ESCUELA POLITÉCNICA NACIONAL • SIMULACIÓN DE L...
213
ESCUELA POLITÉCNICA NACIONAL • FACULTAD DE INGENIERÍA ELÉCTRICA SIMULACIÓN DE LA MAQUINA DE INDUCCIÓN TRIFÁSICA MEDIANTE EL MÉTODO' DEL SISTEMA DE REFERENCIA MÚLTIPLE. EDDY CESAR COBA RUBIO TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIERO EN LA ESPECIALIZACION DE INGENIERÍA ELECTRÓNICA EN LA ESCUELA POLITÉCNICA NACIONAL. QUITO - ECUADOR Oullo-1987
Transcript of ESCUELA POLITÉCNICA NACIONAL • SIMULACIÓN DE L...

ESCUELA POLITÉCNICA NACIONAL •
FACULTAD DE INGENIERÍA ELÉCTRICA
SIMULACIÓN DE LA MAQUINA DE INDUCCIÓN TRIFÁSICA
MEDIANTE EL MÉTODO' DEL SISTEMA DE REFERENCIA
MÚLTIPLE.
EDDY CESAR COBA RUBIO
TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIERO EN
LA ESPECIALIZACION DE INGENIERÍA ELECTRÓNICA EN LA
ESCUELA POLITÉCNICA NACIONAL.
QUITO - ECUADOR
Oullo-1987

Certifico que el presente trabajo
fue realizado en su totalidad por
el Sr. Eddy Cesar Coba Rub1o,bajo
mi di
Julio 1987

AGRADECIMIENTO
Al Sr. Ing. Mil ton Toapanta s profesorde la Escuela Politécnica Nacional5porsu dirección en este trabajo.

ÍNDICE DE MATERIAS
PAG
CAPITULO I : LA MAQUINA DE INDUCCIÓN.
1.1. Introducción
1.2 Ecuaciones de la máquina trifásica de inducción
en variables 3,5,0.
1.3 Ecuaciones de la máquina trifásica de inducción
expresadas en un sistema arbitrario de referencia
1.4 Voltajes de cualquier forma de onda periódica
aplicados al estator.
12
CAPITULO II : MÉTODO DE SISTEMA DE REFERENCIA MÚLTIPLE.
2.1 Consideraciones genera les . 34
2.2 Desarrollo matemático. 38
2.2 .1 Ecuac iones de t ranformación a un sistema de refe-
rencia m ú l t i p l e : t 38
2.2.1.a Ecuaciones de voltajes. 38
2.2 .1 .b Ecuac iones de corrientes. 54
2 . 2 . 1 . C E c u a c i ó n de Torque. 64
2.3 Transformación de las ecuaciones de un sistema
de referencia m ü l t i p l e , a un sistema de referen-
cia : 71
2.3.1 Rotando en sincronismo. . 71
2 .3 .2 Fija en el estator. 75
2 .3 .3 F i j a en el rotor. . 78

2.4
2.5
2 .6
Transformación a variables de fase a , b , c .
Metodología general de la ap l icac ión del mé-
todo del sistema de referencia m ú l t i p l e .
E v a l u a c ó n de pé rd idas .
83
86
90
CAPITULO I I I :
3.1
3.2
3.3
SIMULACIÓN DIGITAL.
Consideraciones generales
Formulación del modelo.
Diagramas de flujo.
Descripción del programa.
96
97
101
116
CAPITULO IV
4.1
4.a
4.a.l
¿i.a.2
4.b
4.b.l
EJEMPLOS DE APLICACIÓN Y RESULTADOS.
Ejemplos de aplicación . Análisis y comparación
de los resultados obtenidos 123
Estado estable.
Operación balanceada con fuentes sinusoidales. 124
Operación balanceada con fuentes no sinusoidales 143
Operación desbalanceada. 163
Operación desbalanciada con fuentes sinusoidales 163
Perdidas 192
CONCLUCIONES Y RECOMENDACIONES.
APÉNDICE : - Manual de uso del programa.
- Obje t ivos
- Nomenc la tu ra
- Forma de proporc ionar los datos al programa.
- Listados del p rograma.
193

C A P I T U L O 1
1.1. INTRODUCCIÓN
Las máquinas de inducción se han constituido en las más utili-
zadas, debido a sus características especiales que las hacen convenien.
tes para los diversos usos tanto industriales como domésticos. Así en
el campo industrial se han desarrollado nuevos métodos en el área de
máquinas eléctricas que involucran fuentes de alimentación no sinusoi-
dales. En las máquinas se pueden presentar condiciones desbalanceadas
que pueden ocasionar graves daños en los equipos, condiciones que alea_
toriamente se dan y para lo cual los equipos de control de dichas má-
quinas deben estar diseñados de tal forma de tomar en cuenta dichas
contingencias.
En años anteriores se han desarrollado trabajos de tesis refe-
ridos al comportamiento de motores polifásicos de inducción analizados
mediante el método de las componentes simétricas el cual permite el e_s_
tudio cuando la maquina está alimentada con fuentes no sinusoidales e
inclusive la operación desbalanceada. Otros trabajos han realizado u-
na simulación de la máquina de inducción en un sistema de coordenadas
arbitrarias de referencia mediante el cual se ha estudiado tanto el e_s_
tado transitorio como el estado estable de la máquina de inducción pe-
ro alimentada con fuentes sinusoidales.
El presente trabajo está encaminado al estudio a • velocidad
- 1 -

- 2 -
constante y en el estado estable de una maquina de inducción trifásica
simétrica con voltajes no sinusoidales aplicados al estator cuya forma
de onda sea periódica, mediante el método de Sistemas de Referencia
Múltiple.
En éste análisis no serán usadas las componentes simétricas -
que introducen- el uso de fasores e impedancias complejas.
En cambio, se introduce la teoría de estructuras de referencia
múltiple., en la cual se prescinde del uso de fasores e impedancias com
plejas y más bien, es utilizada la teoría de circuitos EG para determi
nar el desempeño de la máquina de inducción, en lo que se refiere al _a
nálisis en estado estable de operación no balanceada y no sinusoidal
las cuales antes estaban limitadas al estudio utilizando el método de
las componentes simétricas.
El método del sistema de referencia múltiple es realizable me-
diante la construcción de un modelo matemático basado en la transforma
ción del sistema de ecuaciones de fase de la máquina, a otro sistema
de ejes arbitrarios de referencia q, d, o, a partir del cual y previa
la descomposición en series de Fourier de cada una de las ondas de vo_l_
taje de entrada aplicadas al estator, se obtienen las ecuaciones en u-
na estructura de referencia arbitraria luego de lo cual aplicamos el
principio de superposición para obtener el desempeño de la máquina tri
fásica de inducción.
El modelo matemático antes mencionado se lo implementará, en un
computador digital APPLE lie y permitirá analizar el comportamiento en

el estado estable y a velocidad constante de una máquina de inducción
trifásica simétrica en los modos de operación NO balanceada y NO sinu-
soidal en lo que respecta a voltaje, corriente y torque.
El programa a desarrollarse permitirá que el usuario ingrese
como datos la onda periódica de cada fase en forma de una función en
el rango de O - 2j[} y el programa las descompondrá en series de Fou-
rier y éstos resultados se los utilizará en el programa principal para
procesarlos y entregar los resultados.
El presente trabajo se lo desarrollará de la siguiente manera:
En el capítulo I se describirá la máquina de inducción trifási_
ca en un sistema arbitrario de referencia q, d, o.
En el capítulo II se describe matemáticamente el método del
sistema de referencia múltiple que es el que compete a éste trabajo de
tesis.
En el capítulo III se rmplementa el modelo matemático para la
simulación digital y su explicación.
En el capítulo IV se realizarán ejemplos de aplicación y se a-
nalizará y comparara los resultados de operación en estado estable pa-
ra los casos no sinusoidal y desbalanceado.

- 4 -
1.2. ECUACIONES DE LA MAQUINA TRIFÁSICA DE INDUCCIÓN EN VARIABLES
a, b, c. Cl, 3, 9, 11)
Para el análisis se considerará una máquina de inducción trifa
sica lineal simétrica idealizada en donde:
1) El entrehierro sea uniforme
2) El circuito magnético sea lineal
3) Los devanados del estator sean idénticos, y que sean distribuí_
dos de tal manera que produzcan una onda de fmm sinusoidal en
el espacio (es decir, que se desprecia el contenido de - ..armó-
nicos de la onda de fmm).
4) Que el cambio en el valor de la resistencia debido a la tempe-
ratura y a cambios de frecuencia sea despreciable.
5) Devanados del rotor de la máquina simétrica sean idénticos y
distribuidos de tal forma que produzcan una onda de fmm en el
rotor sinusoidal y que tenga el mismo número de polos que la
del estator.
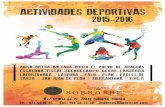
Una vez tomado en cuenta lo anteriormente expuesto, se -;tomará
para el desarrollo una máquina trifásica de dos polos como la de la f±_
gura 1.1. en la que se observa que el ángulo de desface entre cada de-
vanado tanto del rotor como del estator es 120° y el ángulo entre los
dos conjuntos de devanados 8 •.

br
ESTATOR
es
E S T A T O R R O T O
Fl G . ! . 1

- 5 -
Si se llama por a , b 3 c y a , b 3 c a los devanados del es_
tator y rotor respectivamente.
La siguiente ecuación de voltaje es aplicable a cada uno de
los devanados.
v = p.X + r.i
donde:
v = voltaje por fase
r = resistencia total por fase de cada bobina
i = corriente por fase
A = concatenaciones de flujo totales de una bobina
A dp = operador - .
La mayoría de las veces, en una máquina de inducción trifásica
se tiene que estator y rotor son conectados como sistemas de tres hi-
los. En el caso de la maquina de inducción trifásica tipo "jaula de
ardilla" puede ser considerada como un sistema a tres hilos. En éste
desarrollo no se considerarán sistemas a 4 hilos.
Si se expresa en forma matricial los voltajes fase-neutro para
devanados del estator y rotor se tiene:
Vabcs- - - -
aber
= P
Xabcs
- - -
Xabcr
+
r. 0s
- -
0
- - -
rr
xabcs_ _ _ _
3;abcr

- 6 -
En donde:
Vabes_
VasVbs
Ves
Vaber_
VarYbr
Vcr
(3)
=
r 0 0s
0 ' f 0s
0 0 rQ
rrss
r 0 0r
0 r 0r
0 0 r
abes
=
ias
i\s
ies
aber
=
iar
Vicr
xabcs=
\s
Xbs
X es
Xabcr=
X ar
Xbr
X cr
(6)
Como: A = L . i
.donde L = inductancia del devanado
Entonces matricialmente se tiene:
Xabcs
aber
—
Lo
- „
LSR
ILSR_ _ _ _
" 'lLr'
abes
abc3T

donde
7 -
L;sss
L - 0 0ss
0 Lss 0
0 0 Lss
7 LVr
=
L • • 0 0rr0 Lrr 0
0 0 Lrr
eos rr,COS(9r'
2TT!•' = L • cosí 6-". =—) eos 9"'SR sr ^ r 3 J r
2ireos (8 + —=—) cos(0
2lT .. ,-_ • '2TT
eos (8 + -T^ r 3
2Tr i o——J eos 0ó r
CIO)
donde:
L-
L
ss
•rr
Js
L =r
sm
rm
L' •sr
- L: - Ls sm
- L - L:r rm
= Inductancia propia de un devanado del estator
Inductancia propia de un devanado del rotor
= Inductancia mutua entre fases del estator
= Inductancia mutua entre fases del rotor
= Amplitud del acoplamiento mutuo entre los devanados del
estator y del rotor.
Desplazamiento angular entre ejes del estator y del ro-
tor.
= Subniatriz de inductancias mutuas entre devanados del
rotor y estator.
De lo anterior/se observa que la inductancia mutua entre un

X-- as
Xbs
Xcs
Xa
r
X'b
r
Xcr
—
Lss
°
0 L
oc
ós
e-
L^co
sC
e^)
Lrv
cos
C6r
- fL
)
° Ls
s °
. .
Lsr
cos
cef-
fí-:)
LS
rcos
er-
• L
sr c
os(e
r+f-
)'
°- .
° o
• L
cos(
er+
f)
L-
'cos
Ce.
-fD
L •
eos
e->
J-
. j.
j
bi
T
O
ST
1
Lsr
co
s6
r L
srco
s(e
r-|L
) L
^ e
os C
er+ f]
Lrr
-
0
0
Lsr
c
os^
er+ ?
}
Lsr
C
OS
6r
Lsr
co
s^r-
°
' L
rr '
0'
Lsr
co
sCV
Í:) ^
r0
05^
^
Ls
rCO
S6r
°
° L
rr
{ X
i as
fí>s ¿s ar Vr
'
icr
I CO 1
Ecuación matricial

- 9 -
devanado del estator y uno del rotor varía en forma sinusoidal con res_
pecto al desplazamiento angular 0 ,_ por tanto, aparecen en las ecuacip_
nes de voltaje coeficientes que varían con el tiempo. Esta indeseable
condición puede ser tratada mediante una transformación que se descri-
birá más adelante.
Entonces las ecuaciones de las concatenaciones de flujo para
una máquina a 3 hilos puede ser expresada tal como (11].
Generalmente se tienen las ecuaciones del rotor referidas al
estator, esto se logra multiplicando dichas ecuaciones por la -T rela-
ción del número de espiras de los devanados del estator y del rotor.
Entonces:
abe
,abe
.NrNs
NsNr
.abe
abe
(12)
iabe NsNr
Kabe
r '
Entonces la ecuación (2) quedará luego de hacer los reemplazos
respectivos:

Donde:
- 10 -
VabcS
aber
r + p L rs • r s l
TP l-^/g 1
' |i
i
>B
+r)i
Lr
iabcs
aber
NsNr (14)
Para obtener la ecuación del torque electromagnético se sabe
que la energía almacenada en el campo magnético tiene por ecuación:
1 - TW = •=• i L (15)
en donde
|-'-abe
T T -'abe -'•abe T
La ecuación del torque electromagnético:
Te = . 3W2 ' 3
(16)
(17)
donde P = número de polos de la máquina.

- 11 -
Sí se reemplaza (15) en (17) se obtiene:
To -Te~2'2'
T L (18)
Desarrollando (18) se llega a:
p ' i ' i 'Te = - (~) L - { (i (i - ¿ 1 • - i i ) +^2J ms *• as^ ar 2 ^r 2 cr^
i i f 1 '- o- Ír - o- - o -bs or 2 ar 2
cs crI .'*7 "\-\ • ' -o D ^ 3—- T 1 I ^ PTl R ' +
2J- / J j\-tii \j ' i-,ar r 2 br crj
donde
t i 1 1+ i, (i - i ) + i (i - i, )) cose } (19)bs ^ cr ar es ar b r J J r
NsL = Lms Nr sr (20)
F l G. 1.2

- 12 -
1.3. ECUACIONES DE 'LA MAQUINA TRIFÁSICA DE INDUCCIÓN EXPRESADAS EN
UN SISTEMA. ARBITRARIO DE REFERENCIA. (1, 2, 3, 9, 11, 12]
Como se comentó anteriormente, en'la ecuación (10) se ve que
las inductancias mutuas entre rotor y estator varían sinusoidalmente -
en el tiempo en función del ángulo 0 . existente entre los ejes del es-
tator y los del rotor, dicha indeseable característica que complica el
análisis puede ser eliminada mediante un apropiado cambio de variables
transformando voltajes y corrientes tanto de estator y rotor, a varia-
bles definidas en un sistema de ejes arbitrarios de referencia que gi-
ra a una velocidad arbitraria oí.
En la figura [1-2) se tienen:
a) Los ejes a, b, c, del estator los cuales están fijos.
b) Los ejes a, b, c, del rotor los cuales giran a una velocidad -
angular eléctrica w •
c) Los ejes q, d, que son ortogonales y que giran a una velocidad
arbitraria to-
d) El ángulo entre el nuevo sistema de ejes q, d, y los ejes a,b,
c, fijos del estator es 0.
Las ecuaciones de transformación resultan a partir de las reía
ciones trigonométricas que existen entre los grupos de ejes de estator
y rotor, con el grupo de ejes ortogonales q, d del sistema de referen-

- 13 -
cia arbitrarlo.
Si al tiempo cero se asume que los tres grupos de ejes coincá._
den, entonces, las ecuaciones generalizadas de transformación que re-
sultan son:
fqs " I <fas C0se + £bs COS^ f + £cs <=°*to+T» C21D
Donde:
ff Sen^ + f
ds as bs cs
f = [f + f, + £ ) (23)os 3 ^ as bs es ^ J
I 7 I I - 'f = (f cosg + £ cosÍB- ) + £ COSÍB+ -)) (24)qr 3 ^ ar p br ^p 3 J cr ^p 3 JJ ^ J
1 ? ' ' ?TT '
fdr = T C£ar sen^ + £br Sen^~ f 5 + £cr
fr = 4 (f' + fi + f' ) • (26)or 3 v ar br cr ^ J
£ = variable que puede representar voltajes, corrientes o con-
catenaciones de flujo.
0 = Es el ángulo de desplazamiento del sistema de referencia
arbitrario.
(27)
00 = •' üi.dt + 6(0) (28)

- 14 -
ur.dt + 8r(o) . (29)
2En estas ecuaciones, el factor - ha sido introducido para man-
tener invariante la potencia, pues se ha cambiado.de un sistema trifá-
sico a un sistema que puede considerarse bifásico, pues las variablesi
f y £;•• solo son introducidas con el fin de hacer consistente laos J or
transformación realizada ya que en general, son necesarias tres varia-
bles independientes. (3)
Además según las ecuaciones (23) y (26) se pueden observar pa_r
ticularidades de las variables referidas al eje cero:
1.- Son independientes de la velocidad w a la que gira el sistema
arbitrario de referencia.
2.- Son independientes de los ejes q y d.
3.- Se presentan tónicamente en el lugar donde son originadas.
Así por ejemplo, cuando se tenga un desbalance en el rotor, sp_
lo habrán variables de eje cero en el rotor.
4.- Para el caso de sistemas que tienen conexión de tres alambres,
es decir sin conexión de neutro, las componentes de eje-•-•-.•cero
desaparecen, incluso para sistemas desbalanceados (9) - ,'". .
Si se llama:

- 15 -
T - 2s 3
r -1Fr - 3
?TT 7TTeos 9 Cos(8- — ) eos (9+ —}
27T-, ,- 2fí-\n 0 sen(8- -=— J sen(0+ -=— J
1 1 12 2 2
2ir. 2ii\s 3 c°s(3- ^~"J cos(3+ -v—JO J
sen 3 sen(3- *r- ) sen(3+ -=— )-J o
1 1 12 2 2
(30)
(31)
Entonces, las ecuaciones (21) - (26) expresadas en forma matri
cial quedarán:
f
s-
JTI-1- ^qdo
M r
T,
0
^ 0
Tr
fabcs
-^aDcr
(32)
Ahora, si se desea la transformación inversa, es decir dadas -
las variables en q3 d, o, transformarlas a variables a.¡ b, c, Enton-
ces:
fabcs
£ábcr
Tc
0
-i0
Ti-i
£ jqdos
£qdor
(33)
Donde:

- 16 -
Tc"1
"1
eos 6 sen 0 1
/•« 27K ,-, 2n\. ncos(0- y-) sen(9- — ) . 1
cos(0- -—-) senté* — ) 1
eos 3 sen 3 1
rn 27i\ 2ir^ -,eos (B" T— J sen (.3- •«— J 13 O
rn , 27T-, rn t 2lT^ -cos(3+ ^r~J sen(3+ ^~-J 1
O J
(34)
(35)
Si en la ecuación (8) se refieren todas las variables al esta
tor, matricialmente puede expresarse como:
= L (36)
estando (36) en variables a, b, c.
Donde:
1.abeLs LSR
SR ••r
abc
(37)
Si se aplica la transformación directa a ejes q,d, o, a la _e_
cuación (36), se tiene:

- 17 -
T |X = T L (38)
se sabe que T T = I 1 (39)
Multiplicando al segundo miembro por (39), resulta:
T |X = T L |T| T (40)
Realizando operaciones se llega a lo siguiente, ya en varia-
bles q, d, o.
qdo = Lqdo| ^qdo] (41)
donde:
qdo | =
tqdo
T|
(42)
(43)
(44)
qdo
Si se desarrolla la ecuación (44) se llega a:
Tx
T ^LT
(45)
que da como resultado:

- 18 -
Lqdc ' -
Lss
0
0
M
0
0
0
LSS
0
0
M
0
0
0
Lss
0
0
0
M
0
0
iLTP
0
0
0
M
0
0i
Lr-'r
0
0
0
'. °
0
0i
L.-A'
(46)
donde:
M = 4 L• 2 ms (47)
M = Inductancia de magnetización de la máquina
Se puede descomponer las inductancias LS y L _; en sus compo-
nentes de dispersión y de magnetización.
Lss * Lls + M (48)
i iL v - L: * Mrr Ir C49)
Recordando que en la ecuación (10) se tenía que las inductan-
cias mutuas entre rotor y estator eran variables en el tiempo pues
dependían de la posición del rotor, mientras que, una vez realizada la
transformación al sistema de ejes de referencia arbitrario se ha cons_e_
guido eliminar dicha dependencia.
Otra nota importante es que las inductancias propias no sufren

- 19 -
ninguna alteración.
Para encontrar las ecuaciones de voltaje en q, d3 o se pue-
de partir de la ecuación (2) pero referidas todas sus variables al
estator se tendrá:
|V| = p |X + R i (50)
Donde:
|v| --Vabc
S
- - - -
V u 'aber
Xabcs
A '.aber
; I*
_
'
=
abe
-s
- -
abe
r
r
0
i
s
0 rr
=
abes- - - -
i 'xabcr
|x =
Realizando la transformación directa a (50):
(51)
T |V| = |T p |X + T R C5Z)
Multiplicando por |T |T
T |V| = T p' { T T |X ' } + T |R| T T i (53)
Da como resultado en variables q d o:

- 20 -
iVqdo = [T] p ' í T Aqdo } + T |R| T qdo. (54)
Analizando se tiene que:
T R T (55)
además, puesto que .qdo y T son funciones del tiempo (54) queda-
rá como:
"qdo = T p T p.qdo -i- T T~ p qdo " + |R| xqdo (56)
Si ^ q¿lo = qdo i.'qdo (57)
|H| « |T| p T (58)
Entonces (56) queda como:
V|qdo| ='{ |H| qdo + Lqdo p + R ' } ¿qdo (59)
desarrollando (58), se llega a:
F-T —1 1 —
o pe o
-p0 0 0
0 0 0 "
1° '
0
0 p3 0
p3 0 0
0 0 0
(60)

- 21 -
Realizando los reemplazos respectivos en la ecuación (59) se
llega a las ecuaciones generales de voltaje en el sistema dé ejes arbi
trarios de referencia:
Vqs
Vjds
vos
iVqr
ivjdr
tVor
(r + L p) L pe 0 Mp Mp0 0
- LSS pe (rs+ LSS p) o -MPe Mp o
0 0 r 0 0 0s
MÍ? Mpf3 0 (r IT+ LTT p) I/ r p(3 0
- Mpp Mp 0 - Lrr p3 (r^+L^O
0 0 0 0 " 0 r'r
^qs
^
as
iiqr
Ci
ior
(61)
Si se expresa (61) en función de las concatenaciones de flujo
totales se tiene:
vqs
vds
r i + p X + X T pes qs l qs ds
ds
v = r i + p Xos s os ^ os
i t r t iv = T i +pX + X ,qr r qr ^ qr dr
(62)
(63)
(64)
(65)

- 22 -
i r i i i/•-, = r i, + p A , + A p3 ' (66)dr r dr ^ dr qr r
v = r i + p A (67)or r or r or
donde las concatenaciones de flujo totales son:
A = L i + M i' (68)qs ss qs qr ** J
\ - L i, + M i, ' (69)ds ss ds dr ^ J
A = L i ' • (70)os ss os ^ J
\ L' i! + M i (71)qr rr qr qs ^ J
X , = L i, + M i (72)dr rr dr ds ^ -*
A' = L i . (73)or rr or ^ J
Que si se reemplaza (48) - (49) en (68) a (73) se obtiene:
A = L 'i + M (i + i ) (74)qs Is qs v qs qr^ ^ J
A T = Ln i, + M Cii + ii ) (75)ds Is ds ^ ds dr^ ^ J
A = L i (76)vos ss os J
\ L! i' + M (i + i' ) (77)qr Ir qr qs qr'

- 23 -
\ = L-, i, + M (i, + i-, ) • ' (78)dr Ir dr ^ ds dr ^ J
rX = L i . (79)or rr or ^ J
Los términos \e ; y^ds P9 i X pe ; Xdr pe'representan
los voltajes de velocidad pues:
pe = u 7 P3 = üi - w (80)
donde: w = Velocidad a la que gira el sistema de ejes arbitrarios.
pg = Velocidad relativa entre los ejes arbitrarios y el rotor.
i iMientras que los términos p \ p Ads ; P \ Xdr repre-
sentan los voltajes de transformación '(6).
Para hallar las ecuaciones del torque electromagnético3 par
tiendo de (19) 7 aplicando a ésta ecuación, la transformación, se lle
ga a la siguiente expresión en variables q d o:
Si se pone (81) en función de las concatenaciones de flujo se
llega a:
^ Til P r ' T '
Te = ¿ CT) &) (A . i, - X , . i ) (82)2 2 V2^ qr dr dr qr^ v J
Donde: m = número de fases
p = numero de polos

- 24 -
1.4. VOLTAJES DE CUALQUIER FORMA DE ONDA PERIÓDICA APLICADOS AL ES-
TATOR. (1, 3, 9)
ySe pueden hallar las expresiones de los voltajes qs y da en
una estructura de referencia fija en el estator simplemente haciendo
que el ángulo 8 = O en [21] y (22):
fqs T3eos 0° + f Cos (O
as bs ^Jü) + f eos [O + |3 J es ^ 3
f - 0.5 £ - 0.5 fas 'bs es
7 1 1— -P — -P _ - Pqs 3 as 3 -bs 3 es
Si, voltajes son los que interesan:
V = -~ V "TV-, - V vqs 3 as 3 bs 3 es (83)
Pero si se analiza la figura (1.3), se tiene que:
Ves
Fig. 1.3.
3 bs 3 es 3 as C84)

- 25 -
lo que se puede comprobar sacando factor común:
i. rv + v ) = •=• v (8513 ^ bs cs^ 3 as ^ J
Ahora, puesto que se está considerando una máquina de induc_
ción simétrica a 3 hilos se cumplirá que:
v + v, + v = 0 (86)o c r K c - f T * - - y
/ v-i • vas bs es
despe j ando:
v + v - - v (87)bs es as ^ J
Si se reemplaza (86) en (85) se llega a una identidad.
Entonces (83) quedará como:
s 2 1 f , -,v = - v - v (y, + v Jqs 3 as 3 v bs cs^
2 1 , ,v - — f- v J
3 as 3 ^ as
v S = v (88)qs as • •*
Donde el superíndice s denotará variables en una estructura de
referencia fija en el estator.
Ahora haciendo 6 = O en (22) se tiene:

- 26 -
Lds 5f
2 es
s - 1'ds 3
/3 v, v1 O Vbs 2 es
vds 2 es bs
v - v.
v s 1ds /3
- V, + Vbs es (39)
Si los voltajes del estator son de cualquier forma de onda pe-
s sriódica, entonces v y v-, pueden ser expresados en series de Fou-
rier:
v = 2 (V-, eos k o) t + V, sen k u t]qs kqa e kqy e J
C90)
Ar > -,,.ds -, =1 v kdaeos k ai t + V, , sen k
e kdy (91)
En donde:
u) = velocidad angular eléctrica correspondiente a la componen_
te fundamental de frecuencia del voltaje de fase aplica-
dos al estator.
a, y = son subíndices que denotan respectivamente los términos
coseno y seno.
Se define una Estructura de referencia rotando sincronizadamen
te como la estructura de referencia la cual gira a una velocidad angu-
lar eléctrica w de la componente fundamental de los voltajes aplica-

