La robotica
30
Conceptos fundamentales Capítulo 1 ¿Qué es un robot? ¿Cuándo conviviremos con ellos? ¿Tendremos diversos tipos de robots entre nosotros? ¿Lavarán los platos? En este primer capítulo intentaremos responder estas y otras preguntas, con el objetivo de entender cuáles son los alcances posibles de nuestro primer proyecto robótico. Robótica SERVICIO DE ATENCIÓN AL LECTOR: [email protected] Introducción a la robótica 16 ¿Qué es un robot? 16 Tipos de robots 19 Unidades de un robot 23 Procesamiento 24 Sensores 33 Actuadores 39 Resumen 43 Actividades 44 Colaborador: Ing. Gonzalo Mon
Transcript of La robotica

Conceptos fundamentales
Capítulo 1
¿Qué es un robot? ¿Cuándo
conviviremos con ellos? ¿Tendremos
diversos tipos de robots entre nosotros?
¿Lavarán los platos? En este primer
capítulo intentaremos responder estas
y otras preguntas, con el objetivo
de entender cuáles son
los alcances posibles de nuestro
primer proyecto robótico.
Robótica
SERVICIO DE ATENCIÓN AL LECTOR: [email protected]
Introducción a la robótica 16¿Qué es un robot? 16Tipos de robots 19Unidades de un robot 23Procesamiento 24Sensores 33Actuadores 39
Resumen 43Actividades 44
Colaborador:Ing. Gonzalo Mon
01_ROBOTICA.qxd 24/10/2007 02:01 p.m. PÆgina 15

INTRODUCCIÓN A LA ROBÓTICA
Día a día, nos sorprendemos con lasnoticias que aparecen en los mediosde comunicación vinculadas a lapresencia de robots en diversos cam-pos de la vida cotidiana. Robots en-fermeros, mascotas, repositores desupermercados, detectores de explo-sivos, aspiradoras hogareñas, o sim-ples jugadores de fútbol, son algu-nos de los ejemplos que podemosencontrar en el mercado de la tecno-logía de última generación. En síntesis, la robótica ya no esparte de nuestro futuro sino denuestro presente tangible. Sin em-
bargo, probablemente gracias a la li-teratura y al cine de ciencia ficción,el concepto de lo que es un robot,sus posibilidades y sus limitacionesreales están desdibujados en el ima-ginario colectivo. Es por eso que eneste primer capítulo haremos unaintroducción a los conceptos funda-mentales de la robótica.
¿Qué es un robot?Sueño de muchas generaciones, laexplosión tecnológica nos ha puestoal alcance de poder concretarlo.Para comenzar nuestro recorrido,hagamos un repaso de la historia dela robótica para comprender haciadónde nos dirigimos.
1. CONCEPTOS FUNDAMENTALES
16
Figura 1. Roomba, la aspiradora robótica más popular y económica del mercado.
01_ROBOTICA.qxd 24/10/2007 02:01 p.m. PÆgina 16

A imagen y semejanzaDesde los orígenes del hombre, po-demos encontrar varios relatos sobrela creación de vida artificial. Porejemplo, en la leyenda del Golem,un rabino de Praga le infunde vida auna estatua de barro. Asimismo, enla obra literaria Frankenstein, eldoctor de dicho nombre crea un sera partir de órganos de otras perso-nas, que luego se vuelve contra él.Si nos apartamos de la literatura, enel antiguo Egipto encontramos esta-tuas de dioses que incorporaban bra-zos mecánicos operados por los sa-cerdotes. En el siglo XIX, también sehicieron conocidas las creaciones derobots que jugaban ajedrez, aunqueen realidad éstos ocultaban a un serhumano de baja estatura que opera-ba la máquina desde su interior (Fi-gura 2). Es decir, el deseo de creaciónde un ser a nuestra imagen y seme-janza está presente desde los prime-ros tiempos de la humanidad.El origen de la palabra robot se re-monta a comienzos del siglo XIX. Eldramaturgo Karel Capek utilizó porprimera vez este término en su obraOpilek para referirse a un conjuntode máquinas inventadas por un cien-tífico para realizar tareas pesadas yaburridas. En checo, idioma originalde la obra, el término robota signi-fica trabajo tedioso. Pero fue el es-critor Isaac Asimov quien populari-zó el término e introdujo el concep-
Introducción a la robótica
17
Figura 2. El Turco, un robot que simulaba
jugar al ajedrez y que, en realidad, tenía
un jugador humano adentro.
Figura 3. Éste es un robot que aparecía
en la adaptación de la obra de Karel
Capek: Rossum's Universal Robot.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 17

to de robótica en diversos relatos deciencia ficción de su autoría. En susobras, Asimov muestra facetas hu-manas de los robots y define un con-junto de leyes para que estos seresnuevos nunca se rebelen contra loshumanos. Luego, el cine y la televi-sión generaron cientos de robots dediversa índole, algunos simpáticos(como R2D2 y Cortocircuito), yotros definitivamente en contra desus creadores (Terminator, HAL).A partir de la creación de las prime-ras computadoras comenzó el verda-dero desarrollo de los robots primi-tivos. En 1974, la empresa Cinci-nnati Milacron realizó el primer ro-bot industrial, conocido como TheTomorrow Tool. A partir de ese mo-mento, junto con la evolución de lossistemas de procesamiento, el creci-miento de la robótica ha sido expo-nencial. La reducción de tamaño yde costos, y el aumento de la capa-cidad de cálculo de los procesadores,han permitido la creación de robotscada vez más sofisticados, rápidos yautónomos. Sin embargo, aún esta-mos lejos de crear un robot a nues-tra imagen y semejanza.
Definición de la palabra robotExisten muchas definiciones de lapalabra robot. En cada una de ellas,encontramos destacado algún aspec-to en particular, que es el que cadaautor quiere resaltar en su obra. Se-
gún la Asociación Japonesa de Robó-tica Industrial (JIRA), los robots sondispositivos capaces de moverse de mo-do flexible, análogo al que poseen losorganismos vivos, con o sin funcionesintelectuales, lo que permite la realiza-ción de operaciones en respuesta a ór-denes recibidas por humanos. Vemosque en esta definición se encuentraresaltada la capacidad de movimien-to de los robots y su analogía con losseres de la naturaleza. Sin embargo,a la JIRA no le interesa la inteligen-cia artificial aplicada al robot, dadoque su función fundamental es seroperado por un humano. Por su par-te, el Instituto de Robótica de Nor-
1. CONCEPTOS FUNDAMENTALES
18
Figura 4. Isaac Asimov, creador
de cientos de cuentos sobre robots
y de la palabra robótica.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 18

teamérica (RIA) define a un robotindustrial como un manipuladormultifuncional y reprogramable dise-ñado para desplazar materiales, com-ponentes, herramientas o dispositivosespecializados por medio de movimien-tos programados variables, con el fin derealizar diversas tareas. En este caso,el acento está puesto en la capacidadde programación del robot y, por lotanto, en cierta independencia defuncionamiento con respecto a laoperación humana. Como dijo Jo-seph Engelberg, padre de la robóticaindustrial: es posible que no sea ca-paz de definir qué es un robot, pe-ro sé cuándo veo uno.Particularmente, y ya que nos hemosganado el derecho dado que estamosescribiendo un libro sobre robótica,agregaremos una definición más derobot a la larga lista preexistente: unrobot es un dispositivo con un de-terminado grado de movilidad, quepuede realizar un conjunto de ta-reas en forma independiente y quese adapta al mundo en el que ope-ra. El objetivo de esta definición es
comenzar a introducirnos en el tipode robot sobre el que vamos a centrar-nos en el desarrollo del libro.
Tipos de robotsDe la misma manera que con las de-finiciones, podemos encontrar mu-chas clasificaciones distintas de ro-bots. En esta obra, al presentarlos,intentaremos acercarnos a los diver-sos problemas mecánicos, electróni-cos y de software que encontramosen el desarrollo de un robot. Las cla-sificaciones elegidas son:
Según el uso del robotA continuación presentaremos unaclasificación posible de los robots se-gún su utilidad específica.• Industriales: se utilizan dentro de
un proceso de trabajo industrial. Esel tipo de robot que más ha sido de-sarrollado en la historia (Figura 5).
• Espaciales: deben desenvolverse enzonas inexploradas y a larga distan-cia de su centro de control.
• Médicos: son utilizados comoapoyo en la intervención médica
Introducción a la robótica
19
✱Uno de los primeros robots reales fue el jugador de ajedrez autómata de Wolfgang
von Kempelen, en 1769. Éste consistía en una cabina de madera de 1,20 metros de
largo, 60 centímetros de profundidad y 90 centímetros de altura. Cuando se abrían
las puertas de la máquina, se podía ver un complejo mecanismo de engranajes que,
supuestamente, permitían jugar un partido de ajedrez de buen nivel. En realidad,
dentro de la estructura se escondía un pequeño jugador humano.
UN ROBOT QUE JUGABA AL AJEDREZ
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 19

