G rmenes Polares e Invariantes de Singularidades de curvas...
111
Introducci´ on hist´ orica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales G´ ermenes Polares e Invariantes de Singularidades de curvas planas Maria Alberich Carrami˜ nana en colaboraci´ on con: V´ ıctor Gonz´ alez Alonso XVII Encuentro de Topolog´ ıa Zaragoza, 26 de Noviembre de 2010
Transcript of G rmenes Polares e Invariantes de Singularidades de curvas...

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Germenes Polares e Invariantes de Singularidadesde curvas planas
Maria Alberich Carraminanaen colaboracion con: Vıctor Gonzalez Alonso
XVII Encuentro de TopologıaZaragoza, 26 de Noviembre de 2010

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Indice
1 Introduccion historica y Preliminares
2 Invariantes polares
3 Morfismos entre superficies
4 Resultados finales

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
1 Introduccion historica y PreliminaresSingularidades de curvas planasClasificacion de singularidadesBlowing-up y puntos infinitamente proximosCurvas planas y equisingularidadCurvas polares y sus puntos baseObjetivos
2 Invariantes polares
3 Morfismos entre superficies
4 Resultados finales

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Notacion y contexto
O ∈ S punto liso de una superficie compleja.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Notacion y contexto
O ∈ S punto liso de una superficie compleja.
(x , y) coordenadas locales centradas en O.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Notacion y contexto
O ∈ S punto liso de una superficie compleja.
(x , y) coordenadas locales centradas en O.
OS,O ≡ anillo local de S en O: funciones holomorfas en unentorno de O.Es isomorfo a C{x , y}, el anillo de series de potenciasconvergentes en un entorno del origen.Es un dominio de factoritzacion unica.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Notacion y contexto
O ∈ S punto liso de una superficie compleja.
(x , y) coordenadas locales centradas en O.
OS,O ≡ anillo local de S en O: funciones holomorfas en unentorno de O.Es isomorfo a C{x , y}, el anillo de series de potenciasconvergentes en un entorno del origen.Es un dominio de factoritzacion unica.
(S ,O) es localmente isomorfa a (C2, (0, 0)).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Germenes de curva
(Germen de) curva en O: ξ = {P ∈ U | f (P) = 0} f funcionholomorfa en un entorno U de O, f (O) = 0.
Representa g ∈ C{x , y} la misma curva ξ sii fges un
elemento invertible del anillo C{x , y}.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Germenes de curva
(Germen de) curva en O: ξ = {P ∈ U | f (P) = 0} f funcionholomorfa en un entorno U de O, f (O) = 0.
Representa g ∈ C{x , y} la misma curva ξ sii fges un
elemento invertible del anillo C{x , y}.
o(f ) ≡ Orden de anulacion de f ∈ OS,O :Mınimo orden del desarrollo de Taylor de f en O.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Germenes de curva
(Germen de) curva en O: ξ = {P ∈ U | f (P) = 0} f funcionholomorfa en un entorno U de O, f (O) = 0.
Representa g ∈ C{x , y} la misma curva ξ sii fges un
elemento invertible del anillo C{x , y}.
o(f ) ≡ Orden de anulacion de f ∈ OS,O :Mınimo orden del desarrollo de Taylor de f en O.
Ramas de ξ ↔ factores de f .ξ irreducible sii f irreducible.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Ejemplos de singularidades: curvas algebraicas elıpticas
−2 −1.5 −1 −0.5 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0.5
1
1.5
2
−4 −3 −2 −1 1 2 3 4
−4
−3
−2
−1
1
2
3
4
−2 −1.5 −1 −0.5 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0.5
1
1.5
2
−2 −1.5 −1 −0.5 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0.5
1
1.5
2

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Entender la complejidad de las singularidades
Medidas de complejidad de la singularidad ξ : f = 0 en O:
Cono tangente:Terminos de grado o(f ) del desarrollo de Taylor de f en O.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Entender la complejidad de las singularidades
Medidas de complejidad de la singularidad ξ : f = 0 en O:
Cono tangente:Terminos de grado o(f ) del desarrollo de Taylor de f en O.
Polıgono de Newton:Terminos iniciales del desarrollo de Taylor de f en O seguntodas las posibles ponderaciones de las variables x e y ,
ej: x iy j tiene grado ponderado mi + nj con la ponderacion(m, n).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Analisis de singularidades: enfoque algebro-analıtico
Parametrizacion de las ramas de ξ : f = 0 (generalizacion Teoremafuncion implıcita):Desarrollo de Newton-Puiseux en potencias con exponentefraccionario (denominador acotado)
s =∑
i≥r
aixin .

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Analisis de singularidades: enfoque algebro-analıtico
Parametrizacion de las ramas de ξ : f = 0 (generalizacion Teoremafuncion implıcita):Desarrollo de Newton-Puiseux en potencias con exponentefraccionario (denominador acotado)
s =∑
i≥r
aixin .
Cumple:
f (x , s) = 0;
s y sus conjugadas σε =∑
i≥r εiaix
in , εi = 1, dan la ecuacion
g =∏
εi=1(y − σε) de una rama γ de ξ,i.e. g es un factor irreducible de f en C{x , y};
(tn, s(tn)) es una parametrizacion uniformizante de γ.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Analisis de singularidades: enfoque algebro-analıtico
Parametrizacion de las ramas de ξ : f = 0 (generalizacion Teoremafuncion implıcita):Desarrollo de Newton-Puiseux en potencias con exponentefraccionario (denominador acotado)
s =∑
i≥r
aixin .
Ejemplo: Cubica nodal y2 = x2 + x3.
s1 = x + 1/2x2 − 1/8x3 + 1/16x4 − 5/128x5 + . . .
s2 = −x − 1/2x2 + 1/8x3 − 1/16x4 + 5/128x5 + . . .

