Interpretación dinámica de bioseñales usando ...
86
Memorias STSIVA 2008 Tomo II 89 - 94 Interpretación dinámica de bioseñales usando técnicas de análisis no lineal Andrea Rodríguez, Juan Pablo Sanmartín, Eduardo Giraldo, Álvaro Orozco y Juan Gabriel Fetecua Universidad Tecnológica de Pereira Resumen— Se presenta una metodología de análisis dinámico para la identificación de patologías, basada en los atributos no lineales de las bioseñales. Se proponen medidas de complejidad tales como el diagrama de Poincare, el máximo exponente de Lyapunov, el exponente de Hurst y la dimensión de correlación para caracterizar su estructura dinámica. Se utilizan registros MER (microelectrodos de registro) y ECG (electrocardiogramas) para validar las técnicas propuestas. La información conjunta para cada uno de los grupos de señales muestra un desempeño del 91,51% de acierto; así las técnicas de dinámica no lineal toman en cuenta la dinámica intrínseca y estructura de la señal para discriminar sus respectivas patologías. Palabras claves— Dimensión de correlación, Exponente de Hurst, Máximo exponente de Lyapunov, Diagrama de Poincare y Dinámica no lineal. I. INTRODUCCIÓN os médicos deben identificar los síntomas que sirvan de referentes para definir la normalidad o anormalidad asociada a posibles enfermedades. La identificación se realiza a través de la percepción con los sentidos, en ocasiones con mediación de instrumentos que facilitan juzgar sobre el grado de normalidad o anormalidad de los diferentes estados funcionales del organismo. En este proceso se tienen varias limitaciones: alta subjetividad cuando solo se interpreta por un médico, imposibilidad de almacenamiento y réplica para un futuro análisis en caso de requerir una asesoría de mayor precisión en el diagnóstico y en las decisiones terapéuticas. De ahí que, en ocasiones se requiera de equipos y ayudas de tecnología que faciliten la exploración y auscultación con la suficiente objetividad para mejorar la calidad de las decisiones clínicas [1]. El ECG es una representación gráfica de la actividad eléctrica del corazón, que ofrece información acerca del estado del músculo cardiaco, donde la arritmia se muestra como una señal anormal de baja frecuencia, difícilmente Andrea Rodríguez: [email protected] , investigador del grupo de control e instrumentación, Universidad Tecnológica de Pereira. Juan Pablo Sanmartín: [email protected] , estudiante de Pregrado en Ingeniería Eléctrica, Universidad Tecnológica de Pereira. Eduardo Giraldo: [email protected] , Profesor, Programa de ingeniería eléctrica, Universidad Tecnológica de Pereira. Álvaro Orozco: [email protected] , Profesor, Programa de ingeniería eléctrica, Universidad Tecnológica de Pereira. detectada antes que lleguen a ser casos extremos a la hora de realizar un diagnóstico [2]. En el análisis de la variabilidad del ritmo cardiaco se observan complejidades que no son lineales, por lo tanto tratándolo como un sistema no lineal se pueden obtener datos importantes de la dinámica del sistema [3], además, ha sido ampliamente estudiada en cuanto a la existencia de determinismo no lineal en el comportamiento eléctrico del corazón [4,5]. Por otra parte, la enfermedad de Parkinson se caracteriza fundamentalmente por un deterioro de las funciones motoras, consistente en rigidez articular, dificultad para los movimientos y temblor; esto debido a un deterioro celular en la sustancia reticular compacta que conlleva a una pérdida de la capacidad de producir dopamina [6]. La estimulación cerebral profunda puede ser aplicada al tálamo, al pálido o al núcleo subtalámico. El éxito de estas cirugías depende del acierto del neurofisiólogo al inferir en qué zona se encuentra el microelectrodo que se usa para realizar la estimulación [7]. Ya que estos tipos de señales son no estacionarias por la presencia de potenciales de acción; se hace muy compleja la detección de cada una de las zonas, además por definición, la información contenida en las señales biológicas tiene una estructura que depende fuerte y no linealmente de numerosos aspectos biológicos [8], es decir, la señal biológica no es el resultado de la suma de sus componentes [5]. Se han usado otras técnicas basadas en wavelets [10] o técnicas de spike sorting [11], las cuales aún no son contadas como solución del problema [12]. Dado que las señales antes mencionadas poseen comportamientos intrínsecos no lineales [4,8], en este trabajo se propone la implementación de técnicas de dinámica no lineal para analizar la estructura regular de estas bioseñales y brindar un análisis más preciso y a tiempo, con lo cual se disminuye la dependencia del diagnóstico del médico. II. MATERIALES Y MÉTODOS A. Base de datos Las señales MER corresponden a la Universidad Politécnica de Valencia (UPV), las cuales son grabaciones de L
Transcript of Interpretación dinámica de bioseñales usando ...

Memorias STSIVA 2008 Tomo II 89 - 94
Interpretación dinámica de bioseñales usando técnicas de análisis no lineal
Andrea Rodríguez, Juan Pablo Sanmartín, Eduardo Giraldo, Álvaro Orozco y Juan Gabriel FetecuaUniversidad Tecnológica de Pereira
Interpretación Dinámica de Bioseñales Usando Técnicas de Análisis no Lineal
Andrea Rodríguez, Juan Pablo Sanmartín, Eduardo Giraldo, Álvaro Orozco y Juan Gabriel Fetecua Universidad Tecnológica de Pereira
Resumen— Se presenta una metodología de análisis dinámico para la identificación de patologías, basada en los atributos no lineales de las bioseñales. Se proponen medidas de complejidad tales como el diagrama de Poincare, el máximo exponente de Lyapunov, el exponente de Hurst y la dimensión de correlación para caracterizar su estructura dinámica. Se utilizan registros MER (microelectrodos de registro) y ECG (electrocardiogramas) para validar las técnicas propuestas. La información conjunta para cada uno de los grupos de señales muestra un desempeño del 91,51% de acierto; así las técnicas de dinámica no lineal toman en cuenta la dinámica intrínseca y estructura de la señal para discriminar sus respectivas patologías.
Palabras claves— Dimensión de correlación, Exponente de Hurst, Máximo exponente de Lyapunov, Diagrama de Poincare y Dinámica no lineal.
I. INTRODUCCIÓN
os médicos deben identificar los síntomas que sirvan de referentes para definir la normalidad o anormalidad
asociada a posibles enfermedades. La identificación se realiza a través de la percepción con los sentidos, en ocasiones con mediación de instrumentos que facilitan juzgar sobre el grado de normalidad o anormalidad de los diferentes estados funcionales del organismo. En este proceso se tienen varias limitaciones: alta subjetividad cuando solo se interpreta por un médico, imposibilidad de almacenamiento y réplica para un futuro análisis en caso de requerir una asesoría de mayor precisión en el diagnóstico y en las decisiones terapéuticas. De ahí que, en ocasiones se requiera de equipos y ayudas de tecnología que faciliten la exploración y auscultación con la suficiente objetividad para mejorar la calidad de las decisiones clínicas [1].
El ECG es una representación gráfica de la actividad
eléctrica del corazón, que ofrece información acerca del estado del músculo cardiaco, donde la arritmia se muestra como una señal anormal de baja frecuencia, difícilmente
Andrea Rodríguez: [email protected], investigador del grupo de control e instrumentación, Universidad Tecnológica de Pereira.
Juan Pablo Sanmartín: [email protected], estudiante de Pregrado en Ingeniería Eléctrica, Universidad Tecnológica de Pereira.
Eduardo Giraldo: [email protected], Profesor, Programa de ingeniería eléctrica, Universidad Tecnológica de Pereira.
Álvaro Orozco: [email protected], Profesor, Programa de ingeniería eléctrica, Universidad Tecnológica de Pereira.
detectada antes que lleguen a ser casos extremos a la hora de realizar un diagnóstico [2]. En el análisis de la variabilidad del ritmo cardiaco se observan complejidades que no son lineales, por lo tanto tratándolo como un sistema no lineal se pueden obtener datos importantes de la dinámica del sistema [3], además, ha sido ampliamente estudiada en cuanto a la existencia de determinismo no lineal en el comportamiento eléctrico del corazón [4,5].
Por otra parte, la enfermedad de Parkinson se caracteriza
fundamentalmente por un deterioro de las funciones motoras, consistente en rigidez articular, dificultad para los movimientos y temblor; esto debido a un deterioro celular en la sustancia reticular compacta que conlleva a una pérdida de la capacidad de producir dopamina [6]. La estimulación cerebral profunda puede ser aplicada al tálamo, al pálido o al núcleo subtalámico. El éxito de estas cirugías depende del acierto del neurofisiólogo al inferir en qué zona se encuentra el microelectrodo que se usa para realizar la estimulación [7].
Ya que estos tipos de señales son no estacionarias por la
presencia de potenciales de acción; se hace muy compleja la detección de cada una de las zonas, además por definición, la información contenida en las señales biológicas tiene una estructura que depende fuerte y no linealmente de numerosos aspectos biológicos [8], es decir, la señal biológica no es el resultado de la suma de sus componentes [5]. Se han usado otras técnicas basadas en wavelets [10] o técnicas de spike sorting [11], las cuales aún no son contadas como solución del problema [12].
Dado que las señales antes mencionadas poseen
comportamientos intrínsecos no lineales [4,8], en este trabajo se propone la implementación de técnicas de dinámica no lineal para analizar la estructura regular de estas bioseñales y brindar un análisis más preciso y a tiempo, con lo cual se disminuye la dependencia del diagnóstico del médico.
II. MATERIALES Y MÉTODOS
A. Base de datos Las señales MER corresponden a la Universidad Politécnica
de Valencia (UPV), las cuales son grabaciones de
L

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 90
intervenciones quirúrgicas sobre cinco pacientes y están etiquetadas por médicos especialistas, quienes identificaron la zona en la cual se encuentra el microelectrodo. Los registros se encuentran a diferentes profundidades de acuerdo al equipo estereotáxico. La frecuencia de muestreo de todas las señales es de 24000 Hz. Cada registro tiene una duración de 10 s. En total existen 41 segmentos para la zona snr, 25 para subtálamo, 66 para tálamo y 92 segmentos de zonas inciertas.
Por otra parte, las señales del ECG corresponden al
MIT BIH (The Massachusetts Institute of Technology-Beth Israel Hospital Arrhythmia Database). En esta base de datos se han incluido señales representativas de un conjunto muy amplio de patologías. Consta de 48 registros con 30 minutos de duración, los cuales fueron tomados de hombres y mujeres entre los 23 y 89 años [9]. Estas series fueron registradas analógicamente por el mismo modelo de instrumento en todos los casos, y digitalizadas con una frecuencia de muestreo de 360 Hz y resolución de 11 bits (para 78±5 mV).
B. Reconstrucción de atractores La reconstrucción del espacio de estado se basa en el
teorema de embebimiento presentado en [7], el cual puede ser descrito de la siguiente forma [15]:
Dado un sistema dinámico con un espacio de solución m-
dimensional y una solución h(t), sea x una observación x(h(t)). El vector de retardo puede definirse como sigue: x(t)= (xt, xt-, xt-2 , …, xt-(m-1) ,) con dimensión m y tiempo de retardo .
Luego, bajo condiciones generales, el espacio de vectores x(t) generado por la dinámica contiene toda la información del espacio de vectores solución h(t). El mapeo entre ellos es suave e invertible. Esta propiedad indica su difeomorfismo y el mapeo su embebimiento. Además, el estudio de la serie de tiempo x(t) es también el estudio de las soluciones del sistema dinámico subyacente h(t) por un sistema de coordenadas particular dado por x. El teorema de embebimiento establece que, con una serie de datos unidimensionales de un sistema dinámico, es posible reconstruir un espacio de estados difeomórfico al construido con todas las variables dinámicas [16].
C. Dimensión de correlación La dimensión de correlación D2 se toma como la dimensión
del espacio ocupado por una serie de puntos aleatorios, e informa sobre la naturaleza dinámica de la trayectoria del atractor reconstruido. Así, para cualquier serie de tiempo {x[n]: n=1…N}, usando el teorema de embebimiento e iniciando en el instante t0, se reconstruyen N puntos en un espacio m-dimensional:
, , 2 ,..., ( 1)s n x n x n x n x n m (1)
con una dimensión de embebimiento m y un retraso , de
acuerdo con el teorema de Takens [7]. El valor D2 del atractor reconstruido puede ser calculado a partir de [9]:
2 0
log( ( ))limlog( )r
C rDr
Donde C(r) es la suma de correlación:
1 1
1 1( )N N
i ji j
C r r s n s nN N
Siendo is n y js n puntos de la trayectoria en el espacio
de estado, y r la distancia radial a cada punto de referencia is n . es la función de Heaviside.
D. Máximo exponente de Lyapunov –LLE Como las trayectorias de un sistema caótico evolucionan
temporalmente en el espacio de estado, la separación entre ellas parece crecer exponencialmente; esta separación puede se cuantificada en cierto instante de tiempo por el LLE, el cual brinda la medida de caos del sistema [12]. Pequeñas desviaciones de ambas trayectorias, xs n y ys n , pueden ser dadas por:
1 xu n J s n u n
Donde nsJ x es la matriz jacobiana, evaluada por el
punto de referencia de nsx . Si n0 es el tiempo inicial, y
u[ n] la distancia entre las trayectorias nsx y nsy , luego:
0
0
, y
1 2 ...x x x
u n J n u n
J n J s n J s n J s n
La matriz J[ n] es calculada por el producto de las matrices
Jacobianas, evaluadas en los estados de las trayectorias de nsx . Para medir la separación de las trayectorias, se asume
que en un futuro distante ( n»0), la norma del vector u[ n] se comporta como:
0
10
[ ] ; ,
, 1, 1sin
nu n u n e n
u n n
El LLE ( 1) puede ser estimado como el promedio de
separación desde el vecino más cercano [17] por la expresión:
11 0
( )1 1( ) ln( )
l nj
j j
u nn
nT l n u n (2)
Donde T es el periodo de muestreo de la serie de tiempo,
uj( n) es la distancia entre el par jth desde el vecino más cercano después que n discretice los pasos en tiempo, y l es el número de puntos reconstruidos de acuerdo a (1). Para

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 91
mirar la convergencia (respecto a n), una forma alternativa de (2) es:
11 0
( )1 1( ) ln( )
l kj
j j
u n kn
kT l k u n
E. Exponente de Hurst (H) El exponente de Hurst determina si la serie de tiempo puede ser representada por un movimiento browniano. Si H existe, su rango de valores está entre 0 y 1, además mostrara la no linealidad de la serie de tiempo [5]. Particularmente, H=0 significa movimiento browniano, 0<H<0.5 significa que términos de alta frecuencia están presentes en la serie de tiempo, así las tendencias del pasado tienden a invertirse en el futuro. El rango, 0.5<H<1 significa que la serie de tiempo presenta una dinámica suave (las tendencias del pasado persisten en el futuro). El cálculo del exponente de Hurst se obtiene con la siguiente regresión empírica:
/ / 2 HR
Donde R es el rango (diferencia entre el mínimo y el máximo valor de la serie de tiempo); es la desviación estándar; y es el tiempo de retardo usado en la reconstrucción del atractor. El valor del exponente de Hurst es definido como la pendiente resultante después de computar el promedio de los R/ , para diferentes escalas [18].
F. Diagrama de Poincare Los diagramas de Poincaré permiten distinguir un
comportamiento cuasi-periódico de uno caótico y observar la estructura fractal de un atractor, reduciendo la representación del espacio de fase de un sistema continuo de dimensión N a un sistema discreto de dimensión (N-1) [19].
Es una técnica de la dinámica no lineal que muestra la
naturaleza de los intervalos R R, graficando cada intervalo R R contra el siguiente. El análisis de esta técnica se puede determinar cuantitativa o visualmente donde la forma de la gráfica determina las clases funcionales que indican el grado de fallo del corazón de un sujeto. La gráfica provee información de cada latido en detalle y del comportamiento del corazón. Un ejemplo de la estructura de los latidos en los intervalos R R son pequeñas islas de puntos rodeando una nube alrededor del rango que asigna cuantitativamente la técnica.
El problema de cuantificar las medidas que caracterizan la
información ha sido resuelto con varias técnicas, en este trabajo se aplica la propuesta por [20] donde se cuantifica utilizando un sistema estadístico estándar. Se aplican expresiones que conectan cada medida con su relación existente en la variabilidad del ritmo cardíaco. Para su análisis cuantitativo, se calcula la desviación estándar de las distancias de los (R R)i a las líneas:
mRRxyxy
*2
donde (R R)m es la media de todos los (R R)i, y donde i
varía desde el comienzo hasta el final de la señal. Las desviaciones estándar son llamadas SD1 y SD2 respectivamente. SD1 está relacionada con la velocidad de cambio en los latidos y SD2 describe lo largo del cambio del intervalo (R R)i [13]. La relación SD1/SD2 describe la relación entre estos dos componentes además de brindar información acerca de la ubicación de las patologías.
G. Entropía espectral Dado que la entropía cambia con los cambios de estado y
tiende a incrementarse con el tiempo, se ha considerado que podría ser la medida del "desorden" de un sistema, donde se asigna un valor de incertidumbre a la posibilidad de ocurrencia de un evento en una serie de datos.
La "entropía lógica" de Shannon es la medida de la
dispersión, variación o diversidad de los datos en una serie [21]. Shannon estaba interesado en una medida de la información, para reducir la incertidumbre, tanto la información como la incertidumbre están relacionadas inversamente: a más información, menos incertidumbre.
Aplicada a una serie de datos la Entropía de Shannon es:
n
kkk PPH
12 )(log
donde Pk es la probabilidad de existencia del dato ak en la
serie X(k) y n es la longitud de la señal. De esta forma la Entropía de Shannon aumentará cuanto mayor sea la distribución probabilística del resultado. Así, el algoritmo resultante se compone de cuatro fases diferentes:
1. Obtención del Espectro de Potencia P(fi) mediante
Fourier (FFT), donde fi son las distintas frecuencias que componen la señal del ECG.
2. Normalización de dicho espectro [21]. 3. Mapeado y suma, donde para cada una de las frecuencias
del Espectro se aplica la fórmula de Shannon, donde Pn es la potencia en la frecuencia fi.
1inin fPCfP
4. El resultado se normaliza, con respecto a N, siendo N el
número de frecuencias del espectro.
2
22 ,log
,,ffN
ffSffSi
iiN
donde S es la entropía de Shannon sin normalizar.

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 92
III. PROCEDIMIENTO
A. Señales ECG Las señales del ECG a utilizar fueron obtenidas de la base
de datos de MIT-BIH, aplicando un preprocesamiento para remover el ruido, la interferencia de la red y otras perturbaciones, además de obtener la variabilidad del ritmo cardíaco que es sobre la cual se trabaja (Fig. 1).
Figura 1. Preprocesamiento de la señal ECG
Las patologías cardíacas analizadas son cinco incluyendo el
ritmo cardíaco normal:
1. APC: Contracción prematura de la aurícula (Atrial premature contraction).
2. LBBB: Bloqueo de rama izquierda (Left bundle Branco block).
3. RBBB: Bloqueo de rama derecha (Right bundle Branco block).
4. PVC: Contracción prematura del ventrículo (Premature ventricular contraction). Para la validación de los resultados se utilizó el clasificador
bayesiano entrenandoló con tres parámetros derivados de las señales cardíacas: el diagrama de Poincaré, la entropía espectral y el exponente de Hurst. Cada señal fue segmentada extrayendo cada latido dentro de una ventana de 700 ms.
B. Señales MER Se toman 96 registros MER; 12000 puntos por cada muestra
(0.5 ms), partiendo desde la mitad del registro y tomando 6000 puntos a lado y lado del registro, discriminando en ellas 4 diferentes zonas (24 señales por cada zona):
Tálamo Subtálamo Sustancia negra Zona incierta
Para el preprocesamiento en este tipo de señales, las
técnicas de filtrado lineal no son la herramienta más efectiva [22], debido a que las propiedades de los potenciales de acción o espigas presentes en las señales MER pierden información al realizarse este proceso.
La caracterización consiste en tres medidas de complejidad: el máximo exponente de Lyapunov (LLE), el exponente de Hurst (H) y la dimensión de correlación (El cálculo de D2 sigue el método propuesto en [17]). Para cada una de las zonas se toman 24 señales, es decir, se analizan un total de 96 registros; y se utiliza un clasificador de máquinas de soporte vectorial con kernel RBF para la validación cruzada (70% para entrenamiento y 30% para la clasificación).
Para escoger la dimensión de embebimiento (m) y el tiempo de retardo ( ) de estas señales se utilizan las técnicas sugeridas en [23], que implica el cálculo de la dimensión de correlación con un retardo unitario; se observan las pendientes obtenidas, donde las que se ubican en la zona mas lineal permiten el cálculo de m. En una prueba inicial para el cálculo del m se asume =1, y se observa en qué región se presenta la linealidad (Fig. 2), donde se estima un m=37.
Figura 2. Dimensiones de correlación con =1
La determinación de se logró estimando la característica
LLE para un variando desde 2 hasta 20 y escogiendo el que minimizara tanto la aparición datos atípicos como la variabilidad intra-clase. De esta manera se determinó el =18. Con este tiempo de retardo se hace una vez más el cálculo de la dimensión de correlación para diferentes valores de m, aplicando el teorema de Takens [7]; obteniendo así el valor de m=52.
Por otro lado, partiendo del espacio de características se hizo necesario realizar un análisis de estructuras multivariadas con el objetivo de maximizar la distancia entre-clases y minimizar la variabilidad intra-clase. Dada la variabilidad inherente a las series de tiempo, se realiza un análisis de datos atípicos, ubicando la procedencia de estos datos, con el fin de retirarlos del estudio en caso de que se confirme que ha sido un error (i.e. error de estimación) aunque el modelo esté bien ajustado. La presencia de un valor anómalo puede alterar severamente la sensibilidad del análisis estadístico. Por lo que se someten los resultados a la prueba de Grubbs [15] que calcula el promedio para cierta muestra de datos y luego la desviación estándar de esos promedios. Se elimina el promedio más alto (sa) y bajo (sb). Se hace una disminución porcentual en la desviación estándar:

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 93
100* 1 bss
y 100* 1 ass
El mayor de esos decrecimientos se compara con el valor
crítico de Grubbs para el número de muestras consideradas, el dato que excede esto se rechaza o es tomado como dato atípico.
IV. RESULTADOS
A. Señales ECG Como conjunto de entrenamiento se utilizaron 250 latidos,
que corresponden a 50 latidos por cada patología y que han sido etiquetados para obtener la tasas de error de entrenamiento en forma automática. Como conjunto de validación se utilizan otros 250 latidos extraídos con el mismo criterio. Para cada una de las tablas presentadas se considera que: AC (aciertos de latidos), TO (total de latidos) y A es el porcentaje de acierto.
En las tablas 1 y 2, se presentan los mejores resultados de la
clasificación. La tabla 1 muestra los resultados para una prueba de comparación entre latidos de cada patología contra latidos normales donde se computa la entropía de Shannon y el exponente de Hurst, además la tabla 2 muestra los resultados para una prueba de comparación entre los latidos de todas las patologías en estudio y los latidos normales; los resultados confirman que una señal ECG normal puede ser estadísticamente diferenciada de una patológica por los sistemas dinámicos. Sin embargo, se observa que para patologías como APC estas características no son completamente discriminantes de las normales; esto puede ser explicado por la presencia de características dinámicas similares entre estos dos tipos.
Tabla 1. Resultados de cada patología contra el ritmo normal
Bayes K-esimo vecino Patologías AC TO A% AC TO A%
APC 24 76
50 50
74,00
45 55
50 50
95,00
LBBB 50 50
50 50
99,99
50 50
50 50
99,99
PVC 100 0
50 50
50,00
47 53
50 50
97,00
RBBB 50 50
50 50
99,99
50 50
50 50
99,99
Tabla 2. Resultados de todas las patologías
Bayes K-esimo vecino Patologías AC TO A% AC TO A%
APC 16 50 29 50 LBBB 58 50 60 50 Normal 77 50 58 50
PVC 49 50 52 50 RBBB 50 50
86,00
51 50
91,60
Debido a que la caracterización haciendo uso del diagrama
de Poincaré no se puede realizar usando cada latido de manera individual; se debe utilizar un conjunto de latidos que permitan lograr las diferencias de intervalos requeridas; la clasificación se efectúa utilizando este método como único caracterizador. Con el fin de mostrar el análisis gráfico de esta técnica, la figura 2 permite observar las nubes que clasifican cada una de las patologías, graficando cada uno de los intervalos R R contra los siguientes intervalos.
Figura 3. Diagrama de Poincaré
De ella se puede observar como los intervalos normales
(verde) y los latidos patológicos del APC (naranja) se encuentran dentro de un rango que se superpone, demostrando así que las características dinámicas de estas señales pueden no llegar a ser lo suficientemente discriminantes para su adecuada clasificación. Para los demás latidos patológicos como LBBB (rojo), RBBB (azul) y PVC (cian) se observa la nube que delimita el rango dentro del cual cada patología se encuentra.
B. Señales MER Para la reconstrucción del espacio de embebimiento se
obtuvo un retardo de reconstrucción unitario, el cual brinda mayor separabilidad entre las clases. Considerando que la

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 94
frecuencia de muestreo es 24000 Hz, =0.75 ms. Este valor revela que la dinámica no lineal inherente al comportamiento cerebral en las diferentes zonas es fuerte, además de que la dinámica inherente al comportamiento cerebral preserva información no lineal determinista que no es destruida por otros agentes emisores biológicos. Asimismo, la dimensión de embebimiento estimada para los atractores fue de 52, lo cual afirma lo dicho anteriormente, ya que este valor es muy alto con respecto a los hallados para otro tipo de bioseñales reportados en la literatura [5,9].
Con el fin de evaluar la capacidad discriminante de las
características de complejidad se usó el clasificador bayesiano para una validación con 10 folds, obteniendo un porcentaje de acierto del 91,51% ± 0.072. Adicionalmente, la característica que ofrece mayor separabilidad entre zonas es el máximo exponente de Lyapunov.
Figura 4. Diagrama de dispersión
La información conjunta entre las zonas es notable, lo cual hace más difícil la tarea de clasificación. Este hecho se refleja en la alta variabilidad entre-clases de los índices estimados. El análisis de estructuras multivariadas mejoraron la clasificación de 89,15% ± 0.112 a un 91,51% ± 0.072.
V. CONCLUSIONES Las técnicas de dinámica no lineal ayudan a la distinción
entre las 4 zonas cerebrales analizadas y la detección de patologias, ya que permiten tomar en cuenta la dinámica intrínseca de las señales, revelando estructuras no lineales deterministas que capturan la representación discriminante.
La implementación de las técnicas de análisis de
complejidad puede ser más eficiente que las técnicas convencionales de caracterización, ya que permiten discriminar las patologías dentro de cada tipo de señal sin la ayuda básica de un clasificador de alto rendimiento.
El análisis de estructuras basado en los procedimientos
estadísticos multivariados es un procedimiento importante en la adecuación de los datos, ya que ayuda a la convergencia del
sistema de clasificación además de incrementar el rendimiento.
A diferencia del análisis lineal, el cual atribuye el
comportamiento irregular de un sistema a la naturaleza aleatoria de la señal de entrada, la teoría del Caos afirma que las entradas aleatorias no son las únicas fuentes posibles de irregularidad en la salida de un sistema [13, 14].
REFERENCIAS [1] Laguna P. Nuevas Técnicas de Procesado de Señales
electrocardiográficas: Aplicación a Registros de Larga Duración. Tesis doctoral. Instituto de Cibernética de Cataluña, 1990.
[2] Aguirre P., Cardelino J., y Loeff N. Sistema de detección, clasificación e identificación en línea de complejos QRS. Universidad de Ingeniería Eléctrica, 2001.
[3] Ávila J. Análisis de la actividad eléctrica cerebral en pacientes epilépticos. Tesis de maestría, Pontificia Universidad Javeriana, 2003.
[4] Berraondo P., Perez J., Elizalde P., Ortuño F., Teijeira J., y Díaz E. Dinámica no lineal en el análisis de electrocardiogramas. Física Medica, 2001.
[5] Carvajal R., Vallverdú M., Baranowski R., Baranowska A., Zebrowski J., y Caminal P. Dynamical Non Linear análisis of Haert rate Variability in Patients with Aortic Stenosis. Cambridge university Press, 2002.
[6] Victor M., y Romper A. Principios de neurología, 7th Edición. McGraw-Hill Interamericana, 2002.
[7] Takens F. Dynamical Systems and Turbulence, Lecture Notes in Mathematics, vol. 898. Springer-Verlag, 1981; 366-381.
[8] Rangayyan R. Biomedical signal analysis: a case-study approach. IEEE press. 2002.
[9] PhysioBank, MIT-BIH Arrhythmia Database, PhysioNet, 2005. [10] Hasegawa H. A wavelet analysis of transient spike trains of Hodgkin –
Huxley neurons. Departamento de fisica. Universidad Gayugei de Tokio, 2004.
[11] Luczak A., y Narayanan N. Spectral representation – analyzing single – unit activity in extracellularly recorded neuronal data without spike sorting. Journal of Neuroscience Methods, vol. 144, 53-61, 2005.
[12] Quiroga R., Nadasdy Q., y Ben-Shaul Y. Unsupervised spike detection and sorting with wavelets and superparamagnetic clustering. Neural Computation, vol. 16, 1661-1687, 2004.
[13] García J. Análisis Automatizado de Señales Cardíacas. Ph.D. disertacion, Universidad Nacional de Colombia Sede Manizales, 2004.
[14] Castellanos G. Identificación de estados funcionales en bioseñales. Voz, ECG y Fonocardiografía. Universidad Nacional de Colombia sede Manizales, Septiembre 2005.
[15] Sauer T., Yorke J., y Casdagli M. Embeddology. Journal of Statistical physics, 1991; 65:579-616.
[16] Parker T., Chua L. Practical Numerical Algorithms for Chaotic Systems. New York: Springer-Verlag, 1989.
[17] Rosentein M., Collins J., y Luca C. A practical method for calculating largest Lyapunov exponents from small data sets. Physica D. Vol. 65, no. 12, 117-134, 1993.
[18] Peters E. Chaos and Order in the Capital Markers. John Wiley and Sons, 1996.
[19] Kubin G. Nonlinear processing of speech. Speech Coding and Synthesis, 557-610. Amsterdam: Elsevier, 1995.
[20] Brennan M., Palaniswami M. Do existing measures of Poincaré plot geometry reflect nonlinear features of heart rate variability? IEEE Transactions On Biomedical Engineering, vol. 48, no. 11, Noviembre, 2001.
[21] Martínez I., Entropía espectral y profundidad anestésica, 2000, laboratorio Datex - Ohmeda.
[22] Guarnizo C. Análisis de reducción de ruido en señales provenientes de microelectrodos de registro. Scientia et técnica, 2005.
[23] Grassberger P., y Procaccia I. Measuring the strangeness of strange attractors. Physica D. 9:189-208, 1983.

Memorias STSIVA 2008 Tomo II 95 - 98
Abstract— Bogotá no ha sido ajena al creciente índice de
accidentes de transito en las grandes ciudades; todo lo contrario, este factor de riesgo es uno de los que más crece en la ciudad. Conductores pasajeros y peatones son victimas por igual, pero son los peatones los que se encuentran más expuestos y los que suelen sumar el mayor número de fatalidades. Por esta razón el Centro de Estudios de Ergonomía de la Facultad de Ingeniería de la Pontificia Universidad Javeriana, Grupo Categoría A en Colciencias, ha desarrollado el estudio titulado “Análisis de los factores que determinan el comportamiento de los Peatones en los cruces de alta criticidad en la ciudad de Bogotá D.C., Colombia: Estudio Piloto”. Este estudio pretende mejor el entendimiento del problema para posteriormente plantear mejores y quizá soluciones. Este artículo se centra en el sistema de visión artificial desarrollado para el Centro de Estudios de Ergonomía, el cual sirvió de herramienta para capturar datos de vehículos y peatones. El sistema de visión artificial captura la escena de interés, segmenta los objetos en movimiento, para extraer personas y vehículos, y estima la velocidad y la distancia entro los distintos móviles.
Index Terms— Visión artificial, tráfico, detección de vehículos, seguimiento.
I. INTRODUCCIÓN
L crecimiento en el uso del automóvil como medio de transporte en las grandes ciudades ha generado nuevos
retos para nuestra forma de vida, la congestión, lacontaminación y los accidentes de tránsito son hoy día problemas que hace cien años no se llegaba a imaginar. Todos estos son problemas graves que la sociedad actual trata de enfrentar, pero que frecuentemente se ve desbordada por la velocidad del desarrollo.
Uno de lo principales problemas para poder afrontar este escenario difícil, es la falta de información. Las variables que describen el tráfico y sus problemas asociados son muy dinámicas y difíciles de estimar [3]. Fácilmente se puede llegar a concepciones erradas, fácilmente se pueden hacer predicciones que en muy corto tiempo se revalúan, trayendo como resultado un accionar insuficiente para poder dar
solución a los problemas ocasionados por la necesidad de movilizarse que tienen las personas.
Este artículo pretende exponer la acción conjunta de un grupo interdisciplinario para tratar de avanzar en la solución de los problemas ocasionados por la necesidad de trasportase, iniciando por la recopilación de información, aunque se centra en el diseño y desarrollo de una herramienta de visión artificial.
Desde el Centro de Estudios de Ergonomía de la Facultad de Ingeniería de la Pontificia Universidad Javeriana, se ha emprendido la tarea de desarrollar una herramienta que permita hacer mediciones de las variables de tráfico, en particular aquellas que están relacionadas con las causas de los accidentes de transito que involucran peatones, pues son estos los más afectados por este problema. [1].Sin embargo, extraer toda la información deseable de la escena donde confluye el flujo de automóviles con el de peatones puede ser una tarea dispendiosa y muy compleja, sobretodo si se tiene presente la cantidad de información que simultáneamente debería extraerse [2] [3] [4].
Como proyecto inicial se planteo un estudio sobre lapercepción del riesgo en el que incurren los peatones al cruzar una vía; este estudio, pensado y diseñado para la ciudad de Bogota, se basa principalmente en una encuesta que se le suministra a los peatones, pero también esta acompañado de una herramienta de visión artificial que extrae algunas de las variables relevantes para el mencionado estudio. La idea es complementar las percepciones personales con una medición objetiva de las variables de tráfico que puedan definir la posibilidad de un accidente.
Las variables definidas como críticas y sobre las cuales se ocupa la herramienta de visión artificial desarrollada son la velocidad de los vehículos que circulan y la distancia que puede existir en determinado momento con un peatón [6] [7].
Es importante aclarar que la herramienta diseñada no es un sistema autónomo ni automático, pues requiere de laintervención del encuestador y del peatón encuestado para poder obtener la información que se busca. Además, el procesamiento del video no se esta haciendo en línea, por lo cual el costo en tiempo del algoritmo no fue una variable a tener en cuenta. Así pues la herramienta que se presenta solo
Implementación de una herramienta para la adquisición de variables de tráfico: peatones y vehículos, utilizada en la evaluación del riesgo
de peatones que cruzan la vía
A. Forero, C. Diaz, A. Sanchez, L. Quintana, F. Mariño, L. Barrero
E
Implementación de una herramienta para la adquisición de variables de tráfi co: peatones y vehículos, utilizada en la
evaluación del riesgo de peatones que cruzan la vía A. Forero, C. Diaz, A. Sanchez, L. Quintana, F. Mariño, L. Barrero

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 96
es la primera etapa en el desarrollo de una herramienta de medición de variables de tráfico, la cual habrá de ser indispensable en la caracterización y solución de los problemas de tráfico.
A continuación, se expone la estrategia empleada paradesarrollar el algoritmo de detección de vehículos, luego se presenta el módulo de visualización, seguido de una breve descripción de los resultados y finalmente se presentan las conclusiones alcanzadas por el proyecto.
II. DESARROLLO DEL ALGORITMO
La herramienta de Software desarrollada tiene como entrada principal un video en formato AVI, el cual contiene la información del cruce de peatones que se va a analizar. La herramienta esta diseñada para procesar un video capturado desde una vista superior de la escena, desde donde se minimizan las oclusiones entre los objetos de interés. Adicionalmente, la herramienta recibe otro video que se espera sea capturado desde el nivel de la vía, este segundo video esta pensado para que los peatones participantes en el estudio se identifiquen con facilidad, sin embargo, la herramienta no realiza ningún tipo de procesamiento con este segundo video, pero debe ir sincronizado con el primer video para que la identificación de los peatones participantes en el estudio sea efectiva.
El algoritmo empleado para la detección de vehículos y peatones está basado en la detección de movimiento [8] y etapas previas y posteriores de preprocesamiento de la imagen antes de realizar la segmentación final de los objetos de interés. En la figura 1, presenta el diagrama de flujo del algoritmo y a continuación se explica cada uno de los bloques que lo conforman.
Fig. 1 Diagrama de flujo del algoritmo
A. Lectura del video, cambio de espacio y separación por canales
Una vez se ingresa el archivo en formato AVI a la herramienta, el algoritmo inicia el proceso de cada cuadro de video. Lo primero que se hace es una transformación al espacio HSV, esto para concentrar el efecto de la iluminación en un solo canal; luego se aplica un filtro gaussiano a cada canal para minimizar los efectos del ruido.
B. Detección del movimiento
Sobre cada canal se hace la detección de movimiento, esta operación se hizo tomando como base la función motion_history_image de OpenCV. Como resultado se obtiene una mascara binaria por canal donde se indica los píxel asociados con movimiento y los que no.
C. Filtro morfológico
A partir de las tres mascaras binarias obtenidas de la detección de movimiento en el espacio HSV, se unifica la información mediante la operación OR entre las tres mascaras. De esta forma, cualquier píxel marcado como de movimiento se conserva en la mascara resultante. Después, para rellenar las regiones obtenidas se aplica un filtro morfológico, consistente en dilataciones seguidas deerosiones. En todas las operaciones morfológicas se emplean como elemento estructural una elipse, esto con el fin de resaltar los vehículos que son de forma cuadra, pero evitando el problema que se genera por las esquinas con un elemento estructural rectangular
D. Segmentación e Indexación
Una vez se tiene una única mascara de movimiento, donde ya se han llenada espacios y definido diferentes conjuntos de movimiento se procede a indexar cada uno de esos conjuntos, buscando identificar los diferentes móviles que se desplazan por la escena analizada. Para eliminar falsos positivos se utiliza un conjunto de descriptores asociados a cada conjunto de movimiento. Estos descriptores son: centro de masa y área. Los conjuntos que no cumplan con las condiciones establecidas para los descriptores dejan de ser considerados como objetos de interés. Por ultimo utilizando la mascara anterior, se calcula la dirección y velocidad del movimiento y esos datos se asocian a cada índice.
E. Seguimiento
El seguimiento se realiza comparando los objetos detectados en un cuadro con los detectados en el cuadro anterior. Sin embargo, El algoritmo no procesa cada cuadro de video, sino que después de procesar un cuadro descarta cinco antes de tomar el siguiente cuadro a procesar. De esta forma se tienen que en lugar de trabajar con un video de 30 cuadros por segundo, en realidad se esta procesado un video de 5 cuadros por segundo

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 97
Para validar si un objeto detectado en el cuadro anterior representa al mismo móvil en el cuadro siguiente se hace una búsqueda en el cuadro actual alrededor del centroide que ubicaba al objeto en el cuadro anterior, luego se comparan los objetos detectados en el cuadro actual con el objeto que representaba al móvil en el cuadro anterior y se procede a compara el área, el ángulo del movimiento, y un delta de desplazamiento. El objeto de interés en el nuevo cuadro que más se asemeje al objeto de interés en el cuadro anterior es seleccionado como el mismo móvil.
III. MÓDULO DE VISUALIZACIÓN
La herramienta desarrollada se implemento usando C++, .NET y la librería OpenCV; como complemente a la implementación del algoritmo propiamente dicho, se tiene una pantalla de visualización a modo de GUI (graphical user interface) que permite a los usuarios acceder a la información que condensa el algoritmo. En esta sección se introduce la interfaz gráfica y se explica como se presentan las diferentes variables que el algoritmo permite extraer de la escena.
A través de un menú ubicado en la parte superior se da inicio al programa como se muestra en la figura 2.
Fig. 2 Apariencia inicial del módulo de visualización
En el menú procesamiento se escoge iniciar, es el único evento disponible, de allí, la aplicación pregunta cual es el video principal, con el cual se hará el procesamiento, e inmediatamente después pide con la vista desde el nivel de la vía (el video cercano a las personas para que los peatones participantes en el estudio se puedan identificar)
La pantalla de visualización está dividida en cuatro áreas, como se muestra en la figura 3. En la parte superior izquierda se presenta el video sobre el cual se hace el procesamiento. En la parte superior derecha, se presenta el resultado del procesamiento: se muestran los objetos de interés rodeados por un círculo blanco y su respectivo índice. En la parte inferior izquierda se presenta el video auxiliar. EL cuadro inferior derecho se utiliza para desplegar la información de
velocidad y el resto de variables que la herramienta computa.
Fig. 3 De izquierda a derecha de arriba a abajo: Video Principal, el que se procesa, objetos de interés, video auxiliar
Para calcular la velocidad de un objeto determinado que se encuentre en movimiento, se debe hacer click sobre el objeto en el video principal; En la misma imagen el objeto aparecerá encerrado en un cuadro y al lado será desplegada la velocidad del móvil seleccionado, como se puede observar en la figura 4.
Fig. 4 Medición de la velocidad de un movíl
Para obtener las distancias entre diferentes elementos, es necesario que el proceso este detenido, lo cual se logra haciendo pausa. Una vez detenidos el proceso se hace un clicken el primer punto dentro de la imagen original, luego se hace otro click en el segundo punto hasta donde se quiere medir ladistancia; inmediatamente después aparece un cuadro de mensaje indicando la distancia en metros entre los dos puntos seleccionados.

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 98
IV. RESULTADOS
El proyecto realizado permitió verificar el alto riesgo en el que incurren los peatones bogotanos al cruzar una vía. Los videos adquiridos ponen en evidencia los malos hábitos que la población en general tiene, pero al cruzar la información recopilada mediante el video con las percepciones de riesgo de los peatones, se encuentra que los peatones no dimensionan el riesgo en el que incurren al cruzar una calle. Sin embargo, en la primera etapa de la investigación, también se noto la baja disponibilidad de las personas para realizar una encuesta, razón por la cual la muestra que hasta el momento se realizado es muy pequeña.
V. CONCLUSIONES
La adquisición de información de las variables de tráfico parece un objetivo alcanzable mediante la utilización de sistemas de visión artificial. Los resultados de laimplementación del algoritmo así lo reflejan, pues lejos de ser perfectos, si manifiestan que la captura de video para su posterior procesamiento es una forma confiable de adquirir la información que se busca. Sin embargo las dificultades existentes para alcanzar un sistema autónomo y permanente son grandes.
En el trabajo hecho muchas de las dificultades presentes se sobrellevaron con la intervención del operador del sistema, pues cuando se hace la encuesta, un operador capacitado manipula la herramienta. Pero todas las problemas inherentes al procesamiento de los datos que se buscan son elementos que deben seguir siendo trabajados.
A continuación se hace una reseña de los principales problemas que se deben superar para alcanzar un sistema autónomo y permanente encaminado a mejorar el control de tráfico de una ciudad y permitir la adquisición de información que se busca.
Primero, la cantidad de información que adquiere unacámara cada segundo es muy grande, máxime si se quieretener la habilidad de identificar pequeños detalles dentro de la escena. Esto hace costosos los repositorios necesarios para almacenar la información y muy lenta la transferencia de datos, debido a su volumen.
Segundo, difícilmente un único algoritmo de procesamiento será capaz de resolver todas las dificultades que se pueden presentar en la escena. Esto hace difícil lograr un algoritmo que proséese los datos simultáneamente con la captura
Tercer, las condiciones del ambiente restringen mucho los alcances del sistema de visión: las posibles oclusiones en la escena, la iluminación y el clima en general son una dificultad que la solución tienen que afrontar. La ausencia deiluminación es una limitante que se asume intrínseca al uso de visión artificial.
Cuarto, la ubicación ideal de la cámara por lo general no se ajusta con la disposición natural de la escena, lo que genera un costo adicional de infraestructura.
Todas estas limitantes han sido evidentes en la implementación del proyecto, pero como se observa en el
creciente desarrollo de la visión artificial enfocada en los problemas de tráfico, más que un problema, todos estos inconvenientes se convierten en retos a ser resueltos en la implementación futuro de la solución propuesta.
REFERENCIAS
[1] Accidentalidad vial en Colombia – 2005. Fondo de Prevención Vial. www.fonprevial.org.co/documentos
[2] D. A. Noyce, R. Dharmaraju. “An Evaluation of Technologies for Automated Detection and Classification of Pedestrians and Bicyclists”, Technical Report University of Massachusetts Transportation Center, May 20, 2002. www.walkinginfo.org/pdf/UMTCBikeReport02-01.pdf
[3] Highway Capacity Manual, Transportation Research Board (Washington), 2000.
[4] Al Y Mayor, Rafael Y Cárdenas, James, “INGENIERÍA DE TRÁNSITO Fundamentos y Aplicaciones, 8ª Ed.”. Editorial Alfaomega-México 2003.
[5] Ian Lewin, John O'Farrell. “Development and Analysis of a Pedestrian Crossing Warning System”. Journal of the Illuminating Engineering Society, summer 2000.
[6] Dona Sauerburger. “Instructional Strategies for Teaching Judgment in Detecting Gaps for Crossing Streets with No Traffic Controls”. Heldref Publications, 2006.
[7] C. Stauffer, “Learning to track objects through unobserved regions”, IEEE Workshop on motion and video computing. 2005.

