Lenguajes Robot
143
José Manuel Ruiz Gutiérr ez Programación Gráfica: El nuevo paradigma de la enseñanza de las técnicas del control y gobierno de las interfaces externas
Transcript of Lenguajes Robot

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 1/143
José Manuel Ruiz Gutiérrez
Programación Gráfica: El nuevo paradigma de laenseñanza de las técnicas del control y gobiernode las interfaces externas
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 2/143
José Manuel Ruiz Gutiérrez
FabricarControlar
El estudio de la Robótica y el Control permiten•Reconocer los operadores técnicos básicos•Comprender el funcionamiento de los sistemas•Desarrollar destrezas en el campo de la lógica•Comprender los principios de la algoritmia
•Estructurar el pensamiento
Simular
Programar
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 3/143
José Manuel Ruiz Gutiérrez
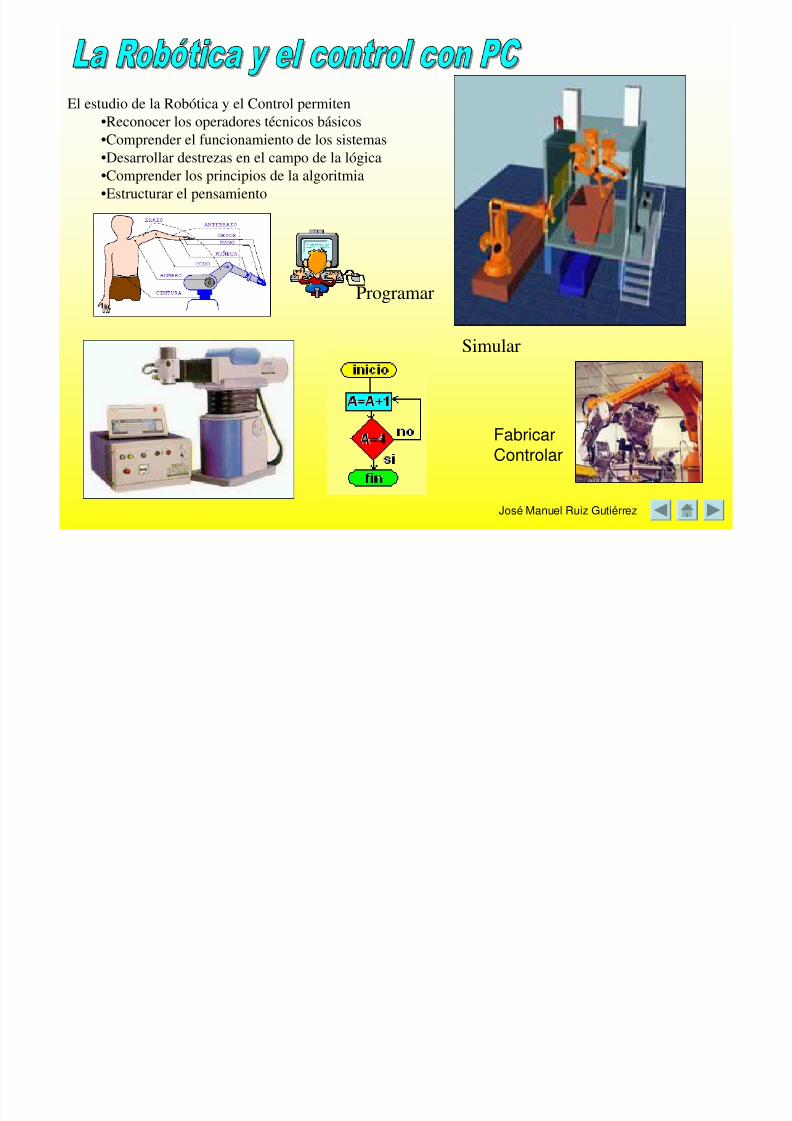
Fischertechnik
LEGO RCX
FLOWGO
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 4/143
José Manuel Ruiz Gutiérrez

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 5/143
José Manuel Ruiz Gutiérrez
Interface
Elementos Sensores y Maquetas
Software LOGICATOR oPIC-LOGICATOR
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 6/143
José Manuel Ruiz Gutiérrez
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 7/143
José Manuel Ruiz Gutiérrez
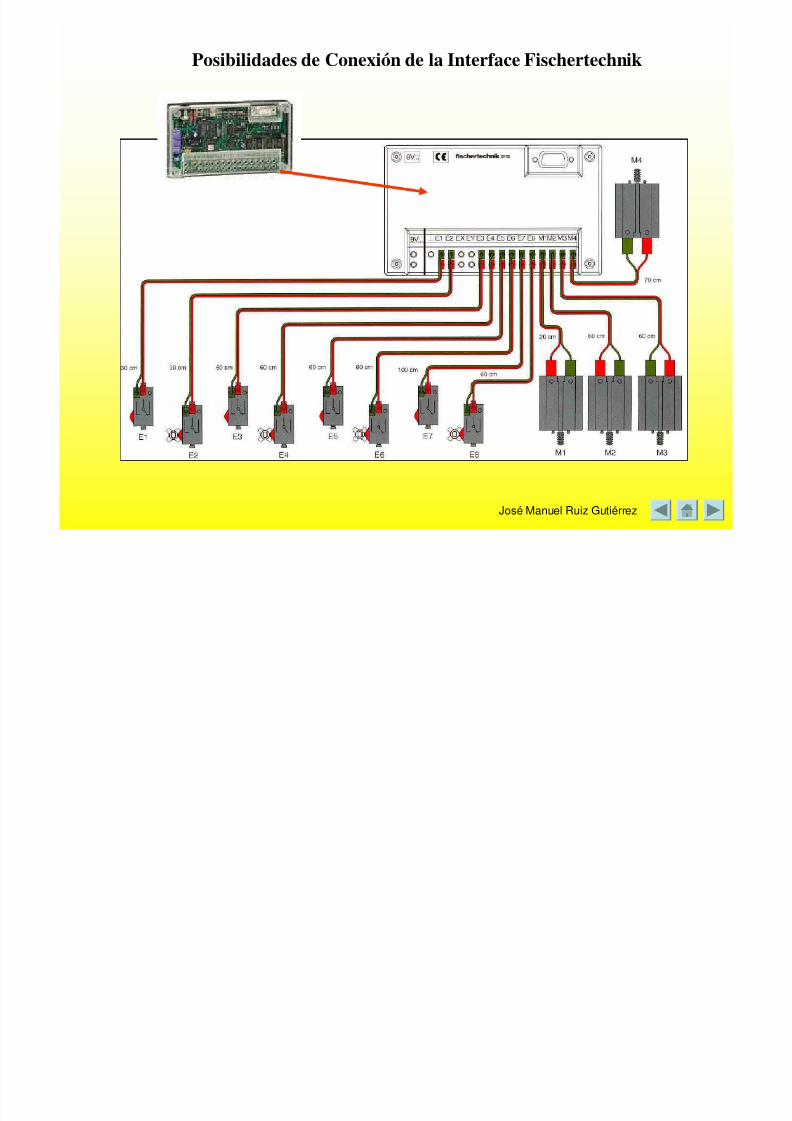
Posibilidades de Conexión de la Interface Fischertechnik

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 8/143
José Manuel Ruiz Gutiérrez
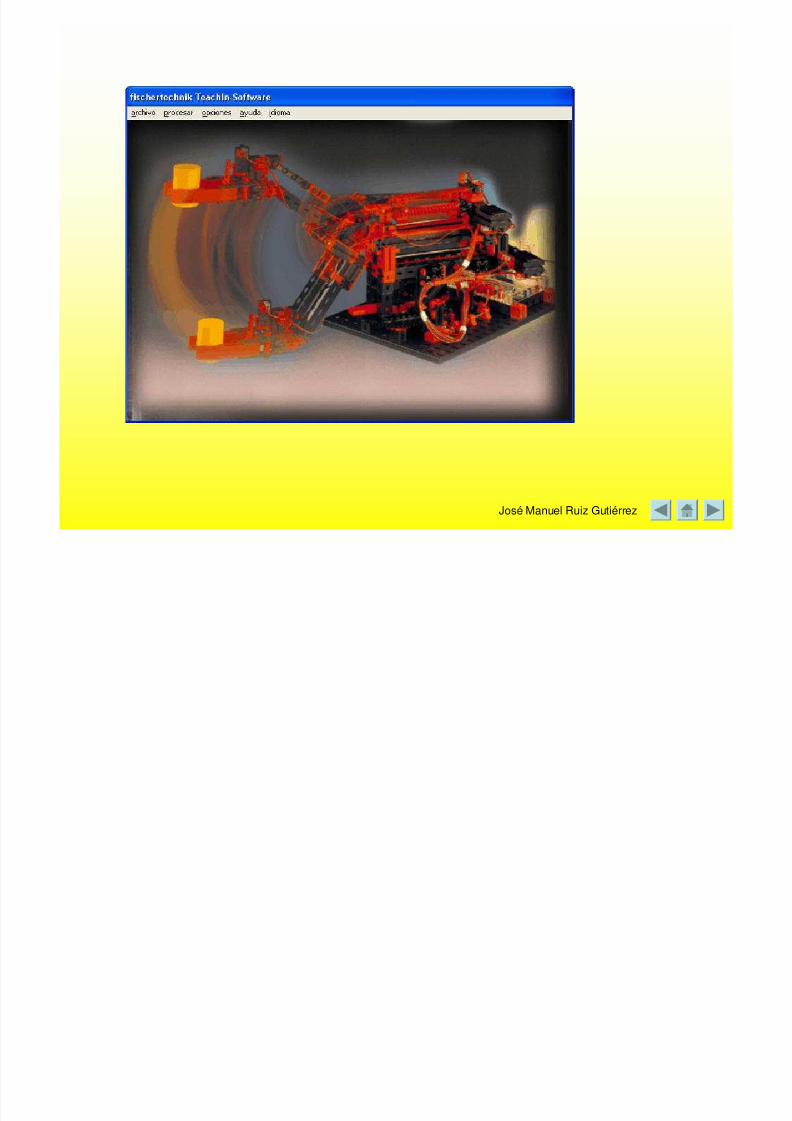
Ejemplos de Montajes con el kit Fischertechnik
Los modelos incorporan las principales característicasde la máquinas y sistemas reales, permitiendo lasimulación de estas de una manera cómoda y sencilla
La utilización de maquetas es un poderosoRecurso educativo, a la vez que permite eltrabajo en grupos y la realización de maquinasy mecanismos muy variados.
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 9/143
José Manuel Ruiz Gutiérrez
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 10/143
José Manuel Ruiz Gutiérrez
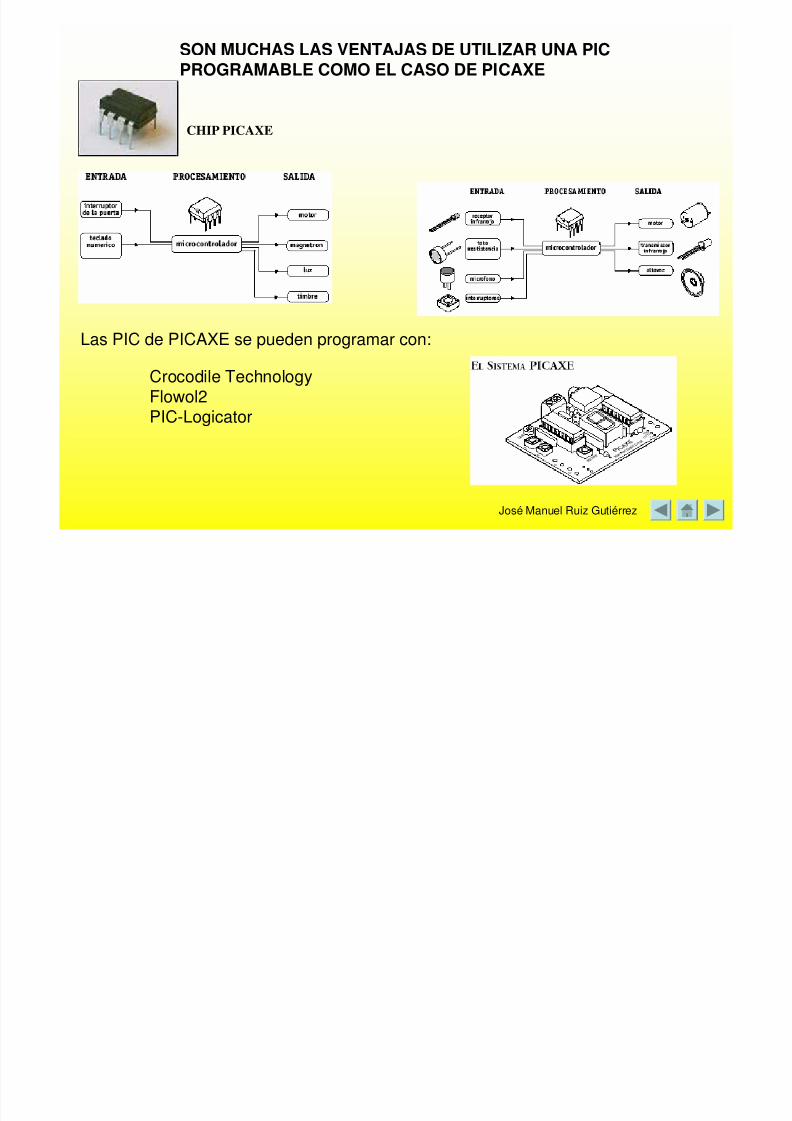
SON MUCHAS LAS VENTAJAS DE UTILIZAR UNA PICPROGRAMABLE COMO EL CASO DE PICAXE
Las PIC de PICAXE se pueden programar con:
Crocodile Technology
Flowol2PIC-Logicator
CHIP PICAXE
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 11/143
José Manuel Ruiz Gutiérrez
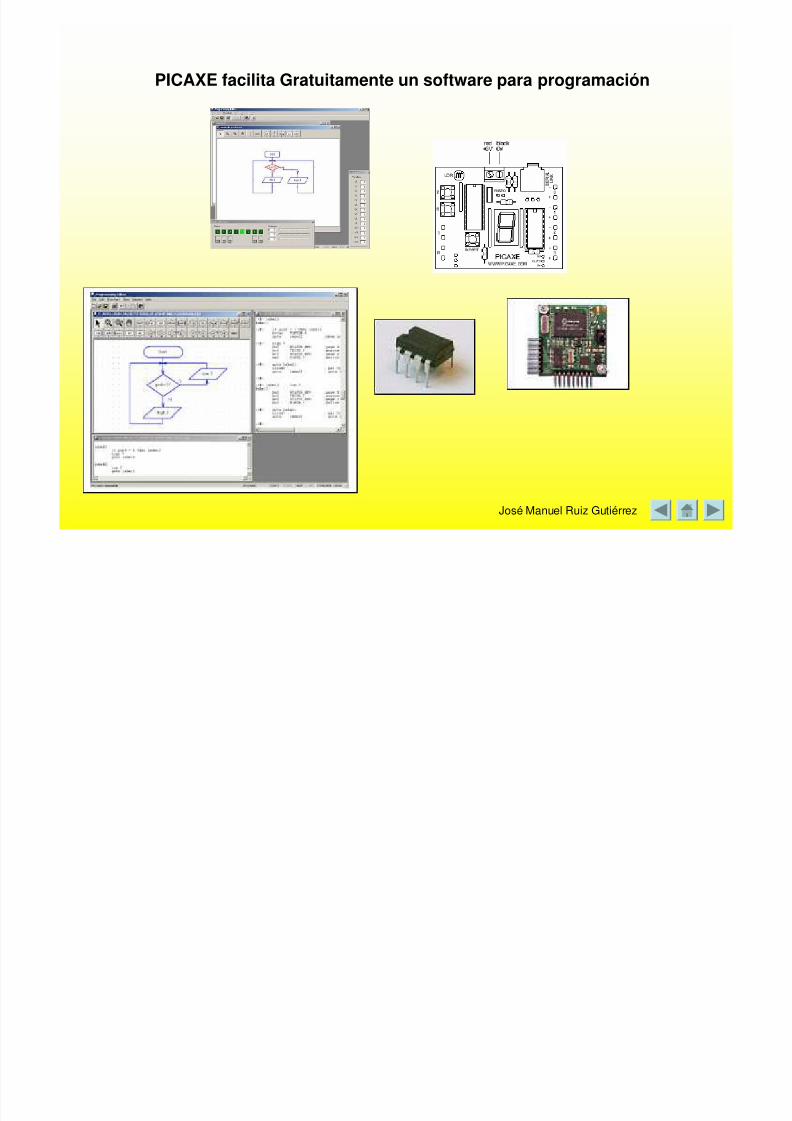
PICAXE facilita Gratuitamente un software para programación
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 12/143
José Manuel Ruiz Gutiérrez
Lenguajes Gráficos
Utilización de bloques funcionales muy potentes
Conexión con el mundo exterior
Intercambio dinámico de datos
Interacción con objetos gráficos: Mímicos de Funcionamiento
Se han abandonado los Lenguajes de sintaxis textual:Logo. Basic, Pascal, C, etc…
Recursos orientados a la Algoritmia.
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 13/143
José Manuel Ruiz Gutiérrez
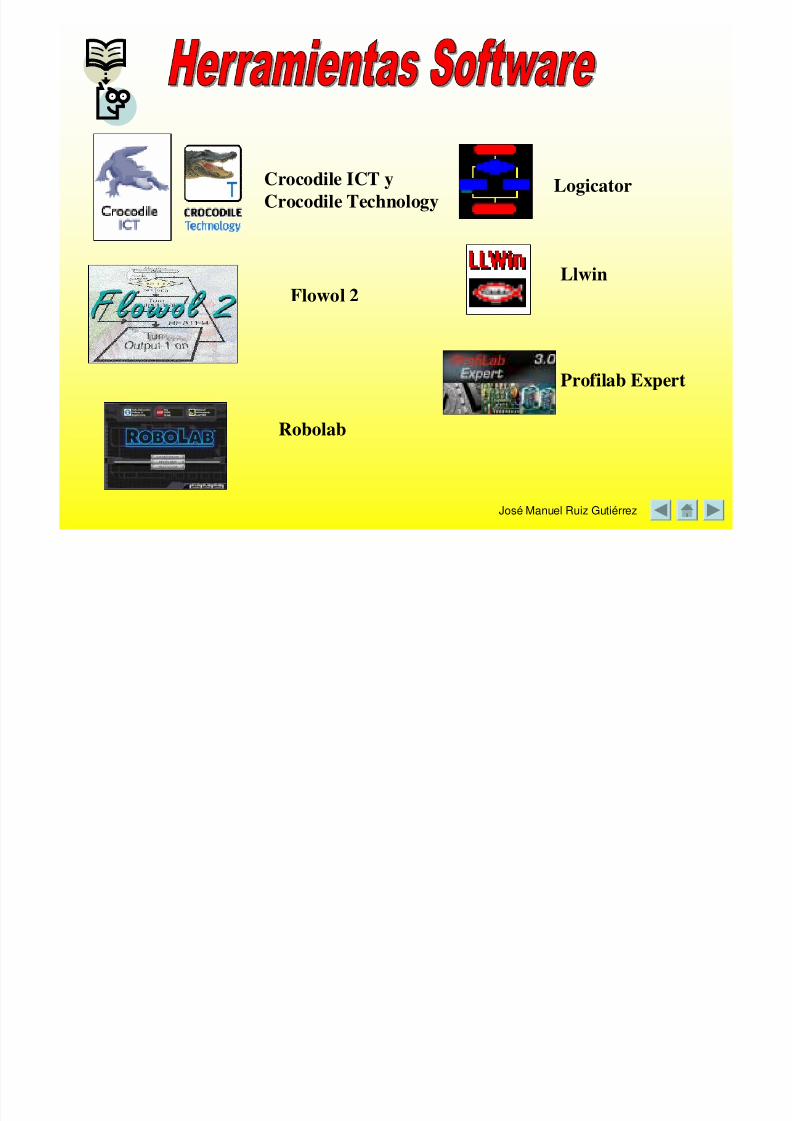
Crocodile ICT y
Crocodile Technology
Flowol 2
Robolab
Profilab Expert
Llwin
Logicator
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 14/143
José Manuel Ruiz Gutiérrez
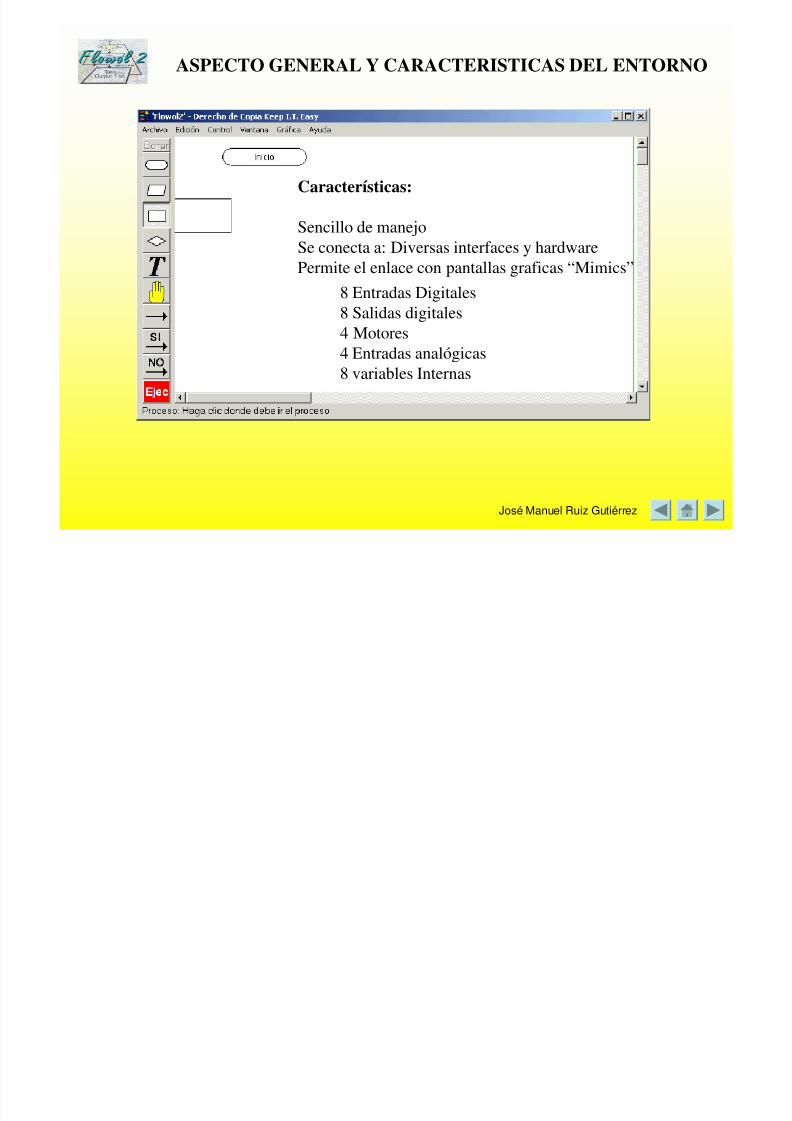
Características:
Sencillo de manejoSe conecta a: Diversas interfaces y hardwarePermite el enlace con pantallas graficas “Mimics”
8 Entradas Digitales8 Salidas digitales4 Motores4 Entradas analógicas8 variables Internas
ASPECTO GENERAL Y CARACTERISTICAS DEL ENTORNO
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 15/143
José Manuel Ruiz Gutiérrez
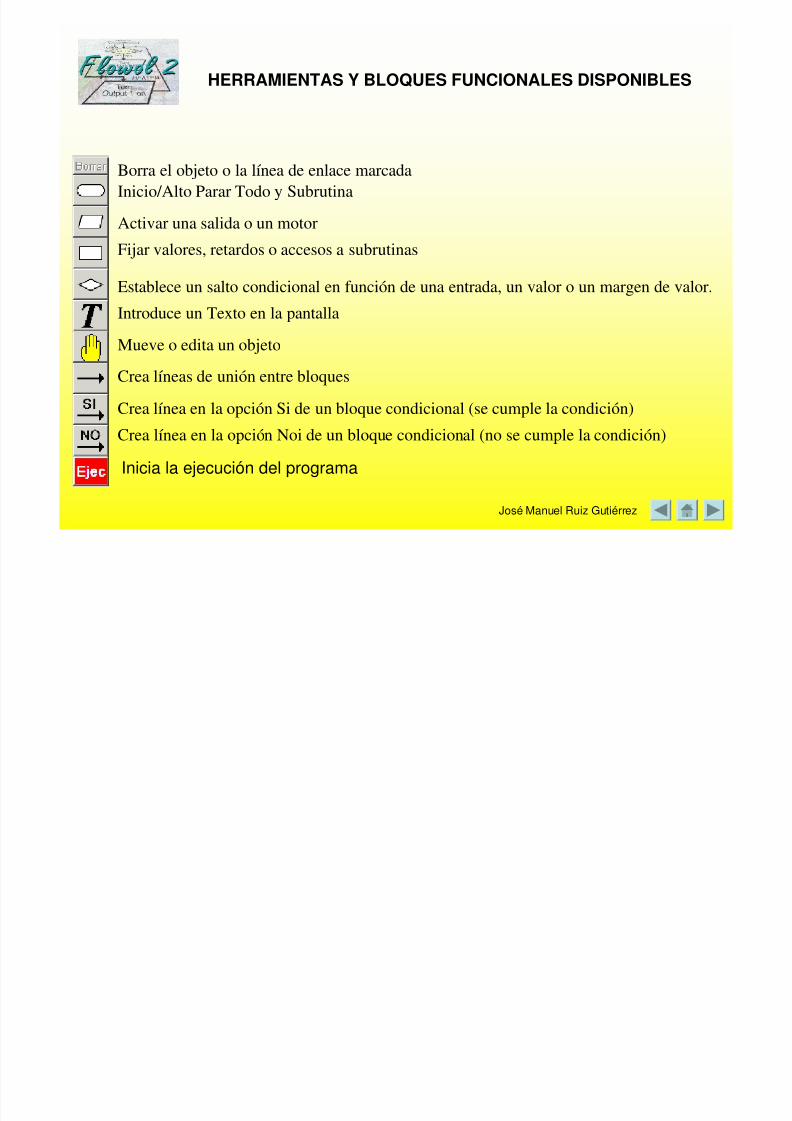
Inicio/Alto Parar Todo y SubrutinaActivar una salida o un motor
Fijar valores, retardos o accesos a subrutinas
Establece un salto condicional en función de una entrada, un valor o un margen de valor.
Introduce un Texto en la pantalla
Mueve o edita un objeto
Crea líneas de unión entre bloques
Crea línea en la opción Si de un bloque condicional (se cumple la condición)
Crea línea en la opción Noi de un bloque condicional (no se cumple la condición)
Inicia la ejecución del programa
Borra el objeto o la línea de enlace marcada
HERRAMIENTAS Y BLOQUES FUNCIONALES DISPONIBLES

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 16/143
José Manuel Ruiz Gutiérrez
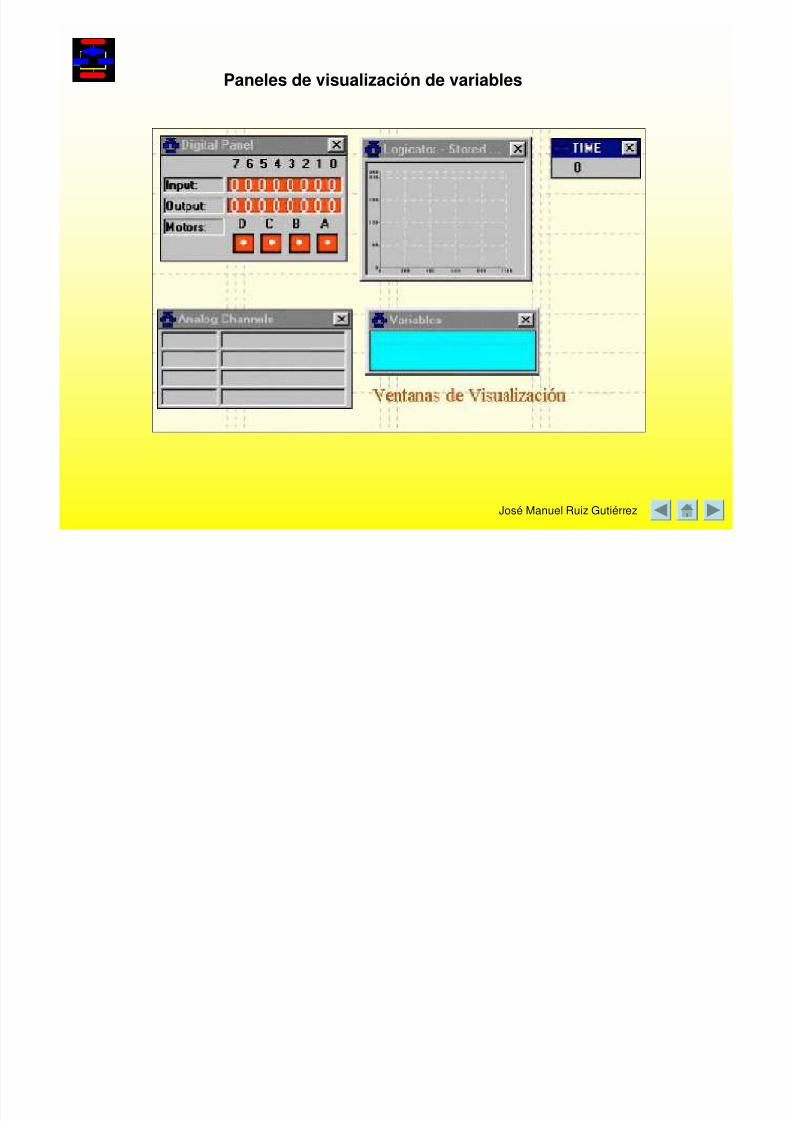
Los datos se pueden visualizar en tiempo realmediante las pantallas correspondientes
Pantallas de visualización y activación de
variables desde el programa
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 17/143
José Manuel Ruiz Gutiérrez
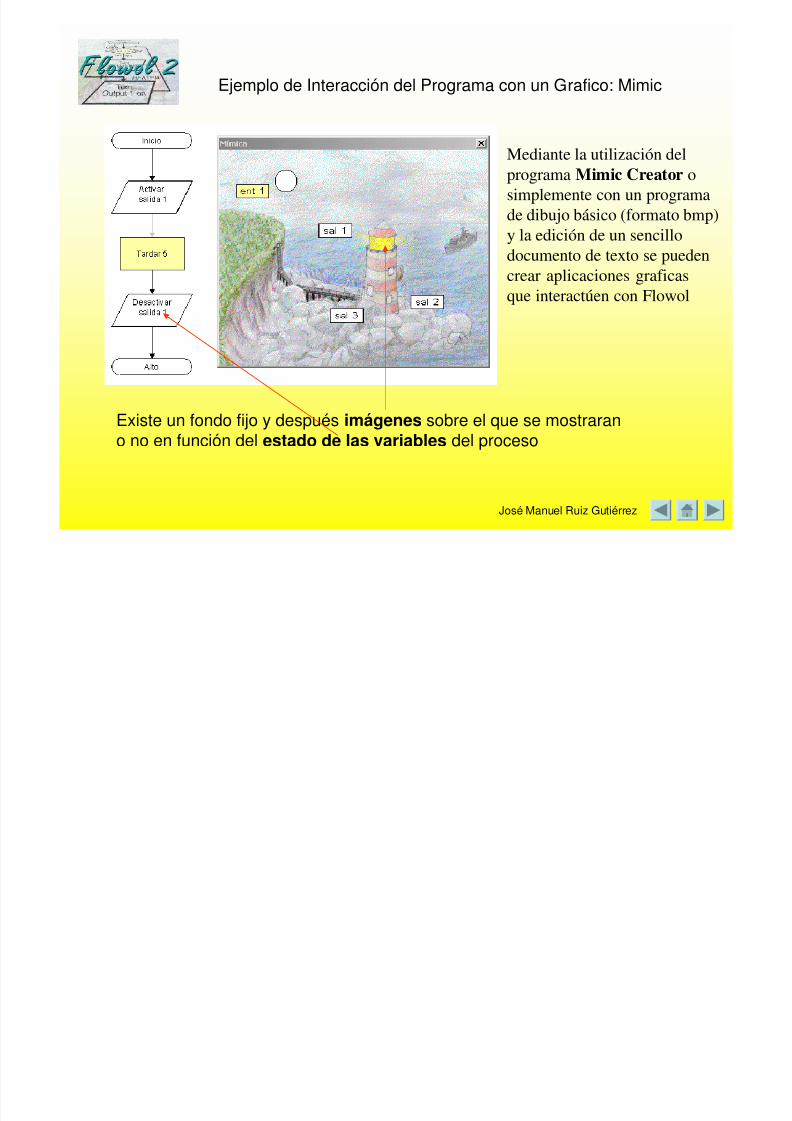
Ejemplo de Interacción del Programa con un Grafico: Mimic
Mediante la utilización delprograma Mimic Creator o
simplemente con un programade dibujo básico (formato bmp)y la edición de un sencillodocumento de texto se puedencrear aplicaciones graficas
que interactúen con Flowol
Existe un fondo fijo y después imágenes sobre el que se mostrarano no en función del estado de las variables del proceso
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 18/143
José Manuel Ruiz Gutiérrez
DISTINTOS EJEMPLOS DE PANTALLAS GRAFICAS
PARA ENLAZAR CON APLICACIONES “MIMICS”
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 19/143
José Manuel Ruiz Gutiérrez
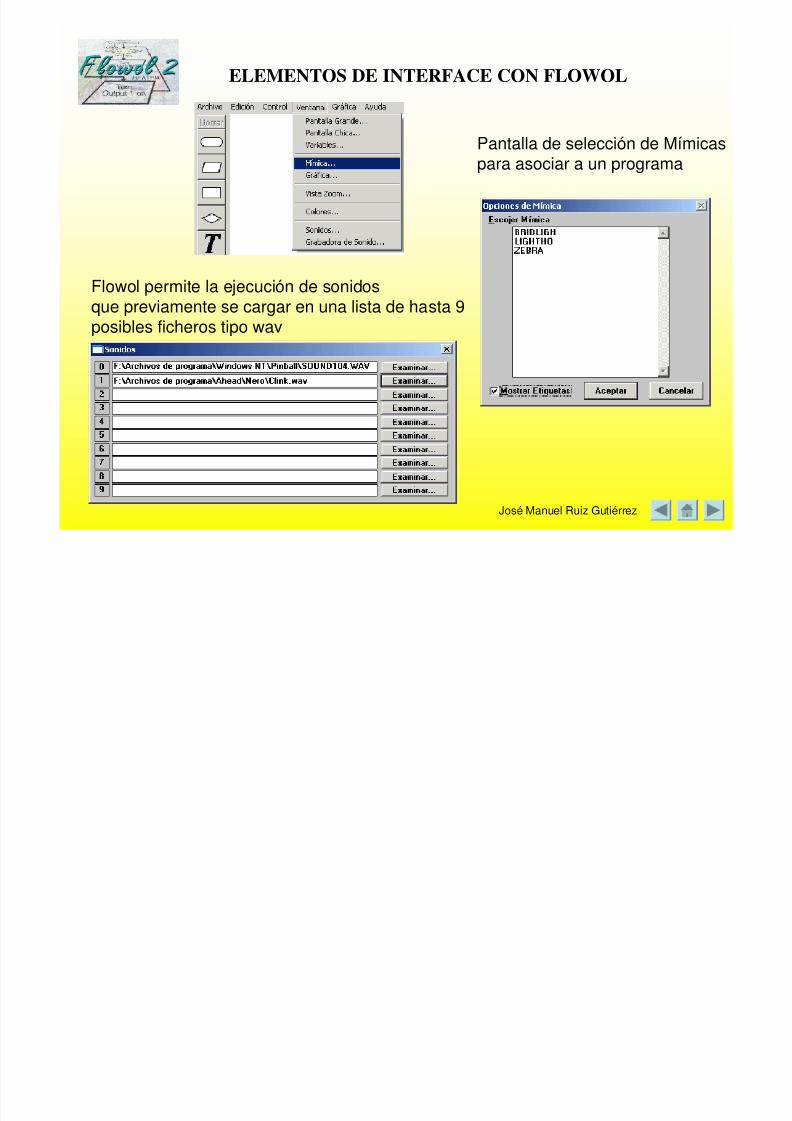
Flowol permite la ejecución de sonidosque previamente se cargar en una lista de hasta 9posibles ficheros tipo wav
Pantalla de selección de Mímicaspara asociar a un programa
ELEMENTOS DE INTERFACE CON FLOWOL
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 20/143
José Manuel Ruiz Gutiérrez
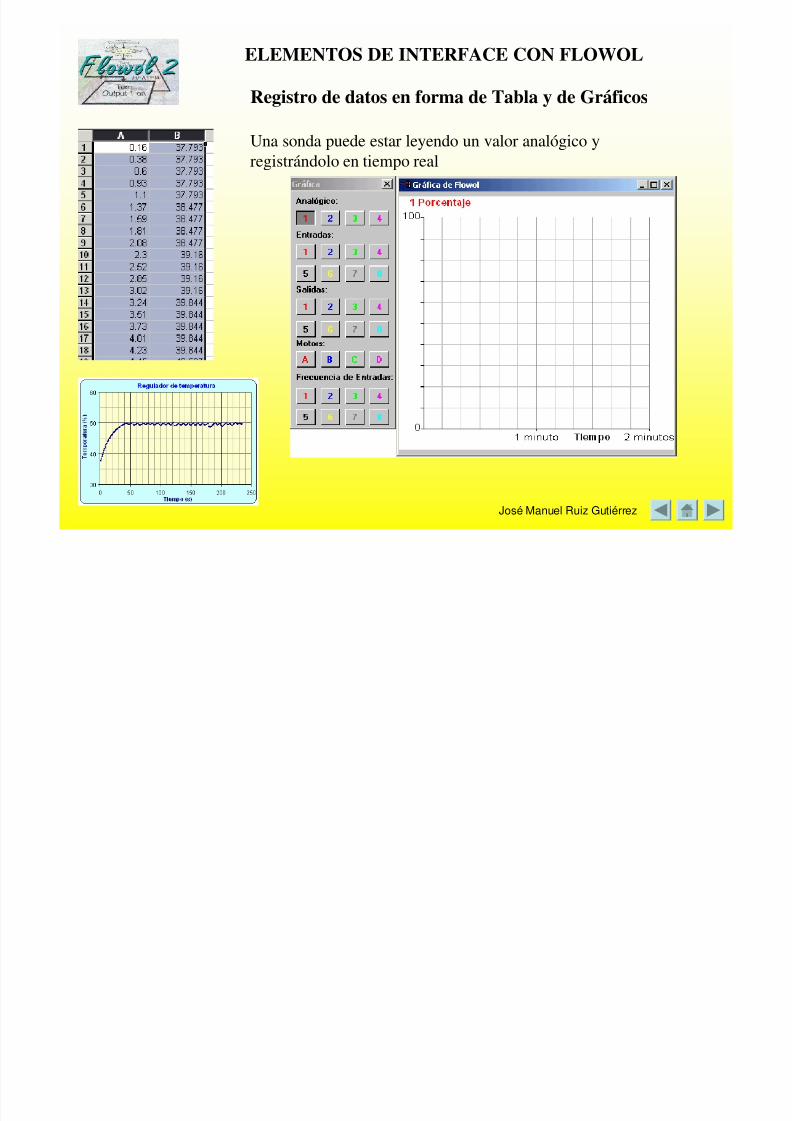
Registro de datos en forma de Tabla y de Gráficos
Una sonda puede estar leyendo un valor analógico yregistrándolo en tiempo real
ELEMENTOS DE INTERFACE CON FLOWOL
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 21/143
José Manuel Ruiz Gutiérrez
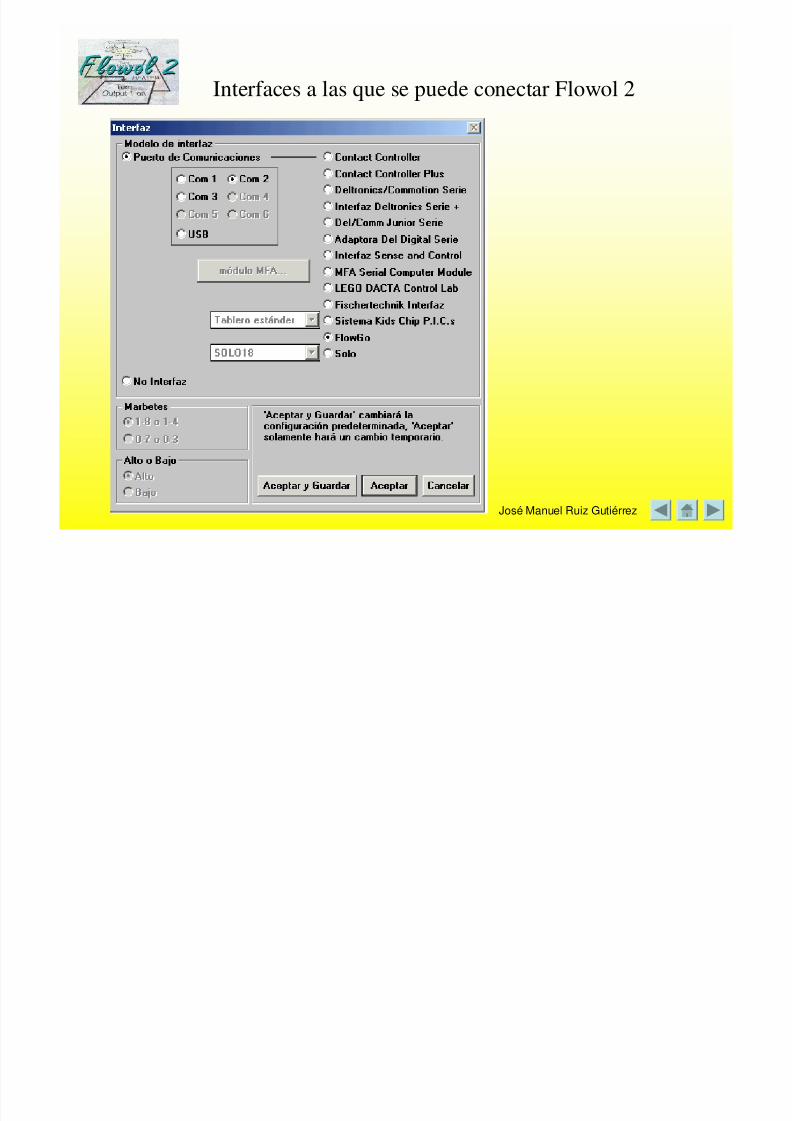
Interfaces a las que se puede conectar Flowol 2