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Singularidades de curvas planas
Analisis de singularidades: enfoque algebro-analıtico
Isaac Newton, 1676 Victor Puiseux, 1850

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Analisis de singularidades: enfoque algebro-geometrico
La parametrizacion de Newton-Puiseux permite definir
Definicion
Dadas dos curvas ξ, ζ de ecuaciones f y g, se definine sumultiplicidad de interseccion (en O) como
[ζ.ξ] =∑
γ rama de ξ
∑
εn=1
o(g(x , σε)).
Es simetrica (Formula de Halphen-Zeuthen).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Analisis de singularidades: enfoque algebro-geometrico
La parametrizacion de Newton-Puiseux permite definir
Definicion
Dadas dos curvas ξ, ζ de ecuaciones f y g, se definine sumultiplicidad de interseccion (en O) como
[ζ.ξ] =∑
γ rama de ξ
∑
εn=1
o(g(x , σε)).
Es simetrica (Formula de Halphen-Zeuthen).
Tambien permite introducir la clasificacion por equisingularidad:
Definicion
Dos curvas son equisingulares si se comportan del mismo modocuando son intersecadas por otras curvas.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Analisis de singularidades: enfoque algebro-geometrico
Definicion
Dadas dos curvas ξ, ζ de ecuaciones f y g, se definine sumultiplicidad de interseccion (en O) como
[ζ.ξ] =∑
γ rama de ξ
∑
εn=1
o(g(x , σε)).
Definicion
Dos curvas son equisingulares si se comportan del mismo modocuando son intersecadas por otras curvas.
¿Que invariantes del desarrollo de Newton-Puiseux de las ramas deξ permiten recuperar su clase de equisingularidad?

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Analisis de singularidades: enfoque algebro-geometrico
Max Noether, 1884 Federigo Enriques, 1915

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Analisis de singularidades: enfoque topologico
(Germen de) curva (U, ξ) ≡ s.e. topologico de C2 = R
4.
Tiene dimension 1 sobre C, luego dimension 2 sobre R.
Cortando con una pequena esfera S3 de R4 centrada en O y vıa
proyeccion estereografica de S3 sobre R3: S3 ∩ ξ nos da un enlace.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Analisis de singularidades: enfoque topologico
(Germen de) curva (U, ξ) ≡ s.e. topologico de C2 = R
4.
Tiene dimension 1 sobre C, luego dimension 2 sobre R.
Cortando con una pequena esfera S3 de R4 centrada en O y vıa
proyeccion estereografica de S3 sobre R3: S3 ∩ ξ nos da un enlace.
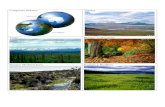
Ejemplo: Cubica cuspidal y2 = x3.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Analisis de singularidades: enfoque topologico
Mas ejemplos:
Cubica cuspidaly2 − x3
Cubica nodaly2 − x2 − x3
(y2 − x3)(y2 − x3 − y10)

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Clasificacion de singularidades
Definicion
Dos curvas ξ, ζ son topologicamente (analıticamente)equivalentes si existen entornos U,V de O y un homeomorfismo(isomorfismo analıtico) ϕ : U −→ V , ϕ(O) = O, de manera que
ϕ(U ∩ ξ) = V ∩ ζ.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Clasificacion de singularidades
Definicion
Dos curvas ξ, ζ son topologicamente (analıticamente)equivalentes si existen entornos U,V de O y un homeomorfismo(isomorfismo analıtico) ϕ : U −→ V , ϕ(O) = O, de manera que
ϕ(U ∩ ξ) = V ∩ ζ.
¿Que informacion es topologica (analıtica)?¿Que invariantes del desarrollo de Newton-Puiseux de las ramas deξ permiten recuperar su clase de equivalencia topologica(analıtica)?

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Clasificacion de singularidades
Definicion
Dos curvas ξ, ζ son topologicamente (analıticamente)equivalentes si existen entornos U,V de O y un homeomorfismo(isomorfismo analıtico) ϕ : U −→ V , ϕ(O) = O, de manera que
ϕ(U ∩ ξ) = V ∩ ζ.
¿Que informacion es topologica (analıtica)?¿Que invariantes del desarrollo de Newton-Puiseux de las ramas deξ permiten recuperar su clase de equivalencia topologica(analıtica)?
¿Que relacion hay entre las clasificaciones modulo equivalenciatopologica (analıtica) y modulo equisingularidad?