Memorias STSIVA 2008 Tomo II 99 - 103
Representación de detalles en imágenes usando cuadros diádicos y reglas de información basados en Wavelets
B. Ortiz†§, J.Reinosa†, J.Garcia‡ IEEE Member, N.Cañas†
Grupo de Control y Procesamiento Digital de Señales Laboratorio de Comunicaciones
Representacion de Detalles en Imagenes UsandoCuadros Diadicos y Reglas de Informacion Basados
en WaveletsB. Ortiz†§, J. Reinosa†, J. Garcia‡ IEEE Member, N. Canas†
Grupo de Control y Procesamiento Digital de SenalesLaboratorio de Comunicaciones
Resumen—Se presenta un procedimiento experimental paraencontrar las representaciones mas adecuadas para imagenes us-ando el filtro wavelet Daubechies 9/7, utilizando la segmentacionen cuadros diadicos implementada por Wedgelets, para encontrarla region de interes en varios niveles de descomposicion. Laeleccion de la representacion mas adecuada, se basa en lamedicion de distorsion mediante un diccionario de metricas,clasificadas entre: Objetivas como el error cuadratico medio,diferencias de pixel y basadas en correlacion; utilizando medidascon histogramas como divergencia de Jensen-Shannon; y basadasen el sistema visual humano usando medidas sobre blockinessy visual impairments. Los resultados muestran que puede sermas eficiente el uso de filtros con componente geometrica quecon filtros implıcitamente geometricos, como son las wedgelets,o contourlets.
Palabras Claves—Daubechies 9/7, Wavelet, Wedgelets.
I. INTRODUCCION
Hallar un espacio de representacion adecuado para la rapidabusqueda sintactica y de caracterısticas relevantes en imagenesdigitales, se ha convertido en una de las tareas a resolvermas desafiantes, ya que se debe hallar alguna transformacionque brinde informacion que describa la mayor cantidad deelementos que representen algun objeto o detalle que sedesee analizar. Debido a esto, las tecnicas existentes puedenestablecer las bases para calcular la funcion que de solucion alproblema, como por ejemplo, hallar la funcion que representeun detalle especıfico de una region de interes demarcada porun proceso de segmentacion o reconocimiento de patrones.Luego de hallar una representacion adecuada para la region deinteres basada en la segmentacion, se espera que alguna me-dida discrimine cuantitativamente que la solucion al problemafue el adecuado y no existe alguna otra solucion cercana.El documento esta organizado de la siguiente manera: en laseccion II se muestra la tecnica propuesta y algunas defini-ciones, para luego dar a conocer el procedimiento experimentalpara la elaboracion de las pruebas, en la seccion III sepresentan algunos resultados relevantes, que dan paso para ladiscusion en la seccion IV, finalmente en la seccion V se dan aconocer algunas conclusiones a partir del marco experimentalpropuesto.
†Estudiantes Universidad Nacional de Colombia Sede Manizales‡Profesor Asistente Universidad Nacional de Colombia Sede Manizales§e-mail: [email protected]
II. MATERIALES Y METODOS
La base para el metodo propuesto es el espacio de transfor-macion Wavelets. Este utilizara un acercamiento hıbrido entrefiltros 1D y procesos 2D, en efecto, un filtro 1D sera ubicadogeometricamente sobre cada cuadro de resolucion, a tal puntode obtener una componente direccional adicional a las yacalculadas a priori en un componente de descomposicionarbitrario j (HH , HL, LH , LL). Este proceso sera explicadoluego en la metodologıa.
II-A. Wavelet
La teorıa de wavelet se basa en el uso de senales de cortaduracion y energıa media igual a cero como bases. Estassenales tienen varias caracterısticas que las definen comowavelets apropiadas, las caracterısticas mas relevantes para usoen este trabajo son [1]:
Momentos de desvanecimiento: dan informacion sobre lahabilidad de la wavelet para hallar los puntos nulos deuna funcion.Orden: esta dado por el numero de momentos desvanec-imiento existentes.Soporte compacto: es adecuado para describir carac-terısticas locales que varıan rapidamente en el tiempo.
Se examina la senal de tal modo que cada componente deescala se analiza a una resolucion diferente (analisis multires-olucion), obteniendo en resoluciones altas buena resolucionespacial y poca resolucion espectral y viceversa. Para estohay 2 tipos de muestreo: decimado y undecimado. El deci-mado incrementa el numero de muestras y el undecimado lodecrementa. Para transformar una senal del dominio espacialal espectral se debe filtrar repetitivamente usando el decimadofiltrando primero con un pasa bajas y luego un pasa altas conescala de corte a la mitad de la componente de escala de lasenal a analizar. Este resultado se filtra nuevamente con lasmismas clases de filtros, pero la escala de corte del segundofiltro es la mitad de la maxima componente de la senal entrantea este. Con este proceso se reduce cada vez mas en ancho debanda de la senal y por lo tanto se reduce la resolucion [2].La transformada wavelet unidimensional se puede extendera una transformada bidimensional utilizando filtros waveletseparables. Para calcular una transformada bidimensional, seaplica una transformada unidimensional a cada fila de datosde entrada, seguido por un submuestreo a traves de las filas,

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 100
y luego a cada columna de los datos de entrada, seguido porun submuestreo a traves de las columnas, esto con ayuda delos filtros separables [3].
II-B. Representacion funcional de imagenes
Primero se define un cuadro diadico como [4]:
Qj =
2−jk : 2−j(k + 1)×2−jl : 2−j(l + 1)
: 0 ≤ j ≤ 2−j
(1)
El cual no necesariamente es del mismo tamano. Un conjuntode funciones de aproximacion representan los elementos en uncuadro diadico con discontinuidad lineal dentro de una imagen.Estas aproximaciones son utiles tambien para aproximacionesno lineales y propiedades relacionadas con R/D para imagenescon regiones separadas por fronteras casi imperceptibles [5].Hay 2 componentes importantes: la descomposicion (MWD)y la representacion (MWR). MWD divide la imagen porbloques diadicos a diferentes escalas y proyecta las imagenesde cada bloque en un conjunto de representacion con diversasorientaciones. MWR es una aproximacion de la imagen que hasido construida con un conjunto de representacion obtenido delMWD. Las aplicaciones de descomposicion y representacionde los conjuntos de representacion incluyen deteccion desingularidades lineales en presencia de ruido y codificacion deimagenes. La insuficiencia de las wavelets en la representacionde fronteras hace mas visible la necesidad de descomponer laimagen para sacar provecho de las regularidades geometricasen las imagenes. Para la seleccion de los cuadros diadicos,los bordes se pueden representar concatenandolos individual-mente. En los lugares en los cuales los bordes varıan leve-mente, se pueden representar por medio de bloques diadicosgrandes, para los lugares donde el contorno varıa mucho, seutiliza un numero mayor de cuadros diadicos a menor escala,ası las reglas que se ensenan al sistema para la seleccion deldetalle se describen en la definicion (1).
Definicion 1 Sea el espacio de representacion cuyos subcon-juntos estan separados en cuadros diadicos Qj . Cada cuadrodiadico pertenece a un Detalle, si:
Debe existir en cuadros diadicos un borde que las defina,es decir, debe existir un gradiente.Debe existir un gradiente en el siguiente nivel de de-scomposicion.Debe tener vecinos igualmente definidos.Debe ser convexo.En algun nivel de resolucion llega a ser de untamano menor al de resolucion mınima observable (8x8,16x16...).
II-C. Criterios para la evaluacion de la representacion
Para evaluar la calidad de la representacion se utilizaronmedidas de distorsion sobre diferencias de pixel y basadas enel sistema visual humano (HVS) como:
Error cuadratico medio y error absoluto medio: Estasmedidas calculan la distorsion entre 2 imagenes basadasen la diferencia espacial (error) de pixel [6].Cross-correlacion normalizada, fidelidad de la ima-gen y correlacion Czenakowski: La cercanıa entre 2
imagenes puede ser medida en terminos de la funcionde correlacion, por lo tanto, son complementarias a lasmedidas basadas en la diferencia de pixel [6].Blockiness, error de bordes e impedimentos visuales:Estas medidas toman en cuenta los artefactos tıpicosintroducidos por algunos tipos de codificadores [7].Divergencia de Jensen-Shannon, Desviacion relativadel Bin y distancia Chi cuadrada: Estas son medidasde caracterısticas de bajo nivel, que evaluan diferenciasentre distribuciones de probabilidad [8].
Para una definicion completa de las metricas usadas, favorreferirse a [6], [7] y [8].
II-D. Segmentacion para la region de interes
Con base en las reglas para definir un detalle, se creany clasifican los cuadros diadicos, para encontrar una rep-resentacion en la region de interes (ROI) para el nivel deescala 2−j con j = 1, 2, . . . , N . Comparando los conjuntosde cuadros diadicos en la imagen original con el conjuntode cuadros diadicos generados en el nivel de descomposicionsuperior j = j + 1, se encuentran puntos relevantes enaquellos donde ya no es posible reducir mas su tamano.En dichos cuadros desde la escala j = 1, se encuentraque algunas de estas secciones han emergido para conservarsu tamano original, esto muestra que dichas secciones sonposibles candidatos para conformar lo que definimos comoun Detalle y, en consecuencia la ROI. El Detalle es definidocomo sigue: primero, la imagen es analizada en el primer nivelde descomposicion HH , HL, LL y LH . Luego los cuadrosdiadicos son calculados, al nivel de descomposicion 2−j−1.En el siguiente nivel de descomposicion, si el cuadro diadicotiene un tamano menor que el u0(D), este cuadro diadico aeste nivel de descomposicion debe ser unido con sus vecinos.Cuando un numero significativo de cuadros diadicos vecinoscon esta propiedad es encontrada, un candidato para un Detallees encontrado.
Figura 1. Segmentacion en cuadros diadicos para ROI
En la figura 1, se puede observar un ejemplo de los puntosgenerados luego de la segmentacion en cuadros diadicos. Lospuntos en blanco marcan aquellos cuadros que cumplen conlas reglas descritas en la seccion II-B, y que son candidatos adefinir un detalle desde el nivel j = 1.
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 101
II-E. Transformada discreta wavelet y umbralizacion
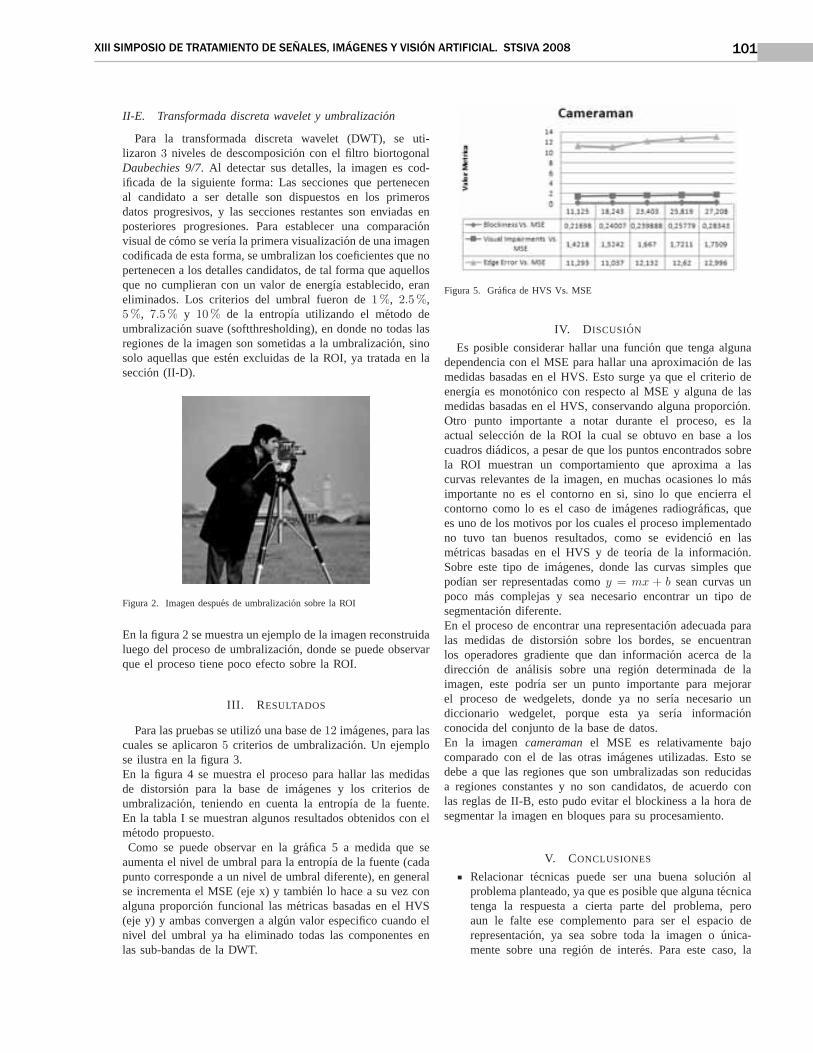
Para la transformada discreta wavelet (DWT), se uti-lizaron 3 niveles de descomposicion con el filtro biortogonalDaubechies 9/7. Al detectar sus detalles, la imagen es cod-ificada de la siguiente forma: Las secciones que pertenecenal candidato a ser detalle son dispuestos en los primerosdatos progresivos, y las secciones restantes son enviadas enposteriores progresiones. Para establecer una comparacionvisual de como se verıa la primera visualizacion de una imagencodificada de esta forma, se umbralizan los coeficientes que nopertenecen a los detalles candidatos, de tal forma que aquellosque no cumplieran con un valor de energıa establecido, eraneliminados. Los criterios del umbral fueron de 1%, 2.5%,5%, 7.5% y 10% de la entropıa utilizando el metodo deumbralizacion suave (softthresholding), en donde no todas lasregiones de la imagen son sometidas a la umbralizacion, sinosolo aquellas que esten excluidas de la ROI, ya tratada en laseccion (II-D).
Figura 2. Imagen despues de umbralizacion sobre la ROI
En la figura 2 se muestra un ejemplo de la imagen reconstruidaluego del proceso de umbralizacion, donde se puede observarque el proceso tiene poco efecto sobre la ROI.
III. RESULTADOS
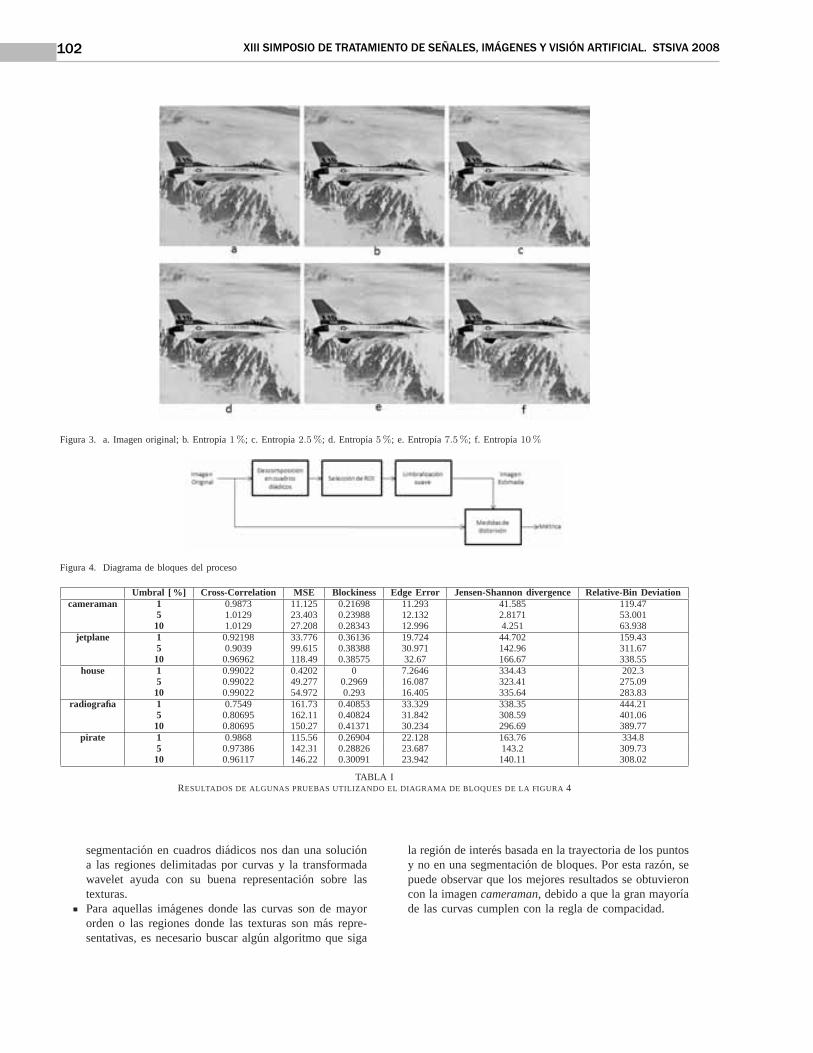
Para las pruebas se utilizo una base de 12 imagenes, para lascuales se aplicaron 5 criterios de umbralizacion. Un ejemplose ilustra en la figura 3.En la figura 4 se muestra el proceso para hallar las medidasde distorsion para la base de imagenes y los criterios deumbralizacion, teniendo en cuenta la entropıa de la fuente.En la tabla I se muestran algunos resultados obtenidos con elmetodo propuesto.Como se puede observar en la grafica 5 a medida que se
aumenta el nivel de umbral para la entropıa de la fuente (cadapunto corresponde a un nivel de umbral diferente), en generalse incrementa el MSE (eje x) y tambien lo hace a su vez conalguna proporcion funcional las metricas basadas en el HVS(eje y) y ambas convergen a algun valor especifico cuando elnivel del umbral ya ha eliminado todas las componentes enlas sub-bandas de la DWT.
Figura 5. Grafica de HVS Vs. MSE
IV. DISCUSION
Es posible considerar hallar una funcion que tenga algunadependencia con el MSE para hallar una aproximacion de lasmedidas basadas en el HVS. Esto surge ya que el criterio deenergıa es monotonico con respecto al MSE y alguna de lasmedidas basadas en el HVS, conservando alguna proporcion.Otro punto importante a notar durante el proceso, es laactual seleccion de la ROI la cual se obtuvo en base a loscuadros diadicos, a pesar de que los puntos encontrados sobrela ROI muestran un comportamiento que aproxima a lascurvas relevantes de la imagen, en muchas ocasiones lo masimportante no es el contorno en si, sino lo que encierra elcontorno como lo es el caso de imagenes radiograficas, quees uno de los motivos por los cuales el proceso implementadono tuvo tan buenos resultados, como se evidencio en lasmetricas basadas en el HVS y de teorıa de la informacion.Sobre este tipo de imagenes, donde las curvas simples quepodıan ser representadas como y = mx + b sean curvas unpoco mas complejas y sea necesario encontrar un tipo desegmentacion diferente.En el proceso de encontrar una representacion adecuada paralas medidas de distorsion sobre los bordes, se encuentranlos operadores gradiente que dan informacion acerca de ladireccion de analisis sobre una region determinada de laimagen, este podrıa ser un punto importante para mejorarel proceso de wedgelets, donde ya no serıa necesario undiccionario wedgelet, porque esta ya serıa informacionconocida del conjunto de la base de datos.En la imagen cameraman el MSE es relativamente bajocomparado con el de las otras imagenes utilizadas. Esto sedebe a que las regiones que son umbralizadas son reducidasa regiones constantes y no son candidatos, de acuerdo conlas reglas de II-B, esto pudo evitar el blockiness a la hora desegmentar la imagen en bloques para su procesamiento.
V. CONCLUSIONES
Relacionar tecnicas puede ser una buena solucion alproblema planteado, ya que es posible que alguna tecnicatenga la respuesta a cierta parte del problema, peroaun le falte ese complemento para ser el espacio derepresentacion, ya sea sobre toda la imagen o unica-mente sobre una region de interes. Para este caso, la
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 102
Figura 3. a. Imagen original; b. Entropıa 1%; c. Entropıa 2.5%; d. Entropıa 5%; e. Entropıa 7.5%; f. Entropıa 10%
Figura 4. Diagrama de bloques del proceso
Umbral [ %] Cross-Correlation MSE Blockiness Edge Error Jensen-Shannon divergence Relative-Bin Deviationcameraman 1 0.9873 11.125 0.21698 11.293 41.585 119.47
5 1.0129 23.403 0.23988 12.132 2.8171 53.00110 1.0129 27.208 0.28343 12.996 4.251 63.938
jetplane 1 0.92198 33.776 0.36136 19.724 44.702 159.435 0.9039 99.615 0.38388 30.971 142.96 311.67
10 0.96962 118.49 0.38575 32.67 166.67 338.55house 1 0.99022 0.4202 0 7.2646 334.43 202.3
5 0.99022 49.277 0.2969 16.087 323.41 275.0910 0.99022 54.972 0.293 16.405 335.64 283.83
radiografia 1 0.7549 161.73 0.40853 33.329 338.35 444.215 0.80695 162.11 0.40824 31.842 308.59 401.06
10 0.80695 150.27 0.41371 30.234 296.69 389.77pirate 1 0.9868 115.56 0.26904 22.128 163.76 334.8
5 0.97386 142.31 0.28826 23.687 143.2 309.7310 0.96117 146.22 0.30091 23.942 140.11 308.02
TABLA IRESULTADOS DE ALGUNAS PRUEBAS UTILIZANDO EL DIAGRAMA DE BLOQUES DE LA FIGURA 4
segmentacion en cuadros diadicos nos dan una soluciona las regiones delimitadas por curvas y la transformadawavelet ayuda con su buena representacion sobre lastexturas.Para aquellas imagenes donde las curvas son de mayororden o las regiones donde las texturas son mas repre-sentativas, es necesario buscar algun algoritmo que siga
la region de interes basada en la trayectoria de los puntosy no en una segmentacion de bloques. Por esta razon, sepuede observar que los mejores resultados se obtuvieroncon la imagen cameraman, debido a que la gran mayorıade las curvas cumplen con la regla de compacidad.

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 103
REFERENCIAS
[1] S. Mallat, A Wavelet Tour of Signal Processing, 2nd ed., A. Press, Ed.,1999.
[2] C. S. Diego and H. Federico, “Wavelet y banco de filtros.”[3] P. Roncagliolo and A. Gonzalez, “Transmision progresiva de imagenes,
basada en wavelets, para reducir el uso de ancho de banda en aplicacionescompartidas.”
[4] H. F. Laurent Demaret and F. Friedrich, “A quick guide to wedgelets,”March 2005.
[5] H. C. Michael Wakin, Justin Romberg and R. Baraniuk, “Rate-distortionoptimized image compression using wedgelets.”
[6] Ysmail Avcybas and B. Sankur, “Statistical analysis of image qualitymeasures.”
[7] F. M. Giaime Ginesu and D. Giusto, “A multi-factors approach forimage quality assessment based on a human visual system model,” SignalProcessing: Image Communication, 2006.
[8] J. C. C. Rueda, “A prototype system to archive and retrieve histopathologyimages by content,” Master’s thesis, National University of ColombiaFaculty of Engineering, 2007.

Memorias STSIVA 2008 Tomo II 104 - 107
Ajuste circular en sensores térmicosLuis Martin, Cesar Suarez e Isabel Amaya
Docentes Facultad de Ingeniería Universidad Distrital Francisco José de Caldas
Ajuste Circular en Sensores TermicosLuis Martin, Cesar Suarez e Isabel Amaya.
Docentes Facultad de Ingenieria Universidad Distrital Francisco Jose de Caldas
Resumen—En el diseno de un instrumento de medicionparticipan distintos elementos que aportan, de maneraparticular cada uno de ellos, a la calidad del producto final;uno de estos es el modelo matematico. En este trabajo seaplica un modelo de ajuste circular para sensores termicosy se compara el grado de exactitud logrado con respectoa otros tipos de ajuste.
Palabras claves—Ajuste, Sensor, sensor termico, ajustecircular, modelo matematico.
I. INTRODUCCION
LA adjudicacion de un modelo matematico,para un sensor, se realiza sobre los princi-
pios y leyes fısicas que lo gobiernan, generandouna ecuacion racional como soporte al modelomatematico buscado [7], o de otra forma, basandoseen la curva caracterıstica del sensor y ajustando unafuncion matematica a dicha curva , obteniendose asıuna ecuacion empırica o funcion de ajuste [2] que,igualmente, pasa a ser soporte y modelo matematicopara el sensor en referencia.El proceso de ajuste de funciones se centra en ubicarla diferencia entre el valor dado por el modelo y elvalor dado por la curva caracterıstica del sensor, pordebajo de un cierto nivel, de tal manera que todos ycada uno de los puntos de la curva queden fielmenterepresentados por dicha funcion.Entre las tecnicas indicadas para la realizacion deestos procesos, se encuentran la de promedios yla de mınimos cuadrados [8]. Basados en dichastecnicas y utilizando Matlab, en este trabajo seimplementan dos algoritmos de ajuste circular sobresensores termicos tipo RTD y Termopares.
II. AJUSTE CIRCULAR
A. Descripcion del Algoritmo de Mınimos Cuadra-dos
Este algoritmo fue propuesto por U.M.Landau, en[1]. A partir de un conjunto de N puntos en R
2,(xi, yi), para i = 1, 2, 3, ..., n, se definen losvectores r1, r2 r3 r n−1,..., rn, siendo ri el vector
con punto inicial en (0, 0) y punto terminal en(xi, yi); se define un arco circular de radio R ycentro en el punto a = (xa, ya) y se considera elerror:
∆ri = ri − a − R1ri−a (1)
donde, 1ri−a representa un vector unitario en ladireccion de ri − a.Sumando el cuadrado de los errores, se tiene
e(R, a) =1
N
�
i
(∆ri)2
=1
N
�
i
||ri − a − R1ri−a||2
(2)
La funcion e(R, a) denota el error cuadratico medioy el proposito es entonces encontrar un valormınimo para este error en funcion de R y de a.El cambio en e(R, a), en funcion del cambio en Ry a, se aproxima por:
e =� ∂
∂R,
∂
∂xa
,∂
∂ya
�
e(R, xa, ya) · (R, ∆xa, ∆ya)
(3)donde · denota el producto escalar entre el gra-diente de e(R, a) y el vector (R, ∆xa, ∆ya).Como (R, ∆xa, ∆ya) es arbitrario, el punto extremo(R0, x0
a, y0
a) se determina resolviendo la ecuacion:
� ∂
∂R,
∂
∂xa
,∂
∂ya
�
e(R, xa, ya) = 0 (4)
lo cual implica que:
1
N
�
i
||ri − a|| = R (5)
a =1
N
�
i
(ri − R1r−a) (6)
Por consiguiente, el error cuadratico medio seminimiza si R y a satisfacen simultaneamente lasecuaciones dadas por (5) y (6).

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 105
Dada la complejidad que presentan estas dos ecua-ciones, Landau propuso un algoritmo [1] que per-mite llegar a una solucion aproximada, el cual sedescribe a continuacion:(a). Se estima un centro tentativo de inicio para el
arco, el cual se define como ak, iniciando enk = 0.
(b). Se sustituye ak en la ecuacion (5) y se calculaRk.
(c). Partiendo de ak y Rk, se calcula ak+1, apartir de la ecuacion (6).
(d). Si la diferencia |ak − ak+1| es una cantidaddespreciable como error de tolerancia en elajuste, se finaliza el procedimiento, si no, secontinua trabajando el algoritmo a partir delpaso (b).
B. Descripcion del Algoritmo de ajuste circular porpromedios
Se toma la funcion de dispersion original y sereparte en cuatro grupos iguales y contiguos; si esnecesario se repite el punto final de algunos de losgrupos, para que este sea el inicio del siguiente,completando asi el tamano requerido. Se denotan lospuntos de cada grupo de la forma Pi, Qi, Ri y Si,donde i = 1, 2, 3, ...,m (m es el numero resultantede elementos por grupo) y eventualmente, Pm = Q1
o, Qm = R1 o Rm = S1.(a). Se trazan las secantes PiRi y QiSi y se
calculan sus respectivas pendientes, como lomuestra la figura 1.
−20 −15 −10 −5 02
4
6
8
10
12
14
16
18
20Método de promedios
Grupo Pi
Grupo Si
Grupo Ri
Grupo Qi
o
( Xci , Yci )
Fig. 1: Ajuste circular por promedios
(b). Se obtienen los puntos medios de los segmen-tos de recta PiRi y QiSi y se hallan luego
las ecuaciones de las rectas perpendiculares acada una de las secantes trazadas que pasanpor el punto medio de cada segmento.
(c). Se determina el punto de corte de las dosrectas, halladas en el ıtem anterior, el cualcorresponde al centro del cırculo que ajustalos cuatro puntos; dicho punto se nota por(xci
, yci).
(d). Se repiten los item del (a) al (c) para i =1, 2, ...,m.
(e). Se calcula el promedio de las abscisas xciy
las ordenadas yci, para elegir este como centro
promedio, (xc, yc), del arco de circunferencia.(f). Se estima la distancia desde cada grupo de
puntos Pi, Qi, Ri y Si, al punto denominadocentro promedio, (xc, yc) y luego se calculael promedio de esta distancia, el cual sera elradio, r, de la funcion de dispersion ajustadaa una circunferencia.
Para disminuir el tiempo de procesamiento en elalgoritmo de Landau, se puede partir del valor(xc, yc), hallado en el algoritmo de promedios,como primer centro a0 utilizado en el paso (a) delalgoritmo de mınimos cuadrados. Esta variante seimplemento en los casos de estudio abordados.
III. APLICACION Y COMPARACION DE LOS
MODELOS DE AJUSTE CIRCULAR A SENSORES
REALES
A los sensores de temperatura tipo termopar E, J yK, asi como al sensor RTD Pt100, se les aplicaronlos dos algoritmos de ajuste circular descritos en laseccion anterior, con el fin de ver los resultados ycompararlos con ajustes de tipo lineal, polinomial yexponencial.
A. Resultados Encontrados
Como primer sensor de estudio se utilizo un Pt 100en el rango de 400 oC a 800 oC y como referenciase empleo su tabla caracterıstica especificada porla norma NF C 42-330 y ratificada por el ITS 90,[7]. A este sensor se le estimaron ajustes del tipo:circular por promedios (acP), circular por mınimoscuadrados (acM), polinomial (ap), exponencial (ae)y lineal (al).Respecto a la exactitud que presenta cada uno deestos modelos, es notorio el bajo nivel de errorde los dos ajustes circulares y del polinomial, con
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 106
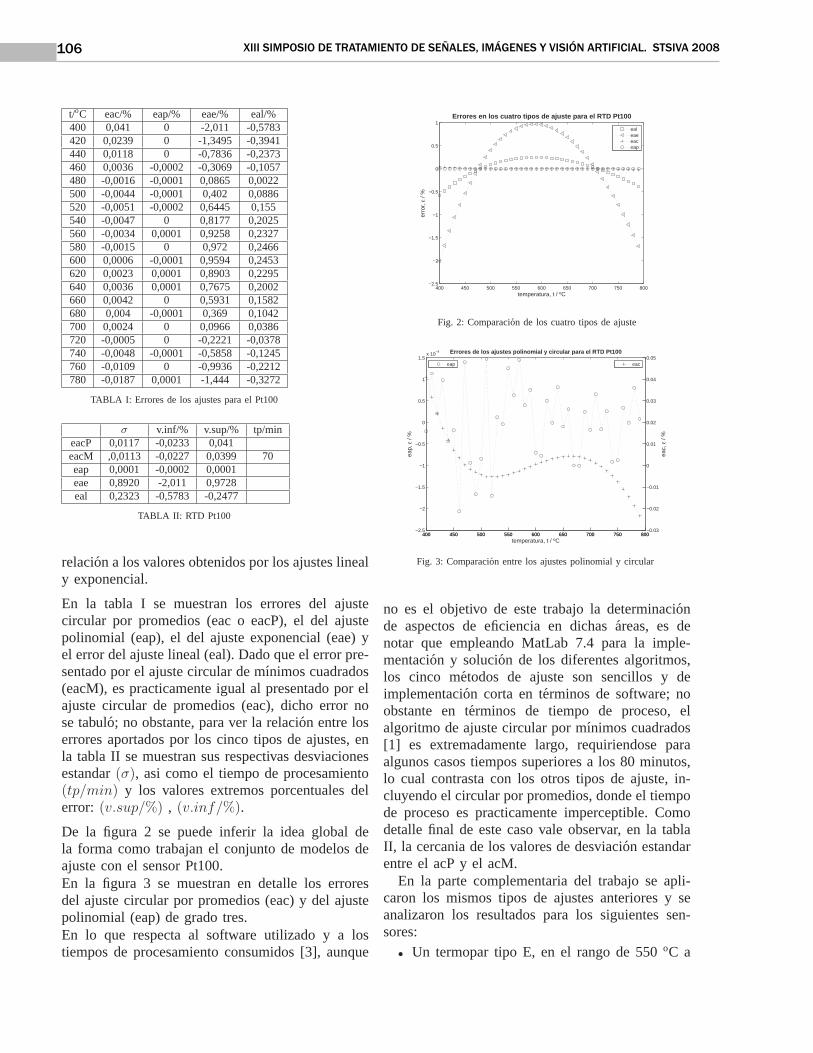
t/oC eac/% eap/% eae/% eal/%400 0,041 0 -2,011 -0,5783420 0,0239 0 -1,3495 -0,3941440 0,0118 0 -0,7836 -0,2373460 0,0036 -0,0002 -0,3069 -0,1057480 -0,0016 -0,0001 0,0865 0,0022500 -0,0044 -0,0001 0,402 0,0886520 -0,0051 -0,0002 0,6445 0,155540 -0,0047 0 0,8177 0,2025560 -0,0034 0,0001 0,9258 0,2327580 -0,0015 0 0,972 0,2466600 0,0006 -0,0001 0,9594 0,2453620 0,0023 0,0001 0,8903 0,2295640 0,0036 0,0001 0,7675 0,2002660 0,0042 0 0,5931 0,1582680 0,004 -0,0001 0,369 0,1042700 0,0024 0 0,0966 0,0386720 -0,0005 0 -0,2221 -0,0378740 -0,0048 -0,0001 -0,5858 -0,1245760 -0,0109 0 -0,9936 -0,2212780 -0,0187 0,0001 -1,444 -0,3272
TABLA I: Errores de los ajustes para el Pt100
σ v.inf/% v.sup/% tp/mineacP 0,0117 -0,0233 0,041eacM ,0,0113 -0,0227 0,0399 70eap 0,0001 -0,0002 0,0001eae 0,8920 -2,011 0,9728eal 0,2323 -0,5783 -0,2477
TABLA II: RTD Pt100
relacion a los valores obtenidos por los ajustes linealy exponencial.
En la tabla I se muestran los errores del ajustecircular por promedios (eac o eacP), el del ajustepolinomial (eap), el del ajuste exponencial (eae) yel error del ajuste lineal (eal). Dado que el error pre-sentado por el ajuste circular de mınimos cuadrados(eacM), es practicamente igual al presentado por elajuste circular de promedios (eac), dicho error nose tabulo; no obstante, para ver la relacion entre loserrores aportados por los cinco tipos de ajustes, enla tabla II se muestran sus respectivas desviacionesestandar (σ), asi como el tiempo de procesamiento(tp/min) y los valores extremos porcentuales delerror: (v.sup/%) , (v.inf/%).
De la figura 2 se puede inferir la idea global dela forma como trabajan el conjunto de modelos deajuste con el sensor Pt100.En la figura 3 se muestran en detalle los erroresdel ajuste circular por promedios (eac) y del ajustepolinomial (eap) de grado tres.En lo que respecta al software utilizado y a lostiempos de procesamiento consumidos [3], aunque
400 450 500 550 600 650 700 750 800−2.5
−2
−1.5
−1
−0.5
0
0.5
1
temperatura, t / ºC
erro
r,ε
/ %
Errores en los cuatro tipos de ajuste para el RTD Pt100
ealeaeeaceap
Fig. 2: Comparacion de los cuatro tipos de ajuste
400 450 500 550 600 650 700 750 800−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5x 10
−4
eap,
ε / %
temperatura, t / ºC
Errores de los ajustes polinomial y circular para el RTD Pt100
400 450 500 550 600 650 700 750 800−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
0.05
eac,
ε / %
eap eac
Fig. 3: Comparacion entre los ajustes polinomial y circular
no es el objetivo de este trabajo la determinacionde aspectos de eficiencia en dichas areas, es denotar que empleando MatLab 7.4 para la imple-mentacion y solucion de los diferentes algoritmos,los cinco metodos de ajuste son sencillos y deimplementacion corta en terminos de software; noobstante en terminos de tiempo de proceso, elalgoritmo de ajuste circular por mınimos cuadrados[1] es extremadamente largo, requiriendose paraalgunos casos tiempos superiores a los 80 minutos,lo cual contrasta con los otros tipos de ajuste, in-cluyendo el circular por promedios, donde el tiempode proceso es practicamente imperceptible. Comodetalle final de este caso vale observar, en la tablaII, la cercania de los valores de desviacion estandarentre el acP y el acM.
En la parte complementaria del trabajo se apli-caron los mismos tipos de ajustes anteriores y seanalizaron los resultados para los siguientes sen-sores:
• Un termopar tipo E, en el rango de 550 oC a
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 107
σ v.inf/% v.sup/% tp/mineacP 0.0942 -0.1092 0.3843eacM 0.0854 -0.0963 0.352 80eap 0.0046 -0.0129 0.0124eae 3.4622 -8.6131 3.6529eal 0.1879 -0.1786 0.6776
TABLA III: Termopar tipo K
σ v.inf/% v.sup/% tp/mineacP 0.0239 -0.0498 0.086eacM 0.0223 -0.0468 0.0803 45eap 0.0009 -0.0033 0.0031eae 1.3713 -3.1402 1.4883eal 0.1443 -0.3434 0.1536
TABLA IV: Termopar tipo E
950 oC.• Un termopar tipo K, en el rango de 250 oC a
650 oC .• Un termopar tipo J, en el rango de 760 oC a
1160 oC .Se utilizaron como referencia las tablas especifi-cadas en [2] y [4], ratificadas por el ITS 90.Sobre estos tres sensores se efectuo el mismo tra-bajo llevado a cabo en el Pt100, con los mismosreportes y en los rangos aquı especificados. Losresultados son particularmente similares en terminosde desviaciones estandar, tiempos de proceso yniveles de error. La evaluacion de estos ıtem semuestran en las tablas III, IV y V.
σ v.inf/% v.sup/% tp/mineacP 0.0286 -0.0469 0.0723eacM 0.0280 -0.0345 0.0906 75eap 0.0265 -0.0883 0.0429eae 1.0414 -2.3266 1.1637eal 0.2892 -0.6852 0.3346
TABLA V: Termopar tipo J
IV. CONCLUSIONES
• Se evidencia la aplicabilidad de modelos cir-culares a sensores que, por su tipo de compor-tamiento, presenten funciones de transferenciao curvas caracterısticas con concavidades de unsolo sentido.
• Haciendo la salvedad de los resultadosobtenidos con el ajuste polinomial, en generalse observa que el error aportado por el ajustecircular es bajo y se encuentra dentro de lastolerancias permitidas por las respectivas nor-mas.
• El modelo matematico que representa lafuncion circular y su respectiva funcion inversa,es simetrico y esta constituido por los mismosparametros. En este aspecto el modelo circularsupera a los demas modelos, dado que en estosultimos la obtencion de la funcion inversa, par-tiendo de cualquier funcion, se hace laboriosa yda como resultado unos parametros diferentesy en algunos casos, otro modelo de funcion.
• La implementacion del modelo circular implicaun algoritmo que calcule tres parametros; estocomparado con un modelo polinomial de se-gundo grado, serıa equivalente en trabajo, masno equivalente en resultados puesto que, enalgunos ajustes, los polinomios competitivoscon el ajuste circular, en terminos de errores,estan por arriba del segundo grado.
• El ajuste circular por promedios, sin ser unproceso optimizado matematicamente, cumplecon los objetivos de este trabajo y mantieneuna desviacion estandar muy cercana o iguala la del ajuste circular de mınimos cuadradosempleado y lo supera en un aspecto tan impor-tante como lo es el tiempo de proceso.
REFERENCIAS
[1] U.M. Landau, Estimation of a circular arc center and its radius,Computer Vision, Graphics and Image Processing 38 (1987), pp.317-326.
[2] Bureau international des poids et mesures, Tables for Standard-ized Thermocuples. Annual Book of ASTM Standard, ASTM,Philadelphia 1987.
[3] N.I. Chernov and G.A. Ososkov, Effective algorithms for circlefitting, Comp. Phys. Comm. 33, 1984, pp. 329-333.
[4] National Institute of Standards and Technology, Temperature-Electromotive Force Reference Functions and Tablesfor the Letter-Designated Thermocouple Types Basedon the ITS-90, en Monograph 175; 1993. 630 p,[en linea], consultado en marzo 2008. Disponible en<http://srdata.nist.gov/its90/authors/authors.html >.
[5] S.M. Thomas and Y.T. Chan, A simple approach for the esti-mation of circular arc center and its radius, Computer Vision,Graphics and Image Processing 45, 1989, pp. 362-370.
[6] Z. Wu, L. Wu, and A. Wu , The Robust Algorithms for Findingthe Center of an Arc, Computer Vision and Image Understand-ing,(1995),Vol 62 pp. 269-278.
[7] Asch,, Georges (et collaborateurs), Les Capteurs en Instrumen-tation industrielle, ed. Dunod, Paris,1999.
[8] N. Chernov and C. Lesort, Least squares fitting of circles andlines, Journal of Mathematical Imaging and Vision, 23, 2005,pp. 239-251.
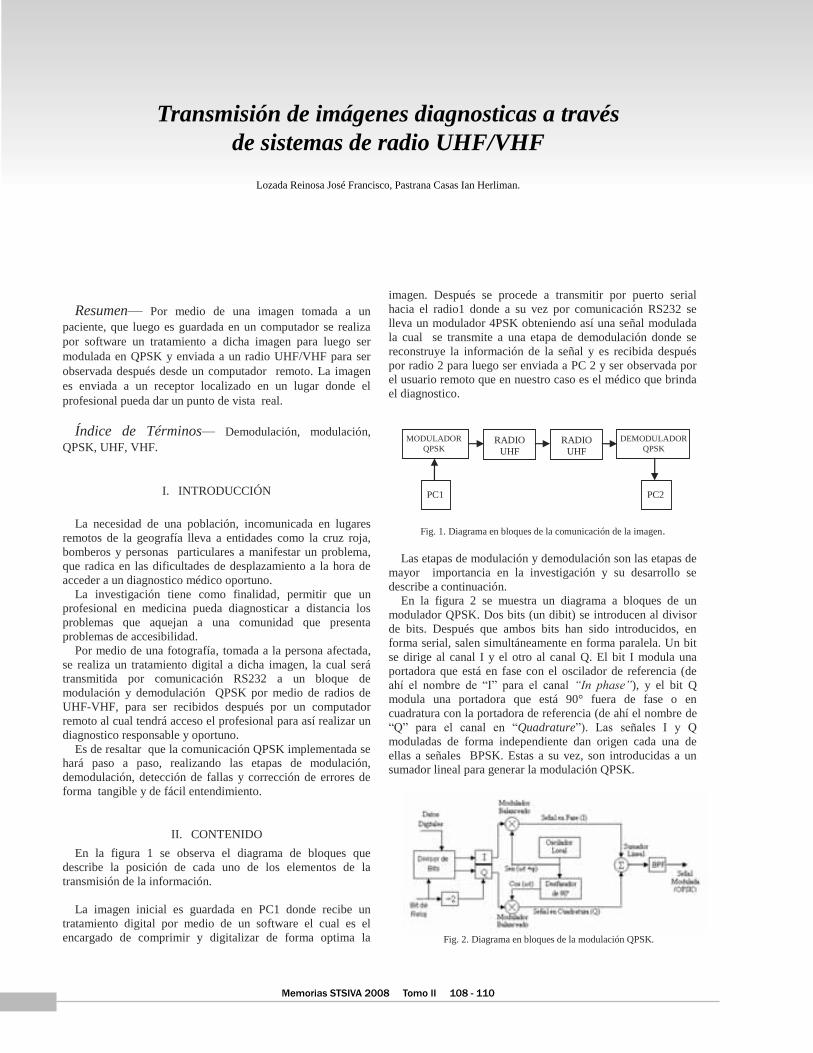
Memorias STSIVA 2008 Tomo II 108 - 110
Transmisión de imágenes diagnosticas a través de sistemas de radio UHF/VHF
Lozada Reinosa José Francisco, Pastrana Casas Ian Herliman.
Resumen— Por medio de una imagen tomada a un
paciente, que luego es guardada en un computador se realiza por software un tratamiento a dicha imagen para luego ser modulada en QPSK y enviada a un radio UHF/VHF para ser observada después desde un computador remoto. La imagen es enviada a un receptor localizado en un lugar donde el profesional pueda dar un punto de vista real.
Índice de Términos— Demodulación, modulación, QPSK, UHF, VHF.
I. INTRODUCCIÓN
La necesidad de una población, incomunicada en lugares remotos de la geografía lleva a entidades como la cruz roja, bomberos y personas particulares a manifestar un problema,que radica en las dificultades de desplazamiento a la hora de acceder a un diagnostico médico oportuno.
La investigación tiene como finalidad, permitir que un profesional en medicina pueda diagnosticar a distancia los problemas que aquejan a una comunidad que presenta problemas de accesibilidad.
Por medio de una fotografía, tomada a la persona afectada,se realiza un tratamiento digital a dicha imagen, la cual será transmitida por comunicación RS232 a un bloque de modulación y demodulación QPSK por medio de radios de UHF-VHF, para ser recibidos después por un computador remoto al cual tendrá acceso el profesional para así realizar un diagnostico responsable y oportuno.
Es de resaltar que la comunicación QPSK implementada se hará paso a paso, realizando las etapas de modulación, demodulación, detección de fallas y corrección de errores de forma tangible y de fácil entendimiento.
II. CONTENIDOEn la figura 1 se observa el diagrama de bloques que
describe la posición de cada uno de los elementos de la transmisión de la información.
La imagen inicial es guardada en PC1 donde recibe un tratamiento digital por medio de un software el cual es el encargado de comprimir y digitalizar de forma optima la
imagen. Después se procede a transmitir por puerto serial hacia el radio1 donde a su vez por comunicación RS232 se lleva un modulador 4PSK obteniendo así una señal modulada la cual se transmite a una etapa de demodulación donde se reconstruye la información de la señal y es recibida después por radio 2 para luego ser enviada a PC 2 y ser observada por el usuario remoto que en nuestro caso es el médico que brinda el diagnostico.
Fig. 1. Diagrama en bloques de la comunicación de la imagen.
Las etapas de modulación y demodulación son las etapas de mayor importancia en la investigación y su desarrollo se describe a continuación.
En la figura 2 se muestra un diagrama a bloques de un modulador QPSK. Dos bits (un dibit) se introducen al divisor de bits. Después que ambos bits han sido introducidos, en forma serial, salen simultáneamente en forma paralela. Un bit se dirige al canal I y el otro al canal Q. El bit I modula una portadora que está en fase con el oscilador de referencia (de ahí el nombre de “I” para el canal “In phase”), y el bit Q modula una portadora que está 90° fuera de fase o en cuadratura con la portadora de referencia (de ahí el nombre de “Q” para el canal en “Quadrature”). Las señales I y Q moduladas de forma independiente dan origen cada una de ellas a señales BPSK. Estas a su vez, son introducidas a un sumador lineal para generar la modulación QPSK.
Fig. 2. Diagrama en bloques de la modulación QPSK.
TRANSMISIÓN DE IMÁGENES DIAGNOSTICAS A TRAVÉS DE SISTEMAS
DE RADIO UHF/VHF Lozada Reinosa José Francisco, Pastrana Casas Ian Herliman.
PC1
MODULADORQPSK
RADIOUHF
RADIOUHF
PC2
DEMODULADORQPSK