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 22/143
José Manuel Ruiz Gutiérrez
Algunas de las Opciones de los Bloques funcionales de Flowol 2
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 23/143
José Manuel Ruiz Gutiérrez
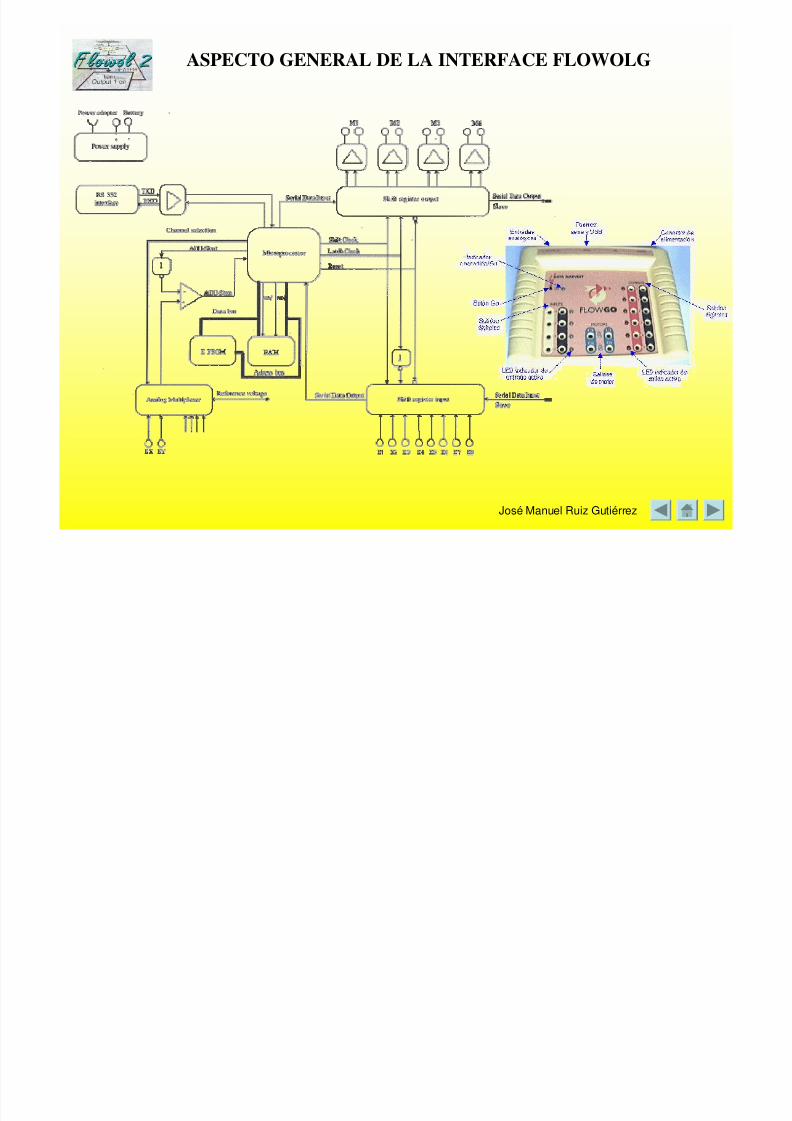
ASPECTO GENERAL DE LA INTERFACE FLOWOLG

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 24/143
José Manuel Ruiz Gutiérrez
Ejemplo 1 de Programa:
El programa representa un contador
asociado a la variable a que se incrementahasta llegar al valor x , momento en el que acaba.
La cuenta se realiza cada vez que pulsamos ysoltamos en la entrada 2 mediante los
condicionales que se establecen.
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 25/143
José Manuel Ruiz Gutiérrez
Inicio Sub 1(S1)
¿Estáactivada ent 1?
Sub 1(S1) Tardar 1
Activarsalida 1
Tardar 2
Desactivarsalida 1
Activarsalida 2
Desactivarsalida 2
Alto
SI
NO
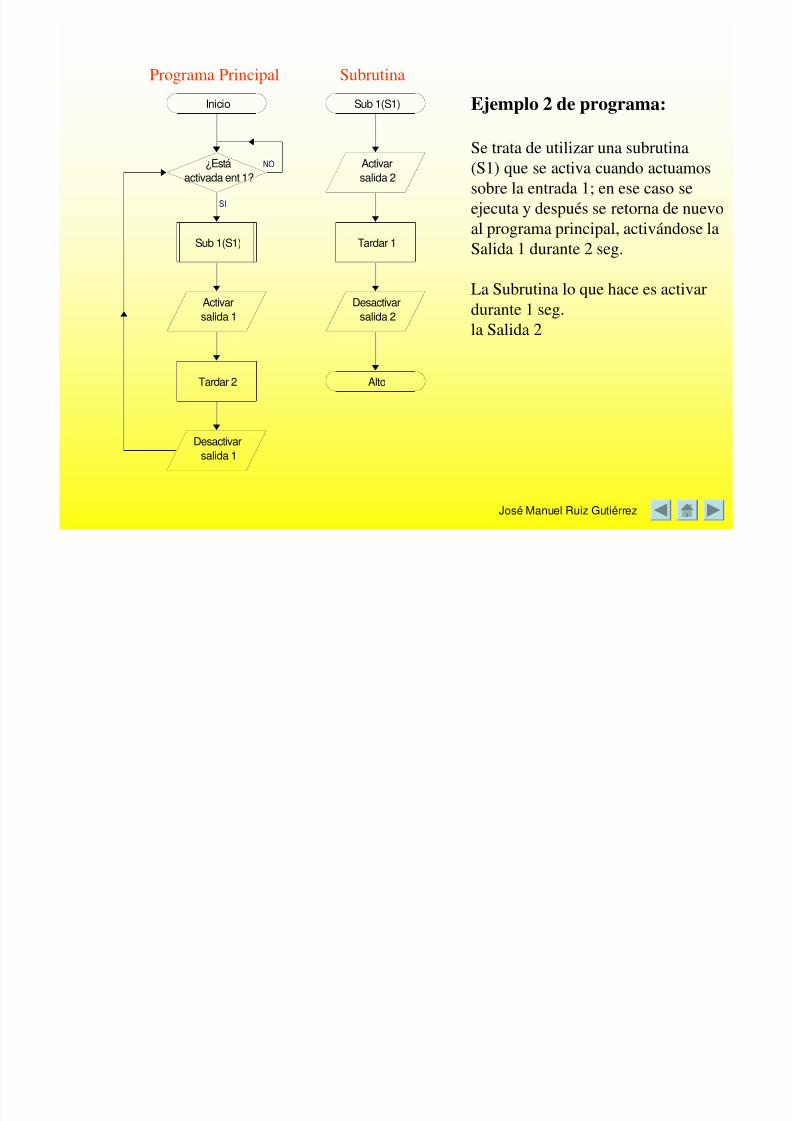
Ejemplo 2 de programa:
Se trata de utilizar una subrutina(S1) que se activa cuando actuamossobre la entrada 1; en ese caso seejecuta y después se retorna de nuevoal programa principal, activándose laSalida 1 durante 2 seg.
La Subrutina lo que hace es activardurante 1 seg.la Salida 2
Programa Principal Subrutina
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 26/143
José Manuel Ruiz Gutiérrez
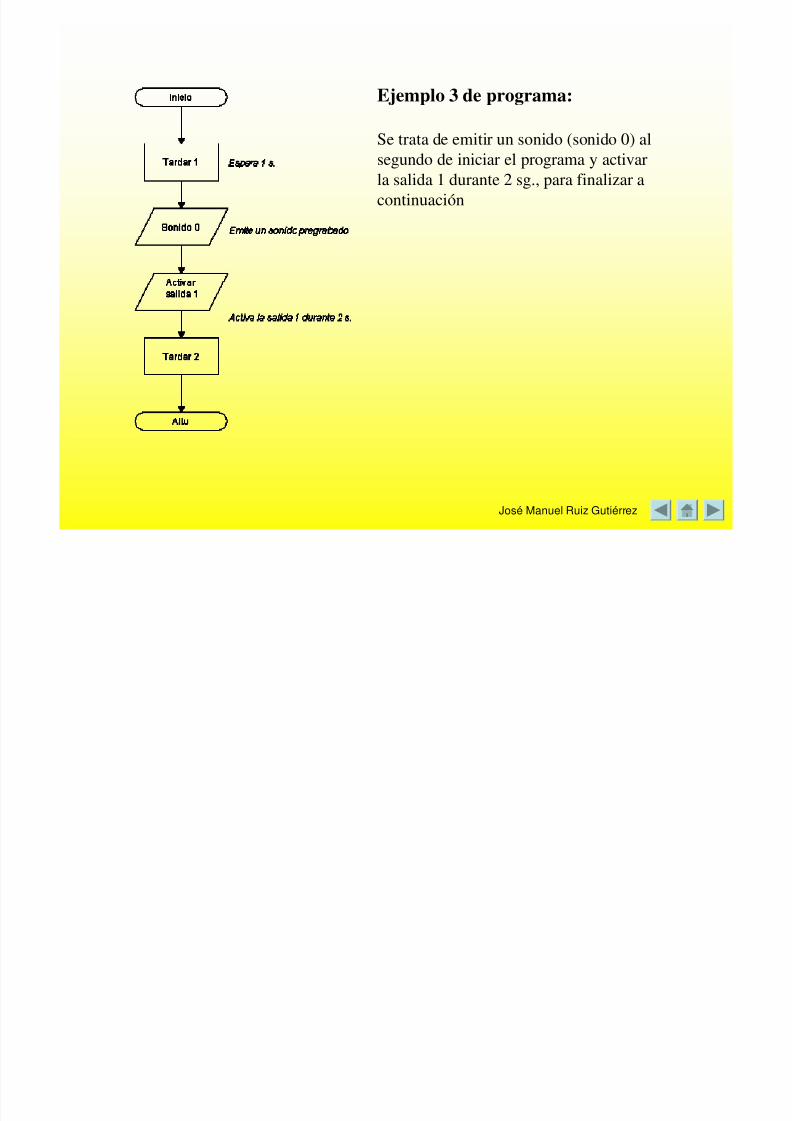
Ejemplo 3 de programa:Se trata de emitir un sonido (sonido 0) alsegundo de iniciar el programa y activarla salida 1 durante 2 sg., para finalizar a
continuación
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 27/143
José Manuel Ruiz Gutiérrez
Inicio
¿EsVal 1 > 20?
Activarsalida 1
Desactivarsalida 1
SI
NO
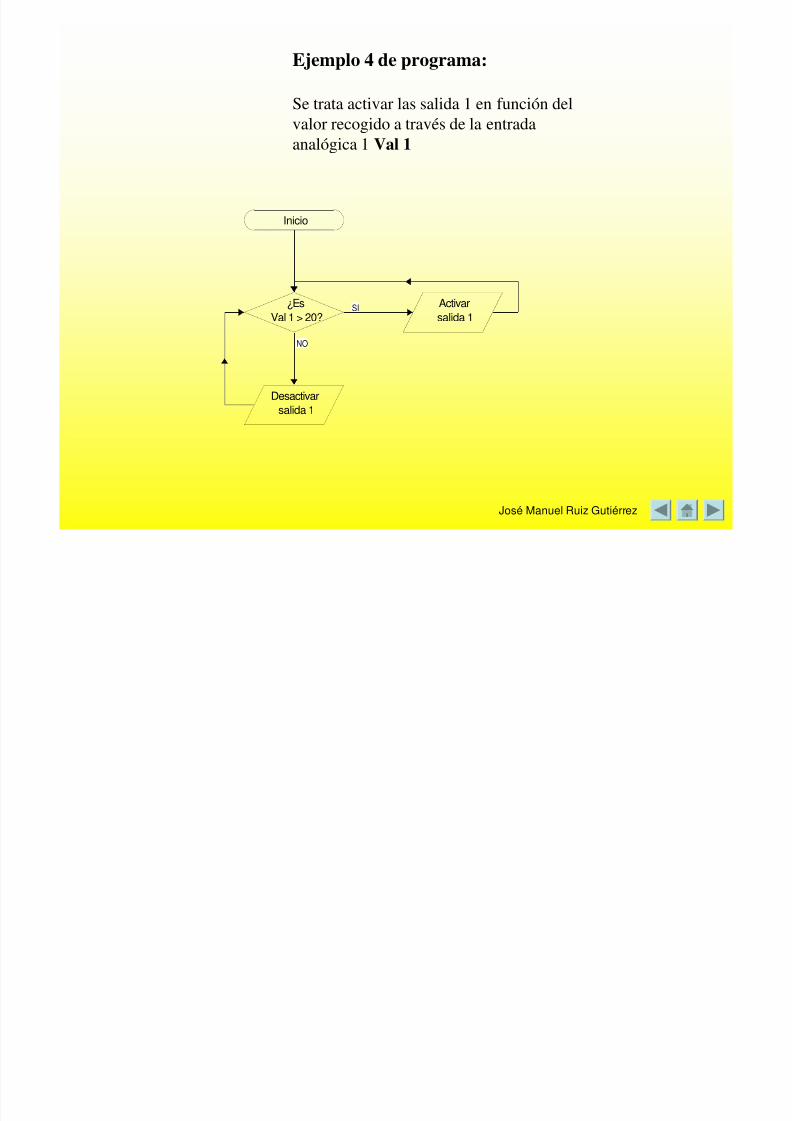
Ejemplo 4 de programa:
Se trata activar las salida 1 en función delvalor recogido a través de la entradaanalógica 1 Val 1
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 28/143
José Manuel Ruiz Gutiérrez
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 29/143
José Manuel Ruiz Gutiérrez

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 30/143
José Manuel Ruiz Gutiérrez
CARACTERISTICAS
Lenguaje de programación grafica8 Entradas digitales8 Salidas Digitales4 Motores (dos sentidos de giro)
4 Entradas AnalógicasCapaz de comunicarse con un PICcapaz de concertarse con la Interface SmartBox y otrasMas de 30 Bloques funcionales para programar
SE PUEDE CONECTAR A DISTINTAS INTERFACES
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 31/143
José Manuel Ruiz Gutiérrez
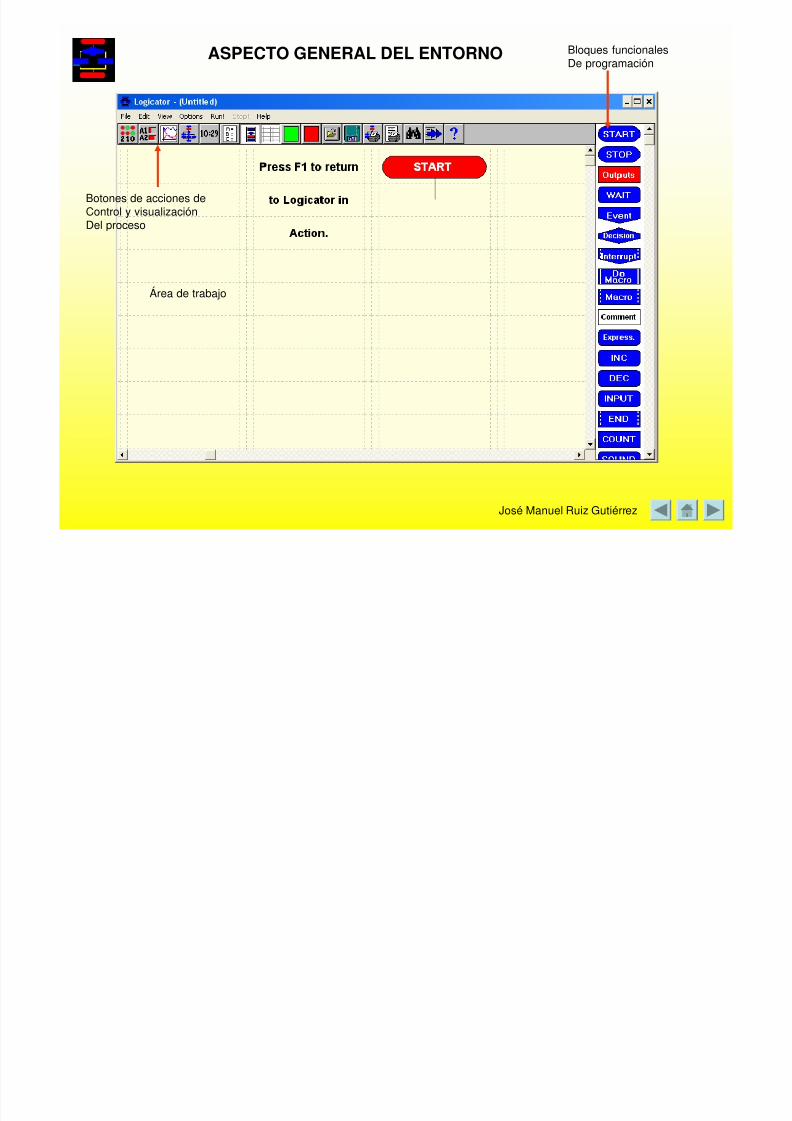
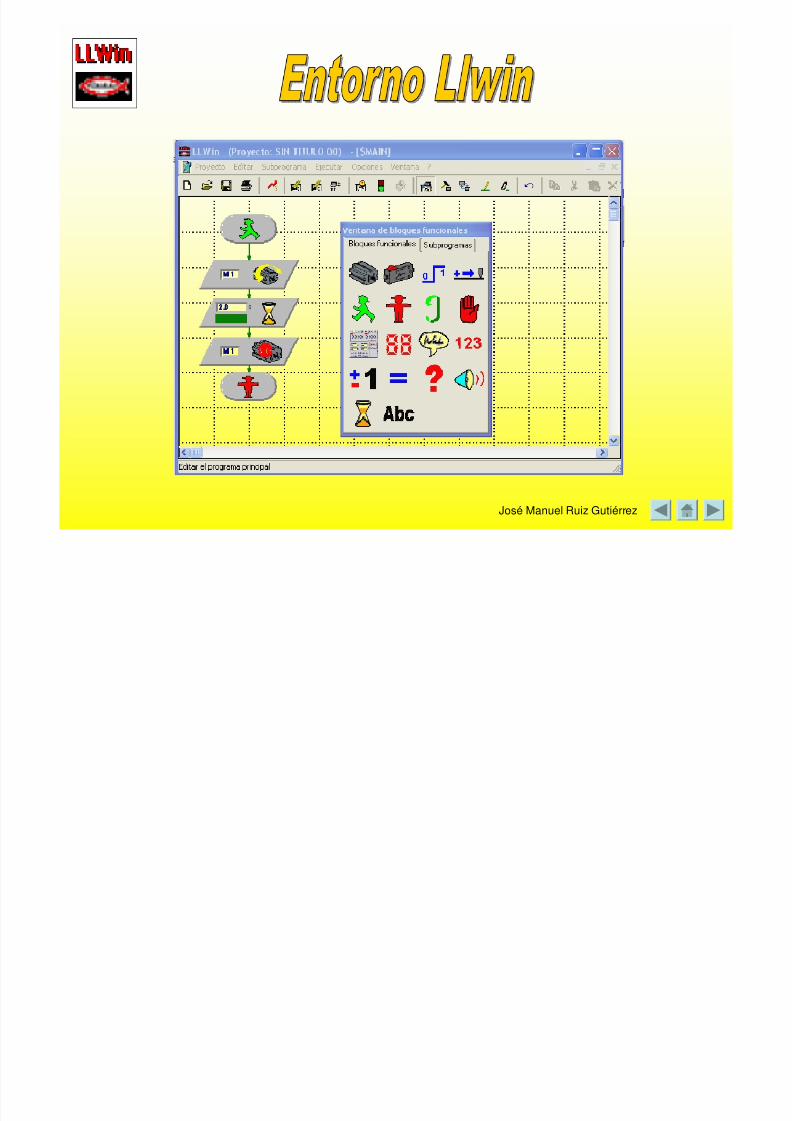
ASPECTO GENERAL DEL ENTORNO
Área de trabajo
Bloques funcionalesDe programación
Botones de acciones deControl y visualizaciónDel proceso
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 32/143
José Manuel Ruiz Gutiérrez
Paneles de visualización de variables
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 33/143
José Manuel Ruiz Gutiérrez
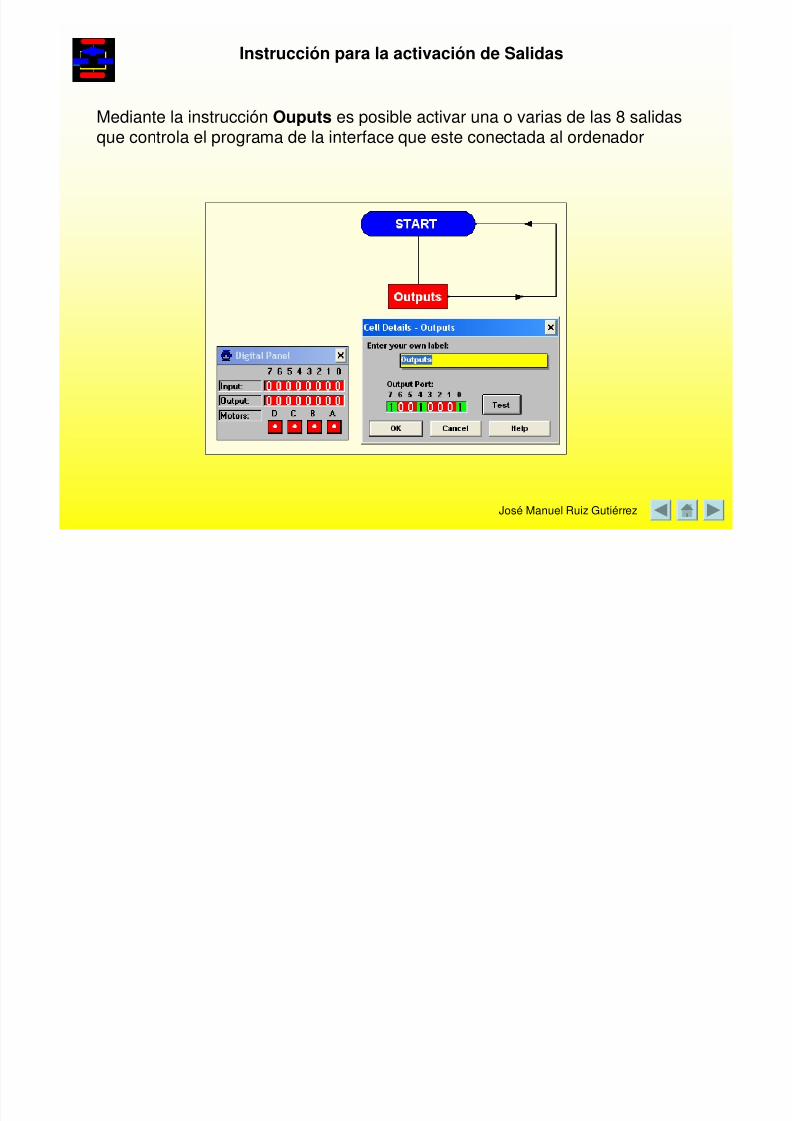
Instrucción para la activación de Salidas
Mediante la instrucción Ouputs es posible activar una o varias de las 8 salidasque controla el programa de la interface que este conectada al ordenador
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 34/143
José Manuel Ruiz Gutiérrez
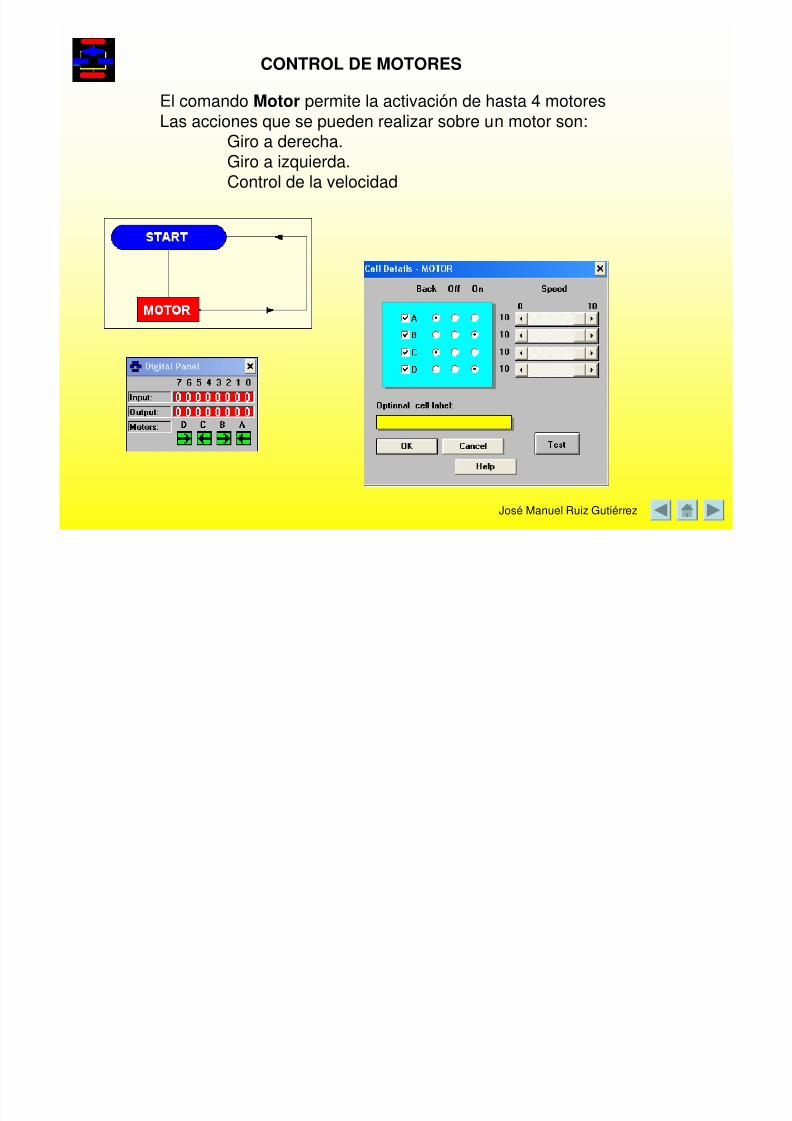
El comando Motor permite la activación de hasta 4 motoresLas acciones que se pueden realizar sobre un motor son:Giro a derecha.Giro a izquierda.Control de la velocidad
CONTROL DE MOTORES
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 35/143
José Manuel Ruiz Gutiérrez
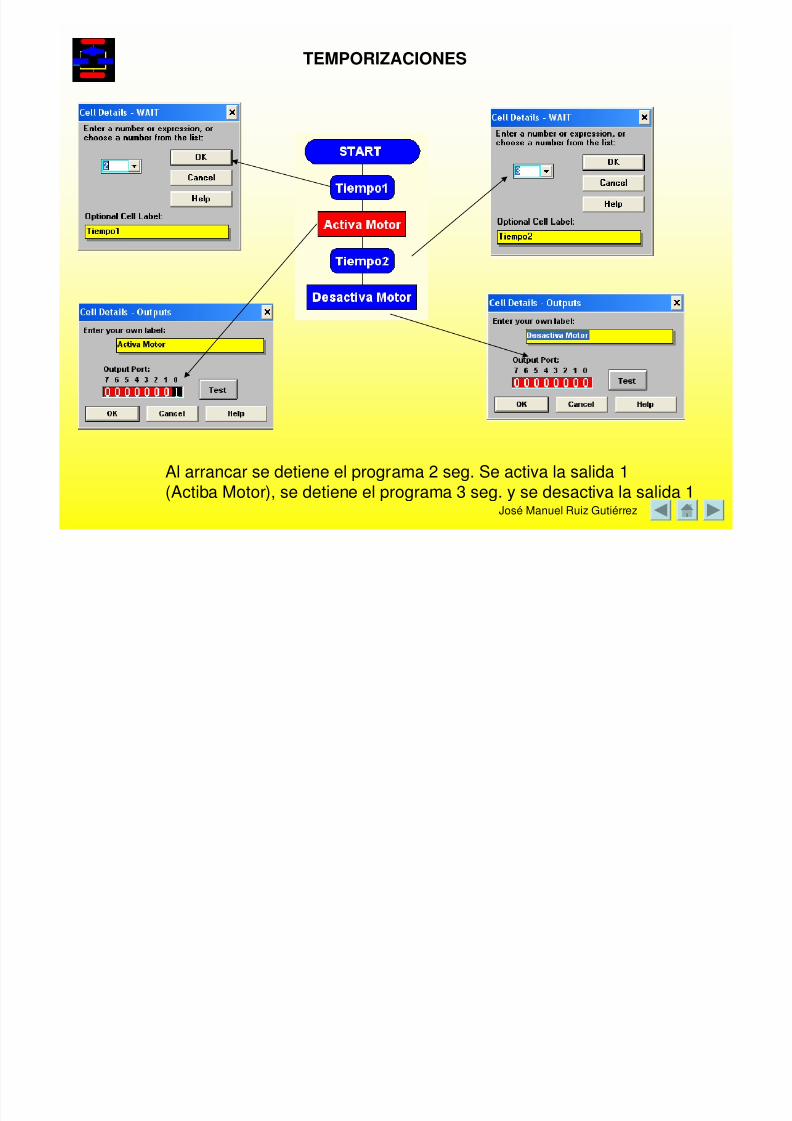
TEMPORIZACIONES
Al arrancar se detiene el programa 2 seg. Se activa la salida 1
(Actiba Motor), se detiene el programa 3 seg. y se desactiva la salida 1
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 36/143
José Manuel Ruiz Gutiérrez
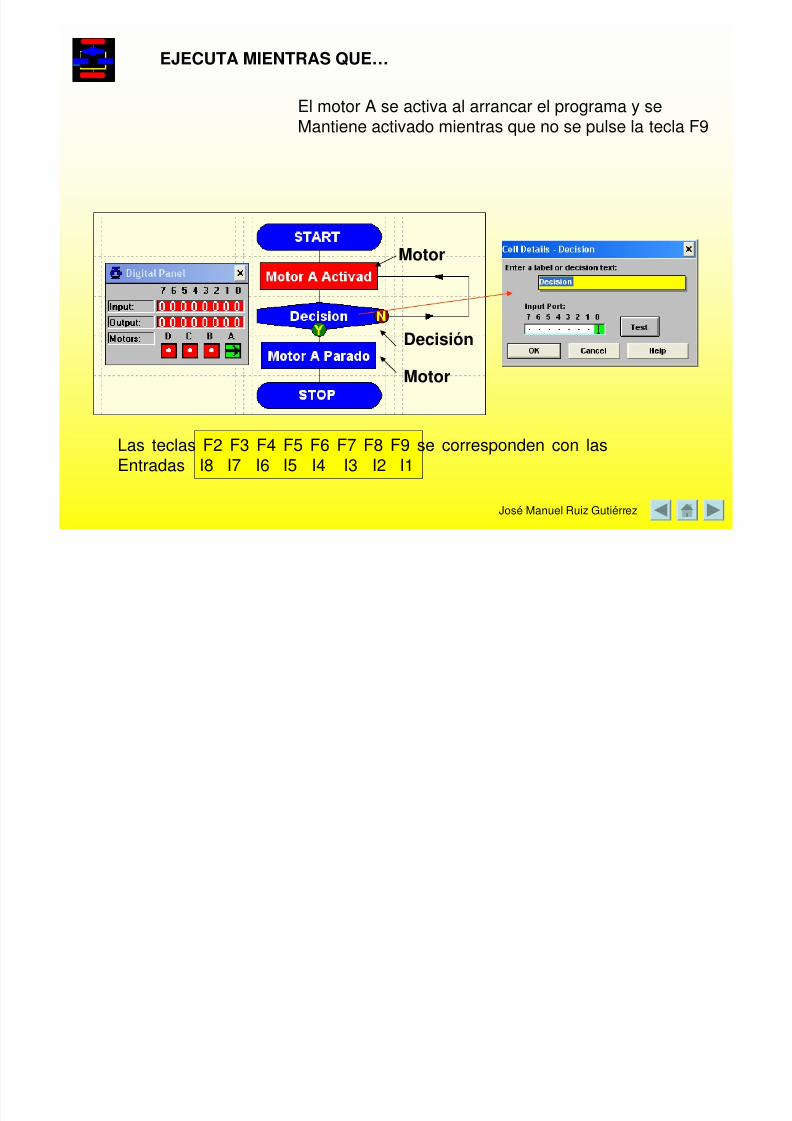
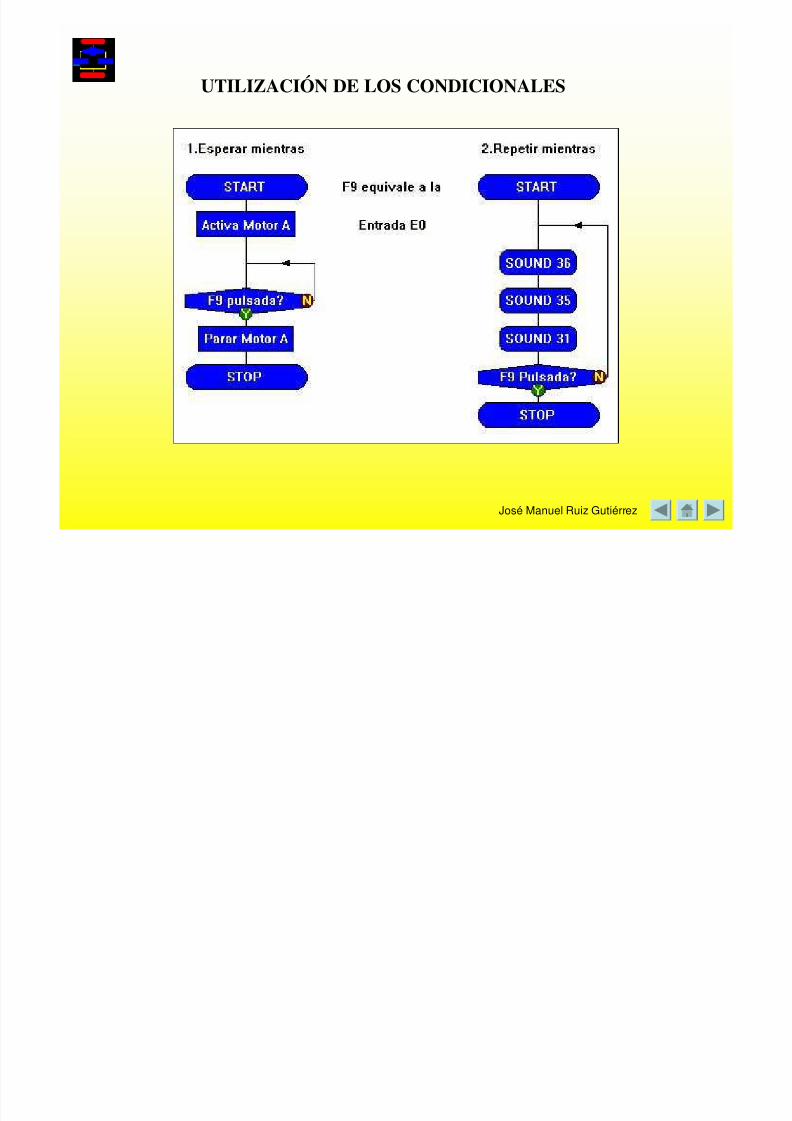
EJECUTA MIENTRAS QUE…
El motor A se activa al arrancar el programa y seMantiene activado mientras que no se pulse la tecla F9
Motor
Las teclas F2 F3 F4 F5 F6 F7 F8 F9 se corresponden con lasEntradas I8 I7 I6 I5 I4 I3 I2 I1
Motor
Decisión

