infofich.unl.edu.arinfofich.unl.edu.ar/upload/f6067c22d23f2fe8f42db981cfef… · Mecánica...
45
U NIVERSIDAD N ACIONAL DEL L ITORAL FACULTAD DE I NGENIERÍA Y C IENCIAS H ÍDRICAS MECÁNICA COMPUTACIONAL Base Teórica de Métodos Numéricos Autores: Gerardo FRANCK Carlos GENTILE Norberto NIGRO Diego SKLAR E-mail: [email protected] [email protected] [email protected] [email protected] JULIO, 2019
Transcript of infofich.unl.edu.arinfofich.unl.edu.ar/upload/f6067c22d23f2fe8f42db981cfef… · Mecánica...

UNIVERSIDAD NACIONAL DEL LITORAL
FACULTAD DE INGENIERÍA Y CIENCIAS HÍDRICAS
MECÁNICA COMPUTACIONAL
Base Teórica de Métodos Numéricos
Autores:Gerardo FRANCKCarlos GENTILENorberto NIGRODiego SKLAR
E-mail:[email protected]
[email protected]@gmail.com
JULIO, 2019

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Índice
1. FDM - Método de Diferencias Finitas 21.1. Descripción del Método . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2. Ecuación del Calor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3. Ecuaciones en diferencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.4. Sistema de ecuaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.5. Expresiones para mallas con espaciado no uniforme . . . . . . . . . . . . . . . . . . . . 71.6. Condiciones de Borde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6.1. Dirichlet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106.2. Neumann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106.3. Robin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2. FVM - Método de Volúmenes Finitos 132.1. Descripción del Método . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2. Ecuación del Calor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3. FVM en mallas estructuradas bidimensionales . . . . . . . . . . . . . . . . . . . . . . . 152.4. Coeficientes del término difusivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.5. Condiciones de borde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5.1. Dirichlet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195.2. Neumann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205.3. Robin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3. FEM - Método de Elementos Finitos 223.1. Descripción del Método . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.2. Ecuación del Calor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.3. Elementos y funciones de forma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.1. Elementos triangulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.2. Elementos cuadrangulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.4. Cálculo de matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.1. Matriz de difusión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.2. Matriz de masa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.5. Ensamble de matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.6. Condiciones de borde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
6.1. Neumann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326.2. Robin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.7. Fuentes por elemento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.8. Fuentes puntuales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.9. Tensión/Deformación Plana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
9.1. Cálculo de matriz de rigidez . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 389.2. Cálculo de vector de fuerzas volumétricas . . . . . . . . . . . . . . . . . . . . . . 409.3. Condiciones de borde - Nodos fijos . . . . . . . . . . . . . . . . . . . . . . . . . 409.4. Condiciones de borde - Cargas distribuidas . . . . . . . . . . . . . . . . . . . . . 409.5. Cargas puntuales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4. Esquemas Temporales 424.1. Discretización Temporal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.2. Forward-Euler o Esquema Explícito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.3. Backward-Euler o Esquema Implícito . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 1

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
1. FDM - Método de Diferencias Finitas
En esta sección se presenta una revisión de los conceptos teóricos que sirvieron de base para laimplementación del método de diferencias finitas en código de alto nivel. Si el lector está familiarizadocon la formulación de ecuaciones en diferencias a partir del desarrollo de series de Taylor, puede omitirlos primeros cuatro puntos de esta sección y avanzar hasta el desarrollo de ecuaciones para mallascon espaciado no uniforme.
1.1. Descripción del Método
El Método de Diferencias Finitas es un método que permite la resolución aproximada de ecuacionesdiferenciales en derivadas parciales definidas en un dominio simple. Es de una gran sencillez concep-tual y constituye un procedimiento muy adecuado para la resolución de ecuaciones diferenciales enuna o dos dimensiones.
El método consiste en una aproximación de las derivadas parciales a partir de expresiones algebrai-cas que representan una combinación de la variable incógnita en distintos puntos del dominio. Comoresultado de la aproximación, la ecuación diferencial que describe el problema es remplazada por unnúmero finito de ecuaciones algebraicas, en términos de los valores de la variable dependiente enlos puntos seleccionados. Los valores en estos puntos se convierten en las incógnitas. A partir de laresolución del sistema de ecuaciones algebraicas se puede obtener la distribución aproximada de lavariable dependiente en cada punto seleccionado de la malla.
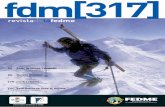
Para simplificar el desarrollo de ecuaciones se introduce un dominio como el de la Fig. 1, donde elespaciado entre nodos en sentido eje-x es uniforme, y dado por ∆x. Del mismo modo, el espaciado denodos en sentido eje-y es también uniforme, y dado por ∆y. De acuerdo a esta consideración, ∆x y∆y son constantes, pero no necesariamente iguales entre sí. En la sección 1.5 se realiza la deducciónde expresiones para el caso en que ∆x y ∆y no son uniformes.
y
Δ y
i−1,j−1x
i,j−1 i+1,j−1
i−1,j i,j i+1,j
i−1,j+1 i,j+1 i+1,j+1Δ x
P
Figura 1: Discretización de una malla de para FDM.
Los puntos de la malla en la Fig. 1 están identificados por un índice i, el cual se incrementa en elsentido positivo del eje-x, y un índice j, el cual se incrementa en el sentido positivo del eje-y. Si (i, j)es el índice del punto P en la Fig. 1, luego el punto inmediatamente a la derecha se designa como(i+1, j) y el punto inmediatamente a la izquierda como (i−1, j). De manera similar, el punto arriba es(i, j+1), y el punto abajo es (i, j−1). La metodología básica del método de diferencias finitas es la dereemplazar las derivadas que gobiernan las ecuaciones diferenciales por ecuaciones en diferencias.Esto va a dar como resultado un sistema de ecuaciones algebraicas a partir del cual se puede obtenerla solución aproximada para todos los puntos de la malla.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 2

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
1.2. Ecuación del Calor
n
Γϕ
Γq
Γh
Ω
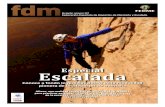
Figura 2: Dominio arbitrario Ω con fronteras Dirichlet (Γφ), Neumann (Γq) y Robin (Γh).
Aplicaremos las ecuaciones de FDM al modelo de transporte escalar en un dominio bidimensional, sinconsiderar fenómenos convectivos. Es decir, en la ecuación sólo se tienen en cuenta los fenónemosdifusivos, reactivos y de producción, tanto en estado estacionario como transiente. Consideremos eltransporte de una sustancia de concentración φ [1] en un medio arbitrario como el de la Fig. 2, dondeel campo de velocidades es nulo (v = 0) y la difusividad k > 0. Además consideramos que φ seconsume con una reacción química de cinética de primer orden, con constante c > 0 y que hay unaproducción de φ dada por una densidad de producción G. Luego,
Dφ
Dt= k∆φ− cφ+G
∂φ
∂t+
=0
v · ∇φ = k∆φ− cφ+G
∂φ
∂t= k∆φ− cφ+G (1)
con condiciones de contornoφ = φ, en Γφ
−k ∂φ∂n
= q, en Γq
−k ∂φ∂n
= h(φ− φ∞), en Γh
(2)
Los términos involucrados en (1) se denominan
∂φ
∂t= Término temporal
k∆φ = Término difusivo
cφ = Término reactivo
G = Término fuente o producción
(3)
Tanto k como c podrían ser funciones de la posición y del tiempo, pero aquí sólo se considerarán cons-tantes. Por otro lado, al término producción G lo consideramos variando únicamente con la posición,es decir, G(x, y). Las dimensiones para dichos términos son [1]
k :
[m2
sec
]c :
[1
sec
]G :
[[φ]
sec
] (4)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 3

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Finalmente, la ec. (1) puede reescribirse de manera más conveniente como
∂φ
∂t− k
(∂2φ
∂x2+∂2φ
∂y2
)+ cφ = G (5)
1.3. Ecuaciones en diferencias
Las representaciones en diferencias finitas de los operadores diferenciales se derivan de las expan-siones por series de Taylor. Por ejemplo, el valor de la magnitud φ en el punto (i + 1, j) puede serexpresado en términos de las series de Taylor centradas en el punto (i, j) como
φi+1,j = φi,j + ∆x
(∂φ
∂x
)i,j
+∆x2
2
(∂2φ
∂x2
)i,j
+∆x3
6
(∂3φ
∂x3
)i,j
+ . . . (6)
Matemáticamente, la ec. (6) es una expresión exacta para φi+1,j si la serie converge. En la práctica,para ∆x < 1, cualquier término de orden mayor a ∆x será menor que ∆x. Por lo tanto, para cualquierfunción φ, la ec. (6) puede ser truncada en un número finito de términos. Por ejemplo, si se descartanlos términos de orden O(∆x3) o superiores, entonces la ec. (6) queda
φi+1,j ≈ φi,j + ∆x
(∂φ
∂x
)i,j
+∆x2
2
(∂2φ
∂x2
)i,j
(7)
Si los términos de orden O(∆x2) y superiores son truncados, la ec. (7) se reduce a
φi+1,j ≈ φi,j + ∆x
(∂φ
∂x
)i,j
(8)
En (7) y (8) los términos de orden superior que fueron descartados representan el error de truncamien-to. Obviamente, este error puede ser reducido al considerar más términos de las series de Taylor asícomo también haciendo más pequeño el tamaño de ∆x.
Volviendo a la ec. (6) y resolviendo para (∂φ/∂x)i,j se llega a(∂φ
∂x
)i,j
=φi+1,j − φi,j
∆x− ∆x
2
(∂2φ
∂x2
)i,j
− ∆x2
6
(∂3φ
∂x3
)i,j
+ . . .
o bien (∂φ
∂x
)i,j
=φi+1,j − φi,j
∆x+O(∆x) (9)
La expresión de la diferencia de primer orden de precisión para la derivada (∂φ/∂x)i,j de la ec. (9) sedenomina diferencia hacia adelante o forward difference. Considerando ahora la expansión en seriesde Taylor para φi−1,j alrededor de φi,j
φi−1,j = φi,j −∆x
(∂φ
∂x
)i,j
+∆x2
2
(∂2φ
∂x2
)i,j
− ∆x3
6
(∂3φ
∂x3
)i,j
+ . . . (10)
Resolviendo para (∂φ/∂x)i,j , obtenemos(∂φ
∂x
)i,j
=φi,j − φi−1,j
∆x+O(∆x) (11)
la cual se denomina diferencia hacia atrás o backward difference de primer orden.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 4

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Restando la ec. (10) a la ec. (6) se obtiene(∂φ
∂x
)i,j
=φi+1,j − φi−1,j
2∆x+O(∆x2) (12)
expresión denominada diferencia central o central difference, la cual es una aproximación de segundoorden de precisión a la derivada (∂φ/∂x) centrada en el punto (i, j).
Hasta aquí hemos encontrado tres expresiones diferentes, con distintos órdenes de precisión y puntosde la malla involucrados en el cálculo, únicamente para la primer derivada de la función φ. Para obteneruna derivada de segundo orden se suman las ec. (6) y (10) y luego se resuelve para (∂2φ/∆x2)i,j(
∂2φ
∂x2
)i,j
=φi+1,j − 2φi,j + φi−1,j
∆x2+O(∆x2) (13)
la cual es una derivada de segundo orden centrada en el punto (i, j) con precisión de orden O(∆x2).El razonamiento es análogo para deducir las expresiones de las derivadas con respecto a la variableindependiente y.
En las ec. (14) se presenta el resumen de expresiones para las derivadas de primer y segundo orden.
Para la variable x :(∂φ
∂x
)i,j
=φi+1,j − φi,j
∆x+O(∆x) [1ra. derivada, forward difference](
∂φ
∂x
)i,j
=φi,j − φi−1,j
∆x+O(∆x) [1ra. derivada, backward difference](
∂φ
∂x
)i,j
=φi+1,j − φi−1,j
2∆x+O(∆x2) [1ra. derivada, central difference](
∂2φ
∂x2
)i,j
=φi+1,j − 2φi,j + φi−1,j
∆x2+O(∆x2) [2da. derivada, central difference]
Para la variable y :(∂φ
∂y
)i,j
=φi,j+1 − φi,j
∆y+O(∆y) [1ra. derivada, forward difference](
∂φ
∂y
)i,j
=φi,j − φi,j−1
∆y+O(∆y) [1ra. derivada, backward difference](
∂φ
∂y
)i,j
=φi,j+1 − φi,j−1
2∆y+O(∆y2) [1ra. derivada, central difference](
∂2φ
∂y2
)i,j
=φi,j+1 − 2φi,j + φi,j−1
∆y2+O(∆y2) [2da. derivada, central difference]
(14)
Volviendo a la ec. (1), si consideramos ahora al sistema estacionario podemos despreciar el términode variación temporal y reformular la ecuación como
−k(∂2φ
∂x2+∂2φ
∂y2
)+ cφ = G (15)
A partir de los resultados obtenidos en (14) podemos reescribir la ec. (15) reemplazando los operado-res diferenciales por sus correspondientes expresiones en diferencias. Luego, el stencil para un punto
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 5

