
MANUAL DE PRÁCTICAS DE CONTROLADORES … · Los experimentos de este manual proceden de diferentes...
60
Dirección Académica Código: CPE-FO-02-03 Revisión: 1 MANUAL DE PRÁCTICAS Página: 1 de 60 Revisó Aprobó Autorizó Presidente de Academia ING. Jimer Emir Loria YAh Coordinador del PE ARQ. Ramiro José González Horta Dirección Académica Lic. Miguel Ángel Cohuó Ávila MANUAL DE PRÁCTICAS DE CONTROLADORES LOGICOS PROGRAMABLES PROGRAMA EDUCATIVO: INGENIERIA MECATRÓNICA. Elaboro: Ing. Carlos Alberto Decena Chan, M.I.A Calkiní, Campeche, (Junio de 2016)
Transcript of MANUAL DE PRÁCTICAS DE CONTROLADORES … · Los experimentos de este manual proceden de diferentes...

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
1 de 60
Revisó Aprobó Autorizó
Presidente de Academia ING. Jimer Emir Loria YAh
Coordinador del PE ARQ. Ramiro José González
Horta
Dirección Académica Lic. Miguel Ángel Cohuó
Ávila
MANUAL DE PRÁCTICAS DE CONTROLADORES LOGICOS
PROGRAMABLES
PROGRAMA EDUCATIVO:
INGENIERIA MECATRÓNICA.
Elaboro:
Ing. Carlos Alberto Decena Chan, M.I.A
Calkiní, Campeche, (Junio de 2016)
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
2 de 60
ÍNDICE
CONCEPTO PÁGINAS
PRACTICA 1. INVESTIGAR ETAPAS DE UN AUTOMATISMO. ................................................................ 7
PRACTICA 2. IDENTIFICAR LOS ELEMENTOS DE CONTROL Y TRABAJO UBICADOS EN LOS TABLEROS
DE PRÁCTICAS.................................................................................................................................... 11
PRACTICA 3. INSTALACIÓN SOFTWARE WIN FST ............................................................................ 15
PRACTICA 4. SIMULACIÓN DE GIRO DE UN MOTOR .................................................................... 47
PRACTICA 5. IMPLEMENTACIÓN DE GIRO DE UN MOTOR ................................................. 51
PRACTICA 6. LOS TIMERS .................................................................................................................. 54

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
3 de 60
PRESENTACIÓN
El manual – Guía del experimento de laboratorio de Controladores Lógico Programables, es un
material de trabajo que será utilizado en el proceso de instrucción para objetivizar el contenido de
la enseñanza de la misma y vincular la teoría con la práctica.
Con este instructivo se pretende desarrollar habilidades básicas y especificas al estudiante de
Ingeniería en las diferentes especialidades que se ofrecen en el Instituto Tecnológico Superior de
Calkiní (ITESCAM).
Los experimentos de este manual proceden de diferentes fuentes adaptados a los objetivos que se
propone alcanzar la asignatura Controladores Lógico Programables y a los recursos didácticos
disponibles en el laboratorio del ITESCAM.
Las instrucciones para la realización de los experimentos están bien detalladas, las ideas
conceptuales de cada experiencia vienen acompañadas de una breve introducción y se agrega un
cuestionario de preguntas fundamentales, que deben ser contestadas por el estudiante en cada
práctica.

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
4 de 60
Al estudiante se le requiere que antes de comenzar un experimento lea las instrucciones generales
del manual, así también la exposición teórica para que alcance una comprensión clara de lo que va
a hacer. Se le recomienda, además que conserve un registro de la experiencia y de las medidas
realizadas de suerte que en todo momento tenga los datos necesarios y la información suficiente
para conocer los concernientes al experimento realizado. Se describe el alcance del manual de
prácticas y se da una breve explicación del fundamento teórico de la asignatura.
OBJETIVO GENERAL
Conocer, analizar y aplicar lenguajes de programación de controladores lógicos programables para
automatizar, mantener y administrar equipos y sistemas mecatrónicos.
SEGURIDAD
En un laboratorio de Controladores Lógico Programables es absolutamente necesario establecer
ciertas reglas de conducta, de cuyo cumplimiento dependen el orden en el trabajo, la comodidad y
la seguridad de todos los participantes. A continuación se ofrecen algunas reglas generales que
deben leerse cuidadosamente:
Usuarios:
Otorgar el acceso a los usuarios aceptados.
Indicar a los usuarios el área asignada para su trabajo.

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
5 de 60
Indicar a los usuarios los lugares destinados para objetos personales.
Indicar a los usuarios las ubicaciones de los extintores, botiquines de primeros auxilios y
salidas de emergencia.
Indicar a los usuarios las ubicaciones de los botones de emergencia y explicar su uso
apropiado.
Explicar a los usuarios el uso apropiado y seguro de las instalaciones de electricidad, agua,
aire comprimido, criogénicos, etc.
Informar a los usuarios con anticipación sobre el mantenimiento de equipos y obras
programadas al interior de las instalaciones.
Comunicar con los usuarios de los laboratorios y talleres para entender sus necesidades.
Equipos, herramientas y consumibles:
Identificar, junto con los usuarios, los equipos, herramientas y consumibles que se requieran y
solicitar su adquisición.
Pruebas y puesta en marcha de equipos o herramientas de nueva adquisición.
Mantener el inventario de equipo, herramientas y consumibles.
Ejercer el presupuesto apropiadamente.
Mantenimiento y seguridad
Coordinar las labores de limpieza y orden en el laboratorio o taller.
Vigilar el buen uso del laboratorio o taller.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
6 de 60
Encargarse del mantenimiento preventivo y correctivo de los equipos e instrumentos del
laboratorio o taller.
Promover y estar al tanto de la realización del mantenimiento preventivo y correctivo de la
infraestructura a cargo de la Comisión de Operatividad y Seguridad.
Encargarse de que se realice el mantenimiento de los extintores, botiquines de primeros
auxilios, y botones de emergencia.

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
7 de 60
PRACTICA 1. INVESTIGAR ETAPAS DE UN AUTOMATISMO.
-INTRODUCCIÓN
El origen de los automatismos no se encuentra definido para una fecha específica,
probablemente se puede hablar de los primeros sistemas automáticos desde los mismos
inicios de la era prehistórica de la humanidad en el Paleolítico1, cuando se realizaban
trampas de caza con funcionamiento automático consistentes básicamente en fosas cavadas
y cubiertas adecuadamente para ser activadas por el peso de la presa. Pero es desde los
comienzos de la revolución industrial, a finales del siglo XIX y principios del XX, cuando
la automatización de procesos ha cobrado un interés especial por parte de la ciencia y de los
ingenieros, presentando la perspectiva que tenemos hoy de ellos como sistemas en los
cuales se realizan acciones sobre un sistema mediante la manipulación directa de
magnitudes físicas haciendo uso de otro sistema denominado de control. Los esfuerzos se
han enfocado en reducir significativamente todos los costos derivados de la producción de
bienes, manteniendo una calidad constante tanto en los productos terminados como en los
mismos medios de producción y apartando al hombre de labores rutinarias, peligrosas, con
gran incidencia de error, con riesgos para la salud humana e incluso donde se involucra un
componente importante de estrés. El uso de los sistemas de automatización se ha
incrementado especialmente durante la última mitad del siglo XX, debido principalmente a
la globalización de los mercados, lo cual ha llevado a todas las organizaciones productivas
a estar dentro de ámbitos competitivos y sometidos a rápidos procesos de cambios para
adecuarse a las exigencias de cada tiempo, más aún cuando este mismo entorno pide
respuestas rápidas y adecuadas con el fin de poder mantenerse en los niveles demandados
por una competencia cada vez más especializada. Los automatismos, han sido entonces, la
herramienta sobre la cual las organizaciones han basado su estrategia, desde los tiempos en
los cuales sólo se empleaban dispositivos de accionamiento y control con base en lógica
“todo o nada”, hasta los tiempos actuales donde con base en la microelectrónica y
procesadores se emplean equipos mucho más sofisticados como lo son los autómatas de
lógica programable. Es por esta razón fundamental que los autores han querido presentar
este libro como una herramienta básica en el aprendizaje y conocimiento de estas
tecnologías, iniciando desde los conceptos básicos de lógica secuencial y combinacional,
pasando por la lógica cableada y programada enmarcadas dentro de la norma IEC 61131-3,
y presentando herramientas especializadas de diseño como lo son las redes de Petri.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
8 de 60
-OBJETIVO
Entender el principio de funcionamiento de los elementos convencionales utilizados en el
desarrollo de automatismos.
-LUGAR
La práctica se realizara en el laboratorio en aula. (Considerando el reglamento descrito
anteriormente)
-SEMANA DE EJECUCIÓN
La Práctica Estructura de un automatismo, se realizara la 2 semana de la asignatura.
- MATERIAL Y EQUIPO
Hoja blanca
Computadora portátil
Libreta
NOTA: Se incluyen las hojas de datos de los dispositivos electrónicos a utilizarse en esta práctica.
Lea cuidadosamente estas características para el adecuado manejo de estos dispositivos.
-DESARROLLO DE LA PRÁCTICA
Paso 1. El alumno realizara una investigación Etapas De Un Automatismo
Paso2. El alumno analizara de diferentes fuentes bibliográficas para realizar considerar las
ideas primordiales de las Etapas De Un Automatismo
Paso 3. El alumno realizara un reporte escrito detallando los principios Etapas De Un
Automatismo, su funcionalidad, aplicación y finalidad.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
9 de 60
- EVALUACIÓN Y RESULTADOS
El alumno entregara un reporte de práctica con los siguientes criterios
Portada
Introducción
Justificación
Metodología y desarrollo
Obtención de resultados
Resultados y discusiones
Anexos
Referencias bibliográficas.
-REFERENCIAS
1. Mayol I. Badia Albert , Autómatas programables, Editorial Marcombo, 1988. 2. Porras A. / Montaner A. P., Autómatas programables, 1a Ed., Editorial Mc Graw Hill, 1990.
Nota: Se presenta el listado de bibliografías utilizadas en el fundamento teórico y en el desarrollo
de la práctica en sistema de referencia APA.
-ANEXOS
Se recomienda poner en anexos las partes del trabajo que, intercaladas en medio del texto
romperían la continuidad de lectura del mismo, por ejemplo deducciones detalladas de alguna
expresión, cálculos largos y detallados, códigos y enumeración detallada de algunos componentes.

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
10 de 60
El docente según considere podría proporcionar tablas de valores, indicadores, manuales de
equipos u otro
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
11 de 60
PRACTICA 2. IDENTIFICAR LOS ELEMENTOS DE CONTROL Y
TRABAJO UBICADOS EN LOS TABLEROS DE PRÁCTICAS.
-INTRODUCCIÓN
Hasta no hace mucho tiempo el control de procesos industriales se venía haciendo de forma
cableada por medio de contactores y relees. Al operario que se encontraba a cargo de este
tipo de instalaciones, se le exigía tener altos conocimientos técnicos para poder realizarlas y
posteriormente mantenerlas. Además cualquier variación en el proceso suponía modificar
físicamente gran parte de las conexiones de los montajes, siendo necesario para ello un gran
esfuerzo técnico y un mayor desembolso económico. En la actualidad no se puede entender
un proceso complejo de alto nivel desarrollado por técnicas cableadas. El ordenador y los
Controladores Lógicos Programables han intervenido de forma considerable para que este
tipo de instalaciones se hayan visto sustituidas por otras controladas de forma programada.
El Controlador Lógico Programable (PLC) nació como solución al control de circuitos
complejos de automatización. Por lo tanto se puede decir que un PLC no es más que un
aparato electrónico que sustituye los circuitos auxiliares o de mando de los sistemas
automáticos. A él se conectan los captadores (finales de carrera, pulsadores, etc.) por una
parte, y los actuadores (bobinas de contactores, lámparas, pequeños receptores, etc.) por
otra. Los PLC se introdujeron por primera vez en la industria en 1960 aproximadamente. La
razón principal de tal hecho fue la necesidad de eliminar el gran costo que se producía al
reemplazar el complejo sistema de control basado en relees y contactores. Bedford
Associates propuso algo denominado Controlador Digital Modular (MODICON, Modular
Digital Controler) a un gran fabricante de coches. Otras compañías propusieron a la vez
esquemas basados en ordenador, uno de los cuales estaba basado en el PDP-8. El
MODICON 084 (Scheider) resultó ser el primer PLC del mundo en ser producido
comercialmente. El problema de los relés era que cuando los requerimientos de producción
cambiaban también lo hacía el sistema de control. Esto comenzó a resultar bastante caro
cuando los cambios fueron frecuentes. Dado que los relés son dispositivos mecánicos y
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
12 de 60
poseen una vida limitada se requería un estricto mantenimiento planificado. Por otra parte,
a veces se debían realizar conexiones entre cientos o miles de relés, lo que implicaba un
enorme esfuerzo de diseño y mantenimiento.
-OBJETIVO
El alumno Comprenderá la forma en que está conformado un controlador lógico
programable según el tipo.
-LUGAR
La práctica se realizara en el laboratorio de Simulación. (Considerando el reglamento descrito
anteriormente)
-SEMANA DE EJECUCIÓN
La Práctica Identificar Los Elementos De Control De Laboratorio de simulación, se
realizara la 3 semana de la asignatura.
- MATERIAL Y EQUIPO
PLC Festo
Pc portátil
Libreta
Bolígrafo
DESARROLLO DE LA PRÁCTICA
Paso 1. El Alumno Identificara el software cada una de las pestañas de dicho software.

