I MAGNITUDES Y MEDIDAS - assets-libr.cantook.net · recha es mayor que cinco, la significativa se...
22
Transcript of I MAGNITUDES Y MEDIDAS - assets-libr.cantook.net · recha es mayor que cinco, la significativa se...



IMAGNITUDES Y MEDIDAS
1. MAGNITUDES
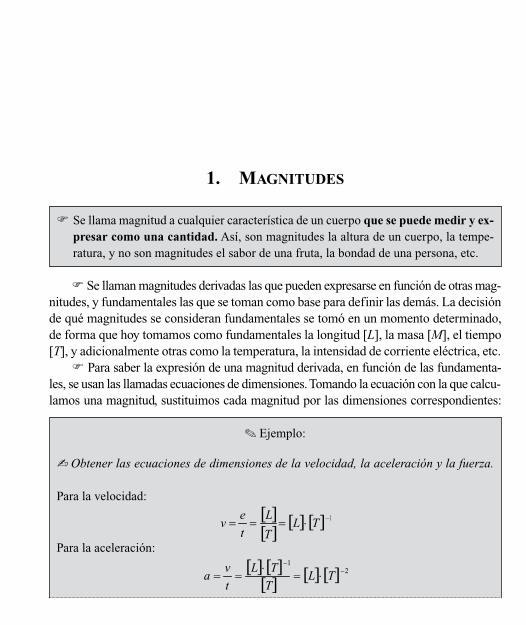
� Se llama magnitud a cualquier característica de un cuerpo que se puede medir y ex-presar como una cantidad. Así, son magnitudes la altura de un cuerpo, la tempe-ratura, y no son magnitudes el sabor de una fruta, la bondad de una persona, etc.
� Se llaman magnitudes derivadas las que pueden expresarse en función de otras mag-nitudes, y fundamentales las que se toman como base para definir las demás. La decisiónde qué magnitudes se consideran fundamentales se tomó en un momento determinado,de forma que hoy tomamos como fundamentales la longitud [L], la masa [M], el tiempo[T], y adicionalmente otras como la temperatura, la intensidad de corriente eléctrica, etc.
� Para saber la expresión de una magnitud derivada, en función de las fundamenta-les, se usan las llamadas ecuaciones de dimensiones. Tomando la ecuación con la que calcu -lamos una magnitud, sustituimos cada magnitud por las dimensiones correspondientes:
✎ Ejemplo:
✍ Obtener las ecuaciones de dimensiones de la velocidad, la aceleración y la fuerza.
Para la velocidad:
Para la aceleración:
[ ] [ ][ ] [ ] [ ] 2
1−
−
⋅=⋅
== TLT
TL
t
va
[ ][ ]
[ ] [ ] 1−⋅=== TLTL
tev
Y en cuanto a la fuerza:
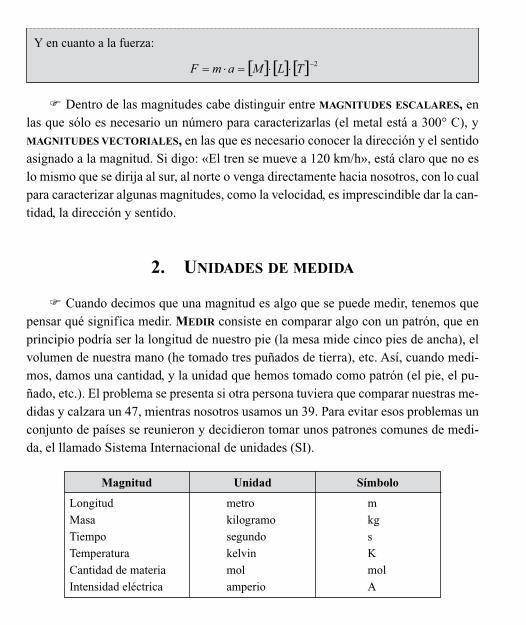
� Dentro de las magnitudes cabe distinguir entre MAGNITUDES ESCALARES, enlas que sólo es necesario un número para caracterizarlas (el metal está a 300° C), yMAGNITUDES VECTORIALES, en las que es necesario conocer la dirección y el sentidoasignado a la magnitud. Si digo: «El tren se mueve a 120 km/h», está claro que no eslo mismo que se dirija al sur, al norte o venga directamente hacia nosotros, con lo cualpara caracterizar algunas magnitudes, como la velocidad, es imprescindible dar la can-tidad, la dirección y sentido.
2. UNIDADES DE MEDIDA
� Cuando decimos que una magnitud es algo que se puede medir, tenemos quepensar qué significa medir. MEDIR consiste en comparar algo con un patrón, que enprincipio podría ser la longitud de nuestro pie (la mesa mide cinco pies de ancha), elvolumen de nuestra mano (he tomado tres puñados de tierra), etc. Así, cuando medi-mos, damos una cantidad, y la unidad que hemos tomado como patrón (el pie, el pu-ñado, etc.). El problema se presenta si otra persona tuviera que comparar nuestras me-didas y calzara un 47, mientras nosotros usamos un 39. Para evitar esos problemas unconjunto de países se reunieron y decidieron tomar unos patrones comunes de medi-da, el llamado Sistema Internacional de unidades (SI).
Magnitud Unidad Símbolo
Longitud metro m
Masa kilogramo kg
Tiempo segundo s
Temperatura kelvin K
Cantidad de materia mol mol
Intensidad eléctrica amperio A
[ ] [ ] [ ] 2−⋅⋅=⋅= TLMamF
16 MAGNITUDES Y MEDIDAS

