Manipulación de Robot Quirúrgico mediante Interfaz Natural · permite escalar la posición para...
12
NOTA TÉCNICA REVISTA MEXICANA DE INGENIERÍA BIOMÉDICA ib Vol. 37, No. 3, Sep-Dic 2016, pp. 287-298 dx.doi.org/10.17488/RMIB.37.3.2 Manipulación de Robot Quirúrgico mediante Interfaz Natural H.F. Vargas-Rosero, O.A. Vivas-Albán Departamento de Electrónica, Instrumentación y Control, Universidad del Cauca, Calle 5 No. 4-70, Popayán, Colombia RESUMEN En este trabajo se presenta la implementación de un simulador virtual de cirugía gobernado por interfaz natural a través de Leap Motion para determinar la viabilidad de la utilización de esta clase de interfaces. El simulador consta de tres robots, uno de los cuales maneja el endoscopio en el abdomen del paciente, y los otros son robots quirúrgicos, también se implementó una colecistectomía laparoscópica (extirpación de la vesícula biliar), que se dirige a través del movimiento libre de las manos. La aplicación permite algunas acciones como apertura o cierre de pinzas quirúrgicas, localizar grapas, hacer cortes, guiar instrumentos y fue probada por estudiantes de cirugía, obteniéndose un mejor grado de satisfacción con el uso de la interfaz natural. Palabras clave: interfaz natural, robótica quirúrgica, control por gestos, tele-cirugía. Correspondencia: Fabián Vargas Universidad del Cauca, Calle 5 No. 4-70, Popayán, Colombia. Correo electrónico: [email protected] Fecha de recepción: 5 de agosto de 2015 Fecha de aceptación: 21 de marzo de 2016
Transcript of Manipulación de Robot Quirúrgico mediante Interfaz Natural · permite escalar la posición para...

NOTA TÉCNICA REVISTA MEXICANA DE
INGENIERÍA BIOMÉDICAibVol. 37, No. 3, Sep-Dic 2016, pp. 287-298
dx.doi.org/10.17488/RMIB.37.3.2
Manipulación de Robot Quirúrgico medianteInterfaz Natural
H.F. Vargas-Rosero, O.A. Vivas-Albán
Departamento de Electrónica, Instrumentación y Control, Universidad del Cauca, Calle 5 No. 4-70, Popayán,Colombia
RESUMENEn este trabajo se presenta la implementación de un simulador virtual de cirugía gobernado por interfaz natural
a través de Leap Motion para determinar la viabilidad de la utilización de esta clase de interfaces. El simuladorconsta de tres robots, uno de los cuales maneja el endoscopio en el abdomen del paciente, y los otros son robotsquirúrgicos, también se implementó una colecistectomía laparoscópica (extirpación de la vesícula biliar), que se dirigea través del movimiento libre de las manos. La aplicación permite algunas acciones como apertura o cierre de pinzasquirúrgicas, localizar grapas, hacer cortes, guiar instrumentos y fue probada por estudiantes de cirugía, obteniéndoseun mejor grado de satisfacción con el uso de la interfaz natural.Palabras clave: interfaz natural, robótica quirúrgica, control por gestos, tele-cirugía.
Correspondencia:Fabián VargasUniversidad del Cauca, Calle 5 No. 4-70, Popayán, Colombia.Correo electrónico: [email protected]
Fecha de recepción:5 de agosto de 2015
Fecha de aceptación:21 de marzo de 2016

288 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
ABSTRACTThis paper presents the implementation of a virtual surgical simulator governed by natural interface through
Leap Motion to determine the feasibility of using this interface in this area. The simulator comprises three robotsone of which handles the endoscope into the patient’s abdomen, and the others are surgical robots. A method oflaparoscopic cholecystectomy (removal of the gallbladder) was developed, which targets through joystick or naturalinterface. The application allows some actions such as opening or closing crow bill, locate clips, make cuts and guidethe instruments. Additionally this tool was tested by surgery students, obtaining a better degree of satisfaction withthe use of natural interface.Keywords: natural interface, surgical robotics, gesture control, Leap Motion.
INTRODUCCIÓN
La cirugía laparoscópica es una prácticaquirúrgica que ha tenido un gran desarrollo enlas últimas décadas [1]. Actualmente muchascirugías son ejecutadas mediante esta técnicadebido a las ventajas que ofrece respecto ala cirugía abierta, tales como: menor dolor,disminución del tamaño de la incisión, mejorcicatrización, menor tiempo de recuperacióny de incapacidad laboral del paciente, ypor ende reducción de costos hospitalarios[2] [3]. Sin embargo, presenta algunaslimitaciones como pérdida de la sensacióntáctil, deficiente percepción de profundidad,y en procedimientos prolongados puedepresentarse temblor en la mano del cirujanoy fatiga. Además el movimiento delos instrumentos es invertido, alterandola coordinación entre la mano y el ojo.Estos inconvenientes se solventan medianteel uso de robots quirúrgicos en lugar de lamanipulación directa por parte del cirujano.
La cirugía robótica posibilita larealización de intervenciones complejas arazón del mayor número de grados de libertaddisponibles ampliando considerablementeel espectro de acciones posibles, tambiénpermite restringir movimientos erróneos ymejora la precisión de los mismos elevando laeficiencia en beneficio del paciente, con esta
técnica la posición de trabajo del cirujanoes confortable a diferencia de la formatradicional de laparoscopia, y permite laejecución de operaciones a distancia (tele-cirugía).