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
(i, j) interior de una malla será
−k(φi+1,j − 2φi,j + φi−1,j
∆x2+φi,j+1 − 2φi,j + φi,j−1
∆y2
)+ cφi,j = Gi,j (16)
donde se expresa también la variación de la fuente G para cualquier punto de la malla.
1.4. Sistema de ecuaciones
A lo largo de la sección hemos hecho referencia a encontrar la distribución de la magnitud escalar φmediante la resolución de un sistema de ecuaciones algebraicas. Dicho sistema variará de acuerdoa los valores de las constantes del problema, la geometría de la malla y las condiciones de bordeimpuestas, entre otros. Se hará aquí una breve mención de la forma que adoptan los sistemas alge-braicos que surgen de la aplicación del método de diferencias finitas. El lector encontrará un desarrollomás acabado del tema en Zienkiewicz y Morgan (1983) [2].
Resulta ilustrativo analizar un caso base sencillo: una placa rectangular de dimensiones L ×M conespaciado uniforme ∆x = 1 y ∆y = 1, cuyas condiciones de contorno vienen dadas por
φi0 = φ, i = 1 . . . L
φLj = φ, j = 1 . . .M
φiM = φ, i = 1 . . . L
φ0j = φ, j = 1 . . .M
(17)
Se puede demostrar que a partir de las ec. (16) y (17), la aplicación del método de diferencias finitasproduce una solución del tipo
Kφ = F (18)
siendo K una matriz tri-diagonal por bloques
K = k
K −I 0 0
−I K −I 0
0 −I K −I
. . . . . . . . .
−I K −I
0 −I K
(19)
donde I es una matriz identidad de (M − 1)× (M − 1) y K se define convenientemente como
K =
4 + c −1 0 0
−1 4 + c −1 0
0 −1 4 + c −1
. . . . . . . . .
−1 4 + c −1
0 −1 4 + c
(20)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 6

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Debe observarse en (20) la contribución a la diagonal principal de K del término reactivo (constantec).
Por otro lado, φ y F son vectores, donde el primero contiene las incógnitas del problema y el segundolos valores que surgen de la presencia de fuentes de calor y la aplicación de las condiciones de borde.Ambos vectores serán de dimensiones (L − 1) × (M − 1), es decir, un valor para cada nodo de lamalla. Los vectores tendrán la siguiente forma
φ =
φ11
φ12
φ13
...
φ1,M−1
φ21
φ22
φ23
...
φ2,M−1
...
φL−1,1
φL−1,2
φL−1,3
...
φL−1,M−1
, F =
F11
F12
F13
...
F1,M−1
F21
F22
F23
...
F2,M−1
...
FL−1,1
FL−1,2
FL−1,3
...
FL−1,M−1
(21)
1.5. Expresiones para mallas con espaciado no uniforme
En la sección anterior se hallaron las expresiones en diferencias para los operadores de derivadas deprimer y segundo orden para el caso en que la malla es de espaciado uniforme en x y en y. Cuandola malla presenta un espaciado no uniforme ya no podemos asumir ∆x y ∆y como constantes y por lotanto hay que reformular las expresiones para adaptarlas al nuevo contexto. Como se vio, la expresióndel operador derivada segunda se puede aproximar con una precisión de segundo orden a partir detres puntos de la malla. Por ejemplo, para la derivada en dirección x, el operador diferencial requierede los puntos φi+1,j , φi,j y φi−1,j . La ec. (13) puede reescribirse como(
∂2φ
∂x2
)i,j
= a∗xφi+1,j + b∗xφi,j + c∗xφi−1,j (22)
dondeφi+1,j : a∗x =
1
∆x2
φi,j : b∗x =−2
∆x2
φi−1,j : c∗x =1
∆x2
(23)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 7

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
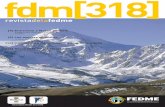
Ahora bien, queremos encontrar una expresión similar a la de la ec. (22), pero donde los coeficientesasociados a cada nodo se adapten a una malla de espaciado no uniforme, como la de la Fig. 3.
y
Δ yn
i−1,j−1x
i,j−1 i+1,j−1
i−1,j i,j i+1,j
i−1,j+1 i,j+1 i+1,j+1
Δ xeΔ xw
Δ ys
P
N
EW
S
Figura 3: Discretización de una malla de para FDM con espaciado no uniforme.
Se introduce un leve cambio de notación para poder diferenciar las distancias entre nodos, ahoradiferentes a derecha, izquierda, arriba y abajo. Para el punto P ubicado en la posición (i, j) sus nodosvecinos serán
(i+ 1, j) : (E), a una distancia ∆xe de P
(i− 1, j) : (W ), a una distancia ∆xw de P
(i, j + 1) : (N), a una distancia ∆yn de P
(i, j − 1) : (S), a una distancia ∆ys de P
Luego, queremos hallar los nuevos coeficientes que describen los operadores en diferencias para laderivada segunda en x e y (
∂2φ
∂x2
)i,j
= axφi+1,j + bxφi,j + cxφi−1,j (24)(∂2φ
∂y2
)i,j
= ayφi,j+1 + byφi,j + cyφi,j−1 (25)
Nótese que los coeficientes de la ec. (22) llevan un asterisco como superíndice para diferenciarlos delos coeficientes de las ec. (24) y (25) que hallaremos a continuación. Reformulando las expresiones de(6) y (10) para el nuevo esquema tenemos que
φi+1,j = φi,j + ∆xe
(∂φ
∂x
)i,j
+∆x2
e
2
(∂2φ
∂x2
)i,j
+O(∆x3e)
φi−1,j = φi,j −∆xw
(∂φ
∂x
)i,j
+∆x2
w
2
(∂2φ
∂x2
)i,j
+O(∆x3w)
(26)
Luego, a partir de la ec. (26), se puede expresar el operador derivada de segundo orden como unacombinación lineal de los puntos (i+ 1, j), (i, j) y (i− 1, j)(
∂2φ
∂x2
)i,j
= ax
[φi,j + ∆xe
(∂φ
∂x
)i,j
+∆x2
e
2
(∂2φ
∂x2
)i,j
]+ bxφi,j + . . .
+ cx
[φi,j −∆xw
(∂φ
∂x
)i,j
+∆x2
w
2
(∂2φ
∂x2
)i,j
] (27)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 8

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
(∂2φ
∂x2
)i,j
= [ax + bx + cx]φi,j + [ax∆xe − cx∆xw]
(∂φ
∂x
)i,j
+ . . .
+
[ax
∆x2e
2+ cx
∆x2w
2
](∂2φ
∂x2
)i,j
(28)
Para que se cumpla la igualdad a ambos lados de la ec. (28) debe darse que
[ax+ bx+ cx] = 0
[ax∆xe − cx∆xw] = 0[ax
∆x2e
2+ cx
∆x2w
2
]= 1
(29)
A partir de (29) puede expresarse el siguiente sistema de ecuaciones[1,5]1 1 1
∆xe 0 −∆xw∆x2
e
20
∆x2w
2
ax
bx
cx
=
0
0
1
(30)
Resolviendo el sistema de ecuaciones dado por (30) se obtiene
ax =2
∆xe(∆xe + ∆xw)
bx =−2
∆xe∆xw
cx =2
∆xw(∆xe + ∆xw)
(31)
Debe observarse que cuando el espaciado de la malla es uniforme en dirección eje-x, es decir que∆xe = ∆xw = ∆x, las expresiones dadas por (31) resultan iguales a las introducidas previamente en(23).
Finalmente, arribamos a la expresión de la derivada segunda en dirección eje-x de la magnitud escalarφ (
∂2φ
∂x2
)i,j
=2φi+1,j
∆xe(∆xe + ∆xw)− 2φi,j
∆xe∆xw+
2φi−1,j
∆xw(∆xe + ∆xw)(32)
la cual es de primer orden de precisión. A diferencia de lo que ocurre cuando el espaciado es unifor-me, la aproximación de la derivada segunda con tres puntos es O(∆x), siendo ∆x la mayor de lasdistancias entre nodos en dirección x.
Se puede seguir el mismo razonamiento para encontrar que los coeficientes para la derivada en direc-ción eje-y son
ay =2
∆yn(∆yn + ∆ys)
by =−2
∆yn∆ys
cy =2
∆ys(∆yn + ∆ys)
(33)
y la derivada de segundo orden en dirección eje-y es(∂2φ
∂y2
)i,j
=2φi,j+1
∆yn(∆yn + ∆ys)− 2φi,j
∆yn∆ys+
2φi,j−1
∆ys(∆yn + ∆ys)(34)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 9

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Estamos ahora en condiciones de reformular el stencil de nodos interiores de la malla para el caso enque tanto ∆x como ∆y no son uniformes
−k(
2φi+1,j
∆xe(∆xe + ∆xw)− 2φi,j
∆xe∆xw+
2φi−1,j
∆xw(∆xe + ∆xw)
)+ . . .
−k(
2φi,j+1
∆yn(∆yn + ∆ys)− 2φi,j
∆yn∆ys+
2φi,j−1
∆ys(∆yn + ∆ys)
)+ cφi,j = Gi,j
(35)
Como ya se vio, la expresión de la ec. (35) es de carácter general y abarca también el caso en que elespaciado sea uniforme en x, en y o en ambos.
1.6. Condiciones de Borde
6.1. Dirichlet
Una condición de borde de tipo Dirichlet implica fijar el valor de la magnitud escalar en el borde, esdecir, φborde = φ, donde φ es un valor arbitrario definido para una determinada frontera del dominio.Básicamente, aplicar una condición de frontera Dirichlet en FDM implica reemplazar el valor φi,j por φen todos los nodos (i, j) ∈ Γφ. Luego, φi,j ya no es una incógnita sino un valor solución ya conocido.Una forma de adaptar el sistema de ecuaciones para los nodos pertenecientes a Γφ es reemplazar lasecuaciones por
φi,j = φ, ∀ (i, j) ∈ Γφ (36)
Para llevar la ec. (36) al sistema de ecuaciones Kφ = F se puede reemplazar cada fila de la matriz Kpor la ecuación trivial φi,j = φ. Esto equivale a transformar la fila en un vector de ceros con un 1 enla columna que integra la diagonal principal de la matriz. Luego, siguiendo la notación introducida en(21), tendremos que Fi,j = φ.
6.2. Neumann
Γq
ny
Δ y
i−1,j−1
Δ x
xi,j−1 i+1,j−1
i−1,j i,j i+1,j
i−1,j+1 i,j+1 i+1,j+1Δ x
P
Figura 4: Frontera de una malla. Ubicación de nodos ficticios.
En la Fig. 4 se plantea una sección de una malla donde a la frontera Γq (derecha) se le impone unacondición de borde de tipo Neumann, es decir, se fija cuánto calor fluye en dirección normal a lafrontera. Esta situación implica que ya no vamos a conocer el valor de temperatura asociada a cadanodo de la frontera Γq sino su valor de flujo normal.
Suponiendo una malla de espaciado uniforme tanto en x como en y, podemos expresar el stencil paraun nodo (i, j) ∈ Γq del mismo modo que se hizo en (16). A priori el resultado es idéntico a lo planteado
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 10

