, HSI and othe cockpit systemsAmericas, International, or Worldwide Datábase coverage availableJeppesen datábase includes airports, VORs, NDBs, intersections,Comm frequencies, runways, FSS/ARTCC, MSA, SUA, approaches,SIDs/Stars
1000 user defined waypoints20 reversible routes of up to 31 waypoints eachStoarge for comments on up to 250 waypoints9 user checklists of up to 30 Ítems each9 schedules user messages
SPECIFICATIONSEmergency Search:
Receiver:
Update Rate:
Interfaces:
9 nearest airports, VORs, Alarms:NDBs, intersections, oruser waypoints; 2 nearestFSS with frequncies; 2nearest ARTCCfrequencies
PhaseTrac 12 tracks anduses up to 12 satellites tocompute amd updateposition
1/second, continuous
ARINC 429, RS232,plotting (NMEA0183v2.0), Aviation, PCinterface, altitudeserializer, fuel sensor,fuel/air data computer,gray code, serial data
AcguisitionTime:
Accuracy:
Map Daturas:
Arrival, Proximity,Timers, SUAsless than 10minutes, 2NM andinside SUA
15 seconds(warm), 45seconds (cold)
15 meters(position)
124 predefined, 1user defined
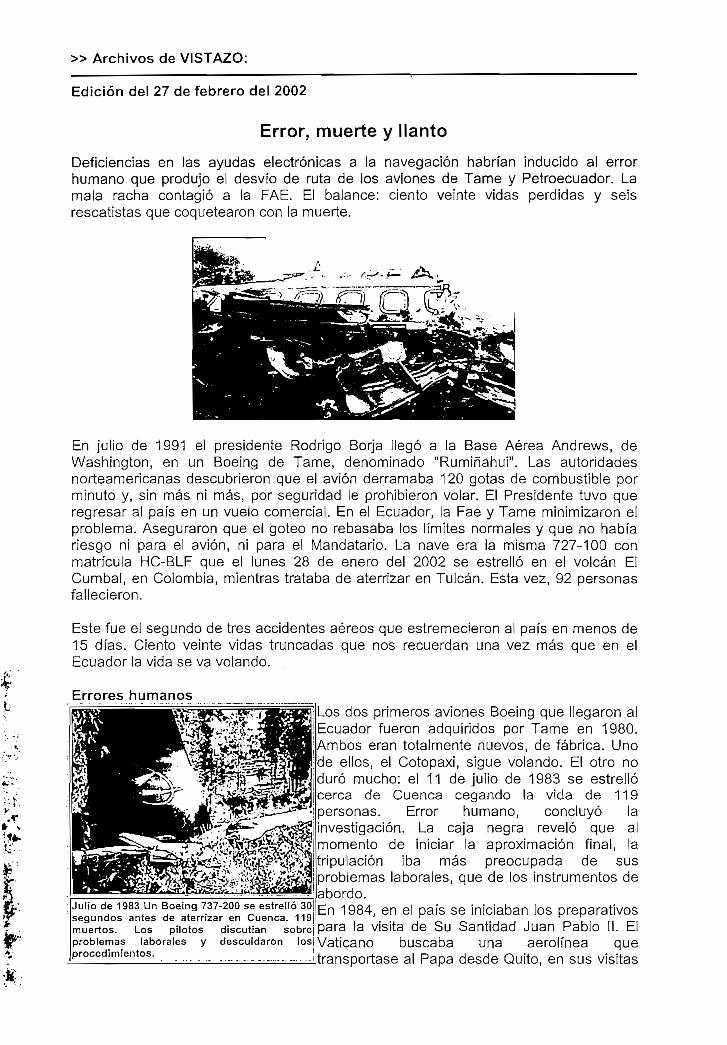
» Archivos de VISTAZO:
Edición del 27 de febrero del 2002
Error, muerte y llanto
Deficiencias en las ayudas electrónicas a la navegación habrían inducido al errorhumano que produjo el desvío de ruta de los aviones de Tame y Petroecuador. Lamala racha contagió a la FAE. El balance: ciento veinte vidas perdidas y seisrescatistas que coquetearon con la muerte.
