IMPLEMENTACIÓN DE FILTROS DIGITALES TIPO...
13
IMPLEMENTACIÓN DE FILTROS DIGITALES TIPO IIR Y FIR EN UN FPGA Y DISEÑO DE UNA INTERFAZ ANÁLOGA-DIGITAL PARA SU PRUEBA MEDIANTE SEÑALES ANALÓGICAS Jorge Alberto Del Carpio Salinas Miguel Angel Robles León
Transcript of IMPLEMENTACIÓN DE FILTROS DIGITALES TIPO...
IMPLEMENTACIÓN DE FILTROS DIGITALES TIPO IIR Y FIR EN UN FPGA
Y DISEÑO DE UNA INTERFAZ ANÁLOGA-DIGITAL PARA SU PRUEBA MEDIANTE SEÑALES ANALÓGICAS
Jorge Alberto Del Carpio Salinas
Miguel Angel Robles León
IMPLEMENTACIÓN DE
FILTROS DIGITALES TIPO
IIR Y FIR EN UN FPGA Y
DISEÑO DE UNA INTERFAZ
ANÁLOGA-DIGITAL PARA SU
PRUEBA MEDIANTE SEÑALES ANALÓGICAS
Primera edición digital
Julio, 2011
Lima - Perú
© Jorge Alberto Del Carpio Salinas
Miguel Angel Robles León
PROYECTO LIBRO DIGITAL
PLD 0160
Editor: Víctor López Guzmán
http://www.guzlop-editoras.com/[email protected] [email protected] facebook.com/guzlop twitter.com/guzlopster428 4071 - 999 921 348Lima - Perú
PROYECTO LIBRO DIGITAL (PLD)
El proyecto libro digital propone que los apuntes de clases, las tesis y los avances en investigación (papers) de las profesoras y profesores de las universidades peruanas sean convertidos en libro digital y difundidos por internet en forma gratuita a través de nuestra página web. Los recursos económicos disponibles para este proyecto provienen de las utilidades nuestras por los trabajos de edición y publicación a terceros, por lo tanto, son limitados.
Un libro digital, también conocido como e-book, eBook, ecolibro o libro electrónico, es una versión electrónica de la digitalización y diagramación de un libro que originariamente es editado para ser impreso en papel y que puede encontrarse en internet o en CD-ROM. Por, lo tanto, no reemplaza al libro impreso.
Entre las ventajas del libro digital se tienen:• su accesibilidad (se puede leer en cualquier parte que tenga electricidad),• su difusión globalizada (mediante internet nos da una gran independencia geográfica),• su incorporación a la carrera tecnológica y la posibilidad de disminuir la brecha digital (inseparable de la competición por la influencia cultural),• su aprovechamiento a los cambios de hábitos de los estudiantes asociados al internet y a las redes sociales (siendo la oportunidad de difundir, de una forma diferente, el conocimiento),• su realización permitirá disminuir o anular la percepción de nuestras élites políticas frente a la supuesta incompetencia de nuestras profesoras y profesores de producir libros, ponencias y trabajos de investiga-ción de alta calidad en los contenidos, y, que su existencia no está circunscrita solo a las letras.
Algunos objetivos que esperamos alcanzar:• Que el estudiante, como usuario final, tenga el curso que está llevando desarrollado como un libro (con todas las características de un libro impreso) en formato digital.• Que las profesoras y profesores actualicen la información dada a los estudiantes, mejorando sus contenidos, aplicaciones y ejemplos; pudiendo evaluar sus aportes y coherencia en los cursos que dicta.• Que las profesoras y profesores, y estudiantes logren una familiaridad con el uso de estas nuevas tecnologías.• El libro digital bien elaborado, permitirá dar un buen nivel de conocimientos a las alumnas y alumnos de las universidades nacionales y, especialmente, a los del interior del país donde la calidad de la educación actualmente es muy deficiente tanto por la infraestructura física como por el personal docente.• El pe r sona l docente jugará un r o l de tu to r, f ac i l i t ador y conductor de p r oyec tos

de investigación de las alumnas y alumnos tomando como base el libro digital y las direcciones electró-nicas recomendadas.• Que este proyecto ayude a las universidades nacionales en las acreditaciones internacionales y mejorar la sustentación de sus presupuestos anuales en el Congreso.
En el aspecto legal:• Las autoras o autores ceden sus derechos para esta edición digital, sin perder su autoría, permitiendo que su obra sea puesta en internet como descarga gratuita.• Las autoras o autores pueden hacer nuevas ediciones basadas o no en esta versión digital.
Lima - Perú, enero del 2011
“El conocimiento es útil solo si se difunde y aplica” Víctor López Guzmán Editor
Memorias - XVII CONIMERA
367
I. Introducción
Un filtro, es un sistema selector defrecuencias; es decir, deja pasar sin ninguna o muypoca atenuación las frecuencias para las cualesse haya diseñado y atenúa o rechaza aquellas queno se deseen.
Los filtros digitales son utilizados en muchossistemas de procesamiento de señal como sonde audio, video, radar, telecomunicaciones, etc.Existen fundamentalmente dos tipos de filtrosdigitales filtros IIR (filtros de respuesta impulsionalinfinita) y filtros FIR (filtros de respuesta impulsionalfinita) ambos con una estructura y característicaspropias, la elección de uno u otro dependerán dela aplicación para la cual se necesite.
