
id. - · PDF filetes para todo tipo de ... En vista de lo anterior surge la necesidad de...
9
CAPITULO III COORDENADAS CURVILINEAS En física existe un gran número de problemas que se pueden resolver mas fácil- mente si se trabaja con coordenadas apropiadas al problema que de resolver se trata, es decir, las coordenadas cartesianas no son siempre las mas convenien- tes para todo tipo de problema; así por ejemplo si estudiamos el flujo de calor a través de una esfera, evidentemente lo más práctico es trabajar con coordena- das esféricas; si estamos calculando la longitud de un arco de circunferencia lo mas conveniente es trabajar con coordenadas polares ( es decir, cilíndricas en un plano) ya que en e ste caso SCI. \,:;. f8-7<. d. -e- 7< (ti-b - e-A..) lo cual , )-0;0. es mas simple que si lo hacemos con coordenadas cartesianas: con id. -.x. (R."L_;;(... 'l.. ) - '/, d.:t.. En vista de lo anterior surge la necesidad de estudiar las coordenadas curvilíneas . J en un espacio dado instalemos un sistema coordenado cartesiano Yi ó sea cada punto del espacio queda determinado en este sistema por una terna de valores ( d', Jl, 13 ); definamos ahora tres funciones ( :x,. XL, ) tales que: 3-1) X,::: XI l J',1 1.,13 ) Xt= :lo¿ (:h.J'L,Jl) l' }.= X") ('J, ,lt, J:1) Esas funciones las vamos a suponer monovaluadas y derivables en todos los pun- tos del espacio tomado; si en 3-1) hacemos x,:: el' ::x.2. = ,..:t.:. -::: C3 , las ecuaciones quedan: 3-2) :t, ( J., 1 t.. , = el Xl. ( J, )1.. j ) ":. (lo , , (J •. 'j . ') ') ::. Vemos que en cada una de esas tres ecuaciones se puede despejar una de las en función de las otras dos 1. t por ejemplo jI = f, ( c.. 1 I J .... , 'J, ) ó sea que cada una de las ecuaciones 3-2) representa una porque la coordenada en una dirección ( ';fl por ejemplo) es función de los puntos del pla- no normal a esa dirección (plano Y2 Y3 por ejemplo); este es el caso por ejem- plo de la ecuación -t" V7P"_x1.._J·L. que nos represente. una semiesfera de ra- dio R y centrada. en el origen: a cada punto ( x , y) del plano X Y corresponde un punto de coordenadas ( X. , J I t ) perteneciente a esa semiesfera y el z. dado precisamente por V 1<.1.. -xl..- j'Z" .
Transcript of id. - · PDF filetes para todo tipo de ... En vista de lo anterior surge la necesidad de...

CAPITULO III
COORDENADAS CURVILINEAS
En física existe un gran número de problemas que se pueden resolver mas fácilmente si se trabaja con coordenadas apropiadas al problema que de resolver se trata, es decir, las coordenadas cartesianas no son siempre las mas convenientes para todo tipo de problema; así por ejemplo si estudiamos el flujo de calor a través de una esfera, evidentemente lo más práctico es trabajar con coordenadas esféricas; si estamos calculando la longitud de un arco de circunferencia lo mas conveniente es trabajar con coordenadas polares ( es decir, cilíndricas en un plano) ya que en e ste caso SCI. \,:;. f8-7<. d. -e- ~ 7< (ti-b - e-A..) lo cual
, )-0;0.
es mas simple que si lo hacemos con coordenadas cartesianas:
con id. ~ -.x. (R."L_;;(... 'l.. ) - '/,
d.:t..
