Estructura de buses para control de AGV · Mario R. Modesti 1 Estructura de buses para control de...
16
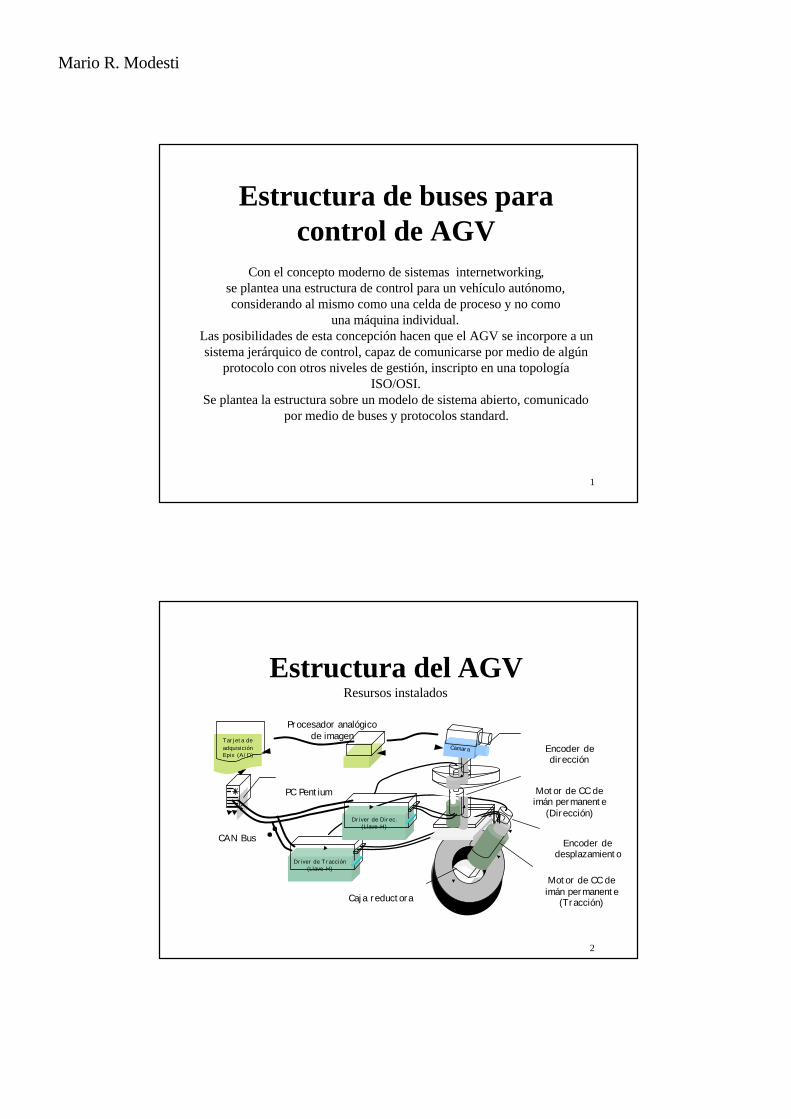
Mario R. Modesti 1 Estructura de buses para control de AGV Con el concepto moderno de sistemas internetworking, se plantea una estructura de control para un vehículo autónomo, considerando al mismo como una celda de proceso y no como una máquina individual. Las posibilidades de esta concepción hacen que el AGV se incorpore a un sistema jerárquico de control, capaz de comunicarse por medio de algún protocolo con otros niveles de gestión, inscripto en una topología ISO/OSI. Se plantea la estructura sobre un modelo de sistema abierto, comunicado por medio de buses y protocolos standard. 2 Estructura del AGV Resursos instalados Driver de Tracción (Llave–H) Tarjeta de adquisición Epix (A/D) Procesador analógico de imagen Encoder de dirección Encoder de desplazamiento Cámara Caja reductora Motor de CC de imán permanente (Tracción) Motor de CC de imán permanente (Dirección) CAN Bus PC Pentium Driver de Direc. (Llave–H)
Transcript of Estructura de buses para control de AGV · Mario R. Modesti 1 Estructura de buses para control de...
