IPN ESCUELA SUPERIOR DE INGENIERIA …tesis.ipn.mx/jspui/bitstream/123456789/13454/1/1336...
79
Transcript of IPN ESCUELA SUPERIOR DE INGENIERIA …tesis.ipn.mx/jspui/bitstream/123456789/13454/1/1336...


IPN ESCUELA SUPERIOR DE INGENIERIA
MECANICA Y ELECTRICA
INGENIERIA AERONAUTICA
“SIMULACION DE MOVIMIENTO ASISTIDO CON LAS HERRAMIENTAS CAD / CAE DE UN SISTEMA DE CONTROL CICLICO EN UN
HELICOPTERO BELL 206”
REPORTE FINAL DE INVESTIGACIÓN
PARA OBTENER EL TITULO DE INGENIERO EN AERONAUTICA
P R E S E N T A:
RODRIGO CHRISTIAN MARTINEZ OLMOS ANGEL JOHARY OLIVA OLIVERA
MÉXICO D.F. FEBRERO 2006

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD TICOMÁN
QUE PARA OBTENER EL TÍTULO DE: INGENIERO EN AERONÁUTICA POR LA OPCIÓN DE TITULACIÓN: SEMINARIO
DEBERÁN PRESENTAR: LOS CC. PASANTES: RODRIGO CHRISTIAN MARTINEZ OLMOS ANGEL JOHARY OLIVA OLIVERA
SEMINARIO DE TITULACIÓN
“INGENIERIA Y MANUFACTURA ASISTIDA POR COMPUTADORA”
“SIMULACION DE MOVIMIENTO ASISTIDO CON LAS HERRAMIENTAS
CAD / CAE DE UN SISTEMA DE CONTROL CICLICO EN UN HELICOPTERO
BELL 206”
CONTENIDO TABLA DE FIGURAS INTRODUCCIÓN CAPÍTULO I PLANTEAMIENTO DEL PROBLEMA CAPÍTULO II HELICÓPTEROS CAPÍTULO III CONSIDERACIONES TEÓRICAS CAPÍTULO IV APLICACIÓN DEL CAD / CAE / CAM CAPÍTULO V SIMULACIÓN CONCLUSIONES BIBLIOGRAFÍA
México, DF., a 23 de Enero del 2006.
A S E S O R E S
M. EN C. PEDRO SANTAMARIA BRIONES ING. EDUARDO BRAVO GARCIA
Vo. Bo.
ING. MIGUEL ÁLVAREZ MONTALVO DIRECTOR

A mis padres:
Por haberme apoyado durante el transcurso de mi carrera
profesional, gracias porque cuando mas necesitaba su ayuda en éste
periodo estaban a mi lado ayudándome a resolver todos y cada uno
de mis problemas aún en momentos muy difíciles.
A Richard y Gaby:
Por apoyarme en todo momento, a ti Richard por tener el libro
indicado en el momento preciso justo cuando mas lo necesitaba y a ti
Gaby por estar conmigo en situaciones fáciles y difíciles.
Con cariño para mis papas, Richard y Gaby
Rodrigo
A mis padres:
Por dejarme la mejor herencia que un hijo pueda recibir, mis estudios
profesionales; gracias por apoyarme en mis deseos y necesidades en
todo momento desde el momento que los conocí por primera ves.
Sepan que los quiero y admiro profundamente.
A mis hermanos:
Gracias Miguel por todas las noches en vela que te pasaste junto a mi
por causa de mis deberes y demás situaciones, esta es la mejor
forma que puedo describir la gratitud que te tengo para conmigo.
Claudia, gracias por enseñarme que el futuro que forjamos es para
nosotros y los que nos siguen.
Con cariño y eterno agradecimiento para mi FAMILIA
Angel

CONTENIDO
TABLA DE FIGURAS INTRODUCCION CAP I. PLANTEAMIENTO DEL PROBLEMA 1.1 CONTEXTO 1.2 OBJETIVO GENERAL 1.3 OBJETIVOS ESPECÍFICOS 1.4 JUSTIFICACIÓN 1.5 ALCANCE 1.6 METODOLOGÍA UTILIZADA CAP II. HELICOPTEROS 2.1 ANTECEDENTES HISTÓRICOS 2.2 CONFIGURACIONES DE LOS ROTORES EN LOS HELICÓPTEROS 2.3 INVESTIGACIÓN DE CAMPO CAP III. CONSIDERACIONES TEORICAS 3.1 CINEMÁTICA DE MECANISMOS 3.2 REGLAMENTACIÓN DE LOS SISTEMAS DE CONTROL 3.3 ERGONOMIA 3.4 CONTROLES DE VUELO CAP IV. APLICACIÓN DEL CAD / CAE / CAM 4.1 INTRODUCCIÓN 4.2 PRINCIPALES FUNCIONES 4.3 MOVIMIENTO EN EL CAD / CAE 4.4 TÉRMINOS DENTRO DE LA APLICACIÓN MOTION CAP V. SIMULACION 5.1 INTRODUCCIÓN
1 2 4 4 4 4 5 6 6 7 7 11 13 14 14 21 23 25 45 45 46 47 49 56 56

5.2 ANÁLISIS DE MOVIMIENTO 5.3 ANÁLISIS DE COMPONENTES 5.4 PROCEDIMIENTO 5.5 PUNTO DE MANDO PRINCIPAL 5.6 SECUENCIA DE MOVIMIENTO CONCLUSIONES BIBLIOGRAFIA
57 60 65 66 69 71 73

Representación de Movimiento en un Helicóptero
TABLA DE FIGURAS
FIGURA NOMBRE PAGINA 1 Helicóptero convencional (rotor principal –
rotor de cola) 12
2 Sistemas de control 13 3 Limpiaparabrisas 20 4 Cilindros de un motor 20 5 válvulas de un motor 21 6 Desplazamientos máximos de los bastones 24 7 Arreglo ergonómico 24 8 Combinación de los sistemas de control 27 9 Teoría del momentum 29 10 Vuelo estacionario 30 11 Vuelo trasnacional 31 12 Viento relativo 32 13 Bisagra de aleteo 33 14 Efecto de coriolis 33 15 Tendencia a la deriva 34 16 Estabilidad estática 35 17 Inestabilidad estática 36 18 Estabilidad neutra 36 19 Inestabilidad dinámica 39 20 Estabilidad dinámica 39 21 Palanca de control direccional “cíclico” 41 22 Palanca del control colectivo 43 23 Sistema de cambio de paso del rotor de cola 44 24 Acelerador 44 25 Ciclo del producto 45 26 Clase de juntas 48 27 Navegador de escenarios 49 28 Explicación del navegador de escenarios 50 29 Escenario 50 30 Eslabón 51 31 Explicación del(los) eslabón(es) 51 32 Junta 52 33 Representación gráfica de las juntas 53 34 Explicación de la(s) junta(s) 54 35 Animación 55 36 Movimiento 56 37 Sistemas de control cíclico 58 38 Movimiento lateral del control cíclico 59 39 Ensamble 60

Representación de Movimiento en un Helicóptero
40 Bastón 60 41 Leva del control cíclico 61 42 Base de la leva del control cíclico 62 43 Varilla de interconexión de mandos 63 44 Yugo 63 45 Mezcladora 64 46 Plato oscilante 65 47 Movimiento hacia delante y atrás 68 48 Movimiento hacia los lados 68 49 Movimiento longitudinal 70 50 Movimiento lateral 70

Representación de Movimiento en un Helicóptero
INTRODUCCION
A medida de que las ciudades van siendo más grandes con el tiempo,
las aeronaves de ala rotativa van creciendo en importancia dentro de
la aeronáutica, ya sea para uso de pasajeros o de carga. El
helicóptero gracias a su versatilidad se ha convertido en uno de los
medios de transporte más funcionales en la actualidad. Debido a
esto su estudio es más importante día a día.
Así mismo el uso de las herramientas CAD / CAE / CAM en la
actualidad tiene una gran importancia dentro del diseño, construcción
y análisis de mecanismos, ya que estos nos permiten realizar la
ingeniería y los estudios respectivos de una forma mas practica,
segura y económica.
El propósito de este proyecto es analizar la cinemática de un sistema
de control lateral y longitudinal de una aeronave de ala rotativa para
así demostrar y proponer el alcance de un sistema de control y de un
software de diseño al personal y alumnado del ramo de ingeniería
mecánica.
Representación de Movimiento en un Helicóptero
CAP. I PLANTEAMIENTO DEL PROBLEMA
1.1 CONTEXTO
El sistema de control longitudinal y lateral ha sido previamente
modelado y ensamblado en la TESINA “Implementación de un
software de diseño como método didáctico en la enseñanza del
funcionamiento de controles de vuelo en helicópteros” del 2002. Para
mayor referencia sobre el modelado y ensamblado, favor de dirigirse
a la bibliografía antes mencionada. Así este trabajo dará una
aportación al mismo.
El sistema de control cíclico que se estudia en este trabajo es el
perteneciente a un helicóptero Bell 206.
1.2 OBJETIVO GENERAL
Desarrollar una herramienta didáctica que ayude en forma práctica a
la enseñanza del funcionamiento del control cíclico del helicóptero;
así mismo, visualizar mediante la asistencia de la computadora la
interrelación de todos y cada uno de los mecanismos que
comprenden el sistema de control cíclico y a su vez el proponer un
método simple y practico para poder realizar estas visualizaciones en
el programa mismo.
1.3 OBJETIVOS ESPECÍFICOS
• Proponer un método alternativo para la simulación de
movimiento del sistema de control cíclico de un helicóptero

Representación de Movimiento en un Helicóptero
• Lograr a través de herramientas computacionales, la
visualización del funcionamiento de los mecanismos que
conforman el sistema cíclico en los helicópteros.
• Facilitar la visualización del funcionamiento del control cíclico a
todo aquel personal técnico involucrado en el mantenimiento,
operación y diseño de los helicópteros.
• Se podrán efectuar de manera más eficiente los reglajes del
sistema al tener una compresión clara de cómo la variación en
un reglaje afecta significativamente la actuación del
helicóptero.
1.4 JUSTIFICACIÓN
Al cabo del tiempo la asistencia de las computadoras va siendo más
importante en cualquier área de interés. En la ingeniería es una de
las herramientas más importantes (sino la mas importante) ya que el
beneficio que se obtiene al simular la realidad es realmente
importante para la materia a la que se aplique. Estos beneficios antes
mencionados se refieren al tiempo, trabajo, calidad y economía tanto
de la industria como de los particulares o de cualquier persona que
utilice estas aplicaciones.
El estudio cinemático de un mecanismo es la base para un análisis
mas profundo del mismo. Este da la pauta para saber los tipos de
movimientos de cada uno de los componentes, la relación de
movimientos entre cada uno de los componentes, los puntos de
apoyo para que los movimientos sean correctos (el uno con respecto
al otro), es decir, el comportamiento individual y en conjunto del
mecanismo.

Representación de Movimiento en un Helicóptero
1.5 ALCANCE
Este proyecto consistirá en la simulación del funcionamiento de un
sistema de control cíclico de un helicóptero, para realizar un análisis
profundo y así un entendimiento completo de los principios y
funcionamientos de este tipo de controles, así como de todo lo que
implica la cinemática.
A su vez este proyecto planteara la implementación de un método
para realizar estas simulaciones en el software de una forma sencilla
y práctica.
El propósito de este proyecto no contempla el realizar un análisis
dinámico al sistema de control cíclico, ni el de dar una metodología
para modelado y ensamblado del mismo sistema.
1.6 METODOLOGÍA UTILIZADA
La metodología de la simulación propuesta en este trabajo es el
primero encontrar el eslabón que sea el punto de mando principal,
para posteriormente a éste eslabón definirle la junta que tendrá un
movimiento entre éste eslabón y el marco, ya sea constante,
harmónico, general ó articulado; para después realizar una
simulación del movimiento
Si la simulación se desarrolla de acuerdo a lo esperado concluimos la
verificación, de no ser así repetimos constantemente hasta tener una
cadena de movimientos adecuados.
Representación de Movimiento en un Helicóptero
CAP. II HELICOPTEROS
2.1 ANTECEDENTES HISTÓRICOS.
A través del tiempo, los helicópteros han alcanzado tal desarrollo que
en la actualidad puede decirse que estas aeronaves son más
versátiles y maniobrables que los autogiros y las aeronaves de ala
fija, aunque de diseño más complicado. El primer concepto de ala
rotativa viene de los chinos, los cuales idearon un juguete construido
de Corcho y Bambú que volaba al ser girado entre las manos.
Los primeros intentos por diseñar un helicóptero se remontan a 1490
cuando uno de los más grandes inventores Leonardo Da Vinci realizó
los planos de una máquina voladora la cual al girar se enroscaba en
el aire ascendiendo.
A menudo Da Vinci es citado ya que fue el primero en visualizar el
concepto de ala rotativa, sin embargo solo concibió diseños
experimentales que teóricamente podrían funcionar, pero que
resultaban imprácticos en la vida real. Da Vinci nombró a su máquina
voladora Helicóptero, nombre que se conserva hasta la actualidad y
se deriva de dos palabras griegas Helix que significa tornillo y Pteros
que significa ala.
Entre mediados de 1700 y hasta principios de 1900, los helicópteros
desencadenaron un gran número de diseños y propuestas que no
progresaron más allá del concepto inicial debido a que la naturaleza
del vuelo vertical no era comprendida en su totalidad y no se tenía
una planta de potencia adecuada. Básicamente los problemas que se
presentaron eran:

Representación de Movimiento en un Helicóptero
• La incomprensión de la aerodinámica del vuelo vertical. Aunque
las teorías básicas de la sustentación generada por los rotores
fueron establecidas a finales del siglo XIX por William Rankine,
W Froude y R.E. Froude, no fue sino hasta la década de 1920
que se dio la primera aplicación de la teoría aerodinámica de los
rotores.
• La planta de potencia no era la adecuada. La aparición del
motor de combustión interna hizo posible desarrollar modelos
de mayor tamaño.
• Minimizar el peso estructural y el peso del motor. Las primeras
plantas de potencia eran construidas de aleaciones de hierro
por lo que eran de gran peso. El aluminio comenzó a ser
utilizado hasta 1890, pero se comercializó ampliamente en la
aviación hasta 1920 debido a su elevado costo.
• Contrarrestar el par de reacción. Para contrarrestar el efecto del
par reacción se idearon diferentes configuraciones; rotores en
tandem, coaxiales, lado a lado, rotor principal con rotor de cola.
• Dar estabilidad y adecuado control. Los primeros helicópteros
eran pobres en estabilidad y control debido a la complejidad de
sus configuraciones, lo robusto de su construcción y a la
inadecuada planta de potencia. Sin embargo poco a poco se
idearon dispositivos que permitieron lograr dicho control en las
diversas configuraciones. Se desarrollaron bisagras de aleteo,
de adelanto y retraso, sistemas de control para el cambio de
paso de la pala, el sistema de control cíclico etc.
• Vencer el Problema de las grandes vibraciones. Las vibraciones
fueron la fuente de muchas fallas mecánicas del rotor y del

Representación de Movimiento en un Helicóptero
planeador reflejando de esta manera el desconocimiento del
comportamiento dinámico y aerodinámico de las aeronaves de
ala rotativa.
Antes de la segunda guerra mundial, el español Juan de la Cierva
había dedicado su vida a perfeccionar una aeronave a la que bautizo
con el nombre de "autogiro". Cierva buscaba un diseño que fuera
inmune a la entrada en perdida. Comenzó experimentando con un
avión provisto de una hélice frontal y al que le sustituyo el ala por
unas aspas autogiratorias. El autogiro aprovecha el empuje que le
proporciona la hélice frontal, mientras que el rotor continúa girando
gracias al flujo de aire generado por la hélice. El plano del rotor esta
inclinado hacia atrás, y los extremos de las palas se elevan hacia el
frente y descienden en la parte posterior, de manera que el flujo de
aire asciende diagonalmente a través del disco del rotor.
A partir de la década de 1920, los avances en la construcción de los
helicópteros se dieron de manera rápida y continua. Se desarrollaron
las teorías del Momentum y del Elemento de Pala para entender la
aerodinámica del vuelo, se idearon bisagras de aleteo, bisagras de
adelanto y retraso para contrarrestar el efecto de la disimetría de la
sustentación, se probaron diferentes configuraciones para evitar el
efecto del par motor (rotores en tandem, coaxiales, rotores en ambos
extremos, un rotor principal y uno de cola), y los sistemas de control
adecuados para cada configuración.
Hacia 1955, todos los helicópteros, excepto los más ligeros,
comenzaron a sustituir sus motores de émbolos por turbinas de gas,
que constituyeron el mayor avance en la historia del ala rotativa. Hoy
en día, las turbinas de gas proporcionan la potencia precisa, con una
reducción de tamaño y pesos muy competitivos.

Representación de Movimiento en un Helicóptero
En los últimos cuarenta años, se han realizado amplias
investigaciones y desarrollo científico en las diversas disciplinas
aeronáuticas lo que ha permitido lograr un gran incremento en el
desempeño del helicóptero, aumento en la capacidad de sustentación
del rotor principal, se han logrado mejores eficiencias a altas
velocidades y mejorado la fiabilidad mecánica. Las continuas mejoras
aerodinámicas en la eficiencia del rotor permite al helicóptero lograr
mejor capacidad de carga y un comportamiento más eficiente a
velocidades mayores a los 100 nudos.
A partir de 1980 ha habido un esfuerzo científico acelerado para
entender y superar algunos de los más difíciles problemas técnicos
asociados con el vuelo del helicóptero, particularmente al considerar
las limitaciones aerodinámicas impuestas por el rotor principal. El
desarrollo logrado en los programas de diseño, manufactura e
ingeniería asistidos por computadora y la experimentación de nuevos
materiales permiten obtener diseños de helicópteros más versátiles e
incrementar la viabilidad de otras aeronaves de vuelo vertical.
El helicóptero en la actualidad es seguro, versátil y fiable, y juega un
papel único que no es dado por ninguna otra aeronave. En el área
civil el helicóptero se desempeña como ambulancia, vehículo de
rescate, combate de incendios, vigilancia policíaca, servicios
corporativos, transporte de personal, reportes viales, etc. En lo que
respecta a operaciones militares el helicóptero es utilizado para el
transporte de tropas, barrido de minas, inspección en el área de
combate, misiones de asalto y antitanques, etc.
Con el panorama descrito anteriormente, no es de extrañar que al
comienzo de este milenio haya alrededor de 40,000 helicópteros
volando en todo el mundo y que en operaciones de rescate los

Representación de Movimiento en un Helicóptero
helicópteros hayan salvado la vida de más de un millón de personas
en todo en el mundo.
México cuenta con aproximadamente 255 helicópteros, distribuidos
en los sectores militar y civil, y es uno de los mercados líder en
América latina en la compra de estos aparatos.
Ante ello, compañías como la norteamericana Bell Helicopters,
francoalemana Eurocopter, italiana Agusta, Sikorky y lituana
Aviabaltika intensifican la comercialización de sus aeronaves en
nuestro país.
Aproximadamente el 34% de las unidades tiene uso militar, 23%
para labores corporativas, 21% en corporaciones policíacas, 14%
para trabajos utilitarios y 8% para diversos usos.
Aun así, Bell Helicopters domina en aproximación 40% del mercado
nacional. Se considera que el tráfico vehicular en México es una de
las variables que impulsa el crecimiento de las ventas de alas
rotativas en la parte central del país
2.2 CONFIGURACIONES DE LOS ROTORES EN
HELICOPTEROS
El helicóptero es una aeronave propulsada por un motor en la que la
sustentación, contrariamente a los aviones, no proviene de unas alas
fijas, sino de un conjunto de alas giratorias más conocido como hélice
o rotor, situado en la parte superior del aparato. Este es capaz de
realizar vuelo estacionario para despegar y aterrizar verticalmente,
puede desplazarse en cualquier dirección, gracias a la posibilidad de
inclinar su rotor en referencia a su eje de rotor. La potencia

Representación de Movimiento en un Helicóptero
suministrada al rotor permite crear un levantamiento sensiblemente
perpendicular al disco rotor. Su componente vertical equilibra el peso
del aparato mientras que su componente horizontal equilibra las
fuerzas de resistencia al avance de la maquina.
Los helicópteros, dependiendo de la configuración del o los rotores,
pueden clasificarse como:
Rotor principal/ Rotor de cola (un solo rotor principal)
Tandem (doble rotor principal)
Lado a lado (doble rotor principal)
Coaxial (doble rotor principal)
Sincrocóptero (rotores sincronizados)
Helicóptero con puntas propulsivas
2.2.1 Partes de un Helicóptero
Figura 1. Helicóptero convencional (rotor principal – rotor de cola)
1. Tren de aterrizaje tipo patín 6. Estabilizador horizontal de
perfil invertido
2. Tubo pitot 7. Estabilizador o aleta vertical
3. Mástil del rotor principal 8. Rotor de cola
4. Núcleo del rotor principal 9. Patín de cola
5. Pala 10. Botalón de cola
Representación de Movimiento en un Helicóptero
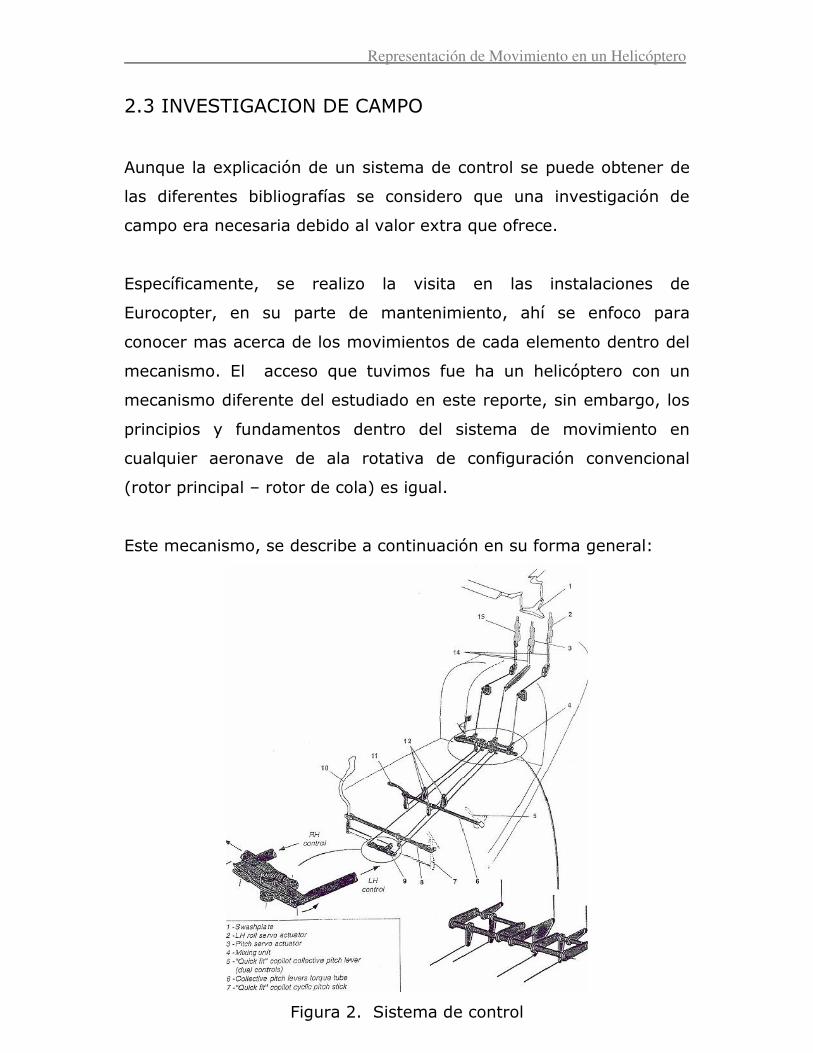
2.3 INVESTIGACION DE CAMPO
Aunque la explicación de un sistema de control se puede obtener de
las diferentes bibliografías se considero que una investigación de
campo era necesaria debido al valor extra que ofrece.
Específicamente, se realizo la visita en las instalaciones de
Eurocopter, en su parte de mantenimiento, ahí se enfoco para
conocer mas acerca de los movimientos de cada elemento dentro del
mecanismo. El acceso que tuvimos fue ha un helicóptero con un
mecanismo diferente del estudiado en este reporte, sin embargo, los
principios y fundamentos dentro del sistema de movimiento en
cualquier aeronave de ala rotativa de configuración convencional
(rotor principal – rotor de cola) es igual.
Este mecanismo, se describe a continuación en su forma general:
Figura 2. Sistema de control

Representación de Movimiento en un Helicóptero
CAP. III CONSIDERACIONES TEORICAS
3.1 CINEMATICA DE MECANISMOS
La mecánica trata las relaciones entre fuerza, materia y movimiento;
nos disponemos a analizar los métodos matemáticos que describen el
movimiento.
Esta parte de la mecánica recibe el nombre de cinemática.
Las siguientes son consideraciones que fundamentan dicho estudio:
• El movimiento puede definirse como un cambio continuo de
posición.
• En el movimiento real de un cuerpo extenso, los distintos
puntos del mismo se mueven siguiendo trayectorias diferentes,
pero consideraremos en principio una descripción del
movimiento en función de un punto simple (partícula).
• Tal modelo es adecuado siempre y cuando no exista rotación ni
complicaciones similares, o cuando el cuerpo es suficientemente
pequeño como para poder ser considerado como un punto
respecto al sistema de referencia.
• El movimiento más sencillo que puede describirse es el de un
punto en línea recta, la cual haremos coincidir con un eje de
coordenadas.
3.1.1 Introducción
Cinemática y cinética
Cinemática: estudio del movimiento sin consideración de las fuerzas.
Cinética: Estudio de fuerzas en sistemas en movimiento.
Representación de Movimiento en un Helicóptero
Un propósito principal de la cinemática es crear (diseñar) los
movimientos deseados de los elementos mecánicos considerados, y
luego calcular matemáticamente las posiciones, velocidades y
aceleraciones que tales movimientos generarán sobre dichos
elementos.
3.1.2 Mecanismos y máquinas
Mecanismo: Sistema de elementos dispuestos para transmitir
movimiento en un modo predeterminado. Ejemplos: sacapuntas de
manivela, obturador de cámara fotográfica, reloj analógico, silla
plegadiza, lámpara ajustable de escritorio y sombrilla.
Máquina: Sistema de elementos dispuestos para transmitir
movimiento y energía en un modo predeterminado. Ejemplos:
batidora o mezcladora de alimentos, puerta de la bóveda de un
banco, engranaje de transmisión de un automóvil y robot.
3.1.3 Conceptos fundamentales de cinemática
Grados De Libertad
El número de grados de libertad (GDL) de un sistema es el número
de parámetros independientes que se necesitan para definir
unívocamente su posición en el espacio en cualquier instante.
En el plano se requiere de tres parámetros (GDL): dos coordenadas
lineales (x,y) y una coordenada angular (q ).
En el espacio se requiere de seis GDL: tres distancias (x,y,z) y tres
ángulos (α,β,δ).

