M idefinida.tex
18
Cap´ ıtulo 4 La integral definida 4.1. Motivaci´ on de la integral definida I) El problema del ´area. Para medir ´areas de recintos planos, previamen- te hemos de escoger una unidad de medida. Tomaremos un cuadrado cuyo lado sea la unidad. Entonces medir el ´area de un recinto plano consiste en determinar cu´ antos cuadrados unidad contiene el recinto. As´ ı en el caso del rect´ angulo de la figura, vemos que su ´area es 2 · 4 unidades cuadradas. Para un rect´ angulo general de lados a y b, el ´area se obtiene multiplicando a por b. Es muy f´acil calcular el ´area de un pol´ ıgono cualquiera. En primer lugar, se determina el ´area de un tri´angulo rect´ angulo de base b y altura h. Para 102
-
Upload
fabiana-carnicelli -
Category
Documents
-
view
81 -
download
0
Transcript of M idefinida.tex

Capıtulo 4
La integral definida
4.1. Motivacion de la integral definida
I) El problema del area. Para medir areas de recintos planos, previamen-
te hemos de escoger una unidad de medida. Tomaremos un cuadrado cuyo
lado sea la unidad. Entonces medir el area de un recinto plano consiste en
determinar cuantos cuadrados unidad contiene el recinto. Ası en el caso del
rectangulo de la figura, vemos que su area es 2 · 4 unidades cuadradas. Para
un rectangulo general de lados a y b, el area se obtiene multiplicando a por
b.
a
b
Es muy facil calcular el area de un polıgono cualquiera. En primer lugar,
se determina el area de un triangulo rectangulo de base b y altura h. Para
102

ello, podemos construir un rectangulo cuya diagonal sea la hipotenusa del
triangulo; el area del rectangulo es el doble de la del triangulo de partida e
igual a b · h. Por tanto, el area del triangulo es 12b · h.
b
h h
b 1 b2
b
Para un triangulo cualquiera de base b y altura h, bastarıa sumar las areas
de los triangulos rectangulos que se indican, resultando A = 12b1 ·h+ 1
2b2 ·h =
12b · h, ya que b = b1 + b2.
Ahora se puede abordar el calculo del area de cualquier recinto poligonal
descomponiendolo convenientemente. Estos resultados elementales eran co-
nocidos desde los albores de las matematicas. Sin embargo, el problema de
encontrar el area de un recinto plano no poligonal (limitado por lıneas curvas)
no se resuelve, de un modo general, hasta Newton y Leibniz en el siglo XVII.
Con anterioridad, se sabıa la forma de calcular el area de algunos recintos no
poligonales particulares como un cırculo, un segmento parabolico, etc. Arquı-
medes ideo un metodo para determinar areas de recintos curvilıneos, por el
que se le considera un precursor del calculo integral. Sin embargo, su metodo
tenıa una limitacion importante, que explica lo mucho que se retraso la crea-
cion del calculo integral (alrededor de 2000 anos). En lugar de un metodo
general, Arquımedes seguıa una estrategia especıfica para cada figura.
103

A B
C
A B1 1
A tıtulo de ejemplo, vamos a explicar
sucintamente como Arquımedes calcu-
laba el area de un semicırculo. En pri-
mer lugar, calcula el area del triangu-
lo inscrito ABC. A continuacion con-
sidera el polıgono inscrito que se ob-
tiene al anadir los triangulos AA1C y
BB1C. Continuando de esta forma, las
areas de los polıgonos inscritos que se
van considerando se aproximan cada
vez mas al area buscada. El razona-
miento termina con un paso al lımite
encubierto.
El objetivo inicial del calculo integral consiste en encontrar un metodo
general para determinar el area de una figura plana como la que se indica en
la figura siguiente.
y = f(x)
Y
X
O a b
Se trata del area bajo la curva de ecuacion y = f(x) entre x = a y
x = b, siendo f : [a, b] → R una funcion no negativa. La idea fundamental
del metodo que seguiremos consiste en subdividir el intervalo [a, b] en otros
mas pequenos y calcular el area en cuestion como la suma de las areas de los
rectangulos curvilıneos que se indican en la figura.
104

y = f(x)
Y
X
O a b
Si los subintervalos son muy pequenos, el area de cada uno de estos rec-
tangulos curvilıneos se puede aproximar bien por la de un rectangulo que
tiene la misma base y cuya altura es el valor que toma f en algun punto que
escojamos en cada subintervalo. De esta forma se obtiene un valor aproxima-
do del area buscada, aproximacion que es tanto mas precisa en cuanto que
las longitudes de los subintervalos sea mas pequena. En la figura siguiente
aparecen reflejados dos casos especialmente importantes que producen apro-
ximaciones por defecto y por exceso al area buscada. La aproximacion por
defecto se consigue tomando para cada subintervalo el menor valor de f(x)
y la aproximacion por exceso tomando el mayor valor de f(x) en cada subin-
tervalo.
y = f(x)
Y
X
a b
105