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
anteriormente, pero ahora se tiene que φi+1,j es una incógnita. Se introduce aquí el concepto de nodoficticio, ya que como vemos en la Fig. 4 el nodo en la posición (i + 1, j) está ubicado fuera de loslímites de la malla, a una distancia ∆x del nodo (i, j). Este nodo no tiene un significado físico, sinoque se plantea como parte de la técnica numérica.
Ahora bien, necesitamos una ecuación más para obtener nuevamente un sistema con el mismo númerode ecuaciones que incógnitas. Recordando las ec. (2) y (14), podemos reemplazar el operador derivadaprimera por su correspondiente ecuación en diferencias. Luego el flujo normal a través de la fronteraqueda definido como
−kφi+1,j − φi−1,j
2∆x= q, ∀(i, j) ∈ Γq (37)
Obsérvese que la diferencia (φi+1,j − φi−1,j) es un vector paralelo al vector normal de la frontera Γq. Sise hubiera definido la diferencia como (φi−1,j − φi+1,j) también sería un vector en la misma direcciónque el anterior, pero con sentido opuesto. Este último caso correspondería a una frontera cuyo vectornormal apunta en sentido eje-x negativo.
Combinando los resultados de las ecuaciones (16) y (37) y realizando el análisis precedente para todaslas fronteras arribamos finalmente a
−k(
2φi−1,j − 2φi,j∆x2
+φi,j+1 − 2φi,j + φi,j−1
∆y2
)+ cφi,j = Gi,j −
2q
∆x, [frontera Este]
−k(
2φi+1,j − 2φi,j∆x2
+φi,j+1 − 2φi,j + φi,j−1
∆y2
)+ cφi,j = Gi,j −
2q
∆x, [frontera Oeste]
−k(φi+1,j − 2φi,j + φi−1,j
∆x2+
2φi,j−1 − 2φi,j∆y2
)+ cφi,j = Gi,j −
2q
∆y, [frontera Norte]
−k(φi+1,j − 2φi,j + φi−1,j
∆x2+
2φi,j+1 − 2φi,j∆y2
)+ cφi,j = Gi,j −
2q
∆y, [frontera Sur]
(38)
Se observa a partir de (38) que la aplicación de este tipo de condición de borde produce dos cambiosen el stencil de la ec. (16):
• Se cambian algunos coeficientes de la matriz K, ya que se duplica la contribución del nodoanterior al borde y desaparece la contribución del nodo posterior al borde (nodo ficticio).• Se agrega al vector F un coeficiente que depende del valor q de la condición Neumann, es decir,
parte de la aplicación de la condición de borde implica la aparición de una fuente en el nodo defrontera.
El lector puede observar que a partir de las expresiones (38) se puede deducir la forma del stencil paranodos “esquina”, es decir, nodos con dos aportes de frontera Neuman (uno en dirección ± eje−x y elotro en dirección ± eje−y).
6.3. Robin
El caso de las condiciones de contornos mixtas es un caso que combina las dos condiciones decontorno previamente tratadas, las Dirichlet o de valor impuesto para la incógnita y la de Neumann queimpone condiciones sobre la derivada de esta función incógnita [1].
Si suponemos ahora que la frontera derecha de la Fig. 4 se encuentra sometida a una condición defrontera mixta o Robin, debemos encontrar la forma del stencil para el nuevo esquema. Recordando(2), podemos expresar la ecuación en diferencias para la frontera Γh
−kφi+1,j − φi−1,j
2∆x= h (φi,j − φ∞) , ∀(i, j) ∈ Γh (39)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 11

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Siguiendo la metodología aplicada para Neumann, encontramos que el stencil para todas las fronterasde la malla con condición Robin es
− k(
2φi−1,j − 2φi,j∆x2
+φi,j+1 − 2φi,j + φi,j−1
∆y2
)+ . . .
. . . + φi,j
(c+
2h
∆x
)= Gi,j +
2hφ∞∆x
, [frontera Este]
− k(
2φi+1,j − 2φi,j∆x2
+φi,j+1 − 2φi,j + φi,j−1
∆y2
)+ . . .
. . . + φi,j
(c+
2h
∆x
)= Gi,j +
2hφ∞∆x
, [frontera Oeste]
− k(φi+1,j − 2φi,j + φi−1,j
∆x2+
2φi,j−1 − 2φi,j∆y2
)+ . . .
. . . + φi,j
(c+
2h
∆y
)= Gi,j +
2hφ∞∆y
, [frontera Norte]
− k(φi+1,j − 2φi,j + φi−1,j
∆x2+
2φi,j+1 − 2φi,j∆y2
)+ . . .
. . . + φi,j
(c+
2h
∆y
)= Gi,j +
2hφ∞∆y
, [frontera Sur]
(40)
Aquí la imposición de este tipo de condición de borde realiza los siguientes cambios en el sistema:
• Al igual que Neumann, se cambian algunos coeficientes de la matriz K, ya que se duplica lacontribución del nodo anterior al borde y desaparece la contribución del nodo posterior al borde(nodo ficticio). Pero también aparece una contribución al nodo (i, j), es decir, se suma un aporteque depende del coeficiente de convección h a la diagonal principal de la matriz.• Se agrega al vector F un coeficiente que depende del valor h de la condición Robin, es decir,
parte de la aplicación de la condición de borde implica la aparición de una fuente en el nodo defrontera (si se compara con el caso Neumann podría pensarse en una equivalencia q = −hφ∞).
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 12

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
2. FVM - Método de Volúmenes Finitos
2.1. Descripción del Método
Continuando con la descripción de los métodos numéricos que forman parte de este desarrollo, sepresenta el Método de Volúmenes Finitos. Existen distintas formulaciones del mismo para hallar lasolución de un sistema. Puntualmente en este trabajo, nos enfocamos en el método de volúmenesfinitos para problemas bidimensionales, con tratamiento de celdas ortoédricas con los lados alineadosa los ejes cartesianos. La solución del sistema se expresa en el centroide de cada celda [3].
En contraste a lo que sucede en FDM, donde se reemplazan los operadores diferenciales por ecuacio-nes en diferencias definidas para cada nodo de la malla, en el método de volúmenes finitos se planteauna solución del sistema a partir de la aplicación de un balance integral en todo el dominio, el cual separticiona en celdas o volúmenes finitos. Finalmente se arriba también a un sistema de ecuaciones dela forma Kφ = F a partir del ensamble de todas las contribuciones individuales.
2.2. Ecuación del Calor
Volvamos a la ecuación del calor introducida en (1) y (2). Partimos nuevamente de un dominio arbitrariocomo el de la Fig. 2, donde ahora Ω se encuentra particionado en N celdas sin solapamiento entre sí.Si a la ec. (1) se le aplica un balance integral obtenemos∫∫∫
Ω
∂φ
∂tdΩ−
∫∫∫Ω
k∆φdΩ +
∫∫∫Ω
cφdΩ =
∫∫∫Ω
GdΩ (41)
lo cual puede ser expresado en términos de la discretización del dominio Ω como
N∑j=1
∫∫∫Ωj
∂φ
∂tdΩj −
∫∫∫Ωj
k∆φdΩj +
∫∫∫Ωj
cφdΩj
=N∑j=1
∫∫∫Ωj
GdΩj
(42)
siendo Ωj la porción del dominio correspondiente al volumen de la celda j. La ec. (42) plantea que elbalance integral en todo el dominio Ω puede ser expresado como una sumatoria de las contribucionesde cada balance local, es decir, el balance para cada celda. Asimismo, se observa que las integralesson volumétricas. Aplicando el Teorema de la Divergencia [4] al término difusivo, se puede pasar deuna integral de volumen a una de superficie según
N∑j=1
∫∫∫Ωj
∂φ
∂tdΩj −
M∑i=1
∫∫Γi
k∇φ · dΓi +
∫∫∫Ωj
cφdΩj
=
N∑j=1
∫∫∫Ωj
GdΩj
(43)
En (43) se plantea que la divergencia div(∇φ) en el volumen de control Ωj puede ser evaluada comoel gradiente∇φ sobre el contorno de la celda. Suponiendo que cada celda es un poliedro de M caras,luego el contorno puede descomponerse enM superficies. Debe observarse a su vez que se introduceun producto escalar entre el vector gradiente ∇φ y los vectores normales a las superficies que formanel contorno de la celda, dΓi (nótese el uso de negrita para indicar magnitud vectorial).
La ec. (43) puede reescribirse como
N∑j=1
∫∫∫Ωj
∂φ
∂tdΩj +
∫∫∫Ωj
cφdΩj −∫∫∫
Ωj
GdΩj
=N∑j=1
M∑i=1
∫∫Γi
k∇φ · dΓi
(44)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 13

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
donde se pone en evidencia que todo lo que se acumula o se pierde de la magnitud escalar φ enel interior del dominio Ω, debe estar en correspondencia con los flujos que atraviesan el contorno dedicho dominio [1].
Asumiendo ahora que el valor de φ será constante por celda y por cara, luego podemos realizar lassiguientes simplificaciones: ∫∫∫
Ωj
φdΩj = φjVj
∫∫Γi
φdΓi = φiAi
(45)
de donde se deduce que
• φj es el valor de la magnitud φ en el centroide de la celda j.• Vj es el volumen de la celda j.• φi es el valor de la magnitud φ en el centro de la cara i (perteneciente a la celda j).• Ai = Aini es el vector normal a la superficie de la cara i, cuya magnitud es Ai y su dirección
viene dada por el versor ni.
Finalmente, arribamos a
N∑j=1
[∂φj∂t
+ cφj −G]Vj =
N∑j=1
[M∑i=1
k∇φi ·Ai
](46)
la cual corresponde a la expresión general del método de volúmenes finitos aplicado a la ecuación decalor con términos difusivo, reactivo y fuente, en estado transiente.
P
N
S
EW
y
zx
Δ yP
Δ xPt
Figura 5: Vecindad de una celda P para el Método de Volúmenes Finitos.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 14

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
2.3. FVM en mallas estructuradas bidimensionales
Nos interesa ahora adaptar el resultado obtenido en (46) a un dominio estructurado como el de laFig. 5. Como puede verse, la malla se compone de celdas prismáticas, cuyos lados se encuentranalineados con los ejes cartesianos. Asimismo, los límites en el plano x−y de cada celda vienen dadospor los nodos de la malla. Obsérvese que la malla posee un espesor t, el cual se considera constanteen todo el dominio (aunque no es obligatorio) y permite definir el volumen de cada celda.
y
zx
Δ xP
Δ yP ϕP ϕeϕwϕs
ϕn
t
An(j)
As(−j)
Ae(i )Aw(−i )
VP
Figura 6: Propiedades de la celda P.
Analizando más en detalle la celda P, como puede verse en la Fig. 6, tenemos que:
• Sus dimensiones son ∆xP ×∆yP × t, siendo ∆xP ancho, ∆yP alto y t espesor.• El volumen de la celda es VP = ∆xP∆yP t.• En dos dimensiones nos interesa saber lo que sucede con las caras perpendiculares al planox− y de cada celda, es decir, las áreas a izquierda, derecha, arriba y abajo (o bien East, West,North y South). Dichas áreas son:
Ae = Aw = ∆yP t (caras derecha e izquierda, respectivamente). An = As = ∆xP t (caras superior e inferior, respectivamente).
A su vez, se indican los versores normales de cada una de estas áreas, siendo ±i = (±1, 0, 0)para las caras derecha e izquierda, y ±j = (0,±1, 0) para las caras superior e inferior, respecti-vamente, dado la característica estructurada de la malla. En general, el versor normal a una carase define como:
n =xneighb − xP‖xneighb − xP ‖
• Como puede verse en la Fig. 6, la celda cuenta con 5 valores característicos:
Valor en el centroide de la celda, φP . Valores en los centros de cada cara, φe, φw, φn y φs.
• Las celdas vecinas son:
E y W, con las que comparte las caras Ae y Aw, respectivamente. N y S, con las que comparte las caras An y As, respectivamente.
Debe observarse la notación aquí introducida, donde se especifican centroides de celdas con letrasmayúsculas (P,E,W,N y S) y las caras de la celda con letras minúsculas (e, w, n y s).
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 15