Representación de Movimiento en un Helicóptero
Se define cuerpo rígido como aquel que no experimenta ninguna
deformación.
3.1.4 Tipos De Movimiento
Rotación pura: El cuerpo posee un punto (centro de rotación) que no
tiene movimiento con respecto al marco de referencia estacionario.
Todos los demás puntos del cuerpo describen arcos respecto a ese
centro. Una línea de referencia marcada en el cuerpo a través de su
centro cambia únicamente en orientación angular.
Traslación pura: Todos los puntos en el cuerpo describen trayectorias
paralelas (curvas o rectas). Una línea de referencia trazada en el
cuerpo cambia su posición lineal pero no su orientación o posición
angular.
Movimiento complejo: Es una combinación simultánea de rotación y
traslación.
3.1.5 Eslabones, juntas y cadenas cinemáticas
Eslabón: Cuerpo rígido que posee al menos dos nodos, que son los
puntos de unión con otros eslabones. El número de nodos le da su
nombre al eslabón: Binario = dos nodos, Terciario = tres nodos, etc.
Junta o par cinemático: Conexión entre dos o más eslabones que
permite algún movimiento o movimiento potencial entre los
eslabones conectados. Pueden clasificarse en varios modos:
1. Por el número de grados de libertad.
• Rotacional 1 GDL
• Prismática o Deslizante 1 GDL

Representación de Movimiento en un Helicóptero
2. Por el tipo de contacto entre los elementos.
• Unión completa o par cinemático inferior: contacto superficial
• Unión media o par cinemático superior: contacto sobre una
línea o un punto
A las juntas con dos GDL se les llama semijuntas.
1. Por el tipo de cierre de la junta.
• Forma: su forma permite la unión o el cierre
• Fuerza: requiere de una fuerza externa para mantenerse en
contacto o cierre.
2. Por el número de eslabones conectados u orden de la junta. Se
define como el número de eslabones conectados menos uno.
Cadena cinemática: Es un ensamble de eslabones y juntas
interconectados de modo que proporcionen un movimiento de salida
controlado en respuesta a un movimiento de entrada proporcionado.
Mecanismo: Es una cadena cinemática en la cual por lo menos un
eslabón ha sido fijado o sujetado al marco de referencia (el cual
puede estar en movimiento).
Máquina: Es una combinación de cuerpos resistentes dispuestos para
hacer que las fuerzas mecánicas de la naturaleza realicen trabajo
acompañado por movimientos determinados. Es un conjunto de
mecanismos dispuestos para transmitir fuerzas y realizar trabajo.
Representación de Movimiento en un Helicóptero
Manivela: Eslabón que efectúa una vuelta completa o revolución, y
está pivotado a un elemento fijo.
Balancín u oscilador: Eslabón que tiene rotación oscilatoria y está
pivotado a un elemento fijo.
Biela o acoplador: Eslabón que tiene movimiento complejo y no está
pivotado a un elemento fijo.
Elemento fijo: Cualesquiera eslabones (o eslabón) que estén sujetos
en el espacio, sin movimiento en relación con el marco de referencia.
3.1.6 Determinación del grado de libertad
Mecanismo cerrado: No tendrá nodos con apertura y puede tener uno
o más grados de libertad.
Mecanismo abierto con más de un eslabón: Tendrá siempre más de
un grado de libertad y con esto necesitará tantos actuadores
(motores) como GDL tenga.
Díada: Cadena cinemática abierta de dos eslabones binarios y una
junta.
Ecuación de Gruebler
GDL = (#Eslabones X 6) - #Restricciones - #Juntas
GDL = 3L – 2J – 3G
Donde:
GDL: número de grados de libertad

Representación de Movimiento en un Helicóptero
L: número de eslabones
J: número de juntas
G: número de eslabones fijados
Ecuación de Kutzbach
GDL = 3(L – 1) – 2J1 – J2
Donde:
L: número de eslabones
J1: número de juntas completas
J2: número de semijuntas
3.1.7 Mecanismos y estructuras
Los GDL de un ensamble de eslabones predicen por completo su
carácter. Hay sólo tres posibilidades:
1) GDL positivo: Se tendrá un mecanismo, y los eslabones tendrán
movimiento relativo.
2) GDL = 0: Se tendrá una estructura, y ningún movimiento es
posible.
3) GDL negativo: Se tendrá una estructura precargada, por lo que
ningún movimiento es posible y algunos esfuerzos pueden también
estar presentes en el momento del ensamble.
Inversión de mecanismos: Consiste en fijar un eslabón diferente en la
cadena cinemática.
Nota: El eslabonamiento de cuatro barras es el mecanismo articulado

Representación de Movimiento en un Helicóptero
más simple posible para movimiento controlado de un grado de
libertad.
3.1.8 Consideraciones prácticas
Junta de pasador simple: Su configuración de perno a través de un
hueco conduce a la captura de una película de lubricante entre las
superficies de contacto cilíndricas. Ejemplo: mecanismo
limpiaparabrisas.
Figura 3. Limpiaparabrisas
Juntas de corredera: Estos elementos requieren una ranura o varilla
rectas cuidadosamente maquinadas. La lubricación es difícil de
mantener ya que el lubricante no es capturado por configuración y
debe ser provisto de nuevo al correr la junta. Ejemplo: los pistones
en los cilindros de un motor.
Figura 4. Cilindros de un motor

Representación de Movimiento en un Helicóptero
Semijuntas: Experimentan aún más agudamente los problemas de
lubricación de la corredera debido a que por lo general tienen dos
superficies curvadas de manera opuesta en contacto lineal, que
tienden a expulsar la capa de lubricante en la unión. Ejemplo: las
válvulas de un motor que se abren y cierran por juntas de leva-
seguidor.
Figura 5. Válvulas de un motor
3.2 REGLAMENTACIÓN DE LOS SISTEMAS DE CONTROL
Todo tipo de aeronaves, ya sea de ala fija o rotativa, están reguladas,
esto, debido a la importancia en seguridad de estos medios de
transporte.
De lo anterior, la importancia de seguir estas regulaciones para el
estudio, cualquiera que este sea, de un sistema cíclico. Esto con el
propósito de contar con toda la información necesaria.
Las Reglas de Aviación Federal (FAR), en su parte 27, norman los
estándares para los sistemas de control de helicópteros
específicamente.

Representación de Movimiento en un Helicóptero
3.2.1 FAR 27. Estándares De Aeronavegabilidad: Categoría
Normal De Las Aeronaves De Ala Rotativa.
FAR 27.1 APLICABILIDAD.
a) Esta parte prescribe los estándares de aeronavegabilidad por cada
clase de certificado tipo y cambios de estas certificaciones, por
categoría normal de aeronaves de ala rotativa con pesos máximos de
7000 lb. (317 kg.) o menos y 9 o menos asientos de pasajeros.
FAR 27.395 SISTEMAS DE CONTROL.
a) La parte de cada sistema de control, desde los controles del piloto
a las paradas del control deben de ser diseñadas para soportar
fuerzas del piloto de:
1) Las fuerzas especificadas en: FAR 27.397 LIMITES DE FUERZAS
DEL PILOTO Y TORQUES.
a) Como es previsto en el párrafo b de esta sección, los límites de
fuerzas del piloto son los siguientes:
Para controles del pie, 130 lb. (60 kg.)
Para controles del bastón, 100 lb. (45 kg.) adelante y atrás, y 67 lb.
(30 kg.) lateralmente.
b) Para flaps, estabilizadores, freno del rotor y controles de operación
del tren de aterrizaje, aplica lo siguiente (R = Radio en plg.):
1) Manivela, volantes y controles del nivel, (1+R)/3 x 50lb, pero no
menos de 50 lb. (22 kg.) ni mas de 100 lb. (45 kg.) para controles
operados a mano o 130 lb. (58 kg.) para controles operados por pie,
Representación de Movimiento en un Helicóptero
aplicados en cualquier ángulo dentro de 20 grados del plano del
movimiento del control.
2) Controles de cambio, 80R plg/lb.
3.3 ERGONOMIA
El movimiento de un sistema de control cíclico de un helicóptero se
puede dividir en dos movimientos; pero no sin antes de dividirlos
mencionar que existe un sin numero de combinaciones entre ellos.
Estos dos tipos de movimientos para su estudio simplificado, serán:
un movimiento longitudinal (adelante y atrás) y lateral (de lado a
lado) que actuaran en un plato oscilante de la misma manera.
Los dos tipos de movimientos se definen como desplazamientos
angulares de los bastones, ya que es el punto del mecanismo en el
que la tripulación tiene un control directo. Cabe mencionar que
aunque se habla de bastones (2) estos están interconectados de tal
forma que su movimiento será idéntico.
De acuerdo a lo explicado anteriormente, estos movimientos deberán
de tener un desplazamiento angular no mayor a 15 grados a partir
del centro. Esto se puede definir gráficamente mediante la siguiente
figura, esto para su mejor entendimiento.

Representación de Movimiento en un Helicóptero
Figura 6. Desplazamientos máximos de los bastones.
Con le propósito de definir más los movimientos del bastón, a
continuación se muestra una figura en la cual define las distancias
horizontales del movimiento de los brazos de un piloto (16 y 20 cm)
para un diseño promedio:
Figura 7. Arreglo ergonómico

Representación de Movimiento en un Helicóptero
1) ver la figura anterior para la explicación de los símbolos. 2) todas las dimensiones lineares están en cm. 3) todas las dimensiones angulares están en grados.
SIMBOLO CONTROL DEL BASTON a 63 (+/- 4) ξ 7° (+/- 2°) p = movimiento hacia delante del punto A 16 (+/- 2) q = movimiento hacia atrás del punto A 20 (+/- 2) r = movimiento hacia los lados del punto A desde el centro*
15 (+/- 2)
v = distancia entre las líneas centrales del pedal
45 (+/- 5)
a 70° (+/- 3°) β1 10˚ β2 22˚ c 77 (+/- 2) γ 21˚ (+/- 1˚) φ 102˚ (+/- 2˚) Vv = rango de ajuste de los pedales desde la posición central B
7 (+/- 2)
Uv = movimiento del pedal delantero y trasero desde la posición central B*
10 (+/- 2)
Sh = rango de ajuste horizontal de S desde la posición central*
< 10
Sv = rango de ajuste vertical de S desde la posición central*
8 (+/- 1)
* no mostrados en la figura.
3.4 CONTROLES DE VUELO.
De manera similar que en los aviones de ala fija, los helicópteros
también requieren de control longitudinal, lateral y direccional.
3.4.1 Generalidades
El control vertical del helicóptero es casi siempre obtenido a través de
una variación directa de la sustentación del rotor o de los rotores. La
forma más común para lograr incrementar la sustentación es a través
del incremento o decremento simultaneo del ángulo de paso de todas
las palas en el rotor. A este control se le llama control colectivo. Otra

Representación de Movimiento en un Helicóptero
manera de lograr incrementar la sustentación es a través de la
circulación, o control de la capa limite a través de los perfiles de la
pala. La variación de la velocidad de giro del rotor, puede también ser
utilizada como un medio directo para aumentar la sustentación, pero
la lenta respuesta resulta en una gran inercia por lo que resulta
impráctica.
El control longitudinal y lateral de los helicópteros con un solo rotor o
coaxiales es usualmente llevado a cabo al inclinar el vector del
empuje por medio del paso cíclico. La inclinación resultante del vector
empuje proporciona una componente horizontal que empuja el rotor
en la dirección deseada mientras que el momento generado gira el
helicóptero alrededor de su centro de gravedad produciendo un
cabeceo, una guiñada, o bien un movimiento coordinado.
El tipo de control empleado en un helicóptero determinado estará en
función de la configuración que presente, es decir por ejemplo, el
control longitudinal en un helicóptero convencional será a través del
mando cíclico, mientras que en una configuración en tandem será la
diferencia de levantamiento provocada al mover simultáneamente los
mandos cíclico y colectivo. El control vertical es el único control que
se obtiene al variar el colectivo en todas las configuraciones.
Es necesario aclarar que en este reporte técnico solo se tiene
contemplado estudiar los helicópteros de configuración convencional,
por lo que de ahora en adelante nos enfocaremos a este tipo de
configuración.
Sistemas de control
Existen cuatro sistemas de control comunes en los helicópteros que
son:

Representación de Movimiento en un Helicóptero
• Sistema de control cíclico
El sistema de control cíclico permite al piloto mantener el
control direccional de la aeronave hacia delante, hacia atrás, hacia la
izquierda o hacia la derecha mientras la aeronave este en vuelo.
• Sistema de control colectivo
El sistema de control del colectivo permite aumentar o
disminuir el ángulo de paso de las palas del rotor. Este control
permite Despegar, ascender y descender.
• Control de cambio de paso del rotor de cola
El rotor de cola es el encargado de contrarrestar el efecto del
par motor en el helicóptero, y a su vez permite variar el ángulo de
paso de las palas del rotor de cola permitiendo de esta manera
realizar virajes.
• Control de potencia
Permite la variación de la potencia en diferentes condiciones de
vuelo.
Figura 8. Combinación de los sistemas de control.

