Mecanismos
14
Unidad 3. Máquinas y Mecanismos I.E.S. Guadalerzas Los Yébenes (Toledo) Curso 2011-12
Transcript of Mecanismos
Unidad 3. Maquinas y Mecanismos
I.E.S. Guadalerzas Los Yébenes (Toledo)
Curso 2011-12
Contenido 1 Las máquinas ......................................................................................................................... 1
1.1 Introducción .................................................................................................................. 1
1.2 Clasificación de las máquinas ........................................................................................ 1
1.3 Constitución de las máquinas ....................................................................................... 1
2 Transmisión y conversión de fuerzas y movimientos. .......................................................... 2
3 Conversión de movimiento rectilíneo en movimiento circular ............................................ 2
3.1 La rueda ......................................................................................................................... 2
4 Conversión del movimiento rectilíneo en movimiento rectilíneo ........................................ 3
4.1 Palancas ......................................................................................................................... 3
4.2 Poleas y polipastos ........................................................................................................ 3
5 Conversión del movimiento circular en movimiento rectilíneo ............................................ 4
5.1 Torno ............................................................................................................................. 4
5.2 Piñón-cremallera ........................................................................................................... 5
5.3 Tornillo .......................................................................................................................... 5
6 Conversión de movimiento circular en movimiento circular. ............................................... 6
6.1 Polea-Correa .................................................................................................................. 6
6.2 Piñón-cadena. ................................................................................................................ 7
6.3 Ruedas de fricción ......................................................................................................... 7
6.4 Engranajes. .................................................................................................................... 7
6.5 Tornillo sinfín ................................................................................................................. 8
7 Conversión de movimiento circular en movimiento alternativo. ......................................... 8
7.1 Levas y excéntricas ........................................................................................................ 8
7.2 Biela-manivela ............................................................................................................... 9
8 Actividades .......................................................................................................................... 10
Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 1
1 Las máquinas
1.1 Introducción ¿En qué se parecen una tijera, una bicicleta y un ascensor? Todas ellas son máquinas que necesitan energía para funcionar y que la transforman en otra forma de energía más adecuada para realizar un trabajo y, de este modo, reducir el esfuerzo de las personas para realizarlo.
Según esto, una máquina se puede considerar como un Sistema Tecnológico en el que una forma de energía entra para salir transformada en otra forma de energía o en trabajo útil. Como tal, su utilidad se basa en que multiplica y transforma la fuerza que una persona o motor pueden realizar. Para ello, el movimiento y las fuerzas que se aplican a la entrada deben ser transmitidos, transformados o ambas cosas a la vez, en un movimiento o fuerza de salida adecuados para que la máquina pueda realizar la función para la que ha sido diseñada.
Ahora piensa en la tijera, la bicicleta o el ascensor que comentábamos al principio. En el caso de la tijera, la fuerza que se realiza con las manos al abrir y cerrar las partes o cuchillas de la tijera, son transmitidas y transformadas hasta las cuchillas siguiendo la ley de la palanca y, el efecto de un plano inclinado (las cuchillas) lo que nos permite cortar fácilmente. En el caso de la bicicleta, la fuerza que ejercemos con nuestras piernas son transmitidas hasta la rueda trasera y, nos permiten movernos con mayor facilidad y comodidad. Algo similar ocurre con el ascensor, en este caso, la fuerza de un motor es la que es transmitida por medio de un sistema de poleas hasta la cabina del mismo, y este sistema de poleas permite que se eleve o descienda el ascensor.
1.2 Clasificación de las máquinas En función de los pasos en los que se realice esta transformación podemos clasificar las máquinas en:
• Máquinas simples: son aquellas que la transformación de energías la realizan en un solo paso como es el caso de la palanca o el plano inclinado.
• Máquinas compuestas: está formada por varios mecanismos conectados entre sí. Cada uno de ellos realiza una parte del trabajo y, la suma de todos los pasos o etapas que intervienen permiten obtener el efecto deseado.
1.3 Constitución de las máquinas Toda máquina consta de dos elementos fundamentales:
• Los Mecanismos que son los elementos encargados de transmitir y transformar los movimientos y las fuerzas en trabajo útil.
• La Estructura es el conjunto de elementos que sirve de soporte y protección a los mecanismos.
Energía de entrada Máquina Energía de
salida

Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 2
2 Transmisión y conversión de fuerzas y movimientos. En general, la transmisión y transformación de los movimientos son sobre movimientos de los siguientes tipos:
• Rectilíneos: El desplazamiento es en línea recta. • Circulares: el desplazamiento se realiza describiendo circunferencias. • Alternativos: avance y retroceso en línea recta (como ocurre con el pistón de un
motor). • Oscilante: avance y retroceso a lo largo de un arco (como ocurre con el péndulo de un
reloj).