A su vez, se definen los múltiplos o submúltiplos de estas unidades como poten-cias de diez, según la siguiente tabla:
MÚLTIPLOS SUBMÚLTIPLOS
Factor Prefijo Símbolo Factor Prefijo Símbolo
101 deca Da 110–1 deci d
102 hecto H 110–2 centi c
103 kilo K 110–3 mili m
106 mega M 110–6 micro μ109 giga G 110–9 nano n
1012 tera T 10–12 pico p
Para realizar una conversión de unidades, se utilizan los factores de conversión, queson fracciones en las que se escriben las relaciones entre las unidades a convertir.
✎ Ejemplo:
✍ Realiza las siguientes conversiones de unidades:
10.000 m → km
25 m/s → km/h
0,00006 cm2 → mm2
3 litros → m3
� Como 1 litro = 1 dm3;
333
33
003,0000.1
3
000.1
1
1
13 mm
dm
m
l
dml ==⋅⋅
22
2
006,010000006,= 01
101
1000006,000006,0
mmmmcmmm
cmmm
cmcmcm
=⋅
=⋅⋅⋅=
hkm
hkm
hs
mkm
sm
90000.1
6060251min60
min160
000.11
25 =⋅⋅
=⋅⋅⋅
kmkmm
kmm 10
000.1
000.10
000.1
1000.10 ==⋅
MAGNITUDES Y MEDIDAS 17

3. PROCESOS DE MEDIDA: ERRORES
� Cuando se realiza una medida, es decir, cuando comparamos una magnitud conun patrón, no podemos dar un resultado completamente preciso, y ello puede ocurrirpor varias razones, como ahora veremos.
� Para expresar el resultado más correcto posible utilizamos el redondeo. Para re-dondear tomamos una cifra como última significativa, y si el valor de la cifra de la de-recha es mayor que cinco, la significativa se aumenta en una unidad.
✎ Ejemplo:
✍ Redondea el número 0,7803546.
� Sin decimales. La cifra a la derecha del 0 es un 7, luego queda como 1.� 1 decimal. Sería 0,7, pero al ser un 8 el de la derecha se incremente, quedando 0,8.� 2 decimales. En este caso, el cero no altera al número anterior, por lo que es 0,78.� 4 decimales. Al ser un cinco el número siguiente a la última cifra significativa se
incrementa en una unidad, 0,7804.
Una vez entendido el proceso de redondeo, vamos a estudiar los tipos de error quepodemos encontrarnos:
� ERRORES SISTEMÁTICOS
Ocurren siempre que se realiza la medida, por ejemplo por la precisión máxima delins trumento de medida (en este caso, el error es la mitad de la precisión del instru-mento).
� ERRORES ACCIDENTALES
Ocurren accidentalmente, es decir, pueden producirse en una medida y no en otra(por ejemplo, por un error de la persona que realiza la medida). Se corrigen tomandovarias medidas y calculando la media.
� El proceso de medida consistirá entonces en:
� Realizar varias medidas y calcular la media de ellas.
18 MAGNITUDES Y MEDIDAS

