M.A. Rodr´ıguez 4 de septiembre de 2007 - …jacobi.fis.ucm.es/marodriguez/ProyectoAlg_Lin.pdf ·...
155
´ Algebra Lineal. Curso 2006-07 M.A. Rodr´ ıguez 4 de septiembre de 2007
Transcript of M.A. Rodr´ıguez 4 de septiembre de 2007 - …jacobi.fis.ucm.es/marodriguez/ProyectoAlg_Lin.pdf ·...

Algebra Lineal. Curso 2006-07
M.A. Rodrıguez
4 de septiembre de 2007
2

Indice general
1. Generalidades 5
2. El programa 7
3. El calendario 9
4. El grupo conforme 13
5. Ejercicios y presentaciones 175.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175.2. Ejercicios para entregar . . . . . . . . . . . . . . . . . . . . . . . 17
6. Las notas de clase y los ejercicios 256.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256.2. Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . 256.3. Soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7. Los programas de manipulacion simbolica 83
8. Las pruebas quincenales 858.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 858.2. Pruebas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 858.3. Soluciones de las pruebas . . . . . . . . . . . . . . . . . . . . . . 104
9. El examen final 1239.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1239.2. Examen final . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1239.3. Soluciones al examen final . . . . . . . . . . . . . . . . . . . . . . 1299.4. Examen de septiembre . . . . . . . . . . . . . . . . . . . . . . . . 1359.5. Soluciones al examen de septiembre . . . . . . . . . . . . . . . . . 141
10.Las tutorıas 147
11.La evaluacion 149
3

4 INDICE GENERAL
12.El control de calidad 151

Capıtulo 1
Generalidades
Esta programacion corresponde a un curso “piloto” en algebra lineal, de-sarrollado en la Facultad de Fısicas de la UCM en el primer cuatrimestre delcurso 2006-2007. Dentro del llamado “espıritu de Bolonia” se pretende dar unaensenanza mas personalizada y tener en cuenta el trabajo personal del alumnoa la hora de contabilizar el numero de creditos.
5

6 CAPITULO 1. GENERALIDADES
Capıtulo 2
El programa
El curso consta de siete temas, que no son de igual duracion. En particularel tema 1 contiene material basico para los demas, de caracter general. Se tratade un curso de algebra lineal basica, en el que se pretende dotar al alumno deherramientas utiles e imprescindibles en la Fısica. La exposicion ira acompanadasiempre que sea posible de algunas aplicaciones, aunque dada la corta duraciondel curso estas seran muy escuetas. Se trabajan los conceptos elementales de lateorıa de espacios vectoriales y se hace uso intensivo de matrices y operacionescon ellas. En la parte final del curso se trabaja especialmente con espacios conproducto escalar y problema de diagonalizacion.
Aprovechando las particularidades del algebra lineal, se hara un cierto enfasisen las reglas del razonamiento logico en matematicas. Se trata de hacer algu-nas demostraciones (aunque por razones de tiempo no podran ser todas) quemuestran como se construye una teorıa.
Se pretende que el alumno adquiera una cierta habilidad en el manejo deestos conceptos y en el calculo con ellos, que le permitan comprender otros enFısica y en posibles ampliaciones del tema.
7
8 CAPITULO 2. EL PROGRAMA
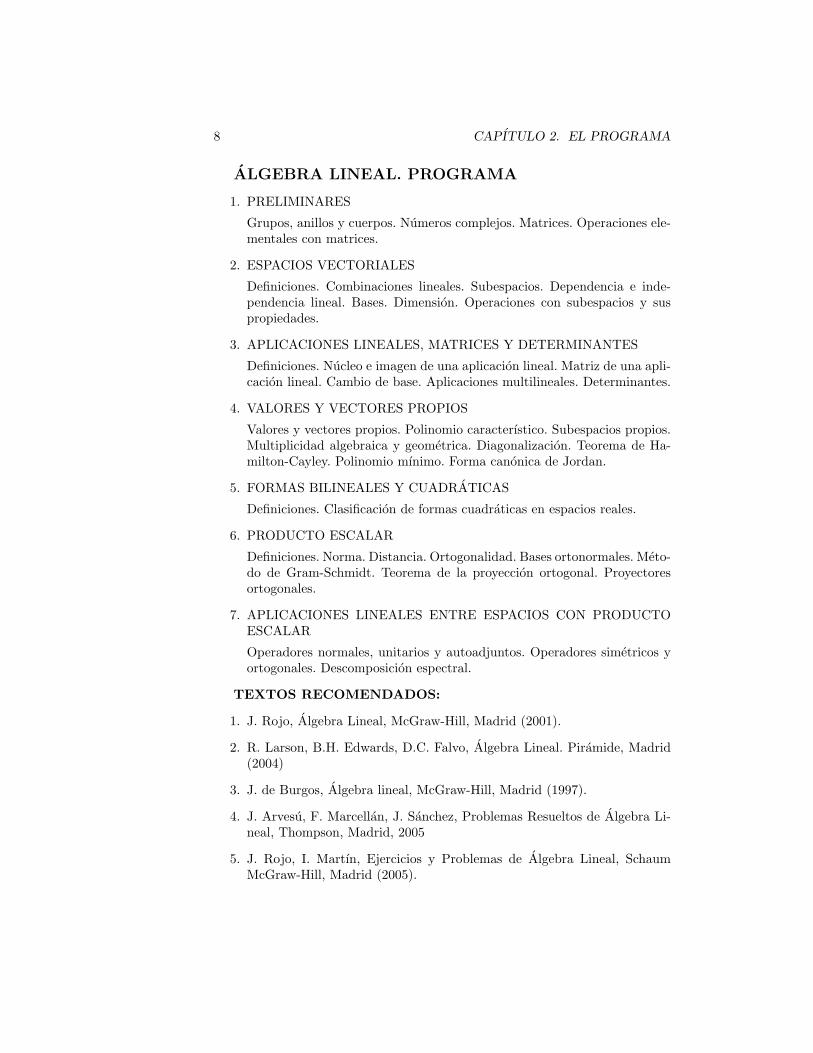
ALGEBRA LINEAL. PROGRAMA
1. PRELIMINARES
Grupos, anillos y cuerpos. Numeros complejos. Matrices. Operaciones ele-mentales con matrices.
2. ESPACIOS VECTORIALES
Definiciones. Combinaciones lineales. Subespacios. Dependencia e inde-pendencia lineal. Bases. Dimension. Operaciones con subespacios y suspropiedades.
3. APLICACIONES LINEALES, MATRICES Y DETERMINANTES
Definiciones. Nucleo e imagen de una aplicacion lineal. Matriz de una apli-cacion lineal. Cambio de base. Aplicaciones multilineales. Determinantes.
4. VALORES Y VECTORES PROPIOS
Valores y vectores propios. Polinomio caracterıstico. Subespacios propios.Multiplicidad algebraica y geometrica. Diagonalizacion. Teorema de Ha-milton-Cayley. Polinomio mınimo. Forma canonica de Jordan.
5. FORMAS BILINEALES Y CUADRATICAS
Definiciones. Clasificacion de formas cuadraticas en espacios reales.
6. PRODUCTO ESCALAR
Definiciones. Norma. Distancia. Ortogonalidad. Bases ortonormales. Meto-do de Gram-Schmidt. Teorema de la proyeccion ortogonal. Proyectoresortogonales.
7. APLICACIONES LINEALES ENTRE ESPACIOS CON PRODUCTOESCALAR
Operadores normales, unitarios y autoadjuntos. Operadores simetricos yortogonales. Descomposicion espectral.
TEXTOS RECOMENDADOS:
1. J. Rojo, Algebra Lineal, McGraw-Hill, Madrid (2001).
2. R. Larson, B.H. Edwards, D.C. Falvo, Algebra Lineal. Piramide, Madrid(2004)
3. J. de Burgos, Algebra lineal, McGraw-Hill, Madrid (1997).
4. J. Arvesu, F. Marcellan, J. Sanchez, Problemas Resueltos de Algebra Li-neal, Thompson, Madrid, 2005
5. J. Rojo, I. Martın, Ejercicios y Problemas de Algebra Lineal, SchaumMcGraw-Hill, Madrid (2005).

Capıtulo 3
El calendario
El curso se desarrolla durante el primer cuatrimestre. El calendario detalladoaparece en el Cuadro 3.1.
Hay 37 dıas de clase. Las clases de martes y jueves son de dos horas y lasdel viernes de una hora. Eso hace un total de 15×2+11×2+11×1 = 63 horasde clase.
Las clases del lunes y martes se dedican a lecciones magistrales, problemas ya presentacion de problemas por los alumnos. Despues de cada tema se dedicanuna o dos horas a problemas. De las clases del viernes, 5 horas se dedican apruebas objetivas. La sexta sera un martes.
En los siguientes cuadros aparece toda la informacion sobre la distribuciondel tiempo en las distintas actividades.
El total de horas de clases magistrales es de 34 y el de problemas 23 (60 %frente al 40 %).
9

10 CAPITULO 3. EL CALENDARIO
Cuadro 3.1: Dıas de clase.
L M X J V S DO . 3 . 5 6 . .C . 10 . . 13 . .L . 17 . 19 20 . .
. 24 . 26 27 . .N . 31 . 2 3 . .O . 7 . . . . .V . 14 . 16 17 . .
. 21 . 23 24 . .D . 28 . 30 1 . .I . 5 . . . . .C . 12 . 14 15 . .
. 19 . 21 . . .
. . . . . . .E . . . . . . .N . 9 . 11 12 . .E . 16 . 18 19 . .
. 23 . . . . .
Cuadro 3.2: Distribucion del tiempo. Li=Lecciones magistrales, Pi=Pruebasparciales. Pri=Presentaciones. Ei=Ejercicios.
L M X J V S DO . 3 L1 L1 . 5 L1 E1 6 E1 . .C . 10 Pr1 L2 . . . . 13 L2 . .T . 17 L2 L2 . 19 L2 E2 20 E2 . .
. 24 Pr2 Pr2 . 26 L3 L3 27 P2 . .N . 31 L3 L3 . 2 L3 L3 3 E3 . .O . 7 E3 Pr3 . . . . . . . .V . 14 Pr3 L4 . 16 L4 L4 17 P3 . .
. 21 L4 L4 . 23 L4 E4 24 E4 . .D . 28 Pr4 Pr4 . 30 L5 L5 1 P4 . .I . 5 L5 L5 . . . . . . .C . 12 E5 Pr5 . 14 L6 L6 15 P5 . .
. 19 L6 L6 . 21 L6 E6 . . .
. . . . . . . . . . .E . . . . . . . . . . .N . 9 E6 Pr6 . 11 L7 L7 12 P6 . .E . 16 L7 L7 . 18 L7 E7 19 E7 . .
. 23 Pr7 P7 . . . . . . . .
11
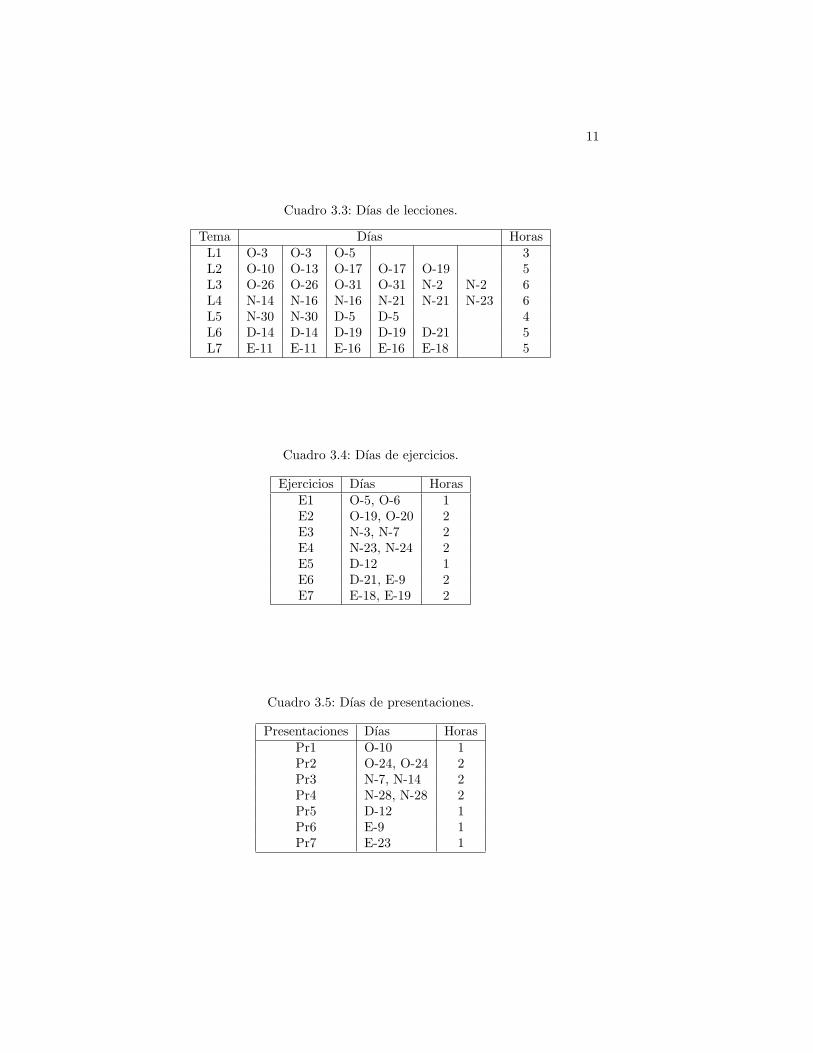
Cuadro 3.3: Dıas de lecciones.
Tema Dıas HorasL1 O-3 O-3 O-5 3L2 O-10 O-13 O-17 O-17 O-19 5L3 O-26 O-26 O-31 O-31 N-2 N-2 6L4 N-14 N-16 N-16 N-21 N-21 N-23 6L5 N-30 N-30 D-5 D-5 4L6 D-14 D-14 D-19 D-19 D-21 5L7 E-11 E-11 E-16 E-16 E-18 5
Cuadro 3.4: Dıas de ejercicios.
Ejercicios Dıas HorasE1 O-5, O-6 1E2 O-19, O-20 2E3 N-3, N-7 2E4 N-23, N-24 2E5 D-12 1E6 D-21, E-9 2E7 E-18, E-19 2
Cuadro 3.5: Dıas de presentaciones.
Presentaciones Dıas HorasPr1 O-10 1Pr2 O-24, O-24 2Pr3 N-7, N-14 2Pr4 N-28, N-28 2Pr5 D-12 1Pr6 E-9 1Pr7 E-23 1

12 CAPITULO 3. EL CALENDARIO
Cuadro 3.6: Dıas de entrega de ejercicios.
Entrega DıaEn1 O-10En2 O-24En3 N-7En4 N-28En5 D-12En6 E-9En7 E-23
Cuadro 3.7: Dıas de pruebas parciales.
Pruebas parciales Dıas HorasP2 O-27 1P3 N-17 1P4 D-1 1P5 D-15 1P6 E-12 1P7 E-23 1
Cuadro 3.8: Horas dedicadas a cada actividad.
Temas Lecc. magstrls. Ejercicios Presentaciones Pruebas1 3 2 1 02 5 2 2 13 6 2 2 14 6 2 2 15 4 1 1 16 5 2 1 17 5 2 1 1
Totales 34 13 10 6

Capıtulo 4
Un tema avanzado: el grupoconforme
Durante el curso se estudiara un tema que reune materias propias del algebralineal con otras algo mas avanzadas (en realidad no mucho mas, pero para lasque no hay tiempo, ni motivo quizas, para desarrollarlas en un curso normal).Se trata de algunos calculos sobre el grupo conforme, SU(2, 2). Es un proyectoambicioso del que se espera realizar una parte. Se hara en grupos de 6 alumnos(dos grupos de 3), lo que asigna un tema a cada grupo y deja un tema finalde resumen, que, si hay tiempo, se expondra en clase por el profesor de laasignatura. Los trabajos se colocaran en el campus virtual Los primeros son losmas sencillos, pero tambien los conocimientos son menores. La estructura deltrabajo es como sigue:
1. El grupo de Lorentz en 1+1. Se consideran dos dimensiones, una tem-poral x0 = ct y otra espacial, x1 = x. La cantidad invariante fundamentalen las transformaciones (lineales) de sistemas de coordenadas es:
(x0)2 − (x1)2 (4.1)
Se hace una transformacion lineal:(x0′
x1′
)=
(α βγ δ
) (x0
x1
)= Λ
(x0
x1
)(4.2)
y se impone que se conserve la expresion anterior,
ΛGΛt = G, G =(
1 00 −1
)(4.3)
Se obtienen ası las transformaciones de Lorentz:
Λ =(
coshu senh usenh u coshu
), u ∈ R (4.4)
13

14 CAPITULO 4. EL GRUPO CONFORME
o, de otra forma{x0′ = γ(x0 + βx1)x1′ = γ(βx0 + x1)
, β = tanhu =v
c, γ = (1− β2)−1/2 (4.5)
Finalmente se estudia la transformacion infinitesimal:
K =ddu
∣∣∣∣u=0
Λ =(
0 11 0
)(4.6)
y se comprueba que verifica:
KG + GKt = 0 (4.7)
Se calcula la exponencial de la matriz uK y se obtiene Λ.
Se introducen la paridad y la inversion temporal.
2. El grupo de Lorentz en 1 + 2. Se repite el esquema anterior, para elgrupo de Lorentz en una dimension espacial y dos temporales.
(x0)2 − (x1)2 − (x2)2 (4.8) x0′
x1′
x2′
= Λ
x0
x1
x2
(4.9)
ΛGΛt = G, G =
1 0 00 −1 00 0 −1
(4.10)
coshu1 senh u1 0senh u1 coshu1 0
0 0 1
,
coshu2 0 senhu2
0 1 0senh u2 0 coshu2
(4.11)
1 0 00 cos ϕ − senϕ0 senϕ cos ϕ
, u1, u2, ϕ ∈ R (4.12)
K1 =
0 1 01 0 00 0 0
, K2 =
0 0 10 0 01 0 0
, J =
0 0 00 0 −10 1 0
(4.13)
K1G + GKt1 = 0, K2G + GKt
2 = 0, JG + GJ t = 0 (4.14)
En este caso se estudian las relaciones de conmutacion de las matricesK1,K2, J .

15
3. El grupo de Lorentz en 1 + 3. Se repiten los esquemas anteriores.
(x0)2 − (x1)2 − (x2)2 − (x3)2 (4.15)
ΛGΛt = G, G =
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
(4.16)
KiG + GKti = 0, JiG + GJ t
i = 0, i = 1, 2, 3 (4.17)
4. Spinors bajo el grupo de Lorentz. Se considera el espacio de matriceshermıticas 2× 2, parametrizadas como:
X =(
x0 + x3 x1 − ix2
x1 + ix2 x0 − x3
), det X = (x0)2 − (x1)2 − (x2)2 − (x3)2
(4.18)Se trata de un espacio vectorial real de dimension 4. En este espacio seconsidera una aplicacion lineal definida por:
X ′ = AXAt, A =(
a11 a12
a21 a22
), det A = 1 (4.19)
La transformacion conserva el determinante de la matriz X. Se trata deencontrar la relacion entre las matrices Λ desarrolladas en el apartadoanterior y las matrices A que forman un grupo, SL(2,C). Los vectores deC2 se llaman spinors bajo SL(2,C). Se estudian las clases de spinors quehay.
5. El grupo de Poincare. Se anaden al grupo de Lorentz las traslacionescon lo que se introduce la nocion de producto semidirecto. Se construyenoperadores diferenciales asociados a las transformaciones infinitesimales yse estudian las relaciones de conmutacion. Se introduce la notacion cua-dridimensional.
6. El grupo conforme. Se anade la dilatacion al grupo de Poincare y lastransformaciones conformes. Se estudian los correspondientes operadoresdiferenciales y las relaciones de conmutacion. Se pasa a expresiones enlas que se puede ver la relacion con las matrices pseudo-unitarias 4 × 4(SU(2, 2)) y la relacion con el grupo pseudo-ortogonal SO(4, 2).
16 CAPITULO 4. EL GRUPO CONFORME
Capıtulo 5
Los ejercicios a entregar ylas presentaciones en clase
5.1. Introduccion
Se entregan en los dıas senalados como presentaciones (en la primera hora sihay dos y siempre en martes) por el grupo de trabajo, formado por tres personas,lo que hace diez grupos. Los ejercicios se entregan por escrito y se hace unapresentacion en clase por uno de los componentes del grupo (designado por elprofesor, el orden sera aleatorio), sin la solucion presentada. Cada alumno haceuna presentacion de 20 minutos lo que hace 3 presentaciones por hora. Al haber30 alumnos, son necesarias 10 horas. El numero de entregas de ejercicios es 7.
5.2. Ejercicios para entregar
17

18 CAPITULO 5. EJERCICIOS Y PRESENTACIONES
Algebra Lineal. Curso 2006-07. Grupo A
Problema 1.
Demuestre que las raıces complejas de orden n de la unidad forman ungrupo multiplicativo. Una raız es primitiva si todas las raıces son potenciassuyas. ¿Cuales son las raıces primitivas de orden n de la unidad? Estudie si laspotencias de cualquier raız son un subgrupo del grupo de raıces.
10 de octubre de 2006
5.2. EJERCICIOS PARA ENTREGAR 19
Algebra Lineal. Curso 2006-07. Grupo A
Problema 2.
i) Calcule bases y ecuaciones de la interseccion y la suma de los subespaciosde R5, W1 y W2 donde W1 viene descrito por la ecuaciones
x1 − x2 + x3 = 0, x2 − x4 − 2x5 = 0, x1 + x2 = 0, 2x1 + x3 = 0
y W2 es generado por los vectores
{(−3, 3, 6, 1, 1), (2, 0, 0,−1, 0), (1, 0, 0, 0,−1), (−1, 3, 6, 0, 1)}
ii) Se consideran en R4 los conjuntos de vectores
B1 = {(1, 0,−1, 0), (2, 0,−1, 1), (1, 1, 0, 0), (0,−1, 3,−2)}B2 = {(0, 0,−1, 1), (1, 0,−1, 1), (1, 3, 0, 1), (0,−1, 2,−2)}
Demuestre que ambos son bases de R4. Calcule la matriz de cambio debase y las coordenadas del vector v = (1,−1, 1,−1) en ambas bases.
24 de octubre de 2006

20 CAPITULO 5. EJERCICIOS Y PRESENTACIONES
Algebra Lineal. Curso 2006-07. Grupo A
Problema 3.
i) Sea f : C5 → C4 una aplicacion lineal definida por las imagenes de la basecanonica en C5:
f(e1) = e′1 + e′2 − e′3, f(e2) = e′1 − 2e′2 − e′4, f(e3) = e′2 − e′3
f(e4) = 2e′3 + e′4, f(e5) = 3e′1 − e′4
Escriba la matriz asociada a f en las bases canonicas de C5 y C4. Hallebases del nucleo y la imagen de f . Estudie si f es inyectiva o sobreyectiva.
ii) Se consideran los espacios vectoriales R2, R3 y R4 con las bases
B2 = {(1, 1), (2,−1)}, B3 = {(1, 0,−1), (0, 1, 1), (1, 0, 1)}B4 = {(1, 0, 0, 1), (−1, 0, 2, 0), (1,−1, 2, 0), (1, 1, 1, 1)}
y las aplicaciones lineales f, g dadas por las matrices (en esas bases)
F =
1 0−1 21 10 1
, G =
1 0 −1 01 1 0 10 1 0 1
Calcule la matriz de la aplicacion lineal g ◦ f en las bases canonicas de R2
y R3.
16 de noviembre de 2006

5.2. EJERCICIOS PARA ENTREGAR 21
Algebra Lineal. Curso 2006-07. Grupo A
Problema 4.
i) Sea una aplicacion lineal f de C5 en C5 y {u1, u2, u3, u4, u5} una base deC5. Sabiendo que los vectores u1−u2, u1− 2u2 +u3, u1−u4 y u1− 3u2 +u3 + u4 son autovectores de f con autovalor 3 + 2i, que el nucleo de ftiene dimension 1 y que la traza de f es −1 + i, calcule el espectro de fy las multiplicidades algebraicas y geometricas de los autovalores. ¿Es fdiagonalizable?
ii) Demuestre que una matriz nilpotente no es en general diagonalizable. ¿Enque casos lo es? Calcule para la matriz
A =
−4 2 0 4−1 5 −3 4−3 −3 3 0−2 −8 6 −4
su forma canonica de Jordan.
5 de diciembre de 2006

22 CAPITULO 5. EJERCICIOS Y PRESENTACIONES
Algebra Lineal. Curso 2006-07. Grupo A
Problema 5.
i) Sea la forma bilineal en R2
ϕ(x, y) = x1y2 + x2y1
Encuentre una base de R2 en la cual la matriz de esta forma bilineal seadiagonal. Calcule en ambas bases, el conjunto de vectores que verificanϕ(x, x) = 0. Dibujelos en el plano R2.
ii) Sea la forma bilineal ϕ(x, y) = x1y1−x2y2−x3y3−x4y4 y el subespacio deR4 , W , definido por las ecuaciones x1 − x4 = 0, x1 − x2 + x3 − x4 = 0,x2+x3 = 0. Calcule el conjunto U de vectores x ∈ R4 tales que ϕ(x, y) = 0para todo y ∈ W . Demuestre que U es un subespacio de R4 y calculeU ∩W .
9 de enero de 2007