Representación de Movimiento en un Helicóptero
3.4.2 Fuerzas y momentos durante el vuelo
Debido a la amplia gama de características de vuelo que presenta un
helicóptero, el estudio de las fuerzas que actúan sobre él está
dividido en diferentes fases dependiendo de las componentes de
aquellas fuerzas que en ese momento, tienen efecto directo en el
helicóptero. Generalmente, existen cuatro fuerzas principales
presentes en todo tipo de vuelo, ellas son la sustentación, la tracción,
la resistencia y el peso de la aeronave. Las tres primeras de ellas son
consideradas como fuerzas aerodinámicas producidas por el rotor del
helicóptero. El efecto de las fuerzas aerodinámicas generadas por el
fuselaje de la aeronave se discutirá más adelante.
Desde el comienzo del estudio de las aeronaves de ala rotativa, se
han desarrollado diferentes teorías para analizar el rotor del
helicóptero aerodinámicamente, el cual determina en gran parte las
actuaciones durante el vuelo de la aeronave.
Una de las corrientes principales para el estudio aerodinámico del
rotor del helicóptero es la Teoría del Momentum desarrollada por
Glauert la cual se basa en las leyes de la conservación de la energía,
la masa y el momentum.
El rotor es considerado aquí como un disco actuador por el cual se
hace pasar una columna de aire perfectamente definida por un tubo
de sección variable que va desde la parte superior del disco
prolongada hasta el infinito, hasta la parte inferior del mismo de igual
forma prolongada hasta el infinito.
El flujo de aire no se ve afectado por ninguna rotación, además la
variación de presión va desde la presión atmosférica a ese nivel de
vuelo en la parte superior del rotor hasta una presión negativa
máxima instantes antes de pasar por el disco actuador, se genera un
Representación de Movimiento en un Helicóptero
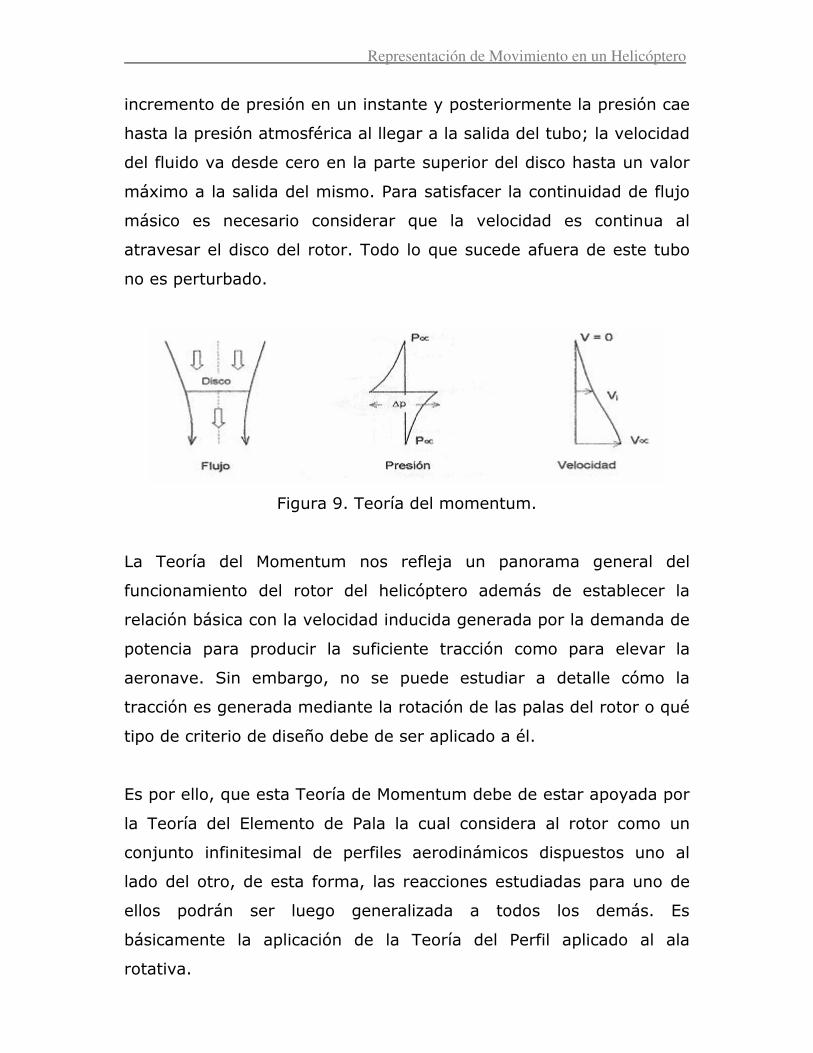
incremento de presión en un instante y posteriormente la presión cae
hasta la presión atmosférica al llegar a la salida del tubo; la velocidad
del fluido va desde cero en la parte superior del disco hasta un valor
máximo a la salida del mismo. Para satisfacer la continuidad de flujo
másico es necesario considerar que la velocidad es continua al
atravesar el disco del rotor. Todo lo que sucede afuera de este tubo
no es perturbado.
Figura 9. Teoría del momentum.
La Teoría del Momentum nos refleja un panorama general del
funcionamiento del rotor del helicóptero además de establecer la
relación básica con la velocidad inducida generada por la demanda de
potencia para producir la suficiente tracción como para elevar la
aeronave. Sin embargo, no se puede estudiar a detalle cómo la
tracción es generada mediante la rotación de las palas del rotor o qué
tipo de criterio de diseño debe de ser aplicado a él.
Es por ello, que esta Teoría de Momentum debe de estar apoyada por
la Teoría del Elemento de Pala la cual considera al rotor como un
conjunto infinitesimal de perfiles aerodinámicos dispuestos uno al
lado del otro, de esta forma, las reacciones estudiadas para uno de
ellos podrán ser luego generalizada a todos los demás. Es
básicamente la aplicación de la Teoría del Perfil aplicado al ala
rotativa.

Representación de Movimiento en un Helicóptero
Son estas dos teorías las que permiten plantear los diferentes tipos
de vuelo para una aeronave de ala rotativa. Se considera que el
viento es calma y no existen factores externos que afecten al
sistema. A continuación se describen algunos de ellos; cabe destacar
que tanto la demostración como el estudio a detalle de las ecuaciones
que definen estas actitudes de vuelo no son el objeto principal de
este documento.
Vuelo Estacionario
La tracción y la sustentación para este caso en especifico, se
encuentran aplicadas en un mismo eje al que el peso y la resistencia
de la aeronave están aplicados pero de sentido contrario. La suma de
todas las fuerzas es igual a cero. El plano de rotación del disco del
rotor es horizontal.
Figura 10. Vuelo estacionario.
Vuelo Vertical
La tracción y la sustentación se encuentran aplicadas en un mismo
eje al que el peso y la resistencia de la aeronave están aplicados pero
de sentido contrario. La suma de las fuerzas es asimétrica por lo que

Representación de Movimiento en un Helicóptero
la aeronave tiende a desplazarse en forma vertical ya sea hacia arriba
o hacia abajo. El plano de rotación del disco del rotor es horizontal.
Vuelo adelante o hacia atrás
Para poder desplazar la aeronave en forma horizontal, es necesario
inclinar el plano de rotación del disco del rotor a fin de que la
resultante de la suma de las fuerzas genere componentes en
diferentes ejes en el espacio; si se desea volar recto y nivelado pero
con velocidad constante, la resultante sustentación-tracción deberá
ser mayor a la resultante peso-resistencia.
Figura 11. Vuelo Traslacional.
Vuelo lateral
El vuelo lateral es de cierta forma similar al vuelo hacia delante; el
plano del disco del rotor debe ser inclinado hacia donde se desea
desplazar, la resultante de las componentes sustentación-tracción
deberá ser mayor a la resultante de las fuerzas resistencia-peso; de
esta manera la aeronave tendrá un direccionamiento controlado. Si
no existe variación en el vector tracción la velocidad de
desplazamiento será constante.

Representación de Movimiento en un Helicóptero
Efecto de Coriolis
Hasta el momento se ha estudiado el comportamiento del rotor en un
ambiente donde no existen perturbaciones en las afueras del sistema,
sin embargo es necesario plantear algunas de ellas para poder
explicar los diferentes dispositivos que tiene incorporados los rotores
desde tiempo atrás.
Se supone que existe un viento de frente impactando con un rotor de
un helicóptero que se encuentra en movimiento, debido al
movimiento de rotación de las palas del rotor, estas no
experimentarán el mismo viento relativo.
Figura 12. Viento Relativo.
Mientras que la(s) pala(s) que se mueve(n) en contra de la dirección
del viento experimenta(n) un incremento en la velocidad del flujo que
pasa a través de ella(s), la(s) pala(s) que va(n) a favor del viento se
encuentra(n) interactuando con una velocidad relativa del flujo
mucho menor.
Esto trae como consecuencia que el rotor en su conjunto experimente
una variación cíclica en el levantamiento que genera el disco. Por ello,
los rotores traen incorporada una bisagra de aleteo en la raíz de las
palas lo que ayuda a reducir las vibraciones.

Representación de Movimiento en un Helicóptero
Figura 13. Bisagra de aleteo.
Sin embargo este dispositivo presenta un inconveniente, conforme el
ángulo de aleteo comience a incrementarse, el centro de gravedad de
la pala se acercará cada vez más al eje de rotación del rotor e
imprimirá una tendencia a acelerar el giro del mismo. De igual forma,
cuando la pala se bate hacia abajo su centro de gravedad se aleja del
eje de giro y esto tiende a desacelerar el rotor. A este fenómeno se le
conoce como Efecto de Coriolis.
Figura 14. Efecto Coriolis.
Par de reacción
Se sabe perfectamente que cuando se aplica una fuerza, se generará
una reacción de igual magnitud pero de sentido opuesto; es
precisamente el efecto que ocurre cuando la planta motriz de la
aeronave imprime un movimiento de rotación al rotor principal. El
cuerpo del helicóptero experimenta una reacción que tiende a hacerlo
girar en sentido contrario al de la rotación del rotor.
Representación de Movimiento en un Helicóptero
Por ello los helicópteros con el tipo de configuración de rotor principal
deben de incorporar al final del botalón de cola, un dispositivo
(generalmente se utilizan rotores de cola auxiliares aunque
actualmente, algunos helicópteros tienen una tobera de salida de
gases que imprime el mismo efecto) capaz de generar una fuerza que
multiplicada por la distancia al eje de rotación del rotor, contrarreste
el efecto del par del motor.
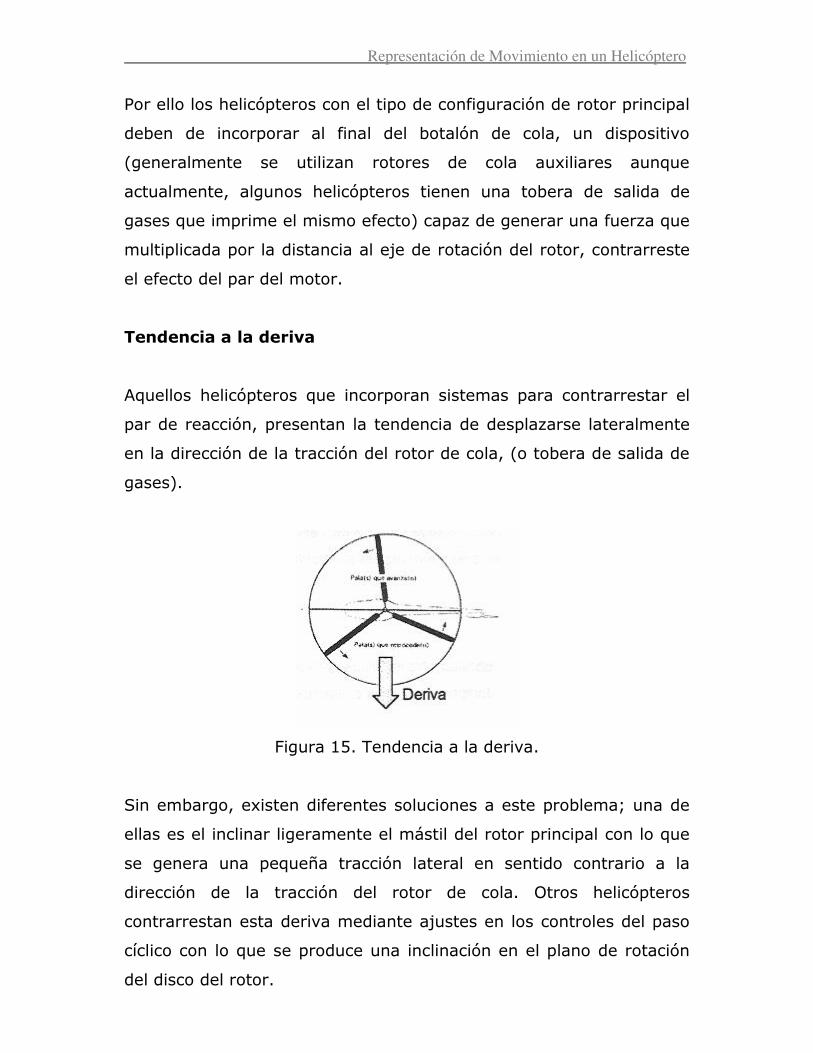
Tendencia a la deriva
Aquellos helicópteros que incorporan sistemas para contrarrestar el
par de reacción, presentan la tendencia de desplazarse lateralmente
en la dirección de la tracción del rotor de cola, (o tobera de salida de
gases).
Figura 15. Tendencia a la deriva.
Sin embargo, existen diferentes soluciones a este problema; una de
ellas es el inclinar ligeramente el mástil del rotor principal con lo que
se genera una pequeña tracción lateral en sentido contrario a la
dirección de la tracción del rotor de cola. Otros helicópteros
contrarrestan esta deriva mediante ajustes en los controles del paso
cíclico con lo que se produce una inclinación en el plano de rotación
del disco del rotor.

Representación de Movimiento en un Helicóptero
Movimiento pendular
Debido a que el fuselaje del helicóptero se encuentra suspendido del
mástil del rotor, los efectos de la fuerza de resistencia al avance que
genera el cuerpo del helicóptero pueden generar movimientos
pendulares.
Por ello, durante el próximo tema de este trabajo estudiaremos la
importancia de los conceptos de estabilidad estática y dinámica.
3.4.3 Estabilidad
La estabilidad es un concepto que adquiere gran importancia durante
el proceso de diseño de los helicópteros; sin embargo para poder
comprender cómo afecta el desempeño de las aeronaves de ala
rotativa, es necesario primero definir que existen dos maneras
fundamentales de ser estable: estáticamente y dinámicamente.
Estabilidad Estática
Se dice que un helicóptero es estable estáticamente cuando después
de ser sometido a una perturbación, éste tiende a regresar a su
estado original. La figura que se muestra a continuación representa lo
arriba descrito:
Figura 16. Estabilidad estática.