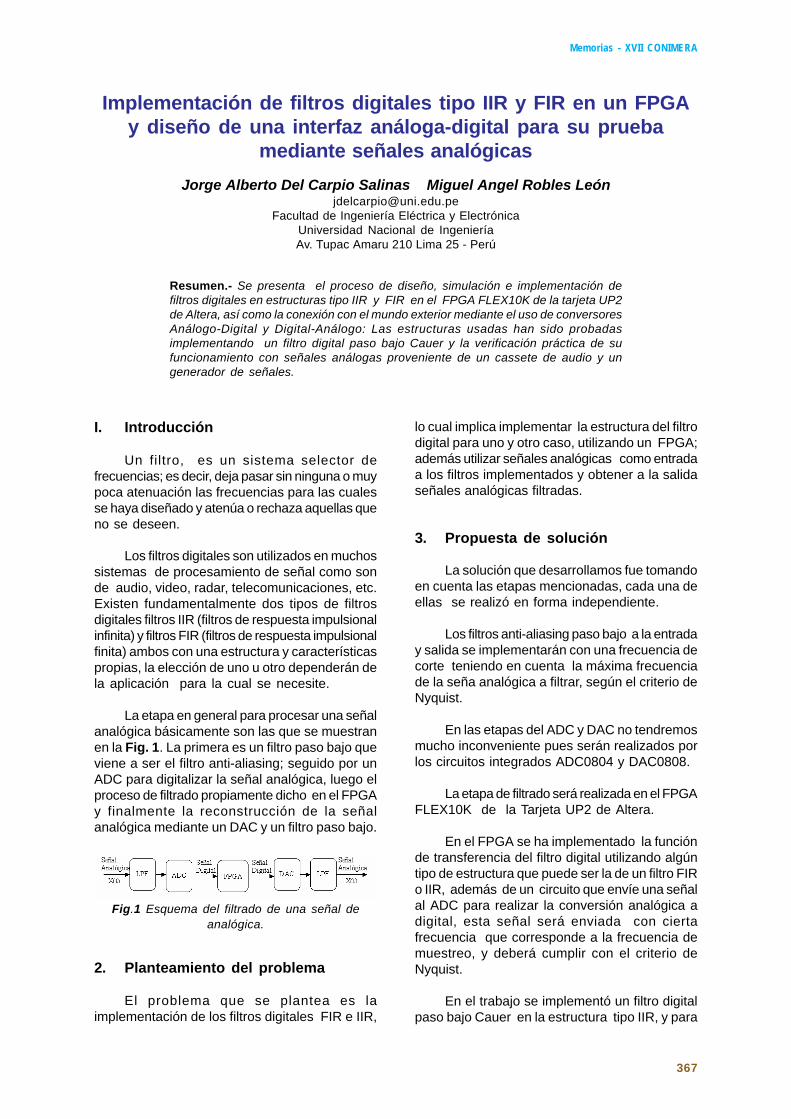
La etapa en general para procesar una señalanalógica básicamente son las que se muestranen la Fig. 1. La primera es un filtro paso bajo queviene a ser el filtro anti-aliasing; seguido por unADC para digitalizar la señal analógica, luego elproceso de filtrado propiamente dicho en el FPGAy finalmente la reconstrucción de la señalanalógica mediante un DAC y un filtro paso bajo.
lo cual implica implementar la estructura del filtrodigital para uno y otro caso, utilizando un FPGA;además utilizar señales analógicas como entradaa los filtros implementados y obtener a la salidaseñales analógicas filtradas.
3. Propuesta de solución
La solución que desarrollamos fue tomandoen cuenta las etapas mencionadas, cada una deellas se realizó en forma independiente.
Los filtros anti-aliasing paso bajo a la entraday salida se implementarán con una frecuencia decorte teniendo en cuenta la máxima frecuenciade la seña analógica a filtrar, según el criterio deNyquist.
En las etapas del ADC y DAC no tendremosmucho inconveniente pues serán realizados porlos circuitos integrados ADC0804 y DAC0808.
La etapa de filtrado será realizada en el FPGAFLEX10K de la Tarjeta UP2 de Altera.
En el FPGA se ha implementado la funciónde transferencia del filtro digital utilizando algúntipo de estructura que puede ser la de un filtro FIRo IIR, además de un circuito que envíe una señalal ADC para realizar la conversión analógica adigital, esta señal será enviada con ciertafrecuencia que corresponde a la frecuencia demuestreo, y deberá cumplir con el criterio deNyquist.
En el trabajo se implementó un filtro digitalpaso bajo Cauer en la estructura tipo IIR, y para
Implementación de filtros digitales tipo IIR y FIR en un FPGAy diseño de una interfaz análoga-digital para su prueba
mediante señales analógicas
Jorge Alberto Del Carpio Salinas Miguel Angel Robles Leó[email protected]
Facultad de Ingeniería Eléctrica y ElectrónicaUniversidad Nacional de IngenieríaAv. Tupac Amaru 210 Lima 25 - Perú
Resumen.- Se presenta el proceso de diseño, simulación e implementación defiltros digitales en estructuras tipo IIR y FIR en el FPGA FLEX10K de la tarjeta UP2de Altera, así como la conexión con el mundo exterior mediante el uso de conversoresAnálogo-Digital y Digital-Análogo: Las estructuras usadas han sido probadasimplementando un filtro digital paso bajo Cauer y la verificación práctica de sufuncionamiento con señales análogas proveniente de un cassete de audio y ungenerador de señales.
Fig.1 Esquema del filtrado de una señal deanalógica.
2. Planteamiento del problema
El problema que se plantea es laimplementación de los filtros digitales FIR e IIR,
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
368
realizarlo en una estructura tipo FIR se hizo unaaproximación del filtro Cauer tomando ciertacantidad de términos de la respuesta impulsional.
Conversión analógica-digital
Para esta primera parte utilizamos elconvertidor analógico-digital de 8 bits de resoluciónADC0804.
Este ADC posee una pin llamado wr al cualdebemos aplicar un voltaje de cero voltios para quede inicio la conversión de la señal analógica.
El tiempo de conversión del ADC es de100us, por ello la máxima frecuencia a la cualpodemos muestrear la señal será de 10Khz. Estolimita nuestra señal a filtrar, debiendo ser menorque 5Khz.
Conversión digital-analógica
A la salida del FPGA tendremos una señaldigital de 8 bits, la cual será nuevamente convertidaen analógica usando el DAC0808; éste entregauna corriente proporcional a la entrada digital,entonces para convertirlo en tensión usamos elOPAM LF356.
Tener en cuenta que se debe corregir elOFFSET del OPAM antes de utilizarlo en el circuitode conversión para minimizar los errores.
Etapa de filtrado
Un filtro queda determinado por sus especifi-caciones (frecuencia de muestreo, atenuaciones,frecuencias de corte, etc...), esta dependerá dela aplicación para la cual se realice el filtro.