En julio de 1991 el presidente Rodrigo Borja llegó a la Base Aérea Andrews, deWashington, en un Boeing de Tame, denominado "Rumiñahui". Las autoridadesnorteamericanas descubrieron que el avión derramaba 120 gotas de combustible porminuto y, sin más ni más, por seguridad le prohibieron volar. El Presidente tuvo queregresar al país en un vuelo comercial. En el Ecuador, la Fae y Tame minimizaron elproblema. Aseguraron que el goteo no rebasaba los límites normales y que no habíariesgo ni para el avión, ni para el Mandatario. La nave era la misma 727-100 conmatrícula HC-BLF que el lunes 28 de enero del 2002 se estrelló en el volcán ElCumbal, en Colombia, mientras trataba de aterrizar en Tulcán. Esta vez, 92 personasfallecieron.
Este fue el segundo de tres accidentes aéreos que estremecieron al país en menos de15 días. Ciento veinte vidas truncadas que nos recuerdan una vez más que en elEcuador la vida se va volando.
Errores humanos
:!»*•'
Julio de 1983 Un Boeing 737-200 se estrelló 30segundos antes de aterrizar en Cuenca. 119muertos. Los pilotos discutían sobre
Los dos primeros aviones Boeing que llegaron alEcuador fueron adquiridos por Tame en 1980.Ambos eran totalmente nuevos, de fábrica. Unode ellos, el Cotopaxi, sigue volando. El otro noduró mucho: eM1 de julio de 1983 se estrellócerca de Cuenca cegando la vida de 119personas. Error humano, concluyó lainvestigación. La caja negra reveló que almomento de iniciar la aproximación final, latripulación iba más preocupada de susproblemas laborales, que de los instrumentos deabordo.En 1984, en el país se iniciaban los preparativospara la visita de Su Santidad Juan Pablo II. El
problemas laboralesprocedimientos.
y descuidaron los¡Vat¡CanO buscaba una aerolínea queal Papa desde Quito, en sus visitas
ANEXO J
Recopilación de accidentes
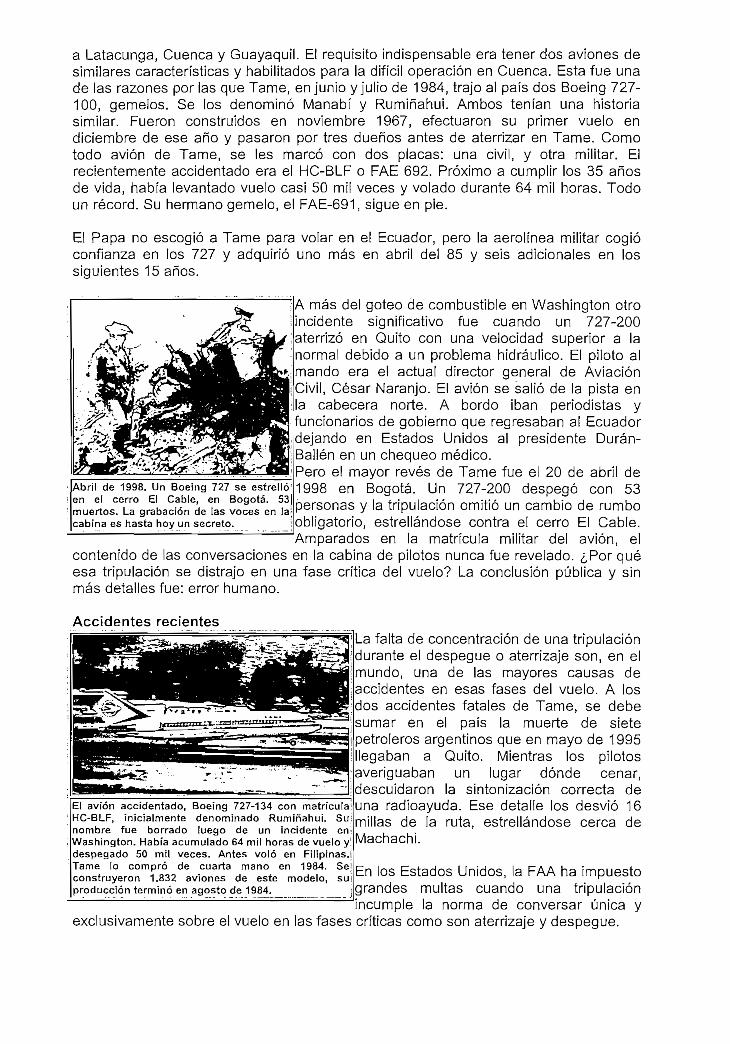