Representación de Movimiento en un Helicóptero
De forma contraria cuando una aeronave estáticamente inestable se
ve afectada por una perturbación, el resultado es la tendencia a salir
de su estado original de vuelo. La inestabilidad estática se ve
representada en la siguiente ilustración:
Figura 17. Inestabilidad estática.
Sin embargo, existe una tercer condición conocida como estabilidad
neutra; Cuando una aeronave es estáticamente neutra, ésta asumirá
la posición que la perturbación le provoque hasta no ser afectada por
cualquier otra perturbación.
Figura 18. Estabilidad neutra.
Existen una serie de factores presentes durante el vuelo que deben
ser compensados para considerar a un helicóptero estáticamente
estable:
Representación de Movimiento en un Helicóptero
• Control del rotor principal. Hemos mencionado que el control
direccional de los helicópteros (de configuración convencional)
puede ser logrado mediante la inclinación del plano de rotación
del rotor principal, sin embargo, debido a esta inclinación se
produce un cambio cíclico en el ángulo de ataque de las palas
afectando directamente la distribución del levantamiento
generado por cada una de las palas; la inclinación resultante
del rotor con respecto al fuselaje, producirá un momento con
respecto al centro de gravedad del helicóptero que debe de ser
compensado por un momento en el control cíclico para
mantener al helicóptero en equilibrio estático; debido a que la
cantidad de desplazamiento está limitada por razones
mecánicas, un incremento en el movimiento del bastón cíclico
es la mejor solución para obtener que el desplazamiento del
centro de gravedad sea lo más extenso posible.
• Amortiguación del movimiento de alabeo. Si un helicóptero se
inclina con una velocidad angular determinada, el retraso
resultante del plano de rotor desplaza al vector velocidad y se
produce un momento con respecto al centro de gravedad y son
esta clase de momentos los conocidos como amortiguación de
cabeceo o alabeo dependiendo de los ejes donde ocurren estas
oscilaciones.
• Sensibilidad de control. La combinación del control de rotor
principal y la amortiguación del movimiento de alabeo o
cabeceo dan como resultado una característica que adquiere
gran importancia dentro de las particularidades de vuelo de un
helicóptero; se le conoce como sensibilidad de control y se
define como la máxima razón de alabeo o cabeceo por una
unidad de desplazamiento del control y puede representarse de
tres maneras:

Representación de Movimiento en un Helicóptero
En resumen, los helicópteros con sistema de control convencional
están sujetos a una sensibilidad de control muy elevada y es por ello
que la relación de alabeo máximo obtenida por un helicóptero
pequeño puede alcanzar valores considerables debido al bajo
amortiguamiento.
Estabilidad Dinámica
La estabilidad dinámica de un helicóptero es una relación directa del
número de factores que afectan a la aeronave en conjunto y depende
en gran medida, de las posibles combinaciones de estos. La
estabilidad dinámica sugiere que la perturbación (en su totalidad) a la
que es sometido el helicóptero, es amortiguada por completo en un
lapso de tiempo determinado.
Sensibilidad de Control
Control de potencia / Amortiguamiento de control
Momentos de control / Desplazamiento del bastón
Momento de amortiguación / Velocidad angular
Velocidad angular / Desplazamiento del bastón

Representación de Movimiento en un Helicóptero
Figura 19. Inestabilidad Dinámica
Gracias a los estudios desarrollados durante gran parte del siglo
pasado, el comportamiento del vuelo de los helicópteros se ha podido
plantear en forma analítica casi en su totalidad y de esta manera
resolver ciertas incógnitas que permiten con esto, tener un control
más estricto del desempeño de los mismos.
Cuando un helicóptero es estable dinámicamente, este amortiguará
cualquier desvío de su posición original de vuelo en un determinado
lapso de tiempo; analíticamente sabemos que la etapa de desarrollo
de esta aeronave obtuvo los resultados que satisfacían las ecuaciones
de estabilidad dinámica.
Figura 20. Estabilidad Dinámica
En situaciones de perturbaciones, el rotor y el fuselaje pueden
reaccionar de maneras muy diferentes; por ello, es necesario hacer

Representación de Movimiento en un Helicóptero
hincapié que normalmente debe de estudiarse a las aeronaves de ala
rotativa de tres formas principales en lo que a estabilidad del
helicóptero se refiere: el rotor principal como una entidad
independiente, el fuselaje en forma independiente y la aeronave en
conjunto (fuselaje y rotor). Sin embargo, debido a que el propósito
de este trabajo es otro, el análisis y cálculos correspondientes a la
estabilidad del helicóptero tendrían que ser por si solos, el objeto
principal de otro documento.
3.4.4 Control cíclico
Como mencionamos anteriormente, el control cíclico nos permite
mantener el control direccional del helicóptero.
Como bien se sabe, la fuerza total de sustentación-reacción es
perpendicular al plano de la punta ce las palas del rotor principal.
Cuando este plano se inclina, la fuerza sustentación-tracción se
descompone en la componente horizontal, la tracción y la
componente vertical, la sustentación. El objeto del control cíclico es
inclinar el plano de rotación del rotor en la dirección hacía la cual se
desea el desplazamiento horizontal. Es importante aclarar que el
control cíclico no ejerce efecto sobre la magnitud de la fuerza total
sustentación-empuje, solamente cambia la dirección de esta fuerza,
controlando de este modo la actitud y la velocidad del helicóptero.
La inclinación que sufre el disco del rotor es en la misma dirección en
que es aplicada la presión del cíclico, es decir, si la palanca se mueve
hacia adelante, el disco se inclina hacia delante y así sucesivamente.
Para que esto suceda, el mecanismo articulado entre la palanca del
cíclico y el rotor (a través del plato oscilante) debe ser tal que la
mima deflexión hacia abajo de las palas se alcance en la dirección en

Representación de Movimiento en un Helicóptero
que se desplaza la palanca, por lo tanto, la máxima deflexión hacia
arriba ocurre en el lado opuesto.
El sistema de control cíclico consiste generalmente de la palanca de
mando del cíclico, tubos de torque, una mezcladora, servo actuadores
hidráulicos, tubos de control y bellcranks (Balancines). El movimiento
del control cíclico es transmitido a través de las varillas y de los servo
actuadores hidráulicos hasta el plato oscilante, el cual actúa los
controles rotativos del rotor principal. Los servo actuadores
hidráulicos son incorporados para minimizar el esfuerzo requerido
para mover los controles.
Figura 21. Palanca de control direccional “cíclico”
3.4.5 Control Colectivo
El sistema de control del colectivo permite aumentar o disminuir el
ángulo de paso de las palas del rotor. Este control permite despegar,
ascender y descender.
Representación de Movimiento en un Helicóptero
La palanca del control colectivo se encuentra localizada al lado
izquierdo del asiento del piloto. Este sistema utilizado para
incrementar el ángulo de paso de las palas del rotor principal con el
objeto de incrementar o disminuir la sustentación generada por el
rotor. La palanca del colectivo esta conectada al plato oscilante por
medio de una serie de tubos de control. Al levantar la palanca del
colectivo se incrementa el ángulo de paso de las palas y viceversa, al
moverlo hacia abajo, el ángulo de paso de la pala disminuye. El
desplazamiento de la palanca determina la variación en el ángulo de
paso de la pala.
Como se incrementa el ángulo de paso, la resistencia se incrementa y
las R.P.M. del rotor y del motor tienden a disminuir. En el caso
contrario, una disminución del ángulo de ataque genera disminución
de la resistencia y las R.P.M. del rotor y del motor tienden a
incrementarse. Ya que es esencial que las R.P.M. permanezcan
constantes, debe haber un medio para lograr un cambio proporcional
de la potencia para compensar el cambio de la resistencia.
Esta coordinación entre el cambio de potencia con el cambio del
ángulo de paso es controlado a través de un varillaje del control de
aceleración que se encuentra en la parte delantera de la palanca del
mando colectivo, el cual automáticamente incrementa la potencia
cuando la palanca del colectivo se mueve hacia arriba y disminuye la
potencia en el caso contrario.
El sistema colectivo consiste de un bastón del sistema colectivo,
jackshaft, tubos de control, bellcranks (balancines) y un servo
actuador hidráulico. El movimiento del bastón del colectivo es
transmitido a través de las varillas hasta los servo actuadores y de
ahí a la palanca del plato oscilante del colectivo. El cambio de paso es
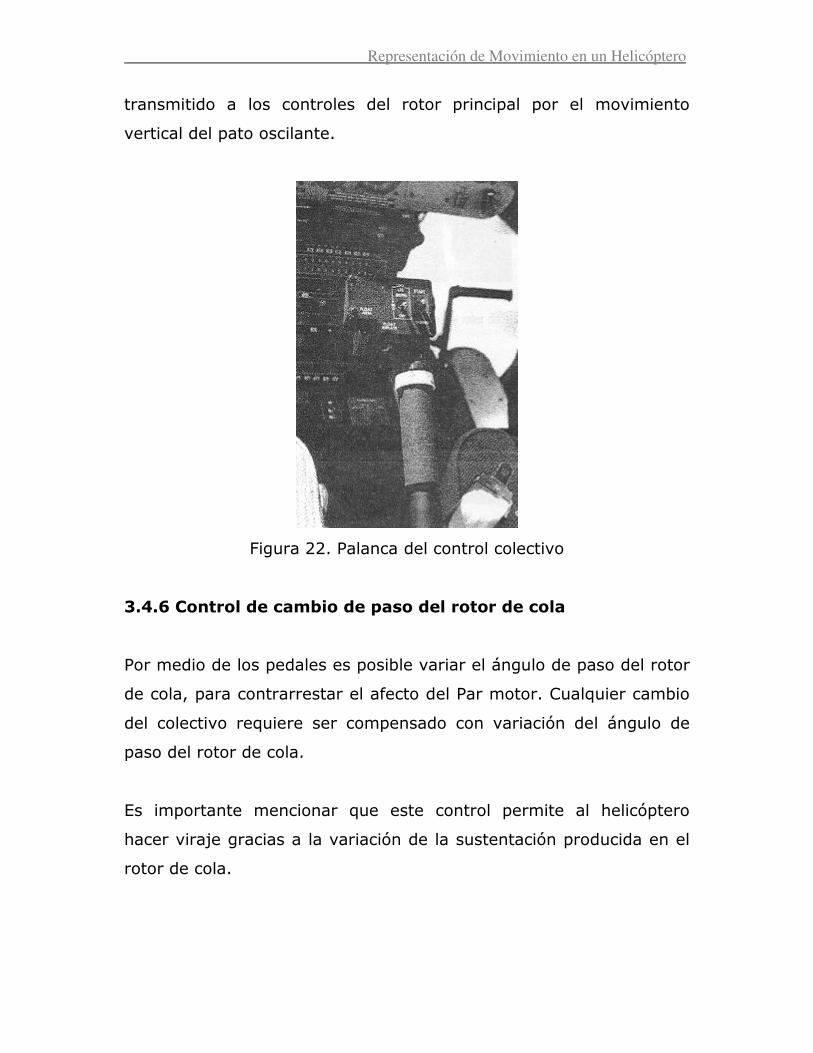
Representación de Movimiento en un Helicóptero
transmitido a los controles del rotor principal por el movimiento
vertical del pato oscilante.
Figura 22. Palanca del control colectivo
3.4.6 Control de cambio de paso del rotor de cola
Por medio de los pedales es posible variar el ángulo de paso del rotor
de cola, para contrarrestar el afecto del Par motor. Cualquier cambio
del colectivo requiere ser compensado con variación del ángulo de
paso del rotor de cola.
Es importante mencionar que este control permite al helicóptero
hacer viraje gracias a la variación de la sustentación producida en el
rotor de cola.

Representación de Movimiento en un Helicóptero
Figura 23. Sistema de cambio de paso del rotor de cola
3.4.7 Control de potencia
El control de potencia se hace por medio del acelerador "Twist Grip",
este se encuentra montado en el extremo del bastón del colectivo,
este se encarga de controlar la posición de la palanca de control de la
productora de gases, la cual tiene tres posiciones que son:
a) Corte “Cuttoff”
b) Marcha lenta “Ground idle”
c) Completamente abierta “Full open”
Figura 24. Acelerador
Representación de Movimiento en un Helicóptero
CAP. IV. APLICACIÓN DEL CAD / CAM / CAE
4.1 INTRODUCCIÓN
Las herramientas computacionales CAD/CAM/CAE, cuyo significado es
Diseño Asistido por Computadora / Manufactura Asistida por
Computadora / Ingeniería Asistida por Computadora, cubren todo el
ciclo de desarrollo de un producto, desde la primera idea del
diseñador hasta la obtención de la pieza terminada y lista para el
mercado.
Figura 25. Ciclo del producto
Como modelador combina el diseño paramétrico (detallado
geométrica, posicional y funcionalmente) con el tradicional (no se
relaciona funcionalmente), complementándose con un potente y
fiable módulo para el mecanizado y el análisis térmico y estructural.
Estas herramientas permiten trabajar con secciones sobre o
infradimensionadas, combinar sólidos paramétricos con superficies
complejas evolutivas, permitiendo añadir nuevas especificaciones al
diseño o anular anteriores restricciones, dando al diseñador absoluta
libertad de trabajo.

Representación de Movimiento en un Helicóptero
El principio básico es la utilización del modelo tridimensional como
punto de partida, facilitando la creación de vistas, secciones, detalles
y proyecciones de un modo automático, el dibujo así creado está
totalmente asociado con la pieza de partida. A su vez proporciona las
técnicas de procesado, mallado de la geometría, análisis básico de
esfuerzos y postprocesado de resultados interpretando gráficamente.
También aborda todos los procesos concebidos en el Diseño,
ingeniería, verificación y manufactura de productos, utilizando el
mayor conjunto de soluciones integradas del mercado.
4.2 PRINCIPALES FUNCIONES
• Simula, valida y optimiza digitalmente productos y procesos de
manufactura
• Reduce el tiempo de salida al mercado.
• Incentiva la creatividad y la innovación durante el desarrollo de
producto.
• Todos los equipos de desarrollo pueden utilizar los mismos datos de
producto y propagar automáticamente los cambios en todas las
aplicaciones relacionadas.
• Elimina la necesidad de diferentes sistemas para cada etapa de
proceso, optimizando recursos a través de un ambiente asociativo e
integrado.
• Propone una ingeniería conceptual y planeamiento de producto con
alto nivel de abstracción.

Representación de Movimiento en un Helicóptero
• Captura y aplica las características y pre-requisitos del producto en
una estructura de sistemas interdependientes que permiten la
creación y habilitación de un mayor número de alternativas de
proyecto y operaciones de manufactura.
• Crea y edita rápidamente formas orgánicas complejas.
• Herramientas avanzadas de visualización y sombreado.
• Recursos de alto desarrollo para proyecto mecánico y
documentación.
• Asistentes de proceso para el proyecto de cañerías, chapas
metálicas, componentes en plástico, moldes, matrices, herramental
para estampado, etc.
• Análisis estructural integrado al proyecto
• Mejora la calidad del producto reduciendo o eliminando modelos
físicos y procesos de prueba y error.
• Operaciones de manufactura asociadas al producto garantizando la
calidad y la exactitud del herramental a utilizar.
4.3 MOVIMIENTO EN EL CAD / CAE.
El movimiento de este proyecto, se realizo mediante un software CAD
/ CAE, denominado Unigraphics NX 2, líder mundial en el desarrollo
de diseño de un producto.
Representación de Movimiento en un Helicóptero
Para simular el movimiento en un software CAD / CAE primero se
debe definir el tipo de análisis que se realizará; estos tipos de análisis
se dividen en dos tipos dentro de la aplicación llamada Motion:
• Un análisis en el que no se contemplan las causas (fuerzas) o
también llamado un análisis cinemático
• Un análisis en el que las causas (fuerzas) repercuten en el
mecanismo alterando su posición estática o también llamado
análisis dinámico.
Tras haber realizado un estudio cinemático en un software CAD / CAE
se pueden esperar los siguientes resultados:
• Máximos desplazamientos tanto de un componente como del
mecanismo en su totalidad.
• Un posicionamiento exacto de los puntos de rotación de los
componentes.
• La eficiente interrelación de movimiento entre cada
componente.
• Los grados de libertad reales de cada componente
• Las juntas reales y necesarias dentro del mecanismo
Figura 26. Clase de juntas
• Los componentes fijos que se encuentran dentro del
mecanismo.
• Las restricciones de cada tipo de junta.
• El correcto funcionamiento de un mecanismo.