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 37/143
José Manuel Ruiz Gutiérrez
Interrupción tipo EVENT
Esta instrucción es una especie de instrucción de interrupción que provoca la paradadel programa este en donde este y la ejecución de una rutina escrita bajo el nombre de“nº” Event.
Cada vez que definamos una instrucción Event se numera automáticamente (“nº”)
El organigrama de la figura estaemitiendo permanentemente
Una secuencia de 4 sonidos sipulsamos la tecla asociadaA la definición del Event saldrá del bucley se ejecutará la rutina
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 38/143
José Manuel Ruiz Gutiérrez
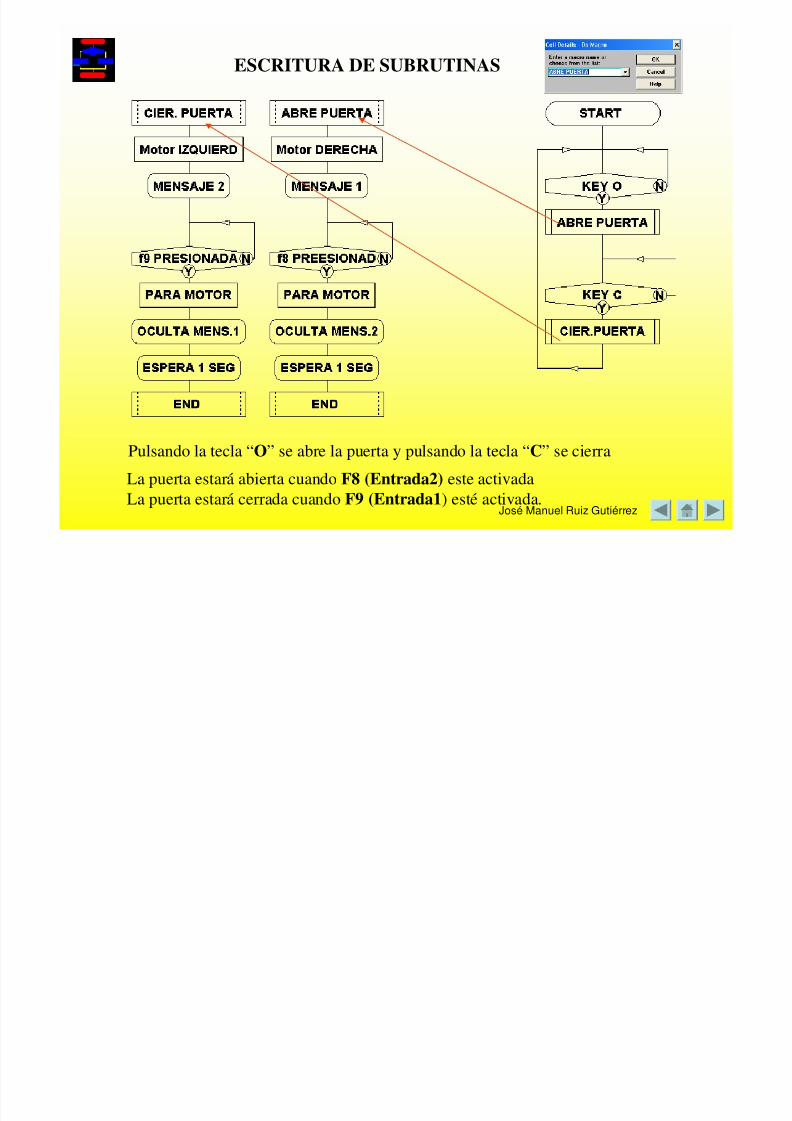
ESCRITURA DE SUBRUTINAS
Pulsando la tecla “O” se abre la puerta y pulsando la tecla “C” se cierra
La puerta estará abierta cuando F8 (Entrada2) este activada
La puerta estará cerrada cuando F9 (Entrada1) esté activada.
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 39/143
José Manuel Ruiz Gutiérrez
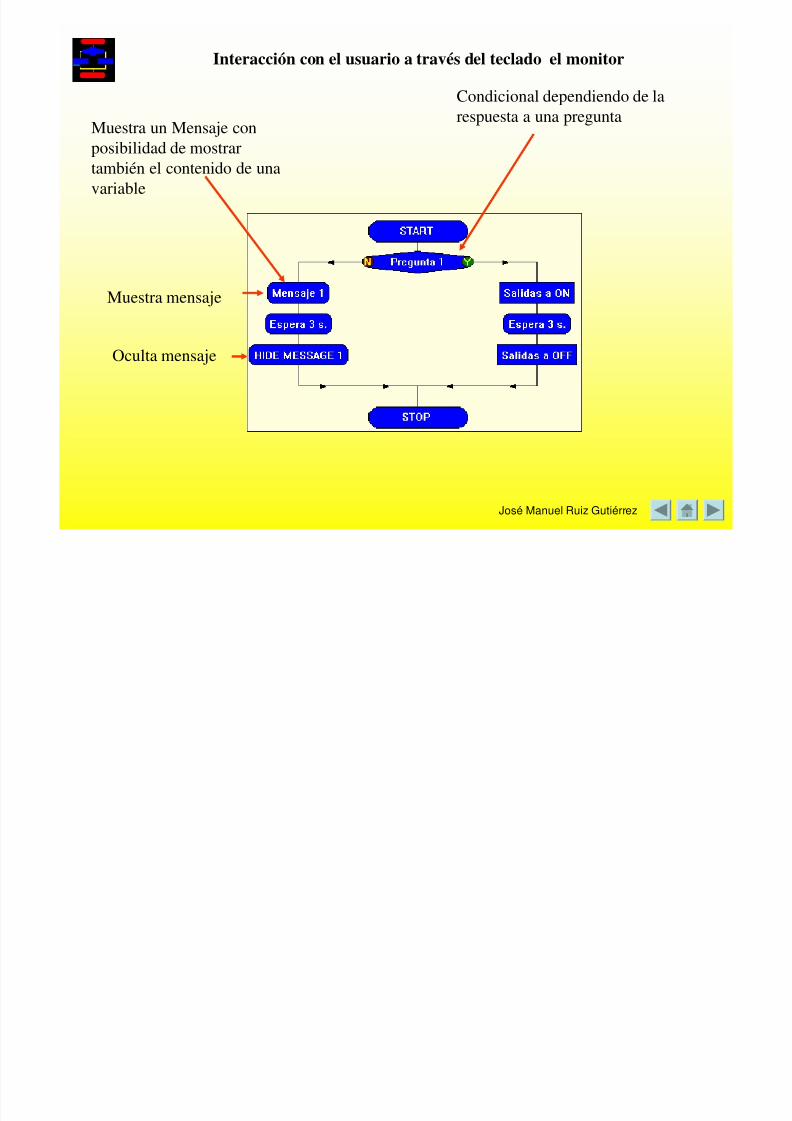
Interacción con el usuario a través del teclado el monitor
Muestra un Mensaje conposibilidad de mostrartambién el contenido de unavariable
Condicional dependiendo de larespuesta a una pregunta
Muestra mensaje
Oculta mensaje
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 40/143
José Manuel Ruiz Gutiérrez
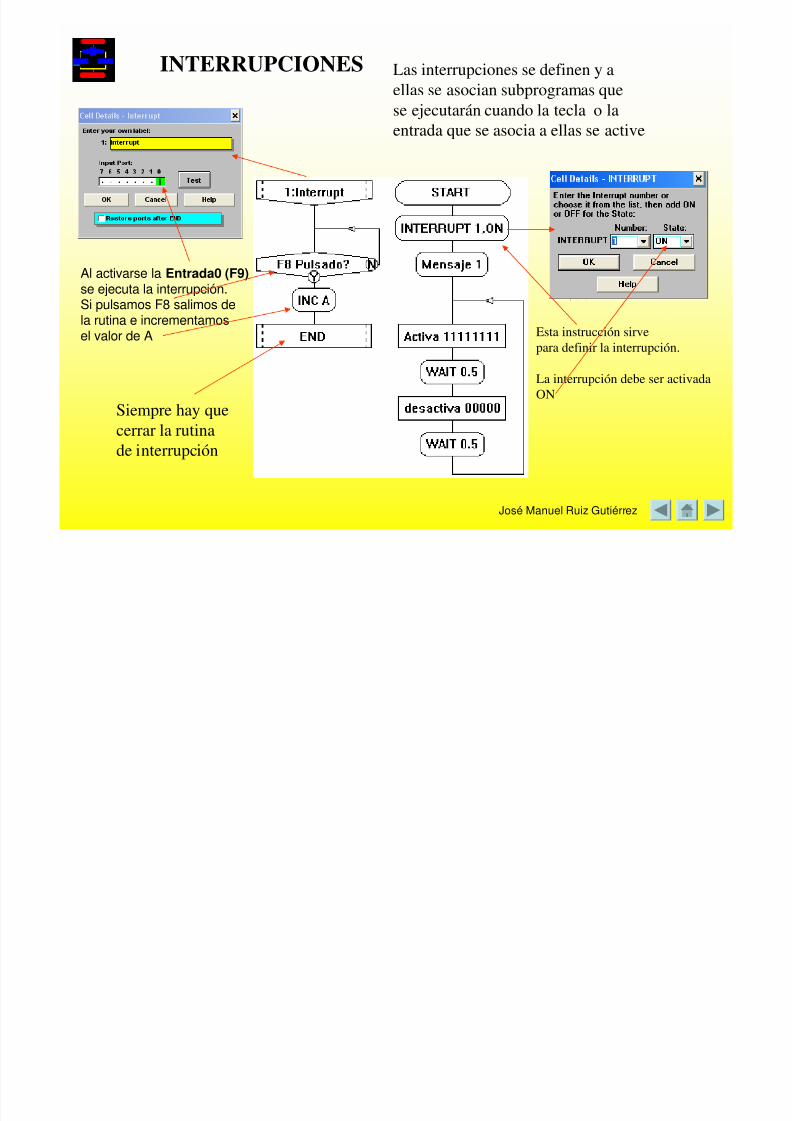
INTERRUPCIONES Las interrupciones se definen y aellas se asocian subprogramas que
se ejecutarán cuando la tecla o laentrada que se asocia a ellas se active
Al activarse la Entrada0 (F9)se ejecuta la interrupción.
Si pulsamos F8 salimos dela rutina e incrementamosel valor de A
Siempre hay quecerrar la rutinade interrupción
Esta instrucción sirvepara definir la interrupción.
La interrupción debe ser activada
ON
LECTURA DE SEÑALES ANALÓGICAS

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 41/143
José Manuel Ruiz Gutiérrez
La instrucción LOG permite recoger los valores de lasSeñales de entrada analógicas (4) y representarlas gráficamente
Este programa recoge 30 muestras del canal analógico Ael tiempo entre cada muestra es de 1 seg WAIT 1
LECTURA DE SEÑALES ANALÓGICAS
Registro de los valores leídos

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 42/143
José Manuel Ruiz Gutiérrez
Se identifica como el comienzo de un organigrama. En una aplicación puede habervarios START’s
Sirve para detener la ejecución de una aplicación.
Cambia a ON y OFF cualquiera de las Salidas de la Interface
Provoca una espera (temporización).
Adquiere el control de la ejecución cuando se produce una cambio determinadoen una entrada digital
Salta a SI cuando se cumple la condición establecida y a NO cuando no se cumple
Adquiere el control de la ejecución cuando se da un código en la entrada
Salta a una macro que constituye un organigrama
Sirve para escribir un texto en la hoja de trabajo
Sirve para colocar una expresión matemática que se iguala a una variable definida
Incrementa el valor de una variable

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 43/143
José Manuel Ruiz Gutiérrez
Cuenta un número de impulsos que le asignemos y que le llegan por una de lasentradas digitales
Se ejecuta un sonido definido por el tipo de nota y la duración
Sirve para activar o desactivar Eventos
Sirve para activar o desactivar Interrupciones
Permite la ejecución de un organigrama mientras este pulsada una tecla
Ejecuta una función condicional si una tecla es presionada
Decremeta el valor de una variable
Permite al usuario la petición de un valor mediante una pantalla de captura de dato.
Identifica el fin de un organigrama. En una aplicación pueden haber varios.
Cancela el envío de impulsos a las líneas del puerto de salida.
Envía impulsos a las línea de salida del puerto.
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 44/143
José Manuel Ruiz Gutiérrez
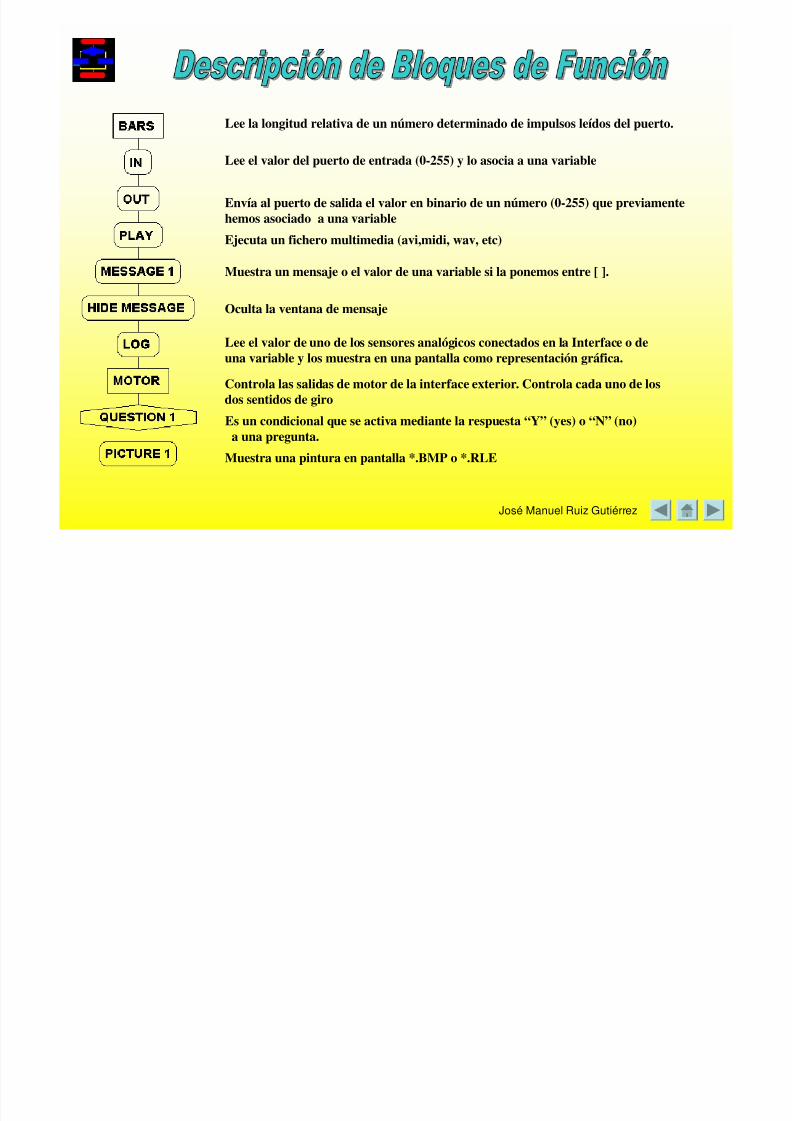
Muestra una pintura en pantalla *.BMP o *.RLE
Lee la longitud relativa de un número determinado de impulsos leídos del puerto.
Lee el valor del puerto de entrada (0-255) y lo asocia a una variable
Envía al puerto de salida el valor en binario de un número (0-255) que previamentehemos asociado a una variable
Ejecuta un fichero multimedia (avi,midi, wav, etc)
Muestra un mensaje o el valor de una variable si la ponemos entre [ ].
Oculta la ventana de mensaje
Lee el valor de uno de los sensores analógicos conectados en la Interface o deuna variable y los muestra en una pantalla como representación gráfica.
Controla las salidas de motor de la interface exterior. Controla cada uno de los
dos sentidos de giroEs un condicional que se activa mediante la respuesta “Y” (yes) o “N” (no)a una pregunta.
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 45/143
José Manuel Ruiz Gutiérrez
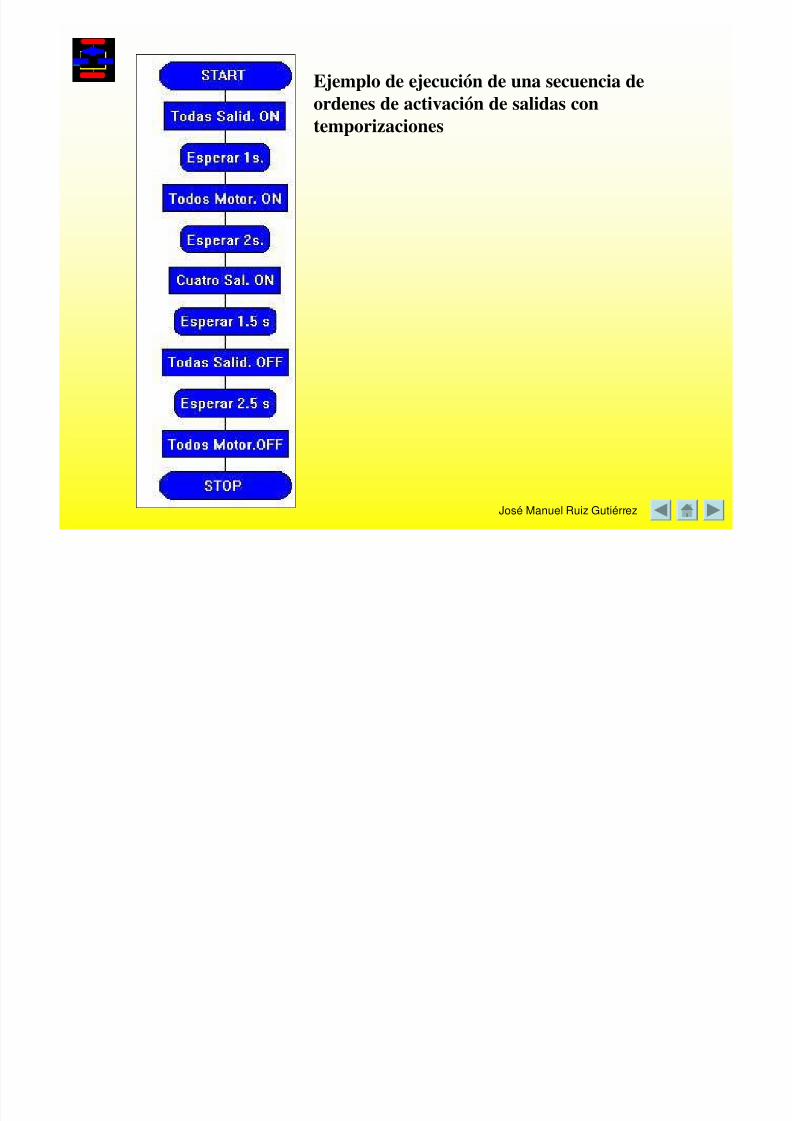
Ejemplo de ejecución de una secuencia de
ordenes de activación de salidas contemporizaciones
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 46/143
José Manuel Ruiz Gutiérrez
UTILIZACIÓN DE LOS CONDICIONALES
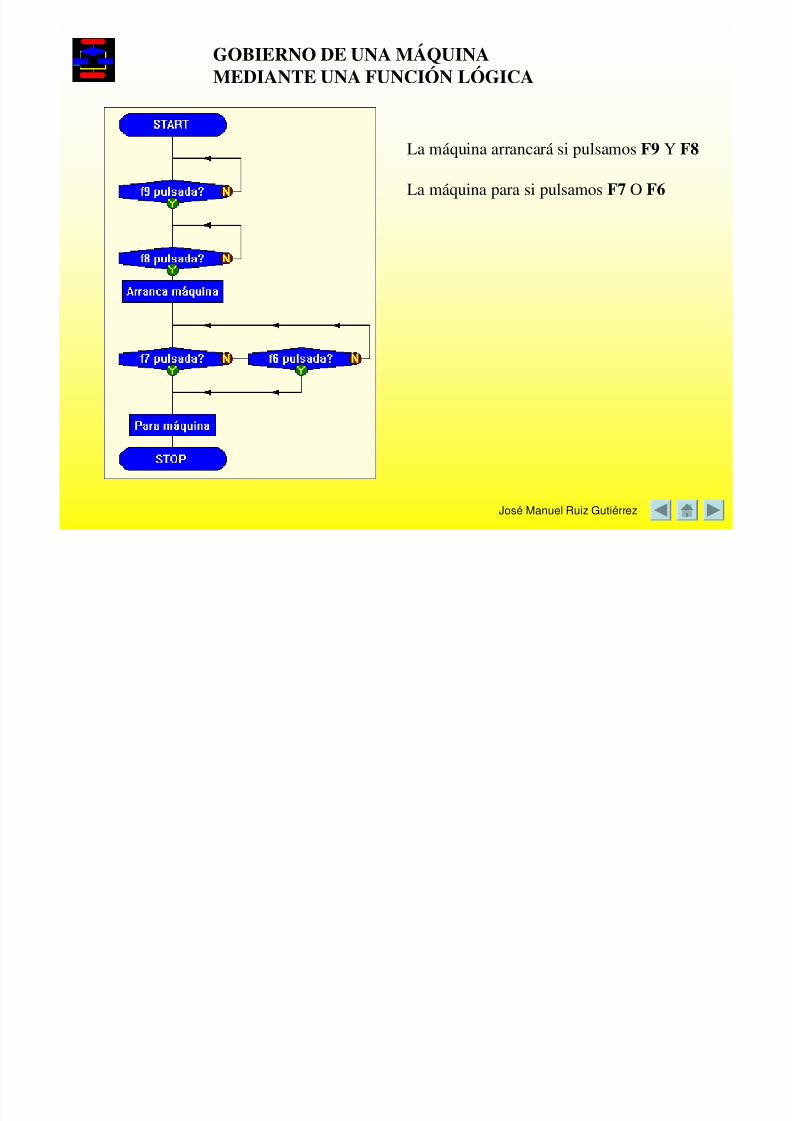
GOBIERNO DE UNA MÁQUINA
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 47/143
José Manuel Ruiz Gutiérrez
QMEDIANTE UNA FUNCIÓN LÓGICA
La máquina arrancará si pulsamos F9 Y F8
La máquina para si pulsamos F7 O F6
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 48/143
José Manuel Ruiz Gutiérrez
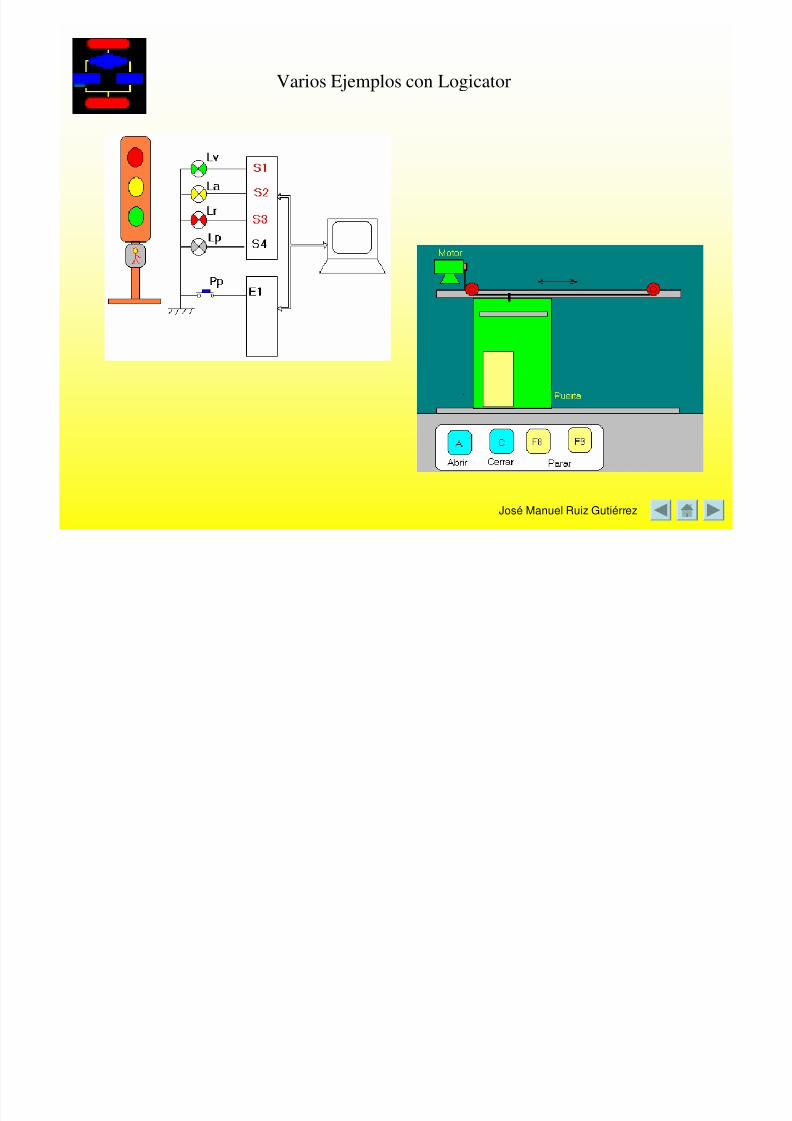
Varios Ejemplos con Logicator
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 49/143
José Manuel Ruiz Gutiérrez
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 50/143
José Manuel Ruiz Gutiérrez
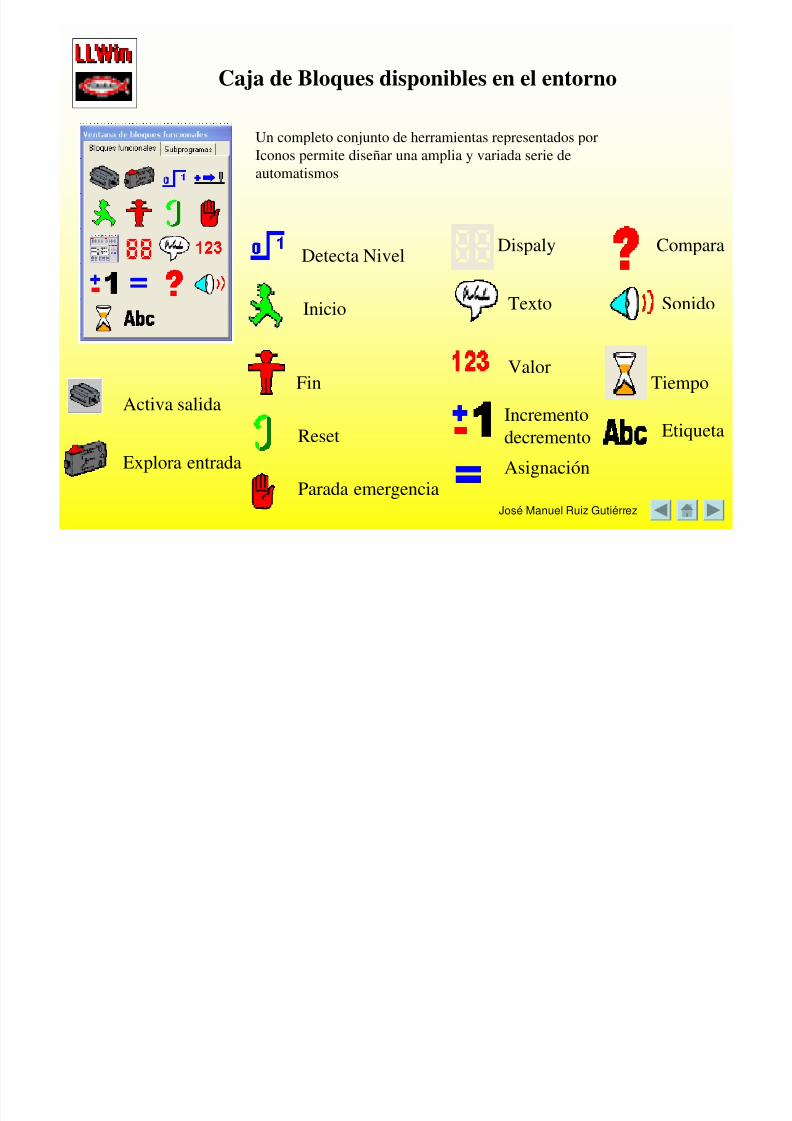
Caja de Bloques disponibles en el entorno
Un completo conjunto de herramientas representados porIconos permite diseñar una amplia y variada serie deautomatismos
Activa salida
Explora entrada
Detecta Nivel
Inicio
Parada emergencia
Reset
Fin
Dispaly
Texto
Valor
Incrementodecremento
Asignación
Compara
Sonido
Tiempo
Etiqueta
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 51/143
José Manuel Ruiz Gutiérrez
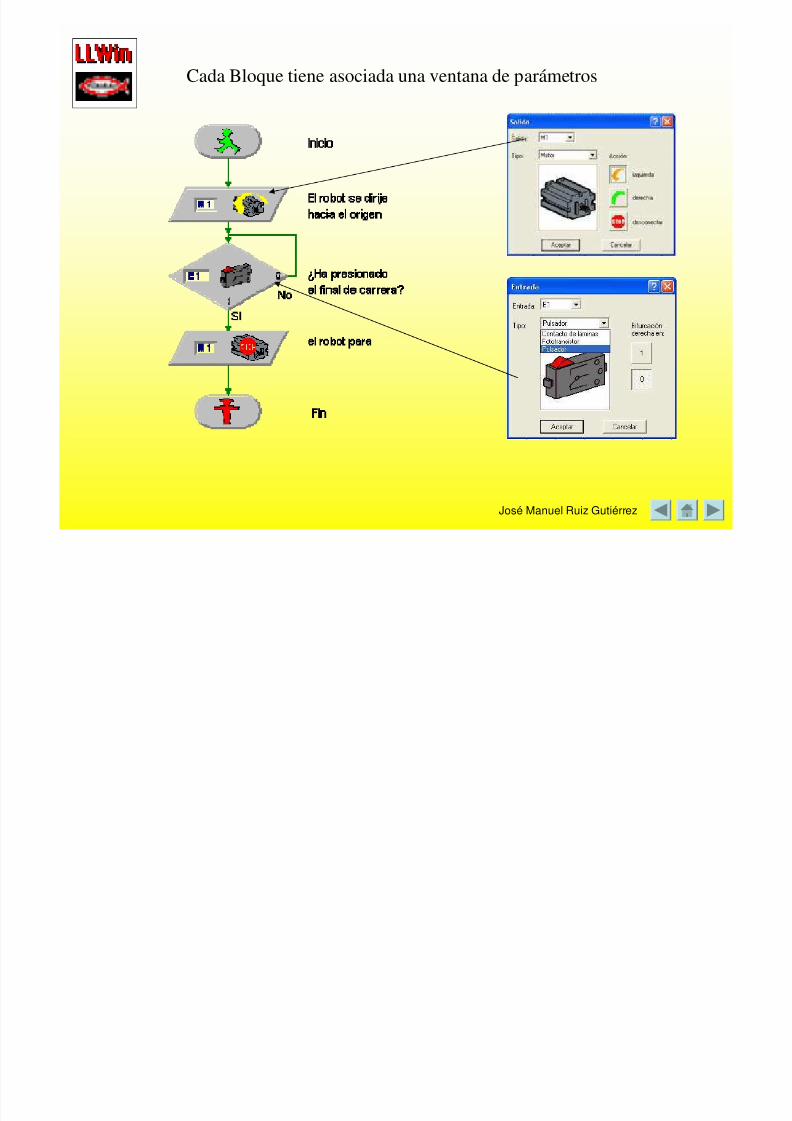
Cada Bloque tiene asociada una ventana de parámetros
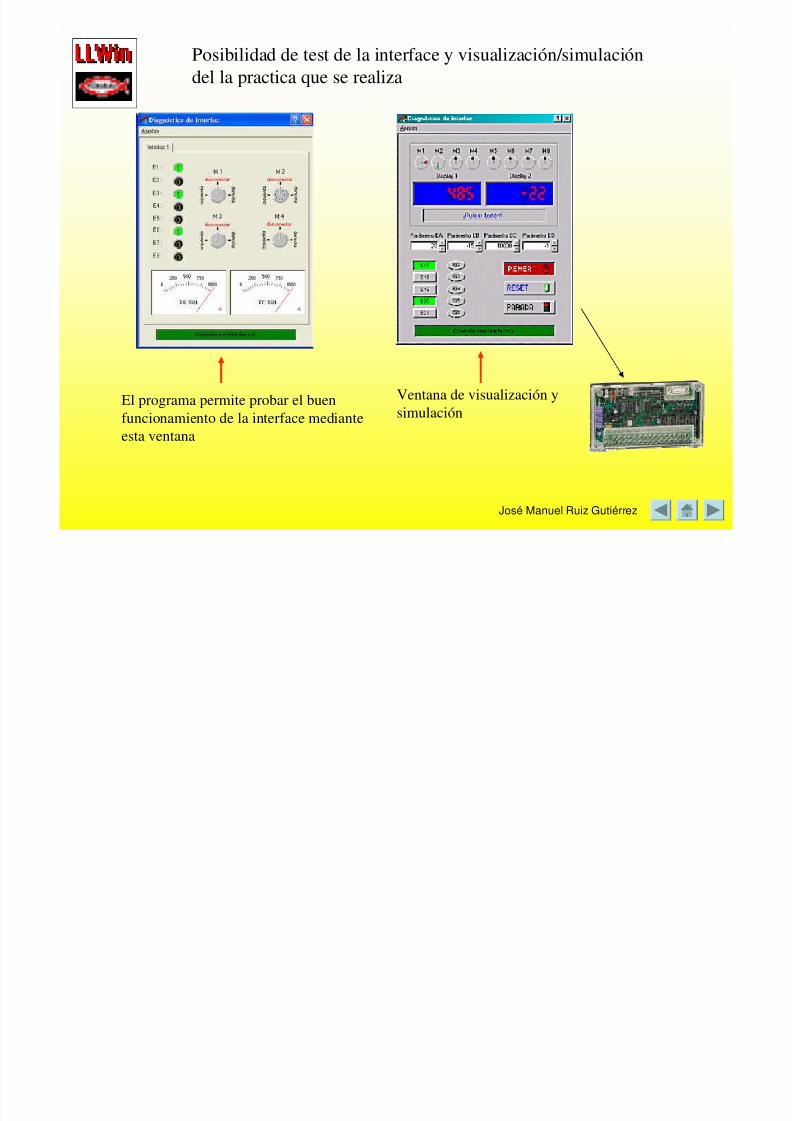
Posibilidad de test de la interface y visualización/simulación
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 52/143
José Manuel Ruiz Gutiérrez
El programa permite probar el buenfuncionamiento de la interface medianteesta ventana
del la practica que se realiza
Ventana de visualización ysimulación

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 53/143
José Manuel Ruiz Gutiérrez
Testea el estado de una entrada

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 54/143
José Manuel Ruiz Gutiérrez
Activa un motor, una lámpara o un electroimán
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 55/143
José Manuel Ruiz Gutiérrez
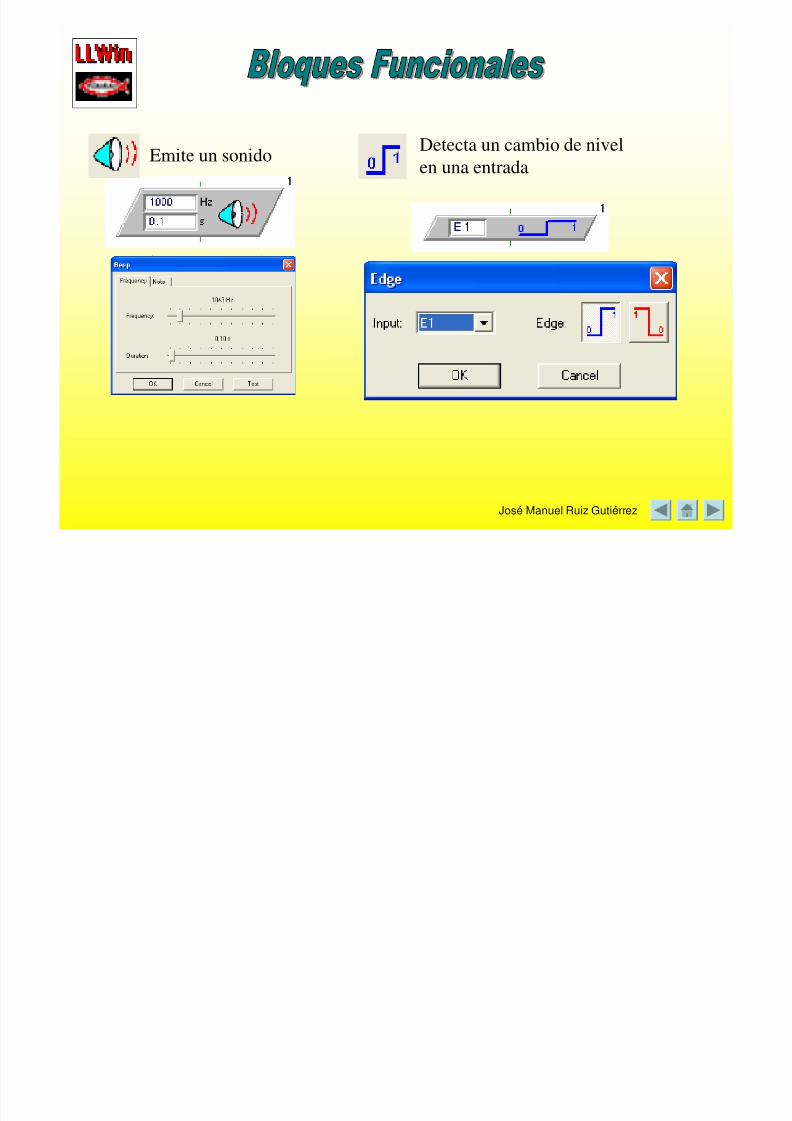
Emite un sonidoDetecta un cambio de nivelen una entrada
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 56/143
José Manuel Ruiz Gutiérrez
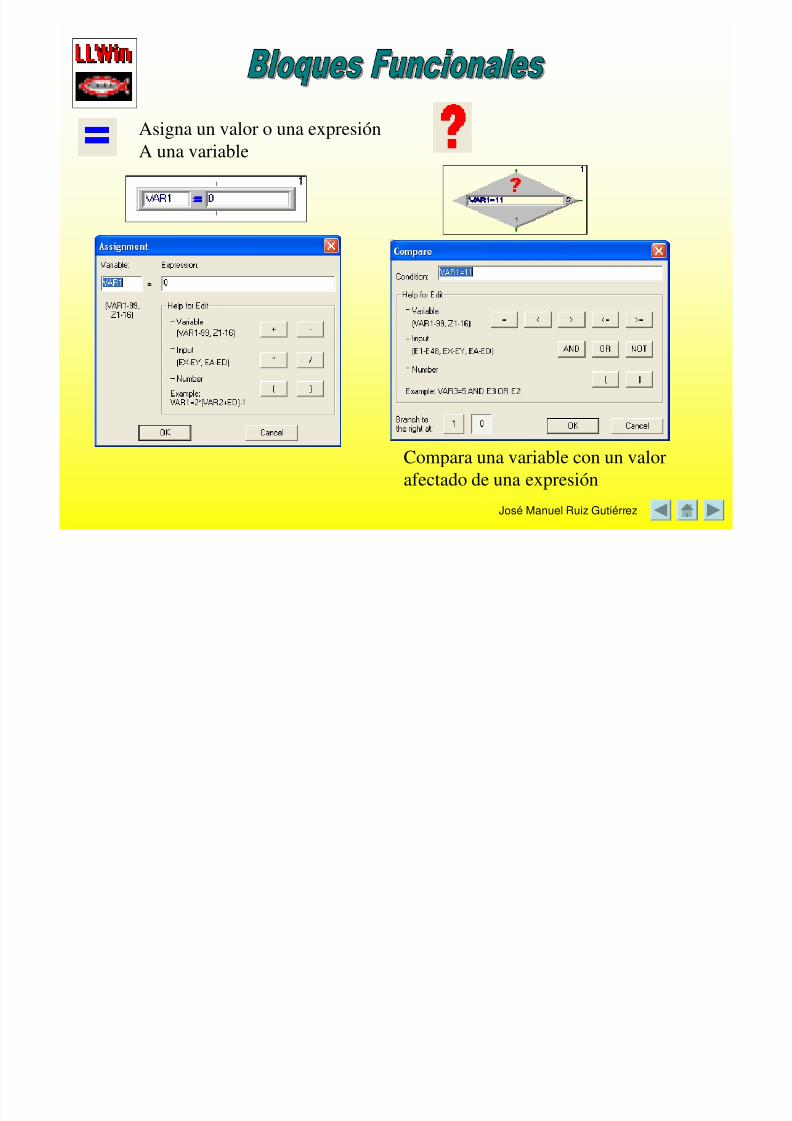
Asigna un valor o una expresiónA una variable
Compara una variable con un valorafectado de una expresión
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 57/143
José Manuel Ruiz Gutiérrez
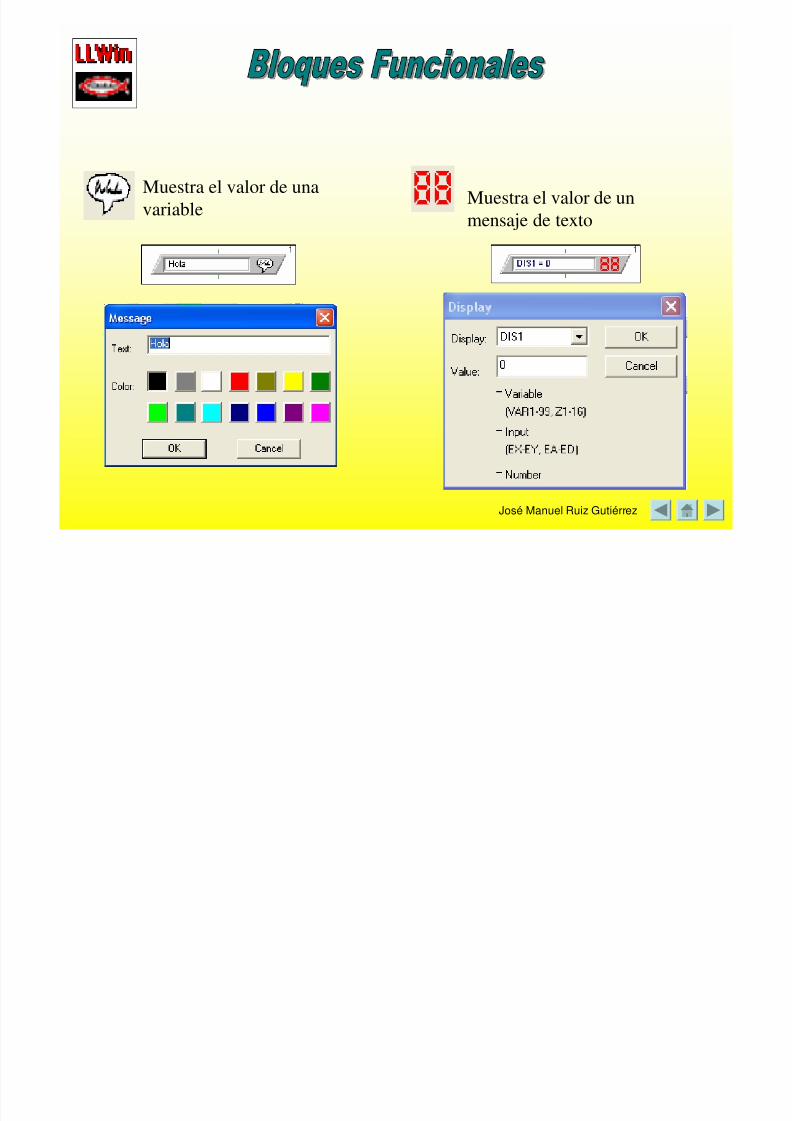
Muestra el valor de unmensaje de texto
Muestra el valor de una
variable
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 58/143
José Manuel Ruiz Gutiérrez
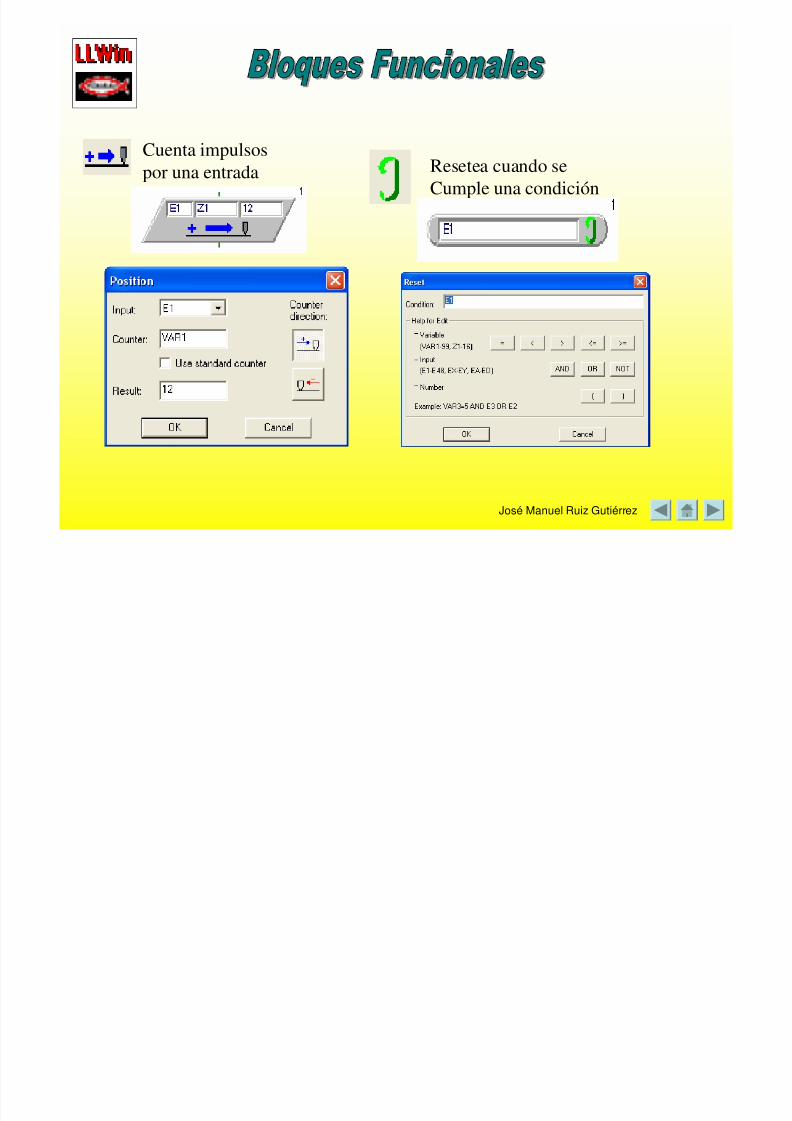
Resetea cuando seCumple una condición
Cuenta impulsospor una entrada
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 59/143
José Manuel Ruiz Gutiérrez
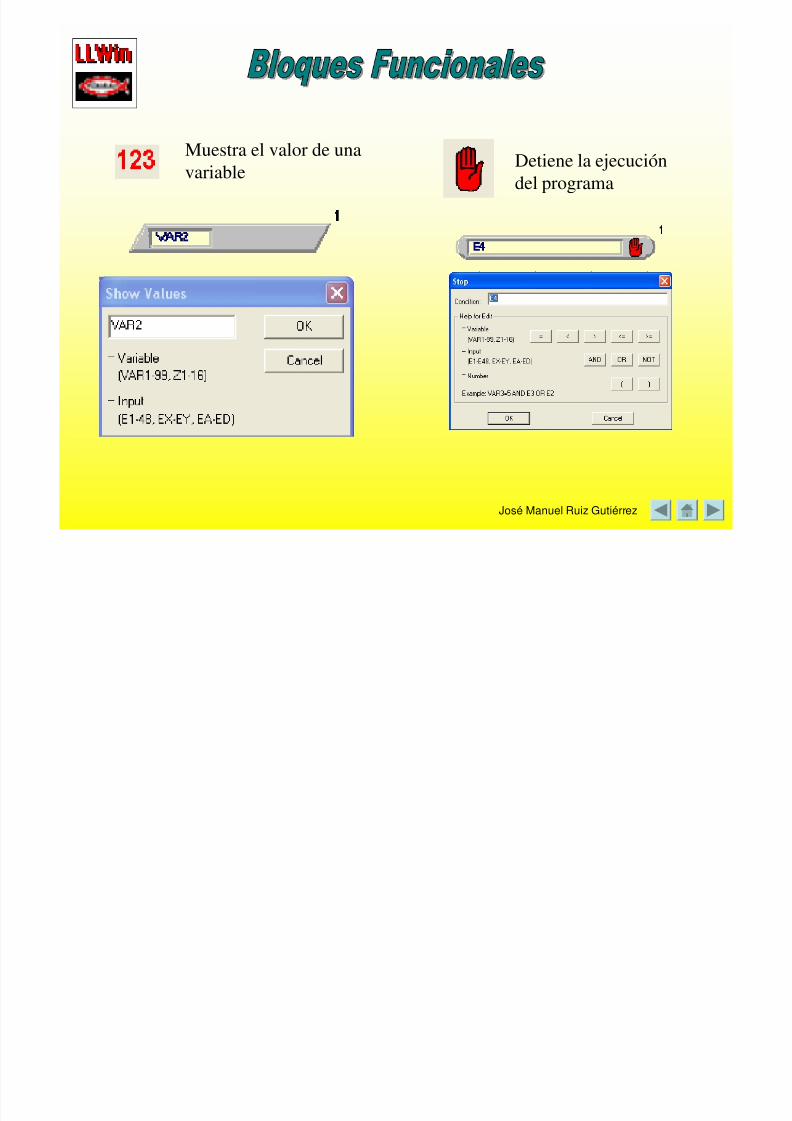
Muestra el valor de unavariable
Detiene la ejecucióndel programa
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 60/143
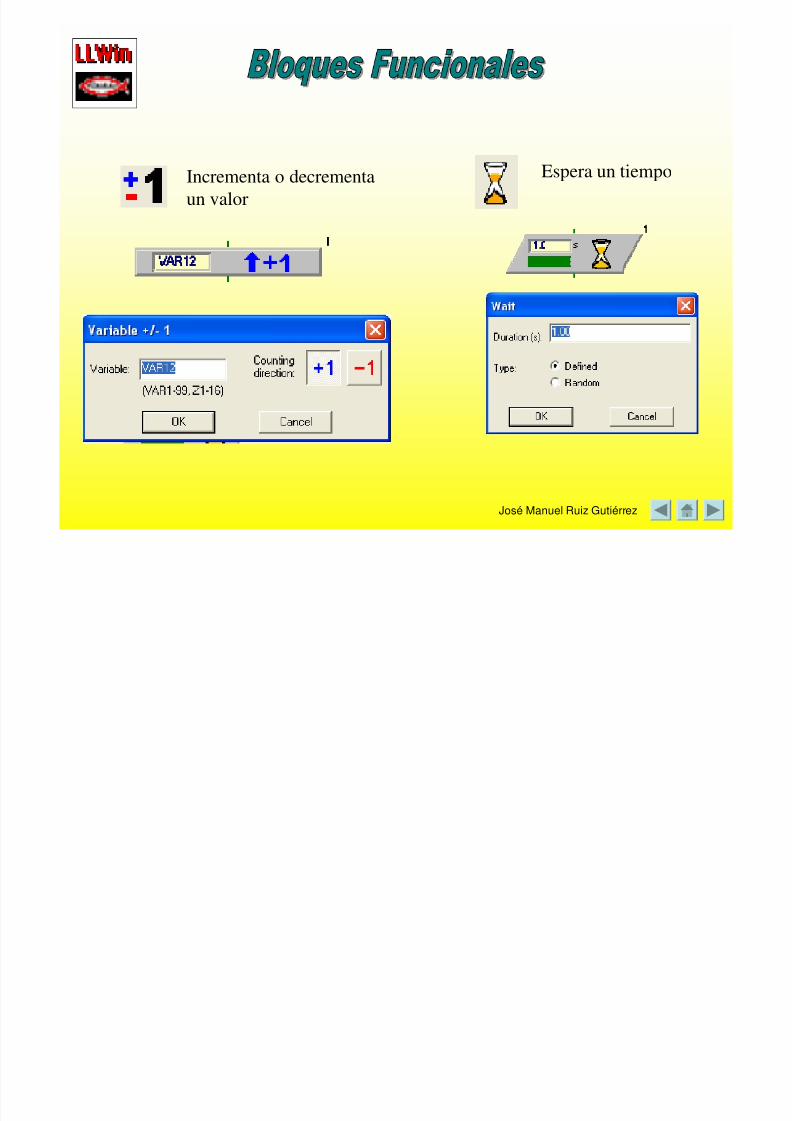
José Manuel Ruiz Gutiérrez
Incrementa o decrementaun valor
Espera un tiempo

