ma??? - 543214 SLD Cap I · 1, y que el flujo de salida f s2 es función lineal de la señal u....
26
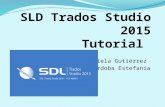
© UdeC - DIE Conceptos Generales Problema Aplicar en un caso práctico los conceptos generales de Sistemas. Objetivos de Estudio : - Pérdidas de fluido en las cañerías - Rendimiento del generador - Aumento de temperatura del agua - Generación de tensión constante - ... Caso 1 Mini-central hidro-eléctrica. u f e f s1 f s2 h 1 h 2 v, P Un estudiante del 543 214 decidió utilizar un canal de regadío para generar la energía eléctrica necesaria en su cabaña de veraneo. Para estos efectos - y después de un exhaustivo análisis - instaló las facilidades mostradas en la figura superior. El canal tiene un ancho a = 5 m, el agua se mueve a una velocidad v = 10 m 3 /s y está a una temperatura T = 15 °C. De acuerdo a las indicaciones de expertos en estas centrales, se debería mantener constante la velocidad del generador = 1000 rpm para mantener un voltaje de v = 220 V. En términos de sensores-transmisores, se tiene: uno de altura, uno de velocidad de giro y uno de potencia. Los elementos anteriores poseen una F. de T. unitaria. Además, se tiene una válvula que responde a la señal u. El área del estanque es A = 2 m 2 y está ubicado a una altura h e = 5 m. Pruebas en terreno muestran que el flujo de entrada al estanque f e es función de la altura del agua en el caudal de regadío h 2 , que el flujo de salida f s1 es función de la altura del agua en el estanque h 1 , y que el flujo de salida f s2 es función lineal de la señal u. Además, se encuentra que la velocidad de giro del generador es función del flujo de salida f s1 y de la potencia consumida en la cabaña P. v P f s1 f e u h 2 generador estanque canal h 1 f s2 válvula Diagrama en Bloques de la Mini-Central Hidro-Eléctrica. Capítulo I - Introducción 1 de 26 Sistemas Lineales Dinámicos - 543 214
Transcript of ma??? - 543214 SLD Cap I · 1, y que el flujo de salida f s2 es función lineal de la señal u....

© UdeC - DIEConceptos GeneralesProblema Aplicar en un caso práctico los conceptos generales de Sistemas. Objetivos de Estudio:
- Pérdidas de fluido en las cañerías- Rendimiento del generador- Aumento de temperatura del agua- Generación de tensión constante- ...
Caso 1 Mini-central hidro-eléctrica.
u
fe
fs1
fs2
h1
h2
v, P
Un estudiante del 543 214 decidió utilizar un canal de regadío paragenerar la energía eléctrica necesaria en su cabaña de veraneo.Para estos efectos - y después de un exhaustivo análisis - instalólas facilidades mostradas en la figura superior. El canal tiene unancho a = 5 m, el agua se mueve a una velocidad v = 10 m3/s y estáa una temperatura T = 15 °C. De acuerdo a las indicaciones deexpertos en estas centrales, se debería mantener constante lavelocidad del generador = 1000 rpm para mantener un voltaje dev = 220 V. En términos de sensores-transmisores, se tiene: uno dealtura, uno de velocidad de giro y uno de potencia. Los elementosanteriores poseen una F. de T. unitaria. Además, se tiene unaválvula que responde a la señal u. El área del estanque es A = 2 m2
y está ubicado a una altura he = 5 m. Pruebas en terreno muestranque el flujo de entrada al estanque fe es función de la altura delagua en el caudal de regadío h2, que el flujo de salida fs1 es funciónde la altura del agua en el estanque h1, y que el flujo de salida fs2es función lineal de la señal u. Además, se encuentra que lavelocidad de giro del generador es función del flujo de salida fs1 yde la potencia consumida en la cabaña P.
v
P
fs1
fe u
h2
generador estanque
canal
h1 fs2 válvula
Diagrama en Bloquesde la Mini-CentralHidro-Eléctrica.
Capítulo I - Introducción 1 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIEConceptos Generales
Def.: Por proceso se entenderá una realidad física cualquiera que conlleva, en algún intervalo de tiempo, un cambio de estado que exhiben sus componentes esenciales.
Definiciones
Def.: Un sistema es una abstracción de una realidad física de acuerdo a los objetivos de estudio planteados.
