G4 monografía
18
ESCUELA POLITÉCNICA NACIONAL FACULTAD DE INGENIERÍA EN SISTEMAS INFORMÁTICOS Y DE COMPUTACIÓN ECUACIONES DIFERENCIALES ORDINARIAS RESOLUCIÓN DE ECUACIONES DIFERENCIALES NO HOMOGÉNEAS Y SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES CON COEFICIENTES CONSTANTES GRUPO Nº 4 INTEGRANTES: BORJA JARAMILLO JORGE IVÁN GUALOTUÑA FAJARDO JEFFERSON SANTIAGO GAIBOR MARIÑO MIGUEL ANGEL
-
Upload
centro-de-multimedios -
Category
Documents
-
view
206 -
download
0
Transcript of G4 monografía
ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA EN SISTEMAS INFORMÁTICOS Y DE COMPUTACIÓN
ECUACIONES DIFERENCIALES ORDINARIAS
RESOLUCIÓN DE ECUACIONES DIFERENCIALES NO HOMOGÉNEAS Y SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES CON
COEFICIENTES CONSTANTES
GRUPO Nº 4
INTEGRANTES:
BORJA JARAMILLO JORGE IVÁNGUALOTUÑA FAJARDO JEFFERSON SANTIAGOGAIBOR MARIÑO MIGUEL ANGELVEGA VARELA ROGER PAU
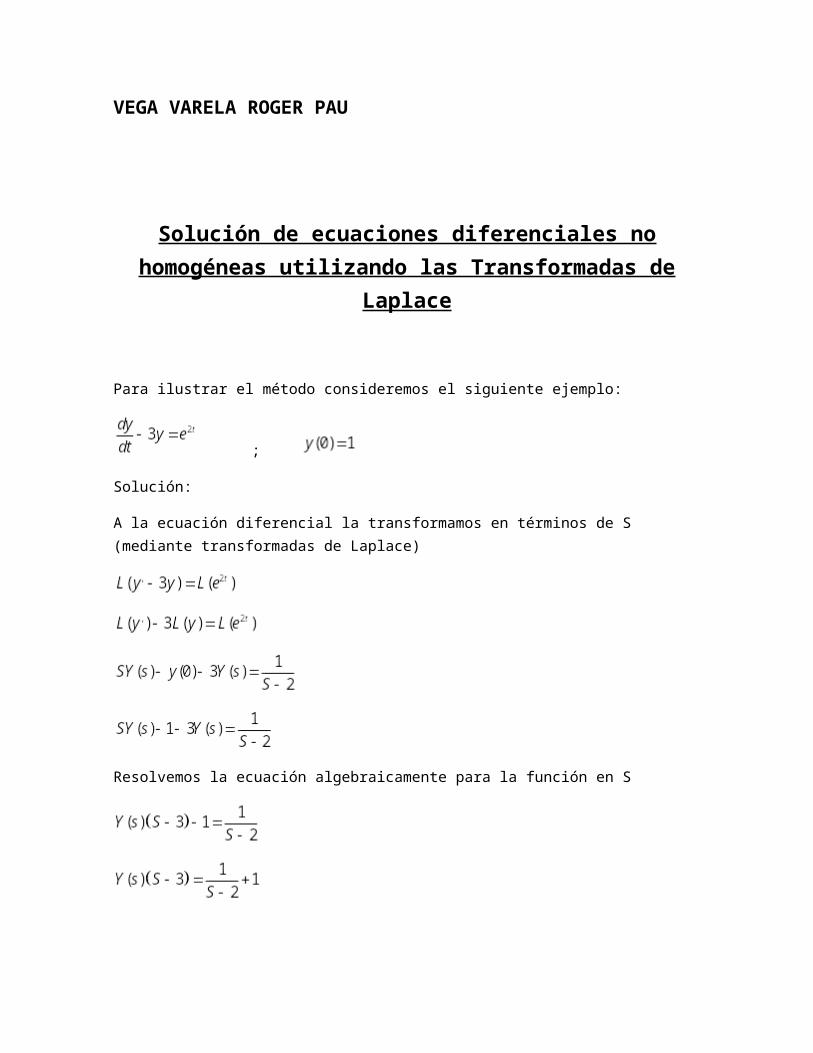
Solución de ecuaciones diferenciales no homogéneas utilizando las Transformadas de
Laplace
Para ilustrar el método consideremos el siguiente ejemplo:
;
Solución:
A la ecuación diferencial la transformamos en términos de S (mediante transformadas de Laplace)
Resolvemos la ecuación algebraicamente para la función en S
Calculamos la inversa ( ) para ambos lados
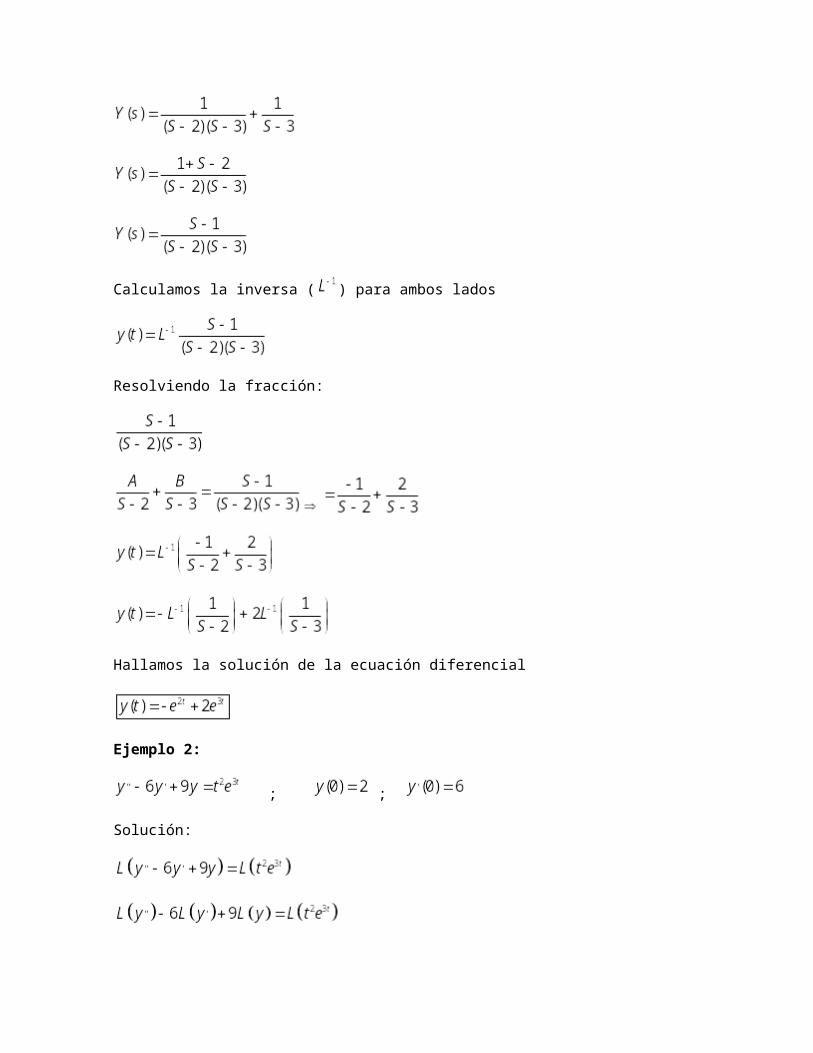
Resolviendo la fracción:
Hallamos la solución de la ecuación diferencial
Ejemplo 2:
; ;
Solución:
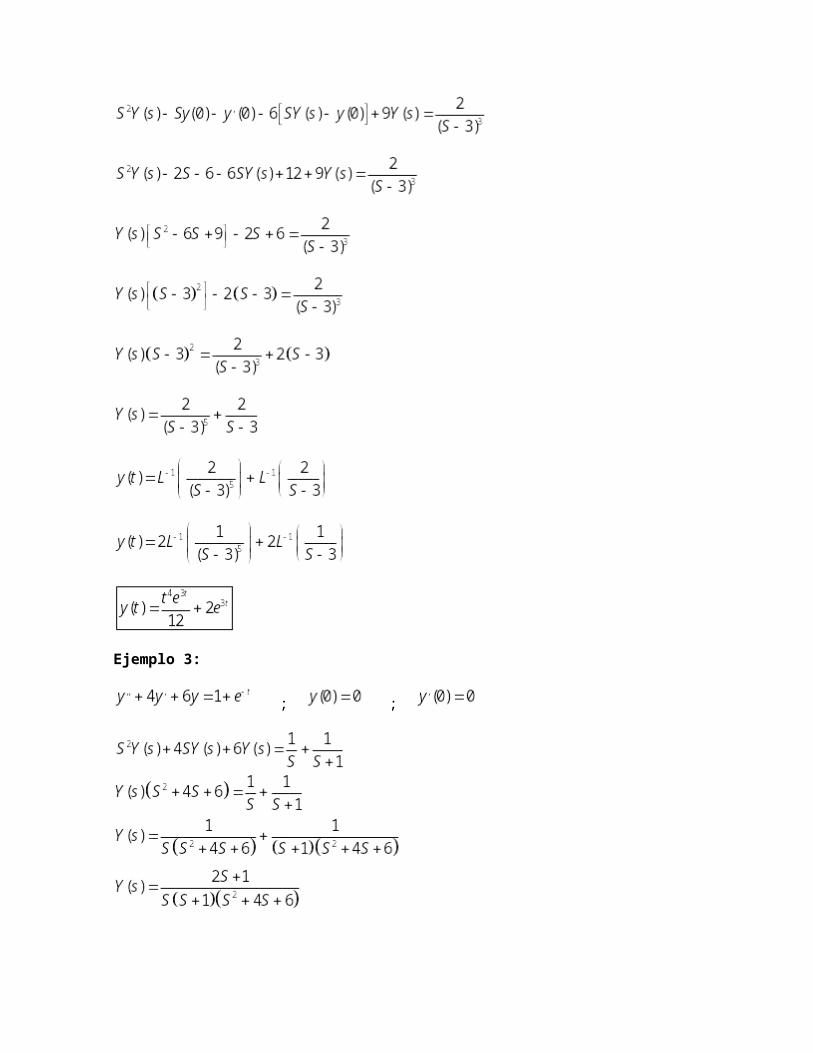
Ejemplo 3:
; ;
Ejemplo 4:
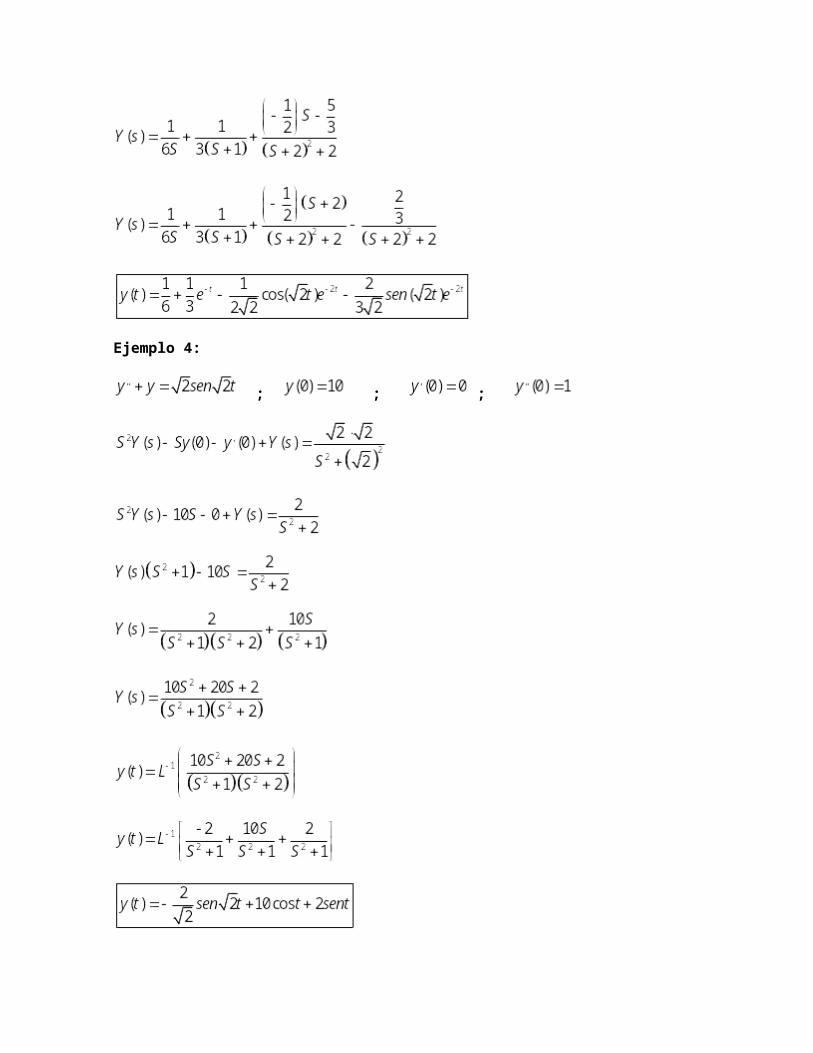
; ; ;
Ejemplo 5:
y ' '+ y=cos ( t )
y (0 )=0; y ' (0 )=1
z2L [ y ] ( z )−zy (0 )− y ' (0 )+L [ y ] ( z )= z
z2+1
L [ y ] ( z )= z2+z+1(z¿¿2+1)2¿
y (t )=Res¿
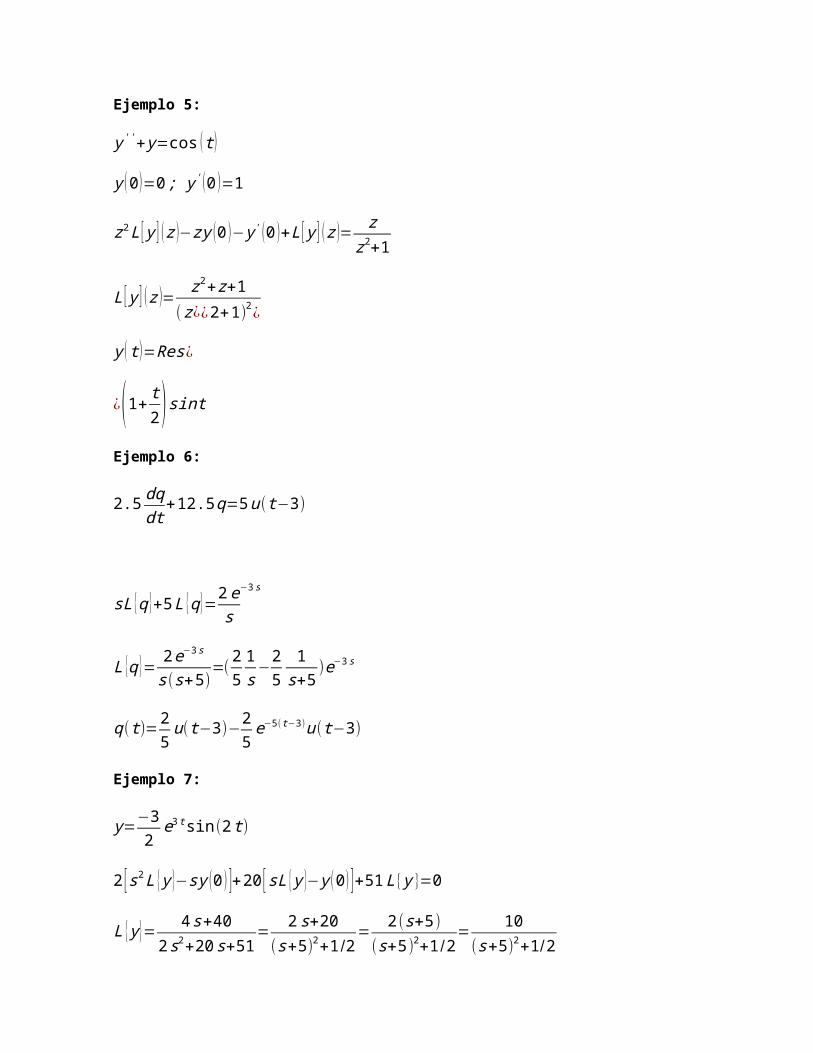
¿(1+ t2 ) sintEjemplo 6:
2.5dqdt
+12.5q=5u (t−3)
sL {q }+5 L {q }=2es
−3 s
L {q }= 2e−3 s
s(s+5)=( 251s−251s+5
)e−3 s
q (t)=25u (t−3)−2
5e−5 (t−3)u (t−3)
Ejemplo 7:
y=−32e3 t sin (2 t)
2 [s2L { y }−sy (0 ) ]+20 [ sL {y }− y (0 ) ]+51L {y }=0
L { y }= 4 s+402 s2+20 s+51
= 2 s+20(s+5)2+1/2
=2(s+5)
(s+5)2+1/2= 10
(s+5)2+1/2
y=2e−5 t cos ( t√2 )+10√2e−5 t sin( t√2 )Ejemplo 8:
10dqdt
+10q=30et−30e tu(t−1.5)
sL {q }−q0+L {q }= 3s−1
− 3e1.5
s−1.5e−1.5
L {q }=(q¿¿0−32)1s+1
+321s−1
3e1.5 (
−25s+1
+
25