sobre los humanos y como com-plemento para las personas con ca-pacidades disminuidas.
• Domésticos: el sueño de todo amoo ama de casa, un robot que reali-ce alguna o todas las tareas del ho-gar. Ya hay entre nosotros aspira-
doras, lavarropas, heladeras, etcé-tera, que modifican su comporta-miento en forma autónoma segúnel ambiente en el que trabajan.
• Sociales: robots utilizados en ám-bitos sociales (como películas,eventos y supermercados) con fun-ciones de comunicación intensivacon los humanos. En estos casos,uno de los elementos de investiga-ción fundamental es el aspecto es-tético del robot, el estudio de la in-terfaz con el humano para realizaruna comunicación completa, congestos, tonos, silencios, etcétera.
• Agrícolas: así como en sus co-mienzos la robótica tuvo ampliaaplicación en la industria, en losúltimos años ha comenzado a cre-cer en forma exponencial el uso derobots y de la inteligencia artificialen el sector agrícola-ganadero. Lascosechadoras autónomas, las sem-bradoras controladas por mapassatelitales, los fumigadores roboti-zados y otros dispositivos hicieronsu aparición dentro de lo que ac-tualmente se conoce como agri-cultura de precisión (Figura 6).
1. CONCEPTOS FUNDAMENTALES
20
Figura 5. Kit de brazo robótico
RA-01 con 5 servos.
❘❘❘Como si no fueran suficientes los insectos que nos perturban durante todo el año, los
ingenieros han decidido que, antes de imitar a un humano, es necesario lograr un in-
secto robótico. Los sistemas de visión y de vuelo de los insectos son dos fuentes de
inspiración muy importantes, dado que con mecanismos sumamente sencillos, logran
captar el mundo que los rodea y volar sobre él de una manera altamente adaptativa.
ROBOTS INSECTOS
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 20

Según el medio en el que desarro-lla la actividad• Acuáticos: se caracterizan por movi-
mientos tridimensionales en un am-biente hostil desde el punto de vistamecánico y electrónico (Figura 8).
• Terrestres: son los más popularesy económicos. Podemos, a su vez,subclasificarlos por sistema de lo-comoción: fijos, ruedas, orugas,patas, arrastre, etcétera.
• Aéreos: con movimientos tridi-mensionales, como el acuático, pe-ro con una exigencia mucho ma-yor en el control en tiempo real delsistema de levitación (Figura 7).
• Híbridos: combinación de algu-nos de los anteriores.
En esta clasificación, las característi-cas mecánicas del robot se modifi-can en forma sustancial entre uno uotro medio. Prácticamente, es impo-
Introducción a la robótica
21
Figura 6. Demeter, un robot de
aplicación agrícola desarrollado
en la Universidad de Carnegie Mellon.
Figura 7. Robot insecto volador desarrollado en la Universidad de Berkeley.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 21

sible utilizar la mecánica de un ro-bot construido en un medio paraque funcione en otro, salvo en el ca-so de algunos híbridos.
Según la ubicación de la inteligen-cia del robot• Autónomos: la inteligencia está
ubicada en el mismo robot. Puedecomunicarse con otros o con unsistema central, pero los aspectosesenciales de funcionamiento seresuelven en forma independienteen el propio robot.
• Control automatizado (semiautó-nomos): la mayor parte de la inte-ligencia del robot está ubicada enun sistema central. Los sensorespueden ser locales, es decir que leenvían la información obtenida aese sistema central, o globales. Elsistema central les comunica a los
robots las acciones que deben rea-lizar. Un ejemplo de este modeloes la categoría Mirosot de fútbolde robots de la FIRA.
• Híbridos: son robots autónomosque, en ciertos momentos del pro-ceso, pueden ser controlados porhumanos o por un sistema central.Un ejemplo son los robots que seutilizan en misiones espaciales, queoperan en forma autónoma peroque, ante un percance, pueden serdirigidos desde nuestro planeta.
También podríamos clasificar a losrobots por sus características estruc-turales, por el tipo de sensado delmundo, etcétera. De todas maneras,todos los robots comparten la mis-ma arquitectura básica, desde el máspequeño hasta Terminator. A conti-nuación veremos la fuerte analogía
1. CONCEPTOS FUNDAMENTALES
22
Figura 8. Robotacuático japonés,
que imita la
estructura de
algunos seres
acuáticos.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 22
que encontramos entre un robot yuna computadora convencional.
Unidades de un robotEn la arquitectura de cualquier com-putadora, podemos encontrar las si-guientes unidades que la componen:
• Unidades de procesamiento: es elconjunto de dispositivos que seencargan de realizar la transforma-ción de los datos de entrada paraobtener los datos de salida.
• Unidades de entrada: son las uni-dades que permiten realizar el in-greso de información para su pos-terior procesamiento.
• Unidades de salida: son las unida-des que se ocupan de comunicarlelos resultados del procesamiento alusuario u operador.
En un robot podemos encontrar lamisma arquitectura. A las unidadesde entrada de un robot las llamamossensores, que pueden ser externos,como un sensor de tacto, o internos,como un encoder que permite deter-minar la distancia recorrida por unarueda. A las unidades de salida se lasconoce como actuadores. Aquí po-demos mencionar leds de señaliza-ción, buzzers, motores, displays,etcétera. En síntesis, el robot recibeinformación del ambiente mediantesus sensores, procesa la informa-ción con su unidad de procesamien-
to y realiza sus acciones al movermotores y encender luces y buzzers.Tomemos como ejemplo a uno de losrobots más conocidos: Terminator.En este caso, sus sensores son las cá-maras que le permiten mirar, su siste-ma auditivo y los sensores de tactoque tiene su piel. No recordamos quetenga olfato o que alguna vez haya co-mentado lo sabroso de alguna comi-da. Sus actuadores esenciales son losmotores o los músculos de alambreque conforman su cuerpo.Uno de los problemas más apasio-nantes de la robótica es el equilibrioque es necesario obtener entre las tresunidades, para lograr que el robotcumpla con su objetivo. Por ejemplo,los sensores más sofisticados o que
Introducción a la robótica
23
❘❘❘
Así como hablamos de generaciones de
computadoras, también se ha definido
el grado de evolución de los robots in-
dustriales como vemos a continuación:
● Primera generación: repiten una ta-
rea sin considerar las modificaciones
que ocurren en su entorno.
● Segunda generación: toman informa-
ción limitada de su entorno y modifican
su comportamiento.
● Tercera generación: son programados
en lenguaje natural y organizan sus tareas
en forma automática en un nivel más alto
que los de Segunda generación.
GENERACIONES DE ROBOTS
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 23

