Grupo de Robótica y Sociedad - Universidad de Salamanca
21
h"p://gro.usal.es Grupo de Robó5ca y Sociedad Dpto de Informá5ca y Automá5ca Dra. Belén Curto Dr. Vidal Moreno Programa Doctorado en Formación en la Sociedad del Conocimiento
-
Upload
education-in-the-knowledge-society-phd -
Category
Education
-
view
198 -
download
0
Transcript of Grupo de Robótica y Sociedad - Universidad de Salamanca

h"p://gro.usal.es
Grupo de Robó5ca y Sociedad Dpto de Informá5ca y Automá5ca
Dra. Belén Curto Dr. Vidal Moreno
Programa Doctorado en Formación en la Sociedad
del Conocimiento

h"p://gro.usal.es Contenidos
• Recursos • Historia • Líneas de inves5gación • Hitos • Innovación docente: proyectos y publicaciones
• Educación en Robó5ca • Robó5ca en Educación

h"p://gro.usal.es Recursos
• Recursos humanos • 6 Profesores Universitarios Doctores • Colaboradores + Becarios
• Alto nivel de cualificación • 4 Tesis doctorales en realización
• Instalaciones • 2 Laboratorios dotados de equipos de medida y computación de
úl5ma generación

h"p://gro.usal.es Historia
• Largo recorrido inves5gador • 1996 .-‐ Primera tesis doctoral
• Contacto estrecho con empresas • 1997: Primer contrato con empresas • Empresas
• Sector cárnico: CRDO Guijuelo (1999), INPORCASA (2000), Jamón Jabugo (2009)
• Sector alimentario: Centro Tecnología Azucarera (2001) • Sector nuclear: Consejo de Seguridad Nuclear (1997), Enusa Industrias
Avanzadas (2001) • Sector seguridad: Sen5nel (2007-‐11) • Sector medioambiental: Biogas PN (2011) • Sector innovación: Centro Láseres Pulsados (2012) • Sector formación y educación: SIMDEMED (2013)
• Reconocimiento de GIR USAL (2010)
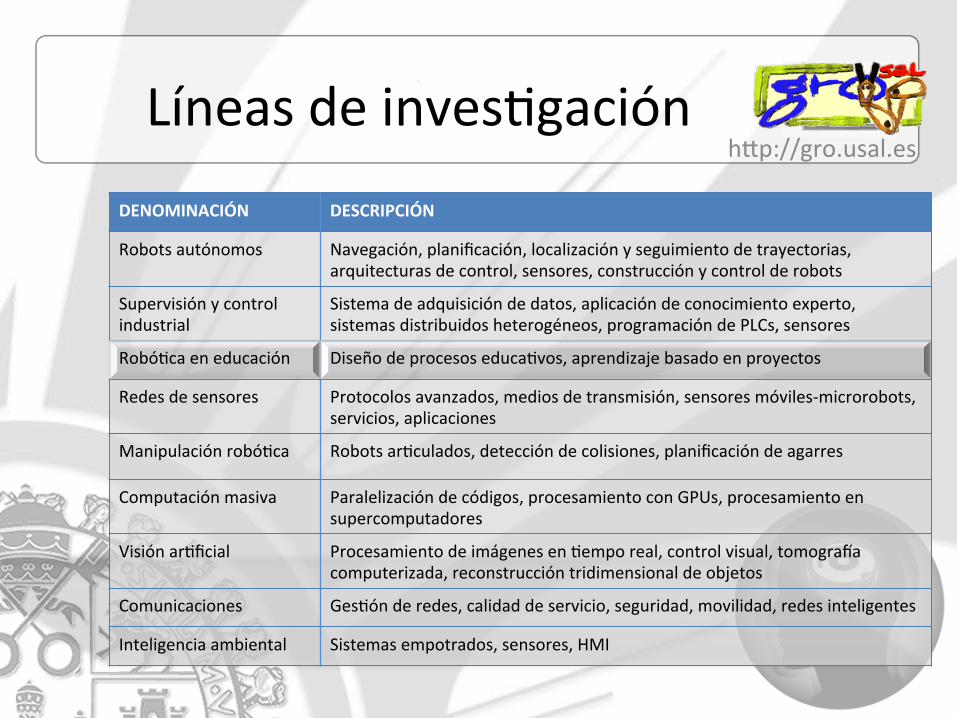
h"p://gro.usal.es Líneas de inves5gación
DENOMINACIÓN DESCRIPCIÓN
Robots autónomos Navegación, planificación, localización y seguimiento de trayectorias, arquitecturas de control, sensores, construcción y control de robots
Supervisión y control industrial
Sistema de adquisición de datos, aplicación de conocimiento experto, sistemas distribuidos heterogéneos, programación de PLCs, sensores
Robó5ca en educación Diseño de procesos educa5vos, aprendizaje basado en proyectos
Redes de sensores Protocolos avanzados, medios de transmisión, sensores móviles-‐microrobots, servicios, aplicaciones
Manipulación robó5ca Robots ar5culados, detección de colisiones, planificación de agarres
Computación masiva Paralelización de códigos, procesamiento con GPUs, procesamiento en supercomputadores
Visión ar5ficial Procesamiento de imágenes en 5empo real, control visual, tomografa computerizada, reconstrucción tridimensional de objetos
Comunicaciones Ges5ón de redes, calidad de servicio, seguridad, movilidad, redes inteligentes
Inteligencia ambiental Sistemas empotrados, sensores, HMI