Si queremos realizar estas transmisiones o transformaciones, deberemos emplear unos mecanismos determinados. En la siguiente tabla, podemos ver qué mecanismos debemos emplear en función de conversión o transmisión que queramos realizar
Movimiento de entrada Movimiento de salida Mecanismos Rectilíneo Circular Rueda Rectilíneo Rectilíneo Palanca
Polea (fija y móvil) Polipasto
Circular Rectilíneo Torno Tornillo/tuerca Piñón-cremallera
Circular Circular Polea-correa Piñón-cadena Ruedas de fricción Engranajes y trenes de engranajes Tornillo sin fin
Circular Alternativo Biela-manivela Levas y excéntricas
Circular Oscilante Leva-palanca
3 Conversión de movimiento rectilíneo en movimiento circular
3.1 La rueda La rueda fue inventada hace más de 5000 años. Existen distintos tipos de ruedas que se emplean como mecanismos en máquinas:
a. Ruedas lisas: las encontramos en poleas, polipastos, grúas, etc. Para reducir esfuerzos. b. Ruedas dentadas: las encontramos en engranajes, para transmitir y transformar
movimientos circulares entre ejes. c. Ruedas de palas: las encontramos en las turbinas para conseguir un movimiento
circular a partir del desplazamiento un fluído, las hemos visto en los barcos del río Mississippi.
En cualquier caso, cualquier rueda tiene siempre la misma estructura:
Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 3
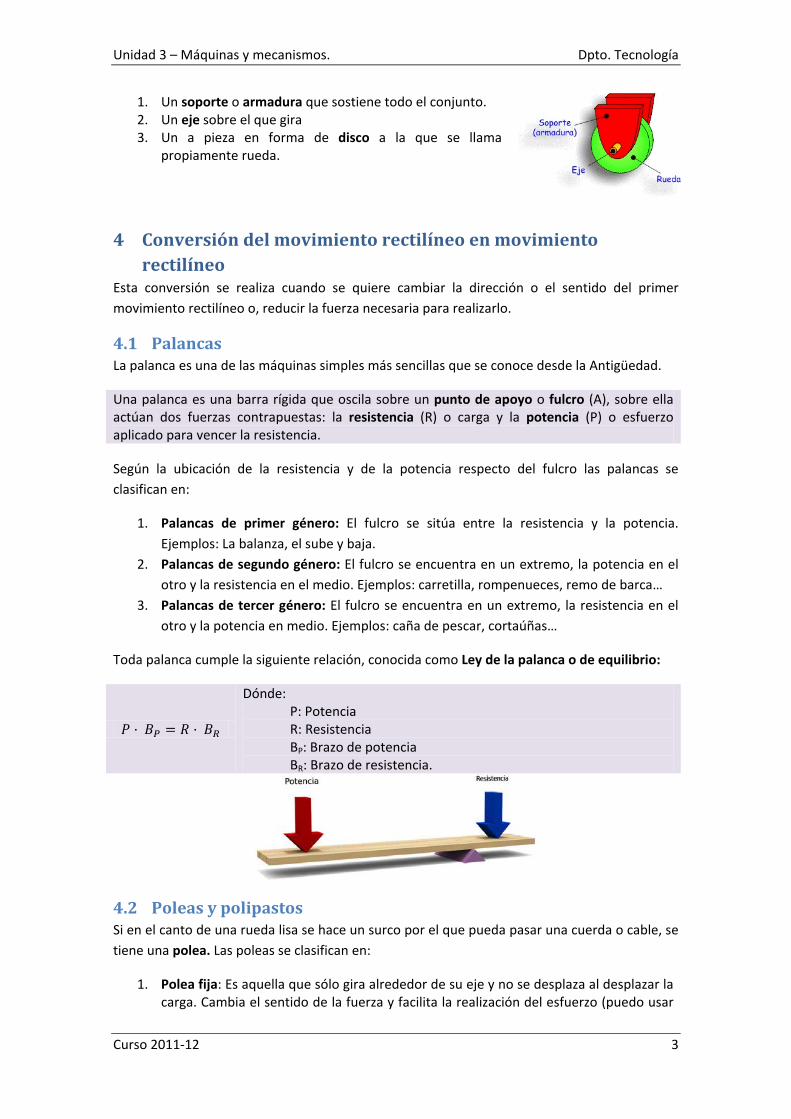
1. Un soporte o armadura que sostiene todo el conjunto. 2. Un eje sobre el que gira 3. Un a pieza en forma de disco a la que se llama
propiamente rueda.
4 Conversión del movimiento rectilíneo en movimiento rectilíneo
Esta conversión se realiza cuando se quiere cambiar la dirección o el sentido del primer movimiento rectilíneo o, reducir la fuerza necesaria para realizarlo.
4.1 Palancas La palanca es una de las máquinas simples más sencillas que se conoce desde la Antigüedad.
Una palanca es una barra rígida que oscila sobre un punto de apoyo o fulcro (A), sobre ella actúan dos fuerzas contrapuestas: la resistencia (R) o carga y la potencia (P) o esfuerzo aplicado para vencer la resistencia.
Según la ubicación de la resistencia y de la potencia respecto del fulcro las palancas se clasifican en:
1. Palancas de primer género: El fulcro se sitúa entre la resistencia y la potencia. Ejemplos: La balanza, el sube y baja.