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Consideremos ahora el sistema de la ec. (46) como estacionario, es decir, podemos despreciar eltérmino de variación temporal. A partir de las consideraciones previas, y suponiendo que la celda Pposee sus cuatro vecinos, podemos expresar el stencil para dicha celda como:
cφPVP −GPVP = ke∇φe ·Ae + kw∇φw ·Aw + kn∇φn ·An + ks∇φs ·As (47)
En (47) se ha expresado el balance para la celda P, donde en el lado derecho de la ecuación seespecificó el gradiente de la magnitud φ a través del contorno de la celda, en el cual ya se identificancada una de las áreas que componen dicho contorno.
En este punto, debemos definir cómo evaluar cada uno de los gradientes, ya que el sistema de ecua-ciones que vamos a resolver, a partir de la aplicación del método de volúmenes finitos, permite hallarla distribución de la magnitud φ en toda la malla, pero los valores se ubican en el centroide de cadacelda. Esto nos obliga a definir cada una de las expresiones de los gradientes en función de los valoresde φ en centroides de celdas.
Tomemos por ejemplo el gradiente a través de la cara (e), es decir, ∇φe. Debemos hallar una expre-sión para el gradiente a través de la superficie Ae. Como puede verse en la Fig. 5, las celdas P y Ecomparten dicha superficie (aunque la notación si es a izquierda o derecha depende meramente de lacelda P y no de E). Luego, a partir de aproximaciones en series de Taylor (como se vio ya para FDM)podemos hallar que
∇φe =
(∂φ
∂x
)e
(i) =φE − φP
δe(i) (48)
donde δe es la distancia entre los centroides de las celdas P y E. En (48) se halló el gradiente a travésde la cara Ae como una expresión en diferencias entre los valores de φ en los centroides de las celdasP y E. Como el gradiente es un vector, en (48) se expresa también su correspondiente versor. Delmismo modo, ahora para la cara (w) hallamos que
∇φw =
(∂φ
∂x
)w
(−i) =φP − φW
δw(−i) =
φW − φPδw
(i) (49)
con δw la distancia entre los centroides de las celdas P y W. Siguiendo esta metodología, se puedenhallar las correspondientes expresiones para los gradientes a través de An y As. Luego la ec. (47) sepuede reformular convenientemente como
cφPVP −GPVP = keφE − φP
δe(i) · (i)Ae + kw
φW − φPδw
(i) · (i)Aw + . . .
+ knφN − φP
δn(j) · (j)An + ks
φS − φPδs
(j) · (j)As
(50)
Evaluando los productos escalares en (50), arribamos a
cφPVP −GPVP = keφE − φP
δeAe + kw
φW − φPδw
Aw + . . .
+ knφN − φP
δnAn + ks
φS − φPδs
As
(51)
Finalmente, tenemos que el stencil para la celda P es
φP (Re +Rw +Rn +Rs + cVP )−ReφE −RwφW −RnφN −RsφS = GPVP (52)
siendo
Re =keAeδe
, Rw =kwAwδw
, Rn =knAnδn
, Rs =ksAsδs
(53)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 16

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
A partir de (52) y (53) se puede hallar el stencil que surge de la aplicación del método de volúmenesfinitos a una celda P cuyos vecinos son E, W, N y S. Si se sigue el mismo procedimiento para todaslas celdas del dominio, se arriba nuevamente a un sistema de ecuaciones de la forma Kφ = F, concaracterísticas similares a lo visto anteriormente para FDM.
2.4. Coeficientes del término difusivo
En esta sección, se hace una breve mención sobre las constantes que forman parte de los coeficientesRe, Rw, Rs y Rn de la ec. (53). Cada uno de estos coeficientes se desprenden de la presencia deltérmino difusivo en la ecuación del calor y se componen de tres magnitudes que van a depender de lafísica del material y de la discretización del dominio:
• La conductividad térmica ki, la cual es una propiedad física del material que mide su capacidadde conducción de calor.• El área Ai, correspondiente a la porción del contorno de la celda en la que se evalúa el flujo
térmico.• La distancia δi, la cual mide la separación entre los dos centroides de las celdas que comparten
la cara (i).
Veamos término a término cómo éstos se deducen a partir de los datos de entrada al método numérico.Solo a los fines de clarificar la exposición, se ve en detalle lo que sucede para una celda P con vecinosE y W, a derecha e izquierda, respectivamente. El lector encontrará luego que el análisis es idénticopara las relaciones de P con vecinos N y S.
Superficies en las caras (e) y (w) de la celda P
En la Fig. 7 se especifican todos los términos que forman parte de los coeficientes Re y Rw. Las áreassombreadas corresponden a las caras (e) y (w) donde se evalúa la difusión de φ.
x
yz
Ae
ke
Awkw
Ww
δw
kP
P Ei-i
δe
e
t
Δ xP
Δ yP
Δ xW Δ xE
kEkW
Figura 7: Propiedades de la celda P. Términos que intervienen en el cálculo de los coeficientes deltérmino difusivo a izquierda y derecha.
Se deduce que las áreas a izquierda y derecha serán
Ae = Aw = ∆yP t (54)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 17

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Distancias a los centroides de las celdas E y W
Para definir las distancias entre centroides de las celdas, basta con observar que se componen comola suma entre las mitades de cada celda en esa dirección. Esto es,
δe =∆xP
2+
∆xE2
δw =∆xP
2+
∆xW2
(55)
Conductividad térmica en las caras (e) y (w) de la celda P
También a partir de la Fig. 7, podemos ver que ke y kw representan la conductividad térmica en lascaras derecha e izquierda de la celda P. Ahora bien, pensemos en cada una de las celdas con unvalor de conductividad constante en todo su volumen. Luego P tendrá una conductividad kP y E unaconductividad kE . Como se vio antes, ambas celdas comparten la superficie Ae, entonces si kP = kEinmediatamente se obtiene el valor de la conductividad ke sobre Ae. Pero si kP 6= kE , el valor deconductividad en Ae no es ni kP ni kE . Se habla en este caso de una “interfaz” entre ambas celdasy el valor correspondiente de conductividad debe ser promediado a partir de las conductividades encada celda. Adoptamos aquí la media armónica (debido a que la media aritmética no garantiza laconservación de los flujos), a partir de definir una relación fe que depende de las distancias entrecentroides y desde cada centroide a la superficie Ae. De igual manera se define para el caso en quekP 6= kW . Recordando los resultados obtenidos en (55) se obtiene que
fe =
∆xE2
∆xP2
+∆xE
2
=∆xE2δe
fw =
∆xW2
∆xP2
+∆xW
2
=∆xW2δw
(56)
En (56) se definieron los coeficientes que permiten hallar las expresiones finales de las conductividadeske y kw según:
ke =kPkE
fekP + (1− fe)kE
kw =kPkW
fekP + (1− fw)kW
(57)
Finalmente, podemos hallar los valores de los coeficientesRe yRw a partir de los resultados obtenidosen las ecuaciones (54) a (57). El análisis precedente pone de manifiesto la gran dependencia de loscoeficientes con la geometría de cada celda, siendo esto último una consecuencia de la discretizaciónadoptada para el dominio.
A continuación, en las ecuaciones (58) a (61) se introducen las expresiones de las constantes quecomponen los coeficientes Rn y Rs.
Superficies en las caras (n) y (s) de la celda P
An = As = ∆xP t (58)
Distancias a los centroides de las celdas N y S
δn =∆xP
2+
∆xN2
δs =∆xP
2+
∆xS2
(59)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 18

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Conductividad térmica en las caras (n) y (s) de la celda P
fn =
∆xN2
∆xP2
+∆xN
2
=∆xN2δn
fs =
∆xS2
∆xP2
+∆xS
2
=∆xS2δs
(60)
kn =kPkN
fnkP + (1− fn)kN
ks =kPkS
fskP + (1− fs)kS
(61)
2.5. Condiciones de borde
En las siguientes secciones se muestra el desarrollo de ecuaciones para obtener el stencil de cadafrontera para cada tipo de condición de borde. No se plantea el caso en que para una misma celdahaya más de una condición de borde (celda ubicada en una esquina de la malla), ya que, como com-probará luego el lector, éstas pueden ser obtenidas a partir de las fórmulas y ecuaciones enunciadasa continuación.
5.1. Dirichlet
En el método de volúmenes finitos, las condiciones de borde de tipo Dirichlet implican fijar el valor dela magnitud φ en la cara de la celda que pertenece a la frontera. A diferencia de lo que ocurre conFDM, la solución del método de volúmenes finitos se obtiene en los centroides de celdas, es por esto,que debemos reemplazar el término difusivo con el valor de la condición de borde impuesta.
Como vimos anteriormente, el término difusivo queda siempre planteado de la siguiente forma:
ki∇φi ·Ai = kiφF − φP
δiAi, i = e, w, n, s (62)
donde φF es el valor en el centroide del vecino F de P. Ahora bien, como estamos parados sobre unborde ya no habrá una celda vecina, de modo que φF tiene que ser reemplazado por el valor de lacondición de borde. Dicho borde se encuentra a una distancia ∆P /2 desde el centroide de la celda P,al que se le impone un valor arbitrario φborde = φ. Luego, podemos reformular la ec. (62) para hallar eltérmino difusivo en el borde:
ki∇φi ·Ai = kiφ− φP
∆P
2
Ai = R∗i (φ− φP ), i = e, w, n, s (63)
donde el coeficiente R∗i es
R∗i =2kiAi∆P
, i = e, w, n, s (64)
con ∆P = ∆xP para las fronteras a derecha e izquierda y ∆P = ∆yP para las fronteras a arriba yabajo. Finalmente, podemos hallar el stencil para cada frontera de borde a partir de la combinación delas ecuaciones (52), (53), (63) y (64).
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 19

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
φP (R∗e +Rw +Rn +Rs + cVP )−RwφW −RnφN −RsφS = GPVP +R∗eφ (E)
φP (Re +R∗w +Rn +Rs + cVP )−ReφE −RnφN −RsφS = GPVP +R∗wφ (W)
φP (Re +Rw +R∗n +Rs + cVP )−ReφE −RwφW −RsφS = GPVP +R∗nφ (N)
φP (Re +Rw +Rn +R∗s + cVP )−ReφE −RwφW −RnφN = GPVP +R∗sφ (S)
(65)
siendo
R∗e =2keAe∆xP
, R∗w =2kwAw∆xP
, R∗n =2knAn∆yP
, R∗s =2ksAs∆yP
(66)
Obsérvese en (65) que la condición de borde Dirichlet aporta un término fuente (lado derecho de laecuación) que depende de la temperatura impuesta φ y el coeficiente de difusión modificado.
5.2. Neumann
Como ya se vio, aplicar una condición de frontera Neumann implica imponer el valor de flujo normal endicha frontera. Recordando la expresión para este tipo de condiciones de borde
−ki(∂φ
∂n
)i
= −ki∇φi = q, i = e, w, n, s (67)
vemos que se especifica un valor q para el flujo normal a través de la frontera, en este caso, la carai de la celda. Luego podemos reemplazar el resultado de (67) en la expresión de la difusión en cadacara de la celda
−ki∇φi ·Ai = −ki∇φiAi = qAi, i = e, w, n, s (68)
En (68) se observa, nuevamente, que el versor del gradiente es paralelo al versor de la cara de lacelda, motivo que permite simplificar el producto interno entre ambos. Finalmente, podemos hallar elstencil para cada frontera Neumann a partir de la combinación de las ecuaciones (52), (53) y (68).
φP (Rw +Rn +Rs + cVP )−RwφW −RnφN −RsφS = GPVP − qAe (E)
φP (Re +Rn +Rs + cVP )−ReφE −RnφN −RsφS = GPVP − qAw (W)
φP (Re +Rw +Rs + cVP )−ReφE −RwφW −RsφS = GPVP − qAn (N)
φP (Re +Rw +Rn + cVP )−ReφE −RwφW −RnφN = GPVP − qAs (S)
(69)
Obsérvese en (69), al igual que lo ocurrido con las fronteras Dirichlet, la condición de borde Neumannaporta un término fuente (lado derecho de la ecuación), pero este depende del valor de flujo impuestoq y ya no habrá contribución en la diagonal principal de la matriz (desaparece el coeficiente Ri del ladoi, con i = e, w, n, s).
5.3. Robin
En el método de volúmenes finitos podemos expresar la condición de borde Robin para una frontera icomo
−ki(∂φ
∂n
)i
= h(φi − φ∞)⇒ −ki∇φi = h(φi − φ∞), i = e, w, n, s (70)
A partir de la ec. (70) podemos ver que ahora tenemos dos incógnitas, ya que desconocemos tanto elvalor de φ en el borde como su gradiente. Necesitamos incorporar una ecuación más para tener dos
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 20

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
ecuaciones con dos incógnitas y resolver dicho sistema. A partir de Series de Taylor centradas en lacara de la celda podemos plantear:
φP = φi +∇φi(xP − xi), i = e, w, n, s (71)
donde (xP − xi) = δi, es la distancia (vectorial) desde el centroide de la celda P a la cara (i). Luego,a partir de (70) y (71) podemos armar el siguiente sistema de ecuaciones
hφi + ki∇φi = hφ∞
φi +∇φiδi = φP(72)
o bien en forma de sistema compacto [1]ki h
δi 1
∇φiφi
=
hφ∞φP
, i = e, w, n, s (73)
Las expresiones que surgen de la resolución del sistema dado en (73) son∇φiφi
=
[2]hφ∞k − hδi
− hφPk − hδi
− hφ∞δik − hδi
+kφP
k − hδi
=
ai + biφP
ci + diφP
, i = e, w, n, s (74)
Como puede observarse en (74), a partir de la resolución del sistema de ecuaciones de 2 × 2 sepudieron hallar expresiones de φi y ∇φi como funciones lineales de φP , es decir, la temperatura enel centroide de la celda (no confundir la constante ai con el área Ai). Esto nos permite a su vezreemplazar el término difusivo en fronteras Robin directamente por la expresión dada por (74). Asíentonces
−ki∇φi ·Ai = −ki∇φiAi = −ki (ai + biφP )Ai, i = e, w, n, s (75)
Finalmente, combinando los resultados obtenidos en (52), (53), (74) y (75) hallamos el stencil paracada frontera de tipo Robin
φP (−kebeAe +Rw +Rn +Rs + cVP )−RwφW −RnφN −RsφS = GPVP + keaeAe (E)
φP (Re − kwbwAw +Rn +Rs + cVP )−ReφE −RnφN −RsφS = GPVP + kwawAw (W)
φP (Re +Rw − knbnAn +Rs + cVP )−ReφE −RwφW −RsφS = GPVP + knanAn (N)
φP (Re +Rw +Rn − ksbsAs + cVP )−ReφE −RwφW −RnφN = GPVP + ksasAs (S)
(76)
La ec. (76) pone de manifiesto que la imposición de una frontera de tipo Robin producirá la apariciónde un término fuente como contribución al vector F, así como también un aporte a la diagonal principalde la matriz K (término dependiente de φP ).
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 21