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Clasificacion de singularidades
Teorema (Brauner, Burau, Zariski)
Equivalencia topologica ≡ equisingularidad.
Demostracion: vıa interpretacion de las singularidades como nudostoricos (grupo fundamental, polinomio de Alexander).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Clasificacion de singularidades
Clasificacion de singularidades
Teorema (Brauner, Burau, Zariski)
Equivalencia topologica ≡ equisingularidad.
Demostracion: vıa interpretacion de las singularidades como nudostoricos (grupo fundamental, polinomio de Alexander).
Objetivo inmediato: Introducir los conceptos para dar unaformulacion precisa al concepto de equisingularidad.
Clase de equisingularidad representada mediante un diagrama dearbol: Diagrama de Enriques.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Blowing-up y puntos infinitamente proximos
Blowing-up (explosion)
Definicion
El blowing-up de O en S es π : S −→ Sholomorfa tal que
π es isomorfismo fuera de O.
π−1(O) = E ∼= P1C.
Expresion en coordenadas: (x , z) 7→ (x , zx).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Blowing-up y puntos infinitamente proximos
Blowing-up (explosion)
Definicion
El blowing-up de O en S es π : S −→ Sholomorfa tal que
π es isomorfismo fuera de O.
π−1(O) = E ∼= P1C.
Expresion en coordenadas: (x , z) 7→ (x , zx).
E ≡ divisor excepcional ≡ primer entornoinfinitesimal de O.
Parametriza las direcciones tangentes en O.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Blowing-up y puntos infinitamente proximos
Puntos infinitamente proximos
Punto del k-esimo entorno: Punto del primer entorno de unpunto del entorno (k − 1)-esimo.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Blowing-up y puntos infinitamente proximos
Puntos infinitamente proximos
Punto del k-esimo entorno: Punto del primer entorno de unpunto del entorno (k − 1)-esimo.
Ası obtenemos NO , los puntos infinitamente proximos a O.Codifican la informacion infinitesimal alrededor de O.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Blowing-up y puntos infinitamente proximos
Puntos infinitamente proximos
Punto del k-esimo entorno: Punto del primer entorno de unpunto del entorno (k − 1)-esimo.
Ası obtenemos NO , los puntos infinitamente proximos a O.Codifican la informacion infinitesimal alrededor de O.
πp : Sp → S . Mınima succession de explosiones tales que p aparececomo punto propio en la superficie Sp.
NO esta parcialmente ordenado: p 6 q ⇔ πq : Sq → Spπp→ S

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Blowing-up y puntos infinitamente proximos
Proximidad
Fijado p ∈ NO , el divisor excepcional π−1p (O) ⊂ Sp descompone
como⋃
q<p Eq .
Definicion
p es proximo a q si p ∈ Eq. Se escribe p → q.
p es libre/satelite si es proximo a un/dos puntos.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Blowing-up y puntos infinitamente proximos
Proximidad
Fijado p ∈ NO , el divisor excepcional π−1p (O) ⊂ Sp descompone
como⋃
q<p Eq .
Definicion
p es proximo a q si p ∈ Eq. Se escribe p → q.
p es libre/satelite si es proximo a un/dos puntos.
Definicion
p es satelite de q (o q-satelite) si q es el ultimo punto libre queprecede p.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Transformacion de curvas: multiplicidades y valores
Multiplicidad de ξ en O: eO(ξ) = o(f ). Es independiente de laecuacion.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Transformacion de curvas: multiplicidades y valores
Multiplicidad de ξ en O: eO(ξ) = o(f ). Es independiente de laecuacion.
Transformada total de ξ: ξp.Germen en p de ecuacion π∗
p(f ) = f ◦ πp.Contiene el divisor excepcional (multiplesveces).El valor de ξ en p es vp(ξ) = ep(ξp).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Transformacion de curvas: multiplicidades y valores
Multiplicidad de ξ en O: eO(ξ) = o(f ). Es independiente de laecuacion.
Transformada total de ξ: ξp.Germen en p de ecuacion π∗
p(f ) = f ◦ πp.Contiene el divisor excepcional (multiplesveces).El valor de ξ en p es vp(ξ) = ep(ξp).
Transformada estricta de ξ: ξp.Se obtiene eliminando las componentesexcepcionales de ξp.La multiplicidad de ξ en p esep(ξ) = ep(ξp).Decimos que ξ pasa por p, o que p pertenecea ξ, si ep(ξ) > 0.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Algunas relaciones
Igualdades de proximidad:
ep(ξ) =∑
q→p
eq(ξ).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Algunas relaciones
Igualdades de proximidad:
ep(ξ) =∑
q→p
eq(ξ).
Relacion multiplicidades-valores:
vp(ξ) = ep(ξ) +∑
p→q
vq(ξ).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Multiplicidad de interseccion
Definicion
Dadas dos curvas ξ, ζ de ecuaciones f y g, se definine sumultiplicidad de interseccion (en O) como
[ξ.ζ] = dimCOS,O/(f , g).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Multiplicidad de interseccion
Definicion
Dadas dos curvas ξ, ζ de ecuaciones f y g, se definine sumultiplicidad de interseccion (en O) como
[ξ.ζ] = dimCOS,O/(f , g).
Las definiciones de multiplicidad de interseccion algebraica ygeometrica coinciden.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Multiplicidad de interseccion
Definicion
Dadas dos curvas ξ, ζ de ecuaciones f y g, se definine sumultiplicidad de interseccion (en O) como
[ξ.ζ] = dimCOS,O/(f , g).
Ejemplo: Interseccion de una parabola y una tangente = 2.
[ξ.ζ] = dimC
C{x , y}
(x , x − y2)= dimC
C{x , y}
(x , y2)
= dimC{α+ βy |α, β ∈ C} = 2