Los sistemas de robótica quirúrgica sonllamados asistentes quirúrgicos, ya que esel cirujano quien dirige cada uno de losmovimientos y acciones, realizados medianteinterfaces tipo joystick. Sin embargolos mecanismos de control ampliamenteaceptados y el sistema robótico en símismo requieren de un extenso periodo deentrenamiento.
El sistema de robótica quirúrgica demayor difusión en la actualidad es elrobot Da Vinci, diseñado para realizarvariados procedimientos, entre los que seencuentran afecciones del colon, vejiga,arterias coronarias, vesícula, próstata,garganta, entre muchas otras [4]. En elmercado existen otros robots para llevar acabo diversos procedimientos, por ejemplopara el implante de prótesis de cadera dondese requiere precisión milimétrica [5], delmismo modo hay soluciones para la inserciónde placas en la columna sin lesionar elsistema nervioso [6], robots de guía de catéteren conductos circulatorios para ablaciónde tejidos y eliminación de tumores enzonas de difícil acceso mediante radiación

Vargas-Rosero y Vivas-Albán, Manipulación de robot quirúrgico mediante interfaz natural 289
Autores
Hermes Fabián Vargas Rosero Departamento de Electrónica, Instrumentación y Control, Universidad del Cauca, Calle 5 No. 4-70, Popayán,
Colombia
Oscar Andrés Vivas Albán
Departamento de Electrónica, Instrumentación y Control, Universidad del Cauca, Calle 5 No. 4-70, Popayán, Colombia
Correspondencia: Fabián Vargas
Correo electrónico:
Dirección:
Universidad del Cauca, Calle 5 No. 4-70, Popayán, Colombia
Figuras articulo RMIB 2015-37
Figura 1. Control maestro del robot Da Vinci®.
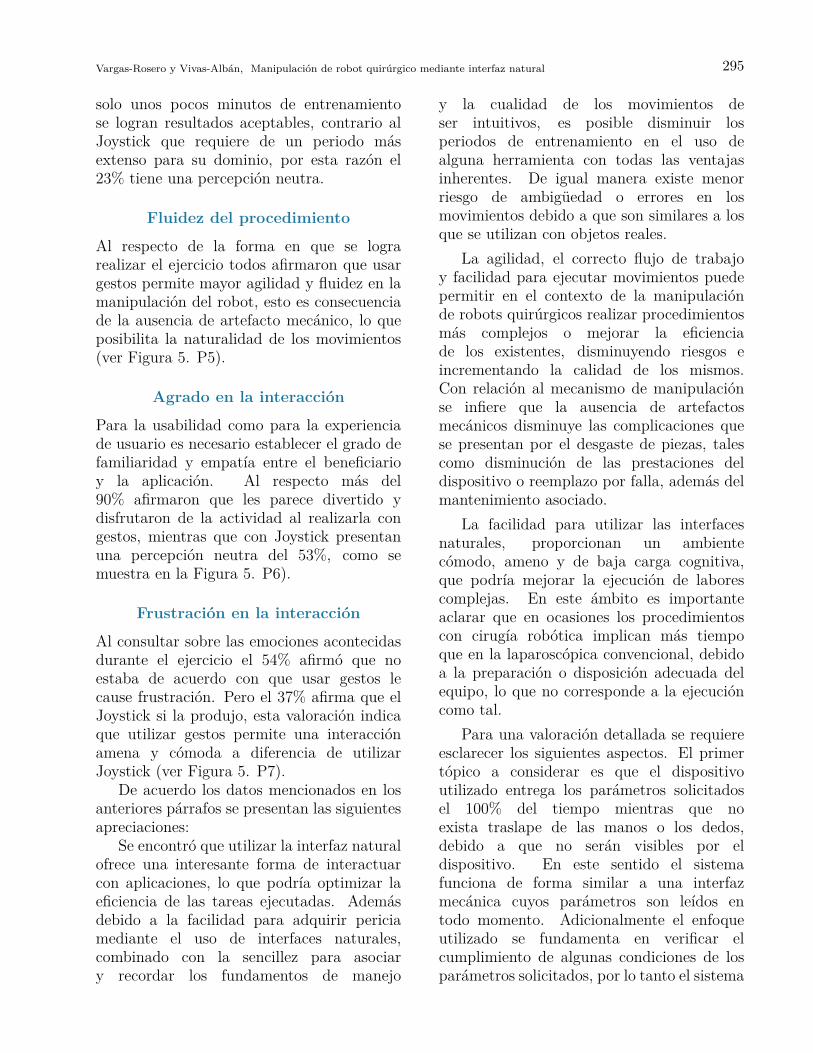
Figura 2. Simulador quirúrgico.
Figura 1. Control maestro del robot Da Vinci R©.
[7], entre otros. Convencionalmente loscontroles que dirigen los movimientos de losrobots son articulaciones pasivas, algunascon realimentación de fuerza (o háptica).En el caso del robot Da Vinci los dedosse ubican como lo indica la Figura 1, deesta forma se manipula el terminal en elinterior del paciente desplazándolo hasta unlugar determinado, donde se realiza suturas,disecciones, abrir o cerrar pinzas y engeneral todo lo necesario para dirigir alrobot en la ejecución de un procedimiento.Debido a la dinámica de los controlesmencionados, el principal aspecto en lacapacitación de los cirujanos consiste entrasladar adecuadamente las herramientas alinterior del paciente.