� Hallar la media del valor absoluto de la diferencia entre las medidas y la mediacalculada. El mayor entre este número y la incertidumbre de la medida (la mitad de laprecisión del instrumento) es el error absoluto de la medida.
� Dividir el error absoluto entre el resultado de la medición y multiplicar por cien.(Éste es el error relativo.)
✎ Ejemplo:
✍ Con un metro de 1 mm de precisión, se toman cinco medidas de la anchura de unatabla, obteniéndose los siguientes resultados: 389, 392, 375, 385 y 382 mm. Calculala medida, el error absoluto y el error relativo.
� El error introducido por la precisión del instrumento es 0,5 mm.
� La medida será la media de las lecturas:
� El error, calculado como media de las diferencias entre las lecturas y el valor me-dio, en valor absoluto, es:
� Así, como 5 es mayor que la precisión 0,5, la medida se escribe como 385±5 mm(hemos redondeado el valor medio sin decimales, debido al error obtenido). El error relativo cometido es:
%3,11003855
=⋅
55
219855
384382384385384375384392384389
=++++
=
=
−+−+−+−+−
384,65
382385375392389=
++++
MAGNITUDES Y MEDIDAS 19

IICINEMÁTICA
1. CONCEPTOS BÁSICOS
� POSICIÓN
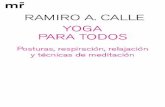
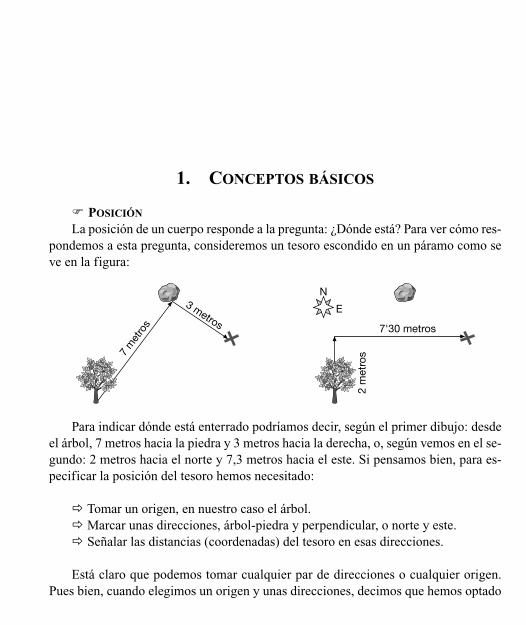
La posición de un cuerpo responde a la pregunta: ¿Dónde está? Para ver cómo res-pondemos a esta pregunta, consideremos un tesoro escondido en un páramo como seve en la figura:
Para indicar dónde está enterrado podríamos decir, según el primer dibujo: desdeel árbol, 7 metros hacia la piedra y 3 metros hacia la derecha, o, según vemos en el se-gundo: 2 metros hacia el norte y 7,3 metros hacia el este. Si pensamos bien, para es-pecificar la posición del tesoro hemos necesitado:
� Tomar un origen, en nuestro caso el árbol.� Marcar unas direcciones, árbol-piedra y perpendicular, o norte y este.� Señalar las distancias (coordenadas) del tesoro en esas direcciones.
Está claro que podemos tomar cualquier par de direcciones o cualquier origen.Pues bien, cuando elegimos un origen y unas direcciones, decimos que hemos optado
3 metros
7 m
etro
s
N
E
7'30 metros
2 m
etro
s