s−1.5)e−1.55 ¿
q (t)=(q¿¿0−32)e−t+ 3
2et+ 65e1.5(e−(t−1.5 )−e1.5 (t−1.5 ))u(t−1.5)¿

Resumen
A la ecuación diferencial la transformamos en términos de S (mediante transformadas de Laplace)
Resolvemos la ecuación algebraicamente para la función en S
Calculamos la inversa ( ) para ambos lados
Hallamos la solución de la ecuación diferencial
SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES DE PRIMER ORDEN
1.-VALORES PROPIOS REALES Y DISTINTOS
Teniendo uns solucion de la forma:
En donde k1 y k2 son constantes, surge la pregunta de si es posible determinar una solucion de la forma:
(1)
Del sistema homogéneo, lineal y de primer orden:
(2)
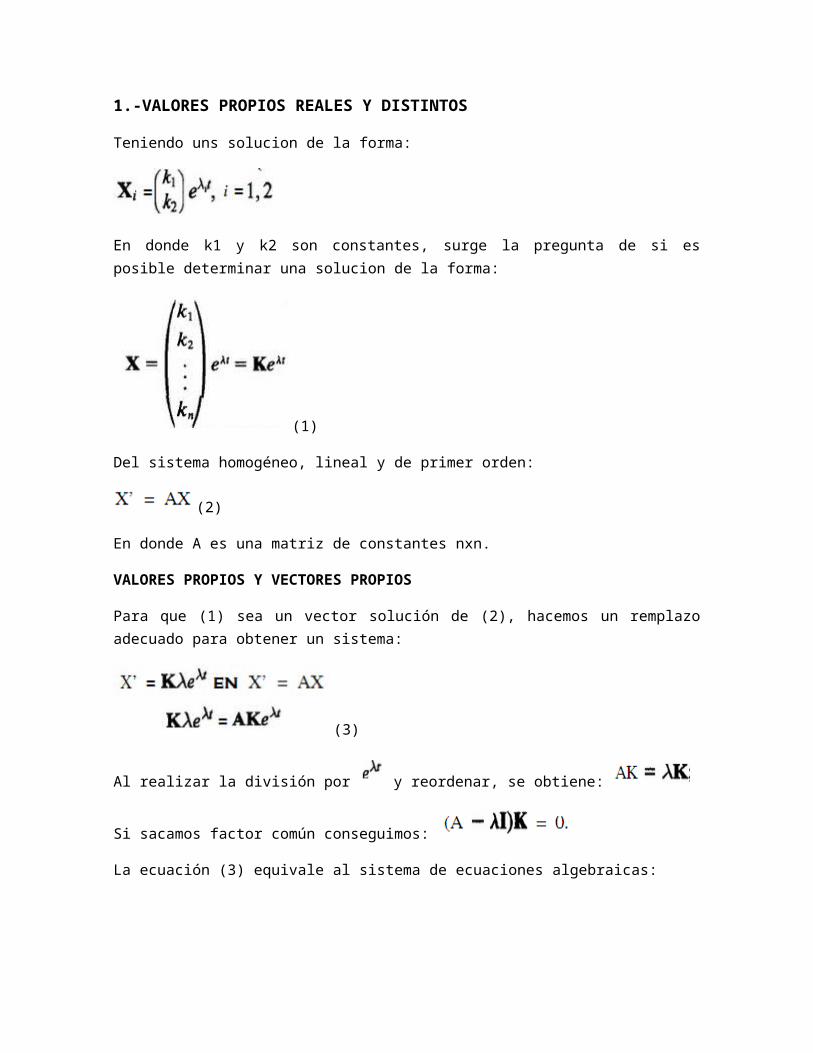
En donde A es una matriz de constantes nxn.
VALORES PROPIOS Y VECTORES PROPIOS