En vista de lo anterior surge la necesidad de estudiar las coordenadas curvilíneas . J
en un espacio dado instalemos un sistema coordenado cartesiano Yi ó sea cada punto del espacio queda determinado en este sistema por una terna de valores ( d', Jl, 13 ); definamos ahora tres funciones ( :x,. XL, ~J ) tales que:
3-1) X,::: XI l J',1 1.,13 )
Xt= :lo¿ (:h.J'L,Jl) l' }.= X") ('J, ,lt, J:1)
Esas funciones las vamos a suponer monovaluadas y derivables en todos los pun-tos del espacio tomado; si en 3-1) hacemos x,:: el' ::x.2. = (~ ,..:t.:. -::: C3 , las ecuaciones quedan:
3-2) :t, ( J., 1 t.. , ~"3) = el Xl. ( J, )1.. j ~ ) ":. (lo , , ::(.~ (J •. 'j ~ . ') ~ ') ::. ~"}
Vemos que en cada una de esas tres ecuaciones se puede despejar una de las ~ en función de las otras dos 1. t por ejemplo jI = f, ( c.. 1 I J .... , 'J, ) ó sea que cada una de las ecuaciones 3-2) representa una s1..~perficie porque la coordenada en una dirección ( ';fl por ejemplo) es función de los puntos del plano normal a esa dirección (plano Y2 Y3 por ejemplo); este es el caso por ejemplo de la ecuación ~::: -t" V7P"_x1.._J·L. que nos represente. una semiesfera de radio R y centrada. en el origen: a cada punto ( x , y) del plano X Y corresponde un punto de coordenadas ( X. , J I t ) perteneciente a esa semiesfera y el z. dado precisamente por V 1<.1.. -xl..- j'Z" .

r
,
8
Si en la ecuación 1\ ( 'f '. '11. J, ) ::. L, vamos cambiando el valor de la cons tante e, obtenemos una familia de superficies (por ejemplo si en 2::. V'RZ-_:;;Ll._'jL