h"p://gro.usal.es Hitos
• Sistemas de SCADA ( Supervisory Control And Data Adquisi5on) • 1997.-‐ -‐ Sistema centralizado para visualizar temperatura y humedad con tarjeta
PCL-‐812PG • 2003.-‐ Visualización remota en móvil • 2011.-‐ Redes de sensores (motes) • 2012.-‐ Supervisión remota de planta
• Robó5ca • 1994.-‐ Sohware de control de manipulador robó5co • 2004.-‐ Desarrollo de micro-‐robots • 2010.-‐ Robo5zación de vehículo industrial pale5zador • 2011.-‐ Construcción plataformas robó5cas • 2014.-‐ Sistemas empotrados y posicionamiento en 3D (IMU) • …
• Simuladores • 2005.-‐ Procesos industriales • 2010.-‐ Códigos PIC con CUDA • 2012.-‐ Formación médica • 2014.-‐ Visualización 3D en formación médica

h"p://gro.usal.es Hitos

h"p://gro.usal.es Hitos
!!

h"p://gro.usal.es Hitos

h"p://gro.usal.es Proyectos
• Elaboración de Material Didác5co en el entorno Mathema5ca para Ingeniería (JCyL. 1998-‐99)
• Una herramienta integrada para la enseñanza de los fundamentos de la transmisión de datos y las redes de ordenadores (USAL 2001-‐03)
• Desarrollo de un si5o web de historia de la informá5ca (JCyL 2003-‐04) • Proto5po de portalWeb, basado en un portal de coordinación y evaluación, para
las materias Programación y Estructuras de Datos (JCyL 2004) • Creación de material audiovisual para las asignaturas algoritmia y estructuras de
datos (USAL 007) • Definición y elaboración de procedimientos para el cumplimiento de criterios de
calidad en un Máster Oficial orientado hacia la inves5gación (JCyL 2007-‐08) • Implantación de un sistema de generación de "podcast" orientado a la
coordinación de las materias englobadas en el ítem "Programación y Estructuras de Datos" en los estudios de Informá5ca en el marco del EEES (JCyL 2008-‐09)
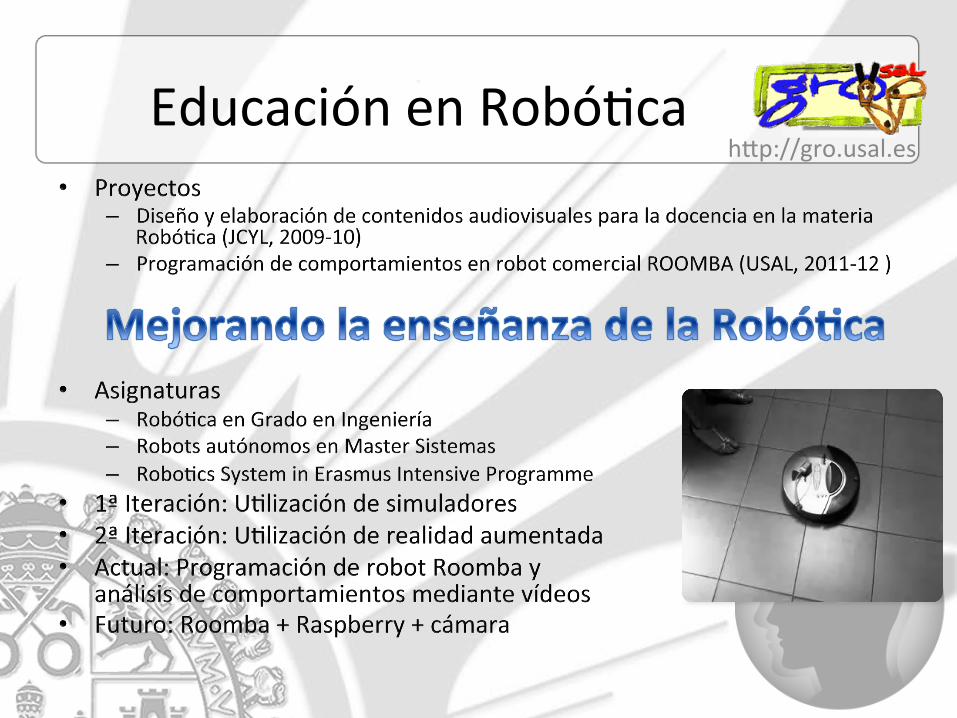
• Diseño y elaboración de contenidos audiovisuales para la docencia en la materia de robó5ca (USAL 2009-‐10)
• Herramienta para el aprendizaje visual y dinámico de estructuras de datos (USAL-‐ 2010-‐12)

h"p://gro.usal.es Proyectos
• Elaboración de contenidos audiovisuales para la asignatura de Informá5ca en el Grado de Ingeniería Química (USAL 2011-‐12)
• Programación de comportamientos en robot comercial ROOMBA (USAL 2011-‐12) • Elementos de Interconexión de Redes: Integrando Voz y Datos (USAL 2011-‐12) • Herramientas Visuales para el Aprendizaje de los Algoritmos de Encaminamiento
en las Redes de Computadores (USAL 2012) • Creación de Material para Prác5cas de Estructuras de Datos Complejas (USAL
2013) • Diseño de materiales para el laboratorio de interconexión de redes: Integrando
voz y datos (USAL 2013-‐14) • Ges5ón de la iden5dad digital del inves5gador como medio de coordinación y
seguimiento en el Programa de Doctorado de Formación en la Sociedad del Conocimiento (USAL 2013-‐14)
• Desarrollo simulador médico para entrenamiento de anestesistas (Arpculo 83 LOU. 2013)
• Integración de visor 3D en Sohware de entrenamiento médico ( Arpculo 83 LOU. 2014-‐15)