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Multiplicidad de interseccion
Definicion
Dadas dos curvas ξ, ζ de ecuaciones f y g, se definine sumultiplicidad de interseccion (en O) como
[ξ.ζ] = dimCOS,O/(f , g).
Teorema (Formula de Noether.)
[ξ.ζ] =∑
p∈NO
ep(ξ)ep(ζ).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Puntos singulares, equisingularidad y diagramas de
Enriques
Definicion (Puntos singulares.)
Un punto p ∈ NO es singular de ξ si
ep(ξ) > 2 (es multiple), o bien
p es satelite, o bien
ξp es tangente al divisor excepcional.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Puntos singulares, equisingularidad y diagramas de
Enriques
Definicion (Puntos singulares.)
Un punto p ∈ NO es singular de ξ si
ep(ξ) > 2 (es multiple), o bien
p es satelite, o bien
ξp es tangente al divisor excepcional.
S(ξ) ≡ conjunto de puntos singulares de ξ con multiplicidades.Se puede representar con diagramas de Enriques.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Puntos singulares, equisingularidad y diagramas de
Enriques
Definicion (Puntos singulares.)
Un punto p ∈ NO es singular de ξ si
ep(ξ) > 2 (es multiple), o bien
p es satelite, o bien
ξp es tangente al divisor excepcional.
S(ξ) ≡ conjunto de puntos singulares de ξ con multiplicidades.Se puede representar con diagramas de Enriques.
Teorema
ξ1 i ξ2 son equisingulares (topologicamente equivalentes) si y solosi S(ξ1) y S(ξ2) tienen el mismo diagrama de Enriques.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas planas y equisingularidad
Un ejemplo
γ1
γ2
γ3
γ4
γ5
32
32
15
12
21
4 32
1
1
1
ξ : (y4−α1x11)(y3−α2x
8)(y9−α3x22)(y12−α4x
29)(y4−α5x9) = 0

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Definicion
ξ : f = 0 curva reducida (sin factores multiples),
η : g = 0 curva lisa (eO(η) = 1).
La g-polar de ξ respecto de la ecuacion f es la curva
ζ = Pg (f ) :∂(f , g)
∂(x , y)= det
∣
∣
∣
∣
∣
∂f∂x
∂f∂y
∂g∂x
∂g∂y
∣
∣
∣
∣
∣
= 0.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Definicion
ξ : f = 0 curva reducida (sin factores multiples),
η : g = 0 curva lisa (eO(η) = 1).
La g-polar de ξ respecto de la ecuacion f es la curva
ζ = Pg (f ) :∂(f , g)
∂(x , y)= det
∣
∣
∣
∣
∣
∂f∂x
∂f∂y
∂g∂x
∂g∂y
∣
∣
∣
∣
∣
= 0.
Ejemplos: g = y → ζ : ∂f∂x
= 0, g = x → ζ : ∂f∂y
= 0.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Definicion
ξ : f = 0 curva reducida (sin factores multiples),
η : g = 0 curva lisa (eO(η) = 1).
La g-polar de ξ respecto de la ecuacion f es la curva
ζ = Pg (f ) :∂(f , g)
∂(x , y)= det
∣
∣
∣
∣
∣
∂f∂x
∂f∂y
∂g∂x
∂g∂y
∣
∣
∣
∣
∣
= 0.
Ejemplos: g = y → ζ : ∂f∂x
= 0, g = x → ζ : ∂f∂y
= 0.
Es independiente de las coordenadas.
Depende de las ecuaciones f i g , pero no tiene importancia.
ζ es transversa si y solo si η no es tangente a ξ.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Polares genericas
Ideal jacobiano: J(ξ) =(
f , ∂f∂x, ∂f∂y
)
⊆ OS,O . Es independiente
de la ecuacion f .
Sistema jacobiano: J (ξ) = {ζ : h = 0 | h ∈ J(ξ)}. Contienetodas las polares.
Las curvas ζ ∈ J (ξ) de multiplicidad eO(ζ) = eO(ξ)− 1 sonpolares y forman un abierto de Zariski⇒ polares genericas tienen multiplicidad eO(ξ)− 1.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Polares genericas
Ideal jacobiano: J(ξ) =(
f , ∂f∂x, ∂f∂y
)
⊆ OS,O . Es independiente
de la ecuacion f .
Sistema jacobiano: J (ξ) = {ζ : h = 0 | h ∈ J(ξ)}. Contienetodas las polares.
Las curvas ζ ∈ J (ξ) de multiplicidad eO(ζ) = eO(ξ)− 1 sonpolares y forman un abierto de Zariski⇒ polares genericas tienen multiplicidad eO(ξ)− 1.
Teorema
Polares genericas son equisingulares y comparten los mismospuntos singulares.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Algunos comentarios
Encierran mucha informacion analıtica:
Teorema (Mather y Yau)
ξ1 y ξ2 son analıticamente equivalentes si y solo si
OS,O/J(ξ1) ∼= OS,O/J(ξ2).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Algunos comentarios
Encierran mucha informacion analıtica:
Teorema (Mather y Yau)
ξ1 y ξ2 son analıticamente equivalentes si y solo si
OS,O/J(ξ1) ∼= OS,O/J(ξ2).
¿Que informacion es topologica?¿Que invariantes de las curvas polares de ξ permiten recuperar suclase de equisingularidad?