Cuando se diseña un filtro primero vemoscual son sus especificaciones y sobre la base deello se escoge el tipo de filtro y el orden; conesto se diseña la función de transferencia quecumpla con los requerimientos del filtro.
La frecuencia de muestreo es un parámetromuy importante en el desarrollo del filtro digital.
Programa para muestrear una señal acualquier frecuencia
Este programa nos permitirá muestrear unaseñal a cualquier frecuencia. Debemos tener en
cuenta que una señal deberá ser muestreada conuna frecuencia Fs que verifique el criterio deNyquist.
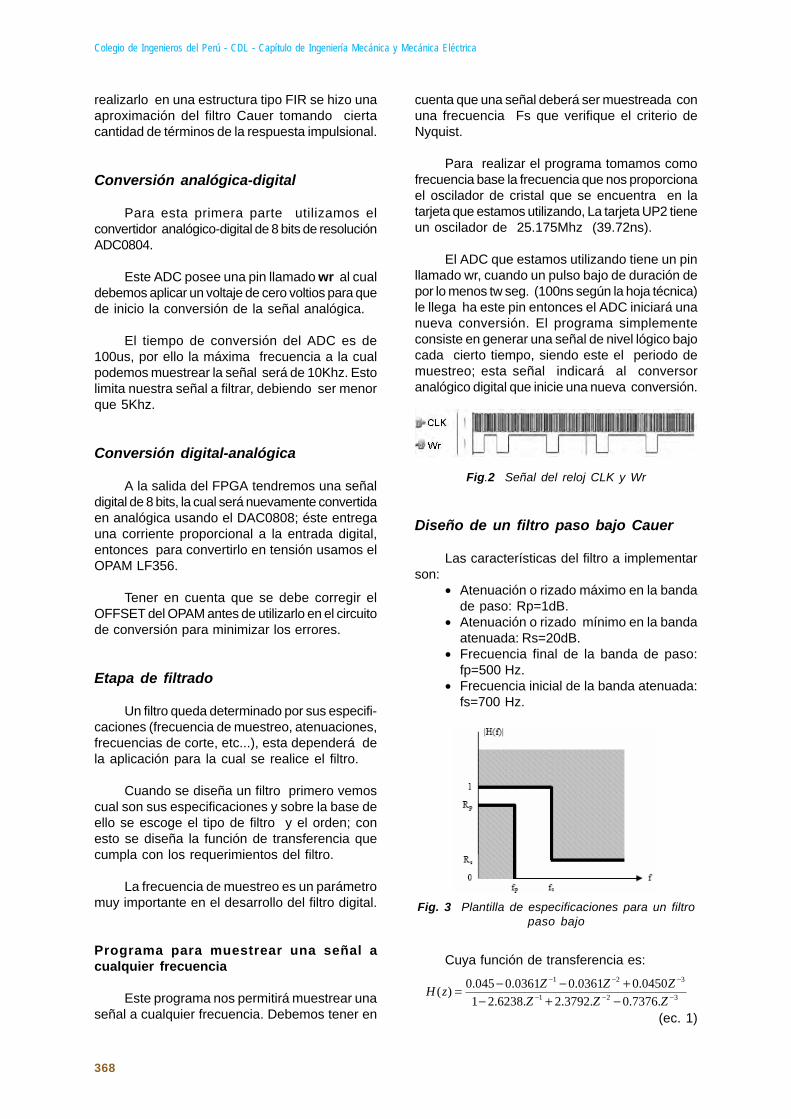
Para realizar el programa tomamos comofrecuencia base la frecuencia que nos proporcionael oscilador de cristal que se encuentra en latarjeta que estamos utilizando, La tarjeta UP2 tieneun oscilador de 25.175Mhz (39.72ns).
El ADC que estamos utilizando tiene un pinllamado wr, cuando un pulso bajo de duración depor lo menos tw seg. (100ns según la hoja técnica)le llega ha este pin entonces el ADC iniciará unanueva conversión. El programa simplementeconsiste en generar una señal de nivel lógico bajocada cierto tiempo, siendo este el periodo demuestreo; esta señal indicará al conversoranalógico digital que inicie una nueva conversión.
Fig.2 Señal del reloj CLK y Wr
Diseño de un filtro paso bajo Cauer
Las características del filtro a implementarson:
• Atenuación o rizado máximo en la bandade paso: Rp=1dB.
• Atenuación o rizado mínimo en la bandaatenuada: Rs=20dB.
• Frecuencia final de la banda de paso:fp=500 Hz.
• Frecuencia inicial de la banda atenuada:fs=700 Hz.