2. Palancas de segundo género: El fulcro se encuentra en un extremo, la potencia en el otro y la resistencia en el medio. Ejemplos: carretilla, rompenueces, remo de barca…
3. Palancas de tercer género: El fulcro se encuentra en un extremo, la resistencia en el otro y la potencia en medio. Ejemplos: caña de pescar, cortaúñas…
Toda palanca cumple la siguiente relación, conocida como Ley de la palanca o de equilibrio:
𝑃 · 𝐵𝑃 = 𝑅 · 𝐵𝑅
Dónde: P: Potencia R: Resistencia BP: Brazo de potencia BR: Brazo de resistencia.
4.2 Poleas y polipastos Si en el canto de una rueda lisa se hace un surco por el que pueda pasar una cuerda o cable, se tiene una polea. Las poleas se clasifican en:
1. Polea fija: Es aquella que sólo gira alrededor de su eje y no se desplaza al desplazar la carga. Cambia el sentido de la fuerza y facilita la realización del esfuerzo (puedo usar

Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 4
mi propio peso como ayuda) pero, no lo reduce. En este caso, la fuerza a realizar será superior al peso a desplazar.
2. Polea móvil. Además de girar alrededor de su eje, se desplaza sobre la cuerda. Se usa para elevar cargas. La fuerza (P) a realizar en este caso es la mitad que el peso de la carga(R).
3. Polipasto. Es el resultado de combinar poleas fijas y móviles. Reduce el esfuerzo a realizar para elevar cargas y, por eso, se emplea en grúas. La fuerza a realizar (P) será igual al peso de la carga (R) dividido por el número de poleas del polipasto.
Polea fija Polea móvil Polipasto
𝑃 =𝑅𝑛
Dónde: P: Potencia R: Resistencia n: Número de poleas fijas y móviles.
5 Conversión del movimiento circular en movimiento rectilíneo Éste es una de las conversiones de movimiento más empleada ya que todos los motores generan un movimiento circular o de rotación y, en el caso de un coche, se debe transformar en un movimiento rectilíneo para desplazar el coche.
5.1 Torno Está compuesto por un cilindro que gira alrededor de su eje con una manivela. En el cilindro se fija un extremo de una cuerda o cable y, en el otro extremo se fija la carga (R). Al ejercer una fuerza sobre la manivela que la hace girar, la cuerda se enrolla sobre el cilindro, elevando la carga.
El torno es una palanca de primer género. El fulcro (A) es el eje de giro, la resistencia (R) es el peso sujeto a la cuerda y la potencia (P) es el esfuerzo aplicado para hacer girar la manivela. El brazo de resistencia (BR) es el radio del cilindro del torno y el brazo de potencia (BP) es la longitud de la manivela.

Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 5
5.2 Piñón-cremallera Está formado por dos elementos:
1. Cremallera: Una barra metálica con dientes tallados en una de sus caras.
2. Piñón: una rueda dentada cuyos dientes presentan la misma separación que los de la cremallera, por lo que engrana en la cremallera.
Al engranar estos dos elementos, si hacemos girar el piñón, desplazamos longitudinalmente la cremallera y viceversa, pues se trata de un mecanismo reversible.
El sistema de dirección de un coche contiene, entre otros mecanismos, un piñón-cremallera. El movimiento de rotación del volante es transmitido a través del eje. En el otro extremo del eje, encontramos un piñón que se apoya sobre una cremallera que transforma el giro del eje en un movimiento izquierda a derecha de las ruedas.
Dirección de un coche Elevalunas manual de un coche
5.3 Tornillo
En un tornillo se distinguen tres partes fundamentales: la cabeza, el cuello y la rosca. Cada uno de los surcos de la rosca se denomina filete. Si la rosca se halla en la superficie interior del cilindro, se tiene una tuerca.
La cabeza tiene diversas formas (hexagonal, cilíndrica, redonda, avellanada, etc.) con diversas ranuras o hendiduras. El tornillo se sujeta por la cabeza con la herramienta adecuada y se hace girar. Si la cabeza es hexagonal, se debe usar una llave inglesa o una llave fija de la medida correspondiente. Si la cabeza es redonda con una ranura, emplearemos un destornillador, si la hendidura es hexagonal, emplearemos una llave Allen.
Los tamaños de los tornillos, y los tipos de rosca están estandarizados según las normas ISO que definen el sistema de rosca métrica. Así, la distancia entre dos filetes consecutivos se denomina paso de rosca y corresponde con la distancia que avanza en sentido longitudinal el tornillo al dar una vuelta completa.
Este mecanismo destaca por transmitir grandes fuerzas con un desplazamiento uniforme y preciso. Se usa en tapones, grifos, sacacorchos, gatos de automóvil, etc. Aunque los tornillos y las tuercas suelen ser más utilizados como sistemas de sujeción en las uniones desmontables.
Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 6
6 Conversión de movimiento circular en movimiento circular. En este tipo de conversiones, siempre intervienen dos ejes: el eje conductor que es el que produce el movimiento y, el eje conducido que es el que lo recibe. Puede realizarse sólo con el fin de trasladar el movimiento del eje conductor al conducido manteniendo sus características (llevar el mismo movimiento a un punto alejado del motor) o bien modificar la velocidad, el sentido o la intensidad de la fuerza.