Para facilitar el desarrollo de la teorıa, se dividira el intervalo [a, b] en
n partes iguales de longitud ∆x = (b − a)/n. Obviamente, ∆x se hace mas
pequeno a medida que n aumenta.
II) Momentos de inercia. Vamos a calcular el momento de inercia de una
lamina circular delgada respecto de su centro, sabiendo que su radio es R y
su masa M . En la figura siguiente vemos la lamina en la que se ha trazado
un radio. Al dividir este radio en n partes iguales de longitud ∆r = R/n se
ORr k
producen una serie de anillos concen-
tricos Ak de espesor ∆r. El momen-
to de inercia total es la suma de los
momentos de inercia de cada anillo:
I =P
k Ik. Si Mk denota la masa del
anillo Ak, entonces es facil compro-
bar que Ik = Mkr2k. Para determinar
Mk, necesitamos manejar la densidad
superficial de la lamina, ρ. Entonces
Mk = ρ · Sk, donde Sk denota la su-
perficie del anillo Ak, que puede apro-
ximarse por Sk = 2πrk∆r.
Luego un valor aproximado de Ik es 2πρr3k∆r. Por tanto, obtenemos una
aproximacion del momento de inercia I haciendo la suma para todo k:
Xk
2πρr3k∆r.
En el apartado siguiente una suma de este tipo se dira que es una suma de
Riemann para la integral Z R
02πρr3 dr.
Como la integral se va a definir como el lımite de las sumas de Riemann
cuando ∆r tiende a cero, el valor de la integralZ R
02πρr3 dr se toma como el
momento de inercia de la lamina respecto de su centro.
106

4.2. Sumas de Riemann.
Dado un numero natural cualquiera n, dividimos el intervalo [a, b] en n
partes iguales (cada una de longitud ∆x = (b − a)/n) y denotamos por
xk (k = 0, ..n) los puntos de subdivision. Estos puntos tienen la forma
xk = a+(b− a)
nk (k = 0, 1, ..., n).
a b
En cada subintervalo [xk−1, xk] escogemos un valor intermedio tk. Las
sumas Sn(f, (tk)) =nX
k=1
f(tk)∆x reciben el nombre de sumas de Riemann
de f . Para simplificar, muchas veces escribiremos Sn(f), siempre que no exista
peligro de confusion. Estas sumas pueden interpretarse como aproximaciones
al area bajo la curva, especialmente si n es suficientemente grande.
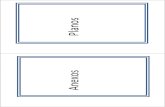
Ejemplo 4.2.1. Consideramos la integral definidaR 10 ex
2dx.En la figura
siguiente aparecen sombreados los rectangulos cuyas areas (la suma de to-
das) constituyen la suma de Riemann S10(f, (tk)); los tk son los puntos medios
de cada subintervalo. En la ultima figura se ha dividido [0, 1] en 15 partes
iguales.
107

0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
exp(x.^2) : 1.460393
10
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
exp(x.^2) : 1.461646
15
y=exp(x2)
108