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
3. FEM - Método de Elementos Finitos
3.1. Descripción del Método
La última de las técnicas numéricas que forman parte de este desarrollo es el Método de ElementosFinitos, a partir del cual hallaremos la solución de las ecuaciones diferenciales bajo estudio medianteel planteo de Residuos Ponderados con funciones de prueba arbitrarias. El lector encontrará undesarrollo más acabado acerca de formulaciones mediante Residuos Ponderados y la aplicación delmétodo de elementos finitos en [1] y [2].
El método de residuos ponderados consiste en aproximar la solución mediante una expansión comola de la ec. (77)
φ ' φ = ψ +
M∑m=1
amNm (77)
donde la función ψ está definida en todo el dominio y cumple con las condiciones de contorno. Asimis-mo, en (77) Nm son funciones de prueba definidas a lo largo de todo el dominio Ω y los coeficientesam son las incógnitas a resolver mediante un sistema lineal de ecuaciones algebraicas. La aplicacióndel método de residuos ponderados, implica hallar la solución al siguiente balance integral:∫
Ω
WRΩdΩ +
∫Γ
WRΓdΓ = 0 (78)
con RΩ y RΓ residuos generados por la aproximación en el dominio Ω y la frontera Γ, respectivamente.Por otro lado W son funciones de peso adoptadas según la técnica numérica elegida, mientras que Wson funciones de peso arbitrarias establecidas en la frontera Γ.
En contraposición al método de Diferencias Finitas, basado en la aproximación de los operadoresdiferenciales mediante series de Taylor, el método de Residuos Ponderados propone aproximar la so-lución mediante una familia de funciones pesadas (ponderadas), las cuales se evalúan en la ecuacióndiferencial del problema para determinar el valor correcto de dichos pesos.
3.2. Ecuación del Calor
Nos centraremos en plantear el método de elementos finitos aplicado a la resolución de la ecuación delcalor, con presencia de términos difusivo, reactivo y producción. Partimos nuevamente de un dominioΩ arbitrario, donde el campo de velocidades es nulo (v = 0), la conductividad térmica es k > 0,la constante de reacción es c > 0 y el término producción es G 6= 0. Luego, podemos plantearconvenientemente el siguiente sistema de ecuaciones diferenciales en derivadas parciales para hallarla distribución de la variable φ:
A(φ) =
∂
∂x
(kx∂φ
∂x
)+
∂
∂y
(ky∂φ
∂y
)− cφ+G = 0 (79)
B(φ) =
φ− φ = 0, en Γφ
k∂φ
∂n+ q = 0, en Γq
k∂φ
∂n+ h (φ− φ∞) = 0, en Γh
(80)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 22

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
siendo (79) la ecuación principal del sistema y (80) las ecuaciones generales para las condiciones deborde de dicho sistema. Aplicamos ahora residuos ponderados:∫
Ω
WRΩdΩ +
∫Γ
WRΓdΓ = 0
⇒∫Ω
W
[∂
∂x
(kx∂φ
∂x
)+
∂
∂y
(ky∂φ
∂y
)− cφ+G
]dΩ + . . .
. . .+
∫Γφ
W(φ− φ
)dΓ +
∫Γq
W
(kx∂φ
∂xηx + ky
∂φ
∂yηy + q
)dΓ + . . .
. . .+
∫Γh
W
(kx∂φ
∂xηx + ky
∂φ
∂yηy + h(φ− φ∞)
)dΓ = 0
(81)
Se puede ver que si utilizamos el Teorema de la Divergencia [4] y expresamos en su forma débil elprimer término de la ec. (81), a la vez que convenientemente definimos los pesos W del residuo en lafrontera como:
W = 0 en Γφ
W = −W en Γq y Γh(82)
podemos anular parte de los residuos en la frontera Neumann y Robin como puede verse en la ecua-ción (83).
∫Ω
(kx∂W
∂x
∂φ
∂x+ ky
∂W
∂y
∂φ
∂y
)dΩ +
∫Ω
WcφdΩ +
∫Γh
WhφdΓ = . . .
. . .
∫Ω
WGdΩ−∫Γq
WqdΓ−∫Γh
Whφ∞dΓ +
∫Γφ
WF rxdΓ +
∫Γφ
WF ry dΓ
(83)
Obsérvese en (82) que en la frontera Dirichlet es propicio asignar un peso nulo, ya que no habráresiduo en dicha frontera debido a que conocemos exactamente el valor de φ en todo Γφ. Los términosF rx y F ry se denominan flujos reactivos. Ya que sobre la frontera Γφ conocemos el valor de φ, estosflujos no son tenidos en cuenta para calcular φ en el resto del dominio, pero sí son calculados una vezresuelto el sistema de ecuaciones, como una variable secundaria.
El balance formulado en (83) plantea la aplicación de residuos ponderados en el dominio Ω, siendo elmismo un balance global (visión macroscópica del problema). El método de elementos finitos parte dela idea de dividir la región [1] Ω en un conjunto de subdominios o elementos Ωe sin solapamiento yque cubran todo el dominio, de forma que la aproximación φ se construya a pedazos o trozos sobrecada subdominio. Expresando matemáticamente lo anterior en (84),
∩eΩe = ∅∪eΩe = Ω
(84)
De esta forma, y teniendo en cuenta la propiedad aditiva de las integrales, los términos en (83) se
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 23

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
pueden calcular agregando a la integral la contribución de cada elemento,
E∑e=1
∫Ωe
(kx∂W
∂x
∂φ
∂x+ ky
∂W
∂y
∂φ
∂y
)dΩ +
∫Ωe
WcφdΩ +
∫Γeh
WhφdΓ
= . . .
. . .E∑e=1
∫Ωe
WGdΩ−∫Γeq
WqdΓ−∫Γeh
Whφ∞dΓ +
∫Γeφ
WF rxdΓ +
∫Γeφ
WF ry dΓ
(85)
donde E es la cantidad total de elementos en los que se particiona Ω, y Γe = Γeφ + Γeq + Γeh es el bordedel elemento que cae sobre algún borde del dominio Γ y es tal que ∪eΓe = Γ.
El método de elementos finitos es un caso particular del método de residuos ponderados, donde laaproximación a la solución φ la expresamos como:
φ ' φ =
M∑m=1
N emφ
em (86)
siendo N em las funciones de forma definidas para el elemento e, el cual se compone de M nodos.
Nótese que (86) difiere de la aproximación definida previamente en (77) en dos aspectos:
• No se incluye la función ψ para ajustar los valores del contorno.• Los coeficientes incógnita am son reemplazados por valores de la variable φ en los nodos del
elemento (φem).
La definición a trozos de la aproximación introduce discontinuidades en la solución o en alguna desus derivadas. Cierto grado de discontinuidad es permisible y esto limita fuertemente la formulación aemplear. Por otro lado el hecho de que las funciones de prueba se elijan a trozos provoca un beneficiocomputacional importante respecto a la estructura de la matriz resultante. Una función a trozos engeneral tiene un soporte compacto, o sea, ésta no es nula solo en una región pequeña del dominioabarcando algunos pocos elementos del mismo. Esto produce matrices con estructura de banda, aligual que hemos visto anteriormente.
Resta definir qué tipo de funciones adoptar para los pesos W en (85). Para ello se aplica el Método deGalerkin [2], [1], el cual supone utilizar como pesos las mismas funciones de forma, es decir, W = N e
l
para l = 1 . . .M . Luego, la expresión completa de la aplicación del método de elementos finitos parala resolución del sistema de ecuaciones dado por (79) y (80), aplicado localmente a un elemento e,queda como:
M∑m=1
M∑l=1
∫Ωe
(kx∂N e
l
∂x
∂N em
∂xφem + ky
∂N el
∂y
∂N em
∂yφem
)dΩ
+ . . .
. . .+
M∑m=1
M∑l=1
∫Ωe
cN el N
emφ
emdΩ +
∫Γeh
hN el N
emφ
emdΓ
= . . .
. . .
M∑l=1
∫Ωe
N el GdΩ−
∫Γeq
N el qdΓ−
∫Γeh
N el hφ∞dΓ +
∫Γeφ
N el F
rxdΓ +
∫Γeφ
N el F
ry dΓ
(87)
La notación indicial empleada en (87) pone en evidencia la presencia de términos matriciales y vecto-riales. Entonces podemos reescribir la ecuación como sigue:(
De + Ce +He)φe = F e
Ke φe = F e(88)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 24

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
siendo
• De: aporte matricial del término difusivo,
De =M∑m=1
M∑l=1
∫Ωe
(kx∂N e
l
∂x
∂N em
∂x+ ky
∂N el
∂y
∂N em
∂y
)dΩ
• Ce: aporte matricial del término reactivo,
Ce =
M∑m=1
M∑l=1
∫Ωe
cN el N
emdΩ
• He: aporte matricial debido a la presencia de frontera Robin,
He =M∑m=1
M∑l=1
∫Γeh
hN el N
emdΓ
• Ke: matriz del elemento,
Ke = De + Ce +He
• φe: vector de incógnitas del elemento,
φe =
M∑m=1
φem
• F e: vector de de flujo, formado por aportes de fuentes de calor, términos provenientes de lascondiciones de frontera y los flujos reactivos,
F e =M∑l=1
∫Ωe
N el GdΩ−
∫Γeq
N el qdΓ−
∫Γeh
N el hφ∞dΓ +
∫Γeφ
N el F
rxdΓ +
∫Γeφ
N el F
ry dΓ
La resolución de las integrales depende del tipo de elemento considerado y las funciones de formaadoptadas. En el contexto de este trabajo se consideraron funciones de forma lineales y elementostriangulares y cuadrangulares. En las siguientes secciones se abordarán éstas y otras cuestionesrelacionadas a la resolución de las integrales.
Hasta aquí, hemos encontrado las expresiones generales del método de elementos finitos aplicado ala resolución de la ecuación del calor, pero solamente desde el punto de vista de un elemento e que esparte del dominio Ω. Si recordamos, hablamos de particionar el dominio en porciones más pequeñaso elementos Ωe cuyas funciones de forma se definan de manera local.
3.3. Elementos y funciones de forma
Como se mencionó previamente, la formulación del método de elementos finitos, tanto para la resolu-ción de la Ecuación del Calor como para el modelo de Tensión/Deformación plana, se hizo contemplan-do la utilización de elementos triangulares y cuadrangulares, de tres y cuatro nodos, respectivamentey funciones de forma lineales. En la siguientes secciones se da una breve formulación sobre dichoselementos en coordenadas naturales. Se introduce un cambio de variables que permite adaptar loselementos cuando tienen lados no paralelos a los ejes cartesianos, transformándolos a un espaciocon elementos normalizados, cuyas funciones de forma e integrales resultan más convenientes parael cálculo. Asimismo se ejemplifica el procedimiento para ensamblar matrices elementales en la matrizglobal del sistema.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 25

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
3.1. Elementos triangulares
e
kj
iy
x(xi,yi)
(xk,yk)
(xj,yj)
ξ
η j
k
i(0,0) (1,0)
(0,1)
e
Figura 8: Representación bidimensional de un elemento triangular.
En la Fig. 8, a la izquierda se ejemplifica un elemento triangular en coordenadas cartesianas con nin-gún lado alineado a los ejes cartesianos, y a la derecha un elemento triangular master o normalizadoen el espacio de coordenadas naturales (ξ, η).
Funciones de Forma en Coordenadas Naturales
De la Fig. 8 se puede observar que las funciones de forma y sus derivadas, definidas para el triángulonormalizado, vienen dadas por las expresiones en (89)
N ei (ξ, η) = 1− ξ − η, ∂N e
i
∂ξ= −1,
∂N ei
∂η= −1
N ej (ξ, η) = ξ,
∂N ei
∂ξ= 1,
∂N ei
∂η= 0
N ek(ξ, η) = η,
∂N ei
∂ξ= 0,
∂N ei
∂η= 1
(89)
Al igual que en el caso de coordenadas cartesianas, las funciones de forma en (89) valen entre 0 y 1,y su suma siempre es igual a 1, para cualquier punto (ξ, η) dentro del elemento.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 26