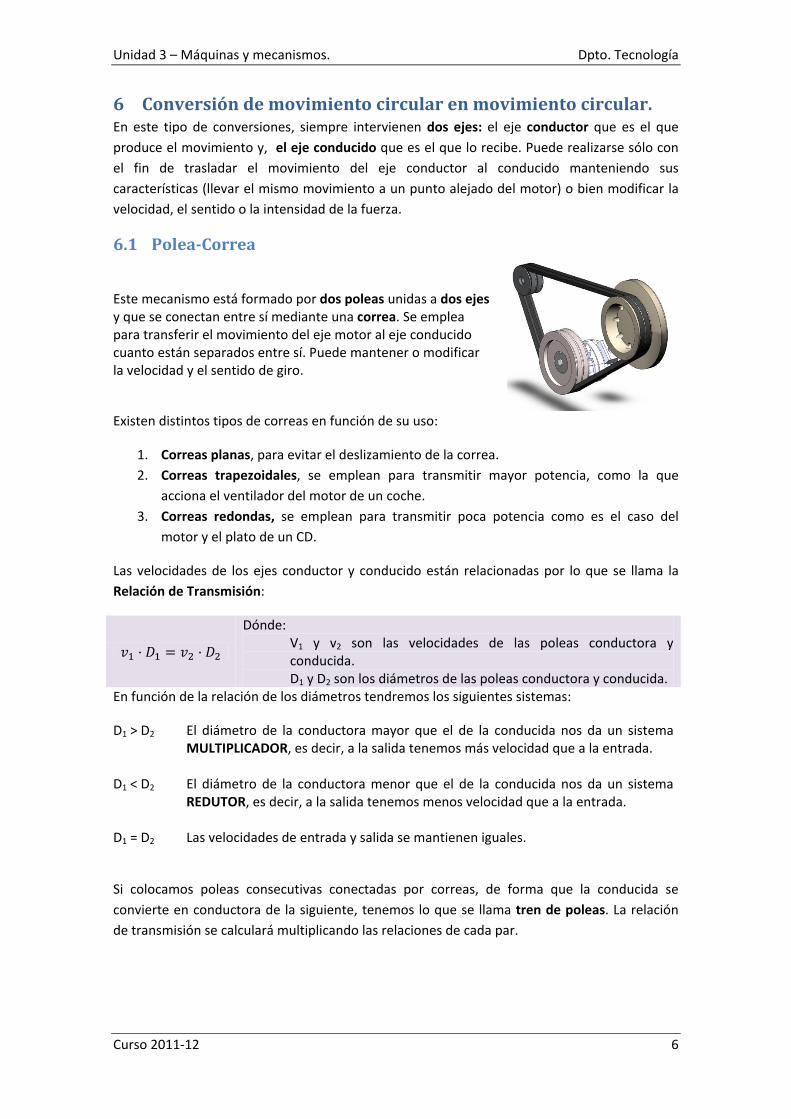
6.1 Polea-Correa
Este mecanismo está formado por dos poleas unidas a dos ejes y que se conectan entre sí mediante una correa. Se emplea para transferir el movimiento del eje motor al eje conducido cuanto están separados entre sí. Puede mantener o modificar la velocidad y el sentido de giro.
Existen distintos tipos de correas en función de su uso:
1. Correas planas, para evitar el deslizamiento de la correa. 2. Correas trapezoidales, se emplean para transmitir mayor potencia, como la que
acciona el ventilador del motor de un coche. 3. Correas redondas, se emplean para transmitir poca potencia como es el caso del
motor y el plato de un CD.
Las velocidades de los ejes conductor y conducido están relacionadas por lo que se llama la Relación de Transmisión:
𝑣1 · 𝐷1 = 𝑣2 · 𝐷2
Dónde: V1 y v2 son las velocidades de las poleas conductora y conducida. D1 y D2 son los diámetros de las poleas conductora y conducida.
En función de la relación de los diámetros tendremos los siguientes sistemas:
D1 > D2 El diámetro de la conductora mayor que el de la conducida nos da un sistema MULTIPLICADOR, es decir, a la salida tenemos más velocidad que a la entrada.
D1 < D2 El diámetro de la conductora menor que el de la conducida nos da un sistema REDUTOR, es decir, a la salida tenemos menos velocidad que a la entrada.
D1 = D2 Las velocidades de entrada y salida se mantienen iguales.
Si colocamos poleas consecutivas conectadas por correas, de forma que la conducida se convierte en conductora de la siguiente, tenemos lo que se llama tren de poleas. La relación de transmisión se calculará multiplicando las relaciones de cada par.
Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 7
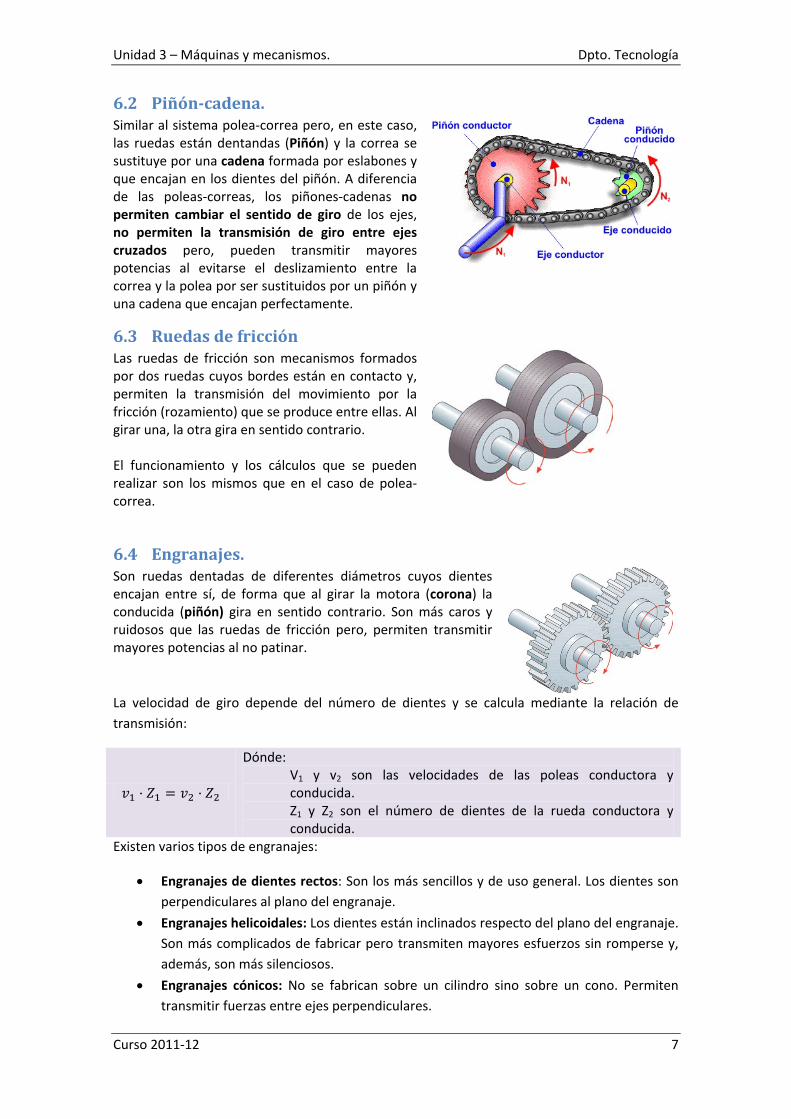
6.2 Piñón-cadena. Similar al sistema polea-correa pero, en este caso, las ruedas están dentandas (Piñón) y la correa se sustituye por una cadena formada por eslabones y que encajan en los dientes del piñón. A diferencia de las poleas-correas, los piñones-cadenas no permiten cambiar el sentido de giro de los ejes, no permiten la transmisión de giro entre ejes cruzados pero, pueden transmitir mayores potencias al evitarse el deslizamiento entre la correa y la polea por ser sustituidos por un piñón y una cadena que encajan perfectamente.
6.3 Ruedas de fricción Las ruedas de fricción son mecanismos formados por dos ruedas cuyos bordes están en contacto y, permiten la transmisión del movimiento por la fricción (rozamiento) que se produce entre ellas. Al girar una, la otra gira en sentido contrario. El funcionamiento y los cálculos que se pueden realizar son los mismos que en el caso de polea-correa.
6.4 Engranajes. Son ruedas dentadas de diferentes diámetros cuyos dientes encajan entre sí, de forma que al girar la motora (corona) la conducida (piñón) gira en sentido contrario. Son más caros y ruidosos que las ruedas de fricción pero, permiten transmitir mayores potencias al no patinar.
La velocidad de giro depende del número de dientes y se calcula mediante la relación de transmisión:
𝑣1 · 𝑍1 = 𝑣2 · 𝑍2
Dónde: V1 y v2 son las velocidades de las poleas conductora y conducida. Z1 y Z2 son el número de dientes de la rueda conductora y conducida.
Existen varios tipos de engranajes:
• Engranajes de dientes rectos: Son los más sencillos y de uso general. Los dientes son perpendiculares al plano del engranaje.
• Engranajes helicoidales: Los dientes están inclinados respecto del plano del engranaje. Son más complicados de fabricar pero transmiten mayores esfuerzos sin romperse y, además, son más silenciosos.
• Engranajes cónicos: No se fabrican sobre un cilindro sino sobre un cono. Permiten transmitir fuerzas entre ejes perpendiculares.

Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 8
• Engranajes interiores: los dientes se sitúan en el interior en lugar de en el exterior. Se emplean, por ejemplo, en el diferencial de un coche.
Engranaje recto Engranaje helicoidal Engranaje cónico
Si colocamos varios engranajes consecutivos de forma que el conducido se convierte en conductor del siguiente, tenemos lo que se llama tren de engranajes. La relación de transmisión se calculará multiplicando las relaciones de cada par.