5.2. EJERCICIOS PARA ENTREGAR 23
Algebra Lineal. Curso 2006-07. Grupo A
Problema 6.
i) Sea el producto escalar en C3 definido por:
〈x, y〉 = x1y1 + ix1y2 − ix2y1 + 2x2y2 + 3x3y3 + x2y3 + x3y2
¿Es la base canonica una base ortonomal? Calcule una base ortonormalde C3 con ese producto escalar.
ii) Halle el proyector ortogonal (en R5 con el producto escalar usual) sobre elsubespacio W dado por la ecuacion: x1 + x2 − 2x3 + x4 − x5 = 0.
9 de enero de 2007

24 CAPITULO 5. EJERCICIOS Y PRESENTACIONES
Algebra Lineal. Curso 2006-07. Grupo A
Problema 7.
i) Halle una base ortonormal de autovectores de de la matriz
A =
5 −2i −i2i 2 −2i −2 5
Calcule la descomposicion espectral de dicha matriz y q(A) donde q(λ) =λ513 − 1.
ii) Se consideran las rotaciones en R3 dadas por las matrices
R1 =
1√2
0 1/√
20 1 0
−1/√
2 0 1/√
2
, R2 =
1/2 −√
3/2 0√3/2 1/2 00 0 1
Calcule los angulos y el eje de rotacion de ambas. Sean ahora R3 = R1R2
y R4 = R2R1. Demuestre que R3 y R4 son tambien rotaciones y calculesus ejes y angulos de rotacion. ¿Que relacion existe entre los angulos y losejes de rotacion de R1 y R2 y los de R3 y R4?
23 de enero de 2007
Capıtulo 6
Las notas de clase y losejercicios
6.1. Introduccion
Las notas “Notas de Algebra Lineal” de A. Ibort y M. A. Rodrıguez seranusadas de forma habitual durante el curso. Se pondra a disposicion de los alum-nos en el campus virtual el capıtulo correspondiente, al principio de su exposi-cion.
Ademas, cada dıa un alumno redactara lo explicado en clase y una vez su-pervisado y corregido por el profesor se colocara en el campus virtual.
Habra siete hojas de ejercicios, una por tema, que se colocaran en el campusvirtual. Las soluciones de los ejercicios apareceran con posterioridad.
6.2. Ejercicios propuestos
25

26 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Problemas Algebra Lineal. Curso 2006-2007Tema 1
1. Un triangulo equilatero es invariante bajo tres rotaciones en torno al cen-tro. Escriba la tabla del grupo formado por esas tres rotaciones. Las refle-xiones respecto a las alturas del triangulo lo dejan invariante. Escriba latabla del grupo formado por las rotaciones y las reflexiones.
2. Demuestre que las raıces complejas de orden n de la unidad forman ungrupo multiplicativo. Una raız es primitiva si todas las raıces son potenciassuyas. ¿Cuales son las raıces primitivas de orden n de la unidad? Estudiesi las potencias de cualquier raız son un subgrupo del grupo de raıces.
3. Demuestre que el conjunto R[x] de polinomios en x con coeficientes realeses un anillo. Estudie las propiedades del conjunto de los multiplos de unpolinomio p ∈ R[x].
4. Se considera el conjunto de los numeros reales y el punto del infinito:R = R ∪ {∞}). En este conjunto se definen las operaciones: x • y =mın(x, y), x∗y = x+y. Estudie las propiedades de la estructura algebraica,(R, •, ∗).
5. Sea G un grupo de orden 2n y H un subgrupo de orden n. Pruebe que Hes un subgrupo normal (es decir, todo elemento de la forma ghg−1, dondeh ∈ H y g ∈ G, esta en H).
6. Demuestre que las matrices 2 × 2 de determinante distinto de cero sonun grupo. Demuestre que las matrices de determinante igual a 1 son unsubgrupo del anterior. ¿Que pasa con las matrices n× n?
7. Sea A el conjunto de las matrices n×n con elementos complejos y en esteconjunto la operacion: (A,B) → [A,B] = AB − BA. ¿Es (A,+, [·, ·]) unanillo?
8. Calcule la parte real e imaginaria y el modulo y argumento de todas losnumeros complejos que elevados a 5 son iguales a 1/(1+i
√3). Represente-
los en el plano complejo.
9. Calcule el modulo y el argumento, la parte real y la parte imaginaria de lasuma, la resta, el producto y el cociente de los numeros complejos 2eiπ/3
y e25iπ/6.
10. Dibuje en el plano complejo los conjuntos D = {z = t−1e2it, t ∈ (0,∞)} yS = {z ∈ C : |z − 2| = 3}.
11. Calcule las soluciones de la ecuacion: z2 + (3 + i)z − 2 + 9i = 0.
12. Calcule las soluciones del sistema de ecuaciones
(1− i)z − wz = 0, |z − 1| − w = 2

6.2. EJERCICIOS PROPUESTOS 27
Problemas Algebra Lineal. Curso 2006-2007
Tema 2
1. Estudie si los siguientes conjuntos son espacios vectoriales con las opera-ciones que se indican y calcule su dimension caso de que lo sean
i) Sobre los reales, las matrices reales 3× 3 que verifican A = −AT , conla suma de matrices y el producto de un escalar por una matriz.
ii) Sobre los reales, los numeros complejos, con las operaciones usuales.
iii) Sobre los complejos, la matrices complejas 2 × 2 de determinanteigual a 1, con la suma de matrices y el producto de un escalar poruna matriz.
2. Estudie si los siguientes conjuntos son linealmente independientes en losespacios vectoriales que se indican:
a) {(2, 0, 1, 3), (2, 1, 1,−1), (2, 0, 1, 4)} ⊂ R4
b) {1, x− 2, x2 − x, x3 − x2} ⊂ R4[x].
c){(
i −2i−1 0
),
(1− i −1
4 −i
),
(2 + 5i −8i−3 + 8i 2
)}⊂M2×2(C)
3. i) Calcule una base del subespacio de R5 descrito por las ecuaciones:x1 − x2 + 2x3 − x4 = 0, x3 − x4 = 0, x1 − x4 + x5 = 0. ¿Cual es ladimension?
ii) Calcule las ecuaciones del subespacio de M2×2(C) generado por las
matrices{(
2 −2i4 0
),
(0 i−1 1
),
(−2 −i−1 −3
)}. Halle la di-
mension del subespacio.
4. Calcule bases y ecuaciones de la interseccion y la suma de los subespaciosde R5, W1 y W2 donde W1 viene descrito por la ecuaciones
x1 − x2 + x3 = 0, x2 − x4 − 2x5 = 0, x1 + x2 = 0, 2x1 + x3 = 0
y W2 es generado por los vectores
{(−3, 3, 6, 1, 1), (2, 0, 0,−1, 0), (1, 0, 0, 0,−1), (−1, 3, 6, 0, 1)}
5. Se considera el espacio de polinomios con coeficientes reales de grado me-nor o igual que n, Rn[x]. Demuestre que este espacio es suma directa delsubespacio de polinomios pares y del subespacio de polinomios impares.Calcule las dimensiones de estos dos subespacios.
6. Demuestre que {i, z−3, z2 + z} es una base de C2[z]. Calcule la matriz decambio a la base {1, z, z2} y halle las coordenadas del polinomio i(1+z2)−zen ambas bases.

28 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
7. Se consideran en R4 los conjuntos de vectores
B1 = {(1, 0,−1, 0), (2, 0,−1, 1), (1, 1, 0, 0), (0,−1, 3,−2)}B2 = {(0, 0,−1, 1), (1, 0,−1, 1), (1, 3, 0, 1), (0,−1, 2,−2)}
Demuestre que ambos son bases de R4. Calcule la matriz de cambio debase y las coordenadas del vector v = (1,−1, 1,−1) en ambas bases.
8. Sean los subespacios de R4, V1 y V2, definidos por las ecuaciones:
V1 :
2x1 + x2 + x3 = 0x1 − x4 = 0x2 + x3 + 2x4 = 0
, V2 :
{4x1 + 2x2 − x3 = 07x1 + 4x2 + x4 = 0
Encuentre una base de R4 tal que el primer vector genere V1 ∩V2, los dosprimeros sean una base de V1 y el primero y el tercero sean una base deV2. Calcule una base de V1 + V2.
9. Demuestre que las matrices antisimetricas 3× 3 de coeficientes reales sonun subespacio vectorial de M3×3(R). Compruebe que las matrices
A1 =
0 −1 21 0 3−2 −3 0
, A2 =
0 1 4−1 0 −1−4 1 0
,
A3 =
0 1 10−1 0 1−10 −1 0
, A4 =
0 1 0−1 0 −20 2 0
son un sistema de generadores y extraiga una base. Sea ahora el conjunto
J1 =
0 −1 01 0 00 0 0
, J2 =
0 0 10 0 0−1 0 0
, J3 =
0 0 00 0 −10 1 0
Demuestre que es una base y encuentre la matriz de cambio de base deesta base a la anterior. Calcule las coordenadas de la matriz A3 en ambasbases.
10. En R3 se considera el subespacio W definido por la ecuacion x1 − x2 +x3 = 0. Calcule una base de W . Construya un subespacio U tal queW ⊕U = R3 y calcule una base de U . Calcule la matriz de cambio de basede la base canonica de R3 a la construida usando las dos bases calculadasanteriormente.
11. Sea el espacio C6 y el subespacio W de ecuaciones x1 − ix2 + x3 = 0,x2 + ix4 = 0, x5 + x6 = 0. Determine si el vector
v = (−1, 3i,−2,−3, 1 + i,−1− i)
esta en W y, en caso afirmativo, construya una base de W y escriba lascoordenadas del vector v en esa base.

6.2. EJERCICIOS PROPUESTOS 29
12. En el espacio R3 se considera el subespacio W definido por la ecuacionx1−2x2−x3 = 0. Calcule una base de este subespacio. Sea w ∈ W . Calculelas coordenadas de w en la base hallada anteriormente. Discuta si es posibleencontrar una matriz que aplicada a w (dado por sus coordenadas en labase canonica de R3), permita hallar sus coordenadas en la base de W .¿Que sentido tiene aplicar dicha matriz a un vector que no este en W?

30 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Problemas Algebra Lineal. Curso 2006-2007Tema 3
1. Sea f : C5 → C4 una aplicacion lineal definida por las imagenes de labase canonica en C5:
f(e1) = e′1 + e′2 − e′3, f(e2) = e′1 − 2e′2 − e′4, f(e3) = e′2 − e′3
f(e4) = 2e′3 + e′4, f(e5) = 3e′1 − e′4
Escriba la matriz asociada a f en las bases canonicas de C5 y C4. Hallebases del nucleo y la imagen de f . Estudie si f es inyectiva o sobreyectiva.
2. Sea V = R4[x]. Calcule la matriz (en la base canonica) de la aplicacionlineal D : V → V donde Dp, con p ∈ V es la derivada del polinomio p(x)con respecto a x. Calcule el nucleo y la imagen. Se considera la integralindefinida de un polinomio. Pruebe que es lineal y establezca el espacio departida y llegada y la relacion con D.
3. Calcule la matriz de la aplicacion lineal f : R3 → R4 en las bases de R3
y R4,
B3 = {(1, 2, 0), (0, 0,−1), (−1, 1, 1)}B4 = {(1, 2, 1, 0), (0, 2,−1, 0), (−1, 1, 1,−1), (0,−1, 0, 1)}
sabiendo que en las bases
B′3 = {(1, 1,−1), (1, 0, 0), (−1, 1, 1)}B′4 = {(1, 0, 2, 0), (1, 0,−1, 1), (−1, 1, 0, 1), (0,−1, 1, 0)}
la matriz de la aplicacion es:
M(f,B′3,B′4) =
1 0 −12 1 00 −1 20 2 −2
4. El nucleo de la aplicacion lineal f : C4 → C3 es
ker f = lin{(1,−1, 1, 0), (0, 0,−1, 1)}
Calcule la matriz de f en las bases canonicas y su imagen sabiendo que
f(e1 + e2) = 6e′2, f(e3 − e1) = 3e′1 − 3e′3
5. Sea f una aplicacion lineal de C4 en C5, cuya matriz en las bases canonicasde estos espacios es
1 0 −1 −4i 0 i i2 0 0 −30 i i i2 1 1 −2

6.2. EJERCICIOS PROPUESTOS 31
a) Calcule una base del nucleo y una base de la imagen de esta aplicacion.
b) Calcule, si existen, el conjunto S1 de vectores de C4 cuya imagen es elvector (1, 0, 1, 0, 0) y el conjunto S2 de vectores de C4 cuya imagenes el vector (1, 0, 1, 0, 1). ¿Son S1 y S2 subespacios de C4?
6. Se considera en R3 el producto vectorial de dos vectores y la aplicacionlineal fv(x) = v × x, donde v es un vector (distinto de 0) de R3. Escribala matriz de esta aplicacion en la base canonica de R3 y calcule su nucleoe imagen.
7. Calcule el determinante de las siguientes matrices
A =
1 2 3 41 3 2 10 0 −1 10 0 2 1
, B =
1 1 1 1 11 2 3 4 51 4 9 16 251 8 27 64 1251 16 81 256 625
C =
i 5 −1 0 00 1 −1 0 01 2 −1 0 00 1 2 1 −1i 1− i −1 0 i
8. Se consideran los espacios vectoriales R2, R3 y R4 con las bases
B2 = {(1, 1), (2,−1)}, B3 = {(1, 0,−1), (0, 1, 1), (1, 0, 1)}B4 = {(1, 0, 0, 1), (−1, 0, 2, 0), (1,−1, 2, 0), (1, 1, 1, 1)}
y las aplicaciones lineales f, g dadas por las matrices (en esas bases)
F =
1 0−1 21 10 1
, G =
1 0 −1 01 1 0 10 1 0 1
Calcule la matriz de la aplicacion lineal g ◦ f en las bases canonicas de R2
y R3.
9. Sea V el espacio de las formas lineales de R4. Estudie si el conjunto deformas B = {f1, f2, f3, f4}, f1(x) = x1−x2 +x3, f2(x) = x1−x2, f3(x) =x4 − x1, f4(x) = 2x2, es una base de ese espacio y calcule las matrices deestas formas en la base canonica. Calcule el nucleo de cada una de ellas.¿Existe alguna forma lineal cuyo nucleo sea {0} o tenga dimension 1?
10. Sea f : V → V . Demuestre que si ker f 6= {0}, la imagen de una base deV no puede ser una base de V . ¿Es posible que la imagen de un sistemalinealmente independiente de V sea un sistema l.i. de V ?

32 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
11. Sea f : V → W una aplicacion lineal de rango 3, de un espacio de dimen-sion 4 en otro de dimension 5. Estudie si existen bases de V y W en lasque la matriz de la aplicacion sea:
F =
1 0 0 00 1 0 00 0 1 00 0 0 00 0 0 0
12. Sea f al endomorfismo de C4 definido por
f(e1) = ie1−e3, f(e2) = e2 +ie4, f(e3) = λe1 +e3, f(e4) = λe2 +e4
Discuta para que valores de λ la aplicacion f es biyectiva y calcule laaplicacion inversa de la dada cuando sea posible.

6.2. EJERCICIOS PROPUESTOS 33
Problemas Algebra Lineal. Curso 2006-2007Tema 4
1. Estudie si es posible encontrar una base del espacio vectorial C2 en la quelas siguientes matrices sean diagonales:
σ1 =(
0 11 0
), σ2 =
(0 −ii 0
)2. Sea f un endomorfismo en un espacio vectorial complejo V de dimension
n. Demuestre que si dim ker f = m ≤ n, entonces λ = 0 es un autovalor def con multiplicidad geometrica m. ¿Que se puede decir de la multiplicidadalgebraica de λ = 0?
3. Sea una aplicacion lineal f de C5 en C5 y {u1, u2, u3, u4, u5} una base deC5. Sabiendo que los vectores u1−u2, u1− 2u2 +u3, u1−u4 y u1− 3u2 +u3 + u4 son autovectores de f con autovalor 3 + 2i, que el nucleo de ftiene dimension 1 y que la traza de f es −1 + i, calcule el espectro de fy las multiplicidades algebraicas y geometricas de los autovalores. ¿Es fdiagonalizable?
4. Calcule la forma canonica de Jordan de la matriz,
A =
1 −i 0i 0 10 −1 1
hallando la base correspondiente.
5. Estudie si la siguiente matriz es diagonalizable y en caso de que lo seacalcule una base de autovectores
A =
−3 0 02 −5 −4−2 2 1
6. Demuestre que una matriz nilpotente no es en general diagonalizable. ¿En
que casos lo es? Calcule para la matriz
A =
−4 2 0 4−1 5 −3 4−3 −3 3 0−2 −8 6 −4
su forma canonica de Jordan.
7. Sea f un endomorfismo de un espacio vectorial. Discuta que relacion hayentre el hecho de ser f diagonalizable y el que el nucleo y la imagen de fsean suma directa.

34 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
8. Sean A y B dos matrices de Cn×n tales que [A,B] = 0. Demuestre queexiste al menos un vector que es autovector de ambas matrices.
9. Calcule A1234 donde A es la matriz siguiente:
A =
1 i 0i 0 10 −1 −1
10. Una matriz tiene una forma canonica de Jordan con tres cajas. Sabiendo
que sus autovalores son λ1 y λ2 y que la dimension es 6, calcule todas lasformas canonicas que corresponden a estos datos.
11. El polinomio caracterıstico de una matriz es p(λ) = (λ−1)(λ−2)3(λ+3)2
y el polinomio mınimo es m(λ) = (λ− 1)(λ− 2)2(λ + 3). Calcule la formacanonica de Jordan de dicha matriz. Intente resolver la misma cuestionpara p(λ) = (λ− 2)4 y m(λ) = (λ− 2)2.
12. Calcule la forma canonica y la exponencial de las matrices
T =
0 0 0λ 0 0µ 0 0
, J =
0 0 ϕ0 0 0−ϕ 0 0
, K =
0 u 0u 0 00 0 0
6.2. EJERCICIOS PROPUESTOS 35
Problemas Algebra Lineal. Curso 2006-2007
Tema 5
1. Estudie cuales de las expresiones siguientes son formas bilineales en R3 ycuales son simetricas o antisimetricas. Cuando sea posible halle una basedel radical:
ϕ(x, y) = x21 + x2y2, ϕ(x, y) = x1 + x2 − 2y3,
ϕ(x, y) = x1y2 − x2y1 + x2y2 − 2x3y2 − 2x2y3,
ϕ(x, y) = x1y1 + x2y1 + x1y2, ϕ(x, y) = x1y2 − x3y1 + x1y3 − x2y1
2. Calcule una base en la que la forma bilineal siguiente este representadapor una matriz diagonal
ϕ = x1y1 + x2y1 + x1y2 − x1y3 − x3y1 − x2y2 − x2y3 − x3y2 + x3y3
3. Sea la forma bilineal en R3
ϕ(x, y) = x3y3 − x1y1 − x2y2
Demuestre que es simetrica y su radical es {0}. De ejemplos de vectoresque verifican ϕ(x, x) > 0 o ϕ(x, x) < 0. Calcule el conjunto de vectores queverifican ϕ(x, x) = 0. Dibujelo en el espacio x1, x2, x3. ¿Es un subespaciovectorial?
4. Sea la forma bilineal en R2
ϕ(x, y) = x1y2 + x2y1
Encuentre una base de R2 en la cual la matriz de esta forma bilineal seadiagonal. Calcule en ambas bases, el conjunto de vectores que verificanϕ(x, x) = 0. Dibujelos en el plano R2.
5. Sea f una forma lineal no nula de un espacio vectorial de dimension n(f : V → R). Demuestre que ϕ(x, y) = f(x)f(y) es una forma bilinealsimetrica y calcule su rango. Calcule su radical y una base en la que seadiagonal.
6. Sea la forma bilineal ϕ(x, y) = x1y1 − x2y2 − x3y3 − x4y4 y el subespaciode R4 , W , definido por las ecuaciones x1−x4 = 0, x1−x2 +x3−x4 = 0,x2+x3 = 0. Calcule el conjunto U de vectores x ∈ R4 tales que ϕ(x, y) = 0para todo y ∈ W . Demuestre que U es un subespacio de R4 y calculeU ∩W .
7. Una matriz cuadrada A se usa (entre otras cosas) para representar endo-morfismos y formas bilineales. Compare sus propiedades de transformacionfrente a cambios de base en ambas situaciones.
36 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
8. Una r-forma multilineal se define (en una base dada de un espacio vectorialV de dimension n) por
f(x) =n∑
i1,i2,...,ir=1
ai1i2...irxi1xi2 · · ·xir , x ∈ V
Estudie sus propiedades. Si se cambia la base, los coeficientes ai1i2...ir
cambian. Halle los nuevos coeficientes en funcion de los antiguos usandola matriz de cambio de base.
9. Demuestre que si una forma cuadratica regular no es definida, entoncesexiste x ∈ V tal que Q(x) = 0. Demuestre tambien que si ϕQ(x, y) = 0para todo y ∈ V entonces x = 0, donde ϕQ es la forma bilineal simetricaasociada a Q.
10. Estudie las caracterısticas de las formas cuadraticas siguientes
Q1(x) = x21 − x2
2 + 2x1x2, Q2(x) = 3x21 + x1x2 − 2x1x3 + x2
2 + x23
Q3(x) = −9x21 − 3x2
2 − 6x23 − 10x1x3 + 6x2x3
11. Escriba las siguientes formas cuadraticas como una suma de cuadrados:
Q1(x) = x21 − 2x2x3 + 3x2
3 − 4x1x2 − x3x4 + x24
Q2(x) = x1x2 + x1x3 + x1x4 + x2x3 + x2x4 + x3x4
¿Son regulares? ¿Son definidas positivas?
12. Demuestre que si una forma cuadratica es definida positiva, los autovaloresde la matriz asociada (en cualquier base) son positivos.

6.2. EJERCICIOS PROPUESTOS 37
Problemas Algebra Lineal. Curso 2006-2007Tema 6
1. Estudie si las siguientes expresiones definen un producto escalar en cadauno de los espacios considerados:
〈x, y〉 = x1y1 − x2y2, x, y ∈ R2, 〈x, y〉 = x1y1 + x2y2 + x3y3, x, y ∈ R4
〈x, y〉 = x1y1 + x2y2, x, y ∈ C2
〈x, y〉 = x1y1 + ix1y2 − ix2y1 + 2x2y2, x, y ∈ C2
2. Calcule una base ortonormal del subespacio de R4 (con el producto escalarusual) definido por las ecuaciones: x1 + x2 − x3 = 0, x1 − 2x4 = 0.
3. Sea el producto escalar en C3 definido por:
〈x, y〉 = x1y1 + ix1y2 − ix2y1 + 2x2y2 + 3x3y3 + x2y3 + x3y2
¿Es la base canonica una base ortonomal? Calcule una base ortonormalde C3 con ese producto escalar.
4. Halle el subespacio ortogonal al definido por las ecuaciones
x1 + ix3 = 0, ix3 + x4 = 0, 3x1 + ix3 − 2x4 = 0
(en C4 con el producto escalar usual). Calcule una base ortonomal de esesubespacio y extiendala a una base ortonormal de C4.
5. Halle el proyector ortogonal (en R5 con el producto escalar usual) sobreel subespacio W dado por la ecuacion: x1 + x2 − 2x3 + x4 − x5 = 0.
6. Calcule la distancia del vector v = (1, 0,−1, 1) al subespacio de R4 cuyabase es: {(1, 0, 0,−1), (1,−1, 0, 0)}.
7. Sea V un espacio vectorial complejo de dimension finita n dotado de unproducto escalar. Sea W un subespacio de V con base {u1, . . . , um} y v ∈V . Demuestre que las coordenadas de la proyeccion ortogonal de v sobreW , en la base de W citada, son la solucion del sistema
∑mi=1 λi〈uj , ui〉 =
〈uj , v〉 y escriba las componentes paralela y perpendicular de v con res-pecto a W .
8. Encuentre en el subespacio W = lin{1, t, t2} de R6[t] con el productoescalar 〈p, q〉 =
∫ 1
0p(t)q(t)dt, el vector que mejor aproxima a r(t) = t5 y
su distancia a este polinomio.
9. En el espacio vectorial C4 con el producto escalar usual, se define unaforma lineal por: f(x) = ix1−2x2+(1−i)x3−x4, x ∈ C4. Calcule un vectorvf ∈ C4 tal que f(x) = 〈vf , x〉. Si se considera la forma g(x) = if(x),calcule el vector correspondiente vg y relacionarlo con vf . ¿Es posibleencontrar wf tal que f(x) = 〈x, wf 〉?