h"p://gro.usal.es Publicaciones
• E. Calzada; B. Curto; A. M. Moreno; V. Moreno; F. J. García, “APRISA: A tool for teaching the interconnec5on of Open Systems”, Congreso Nacional de Informá5ca Educa5va -‐ CONIED'99 , Puertollano (España), 1999
• E. Calzada; B. Curto; A. M. Moreno; V. Moreno; F. J. García, “APRISA: A tool for teaching the interconnec5on of Open Systems”, KLUWER ACADEMIC PUBLISHERS, pp 137-‐147, 2000 Cap. Libro
• J.A. Vicente; B. Curto; V. Moreno; A. M. Moreno; F. J. García, “Herramienta mul5plataforma y remota para la enseñanza prác5ca de Control de Procesos”, Interna5onal Conference on New Technologies in Science, CINTEC'2001, Aveiro (Portugal), 2001
• S. San Victoriano; A. M. Moreno; B. Curto; V. Moreno; F. J. García, “Ges5ón remota de elementos ac5vos de red en un entorno educa5vo”, Interna5onal Conference on New Technologies in Science, CINTEC'2001, Aveiro (Portugal), 2001,
• B. Curto; V. Moreno; J. A. Vicente; A. M. Moreno; F. J. García, “A Java based tool to develop a remote laboratory for process control teaching ”, IFAC Workshop on Internet Based Control Educa5on -‐ IBCE'01 , ELSEVIER SCIENCE, pp 53-‐58 , 2001
• B. Curto; A. M. Moreno; V. Moreno; P. Mapas: “JPSC: Herramienta Docente para la Enseñanza de Procesamiento de Señales y Comunicaciones”, SAAEI, 2003
• M. J. Polo; A. M. Moreno; C. Iglesias; B. Curto; V. Moreno. ; M. N. Moreno, “Sohware Educa5vo para la Enseñanza de Estructuras de Datos en el Grado en Ingeniería Informá5ca ”, IIE 08 -‐ X Simposio Internacional de Informá5ca Educa5va, 2008
• A. Sánchez Tabernero, J. A. Juanes Méndez, F. Hernández Zaballos, B. Curto Diego, V. Moreno Rodilla, P. Alonso Hernández. “Use of New Technologies in the Acquisi5on of Clinical Skills in Anesthesiology” en PROCEEDINGS TEEM’14
h"p://gro.usal.es Educación en Robó5ca

h"p://gro.usal.es Publicaciones
• J.L. Gómez; I. Alvarez; F. J. Blanco; F. J. García; B. Curto, “Simurob and JRF. Teaching Tools for Robot Simula5on and Programming” , KLUWER ACADEMIC PUBLISHERS, pp 167-‐175, 2001
• J.L. Gómez; V. Moreno; B. Curto; A. M. Moreno; E. Sanz; I. Álvarez; F. J. Blanco, “JRF: Una herramienta mul5plataforma para el diseño y simulación de estructuras robó5cas”, XXII Jornadas de Automá5ca, 2001
• F. J. Blanco; V. Moreno; B. Curto; R. Alves; J. A. Vicente, “Experiencias en la u5lización del robot Roomba en sesiones prác5cas de una asignatura de Robó5ca”, CEA/IFAC, pp 115-‐120, 2009
• A. Rodríguez; B. Curto; V. Moreno; R. González; C. Fernández, “Herramienta Virtual para la Enseñanza de Robó5ca Basada en Realidad Aumentada” , CEA/IFAC, 2009
• F. J. Blanco; B. Curto; V. Moreno; C. Fernández, “Propuesta docente para las prác5ca de Robó5ca en el Grado de Ingeniería Informá5ca”, Revista Teoría de la Educación: Educación y Cultura en la Sociedad de la Información TESI, 2(13), pp 156-‐117, 2013
• K. Pi{, B. Curto, V. Moreno, F. J. Blanco, “A new approach to Robo5cs teaching at Computer Science Engineering degree based on ac5on-‐research” en PROCEEDINGS TEEM'13 Technological Ecosystems for Enhancing Mul5culturality, ISBN 978-‐1-‐4503-‐2345-‐1, 2013
• F. J. Blanco, B. Curto, V. Moreno, K. Pi{, J.F. Rodíguez-‐ Aragón. “Improving Robo5cs Teaching in the Computer Engineering Degree through the Ac5on-‐Research Approach”. Interna5onal Journal of Engineering Educa5on., ISSN. 0949-‐149X. 2014

h"p://gro.usal.es Robó5ca en Educación
• Obje5vo – Aumentar el interés de los estudiantes por los estudios
STEM (Science, Technology, Engineering and Mathema5cs) • Ac5vidades de divulgación
– Charlas interac5vas • Semana de la Ciencia, Jornadas Puertas Abiertas, • IME – Ayuntamiento de Salamanca
– Concursos y exposiciones • Rastreadores, velocistas, humanoides
– Campamentos y cursos • Colaboración con CITA (Peñaranda)
• Introducir el “robot en clase” – Construir robots para comprender conceptos de
ciencia e ingeniería
!
h"p://gro.usal.es Congreso
• Track: “A robot in the classroom”
– Experiences with new teaching materials – Web-‐based materials, virtual worlds and simula5on – Open source material – Laboratory experiments in educa5onal robo5cs – Teaching Methodology – Design of educa5onal projects with robo5cs – Pilot studies in educa5onal robo5cs – Robo5cs in school – Development of Curriculum in robo5cs at the University – Experimental evalua5on of hardware and sohware pla}orms – Free and printable Robots – Compe55ons as mo5va5on ac5vi5es