- 27 -
dos. (1)
Los voltajes aplicados en la estructura de referencia rotando
e esincronizadamente v y v, } pueden ser expresados como función de
s sv y v_ de la siguiente manera:qs J ds &
De la ecuación (21) y si el superíndice e denota voltajes ^
cados en la estructura de referencia rotando sincronizadamente, enton-
ces
e 2 ?TT ?Tv = (v eos w t + vu eos (to t ~ 4-) + v eos (u t + 4qs 3 "• as e bs ^ e 3 . es ^ e 3
(92)
En donde 6 = w te
y sabiendo que:
eos (ui t - •—) = eos u t' .- eos ~~ + sen w t . sen ~e o e j .' e ->
eos Uet + - sen t . (93)
eos Coit + ?= - eos ü,t - -¿- Sen m ' [94)
reemplazando (93) y (94) en (92) :
Cvas COS wet + VbsC- COS "e11 + Sen

- 28 -
2 1 - 1•=- v eos to t - — v, eos w t + - v, sen w t3 as e 3 bs e -r bs e
1 1- — v eos w t -- v sen w t3 es e /-= es e
2 1 1•=• v eos w t - — eos tu tfv, + v I - • - (-v, + v ) senw t3 as e 3 e ^ bs es n: bs cs^ e
pero recordando (86), (88) y (89)
v, + v - - vbs es as
s s iv = v " y v- = — (- v, + vqs as J ds T °s cs
efectuando los reemplazos se tiene que:
e s sv „ = v eos u t - v- sen tu t ' ("951
qs qs e ds e ^ J
eAhora, para hallar v, , partiendo de (22) y con 0 = w t
e 2 2ir ZTT, = v (v sen w t + v, sen(w t - •=— ) + v senfoi t + ~\'] (96)ds 3 as e bs ^ e 3 ^ cs e 3 • J
Sabiendo que:
t -- ^e 2
sen(w t - -=— ) = - — sen w t -- ^— eos w t^ e 3 J 2
senfw t + -=-) = - TT sen w t + :— eos w t^ e 3 2 e 2 e
Reemplazando en (93):

- 29 -
v, = ~=r v sen tu t - •=• v, sen w t -- v. eos w t - •=- v sen w tas 3 as e 3 bs e /v bs e 3 es e
1v cos
/3 CS
sen «* ' Cv + v } sen + C~ Vbs + Vcs] cos
Entonces por (86), (88) y (89), se obtiene:
sen + V COS
Si se sustituye (90) y (91) en (95) y (97):
ev = £ (V, • cos k oí t+ V sen k oj t) cos oíqs v^ kqa e kdy e . e
(V, , eos k ai t + V-, , sen k 03 t) sen a> t (98)
e ^ e e
Para facilitar el desarrollo, haciendo w t = 0
= COS9 S (vv^ cos 9 + vv^ sen 6 ) - sene 2 (Vv, cos ke= Kqa Kqy =
+ V, , sen ke )Kdy
00
?r S W ' { 2cos ke cose } + V, ' { 2sen ke cose }°^
+ V ' { - 2sene cos ke } + V, ' { - 2sen ke sene } )-
Sabiendo que:

- 30 -
eos (k0 + 0) = eos k0 cos8 - sen k8 sen0
eos (ke - 0) = eos k0 eos© + sen k0 sene
sen (k0 + 6) = sen k6 cos0 + sene eos ke
sen (k0 - 0] = sen k0 cose - sen0 eos ke
7
- cos(ke- e) } + V ' { - sen(k0 + 0) + sen(k6 - 0}
+ V, ' {sen(k0 + e) + sen(ke - e) }•Kqy
" Vkda sen k+1)e + %a cos(k-l)e - V cos(k-l)0
+ V, sen(k-l)0 + V, _ senfk-lle )kqy ^ J kda
agrupando por factor común y haciendo 0 = w t se obtiene:
v e = i E ((V, + V, , ) cosCk+l)w t + (V, - V, , ) senCk-l)w t +qs 2 , ., ^ kqa kdy^ ^ ^ e ^ kqy kda ^ e.
+ (V-, - V, , ) cos(k-l)w t + (V. + V. , ) sen(k-l)ü) t ) (99)^ kqa kdy ^ J e ^ kqy kda e J ^ J
eAhora, por un procedijniento similar para calcular v, :

- 31 -
vdse - sene (Vkqa eos ke + V sen ke ) + cose (V eos k9
V, - sen ke )kdy
4- 2 "fV, ' " {2sen9 eos ke } + V, {2sen ke sene } +2 ^ kqa kqy
V, , ' { 2cos6 eos ke} + V, j ' {2cos9 sen ke } )kda kdy
1 •~ S (V • {senCke + 6) - sen(ke - 9) } + V, {cos(ke - 0)L - _ Kqa Kqy
- cos(ke + e) } + \¿a' fcos(ke + e) + cos(ke - e) +
.' {sen(ke + 9) + sen(k6 - 6) } )
" Vkqa SenCke " e) + Vkqy
cos(ke + e) + v cosCke + e) + vkda cosCke - e)
sen(ke + e) + V sen(ke -
Sacando factores comunes y con e = oí -t;' e
v, e = i S (V. + V. , ) sen(k+l)w t - (V, - V, , ) cosCk+l)w t= a ' . e v kqy kda ^ J .e
- (X - V, , ) sen[k-l]üj t + (V, + V, , ) cos(k:l)ü) t) (101)^ kqa kdy^ ^ J e ^ kqy kda L J e J ^ J
Las expresiones (99) y (101) , pueden ser expresadas como :

- 32 -
e +S ~Gv = v + vqs qs qs
e ~!~G ~ SV, = v, + v,ds ds ds
donde:
4- -.
\s e - 2-
(104)
(IOS)
C106)
(107)
Las expresiones (99)y (101) se puede observar que tienen un
término constante y unos términos variando sinusoidalmente los cuales
forman una serie de juegos bifásicos balanceados.
Los voltajes v-, y v,, ambos forman para k > 1, una se-
rie de juegos balanceados, cada uno de los cuales establece una onda

- 33 -
e eFMM de amplitud constante al ser aplicados a los devanados d - q
que rotan a una velocidad angular eléctrica de (k-l)w (sentido antihoe •—
rario) con respecto a la estructura de referencia rotando sincronizad_a
mente, ó a una velocidad kw si es que se toma con respecto al esta-
tor. El superescrito + de las expresiones (104) y (105) indica que
el sentido de rotación es antihorario.
-Q -Q
De una manera similar, v, y v, A forman juntos una serieKqs Kds
de juegos balanceados, para k > O, estableciendo cada uno una onda de
ÍMM de amplitud constante que rota a una velocidad angular •• eléctrica
de -(k-KL)w (sentido horario) con respecto a la estructura de referen-
cia rotando sincronizadamente; 6 a una velocidad de -kw con respecto
al estator. El superescrito - de las expresiones (106) y (107), indi-
ca que el sentido de rotación es horario.
Estos juegos balanceados aparecerán en la estructura de refe-
rencia rotando sincronizadamente indiferente de la forma ó relacionesi) entre los voltajes de fase desbalanceados o no sinusoidales. (1)
V (i)
Por ejemplo, si v es una onda periódica cuadrada; v, una vaas DS —
riación sinusoidal y v una onda paso, la expansión en series de Fou-
rier de esos voltajes formarán una serie de juegos balanceados cuando
son transformados a la estructura de referencia rotando sincronizada-
mente .

C A P I T U L O I I
NETODO DEL SISTEMA DE REFERENCIA MÚLTIPLE
2.1. CONSIDERACIONES GENERALES: (1, 2, 3)
Si se revisa las ecuaciones generales de voltaje en el sistema
de ejes arbitrarios de referencia (ecuaciones (62), [63), (65) y (66))
se observa que existen términos dependientes de la velocidad angular
del rotor u .. Si dicha velocidad es constante entonces las ecuaciones
(62) a (66) serán lineales, caso contrario, se tendrá ecuaciones no
lineales. (1)
El mantener la velocidad del rotor constante, es una condición
necesaria para el análisis de la operación balanceada o no balanceada,
de la máquina de inducción.
Debido a que las ecuaciones de voltaje serán lineales para ope_
ración a velocidad constante, entonces el principio de superposición -
puede ser aplicado.
e ©Las expresiones para los voltajes v y v, (ecuaciones (99)
y (101) que son los voltajes q, d, expresados en la estructura de ref£
rencia rotando sincronizadamente, contienen términos constantes, así
como una serie de sets balanceados que en el caso de ser aplicado - el
- 34 -

- 35 -
principio de superposición, se pueden aplicar separadamente cada térmi_
no constante así como cada conjunto balanceado de voltaje y obtener u-
una por una las corrientes resultantes correspondientes y una vez ter-
minado este proceso superponerlas con el fin de obtener una respuesta
total de corriente que es la supuesta de la máquina debida a la " fase
completa de voltaje que se había aplicado.
De las ecuaciones (104) y (105) se tiene que para k = 1 los
+e +evoltajes v., y v, ., son constantes. Si se aplica dichos volta-
j es, las corrientes que resulten serán constantes." Pero los voltaj es
+e -ev , v-, están formados además por una serie de términos que ya
no son constantes pues son funciones coseno ó seno, así por Ejm., para
k = 2} en la ecuación (104) se tiene que:
ahora, para k = 2 en la ecuación (105):
donde recordando:
+G +Sv,, „ es uno de los términos de voltaje de los que está formado v2qs J n _ qs
v«n = es uno de los términos de voltaje de los que está formado v.
,, Vn ,, = Son los coeficientes para k = 2. de los términos coseno y¿J 2qY ^ ' J5
seno, respectivamente, del voltaje v expresado en s_e_

- 36 -
ries de Fourier (ecuación (90))
n-, • V , = Son los coeficientes para k = 2, de los términos coseno2dc¿ qdy *
C"
y seno, respectivamente, del voltaje v, (ecuación (91))
a y y - son subíndices que indican que es un coeficiente del coseno o
del seno respectivamente.
+ = superíndice que indica que el sentido de rotación de ese eje es an
tihorario.
- = superíndice que indica que el sentido de rotación de ese eje es ho_
rario.
e = superíndice que indica que dicha variable está en el sistema de re
ferencia rotando sincronizadamente.
q, d = los subíndices que indican que eje es: eje q o eje d.
s, r = subíndices que indican variable del estator o del rotor respec-
tivamente .
' = variable del rotor referida al estator.
"S "Sv? Y V7rl = Juntos forman un conjunto balanceado que al ser
caaos, cada uno establece una onda de f MM de ampli
tud constante que rota a una velocidad angular eléc
trica (2 - 1)(D en sentido antihorario.

- 37 -
Cada uno de éstos conjuntos balanceados que no son constantes
en la estructura de referencia rotando sincronizadamente, lo serán en
otra estructura, entonces Interesa precisamente encontrar una estructu
ra de referencia adecuada para cada sistema balanceado, de tal manera
que éste aparezca en ella como constante.
Terminado este proceso., se tendrá un sistema de referencia ^
tiple en el cual se tienen estructuras cuyos voltajes van a ser cons_
tantes, que al ser aplicados cada uno por separado, van a dar por re-
sultado corrientes que también serán constantes, entonces se hace irme
cesarlo el uso de fasores e impedancias complejas y más bien se aplica
la teoría de circuitos D.C.
Las corrientes D.C. de una estructura de referencia determina-
da, pueden luego ser transformadas de dicha estructura a la estructu-
ra de referencia rotando slncronizadamente, para luego ser superpues-
' tas y obtener de ésta manera la expresión para las corrientes en la es
tructura de referencia rotando sincronizadarnente.
De manera similar, se puede obtener las corrientes resultantes
expresadas en la estructura de referencia fija en el estator, y a par
tir de ésta obtener las corrientes de fase i , i, , i , del estatoras bs' csjty las del rotor i , i, e iJ arj br cr

- 38 -
2.2. DESARROLLO MATEMÁTICO:
2.2.1. ECUACIONES DE TRANSFORMACIÓN A UN SISTEMA DE REFERENCIA MÚLTI-
PLE. (1, 3)
2.2.1.a.Ecuaciones do Voltajes.-
El presente desarrollo está orientado a encontrar las expresio
nes de los voltajes en el sistema de referencia múltiple. Antes de i-
niciarlo se hace conveniente una nomenclatura adecuada.
NOMENCLATURA:
f = Variable que puede representar: voltaje, corriente o • concate-
nación de flujo,
q = Subíndice que indica que es una variable del eje q.
d = Subíndice que indica que es una variable del eje d.
s = Subíndice que indica variable del estator.
r = Subíndice que indica variable del rotor.
f = Indica variable del rotor referida al estator.
s = Superíndice que indica que una variable está expresada en la es_
tructura de referencia fija en el estator.

- 39 -
e = Superíndice que indica que una variable está expresada en la es-
tructura de referencia rotando sincronizadamente.
k = Superíndice, factor multiplicativo de la velocidad donde k - 1,
2 3 oo¿,, -j, . ..,
+ = Signo que acompaña al superíndice k y que identifica sentido de
rotación antihorario de una estructura de referencia determinada
con respecto al estator.
- = Signo que acompaña al superíndice k que identifica sentido de
rotación horario de una estructura de referencia determinada,con
respecto al estator.
+_ Ice = Superíndices usados para identificar la velocidad y dirección
de rotación de una estructura de referencia, con respecto al
estator.
oí = Velocidad angular eléctrica correspondiente a la componente fun
damental de los voltajes de fase aplicados al estator.
t = Es el tiempo.
u t = Resulta un ángulo en radianes.e to
£ = Símbolo para indicar un sumatorio desde le = 1 hastak=l
= Velocidad angular eléctrica del rotor.r

- 40 -
V, , V, = Son los coeficientes de los términos coseno y seno res-kqa' kqy
pectivamente de la expansión en serie de Fourier de
v (ecuación^
V, j y V, , = Son los coeficientes de los términos coseno y seno reskdc¿ kdy J —
pectivamente de la expansión en serie de Fourier de2
v, (ecuación (91]).
DESARROLLO MATEMÁTICO:
Para éste desarrollo, es conveniente el empleo de un sistema -
de ecuaciones de transformación, mediante las cuales se puede hallar
las expresiones de voltajes, corrientes y torque en el sistema de re-
ferencia múltiple.
Son necesarias ecuaciones de transformación tanto para las can
tidades +e (ecuaciones (104) y (105), como para las cantidades -e '(e-
cuaciones (106) y (107)).
Se debe recordar que los voltajes v, y v, •» (ecuaciones
(104) y (105)), juntos forman una serie de conjuntos balanceados, que
giran en sentido antihorario con una velocidad ' (krl)to con respecto
a la estructura de referencia rotando sincronizadamente, ó a una velo-
cidad 'kco si es que se toma con respecto a la estructura de referen-
cia fija en el estator. El porqué de (k-l)w y de kw puede ser expli_
cado observando la figura 2.2.1.a.l.
En esta figura se tienen tres sistemas de ejes ortogonales q-d:

- 41
kooe
toe
Fig. 2.2.1.a.1.
s sq y d forman el sistema de ejes fijos en el estator
q y d forman el sistema de ejes en la estructura de referenciaLs J s
rotando sincronizadainente girando a una velocidad w (sen
tido antihorario).
-
q y d forman varios sistemas de ejes (dependiendo 'del valor
de k) en el sistema de referencia múltiple, girando a u_
na velocidad kw (sentido antihorario).
La velocidad del sistema de ejes q y d con respecto al
sistema de enes fijo en el estator es kto - O = kw .J J Q Q
- ~t~keLa velocidad del sistema de ejes q y d con respecto a
+G +Slos ejes q y d de la estructura de referencia rotando sincronizaj n / __

- 42 -
damente es kw - w = fk - lltu .e e e
Ayudándose de la figura 2.2.1.a.2. y aplicando las relaciones
trigonométricas entre los dos sistemas de ejes, es posible encontrar
las ecuaciones de transformación al sistema de referencia múltiple, en
función de los sistemas que giran en sentido antihorario (cantidades.
+e) que están expresadas en el sistema de referencia rotando sincroni-
zadámente.
-fkeküue
•He
Fig. 2.2.1.a.2.
Entonces, para las variables de estator;
r _ +e _c +e _f = f1 cosS - fv, seneqs kqs kds
,. +ke ,. +e A , +e _j = £1 sen6 + f, fAf_ coseds kqs kds

- 43 -
Para las variables del rotor':
,- +ke - +e Q ,- +e Qf = £ eos O - f, j sen0qr kqs kdr
,, +ke r +e . , - +e _f-, = f i „ sene + f, , cosedr kqr kdr
donde: 9 = kw t - u te e
te.
Reemplazando el'valor de 0
ds kqs
(108)
+P ' +p- f senCk-l)o,t + f cosCk-lt (109)
+Vp +p +Pf = f, cosCk-l)w t - £ , e senCk-l)w t molqr kqr ^ J e kdr ^ J e ^ J
f T +lce = £ +e sen(k-l)w tdr kqs ^ J e
Por im proceso semejante se hallan las siguientes ecuaciones -
de transformación al sistema de referencia múltiple, en función de los
sistemas que giran en sentido horario (cantidades -e) que están expre-
sados en el sistema de referencia rotando sincronizadamente.
f = flrt cos(k-r)w t + f. . sen(k-l)w tqs kqs ^ J e kds *• J e
—vp — p — pfds = - £kqs ^Ck-lDV + f cosCk-lD (113)

- 44 -
-Vp -p -p
f = £ cos(k+l)w t + £ , ° sen(k+l)w tqr kqr v J e kdr e
-P -f , = - ft sen(k+l> t + £ , cos(k+l> tdr kqr ^ J e kdr ^ ^ e •
Donde: (108), (109) y (112), (113) son las ecuaciones de
transformación para las cantidades del estator; mientras que (110) }
(111) y (114), (115) lo son para las cantidades del rotor. Si los de-
vanados del rotor son cortocircuitados se tendrá que v = v. = var br cr
0.
Puesto que se habia dicho que £ es una variable que puede re-
presentar voltaje, corriente o concatenación de flujo, entonces las e-
cuaciones (108) y (109) expresadas como voltajes quedarán:
+lcp +P +p\s = vkqs cosCk-lDaiet - vkds seti(k-l>et (108)
Vds =vkqs
Q +PPero las expresiones para los voltajes v, y v, -, son
'precisamente las ecuaciones (104) y (105) respectivamente, entonces,
sustituyendo (104) y (105) en las ecuaciones (108) y (109) se ' tiene
que:
- iv -' {4 r ((V-, ^ - v, ,j cos(k-l)w tqs u 2 ^ kqct kdY e
i ^ i i -l)w t) cos(k-l)w tkqY kdct^ ^ J e e
{i- Z C-(V7 „ - Y, ,J sen(k-l)w t2 , =1 ^ v kqcí kdT v e

- 45 -
v = z (W - v,qs 2 = qa
+ V, , ) sen(k-l)ü) t cos(k-l)w tkqy kda J e ^ J e
sen(k-l)Wet)
(VkqY
cosCk-l)ü) t)
quedando finalmente:
v = z (v - V,qs 2
Cabe hacer un comentario, sobre éste último resultado: el sis_
tema de referencia múltiple está conformado por +_ k estructuras, donde
cada estructura de referencia tiene una velocidad angular +_ kw , recor_
dando que el signo + significa sentido de rotación antihorario, men-
tras que el signo - significa sentido de rotación horario.
En cada estructura de referencia particular, existirán volta_
jes aplicados específicos, así por ejemplo: para k = 2 se tendrán los-

- 46 -
siguientes voltajes aplicados:
Voltajes estator
+2e +2ev , V-,qs ds
Voltajes del rotor
+2e +2ev , v jqr } dr
Esta estructura girará a una velocidad 2w (sentido antihora.-
rio), donde recordando, w es la velocidad angular eléctrica a la cual
gira la estructura de referencia rotando sincronizadamente.
Entonces, la anterior expresión calcula el voltaje en el siste
ma de referencia múltiple como una sumatoria de cada uno de los volta
jes v existentes en cada estructura de referencia específica.
+ke +le , +2e ( +3e , +kev =v + v + v + + vqs qs qs qs qs
+keSi se desea calcular un voltaje v para un valor específi-
co de k, entonces puede ser utilizada la expresión (116)
v +ke = 1 (v - V, , ) (116)qs 2 kqa ^ v J
Para hallar el voltaje v, expresado en el sistema de refe-+Q +Q
rencia múltiple, se reemplazan las expresiones v, y v-, -, (ecua-
ciones 104 y 105) en la ecuación (109) :

1 1
, = i £ C (Vi - V, n ) cos(k~l)w t +ds 2 , - *• "• kqa kdy e
^ Z ( - (V, - V, , ) sen(k"l)w t +2 | ^ *" kqa kdy-" ^ -* e
vds
+ cos(k-l)ü) t . senCk-l)üj t) +C- S
quedando finalmente:
+kev,ds
Si se quiere encontrar el valor de v, para una estructura
específica, se utilizará la siguiente expresión:
, [V, + V, , ) (117)ds 2 kqy kdcr ^ J
Por un proceso similar, las ecuaciones (110) y (111) expresadas
como voltajes quedarán como:
v ~ke * v, "e cos(k+l)tú t + vn , ~e sen(k-KL> t ' (110)qs kqs ^ J e kds e

- 48 -
v, "ke - - v, "e sen(k+l)w t + vn ~e cos(M> t . (111)ds kqs ^ J e kds ^ J e ^ J
-e -eLas expresiones v, y v, , de las ecuaciones (106) y (107)
respectivamente pueden ser reemplazadas en (110) y (111) tal como se
muestra:
-Vp _p _p
vnc = vv,. cosCk+lDco t H- vv. senCkn-lDü) t CHO)
reemplazando:
-Tcp 1 °°e = -y 2 ( (V, ' + V, , ) cos(k+l)íü t +qs 2 , ^ kqa kdyj ^ J e
i,, - V, , ) sen(k+l)w t) cos(k+l)ü) tkqy kda ^ - e ^ • •'e
°°T 2 C (Vv ' + V, T ) sen(k-KL)ü) t -2 , , ^ kqa kdy^ ^ •'e
(VkqY
(V, - V, , ) (sen(k-KL)ü) t.cos(k+l)ü) t^ kqy kda ^ ^ J e ^ J e
sen(k-KL)w t . cos(k+l)w t)
-V 1v "Ke = ~ 2 (V, + V,qs 2 , ^ kqa
Para una estructura específica:

- 49 -
v ~ke = i- (Y + V, , Jqs 2 ^ kqa kdy
-keAhora para v, , reemplazando (106) y (107) en (111)
~ke "e e, = - v,ds kqs
sen(k+l>et + vMs c cos(M>et ' (111)
reemplazando:
, ~ke = - T 2 ( (V, + V, , ) cos(k+l)w t -ds 2 ,, ^ ^ kqc¿ kdy ^ e
(V, - V, , ) sen(k+l)w t) sen(k+l)w t +^ kqy kda ^ J e J ^ J e
, " vi^ ) cos(k+l)w t) cos(k+l)w tkqy kda J e J ^ J e
v-, ; = i , 2 ' {(V-, + V, , ) (cos(k+l)w t . sen(k+l)w t -ds 2 .,__-,•. v kqa kdy^ ^ ^ J e - J Q, =
- cos(k-KL)a) t . sen(k+l)w t) - (V, - Y, . )^ - ^ e L ^ e k q y kda
2 2(sen (k+l)w t + eos (k+l)w t) }
T S (V, - Vv, )2 ,_., v kqy kda
Era una estructura específica:

- 50 -
En resumen, se ha llegado a las siguientes ecuaciones
v = I (v • - V, , )qs 2 "• kqa kdy
v « (Vi + V •)ds 2 kqy kda
- ov Ke = CV, + V, , ) (118)qs 2 kqa kdy
v, " e = CV, - V, , ) (119)ds 2 ^ kqy kda ^ J
En'este punto, cabe hacer un comentario sobre las ecuaciones
(116) a (119).
Hay que recordar que V, y V, son los .coeficientes de losKqcx -"-HY
términos coseno y seno respectivamente de la expansión en serie de Fou
srier de v (ver ecuación (9)) y que V, , y V, -, son los coeficientesqs ^ ^ JJ J M kda kdyq
de los términos coseno y seno respectivamente del voltaje v, ^(ecua-
ción (91))- Así por ejemplo si:
v = -=• eos oí t + -7- sen w t - -=• eos Sai t - -=-?r sen 5w tq s 3 e o e b e 1 0 e
Entonces los coeficientes V, y V. serán:kqa J kqy
V-, =\, - ~ V0 = V, = V, = 0Iqa 3 Iqy 6 2qa 3qa 4qa
Vc = - Vr « - - v« = V7 = V, = 05qa 5 5qy 10 2qy 3qy 4qy
s i 1 1V, = -x- eos 2ai t + — sen 4w t + -^ eos 6w tds 2 e 4 e o e

- 51 -
Entonces los coeficientes V, ,' y V, , serán:kda J kdy
, - , = V7/q = V., <= V , = Oloa oda 4 da '
n 1 = V0, = V_ , = Vc . = V, , = 0Idy 2ay 3dy 5dy ody
v = ±. v = i.V2da 2 V4dy 4
oda 6
s sAdemás, ya que v y v, fueron establecidos en base a los
+lcevoltajes de fase v , v, } v ; entonces, los voltajes v , v , ,as DS es qs ds
v y VJ Q116 están para ser aplicadas a cada una de las estruc-
turas de referencia, pueden ser determinados directamente de las ecua
ciones (116) a (119), esto es, si bien fue conveniente para el desarrc_
lio del método del sistema de referencia múltiple, el llegar a las e-
cuaciones (102) a (107) expresadas en el sistema de referencia rotandoc
sincronizadamente; es innecesario considerarlos, ya que, conocidos ve
y v-, (ecuaciones (90) y (91)), pueden ser directamente hallados los
voltajes (116) a (119) expresados en el sistema de referencia múltiple,
puesto que estos últimos están en función de los coeficientes V, ,
V, . V, , , V, , , que ya son datos conocidos una vez encontrado laskqy ' leda ' kdy ' M }
s sexpresiones v y v^ .
May que recordar además que los superíndices +ke y -ke identi-
fican la velocidad y el sentido de rotación de las estructuras de re-
ferencia. Así por ejemplo: +le: El signo + significa sentido antiho_
rarío y puesto que k = 1, denota la estructura de referencia rotando

- 52 -
a la velocidad sincrónica w .e
-Se: El signo - denota sentido de rotación horario de una estructura
cuya velocidad angular es 5 veces la velocidad sincrónica [k=5).
ECUACIONES GENERALES DE VOLTAJE EN EL SISTEMA DE REFERENCIA
MÚLTIPLE:
En la ecuación matricial [61) del capítulo I, se tienen las
ecuaciones generales de voltaje en el sistema de ejes arbitrarios de
referencia.
También, anteriormente se obtuvo las ecuaciones de transforma-
ción (IOS) a [111) y [112) a [115), que sirvieron para hallar las ex-
presiones para los voltajes a ser aplicados en el sistema de referen
cia múltiple.
Ahora, se hace indispensable encontrar las ecuaciones genera-
les de voltaje en el sistema de referencia múltiple, para ésto sería
necesario utilizar las ecuaciones de transformación [108) a [115) en
las ecuaciones de voltaje de la máquina de inducción para obtener las
ecuaciones de voltaje para cada una de las estructuras de referencia -
que componen el sistema de referencia múltiple; en realidad, no es ne-
cesario realizar esta larga tarea, sino que simplemente se puede utili_
zar la ecuación matricial [61) ajustando en ésta la velocidad de la
estructura de referencia arbitraria oí a la velocidad de la estructura
de referencia deseada.(i) •

- 53 -
Entonces, la siguiente ecuación matricial puede ser utilizada
para determinar las ecuaciones de voltaje de la máquina de " inducción
en todas las estructuras de referencia:
ne neVqs
V,ds
0
0
r +L p nw L Mp nw Ms ss e ss • r • e
-n/o L r -f-L p -n M Mpe ss s ss e • c
i i iMp ( e" )M r +L p (nw "w )L
i i i-tooe-üJr)M Mp - e"wr)Lrr VLrrP
iqs
i ,ds
i
V1
-dr
(120)
Donde n es utilizado para denotar +k. Los demás parámetros de
la máquina de inducción ya fueron descritos en el capítulo I.
Cada valor de k, da por resultado dos estructuras de referen_
cía: + ke y -ke, de las cuales deben ser consideradas aquellas estruc_
turas cuyos voltajes aplicados sean diferentes de cero.
En la expresión (120), no aparecen las componentes de eje ce-
ro, pues en el capitulo I se mencionó que para el caso de sistemas que
tienen conexión de tres alambres, dichas componentes desaparecen. Tami t
poco aparecen los voltajes v y v, a ser aplicados en el rotor, debi_
do a que anteriormente se mencionó que si los devanados del rotor son
cortocircuitados, entonce
implica que los voltajes
cortocircuitados. entonces los voltai es v - v, = v _ = O, lo que? J ar br cr ' •n .i i/ = v, = O,qr dr

- 54 -
La ecuación matricial (120) , permite el estudio a velocidad
constante de los transitorios eléctricos y del trabajo en estado es-
table de una máquina de inducción simétrica.
2.2.1.b. Ecuaciones de las Corrientes
Puesto que las velocidades de las diferentes estructuras de re_
ferencia que conforman el sistema de referencia múltiple, han sido se-
leccionadas de tal manera que los voltajes a ser aplicados en - ellas
[ecuaciones (116) a (119)) sean constantes, entonces las corrientes de
estado estable debidas a ellos, también serán constantes.
Como se había dicho, la ecuación matricial (120) puede ser ut±_
lizada para el análisis en estado estable, resolviendo (120) para ha-
llar las corrientes de estado estable, se llega a las siguientes expre_
s iones:
nene , A >. ne r B , ne _ .., .
= ( -HF ] Vqs + ^ - 3 vds . (121)
ne ne- ne , B -, ne f A ^ ne r-no^j = ~ ( ~ r J v + ( "T rJ VJ (122)ds ^ ne J qs ^ ne ds ^ J
E E '
ne ne
H - C D v C123De
E E
ne nene ,. D > ne f C ^ ne
= - C -ñé } Vqs + ^ 1 VdsE E

- 55 -
Donde:
ne ,2 w 2 i tú „ iA = r f r + (n. - -2- ) f/ X 2] + n(n - -^ ) r fD 2X 2 (125)s L r ü i ^ R r r J o i r R me e
oí 2 , , ,2= n(n - — ) £,3 X CX z - X X ) - n r fD X (126)
^ u R rr m ss rr r R ss J
ne en , M , _C = - (n - -! ) fn2 X Tn r X + (n - — ) r X I (127)
^ /.» J R m L -r ce ^ /.i ^ c: 7~r J ^ ^L.1-, J*- I 11. 1, J\. • I ií.
ü> ' R m L r ss ÜKc tí
^ „ iD ' = - (n - — ) £„ X fr r -i- n(n - — ) £n2 (X 2 - X X )1 (128)
oj_ R m L s r ^ ü), R m ss rr;j J
I 2E = ir r + n(n - — ) fn (X 2 - X X )"] +
L s r M. R m ss rr^J
+ [n rr £R Xgs + (n - —) rg £R X J (129)
Donde, todos los valores están en "por unidad" (p.u.)3 se ha
introducido la oh - velocidad angular base, 7 se hace uso de las reac-
tancias inductivas X , X , X en lugar de sus respectivas inducíanss rr m —
cias.
además: fn - —R ü
Las ecuaciones (121) a (124) son las'corrientes expresadas en
el sistema de referencia múltiple para el trabajo en • •'•estado.* esta-
ble.