Mario R. Modesti
1
Estructura de buses paracontrol de AGV
Con el concepto moderno de sistemas internetworking,se plantea una estructura de control para un vehículo autónomo,considerando al mismo como una celda de proceso y no como
una máquina individual.Las posibilidades de esta concepción hacen que el AGV se incorpore a unsistema jerárquico de control, capaz de comunicarse por medio de algún
protocolo con otros niveles de gestión, inscripto en una topologíaISO/OSI.
Se plantea la estructura sobre un modelo de sistema abierto, comunicadopor medio de buses y protocolos standard.
2
Estructura del AGVResursos instalados
Driver de Tracción(Llave–H)
Tarjeta deadquisiciónEpix (A/D)
Procesador analógicode imagen
Encoder dedirección
Encoder dedesplazamiento
Cámara
Caja reductora
Motor de CC deimán permanente
(Tracción)
Motor de CC deimán permanente
(Dirección)
CAN Bus
PC Pentium
Driver de Direc.(Llave–H)

Mario R. Modesti
3
Estructura Jerárquica de buses
4
Modelo de referencia de interconexión de sistemas abiertos
Mario R. Modesti
5
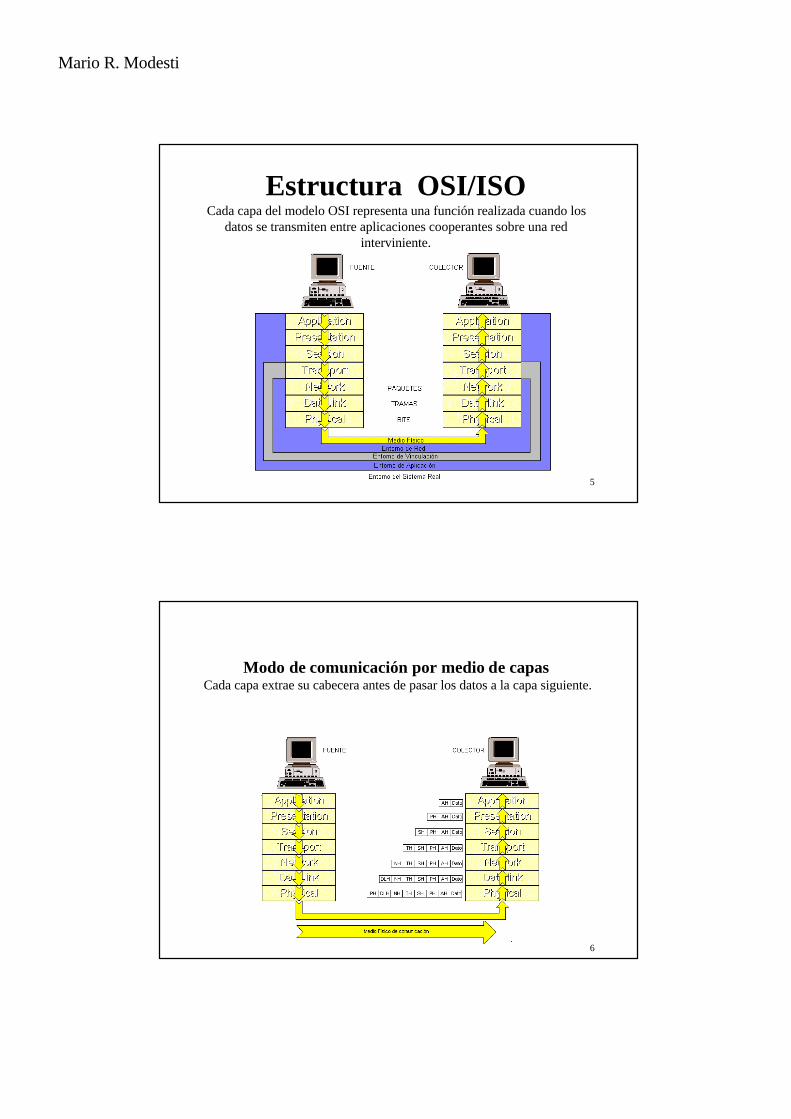
Estructura OSI/ISOCada capa del modelo OSI representa una función realizada cuando los
datos se transmiten entre aplicaciones cooperantes sobre una redinterviniente.