por un sistema de referencia, porque será a partir de él de donde determinemos la po-sición de cualquier cuerpo, mediante sus coordenadas.
� En el caso de un cuerpo en el espacio, ne-cesitaremos un sistema de referencia de tresdimensiones, y la posición del cuerpo vendráseñalada por un vector (es como el caso delmapa, pero hemos de añadir una tercera mag-nitud, la altura desde el suelo a la que se en-cuentra el cuerpo).
� Si el cuerpo está en movimiento, este vec-tor irá variando en función del tiempo; es decir,en cada instante t, el cuerpo tendrá un vectorde posición diferente r(t). Esta expresión re-cibe el nombre de ecuación de movimiento.
� Se llama trayectoria a la curva que describe el cuerpo al moverse por el espa-cio, y desplazamiento en un intervalo de tiempo, a la diferencia de las posiciones en-tre dichos instantes.
� En el dibujo de la izquierda, la mos-ca estaba en el instante t = 0 en el puntomarcado por el vector , y en el ins-tante t = 10 se encontraba en el puntomarcado por el vector . El despla-zamiento entre dichos puntos lo da elvector . Sin embargo, la mosca no se hamovido en línea recta entre ambos pun-tos, ha seguido la trayectoria que puedesver dibujada. Esta trayectoria está for-mada por las «puntas» de los vectoresposición en cada instante.
)10(rr
dr
rr
(0)
rr
(10)
dr= rr
(10) − r (0)r
kzjyixrrrrr
++=
dr
)0(rr
24 CINEMÁTICA
trayectoria
Z
X
Y
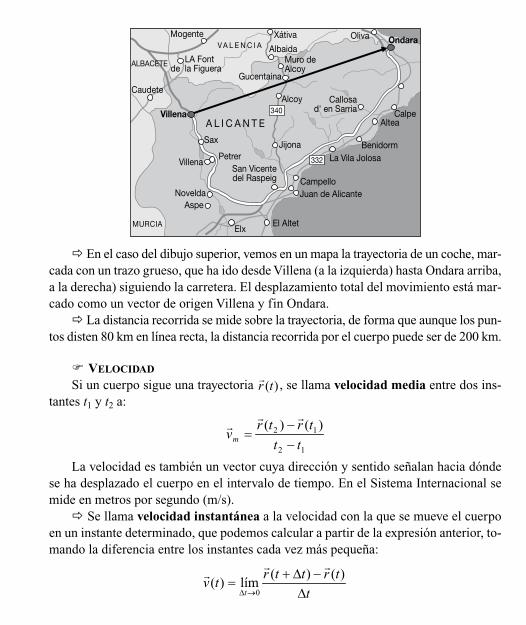
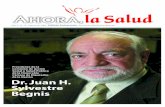
� En el caso del dibujo superior, vemos en un mapa la trayectoria de un coche, mar-cada con un trazo grueso, que ha ido desde Villena (a la izquierda) hasta Ondara arriba,a la derecha) siguiendo la carretera. El desplazamiento total del movimiento está mar-cado como un vector de origen Villena y fin Ondara.
� La distancia recorrida se mide sobre la trayectoria, de forma que aunque los pun-tos disten 80 km en línea recta, la distancia recorrida por el cuerpo puede ser de 200 km.
� VELOCIDAD
Si un cuerpo sigue una trayectoria , se llama velocidad media entre dos ins-tantes t1 y t2 a:
La velocidad es también un vector cuya dirección y sentido señalan hacia dóndese ha desplazado el cuerpo en el intervalo de tiempo. En el Sistema Internacional semide en metros por segundo (m/s).
� Se llama velocidad instantánea a la velocidad con la que se mueve el cuerpoen un instante determinado, que podemos calcular a partir de la expresión anterior, to-mando la diferencia entre los instantes cada vez más pequeña:
t
trttrtv
t Δ−Δ+
=→Δ
)()(lím)(
0
rrr
Oliva
Callosad' en Sarria
Ondara
Alcoy340
332
JijonaPetrer
Sax
Campello
La Vila JolosaBenidorm
Altea
Xátiva
AlbaidaMuro deAlcoy
Gucentaina
LA Fontde la Figuera
Villena
Caudete
Villena
MogenteV A L E N C I A
A L I C A N T E
MURCIA
ALBACETE
NoveldaAspe
San Vicentedel Raspeig
Calpe
El AltetElx
Juan de Alicante
12
12 )()(
tt
trtrvm −
−=
rrr
)(trr
CINEMÁTICA 25