- 56 ~
Conviene hacer ion ejemplo, que clarifique como calcular las
corrientes mediante las ecuaciones (121) a (124):
~2e ~2eSean v y v, los voltajes aplicados en una estructura.
de referencia que gira en sentido horario y que gira a una - velocidad
2w .e .
— gEntonces las corrientes resultantes serán i , i,
qs '*' ds- T -2e - -2e f „.i e i, [pues n = - 2).qr dr ^ J
-2ePara calcular i , se utiliza la ecuación (121) quedando:
-2e -2e-2e * A x -2e , B -s -2ei = C —T- J v + r —=— ) v-,qs ^ -2e - qs ^ -2e y ds
E E
-2e -2e -2edonde los valores de A , B , E pueden ser hallados utilizando -
las expresiones (125), (126) y (127), en base a los datos de la máqui-
na expresados en "por unidad'T.
-2e ' -2eDe una manera semejante se pueden hallar i, , iJ ^ ds ' qr
.' -2e
TRANSFORMACIÓN DE LAS CORRIENTES EXPRESADAS EN EL SISTEMA DE
REFERENCIA MÚLTIPLE A LA ESTRUCTURA DE REFERENCIA ROTANDO SIN
CRONI ZATAMENTE.
Para transformar las corrientes qs y ds del sistema de refe-
rencia múltiple a la estructura de referencia rotando sincronizadamen-
te, se puede hacer uso de las figuras 2.2.1.b.l. y 2.2.1.13.2, la prime_

- 57
ra para transformar las cantidades + ke y las segunda para las - ke.
Pues hay que recordar que el sistema de referencia . múltiple
hay dos grupos de estructuras: las + ke que giran en sentido antihora
rio y las - ke que lo hacen en sentido horario.
,+ke
Fig. 2.2.1.b.l.
De la figura 2.2.1.b.l. y de las relaciones trigonométricas en_
tre los dos pares de ejes se tiene que:
r e - +ke o , r- ke _£, = f eos 8 + f, sen6Iqs qs ds
donde: e = 0 ) -W ]t = (k-l)to t
reemplazando el valor de 6:

- 58 -
ahora f.Ids '
La figura 2.2.1.b.2. servirá para encontrar las ecuaciones de
transformación del sistema de referencia múltiple a la estructura de
referencia estacionaria.
u>e
Fig. 2.2.1.b.2.
De la figura, se tiene que:
r e r -ke . r -Icef0 = f cosG - f, sene2qs qs os
donde e = w t -(- ]QÜ t) = C^+lDu) t
-Ice

- 59 -
Aplicando el principio de superposición:
f e = f e + f eqs " Iqs 2qs
e = frlds
Entonces
£ e = (f ke cos(k-l> t + f ke sen(k-l)ü) t) +qs ^ qs ^ J e as ^ J e J
Cfqs
reenplazando el valor de f por corriente y aplicando el principio deg
superposición, la corriente total i será la suma de cada una de las
. , . +ke" . +ke . -ke . -ke - , _corrientes i , i, , i . i, pero transformadas a la es-qs ' ds qs ' ds t.tructura de referencia rotando sincronizadamente.
La expresión anterior quedará:
i e = 2 fi ~ke cos(k+l)w t - i ' "ke sen(k+l)ü) t +qs i _-i qs ^ J e ds ^ J e~
+ i +ke cosCk-l> t + i , sen(k-l]tü t) (130)qs J e ds v e
De manera similar para i, :
C-

- 60 -
ePor un razonamiento similar al desarrollado para hallar i ,
qs
se puede hallar la expresión para i, :
i, e = £ (:U "ke cos(k+l)üj t + i ~ke sen(k+l)fd t +ds , -i ^ ds ^ J e qs ^ J e= n .
+ i, +ke cos(k-l)w t - i +ke sen(k-l> t) (131)ds ^ -* e qs e ^ J
En resumen, se tienen las ecuaciones (130) y (131) t que son
e elas corrientes i e i-, expresadas en la estructura de referencia -
rotando sincronizadamente sincronizadamente, en función de las corrien
, . . +ke . -ke . -ke • -, n • ^ -, r - ^ . - . -,tes i . i , ,1 . i j . del sistema de referencia múltiple.qs ' ds 3 qs J ds . . . , l
TRANSFORMACIÓN DE LAS CORRIENTES EXPRESADAS EN EL SISTEMA DE
REFERENCIA -MÚLTIPLE A LA ESTRUCTURA DE REFERENCIA ESTACIONA-
RIA. (1)
s s ' s ' sPara hallar las corrientes i , i-, (estator) e i . i_qs ' ds ** _ qr ' dr •
(rotor) expresadas en la estructura de referencia estacionaria, es ne-
cesario encontrar las ecuaciones de transformación que permitan trans-
r- T - 4. • +ke . -Kke . -ke . -ke , , , ,formar las corrientes i , i, , i .1, (estator) eqs ' ds ' qs 3 ds ^ J
1 " ke ' "Hce ' ~ ek ' -kei , i, . i , i, (rotor) del sistema de referencia múltiqr 3 dr ' qr ? dr ^ J ^ —
pie.
s sEntonces} para encontrar las corrientes de estator i e i,
expresadas en la estructura de referencia estacionaria, se hará uso de
las figuras 2.2.1.b.3 y 2.2.1.b.4.
En la figura 2.2.1.b.3. se ha dibujado los dos pares de ejes

- 61 -
q - d, el tino que gira a una velocidad +kü representado por los e-c
jes o' y d: , y el otro estacionario, representado por los ejess s
s jSq y d .
Fig. 2.2.1.1».3.
De la figura se tiene que:
0 = kw te
COS
En la figura 2.2.1.b.4. se tienen los ejes q " y d " que
s sgira a la velocidad ko pero en sentido horario; y q y d estacío-o
nario.
De la figura:

- 62 -
kuue
ig. 2.2.1.b.4.
:« - - £ eos kíü t - f, sen ku t2qs qs e as e
.„, - f . sen kw t + f, eos kw t2ds qs e ds e
s s s sDonde £ ., f _, , f , £ , son variables q - d expresa-
das en la estructura de referencia estacionaria.
' S S S SLas variables f, „ . £. , y £0 , f«, fueron producto deIqs ' Ids } 2qs ' 7^c ^„,
los aportes de las cantidades +ke y -ke respectivamente. Pero en las sestructura de referencia estacionaria existe una sola £ y una f ,qs • ds 5
spor lo que f será el resultado del aporte en el eje q de las canti-
*-ps s sdades +k (que es f, ) y de las -k cuyo aporte es £„ ; f , es el
sresultado del aporte en el ejq d de las cantidades +k (que es £, , ] yC ""
de las -k cuyo aporte es f-,

- 63 -
Entonces, por lo anteriormente expresado se puede escribir:
=qs Iqs 2qs
J^ O j— ! J~
ds ~ Ids 2ds
que reemplazando los respectivos valores queda:
f s = (f ke eos kü t + f. ke sen kw t) +s s e ds e
(f eos ka t - f, e sen kw t)^ s e ds e
j = f- £ sen kw t + f • eos kw t) +ds ^ qs e ds e
+ (f sen ko t + f, eos kw t)^ qs e ds e
finalmente, si las anteriores ecuaciones se expresan como corrientes,
y además se considera que el aporte individual de corriente de cada u-
na de las estructuras de referencia del sistema de referencia múltiple
transformadas a la estructura de referencia estacionaria deben ser su-
perpuestas, se obtienen las siguientes ecuaciones:
s r r- Ke . -Ae-, -, +. , f Ke . ~Ke-, , .-,i = E C CL +1 3 eos koj t + (i - x, ) sen ko t)qs i _i qs qs J e ds ds J e
K.—J.' (132)
i, S = Z C &, ke + i, ~ke) eos kw t - (i ke - i "ke) sen kw t)ds v_, ds ds J e qs qs J eK~J-
(133)
Donde:

- 64 -
s si , i. Son las corrientes en la estructura de referencia
estacionaria.
s = Es un superíndice que denota variable en la estructura
de referencia estacionaria.
' s ' sPara encontrar las corrientes de rotor i , i, expresadasqr 3 dr
en la estructura de referencia estacionaria, se sigue un procedimien-
to similar, obteniéndose:
.' s _ r r.' ke .r -ke, , , . ,.¡ ke .' -ke.. . ...i = Z ( [i + i J eos kw t + fi - i ) sen kw tjqr •.., *• ^ qr Qp e . ^ dr dr J e J
- ' s „ r r - ] ke t . r -ke.. , , ,.1 ke .' -ke, , , ,i, = £ ( u-i + I T 1 eos kw t - [i - i j sen kw tjdr T . dr dr ^ e ^ qr qr J e •*K"~l
(135)
2.2.I.C. Ecuación del Torque
Para obtener la ecuación del torque electromagnético expresado
en función de las corrientes del sistema de referencia múltiple, se
puede partir de la ecuación (81):
T = M ( f ) C | ) (iq/ • 4S - id/ - V5) (136)
Recordando que
m ™ numero de fases.

- 65 -
P, = .-numero de polos de la máquina
s . si , in = corrientes q - d de estator, en la estructura de referenqs 3 ds n ' —
cia estacionaria.
.' s .' si , ij corrientes q - d del rotor, expresadas en la estructuraqr 9 dr r
de referencia estacionaria.
s s ' s ' sLas corrientes i . i, e i , i, fueron ya determinadasqs * ds qr 3 dr *
y son las ecuaciones (132), (133) y (134), (135) respectivamente. Con
el fin de facilitar los cálculos, se han hecho los siguientes reempla-
zos en (132) a (135) :
. +ke . r +kea = i e = iqs qr
-ke j- •' ~kef = V
+ke . r +ke
j . -ke , .' -ked = i, h = i,ds dr
9 = koi te
Entonces, se tendrá:
i s « 2 ( (a + b) cos6+ (c - d) sen6 )
i, s = E ( (c + d) cose- (a - b) sene )

- 66 -
i' s = £ C O + f) cose + (g - h) sene)qr k=l
ii, S = 2 ( (g + h) cose - (e + £) sene)dr
Reemplazando éstas expresiones en (136) y dejando en el lado
derecho de la ecuación lo que es el sumatorio:
4T = £ ;{ ( (a+b)cos6 + (c-d)sene)((g+h)cose - O~f)sen6)
- C (.c+d*)cosQ - (a-b)sene) CC^+f)cose + (g-h)sene )}
llamando:
4Tot Mmp
Desarrollando el contenido del sumatorio:
a = E ' (Ca+b) Cg+h)cos2e - O+b) (e-f)cose sene +k=l
sene - (c-d) (e-£)sen2e -
- [ (c+d) Ce+f)cos2e + (c+d) (g-h)cose sene -
- O-b)(e+f)cose sene - (a-b) Cg-h)sen2e )}
a = E '{(a+b)(g+h)cos e - (a+b) (e-f)cose sene + (c-d) (g+h) eos e sene -
- (c-d)(e-f)sen26 - (c-d) (e+f)cos2e - (c+d)(g-h)cose sene +

- 67 -
+ Ca-b)(e+f)cos6 sene + (a-b)(g-h)sen26 }
a = S ' í C (a+b)(g+h) - (c+d)(e+f) ) 005*8 +kKL
+ (- (a+bXe-f) + (c-d)Cg+h) - (c+d) (g-h)
cose sene +
sen2e}
llamando :
{1 } = ( (a+b) Cg+h) - (c+d) Ce+f] )
{1} - (ag + ah + bg + bh - ce - cf - de - df)
' {2 } - ( Ca-b) (g-h) - (c-d) (e-f) )
' {2 } = (ag - ah - bg -*- bh - ce + df + de - df)
Entonces:
co
a - S ' {' {1} cos26 +' {2} sen2e + (-ae + af - be + bf + cg + ch +
+ dg - dh - cg + ch - dg + dh + ae + af - be - bf ) cose sene }
oo
a - E" {' ÍL> cos26 +' {2} sen26 + (2af - 2be + 2ch - 2dg) cose sene}

- 68 -
00
a = 2 ' {' {1} cos20 +' {2} sen26 + ( (af + ch) - (be + dg) ) 2cos0 sen0 }k~l
Pero: 2cos0 sen© = sen 20
a = T, {' {1} cos20 +' {2} sen26 + ( (af + ch) - [be + dg) ) sen 26}k=l
como sen^8 = cos^e - eos 20
haciendo:
' {3}= ( Caf + ch) - (be + dg))
= £'{'{!} cos20 +' {2} (eos2© - eos 20) +"{3} sen 20}
a = S ' { C' {1} +' {2} ) cos2e -' 12} eos 2e +' {3} sen 20}k=l
desarrollando:
C' {1} +" {2} ) = (ag + ah + bg + bh - ce - cf - de - df + ag -
- ah - bg + bh - ce + cf + de - df)
C' {1} +' {2} ) = (2ag + 2bh - 2ce - 2d£)
C ' íl} +' {2} ) = 2( (ag + bh) - (ce + df))
Entonces:

- 69 -
co
ot = £ " ÍC Cag + bh) - (ce + df) ) 2 cos29 - ' {2 } eos 20 +' Í3 } sen 29 }k=l
haciendo:
' {4 } = ( (ag + bh) - (ce + df) )
{4 } = (ag + bh - ce - df)
7 sabiendo que:
2cos20 = (1 + eos 28)
se tiene:
co
a = 2' { ' (4 } (1 + eos 28) - ' {2 } eos 20 +' {3 } sen 29 }
CO
a = £ ' {' {4 } + (' {4 } - '• {2 } ) eos 29 +' {3 } sen 29' }k=l
desarrollando:
(' {4 } -' {2 } ) = (ag + bh - ce - df - ag + ah + bg - bh +
+ ce - cf - de + df)
(' (4 } - ' {2 } ) = ( (ah + bg) - (cf + de) )
entonces, reemplazando los valores de ' {4 } , " {3 } y ( {4 } - ' {2 } ), se
tiene:

- 70 -
a = E ' { ( (ag + bh) - (ce + df) ) + ( (ah + bg) - (cf + de) )cos 29 +k=l
+ C (af + ch) - (dg + be) ) sen 29 }
finalmente, reemplazando los valores de a, b, c, d} e, £, g, h y
]<üj t? se obtiene la ecuación del torque:
^ > < r i r -> ^ - r c- .' +ke . -ke .' -ke-,T = M ( j ) C- T D E í dqs idr + i idr )
K—J.
. +ke .' +ke . -ke .' -ke.i, i + i1 i )+ds qr ds qr J
r. +ke . r -ke , . -ke .Clqs Xdr + \s x
. +ke .' -ke , . -ke .r , , 01 . ,! i + 1J i ) ) eos Zkw t +ds qr ds qr J J e
f f. +ke .' -ke . +ke .' -ke-, r. -ke .' +ke+ ( fl 1 + 1, ln ) - fl, 1-, +^ ^ qs qr ds dr ' ^ ds dr
-+ i i ) ) sen 2kw t } (137)qs qr J J e ^ J

- 71 -
2.3. TRANSFORMACIÓN DE LAS ECUACIONES DE UN SISTEMA DE REFERENCIA
MÚLTIPLE A UN SISTEMA DE REFERENCIA: (1,3)
2.3.1. ROTANDO EN SINCRONISM):
Se había indicado, que una estructura de referencia rotan-
do síncronizadamente es aquella que gira a una velocidad angular eléc-
trica w que es la componente fundamental de los voltajes aplicados.
Las expresiones para los voltajes en el sistema de referencia
múltiple fueron ya obtenidas en el literal 2.2.1.a y son las siguien.
tes:
A = T CV, + V, ,•) (117)ds 2 "• kqy kdcr L J
-V<^ 1\s = 2 C - CUS)
donde se indico que V, , V, y V, -, . V. , son los coeficientes den kqa ' kqy J kda ' kdy
Fourier de los voltajes v y v, respectivamente.
Precisamente, para encontrar las expresiones (116) a (119) el
s sestudio se encamino primeramente a obtener los voltajes v y v,
expresados en la estructura de referencia estacionaria, en función de
los voltajes de fase de entrada (ecuaciones (88), (89) del literal

- 72 -
s s1.4]; a partir de v y v, se encontraron las siguientes expresiones
para los voltajes en la estructura de referencia rotando sincronizada-
mente :
+ (Vi - V. ,') sen(k+l)w t +^ kqy kda e
(Y- • - V, 1 ) cos(k-l)w^ ^ ^ J*kqa W wa^ "-""e1- '
: ) (99)
v, " = S ( W + V, , ) sen(k+l)w t -ds 2 v kqc¿ kdv e
i - V, , ) cos(k+l]tükqy kda^ v J e
(Vi - V. T ) sen(k-l)tü tv ^ ^ e
Donde el superíndice e denota variables en la estructura de re_
ferencia rotando sincronizadamente.
La aplicación de los voltajes constantes expresados en [116] a
(119) en cada una de las estructuras de referencia que conforman el
sistema de referencia múltiple, dará por resultado las corrientes tam-
bién constantes i .i-, , i e i, (ecuaciones (1211 a (124)qs ? ds ' qr dr ^ J
del literal 2.2.1.b).

73 -
Estas corrientes, constantes en el sistema de referencia múltjL
pie, fueron transformadas a la estructura de referencia rotando sincro_
nizadamente, por un procedimiento explicado anteriormente en el lite-
e eral 2.2.1.b, obteniéndose las corrientes i e i, .
3 qs ds
00e ' „ e- "ke ,., ,.,-, . - -Ke n - % ,. .i = S- [i cosík+lloi t - i, senfk+ljü) t +
qs vji qs ^ e ds eÍC~~1
•TvCí f~T -i ~\_ ~JxO t"\ ~^ j- *\ i -7 r\~\ i cosík-ljw t + i, sen fk - l jü j t j Q30J
q s ^ - ^ e d s ^ - ' e . \. j
a -(^ • -p
i, = S Ci, cos(k+l)w t + i ^ sen(k+l)w t +Cío -i __-i Cío c i*-' ^
+ i, +ke cos(k-l)w t - i sen(k~l)w t ) fi311as e q s ^ - ^ ^ J
Donde:
e e9 i., = son las corrientes resultantes de estator expresadas en
la estructura de referencia rotando en sincronismo.
nei " = I = son las corrientes i de estator en el sistema • deqs qs qs
referencia múltiple.
¿ke nei, = i, - son las corrientes i, de estator en el sistema deds ds ds
referencia múltiple.
n denota +
k = toma valores enteros 1, 2, 3, , °°

- 74 -
1 e ' ePara obtener las corrientes de rotor i 3 i, expresadas en
la estructura de referencia rotando en sincronismo partiendo de las cp_
- i •' +ke .' +ke .' -ke .' -ke -, - . , , ,-mentes de rotor i . i-, . i e i, del sistema de refe-qr ' dr ' qr dr
rencia múltiple, es necesario utilizar las ecuaciones de transforma
ción obtenidas en base a las figuras 2.2.1.b.l. y 2.2.1.b.2.:
Estas ecuaciones de transformación para las variables del ro-<
tor son las siguientes:
1 P ' VP ' VPf e = (f x cos(k-l)w t + f, *e sen(k-l> t +qr ^ qr *- J e dr ^ J e
- f a - p+ Cf cos(k-l)w t - f, Ke senCk+l)w t)^ qr *• J e dr ^ J e J
' n ' ^T<"f3 ' -Trp, e = (£ sen(k+l)w t + f , Ke cos(k+l)w t) +dr ^ qr ^ J e dr ^ J e
- fqr Sen(k-l)Uet + fdr cos(k-l)Wet)
Reemplazando la variable f por corriente y tomando en -cuentar e r eque las corrientes i e i, son el resultado del aporte de cada unaL qr dr r .
de las corrientes del sistema de referencia múltiple pero transforma-
das a la estructura de referencia rotando en sincronismo (esta es laoo
razón del sumatorio £ ) ; se obtienen los siguientes resultados :k=l
P -p — Pi e = E (i *e cos(k+l> t - i, ^ sen(k+l)a) tqr n = ^ qr ^ J e dr ^ J e
r+ i cos(k~r)cü t + i, sen[k-l)üJ t) ' (138)q r ' - - ' e d r ^ ^ e - ^ , ^ J

- 75 -
+ i' +ke eos{k-l)w t - i' +ke sen(k-l)ü) t) (139)dr e qr e
Donde:
1 e ei , ij - son las corrientes de rotor expresadas en la estructuraqr ' dr
de referencia rotando en sincronismo.
i = Son las corrientes i de rotor en el sistema de referenciaqr qr
múltiple. • .
i, = Son las corrientes i, de rotor expresadas en el sistema dedr dr r
referencia múltiple.
2.3.2. FIJA EN EL ESTATOR
s sLos voltajes v " y v, , a ser aplicados en la estructura de.
referencia estacionaria fueron hallados anteriormente en el numeral
1.4, dichas expresiones están en función de los voltajes de entrada
v . v, . v y son:as' bs' es *
v S - v (88)qs as J
v, S = -- (- v, + v ) (89)ds /v bs cs^ ^ .
donde el superíndice s denota variables en la estructura de referencia
estacionaria.
s sLos voltajes v y v-, posteriormente fueron descompuestos -

- 76 -
en serie de Fourier, obteniéndose:
v s = E Oí eos 3foj"f+ V, sen kw t) (90)qs ^ kqa e .kqy ^e v J
v, S = s (V, , eos k¿o t + V, , sen ko t) (91)ds kda e ^ e
donde:
sV, , V, son los coeficientes de Fourier de v correspondienteskqa ' Icqy qs _ F
a los términos coseno y seno respectivamente.
V, -, , V, j son los coeficientes de Fourier de v, s correspondientes
a los términos coseno y seno respectivamente.
oíti
Velocidad angular eléctrica correspondiente a la componente fun-
damental de frecuencia de los voltajes de fase aplicados al esta_
tor.
cEn el literal 2.2.1.b. fueron halladas las corrientes iqs '
s ' s ' si-, de estator e i , i, de rotor expresadas en la estructura deds qr ' dr r
referencia estacionaria, para obtenerlas -se partió de las expresiones
j n - .,. ±ke . ±ke . ±ke . ±ke - . . ,de las corrientes i , i, . i e i, en el sistema de re-qs * ds J qr drferencia múltiple, transformando cada una de ellas directamente a la
estructura de referencia estacionaria y luego haciendo el sumatorio de
todas ellas; las ecuaciones de transformación fueron halladas en base
a las figuras 2.2.1.b.3. y 2.2.1.b.4.
I o I
Otra manera de hallar i s, i, S, i e i, es partiendo deqs J ds J qr dr r

- 77 -
e e r e ' elas corrientes i . i-, . , i .i, expresadas en la estructura deqs J ds. * qr ' dr r
referencia rotando sincronizadamente. Para ésto es necesario hallar
ecuaciones de transformación que permitan transformar las variables
desde la estructura de referencia rotando sincronizadamente a la es-
tructura de referencia estacionaria. (Recordar que en el literal 2.2.
l.b. se siguió un método distinto, pues se hallaron ecuaciones de
transformación que permitan transformar las variables desde el sistema
de referencia múltiple a la estructura de referencia estacionaria].
Entonces, las expresiones para las corrientes i s, i, s, i s5 r r qs > ds 3 qr
1 se i, fueron obtenidas en el literal 2.2.l.b. y son las siguientes:
- s r r. +ke , . -kev 1 . 4 . , r- +ke - -ke, , , ,-,= S [ (i + i J c°s kw t + (i, - i, ) sen kw t]qs -, =, ^ ^ qs qs J e ^ ds ds J e J
(132]
- ^ r r- , • " - ^ 1 4 - r- . - ^ . ,^i, ~ T, C Uj + ij J eos KOI t - (i - i ] sen kw t]ds , , ds ds J e ^ qs qs J e J
C133)
.' s ^ /• r- +ke , .' -ke, , - , , r.T +ke .' -ke, , _x = S C LI + i J cos kw t + fi1 - i, j sen ko t]qr , - qr -qr J e ^ dr dr J Q J
(134]
.' s „ r r- + e .' -ke, T ._ ,--' +ke .' -ke, , .,i, = S ( [i, + i, ] eos kw t - (i - i ] sen km tjdr , _., v ^ dr dr ^ e ^ qr qr y e ^
(135)
donde:
s = superíndice que indica que la variable está expresada en la es-
tructura de referencia estacionaria.