Fig. 3 Plantilla de especificaciones para un filtropaso bajo
Cuya función de transferencia es:
321
321
.7376.0.3792.2.6238.21
0450.00361.00361.0045.0)( −−−
−−−
−+−+−−=
ZZZ
ZZZzH
(ec. 1)
Memorias - XVII CONIMERA
369
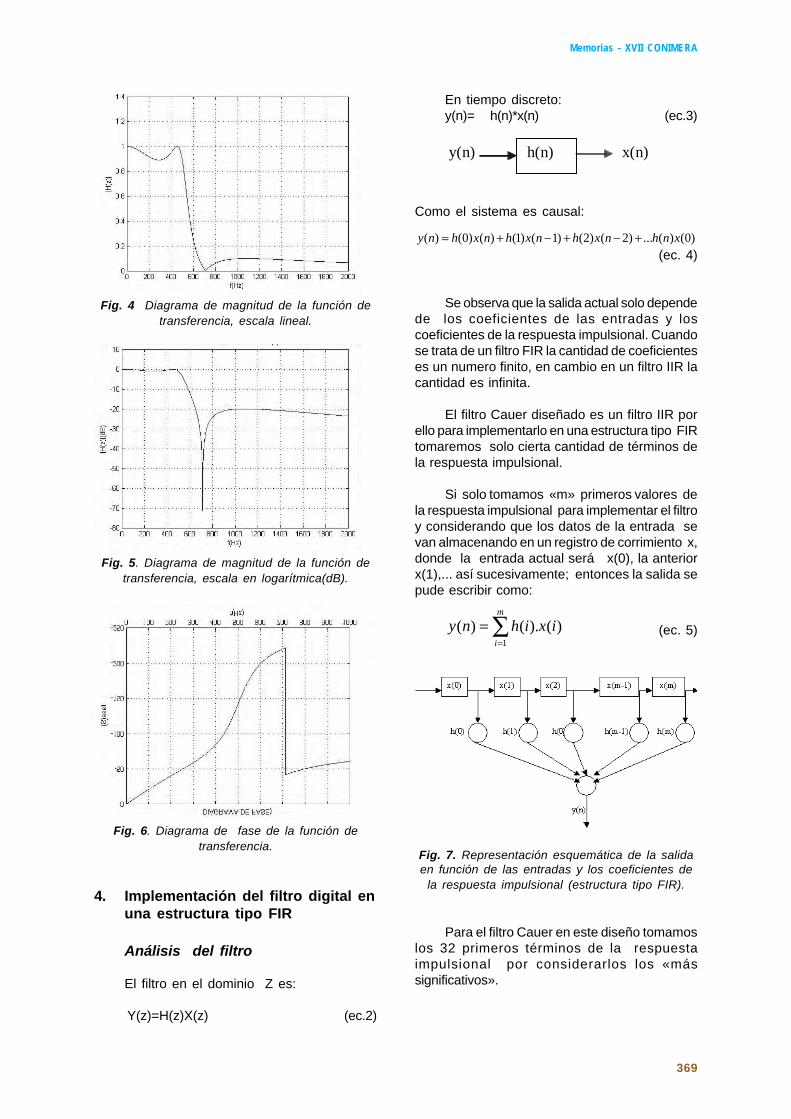
Fig. 4 Diagrama de magnitud de la función detransferencia, escala lineal.
En tiempo discreto:y(n)= h(n)*x(n) (ec.3)
Como el sistema es causal:
)0()(...)2()2()1()1()()0()( xnhnxhnxhnxhny +−+−+=(ec. 4)
Se observa que la salida actual solo dependede los coeficientes de las entradas y loscoeficientes de la respuesta impulsional. Cuandose trata de un filtro FIR la cantidad de coeficienteses un numero finito, en cambio en un filtro IIR lacantidad es infinita.
El filtro Cauer diseñado es un filtro IIR porello para implementarlo en una estructura tipo FIRtomaremos solo cierta cantidad de términos dela respuesta impulsional.
Si solo tomamos «m» primeros valores dela respuesta impulsional para implementar el filtroy considerando que los datos de la entrada sevan almacenando en un registro de corrimiento x,donde la entrada actual será x(0), la anteriorx(1),... así sucesivamente; entonces la salida sepude escribir como:
∑=
=m
i
ixihny1
)().()( (ec. 5)
Fig. 5. Diagrama de magnitud de la función detransferencia, escala en logarítmica(dB).
Fig. 6. Diagrama de fase de la función detransferencia.
4. Implementación del filtro digital enuna estructura tipo FIR
Análisis del filtro
El filtro en el dominio Z es:
Y(z)=H(z)X(z) (ec.2)
y(n) x(n) h(n)
Fig. 7. Representación esquemática de la salidaen función de las entradas y los coeficientes de
la respuesta impulsional (estructura tipo FIR).
Para el filtro Cauer en este diseño tomamoslos 32 primeros términos de la respuestaimpulsional por considerarlos los «mássignificativos».
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
370
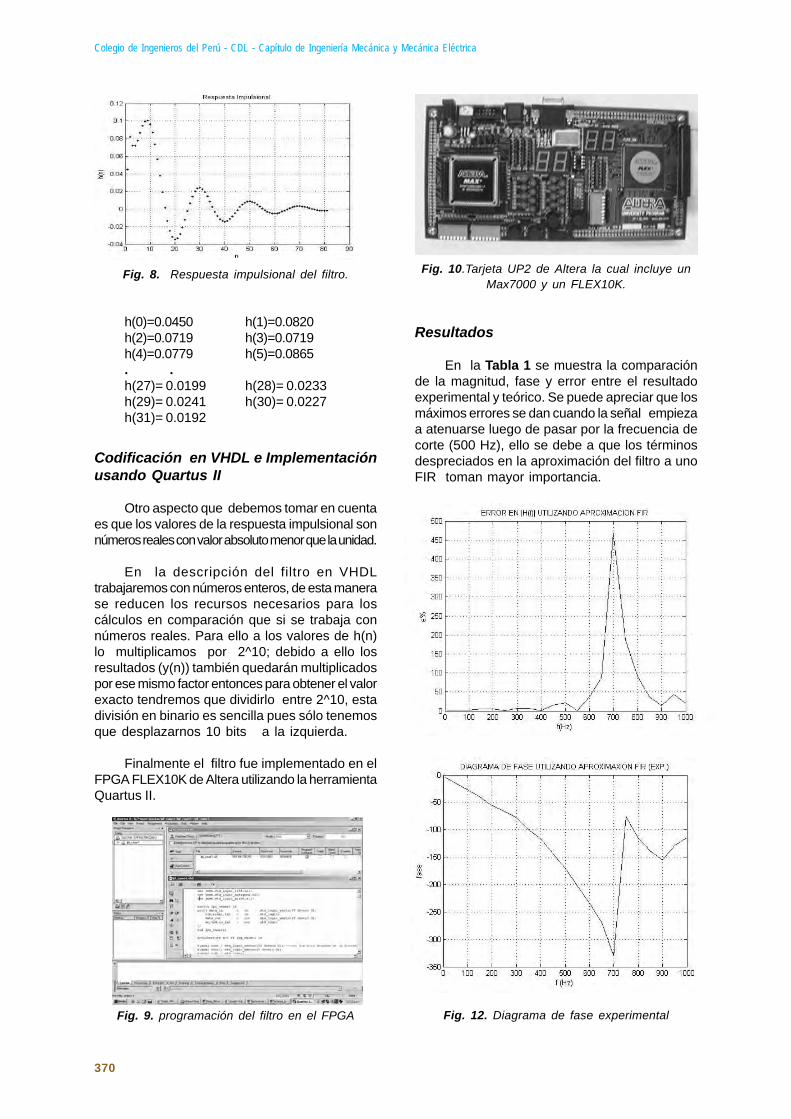
Fig. 8. Respuesta impulsional del filtro.
h(0)=0.0450 h(1)=0.0820h(2)=0.0719 h(3)=0.0719h(4)=0.0779 h(5)=0.0865. .h(27)= 0.0199 h(28)= 0.0233h(29)= 0.0241 h(30)= 0.0227h(31)= 0.0192
Codificación en VHDL e Implementaciónusando Quartus II
Otro aspecto que debemos tomar en cuentaes que los valores de la respuesta impulsional sonnúmeros reales con valor absoluto menor que la unidad.
