Mecanismos
24
LOS MECANISMOS DEPARTAMENTO DE TECNOLOGÍA
Transcript of Mecanismos
LOS MECANISMOS
DEPARTAMENTO DE TECNOLOGÍA

LOS MECANISMOS
• Todas las máquinas, sean básicas o complejas, se componen de mecanismos sencillos.
• Mecanismo: dispositivo que transforma un movimiento y una fuerza de entrada en el movimiento y fuerza de salida deseados.
Movimiento y fuerza de entrada
MECANISMO Movimiento y fuerza de salida

LAS PALANCAS
• Una palanca es simplemente una barra que oscila sobre un punto de apoyo llamado fulcro.
FULCRO
• Si se aplica una fuerza en un extremo con la intención de levantar otra fuerza situada en el otro extremo, a la fuerza aplicada se le llama potencia y a la fuerza levantada resistencia
Potencia
Resistencia

LAS PALANCAS
• Ley de la palanca: Una palanca está en equilibrio cuando el momento de fuerza total hacia la izquierda es igual al momento de fuerza total hacia la derecha.
P x BP = R X BR
P= Potencia BP= Distancia entre la potencia y el punto de apoyo.R= Resistencia.BR= Distancia entre la resistencia y el punto de apoyo.

TIPOS DE PALANCASEn las palancas de primer género el punto de apoyo está entre el peso y el lugar de aplicación de la
fuerza.
En las palancas de segundo género el peso se encuentra entre el apoyo y el lugar en el que hacemos la fuerza.
En las palancas de tercer género la fuerza se aplica entre el punto
de apoyo y el peso.

EJEMPLOS DE PALANCAS

ACTIVIDADES
Dispositivo 1º 2º 3º
Microrruptor XTenazas X
Pie de cabra XColumpio XFreno de
coche XPala X
Pinzas XCascanueces X