- 78 -
s si , i, = corrientes q - d de estator expresadas en la estructuraqs } ds l r
de referencia estacionaria.
1 s ' si , i, = corrientes q - d de rotor expresadas en la estructura deqr ? dr n l
referencia estacionaria.
¿ke ¿Icei .i, = corrientes de estator expresadas en el sistema de reqs 3 ds ^ —
ferencia múltiple.
1 ±ke T ±kei , i., = corrientes de rotor expresadas en el sistema de refe
rencia múltiple.
2.3,3. FIJA EN EL ROTOR
En este literal se encontrará las ecuaciones de transformación
±ke .qs > 1ds
... ^ . r* n . . ±ke . ±ke .' ±keque permitirán transformar las corrientes i , i
1 ±kei-, • del sistema de referencia múltiple a la estructura de • referen-
r . rcia fija en el rotor, con el fin de hallar las corrientes i , i-J qs ' ds
i , i, en dicha estructura.qr } dr
Partiendo de las estructuras del sistema de referencia múlti-
ple, se pueden hallar las ecuaciones de las corrientes expresadas en
la estructura de referencia fija en el rotor, con la ayuda de las figu
ras 2.3.3.1. y 2.3.3.2, en las cuales se han dibujado las dos estructu
ras: la del sistema de referencia múltiple que gira a +_ ka» . y la es-
tructura de referenciafija en el rotor, que por lo mismo, girará a una
velocidad angular tu = tu , donde w es la velocidad del rotor.

- 79 -
En la figura 2.3.3.1. se ha dibujado la estructura + kfü del
sistema de referencia múltiple que gira en sentido antihorario a una
velocidad lew , y la estructura de referencia fija en el rotor.
-f-koue
ke
d r
Fig. 2.3.3.1.
De la figura, se pueden obtener las ecuaciones de transforma-
ción para las estructuras + kw :
r r j. +ke . , - +kef-, = f cos6 + f j senGIqs qs ds
fn , = f, cose - f - seneIds ds qs
6 = ükü>e - ü)r) t
donde:
r = superíndice que denota que la variable f está expresada en la
estructura de referencia, fija en el rotor.

- 80 -
s = subíndice que indica variable del 'estator.
En la figura 2.3.3.2. se tiene la estructura - küi del sistema
de referencia múltiple que gira en sentido horario a una velocidad kw
y la estructura de referencia fija en el rotor.
-kooe
Fig. 2.3.3.2.
Observando la figura 2.3.3.2., se obtienen las ecuaciones de
transformación para las estructuras - kw .r e
-j^r- ~ f2qs qs*
jds
_rr r _ , ,-
f2ds = fds COS8 + fqs
El aporte de las variables de las dos estructuras (+ kw y
- kw ) del sistema de referencia múltiple dará por resultado las si-
guientes ecuaciones de transformación:

- 81 -
T T rf = f + fqs Iqs 2qs
r = r + £ T2ds
Entonces:
f r = £ +:ke cosfkw - u )t + f, +ke sen(ku - w )t +qs qs v e r ds ^ e r
— i —f cosCkwe + w r t - f^ sen(kwe + w^t (140)
~ CP ~í"p+ f, cos(kü + oí ]t + £ sen(kü) +'01 )t (141}ds . ^ e r qs ^ e r *• ^
Si (140) y (141) se expresan como corrientes, y se toma en
T" "T~cuenta que i ¡, i, son el resultado de el aporte de cada una de las
1 qs ' ds r
estructuras del sistema de referencia múltiple:
r = E' { i +ke cos(kw - oí )t + i, +ke sen(ko) - w )t +5 v=1 s G:" r ^S e T
~iqs cos(kwe + ü>r)t - ids sen(kwe + wr)t} (142)
^ • r • +ke ,, -,.v^ { s cos(ka)e - Vt - xqsK— 1
+ i, "ke cos(koj + oí )t + i ~ke sen(kco + wjt} (143)ds ^ e i qs e r
Donde:

- 82 -
r Xi , i, - son las corrientes q. d de estator expresadas en la es-qs } ds L' í
tructura de referencia fija en el rotor.
Por un procedimiento similar, se obtienen las corrientes ii > qr >
i, } de rotor expresadas en la estructura de referencia fija en el
rotor:
' - 'cos(kw - u )t + i, sen(kw - w ]
qr , _. qr e r dr ^ e r, _.
. p . Ai cos(lxü3 + w Dt - i, sen(kw + w )tqr v e r dr • e r
. \ = 2 { i, cos(ko) - o) )t - i seníkoi - w )dr -i ,„ T dr e r qr v e r
K~J.
- -+ i, cos(kü) -í- u )t + i sen(kw + w )t Jdr ^ e r qr v e r

- 83 -
2.4. TRANSFORMACIÓN A VARIABLES DE FASE a,b,c.
Las corrientes de fase del estator y del rotor, pueden ser ob-
tenidas partiendo de la'estructura de referencia estacionaria.
En la figura 2.4.1. se tienen los ejes q - d de la estructura
de referencia estacionaria y, los ejes a, b, c.
cs
Fig. 2.4.1.
Del gráfico, se obtiene que para las corrientes de estator:
i = i + O i,as qs ds
* J /• i-\ - O —..-,(i, - - i eos 60 - i, eos 30DS s ds
1 - s /3 . si •* ^ ' i •
(146)
bs 2 qs 2 ds (147)

- 84 -
eseos 60° + i 5 eos 30°
1 ~ " X/? .
cs " 2 qs 2(148)
Donde:
ci , i, son las corrientes de estator expresadas en la estructuraqs ' ds r
de referencia estacionaria.
i , i, . i son las corrientes de fase de estator,asJ bs es
De una manera similar, las corrientes de fase de rotor expresa_
das en. la estructura de referencia estacionaria, pueden ser obtenidas
como sigue:
Fig. 2.4.2.

- 85 -
En la figura 2.4.2. se tienen los ejes q - d del rotor expresa_
dos en la estructura de referencia estacionaria y los ejes a, b, e, de
rotor (pero referidas al estator).
De la figura se tiene:
1 s ' sV =iqr
c- Q ej . o /-• r\ • j -7 i~i Oi, = - i eos 60 - i, eos 30br qr dr
5 s -" " 2 " 2
i q r C r Q•J J _ /- r\ , • J -7 r\i = - i eos 60 + i, eos 30cr qr dr
-i' s ' s - r s"-
_sr " 2 2.
Donde:
's superíndice que indica variable expresada en la estructura de refe_
rencia estacionaria.
' s ' si . i, corrientes de rotor expresadas en la estructura de referenqr ' .dr L —
cía estacionaria.
i s ' S ' Si , i, . i corrientes de fase de rotor referidas al estator.ar ' br .cr

2.5. METODOLOGÍA GENERAL DE LA APLICACIÓN DEL MÉTODO DEL SISTEMA
DE REFERENCIA MÚLTIPLE. (1]
Este numeral es una guía práctica para el usuario del método
del sistema de referencia múltiple.
En la figura 2.5.1. se muestra el circuito del estator y los
voltajes de fuente que lo alimentan.
ibs.
Fig. 2.5.].
Los voltajes de fase del estator pueden expresarse como:
v = e - vas ga ng
v, = e , - vbs gb ng
v = e - ves ge ng
O 54)
Puesto que se estudia una máquina trifásica simétrica a 3 hi

- 87 -
los, el voltaje de secuencia cero es v ¿ 0. y el voltaje v será:' J os } J n
v - i - C e + e . + e )ng ¿ ga gb ge'
Entonces, si se sustituye los voltajes de fase v , v vas bs es
c(ecuaciones (152) a (154) en las expresiones de los voltajes v ,
qso
v, , (ecuaciones (88) y (89) del numeral 1.4) se obtiene:
v s = 4 (e ~ T e 1 " T e ) " (156)qs 3 ^ ga ¿ gb 2 ge
v, S = — (- e , + e ) • (157)ds b c
Las últimas ecuaciones (156) y (157), servirán en el caso que
se tengan como datos los voltajes de fuente; mientras que si los datos
son los voltajes de fase v , v, y v , entonces servirán las 'expre-as DS es
siones (88) ü (89).
s sLos voltajes v y v, pueden ser expresados en serie de Fou
rier, obteniéndose las expresiones (90) y (91).
v S = Z (V, eos l<w t + V, sen kw t) (90)qs -, _.. kqa e kqy e J *• J
v, s = E (V-, , eos kw t + v sen kw t) (91)ds v=i ^a e Y e
Los coeficientes V-, , V, , Vn , y V, , obtenidos en (90) ykqa kqy kda kdy - y 7
(91), son entonces sustituidos en las ecuaciones (116) , (117), :'(118),
C119).

- 88 -
v (y - - v ) - (116)qs 2 ^ kqa kdy
+ke 1 (v + y }
ds 2 ^ kqy kdcr
v ~ke = ~ (V, ' + V, , ) (118)qs 2 ^ kqa ^
Las expresiones (116) a (119) son los voltajes constantes que
se van a aplicar a cada estructura de referencia del sistema de refe-
rencia múltiple.
Luego de lo cual pueden ser determinadas las corrientes i 3
ne r ne ' nei-, , i , i, (ecuaciones (121) a (124)) de estado estable, en
las estructuras de referencia que estén siendo consideradas.
Las corrientes del sistema de referencia múltiple obtenidas -
por la aplicación de (121) a (129), pueden ser sustituidas directamen-
te en (132) y (133) y en (134) y (135) para obtener 'respectivamente,
s s T s ' slas corrientes I , i, de estator e i , i- de rotor expresadas
en la estructura de referencia estacionaria.
También éstas corrientes pueden ser convertidas a un •' -siste-
ma trifásico, mediante la sustitución directa de (132), (133) en las
ecuaciones (146), (147), (148) para obtener las corrientes de fase de
estator. Mientras que se deberá sustituir (134) y (135) en '(149),
(150) y (151) para obtener las corrientes de fase del rotor.

- 89" -
i = I S (146)as qs ^ J
/3- -r jbs 2 qs 2 ds
1 - s , /3 . s1 = - T 1 + -75— 1,es 2 qs 2 ds
1 s ' q= i (149)ar qr ^
. ' s 1 • r s /3* - r si = ~ " r -L ~ ^ -L j (XbU Jbr 2 qr 2 dr ^ ^
r s 1 r s /J r si = - — i + —-_ i (151)cr 2 qr 2 dr ^ J
El torque electromagnético se determina mediante la : süstitu-
ne ne ' ne ' n.ecion de los valores de las corrientes i , i, , i , i, delqs ' ds ' qr J dr
sistema de referencia múltiple en la ecuación del torque electromagné-
tico (ecuación (137)).

- 90 -
2.6. EVALUACIÓN DE PERDIDAS (I, 3, 5, 6)
El determinar las pérdidas en una máquina es importante pues
estas determinan el rendimiento de ésta, e influyen apreciablemente en
el costo del servicio. Estas pérdidas producen calentamiento y por lo
tanto permiten determinar la potencia nominal que puede obtenerse de
la máquina sin deterioro de los aislamientos.
El rendimiento viene dado por la siguiente fórmula:
Rendimento = Entrada ' pérdidasentrada
o también:
n T - . Potencia de salida . m rmRendimiento = n . .—-, —j— • (1591Potencia de entrada ^ J
Para el cálculo del rendimiento, generalmente se emplea (158),
pues es más conveniente medir las pérdidas por ser más económico y
más preciso. Los rendimientos hallados de esta manera, pueden servir
para comparar distintas máquinas entre sí (siempre que se empleen en
todas ellas los mismos métodos de medición y cálculo).
La "American National Standars Association" ha considerado cu_a
tro tipos de pérdidas: (5)
1.- Pérdidas en el cobre, o RI2
Pérdidas mecánicas

- 91 -
3.- Pérdidas en el núcleo, en circuito abierto o sin carga.
4.- Pérdidas adicionales •* 1 \e la potencia suministrada.
En el presente trabajo, se encontrará una expresión para el
cálculo de las pérdidas en el cobre., valiéndose para ello, del teore-
ma de Parceval. (6)
Como se sabe, una función periódica puede ser representada por
un conjunto infinito de funciones elementales, al que se denomina se-
rie de Fourier entonces:
f (t) = An + i (Av eos kwt + B, sen kut) (160)k=l
que puede expresarse también como:
f (t) = An + £ C, sen(kü)t + 4, ) (161)k=l
donde:
= CAk
-,= tg c /
Mientras mayor cantidad de términos sean considerados, mayor
será la aproximación a la función original.
El valor RMS para una una función periódica, está definido por:

- 92 -
T
VRMS = C TO
Aplicando (164) en la ecuación (161) se obtiene la expresión
conocida como teorema de Parceval :
VRMS = (Ao + Z C )2) 'Wb ° k=l /?
Ckdonde la magnitud ( — ) _, es el valor RMS de la componente armónica de/2
orden k.
Interesa, en éste estudio calcular las pérdidas InMq2- ^> P°r
tanto se hallará primeramente el valor
En el literal 2.4, se obtuvieron las siguientes expresiones p_a
ra las corrientes de fase tanto para estator como para rotor:
i c = i S ' (146)as qs ^ J
i = _ I i s _-/Ibs 2 qs 2
~ ~1es 2 qs 2 ds (148)^ J
r q r s= i' (149)ar qr
i q i i c yr i ci, s « - 4- i - —-i, S (150)br 2 qr 2 dr v J
' s 1 - r s 3 .' s= - -7T- 1 + —^— X,
cr 2 qr 2 dr

- 93 -
Son precisamente éstas las corrientes vuyos valores RMS inter_e_
san.
qLa corriente i = i fue expresada ya en (132) :qs as * j \. j
. s f f. +ke . -ke, , , , f. +ke . -ke, , ,,i = £ t (i + 1 J eos küi t + (i - i j sen koj tjqs -, .1, qs qs J e ^ as as J e
(132)
llamando:
A „ • . -keAk - X s +
•n - ,- . -keBk - xds - xds
Entonces el valor RMS de i = i será:qs as
V n í/£I = C I C-^)2)17* (155)^ k=l /2
Por lo tanto las pérdidas en el cobre para la fase "a" del es-
tator :
Pérdidas = Iz . ras sa
donde: I = valor RMS de la corriente ias as
r = valor de la resistencia de la fase a del estator.sa

- 94
entonces:
Pérdidas = [ S ( - )2). r (156)k=l /I sa -
I eAhora, para calcular el valor RMS de la corriente i ; puesto
' s r s ' sque según (149) i = i y la expresión obtenida para i fue:ar qr qr
-' s " r r . ' +ke . ' -ke, 1 , _,_ r.! +ke .' -ke,V = ¿I C C V + V 3 eos feoet + Cidr - idr D sen
(134)
llamando:
A, = i' +ke + i' -k qr qr
B _ .' +ke .' -keBk - xdr - r
(159)
1 S ' Spor tanto , el valor RMS de i = i es^ ' ar qr
ar k=i
entonces las perdidas en el cobre para la fase TIa:i del rotor:
' s ' sPérdidas = (I )2 . r^ ar J r-:
1 s f sdonde I = valor RMS de iar .ar

'sr = resistencia de la fase "a" del rotor referida al estator.
finalmente:
<*> CPérdidas = ( S ( —- )2) . r's (161)
k=l /2 r
Para el caso balanceado, serían suficientes las ecuaciones(156)
y (161) pues se trata de una máquina simétrica ideal, pues simplemente
las pérdidas en el estator se calcularían multiplicando por 3 y este
resultado sumarlo al valor de (161) multiplicado también por 3.
Mientras que para el caso desbalanceado será necesario calcu-
lar las pérdidas en cada fase para el rotor y para estator y finalmen-
te hacer un sumatorio para calcular el total de pérdidas en el cobre.

C A P I T U L O I I I
SIMULACIÓN DIGITAL
3.1. CONSIDERACIONES GENERALES:
El programa está desarrollado en un microcomputador APPLE //c
el lenguaje utilizado es el BASIC cu/a versión para éste micro es deno_
minada APPLESOFT.
En general, el programa implementado trabaja con series de
Fourier, la manera como lo hace, será explicada más adelante.
El programa está estructurado en subrutinas accesibles median-
te varios menús de' opciones con su debida jerarquía.
El usuario ingresará las funciones de entrada de la forma i ^
cada, en el manual de uso del programa. Así mismo puede ingresar los
datos de la máquina, así como el número de armónicos que crea conve-t
niente para trabajar.
Los resultados serán tanto numéricos como gráficos con la op-
ción de escoger el periférico de salida:( sea monitor o" impresora.
Siendo recomendable para gráficos, el monitor por la característica de
este microcomputador que posee la opción de gráficos de alta resolución .
- 96 -

- 97 -
3.2. FORMULACIÓN DEL MODELO:
El programa implementado en esta tesis, trabaja con funciones
descompuestas en series de Fourier por lo que entonces cabe hacer una
introducción matemática sobre series de Fourier que ayudará a explicar
la metodología de proceso de este programa.
Una función periódica descompuesta en serie de Fourier tendrá
la forma:
f (t) = A + E (A, eos kot + B, sen kart)o K Je
los coeficientes de Fourier A , A, , B, son datos conocidos, por ' loo k* k l
que, interesa tener la función f (t) almacenada en la memoria del compu_
tador, ¿Cuál sería la forma conveniente de hacerlo?
La respuesta es que, basta tener almacenados en memoria los
coeficientes de Fourier, y, en el caso que se desee evaluar la función
f(t), entonces, mediante un lazo adecuado como:
FC40 = *
FOR WT = cj) TO 720°
NT = TO * 2 * 7Í
' 360°i
FOR k - (> TO N

' - 98 -
F(k) == A (le) eos k WT + BOO sen k WT
FOO « FOO + F(k-l)
NEXT k
NEXT WT
donde k = O, 1, 2, , N
N = número de armónicos escogido
WT = ángulo 0° hasta 720°[que luego son pasados a radianes)
Por cada valor de WT, el computador hace N evaluaciones y ter-
minado ésto, da por resultado el valor F[k) correspondiente al valor
WT. Finalmente se obtendrán 721 valores de f (t) que pueden ser grafi-
cados; utilizando una subrutina de gráficos:
Una vez explicada la -forma de almacenar una función f (t) y co-
mo evaluarla, se hace necesario indicar, dadas f (t) y g(t) descompues-
tas en serie de Fourier, como se hallaría:

- 99 -
h(t) = f(t) + g(t)
Con la nomenclatura adecuada:
h(t) = Z CAQO eos küt + B(k) sen kwt) +k=0
Z CE DO eos loot + F(k) sen kot)k=0
lo que se podría escribir como:
co
h(t) = £' { A(k) eos küjt + B(k) sen k&t + E(k) eos
+ Ffk) sen k t}
agrupando:
co
hC"t) = £'{ (A 00 + E(k)) eos k t + (B(kJ + F(k]) senk=0
pero: CA(k) + e(k)J y CB(k) + F(k)) forman los coeficientes coseno y
seno respectivamente, de la función h(t); por lo tanto, para sumar/res_
tar dos funciones del tipo descrito, basta sumar/restar sus coeficien-
tes correspondientes a cada armónico formando el nuevo coeficiente que
tendrá que ser almacenado en memoria:
Si h(tO = 2 (GOO eos kwt + J(k) sen kwt)k=o
entonces:

- 100 -
G(l) = ACÓ + ECO
J[5) = B(5) + FCS), etc.
Finalmente, si un factor constante a afecta un sumatorio:
co
X(t) = a' { 2 (A(k) eos kut + B(k) sen kwt) }
Entonces, cada coeficiente A(k) 7 B(k) del sumatorio original
quedará afectado por dicha constante, así: si X(t) es:
X(X) = E ' { J(k) eos kwt + LOO sen kwt}k=0
donde J(k] = a A(k) y L(k) = a B(k)
por ejemplo: J(2) = a A(2)
LC13) = 'a B(13), etc.

- 101 -
3.3. DIAGRAMAS DE FLUJO: [7,8)
El programa digital está compuesto por cuatro bloques fundamen_
tales, tal como se muestra en el diagrama de flujo de la figura 3.3,1.
Primero, se hace necesario que el usuario ingrese los paráme_
tros de la máquina, así como las tres funciones periódicas de entrada
a la máquina.
Entonces se ingresa al menú de descomposición en series de
Fourier, y a travéz de el al bloque 1.
BLOQUE 1: Esta es la subrutina de descomposición en serie de Fourier
de una función periódica dada, expresada como tal en el
rango de O a ZTÍ. Esta subrutina existe como subrutina de biblioteca -
en el computador IBM de la Escuela Politécnica Nacional, escrita en
lenguaje PORTAN IV por lo que fue necesario implementarla a lenguaje
BASIC, información disponible sobre ésta subrutina se puede encontrar
en la referencia (8)

- 102 -
INICIO
r
INGRESO DE DATOS
'MENÚ DE OPCIONESDE DESCOMPOSICIÓN'EN SERIES FOURIER
JL
SlIBRUTINA DE DES-COMPOSICIÓN ENSERIES DE FOURIER.DE LAS FUNCIONESDE ENTRADA
PROGRAMA PRINCIPALCALCULO DE:- VOLTAJES- CORRIENTES- TORQUE, etcEN LAS DIFERENTESESTRUCTURAS DEREFERENCIA Y EN ELSISTEMA DE REFERENCÍA MÚLTIPLE
MENÚ DE RESULTADOS- VOLTAJES- CORRIENTES- TORQUE
T NO T

- 103 -'
MENÚ DE RESULTADOS- MONITOR- IMPRESORA
Si REGRESOAL MENÚRESULTADO
2
GRÁFICOS ENMONITOR
Fig. 3.3.1.

- 104 -
El diagrama de flujo del BLOQUE 1, puede ser observado en la
figura 3.3.2.
BLOQUE 2: Es el programa principal, donde se hace uso de los coefi-
cientes de Fourier dados por la subrutina de descomposición
en series de Fourier. Utilizando dichos coeficientes y con la ayuda
de las expresiones obtenidas anteriormente en el capítulo II, se calcu
la los voltajes, corrientes, torque resultantes, en los diferentes sis
temas de referencia y en especial en el sistema de referencia múlti-
ple. Todos los resultados son almacenados en memoria, para que en el
momento requerido, sirvan la representación gráfica. En la figura 3.
3.3. se muestra el diagrama de flujo del programa principal.
BLOQUE 3 y 4: Los bloques 3 y 4 pueden ser considerados como uno solo
pues ambos son para entregar los resultados en una for-
ma gráfica.
El bloque 3, entrega los resultados en el monitor mientras que
el bloque 4 en la impresora, siendo dos programas diferentes e indepen_
dientes por las diferentes características de éstos dos dispositivos -
periféricos de salida. Los diagramas de flujo correspondientes, cons-
tan en las figuras 3.3.4; '3.3.5 (en monitor) y 3.3.6 [en impresora).

- 105 -
DIMENSIÓN A(M-KL) , B(M+1)
2 (AiY) + 1
CANST = ir(COEF)
SI = SIN (CANST)
Cl « COS (CANST)
Cl = 1
s = oJ =_1FZ = FUN
U2 « (f>
Ul = <j>
AI = 2 (N)
x = AI A CA:-¡STUó = FUN (X) + 2 (C) (Ul)
U2 = Ul
Ul = U<p
AI = AI - 1
- U2
T T T

- 106 -
A(J)
B(J)
COEF (FZ * C * Ul
COEF * S * Ul
•UZ)
Si
T
A(1)=A(1) A 0.5
RF.TURN
Fie. 3.3.2.

- 107 -
. FOR I = 1 TO M + 1
CALCULO DE LOS COEFICIENTES DE
FOURIER DEL VOLTAJE V
AN(I)
BNCD
7
CALCULO DE LOS COEFICIENTES DE
FOURIER DE LOS VOLTAJES DE
FASE V ; V, , Vas' bsJ es
PARA FASE a
AMCI)
BM(I)
PARA FASE b
APCDBPCI)
PARA FASE c
ARCI)
BR(I)
CALCULO DE LOS COEFICIENTES DE
FOURIER DE LOS VOLTAJES V S .Qs
y V, S EN UNA ESTRUCTURA FIJA; as
PARA V
AS (I)
BSCI)
PARA Vds
BTCDFie. 3.3.3.

- 108 -
Continuación
CALCULO DE LOS VOLTAJES EN EL SISTEMA DE
. -keREFERENCIA MÚLTIPLE:v +ke ,, +ke v -keqs J ds 3 qs
+ke'ds
PARA Vqs
VQSMECI)
VDSME(I)
y VJ ds
PARA Vqs y VJ
"keds
MQSECI]
MDSECI)
CALCULO DE LOS COEFICIENTES NECESARIOS
PARA CALCULAR LAS CORRIENTES EN EL
'SISTEMA DE REFERENCIA MJLTIPLE:
FOE(I) y Fl(I) ; GNECI) y GlCI)HNECI} y KL(I] ; INECI) y I1CI)JNE(I) y Jl(I)
CALCULO DE LAS CORRIENTES EXPRESADAS EN
EL SISTEMA DE REFERENCIA MÚLTIPLE:
qsCALCULO DE I
IQSME(I)
ISQSE(I)
CALCULO DE
IDSMECI)
IPDSECI)"T
CALCULO DE I ,qr
IRQME(I)
ITRSE(I)
CALCULO DE I,tdrIUDRECI) .
IVDRECD
+ke e I~ke
qs
•
e I ,qr
e I,-dr

- 109 -
Continuación
CALCULO DE LOS COEFICIENTES DE FOURIER
DE LAS CORRIENTES q, d3 EXPRESADAS EN
LA ESTRUCTURA DE REFERENCIA ESTACIONA-
RIA: i S e i, S •qs ds
PARA i sqsIAQSSCI)
IBDSS(I)
PARA i, 5dsICDSS(I)
IHQSS(I)
CALCULO DE LOS COEFICIEmES DE FOURIER
DEL TORQUE:
CALCULO DEL COEFICIENTE INDEPENDIENTE
TC(I)
CALCULO DEL COEFICIENTE DEL COSENO
TA(I)
CALCULO DEL COEFICIENTE DEL SENO
TB(T) "
NEXT I

- 110 -
MENÚ DE GRÁFICOS
POR I = 1 TO Mfl
CARGA DE LOS VALORES REQUE-
RIDOS DE ACUERDO AL GRÁFICO
ESCOGIDO EN EL MENÚ:
Z1CIDZ2(I)
Z3(I)
L
~1
MENÚ DE DISPOSITIVOS DE
SALIDA:
1. GRÁFICO EN MONITOR
2. GRÁFICO .EN IMPRESORA
GRÁFICOS EN
MONITOR
GRÁFICOS EN
IMPRESORA
Fie. 3.3.4.

- 111 -
SELECCIÓN PARA GRÁFICOS
DE ALTA RESOLUCIÓN
" r
TPI = 2 * ir
- f
FOR I = O TO 720'
-1SI O) = 4>
"T
CAMPO MÁXIMO EN
EJEX ES 279
X 2.58
. J
CONVERSIÓN DE
GRADOS A RADIANES
Z = 1/360 * TPI
-1
FOR K=l TO M+l
EVALUACIÓN DE LA FUNCIÓN
ESCOGIDA PARA GRAFICAR;
PUNTO POR PUNTO, CADA
PUNTO CALCULADO SE LLAMA
SI (M-hL)
GRAFiCAR EL PUNTOS I ( M f l )
Fig. 3.3.5.