Si el vector velocidad media nos daba el desplazamiento del cuerpo en el interva-lo, la velocidad instantánea es tangente a la trayectoria en cada punto de ésta y nosdice hacia dónde se está moviendo el cuerpo en ese instante.
� La velocidad media está asociada al desplazamiento, y la instantánea, a la tra-yectoria.
Si te suena la expresión de la velocidad instantánea de matemáticas, no es ni másni menos que la derivada de la función . Al ser un vector, la derivada es otro vec-tor que se obtiene derivando sus componentes. O sea:
✎ Ejemplo:
✍ Si un mosquito se mueve con la siguiente ecuación de movimiento:
¿Cuál es el desplazamiento entre los instantes t = 0 y t = 2 s?
� Calculamos primero los vectores de posición en cada instante:
kjirkirrrrrrrr
3420)2(4)0( ++=+−= ;
Velocidad instantánea en t0
Velocidad media en elintervalo t0, t
Trayectoria
t
t0
ktjtittrrrrr
)1()412()( 2 +++−=
kdt
tdzj
dt
tdyi
dt
tdx
dt
rdtv
rrrrr )()()(
)( ++==
)(trr
26 CINEMÁTICA

� Ahora el desplazamiento será la diferencia de ambos vectores:
¿Cuál es la velocidad media entre dichos instantes?
� Según la fórmula de la velocidad media:
¿Y la velocidad instantánea en t = 0 y t = 2?
� Para la velocidad instantánea, hemos de derivar:
� Sustituyendo t = 0 y t = 2;
� Si piensas un poco, te darás cuenta de que cuando hablamos de la velocidad deun cuerpo solemos decir algo como «el coche iba a 110 kilómetros por hora», sin ha-blar de direcciones o sentidos; es decir, sin considerar que la velocidad es un vector.Lo que queremos expresar es que el módulo de la velocidad del coche era de 110 ki-lómetros por hora.
✎ Ejemplo:
✍ Un coche se ha desplazado del punto , hasta el punto ,con las coordenadas expresadas en kilómetros, en 2 horas. ¿A qué velocidad ha he-cho el recorrido?
� En primer lugar, como no tenemos la expresión de la trayectoria, estamos hablan-do de velocidad media. Esa velocidad media será:
jijirr
v ABm
rrrrrr
r1015
2
2030
2−=
−=
−=
jirA
rrr3020 += jirB
rrr1050 +=
kjivkivrrrrrrr
++=+= 412)2(12)0(
kjtikdttdzj
dttdyi
dttdx
dtrdtv
rrrrrrrr
++=++== 212)()()()(
kjikjittrrvm
rrrrrrrr
r++=
++=
−−
= 2122
2424)0()2(
12
kjirrdrrrrrr2424)0()2( ++=−=
CINEMÁTICA 27