ACTIVIDADES
• Completa las celdas de la tabla adjunta, sabiendo que deben de equilibrar una palanca de 1er género
Peso del bloque a elevar (Kg)
Distancia del peso al punto de apoyo (m)
Fuerza a aplicar para equilibrar la palanca (Kg)
Distancia de la fuerza al punto de apoyo (m)
120 20 5
250 25 50
1300 40 390
20 135 120
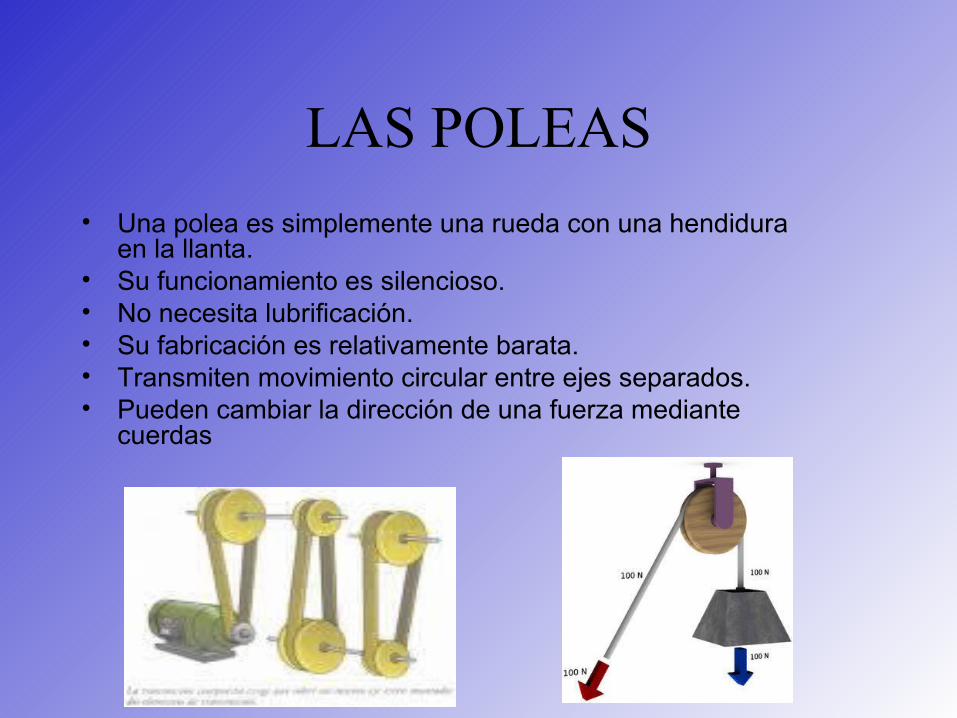
LAS POLEAS
• Una polea es simplemente una rueda con una hendidura en la llanta.
• Su funcionamiento es silencioso.• No necesita lubrificación.• Su fabricación es relativamente barata.• Transmiten movimiento circular entre ejes separados.• Pueden cambiar la dirección de una fuerza mediante
cuerdas
LAS POLEAS
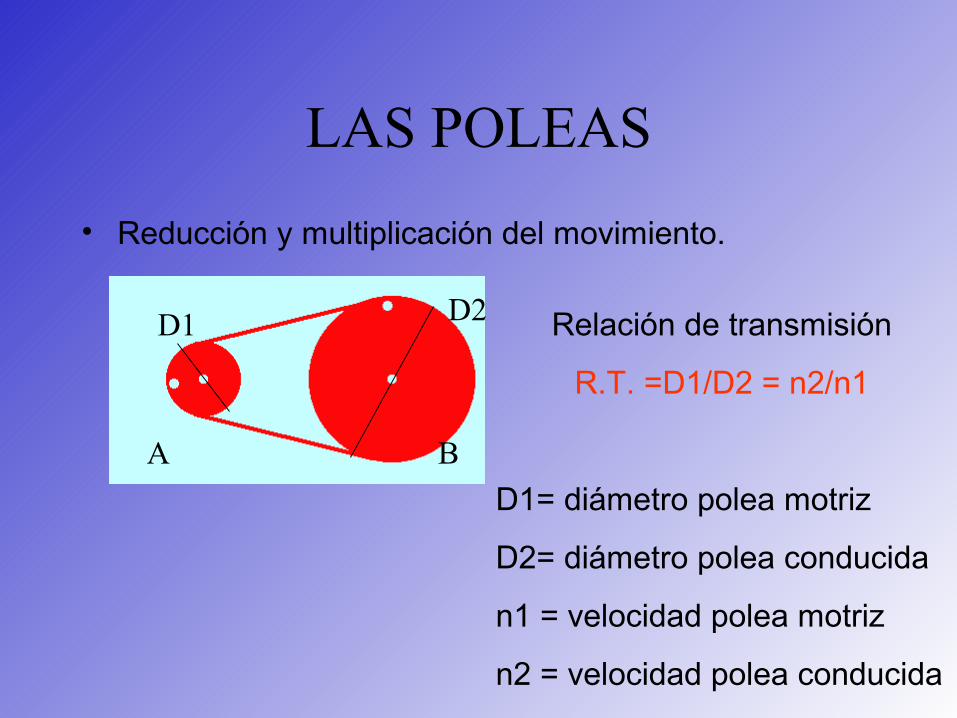
• Reducción y multiplicación del movimiento.
