Las Fuentes de Alimentación
129
Las Fuentes de Alimentación Serie Lecciones (Lección 3) Introducción. El motivo de estas lecciones no pretenden sentar las bases de los conocimientos sobre electrónica analógica o digital, sin embargo antes debemos revisar los conocimientos de la electrónica analógica, si el lector considera que sus conocimientos son suficientes, espero sepa disculpar este preámbulo. No obstante, si pueden aclarar algunos conceptos puntuales, que por cualquier motivo no se hayan retenido en su momento, si todo este trabajo lograra hacer entender un sólo concepto en alguno de los visitantes, ya me daría por satisfecho. De todos modos, GRACIAS, por anticipado. He de aclarar que, una fuente de alimentación estabilizada, puede construirse de dos modos genéricos, paralelo o serie. En este tutorial nos ocuparemos de fuentes de alimentación serie. Para empezar se revisarán los puntos más importantes a tener en cuenta para construir una fuente de alimentación estabilizada, con unas características adecuadas para alimentar un circuito electrónico con especificaciones digitales. El diseño de fuentes de alimentación estabilizadas mediante reguladores integrados monolíticos (reguladores fijos), resulta sumamente fácil. Concretamente para 1A (amperio) de salida, en el comercio con encapsulado TO- 220, se dispone de los más populares en las siguientes tensiones estándar de salida: TABLA1 Tipo 1A positivo Tensión/Salida UA7805 5 UA7806 6
Transcript of Las Fuentes de Alimentación
Las Fuentes de Alimentación Serie Lecciones (Lección 3)
Introducción.
El motivo de estas lecciones no pretenden sentar las bases de los conocimientos sobre electrónica analógica o digital, sin embargo antes debemos revisar los conocimientos de la electrónica analógica, si el lector considera que sus conocimientos son suficientes, espero sepa disculpar este preámbulo. No obstante, si pueden aclarar algunos conceptos puntuales, que por cualquier motivo no se hayan retenido en su momento, si todo este trabajo lograra hacer entender un sólo concepto en alguno de los visitantes, ya me daría por satisfecho. De todos modos, GRACIAS, por anticipado.
He de aclarar que, una fuente de alimentación estabilizada, puede construirse de dos modos genéricos, paralelo o serie. En este tutorial nos ocuparemos de fuentes de alimentación serie. Para empezar se revisarán los puntos más importantes a tener en cuenta para construir una fuente de alimentación estabilizada, con unas características adecuadas para alimentar un circuito electrónico con especificaciones digitales.
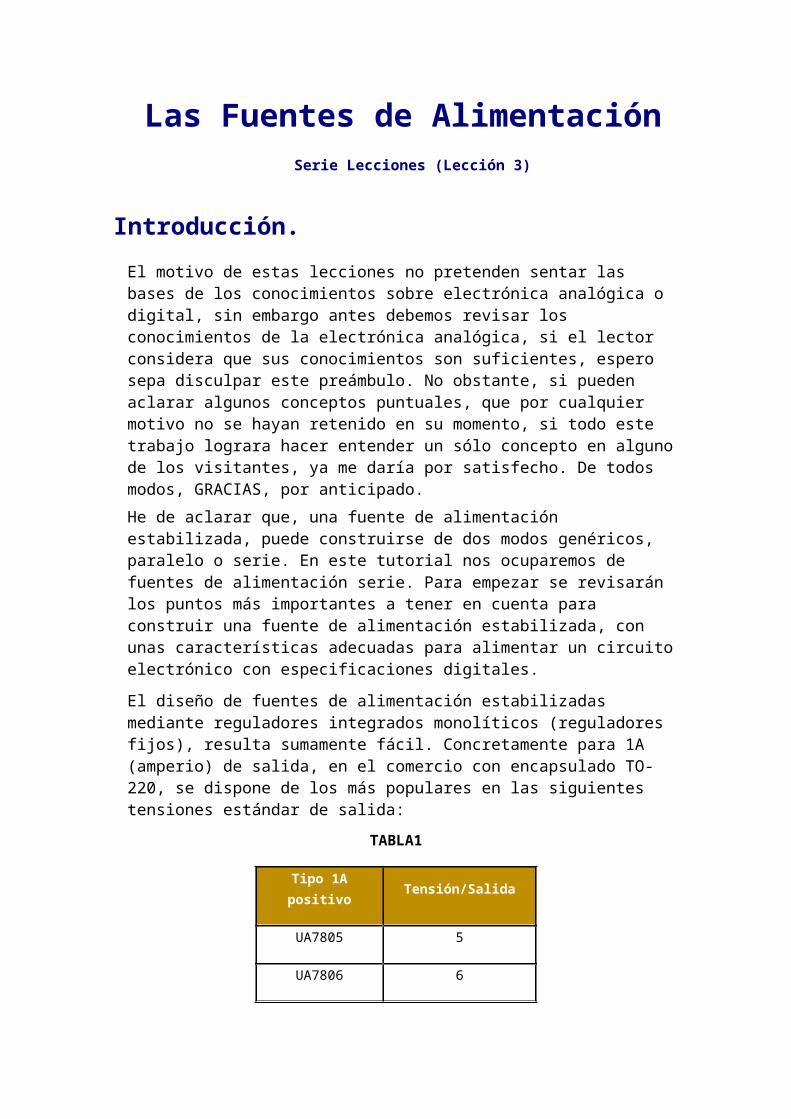
El diseño de fuentes de alimentación estabilizadas mediante reguladores integrados monolíticos (reguladores fijos), resulta sumamente fácil. Concretamente para 1A (amperio) de salida, en el comercio con encapsulado TO-220, se dispone de los más populares en las siguientes tensiones estándar de salida:
TABLA1
Tipo 1A positivo Tensión/Salida
UA7805 5
UA7806 6
UA7808 8
UA7809 9
UA7812 12
UA7915 15
UA7818 18
UA7824 24
UA7830 30
UA79XX Versión negativo =
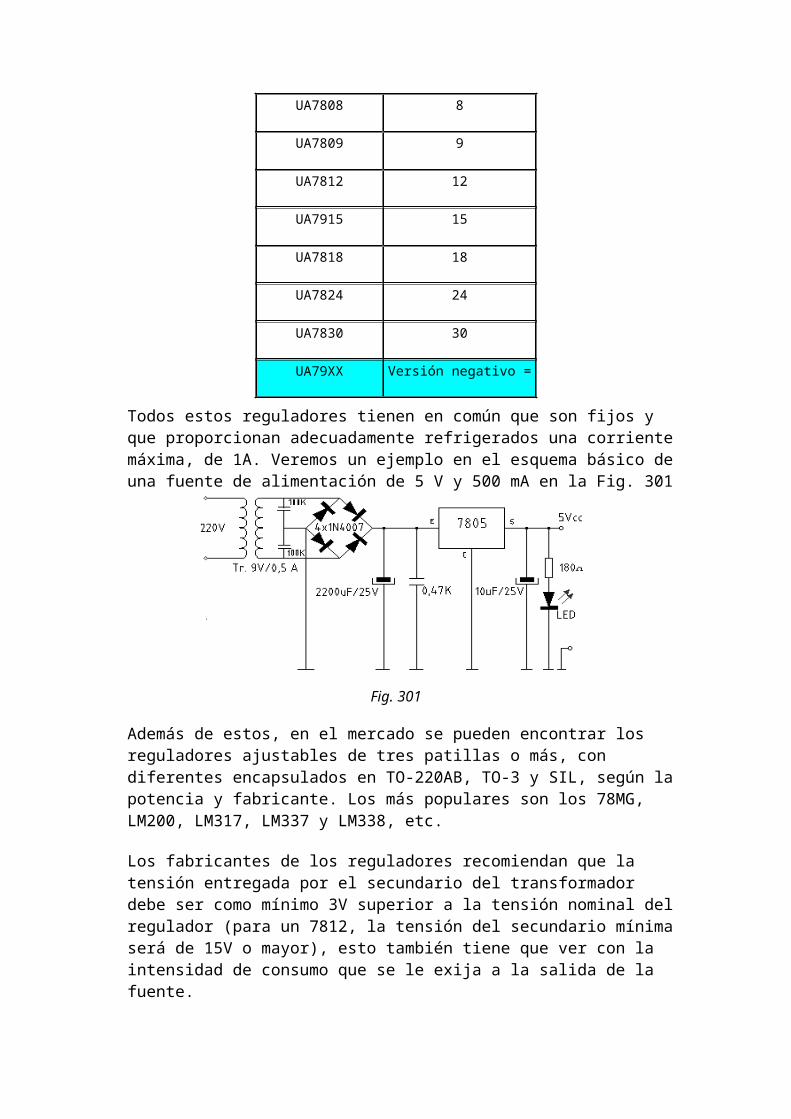
Todos estos reguladores tienen en común que son fijos y que proporcionan adecuadamente refrigerados una corriente máxima, de 1A. Veremos un ejemplo en el esquema básico de una fuente de alimentación de 5 V y 500 mA en la Fig. 301
Fig. 301
Además de estos, en el mercado se pueden encontrar los reguladores ajustables de tres patillas o más, con diferentes encapsulados en TO-220AB, TO-3 y SIL, según la potencia y fabricante. Los más populares son los 78MG, LM200, LM317, LM337 y LM338, etc.
Los fabricantes de los reguladores recomiendan que la tensión entregada por el secundario del transformador debe ser como mínimo 3V superior a la tensión nominal del regulador (para un 7812, la tensión del secundario mínima será de 15V o mayor), esto también tiene que ver con la intensidad de consumo que se le exija a la salida de la fuente.
El Transformador.
El transformador para una alimentación estabilizada debe ser, un transformador separador, esto quiere decir, que ha de disponer por seguridad, de dos devanados separados galvánicamente (eléctricamente), no es conveniente utilizar los llamados auto-transformadores los cuales como se sabe están construidos por una única bobina o devanado, el cual está provisto de diferentes tomas para obtener varias tensiones de salida, la verdad es que este tipo de 'transfo' actualmente no se ve muy a menudo.
Dependiendo de la aplicación a la que se destine la fuente de energía, deben tenerse en cuenta unos puntos concretos a la hora de decidir las características del transformador. La tensión en vacío del secundario debe multiplicarse por la raíz cuadrada de dos (√
1'42). En cuanto a la intensidad haremos hincapié en la corriente que se le exigirá a la salida, es decir, si necesitamos 3A de consumo y el factor de tiempo, esto quiere decir, si el consumo va a ser continuado o tan solo es un consumo máximo esporádico, como punto medio, es buena idea aplicar el mismo criterio del factor raíz cuadrada de dos, lo que indica una intensidad sobre 4A.
Hay dos tipos de transformador, los de armadura F o E-I y los toroidales O, estos últimos tienen un mejor rendimiento, no obstante esto no es determinante, por otra
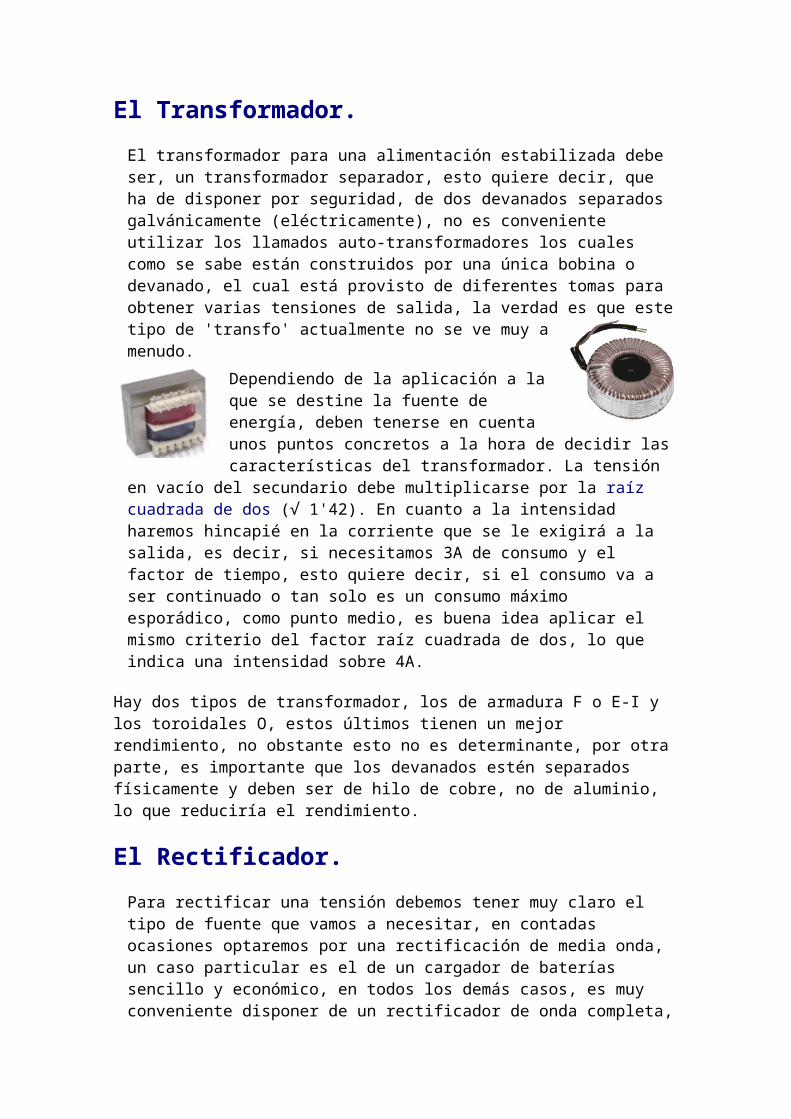
parte, es importante que los devanados estén separados físicamente y deben ser de hilo de cobre, no de aluminio, lo que reduciría el rendimiento.
El Rectificador.
Para rectificar una tensión debemos tener muy claro el tipo de fuente que vamos a necesitar, en contadas ocasiones optaremos por una rectificación de media onda, un caso particular es el de un cargador de baterías sencillo y económico, en todos los demás casos, es muy conveniente disponer de un rectificador de onda completa, para minimizar el rizado. Los diodos encargados de esta función han de poder disipar la potencia máxima exigible además de un margen de seguridad. También están los puentes rectificadores que suelen tener parte de la cápsula en metálico para su adecuada refrigeración.
En algunos casos los rectificadores están provistos de un disipador de calor adecuado a la potencia de trabajo, de todas formas, se debe tener en cuenta este factor. La tensión nominal del rectificador debe tener así mismo un margen para no verse afectado por los picos habituales de la tensión de red, en resumidas cuentas y sin entrar en detalles de cálculos, para una tensión de secundario simple de 40V, debemos usar un diodo de 80V como mínimo, en el caso de tener un secundario doble de 40V de tensión cada uno, la tensión del rectificador debe ser de 200V y la potencia es algo más simple de calcular, ya que se reduce a la tensión por la intensidad y aplicaremos un margen de 10 a 30 Watios por encima de lo calculado, como margen. En algún caso debe vigilarse la tensión de recubrimiento, pero eso es en caso muy concretos.
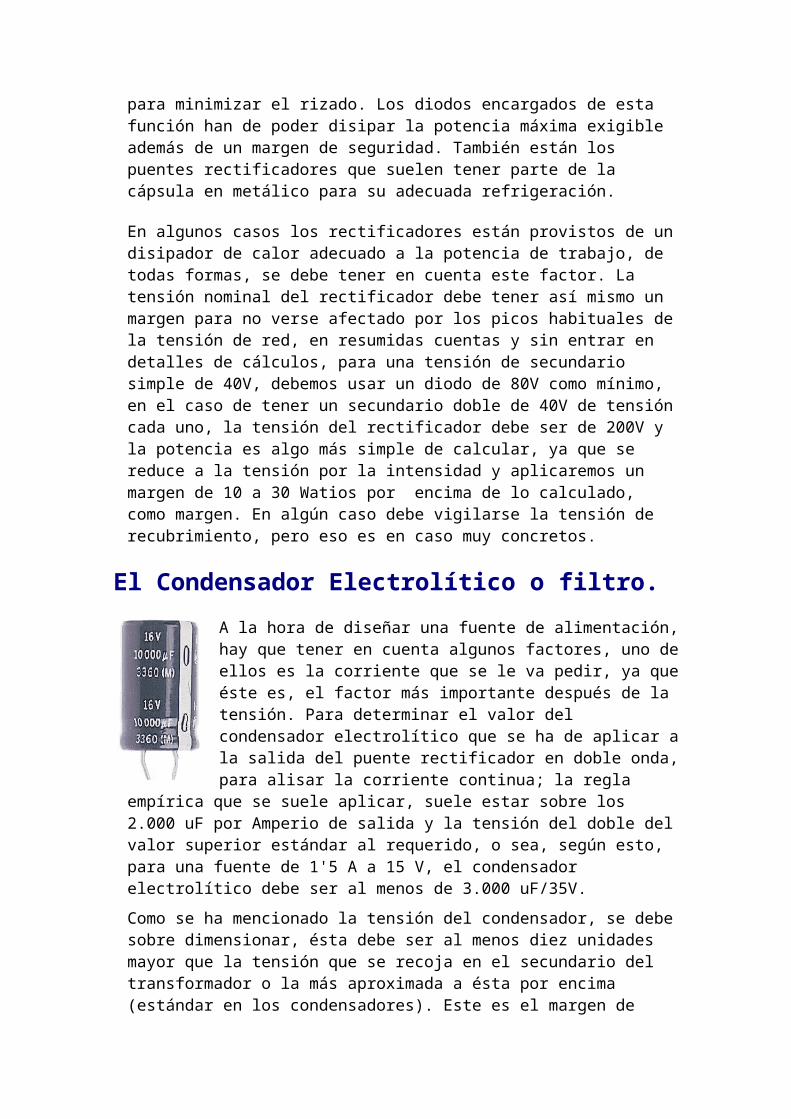
El Condensador Electrolítico o filtro.
A la hora de diseñar una fuente de alimentación, hay que tener en cuenta algunos factores, uno de ellos es la corriente que se le va pedir, ya que éste es, el factor más importante después de la tensión. Para determinar el valor del condensador electrolítico que se ha de aplicar a la salida del puente rectificador en doble onda, para alisar la corriente continua; la regla empírica que se suele aplicar, suele estar sobre los 2.000 uF por Amperio de salida y la tensión del doble del valor superior estándar al requerido, o sea, según esto, para una fuente de 1'5 A a 15 V, el condensador electrolítico debe ser al menos de 3.000
uF/35V.
Como se ha mencionado la tensión del condensador, se debe sobre dimensionar, ésta debe ser al menos diez unidades mayor que la tensión que se recoja en el secundario del transformador o la más aproximada a ésta por encima (estándar en los condensadores). Este es el margen de seguridad exigible, ya que en muchas ocasiones los valores de tensión a los que se exponen no sólo depende de la tensión nominal, también hay tensiones parásitas que pueden perforar el dieléctrico, en caso de ser muy ajustada la tensión de trabajo y máxime si estamos tratando con una fuente balanceada, este es otro caso.
El Regulador.
En el caso de necesitar corrientes superiores a 1A, como ya se ha dicho, pueden utilizarse los reguladores de la serie 78HXX, LM3XX, en cápsula TO-3, capaces de suministrar 5A, no muy habituales. Otro problema reside en que sólo se disponen de 5V, 12V y 15V, que en la mayoría de los casos puede ser suficiente.
En el supuesto de necesitar una tensión regulable (ajustable) desde 1'7V a 24V. El regulador a utilizar podría ser uno de la serie LM317, LM350 o LM338, la diferencia con los anteriores es que el terminal común, en lugar de estar conectado a masa, es del tipo flotante y por lo tanto esto permite ajustarle en tensión. Estos con los encapsulados típicos, TO-220 o TO-3.
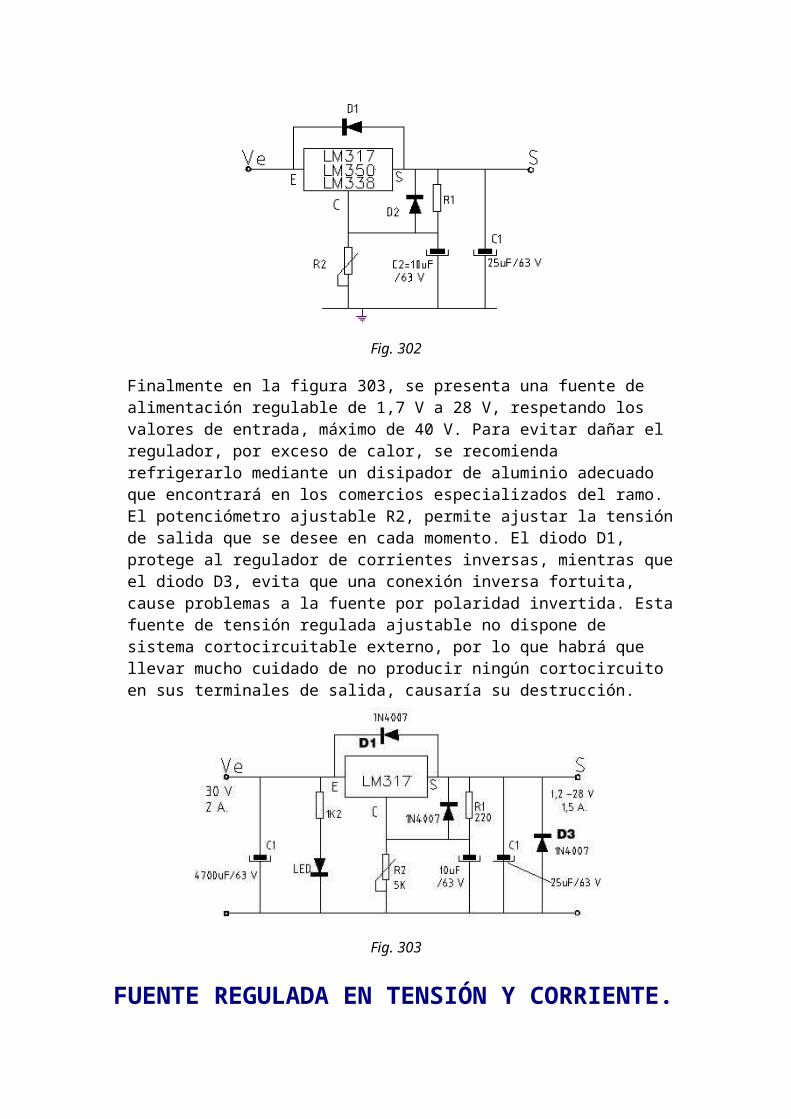
En la figura 302, se muestra el esquema básico mejorado. Los condensadores C1 y C2, se emplean con el fin de eliminar tensiones alternas residuales y mejorar el rizado de la rectificación, en cuanto a los diodos D1 y D2, sirven para la seguridad del regulador, contra tensiones inversas y evitar las tensiones parásitas o transitorios que lo destruyan. Es muy recomendable, siempre insistiré, se deben poner los mencionados diodos.
Fig. 302
Finalmente en la figura 303, se presenta una fuente de alimentación regulable de 1,7 V a 28 V, respetando los valores de entrada, máximo de 40 V. Para evitar dañar el regulador, por exceso de calor, se recomienda refrigerarlo mediante un disipador de aluminio adecuado que encontrará en los comercios especializados del ramo. El potenciómetro ajustable R2, permite ajustar la tensión de salida que se desee en cada momento. El diodo D1, protege al regulador de corrientes inversas, mientras que el diodo D3, evita que una conexión inversa fortuita, cause problemas a la fuente por

polaridad invertida. Esta fuente de tensión regulada ajustable no dispone de sistema cortocircuitable externo, por lo que habrá que llevar mucho cuidado de no producir ningún cortocircuito en sus terminales de salida, causaría su destrucción.
Fig. 303
FUENTE REGULADA EN TENSIÓN Y CORRIENTE.
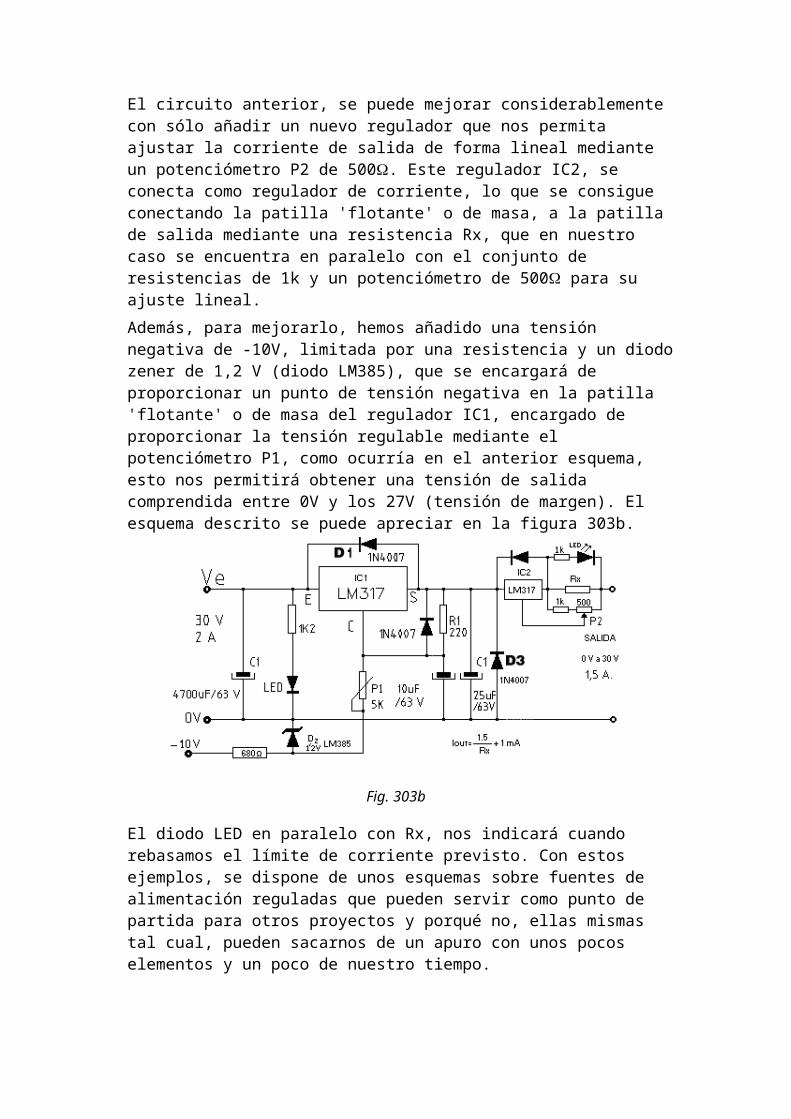
El circuito anterior, se puede mejorar considerablemente con sólo añadir un nuevo regulador que nos permita ajustar la corriente de salida de forma lineal mediante un potenciómetro P2 de 500. Este regulador IC2, se conecta como regulador de corriente, lo que se consigue conectando la patilla 'flotante' o de masa, a la patilla de salida mediante una resistencia Rx, que en nuestro caso se encuentra en paralelo con el conjunto de resistencias de 1k y un potenciómetro de 500 para su ajuste lineal.
Además, para mejorarlo, hemos añadido una tensión negativa de -10V, limitada por una resistencia y un diodo zener de 1,2 V (diodo LM385), que se encargará de proporcionar un punto de tensión negativa en la patilla 'flotante' o de masa del regulador IC1, encargado de proporcionar la tensión regulable mediante el potenciómetro P1, como ocurría en el anterior esquema, esto nos permitirá obtener una tensión de salida comprendida entre 0V y los 27V (tensión de margen). El esquema descrito se puede apreciar en la figura 303b.
Fig. 303b
El diodo LED en paralelo con Rx, nos indicará cuando rebasamos el límite de corriente previsto. Con estos ejemplos, se dispone de unos esquemas sobre fuentes de alimentación reguladas que pueden servir como punto de partida para otros proyectos y porqué no, ellas mismas tal cual, pueden sacarnos de un apuro con unos pocos elementos y un poco de nuestro tiempo.
EL CIRCUITO PRÁCTICO.
Alguien puede decidirse por trazar las pista por el sistema de rombos, cubos y rectángulos, por que le lleva menos trabajo, aunque esto no es importante, siempre que las pistas admitan la corriente máxima. Esto, consiste en trazar unas líneas entre lo que serán los terminales de los diferentes componentes que, se habrán dispuesto en posiciones adecuadas separando de esta manera los trazos que representan las pistas, dichas líneas, serán el cobre que se comerá la solución ácida que se emplee para su realización.
En la práctica, la placa de circuito impreso o PCB, con el puente rectificador y el condensador electrolítico, se pueden apreciar en la figura 304, cuyo esquema esta en la fig. 303. El regulador LM317, se debe montar directamente sobre el refrigerador, aplicándole silicona de contacto y por seguridad un separador aislante y conectar al PCB mediante hilo de 2 m/m de sección, las pistas de conexión generales se representan con mayor espesor, se ve claramente, debe ser de unos 3 m/m de ancho, para soportan más intensidad, las salidas para el potenciómetro que estará en el panel, se harán con hilo de conexión de 1.25 m/m de sección. El led, deberá instalarse también en el panel.
Fig. 304
Los trazos negros, representan las pistas del circuito impreso y son la únicas de la placa pcb. El transformador adecuado, ha de entregar los 22V y 1'5A, como se ve éste, está sobre dimensionado por seguridad y un segundo secundario de 7V 0'5A.
Otro caso.
En ocasiones se necesita una fuente de alimentación regulada con varias tensiones, siendo lo más habitual encontrar en el comercio las tensiones de +12V y -12V. Ahora repasaremos el esquema de una fuente de estas características que nos proporcione una corriente de 1A en cada salida, se puede obtener mas amperios fácilmente. Utilizaremos dos partes del esquema de la fig. 303. El transformador necesario, ha de disponer de dos secundarios de 15V y 1,5A, cada uno, como se verá, estos están sobre dimensionados por seguridad.
Los puentes rectificadores dependiendo de la corriente, deben ser del tipo metálico con terminales faston, el terminal positivo tiene un resalte en la caja a parte de estar marcado al lado de éste. Los terminales con una (S) deben conectarse cada uno, mediante hilo de sección de 2 m/m a cada terminal del mismo secundario. El otro rectificador, se conectará de igual modo al otro secundario del 'transfo', con esto disponemos de las dos tensiones más o menos iguales a las necesarias en las respectivas salidas de ambos rectificadores.
Por otra parte, debemos preparar un dibujo de las pistas que, se ajuste al esquema adjunto, sobre una placa de fibra de vidrio de manera que nos pueda dar mejores resultados y sea más fiable. Cada uno puede trazar las pistas como mejor le parezca, pero, debe guardar ciertas reglas, una de las más importantes es la separación entre pistas no debe ser inferior a 2 m/m en el peor de los casos, otra es el espesor, debe observarse que las pista con mayor consumo, han de soportar más paso de corriente y deben ser de mayor espesor unos 2 o 3 m/m será suficiente para el ej. y procurar trazos lo más cortos posible y las esquinas sin picos.
Necesitamos tres condensadores electrolíticos (son los que tienen polaridad), con una capacidad en este caso concreto de 2.000 uf/63V, para evitar en lo posible el rizado de alterna, se utiliza esta alta capacidad para más seguridad, cuando se exija el máximo de corriente. La tensión de +5V, la obtendremos del puente que representa el punto más positivo en el montaje, como se aprecia en el esquema general.
Los reguladores que utilizaremos en esta ocasión, son de 5V y 12V, con las referencias 7805, 7812 y 7912 el encapsulado, del tipo TO220AB, de esta manera se pueden atornillar sobre disipadores diferentes. Atención cada uno por separado, salvo que se disponga entre cada cápsula y el disipador un separador aislante, en este caso puede usarse un disipador único, ya que el terminal central de los reguladores 7812 y 7912, es de signo de tensión diferente y se estropearían inmediatamente si no se respetan estas reglas.
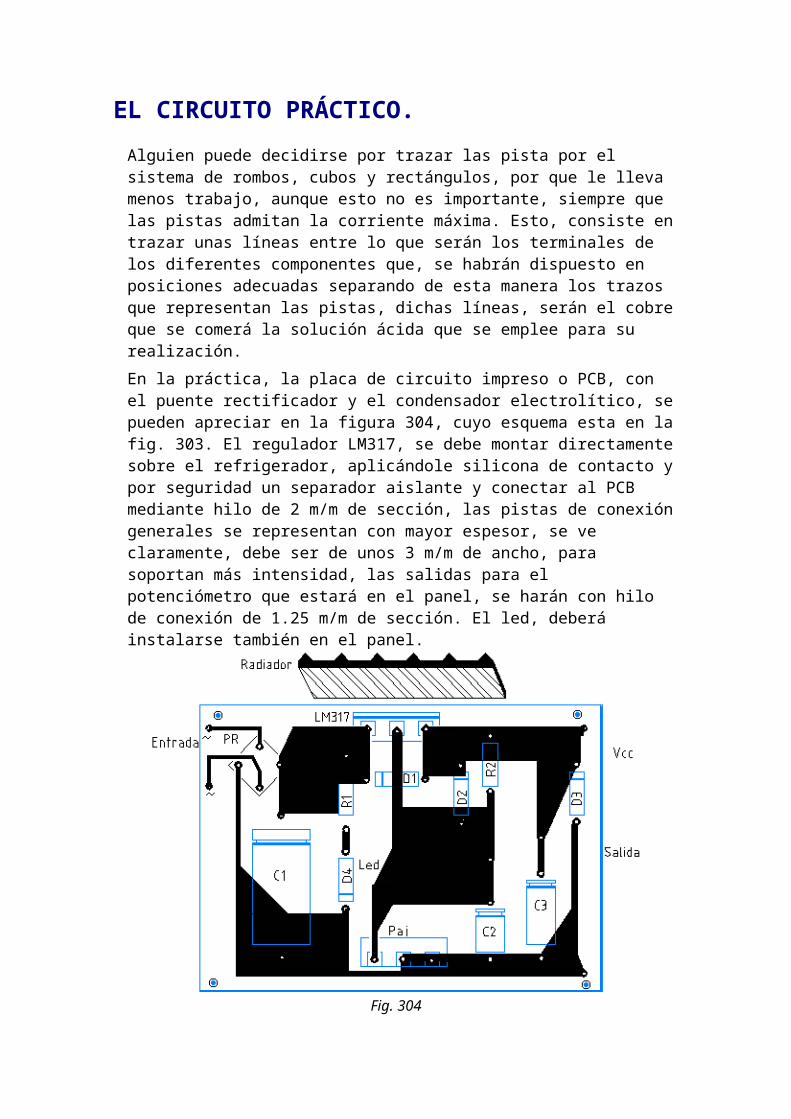
Fig. 305
La imagen anterior consta de dos partes, en la superior, el fondo negro, representa el cobre de la placa de fibra de vidrio o baquelita en su caso, las líneas blancas son las separaciones entre componentes, las cuales, es lo que el ácido 'quitará', los trazos de color son las siluetas de los componentes y los cubos blancos son los 'pads', para las patillas de los componentes, los cuadrados de las esquinas, son para los pasadores de los tornillos que sujetaran la placa al chasis. En la parte inferior se presenta el negativo, visto por la parte de las pistas.
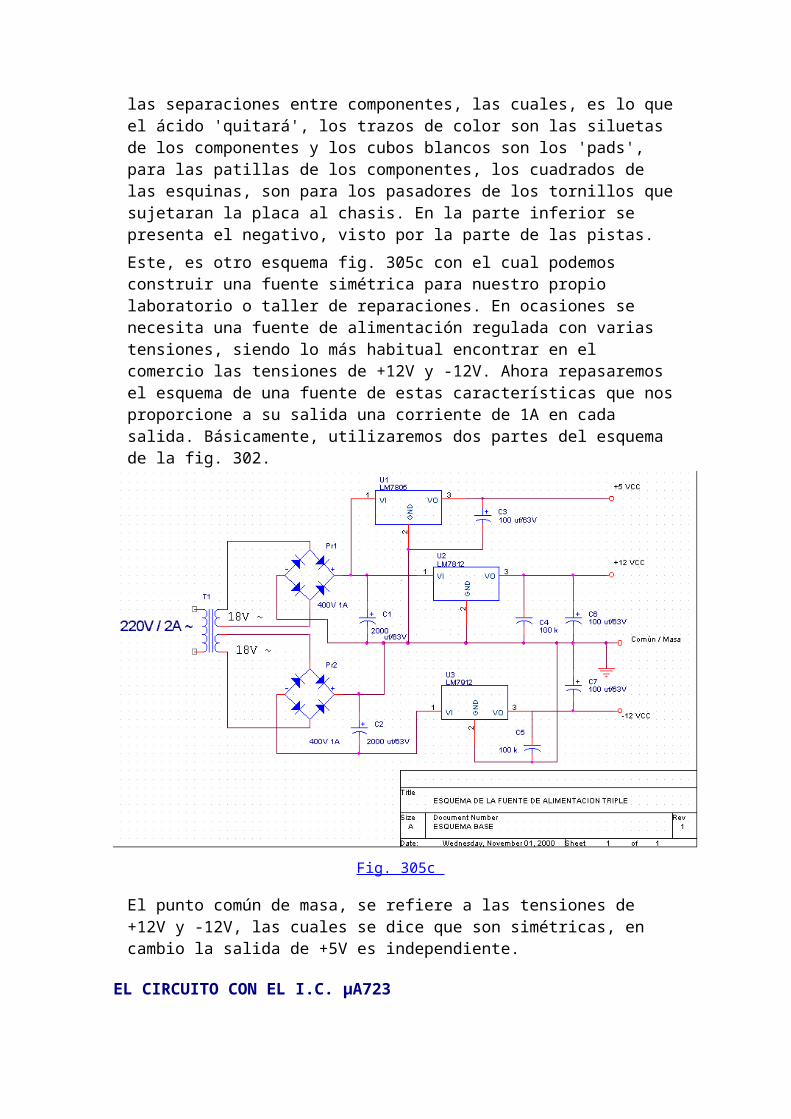
Este, es otro esquema fig. 305c con el cual podemos construir una fuente simétrica para nuestro propio laboratorio o taller de reparaciones. En ocasiones se necesita una fuente de alimentación regulada con varias tensiones, siendo lo más habitual encontrar en el comercio las tensiones de +12V y -12V. Ahora repasaremos el esquema de una fuente de estas características que nos proporcione a su salida una corriente de 1A en cada salida. Básicamente, utilizaremos dos partes del esquema de la fig. 302.
Fig. 305c
El punto común de masa, se refiere a las tensiones de +12V y -12V, las cuales se dice que son simétricas, en cambio la salida de +5V es independiente.
EL CIRCUITO CON EL I.C. µA723
Un circuito integrado bastante utilizado para realizar fuentes de alimentación ajustables, es el popular µA723PC encapsulado DIL de 14 patillas, el cual admite una elevada tensión de entrada de 40V que dopándola puede llegar sobre los 120V dando una salida ajustable entre 2V y 37V a 150 mA, pero en algunos casos como en fuentes para transmisión, se vuelve bastante inestable, por lo que respecta a mi experiencia.
En ciertas revistas especializadas del sector, se pueden encontrar esquemas mucho más elaborados a los que se les puede exigir mayores prestaciones, tales como que, la salida parta de 0V y no de los 1' 7V, o que sea cortocircuitable, ajustable en corriente de salida, entre otras.
En la siguiente figura 306, se muestra el esquema básico de la alimentación propuesta con un LM723D y debajo el circuito de aplicación, visto por la cara de los componentes porque es muy sencillo, considero que no requiere mayores descripciones.
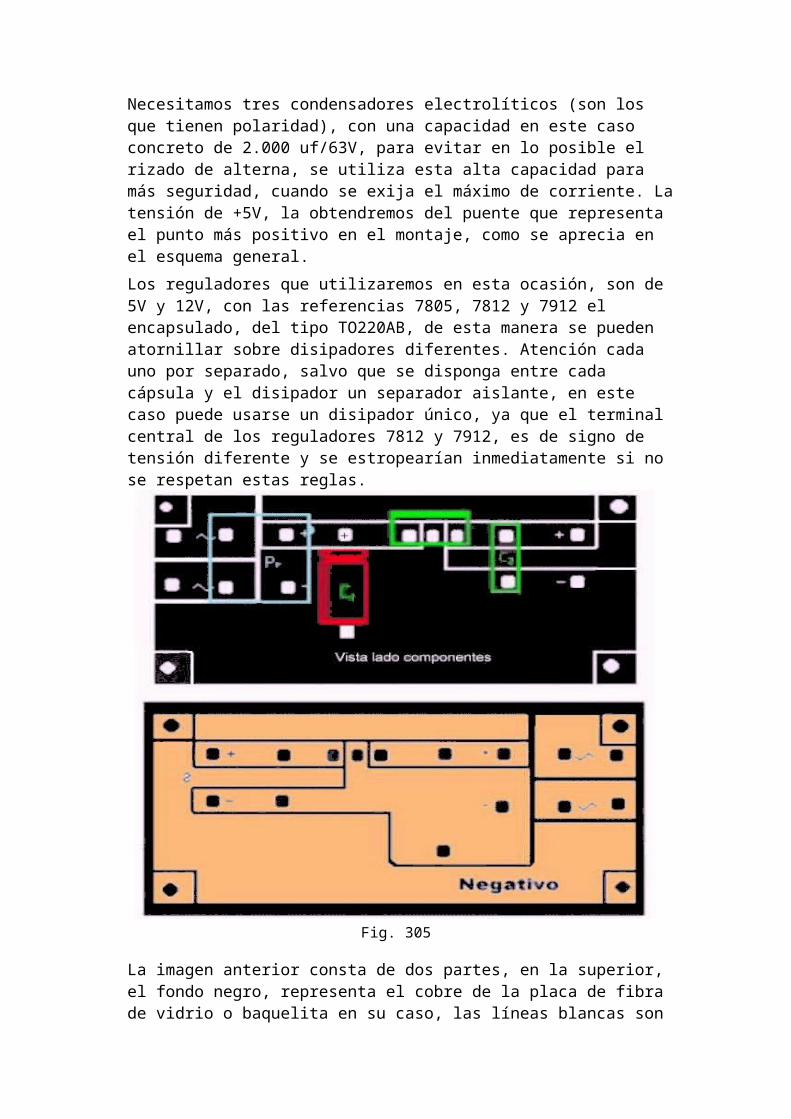
Fig. 306
Nota.
En ciertas ocasiones, se presentan proyectos que por sus exigencias no son los clásicos, en el caso de exigir una tensión de salida mayor de 40 Voltios, al proyectar una fuente de energía de esas características, el técnico encuentra problemas de temperatura por todas partes, me explico, aunque ponga un refrigerador a los circuitos integrados (7824, LM317 o LM723), observa que toman una temperatura excesiva que no es fácil eliminar.
En el esquema, el anterior (ver fig. 306) puede servir para el caso, básicamente es el mismo, salvo que, debe cuidarse la tensión que alimenta al circuito integrado, el cual no admite tensiones mayores de los 40 Voltios según se desprende de las hojas de características del fabricante. Esto se resuelve con una resistencia que reduzca la tensión y un diodo zener con un condensador mínimo que estabilice dicha tensión. Con esta solución, se pueden regular tensiones de hasta 125 Voltios con problemas relativos que no se resuelvan con ingenio.