Continuación
CALCULO DEL VALOR MÁXIMO
DE LA FUNCIÓN A SER
GRAFICADA
A « VALOR MÁXIMO EN P.U.
1
SETEO DEL APROPIADO
FACTOR DE ESCALA R
R = A
GRÁFICOS DE LOS EJES
Xy Y
¿DESEA EL GRÁFICO
ANTERIOR CON LA
ESCALA ADECUADA?
No
R = 0,5A = 4>
Si

- 113 -
REM: EVALUACIÓN DE LA FUNCIÓN
A SER GRAFICADA
FOR I = O TO 720 STEP'Z4
CONVERSIÓN DE GRADOS A
DARIANES
2ir * IL - 360
FOR k=l To .M+l
EVALUACIÓN DE LA FUNCIÓN
ESCOGIDA PARA GRAFICAR.
PUNTO POR PUNTO, CADA PUNTO
CALCULADO SE LLAMA:
SI (M + 1)
ALMACENA EN MEMORIA CADA PUNTO
S2[L1) « SI (M+l) :
= Ll
NEXT I is. 3.3.6

Continuación
FOR 1 = 1 TO Ll
VALOR CON FACTOR DE ESCALA* 20S2CI) = S2(I) Z7
1CALCULO DE LA PARTE ENTERA
DE S2 (I)
ZS = INT (S2
_TCALCULO DE LA PARTE DECIMAL
DE S2 (I)
REM. CONVERSIÓN A ENTERO CON
LA DEBIDA APROXIMACIÓN;
Si
REM: CONVERSIÓN DE LOS VALORES
NEGATIVOS A VALORES ADECUADOS
PARA PODERLOS GRAFICAR.
_LS2(I) = ZS+1

- 115 -
Continuación
S2(I) = S2(I) + 20
J_
1ABS (20 - ABS(S2(I)))
IMPRESIÓN DE RESULTADOS
PUNTO POR .PUNTO
EN LA
IMPRESORA

- 116 -
3.4. DESCRIPCIÓN DEL PROGRAMA:
A continuación se describirá en una forma completa el programa
digital implementado.
Una vez cargados los datos al programa y luego de dar el coman
do RUN, se accede al menú de descomposición en series de Fourier donde
se tiene la opción de escoger que función de entrada desea el usuario
descomponerla, así por ejemplo si pulsa la tecla numero 1 entonces se
descompondrá en series de Fourier a la función dada para la"fase a".
Es precisamente la subrutina de Descomposición en series de
Fourier la que se encarga de ello. Una vez terminado el proceso, auto_
máticamente regresa al menú de descomposición. La subrutina menciona-
da tiene los siguientes parámetros: (8)
M = Máximo orden de armónicas a ser encontradas.
N = Define el intervalo tal que 2N + 1 puntos son hallados sobre el
intervalo (O - ZTT) . El espacio entre cada punto es 2ir/2N + 1.
A[J) = Vector resultante de los coeficientes coseno., cuya longitud .!
es M + 1.
B(J) = Vector resultante de los coeficientes seno, longitud = M + 1.
"IER = Código de error resultante, donde:
IER = O quiere decir que no existe error

- 117 -
IER = 1 implica que N / M
1ER = 2 implica que M < O
NOTA: 1 - M puede ser: M > O
2 - N puede ser: N > M
3 - El primer elemento en el vector B(J) es <j> en todos los ca-
sos.
Esta subrutina primero hace un chequeo de parámetros de error,
luego hace un seteo de los valores necesarios para calcular los coefi-
cientes, luego calcula ACJ} , BCJ) y A(l) y entrega los resultados, acu
muláridolos previamente en memoria en la siguiente manera:
Para "fase a" (e )ga
M(I] = coeficientes coseno
BA(I) = coeficientes seno
Para "fase b" Ce , ]^ glrAD(I) = coeficientes coseno
BD(I) = coeficientes seno
Para la "fase c" Ce r) •Sc
AECI] = coeficientes coseno
BE(I) - coeficientes seno
Una vez calculados y acumulados en memoria los coeficientes co_
seno y seno para las tres fases, se pulsa la tecla 4 con lo que se in-
gresa al programa principal, en éste, se inicia un lazo general que a-

- 118 -
yudará a calcular NB-1 armónicos, comenzando primeramente por calcular
el voltaje entre los neutros de'la alimentación y del estator de la
máquina de inducción, llamando v a éste voltaje, sus coeficientes co
seno y seno son AN(I) y BN(I) respectivamente.
A continuación se procede a calcular los coeficientes de los
voltajes de fase v , v, y v en función de los voltajes de alimentaas DS es —
ción e , e , y e y el voltaje v .ga' gb ge ng
Para v :as
AM(I) = coeficientes coseno
BM(I) = coeficientes seno
Para v,bs
AP(I) = coeficientes coseno
BP(I) = coeficientes seno
Para ves
AR(I) = coeficientes coseno
BR(I) = coeficientes seno
Luego se calculan los coeficientes de los voltajes q, d expre-
sados en la estructura de referencia fija en el estator.
Estos voltajes v s y v, S, están en función de los voltajesJ qs ' ds '
e . e , , ega? gb> ge
Entonces para v :1

- 119 -
AS(I) coseno
BS(T) seno
Para v,ds
Al[I) coseno
BT(I) seno
Luego procede a calcular los diferentes voltajes en el sistema
de referencia múltiple:
V s - VQSME(I) V ~ = MQSE(I)
Posteriormente, realiza el cálculo de los coeficientes necesa-
rios para hallar las corrientes en el sistema de referencia . múltiple
los cuales son:
FOE(I) GNE(I) HNE(I) INE(I) JNE(I)
F1CID G1CI) H1CI) 11(1) J1CID
a continuación procede al cálculo de las corrientes en el sistema de
referencia múltiple:
IQSME(I)
ISQSECI)
IDSMECID
IPDSECI)

- 120 -
T' +ke ' -ke _. ' +ke T¡ -keV e V Para :dr e Zdr
IRQME(I) ' IUDRE(I)
ITRSE(I) IVDRE(I)
Luego, calcula los coeficientes de las corrientes q, d expresji
das en la estructura de referencia estacionaria,
Para i Para i1qs ds
lAQSSCI] ICDSS(r)
IBDSSCI) IHQSSCI]
las cuales están en función de las corrientes del sistema de referen-
cia múltiple.
Finalmente, calcula los coeficientes del torque: El termino
independiente y los coeficientes coseno y seno TCCI), TA(I) y . 'TB(I)
respectivamente. Estas expresiones están en función de las corrientes
del sistema de referencia múltiple.
Una vez terminado el lazo, es decir, una vez calculados ' los
M + 1 armónicos, automáticamente aparece en pantalla el menú de gráfi-
cos, donde por medio de una tecla, el usuario puede obtener el gráfico
deseado. Así por ejemplo al pulsar la tecla 6 se selecciona el gráfi-§
co de i entonces se cargan los coeficientes correspondientes a
i en tres vectores: Z1(I), Z2(I) y Z3(T) donde:qb
En Zlfl) se almacenan los coeficientes coseno
Z2(I) se almacenan los coeficientes seno

- 121 -
Z3(I) se almacenan los coeficientes independientes
Una vez cargados Z1(I), Z2(I) y Z3(I), aparece un mení que da
opción de gráfico en pantalla (tecla 1) ó en impresora (tecla 2) y la
tecla 3 es una opción de regreso al menú de gráficos.
En el menú de gráficos existe la tecla 19 que permite finali-
zar el programa.
Suponiendo el caso que con la tecla 1 se selecciono la panta-
lla, entonces automáticamente entra en modo de alta resolución y co-
mienza dos lazos que permiten ir calculando y graficando punto a punto
a la función en el rango de O - 720° mientras al mismo tiempo va bus-
cando el valor máximo con el fin de hallar un factor de escala adecua-
do. Una vez terminado el gráfico aparece un pequeño menú-información
en el que se expresa el valor máximo encontrado en p.u. y el factor
de escala adecuado, permitiendo al usuario con la tecla 1 repetir - el
gráfico pero con el adecuado factor de escala. Mientras que si pulsa
la tecla 2 regresa al menú general de gráficos.
Ahora, suponiendo el caso que con la tecla 2 se seleccionó la
impresora, entonces mediante dos lazos se comienza la evaluación punto
por punto de la función., también al mismo tiempo se calcula el valor
máximo con el fin de calcular el valor de escala adecuado; por la natu
raleza de la impresora, sólo admite valores enteros, entonces los da-
tos son hechos enteros utilizando aproximación, esto es, aquellos valo_
res cuya parte decimal sea may-r o igual a 0.5 serán aproximados a su
entero inmediato superior, mientras que los otros valores serán quita-

- 122 -
dos su parte decimal.
Una vez finalizado este proceso, se requiere programar a la im
presora en un lenguaje un poco diferente al conocido, pues sus ins-
trucciones son especiales, para lograr los resultados en forma gráfi
ca. Una vez terminado el gráfico, automáticamente transfiere el con-
trol al monitor en cuya pantalla aparece nuevamente el menú general de
gráficos.

C A P I T U L O I V
EJEMPLOS DE APLICACIÓN Y RESULTADOS
4.1. EJEMPLOS DE APLICACIÓN
Se analizará dos casos:
4.a. Operación balanceada
4.b. Operación desbalanceada
4.a. OPERACIÓN BALANCEADA: Serán analizados dos ejemplos:
4.a.l. Operación con fuentes sinusoi-ales
e = V sen o) tga e
egb - V sent^t - )
e = V senCu t + -ge e 3
4.a.2. Operación con fuentes no sinusoidales
e •-= e (to t)ga ga e
<• +. 27Ke , = e (to t - •=—jgb ga e 3
- 123 -

- 124
e - e Cu t +ge ga e 3
4.b. OPERACIÓN DESBALANCEADA: Serán analizados dos ejemplos,
4.b.l. Operación con fuentes sinusoidales
e = 0
= sen * -
V = sen
4.b.2. Operación con fuentes no sinusoidales
Voltaje de fuente e = 0: e , y e las mismas quega- gb ' ge L
para el caso balanceado (literal 4.a.2)
4.a.l. OPERACIÓN BALANCEADA CON FUENTES SINUSOIDALES
En este ejemplo, se analizará la operación balanceada con fuen
tes sinusoidales, en la figura 4.a.l. se tienen los voltajes de fuente
y el circuito del estator de la máquina que será usado en éste y en
los ejemplos que preceden.
Donde:
e = V sen foi t)ga e

- 125 -
e v - V sen fui t - -=—)gb *- e 3 J
= V sen (QJ t -^ o \s
-f-
Pig. 4 . a . l .
V = amplitud en p.u. del voltaje
V « 1 p .u .
Los parámetros de la maquina de inducción expresados en p.u.
son los siguientes:
n]s
= 0,1067
. = O,] 067
X = 1,9242
r = 0 ,0276
r, = 0,0904

- 126 -
ide donde se puede calcular las reactancias X , X
1 ss3 rr
X = Xn + X x = x + Xss Is m rr Ir m
X = 0,1067 + 1,9242 x' = 2,0309 p.u.ss J ' rr > t
X = 2,0309 p.u.ss J ^
Tomando como frecuencia base 60 Hz, se tiene además en p.u.
= 09
fR = 1
En éste y en los ejemplos que preceden, se tienen disponibles
mediante menú de opciones, los siguientes gráficos:
MENÚ DE VOLTAJES
ESTRUCTURA DE REFERENCIA ESTACIONARIA
1.- v sqs
o S2." v,ds
ESTRUCTURA DE REFERENCIA ROTANDO SINCRONIZADAMBNTE

- 127 -
73. - vqs
4.- v,ds
MENÚ DE CORRIENTES
ESTRUCTURA DE REFERENCIA ESTACIONARIA
S T c6.- i / 8.- i 'qs qr
s r s7.- i, 9.- i,ds dr
ESTRUCTURA DE REFERENCIA ROTANTO SINCRÓNICAMENTE
10.- i e 12.- i eqs qr
11.- i, 13.- i,ds dr
CORRIENTES DE FASE (ESTRUCTURA DE REFERENCIA ESTACIONARIA)
14.- i * 17.- i/ Sas . ar
15'
16.- i . * 19.- i' ses . br
TORQUE
20.- TORQUE
* Corrientes de fase del rotor expresadas en la estructura de re£eren_cia estacionaria.

- 128 -
En este ejemplo, se presentan los siguientes gráficos:
VOLTAJES:
s s e e, v, , v , v,qs J ds J qs > as
CORRIENTES:
I e- I. S - S - ' S . ' S
qs ' ds ' qr ' dr
e - e .' si , i-, . i , iqs J ds J as ar
TORQUE
cLa figura 4.a. 1.1. se tiene el voltaje v que según la ecua-
qb
ción (88) también corresponde al voltaje v ? el superíndice s 'indicaas
que la variable está expresada en la estructura de referencia estacio-
naria.
La forma de onda es sinusoidal y su amplitud es 1 p.u., con u-
na frecuencia de 60 Hz.
El voltaje v-. es mostrado en la figura 4.a. 1.2, es una onda
sinusoidal teniendo un desface de noventa grados con respecto al voltac
je v ; la amplitud de ésta onda es 1 p.u. y su frecuencia 60 Hz.
Q
La figura 4.a.1.3. muestra el voltaje v donde el superíndi-qs
ce e indica que -la variable está expresada en la estructura de referen

- 129 -
cía rotando sincronizadamente.
Se debe recordar que las variables en ejes q - d tienen \a
frecuencia (w - u) donde w es la velocidad a la que gira el sistema -
de ejes escogido. Así si se trata de la estructura de referencia ro-
tando sincronizadamente esto es, co = w . entonces la frecuencia de lase
variables expresadas en dicha estructura es (w -w ) = O por lo que,e o
son cantidades constantes.
eEl voltaje v tiene un valor constante muy próximo a cero.qs
Este valor se puede explicar si se analiza la ecuación (99), que es la
expresión para el voltaje v f y se toma en 'cuenta que v = 1 senq
w t (figura 4.a.1.1), si se expresa a v en series de Fourier, se
tiene exactamente lo mismo. Entonces, según (90):
V, = O . V, =1 y V. = O , V, = 0 para k=2,Iqa > Iqy 7 kqa 3 kqY
El voltaje v, = 1 eos co t (figura 4. a. 1.2), por lo que segúnCJ-O tí
(91) :
V,j = 1, Vn , = O y V-, , = O , V, , = O para k=2,Ida ' Idy kda ' kdy r } '
En base a lo anterior, (99) queda como:
i' í(Vn + V, . ) eos 2 w t + (v - V. , ) sen ';2u t2 v Iqa Idv e IQY Ida e
+ (V, - V, ) cos(O)o) t + (Y + V-,J sen (0)0) t' }^ Iqa Iqy e ^ Iqy Ida^ *- e

- 130 -
quedando:
v e = y ' {(O + 0) eos 2üjgt + (1 - U sen 2w t
+ [O - 0). 1 + (1 + 1). O " }
v c = Oqs
Comprobándose este resultado matemático con el gráfico.
Las pequeñas irregularidades de la figura 4.a.1.3. se deben a
que, para graficación en la impresora, los valores verdaderos que se
presentan en la parte inferior del gráfico, son multiplicados por un
factor que para éste ejemplo fue 15.
La figura 4.a.1.4 muestra el voltaje v, , como se puede obser_
var, en un valor constante de 1 p.u.
CORRIENTES:
La corriente i que según (146) es la misma que la corriente
i , es mostrada en la figura 4.a.1.5 es una onda sinusoidal cuya am-as
plitud máxima es 1.15 p.u. y su frecuencia 60 Hz. Y en la figura 4.
a. 1.6. se muestra i, s que es sinusoidal y tiene la misma amplitud que
i , y está 90° defasada de ésta.qs ' J
Las figuras 4.a.1.7. y 4.a.1.8. muestran las corrientes i•qs
i, e (expresadas en la estructura de referencia rotando sincronizada-

- 131 -
mente) respectivamente. Se observa que son constantes, la primera con
un valor - 0.67 p.u., mientras que i-, tiene un valor 0.93 p.u.
La corriente i que es la misma que la corriente iar (ecua
ción 149), es mostrada en la figura 4.a.1.9; mientras la figura 4.a.l.
r s10, muestra la corriente i, , ambas ondas son sinusoidales defasadas
90° entre sí, con una amplitud de 3.99 p.u. y una frecuencia de 60 Hz.
Hay que recordar que el superíndice 5 denota que la variable está ex-
presada en la estructura de referencia estacionaria, por lo que las
variables expresadas en ella, tendrían una frecuencia de (w - w) don-
de cu = O, entonces la frecuencia es (w - 0) = w .3 ^ e J e
Finalmente la figura 4.a.l ,11 muestra el torque electromagnéti
co, que en éste caso, es constante e igual a + 0.895 p.u., positivo co
mo se esperaba puesto que to < oí y por lo tanto el deslizamiento • esr e
positivo dando un par positivo (efecto motor).
PERDIDAS:
Una vez calculadas, el programa digital entregó los siguientes
resultados:
Pérdidas totales en el co :>re en el estator: 0.0547 p.u.
Pérdidas totales en el cobre en el rotor: 0.1072 p.u.

t•
•
•*
-'• • s G ; ¡i! V >-. N ; i r.
í T
: "
fl -o
íí n
<v;<
c -«
-o <•
i- 4
í a
- M
n o-
E3
f. o
o ,
t f^
'• 0
0 0
0 3
- \S¡
- -
ií
,"l í
í 0
I .
..
.t
i
. «
. .
..
..
.
• .
1
•
' .
..
• •
•1
' '
•<
. •
OJ
'
- -
[•O
• •
-H
'
' '
i «
- .
. .
r
"
--
y~
— ~
••
•*•
[ •
—
~-~\
—
• ~
— *
~-h
' — •---•=
--•=
==¿=1:
— ..
T^
— r
- —
:."
t
• .
>
i.
.
i
. .
«
"
• •
' "
.
•-
.
•-
.
<!
4
0
' -5
'0
. ¡
D1
t!
1i¡!
n n
4 N
Q (M
i fi
<'* *
fi o
•*
GJ n
n oí
N 4
H s
* n
-,- ¡v
. tí
e n
(M
4 4
* &
t- fi
< n
03
íí fi
^ •«
Ji s *
i> fi
t^ <
-í n
N í'
.1 fi
n >
* «
n 4
-i
n r*
4 N
-r <
rt fr
r D
fl N
* 11
fi o
n í
f- ?
N N
n 4
h c-
-o 4
-o u
cf (f
* 11
* 4
tt fi
tt íi
•? -o
n íí
n N
n n
tf si
f> fi
(r N
rí^
rmn
f^iM
üc
ie-í
Cíi
Ort
^Q
tMfi
íiíi
cfi
rtt^
frQ
4 s
o í
-o o
oj p-
rt-
ccíG
íinnn
nNot
Mfro
í:
»(c
-íE
«rt
ü4
0rt
í5fi
'íií
Mí4
(DH
-Oí'
Oíi
r»4
rtO
ft-G
n
fi N
N s
-o o
o fi
-o fr
D v
ID -í
r- *
« ó
- o
n o
N -3
a- ¡-
c- a
te íi
t^H
^íi
.ífr
sa
u.e
fle
?• $
n*
4 fi
o n m
r¡ f/
o o
-< íi
\ o
H o
H í(
n «
r: n
p c-
N fí
o o
^ n
o í
ri S
fi s
w í ¡i
•") ít
^s -«
> íi
o N
t- f^
c- 3)
•: ?•
s T-
¿i j)
^ n
o- «
fi íj
&• ii
K te
< TI
o -o
í) o
o i-
H }>
n o
fi N
o n
-i n
M K
H -
o a
o- E
c\5
-í $
n o
^ ri
íí o
o- tí
« í~
í1 o
ci -•
o; f
0 I
-í fi íi
C N
H
0 f(
£' N
-0 í
(tt
JJ {{
-0 H
¡D 0
- í
n
D- ÍÍ
0 •<
D C-
iO íl
-í "
ti -
í fi
1 íí
í- H
4 n
-í
íi ^
4 ft
E- 0
4 í)
^ (1
4 H
-0 H
* -
t 0
-0 0
íí fl
íí 4
-í "
G íi
^ f
fi ES
•> "
b^
) " í
fi •
* fr
-0
f- ti
0 0
¡U-
t* fi
fj «
ti 4
n 4
N f
r fí
-í n
4 fJ
H fl f
: C
f' -f
" H
-f f
l 4
íí 0
[í -i
n -í
i\ \
fi Q
0 t
í ~:
rt
fi 0
íí l>
0 N
P-
í« 1
1 n
0 Q
fi
0 r¡
fi t-
fi rt
D f¡
c Ü
H M
fs
D ,
Q f
r n
-} fí
G r
i fi
Cf-
tu í{
-;
T- fi
s*
fl 4
tf 0
M í
(1
4 fl
ti >
í T>
í Q
4 t<
-1 H
fj
n ^
0 ^
0- f-
-• H
0 0
fi
0 ^
fl P
T, *
0 n
0 C
n r
t f^
-* 0
Ü f
i 0
rt f
. D
ñ H
D 11
D 0
H H
N 0
í'
0 -M
I ¡í
4 N
O-
4 C1
1» fr íi
M
fi « 0
4
Sc
fin
fl-S
íf-r
ífrN
Gíf
r-M
D t^
0 h
C"
N H
n Q
Q n
0 n
fi
0 U
K 0
n Ó
0 n
H >
0 ¡*
0 f
r,
C í
N P
< f
- N
J- f
j P-
í- M
•* (P
í
Oí(
Mft
>!¡
£fl
&-í
r ft f
r «D
n ^
3 í
D4í
c-f^
-v'^
^¡';
^^o^
lP'^
Il fi
oG
oo
t-o
í-ío
^f'.
oN
f t^
Nf-
i'íi
G't
'Cíi
OÓ
oü
Q l
^•í^
í'••
o^^p
'^1
^'O
^J^t
-4
04C
ijrj'
Oii
'?ií
í'0'
5C'^
't rO
QO
oo•l
^í•í
Oí•
^1n
^^ ü
'f^^
l^•!
0•^l
íJc
•o-í
co^n
No-
oo
Nn
*j'C
úí>
cüiO
DD
Qó
-í -<
fi KJ
•* 4
n fl
N í
s ^
& j-
ó1 ^c
-oó-
C'S
Qi^
-íi'í
iT'í
f'íM
lO
üDO
!^^•
o^O
'í''
^(^^
p• G
íi'f-
flrf
¡04
-ÜÍS
OO
OO
Q ^^
^í•i
^•4'
lp^^
&)S
^O'0
'l^
í•^^
f•i)
'^íf
fi^'
OI
-í ^
c i
o* í
í j.
i LV c
- &• t
$ c
i- <f
n ¡i í
fi íí
« i
• ,,,,,.,.,...
i .
, n
H fi
.'•'. 4
-í ñ
C t-
c 0
o- D
- M>
• fr 3
- a- o
- B ff
i N -o
r. r¡
í tt
íí •<
• •
• '
• •
. .
• . i
» • .
• •
«
• i
i i
i n
!
1 1
1
i 1
1 i
1
I 1
I 1
1 1
1 1
1 i
1
1 1
1
( 1
! 1
1 I
1
,,.,.. .
H .
,
, ,
. •
.
I 1
1 I
t 1
1 ¡
1
1 I
1 I
I I
I I
1 I
! !
1 1
tlfl
"2—
-H
0P
H
N M ce o X <c J LJ
^ [-
-
yj ^
D LU h- -o o*
i-f •r " c •rl
•I/i > •H •D X Vi D •D
ñ ^
? n
,', &
w u
(E «
4 N
H -
í ui
_ ri r
, r¡ ^
4 5
) t-
-3 f>
(í 0-
4 ¿
> 0
N 0
f
íl rt
Q
» C* í
' N
4
Ü)
nD
0 0
0 0
0
0
gT í
i -í n
f i *
• QI
í ['
1 1
í /
7
w

OJ t-í cd bo •H
(O
—

•- 1 . Ttrí-^SlCIT 1 Í,ÍT--OV-í „ scj-^- a 7 j. -* i f=-~ov
i _ -•.•'» -y ef* íiae — ov«o- % s* •?•«•/ cuas-? e— OH»
• — - e.ei-.2-3 ov 3 ^.^r— otai . rt>-í>O'7 L «Va E.'— O'3
. -."-*•••/ 1<V O/U *=J IZ — O V
. 'F *i. -^ --.-?• o . a E:— ov;- '^x^.ra^r. 3. tr — ov*- TJ. 'n-^TívOiS-í-íz — ov- ~»~ii V3-v i :zt-— ov. <*>:^:3=> v-* .1 r>E — OT"
1- :i 1=11 rt.r-¿>rs tiE — ovJ- &E5*- J Ti <S3 se — OV;, v ar>oi *»::*(=• — o v. 3. .1 i;vs>«>3'e— ov
I - V J «•'/s-iSA O-"-Ii ~OV
, . ci — 20 as= j (=;_-ov<. 1=1 T os"-r>e>&t2:— 0*35r- j TJ oo^oei'y E^— oe
j - 134 -
. «, j -DCL— o«?ísa'.FS— ora
-.;;- Tira s— CJíT*
— i - o— «í>u<vtnt.ii<sja — ov— 3 - CIT> .2 V <;><•:* fe*-1» !=• — OV-3 . i* rt'p-sriajssfcr— ov- - X - T3;W/»y5.'5'«^rs— OV— i - v.-.*. .1 ¿-. :&->&•— ov-i _ rf> «í-rs «•>:&<•- -?ie — o v... i _ -r.S-Sa OO-7-7PT — OV— i _ 3. Fi/s.:",*'-<?«5'tv>te:--oy- E» - o-svaaíií-vz^e— o«— 2t- Wi V-^-3 ' •?•£•- -O a•í*. '^V'iía'.l •^•3.-*t3— O"»"'-.. 2»S J TVl 3S-— OQ-.-_ cs<?3 oi-ívr**>e~oo*?. c^ooo'vs'^. i i^—oe»? . isJ>*^-f5>-í--aí=:— 013i--*, •v-v&of.¿,*.^,e:— ci«=?-t,. <S7< x -v^-vii.-'.Fr — o o13. i !*.-•• •.•'•raj -."ve:— oe»--•; _ 3 ei^f i .^(— Fser—oe— _ w»? -5nnn-A.se — o e— L , ov-assisavo^ — ov— i _ -•* -^ .1 o 3 v--- 1=:— o v— i _ f-ro*yov*3Q*í»t=:— ov— i - •^rat-3eio*5>3:ve— ov
GI-'-^-yJlTíS'e — OVtT-* i -ST> i n e: — ov•'frsOíyíSO'-J CU— p X
r?írí»O7.*V-Veí— OF3iii-a-'— í.j;-<»i e -oo
i= — civ-.'..^ — OV
'.KT-— o'?".Jrít5— 07-í-e— ov
rs— ov^e. — os
e:— o víT — O"-'
3_ ^s 5* e* •<•-;•:• ,»»- e — o •=
7 _ ^r> 3 «?iyn¿.i?e— oren _ orj*^s-r>3 i .1. e:— CTT-1 _ 33 3: VE*»! -VS— -CIVx - z>ec^Si"VO3:ve:— ovi _ V^T-T-^.-Ü i ts— ovT . v v«t.i ^¿.cv&e: — ov
•-i _ ^^--íA-^^t-arie—ovj. _ ^«y-sí ^ 3 -*-o:se:— ovi _ T. ts-íti''» i T - i a e— ovQ _ c»^:-^-^-^-i.r.ve~os-;?. vv 3 •Ví.o-7'3-1;:— oe
. 1
_ e? «?-^ *v 3 •»*«? j. R;— o e?•_ -tooo~-<í.o ie-. os>. ei"-*>J»^*eíor-íí--oi3
- -^^ri 1. L<F3A>^*t^ — Ofíí- tí>15J A.-ÍI &»S-1 E — OI3
1.- 3 A.-^-s'-^iríA>-''-t= — ota-3 - i tav-yov&ee— orar* > -T-VS» -r:s-v T- i «E— oe
- 3 _ OT-.H a. v -v^-e'—ovJ. _ -VS*CT'?-v*f3-^¿-I=: — O"**a _ í="OVO^Cr 1 rf.e — OV-
-l _ -PSOírtO *»í>-l -=••— OV
. 1 Fig. 4.a.1.3. VQSE

l-i oí
C O
lí N
iiG
D J
3 2
O o
e- f-
<f--
- n
M-
00
DO
C*
* f
O- . ,
G j
O1 f
C- D-
J1 C
-i
i í f
r a-
{í j.
a-
í ft
o o
•<&
ix o
o o
!» O
O O
a- G.
o o
c-?•
f-
C- O
O
• J í
CC
O- í
O
DO
Dft-3
- '
• 'f)
J "
i «
Oí
-*
ri * n
OD
D O
C O
CD
OO
OQ
OO
OQ
ü O
O D
OO
O O
O 3
O f
l C
O Q
r,o- r
»O
N H
Oí-
C E
Oí
f00
- ^
D5>
MO
V
It-
^
Oí
C-i
f-
O-
í C
-C
Ní)
f I S
< f
l -O
iffi
¡- N
N f. ,
C'
í
3- i
f- •
í' C
' fr
f1 &
•
í W 2
([ tt
D í
b « í
ÍB e
(a u-
frfr
5' f'
í" ^
o- o-
í e- >
D- £K
í- ?
J-
^^i>
íO-^
^^^
^i
í ^
o- c-
o-M
> o-
f J
-^}- f
-V
>.- í,-
C-c*
n rt
-e ]U
J' . c-.
- O' >
Cí-
o- 1"
Cf- O-
0-
frf e-
frfr
í->
O >
• f- e
-C-
íiv
^
^0
&-0 ^ c
Í-G
j- o
f O
tr O
n K
-o í-
« f*
•írí
fi-
* ft
ct «
í) n
fl t\
H0
0 O
00
00
00
00
OOOCOOODOOO
DOOÚOOOOOGO
OOOCDOOOGOO
GOOCOGÜOCOO
GOOOOGOOQGQ
1 (!
C CU
OO
HD
ffiN
M'Ü
ttB
O'O
QG
QO
GO
OO
O
K fl
fr O
«t
N íl
fl fi
fi f
t ft
K "
OO
-^Í-
OO
CO
OO
OQ
QO
OO
O
í•^
^o
oQ
oc
oo
oo
oo
o o
Ho-OOüGGOOOOQDO Q
^0-&OOOQüOOQOQOC
O^^>COOOOOuOGGOCü
i,
, .o
-[^^
^c^^
o•^c
^^