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 61/143
José Manuel Ruiz Gutiérrez
• Se inicia el programa activandouna lámpara conectada en la salida 1
• Se salta después a la Subrutina “SUB1”en donde se espera a que la entrada E1pase de nivel o a nivel 1.
• Si la E1 pasa a 1 se activa el motor M2manteniéndose así hasta que se detecta en laE1 un paso de nivel 1 a nivel 2
Empleo de Subrutinas
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 62/143
José Manuel Ruiz Gutiérrez

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 63/143
José Manuel Ruiz Gutiérrez
Realiza un programa que avance el robot durante 2segundos y que se pare y emita un sonido durante medio
segundo.

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 64/143
José Manuel Ruiz Gutiérrez
•Realiza un programa que permita avanzar elrobot mientras se mantenga presionado elpulsadorE8.

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 65/143
José Manuel Ruiz Gutiérrez
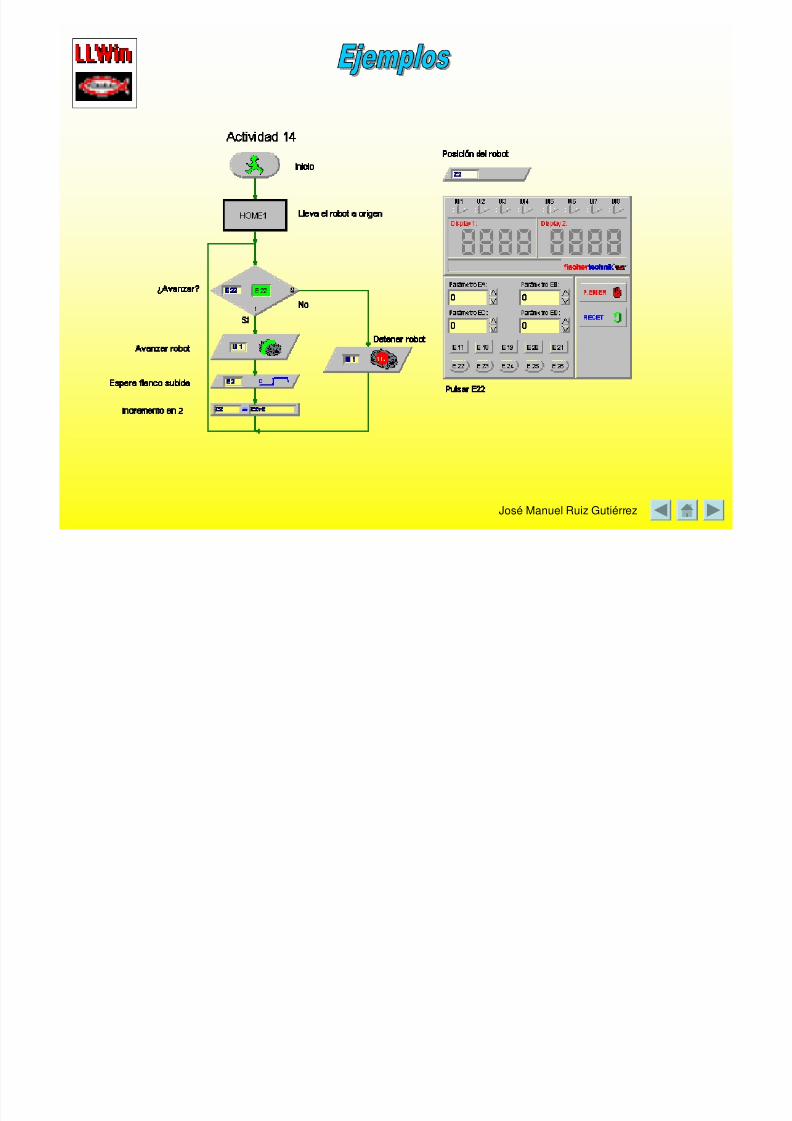
Realiza un programa que por cada presión en el pulsador de entradaE8 el robot avance un diente de la ruleta de contador (detección de
flanco de subida de E2).