Algunos Casos Especiales.
En algún caso, puede ocurrir que alguien que lea este manual y después de considerarlo se deprima, debido a que no tiene forma de hallar en el comercio o en su ciudad, los reguladores que se describen más arriba. Entonces, qué podemos hacer, voy a pensar que por lo menos si pueden localizar transistores de cierta potencia, como por ejemplo los 2N3055, no importa de que fabricante, este transistor, los fabricantes normalmente dicen que, bien refrigerados pueden dar 15A, yo quiero ser más realista y lo voy a dejar en 3 A a 45V, eso sí, requiere una corriente de base bastante apreciable, ya que su (beta) es de tan solo 20.
Veamos, cómo podemos montar una fuente regulada de alimentación ajustable entre 0V y 30V con una salida de 0A a 3A.
Vamos a centrarnos en lo que es el esquema y los componentes que vamos a utilizar, dejando a un lado no menos importante elementos como el transformador, la caja donde ubicaremos el circuito impreso y los condensadores electrolíticos y también los refrigeradores, todas las piezas más grandes y de mayor peso del montaje.
Primero, debemos pensar que vamos a tratar con corrientes bastante importantes sobre los 3 o más amperios junto a unas tensiones relativamente bajas, sobre un máximo de 50V, fríamente estamos hablando de 150 W (vatios), una apreciable potencia a tener en cuenta.
Las pistas del circuito impreso deben soportar corrientes elevadas y por lo tanto tienen que tener cierto espesor, sobre 3 mm. Por otro lado los transistores que vamos a utilizar los 2N3055, tiene una cápsula metálica TO-3, los diodos rectificadores, deben soportar corrientes de 5A a 8A para tener cierta seguridad (BYX38 o similar) y si es posible refrigerarlos también (esto por su cuerpo, es más problemático), veremos cómo solucionarlo.
En cuanto a los transistores, vamos a utilizar un montaje en Darlington, este tipo de montaje tiene la ventaja de multiplicar su rendimiento según la (beta o ganancia), lo que nos dará un mejor aprovechamiento de las características intrínsecas del transistor por sí mismo.
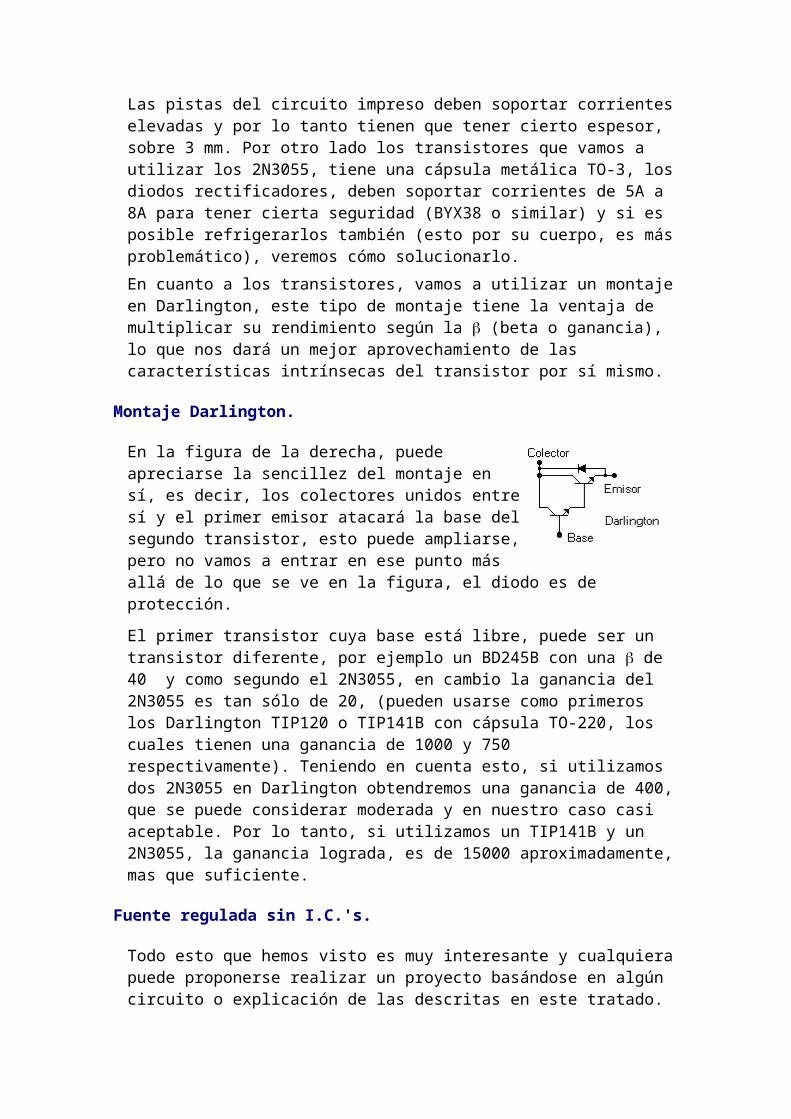
Montaje Darlington.
En la figura de la derecha, puede apreciarse la sencillez del montaje en sí, es decir, los colectores unidos entre sí y el primer emisor atacará la base del segundo transistor, esto puede ampliarse, pero no vamos a entrar en ese punto más allá de lo que se ve en la figura, el diodo es de protección.
El primer transistor cuya base está libre, puede ser un transistor diferente, por ejemplo un BD245B con una de 40 y como segundo el

2N3055, en cambio la ganancia del 2N3055 es tan sólo de 20, (pueden usarse como primeros los Darlington TIP120 o TIP141B con cápsula TO-220, los cuales tienen una ganancia de 1000 y 750 respectivamente). Teniendo en cuenta esto, si utilizamos dos 2N3055 en Darlington obtendremos una ganancia de 400, que se puede considerar moderada y en nuestro caso casi aceptable. Por lo tanto, si utilizamos un TIP141B y un 2N3055, la ganancia lograda, es de 15000 aproximadamente, mas que suficiente.
Fuente regulada sin I.C.'s.
Todo esto que hemos visto es muy interesante y cualquiera puede proponerse realizar un proyecto basándose en algún circuito o explicación de las descritas en este tratado. Sin lugar a dudas que, siguiendo los pasos descritos y revisando bien lo que se hace, puede y debe lograrse el éxito en la realización y posterior puesta a punto.
Sin embargo, cuando un aficionado o incluso un técnico, debido a situaciones en las que nadie quiere entrar, por las cuales no dispone de un mínimo de dispositivos o dicho de otro modo, cuando no se dispone de circuitos integrados con los que realizar una simple fuente de tensión regulada, disponiendo tan sólo de unos transistores y me atrevería a decir unos pocos, para esos casos o circunstancias, he pensado (léase, me han pedido), que haga una pequeña descripción de un proyecto que les pueda servir y en eso estamos.
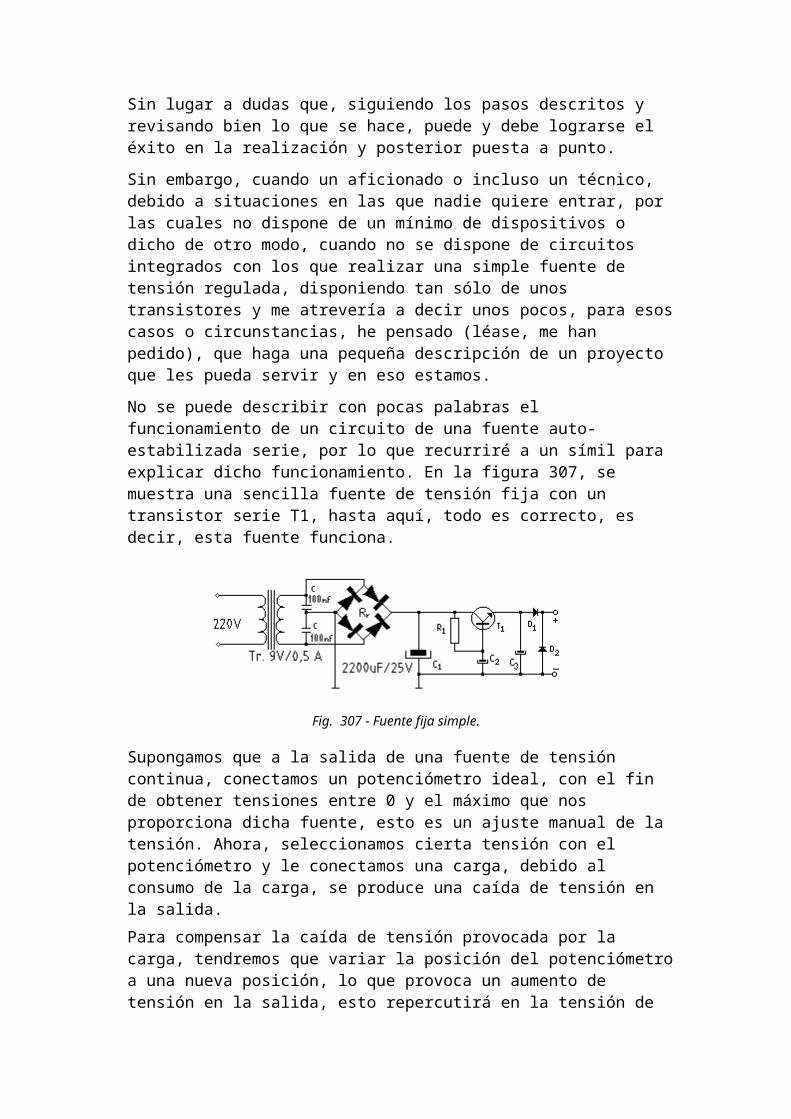
No se puede describir con pocas palabras el funcionamiento de un circuito de una fuente auto-estabilizada serie, por lo que recurriré a un símil para explicar dicho funcionamiento. En la figura 307, se muestra una sencilla fuente de tensión fija con un transistor serie T1, hasta aquí, todo es correcto, es decir, esta fuente funciona.
Fig. 307 - Fuente fija simple.
Supongamos que a la salida de una fuente de tensión continua, conectamos un potenciómetro ideal, con el fin de obtener tensiones entre 0 y el máximo que nos proporciona dicha fuente, esto es un ajuste manual de la tensión. Ahora, seleccionamos cierta tensión con el potenciómetro y le conectamos una carga, debido al consumo de la carga, se produce una caída de tensión en la salida.
Para compensar la caída de tensión provocada por la carga, tendremos que variar la posición del potenciómetro a una nueva posición, lo que provoca un aumento de tensión en la salida, esto repercutirá en la tensión de salida y también en la corriente y talvez se necesite un nuevo ajuste, hasta lograr la tensión deseada, si la nueva posición es correcta, la salida mostrará dicho aumento corrigiendo así la corriente de consumo finalmente.
Sin embargo si variamos la carga o la desconectamos, veremos que la tensión de salida aumenta sin control, por lo tanto, los ajustes mencionados se deben realizar a la

misma velocidad que varía la carga, para estabilizar la tensión de salida. Es fácil de entender y también que, es muy difícil de conseguir de forma manual mantener estable la tensión de salida, por este motivo se utilizan los sistemas electrónicos ideados para hacerlo fácil.
Descripción del circuito regulador.
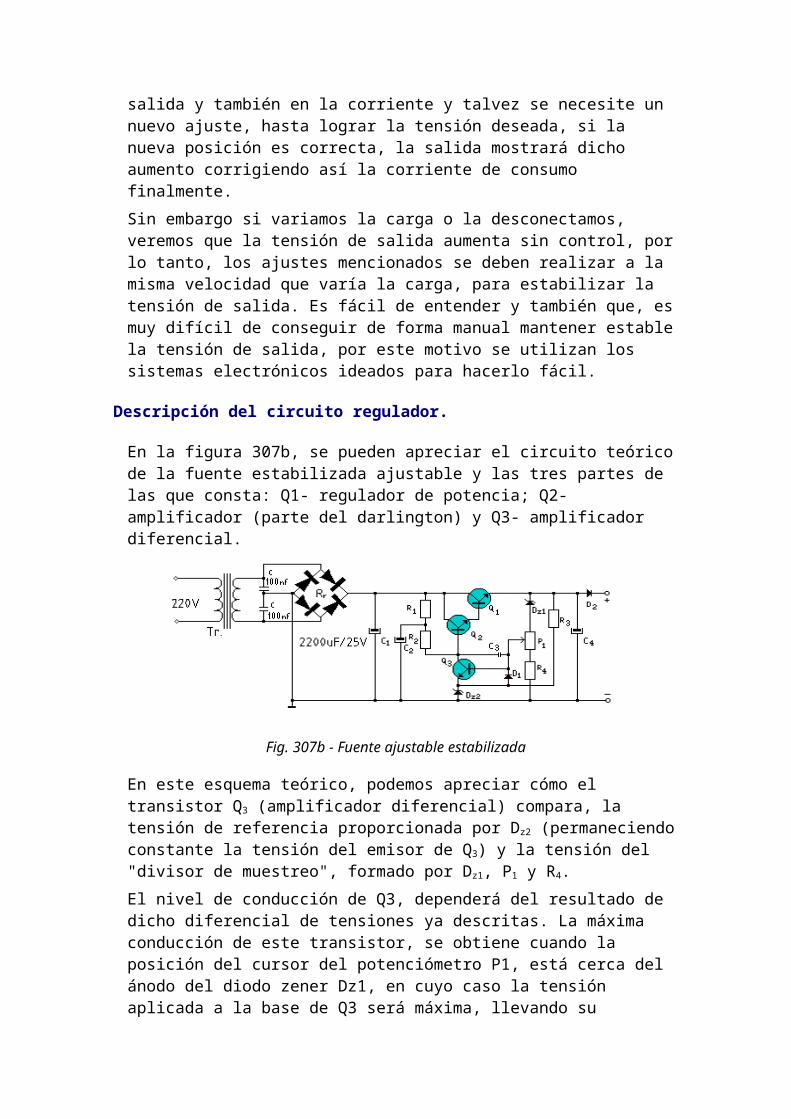
En la figura 307b, se pueden apreciar el circuito teórico de la fuente estabilizada ajustable y las tres partes de las que consta: Q1- regulador de potencia; Q2- amplificador (parte del darlington) y Q3- amplificador diferencial.
Fig. 307b - Fuente ajustable estabilizada
En este esquema teórico, podemos apreciar cómo el transistor Q3 (amplificador diferencial) compara, la tensión de referencia proporcionada por Dz2 (permaneciendo constante la tensión del emisor de Q3) y la tensión del "divisor de muestreo", formado por Dz1, P1 y R4.
El nivel de conducción de Q3, dependerá del resultado de dicho diferencial de tensiones ya descritas. La máxima conducción de este transistor, se obtiene cuando la posición del cursor del potenciómetro P1, está cerca del ánodo del diodo zener Dz1, en cuyo caso la tensión aplicada a la base de Q3 será máxima, llevando su conducción al máximo, lo que conlleva que la tensión en la base de Q2 será mínima y esto proporciona la máxima impedancia (o sea, máxima tensión colector-emisor) de Q1, reduciendo así la tensión de salida al mínimo. Sigamos.
La auto-regulación.
Una forma de reducir el consumo de corriente en un circuito, consiste en reducir su tensión de alimentación de algún modo, esto digamos que, no es muy ortodoxo, ya que una reducción de tensión en P1 produce un cambio de corriente y esto produce una reducción de corriente que hemos de corregir y a éste cambio le sigue otro cambio, de manera que resultaría del todo imposible modificar los cambios con la debida celeridad que se exige. Ahora, veamos cómo podemos lograr lo propuesto de modo automático, es decir, compensando la caída de tensión por un medio electrónico con el que se corrijan y compensen las variaciones que se producen hasta compensar.
Al aplicar una carga a la salida de una fuente, inmediatamente se producirá una caída de tensión, proporcional a la carga que, tiende a reducir la tensión de salida. El divisor de tensión (o de 'muestreo') del circuito, detecta esta caída de tensión, al compararla con la de base de Q3, esto hace que éste reduzca su conducción y aumente la tensión en la base de Q2 a través del partidor formado por R1 y R2, lo que repercute sobre
Q1, reduciendo su impedancia entre colector-emisor, a consecuencia de lo cual aumenta la tensión de salida de forma proporcional para compensar la mencionada caída de tensión producida por la carga.
El tiempo de respuesta ante una variación en la carga es de unos pocos microsegundos, lo que hace inapreciable la variación en la tensión de salida. Esto es en sí, la auto-regulación. Es evidente la similitud entre lo descrito en el párrafo anterior y el símil del potenciómetro mencionado más arriba.
FUENTE CORTOCIRCUITABLE.
Con lo descrito hasta ahora, si a la salida de la fuente de la figura 307b se produce un cortocircuito, la tensión en la salida tiende a 0V y la corriente de paso tiende a infinito (bueno a lo que de el transformador), esto hará que Q1 entre a conducir al máximo, aumentando así su temperatura, que a su vez producirá un incremento de corriente, lo que incrementará la temperatura del mismo produciendo el efecto avalancha y en décimas de segundo alcance su punto de destrucción por alta temperatura, a pesar de la auto-regulación descrita. Veremos cómo evitar este efecto (o 'defecto') de forma sencilla y efectiva.
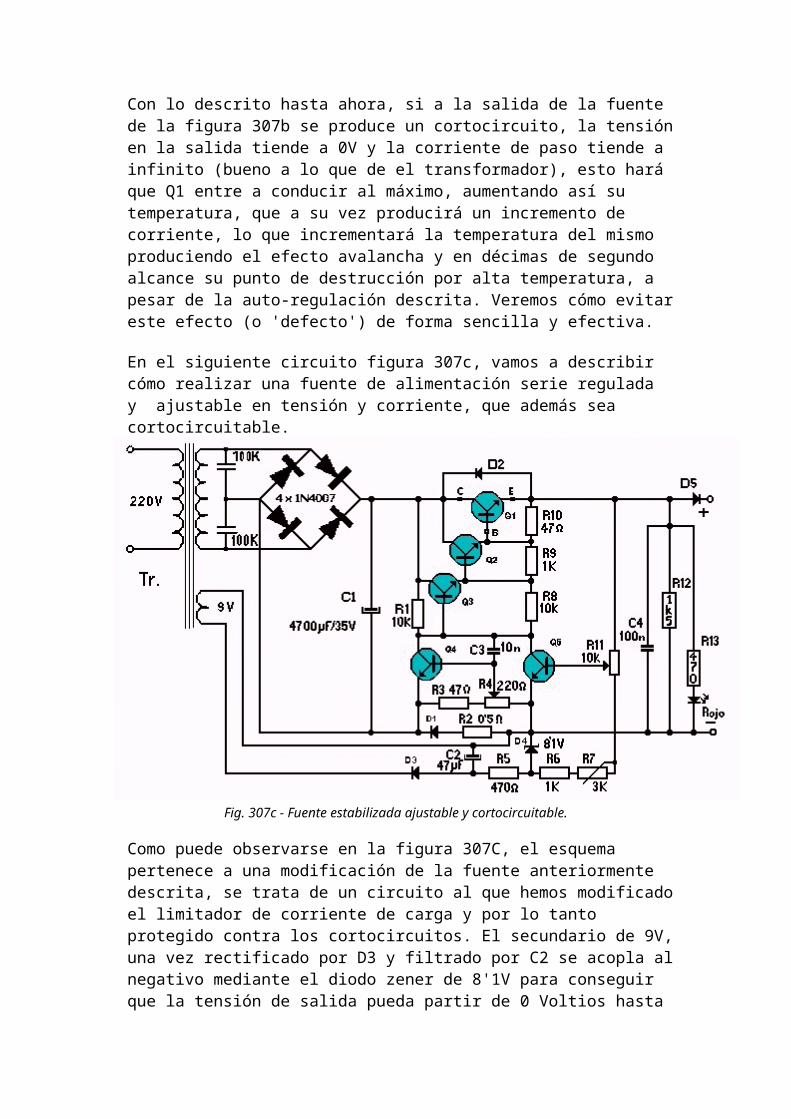
En el siguiente circuito figura 307c, vamos a describir cómo realizar una fuente de alimentación serie regulada y ajustable en tensión y corriente, que además sea cortocircuitable.
Fig. 307c - Fuente estabilizada ajustable y cortocircuitable.
Como puede observarse en la figura 307C, el esquema pertenece a una modificación de la fuente anteriormente descrita, se trata de un circuito al que hemos modificado el limitador de corriente de carga y por lo tanto protegido contra los cortocircuitos. El secundario de 9V, una vez rectificado por D3 y filtrado por C2 se acopla al negativo mediante el diodo zener de 8'1V para conseguir que la tensión de salida pueda partir
de 0 Voltios hasta el máximo previsto por el secundario principal, que puede ser de 12 V hasta cerca de 50V, vigilar las tensiones de los distintos componentes.
Lo descrito para el circuito de la figura 307b, es aplicable al circuito que estamos describiendo, resumiendo, la carga aplicada a la salida, provocará una caída de tensión que acusará la base de Q5 y hará que éste conduzca menos y como consecuencia, la impedancia colector-emisor de Q5 será menor, corrigiendo dicha caída de tensión. El transistor Q4 se encarga del limite de intensidad, drenando la tensión de salida a 0 cuando la corriente de la carga supere el nivel establecido por R4, el diodo D1 permite que el nivel de limitación alcance los 100 mA.
Siempre recomiendo que, los cables de salida, positivo y negativo, no deben ser excesivamente largos (1'5m) y sobre todo pensando que pueden soportar 3 Amperios o más, deben ser de 3 a 4 m/m de sección Ø.
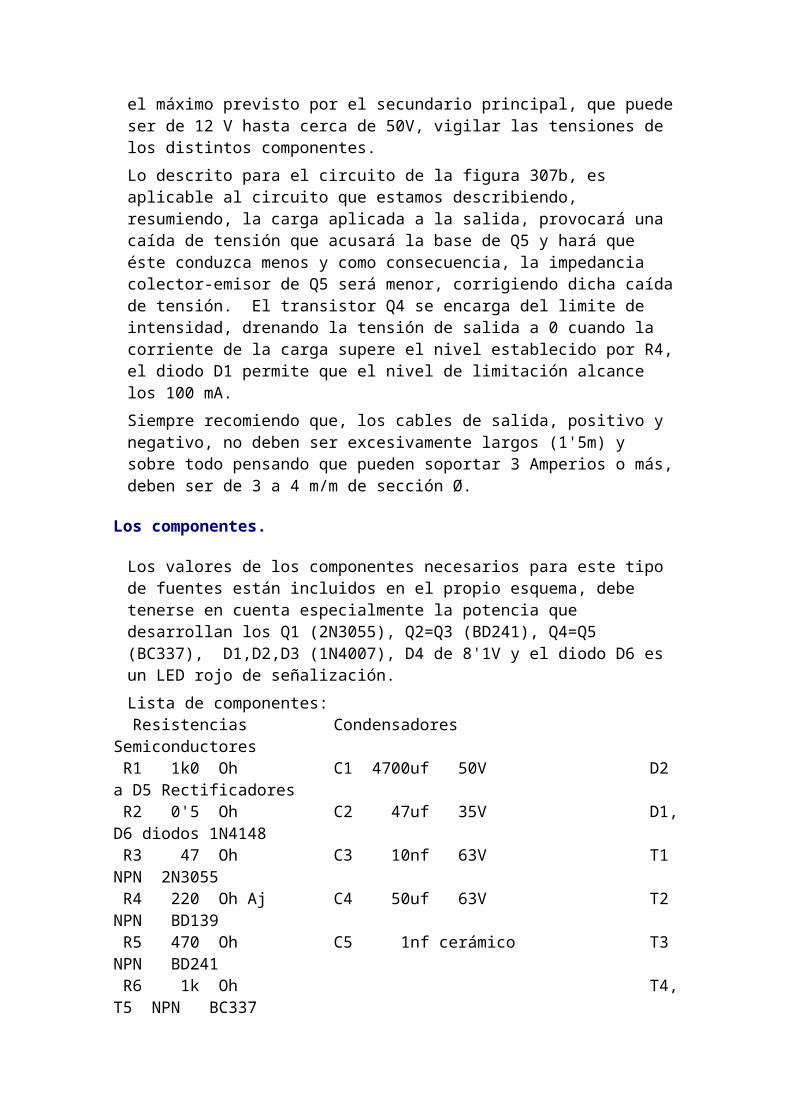
Los componentes.
Los valores de los componentes necesarios para este tipo de fuentes están incluidos en el propio esquema, debe tenerse en cuenta especialmente la potencia que desarrollan los Q1 (2N3055), Q2=Q3 (BD241), Q4=Q5 (BC337), D1,D2,D3 (1N4007), D4 de 8'1V y el diodo D6 es un LED rojo de señalización.
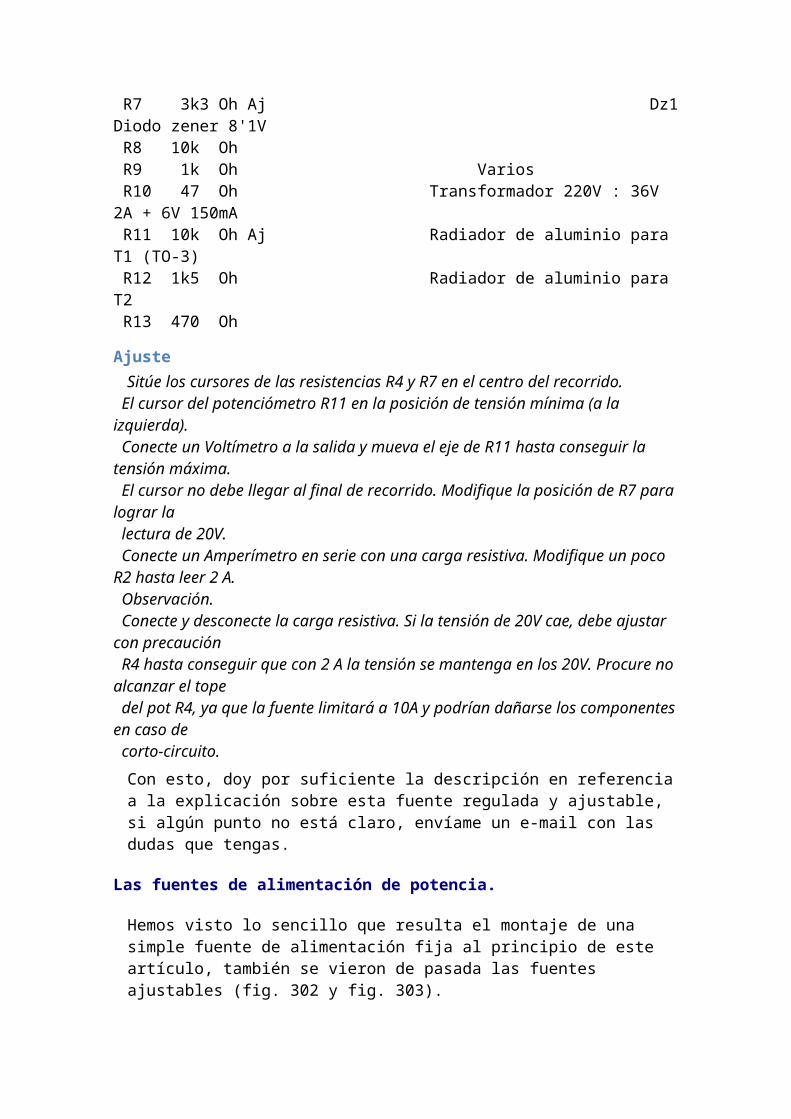
Lista de componentes: Resistencias Condensadores Semiconductores R1 1k0 Oh C1 4700uf 50V D2 a D5 Rectificadores R2 0'5 Oh C2 47uf 35V D1, D6 diodos 1N4148 R3 47 Oh C3 10nf 63V T1 NPN 2N3055 R4 220 Oh Aj C4 50uf 63V T2 NPN BD139 R5 470 Oh C5 1nf cerámico T3 NPN BD241 R6 1k Oh T4, T5 NPN BC337 R7 3k3 Oh Aj Dz1 Diodo zener 8'1V R8 10k Oh R9 1k Oh Varios R10 47 Oh Transformador 220V : 36V 2A + 6V 150mA R11 10k Oh Aj Radiador de aluminio para T1 (TO-3) R12 1k5 Oh Radiador de aluminio para T2 R13 470 Oh
Ajuste Sitúe los cursores de las resistencias R4 y R7 en el centro del recorrido.
El cursor del potenciómetro R11 en la posición de tensión mínima (a la izquierda). Conecte un Voltímetro a la salida y mueva el eje de R11 hasta conseguir la tensión máxima. El cursor no debe llegar al final de recorrido. Modifique la posición de R7 para lograr la lectura de 20V. Conecte un Amperímetro en serie con una carga resistiva. Modifique un poco R2 hasta leer 2 A. Observación. Conecte y desconecte la carga resistiva. Si la tensión de 20V cae, debe ajustar con precaución R4 hasta conseguir que con 2 A la tensión se mantenga en los 20V. Procure no alcanzar el tope del pot R4, ya que la fuente limitará a 10A y podrían dañarse los componentes en caso de corto-circuito.
Con esto, doy por suficiente la descripción en referencia a la explicación sobre esta fuente regulada y ajustable, si algún punto no está claro, envíame un e-mail con las dudas que tengas.
Las fuentes de alimentación de potencia.
Hemos visto lo sencillo que resulta el montaje de una simple fuente de alimentación fija al principio de este artículo, también se vieron de pasada las fuentes ajustables (fig. 302 y fig. 303).
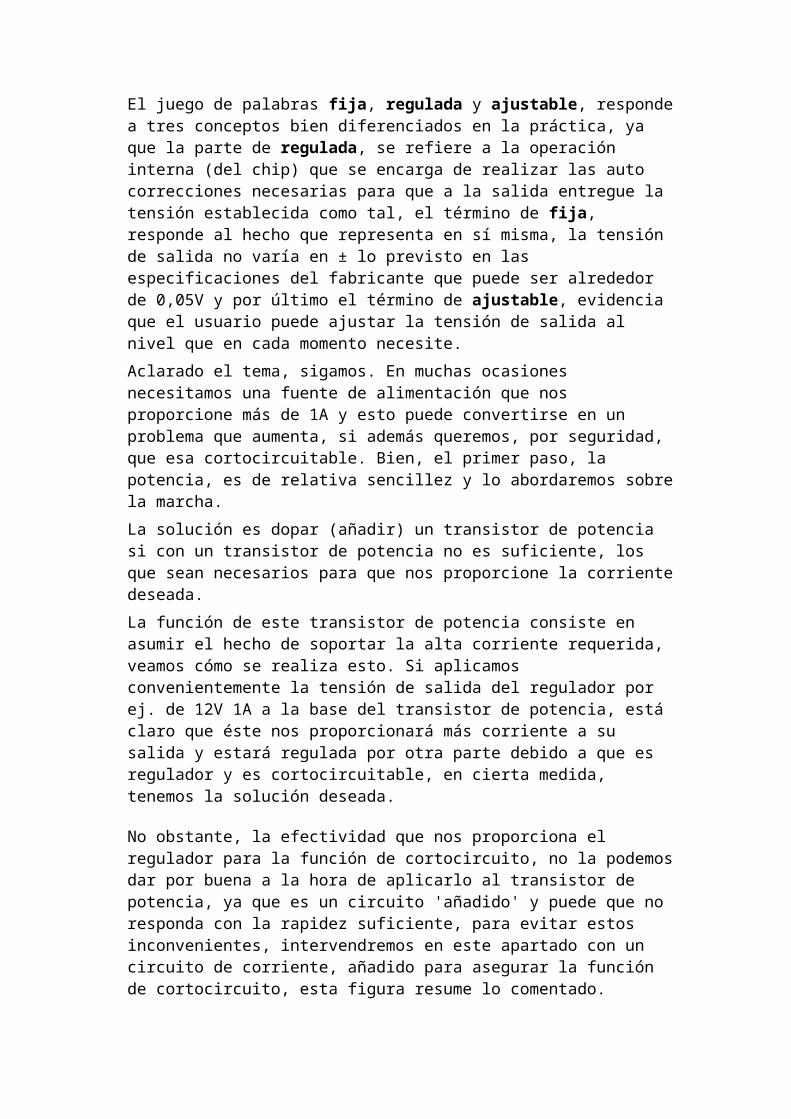
El juego de palabras fija, regulada y ajustable, responde a tres conceptos bien diferenciados en la práctica, ya que la parte de regulada, se refiere a la operación interna (del chip) que se encarga de realizar las auto correcciones necesarias para que a la salida entregue la tensión establecida como tal, el término de fija, responde al hecho que representa en sí misma, la tensión de salida no varía en ± lo previsto en las especificaciones del fabricante que puede ser alrededor de 0,05V y por último el término de ajustable, evidencia que el usuario puede ajustar la tensión de salida al nivel que en cada momento necesite.
Aclarado el tema, sigamos. En muchas ocasiones necesitamos una fuente de alimentación que nos proporcione más de 1A y esto puede convertirse en un problema que aumenta, si además queremos, por seguridad, que esa cortocircuitable. Bien, el primer paso, la potencia, es de relativa sencillez y lo abordaremos sobre la marcha.
La solución es dopar (añadir) un transistor de potencia si con un transistor de potencia no es suficiente, los que sean necesarios para que nos proporcione la corriente deseada.
La función de este transistor de potencia consiste en asumir el hecho de soportar la alta corriente requerida, veamos cómo se realiza esto. Si aplicamos convenientemente la tensión de salida del regulador por ej. de 12V 1A a la base del transistor de potencia, está claro que éste nos proporcionará más corriente a su salida y estará regulada por otra parte debido a que es regulador y es cortocircuitable, en cierta medida, tenemos la solución deseada.
No obstante, la efectividad que nos proporciona el regulador para la función de cortocircuito, no la podemos dar por buena a la hora de aplicarlo al transistor de potencia, ya que es un circuito 'añadido' y puede que no responda con la rapidez suficiente, para evitar estos inconvenientes, intervendremos en este apartado con un circuito de corriente, añadido para asegurar la función de cortocircuito, esta figura resume lo comentado.
Fig. 308
El circuito entorno de Q2-R1-Rsc, se encarga de proporcionar un límite de corriente a Q1, evitando su destrucción.
Principio de Alimentación Ajustable.
Hasta el momento, hemos visto las fuentes de alimentación de regulación o estabilización fija. En esta parte, vamos a abordar lo que se entiende por una fuente de alimentación regulable y ajustable y lo que conlleva este hecho.
Las ventajas que aporta una fuente ajustable básicamente son, la posibilidad de alcanzar en su salida una tensión continua exacta a la especificada por el usuario o circuito examinado, bajo prueba. Esto que en un principio parece una simpleza, no lo es tanto cuando hemos de variar la tensión en niveles de un voltio o incluso menos en ciertos casos y si además necesitamos que dicha fuente sea cortocircuitable, esto puede complicarse un poco.
Una fuente de alimentación sencilla puede ser uno de los ejercicios que mejor ilustran una lección de electrónica práctica y, eso precisamente es lo que vamos a realizar. Proponemos estudiar cómo construir una fuente de alimentación que nos sirva para la mayoría de las aplicaciones que habitualmente venimos realizando en las prácticas de las escuelas, laboratorios y academias de enseñanza sobre electrónica (¡uf!, donde me estoy metiendo).
Vaya por delante mi total respeto por los formadores, una disciplina de lo más importante en nuestros días pero tan mal considerada, gracias a ellos los tiempos
pueden y de hecho mejoran. Felicitaciones por dar lo que tienen, profesores. Sus conocimientos.
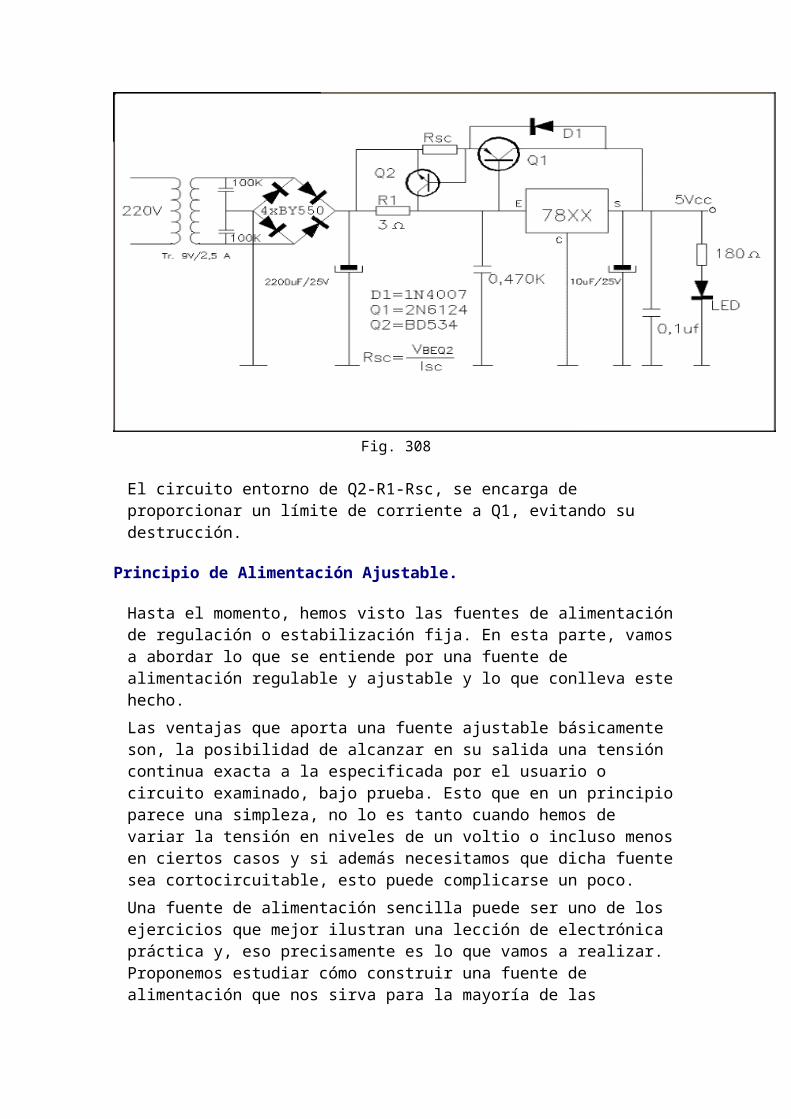
Volviendo donde estábamos. En la siguiente figura 309, se presenta el esquema de una alimentación cuyas características podemos considerar amplias, en el aspecto de cubrir las necesidades más habituales que se pueden presentar en la mayoría de los casos.
Fuente simétrica ajustable.
Seguro que en muchas ocasiones hemos necesitado una fuente capaz de suministrar diversas tensiones dentro de un amplio margen de valores. Del mismo modo y por causa de los distintos márgenes de consumo, habría sido útil que dicha fuente incorporara un limitador de corriente ajustable, por ejemplo; para cargar baterías Ni/Cd, en cuya carga como es sabido, necesita mantener constante la corriente de carga y que fuera cortocircuitable para usarla en circuitos cuyo consumo desconocemos.
Generalmente, para 'cacharrear' es suficiente con una fuente de alimentación sencilla, nada más lejos de la realidad. En algunas aplicaciones será necesario que la corriente suministrada por la fuente sea elevada y en casi todos los casos una fuente regulable de 0V a 30V capaz de suministrar 5A será más que suficiente para poder alimentar todos los prototipos y equipos de laboratorio.
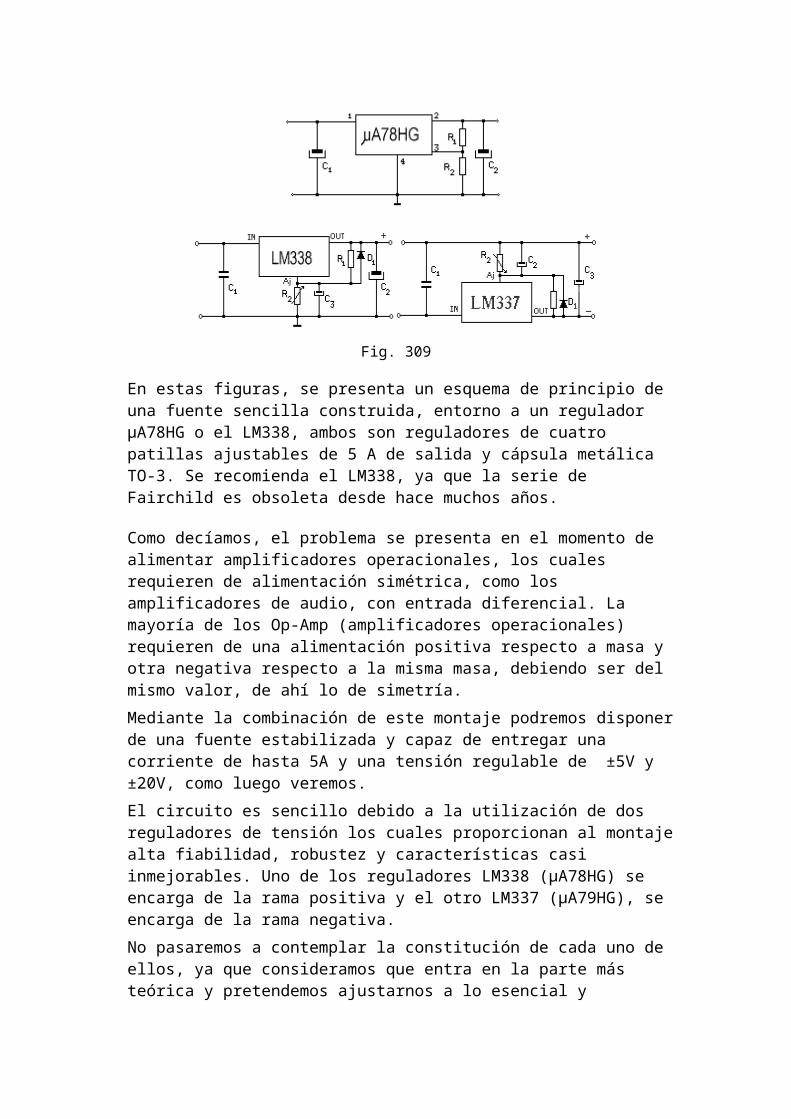
Fig. 309
En estas figuras, se presenta un esquema de principio de una fuente sencilla construida, entorno a un regulador µA78HG o el LM338, ambos son reguladores de cuatro patillas ajustables de 5 A de salida y cápsula metálica TO-3. Se recomienda el LM338, ya que la serie de Fairchild es obsoleta desde hace muchos años.
Como decíamos, el problema se presenta en el momento de alimentar amplificadores operacionales, los cuales requieren de alimentación simétrica, como los amplificadores de audio, con entrada diferencial. La mayoría de los Op-Amp (amplificadores operacionales) requieren de una alimentación positiva respecto a masa y otra negativa respecto a la misma masa, debiendo ser del mismo valor, de ahí lo de simetría.