entregan mayor cantidad de datos,como puede ser una cámara de video,exigen de parte del procesador unmayor tiempo de trabajo para poderobtener un conjunto de informaciónque resulte significativo. De la mismamanera, el control de los actuadoressofisticados, como cierto tipo de mo-tores, consume tiempo de procesa-miento que es absolutamente necesa-rio para que el robot opere en tiem-po real. En síntesis, es imprescindiblelograr el equilibrio entre velocidady precisión, en especial en aquellosrobots que operan en entornos muydinámicos. Es por eso que, habitual-mente, se utilizan ciertos procesado-res específicos para el filtrado de la in-formación de entrada y para el con-trol de los actuadores, y así se liberade esta tarea al procesador central yse complementa su función.En las próximas páginas, analizare-mos cada una de estas unidades enprofundidad, de forma tal que poda-mos realizar la elección adecuada se-gún los objetivos específicos quetengamos para nuestro robot.
ProcesamientoCuando comenzamos a analizar loque nos ofrece el mercado de la ro-bótica con respecto a procesamiento,probablemente nos encontremosconfundidos ante la diversidad deposibilidades. Podemos encontrardesde micros de muy bajo precio, en
los que debemos construir en formaartesanal toda la electrónica que loscomplementa para poder procesarlas entradas y salidas, hasta costososkits que tienen absolutamente todoresuelto. Está claro que con éstos úl-timos podremos hacer que nuestrorobot funcione en algunas horas, pe-ro es en el primer caso donde tendre-mos un control absoluto y de bajonivel de las capacidades de procesa-miento de nuestro dispositivo.De todas maneras, analizaremos enforma detallada las ventajas y lasdesventajas de ambas propuestas: eldesarrollo con el uso de kits frente ala construcción en forma artesanalde los robots. Además, conoceremosbrevemente algunos kits y microsdisponibles en el mercado, y hare-mos una lista de los sitios web don-de se puede conseguir informaciónmás detallada y completa.
KitsLos kits para la construcción de ro-bots, en general, presentan los si-guientes elementos:• Un procesador o conjunto de pro-
cesadores con toda la electrónica deentrada y salida de los sensores re-suelta. Además, poseen un sistemaoperativo dentro del controlador(firmware), que eleva el nivel de pro-gramación de los procesadores, loque posibilita el uso de lenguajes dealto nivel o interfaces gráficas para el
1. CONCEPTOS FUNDAMENTALES
24
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 24

desarrollo de la inteligencia de nues-tro robot en forma muy sencilla.
• Un conjunto de sensores queaprovechan la electrónica ya re-suelta, y que con una simple cone-xión funcionan de manera casimágica. Por ejemplo, sensores deluz donde el firmware interpreta elvoltaje que entrega el sensor comoun valor entre 0 y 100.
• Un conjunto de motores quetambién utilizan la electrónica desalida, que se alimentan directa-mente de la misma fuente que ali-menta al procesador, y que graciasal firmware podemos indicarle di-rección, velocidad, etcétera, sin lanecesidad de cálculos complejos.
• Material constructivo para resolverla mecánica del robot, altamente
reutilizable y que en poco tiempopermite la elaboración de la física delrobot mediante la aplicación de co-nocimientos de nuestra infancia.
Si tenemos en cuenta este conjuntode materiales, es sencillo notar que lasventajas que nos presenta el uso dekits para la construcción de nuestrorobot son las siguientes:• Menor tiempo de construcción
del robot: en pocas horas, podemosobtener robots poderosos para losdesafíos habituales en robótica.
• Alta reusabilidad del material:una vez terminado el desafío, po-demos desarmar el robot y utilizartodas las piezas, los sensores, losmotores y el procesador para armarun robot completamente distinto.
• Baja necesidad de conocimientos
Introducción a la robótica
25
Figura 9. Lego Nxt con el conjunto de motores y sensores que vienen con el kit.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 25

técnicos: sin saber electrónica yprácticamente sin saber programa-ción, podemos desarrollar un robotpoderoso. Desde ya que para aque-llos usuarios que sí tengan esos co-nocimientos, el aprovechamientoserá mucho mayor. Más aún si losdesarrolladores del kit tuvieron laprecaución de dejar abiertos tanto elfirmware como el hardware del pro-cesador y los sensores.
De todas formas, no todas son cosaspositivas. Las desventajas que tene-mos con el uso de kits son:• El alto o altísimo costo de un kit:
la relación puede ser de 20 a 1 conrespecto a un desarrollo manual. Elrobot que construiremos en este li-bro mantiene esta relación con loskits más económicos de robótica.
• La imposiblidad, en muchos casos,de poder realizar modificaciones debajo nivel en el hardware o el firm-ware del robot. A pesar de todos losesfuerzos de documentación que ha-ga la empresa creadora del kit, es im-posible que todo sea altamente mo-dificable, por la misma necesidad demantener la arquitectura intrínsecadel robot. Su elaboración artesanaldesde cero nos permite modificarhasta el más mínimo detalle.
• Baja precisión y calidad final delos robots: dado que los kits sonpara el desarrollo de robots de di-versos propósitos, en todos los ca-sos perdemos precisión y calidad.Por ejemplo, los motores sirvenpara moverse en un determinadoambiente con alto margen deerror, pero no son veloces ni per-miten movimientos de precisióncomo lo pueden exigir ciertos ob-jetivos. En general, los sensoresson económicos, y el rango de va-lores que devuelven es pobre.
Los kits de robótica más conocidosen el mercado son los siguientes:• Lego Nxt: sucesor del modelo
Mindstorms, es el kit de mayor di-fusión en todo el mundo (Figura 9).
1. CONCEPTOS FUNDAMENTALES
26
Figura 10. Un humanoide realizado
con el Lego Nxt.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 26

Su procesador es un ARM7 de 32bits. Cuenta con 256 Kb de Flash y64 Kb de RAM. Se comunica porBluetooth clase 2 y por USB. Tiene4 entradas para sensores y 3 salidaspara actuadores. En el kit se inte-gran 3 motores servo con encodersincorporados para controlar su mo-vimiento con precisión.Además, cuenta con un sensor detacto, uno de sonido, otro de luz ypor último un sensor ultrasónico.Para la mecánica del robot cuentacon piezas de las denominadasTechnic, que permiten diseñar dife-rentes estructuras según el destinodel robot creado (Figura 10). El len-
guaje de programación es un am-biente gráfico muy sencillo, similaral Robolab de las versiones anterio-res, pero con mayor potencia y ver-satilidad. Para finalizar, una de lasmejores decisiones que ha tomado lafirma Lego es publicar muchísimainformación sobre el desarrollo tan-to de hardware como de software delkit, lo que ha permitido que en po-co tiempo (salió a la venta en agos-to de 2006) las personas de todo elmundo que tienen este hobby hayandesarrollado hardware y software es-pecífico fuera del oficial. Para obte-ner más información, podemos visi-tar http://mindstorms.lego.com.
Introducción a la robótica
27
Figura 11. Placa educativa del Basic Stamp de Parallax.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 27