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 66/143
José Manuel Ruiz Gutiérrez
Realiza un programa que lleve el robot desdecualquier posición a su posición origen (HOME)fijada por la entrada E1
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 67/143
José Manuel Ruiz Gutiérrez
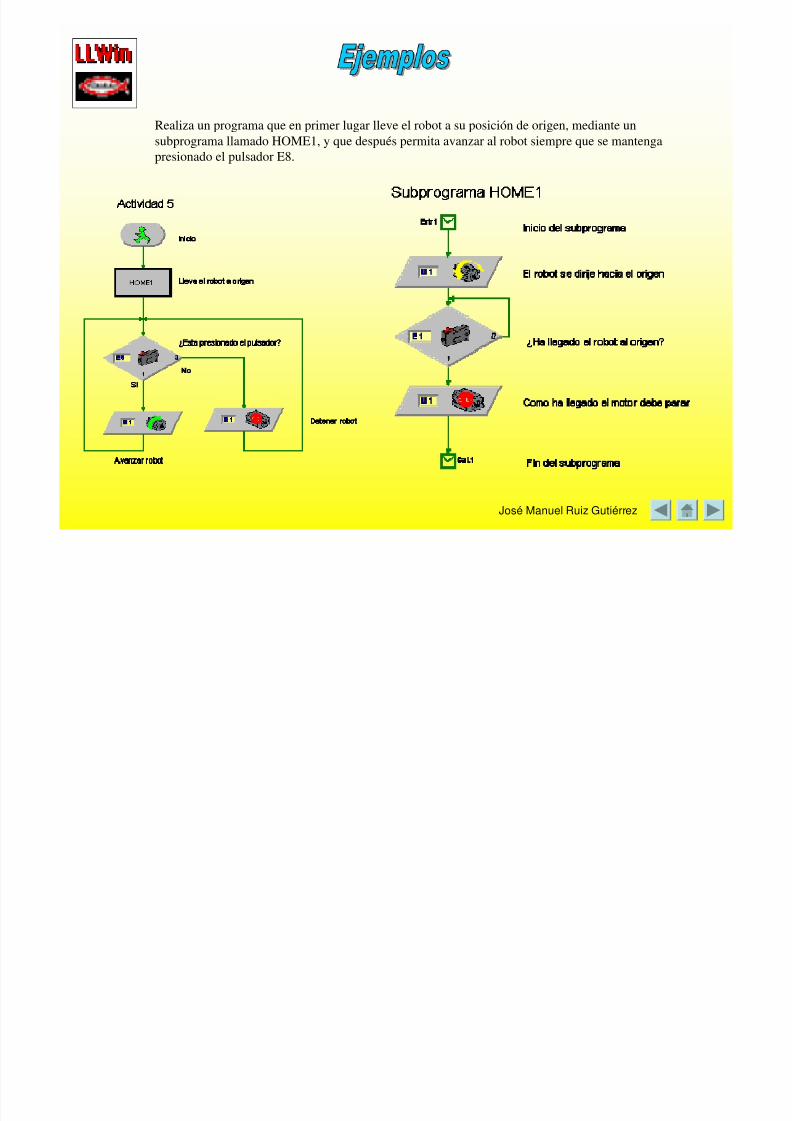
Realiza un programa que en primer lugar lleve el robot a su posición de origen, mediante unsubprograma llamado HOME1, y que después permita avanzar al robot siempre que se mantengapresionado el pulsador E8.
Diagrama de conexionadoPanel de funcionamiento
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 68/143
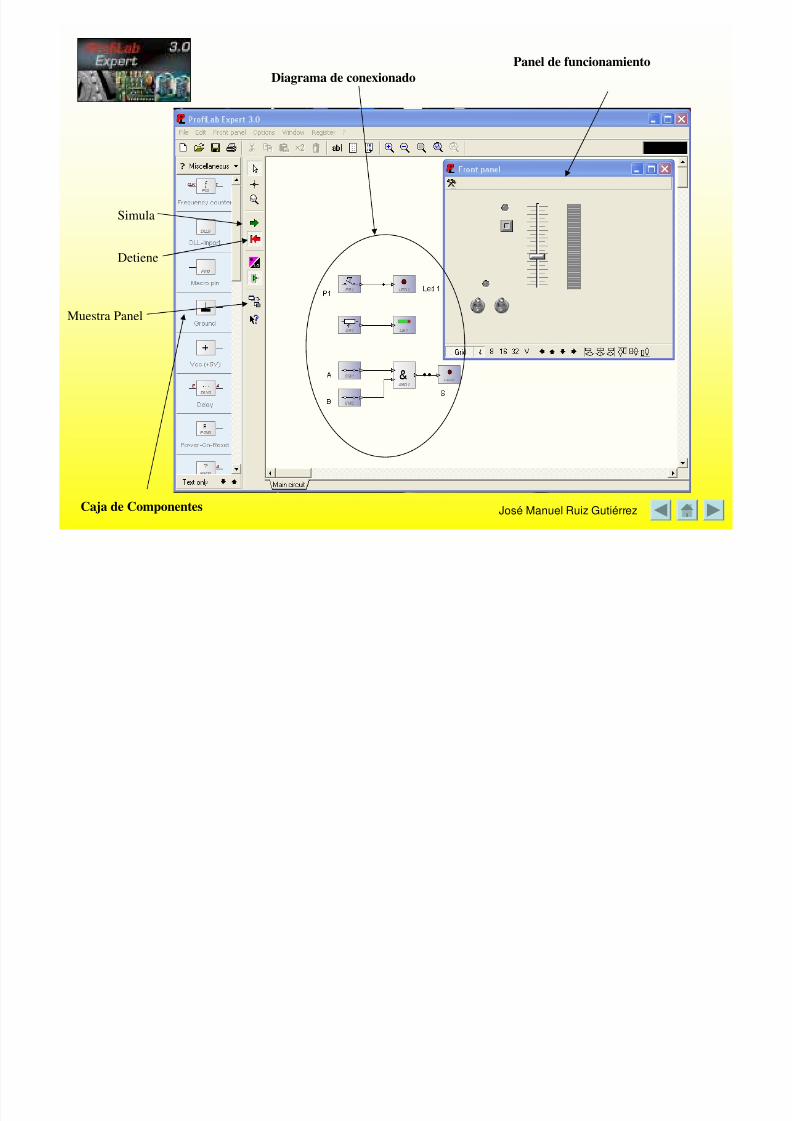
José Manuel Ruiz GutiérrezCaja de Componentes
Simula
Detiene
Muestra Panel
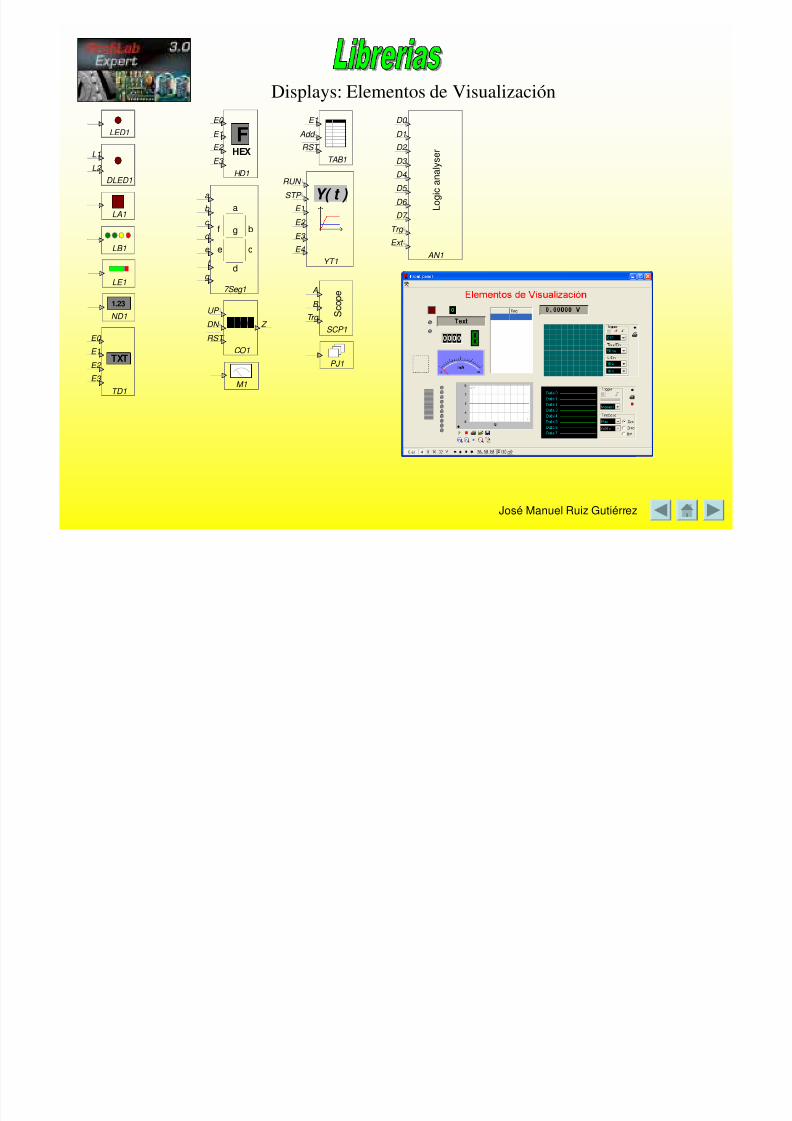
Displays: Elementos de Visualización
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 69/143
José Manuel Ruiz Gutiérrez
LED1
L1
L2
DLED1
LA1
LB1
LE1
ND1
1.23
E0
E1
E2
E3
TD1
TXT
E0
E1
E2
E3
HD1
FHEX
a
b c
d
e
f
g
7Seg1
ab
c
d
e
f g
UP
DN
RST
Z
CO1
0 0 0 1
M1
E1
Add
RST
TAB1
RUN
STP
E1E2
E3
E4
YT1
Y( t )
A
B
Trg
SCP1
S c
o p e
D0
D1
D2
D3
D4
D5
D6
D7
Trg
Ext
AN1
L o g i c a n a l y s e r
PJ1
Displays: Elementos de Visualización
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 70/143
José Manuel Ruiz Gutiérrez
SW1
PB1
D7
D6
D5
D4
D3
D2
D1D0
DPT1
h00...hFF
D7
D6 D5
D4
D3
D2
D1
D0
DSR1
h00...hFF
D3
D2
D1
D0
HI1
F
HEX
D3
D2
D1
D0
LI1
HEX
CLR
CLK
D7
D6 D5
D4
D3
D2
D1
D0
KB1
ASCII
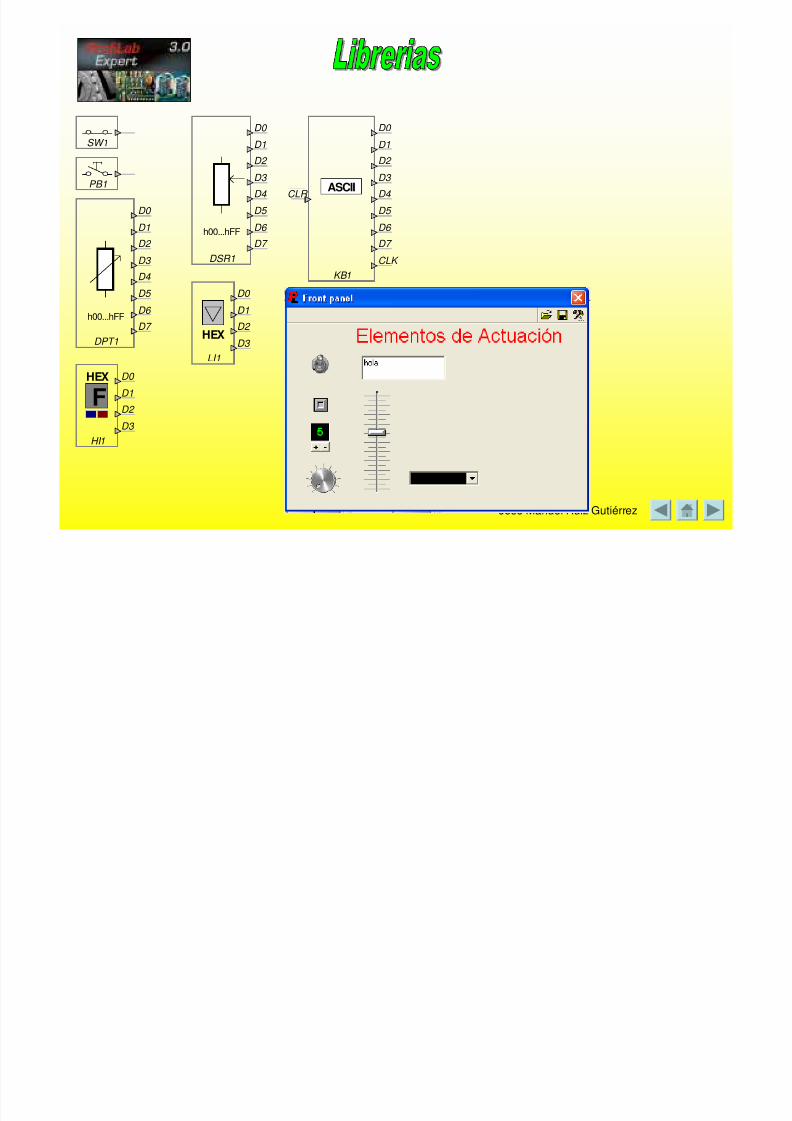
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 71/143
José Manuel Ruiz Gutiérrez
PT1
SR1
A
NI1
1.471
A1
A0
SWA1
A1
A0
PBA1
E0
E1SWB1
E0
E1
PBB1
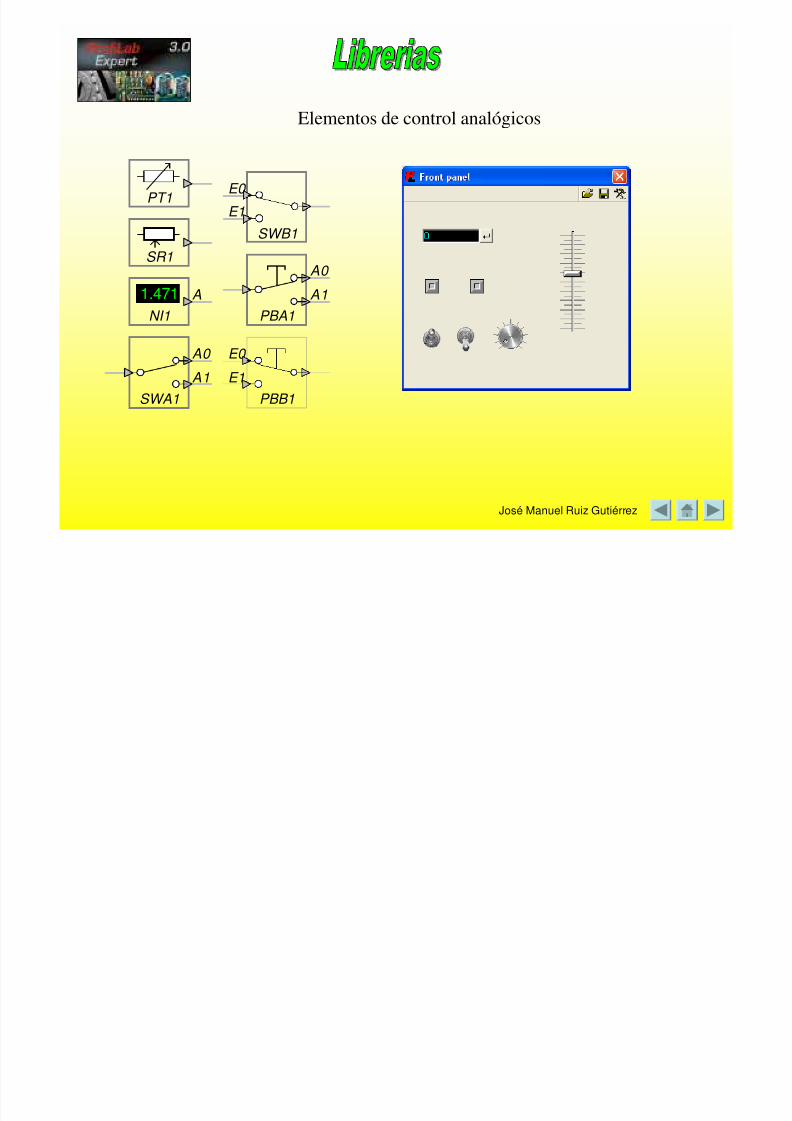
Elementos de control analógicos
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 72/143
José Manuel Ruiz Gutiérrez
RUN
STP
RST
Stp1
RST Q
Ti1
Q
WTi1
Q
DTi1
ms
S
M
H
TM1
T
DOW
D
M Y
DT1
D
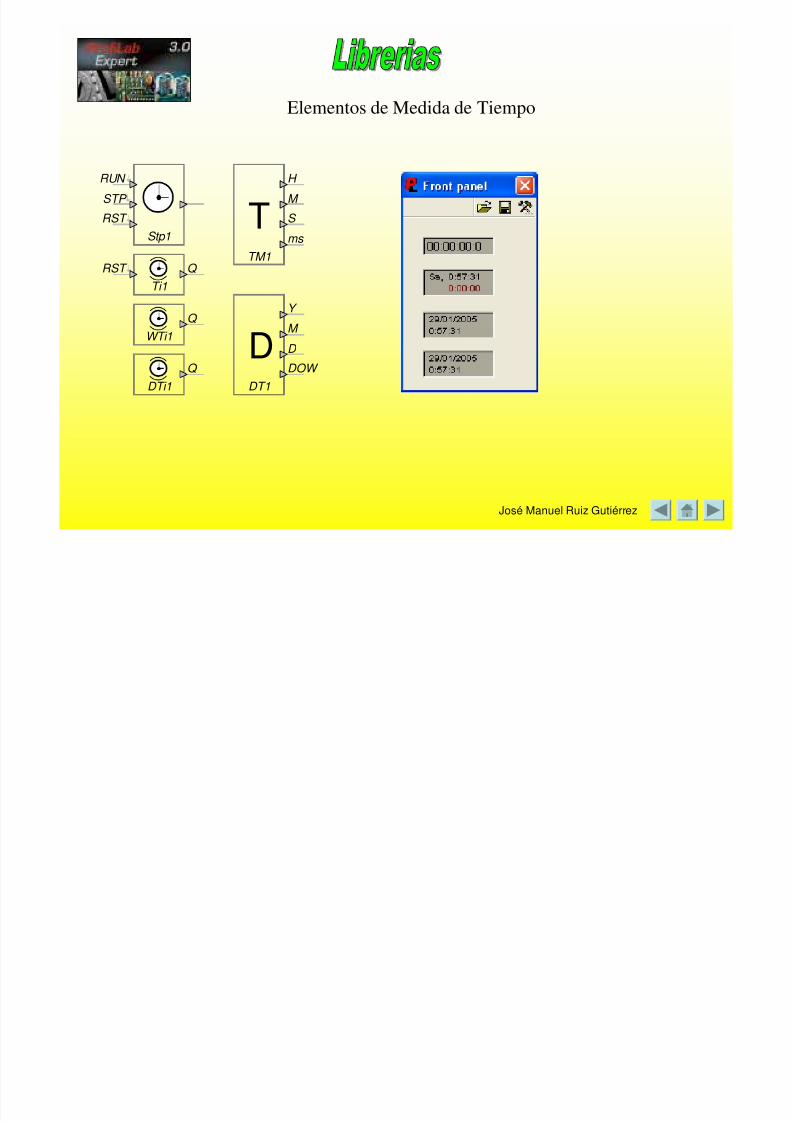
Elementos de Medida de Tiempo
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 73/143
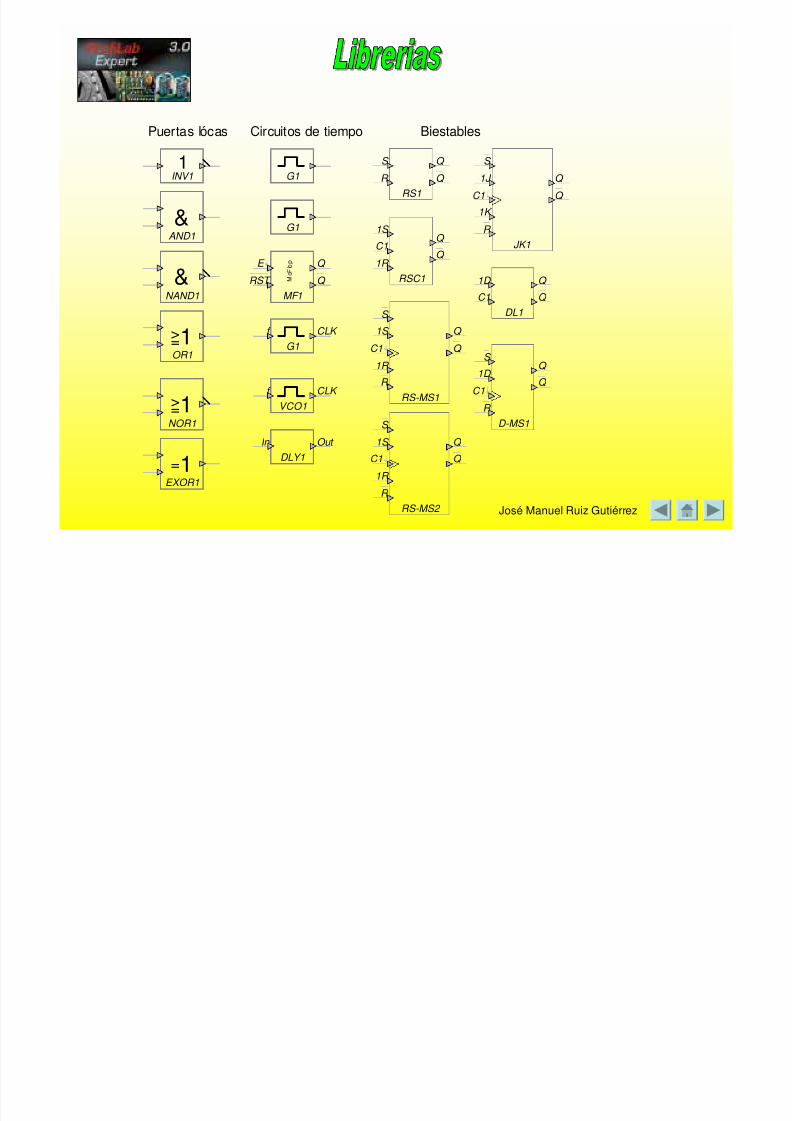
José Manuel Ruiz Gutiérrez
INV11
AND1&
NAND1
&
OR1
1>=
NOR11>=
EXOR1
1=
G1
G1
E
RST Q
Q
MF1
M o F l o p
f CLK
G1
f CLK
VCO1
In Out
DLY1
Puertas lócas Circuitos de tiempo
S
R Q
Q
RS1
1S
C1
1R Q
Q
RSC1
S
1S
C1
1R
R
Q
Q
RS-MS1
S
1S
C1
1R
R
Q
Q
RS-MS2
S
1J
C1
1K
R
Q
Q
JK1
1D
C1 Q
Q
DL1
S
1D
C1
R
Q
Q
D-MS1
Biestables
CONTADORES
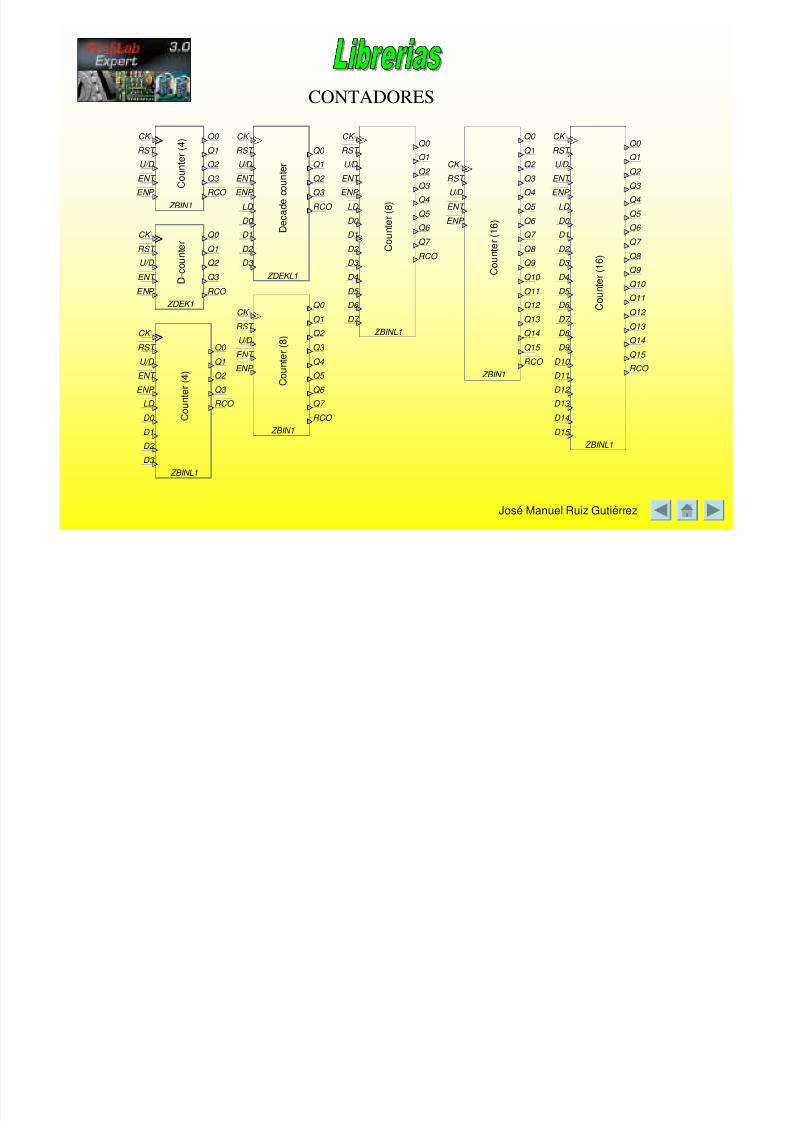
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 74/143
José Manuel Ruiz Gutiérrez
CK
RST
U/D
ENT
ENP RCO
Q3
Q2
Q1
Q0
ZBIN1
C o u n t e r ( 4 )
CK
RST
U/D
ENT
ENP RCO
Q3
Q2
Q1
Q0
ZDEK1
D - c o u n t e r
CK
RST
U/D
ENT
ENP
LD D0
D1
D2
D3
RCO
Q3
Q2
Q1
Q0
ZBINL1
C o u
n t e r ( 4 )
CK
RST
U/D
ENT
ENP
LD
D0
D1
D2
D3
RCO
Q3
Q2
Q1
Q0
ZDEKL1
D e c a
d e c o u n t e r
CK
RST
U/D
ENT
ENP
RCO Q7
Q6
Q5
Q4
Q3
Q2
Q1
Q0
ZBIN1
C o u n t e r ( 8 )
CK
RST
U/D
ENT
ENP
LD
D0
D1
D2
D3
D4
D5
D6
D7
RCO
Q7
Q6
Q5
Q4
Q3
Q2
Q1
Q0
ZBINL1
C o u n t e r (
8 )
CK
RST
U/D
ENT
ENP
RCO
Q15
Q14
Q13
Q12
Q11
Q10
Q9
Q8
Q7
Q6
Q5
Q4
Q3
Q2
Q1
Q0
ZBIN1
C o u n t e r ( 1 6 )
CK
RST
U/D
ENT
ENP
LD
D0
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13 D14
D15
RCO
Q15
Q14
Q13
Q12
Q11
Q10
Q9
Q8
Q7
Q6
Q5
Q4
Q3
Q2
Q1
Q0
ZBINL1
C
o u n t e r ( 1 6 )
CONTADORES
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 75/143
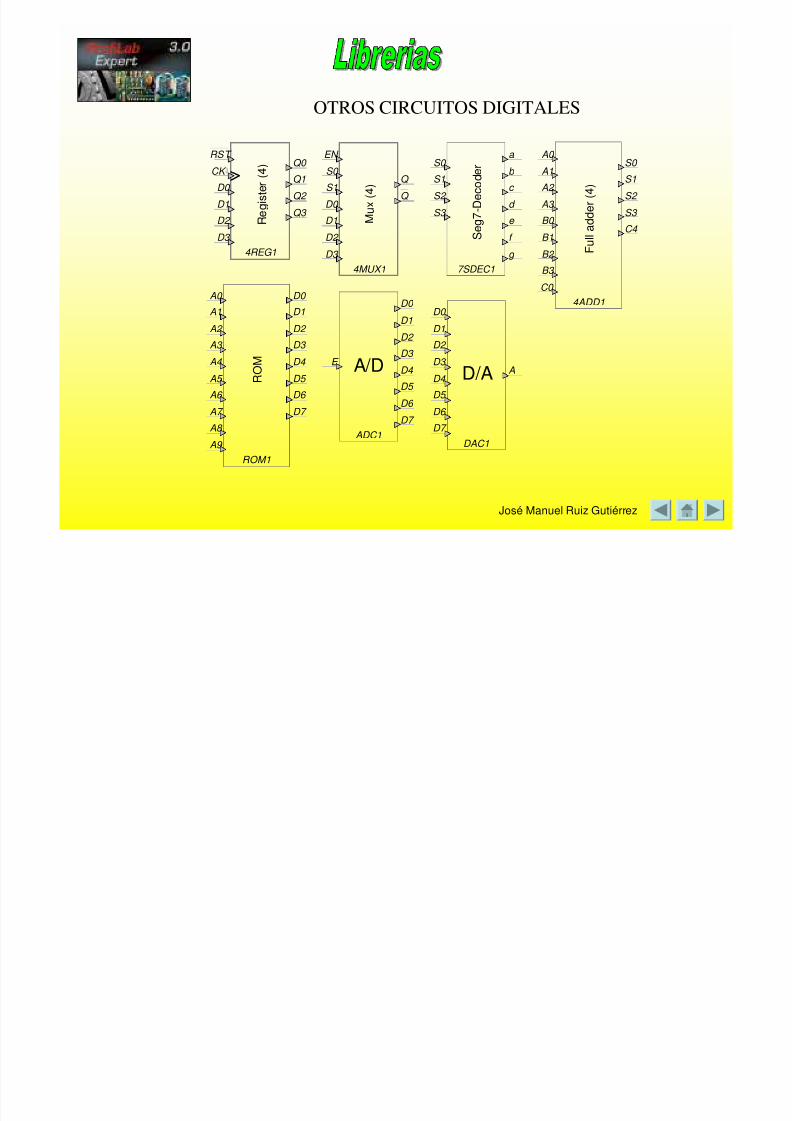
José Manuel Ruiz Gutiérrez
RST
CK
D0
D1
D2
D3
Q3
Q2
Q1
Q0
4REG1
R e
g i s t e r ( 4 )
EN
S0
S1
D0
D1
D2
D3
Q
Q
4MUX1
M u
x ( 4 )
S0
S1
S2
S3
g
f
e
d
c
b
a
7SDEC1
S e g 7 - D e c o d e r
A0
A1
A2
A3
B0
B1
B2
B3
C0
C4
S3
S2
S1
S0
4ADD1
F u l l a d d e r ( 4 )
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
D7
D6
D5
D4
D3
D2
D1
D0
ROM1
R O M E
D7 D6
D5
D4
D3
D2
D1
D0
ADC1
A/D
D0
D1
D2
D3
D4
D5
D6
D7
A
DAC1
D/A
OTROS CIRCUITOS DIGITALES
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 76/143
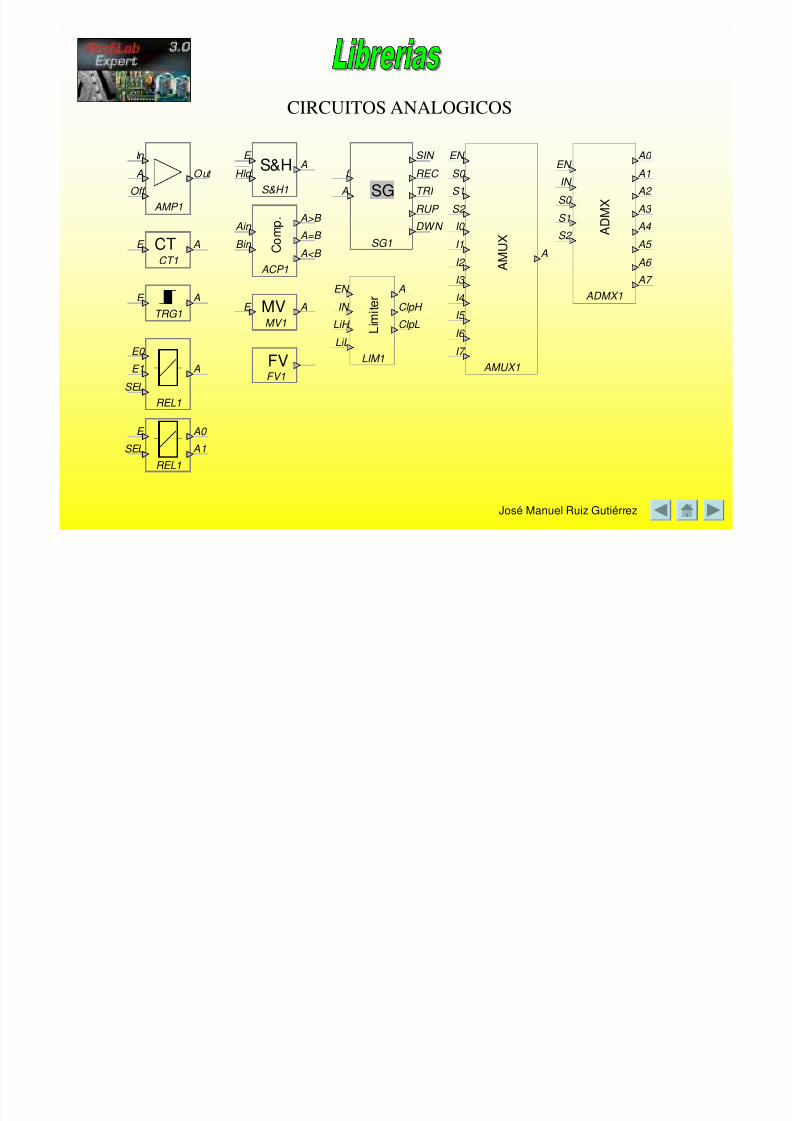
José Manuel Ruiz Gutiérrez
In
A
Off
Out
AMP1
E A
CT1
CT
E A
TRG1
E0
E1
SEL
A
REL1
E
SEL A1
A0
REL1
E
Hld A
S&H1
S&H
Ain
Bin A<B
A=B
A>B
ACP1
C o m p .
E AMV1MV
FV1
FV
f
A
DW N RUP
TRI
REC
SIN
SG1
SG
EN
IN LiH
LiL
ClpLClpH
A
LIM1
L i m i t e r
EN
S0
S1
S2 I0
I1
I2
I3
I4
I5
I6
I7
A
AMUX1
A M U X
EN
IN
S0
S1
S2
A7
A6
A5
A4 A3
A2
A1
A0
ADMX1
A D M
X
CIRCUITOS ANALOGICOS
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 77/143
José Manuel Ruiz Gutiérrez
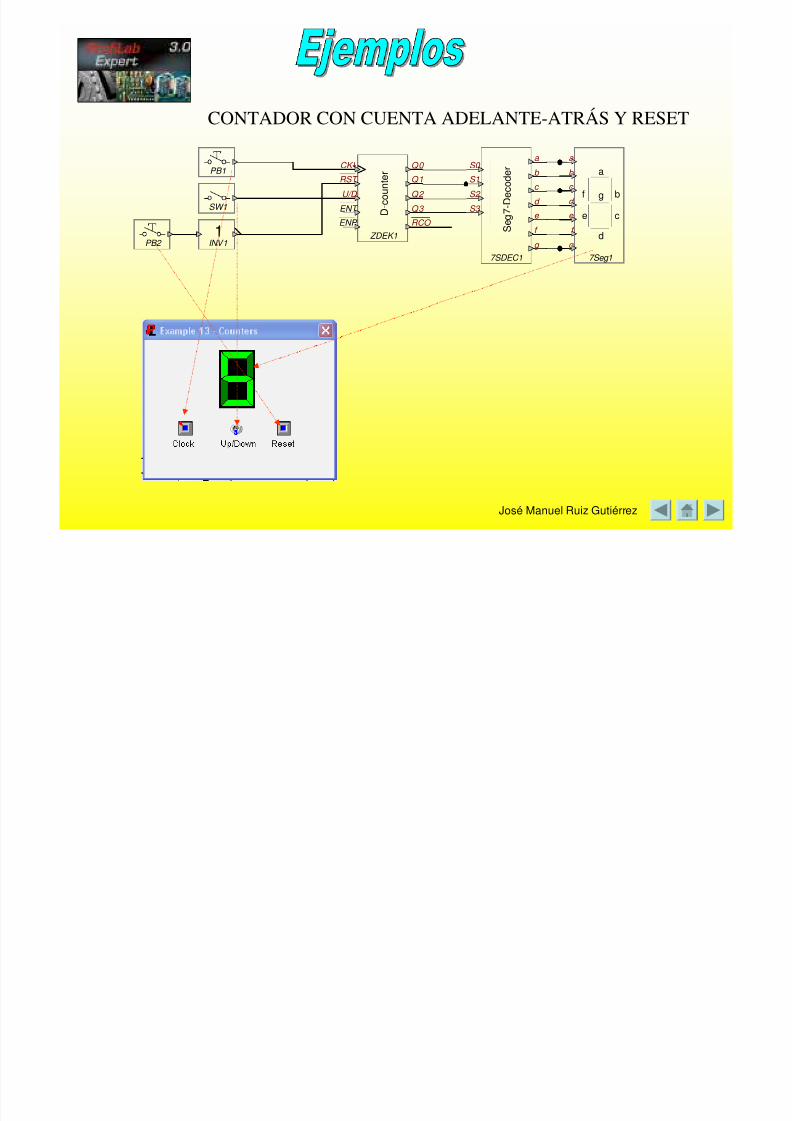
SW1
PB1
PB2 INV11
CK
RST
U/D
ENT
ENP RCO
Q3
Q2
Q1
Q0
ZDEK1
D
- c o u n t e r
a
b
c
d
e
f
g
7Seg1
a
b
c
d
e
f g
S0
S1
S2
S3
g
f
e
d
c
b
a
7SDEC1
S e g 7
- D e c o d e r
CONTADOR CON CUENTA ADELANTE-ATRÁS Y RESET
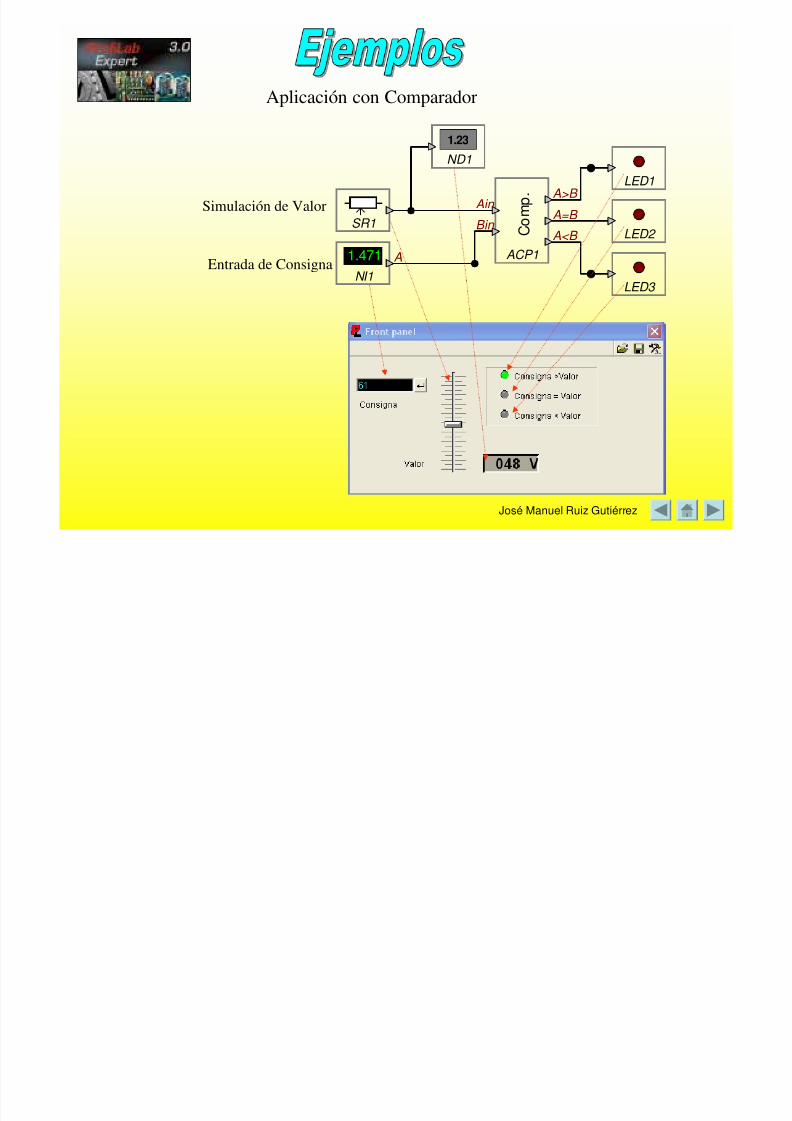
Aplicación con Comparador
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 78/143
José Manuel Ruiz Gutiérrez
Ain
Bin A<B
A=B
A>B
ACP1
C o m
p .
LED1
LED2
LED3
SR1
A
NI1
1.471
ND1
1.23
p p
Entrada de Consigna
Simulación de Valor
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 79/143
José Manuel Ruiz Gutiérrez
E0
E1A
FRM1
F
E0
E1A
ADD1+
E0
E1
A
SUB1-E0
E1A
MUL1
*
E0
E1A
DIV1
/
E
RST A
INT1
d(+)
E
RST
A
DIF1
d(-)
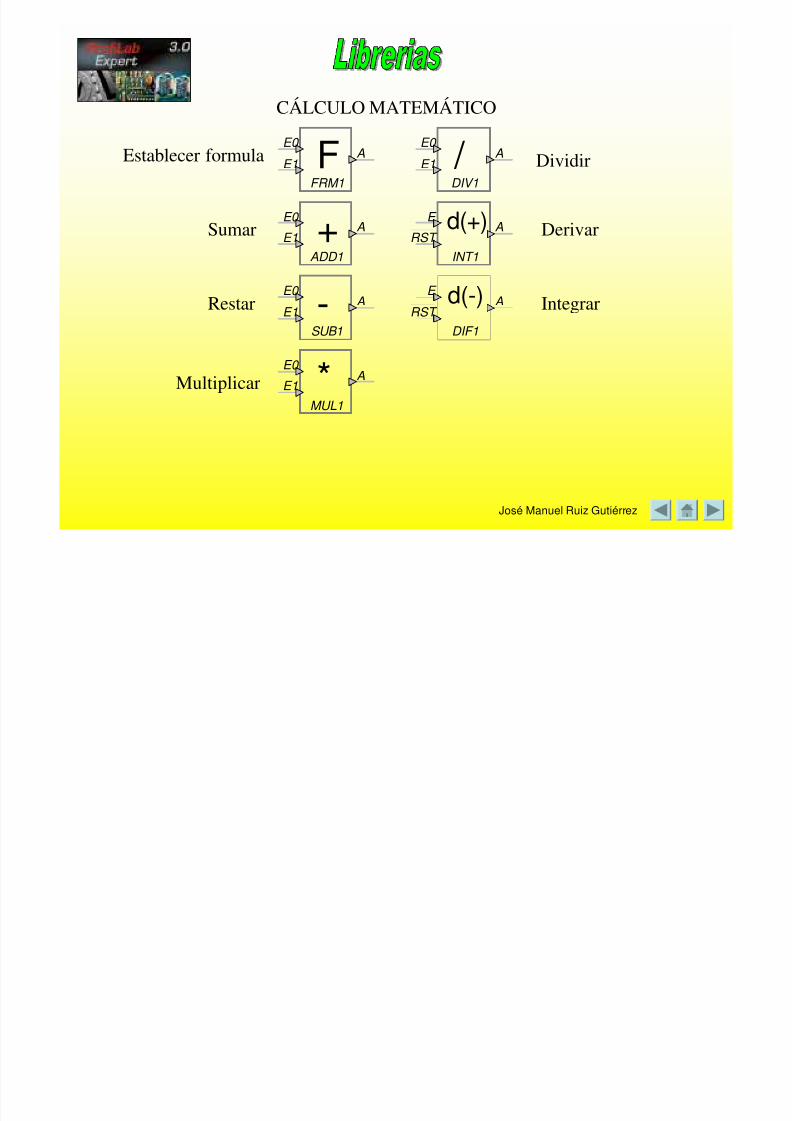
CÁLCULO MATEMÁTICO
Establecer formula
Sumar
Restar
Multiplicar
Integrar
Derivar
Dividir
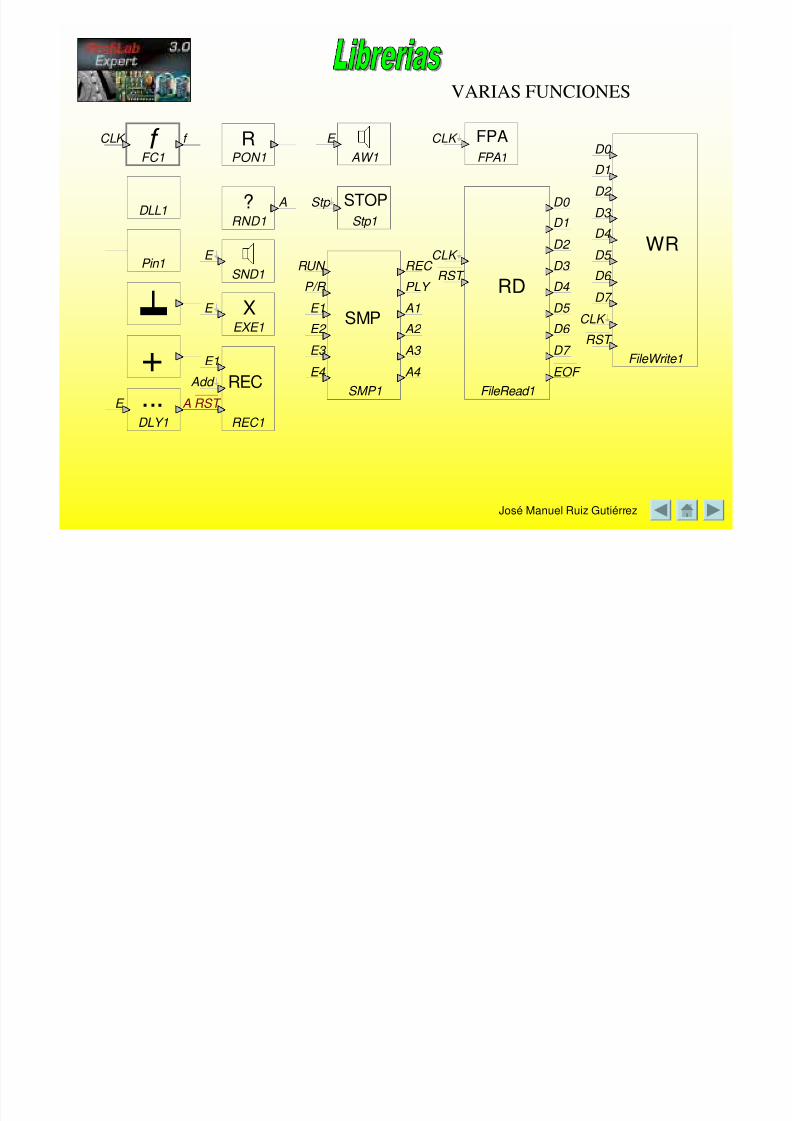
VARIAS FUNCIONES
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 80/143
José Manuel Ruiz Gutiérrez
CLK f
FC1f
DLL1
Pin1
+E A
DLY1...
PON1
R
A
RND1
?
E
SND1
E EXE1X
E1
Add
RST REC1
REC
E
AW1
Stp
Stp1
STOP
RUN
P/R
E1E2
E3
E4 A4
A3
A2 A1
PLY
REC
SMP1
SMP
CLK
FPA1
FPA
CLK
RST
EOF
D7
D6 D5
D4
D3
D2
D1
D0
FileRead1
RD
D0
D1
D2
D3 D4
D5
D6
D7
CLK
RST
FileWrite1
WR
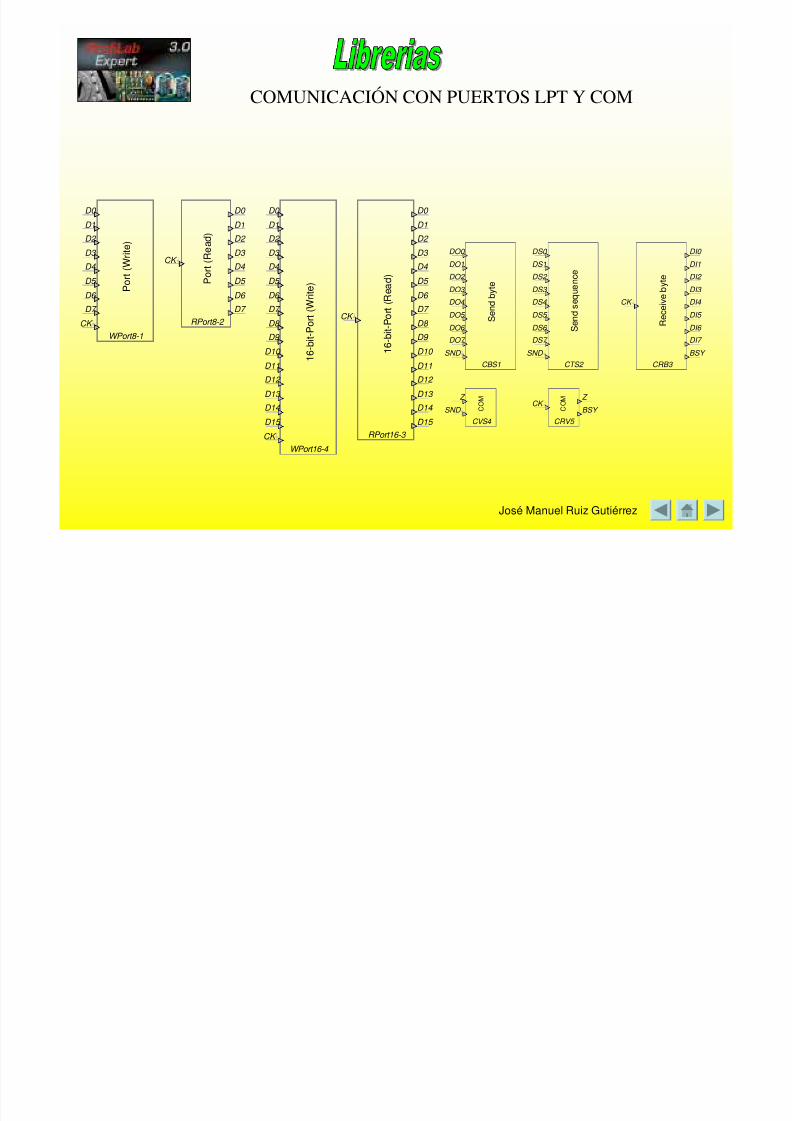
COMUNICACIÓN CON PUERTOS LPT Y COM
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 81/143
José Manuel Ruiz Gutiérrez
D0 D1
D2
D3
D4
D5
D6
D7 CK
WPort8-1
P o r t ( W r i t e )
CK
D7
D6
D5
D4
D3
D2
D1D0
RPort8-2
P o r t ( R e a d )
CK
D15 D14
D13
D12
D11
D10
D9
D8 D7
D6
D5
D4
D3
D2
D1D0
RPort16-3
1 6 - b i t - P o r t ( R e a d )
D0 D1
D2
D3
D4
D5
D6
D7 D8
D9
D10
D11
D12
D13
D14 D15
CK
WPort16-4
1 6 - b i t - P o r t ( W r i t e )
DO0
DO1
DO2
DO3
DO4
DO5
DO6
DO7
SND
CBS1
S e n d b y t e
DS0
DS1
DS2
DS3
DS4
DS5
DS6
DS7
SND
CTS2
S e n d
s e q u e n c e
CK
BSY
DI7
DI6
DI5
DI4
DI3
DI2
DI1
DI0
CRB3
R e c e i v e b y t e
Z
SND CVS4 C
O M
CK
BSY
Z
CRV5 C
O M
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 82/143
José Manuel Ruiz Gutiérrez
AA0
AA1
AA2
AA3
AA4
AA5
AA6
AA7
AC0
AC1
AC2
AC3 EC7
EC6
EC5
EC4
EB7
EB6
EB5
EB4
EB3
EB2
EB1
EB0
8255-1
8 2 5 5 - P o
r t
M1L
M1R
M2L
M2R
M3L
M3R
M4L
M4R
EY
EX
E8
E7
E6
E5
E4
E3
E2
E1
FTI2
f i s c h e r t e c h
n i k 3 0 4 0 2
M1L
M1R
M2L
M2R
M3L
M3R
M4L
M4R
M5L
M5R
M6L
M6R
M7L
M7R
M8L
M8R
EY
EX
E16
E15
E14
E13
E12
E11
E10
E9
E8
E7
E6
E5
E4
E3
E2
E1
FTIE3
f i s c h e r t e c h
n i k 3 0 4 0 2 + 1 6 5 5 4
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 83/143
José Manuel Ruiz Gutiérrez
OR1
1>=
OR2
1>=
NOR1
1>=
NOR2
1>=
OR3
1>=
OR4
1>=
INV11
Pin1
n.C.
Pin2
n.C.
Pin3
1E1
Pin4
1E2
Pin5
1E3
Pin6
1A
Pin7
GNDPin8
2E
Pin9
2A
Pin10
3A
Pin11
3E1
Pin12
3E2
Pin13
3E3
Pin14
Vcc
n.C.
n.C.
1E1
1E2
1E3
1A
GND 2E
2A
3A
3E1
3E2
3E3
Vcc
4 0 0 0 B P
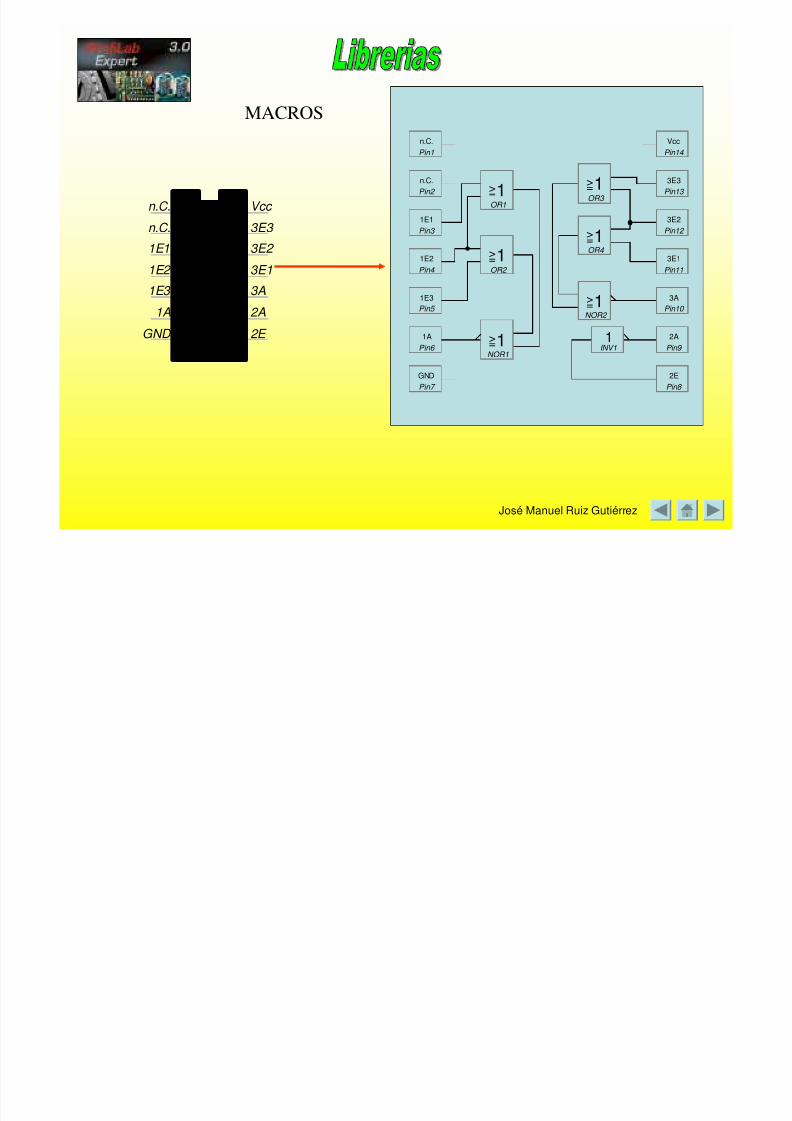
MACROS
Generador de Señal y Osciloscopio

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 84/143
José Manuel Ruiz Gutiérrez
f A
DWN
RUP
TRI REC
SIN
SG1
SG
A
B Trg
SCP1
S c o p e
PT1
PT2
Generador deSeñal Osciloscopio
y p
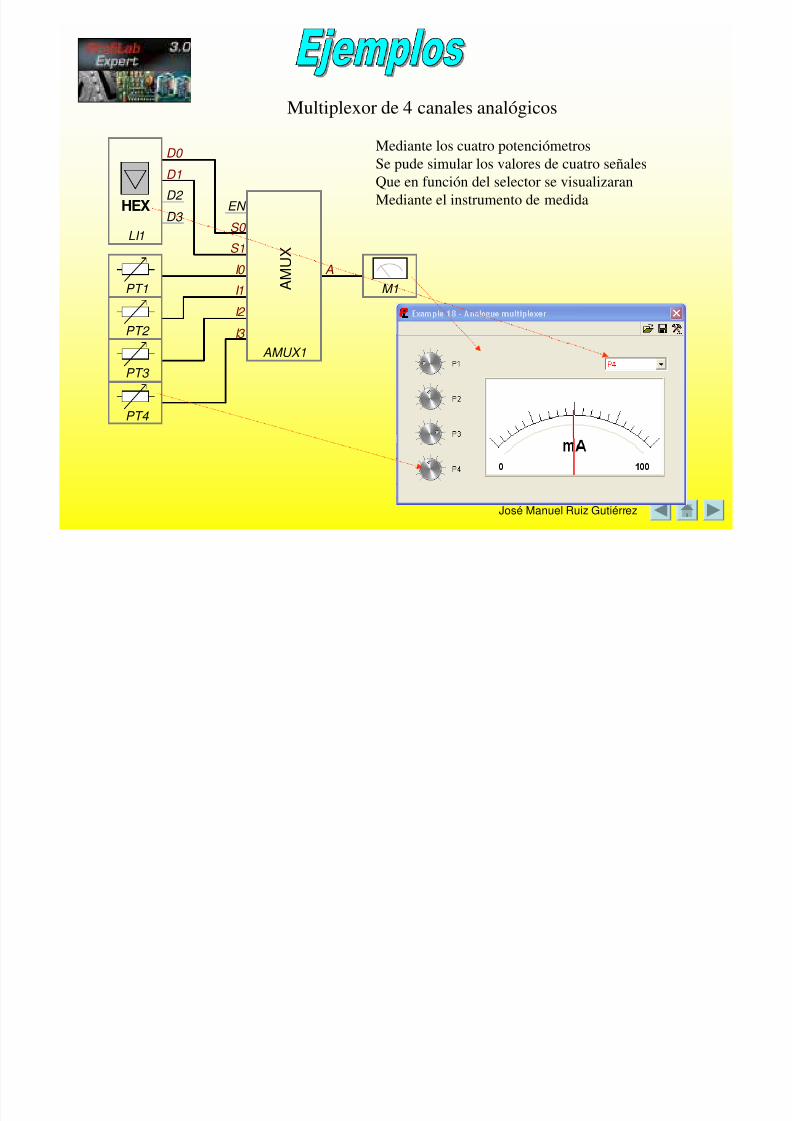
Multiplexor de 4 canales analógicos
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 85/143
José Manuel Ruiz Gutiérrez
EN
S0
S1
I0
I1
I2
I3
A
AMUX1
A M U X
M1PT1
PT2
PT3
PT4
D3
D2
D1
D0
LI1
HEX
p g
Mediante los cuatro potenciómetrosSe pude simular los valores de cuatro señalesQue en función del selector se visualizaranMediante el instrumento de medida
Double click DMM to select type and port!
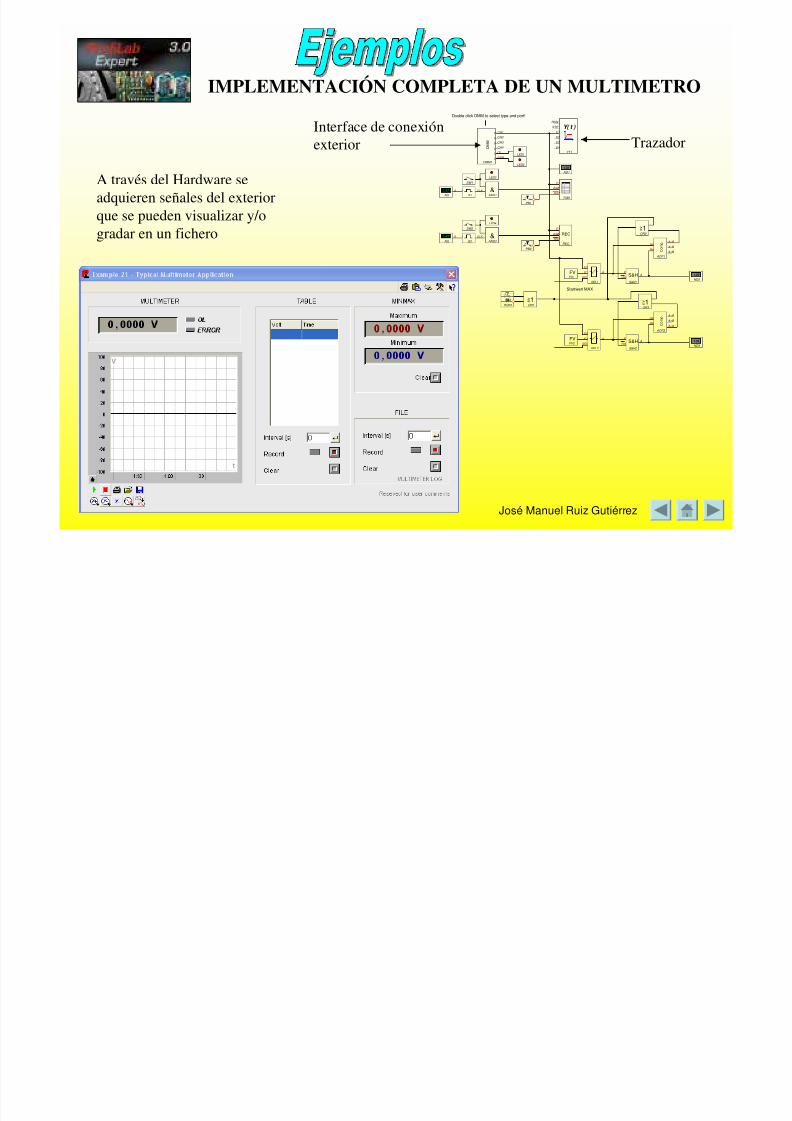
IMPLEMENTACIÓN COMPLETA DE UN MULTIMETRO
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 86/143
José Manuel Ruiz Gutiérrez
ERR
OL
CH4
CH3
CH2
CH1
DMM1
D M M
LED1
LED2
ND1
1.23
E1
Add
RST
TAB1
RUN
STP
E1
E2
E3
E4
YT1
Y( t )
E1
Add
RST
REC1
REC
f CLK
G1
A
NI1
1.471
PB1
SW1
AND1
&
LED3
f CLK
G2
A
NI2
1.471
SW2
AND2
&
LED4
PB2
ND2
1.23
ND3
1.23
PB3
OR1
1>=PON1
R
yp p
E
Hld A
S&H1
S&H
Ain
Bin A<B
A=B
A>B
ACP1
C o m p .
E
Hld A
S&H2
S&H
Ain
Bin A<B
A=B
A>B
ACP2
C o m p .
OR2
1>=
OR3
1>=
E0
E1
SEL
A
REL1
FV1
FV
E0
E1
SEL
A
REL2
FV2
FV
Startwert MAX
A través del Hardware seadquieren señales del exterior
que se pueden visualizar y/ogradar en un fichero
Interface de conexiónexterior Trazador
Juego de simulación de tirada de un dado