38 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
10. Sea la descomposicion en suma directa de R6 = V1 ⊕ V2 ⊕ V3, donde losespacios vienen definidos por las ecuaciones
V1 :
x1 + x2 + x3 + x4 + x5 + x6 = 0x1 − x2 + x3 − x6 = 05x1 − x2 + 5x3 + 2x4 + 2x5 − x6 = 0
V2 :
2x1 + x2 − x3 = 02x1 + x2 − x3 + x4 − x5 = 0x2 + x4 − x5 − x6 = 0x2 + x3 + x4 − x5 = 02x1 + 2x2 + x4 − x5 = 0
, V3 :
x1 − x3 + x4 − x5 = 0x1 − x3 − x4 − x5 = 0x1 + x3 − 2x6 = 0x1 − 2x2 + x3 = 0x4 + x5 = 0
¿Es posible encontrar una base ortonormal adaptada a esa descomposi-cion? Hallela en caso de que sea ası.
11. Demuestre que en Rn (con la metrica euclidiana) la suma de los cuadradosde las diagonales de un paralelogramo es dos veces la suma de los cuadradosde los lados. Demuestre el teorema de Pitagoras: si un conjunto de vectoresson ortogonales dos a dos, el cuadrado de la norma de su suma es la sumade sus normas al cuadrado.
12. Sea K la matriz de un producto escalar definido en Cn. Demuestre que lasmatrices U que verifican U+KU = K, forman un grupo con la operacionde multiplicacion de matrices. Demuestre que si se impone que el determi-nante sea igual a 1, se obtiene un subgrupo del anterior. Compruebe quesi U es una de esas matrices, el producto escalar de los vectores x, y ∈ Cn
es igual al del los vectores Ux y Uy. ¿Que ocurre si K no es un productoescalar, pero es real y regular?

6.2. EJERCICIOS PROPUESTOS 39
Problemas Algebra Lineal. Curso 2006-2007Tema 7
1. Encuentre una matriz ortogonal que diagonalice a la matriz
A =(
1 11 0
)Calcule la descomposicion espectral y Ak para cualquier k entero positivo.Aplique Ak al vector (1, 0) y discuta el resultado para distintos valores dek.
2. Calcule el espectro de la matriz (en C4, con el producto escalar usual)
A =
2 0 −1 00 3 0 −1−1 0 2 00 −1 0 3
Halle una base ortonormal de autovectores y la descomposicion espectralasociada.
3. Demuestre que la exponencial de una matriz iA donde A es autoadjuntaes una matriz unitaria. ¿Como es la exponencial de una matriz real yantisimetrica? Calcule la exponencial de las siguientes matrices utilizandola descomposicion espectral correspondiente.
A =
1 −i 0i 0 −10 −1 2
, K =
0 −1 11 0 −1−1 1 0
4. Sabiendo que v1 = (1, 0,−i) y v2 = (0,−1, 2i) son dos autovectores de una
matriz autoadjunta (en C3 con el producto escalar usual), calcule otrovector linealmente independiente con los anteriores y que sea autovectorde la matriz. Si el polinomio caracterıstico de A es (λ + 1)2(λ− 1) calculela matriz A en la base canonica de C3.
5. Sea la matriz
A =(
2 + i 2i−i 2− i
)Discuta si es posible que exista un producto escalar en C2 tal que un ope-rador autoadjunto, A, tenga a A por matriz en una cierta base. En casoafirmativo calcule una base ortonormal de autovectores y la descomposi-cion espectral de A.
6. Sean A1 y A2 dos matrices anti-autoadjuntas (A+ = −A). Demuestreque su conmutador [A1, A2] = A1A2 − A2A1 es tambien una matriz anti-autoadjunta. Sean U1 y U2 dos matrices unitarias. Demuestre que su pro-ducto es una matriz unitaria. Sea U(λ) un conjunto de matrices unitarias,

40 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
con λ ∈ R, tales que los elementos de U(λ) son derivables con respecto aλ, U(λ1)U(λ2) = U(λ1 + λ2) y U(0) = I. Demuestre que la derivada J deU(λ) con respecto a λ en λ = 0 es una matriz anti-autoadjunta.
7. Halle una base ortonormal de autovectores de de la matriz
A =
5 −2i −i2i 2 −2i −2 5
Calcule la descomposicion espectral de dicha matriz y q(A) donde q(λ) =λ513 − 1.
8. Sea R una rotacion en R3 de angulo π6 cuyo eje tiene la direccion del
vector (1,−1, 1). Calcule la matriz de la rotacion en la base canonica deR3.
9. Sea R una rotacion en R3 de eje en la direccion (0, 0, 1) y angulo π3 . Calcule
otra rotacion R1 tal que R1RR−11 sea una rotacion con eje en la direccion
(1, 0, 0). ¿Cual es el angulo de la nueva rotacion?
10. Sea
R =18
4−√
2 +√
6 2(−1−√
3) 4 +√
2−√
62(1 +
√3) 2
√2(−1 +
√3) 2(−1−
√3)
4 +√
2−√
6 2(1 +√
3) 4−√
2 +√
6
Demuestre que se trata de una rotacion en R3 y calcule el eje y el angulode rotacion. Halle una base ortonormal en la que esta matriz tenga laforma canonica.
11. Se consideran las rotaciones en R3 dadas por las matrices
R1 =
1√2
0 1/√
20 1 0
−1/√
2 0 1/√
2
, R2 =
1/2 −√
3/2 0√3/2 1/2 00 0 1
Calcule los angulos y el eje de rotacion de ambas. Sean ahora R3 = R1R2
y R4 = R2R1. Demuestre que R3 y R4 son tambien rotaciones y calculesus ejes y angulos de rotacion. ¿Que relacion existe entre los angulos y losejes de rotacion de R1 y R2 y los de R3 y R4?
12. Calcule los subespacios invariantes de la matriz ortogonal
R =1
2√
2
1 1 +
√2 −1 +
√2 −1
−1 +√
2 1 −1 1 +√
21 +
√2 −1 1 −1 +
√2
−1 −1 +√
2 1 +√
2 1
y los puntos de R4 que quedan fijos al aplicar la transformacion. Halle unabase ortonormal en la cual esta matriz tenga la forma canonica. ¿Existealgun subespacio de dimension 3 que sea invariante?
6.3. SOLUCIONES 41
6.3. Soluciones

42 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Problemas Algebra Lineal. Curso 2006-2007Tema 1
1. Un triangulo equilatero es invariante bajo tres rotaciones en torno al cen-tro. Escriba la tabla del grupo formado por esas tres rotaciones. Las refle-xiones respecto a las alturas del triangulo lo dejan invariante. Escriba latabla del grupo formado por las rotaciones y las reflexiones.Solucion:
I R1 R2
I I R1 R2
R1 R1 R2 IR2 R2 I R1
I R1 R2 S1 S2 S3
I I R1 R2 S1 S2 S3
R1 R1 R2 I S3 S1 S2
R2 R2 I R1 S2 S3 S1
S1 S1 S2 S3 I R1 R2
S2 S2 S3 S1 R2 I R1
S3 S3 S1 S2 R1 R2 I
2. Demuestre que las raıces complejas de orden n de la unidad forman ungrupo multiplicativo. Una raız es primitiva si todas las raıces son potenciassuyas. ¿Cuales son las raıces primitivas de orden n de la unidad? Estudiesi las potencias de cualquier raız son un subgrupo del grupo de raıces.Solucion: Raıces: ωk = e2kπi/n, k = 1, 2 . . . , n. Si ω1, ω2 raıces entonces ω1ω2
es otra raız.(ω1ω2)
n = ωn1 ωn
2 = 1
ωrωn−r = 1 = ωn
Si k y n son primos entre sı, entonces ωk es una raız primitiva. Los exponentes:
k
n,2k
n, . . . ,
(n− 1)k
n
no son un numero entero. Por tanto, si n es primo todas las potencias sonprimitivas.
Si k es un divisor de n, ωk no es primitiva. pero sus potencias:
ωk, ω2k = ω2k, . . . , ωr
k = ωkr = 1, r =n
k
son un subgrupo del grupo de raıces primitivas (la suma de dos multiplos de k
es un multiplo de k y como n es un multiplo de k, al restar n obtenemos otro
multiplo de k).
3. Demuestre que el conjunto R[x] de polinomios en x con coeficientes realeses un anillo. Estudie las propiedades del conjunto de los multiplos de unpolinomio p ∈ R[x].
Solucion: La suma y el producto de polinomios son polinomios. El elemento 0
es el neutro de la suma y 1 el del producto. Ambas operaciones son asociativas
y se cumple la distributiva. EL conjunto de los multiplos de un polinomio es
tambien un anillo (si dos polinomios son multiplos de otro, su suma y su producto
tambien lo son). Ademas el producto de cualquier polinomio por un multiplo
del polinomio dado es otro polinomio. Se dice que ese subconjunto es un ideal
(y se llaman principales).
6.3. SOLUCIONES 43
4. Se considera el conjunto de los numeros reales y el punto del infinito:R = R ∪ {∞}). En este conjunto se definen las operaciones: x • y =mın(x, y), x∗y = x+y. Estudie las propiedades de la estructura algebraica,(R, •, ∗).Solucion: Respecto a • se tienen la asociativa y la conmutativa. El elementoneutro es el ∞. Sin embargo no existe el inverso. Respecto a ∗ se tiene laspropiedades de la suma en los numeros reales. En cuanto a la distributiva:
x ∗ (y • z) = x + mın(y, z) = mın(x + y, x + z) = (x ∗ y) • (x ∗ z)
Tengase en cuenta que, en general, no es cierto que
x • (y ∗ z) = (x • y) ∗ (x • z)
puesmın(x, y + z) 6= mın(x, y) + mın(x, z)
Por tanto este conjunto no es un anillo porque le falta la propiedad de tener
inverso respecto a la primera operacion. Se dice que es un semianillo.
5. Sea G un grupo de orden 2n y H un subgrupo de orden n. Pruebe que Hes un subgrupo normal (es decir, todo elemento de la forma ghg−1, dondeh ∈ H y g ∈ G, esta en H).
Solucion: Como H tiene n elementos, hay n elementos de G en H y n fuera de
el. Entonces G esta dividido en dos clases de elementos cada una con el mismo
numero de elementos. Si h ∈ H esta claro que hH = Hh = H (el producto de
dos elementos de H esta en H). Si g /∈ H, gh /∈ H para todo h de G. Luego
el conjunto de elementos de la forma gH donde g /∈ H es igual a la clase de
elementos que no esta en H. Cuando se multiplica por la izquierda se obtiene el
mismo resultado, por tanto gH = Hg.
6. Demuestre que las matrices 2 × 2 de determinante distinto de cero sonun grupo. Demuestre que las matrices de determinante igual a 1 son unsubgrupo del anterior. ¿Que pasa con las matrices n× n?
Solucion: Las matrices de determinante distinto de cero tienen inversa. Ademas
el determinante de un producto de matrices es el producto de los determinantes.
Por tanto se trata de un grupo (no abeliano). Las matrices de determinante
igual a 1 son un subgrupo del anterior por la misma propiedad del determinante
de un producto. La situacion es la misma para las matrices n× n.
7. Sea A el conjunto de las matrices n×n con elementos complejos y en esteconjunto la operacion: (A,B) → [A,B] = AB − BA. ¿Es (A,+, [·, ·]) unanillo?Solucion: Respecto a la suma se trata de un grupo abeliano. Respecto a laconmutacion, no es asociativa:
[A, [B, C] 6= [[A, B], C],
en general. Tampoco es conmutativa ([A, B] = −[B, A]) pero es distributiva:
[A + B, C] = [A, C] + [B, C]

44 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Se dice que A es un anillo de Lie.
8. Calcule la parte real e imaginaria y el modulo y argumento de todas losnumeros complejos que elevados a 5 son iguales a 1/(1+i
√3). Represente-
los en el plano complejo.
Solucion:
1
21/5
„cos
π
5
„1
3+ 2k
«+ i sen
π
5
„1
3+ 2k
««, k = 0, 1, 2, 3, 4
-0.75 -0.5 -0.25 0.25 0.5 0.75
-0.75
-0.5
-0.25
0.25
0.5
0.75
9. Calcule el modulo y el argumento, la parte real y la parte imaginaria de lasuma, la resta, el producto y el cociente de los numeros complejos 2eiπ/3
y e25iπ/6.
Solucion:
z1 = 2eiπ/3 = 1 + i√
3, z2 = e25iπ/6 =
√3
2+
i
2
z1 + z2 = 1 +
√3
2+ i
„√3 +
1
2
«, z1 − z2 = 1−
√3
2+ i
„√3− 1
2
«z1z2 = 2i,
z1
z2=√
3 + i
10. Dibuje en el plano complejo los conjuntos D = {z = t−1e2it, t ∈ (0,∞)} yS = {z ∈ C : |z − 2| = 3}.Solucion:
-0.5 -0.25 0.25 0.5 0.75 1
0.5
1
1.5
2
0.5 1 1.5 2 2.5 3 3.5
-1.5
-1
-0.5
0.5
1
1.5

6.3. SOLUCIONES 45
11. Calcule las soluciones de la ecuacion: z2 + (3 + i)z − 2 + 9i = 0.Solucion:
z1 = 1− 2i, z2 = −4 + i
12. Calcule las soluciones del sistema de ecuaciones
(1− i)z − wz = 0, |z − 1| − w = 2
Solucion: Si (1− i)z − wz = 0, entonces z = 0 o w = 1− i. En el primer caso,
| − 1| − w = 2, es decir w = −1. En el segundo, |z − 1| − 1 + i = 2 que no tiene
solucion.

46 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Problemas Algebra Lineal. Curso 2006-2007Tema 2
1. Estudie si los siguientes conjuntos son espacios vectoriales con las opera-ciones que se indican y calcule su dimension caso de que lo sean
i) Sobre los reales, las matrices reales 3× 3 que verifican A = −AT , conla suma de matrices y el producto de un escalar por una matriz.
ii) Sobre los reales, los numeros complejos, con las operaciones usuales.
iii) Sobre los complejos, la matrices complejas 2 × 2 de determinanteigual a 1, con la suma de matrices y el producto de un escalar poruna matriz.
Solucion:
i) La suma de matrices antisimetricas es antisimeetrica y el producto de unescalar por una matiz antismetrica tambien. La dimension es 3. De A =−At se tiene
a11 = a22 = a33 = 0, a21 = −a12, a31 = −a13, a23 = −a32
ii) El producto de un numero real por uno complejo es complejo. En cuanto ala dimension z = a + ib ∈ C, con a, b ∈ R, luego la dimension es 2.
iii) La suma de dos matrices complejas de determinante igual a 1 no tienedeterminante igual a 1 en general.
2. Estudie si los siguientes conjuntos son linealmente independientes en losespacios vectoriales que se indican:
a) {(2, 0, 1, 3), (2, 1, 1,−1), (2, 0, 1, 4)} ⊂ R4
b) {1, x− 2, x2 − x, x3 − x2} ⊂ R4[x].
c){(
i −2i−1 0
),
(1− i −1
4 −i
),
(2 + 5i −8i−3 + 8i 2
)}⊂M2×2(C)
Solucion:
a) Son l.i.
λ1(2, 0, 1, 3) + λ2(2, 1, 1,−1) + λ3(2, 0, 1, 4) = 0 ⇒ λ1 = λ2 = λ3 = 0
b) Son l.i.
λ1 + λ2(x− 2) + λ3(x2 − x) + λ4(x
3 − x2) = 0 ⇒ λ1 = λ2 = λ3 = λ4 = 0
c) Son l.d.
λ1
„i −2i
−1 0
«+ λ2
„1− i −1
4 −i
«+ λ3
„2 + 5i −8i
−3 + 8i 2
«= 0
λ1 = −3λ3, λ2 = −2iλ3

6.3. SOLUCIONES 47
3. i) Calcule una base del subespacio de R5 descrito por las ecuaciones:x1 − x2 + 2x3 − x4 = 0, x3 − x4 = 0, x1 − x4 + x5 = 0. ¿Cual es ladimension?
ii) Calcule las ecuaciones del subespacio de M2×2(C) generado por las
matrices{(
2 −2i4 0
),
(0 i−1 1
),
(−2 −i−1 −3
)}. Halle la di-
mension del subespacio.
Solucion:
i) Resolviendo el sistema:
x1 = x4 − x5, x2 = 2x4 − x5, x3 = x4
y una base es:
{(1, 2, 1, 1, 0), (−1,−1, 0, 0, 1)}La dimension es 2
ii) La tercera matriz d.l. de las dos primeras„x1 x2
x3 x4
«= λ
„2 −2i4 0
«+ µ
„0 i−1 1
«Eliminando parametros
2x1 − x3 − x4 = 0, x1 − ix2 − x4 = 0
La dimension es 2.
4. Calcule bases y ecuaciones de la interseccion y la suma de los subespaciosde R5, W1 y W2 donde W1 viene descrito por la ecuaciones
x1 − x2 + x3 = 0, x2 − x4 − 2x5 = 0, x1 + x2 = 0, 2x1 + x3 = 0
y W2 es generado por los vectores
{(−3, 3, 6, 1, 1), (2, 0, 0,−1, 0), (1, 0, 0, 0,−1), (−1, 3, 6, 0, 1)}
Solucion: Una base de W1 es
{(−1, 1, 2, 1, 0), (−2, 2, 4, 0, 1)}
y las ecuaciones implıcitas son:
x1 − x2 + x3 = 0, x2 − x4 − 2x5 = 0, x1 + x2 = 0
Una base de W2 es:
{(−3, 3, 6, 1, 1), (2, 0, 0,−1, 0), (1, 0, 0, 0,−1)}
y las ecuaciones:
x1 + 2x4 + x5 = 0, 2x2 − x3 = 0

48 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Un sistema de generadores de W1 + W2 es
{(−1, 1, 2, 1, 0), (−2, 2, 4, 0, 1), (−3, 3, 6, 1, 1), (2, 0, 0,−1, 0), (1, 0, 0, 0,−1)}
y una base:
{(−1, 1, 2, 1, 0), (−2, 2, 4, 0, 1), (2, 0, 0,−1, 0), (1, 0, 0, 0,−1)}
Las ecuaciones son:2x2 − x3 = 0
Las ecuaciones de W1 ∩W2 son:
x1−x2 +x3 = 0, x2−x4−2x5 = 0, x1 +x2 = 0, x1 +2x4 +x5 = 0, 2x2−x3 = 0
que se reducen a
x1 − x2 + x3 = 0, x2 − x4 − 2x5 = 0, x1 + x2 = 0, x1 + 2x4 + x5 = 0
y una base es: {(−3, 3, 6, 1, 1)}.
5. Se considera el espacio de polinomios con coeficientes reales de grado me-nor o igual que n, Rn[x]. Demuestre que este espacio es suma directa delsubespacio de polinomios pares y del subespacio de polinomios impares.Calcule las dimensiones de estos dos subespacios.Solucion: Todo polinomio se puede poner como:
p(x) =1
2(p(x) + p(−x)) +
1
2(p(x)− p(−x))
Esta claro que la descomposicion es unica. El primero es un polinomio par y el
segundo impar. Los polinomios pares forman un subespacio con base (cuando n
es par) {1, x2, . . . xn} y los impares {x, x3, . . . xn−1}. Las dimensiones son 1+n/2
y n/2 respectivamente. Si n es impar, los dos subespacios tienen dimension son
(n + 1)/2.
6. Demuestre que {i, z−3, z2 + z} es una base de C2[z]. Calcule la matriz decambio a la base {1, z, z2} y halle las coordenadas del polinomio i(1+z2)−zen ambas bases.Solucion:
λ1i+λ2(z−3)+λ3(z2 + z) = iλ1−3λ2 +(λ2 +λ3)z +λ3z
2 ⇒ λ1 = λ2 = λ3 = 0
son l.i. y como la dimension del espacio es 3, son una base. Cambio de base:8><>:i = i
z − 3 = −3 + z
z2 + z = z + z2
, P =
0@ i −3 00 1 10 0 1
1ALas coordenadas de i(1 + z2) − z en la base {1, z, z2} son (i,−1, i). En la otrabase:0@ y1
y2
y3
1A = P−1
0@ i−1i
1A =
0@ −i −3i 3i0 1 −10 0 1
1A0@ i−1i
1A =
0@ −2 + 3i−1− i
i
1Ai(1 + z2)− z = (−2 + 3i)(i) + (−1− i)(z − 3) + i(z2 + z)

6.3. SOLUCIONES 49
7. Se consideran en R4 los conjuntos de vectores
B1 = {(1, 0,−1, 0), (2, 0,−1, 1), (1, 1, 0, 0), (0,−1, 3,−2)}B2 = {(0, 0,−1, 1), (1, 0,−1, 1), (1, 3, 0, 1), (0,−1, 2,−2)}
Demuestre que ambos son bases de R4. Calcule la matriz de cambio debase y las coordenadas del vector v = (1,−1, 1,−1) en ambas bases.
Solucion: La matriz de cambio de base es P = B−12 B1:
B1 =
0BB@1 2 1 00 0 1 −1−1 −1 0 30 1 0 2
1CCA , B2 =
0BB@0 1 1 00 0 3 −1−1 −1 0 21 1 1 −2
1CCA
P =
0BB@−7 −1 −3 62 2 1 −1−1 0 0 1−3 0 −1 4
1CCALas coordenadas de v en la bases B1 y B2 son:
X1 = B−11 v =
0BB@2/31/3−1/32/3
1CCA , X2 = B−12 v =
0BB@0101
1CCASe tiene:
X2 = B−12 B1X1 = PX1
8. Sean los subespacios de R4, V1 y V2, definidos por las ecuaciones:
V1 :
2x1 + x2 + x3 = 0x1 − x4 = 0x2 + x3 + 2x4 = 0
, V2 :
{4x1 + 2x2 − x3 = 07x1 + 4x2 + x4 = 0
Encuentre una base de R4 tal que el primer vector genere V1 ∩V2, los dosprimeros sean una base de V1 y el primero y el tercero sean una base deV2. Calcule una base de V1 + V2.
Solucion: La interseccion tiene por ecuaciones
2x1 + x2 + x3 = 0, x1 − x4 = 0, x2 + x3 + 2x4 = 0
4x1 + 2x2 − x3 = 0, 7x1 + 4x2 + x4 = 0
y una base es: u1 = (1,−2, 0, 1). Ahora buscamos un vector u2 tal que {u1, u2}sea un base de V2. Resolviendo
2x1 + x2 + x3 = 0, x1 − x4 = 0, x2 + x3 + 2x4 = 0

50 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
obtenemos u2 = (0,−1, 1, 0). Se busca ahora u3, tal que {u1, u3} sea una basede V2. Resolviendo
4x1 + 2x2 − x3 = 0, 7x1 + 4x2 + x4 = 0
obtenemos u3 = (4,−7, 2, 0). Para construir el cuarto vector, basta tomar uno
que sea l.i. con los anteriores, por ejemplo u4 = (1, 0, 0, 0). Una base de V1 + V2
es {u1, u2, u3}.
9. Demuestre que las matrices antisimetricas 3× 3 de coeficientes reales sonun subespacio vectorial de M3×3(R). Compruebe que las matrices
A1 =
0 −1 21 0 3−2 −3 0
, A2 =
0 1 4−1 0 −1−4 1 0
,
A3 =
0 1 10−1 0 1−10 −1 0
, A4 =
0 1 0−1 0 −20 2 0
son un sistema de generadores y extraiga una base. Sea ahora el conjunto
J1 =
0 −1 01 0 00 0 0
, J2 =
0 0 10 0 0−1 0 0
, J3 =
0 0 00 0 −10 1 0
Demuestre que es una base y encuentre la matriz de cambio de base deesta base a la anterior. Calcule las coordenadas de la matriz A3 en ambasbases.Solucion: Si A ∈M3×3(R) verifica At = A, entonces:
A =
0@ 0 x1 −x2
−x1 0 x3
x2 −x3 0
1Aque es un subespacio de dimension 3.
λ1A1 + λ2A2 + λ3A3 + λ4A4 = 0
implica que λ3 = λ1 + 2λ2 ası que A1, A2 y A4 son l.i. y por tanto una basedel subespacio. Ademas las coordenadas de A3 en esta base son (1, 2, 0). Esinmediato que {J1, J2, J3} es una base. Ademas:
A1 = J1 + 2J2 − 3J3, A2 = −J1 + 4J2 + J3, A4 = −J1 + 2J3
por lo que la matriz de cambio de base es:
P =
0@ 1 −1 −12 4 0−3 1 2
1Ay las coordenadas de A3 en la base Ji son (como, por otra parte, se puede verde forma evidente):
P
0@ 120
1A =
0@ −110−1
1A

