Miner a de procesos aplicada a la monitorizaci on de … · Figura 1: Miner a de procesos. tanto,...
8
Miner´ ıa de procesos aplicada a la monitorizaci´ on de las misiones rob´ oticas Juan Jes´ us Rold´ an, Jaime del Cerro y Antonio Barrientos Centro de Autom´ atica y Rob´ otica (UPM-CSIC) C/ Jos´ e Guti´ errez Abascal 2, 28006 Madrid [email protected], [email protected], [email protected] Resumen Las misiones rob´oticas y especialmente las misio- nes multi-robot generan un considerable volumen de datos. El control y la monitorizaci´on de estas misiones requiere el an´alisis de estos datos para extraer informaci´on. Este trabajo estudia la mi- ner´ ıa de procesos y su posible aplicaci´on en el terreno de las misiones rob´oticas. Esta discipli- na aborda el descubrimiento, dise˜ no,evaluaci´on y optimizaci´on de los procesos a partir de la in- formaci´on recogida en registros de eventos. Estas t´ ecnicas aplicadas a las misiones rob´oticas podr´ ıan servir para la generaci´on autom´atica de modelos a partir de la experiencia o el an´alisis y la mejora de las misiones rob´oticas a partir de los modelos. Palabras clave: Misi´ on Rob´ otica, Modelado, Control, Monitorizaci´ on, Miner´ ıa de Procesos 1. INTRODUCCI ´ ON A d´ ıa de hoy, las misiones rob´ oticas son una reali- dad y cuentan con multitud de aplicaciones: agri- cultura, monitorizaci´ on ambiental, inspecci´ on de infraestructuras, vigilancia de seguridad, explora- ci´ on... Esta variedad de aplicaciones da lugar a una varie- dad de misiones. Seg´ un la complejidad, las misio- nes pueden requerir la utilizaci´ on de uno o varios robots y, en el segundo caso, robots heterog´ eneos u homog´ eneos. Seg´ un el escenario, estas pueden em- plear robots terrestres (Unmanned Ground Vehi- cle, UGV), marinos (Unmanned Surface Vehicle, USV), submarinos (Unmanned Underwater Vehi- cle, UUV) o a´ ereos (Unmanned Aerial Vehicle, UAV). Un an´ alisis a la literatura sobre misiones rob´ oticas permite extraer las siguientes conclusiones: Las misiones rob´ oticas est´ an experimentando un aumento de complejidad, motivado por la necesidad de expansi´ on a nuevos campos de aplicaci´ on y apoyado por los avances en la autom´ atica y la rob´ otica. En particular, el paso de las misiones con un robot a las misiones con m´ ultiples robots su- pone un salto en su complejidad y plantea una serie de retos relacionados con la automatiza- ci´ on o los factores humanos [1]. Las misiones multi-robot conllevan un incre- mento de la autonom´ ıa de los robots, dejando atr´ as el control manual y acerc´ andose al con- trol autom´ atico con sistemas de gesti´ on por consentimiento o excepci´ on [2]. Adem´ as, las misiones multi-robot suponen un aumento de la carga de trabajo de los opera- dores, que puede sobrepasar sus capacidades si no se introducen t´ ecnicas para mejorar el conocimiento de la situaci´ on y apoyar la toma de decisiones [3]. Las misiones rob´ oticas generan un volumen de datos considerable, aunque dependiente de factores como el n´ umero y la complejidad de los robots o las caracter´ ısticas del escenario [5]. Este trabajo parte de la necesidad de reducir la carga de trabajo del operador de misiones multi- robot y se centra en el tratamiento de los cuan- tiosos vol´ umenes de datos para extraer la infor- maci´ on valiosa para la misi´ on. Con este fin, esta comunicaci´ on aborda el campo de la miner´ ıa de procesos y estudia su aplicaci´ on en diferentes ´ areas de las misiones rob´ oticas. La secci´ on 2 describe brevemente la miner´ ıa de procesos y selecciona algunas fuentes que aportan m´ as informaci´ on. La secci´ on 3 aborda su posible aplicaci´ on en el modelado de misiones, mientras que la secci´ on 4 se ocupa de su posible aplicaci´ on en el an´ alisis de las mismas. Por ´ ultimo, la secci´ on 5 resume las conclusiones que se han obtenido tras la realizaci´ on de este estudio. 2. MINER ´ IA DE PROCESOS La miner´ ıa de procesos [6] es una disciplina que se ocupa del descubrimiento, dise˜ no, evaluaci´ on y optimizaci´ on de los procesos a partir de la infor- maci´ on recogida en registros de eventos. Por lo Actas de las XXXVI Jornadas de Automática, 2 - 4 de septiembre de 2015. Bilbao ISBN 978-84-15914-12-9 © 2015 Comité Español de Automática de la IFAC (CEA-IFAC) 300
Transcript of Miner a de procesos aplicada a la monitorizaci on de … · Figura 1: Miner a de procesos. tanto,...