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 109
De acuerdo a la figura 2, como la salida de los canales digitales I y Q es binaria, esta se puede representar como 1 V para el 1 lógico y -1 V para el cero lógico. Estos niveles lógicos hacen posible que la portadora tome dos fases a la salida de cada uno de los moduladores balanceados (o moduladores BPSK), debido a que la función de este modulador es la de multiplicar las dos señales presentes en sus entradas. Lo anterior nos lleva a la ecuación 1 que representalas posibles salidas del modulador balanceado I:
𝐼 = � 𝑠𝑒𝑛(𝜔𝑐𝑡), 𝐼 = 1𝑉 −𝑠𝑒𝑛(𝜔𝑐𝑡), 𝐼 = −1𝑉
�(1)
En la ecuación 2 se observan las posibles salidas del modulador balanceado Q:
𝑄 = � 𝑐𝑜𝑠(𝜔𝑐𝑡), 𝑄 = 1𝑉 −𝑐𝑜𝑠(𝜔𝑐𝑡), 𝑄 = −1𝑉
�(2)
En la tabla 1 se muestra la acción de el sumador lineal que combina las dos señales en cuadratura, I y Q, obteniendo cuatro fasores resultantes.
TABLA ICOMBINACION DE EXPRESIONES EN CUADRETURA.
Q I COMBINACION DE EXPRESIONES EN CUADRETURA.
1 1 coswct + senwct1 0 coswct - senwct0 1 -coswct + senwct0 0 -coswct - senwct
La figura 3 muestra el diagrama fasorial que representa la modulación, la figura 4 representa el diagrama de constelaciones y en la tabla 2 se observa el comportamiento lógico del modulador QPSK.
TABLA 2COMPORTAMIENTO LOGICO DEL MODULADOR QPSK.
Fig. 3, Diagrama fasorial modulador QPSK.
Fig. 4. Diagrama de constelaciones QPSK
De las figuras 3 y 4 se desprende que por cada fase de la portadora modulada se transmiten 2 bits de forma simultánea, razón por la cual la eficiencia del esquema de modulación QPSK es dos veces el esquema binario, o BPSK. Es decir la rapidez de cambio en la salida es igual a la mitad de la rapidez de bits en la entrada del modulador. Si se denota la velocidad de bit de entrada al modulador QPSK como fb, la rapidez en cualquiera de los dos canales I o Q es fb/2, por lo tanto la frecuencia máxima, fm, presente en la entrada de los moduladores balanceados es igual a la mitad de la rapidez con que ingresan los datos a estos; esto es fm = fb /2. Como la salida de los moduladores balanceados I y Q requiere un ancho de banda bilateral de Nyquist, FN, mínimo igual a la mitad de la frecuencia de bits de entrada, se tiene que FN = 2 * fb /4 con lo cual FN = fb/2. De este modo con la QPSK se obtiene una compresión de ancho de banda en relación con la BPSK.
Como se mencionó anteriormente los moduladores balanceados implementan la función de multiplicación. Se puede expresar la salida de los moduladores balanceados a través de la ecuación 4.
𝑆𝑎𝑙𝑖𝑑𝑎 = 𝑠𝑒𝑛(𝜔𝑎𝑡) ∗ 𝑠𝑒𝑛(𝜔𝑐𝑡) (4)
Así en la ecuación 5 se sintetiza la salida de los moduladores balanceados.
𝑆𝑎𝑙𝑖𝑑𝑎 = 12 cos2𝜋 �𝑓𝑐 −
𝑓𝑏4 � 𝑡 −
12 𝑐𝑜𝑠2𝜋 �𝑓𝑐 + 𝑓𝑏
4 � 𝑡 (5)
De esta manera la modulación QPSK consta de dos bandas laterales, el espectro de frecuencias de salida va desdefc+ fb/4 hasta fc- fb/4 y el ancho de banda mínimo FN se muestra en la ecuación 6.
Entrada Binaria Fase de Salida
QPSKQ I
0 0
0 1
1 0
1 1
-135°
-45°
+135°
+45°
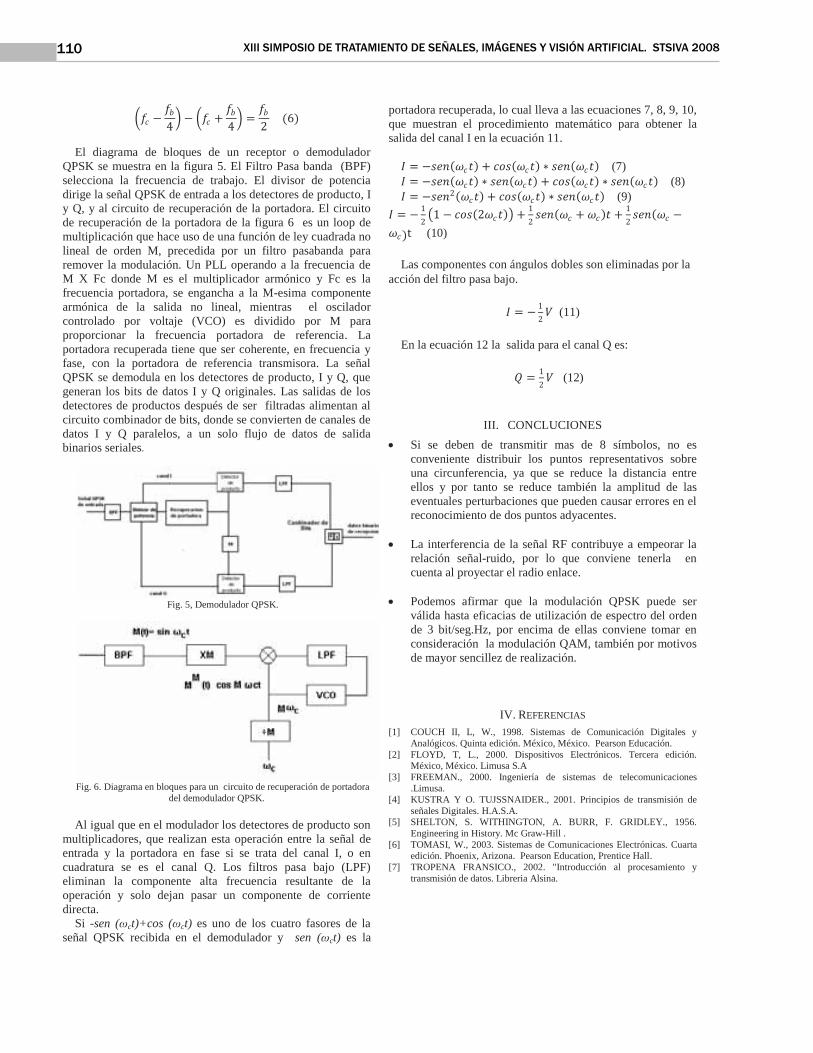
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 110
�𝑓𝑐 −𝑓𝑏4 � − �𝑓𝑐 + 𝑓𝑏
4 � = 𝑓𝑏2 (6)
El diagrama de bloques de un receptor o demodulador QPSK se muestra en la figura 5. El Filtro Pasa banda (BPF) selecciona la frecuencia de trabajo. El divisor de potencia dirige la señal QPSK de entrada a los detectores de producto, I y Q, y al circuito de recuperación de la portadora. El circuito de recuperación de la portadora de la figura 6 es un loop de multiplicación que hace uso de una función de ley cuadrada no lineal de orden M, precedida por un filtro pasabanda para remover la modulación. Un PLL operando a la frecuencia de M X Fc donde M es el multiplicador armónico y Fc es la frecuencia portadora, se engancha a la M-esima componente armónica de la salida no lineal, mientras el oscilador controlado por voltaje (VCO) es dividido por M para proporcionar la frecuencia portadora de referencia. La portadora recuperada tiene que ser coherente, en frecuencia y fase, con la portadora de referencia transmisora. La señal QPSK se demodula en los detectores de producto, I y Q, que generan los bits de datos I y Q originales. Las salidas de los detectores de productos después de ser filtradas alimentan al circuito combinador de bits, donde se convierten de canales de datos I y Q paralelos, a un solo flujo de datos de salida binarios seriales.
Fig. 5, Demodulador QPSK.
Fig. 6. Diagrama en bloques para un circuito de recuperación de portadora del demodulador QPSK.
Al igual que en el modulador los detectores de producto son multiplicadores, que realizan esta operación entre la señal de entrada y la portadora en fase si se trata del canal I, o en cuadratura se es el canal Q. Los filtros pasa bajo (LPF) eliminan la componente alta frecuencia resultante de la operación y solo dejan pasar un componente de corriente directa.
Si -sen (ωct)+cos (ωct) es uno de los cuatro fasores de la señal QPSK recibida en el demodulador y sen (ωct) es la
portadora recuperada, lo cual lleva a las ecuaciones 7, 8, 9, 10, que muestran el procedimiento matemático para obtener la salida del canal I en la ecuación 11.
𝐼 = −𝑠𝑒𝑛(𝜔𝑐𝑡) + 𝑐𝑜𝑠(𝜔𝑐𝑡) ∗ 𝑠𝑒𝑛(𝜔𝑐𝑡) (7)𝐼 = −𝑠𝑒𝑛(𝜔𝑐𝑡) ∗ 𝑠𝑒𝑛(𝜔𝑐𝑡) + 𝑐𝑜𝑠(𝜔𝑐𝑡) ∗ 𝑠𝑒𝑛(𝜔𝑐𝑡) (8)𝐼 = −𝑠𝑒𝑛2(𝜔𝑐𝑡) + 𝑐𝑜𝑠(𝜔𝑐𝑡) ∗ 𝑠𝑒𝑛(𝜔𝑐𝑡) (9)
𝐼 = − 12 �1 − 𝑐𝑜𝑠(2𝜔𝑐𝑡)� + 1
2 𝑠𝑒𝑛(𝜔𝑐 + 𝜔𝑐)𝑡 + 12 𝑠𝑒𝑛(𝜔𝑐 −
𝜔𝑐)t (10)
Las componentes con ángulos dobles son eliminadas por la acción del filtro pasa bajo.
𝐼 = − 12 𝑉 (11)
En la ecuación 12 la salida para el canal Q es:
𝑄 = 12 𝑉 (12)
III. CONCLUCIONES Si se deben de transmitir mas de 8 símbolos, no es
conveniente distribuir los puntos representativos sobre una circunferencia, ya que se reduce la distancia entre ellos y por tanto se reduce también la amplitud de las eventuales perturbaciones que pueden causar errores en el reconocimiento de dos puntos adyacentes.
La interferencia de la señal RF contribuye a empeorar la relación señal-ruido, por lo que conviene tenerla en cuenta al proyectar el radio enlace.
Podemos afirmar que la modulación QPSK puede ser válida hasta eficacias de utilización de espectro del ordende 3 bit/seg.Hz, por encima de ellas conviene tomar en consideración la modulación QAM, también por motivos de mayor sencillez de realización.
IV. REFERENCIAS
[1] COUCH II, L, W., 1998. Sistemas de Comunicación Digitales y Analógicos. Quinta edición. México, México. Pearson Educación.
[2] FLOYD, T, L., 2000. Dispositivos Electrónicos. Tercera edición. México, México. Limusa S.A
[3] FREEMAN., 2000. Ingeniería de sistemas de telecomunicaciones .Limusa.
[4] KUSTRA Y O. TUJSSNAIDER., 2001. Principios de transmisión de señales Digitales. H.A.S.A.
[5] SHELTON, S. WITHINGTON, A. BURR, F. GRIDLEY., 1956. Engineering in History. Mc Graw-Hill .
[6] TOMASI, W., 2003. Sistemas de Comunicaciones Electrónicas. Cuarta edición. Phoenix, Arizona. Pearson Education, Prentice Hall.
[7] TROPENA FRANSICO., 2002. "Introducción al procesamiento y transmisión de datos. Libreria Alsina.

Memorias STSIVA 2008 Tomo II 111 - 114
Sistema de Telediagnóstico Médico L.A Aristizábal Q, G.A. Morante, C.A. Cárdenas. Universidad Autónoma de Manizales
Resumen— Se presenta las etapas desarrolladas de un
sistema de telediagnóstico médico que permite, mediante dispositivos móviles, transmitir imágenes diagnósticas médicas y sonido hacia un servidor. El sistema está constituido por tres módulos: Un módulo que gestiona el intercambio de información textual y gráfica entre especialistas, implementado con un gestor de contenidos; un segundo módulo que permite la captura ytransmisión de imágenes y sonidos desde los dispositivos móviles al servidor y un tercer módulo que comprime la información sonora, como paso previo a la transmisión. El proceso de captura de señales con el dispositivo móvil, se realiza haciendo uso de la infraestructura de digitalización que el dispositivo posee como son: su cámara de video y su conversor A/D para sonido; se considera las limitaciones del dispositivo móvil para ajustar los parámetros de captura que permitan optimizar el espacio de almacenamiento y tiempo de transmisión. Los sonidos digitalizados se comprimen aplicando un método que inicialmente utiliza la transformada wavelet, la que es implementada en el dispositivo previamente al proceso de transmisión.
Indice de términos. Imágenes diagnósticas, audio, Transmisión, compresión, wavelets, dispositivos móviles.
I. INTRODUCCIÓN
L Objetivo del sistema es proporcionar una infraestructura de comunicación entre los médicos y/o auxiliares que
prestan sus servicios en la zona rural con los médicos especialistas, usualmente ubicados en la zona urbana de las ciudades capitales de nuestro país. Para este fin se ha aprovechado la red de telefonía celular que en la actualidad cubre una gran parte del territorio nacional. Se ha desarrollado una aplicación de software que se ejecuta en los celulares para permitir al médico que se encuentra en la zona rural enviar fotografías de imágenes diagnósticas y señales de audio como material de soporte para los intercambios técnicos con los especialistas; así mismo se ha implementado la aplicación que permite a ambas partes intercambiar la información, e interactuar bien sea en forma textual o visualmente. Dado que la información capturada mediante la cámara de video del celular es codificada utilizando el formato jpg (Joint photographic Expert Group), el que presenta una buena relación de compresión, ésta sólo se aplica a la señal de audio que se comprime utilizando un método que en la primera fase de caracterización usa la transformada wavelet; en la fase de codificación utiliza huffman, previo a un procesode cuantización.
Las pruebas realizadas hasta el momento se han llevado a cabo en un ambiente académico, estan orientadas a que los estudiantes practicantes en regiones alejadas de las ciudades capitales compartan sus dudas con sus tutores en relación adiagnósticos; soportando sus decisiones con la transmisión deinformación capturada con su celular. El módulo decompresión se ha evaluado con la medida de confiabilidad,PRD (mean square difference) y CR (compression rate).
II. DESCRIPCIÓN DE MÓDULOS IMPLEMENTADOS
A. Compresión del sonido.El objetivo básico de una compresión no sólo se centra en la
reducción en el número de muestras que conforman una señal, si no también en el número de bits que codifican cada muestra.Cuando se utiliza compresión con perdida, se presenta una distorsión, D, lo que hace necesario una función de distorsión f(D), que mida la cantidad de distorsión de la señal comprimida con respecto a la original; una posible función f(D) puede ser especificada por:
%100
1
2
1
2_
n
ii
n
iii
x
xxPRD
(1)
Donde : ix es la señal original, ix_
la muestra comprimida yn el total de las muestras.Otra métrica empleada es la relación de compresión alcanzada:
_
)(#
)(#
xbits
xbitsCR (2)
El desarrollo de este módulo de compresión involucra la implementación de tres etapas: Caracterización, cuantización y codificación.
La caracterización de la señal de audio se realiza aplicandola transformada wavelet con base daubuchies(6), la que busca extraer las características de la señal, de tal manera que se pueda reducir la longitud inicial de la señal, eliminando información redundante. La reducción de coeficientes se logra con la transformada discreta restringiendo los cambios de escala y translación a potencias de 2. Su implementación consiste en la aplicación de un banco de filtros uno paso bajo y otro paso alto. La Figura 1.a. ilustra el proceso; en este caso laseñal de audio es la ja a la que se le aplica el
Sistema de Telediagnóstico MédicoL.A Aristizábal Q, G.A. Morante, C.A. Cárdenas. Universidad Autónoma de Manizales
E

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 112
Figure 1. Aplicación de banco de filtros compuesto de un filtro paso bajo y paso alto. Tomada de: A wavelet Tour of signal processing. Stéphane Mallat. Pag. 257
filtro paso bajo con respuesta de frecuencia, h, y el filtro paso alto con respuesta de frecuencia g; la aplicación del filtro, involucra una convolución, que genera un número mayor de muestras con respecto a la señal original, se hace necesario aplicar un submuestreo, que en la Figura 1. Se denota como
2 , permitiendo reducir el número de muestras a la mitad, por cada aplicación de los filtros.
La trasformada es aplicada reiteradamente a la señal, en nuestro problema específico, para una señal de audio de 16384 muestras (1.024 segundos de registro), aplicar el banco de filtros reiteradamente 4 veces permite obtener una señal de 2048 muestras; lo que la hace apta, en primera instancia,para ser aplicada en procesos de compresión.
La etapa de caracterización es seguida por una etapa de cuantización, de la que se obtiene un número limitado de valores. Cada entrada al cuantizador es mapeada al centroide de un intervalo. Como resultado de este proceso se obtiene una señal que tendrá la suficiente redundancia para que un proceso de codificación probabilístico obtenga el mejor beneficio, alcodificar estos símbolos repetidos, con el menor número de bits. Dado que el cuantizador implementado es uniforme, cada intervalo es del mismo tamaño, el error máximo es igual a la mitad del tamaño de intervalo. La etapa final es la codificación que reduce el número de bits necesarios para representar los valores de la señal cuantizada, se utiliza el método de Huffman, que inicia con una distribución probabilística de los datos para asignar el código más pequeño al símbolo con una mayor probabilidad de ocurrencia en un mensaje, y el código con mayor número de bits al valor de laseñal con menor ocurrencia.
El proceso de descompresión lo comprenden dos etapas: la decodificación, y la aplicación del banco de filtros con los coeficientes wavelets, pero esta vez realizando el proceso de síntesis. (Figura 1. Gráfica inferior)
B. Captura de imagen y sonidoLa digitalización del audio en el celular se realiza con una
frecuencia de muestreo de 16 Khz, codificación PCM a 16 bits y calidad mono. La captura, almacenamiento y reproducción del sonido requieren de la instanciación de variables cuyos
tipos son definidos en la API Multimedia en J2ME (Java 2 Micro Edition - MIDP 2.0), específicamente se hace uso de lasinterfaces Control, Player y la clase Manager que provee un punto de acceso a los recursos del sistema para el procesamiento multimedia. La señal de sonido capturada esalmacenada como un arreglo de bytes en la memoria RAM del dispositivo móvil, de dónde se toma para continuar con el proceso de compresión. Las fotografías tomadas a las imágenes diagnósticas específicamente de radiografías, son almacenadas en formato (JPG) y transmitidas excluyendo el proceso de compresión. Antes de transmitir el flujo de bytes que almacenan la imagen y/o sonido al servidor, es necesario realizar una codificación. Para ambos medios se aplicó BASE64, que permite la codificación de un arreglo de bytes en una cadena de caracteres de base 64.
C. Plataforma para la comunicación textual y/o visual.Se estructura una aplicación web de tres capas, utilizando un
gestor de contenidos de código abierto. Se ha implementadoun conjunto de opciones para la publicación en línea y la interacción mediante foros y chats de los usuarios médicos, al igual que se ha adicionado el código que permite la recepción de imágenes y sonido como parte de la información suministrada como soporte para un diagnóstico o tema de discusión.
III. RESULTADOS EXPERIMENTALES
A. Módulo de compresión.Se han llevado a cabo tres tipos de mediciones: PRD (mean
square difference. Ecuación (1)), la CR (compression rate.Ecuación (2)) lograda y la prueba de inteligibilidad sonora. La tabla 1. Muestra los resultados obtenidos para sonidos digitalizados a una frecuencia de muestreo de 16Khz, 16 bits por muestra, 1.024 seg. de registro. Todos ellos ocupando un espacio de almacenamiento inicial de 64.04KB. La base wavelet utilizada: Db(6).
TABLA 1RESULTADOS DE METRICAS DE COMPRESIÓN
Tamaño inicial(bytes)
Compresión Rate (CR)
Root mean square difference(% PRD)
1198 53.45 19.044766 83.60 40.50
4888 13.17 40.87
2420 26.46 21.731156 55.4 19.12
La figura 2, ilustra como la forma de onda se conservaincluso con un factor de compresión tan alto como el logrado.
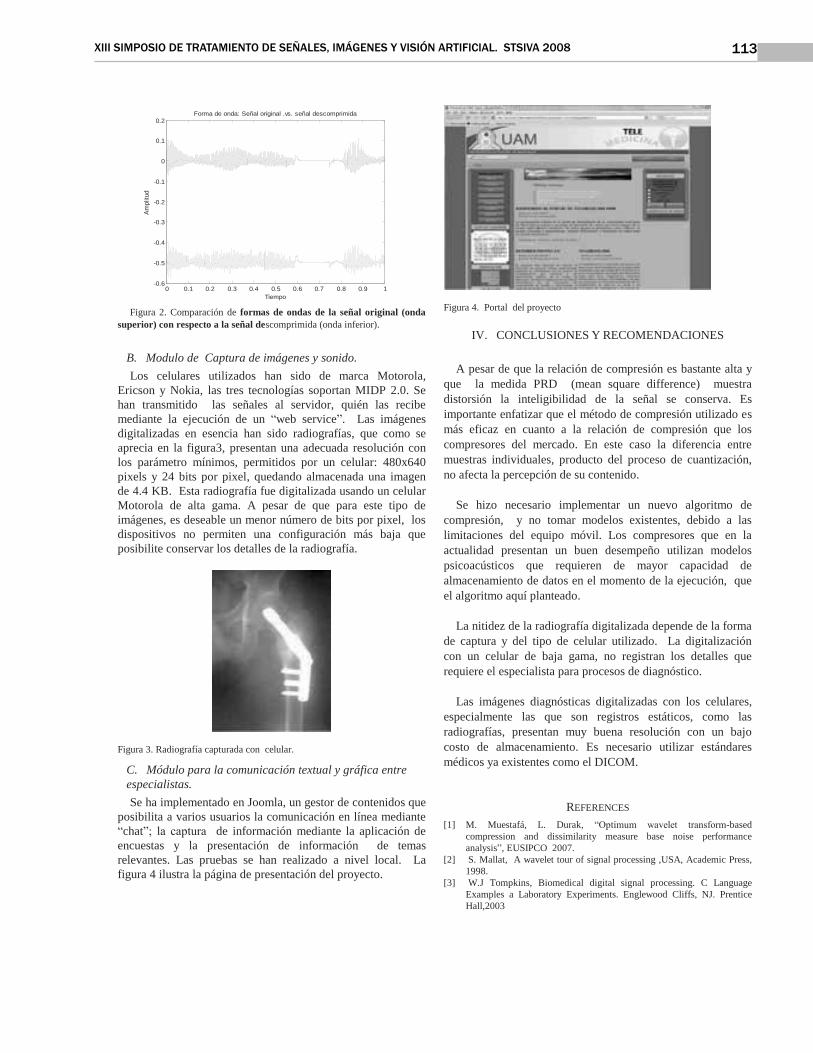
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 113
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2Forma de onda: Señal original .vs. señal descomprimida
Tiempo
Am
plitu
d
Figura 2. Comparación de formas de ondas de la señal original (onda superior) con respecto a la señal descomprimida (onda inferior).
B. Modulo de Captura de imágenes y sonido.Los celulares utilizados han sido de marca Motorola,
Ericson y Nokia, las tres tecnologías soportan MIDP 2.0. Se han transmitido las señales al servidor, quién las recibe mediante la ejecución de un “web service”. Las imágenes digitalizadas en esencia han sido radiografías, que como se aprecia en la figura3, presentan una adecuada resolución con los parámetro mínimos, permitidos por un celular: 480x640 pixels y 24 bits por pixel, quedando almacenada una imagen de 4.4 KB. Esta radiografía fue digitalizada usando un celularMotorola de alta gama. A pesar de que para este tipo de imágenes, es deseable un menor número de bits por pixel, los dispositivos no permiten una configuración más baja que posibilite conservar los detalles de la radiografía.
Figura 3. Radiografía capturada con celular.
C. Módulo para la comunicación textual y gráfica entre especialistas.Se ha implementado en Joomla, un gestor de contenidos que
posibilita a varios usuarios la comunicación en línea mediante“chat”; la captura de información mediante la aplicación de encuestas y la presentación de información de temas relevantes. Las pruebas se han realizado a nivel local. Lafigura 4 ilustra la página de presentación del proyecto.
Figura 4. Portal del proyecto
IV. CONCLUSIONES Y RECOMENDACIONES
A pesar de que la relación de compresión es bastante alta yque la medida PRD (mean square difference) muestra distorsión la inteligibilidad de la señal se conserva. Es importante enfatizar que el método de compresión utilizado esmás eficaz en cuanto a la relación de compresión que los compresores del mercado. En este caso la diferencia entre muestras individuales, producto del proceso de cuantización, no afecta la percepción de su contenido.
Se hizo necesario implementar un nuevo algoritmo de compresión, y no tomar modelos existentes, debido a las limitaciones del equipo móvil. Los compresores que en la actualidad presentan un buen desempeño utilizan modelos psicoacústicos que requieren de mayor capacidad de almacenamiento de datos en el momento de la ejecución, que el algoritmo aquí planteado.
La nitidez de la radiografía digitalizada depende de la forma de captura y del tipo de celular utilizado. La digitalización con un celular de baja gama, no registran los detalles querequiere el especialista para procesos de diagnóstico.
Las imágenes diagnósticas digitalizadas con los celulares, especialmente las que son registros estáticos, como las radiografías, presentan muy buena resolución con un bajo costo de almacenamiento. Es necesario utilizar estándares médicos ya existentes como el DICOM.
REFERENCES
[1] M. Muestafá, L. Durak, “Optimum wavelet transform-based compression and dissimilarity measure base noise performance analysis”, EUSIPCO 2007.
[2] S. Mallat, A wavelet tour of signal processing ,USA, Academic Press, 1998.
[3] W.J Tompkins, Biomedical digital signal processing. C Language Examples a Laboratory Experiments. Englewood Cliffs, NJ. Prentice Hall,2003

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 114
[4] S.H Robert, Optimal Zonal Wavelet-Based ECG Data Compression for a Mobile Telecardiology System. IEEE Transactions on information technology in biomedicine, vol. 4, No. 3, Septiembre 2000.
[5] S.H Robert, “ECG Data Compression Using wavelets and Higher Order Statistics Methods System”, IEEE Transactions on information technology in biomedicine, vol..5, No. 2, Septiembre 2001.
[6] Kanwaldip, “Vector Quantization of ECG Wavelet Coefficients”, IEEEsignal processing letter, Vol. XX, 1999.
[7] K. Knizhnik. J2ME - Applications for mobile phones.(citado 28 diciembre 2007), Disponible en internet: http://www.garret.ru/~knizhnik/En_Timer.htm#Metronome
[8] L. Craig, Digital Audio with Java, Prentice Hall, 2000, ISBN: 0-13-087676-3.
[9] Sun Developer Network (SDN) ,(citado 24 mayo 2008), Disponible en internet: http://developers.sun.com/mobility/articles/fsm/
[10] A. F. Rodriguez, “Captura inalámbrica y caracterización de señales de voz”, Proyecto de grado 2007.

Memorias STSIVA 2008 Tomo II 115 - 119
Prototipo de contador electrónico trifásico de energía eléctrica para control y monitorización remota utilizando DSPs
Gabriel Eduardo González Sua, Gabriel Ordóñez Plata, Senior Member IEEE, Jaime Guillermo Barrero Pérez, Cesar Antonio Duarte Gualdrón
Prototipo de Contador Electrónico Trifásico de Energía Eléctrica para Control y Monitorización
Remota Utilizando DSPs Gabriel Eduardo González Sua, Gabriel Ordóñez Plata, Senior Member IEEE, Jaime Guillermo
Barrero Pérez, Cesar Antonio Duarte Gualdrón
Resumen—En este artículo se plantea la elaboración del prototipo de un contador trifásico electrónico digital de energía eléctrica utilizando procesadores digitales de señales (DSPs), el cual obtiene las cantidades de potencia y energía eléctrica a partir de las señales de tensión y corriente, que son adquiridas mediante conversores analógicos digitales; para luego ser procesadas digitalmente. Estos cálculos se realizan teniendo en cuenta las recomendaciones del estándar IEEE 1459-2000, en el cual se formulan algunas técnicas para la obtención de parámetros metrológicos relacionados con potencia y energía eléctrica.
Con el equipo desarrollado, se estima la energía eléctrica teniendo en cuenta los diversos escenarios que se pueden presentar en los sistemas de distribución de energía eléctrica actuales; como es la presencia de armónicos y cargas no balanceadas, con el propósito de proponer una solución a los problemas existentes en la medición de potencia y energía eléctrica.
Palabras Claves— IEEE-1459, lectura automática de medidores, medición de potencia y energía eléctrica, procesadores de señales digitales.
I. INTRODUCCIÓN
A correcta medición del consumo de energía eléctrica y en consecuencia su adecuada facturación, es una necesidad fundamental tanto para las compañías
distribuidoras, como para sus clientes; pero las nuevas definiciones de potencia que han surgido en los últimos años a raíz de cambios importantes en los sistemas eléctricos, debido a la aparición de componentes armónicas y al no balance de las cargas, han redefinido la metrología utilizada en la medición de potencia y energía eléctrica, ya que los métodos empleados en los medidores tradicionales de energía eléctrica para el cálculo del factor de potencia y su consecuente equivalencia con la energía reactiva consumida, en algunos casos no son apropiados.
Actualmente en nuestro país gran cantidad de medidores de energía eléctrica aún son electromecánicos o utilizan enfoques para la medición de potencias y energía eléctrica que emulan el funcionamiento de los dispositivos electromagnéticos.
G. Ordóñez Plata, C. A. Duarte Gualdrón y G. E. González, son miembros del Grupo de Investigación en Sistemas de Energía Eléctrica GISEL, de la Universidad Industrial de Santander UIS, Bucaramanga, Colombia (e-mail: [email protected]; [email protected]; [email protected]).
J. G. Barrero, es miembros del Grupo de Investigación en Control, Electrónica, Modelado y Simulación CEMOS, de la Universidad Industrial de Santander UIS, Bucaramanga, Colombia (e-mail: [email protected]).
Este tipo de instrumentos de medición se diseñan, calibran y prueban en la mayoría de los casos para que sus especificaciones se cumplan en entornos donde se consideran sistemas trifásicos sin componentes armónicas, y balanceados; lo cual puede generar incertidumbres superiores a los márgenes establecidos en el equipo cuando estos se instalan en sistemas donde las señales de tensión y corriente no son sinusoidales [1]; condiciones que actualmente suelen ser la regla y no la excepción. Estos cambios importantes en las condiciones de los sistemas eléctricos, se deben a la aparición de componentes armónicas, debido al incremento de las cargas no lineales y/o variantes con el tiempo; y al no balance de las cargas en sistemas trifásicos. Debido a esta problemática, es necesario plantear un enfoque que esté de acuerdo con las nuevas condiciones de los sistemas eléctricos.
II. MEDICIÓN DIGITAL DE ENERGÍA ELÉCTRICA
Los medidores electromecánicos de energía eléctrica han sido desarrollados y utilizados durante muchos años y todos los fabricantes utilizan enfoques muy similares; sin embargo, no puede decirse lo mismo de los medidores digitales [2].
La medición de la energía activa es realizada de la misma forma por todos los equipos digitales y básicamente se hace de forma similar que con los medidores electromecánicos; es decir, acumulando el producto de las señales de tensión y corriente. Pero aún no hay uniformidad en los criterios de estimación de las potencias aparente y reactiva, y sus respectivos acumulados, como se describe en [3].
A. Etapas del medidor
Sin importar su topología, todos los enfoques de medidores de energía requieren cuantificar la potencia, acumularla y almacenar, mostrar y/o transmitir los resultados. Esto implica que se requiere sensar la tensión y la corriente de cada fase del sistema eléctrico, entonces, estos valores deben ser procesados y los datos obtenidos deben ser almacenados y posteriormente mostrados o transmitidos a algún sistema central. De allí que un medidor digital de energía se puede dividir en tres etapas: 1) Sensado.
Esta primera etapa es la encargada de adquirir los datos del sistema eléctrico a través del uso de transductores, los cuales son indispensables para obtener las muestras de las señales de corriente y tensión en el diseño y construcción cualquier tipo de medidor. De esta forma se obtienen las señales que luego serán procesadas por la siguiente etapa, y con las cuales se realiza los cálculos para estimar las cantidades de potencia y
L

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 116
energía eléctrica. Antes de realizar el procesado en la unidad digital, todos los
medidores electrónicos digitales de energía deben convertir las señales analógicas de tensión y corriente en datos digitales por medio de un conversor analógico digital (ADC), que deben tener la capacidad de adquirir la información con suficiente rapidez para captar todas las fluctuaciones relevantes de las señales y así cumplir con el criterio de Nyquist [4]. 2) Procesado.
Los medidores digitales utilizan un sistema basado en microprocesador, encargado de realizar las funciones de multiplicación y de registro; y otras adicionales, que hacen a los medidores digitales muy superiores a su contraparte electromecánica.
Una de las opciones más ampliamente utilizadas para esta etapa del medidor es el uso de procesadores de señales digitales (DSP), microprocesadores especializados y diseñados específicamente para procesar señales digitales en tiempo real.
El DSP realiza varias operaciones dentro del medidor, como se pueden apreciar en Fig. 1, él es el encargado de calcular, las diferentes variables de potencia y energía eléctrica, utilizando algún tipo de definición; y mediante el uso de diferentes periféricos disponer de las cantidades obtenidas, para su posterior almacenamiento, visualización, transferencia o para realizar alguna labor de control. 3) Visualización y comunicación de datos.
Esta es la etapa final del proceso de medición, y es la encargada de mostrar los datos ya sea de manera local, a través de un visualizador (display), que puede ser una pantalla de cristal líquido (LCD); o de manera remota, comunicando los datos a un sistema central por medio de algunas de las distintas redes de comunicación presentes en la actualidad, tales como GPRS y ZigBee, entre otras.
III. DEFINICIÓN PARA LA MEDICIÓN DE LAS CANTIDADES DE
POTENCIA ELÉCTRICA.
Dentro de la estructuración del medidor es necesario determinar la definición para el cálculo de las cantidades de potencia y energía eléctrica, que mejor se adecue al equipo; donde es indispensable tener en cuenta que el núcleo del sistema está compuesto por un DSPs de la familia 56F8300 de Freescale, el cual posee una moderada capacidad de cálculo y de memoria
Por ello se realizó una comparación de distintas definiciones de potencia eléctrica, donde se escogieron tres,
partiendo de Budeanu [5] por su importancia como referente histórico, al ser el primero en abordar este problema y dado que en la actualidad todavía es el modelo utilizado por varios medidores digitales de energía eléctrica; Czarnecki [6], como una aproximación desde el punto de vista vectorial; y finalmente el estándar IEEE-1459 [7], como un intento por establecer un estándar para la medición de las cantidades de potencia eléctrica.
Los datos requeridos por estas definiciones se observan en Fig. 2, donde se puede apreciar que todas las definiciones parten de los mismos valores de las señales de tensión y corriente de cada una de las fases, sin embargo, Czarnecki requiere el cálculo de los espectros de estas señales, lo cual conlleva una gran cantidad de cómputo y requerimiento de memoria para el almacenamiento de los datos operados ya que estos son de tipo complejo.
Por otro lado el modelo propuesto por Budeanu, presenta la deficiencias en la forma en que propone la evaluación de la potencia reactiva tratando de sumar las potencias reactivas de cada componente armónica; y considera el sistema trifásico como tres sistemas monofásicos, cuando en realidad la generación, transmisión, distribución y operación de los sistemas trifásicos se hace considerándolo como un sistema único.
De la comparación de las estimaciones de potencia y energía de diferentes algoritmos, se visualiza que los algoritmos propuestos por el estándar IEEE-1459 requiere menos cálculos, comparado con los otros métodos, ya que solo es necesario obtener a partir de las señales de tensión y corriente en el tiempo, los valores eficaces y las componente fundamental de la señal, para el cálculo de los cantidades de potencia y energía; sin requerir el computo de todo el espectro de las señales que representa. Además presenta una independencia de la incertidumbre en la medición de los posibles escenarios que se pueden presentar en sistemas trifásicos, lo que ha sido ampliamente discutido por diferentes investigadores del mundo [10] y [11], analizando sus ventajas, desventajas e impacto económico en la facturación [12]; y los
Fig. 2 Flujo de datos definiciones de potencias y energías eléctricas.Fig. 1 Funciones del DSP dentro del medidor

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 117
algoritmos utilizados no son complejos, lo que permite su comprensión, factor importante para que una medición sea aceptada y utilizada adecuadamente.
Por estas razones se decidió implementar un contador digital de energía eléctrica basado en este estándar.
IV. SISTEMA DISEÑADO
En la actualidad la mayor parte de los medidores digitales de energía eléctrica utilizan algoritmos de estimación de potencia reactiva que se basan en los procesos de medición de esta potencia, utilizados por los medidores de inducción, desaprovechando que una vez se tienen las muestras de tensión y corriente digitalizadas se pueden utilizar algoritmos que tengan en cuenta todos los efectos del sistema de suministro y del tipo de carga [6], aprovechando el potencial de procesamiento digital de señales.
Por ello se han desarrollado prototipos que tienen en cuenta este potencial [13], donde se hace uso del DSP debido fundamentalmente a su gran poder de cómputo, sus múltiples funciones y su relativo bajo costo; además de contar con una programación relativamente sencilla que permite disminuir los tiempos de desarrollo.
Dentro de estos equipos, se presenta una oportunidad de probar la utilidad de esta formulación propuestas por el estándar IEEE-1459 en un sistema real, con el propósito de enriquecer la discusión y pruebas que se vienen realizando de estas definiciones a nivel mundial.
Otro aspecto importante es el avance vertiginoso de las tecnologías de las comunicaciones, que ha permitido la interconectividad de los sistemas, y el sector eléctrico no ha sido ajeno a este fenómeno, en particular, lo referente a la medición de potencia y energía eléctrica. Por ello, dentro del desarrollo del prototipo se diseño un sistema de comunicación que permite la interconexión con un sistema de medición automática AMR. Con lo cual el equipo se puede programar con funciones adicionales que magnifican la utilidad del mismo.
Teniendo en cuenta lo anterior se diseño y se está finalizando la construcción un medidor digital trifásico, el cual se describe a continuación.
A. Hardware del sistema.
En Fig. 3 se muestra el diagrama de bloques que describe los elementos que componen el sistema, los cuales se dividen en dos sección principales, desarrolladas en tarjetas independientes. 1) Adquisición. En esta sección se realiza la etapa de sensado, y es la encargada de adquirir las señales de tensión y corriente del sistema trifásico por medio de los correspondientes transductores, cuya salida es posteriormente acondicionada, y filtrada; con el fin de ajustarse a los niveles de tensión que puedan ser convertidos por el ADC y su vez evitar el fenómeno de solapamiento; y con esto suministra una señal digital a la siguiente etapa, por ello previo a introducir las señales al ADC es necesario aplicar un filtrado, para reducir las exigencias de este filtro, el ADC realiza un sobremuestreo
y posteriormente un filtrado digital con diezmado, todo dentro del chip y sin que esto represente carga computacional alguna para el DSP.
Fig. 3. Diagrama de bloques del sistema diseñado.
Es importante tener en cuenta los efectos introducidos por el uso de conversores con entradas analógicas multiplexadas, que producen un sesgo en la adquisición de las muestras. Este efecto puede hacer que los errores en la estimación de los parámetros que se obtengan a partir de dos señales diferentes como las potencias del sistema sobrepasen los máximos establecidos por la clase del medidor [14]; para evitar este efecto, dentro del prototipo se utilizarán conversores independientes para cada uno de las señales provenientes de los transductores, que permiten adquirir todas las señales de forma simultánea. 2) Procesamiento y control.
En esta sección, que es totalmente digital, es donde se lleva a cabo las dos últimas etapas de la medición, para ello, se procesa la información adquirida por la anterior sección, con el propósito de obtener los parámetros de la potencia eléctrica, y posteriormente mostrarlos, almacenarlos o transmitirlos a un sistema central.
El elemento central de esta sección es un DSP, encargado de controlar todos los demás elementos de la sección y recibir los datos digitalizados provenientes de la sección anterior. Para está aplicación se utiliza los DSP de la familia 56F83XX de Freescale.
El sistema también cuenta con una memoria no volátil, que le permite almacenar periódicamente datos sobre el consumo de energía u otros parámetros de interés, además de permitir almacenar los datos del sistema en caso de que falle el suministro principal de energía eléctrica.
El uso de un reloj de tiempo real (RTC), permite contar con la hora y fecha exacta, para propósitos de facturación o estadísticas de consumo. Este reloj cuenta con un suministro de energía alterno, para el caso en que falle la fuente principal de energía eléctrica del sistema.
La comunicación con cualquier sistema externo se logra con la implementación de dos protocolos de comunicación serial, uno óptico, Infrared Data Association (IrDA) y otro cableado, EIA-485, también conocido como RS-485; que son los puertos con los que normalmente cuenta un medidor digital actual.
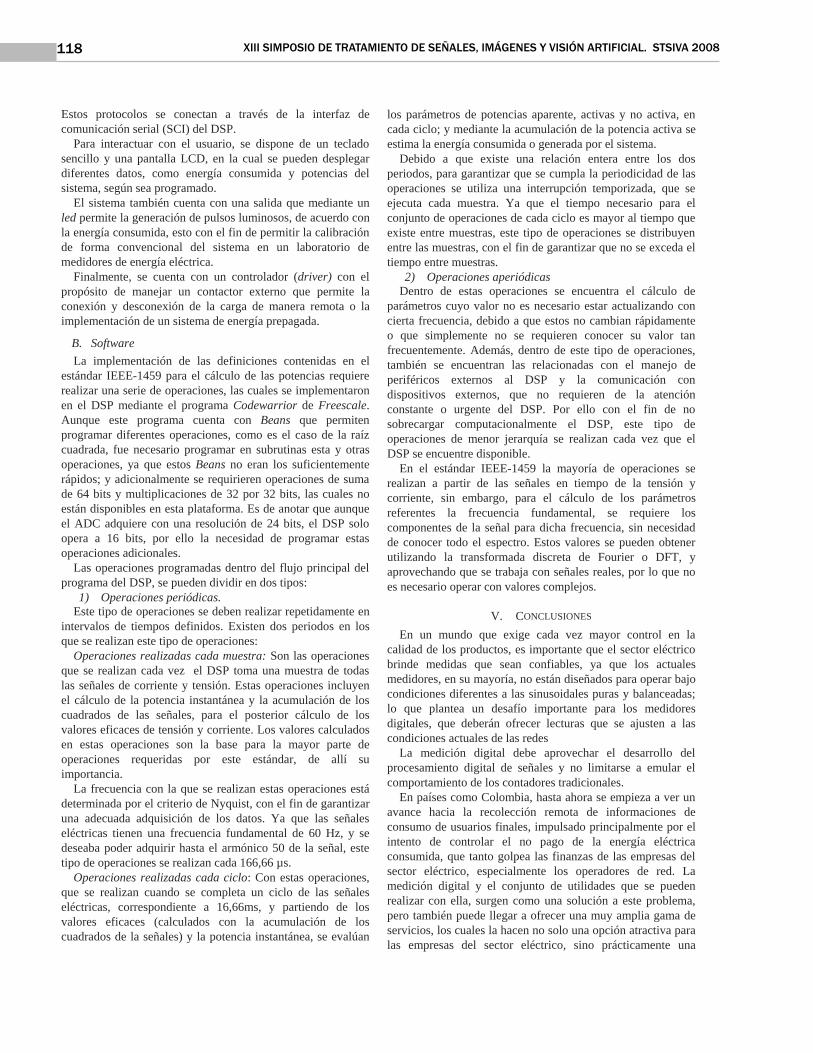
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 118
Estos protocolos se conectan a través de la interfaz de comunicación serial (SCI) del DSP.
Para interactuar con el usuario, se dispone de un teclado sencillo y una pantalla LCD, en la cual se pueden desplegar diferentes datos, como energía consumida y potencias del sistema, según sea programado.
El sistema también cuenta con una salida que mediante un led permite la generación de pulsos luminosos, de acuerdo con la energía consumida, esto con el fin de permitir la calibración de forma convencional del sistema en un laboratorio de medidores de energía eléctrica.
Finalmente, se cuenta con un controlador (driver) con el propósito de manejar un contactor externo que permite la conexión y desconexión de la carga de manera remota o la implementación de un sistema de energía prepagada.
B. Software
La implementación de las definiciones contenidas en el estándar IEEE-1459 para el cálculo de las potencias requiere realizar una serie de operaciones, las cuales se implementaron en el DSP mediante el programa Codewarrior de Freescale.Aunque este programa cuenta con Beans que permiten programar diferentes operaciones, como es el caso de la raíz cuadrada, fue necesario programar en subrutinas esta y otras operaciones, ya que estos Beans no eran los suficientemente rápidos; y adicionalmente se requirieren operaciones de suma de 64 bits y multiplicaciones de 32 por 32 bits, las cuales no están disponibles en esta plataforma. Es de anotar que aunque el ADC adquiere con una resolución de 24 bits, el DSP solo opera a 16 bits, por ello la necesidad de programar estas operaciones adicionales.
Las operaciones programadas dentro del flujo principal del programa del DSP, se pueden dividir en dos tipos:
1) Operaciones periódicas. Este tipo de operaciones se deben realizar repetidamente en
intervalos de tiempos definidos. Existen dos periodos en los que se realizan este tipo de operaciones:
Operaciones realizadas cada muestra: Son las operaciones que se realizan cada vez el DSP toma una muestra de todas las señales de corriente y tensión. Estas operaciones incluyen el cálculo de la potencia instantánea y la acumulación de los cuadrados de las señales, para el posterior cálculo de los valores eficaces de tensión y corriente. Los valores calculados en estas operaciones son la base para la mayor parte de operaciones requeridas por este estándar, de allí su importancia.
La frecuencia con la que se realizan estas operaciones está determinada por el criterio de Nyquist, con el fin de garantizar una adecuada adquisición de los datos. Ya que las señales eléctricas tienen una frecuencia fundamental de 60 Hz, y se deseaba poder adquirir hasta el armónico 50 de la señal, este tipo de operaciones se realizan cada 166,66 µs.
Operaciones realizadas cada ciclo: Con estas operaciones, que se realizan cuando se completa un ciclo de las señales eléctricas, correspondiente a 16,66ms, y partiendo de los valores eficaces (calculados con la acumulación de los cuadrados de la señales) y la potencia instantánea, se evalúan
los parámetros de potencias aparente, activas y no activa, en cada ciclo; y mediante la acumulación de la potencia activa se estima la energía consumida o generada por el sistema.
Debido a que existe una relación entera entre los dos periodos, para garantizar que se cumpla la periodicidad de las operaciones se utiliza una interrupción temporizada, que se ejecuta cada muestra. Ya que el tiempo necesario para el conjunto de operaciones de cada ciclo es mayor al tiempo que existe entre muestras, este tipo de operaciones se distribuyen entre las muestras, con el fin de garantizar que no se exceda el tiempo entre muestras.
2) Operaciones aperiódicas Dentro de estas operaciones se encuentra el cálculo de
parámetros cuyo valor no es necesario estar actualizando con cierta frecuencia, debido a que estos no cambian rápidamente o que simplemente no se requieren conocer su valor tan frecuentemente. Además, dentro de este tipo de operaciones, también se encuentran las relacionadas con el manejo de periféricos externos al DSP y la comunicación con dispositivos externos, que no requieren de la atención constante o urgente del DSP. Por ello con el fin de no sobrecargar computacionalmente el DSP, este tipo de operaciones de menor jerarquía se realizan cada vez que el DSP se encuentre disponible.
En el estándar IEEE-1459 la mayoría de operaciones se realizan a partir de las señales en tiempo de la tensión y corriente, sin embargo, para el cálculo de los parámetros referentes la frecuencia fundamental, se requiere los componentes de la señal para dicha frecuencia, sin necesidad de conocer todo el espectro. Estos valores se pueden obtener utilizando la transformada discreta de Fourier o DFT, y aprovechando que se trabaja con señales reales, por lo que no es necesario operar con valores complejos.
V. CONCLUSIONES
En un mundo que exige cada vez mayor control en la calidad de los productos, es importante que el sector eléctrico brinde medidas que sean confiables, ya que los actuales medidores, en su mayoría, no están diseñados para operar bajo condiciones diferentes a las sinusoidales puras y balanceadas; lo que plantea un desafío importante para los medidores digitales, que deberán ofrecer lecturas que se ajusten a las condiciones actuales de las redes
La medición digital debe aprovechar el desarrollo del procesamiento digital de señales y no limitarse a emular el comportamiento de los contadores tradicionales.
En países como Colombia, hasta ahora se empieza a ver un avance hacia la recolección remota de informaciones de consumo de usuarios finales, impulsado principalmente por el intento de controlar el no pago de la energía eléctrica consumida, que tanto golpea las finanzas de las empresas del sector eléctrico, especialmente los operadores de red. La medición digital y el conjunto de utilidades que se pueden realizar con ella, surgen como una solución a este problema, pero también puede llegar a ofrecer una muy amplia gama de servicios, los cuales la hacen no solo una opción atractiva para las empresas del sector eléctrico, sino prácticamente una