Debido que la tecnología avanzaconstantemente en busca de formas máseficientes para llevar a cabo determinadastareas, la manipulación de robots quirúrgicosque actualmente se realiza a través decontroles mecánicos podría mejorarse alreemplazarlos por interfaces naturales, queconsisten en el uso de características delcuerpo humano tales como el movimientode las manos o los brazos, la voz, y pupilas,con el fin de interactuar con determinadasaplicaciones. Por este motivo un área deinvestigación reciente es la utilización degestos, debido a que la operación es másnatural, intuitiva y amena que los sistemasde control convencionales [8] [9], ademáspermite una mejor inmersión, generando que
la relación del usuario con la aplicación seperciba como si fuese una interacción real.De igual manera mejora la experiencia delusuario, reduce la carga cognitiva y acelera elaprendizaje mediante la memoria kinestésica[10]. En general este tipo de técnicas ofrecenfacilidad para aprender a utilizar algunaaplicación, y adquirir pericia y dominio enmuy poco tiempo [11] [12] [13].
En el ámbito médico quirúrgico se requierede imágenes diagnósticas para definir lasacciones del procedimiento. Esta tarease realiza mediante teclado y mouse, loque incrementa el tiempo y la posibilidadde contaminación por contacto, por estemotivo algunas innovaciones buscan facilitaresta tarea manteniendo las condiciones desalubridad y disminuyendo los riesgos. Wachsy otros [14], desarrollaron un sistema demanipulación de imágenes radiológicas queconsiste en el reconocimiento y seguimientode gestos de las manos, permitiendo alcirujano mantenerse enfocado en su labor,conservando la esterilidad y disminuyendo eltiempo del procedimiento. Jacob y otros [15],desarrollaron una enfermera robótica quesuministra instrumentos durante una cirugía,este sistema detecta ordenes mediantecomandos de voz o gestos capturadospor un Kinect y entrega el instrumentosolicitado. Zhou y otros [16], realizaronun estudio comparativo de la manipulaciónde un robot quirúrgico mediante interfazsin contacto como Kinect y Leap Motion,junto a dispositivos hápticos como elcontrol Omega, Hydra y teclado. En elexperimento utilizaron un robot Taurus conrealimentación de fuerza mediante sonidos yseñales gráficas para las interfaces naturales.
Partiendo de los conceptos mencionados elpresente artículo muestra el desarrollo de unsistema de manipulación de robots mediantegestos, con el propósito de probar que alutilizar interfaces naturales se obtiene mayorfluidez en la ejecución de los procedimientos ynaturalidad en la manipulación. En este casose utilizan dos robots quirúrgicos virtuales

290 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
en un procedimiento de colecistectomíalaparoscópica, y el dispositivo Leap Motionpara capturar los gestos del usuario [17]. Elprototipo desarrollado fue probado por variaspersonas quienes valoraron su ejecución sobreel citado procedimiento.
MATERIALES Y MÉTODOS
Con el propósito de evaluar la manipulaciónde robots quirúrgicos mediante interfaznatural, se implementó una colecistectomíaque consiste en la extracción de la vesículapor presencia de cálculos biliares. La funciónde dicho órgano es suministrar la bilis queayuda a digerir los alimentos especialmentela carne y las grasas.
El procedimiento para una colecistectomíaconsiste en una serie de pasos que se describena continuación: en la fase uno es necesarioseccionar los tejidos que cubren la arteria yconducto cístico en el área del triángulo deCalot para exponerlos totalmente. En la fasedos se colocan mínimo cuatro clips o grapassobre los conductos para evitar derrames. Enla fase tres se cortan los ductos mediante unelectro bisturí que cauteriza el tejido y sellala disección. En la fase cuatro el cirujanosostiene la vesícula mientras realiza el cortede los ligamentos que la adhieren al lechohepático. Finalmente en la fase cinco secolocan el órgano en una endobolsa y seextrae, teniendo en cuenta la verificación delbuen estado de la región intervenida.
Las fases mencionadas se ejecutanutilizando dos robots quirúrgicos desarrolladosen la Universidad del Cauca, Colombia, cuyofuncionamiento se modela e implementa enun simulador.
Los robots quirúrgicos utilizados son elrobot Lapbot [18], diseñado para posicionary orientar el instrumental quirúrgico dentrode la cavidad abdominal del paciente, yun robot portaendoscopio denominado Hibou[19], desarrollado para la orientación delendoscopio, o cámara dentro del paciente.
El propósito del portaendoscopio esproporcionar el mejor ángulo y posición de
la vista del área a intervenir debido a queel cirujano depende únicamente de la imagenpara la ejecución de cada procedimiento,por lo tanto el robot se traslada conformese requiera. Existen distintos enfoques delcontrol de este tipo de sistemas, entre losque se encuentra la ubicación por comandosde voz, posición de la pupila o ángulode la cabeza del mismo cirujano, peroconvencionalmente es un asistente quien lodirige.
La construcción real de los robots requierede una adecuada investigación e inversión,pero mientras tanto es posible evaluar suscapacidades en un simulador que contiene losmodelos correspondientes para su operación,en el presente caso es un ambiente virtual 3Ddesarrollado con la librería de visualizacióngráfica de código abierto VTK, que brindaclases, funciones y métodos que permiteninteractuar con modelos 3D [20], y la libreríade detección de colisiones Vcollide, sobre laplataforma de desarrollo Visual Studio 2010.
Como detector de gestos se utilizael dispositivo Leap Motion, diseñadopara realizar el seguimiento de lasmanos en tiempo real sobre un espaciode tres dimensiones de 0,227 m3, concaptura de 50 a 200 cps, y precisiónde 1/100 milímetros, además cuenta conuna plataforma de desarrollo SDK API(Application Programming Interface) quesoporta varios lenguajes, y la documentacióncorrespondiente [21].