6
Modo de comunicación por medio de capas Cada capa extrae su cabecera antes de pasar los datos a la capa siguiente.
Mario R. Modesti
7
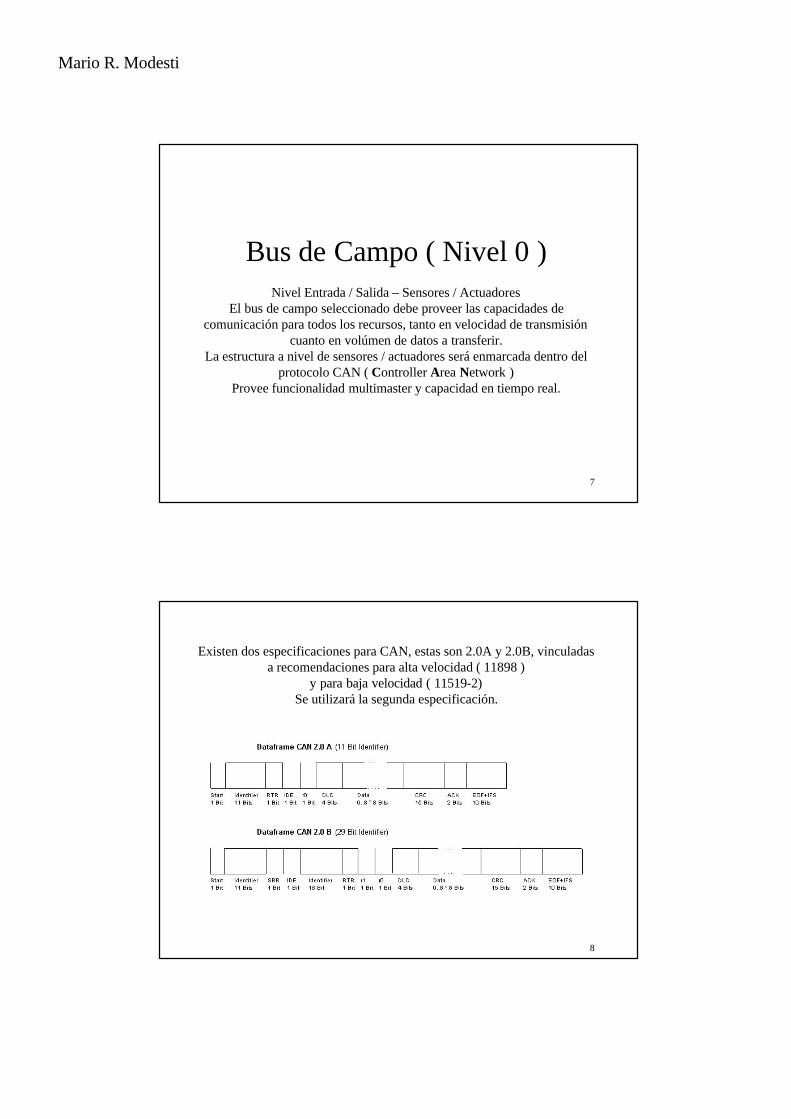
Bus de Campo ( Nivel 0 )Nivel Entrada / Salida – Sensores / Actuadores
El bus de campo seleccionado debe proveer las capacidades decomunicación para todos los recursos, tanto en velocidad de transmisión
cuanto en volúmen de datos a transferir.La estructura a nivel de sensores / actuadores será enmarcada dentro del
protocolo CAN ( Controller Area Network )Provee funcionalidad multimaster y capacidad en tiempo real.
8
Existen dos especificaciones para CAN, estas son 2.0A y 2.0B, vinculadasa recomendaciones para alta velocidad ( 11898 )
y para baja velocidad ( 11519-2)Se utilizará la segunda especificación.