� Esto querría decir que se mueve hacia el «sureste» en el mapa, o a la derecha (dir.X positiva) y abajo (dir. Y negativa). La velocidad con la que hace el desplazamientoserá el módulo del vector:
Por lo visto, el coche estaba en un atasco.
� ACELERACIÓN
Igual que la velocidad tenía que ver con los cambios en la posición de un cuerpoa lo largo del tiempo, la aceleración está relacionada con los cambios en la velocidad.
� Expresamos entonces la aceleración media entre dos instantes con una fórmulasimilar a la de la velocidad:
La aceleración es un vector cuya dirección y sentido señalan el cambio en la ve-locidad. Así, si coinciden la dirección y el sentido, el cuerpo está acelerando, mientrasque si el sentido es opuesto al de la velocidad, el cuerpo está frenando. Si no coinci-den las direcciones de los vectores, el cuerpo está girando, y a la vez puede estar o noacelerando. Veremos esto más despacio después.
En el Sistema Internacional, la aceleración se mide en metros por segundo al cua-drado (m/s2).
� Se llama aceleración instantánea al límite de la aceleración media, con una ex-presión idéntica a la de la velocidad instantánea:
Como antes, coincide con la derivada, y podemos calcularla como:
kdt
tdvj
dt
tdvi
dt
tdv
dt
vdta zyx
rrrrr )()()(
)( ++==
t
tvttvta
t Δ−Δ+
=→Δ
)()(m)(
0
rrr
í
183251002251015 22vm ==+=+= ,03 km/h
12
12 )()(
tt
tvtvam −
−=
rrr
28 CINEMÁTICA

✎ Ejemplo:
✍ Calcula el vector aceleración de un cuerpo que se mueve según la trayectoria dada
por el vector posición:
� Lo único que tenemos que hacer es derivar el vector posición dos veces:
, nos da la velocidad, y derivando otra:
Hemos visto que la aceleración se encarga de modificar el vector velocidad. Estose puede hacer cambiando el módulo, la dirección o ambas cosas.
Cuando cambiamos sólo el módulo, estamos incrementando la velocidad del cuer-po o frenándolo. Si sólo modificamos la dirección, hacemos que el cuerpo gire apar-tándose de una trayectoria en línea recta.
Esto quiere decir que hay dos «tipos» de aceleración: una encargada de modificarel módulo de la velocidad (llamada aceleración tangencial), y otra que se encarga decambiar la dirección (aceleración normal, radial o centrípeta).
El módulo y dirección de cada una de estas aceleraciones se calcula de esta forma:
donde R es el radio de giro de la curva que se origina al cambiar de dirección.
nntt uR
vau
dt
vda
rrrr
r⋅=⋅=
2
ktitttrrrr 62
6
1)134(
3
5)( ++−=
ktitarrr 45
3
40)( +=ktittv
rrr 5)38(3
5)( +−=
an
aat
v
CINEMÁTICA 29

El vector unitario tiene la dirección del vector velocidad (la aceleración tangencialactúa cambiando el módulo de este vector, recuérdalo). El vector es perpendicularal anterior, y apunta hacia el centro de la curva que se produce al cambiar la direcciónde movimiento del cuerpo.
Como los vectores unitarios son perpendiculares, y la aceleración total del cuer-po es la suma de las dos componentes, se podrá calcular su módulo mediante el teore-ma de Pitágoras:
✎ Ejemplo:
✍ Un cuerpo sigue la trayectoria dada por el vector posición .Calcula la aceleración tangencial y la aceleración total del cuerpo.
� La aceleración total, la calculamos derivando dos veces el vector posición:
� Para hallar la aceleración tangencial, calculamos la derivada del módulo de la ve-locidad:
� Por tanto:
� Si quisiéramos escribirlo como un vector, necesitaríamos el vector unitario de la velo-cidad (recuerda que la aceleración tangencial y la velocidad tienen la misma dirección):
Esta expresión es un poco más complicada, ¿no te parece? Lo importante es que entiendasla diferencia entre el módulo de la aceleración tangencial at , y el vector aceleración tangenciala→t , que es el módulo más la componente vectorial (dirección y sentido del vector).
tur
nur
( )ktjtit
ta t
rrrr225
8258
2 +−+
=
222 825
225
825
8
825
225
t
ktjti
t
ta
t
ktjti
v
vu tt
+
+−
+=→
+
+−==
rrrr
rrr
r
rr
2825
8
t
tat
+=
28252
16
t
t
dt
dv
+=
kjtarrr
22)( +−=ktjtitvrrrr
225)( +−=
ktjtittrrrrr 22)25()( +−−=
222 8254425)()( ttttvtv +=++==r
30 CINEMÁTICA

