
Experiencia docente en la impartición de un curso de ...disa.us.es/cea/toledo2013/berenguel.pdf ·...
43
Universidad de Almería Área de Ingeniería de Sistemas y Automática Departamento de Informática Experiencia docente en la impartición de un curso de modelado y control de sistemas continuos usando herramientas interactivas Grado en Ingeniería Electrónica Industrial
Transcript of Experiencia docente en la impartición de un curso de ...disa.us.es/cea/toledo2013/berenguel.pdf ·...

Universidad
de Almería
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Experiencia docente en la impartición de un curso
de modelado y control de sistemas continuos usando herramientas
interactivas
Grado en Ingeniería Electrónica Industrial

Universidad
de Almería
2
Área de Ingeniería de Sistemas y Automática Departamento de Informática
1. Asignatura “Modelado y control de sistemas continuos”
2. Bibliografía y herramientas interactivas
3. Metodología docente y curso virtual de apoyo
4. Programa de ejercicios
5. Programa de prácticas
6. Evaluación
7. Encuesta de la asignatura
8. Resultados de la asignatura
9. Conclusiones

Universidad
de Almería
3
Área de Ingeniería de Sistemas y Automática Departamento de Lenguajes y Computación
Mecánica Química industrial
Electrónica industrial
y Automática
Automatización industrial (2º curso)
Modelado y control de sistemas continuos (3º)
Técnicas de control industrial (4º)
Control por computador (3º)
Robótica (4º)
Informática industrial (3º)
Control e instrumentación de
procesos químicos (4º)

Universidad
de Almería
4
Área de Ingeniería de Sistemas y Automática Departamento de Informática
1.- Entender el concepto de sistema dinámico, siendo capaz de modelar y simular su comportamiento.
2.- Adquirir la capacidad de análisis de la respuesta temporal y frecuencial de un sistema dinámico, tanto en términos de estabilidad como en términos de rendimiento.
3.- Adquirir las capacidades de análisis de sistemas realimentados y de diseño de controladores.
Se utilizarán herramientas matemáticas conocidas por el alumno: - Variable compleja - Ecuaciones diferenciales lineales ordinarias - Transformada de Laplace

Universidad
de Almería
5
Área de Ingeniería de Sistemas y Automática Departamento de Informática
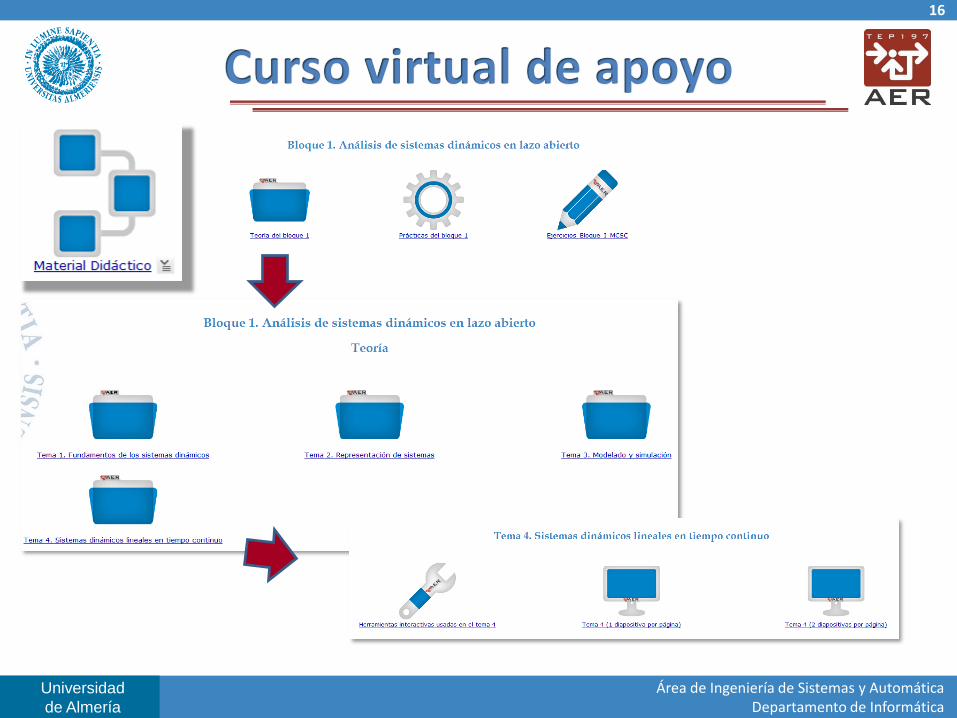
Tema 1. Fundamentos de los sistemas dinámicos Tema 2. Representación de sistemas Tema 3. Modelado y simulación Tema 4. Sistemas dinámicos lineales en tiempo continuo Práctica 1. Modelado y simulación de sistemas físicos. Motor de corriente continua. Práctica 2. Identificación experimental de modelos en el tiempo y en la frecuencia.
Bloque 1. Análisis de sistemas dinámicos en lazo abierto
Bloque 2. Diseño de sistemas de control en lazo cerrado Tema 5. Análisis de sistemas realimentados Tema 6. Diseño de controladores Práctica 3. Análisis de errores en estado estacionario y estabilidad con realimentación
unitaria Práctica 4. Control del motor de corriente continua