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 119
necesidad para anteponerse a los retos que presenta el futuro. Finalmente, es necesario trabajar en el desarrollo de
aplicaciones para aprovechar los sistemas de recolección de datos de forma automática, con el fin de explotar las utilidades que puede aportar esta herramienta a las empresas prestadoras de servicio y que le permitan alcanzar los niveles de calidad y competencia que exigen los usuarios y el mercado.
REFERENCIAS
[1] Castillo Alexis, Carvajal William y Plata Gabriel, Análisis de la medición de potencia y energía eléctrica teniendo en cuenta las características de la carga y la conexión de los medidores digitales Bucaramanga, 1999. 5° Simposio regional de mejoramiento empresarial CIDET,
[2] EDISON ELECTRIC INSTITUTE, Handbook for Electricity Metering, Décima Edición, s.l. : Edison Electric Institute, 2002.
[3] Quintero Oscar y Gámez Edward, Contadores de estado sólido y digitales: Análisis de los algoritmos de medición de energía e índices de calidad de onda que se pueden evaluar, UIS, s.l. : Director: Gabriel Ordóñez Plata., 2000. proyecto de grado.
[4] OPPENHEIM A.V., SCHAFER R. W. y BACK J. R., Tratamiento de Señales en Tiempo Discreto, Segunda, Madrid : Prentice Hall, 2000. págs. 146 – 147.
[5] Budeanu, C. I., Reactive and Fictive Powers (in French), s.l. : I.R.E. (National Romanian Institute), 1927.
[6] Ordóñez Gabriel, Duarte Cesar y Bautista Adan, Análisis de la medición de potencia y energía eléctrica teniendo en cuenta las características de la carga y la conexión de los medidores digitales, Quito, Ecuador, 2006. Congreso del Área Andina – IEEE, ANDESCON,
[7] Ordóñez Gabriel y Duarte Cesar, Mitos y realidades en la medición de potencia y energía eléctrica Bogotá, 2005, Tercer Simposio Internacional de la Calidad de la Energía Eléctrica, SICEL.
[8] Czarnecki, Leszek S., «Orthogonal decomposition of the current in a 3-phase nonlinear asymmetrical circuit with a nonsinusoidal voltage source,» IEEE Trans. on Instrumentation and Measurement, vol. 37, no. I, págs. 30-34, marzo de 1988.
[9] IEEE, «IEEE Trial-Use Standard Definitions for the Measurement of Electric Power Quantities Under Sinusoidal, Nonsinusoidal, Balanced, or Unbalanced Conditions,» 2000.
[10] De León Francisco y Cohen José, Inconsistencias de las Definiciones de Potencia y Factor de Potencia en Circuitos No Lineales y/o Desbalanceados ¿Es la Nueva Norma IEEE 1459-2000 la Solución?,2002. Reunión de verano del capítulo de potencia del IEEE sección México,
[11] Emanuel, A. E., «IEEE standard 1459: questions and future direction - quo vadis?» Power Engineering Society General Meeting, vol. 1, pág. 86, 13-17 de julio de 2003.
[12] Arseneau, R., «Application of IEEE standard 1459-2000 for revenue meters,» Power Engineering Society General Meeting, vol. 1, págs. 87 - 91, 13-17 de julio de 2003.
[13] Pérez, W. A., Quiroga, J. M. y Romero, O. F., Diseño e implementación de un prototipo de contador de energía trifásico utilizando un procesador de señales digitales (DSP), UIS, s.l. : Director: G. Ordóñez Plata., 2006. Tesis de grado.
[14] Ordóñez, Gabriel, Medición Digital de Magnitudes Eléctricas Mediante Transformada Discreta de Fourier. Algoritmos de Adaptación de la Frecuencia de Muestreo, Escuela Técnica Superior de Ingenieros
Gabriel Eduardo González Sua. Ingeniero Electrónico UIS 2003, candidato a Magíster en Ingeniería Electrónica UIS. Investigador del grupo GISEL. Área de trabajo: Medición de energía eléctrica y Procesamiento digital de señales eléctricas.
Gabriel Ordóñez Plata. Ingeniero Electricista UIS 1985, Distinción Cum Laude; Especialista Universitario en Técnicas de Investigación Tecnológica UPCO 1993, Doctor Ingeniero Industrial UPCO 1993, Madrid (España) 1993. Profesor Titular de la Escuela de Ingeniería Eléctrica, Electrónica y Telecomunicaciones Universidad Industrial de Santander (UIS). Investigador del Grupo GISEL. Senior Member IEEE. Áreas de trabajo: Tratamiento de
señales, mediciones eléctricas, calidad del servicio, gestión tecnológica y formación basada en competencias.
Jaime Guillermo Barrero Pérez. Ingeniero Electricista UIS, Magíster en Potencia Eléctrica UIS. Profesor Asociado de la Escuela de Ingeniería Eléctrica, Electrónica y Telecomunicaciones Universidad Industrial de Santander (UIS). Investigador del grupo CEMOS.
Cesar Antonio Duarte Gualdrón. Ingeniero Electricista UIS 1998, Magíster en Potencia Eléctrica UIS 2000, Bucaramanga, Colombia. Profesor Asistente de la Escuela de Ingeniería Eléctrica, Electrónica y Telecomunicaciones Universidad Industrial de Santander (UIS). Investigador del grupo GISEL. Áreas de Trabajo: Tratamiento de señales, calidad del servicio de energía eléctrica y formación basada en competencias.

Memorias STSIVA 2008 Tomo II 120 - 123
Diseño de un colorímetro basado en una cámara CCD para aplicación en inspección de color en telas utilizando
el modelo CIE L*a*b* (Julio 2008) N. Palacios†, M. Patiño‡, G. Ricaurte*, M. Aguilar**.

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 121

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 122

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 123

Memorias STSIVA 2008 Tomo II 124 - 127
Las “Wavelets Package” en la reducción de ruido de señales de espectroscopía de resonancia magnética
Héctor F. Cancino de Greiff Universidad Distrital “Francisco José de Caldas, Bogotá, Colombia.

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 125

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 126
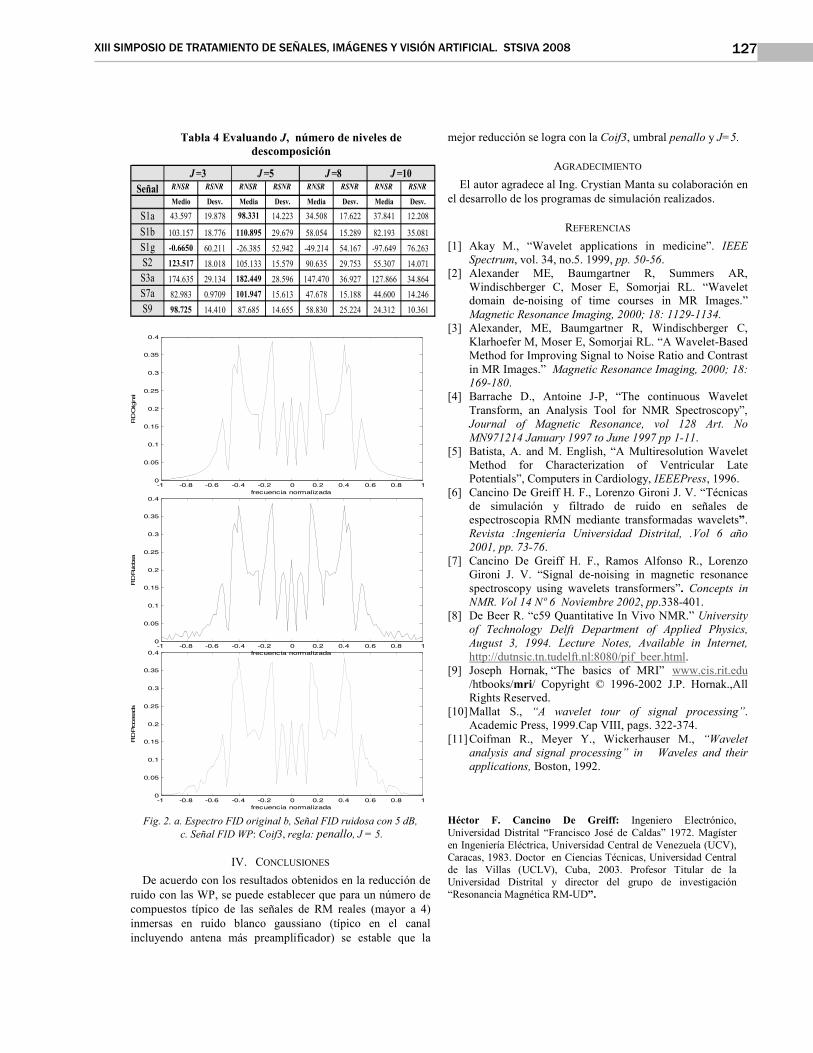
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 127

Memorias STSIVA 2008 Tomo II 128 - 134
Métodos de segmentación del patrón de las venas del dorso de la mano basados en fi ltros Shock coherentes
Bernardo Núñez, Felipe Wilches, Pedro Vizcaya, Member IEEE
Resumen—En el presente artículo se proponen dos formas de
realizar la segmentación del patrón de las venas del dorso de la mano a partir de filtros shock coherentes. Los resultados obtenidos muestran que ésta técnica facilita significativamente realizar la caracterización de las venas en imágenes en donde el contorno de las mismas tiene una transición muy suave.
Palabras clave— Filtros shock, biometría, venas del dorso de la mano, bottom-hat.
I. INTRODUCCIÓN
A segmentación de las venas de la mano consiste en dividir una imagen de la mano con sus venas en una
imagen con el detalle específico de las venas y en un fondo [1]Comúnmente los métodos de segmentación son clasificados en cuatro grupos principales, los cuales son, los basados en la segmentación por umbralización, los basados en la segmentación por bordes, los basados en la segmentación por regiones, y los basados en la segmentación por encaje (matching) [1]. Dentro de éstos, los más utilizados son los basados en la segmentación por umbrales, debido a que estos son los que son más veloces y baratos computacionalmente hablando. A su vez, este tipo de métodos son divididos en dos, los cuales emplean una umbralización global para destacar detalles de importancia en la mano, y los que los que emplean umbrales locales adaptativos para destacar detalles de importancia en regiones de la mano. Para esto, una gran cantidad de formas de procesamiento han sido utilizadas, de tal manera que a la hora de realizar la segmentación el efecto del ruido presente en la imagen sea minimizado, y de esta forma la segmentación sea menos propensa a falsos positivos. Dentro de estas formas de procesamiento se destacan las utilizadas por Wang y Leedham en [6], en donde hacen una mejora de la imagen a partir de la normalización de la mismapor medio del ajuste global de su media y su varianza. En [2],Cross y Smith realizan una normalización determinando el brillo de la superficie de la mano y sustrayéndolo de la imagen, dejando así un realce completo de las venas la mano. Yuan, Lu y Yahagi emplean en [9] una serie de operaciones morfológicas basadas en apertura y cierre morfológico para mejorar el contraste de la imagen.
En 1975 Kramer y Bruckner propusieron el primer filtro shock [5]. Este se basaba en la idea de emplear el proceso de dilatación alrededor de un máximo y el proceso de erosión alrededor de un mínimo. La decisión de si un píxel pertenecía a la zona de influencia de un máximo o de un mínimo de hacía a partir del Laplaciano. Si el Laplaciano es negativo, se considera al píxel como perteneciente a la zona de influencia de un máximo, y por el contrario, se considera como perteneciente a la zona de influencia de un mínimo si el Laplaciano es positivo. Al iterar este proceso se produce un realce por discontinuidad (shock) en la línea de frontera encontrada en las dos zonas de influencia [8].
Para el presente artículo, dos métodos de procesamiento basados en los filtros shock coherentes son propuestos, debido a que por la forma en que los filtros shock operan, presentan la ventaja de crear un salto de discontinuidad en las regiones que conforman la frontera entre las venas y el tejido circundante de la mano, lo que mejora la segmentación.
En la sección II del artículo se exponen los preliminares en donde se encuentra un marco teórico referente a los filtros shock. En la sección III se muestra es sistema de adquisición empleado para obtener las imágenes con que se evaluaron los métodos de segmentación expuestos en la sección IV. En la sección V se muestra la forma de evaluación de los mencionados métodos, y, finalmente, en la sección VI se comentan las conclusiones del trabajo.
II. PRELIMINARES
Los filtros Shock, son un proceso orientado al realce de las características presentes en las imágenes como los bordes. Osher y Rudin [7] propusieron una ecuación hiperbólica, la cual llamaron filtro shock (shock filter) el cual sirve como un algoritmo de realce (deblurring algorithm), y tiene undesempeño similar al de una deconvolución. Para este tipo de filtros se tiene que, dada una imagen, que ha sido desvanecida debido a un proceso de difusión temporal:
𝑈(𝑥, 𝑡)
La ecuación que los describe en una dimensión es:
𝜕𝑈(𝑥, 𝑡)𝜕𝑡 = − �𝜕𝑈(𝑥, 𝑡)
𝜕𝑥 � 𝐹 �𝜕2𝑈(𝑥, 𝑡)𝜕𝑥2 �
(1) f
Métodos de Segmentación del Patrón de las Venas del Dorso de la Mano Basados en Filtros
Shock CoherentesBernardo Núñez, Felipe Wilches, Pedro Vizcaya, Member IEEE
L

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 129
Donde 𝐹(𝑠), es una función de la variable s tal que debe satisfacer 𝐹(0) = 0, y 𝐹(𝑠)𝑠𝑖𝑔𝑛(𝑠) ≥ 0. Escogiendo 𝐹(𝑠) = 𝑠𝑖𝑔𝑛(𝑠), se obtiene (2) que es la ecuación tradicionalde un filtro shock en una dimensión.
𝜕𝑈(𝑥, 𝑡)𝜕𝑡 = −𝑠𝑖𝑔𝑛 �𝜕
2𝑈(𝑥, 𝑡)𝜕𝑥2 � �𝜕𝑈(𝑥, 𝑡)
𝜕𝑥 �(2) f
La discretización temporal del lado izquierdo de la (2), da como resultado:
𝜕𝑈(𝑥, 𝑡)𝜕𝑡 ≈ 𝑈(𝑥, 𝑡 + 𝑑𝑡)− 𝑈(𝑥, 𝑡)
𝑑𝑡(3) f
Entonces, la aproximación discreta de (2), es:
𝑈𝑖𝑛+1 = 𝑈𝑖𝑛 − 𝑑𝑡|𝐷𝑈𝑖𝑛 |𝑠𝑖𝑔𝑛(𝐷2𝑈𝑖𝑛) (4) f
Donde,
𝐷𝑈𝑖𝑛 ≐ 𝑚(∆+𝑈𝑖𝑛 ,∆−𝑈𝑖𝑛)/ℎ𝐷2𝑈𝑖𝑛 ≐ 𝑚(∆+∆−𝑈𝑖𝑛)/ℎ2
(5) f
Donde 𝑚(𝑎,𝑏), es la función minmod, esto es:
𝑚(𝑎, 𝑏) ≐ �𝑠𝑖𝑔𝑛(𝑎)min(|𝑎|, |𝑏|) 𝑆𝑖 𝑎𝑏 > 0 0 𝐸𝑛 𝑜𝑡𝑟𝑜 𝑐𝑎𝑠𝑜
� (6) f
Donde ∆±≐ ±(𝑈𝑖±1 − 𝑈𝑖).Generalizando (2), a dos dimensiones se obtiene:
𝜕𝑈(𝑥, 𝑦, 𝑡)𝜕𝑡 = −𝑠𝑖𝑔𝑛(𝐷𝜂𝜂 𝑈(𝑥, 𝑦)) |∇𝑈| (7) f
En donde ∇ es el gradiente y 𝐷𝜂𝜂 𝑈(𝑥, 𝑦), es la segunda derivada de 𝑈(𝑥, 𝑦) en la dirección del vector 𝜂, que para este caso es la dirección del gradiente. Para el caso discreto, se tienen las siguientes consideraciones:
La aproximación discreta del gradiente ∇ es:
∇𝑈 = (Δx)2 + �Δy�2 (8) f
Donde ∆𝑥≐ ±(𝑈(𝑥, 𝑦)𝑥±1 − 𝑈(𝑥, 𝑦)𝑥).En forma discreta también se tiene que la segunda derivada
en la dirección del gradiente (𝜂), se puede aproximar:
𝐷𝜂𝜂 𝑈(𝑥, 𝑦) = ∆𝑥𝑥 ∙ |∆𝑥 |2 + 2 ∙ ∆𝑥𝑦 ∙ ∆𝑥 ∙ ∆𝑦 + ∆𝑦𝑦 ∙ �∆𝑦�2 (9) f
Las propiedades principales que tienen los filtros shock,son, que en su estado estable crean una discontinuidad (shock)en los lugares en los que existen bordes, los valores extremos entre los que se encuentra el borde no son cambiados, y es un proceso que se aproxima a una deconvolución [4]. Una gran desventaja que presentan este tipo de filtros es que el ruido también se ve resaltado por el proceso. Lo cual ha llevado a que se propongan diferentes técnicas con el propósito de superar esta desventaja así como de mejorar las propiedades del proceso.
A. Filtros Shock CoherentesEste tipo de filtros son propuestos para corregir los
problemas en el desempeño presentados por el filtro descrito por (7), el cual depende altamente en la dirección 𝜂, lo que no los hace efectivos a imágenes con patrones dirigidos. Es por esto que se decide obtener una mejor descripción de la estructura local. Para lo cual se usa el producto tensorial del gradiente, descrito por:
𝐽0(𝛻𝑈) = 𝛻𝑈𝛻𝑈𝑇
𝐽0(𝛻𝑈) = �𝜕𝑈(𝑥, 𝑦)
𝜕𝑥𝜕𝑈(𝑥, 𝑦)
𝜕𝑦�⊗ �𝜕𝑈(𝑥, 𝑦)
𝜕𝑥 , 𝜕𝑈(𝑥, 𝑦)𝜕𝑦 �
𝐽0(𝛻𝑈) =
⎝
⎜⎛ �𝜕𝑈𝜕𝑥�
2 𝜕𝑈𝜕𝑥 ∙
𝜕𝑈𝜕𝑦
𝜕𝑈𝜕𝑦 ∙
𝜕𝑈𝜕𝑥 �𝜕𝑈𝜕𝑦�
2
⎠
⎟⎞
(10) f
Esta matriz tiene la propiedad de ser par, esto es 𝐽0(∇𝑢) = 𝐽0(−∇𝑢). Para hacer este resultado menos sensible al ruido, se elige suavizar las orientaciones dadas por el producto tensorial(𝐽0(𝛻𝐼)), por medio de la convolución con una Gaussiana de desviación estándar ρ, lo que da:
𝐽𝜌(∇𝐼) = 𝐾𝜌 ∗ (∇𝐼 ∇𝐼𝑇) (11) f
Donde para este caso,
𝐾𝜌 = exp�− 12 ∙ ��
𝑥𝜌�
2+ �𝑦𝜌�
2��
(12) f
𝐽𝜌(∇𝐼) es una matriz de 2 x 2 que se denomina tensor estructural (structure tensor), el cual es semidefinido positivo y cuyos vectores propios ortonormales describen las direcciones en las cuales el contraste es máximo. Este contraste se mide por sus correspondientes valores propios. Sea 𝑤, el vector propio (normalizado) dominante de 𝐽𝜌 el cual está relacionado con el valor propio más elevado de 𝐽𝜌 .Teniendo en cuenta lo anteriormente mencionado el filtro shock coherente propuesto por Joachim Weickert [7], es:
𝜕𝑈𝜕𝑡 = −𝑠𝑖𝑔𝑛(𝐷𝑤𝑤 𝑉(𝑥, 𝑦))|∇𝑈| (13) f
Donde 𝑉 = 𝐾𝜎 ∗ 𝑈 (la imagen original convolucionada con una Gaussiana de desviación estándar 𝜎) y 𝑤 es la dirección del vector propio dominante, del tensor estructural 𝐽𝜌(∇𝐼).Para discretizar, se asume que, sea 𝑤 = (𝑐, 𝑠)𝑇 el vector propio dominante normalizado, entonces 𝐷𝑤𝑤 𝑉(𝑥,𝑦) se calcula de la siguiente forma:

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 130
𝐷𝑤𝑤 𝑉 = 𝑐2Δxx + 2𝑐𝑠Δxy + 𝑠2Δyy (14) f
Esta acción en la dirección 𝑤, hace que el proceso del filtro shock cree discontinuidades ortogonales a la dirección de cambio de la imagen (a la dirección en la que se encuentra el borde), lo cual lo hace útil para resaltar los bordes muchas veces borrosos de las imágenes de las venas del dorso de la mano.
III. SISTEMA DE ADQUISICIÓN DE IMÁGENES
Este sistema se basó en la adquisición por medio de un computador personal de escritorio con procesador Intel Pentium 4 y 512Mbytes de memoria RAM y un módulo de adquisición que está constituido por una cámara industrial cuya referencia es ISG LW-1.3-S-1394, con conexión al computador vía puerto firewire IEEE 1394; un conjunto de cuatro lámparas compuestas cada una por 25 diodos emisores de luz (LED); cuatro fuentes de corriente variables entre 50mA y 100mA empleadas para la polarización de las lámparas de infrarrojo; un filtro para bloquear la luz visible, una estructura con forma de paralelepípedo, cuyas paredes y fondo están recubiertas en poliestireno (icopor) y en caucho espuma negro respectivamente, y que además cuenta con una guía transversal ubicada en la parte inferior de la misma que tiene como objeto la sincronización de la mano para la adquisición de la imagen.
Como de la calidad de las imágenes obtenidas depende en gran medida el desempeño de los algoritmos de segmentación aquí presentados, se diseñó un sistema de control que garantiza la consecución de las imágenes con un alto grado de contraste.
La resolución de las imágenes fue de 752 x 560 píxeles en escala de grises de 16bits.
A. Sistema de ControlEn la adquisición de las imágenes se encontró que para una
misma iluminación el contraste de las venas variaba dependiendo de cada persona, esto debido a factores como, el color de piel y la temperatura ambiente. Para solucionar este inconveniente se decidió implementar un control de iluminación, que sin embargo no ajustaba propiamente la iluminación (no modificaba la corriente sobre los LEDs) incidente sobre la mano, sino, más bien se aprovechó el hecho que como la cámara era totalmente controlada por software secontroló, el tiempo de integración de la misma, con lo que se logró un efecto similar al de controlar la iluminación infrarroja incidente en la mano.
Para saber de una manera sencilla si el cuadro transmitido por la cámara, presentaba un contraste de las venas se le medían a éste la media de los máximos de las filas, en las que se encontraba un valor diferente de cero. Esta medida de determinó de manera experimental, al igual que su valor para una imagen buena (que no estuviese saturada, y que la mano se apreciara), y el cual fue de 53000.
El control desarrollado fue un control proporcional integral (PI). La parte integral se seleccionó porque era necesario que
el error en estado estable fuera cero y la proporcional ayuda a que el sistema responda más rápido. Adicionalmente se colocó una banda muerta a la salida del sistema de control con el fin de garantizar al sistema inmunidad respecto a las pequeñas variaciones producidas por el ruido. El sistema de control es un sistema en tiempo discreto cuya frecuencia de muestreo es de 66ms, que es lo correspondiente a los 15 cuadros por segundo que transmite la cámara, un diagrama del sistema de control se puede apreciar en la Figura 1.
B. PromediaciónPara que el sistema de adquisición entregara una imagen de
alta calidad, se escogió al momento de la captura, tomar diez imágenes (10 cuadros consecutivos) y promediarlas, esto con el propósito de reducir los efectos del ruido gausiano aditivo (AWGN) de media cero que puede afectar a cada una individualmente pero de manera diferente a todas. Se escogió tomar diez cuadros porque su tiempo de adquisición es corto, de aproximadamente 0,67 segundos (a 15fps) y una persona puede hacer que su mano permanezca estática durante este lapso sin ningún problema; si la persona se moviera durante la adquisición se presentaría un problema al tratar de promediar diez cuadros diferentes ya que este proceso no quitaría el ruido sino que mezclaría las imágenes tomadas.
IV. MÉTODOS DE SEGMENTACIÓN
La segmentación de las imágenes se hizo a partir de los dos métodos basados en filtros shock mencionados en la introducción.
A. Primer MétodoEl primer método de segmentación comienza con la
aplicación de un algoritmo para determinar la cantidad de objetos que no son de interés pero que están presentes en la imagen, tales como lo son los vellos o los poros demasiado prominentes. Esto se hizo debido a que fue necesario establecer un referente de qué tan exigente debía ser el filtrado para cada imagen, puesto que no todas las manos son iguales y por tanto no merecen el mismo tratamiento. Así pues, amedida que la imagen presentara más objetos extraños se empleaba un filtrado más exigente, con el propósito de removerlos ya que de estar presentes al de aplicar el filtro shock, este podría realzarlos.
Dicho algoritmo de conteo de objetos consistió en utilizar la operación morfológica bottom-hat, la cual consiste en hacerle un cerramiento morfológico a la imagen para luego restarlo de la imagen original. Esta operación morfológica, fue aplicada con un elemento estructural pequeño (circular de radio 4 cuyo tamaño fue determinado mediante la observación
𝑇 = 115 𝑠
CÁMARAPI
Media Max
Ref.
Figura 1. Sistema de control implementado

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 131
de los tamaños de los objetos extraños (pelos y poros prominentes). Luego de obtener una imagen en la que se realzan los objetos no deseados, se le aplica una umbralización local, la cual se hace calculando en primer lugar una media de un vecindario para cada pixel, y luego comparando si este pixel es mayor o menor que la media de su vecindario de interés, de lo cual se obtiene una imagen binaria.
Posteriormente se procedió a determinar de esta imagen binaria únicamente los vellos para lo cual se utilizó la característica de que los mismos siempre tienen una misma orientación, por lo que se calculó la orientación de cada objeto de la imagen binaria mediante la determinación del ángulo de la elipse que lo contiene. Después de mirar la orientación se procedió a descartar los objetos cuya orientación era muy disímil a la de la media de orientaciones de los objetos. Elnúmero de objetos restantes correspondía al número de objetos no deseados por lo que se procedió a contarlos.
Luego de determinado el número aproximado de objetos no deseados presentes en la imagen, generalmente correspondientes a pelos y poros, se aplicó un filtrado no lineal a la imagen con el propósito de removerlos, tratando de que su accionar no afectara de manera significativa a las venas. Para imágenes con pocos objetos no deseados se aplicó un filtro mediana con una semilla (kernel en inglés) pequeña.En imágenes con presencia media de objetos extraños los filtros aplicados fueron, un filtro mediana con una semilla mediana y luego se aplicó la operación morfológica de cerrado con la misma semilla, y para imágenes con una gran cantidad de objetos indeseados se aplicó el mismo procedimiento anterior pero reemplazando el filtro mediana por un filtro máximo.
Posteriormente fue aplicado un filtro de Wiener adaptativo, local para quitar pequeñas irregularidades en la imagen causadas por el filtrado no lineal precedente. El siguiente paso fue aumentar el contraste de las venas. El incremento en el contraste de las venas se logró por medio de un filtrado pasa altas en frecuencia. Se aplicaron por separado los filtros pasa altas mostrados en la Figura 2, los cuales fueron obtenidos extendiendo un filtro digital en una dimensión el cual se basó en un filtro de Butterworth continuo. El filtro utilizado fue de orden 4 y su frecuencia de corte respecto a la frecuencia máxima, correspondiente a 𝑓𝑚𝑎𝑥 = 𝑓𝑠/2 (la mitad de la
frecuencia de muestreo), fue 𝑓𝑐 = 8𝑓𝑚𝑎𝑥𝑁
, donde N, es el número de puntos de la señal.
Se determinó que los filtros anteriormente mencionados aumentaron el contraste porque, la varianza de la región de interés aumentó. El efecto de estos filtros se puede apreciar en la Figura 3, de donde se deduce que el filtro de la Figura 2(izquierda), resalta los bordes verticales, y el filtro de la Figura 2 (derecha) resalta los bordes horizontales.
Se obtienen entonces dos imágenes contrastadas, a las cuales se les aplica la operación morfológica bottom-hat. Esta operación morfológica fue aplicada con dos elementos estructurales diferentes circulares, el primero de diámetro siete y el segundo de diámetro 19. A la salida de este paso se consiguen cuatro imágenes en las cuales se resaltan los valles (idealmente correspondientes a las venas) de la imagen original pero de diferente manera, es decir se obtienen dos imágenes con los valles verticales resaltados con tamaño diferente, una con objetos gruesos correspondiente a la semillacircular con diámetro de 19 pixeles, y otra con objetos delgados a causa del elemento estructural de radio siete.Adicionalmente se obtienen otras dos imágenes de objetos gruesos y delgados pero con tendencia a resaltar los valles horizontales de la imagen original. A la imagen de valles verticales resaltados con objetos gruesos se le aplicó un cierre morfológico con el fin de unir los objetos cercanos, y con esto unir venas. Estas cuatro imágenes se pueden apreciar en laFigura 4 y les fue aplicado una saturación de los colores para poderlas visualizar mejor.
Figura 2 Filtros pasa altas para el aumento del contraste de las venas.
Figura 3. Arriba (Izquierda): Imagen original. (Derecha)Después de aplicado el filtro de la izquierda de la Figura 2.
Abajo: Luego de aplicado el filtro de la derecha de la Figura 2.

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 132
A estas cuatro imágenes les es aplicado un filtro shockcoherente, con diez iteraciones , 4 , 2 y con pasos
25.0t . Posteriormente estas imágenes son normalizadas, es decir que el valor máximo se asigna a uno y el menor se hace corresponder a cero. Luego son aplicados umbrales para binarizar con lo que se obtienen cuatro imágenes binarias de las cuales finalmente se forma una sola a partir de una orlógica entre éstas. En la Figura 5 se muestra la imagen de entrada luego de la remoción de objetos no deseados, las imágenes de la Figura 4 después del filtro shock y la imagen binaria de salida.
B. Segundo MétodoDe manera similar al anterior método, para este método se
empleó un algoritmo para determinar el número de objetos no deseados y posteriormente quitarlos de la imagen original. Para tal efecto se empleó un filtro máximo de tamaño 1x11, talque la longitud horizontal fue mayor a la vertical, debido a que en la mayoría de personas la distribución de los vellos tiene una orientación predominante que parte de muñeca y se dirige hacia los nudillos, y luego otro filtro máximo de tamaño 4x1,para remover objetos orientados horizontalmente. Para las personas con pocos vellos se le aplicó un filtro mediana de tamaño 5x4. A continuación, como complemento del filtrado especial, se empleó un cierre morfológico con un elemento rectangular de tamaño 9x1 y luego otro cierre morfológico con un elemento rectangular de tamaño 1x4.
Adicionalmente, con el fin de corregir el efecto no deseado del filtro máximo y del cierre morfológico, se empleó un filtro Wiener de tamaño 11x9 para las personas con mucho vello, y de 10x10 para personas no velludas.
Una vez se obtuvo una imagen más limpia de vellos y porosidades, se empleó un filtro shock con los siguientes parámetros: 10 iteraciones, 4, 2, y con pasos
25.0t .Para la extracción de las venas se aplicó un proceso de
bottom-hat con un elemento estructural circular de radio de 11.5 píxeles, de tal forma que quedara una imagen con solo las venas.
Finalmente se segmentó mediante el establecimiento de un umbral de valor 700, en donde los píxeles con intensidad mayor a este valor se colocaron en un valor lógico alto. Para limpiar la imagen de elementos no deseados y que se encontraban separados de las venas, se eliminaron los elementos con un área menor a 200. En la Figura 6 se muestra en primer lugar (arriba izquierda) la imagen original, seguida de la imagen luego de aplicado el filtrado especial para remover objetos no deseados compuesto por filtro mediana de 9x10 y filtro Wiener de 10x10. En el centro se muestra a la
Figura 4. Resultado de la operación bottom-hat, con el elemento estructural de diámetro 19 (arriba) y de diámetro
7 (abajo)
Figura 5. Secuencia de imágenes del primer método.
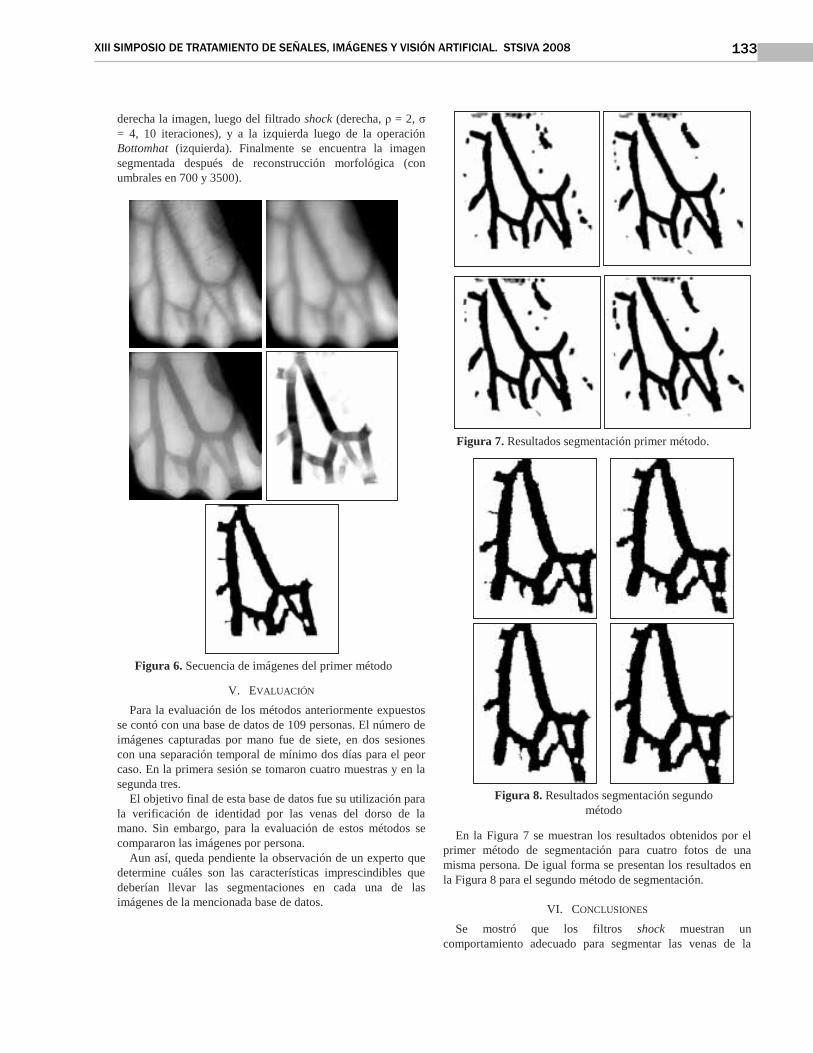
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 133
derecha la imagen, luego del filtrado shock (derecha, ρ = 2, σ= 4, 10 iteraciones), y a la izquierda luego de la operaciónBottomhat (izquierda). Finalmente se encuentra la imagen segmentada después de reconstrucción morfológica (conumbrales en 700 y 3500).
V. EVALUACIÓN
Para la evaluación de los métodos anteriormente expuestosse contó con una base de datos de 109 personas. El número de imágenes capturadas por mano fue de siete, en dos sesiones con una separación temporal de mínimo dos días para el peor caso. En la primera sesión se tomaron cuatro muestras y en la segunda tres.
El objetivo final de esta base de datos fue su utilización para la verificación de identidad por las venas del dorso de la mano. Sin embargo, para la evaluación de estos métodos se compararon las imágenes por persona.
Aun así, queda pendiente la observación de un experto que determine cuáles son las características imprescindibles que deberían llevar las segmentaciones en cada una de las imágenes de la mencionada base de datos.
En la Figura 7 se muestran los resultados obtenidos por el primer método de segmentación para cuatro fotos de una misma persona. De igual forma se presentan los resultados en la Figura 8 para el segundo método de segmentación.
VI. CONCLUSIONES
Se mostró que los filtros shock muestran un comportamiento adecuado para segmentar las venas de la
Figura 6. Secuencia de imágenes del primer método
Figura 7. Resultados segmentación primer método.
Figura 8. Resultados segmentación segundo método
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 134
mano, y en especial, los filtros shock coherentes, ya que estos determinan la dirección de máximo cambio en imagen, para de esta manera crear en los bordes una discontinuidad prominente, lo cual repercute en que las regiones que tienen transiciones suaves de cambio queden definidas por bordes muy bien detallados.
REFERENCIAS
[1] Ahmed Badawi. “Hand Vein Biometric Verification Prototype: A Testing Performance and Patterns Similarity.” Proceedings of the 2006 International Conference on Image Processing, Computer Vision and Pattern Recognition. Las Vegas, Nevada, USA, June 26-29, 2006, Volume 1, Page(s):3-9.
[2] CROSS J. M., SMITH C. L. “Thermographic imaging of the subcutaneous vascular network of the back of the hand for biometric identification”, Proceedings of 29th International Carnahan Conference on Security Technology, Institute of Electrical and Electronics Engineers, Page(s):20–35, 1995.
[3] F. Guichard and J.-M. Morel. “A note on two classical shock filters and their asymptotics”. In M. Kerckhove, editor, Scale-Space and Morphology in Computer Vision, volume 2106 of Lecture Notes in Computer Science, pages 75 - 84. Springer, Berlin, 2001.
[4] GILBOA, Guy. “Super resolution algorithms based on inverse diffusion type processes”, Ph.D Thesis. Marzo de 2004, Haifa Israel. 183p. Technion - Israel Institute of Technology.
[5] H. P. Kramer and J. B. Bruckner. “Iterations of a non-linear transformation for enhancement of digital images”. Pattern Recognition7, Page (s): 53-58, 1975.
[6] L. Wang and G. Leedham, Feature Extraction of Hand-Vein Patterns Based on Ridgelet Transform and Local Interconnection Structure Neural Network.
[7] S.J. Osher and L. I. Rudin, “Feature-Oriented Image enhancement using Shock Filters," SIAM Journal on Numerical Analysis, Vol. 27, No. 4 (Aug., 1990), pp. 919-940 (article consists of 22 pages).
[8] WEICKERT Joachim. “Coherence Enhancing Shock Filters”. Proceedings of DAGM 2003. En: B. Michaelis, G. Krell (Eds.), Pattern Recognition, Lecture Notes in Computer Science, vol. 2781, Springer, Berlin, 2003, pp. 1-8.
[9] Yuan, X., Lu, J. y Yahagi, T. Biometric (2006) “Verification Using Palm Vein-Patterns”. En: RISP International Workshop on Nonlinear Circuits and Signal Processing (NCSP'06) Waikiki Beach Marriott, Honolulu, Hawaii, USA, March 3-5, 2006.
Bernardo Núñez Ingeniero Electrónico de la Pontificia Universidad Javeriana, Bogotá (2008). Dentro de sus áreas de interés se encuentra el tratamiento de señales y los sistemas de comunicació[email protected]
Felipe Wilches Ingeniero Electrónico de la Pontificia Universidad Javeriana, Bogotá (2008). Entre sus áreas de interés se encuentran, las biométricas, el análisis y procesamiento de señales, los sistemas de comunicación, el diseño de circuitos eléctricos y la electrónica de [email protected]
Pedro Vizcaya obtuvo su grado como Ingeniero Electrónico en la PontificiaUniversidad Javeriana, Bogotá, en 1980, el grado de MSc in EE del Instituto Politécnico Rensselaer, Troy, NY, EEUU, en 1986 y el grado de PhD en EEde la misma institución en 1998. Trabaja como Profesor Titular en la Facultad de Ingeniería, Pontificia Universidad Javeriana, Bogotá. Su dirección es facultad de Ingeniería, Pontificia Universidad Javeriana, Carrera 7 No. 40-62, Bogotá, Colombia, (571) 3208320, ext. [email protected]

Memorias STSIVA 2008 Tomo II 135 - 141
Verifi cación de personal por el patrón de las venas del dorso de la mano
Bernardo Núñez, Felipe Wilches, Pedro Vizcaya, Member IEEE
Resumen— En el presente estudio se analiza la utilización de la
biométrica de la red de las venas de la mano como una medida útil para lograr la diferenciación de individuos. Para tal propósito, inicialmente se construyó un módulo de adquisición con el cual se tomaron a un grupo de 109 personas siete fotos por cada mano. Posteriormente se emplearon una serie de algoritmosdedicados a la segmentación de las venas y posterior clasificación de las muestras obtenidas. Para lograr la comparación entre individuos se emplearon distintas formas de la distancia de Hausdorff. El desempeño del sistema se comprobó por medio del punto de igual error (EER), el cual es obtenido a partir del cruce de la curva de falsa aceptación (FAR) con la curva de falso rechazo (FRR).
Palabras Clave—Biométricas, Distancia de Hausdorff, Venas del dorso de la mano, Tasa de falsa aceptación (FAR), Tasa deFalso Rechazo (FRR), Tasa de igual error (EER).
I. INTRODUCCIÓN
A forma de identificación de personas mediante medidas biométricas es un tema que se encuentra en
creciente desarrollo en la actualidad debido a la ventaja que presentan frente a otras formas de identificación de personas, ya que aquellas son características inherentes a los individuos. Dentro de este tipo de biométricas estudiadas encontramos a las venas de la mano, la cual es una biométrica interesante debido a que es fácil de obtener mediante imágenes capturadas con cámaras sensibles en infrarrojo o con cámaras térmicas, además es un patrón difícil de reproducir, lo que hace que prácticamente sea imposible de suplantar a una persona [4].
En la actualidad no son muchos los trabajos que se tienen acerca del tema, por lo que cada vez son más quienes proponen técnicas para lograr la verificación de personas por medio de este patrón. Dentro de las investigaciones realizadas hasta el momento está la desarrollada por Fan, Lin y Lee [3],trabajo en el cual se emplea la transformación watershed paraextraer el patrón de los capilares. También es de destacar el trabajo de Zhang, Han y Ma [7] de la universidad de Jilin en Changchun en China, en donde para mejorar el contraste de las venas en las imágenes es utilizada la transformada de Ridgelet, y una red neuronal es entrenada para lograr segmentar. Del trabajo de Wang y Leedhan de la universidad tecnológica de Nanyang en Singapur [6], es de destacar la forma de realizar la comparación entre individuos ya que emplean la distancia de Hausdorff del segmento de línea (LHD) con el fin de analizar qué tanto se parecen las formas
de los patrones de las venas.En el presente artículo se propone una segmentación a partir
de cuatro derivadas direccionales en diferentes direcciones debido a que este es un método de poca complejidad que arroja buenos resultados, así como para la comparación se propone emplear la distancia de Hausdorff y algunas de sus variaciones, como lo son la MHD (Modified Hausdorff Distance) y la MedHD (Median Hausdorff Distance), con el fin de analizar el desempeño de estas en una tabla comparativa.
II. PRELIMINARES
A. Distancia de HausdorffLa distancia de Hausdorff [10], [9], es una medida de que
tan similares son conjuntos arbitrarios de puntos (objetos). Ésta debe su nombre al matemático alemán Felix Hausdorff. Para dos conjuntos de puntos, 𝐴 = 𝑎1,… , 𝑎𝑚 , y 𝐵 = 𝑏1,… , 𝑏𝑛la distancia de Hausdorff se define como:
)),(),,(max(),( ABhBAhBAH (1) fDonde,
)}},({min{max),( badBAhBbAa
(2) f
y 𝑑(𝑎, 𝑏), es cualquier métrica entre a y b, que por simplicidad usualmente se toma la distancia euclidiana como la métrica entre estos puntos. Lo que quiere decir que para el cálculo de h(A,B) (conocida como distancia de Hausdorff directa) a cada uno de los puntos 𝑎𝑖 , pertenecientes al conjunto A, se le calcula la distancia al punto más próximo 𝑏𝑗 ,perteneciente al conjunto B, para después escoger la mayor de estas distancias. Posteriormente para el cálculo de 𝐻(𝐴,𝐵), se determinan las distancias directas, ℎ(𝐴,𝐵) y ℎ(𝐵,𝐴), para escoger la mayor entre éstas.
Para aplicaciones en procesamiento de imágenes se ha aplicado una medida un poco diferente, la cual se conoce como distancia de Hausdorff modificada (MHD, modified Hausdorff distance), introducida por Dubuisson y Jain [1], en la cual se modifica la distancia directa, que para este caso se obtiene calculando la media de las distancias mínimas entre los conjuntos de puntos A y B, de donde se tiene que:
Aa
badm
BAh )},(min{1),(mod (3) fAdicionalmente, otra variante de la distancia de Hausdorff
se obtiene también al cambiar la distancia de Hausdorff directa, pero esta vez seleccionando la mediana de las distancias mínimas entre los conjuntos de puntos A y B, esto
Verificación de Personal por el Patrón de las Venas del Dorso de la Mano
Bernardo Núñez, Felipe Wilches, Pedro Vizcaya, Member IEEE
L