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
13 de 60
Paso 2. El alumno identificará en los tableros de PLC cada uno de los elementos que lo
conforman.
Paso 3. El alumno dibujara en su libreta u hoja blanca cada uno de los elementos de un
PLC.
Paso 4. El alumno explicara al profesor lo visto en la práctica.
- EVALUACIÓN Y RESULTADOS
El alumno entregara un reporte de práctica con los siguientes criterios
Portada
Introducción
Justificación
Metodología y desarrollo
Obtención de resultados
Resultados y discusiones
Anexos
Referencias bibliográficas.
-REFERENCIAS
1. Mayol I. Badia Albert , Autómatas programables, Editorial Marcombo, 1988.
2. Porras A. / Montaner A. P., Autómatas programables, 1a Ed., Editorial Mc Graw Hill,
1990.
3. Manual de programación e instalación de PLC Siemmens.
4. Manual de programación e instalación de PLC Allen Bradley.
5. Manual de programación e instalación de PLC Telemecanique.
6. Manual de programación e instalación de PLC Festo.
Nota: Se presenta el listado de bibliografías utilizadas en el fundamento teórico y en el desarrollo
de la práctica en sistema de referencia APA.

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
14 de 60
-ANEXOS
Se recomienda poner en anexos las partes del trabajo que, intercaladas en medio del texto
romperían la continuidad de lectura del mismo, por ejemplo deducciones detalladas de alguna
expresión, cálculos largos y detallados, códigos y enumeración detallada de algunos componentes.
El docente según considere podría proporcionar tablas de valores, indicadores, manuales de
equipos u otros
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
15 de 60
PRACTICA 3. INSTALACIÓN SOFTWARE WIN FST
-INTRODUCCIÓN
Un método de programación con futuro Con la nueva versión 4.10, FST ha evolucionado de
manera sustentable: el diagrama de contactos Internet, World Wide Web, el mantenimiento
remoto, la visualización, la gestión de procesos, los buses de campo, la conexión en red y el
diagnóstico ofrecen un sinnúmero de nuevas posibilidades de aplicación y funciones.
Funciones básicas que soporta el software • Interfaz de usuario sencilla • Inicio inmediato
de la confección del programa sin declaraciones complejas • Definición de variables
“online” mientras se programa • Lenguajes de programación con lista de instrucciones y
diagrama de contactos • El lenguaje de programación con lista de instrucciones simplifica
la programación de ciclos secuenciales, gracias a una estructura paso a paso integrada. •
Confección del programa y modificación de programa existentes en los controladores y
mantenimiento del controlador de la máquina a través de conexión en red (Ethernet) •
Confección extrasimple de cadenas de caracteres (strings) • Soporte simple mediante
herramientas de configuración y drivers de los sistemas de bus de campo Profibus-DP und
ASInterface que ofrece Festo • Herramienta de configuración integrada (FED Designer)
para parametrización y programación de las unidades de indicación y control • Soporte
óptimo de la estructura de un sistema de comunicación descentralizado a través de Ethernet,
con auxilio del protocolo EasyIP
-OBJETIVO
El alumno aprenderá los primeros pasos para iniciar del software Win FST de modo de
operación
-LUGAR
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
16 de 60
La práctica se realizara en el laboratorio de simulación (Considerando el reglamento descrito
anteriormente)
-SEMANA DE EJECUCIÓN
La Práctica Inicio del software Win FST se realizara en el laboratorio de simulación la 4
semana de la asignatura.
- MATERIAL Y EQUIPO
Pc portátil
Usb de 4 gb
Libreta
Lápiz
-DESARROLLO DE LA PRÁCTICA
1.1 Inicio del software Win FST
Al iniciar el software Win FST observará la siguiente pantalla:

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
17 de 60
1.2 Creación de un nuevo proyecto
De un Click en [File],[New Project].
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
18 de 60
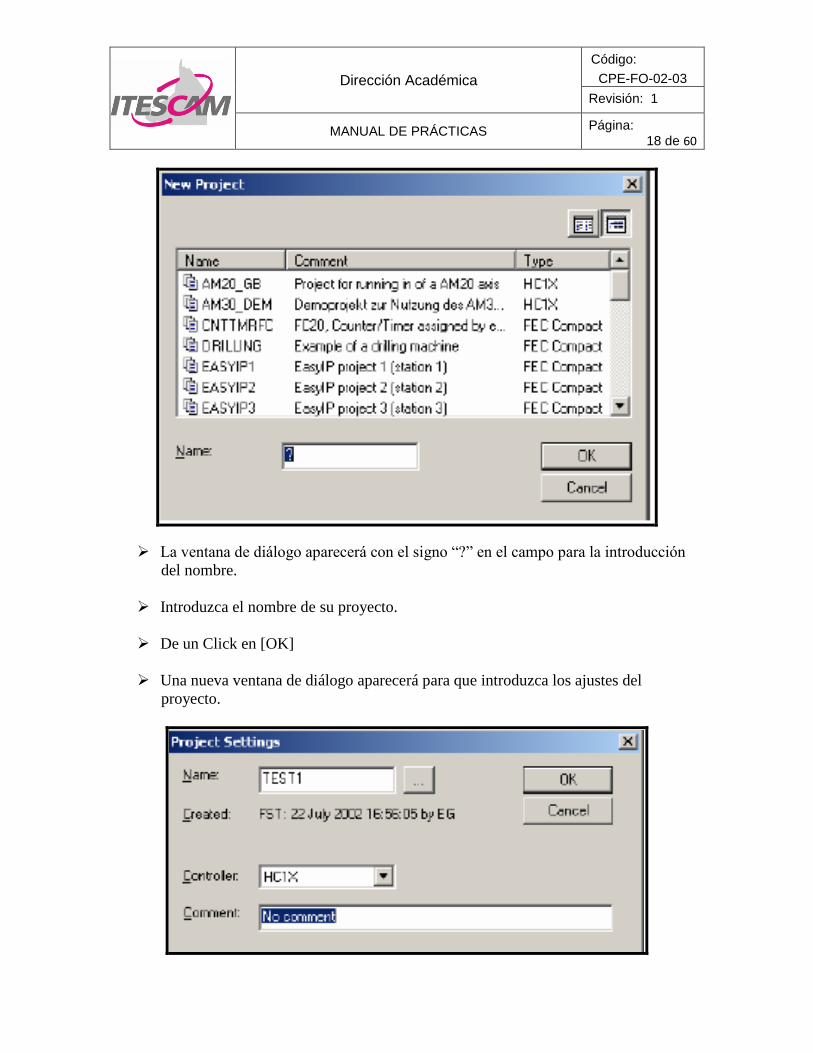
La ventana de diálogo aparecerá con el signo “?” en el campo para la introducción
del nombre.
Introduzca el nombre de su proyecto.
De un Click en [OK]
Una nueva ventana de diálogo aparecerá para que introduzca los ajustes del
proyecto.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
19 de 60
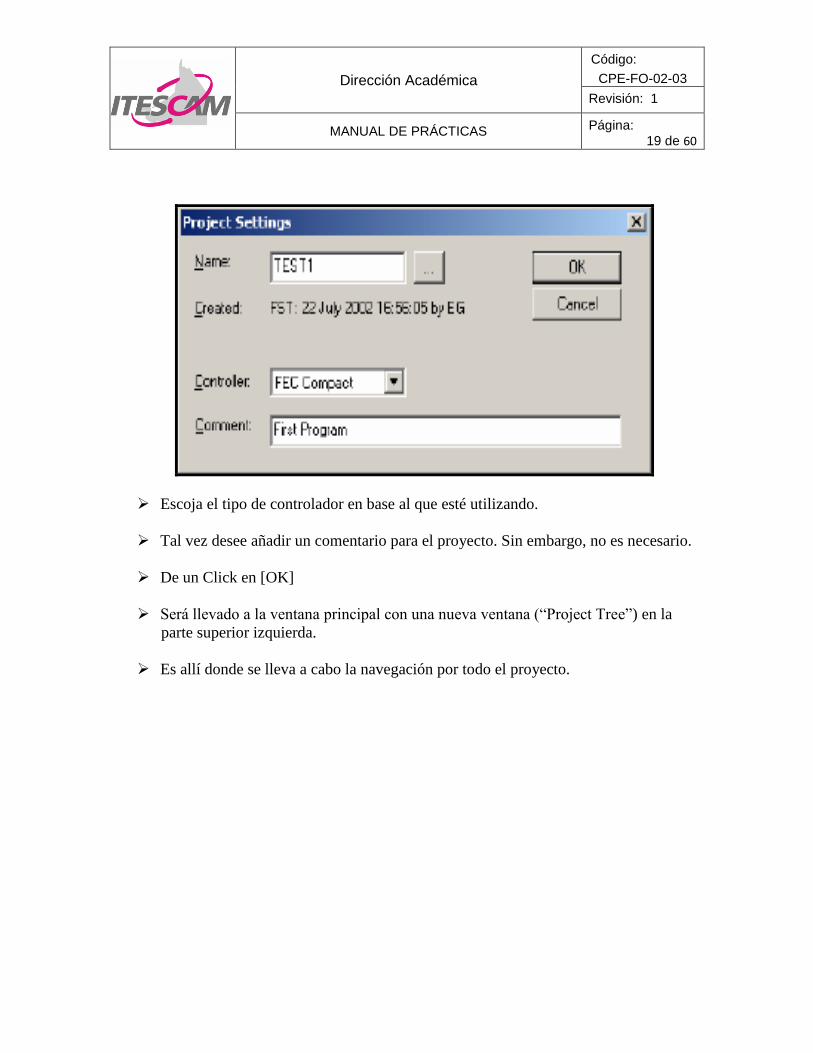
Escoja el tipo de controlador en base al que esté utilizando.
Tal vez desee añadir un comentario para el proyecto. Sin embargo, no es necesario.
De un Click en [OK]
Será llevado a la ventana principal con una nueva ventana (“Project Tree”) en la
parte superior izquierda.
Es allí donde se lleva a cabo la navegación por todo el proyecto.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
20 de 60
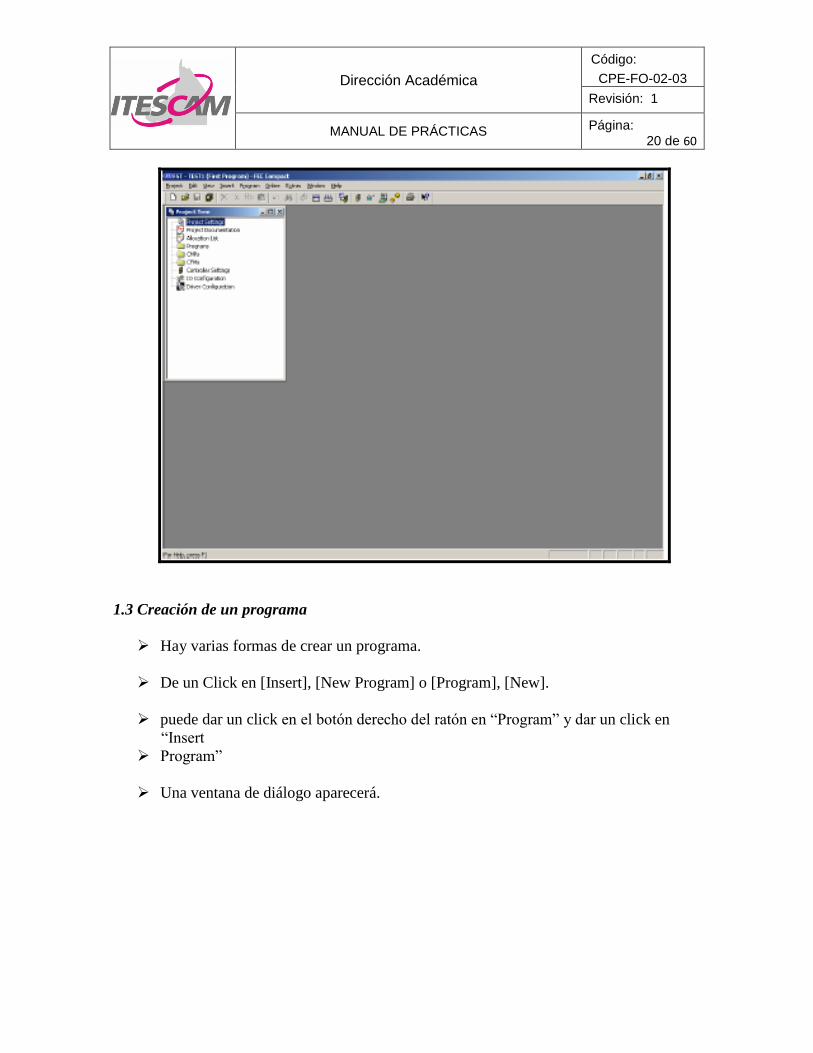
1.3 Creación de un programa
Hay varias formas de crear un programa.
De un Click en [Insert], [New Program] o [Program], [New].
puede dar un click en el botón derecho del ratón en “Program” y dar un click en
“Insert
Program”
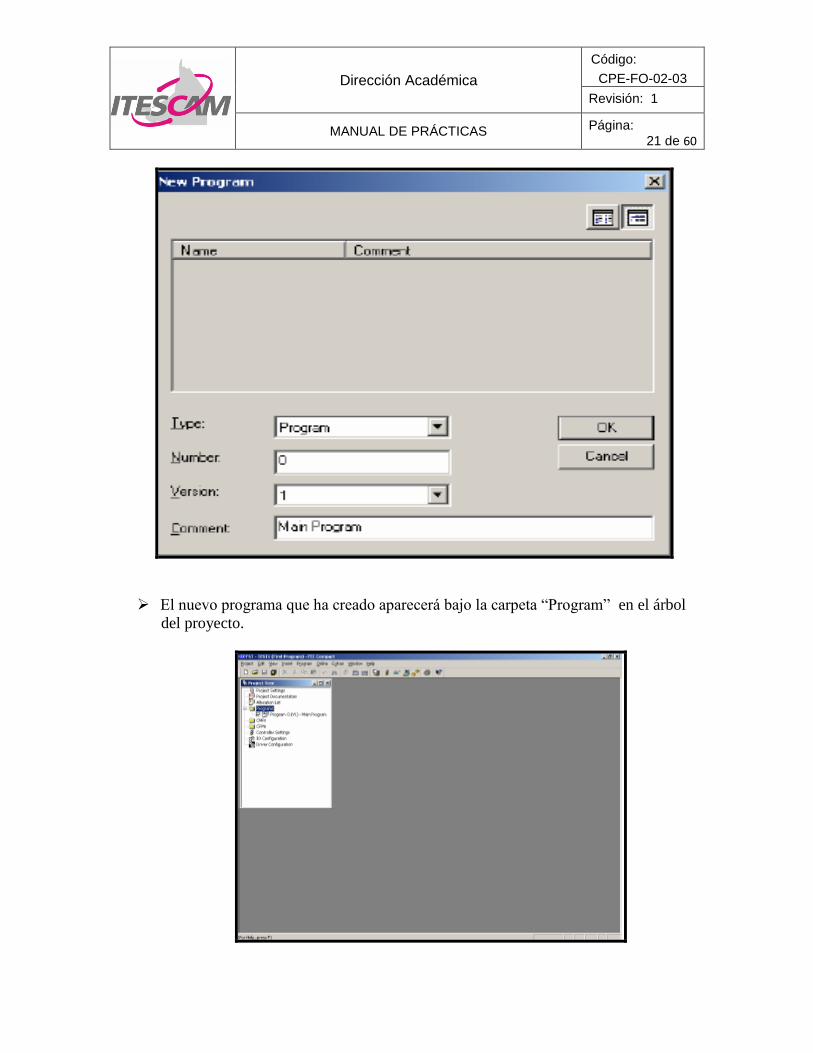
Una ventana de diálogo aparecerá.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
21 de 60
El nuevo programa que ha creado aparecerá bajo la carpeta “Program” en el árbol
del proyecto.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
22 de 60
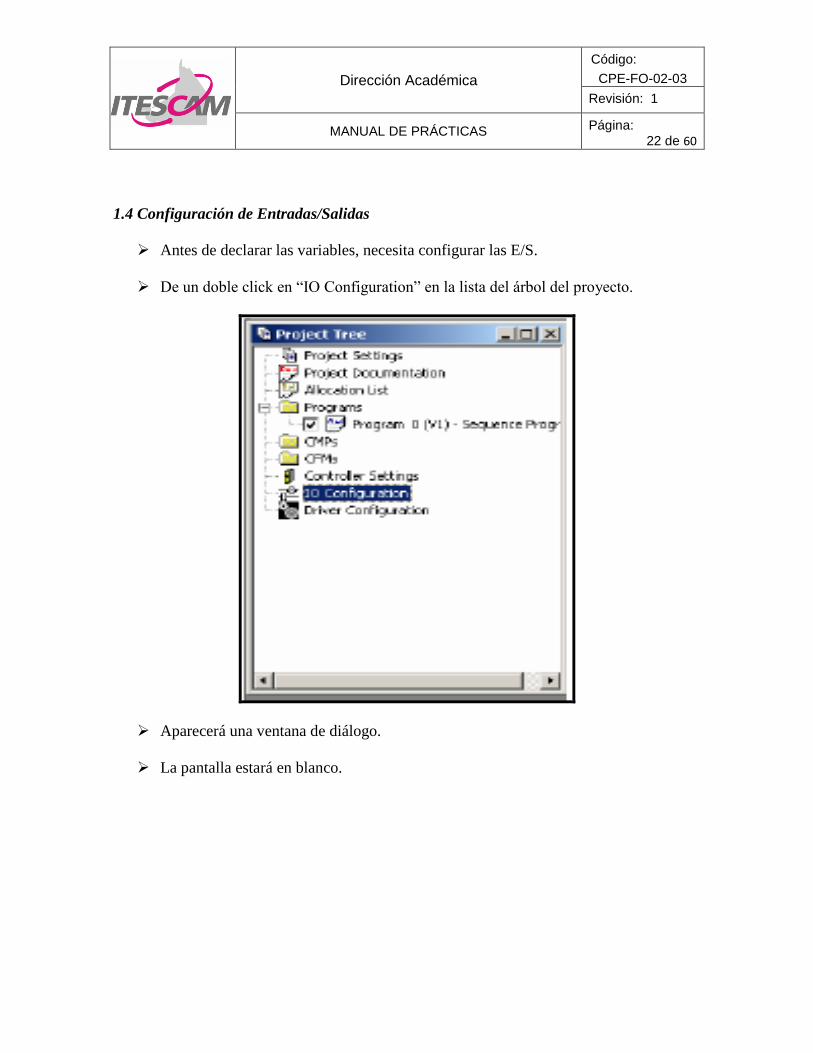
1.4 Configuración de Entradas/Salidas
Antes de declarar las variables, necesita configurar las E/S.
De un doble click en “IO Configuration” en la lista del árbol del proyecto.
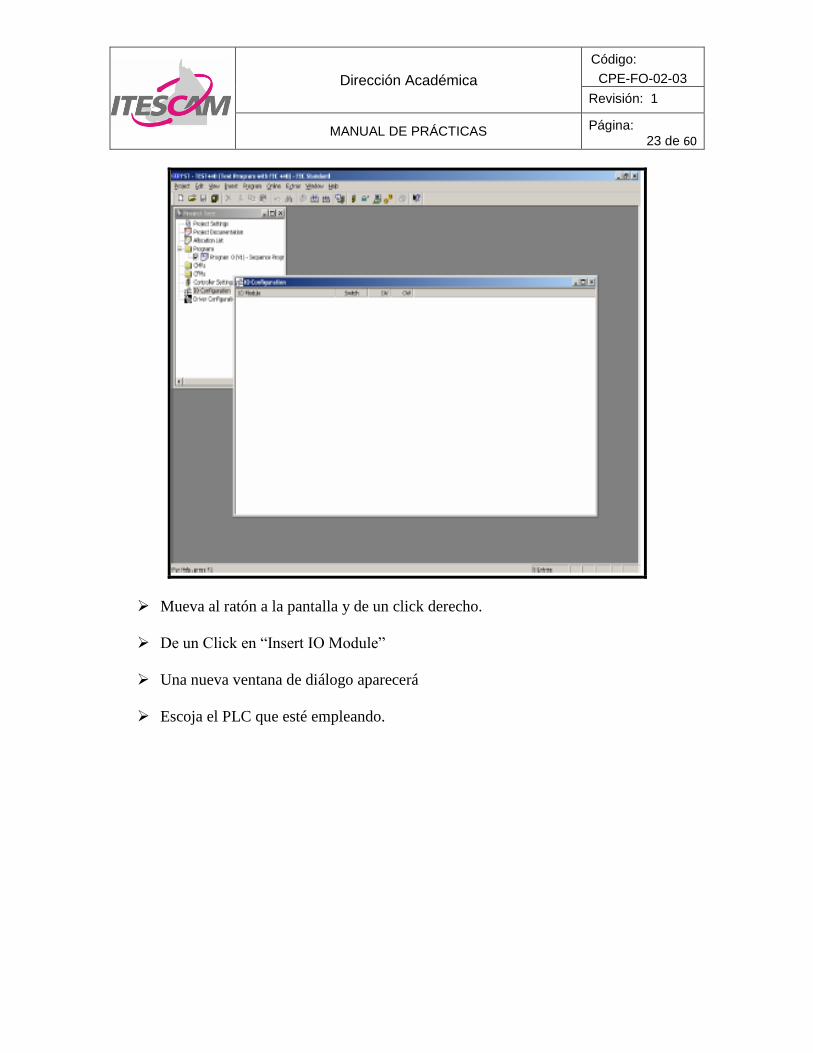
Aparecerá una ventana de diálogo.
La pantalla estará en blanco.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
23 de 60
Mueva al ratón a la pantalla y de un click derecho.
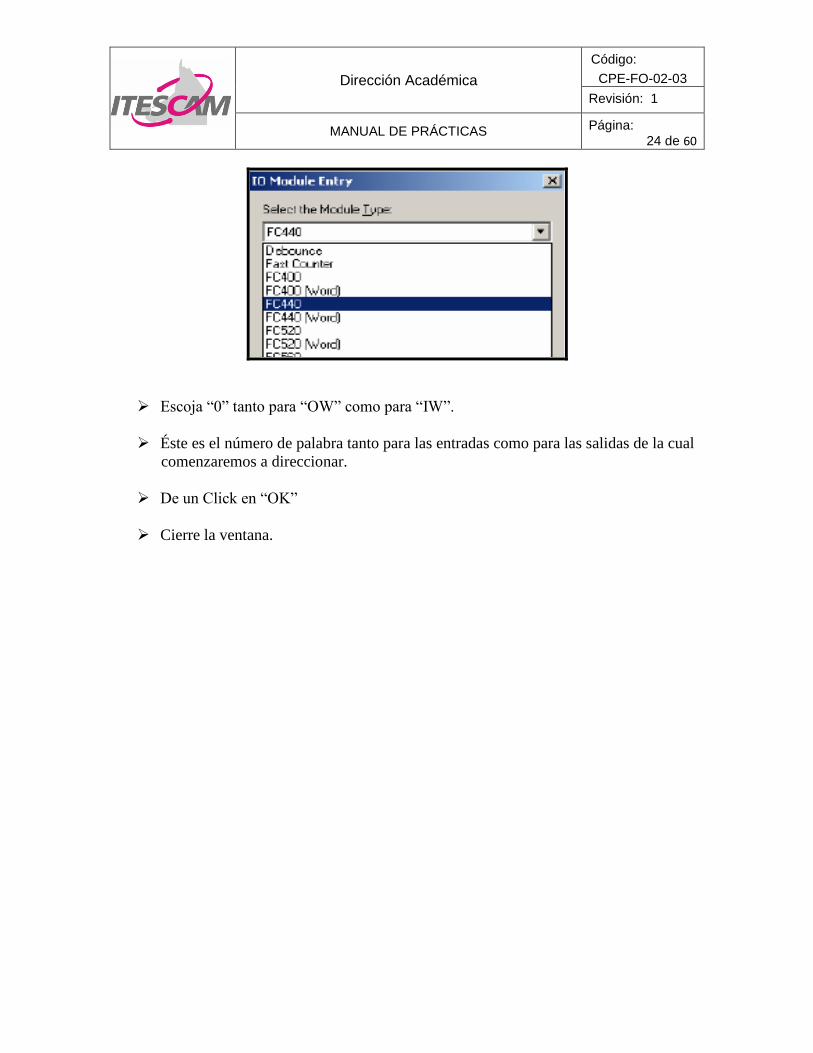
De un Click en “Insert IO Module”
Una nueva ventana de diálogo aparecerá
Escoja el PLC que esté empleando.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
24 de 60
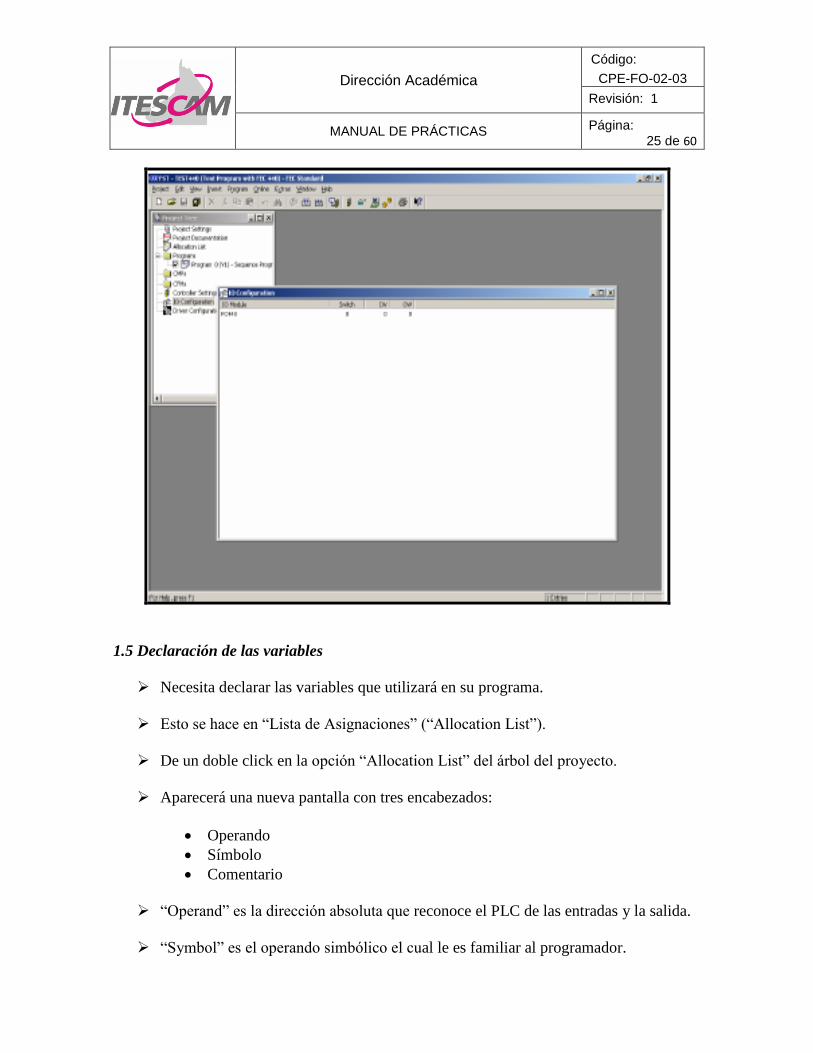
Escoja “0” tanto para “OW” como para “IW”.
Éste es el número de palabra tanto para las entradas como para las salidas de la cual
comenzaremos a direccionar.
De un Click en “OK”
Cierre la ventana.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
25 de 60
1.5 Declaración de las variables
Necesita declarar las variables que utilizará en su programa.
Esto se hace en “Lista de Asignaciones” (“Allocation List”).
De un doble click en la opción “Allocation List” del árbol del proyecto.
Aparecerá una nueva pantalla con tres encabezados:
Operando
Símbolo
Comentario
“Operand” es la dirección absoluta que reconoce el PLC de las entradas y la salida.
“Symbol” es el operando simbólico el cual le es familiar al programador.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
26 de 60
“Comment” son los comentarios acerca del operando en cuestión.
Los operandos simbólicos y los comentarios son opcionales; sin embargo se
aconseja definirlos con el fin de documentar al proyecto.
Para insertar una variable de un click derecho, y de un click en [Insert Operand]
Otra manera es presionando la tecla [Insert].