• Parallax: el producto más popular deesta empresa es el micro Basic Stamp(Figura 11). Aunque uno puede adqui-rir solamente el micro y realizar el ro-bot desde cero como comentaremosmás adelante, hay tantos desarrollosy tantas presentaciones de productosde la firma Parallax que hemos deci-dido presentarlo dentro de esta sec-ción. El Basic Stamp Starter Kit es-tá desarrollado para iniciarse en elmundo de la robótica. Incluye un Ba-sic Stamp II, que tiene una velocidadde procesamiento de 20 Mhz, con 2Kb de EEPROM (electrically-erasableprogrammable read-only memory,ROM programable y borrable eléc-tricamente) y 16 E/S (entradas y sa-lidas) más 2 dedicadas. Este micro es-tá instalado en una placa educativacon una pequeña protoboard (pla-
queta de experimentación), dondepodremos realizar todas nuestras ex-periencias. Viene con un servo, leds,capacitores, resistencias y otros com-ponentes para diseñar nuestro robot.Las guías que acompañan a este yotros kits son excelentes (¡y algunasestán en castellano!), y pueden con-seguirse en forma gratuita en el sitiode la empresa. La última creación deParallax ha sido el micro de nombrePropeller, con 8 procesadores para-lelos en su interior. Tiene una arqui-tectura de 32 bits, 80 Mhz, con 32pines de E/S direccionables por cual-quiera de los 8 procesadores. Parabuscar más información, podemosvisitar www.parallax.com.
• XiOR: en América Latina, conta-mos con nuestro propio kit de ro-bótica. XiOR (www.xior.org) esuna empresa argentina de tecnolo-gía y entre sus trabajos ha desarro-llado un sistema constructivo parala fabricación de robots móviles au-tónomos. El modelo N10 es el pri-mer robot desarrollado con él (Figu-ra 12). Una de sus principales carac-terísticas es la posibilidad de que elusuario reconfigure toda su morfo-logía física para adaptarlo a diferen-tes entornos y experimentos. Inclu-so es posible combinarlo con otrosrobots similares para formar partede estructuras mayores.Normalmente, está equipado con2 o 4 celdas de Li-Ion de 900 mAh,
1. CONCEPTOS FUNDAMENTALES
28
Figura 12. Aquí podemos ver uno
de los modelos constructivos de XiOR,
conocido como N10.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 28
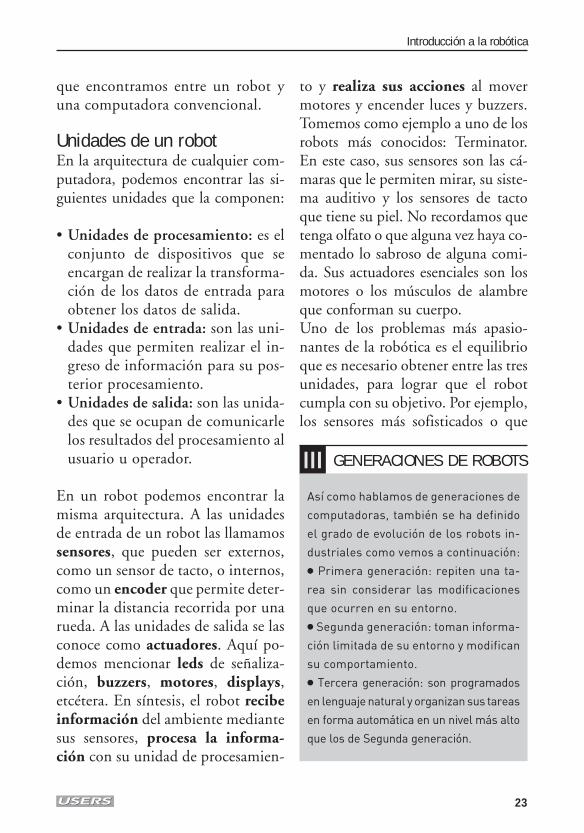
agrupadas en packs de a dos. Encuanto a las capacidades de procesa-miento, el controlador XiOR.0107tiene un procesador AVR ATMega8(Atmel, 2003) de 16 MIPS aproxi-madamente, y 8 KB de RAM deprograma, e incorpora comunica-ciones RS-232, 2WI y drivers de po-tencia para agregar dos motores adi-cionales de corriente continua o unmotor paso a paso. El sistema constructivo Múltiploofrece piezas de aluminio y plásti-co cuidadosamente diseñadas paradesarrollar robots de tamaño redu-cido, pero con una precisión y ro-bustez sorprendentes. Podemosencontrar más información enwww.xior.org.Además de estos kits que mencio-namos, el mercado de la robóticaeducativa crece día a día, y en laWeb podemos encontrar muchosotros que tal vez se ajusten mejora nuestras necesidades. Aunqueaquí describimos los más conoci-dos, podemos navegar para buscarmás información sobre el tema.
Robótica sin kitsComo comentamos antes, realizarun robot sin la ayuda de un kit nosproporciona mayor versatilidad, ro-bustez, potencia, precisión, veloci-dad y adaptabilidad. El problemaesencial es que nos exige mayor co-nocimiento y trabajo. Cuando co-mencemos un desarrollo de este tipo,lo primero que debemos analizar esel procesador que vamos a utilizar,según la funcionalidad y el costo quedeseamos que tenga nuestro robot.
Introducción a la robótica
29
Figura 13. Sphinx, otro modelo de XiOR
para el control de pozos de petróleo.
▲
Además de los kits mencionados, a continuación presentamos links donde se pue-
den encontrar otros kits desarrollados en Latinoamérica:
•NeoRobotic: kits de robótica autónoma (www.neorobotic.com).
•Arbot: robots controlados desde la PC por puerto paralelo (www.dutten.com.ar).
•Blocky-tronic: sistema constructivo con microcontrolador, sensores y motores
(www.blockymania.com.ar/blockytronic/).
OTROS KITS LATINOAMERICANOS
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 29

Además, debemos tener en cuentaque es necesario complementar elprocesador con un circuito de con-trol adecuado para realizar las cone-xiones de entrada, salida, alimenta-ción y control de dispositivos.
MicrocontroladoresEl procesamiento más habitual en losrobots pequeños y de bajo costo es elprovisto por microcontroladores.Los micros más utilizados son los dela familia PIC, de la firma Micro-chip. De todos los modelos que seofrecen, el más popular para la cons-trucción de robots es el PIC16F84.Posee una memoria de programaFlash de 1 KB con palabras de 14 bits,una memoria RAM de datos de 68bytes y una EEPROM de 64 bytes, y13 pines de E/S. Por otra parte, su precio es más queaccesible. Dado que desarrollaremosnuestro robot con PIC, dejaremospara más adelante una descripciónmás detallada de éstos.La empresa Atmel fabrica otro tipode microcontroladores, que tambiénson de uso habitual en la construc-ción de robots. De todas sus líneas, ladenominada AVR de 8 bits es la másrecomendada para el procesamientoen esta disciplina. Toda la línea AVRpresenta características como bajopoder de consumo, arquitecturaRISC y Harvard, 32 registros de 8bits de propósito general y facilidadde implementación de lenguajes dealto nivel para la programación. En particular, el micro ATMega8 (Figu-ra 15) es ideal, dado que presenta unamemoria de 8 KB de programa, 1 KBde SRAM y 512 bytes de EEPROM,seis canales de PWM, USART progra-
1. CONCEPTOS FUNDAMENTALES
30
Figura 14. Otro de los micros
de la firma Microchip, creadora
del 16F84.
Figura 15. ATMega8 en una placa
de prototipado rápido.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 30
❘❘❘
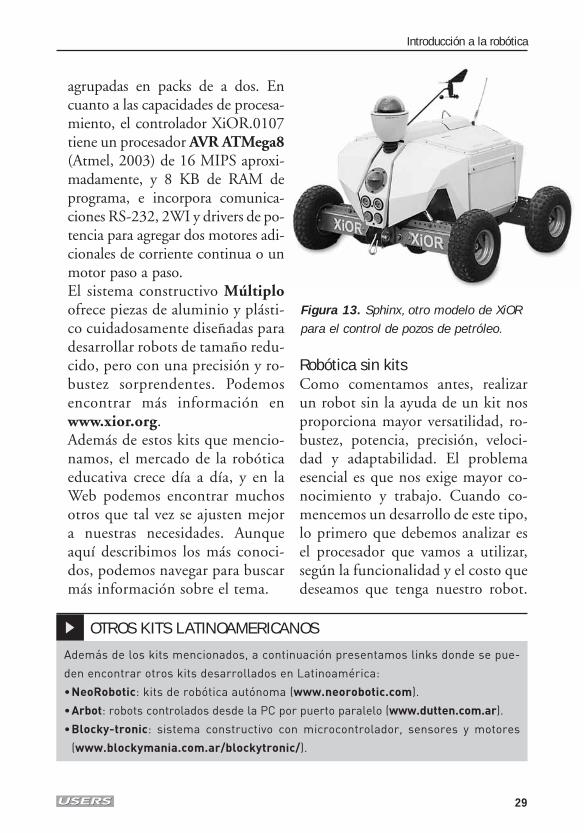
mable, conversor analógico digital decuatro canales multiplexados de 10 u 8bits y dos canales de 8 bits, entre otrascaracterísticas que se pueden encontraren la página de la firma.
PDASi no tenemos una base de conoci-miento y experiencia en electrónicapara utilizar los microcontroladoresque presentamos pero contamos conuna Palm o una PocketPC, podemosdestinar parte de su tiempo de uso pa-ra que actúe como cerebro de nuestracreación. En los últimos años, estosdispositivos han bajado de precio enforma notable y, además, algunos mo-delos han caído en desuso, aunquepueden adaptarse perfectamente paraser empleados con nuestros robots.Uno de los ejemplos más interesantesen este punto es la adaptación del ro-bot Robosapien (Figura 17) de la fir-ma Wow Wee para que pueda sercontrolado desde una PocketPC porinfrarrojo, con lo cual utilizamos laPDA como control remoto inteligen-te que puede generar su propio pro-cesamiento. Para la detección del
mundo se utiliza una cámara que seconecta en el puerto de tarjetas de me-moria. En síntesis, con poco dineropodemos tener un robot humanoide.Se puede obtener más información enwww.informatik.uni-freiburg.de/~nimbro/media.html.El Instituto de Robótica de Car-negie Mellon desarrolló un proyec-to para la construcción de un robotautónomo móvil de bajo costo, y seutilizó una Palm como procesador (Fi-gura 18). En el sitio www.cs.cmu.edu/~reshko/PILOT podemos encontrartodos los pasos y los materiales nece-
Introducción a la robótica
31
Figura 16. Arduino, una plataforma
abierta en software y hardware para
el desarrollo de robots.
Arduino es una placa basada en el micro Atmel ATmega8, programable por serial o
USB, con entradas y salidas analógicas y digitales. Su diseño y distribución son com-
pletamente libres. En su sitio web, www.arduino.cc, podemos encontrar los planos pa-
ra armar la placa y el software necesarios para su programación. Si no nos animamos
a construirlos desde cero, podemos adquirir los componentes en el mismo sitio.
ARDUINO, UNA PLATAFORMA OPEN HARDWARE PARA ROBÓTICA
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 31