Universidad
de Almería
6
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Explicar de forma interactiva conceptos básicos de un curso de introducción al control automático y facilitar al recién llegado su aprendizaje
Objetivo del libro

Universidad
de Almería
7
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Uso en sesiones de teoría, en prácticas y para el trabajo autónomo de los estudiantes

Universidad
de Almería
8
Área de Ingeniería de Sistemas y Automática Departamento de Informática
PÁGINA WEB: http://www.pearson.es/fichas_interactivas
Premio PRODEL al mejor trabajo del grupo de Educación en Automática en las Jornadas de Automática 2012

Universidad
de Almería
9
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Bibliografía complementaria
• K. J. Åstrom, R. M. Murray. Feedback systems: an introduction for scientists and engineers. Princeton University Press, 2008. ISBN: 978-84-481-6640-3.
• K. J. Åstrom, T. Hägglund. Control PID avanzado. Pearson-Prentice Hall 2009. ISBN: 978-84-8322-511-0.
• P. Bolzern, R. Scattolini, N. Schiavoni. Fundamentos de control automático, 3ª Edición, McGraw-Hill, 2009. ISBN: 978-84-481-6640-3.
• R. C. Dorf, R. H. Bishop. Sistemas de control moderno, 10ª Edición, Prentice Hall, 2005. ISBN: 84-205-4401-9.
• G. F. Franklin, J. D. Powell, A. Emami-Naeini. Feedback control of dynamic systems, 6ª Edición, Prentice Hall, 2010. ISBN: 978-0-13-500150-9.
• B. C. Kuo, Sistemas control automático , 7ª Edición, Prentice Hall, 1996. ISBN: 968-880-723-0.
• K. Ogata. Ingeniería de control moderna, 5º Edición, Pearson Educación S.A., 2010. ISBN: 978-84-8322-660-5.

Universidad
de Almería
10
Área de Ingeniería de Sistemas y Automática Departamento de Informática
• Sesiones de teoría para todo el grupo de alumnos en las que el profesor explicará los contenidos teóricos fundamentales de cada tema y donde se valorará la participación del alumnado. Además durante el transcurso de cada bloque hay un conjunto de ejercicios que permiten al alumno/a mejorar la destreza en el uso de los conceptos.
• La parte práctica se organiza en sesiones para cada grupo de
alumnos, desarrolladas en paralelo a la parte teórica y con una adecuada sincronización, de forma que el alumnado pueda poner en práctica los conocimientos teóricos adquiridos y donde se pretenderá un comportamiento lo más autónomo posible.
Universidad
de Almería
11
Área de Ingeniería de Sistemas y Automática Departamento de Informática

Universidad
de Almería
12
Área de Ingeniería de Sistemas y Automática Departamento de Informática

Universidad
de Almería
13
Área de Ingeniería de Sistemas y Automática Departamento de Informática

Universidad
de Almería
14
Área de Ingeniería de Sistemas y Automática Departamento de Informática

Universidad
de Almería
15
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Universidad
de Almería
16
Área de Ingeniería de Sistemas y Automática Departamento de Informática

Universidad
de Almería
17
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Universidad
de Almería
18
Área de Ingeniería de Sistemas y Automática Departamento de Informática
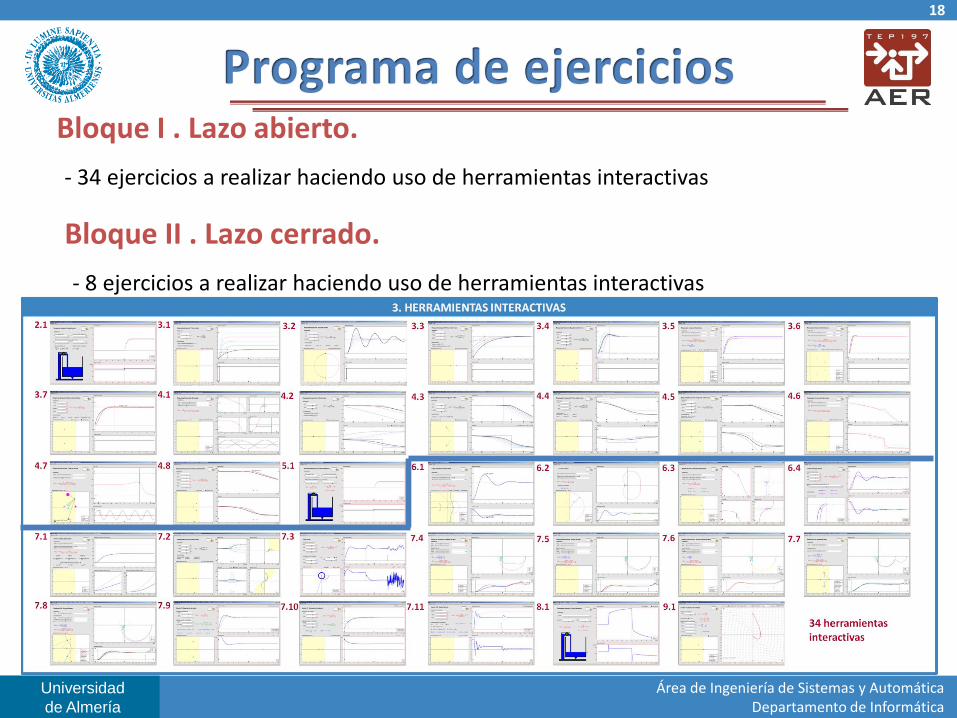
Bloque I . Lazo abierto.
- 34 ejercicios a realizar haciendo uso de herramientas interactivas
Bloque II . Lazo cerrado.
- 8 ejercicios a realizar haciendo uso de herramientas interactivas