a Latacunga, Cuenca y Guayaquil. El requisito indispensable era tener dos aviones desimilares características y habilitados para la difícil operación en Cuenca. Esta fue unade las razones por las que Tame, en junio y julio de 1984, trajo al país dos Boeing 727-100, gemelos. Se los denominó Manabí y Rumiñahui. Ambos tenían una historiasimilar. Fueron construidos en noviembre 1967, efectuaron su primer vuelo endiciembre de ese año y pasaron por tres dueños antes de aterrizar en Tame. Comotodo avión de Tame, se les marcó con dos placas; una civil, y otra militar. Elrecientemente accidentado era el HC-BLF o FAE 692. Próximo a cumplir los 35 añosde vida, había levantado vuelo casi 50 mil veces y volado durante 64 mil horas. Todoun récord. Su hermano gemelo, el FAE-691, sigue en pie.
El Papa no escogió a Tame para volar en el Ecuador, pero la aerolínea militar cogióconfianza en los 727 y adquirió uno más en abril del 85 y seis adicionales en lossiguientes 15 años.
A más del goteo de combustible en Washington otroincidente significativo fue cuando un 727-200aterrizó en Quito con una velocidad superior a lanormal debido a un problema hidráulico. El piloto almando era el actual director general de AviaciónCivil, César Naranjo. El avión se salió de la pista enla cabecera norte. A bordo iban periodistas yfuncionarios de gobierno que regresaban al Ecuadordejando en Estados Unidos al presidente Durán-Ballén en un chequeo médico.Pero el mayor revés de Tame fue el 20 de abril de1998 en Bogotá. Un 727-200 despegó con 53personas y la tripulación omitió un cambio de rumboobligatorio, estrellándose contra el cerro El Cable.Amparados en la matrícula militar del avión, el
contenido de las conversaciones en la cabina de pilotos nunca fue revelado. ¿Por quéesa tripulación se distrajo en una fase crítica del vuelo? La conclusión pública y sinmás detalles fue: error humano.
Abril de 1998. Un Boeing 727 se estrellóen el cerro El Cable, en Bogotá. 53muertos. La grabación de las voces en lajcabina es hasta hoy un secreto.
Accidentes recientes
El avión accidentado, Boeing 727-134 con matrículaHC-BLF, inicialmente denominado Rumiñahui. Sunombre fue borrado luego de un incidente enWashington. Había acumulado 64 mil horas de vuelo ydespegado 50 mil veces. Antes voló en Filipinas.Tame lo compró de cuarta mano en 1984. Seconstruyeron 1.832 aviones de este modelo, suproducción terminó en agosto de 1984.