sarios para construirlo, incluido elsoftware que es indispensable bajaren la Palm para la programación. Sibien utiliza ruedas omnidirecciona-les, servos y otros materiales quepueden ser costosos en el mercadolocal, con ellos obtendremos un ro-bot móvil de excelente calidad.Comprar una PDA pura y exclusiva-mente para la construcción de un ro-bot es demasiado costoso en compa-ración con las otras variantes. Pero sidisponemos de una, o si los preciosde estos dispositivos continúan ba-jando, puede ser una posibilidadmuy interesante por su potencia deprocesamiento y tamaño.
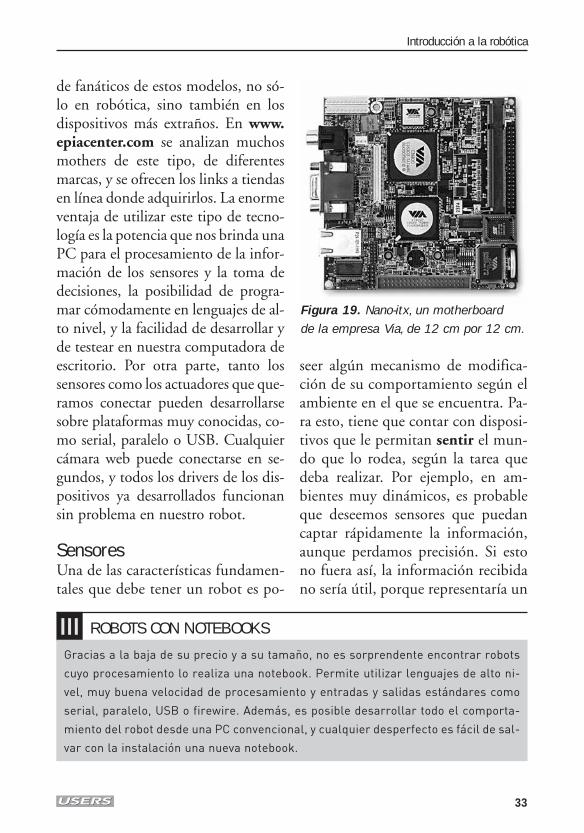
Computadoras (PC)Por último, no queremos dejar de pre-sentar la posibilidad de usar mother-boards de PC convencionales pero detamaños reducidos, conocidos comoMini y Nano-ITX (Figura 19). Porejemplo, la conocida firma VIA ha de-sarrollado la línea EPIA, de bajo con-sumo y con un tamaño que oscila en-tre 12 y 17 centímetros de lado. Unode sus modelos, el VIA EPIA NL, po-see placa de video de S3, zócalo paramemoria DDR 266/333/400, un slotmini PCI, un puerto S-ATA y dosP-ATA, placa de sonido, LAN, puertoserie, USB y otros, que permiten tenertoda la potencialidad de una PC ¡en 12x 12 centímetros! En el sitio www.mini-itx.com se muestran desarrollos
1. CONCEPTOS FUNDAMENTALES
32
Figura 17. Robot Robosapienhackeado con una PDA en
su cabeza como procesador.
Figura 18. Palm Pilot Robot Kites un kit de robótica cuyo
procesador es una Palm Pilot.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 32
❘❘❘
de fanáticos de estos modelos, no só-lo en robótica, sino también en losdispositivos más extraños. En www.epiacenter.com se analizan muchosmothers de este tipo, de diferentesmarcas, y se ofrecen los links a tiendasen línea donde adquirirlos. La enormeventaja de utilizar este tipo de tecno-logía es la potencia que nos brinda unaPC para el procesamiento de la infor-mación de los sensores y la toma dedecisiones, la posibilidad de progra-mar cómodamente en lenguajes de al-to nivel, y la facilidad de desarrollar yde testear en nuestra computadora deescritorio. Por otra parte, tanto lossensores como los actuadores que que-ramos conectar pueden desarrollarsesobre plataformas muy conocidas, co-mo serial, paralelo o USB. Cualquiercámara web puede conectarse en se-gundos, y todos los drivers de los dis-positivos ya desarrollados funcionansin problema en nuestro robot.
SensoresUna de las características fundamen-tales que debe tener un robot es po-
seer algún mecanismo de modifica-ción de su comportamiento según elambiente en el que se encuentra. Pa-ra esto, tiene que contar con disposi-tivos que le permitan sentir el mun-do que lo rodea, según la tarea quedeba realizar. Por ejemplo, en am-bientes muy dinámicos, es probableque deseemos sensores que puedancaptar rápidamente la información,aunque perdamos precisión. Si estono fuera así, la información recibidano sería útil, porque representaría un
Introducción a la robótica
33
Figura 19. Nano-itx, un motherboard
de la empresa Via, de 12 cm por 12 cm.
Gracias a la baja de su precio y a su tamaño, no es sorprendente encontrar robots
cuyo procesamiento lo realiza una notebook. Permite utilizar lenguajes de alto ni-
vel, muy buena velocidad de procesamiento y entradas y salidas estándares como
serial, paralelo, USB o firewire. Además, es posible desarrollar todo el comporta-
miento del robot desde una PC convencional, y cualquier desperfecto es fácil de sal-
var con la instalación una nueva notebook.
ROBOTS CON NOTEBOOKS
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 33