En la descripción del filtro en VHDLtrabajaremos con números enteros, de esta manerase reducen los recursos necesarios para loscálculos en comparación que si se trabaja connúmeros reales. Para ello a los valores de h(n)lo multiplicamos por 2^10; debido a ello losresultados (y(n)) también quedarán multiplicadospor ese mismo factor entonces para obtener el valorexacto tendremos que dividirlo entre 2^10, estadivisión en binario es sencilla pues sólo tenemosque desplazarnos 10 bits a la izquierda.
Finalmente el filtro fue implementado en elFPGA FLEX10K de Altera utilizando la herramientaQuartus II.
Fig. 10.Tarjeta UP2 de Altera la cual incluye unMax7000 y un FLEX10K.
Resultados
En la Tabla 1 se muestra la comparaciónde la magnitud, fase y error entre el resultadoexperimental y teórico. Se puede apreciar que losmáximos errores se dan cuando la señal empiezaa atenuarse luego de pasar por la frecuencia decorte (500 Hz), ello se debe a que los términosdespreciados en la aproximación del filtro a unoFIR toman mayor importancia.
Fig. 9. programación del filtro en el FPGA Fig. 12. Diagrama de fase experimental
Memorias - XVII CONIMERA
371
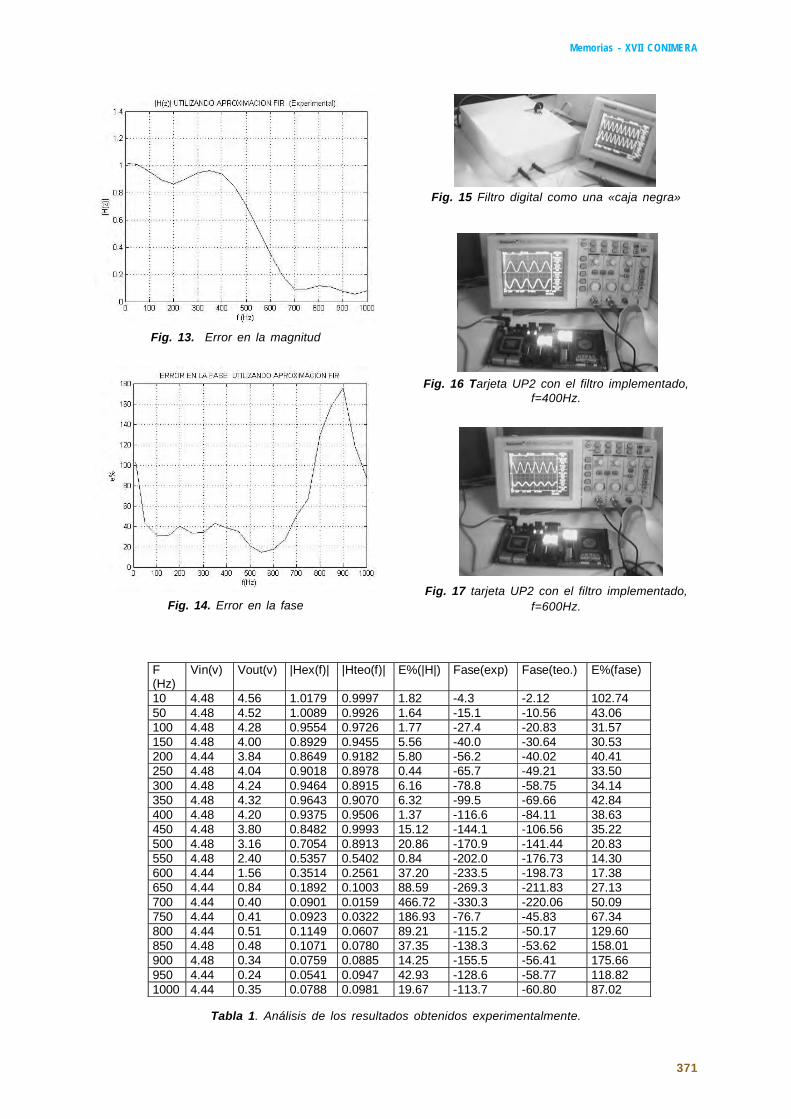
Fig. 13. Error en la magnitud
Fig. 15 Filtro digital como una «caja negra»
Fig. 14. Error en la fase
F (Hz)
Vin(v) Vout(v) |Hex(f)| |Hteo(f)| E%(|H|) Fase(exp) Fase(teo.) E%(fase)
10 4.48 4.56 1.0179 0.9997 1.82 -4.3 -2.12 102.74 50 4.48 4.52 1.0089 0.9926 1.64 -15.1 -10.56 43.06 100 4.48 4.28 0.9554 0.9726 1.77 -27.4 -20.83 31.57 150 4.48 4.00 0.8929 0.9455 5.56 -40.0 -30.64 30.53 200 4.44 3.84 0.8649 0.9182 5.80 -56.2 -40.02 40.41 250 4.48 4.04 0.9018 0.8978 0.44 -65.7 -49.21 33.50 300 4.48 4.24 0.9464 0.8915 6.16 -78.8 -58.75 34.14 350 4.48 4.32 0.9643 0.9070 6.32 -99.5 -69.66 42.84 400 4.48 4.20 0.9375 0.9506 1.37 -116.6 -84.11 38.63 450 4.48 3.80 0.8482 0.9993 15.12 -144.1 -106.56 35.22 500 4.48 3.16 0.7054 0.8913 20.86 -170.9 -141.44 20.83 550 4.48 2.40 0.5357 0.5402 0.84 -202.0 -176.73 14.30 600 4.44 1.56 0.3514 0.2561 37.20 -233.5 -198.73 17.38 650 4.44 0.84 0.1892 0.1003 88.59 -269.3 -211.83 27.13 700 4.44 0.40 0.0901 0.0159 466.72 -330.3 -220.06 50.09 750 4.44 0.41 0.0923 0.0322 186.93 -76.7 -45.83 67.34 800 4.44 0.51 0.1149 0.0607 89.21 -115.2 -50.17 129.60 850 4.48 0.48 0.1071 0.0780 37.35 -138.3 -53.62 158.01 900 4.48 0.34 0.0759 0.0885 14.25 -155.5 -56.41 175.66 950 4.44 0.24 0.0541 0.0947 42.93 -128.6 -58.77 118.82 1000 4.44 0.35 0.0788 0.0981 19.67 -113.7 -60.80 87.02
Tabla 1. Análisis de los resultados obtenidos experimentalmente.