6.3. SOLUCIONES 51
10. En R3 se considera el subespacio W definido por la ecuacion x1 − x2 +x3 = 0. Calcule una base de W . Construya un subespacio U tal queW ⊕U = R3 y calcule una base de U . Calcule la matriz de cambio de basede la base canonica de R3 a la construida usando las dos bases calculadasanteriormente.Solucion: Una base de W es {(1, 1, 0), (1, 0,−1)}. U se puede tomar como laenvolvente lineal de (1, 0, 0) que es l.i. con los anteriores. La matriz de cambio ala base B = {(1, 1, 0), (1, 0,−1), (1, 0, 0)} es
P =
0@ 1 1 11 0 00 −1 0
1A , P−1 =
0@ 0 1 00 0 −11 −1 1
1A , XB = P−1Xc
11. Sea el espacio C6 y el subespacio W de ecuaciones x1 − ix2 + x3 = 0,x2 + ix4 = 0, x5 + x6 = 0. Determine si el vector
v = (−1, 3i,−2,−3, 1 + i,−1− i)
esta en W y, en caso afirmativo, construya una base de W y escriba lascoordenadas del vector v en esa base.Solucion: Sustituyendo se ve que v ∈ W . Una base de W se obtiene resolviendolas ecuaciones
{(1, 0,−1, 0, 0, 0), (1,−i, 0, 1, 0, 0), (0, 0, 0, 0, 1,−1)}
Para calcular las coordenadas de v en esta base:
(−1, 3i,−2,−3, 1 + i,−1− i) = λ1(1, 0,−1, 0, 0, 0) + λ2(1,−i, 0, 1, 0, 0)
+λ3(0, 0, 0, 0, 1,−1)
y las coordenadas son:(2,−3, 1 + i)
12. En el espacio R3 se considera el subespacio W definido por la ecuacionx1−2x2−x3 = 0. Calcule una base de este subespacio. Sea w ∈ W . Calculelas coordenadas de w en la base hallada anteriormente. Discuta si es posibleencontrar una matriz que aplicada a w (dado por sus coordenadas en labase canonica de R3), permita hallar sus coordenadas en la base de W .¿Que sentido tiene aplicar dicha matriz a un vector que no este en W?Solucion: Una base de W es:8<:
0@ 101
1A ,
0@ 210
1A9=;Si w ∈ W ⊂ R3
w =
0@ w1
w2
w3
1A , w1 − 2w2 − w3 = 0, w = w3
0@ 101
1A+ w2
0@ 210
1A

52 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Una matriz de las buscadas es:
M =
„0 0 10 1 0
«, w = (Mw)1
0@ 101
1A+ (Mw)2
0@ 210
1ASi v /∈ W
v 6= (Mv)1
0@ 101
1A+ (Mv)2
0@ 210
1A =
0@ v3 + 2v2
v2
v3
1A

6.3. SOLUCIONES 53
Problemas Algebra Lineal. Curso 2006-2007Tema 3
1. Sea f : C5 → C4 una aplicacion lineal definida por las imagenes de labase canonica en C5:
f(e1) = e′1 + e′2 − e′3, f(e2) = e′1 − 2e′2 − e′4, f(e3) = e′2 − e′3
f(e4) = 2e′3 + e′4, f(e5) = 3e′1 − e′4
Escriba la matriz asociada a f en las bases canonicas de C5 y C4. Hallebases del nucleo y la imagen de f . Estudie si f es inyectiva o sobreyectiva.Solucion:
Af =
0BB@1 1 0 0 31 −2 1 0 0−1 0 −1 2 00 −1 0 1 −1
1CCA , ker f = lin{−1, 1, 3, 1, 0}, im f = C4
Es sobreyectiva pero no inyectiva.
2. Sea V = R4[x]. Calcule la matriz (en la base canonica) de la aplicacionlineal D : V → V donde Dp, con p ∈ V es la derivada del polinomio p(x)con respecto a x. Calcule el nucleo y la imagen. Se considera la integralindefinida de un polinomio. Pruebe que es lineal y establezca el espacio departida y llegada y la relacion con D.Solucion:
BV = {1, x, x2, x3, x4}D1 = 0, Dx = 1, Dx2 = 2x, Dx3 = 3x2, Dx4 = 4x3
AD =
0BBBB@0 1 0 0 00 0 2 0 00 0 0 3 00 0 0 0 40 0 0 0 0
1CCCCA , ker D = lin{1}, im D = lin{1, x, x2, x3}
I(p) =
Zpdx =
Z(a0 + a1x + a2x
2 + a3x3 + a4x
4)dx
= a0x +a1
2x2 +
a2
3x3 +
a3
4x4 +
a4
5x5
I : R4[x] → R5[x], MI =
0BBBBBB@0 0 0 0 01 0 0 0 00 1/2 0 0 00 0 1/3 0 00 0 0 1/4 00 0 0 0 1/5
1CCCCCCA
MIAD =
0BBBBBB@0 0 0 0 00 1 0 0 00 0 1 0 00 0 0 1 00 0 0 0 10 0 0 0 0
1CCCCCCA

54 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
3. Calcule la matriz de la aplicacion lineal f : R3 → R4 en las bases de R3
y R4,
B3 = {(1, 2, 0), (0, 0,−1), (−1, 1, 1)}B4 = {(1, 2, 1, 0), (0, 2,−1, 0), (−1, 1, 1,−1), (0,−1, 0, 1)}
sabiendo que en las bases
B′3 = {(1, 1,−1), (1, 0, 0), (−1, 1, 1)}B′4 = {(1, 0, 2, 0), (1, 0,−1, 1), (−1, 1, 0, 1), (0,−1, 1, 0)}
la matriz de la aplicacion es:
M(f,B′3,B′4) =
1 0 −12 1 00 −1 20 2 −2
Solucion:
XB′3 = PB3B′3
XB3 , XB′4 = PB4B′4
XB4
YB4 = M(f,B3,B4)XB3 , YB′4 = M(f,B′3,B′4)XB′3
PB3B′3
= (B′3)−1B3, PB4
B′4= (B′
4)−1B4
M(f,B3,B4) =
„PB4B′4
«−1
M(f,B′3,B′4)PB3B′3
B3 =
0@ 1 0 −12 0 10 −1 1
1A , B′3 =
0@ 1 1 −11 0 1−1 0 1
1A
B4 =
0BB@1 0 −1 02 2 1 −11 −1 1 00 0 −1 1
1CCA , B′4 =
0BB@1 0 −1 00 0 1 −12 −1 0 10 1 1 0
1CCA
M(f,B3,B4) =1
6
0BB@−3 5 −818 −2 263 −1 1027 −1 22
1CCA4. El nucleo de la aplicacion lineal f : C4 → C3 es
ker f = lin{(1,−1, 1, 0), (0, 0,−1, 1)}
Calcule la matriz de f en las bases canonicas y su imagen sabiendo que
f(e1 + e2) = 6e′2, f(e3 − e1) = 3e′1 − 3e′3
Solucion:f(e1)− f(e2) + f(e3) = 0, −f(e3) + f(e4) = 0,

6.3. SOLUCIONES 55
f(e1) + f(e2) = 6e′2, f(e3)− f(e1) = 3e′1 − 3e′3
f(e1) = −e′1 + 2e′2 + e′3, f(e2) = e′1 + 4e′2 − e′3,
f(e3) = 2e′1 + 2e′2 − 2e′3, f(e4) = 2e′1 + 2e′2 − 2e′3
Af =
0@ −1 1 2 22 4 2 21 −1 −2 −2
1A , im f = lin{(−1, 2, 1), (1, 4,−1)}
5. Sea f una aplicacion lineal de C4 en C5, cuya matriz en las bases canonicasde estos espacios es
1 0 −1 −4i 0 i i2 0 0 −30 i i i2 1 1 −2
a) Calcule una base del nucleo y una base de la imagen de esta aplicacion.
b) Calcule, si existen, el conjunto S1 de vectores de C4 cuya imagen es elvector (1, 0, 1, 0, 0) y el conjunto S2 de vectores de C4 cuya imagenes el vector (1, 0, 1, 0, 1). ¿Son S1 y S2 subespacios de C4?
Solucion: Una base de la imagen es: {(1, i, 2, 0, 2), (0, 0, 0, i, 1), (−1, i, 0, i, 1)}.
Una base del nucleo es: {(3, 3,−5, 2)}. El vector (1, 0, 1, 0, 0) no esta en la ima-
gen. No existe ningun vector de C4 cuya imagen sea este vector (no es un
subespacio). (1, 0, 1, 0, 1) sı esta en la imagen: S2 = (0, 0, 1/3,−1/3) + ker f . No
es un subespacio vectorial.
6. Se considera en R3 el producto vectorial de dos vectores y la aplicacionlineal fv(x) = v × x, donde v es un vector (distinto de 0) de R3. Escribala matriz de esta aplicacion en la base canonica de R3 y calcule su nucleoe imagen.Solucion:
fv(x) = (v2x3−v3x2, v3x1−v1x3, v1x2−v2x1), Afv =
0@ 0 −v3 v2
v3 0 −v1
−v2 v1 0
1Av2x3 − v3x2 = 0, v3x1 − v1x3 = 0, v1x2 − v2x1 = 0, ker fv = lin{v}
im f = {(x1, x2, x3) : x1v1 + x2v2 + x3v3 = 0}
7. Calcule el determinante de las siguientes matrices
A =
1 2 3 41 3 2 10 0 −1 10 0 2 1
, B =
1 1 1 1 11 2 3 4 51 4 9 16 251 8 27 64 1251 16 81 256 625

56 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
C =
i 5 −1 0 00 1 −1 0 01 2 −1 0 00 1 2 1 −1i 1− i −1 0 i
Solucion:
det A = −3, det B = 288, det C = −1− 4i
8. Se consideran los espacios vectoriales R2, R3 y R4 con las bases
B2 = {(1, 1), (2,−1)}, B3 = {(1, 0,−1), (0, 1, 1), (1, 0, 1)}B4 = {(1, 0, 0, 1), (−1, 0, 2, 0), (1,−1, 2, 0), (1, 1, 1, 1)}
y las aplicaciones lineales f, g dadas por las matrices (en esas bases)
F =
1 0−1 21 10 1
, G =
1 0 −1 01 1 0 10 1 0 1
Calcule la matriz de la aplicacion lineal g ◦ f en las bases canonicas de R2
y R3.Solucion:
P2 =
„1 21 −1
«, P3 =
0@ 1 0 10 1 0−1 1 1
1A , P4 =
0BB@1 −1 1 10 0 −1 10 2 2 11 0 0 1
1CCA
Mg◦f = P3GFP−12 =
0@ 1/3 −4/31 −12 −3
1A9. Sea V el espacio de las formas lineales de R4. Estudie si el conjunto de
formas B = {f1, f2, f3, f4}, f1(x) = x1−x2 +x3, f2(x) = x1−x2, f3(x) =x4 − x1, f4(x) = 2x2, es una base de ese espacio y calcule las matrices deestas formas en la base canonica. Calcule el nucleo de cada una de ellas.¿Existe alguna forma lineal cuyo nucleo sea {0} o tenga dimension 1?Solucion: Las matrices que representan a estas formas en la base canonica son:
F1 =`
1 −1 1 0´, F2 =
`1 −1 0 0
´,
F3 =`−1 0 0 1
´, F4 =
`0 2 0 0
´Son l.i. y forman una base. Las bases de los nucleos son:8>><>>:
0BB@1100
1CCA ,
0BB@10−10
1CCA ,
0BB@0001
1CCA9>>=>>; ,
8>><>>:0BB@
1100
1CCA ,
0BB@0010
1CCA ,
0BB@0001
1CCA9>>=>>;

6.3. SOLUCIONES 57
8>><>>:0BB@
1001
1CCA ,
0BB@0100
1CCA ,
0BB@0010
1CCA9>>=>>; ,
8>><>>:0BB@
1000
1CCA ,
0BB@0010
1CCA ,
0BB@0001
1CCA9>>=>>;
El nucleo de toda forma lineal de R4 tiene dimension 3, salvo la cero, que tiene
dimension 4.
10. Sea f : V → V . Demuestre que si ker f 6= {0}, la imagen de una base deV no puede ser una base de V . ¿Es posible que la imagen de un sistemalinealmente independiente de V sea un sistema l.i. de V ?
Solucion: La dimension de la imagen de f es menor estrictamente que la di-
mension de V y la imagen de una base de V genera la imagen de f . La imagen
de un sistema l.i. de V es un sistema l.i. si el subespacio lineal que generan corta
al nucleo en {0}.
11. Sea f : V → W una aplicacion lineal de rango 3, de un espacio de dimen-sion 4 en otro de dimension 5. Estudie si existen bases de V y W en lasque la matriz de la aplicacion sea:
F =
1 0 0 00 1 0 00 0 1 00 0 0 00 0 0 0
Solucion: ran(f) = 3, luego dimker f = 1. Sea BV = {v1, v2, v3, v4} una base
de V , tal que ker f = lin{v4}. Sea w1 = f(v1), w2 = f(v2), w3 = f(v3). Por la
eleccion anterior, {w1, w2, w3} es l.i. en W . Se prolonga a una base de W . En
las bases construidas, la matriz de f es la dada.
12. Sea f al endomorfismo de C4 definido por
f(e1) = ie1−e3, f(e2) = e2 +ie4, f(e3) = λe1 +e3, f(e4) = λe2 +e4
Discuta para que valores de λ la aplicacion f es biyectiva y calcule laaplicacion inversa de la dada cuando sea posible.Solucion:
F =
0BB@i 0 λ 00 1 0 λ−1 0 1 00 i 0 1
1CCA , det F = −i(λ2 + 2iλ− 1), det F = 0 ⇒ λ = −i
La aplicacion es biyectiva si λ 6= i. En este caso
F−1 =i
λ2 + 2iλ− 1
0BB@1− iλ 0 iλ2 − λ 0
0 λ + i 0 −λ2 − iλ1− iλ 0 λ + i 0
0 1− iλ 0 λ + i
1CCA

58 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Problemas Algebra Lineal. Curso 2006-2007Tema 4
1. Estudie si es posible encontrar una base del espacio vectorial C2 en la quelas siguientes matrices sean diagonales:
σ1 =(
0 11 0
), σ2 =
(0 −ii 0
)Solucion:
det(σ1 − λI2) = λ2 − 1 = 0, λ = ±1
(σ1 − I2)
„xy
«= 0, u1 =
„11
«, (σ1 + I2)
„xy
«= 0, u2 =
„1−1
«luego la matriz mas general que diagonaliza a σ1 es:
P =
„a ba −b
«, P ′ =
„a b−a b
«, a, b ∈ C
pero ninguna diagonaliza a σ2:
P−1σ2P =
„0 −ib/a
ia/b 0
«2. Sea f un endomorfismo en un espacio vectorial complejo V de dimension
n. Demuestre que si dim ker f = m ≤ n, entonces λ = 0 es un autovalor def con multiplicidad geometrica m. ¿Que se puede decir de la multiplicidadalgebraica de λ = 0?Solucion: El subespacio invariante del autovalor 0 es el nucleo luego la multi-plicidad geometrica del 0 es la dimension del nucleo. La multiplicidad algebraicaverifica:
dimker f ≤ multiplicidad algebraica de λ=0 ≤ n
3. Sea una aplicacion lineal f de C5 en C5 y {u1, u2, u3, u4, u5} una base deC5. Sabiendo que los vectores u1−u2, u1− 2u2 +u3, u1−u4 y u1− 3u2 +u3 + u4 son autovectores de f con autovalor 3 + 2i, que el nucleo de ftiene dimension 1 y que la traza de f es −1 + i, calcule el espectro de fy las multiplicidades algebraicas y geometricas de los autovalores. ¿Es fdiagonalizable?Solucion: El rango de los autovectores dados es 3. Como
1 ≤ multiplicidad geometrica ≤ multiplicidad algebraica
La multiplicidad geometrica del autovalor 3+2i es al menos 3. Como dimker f =1, λ = 0 es autovalor con multiplicidad geometrica igual a 1. La suma de las mul-tiplicidades algebraicas de los autovalores es 5, por lo que existe otro autovalorλ (que puede ser 0 o 3 + 2i). Pero
3(3 + 2i) + 0 + λ = −1 + i ⇒ λ = −10− 5i

6.3. SOLUCIONES 59
que tiene multiplicidad algebraica y geometrica tigual a 1. El espectro es
σ(f) = {0,−10− 5i, 3 + 2i}
y las multiplicidades algebraicas (que son iguales a las geometricas) son 1, 1 y
3 respectivamente. Por lo tanto la aplicacion es diagonalizable.
4. Calcule la forma canonica de Jordan de la matriz,
A =
1 −i 0i 0 10 −1 1
hallando la base correspondiente.
Solucion: Autovalores: σ(A) = {0, 1}. Como ran ker(A − I) = 2, no es diago-nalizable. La forma canonica de Jordan y la matriz de cambio de base son:
J =
0@ 0 0 00 1 10 0 1
1A , P =
0@ i i i1 0 −11 1 0
1A
5. Estudie si la siguiente matriz es diagonalizable y en caso de que lo seacalcule una base de autovectores
A =
−3 0 02 −5 −4−2 2 1
Solucion: Autovalores: σ(A) = {−3,−1}. Como ran ker(A + 3I) = 1, es diago-nalizable. La forma diagonal y la matriz de cambio de base (las columnas de Pson los autovectores) son:
D =
0@ −3 0 00 −3 00 0 −1
1A , P =
0@ 2 1 00 1 −11 0 1
1A
6. Demuestre que una matriz nilpotente no es en general diagonalizable. ¿Enque casos lo es? Calcule para la matriz
A =
−4 2 0 4−1 5 −3 4−3 −3 3 0−2 −8 6 −4
su forma canonica de Jordan.
Solucion: Si A es nilpotente, σ(A) = {0}. La multiplicidad algebraica de λ = 0es n (la dimension de la matriz). La matriz es diagonalizable solo cuando la

60 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
multiplicidad geometrica es n. Pero entonces existe una base de autovalores yla imagen de todos ellos es 0. Luego A solo es diagonalizable cuando A = 0.
A es una matriz nilpotente, A3 = 0. Su rango es 2, por lo que hay 4 − 2 = 2autovectores, 2 cajas:
J =
0BB@0 0 0 00 0 1 00 0 0 10 0 0 0
1CCA , P =
0BB@0 18 0 02 0 −3 02 18 3 1−1 18 6 0
1CCA
7. Sea f un endomorfismo de un espacio vectorial. Discuta que relacion hayentre el hecho de ser f diagonalizable y el que el nucleo y la imagen de fsean suma directa.Solucion: Al ser diagonalizable existe una base de autovectores en la que lamatriz de F es: 0BBBBBBBB@
0
. . .
0λr+1
. . .
λn
1CCCCCCCCALos r primeros vectores generan el nucleo y el resto la imagen. La suma es directa(salvo el 0 no hay nigun vector en la imagen para el que f(v) = 0).
Pero aunque la suma sea directa la matriz puede no ser diagonalizable. Porejemplo, sea f con matriz en una base:
F =
0@ 0 0 00 1 10 0 1
1AEl nucleo es lin{u1} e im f = lin{u2, u3}. La suma es directa pero f no es
diagonalizable.
8. Sean A y B dos matrices de Cn×n tales que [A,B] = 0. Demuestre queexiste al menos un vector que es autovector de ambas matrices.Solucion: Como el espacio es complejo al menos hay un autovalor λ de A. Seav un autovector: Av = λv. Como [A, B] = 0
ABv = BAv = B(λv) = λBv
Por lo tanto Bv es un autovector de A con autovalor λ. Aplicando A a B2v.
AB2v = B2(Av) = λB2v
De esta forma se ve que Bv, B2v, . . . son autovectores de A con autovalor λ.
Como el espacio es de dimension finita existe r tal que Brv depende linealmente
de los anteriores. El espacio lin{v, Bv, B2v . . . Br−1v} es invariante bajo B, luego
existe un autovector de B en ese espacio, que tambien lo es de A.

6.3. SOLUCIONES 61
9. Calcule A1234 donde A es la matriz siguiente:
A =
1 i 0i 0 10 −1 −1
Solucion: Diagonalizando la matriz:
A = PJP−1, P =
0@ −1 1 i−1− i −1 + i −1
1 1 1
1A , D =
0@ i 0 00 −i 00 0 0
1A
D1234 =
0@ i1234 0 00 (−i)1234 00 0 0
1A =
0@ −1 0 00 −1 00 0 0
1AA1234 = P
0@ −1 0 00 −1 00 0 0
1AP−1 =
0@ 0 i ii −2 −1−i 1 0
1ATambien, del teorema de Cayley-Hamilton, A3 = −A, luego, como 1234 = 5 ×35 + 2× 32 + 1, se tiene:
A1234 = A5×35+2×32+1 = A5×35A2×32
A = (A35)5(A32
)2A
A35= (−1)5A = −A, A32
= (−1)2A = A, A1234 = (−A)5A2A = −A8 = A2
10. Una matriz tiene una forma canonica de Jordan con tres cajas. Sabiendoque sus autovalores son λ1 y λ2 y que la dimension es 6, calcule todas lasformas canonicas que corresponden a estos datos.
Solucion: Sea la multiplicidad algebraica de λ1 mayor o igual que la de λ2. Dela descomposicion de 6 en suma de tres enteros positivo no nulos ordenados demayor a menor, se obtiene que hay 3 casos posibles para las dimensiones de lascajas:
4 + 1 + 1, 3 + 2 + 1, 2 + 2 + 2
J1 =
0BBBBBB@. 1
. 1. 1
..
.
1CCCCCCA , J2 =
0BBBBBB@. 1
. 1.
. 1.
.
1CCCCCCA
J3 =
0BBBBBB@. 1
.. 1
.. 1
.
1CCCCCCA

62 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Teniendo en cuenta la multiplicidad algebraica de los autovalores (5, 1), (4, 2) o(3, 3), los casos que se presentan son:0BBBBBB@
λ1 1λ1 1
λ1 1λ1
λ1
λ2
1CCCCCCA ,
0BBBBBB@λ1 1
λ1 1λ1 1
λ1
λ2
λ2
1CCCCCCA0BBBBBB@
λ1 1λ1 1
λ1
λ1 1λ1
λ2
1CCCCCCA ,
0BBBBBB@λ1 1
λ1 1λ1
λ2 1λ2
λ1
1CCCCCCA0BBBBBB@
λ1 1λ1 1
λ1
λ2 1λ2
λ2
1CCCCCCA ,
0BBBBBB@λ1 1
λ1
λ1 1λ1
λ2 1λ2
1CCCCCCA
11. El polinomio caracterıstico de una matriz es p(λ) = (λ−1)(λ−2)3(λ+3)2
y el polinomio mınimo es m(λ) = (λ− 1)(λ− 2)2(λ + 3). Calcule la formacanonica de Jordan de dicha matriz. Intente resolver la misma cuestionpara p(λ) = (λ− 2)4 y m(λ) = (λ− 2)2.
Solucion: La parte correspondiente a λ = 1,−3 es diagonalizable, la primera esuna caja y la segunda 2 cajas (todas 1×1). La parte correspondiente a λ = 2 noes diagonalizable. Puede tener una caja o dos. Pero como el polinomio mıınimoes (λ − 2)2, tiene que tener dos cajas (si tuviera solo una el polinomio mınimoserıa (λ− 2)3.
J =
0BBBBBB@1
2 12
2−3
−3
1CCCCCCAEn el segundo caso, la matriz no es diagonalizable, pero las dos formas siguientestienen esos polinomios caracterıstico y mınimo:
J1 =
0BB@2 1
22
2
1CCA , J2 =
0BB@2 1
22 1
2
1CCA

6.3. SOLUCIONES 63
12. Calcule la forma canonica y la exponencial de las matrices
T =
0 0 0λ 0 0µ 0 0
, J =
0 0 ϕ0 0 0−ϕ 0 0
, K =
0 u 0u 0 00 0 0
Solucion:
eT =
0@ 1 0 0λ 1 0µ 0 1
1A , eJ =
0@ cos φ 0 sen φ0 1 0
− sen φ 0 cos φ
1A
eK =
0@ cosh u senh u 0senh u cosh u 0
0 0 1
1A

64 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Problemas Algebra Lineal. Curso 2006-2007Tema 5
1. Estudie cuales de las expresiones siguientes son formas bilineales en R3 ycuales son simetricas o antisimetricas. Cuando sea posible halle una basedel radical:
ϕ(x, y) = x21 + x2y2, ϕ(x, y) = x1 + x2 − 2y3,
ϕ(x, y) = x1y2 − x2y1 + x2y2 − 2x3y2 − 2x2y3,
ϕ(x, y) = x1y1 + x2y1 + x1y2, ϕ(x, y) = x1y2 − x3y1 + x1y3 − x2y1
Solucion: Las dos primeras no son bilineales. Las tres ultimas son bilineales;la tercera no es simetrica ni antisimetrica, la cuarta es simetrica y la quinta esantisimetrica. El radical de la cuarta es:
A =
0@ 1 1 01 0 00 0 0
1A , rad ϕ = lin{(0, 0, 1)}
2. Calcule una base en la que la forma bilineal siguiente este representadapor una matriz diagonal
ϕ = x1y1 + x2y1 + x1y2 − x1y3 − x3y1 − x2y2 − x2y3 − x3y2 + x3y3
Solucion:
A =
0@ 1 1 −11 −1 −1−1 −1 1
1AEl radical es rad ϕ = {(1, 0, 1)} y un subespacio complementario esta generadopor los vectores
{u2 = (1, 0, 0), u3 = (0, 1, 0)}La matriz en esta base es:
A′ =
0@ 0 0 00 1 10 1 −1
1AComo
ϕ(u2, λu2 + µu3) = λ + µ
escogemos como nueva base:
B = {(1, 0, 1), (1, 0, 0), (1,−1, 0)}, A′ = M(ϕ,B) =
0@ 0 0 00 1 00 0 −2
1A
ϕ(x, y) = x′2y′2 − 2x′3y
′3, P =
0@ 1 1 10 0 −11 0 0
1A , P tAP = A′
6.3. SOLUCIONES 65
3. Sea la forma bilineal en R3
ϕ(x, y) = x3y3 − x1y1 − x2y2
Demuestre que es simetrica y su radical es {0}. De ejemplos de vectoresque verifican ϕ(x, x) > 0 o ϕ(x, x) < 0. Calcule el conjunto de vectores queverifican ϕ(x, x) = 0. Dibujelo en el espacio x1, x2, x3. ¿Es un subespaciovectorial?
Solucion: Es simetrica y el determinante de la matriz asociada es −1 6= 0.
ϕ((0, 0, 1), (0, 0, 1)) = 1 > 0, ϕ(0, 1, 0), (0, 1, 0)) = −1 < 0
Los vectores que verifican ϕ(x, x) = 0 son la solucion de
x23 − x2
1 − x22 = 0
que es un doble cono (el cono de luz) con vertice en el origen y eje el eje x3. No
es un subespacio.
4. Sea la forma bilineal en R2
ϕ(x, y) = x1y2 + x2y1
Encuentre una base de R2 en la cual la matriz de esta forma bilineal seadiagonal. Calcule en ambas bases, el conjunto de vectores que verificanϕ(x, x) = 0. Dibujelos en el plano R2.
Solucion: La base es: {(1, 1), (1,−1)}.
En la primera base los vectores que verifican ϕ(x, x) = 0 son x1x2 = 0, es decirlos ejes x1 = 0, x2 = 0. En la segunda base son las diagonales:
(x′1)2 − (x′2)
2 = 0 ⇒ x′2 = ±x′1
5. Sea f una forma lineal no nula de un espacio vectorial de dimension n(f : V → R). Demuestre que ϕ(x, y) = f(x)f(y) es una forma bilinealsimetrica y calcule su rango. Calcule su radical y una base en la que seadiagonal.
Solucion: ϕ es bilineal simetrica. Su radical es el nucleo de la forma lineal f
y tiene dimension n − 1, por lo que su rango es 1. Una base en la que ϕ sea
diagonal se obtiene construyendo una base del radical y anadiendo un vector
arbitrario fuera del radical.
6. Sea la forma bilineal ϕ(x, y) = x1y1 − x2y2 − x3y3 − x4y4 y el subespaciode R4 , W , definido por las ecuaciones x1−x4 = 0, x1−x2 +x3−x4 = 0,x2+x3 = 0. Calcule el conjunto U de vectores x ∈ R4 tales que ϕ(x, y) = 0para todo y ∈ W . Demuestre que U es un subespacio de R4 y calculeU ∩W .