estado antiguo que, con seguridad,ha sido modificado por el alto dina-mismo del ambiente. Un ejemplo deesto es el fútbol de robots. En otros casos, necesitamos la mayorprecisión posible por la operación querealizamos y para lograrlo, tendremosque utilizar sensores de mayor fiabili-dad, aunque su tiempo de respuestasea bajo. En realidad, cuando cons-truimos un robot, siempre luchamoscon esta dualidad (y, seguramente,con muchas variables más). Es poreso que la elección de los sensoresque utilicemos estará determinadapor la tarea que vayamos a realizar ysus requerimientos particulares.Los sensores pueden definirse como
dispositivos que nos permiten mediralguna característica del ambiente, co-mo la temperatura, la distancia, la po-sición, el sonido, la intensidad de laluz, los colores, la altitud, la velocidad,la rotación, etcétera. Lamentablemen-te, en la realidad no existe el sensorperfecto, y por lo tanto debemos com-pletar y corregir la información con lautilización de algoritmos de correc-ción y redundancia de sensores.Otro aspecto importante para teneren cuenta es que, según el tipo decontrolador que utilicemos paranuestro robot, deberemos diseñarcircuitos intermedios entre el sen-sor y el controlador, con el fin deconvertir la señal del sensor en un
1. CONCEPTOS FUNDAMENTALES
34
30
25
20
15
10
5
0 0 5 10 15 20 25 30
Tiempo
Valo
r
Figura 20. En este caso, los valores son los de un sensor analógico.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 34
valor interpretable por nuestro pro-cesador. Por lo tanto, aunque poda-mos utilizar un mismo sensor paradiferentes plataformas de controla-dores, con seguridad tendremos quediseñar estas interfaces en forma de-dicada para cada procesador.
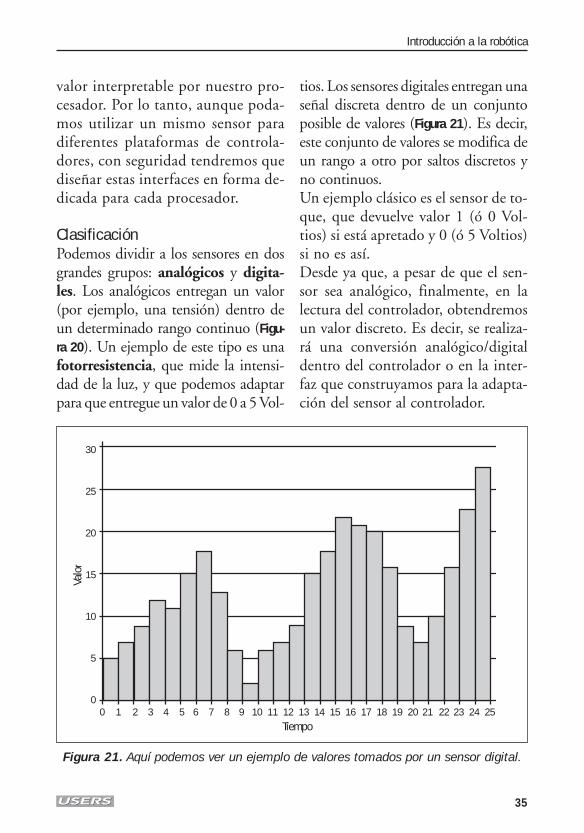
ClasificaciónPodemos dividir a los sensores en dosgrandes grupos: analógicos y digita-les. Los analógicos entregan un valor(por ejemplo, una tensión) dentro deun determinado rango continuo (Figu-ra 20). Un ejemplo de este tipo es unafotorresistencia, que mide la intensi-dad de la luz, y que podemos adaptarpara que entregue un valor de 0 a 5 Vol-
tios. Los sensores digitales entregan unaseñal discreta dentro de un conjuntoposible de valores (Figura 21). Es decir,este conjunto de valores se modifica deun rango a otro por saltos discretos yno continuos.Un ejemplo clásico es el sensor de to-que, que devuelve valor 1 (ó 0 Vol-tios) si está apretado y 0 (ó 5 Voltios)si no es así. Desde ya que, a pesar de que el sen-sor sea analógico, finalmente, en lalectura del controlador, obtendremosun valor discreto. Es decir, se realiza-rá una conversión analógico/digitaldentro del controlador o en la inter-faz que construyamos para la adapta-ción del sensor al controlador.
Introducción a la robótica
35
30
25
20
15
10
5
0 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
Tiempo
Valo
r
Figura 21. Aquí podemos ver un ejemplo de valores tomados por un sensor digital.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 35
Otra clasificación posible de los sen-sores es internos y externos. Los in-ternos son aquellos que nos brindaninformación del propio robot, comola velocidad, la rotación, la posición,la altura, etcétera; en tanto que los ex-ternos son los que proporcionan da-tos del ambiente, como las distancias,la temperatura, la presión, etcétera.Por último, también podemos dividirlos sensores en pasivos y activos. Losactivos son los que necesitan enviar unaseñal hacia el ambiente para luego reci-bir el rebote de esa señal y, de esta ma-nera, interpretar el estado del mundoque lo rodea. Un ejemplo clásico de es-
te tipo de sensor es el ultrasónico, queenvía una señal sonora que, al rebotarcon un objeto, vuelve al robot, y al cal-cular el tiempo de demora, puede in-terpretar la distancia al objeto. Desdeya que los sensores activos necesitanmucha más electrónica para su funcio-namiento, pero la información que nosbrindan es mucho más rica que la quenos ofrecen los sensores pasivos.
Tipos de sensoresHacer una lista de todos los tipos desensores existentes sería imposible.Los que nombraremos a continua-ción son los más utilizados en robó-tica de bajo costo:
• Sensores de interrupción: simple-mente, detectan si pasa corriente ono. Se utilizan como sensores dechoque o contadores de eventos(vueltas de una rueda, por ejemplo).
• Sensores de posición: determinan laposición del robot. Un sensor de es-te tipo puede ser un potenciómetroque cambia su valor por la rotaciónde las ruedas; u ópticos, como los que
1. CONCEPTOS FUNDAMENTALES
36
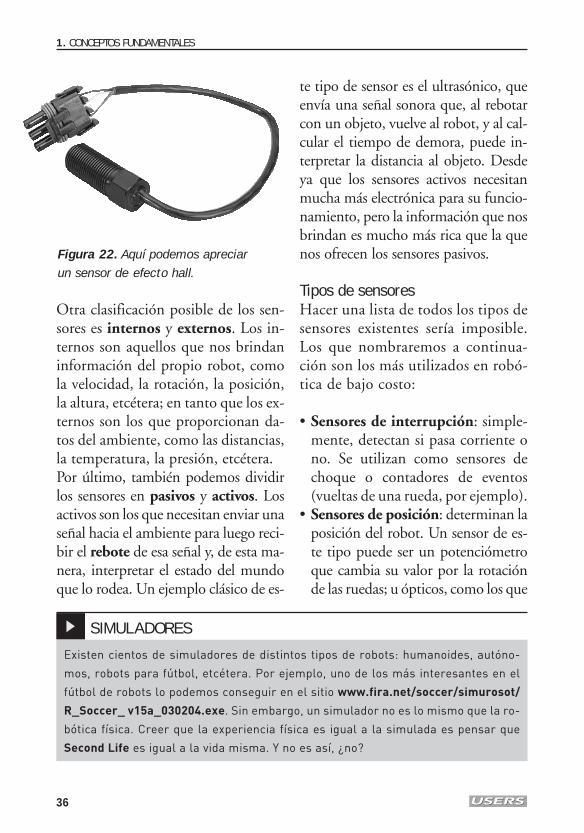
Figura 22. Aquí podemos apreciar
un sensor de efecto hall.
Existen cientos de simuladores de distintos tipos de robots: humanoides, autóno-
mos, robots para fútbol, etcétera. Por ejemplo, uno de los más interesantes en el
fútbol de robots lo podemos conseguir en el sitio www.fira.net/soccer/simurosot/
R_Soccer_ v15a_030204.exe. Sin embargo, un simulador no es lo mismo que la ro-
bótica física. Creer que la experiencia física es igual a la simulada es pensar que
Second Life es igual a la vida misma. Y no es así, ¿no?
SIMULADORES
▲
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 36