hacemos variar R obtenemos una familia de superEicies esféricas concéntricas) y lo mismo se aplica a X z. ('1.)'1. '1~)-:'(l.y x~('f,lz.'J'!))=-ó; de este modo el espacio considerado se puede pensar como lleno completamente con tres familias de superficies y en cada punto ( ~ I j~. ~") ) de este espacio se cortan tres superficies, p:-ecisamente aquellas para las cuales se cumple:
'J =- '1, (y \, ::t 2. • Y ~ )"; ~,dado
Como vemos, para poder garantizar la intersección de tres superficies en cada punto del espacio es necesario que en las ecuaciones 3-2) se puedan despejar las j \' en función de las ::i.,.' de modo que para cada terna ( X" xt. J X ~ ) exis-ta una y solo una terna ( ~" :J't. ~ 3 ); la condición algebráica que nos ga-nntiza esto la obtenemos si en 3-1) expresamos las diferenciales totales de x.... en función de los diferenciales totales de J',', es decir:
3-3) ~, r7 (
d :I:, d j, 4- d .x, d)1. + aXI el J3 2J'h,. -~ 'J, d'$~
d-:i., =
.;;::ú d 'J I + ;) X1.. d 1-r + ;; Xl. d '13 •
dj¡ d 'f~ .;):13 d -::1.1... =
a :f.3_ do 'i ~ .:i 3. d..1 '1. + a x,. el J'3 ... ~ j, I é>:f-z. d J'}
Se demuestra en el análisis matemático avanzado que la condición necesaria y suficiente para que exista una correspondencia buinÍvoca entre los ::fJ y los
JL es la de que no se anule el determinante de los coeficientes del sistema de ecuaciones 3-3); este determinante se llama el jacobiano de la transformación que nos convierte a los JI' en los .:(' a partir de las ecuaciones 3-1) I es decir se debe cumplir:
•
.I. é)Xj. =1 O - (3 :ü. a,:t lo -- dj, -C> 'j '&. d '13
;;; -:L) .a X3 . 2> X-J, d '1, •
.;) '1 ~ d 13
• 9
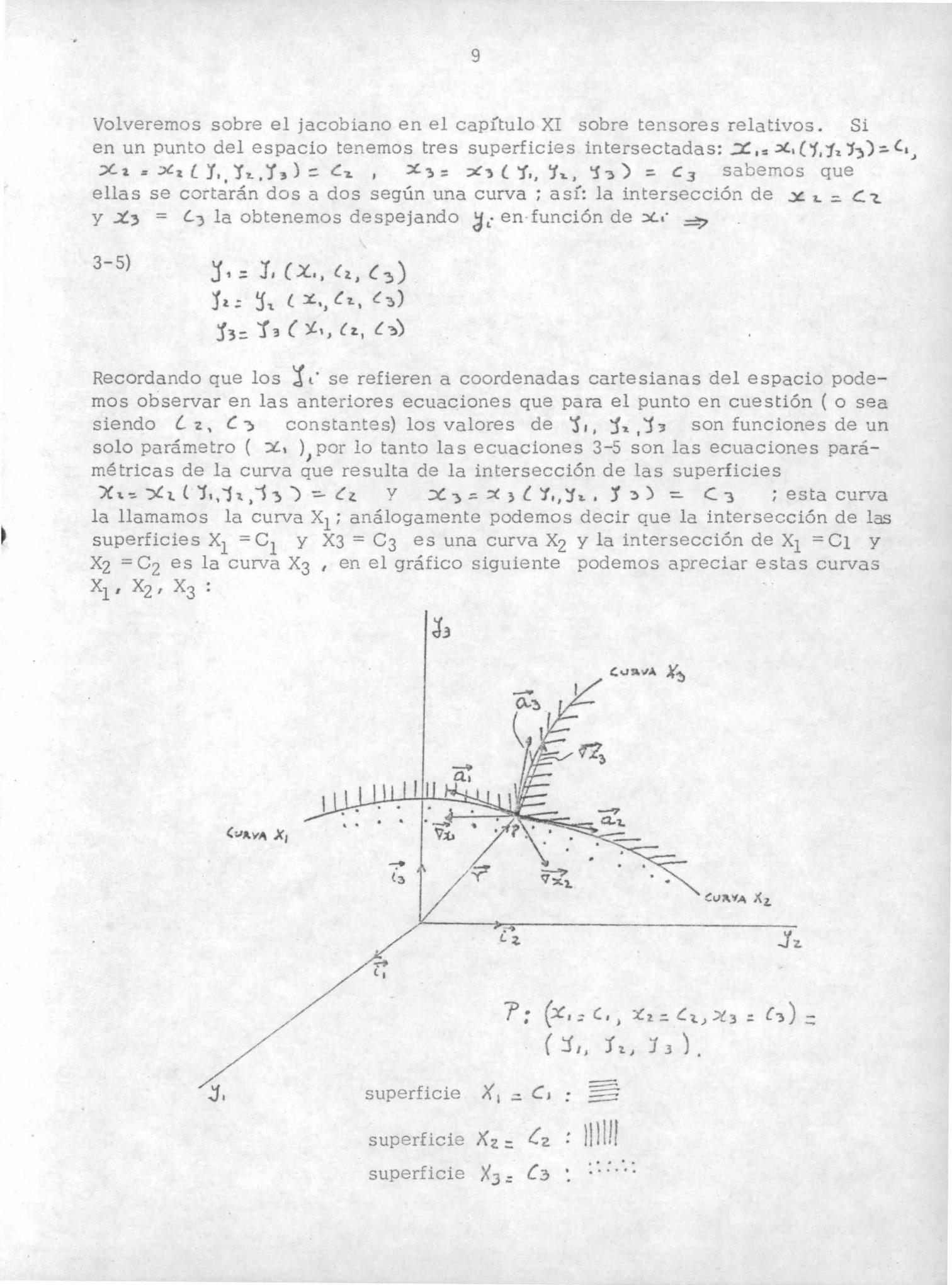
Volveremos sobre el jacobiano en el capítulo XI sobre tensores relativos. Si en un punto del espacio tenemos tres superficies intersectadas: :::t:.,:: x, C1.1"l.J'});:, (1.)