Mediante la combinación de este montaje podremos disponer de una fuente estabilizada y capaz de entregar una corriente de hasta 5A y una tensión regulable de ±5V y ±20V, como luego veremos.
El circuito es sencillo debido a la utilización de dos reguladores de tensión los cuales proporcionan al montaje alta fiabilidad, robustez y características casi inmejorables. Uno de los reguladores LM338 (µA78HG) se encarga de la rama positiva y el otro LM337 (µA79HG), se encarga de la rama negativa.
No pasaremos a contemplar la constitución de cada uno de ellos, ya que consideramos que entra en la parte más teórica y pretendemos ajustarnos a lo esencial y práctico, el lector puede localizar las hojas de características si está interesado.
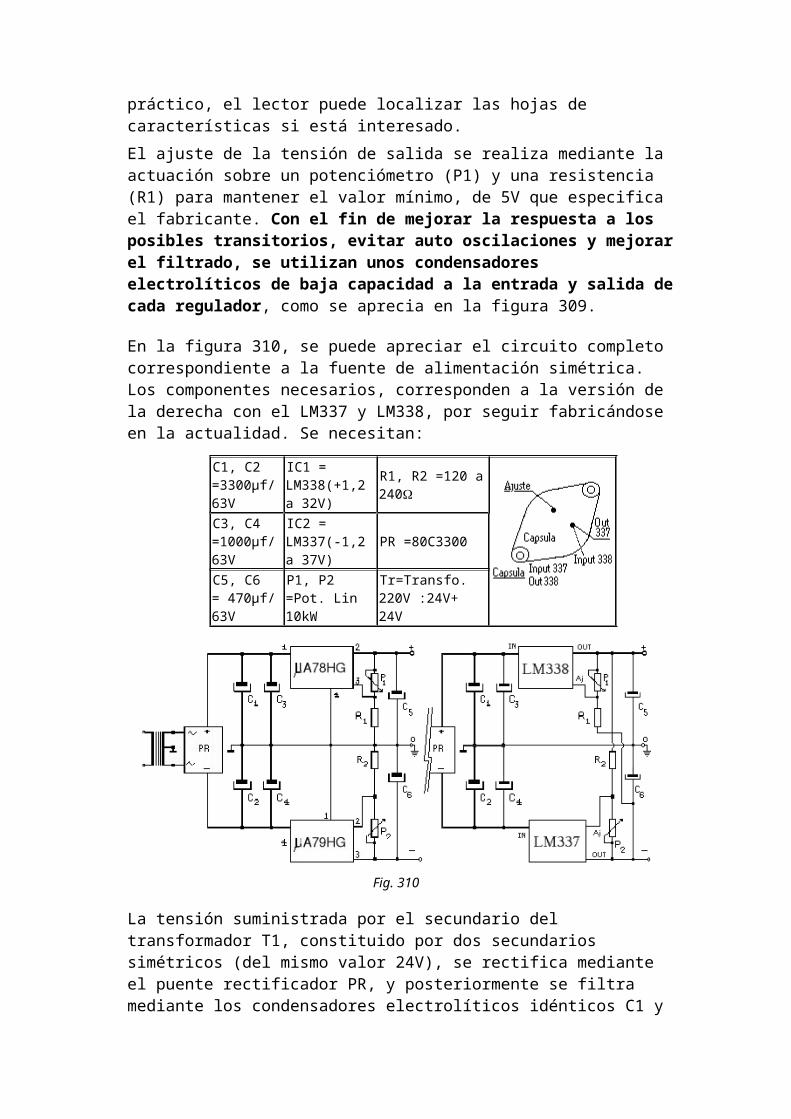
El ajuste de la tensión de salida se realiza mediante la actuación sobre un potenciómetro (P1) y una resistencia (R1) para mantener el valor mínimo, de 5V que especifica el fabricante. Con el fin de mejorar la respuesta a los posibles transitorios, evitar auto oscilaciones y mejorar el filtrado, se utilizan unos condensadores electrolíticos de baja capacidad a la entrada y salida de cada regulador, como se aprecia en la figura 309.
En la figura 310, se puede apreciar el circuito completo correspondiente a la fuente de alimentación simétrica. Los componentes necesarios, corresponden a la versión de la derecha con el LM337 y LM338, por seguir fabricándose en la actualidad. Se necesitan:
C1, C2 =3300µf/63V
IC1 = LM338(+1,2 a 32V)
R1, R2 =120 a 240
C3, C4 =1000µf/63V
IC2 = LM337(-1,2 a 37V)
PR =80C3300
C5, C6 = 470µf/63V
P1, P2 =Pot. Lin 10kW
Tr=Transfo. 220V :24V+ 24V
Fig. 310
La tensión suministrada por el secundario del transformador T1, constituido por dos secundarios simétricos (del mismo valor 24V), se rectifica mediante el puente rectificador PR, y posteriormente se filtra mediante los condensadores electrolíticos idénticos C1 y C2 los cuales se cargarán a la tensión de pico, téngase muy en cuenta en estos casos la tensión de trabajo de estos condensadores que será de la suma de los
dos polos, en este caso de 80V, la tensión obtenida a la entrada de los reguladores será de aproximadamente 33,8V.
Mediante los potenciómetros P1 y P2, debe ser uno doble de modo que la tensión de salida sea idéntica en cada ramal, para lograrlo se debe retocar la posible diferencia con el potenciómetro de ajuste en serie. Si se desea, se puede ajustar independientemente la salida de cada ramal, al valor deseado utilizando dos potenciómetros independientes, en el margen de 5 a 28V. Los condensadores C5 y C6, mejoran la respuesta de los reguladores frente a los transitorios de conmutación a la salida.
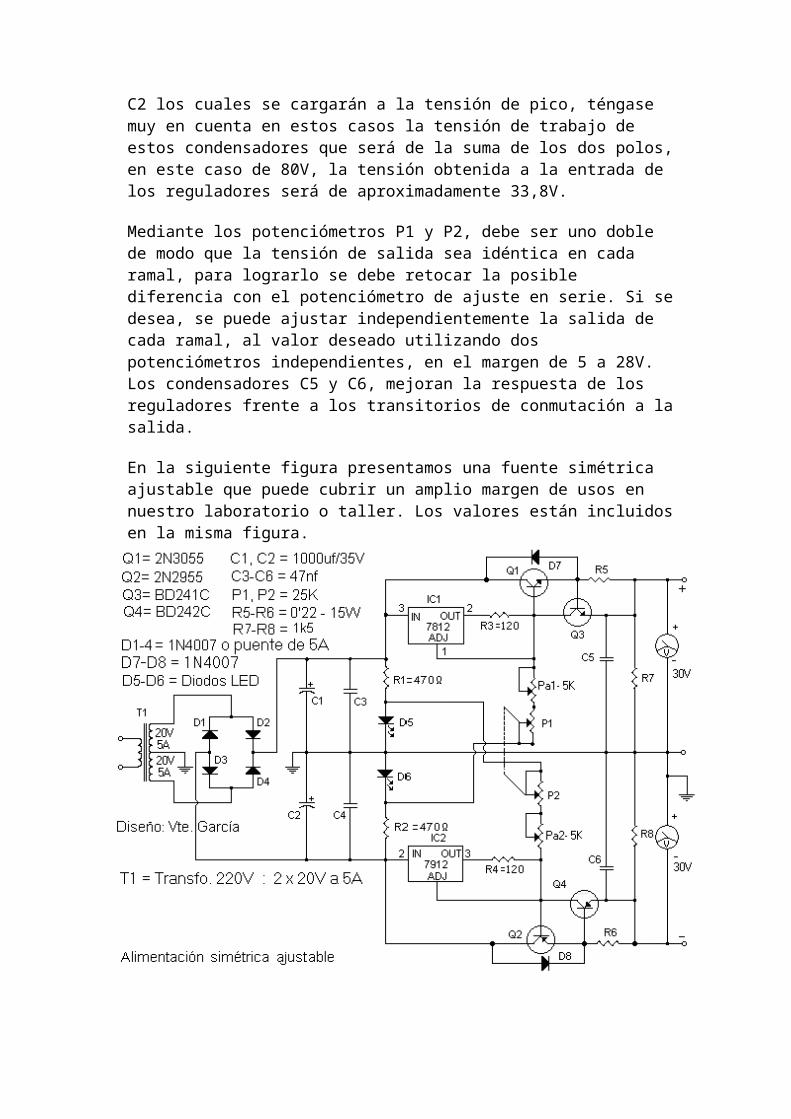
En la siguiente figura presentamos una fuente simétrica ajustable que puede cubrir un amplio margen de usos en nuestro laboratorio o taller. Los valores están incluidos en la misma figura.
De nuevo mediante los potenciómetros P1 y P2 se puede ajustar independientemente la salida de cada regulador al valor deseado, en el margen de 0 a 30V. Los condensadores C5 y C6 de 47 a 100nf, mejoran la respuesta de los reguladores frente a los transitorios de conmutación a la salida.
Montaje.
El montaje queda reducido y compacto al utilizar un circuito impreso (PCB). Se debe prestar especial atención a no invertir la posición de los condensadores electrolíticos, así mismo, no intercambiar los reguladores, en la práctica se puede apreciar que los patillajes de ambos difieren entre sí, lo que debe observarse con atención ya que su
inversión los destruye inmediatamente. El transformador, según la línea de red y 5A de salida por secundario.
Las zona de contacto entre los reguladores y el refrigerador debe aislarse e impregnarse de silicona especial que, ayudará a disipar el calor sobre el radiador, poner especial cuidado en aislar todos los terminales de los mismos ya que igualmente se destruirían por cortocircuito.
Los cables de conexión deben ponerse de suficiente sección 2 o 3 mm Ø, para no oponer ninguna resistencia y así evitar caídas de tensión al cargar la salida. Para poder controlar en todo momento el valor de la tensión de salida suministrada por la fuente, recomendamos incorporar en la caja, dos indicadores uno por rama, como voltímetros y si se desea dos como amperímetros (o galvanómetros).
Utilización.
Al terminar el montaje, la fuente quedará dispuesta para su inmediata utilización, sin necesidad de ajuste alguno, salvo el ajuste de los P1 y P2 para obtener la tensión deseada a la salida.
En caso de cortocircuito, la corriente máxima quedará limitada a 7A, según el propio fabricante evitando de este modo su destrucción. Se recomienda no probar si esto es cierto, debido al alto costo de estos reguladores y la hipotética posibilidad de que no actúe el sistema de desconexión interna.
Fuente ajustable de alta tensión.
Esta, puede considerarse una fuente ajustable que nos puede proporcionar una tensión comprendida de 0 a 60V, con una corriente ajustable entre 0 y 2A. El excelente rendimiento y calidad del funcionamiento de esta fuente es de tal grado que, en cierto modo, puede utilizarse como fuente de alimentación para laboratorio de electrónica. La fuente se ajusta a una tensión y corriente máxima prevista, y se conecta al dispositivo bajo prueba, si por alguna circunstancia, la corriente de consumo aumenta por encima de lo establecido, el sistema de seguridad se dispara y corta la tensión de salida, controlando la corriente de consumo. Sin embargo no pueden cruzarse los polos de salida.
Características Técnicas. Voltaje DC de salida regulable de 0 a 50V.
Intensidad de la corriente de salida regulable de 0'5 a 3Amperios.
Circuito de desconexión automática del voltaje.
Si se elige una corriente determinada mediante el potenciómetro que controla su intensidad y después el circuito de carga tiene un mayor consumo de corriente, el circuito de control automático, desconecta el voltaje, evitando así que se dañe el circuito de carga. Si embargo, debe evitarse unir los cables de salida, lo que producirá el deterioro de los transistores consecuente.(NO ES CORTOCIRCUITABLE)
En este momento se iluminará un LED indicando la desconexión del voltaje y para restablecerlo debe apretar el pulsador RESET.
Este circuito también actúa de forma automática en el caso de cortocircuito entre los cables de salida, desconectando el voltaje de salida. Para restablecer la corriente, pulse el RESET.
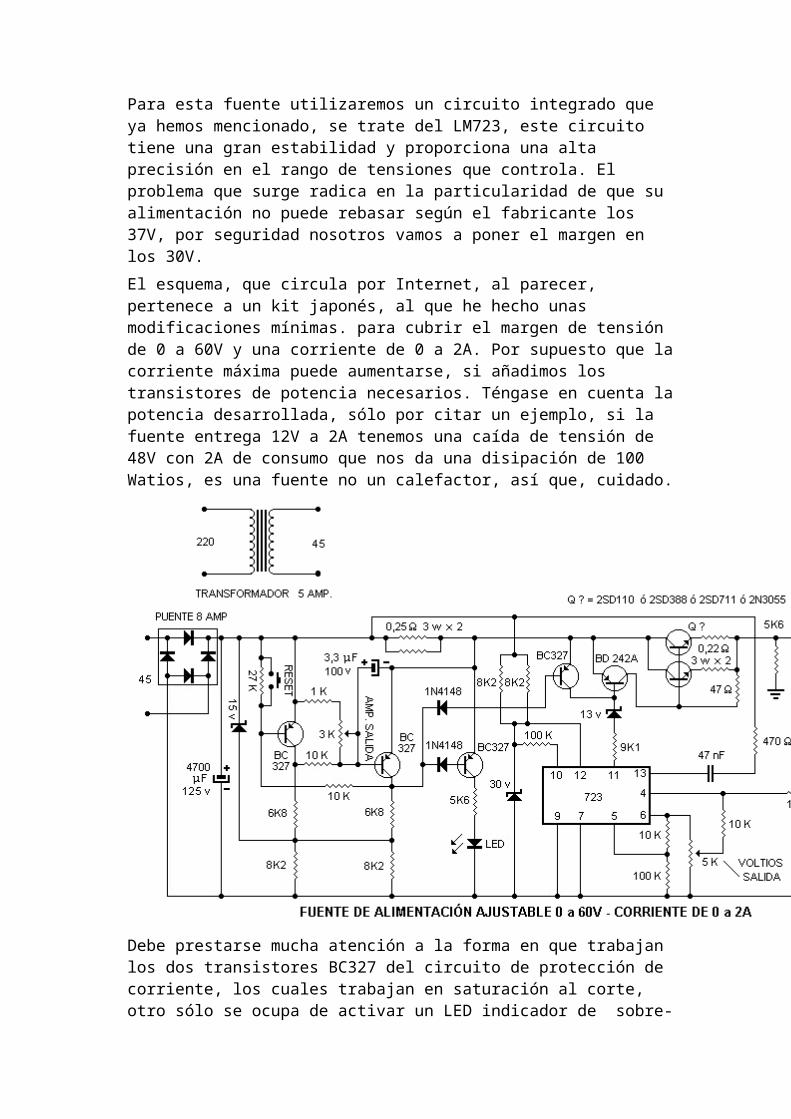
Para esta fuente utilizaremos un circuito integrado que ya hemos mencionado, se trate del LM723, este circuito tiene una gran estabilidad y proporciona una alta precisión en el rango de tensiones que controla. El problema que surge radica en la particularidad de que su alimentación no puede rebasar según el fabricante los 37V, por seguridad nosotros vamos a poner el margen en los 30V.
El esquema, que circula por Internet, al parecer, pertenece a un kit japonés, al que he hecho unas modificaciones mínimas. para cubrir el margen de tensión de 0 a 60V y una corriente de 0 a 2A. Por supuesto que la corriente máxima puede aumentarse, si añadimos los transistores de potencia necesarios. Téngase en cuenta la potencia desarrollada, sólo por citar un ejemplo, si la fuente entrega 12V a 2A tenemos una caída de tensión de 48V con 2A de consumo que nos da una disipación de 100 Watios, es una fuente no un calefactor, así que, cuidado.
Debe prestarse mucha atención a la forma en que trabajan los dos transistores BC327 del circuito de protección de corriente, los cuales trabajan en saturación al corte, otro sólo se ocupa de activar un LED indicador de sobre-carga, cuando éste se encienda caerá la tensión de salida y habrá que presionar el pulsador de RESET previsto para el caso. Esto activará la tensión de salida de nuevo.
Como ya se ha mencionado, esta fuente dispone de un control de intensidad, el cual desconecta la tensión de la salida. Esto no quiere decir que admita el cruce de los cables (positivo y negativo) de salida. Debemos evitar en lo posible esta circunstancia ya que provocaría la destrucción de los transistores y otros componentes del circuito, debe tenerse en cuenta que, estamos tratando con potencias respetables.
Por ejemplo: 5V y 2A de salida, esto representa 65V - 5V = 60V que deben disipar los transistores de salida por 2A, estamos hablando de la potencia en perdidas de 120 Watios como una pequeña "estufa eléctrica", este calor, más el calor producido por los 10W del consumo que aprovechamos, estos 130W se deben evacuar entre los radiadores y un ventilador que le ayude a bajar la temperatura que produce este "calefactor", de lo contrario, puede imaginarse el resultado.
F. ALIMENTACIÓN DE LABORATORIO.
Cuando necesitamos disponer de una fuente de alimentación para laboratorio, con ciertas características, es buena práctica tomarse un tiempo meditando las necesidades que queremos abarcar, es decir, hemos de considerar los márgenes de tensión entre los que podemos vernos obligados a utilizar. Entre las opciones, es muy conveniente disponer siempre de una tensión mínima de 0 Voltios, hasta alcanzar la tensión máxima prevista o lo que nos permita la economía, es decir, interviene el precio del transformador separador, el cual representará aproximadamente del 55 al 60% del costo de la fuente de alimentación de laboratorio. Una vez hayamos elegido la tensión que 'podemos' utilizar (pensar que la tensión de salida del transformador se ha de multiplicar por (√2) raíz cuadrada de 2, revisar lecciones anteriores).
El transformador, es la parte más importante de la fuente de alimentación, un objeto a tener muy en cuenta por dos razones; por su tamaño y el costo, sin duda, los condensadores electrolíticos, para filtrar el rizado residual, un tamaño a considerar, prestar atención a la tensión de los mismos, ésta debe ser aproximadamente el doble de rectificada.
En segundo plano quedan el resto de componentes pasivos, así mismo, como la etapa de potencia que depende del tipo, personalmente recomiendo si es posible el encapsulado TO-3 por su robustez y fácil disipación (transistores de salida en este caso 2N3055, permiten hasta 60V de salida). ¡Ojo! Deben aislarse eléctricamente cada uno de los transistores mediante un separador de mica o nylon y silicona, con el mencionado refrigerador de aluminio.
La caja metálica y los instrumentos de medida, tales como el Voltímetro y el Amperímetro, son importantes. En caso de no disponer de un Voltímetro y el Amperímetro de los valores deseados y querer una aproximación mayor, utilizaremos dos microamperímetros (µA), idénticos de 100µA. Esto requiere añadir una resistencia en serie para el voltímetro y una resistencia (en shunt) o paralelo para el amperímetro. Estas se deben calcular.
Las características del transformador una vez más, deben decidirse dependiendo de la tensión que deseemos a la salida de nuestra fuente de alimentación.
1. La tensión de salida máxima a plena carga se considerará aproximadamente igual al producto de la tensión nominal del secundario por la raíz cuadrada de 2 (√2=1,4142).
2. Para la corriente de salida puede calcularse que, el transformador debe proporcionar una corriente alterna igual al producto de 1.4142 por la corriente máxima exigida a la salida. Podemos decir que, para una corriente de salida de 3A el transformador suministrará aproximadamente 4A.
Para estabilizar una tensión, como se ha indicado más arriba, puede optarse entre dos procedimientos: la estabilización en paralelo o la estabilización en serie. En el primer
caso, se monta el transistor de regulación en paralelo con la carga; mientras que en el segundo caso, el transistor se coloca en serie con la carga. El método más extendido de ambos, es el segundo por su mayor control y es el que adoptaremos en nuestro circuito, no hay pues, nada nuevo hasta ahora. Es en el tipo de regulación en donde radica la novedad.
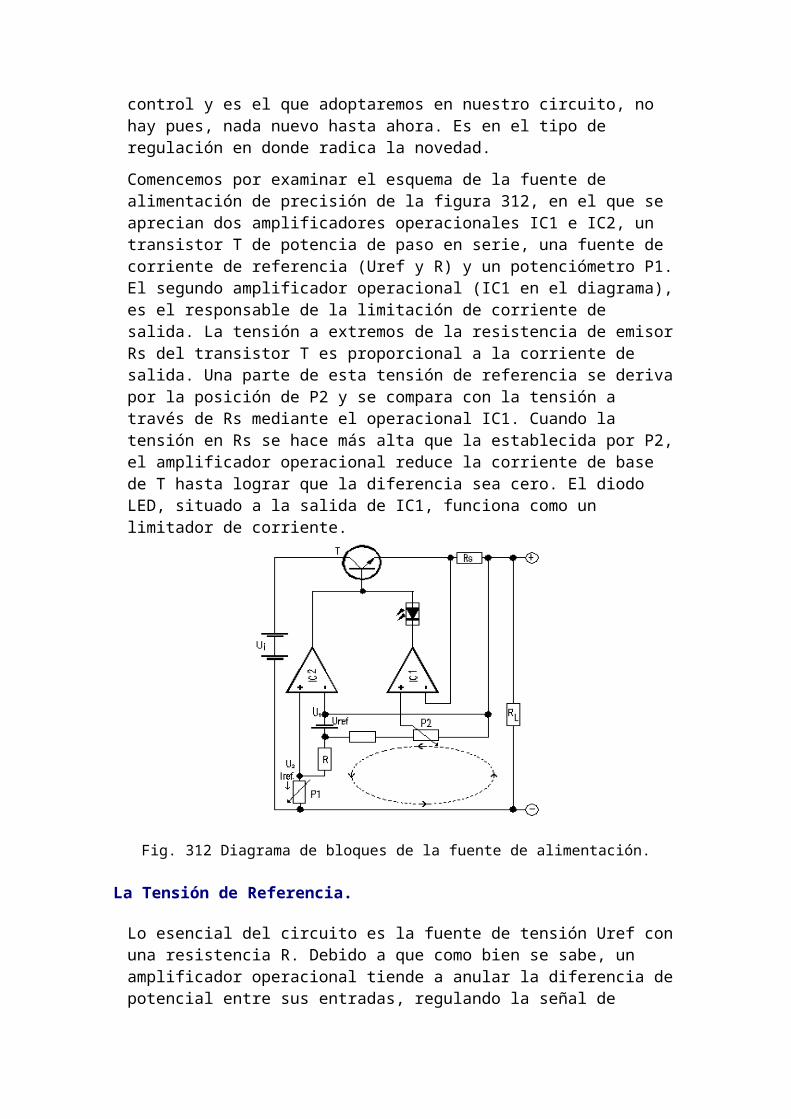
Comencemos por examinar el esquema de la fuente de alimentación de precisión de la figura 312, en el que se aprecian dos amplificadores operacionales IC1 e IC2, un transistor T de potencia de paso en serie, una fuente de corriente de referencia (Uref y R) y un potenciómetro P1. El segundo amplificador operacional (IC1 en el diagrama), es el responsable de la limitación de corriente de salida. La tensión a extremos de la resistencia de emisor Rs del transistor T es proporcional a la corriente de salida. Una parte de esta tensión de referencia se deriva por la posición de P2 y se compara con la tensión a través de Rs mediante el operacional IC1. Cuando la tensión en Rs se hace más alta que la establecida por P2, el amplificador operacional reduce la corriente de base de T hasta lograr que la diferencia sea cero. El diodo LED, situado a la salida de IC1, funciona como un limitador de corriente.
Fig. 312 Diagrama de bloques de la fuente de alimentación.
La Tensión de Referencia.
Lo esencial del circuito es la fuente de tensión Uref con una resistencia R. Debido a que como bien se sabe, un amplificador operacional tiende a anular la diferencia de potencial entre sus entradas, regulando la señal de salida reinyectada en la entrada inversora, así pues, la tensión de salida es siempre igual a la tensión existente en la entrada no inversora.
La resistencia en serie R, está efectivamente colocada entre las dos entradas del amplificador operacional. No obstante, debido a la alta impedancia que ofrecen dichas entradas, al menos teóricamente, ninguna corriente podrá penetrar en el amplificador operacional. Entonces, la corriente derivada de la fuente de referencia seguirá el recorrido que muestra la línea de trazos en el diagrama de bloques.
Puesto que U1 = U2 (el amplificador operacional se encarga de que se cumpla) la corriente será constante, independientemente de la posición del potenciómetro P1 así como, del valor de la resistencia de carga. El valor de esta corriente será Uref/R, lo que genera una tensión a extremos del potenciómetro P1 que el amplificador operacional corrige en su salida, mientras que la corriente de referencia se compensa mediante la carga. Lo cual nos proporciona un circuito que nos entrega una corriente de referencia constante incluso a 0 voltios, mediante una fuente de tensión de referencia y una resistencia.
EL ESQUEMA.
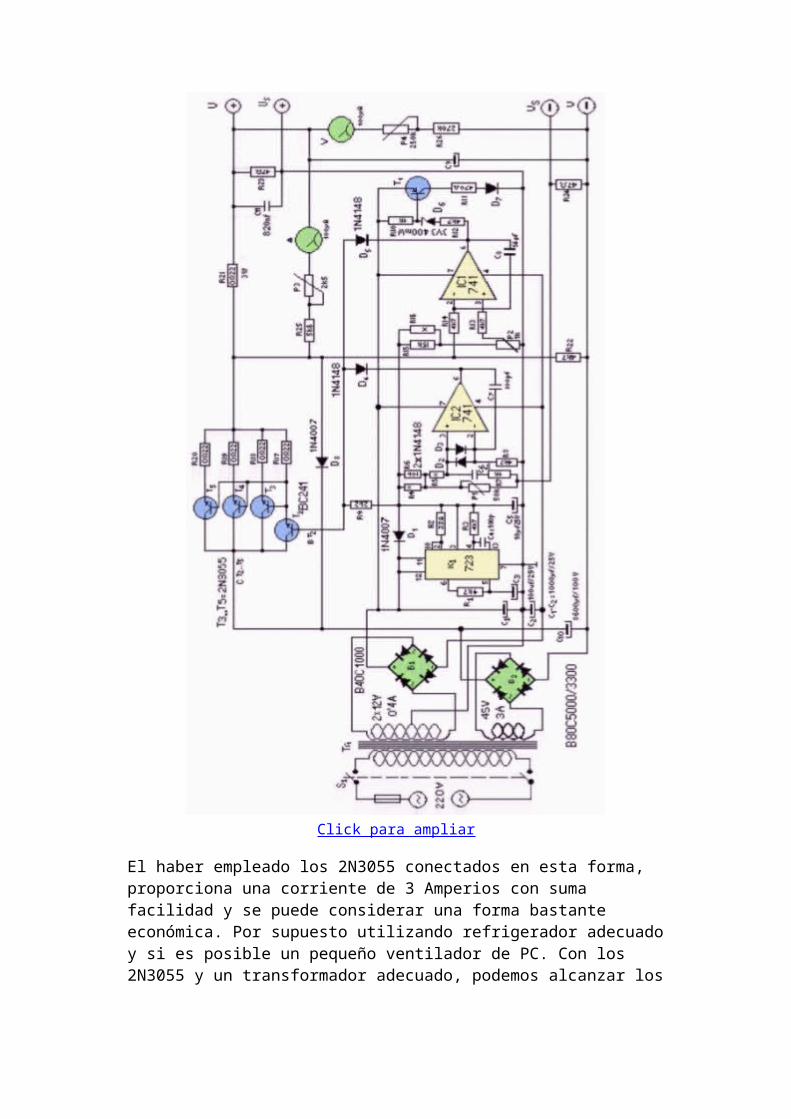
El circuito de la fuente de alimentación, mostrado en la figura 313, está compuesto por dos fuentes de alimentación que de alguna manera son independientes entre sí. La potencia de la etapa de salida, la proporciona el secundario del devanado S2 de 35V/4A y la potencia para la fuente de referencia y alimentación de los amplificadores operacionales, la proveerá el secundario S1 de 12V/0'5A, en el caso de utilizar un transformador de dos secundarios, en caso de dos transformadores, S2 = Tr1 y S1 = Tr2.
La alimentación de 12V está constituida por S1 (Tr1) un rectificador en puente B1 y dos condensadores C1 y C2. La tensión de referencia será suministrada por el µA723 (IC1), los componentes asociados a él se han elegido para proporcionar una tensión de referencia de 7'15V. Esta última aparece en la unión R4/R5 (R en el teórico), R15/R16 y R9.
Los valores de R4 y R16 dependen directamente de la magnitud máxima de tensión y corriente de salida, sería conveniente utilizar un potenciómetro ajustable, mientras se realiza el calibrado de la fuente, luego se pueden sustituir por las resistencias de valores apropiados.
En la figura 313, se presenta el esquema general de la fuente de alimentación para laboratorio, esta fuente es la que utilizo personalmente en mi 'labo'. Por cierto, la hice siguiendo los pasos de una revista en la que salió hace bastantes años, como da muy buen resultado no creo que haga falta cambiar nada. En el esquema, T2 (BD241 o similar) proporciona la corriente de base de los transistores T3, T4 y T5, conectados en paralelo, cuyas salidas (Emisores) están compensadas mediante las resistencias de alta potencia (3W), las cuales entregan la salida de la fuente de alimentación a través de R21 de 0'22Ω y 3W.
Click para ampliar
El haber empleado los 2N3055 conectados en esta forma, proporciona una corriente de 3 Amperios con suma facilidad y se puede considerar una forma bastante económica. Por supuesto utilizando refrigerador adecuado y si es posible un pequeño ventilador de PC. Con los 2N3055 y un transformador adecuado, podemos alcanzar los 60V de salida, cuidando de no olvidar las tensiones de los electrolíticos.
Las Salidas +Us positiva y -Us negativa, son las correspondientes a los hilos sensores, en caso de que la toma de tensión sea muy larga y de alta corriente, debería ponerse, para compensar las pérdidas.
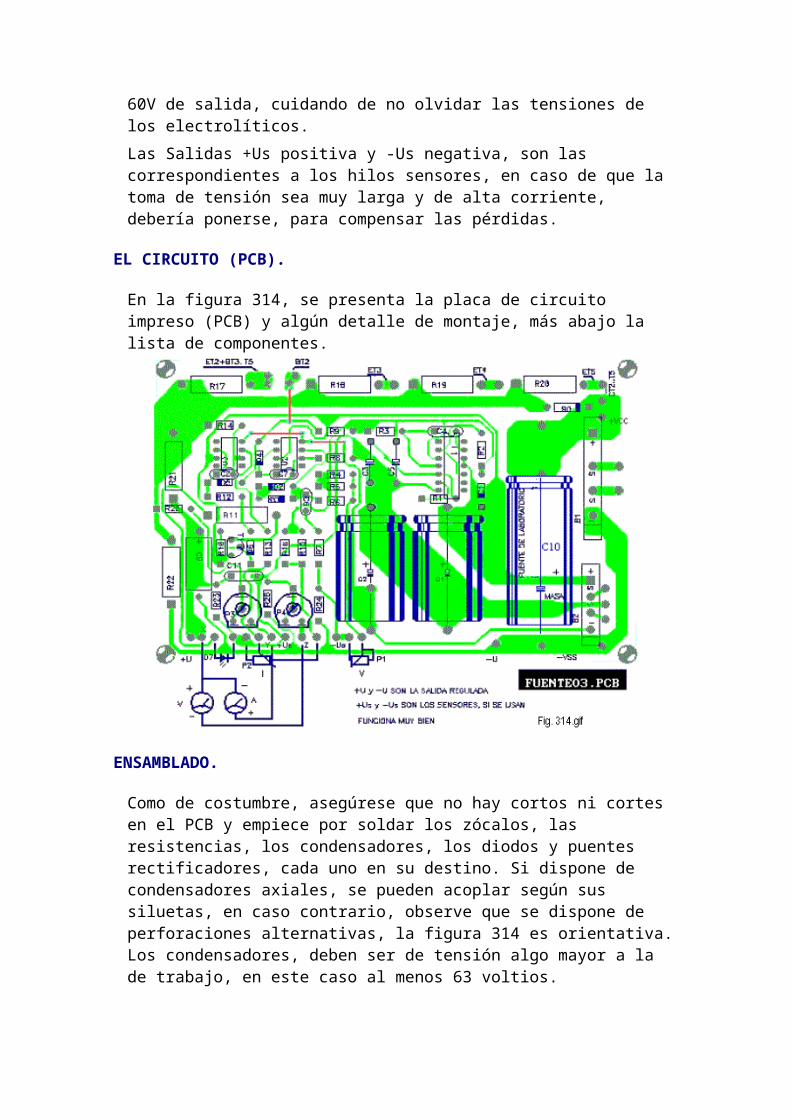
EL CIRCUITO (PCB).
En la figura 314, se presenta la placa de circuito impreso (PCB) y algún detalle de montaje, más abajo la lista de componentes.
ENSAMBLADO.
Como de costumbre, asegúrese que no hay cortos ni cortes en el PCB y empiece por soldar los zócalos, las resistencias, los condensadores, los diodos y puentes rectificadores, cada uno en su destino. Si dispone de condensadores axiales, se pueden acoplar según sus siluetas, en caso contrario, observe que se dispone de perforaciones alternativas, la figura 314 es orientativa. Los condensadores, deben ser de tensión algo mayor a la de trabajo, en este caso al menos 63 voltios.
Las resistencias R17 a R22 de 0'22Ω deben escogerse de cerámica de 3W, para disipar el calor, para la R17 de 3W, 10Ω , al instalarlas, tenga la precaución de separarlas de la superficie del circuito impreso. Los Transistores T2 a T5 deben montarse sobre un radiador de aluminio, mediante sus respectivos aisladores de mica o nylon, además de utilizar pasta de silicona si es posible, para que el calor se transfiera más rápidamente al radiador, como ya se ha mencionado.
PUESTA EN MARCHA Y AJUSTE.
Para la puesta en marcha, es aconsejable, conectar las dos tensiones alternas de los secundarios a sus respectivos puentes, los dos potenciómetros P1(Voltaje) y P2 (Intensidad) y por precaución en principio sólo T1 y T2 (Después del ajuste, ya conectará el resto T3, T4 y T5), no inserte los IC. Alimente el circuito y compruebe que la tensión, a extremos de C10 está al nivel esperado, haga lo mismo con C1 (+12V) y C2 (+12V), esto se confirma, si a extremos entre +C1 y -C2 hay 24 Voltios, máximo.
Asegúrese que, la tensión entre las patillas 11-12 del zócalo del LM723 y la patilla 7 (la alimentación del LM723) es de 12V, máximo 14V. Esto nos evitará algún disgusto. Inserte los circuitos integrados y compruebe que no se calientan los IC. Si se calienta el LM723, debe volver comprobar que, la tensión entre el pin11 y el pin7 es de 12V, si es así, cambie el LM723, tiene un consumo excesivo y no es correcto. A extremos de C5, disponemos de la tensión de referencia. A extremos de R9 debe haber 7'15V.
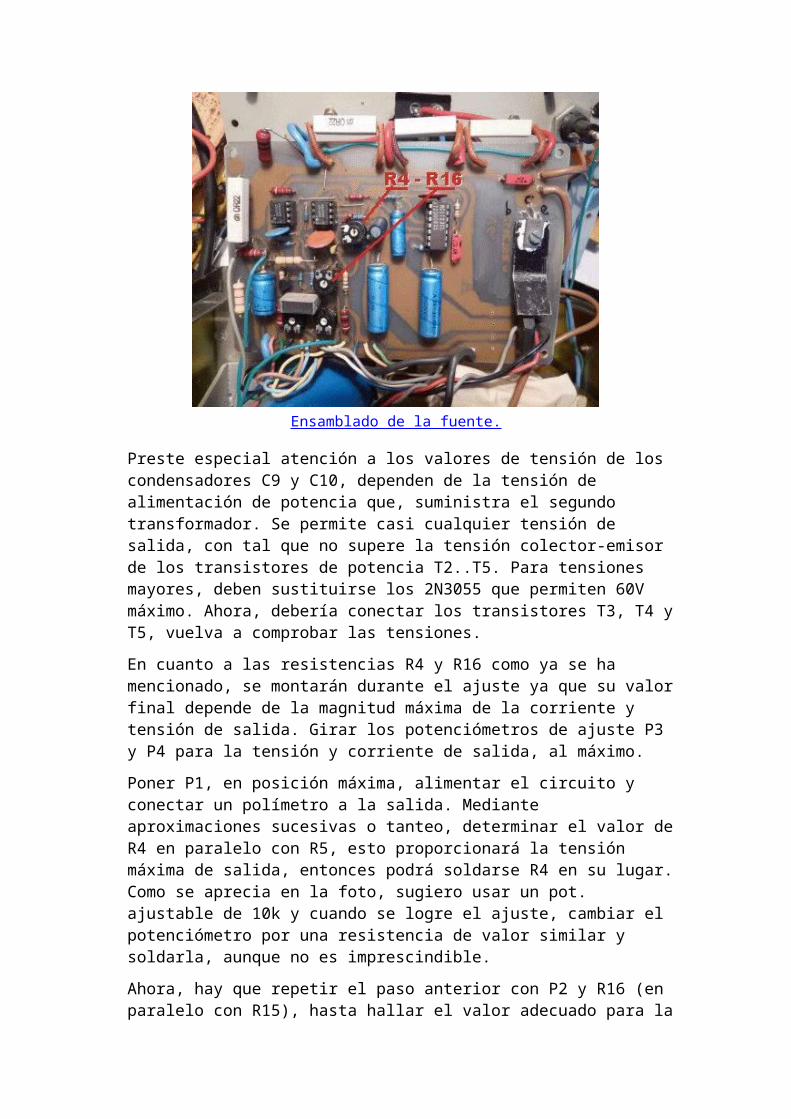
Ensamblado de la fuente.
Preste especial atención a los valores de tensión de los condensadores C9 y C10, dependen de la tensión de alimentación de potencia que, suministra el segundo transformador. Se permite casi cualquier tensión de salida, con tal que no supere la tensión colector-emisor de los transistores de potencia T2..T5. Para tensiones mayores, deben sustituirse los 2N3055 que permiten 60V máximo. Ahora, debería conectar los transistores T3, T4 y T5, vuelva a comprobar las tensiones.
En cuanto a las resistencias R4 y R16 como ya se ha mencionado, se montarán durante el ajuste ya que su valor final depende de la magnitud máxima de la corriente y tensión de salida. Girar los potenciómetros de ajuste P3 y P4 para la tensión y corriente de salida, al máximo.
Poner P1, en posición máxima, alimentar el circuito y conectar un polímetro a la salida. Mediante aproximaciones sucesivas o tanteo, determinar el valor de R4 en paralelo con R5, esto proporcionará la tensión máxima de salida, entonces podrá soldarse R4 en su lugar. Como se aprecia en la foto, sugiero usar un pot. ajustable de 10k y cuando se logre el ajuste, cambiar el potenciómetro por una resistencia de valor similar y soldarla, aunque no es imprescindible.
Ahora, hay que repetir el paso anterior con P2 y R16 (en paralelo con R15), hasta hallar el valor adecuado para la corriente máxima. Poner la salida en cortocircuito y girar P2 al máximo y proceder a tantear como antes, cuando se consiga, sustituir por una de valor adecuado y ya podemos soldar R16, aunque tampoco es imprescindible.
Finalmente ajustemos los potenciómetros P3 y P4 los utilizaremos como potenciómetros de ajuste para calibrar la tensión y corriente de salida que podremos
visualizar por medio de los galvanómetros dispuestos a tal fin. Esta previsto para que utilicemos dos instrumentos idénticos, como microamperímetros, como se describe más arriba.
Para adquirir el fotolito (dibujo o imagen) a imprimir y obtener la placa PBC, debe ponerse en contacto con el autor mediante correo-e aquí elimine los guiones de admin.
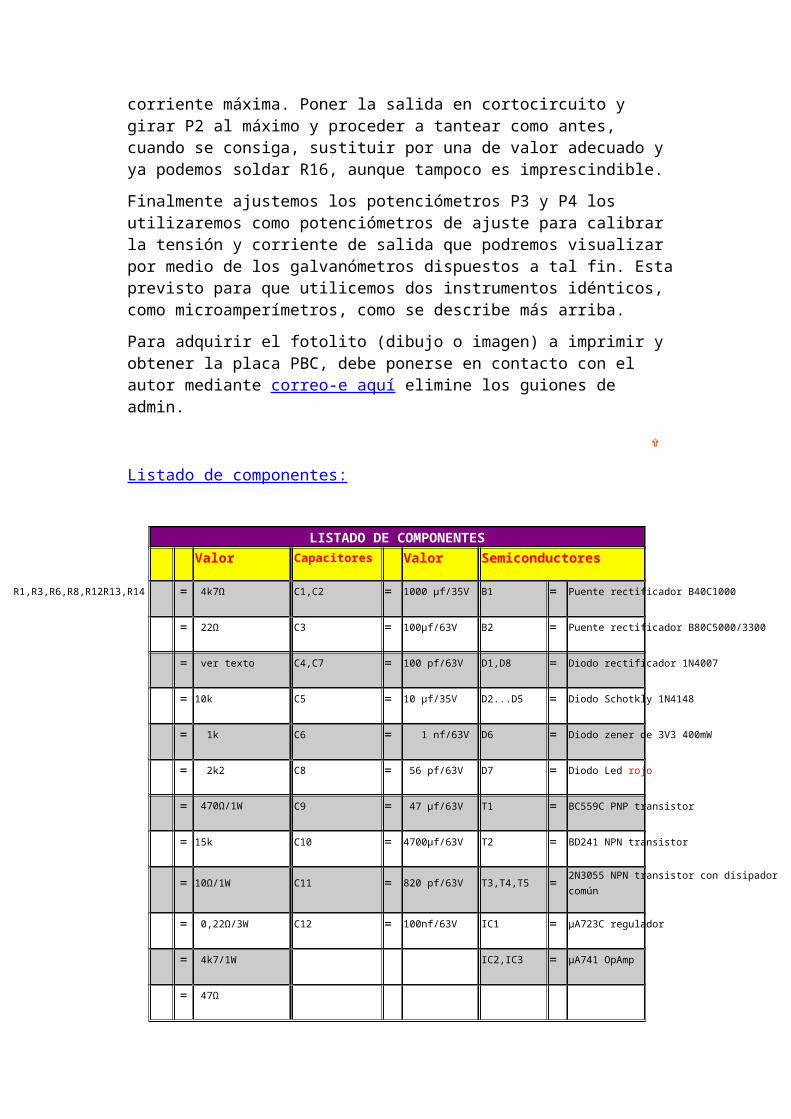
Listado de componentes:
LISTADO DE COMPONENTES
Valor Capacitores Valor Semiconductores
= 4k7Ω C1,C2 = 1000 µf/35V B1 = Puente rectificador B40C1000
= 22Ω C3 = 100µf/63V B2 = Puente rectificador B80C5000/3300
= ver texto C4,C7 = 100 pf/63V D1,D8 = Diodo rectificador 1N4007
= 10k C5 = 10 µf/35V D2...D5 = Diodo Schotkly 1N4148
= 1k C6 = 1 nf/63V D6 = Diodo zener de 3V3 400mW
= 2k2 C8 = 56 pf/63V D7 = Diodo Led rojo
= 470Ω/1W C9 = 47 µf/63V T1 = BC559C PNP transistor
= 15k C10 = 4700µf/63V T2 = BD241 NPN transistor
= 10Ω/1W C11 = 820 pf/63V T3,T4,T5 = 2N3055 NPN transistor con disipador común
= 0,22Ω/3W C12 = 100nf/63V IC1 = µA723C regulador
= 4k7/1W IC2,IC3 = µA741 OpAmp
= 47Ω
= 5k6 Varios
= 270k S1 = Interruptor bipolar
= pot. 50k lin. M1,M2 = Galvanómetro 100 µ A
= pot. 1k lin. Tr1 = Transformador de red 2x12V/0.5A
= pot. ajust. 2k5 Tr2 = Transformador de red 33V/4A
= pot. ajust. 250k F1 = Fusible 2'5 A
Da Disipador de Aluminio
Los comentarios serán bienvenidos.