Universidad
de Almería
19
Área de Ingeniería de Sistemas y Automática Departamento de Informática
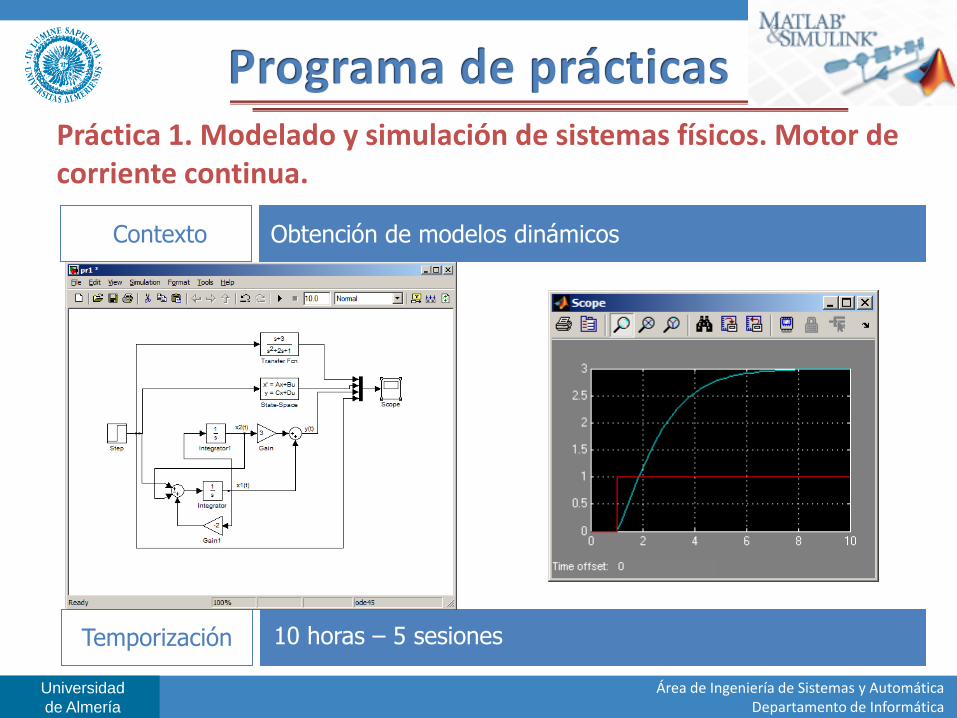
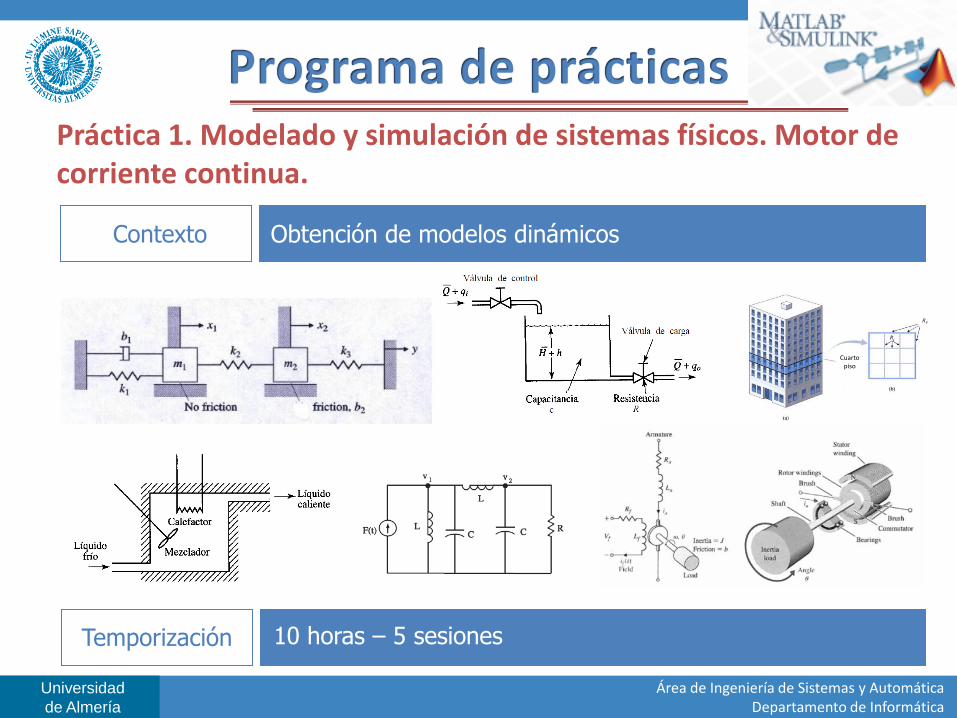
Práctica 1. Modelado y simulación de sistemas físicos. Motor de corriente continua.
Contenidos
Temporización
1. Modelado de sistemas continuos: ecuaciones diferenciales, funciones de transferencia, representación en el espacio de estados.
2. Linealización de sistemas no lineales. Elementos no lineales. 3. Simulación de ecuaciones diferenciales con Simulink. 4. Simulación usando funciones de transferencia con Simulink. Diagramas de bloques. 5. Modelado y simulación de un circuito eléctrico. 6. Modelado y simulación de un sistema mecánico. 7. Modelado y simulación de un sistema hidráulico. 8. Modelado y simulación de un sistema térmico. 9. Obtención de la función de transferencia del motor de corriente continua con
salida en velocidad angular. 10. Obtención de la función de transferencia del motor de corriente continua con
salida en posición angular. Simulación con Simulink. 11. Modelo del motor de corriente continua en espacio de estados.
10 horas – 5 sesiones
Contexto Obtención de modelos dinámicos