Minerıa de procesos aplicada a la monitorizacion de las misionesroboticas
Juan Jesus Roldan, Jaime del Cerro y Antonio BarrientosCentro de Automatica y Robotica (UPM-CSIC)
C/ Jose Gutierrez Abascal 2, 28006 [email protected], [email protected], [email protected]
Resumen
Las misiones roboticas y especialmente las misio-nes multi-robot generan un considerable volumende datos. El control y la monitorizacion de estasmisiones requiere el analisis de estos datos paraextraer informacion. Este trabajo estudia la mi-nerıa de procesos y su posible aplicacion en elterreno de las misiones roboticas. Esta discipli-na aborda el descubrimiento, diseno, evaluaciony optimizacion de los procesos a partir de la in-formacion recogida en registros de eventos. Estastecnicas aplicadas a las misiones roboticas podrıanservir para la generacion automatica de modelos apartir de la experiencia o el analisis y la mejorade las misiones roboticas a partir de los modelos.
Palabras clave: Mision Robotica, Modelado,Control, Monitorizacion, Minerıa de Procesos
1. INTRODUCCION
A dıa de hoy, las misiones roboticas son una reali-dad y cuentan con multitud de aplicaciones: agri-cultura, monitorizacion ambiental, inspeccion deinfraestructuras, vigilancia de seguridad, explora-cion...
Esta variedad de aplicaciones da lugar a una varie-dad de misiones. Segun la complejidad, las misio-nes pueden requerir la utilizacion de uno o variosrobots y, en el segundo caso, robots heterogeneos uhomogeneos. Segun el escenario, estas pueden em-plear robots terrestres (Unmanned Ground Vehi-cle, UGV), marinos (Unmanned Surface Vehicle,USV), submarinos (Unmanned Underwater Vehi-cle, UUV) o aereos (Unmanned Aerial Vehicle,UAV).
Un analisis a la literatura sobre misiones roboticaspermite extraer las siguientes conclusiones:
Las misiones roboticas estan experimentandoun aumento de complejidad, motivado por lanecesidad de expansion a nuevos campos deaplicacion y apoyado por los avances en laautomatica y la robotica.
En particular, el paso de las misiones con unrobot a las misiones con multiples robots su-pone un salto en su complejidad y plantea unaserie de retos relacionados con la automatiza-cion o los factores humanos [1].
Las misiones multi-robot conllevan un incre-mento de la autonomıa de los robots, dejandoatras el control manual y acercandose al con-trol automatico con sistemas de gestion porconsentimiento o excepcion [2].
Ademas, las misiones multi-robot suponen unaumento de la carga de trabajo de los opera-dores, que puede sobrepasar sus capacidadessi no se introducen tecnicas para mejorar elconocimiento de la situacion y apoyar la tomade decisiones [3].
Las misiones roboticas generan un volumende datos considerable, aunque dependiente defactores como el numero y la complejidad delos robots o las caracterısticas del escenario[5].
Este trabajo parte de la necesidad de reducir lacarga de trabajo del operador de misiones multi-robot y se centra en el tratamiento de los cuan-tiosos volumenes de datos para extraer la infor-macion valiosa para la mision. Con este fin, estacomunicacion aborda el campo de la minerıa deprocesos y estudia su aplicacion en diferentes areasde las misiones roboticas.
La seccion 2 describe brevemente la minerıa deprocesos y selecciona algunas fuentes que aportanmas informacion. La seccion 3 aborda su posibleaplicacion en el modelado de misiones, mientrasque la seccion 4 se ocupa de su posible aplicacionen el analisis de las mismas. Por ultimo, la seccion5 resume las conclusiones que se han obtenido trasla realizacion de este estudio.
2. MINERIA DE PROCESOS
La minerıa de procesos [6] es una disciplina quese ocupa del descubrimiento, diseno, evaluacion yoptimizacion de los procesos a partir de la infor-macion recogida en registros de eventos. Por lo
Actas de las XXXVI Jornadas de Automática, 2 - 4 de septiembre de 2015. Bilbao ISBN 978-84-15914-12-9 © 2015 Comité Español de Automática de la IFAC (CEA-IFAC) 300
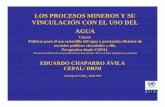
Figura 1: Minerıa de procesos.
tanto, la minerıa de procesos se situa a medio ca-mino entre el analisis y modelado de procesos yla minerıa de datos, disciplina que se centra enel analisis de datos para realizar clasificaciones opredicciones.
Esta disciplina surgio por la necesidad de analizary optimizar los procesos de negocios, pero su apli-cacion se ha extendido por diversos campos - comolas industrias, las infraestructuras o las organiza-ciones - y en el futuro podrıa alcanzar el terrenode la robotica.
La minerıa de procesos ofrece las siguientes posi-bilidades:
Descubrimiento de modelos: Generacion au-tomatica de modelos para los procesos a par-tir de registros de eventos. Estos modelos sue-len describir los procesos como sucesiones deactividades, pero tambien pueden enfocar losprocesos segun su coste temporal o su consu-mo de recursos. Algunos modelos habitualesson las redes de Petri, los modelos y notacio-nes de procesos de negocio, los sistemas detransiciones, los grafos de dependencias, lasredes causales... En el terreno de las misio-nes de robots, estas tecnicas permiten la ge-neracion de modelos a partir de la experien-cia recogida en simulaciones o experimentosde campo.