REVISIONES:
26/10/09. A petición, se puntualiza en el ajuste de la fuente. 16/07/09. A petición, se añade lista completa de componentes fig.307C. 24/04/09. Se añade imagen del ensamblado de 1987. 25/07/08. Añado notas que aclaran conceptos. Modifico esquemas de las figuras 306 y 313. 20/09/07. Modificar errores T1 es PNP y R17 es de 10 14/06/04. Mejoras en: la primera, segunda y tercera parte y figuras. 04/12/02. Cambios en los valores de C1 y C2 por los correctos. 03/10/02. Mejoras en las imágenes del esquema electrónico y el PCB, mejorando calidad. 18/05/01. Presentación de la lección.
Lección 4
La Sonda Lógica
Introducción
De todos es sabido que los circuitos digitales suelen trabajar a unas velocidades que hacen imposible el empleo de los tradicionales instrumentos de prueba para la detección, seguimiento y reparación de averías. Si intentamos utilizar el polímetro, no podremos leer el verdadero nivel lógico debido a la inercia coercitiva del galvanómetro, el equipo no es adecuado para detectar los rápidos cambios de nivel de una serie de impulsos también llamado tren de impulsos. Las sondas lógicas, pueden ayudarnos proporcionando una indicación óptica del nivel lógico (mediante LEDs) en la patilla del circuito integrado o la pista bajo prueba, siempre que las variaciones sean relativamente lentas o estáticas.
Consideremos el caso, en el que necesitamos conocer el estado lógico de un punto del circuito bajo prueba y hacer un seguimiento de una señal y, no disponemos de un osciloscopio, sólo un polímetro, las posibilidades de éxito, se verán comprometidas a poco que tengamos que seguir una señal de cierta frecuencia. En estos casos, es necesario disponer de un elemento llamado Sonda Lógica Digital, la cual nos ayudará en cierto modo, en el cometido que se proponía (siempre que la velocidad no sea demasiado alta), el seguimiento de una señal a través de un circuito funcional.
Cuando se trata de realizar ciertos montajes en electrónica digital, pronto o más tarde, surge la necesidad de conocer el estado de una puerta lógica o la situación en la que se encuentra un circuito integrado del que sospechamos de su integridad, éste es el momento que se hace imprescindible, disponer de una sonda que nos permita conocer los diferentes estados que registran las distintas patillas del dispositivo bajo sospecha.
Si bien, en esta ocasión no podemos decir que la sonda que vamos a abordar sea 100 x 100 profesional, sí podemos asegurar que nos proporcionará suficiente margen de seguridad al detectar los niveles lógicos (en prueba), sin realizar un desembolso gravoso para nuestra economía.
El procedimiento a seguir, es preparar un circuito capaz de detectar el estado del punto bajo prueba (sin influenciar en lo posible al circuito). Para lo cual, es importante preparar un circuito de entrada que presente una alta impedancia, sobre el circuito que
se va a controlar, esto permitirá la detección sin apenas absorción o adición de señal del circuito bajo prueba.
Lograr una alta impedancia de entrada puede conseguirse mediante circuitos pasivos: resistencias, condensadores, diodos, etc, o activos, es decir, mediante circuitos integrados operacionales o lógicos, con los que se logra una muy alta impedancia (Z) de entrada.
Nota: Los circuitos elaborados con operacionales, no los vamos a estudiar debido a la necesidad de una alimentación simétrica con sus valores entre +7V y -7V, alimentación que puede no esté a nuestro alcance a la hora de un análisis rápido y efectivo.
Debemos centrarnos en dos tipos básicos debido a la tecnología utilizada, uno es el referente a la familia TTL, y otro a la familia CMOS.
Una sonda digital sencilla.
Iremos realizando ciertos ejemplos que nos llevarán a conocer los diferentes casos y posibilidades, según necesidades y las tecnología. Para empezar, vamos a contemplar el caso de los niveles TTL con componentes pasivos, conectaremos una resistencia a un amplificador seguidor de señal, para que nos amplifique el nivel detectado sin inversión de fase y la salida la inyectaremos a un transistor separador, el cual se encargará de activar unos diodos led rojo y verde por ej. como indicadores de estado alto (H) o bajo (L), respectivamente.
Fig. 1
El esquema de la figura 1, es eficiente para la mayoría de los casos con niveles TTL y muestra la disposición de los pocos componentes electrónicos pasivos, necesarios para la Sonda Lógica propuesta. La alimentación de la sonda admite un ancho rango de valores y puede tomarse del circuito bajo prueba o con baterías a tal efecto, no obstante las masas o negativos deben ser comunes a ambos circuitos.
El problema que puede presentar la sonda de la figura 1, reside mayormente en los niveles lógicos, forzados por el diodo zener, rango del TTL. Cuando se trata de tecnología CMOS, ya que éstos, varían con respecto a los de TTL, debido esencialmente

a la diferencia de consumo y tensión que alimenta a cada familia y la diferencia de las cargas que soportan ambas.
Mejorando la sensibilidad de la sonda lógica.
En la sonda que se presenta en la figura 2, trata de un circuito más elaborado y cercano a los nivelas CMOS, aunque los niveles que presenta para TTL, no son del todo rigurosos, se pueden aceptar como buenos.
En dicho esquema, se aprecia una fuente de corriente constante de unos 15mA, formada por los componentes pasivos: Tr1, R3, R4, D5 y D6, la cual se encarga de alimentar el LED correspondiente, según el nivel lógico detectado.
Los diodos D1 y D2, sirven de protección para la sonda, contra tensiones fortuitas de hasta 100V. Si a la conexión "terminal libre" de R1 de 100k, se aplica una tensión elevada respecto a masa, la puerta inversora N1 del circuito integrado CMOS, invertirá este nivel y el cátodo de D3 (Rojo) se pondrá a masa, por consiguiente se iluminará, indicando un nivel lógico alto H.
Mientras tanto el nivel del cátodo de D4 (Verde), permanecerá alto gracias a la nueva inversión producida por N2, y por consiguiente, dicho diodo no se iluminará. Sólo se iluminará cuando al extremo libre de R1 se le aplique una pequeña tensión, respecto a masa inferior a 1/3 de la tensión de alimentación, en cuyo caso el nivel bajo 0, se transmitirá hasta el cátodo de D4 y éste se iluminará indicando un nivel lógico L, lo que conlleva que el diodo D3 se desactive permaneciendo ambos diodos en ese estado hasta que se produzca un cambio en la entrada.
La resistencia R2 tiene encomendadas las funciones de limitar la carga que presentará la sonda al circuito bajo prueba por una parte y pone a masa al primer inversor N1 cuando no se aplica tensión alguna a la entrada, evitando así que las puertas N1 y N2 entren en auto-oscilación por la gran sensibilidad que estas presentan por tratarse de CMOS.
Fig. 2
Esta sonda se ajusta mucho mejor a los niveles lógicos CMOS según las necesidades que se pueden presentar.
Una sonda con display.
Ahora vamos a analizar un tercer esquema, que nos muestra otra forma de presentar los diferentes estados de una sonda. En el esquema siguiente, podemos apreciar una entrada seguida de unos transistores, un IC y un display de 7 segmentos de cátodo común, como elemento de presentación, en lugar de los típicos diodos led.
Fig. 3
Al aplicar a la entrada E un nivel alto, Tr1 y Tr2 conducirán por lo que el estado de Tr3 estará cortado. La salida de Tr3 es alta, luego la salida de IC1a es baja y la salida de IC1b es alta, porque su entrada es baja (colector Tr1 bajo). Además de los segmentos 'e' y 'f', los segmentos 'b', 'c' y 'g', estarán iluminados, formando de esta manera una H en el indicador.
Si la señal de entrada es un nivel bajo, Tr1 no conducirá, Tr2 y Tr3 conducirán, lo que activará un nivel alto en la salida de IC1a, y que la salida de IC1b, esté a nivel bajo, activando el segmento 'd', debido a que los segmentos 'e' y 'f' en estas condiciones, permanecen iluminados, el indicador presentará una L.
Si la entrada está al aire o no tiene un nivel lógico definido, todos los transistores estarán en conducción gracias a R1, R2 y R3, por tanto las salidas de IC1a e IC1b estarán ambas altas, activando de forma conjunta los segmentos 'a', 'b', 'c', 'e' y 'f', presentado una N, como No nivel.
Una sonda mejor.
En esta parte proponemos una sonda más completa, con dos partes bien diferenciadas, como se aprecia en el esquema ya que la parte coloreada en azul, no es necesaria si el proyecto se pretende ubicar en el interior de un recipiente similar a un rotulador en desuso o un elemento parecido, al que se le practicará una apertura suficiente para la presentación del display.
Revisión de la sonda digital con sonido.
Ahora presentaremos un nuevo esquema que, considero como el más completo por su elaboración. Ciertamente requiere unos cuantos componentes más que las sondas precedentes, pero vale la pena su realización, se han producido unos pequeños retoques para mejorar su rendimiento.
Fig. 4
Podemos apreciar que se necesitan cinco transistores, uno de ellos T2 PNP, el resto
T1,T3-T5 NPN, un circuito integrado N1 CD4093B y un indicador de 7 segmentos
(display) de ánodo común (CA), el resto son componentes normales como resistencias
de 1/4W y 7 diodos 1N4148 de pequeña señal.
Descripción.
Utilizamos un display de ánodo común, que nos proporciona la opción de encender un segmento cualquiera con sólo ponerlo a masa, así que tendremos que controlar dos secciones una que forme la L de bajo (low) cuando el nivel de entrada es bajo y la otra que forme la H de alto (High) cuando el nivel sea alto. Como únicamente disponemos de una señal en cada momento, deberemos utilizar un diferenciador que nos proporcione
la opción de separar ambos niveles, luego, mediante sendas puertas controlaremos las mencionadas secciones.
La señal de entrada, después de atravesar R1 es recortada por los diodos D1-D2 y
amplificada por T1 y T2 como seguidores de señal. Una señal de nivel alto en la entrada,
atraviesa R2 y R3, según el nivel, activará los transistores T1 o T2, que lo hacen como
diferenciador. Al entrar en conducción T1, su emisor pasa de 0V a una tensión cercana a
Vcc, este nivel H será invertido por la puerta N1, por lo que T4 dejará de conducir y en
consecuencia los cátodos de los diodos D6-D7 se ponen a conducir encendiendo los
segmentos BCEFG por lo que se representará la H de alto en el display.
Entre tanto T2 no estará conduciendo, presentado un nivel alto a la entrada de la puerta
N4, la cual invertirá este nivel a bajo con lo que T3 deja de conducir, impidiendo así que,
los diodos D4-D5 permitan encender los segmentos dependientes DEF.
Cuando la señal de entrada es baja, los roles se invierten y los segmentos activos presentan una L de (low), bajo.
Cuando el nivel de entrada esté 'flotando', es decir, cuando no se aplica un nivel H o L a
la entrada, T1 y T2 conducirán en la zona inferior a la llamada indeterminada, en estas
condiciones los niveles alcanzados a las entradas no producen cambios en sus salidas de
N1 que será H, esto hace conducir a T4 que cortocircuita los segmentos dependientes y
en N4 permanece a L, que a su vez hace que T3 no conduzca.
El funcionamiento.
En el momento de conectar la sonda a la alimentación, se ilumina el punto decimal del display, indicando que está preparado para su funcionamiento. Se aprecian tres posibles indicaciones del estado lógico aplicado al terminal de entrada de la sonda:
-Si no se aplica ninguna señal a su entrada o si ésta señal no está definida como un estado lógico [estado flotante], el indicador a parte del punto decimal, permanecerá oscuro [apagado] y eventualmente si se opta por realizar la parte coloreada del esquema, el altavoz permanecerá mudo.
-Si la señal aplicada a la entrada de la sonda, es de nivel lógico bajo, el indicador muestra una L, formada por tres segmentos del display y el altavoz emitirá una nota grave.
-Si la señal aplicada a la entrada de la sonda, es un nivel lógico alto, en el visualizador se presenta una H, formada por cinco segmentos del display y el altavoz emitirá una nota más aguda.
Hasta aquí, se ha tratado de presentar de forma sencilla, unas prácticas de electrónica digital aplicada al análisis de las señales y sus niveles lógicos. En otros documentos de este sitio, se presentan diferentes esquemas a los cuales espero se les pueda aprovechar para practicar en la detección de sus niveles por parte de algún visitante interesado.
El siguiente capitulo, lo dedicaremos a un conocido y popular microcontrolador, que aunque no se ha descrito hasta el momento de presentar esta actualización en estas páginas, esperamos poder hacerlo en breve, nos referimos al popular PIC16F84A.
Desde aquí emplazamos iniciarse en estos dispositivos de avanzado diseño, a los seguidores de estos tutoriales, documentos, charlas o lecciones, que para el caso es lo mismo.
Lección 5
Aplicación de un teclado
Construya un práctico teclado de 16 teclas. Consideremos el caso, en el que necesitamos hacer un teclado de dieciséis teclas para entrar los datos de un programa en las direcciones de una memoria, por ejemplo.
Análisis del circuito
En principio un primer circuito de un teclado se muestra en la figura 01, éste, se caracteriza por que al pulsar una tecla, el código que genera (hexadecimal normalmente) representa el valor de la misma, dicho valor aparecerá en las
salidas del dispositivo al que corresponda. En la ampliación añadida, veremos un segundo caso, pero ahora, veamos la teoría con este ejemplo práctico:
Al pulsar una tecla se genera un código.
El código binario del número 3 por ejemplo, corresponde a 0011 (DCBA), es decir, las salidas del CI con menor peso (U1=4532B), presentará un estado alto
en las patillas A y B. Dicho CI será el que presente los bits de menor peso, o sea, desde el 7 al 0, y el de mayor peso, desde el 15(F) al 8, lo presentará el CI
(U2=4532B).
Para tener un concepto más claro del funcionamiento del circuito, se recomienda leer la información disponible del CD4532B, consideramos que
su lectura puede ser de ayuda para comprender mejor su funcionamiento.
Aclarada la funcionalidad del CD4532B, seguimos con el tema. En el esquema que se presenta en la siguiente figura 01, se ha dispuesto un conjunto de
puertas OR (CD4076B), cuyo cometido es dar paso alternativo al código generado por el codificador activo en ese momento y así direccionar dicho
código a la salida del registro de BUS (CD4508B).
Debido a la disposición de las puertas Ei, Gs y el modo de operar del propio circuito, no es necesario el circuito antirrebote, ya que el sistema establecido de
prioridad a alto, elimina dicho efecto mecánico de las teclas.
La báscula realizada alrededor de las dos puertas NOR (CD4071B), son las encargadas de activar el cerrojo adecuado, según el código que vaya a presentar en las líneas del bus de salida (Q0 o Q1 que corresponda).
En el caso que estamos contemplando (al pulsar el número 3), la salida Gs1 se activaría a nivel H, y por lo tanto, la báscula pondrá a nivel H su salida
denominada ST0, para que de esta forma se abra el cerrojo correspondiente a las salidas Q0 (3 - 0), presentando el valor de la tecla número 3, en binario el
0000 0011 en el bus del CD4508B.
El circuito del teclado que presentamos proporcionará dos palabras de 4 bits, para entrar los datos de un programa, por ejemplo, en las direcciones
correspondientes de una memoria.
Después de un elaborado estudio, se opta por utilizar el esquema de lógica positiva, para seguir y entender mejor, haga una copia de la figura siguiente:
Pulse para ampliarFig. 01
2 x CD4532 - 8 bits prioridad codificador.1 x CD4508 - doble 4 bits cerrojo.
1 x CD4076 - 4 puertas OR de 2 entradas.1 x CD4071 - 4 puertas NOR de 2 entradas.
El teclado, puede ser cualquiera que se disponga con 16 pulsadores. A la vista de la figura 01, se puede apreciar la sencillez de la práctica y lo eficaz del
sistema.
Cuando uno tiene la necesidad de hacer un montaje electrónico que utilice varios dispositivos integrados, es recomendable hacer algún tipo de práctica que se ajuste al esquema que se haya estudiado y trazado, para evitar en
alguna medida el eventual fracaso. Un buen sistema es, adquirir una placa de pruebas para montajes, de las de se "pinchan" los diferentes componentes,
llamadas 'protoboard' de esta forma se perderá menos tiempo y no añadiremos costos superfluos a las pruebas.
La funcionalidad de este circuito, está probada en un caso práctico de necesidad por parte del autor. Por lo que, este circuito se puede utilizar en
todos los casos que se requiera un pequeño teclado de hasta 16 teclas.
Construir la parte 'mecánica' del teclado BCD.
Este circuito proporcionará una salida decimal codificado en binario de cualesquiera de los interruptores de entrada. Los interruptores de entrada se
pueden ampliar a 16 interruptores, proporcionando la conversión del BCD a un hexadecimal.
Cuando se presiona cualquier pulsador en particular, su valor aparecerá en forma BCD en las salidas (A, B, C y D). Permanecerá allí hasta que se presiona
otro pulsador. Los 16 pulsadores producen salidas hasta "1111". El circuito anterior produce una salida, cuando se presiona el pulsador deseado,
permaneciendo dicho valor en la salida.
Al revisar esta lección hemos observado que tal vez algún lector haya tenido cierta dificultad para comprender alguna parte descrita, por lo que hemos
revisado su contenido y rectificado los errores detectados, además se ha hecho una nueva práctica.
Actualización.
En esta ocasión abordaremos desde otra filosofía el tema de construcción de un teclado, con el que podremos practicar o incluso utilizar en alguna aplicación
que lo requiera como ya se ha mencionado.
En la figura 02, se muestra el esquema con los componentes que vamos a utilizar. Como se aprecia, los dispositivos empleados son componentes estándar fácilmente localizables en el comercio. El DISP1, es un simple
decodificador BDC a 7 segmentos como puede ser el 4511B y un display a LED de 7 segmentos.
Fig. 02
Utilizaremos una entrada de reloj I, que puede ser independiente o aprovechar un generador de reloj como el descrito en la documentación que se dispone en
base de tiempos, cualquier tren de impulsos con una frecuencia de 1Hz/s servirá para el propósito de esta aplicación.
La señal de reloj se aplica al contador 74LS93 configurado como divisor por 12, sus salidas BDC se aplican a un comparador de 4 bits 74LS75 o 74HC75, las salidas son derivadas por un lado, hacia el 74LS139 (doble decodificador de 2 a 4 líneas), con sus entradas a y b, a masa para obtener un comparador, así
sus salidas 'b' servirán para su comparación con las líneas de entrada del teclado.
Estas 4 líneas de entrada del teclado comparadas por las puertas NAND del 74LS02 con las mencionadas salidas 'b' del 74LS139, y la puerta OR del 4072,
nos proporcionará la señal de reloj para habilitar los cerrojos tipo D del 74LS174 (seis básculas tipo D), permitiendo así que, se muestre la cuenta en
el dispositivo DISP1.
A las salidas Q0-Q3 del 74LS174, dispondremos de los distintos valores que vayan adoptando según la tecla pulsada, codificada en BCD, junto con la señal de salida del 4072B, desde aquí podemos tomar estos valores para el propósito
deseado.
Lección 6
El Contador Digital
Introducción.
En electrónica es bastante frecuente verse necesitado de contabilizar eventos y por tanto se requiere utilizar un contador, en nuestro caso se tratará de un contador
electrónico digital. Por otra parte, en nuestros días estamos rodeados de dispositivos que disponen de algún tipo de contador digital, incluso en la mayoría de los
electrodomésticos vienen equipados con uno. Un contador digital, básicamente consta de una entrada de impulsos que se encarga de conformar (escuadrar) las señales, de manera que el conteo de los pulsos no sea alterado por señales no
deseadas, las cuales pueden falsear el resultado final. Estos impulsos son acumulados en un contador propiamente dicho cuyo resultado, se presenta mediante un visor que puede estar constituido por una serie de sencillos dígitos de siete segmentos o en su
caso mediante una sofisticada pantalla de plasma.
Nosotros empezaremos por considerar un circuito de entrada que nos permita tomar la señal motivo del conteo, para lo cual hemos de pensar en la forma de tomar la
señal a medir, de modo que le demos a ésta una forma adecuada que nos asegure una cuanta correcta.
Para que el mencionado circuito sea lo más universal posible es importante:
Tener la entrada de alta impedancia (Z). Nuestro circuito no debería absorber demasiada señal para no inducir errores.
Dicha señal, la deberemos escuadrar de forma segura.
El circuito constará de un separador de corriente continua mediante un condensador cerámico de baja capacidad (47nf/400V), para detectar las señales de alta frecuencia,
separando la alta tensión, si es el caso. La salida, se conectará a un diferenciador constituido por una puerta lógica, para una mayor seguridad dicha puerta será un
disparador Schmitt (triger Schmitt). Si utilizamos un transistor, éste debe ser de alta velocidad, similar al 2N2222. En la figura 01, se presenta el esquema sinóptico de un
contador de dos dígitos formado por dos contadores (74HCT192 o 74LS192), dos decodificadores (74HCT48 o 74LS48) y sus correspondientes visualizadores
(display) MAN74 o FND500.
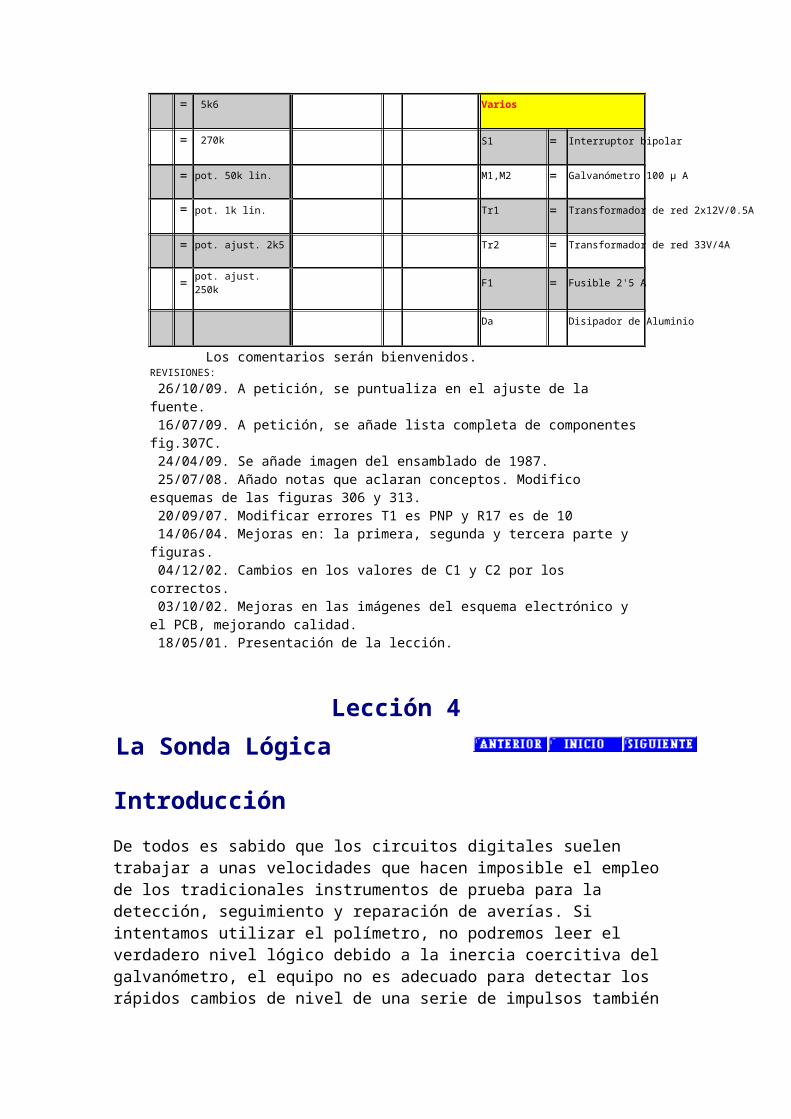
Fig. 01 Esquema sinóptico
Adaptador de señal.
El circuito de la figura 02, representa la entrada descrita, en la figura 03, más elaborada, se aprecia el circuito de entrada completo que, puede servirnos en la mayoría de los casos, en la figura 04, se presenta un nuevo circuito con mejores
prestaciones, al que se le a añadido el mencionado disparador Schmitt, formado por la puerta de alta velocidad 74HCT14 (6 inversores Schmitt). En el cual resaltamos el punto (A) ya que en él, los impulsos detectados aún no están totalmente escuadrados,
como ocurre con los obtenidos a su salida.
Fig. 02
Fig. 03
Fig. 04
En la figura 02, se pueden apreciar dos componentes, el condensador separa la tensión continua y el resistor que eleva la impedancia lo suficiente para nuestro cometido. En la figura 03, se propone un circuito que utiliza un transistor como
seguidor de emisor con un limitador de tensión a 6V, mediante el diodo zener, al que le sigue un nuevo transistor separador que mejora la salida, permitiendo así, un
mayor impedancia de entrada, algo imprescindible en estos casos y una alimentación con un amplio margen.
En la figura 04, los limitadores de tensión son los dos diodos D1 y D2, su punto común como se aprecia, está conectado a la base de un transistor mediante un divisor
de tensión formado por R2 y R4 y la salida del transistor T1 como seguidor de emisor, nos da la señal que utilizaremos para el contador, no obstante, se ha
intercalado un inversor o puerta triger-Schmitt para escuadrar al máximo dicha señal.
El contador.
Hasta aquí, hemos visto cómo detectar y escuadrar los impulsos que posteriormente se han de contar, un paso importante. Ahora, trataremos el que considero corazón del contador propiamente dicho, es decir, la parte del circuito que se encarga de contar, almacenar y acumular cada pulso de la cuenta al siguiente y si es el caso cambiar de
década, pero será mejor empezar por el principio.
Más adelante analizaremos en profundidad los circuitos que componen un contador, en estos momentos nos centraremos en lo que se necesita para construir un contador
unido a un visor, en el que se muestre los totales contados.
El circuito básico que se use, dependerá de la tecnología disponible, esto lo podemos apreciar mejor en la tabla siguiente:
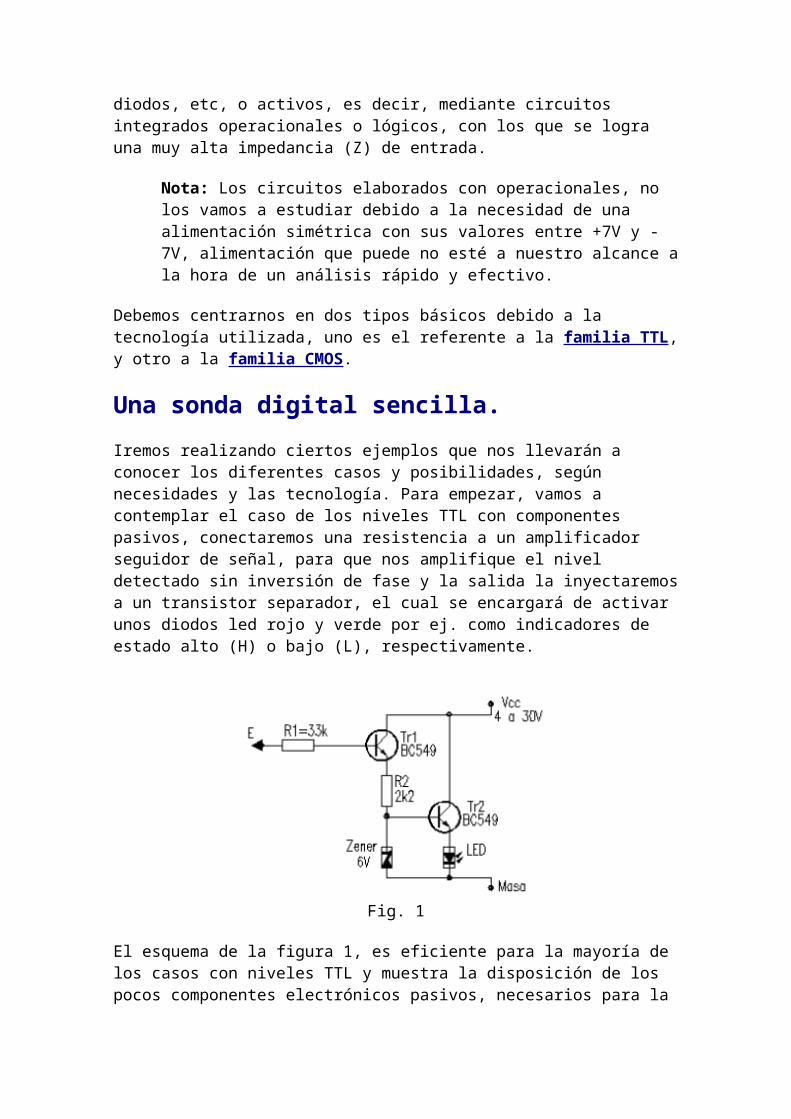
TIPO Frec. Vol. Decodificador Relación V/C
74LS192 32 MHz 5,5 74LS48 + velocidad + consumo CD4510B 4 MHz 3 ÷12 CD4511 - velocidad74HCTLS192 54 MHz. 3 ÷ 6 74HC48 + velocidad - consumo
El circuito digital 74LS192 contador decimal.
Atendiendo a que la velocidad es muy importante y en cualquier momento se puede requerir esta capacidad, nos centraremos en la opción de la serie 74HCTLS192 o en su defecto por la 74LS192 ya que se trata del mismo dispositivo, lo único que cambia
es el consumo, la tensión de trabajo y poco más.
El dispositivo 'LS192, constituye un contador asíncrono reversible con entrada paralela, preparado para efectuar el conteo decimal en código binario BCD, que
además dispone de preselección de carga.
Para cargar las salidas a un determinado estado, se aplican los datos a las entradas DA, DB, DC y DD y se aplica el nivel bajo L a la patilla 11 'load', esta operación de
carga es independiente del reloj y del estado del contador. Por ejemplo: cargar el preselector a 9, esto quiere decir que en las líneas de datos pondremos los siguientes niveles: 1001, donde DA1, DB0, DC0 y DD1, es decir DA-DD al positivo y DB-DC
al negativo.
En la figura 07, se muestra la disposición de las patillas de este circuito integrado. Para más información, a cerca del funcionamiento de este dispositivo, 74HCT192
puedes pulsar sobre este enlace, donde se presenta una aplicación y la configuración de las señales de entrada y salida E/S en modo serie o cascada.
Fig. 07
El circuito de la figura 08, es una aplicación práctica que, se complementará añadiendo 3 puertas NAND correspondientes a un 74LS00, una de ellas conectada a
su vez como inversor, o sea, sus dos entradas unidas además de unos pocos elementos, como 1 pulsador de puesta a cero PAC, 4 preselectores, 1 conmutador
arriba-abajo 'Up-Down' y unas resistencias de 1k5 de 1/4 W. También se puede hacer que el contador se ponga a una determinada cuenta de forma automática, esto lo dejo
para que se investigue por quien este interesado.
Obsérvese que, las entradas ABCD, están forzadas a positivo (permanentemente conectadas a +Vcc mediante sendas resistencias [1k ]), esto es necesario, si
queremos que no haya saltos en la cuenta, debidos a diversas señales e interferencias
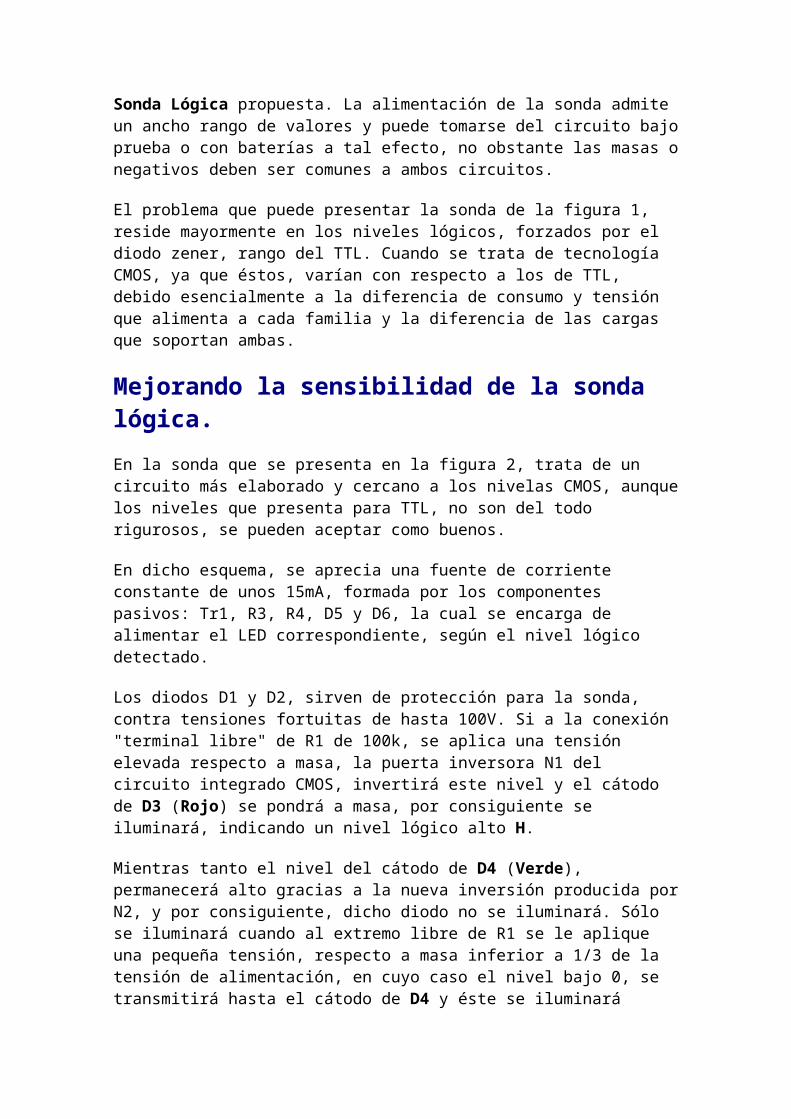
espúreas que, suelen afectar bastante a los circuitos integrados cuando no se utiliza este método, además recomiendo, aunque no se muestra en el circuito, aplicar un
condensador cerámico tipo lenteja de 100nf/100V (marcados como 104), a los pines de alimentación de cada circuito integrado del montaje.
Fig. 08Esquema del contador para 1 dígito.
Como se desprende del circuito, para incrementar el número de dígitos, tan solo habrá que añadir otros tantos contadores como dígitos se deseen y conectarlos en
serie o cascada, prescindiendo de las subsiguientes puertas de los nuevos contadores, o sea, las salidas Sc y Sb a las respectivas entradas Eu y Ed del siguiente contador, conectando las patillas de carga del mismo modo a sus respectivos interruptores, de igual forma todas las patillas de puesta a creo, utilizaran el mismo y único pulsador
de PAC.
Por otra parte, se encuentran los CD4511 o el 74LS48, convertidores o decodificadores de BCD a 7 segmentos, el primero se trata de un dispositivo de la serie CMOS por ser el más típico al igual que por ser compatible con los HCT y el
segundo de la serie TTL. Esto es si se decide utilizar los dígitos a 7 segmentos led de ánodo común, como el MAN72 o FND500, pongo por caso.
En la figura 09, se presenta la imagen correspondiente al circuito impreso visto por la cara de los componentes, el cual puede utilizarse para generar la placa de circuito
impreso, atención, obsérvese el punto indicando la patilla 1, de cada circuito integrado en el circuito impreso.
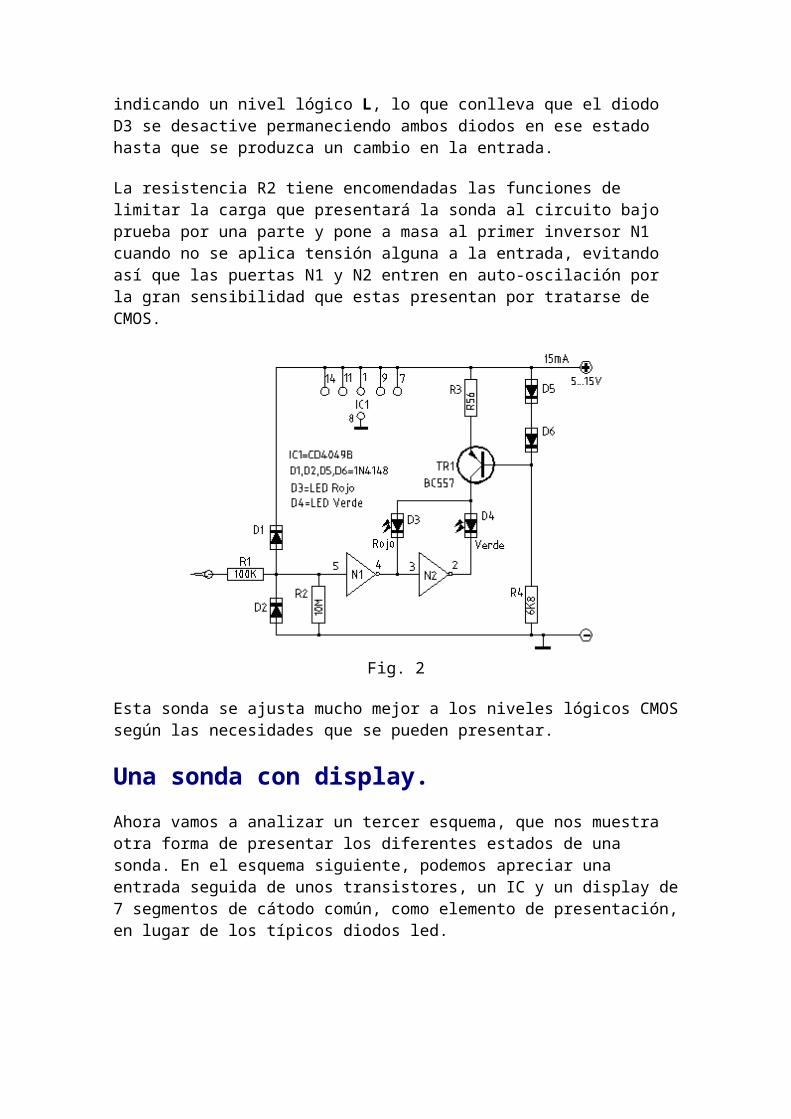
Fig. 09
Nota.- Si alguien desea hacer una adaptación para presentar la cuenta del contador para tres dígitos mediante un display del tipo plasma, ésta página está abierta a sugerencias y aportaciones de los lectores.
Contador Digital con preselección.
El contador que abordaremos en esta sección, estará dotado de un preselector que nos permitirá indicarle que cuenta máxima debe hacer y de este modo a su salida dispondremos de un pulso, con el que podremos ejecutar una orden, bien con la ayuda de un relé o mediante una señal luminosa u otro sistema digital al que le indiquemos cuando debe realizar una nueva función.
El contador digital que proponemos, permitirá realizar la cuenta aditiva y regresiva, dependiendo de lo que en cada momento necesitemos en nuestro programa de
trabajo. La utilidad de un contador digital que cuente en ambos sentidos, tiene una mayor ventaja si le añadimos un sistema que nos permita utilizar la señal de fin de
cuenta para que a la salida podamos poner en marcha o parar un proceso que dependa directamente de dicha cuenta.
Basándonos en el circuito integrado que hemos visto en la segunda parte, como es el 74LS192, si vemos el circuito de la figura 08 y la descripción que allí se hace,
podemos deducir que para cada década (dígito), son necesarios los mismos componentes, es decir:
1- Display de 7 segmentos (tener en cuenta su polaridad), ánodo común o cátodo común.
1- Decodificador de 7 segmentos con la salida para ánodo o cátodo común (el 74LS48 es de salida H y el 74LS47 de salida L).
1- Un contador decimal bidireccional (up/down) con preselector en paralelo, como el 74LS192.
1- Un preselector decimal codificado en BCD (a ser posible rotativo, esto
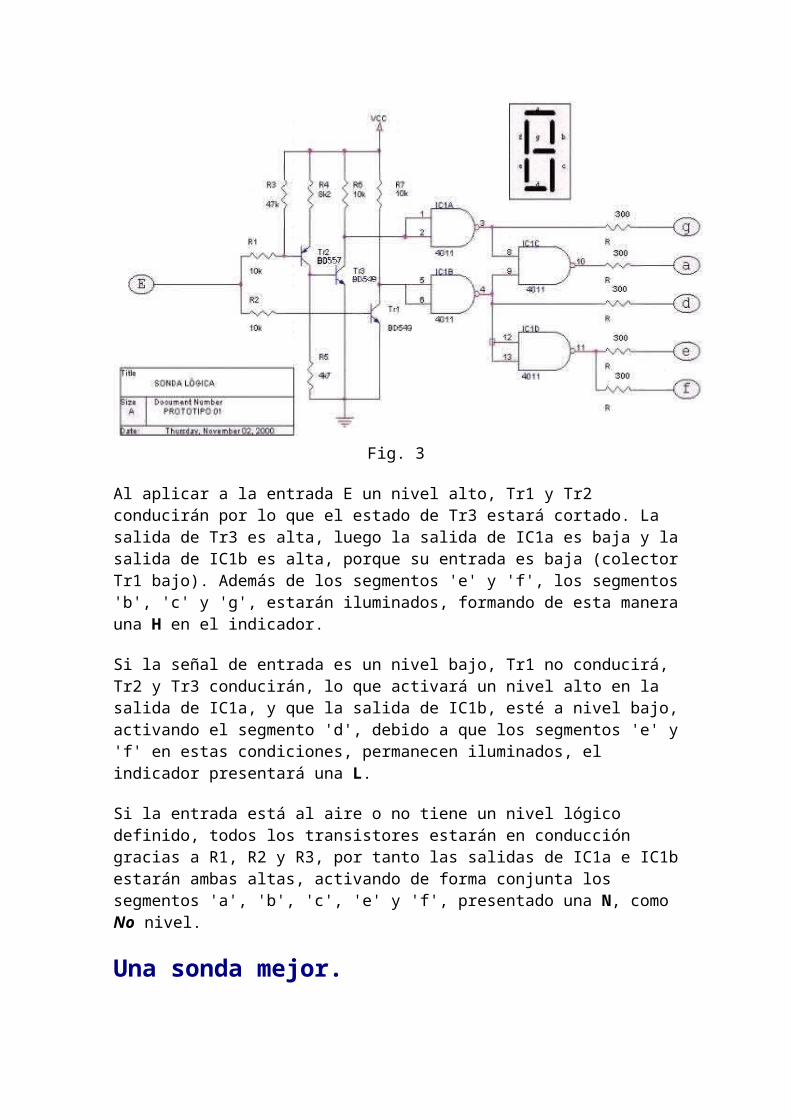
último no es imprescindible).