Universidad
de Almería
20
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 1. Modelado y simulación de sistemas físicos. Motor de corriente continua.
Temporización 10 horas – 5 sesiones
Contexto Obtención de modelos dinámicos
Universidad
de Almería
21
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 1. Modelado y simulación de sistemas físicos. Motor de corriente continua.
Temporización 10 horas – 5 sesiones
Contexto Obtención de modelos dinámicos

Universidad
de Almería
22
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 1. Modelado y simulación de sistemas físicos. Motor de corriente continua.
Temporización 10 horas – 5 sesiones
Contexto Obtención de modelos dinámicos
Universidad
de Almería
23
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 1. Modelado y simulación de sistemas físicos. Motor de corriente continua.
Temporización 10 horas – 5 sesiones
Contexto Obtención de modelos dinámicos
Cuarto piso
Universidad
de Almería
24
Área de Ingeniería de Sistemas y Automática Departamento de Informática
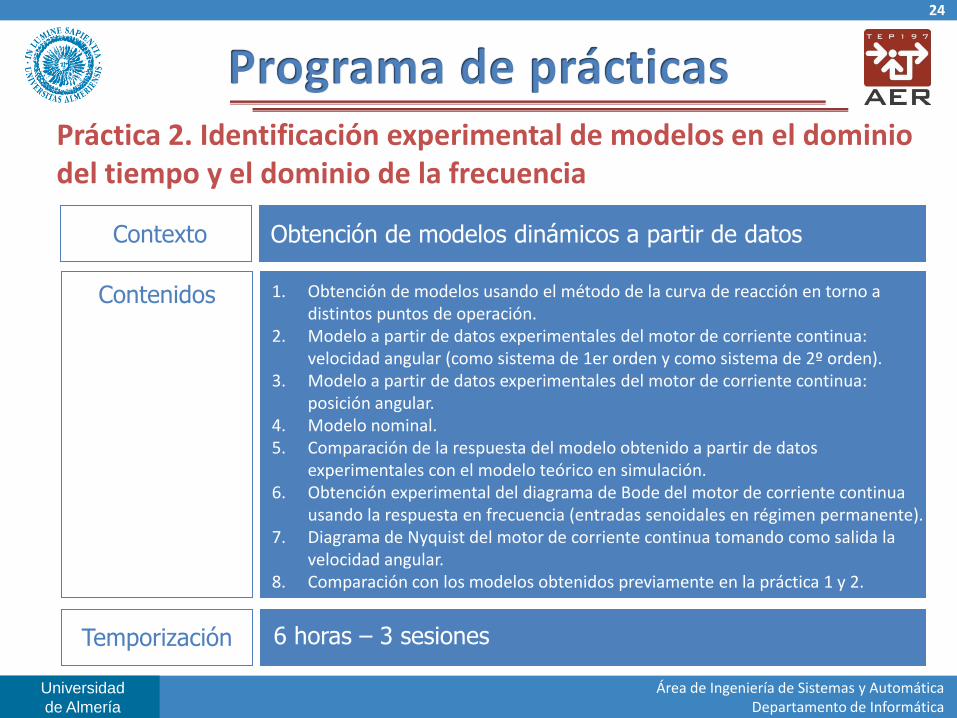
Práctica 2. Identificación experimental de modelos en el dominio del tiempo y el dominio de la frecuencia
Contenidos
Temporización
1. Obtención de modelos usando el método de la curva de reacción en torno a distintos puntos de operación.
2. Modelo a partir de datos experimentales del motor de corriente continua: velocidad angular (como sistema de 1er orden y como sistema de 2º orden).
3. Modelo a partir de datos experimentales del motor de corriente continua: posición angular.
4. Modelo nominal. 5. Comparación de la respuesta del modelo obtenido a partir de datos
experimentales con el modelo teórico en simulación. 6. Obtención experimental del diagrama de Bode del motor de corriente continua
usando la respuesta en frecuencia (entradas senoidales en régimen permanente). 7. Diagrama de Nyquist del motor de corriente continua tomando como salida la
velocidad angular. 8. Comparación con los modelos obtenidos previamente en la práctica 1 y 2.
6 horas – 3 sesiones
Contexto Obtención de modelos dinámicos a partir de datos