Para que (1) sea un vector solución de (2), hacemos un remplazo adecuado para obtener un sistema:
(3)
Al realizar la división por y reordenar, se obtiene:
Si sacamos factor común conseguimos:
La ecuación (3) equivale al sistema de ecuaciones algebraicas:
Así, para determinar una solución X no trivial de (2), debemos llegar a una solución no trivial del sistema anterior; calculando el vector K no trivial para que cumpla con (3). Para esto se debe cumplir con la siguiente condición:
Esta es la ecuación característica de la matriz A; en otras
palabras, va a ser solución del sistema (2) de ecuaciones
diferenciales, si y solo si es un valor propio de A, y K es un
vector propio correspondiente a .
Cuando la matriz A de nxn tiene n valores propios reales y
distintos, siempre se puede determinar un conjunto
de n vectores propios literalmente independientes, de donde obtenemos:
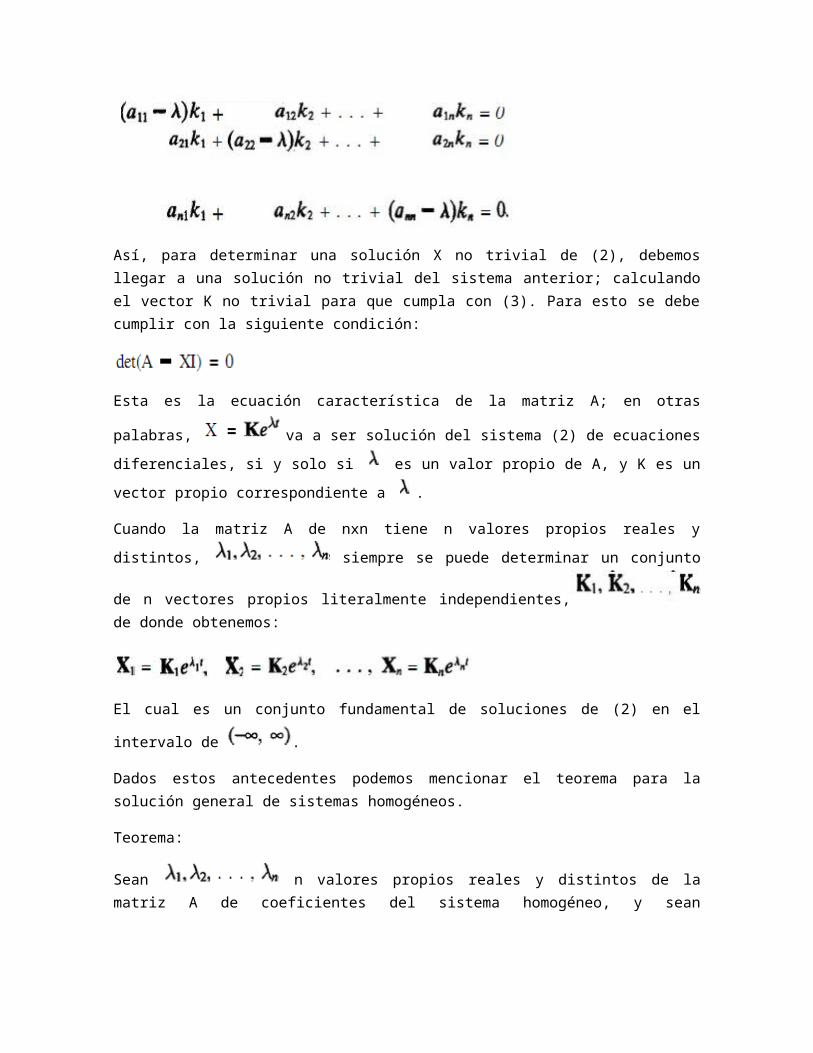
El cual es un conjunto fundamental de soluciones de (2) en el
intervalo de .
Dados estos antecedentes podemos mencionar el teorema para la solución general de sistemas homogéneos.
Teorema:
Sean n valores propios reales y distintos de la matriz A de coeficientes del sistema homogéneo, y sean
los vectores propios correspondientes, entonces la
solución general viene en el intervalo es:
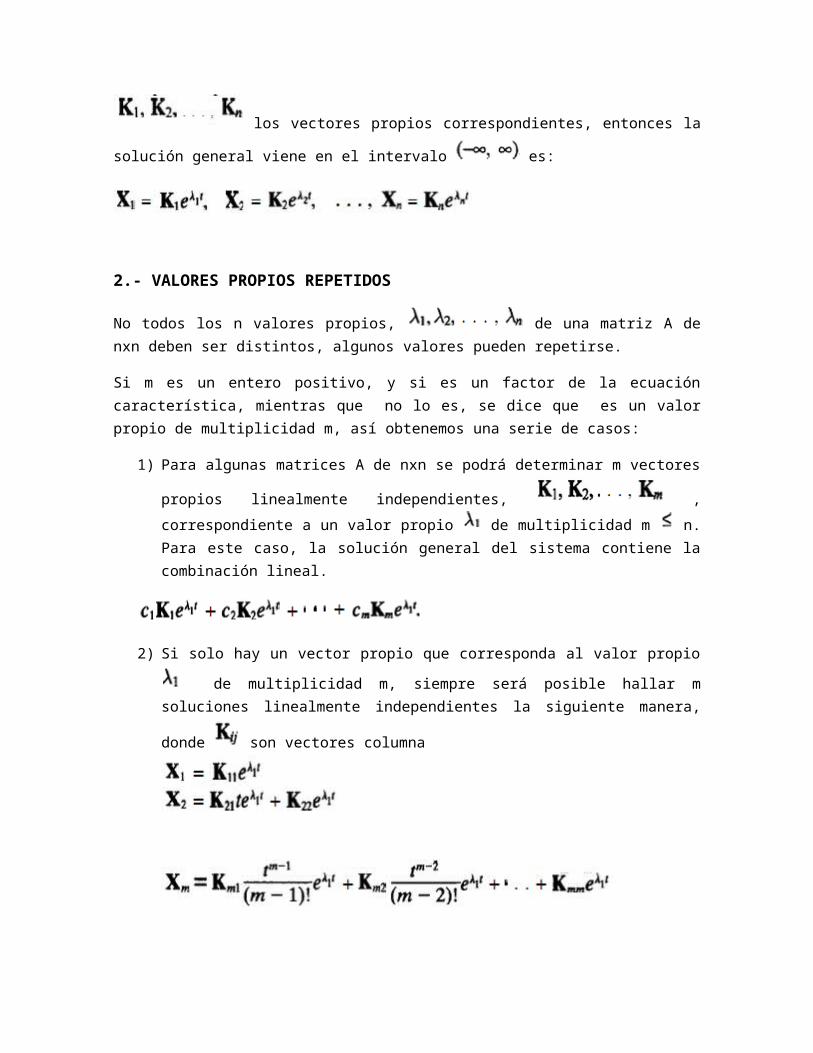
2.- VALORES PROPIOS REPETIDOS
No todos los n valores propios, de una matriz A de nxn deben ser distintos, algunos valores pueden repetirse.