Reproduccion de modelos: Generacion au-tomatica de registros de eventos a partir delos modelos de los procesos. Estas tecnicaspermiten simular los procesos para obtenerinformacion interesante sobre la evolucion delos mismos. Posteriormente, esta informacionpuede tener diversos usos: estudio de los pro-cesos, diseno de componentes, asignacion derecursos o entrenamiento de operarios. Es-tas tecnicas aplicadas a las misiones roboticaspermiten la realizacion de simulaciones en lu-gar de experimentos, lo que conlleva una re-duccion del coste temporal y economico de laspruebas.
Analisis de conformidad y mejora de mode-los: Comparacion de los modelos de los pro-cesos con los registros de eventos. Estas tecni-cas son utiles para evaluar la conformidad delmodelo con los eventos y corregir sus posi-bles desviaciones (desde descubrir estados otransiciones que no habıan sido consideradosen el modelo hasta detectar cuellos de bote-lla y ayudar a optimizar la asignacion de losrecursos). En el terreno de las misiones de ro-bots, estas tecnicas permiten la adecuacion delos modelos, habitualmente disenados por losoperadores mediante un analisis previo a lamision, a la experiencia.
Como se ha mencionado, la minerıa de procesosopera entre los registros de eventos y los mode-los de los procesos. En los siguientes apartados sedescriben con mas detalles ambos elementos.
2.1. Registros de eventos
Un registro de eventos es una sucesion ordenadade eventos que tienen lugar durante la ejecucion deun proceso. A continuacion se muestra la informa-cion que suelen contener estos eventos utilizandoel ejemplo de una mision de robots.
Caso: Identificador unico del caso en el quese ha producido el evento. En el ejemplo sepodrıa utilizar un codigo alfanumerico paraidentificar la mision real o simulada.
Actividad: Operacion que forma parte delproceso y se ha realizado en el evento. En elejemplo podrıa ser vigilancia, reconocimiento,seguimiento, carga, descarga, etc.
Tiempo: Fecha y hora en la que se ha produci-do el evento. Habitualmente se utiliza el for-mato AAAA/MM/DD-HH:MM:SS o algunomas simplificado.
Recurso: Agente que ha participado en la rea-lizacion del evento. En el ejemplo podrıa serun robot terrestre, acuatico o aereo previa-mente identificado.
Otros datos: La cantidad de datos que se pue-den anadir al evento no esta acotada y depen-de de la aplicacion. En el ejemplo se podrıananadir datos sobre los robots (localizacion,autonomıa...) o sobre las tareas (objetivos,duracion...).
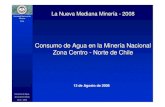
La tabla 1 muestra un posible registro de even-tos para una mision multi-robot. En este ejemplovarios robots terrestres (UGVs) y aereos (UAVs)colaboran para transportar una mercancıa entre
Actas de las XXXVI Jornadas de Automática, 2 - 4 de septiembre de 2015. Bilbao ISBN 978-84-15914-12-9 © 2015 Comité Español de Automática de la IFAC (CEA-IFAC) 301
Cuadro 1: Ejemplo de registro de eventos.
Caso Actividad Tiempo RecursoMision 1 Iniciar 9:52 UAV 1Mision 1 Iniciar 9:57 UGV 1Mision 1 Buscar 10:01 UAV 1Mision 1 Iniciar 10:03 UAV 2Mision 1 Vigilar 10:09 UAV 2Mision 1 Cargar 10:10 UGV 1Mision 1 Finalizar 10:13 UAV 1Mision 1 Transportar 10:14 UGV 1Mision 1 Seguir 10:14 UAV 2Mision 1 Descargar 10:34 UGV 1Mision 1 Finalizar 10:36 UAV 2Mision 1 Finalizar 10:48 UGV 1
... ... ... ...
dos ubicaciones. Este registro de eventos se podrıacompletar con otros datos de los eventos y con in-formacion de otras misiones.
2.2. Modelos de procesos
Un modelo es una representacion de un procesoque puede servir para su estudio, comprension, vi-sualizacion o reproduccion. Trabajar con un mo-delo en lugar de con el proceso supone una reduc-cion de la complejidad y, ademas, permite elegir eldominio de aplicacion y el nivel de detalle. En laminerıa de procesos se suelen utilizar los siguientestipos de modelos [6]:
Sistema de transiciones: Los sistemas de tran-siciones estan entre los modelos mas basicos,constan de estados y transiciones y tienen unestado inicial y otro final.
Formalmente, un sistema de transiciones esun conjunto TS = (S,A, T ), donde S es elconjunto de estados, A es el conjunto de ac-tividades y T ⊆ SxAxS es el conjunto detransiciones.
Red de Petri: Las redes de Petri son herra-mientas matematicas y graficas para el mode-lado de sistemas, que consisten en un grafo bi-partido y orientado con lugares, transiciones,arcos (que conectan lugares y transiciones) ymarcas (que definen el estado y la evolucion).