❴❵
se usan en un mouse tradicional, quecuentan la cantidad de veces que re-cibe señal el sensor óptico de una rue-dita que tiene ventanitas cada deter-minado ángulo (podemos abrir unopara verlo, el mecanismo es sencillo).
• Sensores de efecto hall: estos sen-sores utilizan una propiedad de losimanes, que modifican su conduc-tividad cuando encuentran un ob-jeto metálico (Figura 22).
• Sensores de luz o brillo: detectanla cantidad de luz que reciben. Se-gún el tipo de sensor utilizado, poreste mecanismo podemos detectardiferencias entre los colores, si és-tos no son brillantes.
• Sensores infrarrojos: envían unaseñal infrarroja y determinan eltiempo que tardan en volver a reci-birla. Permiten detectar obstáculos(si la señal vuelve) o medir distan-cias si el sensor es preciso.
• Sensores de ultrasonido: comoexplicamos antes, envían una señalsonora y captan el rebote, de lamisma manera en que lo hace unSonar en el mar.
En los últimos tiempos, gracias a laposibilidad de contar con mucha ca-pacidad de procesamiento en tamañoreducido, se ha comenzado a utilizarel video como sensor de los robots.
Introducción a la robótica
37
Figura 23. Laser Sick, usado como
sensor por su magnífica precisión.
Una de las dificultades más complejas en el desarrollo de robots es la de darles la
capacidad de adaptarse en tiempo real al mundo que los rodea. Por ejemplo, los sis-
temas de visión son muy dependientes de la luz que existe en el ambiente. Por esa
razón, es habitual que en las competencias de robots, los equipos que han tenido un
gran desempeño en días anteriores, ante un leve cambio de iluminación no puedan
realizar prácticamente ninguna tarea.
ROBOTS ADAPTATIVOS
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 37

❘❘❘
El procesamiento de imágenes es untema muy complejo y apasionante almismo tiempo, y escapa a la arquitec-tura y los costos de fabricación de losrobots que nos hemos propuesto pa-ra este libro. Pero seguramente, enpoco tiempo podremos utilizar nues-tras webcam en forma sencilla y eco-
nómica para nuestras creaciones. Lascámaras son los sensores que más da-tos nos proveen en un lapso de tiem-po muy breve. El problema funda-mental es que necesitamos muchotiempo de procesamiento en algorit-mos complejos para extraer informa-ción útil de semejante cantidad de
1. CONCEPTOS FUNDAMENTALES
38
Hasta hoy, el movimiento de los robots se ha realizado con motores. Pero si queremos
imitar el movimiento de organismos vivos, ninguno de ellos utiliza este tipo de dispo-
sitivos. Es por eso que se ha desarrollado otro tipo de sistema de movimiento conoci-
do como músculos de alambre (wired muscles). Los músculos de alambre son, como
su nombre lo indica, alambres que cambian su longitud cuando se calientan, lo que se
puede lograr al pasar corriente eléctrica por ellos (Figura 24).
MÚSCULOS DE ALAMBRE
Figura 24. En esta imagen podemos ver un insecto robótico que,
en lugar de motores, utiliza músculos de alambre.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 38

❘❘❘
bits. Es en este tipo de algoritmosdonde podremos encontrar con másclaridad el dilema a resolver entrevelocidad y precisión.
ActuadoresSi nuestro robot sólo observara elmundo sin actuar en él, sería un robotsumamente limitado. Nuestro deseoes que modifique su estado y el delambiente según la información queobtiene en el proceso. Con este fin,disponemos de motores, músculos dealambre, lámparas, displays, buzzers,etcétera. Al conjunto de estos disposi-tivos se lo denomina actuadores.Los actuadores más sencillos de utili-zar son las lámparas, que no ameritandemasiada descripción para su uso.Simplemente, con conectarlas a algu-na salida del procesador y proveer laalimentación necesaria para su fun-cionamiento, podremos encenderlasy apagarlas con nuestro programa.Sin embargo, pondremos nuestro fo-co de atención en los motores, dadoque definen en gran medida nuestracapacidad de desplazamiento, losgrados de libertad y otros aspectosvinculados al movimiento del robot.Por definición, el motor eléctrico esun dispositivo electromotriz, es decir,que convierte la energía eléctrica enenergía motriz. Todos los motoresdisponen de un eje de salida para aco-plar un engranaje, una rueda, una po-lea o cualquier mecanismo capaz de
transmitir el movimiento creado porel motor. La etapa de elección de unmotor puede ser una tarea muy com-plicada según las limitaciones denuestro proyecto, si tenemos encuenta todas las características quedefinen al motor. Éstas son: tamaño,peso, velocidad (revoluciones por mi-nuto, RPM), torque (kilogramo porcentímetro) tensión y, la más sensi-ble: el costo. En la actualidad, existendiferentes tipos de motores, que des-cribiremos a continuación:
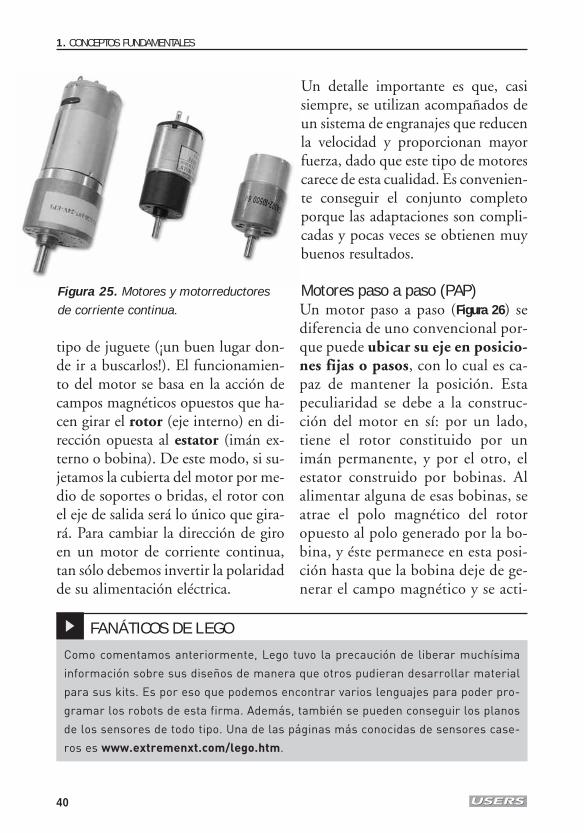
Motores de corriente continua (CC)Son los motores más comunes y quecasi todos conocemos (Figura 25). Engeneral, los encontramos en cualquier
Introducción a la robótica
39
Dentro de su producción literaria basa-
da en la robótica, Asimov definió tres
leyes para la protección de los huma-
nos que los robots de ficción tienen al-
macenadas en su cerebro positrónico.
Éstas son:
1. Un robot no puede hacerle daño a un
ser humano o, por inacción, permitir que
un ser humano sufra daño.
2. Un robot debe obedecer las órdenes
de un humano, salvo que alguna de és-
tas entre en conflicto con la primera ley.
3. Un robot debe proteger su propia
existencia, salvo que esto viole la pri-
mera o la segunda ley.
LEYES DE LA ROBÓTICA
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 39
▲
tipo de juguete (¡un buen lugar don-de ir a buscarlos!). El funcionamien-to del motor se basa en la acción decampos magnéticos opuestos que ha-cen girar el rotor (eje interno) en di-rección opuesta al estator (imán ex-terno o bobina). De este modo, si su-jetamos la cubierta del motor por me-dio de soportes o bridas, el rotor conel eje de salida será lo único que gira-rá. Para cambiar la dirección de giroen un motor de corriente continua,tan sólo debemos invertir la polaridadde su alimentación eléctrica.
Un detalle importante es que, casisiempre, se utilizan acompañados deun sistema de engranajes que reducenla velocidad y proporcionan mayorfuerza, dado que este tipo de motorescarece de esta cualidad. Es convenien-te conseguir el conjunto completoporque las adaptaciones son compli-cadas y pocas veces se obtienen muybuenos resultados.
Motores paso a paso (PAP)Un motor paso a paso (Figura 26) sediferencia de uno convencional por-que puede ubicar su eje en posicio-nes fijas o pasos, con lo cual es ca-paz de mantener la posición. Estapeculiaridad se debe a la construc-ción del motor en sí: por un lado,tiene el rotor constituido por unimán permanente, y por el otro, elestator construido por bobinas. Alalimentar alguna de esas bobinas, seatrae el polo magnético del rotoropuesto al polo generado por la bo-bina, y éste permanece en esta posi-ción hasta que la bobina deje de ge-nerar el campo magnético y se acti-
1. CONCEPTOS FUNDAMENTALES
40
Como comentamos anteriormente, Lego tuvo la precaución de liberar muchísima
información sobre sus diseños de manera que otros pudieran desarrollar material
para sus kits. Es por eso que podemos encontrar varios lenguajes para poder pro-
gramar los robots de esta firma. Además, también se pueden conseguir los planos
de los sensores de todo tipo. Una de las páginas más conocidas de sensores case-
ros es www.extremenxt.com/lego.htm.
FANÁTICOS DE LEGO
Figura 25. Motores y motorreductores
de corriente continua.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 40