Proceso
Objetivo 1
Objetivo 2
Objetivo n
Sistema 1
Sistema 2
Sistema n
Modelo 1 Modelo 2 Modelo 3
Modelo: Representación del Sistema. Tipo: Conceptual, Matemático o Lingüistico.Obtención: Fenomenológico, Empírico.Complejidad versus Representabilidad.Simplificaciones: Reducción de Orden,Concentración de Parámetros, Linealización.Rango de Validez.
Def.: Las variables de entrada son aquellas mediante las cuales se actúa desde el exterior sobre el proceso y a total voluntad. Éstas permiten determinar las principales características de comportamiento del proceso.
Def.: Las variables de salida constituyen el medio que permite efectuar el análisis del proceso, mediante la evaluación directa de los objetivos de estudio.
Def.: Las perturbaciones son variables que también actúan desde el exterior pero que no son manejables a voluntad y cuyo efecto sobre el proceso siempre es conocido. Introducen una componente de incertidumbre en el estudio.
Def.: Las variables de estado son aquellas variables que definen totalmente la condición del sistema, desde el punto de vista de los objetivos de estudio, en cuanto a la información contenida en éste y a su evolución frente a una acción del medio.
Def.: Los parámetros son cantidades que fijan ciertas características del proceso, estableciendo un marco al cual estará condicionado su comportamiento; se consideran fijos cuando el resto está sujeto a variaciones.
Capítulo I - Introducción 2 de 26 Sistemas Lineales Dinámicos - 543 214

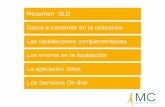
© UdeC - DIECaso 2 Mini-central solar.
sol
2 1
cel vc
v1
v2 vout
Objetivos de Estudio:
- vout v/s ángulo del sol- Regulación de tensión- Generación de tensión máxima- Generación de tensión constante- ...
En un futuro muy cercano y dadas las proyeccioneseconómicas hechas por el centro DREAMS INC., el futurogobierno de turno y construcciones ADOBE le permitirántener su casa de veraneo en el norte de Chile. El lugardispondrá de mucho sol (temperatura ambiente promedioanual de Tamb = 25°C); sin embargo, no se contempla lageneración eléctrica. Para tales efectos usted sabe de lautilización de paneles solares de área 1 m2 como elilustrado en la figura superior. En esta parte del estudio sumisión es disponer la celda mayor siempre perpendicular alsol - que incide con un ángulo sol - de manera que éstagenere el máximo voltaje vout posible. Para esto, ustedpuede variar la tensión vc del pequeño motor dc paracambiar el ángulo de la celda cel. La relación entre estasvariables es:
2
2cel cel
p cd d k v
dt dt
θcelvc
kp1
s τs 1( )= o bien,
con km = 1, = 10 y ángulos en grados. A manerade sensores, se dispone de dos celdas solaresauxiliares de área Aaux = 10 cm2 que estánmontadas en el plano de la celda solar más unainclinación de 10° como se muestra en la figura.Estas celdas auxiliares generan tensiones v1 y v2proporcionales a los ángulos incidentes 1 y 2,respectivamente (se considera que 0 < 1, 2 <90°). Las relaciones son: v1 = kaux1 con 1 = sol -10° - cel y v2 = kaux2 con 2 = -sol + 170° + cel.(kaux = Aaux/10 V/°).
v1 1
vc
sol
v2 2cel
motor
panel solar
vout
Diagrama en Bloques de laMini-Central Solar.
Capítulo I - Introducción 3 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIEClasificación de SistemasProblema Clasificar sistemas encontrados en ingeniería.
Caso 1 Circuito eléctrico I (lineal, no-lineal).
+
-
R e(t)
i(t)
L
lineale R i
tL i( )d
d= R i L
tid
d=
Si la inductancia depende de la corriente; es decir, L = L(i), entonces,
e R it
L i( ) i( )dd
= R itL i( )d
d
i L i( )tid
d= no-lineal
Caso 2 Circuito eléctrico II (dinámico, estático).
+
-
L
e(t)
i(t) C
+
-
vc(t) R
Ecuacionesdinámicas
e Ltid
d vc= Ecuaciones
estáticase vc=
i Ctvc
dd
vcR
= ivcR
=
Caso 3 Cohete (invariante, variante).
m t( )tvd
d m t( ) g ve u t( )= v
txd
d=
donde ve es la velocidad relativa de los gases de salida - asumidaconstante - y u(t) es la razón de cambio de la masa. Por lo tanto,
tm t( )d
du t( )=
Nótese que se ha utilizado g constante. En estricto rigor g es,
g km t( )
x2=
Capítulo I - Introducción 4 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIECaso 4 Depósito en un banco (continuo, discreto).