En esencia poco más tendremos que añadir, si bien deberemos tener en cuenta los siguientes puntos:
- En primer lugar, tendremos en cuenta cuantos dígitos vamos a disponer, en nuestro caso dos.
- Los preselectores que necesitaremos dependerá de los dígitos que hayamos considerado.
- Los display que utilicemos, si utilizamos los comerciales de 1" (una pulgada) o los fabricamos nosotros mediante dos o tres lámparas por segmento o tubos
fluorescentes de encendido rápido.- La corriente de consumo del equipo también dependerá de estos elementos,
tengamos en cuenta que los dispositivos implicados en cada dígito se repiten para cada década y puede ser considerable.
- Por último, sería conveniente disponer de un tablero de control desde el cual, deberemos poder manejar los diferentes pulsadores, conmutador de avance o
retroceso o los distintos selectores.
En principio y solo en principio, podemos estar ante un control de tanteo de un marcador de un evento deportivo, esto se tratará en otra lección que ya tenemos
previsto poner a disposición de los interesados. En este momento, vamos a continuar con nuestro contador digital de dos décadas para alcanzar una cuenta máxima de 100
(tener en cuenta que el 00, también es una cuenta), o si apuramos el sistema, podremos llegar con dos dígitos hasta 1000, pero no 1001.
Ahora presentamos el circuito de la figura 07 de la anterior sección, para mayor comprensión, en ella podemos diferenciar tres partes fundamentales:
Fig. 08 Contador digital con preselector.
Un punto muy importante a considerar con mucha atención es la parte encerrada en
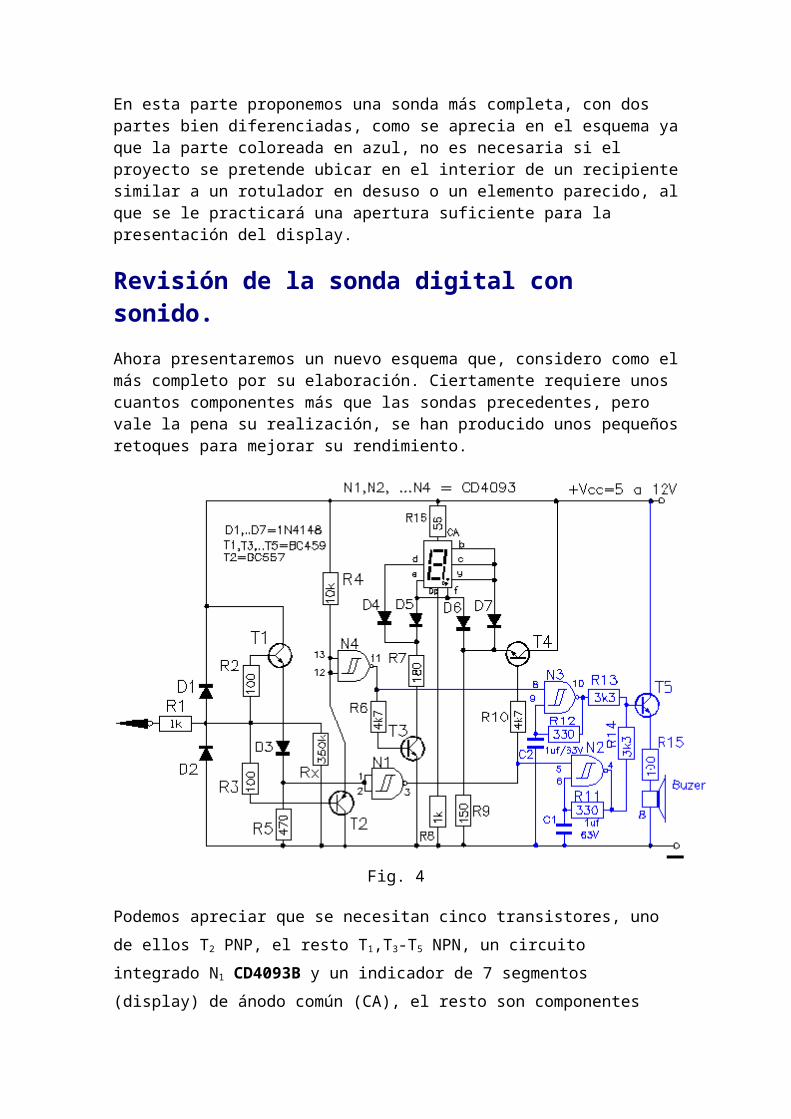
un cuadro que hemos denominado 'Control de cuenta', esta sencilla disposición de estas tres puertas NAND (que pueden pertenecer a un 74LS00), un conmutador de
dos posiciones y una resistencia de 1k, son la parte esencial de comando del contador en la forma más simple y que al mismo tiempo nos permite la mayor garantía de
buen funcionamiento.
Otro punto de los tres enumerados es el formado por el preselector y el propio contador decimal 74LS192. Estas dos piezas son las responsables de la que podemos considerar forma concreta de conteo particular al que podemos dar lugar, basándonos
en la disposición exacta del preselector.
Veamos con detalle lo que queremos decir con la posición del preselector, si utilizamos uno pequeño de los llamados 'switch dual-in line' de 4 u 8 contactos que van en un dispositivo similar a un circuito integrado, como los representados en la
figura 08, hemos de tener en cuenta que el usuario ha de conocer muy bien contar en binario, ya que no todos son capaces de hacer una conexión adecuada con soltura.
CUENTA
D C B A
5 0 1 0 1
7 0 1 1 1
9 1 0 0 1
3 0 0 1 1
4 0 1 0 0
8 1 0 0 0
6 0 1 1 0Naturalmente para nosotros es bastante sencillo de comprender este sistema de
contar y fácilmente podemos deducir que un 1 significa que el contacto en cuestión, según la citada figura, lo tendremos que dejar al 'aire' como decimos en el argot de la electrónica, en cambio para cada 0 (cero), deberemos poner en contacto cerrado cada
contacto que le corresponda. Obsérvese la disposición que le hemos dado a los contactos (DCBA), esto es debido al peso que corresponde a cada línea de entrada al
circuito integrado y que se debe respetar escrupulosamente para su buena comprensión.
Fig. 10 Detalle eléctrico de un decodificador 10 a BCD y muestra real.
En la figura 10, mostramos las características de construcción de un decodificador rotativo decimal a BCD. Los cuatro círculos concéntricos pretenden ser cada uno un contacto en el que los tramos de mayor espesor representa las pistas de contacto de la escobilla que unirá cada uno con el eje central el cual se conectará a masa en nuestro
caso, obsérvese que cada línea se conecta a través de una resistencia de 1k al positivo. Comparemos las dos imágenes de la figura 10 y observemos la similitud
que existe entre ambas.
Visto el decodificador, resultará más sencillo comprender cómo actúa sobre el circuito contador decimal integrado en el dispositivo 74LS192, al que lo
conectaremos en las entradas denominadas de preselección. Para cargar las salidas a un determinado estado, se aplicará la información a las entradas de datos (patillas 15,1,10 y 9), esto nos permite preseleccionar el inicio de la cuenta. Conectamos la entrada de carga (patilla 11) a nivel bajo L. Esta función de carga es independiente
de la entrada de reloj y del estado del contador. El 74LS193 es un contador similar al que se describe 74LS192, la diferencia es que el 74LS193 realiza un conteo en
binario puro.
En este dispositivo contador, (las entradas que no reciben impulsos, deben permanecer a nivel alto H), dispone de dos entradas independientes de reloj, la de
conteo (subida 'Up', patilla 5) y la de descuento (bajada 'down', patilla 4). La patilla 14 'puesta cero' PAC, es la que nos permite situar el contador a 0, al aplicarle un nivel alto H. Las salidas del contador cambian de estado durante la transición del
nivel L al nivel H en cualquiera de ellas.
La salida de descuento ('borrow' patilla 13) nos presenta un impulso de la misma duración que el de entrada cuando el contador alcanza la cuenta mínima (estado 0). La salida de acarreo ('carry', patilla 12) nos dará un impulso de la misma duración
que el de entrada al alcanzar la cuenta máxima (estado 9). Estas dos líneas nos sirven para interconectar con otros contadores en serie o cascada, permitiendo el acarreo o
descuento en las respectivas décadas.
De manera que cuando hemos cargado el número de partida en el preseleccionador, debemos cargar dicha cuenta con un impulso L en la patilla de carga (pin 11),
devolviéndolo al estado H. Es decir, cada vez que se lleva a L esta patilla, se iniciará la cuenta desde ese número preseleccionado.
El Reloj Digital.
El contador que abordaremos en esta sección, como indica el título, se trata de un reloj. Ahora, podemos abordar la realización de un reloj digital desde dos
perspectivas: El tradicional reloj que nos muestre los dígitos desde el 1 al 12 o el reloj de números binarios para complacer a los entusiastas de este tipo menos visto y
sin embargo no menos atractivo.
En principio el planteamiento es el mismo: un generador de pulsos, un contador/divisor por 10, un contador/divisor por 12, un contador/divisor por 6 y si
queremos un preselector para una alarma. En un caso usaremos, displays y en el otro caso unos diodos LED para representar los bits. Propongo usar los circuitos
integrados de la serie CMOS, por sus características, en caso de disponer de los clásicos TTL, el lector debe encontrar los equivalentes.
Reloj digital con diodos LED.
Dependiendo de las exigencias que le pidamos, el generador de impulsos debe ser de décimas de segundo como ya hemos visto en base de tiempos y el 'segundo método' en la lección 2, donde podemos aprender cómo conseguir fácilmente los pulsos de
10Hz/s y 1Hz/s. Ver imagen.
Los Contadores.
Como ya he apuntado, son necesarios dos tipos de contadores, las unidades y las decenas de segundos minutos y horas. Para todos usaremos un contador decimal, el cual como ya veremos mediante una
combinación de puertas podemos adaptarlo a nuestras necesidades. Otra cuestión a tener en cuenta es, reducir
al máximo los componentes utilizados y aprovechar todos sus recursos.
Como contador vamos a usar un doble contador Binario como puede ser el CD4520B o el 74LS393, el cual se muestra en la figura de la derecha, este contador por sus
características como veremos, lo podemos configurar como divisor por 10 y como divisor por 6, ambos son los que necesitamos.
La figura de la izquierda muestra
el contador por diez para los segundos, se
puede apreciar el pulsador para
poner la cuenta a "0" para
sincronizar la hora, este pulsador pone a cero los segundos y las décimas de segundo al mismo tiempo. En la figura de la derecha se muestra el conexionado del mismo contador
para dividir por seis para la cuenta de las decenas de segundo para los 60 segundos .
De este modo aprovechamos ambos contadores contenidos en el mismo dispositivo y reducimos al mínimo los circuitos integrados que intervienen en el montaje.
El esquema que se muestra a continuación muestra la configuración para construir un reloj digital, constituido por 20 diodos LED, el conocido como reloj binario, diodos dispuestos de forma que se puede leer la hora sumando los bits de cada columna. Si,
es un tanto extraño para la mayoría, sin embargo hay muchos que les gustan las cosas personalizadas (como algunos dicen "tuneadas").
Click para ampliar
La figura siguiente muestra la disposición de los 20 diodos LED en un panel que dispondremos para su presentación.
Lista de componentes.
La lista de componentes para construir este reloj digital de lectura binaria es la siguiente:
1CD4022B - Divisor
1CD4017B - Divisor decimal Johnson
1CD4093B - 4 Puertas NAND Schmit Trigger
3CD4520B - Doble divisor Binario
2 CD4081B - 4 Puertas AND10
1N4148 - Diodos pequeña señal
21
LED ROJO - 5m/m de Alta luminosidad
1LED VERDE - 5m/m de Alta luminosidad
1BC549C - Transistor universal NPN
2 Diodos Zener de 5'1V 0'5Watios
3 Pulsadores NO (Normalmente abiertos)
1Conmutador dos posiciones (para 50 o 60 Hz)
1 Interruptor de red.
1 Transformador de red de 220-240 / 9 + 9 Voltios 500mA
1 Porta Fusible con fusible de
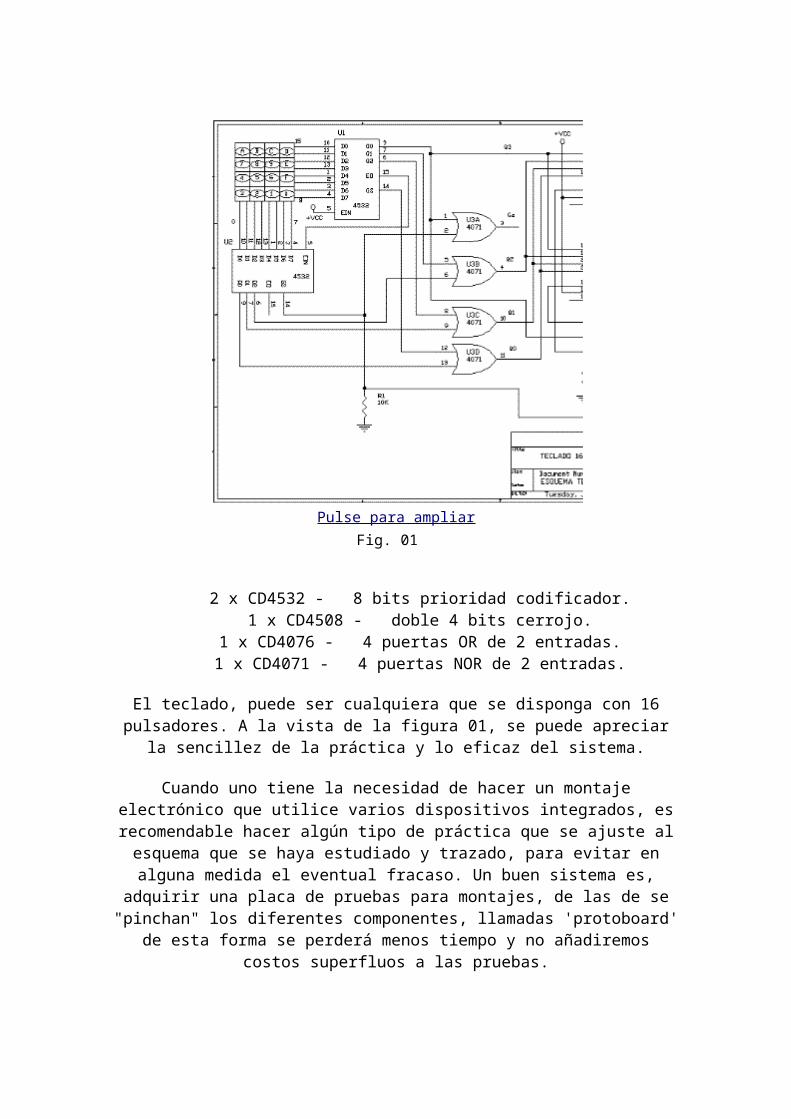
0'5A
3Resistencias de 10KOhms 5% 0'5 W
21
Resistencias de 100Ohms 5% 0'5W
4 Resistencias de 2K2Ohms 5% '05W
LECTURA.
La lectura de este tipo de reloj, se efectúa sumando el peso de cada LED encendido en cada columna, de modo que en la imagen que se muestra debajo, la hora indicada
es mostrada como: 13:50:25
En la foto que sigue (no es mía, aunque sirve al caso), se aprecia un nuevo ejemplo en un montaje más personalizado y con más detalle.
Reloj con Dígitos.
Para los interesados en lo tradicional, pueden usar el mismo circuito de base para adaptarlo a los visualizadores de 7 segmentos, debe realizarse un cambio en el esquema mostrado más arriba, en el dual puede apreciarse los puntos dispuestos a la salida de cada divisor, justo antes de las resistencias de 100 Ohmios limitadores de los diodos LED, estos puntos se han previsto en el esquema como referencia para este proyecto.
Este es el punto o mejor dicho, estos son los puntos donde conectaremos las
entradas BCD de los decodificadores que se encargarán de convertir las cuentas de binario a decimal de los
divisores. Los circuitos integrados que se deben usar vienen condicionados por
el tipo de display disponible en el mercado, así pues, para unos displays de cátodo común se debe usar el CD4511
(es el mas habitual) y si se trata de la serie TTL, puede ser el 74LS47 para los visualizadores de ánodo común o 74LS48 para los de cátodo común.
Usaré el CD4511, especialmente por que el mismo dispositivo lleva incorporado un sistema de enganche (latch) para retener la cuenta hasta la siguiente actualización
(esto se hace más necesario para contadores de gran velocidad, ya que en estas condiciones sería del todo imposible leer la visualización) , un decodificador BCD a 7 segmentos y un amplificador o driver, lo que reduce al mínimo el espacio físico. Este dispositivo como se ha dicho, requiere de un visualizador (display) de cátodo
común para visualizar los dígitos en el panel.
En la imagen de abajo, para obtener una mayor claridad se han eliminado ciertas líneas, creo que se pueden seguir con facilidad y su exclusión nos permite una mejor comprensión del circuito general, en dicha imagen se puede apreciar la disposición
de los CD4511 y los correspondientes visualizadores. Esta es la versión con 6 displays, en caso de usar sólo 4 displays, deben conectarse a los CD4511
correspondientes (horas y minutos).
Click para ampliar
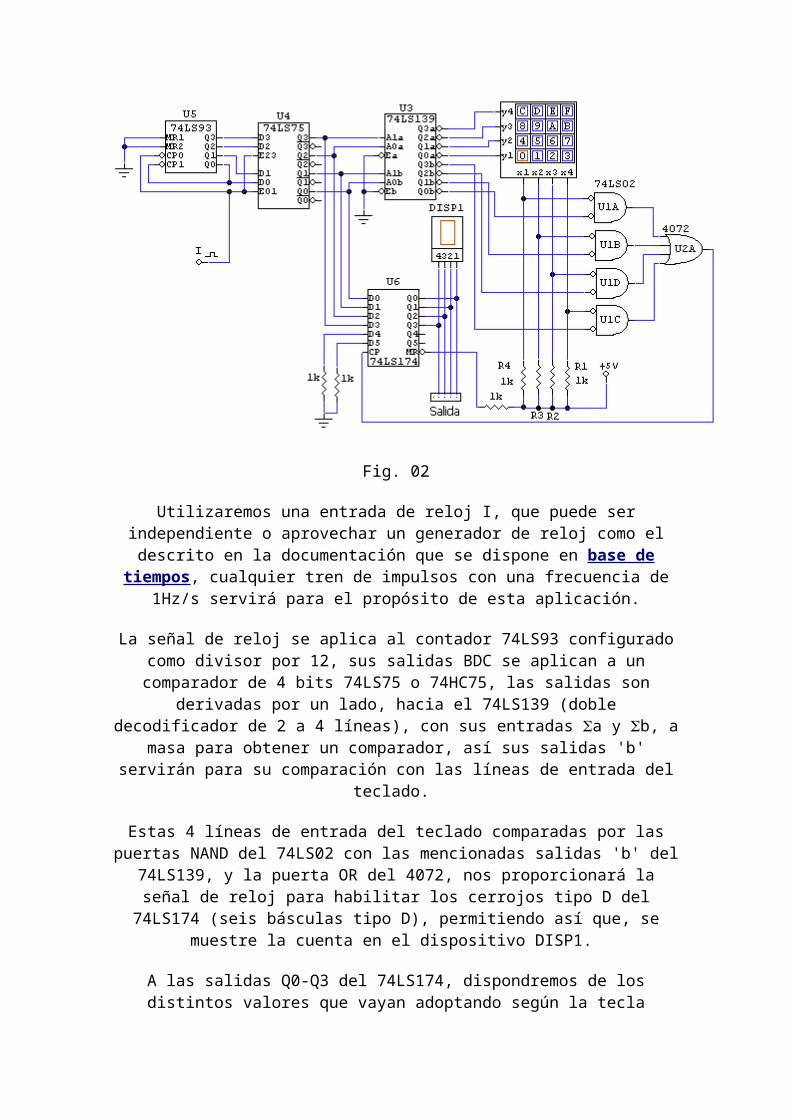
Los terminales en rojo de la figura, son los que no se usan en el caso del reloj binario, en cambio son necesarios para este caso del reloj con displays.
Ahora uniendo los dos esquemas electrónicos, dispondremos del circuito del reloj digital con displays que es la segunda opción que podemos obtener de un reloj. En la
figura que sigue puede verse el circuito completo.
Click para ampliar
El circuito está constituido por dos contadores dobles en código BCD, cada uno maneja las unidades y decenas de las horas y de los minutos. El circuito integrado 4518B dispone de estos dos contadores, también posee dos entradas de reloj y dos
inhibidores además de sus respectivos terminales de reset independientes.
Estará dotado de un preselector que nos permitirá indicarle que cuenta máxima debe hacer y a su salida dispondremos de un pulso, con el que podremos ejecutar una orden bien con la ayuda de un relé o mediante una señal luminosa u otro sistema
digital al que le indiquemos que nueva función debe realizar .
En otro apartado se pretende hacer el mismo reloj usando un microcontrolador PIC, para mas adelante.
Lección 7
EL CIRCUITO TEMPORIZADOR
El circuito electrónico que más se utiliza tanto en la industria como en circuitería comercial, es el circuito temporizador o de retardo, dentro de la categoría de temporizadores, cabe destacar el más económico y también menos preciso consistente en una resistencia y un condensador, a partir de aquí se puede contar con un sinfín de opciones y posibilidades. En este tutorial se tratarán unos tipos sencillos para adquirir conocimiento de cómo conseguir un retardo en un sistema que no requiera gran precisión y terminaremos por analizar un temporizador de mayores prestaciones y precisión.
Cuando necesitamos un temporizador, lo primero que debemos considerar es la necesidad de precisión en el tiempo, base muy importante para determinar los elementos que vamos a utilizar en su concepción y diseño.
Como se ha mencionado anteriormente un temporizador básicamente consiste en un elemento que se activa o desactiva después de un tiempo más o menos preestablecido. De esta manera podemos determinar el parámetro relacionado con el tiempo que ha de transcurrir para que el circuito susceptible de temporizarse, se detenga o empiece a funcionar o simplemente cierre un contacto o lo abra.
EL MÁS SENCILLO.
El más simple de los retardos, requiere de una resistencia de cierto valor y un condensador de considerable capacidad.
Veamos, se necesita un retardo en una máquina cizalla de corte, la cual conlleva cierto riesgo de accidentar al operario que la maneja.
1. Necesitamos un sistema de seguridad para que sólo cuando el operario esté fuera de peligro, la cuchilla pueda bajar.
2. Otro sistema de seguridad, consiste en producir un retardo y al mismo tiempo un sonido o luz intermitente de aviso.
El primer caso, se puede lograr con la combinación de unos fines de carrera y un par de pulsadores, localizados fuera del recorrido de la cuchilla y sus alrededores.
Para el segundo punto, podemos optar por un diodo rectificador D1, una resistencia R1 y un condensador C1. El montaje sumamente sencillo se muestra en la figura 1.
Fig. 1
El diodo D1 se encarga de rectificar la corriente proporcionada por un secundario de un transformador o simplemente de la red a la que se conectará el equipo al que se ha de controlar, para lo cual deberá observarse las precauciones básicas y elementales a la hora de seleccionar los diferentes elementos mencionados, respetando un margen de seguridad en la tensión a la que se someterán en el montaje.
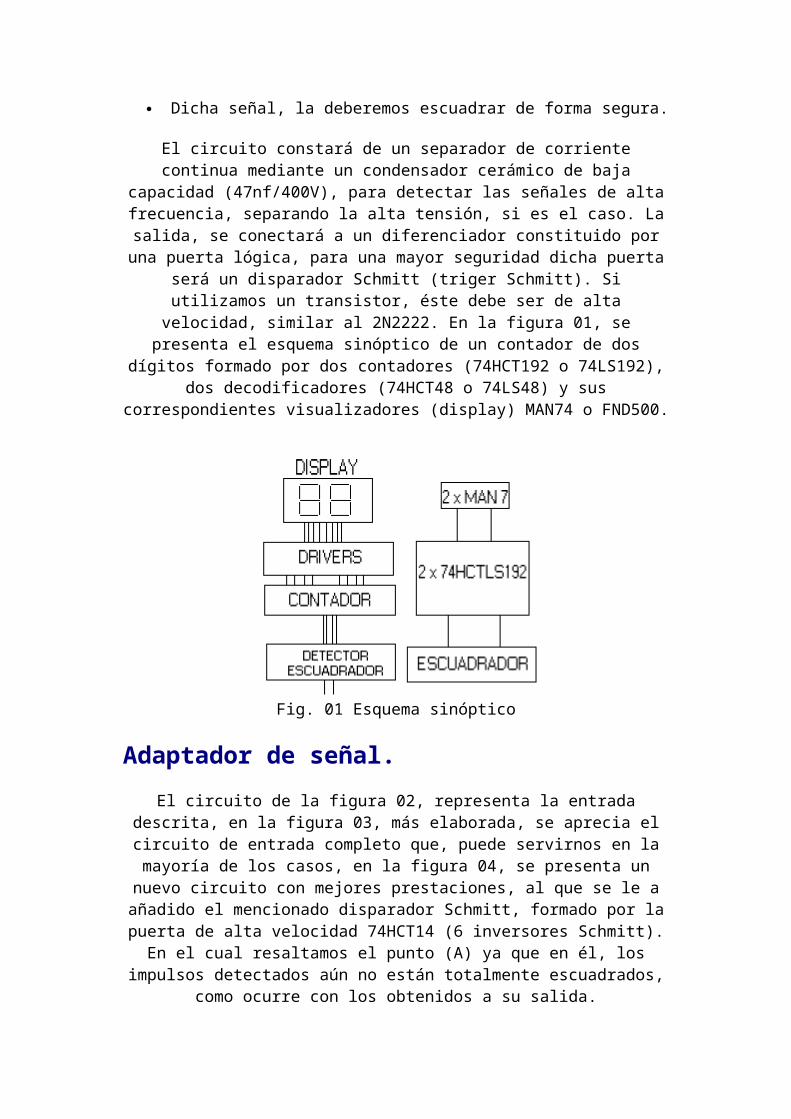
A continuación se intercala la resistencia R1 que será la responsable directa del tiempo de carga del condensador, es decir, a mayor valor ohmico le corresponde un mayor tiempo de carga del condensador.
El siguiente elemento, el condensador, debe escogerse de una considerable capacidad cosa muy determinante, pero sin perder de vista la tensión a la que se verá sometido, para evitar que se perfore y quede definitivamente inservible. A la hora de elegir el condensador, es conveniente considerar su tamaño y siempre que sea posible debería optarse por un modelo electrolítico (de ahí el uso del diodo), como digo electrolítico debido esencialmente a la mayor capacidad y menor tamaño, cosa que en algunos casos no es posible, utilizando en tal caso uno de los no polarizados industriales de unos 8 a 12 µf y por seguridad 400V, los que suelen utilizar en los motores de las lavadoras o frigoríficos.
Bien, veamos que ocurre cuando se aplica una tensión a la figura 1 a, la corriente al atravesar el diodo D1, se rectifica a media onda, esto la reduce aproximadamente a la mitad, esta tensión se enfrenta al paso de la resistencia R1, que le restringe su paso a un valor previsto por el diseñador.
A la salida de R1, la tensión se precipita para cargar el condensador C1, que es el camino que menor resistencia le ofrece y, ese tiempo de carga, justamente es el tiempo que se pretende controlar, ya que durante ese tiempo de carga, la corriente no fluirá más allá del condensador. Hay que tener en cuenta que el tiempo de carga, no representa más que dos tercios (2/3) de la capacidad total de C, rebasada la cual, la corriente empezará a fluir hacia el siguiente elemento conductor que encuentre, terminando así el retardo.
De lo expuesto, se puede asegurar que la corriente que atraviesa el circuito, recorre dos caminos; uno el representado por la línea de trazos (Ic) durante los primeros 2/3 de carga, y otro, el de la salida (Id). La salida puede conectarse a un relé que se encargará de producir el efecto deseado conectar/desconectar, según lo previsto. Este sistema se estuvo utilizando hasta los años 70 en cierto control de los ferrocarriles de España, en el sistema de seguridad llamado 'hombre muerto'
Este caso digamos que es el directo, también se puede utilizar una forma más, digamos sofisticada, a esta se conecta el relé RL, en serie con la resistencia R1, a la cual se le calculará su valor, de manera que la corriente que la atraviese, active el relé sólo cuando el condensador C, se haya cargado. la tensión de trabajo del relé deberá ser la que corresponda a la tensión nominal de alimentación del circuito, para evitar que se queme cuando se active mediante la corriente de paso en carga.
En ambos circuitos, se percibe que el control no es tal, ya que la carga del condensador se ve influenciada por muchos imponderables, además de poco fiable. Se necesita un mayor control y rango de tiempos.
La solución puede estar en los transistores que permiten un mayor control de los diferentes parámetros. Debido al control de ganancia y paso de corriente que nos permite el transistor y mediante un montaje adecuado, podemos lograr una mejora en los tiempos y por lo tanto más fiabilidad, al utilizar condensadores más pequeños. Véase en la figura 2, la báscula formada por T1 y T2 a los que se ha añadido un tercer transistor para mejorar la carga del relé a su salida. El funcionamiento de la báscula
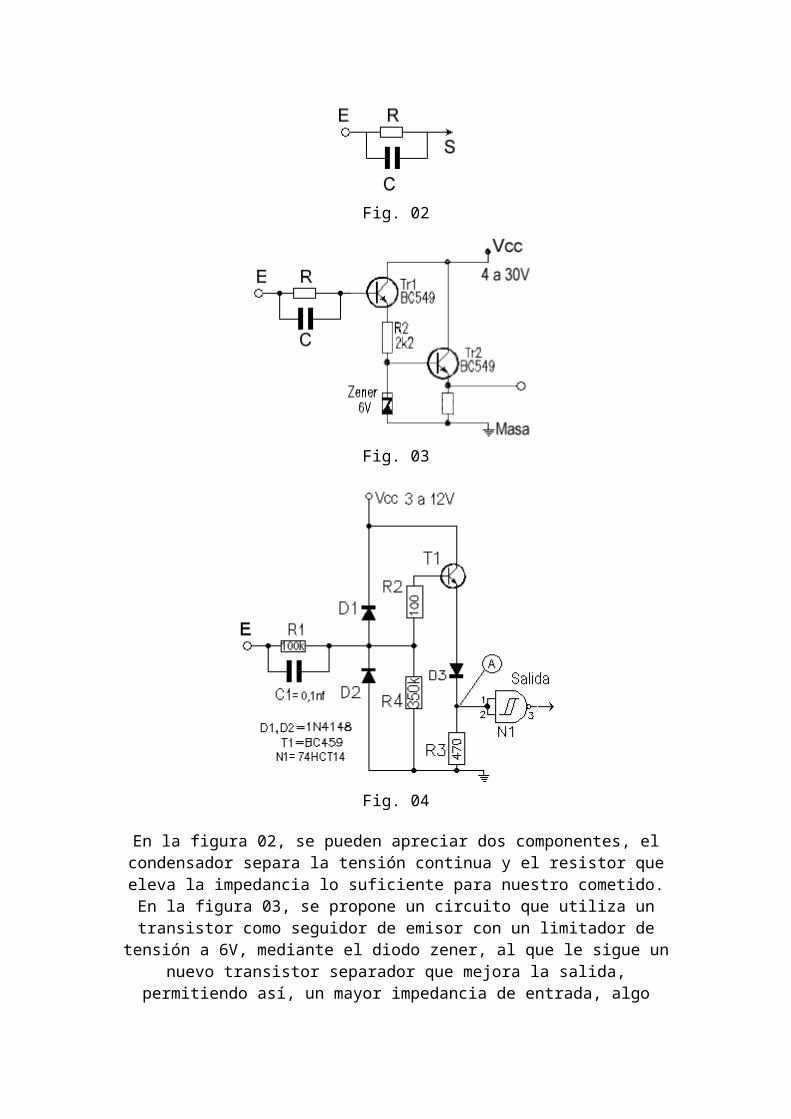
determina mediante el ajuste de los potenciómetros P1 y P2 los tiempos de basculamiento obteniendo un mejor control de amplitud del tiempo de retardo.
No obstante y a pesar de lograr una considerable reducción en la capacidad de los condensadores, lo que conlleva una mayor seguridad y control, no es bastante fiable en algunos casos y la industria necesitaba algo más compacto que le dotara de tiempos mas largos y fiables. Esto se lograría mediante el circuito integrado temporizador µA555.
Fig. 2
EL TEMPORIZADOR µA 555
Creo que es hora de que utilicemos un circuito integrado, en la industria se viene utilizando desde los años 70, uno muy popular que además de sencillo es muy eficaz y versátil a la hora de producir temporizaciones, estoy hablando del socorrido µA555PC, que nos permite construir un temporizador mediante unos pocos componentes de bajo coste. Su estabilidad con la temperatura es de 0'005 % por grado centígrado. Aquí, se describen de forma simple algunos aspectos de este CI. En otro manual, se entrará con mayor detalle.
Veamos el esquema teórico en la figura 3 en la versión como monoestable y en la figura 4, con el modo astable .
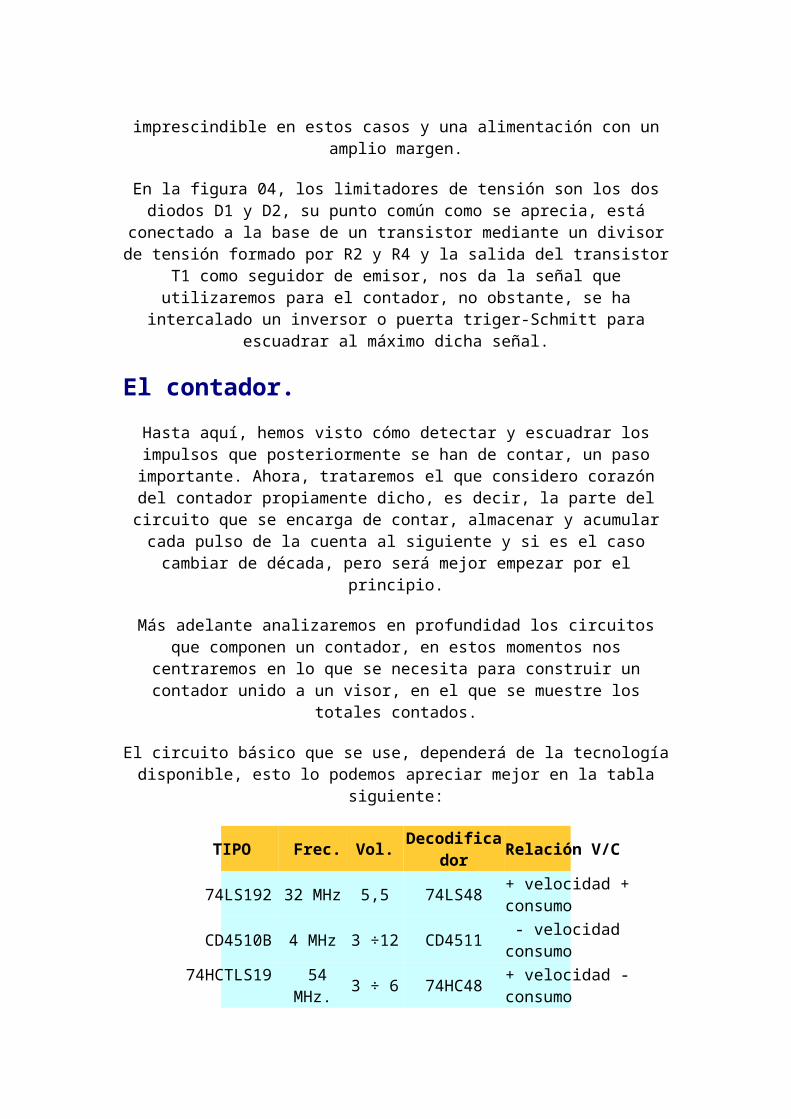
Fig. 3 Fig. 4
Aplicando una señal de disparo, el ciclo de temporización se inicia y una báscula interna le inmuniza frente a futuras señales de disparo. Al aplicar una señal de reposición (rest), el ciclo de retardo se interrumpe dándose por finalizada la temporización. Entre sus características más importantes, hay que destacar el amplio margen de control de tiempo desde microsegundos a horas.
Funcionando como astable o monoestable, el ciclo de trabajo es capaz de proporcionar 200 mA de corriente en su salida.
Funcionamiento monoestable
En el apartado anterior vimos cómo producir un retardo o temporización, la referida figura 3 esta aquí, el esquema que se presenta es bastante sencillo y corresponde a un montaje monoestable, el cual se caracteriza por el modo de conexión de la patilla 2, Disparo, la cual debe permanecer en nivel alto, hasta el momento de empezar la temporización, hemos de hacer notar que esta patilla, debe ser repuesta a su nivel alto, antes de terminar la temporización, si se quiere ampliar el retardo, para evitar disparos fortuitos que variarían el tiempo previsto.
La salida es capaz de entregar una corriente de 200 mA máximo, en caso de necesitar mas corriente, utilizar un relé con contactos que soporten una mayor corriente. Mientras la patilla de disparo esté a nivel alto, la salida patilla 3, permanecerá a nivel bajo, esto debe tenerse en cuenta, para un mejor aprovechamiento del dispositivo.
Mediante este principio de esquema, podemos trazar un temporizador que encienda o apague una luz con un retraso de tiempo que vendrá calculado mediante la siguiente formula:
T = 1.1*Ra*C
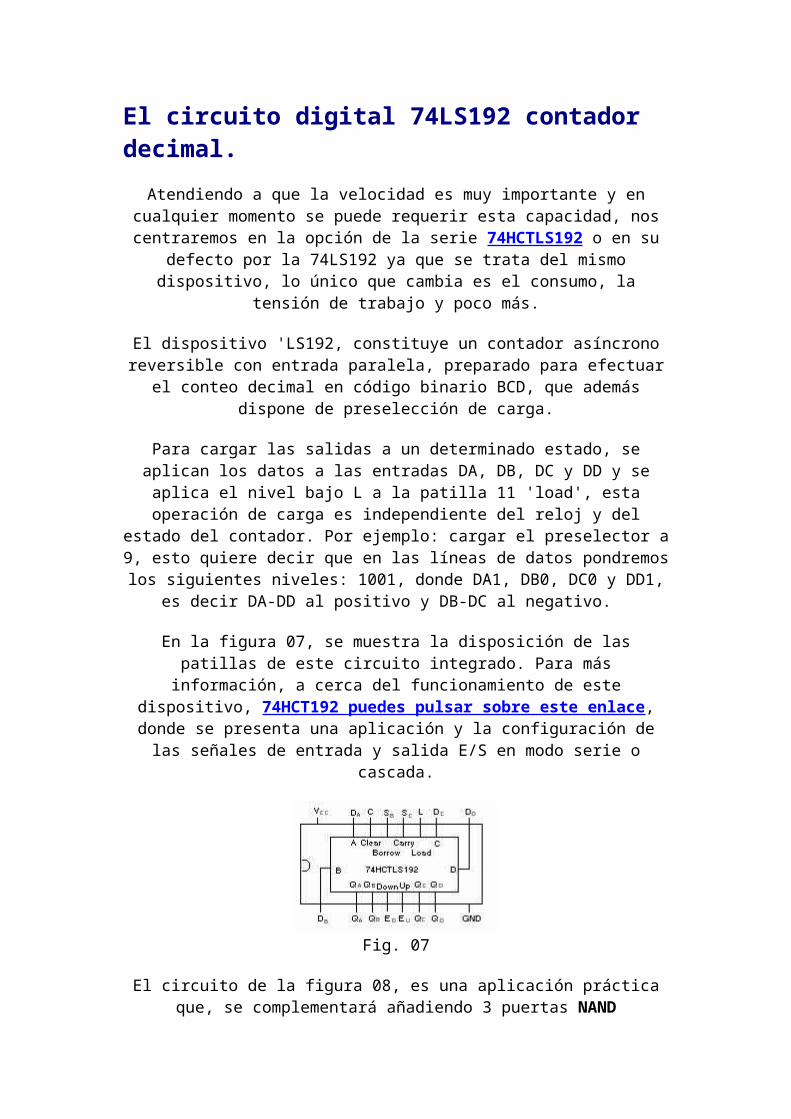
Fig. 5
En la figura 5, se presenta el esquema que cumple con las exigencias descritas, con un retraso en el enciendo o apagado, de un diodo led. El circuito como se menciona, puede utilizarse tanto para el encendido como para el apagado de un diodo led o una lámpara, así mismo mediante un relé, se puede poner en marcha o parar un motor. En las figuras, se pueden cambiar el diodo led, por un relé para dotar si es necesaria de mayor potencia a la salida.
En el caso de necesitar encender el led durante un tiempo previsto, dicho led se conectará entre la salida, patilla 3 y la masa o negativo, permaneciendo encendido hasta transcurrido el tiempo establecido desde el impulso de disparo, figura 6, un pulso de puesta a cero (PAC) en el reset reiniciará el retardo. Una posible aplicación de seguridad, emitir una señal de alarma durante un período de tiempo desde que se da la señal corte, hasta que baja la cuchilla de la cizalla, evitando así accidentes laborales.
Fig. 6
En el segundo caso, o sea, necesitamos que el led, permanezca apagado durante un tiempo desde que se aprieta un pulsador y permanezca apagado hasta que vuelva a pulsarse. En este caso se conectará el led entre el Vcc de la alimentación y la patilla 3 de salida, ver figura 7. Una aplicación sería que no se abra la puerta del garaje hasta que se le de la señal y pasado ese tiempo se cierre de nuevo hasta la siguiente señal de apertura.