A B
D1 D2 Relación de transmisión
R.T. =D1/D2 = n2/n1
D1= diámetro polea motriz
D2= diámetro polea conducida
n1 = velocidad polea motriz
n2 = velocidad polea conducida
POLEA SIMPLE FIJA
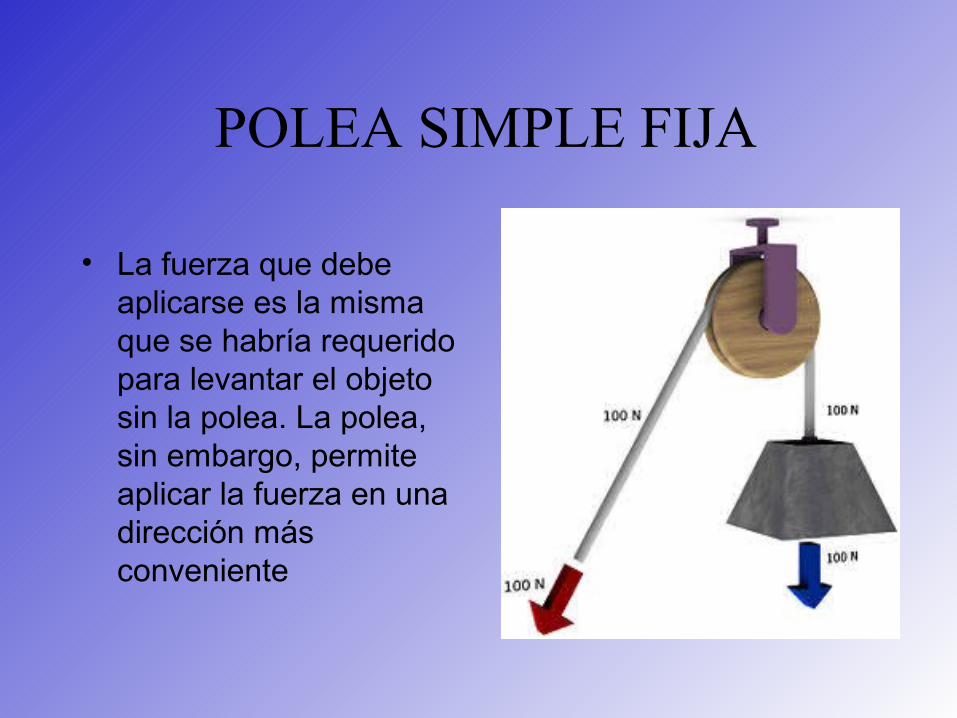
• La fuerza que debe aplicarse es la misma que se habría requerido para levantar el objeto sin la polea. La polea, sin embargo, permite aplicar la fuerza en una dirección más conveniente
POLEA SIMPLE MÓVIL
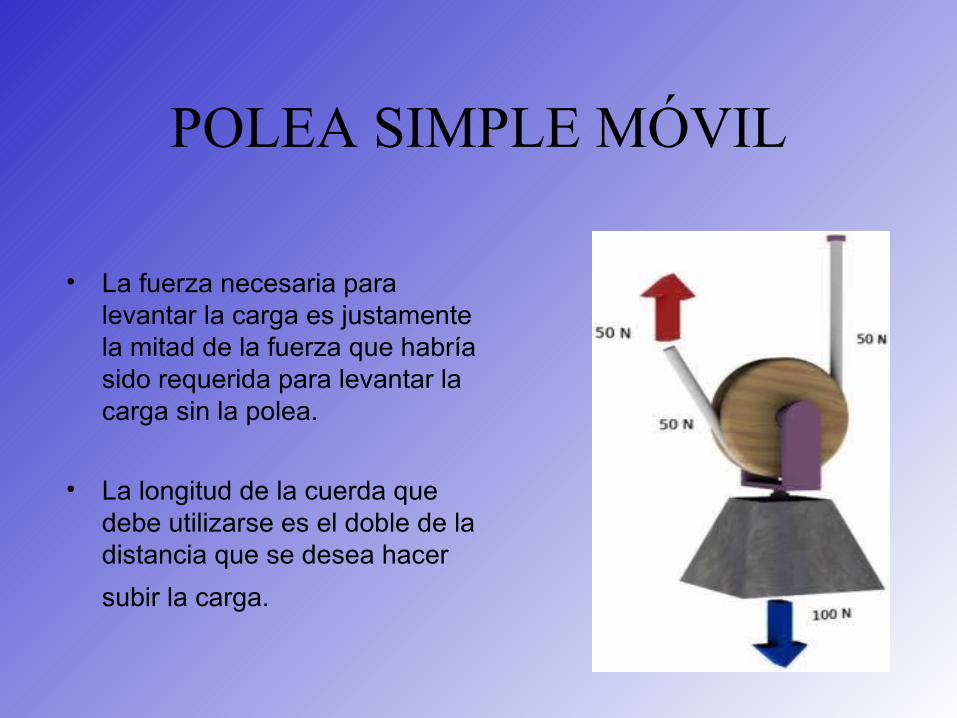
• La fuerza necesaria para levantar la carga es justamente la mitad de la fuerza que habría sido requerida para levantar la carga sin la polea.
• La longitud de la cuerda que debe utilizarse es el doble de la distancia que se desea hacer
subir la carga.