Para un depósito de P0 se tiene al cabo de un mes la cantidad P1 = P0(1 + I), donde I es el interés. Así, lacantidad de dinero al cabo de un mes arbitrario kT (donde T es un mes) denotada por P(kT+T) está dada por,P kT T( ) 1 I( ) P kT( )= o bien, P kT T( ) 1 I( ) P kT( ) 0= . Se sabe que la solución de esta ecuación es,
P kT( ) P0 1 I( )k=
Serie de Fibonacci (http://goldennumber.net)
La ecuación que indica cuántos pares deconejos, y(n), hay al principio de cada mes es,
y k 2( ) y k 1( ) y k( )=
y k 2( ) y k 1( ) y k( ) 0=
Si bien la cantidad de conejos es un númeroentero, la solución contiene números irracionales,
y k( )1
5
1 5
2
k 11 5
2
k 1
k 0 9 k0123456789
y k( )112358
13213455
Problema: Hay un par inicial (macho y hembra) de conejos. Suponer que losconejos nunca mueren y que cada hembra gesta una pareja cada mes apartir del segundo mes de nacida. ¿ Cuántos pares de conejos hay en unmes arbitrario k ?
El número de Oro ().
ϕ∞n
y n( )y n 1( )
lim
=
1 5
2
n 11 5
2
n 1
1 5
2
n1 5
2
n
= 1 5
2=
La Proporción de Oro.
ABBC
BCAC
= 1x
x1 x
= x ϕ= ϕ1 5
2 ϕ 1.618033989
Capítulo I - Introducción 5 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIECaso 5 Promediador (causal, no-causal).
k 0 20 T 8
yT k( ) k Φ k( ) 2 kT4
Φ kT4
2 k T34
Φ k T34
k T( ) Φ k T( )
y k( ) yT mod k T( )( )
yavg1 k( )y k( ) y k 1( ) y k 2( )
3 --> Causal yavg2 k( )
y k 1( ) y k( ) y k 1( )
3 --> No-causal
0 5 10 15 20
2
0
2
0
y k( )
yavg1 k( )
yavg2 k( )
k
El promediador es un buen filtro. El filtrocausal agrega un desfase entre la salida yentrada, no así el no-causal.
Caso 6 Intercambiador de Calor (concentrado, distribuido).
z
z
Vapor
Vapor
Vapor
Vapor
Líquido Líquido T2 T1
( )p p stT Tc A c vA DU T Tt z
Esta ecuación describe el comportamiento en el tiempo y espacio (z) dela temperatura del líquido en el intercambiador, donde v es la velocidadmedia del fluido, U es el coeficiente de transferencia entre el vapor y ellíquido en el tubo, Tst es la temperatura del vapor saturado, D es eldiámetro interno del intercambiador, cp es el calor específico del líquido y su densidad.
Si sólo se consideran las temperaturas de entrada y salida dellíquido se obtiene una ecuación diferencial ordinaria, que es,
ρ cp AtT2
dd π D U Tst T1 cp v A T2 T1 =
Capítulo I - Introducción 6 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIEModelación y Simulación de SistemasPrincipio 1 Ecuaciones de Balance
cantidad de cantidad de
flujo de flujo de acumulación de generada consumida=
que entra que saleperíodo de tiempo período de tiempo período de tiempo
P PP PP
( ) ( ) ( ) ( ) ( )e s g cdP t F t F t C t C t
dt
con t --> 0
Principio 2 de Mínima Acción
1,...,ii i
d L L Q i ndt x x
2
1
{ ( )}t
tJ L t dt x
para que se minimice, donde los Qi representan lasseñales externas (fuerzas o torques) asociadas a lavariable de estado xi.
función de energía
Modelo 1 Ecuacíon Diferencial
1 1' ' ' ' ' ' '
1 1 0 1 1 01 1
n n m m
n n m mn n m m
d y d y dy d u d u dua a a a y b b b b udt dt dt dt dt dt
1 1
1 1 0 1 1 01 1
n n m m
n m mn n m m
d y d y dy d u d u dua a a y b b b b udt dt dt dt dt dt
0 0
i in m
i ii ii i
d y d ua bdt dt
Modelo 2 Ecuaciones de Estado
x = Ax + Bu + Ep, y = Cx + Du + Fp donde A, B, C, D, E, y F son matrices de parámetros. Si hay n variables de estados, entoncessiempre se cumple que las dimensiones de cada componente son; x: n, u: p, p: m, y: q, A: n·n,B: n·p, C: q·n, D: q·p, E: n·m, y F: q·m, respectivamente
),,(),,,( puxhypuxfx en donde, x = [x1 ... xn]T es el vector de variables de estado, u = [u1 ... up]T es el vector de
entradas, y = [y1 ... yq]T es el vector de salidas, p = [p1 ... pm]T es el vector de perturbaciones1 1 1 1( , , ) ( , , )
, ( , , ) ( , , )n n q q
x f y h
x f y h
x u p x u p
x u p x u p
Capítulo I - Introducción 7 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIEEjemplo Masa suspendida.