Mario R. Modesti
9
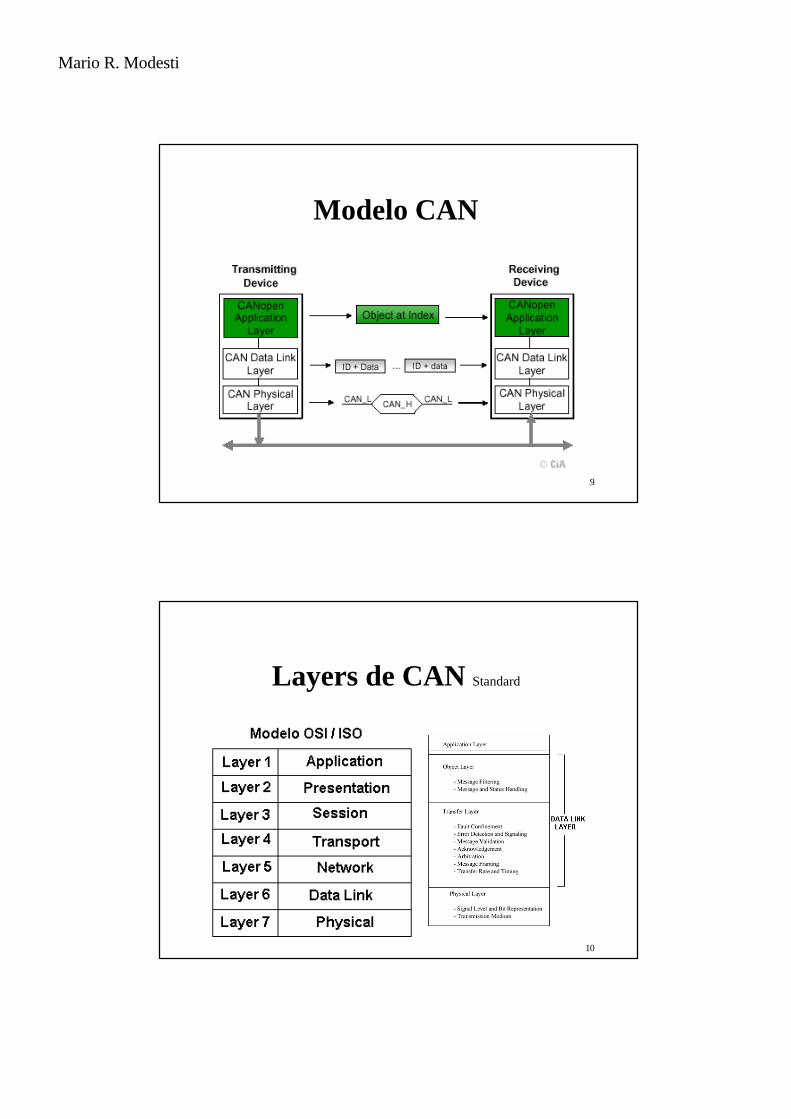
Modelo CAN
10
Layers de CAN Standard

Mario R. Modesti
11
Layers de CAN extendidoLLC : Logical Link Control
MAC : Medium Access Control
12
CAN Características operativas
Standards ISO/DIS 11 519-1 ISO/DIS 11 898Topología Línea con stubParticipantes Hasta 32 sin repetidorMedio de acceso CSMA / CAVelocidad de transmisión 1 [Mb] / 40 [m] 100 [Kb] / 800 [m]Telegrama 8 bytes de datoNiveles de señal RS 485 modificadoTipo de cable STP ( Shielded Twisted Pair )
Mario R. Modesti
13
CANCaracterísticas operativas
El mecanismo de acceso de CAN esta implementado como un arbitrobidireccional no destructivo, esto último significa que el vencedor del
arbitraje ( mensaje de más alta prioridad ) no debe restablecer elmensaje desde el principio.