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Mapeo de coordenadas
Para mapear las coordenadas (x, y) de un punto cualquiera dentro del elemento al dominio de lascoordenadas naturales, parametrizamos según [1]:
x(ξ, η) =3∑
m=1
xmNem(ξ, η)
= xi(1− ξ − η) + xjξ + xkη
= xi + ξ(xj − xi) + η(xk − xi)
y(ξ, η) =
3∑m=1
ymNem(ξ, η)
= yi(1− ξ − η) + yjξ + ykη
= yi + ξ(yj − yi) + η(yk − yi)
(90)
de lo cual surge que dado un par (ξ, η) podemos calcular su correspondiente (x, y) y viceversa. Apli-cando ahora este mapeo a la aproximación φe para el elemento e, tenemos
φe = φi + ξ(φj − φi) + η(φk − φi) (91)
∇φe =
(∂φe
∂x,∂φe
∂y
)=
(∂φe
∂ξ
∂ξ
∂x+∂φe
∂η
∂η
∂x,∂φe
∂ξ
∂ξ
∂y+∂φe
∂η
∂η
∂y
)(92)
∂φe
∂ξ= φj − φi (93)
∂φe
∂η= φk − φi (94)
A partir de las ecuaciones (90) a (94) podemos deducir que las derivadas de las funciones de formaserán
∂N ei
∂ξ=∂N e
i
∂x
∂x
∂ξ+∂N e
i
∂y
∂y
∂ξ
∂N ei
∂η=∂N e
i
∂x
∂x
∂η+∂N e
i
∂y
∂y
∂η
(95)
Las expresiones de la ec. (95) plantean la relación de las derivadas de las funciones de forma conrespecto a los sistemas cartesiano y natural. Aplicando ahora la regla de derivación en cadena,
∂N ei
∂ξ
∂N ei
∂η
=
∂x
∂ξ
∂y
∂ξ
∂x
∂η
∂y
∂η
∂N e
i
∂x
∂N ei
∂y
= Je
∂N e
i
∂x
∂N ei
∂y
(96)
donde la matriz Je es el Jacobiano de la transformación. Por lo tanto, la transformación inversa puedeverse formulada en (97)
∂N ei
∂x
∂N ei
∂y
=1∣∣Je∣∣∂y
∂η−∂y∂ξ
−∂x∂η
∂x
∂ξ
∂N e
i
∂ξ
∂N ei
∂η
= (Je)−1
∂N e
i
∂ξ
∂N ei
∂η
(97)
3.2. Elementos cuadrangulares
En la Fig. 9, a la izquierda se ejemplifica un elemento cuadrangular en coordenadas cartesianas conningún lado alineado a los ejes cartesianos, y a la derecha un elemento cuadrangular master o nor-malizado en el espacio de coordenadas naturales (ξ, η).
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 27

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
le
k
jiy
x ξ
η j
k
i
l
(0,0) (1,0)
(0,1) (1,1)
e
(xi,yi) (xj,yj)
(xk,yk)
(xl,yl)
Figura 9: Representación bidimensional de un elemento cuadrangular.
Funciones de Forma en Coordenadas Naturales
De la Fig. 9 se puede observar que las funciones de forma y sus derivadas, definidas para el cuadrán-gulo normalizado, vienen dadas por las expresiones en (98)
N ei (ξ, η) =
1
4(1− ξ)(1− η),
∂N ei
∂ξ=
1
4(η − 1),
∂N ei
∂η=
1
4(ξ − 1)
N ej (ξ, η) =
1
4(1 + ξ)(1− η),
∂N ei
∂ξ=
1
4(1− η),
∂N ei
∂η=
1
4(−ξ − 1)
N ek(ξ, η) =
1
4(1 + ξ)(1 + η),
∂N ei
∂ξ=
1
4(1 + η),
∂N ei
∂η=
1
4(1 + ξ)
N el (ξ, η) =
1
4(1− ξ)(1 + η),
∂N ei
∂ξ=
1
4(−1− η),
∂N ei
∂η=
1
4(1− ξ)
(98)
Mapeo de coordenadas
Utilizamos el mismo tipo de parametrizaciones definidas para elementos triangulares. Nuevamente, apartir de (99) y (100), dado un par (ξ, η) podemos calcular su correspondiente (x, y) pero no podemosplantear la correspondencia inversa ya que el sistema es no lineal. En la Sección 3.8 se plantea unmétodo para poder realizar esta interpolación inversa, ya que es útil para algunos cálculos, como porejemplo, la aplicación de una fuente puntual dentro de un elemento cuadrangular.
x(ξ, η) =4∑
m=1
xmNem(ξ, η)
=1
4[xi(1− ξ)(1− η) + xj(1 + ξ)(1− η) + xk(1 + ξ)(1 + η) + xl(1− ξ)(1 + η)]
=xi + xj + xk + xl
4+ ξ
[(xj + xk)− (xi + xl)
4
]+ . . .
. . .+ η
[(xk + xl)− (xi + xj)
4
]+ ξη
[(xi + xk)− (xj + xl)
4
](99)
y(ξ, η) =
4∑m=1
ymNem(ξ, η)
=1
4[yi(1− ξ)(1− η) + yj(1 + ξ)(1− η) + yk(1 + ξ)(1 + η) + yl(1− ξ)(1 + η)]
=yi + yj + yk + yl
4+ ξ
[(yj + yk)− (yi + yl)
4
]+ . . .
. . .+ η
[(yk + yl)− (yi + yj)
4
]+ ξη
[(yi + yk)− (yj + yl)
4
](100)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 28

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
3.4. Cálculo de matrices
Hemos definido previamente cómo son las ecuaciones generales del método de elementos finitos ycómo son las expresiones de las funciones de forma y sus derivadas, tanto para elementos triangularescomo cuadrangulares. En las siguientes secciones se formulará el cálculo de las matrices elementalesmediante la utilización de coordenadas naturales e integración numérica.
4.1. Matriz de difusión
En la sección 3.2 definimos la matriz elemental de difusión como
De =M∑m=1
M∑l=1
∫Ωe
(kx∂N e
l
∂x
∂N em
∂x+ ky
∂N el
∂y
∂N em
∂y
)dΩ
(101)
donde podemos asumir dΩ = dxdy =∣∣Je∣∣ dξdη.
Asimismo, podemos reformular la ec. (101) de forma de suprimir las sumatorias y arribar a una expre-sión compuesta de producto de matrices:
De =
∫Ωe
(Be)T k Be∣∣Je∣∣ dξdη (102)
donde ke
k =
kx 0
0 ky
(103)
Las matrices Be y∣∣Je∣∣ dependen de la geometría del elemento y, en consecuencia, se calculan de
maneras distintas para triángulos y cuadrángulos.
Triángulos
Je =
∂x
∂ξ
∂y
∂ξ
∂x
∂η
∂y
∂η
=
(xj − xi) (yj − yi)
(xk − xi) (yk − yi)
(104)
Be =
∂N e
i
∂x
∂N ej
∂x
∂N ek
∂x
∂N ei
∂y
∂N ej
∂y
∂N ek
∂y
= (Je)−1
∂N e
i
∂ξ
∂N ej
∂ξ
∂N ek
∂ξ
∂N ei
∂η
∂N ej
∂η
∂N ek
∂η
Be = (Je)−1
−1 1 0
−1 0 1
(105)
Como se observa en las ecuaciones (103) a (105), las matrices están compuestas de coeficientesconstantes, por lo que la integral en (102) queda reducida a:
De = (Be)T k Be∣∣Je∣∣ ∫
Ωe
dξdη =1
2(Be)T k Be
∣∣Je∣∣ (106)
En (106) la integral a resolver es en definitiva el área del triángulo normalizado, siendo ésta Ae = 1/2.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 29

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Cuadrángulos
Je =
∂x
∂ξ
∂y
∂ξ
∂x
∂η
∂y
∂η
=1
4
−(1− η) (1− η) (1 + η) −(1 + η)
−(1− ξ) −(1 + ξ) (1 + ξ) (1− ξ)
xi yi
xj yj
xk yk
xl yl
(107)
Be = (Je)−1
−(1− η) (1− η) (1 + η) −(1 + η)
−(1− ξ) −(1 + ξ) (1 + ξ) (1− ξ)
(108)
A diferencia de lo que ocurría para el caso de triángulos, aquí las matrices son funciones de (ξ, η) y lasintegrales resultan complicadas de resolver analíticamente. Se emplea entonces integración numérica,para lo cual se aplica el método de Gauss eligiendo cuatro puntos con pesos w = 1. Luego la integralsurge de evaluar las funciones de (ξ, η) en dichos puntos y sumar las contribuciones. Matemáticamenteesto se puede expresar como sigue:
De =
∫Ωe
(Be(ξ, η))T k Be(ξ, η)∣∣Je(ξ, η)
∣∣ dξdη (109)
De '4∑p=1
(Be(ξp, ηp))T k Be(ξp, ηp)
∣∣Je(ξp, ηp)∣∣ (110)
donde los puntos de Gauss (ξp, ηp) son
p = 1 : (ξ1, η1) =
(−√
3
3,−√
3
3
)p = 2 : (ξ2, η2) =
(√3
3,−√
3
3
)
p = 3 : (ξ3, η3) =
(−√
3
3,
√3
3
)p = 4 : (ξ4, η4) =
(√3
3,
√3
3
) (111)
4.2. Matriz de masa
En la sección 3.2 definimos la matriz elemental de reacción (en ocasiones denominada matriz demasa) como
Ce =
M∑m=1
M∑l=1
∫Ωe
cN el N
emdΩ
(112)
Podemos reformular la ec. (112) de manera de expresarla como producto de matrices y vectores y deesta forma reemplazar las sumatorias. Nuevamente, la forma de estas matrices y vectores dependeráde la geometría del elemento. Las funciones de forma en coordenadas naturales y la matriz Jacobianason las mismas definidas en la sección anterior.
Elementos triangulares
Ce = c
∫Ωe
1− ξ − η
ξ
η
[1− ξ − η ξ η] ∣∣Je∣∣ dξdη (113)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 30

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Para resolver la integral en (113) utilizaremos integración numérica con tres puntos de Gauss con pesow = 1/6.
Ce ' c3∑p=1
w
1− ξp − ηp
ξp
ηp
[1− ξp − ηp ξp ηp
] ∣∣Je(ξp, ηp)∣∣ (114)
donde los puntos de Gauss (ξp, ηp) son
p = 1 : (ξ1, η1) =
(1
2, 0
)p = 2 : (ξ2, η2) =
(0,
1
2
)p = 3 : (ξ3, η3) =
(1
2,1
2
) (115)
Elementos cuadrangulares
Ce = c
∫Ωe
N(ξ, η)T N(ξ, η)∣∣Je∣∣ dξdη (116)
N(ξ, η) =1
4
[(1− ξ)(1− η) (1 + ξ)(1− η) (1 + ξ)(1 + η) (1− ξ)(1 + η)
](117)
Nuevamente aplicamos integración numérica con cuatro puntos de Gauss con peso w = 1.
Ce ' c4∑p=1
w(N(ξp, ηp))TN(ξp, ηp)
∣∣Je(ξp, ηp)∣∣ (118)
3.5. Ensamble de matrices
p5
e1e2
p4p3
p2p1
Figura 10: Representación bidimensional de una malla compuesta de elementos triangulares y cua-drangulares.
En la Fig. 10 puede observarse una malla genérica con un elemento triangular y cuadrangular. Paracada elemento de la malla se calculan las integrales definidas en (87) y (88) para luego proceder alensamble de las componentes en las matrices y vectores globales del sistema. De la figura podemosver, entre otras cosas, que:
• Los nodos p1, p3 y p5 no integran ninguna arista compartida, por lo que el aporte de coeficientesen el ensamble de la matriz global provendrá únicamente de dichos puntos.• Los nodos p2, y p4 integran aristas compartidas por dos elementos, de forma que el aporte a la
matriz global, en dichos nodos, será la suma de los coeficientes de ambos elementos.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 31