Parámetros
k
d
F(t)
m
x(t)
lo 0.50 m 1.5 k 20 d 3 g 9.8
Ecuación Diferencial Variables de Estado
mt t
xdd
dd k x lo d
txd
d m g f= x1 x= x2 t
xdd
= v=
A0
km
1
dm
b0
1m
γ
0
k lo
mg
lo es la distancia entreel techo y el centro de
m con el resorte enreposo.
Simulación. Sólo condiciones iniciales (el resorte está en reposo en t = 0) y luego aparece unafuerza f(t) en forma de escalón en t = 6 con amplitud 15.
tf 10 nf 500 n 0 nf f t( ) 15 Φ t 5( ) u t( ) f t( )
D t x( ) Ax0
x1
b u t( ) γ CIlo
0
Zal rkfixed CI 0 tf nf D
0 2 4 6 8 101
0
1
2
3Posición, velocidad y fuerza normalizada
Capítulo I - Introducción 8 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIETransformaciones de SimilitudProblema Modelar sistemas como los encontrados en Ingeniería.
+ va -
if ia
m, m Jm, Tm
l, l Jl, Tl
1/ k
máquina cc carga
- vf +
dl
Caso 1 Motor cc con eje flexible.
Parámetros
Ra 1.2 La 50 10 3 Jm 0.1152 Jl 0.02
k 1000 km 0.6 dl 0.005
va 30002 π
60 km 3000
2 π
60
dlkm Ra
Modelo
va La tia
dd Ra ia km ωm= km ia Jm t
ωmdd Tt= 1
k tTt
dd ωm ωl= Jl t
ωldd Tt dl ωl Tl=
Variables de Estado
x1 ωm= x2 ωl= x3 Tt= x4 ia=
km ia Jm tωm
dd Tt=
Jl tωl
dd Tt dl ωl Tl=
A
0
0
k
km
La
0
dl
Jl
k
0
1Jm
1Jl
0
0
kmJm
0
0
Ra
La
b
0
0
0
1La
e
0
1Jl
0
0
1k t
Ttdd ωm ωl=
va La tia
dd Ra ia km ωm=
Capítulo I - Introducción 9 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
Simulación. El sistema parte en reposo y aparece el torque de carga, Tl.
tf 10 nf 1500 m 0 nf Tl t( ) 20 Φ t 5( ) p t( ) Tl t( ) u t( ) va
D t x( ) A
x0
x1
x2
x3
b u t( ) e p t( ) Za rkfixed 0 0 0 0( )T 0 tf nf D
0 2 4 6 8 100
50
100
150
va
0 2 4 6 8 100
1 103
2 103
3 103wm, rpm
0 2 4 6 8 100
1 103
2 103
wl, rpm
0 2 4 6 8 100
10
20
30
40Tt
0 2 4 6 8 100
50
100
150ia
0 2 4 6 8 100
10
20
30Tl
+ va -
if ia
m, m Jm, te
l, l Jl, tl
1/ k
máquina cc carga
- vf +
dl
Capítulo I - Introducción 10 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIECambio en las Variables de Estado
z1 ωl= z2 ωm ωl= z3 Tt= z4 ia= T
0
1
0
0
1
1
0
0
0
0
1
0
0
0
0
1
AT T A T 1 bT T b eT T e
Simulación. El sistema parte en reposo y aparece el torque de carga, Tl.