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 87/143
José Manuel Ruiz Gutiérrez
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
D7
D6
D5
D4
D3
D2
D1
D0
ROM1
R O M
PB1
E
RST Q
Q
MF1
M o F l o p
OR1
1>=
Nachlauf
1D
C1 Q
Q
DL1
A
A1
A2
RND1
? 1D
C1 Q
Q
DL2
1D
C1 Q
Q
DL3
LA1
LA2
LA3
LA4
LA5
LA6
LA7
Memoria ROM con los códigos de
Activación de los leds
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 88/143
José Manuel Ruiz Gutiérrez
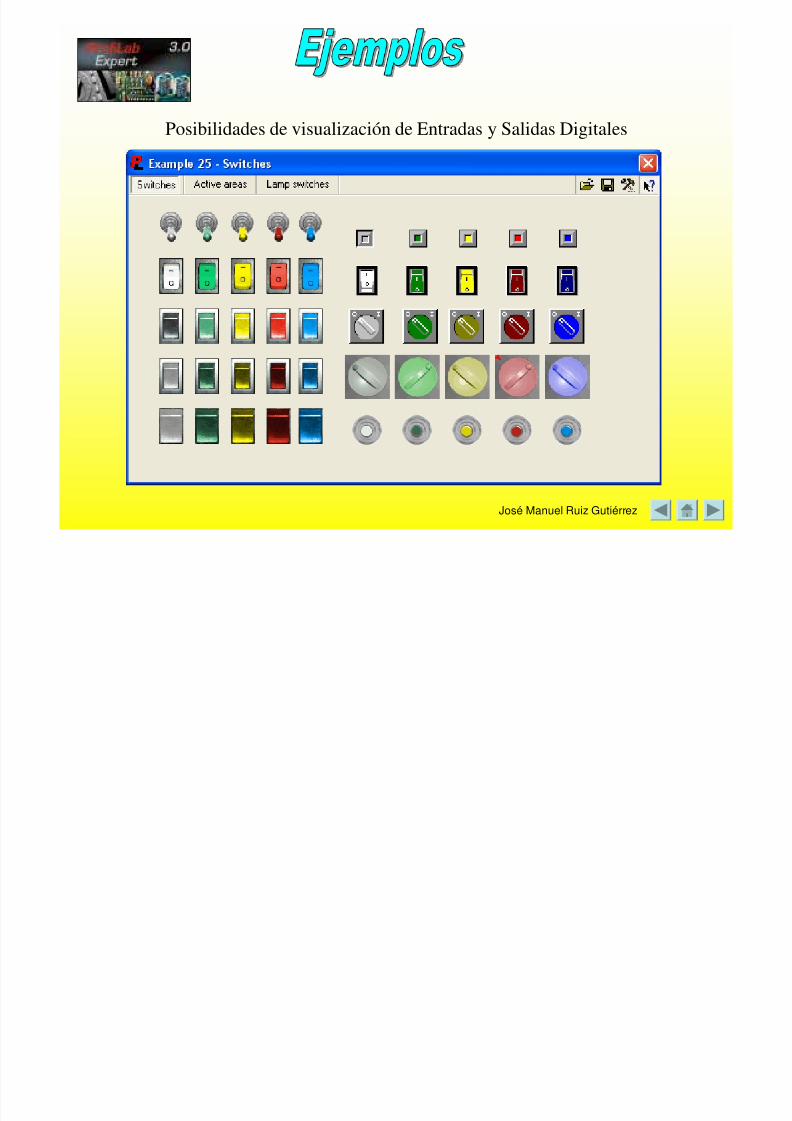
Posibilidades de visualización de Entradas y Salidas Digitales
U lt ti d di l d
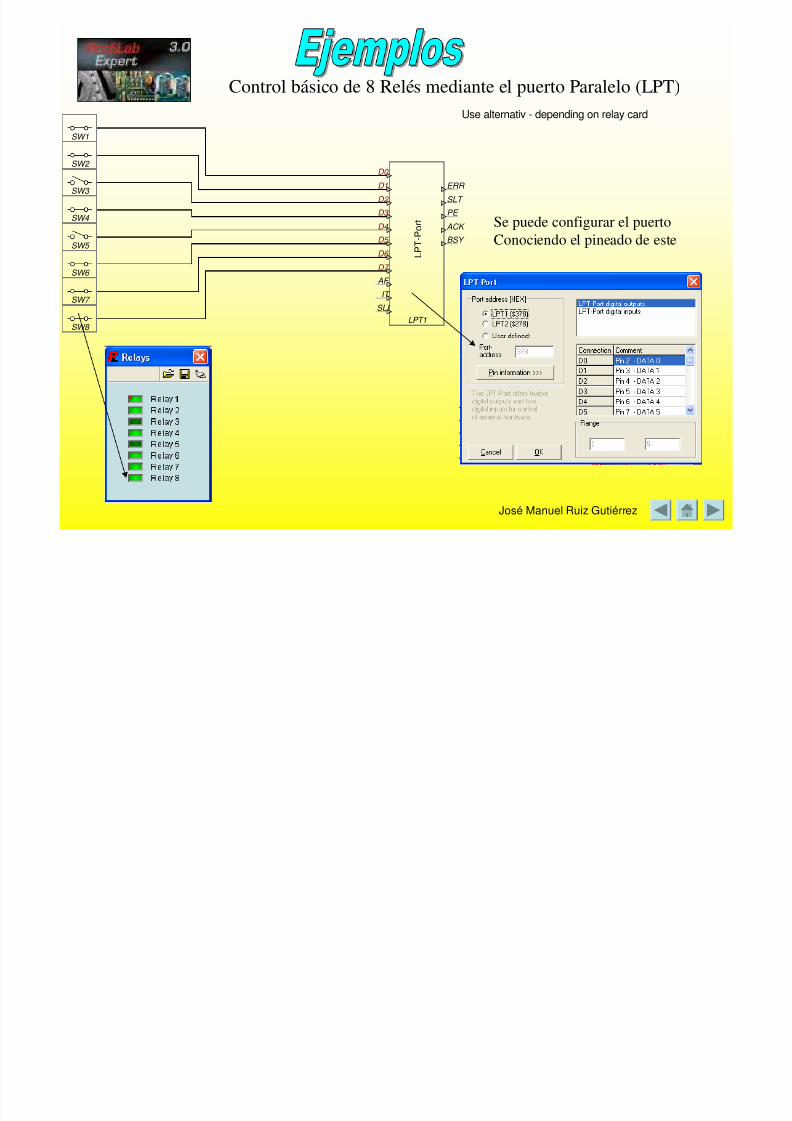
Control básico de 8 Relés mediante el puerto Paralelo (LPT)
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 89/143
José Manuel Ruiz Gutiérrez
SW1
SW2
SW3
SW4
SW5
SW6
SW7
SW8
D0
D1
D2
D3 D4
D5
D6
D7
AF
IT
SLI
BSY
ACK PE
SLT
ERR
LPT1
L P T - P o r t
Use alternativ - depending on relay card
Se puede configurar el puertoConociendo el pineado de este
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 90/143
José Manuel Ruiz Gutiérrez
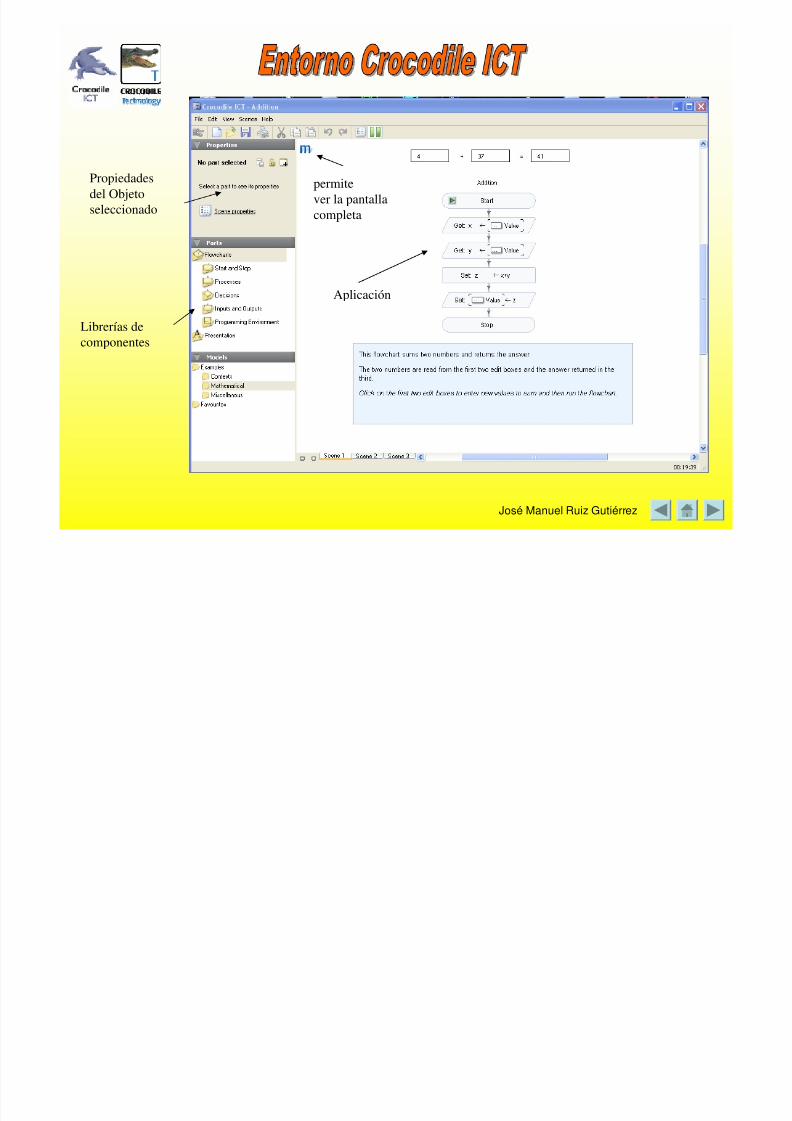
Librerías decomponentes
Propiedadesdel Objetoseleccionado
Aplicación
permitever la pantalla
completa
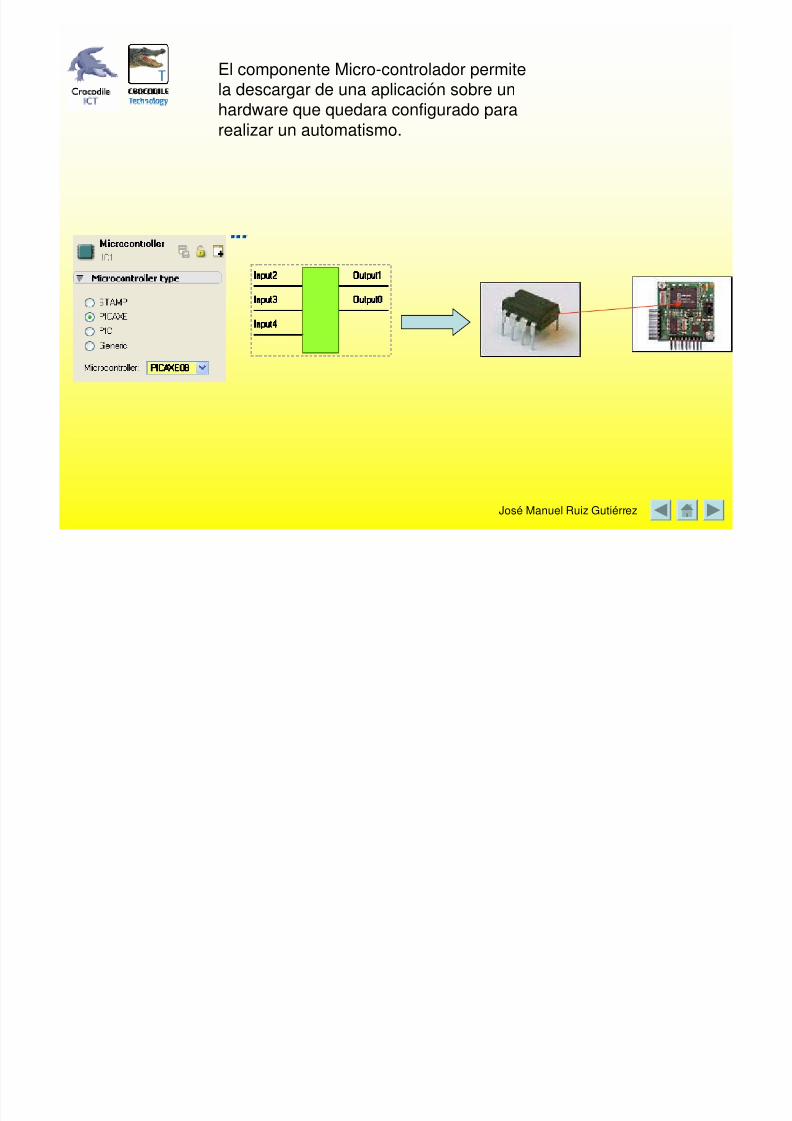
El componente Micro-controlador permitela descargar de una aplicación sobre unhardware que quedara configurado para
li t ti
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 91/143
José Manuel Ruiz Gutiérrez
realizar un automatismo.
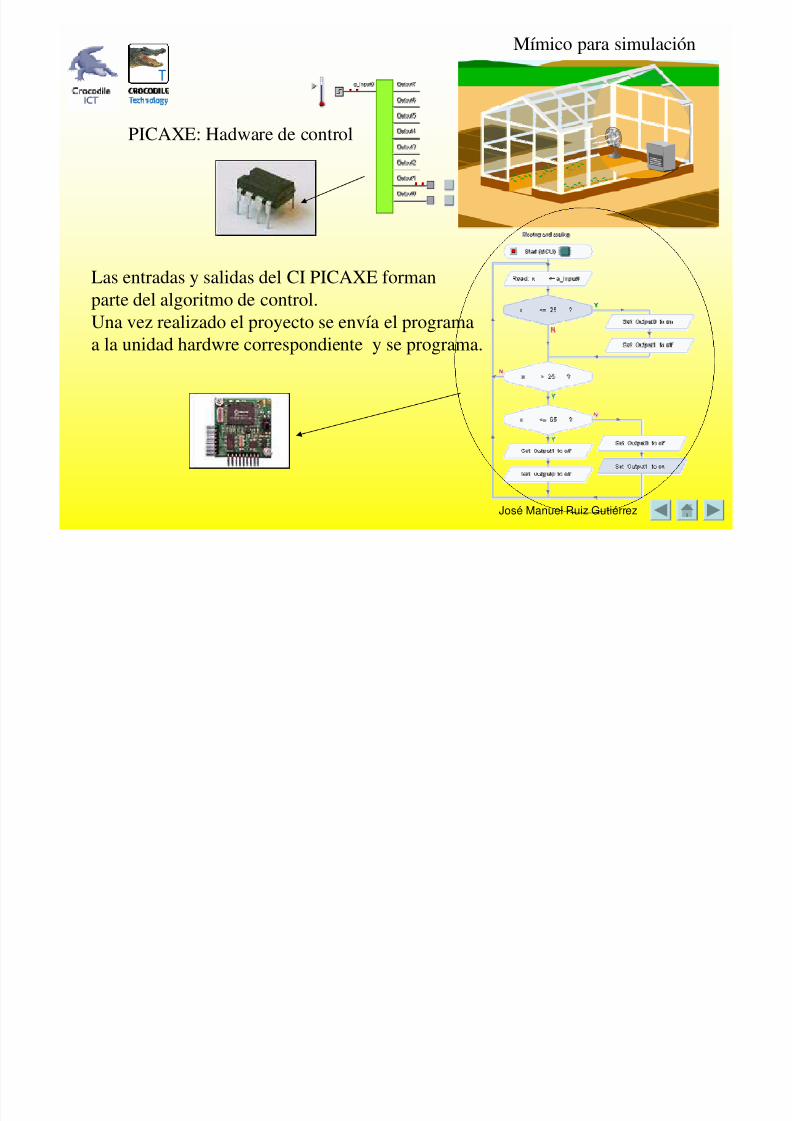
Mímico para simulación
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 92/143
José Manuel Ruiz Gutiérrez
PICAXE: Hadware de control
Las entradas y salidas del CI PICAXE formanparte del algoritmo de control.Una vez realizado el proyecto se envía el programaa la unidad hardwre correspondiente y se programa.
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 93/143
José Manuel Ruiz Gutiérrez
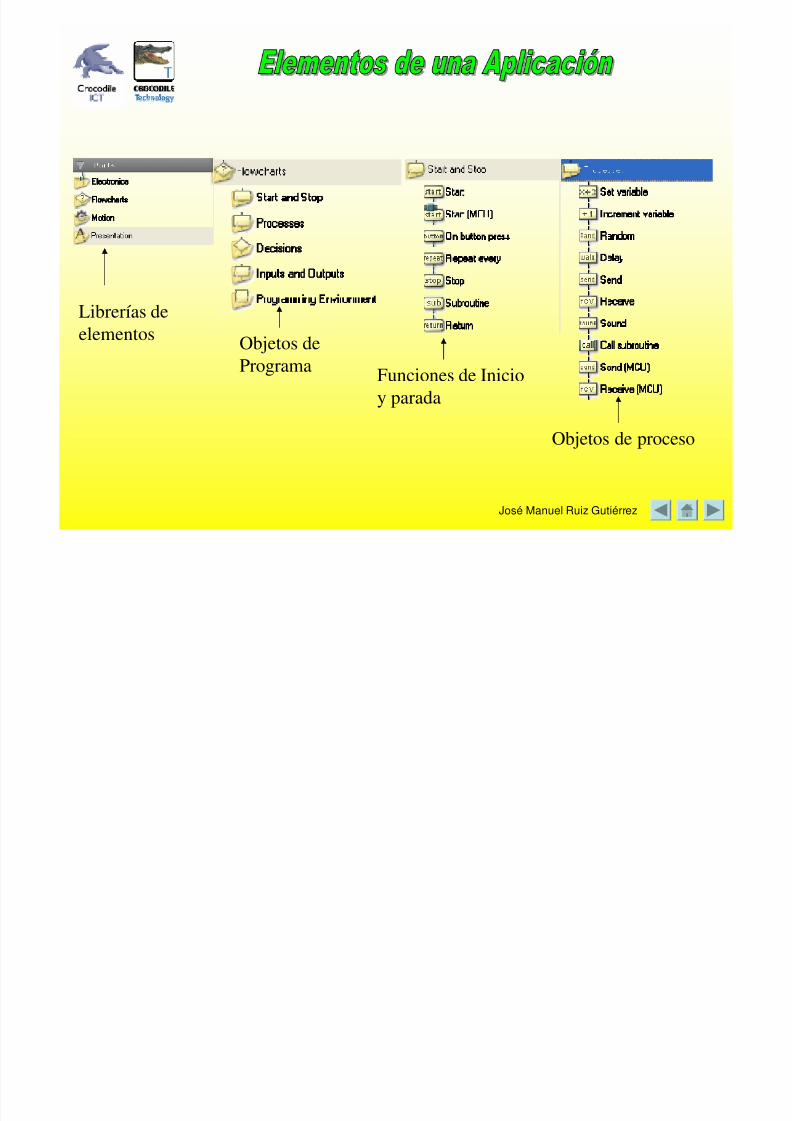
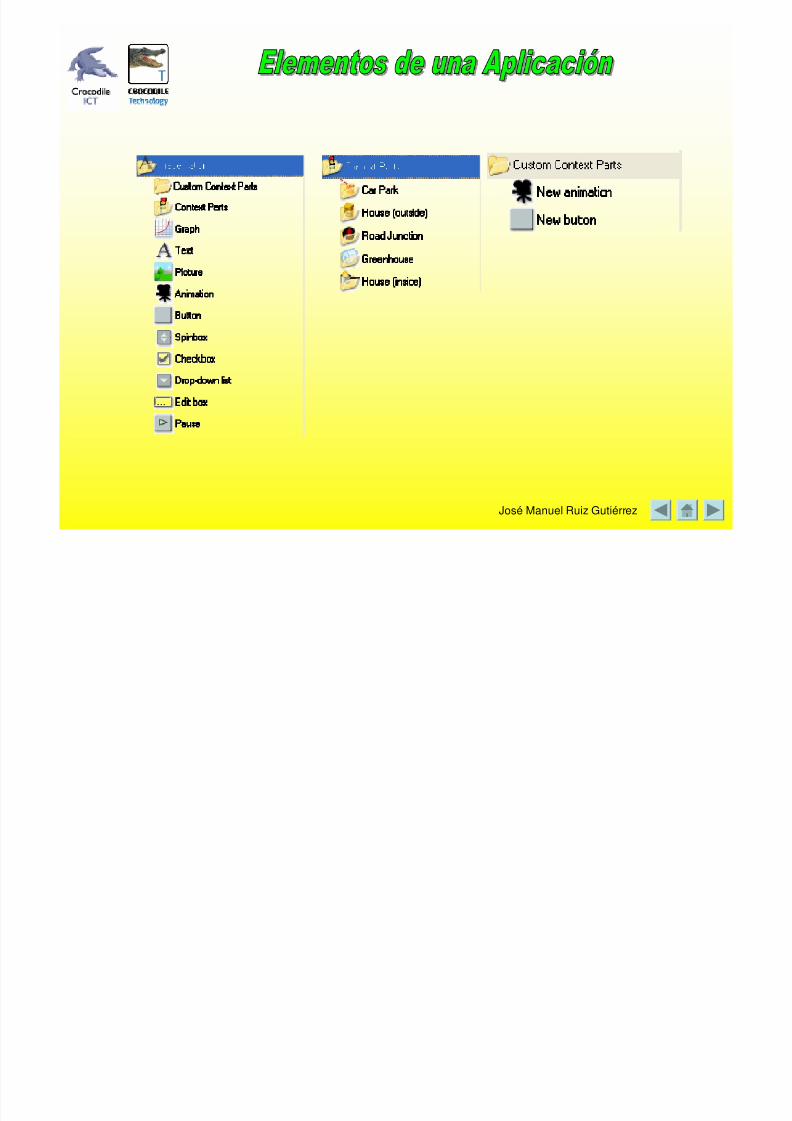
Librerías deelementos Objetos dePrograma Funciones de Inicio
y parada
Objetos de proceso
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 94/143
José Manuel Ruiz Gutiérrez
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 95/143
José Manuel Ruiz Gutiérrez
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 96/143
José Manuel Ruiz Gutiérrez
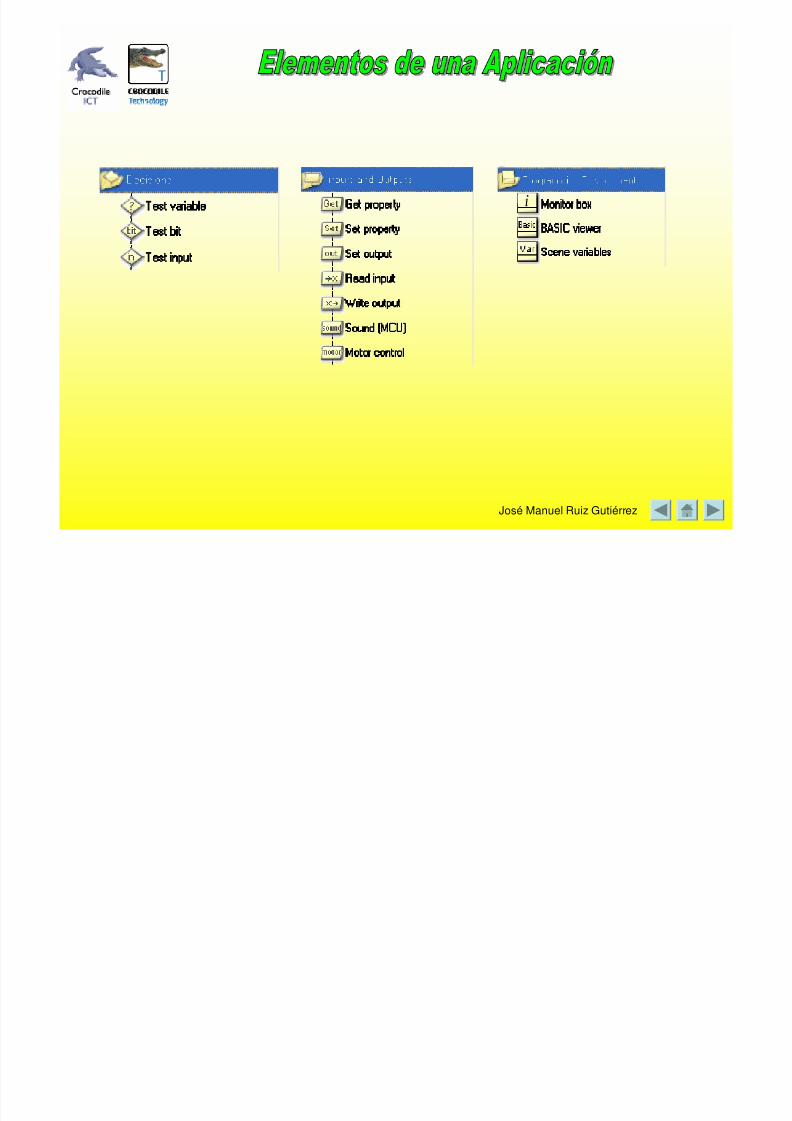
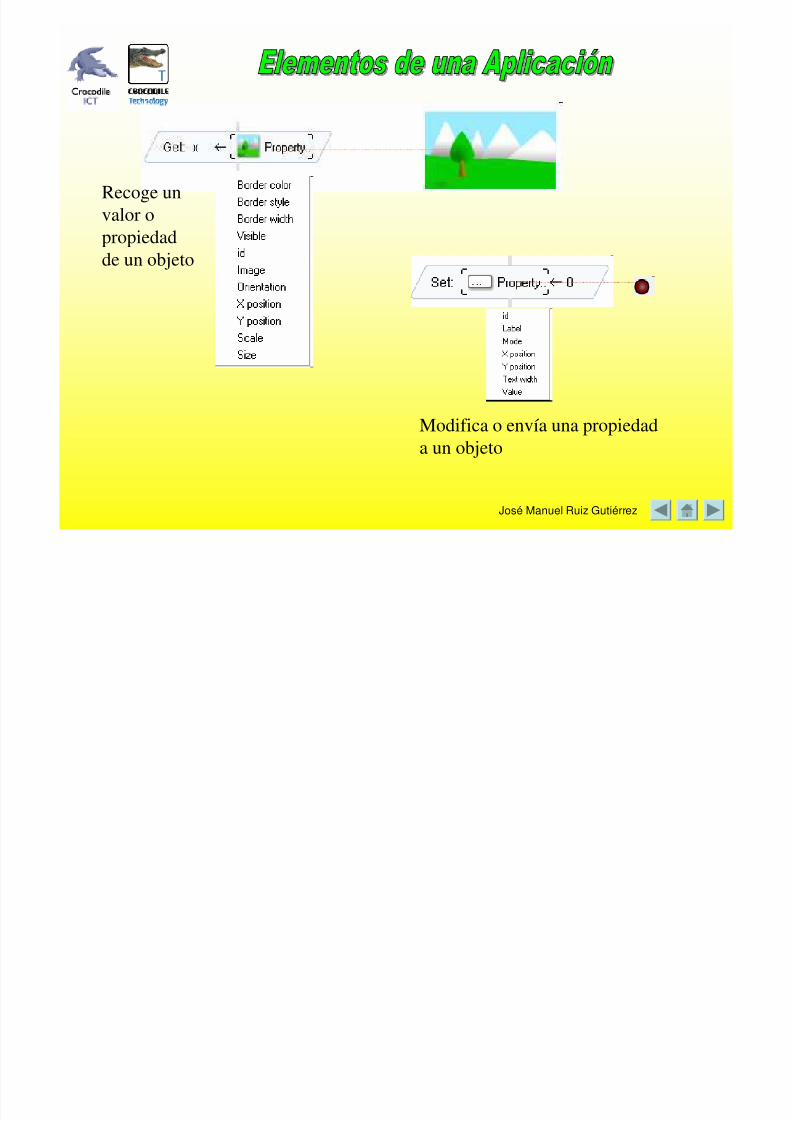
Recoge un
valor opropiedadde un objeto
Modifica o envía una propiedada un objeto
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 97/143
José Manuel Ruiz Gutiérrez
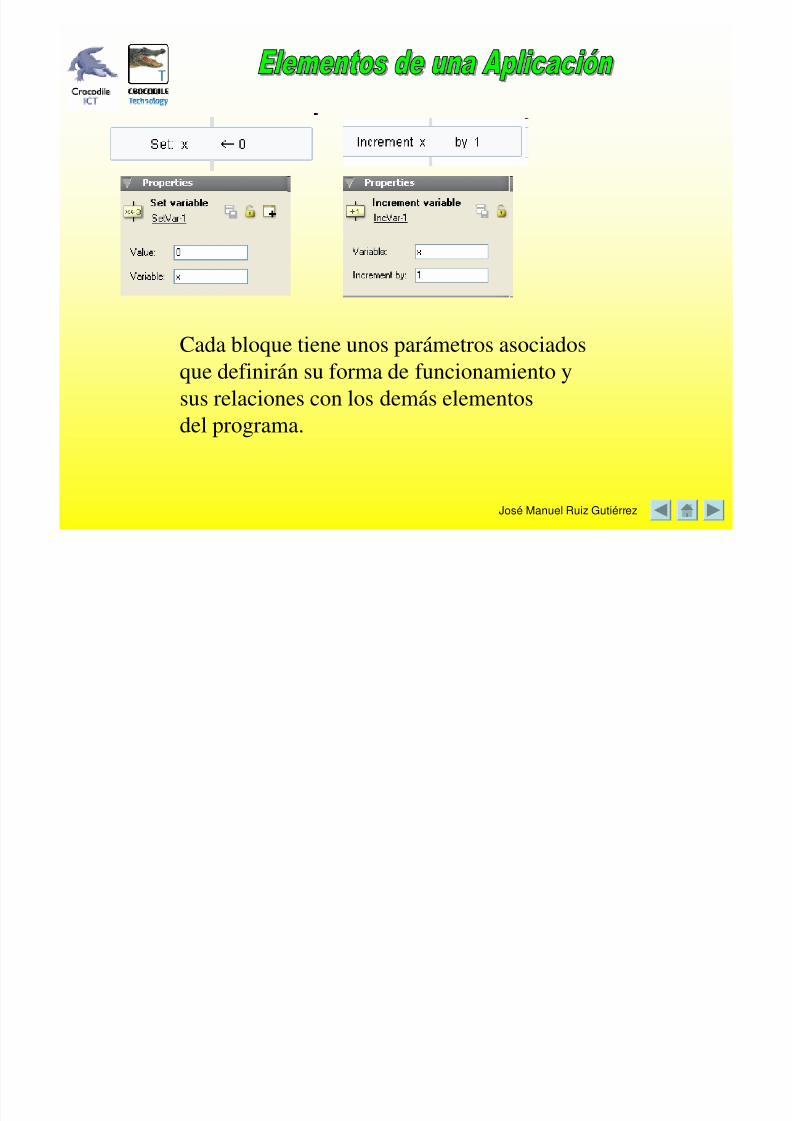
Cada bloque tiene unos parámetros asociadosque definirán su forma de funcionamiento ysus relaciones con los demás elementosdel programa.
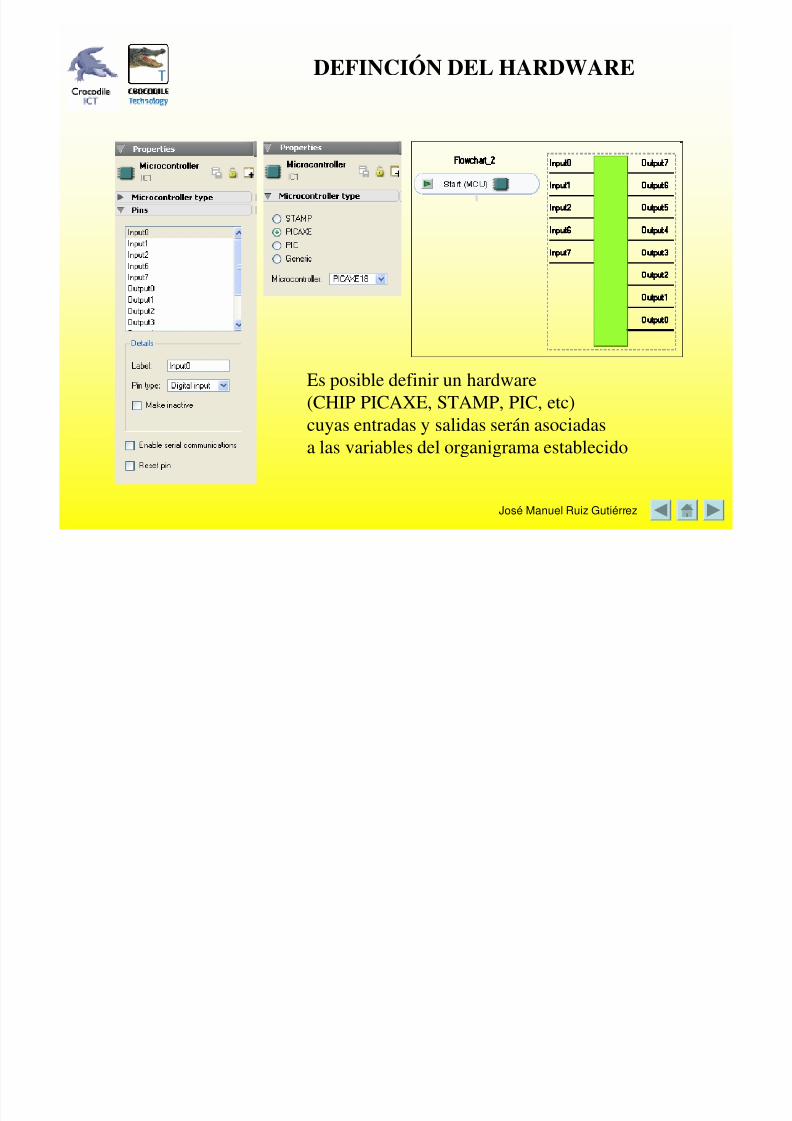
DEFINCIÓN DEL HARDWARE
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 98/143
José Manuel Ruiz Gutiérrez
Es posible definir un hardware(CHIP PICAXE, STAMP, PIC, etc)cuyas entradas y salidas serán asociadasa las variables del organigrama establecido
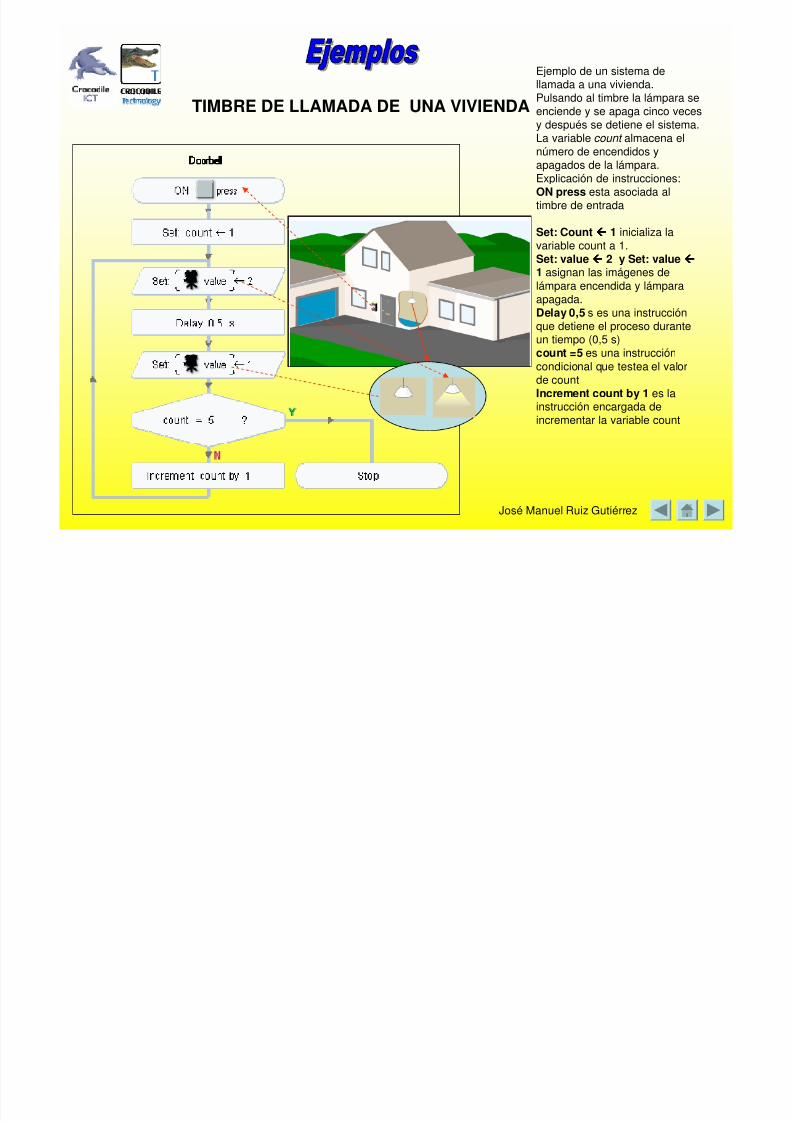
Ejemplo de un sistema dellamada a una vivienda.Pulsando al timbre la lámpara seenciende y se apaga cinco veces
y después se detiene el sistema.La ariable co nt almacena el
TIMBRE DE LLAMADA DE UNA VIVIENDA
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 99/143
José Manuel Ruiz Gutiérrez
La variable count almacena elnúmero de encendidos yapagados de la lámpara.Explicación de instrucciones:ON press esta asociada altimbre de entrada
Set: Count 1 inicializa lavariable count a 1.Set: value 2 y Set: value 1 asignan las imágenes delámpara encendida y lámparaapagada.
Delay 0,5 s es una instrucciónque detiene el proceso duranteun tiempo (0,5 s)count =5 es una instruccióncondicional que testea el valorde countIncrement count by 1 es lainstrucción encargada deincrementar la variable count
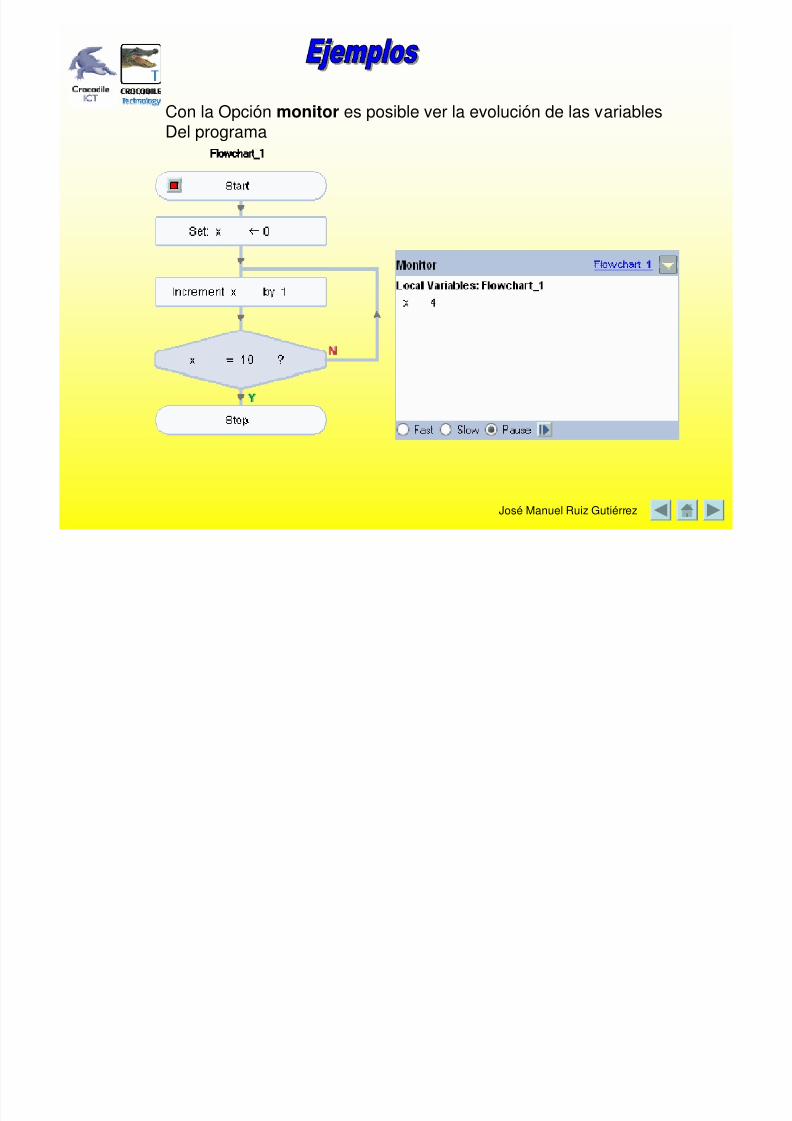
Con la Opción monitor es posible ver la evolución de las variablesDel programa
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 100/143
José Manuel Ruiz Gutiérrez
e p og a a
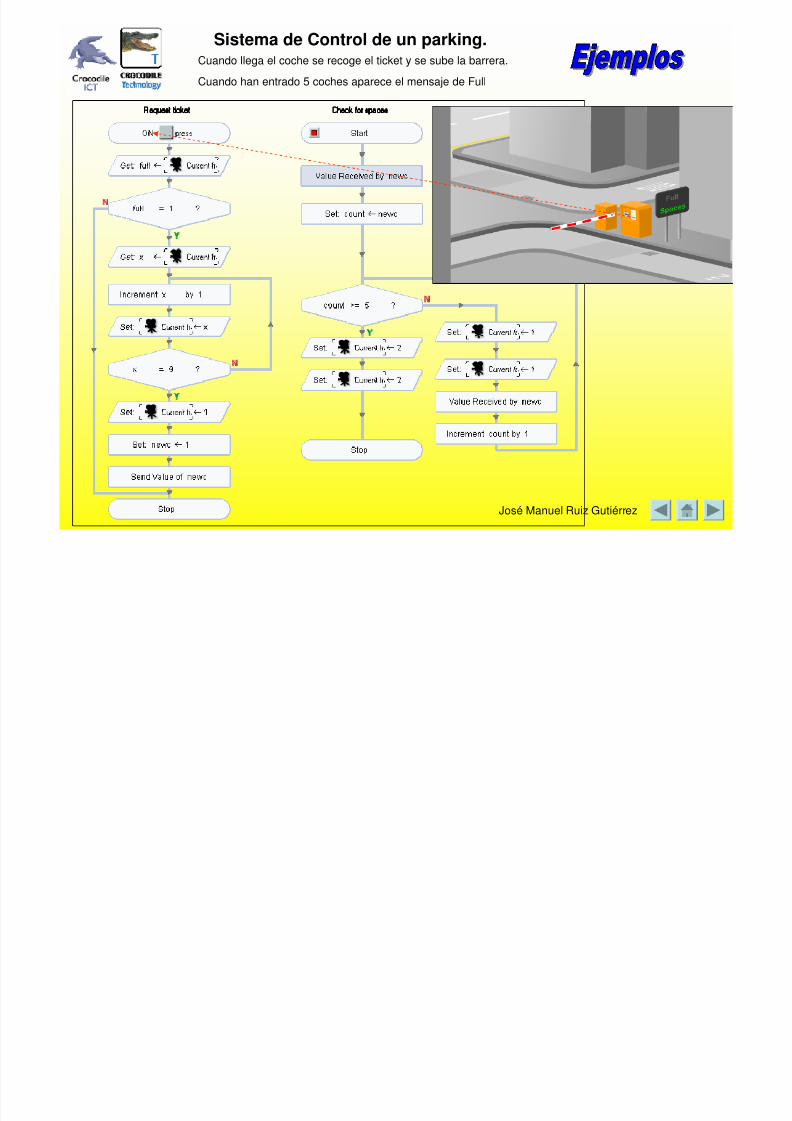
Cuando llega el coche se recoge el ticket y se sube la barrera.
Cuando han entrado 5 coches aparece el mensaje de Full
Sistema de Control de un parking.
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 101/143
José Manuel Ruiz Gutiérrez
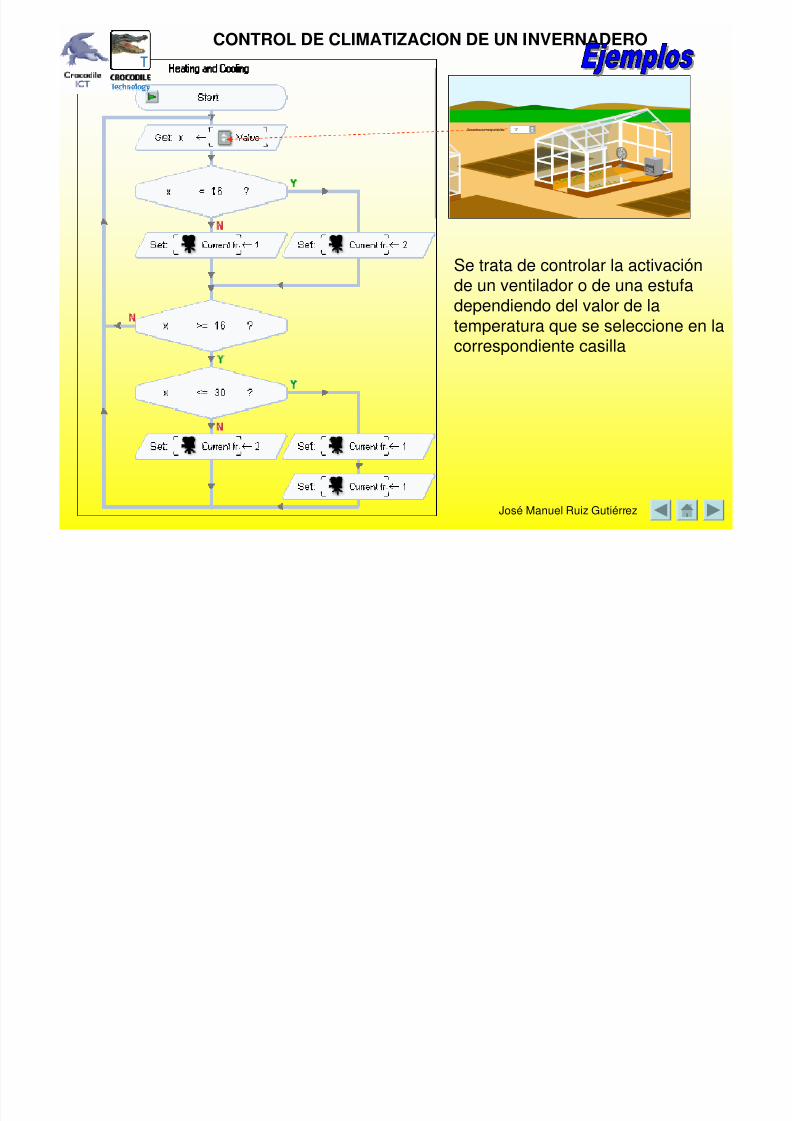
CONTROL DE CLIMATIZACION DE UN INVERNADERO
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 102/143
José Manuel Ruiz Gutiérrez
Se trata de controlar la activaciónde un ventilador o de una estufadependiendo del valor de latemperatura que se seleccione en lacorrespondiente casilla
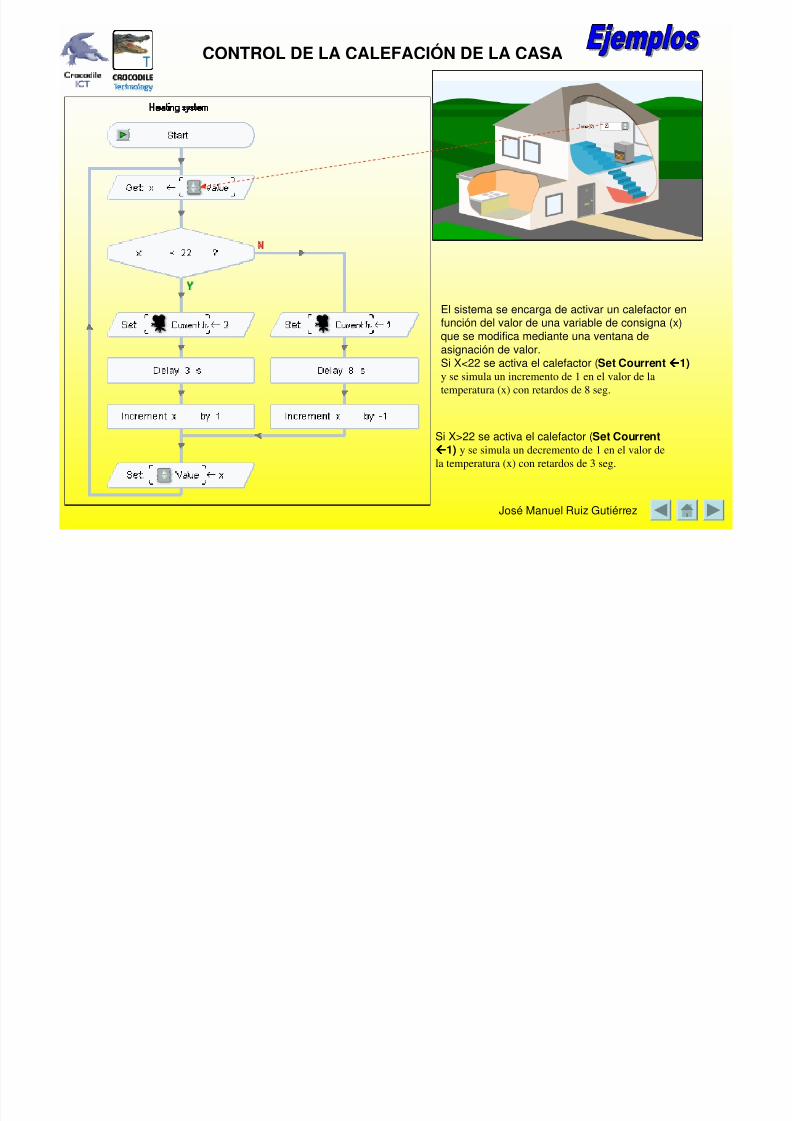
CONTROL DE LA CALEFACIÓN DE LA CASA
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 103/143
José Manuel Ruiz Gutiérrez
El sistema se encarga de activar un calefactor enfunción del valor de una variable de consigna (x)que se modifica mediante una ventana deasignación de valor.Si X<22 se activa el calefactor (Set Courrent1)y se simula un incremento de 1 en el valor de latemperatura (x) con retardos de 8 seg.
Si X>22 se activa el calefactor (Set Courrent1) y se simula un decremento de 1 en el valor dela temperatura (x) con retardos de 3 seg.
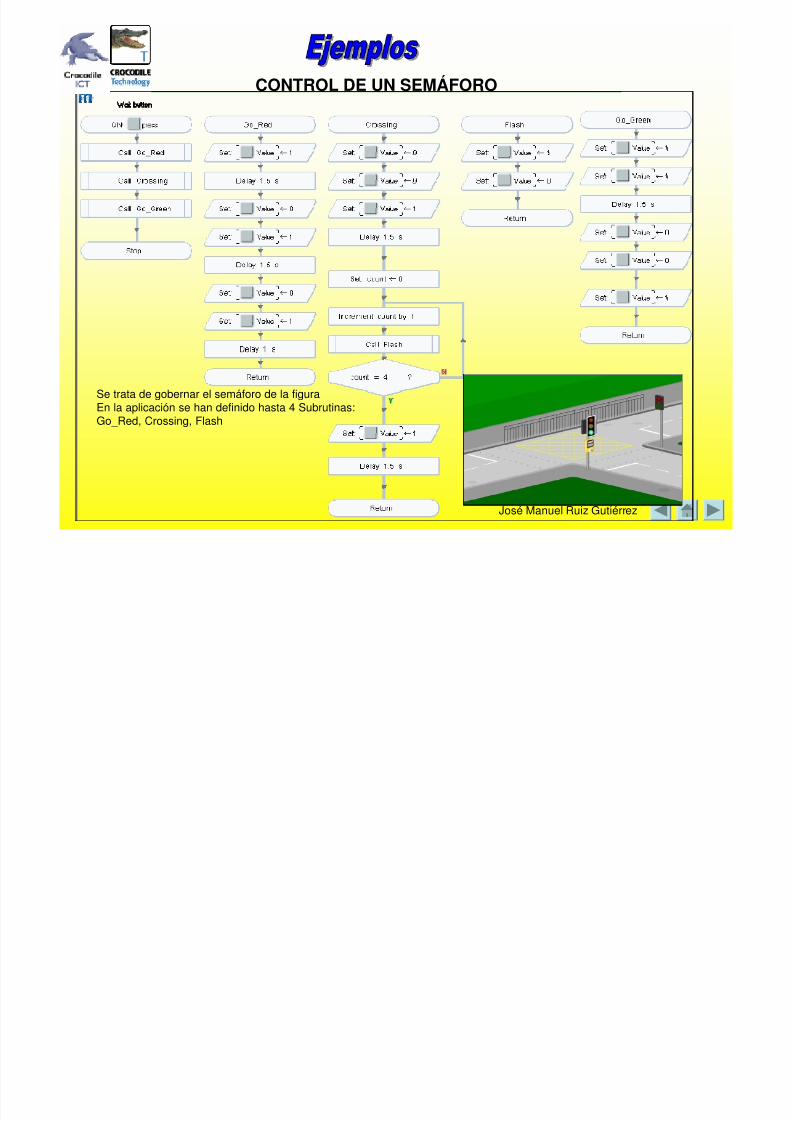
CONTROL DE UN SEMÁFORO
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 104/143
José Manuel Ruiz Gutiérrez
Se trata de gobernar el semáforo de la figuraEn la aplicación se han definido hasta 4 Subrutinas:Go_Red, Crossing, Flash
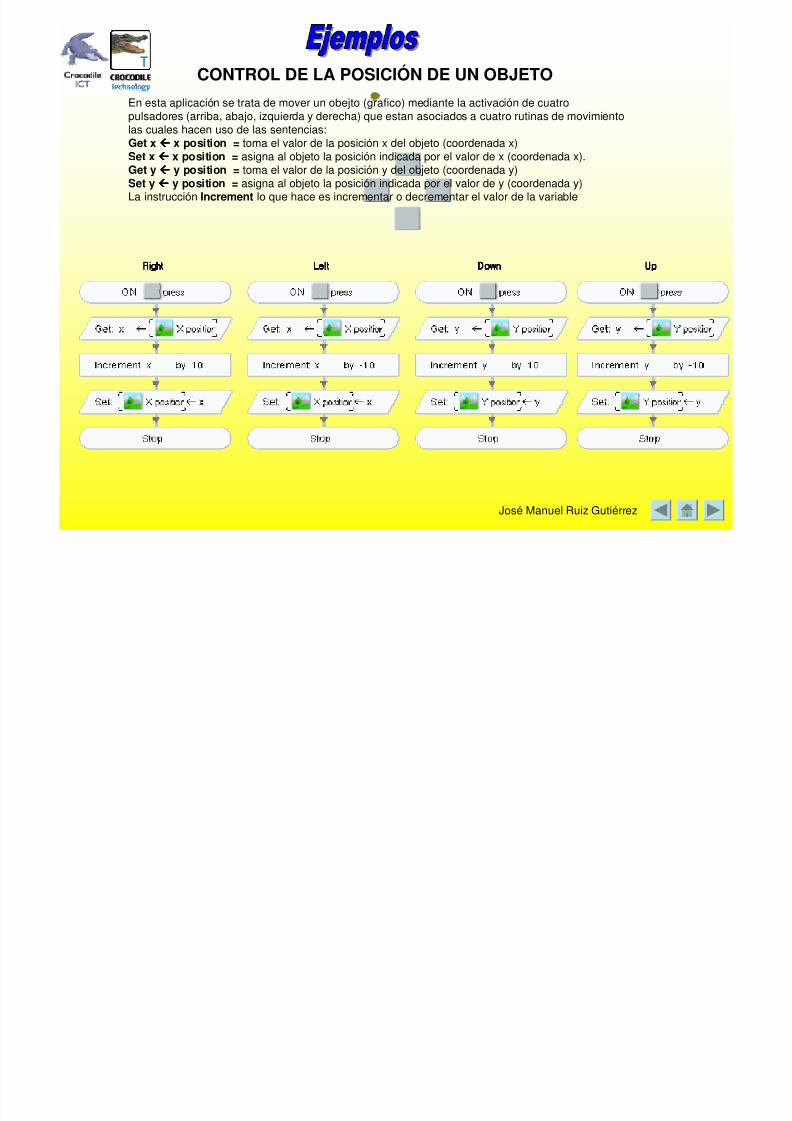
En esta aplicación se trata de mover un obejto (grafico) mediante la activación de cuatropulsadores (arriba, abajo, izquierda y derecha) que estan asociados a cuatro rutinas de movimientolas cuales hacen uso de las sentencias:Get x x position = toma el valor de la posición x del objeto (coordenada x)
CONTROL DE LA POSICIÓN DE UN OBJETO
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 105/143
José Manuel Ruiz Gutiérrez
Get x x position = toma el valor de la posición x del objeto (coordenada x)Set x x position = asigna al objeto la posición indicada por el valor de x (coordenada x).Get y y position = toma el valor de la posición y del objeto (coordenada y)Set y y position = asigna al objeto la posición indicada por el valor de y (coordenada y)La instrucción Increment lo que hace es incrementar o decrementar el valor de la variable
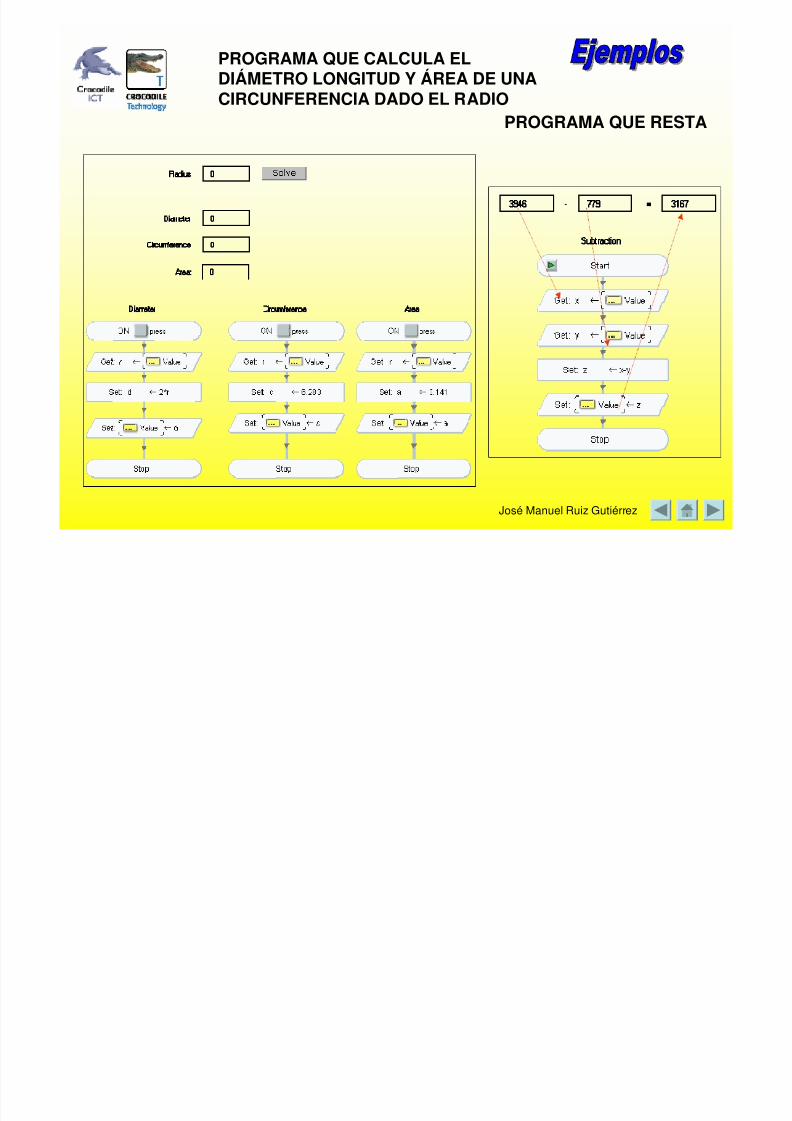
PROGRAMA QUE CALCULA ELDIÁMETRO LONGITUD Y ÁREA DE UNACIRCUNFERENCIA DADO EL RADIO
PROGRAMA QUE RESTA
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 106/143
José Manuel Ruiz Gutiérrez
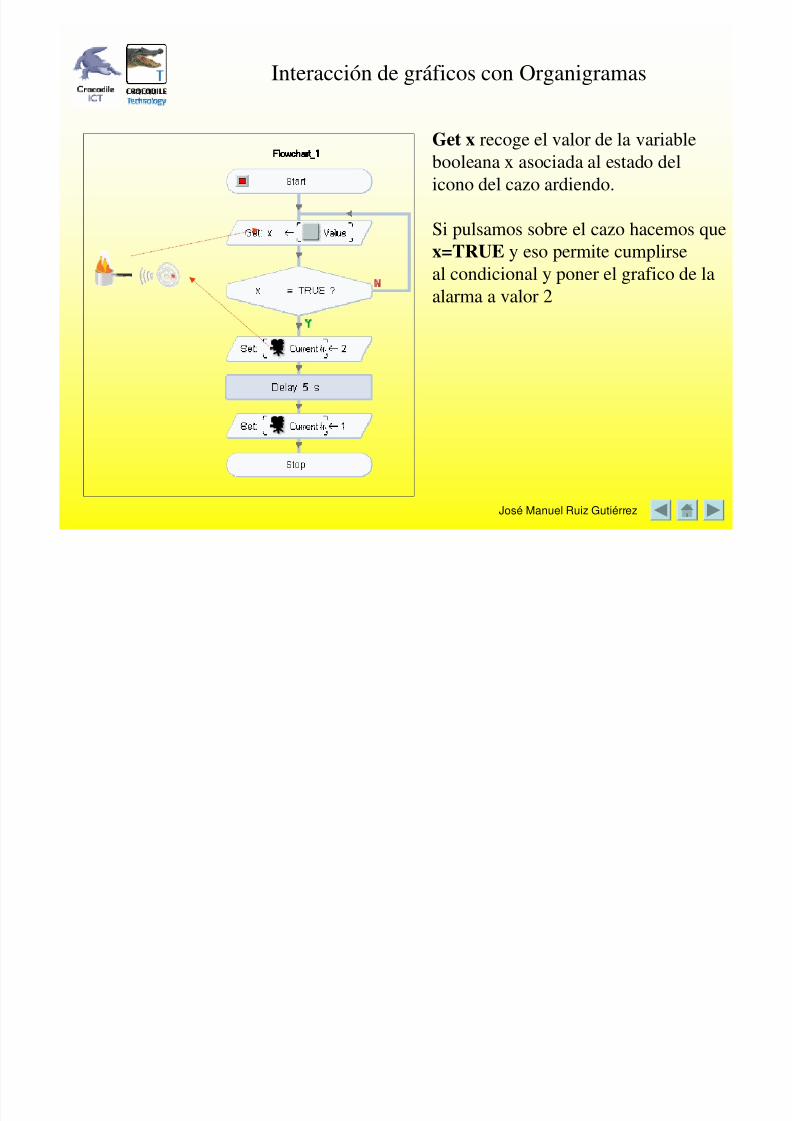
Get x recoge el valor de la variable
Interacción de gráficos con Organigramas
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 107/143
José Manuel Ruiz Gutiérrez
gbooleana x asociada al estado delicono del cazo ardiendo.
Si pulsamos sobre el cazo hacemos quex=TRUE y eso permite cumplirseal condicional y poner el grafico de laalarma a valor 2
El organigrama representa un contador de 0 hasta 10.
Con la herramienta Monitor podemos realizar el trazado
VISUALIZACIÓN DE VARIABLES