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Luego podemos plantear las matrices elementales compuestas por coeficientes de la siguiente forma:
K1 =
K1
11 K112 0 K1
15
K121 K1
22 K124 0
0 K142 K1
44 K145
K151 0 K1
54 K155
, K2 =
K2
22 K223 K2
24
K232 K2
33 K234
K242 K2
43 K244
(119)
Obsérvese que e1 está compuesto de cuatro nodos y su matriz elemental K1 es de 4 × 4, mientrasque e2 está compuesto de tres nodos y su matriz elemental K2 es de 3 × 3. La matriz global K seráde 5 × 5, como era de esperarse ya que la malla está compuesta de cinco nodos y en dichos puntosse hallará la solución a las incógnitas del sistema de ecuaciones. Entonces, el ensamble de K1 y K2
en la matriz global K queda de la siguiente forma:
K =
K111 K1
12 0 0 K115
K121 K1
22 +K222 K2
23 K124 +K2
24 0
0 K232 K2
33 K234 0
0 K142 +K2
42 K243 K1
44 +K244 K1
45
K151 0 0 K1
54 K155
(120)
3.6. Condiciones de borde
En esta sección se da la formulación de las expresiones para el cálculo de las matrices que surgende las condiciones de frontera impuestas al dominio bajo estudio. En la Sección 6.1 se introdujo eltratamiento de condiciones de frontera Dirichlet para el método de diferencias finitas. Debido a quetanto en dicho método como en el de elementos finitos el tratamiento de la solución es nodal, es decir,se halla la distribución de la variable φ para todos los nodos de la malla, la forma de resolución denodos con frontera Dirichlet es idéntica a la formulada en la Sección 6.1.
A continuación, se presenta la resolución de términos pertenecientes a fronteras Neumann y Robin.
6.1. Neumann
Recordando la ec. (87), queremos dar solución a la integral del lado derecho que proviene de la impo-sición de frontera de tipo Neumann, concretamente
Fq =
∫Γeq
N el qdΓ (121)
La condición de frontera Neumann se aplica sobre cada par de nodos formando una arista que pertene-ce a la frontera delimitada como Neumann. Típicamente, un elemento sobre la frontera tendrá algunode sus lados apoyado en dicha frontera. A continuación se formulan todos los posibles resultados dela integral (121), tanto para elementos triangulares como cuadrangulares [5].
Elementos triangulares
F ijq =q dij
2
1
1
0
, F jkq =q djk
2
0
1
1
, F kiq =q dki
2
1
0
1
(122)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 32

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
donde dij , djk y dki son las longitudes de cada lado del elemento, y q es el valor impuesto de flujo enla condición de borde Neumann.
Elementos Cuadrangulares
F ijq =q dij
2
1
1
0
0
, F jkq =q djk
2
0
1
1
0
, F klq =q dkl
2
0
0
1
1
, F liq =q dli
2
1
0
0
1
(123)
6.2. Robin
Recordando ahora la ec. (87), queremos dar solución a las dos integrales que provienen de la imposi-ción de frontera de tipo Robin, concretamente
He =
∫Γeh
hN el N
emφ
emdΓ (124)
Fh = −∫Γeh
N el hφ∞dΓ (125)
Como puede verse, la integral en (125) se resuelve de igual manera que para el caso Neumann, dondeahora q = hφ∞. A continuación se formulan todos los posibles resultados de la integral (124), tantopara elementos triangulares como cuadrangulares [5].
Elementos triangulares
H ij =hdij
6
2 1 0
1 2 0
0 0 0
, Hjk =hdjk
6
0 0 0
0 2 1
0 1 2
, H ik =hdik
6
2 0 1
0 0 0
1 0 2
(126)
Elementos cuadrangulares
H ij =hdij
6
2 1 0 0
1 2 0 0
0 0 0 0
0 0 0 0
, Hjk =hdjk
6
0 0 0 0
0 2 1 0
0 1 2 0
0 0 0 0
Hkl =hdkl
6
0 0 0 0
0 0 0 0
0 0 2 1
0 0 1 2
, H li =hdli
6
2 0 0 1
0 0 0 0
0 0 0 0
1 0 0 2
(127)
3.7. Fuentes por elemento
El último de los términos proveniente de la ec. (87) es el asociado al término producción o fuente.Para este trabajo consideramos que cada elemento puede contar con un valor de fuente Ge diferente.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 33

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Vamos a formular entonces las expresiones para el cálculo de la integral
FG =
∫Ωe
N el G
edΩ (128)
A continuación se formulan los posibles resultados de la integral (128), tanto para elementos triangu-lares como cuadrangulares [5].
FG =AeGe
3
1
1
1
, FG =AeGe
4
1
1
1
1
(129)
donde Ae es el área del elemento e.
3.8. Fuentes puntuales
Las fuentes puntuales, definidas en un cierto punto (x, y) del dominio, son repartidas en cada nodo delelemento al que pertenece el punto, evaluando las funciones de forma definidas para ese elemento.
Elementos triangulares
Fp = Gp
Ni(ξ, η)
Nj(ξ, η)
Nk(ξ, η)
(130)
Elementos cuadrangulares
Fp = Gp
Ni(ξ, η)
Nj(ξ, η)
Nk(ξ, η)
Nl(ξ, η)
(131)
Las funciones de forma fueron definidas en las ecuaciones (89) y (98), mientras que los correspon-dientes mapeos de coordenadas entre ambos sistemas, x(ξ, η) e y(ξ, η) fueron presentados en lasecuaciones (90), (99) y (100).
Cómo vimos en la Sección 3.1, al trabajar en coordenadas naturales, conociendo el punto en el dominio(x, y) podemos obtener fácilmente su par (ξ, η) y así determinar cuál es el aporte de la fuente puntualsobre cada nodo del elemento triangular. Por otro lado, como fuera mencionado previamente en laSección 3.2, presentamos aquí un método para el cálculo de la transformación inversa que permite,a partir de conocer un par (x, y) en coordenadas cartesianas, obtener el par (ξ, η) en coordenadasnaturales, cuando estamos tratando con elementos cuadrangulares.
Tomando como referencia el trabajo realizado por Chongyu Hua [6], se puede formular de manerageneral la relación entre los dos sistemas de coordenadas para elementos cuadrangulares isoparamé-tricos como:
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 34

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
bi ci
bj cj
ξη
=
di − aiξηdj − ajξη
(132)
donde
di = 4xp − (xi + xj + xk + xl)
dj = 4yp − (yi + yj + yk + yl)(133)
y los coeficientes ai, aj , bi, bj , ci, cj son funciones de coordenadas globales de puntos nodales y de-penden de esquemas de numeración de nodos locales.
ai aj
bi bj
ci cj
=
1 −1 1 −1
−1 1 1 −1
−1 −1 1 1
xi yi
xj yj
xk yk
xl yl
(134)
Un posible ejemplo de numeración de los nodos locales para un elemento cuadrangular isoparamétricoen una malla de elementos finitos se muestra en la Fig. 11. Los coeficientes en la ecuación (132) sepueden obtener a partir de la ecuación (134).
l
i
k
j
Figura 11: Ejemplo de numeración local de un cuadrángulo para determinar los coeficientesai, aj , bi, bj , ci, cj .
Un sistema bilineal de ecuaciones en forma de la ec. (132) no se puede resolver en general de formaexacta. Sin embargo, se pueden proporcionar condiciones adicionales considerando las característi-cas geométricas de los elementos cuadrangulares isoparamétricos, bajo las cuales el sistema tienesolución única. Estas condiciones son enumeradas y demostradas en [6], donde a continuación seresume un conjunto de soluciones dependiendo de la combinación de resultados para los coeficientesai, aj , bi, bj , ci, cj .
1. Si aiajabac 6= 0 abξ2 + (cb + da)ξ + dc = 0,
2. Si ai = 0 y ajci 6= 0
η = (ad + baξ)/ac,
3. Si aj = 0 y aicj 6= 0 −1 ≤ ξ ≤ 1
4. Si aiaj 6= 0 y ab = 0, ξ = (aidc)/(biac + aiad), η = ad/ac
5. Si aiaj 6= 0 y ac = 0, ξ = ad/ab, η = (aidb)/(ciab + aiad)
6. Todas las demás condiciones, ξ = dc/(aidj + bc), η = bd/(ajdi + bc)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 35

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
3.9. Tensión/Deformación Plana
Hasta aquí hemos desarrollado de manera completa el tratamiento del método de elementos finitospara la resolución de la ecuación del calor. Veremos ahora como aplicar el método a otro modelo físico:el de Tensión/Deformación Plana. Si bien las ecuaciones que gobiernan dicho modelo son diferentesa las vistas para la ecuación del calor, veremos que la formulación del método de elementos finitos essimilar a lo planteado anteriormente.
Consideramos el problema de tensión plana bidimensional en elasticidad [2]. Aquí se considerará comoincógnitas los desplazamientos u y v en las direcciones x e y, esto es,
φT = (u, v) (135)
Obsérvese el carácter vectorial de la incógnita del problema en (135). Las deformaciones, y por lo tantolas tensiones, pueden ser expresados en términos de estos desplazamientos. Las deformaciones seescriben como
ε =
εx
εy
εxy
=
∂u
∂x∂v
∂y∂u
∂y+∂v
∂x
=
∂
∂x0
0∂
∂y∂
∂y
∂
∂x
uv
= Lφ (136)
El vector de tensiones σ puede ser expresado en término de las deformaciones según
σ = D ε (137)
donde D es la denominada Matriz Constitutiva. Con sólo cambiar D podemos estudiar el mismosistema para tensión o para deformación plana.
Tensión Plana
σ =
σx
σy
σxy
=E
1− ν2
1 ν 0
ν 1 0
0 01− ν
2
ε = Dε (138)
Deformación Plana
σ =
σx
σy
σxy
=E
(1 + ν)(1− 2ν)
1− ν ν 0
ν 1− ν 0
0 01− 2ν
2
ε = Dε (139)
En las ecuaciones (138) y (139), E es el Módulo de Young y ν el Coeficiente de Poisson para elmaterial bajo consideración.
Resta resolver el sistema de ecuaciones de equilibrio el cual, utilizando las ec. (135) a (139), puedeser escrito como
A(φ) =
∂σx∂x
+∂σxy∂y
+X
∂σxy∂x
+∂σy∂y
+ Y
= LT DLφ+X = 0 (140)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 36

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
en un dominio bidimensional Ω. En la ec. (140) X e Y son fuerzas externas por unidad de volumen,XT = [X Y ], y 0T = [0 0].
Las condiciones de borde para un problema típico de elasticidad bidimensional pueden ser definidasmediante la especificación de tracciones o desplazamientos superficiales, y por lo tanto podríamostener
B(φ) =
σxnx + σxyny − txσxynx + σyny − ty
= 0, sobre Γσ (141)
y
B(φ) =
u− uv − v
= 0, sobre Γφ (142)
donde nx y ny son los cosenos directores de la normal apuntando hacia afuera de la frontera Γ y tx,ty, u y v son las tracciones y desplazamientos especificados en los bordes. A partir de haber definidolos sistemas A(φ) y B(φ) de esta forma, se puede aplicar residuos ponderados de la misma forma quese hizo en (81). Nuevamente planteamos una aproximación de la forma
φ =
uv
= ψ +M∑m=1
Nm am (143)
Luego, definiendo las funciones de peso como
Wl =
Wl,1 0
0 Wl,2
, W l
W l,1 0
0 Wl,2
(144)
Nuevamente, puede observarse en las ecuaciones (140) a (144) el tratamiento vectorial del problemay la definición de las aproximaciones y funciones de prueba.
La formulación de residuos ponderados en términos de tensiones para la ecuación de equilibrio puedeser escrita como∫
Ω
(∂σx∂x
+∂σxy∂y
+X
)Wl,1dΩ +
∫Γσ
(nxσx + nyσxy − tx
)W l,1dΓ = 0
∫Ω
(∂σxy∂x
+∂σy∂y
+ Y
)Wl,2dΩ +
∫Γσ
(nxσxy + nyσy − ty
)W l,2dΓ = 0
(145)
donde σ = DL φ. Aplicando el Teorema de la Divergencia [4] (proceso de debilitación), la ec. (145)queda como
−∫Ω
(σx∂Wl,1
∂x+ σxy
∂Wl,1
∂y−Wl,1X
)dΩ +
∫Γφ+Γσ
(σxnx + σxyny)Wl,1dΓ + . . .
. . .+
∫Γσ
(σxnx + σxyny − tx
)W l,1dΓ = 0
−∫Ω
(σxy
∂Wl,2
∂x+ σy
∂Wl,2
∂y−Wl,2Y
)dΩ +
∫Γφ+Γσ
(σxynx + σyny)Wl,2dΓ + . . .
. . .+
∫Γσ
(σxynx + σyny − ty
)W l,2dΓ = 0
(146)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 37