D t z( ) AT z0 z1 z2 z3 T bT u t( ) eT p t( ) Za rkfixed 0 0 0 0( )T 0 tf nf D
0 2 4 6 8 100
50
100
150
va
0 2 4 6 8 100
1 103
2 103
3 103wl, rpm
0 2 4 6 8 1040
20
0
20
40wm - wl, rpm
0 2 4 6 8 100
10
20
30
40Tt
0 2 4 6 8 100
50
100
150ia
0 2 4 6 8 100
10
20
30Tl
+ va -
if ia
m, m Jm, te
l, l Jl, tl
1/ k
máquina cc carga
- vf +
dl
Capítulo I - Introducción 11 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIECaso 2 Ahora se consideran las posiciones angulares de ambos extremos del eje flexible. Por lo tanto,
las variables de estado naturales son
x1 ωm= x2 ωl= x3 Tt= x4 ia= x5 θm= x6 θl= + va -
if ia
m, m Jm, te
l, l Jl, tl
1/ k
máquina cc carga
- vf +
dl
A
0
0
k
km
La
1
0
0
dl
Jl
k
0
0
1
1Jm
1Jl
0
0
0
0
kmJm
0
0
Ra
La
0
0
0
0
0
0
0
0
0
0
0
0
0
0
b
0
0
0
1La
0
0
e
0
1Jl
0
0
0
0
D t x( ) A
x0
x1
x2
x3
x4
x5
b u t( ) e p t( ) Za rkfixed 0 0 0 0 0 0( )T 0 tf nf D
0 2 4 6 8 100
50
100
150
va
0 2 4 6 8 100
1 103
2 103
3 103wm, rpm
0 2 4 6 8 100
1 103
2 103
wl, rpm
0 2 4 6 8 100
10
20
30
40Tt
0 2 4 6 8 100
50
100
150ia
0 2 4 6 8 100
10
20
30Tl
0 2 4 6 8 100
1 103
2 103
3 103teta m
0 2 4 6 8 100
1 103
2 103
3 103teta l
Capítulo I - Introducción 12 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
Cambio en las Variables de Estado
z1 ωl= z2 ωm ωl= z3 Tt= z4 ia= z5 θl= z6 θm θl= T
0
1
0
0
0
0
1
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
1
1
AT T A T 1 bT T b eT T e
D t z( ) AT z0 z1 z2 z3 z4 z5 T bT u t( ) eT p t( ) Za rkfixed 0 0 0 0 0 0( )T 0 tf nf D
0 2 4 6 8 100
50
100
150
va
0 2 4 6 8 100
1 103
2 103
3 103wl, rpm
0 2 4 6 8 1040
20
0
20
40wm - wl, rpm
0 2 4 6 8 100
10
20
30
40Tt
0 2 4 6 8 100
50
100
150ia
0 2 4 6 8 100
10
20
30Tl
0 2 4 6 8 100
1 103
2 103
3 103teta l
0 2 4 6 8 100
0.5
1
1.5
2teta m - teta l, grados
+ va -
if ia
m, m Jm, te
l, l Jl, tl
1/ k
máquina cc carga
- vf +
dl
Capítulo I - Introducción 13 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
AT
0.25
0.25
0
12
1
0
0
0
1 103
12
0
1
50
58.681
0
0
0
0
0
5.208
0
24
0
0
0
0
0
0
0
0
0
0
0
0
0
0
bT
0
0
0
20
0
0
eT
50
50
0
0
0
0
Caso 3 Ahora se considera una transformación que diagonaliza AT.
T eigenvecs A( ) 1 AT T A T 1
T
0.378
0.378
1.701 10 3 2.111i
1.701 10 3 2.111i
0.563
1.562
0.066
0.066
2.58 10 4 2.108i
2.58 10 4 2.108i
0.097
0.271
1.639 10 5
9.836 10 4
0.511 2.362i 10 4
0.511 2.362i 10 4
2.06 10 3
6.144 10 4
0.082
0.082
0.045 4.396i 10 3
0.045 4.396i 10 3
1.181
0.379
1
0
0
0
0
0
0
1
0
0
0
0
AT
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0.108 242.26i
0
0
0
0
0
0
0.108 242.26i
0
0
0
0
0
0
21.518
0
0
0
0
0
0
2.516
eigenvals A( )
0
0
0.108 242.26i
0.108 242.26i
21.518
2.516
Capítulo I - Introducción 14 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIELinealización de ModelosProblema Linealizar sistemas no-lineales como los encontrados en Ingeniería.