.:x."I. := X1 ['1,,'r"L . J"3 ) =- C"I., X ~:: ;1C') ( 1., '1 ... , '13) ;:. e 3 sabemos que ellas se cortarán dos a dos según una curva; así: la intersección de X 1.. :;:. c.."lo y 1} L.., la obtenemos despejando d~' en-función de XI' -!'7
3-5) J 1 =- 1, (X" (2. J C:J Jl.; ~1. (X." (1., ("?»
J 3:: J 3 ( "j. \ J Ú, ("!J)
Recordando que los J l' se refieren a coordenadas cartesianas del espacio podemos observar en las anteriores ecua~iones que para el punto en cuestión ( o sea siendo L"" c.") constantes) los valores de J" '$'1., j., son funciones de un solo parámetro ( X, )} por lo tanto las ecuaciones 3-5 son las ecuaciones parámétricas de la curva que resulta de la intersección de las superficies )( " ~ -x: 1. ( JI, 17. ) -) ~ '") -::.. L z. Y :x ~ ;: ::;( , t.. 'f" 'j '&., '1 3) =- C"3 ; e s ta curva
la llamamos la curva Xl; análogamente podemos decir que la intersección de las superficies Xl = el y X3 = e3 es una curva X2 y la intersección de Xl = el y X2 = e 2 es la curva X3 I en el gráfico siguiente podemos apreciar estas curvas
Xl' X2' X3 :
j,
• • • •
-rl t ,
-•
superficie
superflcie
superficie
• • • • • . ::.::::;::-•
•
r- (X,;:(,¡ :t2 =- ¿~),)(3 ~ h) -• - -( j' J J 11. J 1 J )
•
,
XI el : -:: - • - • - , - -
X<.:= (, • 1I111/ •
X3 .= (3 .. .. . ~
• •••••• •

•
10
llamemos ~ al radio vector que nos localiza el punto l' con respecto al origen de coordenadas del sistema cartesiano ( 'j" J 'Z., ~ 3 .); tenemos entonces:
ya que
hemos d_cho que de 3-1) se pueden despejar las rL' en función de las J::(.' . Ahora, si desplazamos a y una distancia infinitesimal a lo largo de la curva Xl se-f0s convierte en y+- el.::; (aquí se mant~nen x2 y x3 constantes) siendo d y un vector tangente a Xl ; la derivada ay representa entonces un vector
é):;(1 _
tangente ~ Xl Y nos mide precisamente el cambio de Y a lo largo de Xl; este vector dY en general no tiene por qué ser unitario; lo llamaremos a, ;análoga-,
d:t.1 _ -mente a: :=- a y ~.:x'L
y a.3:::: son vectores tangentes a las curvas Xz y
X3 respectivamente.
Si tenemos una función escalar .")(, ::...;(, ( JI )1. '53) se llama ... d:X -e ___ t '. 7? la expresión: eX, L. + -' L'., + é) .),[, l.'.,. _ '\7", con t.,'
;aj, ;;) 'i'l. 40 ;;¡'13 ~ - V ... I )
gradiente de..:x::1 a vector unitario en
Si A ~ representa el parámetro longitud de· arco a lo largo de la curva Xz entonces ;;;7 no solo es un vector tangente a la curva coordenada X2 sino que tam-
dA~ . -bién es unitario ya que en el límite (cuando AY y 6 h""L son infinitesimales) la magnitud de 6,':; tiende a la de .6.-1
2,este vector unitario lo llamamos
--.
1:- - ay . ~ -
~A'1. -. _ Pero Y .= '1, i, + 1t -z: T J"">¡) L:J (con ':t,. '1 'L, j"3 representando puntos de la curva X2 I para lo cual se deben cumplir las ecuaciones del tipo 3-5, es decir va-riando sólo una de las tres variables ::L." X'Z. J::L, en este caso sole X'L)
-.. - ' - --t: l.. ::. é) '1..l • a 'jL ,
;) 'h. .. , Tenemos entonces: L, .¡. l..,. +- L.3 • vector unitario
d~2. d--1'1. d-1z •
tangente a la curva X2 .