4.3. La integral definida
Diremos que f es integrable en [a, b] si existe y es finito el lımite siguiente
lımn→∞
Sn(f),
en cuyo caso su valor se denota porZ b
af(x) dx y recibe el nombre de integral
definida de f en [a, b]. La interpretacion geometrica es obvia, a la vista de las
ideas anteriores: si f es no negativa en [a, b], entoncesZ b
af(x) dx representa
el area bajo la curva y = f(x) entre x = a y x = b.
Definicion 4.3.1. La igualdad ℓ = lımn→∞
Sn(f) significa que, por pequeno que
sea ϵ > 0, puede encontrarse n0 de modo que
|Sn(f, (tk))− ℓ| < ϵ,
para cualquier n > n0 y toda eleccion de los puntos (tk).
Terminamos esta seccion haciendo una relacion de las propiedades de la
integral definida que mas usaremos:
(1) Condicion suficiente de integrabilidad . Si f esta acotada en [a, b] y es
continua salvo, a lo sumo, en un numero finito de puntos de discontinuidad,
entonces f es integrable.
(2) Aditividad de la integral. Si f es integrable en [a, b] y c ∈ (a, b),
entonces f es integrable en los intervalos [a, c] y [c, b], y se verifica
Z b
af(x)dx =
Z c
af(x)dx+
Z b
cf(x)dx.
Recıprocamente, si existen las dos integrales del segundo miembro de la
igualdad anterior, entoces f es integrable en [a, b] y se verifica la igualdad.
(3) Linealidad respecto del integrando. (a) Si f y g son integrables en [a, b],
entonces lo es f + g y se verifica
Z b
a(f + g)dx =
Z b
afdx+
Z b
agdx.
109

b) Si f es integrable y α una constante arbitraria, entonces αf es inte-
grable y se verifica Z b
aαf dx = α
Z b
af dx.
(4) Si f es integrable en [a, b], entonces tambien lo es |f | y se verifica
����Z b
af(x)dx
���� ≤Z b
a|f(x)|dx. (4.1)
La desigualdad anterior se deduce facilmente a partir de la siguiente rela-
cion obvia |Sn(f)| ≤ Sn(|f |), pues tomando lımite en ambos miembros, re-
sulta (3.1).
4.4. La regla de Barrow.
Sean f, F : [a, b] → R, tales que F ′(x) = f(x), para cada x ∈ [a, b]. El
siguiente resultado nos ofrece un metodo muy util para calcular una integral
definida, siempre que podamos encontrar una primitiva del integrando.
Teorema 4.4.1. (Regla de Barrow). Si f es integrable en [a, b] y F es una
primitiva de f , entoncesZ b
af(x)dx = F (b)− F (a).
DEMOSTRACION: Dado cualquier numero natural n, dividimos el inter-
valo [a, b] en n partes iguales. Como es habitual, denotamos los puntos de
subdivision por {xk}n0 . Vamos a probar la igualdad la igualdad
F (b)− F (a) =nX
k=1
�F (xk)− F (xk−1)
�. (4.2)
Para ello, basta observar que se cancelan los terminos dos a dos
F (x1)−F (x0)+F (x2)−F (x1)+F (x3)−F (x2)+ · · ·+F (xn−1)−F (xn−2)+
+F (xn)− F (xn−1) = F (xn)− F (x0) = F (b)− F (a).
110

Usando (3.2) vamos a probar que la diferencia F (b) − F (a) es igual a la
suma de Riemann Sn(f), para cierta eleccion (tk) de los puntos intermedios.
En efecto, por el Teorema del valor medio del calculo diferencial, para cada
k = 1, 2, ..., n, existe tk ∈ [xk−1, xk] de modo que
F (xk)− F (xk−1) = F ′(tk)(xk − xk−1) = f(tk)∆x.
Reuniendo estas ideas, obtenemos
F (b)− F (a) =nX
k=1
�F (xk)− F (xk−1)
�=
nXk=1
f(tk)∆x = Sn(f, (tk)).
Ahora basta tener en cuenta que, a medida que aumenta n, la suma de
Riemann Sn(f, (tk)) se aproxima tanto como queramos aZ b
af(x)dx, y esto
obliga a que la cantidad F (b)− F (a) coincida con la integral. �
4.5. Teorema de la media integral.
Necesitamos la siguiente propiedad de la integral definida:
Monotonıa de la integral. Si f y g son integrables en [a, b], y tales que
f(x) ≤ g(x), para cada x ∈ [a, b], entoncesZ b
af(x)dx ≤
Z b
ag(x)dx.
Para cada n, se verifica Sn(f, (tk)) ≤ Sn(g, (tk)), cualquiera que sea la
eleccion de los puntos intermedios (tk), ya que f ≤ g. Tomando lımite en
la desigualdad, cuando n → ∞, resulta lımn Sn(f, (tk)) ≤ lımn Sn(g, (tk)), es
decir, Z b
af(x)dx ≤
Z b
ag(x)dx.
Recordemos que la integral definida solo tiene sentido para funciones aco-
tadas y que denotamos por m y M el ınfimo y el supremo, respectivamente,
de los valores de f(x) en el intervalo [a, b].
111