Fig. 16 Tarjeta UP2 con el filtro implementado,f=400Hz.
Fig. 17 tarjeta UP2 con el filtro implementado,f=600Hz.
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
372
5. Implementación del filtro digital enuna estructura tipo IIR
Análisis de la estructura del filtro IIR
La función de transferencia del filtro cauerdiseñado es de la forma.
33
22
110
33
22
110
)(
)()( −−−
−−−
++++++==
ZaZaZaa
ZbZbZbb
zX
zYzH
(ec. 6)donde :
b0=0.0450 b1=-0.0361b2=-0.0361 b3=0.0450a0=1.0000 a1=-2.6238a2=2.3792 a3=-0.7376
))((
))((3
32
21
10
33
22
110
−−−
−−−
+++
=+++
ZbZbZbbzX
ZaZaZaazY
(ec. 7)
Y si además: 10 =a
)3()2()1()(
)3()2()1()(
3210
321
−+−+−++−−−−−−=
nxbnxbnxbnxb
nyanyanyany
(ec. 8)
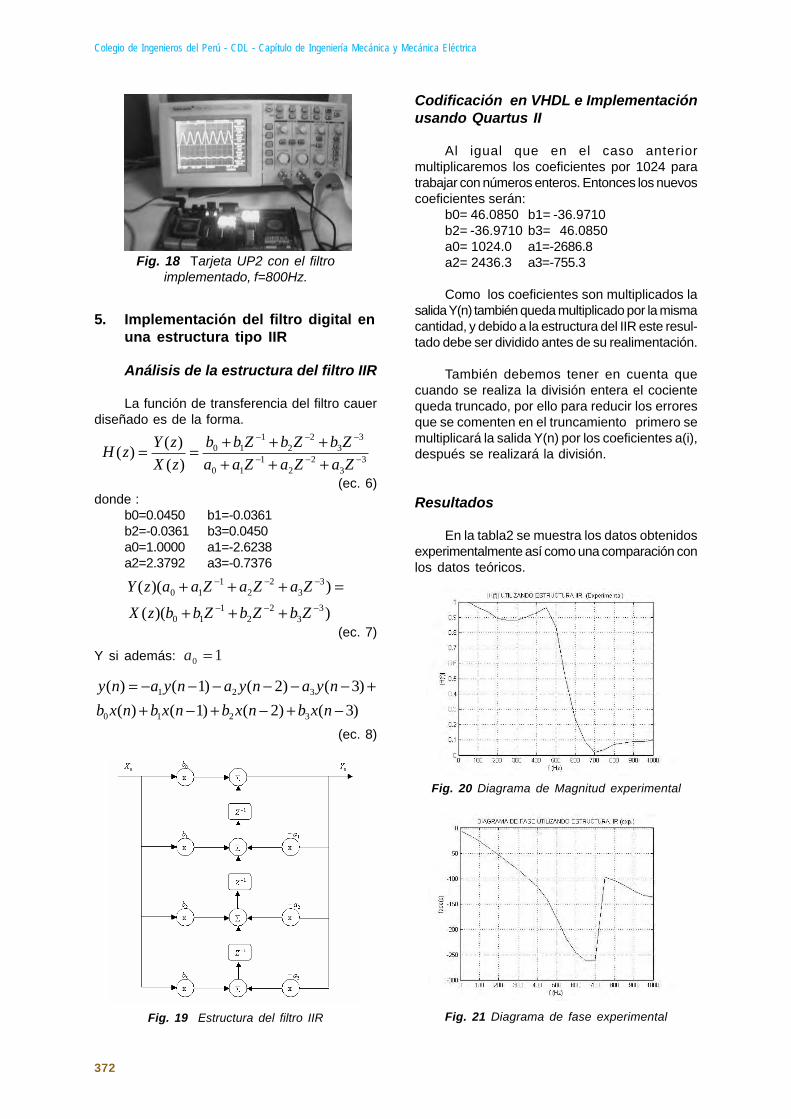
Fig. 18 Tarjeta UP2 con el filtroimplementado, f=800Hz.
Fig. 19 Estructura del filtro IIR
Codificación en VHDL e Implementaciónusando Quartus II
Al igual que en el caso anteriormultiplicaremos los coeficientes por 1024 paratrabajar con números enteros. Entonces los nuevoscoeficientes serán:
b0= 46.0850 b1= -36.9710b2= -36.9710 b3= 46.0850a0= 1024.0 a1=-2686.8a2= 2436.3 a3=-755.3
Como los coeficientes son multiplicados lasalida Y(n) también queda multiplicado por la mismacantidad, y debido a la estructura del IIR este resul-tado debe ser dividido antes de su realimentación.
También debemos tener en cuenta quecuando se realiza la división entera el cocientequeda truncado, por ello para reducir los erroresque se comenten en el truncamiento primero semultiplicará la salida Y(n) por los coeficientes a(i),después se realizará la división.