, d :!z d .:L. ~ '"1 3 d X,
Ahora: - ;::; XI é) '11 5) .::L,_ .;.. -VXI .T?:= + , - . - Gl...02. d /n.. - , ..
:;)'j-;) d J' ,9/')2. a'f7. 8.,.6'1.
,
Hemos demostrado pues que para cualquier punto P el gradiente de la función X,; .:tI (J,,'!<.,13) multiplicado por el vec:tor unitario en la direcCión de la
curva X. (o s e a XI:;' c..r4_ J X3::' dL ) es igual a la derivada de esa fun-ción X'::..:X, ( '/, '$z. '13) con respecto al arco A 1.. ; por lo tanto si a la fun-ción X, ~ X, [1./ .; :., \ la tomamos constante ( :x I =- (, ) entonces
- JI, J L, J»

(
11
-...... -d ~ '. = O Y en este caso: 3-6) d~z.
\l :X. , • -t- A., =O es decir I que si .x, =- <:'1 en-
-tonces el vector gradiente de XI es normal a la tangente -t-~ de la curva X 2. •
Análogamente:
Q -:;t. 1 • -F; :: ?J:;Y a '11 aJ' .9...13
+ a xJ é} '1 3. .¡.. a.:x.J a 'b, = d.. XI. ~'j¡. éJ/5:) é)"j} ;>~') dA3
o sea el g radiente de XI multiplicado e sca larmen te por el vector unitario tangente a la curva X3 es igual a la derivada de XI con respecto a 'la longitud a lo largo de X3 ( /.)'3); si X, = e 1 entonces d ';;::"', =O Y por lo tanto para este
_ _ dA3 caso "'1:$.1. -t:-~ =0: 3-7; vemos así que el gradiente de XI es normal a r:.; cuando XI es constante.
•
De 3-6 Y '3-7 se concluye que cuardo XI =cte ( o sea para la superficie X ,:.)L,{t,'j:'h):'(,,)
el gradiente de XI es normal a la tangente R a la curva Xz y a la tangente ---- .~ ----n a la curva X3 y co~ Ll.. Y -t"~ están sobre la superficie ?<l = el en ton-ceue concluye que '\/XI es normal a la superficie Xl = el' Análogamente:
'1X1. es normal a la superficie.x2 = eZ y
-'V-:/.3 es normal a la superficie:i.3 = e 3
Podernos demostrar ahora que los vectores:
Q. , ;:. Q..' °3 ~-- CJ, - - - y ,
•
Tenemos:
y:
entonces:
forman dos bases recíprocas.
--. --. -=-- ----y;. '! I l I ~ '$1. L'l. ~ )3 ¿ ::::-'/ do::.
~'1"Z.. ax! +- a:j-~ d.::tl 8':h a~1
el XI =- 1 dx,

, análogamente:
--o --?
a~. (Jx.. ::. o)
3-7 a)
y
12
.t- ;;)'11, :2;;(,2 4- ~j:J ? X1 ~ ? ~I é> ~ 'l. e ~ ; é) ':Í3
Vemos pues que se cumple la ecuación 2-3) que nos define las bases recíprocas: -;:;. ~ V' .... ( .' ( = 1 para i = j , = O para i ~ j) . '-(. L. V A.J... a t J
-? --:> Si los Ch forman una triada ortogonal entonces como ya sabemos, los V Xt: . ~
coinciden con los a.l' o sea las dos bases coinciden ( esta coincidencia es por lo menos de sus direcciones y si los ar. son unitarios también coinciden en magnitud).
Para terminar es te capítulo apliquemos lo anterior a un tipo simple de coordenadas curvilíneas, las cilíndricas; en este caso se cumple:
'-j I ;:.. Y ~ 4¡;10..