En la Figura 2 se presenta la interfazgráfica de la aplicación construida, que cuentacon dos ventanas; la primera ubicada ala izquierda representa la vista interna delpaciente que suministra el endoscopio, cuyaposición la traslada el usuario dependiendode la necesidad de tener un mejor puntode observación para ejecutar una tarea.Convencionalmente un auxiliar recibe laorden del cirujano para orientar la cámaralimitando el flujo de trabajo en algunasocasiones, pero cuando el mismo especialistalo realiza, dicha tarea se torna más eficiente.

Vargas-Rosero y Vivas-Albán, Manipulación de robot quirúrgico mediante interfaz natural 291
Autores
Hermes Fabián Vargas Rosero Departamento de Electrónica, Instrumentación y Control, Universidad del Cauca, Calle 5 No. 4-70, Popayán,
Colombia
Oscar Andrés Vivas Albán
Departamento de Electrónica, Instrumentación y Control, Universidad del Cauca, Calle 5 No. 4-70, Popayán, Colombia
Correspondencia: Fabián Vargas
Correo electrónico:
Dirección:
Universidad del Cauca, Calle 5 No. 4-70, Popayán, Colombia
Figuras articulo RMIB 2015-37
Figura 1. Control maestro del robot Da Vinci®.
Figura 2. Simulador quirúrgico. Figura 2. Simulador quirúrgico.
En la vista interna se aprecian los órganos,el movimiento de los extremos de los robotsy el comportamiento de las herramientas.La ventana derecha muestra el quirófanocompleto, con dos robots Lapbot, un robotHibou y el paciente. El renderizado esindependiente para cada ventana para evitarsobrecarga o que la animación se vea lenta.
El sistema de ejes de coordenadas delambiente virtual y los ejes definidos por elLeap Motion son distintos en sus dimensiones,por lo tanto se requiere ajustar el pasode los valores de las posiciones entregadospor el sensor, utilizando una matriz detransformación que establece la relación entredos espacios en 3D. En este caso se plantea uncambio de escala y traslación para ajustar losdesplazamientos en el ambiente virtual, comose indica en la Ecuación 1:
posx1 = 0.455 + px14000 , (1)
posy1 = −0.07 + py14000 ,
posz1 = −0.13 + pz14000
El valor de 4000 es la constante quepermite escalar la posición para interactuaradecuadamente con los objetos virtuales delambiente 3D. Los factores que se suman encada uno de los ejes permiten trasladar lasposiciones recibidas de tal manera que seubiquen en las cercanías de los órganos, delo contrario en ningún momento tendríancontacto con las herramientas manipuladas.Ambos parámetros fueron definidos de lasiguiente manera:
1. Se observaron los valores entregados porel dispositivo de captura en cada uno delos ejes X, Y, Z.
2. Se comparó las posiciones de los órganosvirtuales en el ambiente 3D, con losparámetros obtenidos de las manos.
3. Se estableció el rango de desplazamientosque se requiere en las proximidades delos órganos con el fin de ajustar la escalade los movimientos.
4. Finalmente se establecen factores quese suman o se restan a las posiciones,para que el objeto que se traslada en elambiente se desplace junto los órganos.
La robótica quirúrgica permite ciertosavances inherentes de esta tecnología sobrela laparoscopia normal, uno de ellos es ladelimitación del área para el movimientoseguro. En este caso se estableció una regiónde protección donde el usuario desplaza elterminal, pero cuando se alcanza el límitefijado el sistema deshabilita el movimiento,brindando mayor seguridad a los posiblespacientes. Adicionalmente con el propósito deeliminar los movimientos involuntarios comotemblor en las manos, se utilizó un filtro derespuesta infinita al impulso IIR aplicado alos valores de las posiciones de cada eje decoordenadas, tal como lo indica la ecuación 2,donde la variable suavizado es un porcentajede filtrado entre cero y cien. La variablex depende de su valor anterior y la nuevaposición recibida X0. El valor de suavizadose estableció en 80, ajustándolo mediante laobservación de la respuesta del simulador. LaEcuación 2 se aplica para la posición en cadaeje.