h"p://gro.usal.es Tesis Doctorales
• “Enseñanza de la robó5ca educa5va mediante el aprendizaje basado en proyectos” – Doctorando: Kathia Pi{ – Directores: Joaquín García-‐Carrasco, Belén Curto – Fecha de lectura: Marzo, 2015 – Obje5vo
• Establecer las bases para un modo de trabajo basado en proyectos que permita introducir la Robó5ca educa5va en la enseñanza secundaria, logrando un alto grado de aprendizaje ac5vo centrado en el alumno

h"p://gro.usal.es Publicaciones
• K. Pi{; B. Curto; J. García; V. Moreno, “NXT Workshops: Construc5onist Learning Experiences in Rural Areas”, Proc. In Teaching Robo5cs, Teaching with Robo5cs, In Workshop Proceedings of SIMPAR, pp. 504-‐513. Darmstadt (Germany) November 2010
• K. Pi{; B. Curto; V. Moreno, “Construc5onist experiences with educa5onal robo5cs at the Interna5onal Center for Advanced Technologies”, X Revista Teoría de la Educación: Educación y Cultura en la Sociedad de la Información TESI, 11(1), pp 310-‐329, 2010
• K. Pi{; B. Curto; J. García; V. Moreno; R. On5yuelo, “Use of an Infocenter to Improve the Management and Understanding of Project-‐Based Learning Robo5cs” , Proc. of 2nd Interna5onal Conference on Robo5cs in Educa5on (RiE 2011) pp. 15-‐20. Vienna, Austria, September, 2011
• K. Pi{; B. Curto; J. García; V. Moreno; R. On5yuelo, “CITA: Promo5ng Technological Talent through Robo5cs”, Proc. en Interna5onal Conference on Robo5cs in Educa5on (RiE 2012) , pp. 113-‐120 Prague, Czech Republic, September, 2012