~ 1.. ;::: Y .s,..t..v¡ e-\)3;:: ~
siendo ( '1" :f .... , ':J") ) coordenadas cartesianas y gún la nomenclatura con que hemos venido trabajando
...., ..r _ ;:,L I & =- X"¡, "\:;::: 1 - J 'J
; e s decir: 3- 8) ,
J'2,-::' .xl .5~ ::r. '2. ) '53 ~ ~3
--':> a..:J son: ----? -Los vectores 0-., C1l., - -'9 --'> -C} ~j~ • • •
d ':Í~ .f _d1 1, ,
(. 4- (, (3 - ~ ::t...."l (, 1- ,)-<,v, - '" -dX, C7 x.. eXI
I
se-
.":> Z2.. Lt
- - ---, Para encontrar '({x" -V Xl., í/ X3 necesitamos la transformación inversa de 3- 8) es decir:

13
Ahora: - --.. -.. a:L. - • ax, • a X, 'VX I •
l.:a l., +- (1 r • --- é) 1, é) 'jt dj~
-"J, • ::fa. -.. L, .... • - t 1 -- V J.~ +!: V J.1.. + ~h1.
-- -:)~. ~ X'l.. _ i, ..
V -:f.," Ca ~ '1. :t. ~ +:(~ St.-II"':4
Análogamente obtenemos: - -. - j ..(N).:x.l. • t!C 5 ..:z:k. • 'íj Xl. l.. +- L z • - -- ~, :x, - -... "Ix) - (3 .-
Como vemos, re sulta: -=-- -a. I :. 'íf ::(. J :.
-1 _ _
Q. 3 =- '({.1.,3::' ¿ 3
~ --. tIz. y 'V:x. L tienen igual dirección pero no igual módulo ya que como -entonces 'íj Xl.
,. \ ~1. \ j: 1 --- ---. ~-,. Las dos bases resultan así iguales en sus vectores ( a, CL3 ). Y ( Y:x... \i':b)
--.. --:"'1J' ~ ~
pero no en Ch y 'V x.. esto debido a que ( UI ct·U1...)) es triplemente ortogo-nal pero \ Q'l.. \:f. 1; como se ve: Qt'. 2ij ~ O (i:ir j) I es decir:
, •
14
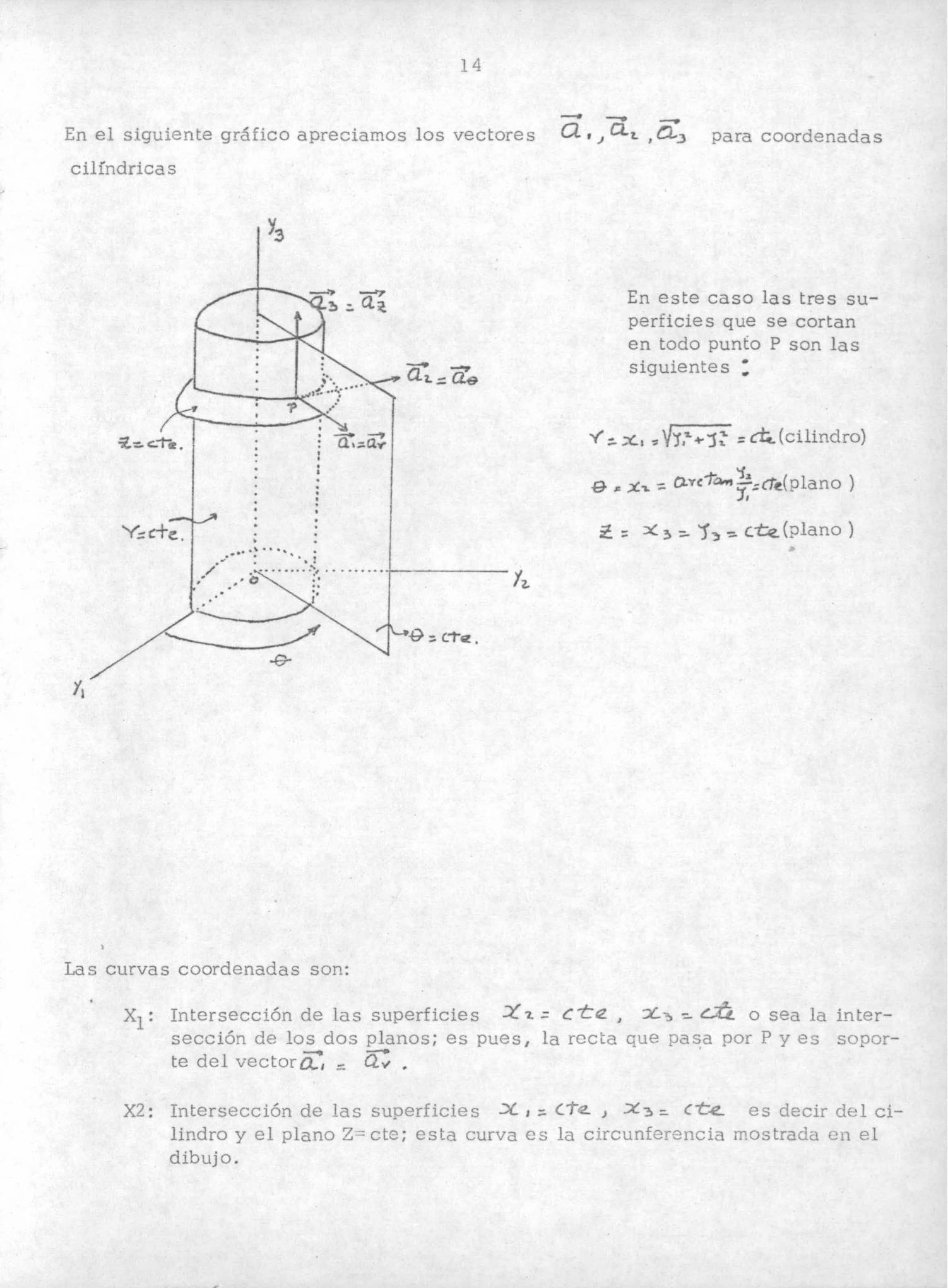