Representación de Movimiento en un Helicóptero
• La eficaz interrelación entre cada componente.
• Trazo del movimiento.
• Interferencia de objetos.
4.4 TERMINOS DENTRO DE LA APLICACIÓN MOTION
Scenario Navigator: El Navegador de escenarios es una ventana
interactiva dentro de la cual se puede observar y accesar a cualquier
tipo de información referente a la aplicación.
Figura 27. Navegador de escenarios
El icono que despliega el navegador de escenarios es el siguiente:
. A continuación se muestra una figura que simplifica la
explicación del mismo:

Representación de Movimiento en un Helicóptero
Figura 28. Explicación del navegador de escenarios
Scenario: Un escenario es un archivo que describe toda la
información necesaria para la representación del movimiento de ese
mismo escenario, esto se encuentra en el navegador de escenarios;
esto se describe a continuación mediante una imagen ilustrativa.
Figura 29. Escenario
Link: Un eslabón es un cuerpo rígido que tiene dos o más pares o
elementos de apareamiento, por medio del cual se pueden conectar a
otros cuerpos con el fin de transmitir la fuerza o el movimiento. Por lo
general, un eslabón es un miembro rígido que tiene en ambos
Titulo del cuadro
Nombre de la información a la que se puede acceder
A dar un click derecho sobre el nombre de la pieza se despliega la opción pare realizar un escenario nuevo
Nombre de la información que se desplegara o se retraerá
Información, especifica y numerada, desde la cual se podrá editar, borrar, u ocultar temporalmente
Nombre del escenario
Información referente al escenario, es decir, sus eslabones y juntas respectivas.

Representación de Movimiento en un Helicóptero
extremos la posibilidad de conectarse a dos, tres, cuatro o incluso
más conexiones.
Figura 30. Eslabón
La siguiente figura explicara brevemente lo referente a este tema
mediante el cuadro de dialogo:
Figura 31. Explicación del(los) eslabón(es)
Joint: Una junta representa la restricción del movimiento entre dos
eslabones ó entre un eslabón y un marco. Las juntas definen el
Nombre
Geometría(s) del(los) eslabón(es)
Filtro de selección de geometrías, ya sean puntos, curvas, componentes sólidos, etc...
Nombre que al eslabón se le desea dar, este puede ser designado por el usuario o por el software.

Representación de Movimiento en un Helicóptero
movimiento relativo entre los eslabones, ó bien entre éstos y el
marco.
Figura 32. Junta
Las juntas varían en el número de restricciones de acuerdo a su tipo,
la siguiente tabla muestra el tipo de junta, el número de restricciones
y su representación gráfica dentro del software:
Junta Restricciones Representación
De Revolución 5
De Deslizamiento 5
Cilíndrica 4
De Tornillo 1
Universal 4
Esférica 3
Planar 3
Fija 6
Una vez construida la junta, esta tendrá una representación grafica
dentro de la ventana grafica; la siguiente figura representa cada una
de las juntas gráficamente:

Representación de Movimiento en un Helicóptero
Figura 33. Representación grafica de las juntas.
El cuadro de dialogo referente a las juntas se explica mediante la
siguiente figura:
Representación de Movimiento en un Helicóptero
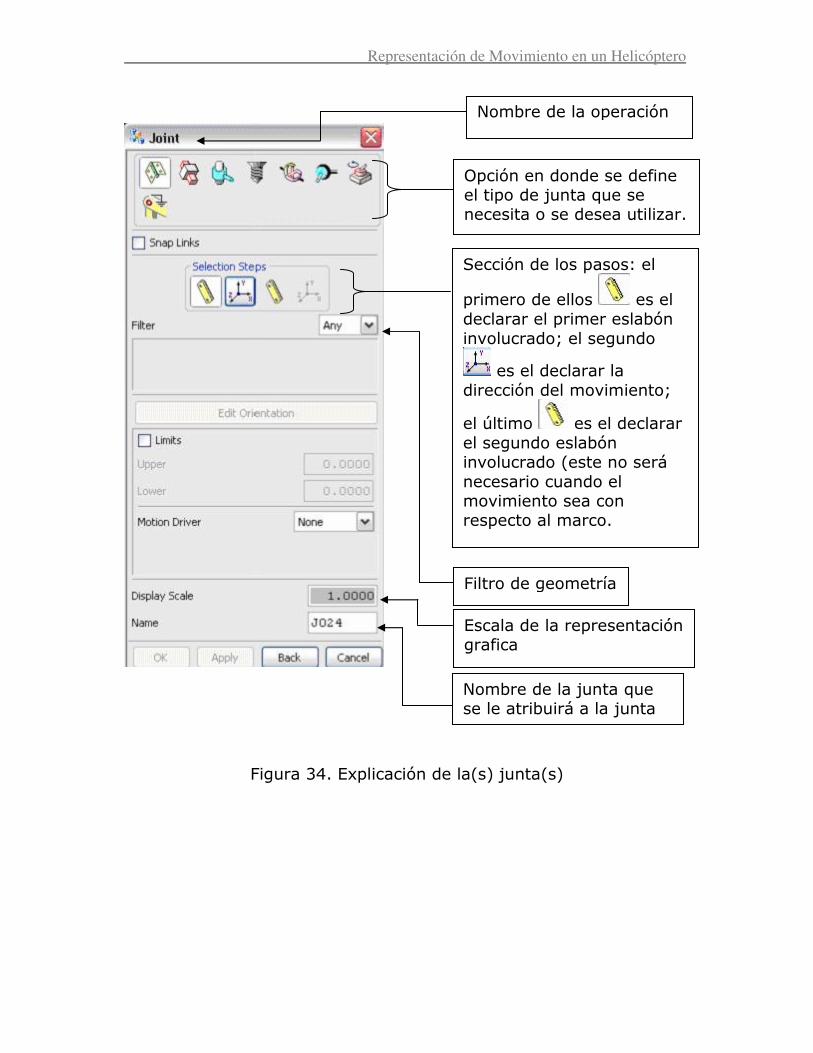
Figura 34. Explicación de la(s) junta(s)
Nombre de la operación
Opción en donde se define el tipo de junta que se necesita o se desea utilizar.
Sección de los pasos: el
primero de ellos es el declarar el primer eslabón involucrado; el segundo
es el declarar la dirección del movimiento;
el último es el declarar el segundo eslabón involucrado (este no será necesario cuando el movimiento sea con respecto al marco.
Filtro de geometría
Escala de la representación grafica
Nombre de la junta que se le atribuirá a la junta
Representación de Movimiento en un Helicóptero
Animation: La animación es la parte dentro del software donde se
representa una simulación de movimiento de todos los componentes
de un mecanismo, para que ésta se lleve a cabo se tiene que declarar
todas las partes del mecanismo que tienen movimiento como
eslabones (links), y después la clase de movimiento de cada
interconexión de los componentes, joints (juntas), como se indica en
el próximo capitulo.
Figura 35. Animación

Representación de Movimiento en un Helicóptero
CAP. V SIMULACION
5.1 INTRODUCCION
Este proyecto, parte de un modelado y ensamblado previamente
realizado; este modelado se llevo a cabo mediante la aplicación
Modeling, dentro de la cual se definieron todas las medidas que cada
uno de los componentes deberían de tener, una vez completado y
definido todo el numero de componentes se definieron todas las
restricciones para así poder llevar a cabo el ensamble
correspondiente, esto ultimo mediante la aplicación Assemblies.
Una vez modelado y ensamblado el sistema de control del
helicóptero, se pueden hacer varios estudios dentro de un software
CAD / CAE , debido a que el propósito de este trabajo es un estudio
cinemático, la aplicación necesaria para un estudio de éste tipo es la
denominada aplicación motion (movimiento).
Figura 36. Movimiento
Cabe mencionar que al desplegarse la ventana de la aplicación, ésta
contendrá una diversidad de iconos de los cuales solo serán utilizados
aquellos que se requieran para un análisis cinemático y así no
dinámico.
Es recomendable que para la solución de cualquier problema primero
se entienda completamente, es decir, en nuestro caso en específico
que se conozcan los componentes, que se conozca la relación entre

Representación de Movimiento en un Helicóptero
ellos, que se definan los puntos de desplazamiento, que se definan
las partes fijas, etc.
5.2 ANÁLISIS DE MOVIMIENTO
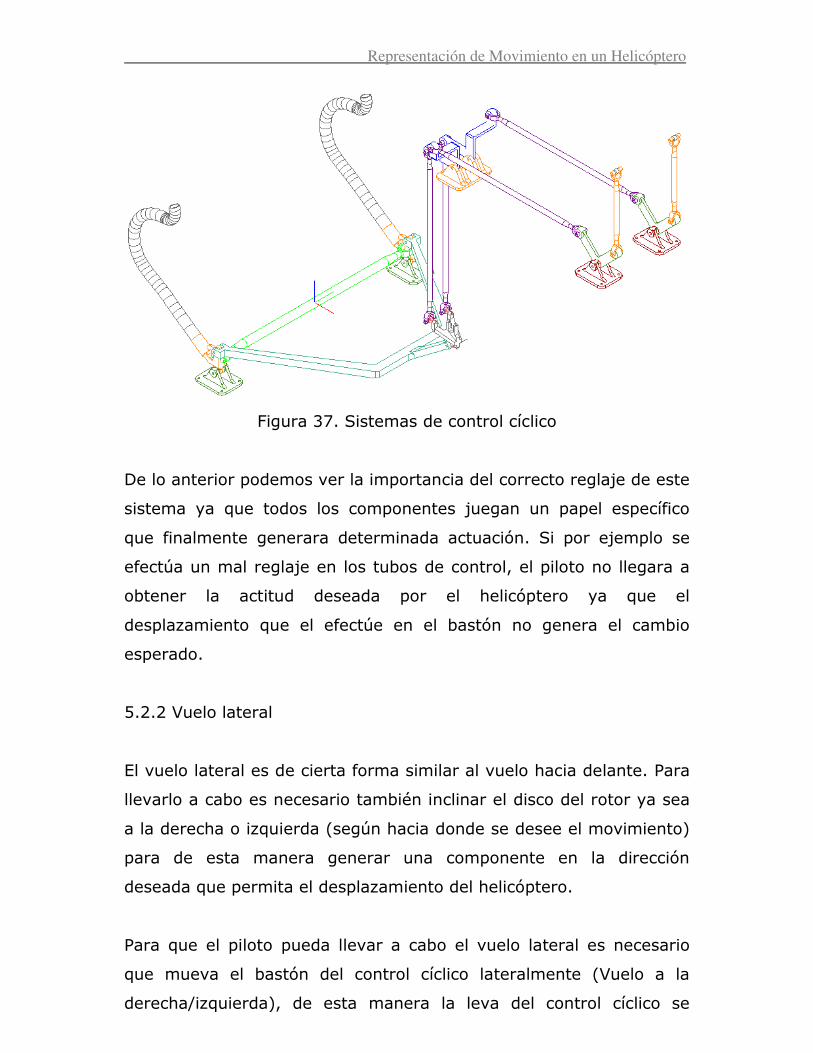
5.2.1 Vuelo adelante o hacia atrás
Para poder llevar al helicóptero a una condición de vuelo hacia
delante es necesario inclinar el plano de rotación del disco del rotor, a
fin que la resultante de las fuerzas genere una componente hacia
delante que permita al helicóptero avanzar en esta dirección, y,
viceversa en el caso del vuelo hacía atrás.
Para lograr dicha inclinación del disco del rotor es necesaria la
interacción del sistema de control cíclico del helicóptero. El piloto al
"jalar" hacia él, el bastón cal control cíclico genera un movimiento
hacia atrás de la leva que es trasmitido a través del yugo a la
mezcladora provocando que 'jale' a los tubos de control de donde se
trasmite el movimiento al plato oscilante para inclinar el disco del
rotor hacia atrás. Cuando se desea inclinar el disco hacia adelante, el
piloto "empuja" el bastón del control cíclico hacia delante, la leva se
mueve hacia delante, el movimiento es trasmitido por el yugo a la
mezcladora la cual "empuja" los tubos de control hacia arriba
provocando que el disco se incline hacia adelante.
Representación de Movimiento en un Helicóptero
Figura 37. Sistemas de control cíclico
De lo anterior podemos ver la importancia del correcto reglaje de este
sistema ya que todos los componentes juegan un papel específico
que finalmente generara determinada actuación. Si por ejemplo se
efectúa un mal reglaje en los tubos de control, el piloto no llegara a
obtener la actitud deseada por el helicóptero ya que el
desplazamiento que el efectúe en el bastón no genera el cambio
esperado.
5.2.2 Vuelo lateral
El vuelo lateral es de cierta forma similar al vuelo hacia delante. Para
llevarlo a cabo es necesario también inclinar el disco del rotor ya sea
a la derecha o izquierda (según hacia donde se desee el movimiento)
para de esta manera generar una componente en la dirección
deseada que permita el desplazamiento del helicóptero.
Para que el piloto pueda llevar a cabo el vuelo lateral es necesario
que mueva el bastón del control cíclico lateralmente (Vuelo a la
derecha/izquierda), de esta manera la leva del control cíclico se

Representación de Movimiento en un Helicóptero
inclinara hacia el mismo lado que el bastón, el yugo por lo tanto
provocara que uno de los brazos de la mezcladora suba mientras el
otro baja (según la dirección del movimiento), por lo que un tubo de
control subirá y el otro bajara inclinando el plato oscilante hacia la
dirección en que el bastón ha sido posicionado.
Es importante mencionar que los helicópteros actuales utilizan servos
hidráulicos que han permitido minimizar la fuerza que debe emplear
el piloto para llevar a cabo los cambios en la actuación del
helicóptero. Para efectos de este trabajo se representaron a través de
actuadores y levas (bellcranks) con la finalidad de ilustrar mejor el
movimiento.
Figura 38. Movimiento lateral del control cíclico.