H >-••
IB 3 13 0 n 3 in n LO r 3 a a w X a
I 1
! 1 l I
1
1 I
M 1
£ •!
.3 -0
sn i
i i i
• i
•J
frWfM
OO
wH
WH
H!J
-J
H
ffl
"•
h J
Ü í
1
*• t
(1
V w
v > y
-o t}
f u
5 y
yH
frO
<»W
5"'N
«>^
o y
a -
? «
í 3
o u
*•j
y fr í
* ^
H u
-J M
Í' íí
>3 -j
-a H u
,v o
-fl y
Q o
-oH
^y-í
süíj
frfr
'OU
U
¿ir',
'
1 '.-
0 -0
00
-0
W^
11
o 1
1Sí
V N
Hí
M u
3y
M -J (
Efr
W
W
-4-o
y y
u0-
0 »
y
e v
J j
J j
\! -J
fr U í
lili
-i
1 t
M u
11
11
v 11
IV
w v \
T u t
ij ,0
H i
H y
y f
t \ -
ii.
M'M
MU
>»
0'U
N*Í} i!
fr '
E *j
o ís
*' y
y u o
* j "
*•m
wyy
Hoi
jfru
oí.'
^GÜ
í<
Q fr
-0 0
v -I ^
^ 0
Q -3
^ U
yo m
» f
rí
y u
-jiv fr
U «
ffl -C
'J fr
W i-
fr 0
'í
3 H
o ti « fr
fr-O
M^y
^íD
-ífl
^fl
- .v
ÍJ .v
S -
í íí í
'J ^
4 U 'J
í ffl 1 0 «
1 1
1•J ff í
3- 3
H^ jj
Q^
y .*•
fr 0
-0y
H fr
y M
¡.
í- í
!>U
'JM
'. r r
r r r
rr^
QC
^^
MV
.^
* M
K *
í-
-> H
M j
j Y\•
y •
j; y
un
IH: "
IJ -3
OC
> í í
Q Q
W r-
tí S
^ M
-,' f
r fr
-{•0
^ -
J 'J
U -0
H>
a u
tí 2
u í)
•<)• '
.1 ji
V
SJ
Q G
-C y
4 U
N' lí
\J c
nt
» y
J ^
-1-0
-j y
N' v
* u
y >
y C
ug
N! y
y .
iii.ii
n o
,\ j
, MU
-í •;
-í *í
yc-
w a
<Jo
sU
*í '' fr
U H
•0 *
3 0
C ¡>
u Q
u w
y -a
fr (r
fr
>•
> M
•J í-
0 >(
M >
J W
í]
U M
U
. , y
k%
M
1fí "
t*1
|> n
«tí
UQ [
' g
s'í-
3v
0 -J
r, w
yH ^ t!
í U
fr PJ 1 0 (I
1 1 1
u M
UM
y •.-.
•J j
V
J¿
Q {
•u ff
lf;y
fr p
í N
H
fr H
fr^
Ü H
y I
M
! !
I I
¡ !
I !
I t
i 1
t I
I 1
I !
M
1 t
1 I
I I
! <
> ,
.,
.-
„y
H M
'-' í
l( fr
s1 c
1 í -3
' '
MI *
-J K
v J
. .
i •
. .
. .
. Ni
4 53
-j f
r y f
« if
t* . ,
y y
fr M
H •
> '.'
», ^3
O O
q q
p n
n v.
H q
D -ji
tí "
^ %'
Ȓ N
u t.
B ÍH
O- M
¡- N
y s'
x> ffi
> i-
-o fc
i- í
¡- tj
-a ü
• ;•
u í
ií -;
H 5-
•- «j
M o
u y
y $•
* o
' "
" "
•4
¿ O
U -
i «
í- U
W Q
ü Ü
U 3
tí *
O >•
í
•? -
. .
H o
w >-
a-o*
wív
'H'f
l'<¡J
'y*M
<4
^3 w
*í c
Q vH
> M
O y
-,' a
o -o
o ^
u a-
^ y
u y
í y ¡a
> E
* g
o í)
« -J
y E
»j y
» > >
s- w
t y
x o
>• u
o u
< í
o c
%' iK
M -3
•B
frH
Ofr
OH
frfr
fr*
'-->
V3
) u
j. ^
5. *
.j W
fr ^
^ H
$ 0
e t
s í
-3 !•
t! !
a o
> M
o tí
-j <i
- ;•
-o o
•? -
í- tv
u >
u M-
J o u
u "
-a o
4 u
u J
fro-
«y
yMW
S'J
^í^e
-ío
s H í
u w
y *
M
u ¡i
w n i o y
- i
-v y
-c ij
;• y í
*,' ü
.K
•c -3
o -í
* y
í•c í
. y s
s -J -
Jvj
vj
,>
H G
-J
Qt!
c y
*i y
> o !,
f o i
^i t- í
o u -
s' y
o 'J
O K
fr
O
sj
U C
C
Li W
H Ȓ
-í y
J -v Q
y y
uu
n y
« h
> -,-
1 v.
v
G O
U I
! I
_! \
i o H
h «
í y
•>-
. u y
fr.' y
'J t
O H
Q i
HK
t'
' '
O ÍJ
G
en n x o N O z > r
P H1
en

^íTí^.oei i ^r-«t ii IT i :> o i. ;s o
— 1 . O.^ a •J'^TITl'
-•»«?•;• o oi <s=r.oc)
— . \ -73, 3ZÍV3::?- oA-i ov a so
.*- o3-I-*?-¿.*ve-t-c. e
t — ' I •
137 -
Fig. 4.3.1.6. ids
ESCALA HORIZONTAL:

[ [
i I
1 [
! I
I I
! 1
1 !
¡ I
! I
I !
! |
I I
1 !
! I
1 1
! !
I I
I !
! !
I M
i
1 !
1 1
I 1
i I
1 i
I !
I I
I :
I 1
1 1
I !
1 I
E II
I i
I !
1 I
1 I
I !
I !
! I
1 1
t I
I I
! 1
I !
I .
I I
I i
I |
| !
I I
1 I
j !
I !
I I
i !
I l
! i
I ¡
I T
I
1
I
< >
•
1 I
I
•
| I
I
I
I
' 1
1
I
I
I
I
I
I 1 1
I
I
t I
I
I
I .
i
I
| I
t I
I
' t
I
1
I
I >
I
1 I
I
t 1
I
I
I
1 [
1
1 I
I
I
I
>
• I
t I
i
| I
I
1
1
I |
1 1
l •
| <
l
| |
l |
| l
< |
I t
i I
| >
i
i ,
, ,
I
I
I
I
I
I
I
I
| 1
| ,
i t
•
$ i>
Oíí
'í(f
-5'?
0'O
i5'f
'i)'
í>0'
5'0'
J''í
O'0
'0'^
^í'v
'0'?
'')'5
'í'
Q'^
Jií-
vkS'
?'9'
f'í'
'íO
~Olí
'¡í
$•$$
$$$•
<)•
$•$'
íbH
-fy^
íí C
i<>
^íC
^?5'
íDtl
'?íí
C'f
/íy'
C"í
í'^C
'v1
(f5-
2'3'
$'f'
'>
C-C'
O'íO
-ií'O
'C'U
!)•
?•(•
•?'tí
í1 iV
$• i
£* í
?• t"
C" ir
?• í
? ?
?• J
y «
y y u
y y í
.1 y y
y u y
y y ¡
í y«y
y u
u u '
J« 3
o y y
y í
w í í
a •>
« u y
« y
í í
'J u i
y y
•) •; w
u u
u u
y'; u
y u
y y
5 u J
y i «
v y
u u
3« y
íi y
w a y
3 u
3 y
«íi y
w íj
u u u
i w
3 y w
u ÍJ u
•; y
y 3 «¿
1 •; í
! s,1 y í
O y
y J M
u 4
i w
í;
E -4 u
u M o
o o
o * u
* o- oí
o f
ío y
w u w
* o
-a %' e-
u * y
y u
» u »
w .o
w u H
- " o
p o o
•- H
y > í
o
f 9 «
> y u
u o
0 ^
u u »
o o o
o >-
u > o
- o a
« íí
w íj y
M *
a -o
-i 9- u
í- y
ti w
u ií M
f.1 fo
MN
HM
"00o
au B
y ^ o
- i *• w
•; *
y y
w c s
í o
^ ^ í
-o ü
M *j ^
H *J
?• í
w ?-
s1 f
~J ?•
o 5
^ M
ffl í
o tí
u -j
^ o
i> -j
*j u
y u
^ s
y u
a u
ij j-
-j u
u u
-j j
o -o
u H
sr ^i
o ^
^ -o j
!.' íj
-j M
^ ^
c- +•
M í
%' >-
-j í1
3 3
c^ >j
új f
H ij
u -j
5- (>
•> -i
-j u
y u
^ ¡3
u y
G *>;
jj í
^ O
y u
-j í1
o -o
u p
^ -o
•a ^j í
y \ H
y í
-í >
u -a u
s <D
-M >*
*í«
* w
v > y
*•
- H 2
y -*
si *•
-o ^
^ u ^
S -í
-J f
ÍD >*
H ^í u
u u
H u <
a ^
w -j
^ y
-o -í
p H ^
3« n
c -;
^¡ H ^
y f-
H u
> u
H M
y $ y
* .3
^ ^
Q. ^ y
^ ^
^ ^
j. ^ u
KI
<j y w
- vi
u c-
1
,0

en K)
co r-5 ni bo •rí
PH
! n n
n H• o-
h n n
o-c o
-o• o-
t^Mi
-¡ o
o o
oI
fí fj
C
i M
> f- n r
, f¡• t>
c- o-
u
n n
(t n
f•a
-ono
n n
9-í e
-D
O 0
0íí
fi N
flr-.
"; íi
r:i-
Ü-
s -ú
n f
íi *
fl s
íi n
•* r-
fi *
H í
„ í
4 e- ^
n N
¿ f.
,N. n
Q *
í •*
ri 4 r
i o-
&- N
f- T f
c n f
i < ••<
a -o
& í
N fi n
íi
o- í N
t- í
íi n
« * f
í o ri
ri -i
n n
í *
í n 4
4t4
f,n
c t^ j*
n a
* i í
n -t
n o- o
- f- *
í
? ('r'
H <¡
N 4
o •;
-í- í
-o n
< í í
i o tí
j- N
r, n
c -o
í- o-
n n
u -o í
i & <
n m
n r-
< « H
o -s
fí r¡
o n
M r,
fí -í
o n
r) fi
H «
n íi
n E
* í-
-í " í
N -í
o -í
í -í <
n <<
n ¡D
rt D
- . ri
r¡ o
-o p- í-
r, s¡
o * í
i ^ ^
ni
snM
4-io
-<f(
ríOf
tí¡p
.ce
o-0'
<-'r<
-ir<
*-i.
<rt*
fí a
n í
n -i o
-o í
¿ n -í
n fí
o o-
os N
N K f
fi D- •-
- tí n
s ^
«íí ñ
rí n
tí *
o- N
n rt
- &•
EO s
-; í í
i* c
t s •>
o ^
-• ^
•< H
-* H
^ -t H
'i ,1
* n
í <•
-o * -
o íi 4
rt íí
o o-
c N
N f*
e o
^ fl n
-^ í
^ ti
n nn
íi r*
c í
* <•
i- -e
^ >o
«-o
< í
í-3-
oíií
ií-i
íí-O
í'f^
írn
ní!n
nn^¡
'00í
*'0^
^^^
r-r^
Ní-O
í-'O
'íiri
nrin
rini
i fir,
níC
JJ<i
(í''0
0'ú'
J3<|
í •o
í-O'
Oííi
'O'C
'C'^
'ü^^
ín nr
nr.
flri'M
^'Mf-í
^hf:
^^t^
^^^i
^t*o
c•^^
£^ ^
oo•E
l•^í£
l•(^
^^^^
fr^i
^Ch
^^^^
^¡f•
í•^^
-i^^
^lvo
•^o•
&•^
^o•[
^^^(
^vN
s•^^
^>c^
o• '^
^o••
k^^^
p'fr
¡^^í
(^^^
fíií
'0-iv
>c-?
-f'V
vC'0
-^(r
i^ ^í
^fr^
í^^:
'^^'
£^^^
^>C
DD
OO
Cú
QO
CO
OO
OO
G
OD
OO
DO
OO
OO
OO
DO
O
Gü
oa
DO
OO
OO
QO
üC
G
OO
OO
OO
OO
OO
CO
DO
D
OO
OC
-O
OC
OG
OO
ÜO
OO
OO
OO
OO
OQ
QO
OO
OO
O
OQ
OC
GG
OO
OO
Dp
OQ
ci íi
tí íí «
H «
u tí
h ti
ft fi
ít H
fí (i
;i fi
n & «
(•>• íi
[< o
N fi
ft íí
H tí r
-; íi ^
u «
oí ti
« ti
n ñ1
(j« Í
Í'N h
f-¡ ft
tí a
tí K
« N
rt íi í
< íi «
-N a
ií «f
í i* f
í H «
fí c¡ f
i íi ü
« ".
fl fi
fí fi
fi íi»
fi ft
w íi
ti« í
j w fl
fí í»
u n í
j « ít
tj ti i
j «if
fi n
n ,"i
r. fi
ri fi
D n
rj í¡
B n
r» r¡
n n
n n
r- r¡
.1 rt
n ¡o
TÍ rt
n r-
n n
r- ?;•
r; r,
r/ n
r- n
n n
ft n
n n
r< TJ
ft fi
»r»
¡-i n r»
».*j rj
n n
íí r
<»r*
r: n rt
n n
n ,"=
ri fi
n n
n *
fi ."• n
n ri
»f<
í! H n
& fi
r? fi
h fi
n n r;
r/ fi
N fi K
n n
ri n

- .HO*— í.r_X3i 3 -¿fT- l O 1 --.IÍ1V7V'-
~S¿- ¡5 .¿.S 3 -'«a 3 Ve— 0:3
- .:» i 001 ¿-.T-OÍ:_ --o-- i n -=-'?• i n
1 D J. •"- =? 1 VTT3a--.«-íri'í» j, - T-FS-rtí-sri-veiTs r
rcj«?j>-»ci j =1733 OO 1 -<* T5TJV-
a conios AS
— _ -» a •?-»-
a 5. -7-3. íj---»V 3. -««-&CH3
»•?•-'*- a »•? se* a.- e o*. v •'*'?' o •?••*>
140 -
. 4.a.l.9
ESCALA HORIZONTAL:

CI-S.3V?-
- 141 -
— . Cí i oo A CT^— _ -r, OV 3 f=l 1 rfn
~- S-TO i ^
, i oa -*^^,.%ia-. r-itr-'VGj^.i.raiE3 Clá,Zi S3V 1 i»^'r^'Q'v -'«-•'*- •í*-i>-j' i"3 J. OO ^ I J?*3 1^O~'l WT>*-*?
'. •v"í- P) Fil í>¿» 1 ZV
- -? ^--"-1 sai.
Fig. 4.a.1.10 idr
en segundos/división —ESCALA HORIZONTAL:O3

i i tas-i l O'Si
. tí) «:-*-. ¿,00 /ai o
- 142 -
Fig. .4.a. 1.11 Torque
ESCALA HORIZONTAL:Tiempo en segundos/división — 4. 166TE—D3

- 143 -
4. a. 2. OPERACIÓN BALANCEADA CON FUENTES NO SINUSOIDALES
En este ejemplo, se analizará en el estado estable la ope-
ración balanceada con fuentes no sinusoidales.
Los siguientes voltajes de fuente son la salida de un inversor
que forma parte de un sistema empleado para obtener voltajes de sali-
da cuya frecuencia sea ajustable.
Estos voltajes de salida del inversor pueden formar un grupo
trifásico que alimentará al estator de la máquina de inducción (FIGURA
Al descomponer los voltajes de salida de ese inversor, en una
expansión en series de Fourier, se ha obtenido lo siguiente:
e = — i eos üi t - \s 3w t + eos 5üi t - )g a ir A e 3 e 5 e J
e = — fcosfw t -gb ir ^ ^ e
2TT-,
egc = CcosC^t + fD - j eos 3Cíoet
Donde V es la amplitud de los voltajes de onda cuadrada y pa-
ra este ejemplo tiene un valor V = 1 p.u. . - .

- 144 -
La máquina de inducción tiene los siguientes parámetros expre-
sados en p.u.:
rs = 0,0453 X = 0,0775 X - 2,0420i i
r = 0,0222 X, = 0,0322r ' Ir *
Por lo'tanto, puesto que: X = X, + X'* L n ss Is m
x'' = x! + xrr Ir m
X = 2,1195 X = 2,0742ss ' rr '
Se trebajara con una frecuencia base de 60 Hz., y se anali
zara la operación a velocidad sincrónica (w = oí )
tú - 1 íú = 1 £, ~e r R
Se obtendrán los resultados tomando en cuenta la componente ••-
fundamental y los pares armónicos hasta el séptimo y hasta el " décimo4
tercero; los gráficos a obtener son los siguientes;
VOLTAJES:
V , V , V "qs J as3 ds
CORRIENTES:
. s , .' s . r s1 , 1 , 1 .1qs * as qr ' ar

- 145 -
TORQUE
Los resultados numéricos y gráficos serán comparados con los
resultados obtenidos en el artículo: "MBTHOD OF MÚLTIPLE REFERENCE FRA
MES APPLIED TO U-ffi ANALYSIS OF SYMMETRICAL INDUCTION MACHINERY -'[refe-
rencia 1) sobre el que se basa el presente trabajo de tesis.
RESULTADOS:
Las expresiones siguientes, son los voltajes v y v, obte-
nidos en el artículo:
s 4V 1 1 1v = — - feos ui t + ~ eos 5w t - — eos 7u t - eos lltu tqs ir e 5 e7 e 11 e
- r eos 13w t)13 e
v-, S = —• f sentó ^ + TT sen Seo t + — sen 7w t - -^ sen lio) tds TT et 5 e . 7 e . 11 e
rr-=- sen 13w t)13 e J
y a continuación9 se tiene la expresión obtenida en la simulación:
v S = 1.273239. cosco t + 0.254647699 eos Su t -qs e e
- 0.18189128 eos 7w t - 0.115748737 eos lio) t +
+ 0.0979416986 eos 13u t.e

- 146 -
, S = - 1.27323922 senw t + 0.25464803 sen 5w t +ds e e
+ 0.181891142 sen 7w t - 0.115749272 sen llw te e
- 0.01979414391 sen 13u t
Puesto que V = 1 p.u, comparando los valores que están en p.u.
se tiene que coinciden en- forma muy satisfactoria.
A continuación, se comparan los voltajes a ser aplicados en
cada una de las estructuras de referencia (que conforman el Sistema de
referencia múltiple).
En la tabla T. 4.a.2.1. se tienen los valores de los volta^
jes expresados en p.u., al hacer una comparación se tiene que dichos
valores coinciden.
En la tabla T. 4.a.2.2. se tienen las corrientes resultan-
tes [expresadas en p.u. ) en cada una de las estructuras de refe_
rencia que conforman el sistema de referencia múltiple. En esta
tabla:
n = índice que indica la estructura de referencia, recordar
do que n = ±- k
Examinando la tabla T. 4.a,2.2. se tiene que los resultados -
son idénticos.

- 147 -
VOLTAJE VALOR EN p.u.
ARTICULO SIMULACIÓN
vqs4VTT
= 1.273239 1.27323953
-5eqs
= 0,254648 0.254647999
v +7eqs - -¿F= - 0,18189 - 0,181891211
-lie 4VV " n i U ,0-1.0 / H-ií U , U.J.J/ ^^UU4-qs HTÍ ' J
.+13evqs
4V _ « nq7Q41 • 0 097941 5689• _ . 13TT . ' . . . . '
Vds5,5212 x 10-i o
v -5eds
-9.5745 x 10
v +7eds
-9,5532 x 10
v -lieds
-1.8813 x 10
vds+13e -1,9363 x 10
-7
* V = 1 p.u. TABLA T.4.a.2.1.

- 148 -
CDr-i
•H
CD
^ H
-H
CDPÍ LO•H
CD
COcr•H
oí — 1CJ<ctí3,-5-í— iCOv~/
o"5cj!— iH •<§
oi— iCJ<£1—3Q
¡HCO
^_
O
^uI— 1H '<í
oI — ¡CJ<TJ3í¿<i— íCOK— '
o"5CJl—iH •
<
3 CD; • HHjn< cj
<£"p¿ HHo S, ^ i>*< H¡> CO
V—
: o"R
cd OO í-i^ E-j
^ 5
oLOen00LO"3"
r*
CD CD
enooLO• t-
CD 0
o-00fOLOCD
*\D CD
1
totoLOCD
CD O1
oo enun co* t~ i — lCD CDCD vOvO " i"^ . ->
CD CD1
*ví* i — 10 0O vOvO -^í-
CD CD1
to ento coco oooo toi-i LOCD CD
'o CD
CO tOoo tor-í "-OO 0
0 ' 0
i
enLOto0000to00^
CD
to00to00
o
LOCDCOi-H00CD
•*•CD
COr-i00oCD
toenLOtoCXICD
^CD
CDvOto00
o1
oo00t~-~rH00CD
CD1
t-
i — 100CD
CD1
+
00COLO•j-cnCD
•CD
l
LO• J-cnCD
O1
• f-CD00LOCDCDn
O
00LOOCD
CD
CO
C--ovoenCD
r*
CD
OVOenoCD
enCDo00LOOO.
Ó
00LOOCD
CD1
i-ít-í
1
enunf-..r .vOO
*to
1
[,t -vQCD
CDi
LO00totOCDCD
rt
CD1
totOoCD
O1
rHtOCOCOVOCD
<-,CD
COco •vOCD
CD
VOooto •to •CD 'CD '
CD
COCO 'OCD '
CD '
COt-i •+ •

- 149 -
Para las estructuras: n = -1, ±2, ±3, ±4, +5, ±6, -7, ±8, ±9,
ne ne ' ne ' ne±10, +11, ±12 y -13, las corrientes i , i, , i .i, son ce-' ' 7 J qs J ds ' qr J dr
ro. Esto es debido al hecho de que los únicos voltajes diferentes de
cero a ser aplicados, son los correspondientes a las estructuras: n =
+1, -5, +7, -11, +13. como puede observarse en la tabla T.4.a.2.1.
La corriente de fase de estator i obtenida en el articulo.as
tiene la siguiente expresión:
i = 0.0128 cosw t + 0.6004 senw t + 0.0533 eos 5w t +as e e e .
+ 0.4601 sen 5to t - 0.0217 eos 7oi t - 0.2360 sen 7w t -e e e
- 0.0052 eos Huí t - 0.0960 sen llw t + 0.0033 eos 13üj";t"+e e ,e
+ 0.0688 sen 13W t.
En la presente simulación se obtuvo para la corriente ias
- 0.012834 cosw t + 0.600454 sentó t + 0.053289 eos 5W t +•cío G tí c
+ 0.460189 sen 5w t - 0.021729 eos 7W t - 0.235937 sen 7W te e e
- 0.005201 eos llw t - 0.096077 sen lloi t +e e
+ 0.003326 eos 13co t + 0.068830 sen 13ü> t.e e
naciendo la comparación, se observa que las dos expresiones cp_

- 150 -
inciden, comprobándose la validez del modelo.
RESULTADOS GRÁFICOS
En la siguiente página, se muestran los resultados gráficos ob_
tenidos en el artículo (referencia 1), la figura 4 muestra los volta-
jes: v . v , v, y las corrientes i . i s. i .i y el tor-J qs J as ds ' asj qs * qr 3 ar 3
que electromagnético obtenidos en un estudio con un computador ANALOGI_
CO.