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Caso irreducible
¿Que invariantes de las curvas polares de ξ permiten recuperar suclase de equisingularidad?
Teorema (Merle)
La clase de equisingularidad de ξ (irreducible) esta determinadapor eO(ξ) y sus invariantes polares.
No es valido en el caso general.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Caso irreducible
¿Que invariantes de las curvas polares de ξ permiten recuperar suclase de equisingularidad?
Teorema (Merle)
La clase de equisingularidad de ξ (irreducible) esta determinadapor eO(ξ) y sus invariantes polares.
No es valido en el caso general.Pregunta: ¿La clase de equisingularidad de la polar genericadetermina la clase de la curva?

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Caso irreducible
¿Que invariantes de las curvas polares de ξ permiten recuperar suclase de equisingularidad?
Teorema (Merle)
La clase de equisingularidad de ξ (irreducible) esta determinadapor eO(ξ) y sus invariantes polares.
No es valido en el caso general.Pregunta: ¿La clase de equisingularidad de la polar genericadetermina la clase de la curva?Respuesta: No, no es suficiente para determinar los invariantespolares.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Caso general
Invariante adecuado: BP(J (ξ)) (puntos base del sistemajacobiano), los puntos infinitamente proximos a O compartidospor las polares genericas de ξ.Son los singulares de las polares y algunos mas.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Caso general
Invariante adecuado: BP(J (ξ)) (puntos base del sistemajacobiano), los puntos infinitamente proximos a O compartidospor las polares genericas de ξ.Son los singulares de las polares y algunos mas.
Teorema (Casas-Alvero)
BP(J (ξ1)) = BP(J (ξ2)) ⇒ S(ξ1) = S(ξ2).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Caso general
Invariante adecuado: BP(J (ξ)) (puntos base del sistemajacobiano), los puntos infinitamente proximos a O compartidospor las polares genericas de ξ.Son los singulares de las polares y algunos mas.
Teorema (Casas-Alvero)
BP(J (ξ1)) = BP(J (ξ2)) ⇒ S(ξ1) = S(ξ2).
Observacion
El recıproco es falso: hay ejemplos de curvas equisingulares conpolares genericas no equisingulares.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Curvas polares y sus puntos base
Ejemplo
5
13
17
5
31
31
15
111
4 32 1
1
11
1
1
1
1
1
1
1
11
1
BP(J (ξ))

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Objetivos
Objetivos
Entender bien la relacion entre los puntos singulares S(ξ) de unacurva reducida y los puntos base BP(J (ξ)) de su sistemajacobiano.
En particular, entender como S(ξ) se puede recuperar a partir deBP(J (ξ)) buscando un algorismo.
BP(J (ξ)) 99K S(ξ)
Herramientas:
Invariantes polares (clasico).
Morfismos entre superficies (nuevo).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
1 Introduccion historica y Preliminares
2 Invariantes polaresDefinicionesResultados principales
3 Morfismos entre superficies
4 Resultados finales

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Puntos de ruptura
Definicion
p ∈ NO es de ruptura de ξ si ξp tiene al menos tres tangentesdiferentes, o equivalentemente, si
ξ tiene al menos dos puntos libres en el primer entorno de p, obien
p es satelite y ξ algun punto libre en el primer entorno de p.
R(ξ) ≡ conjunto de puntos de ruptura de ξ.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Puntos de ruptura
Definicion
p ∈ NO es de ruptura de ξ si ξp tiene al menos tres tangentesdiferentes, o equivalentemente, si
ξ tiene al menos dos puntos libres en el primer entorno de p, obien
p es satelite y ξ algun punto libre en el primer entorno de p.
Rp(ξ) ≡ conjunto de puntos de ruptura de ξ satelites de p.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Puntos de ruptura
Definicion
p ∈ NO es de ruptura de ξ si ξp tiene al menos tres tangentesdiferentes, o equivalentemente, si
ξ tiene al menos dos puntos libres en el primer entorno de p, obien
p es satelite y ξ algun punto libre en el primer entorno de p.
Rp(ξ) ≡ conjunto de puntos de ruptura de ξ satelites de p.
Observacion
Los puntos maximales de S(ξ) son puntos de ruptura⇒ recuperando R(ξ) recuperamos S(ξ) sin multiplicidades.
BP(J (ξ)) 99K R(ξ) 99K S(ξ)

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Ejemplo
R(ξ)

