
Manual de Practicas Plc
14
INSTITUTO TECNOLOGICO DE DURANGO INGENIERIA ELECTRICA Y ELECTRONICA Ing. Juan Pablo Lerma Sánchez Página 1 ENERO 2011
Transcript of Manual de Practicas Plc
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 1
ENERO 2011
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 2
PRACTICA NOMBRE PÁGINA
I Conocimiento físico de los PLC Siemens 3
II Introducción a los software, Step 7, PC- Simu, y S7-200 4
III Programación básica (enclavamientos) 6
IV Programación con Contador 8
V Programación con temporizadores y contadores 10
VI Programación con subrutinas. 12
VII Proyecto final 14
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 3
PRACTICA I.- “CONOSIMIENTO FISICO DE LOS PLCS SIEMENS”
Objetivo: Al termino de esta practica el alumno identificara las partes de que esta
conformado un PLC, así como, los distintos modelos de PLC´s de la familia S7-200 de
marca SIEMENS.
Desarrollo: El alumno en el laboratorio (LEIC), identificara los diferentes módulos
didácticos que tienen instalado un PLC de la familia S7-200 de la marca SIEMENS, y
tomara nota de lo siguiente:
Tipo de CPU.
Cantidad de entradas y salidas.
Literales que aparecen describiendo el tipo de salidas que manejan.
Si el PLC tiene conectado un modulo de expansión, tomar nota de su
numero de modelo.
Tomar fotografía de cada modulo, o en su caso elaborar un esquema del
mismo.
Con los datos obtenidos en el desarrollo de la práctica, investigar en la página oficial de
SIEMENS: http://www.siemens.com de cada uno de los CPU´s que se tienen en el
laboratorio, las características siguientes:
o Voltajes de operación.
o Humedad de trabajo y tolerancias.
o Temperatura de trabajo y tolerancias.
o Capacidad a la vibración.
o Tipos de entradas y salidas; registros, análogas
o digitales, así como las tensiones y corrientes
que soportan.
o Dimensiones físicas.
o Cantidad de módulos especiales que soporta.
Cierre: La información obtenida de cada modulo y de cada PLC, la ordenara en forma de
hoja de datos de cada equipo y la entregaran en un reporte por equipo, el cual debe de
contener: 1.- Portada, 2.- Cinco hojas de datos, una por cada modulo
Nota: La estructura de la hoja de datos deberá contener, la descripción del equipo, la
imagen del mismo, y las características investigadas.

INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 4
PRACTICA II.- “INTRODUCCIÓN A LOS SOFTWARE, STEP 7, PC-SIMU, Y S7-200”
Objetivo: Al término de esta práctica el alumno identificara el uso especifico de cada uno
de los siguientes software: STEP 7, PC-SIMU, y S/.200., así como la manera de accesar e
identificara cada una de las partes así como la forma de programar.
Desarrollo: Se realizara la exposición por parte del profesor de:
La manera en que se accesa a cada uno de los programas, iniciando por el
editor de diagrama escalera STEP 7, después por el simulador de PLC el
programa S7-200 y por ultimo al simulador de procesos industriales, el
programa PC-SIMU.
En el STEP 7, se describirá:
o Cada área de la pantalla, indicando donde se encuentras los
comandos básicos para elaborar los diagramas escalera.
o Como cambiar de lenguaje de programación.
o La instrucción para monitorear en tiempo real las variables del
sistema.
o Como cambiar de modo de funcionamiento al PLC.
o La manera en que se compilan los programas.
o Donde se visualizan las alertas de error durante la compilación.
o Como cargara el programa en el PLC y como descargar el programa
del PLC a la computadora.
o Generar programa para cargar en el simulador del PLC el programa
S7-200.
En el S7-200, se describirá:
o La forma en que se cargaran los programas, que se realizaron el
editor.
o Modo de intercambio de entradas y salidas de este simulador con el
simulador de procesos PC-SIMU.
o Como seleccionar el tipo de CPU a simular.
o Uso del simulador de entradas.
o Como anexar módulos de expansión.
o Visualización en tiempo real de las variables del proceso.

INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 5
En el S7-200, se describirá:
o La forma de acceso al programa
o Las barras de herramientas
o La forma en que se declaran las variables de entradas
o La forma en que se declaran las salidas
o Como establecer la comunicación de este simulador con el PLC o
con el simulador S7-200.
Cierre: con la información proporcionada, así como los pasos para realizar cada acción,
detallada en el desarrollo de esta practica, para cada uno de los programas, cada uno de los
equipos deberán de explicarlo elaborando una presentación en power point, donde se
detalle por medio de imágenes y texto.
La presentación deberá de ser entregada, una por equipo de forma electrónica, enviándola
al correo electrónico: [email protected]
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 6
PRACTICA III.- “PROGRAMACIÓN BÁSICA (ENCLAVAMIENTOS)”
Objetivo: Al término de esta práctica el alumno podrá realizara la programación en
lenguaje escalera de un proceso industrial o de servicios simple, usando para ello las
instrucciones de enclavamiento, instrucciones de SET y de RESET.
Desarrollo: De lo visto en clase sobre la programación con enclavamientos y el uso de las
instrucciones de SET y de RESET, desarrollaran el diagrama de control en lenguaje
escalera del siguiente proceso:
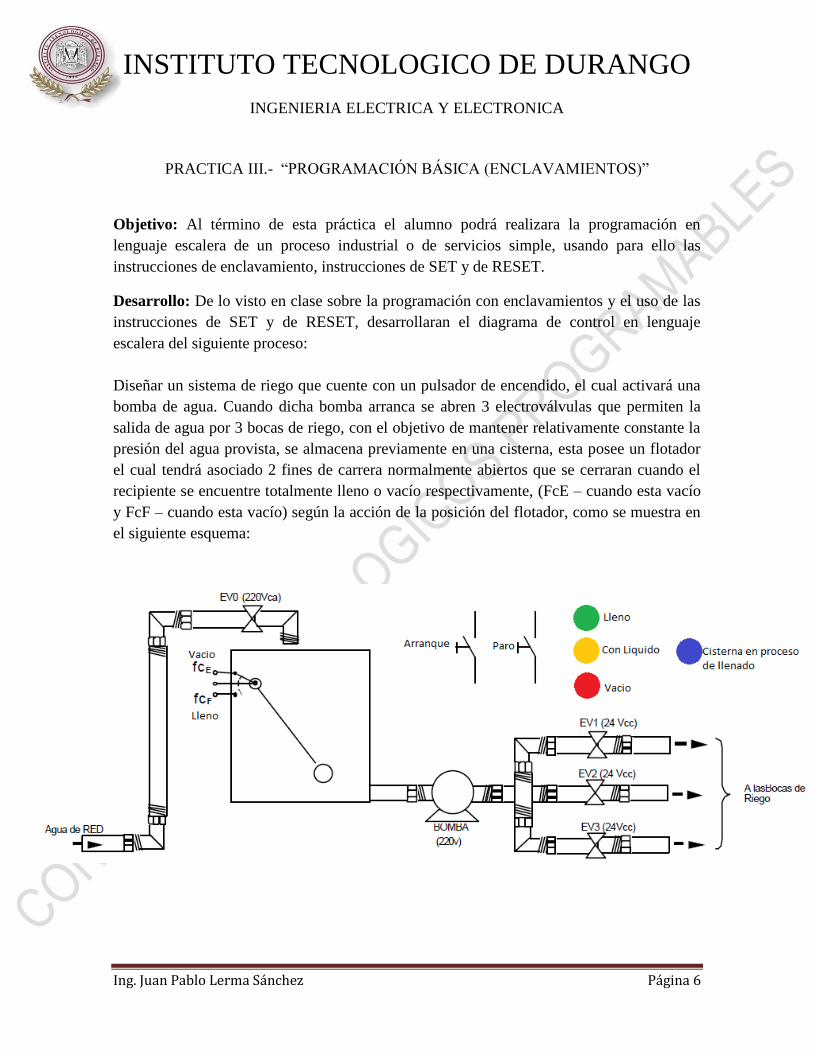
Diseñar un sistema de riego que cuente con un pulsador de encendido, el cual activará una
bomba de agua. Cuando dicha bomba arranca se abren 3 electroválvulas que permiten la
salida de agua por 3 bocas de riego, con el objetivo de mantener relativamente constante la
presión del agua provista, se almacena previamente en una cisterna, esta posee un flotador
el cual tendrá asociado 2 fines de carrera normalmente abiertos que se cerraran cuando el
recipiente se encuentre totalmente lleno o vacío respectivamente, (FcE – cuando esta vacío
y FcF – cuando esta vacío) según la acción de la posición del flotador, como se muestra en
el siguiente esquema:
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 7
Condiciones de funcionamiento:
Sólo se podrá poner en funcionamiento mediante el accionamiento de un pulsador de
marcha (N.O.), si la sistema se encuentra llena.