Teorema 4.5.1. (De la media integral). Si f es integrable en [a, b], existe
c ∈ [m,M ] tal queZ b
af(x)dx = c(b− a). Si, ademas, f es continua en [a, b],
entonces existe x0 ∈ [a, b] de modo queZ b
af(x)dx = f(x0)(b− a).
DEMOSTRACION: Para cada x ∈ [a, b], se verifica m ≤ f(x) ≤ M . Por
tanto, la monotonıa de la integral nos dice queZ b
amdx ≤
Z b
af(x)dx ≤
Z b
aMdx. Pero
Z b
amdx = m(b− a) y
Z b
aMdx = M(b− a), luego
m(b− a) ≤Z b
af(x)dx ≤ M(b− a).
Dividiendo por (b− a), resulta
m ≤ 1
b− a
Z b
af(x)dx ≤ M.
Ahora basta tomar c = 1b−a
Z b
af(x)dx. Finalmente, en el caso particular de
que el integrando f es continuo, basta recordar el Teorema de los valores
intermedios para funciones definidas y continuas en un intervalo cerrado y
acotado, que nos asegura que el valor c obtenido anteriormente es alcanzado
por f , es decir, c = f(x0), para algun x0 perteneciente al intervalo [a, b]. �
La cantidad 1(b−a)
Z b
af(x)dx se conoce con el nombre de valor medio de
f en el intervalo [a, b].
Vamos a mostrar que viene a representar la media aritmetica de los valores
que toma f , es decir, la media aritmetica del conjunto {f(x) : x ∈ [a, b]}.Para justificar esta afirmacion, tomamos una suma de Riemann cualquiera
de la integralZ b
a
f(x)
b− adx y vemos que representa. Sean {xk}n0 los puntos
resultantes de dividir el intervalo [a, b] en n partes iguales y (tk) cualquier
eleccion de los puntos intermedios; entonces
Sn(f
b− a, (tk)) =
nXk=1
f(tk)
b− a∆x.
112

Esta ultima suma representa la media aritmetica de los valores de una funcion
fn que toma sobre cada subintervalo [xk−1, xk] el valor constante f(tk). Parece
razonable tomar lımn Sn(f
b−a, (tk)) como la media aritmetica de los valores que
toma f en el intervalo [a, b], pero el valor del lımite anterior es precisamente
1b−a
Z b
af(x)dx.
Ejemplo 4.5.2. Calcular el valor medio de f(x) = sen x en [0, π].
1
π − 0
Z π
0senxdx =
1
π[− cosx]π0 =
1
π(1 + 1) =
2
π= 0.63.
4.6. Teorema Fundamental del Calculo.
Si f es integrable en [a, b], sabemos que tambien es integrable en el interva-
lo [a, x], cualquiera que sea x ∈ (a, b]. Entonces podemos definir F (x) =Z x
af ,
para x ∈ (a, b] y F (a) = 0.
La funcion F suele llamarse la integral indefinida de f . El resultado
siguiente recibe el nombre de Teorema Fundamental del Calculo y establece
que la derivada de la integral indefinida de f es la propia f (cuando f es
continua). Por tanto, este resultado pone en relacion integracion y derivacion.
Teorema 4.6.1. (Teorema Fundamental del Calculo). Si f es continua en
[a, b],
entonces F es derivable en [a, b] y se verifica F ′ = f .
DEMOSTRACION: Notese que f es integrable por ser continua. Para probar
que F es derivable podemos calcular el cociente incremental
F (x)− F (x0)
x− x0
=
Z x
af −
Z x0
af
x− x0
=
Z x
x0
f
x− x0
,
donde hemos supuesto que x > x0, para simplificar. Ahora usamos el Teorema
de la media integral, en el caso de integrando continuo, que establece que
113