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Limitando ahora la elección de las funciones de peso de forma que
Wl,1 = Wl,2 = 0, sobre Γφ
W l,1 = −Wl,1
∣∣∣Γσ
W l,2 = −Wl,2
∣∣∣Γσ
(147)
Combinando los resultados de (146) y (147), y luego expresándolos de forma compacta tenemos∫Ω
(LWl)T σdΩ−
∫Ω
WlXdΩ−∫Γσ
Wl tdΓ = 0 (148)
donde tT = [tx ty]. Expresando las tensiones en (148) en términos de desplazamientos, tenemos que∫Ω
(LWl)TDL φdΩ =
∫Ω
WlXdΩ +
∫Γσ
Wl tdΓ (149)
Hasta aquí hemos hecho el planteo de residuos ponderados a la ecuación de equilibrio. Usamos ahorala aproximación definida en (143) y tenemos
M∑m=1
∫Ω
(LWl)TDLNmdΩ
am = . . .
. . .
∫Ω
WlXdΩ +
∫Γσ
Wl tdΓ−∫Ω
(LWl)TDLψdΩ
(150)
lo que inmediatamente nos conduce a un sistema de la forma K a = F . En este caso, el uso de laaproximación de Galerkin resulta en una matriz K simétrica en donde las submatrices Ke son dadaspor
Ke =
∫Ω
(LNl)TDLNmdΩ (151)
9.1. Cálculo de matriz de rigidez
Hallaremos ahora el resultado de la integral dada en la ec. (151). El cálculo es similar al realizado parala matriz de difusión introducido para la ecuación del calor, sólo que los términos matriciales que formanla matriz de rigidez para tensión/deformación plana son diferentes, como veremos a continuación. Lamatriz D fue introducida previamente en las ecuaciones (138) y (139) para tensión y deformaciónplana, respectivamente. Por otro lado, y haciendo una analogía a lo visto para la ecuación del calor,introducimos nuevamente la matriz Be que surge de aplicar el operador L sobre las funciones de peso.Luego, podemos reescribir la ec. (151) como
Ke =
∫Ωe
(Be)T DBe∣∣Je∣∣ dξdη (152)
donde el cálculo de Be depende de la geometría del elemento.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 38

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Elementos Triangulares
Be = LNm =
∂
∂ξ0
0∂
∂η∂
∂η
∂
∂ξ
N1 0 N2 0 N3 0
0 N1 0 N2 0 N3
(153)
Be =
∂N1
∂ξ0
∂N2
∂ξ0
∂N3
∂ξ0
0∂N1
∂η0
∂N2
∂η0
∂N3
∂η
∂N1
∂η
∂N1
∂ξ
∂N2
∂η
∂N2
∂ξ
∂N3
∂η
∂N3
∂ξ
(154)
Nuevamente, la matriz Be para elementos triangulares está conformada por coeficientes constantes,de modo que el cálculo de la matriz de rigidez será
Ke = (Be)T DBe∣∣Je∣∣ ∫
Ωe
dξdη =1
2(Be)T DBe
∣∣Je∣∣ (155)
Elementos Cuadrangulares
Be = LNm =
∂
∂ξ0
0∂
∂η∂
∂η
∂
∂ξ
N1 0 N2 0 N3 0 N4 0
0 N1 0 N2 0 N3 0 N4
(156)
Be =
∂N1
∂ξ0
∂N2
∂ξ0
∂N3
∂ξ0
∂N4
∂ξ0
0∂N1
∂η0
∂N2
∂η0
∂N3
∂η0
∂N4
∂η
∂N1
∂η
∂N1
∂ξ
∂N2
∂η
∂N2
∂ξ
∂N3
∂η
∂N3
∂ξ
∂N4
∂η
∂N4
∂ξ
(157)
Como hemos visto, para elementos cuadrangulares las derivadas de las funciones de forma no sonconstantes, de modo que tendremos Be(ξ, η) y por lo tanto la matriz Ke queda como
Ke '4∑p=1
(Be(ξp, ηp))T DBe(ξp, ηp)
∣∣Je(ξp, ηp)∣∣ (158)
La integral de la ec. (158) fue resuelta por integración numérica con cuatro puntos de Gauss con pesow = 1. Estos puntos son los mismos introducidos previamente en (111).
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 39

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
9.2. Cálculo de vector de fuerzas volumétricas
Las fuerzas volumétricas consideradas para este trabajo fueron siempre aquellas que surgen de laacción de la fuerza de la gravedad. Hallaremos el término Fv que surge de dar solución a la integral
Fv =
∫Ω
NlXdΩ (159)
donde XT = [0, −ρg], siendo ρ la densidad del material y g la aceleración de la gravedad. Nótese elsigno negativo indicando el sentido de acción de la fuerza gravitatoria. A continuación se formulan losposibles resultados de la integral (159), tanto para elementos triangulares como cuadrangulares [5].
Fv = −Aeρg
3
0
1
0
1
0
1
, Fv = −A
eρg
4
0
1
0
1
0
1
0
1
(160)
donde Ae es el área del elemento.
9.3. Condiciones de borde - Nodos fijos
Un tipo de condición de borde posible es la fijación de uno o más nodos de la frontera. Se establece queel desplazamiento u en sentido eje-x, o el desplazamiento v en sentido eje-y, o ambos desplazamientosson nulos. El concepto es análogo a lo visto en el tratamiento de fronteras Dirichlet en ecuación delcalor, con la salvedad que ahora la magnitud a fijar es vectorial y no escalar. Luego, el cálculo esidéntico a lo visto en la Sección 6.1.
9.4. Condiciones de borde - Cargas distribuidas
El otro tipo de condición de borde posible es la aplicación de una fuerza distribuida a lo largo de unaparte de la frontera, típicamente un borde o una arista. Sobre la frontera Γσ se aplica una fuerzatT
= [tx ty], la cual se distribuye sobre todos los lados de elementos que apoyan sobre la frontera.El concepto es análogo a lo visto para fronteras de tipo Neumann en ecuación del calor, pero contratamiento vectorial en vez de escalar. Luego, el cálculo es similar a lo visto en la Sección 6.1, dondeahora se fija el valor vectorial de fuerza, esto es
Fσ =
∫Γeσ
N el tdΓ (161)
A continuación se formulan todos los posibles resultados de la integral (161), tanto para elementostriangulares como cuadrangulares [5].
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 40

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Elementos triangulares
Fσij =
t dij2
tx
ty
tx
ty
0
0
, Fσ
jk =t djk
2
0
0
tx
ty
tx
ty
, Fσ
ki =t dki
2
tx
ty
0
0
tx
ty
(162)
Elementos cuadrangulares
Fσij =
t dij2
tx
ty
tx
ty
0
0
0
0
, Fσjk =
t djk2
0
0
tx
ty
tx
ty
0
0
, Fσkl =
t dkl2
0
0
0
0
tx
ty
tx
ty
, Fσli =
t dli2
tx
ty
0
0
0
0
tx
ty
(163)
9.5. Cargas puntuales
Para el tratamiento de cargas puntuales se especifica el punto (xp, yp) dentro del dominio Ω al quese le aplica una fuerza F T = [Fx Fy]. Como se vio en la Sección 3.8, para promediar el valor de lacarga se utilizan las funciones de forma del elemento evaluadas en el punto (ξp, ηp), en coordenadasnaturales.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 41

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
4. Esquemas Temporales
Hemos visto en las secciones precedentes cómo resolver la ecuación del calor cuando se considera alsistema estacionario, es decir, luego de que el mismo ha evolucionado durante un tiempo lo suficien-temente grande como para lograr la estabilidad y que los valores asociados al dominio ya no varíensignificativamente de un instante de tiempo a otro. Se puede pensar en una solución del tipo:
K φ = F (164)
donde φ representa el vector de incógnitas a resolver, K es la matriz del sistema y F es el vector dellado derecho. Luego el sistema anterior se puede resolver según:
φ = (K)−1F (165)
4.1. Discretización Temporal
Si ahora nos interesa estudiar la evolución temporal del sistema, nos encontramos nuevamente frentea una expresión como la siguiente:
∂φ
∂t− k
(∂2φ
∂x2+∂2φ
∂y2
)+ cφ = G (166)
Para discretizar el término temporal de la ec. (166) se puede utilizar una aproximación de primer ordensegún:
ρcp∂φ
∂t' ρcp
[φn+1 − φn
∆t
](167)
donde, ∆t es el paso temporal, φn es el vector solución para el instante de tiempo n = t(n) y φn+1 esel correspondiente al instante n + 1 = t(n) + ∆t. Luego podemos combinar los resultados de las ec.(166) y (167) de la siguiente manera:
ρcp
[φn+1 − φn
∆t
]+K φn+θ = Fn+θ (168)
siendo θ el parámetro temporal que determina el esquema a utilizar según:
θ = 0, Forward-Euler o Esquema Explícito
θ = 1, Backward-Euler o Esquema Implícito
Obsérvese que K es una matriz que agrupa los términos reactivo y difusivo de la ec. (166). A partirde (168) y con la correspondiente selección del parámetro θ se pueden encontrar las expresionesmatriciales para cada esquema temporal. Vale aclarar que de aquí en adelante consideraremos elvector F constante en el tiempo (F = Fn = Fn+1).
4.2. Forward-Euler o Esquema Explícito
Se parte de la ec. (168) con θ = 0:
ρcp
[φn+1 − φn
∆t
]+K φn = F
⇒ φn+1 − φn +
(∆t
ρcp
)K φn =
(∆t
ρcp
)F (169)
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 42

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Se debe recordar que un vector puede expresarse como el producto de él mismo por la matriz iden-tidad: I φn = φn. En otras palabras, si multiplicamos un vector por una matriz cuadrada con 1 en ladiagonal principal y 0 fuera de ella obtendremos como resultado el mismo vector. Luego aplicando estapropiedad en (169) se arriba a:
φn+1 − I φn +
(∆t
ρcp
)K φn =
(∆t
ρcp
)F
⇒ φn+1 −[I −
(∆t
ρcp
)K
]φn =
(∆t
ρcp
)F
φn+1 =
(∆t
ρcp
)F +
[I −
(∆t
ρcp
)K
]φn (170)
Puede comprobarse en la ec. (170) que el vector φn+1 puede ser obtenido como resultado de multipli-caciones entre matrices y vectores con datos conocidos para el tiempo n = t(n).
4.3. Backward-Euler o Esquema Implícito
Se parte de la ec. (168) con θ = 1:
ρcp
[φn+1 − φn
∆t
]+K φn+1 = F
⇒(ρcp
∆t
)φn+1 −
(ρcp∆t
)φn +K φn+1 = F
⇒(ρcp
∆t
)I φn+1 −
(ρcp∆t
)φn +K φn+1 = F
⇒[(ρcp
∆t
)I +K
]φn+1 = F +
(ρcp∆t
)φn
φn+1 =[(ρcp
∆t
)I +K
]−1 [F +
(ρcp∆t
)φn]
(171)
Obsérvese que la ec. (171) conduce a la resolución de un sistema de ecuaciones similar al planteadopreviamente en la ec. (165):
φn+1 = (Kimp)−1 F imp
donde
Kimp =[(ρcp
∆t
)I +K
]F imp =
[F +
(ρcp∆t
)φn]
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 43

Mecánica Computacional Año 2019 Base Teórica de Métodos Numéricos
Referencias
[1] M. Storti, N. Nigro, G. Franck, y D. Sklar, Notas de Mecánica Computacional. Facultad de Inge-niería y Ciencias Hídricas - UNL, 2016.
[2] O. Zienkiewicz y K. Morgan, Finite Elements and Approximation, 1st ed. Dover Publications, 2006.
[3] F. Moukalled, L. Mangani, y M. Darwish, The Finite Volume Method in Computational Fluid Dyna-mics, 1st ed. Springer, 2016.
[4] G. B. J. Thomas, Cálculo - Varias Variables, 11st ed. Pearson Education, 2005.
[5] L. J. Segerlind, Applied Finite Element Analysis, 2nd ed. John Wiley and Sons, 1984.
[6] C. Hua, “An inverse transformation for quadrilateral isoparametric elements: Analysis and aplica-tion,” Finite Elements in Analysis and Design, vol. 7, pp. 159–164, 1990.
Franck - Gentile - Nigro - Sklar Mecánica Computacional - Año 2019 44