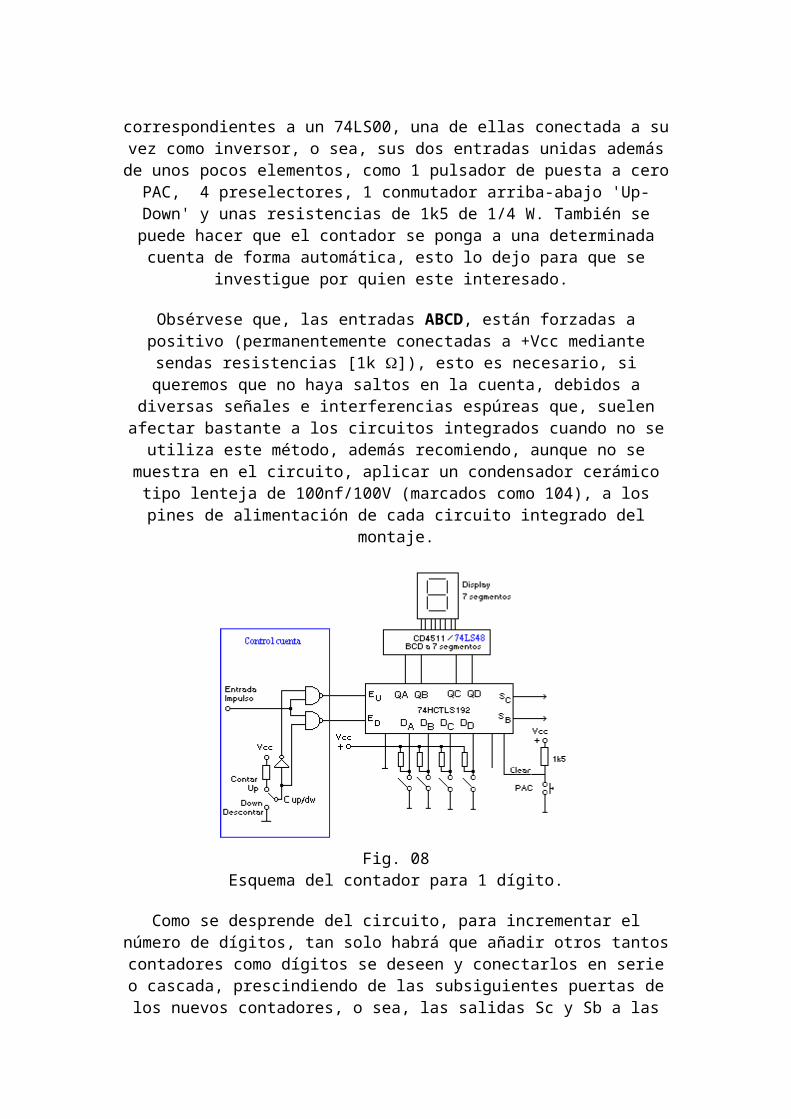
Fig. 7
Estos son dos ejemplos bastante corrientes y que pueden ponerse en práctica en cualquier momento por parte del alumno o del profesional en las labores habituales con total seguridad. Como se verá, la resistencia Ra, es conveniente ponerla del tipo ajustable para que sea más práctico el montaje. En la figura 8, se muestran las señales de disparo flanco de subida, t el tiempo de retardo y de salida del esquema monoestable.
Fig. 8
Funcionamiento astable.
En este caso es la figura 9, la que nos presenta el esquema básico de este modo de funcionamiento. Puede ser interesante conocer su funcionamiento como astable (también llamado redisparable ya que eso es lo que hace, produciendo así cierta frecuencia), ya que uniendo sus terminales 2 y 6, el circuito se auto dispara y trabaja como multivibrador.
Es de destacar que, el comportamiento de este esquema, a grandes rasgos, genera una señal cuadrada en el tiempo, es decir, en la salida, el usuario dispone de una señal cuadrada con un ciclo de completo que viene determinado por la formula:
F = 1/T = 1.44 / [C*(Ra+2*Rb)]
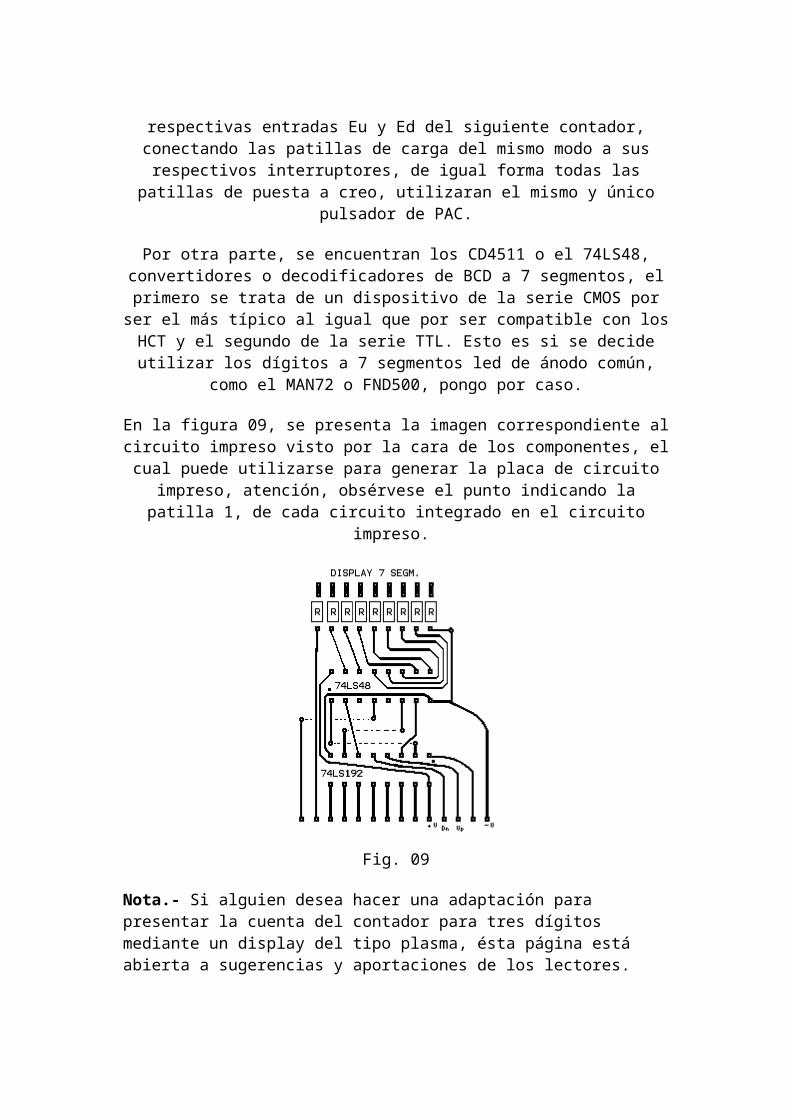
Fig. 9
El condensador C1 se carga a través de Ra+Rb y se descarga a través de Rb. De esta forma, dimensionando adecuadamente los valores de Ra y Rb, se pueden modificar a voluntad el ciclo de trabajo (duración estado alto - duración estado bajo), ver figura 9.
La señal cuadrada tendrá como valor alto = Vcc y como valor bajo = 0V (aproximadamente). Si se desea ajustar el tiempo que está a nivel alto y bajo al 50%, se deben aplicar las fórmulas:
Salida a nivel alto: T1 = 0.693*(Ra+Rb)*C Salida a nivel bajo: T2 = 0.693*Rb*C
En la figura 10, se presenta las señales del circuito astable con un ciclo del 50%. La duración del estado alto depende de Ra y Rb, mientras que la duración del estado bajo, depende de Rb.
Fig. 10
En alguna aplicación muy concreta, puede aprovecharse esta particularidad que ofrece el montaje astable, al producir un ciclo alto-bajo del 50%, lo que nos permitirá (dimensionando adecuadamente los valores de las resistencias y el condensador), disponer de un período activo seguido de otro período inactivo, ambos lo suficientemente largos según nuestras necesidades.
Este último circuito integrado, con sus posibilidades, nos puede servir en muchos casos, pero ya que somos perseverantes y son muchos los caso en los que los tiempos a controlar deben ajustarse al tiempo real, debemos pensar en un circuito con mayores garantías de lo que hemos visto hasta ahora.
Puede encontrar más información sobre el circuito 555 en el tutorial descrito en este enlace.
Hasta aquí, hemos tratado de alguna forma los principios de los temporizadores, desde lo más rutinario, que normalmente no utilizaremos, por lo obvio que resulta su falta de seguridad, hasta el más popular de los circuitos integrados, como el µA555, con sus dos vertientes de monoestable, en el caso de necesitar disparar el retardo por cualquier medio y astable, en el caso de necesitar un multivibrador o generador de frecuencias.
En esta parte, vamos a dar un paso más en la maraña de posibilidades que se nos pueden presentar para trazar un temporizador o disparador con una señal, retardo de tiempo programado.
En un principio, nos proveeremos de un circuito integrado de la familia CMOS, utilizaremos éste, porque el margen de tensión para su alimentación y bajo consumo, es bastante ancho con respecto al de otras familias. El circuito integrado en cuestión el CD4093, se trata de 4 puertas NAND (NO-Y) de 2 entradas, que es muy popular y económico, cuyas patillas y tabla de la verdad, se pueden ver en la figura 11, obsérvese la particularidad de las puertas NAND, siempre que una entrada se encuentre a nivel 0, la salida se encontrará a nivel 1.
ABS001
011
110
Tabla de la verdad
Fig. 11
Bien, otra particularidad no muy conocida de las puestas lógicas es, su capacidad de amplificación, que si bien es de baja ganancia y corriente de salida, no impide que la podamos utilizar en modo amplificador analógico, como vamos a hacer en este ejemplo, aunque como siempre sin entrar en pormenores y formulas para un estudio exhaustivo ya que, no es el caso.
Función Monoestable
Pongámonos en marcha, tomemos una de las 4 puertas disponibles en el 4011B y conectaremos la patilla 1 entrada a la patilla 14 que, es el positivo de alimentación, la otra entrada patilla 2, por un lado la conectaremos a la unión de una resistencia R1 y el terminal positivo de un condensador electrolítico C1, el polo negativo del mismo a masa o negativo de la alimentación, el otro extremos de la R1 lo conectamos al positivo de alimentación, como se aprecia en la figura 12.
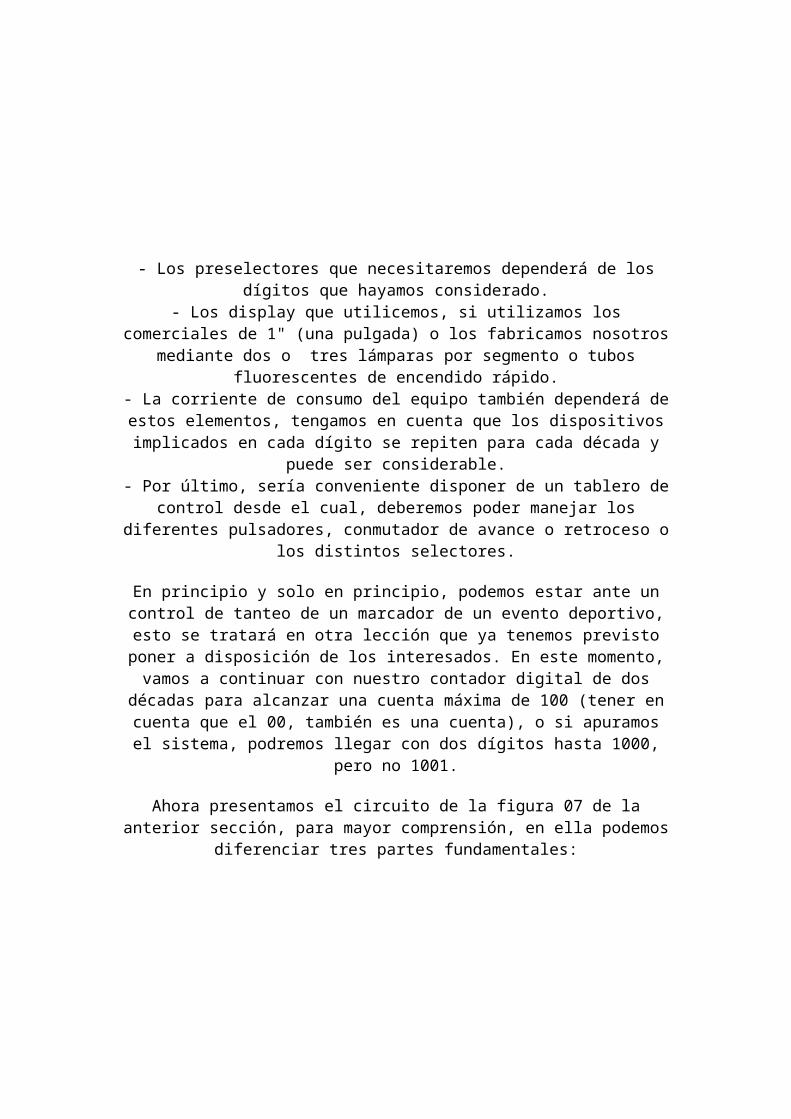
Cuando a la entrada E, le aplicamos un impulso, en la salida, patilla 3, podemos comprobar que tenemos un pulso de cierta duración, que viene determinado por R1 (50k<R1<1M) y el condensador C1 (100pf<C1<1µf), véase la figura 12.
Fig. 12
Se debe amplificar esta señal mediante un transistor, con una resistencia de R2=10k en la base y otra en el emisor de 1k, donde se obtendrá la salida no invertida. El motivo por el cual se debe utilizar este transistor separador, es precisamente para evitar cargar en exceso la salida de la puerta provocando un desequilibrio en su normal funcionamiento y sobre todo por que la corriente de salida de estas puertas es muy baja.
Fig. 13
En cuanto a la patilla 1 de la puerta que, ahora tenemos conectada al positivo de alimentación, si la desconectamos y la tiramos a masa temporalmente, mediante una resistencia R3 (10k), nos sirve como control de inicio de la temporización, véase la figura 13.
Función astable
Ahora, vamos a proceder con el conexionado de la puerta como funcionamiento multivibrador o astable, el cual producirá una frecuencia dentro de los márgenes de la familia CMOS, entre los 0'1 Hz. y los 20MHz. En este caso, la disposición de la patilla 1, nos servirá como bloqueador de la oscilación, cuando la dejemos puesta a masa por medio de R3. Cuando la queramos habilitar, la pondremos a nivel 1 conectándola al +Vcc, lo que hará que entre en oscilación.
Si la habilitación y deshabilitación la producimos de forma controlada con una frecuencia baja, se comportará como una portadora, produciendo lo que llamamos trenes de impulsos. Véase la figura 14.
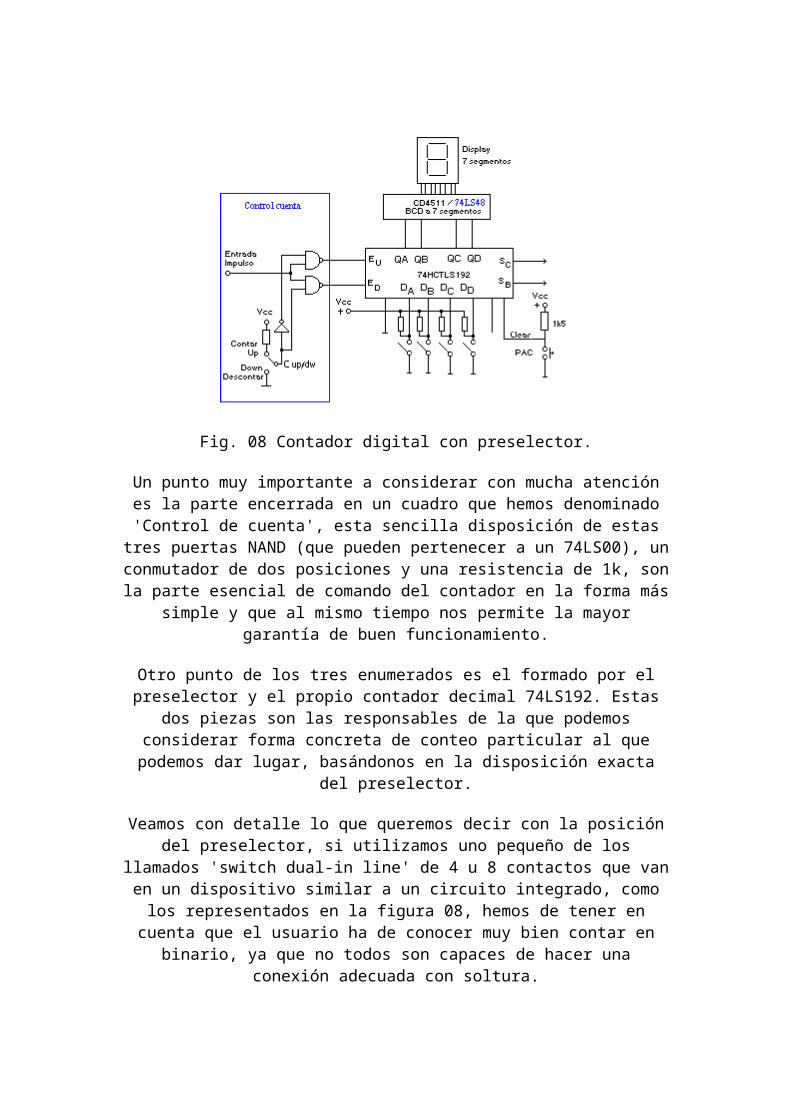
Fig. 14a y 14b
Esta forma de conseguir realizar un temporizador o un oscilador controlados, puede servirnos en multitud de casos, pero sigue siendo muy ineficiente, me explico, no tenemos un control del tiempo real transcurrido, es muy poco fiable, no se puede decir que sea exacto. Para lograr controlar los tiempos de retardo con una precisión de centésimas de segundo o mejor, tenemos que servirnos de la tecnología digital en su forma más natural, es decir mediante una señal de reloj.
Llegados hasta aquí, debo recomendar la lectura del tutorial 'base de tiempos' , que se encuentra en el apartado de glosarios, del mismo autor.
En dicho tutorial o manual, se trata de forma simple cómo generar una señal de reloj con alta precisión, realizada mediante un cristal de cuarzo de uso cotidiano, así obtendrá una serie de señales patrón, de forma económica tanto para el profesional como para el estudiante.
Siguiendo dicho estudio, podemos construir un contador, como el descrito en la lección 6, donde se aborda la construcción de un contador con preselección, lo que nos permite fijar una cuenta máxima con dicho preselector, pasada la cual, el contador se pone a cero de forma automática, dando una señal de salida y vuelve a iniciar la cuenta, si así se desea. O por el contrario, habilitando la patilla adecuada del contador, puede contar a la baja o descontar desde una cuenta preseleccionada, pero eso se describe como se ha dicho en la lección 6.
El circuito temporizador digital tiene que cubrir las mismas prestaciones que los analógicos y además obtener la máxima exactitud posible, lo que le confiere unas posibilidades adecuadas para la mayoría de los casos.
Algo más arriba, hemos tratado la forma de realizar un temporizador o un oscilador controlados, que puede servirnos en multitud de casos, también vimos que no es muy eficiente, por falta de un control del tiempo real transcurrido, es por esto muy poco fiable. Vamos a utilizar la tecnología digital para conseguir una señal de reloj, es decir, una señal de 1herzio/segundo, para a partir de ella lograr una temporización con la mayor fiabilidad posible.
Si ha leído el tutorial 'base de tiempos' , que se encuentra en el apartado de glosarios, puede seguir con mas facilidad lo que sigue, ya que apoyándose en una señal de reloj, podemos construir un contador, como se describe en la lección 6, donde se aborda la construcción de un contador con preselección, lo que nos permite fijar una cuenta máxima con dicho preselector, pasada la cual, el contador se pone a cero de forma automática, dando una señal de salida y vuelve a iniciar la cuenta, si así se desea. O por el contrario, habilitando la patilla adecuada del contador, puede contar a la baja o sea descontar desde una cuenta preseleccionada.
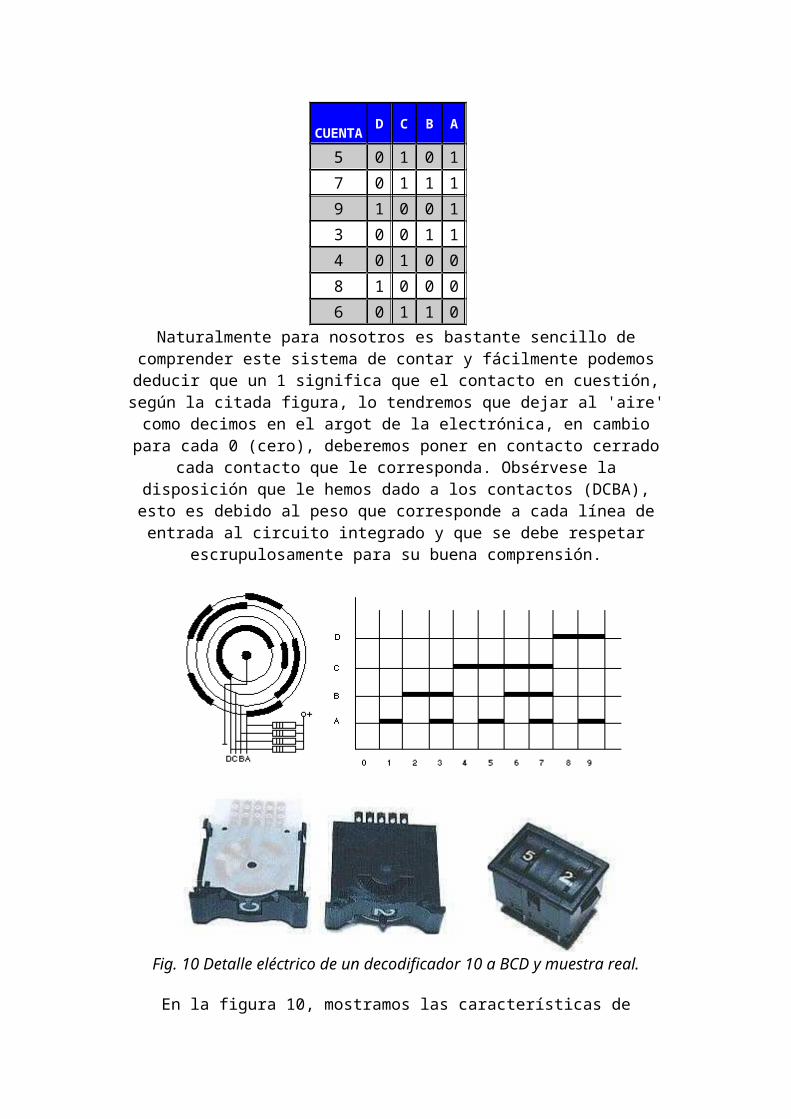
Veamos como conseguir lo propuesto en el apartado anterior. En principio, tomaremos la base del contador descrito como hemos dicho, en la lección 6 (en el esquema de la figura 8), vemos la forma de conexión del circuito integrado 74HCTLS192 junto a tres puertas NAND de dos entradas, mediante las cuales conseguiremos que el contador así dispuesto, avance o retroceda en su cuenta dependiendo de la posición del conmutador C up/dw, dispuesto a tal efecto.
Dos de las tres puertas NAND, se utilizan para direccionar el modo de cuenta arriba (avanzando) o abajo (retrocediendo), el efecto se logra con la tercera puerta conectada como inversor, al unir sus dos entradas al contacto común del conmutador de cuenta C up y al mismo tiempo a las entradas libres de estas dos puertas. La salida de cada puerta NAND se conecta una a Eu y la otra a Ed del 74HCTLS192, observar que ambas son complementarias entre si, ya que es condición necesaria.
La cuenta puede iniciarse en cualquier punto, incluso diferente de 0(cero), es decir, podemos preestablecer el punto de conteo y la dirección de la cuenta según nos convenga en cada caso, mediante los mini-dips de preselección MD.
Bien, ahora fijémonos en las dos salidas del 74LS192, me refiero a las Sc (salida de acarreo) y Sb (salida de borrado), aquí en estas dos patillas, esta la clave del temporizador. Veamos.
Estando en la función de conteo hacia arriba, cuando la cuanta llega a 9, la salida Sc, se pone en nivel H (alto) y permanece así hasta que el contador pasa a 0 (cero), lo que sirve para pasar una unidad de cuenta al posible contador siguiente de las decenas. En cambio en la función de regresión o conteo hacia a 0, la salida Sb, no se activa hasta que dicha cuenta no pasa por 0, descontando una unidad en el contador de la anterior década si es que existe.
Para comprender mejor lo expuesto en el párrafo anterior, vamos a considerar que tenemos un contador como el descrito con dos dígitos, lo que supone poder contar 100 unidades, desde 00 hasta 99, además, el contador lo hemos preseleccionado de manera que cuente desde 00 hasta 99.
Cada vez que le llega un impulso de conteo a la patilla de entrada Eu, el display nos muestra en el primer dígito que cambia de 0 a 1 en el primer paso, de 1 a 2 en el segundo y así sucesivamente, pero qué ocurre cuando llega a 9. Que cuando rebasa dicha cuenta por llegar un nuevo impulso, el contador pasa de nuevo a 0, lo que hace que la patilla de salida Sc, envíe a su vez un impulso de la misma duración que el de entrada hacia el siguiente contador, propagando de esta forma la cuenta más allá de 9, reflejándose en el segundo dígito que hasta ahora marcaba 0 y pasa a su vez a marcar 1 (una decena).
El conjunto de los dos dígitos del display muestran sucesivamente 00, 01, 02, 03, 04, 05, 06, 07, 08, 09, 10 y así continúa mientras le lleguen impulsos de conteo a la puerta de entrada. Qué ocurre cuando la cuenta llegue a 99, sencillamente la salida Sc del segundo contador nos dará un nivel alto durante el paso del impulso de 99 a 00 que es el siguiente número a mostrar, reiniciándose la cuenta.
Bien, llegados a este punto, aprovecharemos este impulso de la salida Sc del segundo contador, para mediante una resistencia, conectada a la base de un transistor activar la carga que deseemos aplicar a su salida. Dado que el primer dígito del contador también dispone de una salida Sb, esta se aplicará a través de la resistencia adecuada a la base del transistor que activará la carga puesta en su colector al pasar el contador de 99 a 00.
Se deduce que la carga del transistor dispuesto se activará cada 100 impulsos de reloj o lo que es lo mismo 100 segundos, ahora bien, si queremos que las cuentas nos salgan redondas y ya que hablamos de tiempo, sería interesante que los pulsos a contar se consideren minutos, es necesario poner el segundo contador en 6 mediante los preselectores y de esta forma, contará 60 segundos cada vez que pase por 00, tanto si cuenta como si descuenta. Se dispone de un pulsador Clear, para reponer la cuenta y digo reponer debido a que la cuenta como se indica puede empezar desde el punto que se desee.
Es conveniente ver la siguiente figura, para aclarar las dudas.
Fig. 15
Este modo de aplicación de un contador digital para producir un temporizador, sin duda es más complejo que cualquiera de los descritos anteriormente, no obstante hemos de convenir en que, a la hora de utilizarlo resultará más flexible, más fiable y exacto que cualquiera de aquellos. Esta forma, nos permite preestablecer con total precisión, los tiempos de retardo necesarios para cada necesidad, además de permitirnos una visión directa, mediante la presentación gráfica con unos dígitos dispuestos a tal efecto, lo que podemos apreciar en la siguiente figura 16, en la que se puede apreciar el transistor Tr de salida con el relé Rc de carga y su diodo D1de seguridad, para evitar la destrucción del transistor.
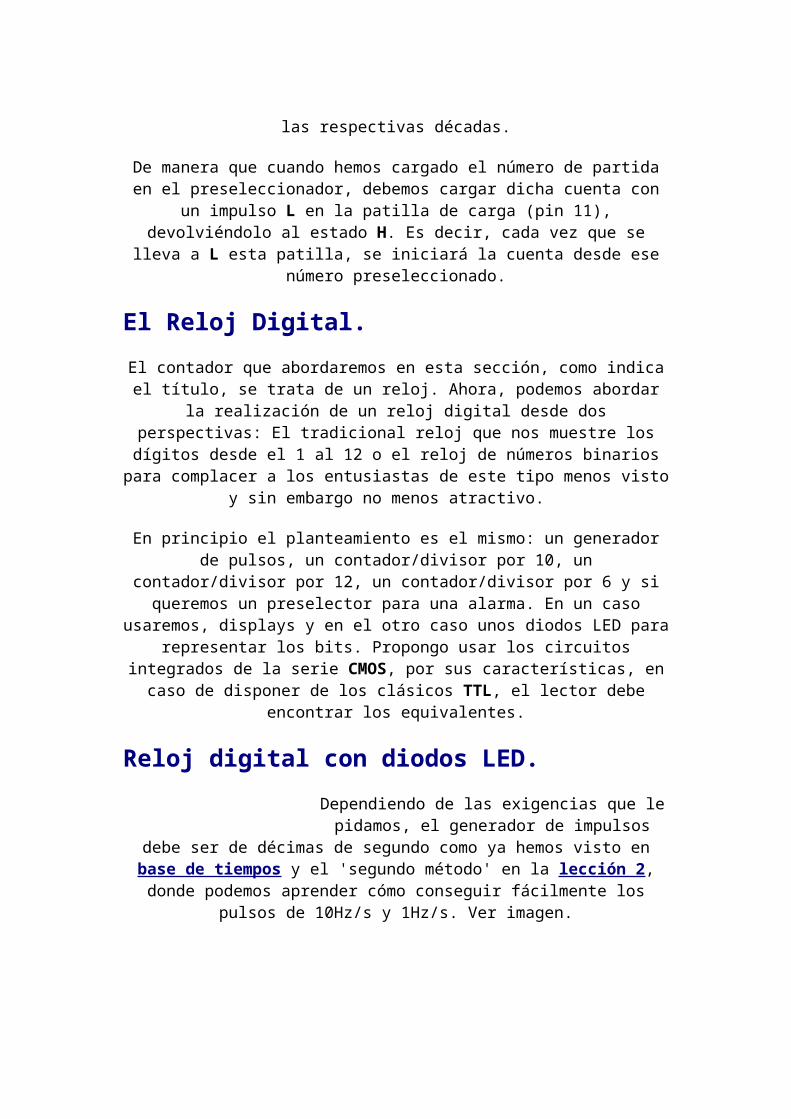
Fig. 16
Espero que haya quedado claro el tema, no obstante si el lector no entiende o le necesita aclarar algún punto, puede ponerse en contacto con nosotros y le atenderemos de forma personalizada. Por cierto, el relé que activará el transistor, tan sólo se activa por un instante, es decir, durante el ancho del impulso de conteo, esto se soluciona añadiendo un pequeño circuito (como los descritos en anteriores lecciones), que mantenga dicho estado de activación durante un período conveniente, según la necesidad que tengamos.
Lección 8
DIVISORES DIGITALES
En esta ocasión vamos a tratar unos circuitos particulares comúnmente conocidos como divisor, lo cierto es que se trata de un contador digital que tiene ciertas particularidades que le hacen reiniciarse desde cierta cuenta y esto lo hace de modo repetitivo. Pero vayamos por partes, en este tratado vamos a ver lo siguientes puntos:
El divisor digital elemental.El divisor 74LS93 (TTL). Divisor por 16 Divisor por 8 BCD Divisor por 6 Divisor por 9 Divisor por 10 Divisor por 12El divisor decimal 74LS90 (TTL).
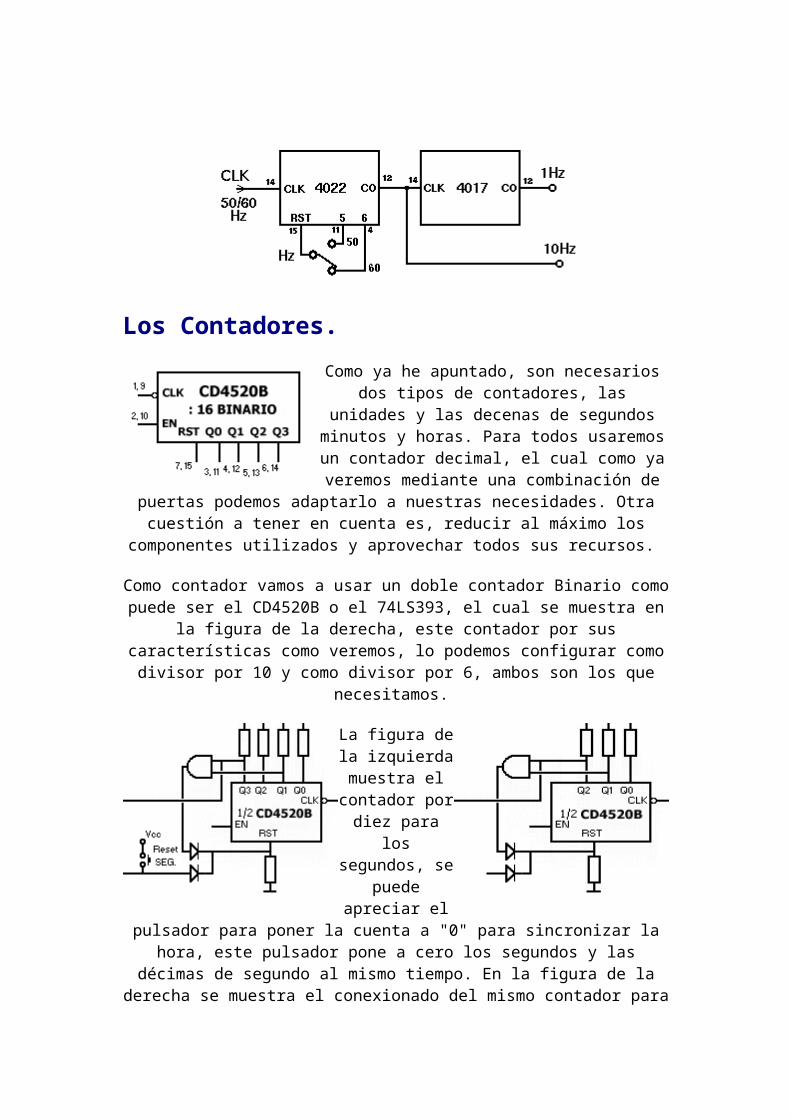
Divisor por 10 en BCD Divisor por 2, 4 y 5 Divisor por 2, 4, 8 y 9
Introducción.
Cuantas veces a lo largo del día necesitamos llevar una cuenta de eventos, es un hecho que se produce de forma continua en infinidad de ocasiones, de manera tan simple que no reparamos en ello. Lo que realmente estamos haciendo cuando llevamos una cuenta, es cuantificar una serie de hechos repetitivos, estableciendo una cuenta de una serie de estos en un tiempo dado, el resto, muchas veces lo despreciamos.
Nos ocuparemos de los contadores digitales, uno de los requisitos más comunes en un equipo digital es el contador. Y el elemento contado, más común tiene que ver con el tiempo. Desde un reloj digital básico (incorporado en la mayoría de los equipos controlados digitalmente) a los cronómetros de intervalo y el contador de eventos, la necesidad de los circuitos contadores es muy grande.
Debido a esto, se requieren contadores para diferentes rangos de conteo y en todo tipo de circunstancias. Por ejemplo, un reloj digital simple, requiere de un contador decimal para las posiciones de unidades de segundos y minutos. Visto esto, vamos a estudiar una serie de circuitos integrados utilizados habitualmente como contadores, entre los que destacaremos la función de dividir como parte central. Un divisor, no es otra cosa que un contador al que se le aplica la condición de reiniciar su cuenta al llegar al final de la cuenta establecida por el usuario, como margen.
De hecho, los contadores son tan importantes en tantas y tan diferentes aplicaciones, que los tipos de CI's contadores se han diseñado para familias de lógica TTL y CMOS. Algunos cuentan adelante para los relojes e intervalos de tiempo; otros cuentan abajo mostrando el tiempo que queda hasta algún evento. Algunos se diseñan específicamente para mostrar en modo decimal, mientras otros están en binario y aún otros, tienen un selector de rangos de cuenta. La lista de capacidades y opciones es bastante extensa, dejando mientras al diseñador del circuito con sólo la tarea de seleccionar el CI particular de las mejores prestaciones.
Una señal digital, está compuesta por una sucesión de impulsos llamados frecuencia que, proceden de un elemento que los genera o los procesa, en algunos casos, estos pulsos no siempre son uniformes, ni simétricos. La parte que, en estos momentos nos interesa de esta señal es muy concreta, tratamos de contar cuantos pulsos se producen en un tiempo establecido (intervalo), este tiempo si no se especifica lo contrario, es el segundo. Partiendo de esta condición, la cuenta que realizamos de una señal, se llama frecuencia. La frecuencia de una señal, se puede obtener teóricamente con la formula: 1Hz = 1/ segundo. El método alternativo para el cálculo es medir el tiempo entre dos repeticiones (período) y luego calcular la frecuencia (f) recíproca así:

Donde: T ( Período en segundos)
f ( Frecuencia en Hertzios)
Contar en electrónica, como en otras disciplinas es un hecho muy común. Debido a que tenemos dispositivos que nos ayudan a realizar estas tareas, a continuación vamos a estudiar algunos circuitos integrados con los que podemos realizar tanto divisiones como cuentas.
El ciclo de servicio o rendimiento (duty cycle) de cualquier forma de onda rectangular se refiere al porcentaje del ciclo de la señal que permanece alto, en lógica 1. Si la señal pasa la mitad de su tiempo en lógica 1 y la otra mitad en lógica 0, tenemos una forma de onda con un ciclo de servicio o rendimiento del 50 %. Esto describe una onda perfecta, simétrica cuadrada.
Digamos que, dependiendo del 'código' establecido internamente por el fabricante del circuito integrado, podemos optar entre un contador binario o decimal, parámetro a tener muy en cuenta a la hora de utilizar cada tipo. Un contador digital básicamente es binario, y es cierto que, mediante una circuitería externa mas o menos sencilla, podemos convertir un contador binario, en contador decimal.
Hemos tratado diferentes contadores y distintos sistemas de uso, en estás páginas, entre dichos documentos podemos encontrar, distintas aplicaciones que utilizan estos dispositivos, sin embargo no hemos estudiado con detalle los contadores como tal. Aquí, veremos estos detalles y en algunos, sus diagramas de tiempo, para una mejor comprensión de lo descrito. Consideramos conveniente que se sigan los diagramas con detalle, es fundamental para su comprensión y posterior aplicación cuando sea necesario.
El divisor digital elemental.
Vamos a describir aquí, cómo se comporta un divisor de frecuencias. Trataremos de frecuencias (en lugar de pulsos individuales que lleguen al azar a intervalos), si aplicamos un tren de pulsos de frecuencia fija a un contador comenzamos a notar algunas características interesantes y algunas relaciones útiles, entre la señal de entrada y la señal de salida.
Consideremos un flip-flop con una sucesión continua de pulsos de reloj y con una frecuencia fija, como el que se
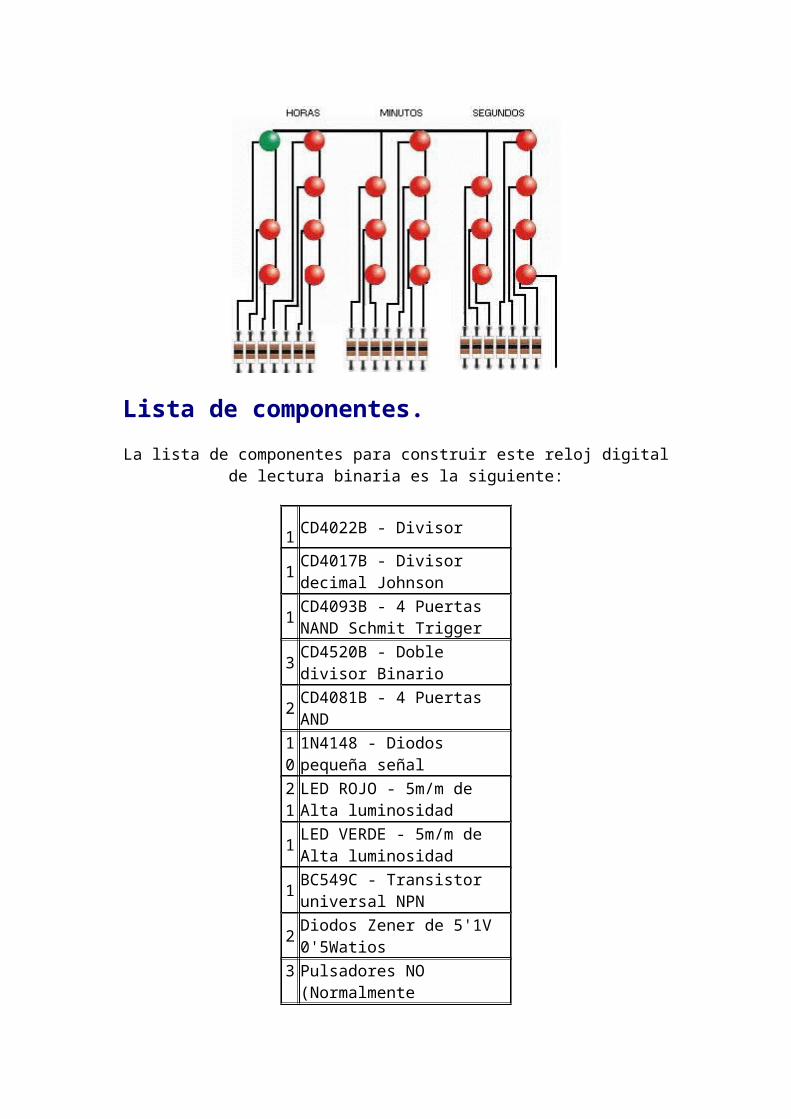
muestra a la derecha. Notamos tres hechos útiles sobre las señales de salida, vistas en Q y Q':
Las señales, están exactamente invertidas una de la otra. Las señales, son ondas cuadradas perfectas, rendimiento del 50 %. Las señales, tienen una frecuencia justamente la mitad del tren de impulsos de entrada.
El divisor digital, más simple es el compuesto por una báscula o flip-flop, elemento éste que puede estar formado por dos transistores y unos pocos componentes o por dos puertas lógicas conectadas en realimentación. En primer lugar, al tratar con flip-flops, alguien erróneamente, puede pensar que una frecuencia, sólo se puede dividir por números pares, la división de una frecuencia por un número impar también es posible, como veremos más adelante.
Este es, un ejemplo sencillo de un divisor de impulsos, puede observarse que de cada dos impulsos introducidos en A, en la salida Q, nos entrega la mitad, la puerta I es un inversor que se ha dispuesto en esa posición para evitar en lo posible los estados indeterminados que suelen aparecer en este tipo de
básculas cableadas.
Otro ejemplo de un divisor sencillo es, la báscula D con puertas NOR que se muestra a la izquierda, sólo tiene una entrada de datos, debido a haber aplicado un inversor entre las entradas R y S, éstas, siempre estarán en oposición, lo que evitará la posibilidad de indeterminación, además se le ha dotado de una entrada de señal de reloj. Observamos que la salida Q = 1, cuando en la señal de reloj está a nivel lógico 1 y al mismo tiempo D = 1. Pasa a Q = 0 cuando haya
caído D a 0 lógico y simultáneamente la señal de reloj pasa de nuevo a 1, es decir, la salida se presenta con el nivel alto de la señal de reloj, lo que se llama nivel activo de reloj .
El estado de salida se presenta únicamente en el instante en que la señal de reloj pasa de nivel lógico bajo a alto. Como vemos, la báscula D es una modificación de la báscula R-S, que mediante un inversor intercalado entre sus entradas R-S, elimina la posibilidad de indeterminación que presenta aquella.