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 108/143
José Manuel Ruiz Gutiérrez
Con la herramienta Monitor podemos realizar el trazado(visualización) de una variable, en este caso x
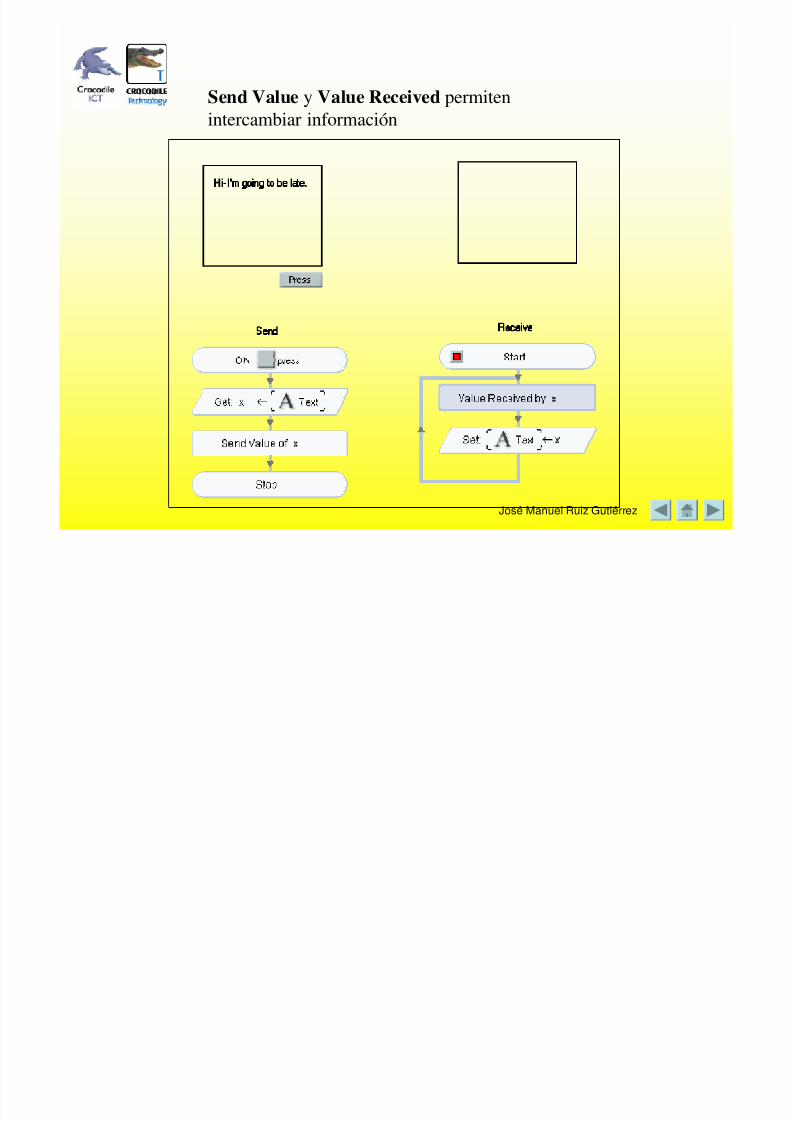
Send Value y Value Received permiten
intercambiar información
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 109/143
José Manuel Ruiz Gutiérrez
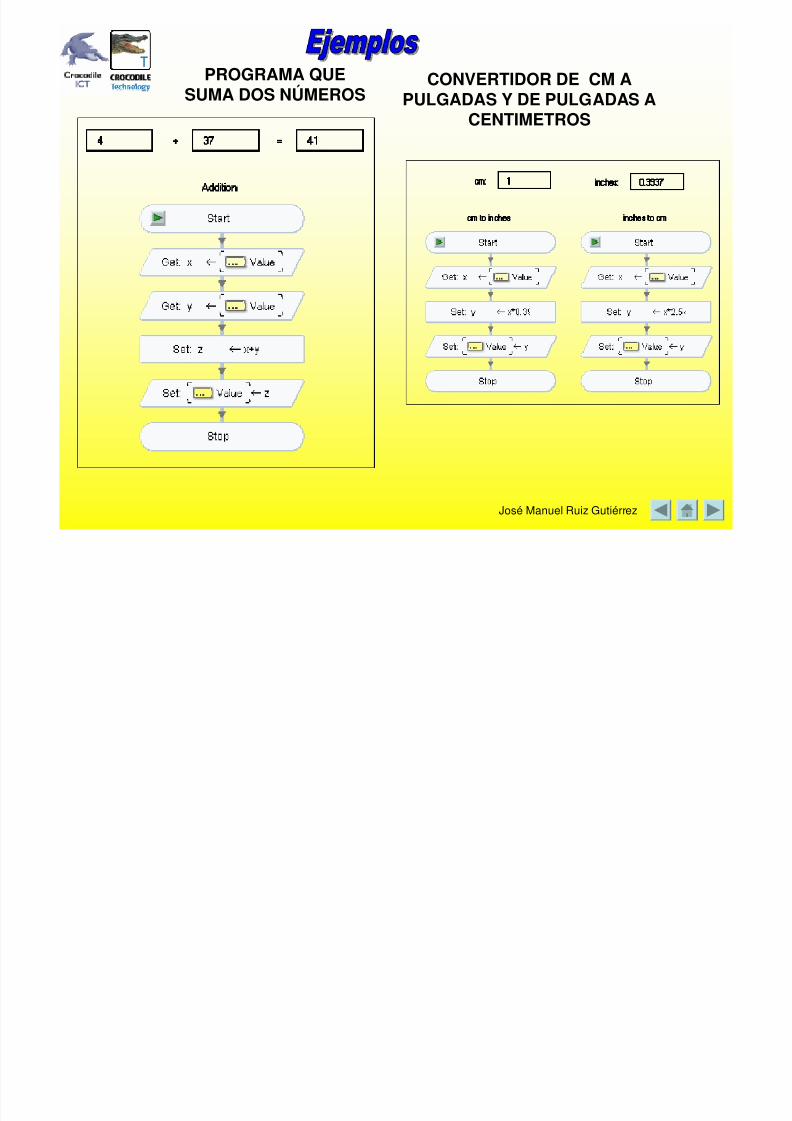
PROGRAMA QUESUMA DOS NÚMEROS
CONVERTIDOR DE CM APULGADAS Y DE PULGADAS A
CENTIMETROS
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 110/143
José Manuel Ruiz Gutiérrez
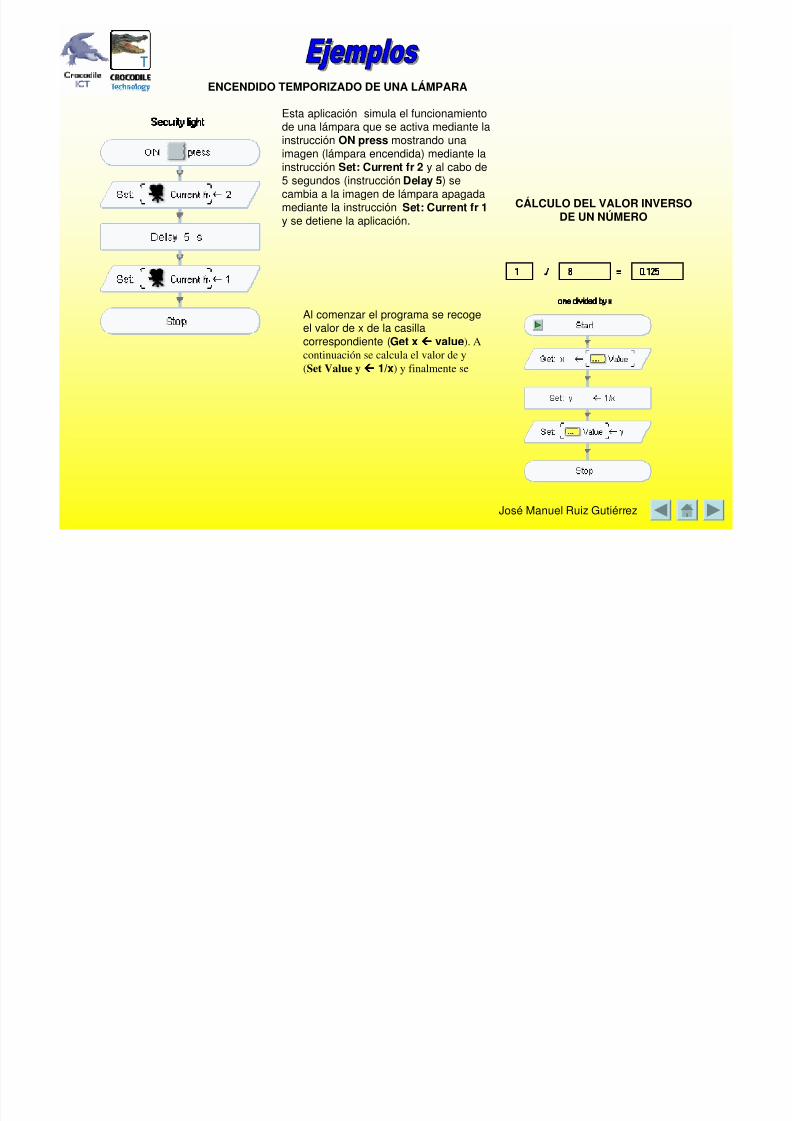
Esta aplicación simula el funcionamiento
de una lámpara que se activa mediante lainstrucción ON press mostrando unaimagen (lámpara encendida) mediante la
ENCENDIDO TEMPORIZADO DE UNA LÁMPARA
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 111/143
José Manuel Ruiz Gutiérrez
imagen (lámpara encendida) mediante lainstrucción Set: Current fr 2 y al cabo de5 segundos (instrucción Delay 5) secambia a la imagen de lámpara apagadamediante la instrucción Set: Current fr 1
y se detiene la aplicación.
CÁLCULO DEL VALOR INVERSO
DE UN NÚMERO
Al comenzar el programa se recogeel valor de x de la casillacorrespondiente (Get x value). Acontinuación se calcula el valor de y(Set Value y 1/x) y finalmente se
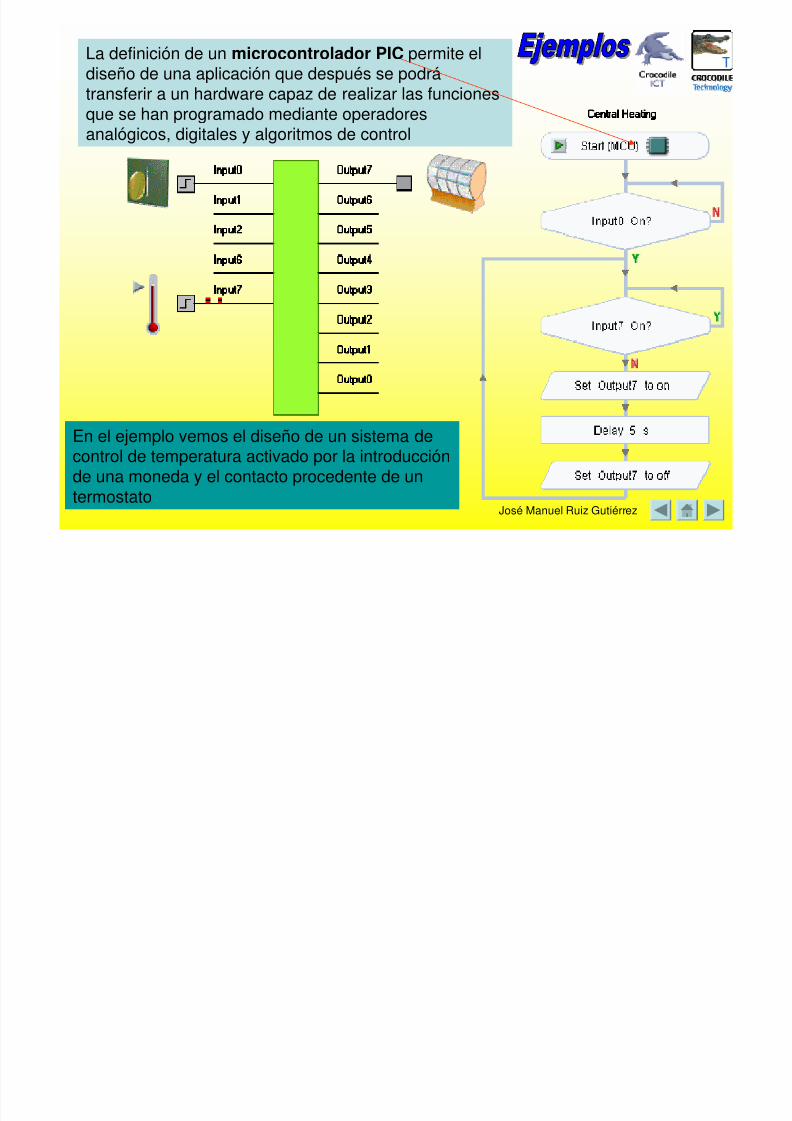
La definición de un microcontrolador PIC permite eldiseño de una aplicación que después se podrátransferir a un hardware capaz de realizar las funcionesque se han programado mediante operadoresanalógicos, digitales y algoritmos de control
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 112/143
José Manuel Ruiz Gutiérrez
En el ejemplo vemos el diseño de un sistema decontrol de temperatura activado por la introducciónde una moneda y el contacto procedente de untermostato

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 113/143
José Manuel Ruiz Gutiérrez
Pensado para La InterfaceLego-Dacta
Pensado para la InterfaceLego RCX
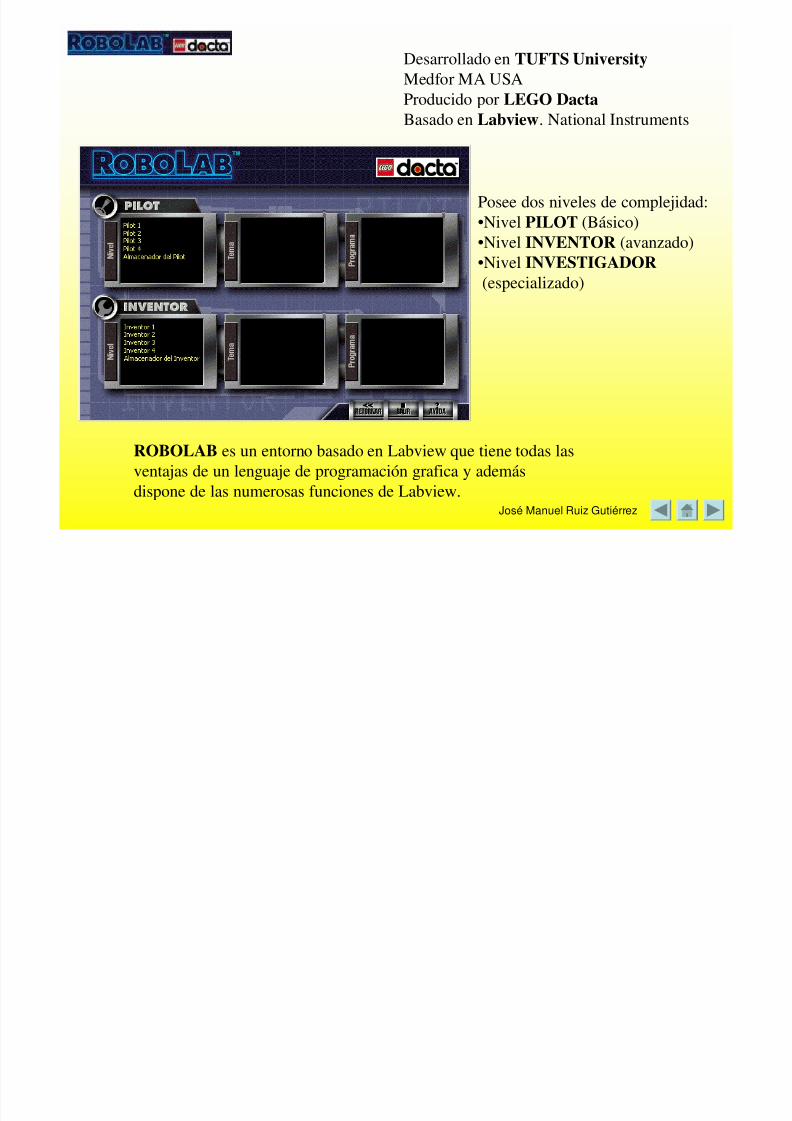
Desarrollado en TUFTS UniversityMedfor MA USAProducido por LEGO Dacta
Basado en Labview. National Instruments
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 114/143
José Manuel Ruiz Gutiérrez
ROBOLAB es un entorno basado en Labview que tiene todas lasventajas de un lenguaje de programación grafica y ademásdispone de las numerosas funciones de Labview.
Posee dos niveles de complejidad:
•Nivel PILOT (Básico)•Nivel INVENTOR (avanzado)•Nivel INVESTIGADOR(especializado)
Características más importantes de ROBOLAB:
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 115/143
José Manuel Ruiz Gutiérrez
• Entorno Grafico de programación
• Potentes bloques de programación de alto nivel
• Uso escalado: Sirve para todos los niveles educativos, incluidala Universidad.
• Es perfectamente ampliable
• Esta en castellano
• Permite aprovechar los recursos de cálculo y visualizaciónde Labview
• Esta preparado para trabajar con la interface LEGO RCX
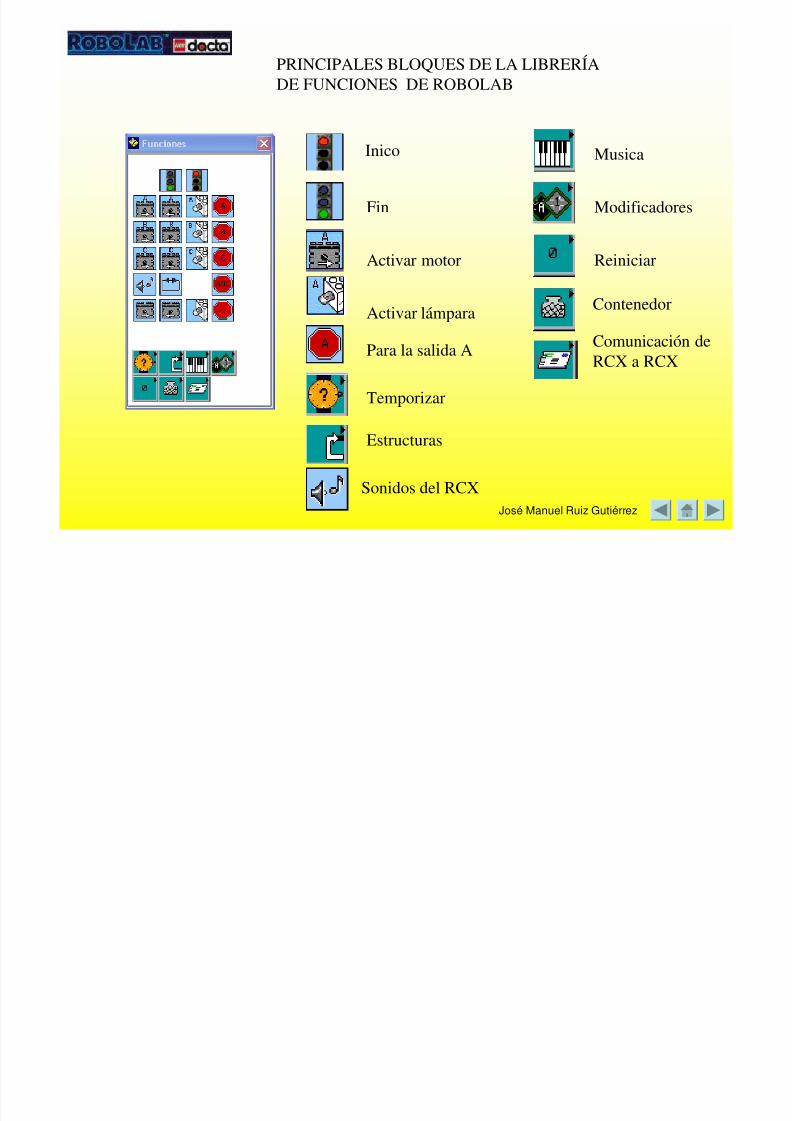
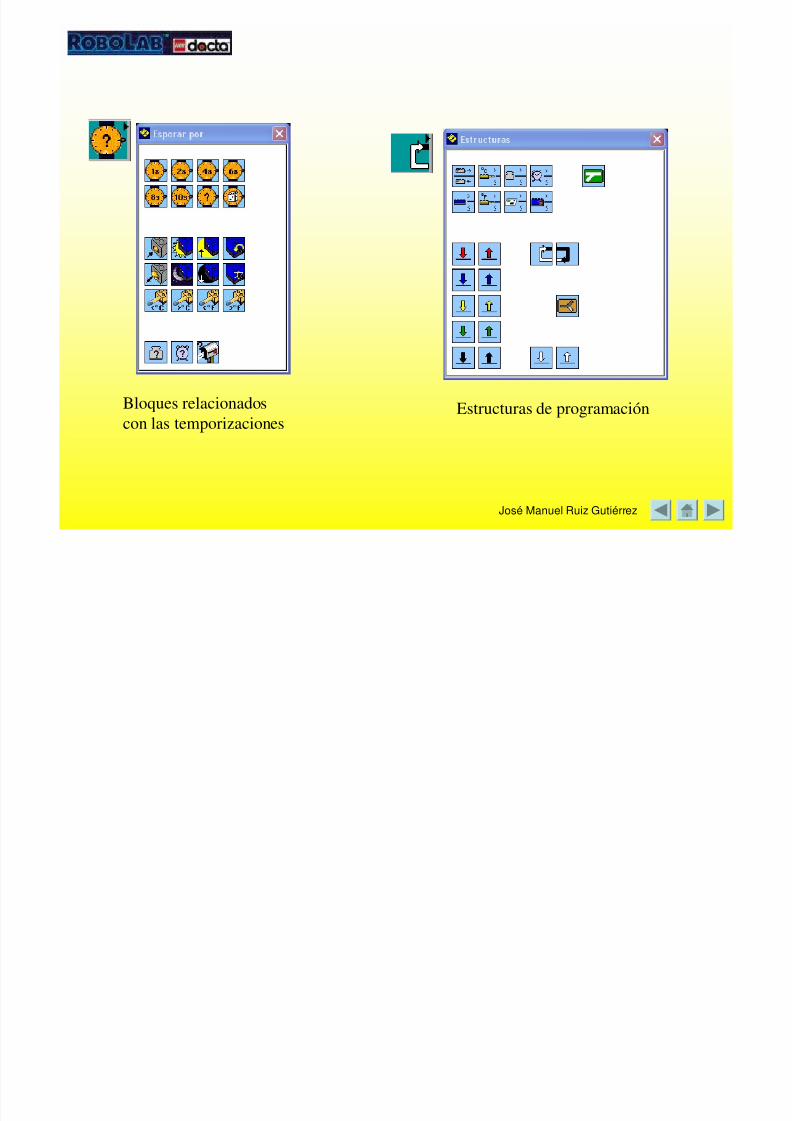
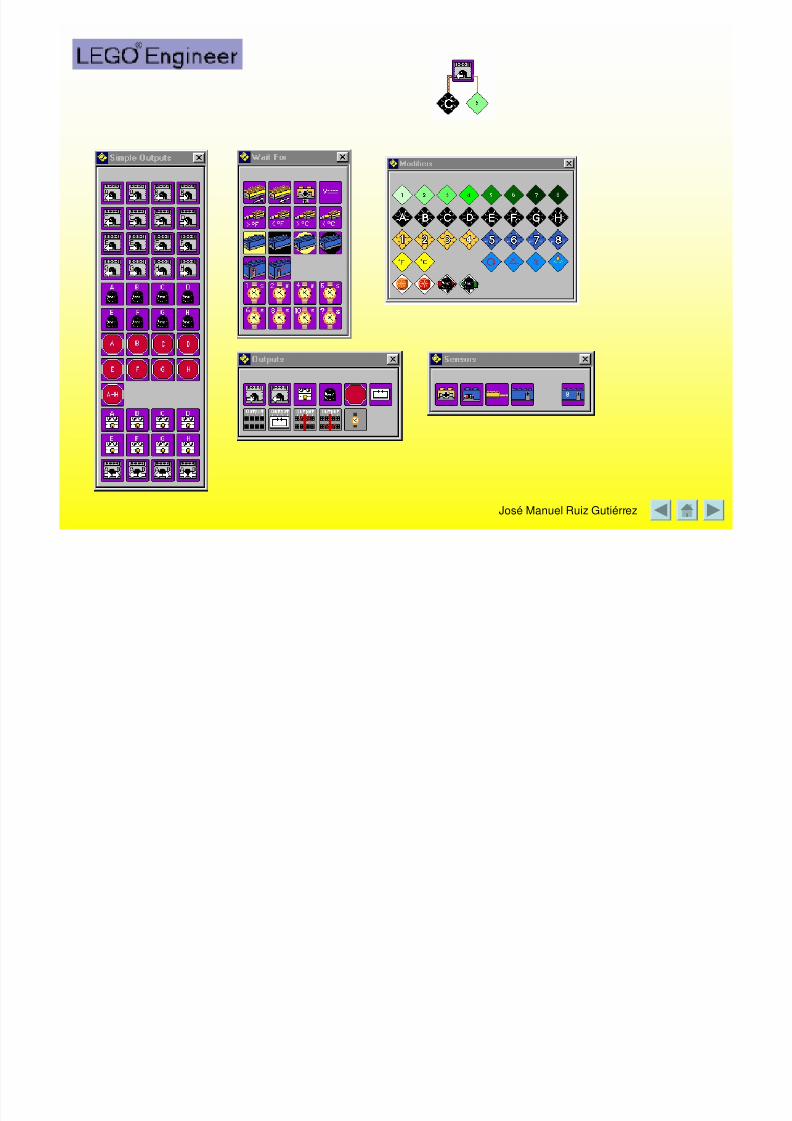
PRINCIPALES BLOQUES DE LA LIBRERÍADE FUNCIONES DE ROBOLAB
Inico Musica
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 116/143
José Manuel Ruiz Gutiérrez
Fin
Activar motor
Activar lámparaPara la salida A
Temporizar
Estructuras
Sonidos del RCX
Modificadores
Reiniciar
Contenedor
Comunicación deRCX a RCX
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 117/143
José Manuel Ruiz Gutiérrez
Bloques relacionados
con las temporizacionesEstructuras de programación
MODIFICADORES