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
27 de 60
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
28 de 60
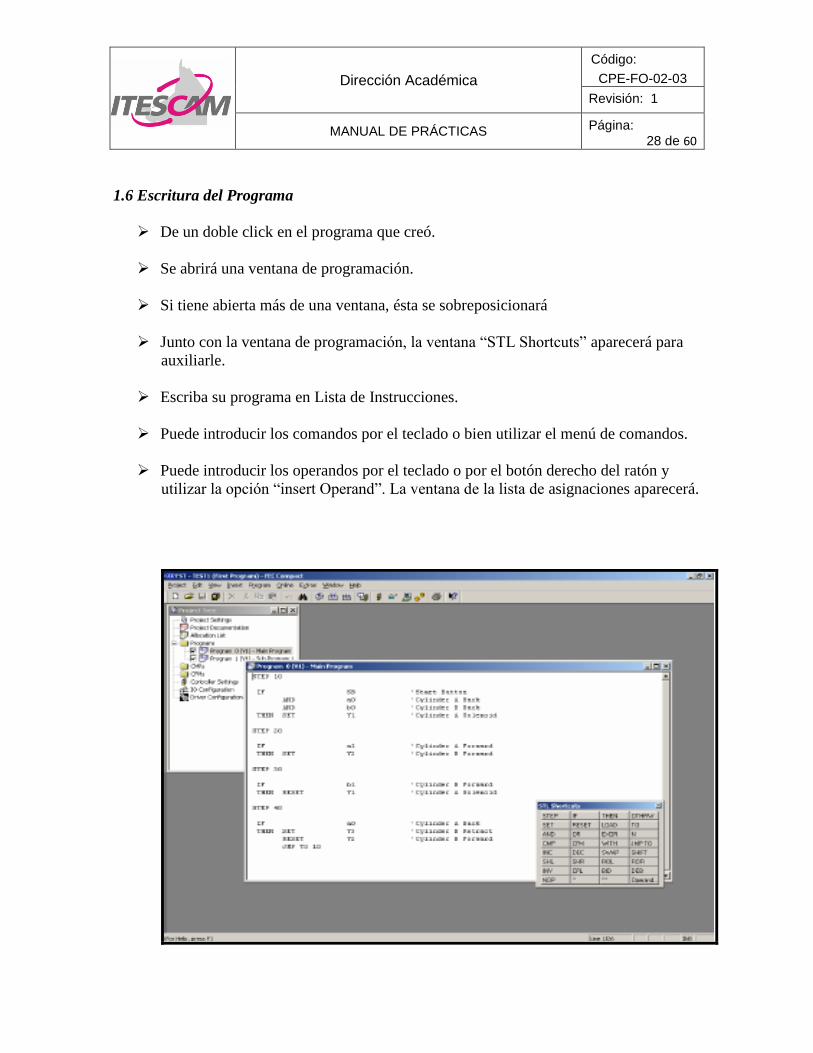
1.6 Escritura del Programa
De un doble click en el programa que creó.
Se abrirá una ventana de programación.
Si tiene abierta más de una ventana, ésta se sobreposicionará
Junto con la ventana de programación, la ventana “STL Shortcuts” aparecerá para
auxiliarle.
Escriba su programa en Lista de Instrucciones.
Puede introducir los comandos por el teclado o bien utilizar el menú de comandos.
Puede introducir los operandos por el teclado o por el botón derecho del ratón y
utilizar la opción “insert Operand”. La ventana de la lista de asignaciones aparecerá.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
29 de 60
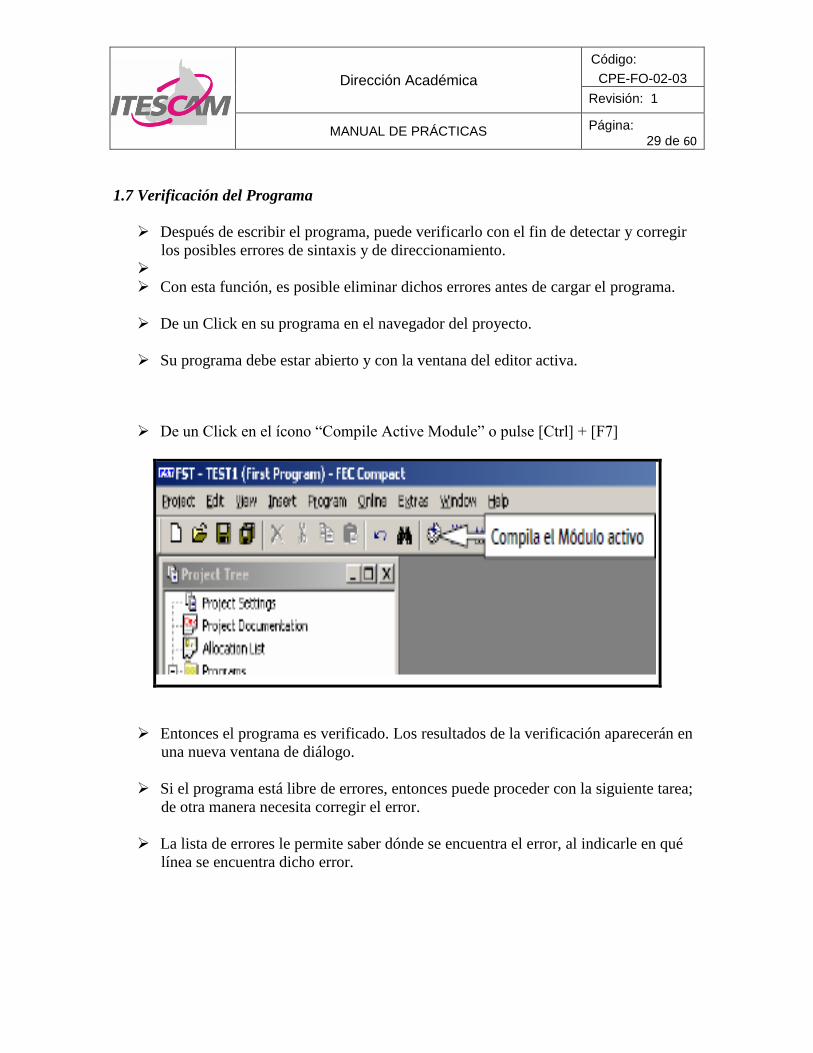
1.7 Verificación del Programa
Después de escribir el programa, puede verificarlo con el fin de detectar y corregir
los posibles errores de sintaxis y de direccionamiento.
Con esta función, es posible eliminar dichos errores antes de cargar el programa.
De un Click en su programa en el navegador del proyecto.
Su programa debe estar abierto y con la ventana del editor activa.
De un Click en el ícono “Compile Active Module” o pulse [Ctrl] + [F7]
Entonces el programa es verificado. Los resultados de la verificación aparecerán en
una nueva ventana de diálogo.
Si el programa está libre de errores, entonces puede proceder con la siguiente tarea;
de otra manera necesita corregir el error.
La lista de errores le permite saber dónde se encuentra el error, al indicarle en qué
línea se encuentra dicho error.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
30 de 60
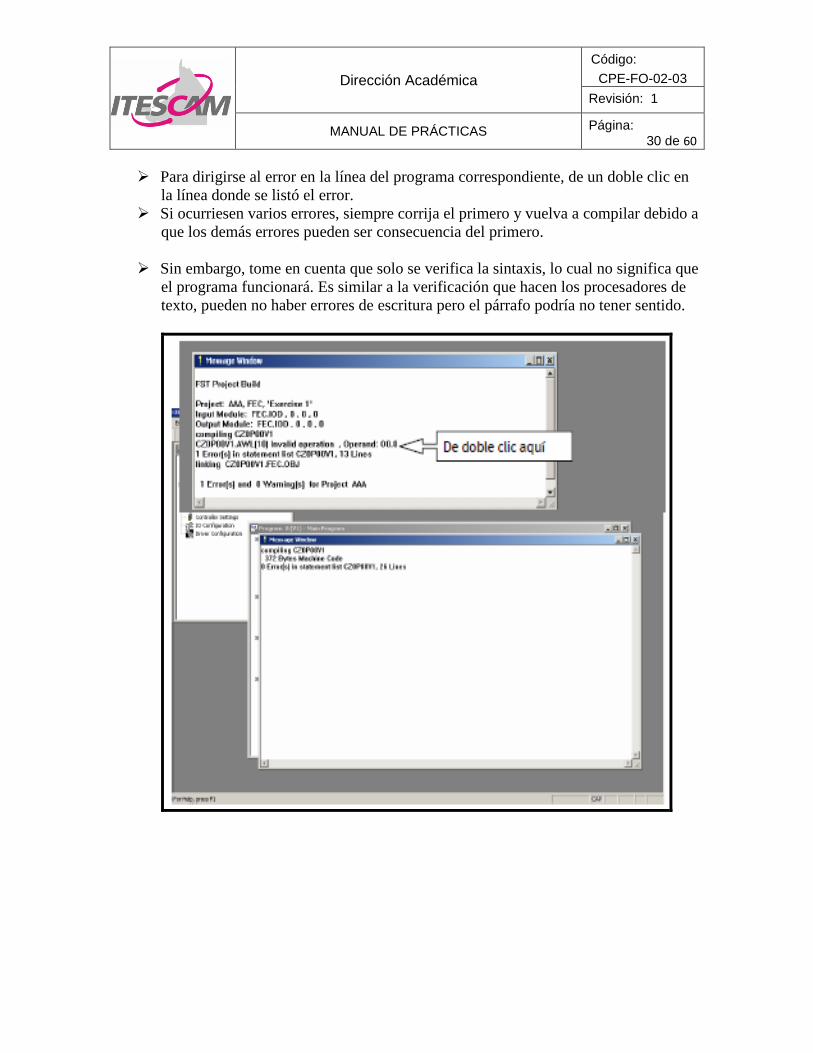
Para dirigirse al error en la línea del programa correspondiente, de un doble clic en
la línea donde se listó el error.
Si ocurriesen varios errores, siempre corrija el primero y vuelva a compilar debido a
que los demás errores pueden ser consecuencia del primero.
Sin embargo, tome en cuenta que solo se verifica la sintaxis, lo cual no significa que
el programa funcionará. Es similar a la verificación que hacen los procesadores de
texto, pueden no haber errores de escritura pero el párrafo podría no tener sentido.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
31 de 60
1.8 Compilación y construcción de un programa
Antes de cargar su programa al PLC, tiene que compilar y construir su programa. Recuerde
que esto es diferente que compilar el programa, ya que esta segunda opción le construye
todo el proyecto con todos los drivers, etc.
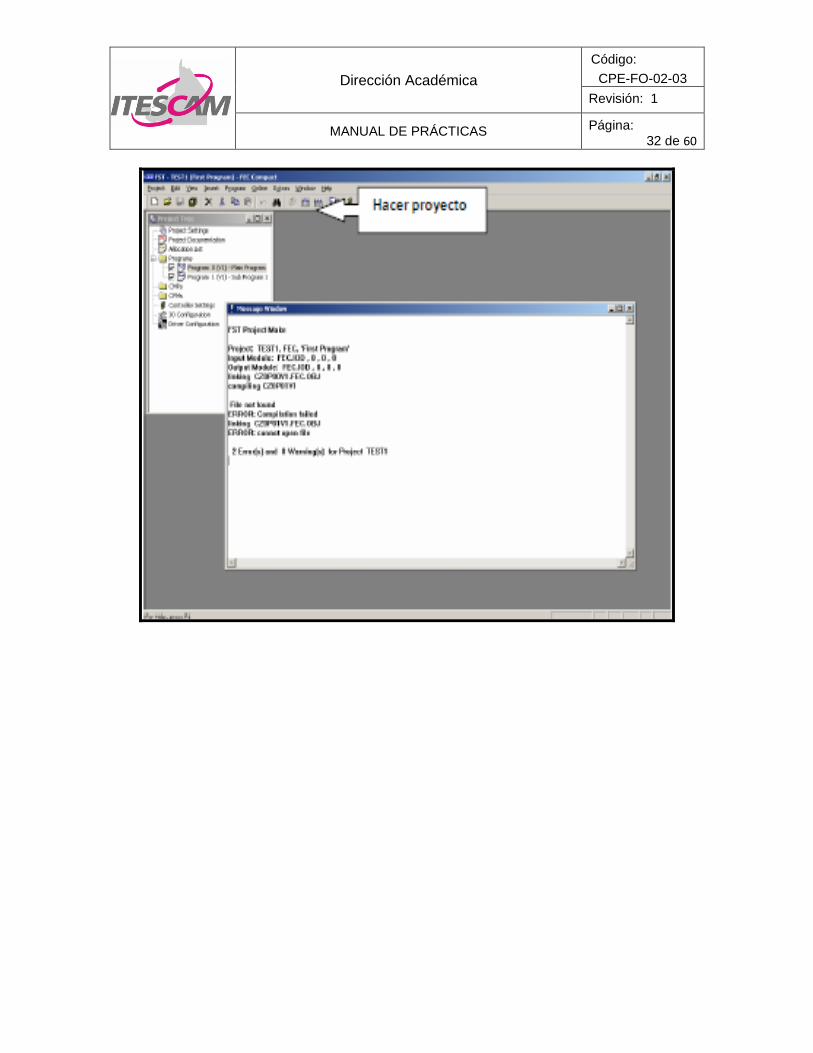
De un Clic en la ícono “Make Project” o pulse la tecla [F7]
Este ícono se utiliza para compilar cualquier cambio efectuado.
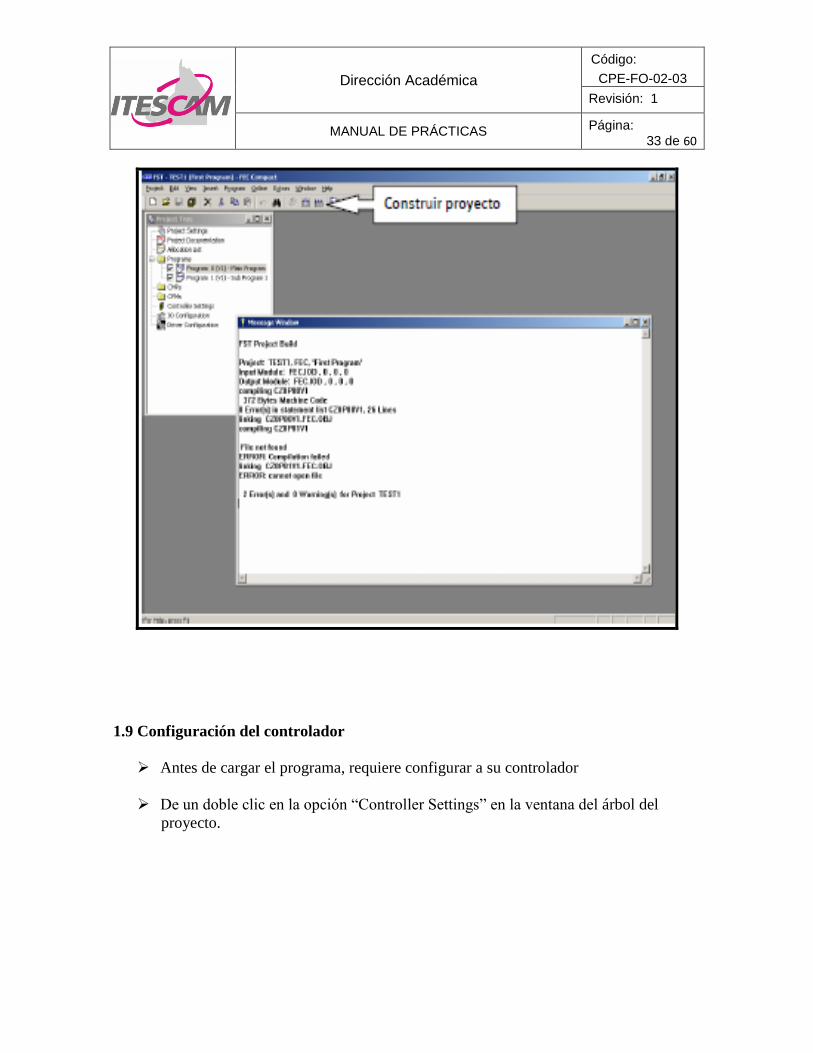
Cuando de un clic en el ícono “Build Project”, se reconstruirá todo el proyecto.
Se recomienda construir su proyecto al menos una vez antes de realizar la carga
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
32 de 60
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
33 de 60
1.9 Configuración del controlador
Antes de cargar el programa, requiere configurar a su controlador
De un doble clic en la opción “Controller Settings” en la ventana del árbol del
proyecto.