existe cx ∈ (x0, x) de modo que
Z x
x0
f = f(cx)(x− x0).
Entonces el cociente incremental adopta la forma
F (x)− F (x0)
x− x0
=
Z x
x0
f
x− x0
= f(cx).
La prueba termina teniendo en cuenta que f es continua en x0, por lo que se
tiene lımx→x0
f(x) = f(x0). En particular, f(cx) tiende a f(x0) cuando x → x0
(cx es aun mas cercano a x0 que el propio x). Es decir, se verifica
lımx→x0
F (x)− F (x0)
x− x0
= f(x0).
�
El teorema siguiente muestra que la funcion F (x) =Z x
af es continua en
cada punto de [a, b], aunque f solo sea integrable.
Teorema 4.6.2. (Continuidad de la integral indefinida) Si f es integrable
en [a, b], entonces F (x) =Z x
af es continua en cada punto de [a, b].
DEMOSTRACION: Sea x0 un punto cualquiera de [a, b]. Para probar que F
es continua en x0, debemos comprobar que la diferencia F (x)−F (x0) tiende
a cero cuando x → x0. Ahora bien, la diferencia F (x)−F (x0) es igual aZ x
x0
f .
Por el Teorema de la media integral, existe cx ∈ [m,M ], tal que
F (x)− F (x0) =Z x
x0
f = cx · (x− x0).
Por tanto, F (x)−F (x0) es el producto de dos factores: el primero acotado y
el segundo un infinitesimo en x0. Entonces lımx→x0
�F (x)− F (x0)
�= 0. �
En particular, se sigue del resultado anterior que lımx→b−
Z x
af =
Z b
af(x) dx.
114

Tambien podemos considerar la funcion G(x) =Z b
xf , para x ∈ [a, b],
ahora con el extremo inferior variable. Para obtener su derivada, ponemos
G(x) =Z b
af −
Z x
af , por lo que resulta G′(x) = 0− f(x).
Ejemplo 4.6.3. Calcular los extremos relativos de F (x) =Z x
0
u− 1
1 + exp(u)du.
Por el Teorema fundamental del Calculo, F ′(x) = x−11+ex
. Por tanto, so-
lo hay un punto crıtico x = 1. Para ver si es maximo o mınimo relativo,
calculamos la derivada segunda F ′′(x) = 1+ex−(x−1)ex
(1+ex)2= 1+2ex−xex
(1+ex)2. Entonces
F ′′(1) = 11+e
> 0, por lo que x = 1 es un mınimo relativo.
Terminamos esta seccion destacando otra consecuencia importante del
Teorema Fundamental del Calculo: toda funcion continua en [a, b] posee una
primitiva, F , que podemos expresar en la forma F (x) =Z x
af .
4.7. Formula de integracion por partes.
Teorema 4.7.1. (Formula de integracion por partes). Sean f y g dos fun-
ciones derivables en [a, b] y tales que f ′ · g y f · g′ son integrables, entonces
se verificaZ b
af ′(x)g(x)dx = f(b) · g(b)− f(a) · g(a)−
Z b
af(x) · g′(x)dx.
DEMOSTRACION: Vamos a aplicar la Regla de Barrow para el calculo de
la integralZ b
a
�f ′(x) · g(x) + f(x) · g′(x)
�dx. Para ello, necesitamos encon-
trar una primitiva del integrando, lo que es facil a la vista de la igualdad�f · g
�′= f ′g+ fg′. Vemos que la funcion producto f · g es una primitiva de
f ′g + fg′, por lo que la regla de Barrow permite obtenerZ b
a
�f ′(x) · g(x) +
f(x) · g′(x)�dx = f(b) · g(b) − f(a) · g(a). Ahora basta usar la linealidad de
la integral. �
115

Ejemplo 4.7.2. CalcularZ π
0x senxdx. En este caso conviene tomar g(x) =
x y f ′(x) = senx. Entonces g′(x) = 1 y f(x) = − cosx, por lo que aplicando
la formula de integracion por partes, resultaZ π
0x senxdx =
�− x cos x
�π0−Z π
0(− cos x)dx =
= −π +Z π
0cos xdx = −π +
�sen x
�π0= −π.
4.8. Cambio de variables en la integral defi-
nida.
La formula de integracion por sustitucion o de cambio de variables esta-
blece, bajo determinadas condiciones, la igualdad
Z b
af(u(x)) · u′(x)dx =
Z u(b)
u(a)f(u)du. (4.3)
La igualdad anterior se usa de izquierda a derecha o al reves, segun el ca-
so concreto. Por ejemplo, si se quiere calcular la integralZ √
π
02x cos x2 dx,
se aplicara la igualdad de izquierda a derecha; pero, si se quiere calcularZ 1
0
√1− x2dx, se aplicara de derecha a izquierda. De cualquier forma, siem-
pre es mas facil el primer caso. Como la funcion u es derivable en [a, b], en
particular, es continua y, por tanto, el conjunto imagen u([a, b]) es un in-
tervalo. Cuando u es decreciente, dicho intervalo tiene la forma [u(b), u(a)],
ya que u(a) > u(b). Luego, en ese caso, la integral del segundo miembro de
(3.3) tiene un extremo inferior mas grande que el superior. Si convenimos queZ b
af(x)dx significa −
Z a
bf(x)dx, cuando a > b, se subsana esta dificultad y
se consigue mantener la igualdad (3.3) sin necesidad de considerar versiones
diferentes, segun sea u.
Teorema 4.8.1. (Cambio de variable en la integral definida). Sea u definida
116