Universidad
de Almería
25
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 2. Identificación experimental de modelos en el dominio del tiempo y el dominio de la frecuencia
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
3.5
4
tiempo (s)
entr
ada y
velo
cid
ad a
ngula
r (V
)
10-2
10-1
100
101
-15
-10
-5
0
5
frecuencia [rad/s]
magnitud G
[dB
]
10-2
10-1
100
101
-200
-150
-100
-50
0
frecuencia [rad/s]
desfa
se G
[º]

Universidad
de Almería
26
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 2. Identificación experimental de modelos en el dominio del tiempo y el dominio de la frecuencia
Temporización 6 horas – 3 sesiones
Universidad
de Almería
27
Área de Ingeniería de Sistemas y Automática Departamento de Informática
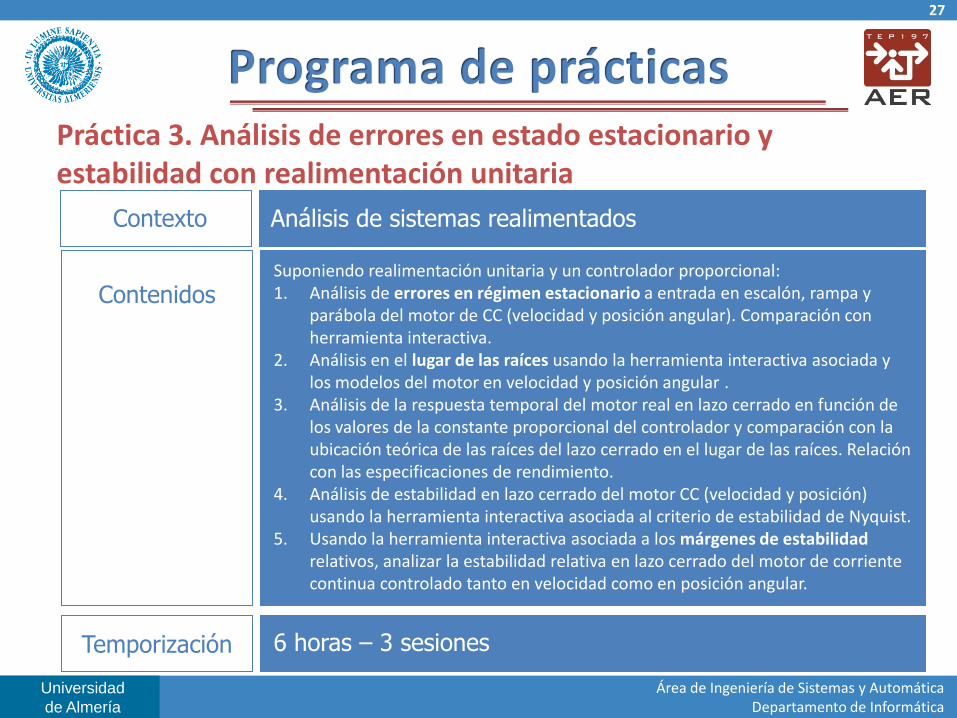
Práctica 3. Análisis de errores en estado estacionario y estabilidad con realimentación unitaria
Contenidos
Temporización
Suponiendo realimentación unitaria y un controlador proporcional: 1. Análisis de errores en régimen estacionario a entrada en escalón, rampa y
parábola del motor de CC (velocidad y posición angular). Comparación con herramienta interactiva.
2. Análisis en el lugar de las raíces usando la herramienta interactiva asociada y los modelos del motor en velocidad y posición angular .
3. Análisis de la respuesta temporal del motor real en lazo cerrado en función de los valores de la constante proporcional del controlador y comparación con la ubicación teórica de las raíces del lazo cerrado en el lugar de las raíces. Relación con las especificaciones de rendimiento.
4. Análisis de estabilidad en lazo cerrado del motor CC (velocidad y posición) usando la herramienta interactiva asociada al criterio de estabilidad de Nyquist.
5. Usando la herramienta interactiva asociada a los márgenes de estabilidad relativos, analizar la estabilidad relativa en lazo cerrado del motor de corriente continua controlado tanto en velocidad como en posición angular.
6 horas – 3 sesiones
Contexto Análisis de sistemas realimentados

Universidad
de Almería
28
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 3. Análisis de errores en estado estacionario y estabilidad con realimentación unitaria
0 1 2 3 4 5 6 70
0.5
1
1.5
2
2.5
3
tiempo (s)r (a
zul),
y (
verd
e),
y1 (
rojo
), y
2 (
cele
ste
), y
3 (
magenta
), y
4 (
nara
nja
) (V
)
Salida
0 1 2 3 4 5 6 70
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
tiempo (s)
u (
verd
e),
u1 (
rojo
), u
2 (
cele
ste
), u
3 (
magenta
), u
4 (
nara
nja
) (V
) Señal de control
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
tiempo (s)r (a
zul),
y (
verd
e),
y1 (
rojo
), y
2 (
cele
ste
), y
3 (
magenta
), y
4 (
nara
nja
) (V
)
Salida
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
3.5
tiempo (s)
u (
verd
e),
u1 (
rojo
), u
2 (
cele
ste
), u
3 (
magenta
), u
4 (
nara
nja
) (V
) Señal de control
Velocidad angular
Posición angular