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Invariantes polares
p ∈ R(ξ) γp, curva irreducible por p con punto libre en elprimer entorno y no en ξ.
Definicion (Teissier)
El invariante polar asociado a p es
Iξ(p) = I (p) =[ξ.γp]
eO(γp)=
vp(ξ)ep(γp)
eO(γp).
Es independiente de la eleccion de γp.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Invariantes polares
p ∈ R(ξ) γp, curva irreducible por p con punto libre en elprimer entorno y no en ξ.
Definicion (Teissier)
El invariante polar asociado a p es
Iξ(p) = I (p) =[ξ.γp]
eO(γp)=
vp(ξ)ep(γp)
eO(γp).
Es independiente de la eleccion de γp.
I(ξ) ≡ {I (p) | p ∈ R(ξ)} se puede calcular a partir de un diagramade Enriques de S(ξ),⇒ es un invariante topologico (Le, Michel y Weber).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Dos resultados clave
ζ polar transversa de ξ, γ rama de ζ. Definimos
Iγ =[ξ.γ]
eO(γ).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Dos resultados clave
ζ polar transversa de ξ, γ rama de ζ. Definimos
Iγ =[ξ.γ]
eO(γ).
Teorema
{Iγ} = {I (q) | q ∈ R(ξ)} ≡ I(ξ), donde γ recorre todas las ramasde ζ.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Dos resultados clave
ζ polar transversa de ξ, γ rama de ζ. Definimos
Iγ =[ξ.γ]
eO(γ).
Teorema
{Iγ} = {I (q) | q ∈ Rp(ξ)} ≡ Ip(ξ), donde γ recorre todas lasramas de ζ tal que p es su ultimo punto libre en comun con ξ.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Dos resultados clave
ζ polar transversa de ξ, γ rama de ζ. Definimos
Iγ =[ξ.γ]
eO(γ).
Teorema
{Iγ} = {I (q) | q ∈ Rp(ξ)} ≡ Ip(ξ), donde γ recorre todas lasramas de ζ tal que p es su ultimo punto libre en comun con ξ.
Lema
Iγ se puede calcular a partir de BP(J (ξ)) como
Iγ =[BP(J (ξ)).γ]
eO(γ)+ 1.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Definiciones
Dos resultados clave
ζ polar transversa de ξ, γ rama de ζ. Definimos
Iγ =[ξ.γ]
eO(γ).
Teorema
{Iγ} = {I (q) | q ∈ Rp(ξ)} ≡ Ip(ξ), donde γ recorre todas lasramas de ζ tal que p es su ultimo punto libre en comun con ξ.
Lema
Iγ se puede calcular a partir de BP(J (ξ)) como
Iγ =[BP(J (ξ)).γ]
eO(γ)+ 1.
BP(J (ξ)) → I(ξ) 99K R(ξ) 99K S(ξ)

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Resultados principales
Generalizacion
Para cualquier p ∈ NO tomamos γp como antes y definimos
Iξ(p) = I (p) =[ξ.γp]
eO(γp)=
vp(ξ)ep(γp)
eO(γp).
Tambien es independiente de la eleccion de γp.
Tambien se puede calcular a partir de un diagrama de Enriques deS(ξ).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Resultados principales
Un nuevo orden en NO : ≺
Se puede definir un nuevo orden (parcial) ≺ a NO .
Se puede extender a curvas irreducibles.
γ1
γ2
γ3
γ4
O
p1p2p3
p4
p5
p6
p7p8
O ≺ p8 ≺ p7 ≺ . . . ≺ p1
p2, . . . , p8 ≺ γ1
p3, . . . , p8 ≺ γ2 ≺ p1
p5, . . . , p8 ≺ γ3 ≺ p1, . . . , p3
p8 ≺ γ4 ≺ p1, . . . , p6

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Resultados principales
Comportamiento de los I (p)
El orden ≺ esta directamente relacionado con el grafo dual de unacomposicion de explosiones, y tambien con el orden de lasvaloraciones de OS,O .

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Resultados principales
Comportamiento de los I (p)
El orden ≺ esta directamente relacionado con el grafo dual de unacomposicion de explosiones, y tambien con el orden de lasvaloraciones de OS,O .⇒ permite estudiar con mucho detalle el comportamiento de loscocientes I (p):
Teorema
Si p ≺ q, entoncesI (p) 6 I (q).
La desigualdad es estricta si y solo si existe una rama γ de ξ talque p ≺ γ.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Resultados principales
Comportamiento de los I (p)
El orden ≺ esta directamente relacionado con el grafo dual de unacomposicion de explosiones, y tambien con el orden de lasvaloraciones de OS,O .⇒ permite estudiar con mucho detalle el comportamiento de loscocientes I (p):
Teorema
Si p ≺ q, entoncesI (p) 6 I (q).
La desigualdad es estricta si y solo si existe una rama γ de ξ talque p ≺ γ.
Resultados similares (Le, Michel y Weber; Casas-Alvero) para elproblema recıproco: determinar comportamiento de polaresgenericas a partir de la (clase de equisingularidad de) la curva.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Resultados principales
Ejemplo
321
641
791
1552
2363
3164
2233
3815
5387
6949
2884
92012
{I (p) | p ∈ S(ξ)}

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Resultados principales
Un pequeno problema
BP(J (ξ)) → I(ξ) 99K R(ξ) 99K S(ξ)
Para calcular S(ξ) es suficiente recuperar los cocientes I (p), dadoque su comportamiento esta muy bien determinado por el teoremaanterior.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Resultados principales
Un pequeno problema
BP(J (ξ)) → I(ξ) 99K R(ξ) 99K S(ξ)
Para calcular S(ξ) es suficiente recuperar los cocientes I (p), dadoque su comportamiento esta muy bien determinado por el teoremaanterior.
Problema: No conocemos los cocientes I (p) ya que no conocemoslos valores vp(ξ).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Resultados principales
Un pequeno problema
BP(J (ξ)) → I(ξ) 99K R(ξ) 99K S(ξ)
Para calcular S(ξ) es suficiente recuperar los cocientes I (p), dadoque su comportamiento esta muy bien determinado por el teoremaanterior.
Problema: No conocemos los cocientes I (p) ya que no conocemoslos valores vp(ξ).
Solucion: Utilizar los morfismos entre superficies para aproximar losvalores vp(ξ).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
1 Introduccion historica y Preliminares
2 Invariantes polares
3 Morfismos entre superficiesTroncos y alturas
4 Resultados finales