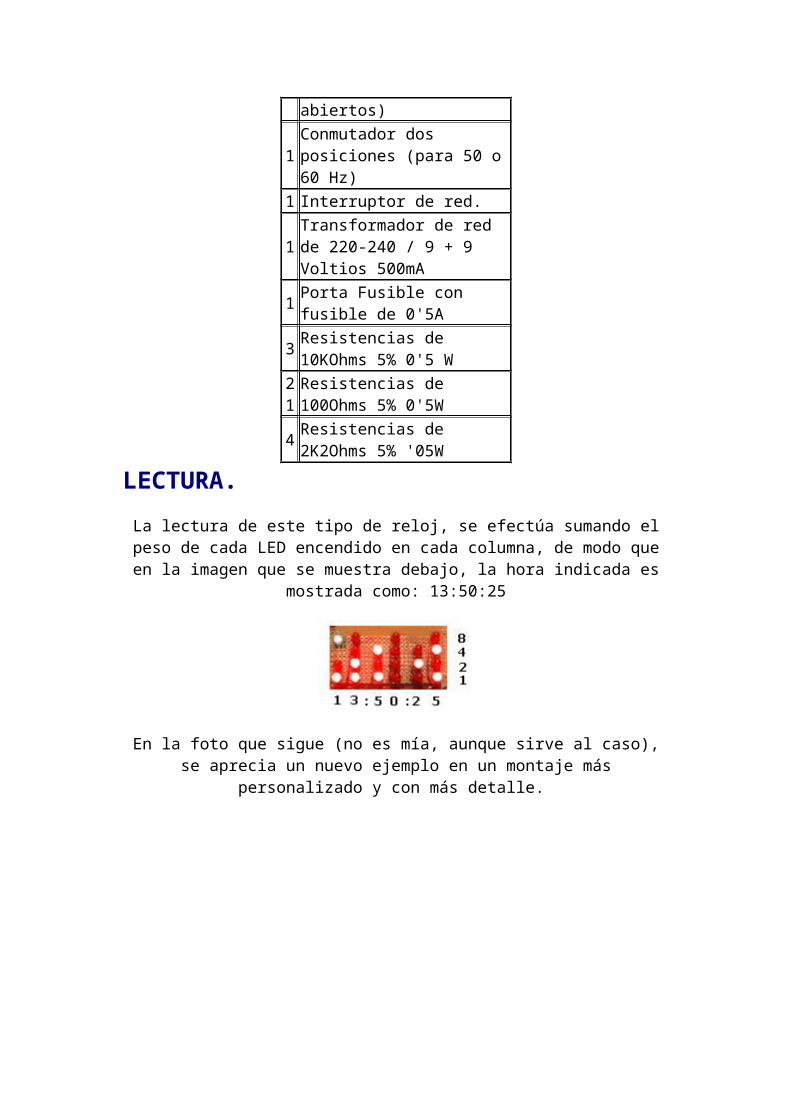
El circuito de un flip-flop tipo D, es algo más que el circuito de una báscula tipo D, aunque parece muy similar, también tiene una única entrada de datos y una de reloj. Es bastante más complicado, la diferencia básica está en la nueva forma de utilizar la señal de reloj.
A veces, en los circuitos digitales, interesa asegurar que no pueda cambiar un dato de entrada durante el intervalo de ser transferido este dato a la salida entonces, se utiliza lo que se conoce como la técnica de 'flanco de disparo'. Por consiguiente, llamaremos báscula a los elementos que utilicen el nivel activo de reloj y flip-flop a los que utilicen el flanco de subida o disparo.
Fig. 5-10 - Sinóptico del Flip-Flop D
Un flip-flop tipo D, está constituido por dos básculas como entradas y una tercera báscula para la salida. Las básculas de entrada están interconectadas entre sí de forma que, al pasar la señal de reloj del nivel lógico bajo al nivel alto, se produce la entrada de estados complementarios de la báscula de salida.
A la derecha se muestra el símbolo del flip-flop J-K. El flip-flop J-K generalmente es el más utilizado, por ser el más versátil y sofisticado. Es similar a la báscula R-S, dispone de dos entradas de preselección éstas denominadas J-K, así como una entrada de reloj para su sincronización. La particularidad más genérica de los flip-flop J-K es que suelen estar controlados por el flanco descendente o de bajada de la señal de reloj, justo al contrario que lo hacen los flip-flop tipo D.
Nota. Las entradas negadas en los símbolos, generalmente se representan con un pequeño circulo junto al cuerpo del símbolo. En este caso, el dato se transferirá a la salida y se indica con el circulo por el flanco de bajada del CLK.
Para conectar los flip-flop J-K, disponemos de dos formas de configurar su activación:
Disparo por flanco; el datos de la entrada se transfiere a la salida con la transmisión predeterminada de la señal de reloj.
Disparo Maestreo-Esclavo; el dato de entrada se carga con el nivel alto de la señal de reloj y se transfiere a la salida con el flanco de bajada de

la señal de reloj. En este caso, el dato de entrada no debe cambiar mientras la señal de reloj es alta.
El flip-flop J-K, actúa como se indica: si una de sus entradas tienen un nivel lógico 1 y la otra un nivel lógico 0, la salida Q se pondrá a 1 o a 0 con el flanco de bajada de la señal de reloj y permanecerá en este estado de salida, al igual que ocurre con la báscula R-S. Si ambas entradas están a nivel lógico 0, cuando lleguen los impulsos de reloj no cambiará, sin embargo si sus dos entradas están a nivel lógico 1, el flip-flop cambiará sus salidas con cada bajada del impulso de reloj; esto es lo que se llama trabajar en modo 'balanceo' (toggle en inglés). Este modo de trabajar es debido a que los niveles de las entradas J-K, se almacenan durante el tránsito del impulso de reloj, no cambiando durante ese tiempo su estado el biestable, una vez llega el siguiente flanco de bajada es cuando los datos almacenados hacen balancear el flip-flop.
Resumiendo, el funcionamiento del filp-flop J-K (maestro-esclavo), cuando J = K = 1, invierte el estado de las salidas Q y /Q con cada impulso de la señal de reloj. Este efecto, requiere de dos pasos de la señal de reloj para que el nivel de Q vuelva al estado inicial, esto realmente ha dividido la señal de reloj por dos. Todos estos son descritos con sobriedad en las lecciones de electrónica digital.
Un contador digital como es el circuito integrado 74LS393 es un divisor algo más complejo, se trata de un dispositivo constituido por un doble contador binario en su interior, cada uno formado por cuatro flip-flop Maestro-Esclavo, conectados de modo que nos permite realizar contadores de 4 bits (se pueden considerar dos 74LS93 en una cápsula) .
Fig. 02- 74LS393
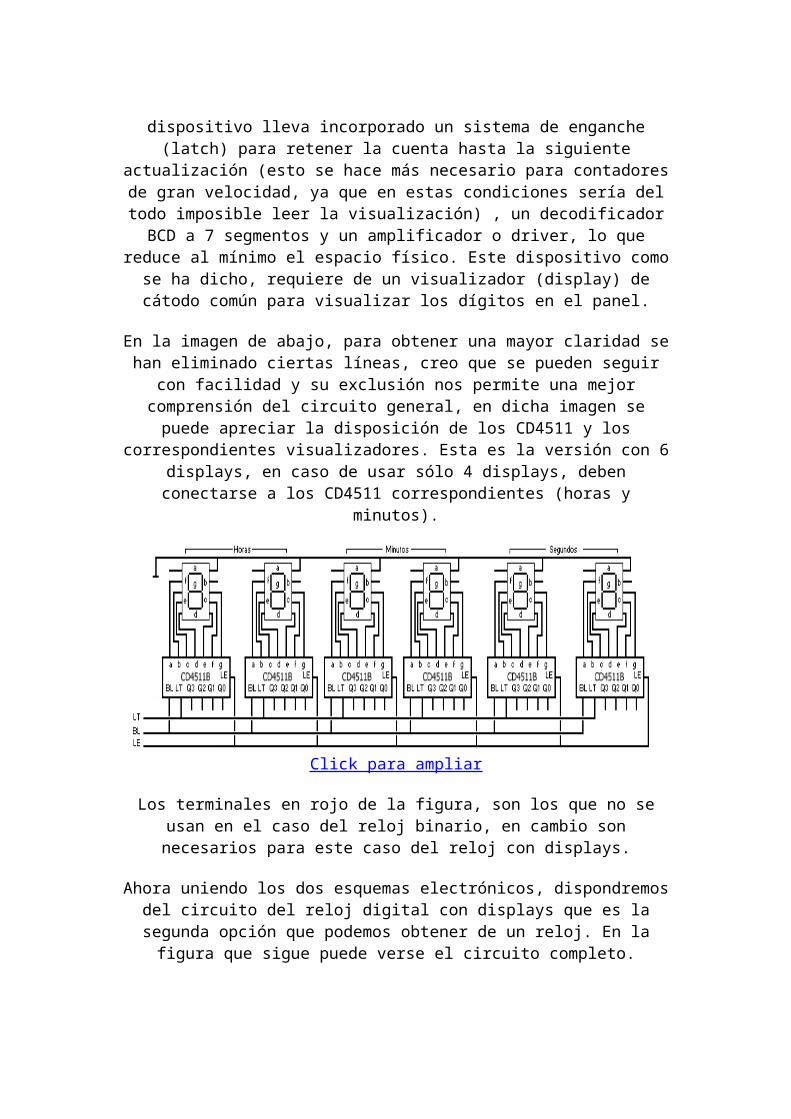
El divisor 74LS93 (TTL).
Como ejemplo entiendo que es suficiente lo anteriormente descrito, ahora vamos a abordar los circuitos integrados digitales comerciales, lo habitual en este caso sería hablar de los 74LS90 (decimal), 74LS92 (binario), 74LS93 (divisor de 4 bits), los patillajes DIL de los actuales y sus respectivas estructuras, se muestran a continuación.
Fig. 03- Composición interna de los 74LS90-92-93
El Divisor por 16 en binario.
En la figura 04, puede apreciarse el modo de conexión interna entre sus patillas, atención a la tabla de verdad adjunta, tratando de comprender la
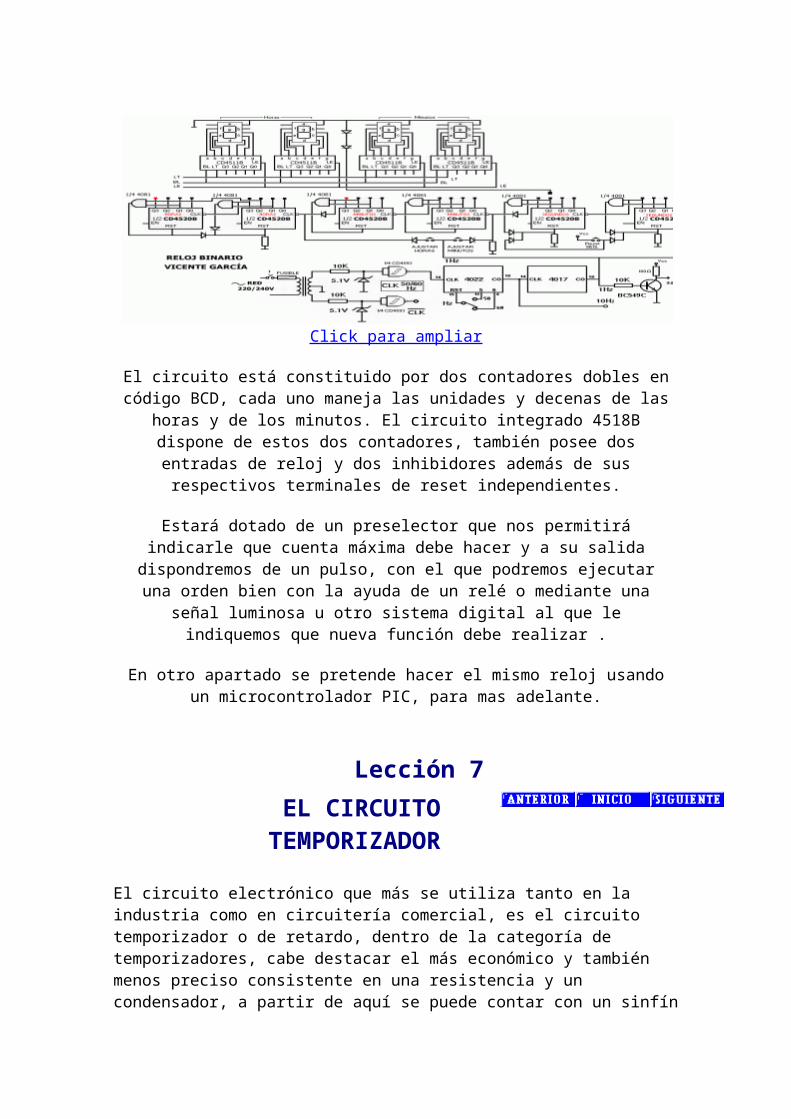
secuencia de conteo seguida. El reloj CP es una señal negada y el reset maestro MR, permite poner a 0 la cadena de 4 filp-flop T, simultáneamente.
Fig. 04 Diagrama interno y tabla de verdad.
Veamos a continuación, el conexionado del 74LS93 y el diagrama de fases, con el fin de obtener la división por 16 en binario. La señal se aplicará a la entrada CKA (patilla 14), la salida QA (patilla 12, primera sección) del primer flip-flop se conecta con la entrada CKB (patilla 1, segunda sección). Al aplicar impulsos de nivel H, de forma simultanea en las entradas R (patillas 2 y 3) inicializarán el divisor a 0000. Las salidas en binario se obtienen en las patillas señaladas como QA, QB, QC y QD respectivamente y consecuentemente la salida QD presentará la división por 16 de la señal de entrada.
Fig. 05 - Divisor por 16 y diagrama de tiempos.
El Divisor por 8 en BCD.
En la siguiente figura 06, presentamos el modo de configurar las entradas y salidas para conseguir un divisor por 8 y con salida codificada en BCD. Si comparamos esta figura con la anterior figura 05, podemos apreciar la aparente y sutil variación del resultado de conectar la salida QD (patilla 11) a las patillas 2 y 3 de puesta a cero, lo que hace que al llegar a 8 el contador dicha salida reponga a 0000, dando como resultado el reinicio del contador y por tanto del divisor.

Fig. 06 - Divisor por 8 en BCD y diagrama de tiempos.
El Divisor por 6.
La forma de conectar el 74LS93, para obtener un divisor por 6 es muy sencilla, obsérvese el esquema de la figura 07 con su diagrama de tiempos y trate el lector de comprender su funcionamiento. Recordar que el primer FF es un divisor por 2 y la segunda entrada CKB corresponde a un segundo divisor por 8, formado por los 3 F-F restantes que conforman al 74LS93.
Fig. 07 - Divisor por 6 y diagrama de tiempos.
Como ya se ha mencionado los impulsos aplicados a la entrada CKA, su salida QA por la (patilla 13), se aplica de nuevo a la entrada CKB (patilla 1) de la cadena de divisores siguientes, la salida QB se aplica a R01 y la salida QC a R02 y de este modo conseguimos nuestro objetivo. Esto esta muy bien, ya que estamos tratando de una serie de divisores en cadena y si pensamos un poco lograremos estos objetivos, no obstante parece menos viable conseguir un divisor por un número impar. La respuesta, la podemos ver a continuación.
El Divisor por 9.
Con el fin de obtener la división por 9, hemos interconectado nuestro 74LS93 del modo que se aprecia en la figura 08. Como siempre, los impulsos se aplican a la entrada CKA y son recogidos en la salida S.
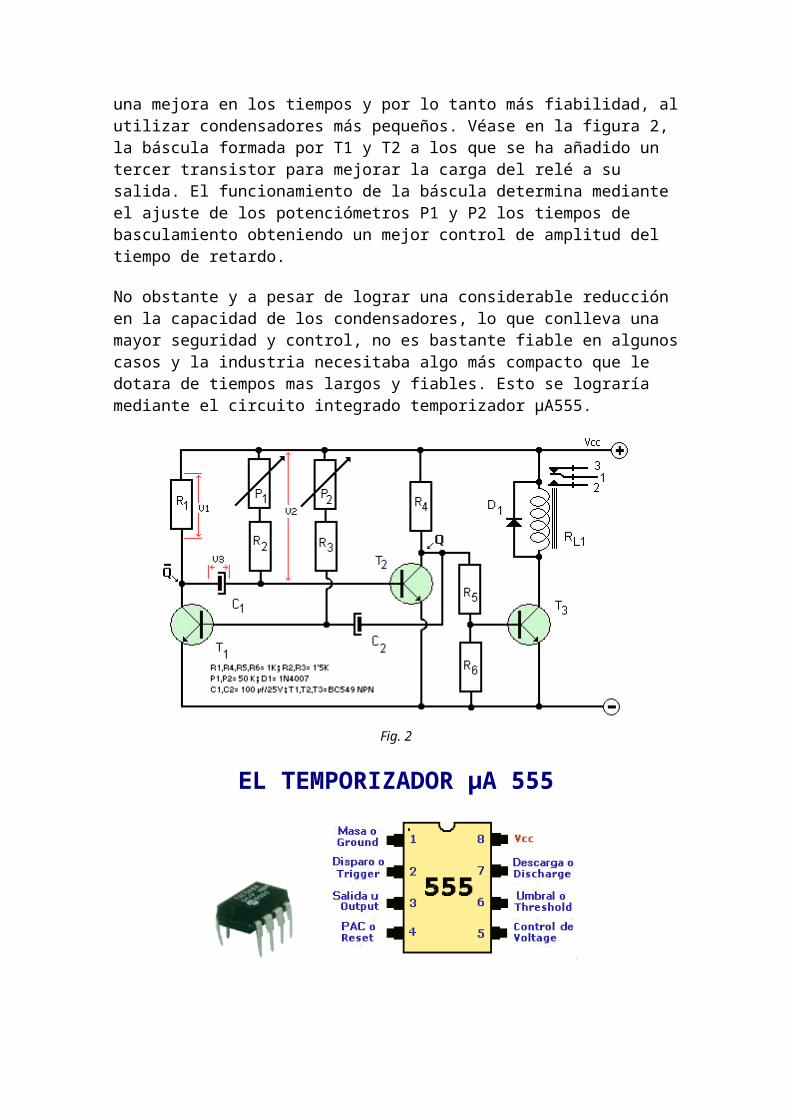
Fig. 08 - Divisor por 9 y diagrama de tiempos.
La salida S es la unión entre la salida QD y la R02, como puede verse. Observar que el impulso de salida tiene un ancho de dos pulsos de entrada.
El divisor por 10.
Para obtener un divisor por 10, el conexionado de las entradas y salidas del circuito integrado 74LS93 o similar, se debe corresponder con lo descrito en la figura 09 que se muestra debajo de estas líneas.
Fig. 09 - Divisor por 10 y diagrama de tiempos.
El Divisor por 12.
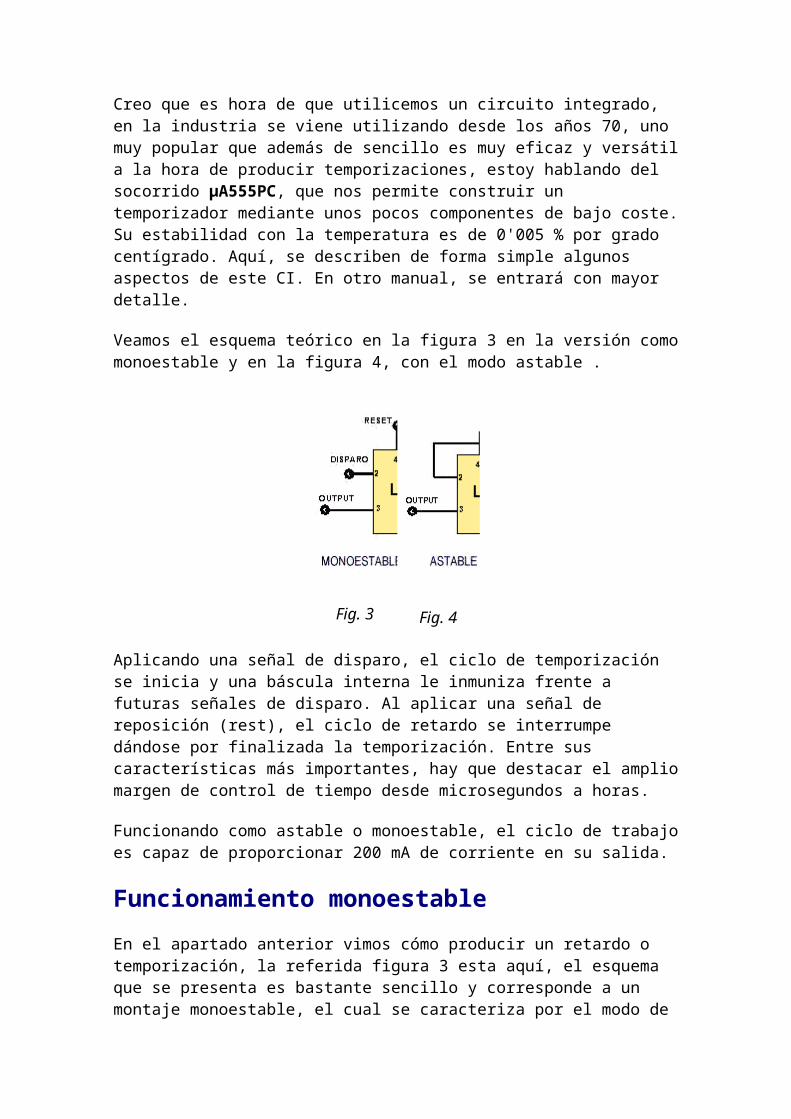
A fin de obtener un divisor por 12, muy utilizado (en su momento) en la generación de relojes electrónicos por su particularidad, podemos obtener si conectamos en un 74LS93 o similar, sus patillas según lo descrito en la figura 10.
Fig. 10 - Divisor por 12 y diagrama de tiempos.
El divisor de decimal 74LS90.
Por su versatilidad y utilidad en múltiples montajes que se han realizado desde siempre en la industria y en algunas aplicaciones descritas en estas páginas, describiremos la capacidad como divisor decimal, del circuito integrado 74LS90.
Fig. 11 - 74LS90 Divisor decimal
Este circuito integrado está compuesto por tres Flip-Flop Maestro-Esclavo y una báscula RS, dispone de dos entradas diferenciadas de reloj CPA para el primer Flip-Flop y CPBD, para B y D. Conectados de modo que nos proporcionan un divisor por dos y un divisor por cinco, separados, las entradas de conteo están inhibidas y las cuatro salidas puestas a cero lógico o a una
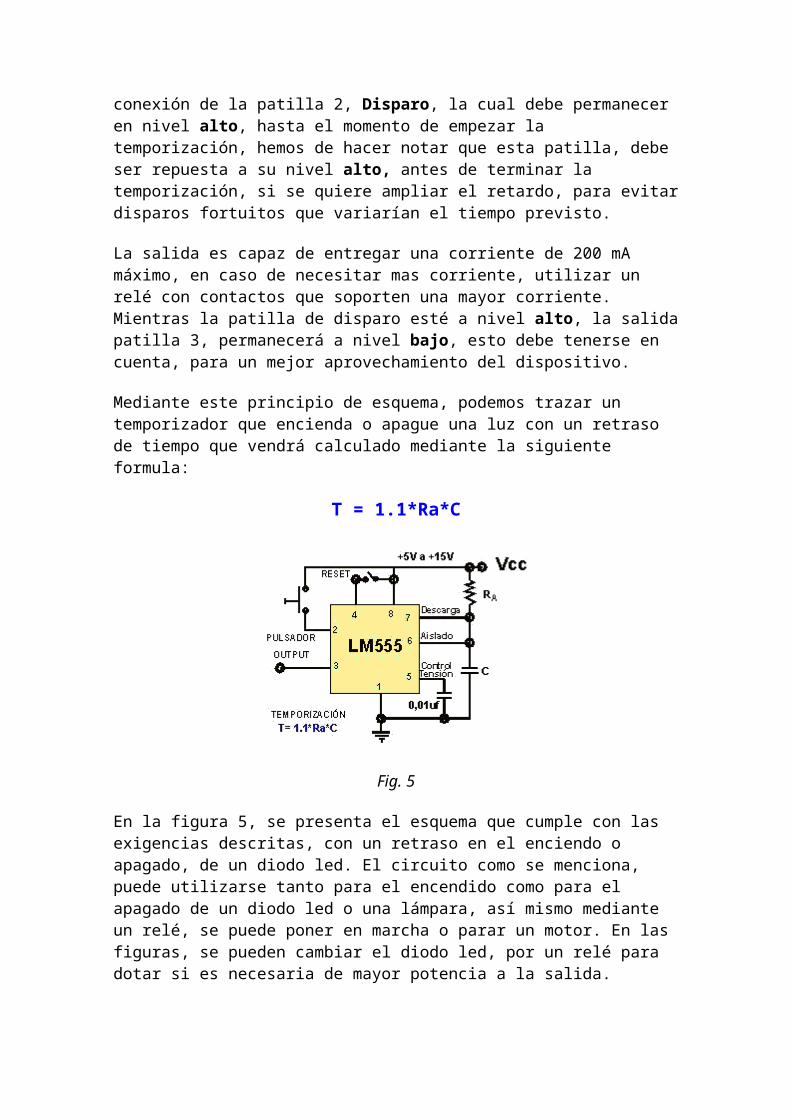
cuenta binaria codificada a decimal (BCD) de nueve mediante líneas de reset directas con puertas. Como se puede apreciar en la imagen de la anterior figura 09, la salida QA no está conectada internamente a las siguientes etapas de conteo para una mayor independencia y versatilidad.
El Divisor por 10 en BCD.
En la siguiente figura 12, mostramos la forma de obtener una división por 10 en código BCD mediante el circuito integrado 74LS90, este circuito está muy utilizado por la industria durante mucho tiempo y hacemos hincapié en que se comprenda el funcionamiento de este dispositivo ya que es la base para comprender los divisores digitales que se emplean en muchos de los procesos de la industria.
Fig. 12 - Divisor por 10 en BCD con el 74LS90
El Divisor por 2, 4 y 5
Para el divisor por 5 utilizando el 74LS90, disponemos de dos formas distintas para conseguir este tipo de divisor, en la figura 13, se muestra una de las dos formas posibles sin necesidad de ninguna puerta adicional.
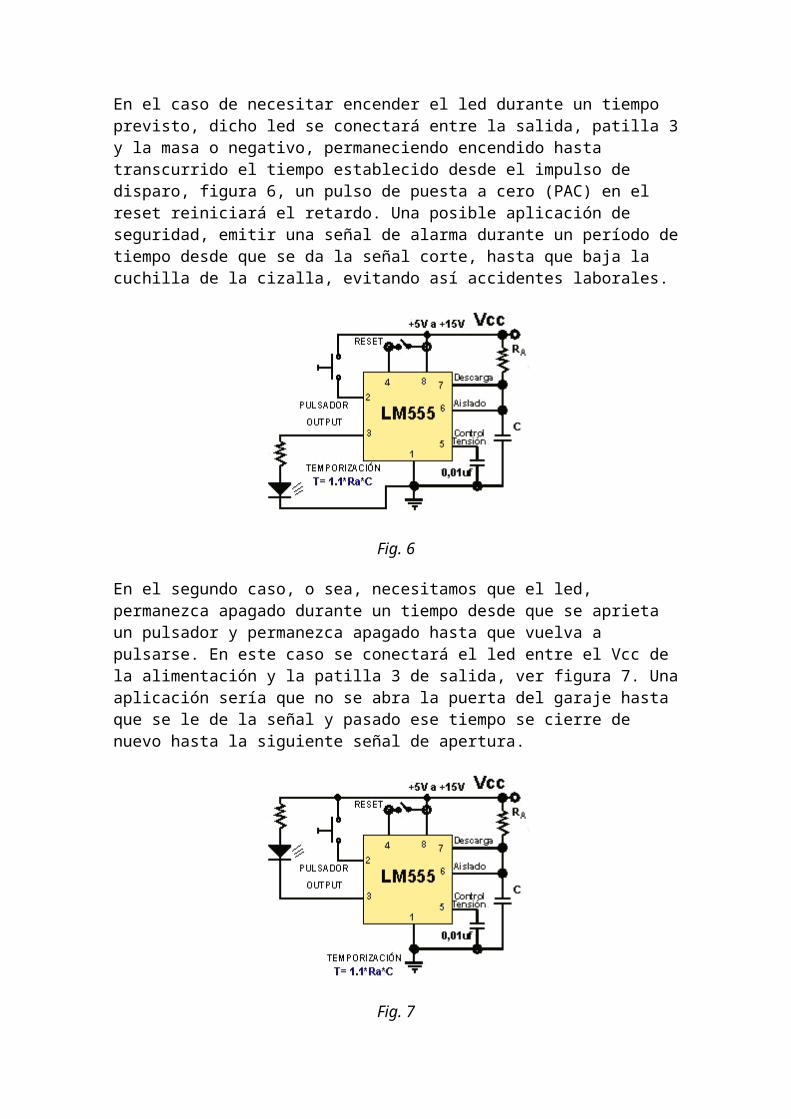
Fig. 13 - Divisor por 5 en BCD con el 74LS90
En la siguiente figura 14, presentamos la segunda forma de conseguir el divisor por 5, en esta ocasión se utiliza el segundo grupo de básculas o flip-flop disponibles en el dispositivo 74LS90.
Fig. 14 - Otro divisor por 5 en BCD con el 74LS90
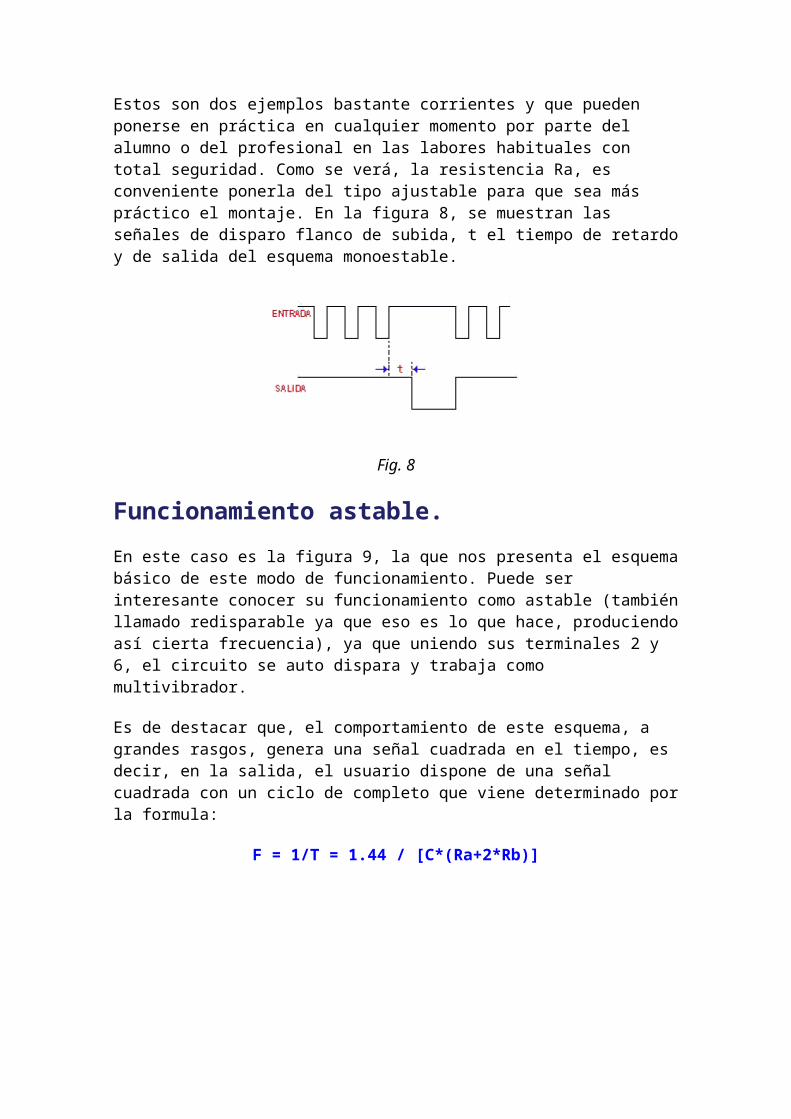
El Divisor por 2, 4, 8 y 9
En la figura 15, se muestra la forma de conectar el 74LS90 para conseguir que éste divida por 9.
Fig. 15 - El divisor por 9 en BCD con el 74LS90
Habrá que observar que en cada divisor, dependiendo de la tecnología utilizada, el impulso del que se sirve un flip-flop para cambiar de estado, puede ser el flanco de subida o el flanco de bajada. Es decir, por ejemplo, viendo la gráfica de tiempos de la figura 15, se observa que el impulso CKA activa la salida A justo en su salida, o sea, al bajar su nivel lógico a cero, a esto se le llama flanco de bajada, lo que nos indica que la salida A se activa en su flanco de subida y no cambia su estado lógico hasta que, se produce un nuevo flanco de bajada en el impulso de CKA, en este caso se produce el cambio de estado de la salida A que, vuelve a cero. También se les suele llamar flanco izquierdo y flanco derecho respectivamente, en algunos tratados.
Aclaración.
La importancia y utilidad de los divisores en sus variantes, radica en la precisión, por ejemplo, en la necesidad de conocer la frecuencia exacta de una señal electromagnética del tipo que sea, ya que cuanto mayor sea la exactitud de la división tanto mayor será la precisión de la medición realizada con dicha división.
Otro ejemplo podríamos hallarlo en la medición del tiempo, un hecho tan natural como es conocer la hora y sin embargo, este hecho hace necesario realizar un oscilador de
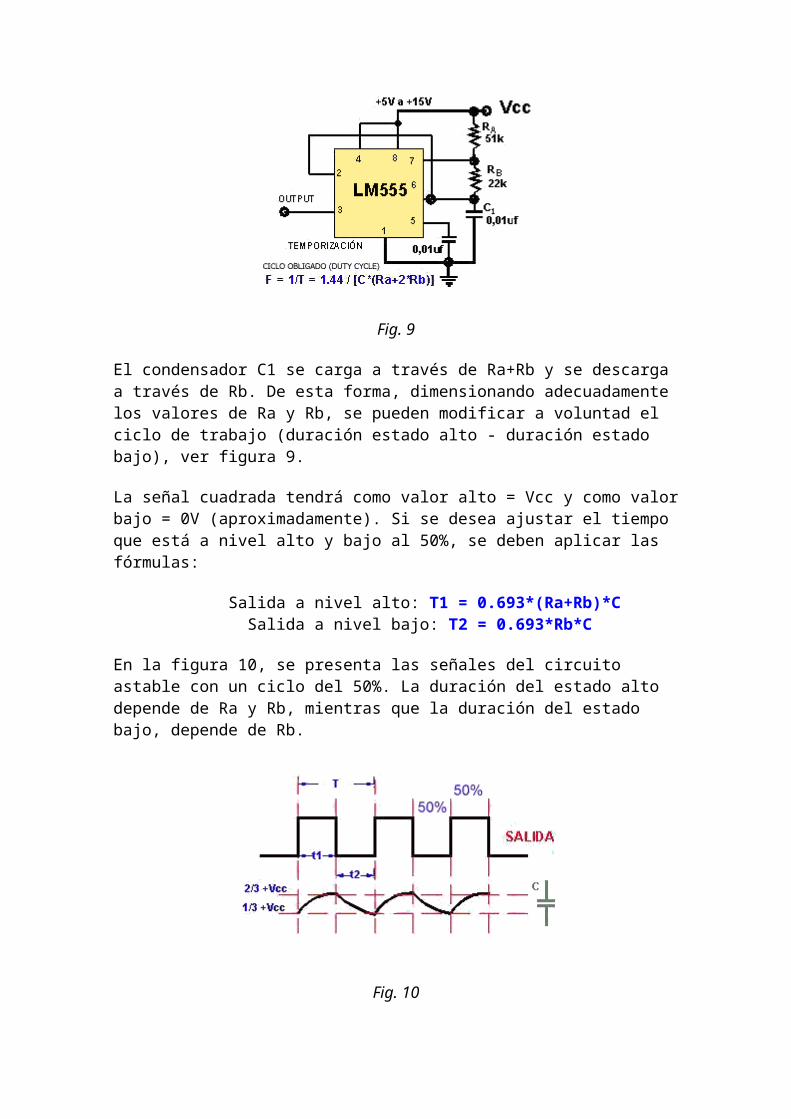
muy alta frecuencia y que cuya frecuencia sea estable, que no varíe, influenciada por la temperatura o los parásitos electromagnéticos del entorno o por las variaciones de la tensión de alimentación, entre otros.
Esa frecuencia ideal, tendría que reducirse de algún modo, esto es, dividirla en una porción exacta que, siempre y en cualquier momento nos de invariablemente en la salida, la misma cuenta, de este divisor depende directamente la exactitud de nuestro reloj, por ese mismo motivo se necesita una frecuencia muy alta, precisamente para poder hacer una división lo más pequeña posible como puede ser una fracción de segundo, para utilizarla posteriormente en la cuenta del tiempo. Pero bueno, eso se trata con más profundidad en los tratados especializados en la medición del tiempo y frecuencímetros que, están fuera de este tratado.
Por el presente consideramos que ha quedado descrito con bastantes ejemplos los diferentes tipos de divisores lógicos y las capacidades de los dispositivos que nos presenta la familia TTL. En un próximo caso abordaremos si se considera necesario el uso de la familia CMOS.
Lección 9 CONOCIMIENTOS BÁSICOS
En esta ocasión no queremos entrar en profundos análisis y extensos formularios, para demostrar la teoría que sigue. El autor considera que existe abundante literatura técnica y en español que, trata debidamente y en profundidad este tema. Sin embargo, ya que que se utiliza en bastantes manuales y tratados que aquí se han editado, aportaremos nuestro punto de vista sobre el tema que deben reforzar siempre los puntos teóricos básicos. Pero vayamos por partes, en este tratado vamos a ver lo siguientes puntos:
Corriente eléctrica.Constantes de tiempo.El diferenciador.El integrador.La fase.Los Armónicos.Recortadores y Limitadores.Tensión pico a pico y RMS.Conversión A a D.
Corriente eléctrica.
He de mencionar aquí que, esta es la definición que recuerdo desde que empecé mis estudios de electricidad y posteriormente electrónica, decía así:
- Cuando se mueven cargas eléctricas de un mismo signo, se establece una corriente eléctrica. La corriente eléctrica, es el flujo de electrones por los conductores eléctricos, por los
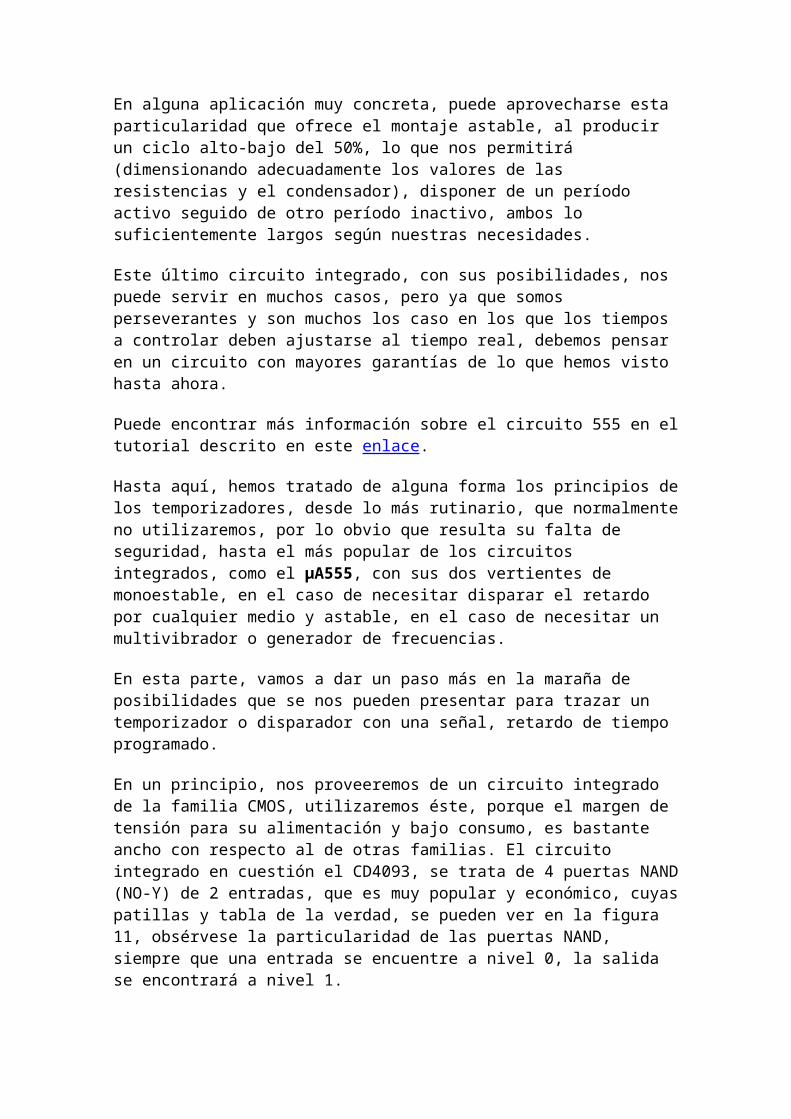
cuales se mueven fácilmente, debido a la diferencia de potencial creada por un generador de corriente eléctrica.
Los generadores eléctricos son dispositivos en los que, a expensas del consumo de energía mecánica, calorífica o química, se efectúa el trabajo necesario para desplazar los electrones por un circuito cerrado y ponerlos en movimiento, venciendo la resistencia que el generador y conductores oponen a su paso.
La corriente eléctrica se definió por un flujo de electrones positivos y se fijo un sentido convencional de circulación de la corriente, desde el polo positivo al negativo, posteriormente se observó que, en los metales los portadores de cargas negativas son electrones, los cuales fluyen en sentido contrario al convencional. -
En el Sistema Internacional, la unidad de intensidad (I) de la corriente eléctrica es el amperio, representado por el símbolo A y es la intensidad de una corriente tal que hace fluir cada segundo un culombio. [Q = I x t]
Fuerza electromotriz.
Conocida como f. e. m. es el impulso que se desarrolla en los generadores eléctricos, absorbiendo los electrones de un polo (+) y acumulándolos al otro polo (-). La unidad de fuerza electromotriz es el voltio (V). Es la f. e. m. de un generador que establezca una corriente de un amperio en un circuito cuya resistencia total (interna del generador más la del circuito) (R) de un Ohmio, se puede calcular por la conocida Ley de Ohm: V = I x R.
Se pueden distinguir dos tipos de electricidad, la electricidad estática y la electricidad dinámica. La electricidad dinámica puede ser de corriente continua (CC) o corriente alterna (CA).
Corriente Continua.
La Corriente Continua implica un flujo de carga que fluye siempre en una sola dirección. Los electrones en el circuito se mueven siempre en la misma dirección, del polo positivo al polo negativo. Si la corriente se mueve a impulsos, siempre que lo haga en una sola dirección es Corriente Continua.
Corriente Alterna.