Formalmente, una red de Petri es un conjuntoN = (P, T, F ), donde P es un conjunto delugares, T es un conjunto de transiciones talesque P ∩ T = 0 y F ⊆ (PxT ) ∪ (TxP ) es unconjunto de arcos dirigidos. Una red de Petrimarcada es un par (N,M), donde N es unared de Petri y M ∈ B(P ) es un conjunto sobreP que indica el marcado de la red.
Modelo y Notacion de Procesos de Nego-cio (Business Process Model and Notation,BPMN): Este lenguaje se utiliza ampliamen-te para modelar procesos de negocio y constade eventos (similares a transiciones), activi-dades (similares a estados) y puertas logicasy eventos temporales.
Redes causales: Las redes causales son grafosdonde los nodos representan actividades y losarcos representan dependencias causales, demanera que cada actividad tiene un conjuntode posibles entradas y otro conjunto de posi-bles salidas.
Algunos de estos modelos estan centrados en losprocesos de negocio (BPMN) o estan adaptadosa procesos con caracterısticas similares como laexistencia de relaciones de causalidad fijas entreactividades (redes causales). Sin embargo, otrosde estos modelos son suficientemente generales ypotentes para utilizarse en campos tan distantescomo la robotica (redes de Petri) [4].
3. MODELADO DE MISIONES
Hay varias formas de llevar a cabo el modelado deuna mision robotica, tal y como se muestra en lafigura 2.
En un extremo esta el modelado manual a partirde un analisis previo a la mision. Este proceso pre-senta varias ventajas: aprovecha un analisis que setiene que realizar para planificar la mision y per-mite alcanzar una mayor profundidad y conseguiruna planificacion mas completa y mas segura. Sinembargo, este proceso tiene tambien inconvenien-tes: principalmente, las desviaciones que puedenexistir entre la planificacion previa y el desarrolloposterior de la mision.
En el otro extremo esta el modelado automatico apartir de la experiencia de la mision. Este procesotambien presenta sus ventajas y sus inconvenien-tes. Por un lado, si los modelos se generan coninformacion suficiente y significativa de las misio-nes, la discrepancia entre los modelos y las mi-siones seran mınimas. Por otro lado, la necesidadde informacion suficiente y significativa de las mi-siones para generar los modelos implica una seriede dificultades: realizacion de las misiones antesde tener modelos, repeticion de las misiones paragenerar esta informacion...
Un termino medio es la combinacion entre los mo-delados manual y automatico, partiendo de un mo-delo obtenido a partir de un analisis de la misione incorporando la experiencia de la mision. Estapropuesta puede superar las dificultades de am-
Actas de las XXXVI Jornadas de Automática, 2 - 4 de septiembre de 2015. Bilbao ISBN 978-84-15914-12-9 © 2015 Comité Español de Automática de la IFAC (CEA-IFAC) 302
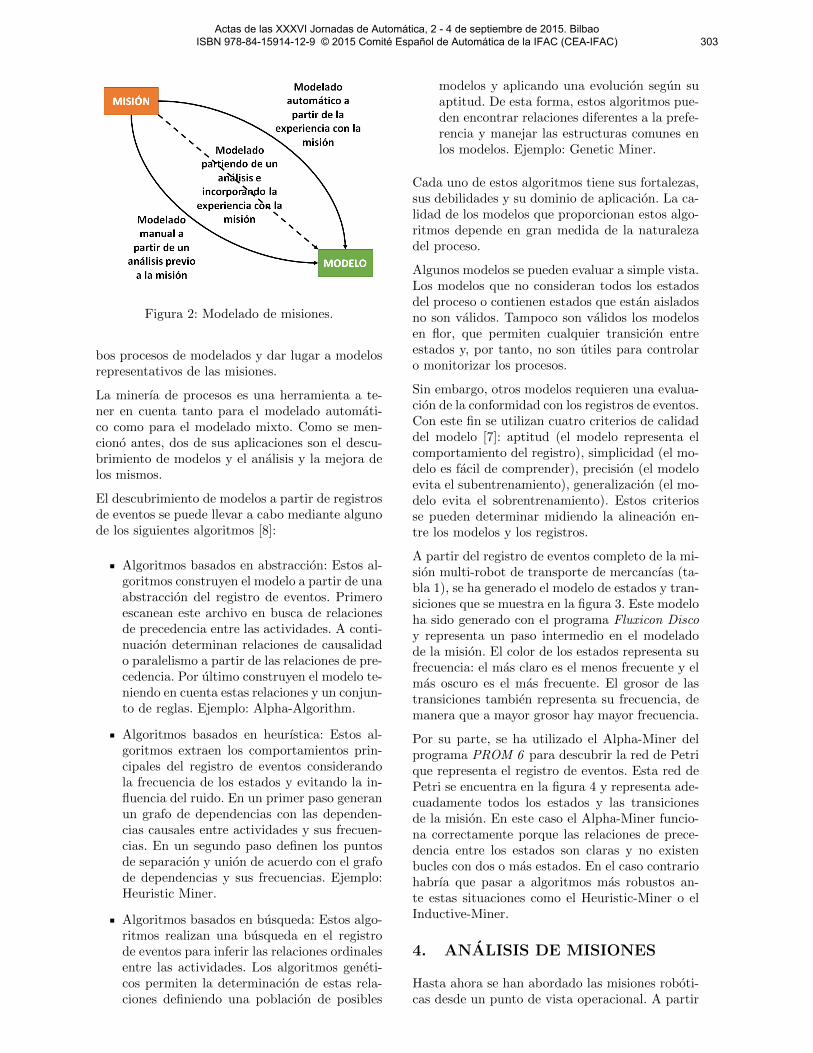
Figura 2: Modelado de misiones.
bos procesos de modelados y dar lugar a modelosrepresentativos de las misiones.