- - -En el siguiente gráfico apreciamos los vectore s a f .1 al. I a.) para coordenadas
cilíndricas
\
• • •
r ..... r-__ .:.. __ .... ; • • ..-.. '""':'"'1J' • • •
• • •
• •
: a, :::.a. ... • • • , • • • • • • • •
• •
••• '. 1 .. .. : . .. ...: I .... ..
,,/- •• ....... w • ~'" .............. +------ t ' .,' e 't ~ •
•
En este caso las tres superficie s que se cortan en todo punto P son las siguiente s :
Y':. XI ~ '1'1,'1.+1-; : d:c.(cilindro)
'1 -e I! X"f. :::. o.vc7"aa;" :t.:ct~(Plano )
,
La s curvas coordenadas son:
Xl: Intersección de las superficies X '2. ~ ct:~ J 1-:, -=- m o sea la intersección de los dos planos; es pues, la recta que pasa por P yes sopor-- --- . te del vector a,::. Q.".
X2: Intersección de las superficies X J;:' ere. ) X3::. (t:.e... es decir del cilindro y el plano Z= cte; esta curva es la circunferencia mostrada en el dibujo.
15
X3: Intersección de Xl =cte¡ ~=cte~s d:.cir es la paralela al eje Y3 que pasa por P. (recta soporte de a, ~ a.i ) .
I

![Curvas en el espacio · Curvas en el espacio Semana 11 [2/48] Coordenadas ortogonales Sistema de coordenadas curvilíneas Una transformación invertible~r : D ⊆ R 3 → 3,](https://static.fdocuments.es/doc/165x107/5bc3bb4809d3f2d7198cfae1/curvas-en-el-curvas-en-el-espacio-semana-11-248-coordenadas-ortogonales-sistema.jpg)
