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
34 de 60
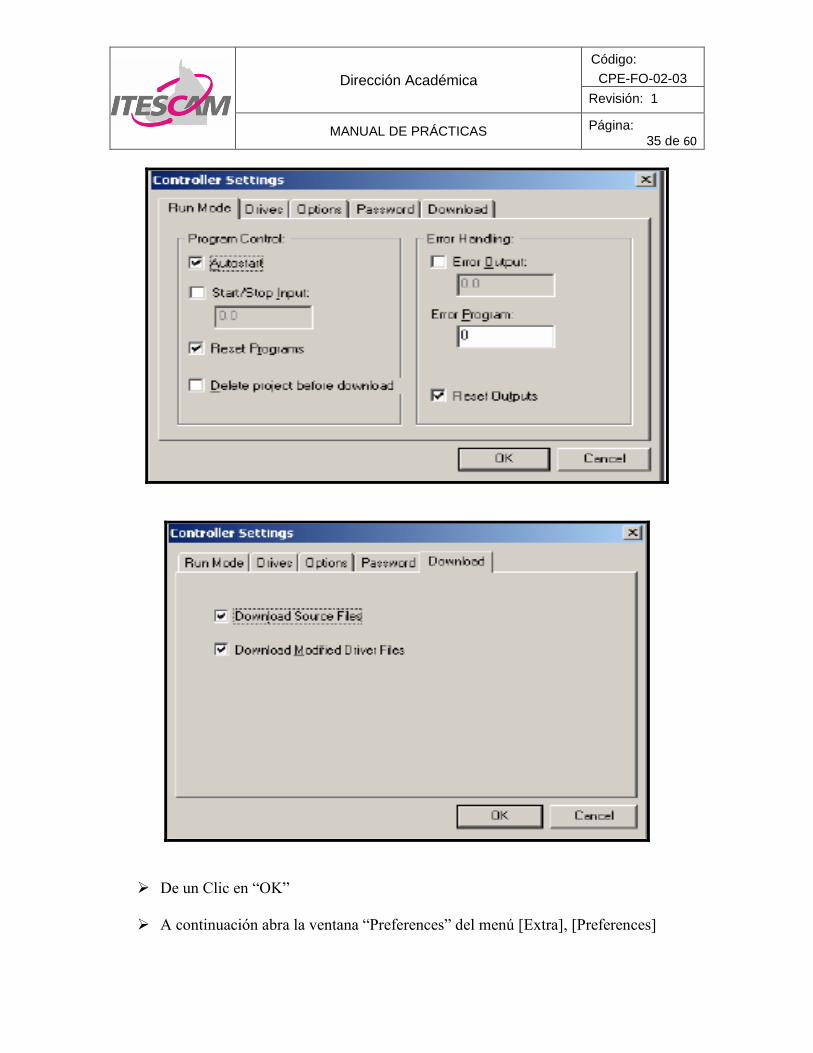
De un clic en la caja marcada como “Autostart”.
Esto le asegura no reiniciar al PLC para iniciar el proyecto.
De un clic en la pestaña “Download” y seleccione la opción “Download Source
File”
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
35 de 60
De un Clic en “OK”
A continuación abra la ventana “Preferences” del menú [Extra], [Preferences]

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
36 de 60
Elija la pestaña “Communications Port”
Elija el puerto COM y ajuste la velocidad de comunicación “Baudrate” a 9600
bauds.
De un Click en “OK”
1.10 Transferencia del programa al PLC
Conecte su PC al PLC con el cable de interfaz