X = X · suavizado + X0 · (100 − suavizado)100
(2)En un procedimiento quirúrgico, ademásde desplazar los instrumentos en todaslas direcciones es necesario halar o cortarmediante pinzas. El instrumento puede estarabierto, cerrado o en posiciones intermedias

292 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
2
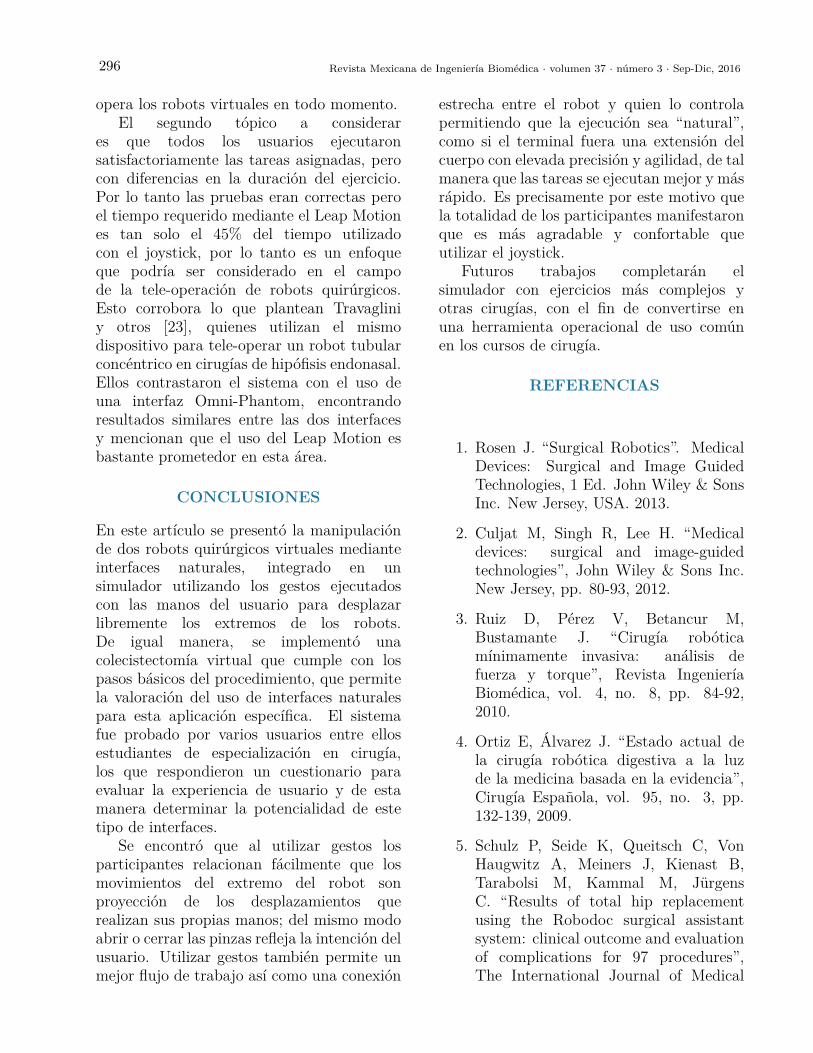
Figura 3. Posición para abrir o cerrar las pinzas.
Figura 4. Posición del usuario para manejar la herramienta.
Figura 3. Posición para abrir o cerrar las pinzas.
para permitir tareas como cortar, separartejidos o sostener órganos. En el simulador laapertura de pinzas se establece mediante laseparación del dedo pulgar e índice izquierdopara la herramienta izquierda. En la Figura3, izquierda se muestra la posición correctade la mano y sus dedos para manejar laspinzas, en la imagen derecha se observa laherramienta que cambia su estado imitandola condición de la mano. Para colocar lasgrapas se utiliza el mismo principio, cerrandolos dedos para ubicar cada una de ellas.
En la aplicación desarrollada seimplementó un protocolo para la ejecución deuna colecistectomía virtual que consiste en elconjunto de etapas que componen la cirugía,de igual manera la interfaz gráfica presentalos órganos y las herramientas involucradascon movimientos y acciones similares a losreales para tener un entorno aceptable quepermita manipular los robots con los gestos.
A diferencia del trabajo presentado en[17], se muestran a continuación varioscambios y mejoras al sistema.
Secuencia del protocolo
El protocolo utilizado para realizar elprocedimiento virtual de extracción devesícula es el siguiente:
a. Seleccionar el instrumento para cadarobot en la interfaz de usuario de
Qt (pinza, bisturí, cauterizador,grapadora).
b. Colocar las manos en el espacio definido(ver Figura 4.).
c. Orientar y disponer la mano izquierdapara abrir la pinza adecuadamente.
d. Habilitar el movimiento de cada robotcolocando las manos en la regiónpróxima a la vesícula con el fin detrasladar y manipular los instrumentos.
e. Ejecutar el procedimiento decolecistectomía realizando las siguientesetapas:
i. Exposición del conducto y arteriacísticos.
ii. Ubicación de grapas en losconductos.
iii. Sección del conducto y la arteriacísticos.
iv. Disección de la vesícula del lechohepático.
v. Extracción de la vesícula.
2
Figura 3. Posición para abrir o cerrar las pinzas.
Figura 4. Posición del usuario para manejar la herramienta. Figura 4. Posición del usuario para manejar laherramienta.

Vargas-Rosero y Vivas-Albán, Manipulación de robot quirúrgico mediante interfaz natural 293
Tabla 1. Definición de cada pregunta delcuestionario.
P1A ¿La manipulación mediante gestoses intuitiva, fácil de entender yutilizar?
P1B ¿La manipulación mediante Joystickes intuitiva, fácil de entender yutilizar?
P2A ¿Podría recordar fácilmente el modode uso de los gestos?
P2B ¿Podría recordar fácilmente el modode uso del Joystick?
P3 ¿La manipulación mediante gestoses más agradable y confortable queel uso de Joystick?
P4A ¿Mediante los gestos se ejecutael procedimiento de manera másrápida y precisa?
P4B ¿Mediante el Joystick se ejecutael procedimiento de manera másrápida y precisa?
P5 ¿Utilizar gestos permite mayorfluidez y agilidad en la manipulacióndel robot que el Joystick?
P6A Utilizar gestos me parece divertido ydisfruté de la actividad.
P6B Utilizar Joystick me parecedivertido, y disfrute de la actividad.
P7A Utilizar gestos me causó frustraciónen algún momento.
P7B Utilizar Joystick me causófrustración en algún momento.