La minerıa de procesos es una herramienta a te-ner en cuenta tanto para el modelado automati-co como para el modelado mixto. Como se men-ciono antes, dos de sus aplicaciones son el descu-brimiento de modelos y el analisis y la mejora delos mismos.
El descubrimiento de modelos a partir de registrosde eventos se puede llevar a cabo mediante algunode los siguientes algoritmos [8]:
Algoritmos basados en abstraccion: Estos al-goritmos construyen el modelo a partir de unaabstraccion del registro de eventos. Primeroescanean este archivo en busca de relacionesde precedencia entre las actividades. A conti-nuacion determinan relaciones de causalidado paralelismo a partir de las relaciones de pre-cedencia. Por ultimo construyen el modelo te-niendo en cuenta estas relaciones y un conjun-to de reglas. Ejemplo: Alpha-Algorithm.
Algoritmos basados en heurıstica: Estos al-goritmos extraen los comportamientos prin-cipales del registro de eventos considerandola frecuencia de los estados y evitando la in-fluencia del ruido. En un primer paso generanun grafo de dependencias con las dependen-cias causales entre actividades y sus frecuen-cias. En un segundo paso definen los puntosde separacion y union de acuerdo con el grafode dependencias y sus frecuencias. Ejemplo:Heuristic Miner.
Algoritmos basados en busqueda: Estos algo-ritmos realizan una busqueda en el registrode eventos para inferir las relaciones ordinalesentre las actividades. Los algoritmos geneti-cos permiten la determinacion de estas rela-ciones definiendo una poblacion de posibles
modelos y aplicando una evolucion segun suaptitud. De esta forma, estos algoritmos pue-den encontrar relaciones diferentes a la prefe-rencia y manejar las estructuras comunes enlos modelos. Ejemplo: Genetic Miner.
Cada uno de estos algoritmos tiene sus fortalezas,sus debilidades y su dominio de aplicacion. La ca-lidad de los modelos que proporcionan estos algo-ritmos depende en gran medida de la naturalezadel proceso.
Algunos modelos se pueden evaluar a simple vista.Los modelos que no consideran todos los estadosdel proceso o contienen estados que estan aisladosno son validos. Tampoco son validos los modelosen flor, que permiten cualquier transicion entreestados y, por tanto, no son utiles para controlaro monitorizar los procesos.
Sin embargo, otros modelos requieren una evalua-cion de la conformidad con los registros de eventos.Con este fin se utilizan cuatro criterios de calidaddel modelo [7]: aptitud (el modelo representa elcomportamiento del registro), simplicidad (el mo-delo es facil de comprender), precision (el modeloevita el subentrenamiento), generalizacion (el mo-delo evita el sobrentrenamiento). Estos criteriosse pueden determinar midiendo la alineacion en-tre los modelos y los registros.
A partir del registro de eventos completo de la mi-sion multi-robot de transporte de mercancıas (ta-bla 1), se ha generado el modelo de estados y tran-siciones que se muestra en la figura 3. Este modeloha sido generado con el programa Fluxicon Discoy representa un paso intermedio en el modeladode la mision. El color de los estados representa sufrecuencia: el mas claro es el menos frecuente y elmas oscuro es el mas frecuente. El grosor de lastransiciones tambien representa su frecuencia, demanera que a mayor grosor hay mayor frecuencia.
Por su parte, se ha utilizado el Alpha-Miner delprograma PROM 6 para descubrir la red de Petrique representa el registro de eventos. Esta red dePetri se encuentra en la figura 4 y representa ade-cuadamente todos los estados y las transicionesde la mision. En este caso el Alpha-Miner funcio-na correctamente porque las relaciones de prece-dencia entre los estados son claras y no existenbucles con dos o mas estados. En el caso contrariohabrıa que pasar a algoritmos mas robustos an-te estas situaciones como el Heuristic-Miner o elInductive-Miner.