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
37 de 60
Conecte su PLC a la PC introduciendo un conector al puerto COM del PLC y el otro
extremo del cable al Puerto serial de la PC (RS 232C).
Después de construir su proyecto y de configurar su controlador entonces podrá
descargar su programa.
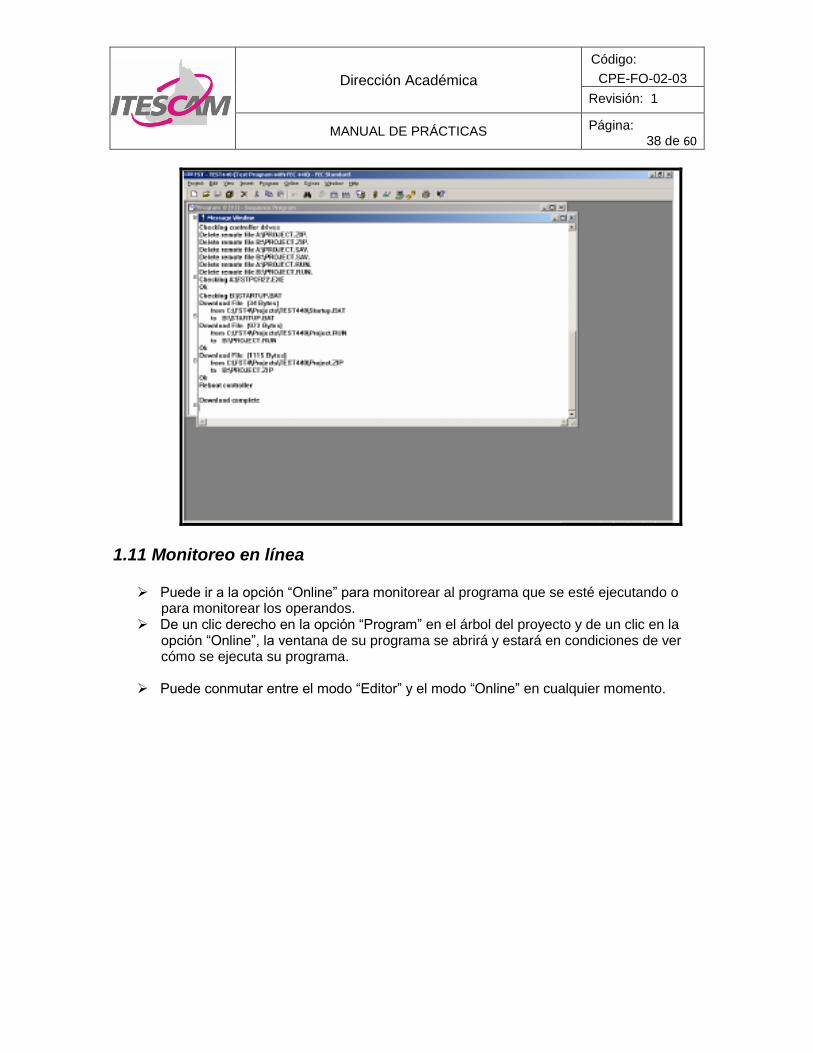
De un Clic en el ícono “Download Project” o presione la tecla [F5]
Aparecerá una ventana de diálogo una vez que la carga se haya completado y si no
existe algún error.
Ejecute el programa moviendo el interruptor de Stop a Run.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
38 de 60
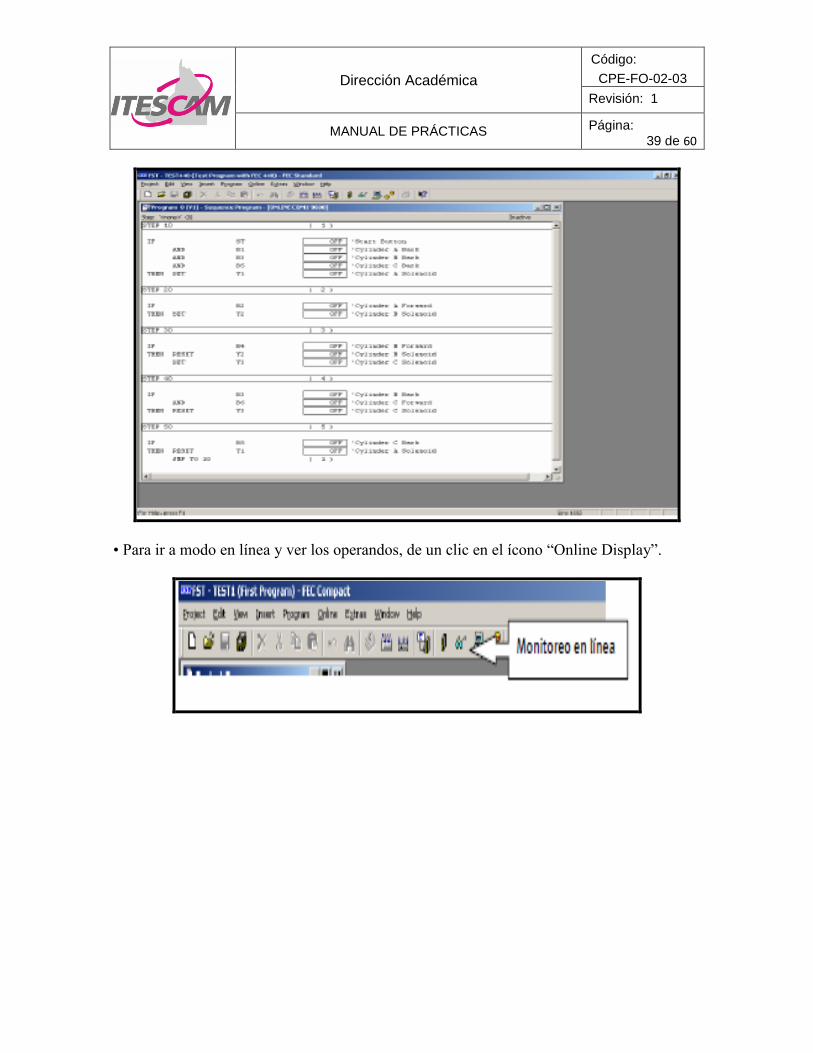
1.11 Monitoreo en línea
Puede ir a la opción “Online” para monitorear al programa que se esté ejecutando o para monitorear los operandos.
De un clic derecho en la opción “Program” en el árbol del proyecto y de un clic en la opción “Online”, la ventana de su programa se abrirá y estará en condiciones de ver cómo se ejecuta su programa.
Puede conmutar entre el modo “Editor” y el modo “Online” en cualquier momento.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
39 de 60
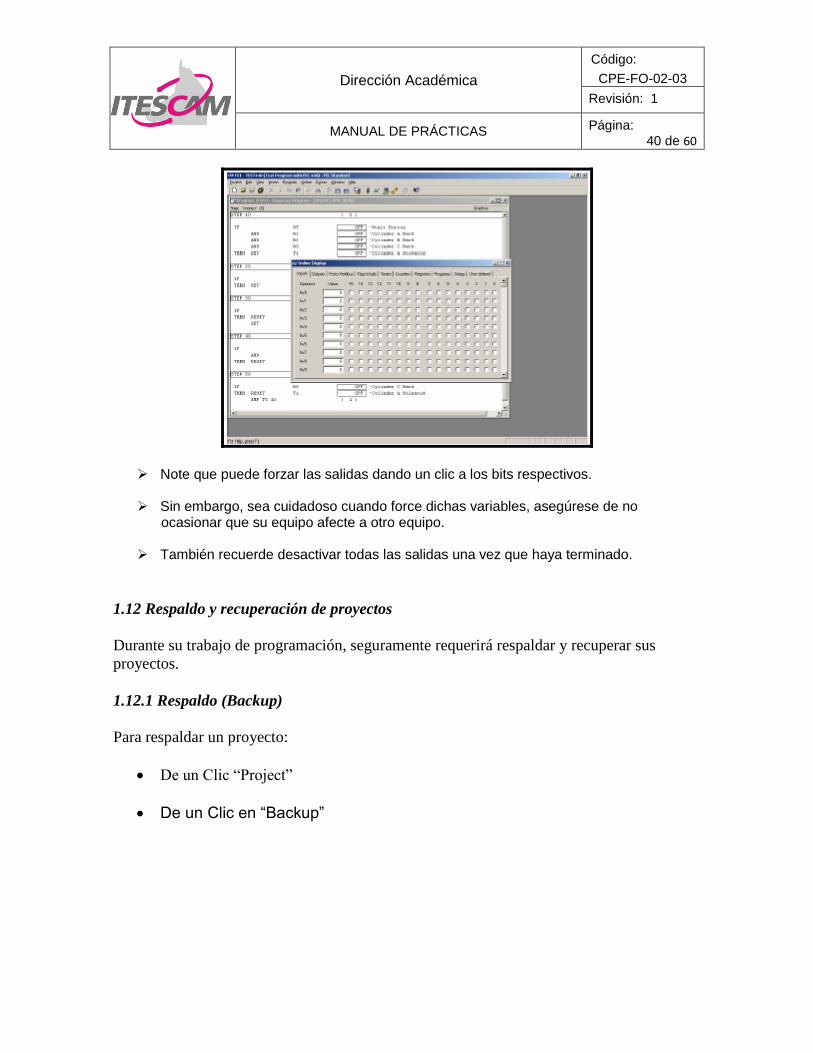
• Para ir a modo en línea y ver los operandos, de un clic en el ícono “Online Display”.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
40 de 60
Note que puede forzar las salidas dando un clic a los bits respectivos.
Sin embargo, sea cuidadoso cuando force dichas variables, asegúrese de no ocasionar que su equipo afecte a otro equipo.
También recuerde desactivar todas las salidas una vez que haya terminado.
1.12 Respaldo y recuperación de proyectos
Durante su trabajo de programación, seguramente requerirá respaldar y recuperar sus
proyectos.
1.12.1 Respaldo (Backup)
Para respaldar un proyecto:
De un Clic “Project”
De un Clic en “Backup”

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
41 de 60
Elija el Proyecto que require respaldar.
De un Clic en “OK”
Elija el lugar en donde desee respaldar al proyecto, regularmente es la unidad de
discos de 3 ½.
De un Clic en “Save”
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
42 de 60
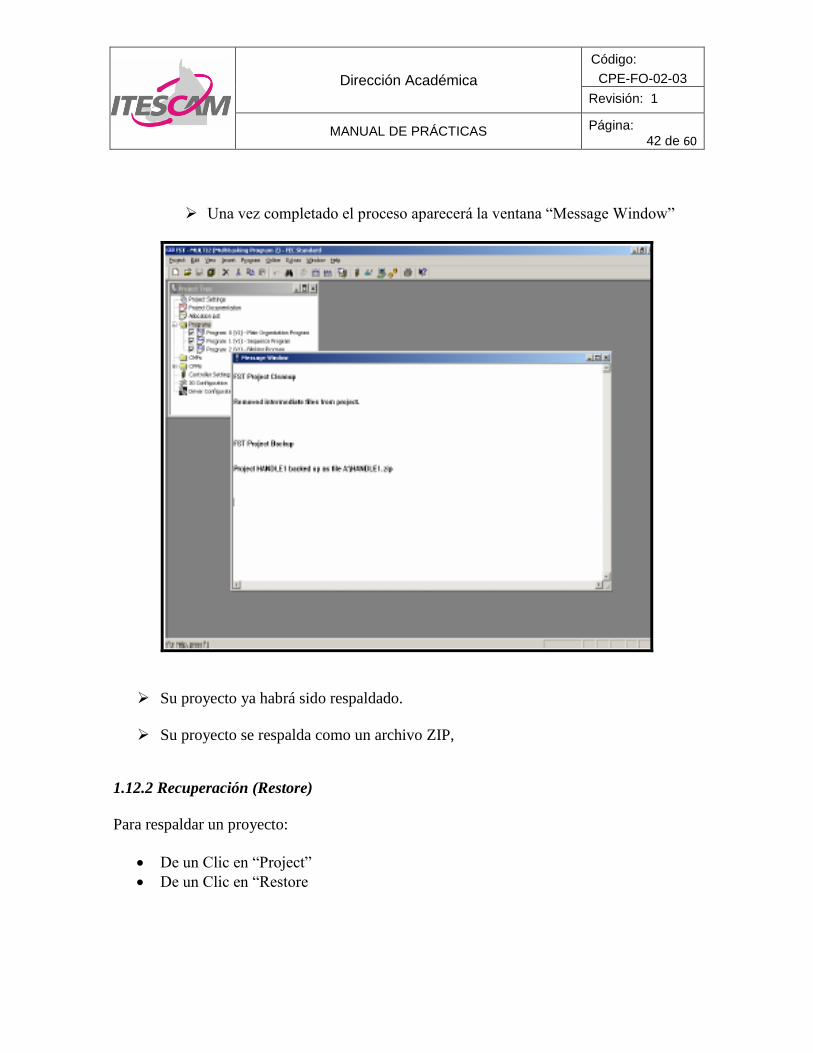
Una vez completado el proceso aparecerá la ventana “Message Window”
Su proyecto ya habrá sido respaldado.
Su proyecto se respalda como un archivo ZIP,
1.12.2 Recuperación (Restore)
Para respaldar un proyecto:
De un Clic en “Project”
De un Clic en “Restore
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
43 de 60
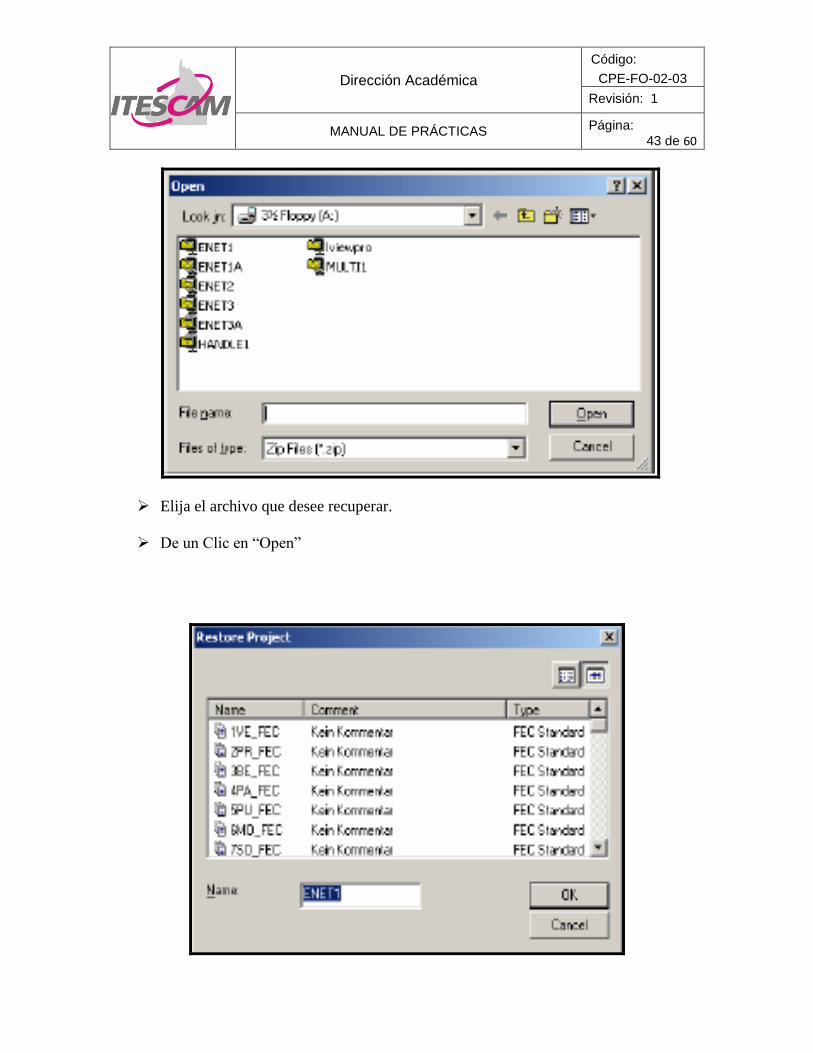
Elija el archivo que desee recuperar.
De un Clic en “Open”
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
44 de 60
De un Clic en “OK”
Una vez que ha sido recuperado, aparecerá la ventana “Message Window”.
El proyecto se recuperará en la carpeta de Proyectos.
1.13 Salida del programa
De un Clic en “Project”
De un Clic en “Exit”
Si el proyecto no ha sido guardado, se le solicitará.