6.5 Tornillo sinfín Está formado por dos ejes perpendiculares. En el eje motor, se monta el sinfín o tornillo y, en el eje conducido se monta una rueda dentada o corona. Por cada vuelta del tonillo, la rueda avanza sólo un diente y, por ello, se obtiene una gran reducción de la velocidad. La relación de transmisión se calcula igual que con los engranajes. Tan sólo hay que tener en cuenta que el sin sinfín actúa como un engranaje con un solo diente (Z1 = 1)
7 Conversión de movimiento circular en movimiento alternativo.
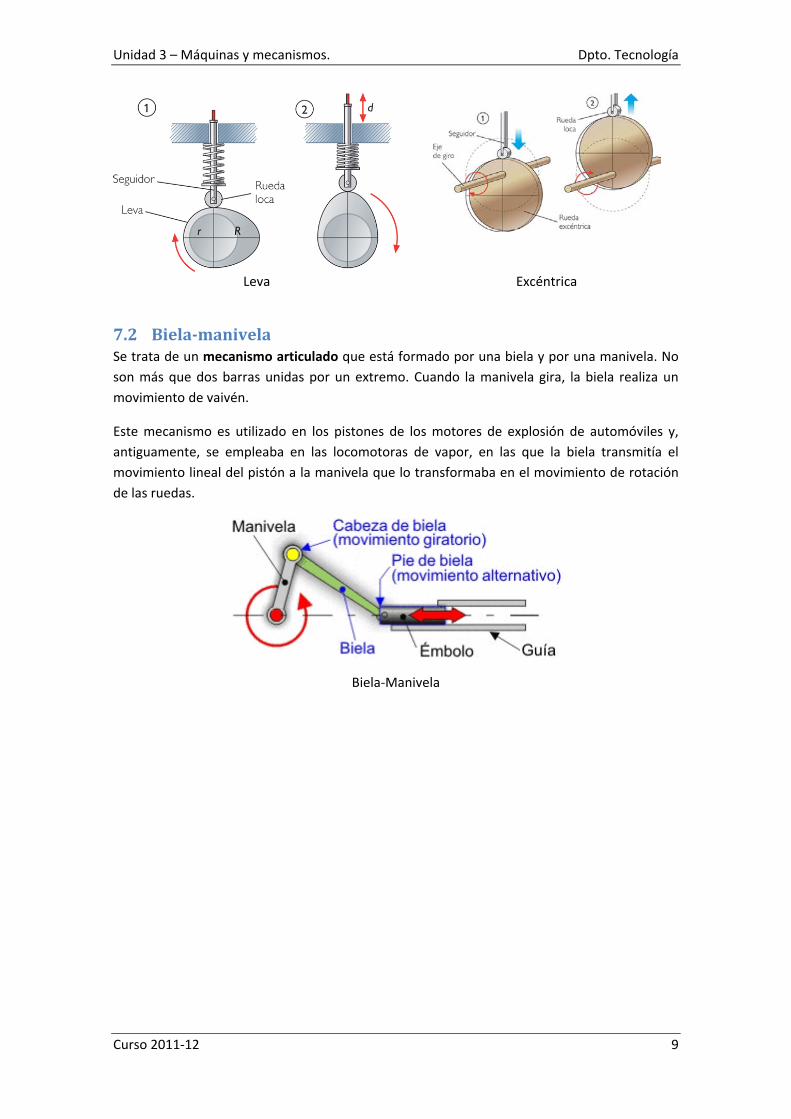
7.1 Levas y excéntricas Una leva es una pieza con forma ovoidal. Una excéntrica, en cambio, tiene forma de disco. En ambos casos, estas piezas giran alrededor de un eje que no coincide con su centro.
Ambos mecanismos se completan con otro elemento llamado seguidor que se halla en contactos ellas y se mueve hacia arriba o abajo mientras éstas giran.
Mediante la combinación del seguidor-leva o del seguidor-excéntrica, se consigue cambiar el movimiento circular de la leva o de la excéntrica en un movimiento alternativo del seguidor. Normalmente, el seguidor va asociado a un muelle que le permite retornar a su posición inicial.
Si se montan varias levas sobre un mismo eje se tiene un árbol de levas que se emplea en todos los motores de automóvil y, también se empleaba en molinos y telares.
Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 9
Leva Excéntrica
7.2 Biela-manivela Se trata de un mecanismo articulado que está formado por una biela y por una manivela. No son más que dos barras unidas por un extremo. Cuando la manivela gira, la biela realiza un movimiento de vaivén.
Este mecanismo es utilizado en los pistones de los motores de explosión de automóviles y, antiguamente, se empleaba en las locomotoras de vapor, en las que la biela transmitía el movimiento lineal del pistón a la manivela que lo transformaba en el movimiento de rotación de las ruedas.
Biela-Manivela
Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 10
8 Actividades 1. Menciona tres máquinas y el tipo de energía que transforman. (Por ejemplo, un
ventilador transforma la energía eléctrica en mecánica, movimiento de las aspas) 2. Clasifica los componentes de un reloj en:
A. Estructura: B. Mecanismos:
3. Un gato de automóvil es una herramienta que permite levantar el coche para cambiar la rueda. Al girar la barra, se eleva el coche. ¿Cuáles son los movimientos de entrada y salida del mecanismo?