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 136
es: ),(min),( badmedianBAhmed (4) f
B. Operaciones Morfológicas [2]Dilatación y ErosiónLa dilatación para imágenes en escala de grises de una
imagen 𝑓 por un elemento estructural plano 𝑏, denotado como 𝑓 ⊕ 𝑏 , se define como:
(𝑓 ⊕ 𝑏)(𝑥, 𝑦) = max{𝑓(𝑥 − 𝑥′ , 𝑦 − 𝑦′)|(𝑥′ ,𝑦′) ∈ 𝐷𝑏 (5) f
Donde 𝐷𝑏 , es el dominio de 𝑏, y 𝑓(𝑥, 𝑦) se asume igual a −∞ fuera del dominio de 𝑓.
De esta manera, la dilatación plana en imágenes en escala de grises es un operador local máximo, donde el máximo es tomado sobre un conjunto de píxeles vecinos determinados por la forma 𝐷𝑏 .
La erosión para imágenes en escala de grises para una imagen 𝑓 por un elemento estructural plano 𝑏, denotado como 𝑓 ⊖ 𝑏 , se define como:
(𝑓 ⊖ 𝑏)(𝑥, 𝑦) = min{𝑓(𝑥 + 𝑥′ , 𝑦 + 𝑦′)|(𝑥′ , 𝑦′) ∈ 𝐷𝑏 (6) f
Donde 𝐷𝑏 , es el dominio de 𝑏, y 𝑓(𝑥, 𝑦) se asume igual a +∞ fuera del dominio de 𝑓.
Así, la erosión plana en escala de grises es un operador local mínimo, donde el mínimo es tomado sobre un conjunto de píxeles vecinos determinados por la forma 𝐷𝑏 .
Cierre MorfológicoEl cierre de una imagen 𝑓 por un elemento estructural plano
𝑏, denotado como 𝑓 ∙ 𝑏, se define de la siguiente manera:
𝑓 ∙ 𝑏 = (𝑓 ⊕ 𝑏)⊖ 𝑏 (7) f
Lo que indica que el cierre de 𝑓 por 𝑏, es simplemente la dilatación de 𝑓 por 𝑏 seguida por una erosión del resultado por 𝑏.
Transformación Bottom-hatOtra operación morfológica importante es la transformación
bottom-hat, la cual se define como el cierre de la imagen menos la imagen original, esto es:
𝑓𝑏𝑜𝑡 = (𝑓 ∙ 𝑏)− 𝑓 (8) f
C. Comparación en sistemas biométricosLa mejor manera de medir el desempeño de un sistema
biométrico es determinando su tasa de igual error (EER), para el cual previamente se hace necesaria la construcción de las curvas de falsa aceptación (FAR) y falso rechazo (FRR). Normalmente un fabricante de un sistema biométrico debe entregar estas curvas al usuario, para que éste determine de acuerdo a la aplicación en qué se va a usar el dispositivo el umbral más adecuado.
Las medidas de desempeño y la construcción de las curvas para un sistema de identificación de personas y uno de verificación de identidad son los mismos.
Dado que dos imágenes (del dorso de la mano de una misma persona) nunca son iguales, las características que se extraen de éstas tampoco van a ser exactamente iguales, sin embargo, el sistema sí debe estar en capacidad de identificar a
la persona para la gran mayoría de los casos. Esto lleva a que, en general, lo que el sistema biométrico hace es establecer que una imagen pertenece a una clase (la de cierto individuo) con cierta probabilidad (umbral).
Tasa de falsa aceptación (False acceptance rate (FAR))Es la probabilidad que un sistema biométrico identifique
incorrectamente a un individuo o falle en rechazar a un impostor. Se conoce también como error tipo II.
Este tipo de error se identifica con la curva de falsa aceptación (FAR), la cual se construye con unas nuevas entradas en la base de datos para cada individuo; lo que se hace con esto es ver la respuesta del sistema, para un umbral determinado, a la nueva entrada correspondiente a determinada persona cuando ésta pretende hacerse pasar por cualquiera del resto de las personas de la base de datos. Es decir, que una persona trata de verificar su identidad haciéndose pasar como el resto de los individuos de la base de datos, considerándolos uno por uno. Esto se hace para cadaindividuo de la base de datos y para un número aceptable de umbrales.
Tasa de falso rechazo (False rejection rate(FRR))Es la probabilidad que un sistema biométrico falle en la
identificación o verificación de identidad de una persona previamente incluida en su base de datos. Conocido también como error tipo I.
Este tipo de error se conoce construyendo la curva de falso rechazo FRR (por sus siglas en inglés), la cual se hace con unas nuevas entradas diferentes a las del enrolamiento de cada persona previamente incluida en la base de datos. Tales entradas tienen el propósito de verificar la identidad de la persona. Esto se realiza para cada persona dentro del banco de datos, considerando un número aceptable de umbrales. Por supuesto que, entre más bajo es el umbral, los falsos rechazos serán más escasos.
Tasa de igual error (Equal Error Rate (EER))Es el punto en el cual el FRR es igual al FAR. Entre menor
sea su valor, el desempeño del sistema biométrico es mejor.
III. BASE DE DATOS
La base de datos obtenida fue de 109 personas, para un total de 218 manos teniendo en cuenta las izquierdas y las derechas. El número de imágenes capturadas por mano fue de siete, en dos sesiones con una separación temporal de mínimo dos días para el peor caso. En la primera sesión se tomaron cuatro muestras y en la segunda tres.
La edad de las personas que conforman la base de datos oscila entre 18 y 29 años. De las 109 personas que conforman la base de datos 31 son mujeres y 78 hombres.
Para la conformación de la base de datos se tomaron siete fotos por cada mano de cada persona, es decir un total de 763 fotos incluyendo ambas manos, las cuales fueron adquiridas en dos sesiones, cuya diferencia temporal fue de dos días para el caso mínimo.
En la primera sesión se creó un archivo referente a la persona, al que se le adhirieron un conjunto de ocho imágenes correspondientes a cuatro imágenes por cada mano. Para tener en cuenta la posible variación de la posición se siguió un
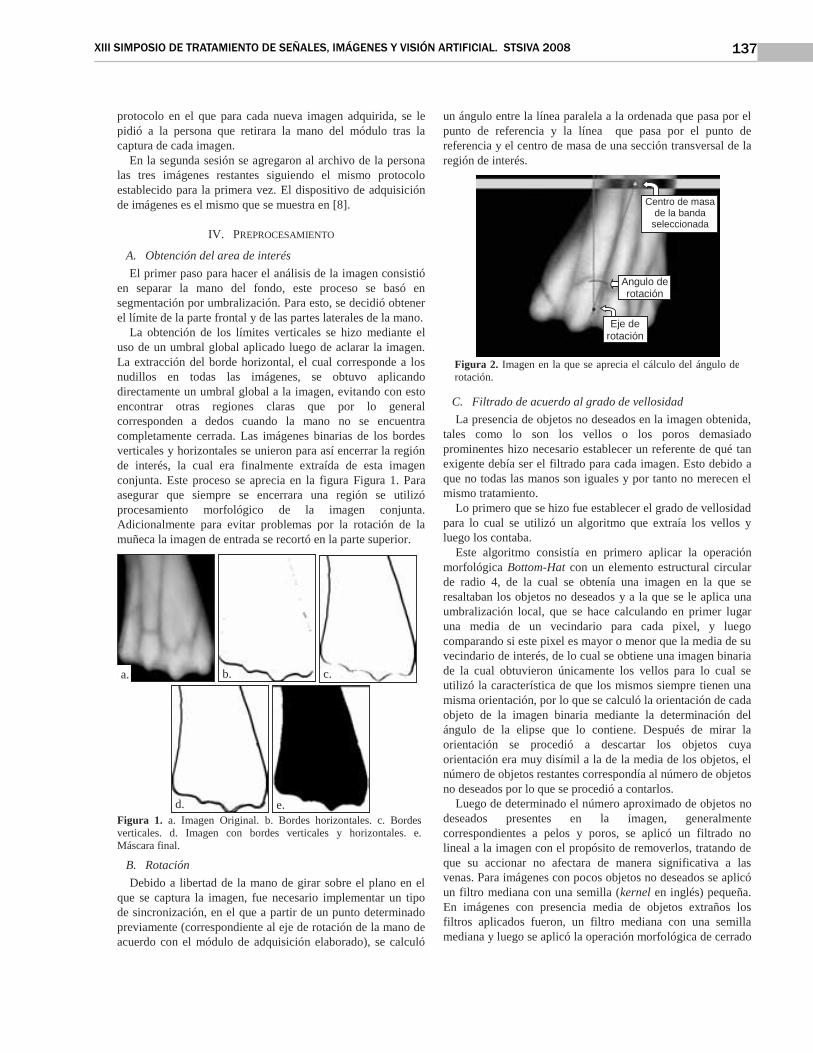
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 137
protocolo en el que para cada nueva imagen adquirida, se le pidió a la persona que retirara la mano del módulo tras la captura de cada imagen.
En la segunda sesión se agregaron al archivo de la persona las tres imágenes restantes siguiendo el mismo protocolo establecido para la primera vez. El dispositivo de adquisición de imágenes es el mismo que se muestra en [8].
IV. PREPROCESAMIENTO
A. Obtención del area de interésEl primer paso para hacer el análisis de la imagen consistió
en separar la mano del fondo, este proceso se basó ensegmentación por umbralización. Para esto, se decidió obtener el límite de la parte frontal y de las partes laterales de la mano.
La obtención de los límites verticales se hizo mediante el uso de un umbral global aplicado luego de aclarar la imagen. La extracción del borde horizontal, el cual corresponde a los nudillos en todas las imágenes, se obtuvo aplicando directamente un umbral global a la imagen, evitando con esto encontrar otras regiones claras que por lo general corresponden a dedos cuando la mano no se encuentra completamente cerrada. Las imágenes binarias de los bordes verticales y horizontales se unieron para así encerrar la región de interés, la cual era finalmente extraída de esta imagen conjunta. Este proceso se aprecia en la figura Figura 1. Para asegurar que siempre se encerrara una región se utilizó procesamiento morfológico de la imagen conjunta. Adicionalmente para evitar problemas por la rotación de la muñeca la imagen de entrada se recortó en la parte superior.
B. RotaciónDebido a libertad de la mano de girar sobre el plano en el
que se captura la imagen, fue necesario implementar un tipo de sincronización, en el que a partir de un punto determinado previamente (correspondiente al eje de rotación de la mano de acuerdo con el módulo de adquisición elaborado), se calculó
un ángulo entre la línea paralela a la ordenada que pasa por el punto de referencia y la línea que pasa por el punto de referencia y el centro de masa de una sección transversal de la región de interés.
C. Filtrado de acuerdo al grado de vellosidadLa presencia de objetos no deseados en la imagen obtenida,
tales como lo son los vellos o los poros demasiado prominentes hizo necesario establecer un referente de qué tan exigente debía ser el filtrado para cada imagen. Esto debido aque no todas las manos son iguales y por tanto no merecen el mismo tratamiento.
Lo primero que se hizo fue establecer el grado de vellosidad para lo cual se utilizó un algoritmo que extraía los vellos y luego los contaba.
Este algoritmo consistía en primero aplicar la operación morfológica Bottom-Hat con un elemento estructural circular de radio 4, de la cual se obtenía una imagen en la que se resaltaban los objetos no deseados y a la que se le aplica una umbralización local, que se hace calculando en primer lugar una media de un vecindario para cada pixel, y luego comparando si este pixel es mayor o menor que la media de su vecindario de interés, de lo cual se obtiene una imagen binaria de la cual obtuvieron únicamente los vellos para lo cual se utilizó la característica de que los mismos siempre tienen una misma orientación, por lo que se calculó la orientación de cada objeto de la imagen binaria mediante la determinación del ángulo de la elipse que lo contiene. Después de mirar la orientación se procedió a descartar los objetos cuya orientación era muy disímil a la de la media de los objetos, el número de objetos restantes correspondía al número de objetos no deseados por lo que se procedió a contarlos.
Luego de determinado el número aproximado de objetos nodeseados presentes en la imagen, generalmente correspondientes a pelos y poros, se aplicó un filtrado no lineal a la imagen con el propósito de removerlos, tratando de que su accionar no afectara de manera significativa a las venas. Para imágenes con pocos objetos no deseados se aplicó un filtro mediana con una semilla (kernel en inglés) pequeña. En imágenes con presencia media de objetos extraños los filtros aplicados fueron, un filtro mediana con una semilla mediana y luego se aplicó la operación morfológica de cerrado
Figura 2. Imagen en la que se aprecia el cálculo del ángulo de rotación.
Centro de masa de la banda
seleccionada
Eje de rotación
Angulo de rotación
Figura 1. a. Imagen Original. b. Bordes horizontales. c. Bordes verticales. d. Imagen con bordes verticales y horizontales. e. Máscara final.
c.b.
e.d.
a.

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 138
con la misma semilla, y para imágenes con una gran cantidad de objetos indeseados se aplicó el mismo procedimiento anterior pero reemplazando el filtro mediana por un filtro máximo.
Posteriormente fue aplicado un filtro de Wiener adaptativo, local para quitar pequeñas irregularidades en la imagen causadas por el filtrado no lineal precedente.
V. SEGMENTACIÓN
Luego de obtener una imagen limpia de la etapa de preprocesamiento, se le hizo un aumento de contraste por medio de un filtrado en frecuencia con filtros pasa altos, como se menciona en [8]. De este aumento de contraste se obteníandos imágenes una con un aumento en el contraste de los bordes verticales y una con aumento en el contraste de los bordes horizontales.
Para identificar lo correspondiente a una vena se aprovechó el hecho que las venas corresponden a mínimos relativos en laimagen, y que al estar el contraste elevado las pendientes entre las que se encuentra el mínimo son elevadas. Por lo cual para la determinación de los mínimos se usó la segunda derivada de la imagen. Como una imagen es una señal en dos dimensiones y las venas se pueden encontrar en cualquier dirección se usaron máscaras (derivativas) orientadas para detectar los cambios en todas las direcciones. Las máscaras usadas para tal propósito fueron:
Cada una de las máscaras de la Figura 4 se aplicó dos veces sobre las dos imágenes contrastadas de manera independiente y se obtuvieron ocho imágenes en las cuales se resaltaban las pendientes positivas de la primera derivada, en la dirección de detección de la máscara respectiva.
Posteriormente fue empleada una umbralización para binarizar las ocho imágenes, a las que se les aplicó un pequeño tratamiento morfológico para en primer lugar unir objetos cercanos, y en segundo lugar descartar objetos pequeños. Con esto se obtuvieron ocho imágenes binarias limpias a las cuales se les hace una or lógica, con el fin de rescatar todos los detalles relevantes de la red venosa, para obtener finalmente la imagen de salida definitiva binaria.
Figura 5. a. b. c. d. Imágenes obtenidas al aplicar las máscaras de la Figura 4, a la imagen de contraste vertical mejorado.
a. b.
c. d.
Figura 4. a. Máscara para detectar bordes verticales. b. Máscara que detecta bordes tanto horizontales como verticales, pero con tendencia a los cambios en dirección noroeste. c. Máscara para detectar bordes horizontales. d. Máscara que detecta bordes tanto horizontales como verticales, pero con tendencia a los cambios en dirección noreste.
(0 1 −1) �0 0 −10 1 00 0 0
�
�−110� �
−1 0 00 1 00 0 0
�
a. b.
c. d.
Figura 3. a. Imagen original de una persona con vellos en la mano. b. Luego de la operación bottom-hat en la que se resaltan los objetos no deseados. c. Imagen binaria en la que se encuentran los objetos no deseados de la imagen a.
a.
c.
b.

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 139
VI. ESQUELETONIZACIÓN
El algoritmo usado para obtener el esqueleto se basa en el propuesto en [5], y que está presente en el IPT (image processing toolbox) de Matlab ®.
Lo primero que se hace es obtener el esqueleto de la imagen de entrada por medio del algoritmo de Lam, Seong-Whan, y Ching, [5], anteriormente mencionado. Éste algoritmo encuentra bien las líneas medias correspondientes a las venas, pero presenta el problema que genera líneas espurias que no corresponden a nada y que serían falsos positivos de no ser tratadas. Es por esto que luego a las líneas obtenidas por el algoritmo de esqueletonización, se les hace un análisis para determinar si son espurias o no. Dicho análisis consiste en mirar su longitud; las líneas menores de cierta longitud son consideradas falsas y se eliminan. El proceso de esqueletonización se aprecia en la Figura 7.
VII. COMPARACIÓN
Se decidió utilizar distancia de Hausdorff para comparar dos esqueletos porque tiene en cuenta la topología de los mismos, que es precisamente lo que hace que el patrón de la red venosa del dorso de la mano sea único. Sin embargo la distancia de Hausdorff como originalmente se define es muy sensible al ruido y cualquier falso positivo detectado en la etapa de segmentación puede hacer que la distancia entre dos imágenes pertenecientes a la misma clase (de la misma persona y la misma mano) tenga una distancia alta.
Para resolver este problema se decidió utilizar la distancia de Hausdorff modificada, la cual no toma el máximo de los mínimos (maximin), sino que toma la media de estos lo cual reduce significativamente el impacto sobre el resultado de los falsos positivos. Para tener en cuenta posibles variaciones constantes se decidió observar, la varianza de las distancias mínimas (primer paso de la distancia de Hausdorff). También
se realizó una modificación en la distancia de Haussdorff, que consistía en tomar la mediana de las distancias mínimas enlugar del máximo.
VIII. EVALUACIÓN Y RESULTADOS
Para la evaluación del sistema propuesto, se realizó la comparación de cada imagen contra el resto de las imágenes pertenecientes a la misma mano dentro de la base de datos. Es de resaltar que la base de datos fue reducida a cuatro imágenes por mano por persona, de las cuales dos correspondían a las tomadas en la primera sesión y las dos restantes correspondían a las tomadas en la segunda sesión.
A continuación en la Tabla 1 se presentan los resultados de la tasa de igual error (EER) anteriormente mencionados para la comparación basada en la distancia de Hausdorffmodificada, al igual que con la comparación hecha a partir de la mediana de la HD, de acuerdo a los métodos basados en filtros shock empleados en [8] y la segmentación basada en las derivadas presentada en este artículo.
Tasa de Igual Error -EER- (%) Método 1
(filtro shock)Método 2
(filtro shock)Método 3(derivadas)
Der. Izq. Der. Izq. Der. Izq.MHD 14,95 14,68 13,56 16,61 13,18 12,69MedianaHD
15,35 15,61 18,02 20,87 14,30 14,73
Tabla 1. Tasas de igual error para los tres métodos de segmentación expuestos evaluados, por medio de la MHD y la MedianHD.
Figura 7. a. Imagen binaria obtenida por alguno de los métodos previamente descritos. b. Imagen luego de la obtención del esqueleto con algunas líneas falsas. c. Imagen luego de la remoción de ramas espurias.
a. b.
c.
Figura 6. a. b. c. d. Imágenes obtenidas al aplicar las máscaras de la Figura 4, a la imagen de contraste horizontal mejorado.
a. b.
c. d.

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 140
El sustento de los resultados anteriormente presentados se halla en las gráficas de falsa aceptación y falso rechazo construidas a partir de la comparación de cada una de las imágenes con las mismas de su clase (para obtener la curva de FRR) y con las del resto de clases (para obtener la curva de FAR). Cabe recalcar que el porcentaje de EER presentado en la Tabla 1 fue obtenido a partir del punto de intersección de las mencionadas curvas. Tales curvas se muestran a continuación:
Figura 8. FAR (curvas decrecientes) y FRR (curvas crecientes) para los diferentes métodos. Esta gráfica corresponde a la comparación por medio de la distancia de Hausdorff Modificada para la mano derecha.
Figura 9. FAR (curvas decrecientes) y FRR (curvas crecientes) para los diferentes métodos. Esta gráfica corresponde a la comparación por medio de la distancia de Hausdorff Modificada para la mano izquierda.
Figura 10. FAR (curvas decrecientes) y FRR (curvas crecientes) para los diferentes métodos. Esta gráfica corresponde a la comparación por medio de la mediana de la distancia de Hausdorff para la mano derecha.
Figura 11. FAR (curvas decrecientes) y FRR (curvas crecientes) para los diferentes métodos. Esta gráfica corresponde a la comparación por medio de la mediana de la distancia de Hausdorff para la mano izquierda.
IX. CONCLUSIONES
Se evidenció con este trabajo que para al menos en un conjunto heterogéneo de 100 personas, con edades oscilantes entre los 18 y 29 años, las venas son una medida biométrica útil para realizar la verificación de la identidad de los individuos.
De los métodos de segmentación analizados en este estudio, se puede concluir que a pesar de que, a la vista los métodos que utilizaban los filtros shock parecían ser los de mejores resultados porque aparentaban tener menos falsos positivos, los resultados de tasa de igual error obtenidos con estos no fueron diferentes al método basado en derivadas, el cual además presenta la ventaja de tener un costo computacional menor. Adicionalmente las tasas de igual error obtenidas al evaluar los métodos propuestos no son de ninguna manera concluyentes.
De la misma manera, se logró observar una tendencia en la que la MHD tiene un mejor desempeño que la Median HD. Noobstante, el estudio no puede ser concluyente debido a que el número de muestras no es significativo y las tasas de igual error obtenidas para ambos distancias son muy similares en el
0 20 40 60 80 1000
20
40
60
80
100
Umbral
FAR y FRRMano Derecha, Distancia de Hausdorff Modificada
0 20 40 60 80 1000
20
40
60
80
100
Umbral
FAR y FRRMano Izquierda, Distancia de Hausdorff Modificada
0 20 40 60 80 1000
20
40
60
80
100
Umbral
FAR y FRRMano Derecha, Mediana de la HD
0 20 40 60 80 1000
20
40
60
80
100
Umbral
FAR y FRRMano Izquierda, Mediana de la HD
Método 1
Método 2
Método 3
Método 1
Método 2
Método 3
Método 1
Método 2
Método 3
Método 1
Método 2
Método 3

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 141
caso de los tres métodos.
Hacer la verificación de la identidad de personas por el patrón de las venas del dorso de la mano puede tener una serie de complicaciones inherentes a las diversas morfologías existentes en las manos de las personas. Por ejemplo, eltratamiento de las imágenes para cierto grupo de personas puede tener dificultades debido a que estas presentan una gran cantidad de vellos, poros pronunciados y otro tipo de marcas en esta parte de la mano. Razón por la cual se hace necesario realizar un tratamiento fuerte para aminorar el efecto de estas marcas, lo que puede comprometer en casos críticos la calidad de la red venosa, llevando así a una pérdida excesiva de la información.
Así mismo, la postura de la mano a la hora de adquirir la imagen es un factor crítico debido a que, por la elasticidad de las venas, el patrón puede tener un cambio significativo, lo que dependiendo de la sensibilidad de los algoritmos de reconocimiento, puede tener repercusiones sobre el movimiento de la curva de falso rechazo. Se puede ver que hay una relación muy estrecha entre el costo computacional y la flexibilidad de los algoritmos de segmentación y comparación; entre más independientes a la rotación y deformación de la mano son dichos algoritmos, más alto es el costo computacional, lo que indica un aumento significativo en el tiempo de ejecución.
Un factor que se puede tornar en un inconveniente al analizar el patrón de las venas es el hecho de que éstas son muy propensas a esconderse conforme a la temperatura corporal disminuye, y en contraposición, tienden a brotarse cuando la temperatura corporal aumenta. Estas variaciones pueden ser debidas al cambio en la temperatura del ambiente o al estado de agitación de la persona.
La tasa de igual error (EER), no es del todo un parámetro definitivo de evaluación de un sistema biométrico, como si lo es la curva que lo determina, ya que sobre esta se pueden determinar las diferentes tasas (FAR y FRR) para un punto de operación dado. Generalmente el punto de operación es diferente del punto donde se presenta el igual error ya que este punto se determina a partir de la aplicación en la cual el sistema biométrico va a ser empleado.
En una posible implementación de un sistema de verificación de identidad basado en el patrón de las venas del dorso de la mano, la falsa aceptación es realmente menor que lo determinado por la curva, ya que, si consideramos el caso hipotético de que exista un impostor que quiera engañar el sistema haciéndose pasar por alguien que tenga acceso al sistema, sería muy complicado para tal impostor saber por cual persona se debe hacer pasar para ser aceptado. Esta incertidumbre que juega a favor del sistema biométrico de verificación es la que le da mayor confiabilidad. Nótese que es importante resaltar que esto es útil para la verificación de identidad mas no para la identificación como tal, porque errores de este tipo sí son altamente importantes en sistemas de identificación. También se sugiere que por esto, y hasta que no se hagan estudios con bases de datos mucho más amplias y diversas en cuanto a edades, población, sexo, raza, etc. no se
utilice el patrón de las venas del dorso de la mano como una biometría para identificar personas.
REFERENCIAS
[1] DUBUISSON M. P., JAIN A. “A modified Hausdorff distance for object matching”. En: Proc. International conference on Pattern Recognition, Jerusalem, Israel, 1994, pp 566 – 568.
[2] GONZALEZ R., WOODS R., EDDINS S. “Digital Image Processing using Matlab”. Pearson Prentice Hall 2004. 609p.
[3] Kuo-Chin F., Chih-Lung L. and Win-Long L. “Biometric verification using thermal images of palm-dorsa vein patterns”. IEEE transactions on Circuits and Systems for Video Technology, Vol. 14, No. 2, Feb. 2004 Page(s): 199 – 213.
[4] L. Wang and G. Leedham, Feature Extraction of Hand-Vein Patterns Based on Ridgelet Transform and Local Interconnection Structure Neural Network.
[5] Lam, L., Seong-Whan L., and Ching Y. S., "Thinning Methodologies-AComprehensive Survey," IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol 14, No. 9, Septiembre 1992, page 879.
[6] WANG, L. LEEDHAM, G. “A Thermal Hand Vein Pattern Verification System”. Lecture Notes in Computer Science, Vol. 3687, Springer, 2005, Page(s): 58-65.
[7] ZHANG Y. HAN X. MA Si-liang. “Feature Extraction of Hand-Vein Patterns Based on Ridgelet Transform and Local Interconnection Structure Neural Network”. Lecture Notes in Control and Information Sciences, Vol. 345, Springer, 2006, Page(s): 870-875.
[8] Vizcaya P., Núñez B., Wilches F. “Métodos de Segmentación del Patrón de las Venas del Dorso de la Mano Basados en Filtros ShockCoherentes”
[9] http://cgm.cs.mcgill.ca/~godfried/teaching/cg-projects/98/normand/main.html. Última consulta: 27.11.2007.
[10] XIAOZHOU Yu. “Hausdorff distance for shape matching”. Presentación disponible en: .http://www.cemnet.ntu.edu.sg/presentation/slides_yuxiaozhou.pdf Última consulta: 27.11.2007.
Bernardo Núñez Ingeniero Electrónico de la Pontificia Universidad Javeriana, Bogotá (2008). Dentro de sus áreas de interés se encuentra el tratamiento de señales y los sistemas de comunicació[email protected]
Felipe Wilches Ingeniero Electrónico de la Pontificia Universidad Javeriana, Bogotá (2008). Entre sus áreas de interés se encuentran, las biométricas, el análisis y procesamiento de señales, los sistemas de comunicación, el diseño de circuitos eléctricos y la electrónica de [email protected]
Pedro Vizcaya obtuvo su grado como Ingeniero Electrónico en la PontificiaUniversidad Javeriana, Bogotá, en 1980, el grado de MSc in EE del Instituto Politécnico Rensselaer, Troy, NY, EEUU, en 1986 y el grado de PhD en EEde la misma institución en 1998. Trabaja como Profesor Titular en la Facultad de Ingeniería, Pontificia Universidad Javeriana, Bogotá. Su dirección es facultad de Ingeniería, Pontificia Universidad Javeriana, Carrera 7 No. 40-62, Bogotá, Colombia, (571) 3208320, ext. [email protected]

Memorias STSIVA 2008 Tomo II 142 - 146
Sistema de visión 3D para control cinemático de un brazo robotMSc.(C), Harold A. Rodriguez A. Ing. Mejia R. Leonardo
��������������������������������������������������������������������������������������� ������ !�"��#���$%�&"�'!(!�)*%�(*+�)�%� ,��)* � "� � -% � .(!/* � (*.*�� � ��������� � ���� � �������������������� � �� � ������ � �� � ����������� � �� � ���� � �� � ����������������������������� �� � ������!����"� ��������� ����������������� � ���� � ����� � ���� � ���� � ��������� � ���� � �� � ���������������� � �� � ���#���� � � � ��#�������� � �� � ��� �������� � � � �����#���� � ���� � ������� � �� � �������������� � ���� � �� � ���������������$�������������������������������������������������������������������������������������������������������������������������������������������������������������������������%
�����������&������ �'����(������)������ �*�#������������+��#�������,���������-�#�������+�.#�����%
0��������1�����
����'(*2�)�*�'(���%"��"���3!(�2�)*%��(-�(�-%�'(*�*��'*�"��-%������ !�"��#���$%�&"�'!(!�)*%�(*+�)�%� ,��)*�"��-%�.(!/*�(*.*��)*%� �+ �)-!+ ��� �'-�"!���+�))�*%!( �*.4��*�� �"� �!)-�("* �! �-%!���(���"��)!(!)��(����)!��'(����!.+�)�"!���* *��� � �!.�"*� �-%! � ), !(! �'(*'*()�*%! � � ,5�%�� ��% �"*��"� �%��*%��� � +* � )-!+ � %* � '(*#�� � �%6*( !)�$% � �*.(� � +!�'(*6-%"�"!"�"��+!����)�%!��2����'*(������ *��#*��7-��'!(!������'(*2�)�*���� �(!.!4!(,�)*%�"*��), !(!���2�!+ ����!.+�)�(��%�(��! .!��� ,5�%���-%!�(�+!)�$%�*(�*%*( !+�����'*"(,%���%�(�+!���(���"� �%��*%���"�+���'!)�*�"���(!.!4*��� � '�(��5-� � "��!((*++!( � -% � ����� ! � "� � ��5-� ��%�*��(�"� �%��*%!+��� '+�!%"*�#!(�!��), !(!���%���� '*�(�!+��)*%�-%! � )*�! � "� � �((*( � !)�'�!.+�� � !%��%��%"* � -% � .!4* � )*����)* '-�!)�*%!+���!(!��% !()!(��+�'(*.+� !����(�!+�/!(,%� ��(���!�-%)�*%����*.(���+������ !�%�'(� �(�+-5!(���+���5-� ��%�*����(�!+�/!(,�8%�)! �%����*.(�������������%��+���'!)�*���"�%��6�)!"*�'*(��-�)*+*(�*�6*( !����9� �� * � �� � � '+�!(,% ��� � �������� � ��% � ��( � %�)��!(�! � +!�-��+�/!)�$%�"��-%�'!(����:(�*�*�"����%)(*%�/!(�+!��� ,5�%���"��! .!��), !(!��2�����-'*%"(,�7-��+!��), !(!�����,%�������������
����������������������
�*(�-+�� *��2�%*� �%*��� '*(�!%������"���3!(,�-%��*6�;!(��7-����(#�(, � "� � �%��(6!/ � 5(,6�)! � �%�(� � �+ � -�-!(�*� � �+ � (*.*� � 2 � +!��), !(!����+�)-!+�'(*'*()�*%!(,�!+�*'�(!"*(��%6*( !)�$%�!)�()!�"�+ � *.4��* � ��+�))�*%!"* � 2 � "� � +! � '*��)�$% � "�+ � .(!/* � (*.*����! .�:%�'�( ���(,�!+�-�-!(�*�'(*5(! !(��!(�!��!+�(*.*��)-!%"*�%*�������%� *"*�!-�$%* *�
<
�����������������������������=>�?0���
+������ !��%��5(!"*�"�� !%�'-+!)�$%�=>�?0������)* '*%��"��+! � �%��5(!)�$% � "� � @!(";!(� � A.(!/* � (*.*�� � ), !(!�� � �!(4��!��+�)�($%�)!�"��)*%�(*+B�2��*6�;!(��A(*.��*�����*%�#0��B�
�!%�'-+!"*(C+�.(!/*����"����'*�!%�(*'* $(6�)*�"��D�5(!"*��"��+�.�(�!"�����"�)�"�$�'*(����!�)*%6�5-(!)�$%�2!�7-��"!� -)@!�#�(�!��+�"!"�!�+!�@*(!�"����+�))�*%!(� +*��*.4��*� �2!�7-�����%��&�5(!"*��"��+�.�(�!" � "� � '*��)�$% � 2 � �(�� � "� � *(��%�!)�$%� � ���*�7-��(� �"�)�( � 7-� � �� �'-�"� � !.*("!( � �+ � *.4��* � '*( �"�6�(�%����6(�%��������)*%��(-�(,�"��-%� !��(�!+�+�#�!%*�2�7-���*'*(���-%!�)!(5!�)*%��"�(!.+� �%���.!4!��%*��-'�(�*(�!�0���5(! *����+ � !��(�!+ � ��)*5�"* � �� � �+ � !)(9+�)* � 2! � 7-� � '(*'*()�*%! � +!��)!(!)��(9���)!� � %�)��!(�!�� � +�#�!%*� � (������%��� � !7-�%!.+� � 2��)*%$ �)*E�'!(!�+!���+�))�$%�"��+*����(#* *�*(������@!(,��+�),+)-+*�"�%, �)*�'!(! �*.��%�( ��+ ��*(7-� �(�7-�(�"* ��%�)!"!�-%*�"��+*���4���
��5-(!�0���*%4-%�*�"�+�.(!/*�(*.*���%��*+�"�"5��
��5-(!������%/!�A6-�%��C������ !� �)!�($%�)*�'!(!�+!���+�))�$%�"���4���2�
�%5(!%!4��B�!����5��0�2��� -���(!%��+� *"�+*�@�)@*��%�-%!�@�((! ��%�!���� � A�*+�" � �"5�B� � �+ � )-!+ � '(*'*()�*%! � -%! � #���$%�
*+*,��(�-�� +*+/0�1-�2('(�&30,'34�&+0��5,+&3�-��60�!'(73�
'3!3,
��)�A�B��=!(*+"�����*"(�5-�/�����%5����4�!������*%!("*
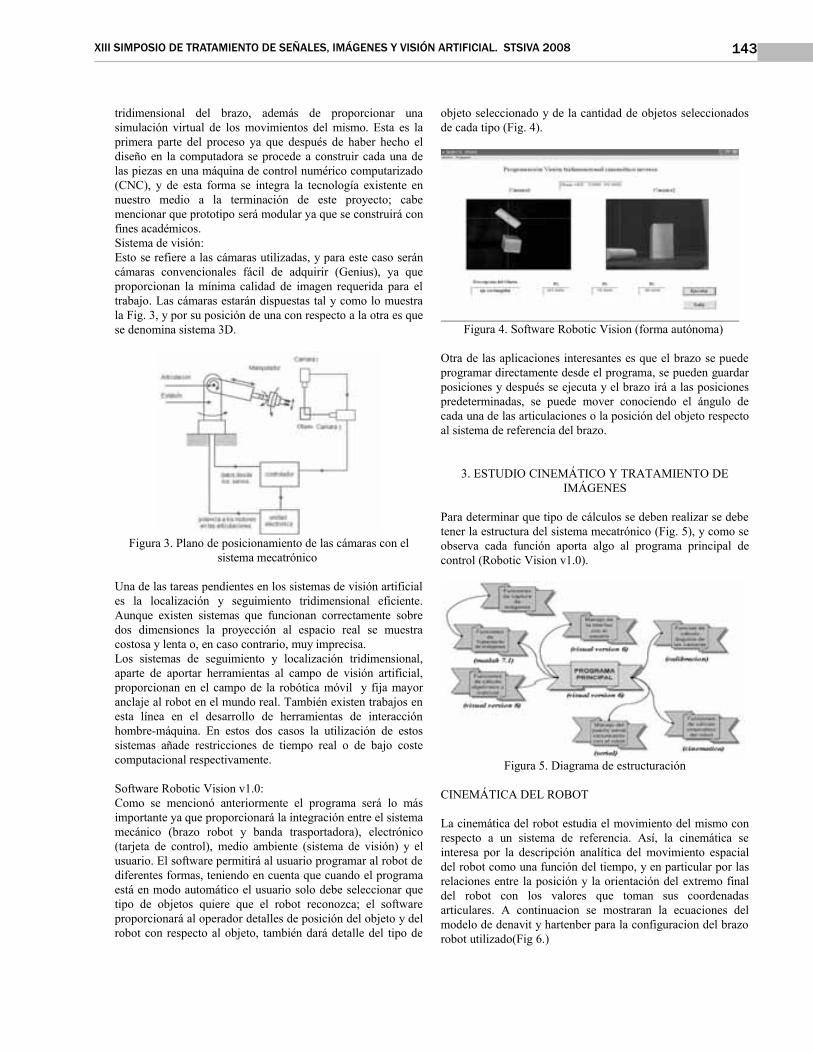
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 143
�(�"� �%��*%!+ � "�+ � .(!/*� � !"� ,� � "� � '(*'*()�*%!( � -%!��� -+!)�$%�#�(�-!+�"��+*�� *#� ��%�*��"�+� �� *����!����+!�'(� �(!�'!(���"�+�'(*)��*�2!�7-��"��'-:��"��@!.�(�@�)@*��+�"���3*��%�+!�)* '-�!"*(!����'(*)�"��!�)*%��(-�(�)!"!�-%!�"��+!��'��/!���%�-%!� ,7-�%!�"��)*%�(*+�%- :(�)*�)* '-�!(�/!"*�A���B��2�"�����!�6*( !�����%��5(!�+!���)%*+*59!��F����%����%�%-���(* � �"�* � ! � +! � ��( �%!)�$% � "� � ���� � '(*2�)�*E � )!.�� �%)�*%!(�7-��'(*�*��'*���(,� *"-+!(�2!�7-�����)*%��(-�(,�)*%�6�%���!)!": �)*������� !�"��#���$%C����*����(�6��(��!�+!��), !(!��-��+�/!"!���2�'!(!������)!�*���(,%�), !(!� � )*%#�%)�*%!+�� � 6,)�+ � "� � !"7-�(�( � A��%�-�B� � 2! � 7-��'(*'*()�*%!%�+!� 9%� !�)!+�"!"�"��� !5�%�(�7-�(�"!�'!(!��+��(!.!4*���!��), !(!�����!(,%�"��'-���!���!+�2�)* *�+*� -���(!�+!���5��&��2�'*(��-�'*��)�$%�"��-%!�)*%�(��'�)�*�!�+!�*�(!����7-�����"�%* �%!������ !�&��
��5-(!�&���+!%*�"��'*��)�*%! ��%�*�"��+!��), !(!��)*%��+������ !� �)!�($%�)*�
1%!�"��+!���!(�!��'�%"��%�����%�+*������� !��"��#���$%�!(��6�)�!+��� � +! � +*)!+�/!)�$% � 2 � ��5-� ��%�* � �(�"� �%��*%!+ � �6�)��%�����-%7-���F����%������ !��7-��6-%)�*%!%�)*((�)�! �%����*.(��"*� � "� �%��*%�� � +! � '(*2�))�$% � !+ � ��'!)�* � (�!+ � �� � -���(!�)*��*�!�2�+�%�!�*���%�)!�*�)*%�(!(�*�� -2�� '(�)��!��*� � ����� !� � "� � ��5-� ��%�* � 2 � +*)!+�/!)�$% � �(�"� �%��*%!+��!'!(�� �"��!'*(�!( �@�((! ��%�!��!+ �)! '*�"��#���$%�!(��6�)�!+��'(*'*()�*%!%��%��+�)! '*�"��+!�(*.$��)!� $#�+� �2�6�4!� !2*(�!%)+!4��!+�(*.*���%��+� -%"*�(�!+���! .�:%��F����%��(!.!4*���%����! � +9%�! � �% � �+ � "��!((*++* � "� � @�((! ��%�!� � "� � �%��(!))�$%�@* .(�? ,7-�%!� �%����*� �"*� �)!�*�� +! �-��+�/!)�$%�"� ����*������� !��!3!"��(���(�))�*%���"�� ��� '*�(�!+ �* �"��.!4* �)*����)* '-�!)�*%!+�(��'�)��#! �%���
�*6�;!(���*.*��)�����*%�#0��C��* *� �� � �%)�*%$ � !%��(�*( �%�� � �+ � '(*5(! !� ��(, � +* � ,��� '*(�!%���2!�7-��'(*'*()�*%!(,�+!��%��5(!)�$%��%�(���+������ !� �),%�)* � A.(!/* � (*.*� � 2 � .!%"! � �(!�'*(�!"*(!B� � �+�)�($%�)*�A�!(4��!�"��)*%�(*+B� � �"�*�! .��%���A����� !�"��#���$%B�2��+�-�-!(�*��+��*6�;!(��'�( ���(,�!+�-�-!(�*�'(*5(! !(�!+�(*.*��"��"�6�(�%����6*( !�����%��%"*��%�)-�%�!�7-��)-!%"*��+�'(*5(! !����,��%� *"*�!-�* ,��)*��+�-�-!(�*��*+*�"�.����+�))�*%!(�7-����'* �"� �*.4��*� � 7-��(� � 7-� � �+ � (*.*� � (�)*%*/)!E � �+ � �*6�;!(��'(*'*()�*%!(,�!+�*'�(!"*(�"��!++���"��'*��)�$%�"�+�*.4��*�2�"�+�(*.*��)*%�(��'�)�*�!+�*.4��*���! .�:%�"!(,�"��!++��"�+���'*�"��
*.4��*���+�))�*%!"*�2�"��+!�)!%��"!"�"��*.4��*����+�))�*%!"*��"��)!"!���'*�A��5��GB�
��5-(!�G���*6�;!(���*.*��)�����*%�A6*( !�!-�$%* !B�
��(!�"��+!��!'+�)!)�*%����%��(��!%�������7-���+�.(!/*����'-�"��'(*5(! !(�"�(�)�! �%���"��"���+�'(*5(! !�����'-�"�%�5-!("!(�'*��)�*%���2�"��'-:������4�)-�!�2��+�.(!/*��(,�!�+!��'*��)�*%���'(�"���( �%!"!�� � �� � '-�"� � *#�( � )*%*)��%"* � �+ � ,%5-+* � "��)!"!�-%!�"��+!��!(��)-+!)�*%���*�+!�'*��)�$%�"�+�*.4��*�(��'�)�*�!+������ !�"��(�6�(�%)�!�"�+�.(!/*�
&����1�����������������������������������
�!(!�"���( �%!(�7-����'*�"��),+)-+*�����"�.�%�(�!+�/!(����"�.����%�(�+!����(-)�-(!�"�+������ !� �)!�($%�)*�A��5��HB��2�)* *����*.��(#! � )!"! � 6-%)�$% � !'*(�! � !+5* � !+ � '(*5(! ! �'(�%)�'!+ � "��)*%�(*+�A�*.*��)�����*%�#0��B��
��5-(!�H����!5(! !�"�����(-)�-(!)�$%
���������������I��
�!�)�%� ,��)!�"�+�(*.*�����-"�!��+� *#� ��%�*�"�+� �� *�)*%�(��'�)�* � ! � -% � ����� ! � "� � (�6�(�%)�!� ���9� � +! � )�%� ,��)! � ����%��(��!�'*(�+!�"��)(�')�$%�!%!+9��)!�"�+� *#� ��%�*���'!)�!+�"�+�(*.*��)* *�-%!�6-%)�$%�"�+���� '*��2��%�'!(��)-+!(�'*(�+!��(�+!)�*%����%�(��+!�'*��)�$%�2�+!�*(��%�!)�$%�"�+��F�(� *�6�%!+�"�+ � (*.*� � )*% � +*� � #!+*(�� � 7-� � �* !% � �-� � )**("�%!"!��!(��)-+!(��� �� � )*%��%-!)�*% � �� � *��(!(!% � +! � �)-!)�*%�� � "�+� *"�+*�"��"�%!#���2�@!(��%.�(�'!(!�+!�)*%6�5-(!)�*%�"�+�.(!/*�(*.*��-��+�/!"*A��5�D�B