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
45 de 60
- EVALUACIÓN Y RESULTADOS
El alumno entregara un reporte de práctica con los siguientes criterios
Portada
Introducción
Justificación
Metodología y desarrollo
Obtención de resultados
Resultados y discusiones
Anexos
Referencias bibliográficas.
-REFERENCIAS
1. Mayol I. Badia Albert , Autómatas programables, Editorial Marcombo, 1988
2. Porras A. / Montaner A. P., Autómatas programables, 1a Ed., Editorial Mc
Graw Hill, 1990
3. Manual de programación e instalación de PLC Siemmens
4. Manual de programación e instalación de PLC Allen Bradley
5. Manual de programación e instalación de PLC Telemecanique
6. Manual de programación e instalación de PLC Festo
Nota: Se presenta el listado de bibliografías utilizadas en el fundamento teórico y en el desarrollo
de la práctica en sistema de referencia APA.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
46 de 60
-ANEXOS
Se recomienda poner en anexos las partes del trabajo que, intercaladas en medio del texto
romperían la continuidad de lectura del mismo, por ejemplo deducciones detalladas de alguna
expresión, cálculos largos y detallados, códigos y enumeración detallada de algunos componentes.
El docente según considere podría proporcionar tablas de valores, indicadores, manuales de
equipos u otros.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
47 de 60
PRACTICA 4. SIMULACIÓN DE GIRO DE UN MOTOR
-INTRODUCCIÓN
El motor eléctrico es un dispositivo que transforma la energía eléctrica en energía
mecánica por medio de la acción de los campos magnéticos generados en sus bobinas. Son
máquinas eléctricas rotatorias compuestas por un estator y un rotor.
Algunos de los motores eléctricos son reversibles, ya que pueden transformar energía
mecánica en energía eléctrica funcionando como generadores o dinamo. Los motores
eléctricos de tracción usados en locomotoras o en automóviles híbridos realizan a menudo
ambas tareas, si se diseñan adecuadamente.
Son utilizados en infinidad de sectores tales como instalaciones industriales, comerciales y
particulares. Su uso está generalizado en ventiladores, vibradores para teléfonos
móviles, bombas, medios de transporte eléctricos, electrodomésticos, esmeriles angulares y
otras herramientas eléctricas, unidades de disco, etc. Los motores eléctricos pueden ser
impulsados por fuentes de corriente continua (CC), y por fuentes de corriente alterna (AC).
El diagrama de escalera o ladder logic es un programa muy utilizado para programar PLC o
autómatas programables. El diagrama de escalera fue uno de los primeros lenguajes
utilizados para programar PLCs debido a su similitud con los diagramas de relés que los
técnicos ya conocían.
Este lenguaje permite representar gráficamente el circuito de control de un proceso, con
ayuda de símbolos de contactos normalmente cerrados (N.C.) y normalmente abiertos
(N.A.), relés, temporizadores, contadores, registros de desplazamiento, etc... Cada uno de
estos símbolos representa una variable lógica cuyo estado puede ser verdadero o falso.
-OBJETIVO
El alumno Simulara De Giro De Un Motor.
-LUGAR
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
48 de 60
La práctica se realizara en el laboratorio de Simulación (Considerando el reglamento descrito
anteriormente)
-SEMANA DE EJECUCIÓN
La Práctica Simulación De Giro De Un Motor. Se realizara la 6 semana de la asignatura.
- MATERIAL Y EQUIPO
PC portátil
-DESARROLLO DE LA PRÁCTICA
Paso 1. El alumno abrirá el software de simulación FST.
Paso 2. El alumno creara sus variables de I/O.
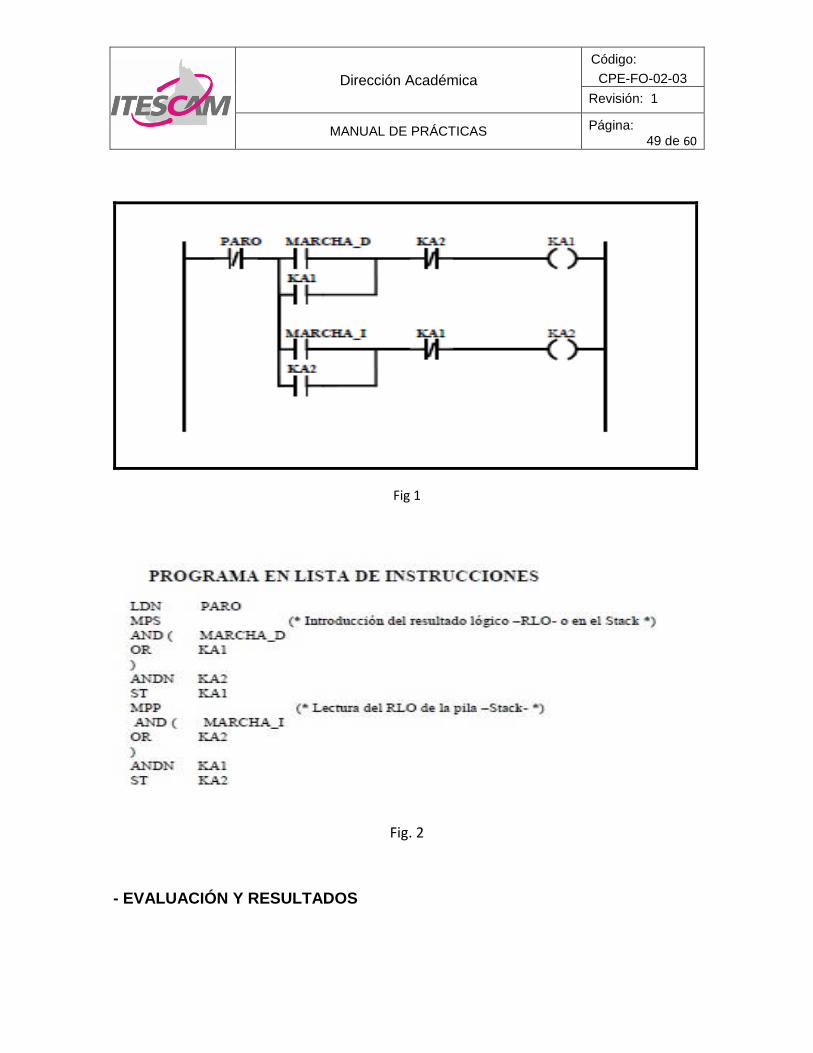
La entrada E0.0 es el botón de paro, si esta entrada se activa, se detendrá el motor.
La entrada E0.1 es el botón de arranque para que el motor funcione hacia una
dirección específica.
La entrada E0.2 es el botón de arranque para que el motor funcione en dirección
opuesta que con la señal E0.1.
Las señales A0.0 y A0.1 son las salidas reales del PLC, y sus contactos en paralelo
con las entradas E0.1 y E0.2 se usan para enclavar las salidas. Los contactos
cerrados de A0.0 y A0.1 son para impedir que se activen ambas salidas al mismo
tiempo, y con esto evitar un corto circuito.
Paso 3. El alumno dibujara el esquema de la figura 1.
Paso 4. El alumno realizara el programa en lista la práctica del giro de un motor de la fig. 2
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
49 de 60
Fig 1
Fig. 2
- EVALUACIÓN Y RESULTADOS
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
50 de 60
El alumno entregara un reporte de práctica con los siguientes criterios
Portada
Introducción
Justificación
Metodología y desarrollo
Obtención de resultados
Resultados y discusiones
Anexos
Referencias bibliográficas.
-REFERENCIAS
1. Mayol I. Badia Albert, Autómatas programables, Editorial Marcombo, 1988
2. Porras A. / Montaner A. P., Autómatas programables, 1a Ed., Editorial Mc
Graw Hill, 1990
3. Manual de programación e instalación de PLC Siemmens
4. Manual de programación e instalación de PLC Allen Bradley
5. Manual de programación e instalación de PLC Telemecanique
6. Manual de programación e instalación de PLC Festo
Nota: Se presenta el listado de bibliografías utilizadas en el fundamento teórico y en el desarrollo
de la práctica en sistema de referencia APA.
-ANEXOS
Se recomienda poner en anexos las partes del trabajo que, intercaladas en medio del texto
romperían la continuidad de lectura del mismo, por ejemplo deducciones detalladas de alguna
expresión, cálculos largos y detallados, códigos y enumeración detallada de algunos componentes.
El docente según considere podría proporcionar tablas de valores, indicadores, manuales de
equipos u otros.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
51 de 60
PRACTICA 5. IMPLEMENTACIÓN DE GIRO DE UN MOTOR
-INTRODUCCIÓN
El motor eléctrico es un dispositivo que transforma la energía eléctrica en energía
mecánica por medio de la acción de los campos magnéticos generados en sus bobinas. Son
máquinas eléctricas rotatorias compuestas por un estator y un rotor.
Algunos de los motores eléctricos son reversibles, ya que pueden transformar energía
mecánica en energía eléctrica funcionando como generadores o dinamo. Los motores
eléctricos de tracción usados en locomotoras o en automóviles híbridos realizan a menudo
ambas tareas, si se diseñan adecuadamente.
Son utilizados en infinidad de sectores tales como instalaciones industriales, comerciales y
particulares. Su uso está generalizado en ventiladores, vibradores para teléfonos
móviles, bombas, medios de transporte eléctricos, electrodomésticos, esmeriles angulares y
otras herramientas eléctricas, unidades de disco, etc. Los motores eléctricos pueden ser
impulsados por fuentes de corriente continua (CC), y por fuentes de corriente alterna (AC).
-OBJETIVO
El alumno Implementara De Giro De Un Motor
-LUGAR
La práctica se realizara en el laboratorio de Simulación. (Considerando el reglamento descrito
anteriormente)
-SEMANA DE EJECUCIÓN
La Práctica Implementara De Giro De Un Motor. Se realizara la 6 semana de la asignatura.