RESULTADOS Y DISCUSIÓN
La propuesta desarrollada fue puesta aprueba con el propósito de determinarla percepción de la herramienta y lavaloración de los beneficios de usar interfacesnaturales en este tipo de aplicacionesquirúrgicas. Para establecer un punto decomparación, los ejercicios de manipulaciónde los robots desarrollados con las manos,también se realizan mediante un joystick.Los participantes del experimento fueron 13personas, 7 hombres y 6 mujeres, con unaedad promedio de 28 años, de los cuales 5 sonestudiantes de la especialización en CirugíaGeneral y el resto estudiantes de Ingeniería enAutomática Industrial de la Universidad delCauca, Colombia. El tamaño de la muestraes el adecuado debido a que el testeo de pocosusuarios, por ejemplo 5, es suficiente para
identificar problemas de usabilidad [22].Los resultados obtenidos se muestran
en la Figura 5, donde en el eje “x” serepresenta el índice de cada una de laspreguntas que se encuentran en la tabla1. Los participantes dieron su concepto enuna escala de Likert de siete puntos dondepueden seleccionar: muy de acuerdo (MA),de acuerdo (A), ligeramente de acuerdo (LA),neutral (N), ligeramente en desacuerdo (LD),en desacuerdo (D) o muy en desacuerdo(MD). En el eje “y” están apilados losporcentajes de incidencia de cada opciónencontrados para cada pregunta.
En la encuesta suministrada a losparticipantes, cada pregunta se diseñó paraabstraer la perspectiva de los usuariosrespecto de distintos tópicos importantespara definir la experiencia de utilizarinterfaces naturales en tareas de especialatención como la manipulación de robots paraprocedimientos quirúrgicos.
Los resultados encontrados en las pruebasrealizadas y consignados en la Figura 5, sondetallados de manera particular en los tópicospresentados a continuación:
Facilidad de uso de interfaces
Confirmando una de las ventajas principalesque ofrecen las interfaces naturales, losparticipantes manifestaron que utilizar gestoses intuitivo, fácil de entender y utilizar. El38% manifestó estar muy de acuerdo y el46% de acuerdo, en cambio a algunos de ellosno les pareció que el Joystick ofreciera estacaracterística (ver Figura 5. P1).
Asimilación y retención delprocedimiento
Con el propósito de determinar lafamiliaridad y la percepción cognitiva sepreguntó cuál sistema podría recordarse conmayor facilidad. Se encontró que el 54% delos encuestados dijo estar muy de acuerdo, yel 46% en estar de acuerdo con que el uso degestos se recordaría con mayor facilidad.

294 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
3
Figura 5. Resultados del cuestionario.
Ecuación 1:
(1)
. La Ecuación 2 se aplica para la posición en cada eje.
( )
(2)
P1A P1B P2A P2B P3 P4A P4B P5 P6A P6B P7A P7B
MD 0,00% 0,00% 0,00% 0,00% 0,00% 0,00% 7,69% 0,00% 0,00% 7,69% 0,00% 7,69%
D 0,00% 15,38 0,00% 15,38 0,00% 0,00% 15,38 0,00% 0,00% 7,69% 53,85 7,69%
LD 0,00% 15,38 0,00% 7,69% 0,00% 0,00% 23,08 0,00% 0,00% 7,69% 7,69% 7,69%
N 0,00% 0,00% 0,00% 15,38 0,00% 0,00% 23,08 0,00% 7,69% 53,85 15,38 15,38
LA 15,38 38,46 0,00% 30,77 0,00% 0,00% 15,38 0,00% 0,00% 0,00% 7,69% 23,08
A 46,15 7,69% 46,15 7,69% 7,69% 15,38 7,69% 30,77 30,77 15,38 7,69% 30,77
MA 38,46 23,08 53,85 23,08 92,31 84,62 7,69% 69,23 61,54 7,69% 7,69% 7,69%
0,00%
10,00%
20,00%
30,00%
40,00%
50,00%
60,00%
70,00%
80,00%
90,00%
100,00%
Po
rcen
taje
Resultados
Figura 5. Resultados del cuestionario.
Se aprecia entonces que todos apoyanesta afirmación, este resultado indica querealizar gestos facilita la retención de nuevashabilidades (ver Figura 5. P2). En elcaso del uso del Joystick los resultados sondistribuidos entre quienes están de acuerdoy quienes no, quizás por el hecho que estainterfaz mecánica sea más conocida.
Percepción de cada interfaz
Para conocer la comodidad que ofrece elsistema se preguntó qué apreciación teníanrespecto a si usar gestos es más confortabley agradable que usar el Joystick, ante lo cualel 92% dijo estar muy de acuerdo (ver Figura5. P3), lo que indica que la afirmación no sololleva el respaldo de los participantes sino quesu percepción es de total convencimiento.
Las interfaces de tipo Joystick presentanrestricciones mecánicas por lo cual el usuariodebe limitarse al rango de movimientospermitidos. Adicionalmente para mantenerla palanca de Joystick en alguna posición sedebe mantener presión sobre él.
Velocidad de ejecución
El 85% de los encuestados afirmó estar muyde acuerdo en que usar gestos es más rápidoy preciso (ver Figura 5. P4), lo cual esconsecuencia de la ausencia de restricciones.Además la precisión depende de la escalaen la que se establezcan los movimientosde las manos respecto del terminal. Laimportancia de este resultado radica en quela mayoría de participantes nunca habíautilizado este tipo de interface y con tan
Vargas-Rosero y Vivas-Albán, Manipulación de robot quirúrgico mediante interfaz natural 295
solo unos pocos minutos de entrenamientose logran resultados aceptables, contrario alJoystick que requiere de un periodo másextenso para su dominio, por esta razón el23% tiene una percepción neutra.
Fluidez del procedimiento
Al respecto de la forma en que se lograrealizar el ejercicio todos afirmaron que usargestos permite mayor agilidad y fluidez en lamanipulación del robot, esto es consecuenciade la ausencia de artefacto mecánico, lo queposibilita la naturalidad de los movimientos(ver Figura 5. P5).