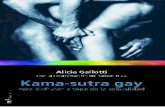
� MOVIMIENTOS RELATIVOS: RELATIVIDAD DE GALILEO
Como hemos visto ya, el sistema de referencia podemos tomarlo donde deseemos,con lo que puede pasar que en un sistema de referencia un cuerpo esté en movimien-to, y en otro, que se mueva respecto al primero, esté detenido (por eso se dice que elmovimiento es relativo).
En el dibujo se ve, por ejemplo, cómo para el observador B, la mosca, que está pa-rada en un cristal del tren, está en reposo, mientras que para el observador A se mue-ve a la misma velocidad del tren.
¿Cómo se relacionan las diferentes magnitudes del movimiento para dos observa-dores en movimiento uno respecto al otro? La solución a esta pregunta se encuentra enel llamado principio de relatividad de Galileo.
� Para ver cuál es esta relación, vamos a considerar dos sistemas de referencia quese mueven uno respecto a otro con velocidad constante V.
� Para simplificar, supondremos que los sistemas de referencia se mueven uno res-pecto a otro en la dirección del eje X, de forma que sus orígenes y ejes se superponenen el momento en que ambos sincronizan sus relojes a t = t' = 0.
Observador B
Observador A
v
V
X'
Y'Y
r
r'
Z'Z
V•t
XO'O
CINEMÁTICA 31