❘❘❘
ve otra bobina, lo cual hace avanzaro retroceder al rotor. De esta mane-ra, al variar los campos magnéticosen torno al eje del motor, se lograque gire. Los motores PAP puedenser de dos tipos: Bipolar: lleva dos bobinados indepen-dientes. Para controlarlo se necesita in-vertir la polaridad de cada una de lasbobinas en la secuencia adecuada. Unipolar: dispone, normalmente,de 5 ó 6 cables, dependiendo de si elcomún está unido en forma internao no. Para controlar este tipo de mo-tores existen tres métodos con suscorrespondientes secuencias de en-cendido de bobinas. El común iráconectado a +VCC o masa según elcircuito de control usado y, luego,sólo tendremos que alimentar la bo-bina correcta para que el motoravance o retroceda según avancemoso retrocedamos en la secuencia. Es-tos motores son muy utilizados endisqueteras, lectoras de CD e impre-soras. En las antiguas disqueteras de51/4, podemos encontrar algunosbastante poderosos, y en las lectoras
de CD, unos más pequeños perosiempre acompañados de buenos me-canismos reductores.
ServomotoresEl servo (Figura 27) es un pequeño pe-ro potente dispositivo que dispone ensu interior de un pequeño motor conun reductor de velocidad y un multi-plicador de fuerza. También cuentacon un pequeño circuito eléctrico en-cargado de gobernar el sistema. El re-corrido del eje de salida es de 180º en
Introducción a la robótica
41
Figura 26. Vista interna
de un motor paso a paso.
Una de las herramientas fundamentales para detectar errores en nuestro robot es
la posibilidad de mostrar en un display el valor de los sensores, las variables, etcé-
tera. El problema es que como se trata de un ente autónomo, tendríamos que co-
rrer detrás de él para ver qué ocurre y leer los valores que se muestran en el dis-
play. Es por eso que usualmente al robot se le agrega un buzzer que nos permite
emitir sonidos y enterarnos de lo que sucede.
BUZZERS PARA DETECTAR ERRORES
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 41

✱
la mayoría de ellos, pero se puede mo-dificar con facilidad para tener un re-corrido libre de 360º y, entonces, ac-tuar como un motor común.El control de posición lo efectúa elservo en forma interna mediante unpotenciómetro que va conectado enforma mecánica al eje de salida. Éstecontrola un PWM (Pulse Width Mo-duler, modulador de anchura de pul-
sos) interno para compararlo con laentrada PWM externa del servo, me-diante un sistema diferencial y así,modificar la posición del eje de sali-da hasta que los valores se igualen yel servo se detenga en la posición in-dicada. En esta posición, el motor delservo deja de consumir corriente ysólo circula una pequeña cantidadhasta el circuito interno. Si en ese
1. CONCEPTOS FUNDAMENTALES
42
Los nanobots son robots de tamaño microscópico, cuyas dimensiones están en el or-
den de una millonésima de milímetro. Se realizan con técnicas de nanotecnología y,
aunque aún son ensayos y especulaciones teóricas, ya se han dado pasos para su con-
creción. Esencialmente, se han desarrollado nanobots químicos o moleculares con fun-
ciones limitadas. La aplicación para estos futuros robotitos está apuntada a la medici-
na, la industria, la ecología y la producción de alimentos.
NANOBOTS
Figura 27. Servomotor tradicional de la marca Hitec.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 42
momento forzamos el servo (al mo-ver el eje de salida con la mano), elcontrol diferencial interno lo detectay manda la corriente necesaria al mo-tor para corregir la posición.Para controlar un servo, tenemos queaplicar un pulso de duración y unafrecuencia específicos. Todos los ser-vos disponen de tres cables: dos pa-ra la alimentación y uno para aplicarel tren de pulsos de control que ha-rán que el circuito de control dife-
rencial interno ponga el servo en la po-sición indicada por la anchura del pul-so. Los servomotores son una muybuena alternativa, ya que traen inte-grado un sistema reductor que nosahorrará dolores de cabeza a la hora debuscar fuerza. La desventaja para al-gunas aplicaciones es que, en general,son lentos. Se utilizan mucho en losautomóviles y aviones radiocontrola-dos, principalmente para accionar elmecanismo que les da la dirección.
Introducción a la robótica
43
… RESUMEN
En este primer capítulo hemos hecho una breve introducción a los conceptos fun-
damentales de la robótica. Un robot no es más que un dispositivo con un deter-
minado grado de movilidad, que puede realizar un conjunto de tareas en forma
independiente y se puede adaptar al mundo en el que opera. Existen diversos ti-
pos de robots, según el uso para el cual se han destinado, el medio en el que se
mueven, la capacidad de autonomía que presentan, etcétera.
Cualquiera de estos robots está dirigido por una unidad de procesamiento, que se
puede adquirir en forma completa con todas sus comunicaciones de entrada y sa-
lida resueltas, o que podemos desarrollar desde cero con micros, dispositivos
portátiles o, simplemente, motherboards de PC.
Además, necesita de sensores para poder captar el mundo. Cuanto más complejo
sea un sensor y más datos nos provea, tendremos que renunciar a ciertos aspec-
tos de velocidad para obtener información más precisa. Por último, para que el ro-
bot pueda trasladarse y actuar sobre el entorno, necesitamos de los actuadores.
Los esenciales y más usados son los motores, de los cuales tenemos diversos ti-
pos según el objetivo de nuestro robot y la cantidad de dinero que poseamos.
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 43
44
✔
TEST DE AUTOEVALUACIÓN
1 ¿Cuál es nuestra definición de robot?
2 ¿Qué clasificaciones encontramos de
los diferentes tipos de robots?
3 ¿Cuáles son las unidades que presen-
ta un robot?
4 Compare las ventajas y desventajas del
uso de un kit de robótica o el desarrollo
desde cero del procesamiento del robot.
5 Si desarrollamos la unidad de procesa-
miento por nuestros propios medios,
¿qué dispositivos podemos utilizar?
ACTIVIDADES
6 ¿Qué es un sensor? ¿Cuál es la diferen-
cia entre sensores activos y pasivos?
7 ¿Cuáles son los tipos de sensores con
los que podemos contar en la elabora-
ción de nuestro robot?
8 ¿Qué ventajas y desventajas presenta
el uso de video como entrada de datos
de un robot?
9 ¿A qué llamamos actuadores?
10¿Qué tipos de motores encontramos
en el mercado?
01_ROBOTICA.qxd 24/10/2007 02:02 p.m. PÆgina 44