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
52 de 60
- MATERIAL Y EQUIPO
Pc Portátil.
-DESARROLLO DE LA PRÁCTICA
Paso 1. El alumno abrirá su simulación de giro de un motor.
Paso 2. El alumno conectara al PLC Compact Festo su diagrama
Paso 3. El alumno conectara su PC portátil en su puerto serial para la comunicación del
PLC Compact Festo.
Paso 4. El alumno comprobara el diseño de su simulación.
- EVALUACIÓN Y RESULTADOS
El alumno entregara un reporte de práctica con los siguientes criterios
Portada
Introducción
Justificación
Metodología y desarrollo
Obtención de resultados
Resultados y discusiones
Anexos
Referencias bibliográficas.
-REFERENCIAS
1. Mayol I. Badia Albert , Autómatas programables, Editorial Marcombo, 1988
2. Porras A. / Montaner A. P., Autómatas programables, 1a Ed., Editorial Mc
Graw Hill, 1990

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
53 de 60
3. Manual de programación e instalación de PLC Siemmens
4. Manual de programación e instalación de PLC Allen Bradley
5. Manual de programación e instalación de PLC Telemecanique
6. Manual de programación e instalación de PLC Festo
Nota: Se presenta el listado de bibliografías utilizadas en el fundamento teórico y en el desarrollo
de la práctica en sistema de referencia APA.
-ANEXOS
Se recomienda poner en anexos las partes del trabajo que, intercaladas en medio del texto
romperían la continuidad de lectura del mismo, por ejemplo deducciones detalladas de alguna
expresión, cálculos largos y detallados, códigos y enumeración detallada de algunos componentes.
El docente según considere podría proporcionar tablas de valores, indicadores, manuales de
equipos u otros.
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
54 de 60
PRACTICA 6. LOS TIMERS
-INTRODUCCIÓN
Un temporizador o minutero es un dispositivo, con frecuencia programable, que permite
medir el tiempo. La primera generación fueron los relojes de arena, que fueron sustituidos por
relojes convencionales y más tarde por un dispositivo íntegramente electrónico. Cuando
trascurre el tiempo configurado se hace saltar una alarma o alguna otra función a modo de
advertencia.
-OBJETIVO
El alumno conozca la operación y sea capaz de programar los timers.
-LUGAR
La práctica se realizara en el laboratorio de Simulación. (Considerando el reglamento descrito
anteriormente)
-SEMANA DE EJECUCIÓN
La Práctica timers. Se realizara la 7 semana de la asignatura
- MATERIAL Y EQUIPO
PC Portátil.
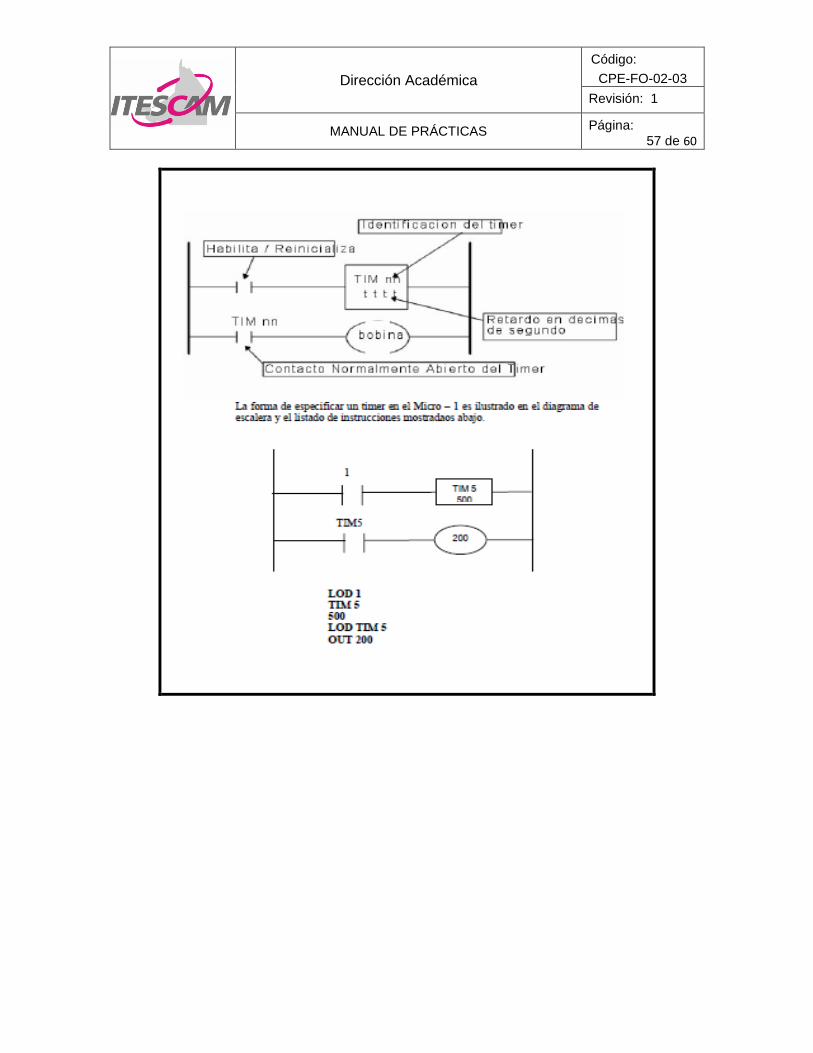
-DESARROLLO DE LA PRÁCTICA
En la figura de abajo mostramos un diagrama funcional de lo que constituye un timer
(temporizador). Para cargar el preset e iniciar su operación tiene un circuito de lógica permisiva
Podemos ver que tiene un reloj que genera una base de tiempo fija (frecuencia fija). En el caso
del Micro-1 es de 1 pulso cada 0.1 segundo.
También consta de un contador decreciente con un preset programable, cuando el conteo
decrece hasta cero, se activa el relevador que corresponda a la designación al Timer.

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
55 de 60
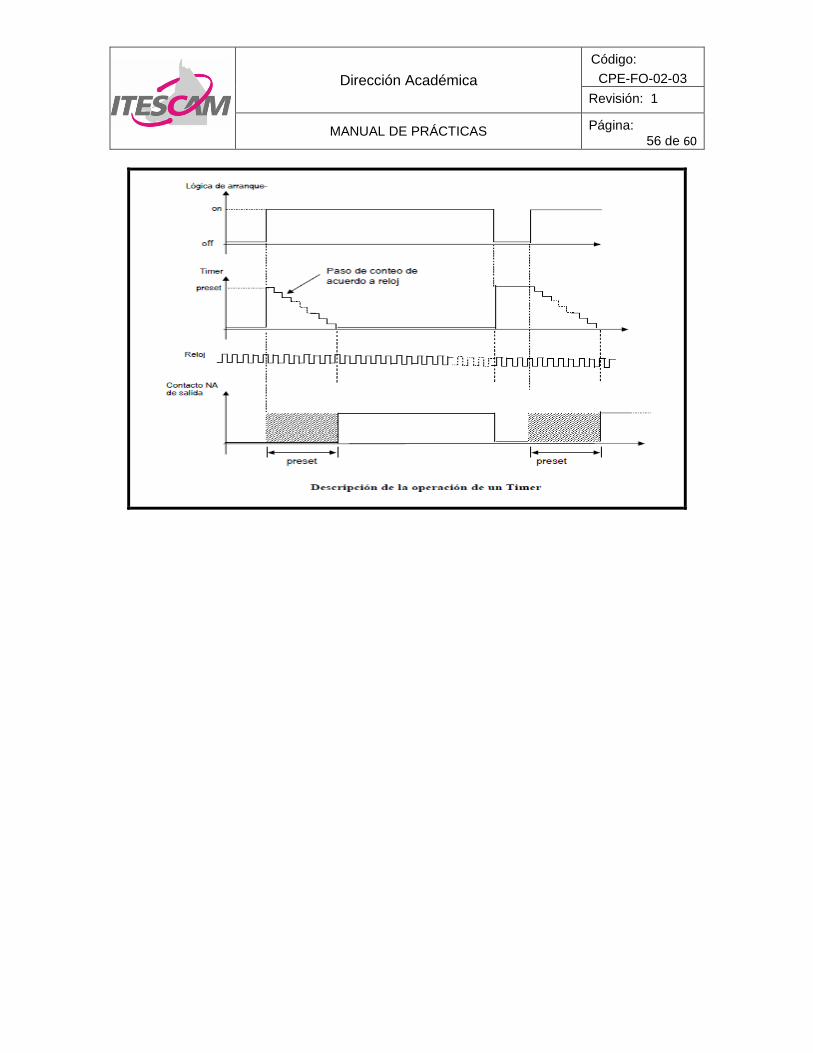
En estos diagramas de tiempo se muestra gráficamente la forma en que opera un Timer.
Observe que cuando la lógica de arranque está abierta, el valor del preset del Timer es cargado
al contador decreciente del timer. Cuando la lógica se cierra el contador comienza su
desconteo. Si la lógica se abre mientras el timer ese en desconteo, se recarga de nuevo el valor
del Preset.
Cuando el desconteo llega a cero se activa un relevador cuyos contactos podemos usar
libremente como TIM xx (NA) o NOT TIM xx (NC).
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
56 de 60
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
57 de 60
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
58 de 60
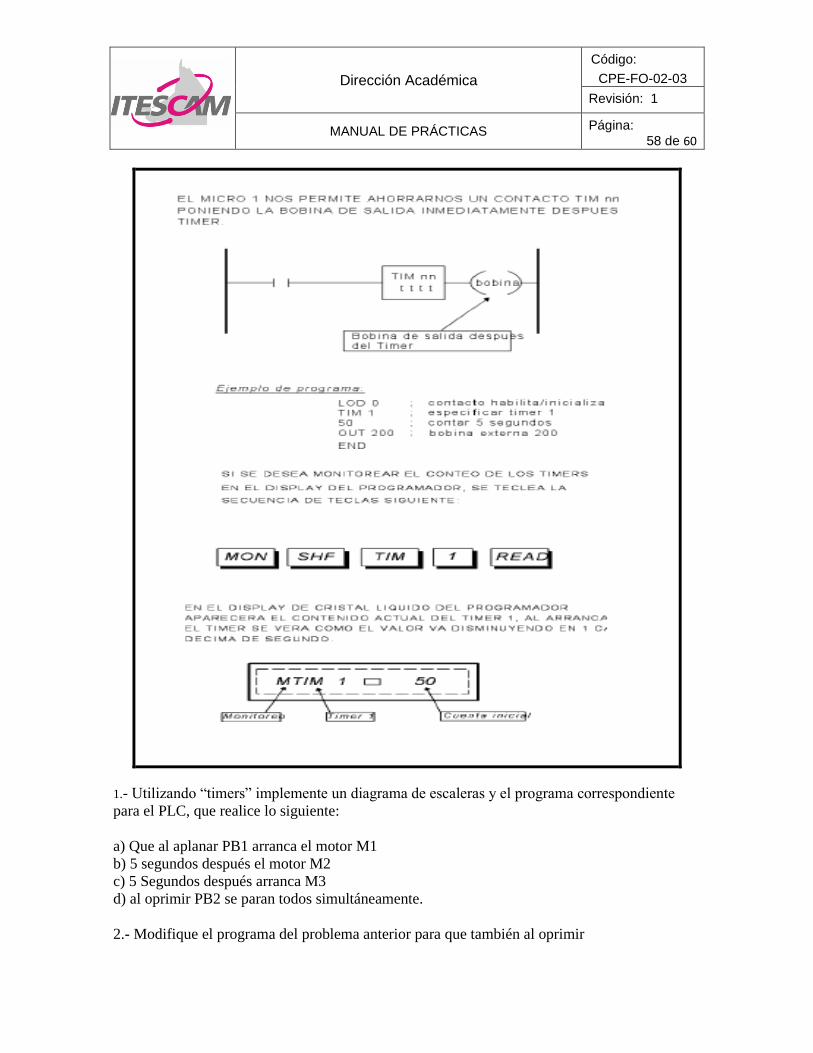
1.- Utilizando “timers” implemente un diagrama de escaleras y el programa correspondiente
para el PLC, que realice lo siguiente:
a) Que al aplanar PB1 arranca el motor M1
b) 5 segundos después el motor M2
c) 5 Segundos después arranca M3
d) al oprimir PB2 se paran todos simultáneamente.
2.- Modifique el programa del problema anterior para que también al oprimir
Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
59 de 60
PB2 se apaguen los motores en el mismo orden en el que se prendieron, esto es: primero M1, 5
segundos después M2 y 5 segundos después M3.
3.- Implemente un programa para hacer que un foco prenda al oprimir PB1, durante 5 minutos,
después se apague 5 minutos y se repita hasta que se oprima PB2.
- EVALUACIÓN Y RESULTADOS
El alumno entregara un reporte de práctica con los siguientes criterios
Portada
Introducción
Justificación
Metodología y desarrollo
Obtención de resultados
Resultados y discusiones
Anexos
Referencias bibliográficas.
-REFERENCIAS
1. Mayol I. Badia Albert , Autómatas programables, Editorial Marcombo, 1988
2. Porras A. / Montaner A. P., Autómatas programables, 1a Ed., Editorial Mc
Graw Hill, 1990
3. Manual de programación e instalación de PLC Siemmens
4. Manual de programación e instalación de PLC Allen Bradley
5. Manual de programación e instalación de PLC Telemecanique
6. Manual de programación e instalación de PLC Festo
Nota: Se presenta el listado de bibliografías utilizadas en el fundamento teórico y en el desarrollo
de la práctica en sistema de referencia APA.
-ANEXOS

Dirección Académica
Código:
CPE-FO-02-03
Revisión: 1
MANUAL DE PRÁCTICAS Página:
60 de 60
Se recomienda poner en anexos las partes del trabajo que, intercaladas en medio del texto
romperían la continuidad de lectura del mismo, por ejemplo deducciones detalladas de alguna
expresión, cálculos largos y detallados, códigos y enumeración detallada de algunos componentes.
El docente según considere podría proporcionar tablas de valores, indicadores, manuales de
equipos u otros.


