La falta de concentración de una tripulacióndurante el despegue o aterrizaje son, en elmundo, una de las mayores causas deaccidentes en esas fases del vuelo. A losdos accidentes fatales de Tame, se debesumar en el país la muerte de sietepetroleros argentinos que en mayo de 1995llegaban a Quito. Mientras los pilotosaveriguaban un lugar dónde cenar,descuidaron la sintonización correcta deuna radioayuda. Ese detalle los desvió 16millas de la ruta, estrellándose cerca deMachachi.
En los Estados Unidos, la FAA ha impuestograndes multas cuando una tripulaciónincumple la norma de conversar única y
exclusivamente sobre el vuelo en las fases críticas como son aterrizaje y despegue.

¿Qué pasó en Tulcán? La aproximación al aeropuerto Luis Mantilla, el más alto delpaís, a 2.950 metros sobre el nivel del mar, se realiza únicamente mediante el uso deuna radioayuda denominada NDB (No Directional Beacon).Las radioayudas no son sino señales de radio que decodificadas en el avión, orientanal piloto. Las hay, de precisión y de no precisión. Entre las primeras está el SistemaInstrumental de Aterrizaje y las aproximaciones por satélite. Y entre las de noprecisión, la más antigua es el NDB. "Siendo la radioayuda pionera de laaeronavegación y la más usada a pesar de la no muy precisa información que brinda",dice una descripción preparada por la DAC en 1990. La radiación emitida por el NDBpermite determinar si una aeronave se está aproximando o alejando del aeropuerto.No le indica el ángulo por e! que se debe dirigir, ni la distancia a la .que se encuentra.Esta es la única ayuda electrónica con que cuenta el aeropuerto de Tuícán. Fueinstalada por primera vez en 1975 y renovada en 1986, mucho antes de que seconvirtiera en aeropuerto internacional.
Es decir que el Boeing 727 de Tame solo podía saber si se acercaba o se alejaba delaeropuerto. De todos modos, cuando llegó a sus inmediaciones decidió entrar en unplan de espera a pesar de que no había tráfico adicional en el área, como lo aseguróel general William Birkett, presidente de Tame. El piloto, capitán López, quien ya habíatenido un incidente con un Búfalo cuando era miembro activo de la Fuerza Aérea, seencontraba en sus última horas de chequeo antes de convertirse en comandante deBoeing 727. Junto a él estaba un experimentado instructor. Todo parece indicar queluego de intentar un primer aterrizaje, decidieron perfeccionar la técnica, girando paravolver a intentarlo. Es decir que realizaban prácticas de vuelo con 90 personas detrásde ellos. Al alejarse nuevamente del aeropuerto entraron en una zona que está fueradel área de aproximación de Tulcán. El impacto contra el volcán Cumbal está a 140kilómetros en línea recta desde el aeropuerto. El análisis de las dos cajas negras delavión, ambas digitales, determinará por qué se alejaron tanto y por qué volaban amenos de 12 mil pies cuando estaban tan lejos de una pista que está a casi 10 mil piesde altura.
FALTAN RADARESEl control de tránsito aéreo en el espacio ecuatoriano sefundamenta en el radar de Guayaquil. Desde allí semonitorea a todo avión que vuele más alto que cualquierade las montañas de la Cordillera de los Andes. Otro radar,ubicado en Quito, solo sirve para vigilar el cono deaproximación al aeropuerto Mariscal Sucre.Pero si un avión vuela entre las montañas o en el Oriente,no hay radar que lo controle. Y esto fue lo que pasó tantoen el vuelo de Petroecuador que se estrelló en El Tigre,cuanto en el de Tame que terminó en Cumbal.Para el Oriente y para el control del narcotráfico, elgobierno norteamericano instaló y donó un radar en losaños 80. Hoy ese equipo está en poder de la Fae. Muchasveces se ha hablado de su reparación y la Fuerza Aéreaprefiere no reconocer públicamente que está dañado. Sihubiese estado funcionando, tenían la obligación decomunicarle al piloto el grado de desvío de ruta que llevabay que finalmente lo enfiló hacia Colombia y hacia lamontaña.No es posible que en el siglo XXI, en el Ecuador, aúnvolemos a la buena de Dios y que no se obligue a que
todos los vuelos comerciales sean instrumentales, debido, principalmente, a la falta deadecuadas y modernas radioayudas.