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Troncos y alturas
Definicion
O ∈ S ,O ′ ∈ T puntos en superficies complejas.
(Germen de) morfismo analıtico:ϕ : U ⊆ S −→ V ⊆ T , ϕ(O) = O ′.
(x , y), (u, v) coordenadas centradas en O y O ′ ϕ = (f , g), paraciertas f , g ∈ OS,O , f (O) = g(O) = 0.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Troncos y alturas
Definicion
O ∈ S ,O ′ ∈ T puntos en superficies complejas.
(Germen de) morfismo analıtico:ϕ : U ⊆ S −→ V ⊆ T , ϕ(O) = O ′.
(x , y), (u, v) coordenadas centradas en O y O ′ ϕ = (f , g), paraciertas f , g ∈ OS,O , f (O) = g(O) = 0.
Multiplicidad de ϕ: n = eO(ϕ) = mın{o(f ), o(g)}.Es independiente de las coordenadas.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Troncos y alturas
Tronco y altura
lα,β = {αx + βy = 0}: recta generica por O.
La imagen directa ϕ∗(lα,β) se puede parametrizar por
v = S(u, θ) =∑
i<m
aiuin + θ(α, β, u)u
mn .

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Troncos y alturas
Tronco y altura
lα,β = {αx + βy = 0}: recta generica por O.
La imagen directa ϕ∗(lα,β) se puede parametrizar por
v = S(u, θ) =∑
i<m
aiuin + θ(α, β, u)u
mn .
La parte fija∑
i<m aiuin determina T = T (ϕ) ⊆ NO′ : el tronco de
ϕ. Es independiente de las coordenadas.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Troncos y alturas
Tronco y altura
lα,β = {αx + βy = 0}: recta generica por O.
La imagen directa ϕ∗(lα,β) se puede parametrizar por
v = S(u, θ) =∑
i<m
aiuin + θ(α, β, u)u
mn .
La parte fija∑
i<m aiuin determina T = T (ϕ) ⊆ NO′ : el tronco de
ϕ. Es independiente de las coordenadas.
El entero m tambien es independiente de las elecciones. Es laaltura de T .

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Troncos y alturas
Extension a NO
Podemos extender estos conceptos a cualquier punto p ∈ NO :
Consideremos la composicion ϕp = ϕ ◦ πp : Sp −→ S −→ T , ydefinimos

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Troncos y alturas
Extension a NO
Podemos extender estos conceptos a cualquier punto p ∈ NO :
Consideremos la composicion ϕp = ϕ ◦ πp : Sp −→ S −→ T , ydefinimos
np = ep(ϕp),

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Troncos y alturas
Extension a NO
Podemos extender estos conceptos a cualquier punto p ∈ NO :
Consideremos la composicion ϕp = ϕ ◦ πp : Sp −→ S −→ T , ydefinimos
np = ep(ϕp),
mp = altura de Tp = T (ϕp).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Troncos y alturas
Multiplicidades del jacobiano
Dado un morfismo ϕ = (f , g), definimos el germen jacobiano deϕ:
J(ϕ) =∂(f , g)
∂(x , y)= det
∣
∣
∣
∣
∣
∂f∂x
∂f∂y
∂g∂x
∂g∂y
∣
∣
∣
∣
∣
= 0.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Troncos y alturas
Multiplicidades del jacobiano
Dado un morfismo ϕ = (f , g), definimos el germen jacobiano deϕ:
J(ϕ) =∂(f , g)
∂(x , y)= det
∣
∣
∣
∣
∣
∂f∂x
∂f∂y
∂g∂x
∂g∂y
∣
∣
∣
∣
∣
= 0.
Teorema (Casas-Alvero)
Para cualquier p ∈ NO tenemos
ep(J(ϕ)) =
m + n − 2 si p = O,
mp + np −mp′ − np′ − 1 si p → p′,
mp + np −mp′ − np′ −mp′′ − np′′ si p → p′, p′′.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
1 Introduccion historica y Preliminares
2 Invariantes polares
3 Morfismos entre superficies
4 Resultados finalesReinterpretacion del problemaEl algorismoEjemplo