Universidad
de Almería
29
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 3. Análisis de errores en estado estacionario y estabilidad con realimentación unitaria
Universidad
de Almería
30
Área de Ingeniería de Sistemas y Automática Departamento de Informática
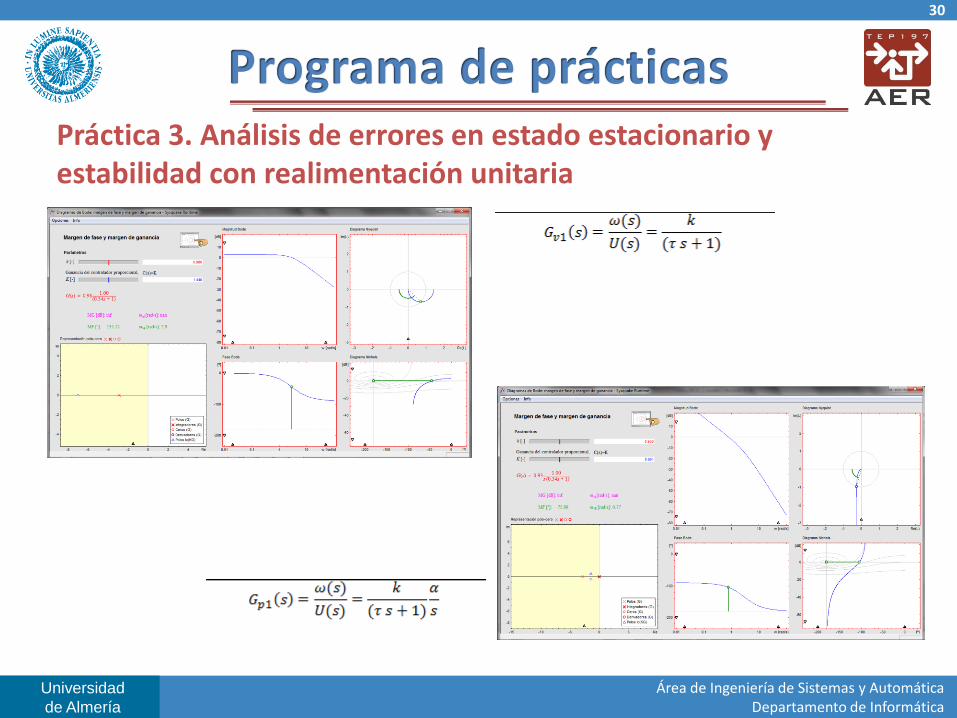
Práctica 3. Análisis de errores en estado estacionario y estabilidad con realimentación unitaria

Universidad
de Almería
31
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 3. Análisis de errores en estado estacionario y estabilidad con realimentación unitaria

Universidad
de Almería
32
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 4. Control del motor de corriente continua
Contenidos
Temporización
1. Control de la velocidad angular del motor de corriente continua haciendo uso del método de cancelación de polos. Comparación con los resultados que se obtienen en simulación usando la herramienta interactiva asociada a ese método.
2. Control de la velocidad angular del motor de corriente continua haciendo uso del método de asignación de polos. Comparación con los resultados que se obtienen en simulación usando la herramienta interactiva asociada a ese método.
3. Control de la posición angular del motor de corriente continua haciendo uso del método de asignación de polos.
4. Diseño de controladores de avance y retraso de fase diseñados mediante métodos frecuenciales y basados en el lugar de las raíces. Comparación con los resultados que se obtienen en simulación usando las herramientas interactivas asociadas a esos métodos.
8 horas – 4 sesiones
Contexto Diseño de sistemas de control