4. ANALISIS DE MISIONES
Hasta ahora se han abordado las misiones roboti-cas desde un punto de vista operacional. A partir
Actas de las XXXVI Jornadas de Automática, 2 - 4 de septiembre de 2015. Bilbao ISBN 978-84-15914-12-9 © 2015 Comité Español de Automática de la IFAC (CEA-IFAC) 303
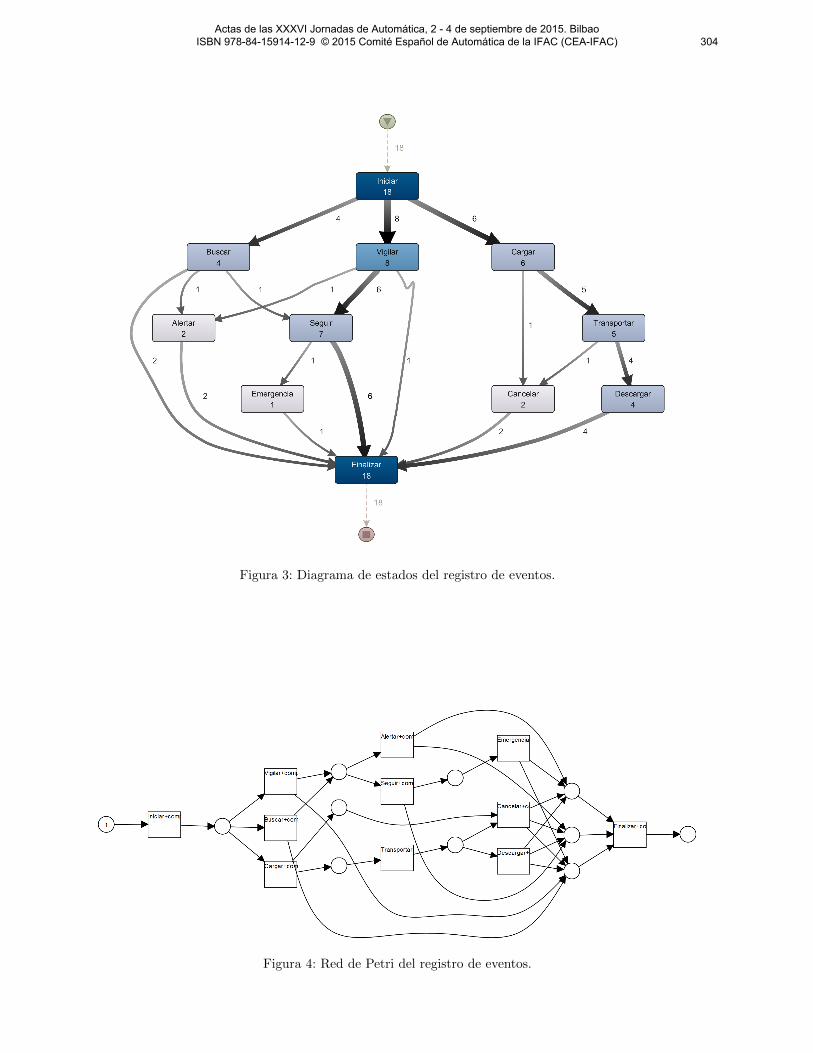
Figura 3: Diagrama de estados del registro de eventos.
Figura 4: Red de Petri del registro de eventos.
Actas de las XXXVI Jornadas de Automática, 2 - 4 de septiembre de 2015. Bilbao ISBN 978-84-15914-12-9 © 2015 Comité Español de Automática de la IFAC (CEA-IFAC) 304

de los registros de eventos se pueden generar mo-delos para facilitar el control y la monitorizacionde las misiones. Sin embargo, la minerıa de pro-cesos integra otras herramientas que pueden serutiles para analizar las misiones roboticas.
Una mision robotica tambien puede ser analizadadesde otras perspectivas como el tiempo o los re-cursos. A continuacion se analiza la mision multi-robot de transporte de mercancıas desde estasperspectivas para mostrar sus posiblidades.
Un analisis temporal de la mision es interesantepara determinar y comparar las duraciones de lastareas. En el diagrama de la figura 5 se muestranlas duraciones medias de las diferentes transicio-nes de la mision. Este analisis permite determinarque tareas son mas o menos eficaces y detectar loscuellos de botella de la mision. Gracias a esta in-formacion se pueden realizar cambios en las tareaso volver a asignar los recursos de modo que mejorela eficacia de la mision. En la mision de transportede mercancıas, la tarea de transporte es el cuellode botella para el robot terrestre, mientras que elseguimiento de esta operacion y la vigilancia de lacarga y descarga son las tareas mas costosas paralos robots aereos. Ademas, las tareas de incializa-cion y finalizacion tambien consumen un tiemposignificativo.