66 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Solucion: Resolviendo las ecuaciones W = lin{(1, 0, 0, 1}. Por tanto U es:
ϕ((1, 0, 0, 1), y) = 0 ⇒ y1 − y4 = 0, U = lin{(1, 0, 0, 1), (0, 1, 0, 0), (0, 0, 1, 0)}
Se tiene que W ⊂ U y por tanto U ∩W = W . Tambien se tiene que dim W +
dim U = 4.
7. Una matriz cuadrada A se usa (entre otras cosas) para representar endo-morfismos y formas bilineales. Compare sus propiedades de transformacionfrente a cambios de base en ambas situaciones.Solucion: Si se tienen dos bases y P es la matriz de cambio de base, en unendomorfismo,
A → P−1AP
mientras que cuando se trata de una forma bilineal
A → P tAP
En un endomorfismo se conserva la traza y el determinante (ademas de espectro
y multiplicidades). En el caso de una forma bilineal se conserva el caracter
de regular (si el determinante es cero o no) pero no la traza ni el valor del
determinante (ni autovalores). Tambien se conserva el signo del determinante en
el caso real. Si P t = P−1 se conserva lo mismo que en el caso de endomorfismos.
8. Una r-forma multilineal se define (en una base dada de un espacio vectorialV de dimension n) por
f(x) =n∑
i1,i2,...,ir=1
ai1i2...irxi1xi2 · · ·xir , x ∈ V
Estudie sus propiedades. Si se cambia la base, los coeficientes ai1i2...ir
cambian. Halle los nuevos coeficientes en funcion de los antiguos usandola matriz de cambio de base.Solucion: Sea P la matriz de cambio de base: (x′)i =
Pnj=1 P i
jxj Entonces,
f(x) =
nXi1,i2,...,ir=1
ai1i2...ir xi1xi2 · · ·xir
=
nXi1,i2,...,ir=1
nXj1,j2,...,jr=1
ai1i2...ir P i1j1
xj1P i2j2
xj2 · · ·P irjr
xjr
=
nXj1,j2,...,jr=1
nXi1,i2,...,ir=1
P i1j1
P i2j2· · · · · ·P ir
jrai1i2...ir xj1xj2 · · ·xjr
es decir:
a′j1j2...jr=
nXi1,i2,...,ir=1
P i1j1
P i2j2· · · · · ·P ir
jrai1i2...ir
f(x) =
nXi1,i2,...,ir=1
a′i1i2...ir(x′)i1(x′)i2 · · · (x′)ir

6.3. SOLUCIONES 67
9. Demuestre que si una forma cuadratica regular no es definida, entoncesexiste x ∈ V tal que Q(x) = 0. Demuestre tambien que si ϕQ(x, y) = 0para todo y ∈ V entonces x = 0, donde ϕQ es la forma bilineal simetricaasociada a Q.Solucion: Si Q es regular y no es definida, existe una base en la que:
Q(x) = c1x21 + · · ·+ crx
2r − (cr+1x
2r+1 + · · ·+ cnx2
n)
donde ci > 0 para todo i y 1 < r < n. La ecuacion
c1x21 + · · ·+ crx
2r − (cr+1x
2r+1 + · · ·+ cnx2
n) = 0
tiene soluciones reales no nulas, por ejemplo (√
cn, 0 . . . ,√
c1). En esa base, laforma bilineal (simetrica) asociada es
ϕQ(x, y) = c1x1y1 + · · ·+ crxryr − (cr+1xr+1yr+1 + · · ·+ cnxnyn)
y es regular, su radical es {0}.
10. Estudie las caracterısticas de las formas cuadraticas siguientes
Q1(x) = x21 − x2
2 + 2x1x2, Q2(x) = 3x21 + x1x2 − 2x1x3 + x2
2 + x23
Q3(x) = −9x21 − 3x2
2 − 6x23 − 10x1x3 + 6x2x3
Solucion: Q1 es regular, pero no es definida: Q1((1, 0)) = 1, Q1((0, 1)) = −1.Q2 es definida positiva:
A2 =
0@ 3 1/2 −11/2 1 0−1 0 1
1A , 3 > 0, 11/4 > 0, 7/4 > 0
Q3 es definida negativa:
A3 =
0@ −9 0 −50 −3 3−5 3 −6
1A , −9 < 0, 27 > 0, −6 < 0
11. Escriba las siguientes formas cuadraticas como una suma de cuadrados:
Q1(x) = x21 − 2x2x3 + 3x2
3 − 4x1x2 − x3x4 + x24
Q2(x) = x1x2 + x1x3 + x1x4 + x2x3 + x2x4 + x3x4
¿Son regulares? ¿Son definidas positivas?Solucion:
Q1(x) = (x1 − 2x2)2 +
r12
13x4
!2
+
„√13
2x3 −
1√13
x4
«2
−“2x2 +
x3
2
”2
Es regular pero no definida.
Q2(x) = −“x1
2− x2
2
”2
−“x3 +
x4
2
”2
− 3x24
4+“x1
2+
x2
2+ x3 + x4
”2
Es regular pero no definida.
68 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
12. Demuestre que si una forma cuadratica es definida positiva, los autovaloresde la matriz asociada (en cualquier base) son positivos.Solucion: Si x es un autovector de la matriz de Q en una base dada y X sonlas coordenadas de x en esa base,:
Q(x) = XtAQX = λXtX, XtX = x21 + · · ·x2
n > 0
luego λ > 0 por ser Q definida positiva.

6.3. SOLUCIONES 69
Problemas Algebra Lineal. Curso 2006-2007Tema 6
1. Estudie si las siguientes expresiones definen un producto escalar en cadauno de los espacios considerados:
〈x, y〉 = x1y1 − x2y2, x, y ∈ R2, 〈x, y〉 = x1y1 + x2y2 + x3y3, x, y ∈ R4
〈x, y〉 = x1y1 + x2y2, x, y ∈ C2
〈x, y〉 = x1y1 + ix1y2 − ix2y1 + 2x2y2, x, y ∈ C2
Solucion: El primero no es definido positivo: 〈(1, 1), (1, 1)〉 = 0. El segundo essolo semidefinido positivo: 〈(0, 0, 0, 1), (0, 0, 0, 1)〉 = 0. El tercero no es sesquili-neal: 〈(i, 0), (1, 0)〉 6= 〈(1, 0), (−i, 0)〉. El cuarto sı lo es: es sesquilineal y definidopositivo:
〈(x1, x2), (x1, x2)〉 = |x1|2 + 2|x2|2 − 2 Im(x1x2)
En coordenadas reales:
a21 + b2
1 + 2a22 + b2
2 − 2(a1b2 − a2b1)
que es una forma cuadratica definida positiva.
2. Calcule una base ortonormal del subespacio de R4 (con el producto escalarusual) definido por las ecuaciones: x1 + x2 − x3 = 0, x1 − 2x4 = 0.Solucion: Una base del espacio es: {(2,−2, 0, 1), (0, 1, 1, 0)}. Ortonormalizandopor Gram-Schmidt:
u1 =1
3(2,−2, 0, 1), u′2 = v2 − λ21u1, λ21 = 〈u1, v2〉 = −2
3, u2 =
1
9(4, 5, 9, 2)
3. Sea el producto escalar en C3 definido por:
〈x, y〉 = x1y1 + ix1y2 − ix2y1 + 2x2y2 + 3x3y3 + x2y3 + x3y2
¿Es la base canonica una base ortonomal? Calcule una base ortonormalde C3 con ese producto escalar.Solucion: La base canonica no es ortonormal: 〈e1, e2〉 6= 0. Podemos usar Gram-Schmidt o diagonalizar la matriz del producto escalar mediante operacioneselementales:
G =
0@ 1 i 0−i 2 10 1 1
1Au1 = e1 = (1, 0, 0), u′2 = e2 − 〈u1, e2〉u1 = e2 − iu1, u2 = (−i, 1, 0)
v3 = e3 − 〈u1, e3〉u1 − 〈u2, e3〉u2, v3 = (i,−1, 1), u3 =1√2(1,−i, 1)
P =
0@ 1 −i i/√
2
0 1 −1/√
2
0 0 1/√
2
1A , P+GP = I

70 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
4. Halle el subespacio ortogonal al definido por las ecuaciones
x1 + ix3 = 0, ix3 + x4 = 0, 3x1 + ix3 − 2x4 = 0
(en C4 con el producto escalar usual). Calcule una base ortonomal de esesubespacio y extiendala a una base ortonormal de C4.Solucion: Los vectores {(1, 0,−i, 0), (0, 0,−i, 1), (3, 0,−i,−2)} son ortogonalesal subespacio dado. Una base del subespacio ortogonal es:
{(1, 0,−i, 0), (0, 0,−i, 1)}
Usando Gram-Schmidt
u1 =1√2(1, 0,−i, 0), u2 =
1√6(−1, 0,−i, 2)
Para extenderla a C4, escogemos dos vectores l.i. que no esten en el subespacio,por ejemplo: (1, 0, 0, 0), (0, 1, 0, 0). Siguiendo con G-S:
u3 =1√3(1, 0, i, 1), u4 = (0, 1, 0, 0)
5. Halle el proyector ortogonal (en R5 con el producto escalar usual) sobreel subespacio W dado por la ecuacion: x1 + x2 − 2x3 + x4 − x5 = 0.Solucion:
W⊥ = lin{(1, 1,−2, 1,−1)}
PW⊥ =1
8
0BBBB@11−21−1
1CCCCA (1 1 − 2 1 − 1) =1
8
0BBBB@1 1 −2 1 −11 1 −2 1 −1−2 −2 4 −2 21 1 −2 1 −1−1 −1 2 −1 1
1CCCCA
PW = I − PW⊥ =1
8
0BBBB@7 −1 2 −1 1−1 7 2 −1 12 2 4 2 −2−1 −1 2 7 11 1 −2 1 7
1CCCCA6. Calcule la distancia del vector v = (1, 0,−1, 1) al subespacio de R4 cuya
base es: {(1, 0, 0,−1), (1,−1, 0, 0)}.Solucion: Una base ortonormal del subespacio es:
u1 =1√2(1, 0, 0− 1), u2 =
1√6(1,−2, 0, 1)
La proyeccion ortogonal y la distancia son:
Pv = 〈u1, v〉u1 + 〈u2, v〉u2 =1
3(1,−2, 0, 1), d =
p‖v‖2 − ‖Pv‖2 =
r7
3

6.3. SOLUCIONES 71
7. Sea V un espacio vectorial complejo de dimension finita n dotado de unproducto escalar. Sea W un subespacio de V con base {u1, . . . , um} y v ∈V . Demuestre que las coordenadas de la proyeccion ortogonal de v sobreW , en la base de W citada, son la solucion del sistema
∑mi=1 λi〈uj , ui〉 =
〈uj , v〉 y escriba las componentes paralela y perpendicular de v con res-pecto a W .Solucion: Sea v|| = PW v la proyeccion de v sobre W (componente paralela).Como v|| ∈ W , se tiene
v|| =
mXi=1
λiui, v⊥ = v − v||
Pero v⊥ ∈ W⊥ (componente perpendicular). Luego es ortogonal a los vectoresde la base de W :
〈uj , v⊥〉 = 0, 〈uj , v−v||〉 = 0, 〈uj , v−mX
i=1
λiui〉 = 0,
mXi=1
λi〈uj , ui〉 = 〈uj , v〉
La matriz del sistema (que es cuadrada) tiene determinante distinto de cero yla solucion es unica:0B@ λ1
...λm
1CA = G−1W
0B@ 〈u1, v〉...
〈um, v〉
1CA , GW = 〈ui, uj〉
8. Encuentre en el subespacio W = lin{1, t, t2} de R6[t] con el productoescalar 〈p, q〉 =
∫ 1
0p(t)q(t)dt, el vector que mejor aproxima a r(t) = t5 y
su distancia a este polinomio.Solucion:
m(t) = a+bt+ct2, 〈r(t)−m(t), 1〉 = 0, 〈r(t)−m(t), t〉 = 0, 〈r(t)−m(t), t2〉 = 0,Z 1
0
(t5 − a− bt− ct2)dt = 0,
Z 1
0
(t5 − a− bt− ct2)tdt = 0Z 1
0
(t5 − a− bt− ct2)t2dt = 0
−a− b
2− c
3+
1
6= 0, −a
2− b
3− c
4+
1
7= 0, −a
3− b
4− c
5+
1
8= 0
m(t) =3
28− 15
14t +
25
14t2, d =
5
28√
11
9. En el espacio vectorial C4 con el producto escalar usual, se define unaforma lineal por: f(x) = ix1−2x2+(1−i)x3−x4, x ∈ C4. Calcule un vectorvf ∈ C4 tal que f(x) = 〈vf , x〉. Si se considera la forma g(x) = if(x),calcule el vector correspondiente vg y relacionarlo con vf . ¿Es posibleencontrar wf tal que f(x) = 〈x,wf 〉?

72 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Solucion:
f(x) = ix1 − 2x2 + (1− i)x3 − x4 = 〈(−i,−2, 1 + i,−1), x〉, vf =
0BB@−i−2
1 + i−1
1CCALa matriz de f en la base canonica es:
`i −2 1− i −1
´.
g(x) = if(x) = −x1 − 2ix2 + (1 + i)x3 − ix4 = 〈−1, 2i, 1− i, i, x〉,
vg =
0BB@−12i
1− ii
1CCA , vg = −ivf
No es posible encontrar wf tal que f(x) = 〈x, wf 〉. f definido de esa forma no
es lineal.
10. Sea la descomposicion en suma directa de R6 = V1 ⊕ V2 ⊕ V3, donde losespacios vienen definidos por las ecuaciones
V1 :
x1 + x2 + x3 + x4 + x5 + x6 = 0x1 − x2 + x3 − x6 = 05x1 − x2 + 5x3 + 2x4 + 2x5 − x6 = 0
V2 :
2x1 + x2 − x3 = 02x1 + x2 − x3 + x4 − x5 = 0x2 + x4 − x5 − x6 = 0x2 + x3 + x4 − x5 = 02x1 + 2x2 + x4 − x5 = 0
, V3 :
x1 − x3 + x4 − x5 = 0x1 − x3 − x4 − x5 = 0x1 + x3 − 2x6 = 0x1 − 2x2 + x3 = 0x4 + x5 = 0
¿Es posible encontrar una base ortonormal adaptada a esa descomposi-cion? Hallela en caso de que sea ası.Solucion:
V1 = lin{v1 = (1, 0,−1, 0, 0, 0), v2 = (0, 0, 0, 1,−1, 0), v3 = (0, 1, 0, 0, 0,−1)}
V2 = lin{v4 = (1,−1, 1, 0, 0,−1), v5 = (0, 0, 0, 1, 1, 0)}
V3 = lin{v6 = (1, 1, 1, 0, 0, 1)}Como se puede ver facilmente, V1 ⊥ V2 ⊥ V3 ⊥ V1. Ortonormalizando las basesen cada uno de los tres subespacios:
{u1 =1√2(1, 0,−1, 0, 0, 0), u2 =
1√2(0, 0, 0, 1,−1, 0), u3 =
1√2(0, 1, 0, 0, 0,−1)}
{u4 =1
2(1,−1, 1, 0, 0,−1), u5 =
1√2(0, 0, 0, 1, 1, 0)}, {u6 =
1
2(1, 1, 1, 0, 0, 1)}
La base {u1, u2, u3, u4, u5, u6} es la buscada.

6.3. SOLUCIONES 73
11. Demuestre que en Rn (con la metrica euclidiana) la suma de los cuadradosde las diagonales de un paralelogramo es dos veces la suma de los cuadradosde los lados. Demuestre el teorema de Pitagoras: si un conjunto de vectoresson ortogonales dos a dos, el cuadrado de la norma de su suma es la sumade sus normas al cuadrado.Solucion: Sean u, v ∈ Rn. Las diagonales son u + v y u− v.
‖u + v‖2 + ‖u− v‖2 = 〈u + v, u + v〉+ 〈u− v, u− v〉 = 2‖u‖2 + 2‖v‖2
Sean v1, . . . , vm ortogonales dos a dos.
‖mX
i=1
vi‖2 = 〈mX
i=1
vi,
mXj=1
vj〉 =
mXi,j=1
〈vi, vj〉 =
mXi=1
〈vi, vi〉 =
mXi=1
‖vi‖2
pues 〈vi, vj〉 = 0 si i 6= j.
12. Sea K la matriz de un producto escalar definido en Cn. Demuestre que lasmatrices U que verifican U+KU = K, forman un grupo con la operacionde multiplicacion de matrices. Demuestre que si se impone que el determi-nante sea igual a 1, se obtiene un subgrupo del anterior. Compruebe quesi U es una de esas matrices, el producto escalar de los vectores x, y ∈ Cn
es igual al del los vectores Ux y Uy. ¿Que ocurre si K no es un productoescalar, pero es real y regular?Solucion:
(U1U2)+KU1U2 = U+
2 U+1 KU1U2 = U+
2 KU2 = K
det(U+KU) = det K|det U |2 = det K, |det U | = 1
U+KUK−1 = I ⇒ UK−1U+K = I ⇒ UK−1U+ = K−1
por tanto, si K2 = λI, con λ ∈ R, cuando U verifica la propiedad, U+ tambienlo hace.
U+KU = K ⇒ K = (U+)−1KU−1 = (U−1)+KU−1
|det(U1U2)| = |det U1| |det U2| = 1.
〈Ux, Uy〉 = x+U+KUy = x+Ky = 〈x, y〉

74 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Problemas Algebra Lineal. Curso 2006-2007Tema 7
1. Encuentre una matriz ortogonal que diagonalice a la matriz
A =(
1 11 0
)Calcule la descomposicion espectral y Ak para cualquier k entero positivo.Aplique Ak al vector (1, 0) y discuta el resultado para distintos valores dek.Solucion:
det(A− λI) = λ2 − λ− 1 = 0, λ± =1
2(1±
√5)
v+ =1q
1 + λ2+
„λ+
1
«, v− =
1q1 + λ2
−
„λ−1
«
P =
0@ λ+√2+λ+
λ−√2+λ−
1√2+λ+
1√2+λ−
1A , PAP t =
„λ+ 00 λ−
«
P+ =1
2 + λ+
„1 + λ+ λ+
λ+ 1
«, P− =
1
2 + λ−
„1 + λ− λ−
λ− 1
«A = λ+P+ + λ−P−, Ak = λk
+P+ + λk−P−
Ak
„10
«=
λk+
2 + λ+
„1 + λ+
λ+
«+
λk−
2 + λ−
„1 + λ−
λ−
«como
λ+
2 + λ+= − λ−
2 + λ−=
1 + λ+
λ+(2 + λ+)= − 1 + λ−
λ−(2 + λ−)=
1√5
Ak
„10
«=
1√5
„λk+1
+ − λk+1−
λk+ − λk
−
«Si se llama Fk = 1√
5(λk
+ − λk−), se tiene
Ak
„F1
F0
«=
„Fk+1
Fk
«
2. Calcule el espectro de la matriz (en C4, con el producto escalar usual)
A =
2 0 −1 00 3 0 −1−1 0 2 00 −1 0 3
Halle una base ortonormal de autovectores y la descomposicion espectralasociada.