Representación de Movimiento en un Helicóptero
5.3 ANALISIS DE COMPONENTES
Figura 39. Ensamble
5.3.1 Bastón
El bastón del control cíclico es uno de los dispositivos que permiten
interactuar al piloto con los mecanismos de control direccional del
helicóptero. Su diseño obedece a la disposición ergonómica del piloto
en el habitáculo de la aeronave. Permite transmitir movimientos
longitudinales, transversales o la combinación de estos a los
mecanismos de control direccional. Interactúa directamente con la
leva del control cíclico.
Figura 40. Bastón

Representación de Movimiento en un Helicóptero
5.3.2 Leva del control cíclico
La leva del control cíclico es el dispositivo que permite tener un punto
de pivoteo al bastón del control cíclico además que es la que permite
transmitir los movimientos generados desde el bastón hasta el rotor
principal. Es de diseño simple pero efectivo, tiene uniones con
características especiales dependiendo de las partes con las que
trabaja, ejemplo: el bastón del control cíclico esta unido a esta leva
mediante una unión rígida; una base sujeta al suelo de la aeronave
se une con la leva mediante un acoplamiento esférico de tal manera
que se tenga libertad total para girar la leva en cualquier dirección;
tanto el tubo de control como el yugo poseen uniones esféricas dando
libertad total de movimiento de tal manera que estos dos últimos
componentes puedan acompañar a la leva en cualquier movimiento
dictado por el bastón del control cíclico.
Figura 41. Leva del control cíclico
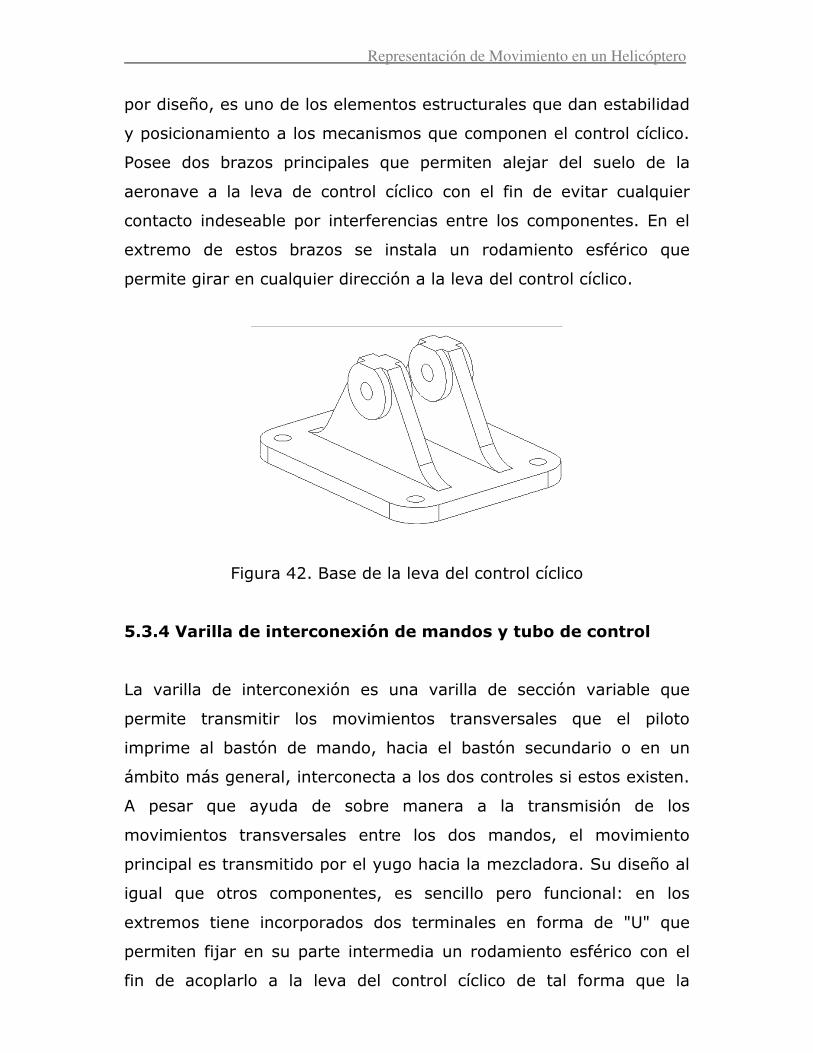
5.3.3 Base de la leva del control cíclico
La base de la leva del control cíclico permite tener un punto de apoyo
para cualquier movimiento que se deseé realizar con los controles del
mando cíclico; es ella quien conecta de forma directa el fuselaje de la
aeronave con los sistemas de control de vuelo de la misma. Además
Representación de Movimiento en un Helicóptero
por diseño, es uno de los elementos estructurales que dan estabilidad
y posicionamiento a los mecanismos que componen el control cíclico.
Posee dos brazos principales que permiten alejar del suelo de la
aeronave a la leva de control cíclico con el fin de evitar cualquier
contacto indeseable por interferencias entre los componentes. En el
extremo de estos brazos se instala un rodamiento esférico que
permite girar en cualquier dirección a la leva del control cíclico.
Figura 42. Base de la leva del control cíclico
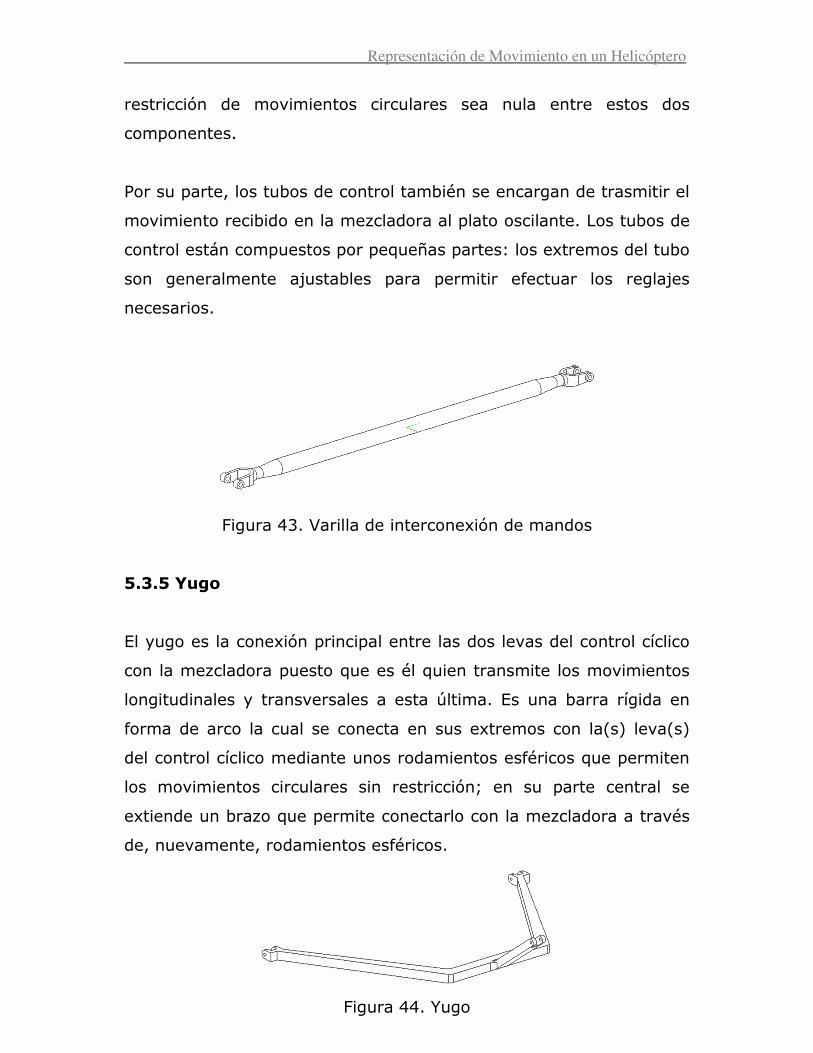
5.3.4 Varilla de interconexión de mandos y tubo de control
La varilla de interconexión es una varilla de sección variable que
permite transmitir los movimientos transversales que el piloto
imprime al bastón de mando, hacia el bastón secundario o en un
ámbito más general, interconecta a los dos controles si estos existen.
A pesar que ayuda de sobre manera a la transmisión de los
movimientos transversales entre los dos mandos, el movimiento
principal es transmitido por el yugo hacia la mezcladora. Su diseño al
igual que otros componentes, es sencillo pero funcional: en los
extremos tiene incorporados dos terminales en forma de "U" que
permiten fijar en su parte intermedia un rodamiento esférico con el
fin de acoplarlo a la leva del control cíclico de tal forma que la
Representación de Movimiento en un Helicóptero
restricción de movimientos circulares sea nula entre estos dos
componentes.
Por su parte, los tubos de control también se encargan de trasmitir el
movimiento recibido en la mezcladora al plato oscilante. Los tubos de
control están compuestos por pequeñas partes: los extremos del tubo
son generalmente ajustables para permitir efectuar los reglajes
necesarios.
Figura 43. Varilla de interconexión de mandos
5.3.5 Yugo
El yugo es la conexión principal entre las dos levas del control cíclico
con la mezcladora puesto que es él quien transmite los movimientos
longitudinales y transversales a esta última. Es una barra rígida en
forma de arco la cual se conecta en sus extremos con la(s) leva(s)
del control cíclico mediante unos rodamientos esféricos que permiten
los movimientos circulares sin restricción; en su parte central se
extiende un brazo que permite conectarlo con la mezcladora a través
de, nuevamente, rodamientos esféricos.
Figura 44. Yugo

Representación de Movimiento en un Helicóptero
5.3.6 Mezcladora
La mezcladora del control cíclico es un dispositivo que como su
nombre lo indica, permite combinar los movimientos transversales y
longitudinales provenientes del bastón del control cíclico transmitidos
por el yugo hacia el rotor del helicóptero a través de unas varillas,
actuadores y otros componentes que más adelante se discutirán. Es
uno de los elementos claves para el funcionamiento adecuado del
mecanismo. En todas sus articulaciones intervienen dos elementos:
los rodamientos junto con una unión esférica.
En su parte inferior, la mezcladora está acoplada con el yugo
mediante una unión que le permite moverse circularmente en
cualquier dirección. En su parte superior existen 2 pares de brazos
principales, uno de ellos va conectado a varillas y actuadores que
definen la posición cíclica del rotor, las uniones que en esos brazos se
tienen son también esféricas por lo tanto, los movimientos circulares
están libres de restricciones; el otro par de brazos controla la posición
del colectivo del rotor.
Figura 45. Mezcladora
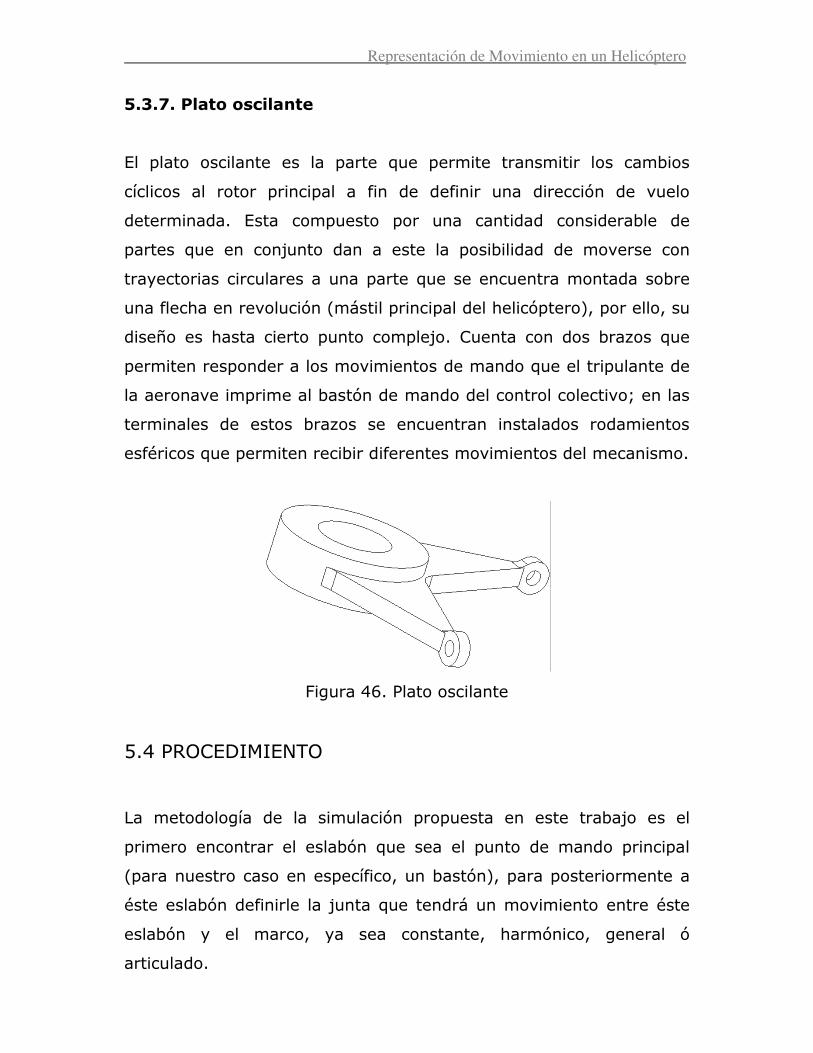
Representación de Movimiento en un Helicóptero
5.3.7. Plato oscilante
El plato oscilante es la parte que permite transmitir los cambios
cíclicos al rotor principal a fin de definir una dirección de vuelo
determinada. Esta compuesto por una cantidad considerable de
partes que en conjunto dan a este la posibilidad de moverse con
trayectorias circulares a una parte que se encuentra montada sobre
una flecha en revolución (mástil principal del helicóptero), por ello, su
diseño es hasta cierto punto complejo. Cuenta con dos brazos que
permiten responder a los movimientos de mando que el tripulante de
la aeronave imprime al bastón de mando del control colectivo; en las
terminales de estos brazos se encuentran instalados rodamientos
esféricos que permiten recibir diferentes movimientos del mecanismo.
Figura 46. Plato oscilante
5.4 PROCEDIMIENTO
La metodología de la simulación propuesta en este trabajo es el
primero encontrar el eslabón que sea el punto de mando principal
(para nuestro caso en específico, un bastón), para posteriormente a
éste eslabón definirle la junta que tendrá un movimiento entre éste
eslabón y el marco, ya sea constante, harmónico, general ó
articulado.