Resultados
En la tabla2 se muestra los datos obtenidosexperimentalmente así como una comparación conlos datos teóricos.
Fig. 20 Diagrama de Magnitud experimental
Fig. 21 Diagrama de fase experimental
Memorias - XVII CONIMERA
373
6. Observaciones
� El filtro Cauer diseñado tiene una frecuenciade paso máxima de 500Hz y fue muestreadoa 10Khz con un ADC de 8 bits de resolución.
� El FPGA FLEX10K dispone de un total de3744 elementos lógicos, en la implementacióndel filtro paso bajo en la estructura tipo IIRse utilizó el 18% mientras que laimplementación en la estructura tipo FIR seutilizó el 55%.
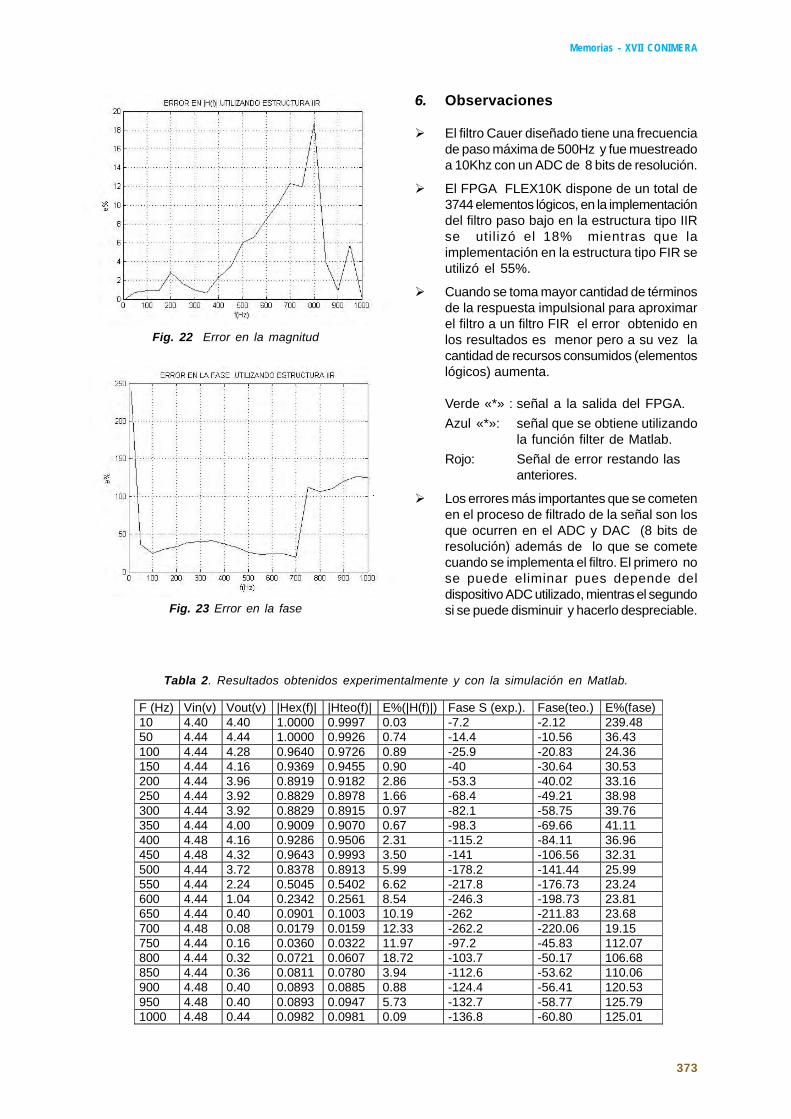
� Cuando se toma mayor cantidad de términosde la respuesta impulsional para aproximarel filtro a un filtro FIR el error obtenido enlos resultados es menor pero a su vez lacantidad de recursos consumidos (elementoslógicos) aumenta.
Verde «*» : señal a la salida del FPGA.
Azul «*»: señal que se obtiene utilizandola función filter de Matlab.
Rojo: Señal de error restando lasanteriores.
� Los errores más importantes que se cometenen el proceso de filtrado de la señal son losque ocurren en el ADC y DAC (8 bits deresolución) además de lo que se cometecuando se implementa el filtro. El primero nose puede eliminar pues depende deldispositivo ADC utilizado, mientras el segundosi se puede disminuir y hacerlo despreciable.
Fig. 22 Error en la magnitud
Fig. 23 Error en la fase
F (Hz) Vin(v) Vout(v) |Hex(f)| |Hteo(f)| E%(|H(f)|) Fase S (exp.). Fase(teo.) E%(fase) 10 4.40 4.40 1.0000 0.9997 0.03 -7.2 -2.12 239.48 50 4.44 4.44 1.0000 0.9926 0.74 -14.4 -10.56 36.43 100 4.44 4.28 0.9640 0.9726 0.89 -25.9 -20.83 24.36 150 4.44 4.16 0.9369 0.9455 0.90 -40 -30.64 30.53 200 4.44 3.96 0.8919 0.9182 2.86 -53.3 -40.02 33.16 250 4.44 3.92 0.8829 0.8978 1.66 -68.4 -49.21 38.98 300 4.44 3.92 0.8829 0.8915 0.97 -82.1 -58.75 39.76 350 4.44 4.00 0.9009 0.9070 0.67 -98.3 -69.66 41.11 400 4.48 4.16 0.9286 0.9506 2.31 -115.2 -84.11 36.96 450 4.48 4.32 0.9643 0.9993 3.50 -141 -106.56 32.31 500 4.44 3.72 0.8378 0.8913 5.99 -178.2 -141.44 25.99 550 4.44 2.24 0.5045 0.5402 6.62 -217.8 -176.73 23.24 600 4.44 1.04 0.2342 0.2561 8.54 -246.3 -198.73 23.81 650 4.44 0.40 0.0901 0.1003 10.19 -262 -211.83 23.68 700 4.48 0.08 0.0179 0.0159 12.33 -262.2 -220.06 19.15 750 4.44 0.16 0.0360 0.0322 11.97 -97.2 -45.83 112.07 800 4.44 0.32 0.0721 0.0607 18.72 -103.7 -50.17 106.68 850 4.44 0.36 0.0811 0.0780 3.94 -112.6 -53.62 110.06 900 4.48 0.40 0.0893 0.0885 0.88 -124.4 -56.41 120.53 950 4.48 0.40 0.0893 0.0947 5.73 -132.7 -58.77 125.79 1000 4.48 0.44 0.0982 0.0981 0.09 -136.8 -60.80 125.01
Tabla 2. Resultados obtenidos experimentalmente y con la simulación en Matlab.