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 118/143
José Manuel Ruiz Gutiérrez
Los modificadores son los parámetros que en cada objetoSe pueden modificar. Por ejemplo en una salida a motor se puedeModificar:
Nº SalidaVelocidadSentido
El motor gira en un sentido durante 4 seg. y se para
Modo Pilot

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 119/143
José Manuel Ruiz Gutiérrez
El Nivel Pilot es el mas sencillo. Aquí el alumno no debe hacer nada masQue modificar los parámetros de los operadores y constatar los cambiosRealizados Observando la propia interface con los elementos conectados.
Descarga la aplicación
sobre el dado RCX
Imprimir
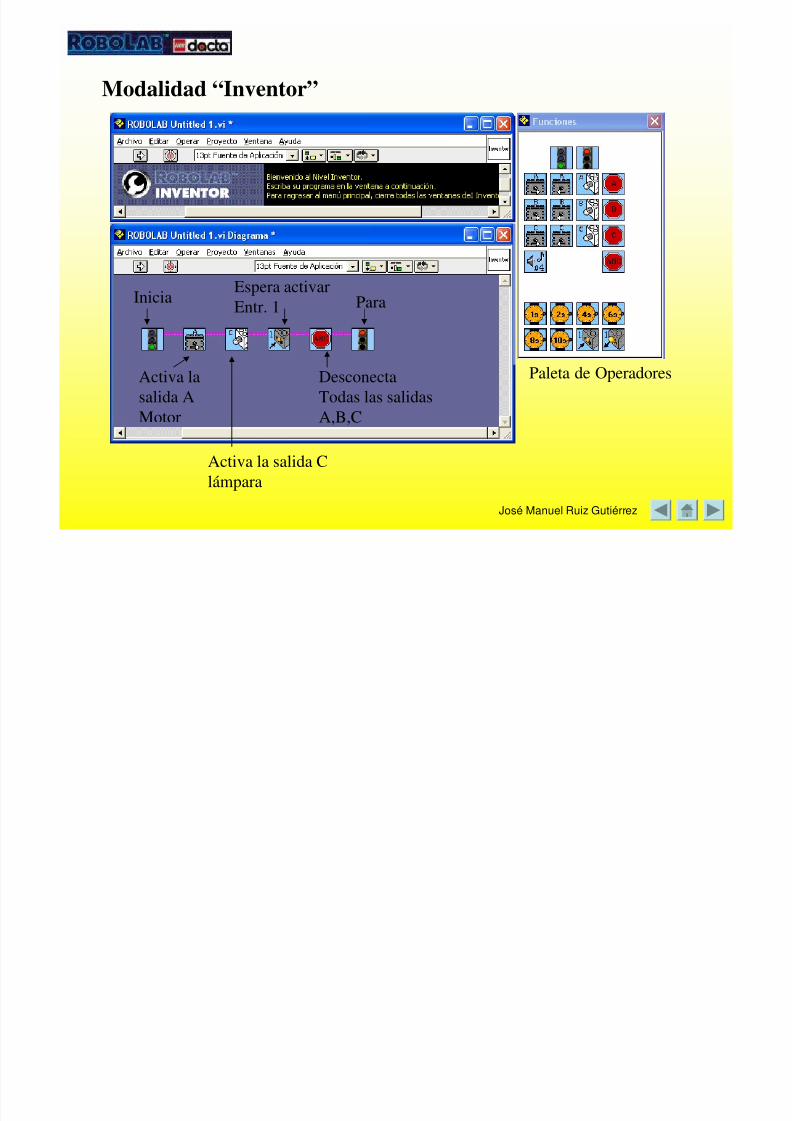
Modalidad “Inventor”
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 120/143
José Manuel Ruiz Gutiérrez
Inicia
Activa lasalida A
Motor
Activa la salida Clámpara
DesconectaTodas las salidas
A,B,C
ParaEspera activarEntr. 1
Paleta de Operadores
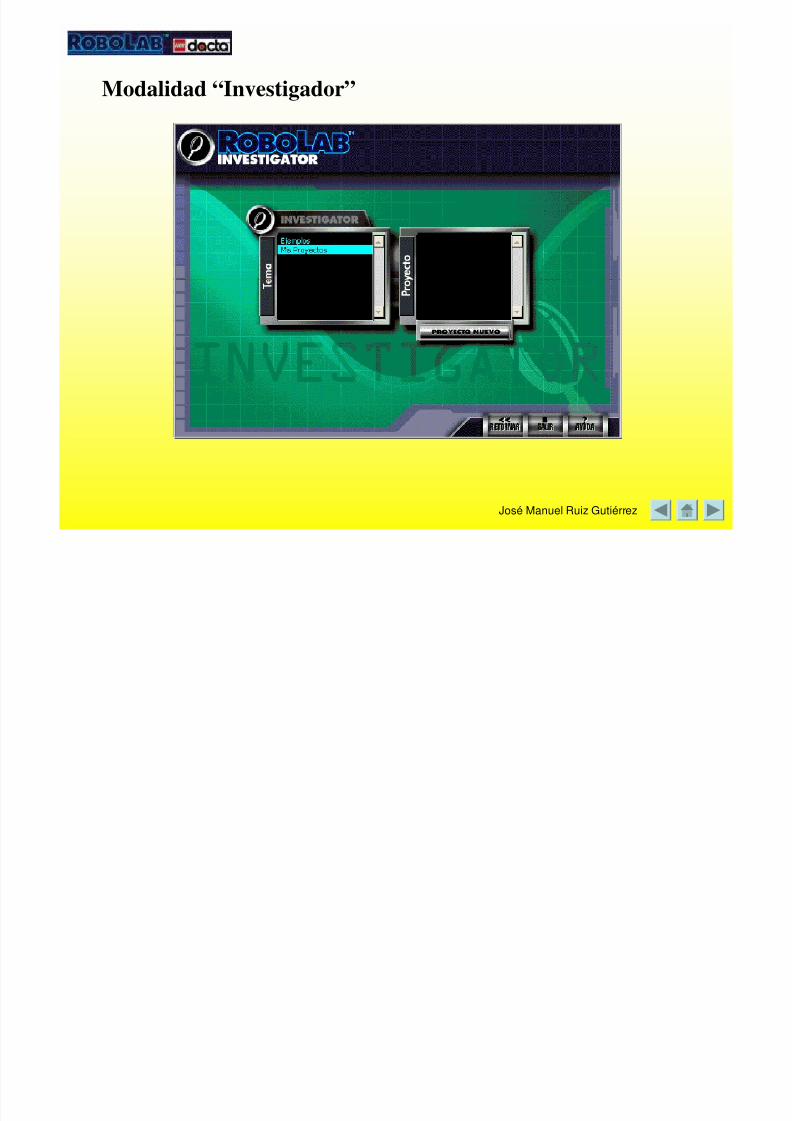
Modalidad “Investigador”
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 121/143
José Manuel Ruiz Gutiérrez
Esta es la modalidad con más prestaciones del entorno.Tiene hasta cinco niveles de programa cada uno en ordencreciente de recursos disponibles para el alumno.
Modalidad “Investigador”

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 122/143
José Manuel Ruiz Gutiérrez
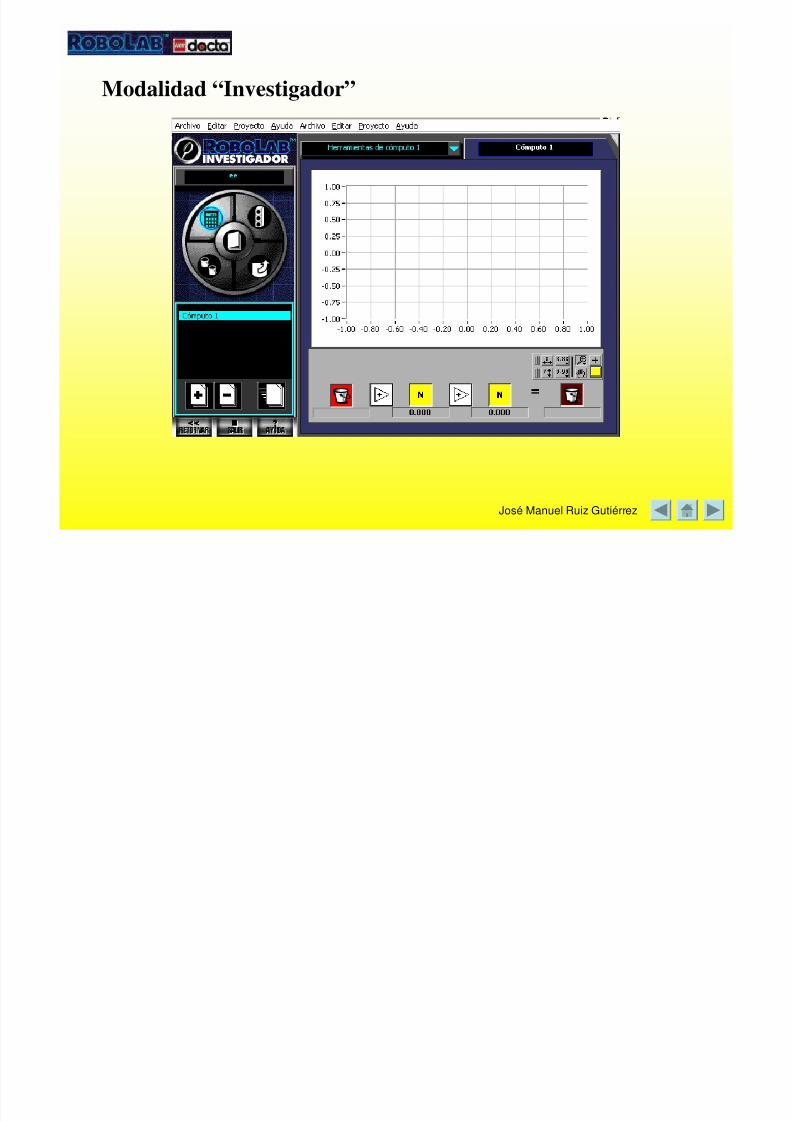
Modalidad “Investigador”
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 123/143
José Manuel Ruiz Gutiérrez
Modalidad “Investigador”

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 124/143
José Manuel Ruiz Gutiérrez
Modalidad “Investigador”

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 125/143
José Manuel Ruiz Gutiérrez
Modalidad “Investigador”

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 126/143
José Manuel Ruiz Gutiérrez
Permite realización el tratamiento de los datosAdquiridos mediante complejas funciones matemáticas y graficasPosee hasta 5 niveles de complejidad
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 127/143
José Manuel Ruiz Gutiérrez

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 128/143
José Manuel Ruiz Gutiérrez

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 129/143
José Manuel Ruiz Gutiérrez
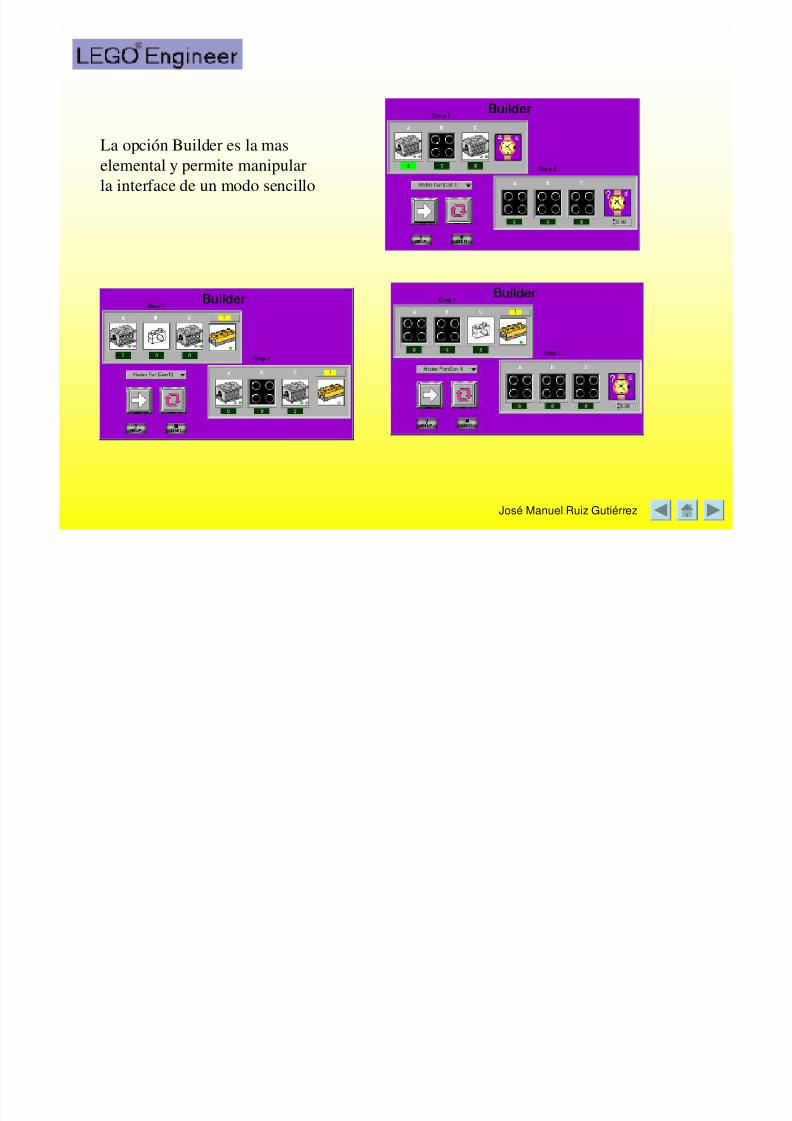
La opción Builder es la maselemental y permite manipularl i f d d ill
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 130/143
José Manuel Ruiz Gutiérrez
la interface de un modo sencillo

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 131/143
José Manuel Ruiz Gutiérrez
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 132/143
José Manuel Ruiz Gutiérrez

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 133/143
José Manuel Ruiz Gutiérrez

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 134/143
José Manuel Ruiz Gutiérrez
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 135/143
José Manuel Ruiz Gutiérrez
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 136/143
José Manuel Ruiz Gutiérrez

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 137/143
José Manuel Ruiz Gutiérrez
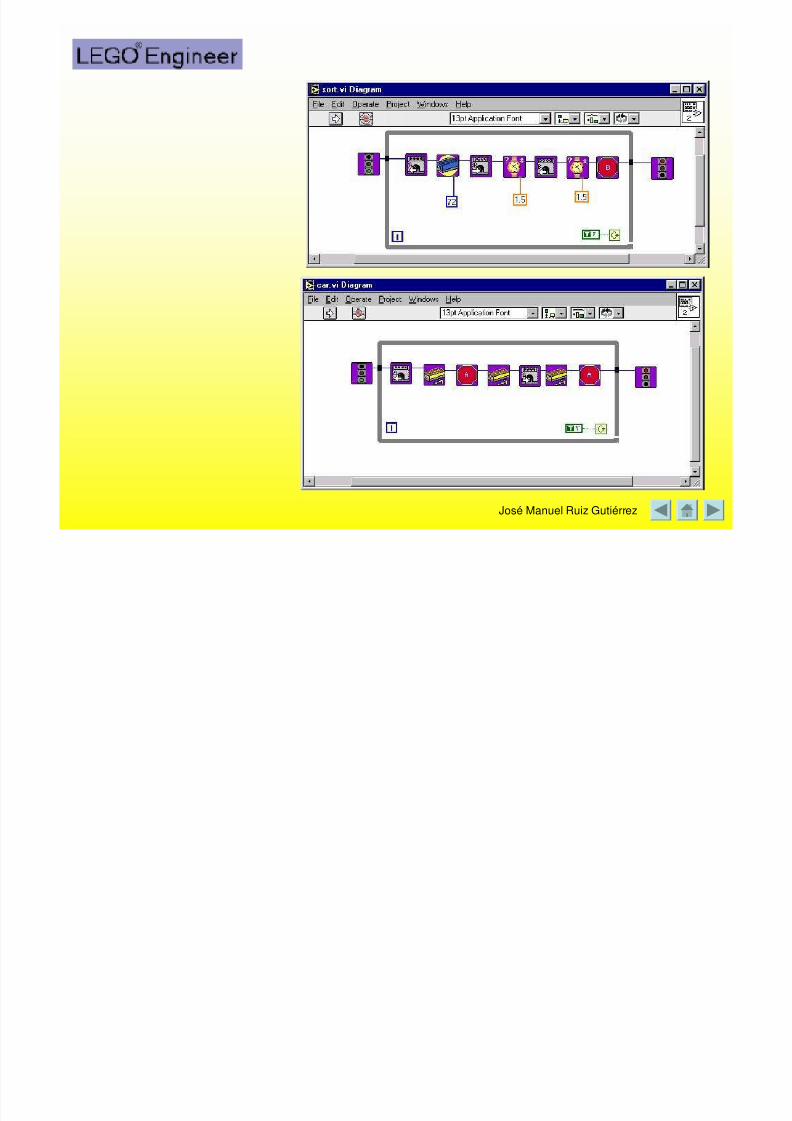
Es posible integrar bloques matemáticosy de tratamiento de los datos en una aplicaciónen la que se utilicen bloques para la interface

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 138/143
José Manuel Ruiz Gutiérrez
a q q pa a a a
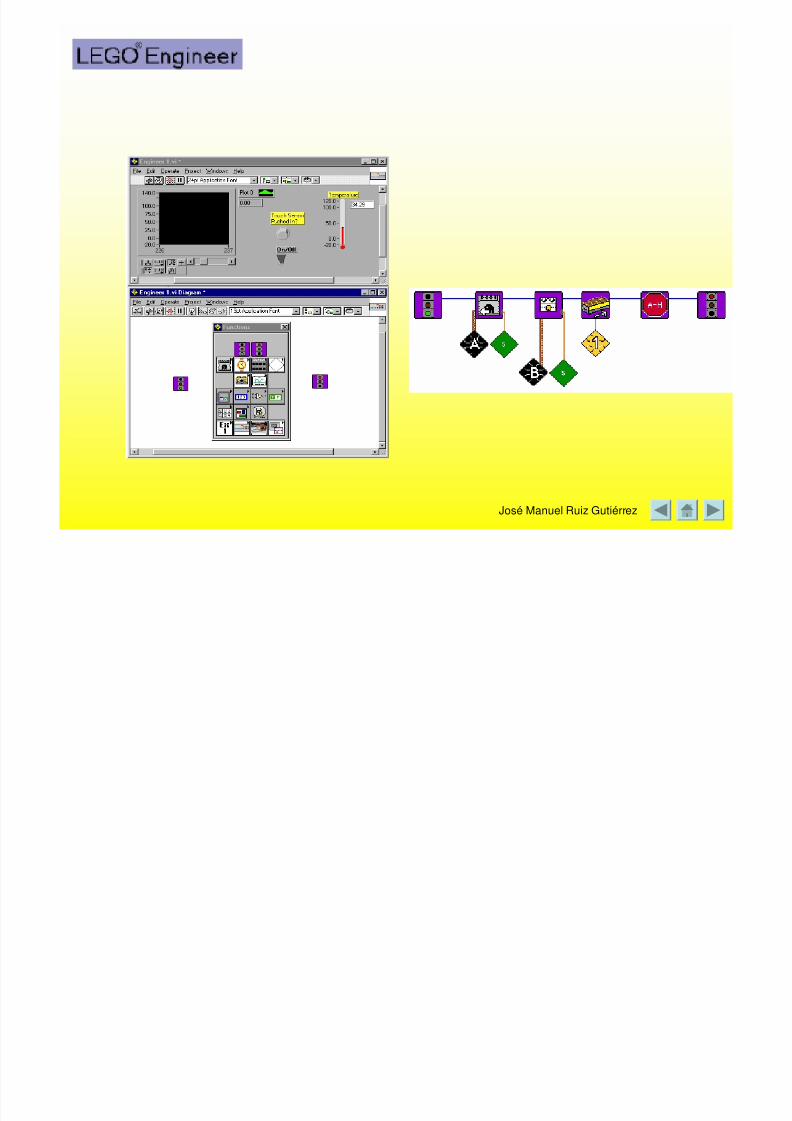
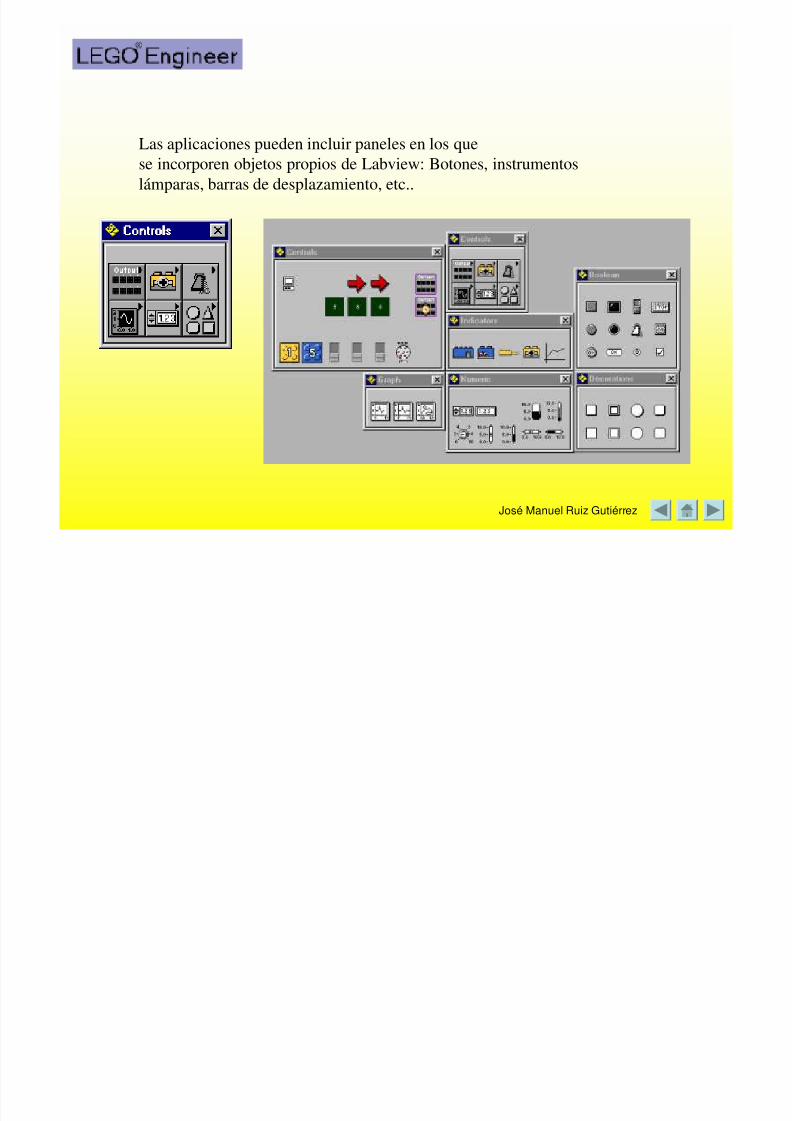
Las aplicaciones pueden incluir paneles en los quese incorporen objetos propios de Labview: Botones, instrumentoslámparas, barras de desplazamiento, etc..
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 139/143
José Manuel Ruiz Gutiérrez
p p
Aplicación de medida y trazado graficode una magnitud adquirida a través de lainterface con la ayuda de un panel de
visualización con objetos propios de Labview
Panel Grafico

5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 140/143
José Manuel Ruiz Gutiérrez
Esquema de conexionado debloques de función
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 141/143
José Manuel Ruiz Gutiérrez
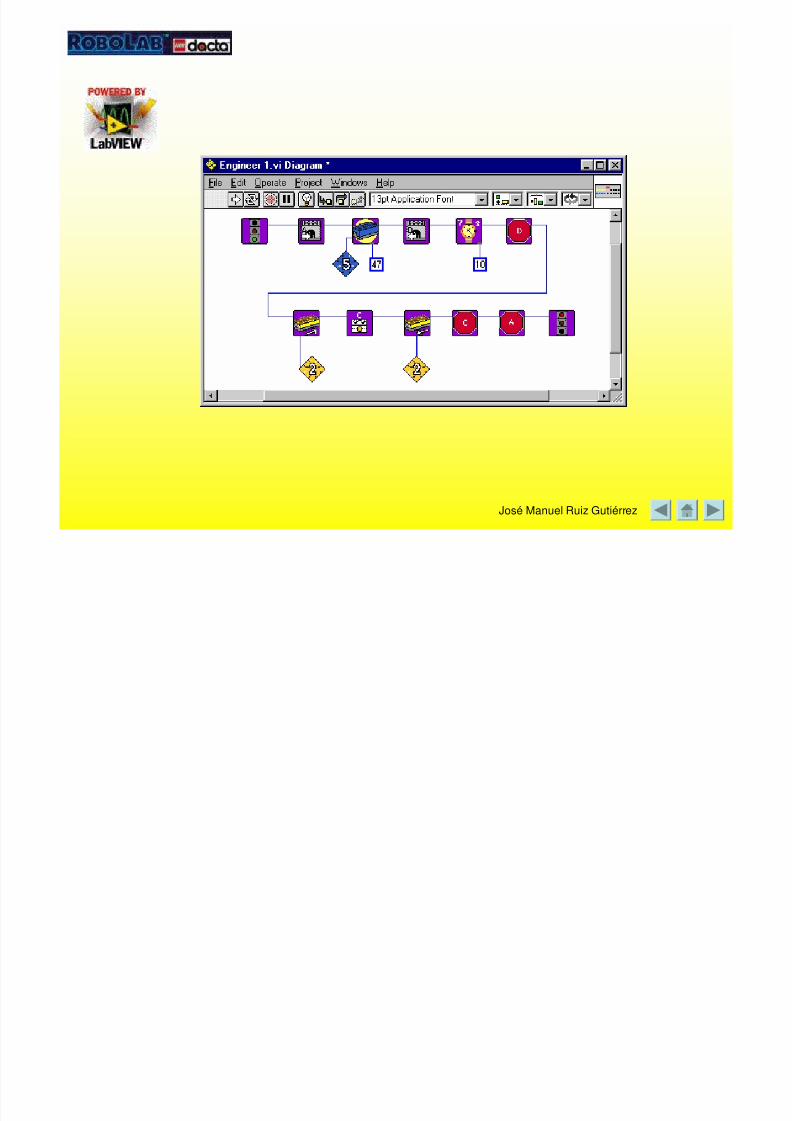
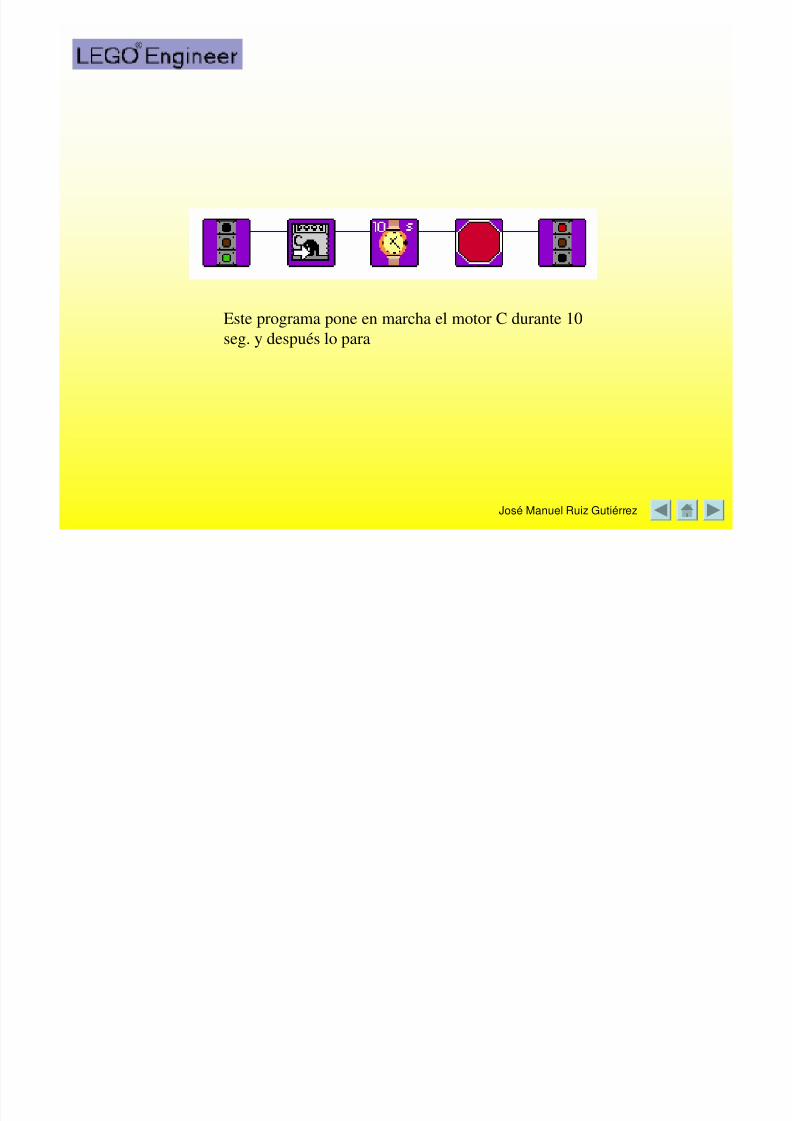
Este programa pone en marcha el motor C durante 10seg. y después lo para
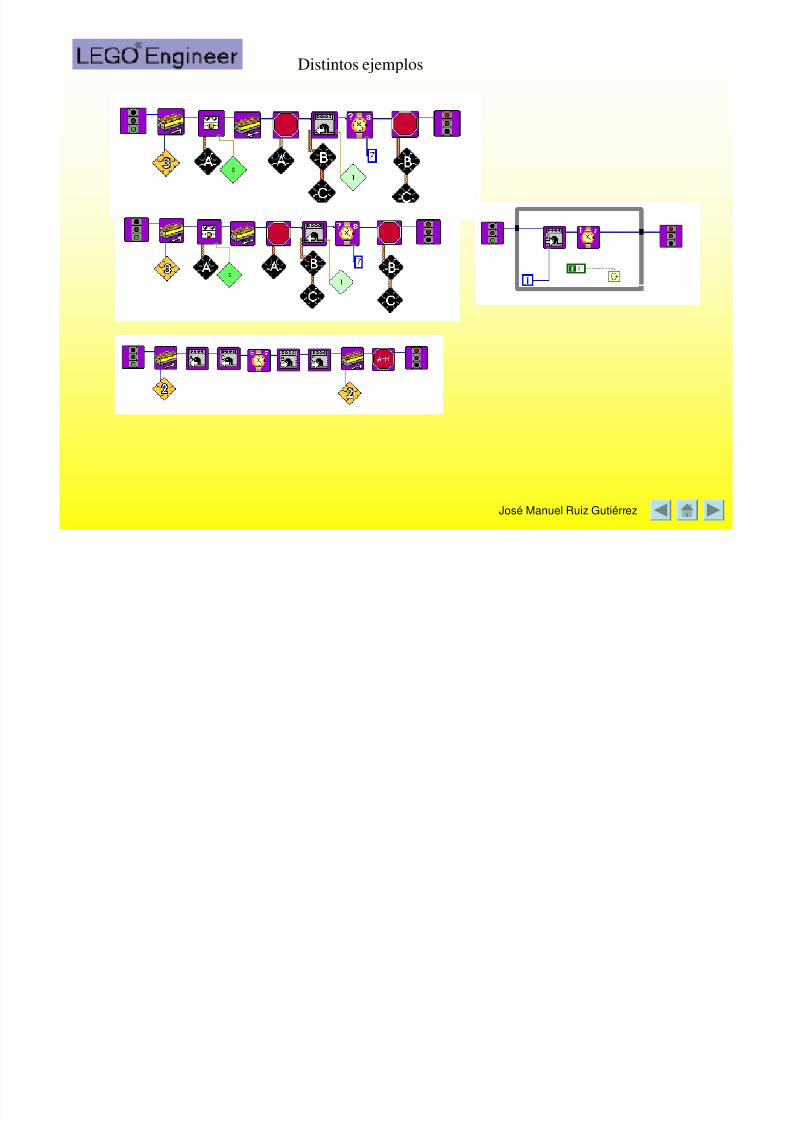
Distintos ejemplos
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 142/143
José Manuel Ruiz Gutiérrez
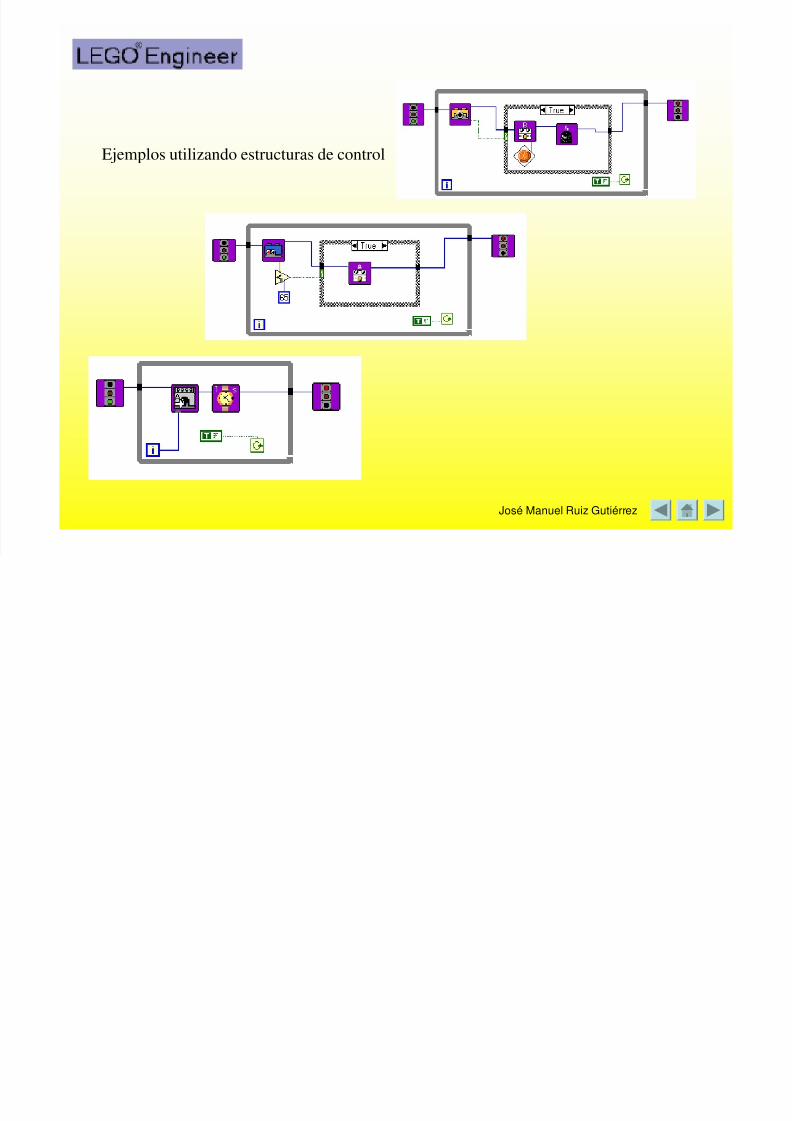
Ejemplos utilizando estructuras de control
5/17/2018 Lenguajes Robot - slidepdf.com
http://slidepdf.com/reader/full/lenguajes-robot 143/143
José Manuel Ruiz Gutiérrez