Suponer que dos nodos del bus recibirán un pedido de transmisión.El métoso de acceso es CSMA/CD+AMP ( Carrier Sense Multiple Accesswith Collission Detection and Arbitration on Message Priority. Acorde con
este algoritmo, ambos nodos de red esperarán hasta que el bus este libre( Carrier Sense ). Cuando esto ocurra, ambos nodos transmitirán su bit de start
( Multiple Access ).
14
CAN Características operativas
- Priorización de los mensajes- Garantiza los tiempos de latencia- Configuración flexible- Multimaster- Detección y señalización de errores
Mario R. Modesti
15
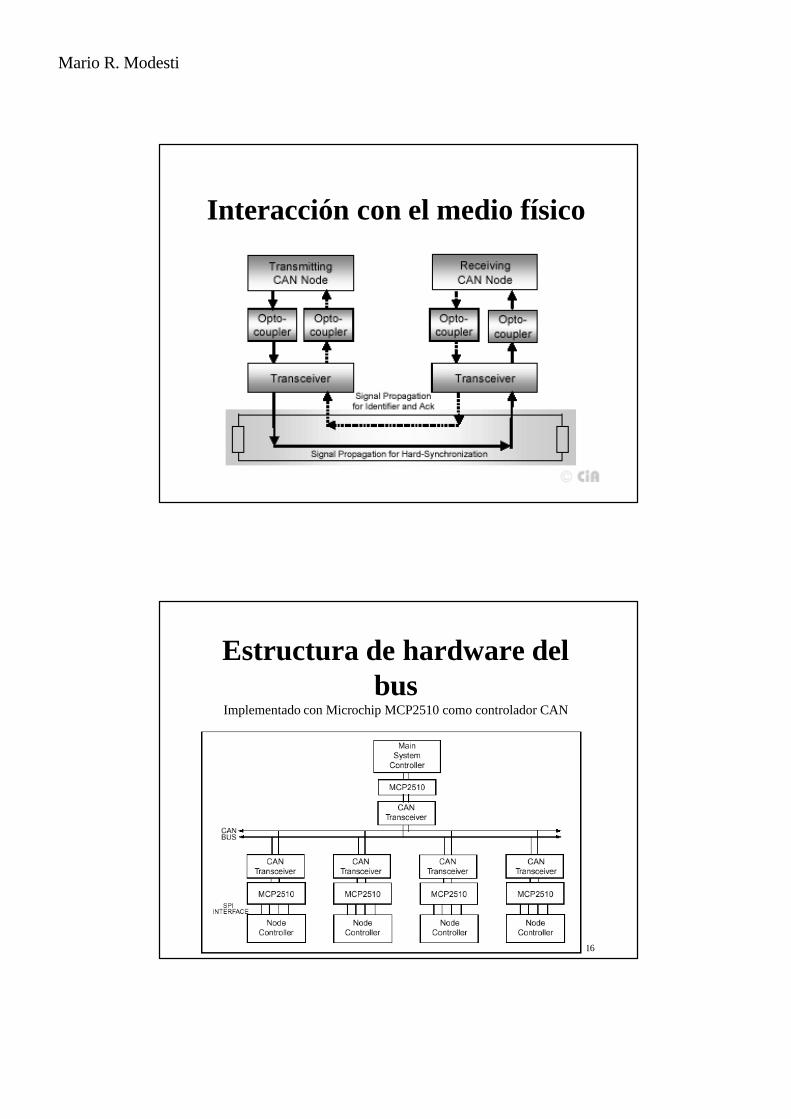
Interacción con el medio físico
16
Estructura de hardware delbus
Implementado con Microchip MCP2510 como controlador CAN
Mario R. Modesti
17
Bus de Control ( Nivel 1 )
Como se mencionara oportunamente, las característicasmóviles de la máquina obligan a un enlace radial de red.