El avión de Tame contaba conidos cajas negras digitales, un;grabador de vocesdatos de vue odespejara las dudas sobre lascausas de accidente

Los Boeing de TAME 1
Nombre [Modelo|Compra |
Cotopaxi
Ciudad deLoja
Manabf
Rumiñahui
Azuay
Guayas
HC-BSC
HC-BSU
Esmeraldas
Pichincha
727-200
737-200
727-100
727-100
727-100
727-200
727-100
727-100
727-100
727-100
Septiembre de1980
Octubre de1981
Junio de 1984
Julio de 1984
Abril de 1985
Diciembre de1991
Enero de 1993
Noviembre de1993
Febrero de1999
Febrero de1999
Estado |
Compradonuevo
Compradonuevo
Fabricado en1967
Fabricado en1967
Fabricado en1970
Fabricado en1972
Fabricado en1974
Fabricado en1979
Fabricado en1978
Fabricado en1978
Hoja de vida |
30.000 horas de vuelo
Accidentado en Cuenca(1983)
Ex Philippíne Airlines(Filipinas)
Accidentado en Cumbal(2002)
Ex San (Ecuador)
Ex Luftthansa (Alemania)
Ex Luftthansa (Alemania)
Accidentado en Bogotá(1998)
Ex Istanbul Airlines (Turquía)
Ex Istanbul Airlines (Turquía)
ACCIDENTES EN EL MUNDO (En los últimos años)
28 de noviembre de 2001
24 muertos por accidente aéreo en Suiza.Por lo menos 24 personas murieron y otras nuevesobrevivieron en un accidente aéreo ocurrido el sábadocerca del aeropuerto de Zurich. El aparato siniestrado, unAvro RJ de la compañía suiza Crossair, cubría la ruta entreBerlín y la ciudad helvética, y se aprestaba a tomar tierra ensu destino final cuando ocurrió la tragedia.
Entre los pasajeros había 13 alemanes, uno con doble nacionalidad estadounidense,10 suizos, tres israelíes, dos holandeses y una persona de Canadá, otra de Ghana,Austria/ Suecia y España.
De los nueve sobrevivientes, entre ellos, dos miembros de la tripulación, cuatroabandonaron el domingo el hospital pero dos continuaban en estado grave. Lasautoridades no quisieron proporcionar los nombres de los 28 pasajeros o cincomiembros de la tripulación a bordo de la aeronave.
La causa del accidente, el segundo de Crossair en menos de dos años, no se pudoestablecer de inmediato. Las condiciones climatológicas eran adversas en elmomento del siniestro, con lluvia y nieve intermitente.

El aparato transportaba a 28 pasajeros y cinco tripulantes, informó el portavoz deCrossair, Manfred Winkler, quien agregó que las dos grabadoras del avión fueronrecuperadas.
Crossair, una subsidiaria del Grupo Swissair, cubre rutas entre ciudades suizas yotros destinos en Europa. La empresa ha empezado a reemplazar a Swissair enalgunas operaciones/ como parte de un complicado esfuerzo de rescate por partedel gobierno helvético hacia la aerolínea principal, que atraviesa por gravesdificultades económicas.
15 de abril de 2002Se estrella avión en Corea del Sur con 166 personas a bordo.
Un vuelo de Air China procedente de Beijing se estrelló el lunes contra una montañacerca de Pusan, segunda ciudad de Corea del Sur, con 155 pasajeros y 11tripulantes a bordo.
Más de 50 personas fueron rescatadas vivas de los restos del fuselaje de laaeronave.