El apagado podrá hacerse en forma manual accionado el pulsador de parada (N.O.) o bien
de forma automática si se detecta que la cisterna se vació.
El llenado de la cisterna se hará de forma automática cada vez que se detecte la ausencia de
dicho estado mediante la apertura de la electroválvula EV0.
El sistema debe de contar con 3 testigos, verde, amarillo y rojo que indiquen el estado de la
cisterna, llena, con liquido o vacía respectivamente y un cuarto testigo color azul que
indicará si está en proceso de llenado.
Realizar un programa en diagrama escalera, en el programa STEP 7, cargue en el PLC de
alguno de los módulos del laboratorio, y para checar su funcionamiento puede realizar la
simulación del proceso en el programa PC-SIMU, simulando el PLC, utilizando el
programa S7-200
Reporte: se deberá de entregar un reporte el cual debe de incluir:
Portada
La descripción del proceso
El diagrama escalera impreso
El archivo generado en STEP7
El archivo generado en el PC-SIMU
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 8
PRACTICA IV.- “PROGRAMACIÓN CON CONTADOR”
Objetivo: Al término de esta práctica el alumno podrá realizara la programación en
lenguaje escalera de un proceso industrial o de servicios, usando para ello las instrucciones
de enclavamiento, instrucciones de SET y de RESET, los diferentes tipos de contadores,
contados ascendente(CTU), contador descendente(CTD) y contador ascendente-
descendente(CTUD)
Desarrollo: De lo visto en clase sobre la programación con enclavamientos y el uso de las
instrucciones de SET y de RESET, asi como los diferentes tipos de contadores (CTU, CTD
y CTUD) desarrollaran el diagrama de control en lenguaje escalera del siguiente proceso:
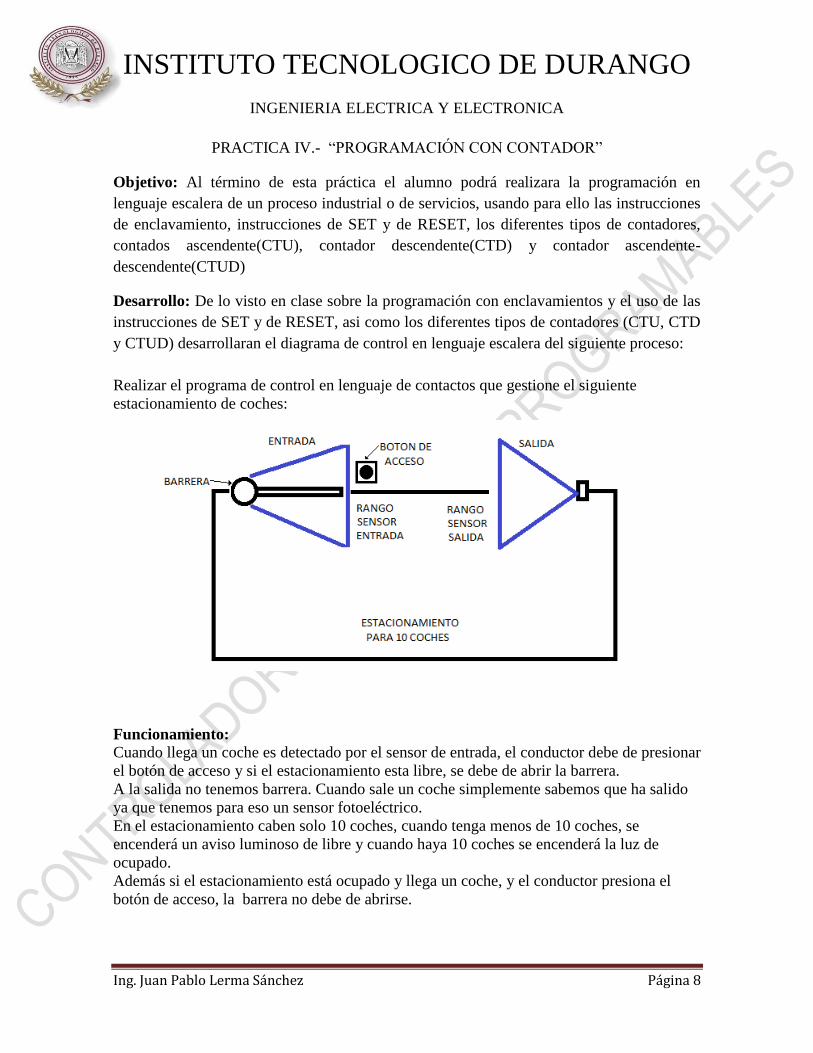
Realizar el programa de control en lenguaje de contactos que gestione el siguiente
estacionamiento de coches:
Funcionamiento:
Cuando llega un coche es detectado por el sensor de entrada, el conductor debe de presionar
el botón de acceso y si el estacionamiento esta libre, se debe de abrir la barrera.
A la salida no tenemos barrera. Cuando sale un coche simplemente sabemos que ha salido
ya que tenemos para eso un sensor fotoeléctrico.