La interface es capaz de proveer servicios a través de Ethernetpor medio de un enlace wireless spread spectrum,con protocolos
como IPX , TCP, UDP principalmente
18
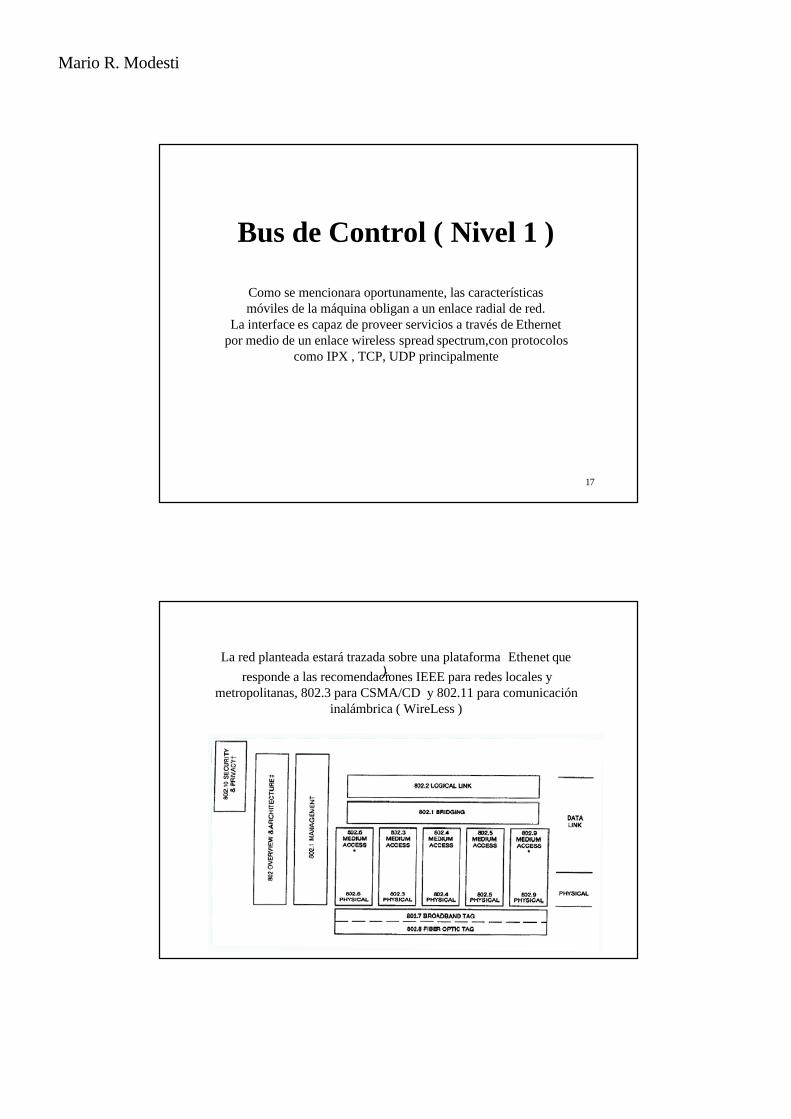
La red planteada estará trazada sobre una plataforma Ethenet que responde a las recomendaciones IEEE para redes locales y
metropolitanas, 802.3 para CSMA/CD y 802.11 para comunicacióninalámbrica ( WireLess )
).

Mario R. Modesti
19
Comparación de capasOSI / IEEE 800.X
20
HDLC High Level Data Link Control

Mario R. Modesti
21
Descripción del modelo LAN&MAN/RM mapeado en el modeloOSI/RM. La parte aplicable de la estructura _OSI consiste de las dos
capas inferiores. Data Link Layer y Physical Layer. LLC : Logical Link Control
MAC : Medium Access Control
22
Formato de la trama Ethernet

Mario R. Modesti
23
Supervisión – Control remoto( Nivel 2 )
24
Así como el modelo de referencia OSI posee siete niveles (o capas), laarquitectura TCP/IP viene definida por 4 niveles : el nivel de subred
[enlace físico], el nivel de interred [Red, IP], el protocolo proveedor deservicio [Transporte, TCP o UDP] , y el nivel de aplicación.