Si m es un entero positivo, y si es un factor de la ecuación característica, mientras que no lo es, se dice que es un valor propio de multiplicidad m, así obtenemos una serie de casos:
1) Para algunas matrices A de nxn se podrá determinar m vectores
propios linealmente independientes, ,
correspondiente a un valor propio de multiplicidad m n. Para este caso, la solución general del sistema contiene la combinación lineal.
2) Si solo hay un vector propio que corresponda al valor propio
de multiplicidad m, siempre será posible hallar m soluciones linealmente independientes la siguiente manera,
donde son vectores columna
Al encontrar valores de multiplicidad 2 se aplica:
En valores de multiplicidad 3 se aplica:
3.-VALORES PROPIOS COMPLEJOS
Si son valores propios complejos de la matriz A de coeficientes, cabe esperar que sus vectores propios correspondientes también tengan elementos complejos, cuando la ecuación característica tiene coeficientes reales, los valores propios complejos siempre se dan en pares conjugados.
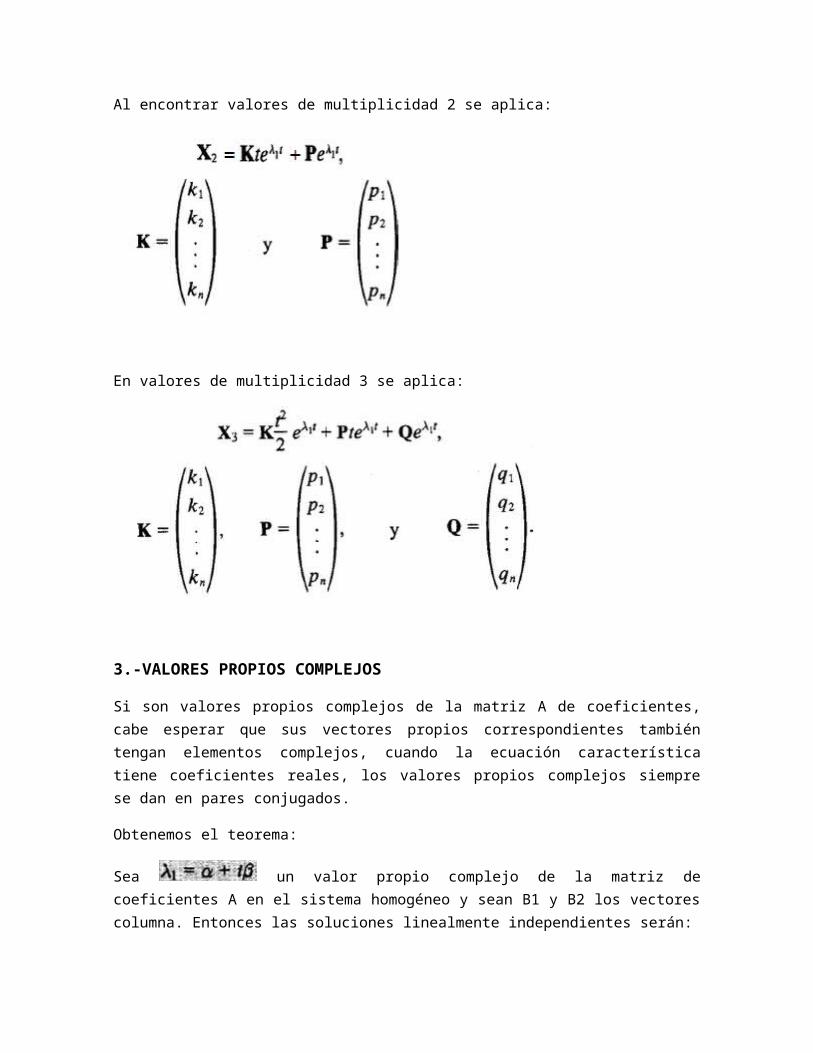
Obtenemos el teorema:
Sea un valor propio complejo de la matriz de coeficientes A en el sistema homogéneo y sean B1 y B2 los vectores columna. Entonces las soluciones linealmente independientes serán:
EJEMPLOS
• Aplicando Laplace, resolver el siguiente sistema de ecuaciones diferenciales homogéneas
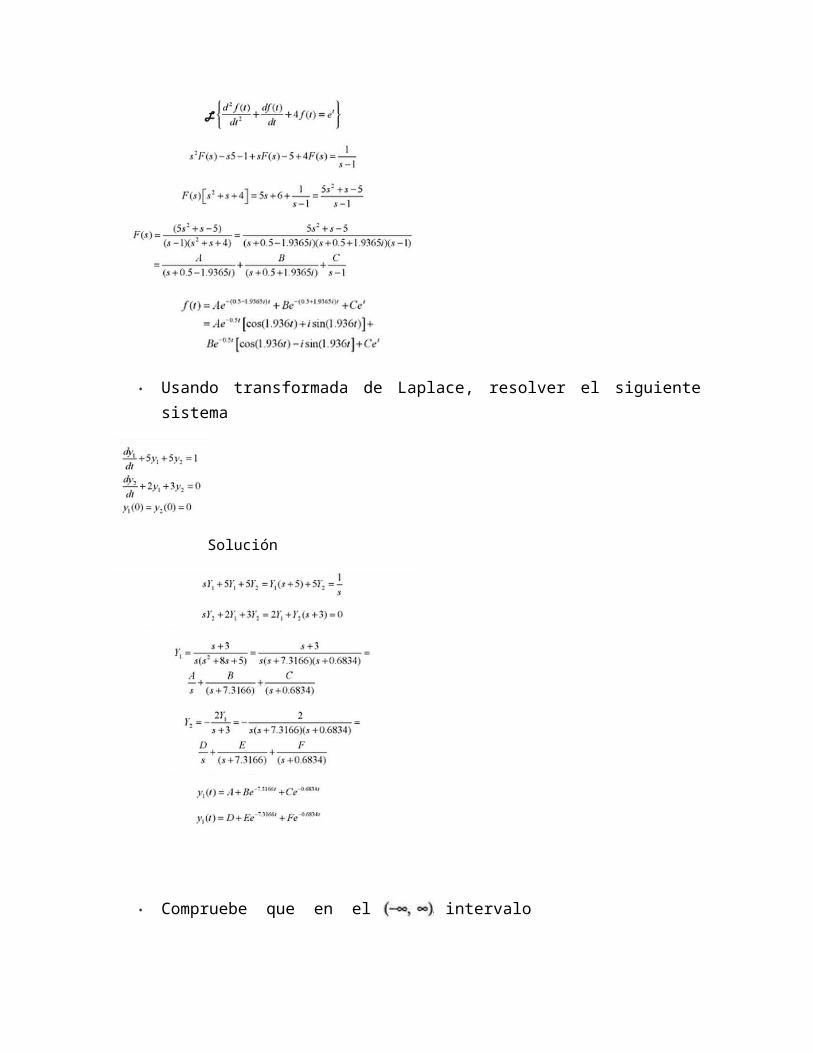
• Aplicando Laplace, resolver la siguiente ecuación diferencial homogénea

• Usando transformada de Laplace, resolver el siguiente sistema
Solución
• Compruebe que en el intervalo
Es solución de