• K. Pi{; B. Curto; V. Moreno,”E-‐infocenter: una herramienta visual para la ges5ón de proyectos en robó5ca educa5va usando tecnologías web”, Revista Teoría de la Educación: Educación y Cultura en la Sociedad de la Información TESI, 13(2), pp 137-‐155, 2013
• K. Pi{, B. Curto, V. Moreno, M. J. Rodríguez, “Resources and Features of Robo5cs Learning Environments (RLEs) in Spain and La5n America” en Proc. TEEM'13 Technological Ecosystems for Enhancing Mul5culturality, ISBN 978-‐1-‐4503-‐2345-‐1, Noviembre 2013, España
• B. Curto, V. Moreno, “A robot in the classroom”, ” en Proc. TEEM'13 Technological Ecosystems for Enhancing Mul5culturality, ISBN 978-‐1-‐4503-‐2345-‐1, Noviembre 2013, España
• K. Pi{, B. Curto, V. Moreno, M. J Conde Rodríguez, J.F. Rodríguez-‐Aragón. “Using Robo5cs as a Learning Tool in La5n America and Spain”. IEEE VAEP-‐RITA, 2014
h"p://gro.usal.es Tesis Doctorales
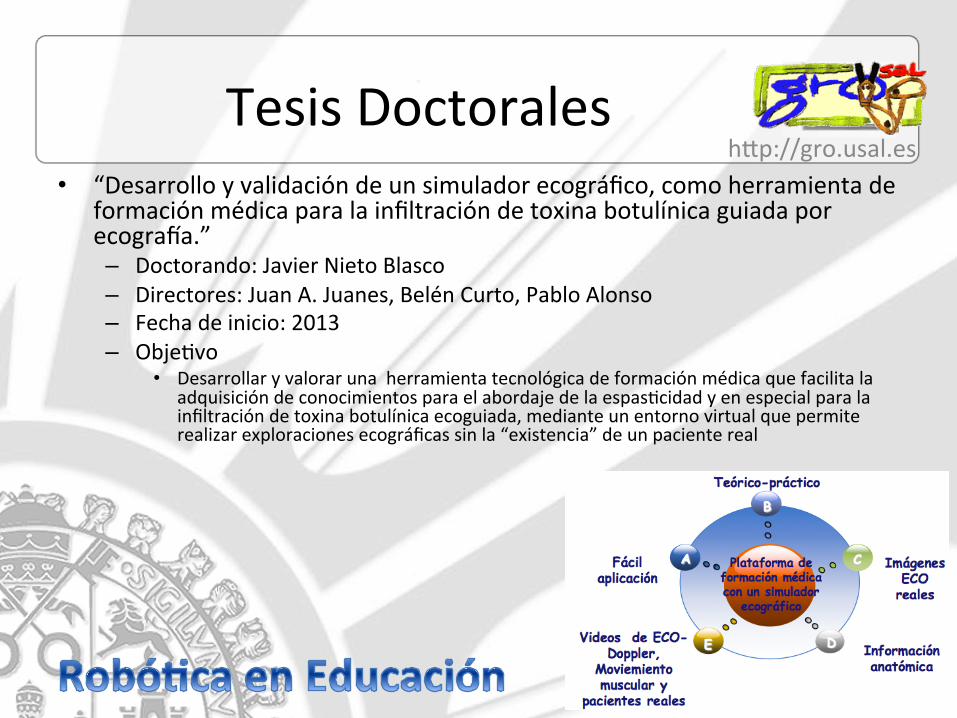
• “Desarrollo y validación de un simulador ecográfico, como herramienta de formación médica para la infiltración de toxina botulínica guiada por ecografa.” – Doctorando: Javier Nieto Blasco – Directores: Juan A. Juanes, Belén Curto, Pablo Alonso – Fecha de inicio: 2013 – Obje5vo
• Desarrollar y valorar una herramienta tecnológica de formación médica que facilita la adquisición de conocimientos para el abordaje de la espas5cidad y en especial para la infiltración de toxina botulínica ecoguiada, mediante un entorno virtual que permite realizar exploraciones ecográficas sin la “existencia” de un paciente real