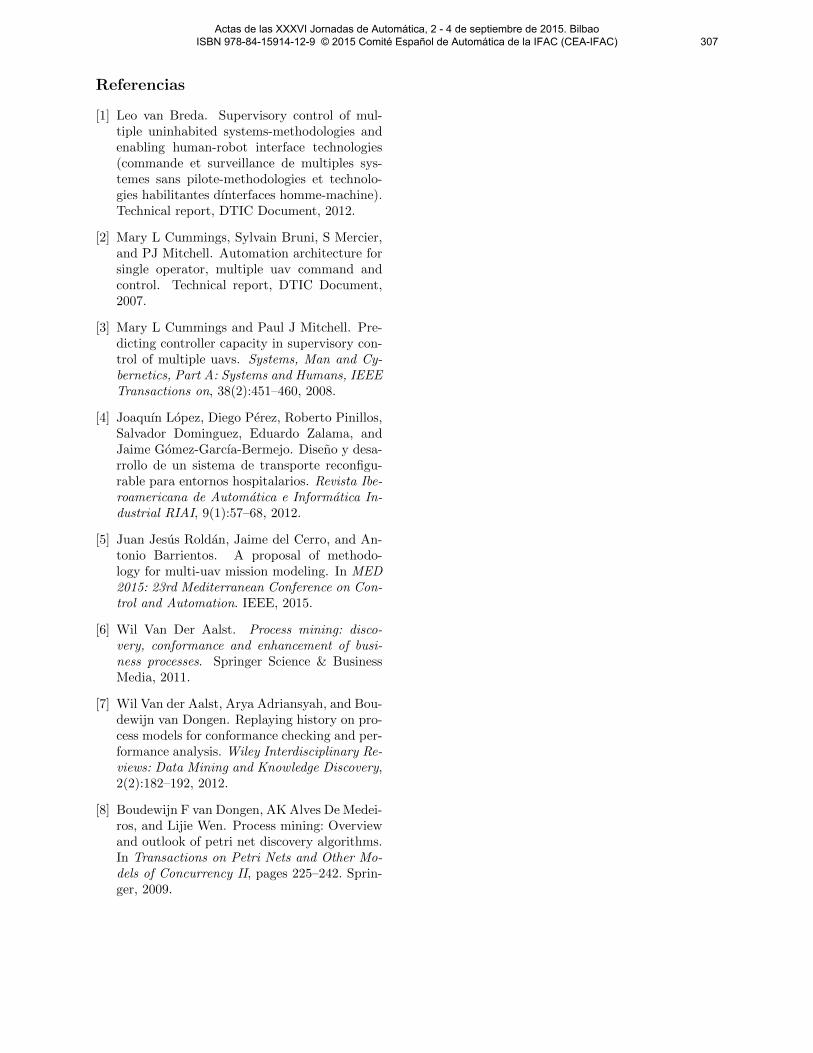
Por su parte, un analisis centrado en los recursoses interesante para evaluar y mejorar la eficienciade la mision. Este analisis permite conocer que re-cursos estan sobreutilizados y cuales estan infra-utilizados, ademas de descubrir sinergias entre losrecursos. Una construccion bastante comun en es-tos analisis es la red social, que representa a losdiferentes recursos y sus relaciones en los diferen-tes casos o tareas. La figura 6 muestra la red socialde la mision con los tres robots (dos UAVs y unUGV) y las colaboraciones entre ellos en los ca-sos. En este caso, la red social muestra que cadarobot colabora con todos los demas en los diferen-tes casos. Sin embargo, en otro caso donde hayamas robots o mas casos la red social cobra interesy permite mejorar la eficiencia de la mision.
5. CONCLUSIONES
En este trabajo se analiza la aplicacion de la mi-nerıa de procesos en el ambito de las misionesmulti-robot. Esta disciplina puede ampliar la pers-pectiva desde la que se suelen analizar estas mi-siones y contribuir a mejoras en la ejecucion de lamision, la duracion de las tareas o la asignacionde los recursos.
Con este fin, se presentan las principales aporta-ciones de la minerıa de procesos: el descubrimien-to de modelos a partir de registros de eventos de
procesos, la reproduccion de modelos de procesospara generar registros de eventos y la evaluacionde la conformidad entre los modelos y los registrosde eventos.
A partir de allı, se sugieren dos caminos para apli-car esta disciplina a las misiones de robots. Porun lado, se propone el modelado automatico delas misiones a partir de la experiencia. En primerlugar, se genera un modelo simple con estados ytransiciones y, en segundo lugar, se transforma enuna red de Petri utilizando herramientas como elAlpha-Algorithm. Por otro lado, se sugiere el es-tudio de las misiones desde las perspectivas deltiempo y los recursos. Estos analisis permiten ladeteccion y solucion de los cuellos de botella y laasignacion eficiente de los recursos.
En futuros trabajos se aplicaran estas tecnicas amisiones multi-robot mas complejas, donde se dis-ponga de un mayor numero de robots, un conjun-to de objetivos mas variado y una serie de tareasmas diferenciadas. Estas misiones se realizaran ensimulacion o experimentos de campo y permitiransacar todo el partido a las herramientas de la mi-nerıa de procesos.
Agradecimientos
Este trabajo esta enmarcado en el proyecto SA-VIER (Situational Awareness Virtual EnviRon-ment), que esta financiado y apoyado por AirbusDefence & Space.
Esta investigacion ha recibido fondos del proyectoRoboCity2030-III-CM (Robotica aplicada a la me-jora de la calidad de vida de los ciudadanos. faseIII; S2013/MIT-2748), financiado por los Progra-mas de Actividades I+D en la Comunidad de Ma-drid y los Fondos Estructurales de la Union Eu-ropea.