Solución:
• Resolver
S=3 S=2 B=1 A=-1

• Resolver
sujeta a las condiciones iniciales y
• Resolver el siguiente sistema de ecuaciones diferenciales usando la transformada de Laplace
con Valores iniciales:
Aplicando Laplace a las 2 ecuaciones obtenemos
Utilizando el metodo de suma y resta obtenemos

Aplicando Laplace inversa para encontrar y(t) nos da como resultado
Sustituimos Y(s) en la ecuación
Finalmente aplicando Laplace inversa para encontrar x(t), nos da como
resultado
Ejercicios Propuestos:
• ;
Respuesta:
• ; ;
Respuesta:
• ; ;

• Rdqdt
+ 1Cq=EOe
−Kt ;q (0 )=0
Respuesta:
q (t )=EOC
1−kRC(e¿¿−kt−e−t /RC )¿
• y=−e3 t sin (2 t)
Respuesta: y=2e−t cos ( t√2 )+10e−t sin( t√2 )
Conclusiones:
Para resolver una ecuación diferencial por medio de las transformadas de Laplace a la ecuación diferencial la transformamos en términos de S (mediante transformadas de Laplace) luego procedemos a resolver la ecuación que nos queda algebraicamente para la función en S por lo general Y(S) aunque
ciertamente depende del ejercicio, luego calculamos la inversa () para ambos lados de la ecuación y hallamos la solución de la ecuación diferencial.
Bibliografía:
R. KENT AUTOR NAGLE, EDWARD B AUTOR SAFF, ARTHUR DAVID AUTOR SNIDER - Ecuaciones diferenciales y problemas con valores en la frontera - Pearson Educación, 2005 - 816 páginas
Pedro Alberto Quintana Hernández - Métodos de solución de Ecuaciones diferenciales y aplicaciones - Reverte, 03/01/2008 - 294 páginas
Dennis G. Zill - ECUACIONES DIFERENCIALES 9/E CON APLICACIONES DE MODELADO - CengageLearning Editores, 15/07/2009 - 532 páginas