6.3. SOLUCIONES 75
Solucion: El polinomio caracterıstico es:
p(λ) = λ4 − 10λ3 + 35λ2 − 50λ + 24, σ(A) = {1, 2, 3, 4}
La base ortonormal de autovectores es:
{ 1√2(0,−1, 0, 1),
1√2(−1, 0, 1, 0),
1√2(0, 1, 0, 1),
1√2(1, 0, 1, 0)}
La forma diagonal es
P tAP =
0BB@4 0 0 00 3 0 00 0 2 00 0 0 1
1CCALa descomposicion espectral es:
A = 4P4 + 3P3 + 2P2 + P1 = 2
0BB@0 0 0 00 1 0 −10 0 0 00 −1 0 1
1CCA
+3
2
0BB@1 0 −1 00 0 0 0−1 0 1 00 0 0 0
1CCA+
0BB@0 0 0 00 1 0 10 0 0 00 1 0 1
1CCA+1
2
0BB@1 0 1 00 0 0 01 0 1 00 0 0 0
1CCA3. Demuestre que la exponencial de una matriz iA donde A es autoadjunta
es una matriz unitaria. ¿Como es la exponencial de una matriz real yantisimetrica? Calcule la exponencial de las siguientes matrices utilizandola descomposicion espectral correspondiente.
A =
1 −i 0i 0 −10 −1 2
, K =
0 −1 11 0 −1−1 1 0
Solucion:
eiAe−iA+= ei(A+A+) = I, eAeAt
= eA+At
= I
Autovalores A: {3,−1, 0}. Descomposicion espectral:
A =1
2
0@ 4 −2i −22i 1 −i−2 i 1
1A− 1
2
0@ 0 0 00 1 i0 −i 1
1A , eiA = e3iP1 + e−iP2 + P3
Autovalores K: {i√
2,−i√
2, 0}. Descomposicion espectral:
K =i√
2
4
0@ 1 i√
2 1
−i√
2 2 −i√
2
1 i√
2 1
1A− i√
2
4
0@ 1 −i√
2 1
i√
2 2 i√
2
1 −i√
2 1
1AeK = ei
√2P1 + e−i
√2P2 + P3

76 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
eK =
0B@12(1 + cos
√2) − sin
√2√
2
12(−1 + cos
√2)
sin√
2√2
cos√
2 sin√
2√2
12(−1 + cos
√2) − sin
√2√
2
12(1 + cos
√2)
1CA4. Sabiendo que v1 = (1, 0,−i) y v2 = (0,−1, 2i) son dos autovectores de una
matriz autoadjunta (en C3 con el producto escalar usual), calcule otrovector linealmente independiente con los anteriores y que sea autovectorde la matriz. Si el polinomio caracterıstico de A es (λ + 1)2(λ− 1) calculela matriz A en la base canonica de C3.Solucion: Los dos autovectores no son ortogonales (pero sı son l.i.) luego tie-nen el mismo autovalor. Si los tres autovalores son iguales, el tercer vector escualquiera l.i. con los dos dados y la matriz es un multiplo de la indentidad encualquier base.
Si hay dos autovalores distintos, el tercer vector es ortogonal a estos dos:
`1 0 i
´0@ x1
x2
x3
1A = 0,`
0 −1 −2i´0@ x1
x2
x3
1A = 0
Una base ortonormal de autovectores es
u1 =1√2
0@ 10−i
1A , u2 =1√3
0@ 1−1i
1A , u3 =1√6
0@ 12i
1AComo σ(A) = {−1, 1}, estamos en en el segundo caso. Como el autovalor doblees −1, la matriz en la base de autovectores es:
D =
0@ −1−1
1
1Ay en la base canonica
A = PDP+ =1√6
0@√
3√
2 1
0 −√
2 2
−i√
3 i√
2 i
1ADP+ =1
3
0@ −2 2 −i2 1 −2ii 2i −2
1A5. Sea la matriz
A =(
2 + i 2i−i 2− i
)Discuta si es posible que exista un producto escalar en C2 tal que un ope-rador autoadjunto, A, tenga a A por matriz en una cierta base. En casoafirmativo calcule una base ortonormal de autovectores y la descomposi-cion espectral de A.Solucion: Un producto escalar en Cn, con base canonica {e1, . . . en} es:
(x, y) =
nXi,j=1
gij xiyj = X+GY, gij = (ei, ej)

6.3. SOLUCIONES 77
donde la matriz G = (gij) verifica: G = G+, det G 6= 0. Para que un operadorA representado por la matriz A en la base canonica sea autodajunto: (Ax, y) =(x,Ay), es decir:
(Ax, y) = (AX)+GY = (x,Ay) = X+GAY, A+G = GA, A+ = GAG−1
Esta es una ecuacion lineal que nos da G (que como hemos dicho verifca ademasG = G+): β = α, δ = 2α. Escogiendo γ = 0, δ = 2 se obtiene como matriz delproducto escalar y base ortornomal:
G =
„1 11 2
«,
„10
«,
„1−1
«ffy en esta base, el operador A viene representado por la matriz:
A′ =
„2 −ii 2
«, A = P−1A′P, G = P tP, P =
„1 10 1
«que, efectivamente, coincide con su adjunta. Una base de autovectores de A es:
Av = λv, p(λ) = λ2 − 4λ + 3, σ(A) = {1, 3}
v1 =1√2
„1 + i−1
«, v3 =
1√2
„1− i
1
«y los proyectores son:
P1 =1
2
„1 + i−1
«`1− i −1
´G =
1
2
„1− i −2i
i 1 + i
«P3 =
1
2
„1− i
1
«`1 + i 1
´G =
1
2
„1 + i 2i−i 1− i
«todo referido a la base canonica de C2: A = P1 + 3P3.
6. Sean A1 y A2 dos matrices anti-autoadjuntas (A+ = −A). Demuestreque su conmutador [A1, A2] = A1A2 − A2A1 es tambien una matriz anti-autoadjunta. Sean U1 y U2 dos matrices unitarias. Demuestre que su pro-ducto es una matriz unitaria. Sea U(λ) un conjunto de matrices unitarias,con λ ∈ R, tales que los elementos de U(λ) son derivables con respecto aλ, U(λ1)U(λ2) = U(λ1 + λ2) y U(0) = I. Demuestre que la derivada J deU(λ) con respecto a λ en λ = 0 es una matriz anti-autoadjunta.Solucion:
[A1, A2]+ = (A1A2 −A2A1)
+ = (A1A2)+ − (A2A1)
+
= A+2 A+
1 −A+1 A+
2 = A2A1 −A1A2
= −(A1A2 −A2A1) = −[A1, A2]
(U1U2)(U1U2)+ = U1U2U
+2 U+
1 = U1U+1 = I
U(λ)U+(λ) = I,d
dλ
„U(λ)U+(λ)
«= 0
d
dλ
„U(λ)
«U+(λ) + U(λ)
d
dλU+(λ) = 0

78 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
En λ = 0:
d
dλ
„U(λ)
«˛λ=0
U+(0) + U(0)
»d
dλU(λ)
˛λ=0
–+= 0, J + J+ = 0
7. Halle una base ortonormal de autovectores de de la matriz
A =
5 −2i −i2i 2 −2i −2 5
Calcule la descomposicion espectral de dicha matriz y q(A) donde q(λ) =λ513 − 1.
Solucion:
p(λ) = −λ3 + 12λ2 − 36λ, σ(A) = {0, 6}
u1 =1√3
0@ 1i−i
1A , u2 =1√2
0@ 10i
1A , u3 =1√6
0@ 1−2i−i
1AP0 + P6 = I, 6P6 = A
P0 =1
6
0@ 1 2i i−2i 4 2−i 2 1
1A , P6 =1
6
0@ 5 −2i −i2i 2 −2i −2 5
1Aq(A) = A513 − I = (6P6)
513 − I = 6513P6 − I = 6512A− I
8. Sea R una rotacion en R3 de angulo π6 cuyo eje tiene la direccion del
vector (1,−1, 1). Calcule la matriz de la rotacion en la base canonica deR3.
Solucion: Una base ortonormal con primer vector el eje es8<: 1√3
0@ 1−11
1A ,1√6
0@ 1−1−2
1A ,1√2
0@ 110
1A9=;P =
1√6
0@√
2 1√
3
−√
2 −1√
3√2 −2 0
1Ay la matriz de la rotacion en esta base y en la canonica son:
R′ =
0@ 1 0 0
0√
3/2 −1/2
0 1/2√
3/2
1A
R = PR′P t =1
3√
3
0@ 3 +√
3 −√
3 −3 +√
3
3−√
3 3 +√
3 −√
3√3 3−
√3 3 +
√3
1A

6.3. SOLUCIONES 79
9. Sea R una rotacion en R3 de eje en la direccion (0, 0, 1) y angulo π3 . Calcule
otra rotacion R1 tal que R1RR−11 sea una rotacion con eje en la direccion
(1, 0, 0). ¿Cual es el angulo de la nueva rotacion?Solucion:
R =
0@ 1/2 −√
3/2 0√3/2 1/2 00 0 1
1A , R1RR−11 =
0@ 1 0 0
0 1/2 −√
3/2
0√
3/2 1/2
1AEl cambio de base consiste en pasar el tercer vector al primero, el primero alsegundo y el segundo al tercero:
R1 =
0@ 0 1/2 −√
3/2
0√
3/2 1/21 0 0
1A
10. Sea
R =18
4−√
2 +√
6 2(−1−√
3) 4 +√
2−√
62(1 +
√3) 2
√2(−1 +
√3) 2(−1−
√3)
4 +√
2−√
6 2(1 +√
3) 4−√
2 +√
6
Demuestre que se trata de una rotacion en R3 y calcule el eje y el angulode rotacion. Halle una base ortonormal en la que esta matriz tenga laforma canonica.Solucion: Se comprueba que RRt = I, det R = 1. En cuanto al eje y el angulo
Rv = v, v = (1, 0, 1), cos ϕ =1
2(tr R− 1) =
1
4(√
6−√
2), ϕ =5π
12
El primer vector de la base buscada es u1 = 1√2(1, 0, 1) y los otros dos son
ortogonales a este, por ejemplo:
u2 =1√2
0@ 10−1
1A , u3 =
0@ 010
1A , P =
0@ 1/√
2 1/√
2 00 0 1
1/√
2 −1√
2 0
1A
P tRP =1
2√
2
0@ 1 0 0
0√
3− 1 −(√
3 + 1)
0√
3 + 1√
3− 1
1A11. Se consideran las rotaciones en R3 dadas por las matrices
R1 =
1√2
0 1/√
20 1 0
−1/√
2 0 1/√
2
, R2 =
1/2 −√
3/2 0√3/2 1/2 00 0 1
Calcule los angulos y el eje de rotacion de ambas. Sean ahora R3 = R1R2
y R4 = R2R1. Demuestre que R3 y R4 son tambien rotaciones y calcule

80 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
sus ejes y angulos de rotacion. ¿Que relacion existe entre los angulos y losejes de rotacion de R1 y R2 y los de R3 y R4?
Solucion: El eje de rotacion de R1 es (1, 0, 1) y su angulo es π/4. El eje derotacion de R2 es (0, 0, 1) y su angulo π/3.
R3 = R1R2 =1
2√
2
0@ 1 −√
3 2√6
√2 0
−1√
3 2
1A
R4 = R2R1 =1
2√
2
0@ 1 −√
6 1√3
√2
√3
−2 0 2
1AEl producto de rotaciones es una rotacion. Los ejes son:
1√2
0@ 2−√
2
2√
3−√
6√2
1A ,1√2
0@ −(2−√
2)
2√
3−√
6√2
1Ay los angulos
ϕ3 = ϕ4 = arc cos3−
√2
4√
2
El angulo de rotacion es el mismo, pues tr R1R2 = tr R2R1.
12. Calcule los subespacios invariantes de la matriz ortogonal
R =1
2√
2
1 1 +
√2 −1 +
√2 −1
−1 +√
2 1 −1 1 +√
21 +
√2 −1 1 −1 +
√2
−1 −1 +√
2 1 +√
2 1
y los puntos de R4 que quedan fijos al aplicar la transformacion. Halle unabase ortonormal en la cual esta matriz tenga la forma canonica. ¿Existealgun subespacio de dimension 3 que sea invariante?
Solucion: El polinomio caracterıstico p(λ) = λ4 −√
2λ3 +√
2λ − 1 tiene dosraıces reales {−1, 1} (y dos complejas). Los autovectores de 1 y −1 son:
Rv1 = −v1, v1 =1
2(1, 1, 1, 1), Rv−1 = −v−1, v−1 =
1
2(1,−1,−1, 1)
R4 se descompone en la suma de tres subespacios invariantes, dos dimension1 (generados por v1 y v−1 ) y otro de dimension 2, ortogonal a los dos pri-
meros:n
v3 = 1√2(1, 0, 0,−1), v4 = 1√
2(0,−1, 1, 0)
o. Los puntos fijos son los del
subespacio lin{v1}. Una base ortonormal es:
{v1, v−1, v3, v4} , P =1
2
0BB@1 1
√2 0
1 −1 0 −√
2
1 −1 0√
2
1 1 −√
2 0
1CCA

6.3. SOLUCIONES 81
P tRP =
0BB@1 0 0 00 −1 0 0
0 0 1/√
2 −1/√
2
0 0 1/√
2 1/√
2
1CCAUn subespacio invariante de dimension 3 se obtiene sumando uno de dimension
2 con otro de dimesnion 1.

82 CAPITULO 6. LAS NOTAS DE CLASE Y LOS EJERCICIOS
Capıtulo 7
Los programas demanipulacion simbolica
Aunque no puede ser un objetivo del curso (por cuestiones de tiempo y cono-cimientos) la formacion del alumno en los programas de manipulacion simbolica(como Maple o Mathematica), se pretende dar unas ligeras nociones sobre elfuncionamiento y utilidad de estos programas en el campo del algebra lineal(contando ademas con la colaboracion de los profesores de Calculo I y CalculoII). Para ello se explicaran unas nociones elementales en clase con la posibili-dad de que el alumno las amplıe en el aula de informatica de la Facultad. Seusara parte del tiempo destinados a ejercicios en este tipo de actividades.
83

84 CAPITULO 7. LOS PROGRAMAS DE MANIPULACION SIMBOLICA

Capıtulo 8
Las pruebas quincenales
8.1. Introduccion
Cada fin de tema (salvo el primero), aproximadamente cada quince dıas,habra una prueba que durara una hora sobre cuestiones y problemas relativosa lo explicado en el tema. Las pruebas son las siguientes:
8.2. Pruebas
85
86 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 1
Grupo A 27 de octubre de 2006
Nombre: Firma: DNI:
1. (1.5 puntos) Sea el espacio vectorial R5 y W un subespacio de dimension4. Estudie si existe un subespacio U de dimension 2 tal que U ∩W = {0}.
2. (1.5 puntos) Sea el espacio vectorial R4 y sus subespacios U1 = lin{e1, e2},U2 = lin{e3}, U3 = lin{e1 + e3}, siendo {e1, e2, e3, e4} una base de R4.Calcule U1 ∩U2, U1 ∩U3 y U2 ∩U3. ¿Es la suma de estos tres subespaciosdirecta?

8.2. PRUEBAS 87
Algebra Lineal. Prueba 1
Grupo A 27 de octubre de 2006
Nombre: Firma: DNI:
A) (3.5 puntos) En R3 se consideran las bases B1 = {(0, 1, 1), (1, 0, 1), (1, 1, 0)}y B2 = {(−1, 1, 1), (1,−1, 1), (1, 1,−1)}. Calcule las coordenadas de (1, 0, 2)en ambas bases y escriba la matriz de cambio de base.
88 CAPITULO 8. LAS PRUEBAS QUINCENALES
B) (3.5 puntos) Calcule bases de la suma e interseccion de los subespacios deR3 definidos por:{
V1 = lin{(1, 1, 0), (1, 0,−1), (5, 2,−3)}V2 = {x ∈ R3 : x1 + x2 − x3 = 0, 2x1 + 2x2 − 2x3 = 0}
Escriba las ecuaciones implıcitas de la suma e interseccion.

8.2. PRUEBAS 89
Algebra Lineal. Prueba 2
Grupo A 23 de noviembre de 2006
Nombre: Firma: DNI:
1. (1.5 puntos) Sean U, V,W espacios vectoriales y f : U → V , g : V → Waplicaciones lineales. Estudie si el siguiente enunciado es correcto o no:
g ◦ f = 0 ⇔ im f ⊂ ker g
2. (1.5 puntos) Sean V,W espacios vectoriales y f : V → W una aplicacionlineal biyectiva. ¿Es f−1 lineal?

90 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 2
Grupo A 23 de noviembre de 2006
Nombre: Firma: DNI:
A) (3.5 puntos) Halle bases del nucleo y la imagen de la aplicacion linealf : R3 → R4 sabiendo que f(u1) = −u′2 + u′3 − u′4, f(u2) = u′1 − u′2 + u′4,f(u1 − u3) = 2u′1 − 2u′3 + 4u′4, con {u1, u2, u3} y {u′1, u′2, u′3, u′4} bases deR3 y R4 respectivamente. Escriba la matriz de f en esas bases.

8.2. PRUEBAS 91
B) (3.5 puntos) Sabiendo que la matriz de una aplicacion lineal f : V → W ,V,W C-espacios vectoriales, es
A =(
i 2 −1−1 λ −i
)en las bases BV = {v1, v2, v3} y BW = {w1, w2}, calcule:
i) los valores de λ ∈ C para los que la dimension de la imagen de f es 2.
ii) la matriz de f en las bases B′V = {v2, v3, v1} y B′W = {w2, w1}.iii) las coordenadas de la imagen de −iv1 + iv3 en la base B′W .
92 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 3
Grupo A 14 de diciembre de 2006
Nombre: Firma: DNI:
1. (1.5 puntos) Sea A ∈ M2(R) con A 6= 0, trA = det A = 0. Estudie si Aes diagonalizable o no.
2. (1.5 puntos) Demostrar que si los autovalores de una matriz A ∈ M3(C)son {1, 1
2 (−1 + i√
3), 12 (−1− i
√3)}, entonces A−1 = A2.

8.2. PRUEBAS 93
Algebra Lineal. Prueba 3
Grupo A 14 de diciembre de 2006
Nombre: Firma: DNI:
A) (3.5 puntos) Estudie si la matriz
A =
−1 + i 1 0i 0 0−1 1 i
es diagonalizable y calcule la matriz de cambio de base que la lleva a suforma diagonal (si es posible) o a su forma canonica de Jordan.
94 CAPITULO 8. LAS PRUEBAS QUINCENALES
B) (3.5 puntos) Calcule el espectro de un endomorfismo de polinomio carac-terıstico p(λ) = λ5−2λ3 +λ y polinomio mınimo m(λ) = λ4 +λ3−λ2−λ.Halle las multiplicidades algebraicas y geometricas de sus autovalores y suforma canonica de Jordan.

8.2. PRUEBAS 95
Algebra Lineal. Prueba 4
Grupo A 15 de diciembre de 2006
Nombre: Firma: DNI:
1. (1.5 puntos) Estudie si es cierto el siguiente enunciado: “Si la signatura deuna forma cuadratica en V es (p, q), con p, q 6= 0, existe un vector x ∈ Vque verifica Q(x) = 0”.
2. (1.5 puntos) Estudie si existe un cambio de base que transforma la matrizQ1 de una forma cuadratica Q de R3 en la matriz Q2:
Q1 =
1 0 00 −1 00 0 1
, Q2 =
−1 0 00 1 00 0 −1
¿Y si el espacio es C3?

96 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 4
Grupo A 15 de diciembre de 2006
Nombre: Firma: DNI:
A) (3.5 puntos) Calcule el radical de la forma bilineal:
ϕ(x, y) = x1y2 + x2y1 − x3y2 − x2y3 + x1y1 − x3y3
y el conjunto S de vectores x ∈ R3 que verifican ϕ(x, y) = 0, dondey = (1, 0,−1). ¿Es S un subespacio? ¿Que relacion hay entre y, S y elradical?
8.2. PRUEBAS 97
B) (3.5 puntos) Escriba la forma cuadratica Q(x) = x21 − 2x1x2 + 3x2x3 − x2
3
como suma y diferencia de cuadrados. ¿Es regular? ¿Es definida positiva?Escriba la matriz de cambio de base.
98 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 5
Grupo A 12 de enero de 2007
Nombre: Firma: DNI:
1. (1.5 puntos) Sea U un subespacio unidimensional de un espacio vectorialreal de dimension finita, V , dotado de un producto escalar. Calcule cuantosvectores de norma 1 hay en U . ¿Cuantos hay si V es complejo?
2. (1.5 puntos) Sean {v1, v2, v3} vectores de un espacio vectorial complejo,V , con producto escalar, tales que si v ∈ V verifica (v, vi) = 0, i = 1, 2, 3,entonces v = 0. ¿Cual es como maximo la dimension de V ?

8.2. PRUEBAS 99
Algebra Lineal. Prueba 5
Grupo A 12 de enero de 2007
Nombre: Firma: DNI:
A) (3.5 puntos) Calcule la distancia del vector v = (1, 1, 1, 1) al subespacio Vgenerado por los vectores de R4 (con el producto escalar usual):
{(1, 0,−1, 0), (2, 0,−2, 0), (1, 0, 0, 1)}
Calcule el angulo que forma v con el subespacio V .

100 CAPITULO 8. LAS PRUEBAS QUINCENALES
B) (3.5 puntos) En el espacio C3 con el producto escalar usual se considera elsubespacio V de ecuaciones:
x1+(1−i)x2−x3 = 0, (1−i)x1−2ix2−x3, (2+i)x1+(3−i)x2−(1+i)x3 = 0
Calcule una base ortornomal del subespacio ortogonal a V . Calcule losproyectores ortogonales sobre V y V ⊥.

8.2. PRUEBAS 101
Algebra Lineal. Prueba 6
Grupo A 23 de enero de 2007
Nombre: Firma: DNI:
1. (1.5 puntos) Estudie si existe una matriz ortogonal en una espacio dedimension impar que no tenga autovectores.
2. (1.5 puntos) Sea A ∈ Mn(R). Demuestre el siguiente enunciado (en casode ser cierto) o ponga un contraejemplo, (si es falso): “A es no diagonali-zable ⇔ At 6= A”.

102 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 6
Grupo A 23 de enero de 2007
Nombre: Firma: DNI:
A) (3.5 puntos) Calcule la descomposicion espectral del endomorfismo fde C4 (con el producto escalar usual), que en la base canonica tienepor matriz:
A =
0 −1 −1 2−1 0 1 2−1 1 2 02 2 0 1
Calcule cos(πA).

8.2. PRUEBAS 103
B) (3.5 puntos) Sea
R =14
−2 +√
2 2 +√
2 −22 +
√2 −2 +
√2 −2
2 2 2√
2
Estudie si R es una transformacion ortogonal en R3 (con el productoescalar usual) y si es una rotacion o no. Calcule un subespacio dedimension 1 y otro de dimension 2 invariantes bajo R. Escriba laforma canonica de R y la base correspondiente.

104 CAPITULO 8. LAS PRUEBAS QUINCENALES
8.3. Soluciones de las pruebas

8.3. SOLUCIONES DE LAS PRUEBAS 105
Algebra Lineal. Prueba 1
Grupo A 27 de octubre de 2006
Nombre: Firma: DNI:
1. (1.5 puntos) Sea el espacio vectorial R5 y W un subespacio de dimension4. Estudie si existe un subespacio U de dimension 2 tal que U ∩W = {0}.Solucion:
dim(U + W ) + dim(U ∩W ) = dim U + dim W, dim(U + W ) = 6
lo que no es posible en un espacio de dimension 5.
2. (1.5 puntos) Sea el espacio vectorial R4 y sus subespacios U1 = lin{e1, e2},U2 = lin{e3}, U3 = lin{e1 + e3}, siendo {e1, e2, e3, e4} una base de R4.Calcule U1 ∩U2, U1 ∩U3 y U2 ∩U3. ¿Es la suma de estos tres subespaciosdirecta?
Solucion: La base canonica es {e1, e2, e3, e4}. Esta claro que el conjunto de
vectores: {e1, e2, e3} es l.i, luego U1 ∩U2 = {0}. De la misma forma {e1, e2, e1 +
e3} es l.i y U1 ∩ U3 = {0}. Finalmente, {e3, e1 + e3} es tambien l.i. y por tanto
U2 ∩ U3 = {0}. Pero, para que se tenga una suma directa, {e1, e2, e3, e1 + e3}deberıa ser una base de la suma y no es ası (no son l.i.).

106 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 1
Grupo A 27 de octubre de 2006
Nombre: Firma: DNI:
A) (3.5 puntos) En R3 se consideran las bases B1 = {(0, 1, 1), (1, 0, 1), (1, 1, 0)}y B2 = {(−1, 1, 1), (1,−1, 1), (1, 1,−1)}. Calcule las coordenadas de (1, 0, 2)en ambas bases y escriba la matriz de cambio de base.Solucion: Las matrices de cambio de base de B1 y B2 a la canonica son repec-tivamente
P1 =
0@ 0 1 11 0 11 1 0
1A , P2 =
0@ −1 1 11 −1 11 1 −1
1ALas coordenadas del vector v = (1, 0, 2) son en las bases B1 y B2, respectiva-mente:
X1 = P−11
0@ 102
1A =1
2
0@ −1 1 11 −1 11 1 −1
1A0@ 102
1A =
0@ 1/23/2−1/2
1A
X2 = P−12
0@ 102
1A =1
2
0@ 0 1 11 0 11 1 0
1A0@ 102
1A =
0@ 13/21/2
1ALa matriz de cambio de base es:
P21 = P−12 P1 =
1
2
0@ 2 1 11 2 11 1 2
1A , X2 = P21X1

8.3. SOLUCIONES DE LAS PRUEBAS 107
B) (3.5 puntos) Calcule bases de la suma e interseccion de los subespacios deR3 definidos por:{
V1 = lin{(1, 1, 0), (1, 0,−1), (5, 2,−3)}V2 = {x ∈ R3 : x1 + x2 − x3 = 0, 2x1 + 2x2 − 2x3 = 0}
Escriba las ecuaciones implıcitas de la suma e interseccion.Solucion: De los tres vectores que generan V1 solo hay dos l.i. Tomemos porejemplo los dos primeros. Los vectores de V1 son:
v = λ(1, 1, 0) + µ(1, 0,−1) = (λ + µ, λ,−µ)
Para que esten en V2 (la segunda ecuacion es igual que la primera):
λ + µ + λ + µ = 0, µ = −λ
Luego la interseccion es:
v = (0, λ, λ), V1 ∩ V2 = lin{(0, 1, 1)}
con ecuaciones: x1 = 0, x2 − x3 = 0.
La suma tiene dimension 3,
dim(U + W ) = dim U + dim W − dim(U ∩W ) = 2 + 2− 1 = 3
luego U + W es el espacio total, R3. Una base es {(1, 0, 0), (0, 1, 0), (0, 0, 1)} ysus vectores no cumplen ninguna ecuacion lineal (no trivial).