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 144
��5-(!�D���!(, ��(*���?=�'!(!��+�(*.*��=>�?0���2��-��(��'�)��#!�� !�(�)���
���!7-9 � �� �*.���%� � +! � !�(�/ �"� � �(!%�6*( !)�$% �@* *5:%�!�6�%!+� -+��'+�)!%"*��*"!��+!�� !�(�)���!%��(�*( �%���"��)(��!��
��%� ,��)!��%#�(�!C+ � *.4���#* � "�+ � "��!((*++* � )�%� ,��)* � �%#�(�* � )*%����� � �%��%)*%�(!( � +*� � #!+*(�� � 7-� � "�.�% � !"*'�!( � +!� � )**("�%!"!��!(��)-+!(���"�+�(*.*��7J�K70��7���7&��7G��7H��7DL��'!(!�7-���-��F�(� * � �� � '*��)�*%� � 2 � *(��%�� � ��58% � -%! � "���( �%!"!�+*)!+�/!)�$%���'!)�!+��2�'!(!��+�.(!/*�� '+�!"*��+� *"�+*����!�(�5�"*�'*(� �"�*�"��+!����5-��%�����)-!)�*%��C
������������� ���� �&
0�
�0 MM= ������������A0B
������������������
= −
�
�
�
�� 00 �!% �������A�B
�
( )
−−
+= −
�0
000� �!%
���
�����
�
��
� A&B�
−−−+= −
�0
��
�0
���0
& �)*�
��
������
���AGB
=
&&
�&G
�
�������� ��*%"��
H
HG
&&
�&
�
��
�
� −= ������ADB����������
����� ( )&&H )*� ���� = ��*%"��� H&& �� = ������ANB
�
−=
&0
&�D !()�!%
�
�� ��*%"����
DH
DH
&0
&�
��
��
�
�
−= ����A�B
������!�6*( !����'-�"��)*%�(*+!(��+�(*.*���*+*�)*%���%�(��+�#!+*(�"��'F��'2��'/�2�'*"�(�'*��)�*%!(�)!"!�!(��)-+!)�$%�)*%��+�,%5-+*��%"�)!"*�)*%�(��'�)�*�!�+!�!(��)-+!)�$%�!%��(�*(��
�(!�! ��%�*�"��� ,5�%��C+�)! '*�"�+��(!�! ��%�*�"�5��!+�"��� ,5�%������,��%�)*%��%-!��#*+-)�$%���-(!%���+*��8+�� *��!3*��@!�!- �%�!"*��+��%��(:���%�+!� *(6*+*59!�"��+!��� ,5�%����'(*)��! ��%�*�"��� ,5�%����% � )*+*(� � )* '(�%��$% �2� (�)*%*)� ��%�* �"� � � ,5�%�� �2� +*������� !���%��+�5�%����"��!%,+�����"��� ,5�%����+��(!�! ��%�*�"�5��!+�"��� ,5�%���)* '(�%"��-%�! '+�*�(!%5*�"��@!(";!(����*6�;!(��2�(�)-(�*����$(�)*���!� !%�'-+!)�$%�5+*.!+�"��-%!�� !5�%����'-�"��"�#�"�(��%�&�)!��5*(9!�C��(*)��!"*�"��� !5�%?���%�(!�%-�#!��� ,5�%���%,+���� � "� � � !5�%? � ��%�(! � )*%4-%�*� � "� � �"�"!� � "��'(*'��"!"���* '(���$%�"��� ,5�%��?����)(�')�$%�!�!+�*�%�#�+��KGL��7-9�����(!.!4!(,��+�!%,+�����"��+!�� !5�%��'!(!�'*"�(���%�(��-��'(*'��"!"��� � �!+�� � )* * � )*+*(� � �! !3*� � 6*( !� � )�%�(*�5�* :�(�)*����)��A��5��NB�
��5-(!�N�����!++��"��+*��*.4��*����+�))�*%!"*��'*(��+��*.*��)�����*%�#0���
�(*)�"� ��%�*�'!(!�+!��F�(!))�*%�"��'(*'��"!"���"��+!�� !5�%C
�%�)�!+ �%��� ��� (�7-��(��)!'�-(!( �-%*�"�� +*� � 6*�*5(! !��"�+�#�"�*�'!(!��-��'*���(�*(�'(*)��! ��%�*�-�!%"*�+!�@�((! ��%�!�'!(!�!"7-���)�$%�"��6*�*5(!69!��!�'!(��(�"��#�"�*�"�+��*6�;!(��-��+�/!"*���!+�)* *���� -���(!��%�+!�A��5���B
��5-(!����1%!�#�/�������%��-%!�� !5�%����,��)!�"��+!��%�(!"!�"��#�"�*����'-�"��)* �%/!(�!'(*)��!(�'!(!�!�9�'*"�(��%)*%�(!(�+!�-.�)!)�$%�"�+�*.4��*�7-����(,�6�%!+ �%��%-���(*�*.4���#*�'(�%)�'!+���!(!��++*�'(� �(*����"�.��@!)�(�+!�)*%#�(��$% � "� � +! � � !5�% � *.��%�"! � 7-� � �� � �%)-�%�(! � �% � -%�6*( !�*�5(!6�)*���I�!�-%�6*( !�*�5(,6�)*� ,����%)�++*�'!(!��� '+�6�)!(��+�'*���(�*(�'(*)��*�"��6�+�(!"*��"�)@!�)*%#�(��$%���'-�"��#�(��+�+!�A��5��OB
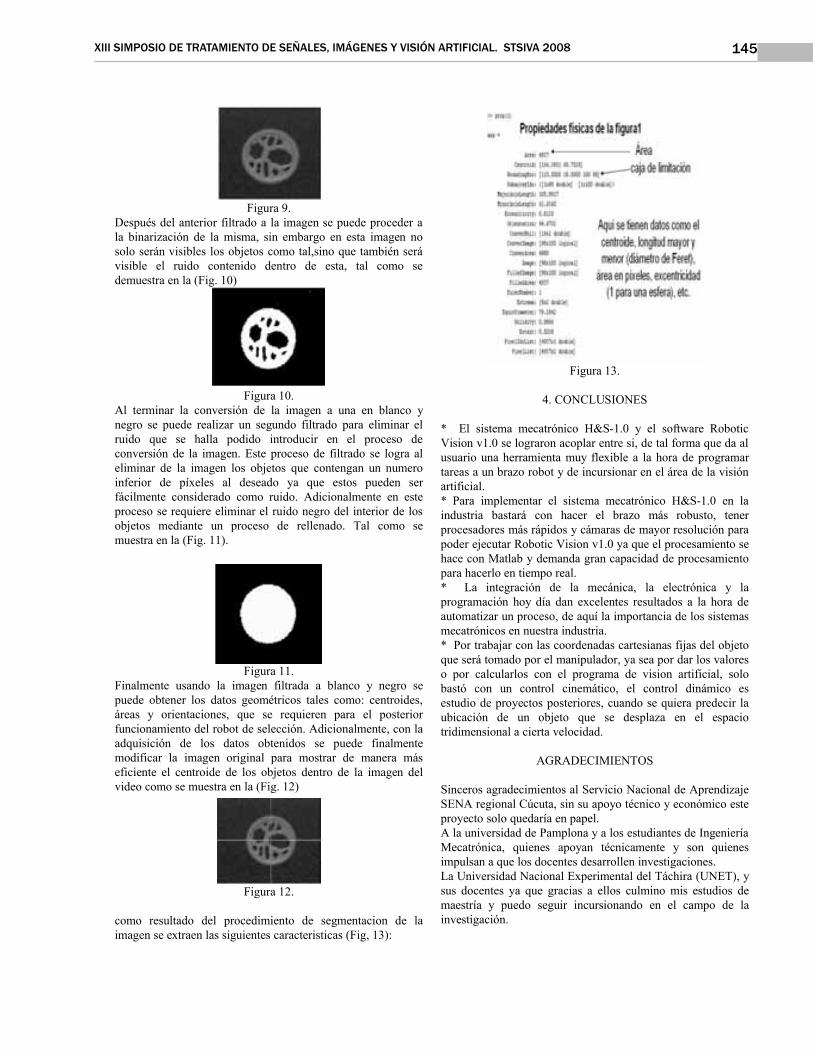
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 145
��5-(!�O����'-:��"�+�!%��(�*(�6�+�(!"*�!�+!�� !5�%����'-�"��'(*)�"�(�!�+!�.�%!(�/!)�$%�"��+!� �� !����%�� .!(5*��%����!�� !5�%�%*��*+*���(,%�#���.+���+*��*.4��*��)* *��!+���%*�7-���! .�:%���(,�#���.+� � �+ � (-�"* � )*%��%�"* � "�%�(* � "� � ���!� � �!+ � )* * � ���"� -���(!��%�+!�A��5��0�B
��5-(!�0���+ � ��( �%!( � +! � )*%#�(��$% �"� � +! � � !5�%�! �-%! ��% �.+!%)* �2�%�5(*����'-�"��(�!+�/!(�-%���5-%"*�6�+�(!"*�'!(!��+� �%!(��+�(-�"* � 7-� � �� � @!++! � '*"�"* � �%�(*"-)�( � �% � �+ � '(*)��* � "��)*%#�(��$%�"��+!�� !5�%������'(*)��*�"��6�+�(!"*����+*5(!�!+��+� �%!(�"��+!� � !5�%�+*��*.4��*��7-��)*%��%5!%�-%�%- �(*��%6�(�*( � "� � '9F�+�� � !+ � "���!"* � 2! � 7-� ����*� � '-�"�% � ��(�6,)�+ �%��� )*%��"�(!"* �)* *�(-�"*� ��"�)�*%!+ �%�� ��% ������'(*)��*����(�7-��(���+� �%!(��+�(-�"*�%�5(*�"�+��%��(�*(�"��+*��*.4��*� � �"�!%�� � -% � '(*)��* � "� � (�++�%!"*� � �!+ � )* * � ��� -���(!��%�+!�A��5��00B�
��5-(!�00���%!+ �%�� � -�!%"* � +! � � !5�% � 6�+�(!"! � ! � .+!%)* � 2 � %�5(* � ���'-�"��*.��%�(� +*��"!�*��5�* :�(�)*���!+���)* *C�)�%�(*�"����,(�!� � 2 � *(��%�!)�*%��� � 7-� � �� � (�7-��(�% � '!(! � �+ � '*���(�*(�6-%)�*%! ��%�*�"�+�(*.*��"����+�))�$%���"�)�*%!+ �%����)*%�+!�!"7-���)�$% � "� � +*� � "!�*� � *.��%�"*� � �� � '-�"� � 6�%!+ �%��� *"�6�)!( � +! � � !5�% � *(�5�%!+ � '!(! � *��(!( � "� � !%�(! � ,���6�)��%����+�)�%�(*�"��"��+*��*.4��*��"�%�(*�"��+!�� !5�%�"�+�#�"�*�)* *���� -���(!��%�+!�A��5��0�B
��5-(!�0��
)* * � (��-+�!"* � "�+ � '(*)�"� ��%�* � "� � ��5 �%�!)�*% � "� � +!�� !5�%�����F�(!�%�+!����5-��%����)!(!)��(����)!��A��5��0&BC
��5-(!�0&�
G�������1�����
M� �+ � ����� ! � �)!�($%�)* �=>�?0�� � 2 � �+ � �*6�;!(� ��*.*��)�����*%�#0������+*5(!(*%�!)*'+!(��%�(������"���!+�6*( !�7-��"!�!+�-�-!(�*�-%!�@�((! ��%�!� -2�6+�F�.+��!�+!�@*(!�"��'(*5(! !(��!(�!��!�-%�.(!/*�(*.*��2�"���%)-(��*%!(��%��+�,(�!�"��+!�#���$%�!(��6�)�!+��M� �!(! � � '+� �%�!( � �+ � ����� ! � �)!�($%�)* �=>�?0�� � �% � +!��%"-��(�! � .!��!(, � )*% � @!)�( � �+ � .(!/* � ,� � (*.-��*� � ��%�(�'(*)��!"*(��� ,��(,'�"*��2�), !(!��"�� !2*(�(��*+-)�$%�'!(!�'*"�(��4�)-�!(��*.*��)�����*%�#0���2!�7-���+�'(*)��! ��%�*����@!)��)*%��!�+!.�2�"� !%"!�5(!%�)!'!)�"!"�"��'(*)��! ��%�*�'!(!�@!)�(+*��%���� '*�(�!+�M� � �! � �%��5(!)�$% � "� � +! � �),%�)!� � +! � �+�)�($%�)! � 2 � +!�'(*5(! !)�$%�@*2�"9!�"!%��F)�+�%����(��-+�!"*��!�+!�@*(!�"��!-�* !��/!(�-%�'(*)��*��"��!7-9�+!�� '*(�!%)�!�"��+*������� !�� �)!�($%�)*���%�%-���(!��%"-��(�!�M���*(��(!.!4!(�)*%�+!��)**("�%!"!��)!(����!%!��6�4!��"�+�*.4��*�7-����(,��* !"*�'*(��+� !%�'-+!"*(��2!���!�'*(�"!(�+*��#!+*(���* �'*( � )!+)-+!(+*� � )*% ��+ � '(*5(! ! �"� �#���*% � !(��6�)�!+� � �*+*�.!��$ � )*% � -% � )*%�(*+ � )�%� ,��)*� � �+ � )*%�(*+ � "�%, �)* � ������-"�*�"��'(*2�)�*��'*���(�*(����)-!%"*����7-��(!�'(�"�)�(�+!�-.�)!)�$% � "� � -% � *.4��* � 7-� � �� � "��'+!/! � �% � �+ � ��'!)�*��(�"� �%��*%!+�!�)��(�!�#�+*)�"!"��
�������������
��%)�(*��!5(!"�)� ��%�*��!+���(#�)�*��!)�*%!+�"���'(�%"�/!4������(�5�*%!+��8)-�!����%��-�!'*2*��:)%�)*�2��)*%$ �)*������'(*2�)�*��*+*�7-�"!(9!��%�'!'�+���+!�-%�#�(��"!"�"���! '+*%!�2�!�+*�����-"�!%����"���%5�%��(9!���)!�($%�)!� � 7-��%�� � !'*2!% � �:)%�)! �%�� � 2 � �*% � 7-��%���� '-+�!%�!�7-��+*��"*)�%����"��!((*++�%��%#����5!)�*%����!�1%�#�(��"!"��!)�*%!+�F'�(� �%�!+�"�+��,)@�(!�A1��B��2��-��"*)�%����2!�7-��5(!)�!��!��++*��)-+ �%*� ������-"�*��"�� !���(9! � 2 � '-�"* � ��5-�( � �%)-(��*%!%"* � �% � �+ � )! '* � "� � +!��%#����5!)�$%��

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 146
I�.+�*5(!69!�K0L � �%�*%�* � I!((��%�*�� � �-9� � � � ��3�%� � �-%"! �%�*� � "���*.$��)!�0OON��!"(�"��'!3!�K�L � ��������� � � � > � ������ � � � P�*.*�� � �%"-��(�!+����!%�'-+!"*(��Q���+6!�* �5!�����G�K&L��%9.!+��++�(*�I!�-(*%����*.$��)!��!%�'-+!"*(���2�(*.*��� $#�+������0��I!()�+*%!?��'!3!�KGL � ���� � �* �%5* � P����$% � �(��6�)�!+Q�1%�#�(��"!" � "���!%��!5*�"���@�+���������@�+�KHL�@��'CRR;;;�-)�)�)+RST"�R'(*)��*�R"*%;+*!"R"*)R)� �"*)��KDL�@��'CRR;;;���!�- !���R'�(�*%!+R!%�*%�*R�*.*��)!R�� !0U��U���%�(*"-))�*%�'"6�� ���

Memorias STSIVA 2008 Tomo II 147 - 150
Eliminación de ruido impulsivo por medio de la utilización de funciones de base radial
Echeverri A. Jaime Alberto*, Bravo Alejandro**, Manrique Bell***
Resumen: En este trabajo se presenta una técnica de
interpolación que permite disminuir el ruido impulsivo presente en imágenes (sal y pimienta) de una manera eficiente mediante el uso de un interpolante obtenido por funciones de base radial. La eliminación del ruido impulsivo es un problema clásico del procesado no lineal, aquí se presenta el procesado y se muestra la utilidad de las funciones de base radial de soporte global. Se presentan a demás resultados al comparar varias funciones de base radial, permitiendo determinar la familia de funciones con mejores resultados. La técnica presenta inicialmente una etapa donde se etiquetan los pixeles de la imagen que son ruidosos y mediante la interpolación obtenemos un valor de reconstrucción de dicho pixel usando los pixeles que le rodean. Los resultados obtenidos son comparables y muchas veces mejores que los de otras técnicas ya publicadas y reconocidas. Además esta técnica se puede aplicar con éxito a imágenes con altas tasas de ruido manteniendo tanto la calidad visual como el bajo error de reconstrucción de los pixeles “ruidosos”.
Palabras Clave: funciones de base radial, ruido impulsivo,
procesamiento digital de imágenes.
Abstract— This work presents an interpolation technique that allows for the effective reduction of impulsive noise (salt and pepper) in images by using an interpolant obtained through radial base functions. The reduction of impulsive noise is a classical problem of lineal processing. In this paper, we present the processing and demonstrate the efficacy of global support radial base functions. Additionally, we present the results of the comparison of several radial base functions which allowed us to determine which family of functions produces better results. The technique comprises an initial stage in which the noisy pixel is tagged. Then, by interpolation, a reconstruction value of the tagged pixel is obtained by using the surrounding pixels. The results are similar and many times better than those obtained with other well-known techniques. Additionally, this technique can be successfully used in images with high levels of noise without damaging the visual quality or the low level of error reconstruction of the “noisy” pixels.
Index Terms—radial basis functions, impulsive noise, digital
image processing.
*M.Sc Ingeniería de Sistemas, Profesor Universidad de Medellín, Líder
Grupo de Investigación ARKADIUS. ** estudiante Ingeniería de Sistemas Universidad San Buenaventura,
Medellín. ***M. Sc Ingeniería de Sistemas, Profesor Universidad de Medellín, Líder
Grupo de Investigación ARKADIUS.
I. INTRODUCCION
as funciones de base radial se han utilizado ampliamente en procesos interpolación para reconstrucción
tridimensional de superficies, en el presente artículo presentamos un uso distinto en el tratamiento de imágenes bidimensionales en el tratamiento y eliminación de ruido, se puede decir que el ruido en una imagen es cualquier valor de un píxel que no se corresponde exactamente con la realidad, el ruido impulsivo es aquel ruido cuya intensidad cambia bruscamente. En muchas ocasiones las imágenes obtenidas por diferentes medios presentan un ruido impulsivo característico por presentar un cambio brusco en los valores de las tonalidades en pixeles aislados [ver Figura 1], este ruido se puede presentar por diversos factores, tales como un canal de transmisión ruidoso o a imperfecciones del sensor con el que obtenemos las imágenes, de manera que en algunos puntos se presenta una saturación tal como se comenta en [1]. Las técnicas para la eliminación de este tipo de ruido han sido ampliamente estudiadas siendo las lineales las más ampliamente utilizadas, este tipo de técnicas son poco eficaces en la reducción de ruido y como alternativa aparecen técnicas no lineales. El método no lineal más conocido es el del filtrado de mediana, su principal desventaja es que se aplica sobre todos los puntos de la imagen lo que hace de él un método costoso computacionalmente, se aplica a cada pixel de la imagen independientemente de si son ruidosos o no, consumiendo tiempo de computo innecesario y presenta como desventaja adicional la obtención de imágenes borrosas.
Figura 1. Ruido impulsivo en imágenes.
II. REVISION DE LA LITERATURA
La aplicación de filtros para la eliminación de ruido ha sido ampliamente utilizada, la eliminación del ruido impulsivo es común a otras técnicas. Algunos autores presentan técnicas en
ELIMINACIÓN DE RUIDO IMPULSIVO POR MEDIO DE LA UTILIZACIÓN DE FUNCIONES DE BASE RADIAL
Echeverri A. Jaime Alberto*, Bravo Alejandro**, Manrique Bell***
L

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 148
las que sólo se realiza sustitución en los pixeles considerados ruidosos y la detección de dichos pixeles ruidosos es implementada mediante la comparación con unos determinados umbrales. Los pixeles ruidosos son reemplazados mediante un filtro de mediana modificado y que no utiliza el pixel ruidoso para calcular la mediana. En este trabajo, realizamos un esquema similar pero tanto la detección de como la sustitución de pixeles ruidosos las realizamos con funciones de base radial, el método presenta buenos resultados tanto en eficiencia computacional como en la calidad de la imagen resultante. La interpolación se calcula en muchos de los casos como el valor de intensidad de un pixel, en una posición dada, como una función de los pixeles que lo rodean y que para este caso ocuparán las posiciones enteras de la matriz que hace la representación computacional de la imagen. [2], otras formas de interpolación ampliamente usadas son las de interpolación bilineal, las cuales pueden presentar mejores resultados pero el castigo computacional es alto, en este tipo de situaciones al pixel en cuestión se le asigna un valor medio ponderado de las intensidades de los cuatro (vecindad 4) pixeles que le rodean. Los factores de ponderación vienen dados por la distancia entre el pixel y los de su entorno.
III. FUNCIONES DE BASE RADIAL
En el problema de la interpolación se requiere encontrar una función s(x) que aproxime a una función dada conocidos los
valores de un conjunto de puntos nxxx ,, 21 una función
de base radial es una función de la forma:
dN
i
i RxxxxPxs ∈−+= =
||),(||)()(1
φλ ( 1)
Donde P es un polinomio de grado a lo sumo dos; y iλ
son factores de ponderación o pesos; . es la normal Euclidea
y φ se llama función básica.
En conclusión, una función de base radial es una combinación lineal de traslaciones de una función radialmente simétrica. Ejemplos típicos de funciones básicas de soporte global, se presentan en la Tabla1.
Tabla 1. Funciones de base radial típicas
Las funciones de base radial pueden ser de soporte
global, infinitamente diferenciables y contener un parámetro libre, llamado “parámetro de forma”, El uso de este tipo de funciones básicas produce una matriz de interpolación densa que se utiliza para interpolar suavemente y generar zonas continuas sobre superficies discontinuas.
El uso de funciones de base radial para interpolar datos dispersos tiene buena aceptación debido a que el sistema asociado de ecuaciones lineales resulta ser invertible, incluso si la distribución de los puntos no presenta regularidad. Por ejemplo con la función Thin Plate Spline (TPS) sólo se requiere que los puntos no sean colineales, mientras que con la Gaussiana y la Multicuádrica no se necesita ninguna clase de regularidad. En particular las funciones de base radial no necesitan que los puntos estén distribuidos en una grilla regular.
Supongamos que se tiene una función ℜ→ℜnf : y se
conocen los valores de f en un conjunto n de puntos, se desea encontrar una función )(xS que aproxime a f usando
funciones de base radial. Para el caso de imágenes bidimensionales se asume a f como una función de dos variables de tipo discreto con dominio el conjunto de valores determinado por : }1,1/),{( MjNijiA ≤≤≤≤= ,
don N: Numero de filas de la matriz que representa la imagen y M el numero de Columnas y además 255),(0 ≤≤ jif , y
representa el nivel de gris del pixel en la posición ),( ji .
En la ecuación (1) los pesos iλ se determinan por medio de la
solución de la ecuación matricial: fA =λ más precisamente
=
mnmm
n
n
φφφ
φφφ
φφφ
φ
21
22221
11211
Donde,
Para el presente caso f esta dado por los valores de intensidad de cada uno de los pixeles que rodean el pixel ruidoso. Las condiciones para que este sistema tenga solución única se establecen en [3] y se refieren a características analíticas de la función básica φ .
IV. ALGORITMO PARA LA ELIMINACION DE RUIDO
IMPULSIVO
El método implementado consta de varios pasos, el primer paso es el proceso es la identificación de los pixeles ruidosos,

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 149
en este caso debemos tener en cuenta que este algoritmo solo clasifica como ruidosos los pixeles o conjunto de pixeles con las características que se muestran en la Figura 2. En la cual se ve la diferencia entre un pixel y sus vecinos.
Figura 2. Diferentes tipos de ruido (casos Tratados) (a) Pixel aislado, (b) 2 pixeles adjuntos aislados, (c) tres
pixeles adyacentes aislados.
Se recorre la imagen (matriz) por filas o columnas y se evalúa
la diferencia de valores del pixel en posición ),( ji con cada
uno de sus nueve vecinos (caso (a) Figura 1) si la diferencia entre el valor de intensidad del pixel evaluado con sus todos sus vecinos es superior en todos los casos a ( un umbral preestablecido) este pixel es etiquetado como ruidoso, de lo contrario se evalúa el pixel inmediatamente siguiente. El algoritmo siguiente detalla el método.
Figura 3. Algoritmo clasificación pixeles ruidosos.
V. RESULTADOS
( a ) ( b )
Figura 4. Imágenes. (a) original (b) imagen con ruido
( a ) ( b ) (c )
Figura 5. (a) eliminación usando RBF Multicuádrica (b) eliminación usando RBF Multicuádrica Inversa (c ) Imagen obtenida el método de la mediana.
(a) (b)
Figura 6. Valores pixeles alrededor del ruido antes (a) y después (b) de aplicar el método.
Figura 8. Cantidad de ruido eliminado.
Figura 9. Comparación de las diferentes técnicas empleadas.
VI. ANÁLISIS DE RESULTADOS
Según la calidad de las imágenes obtenidas (ver Figura 5)
por medio de la aplicación de cada uno de los métodos (a) RBF Multicuádrica, (b) RBF Multicuádrica Inversa y (c) Filtro de la mediana, se ve el alto índice de reducción de ruido, aunque es evidente la mejora “visual” de la imagen se decidió hacer un análisis cuantitativo de la cantidad de ruido realmente eliminado, para este fin se realizo una comparación de la matriz “imagen” original con la matriz obtenida pixel a pixel y

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 150
los resultados se muestran en la tabla a continuación: Tabla 2. Comparación de la Técnicas.
Como puede apreciarse de la Tabla 2 el número de pixeles cambiados en cada uno de los procedimientos aplicados es muy alto en el caso del filtro de la mediana (62.30%), la ecuación siguiente se utilizo para determinar el porcentaje de variación en cada imagen.
= =
−=N
i
M
i
jiIjiINM
D1 1
),('),(1
(2)
En las Figura 7 se muestra la cantidad de ruido eliminado por medio de cada una de las técnicas, como se puede apreciar la eliminación por medio de funciones de base radial (multicuádrica y multicuádrica inversa) en todos los casos presentan resultados mas favorables que el método de la mediana y en la Figura 9 se muestra la cantidad de pixeles eliminados según la técnica lo que corrobora la utilidad de las funciones de base radial para la eliminación de ruido en imágenes.
VII. HARDWARE Y LIBRERIAS
Todas las pruebas fueron realizadas utilizando una computadora con procesador XX Ghz, memoria RAM de XX Gb corriendo bajo el sistema operativo Windows XP ® de Microsoft. Las implementaciones de los modelos fueron realizados en Matlab ® Versión XX; además se programo un conjunto de funciones que posibilitaron los resultados mostrados cada uno de estos procedimientos fue diseñado usando un modelo de descomposición funcional. Los experimentos se realizaron usando 5 funciones de base radial de soporte global.
VIII. CONCLUSIONES
El trabajo presenta una técnica diferente para eliminar ruido impulsivo en imágenes bidimensionales, el método es eficiente comparado con métodos tradicionalmente utilizados para la eliminación de este tipo de ruido, además en muchas situaciones presenta mejores resultados en cuando a la cantidad de ruido eliminado y a la calidad de la imagen obtenida, permitiendo contar con un método adicional para la eliminación de este tipo de ruido. A pesar de que el método hace una correcta detección de ruido el filtro de la mediana, tiene un mejor comportamiento en cuanto a la calidad visual final de la imagen, pero cuantitativamente inferior en cuanto el aspecto borroso o
difuso que se presenta alrededor de los pixeles etiquetados como ruido.
IX. TRABAJO FUTURO
Aunque la utilidad de las funciones de base radial en la eliminación de ruido impulsivo queda manifiesta en este trabajo, una comparación con otras técnicas aplicadas a imágenes en las situaciones planteadas podría dar un panorama mas amplio en este tipo de aplicaciones, por lo que se considera de gran utilidad comparar el método aquí expuesto con otras técnicas en un trabajo posterior. Se plantea también la necesidad de usar funciones básicas de base radial de soporte compacto que permitirán concluir o determinar una mejor selección de familias de funciones de base radial en el proceso de interpolación y además un mejor rendimiento computacional.
BIBLIOGRAFÍA
[1] Abreu, E., Lightstone, M., Mitra, S.K., Arakawa, K. “A new Efficient Approach for the Removal of Impulse Noise from Highly Corrupted Images”, IEEE Trans. on Image Processing, 5(6):1012-1025,1996.
[2] Pajares, Gonzalo y De la Cruz Jesús M. Visión por computador, Imágenes y aplicaciones, editorial Alfa omega (Ra-Ma) México, 2002.
[3] J. C. Carr, W. R. Fright and R. K. Beatson, “Surface interpolation with
Radial Basis Functios for medica Imaging”IEEE Transaction on medical imaging pp 16 – 97.
[4] H. Wendland “piecewise Polynomial, positive definite and compactly
Supported Radila Functions of minimal degree”Adv, in comput Math, 4, PP 389 – 396, 1995.

Memorias STSIVA 2008 Tomo II 151 - 153
Transmisión y recepción de señales de electrocardiografía mediante Short Message Service (SMS)
Leonardo Ramírez López, Johan Leandro Téllez, Jairo Armando Sotelo
Abstract— This paper is about of a developed system for sending/reception of ECG registrations using GSM’s Short message service. This method implicit have software tools and hardware tool, which on the whole allow send and receive database MIT-BIH registrations between GSM’s mobile stations.
Keywords— SMSCod, Modem GSM, WinUHA, ECG, RS-232, commandos AT.
I. INTRODUCCIÓN
A telemedicina es una rama de la medicina que acompañada de las telecomunicaciones, permiten el
acceso a servicios médicos de manera eficaz sin importar la ubicación del paciente. La telemedicina se ha desarrollado de manera considerable en Colombia a mediados de la década del 90 con el desarrollo masivo de las redes de comunicaciones.
En la actualidad se cuenta con importantes desarrollo por parte de grupos de investigación, entre estos desarrollos se encuentran aplicaciones en telepatología, teleradiología, telecardiología entre otras.
Este desarrollo beneficia a usuarios de sitios remotos ya que facilita el acceso a servicios médicos especializados como electrocardiografía, los entes prestadores de salud mejoran el desempeño en la prestación del servicio ya que se aumenta la cobertura del servicio.
II. INFORMACIÓN DEL PROBLEMA A RESOLVER
Utilizar la red de telefonía móvil celular específicamente el sistema de transmisión de mensajes cortos (SMS1) para transmitir y recibir señales ECG2 provenientes de un paciente.
III. DESARROLLO
El sistema desarrollado en diferentes etapas en cada una de las cuales se realiza una tarea especifica.
En la Fig. 1. se observa el esquema de funcionamiento del
1 SMS: Servicio de mensajes cortos disponible en la red GSN 2 ECG: Electrocardiograma
sistema. El en el primer bloque se tiene el registro ECG el cual ha sido extraído de la base de datos comprimida de la MIT – BIH, y tiene un formato digital.
Figura 1. Esquema de funcionamiento
En la Fig. 1. se observa el esquema de funcionamiento del sistema. El en el primer bloque se tiene el registro ECG el cual ha sido extraído de la base de datos comprimida de la MIT – BIH, y tiene un formato digital.
El registro ECG digitalizado pasa al segundo bloque de administración SMS, aquí el registro ECG es convertido a mensajes de texto. El registro ECC también puede ser comprimido mediante la aplicación WinUHA3, esto con la finalidad de reducir el número mensajes de texto. Una vez se han generado el los mensajes de texto son enviados al modem GSM mediante el puerto serial de comunicaciones del computador.
Los procesos de convertir el ECG a mensajes de texto, enviar los SMS al modem GSM y el control del modem GSM, se realiza mediante la Aplicación SMSCod4 la cual se desarrollo en el lenguaje de programación Java.
El modem GSM recibe los mensajes de texto generados en el computador por la aplicación SMSCod. El modem GSM tiene acceso a la red GSM y por medio de esta red se envían los mensajes de texto contenedores de un registro de electrocardiografía.
3 WinUHA: Aplicación de compresión de archivos 4 SMSCod. Aplicación de administración de SMS
Transmisión y Recepción de Señales de Electrocardiografía MedianteShort Message Service (SMS)
Leonardo Ramírez López, Johan Leandro Téllez, Jairo Armando Sotelo
L
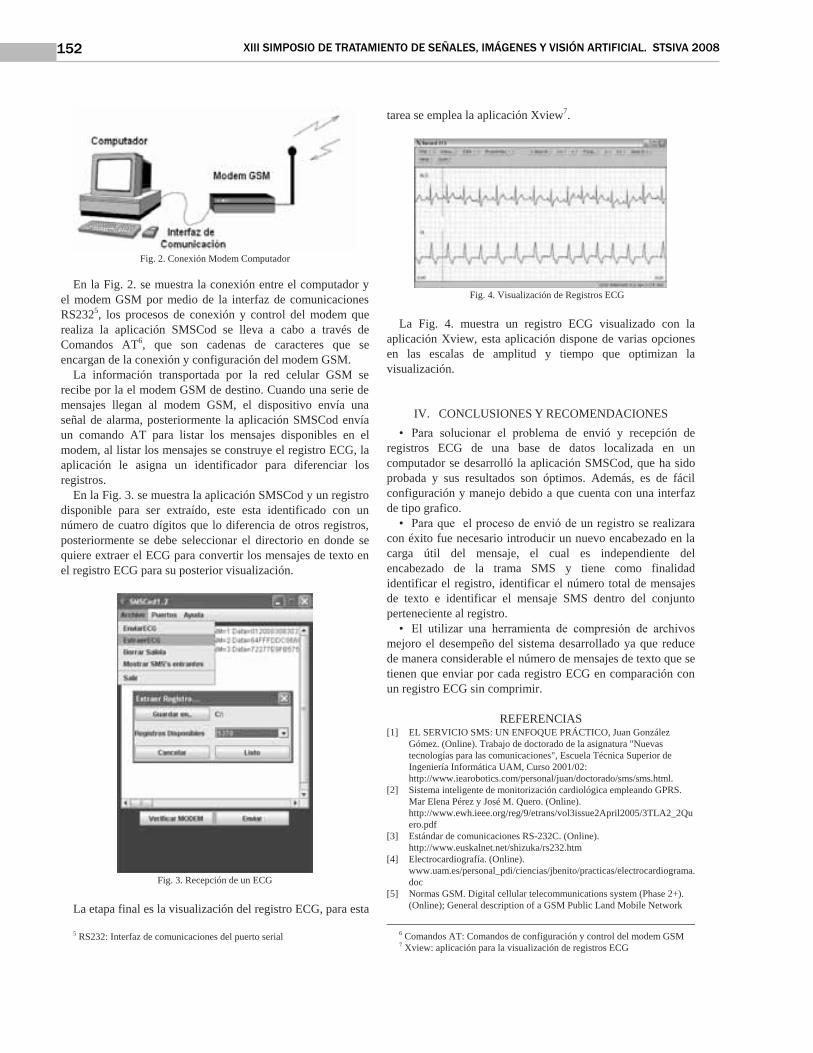
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 152
Fig. 2. Conexión Modem Computador
En la Fig. 2. se muestra la conexión entre el computador y el modem GSM por medio de la interfaz de comunicaciones RS2325, los procesos de conexión y control del modem que realiza la aplicación SMSCod se lleva a cabo a través de Comandos AT6, que son cadenas de caracteres que se encargan de la conexión y configuración del modem GSM.
La información transportada por la red celular GSM se recibe por la el modem GSM de destino. Cuando una serie de mensajes llegan al modem GSM, el dispositivo envía una señal de alarma, posteriormente la aplicación SMSCod envía un comando AT para listar los mensajes disponibles en el modem, al listar los mensajes se construye el registro ECG, la aplicación le asigna un identificador para diferenciar los registros.
En la Fig. 3. se muestra la aplicación SMSCod y un registro disponible para ser extraído, este esta identificado con un número de cuatro dígitos que lo diferencia de otros registros, posteriormente se debe seleccionar el directorio en donde se quiere extraer el ECG para convertir los mensajes de texto en el registro ECG para su posterior visualización.
Fig. 3. Recepción de un ECG
La etapa final es la visualización del registro ECG, para esta
5 RS232: Interfaz de comunicaciones del puerto serial
tarea se emplea la aplicación Xview7.
Fig. 4. Visualización de Registros ECG
La Fig. 4. muestra un registro ECG visualizado con la aplicación Xview, esta aplicación dispone de varias opciones en las escalas de amplitud y tiempo que optimizan la visualización.
IV. CONCLUSIONES Y RECOMENDACIONES
• Para solucionar el problema de envió y recepción de registros ECG de una base de datos localizada en un computador se desarrolló la aplicación SMSCod, que ha sido probada y sus resultados son óptimos. Además, es de fácil configuración y manejo debido a que cuenta con una interfaz de tipo grafico.
• Para que el proceso de envió de un registro se realizara con éxito fue necesario introducir un nuevo encabezado en la carga útil del mensaje, el cual es independiente del encabezado de la trama SMS y tiene como finalidad identificar el registro, identificar el número total de mensajes de texto e identificar el mensaje SMS dentro del conjunto perteneciente al registro.
• El utilizar una herramienta de compresión de archivos mejoro el desempeño del sistema desarrollado ya que reduce de manera considerable el número de mensajes de texto que se tienen que enviar por cada registro ECG en comparación con un registro ECG sin comprimir.
REFERENCIAS[1] EL SERVICIO SMS: UN ENFOQUE PRÁCTICO, Juan González
Gómez. (Online). Trabajo de doctorado de la asignatura "Nuevas tecnologías para las comunicaciones", Escuela Técnica Superior de Ingeniería Informática UAM, Curso 2001/02: http://www.iearobotics.com/personal/juan/doctorado/sms/sms.html.
[2] Sistema inteligente de monitorización cardiológica empleando GPRS. Mar Elena Pérez y José M. Quero. (Online). http://www.ewh.ieee.org/reg/9/etrans/vol3issue2April2005/3TLA2_2Quero.pdf
[3] Estándar de comunicaciones RS-232C. (Online). http://www.euskalnet.net/shizuka/rs232.htm
[4] Electrocardiografía. (Online). www.uam.es/personal_pdi/ciencias/jbenito/practicas/electrocardiograma.doc
[5] Normas GSM. Digital cellular telecommunications system (Phase 2+). (Online); General description of a GSM Public Land Mobile Network
6 Comandos AT: Comandos de configuración y control del modem GSM 7 Xview: aplicación para la visualización de registros ECG