En el estacionamiento caben solo 10 coches, cuando tenga menos de 10 coches, se
encenderá un aviso luminoso de libre y cuando haya 10 coches se encenderá la luz de
ocupado.
Además si el estacionamiento está ocupado y llega un coche, y el conductor presiona el
botón de acceso, la barrera no debe de abrirse.
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 9
Realizar un programa en diagrama escalera, en el programa STEP 7, cargue en el PLC de
alguno de los módulos del laboratorio, y para checar su funcionamiento puede realizar la
simulación del proceso en el programa PC-SIMU, simulando el PLC, utilizando el
programa S7-200
Reporte: se deberá de entregar un reporte el cual debe de incluir:
Portada
La descripción del proceso
El diagrama escalera impreso
El archivo generado en STEP7
El archivo generado en el PC-SIMU
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 10
PRACTICA V.- “PROGRAMACIÓN CON TEMPORIZADORES Y CONTADORES”
Objetivo: Al término de esta práctica el alumno podrá realizara la programación en
lenguaje escalera de un proceso industrial o de servicios, usando para ello las instrucciones
de enclavamiento, instrucciones de SET y de RESET, los diferentes tipos de contadores,
contados ascendente (CTU), contador descendente (CTD) y contador ascendente-
descendente (CTUD), así como temporizadores con retardo a la conexión (TON) o
temporizadores con retardo a la desconexión (TOF)
Desarrollo: De lo visto en clase sobre la programación con enclavamientos y el uso de las
instrucciones de SET y de RESET, los diferentes tipos de contadores (CTU, CTD y CTUD)
así como los diferentes tipos de temporizadores (TON y TOF), desarrollaran el diagrama de
control en lenguaje escalera del siguiente problema:
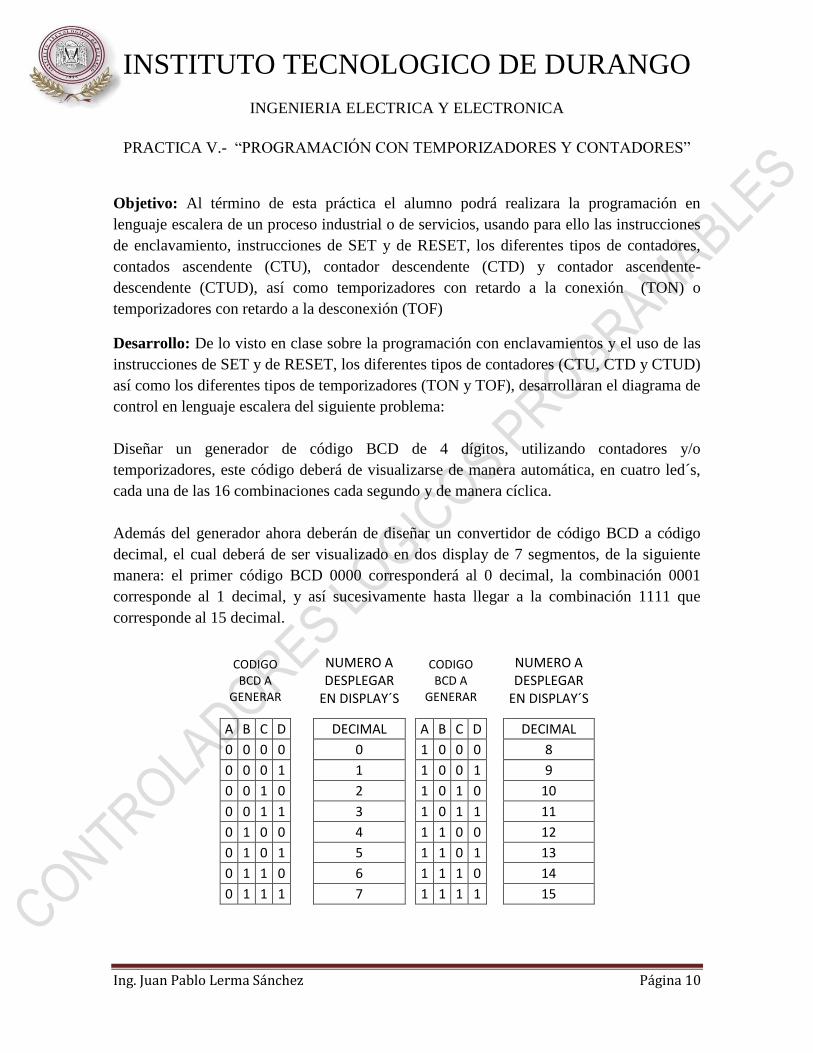
Diseñar un generador de código BCD de 4 dígitos, utilizando contadores y/o
temporizadores, este código deberá de visualizarse de manera automática, en cuatro led´s,
cada una de las 16 combinaciones cada segundo y de manera cíclica.
Además del generador ahora deberán de diseñar un convertidor de código BCD a código
decimal, el cual deberá de ser visualizado en dos display de 7 segmentos, de la siguiente