- 151 -
MUTIIOD or
v ' Z.0r
D ' l —J I
-1.0-Z.Q
Z.O
vdí 1.0, Q_
- 1.0
-z.o
¡q: 2.0, l.o'ot
— - O
/» 1.0
l_
-l.o-z.o
0.4
O.Z
O
-O.Z
"i.
. r i.
• o.oi s
rÍ£. '1. H y n r l i r n M t M t s spccil nr i .vr i i i . ih \ví ' .li '• 'Hi;i.i ' i ' \vjiV(ivoltuj;!'.—Jiiiülu}; r'iinpi|i,«i' sl.uily.
1.0t
O
-1.0
-z,o
i 1.0
t o-1.0
-2.0
O
-o.?
-1.0
-Z.O
-Q.'¿
-0.^
- 0.01 SCC.
—^ |— o.oi scc.
(10ij;. Ti. SyiifliroiifMis spciüd iipcrnUun wii.h ¡itpiíirc'U'nvcvii lLi i m'Sj rnlcnlnl.cfl U K Í I I H Uto nitií.luid nf inull . iplc rfriuncs. (¡t) V t u i c i i i i n c n l i t l muí ixld t inrmnnirs t.lirniinli I-l»' Uii( I i ) l ( 1 i i n< I i i t n i ' i iU t l nui l i i t ld l innnoiiicji l.lironnli t-ho K t t v i t i t Ü i
CASO BALANCEADO -

- 152 -
<
SCALA HORiZC
Tiempo en pegundas/iii v tsinn =• A.l í .AVE-03
v»s:ESCALA HORIZONTAL:
Fig. 4.a.2.1. v sqs

- 153 -
. I J .
1 - i SO2-U
— i . r-Li-i i •/?•- i _ o i i ->:i -^.- - T>T i ^vei-'.nr— , 1 ". JlOCJfl*»-!
l . jo «.-.rtvi . j j i «.(..irirti*i . i v-inji ,-•*•/i . t-tCíi-^rt -ii _ i l vi-'-'T»iMl . l i Ü-.^MÍ.—I . l f , f f O ' í > •fí-'-y\ JV^'. l t.tw
Ti on negiintlos/tlivi^inn - 4. 1667E-03
HORIZONTAL:
• Flg. 4 .3 .2 .2 .'ds

154 -
. 1
• . [j"*'»rií",.-.j»TH--. l UOV— .MI"-?-
• . •£'•=• 1 -3"-'<IJ 1 M•• , •^—-TT-.IÍ-V I— - -run — M'.*...-«.«. VCl-VxS.TM-.f.l
Fig. 4.a.2.3. i
T í cmpo en y09unrio^/divisionESCALA HORIZONTAL:
qs

«d-
CM íO
<
UJ r- -0 -o

-$••+'*'.' \~rn .no o ei ve --
ri-.-v j -,<r,'.L?e:-- o-*-
— y« - •7-¿.'v*!s.Gí*?:> 3 (7.—o>*— n - VVI^FIT J ríl .'-•-•--o-•+
—^ . vm¿>*. -i*7ti 2 íS-- a"•••:> . VVOTW., I T T ir—o'-
~r> . v9--.:s^-.v t t£. —c.\j~— 3 - "/•*=• '«-<íi»;:-^r'"itx—o^—•u - v-.f^-tr^o^ i e—o-^.•-S . 7-«?CJ*? 1 -y-^'Sli—Cí-e.
— ri. v•?• •"iri v*P i ir:--ri-'.
-3 - •-i^ - '•i -
- r> - *-r» . '
.^i.«r>TE — o--»
—^ . 'fíí y ¿I&'' Zfi~ — f,-í< - V-v^O 1 J •'•-'^1=---) _ 'í'-"'! J. 1 «STIPIS-
-^í - VHí^íCD Oí? V ** (i-
f—i'F:— a-'. e — o-^
---»-• i y -"(=;— a "-
--TJ - T *•=• i 3 ss=ríe:— o-**
.aí*, i E— o-1-
—3 - VZi 3- ¿>
156 -
Fig . 4 . a . 2 . 5 Jorque
Ti empo ^n segundos/divi si DH =HSCALA HORIZONTAL:
4.1667E-D3

- 157 -
. En la figura 5 se tienen corrientes y torque, pero calculados
utilizando el método del sistema de referencia múltiple. La -figura
5.a. muestra los resultados obtenidos trabajando con la fundamental y
pares armónicos hasta el décimo tercero. En la figura S.b. se ha toma
do la fundamental y los pares armónicos hasta el séptimo.
RESULTADOS GRÁFICOS OBTENIDOS EN LA SIMULACIÓN DIGITAL
La presente simulación permite mediante menú, de.'opciones el
obtener los gráficos de las variables de voltaje, corriente y torque,
una lista de todos los gráficos disponibles se dio anteriormente en el/
literal 4.a.l.
Se puede seleccionar mediante menú el dispositivo impresora 6
monitor en donde se va a realizar la graficación.
A continuación se presentan los gráficos obtenidos en una im-
presora APPLE SCRIBE. La amplitud de cada uno de los puntos graficci
dos que forman la onda aparecen en la parte inferior y están en p.u.
En la figura 4.a.2.1. se muestra el voltaje v que segúnqs
la ecuación [88) es el mismo que el voltaje de fase de' estator .\ . as
Comparando la forma de la onda y la amplitud de esta con la correspon-
diente del artículo, se tiene que los resultados son muy aceptables, a_
sí el valor máximo encontrado en la simulación es 1.43 p.u. mientras
en el artículo referencia es aproximadamente 1.4. p.u.
El período de la. onda graficada es 0,0166 segundos, mientras

- 158 -
que el correspondiente del artículo es aproximadamente 0,0166 segundos
como se puede observar, los resultados son satisfactorios.
En la figura 4.a.2.2. se presenta el voltaje v, , la amplitud
máxima es 1.29 p.u., en el artículo, para v, s se tiene una amplitud -
de 1.2 p.u. aproximadamente. El período es el mismo para los dos grá-
ficos y es 0,0166 segundos.
sLa figura 4.a.2.3. muestra la corriente i que según la ecuaqs —
clon (146) es la mismo que la corriente i .as
La forma de onda coincide con la del artículo, la amplitud má-
xima es 1.46 p.u.., mientras que en el artículo se tiene una amplitud
máxima aproximada de 1.5 p.u. La amplitud máxima de los picos secun-
darios es 0.71 p.u., mientras en el artículo es 0.7 p.u.
El período coindice y es 0.0166 segundos.
T sLa figura 4.a.2.4. muestra el gráfico de i que según la e-
r scuación (149) es el mismo de iar
Comparando, se tiene que las formas de onda coinciden tanto en ampli_
tud como en frecuencia, así la amplitud máxima de la corriente de fase
de rotor expresada en la estructura de referencia estacionaria (figura
4.a.2.4) es 0.85 p.u., mientras que en el artículo tiene un valor a-
proximado de 0,9 p.u.. El período de las dos ondas coincide y es de
0.0166 segundos.
Puesto que se está analizando el caso balanceado, se tiene que

- 159 -
los voltajes y corrientes de las fases b y c son las mismas que las co
rrespondientes a la fase a, pero desfasados 120° entre uno'y otro.
En la figura 4.a.2.5. presenta el gráfico del' torque electro-
magnético. El artículo presenta el gráfico del torque como una fun-
ción sinusoidal, mientras que la simulación digital da por resultado -
un torque electromagnético cuyo valor es semejante a cero p.u.
Evidentemente existe una discrepancia entre los dos resultados.
A continuación, se demostrará que para este caso, con los voltajes de
fuente e , e , y e que se han dado para éste ejemplo, el torque e-ga go ge
lectroniagnetico resulta ser un valor constante muy pequeño.
La ecuación del torque expresado en función de las corrientes
que forman el sistema de referencia múltiple es la ecuación [137):
T _ M r1 rpi 7' r-r-i +ke i' +ke + i ~ke i' "kelT - M (TD %) { Clqs Xdr + \s *ár J
+ke .' -Hke . -ke . r -ke,V + Xds V
+ke . r -ke . -ke .
+ke .r -ke . -ke
+ke .' -ke _,_ . +ke .' -ke,V + s xdr ^
- fi ~ i + e H- i " e i ) D sen 210,1 f } C137]ll x ^ x J ; e

- 160 -
En la tabla T.4.a.2.2. se tienen las corrientes resultantes en
el sistema de referencia múltiple., se observa que existen corrientes
solo para las estructuras n = +1, -5, +7, -11, +13; siendo las corrien
tes igual a cero para las demás estructuras, esto es n = -la ±2. ±3,
±4, +5, ±6, -7, ±8, ±9, ±10, +11 y -13, si se ha tomado en cuenta la
fundamental y los pares armónicos hasta el décimo tercero.
Hay que recordar que las corrientes para cada estructura n
±k son constantes en cada estructura especifica.
Analizando el coeficiente del término eos 2co t de la expresión
del torque (ecuación. (137)), se encuentran los siguientes términos:
, . +ke .' -keaj i .i-,J qs dr
, , . . -ke .' +kebj ' i .1-,J qs dr
. +ke .' -ke^s • V
. -ke .' +kes. • V
Tomando por ejemplo el término a)
+ke .' -kes . ' 1dr
se tiene que el primer factor es una corriente de una estructura posif.
tiva (+ke), mientras que el otro, es una corriente de una estructura
negativa (-ke).

- 161 -
Dado que las únicas estructuras energizadas (en este ejemplo -
específico) son: +le, -5e, +7e; -lie, +13e. Entonces, según la tabla
T.4.3.2.2:
para la estructura +1 e:
i +le = 0.0128 p.u.qs J
Puesto que no esta encrgizada la estructura -le:
1 -le• j. o ,,i, = Odr
Por lo tanto, el término a) tiene un valor cero.
Un análisis similar, da como resultado que los términos b),
c) y d) tienen también un valor cero, por..tanto el coeficiente del
término eos 2kto t es cero. Un caso similar sucede con el coeficientee
del término sen 2kw t, que para éste ejemplo de aplicación es cero,
En general, se puede concluir que para que el coeficiente del
término eos 2kw t 6 del término sen 2ko t sea diferente de cero, see e 3
hace necesario que al menos para un valor de k se energicen ]a estruc-
ra positiva (+ke) y 3a negativa(-ke).
Ejemplo: Para k = 5 deberían energizarse la estructura +5e y
la estructura -Se. Por lo tanto, existirían las corrientes:
Estructura +5e:

- 162 -
. +5e . +5e .r +5e .' +5e1qs J ^cls ' \x 3 Ir
Estructura -Se:
-Se . -Se .r -Se .r -Se"qs 3 1ds > \r • » 1dr
. -Se"qs
j "-ePor tanto el termino a) i .i, podría ser diferente deqs dr r
+5e ' -Secero, dependiendo de los valores de las corrientes i e i-,3 L . qs dr
De lo expuesto en este ejemplo, se concluye que los resultados
obtenidos son satisfactorios, demostrándose de esta manera la validez
del modelo.
PERDIDAS
Una vez evaluadas, las pérdidas totales en el cobre para el es_
tator son 3.2267 x lO"4 p.u., mientras las pérdidas totales en el co-
bre en el rotor son 2.0S1 x 10 4p.u.

- 163 -.
4.b.l. OPERACIÓN DESBALANCEADA CON FUENTES SINUSOIDALES
En este ejemplo se analizará la operación desbalanceada con
fuentes sinusoidales. El voltaje de fuente e será puesto a cero.,
mientras e , y e serán los mismos que los usados en el ejemplo 4.a.l
esto es:
e = O
i r r +. ¿Tí ,e ! = V . sen fui t - — Jsb ^ e 3 J
e - V . sen fw t + -=— )^ e 3
Donde V = 1 p.u. y los parámetros de la máquina son los mismos
expuestos en el ejemplo 4.a.l.
Se tiene también en p .u . :
til -e
= 0.99
£R
En este ejemplo se presentarán los siguientes gráficos
VOLTAJES:

j j=ci7>i i — ora
- :? i -7T5 5. El l
i o ri no *•-,•*» "'»<•.
fií'- J *? 1 V-7-
- . — : -rr^í o •*» '- e
_ ;; O •— D 3 tf-iS 3. -i»
. i osaoe* 3 =:
— - C^ 3 VO3 "
-- - :? o -^^ i
— -i «9-rv «^ss -v— _ 3 A»^»4»«s»— . 1 S3C»CTS— - i oaoo^
- 165 -
Fig. 4.b.l.l. v • '6 qs
Tiempo en segundos/división —ESCALA HORIZONTAL:
4.1667E-03

1 . OOOOOOOI3 ' ' l i l i
- r<~7r* \-
I ^Tj^Xn^1"^.eiO'T'Oavcinr
:^;S£2£;. ->- O ¿f ~S 1S.7 1 Jíi
- i o-'.rss:*'-'-". a »r . cj«?ooo"i=« i e — o¿>— , i irt-^os-vs-fcaí «— - üíJT'a 1 O^.'r>-. r-?C'S'o i rtrír^r?
— --^'O-íj vcf.n i. sfji
r~^'*'zr'7í^rr*... S-ViSío'^— . T-^^I .i -v^íifva— -rao-7O \-ion
-. v-^-Cí J- ''"roe-v
"::ÍÍ?Í?EH¿ " .--.- oí. «se^-^Zí xer~a¿.
SSí2?Xí:íS
F.'Í.H'/'Ol ^^.tí-^
:HI?HIsIw-*r.siAaa
•?-/-KJ j -Vi?-,":).
•?=i a or-ei a '*fii
?SS?2eiíí
SíOTV 3. VA.«V3.j.0x.;>;»-w,«>
itStííT^"0*
:F^3EH ' - :"
. FiO'í 'OaiS^iSi
. O .i.'í-CJS'.' í •% OV
"5vra?"5?^^ "-S"i-'.^(^O6I3~*
. ->-^---z>ja^ri-?--7
::,H?lEr : -. ^.¿j'v u nv -J •*••»=<
?« íy^ i Tí'?vo«=*e— o<¡.i Cí-^3 i f a -*»
EHiHES•v :i -*n-'»i r> i s-•?r- i cn-vci^^:-í>
. i : i , i , i , ii ~ i i i — —•— , — —
.
- 166 -:.
.
*•
'-
.
•*
-
*
,
•
"• Fig. 4.b.l .2. v, s" . . as
'•
ESCALA HORIZONTAL:

— ¡ - :„ w^ •'n'v. O Cr -*-— i - -f.¿> i TiTüi-iis."•- i . i i tí i ¿: t r< r^— - T*-, a ="•» o. i a— .7-01 i -;*~*.-- . íi-c. j. :_'.¿,s> -i rs
I. "7T3 3. =ÍSÍ' :¿í
i - ¡a o si ?=« <?> a-1 - O^RIOSí-^-'-
i _ ¡íi^j A -»•'* i ,ai . c-r^'-r. J =?'-J. . Í3S V3C7-4*S>
. <S>O J -JT^f.H l E_ -í. i si o .T vri •£»:.. w s? -*r i 3. 3^5 n
a . s a £,ooo<>.:?
a _ -^o^weü^r1 . í> 1 Q-7 VStSS 3
i _ Ht 1 ST'SI 3¿j3>
~ .t - '->A. C.í-í. i
— -i ^ ZZ.IT* «y? ¿3 =•-i . 3r.ao^>i
— 1 _ -*--7--V7-¿,^,j^
— i _ EÍ o e* o j *v <>-• - i . .wereí-hA o— i _ -vs> a TÍ T «v^-
- 167 -
Fig. 4.b.l.3. i /;qs ' as
-.3 _ VTozss:ji os
Tiempo en seai-indos/ d.i vi si on —ESCALA HORIZONTAL:
4.16Ó7E-D3

•- 1 . 1 a "/""> J. í
A 1 1
ns-^s:*» i i
i . n. i •1 . C.líS-
1 , O -"•" '•* -^ •£->J~ 3. •**A , 0-7--' 3. «?-v-*iL . A SJVP-J 1<^-71 - JL. (b.íí.1 diOIS-^-i . i o) ^-Jsras-*X- i 1=1 •"»• 1 ít •* **• OT _ i -^-njTror»^.»•j. . % rifi»^c"^>
— _-'i- 01 V Vil. «5-
Tiempo en
- 168 -
Fig. 4.b.l.4. icLs
ESCALA HORIZONTAL:4. 166TE-03

a .EÍX.ty7"7r-.i.- 169 -
. Fig. 4.b.l.5. L,b's
Tienipo en segundo5/divi sion —ESCALA HORIZONTAL:
1667E-G3

. I , I .
— - -*»• ¿un n ¿rZf " a v
•—. i.ei' v& i ^fQ^-
- i . o i o ¡v sus»-?
- .L . x'.-=?-?• os'rsrs
— . jjr.i-n i -V i -rr>-- . 3 : £»í»-l ^»*,V
. o 3 Í-&T 3 a t a
— . etow-i <**«?• o 13
— . j. x '-.i «s- Ji J, "S"»1
- a i z::j'J.^?eri -"_ 1 13 t?sr 5 •*•-&•**•&
i _ rsi _ r^
- 170 -
Fig. 4.b.l .6. ies
TiE=mpa en segundos/ división
ESCALA HORIZONTAL:166TE-O3

>•*. A Tía-í 1 i 3- ra ov- K.ZJ .-» -:. ra
- or> j. •s— . i o x
x _ ^:*^x «u- 1 í-f;» —
3 _ 1 2íO'í-T-í. V-1 _ O 1 ¿.' Y -7 53 ••*. *VCt> C ••**-— -3^ J.
_ *•>••*. iT'.'j. r> a Q
_ J. 01 » -7-1331=1 "í
-.171 -
.: 4.b.l.7,qr ' . ar
Tiempo en segundos/división =ESCALA HORIZONTAL:
1667E-O3

i. _ OÍS 1 lítEa _ a. s:os;i
• I I
_ n :<:£!::£:=.<
3. - 0:3 i lai _ \n 0: -A _ i •í*i,^a _ i:r3*v-<.j _ ^-•cir-KS'.
i - s-y» •^«•o T:- 1 . T¡ . i a i ^s<
j. - a vj-vwt.-. 3 •
i . os* a f
Ds «-'*•- jo x
. i i .
172 -
Fig. 4.b.l.8. iu sfer
ESCALA HORIZONTAL:"i empo en segundos/d.i visión —

si i .?:?•<. a- 13 VAt.^.^'PV 1 i 3T Sbf.tp i CJÜtMSC l VR. w-i.0 ?• /;,<;{'7ZX.Zf£>3 1 V.A V
t . . t .
— _ ^? i r* i «? e» sí 7-3
Ti erripo
173 -
Fig. 4.b.l.9. Torque
va sion —ESCALA HORIZONTAL:
1ÓÁ7E-O3

- 174 -
Las figuras 4.b.l.l. y 4.b.l.2. muestran los voltajes v sqs
vas y Vds resPectivamente- En éste caso, el voltaje v s es pequeño,qs
tiene una forma de onda sinusoidal y su amplitud máxima es 0.33 p.u.' ,
siendo su frecuencia i
gún la ecuación (156)
c
siendo su frecuencia 60 Hz. La disminución de v se debe a que se-qs
V = I (Sga - T
siendo e = O, el voltaje v queda:ga J J qs H
v s = I [- e , - eqs 3 gb
o
El voltaje v, es una onda sinusoidal defasada 90° con res-c
pecto a v , con una amplitud máxima de 1 p.u. , esta no ha disminuí-qs
do en este caso, puesto que según (157), es independiente del voltaje
e
CORRIENTES :
s sLa corriente i ~ i y la corriente i, , son mostrados enqs as J ds
las figuras 4.b.l.3 y 4.b.l.4 i-espectivamente. Las dos ondas son si-
nusoidales, i S tiene una amplitud máxima de 1.85 p.u., mientras 'queqs
la corriente i, S tiene una amplitud de 1.18 p.u. estando defasada 90°
con respecto a i .
Las corrientes i, - e i son mostradas en las figuras 4.b.l.5.
y 4.b.l.6., las dos son ondas sinusoidales, no hay distorsión en las
ondas, pero si existe una variación en lo que se refiere a la amplitud

- 175 -
así i, tiene una amplitud de 1.41 p.u. mientras que i tiene 1.35u;5 es
p.u.
1 e
Las figuras 4.b.l.7 y 4.b.l.8 muestran las corrientes i
1 s ' siar e i , las dos son sinusoidales y están defasadas 120° entre sí;
la amplitud máxima de la corriente i es 1.46 p.u. mientras la co~
1 srrespondiente a i, es 1.37 p.u.., siendo 60 Hz la frecuencia de es-
tas dos ondas que están expresadas en1la estructura de referencia esta
cionaria.
Finalmente, la figura 4.b.l.9 presenta el torque instantáneo
electromagnético, observándose que posee una pequeña componente de con
tinua sobre la que aparece la componente alterna. El valor pequeño de
la componente D.C. puede explicarse debido al deslizamiento tomado pa-
ra éste ejemplo, esto es, s - 0.01 pues w =0.99 p.u. siendo muy cer-
cana a la velocidad (o .
El gráfico del torque presenta una frecuencia de 120 Hz, el
doble de la frecuencia de las variables expresadas en la estructura de
referencia estacionaria.
EVALUACIÓN DE LAS PERDIDAS
El método utilizado para evaluar las pérdidas fue expuesto en
el literal 2.6. El programa digital proporciono los siguientes resul-
tados: . ' -
Perdidas totales en el cobre en el estator: 0.10003 p.u.
Pérdidas totales en el cobre en el rotor: 0.2502 p.u.

- 176 -
4.b.2. OPERACIÓN DESBALANCEADA CON FUENTES NO SINUSOIDALES:
En este ejemplo, sera considerada en el estado estable la ope-
ración desbalanceada con fuentes no sinusoidales.
Los voltajes de fuente a ser aplicados, son los mismos e , y
e del literal 4.a.2, pero con e = 0..ge ^ ga
Los datos de la máquina son los mismos que para el ejemplo del
literal 4.a.2. Se analizará la operación a velocidad sincrónica, tra-
bajando con la componente fundamental y los pares armónicos hasta el
décimo tercero, se imprimirán los siguientes gráficos:
VOLTAJES
s sV , V , V,qs ' as' ds
CORRIENTES
. s . - ' . . ' . ' s i.1. s.. j.1 sqs as DS es qr sir ur
TORQUE
RESULTADOS NUMÉRICOS
s s •Las expresiones para los voltajes v y v, obtenidos en el
artículo, trabajando con la fundamental y los pares armónicos hasta el
séptimo.

- 177 -
nc5 = (cosw t + -. eos 3w t + i eos 5oj t - ~ eos 7(ü t)qs JJTT e ó e b e 7 e
vds = ~ ¥ *-~ se™11 + j sen 5w t + — sen 7w
Y los resultados, obtenidos en la simulación son:
v S = 0.4244134 cosw t - 0.282942 eos 3w tqs e e
+ 0.084883 eos 5w t - 0.0606305 eos 7w te e
v, S - - 1.273239 sentu t + 0.254648 sen 5oi t + O.U81891 sen 7wds e e e
Comparando, se tiene que los resultados coinciden.
En la tabla T.4.b.2.1, se presenta una comparación de los ^
res de los voltajes a ser aplicados en cada una de las estructuras del
sistema de referencia múltiple.
Según dicha tabla, los resultados coinciden satisfactoriamen-
te. •
3L'a tabla T.4.b.2.2, presenta las corrientes expresadas en p.u.
que resultan de la aplicación de los voltajes descritos en la ;. tabla
T.4.b.2.1. '
Observando la tabla T.4.b.2,2. se concluye que los -resultados
de la simulación coinciden con los del artículo.

- 178 -
•
VOLTAJE . . .
+levqs . . . .
-leV
+3eV . . .
-3evqs
+5eqs
-SeVqs
+7eVqs
-7eVqs
ds
-levds
+3eV-,ds
-3evds
+5evds
-Se
+7evds
-7ev ,ds . . .
• - - . . . ARTICULO .
* 8Vu v — f| O/J O O O3"íT u . ^ 4 u w o .
I |X = -0.42441
~= 0.14147
|£ = 0.14147
4V n o / i o oIStr ' u .uu
- n T ñ07ñM [- U . O.U J / U
— n i °i °fi21TÍ
4V21TT
0
0
0
0
0
0
0
0
VALOR EN p.u.
• - " - - . SIMULACIÓN
U • " l-oo^O ..
-0.424413
0.1414713
0.14147 . . -
,
0606303
0
0
0
0
0
o . . - . ' • ' •
0
0
V = 1 p.u. TABLA T.4.b.2.1,

n +1 -1 +3 -3 +5 -5 +7 -7
VALO
R p
. u.
. . (A
RTIC
ULO
) '
0.00
86
-1.5
777
0.09
68
0.07
82
-0.0
202
0.03
55
-0.0
145
- 0.
0066
0 ...
. ne
• -i
VA
LOR
p'.u
.
'(SIM
ULA
CIÓ
N)'.
0.00
8555
'
-1.5
7772
4
0.09
6730
5 -
0.07
8214
'
-0.0
2019
7 "
0.03
5526
'
-0.0
14
48
6
---0
.006
670
."(A
RTIC
ULO
)
"0.4
00
3
3/07
49
' 0.
4088
"'
-0.4
17
2
-0.1
528
-0.3
069
-0.1
572
^0.0
787.
- •-
. ne
¿5
. .(S
IMU
LAC
IÓN
):
0.40
0301
-
'3.0
7501
6
0.40
8719
.
-0.4
1711
8
-0.1
5277
2-
-0.3
0679
3 .
-0.1
5729
2
- -0
.07
87
60
- •
•//(A
RT
ICU
LO
) :
0 1.5
69
3
-0.0
97
4
-0.0
78
1
- 0
.02
03
. -0
.03
55
. 0.
0145
.,. -
0.0
06
6
. '
ne
QT
'[SIM
ULA
CIÓ
N)"
0 1.56
9386
-0.0
9737
9
-0.0
7809
0.02
0286
-0.0
35
51
3
0.01
4537
-0.0
06
60
8
". (A
RTIC
ULO
) :
0 -3.0
18
8
-0.4
019
0.41
05
0.15
04
. . 0
.302
0
0.15
48
•
. 0.
0775
. '
ne
dr
"(SM
JLA
CIQ
N)
0 -3.0
18
88
1
-0.4
01S
S3
0.41
0434
0.15
0346
' 0.3
0199
7
0.15
4824
0.07
7529
TABL
A T
.4.5
.2.2
.

- 180 -
RESULTADOS GRÁFICOS:
En la página siguiente, se presentan los resultados gráficos -
del artículo. En la figura 6 se muestran los voltajes v s, v , v •J qs ' as ds
las corrientes iq/5 i^, i^, i^, i'^5, i^5, i^5, y el torque elec
tromagnetico obtenidos en el computador ANALÓGICO. Mientras que en
la figura 7 se muestran las corrientes y torque antes mencionados-cal-
culados utilizando el método del sistema de referencia múltiple, tra-
bajando con la fundamental y los pares armónicos hasta el séptimo.
RESULTADOS GRAPICOS OBTENIDOS EN LA SIMULACIÓN DIGITAL:
2La figura 4.b.2.1. muestra el voltaje v que por (88) esqs
también correspondiente al voltaje de fase v . Realizando una compa-as
ración con el gráfico correspondiente del artículo, se tiene que la
forma de onda es muy similar; la amplitud máxima de ésta onda cuadrada
es 0,7274 p.u, mientras en el artículo es aproximadamente 0.7 p.u. El
período de la onda es 0.016668 seg. que corresponde en frecuencia a
60 Hz; en el artículo se tiene un período o,17 seg. aproximadamente.
La figura 4.b.2.2. se presentan el gráfico del voltaje v, ,
comparado con el correspondiente del artículo, se tiene que la ampli-
tud máxima de la onda cuadrada es 1.2151 p.u.; mientras que en el -ar-
tículo se tiene una amplitud de 1.2 p.u. aproximadamente. Los perío_-
dos de las dos ondas coinciden y es 0.016668 segundos.. . •
En la figura 4.b.2.3. se presenta el gráfico de la Acorriente
aueqsi s que también es el correspondiente a i [ecuación 146). La ampli/•ic- i g.5

- 181 -
-íñ issi7TÉí;7\• if CT'I'^IM ' r-. \ M > - t . - i i n."- " " J- \ . - j ¡ , \ u i lün..
£.0
"di IJ3"1—
''• A A A: V \ V
níiious .«pc.t'd npi¡nil,iun willi eoa = O—ealuultiUd; Uiti nu iU iü t l üf nuilliplü riífurüiteií frumea.
. 0. Synchronous s]>cc:fl oi)craüon iviihpuler study.
O' —
CASO DESBALANCEADO

, ^ i •»-."*n.^.nv. tiTr.i-v--rp-.P-
TÍ. o-4'citinf /r.-i , i— =-_ i i-.Uíni i u-e - .tu
-s. o«:tSTi *.!•<. c. -o v
- 182 -
.
.1
.
. f
— — - i «ve triwarvvo — o». c«-*cj-»3O i — e • CTJ;-1 . 0011 i -f-vririr^— r.iy.— . O i I ;»*••>*— El-/
—. mi «.*. i jn i-*»..*,\ oot «Ji •••r.a-fií-CfSi
-T-_ fin-v-í-^ i -^-in
•
- ¡
Fig.- "
"Tiempo en segundo-s/divi nlonESCALA HORIZONTAL:

- 183 -
. i
Tiempo en "segundos/división
;; .•••;: >-"--''-'v:-;;:"v':ESCALA HORIZONTAL: '
A,1667E-03 - -
' Fig. 4.b.2.2.