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Reinterpretacion del problema
Interpretacion: polar ≡ jacobiana de un morfismo.
Podemos pensar BP(J (ξ)) como los puntos comunes a dospolares genericas, y en particular como los puntos singulares (yalgunos mas) de ζ, una polar generica de ξ.
I.e., podemos pensar BP(J (ξ)) como los puntos singulares (yalgunos mas) del jacobiano J(ϕ) de un morfismo
ϕ = (f , g) : U ⊆ S −→ C2,
donde
f es una ecuacion de ξ, y
g determina una curva lisa no tangente a ξ.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Reinterpretacion del problema
Calculo de multiplicidades y alturas
Para puntos de BP(J (ξ)) y sus satelites, podemos calcular
np =
1 si p = O,∑
p→q
nq en caso contrario.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Reinterpretacion del problema
Calculo de multiplicidades y alturas
Para puntos de BP(J (ξ)) y sus satelites, podemos calcular
np =
1 si p = O,∑
p→q
nq en caso contrario.
mp =
eO(BP(J (ξ))) + 1 si p = O,
ep(BP(J (ξ))) +mq + 1 si p → q,
ep(BP(J (ξ))) +mq +mq′ si p → q, q′.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Reinterpretacion del problema
Relacion con los valores
Teorema
Para puntos de BP(J (ξ)) y sus satelites se tiene
vp(ξ) 6 mp,
con desigualdad estricta si y solo si todas las ramas de ξ son ≺ p ono comparables.
En particular, en los puntos de ruptura tenemos igualdad.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Reinterpretacion del problema
Relacion con los valores
Teorema
Para puntos de BP(J (ξ)) y sus satelites se tiene
vp(ξ) 6 mp,
con desigualdad estricta si y solo si todas las ramas de ξ son ≺ p ono comparables.
En particular, en los puntos de ruptura tenemos igualdad.
vp(ξ)
10
2023
46
69
90
160 230mp
10
2025
49
70
90
160 230

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Reinterpretacion del problema
Aproximando los cocientes I (p)
Lema
Para puntos de BP(J (ξ)) y sus satelites se tiene
np =eO(γ
p)
ep(γp).
⇒ I (p) =vp(ξ)
np6
mp
np.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Reinterpretacion del problema
Aproximando los cocientes I (p)
Lema
Para puntos de BP(J (ξ)) y sus satelites se tiene
np =eO(γ
p)
ep(γp).
⇒ I (p) =vp(ξ)
np6
mp
np.
Observacion
Si p ≺ q y tenemos igualdad I (p) = I (q), entonces tenemosdesigualdad estricta vq(ξ) < mq .

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
El algorismo
Etapa A: Recuperacion de R(ξ)
BP(J (ξ)) → I(ξ)−→R(ξ) 99K S(ξ)
Proposicion
Para cada rama γ de ζ = J(ϕ) existe exactamente un punto deruptura qγ cumpliendo:
es satelite de pγ , el ultimo punto libre comun a ξ y γ, y
Iγ = I (qγ).

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
El algorismo
Etapa A: Recuperacion de R(ξ)
BP(J (ξ)) → I(ξ)−→R(ξ) 99K S(ξ)
Proposicion
Para cada rama γ de ζ = J(ϕ) existe exactamente un punto deruptura qγ cumpliendo:
es satelite de pγ , el ultimo punto libre comun a ξ y γ, y
Iγ = I (qγ).
Proposicion
pγ es proximo a p′γ , el ultimo punto de γ tal quemp
np< Iγ y
el punto de γ en su primer entorno es libre.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
El algorismo
Etapa A: Recuperacion de R(ξ)
Para cada rama γ de ζ tenemos que hacer:
Calcular Iγ = [BP(J (ξ)).γ]eO (γ) + 1.
Encontrar el punt pγ comparando los cocientesmp
npcon Iγ .
A partir de q = pγ y mientras Iγ 6= mp
np
Simp
np< Iγ cambiamos q por su satelite mayor.
Simp
np> Iγ cambiamos q por su satelite menor.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
El algorismo
Etapa A: Recuperacion de R(ξ)
Para cada rama γ de ζ tenemos que hacer:
Calcular Iγ = [BP(J (ξ)).γ]eO (γ) + 1.
Encontrar el punt pγ comparando los cocientesmp
npcon Iγ .
A partir de q = pγ y mientras Iγ 6= mp
np
Simp
np< Iγ cambiamos q por su satelite mayor.
Simp
np> Iγ cambiamos q por su satelite menor.
Proposicion (Una mejora)
Si Iγ no es el maximo invariante polar de los satelites de pγ ,entonces qγ es el ultimo pγ-satelite en γ.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
El algorismo
Etapa B: Recuperacion de los valores vp(ξ)
BP(J (ξ)) → I(ξ) → R(ξ)−→S(ξ)
Una vez que ya tenemos los puntos de ruptura de ξ, y por tantolos puntos singulares, queremos recuperar las multiplicidades deestos puntos en ξ, o equivalentemente, los valores vp(ξ).
En los puntos de ruptura tenemos directamente vp(ξ) = mp.
Tenemos caracterizados muchos otros puntos donde tambientenemos igualdad: donde ya vemos una rama � p.
En los puntos que faltan tenemos que mirar q, el maximosatelite en su grupo, i poner
vp(ξ) ∈
[
npnq
vq(ξ),npnq
vq(ξ) + 1
)
.

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Ejemplo
Un ejemplo.
5
13
17
5
mp
np
γ
321
641
801
1552
2363
3164
2234
3815
5387
6949
2884
821 82
1
1632
2383
6969
92212
2904
2463
7209
95412298
4
92012
Iγ =[BP(J (ξ)).γ]
eO(γ)+ 1 =
31 · 2 + 31 · 2 + 15 · 2 + 12 + 12
2+ 1 = 79

Introduccion historica y Preliminares Invariantes polares Morfismos entre superficies Resultados finales
Gracias por su atencion.