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 153
(PLMN) - (GSM 01.02). (Online). http://pda.etsi.org/pda/queryform.asp.
[6] OPPENHEIN V, Alan. Sistemas y Señales. Segunda Edición. Prentice Hall. 1999.
[7][8] NAUGHTON Patrick, SHIILDT Herbert. JAVA manual de referencia.
Osborne/McGraw-Hill. 2004. [9] Apéndice B Comandos AT. (Online).
http://www.vanguardms.com/support/documentation/archive/modem_documentation/surfr_modem/REL_voicesurfr_336_sp/sp-la10a.pdf.
[10] TOMASI. Sistemas de comunicaciones Electrónicas. Cuarta Edición. Prentice Hall. 2001.
[11] API DE COMUNICACIONES. Tutorial API de comunicaciones. (Online).http://www.javahispano.org/download/articulos/api_comm.pdf.
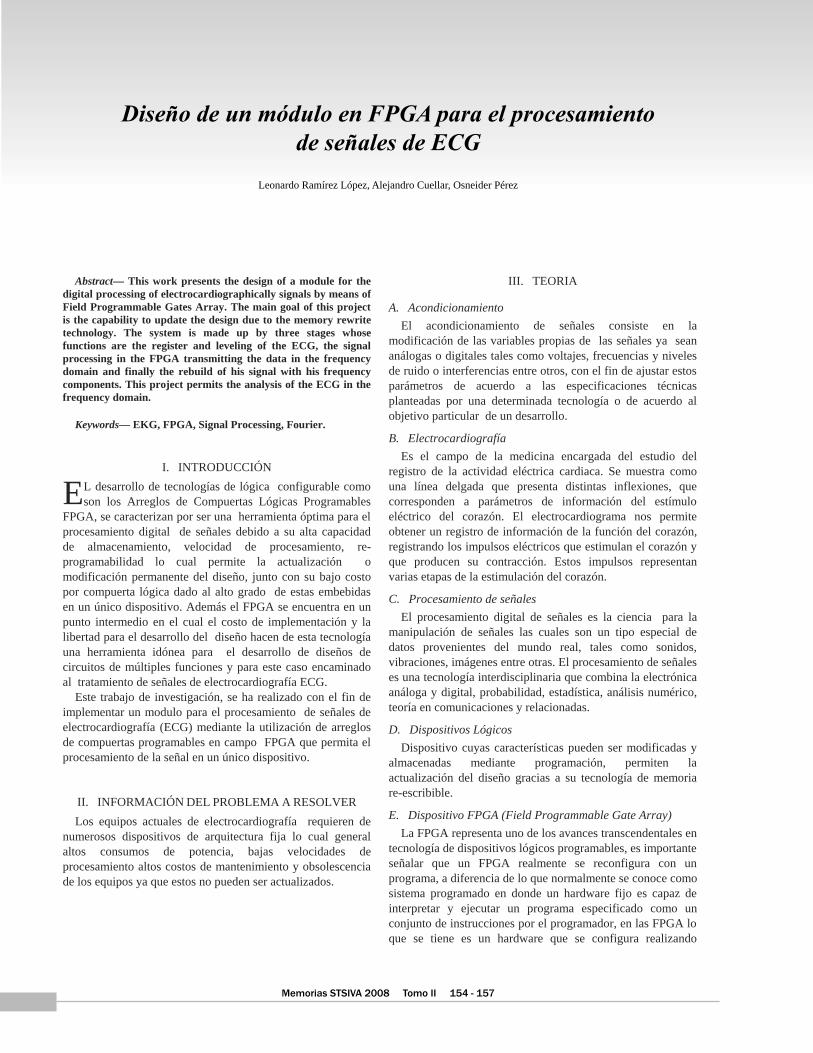
Memorias STSIVA 2008 Tomo II 154 - 157
Diseño de un módulo en FPGA para el procesamientode señales de ECG
Leonardo Ramírez López, Alejandro Cuellar, Osneider Pérez
Abstract— This work presents the design of a module for the digital processing of electrocardiographically signals by means of Field Programmable Gates Array. The main goal of this project is the capability to update the design due to the memory rewrite technology. The system is made up by three stages whose functions are the register and leveling of the ECG, the signal processing in the FPGA transmitting the data in the frequency domain and finally the rebuild of his signal with his frequency components. This project permits the analysis of the ECG in the frequency domain.
Keywords— EKG, FPGA, Signal Processing, Fourier.
I. INTRODUCCIÓN
L desarrollo de tecnologías de lógica configurable como son los Arreglos de Compuertas Lógicas Programables
FPGA, se caracterizan por ser una herramienta óptima para el procesamiento digital de señales debido a su alta capacidad de almacenamiento, velocidad de procesamiento, re-programabilidad lo cual permite la actualización o modificación permanente del diseño, junto con su bajo costo por compuerta lógica dado al alto grado de estas embebidas en un único dispositivo. Además el FPGA se encuentra en un punto intermedio en el cual el costo de implementación y la libertad para el desarrollo del diseño hacen de esta tecnología una herramienta idónea para el desarrollo de diseños de circuitos de múltiples funciones y para este caso encaminado al tratamiento de señales de electrocardiografía ECG.
Este trabajo de investigación, se ha realizado con el fin de implementar un modulo para el procesamiento de señales de electrocardiografía (ECG) mediante la utilización de arreglos de compuertas programables en campo FPGA que permita el procesamiento de la señal en un único dispositivo.
II. INFORMACIÓN DEL PROBLEMA A RESOLVER
Los equipos actuales de electrocardiografía requieren de numerosos dispositivos de arquitectura fija lo cual general altos consumos de potencia, bajas velocidades de procesamiento altos costos de mantenimiento y obsolescencia de los equipos ya que estos no pueden ser actualizados.
III. TEORIA
A. Acondicionamiento
El acondicionamiento de señales consiste en la modificación de las variables propias de las señales ya sean análogas o digitales tales como voltajes, frecuencias y niveles de ruido o interferencias entre otros, con el fin de ajustar estos parámetros de acuerdo a las especificaciones técnicas planteadas por una determinada tecnología o de acuerdo al objetivo particular de un desarrollo.
B. Electrocardiografía
Es el campo de la medicina encargada del estudio del registro de la actividad eléctrica cardiaca. Se muestra como una línea delgada que presenta distintas inflexiones, que corresponden a parámetros de información del estímulo eléctrico del corazón. El electrocardiograma nos permite obtener un registro de información de la función del corazón, registrando los impulsos eléctricos que estimulan el corazón y que producen su contracción. Estos impulsos representan varias etapas de la estimulación del corazón.
C. Procesamiento de señales
El procesamiento digital de señales es la ciencia para la manipulación de señales las cuales son un tipo especial de datos provenientes del mundo real, tales como sonidos, vibraciones, imágenes entre otras. El procesamiento de señales es una tecnología interdisciplinaria que combina la electrónica análoga y digital, probabilidad, estadística, análisis numérico, teoría en comunicaciones y relacionadas.
D. Dispositivos Lógicos
Dispositivo cuyas características pueden ser modificadas y almacenadas mediante programación, permiten la actualización del diseño gracias a su tecnología de memoria re-escribible.
E. Dispositivo FPGA (Field Programmable Gate Array)
La FPGA representa uno de los avances transcendentales en tecnología de dispositivos lógicos programables, es importante señalar que un FPGA realmente se reconfigura con un programa, a diferencia de lo que normalmente se conoce como sistema programado en donde un hardware fijo es capaz de interpretar y ejecutar un programa especificado como un conjunto de instrucciones por el programador, en las FPGA lo que se tiene es un hardware que se configura realizando
Diseño de un Modulo En FPGA para el Procesamiento de Señales de ECG
Leonardo Ramírez López, Alejandro Cuellar, Osneider Pérez
E
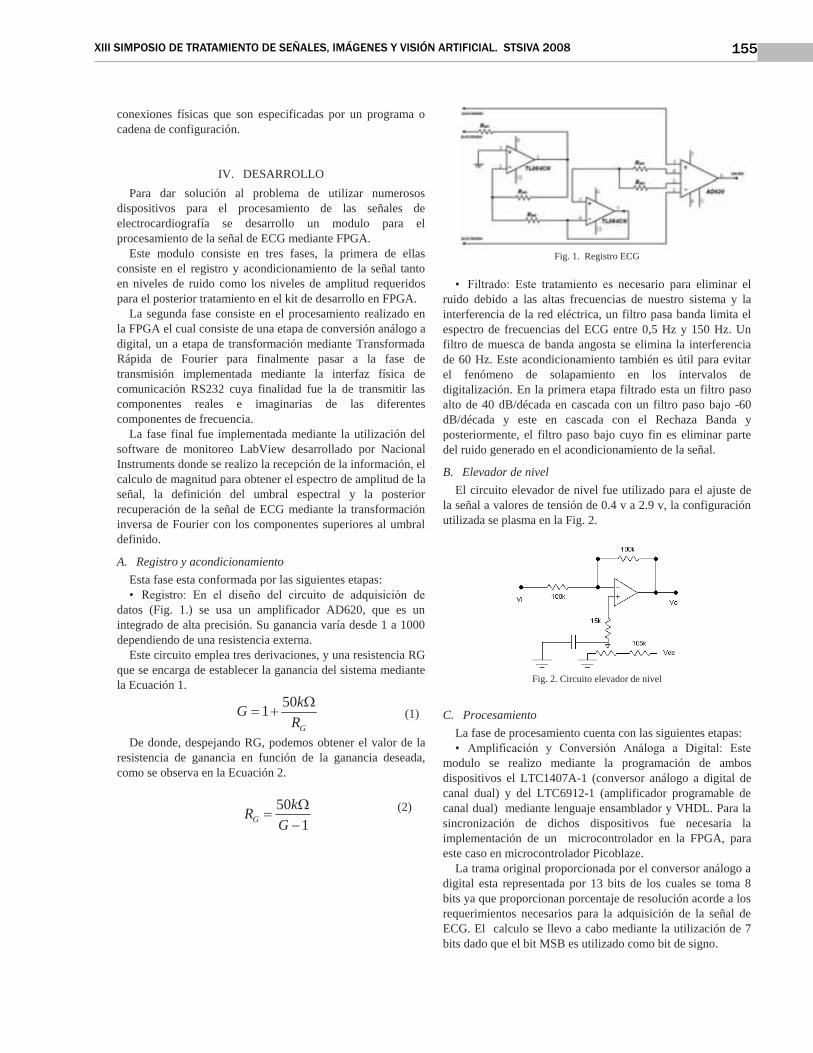
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 155
conexiones físicas que son especificadas por un programa o cadena de configuración.
IV. DESARROLLO
Para dar solución al problema de utilizar numerosos dispositivos para el procesamiento de las señales de electrocardiografía se desarrollo un modulo para el procesamiento de la señal de ECG mediante FPGA.
Este modulo consiste en tres fases, la primera de ellas consiste en el registro y acondicionamiento de la señal tanto en niveles de ruido como los niveles de amplitud requeridos para el posterior tratamiento en el kit de desarrollo en FPGA.
La segunda fase consiste en el procesamiento realizado en la FPGA el cual consiste de una etapa de conversión análogo a digital, un a etapa de transformación mediante Transformada Rápida de Fourier para finalmente pasar a la fase de transmisión implementada mediante la interfaz física de comunicación RS232 cuya finalidad fue la de transmitir las componentes reales e imaginarias de las diferentes componentes de frecuencia.
La fase final fue implementada mediante la utilización del software de monitoreo LabView desarrollado por Nacional Instruments donde se realizo la recepción de la información, el calculo de magnitud para obtener el espectro de amplitud de la señal, la definición del umbral espectral y la posterior recuperación de la señal de ECG mediante la transformación inversa de Fourier con los componentes superiores al umbral definido.
A. Registro y acondicionamiento
Esta fase esta conformada por las siguientes etapas: • Registro: En el diseño del circuito de adquisición de
datos (Fig. 1.) se usa un amplificador AD620, que es un integrado de alta precisión. Su ganancia varía desde 1 a 1000 dependiendo de una resistencia externa.
Este circuito emplea tres derivaciones, y una resistencia RG que se encarga de establecer la ganancia del sistema mediante la Ecuación 1.
501
G
kG
RDe donde, despejando RG, podemos obtener el valor de la
resistencia de ganancia en función de la ganancia deseada, como se observa en la Ecuación 2.
501G
kR
G
Fig. 1. Registro ECG
• Filtrado: Este tratamiento es necesario para eliminar el ruido debido a las altas frecuencias de nuestro sistema y la interferencia de la red eléctrica, un filtro pasa banda limita el espectro de frecuencias del ECG entre 0,5 Hz y 150 Hz. Un filtro de muesca de banda angosta se elimina la interferencia de 60 Hz. Este acondicionamiento también es útil para evitar el fenómeno de solapamiento en los intervalos de digitalización. En la primera etapa filtrado esta un filtro paso alto de 40 dB/década en cascada con un filtro paso bajo -60 dB/década y este en cascada con el Rechaza Banda y posteriormente, el filtro paso bajo cuyo fin es eliminar parte del ruido generado en el acondicionamiento de la señal.
B. Elevador de nivel
El circuito elevador de nivel fue utilizado para el ajuste de la señal a valores de tensión de 0.4 v a 2.9 v, la configuración utilizada se plasma en la Fig. 2.
Fig. 2. Circuito elevador de nivel
C. Procesamiento
La fase de procesamiento cuenta con las siguientes etapas: • Amplificación y Conversión Análoga a Digital: Este
modulo se realizo mediante la programación de ambos dispositivos el LTC1407A-1 (conversor análogo a digital de canal dual) y del LTC6912-1 (amplificador programable de canal dual) mediante lenguaje ensamblador y VHDL. Para la sincronización de dichos dispositivos fue necesaria la implementación de un microcontrolador en la FPGA, para este caso en microcontrolador Picoblaze.
La trama original proporcionada por el conversor análogo a digital esta representada por 13 bits de los cuales se toma 8 bits ya que proporcionan porcentaje de resolución acorde a los requerimientos necesarios para la adquisición de la señal de ECG. El calculo se llevo a cabo mediante la utilización de 7 bits dado que el bit MSB es utilizado como bit de signo.
(1)
(2)
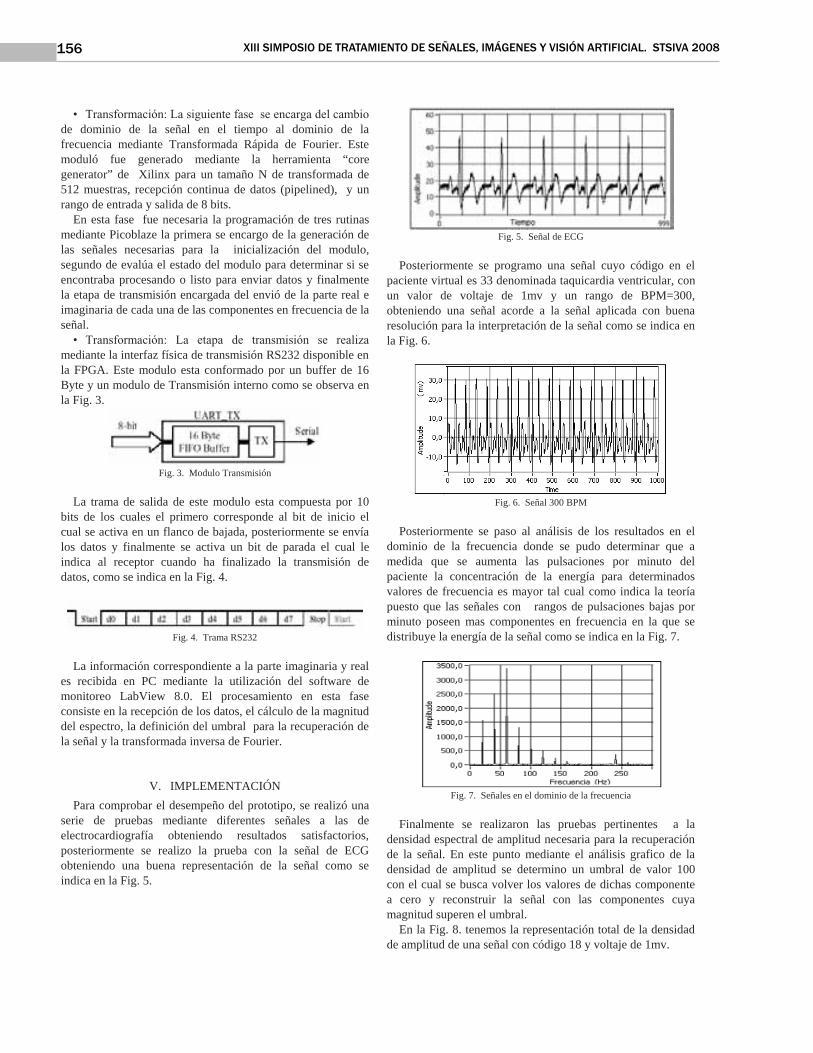
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 156
• Transformación: La siguiente fase se encarga del cambio de dominio de la señal en el tiempo al dominio de la frecuencia mediante Transformada Rápida de Fourier. Este moduló fue generado mediante la herramienta “core generator” de Xilinx para un tamaño N de transformada de 512 muestras, recepción continua de datos (pipelined), y un rango de entrada y salida de 8 bits.
En esta fase fue necesaria la programación de tres rutinas mediante Picoblaze la primera se encargo de la generación de las señales necesarias para la inicialización del modulo, segundo de evalúa el estado del modulo para determinar si se encontraba procesando o listo para enviar datos y finalmente la etapa de transmisión encargada del envió de la parte real e imaginaria de cada una de las componentes en frecuencia de la señal.
• Transformación: La etapa de transmisión se realiza mediante la interfaz física de transmisión RS232 disponible en la FPGA. Este modulo esta conformado por un buffer de 16 Byte y un modulo de Transmisión interno como se observa en la Fig. 3.
Fig. 3. Modulo Transmisión
La trama de salida de este modulo esta compuesta por 10 bits de los cuales el primero corresponde al bit de inicio el cual se activa en un flanco de bajada, posteriormente se envía los datos y finalmente se activa un bit de parada el cual le indica al receptor cuando ha finalizado la transmisión de datos, como se indica en la Fig. 4.
Fig. 4. Trama RS232
La información correspondiente a la parte imaginaria y real es recibida en PC mediante la utilización del software de monitoreo LabView 8.0. El procesamiento en esta fase consiste en la recepción de los datos, el cálculo de la magnitud del espectro, la definición del umbral para la recuperación de la señal y la transformada inversa de Fourier.
V. IMPLEMENTACIÓN
Para comprobar el desempeño del prototipo, se realizó una serie de pruebas mediante diferentes señales a las de electrocardiografía obteniendo resultados satisfactorios, posteriormente se realizo la prueba con la señal de ECG obteniendo una buena representación de la señal como se indica en la Fig. 5.
Fig. 5. Señal de ECG
Posteriormente se programo una señal cuyo código en el paciente virtual es 33 denominada taquicardia ventricular, con un valor de voltaje de 1mv y un rango de BPM=300, obteniendo una señal acorde a la señal aplicada con buena resolución para la interpretación de la señal como se indica en la Fig. 6.
Fig. 6. Señal 300 BPM
Posteriormente se paso al análisis de los resultados en el dominio de la frecuencia donde se pudo determinar que a medida que se aumenta las pulsaciones por minuto del paciente la concentración de la energía para determinados valores de frecuencia es mayor tal cual como indica la teoría puesto que las señales con rangos de pulsaciones bajas por minuto poseen mas componentes en frecuencia en la que se distribuye la energía de la señal como se indica en la Fig. 7.
Fig. 7. Señales en el dominio de la frecuencia
Finalmente se realizaron las pruebas pertinentes a la densidad espectral de amplitud necesaria para la recuperación de la señal. En este punto mediante el análisis grafico de la densidad de amplitud se determino un umbral de valor 100 con el cual se busca volver los valores de dichas componente a cero y reconstruir la señal con las componentes cuya magnitud superen el umbral.
En la Fig. 8. tenemos la representación total de la densidad de amplitud de una señal con código 18 y voltaje de 1mv.
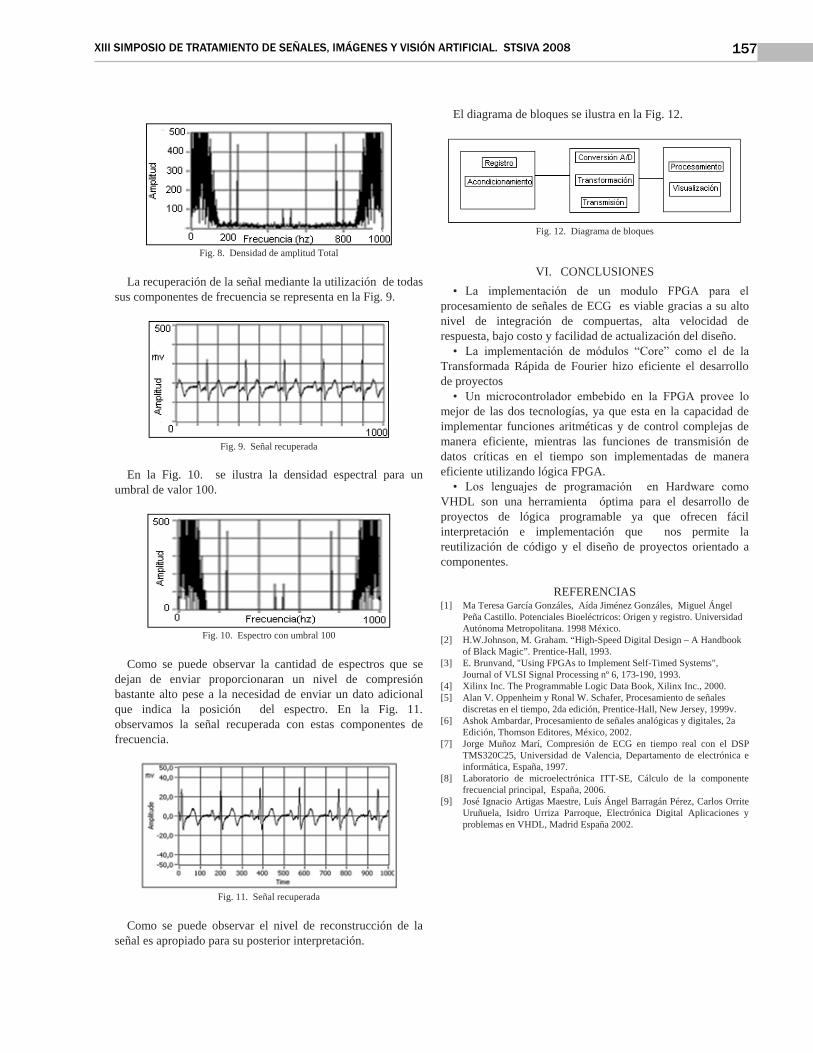
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 157
Fig. 8. Densidad de amplitud Total
La recuperación de la señal mediante la utilización de todas sus componentes de frecuencia se representa en la Fig. 9.
Fig. 9. Señal recuperada
En la Fig. 10. se ilustra la densidad espectral para un umbral de valor 100.
Fig. 10. Espectro con umbral 100
Como se puede observar la cantidad de espectros que se dejan de enviar proporcionaran un nivel de compresión bastante alto pese a la necesidad de enviar un dato adicional que indica la posición del espectro. En la Fig. 11. observamos la señal recuperada con estas componentes de frecuencia.
Fig. 11. Señal recuperada
Como se puede observar el nivel de reconstrucción de la señal es apropiado para su posterior interpretación.
El diagrama de bloques se ilustra en la Fig. 12.
Fig. 12. Diagrama de bloques
VI. CONCLUSIONES
• La implementación de un modulo FPGA para el procesamiento de señales de ECG es viable gracias a su alto nivel de integración de compuertas, alta velocidad de respuesta, bajo costo y facilidad de actualización del diseño.
• La implementación de módulos “Core” como el de la Transformada Rápida de Fourier hizo eficiente el desarrollo de proyectos
• Un microcontrolador embebido en la FPGA provee lo mejor de las dos tecnologías, ya que esta en la capacidad de implementar funciones aritméticas y de control complejas de manera eficiente, mientras las funciones de transmisión de datos críticas en el tiempo son implementadas de manera eficiente utilizando lógica FPGA.
• Los lenguajes de programación en Hardware como VHDL son una herramienta óptima para el desarrollo de proyectos de lógica programable ya que ofrecen fácil interpretación e implementación que nos permite la reutilización de código y el diseño de proyectos orientado a componentes.
REFERENCIAS[1] Ma Teresa García Gonzáles, Aída Jiménez Gonzáles, Miguel Ángel
Peña Castillo. Potenciales Bioeléctricos: Origen y registro. Universidad Autónoma Metropolitana. 1998 México.
[2] H.W.Johnson, M. Graham. “High-Speed Digital Design – A Handbook of Black Magic”. Prentice-Hall, 1993.
[3] E. Brunvand, "Using FPGAs to Implement Self-Timed Systems", Journal of VLSI Signal Processing nº 6, 173-190, 1993.
[4] Xilinx Inc. The Programmable Logic Data Book, Xilinx Inc., 2000. [5] Alan V. Oppenheim y Ronal W. Schafer, Procesamiento de señales
discretas en el tiempo, 2da edición, Prentice-Hall, New Jersey, 1999v. [6] Ashok Ambardar, Procesamiento de señales analógicas y digitales, 2a
Edición, Thomson Editores, México, 2002. [7] Jorge Muñoz Marí, Compresión de ECG en tiempo real con el DSP
TMS320C25, Universidad de Valencia, Departamento de electrónica e informática, España, 1997.
[8] Laboratorio de microelectrónica ITT-SE, Cálculo de la componente frecuencial principal, España, 2006.
[9] José Ignacio Artigas Maestre, Luís Ángel Barragán Pérez, Carlos Orrite Uruñuela, Isidro Urriza Parroque, Electrónica Digital Aplicaciones y problemas en VHDL, Madrid España 2002.

Memorias STSIVA 2008 Tomo II 158 - 162
Sistema de Tele-Consulta a través de la red Leonardo Ramírez López, Mario Arenas, Christian Rojas
Abstract— This work shows a tele-consult system to offer aid in case of medical emergencies. The patient receives an answer of the level of urgency that their symptoms demonstrate. An interface was developed in order that the user accedes to the service of tele-consult through a cellular phone.
Keywords— Short Message System, Tele-consult, Tele-diagnostic, Health.
I. INTRODUCCIÓN
L desarrollo de la ciencia médica en el mundo, requiere la presencia eficaz y eficiente de la tecnología de
comunicación, para facilitar y agilizar los procesos de diagnóstico y la toma de decisiones médicas que mejoren la atención, la calidad del servicio y la calidad de vida de los usuarios de los centros de servicio médicos. Los sistemas actuales se encaminan al mejoramiento de la calidad y eficiencia del servicio de salud en el área de urgencias médicas, aprovechando las ventajas que ofrecen las comunicaciones. En Europa la tele-medicina ha adquirido un papel muy importante en los servicios sanitarios que prestan los centros de servicio; España es uno de los líderes europeos y mundiales en investigación y desarrollo de la tele-medicina, debido a las numerosas publicaciones en el tema y al sistema investigativo que tienen los centros educativos relacionados con la medicina. En Colombia crece el desarrollo de programas de tele-medicina que permiten ofrecer diferentes servicios médicos a gran parte de la comunidad, sin que las condiciones físicas del lugar donde se encuentra el paciente, sea un impedimento para prestar oportunamente el servicio.
Para el desarrollo de lo anterior, se requiere inicialmente conocer el estado actual del sector de la salud y profundizar posteriormente en el área de las emergencias médicas, teniendo en cuenta las necesidades actuales de los médicos y pacientes. Además se deben tener en cuenta factores importantes como el tipo de información que se va a transmitir, el medio que se va a utilizar y qué parte de la población va a tener acceso a dicho servicio, importante conocer exactamente hacia quién va dirigido el servicio qué se ofrece; ya que la tele-medicina brinda un valor agregado que involucra tres aspectos como son la informática, las telecomunicaciones y asistencia sanitaria, por lo que tiene gran impacto social, económico y cultural. Uno de los aspectos relevantes en el desarrollo de cualquier servicio de tele-medicina y más si se trata del manejo de emergencias
medicas, es lograr desarrollar aplicaciones que permitan aprovechar de la mejor manera posible el canal de comunicaciones que se esté usando, para obtener ventajas en costos, en la prestación del servicio, y la posibilidad de poder atender una gran demanda, sin perder la eventualidad de una respuesta o el acceso a un servicio medico especializado.
La tele-consulta a través de equipos telefónicos móviles presenta un dilema entre la eficacia del diagnóstico y factores como la disponibilidad de médicos especialistas, el mejoramiento del acceso, y el cuidado de los pacientes. Los estudios sobre la problemática planteada anteriormente, han sugerido que la atención a través de un equipó móvil o fijo tienes muchas más ventajas de lo que la mayoría de gente piensa, las cuales benefician a los pacientes y a los médicos de igual manera. Por lo anterior se puede creer que en el caso de una urgencia médica, en donde el paciente puede correr el riesgo hasta de morir, cabe de gran manera la opción de introducir un servicio de tele-consulta para atender la urgencia, de esta manera el paciente puede reportar de manera oportuna que se encuentra en riesgo su salud a través de un teléfono móvil y con esto poder ser atendido lo más rápido posible por el servicio de urgencia.
Con el desarrollo de este servicio se está abriendo un nuevo campo que ofrece la tele-medicina, llamado gestión hospitalaria. Una de las razones más importantes de usar la tele-consulta en el manejo de emergencias médicas es la gestión hospitalaria; en los últimos tiempos se han nombrado mucho en todo el mundo debido a la creciente cantidad de pacientes que llegan diariamente a los centros de servicio, como consecuencia, por un lado, del vertiginoso desarrollo armamentista y por el otro de la extrema miseria de muchos habitantes del planeta. Por esto la tele-consulta se tomó como una muy buena opción para manejar esta demanda, ya que permite realizar un “filtro” de los pacientes para poder definir cuáles necesitan una atención medica inmediata y cuáles una atención mediata.
II. PROBLEMA A RESOLVER
En Colombia, el creciente número de pacientes que asisten diariamente a los hospitales o centros de salud no tienen plena seguridad de ser atendidos, siendo la causa principal la falta de capacidad física, técnica o humana de los centros asistenciales. El problema de la salud no se limita únicamente a las capacidades y recursos que pueda tener, también hay un factor topográfico que en algunos casos incide directamente en la posibilidad de que se le pueda prestar un servicio bueno
Sistema de Tele-Consulta a Través de la Red
Leonardo Ramírez López, Mario Arenas, Christian Rojas
E

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 159
y oportuno al paciente. Todo lo anterior permite ver que el paciente puede ser afectado tanto física y económicamente si los factores de prestación de servicio no satisfacen sus necesidades. Es por ello que el grupo TIGUM presenta la necesidad de realizar un trabajo en el campo del tele-diagnostico a través de la red celular para aliviar los desplazamientos y costos.
Dado que se le quiere dar solución a un servicio que se presta en forma masiva como es el medico, un factor preocupante es la cantidad de usuarios que van a hacer uso de este servicio de manera simultanea, puesto que este requiere de agilidad, sea cual sea la hora y el lugar donde se encuentre el paciente. Para lo anterior, es necesario saber exactamente las capacidades que nos ofrece el servicio de mensajes cortos con respecto a la cantidad de datos que puede enviar, lo que obliga conocer las características que tiene la trama TDMA1
puesto que es la usada para enviar los datos sobre la red GSM2
y la capacidad de usuarios que puede llegar a soportar, teniendo en cuenta la limitación que hay en el ancho de banda del canal debido a que el servicio SMS3 utiliza los canales de control y señalización para enviar la información, los cuales son mas limitados que los canales de datos. Todo esto sumado va a provocar un tiempo de espera que en el caso de una urgencia médica, debe ser mínimo para bien del paciente.
III. TEORIA
A continuación se explican los términos y conceptos generales que definen las características que se deben tener en cuenta en el desarrollo del trabajo.
A. Tele-medicina
La tele-medicina surge gracias a la sinergia de las comunicaciones, las ciencias de la salud y la informática. Según la OMS4 , la tele-medicina se define como “la distribución de servicios de salud, en el que la distancia es un factor crítico, donde los profesionales de la salud usan información y tecnología de comunicaciones para el intercambio de información válida para el diagnóstico, tratamiento y prevención de enfermedades o daños, investigación y evaluación; y para la educación continuada de los proveedores de salud pública, todo ello en interés del desarrollo de la salud del individuo y su comunidad.”.
1 TDMA: Time Division Médium Access, Acceso al Medio por División de Tiempo. Tecnología que divide la información en unidades pequeñas o segmentos y las distribuye en espacios de tiempo.
2 GSM: Global System for Mobile Communications, Sistema Global para las Comunicaciones Móviles. Estándar mundial para las comunicaciones móviles digitales.
3 SMS: Short Message Service, Servicio de Mensajes Cortos. Servicio de envío de mensajes de texto cortos a través de teléfonos celulares móviles.
4 OMS: Organización Mundial de la Salud, organismo de las Naciones Unidas especializado en salud.
Fig. 1. Tele-medicina
En la Fig. 1. se muestra el sistema que usa un hospital para transmitir información médica de pacientes a una red de datos, para luego ser transmitida a un sistema móvil.
Siguiendo el concepto de urgencias, es necesario saber que el tiempo de atención debe ser un factor primordial en el desarrollo de un sistema de asistencia tele-médica por lo que el sistema debe ser eficiente y poseer palabras de fácil entendimiento o de uso común. Las condiciones presentadas anteriormente exigen que el sistema tenga un tiempo de respuesta rápido y una interfaz de usuario no muy extensa.
B. Servicios de Tele-medicina
Un servicio de tele-medicina es todo aquel servicio médico que se pueda realizar de manera remota. Los servicios tele-médicos pueden ser prestados por un médico especializado o por un equipo de monitoreo que reciba las señales del paciente de forma remota. La tele-medicina comprende diferentes aplicaciones que se citan a continuación:
• Tele-consulta: se define como la consulta médica tradicional que brinda un médico; a diferencia de la consulta tradicional la tele-consulta no requiere que el paciente y el médico se encuentren en el mismo lugar. La tele-consulta puede variar de acuerdo al sistema por el cual se realice pero debe seguir ciertos criterios comunes para todos los sistemas.
• Tele-diagnóstico: debe ser muy confiable, por lo tanto debe usar un sistema de comunicación que asegura poca pérdida de paquetes en la transmisión. Si no se tiene claro o bien definido un diagnóstico puede ser peligroso para el paciente. El tele-diagnóstico también comprende la transmisión de señales médicas; como signos vitales de un paciente en una ambulancia que son enviados al centro medico para agilizar los procesos médicos de atención urgente.
• Tele-cirugía: comprende una automatización del quirófano, es decir, se necesita de un equipo especializado para poder realizar una cirugía guiada en donde el paciente y el cirujano no están en contacto directo. La tele-cirugía sirve además como un sistema de enseñanza a practicantes universitarios en donde pueden aprender de una cirugía real sin necesidad de entrar al quirófano. El futuro de la tele-cirugía está en la tele-robótica en donde las funciones del cirujano podrán ser simuladas por un autómata que copia los movimientos de las manos del especialista ubicado en una posición geográfica diferente a la del paciente.
• Tele-radiografía: es una de las aplicaciones más usadas y con mejores resultados dada la simplicidad de colores que maneja una radiografía. Con este servicio el radiólogo puede dar un diagnóstico sin tener que trasladarse al centro medico. Existen portales Web dedicados a los diagnósticos

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 160
radiográficos en donde se envía la placa o radiografía y en pocos minutos dictaminan la prescripción médica y el tratamiento a seguir.
C. Modelos para la Tele-medicina
En términos de prestación del servicio de tele-medicina, se han tomado diferentes medios o tecnologías para llevar a cabo un servicio de tele-medicina a diferente tipo de personas. Existen básicamente tres sistemas para hacer tele-medicina; vía Internet, por medio de un PBX o una central de llamado (Call Center) y a través de los sistemas móviles.
• Internet: La tele-medicina a través de Internet es de las tres la ofrece más servicios al usuario. En un sistema de tele-medicina a través de Internet se pueden prestar servicios como: tele-radiología, tele-cirugía, tele-consulta, tele-sonografía, diagnostico remoto por imagen digital térmica, dermatología, geriatría, psiquiatría, oftalmología, etc.
• Centros de Llamada (Call Center): Los sistemas de tele-consulta a través de las líneas telefónicas conmutadas son mucho más limitados en cuanto a la cantidad de servicios que se prestan ya que no se pueden acceder a imágenes, sin embargo son más eficientes en el tiempo de respuesta del caso o de la consulta. En algunos casos el diagnóstico es inmediato y se puede aconsejar un tratamiento de acuerdo a los síntomas citados por el paciente.
En la Fig. 2 aparecen los componentes de un sistema de tele-medicina simple en donde el usuario accede al servicio suministrando una clave al sistema que se conecta con el centro de llamada a través de la red telefónica pública conmutada con un PBX que en este caso es gestionado por un médico general.
Fig. 2. Modelo de Tele-medicina vía centro de llamada
• Sistemas Móviles: La tele-medicina en los sistemas móviles ha sido la menos desarrollada hasta el momento. Dentro de las aplicaciones más comunes se encuentran los servicios médicos sanitarios. Su implementación se ha restringido para lugares remotos, sin embargo con el auge de las comunicaciones móviles y la penetración de los sistemas celulares en la vida de los usuarios, se hace una tecnología en desarrollo como herramienta en función de la tele-consulta (ver Fig. 3.).
Fig. 3. Modelo de Tele-medicina vía sistemas móviles
IV. DESARROLLO DEL MODELO
A partir de estos conceptos se crea una interfaz para el usuario de tal forma que se conecta al servidor y recibe respuesta de acuerdo a una interpretación numérica de diferentes preguntas médicas.
Lo primero que se tuvo en cuenta al momento de empezar a desarrollar el proyecto fue la interfaz del usuario, esta consta de unos menús con pocas opciones y poco texto, esto para que el usuario se sienta cómodo eligiendo las opciones y por ende la atención médica se pueda prestar lo más rápido posible.
La interfaz que se le presenta al usuario (ver Fig. 4.) es una herramienta sencilla y fácil de manipular con el fin de agilizar el proceso.
Esta interfaz no es más que un pequeño cuestionario organizado de tal forma que el usuario va seleccionando su sintomatología y de acuerdo a esta establecer el grado de emergencia.
Figura 4. Pantalla de la interfaz
Después de que el usuario ve la imagen de presentación que tiene la aplicación procede a elegir las opciones que se le muestran, lo primero que hace el usuario es definir si esta haciendo uso del servicio debido a una urgencia médica o simplemente una consulta. Posterior a esto el programa le definir si es el paciente o no. Cuando el usuario elige alguna de estas opciones se le pide el numero de cedula, el cual será un dato muy importante al momento de enviar la información al servidor puesto que este podrá saber de que persona se trata y guardar la información obtenida en una base de datos.
En la Fig. 5. se muestra la forma en que aparecen las diferentes opciones al usuario desde su equipo móvil celular,

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 161
en la mayoría de las preguntas las opciones no son más de cinco a seis, esto con el fin de hacer la aplicación muy practica. Se debe aclarar que el formato del texto en la aplicación depende también de la marca y el modelo del celular que este utilizando el usuario para acceder a esta.
Fig. 5. Interfaz del usuario (cuestionario)
Dentro del menú cada opción tiene un determinado texto, y un valor que le fue asignado a criterio de un medico profesor de la Universidad Militar Nueva Granada, al elegir una opción se va a llevar al usuario a un nuevo árbol de opciones y su valor se va a sumar dentro de un acumulado que al final será enviado al servidor para definir el tipo de atención que se le debe prestar al paciente. En el Anexo 1 se muestra el árbol de opciones completo, los valores que tiene cada una de las opciones y la clasificación para los resultados de las opciones.
La aplicación tiene dos paquetes: main y modelo. En main se encuentra la clase principal, o Midlet, esta es la clase que se ejecuta para correr la aplicación. En modelo se encuentran las clases que representan el modelo de datos de la aplicación: Cuestionario, Pregunta y Opción.
A. Servidor De Tele-Consulta
El servidor del servicio se basa en una aplicación web que se puede configurar de acuerdo al requerimiento del cliente. Usamos para esto el servicio que presta la compañía WAU en convenio académico.
El modo de acceso al servidor es transparente para el usuario, el solo sabe que envía un mensaje de texto pero en ningún momento debe elegir a donde lo envía. El sistema automáticamente después de que el usuario termina de responder el cuestionario envía los tres campos del mensaje al servidor. Sin embargo se puede acceder a este a través del envío del prefijo al código 468.
En la Fig. 6. se muestra como cada uno de los mensajes queda registrado en el servidor, este indica la hora, la fecha y el número del celular desde donde se envió el mensaje.
Figura 6. Página principal del servidor
V. RESULTADOS
A continuación, en la TABLA I se muestran las pruebas de envío de 10 mensajes y su duración desde que el usuario accede al sistema hasta cuando este le muestra el mensaje de envío. Se ve que tiene un tiempo máximo de casi 2 minutos que es aceptable en el caso de una urgencia médica.
TABLA IPRUEBAS DE ENVÍO DEL MENSAJE
PRUEBA HORA Tiempo de
Envío (min) Reporte de
Envío
Nº 1 05:30 a.m. 1,34 exitoso
Nº 2 07:00 a.m. 1,49 exitoso
Nº 3 10:00 a.m. 1,37 exitoso
Nº 4 12:00 p.m. 1,26 exitoso
Nº 5 02:00 p.m. 1,59 exitoso
Nº 6 04:00 p.m. 1,38 exitoso
Nº 7 06:00 p.m. 1,56 exitoso
Nº 8 08:00 p.m. 1,42 exitoso
Nº 9 10:00 p.m. 1,43 exitoso
Nº 10 12:00 a.m. 1,5 exitoso Promedio 1,434
Para determinar cuanto tiempo se demora en responder el mensaje usamos las mismas 10 pruebas y tomamos el tiempo desde que el sistema envía el mensaje hasta que es respondido.
La TABLA II muestra los resultados del tiempo de respuesta del sistema, este tiempo es determinante en cuanto hay que adicionarlo al tiempo de envío. Se muestra que es un tiempo prudencial y que el tiempo total del sistema es bueno y es mejor que el tiempo que se demoraría el mismo paciente con una emergencia llamando una ambulancia.
De las diez pruebas realizadas podemos ver que el tiempo más alto es de 2:07 minutos. Por otro lado en pruebas no registradas se pudo observar que a medida que el usuario maneja el sistema este se vuelve más hábil y por lo tanto los tiempos de respuesta se ven afectados de manera positiva.
TABLA IITIEMPO DE RESPUESTA DEL SISTEMA

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 162
PRUEBA HORA Tiempo de
Respuesta (seg)
Nº 1 05:30 a.m. 10
Nº 2 07:00 a.m. 7
Nº 3 10:00 a.m. 9
Nº 4 12:00 p.m. 8
Nº 5 02:00 p.m. 8
Nº 6 04:00 p.m. 10
Nº 7 06:00 p.m. 8
Nº 8 08:00 p.m. 11
Nº 9 10:00 p.m. 13
Nº 10 12:00 a.m. 9 Promedio 9,3
VI. CONCLUSIONES
• Este proyecto tuvo varias etapas cada una de las cuales cumplió un papel fundamental para llegar al resultado final que fue el desarrollo de un Sistema de tele-consulta a través de la red celular. El planteamiento inicial del proyecto se dio al notar la problemática que existía en los hospitales y centros de salud donde constantemente se presentaban congestiones mas que todo en la parte de urgencias y además de esto se vio la necesidad de evitar de alguna forma que las personas que viven alejadas de los centros de salud tuvieran que desplazarse por largos trayectos simplemente para pedir una cita o manifestar una dolencia.
• Se escogió la red celular como el medio de comunicación a utilizar en el proyecto ya que es la mejor forma de llegar a la mayor cantidad de usuarios posibles sin importar en que parte del país se encuentren. Después de indagar más a fondo con médicos y gente involucrada en el tema de la salud se concluyo que lo mejor era inclinarse por el área de las emergencias médicas, ya que en estos casos extremos es mucho más fácil y precisa la identificación del tipo de atención que merece el paciente.
• Teniendo clara el área de la tele-consulta que se iba a tratar se empezó a plantear maneras como se podría diseñar el menú al cual tendría acceso el usuario, las características del menú fueron definidas de tal forma que pudiera ser manipulado por gran cantidad de personas sin ningún problema y si en dado caso la persona afectada se encontrara incapacitada el programa permitiera que una tercera persona hiciera uso de la aplicación para poder generar la consulta.
• La aplicación se desarrollo sobre el lenguaje J2ME, esto con el fin de que funcionara en muchos equipos y la comunicación entre el celular y el servidor se hizo a través de mensajes de texto que es una herramienta con la cual cuentan todos los celulares en la actualidad. El desarrollo del servidor se realizo a través e una empresa de comunicaciones la cual brindo su plataforma para guardar los mensajes que llegan y poder enviar una respuesta inmediata dependiendo de lo recibido, ha este servidor se puede tener acceso a través de Internet las 24 horas del día, y se puede ver el histórico de los mensajes que han llegado con su hora, teléfono y la fecha
correspondiente, además de poder modificar los mensajes que se quiere sean devueltos al usuario.
• Los mensajes enviados del celular al servidor van dirigidos al código 468 para que puedan llegar a este. En la parte final del proyecto de vio satisfactoriamente que el nivel de confiabilidad que brindaba la red en el envió y la respuesta del mensaje de texto era de casi el 100%. Además que el servidor tiene la capacidad de recibir un gran numero de mensajes de texto simultáneamente sin caerse en ningún momento ni presentar ningún tipo de problema.
• El proyecto alcanzaría un nivel mas alto si se dispusiera de un sistema de posicionamiento global que permitiera saber exactamente la ubicación del paciente para poder brindarle la atención medica lo más rápido posible en un caso de urgencia.
• El proyecto muestra una forma viable de atender las inquietudes de pacientes que presentan algún tipo de síntomas, permitiéndoles recibir una atención a larga distancia sin necesidad de desplazarse del lugar donde se encuentren. Con lo anterior se esta colaborando a la gestión hospitalaria y de paso se esta haciendo un aporte a un área tan importante como la telemedicina la cual toma cada vez mas fuerza en nuestro país.
REFERENCIAS[1] Coma del Corral MJ, Diez Sánchez V, Hernández Martín A, Gutiérrez
Ortega MC, Ramírez Herrera M. Revista Electrónica de Biomedicina, UTILIDAD CLÍNICA DE LA VIDEOCONFERENCIA EN TELEMEDICINA. 2004; 2: 74-78.
[2] KOPEC POLISZUK, Alberto. SALAZAR GÓMEZ, Antonio José. APLICACIONES DE TELECOMUNICACIONES EN SALUD EN LA SUBREGIÓN ANDINA. ORAS-CONHU Organismo Andino De Salud, Convenio Hipólito UNANUE. Este es un documento institucional de la Organización Panamericana de la Salud. 2001.
[3] APARICIO PICO, Lilia Edith. MANUAL DE ESTÁNDARES DE LAS CONDICIONES TECNOLÓGICAS MÍNIMAS PARA LAS PRESTACIÓN DE SERVICIOS DE SALUD POR TELEMEDICINA. Universidad Distrital Francisco José de Caldas. Rev. Ingeniería Universidad Distrital. 2000
[4] Muestra y define conceptos claros de tele-medicina y sus servicios. http://mx.geocities.com/telemedicinaunam/telepag1.htm
[5] MediVox es una organización que ofrece servicios de tele-medicina y soporte tecnológico. Se toma como ejemplo de en servicio de tele-medicina a través de internet. Su vínculo es www.medivox.it
[6] DONALDO ARTETA, Juan Calahorro, ANTONIO CUADRADO, Eladio Gil. PERSPECTIVAS DE LA TELEMEDICINA EN LAS EMERGENCIAS Y URGENCIAS MÉDICAS. Iatreia, volumen 14 No.3. Septiembre 2001.
[7] Normas de la Unión Internacional de Telecomunicaciones ITU-T. Adquiridas a través de la Universidad Militar Nueva Granada. Se usaron para consultar toda la sección referente a los sistemas GSM.
[8] TOMASI, Wayne. SISTEMAS DE COMUNICACIONES ELECTRÓNICAS. Pearson Education. 2003, cuarta edición.
[9] Dirección electrónica del servidor. Convenio académico con la empresa WAU. sms.wau.com
[10] Centro de Investigación de la Telecomunicaciones Cinel. Curso de programación en el lenguaje Java ME. Se adquiere el curso en línea a través de un pago en la página www.cintel.org.co
Memorias STSIVA 2008 Tomo II 163 - 168
Sistema de tele-consulta móvil asistida por GPS Leonardo Ramírez López, Diana Victoria Parra Villa
Abstract—This paper presents a solution assisted for tele-consult by Global Positioning System embedded in a cellular telephone. A patient using this system can send a text message to a center health which contains the information of its symptoms and the geographical position, so that support can be met, whether tele-assisted or sending aid assistance (ambulance) at the point source of the information.
Keywords— Tele-consult, GPS, elemental assist, fast position.
I. INTRODUCCIÓN
L desarrollo de la ciencia médica en el mundo, requiere la presencia eficaz y eficiente de la tecnología de
comunicación, para facilitar y agilizar los procesos de diagnóstico y la toma de decisiones médicas que mejoren la atención, la calidad del servicio y la calidad de vida de los usuarios de los centros de servicio médicos. Colombia carece de programas de tele-medicina que permiten ofrecer diferentes servicios médicos a gran parte de la comunidad, sin que las condiciones físicas del lugar donde se encuentra el paciente, sean un impedimento para prestar oportunamente el servicio.
Los estudios sobre la problemática planteada anteriormente, han sugerido que la atención a través de un equipó móvil brinda muchas más ventajas las cuales benefician a los pacientes y a los médicos de igual manera. Por lo anterior se puede creer que en el caso de una urgencia médica, en donde el paciente puede correr el riesgo de morir, el servicio de tele-consulta atiende la urgencia, a través de un teléfono móvil, con el cual también se envía la ubicación geográfica. Con el desarrollo de este servicio se abre un nuevo campo que ofrece la tele-medicina, llamado gestión hospitalaria, en auge debido a la creciente cantidad de pacientes que llegan diariamente a los centros de servicio.
II. PROBLEMA A RESOLVER
Es necesario que un centro asistencial cuente con la información fiable transmitida desde el paciente, para ellos e debe contar con un sistema de tele-consulta masivo que permita informar sobre el estado de salud y su posición geográfica.
III. TEORIA
A continuación relacionamos algunos términos y conceptos que son de vital importancia durante la lectura del proyecto para lograr su eficaz comprensión.
A. Tele-medicina
La tele-medicina surge gracias a la sinergia de las comunicaciones, las ciencias de la salud y la informática. Según la OMS1 , la tele-medicina se define como “la distribución de servicios de salud, en el que la distancia es un factor crítico, donde los profesionales de la salud usan información y tecnología de comunicaciones para el intercambio de información válida para el diagnóstico, tratamiento y prevención de enfermedades o daños, investigación y evaluación; y para la educación continuada de los proveedores de salud pública, todo ello en interés del desarrollo de la salud del individuo y su comunidad”. En la Fig. 1 se muestra el sistema que usa un hospital para transmitir información médica de pacientes a una red de datos, para luego ser transmitida a un sistema móvil.
Fig.1. Tele-medicina
B. Servicios de Tele-medicina
Un servicio de tele-medicina es todo aquel servicio médico que se pueda realizar de manera remota. La tele-medicina comprende diferentes aplicaciones que se citan a continuación:
• Tele-consulta: Se define como la consulta médica tradicional que brinda un médico; esta puede variar de acuerdo al sistema por el cual se realice pero debe seguir ciertos criterios comunes para todos los sistemas.
• Tele-diagnóstico: Debe ser muy confiable, por lo tanto debe usar un sistema de comunicación que asegura poca pérdida de paquetes en la transmisión. Si no se tiene claro o bien definido un diagnóstico puede ser peligroso para el paciente. El tele-diagnóstico también comprende la transmisión de señales médicas; como signos vitales de un paciente en una ambulancia que son enviados al centro medico
1 OMS: Organización Mundial de la Salud, organismo de las Naciones Unidas especializado en salud.
Sistema de Tele-consulta Móvil Asistida por GPS
Leonardo Ramírez López, Diana Victoria Parra Villa
E
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 164
para agilizar los procesos médicos de atención urgente. • Tele-cirugía: Comprende una automatización del
quirófano, es decir, se necesita de un equipo especializado para poder realizar una cirugía guiada en donde el paciente y el cirujano no están en contacto directo.
• Tele-radiografía: Es una de las aplicaciones más usadas y con mejores resultados dada la simplicidad de colores que maneja una radiografía. Con este servicio el radiólogo puede dar un diagnóstico sin tener que trasladarse al centro medico.
C. Modelos para la Tele-medicina
En términos de prestación del servicio de tele-medicina, se han tomado diferentes medios o tecnologías para llevar a cabo un servicio de tele-medicina a diferente tipo de personas. Existen básicamente tres sistemas para hacer tele-medicina; vía Internet, por medio de un PBX o una central de llamado (Call Center) y a través de los sistemas móviles. • Internet: La tele-medicina a través de Internet es de las tres la que ofrece más servicios al usuario. En un sistema de tele-medicina a través de Internet se pueden prestar servicios como: tele-radiología, tele-cirugía, tele-consulta, tele-sonografía, diagnostico remoto por imagen digital térmica, dermatología, geriatría, psiquiatría, oftalmología, etc. • Centros de Llamada (Call Center): Los sistemas de tele-consulta a través de las líneas telefónicas conmutadas son mucho más limitados en cuanto a la cantidad de servicios que se prestan ya que no se pueden acceder a imágenes, sin embargo son más eficientes en el tiempo de respuesta del caso o de la consulta. En algunos casos el diagnóstico es inmediato y se puede aconsejar un tratamiento de acuerdo a los síntomas citados por el paciente.
Fig. 2. Modelo de Tele-medicina vía centro de llamada
En la Fig. 2 aparecen los componentes de un sistema de tele-medicina simple en donde el usuario accede al servicio suministrando una clave al sistema que se conecta con el centro de llamada a través de la red telefónica pública conmutada con un PBX que en este caso es gestionado por un médico general.
• Sistemas móviles: La tele-medicina en los sistemas móviles ha sido la menos desarrollada hasta el momento. Dentro de las aplicaciones más comunes se encuentran los servicios médicos sanitarios. Su implementación se ha restringido para lugares remotos, sin embargo con el auge de las comunicaciones móviles y la penetración de los sistemas celulares en la vida de los usuarios, se hace una tecnología en desarrollo como herramienta en función de la tele-consulta.
IV. DESARROLLO
A. SISTEMA DE TELECONSULTA
A partir del último concepto estudiado (Tele-consulta a través de sistemas móviles) el usuario (paciente) interactúa con un celular el cual le permite almacenar información de su situación medica y ubicación geográfica. El equipo celular contiene una interfaz grafica de usuario, de tal forma que se conecta al servidor y recibe respuesta de acuerdo a una interpretación numérica de diferentes preguntas médicas.
La interfaz de usuario consta de menús con pocas opciones y poco texto, esto con el fin dar comodidad eligiendo las opciones y por ende la atención médica se pueda prestar lo más rápido posible.
Después de que el usuario ve la imagen de presentación que tiene la aplicación el deberá elegir las opciones que se le muestran. Cuando el usuario elige alguna de las opciones se le pide el numero de cedula, el cual será un dato muy importante al momento de enviar la información al servidor puesto que este podrá saber de que persona se trata y guardar la información obtenida en una base de datos, con le fin de validar los datos allí guardados y conocer estados anteriores del paciente, si los llegase a tener. Luego de validar los datos, se genera un mensaje, al cual se le agregara automáticamente la posición geográfica del paciente. Estos datos son enviados al servidor de Tele-consulta, el cual se encargara de direccionar la información al doctor que asistirá al paciente el momento de su llegada, a demás de dar atención medica a medida que se encuentre en camino al centro asistencial para una atención inmediata del paciente.
B. SISTEMA DE UBICACIÓN GEOGRÁFICA
Una vez probado el menú de teleconsulta, dando diferentes pesos a la información y así evaluando el nivel de consulta.
La segunda fase involucra el desarrollo sobre un modulo de posicionamiento global que permita adjuntar a esta información del paciente, la información proveniente del satélite sobre su posición geográfica.
El modulo de prueba fue un sistema independiente, cuya información se puede leer y guardas a través de un PC. Para hacerlo funcional se realizan pruebas sobre un sistema embebido en un teléfono celular, ref. Nokia N82 el cual permite visualizar y transmitir la trama de la posición dada en coordenadas geográficas y almacenarlas en un archivo plano.
La información adquirida del teléfono celular es agregada a la información enviada del paciente, mediante una línea de lectura adicional, que luego es interpretada por el desarrollo en LabView.
C. INTERFAZ A USUARIO
La fig. 3 muestra la presentación al sistema de referencia.