POLIPASTO
• Las poleas se distribuyen en dos grupos, uno fijo y uno móvil. En cada grupo se instala un número arbitrario de poleas. La carga se une al grupo móvil.
• La ventaja mecánica del polipasto puede determinarse contando el número de segmentos de cuerda que llegan a las poleas móviles que soportan la carga.

ENGRANAJES RECTOS
• Son ruedas dentadas. Los dientes se engranan unos con otros.
• Dos o más engranajes unidos se denominan tren de engranajes.
• Se llama rueda al engranaje de mayor tamaño y piñón al más pequeño.
• El sentido de giro de los engranajes se invierte.

ENGRANAJES RECTOS
Relación de transmisión
R.T. = Z1/Z2 = n2/n1
Z1 = nº dientes del engranaje motor
Z2 = nº dientes del engranaje salida
n1 = velocidad engranaje motor
n2 = velocidad engranaje salida

ACTIVIDAD
• Observa el siguiente dibujo y di si se trata de una transmisión que aumenta o reduce la velocidad, justificando la respuesta. Calcula el número de revoluciones por minuto de la rueda arrastrada. Si la rueda motriz gira en el sentido de las agujas del reloj, ¿en qué sentido girará la rueda arrastrada?
Reduce velocidad
Sentido contrario a las agujas
z1/z2 = n2/n1
n2 = 14/56 x 4000
n2 = 1000 rpm

EL CARDAN
• Permite conectar dos ejes de modo que puedan moverse en cualquier dirección uno respecto del otro.
• Son capaces de transmitir fuerzas de rotación entre sí.
• No funciona cuando los ejes forman un ángulo de 90º

LA EXCÉNTRICA
• Es una pieza, generalmente redonda, que gira alrededor de un punto que no es su centro.
• Permite transformar un movimiento de rotación en otro rectilíneo alternativo.

LEVAS
• Es una variante de la excéntrica, la circunferencia se sustituye por otra forma geométrica.

TORNILLO SINFÍN/ENGRANAJE
• Transmite movimiento entre ejes perpendiculares.
• Es un mecanismo irreversible• El tornillo sifín tiene un solo
diente con forma de hilo de rosca.
nº dientes que entran en el tornillo en cada vuelta
nº de dientes del engranajeR.T. =

SISTEMA PIÑÓN-CREMALLERA
• Transforma movimiento circular en lineal.
• Una cremallera es un engranaje plano que se engrana con los dientes de un piñón.

LA BIELA-MANIVELA
• Transforma movimiento rotatorio en movimiento lineal.
• El giro de la manivela se transforma en un movimiento de vaivén.
• Es un mecanismo reversible

TORNILLO-TUERCA
• Transforma movimiento rotatorio en movimiento lineal.
• El movimiento rotatorio del tornillo produce un movimiento rectilíneo en la rosca

ACTIVIDAD
Indica el nombre de los mecanismos ue aparecen en la siguiente figura
Barra dentada y engranaje
Tornillo sinfín y engranaje
Ruedas dentadas rectas
Engranajes cónicos