h"p://gro.usal.es Tesis Doctorales
• “Mejorando la comunicación persona-‐robot mediante la expresividad y las emociones” – Doctorando: Raúl Calle – Directores: Belén Curto, Vidal Moreno – Fecha de inicio: Sep5embre, 2015 – Obje5vo
• Incorporar expresividad en el robot para mejorar la comunicación con las personas y, especialmente, en entornos de aprendizaje
h"p://www.aisoy.es/
h"p://gro.usal.es Publicaciones
• Nieto, P. Alonso, J.A. Juanes, J.A. Santos, F. Zaballos, , V. Moreno, B. Curto, F. J. Serrano. “Medical training for echo-‐guided infiltra5on of Botulinum toxin by an echograph simulator”. First Interna5onal Conference on Technological Ecosystems for Enhancing Mul5culturality, TEEM 2013, Salamanca, 2013
• Nieto, P. Alonso, J.A. Juanes, J.A. Santos, F. Zaballos, V. Moreno, B. Curto, F. J. Serrano. “Plataforma de formación médica para el manejo de la infiltración de toxina botulínica, guiada por ecografa, mediante un simulador informá5co”. Poster en 51º Congreso SERMEF Sociedad Española de Medicina Física y Rehabilitación 2014
• Nieto, J.A. Juanes, P. Alonso, B. Curto, F. Zaballos, V. Moreno, “Simulador ecográfico: u5lidad como herramienta de formación para la infiltración de toxina botulínica ecoguiada”. Revista Vozes dos Vales Mul5disciplinar da UFVJM – Brasil – ISSN: 2238-‐6424, Pesquisas Doutorais, 2014