( )dxx f xdt
CasoParticularde 1er
orden sinentrada
22
2
1 1 ( ) 1 ( )( ) ( ) ( ) ( )0! 1! 2!o
o o
o ox xx x x x
df x d f xf x f x x x x xdx dx
linealización en torno a x0
1 1 ( ) ( )( ) ( ) ( ) ( ) ( )0! 1!o
o o
o o ox xx x x x
df x df xx f x f x x x f x x xdx dx
( ) ( ) 0o o
o
ox xx
dxx f x f xdt
si x0 es un punto de operaciónpor ejemplo,
ox x x
( )of x( ) ( )
( )
( )
o
o
ox x
x x
o
df x x xdx
df x xdx
a x x
si se define x = x - x0dxdt
2x x3= a x0 2 3x0
2=
dΔxdt
2Δx= para x0 = 0, que es unpunto de operación
),,(
),,(
,
),,(
),,(
1111
pux
pux
pux
pux
qqnn h
h
y
y
f
f
x
x
),,(),,,( puxhypuxfx , x A x B u E p y C x D u F pCasoGeneral modelo linealecuaciones generales
oo
o
ppuuxxx
puxfA
),,(
oo
o
ppuuxxu
puxfB
),,( ( , , )
o
oo
x xu up p
f x u pCx
oo
o
ppuuxxu
puxhD
),,(
ooo
ppuuxxp
puxfE
),,(
ooo
ppuuxxp
puxhF
),,(
x, u, p, y y, son variaciones de x, u, p e y, respectivamente, en torno al punto de operación dado por uo, xo, po, yo.Nótese que en el caso no-lineal uo, xo, y po satisfacen, 0 = f(xo, uo, po)
Capítulo I - Introducción 15 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIELinealización de Ecuaciones DinámicasProblema Linealizar sistemas no-lineales como los encontrados en Ingeniería.
fs
fe
h
y
x
y = 1 + k(x - H/2)2
Caso 1 Estanque con paredes cóncavas.
Parámetros Modelo Variables de Estado
x1 h=H 8 k 0.25 kv2
1000 g 10 dh
dt
fe kv g h
π 1 k hH2
2
2
=
Linealización ho 3 feo kv g ho feo 1000 10.954
a1
2
kv
g ho 1
2
g
π 1 k ho12
H
2
2
4feo kv g ho
1
2
k ho
12
H
π 1 k ho12
H
2
3
b1
π 1 k ho12
H
2
2
Flujos de Entrada (fe) para obtener alturas (h) dadas en S.S.
ho1 3 feo1 kv g ho1 ho2 7 feo2 kv g ho2 ho3 2 feo3 kv g ho3
fe t( ) feo1 feo2 feo1 Φ t 1 60 60( ) feo3 feo2 Φ t 12 60 60( ) feo1 feo3 Φ t 20 60 60( )
tf 24 60 60 nf 2000 n 0 nfSimulación Sistema Original (No-Lineal)
u t( ) fe t( ) D t x( )u t( ) kv g x0
π 1 k x0H2
2
2
CIfe 0( )
kv
21g Za rkfixed CI 0 tf nf D
Simulación Sistema Linealizado
u t( ) fe t( ) feo D t x( ) a x0 b u t( ) CI a 1 b u 0( ) Zal rkfixed CI 0 tf nf D
Capítulo I - Introducción 16 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
Resultado de la Simulación
0 10 200
5
10
15
20flujo de ent. [lt/s] - altura [m]
ho2
ho3
Nota: la línea azul es laoriginal y la verde es delsistema linealizado.
fs
fe
h
y
x
y = 1 + k(x - H/2)2
Capítulo I - Introducción 17 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIECaso 2 Estanque piramidal invertido.
Parámetros
a 2 fm1.8
1000 cm
201000
kv0.5
1000 g 10 H 8
fs, cs
fa fm, cm
CT
CT : sensor de concentración
h
x
y
y = 2ax
Modelo Variables de Estado
x1 h= x2 cs=dhdt
fm fa kv g h
h2
a2
=dcsdt
fm cm fm cs fa cs
13
h3
a2
=
Flujos de Entrada (fa) para obtener determinadas concentraciones (cs) en S.S.