Actas de las XXXVI Jornadas de Automática, 2 - 4 de septiembre de 2015. Bilbao ISBN 978-84-15914-12-9 © 2015 Comité Español de Automática de la IFAC (CEA-IFAC) 305
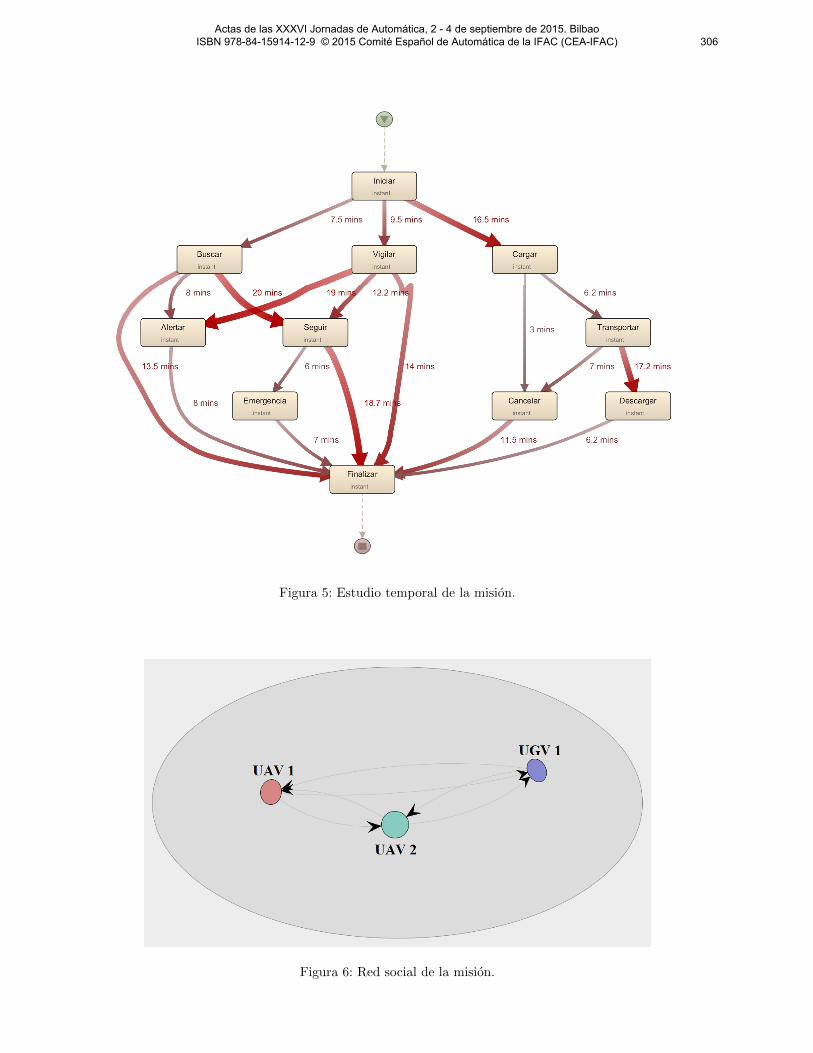
Figura 5: Estudio temporal de la mision.
Figura 6: Red social de la mision.
Actas de las XXXVI Jornadas de Automática, 2 - 4 de septiembre de 2015. Bilbao ISBN 978-84-15914-12-9 © 2015 Comité Español de Automática de la IFAC (CEA-IFAC) 306
Referencias
[1] Leo van Breda. Supervisory control of mul-tiple uninhabited systems-methodologies andenabling human-robot interface technologies(commande et surveillance de multiples sys-temes sans pilote-methodologies et technolo-gies habilitantes dınterfaces homme-machine).Technical report, DTIC Document, 2012.
[2] Mary L Cummings, Sylvain Bruni, S Mercier,and PJ Mitchell. Automation architecture forsingle operator, multiple uav command andcontrol. Technical report, DTIC Document,2007.
[3] Mary L Cummings and Paul J Mitchell. Pre-dicting controller capacity in supervisory con-trol of multiple uavs. Systems, Man and Cy-bernetics, Part A: Systems and Humans, IEEETransactions on, 38(2):451–460, 2008.
[4] Joaquın Lopez, Diego Perez, Roberto Pinillos,Salvador Dominguez, Eduardo Zalama, andJaime Gomez-Garcıa-Bermejo. Diseno y desa-rrollo de un sistema de transporte reconfigu-rable para entornos hospitalarios. Revista Ibe-roamericana de Automatica e Informatica In-dustrial RIAI, 9(1):57–68, 2012.
[5] Juan Jesus Roldan, Jaime del Cerro, and An-tonio Barrientos. A proposal of methodo-logy for multi-uav mission modeling. In MED2015: 23rd Mediterranean Conference on Con-trol and Automation. IEEE, 2015.
[6] Wil Van Der Aalst. Process mining: disco-very, conformance and enhancement of busi-ness processes. Springer Science & BusinessMedia, 2011.
[7] Wil Van der Aalst, Arya Adriansyah, and Bou-dewijn van Dongen. Replaying history on pro-cess models for conformance checking and per-formance analysis. Wiley Interdisciplinary Re-views: Data Mining and Knowledge Discovery,2(2):182–192, 2012.
[8] Boudewijn F van Dongen, AK Alves De Medei-ros, and Lijie Wen. Process mining: Overviewand outlook of petri net discovery algorithms.In Transactions on Petri Nets and Other Mo-dels of Concurrency II, pages 225–242. Sprin-ger, 2009.
Actas de las XXXVI Jornadas de Automática, 2 - 4 de septiembre de 2015. Bilbao ISBN 978-84-15914-12-9 © 2015 Comité Español de Automática de la IFAC (CEA-IFAC) 307