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
374
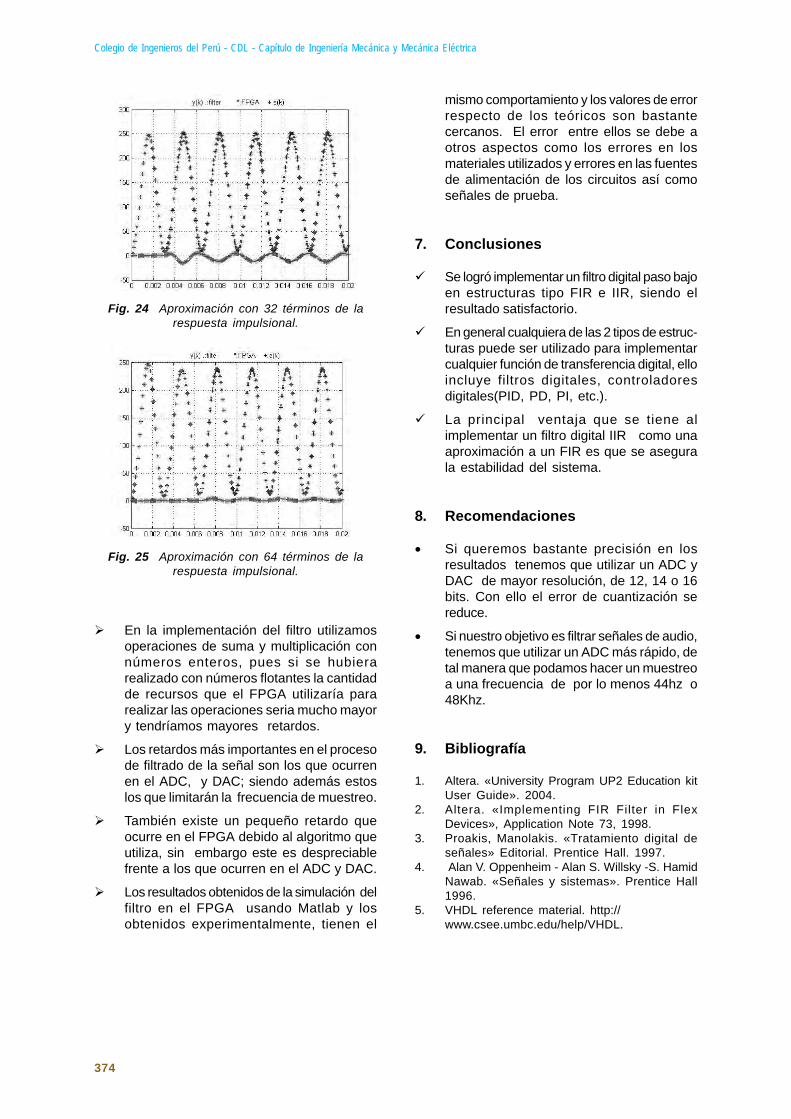
mismo comportamiento y los valores de errorrespecto de los teóricos son bastantecercanos. El error entre ellos se debe aotros aspectos como los errores en losmateriales utilizados y errores en las fuentesde alimentación de los circuitos así comoseñales de prueba.
7. Conclusiones
� Se logró implementar un filtro digital paso bajoen estructuras tipo FIR e IIR, siendo elresultado satisfactorio.
� En general cualquiera de las 2 tipos de estruc-turas puede ser utilizado para implementarcualquier función de transferencia digital, elloincluye filtros digitales, controladoresdigitales(PID, PD, PI, etc.).
� La principal ventaja que se tiene alimplementar un filtro digital IIR como unaaproximación a un FIR es que se asegurala estabilidad del sistema.
8. Recomendaciones
• Si queremos bastante precisión en losresultados tenemos que utilizar un ADC yDAC de mayor resolución, de 12, 14 o 16bits. Con ello el error de cuantización sereduce.
• Si nuestro objetivo es filtrar señales de audio,tenemos que utilizar un ADC más rápido, detal manera que podamos hacer un muestreoa una frecuencia de por lo menos 44hz o48Khz.
9. Bibliografía
1. Altera. «University Program UP2 Education kitUser Guide». 2004.
2. Altera. «Implementing FIR Filter in FlexDevices», Application Note 73, 1998.
3. Proakis, Manolakis. «Tratamiento digital deseñales» Editorial. Prentice Hall. 1997.
4. Alan V. Oppenheim - Alan S. Willsky -S. HamidNawab. «Señales y sistemas». Prentice Hall1996.
5. VHDL reference material. http://www.csee.umbc.edu/help/VHDL.
� En la implementación del filtro utilizamosoperaciones de suma y multiplicación connúmeros enteros, pues si se hubierarealizado con números flotantes la cantidadde recursos que el FPGA utilizaría pararealizar las operaciones seria mucho mayory tendríamos mayores retardos.
� Los retardos más importantes en el procesode filtrado de la señal son los que ocurrenen el ADC, y DAC; siendo además estoslos que limitarán la frecuencia de muestreo.
� También existe un pequeño retardo queocurre en el FPGA debido al algoritmo queutiliza, sin embargo este es despreciablefrente a los que ocurren en el ADC y DAC.
� Los resultados obtenidos de la simulación delfiltro en el FPGA usando Matlab y losobtenidos experimentalmente, tienen el
Fig. 25 Aproximación con 64 términos de larespuesta impulsional.
Fig. 24 Aproximación con 32 términos de larespuesta impulsional.