manera: el primer código BCD 0000 corresponderá al 0 decimal, la combinación 0001
corresponde al 1 decimal, y así sucesivamente hasta llegar a la combinación 1111 que
corresponde al 15 decimal.
CODIGO BCD A
GENERAR
NUMERO A DESPLEGAR
EN DISPLAY´S
CODIGO BCD A
GENERAR
NUMERO A DESPLEGAR
EN DISPLAY´S
A B C D
DECIMAL
A B C D
DECIMAL
0 0 0 0
0
1 0 0 0
8
0 0 0 1
1
1 0 0 1
9
0 0 1 0
2
1 0 1 0
10
0 0 1 1
3
1 0 1 1
11
0 1 0 0
4
1 1 0 0
12
0 1 0 1
5
1 1 0 1
13
0 1 1 0
6
1 1 1 0
14
0 1 1 1
7
1 1 1 1
15
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 11
Realizar un programa en diagrama escalera, en el programa STEP 7, cargue en el PLC de
alguno de los módulos del laboratorio, y para checar su funcionamiento puede realizar la
simulación del proceso en el programa PC-SIMU, simulando el PLC, utilizando el
programa S7-200
Reporte: se deberá de entregar un reporte el cual debe de incluir:
Portada
La descripción del problema
El diagrama escalera impreso
El archivo generado en STEP7
El archivo generado en el PC-SIMU
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 12
PRACTICA VI.- “PROGRAMACIÓN CON SUBRUTINAS”
Objetivo: Al término de esta práctica el alumno podrá realizara la programación en
lenguaje escalera de un proceso industrial o de servicios, usando para ello las instrucciones
de:
Enclavamiento, instrucciones de SET y de RESET
Contadores, ascendente (CTU), descendente (CTD) y ascendente-descendente
(CTUD)
Temporizadores con retardo a la conexión (TON) o con retardo a la desconexión
(TOF)
Llamada a subrutina (SBR_0) y salida de ella (END)
Desarrollo: De lo visto en clase sobre la programación con enclavamientos y el uso de las
instrucciones de SET y de RESET, los diferentes tipos de contadores (CTU, CTD y CTUD)
así como los diferentes tipos de temporizadores (TON y TOF), y de las llamadas a
subrutina (SBR_0), desarrollaran el diagrama de control en lenguaje escalera del siguiente
problema:
Se desea automatizar el limpiaparabrisas de un vehículo cuyas partes constituyentes son las
siguientes:
1. Un selector de movimiento de tres posiciones (Stop, M1 y M2) que permite
seleccionar entre dos posibles modos de funcionamiento más abajo detallados o
reposo (no hace nada).