Universidad
de Almería
33
Área de Ingeniería de Sistemas y Automática Departamento de Informática
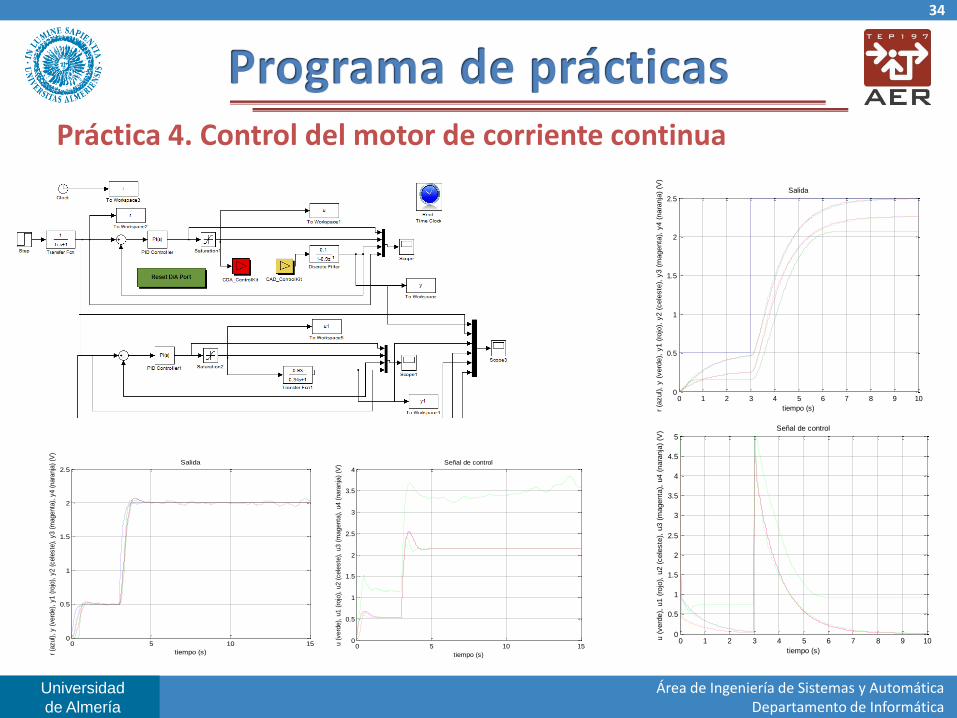
Práctica 4. Control del motor de corriente continua
DISEÑO ANALÍTICO
SIMULACIÓN IMPLEMENTACIÓN
VALIDACIÓN CON HERRAMIENTAS INTERACTIVAS
Universidad
de Almería
34
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Práctica 4. Control del motor de corriente continua
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
tiempo (s)r (a
zul),
y (
verd
e),
y1 (
rojo
), y
2 (
cele
ste
), y
3 (
magenta
), y
4 (
nara
nja
) (V
)
Salida
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
tiempo (s)u (
verd
e),
u1 (
rojo
), u
2 (
cele
ste
), u
3 (
magenta
), u
4 (
nara
nja
) (V
) Señal de control
0 5 10 150
0.5
1
1.5
2
2.5
tiempo (s)r (a
zul),
y (
verd
e),
y1 (
rojo
), y
2 (
cele
ste
), y
3 (
magenta
), y
4 (
nara
nja
) (V
)
Salida
0 5 10 150
0.5
1
1.5
2
2.5
3
3.5
4
tiempo (s)
u (
verd
e),
u1 (
rojo
), u
2 (
cele
ste
), u
3 (
magenta
), u
4 (
nara
nja
) (V
) Señal de control

Universidad
de Almería
35
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Evaluación continua
Forma de evaluacion
• Relaciones de ejercicios a entregar (obligatorias e individual)
• Informes de las prácticas (obligatorios por grupos de dos alumnos)
• Estudios previos de las prácticas (obligatorios por grupos de dos alumnos)
• Examen de la asignatura (obligatorio e individual) • Participación activa del alumno en otras actividades como foros de discusión,
asistencia a clases, visitas técnicas y envío de ejercicios en los plazos predeterminados
Instrumentos de evaluación
Calificación=0.15*Problemas(C2.1)+0.2*Prácticas(C3)+0.6*Examen(C2.2)+0.05*Participación (C1)

Universidad
de Almería
36
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Competencias genéricas a evaluar
La Universidad de Almería estableció 10 competencias transversales
1. Habilidad en el uso de las TIC (nivel 2 y 3) 2. Capacidad para resolver problemas (nivel 3) 3. Comunicación oral y escrita en la propia lengua 4. Capacidad de crítica y autocrítica 5. Trabajo en equipo 6. Conocimiento de una segunda lengua 7. Compromiso ético 8. Capacidad para aprender a trabajar de forma autónoma 9. Competencia social y ciudadanía global 10. Competencia informacional

Universidad
de Almería
37
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Competencia genérica a evaluar
Capacidad para resolver problemas (nivel 3)
• Comprender el problema que se plantea • Identificar los objetivos de aprendizaje • Dominar la metodología o procedimiento con el que abordar cada problema
planteado • Resolver el problema
Competencia genérica a evaluar
Habilidad en el uso de las TIC (niveles 2 y 3)
• Manejar Sistemas operativos y aplicaciones informáticas, en concreto, utilizando diferentes programas de utilidades de análisis y diseño de sistemas de control (Matlab/Simulink, Sysquake, …).
• Manejar paquetes ofimáticos

Universidad
de Almería
38
Área de Ingeniería de Sistemas y Automática Departamento de Informática

Universidad
de Almería
39
Área de Ingeniería de Sistemas y Automática Departamento de Informática