Representación de Movimiento en un Helicóptero
El siguiente paso a seguir es el realizar una simulación previa para así
verificar que efectivamente el punto de mando principal esta
realizando el movimiento de acuerdo a como debe ó se espera que
sea; Este punto es crucial ya que de acuerdo a su movimiento se
basarán los demás eslabones y juntas a declarar.
Una vez cumpliendo con los requerimientos anteriores, éste método
se basa en la acción y reacción que un componente tiene sobre otro
para así establecer una cadena de eslabones y juntas.
Cuando la simulación del control de mando principal es satisfactoria,
se procede a establecer el(los) nuevo(s) eslabón(es) inmediato(s) con
sus respectivas juntas para de esta forma poder transmitir el
movimiento correctamente paso a paso “eslabón por eslabón(es)”.
Entiéndase por eslabón(es) inmediato(s) aquellos que están apegados
muy directamente entre ellos.
Para asegurar que la transmisión de movimiento se esta llevando a
cabo de una manera correcta, en éste punto se realiza una simulación
que así lo demuestre.
El paso en el que se declaran eslabones y juntas inmediatas y así
mismo la animación al término de éste es un paso que se repite
constantemente para así tener una cadena de movimientos correctos
hasta el final.
5.5 PUNTO DE MANDO PRINCIPAL
El punto de mando principal es, para este estudio especifico, la
relación que la tripulación tiene directamente con el mecanismo,
como los movimientos de una persona afectan al mecanismo y como
a su vez el mecanismo es afectado por fuerzas externas; de acuerdo

Representación de Movimiento en un Helicóptero
a esto la interpretación del movimiento principal es el punto de
partida.
El eslabón del mando principal podrá estar contenido no solo por un
componente, sino por el(los) numero(s) de componente(s) que en
primera instancia tengan el movimiento principal en conjunto.
La junta que este deberá de tener, será la relación que este tenga
con el marco para así provocar un movimiento relativo. El
movimiento relativo entre el eslabón y el marco será definido por el
tipo de movimiento que se desee realizar (constante, harmónico,
general o articulado). Para nuestro caso en específico será una junta
de revolución (en el eje X para los lados y eje Y para delante y atrás)
entre la leva y la base de la leva con un movimiento harmónico; este
tipo de movimiento nos permite ver una representación mas acorde a
nuestras necesidades (adelante/atrás, izquierda/derecha).
Una vez definido el tipo de movimiento, harmónico, se debe de
especificar los valores necesarios para su correcto funcionamiento
del mismo; estos valores son: para una actitud de vuelo lateral una
amplitud de 5 y frecuencia una de 500; y para un desplazamiento
del helicóptero longitudinal (adelante y atrás) una amplitud de 10 y
una frecuencia de 500.
En la siguiente figura se demuestra lo anteriormente explicado con
los dos escenarios respectivos.
Para un movimiento hacia delante y atrás:
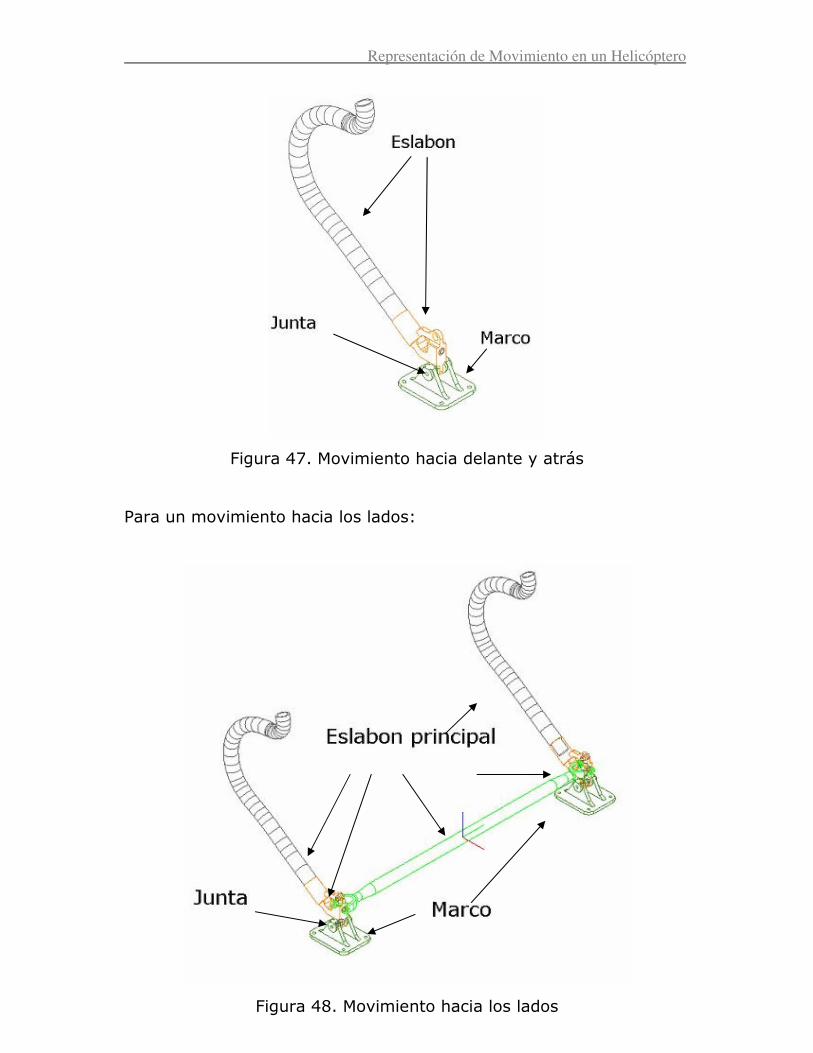
Representación de Movimiento en un Helicóptero
Figura 47. Movimiento hacia delante y atrás
Para un movimiento hacia los lados:
Figura 48. Movimiento hacia los lados

Representación de Movimiento en un Helicóptero
5.6 SECUENCIA DE MOVIMIENTO
El propósito de éste punto es establecer un proceso repetitivo para
que a su vez se logre obtener una cadena de movimientos
secuenciales, es decir, simulaciones secuenciales que lleven al
mecanismo a un movimiento resultante desde la primera hasta el
final.
El(los) eslabón(es) es (son) aquel(los) que están apegados entre sí
para una siguiente simulación.
Por lo tanto, para definir los eslabón(es) se debe de tener en mente
la siguiente simulación, para de esta manera conocer los
componentes que intervienen y posteriormente dividirlos en el
número de el(los) eslabón(es).
Una vez definido(s) el(los) eslabón(es) hasta el momento se debe de
declarar el tipo y posicionamiento de las juntas para así poder
continuar con el movimiento; Las juntas para nuestro mecanismo en
específico son de revolución, y el posicionamiento depende de las
articulaciones que existen en cada uno de los componentes. Nótese
que en este punto, ninguna de las articulaciones que se establecen
aquí tienen movimiento ya que este esta inferido por pura
transmisión del principal.
Este paso, es un paso repetitivo que se llevara a cabo tanto numero
de pasos como numero de animaciones se conciban.
La siguiente figura, muestra lo anteriormente explicado en los dos
escenarios específicos, esto en su segunda animación solamente.
Para un movimiento longitudinal:
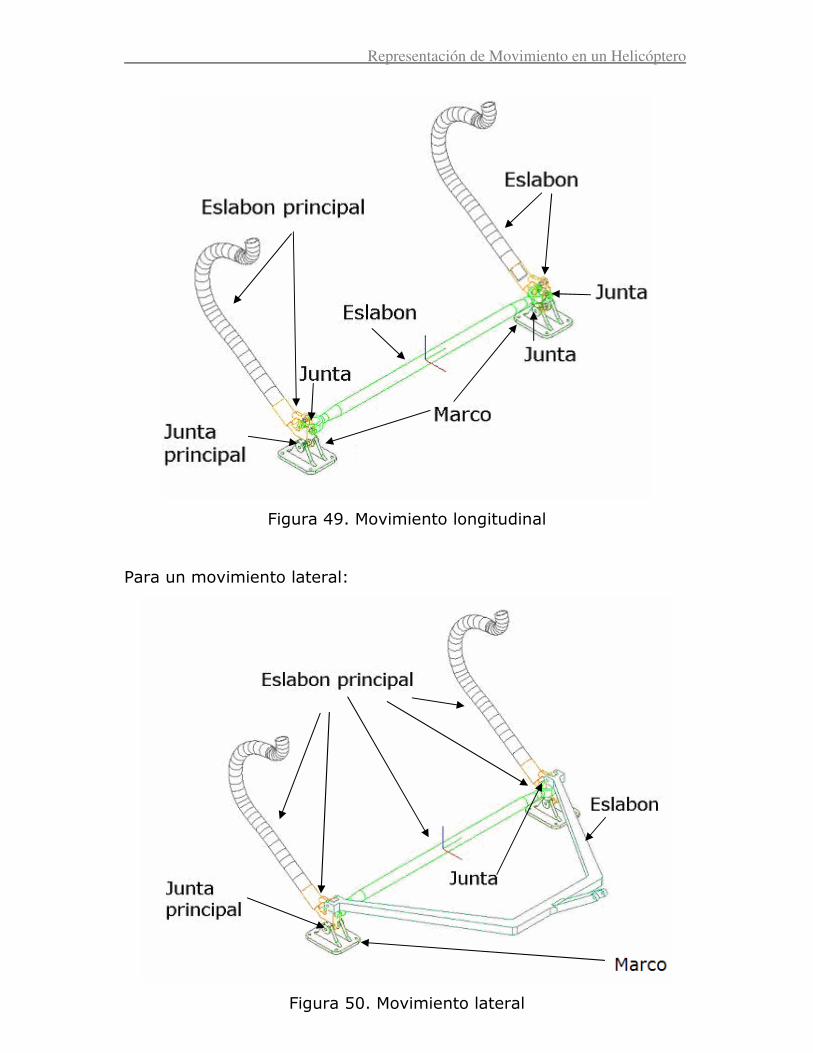
Representación de Movimiento en un Helicóptero
Figura 49. Movimiento longitudinal
Para un movimiento lateral:
Figura 50. Movimiento lateral

Representación de Movimiento en un Helicóptero
CONCLUSIONES
Mediante la implementación de la aplicación Motion del software
Unigraphics NX2 al sistema de control cíclico, se pudo verificar los
movimientos en las actuaciones del sistema.
Las actuaciones del sistema se dividieron en dos simples
movimientos, estos son: movimiento longitudinal (adelante, atrás)
movimiento lateral (a los lados).
Una vez obtenida la simulación se observo que cuando uno de los
bastones se mueve en cualquiera de las direcciones antes
mencionadas, este desencadena una serie de movimientos a los
componentes que conforma el sistema, teniendo una repercusión
directa en el rotor principal y así en el desplazamiento que el
helicóptero realice. Esto es: cuando el bastón se mueve hacia
delante, el helicóptero también, de la misma forma cuando este se
mueva hacia atrás; cuando el bastón se mueva hacia cualquiera de
los lados, el helicóptero lo hará de la misma forma.
El método que se utilizo, se encontró muy sencillo para la aplicación a
este sistema ya que a través del mismo se puede saber si lo que se
plantea en el momento es funcional para el sistema; resulto mucho
mas sencillo una vez que se simplificaron los movimientos, esto tuvo
una especial repercusión en el tipo de juntas a manejar (de
revolución).
Durante el proceso de simulación, se encontró que los puntos de
pivoteo a veces no son reconocidos por el software, esto tuvo su
solución en el inserta puntos y después añadirlos como parte del
eslabón a pivotear.

Representación de Movimiento en un Helicóptero
En este trabajo se puede observar que mediante el software
“Unigraphics, NX2” la simulación del movimiento del sistema de
control cíclico de un helicóptero Bell 206 es correcta. Esto se
encuentra en el siguiente archivo del disco adjunto:
D: CONTROL DE HELICOPTERO1 MOTION /Assembly
Así:
• Con éstas herramientas CAD / CAE / CAM se puede realizar un
completo estudio de los movimientos respectivos y así facilitar
todas las actividades que se realicen por parte del personal
técnico involucrado en el mantenimiento, operación y diseño de
los helicópteros.
• Al término de éste proyecto se puede comprender y analizar
una visualización del funcionamiento del control cíclico, la cual
permite al operador pilotear de una manera más segura y
lograr mejores actuaciones del helicóptero.
Representación de Movimiento en un Helicóptero
BIBLIOGRAFÍA
• Blanca Iris Peña de Paz, Gustavo Adrián Velázquez Jaimes,
Implementación de un Software de diseño como método
didáctico en la enseñanza del funcionamiento de controles de
vuelo en helicópteros, México, 2002, IPN.
• Rogelio Hernández, Diseño Aerodinámico II, México.
• R. W. Prouty, Helicopter Aerodynamics, USA, 1985, Phillips
Publishing, Inc.
• Dr. Jan Roskam, Airplane Design Part III. Layout Design of
cockpit, fuselage, wing and empennage: cutaways and inboard
profiles, Lawrence, Kansas, USA, 2002, DAR Corporation.
• Manual de Eurocopter .
• http://www.monografias.com/trabajos13/cinemat/cinemat2.sht
ml#TEORICO , Enero 2006.
• http://www.planetasaber.com/login/failedvalidate.asp?user=am
gel&urlog=%2Ftheworld%2Fgats%2Farticle%2Fdefault%2Easp
%3Fpk%3D776%26art%3D59, Enero 2006.
• http://www.monografias.com/trabajos13/cinem/cinem.shtml,
Enero 2006.
• http://www.flightsimaviation.com/data/FARS/part_27.html,
Enero 2006.
• http://www.ugs.com/latinoamerica/nx/index.shtml, Enero
2006.
• http://www.solocursos.net/master_unigraphics_cad
slccurso1033131.htm, Enero 2006.
• www.yourdictionary.com, Enero 2006.
• www.plastomatic.com, Enero 2006.
• www.navalchicolino.com, Enero 2006.
• www.notiver.com.mx/index.php?id=10061, Enero 2006.