y derivable con continuidad en [a, b]. Si f esta definida y es continua en el
conjunto imagen u([a, b]), entonces se verifica la igualdad (3.3).
DEMOSTRACION: . En primer lugar, recordamos que el conjunto u([a, b])
es un intervalo, por ser continua u. Por otra parte, como f es continua,
posee primitiva F . La funcion G(x) = F (u(x)) es, a su vez, una primitiva de
f(u(x))u′(x), ya que g′(x) = F ′(u(x))u′(x) = f(u(x))u′(x). Ahora podemos
aplicar la regla de Barrow para el calculo de las dos integrales que aparecen
en la igualdad (3.3), resultando
Z b
af(u(x))u′(x)dx = G(b)−G(a),
Z u(b)
u(a)f(u)du = F (u(b))− F (u(a)).
Como G(b)−G(a) = F (u(b))− F (u(a)), (3.3) queda probada. �
Ejemplos 4.8.2. 1. CalcularZ √
π
02x cosx2dx.
Si ponemos u(x) = x2, entonces u′(x) = 2x. Luego
Z √π
02x cosx2dx =
Z √π
0u′(x) cos u(x)dx =
Z u(√π)
u(0)cosudu.
En el ultimo paso se ha hecho uso de (3.3) de izquierda a derecha. Ahora
como u(0) = 0 y u(√π) = π, sigue que
Z √π
02x cosx2dx =
Z π
0cosudu = [senu]π0 = 0.
2) CalcularZ 1
0
√1− u2du.
Por la forma del integrando, conviene hacer el cambio u = u(x) = sen x.
Entonces u′(x) = cos x, de modo que haciendo uso de (3.3) (de derecha a
izquierda), resulta
Z 1
0
√1− u2du =
Z b
a
È1− u2(x)u′(x)dx,
117

donde u(a) = 0 y u(b) = 1 Es decir, sen a = 0 y sen b = 1. Podemos tomar
a = 0 y b = π2y queda finalmente
Z 1
0
√1− u2du =
Z π2
0
È1− u2(x)u′(x)dx =
Z π2
0
√1− sen2 x cosxdx =
=Z π
2
0cos2 xdx.
Esta ultima integral se calcula transformando el integrando mediante la iden-
tidad cosx =È
1+cos 2x2
que nos permite obtener
Z 1
0
√1− u2du =
Z π2
0
1 + cos 2x
2dx =
�x+ sen 2x2
2
�π2
0=
π
4.
PROBLEMAS PROPUESTOS
1. Calcular el valor exacto deZ 1
−1x2 dx y compararlo con la suma S6.
Solucion: Valor exacto: 2/3, S6 = 1.03.
2. Calcular el valor medio de f(x) = log x en [1, e].
Solucion: 1/(e− 1).
3. Encontrar una cota inferior deZ 1/2
−(1/2)
dx
1 + 8x4.
Solucion: 2/3 (producto de la longitud del intervalo por el mınimo del
integrando).
4. Calcular lımx→0
Z x
0
eu − 1
1 + u2du
ex − x− 1.
Solucion: 1 (puede aplicarse la regla de L’Hopital.
5. Si F (x) =Z 1
x
u senu
1 + u2du, encontrar los extremos relativos de F .
Solucion:Los extremos relativos son nπ, siendo n un entero no nulo (ma-
ximo si n es impar y mınimo si n es par).
118

6. CalcularZ 1
0arc tg x dx.
Solucion: π/4− (1/2) log 2.
7. CalcularZ 1
0
dx
ex + e−x.
Solucion: arc tg e.
119