2. Un selector de tiempo de 3 posiciones (ST1, ST2 y ST3) empleado para seleccionar
la pausa de funcionamiento del sistema cuando el selector de movimiento anterior
esté en la posición M2.
3. Un detector de lluvia (DLL).
4. Dos finales de carrera (FCIzq. y FCDer.) para conocer cuándo el limpia llega a cada
uno de los extremos de su carrera. (Para determinar cuál es la parte izquierda y cuál
la derecha se supone que miramos el limpia desde dentro del vehículo).
5. Un motor de corriente continua que mediante dos contactores (KMI y KMD)
permite desplazar las escobillas del limpia a izquierda y derecha respectivamente.
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 13
El modo de funcionamiento del sistema es el que se describe a continuación.
1. Cuando el selector de movimiento se encuentre en la posición M1, el limpia debe
comenzar a moverse hacia la izquierda hasta que alcance la posición FCI. En este momento
comenzará a moverse hacia la derecha hasta alcanzar la posición FCD.
2. Cuando el selector de movimiento se encuentre en la posición M2, el limpia describirá
ciclos de barrido temporizados. Es decir, describirá movimientos izquierda-derecha,
deteniéndose un cierto periodo de tiempo en la posición marcada por FCD.
3. El tiempo que el limpia permanecerá en la posición FCD vendrá indicado por el selector
de tiempo de tres posiciones. ST1:1 segundo; ST2: 0.5 segundos; ST3: 0.12 segundos.
4. Transcurridos 2.5 segundos desde el momento en que comience a llover, y si el usuario
no ha seleccionado manualmente ninguno de los dos posibles modos de funcionamiento, el
limpia debe comenzar a describir ciclos de barrido temporizados, según la pausa indicada
por el selector de tiempo.
Ambos selectores pueden ser cambiados de posición en cualquier momento.
Sin embargo, en caso de que ese cambio se produzca en medio de un ciclo de barrido, este
no tendrá efecto hasta que no se haya finalizado ese ciclo.
Realizar un programa en diagrama escalera, en el programa STEP 7, cargue en el PLC de
alguno de los módulos del laboratorio, y para checar su funcionamiento puede realizar la
simulación del proceso en el programa PC-SIMU, simulando el PLC, utilizando el
programa S7-200
Reporte: se deberá de entregar un reporte el cual debe de incluir:
Portada
La descripción del problema
El diagrama escalera impreso
El archivo generado en STEP7
El archivo generado en el PC-SIMU
INSTITUTO TECNOLOGICO DE DURANGO
INGENIERIA ELECTRICA Y ELECTRONICA
Ing. Juan Pablo Lerma Sánchez Página 14
PRACTICA VII.- “PROYECTO FINAL”
Objetivo: El alumno diseñara el control del problema o proceso proporcionado por el
profesor, utilizando para la esto los conocimientos y herramientas vistas en clase, la
implementación correcta del mismo se utilizara para la evaluación de la competencia
adquirida en el tema de los controladores lógicos.
Desarrollo: El profesor entregara el problema o proceso al cual se le diseñara su control
por medio de PLC, el alumno deberá de documentar el tipo de sensores, actuadores, CPU,
módulos especiales que llegue a utilizar, y demás equipo que requiera para el diseño del
control.
Reporte: Lo debe de entregar de manera electrónica en CD, en la fecha convenida al cierre
del semestre.

![Manual de Plc Festo[1]](https://static.fdocuments.es/doc/165x107/5571fc4f497959916996f6d4/manual-de-plc-festo1.jpg)
