0 fm fa kv g h= 0 fm cm kv g h cs=
cso113.1451000
ho1 fm2 cm
2
g kv2 cso1
2
ho1 3 fao1 fm kv g ho1 1
2 fao1 9.387 10 4
cso28.60551000
ho2 fm2 cm
2
g kv2 cso2
2
ho2 7 fao2 fm kv g ho2 1
2 fao2 2.383 10 3
cso316.1011000
ho3 fm2 cm
2
g kv2 cso3
2
ho3 2 fao3 fm kv g ho3 1
2 fao3 4.359 10 4
Simulación Sistema Original tf 24 60 60 nf 2000 n 0 nf
fa t( ) fao1 fao2 fao1 Φ t 1 60 60( ) fao3 fao2 Φ t 12 60 60( ) fao1 fao3 Φ t 20 60 60( )
u t( ) fa t( ) D t x( )
fm u t( ) kv g x0
x0 2
a2
fm cm fm x1 u t( ) x1
13
x0 3
a2
CIho1
cso1
Za rkfixed CI 0 tf nf D
Capítulo I - Introducción 18 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
Linealización
cso13.1451000
ho fm2 cm
2
g kv2 cso
2
ho 3 fao fm kv g ho 1
2 fao 1000 0.939
b
1
ho2
a2
31
cso
ho3
a2
A
14
kv
g ho 1
2
g
12
ho2
a2
fm fao kv g ho 1
2
12
ho3
a2
92
fm cm fm cso fao cso 12
ho4
a2
0
32
fm fao 12
ho3
a2
Simulación Sistema Linealizado
u t( ) fa t( ) fao D t x( ) Ax0
x1
b u t( ) CI A 1 b u 0( ) Zal rkfixed CI 0 tf nf D
0 10 200
0.5
1
1.5
2
2.5flujo de agua [lt/s] vs tiempo [hrs]
fs, cs
fa fm, cm
CT
CT : sensor de concentración
h
x
y
y = 2ax
Capítulo I - Introducción 19 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
Resultado de la Simulación
0 10 200
0.5
1
1.5
2
2.5flujo de agua [lt/s] vs tiempo [hrs]
0 10 200
2
4
6
8
altura [m] vs tiempo [hrs]
ho2
ho3
0 10 200
5
10
15
conc. de salida [pmil] vs tiempo [hrs]
cso2 1000
cso3 1000
fs, cs
fa fm, cm
CT
CT : sensor de concentración
h
x
y
y = 2ax
Nota: las líneas verdes son lalinealización
Capítulo I - Introducción 20 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
+
-
L
e(t)
i(t) C
+
-v(t)
R Sw(t)
Caso 3 Circuito Elevador.
Parámetros
L 5 10 3 C 200 10 6
R 12 Δd1 0.2
do 0.5 eo 6 Δe 1Δd2 0.2
Modelo con Función de Switcheo. Variables de Estado. Modelo Resultante. Diente de Sierra.
x1 v= x2 i=tvd
dv
R C
1C
i 1 Sw( )= T 0.002e Ltid
d v 1 Sw( )=
Dien t( )tT
Φ t( ) Φ t T( )( )i 1 Sw( ) C
tvd
d
vR
=tid
d1
Lv 1 Sw( )
1L
e=
Sierra t( ) Dien mod t T( )( )
e t( ) eo d t( ) do Sw t( ) if d t( ) Sierra t( ) 1 0( )
p t( ) e t( ) u t( ) Sw t( ) tf 0.1 nf 2000 n 0 nf t 0tfnf tf
D t x( )
x1
C1 u t( )( )
x0
R C
p t( )L
x0
L1 u t( )( )
CI0
0
Za rkfixed CI 0 tf nf D
Las condiciones iniciales son las condiciones finales de la simulación anterior.
e t( ) eo Δe Φ t 0.07( ) d t( ) do Δd1 Φ t 0.01( ) Δd2 Φ t 0.04( ) Sw t( ) if d t( ) Sierra t( ) 1 0( )
p t( ) e t( ) u t( ) Sw t( )
D t x( )
x1
C1 u t( )( )
x0
R C
p t( )L
x0
L1 u t( )( )
CI
Zanf 1
Zanf 2
Za rkfixed CI 0 tf nf D
Capítulo I - Introducción 21 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIE
0 0.02 0.04 0.06 0.08 0.10
0.5
1
1.5Modulación
Nota: la forma de onda azul es el ciclo detrabajo d(t).
0 0.02 0.04 0.06 0.08 0.10
2
4
6
8
10e y Sw·5
Nota: la forma de onda azul es la funciónde conmutación o de sitcheo Sw(t). Laverde es el voltaje de entrada e(t).
0 0.02 0.04 0.06 0.08 0.10
5
10
15
Tensión de Salida
0 0.02 0.04 0.06 0.08 0.10
1
2
3
4Corriente
+
-
L
e(t)
i(t) C
+
-v(t)
R Sw(t)
Capítulo I - Introducción 22 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIEModelo Promedio.
voeo
1 do vo 12 io
voR 1 do
io 2 uo do po eo Modelo Promedio.
tvd
dv
R C
1C
i 1 d( )=
p t( ) e t( ) u t( ) d t( )
tid
d1
Lv 1 d( )
1L
e=
D t x( )
x1
C1 u t( )( )
x0
R C
p t( )L
x0
L1 u t( )( )
CIvo
io
Zb rkfixed CI 0 tf nf D
0 0.02 0.04 0.06 0.08 0.10
5
10
15
Tensión de SalidaNota: las formas de onda con ondulaciónson las originales y las líneas continuasson del modelo.