Agrado en la interacción
Para la usabilidad como para la experienciade usuario es necesario establecer el grado defamiliaridad y empatía entre el beneficiarioy la aplicación. Al respecto más del90% afirmaron que les parece divertido ydisfrutaron de la actividad al realizarla congestos, mientras que con Joystick presentanuna percepción neutra del 53%, como semuestra en la Figura 5. P6).
Frustración en la interacción
Al consultar sobre las emociones acontecidasdurante el ejercicio el 54% afirmó que noestaba de acuerdo con que usar gestos lecause frustración. Pero el 37% afirma que elJoystick si la produjo, esta valoración indicaque utilizar gestos permite una interacciónamena y cómoda a diferencia de utilizarJoystick (ver Figura 5. P7).
De acuerdo los datos mencionados en losanteriores párrafos se presentan las siguientesapreciaciones:
Se encontró que utilizar la interfaz naturalofrece una interesante forma de interactuarcon aplicaciones, lo que podría optimizar laeficiencia de las tareas ejecutadas. Ademásdebido a la facilidad para adquirir periciamediante el uso de interfaces naturales,combinado con la sencillez para asociary recordar los fundamentos de manejo
y la cualidad de los movimientos deser intuitivos, es posible disminuir losperiodos de entrenamiento en el uso dealguna herramienta con todas las ventajasinherentes. De igual manera existe menorriesgo de ambigüedad o errores en losmovimientos debido a que son similares a losque se utilizan con objetos reales.
La agilidad, el correcto flujo de trabajoy facilidad para ejecutar movimientos puedepermitir en el contexto de la manipulaciónde robots quirúrgicos realizar procedimientosmás complejos o mejorar la eficienciade los existentes, disminuyendo riesgos eincrementando la calidad de los mismos.Con relación al mecanismo de manipulaciónse infiere que la ausencia de artefactosmecánicos disminuye las complicaciones quese presentan por el desgaste de piezas, talescomo disminución de las prestaciones deldispositivo o reemplazo por falla, además delmantenimiento asociado.
La facilidad para utilizar las interfacesnaturales, proporcionan un ambientecómodo, ameno y de baja carga cognitiva,que podría mejorar la ejecución de laborescomplejas. En este ámbito es importanteaclarar que en ocasiones los procedimientoscon cirugía robótica implican más tiempoque en la laparoscópica convencional, debidoa la preparación o disposición adecuada delequipo, lo que no corresponde a la ejecucióncomo tal.
Para una valoración detallada se requiereesclarecer los siguientes aspectos. El primertópico a considerar es que el dispositivoutilizado entrega los parámetros solicitadosel 100% del tiempo mientras que noexista traslape de las manos o los dedos,debido a que no serán visibles por eldispositivo. En este sentido el sistemafunciona de forma similar a una interfazmecánica cuyos parámetros son leídos entodo momento. Adicionalmente el enfoqueutilizado se fundamenta en verificar elcumplimiento de algunas condiciones de losparámetros solicitados, por lo tanto el sistema
296 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
opera los robots virtuales en todo momento.El segundo tópico a considerar
es que todos los usuarios ejecutaronsatisfactoriamente las tareas asignadas, perocon diferencias en la duración del ejercicio.Por lo tanto las pruebas eran correctas peroel tiempo requerido mediante el Leap Motiones tan solo el 45% del tiempo utilizadocon el joystick, por lo tanto es un enfoqueque podría ser considerado en el campode la tele-operación de robots quirúrgicos.Esto corrobora lo que plantean Travagliniy otros [23], quienes utilizan el mismodispositivo para tele-operar un robot tubularconcéntrico en cirugías de hipófisis endonasal.Ellos contrastaron el sistema con el uso deuna interfaz Omni-Phantom, encontrandoresultados similares entre las dos interfacesy mencionan que el uso del Leap Motion esbastante prometedor en esta área.
CONCLUSIONES
En este artículo se presentó la manipulaciónde dos robots quirúrgicos virtuales medianteinterfaces naturales, integrado en unsimulador utilizando los gestos ejecutadoscon las manos del usuario para desplazarlibremente los extremos de los robots.De igual manera, se implementó unacolecistectomía virtual que cumple con lospasos básicos del procedimiento, que permitela valoración del uso de interfaces naturalespara esta aplicación específica. El sistemafue probado por varios usuarios entre ellosestudiantes de especialización en cirugía,los que respondieron un cuestionario paraevaluar la experiencia de usuario y de estamanera determinar la potencialidad de estetipo de interfaces.
Se encontró que al utilizar gestos losparticipantes relacionan fácilmente que losmovimientos del extremo del robot sonproyección de los desplazamientos querealizan sus propias manos; del mismo modoabrir o cerrar las pinzas refleja la intención delusuario. Utilizar gestos también permite unmejor flujo de trabajo así como una conexión
estrecha entre el robot y quien lo controlapermitiendo que la ejecución sea “natural”,como si el terminal fuera una extensión delcuerpo con elevada precisión y agilidad, de talmanera que las tareas se ejecutan mejor y másrápido. Es precisamente por este motivo quela totalidad de los participantes manifestaronque es más agradable y confortable queutilizar el joystick.
Futuros trabajos completarán elsimulador con ejercicios más complejos yotras cirugías, con el fin de convertirse enuna herramienta operacional de uso comúnen los cursos de cirugía.
REFERENCIAS
1. Rosen J. “Surgical Robotics”. MedicalDevices: Surgical and Image GuidedTechnologies, 1 Ed. John Wiley & SonsInc. New Jersey, USA. 2013.
2. Culjat M, Singh R, Lee H. “Medicaldevices: surgical and image-guidedtechnologies”, John Wiley & Sons Inc.New Jersey, pp. 80-93, 2012.