La Corriente Alterna se comporta como su nombre indica. El flujo de electrones del circuito se desplazan primero en una dirección y luego en sentido opuesto, de forma alterna. Esto se consigue alternando la polaridad del voltaje del generador o alternador. La Corriente Alterna, se puede transmitir a grandes
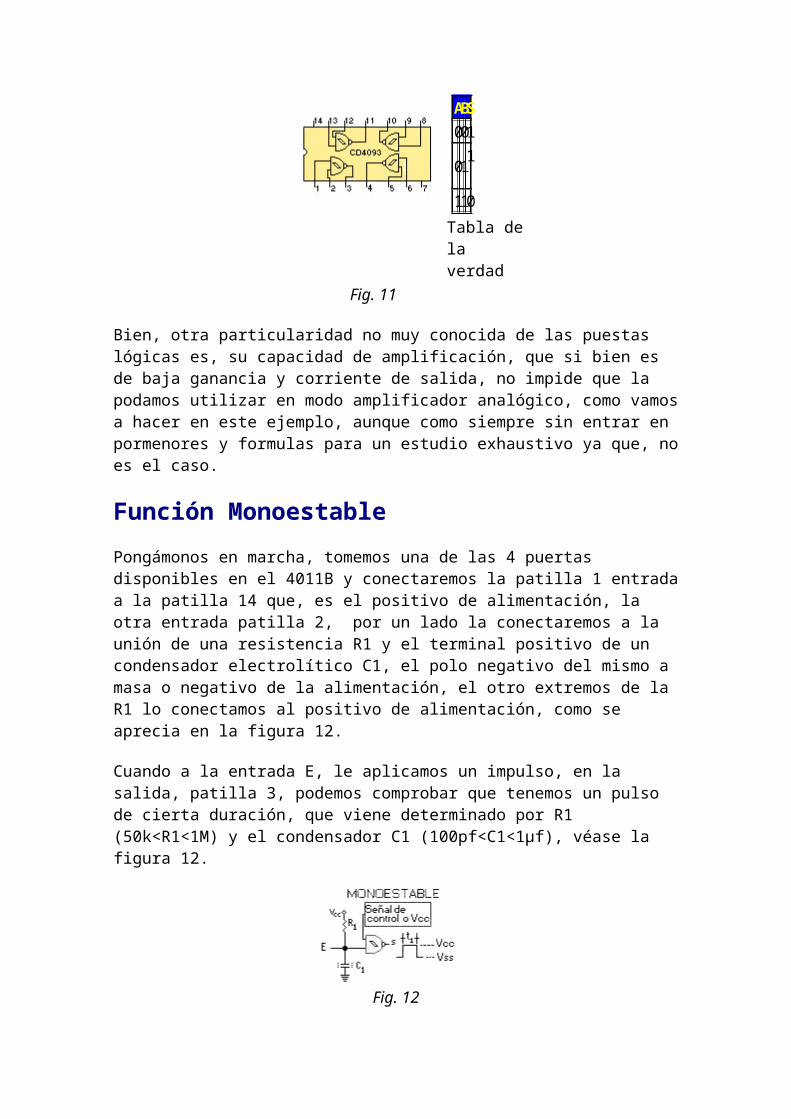
distancias mediante elevadas tensiones que reducen las pérdidas en los cables.
Constantes de tiempo.
En el diagrama de la derecha, cuando el interruptor se cierra, el terminal negativo de la batería rechaza los electrones negativos y los empuja hacia la placa superior del condensador C. Asimismo, el terminal positivo atrae a distancia los electrones negativos a la
placa inferior. Si se quita la batería ahora, el condensador C se mantiene cargado al mismo voltaje de batería. Esto puede ser peligroso, ya que los condensadores pueden permanecer cargados a altos voltajes, durante un largo tiempo.
En el diagrama de la izquierda, se ha colocado una resistencia R en serie con el condensador C. Cuando el interruptor se cierra, el condensador C se carga de la batería, como se ha descrito antes. La carga de corriente pasa por la R. Ya que la resistencia R limita la cantidad de corriente que puede fluir (ley de Ohm), para cargar C hasta el voltaje de batería, lleva un tiempo. A más grandes valores de C y R, más largo tiempo se necesita para cargar el condensador C. Compárelo con el llenado de un cubo de agua con una manguera. A un cubo (C) más grande y cuanto más de pie está sobre la manguera (R), vemos que esto significa más tiempo para llenar el cubo.
Si ahora, colocamos un destornillador entre los terminales del condensador, los electrones sobrantes (carga) de la placa superior ahora fluirán hacia la placa inferior por el destornillador y el condensador C se descargará. Hacer esto, también puede ser peligroso ¡¡Uauh, no veo!!. El destornillador tiene una baja resistencia y el Sr. Ohm dice "una resistencia baja significa una corriente alta". ¡¡Destornillador vaporizado!! Por lo tanto, condensadores grandes previamente cargados, deben ser descargados mediante una resistencia, para limitar la cantidad de corriente de descarga que puede llegar a fluir.
He de recordar a este respecto, que en mis tiempos de estudiante, en la asignatura de tecnología eléctrica, 'la pregunta de siempre' era: "¿Como deben manipularse los cables subterráneos?" E, invariablemente la respuesta debía ser descrita en mayúsculas y en rojo: "PERMANENTEMENTE CONECTADOS A TIERRA". Para evitar que se carguen con el tiempo y no causen con ello la muerte al que los manipula.
Si el condensador C es descargado, conectando una resistencia a través de él, entonces la d.d.p (diferencia de potencial) en el condensador después de RC
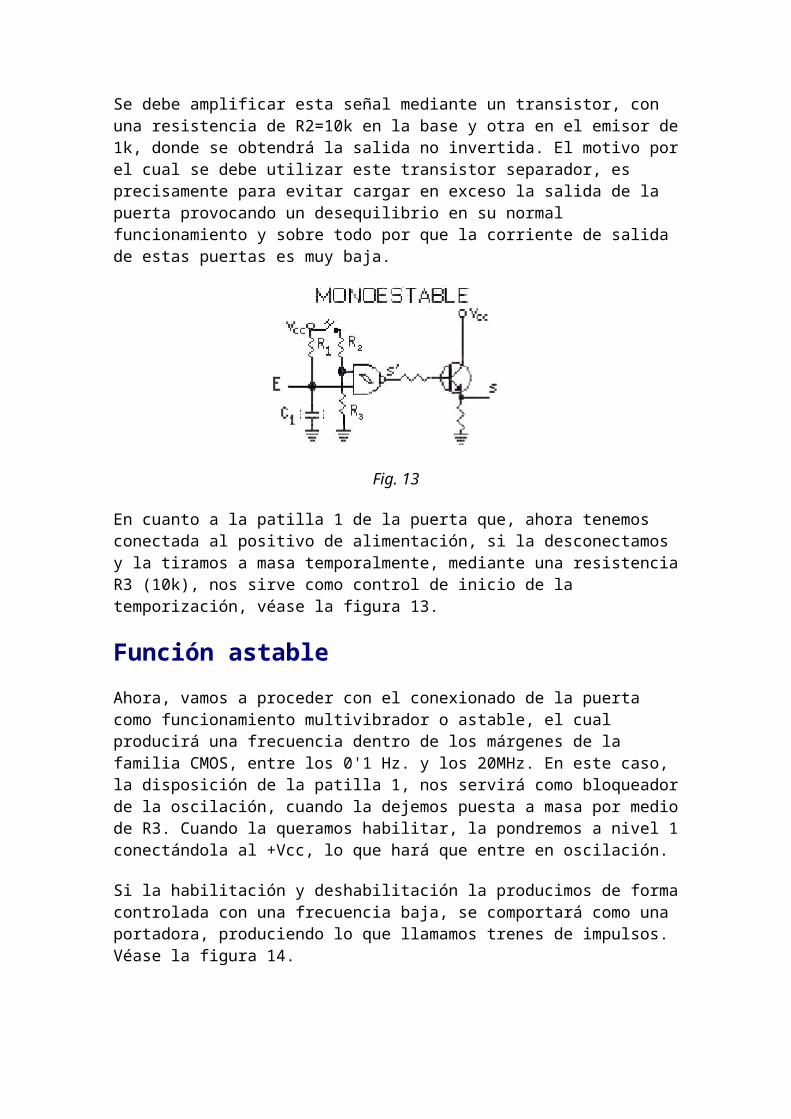
segundos, será del 63 %. La constante tiempo, a menudo es usada donde se requiere un retardo de tiempo.
Repasemos, un condensador requiere una cierta cantidad de tiempo para cargarse al valor del voltaje aplicado (E). Dicho tiempo depende de la capacidad (C) y de la resistencia total (R) en el circuito de carga. El tiempo necesario para que la carga alcance el63,2 % de su valor final (Ce) se llama constante de tiempo capacitiva y está dada por:
Constante de Tiempo capacitiva (CT) = R * C
El valor de C en Faradios, multiplicado por el valor de R en ohmios, nos dará la CONSTANTE TIEMPO (RC), mesurado en segundos. Si C = 2 Faradios y R = 10 ohmios, entonces RC = 20 segundos. Esto significa que C empleará 20 segundos para cargar hasta el 63 % del voltaje de batería. Si esto es una batería de 100 voltios, entonces después de 20 segundos, el voltaje del condensador será 63 voltios. Si dibujamos un gráfico del aumento de voltaje del condensador frente al tiempo, entonces conseguiremos una curva que no es lineal (no es una línea directa), la curva es exponencial. Esto es que, aumenta rápidamente al principio y luego reduce la velocidad, pero esto sigue lentamente muy lentamente.
El estudiante interesado en ampliar sus conocimientos debe consultar los libros del temario de tecnología eléctrica y ciertos enlaces en la red, donde puede encontrar lo que necesita.
El diferenciador.
Se trata de un circuito constituido por una capacidad C y una resistencia R (circuito RC), el cual actúa como un filtro pasivo para altas frecuencias, debido a que no intervienen elementos amplificadores, como transistores o circuitos integrados, este tipo de filtro atenúa las bajas frecuencias según la formula empírica de la derecha:
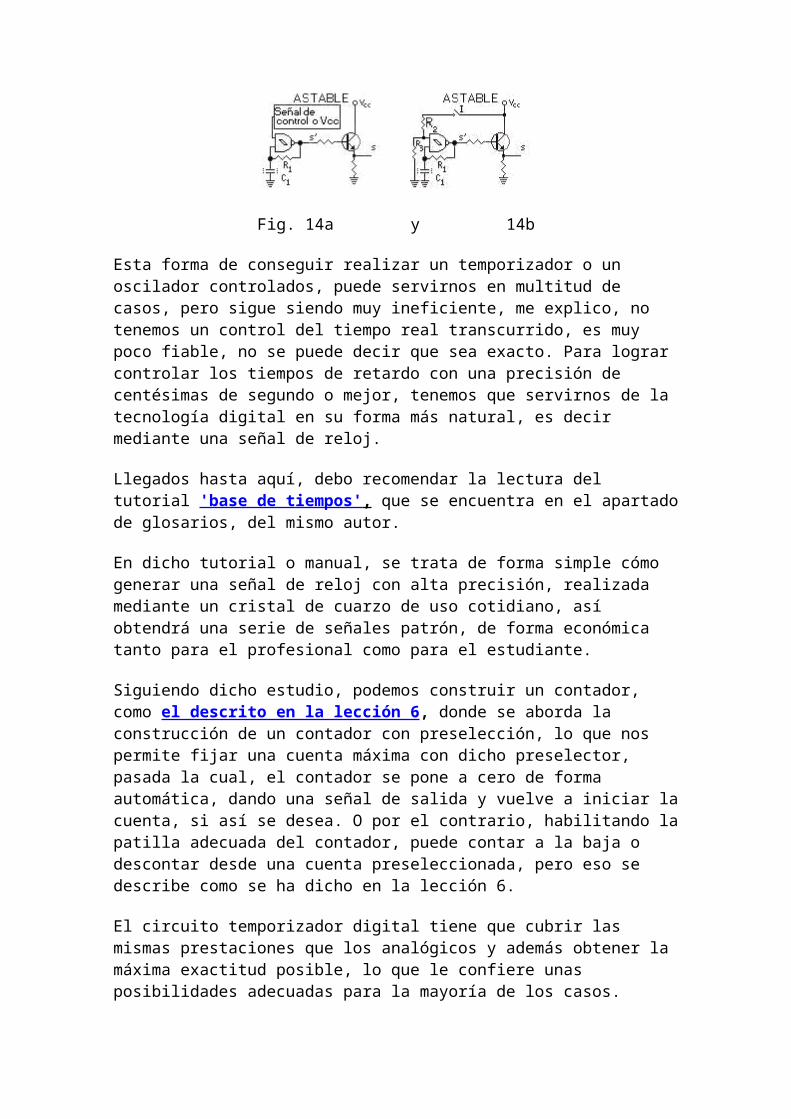
Este circuito se utiliza para detectar flancos de subida y bajada en una señal, provocando una mayor diferenciación en los flancos de entrada y salida de la señal que, es donde la variación con el tiempo (t) se hace más notoria. Estas zonas de la señal son además las que corresponden a las altas frecuencias, mientras que las zonas planas están compuestas por frecuencias más bajas.
Este tipo de circuitos realmente son más conocidos como filtro RC pasivo pasa alto que, se utiliza para filtrar las frecuencias superiores al valor especificado por la fórmula anterior, se recomienda leer el tutorial sobre filtros, si está interesado en el tema. Desde otra perspectiva este circuito, separa la corriente continua entre circuitos ya que el condensador interrumpe el paso de la corriente continua, dejando pasar sólo el pulso correspondiente al flanco de entrada y el de salida. La señal derivada puede utilizarse para disparar algún otro componente de la cadena electrónica como puede ser un trigger (disparador).
Qué ocurre cuando se aplica un tren de impulsos a la entrada de este circuito. Cuando un pulso de tensión, se eleva de repente de cero al máximo, la corriente que carga el condensador C, de repente se eleva a un valor máximo también. En la medida que se carga C, la carga de corriente se cae exponencialmente a cero. Ya que esta corriente de carga pasa por la resistencia R, el voltaje a través de la R (que es el voltaje de salida) hace lo mismo.
Por consiguiente nosotros conseguimos la forma mostrada, con el voltaje de salida que sube de repente al máximo y a continuación caerse exponencialmente entonces a cero. Cuando el pulso se cae a cero, se produce la descarga del condensador C. La corriente de descarga es alta en la salida y entonces se cae exponencialmente a cero como la descarga del condensador C.
Sin embargo, dado que la corriente de descarga, está en oposición a la dirección de la carga actual, el voltaje por R se invertirá, con lo que la forma de onda se muestra ahora por debajo de la línea cero. Para cada pulso, la forma de onda de salida se repite, mostrando la forma siguiente.
Observe la figura anterior, podemos apreciar el efecto que ejerce el condensador C al cargarse y la posterior descarga sobre la resistencia R, motivo por el cual la señal de salida presenta los picos del gráfico. La Ley Ohm dice que, la corriente es proporcional al voltaje y recíprocamente, el voltaje es proporcional a la corriente.
El pulso de salida es proporcional a la variación del pulso de entrada con el tiempo t. El circuito actúa como una derivada. El circuito sólo diferenciará el pulso de entrada si la constante de tiempo es pequeña comparada con la anchura de la señal. En caso contrario el pulso pasa sin grandes variaciones. Esto se hace patente cuando debido a malas terminaciones en los cables o a conexiones en mal estado se generan circuitos RC accidentales, apareciendo situaciones como las de la figura de la derecha.
La carga eléctrica (i) empieza a almacenarse en el condensador (C) cuando el voltaje se aplica a la entrada. La corriente eléctrica que fluye en el condensador, como la carga eléctrica se almacena en decrementos. La corriente eléctrica que fluye a través del condensador (C) y la resistencia (R) se calcula por lo siguiente fórmula:
i = (V/R)e-(t/CR)
Donde: i : La corriente eléctrica (A) que cambia en el tiempoV : El voltaje (V) aplicadoR : El valor de resistencia (ohms)C : El valor del condensador (F) e : La base del logaritmo natural (2.71828)t : El tiempo de retardo después del inicio (sec)CR : La constante de tiempo del condensador ( C x R)
Los cambios de tensión que aparece a extremos de la resistencia (R) se deduce en la fórmula siguiente.
iR = V[e-(t/CR)]
Es como se muestra en la fórmula que sigue sobre el gráfico.
El cálculo exponencial puede calcularse mediante la operación Exp, con la aplicación que nos ofrece la calculadora electrónica de nuestro equipo (la función calculadora electrónica) en caso de Windows95 o mayor.
El integrador.
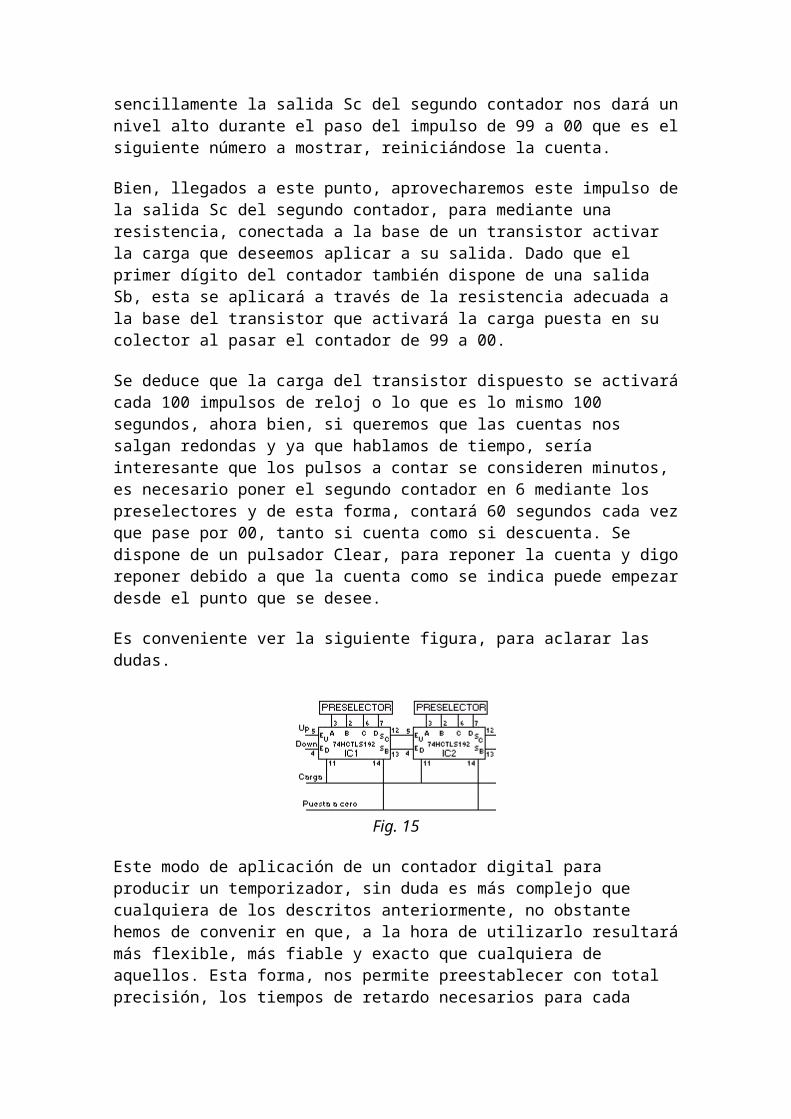
El integrador mas simple consta de una resistencia R y un condensador C, en este caso se trata de un filtro pasivo pasa bajos, como se muestra en la imagen siguiente.
Que ocurre al aplicar un tren de impulsos. Cuando llega un pulso de entrada se eleva rápidamente al máximo cargando el condensador C exponencialmente debido a la resistencia R, lo cual deforma el pulso de entrada como se muestra en la forma de onda inferior. Cuando el pulso de entrada se cae de repente a cero, se descarga exponencialmente el condensador C a cero a través de la resistencia R. El proceso se repite para cada pulso de entrada que, dará la forma de onda de salida mostrada.
La fase.
El generador que produce una estación de potencia o de la red alterna para producir un ciclo, que gira 360 grados y viene asociado al parámetro tiempo con el que forma una onda senoidal que constituye el habitual suministro.
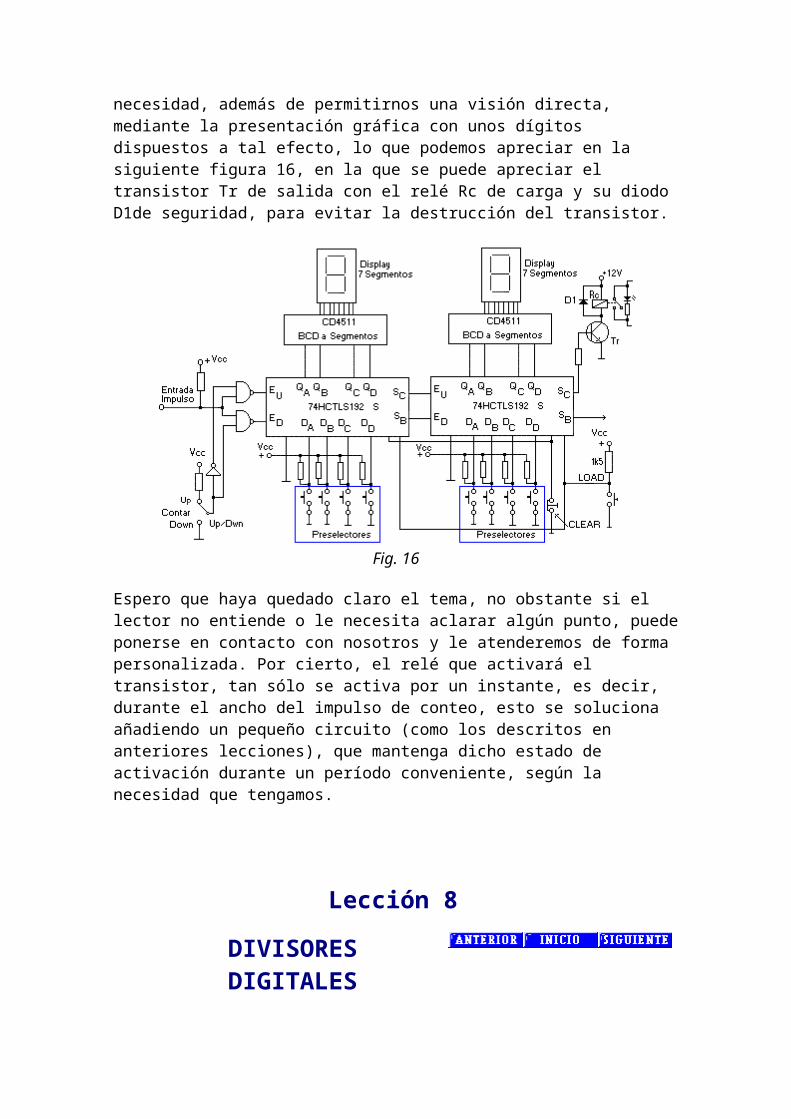
En el siguiente diagrama presenta dos ondas senoidales A y B, las cuales se ven porque que están fuera de fase, ya que ambas no empiezan al mismo tiempo desde cero y una tercera C. Para estar en fase A yB deben empezar al mismo tiempo. La forma de onda A empieza antes que B y está adelantada en 90 grados. La forma de onda B está retrasada de A en 90 grados. Si A y B estuvieran en fase, solo veríamos una forma de onda y por lo tanto estaríamos ante una única forma de onda.
Por otra parte la forma de onda C también está desfasada 90 grados de A y 180 grados de la forma de onda B.
Otra forma de mostrar esto se ve en el siguiente diagrama, conocido como un DIAGRAMA de FASE. En el cual, las fases están girando en sentido contrario a las agujas del reloj como indica la flecha del círculo. A se adelanta a B en 90 grados. La longitud de fase, es determinada por la amplitud de los voltajes A y B. Siempre que los voltajes son del mismo valor, los vectores de sus fases son de la misma longitud. Si el voltaje en A es la mitad el voltaje de B, entonces la longitud del vector de su fase sería la mitad de B.
Los Armónicos.
Cuando se produce una frecuencia (no importa el medio), ésta lleva consigo unas características que la diferencia del resto de las frecuencias que existen a su alrededor, esas características se pueden dosificar y cuantificar, son las frecuencias y subfrecuencias que le acompañan, estas frecuencias que aparecen alrededor de la principal son las que definen el elemento que produjo la principal.
Cuando una misma nota (frecuencia), digamos el Do medio (C medio), suena en diferentes instrumentos, las notas musicales producen un sonido característico diferente. Esto se debe a que, así como produjeron la FRECUENCIA FUNDAMENTAL de Do medio, también produjeron los múltiplos y submúltiplos de esa frecuencia, llamados ARMÓNICOS. La principal es, una onda pura senoidal. Los armónicos los producen las propias características físicas del instrumento, el material del instrumento, el número y amplitud de los armónicos determinan el sonido característico del instrumento, ya que genera unas ondas de reverberación y sintonía característica de dicho material, que no tienen la misma energía que la fundamental, estas ondas múltiplo y submúltiplo adoptan esas características.
El armónico qué es dos veces la frecuencia fundamental, como muestra el diagrama, se llama 2º armónico. La frecuencia que es tres veces la
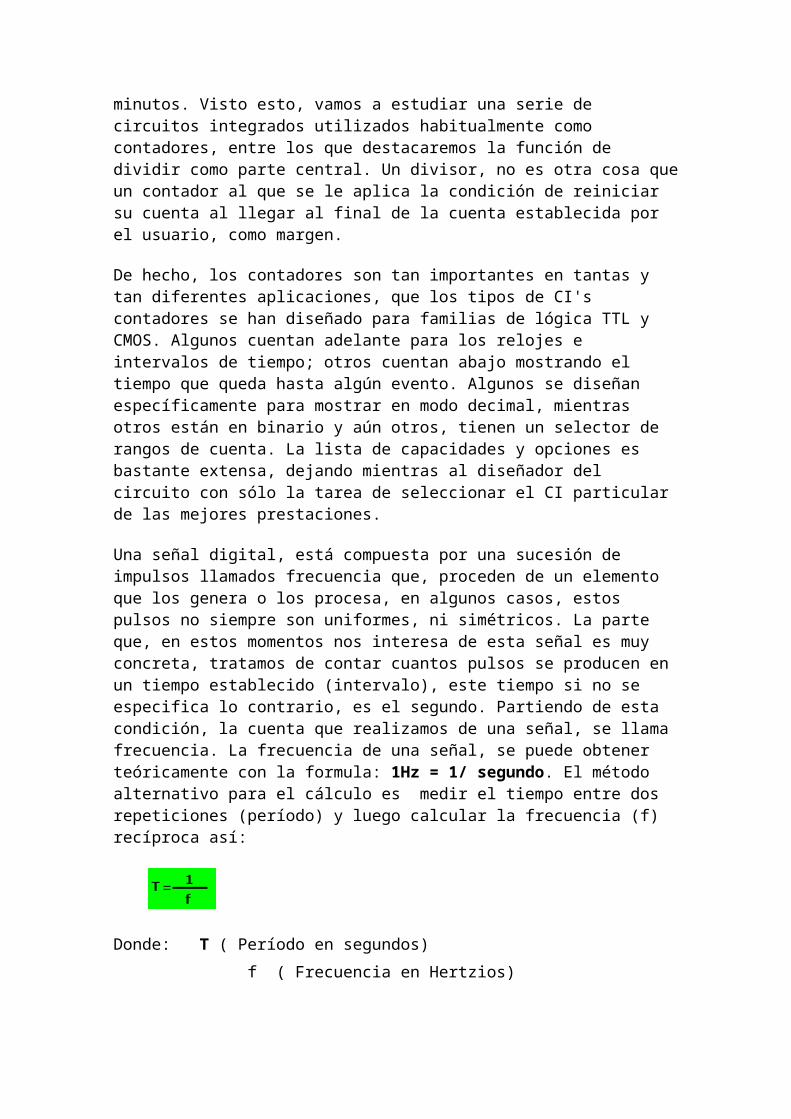
fundamental es el 3er armónico. Así pues, los 3, 5, 7 etc. se llaman armónicos IMPARES y los 2, 4, 6, 8 etc se llaman armónicos PARES.
Por definición una onda cuadrada está formada por una onda senoidal de una frecuencia fundamental y un número infinito de armónicos impares. Una forma de onda en diente de sierra, consiste en una onda fundamental y un número infinito de armónicos iguales.
Si una onda senoidal se inyecta en un amplificador la de onda de salida puede llegar a distorsionar, esto puede ser debido a los armónicos que se generan en el propio amplificador o por acoplamiento.
Recortadores y Limitadores.
Recortar y quitar parte de las crestas (positivo) y los valles (negativo) de una forma de onda, limita la amplitud y como consecuencia el voltaje. Véanse las imágenes siguientes y comprenderemos las descripciones.
Mediante una resistencia R y un diodo D, se recorta el pico positivo, la forma de onda será.
El circuito es semejante a un divisor de tensión, con el diodo que está ofreciendo alta resistencia para voltajes por debajo de 0.6 voltios y baja resistencia para tensiones por encima.
Para recortar el valle negativo, utilizaremos una resistencia R y un diodo D y la forma de onda será.
Como se habrá imaginado el lector una combinación de ambos nos permitirá obtener una forma de onda recortada o limitada. Los diodos de silicio no conducen hasta que el voltaje aplicado excede aproximadamente 0.6 voltios y sólo cuando el ánodo es positivo con respecto al cátodo.
En la siguiente figura, el circuito muestra ambos picos recortados y a menudo este circuito es usado como un LIMITADOR donde la salida no debe exceder 1.2 voltios.
Tensión pico a pico y RMS.
Si alguien mide el valor de tensión de una C.A. (corriente alterna) a la salida de un transformador, usando un osciloscopio y dice, ésta es una tensión de 20 voltios pico a pico y para confirmar esto usamos un voltímetro, encontraremos que el polímetro sólo lee 7.07 voltios.
Esto es debido a que, el osciloscopio mide la tensión pico a pico y el voltímetro mide valores de tensión RMS. En la figura el osciloscopio muestra el valor de pico. El voltaje pico a pico es dos veces esto. Por ejemplo, si el valor de pico es 10 voltios, entonces el valor pico a pico alcanza 20 voltios.
Así pues, cuando usando un medidor para medir un mismo voltaje de C. A. (corriente alterna) el valor obtenido es diferente es porque, como se ha dicho, los voltímetros miden valores de RMS.
La Raíz Cuadrada Promedio (RMS) del voltaje, produce el mismo efecto calorífico que, una tensión de corriente continua del mismo valor. Aplicando dichas tensiones a dos
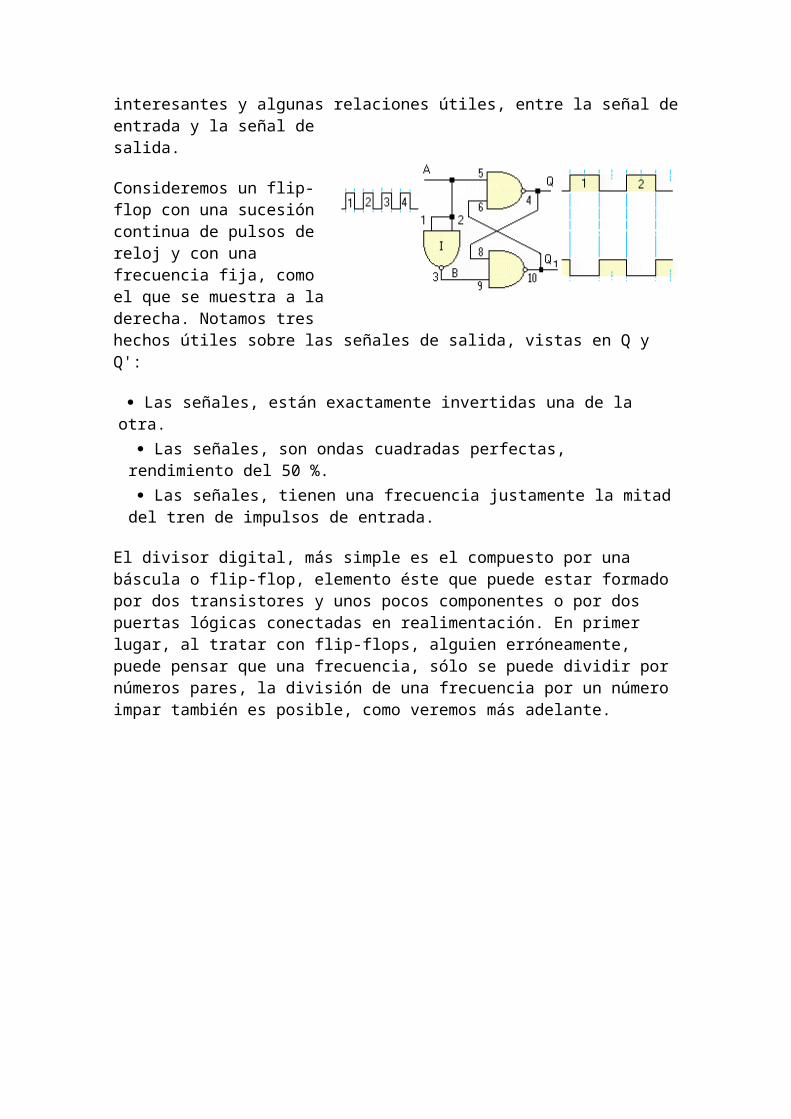
resistencias del mismo valor, mostrará la misma temperatura en el termómetro, cuando las resistencias se calienten por la corriente que pasa en ambos casos. Los valores RMS puede ser convertidos a valores pico a pico y viceversa.
El modo de convertir estos valores es el siguiente: la raíz cuadrada de 2 son 1'4142, éste es el factor a multiplicar por el valor de la tensión que nos muestra el voltímetro y obtendremos el valor pico a pico. En el ejemplo teníamos 7'07 voltios de pico que multiplicado por 1'4142 y por dos (dos picos), nos da 19'9967, es decir 20 voltios pico a pico. Y viceversa; 20 voltios dividido por 2 y dividido a su vez por 1'4142, nos entrega los 7'07 voltios de pico.
Conversión A a D.
Una señal analógica es similar a una onda senoidal y generalmente de amplitud inferior a 5V (5.000mV). Las señales de bajo nivel, generalmente se expresan en mV (milivoltios ), para hacerlos reconocibles instantáneamente y facilitar hablar de ellos.
Esta señal puede ser tan baja como unos pocos milivoltios o cientos de milivoltios. En general este tipo de señal será demasiado pequeño para ser analizado por un sistema digital. El sistema digital necesita una señal mayor, sobre 3.500mV para que la forma de onda aparezca sobre la línea de entrada como un nivel ALTO (H), durante el pico de su excursión. Esto debería ser tan alto como sea posible, sobre 5.000mV para la detección fiable de la señal.
La forma de la onda no tiene importancia, puede consistir en grandes o pequeñas excursiones como se muestra en la figura, ya que, sólo las grandes excursiones serán detectadas por el sistema digital, las demás pueden ser demasiado pequeños para ser detectadas. Para aumentar en lo posible la señal analógica cerca de 5.000mV, es necesario un amplificador, como se muestra en la figura siguiente.
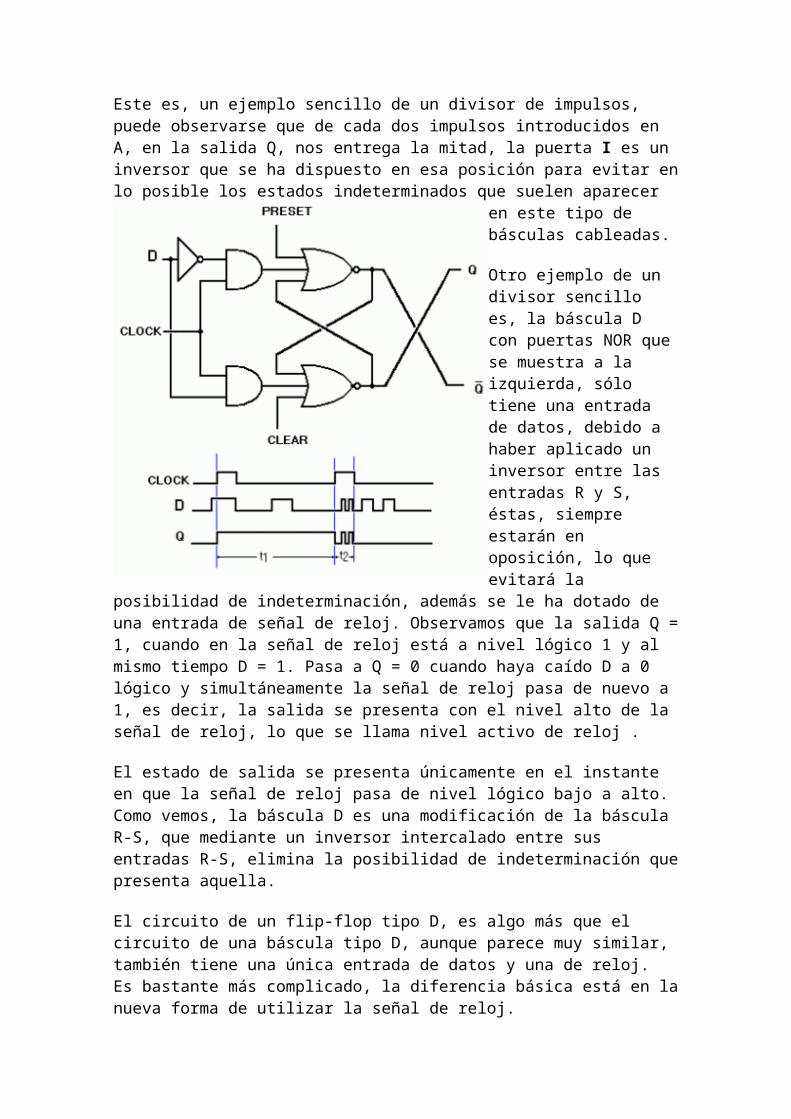
Un amplificador, de tal vez una o dos etapas, según la amplitud de la señal original. Cada etapa del amplificador aumentará el tamaño de la señal ciertas veces. Si tenemos mucha suerte, se puede conseguir una amplificación de por 100 (100 veces). Así, una señal de 5mV con una etapa amplificadora puede que produzca una señal de 350mV. Esto no es suficiente para ser detectada por el micro. Otra etapa, elevará fácilmente la señal a 5.000mV y el sistema digital si detectará su presencia.
La segunda etapa sólo tiene que amplificar la señal aproximadamente entre 10 y 12 veces, será suficiente y la ganancia proporcionada por la etapa añadida, simplemente conlleva la forma de onda de "el fondo" y "el alto" como se muestra en la figura. Esto significa que la forma de onda estará "recortada" en el pico y el valle, convertida a una forma "ligeramente cuadrada". Normalmente se llamaría a esto distorsión pero, en términos digitales no nos preocupamos sobre este estado deformado y simplemente lo usaremos por sus propiedades "de disparo".
Supóngase que se tiene una forma de onda que es mayor de 5mV (es decir entre 30 y 50mV) y quiere saber si esto disparará la puerta digital después de una única etapa de amplificación. Conéctese el circuito de la figura 5 a la salida de la puerta y conecte un LED con la resistencia 470Ohms en serie.
Al final de la señal de una palabra o sonido, el LED puede quedar iluminado o extinguido. Esto depende de la forma de onda del último ciclo. El circuito se detiene con la salida a mitad de tensión aproximadamente y si en lugar de la puerta, hubiera un microprocesador no sabría si esto es un alto (H) o bajo (L), y tomaría la lectura por la dirección del último ciclo. Algunas entradas de los micros son disparadores Schmitt. Esto significa que para ser visto como un alto, un alto (H) tiene que ser del 85 % al 100 % de la línea de tensión y entre el
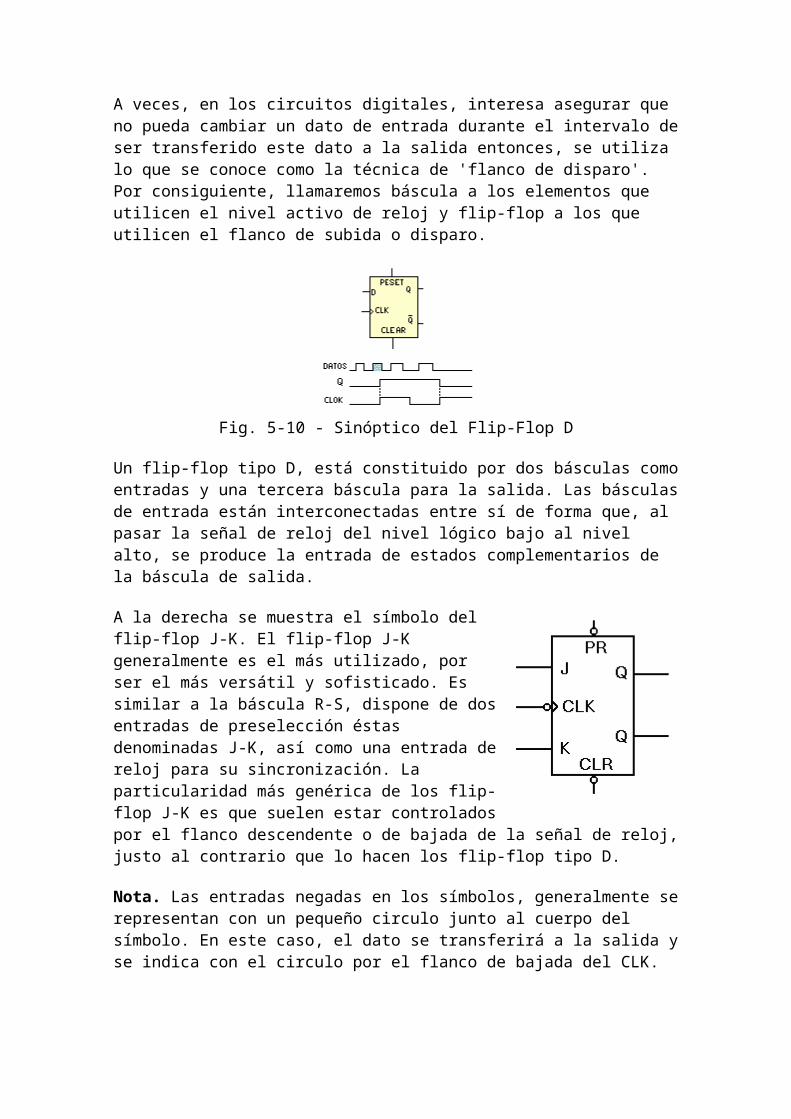
20 % y el 0 % para ser visto como un bajo (L). Las entradas sin disparador Schmitt ven un bajo (L) del 20 % al 0 % y un alto (H) por encima de 2V hasta 5'5V.
He querido dar un repaso muy superficial por cada uno de los apartados que se han descrito, evitando entrar en formulas empíricas y matizando las ideas, con sencillez. Con esto doy por concluido este manual, para el cual he extraído información de diferentes fuentes, tanto de libros como de documentos que he encontrado en la red.