Testigos dijeron a la televisión local que el avión se había estrellado contra la laderade una montaña cerca de un edificio de apartamentos cuando intentaba encondiciones meteorológicas adversas aterrizar en el aeropuerto de la localidadsurcoreana.
La televisión mostró imágenes de equipos de rescate peinando el área en medio delhumo que salía de restos del avión esparcidos entre árboles en una colina arropadapor la neblina.
Un agente de la policía de Kimhae dijo que el mal tiempo y lo escabroso del terrenoestaban dificultando las tareas de rescate, pero pescadores de la zona ya habíanextinguido los focos en el lugar del accidente en una montaña cerca de un árearesidencial.
Noticieros locales citaron a funcionarios del Ministerio del Transporte surcoreanodiciendo que el avión, propiedad de la mayor aerolínea china, se estrelló cuandotrató de aterrizar después que controladores de vuelo lo desviaron de ruta debido almal tiempo.
El siniestro ocurrió a sólo seis semanas de que las finales de la Copa Mundial defútbol se celebren en Corea del Sur y Japón. Corea del Sur espera que unos 60.000fanáticos chinos lo visiten para ver la primera participación del país en dicho torneo.

1 de julio de 2002
Un avión de pasajeros y uno de carga se estrellan en vuelo sobre Alemania.Al menos 71 personas pueden haber muerto en la colisión enpleno vuelo a medianoche del lunes sobre el sur de Alemaniaentre un avión de pasajeros ruso y un Boeing 757 de carga,dijeron las autoridades.
La mayoría de las personas cuya muerte se teme iba a bordodel avión ruso, un Tupolev 154 de Bashkirían Airlines,
un Boeing 757 (arriba) y Funcionarios rusos dijeron que el aparato llevaba 57 pasajerosun Tu-154, similares a los y 12 tripulantes,que se estrellaron.
El Boeing, de la aerolínea de cargo DHL European Air Transport, tenía unatripulación de dos personas, dijo un portavoz de la empresa. La policía alemanainicial mente expresó temores de que el avión ruso llevara entre 140 y 150personas.
Funcionarios [ocales dijeron que los aviones se estrellaron a las 23.43 (17.43 horade Nueva York) del lunes sobre la localidad alemana de Owingen, cerca del lagoConstanza, cerca de la frontera germano-suiza, unos 190 kilómetros al sudoeste deMunich.
Los testigos dijeron haber visto numerosos cadáveres y la policía dijo que ardía unagranja cerca del lugar del siniestro. Los restos de las aeronaves se esparcieronsobre un radio de 30 kilómetros.
"Hubo un gran ruido y un estruendo muy fuerte desde las nubes", dijo uno de lostestigos, Paul Tanzer. "Y luego cayeron tres partes del avión". Tanzer dijo que losrestos en llamas cayeron sobre un bosque cerca de zonas residenciales eindustriales e incendiaron varios árboles.
La policía dijo que se estimaba que los aviones iban a una altitud de 12.000 metroscuando ocurrió la colisión. Las autoridades dijeron que la aeronave de pasajerosrusa se dirigía a Barcelona desde Moscú y acababa de hacer una escala en Munich.El avión de carga iba a Bruselas procedente de Bahrain, un estado en el GolfoPérsico, tras una escala en Italia.
El Tu-154 es la principal aeronave empleada en vuelos domésticos en Rusia, peroalgunos funcionarios de aviación opinan que es inseguro, debido a una serie deaccidentes en la década pasada que ha causado la muerte de más de 600 personas.
Entre los siniestros se cuentan uno en julio de 2001, cuando un Tu-154 se estrellóen Sibiera después de desaparecer de las pantallas de radar, causando la muertede 143 personas; en agosto de 1996, un Tu-154 se estrelló en una montaña en laisla noruega de Spitsbergen, causando la muerte de 141 personas.