� La relación que hay entre las coordenadas de un punto, medidas por observa-dores en cada uno de los sistemas de referencia es: (el vector que une los orígenes vacambiando con el tiempo OO' = V · t).
� Respecto al tiempo medido por ambos observadores, debe coincidir, pues losrelojes se sincronizan en t = 0, y ambos funcionan correctamente:
t' = t� Si ambos observadores miden la distancia entre dos puntos A y B, se cumple que:
� Esto quiere decir que las distancias medidas por los dos coinciden, que es lo quenos parece «sensato».
Además, derivando respecto al tiempo: (la velocidad V no cambia, es cte.)
Ésta es la relación que existe entre las velocidades.� Si volvemos a derivar respecto al tiempo, como la velocidad es constante, ob-
tenemos la relación entre las aceleraciones medidas por ambos observadores.
⎪⎭
⎪⎬
⎫
=
=
=
→
⎪⎪
⎪
⎭
⎪⎪
⎪
⎬
⎫
=
=
=
zz
yy
xx
zz
yy
xx
aa
aa
aa
dt
dv
dt
dv
dt
dv
dt
dv
dt
dv
dt
dv
|
|
|
|
|
|
⎪
⎪
⎪
⎪
⎪⎭
⎪⎬
⎫
=
=
=
→
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
=
=
=
zz
yy
xx
vv
vv
vv
|
|
| V
dt
dzz
dt
ddt
dy
dt
dy
Vdt
dx
dt
dx'
'
'
−−
⎪
⎪
⎪
⎪
||
|
|
BABA
BB
AA rrrrrOOr
rOOr rrrrrr
rr
−=−→⎪⎭
⎪⎬⎫
+=
+= '
'
⎪⎩
⎪⎨
⎧
==
⋅=→−
−=′ ′
′
′′
→+=zz
yy
tVxx
' ' OOrrrOOrrrrr
32 CINEMÁTICA
✎ Ejemplo:
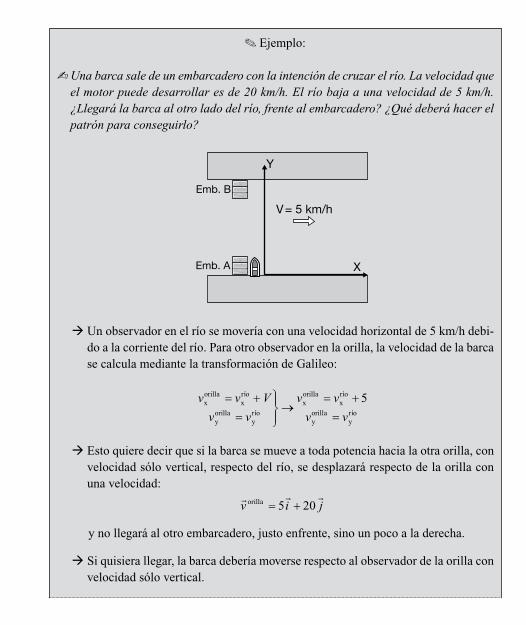
✍ Una barca sale de un embarcadero con la intención de cruzar el río. La velocidad queel motor puede desarrollar es de 20 km/h. El río baja a una velocidad de 5 km/h.¿Llegará la barca al otro lado del río, frente al embarcadero? ¿Qué deberá hacer elpatrón para conseguirlo?
� Un observador en el río se movería con una velocidad horizontal de 5 km/h debi-do a la corriente del río. Para otro observador en la orilla, la velocidad de la barcase calcu la mediante la transformación de Galileo:
� Esto quiere decir que si la barca se mueve a toda potencia hacia la otra orilla, convelocidad sólo vertical, respecto del río, se desplazará respecto de la orilla conuna velocidad:
y no llegará al otro embarcadero, justo enfrente, sino un poco a la derecha.
� Si quisiera llegar, la barca debería moverse respecto al observador de la orilla convelocidad sólo vertical.
r oy
orillay
r ox
orillax
r oy
orillay
r ox
orillax
vv
vv
vv
vv
=+=
→⎪⎭
⎪⎬⎫
=+= 5Ví
í
í
í
Y
V = 5 km/h
XEmb. A
Emb. B
jiv orillarrr
205 +=
CINEMÁTICA 33

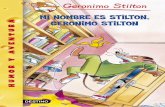
� Si la derivada tenía como significado la pendiente de la recta tangente a la grá-fica de la función en un punto, la integral definida:
nos da el valor del área encerrada entre la gráfica de la función y el eje X.∫ =
b
aaFbFdxxf )()()(
f(x)
a b
f(x)dxb
a
FORMULARIO MATEMÁTICO 231

FORMULARIO MATEMÁTICO 231
Física fácil para Bachillerato y acceso a la Universidad Francisco Navarro González
No se permite la reproducción total o parcial de este libro, ni su incorporación a un sistema informático, ni su transmisión en cualquier forma o por cualquier medio, sea éste electrónico, mecánico, por fotocopia, por grabación u otros métodos, sin el permiso previo y por escrito del editor. La infracción de los derechos mencionados puede ser constitutiva de delito contra la propiedad intelectual (Art. 270 y siguientes del Código Penal)
© del diseño de la portada Paso de Zebra
© de la realización de los textos, Francisco Navarro González, 2005
© de las ilustraciones del interior, Aurelia Sanz
© Espasa Libros, S. L. U., 2012 Av. Diagonal, 662-664, 08034 Barcelona (España)www.planetadelibros.com
Espasa, en su deseo de mejorar sus publicaciones, agradecerá cualquier sugerencia que los lectores hagan al departamento editorial por correo electrónico: [email protected]
Primera edición en libro electrónico (PDF): abril de 2012
ISBN: 978-84-670-0804-3 (PDF)
Conversión a libro electrónico: Newcomlab, S. L. L. www.newcomlab.com