3. Ruiz D, Pérez V, Betancur M,Bustamante J. “Cirugía robóticamínimamente invasiva: análisis defuerza y torque”, Revista IngenieríaBiomédica, vol. 4, no. 8, pp. 84-92,2010.
4. Ortiz E, Álvarez J. “Estado actual dela cirugía robótica digestiva a la luzde la medicina basada en la evidencia”,Cirugía Española, vol. 95, no. 3, pp.132-139, 2009.
5. Schulz P, Seide K, Queitsch C, VonHaugwitz A, Meiners J, Kienast B,Tarabolsi M, Kammal M, JürgensC. “Results of total hip replacementusing the Robodoc surgical assistantsystem: clinical outcome and evaluationof complications for 97 procedures”,The International Journal of Medical

Vargas-Rosero y Vivas-Albán, Manipulación de robot quirúrgico mediante interfaz natural 297
Robotics and Computer AssistedSurgery, vol. 3, no. 4, pp. 301-306,2007.
6. Mehmet O, Sait N. “Robotic Systems inSpine Surgery”, Turkish Neurosurgery,vol. 24, no. 3, pp. 305-311, 2014.
7. Sio T, Jang S, Curran B. “ComparingGamma Knife and CyberKnife inpatients with brain metastases”,Journal of Applied Clinical MedicalPhysics, vol. 15, no. 1, 2014.
8. Valli A. “The design of naturalinteraction”, Journal Multimedia Toolsand Applications, vol. 38, no. 3, pp.295-305, 2008.
9. Jain J, Wixon A, Lund, D. “Thefuture of natural user interfaces”.Proceedings of the 2011 AnnualConference Extended Abstracts onHuman Factors in Computing Systems,CHI EA’ 11, Vancouver, Canada, pp.211-214, 2011.
10. Hinckley K, Wigdor D. “The Human-Computer Interaction Handbook:Fundamentals, Evolving Technologiesand Emerging Applications”, Taylor &Francis. pp. 1-49. Boca Raton, Florida,USA, 2002.
11. Wigdor D, Wixon D. “Brave NUIWorld: Designing Natural UserInterfaces for Touch and Gesture”,Morgan Kaufmann Publishers Inc. SanFrancisco, USA, 2011. [12] RautarayS, Agrawal A. “Vision based handgesture recognition for human computerinteraction: a survey”, ArtificialIntelligence Review, vol. 43, pp. 1-54,2015.
12. Hardenberg C, Bérard F. “Bare-hand Human-computer Interaction,”in Workshop on Perceptive UserInterfaces, New York, NY, USA, pp.1-8, 2001.
13. Wachs J, Stern H, Edan Y, GillamM, Handler J, Feied C,Smith, M.“A Gesture-based Tool for SterileBrowsing of Radiology Images”, Journalof American Medical InformaticsAssociation, vol. 15, no. 3, pp. 321-323, 2008.
14. Jacob M, Li Y, Wachs J. “Gestonurse:A Multimodal Robotic Scrub Nurse”,Human-Robot Interaction (HRI),2012 7th ACM/IEEE InternationalConference, Boston, MA, pp. 153-154,2012.
15. Zhou T, Cabrera M, Wachs J.“Touchless Telerobotic Surgery - Is ItPossible at All”, Proceedings of theTwenty-Ninth AAAI Conference onArtificial Intelligence, Austin, Texas,USA. pp. 4228-423, 2015.
16. Vargas H, Vivas O. “Gesturerecognition system for surgical robot’smanipulation,” Simposio de Image,Signal Processing and Artificial Vision(STSIVA), 2014 XIX, Armenia,Colombia, pp. 1-5, 2014.
17. Salinas S, Vivas O. “Modelado,simulación y control del robot paracirugía laparoscópica Lapbot”, RevistaChilena De Ingeniería, Universidad DeTarapaca vol. 17, no. 3, pp. 317-328,2009.
18. Muñoz C, Lasso E, Tosse C, OrdóñezF, Vivas A. “Sistema Virtual parael Posicionamiento del Robot PortaEndoscopio Hibou a Través de unCasco”, Revista Universitaria enTelecomunicaciones, Informática yControl, vol. 1, no. 1, pp. 59-65, 2012.
19. Vera D, Vivas O. “Ambiente virtualpara el entrenamiento de cirugíaslaparoscópicas utilizando robots”, PanAmerican Health Care Exchanges(PAHCE), Medellín (Col), pp. 1-6,2013.

298 Revista Mexicana de Ingeniería Biomédica · volumen 37 · número 3 · Sep-Dic, 2016
20. Hodson H. “Leap Motion hacks showpotential of new gesture tech”. NewScientist, vol. 218, no. 2911, pp. 21,2013.
21. Brock D, Kim S, Palmer O,Gallagher T, Holmboe E. “UsabilityTesting for the Rest of Us: TheApplication of Discount UsabilityPrinciples in the Development of anOnline Communications AssessmentApplication,” Teaching and learning in
medicine, vol. 25, no. 1, pp. 89-96,2013.
22. Travaglini T, Swaney P, Weaver K,Webster R. “Initial Experiments withthe Leap Motion as a User Interface inRobotic Endonasal Surgery”, Roboticsand Mechatronics, de series Mechanismsand Machine Science, vol. 37, SpringerInternational Publishing, pp. 171-179,2015.
ib






![[Nueva Entrada] Guerra Escalar](https://static.fdocuments.es/doc/165x107/577cc4e11a28aba7119ac13f/nueva-entrada-guerra-escalar.jpg)