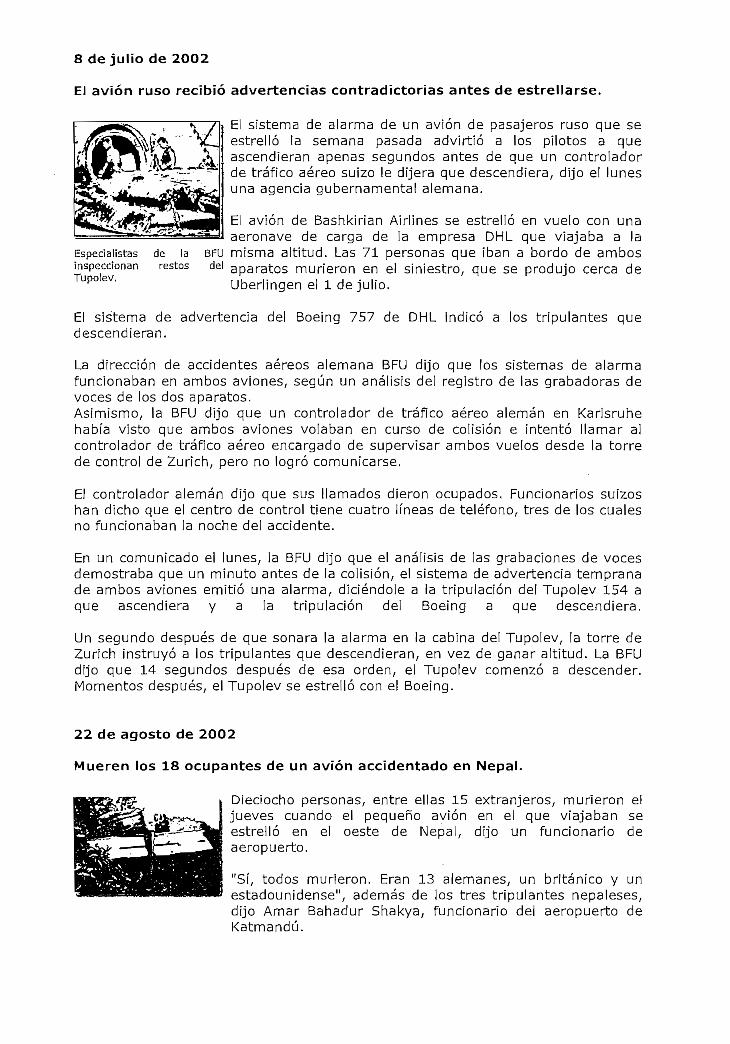
8 de julio de 2002
El avión ruso recibió advertencias contradictorias antes de estrellarse.
EspecialistasinspeccionanTupolev,
El sistema de alarma de un avión de pasajeros ruso que seestrelló la semana pasada advirtió a los pilotos a queascendieran apenas segundos antes de que un controladorde tráfico aéreo suizo le dijera que descendiera, dijo el lunesuna agencia gubernamental alemana.
El avión de Bashkirian Airlines se estrelló en vuelo con unaaeronave de carga de la empresa DHL que viajaba a la
de la BFU misma altitud. Las 71 personas que iban a bordo de ambosrestos del aparatos murieron en el siniestro, que se produjo cerca de
Uberlingen el 1 de julio.
El sistema de advertencia del Boeing 757 de DHL indicó a los tripulantes quedescendieran.
La dirección de accidentes aéreos alemana BFU dijo que los sistemas de alarmafuncionaban en ambos aviones, según un análisis del registro de las grabadoras devoces de los dos aparatos.Asimismo, la BFU dijo que un controlador de tráfico aéreo alemán en Karlsruhehabía visto que ambos aviones volaban en curso de colisión e intentó llamar alcontrolador de tráfico aéreo encargado de supervisar ambos vuelos desde la torrede control de Zurich, pero no logró comunicarse,
El controlador alemán dijo que sus llamados dieron ocupados. Funcionarios suizoshan dicho que el centro de control tiene cuatro líneas de teléfono, tres de los cualesno funcionaban la noche del accidente.