0 0.02 0.04 0.06 0.08 0.10
1
2
3
4Corriente
+
-
L
e(t)
i(t) C
+
-v(t)
R Sw(t)
Capítulo I - Introducción 23 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIEModelo Lineal.
tΔvd
dΔvR C
1C
Δi 1 do 1
Cio Δd=
tΔid
d1
LΔv 1 do
1L
vo Δd1L
Δe= A
1R C
1 do
L
1 do
C
0
b
io
C
voL
e0
1L
Δp t( ) p t( ) po Δu t( ) u t( ) uo D t x( ) Ax0
x1
b Δu t( ) e Δp t( ) CI0
0
Zc rkfixed CI 0 tf nf D
Comparación de todos los casos.
0 0.02 0.04 0.06 0.08 0.10
5
10
15
Tensión de Salida
0 0.02 0.04 0.06 0.08 0.10
0.5
1
1.5Modulación
0 0.02 0.04 0.06 0.08 0.11
0
1
2
3
4Corriente
0 0.02 0.04 0.06 0.08 0.10
2
4
6
8
10e y Sw·5
+
-
L
e(t)
i(t) C
+
-v(t)
R Sw(t)Nota: las formas de onda con ondulación son las originales, laslíneas color verde y roja son del modelo promedio nolineal y lasazules son las del modelo linealizado.
Capítulo I - Introducción 24 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIEAlcances del Curso "Sistemas Lineales Dinámicos" - 543 214
S.L.D. En este curso se estudiarán sistemas lineales del tipo continuo y discreto. Será de especialimportancia al modelo de éstos obtenifdo a partir del análisis fenomenológico, para lo cual se utilizanlas leyes físicas básicas de la ingeniería. Los sistemas mecánicos, hidráulicos, electromecánicos ytérmicos seránpresentados en detalle. La modelación de sistemas eléctricos se asume conocida.
Las señales serán analizadas formalmente en este curso para dar paso al estudio de lastransformaciones de éstas, comenzando por la Transformada de Laplace para señales continuas.Las señales discretas serán analizadas como el resultado de una transformación de señales continuas.Para el estudio de éstas se utilizará la Transformada Z. La Transformada de Fourier de señalescontinuas y discretas será introducida sobre la base de la necesidad de un operador de uso fácilpara señales periódicas.
Los modelos de sistemas estarán basados en ecuaciones diferenciales de orden n o en necuaciones de estado. Se revisarán distintos métodos de solución de estas ecuaciones con el ánimode introducir algunos conceptos nuevos como lo es la Matriz de Transición de sistemas y suspropiedades. Los resultados anteriores darán paso al concepto de Función de Transferencia uno delos más importantes en sistemas y con ello los conceptos de polos y ceros, para finalmentepresentar una alternativa de representación gráfica de la Función de Transferencia conocido comoDiagrama de Bode.
Finalmente, se revisarán los conceptos de estabilidad de acuerdo al tipo de representación delsistema. Con esto nace el concepto de estabilidad de entrada/salida relacionado con los polos delsistema y el de estabilidad interna, este último relacionado con los valores propios de larepresentación en variables de estado.
Capítulo I - Introducción 25 de 26 Sistemas Lineales Dinámicos - 543 214

© UdeC - DIEAlcances del 543 214
+
-
L
e(t)
i(t) C
+
-
vc(t) R
+
-
L
e(t)
i(t) C
+
-v(t)
R Sw(t)
a)
SistemasenEstudio
x
F(t)
lo
M
m
a)
R1
C1 ToTi Tm
R2
C2
+ va -
if ia
m, m Jm, te
l, l Jl, tl
1/ k
máquina cc carga
- vf +
dl
+
-
y(t)
M
Re(t)
i(t)
L
kdx(t)
a
l1
Modelar, Fenomenológica yEmpíricamente (ecuación diferencialy de diferencias, ecuación de estadodiferenciales y de diferencias).
Caracterizar, Tiempo (Respuesta aimpulso, Matriz de Transición,valores propios) y Frecuencia(Función de Transferencia, polos yceros).
Análisis, Transitorio (sobrepaso),estacionario (Diagrama de Bode,respuesta en frecuencia). Estabilidad(entrada/salida, interna).
sol
2 1
cel vc
v1
v2 vout
fs
fe
h
y
x
y = 1 + k(x - H/2)2
Capítulo I - Introducción 26 de 26 Sistemas Lineales Dinámicos - 543 214