- 184'-
— t . 3 •» í-a 232
— 3. n«* 1 l 3 3- «.
-2 . T-TT I 3 TO-r
-2 . •<• I "3 »33 fT
— 1.331 t 000-»
- ».r-5:2T-noT
i . 3 A. t.-*-rt i *i. 33i i iD*.Ti . 3»oa-wfc3-»1.33 -.T 13-»*
3 . •» o a» riza T3 . 3 T* 5- •- 1 VV
— i . isa i --tifc3
— 1 . 2 í , a O V 3 » 3
— i . 3 •> Tztai i t— 3 . O l O 4. t í.f— Z .3 1 7 « T T 1— 3. -• 1Í .3K27B— 3 . 2O3 B 1 fa3— 3. -3¿E*.TT1 3
— 3 . »
1 _ 33 -«-7 1 333
1 . 3 1 2 - -TD33
Tiempo en segundos/divisiónESCALA HORIZONTAL i
4. 1667E-03 . . • •
Fig. 4.b.2.3.

- 185 -
D- wno-iMo'-a
ni- a:-.3*»»Jís i
3. SSTtvtJfsiSC l£*- •ií,"rk'-=i riini». A/-^. i -'y.33. —o i i /-n:.'3
" T •
• ' ' ESCAÍ-A HORIZONTALTíempa en seyundos/divi5ion » ^.1ft67E—O3
Fig. 4 .b .2 .4 . ' i'bs

- 186 -
mpo en segundos/dívl-,ionESCALA HORIZONTAL:
Fig. 4 .b ,2 .5 . Ies .

t
-J-1
:
« «
i t i
i i í
i i i
M
t i
i t i
i :
i i
i i
: i
í t
> •
- -
H i
l .•
y j
y u
:j i;
u y
y ij
s- - -
¡- f
- •
tí
-s
,.
,.
,.
.,
.r
5 ^ i; tí
s í j::
>• >;
- í
> s
-í ^
:• N
* -
> *.w
> í
ti i t
i i i
•, -
- H
\j «
v v.
; -j y
i; y
« a
y *
>• -
*• -«
;>>:
>':•
.• j s
*" t
; i
•: t c
N j
--4
u-i ;
f J
i y
»t •
; y c
-i a
'- c
•• í
íí n
> 9 -•::
s v
;j 3
*;»
41 J
- c o
- a
ij K
a y j
c \ -
j N u
u c
-í í
s 'J
-í o
-í s
>- •>
r •
• •
ii
ii
ii
ii
-•
• ' í
t '
' ~
-^J
UV
v'J
o -
ú í)
v »v
-J T
y -
!• t-
iJ. -
i r s
> -1
1; \
í •-•
im
o v-
y í.1 j
c 'í
c y
o -
^ í-
« (•
a »
c •;
u w
T (•
< '
¿ >
- i c
- í- i
; •; O
•: >";
2'.'
; - i
-¡ •.'
> i v
3 -j
-.' i.-
; -.' i
j í
> v
c o
- a
>j H
o "
~ c
>* •-'
N u
u c
í í i
'j -í
o •)
s i-
•> o
•: »•
t •-
Q o
>• y
í.1 j
c 'í
c y
o -1
- f-
y ^
£ u
c •;
u u
11 M
> í
-1 o
- u'
; »i c
_• i
o *.
•-' -,
v J
£ •» >
: ;t %
* -j
-; u
»• J
í f •
; y s
•; J ;
>! v
-J tí
-' 2
H ?
c- y
•; z
- -i -
j c
-j -
í > 3
a *•
^ ^
-í"
3 s
y -5
-i 4
í c
-J v
f 3
w o
J tí s
i* J
w ^
y '•
'u -5
3 f1 *
•' 2''
u c'-'
- **
** v
c •;
í a-
1 -i c
-í -J
» f
o -!
- > -
2 c
- y
f J
o : i
•-• i
í a
-J o
s i- í í
•, c
-:u
s 5
J í u
J- ;
- i;
-» J
í 4
f c -i
iifr
OíjC
JÍ.-
0 .•
< y
•; «
«ít
ísi-
jca
o^
ou
; o
J j >
- * j
s í
')>
'i p
J >•
« a
^y >
- J
a >
s a
ac,-•
: fr í
u
o s
t,-> ;
«c-
J D
C V
J'Jv i",
u <
s-i
J o
s'iu
•!:
» í
i ^ í
J o
a i
J•i
'J 3
-i -'
/ •
"í - '
c í
o •;
%•:
a í
-i --
> c
N >
- ?
y a
y -
v o ;
y » ^
•* s
í u j
$ u
u y
o -
>,- >
11»
y »
í j:
-.' u
-J o
-J; s
v i
-i c •
-' 3 %
í í
- u
í ^ M
~ y
4 j
<< *
<; u
3 ;*
- y
< í
y j
j ] ;
y j
y v*
J w 4
4 t
o y i;
í ¿/
- u >
-,- L-
y 3
> u ;
-j >
t •
4 -.' ^
o j
) i
•; i
v >
u í
s' i, -
c u '^
» j
y 11
« j
u í
< í É
J > í
t
H u
D u
> í
y -J o
« „•
í ;u
y u
'.' 2
í m
u 3
t -j
u í i
u u
í •; - tu
3 .;
/ t
s i
u u
M
- > -
4 v -
c- :
-j - j
'J J
u - j j
v t
- c
tj •:
•> ti
- ^
í o
u i
^ - M
tj c
- o v
»v :
- a
•) •;
u c
5 f
y >-
f s •
;u -í v
í •;
" u f
N o
si
a *
5 ,M
i." w
M >
í);
$ u
« •
"*' >
•{ -í
- j f
í M
•? -i
3 í
MI i
u y
a -1
a J í
J :
c - ' r
%' í j
-j -j
^ "
t - -1
> j
IH í; i
«-.
^»J
^'•^
¡"S
^íM
^ííJ
ll-•
J'J
^>o
«)^
'tf^
a^í
- •
•! >
y »t
i« y
» j
•; i:
-3 í
* ü
v -
H •:
JJ n
tf -í
u 'J
-J J
> :
-I.-
¿ <• -
jc
-1 •.
-•
u- -j m
;.'-:,
o UF
I H
--.
oí

- 188 -'
a- -r",f~f'-f'Snj't-,-. icti i ci'r''*3Vi . •<',•;««*r>r>;i*
Tiempo en hesundos/di vi si onESCALA HORIZONTAL!
J 667E-O3
Pig. 4.b.2.7. . i-'br

— 1 .•*»<£.*• O "7- iSJ-— 1 _ V-*» t «7--21 ri
l J I, OS
-j:=iO V
— :s_ nns-ov 1
— - *vt/ a ü ..••«• O Es "3- •] Oorü1^^^'»-.i* "'SU S*::?^*?--
i . s:o&<t.jvi. Ve
- .1 O OS. I AFJ-?
•2 - 3 -V EJ '* -7 "
•3. a ^.O-SD i o-Ji _ -'.=> i -u-r>o^?5:a - T! i FI-^ v-T-rin
. I -_ I 1 I1 . ' I I . I I ,
- 189 -
Fig. 4.b.2.8. Torque
Tiempo en
ESCALA HORIZONTAL:4.1667E-03

- 190 -
tud máxima es 3.627 p.u. y la correspondiente del artículo es 3.8 p.u.
Los períodos de las dos ondas coinciden (0.016668 seg) .
La corriente de fase i, expresada en la estructura de refe-
rencia estacionaria es graficada en la figura 4.b.2.4. Realizando la
comparación con el correspondiente gráfico del artículo, se tiene . que
la amplitud máxima es 3.465 p.u. mientras en el artículo es 3.5 p. u.
aproximadamente. Los períodos de las dos ondas coinciden.
La corriente de fase i es mostrada en la figura 4.b.2.5., la
la amplitud máxima de ésta onda es 4.536 p.u. mientras que en el .. ar-
tículo es 4.3 p.u. aproximadamente. El período en los dos gráficos es
el mismo.
La figura 4.b.2.6. muestra la forma de onda de la corriente dei s
rotor i expresada en la estructura de referencia estacionaria..estaqr r .
r scorriente es la misma que i (ecuación 149). La amplitud máxima dear
esta onda es 3.95 p.u. y dicha amplitud en el artículo es 4.0 p.u. a-
proximadamente. Ambas tienen un período de 0.016668 segundos.
1 sLa corriente de fase de rotor i, expresada en la estructura
de referencia estacionaria, es graficada en la figura 4.b.2.7. Reali-
zando una comparación se tiene que la amplitud máxima es 3.23 p.u., y
en el artículo es 3.3 p.u. aproximadamente. -Los períodos coinciden y
su valor es 0.016668 segundos que es el período que tienen todas ' las
ondas descritas en éste ejemplo, a excepción del torque. ;
GRÁFICO DEL TORQUE ELECTROMAGNÉTICO

- 191 -
En el ejemplo 4.a.2. que se refería a la operación balanceada
con fuentes no sinusoidales, se trató sobre la ecuación del torque e-
lectrojnagnético, en ella se analizó los coeficientes de los ^términos
eos 2küJ t y sen 2kw t, expresando que dada la naturaleza de ..'. dichosfc- . c
coeficientes era necesario que para un valor de k determinado, se e-
nergizaran tanto la estructura +ke como la correspondiente a -ke pa
ra que dependiendo de los valores de las corrientes resultantes, los
coeficientes mencionados sean diferentes de cero.
En el presente ejemplo de operación desbalanceada con fuentes
no sinusoidales, se han energizado las estructuras +lé, -le; +3e, ~3e;
+5e, -5e; +7e, -7e cumpliéndose lo que se acaba de' mencionar, esto es
que por ejemplo para el valor de le = 3 se han energizado las estructu-
ras +3e y la -3e; por lo que ya es posible que el coeficiente del..tér-
mino eos 2(3) ü) t y del término sen 2(3) to t /"sea diferente de cero ye c .
por lo tanto exista una componente A.C. en el torque.
Efectivamente, en la figura 4.b.2.8. se muestra el gráfico del
torque en el cual se hace evidente que los coeficientes del j¡ -término
eos 2k w t y del término sen 2k w t son diferentes de cero.e J e .
- Placiendo una comparación con el gráfico del torque del artícu-
lo, se tiene que las formas de onda coinciden. Así, el valor máximo -
de la onda es 2.58 p.u. mientras en el artículo se tiene un valor de
2.4 p.u. paroximadamente. . • •
El período de la onda del torque es 0,008375 segundos que en
frecuencia es 120 Hz, es decir que el torque tiene una frecuencia que

- 192 -
es el doble que la frecuencia de las demás variables (60 Hz) .
En general se puede afirmar que los resultados de la .'".simula-
ción son muy satisfactorios, demostrándose de ésta manera la ' validez
del modelo.
PERDIDAS
El programa arrojó los siguientes resultados:
Pérdidas totalales en el cobre en el estator: 1.7927 x 10 ** p.u.
Pérdidas totales en el cobre para el rotor: 1.275 x 10 4 p.u.

CONCLUSIONES Y RECORDACIONES
De los resultados obtenidos en el presente trabajo de tesis se
derivan las siguientes conclusiones:
1.- El modelo implementado utiliza un método alternativo confiable
y rápido para anlizar en el.estado estable a velocidad cons-.
tante, el comportamiento de la máquina de inducción trifásica
simétrica, con voltajes aplicados de cualquier forma de onda
periódica.
2.- El método del sistema de referencia múltiple ofrece un procedí
miento simple y directo de análisis en el estado estable • ' de
los modos de operación balanceado y desbalanceado.
3.- El método del sistema de referencia múltiple ofrece la ventaja
del análisis de la operación desbalanceada de la máquina de in
ducción empleando la teoría de circuitos D.C., reemplazando al
método de las componentes simétricas, tradicionalmente utiliza-
do en el análisis de la operación desbalanceada.
4.- Se ha comprobado que la teoría del método del sistema de ejes
arbitrarios de referencia q, d, O, es consistente con la teo-
ría del método del sistema de referencia múltiple, pese a que
ambos métodos tienen una teoría diferente. Se puede decir que
- 193 -

- 194 -
el método del sistema de referencia múltiple es un método gene
ralizado, mientras que el sistema de ejes arbitrarios de refe-
rencia q, d, O, es un método particular.
5.- En la operación sinusoidal, se ha comprobado la teoría del
sistema de ejes arbitrarios de referencia q, d, O, que "indica
que la frecuencia de las variables en los ejes q, d, O, es
(w -cu), cumpliéndose ésto también en el método del sistema de
referencia múltiple. _ •
También se comprueba que las variables expresadas en la estruc_
tura de referencia rotando sincrónicamente, son cantidades
constantes.
6.- En la operación desbalanceada,' se puede observar que -""-dichos
desbalances se reflejan sobre las variables tanto de rotor co-'
mo de estator. Se puede anotar también que el efecto del des_
balance se refleja en el cambio de la amplitud de las /.'.varia-
bles expresadas en la estructura de referencia ' estacionaria,
mas no en su frecuencia.
Para éste mismo tipo de operación, el torque se presenta en
general como la superposición de una componente continua y de
una alterna, siendo la frecuencia de ésta última el doble que
la frecuencia de las variables expresadas en la estructura • de
referencia estacionaria.
Con respecto a las funciones de entrada e^ , e , , e se pueder ga go ge

- 195 -
decir que deben ser funciones periódicas que cumplan con las
condiciones de Dirichlet para que puedan ser representadas por
un conjunto infinito de funciones elementales (SERIE DE FOU-
RIER). Mientras mayor cantidad de términos de la serie infini
ta sean considerados en la composición, mayor será la aproxiina
ción del resultado a la función compleja original.
s sEs debido a esto que los voltajes v y v-, presentan peque-
ñas irregularidades, mientras que los gráficos de estos volta-
• jes en el artículo (referencia 1), son perfectas ondas cuadra^
das que de ninguna manera podrán ser obtenidas con los volta-
jes e , e , , e (dados en los ejemplos A y B de la referenga gb ge v j r ; _
cia 1) al trabajar solo con 13 armónicos.
3.- En el método del Sistema de referencia múltiple es muy impor-
tante el número de armónicos que se escoge para trabajar, el'
criterio es que mientras mayor sea el número de armónicos que
se toman en cuenta al descomponer en series de Fourier a una
" función compleja, mayor será la aproximación de dicha serie, a
la función compleja original. En esto, prima el criterio del
usuario del modelo, en función del tipo de funciones comple-
jas a aplicarse al estator de la máquina de inducción.
En el modelo se ha realizado pruebas trabajando con 4, 7, 13,
17 armónicos, se observó que•con 4 armónicos los resultados -
fueron muy diferentes a los que se esperaban.
Con 7 armónicos los resultados eran los esperados. Con 13 ar-

- 196 -
mónicos casi no existió cambio con respecto a 7.
Con 17 armónicos prácticamente resultó lo mismo que si se tra-
bajara con 13 armónicos. .
La diferencia observada al trabajar con 4 armónicos es explica^
ble debido a que los armónicos 5 °, 6 °, 7™°, ... no han ;sido
tomados en cuenta pese a que para el caso de los ejemplos de a
plicación el 5 y 7 tenían valores apreciables que influ
ían en el resultado.
La poca diferencia entre trabajar con 13 o con 17 armónicos se
explica por los valores de los armónicos 14, 15, 16 y 17 ya
que tenían un valor muy pequeño que al ser tomados en cuenta
no influían en la forma de la función compleja graficada.
La naturaleza del método del sistema de referencia múltiple,
hace que el efecto de cada una de las estructuras que confor-
man el sistema de referencia múltiple sea independiente una
con respecto a otra, es decir, lo que suceda en una estructura
de referencia determinada del sistema de referencia múltiple,
no afecte a las demás estructuras de referencia. ' Esto llevci
ría a la conclusión que si por ejemplo se tiene un voltaje de
fuente constituido por la fundamental y 3 armónicos se o: obten_
dría el mismo resultado final si se ingresa separadamente • la"
fundamental, y cada uno de los resultados. Esta es precisamen_
te la filosofía del método del sistema de referencia múltiple.
Es por ésto que se considera la máquina idealizada lo cual en

- 197 -
realidad no es posible en su totalidad, pero lo que si es posi
ble, es trabajar en la zona lineal.
10.- De las comparaciones hechas entre los resultados dados por el
computador analógico mediante una simulación analógica y el
computador digital (mediante el método del sistema de referen-
cia múltiple) se tiene que los resultados son muy similares.

- 198 -
RECOMENDACIONES
Uno de los sistemas mas eficientes para controlar un motor 'de
inducción es mediante la variación de la frecuencia y el volta
je de la fuente que alimenta al estator. Esto se consigue por
medio de los conversores estáticos como un Rectificador-inver-
sor ó un ciclo conversor. El presente modelo puede servir co-
mo base para el estudio del conjunto control-motor de induc-
ción.
Existe inclusive una aplicación del método del sistema de refe_
rencia múltiple y las ecuaciones de transformación del inver_
sor para hallar las variables en un rectificador inversor.
2.- Hay que tomar en cuenta que el número de armónicos con que se
trabaja implica un tiempo de computación y un espacio de memo-
ria ocupado en el microcumputador. A mayor número de armóni-
cos el tiempo es "mayor, así como el porcentaje de memoria ocu-
pada crece.
Entonces es recomendable hacer un análisis sobre el número de
armónicos con el que se va a trabajar, si es o no :-nJndispensa:
ble trabajar con un número excesivo.

APÉNDICE A : MANUAL DE USO DEL PROGRAMA
A.l. OBJETIVOS: El programa implementado tiene por objeto:
a) El descomponer en series de Fourier las funciones ••• conti-
nuas periódicas en el rango O - 2-rr e , e , , e ingresa-ga go ge
das por el usuario, para que el programa principal pueda.
b) Utilizarlas para resolver las ecuaciones que rigen el com-
portamiento en estado estable de la máquina de inducción
trifásica, especialmente cuando los voltajes de fuente son
no sinusoidales; utilizando el método del sistema de refe-
rencia múltiple.
A. 2. FORMA DE PROPORCIONAR LOS DATOS AL PROGRAMA:
El presente programa ha sido desarrollado en un microcomputa-
dor APPLE //c utilizando lenguaje BASIC.
A continuación,, se describe el procedimiento a seguirse para
poder ingresar los datos:
1.- Ponga el microcomputador listo para trabajar en APPLESOFT (leri
guaje BASIC).
Si el APPLE //c está listo, aparecerá en el margen izquierdo el

siguiente símbolo y junto a el aparecerá el
cursor centellando
2.- Ingrese el disco TESISCESAR en el drive
3.- Teclee la sentencia NM y a continuación pulse RETURN, esto es
para borrar cualquier programa anterior y las variables de me-
moria.
4.- . Teclee la sentencia LOAD TESIS y a continuación pulse RETURN.
Esto cargará el programa TESIS de disco a memoria.
5.- INGRESO DE LAS FUNCIONES e , e . y e .ga' gb ge
5.1. INGRESO e
- Ingrese la siguiente instrucción:
275 DEF FN P(x) = Espacio donde debe ingresar la función co_
rrespondiente a e
Ejemplo: Suponga que Ud. quiere ingresar la siguiente función
que corresponde al voltaje e
e = 3 . sen (5 . x)ga v-
Entonces Ud. debe ingresar:
275 DEF FN Pfx) = 3 * SIN (5 * x)

Lo que hace ésta instrucción es definir una función.
*
La función a ingresarse debe ser función de alguna -variable
(tiempo, ángulo, etc), entonces, aquella variable deberá cam-
biarse por la letra X.
Ej emplo:
2-n-
e =3. sen (5ü) t + -=—) - 5 cosw tga ^ e 3 e
Se puede ver que e es función de w t, entonces cambio la va-1 l ga . e * •
riable w t por x, debiendo ingresar:
270 DEF FN W(X) = 3 * SIN (5 * X + 2 * fr/3) - 5 * eos pQ
5.2. INGRESO DE e
El procedimiento es el mismo que para e , sólo cambia el núme_
ro de la instrucción.
260 DEF FN P(X) = Espacio para la función e b
5.3. INGRESO DE e
De manera similar:
480 DEF FN P(X] = Espacio para la función eo

6. - CORRIDA DEL PROGRAMA
Una vez Ingresadas las tres funciones defasadas 120° entre sí,
Ud. hace correr el programa tecleando:
RUN, 7 luego presione la tecla return.
Inmediatamente aparecerá el menú de ingreso de datos, 1 -.-donde
Ud. tiene que ingresar dato por dato, los parámetros pedidos
que deberán estar en p.u.
A partir del paso 6 toda comunicación del usuario con el micro_
computador es por medio de menú, en el cual se le da las opcio_
nes a escoger.
7.- FINALIZACIÓN DEL PROGRAMA
Para finalizar el programa, Ud. deberá escoger la opción 21
del menú general de gráficos. A continuación de escoger ésta
opción aparecerán en la pantalla, las perdidas en el cobre de
la máquina: Pérdidas totales en el estator y pérdidas totales
en el rotor.
8.- DIFICULTADES: El programa completo, está cargado en memoria
RAM, en el caso que hubiese corte momentáneo de luz el usuario
deberá comenzar nuevamente desde el paso 1.
Puede suceder el caso que el usuario ingrese (por medio de me-

nú) que el número de armónicos con el que quiere trabajar es
40, con respecto a esto se tiene que el programa está sideñado
para trabajar con cualquier numero de armónicos, pero el ]iiicro
computador tiene una memoria de 128 k, entonces puede darse el
caso de que la memoria este completamente ocupada. El usuario
deberá escoger un número razonable de armónicos con el que va
a trabajar; el programa ha sido probado trabajando hasta • con
17 armónicos.
NOMENCLArrURA
VARIABLES Y FUNCIONES DE ENTRADA
RS = Resistencia de estator
RRF = Resistencia de rotor referida al estator
XSS = Reactancia estator
XRRF = Reactancia del rotor referida al estator
XM = Reactancia Mutua
TVE = Velocidad angular eléctrica (velocidad sincrónica)
WR = Velocidad angular del rotor
FR = Relación entre WEAVbase "
V = Amplitud del voltaje
M = Número de armónicos
R = Factor de escala para gráficos en pantalla
Rl = Factor de escala para gráficos en impresora
FN WQQ = Función definida
FN P(X) = Función definida por.el usuario
FN Y(X) = Función definida

FN ZpQ - Función definida
B$, A, Q, Q0, R0, X1SS = Variables para comunicación con el usuario
D = Desplazamiento angular en radianes
Z4 = Paso utilizado en el lazo FOR - NEXT para gráficos en impresora
COEFICIENTES DE FOURIER ALMACENADOS EN FORMA DE VECTORES
A(I) = Coeficientes coseno de la función a ser graficada
B(I) = Coeficientes seno de la función a ser graficada
AA(I) = Coeficientes coseno de la función eSa
BAfll = Coeficientes seno de la función e^ J ga
ADfl) - Coeficiente coseno de e ,gb
BD(I) = Coeficiente seno de e ,gb
AEfl) = Coeficiente coseno de e^ J ge
BE (II = Coeficiente seno de eJ ge
ANfl] - Coeficiente coseno de vng
BNfll ~ Coeficiente seno de v1 J ng
AM(I) - Coeficiente coseno del voltaje de fase vas
BM(I) = Coeficiente seno del voltaje de fase v
= Coeficiente coseno del voltaje de fase v,
~ Coeficiente seno de voltaje de fase v,
AR(I) = Coeficiente coseno de voltaje de fase v
BR(I) = Coeficiente seno del voltaje de fase v
AS (I) = Coeficiente coseno del voltaje v
= Coeficiente seno del voltaje v
s
s
s
s
Al [I) = Coeficiente coseno del voltaje v,
BT(I) = Coeficiente seno del voltaje v,
BQSMECI) = Voltajes v

VDSME(I) = Voltajes vds+ke
MQSE(i;) = Voltajes v ~ke
-TcpMDSE(I) = Voltajes v K
FOE(I) = Es el A de las expresiones para las corrientes en el
sistem
F1CI) = Es el A~
sistema de referencia múltiple.~ke
GNE(I) = Es el B+ke
G1(I) = Es el B~ke
HNECI) = Es el C+ke
I-Il(I) = Es el C~ke
INE(r) = Es el D+ke
II (T) = Es el D"ke+VP
JNE(I) = Es el E
J1CI) = Es el E~ke+Vp>
IQSME(r) = Corriente i
ISQSEC1) = Corriente i "ke+Vp>
IDSMECI) = Corriente ids
IPDSECI) • = Corriente ids"ke
IRQME(I) = Corriente i' +ker -ke
ITRSECI) = Corriente i^ J qr
lUDRECI) = Corriente idr1 -ke
IVDRE(I) = Corriente idr e5
lAQSS(I) = Coeficiente coseno de iqs
IBDSSCI) = Coeficiente seno de i
ICDSS(I) = Coeficiente coseno de i, s
IIIQSSCI) = Coeficiente seno de i-, .
1 sIGQRS(I) = Coeficiente coseno de i
1 sIJDRSCI) - Coeficiente seno de i

sILDRS(I) = Coeficiente coseno de i,I C
IIQRSCI) = Coeficiente seno de i,
TC(I) - Coeficiente independiente del torque
TSA(I) = Coeficiente coseno del torque
TBQQ = Coeficiente seno del torque
Sl(k) = Es un punto de la función a ser graficada.
A = Valor máximo de la función a ser graficada
R = Factor de escala para gráficos en pantalla
Rl = Factor de escala para gráficos en impresora
Z1(I) = Coeficiente coseno de la función a ser graficada
Z2(I) = Coeficiente seno de la función a ser graficada
Z3(I) ~ Coeficiente independiente de la función a ser graficada
B9 = Valor del punto de la función a ser graficada en la impresora
INDICADORES:
k9 = 1 Indica que va a graficarse una función expresada en la es-
tructura de referencia rotando sincronizadamente.
k9 = O Indica que no es un gráfico de una función expresada en la
estructura de referencia rotando sincronizadamente.

BIBLIOGRAPIA
1.- KRAUCE P.c., "Method of Múltiple Reference Francés Applied to the
Análysis of Symetrical Induction Machinery", IEEE Trans. Power A-
pparatus and Systems, Vol. PAS-87, p.p. 218 - 227, Jan. 196S
2.- TOAPANTA MILTON, "Estudio Transitorio del Motor de Induceion",EPN
Quito, 1977.
3.- PONCE RUBÉN, "Operación Asimétrica de la Máquina Trifásica de In-
ducción", EPN, Quito 1985.
4.- LOZA JORGE, "Simulación de la Maquina de Inducción Trifásica en
un Sistema de Coordenadas Arbitrarias de Referencia", EPN, Quito,
1982.
5.- FITZGERALD A.E., KINGSLEY, KUSKO, "Teoría y Análisis de las Máqui
ñas Eléctricas", Ed. Hispano Europa, Barcelona, 1975.
6.- BANDA I-IUGO, "Fundamentos del Control Electrónico de Potencia",EPN
Quito 1985
7.- POOLE LON, Me NIFF, COOK, "Apple //, Guía del Usuario", Ed. Osbor_
ne/ Me Graw-Hill, 1983.
8.- RALSTON. WILF, "Mathermatical Methods For Digital Computers",

9.- KRAUCE P.C. and THOMAS C.H., "Simulation of Symetrical Inductioa
Machinery", IEEE Trans. Power Apparatus and Systems, Vol. PAS-84,
pp. 1038 - 1053, Nov. 1965.
10.- KOSCM I.L., "Máquinas Eléctricas y Transformadores", Ed. Reverte,
Barcelona, 1980.
11.- TOAPANTA MILTON, "Apuntes de Máquinas Eléctricas III", EPN 1984.
12.- POVEDA MENTOR, "Apuntos de Dinámica de Máquinas Eléctricas"
13.- KRAUCE P.C. and HAKB, "Method of Múltiple Reference Frames Applied
to the Analysis of a Rectifier - Inverter Induction Motor Drive",
IEEE Trans. Power Apparatus and Systems, Vol. PAS-88, pp. 1635 -
1970, Nov. 1969.