En un comunicado el lunes, la BFU dijo que el análisis de las grabaciones de vocesdemostraba que un minuto antes de la colisión, el sistema de advertencia tempranade ambos aviones emitió una alarma, diciéndole a la tripulación del Tupolev 154 aque ascendiera y a la tripulación del Boeing a que descendiera.
Un segundo después de que sonara la alarma en la cabina del Tupolev, la torre deZurich instruyó a los tripulantes que descendieran, en vez de ganar altitud. La BFUdijo que 14 segundos después de esa orden, el Tupolev comenzó a descender.Momentos después, el Tupolev se estrelló con el Boeing.
22 de agosto de 2002
Mueren los 18 ocupantes de un avión accidentado en Nepal.
Dieciocho personas, entre ellas 15 extranjeros, murieron eljueves cuando el pequeño avión en el que viajaban seestrelló en el oeste de Nepal, dijo un funcionario deaeropuerto.
"Sí, todos murieron. Eran 13 alemanes, un británico y unestadounidense", además de los tres tripulantes nepaleses,dijo Amar Bahadur Shakya, funcionario del aeropuerto deKatmandú.

El av¡ón/ un Twin Otter de fabricación canadiense propiedad de la línea privadaShangrila Air, volaba desde Jomson hasta Pokhara, ambos lugares turísticos.
Los restos de la aeronave fueron hallados diseminados cerca de Dopahar, unapoblación situada a unos cinco kilómetros al sureste de Pokhara.
Este es el segundo accidente de este tipo que ocurre en Nepal durante [atemporada de los monzones, que dura desde junio hasta septiembre y que este añoestá siendo particularmente devastadora.
Se informó que las condiciones meteorológicas en e! momento del accidente noeran buenas y en un principio dificultaron las labores de rescate,
Sin embargo, todavía no está claro si el mal tiempo fue la causa de la tragedia o si,por el contrario, se debió a algún error humano o problema técnico.
Hay más de una decena de aerolíneas privadas en eí montañoso Nepal, que tieneun pobre sistema de carreteras.
Las aerolíneas privadas comenzaron a operar hace unos 10 años, después de que elpaís abriera la aviación al sector privado.
19 de febrero de 2003
Avión con al menos 280 pasajeros se estrella en Irán.
Un avión de pasajeros iraní con al menos 280 pasajeros abordo, en su mayoría personal militar, se estrelló cuandovolaba entre dos ciudades del sudeste de Irán, informó latelevisión de Teherán. Se teme que todos los pasajerosmurieron.
La aeronave realizaba un vuelo doméstico entre la ciudad deZahedan, en la frontera con Pakistán, y Kerman, a unos 500kilómetros al sudeste de Pakistán.
La televisión estatal dijo que el avión, un Antonov de fabricación rusa, perdióconacto con la torre de control en torno a las 17.30 local, y se estrelló cerca deShahdad, a unos 80 kilómetros de Kerman.
Ali Moradi Haqiqi, jefe de policía de la provirir-ia-de-Sistan-Baluchestan, señaló queel accidente ocurrió en una región montañosa bajo malas condiciones climáticas,antes de que la aeronave pudiera iniciar el descenso en e! aeropuerto de Kerman.
Haqiqi sostuvo que equipos de rescate fueron enviados a la región, donde losresidentes escucharon una fuerte explosión casi en el mismo momento en que elavión desapareció del radar.
El último accidente de avión comercial de que se tiene noticia en Irán ocurrió el 12de febrero, cuando un Tupolev Tu-154 de fabricación rusa se estrelló contra unamontaña cubierta de nieve cerca de la ciudad de Khorramabad, a unos 370kilómetros al suroeste de Teherán. Los 119 pasajeros a bordo del avión de Irán AirTours murieron en el accidente.