108 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 2
Grupo A 17 de noviembre de 2006
Nombre: Firma: DNI:
1. (1.5 puntos) Sean U, V,W espacios vectoriales y f : U → V , g : V → Waplicaciones lineales. Estudie si el siguiente enunciado es correcto o no:
g ◦ f = 0 ⇔ im f ⊂ ker g
Solucion: ⇒: Si g◦f = 0, sea y ∈ im f ⊂ V . Entonces ∃x ∈ U tal que y = f(x).Por tanto, g(y) = g(f(x)) = 0, luego y ∈ ker g
⇐: Si im f ⊂ ker g, g ◦ f(x) = 0 pues f(x) im f .
2. (1.5 puntos) Sean V,W espacios vectoriales y f : V → W una aplicacionlineal biyectiva. ¿Es f−1 lineal?Solucion: Sea z = f(λf−1(x) + µf−1(y)) = λx + µy. Aplicando f−1:
f−1(z) = λf−1(x) + µf−1(y) = f−1(λx + µy)
Luego f−1 es lineal.

8.3. SOLUCIONES DE LAS PRUEBAS 109
Algebra Lineal. Prueba 2
Grupo A 17 de noviembre de 2006
Nombre: Firma: DNI:
A) (3.5 puntos) Halle bases del nucleo y la imagen de la aplicacion linealf : R3 → R4 sabiendo que f(u1) = −u′2 + u′3 − u′4, f(u2) = u′1 − u′2 + u′4,f(u1 − u3) = 2u′1 − 2u′3 + 4u′4, con {u1, u2, u3} y {u′1, u′2, u′3, u′4} bases deR3 y R4 respectivamente. Escriba la matriz de f en esas bases.Solucion:
f(u1) = −u′2 +u′3−u′4, f(u2) = u′1−u′2 +u′4, f(u3) = −2u′1−u′2 +3u′3−5u′4
A =
0BB@0 1 −2−1 −1 −11 0 3−1 1 −5
1CCA , Av = 0,
8>>><>>>:x2 − 2x3 = 0
−x1 − x2 − x3 = 0
x1 + 3x3 = 0
−x1 + x2 − 5x3 = 0
ker A = lin
8<:0@ 3
−2−1
1A9=; , im f = lin
8>><>>:0BB@
0−11−1
1CCA ,
0BB@1−101
1CCA9>>=>>;

110 CAPITULO 8. LAS PRUEBAS QUINCENALES
B) (3.5 puntos) Sabiendo que la matriz de una aplicacion lineal f : V → W ,V,W C-espacios vectoriales, es
A =(
i 2 −1−1 λ −i
)en las bases BV = {v1, v2, v3} y BW = {w1, w2}, calcule:
i) los valores de λ ∈ C para los que la dimension de la imagen de f es 2.
ii) la matriz de f en las bases B′V = {v2, v3, v1} y B′W = {w2, w1}.iii) las coordenadas de la imagen de −iv1 + iv3 en la base B′W .
Solucion:
i) El rango de la matriz A es 1 (y la dimension de la imagen es 1) si todoslos menores de orden 2 son cero (basta con que lo sea el que sigue acontinuacion):
det
„i 2−1 λ
«= iλ + 20, λ = 2i
Para λ 6= 2i la dimension de la imagen es 2.
ii) Sean B′V = {v′1, v′2, v′3}, B′W = {w′1, w
′3}. Las matrices de cambio de base
son:
PV =
0@ 0 0 11 0 00 1 0
1A , PW =
„0 11 0
«Por tanto
A′ = P−1W APV =
„λ −i −12 −1 i
«iii) „
i 2 −1−1 λ −i
«0@ −i0i
1A =
„1− i1 + i
«−→
„1 + i1− i
«„
λ −i −12 −1 i
«0@ 0i−i
1A =
„1 + i1− i
«

8.3. SOLUCIONES DE LAS PRUEBAS 111
Algebra Lineal. Prueba 3
Grupo A 14 de diciembre de 2006
Nombre: Firma: DNI:
1. (1.5 puntos) Sea A ∈ M2(R) con A 6= 0, trA = det A = 0. Estudie si Aes diagonalizable o no.Solucion: El polinomio caracterıstico es:
p(λ = λ2 − (tr A)λ + det A = λ2
Como A 6= 0 el polinomio mınimo no puede ser λ. Entonces m(λ) = λ2 y A no
es diagonalizable (es nilpotente de grado 2).
2. (1.5 puntos) Demostrar que si los autovalores de una matriz A ∈ M3(C)son {1, 1
2 (−1 + i√
3), 12 (−1− i
√3)}, entonces A−1 = A2.
Solucion: El polinomio caracterıstico es:
p(λ) = (λ− 1)
„λ− 1
2(1 + i
√3)
«„λ− 1
2(1− i
√3)
«= λ3 − 1
Utilizando el teorema de Cayley-Hamilton:
A3 = I, A−1 = A2
O bien: la matriz es diagonalizable: A = PDP−1:
A−1 = P
0@ 1 0 0
0 12(−1 + i
√3) 0
0 0 12(−1− i
√3)
1A−1
P−1
= P
0@ 1 0 0
0 12(−1− i
√3) 0
0 0 12(−1 + i
√3)
1AP−1
= P
0@ 1 0 0
0 12(−1 + i
√3) 0
0 0 12(−1− i
√3)
1A2
P−1 = A2
pues „1
2(−1 + i
√3)
«−1
=1
2(−1− i
√3) =
„1
2(−1 + i
√3)
«2

112 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 3
Grupo A 14 de diciembre de 2006
Nombre: Firma: DNI:
A) (3.5 puntos) Estudie si la matriz
A =
−1 + i 1 0i 0 0−1 1 i
es diagonalizable y calcule la matriz de cambio de base que la lleva a suforma diagonal (si es posible) o a su forma canonica de Jordan.Solucion: La ecuacion de autovalores es
−λ3 − (1− 2i)λ2 + (1 + 2i)λ + 1 = (λ− i)(λ2 + (1− i)λ− i) = 0
Los autovalores son:λ = −1, i (doble)
Los autovectores son:
(A + I)v = 0, u1 =
0@ 1−i1
1A , (A− iI)v = 0, u2 =
0@ 001
1A , u3 =
0@ 110
1AA es diagonalizable y la matriz de cambio de base es::
P =
0@ 1 0 1−i 0 11 1 0
1A , D = P−1AP =
0@ −1 0 00 i 00 0 i
1A

8.3. SOLUCIONES DE LAS PRUEBAS 113
B) (3.5 puntos) Calcule el espectro de un endomorfismo de polinomio carac-terıstico p(λ) = λ5−2λ3 +λ y polinomio mınimo m(λ) = λ4 +λ3−λ2−λ.Halle las multiplicidades algebraicas y geometricas de sus autovalores y suforma canonica de Jordan.Solucion: Las raıces del polinomio caracterıstico y el mınimo son los autovalo-res:
p(λ) = −λ(λ− 1)2(λ + 1)2, m(λ) = λ(λ− 1)(λ + 1)2
σ(f) = {0, 1,−1}Como en el polinomio mınimo hay factores no lineales (el correspondiente alautovalor −1) el endomorfismo no es diagonalizable. Las multiplicidades alge-braicas se leen en el polinomio caracterıstico: la de 0 es 1, la de 1 es 2 y la de−1 es 2. La forma canonica es (1× 1 en las cajas de autovalores 0 y 1, y 2 × 2en la del autovalor −1):
J =
0BBBB@0
11
−1 1−1
1CCCCALas mutliplicidades geometricas de 0, 1, −1 son 1, 2 y 1 respectivamente

114 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 4
Grupo A 15 de diciembre de 2006
Nombre: Firma: DNI:
1. (1.5 puntos) Estudie si es cierto el siguiente enunciado: “Si la signatura deuna forma cuadratica en V es (p, q), con p, q 6= 0, existe un vector x ∈ Vque verifica Q(x) = 0”.Solucion: En una base apropiada,
Q(x) = (x21 + · · ·+ x2
p)− (xp+1 ∗ 2 + · · ·+ x2p+q
por tantoQ(1, . . . , 0, 1, . . . , 0) = 0
2. (1.5 puntos) Estudie si existe un cambio de base que transforma la matrizQ1 de una forma cuadratica Q de R3 en la matriz Q2:
Q1 =
1 0 00 −1 00 0 1
, Q2 =
−1 0 00 1 00 0 −1
¿Y si el espacio es C3?Solucion: Son distintas formas pues tienen distinta signatura. No existe talmatriz de cambio de base. En C son la misma pues son regulares y existe esamatriz.

8.3. SOLUCIONES DE LAS PRUEBAS 115
Algebra Lineal. Prueba 4
Grupo A 15 de diciembre de 2006
Nombre: Firma: DNI:
A) (3.5 puntos) Calcule el radical de la forma bilineal:
ϕ(x, y) = x1y2 + x2y1 − x3y2 − x2y3 + x1y1 − x3y3
y el conjunto S de vectores x ∈ R3 que verifican ϕ(x, y) = 0, dondey = (1, 0,−1). ¿Es S un subespacio? ¿Que relacion hay entre y, S y elradical?Solucion: La matriz de la forma bilineal y el radical son:
Aϕ =
0@ 1 1 01 0 −10 −1 −1
1A , Ax = 0, rad ϕ = lin
8<:0@ 1
−11
1A9=;`
1 0 −1´Ax = 0, x1 + 2x2 + x3 = 0, W = lin
8<:0@ 2
−10
1A ,
0@ 10−1
1A9=;y ∈ S

116 CAPITULO 8. LAS PRUEBAS QUINCENALES
B) (3.5 puntos) Escriba la forma cuadratica Q(x) = x21 − 2x1x2 + 3x2x3 − x2
3
como suma y diferencia de cuadrados. ¿Es regular? ¿Es definida positiva?Escriba la matriz de cambio de base.Solucion:
Q(x) = (x1 − x2)2 −
„x2 −
3
2x3
«2
+
„√5
2x3
«2
Es regular, pero no es definida positiva. El cambio de coordenadas es
x′1 = x1 − x2, x′2 = x2 −3
2x3, x′3 =
√5
2x3, P =
0@ 1 −1 00 1 −3/2
0 0√
5/2
1A
P t
0@ 1 −1 0−1 0 3/20 3/2 −1
1AP =
0@ 1−1
1
1A

8.3. SOLUCIONES DE LAS PRUEBAS 117
Algebra Lineal. Prueba 5
Grupo A 12 de enero de 2007
Nombre: Firma: DNI:
1. (1.5 puntos) Sea U un subespacio unidimensional de un espacio vectorialreal de dimension finita, V , dotado de un producto escalar. Calcule cuantosvectores de norma 1 hay en U . ¿Cuantos hay si V es complejo?Solucion: U = lin{u}, los vectores de norma 1 en U son dos: ± u
‖u‖ (± son
los unicos numeros reales con valor absoluto igual a 1). Si V es complejo, soninfinitos: eiϕ u
‖u‖ (|eiϕ| = 1, ϕ ∈ R).
2. (1.5 puntos) Sean {v1, v2, v3} vectores de un espacio vectorial complejo,V , con producto escalar, tales que si v ∈ V verifica (v, vi) = 0, i = 1, 2, 3,entonces v = 0. ¿Cual es como maximo la dimension de V ?Solucion: Sea W = lin{v1, v2, v3}. dim W ≤ dim V . Pero W⊥ = {0}, luegoW = V y por tanto dim V ≤ 3.
118 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 5
Grupo A 12 de enero de 2007
Nombre: Firma: DNI:
A) (3.5 puntos) Calcule la distancia del vector v = (1, 1, 1, 1) al subespacio Vgenerado por los vectores de R4 (con el producto escalar usual):
{(1, 0,−1, 0), (2, 0,−2, 0), (1, 0, 0, 1)}
Calcule el angulo que forma v con el subespacio V .Solucion: Una base de V es: {(1, 0,−1, 0), (1, 0, 0, 1)}. Ortonormalizando (porG-S): 8>><>>:
1√2
0BB@10−10
1CCA ,1√6
0BB@1012
1CCA9>>=>>;
La proyeccion de v sobre V y la distancia a V son:
PV v = 〈u1, v〉u1 + 〈u2, v〉 =2
3
0BB@1012
1CCA , d = ‖v − PV v‖ =2√3
cos ϕ =〈v, Pv〉‖v‖ ‖Pv‖ = arc cos
r2
3, ϕ = arc cos
r2
3

8.3. SOLUCIONES DE LAS PRUEBAS 119
B) (3.5 puntos) En el espacio C3 con el producto escalar usual se considera elsubespacio V de ecuaciones:
x1+(1−i)x2−x3 = 0, (1−i)x1−2ix2−x3, (2+i)x1+(3−i)x2−(1+i)x3 = 0
Calcule una base ortornomal del subespacio ortogonal a V . Calcule losproyectores ortogonales sobre V y V ⊥.Solucion: El espacio V viene dado por las ecuaciones l.i.:
x1 + (1− i)x2 − x3 = 0, (1− i)x1 − 2ix2 − x3
luego una base del espacio ortogonal es:
{v1 = (1, 1 + i,−1), v2 = (1 + i, 2i,−1)}
Ortonormalizando
u1 =1
2
0@ 11 + i−1
1A , u′2 = v2 − 〈u1, v2〉u1 =1
4
0@ i−1 + i
3i
1A
u2 =1
2√
3
0@ i−1 + i
3i
1ALos proyectores son:
PV⊥ = u1u+1 + u2u
+2 =
1
3
0@ 1 1− i 01 + i 2 0
0 0 3
1A
PV = I − PV⊥ =1
3
0@ 2 −1 + i 0−1− i 1 0
0 0 0
1A

120 CAPITULO 8. LAS PRUEBAS QUINCENALES
Algebra Lineal. Prueba 6
Grupo A 23 de enero de 2007
Nombre: Firma: DNI:
1. (1.5 puntos) Estudie si existe una matriz ortogonal en una espacio dedimension impar que no tenga autovectores.Solucion: Los autovalores (complejos) de una matriz ortogonal tienen modulo1. Pero como el polinomio caracterıstico es real, aparecen a pares λ y λ. Porlo tanto si la dimension es impar 1 o −1 (o ambos) son autovalores y existenautovectores.
2. (1.5 puntos) Sea A ∈ Mn(R). Demuestre el siguiente enunciado (en casode ser cierto) o ponga un contraejemplo, (si es falso): “A es no diagonali-zable ⇔ At 6= A”.Solucion: Toda matriz simetrica real es diagonalizable. Hacia la derecha escierto. Pero hay matrices diagonalizables que no son simetricas:„
1 10 0
«.

8.3. SOLUCIONES DE LAS PRUEBAS 121
Algebra Lineal. Prueba 6
Grupo A 23 de enero de 2007
Nombre: Firma: DNI:
A) (3.5 puntos) Calcule la descomposicion espectral del endomorfismo fde C4 (con el producto escalar usual), que en la base canonica tienepor matriz:
A =
0 −1 −1 2−1 0 1 2−1 1 2 02 2 0 1
Calcule cos(πA).Solucion: p(λ) = λ4 − 3λ3 − 9λ2 + 27λ, σ(A) = {0,−3, 3}, 3 es doble.
u1 =1√3
0BB@1−110
1CCA , u2 =1√3
0BB@110−1
1CCA
u3 =1√3
0BB@0111
1CCA , u4 =1√3
0BB@10−11
1CCA
I = P0 +P−3 +P3, A = −3P−3 +3P3, P0 =1
3
0BB@1 −1 1 0−1 1 −1 01 −1 1 00 0 0 0
1CCA
P−3 =1
3
0BB@1 1 0 −11 1 0 −10 0 0 0−1 −1 0 1
1CCA , P3 =1
3
0BB@1 0 −1 10 1 1 1−1 1 2 01 1 0 2
1CCAcos πA = cos(0)P0 + cos(−3π)P−3 + cos(3π)P3 = P0 − P−3 − P3
=1
3
0BB@−1 −2 2 0−2 −1 −2 02 −2 −1 00 0 0 −3
1CCA

122 CAPITULO 8. LAS PRUEBAS QUINCENALES
B) (3.5 puntos) Sea
R =14
−2 +√
2 2 +√
2 −22 +
√2 −2 +
√2 −2
2 2 2√
2
Estudie si R es una transformacion ortogonal en R3 (con el productoescalar usual) y si es una rotacion o no. Calcule un subespacio dedimension 1 y otro de dimension 2 invariantes bajo R. Escriba laforma canonica de R y la base correspondiente.Solucion:
RRt = I, det R = −1
Ru1 = −u1, u1 =1√2
0@ 1−10
1AV1 = lin{u1}, V ⊥
1 = lin
8<:u2 =1√2
0@ 110
1A , u3 =
0@ 001
1A9=;P =
0@ 1/√
2 1/√
2 0
−1/√
2 1/√
2 00 0 1
1AR′ = P tRP =
0@ −1 0 0
0 1/√
2 −1/√
2
0 1/√
2 1/√
2
1Aen la base {u1, u2, u3}
Capıtulo 9
El examen final
9.1. Introduccion
El examen final solo se hara para aquellos alumnos que no hayan superadolas pruebas parciales y demas elementos de la evaluacion, segun aparece en elapartado 11.
El examen final, que se realizara el 6 de febrero de 2007 a las 9:30 horasen el aula 12, sigue a continuacion. Como es costumbre, habra tambien unaconvocatoria en Septiembre, el dıa 10 de septiembre a as 15:30. El contenido deesta prueba sigue tambien a continuacion.
9.2. Examen final
123
124 CAPITULO 9. EL EXAMEN FINAL
Algebra Lineal. Examen Final
Grupo A 6 de febrero de 2007
Nombre: Firma: DNI:
1. Sea Rn con el producto escalar usual. Sea B1 una base ortonormal yBi, i = 2, . . . m las bases que se obtienen de B1 cambiando el orden de loselementos de B1. Calcule m. Demuestre que si Pi es la matriz de cambio debase de B1 a Bi, el conjunto {Pi : i = 1, 2, . . . m} con P1 = In, es un grupomultiplicativo finito de matrices ortogonales. ¿Cual es el determinante deestas matrices?

9.2. EXAMEN FINAL 125
2. Calcule bases de la suma e interseccion del nucleo y la imagen del endo-morfismo en R4 dado por la matriz (en la base canonica):
A =
1 3 6 105 −1 −2 2−7 3 6 25 −1 −2 2

126 CAPITULO 9. EL EXAMEN FINAL
3. Calcule la forma canonica de Jordan, J , de la matriz
A =
−10 2 −4 −120 0 −8 −86 2 −4 4−1 −3 2 −2
sabiendo que su polinomio caraterıstico tiene la forma p(λ) = λ4 + aλ3 +64λ2 . Halle la exponencial eJ .

9.2. EXAMEN FINAL 127
4. Escriba la forma cuadratica siguiente como un suma y diferencia de cua-drados y calcule la base en la cual Q viene dada por una matriz diagonal.
Q(x) = x1x3 − 3x2x3 − 3x1x2 + x23, x ∈ R3

128 CAPITULO 9. EL EXAMEN FINAL
5. Calcule una matriz unitaria que diagonalice a la matriz
A =
2 −2i −i2i −1 −2i −2 2
Halle los proyectores y la descomposicion espectral.

9.3. SOLUCIONES AL EXAMEN FINAL 129
9.3. Soluciones al examen final

130 CAPITULO 9. EL EXAMEN FINAL
Algebra Lineal. Examen Final
Grupo A 6 de febrero de 2007
Nombre: Firma: DNI:
1. Sea Rn con el producto escalar usual. Sea B1 una base ortonormal yBi, i = 2, . . . m las bases que se obtienen de B1 cambiando el orden de loselementos de B1. Calcule m. Demuestre que si Pi es la matriz de cambio debase de B1 a Bi, el conjunto {Pi : i = 1, 2, . . . m} con P1 = In, es un grupomultiplicativo finito de matrices ortogonales. ¿Cual es el determinante deestas matrices?
Solucion: Las bases Bi se obtienen por permutacion de B1. por lo tanto m =
n!. Las matrices Pi son ortogonales porque relacionan bases ortonormales. Su
determinante es ±1. Es 1 si la permutacion es par y −1 si es impar. Como las
permutaciones forman un grupo, las matrices asociadas tambien lo forman.

9.3. SOLUCIONES AL EXAMEN FINAL 131
2. Calcule bases de la suma e interseccion del nucleo y la imagen del endo-morfismo en R4 dado por la matriz (en la base canonica):
A =
1 3 6 105 −1 −2 2−7 3 6 25 −1 −2 2
Solucion: El rango de A es 2. Una base del nucleo (de dimension 2) es:
x1 + 3x2 + 6x3 + 10x4 = 0, 5x1 − x2 − 2x3 + 2x4 = 0
u1 =
0BB@130−1
1CCA , u2 =
0BB@02−10
1CCAUna base de la imagen, tambien de dimension 2 es:
v1 =
0BB@15−75
1CCA , v2 =
0BB@3−13−1
1CCAUn sistema de generadores de la suma es: {u1, u2, v1, v2}. Pero solo hay tres l.i.:
ker f + im f = lin{u1, u2, v1}
Para calcular la interseccion, sustituimos un elemento general de la la imagen(λ + 3µ, 5λ− µ,−7λ + 3µ, 5λ− µ) en las ecuaciones del nucleo:
3λ + µ = 0, ker f = lin
8>><>>:0BB@
1−12−1
1CCA9>>=>>;

132 CAPITULO 9. EL EXAMEN FINAL
3. Calcule la forma canonica de Jordan, J , de la matriz
A =
−10 2 −4 −120 0 −8 −86 2 −4 4−1 −3 2 −2
sabiendo que su polinomio caraterıstico tiene la forma p(λ) = λ4 + aλ3 +64λ2 . Halle la exponencial eJ .Solucion: El polinomio caracterıstico es (al ser tr A = −16):
p(λ) = λ4 + 16λ3 + 64λ2, σ(A) = {0,−8}
con 0 y 8 raıces dobles. Los rangos de A y A + 8I son:
ran
0BB@−10 2 −4 −120 0 −8 −86 2 −4 4−1 −3 2 −2
1CCA = 3, ran
0BB@−2 2 −4 −120 8 −8 −86 2 4 4−1 −3 2 6
1CCA = 3
luego solo hay dos autovectores y la matriz no es diagonalizable. Hay dos cajas:
J =
0BB@0 1 0 00 0 0 00 0 −8 10 0 0 −8
1CCA , eJ =
0BB@1 1 0 00 1 0 00 0 e−8 10 0 0 e−8
1CCA

9.3. SOLUCIONES AL EXAMEN FINAL 133
4. Escriba la forma cuadratica siguiente como un suma y diferencia de cua-drados y calcule la base en la cual Q viene dada por una matriz diagonal.
Q(x) = x1x3 − 3x2x3 − 3x1x2 + x23, x ∈ R3
Solucion:
Q(x) =
„1
2(x1 − 3x2) + x3
«2
−„
1
2(x1 + 3x2)
«2
Las matrices de Q en la base original y en la nueva base son
Q =1
2
0@ 0 −3 1−3 0 −31 −3 2
1A , Q′ =
0@ 1 0 00 −1 00 0 0
1A , Q = P tQ′P
siendo P la matriz de cambio de base. Las constantes a, b, c se pueden elegirarbitrariamente siempre que det P 6= 0. La nueva base son las columnas de P−1.Por ejemplo, para a = 1, b = 0, c = 0:
P =1
2
0@ 1 −3 21 3 0a b c
1A , P−1 =1
3
0@ 0 0 30 2 −13 3 −3
1Ay la nueva base es:
u1 =
0@ 001
1A , u2 =
0@ 02/31
1A , u3 =
0@ 1−1/3−1
1A

134 CAPITULO 9. EL EXAMEN FINAL
5. Calcule una matriz unitaria que diagonalice a la matriz
A =
2 −2i −i2i −1 −2i −2 2
Halle los proyectores y la descomposicion espectral.Solucion:
p(λ) = −λ3 + 3λ2 + 9λ− 27, σ(A) = {−3, 3(doble)}
Autovectores:
u1 =1√6
0@ 1−2i−i
1A , u2 =1√2
0@ 10i
1A , u3 =1√3
0@ 1i−i
1A
U =
0B@1√6
1√2
1√3
− 2i√6
0 i√3
− i√6
i√2
− i√3
1CA , U+AU =
0@ −33
3
1AProyectores
P−3 =1
6
0@ 1 2i i−2i 4 2−i 2 1
1A , P3 =1
6
0@ 5 −2i −i2i 2 −2i −2 5
1A , A = −3P−3+3P3
9.4. EXAMEN DE SEPTIEMBRE 135
9.4. Examen de septiembre

136 CAPITULO 9. EL EXAMEN FINAL
Algebra Lineal. Examen de Septiembre
Grupo A 10 de septiembre de 2007
Nombre: Firma: DNI:
1. Calcule la matriz de una aplicacion lineal f : R4 → R3 en las basescanonicas sabiendo que f(e1) = e′1 + 4e′3, f(e2 − e3) = e′2, f(e1 − e4) =2e′1 − e′2 + 6e′3 y que 2e1 − 2e2 + 3e3 + 3e4 esta en el nucleo de f . Calculeuna base de R3 en la que la matriz de f tenga la forma escalon reducidapor filas (en R4 se considera su base canonica).
9.4. EXAMEN DE SEPTIEMBRE 137
2. Calcule bases y ecuaciones de la suma e interseccion de los subespa-cios de C4: V = lin{e1 − e2 + 2e4, e1 − e3, 5e1 − 2e2 − 3e3 + 4e4} yW = lin{0, 1,−2, 0), (−1, 3,−5, 0), (−1, 1,−1, 0)}, donde {e1, e2, e3, e4} esla base canonica.
138 CAPITULO 9. EL EXAMEN FINAL
3. Escriba la forma canonica de Jordan de un endomorfismo f sabiendo quesu polinomio caracterıstico es p(λ) = λ8 − 6λ7 + 11λ6 − 8λ5 + 2λ4, supolinomio mımimo es m(λ) = λ5 − 5λ4 + 6λ3 − 2λ2 y la dimension de sunucleo es 2.