Universidad
de Almería
40
Área de Ingeniería de Sistemas y Automática Departamento de Informática
1; 4% 1; 4%
5; 22%
1; 4%
7; 31%
8; 35% Matrículas
Sobresalientes
Notables
Aprobados
Suspensos
No presentados
Universidad
de Almería
41
Área de Ingeniería de Sistemas y Automática Departamento de Informática
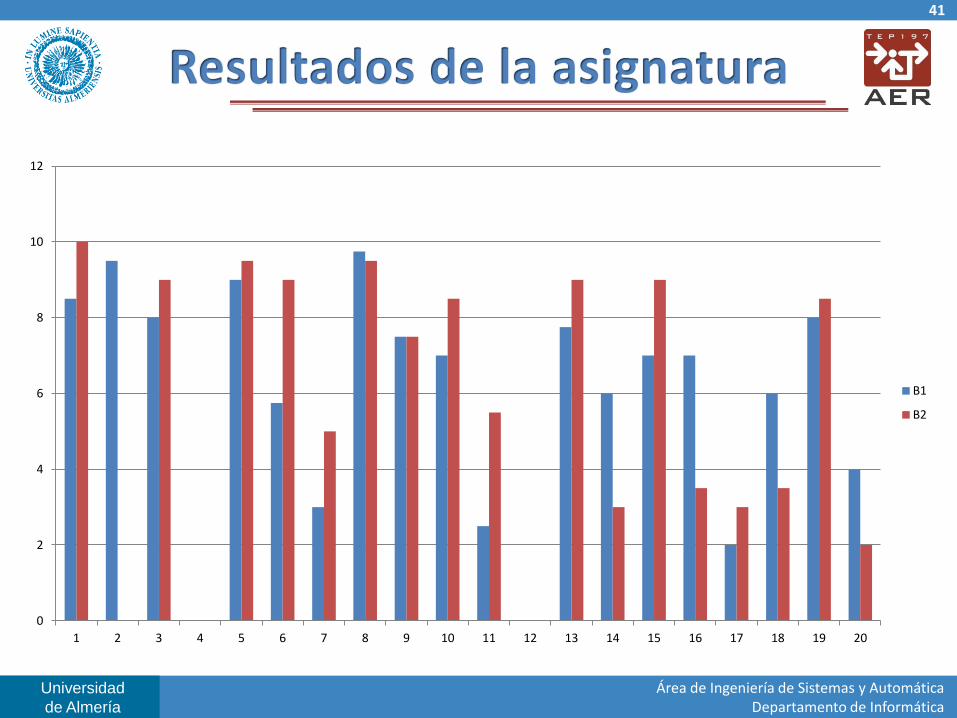
0
2
4
6
8
10
12
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
B1
B2
Universidad
de Almería
42
Área de Ingeniería de Sistemas y Automática Departamento de Informática
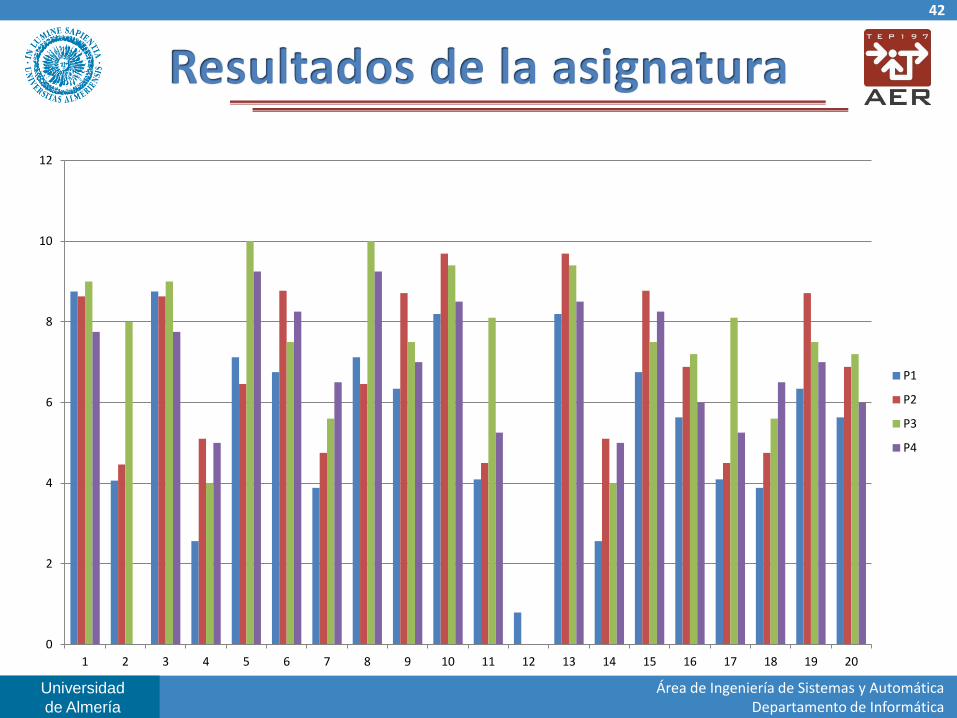
0
2
4
6
8
10
12
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
P1
P2
P3
P4

Universidad
de Almería
43
Área de Ingeniería de Sistemas y Automática Departamento de Informática
Las herramientas interactivas han demostrado ser valiosas en distintos ámbitos:
• Teoría:
• Ayudan al profesor a explicar visualmente conceptos que a veces son complejos desde el punto de vista matemático.
• Ayudan a los alumnos a practicar en casa y visualizar lo que estudian.
• Ejercicios: Permiten realizar ejercicios interaccionando con el sistema objeto de estudio. Nuestra experiencia demuestra que son muy útiles los ejercicios donde el alumno debe realizar una combinación de cálculos propios y uso de la herramienta. El peligro de los ejercicios donde sólo se usa la herramienta es que puede haber alumnos que lo resuelvan por prueba y error sin comprender bien la teoría subyacente.
• Prácticas: Las herramientas interactivas son muy útiles como herramientas de diseño y de comprobación de los cálculos hechos por los alumnos.
• Retos: Aspectos relacionados con el balanceo de la carga de trabajo (mala estimación del tiempo requerido para el desarrollo de prácticas y ejercicios) y con la corrección automática de ejercicios. Necesarias más sesiones presenciales.


