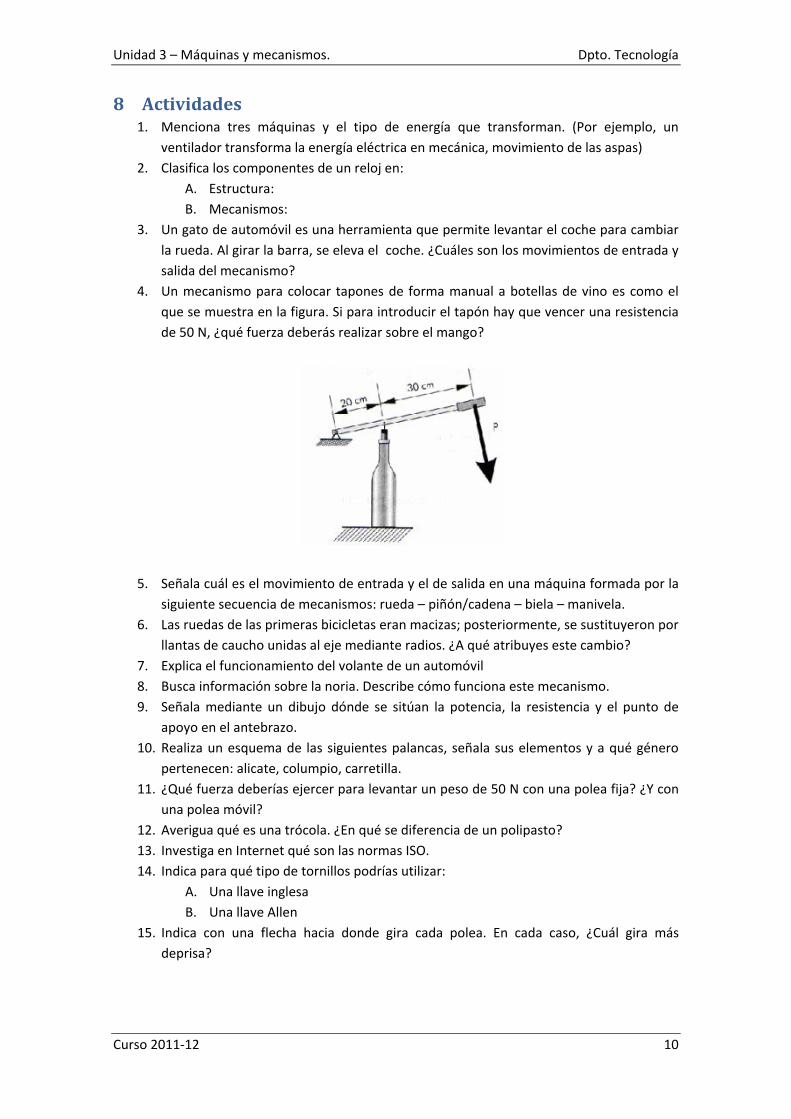
4. Un mecanismo para colocar tapones de forma manual a botellas de vino es como el que se muestra en la figura. Si para introducir el tapón hay que vencer una resistencia de 50 N, ¿qué fuerza deberás realizar sobre el mango?
5. Señala cuál es el movimiento de entrada y el de salida en una máquina formada por la siguiente secuencia de mecanismos: rueda – piñón/cadena – biela – manivela.
6. Las ruedas de las primeras bicicletas eran macizas; posteriormente, se sustituyeron por llantas de caucho unidas al eje mediante radios. ¿A qué atribuyes este cambio?
7. Explica el funcionamiento del volante de un automóvil 8. Busca información sobre la noria. Describe cómo funciona este mecanismo. 9. Señala mediante un dibujo dónde se sitúan la potencia, la resistencia y el punto de
apoyo en el antebrazo. 10. Realiza un esquema de las siguientes palancas, señala sus elementos y a qué género
pertenecen: alicate, columpio, carretilla. 11. ¿Qué fuerza deberías ejercer para levantar un peso de 50 N con una polea fija? ¿Y con
una polea móvil? 12. Averigua qué es una trócola. ¿En qué se diferencia de un polipasto? 13. Investiga en Internet qué son las normas ISO. 14. Indica para qué tipo de tornillos podrías utilizar:
A. Una llave inglesa B. Una llave Allen
15. Indica con una flecha hacia donde gira cada polea. En cada caso, ¿Cuál gira más deprisa?
Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 11
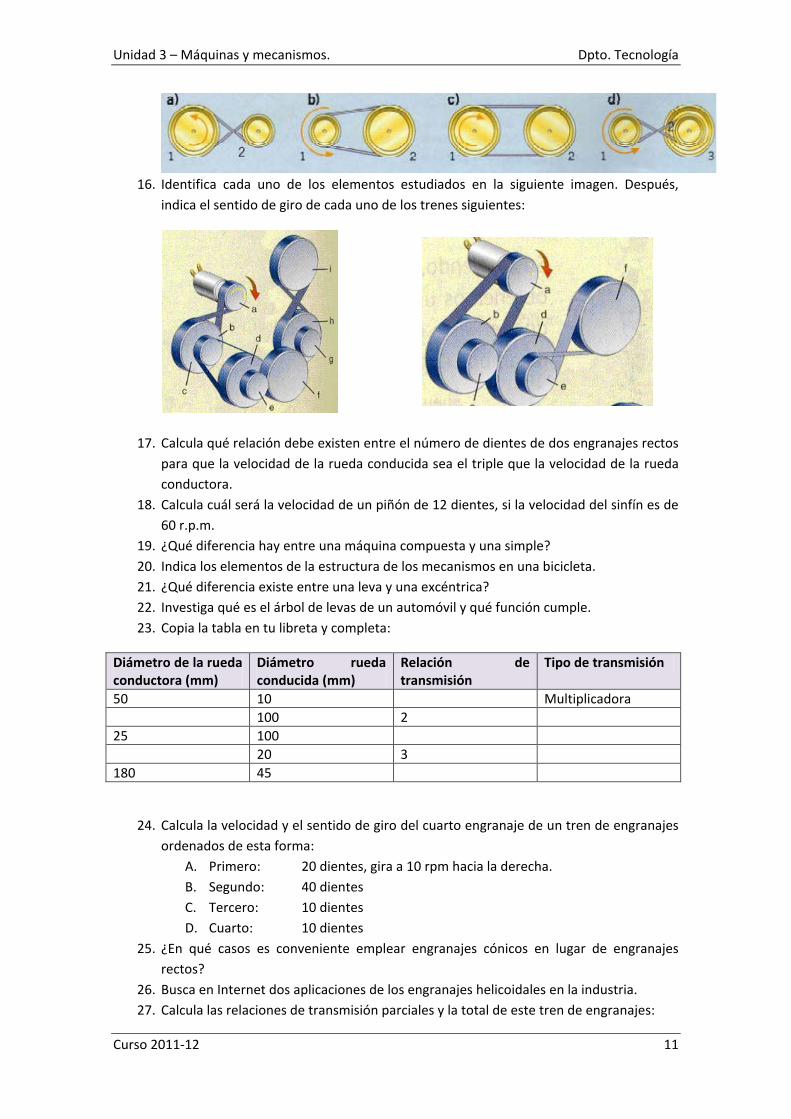
16. Identifica cada uno de los elementos estudiados en la siguiente imagen. Después,
indica el sentido de giro de cada uno de los trenes siguientes:
17. Calcula qué relación debe existen entre el número de dientes de dos engranajes rectos para que la velocidad de la rueda conducida sea el triple que la velocidad de la rueda conductora.
18. Calcula cuál será la velocidad de un piñón de 12 dientes, si la velocidad del sinfín es de 60 r.p.m.
19. ¿Qué diferencia hay entre una máquina compuesta y una simple? 20. Indica los elementos de la estructura de los mecanismos en una bicicleta. 21. ¿Qué diferencia existe entre una leva y una excéntrica? 22. Investiga qué es el árbol de levas de un automóvil y qué función cumple. 23. Copia la tabla en tu libreta y completa:
Diámetro de la rueda conductora (mm)
Diámetro rueda conducida (mm)
Relación de transmisión
Tipo de transmisión
50 10 Multiplicadora 100 2 25 100 20 3 180 45
24. Calcula la velocidad y el sentido de giro del cuarto engranaje de un tren de engranajes ordenados de esta forma:
A. Primero: 20 dientes, gira a 10 rpm hacia la derecha. B. Segundo: 40 dientes C. Tercero: 10 dientes D. Cuarto: 10 dientes
25. ¿En qué casos es conveniente emplear engranajes cónicos en lugar de engranajes rectos?
26. Busca en Internet dos aplicaciones de los engranajes helicoidales en la industria. 27. Calcula las relaciones de transmisión parciales y la total de este tren de engranajes:

Unidad 3 – Máquinas y mecanismos. Dpto. Tecnología
Curso 2011-12 12
A. Primero(conductor): 50 dientes B. Segundo: 100 dientes C. Tercero: 25 dientes D. Cuarto: 50 dientes E. Quinto: 50 dientes
28. ¿Cuántas vueltas dan todas estas poleas cuando la polea B ha dado cuatro vueltas?
29. Dado el siguiente tren de poleas
A. Indica el sentido de giro de cada polea B. Calcula la relación de transmisión considerando la polea A como la motora C. Si la polea A (motora) gira a 120 rpm, determina la velocidad de cada polea.
30. Compara las velocidades de giro de cada uno de los elementos de este tren de engranajes. Calcula las vueltas que dan todos los engranajes cuando la rueda B ha descrito dos vueltas
31. Con las siguientes rudas dentadas, diseña un mecanismo que consiga reducir 60 veces la velocidad de giro:
A. 4 dientes B. 6 dientes C. 24 dientes D. 90 dientes