9.4. EXAMEN DE SEPTIEMBRE 139
4. Calcule una base en la que la forma cuadratica Q de matriz (en la basecanonica de R3):
Q =
0 2 12 0 −11 −1 0
tenga una matriz diagonal. Escriba Q en esa nueva base.

140 CAPITULO 9. EL EXAMEN FINAL
5. Sea el operador A de C3 (con el producto escalar usual) con matriz en labase B = {e2, e3, e1}
A =
2 −i 1i 1 i1 −i 1
Calcule su espectro y los proyectores ortogonales sobre los espacios inva-riantes en la base canonica. Halle eiπA
9.5. SOLUCIONES AL EXAMEN DE SEPTIEMBRE 141
9.5. Soluciones al examen de septiembre

142 CAPITULO 9. EL EXAMEN FINAL
Algebra Lineal. Examen de Septiembre
Grupo A 10 de septiembre de 2007
Nombre: Firma: DNI:
1. Calcule la matriz de una aplicacion lineal f : R4 → R3 en las basescanonicas sabiendo que f(e1) = e′1 + 4e′3, f(e2 − e3) = e′2, f(e1 − e4) =2e′1 − e′2 + 6e′3 y que 2e1 − 2e2 + 3e3 + 3e4 esta en el nucleo de f . Calculeuna base de R3 en la que la matriz de f tenga la forma escalon reducidapor filas (en R4 se considera su base canonica).Solucion:
f(e1) = e′1 + 4e′3, f(e2) = e′1 − 2e′3,
f(e3) = e′1 − e′2 − 2e′3, f(e4) = −e′1 + e′2 − 2e′3
A =
0@ 1 1 1 −10 0 −1 14 −2 −2 −2
1Aen las bases canonicas.
u1 = e′1 + 4e′3, f(e1) = u1
f(e2) = (e′1 + 4e′3)− 6e′3 = u1 − 6e′3, u2 = −6e′3, f(e2) = u1 + u2
f(e3) = (e′1 + 4e′3)− 6e′3 − e′2 = u1 + u2 + u3, u3 = −e′2
f(e4) = −(e′1 + 4e′3)−1
3(−6e′3)− (−e′2) = −u1 −
1
3u2 − u3
B =
0@ 1 1 1 −10 1 1 −1/30 0 1 −1
1Aen la base {e′1 + 4e′3,−6e′3,−e′2}.

9.5. SOLUCIONES AL EXAMEN DE SEPTIEMBRE 143
2. Calcule bases y ecuaciones de la suma e interseccion de los subespa-cios de C4: V = lin{e1 − e2 + 2e4, e1 − e3, 5e1 − 2e2 − 3e3 + 4e4} yW = lin{0, 1,−2, 0), (−1, 3,−5, 0), (−1, 1,−1, 0)}, donde {e1, e2, e3, e4} esla base canonica.Solucion:
U = lin
8>><>>:0BB@
1−102
1CCA ,
0BB@10−10
1CCA9>>=>>; , W = lin
8>><>>:0BB@
01−20
1CCA ,
0BB@−13−50
1CCA9>>=>>;
U + W = lin
8>><>>:0BB@
1−102
1CCA ,
0BB@10−10
1CCA0BB@
01−20
1CCA9>>=>>;
con ecuacion 2x1 + 4x2 + 2x3 + x4 = 0. Las ecuaciones de la interseccion son:
U : x1 + x2 + x3 = 0, 2x2 + x4 = 0, W : x1 + 2x2 + x3 = 0, x4 = 0
con solucion: x3 = −x1, x2 = x4 = 0 y base de la interseccion:8>><>>:0BB@
10−10
1CCA9>>=>>;
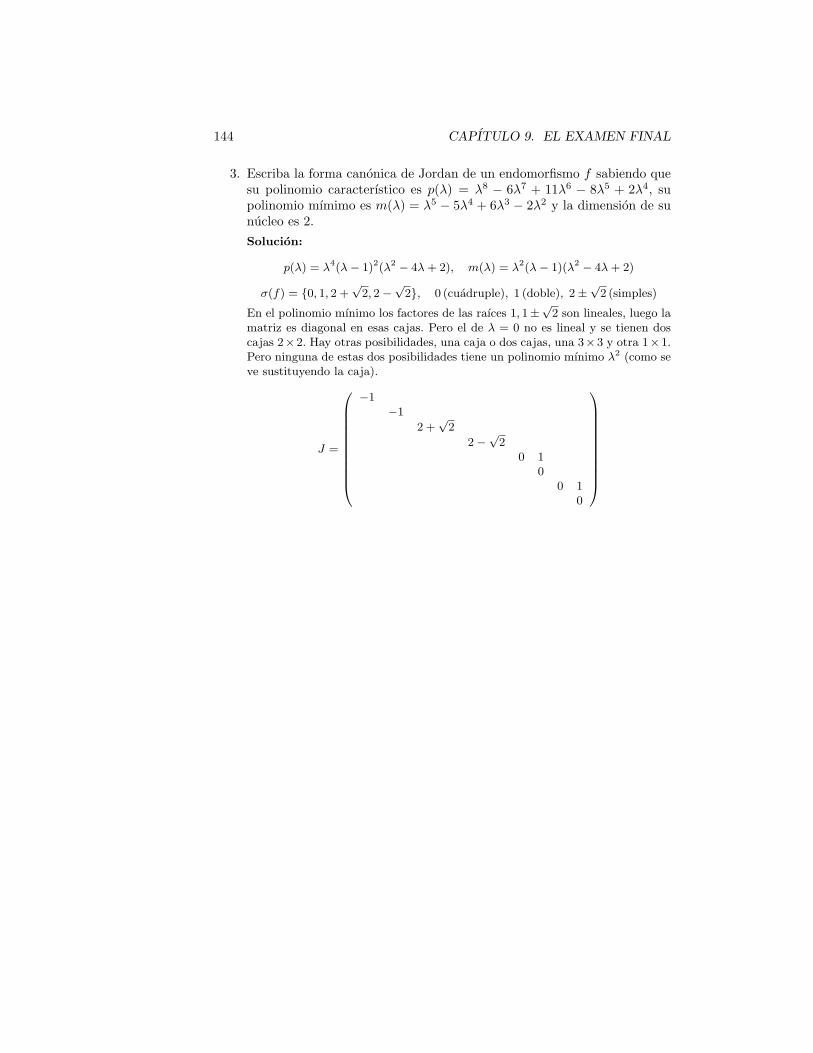
144 CAPITULO 9. EL EXAMEN FINAL
3. Escriba la forma canonica de Jordan de un endomorfismo f sabiendo quesu polinomio caracterıstico es p(λ) = λ8 − 6λ7 + 11λ6 − 8λ5 + 2λ4, supolinomio mımimo es m(λ) = λ5 − 5λ4 + 6λ3 − 2λ2 y la dimension de sunucleo es 2.Solucion:
p(λ) = λ4(λ− 1)2(λ2 − 4λ + 2), m(λ) = λ2(λ− 1)(λ2 − 4λ + 2)
σ(f) = {0, 1, 2 +√
2, 2−√
2}, 0 (cuadruple), 1 (doble), 2±√
2 (simples)
En el polinomio mınimo los factores de las raıces 1, 1±√
2 son lineales, luego lamatriz es diagonal en esas cajas. Pero el de λ = 0 no es lineal y se tienen doscajas 2×2. Hay otras posibilidades, una caja o dos cajas, una 3×3 y otra 1×1.Pero ninguna de estas dos posibilidades tiene un polinomio mınimo λ2 (como seve sustituyendo la caja).
J =
0BBBBBBBBBB@
−1−1
2 +√
2
2−√
20 1
00 1
0
1CCCCCCCCCCA

9.5. SOLUCIONES AL EXAMEN DE SEPTIEMBRE 145
4. Calcule una base en la que la forma cuadratica Q de matriz (en la basecanonica de R3):
Q =
0 2 12 0 −11 −1 0
tenga una matriz diagonal. Escriba Q en esa nueva base.Solucion:
Q(x) = 4x1x2 + 2x1x3 − 2x2x3
=1
2q12
3X
k=1
(q1k + q2k)xk
!2
− 1
2q12
3X
k=1
(q1k − q2k)xk
!2
+ Q2(x)
=1
4(q21x1 + q12x2 + (q13 + q23)x3)
2
−1
4(−q21x1 + q12x2 + (q13 − q23)x3)
2 + Q2(x)
= −(x1 − x2 − x3)2 + (x1 + x2)
2 + x23
Q′ =
0@ −1 0 00 1 00 0 1
1Ax′1 = x1 − x2 − x3, x′2 = x1 + x2, x′3 = x3
es decir
x1 =1
2(x′1 + x′2 + x′3), x2 =
1
2(−x′1 + x′2 − x′3), x3 = x′3
y la nueva base es:
e′1 =1
2e1 −
1
2e2, e′2 =
1
2e1 +
1
2e2, e′3 =
1
2e1 −
1
2e2 + e3

146 CAPITULO 9. EL EXAMEN FINAL
5. Sea el operador A de C3 (con el producto escalar usual) con matriz en labase B = {e2, e3, e1}
A =
2 −i 1i 1 i1 −i 1
Calcule su espectro y los proyectores ortogonales sobre los espacios inva-riantes en la base canonica. Halle eiπA
Solucion: El polinomio caracterıstico de A es:
p(λ) = −λ3 + 4λ2 − 2λ, σ(A) = {0, 2±√
2}
El autovector de autovalor 0 es (en la base B):
u0 =1√2
0@ 01i
1AEl proyector es:
P0 =1
2
0@ 01i
1A` 0 1 −i´
=1
2
0@ 0 0 00 1 −i0 i 1
1Ay los otros proyectores:
P+ + P− = I − P0, (2 +√
2)P+ + (2−√
2)P− = A
P+ + P− = I − P0, P+ − P− =1√2(A− 2(I − P0))
P+ =1
2√
2(A− (2−
√2)(I − P0))), P− =
1
2√
2(−A + (2 +
√2)(I − P0)))
P+ =1
4√
2
0@ 2√
2 −2i 2
2i√
2 i√
2
2 −i√
2√
2
1A . P− =1
4√
2
0@ 2√
2 2i −2
−2i√
2 i√
2
−2 −i√
2√
2
1A
eiπA =1√2
0B@√
2 cos√
2π sin√
2π i sin√
2π
− sin√
2π√
2 cos2 π√2
−i√
2 sin2 π√2
i sin√
2π i√
2 sin2 π√2
√2 cos2 π√
2
1CA
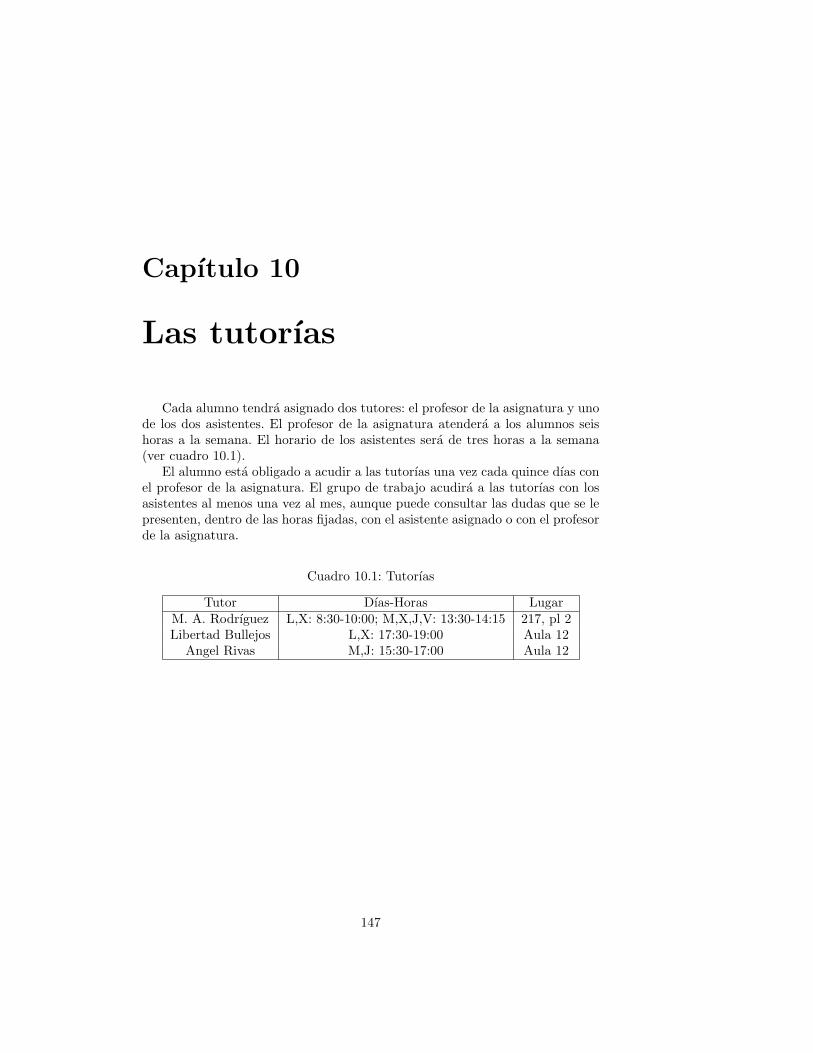
Capıtulo 10
Las tutorıas
Cada alumno tendra asignado dos tutores: el profesor de la asignatura y unode los dos asistentes. El profesor de la asignatura atendera a los alumnos seishoras a la semana. El horario de los asistentes sera de tres horas a la semana(ver cuadro 10.1).
El alumno esta obligado a acudir a las tutorıas una vez cada quince dıas conel profesor de la asignatura. El grupo de trabajo acudira a las tutorıas con losasistentes al menos una vez al mes, aunque puede consultar las dudas que se lepresenten, dentro de las horas fijadas, con el asistente asignado o con el profesorde la asignatura.
Cuadro 10.1: Tutorıas
Tutor Dıas-Horas LugarM. A. Rodrıguez L,X: 8:30-10:00; M,X,J,V: 13:30-14:15 217, pl 2Libertad Bullejos L,X: 17:30-19:00 Aula 12
Angel Rivas M,J: 15:30-17:00 Aula 12
147
148 CAPITULO 10. LAS TUTORIAS

Capıtulo 11
La evaluacion
La evaluacion del trabajo del alumno se hara en base a tres informaciones:
1. Los ejercicios presentados en grupo
2. La presentacion oral de los ejercicios
3. Las pruebas parciales
En todo caso, el alumno tiene derecho a un examen global de toda la asignaturasi no ha superado el mınimo exigido para aprobar por curso.
Ademas, la redaccion de las notas de clase ayudara en la evaluacion anterioren un redondeo hacia arriba con un maximo de 2 puntos (sobre 100) por cadaredaccion efectuada.
Con mas precision se tienen las siguientes puntuaciones (sobre un maximode 100 puntos)
1. Por cada prueba parcial: hasta un maximo de 12 puntos (la prueba sevalorara sobre 10 y se hara un correspondencia lineal con 12). Habidacuenta que hay 6 pruebas, el numero total de puntos es de 72.
2. Por cada conjunto de ejercicios entregados y resueltos completamente: 3puntos. Si los problemas no estan correctamente resueltos, se puntuara conuna cantidad proporcional (sin decimales). La cantidad maxima que sepuede conseguir en este apartado es de 21 puntos.
3. Por la presentacion del problema en clase: hasta un maximo de 7 puntos.La valoracion atendera a la claridad de la exposicion: eleccion de notacio-nes, presentacion del problema, metodo utilizado, resultados conseguidos,relaciones con otros temas. El objetivo de esta evaluacion es verificar elgrado de participacion del alumno en la realizacion de los problemas pre-sentados. Si la presentacion no es satisfactoria, es decir el alumno demues-tra no haber participado en la elaboracion de los ejercicios presentados,tampoco se valoraran estos y se le exigira una nueva presentacion.
149

150 CAPITULO 11. LA EVALUACION
Para superar el curso hay que obtener un mınimo de 50 puntos, 36 de los cualesdeben corresponder al apartado 1.
En el caso en que el alumno no supere el curso de la forma anterior, de-bera presentarse a un examen final en el que se plantearan cuestiones de todala asignatura. En dicha prueba debera obtener para aprobar cinco puntos sobrediez. A estos puntos se sumara una cantidad proporcional al resultado obteni-do en el curso, con lo que puede pasar de aprobado a notable o de notable asobresaliente.
Capıtulo 12
El control de calidad
Se elaboran por parte de cada alumno una ficha quincenal con el numero dehoras dedicadas a la asignatura (teorıa y problemas) y sus opiniones sobre
1. Dificultad del tema en relacion a los conocimientos previos
2. Tiempo dedicado en clase a su exposicion
3. Trabajo en grupo
4. Adecuacion de la bibliografıa
5. Adecuacion de los problemas a la teorıa explicada
El modelo de ficha se presenta en el cuadro 12.1. De forma paralela el profesorelaborara un informe sobre la informacion reunida.
Al final del curso se realizara la encuesta que aparece en el cuadro 12.2.
151
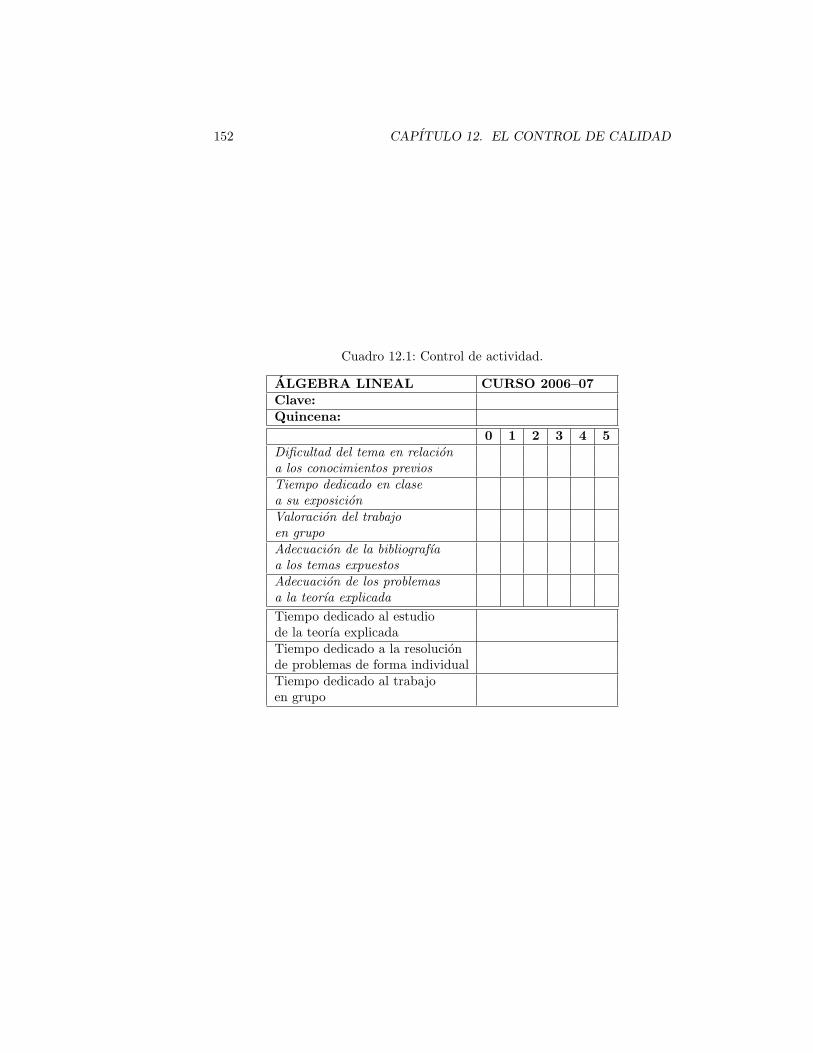
152 CAPITULO 12. EL CONTROL DE CALIDAD
Cuadro 12.1: Control de actividad.
ALGEBRA LINEAL CURSO 2006–07Clave:Quincena:
0 1 2 3 4 5Dificultad del tema en relaciona los conocimientos previosTiempo dedicado en clasea su exposicionValoracion del trabajoen grupoAdecuacion de la bibliografıaa los temas expuestosAdecuacion de los problemasa la teorıa explicadaTiempo dedicado al estudiode la teorıa explicadaTiempo dedicado a la resolucionde problemas de forma individualTiempo dedicado al trabajoen grupo
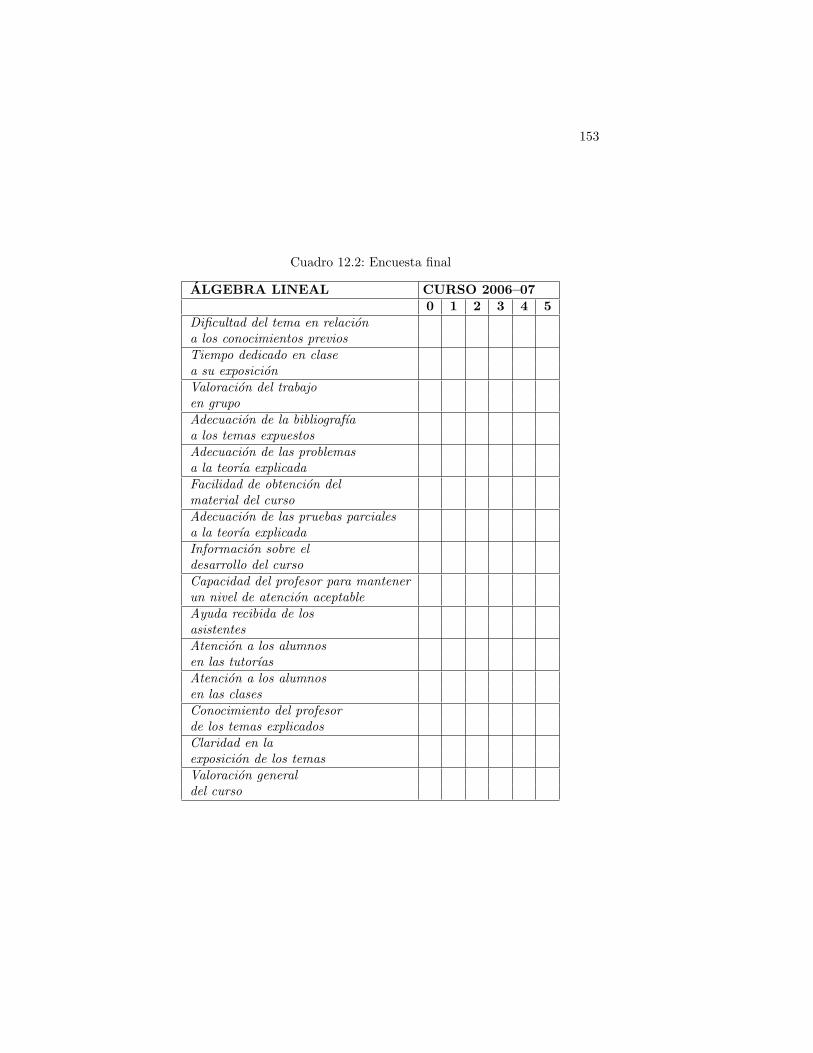
153
Cuadro 12.2: Encuesta final
ALGEBRA LINEAL CURSO 2006–070 1 2 3 4 5
Dificultad del tema en relaciona los conocimientos previosTiempo dedicado en clasea su exposicionValoracion del trabajoen grupoAdecuacion de la bibliografıaa los temas expuestosAdecuacion de las problemasa la teorıa explicadaFacilidad de obtencion delmaterial del cursoAdecuacion de las pruebas parcialesa la teorıa explicadaInformacion sobre eldesarrollo del cursoCapacidad del profesor para mantenerun nivel de atencion aceptableAyuda recibida de losasistentesAtencion a los alumnosen las tutorıasAtencion a los alumnosen las clasesConocimiento del profesorde los temas explicadosClaridad en laexposicion de los temasValoracion generaldel curso

154 CAPITULO 12. EL CONTROL DE CALIDAD

Bibliografıa
[1] J. Rojo: Algebra Lineal. McGraw-Hill, Madrid 1993.
[2] B. Larson: Algebra Lineal. McGraw-Hill. Madrid,1991.
[3] A. Ibort y M. A. Rodrıguez: Notas de Algebra Lineal . Disponible en formatoelectronico.
155