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 165
Fig. 3. Presentación a usuario.
Las coordenadas geográficas adquiridas son tres: longitud, latitud y altura, con esta información de trabaja sobre la aplicación libre de google-map que permite desde una vista satelital ubicar las coordenadas especificas de un paciente.
V. PRUEBAS
Se realizaron dos tipos de pruebas para el proyecto propuesto. La primera consta de la implementación de una tarjeta impresa GPS, en donde con esta se busca compara los datos arrojados por el GPS marca GARMYN, muy utilizado para pruebas de campo de posicionamiento geoestacionario y corroborar la información arrojada por el celular N82 de NOKIA que trae la tecnología GPS y el que acoge el menú de tele-consulta (menú de tele-consulta para pacientes con situación medica delicada) integrado.
A. Pruebas con tarjeta GPS
Inicialmente se utilizo una tarjeta TYCO Electronics de referencia A1029 – B–04 (ver Fig. 4), es un modulo GPS el cual permite una excelente recepción con capacidad de once satélites simultáneamente, exactitud de hasta 6 m y 0.06m/seg en velocidad, manejando un protocolo SiRF; cuenta con una velocidad de adquisición de hasta 15 seg, voltaje de operación de +5VCD y 27dB de ganancia y con dos modalidades de conexión a PC, RS 232 Y USB.
Fig. 4. TYCO Electronics A1029 – B–04 (sin recepción de señales de satélites)
Fue necesario instalar el software para que el PC pudiese reconocer la tarjeta GPS. Se implemento la conexión por el puerto serial RS 232 al PC luego de haber finalizado con la instalación del software. Luego de realizar las instalaciones correspondientes, tanto de software como de hardware, se procedió a realizar pruebas de ubicación geoestacionaria. La
Fig. 5 muestra la comunicación con los satélites al momento de encenderse los dos LEDs (rojo y verde) de la tarjeta.
Fig. 5. Comunicación con satellites
La interfaz grafica del modulo nos da una serie de resultados, los cuales listaremos a continuación (Ver Fig. 6):
• Conexión por puerto COM • Desconexión del puerto COM • Correr Inicio de mensajes NMEA • Detener mensajes NMEA • Grabar mensajes NMEA (guarda en archivo de texto .txt) • Visualización de la captura de coordenadas dados por los
mensajes NMEA (Recoge la información que será guardad en el archivo .txt)
• Estado de la señal de cada satélite conectado • Análisis estadístico de cada momento de la comunicación
entre el satélite y la tarjeta • Visualización de posibles triangulaciones con satélites • Reloj e información general de posicionamiento • Definición por teclado • Borrar información recopilada
Fig. 6. Interfaz de usuario Modulo GPS
A continuación se puede ver como funciona la puesta en marcha del modulo TYCO con su entorno grafico, se observa el momento de capturar los datos (Fig. 7, lado derecho inferior).
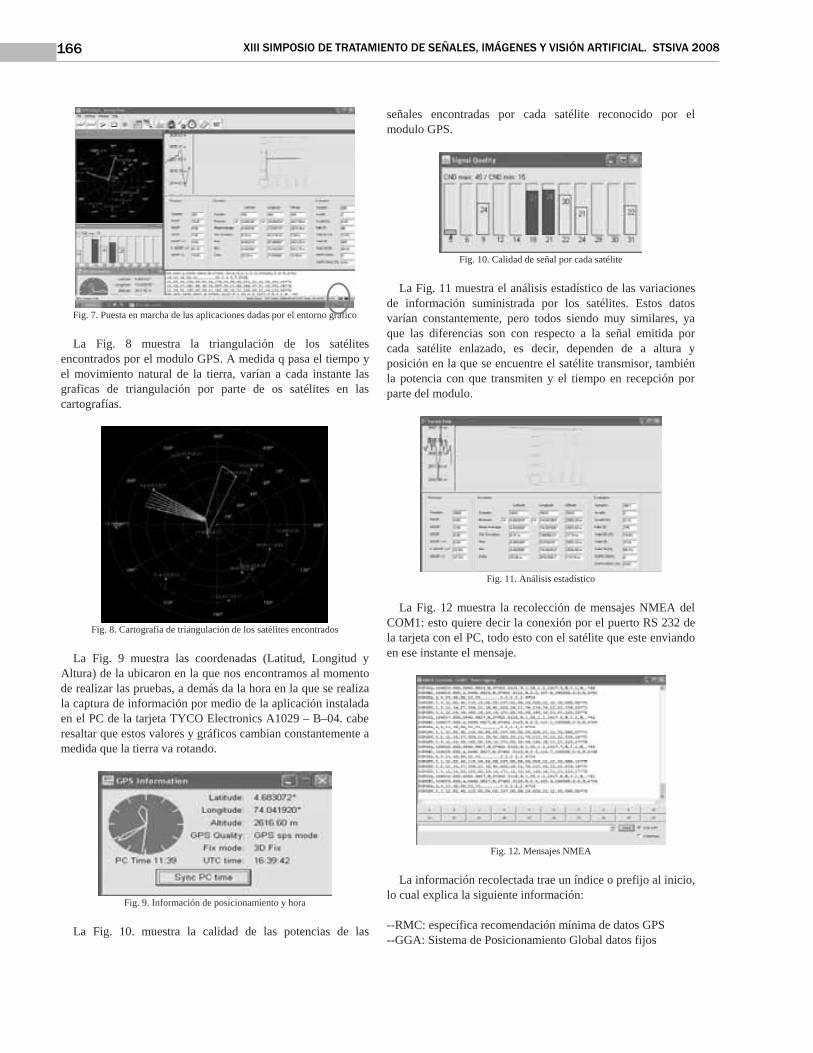
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 166
Fig. 7. Puesta en marcha de las aplicaciones dadas por el entorno grafico
La Fig. 8 muestra la triangulación de los satélites encontrados por el modulo GPS. A medida q pasa el tiempo y el movimiento natural de la tierra, varían a cada instante las graficas de triangulación por parte de os satélites en las cartografías.
Fig. 8. Cartografía de triangulación de los satélites encontrados
La Fig. 9 muestra las coordenadas (Latitud, Longitud y Altura) de la ubicaron en la que nos encontramos al momento de realizar las pruebas, a demás da la hora en la que se realiza la captura de información por medio de la aplicación instalada en el PC de la tarjeta TYCO Electronics A1029 – B–04. cabe resaltar que estos valores y gráficos cambian constantemente a medida que la tierra va rotando.
Fig. 9. Información de posicionamiento y hora
La Fig. 10. muestra la calidad de las potencias de las
señales encontradas por cada satélite reconocido por el modulo GPS.
Fig. 10. Calidad de señal por cada satélite
La Fig. 11 muestra el análisis estadístico de las variaciones de información suministrada por los satélites. Estos datos varían constantemente, pero todos siendo muy similares, ya que las diferencias son con respecto a la señal emitida por cada satélite enlazado, es decir, dependen de a altura y posición en la que se encuentre el satélite transmisor, también la potencia con que transmiten y el tiempo en recepción por parte del modulo.
Fig. 11. Análisis estadístico
La Fig. 12 muestra la recolección de mensajes NMEA del COM1: esto quiere decir la conexión por el puerto RS 232 de la tarjeta con el PC, todo esto con el satélite que este enviando en ese instante el mensaje.
Fig. 12. Mensajes NMEA
La información recolectada trae un índice o prefijo al inicio, lo cual explica la siguiente información:
--RMC: específica recomendación mínima de datos GPS --GGA: Sistema de Posicionamiento Global datos fijos

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 167
--GSV: GPS satélites a la vista --VTG: Curso sobre tierra y velocidad en tierra
A demás de dar la posición en la que nos encontramos al momento de realizar la prueba.
B. Prueba con celular
La segunda parte de estas pruebas, nos confirman la información suministrada por la tarjeta TYCO Electronics A1029 – B–04 de GPS. Utilizamos el celular de referencia N82 de NOKIA (ver Fig. 13) para esta segunda etapa. Fue necesario conseguir e implementar en el celular la cartografía de la Ciudad de Bogota, con el fin de mostrar la ubicación exacta del sitio en el cual nos encontramos.
Fig. 13. NOKIA N82
A continuación, en la Fig. 14 se muestra las coordenadas, cantidad de satélites conectados con el GPS del equipo celular, el ángulo de elevación con respecto a la tierra, la calidad de las señales transmitidas por los satélites.
Fig. 14. Posicionamiento del N82
Cabe resaltar, que la forma en que se calculan los datos de elevación o altura a la q nos encontramos con respecto al nivel del mar, es con la velocidad y tiempo de respuesta obtenida; también es importante aclarar que la velocidad de transmisión es igual a la velocidad de la luz, es por esta razón que en el Menú del celular se encuentra nula la velocidad de transmisión.
Podemos ver en la Fig. 15, la ubicación en la que nos encontramos al momento de realizar las pruebas. Esta ubicación nos indica la dirección exacta (Carrera 11 # 101- 80, Universidad Militar Nueva Granada), a demás de señalar la posición en donde nos encontramos.
Fig. 15. Ubicación en la cartografía, Ciudad de Bogotá D.C.
VI. CONCLUSIONES
• Los datos de ambas pruebas son muy semejantes a las arrojadas por el equipo GPS GARMY, con pequeñas variaciones en los valores obtenidos por razones de ubicación, ya que las pruebas realizadas con el modulo GPS TYCO A1029 – B–04 de GPS, y con el celular N82 de NOKIA, fueron tomadas de dos puntos distintos. Los motivos son: con el modulo GPS, nos encontrábamos en un laboratorio ubicado en el sótano principal del edificio (fue necesario sacar la antena, con cable de longitud de 2.30m de largo, por una ventana); y las pruebas realizadas con el equipo celular se realizaron desde las zonas verdes de la zona universitaria; la razón por que no se capturaba la señal de los satélites desde el sótano y realizar las pruebas de la misma forma que con el modulo se dificultaban por motivos de comodidad. • Aunque el diseño implementado es funcional su comercialización al mercado es muy costosa, debido al costo elevado del teléfono celular. • La cartografía implementada fue suministrada por el Instituto Geográfico Agustín Codazzi, en un estado des-actualizado. Fue necesario ponerse en la tarea de geo-referencia de nuevo varias vías y corrección de nomenclatura, ya que en los últimos dos años se han cambiado por sectores de la ciudad. También fue necesario corregir el formato a una forma plana, ya que la suministrada por el instituto trae las elevaciones correspondientes al los puntos picos reales de la tierra.• Toda la aplicación se ha desarrollado en Java J2ME, generando espacios para nuevas implantaciones. • El radio de precisión es actualmente de 10m, debido esencialmente a la falta de digitalización de calles y avenidas de Colombia, esto hace que se de una medida aproximada del la posición real del paciente. (Conclusión superada: por motivos de actualización de la información de la zona en la que se realizaron dichas pruebas) • Es un diseño aún en desarrollo con un alto grado de aplicabilidad.
REFERENCIAS
[1] Coma del Corral MJ, Diez Sánchez V, Hernández Martín A, Gutiérrez Ortega MC, Ramírez Herrera M. Revista Electrónica de Biomedicina, UTILIDAD CLÍNICA DE LA VIDEOCONFERENCIA EN TELEMEDICINA. 2004; 2: 74-78.
[2] KOPEC POLISZUK, Alberto. SALAZAR GÓMEZ, Antonio José. APLICACIONES DE TELECOMUNICACIONES EN SALUD EN LA SUBREGIÓN ANDINA. ORAS-CONHU Organismo Andino De Salud,

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 168
Convenio Hipólito UNANUE. Este es un documento institucional de la Organización Panamericana de la Salud. 2001.
[3] APARICIO PICO, Lilia Edith. MANUAL DE ESTÁNDARES DE LAS CONDICIONES TECNOLÓGICAS MÍNIMAS PARA LAS PRESTACIÓN DE SERVICIOS DE SALUD POR TELEMEDICINA. Universidad Distrital Francisco José de Caldas. Rev. Ingeniería Universidad Distrital. 2000.
[4] Muestra y define conceptos claros de tele-medicina y sus servicios. http://mx.geocities.com/telemedicinaunam/telepag1.htm
[5] MediVox es una organización que ofrece servicios de tele-medicina y soporte tecnológico. Se toma como ejemplo de en servicio de tele-medicina a través de internet. Su vínculo es www.medivox.it.
[6] DONALDO ARTETA, Juan Calahorro, ANTONIO CUADRADO, Eladio Gil. PERSPECTIVAS DE LA TELEMEDICINA EN LAS EMERGENCIAS Y URGENCIAS MÉDICAS. Iatreia, volumen 14 No.3.
[7] Septiembre 2001. [8] Normas de la Unión Internacional de Telecomunicaciones ITU-T.
Adquiridas a través de la Universidad Militar Nueva Granada. Se usaron para consultar toda la sección referente a los sistemas GSM.
[9] TOMASI, Wayne. SISTEMAS DE COMUNICACIONES ELECTRÓNICAS. Pearson Education. 2003, cuarta edición
[10] Dirección electrónica del servidor. Convenio académico con la empresa WAU. sms.wau.com
[11] Centro de Investigación de la Telecomunicaciones Cinel. Curso de programación en el lenguaje Java ME. Se adquiere el curso en línea a través de un pago en la página www.cintel.org.co
Memorias STSIVA 2008 Tomo II 169 - 172
Análisis comparativo del entrenamiento de modelos ocultos de Markov mediante esquemas generativos y discriminativos
J. Carvajal, M. Sarria, A. Orozco, G. Castellanos
Analisis Comparativo Del Entrenamiento DeModelos Ocultos de Markov Mediante Esquemas
Generativos y DiscriminativosJ. Carvajal, M. Sarria, A. Orozco, G. Castellanos
Resumen—Los HMMs son modelos estadısticos usados deforma muy exitosa y efectiva en procesamiento del habla. Sinembargo, el modelo es un modelo general para procesos es-tocasticos y por tanto puede ser aplicado a una gran variedad desenales biomedicas. Tradicionalmente, los parametros HMM sonestimados bajo el criterio ML. Sin embargo, la estimacion ML,tiene como desventaja el problema de sobreentrenamiento (laverosimilitud siempre incrementa con la complejidad del modelo).Por esta razon en este trabajo se realiza una comparacion entrelas tecnicas de entrenamiento generativo ML y discriminativoMMI para la deteccion de patologıas en senales EEG. Losresultados mostraron un mejor desempeno de la tecnica MMIsobre la ML hasta en un 5.5% en la eficiencia del clasificador.
Palabras Claves—Modelos ocultos de Markov, Entrenamientodiscriminativo, MMI, Electroencefalografıa.
I. INTRODUCCION
Usualmente los HMM se han entrenado mediante el criteriode maxima verosimilitud (Maximum Likelihood - ML), subeneficio mas importante es que garantiza convergencia yeficiencia computacional [1] [2]. Sin embargo, una debilidadcon frecuencia citada por este metodo es que no optimiza di-rectamente las tasas de error. Notando esta debilidad, muchosinvestigadores han estudiado otras tecnicas de entrenamiento[3]. Los esquemas de entrenamiento se pueden dividir en dosgrandes categorıas: aquellos que indirectamente intentan mi-nimizar el error de decodificacion mediante la representacionde las funciones de distribucion (entrenamiento generativo)y aquellos que minimizan directamente una representacionadecuada del error de decodificacion (entrenamiento discri-minativo) [4]. A la primera categorıa pertenece la estimacionML, y en torno a lo que se conoce como entrenamientodiscriminativo, se han desarrollado para la estimacion deparametros de HMMs diferentes criterios de entrenamiento,entre los que se encuentra la maxima informacion mutua(Maximum Mutual Information - MMI) [5] [6].
Los modelos ocultos de Markov (Hidden Markov Models -HMM) son modelos estadısticos usados de forma muy exitosay efectiva en procesamiento del habla [7]. El modelo, sinembargo, es un modelo general para procesos estocasticos ypor tanto puede ser aplicado a una gran variedad de senales
Johanna Carvajal Gonzalez, Milton Orlando Sarria Paja y German Caste-llanos, pertenecen al Grupo de Control y Procesamiento Digital de Senales,Universidad Nacional de Colombia, Vıa al Magdalena, Km 7, Campusla Nubia, Manizales, Colombia. E-mail: {jpcarvajalg, mosarriap,cgcastellanosd}@unal.edu.co. Alvaro Angel Orozco Gutierrezpertenece al grupo de Control e Instrumentacion, Universidad Tecnologica DePereira, Verada la Julita, Pereira, Colombia. E-mail: [email protected]
biomedicas [8]. Por esta razon, en este trabajo se buscacomprobar que ası, como en la deteccion de patologıas de vozo reconocimiento del habla, la tecnica de entrenamiento dis-criminativo muestra mejores resultados sobre el entrenamientogenerativo, es posible ampliar su aplicacion a senales deelectroencefalografıa (EEG), ya que la clasificacion de EEGcomparte caracterısticas similares con la clasificacion del habla[9].
El algoritmo de entrenamiento discriminativo usado eneste trabajo para la estimacion de los parametros de HMMes una aproximacion de la funcion objetivo de MMI, endonde su tecnica de maximizacion es similar al algoritmo EM(Expectation Maximization) [10].
II. MATERIALES Y METODOS
A. Bases de datos
Los datos utilizados para las pruebas consisten de un conjuntode datos recolectados por La Clınica para Epilepsia de laUniversidad de Bonn. La base de datos se compone decinco conjuntos (denotados A-E) cada uno compuesto por 100segmentos de EEG de un canal que pueden ser organizadosen tres clases. Los conjuntos A y B consisten de segmentostomados de registros EEG superficiales (cuero cabelludo) encinco personas saludables. Los registros de estos conjuntoscomponen la clase normal en este estudio. Los conjuntos C, Dy E se originan de registros EEG de diagnostico prequirurgico.Los conjuntos C y D conforman la clase interictal, mientrasque los del conjunto E forman la clase ictal, siendo ambasclases relacionadas con actividad patologica. Todas las senalesEEG fueron registradas con un sistema de adquisicion de128 canales, utilizando una referencia comun promediada. Losdatos fueron digitalizados a 173.61Hz con una resolucion de12 bits.
B. Entrenamiento ML
El entrenamiento del modelo se realiza de acuerdo al conjuntode entrenamiento dado. El conjunto de entrenamiento constade las observaciones O
�
O1, . . . , OU�
y sus correspondientesclases W
�
w1, . . . , wU�
. El entrenamiento ML es basicamentela maximizacion de la funcion objetivo ML, L (θ), definidacomo [11]:
L (θ) = log pθ (O |W ) =U
X
u=1
log pθ (Ou |wu ) =V
X
v=1
X
u∈Av
log pθ (Ou |v )
(1)

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 170
Donde Av∆= {u |wu = v }. Esto indica que los parametros
de cada registro v, son estimados de acuerdo a su corres-pondiente etiqueta, cuyo ındice forma el conjunto Av . Ob-servando esta propiedad es claro que la estimacion ML, notoma en cuenta las confusiones entre clases y errores dereconocimiento, y en este sentido difiere de los metodos deentrenamiento discriminativo [10].
La funcion objetivo ML se implementa iterativamenteusando el algoritmo de Baum-Welch, que es un caso especialdel algoritmo EM. Las formulas de reestimacion son [11]
aij =
P
u∈Av
TuP
t=0pθ (st = i, st+1 = j |Ou, v )
P
u∈Av
TuP
t=0ψu
ik(t)
(2a)
cik =
P
u∈Av
TuP
t=0ψu
ik(t)
P
u∈Av
TuP
t=0ψu
i (t)
(2b)
µikj =
P
u∈Av
TuP
t=1[ou
t ]jψu
ik(t)
P
u∈Av
TuP
t=1ψu
ik(t)
(2c)
σ2ikj =
P
u∈Av
TuP
t=1ψu
ik(t)
“
[out ]
j− µikj
”2
P
u∈Av
TuP
t=1ψu
ik(t)
(2d)
donde
ψuik (t)
∆= pθ (st = i, gt = k |Ou, v ) (3)
ψui (t)
∆= pθ (st = i |Ou, v ) (4)
y T u es la duracion del registro u . Los terminos ψuik (t) y
ψui (t) se pueden calcular eficientemente usando el algoritmo
Forward-Backward [11]. Para el caso general de un parametroHMM, la formula de reestimacion toma la forma
v =N (v)
D (v)
donde N (v) y D (v) se conocen como acumuladores, y soncalculados usando los registros en el conjunto Av .
C. Algoritmo MMI aproximado
La funcion objetivo MMI se da por [10]
M (θ) = log pθ (W |O )
=UP
u=1log pθ (wu |Ou ) =
UP
u=1log p(wu)pθ(Ou|wu )
VP
v=1
p(v)pθ(Ou|v )
=UP
u=1
(
log [p (wu) pθ (Ou |wu )] − logVP
v=1p (v)pθ (Ou |v )
)
(5)
Aplicando la aproximacion
logX
i
Xi ≈ log {max Xi} (6)
en el lado derecho de (5) se obtiene
M (θ)≈U
X
u=1
{log [p (wu) pθ (Ou |wu )]− log maxv
[p (v) pθ (Ou |v )]o
(7)
Observe que la aproximacion de arriba, es un caso especialde los n-mejores procedimientos donde n = 1. Sin embargo,la opcion de n = 1 no es arbitraria y es crucial para laimplementacion de la optimizacion. Sea
Bv∆=
n
u˛
˛
˛v = arg maxw
[p (w) pθ (Ou |w )]o
(8)
Si se aplica el criterio MAP (Maximum a posteriori) parareconocimiento, se puede decir que Bv contiene los ındices delos registros de entrenamiento que fueron reconocidos comode la clase v . Usando estas definiciones de Av y Bv, se puedereescribir 7 como sigue,
M (θ) ≈ M∗ (θ)
∆=
VP
v=1
"
P
u∈Av
log [p (v) pθ (Ou |v )] −P
u∈Bv
log [p (v) pθ (Ou |v )]
#
(9)
Motivado por (9), se introduce la siguiente funcion objetivo,la cual s llamada el criterio MMI aproximado [10],
J (θ) =V
X
v=1
8
<
:
X
u∈Av
log [p (v) pθ (Ou |v )]− λX
u∈Bv
log [p (v) pθ (Ou |v )]
9
=
;
(10)
0 < λ < 1 es el parametro que controla ”la tasa discrimina-tiva”. Observe que usando λ = 0 se obtiene la funcion objetivoML y usando λ = 1 se obtiene la funcion objetivo MMI conla aproximacion log
�
i
Xi ≈ log {maxXi}. Maximizar J (θ)
es equivalente a maximizar la siguiente funcion objetivo [10]
Jv (θ) =X
u∈Av
logpθ (Ou |v ) − λX
u∈Bv
logpθ (Ou |v ) (11)
Para 1 ≤ v ≤ V . Como en el caso ML, el conjunto deparametros de cada clase, puede ser estimado separadamente.Note que esto es diferente del caso MMI (5), en el cual,los parametros de todas las clases deberıan ser optimizadosconjuntamente.
Ahora es posible formular los dos pasos del algoritmo:1) Realizar el reconocimiento en el conjunto de entre-
namiento y obtener los conjuntos Bv , y la funcionobjetivo Jv (θ).
2) Maximizar Jv (θ) con respecto a θ, y obtener las nuevasestimaciones de los parametros.
D. Aplicacion a HMMs
La derivacion explıcita de las formulas de reestimacionpara HMM se detallan en [10]. Las siguientes formulas dereestimacion son obtenidas (Ecs. 14), donde ψu
ik (t) y ψui (t),
se calculan igual que en ML. Comparando (14), con lasformulas de reestimacion ML (2), es posible describir el nuevoprocedimiento de reestimacion para cada parametro, v, de lasiguiente forma [10]:
v =N (v) − λND (v)
D (v) − λDD (v)(12)
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 171
Donde N (v) y D (v) son acumuladores que son calculadosde acuerdo al conjunto Av , la clase original del conjunto deentrenamiento. De forma similar, ND (v) y DD (v) son losacumuladores discriminativos, y se calculan de acuerdo alconjunto Bv, la clase obtenida por reconocimiento.
Como se ha visto hasta ahora, el algoritmo tiene dos pasosprincipales [10]:
1) Aproximacion Etapa del reconocimiento en el conjuntode entrenamiento, con el fin de obtener los conjuntosBv. Usando estos conjuntos, la funcion objetivo Jv (θ)MMI modificada puede ser calculada.
2) Maximizacion Maximizar la funcion objetivo Jv (θ)usando las formulas de reestimacion (14).
E. Extraccion de Caracterısticas
La estimacion de los residuales de Kalman suavizado se usapara estimar la varianza de la senal EEG [12], como sigue:
σ2
ξ [k] =α
M
M�
i=1
gie [k − i]2 + (1 − α)σ2
ξ [k − 1] (13)
donde M es el numero de ventanas de estimacion, e[k] =y[k]−H[k]a[k−1] es el error de estimacion, g = [g1...gM ] esuna ventana suavizante y α un parametro suavizante, ambossirven para minimizar los efectos del error de estimacion yaltas frecuencias [12].
III. RESULTADOS Y DISCUSION
Los experimentos se realizaron sobre los conjuntos A dela clase normal y C de la clase patologica, para realizarla clasificacion y comparacion mediante las dos tecnicas deentrenamiento propuestas.
Se realizaron 10 validaciones, mediante la tecnica validacioncruzada de 2 subconjuntos (“2 folds”) disyuntivos: 70 muestrasde cada clase para entrenar y 30 de cada clase para validar.
Para el entrenamiento se emplearon 3 mezclas Gaussianasy 3 estados, ya que debido al coste computacional que implicatener tantos grados de libertad, ademas de las 10 iteraciones ylos 15 valores distintos de λ, solo se realizo con este conjuntode valores.
Para comenzar se inicializa el algoritmo con ML (2) y apartir de este se aplican las formulas de reestimacion de MMImodificado (14).
El parametro λ varıa en pasos de 0.05 en el intervalo{0, 0.7}. Para cada valor de λ se aplica una Aproximaciony 10 iteraciones de Maximizacion. Para grandes valores deλ, la varianza y las probabilidades de transicion tienden avolverse negativas, por esta razon se limito el experimentoa valores de λ < 0.7. En los casos en que estos valoresdaban negativos fueron reemplazados por su valor en ML.Sin embargo, cuando este evento ocurrıa, el desempeno sedeterioraba drasticamente.
La Fig. 1, muestra la moda de las iteraciones en que selogro el mejor desempeno para cada valor de λ. Es posible
ver que en casi todos los casos, despues de la tercera iteracionno se obtienen mejoras en el desempeno.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
1
2
3
4
5
6
7
8
9
10
λ
Iter
ació
n
Fig. 1. Moda de las iteraciones
En la Fig. 2 se muestra la tasa de reconocimiento deentrenamiento discriminativo y generativo versus λ. Esta tasade reconocimiento discriminativo corresponde al promedio dela eficiencia de las validaciones para cada valor de λ. En estagrafica se comprueba que el entrenamiento discriminativomejora el desempeno de los HMMs hasta en un 5.5%. Sumejor eficiencia se logra para λ = 0.5 con un tasa de exactitudde 81.5%. Para valores de λ > 0.6, el desempeno de HMMempieza a caer y se debe a lo mencionado anteriormente,valores negativos de la varianza y de las probabilidades detransicion.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.774
75
76
77
78
79
80
81
82
λ
% E
fici
enci
a
Línea base MLEntrenamiento Discriminativo
Fig. 2. Tasa de Reconocimiento vs λ

XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 172
aij =
P
u∈Av
TuP
t=0pθ (st = i, st+1 = j |Ou, v ) − λ
P
u∈Bv
TuP
t=0pθ (st = i, st+1 = j |Ou, v )
P
u∈Av
TuP
t=0ψu
ik(t)−λ
P
u∈Bv
TuP
t=0ψu
ik(t)
(14a)
cik =
P
u∈Av
TuP
t=0ψu
ik(t) − λ
P
u∈Bv
TuP
t=0ψu
ik(t)
P
u∈Av
TuP
t=0ψu
i (t)−λP
u∈Bv
TuP
t=0ψu
i (t)
(14b)
µikj =
P
u∈Av
TuP
t=1ψu
ik(t) [ou
t ]j− λ
P
u∈Bv
TuP
t=1ψu
ik(t) [ou
t ]j
P
u∈Av
TuP
t=1ψu
ik(t) − λ
P
u∈Bv
TuP
t=1ψu
ik(t)
(14c)
σ2ikj =
P
u∈Av
TuP
t=1ψu
ik(t)
“
[out ]
j− µikj
”2− λ
P
u∈Bv
TuP
t=1ψu
ik(t)
“
[out ]
j− µikj
”2
P
u∈Av
TuP
t=1ψu
ik(t) − λ
P
u∈Bv
TuP
t=1ψu
ik(t)
(14d)
La Fig. 3 muestra la desviacion estandar para elentrenamiento discriminativo, para valores de λ por debajode 0.6, el comportamiento del clasificador es relativamenteuniforme, para valores superiores la desviacion estandaraumenta hasta casi un ±12%.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.760
65
70
75
80
85
90
λ
% E
fici
enci
a
Desviación EstándarEntrenamiento Discriminativo
Fig. 3. Desviacion estandar entrenamiento discriminativo
IV. CONCLUSIONES
Este trabajo logra comprobar que el entrenamiento discrimina-tivo, especıficamente MMI modificado mejora el desempenode los HMMs en comparacion con los modelos entrenados conel criterio tradicional ML.
Los HMMs entrenados con criterios discriminativos, puedenser ademas aplicados a otro tipo de biosenales, diferentes a lavoz, como en este caso a la deteccion de patologıas en registrosEEG, lograndose tambien optimos desempenos.
El algoritmo MMI modificado implementado, resulta sen-cillo de implementar, debido a que es una simple modificaciondel algoritmo ML.
Se plantea como trabajo futuro restringir λ a valores maspequenos, para evitar problemas de varianza y probabilidades
de transicion negativos. Tambien se propone implementar cri-terios de informacion para determinar el numero de estados delmodelo y por ultimo variar el numero de mezclas gaussianas,para mejorar los resultados de clasificacion.
V. AGRADECIMIENTOS
Los autores agradecen al Programa de Becas para Estudian-tes Sobresalientes de Posgrado de la Universidad Nacionalde Colombia y al programa de Jovenes Investigadores deColciencias, por su apoyo para el desarrollo satisfactorio deeste proyecto.
BIBLIOGRAFIA
[1] M.Collins, “The EM algorithm,” University of Pennsylvania, 1997.[2] J. Bilmes, “A gentle tutorial of the EM algorithm and its application to
parameter estimation for gaussian mixture and Hidden Markov Models,”International Computer Science Institute, Berkeley CA, USA, 1998.
[3] F. Sha, “Large margin training of acoustic models for speech recogni-tion,” Ph.D. dissertation, University of Pennsylvania, 2007.
[4] M. Alvarez, “Reconocimiento de voz sobre diccionarios reducidosusando Modelos Ocultos de Markov,” Manizales, Colombia, 2004.
[5] L. R. Bahl, P. F. Brown, P. V. Souza, and R. L. Mercer, “MaximumMutual Information estimation of Hidden Markov Model parametersfor espeech recognition,” in proc. icassp 86, 1986.
[6] V. Valtchev, J. J. Odell, P. C. Woodalnd, and S. J. Young, “MMIE train-ing of large vocabulary recognition systems,” University Engineeringdepartament, trumpington street, diciembre 1997.
[7] A. A. Dibazar, S. Narayanan, and T. W. Berger, “Feature analysis forautomatic detection of pathological speech,” Second Joint EMBS/BMESconference, vol. 1, 2002.
[8] A. Cohen, “Hidden Markov Models in biomedical signal processing,”20th Annual International Conference of the IEEE Engineering inMedicine and Biology Society, vol. 20, no. 3, pp. 1145–1150, 1998.
[9] J. Stastny, P. Sovka, and A. Stancak, “EEG signal classification,” 23rdAnnual International Conference of the IEEE, vol. 2, pp. 2020–2023,2001.
[10] D. Burshtein and A. Ben-Yishai, “A discriminative training algorithmfor Hidden Markov Models,” IEEE Transactions on Speech and AudioProcessing, vol. 12, no. 3, May 2004.
[11] L. R. Rabiner, “A tutorial on Hidden Markov Models and selectedapplications in speech recognition,” IEEE, vol. 77, pp. 257–285, 1989.
[12] L. D. Avendano, J. M. Ferrero, and G. Castellanos-Dominguez, “Im-proved parametric estimation of time frequency representations forcardiac murmur discrimination,” Computers in Cardiology, 2008.

Memorias STSIVA 2008 Tomo II 173 - 177
Entorno software para la obtención del electrocardiograma fetal
Jhoan Samuel Romero Peña, Irina Vélez López1, Msc Luis Omar Sarmiento2, IEEE member, Dr. Juan Carlos Otero Pinto3, Dr. Francisco Manrrique4 1Estudiantes de Ingeniería de Telecomunicaciones,
2 Grupo de Investigación de Procesamiento de señal GIPSE, Universidad Santo Tomas, Bucaramanga, [email protected] 3Clínica Materno Infantil San Luis,
4Fundación del Corazón.
Abstract—For the monitoring of health of fetus, it were apply
different tools of processing and JADEop algorithm based in ICA (Independent Component Analysis) to acquired signals by the electrodes over on mother´s body; this potentials registers are analyzed with a software building in MatLab for electrocardiographic signals, it let to visualize the signals as are see in the professional ECG system, it letting the implementation of filters, detection R wave, cancelation space-time of QRST complex and analysis time-frequency; all this procedure is the initial pre-processed, after to application of JADEop algorithm that give the separate signals FECG and MECG like a result. This results signals provide the necessary information to the doctors for give a diagnostic about fetus health, determining the possibility of presence of fetal heart. Index Terms— Independent Component Analysis, Electrocardiogram Fetal, Electrocardiogram Maternal, variability of the rat heart, graphical user interface.
I. INTRODUCCIÓN
La obtención de la actividad cardiaca fetal durante el estado de embarazo es de vital importancia para los médicos ya que provee información del estado de salud del feto, que permite dar un diagnóstico temprano de alguna anomalía cardiaca, de manera que se efectúe el tratamiento adecuado [1]. Una de las técnicas usadas comúnmente es el Ultrasonido Doppler para detectar y medir la actividad cardiaca fetal (Fetal Heart Rate, FHR) durante el embarazo y el parto. Sin embargo esta técnica no aporta información suficiente respecto a los parámetros morfológicos y temporales del electrocardiograma fetal (FECG) durante la gestación [2]. Otra de las técnicas para evaluar el estado del feto es el diagnóstico prenatal invasivo que obtiene información bioquímica, genética y fisiológica acerca del feto, pero no entrega información de actividad cardiaca fetal. El procedimiento para la obtención del FECG inicia con la colocación de electrodos sobre el abdomen y tórax de la madre; estos registros tienen un nivel muy débil de señal a ruido (Signal to Noise Ratio, SNR) y bajos valores de voltaje del FECG en relación al electrocardiograma materno (MECG); además los electrodos son también sensibles a otras señales
debidas a la respiración, actividad estomacal, contracciones del útero, y contaminada también con interferencias externas provocados por la red eléctrica o ruido térmico; por lo tanto la señal observada en cada electrodo es un complejo de señales asociadas a la superposición de muchas fuentes [3]. Varias técnicas de procesamiento de señales han sido introducidas para la extracción del FECG. Estas técnicas incluyen filtrado adaptativo [4], técnicas de correlación [5], descomposición de valor singular (SVD) [6], redes neuronales [7], [8] y Separación Ciega de Fuentes (BSS) [9], [10]. El primer acercamiento para obtener el FECG, debería ser la aplicación de un filtrado en el dominio de la frecuencia debido a las diferentes frecuencias cardiacas entre la madre y el feto, pero no puede dar resultado debido a la superposición espectral entre las dos señales (FECG y MECG) y el bajo nivel de SNR [10]. En este trabajo se propone la aplicación del método BSS (Blind Source Separation), implementado a través del algoritmo JADEop, que es ejecutado con el software para el análisis de señales electrocardiográficas (ECG); con le fin de tratar de recuperar la componente de la señal que contenga el FECG.
II. MÉTODOS
A. Método BSS
La formulación matemática de BSS, modela el comportamiento de las señales captadas por los electrodos como una combinación lineal instantánea de las señales fuentes más la presencia de perturbaciones debido al ruido en un instante de tiempo t. Para un grupo de p canales, y en la presencia de q fuentes bioeléctricas (p q) se formula como:
Y(t) = M X(t) + N(t) (1)
donde Y(t) = (y1(t) . . . yp(t)) contiene los registros de los potenciales o electrodos, X(t) = (x1(t) . . . xq(t)) contiene los valores de las señales fuentes bioeléctricas y el ruido en cada canal es representado por N(t) = (n1(t) . . . np(t))
[9] y M = (mij) R pxq es la matriz de transferencia que representa la transformación lineal estacionaria de la propagación de las fuentes bioeléctricas a los electrodos [11].
Entorno software para la obtención del Electrocardiograma Fetal
Jhoan Samuel Romero Peña, Irina Vélez López1, Msc Luis Omar Sarmiento2, IEEE member, Dr. Juan Carlos Otero Pinto
3, Dr. Francisco Manrrique
4
1Estudiantes de Ingeniería de Telecomunicaciones, 2 Grupo de Investigación de Procesamiento de señal GIPSE, Universidad Santo Tomas, Bucaramanga, [email protected] 3Clínica
Materno Infantil San Luis, 4Fundación del Corazón.
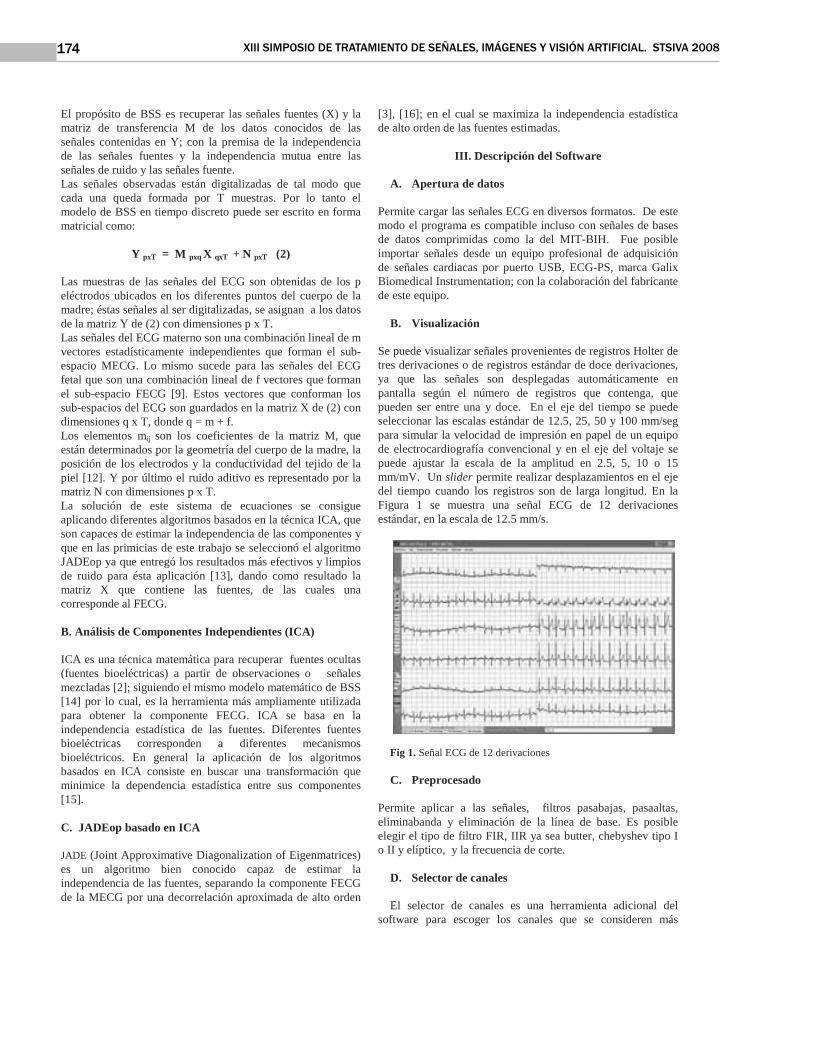
XIII SIMPOSIO DE TRATAMIENTO DE SEÑALES, IMÁGENES Y VISIÓN ARTIFICIAL. STSIVA 2008 174
El propósito de BSS es recuperar las señales fuentes (X) y la matriz de transferencia M de los datos conocidos de las señales contenidas en Y; con la premisa de la independencia de las señales fuentes y la independencia mutua entre las señales de ruido y las señales fuente. Las señales observadas están digitalizadas de tal modo que cada una queda formada por T muestras. Por lo tanto el modelo de BSS en tiempo discreto puede ser escrito en forma matricial como:
Y pxT = M pxq X qxT + N pxT (2)
Las muestras de las señales del ECG son obtenidas de los p eléctrodos ubicados en los diferentes puntos del cuerpo de la madre; éstas señales al ser digitalizadas, se asignan a los datos de la matriz Y de (2) con dimensiones p x T. Las señales del ECG materno son una combinación lineal de m vectores estadísticamente independientes que forman el sub-espacio MECG. Lo mismo sucede para las señales del ECG fetal que son una combinación lineal de f vectores que forman el sub-espacio FECG [9]. Estos vectores que conforman los sub-espacios del ECG son guardados en la matriz X de (2) con dimensiones q x T, donde q = m + f. Los elementos mij son los coeficientes de la matriz M, que están determinados por la geometría del cuerpo de la madre, la posición de los electrodos y la conductividad del tejido de la piel [12]. Y por último el ruido aditivo es representado por la matriz N con dimensiones p x T. La solución de este sistema de ecuaciones se consigue aplicando diferentes algoritmos basados en la técnica ICA, que son capaces de estimar la independencia de las componentes y que en las primicias de este trabajo se seleccionó el algoritmo JADEop ya que entregó los resultados más efectivos y limpios de ruido para ésta aplicación [13], dando como resultado la matriz X que contiene las fuentes, de las cuales una corresponde al FECG.
B. Análisis de Componentes Independientes (ICA)
ICA es una técnica matemática para recuperar fuentes ocultas (fuentes bioeléctricas) a partir de observaciones o señales mezcladas [2]; siguiendo el mismo modelo matemático de BSS [14] por lo cual, es la herramienta más ampliamente utilizada para obtener la componente FECG. ICA se basa en la independencia estadística de las fuentes. Diferentes fuentes bioeléctricas corresponden a diferentes mecanismos bioeléctricos. En general la aplicación de los algoritmos basados en ICA consiste en buscar una transformación que minimice la dependencia estadística entre sus componentes [15].
C. JADEop basado en ICA
JADE (Joint Approximative Diagonalization of Eigenmatrices) es un algoritmo bien conocido capaz de estimar la independencia de las fuentes, separando la componente FECG de la MECG por una decorrelación aproximada de alto orden
[3], [16]; en el cual se maximiza la independencia estadística de alto orden de las fuentes estimadas.
III. Descripción del Software
A. Apertura de datos
Permite cargar las señales ECG en diversos formatos. De este modo el programa es compatible incluso con señales de bases de datos comprimidas como la del MIT-BIH. Fue posible importar señales desde un equipo profesional de adquisición de señales cardiacas por puerto USB, ECG-PS, marca Galix Biomedical Instrumentation; con la colaboración del fabricante de este equipo.
B. Visualización
Se puede visualizar señales provenientes de registros Holter de tres derivaciones o de registros estándar de doce derivaciones, ya que las señales son desplegadas automáticamente en pantalla según el número de registros que contenga, que pueden ser entre una y doce. En el eje del tiempo se puede seleccionar las escalas estándar de 12.5, 25, 50 y 100 mm/seg para simular la velocidad de impresión en papel de un equipo de electrocardiografía convencional y en el eje del voltaje se puede ajustar la escala de la amplitud en 2.5, 5, 10 o 15 mm/mV. Un slider permite realizar desplazamientos en el eje del tiempo cuando los registros son de larga longitud. En la Figura 1 se muestra una señal ECG de 12 derivaciones estándar, en la escala de 12.5 mm/s.
Fig 1. Señal ECG de 12 derivaciones
C. Preprocesado
Permite aplicar a las señales, filtros pasabajas, pasaaltas, eliminabanda y eliminación de la línea de base. Es posible elegir el tipo de filtro FIR, IIR ya sea butter, chebyshev tipo I o II y elíptico, y la frecuencia de corte.
D. Selector de canales
El selector de canales es una herramienta adicional del software para escoger los canales que se consideren más