OSI TCP / IPApplicación (Layer7)
AplicaciónPresentación (Layer6)
Sesion (Layer 5)
Transporte (Layer 4) Transporte ( TCP o UDP )
Red (Layer 3) Interred ( IP )Link de Datos (Layer 2)
SubRed ( Enlace Físico )Físico (Layer 1)
Mario R. Modesti
25
Capa de aplicaciónconsiste en aplicaciones y procesos que usan la redCapa de transporte host-a-hostprovee servicios de distribución de datos extremo-a-extremoCapa de reddefine el datagrama y administra el encaminamiento de losdatosCapa de acceso a la redconsiste en rutinas para acceder a la red física
26
Características TCP/IP
Con el objetivo de poder intercomunicar recursos de diferentes redes yprotocolos se desarrolla TCP / IP. Está basado en un modelo que asume laexistencia de un gran número de redes independientes vinculadas entre si
por medio de gateways. El usuario debe poder acceder de alguna manera aestas redes. El ruteo necesario para la realización de esta comunicación
debe ser completamente invisible al usuario.TCP / IP es una tecnología no orientada a la conexión , la información es
transferida como una secuencia de datagramas. Si bién TCP e IP pueden trabajar en modo separado , no es conincidencia
que trabajen juntos

Mario R. Modesti
27
28
Característcas IPEl protocolo IP es el principal del modelo OSI, así como parte
integral del TCP/IP. Las tareas principales del IP son eldireccionamiento de los datagramas de información y laadministración del proceso de fragmentación de dichos
datagramas.El datagrama es la unidad de transferencia que el IPutiliza, algunas veces identificada en forma más específica comodatagrama Internet o datagrama IP. Las características de este
protocolo son :NO ORIENTADO A CONEXIÓN
Transmisión en unidades denominadas datagramas.Sin corrección de errores, ni control de congestión.
No garantiza la entrega en secuencia.La entrega del datagrama en IP no está garantizada porque ésta
se puede retrasar, rutear de manera incorrecta o mutilar al dividir yreensamblar los fragmentos del mensaje.

Mario R. Modesti
29
Característcas IPEl IP ( Internet Protocol ) es el protocolo de la red de redes, y
especifica minuciosamente las reglas que definen los detalles de lacomunicación entre dispositivos conectados y especifica como se
debe conformar un paquete de datos y se debe encaminar unpaquete hacia su destino por medio de un router.
Los servicios de Internet se acceden por medio de IP, por lo tantocada dispositivo posee una única copia del software IP que será
compartido por diferentes aplicaciones.IP hace que el usuario tenga la sensación de estar presente anteuna única red, cuando por el contrario es un conexionado de una
gran cantidad de redes. Los usuarios no se dan cuenta de laexistencia de los routers y de las diferentes redes.
Cuando un datagrama IP viaja a través de Internet de undispositivo a otro , debe seguir una vía física o un router hacia otra
red, hasta alcanzar su destino final.
30
Características de TCP
TCP suministra un serie de servicios de nivel superior. Es un protocoloorientado a conexión, lo que significa que mantiene información del estado de
cada cadena de datos de usuario que circula ( handshake ).Es responsable de la transferencia de datos entre extremos por la red o redes
hasta la aplicación de usuario receptor.TCP debe asegurar que los datos se transmiten y reciben correctamente
atravesando los correspondientes niveles de red.Cada octeto transmitido contiene un número de secuencia, el módulo TCPreceptor aplica el checksum para verificar si existen daños producidos en el
proceso, si es aceptado el módulo, TCP envía un ACK al módulo transmisor, sino ocurre asi, TCP lo descarta e informa al módulo remitente del problema
utilizando un número de secuencia.

Mario R. Modesti
31
Características de TCP
Dado que Internet utiliza un sistema de conmutación de paquetes,puede ser desbordado con datagramas , de manera que se requiere
de software adicional de comunicaciones, esto es TCP.Este protocolo resuelve muchos de los problemas originados en la
conmutación de paquetes , cuando un router es desbordado dedatagramas, debe descartarlos, con la consiguiente pérdida de datos
en la red. TCP actúa en este preciso momento, revisando laspérdidas y reparando el daño.