Modelado comportamental de dispositivos basados en … · Adicionalmente, existen otras y muy...
131
Modelado comportamental de dispositivos basados en Ag/TiO2/ITO con efecto memristivo. por Jesús Jiménez León Tesis sometida como requisito parcial para obtener el grado de MAESTRO EN CIENCIAS EN LA ESPECIALIDAD DE ELECTRÓNICA en el Instituto Nacional de Astrofísica, Óptica y Electrónica Bajo la supervisión de: Dr. Arturo Sarmiento Reyes Investigador Titular B INAOE Dr. Carlos A. de la Cruz Blas Profesor Contratado Doctor Tipo 1 UPNA Febrero 2017 Tonantzintla, Puebla c INAOE 2017 El autor otorga al INAOE el permiso de reproducir y distribuir copias parcial o totalmente de esta tesis.
-
Upload
nguyenminh -
Category
Documents
-
view
217 -
download
0
Transcript of Modelado comportamental de dispositivos basados en … · Adicionalmente, existen otras y muy...

Modelado comportamental dedispositivos basados enAg/TiO2/ITO con efecto
memristivo.por
Jesús Jiménez LeónTesis sometida como requisito parcial para
obtener el grado deMAESTRO EN CIENCIAS EN LA
ESPECIALIDAD DE ELECTRÓNICAen el
Instituto Nacional de Astrofísica, Óptica yElectrónica
Bajo la supervisión de:Dr. Arturo Sarmiento ReyesInvestigador Titular B INAOEDr. Carlos A. de la Cruz Blas
Profesor Contratado Doctor Tipo 1 UPNA
Febrero 2017Tonantzintla, Puebla
c©INAOE 2017El autor otorga al INAOE el permiso de
reproducir y distribuir copias parcial o totalmentede esta tesis.
Resumen
Se presenta el desarrollo de una metodología de modelado memristivo paradispositivos basados en películas delgadas de dióxido de titanio (TiO2) depositadassobre óxido de estaño e indio (ITO) y utilizando contactos de plata (Ag).
Para probar su efectividad, esta metodología ha sido aplicada para obtener expresionesanalíticas para las variables eléctricas —resistencia y corriente— en dispositivos cuyoespesor de película de TiO2 es de 100 nm y 50 nm.
El resultado es una función definida a trozos, cuyas expresiones están basadas en unpolinomio de grado variable, elegido en función de la reducción del error cuadráticomedio normalizado.
La comparación entre los datos experimentales y las funciones analíticas propuestasmuestran una similitud de, al menos, 88 % para la resistencia en función del tiempo ymayor a 95 % para la corriente en el tiempo.

Agradecimientos
Al Dr. Arturo Sarmiento Reyes por su asesoramiento en la elaboración
de esta tesis. Sus conocimientos, observaciones y comentarios
oportunos contribuyen en gran medida a la realización de este trabajo.
Al personal de la Universidad Pública de Navarra, en especial al Dr.
Carlos Aristóteles de la Cruz Blas y a la Dra. Cristina Gomez Polo, por
su apoyo y orientación durante la estancia en la UPNA. Así mismo, a
Jesús Beato por toda su ayuda brindada en el laboratorio.
A los miembros del jurado de examen: Dr. Luis Hernández Martínez,
Dr. Roberto Stack Murphy Arteaga y Dr. Pedro Rosales Quintero, por la
revisión y las correcciones realizadas en el desarrollo de esta tesis.
Al personal de la Universidad de Oviedo, V. Vega del Laboratorio de
Membranas Nanoporosas, Unidad de Nanotecnología, y V.M. Prida del
Departamento de Física, por proporcionar los dispositivos utilizados en
V
el desarrollo de este trabajo y por su colaboración en el texto descriptivo
de las muestras en la sección 4.1

Índice general
Índice general VII
1. Introducción 11.1. Objetivo de la tesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2. Estructura de la tesis . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2. Conceptos teóricos 32.1. Fundamentos del memristor . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1. Sistemas Memristivos . . . . . . . . . . . . . . . . . . . . . . 62.1.2. Propiedades del memristor . . . . . . . . . . . . . . . . . . . . 7
2.2. La fabricación del memristor—El memristor HP . . . . . . . . . . . . . 92.2.1. Modelo de arrastre lineal . . . . . . . . . . . . . . . . . . . . . 112.2.2. Modelo de arrastre no-lineal . . . . . . . . . . . . . . . . . . . 14
2.3. Dispositivos de transición resistiva . . . . . . . . . . . . . . . . . . . . 152.3.1. Clasificación de los dispositivos RS . . . . . . . . . . . . . . . 18
3. Modelado del Memristor 233.1. Modelo homotópico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2. Modelo de Kavehei . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.3. Otros modelos memristivos . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3.1. Modelo de Biolek . . . . . . . . . . . . . . . . . . . . . . . . . 313.3.2. Modelo de Lehtonen-Laiho . . . . . . . . . . . . . . . . . . . . 33
4. Trabajo experimental 374.1. Descripción de las muestras . . . . . . . . . . . . . . . . . . . . . . . . 374.2. Caracterización eléctrica . . . . . . . . . . . . . . . . . . . . . . . . . 394.3. Resultados de la caracterización eléctrica . . . . . . . . . . . . . . . . 45
5. Extracción del modelo 555.1. Solución de la ecuación diferencial de arrastre no-lineal . . . . . . . . . 575.2. Metodología de las aproximaciones . . . . . . . . . . . . . . . . . . . 59
5.2.1. Aproximación de la resistencia en el tiempo . . . . . . . . . . . 625.2.2. Aproximación de la corriente en el tiempo . . . . . . . . . . . . 64
VII

5.2.3. Criterio de elección de las funciones de aproximación . . . . . 655.3. Resultados de las aproximaciones . . . . . . . . . . . . . . . . . . . . 66
5.3.1. Aproximación en la zona 1© . . . . . . . . . . . . . . . . . . 665.3.2. Aproximación en la zona 2© . . . . . . . . . . . . . . . . . . 705.3.3. Aproximación en la zona 3© . . . . . . . . . . . . . . . . . . 745.3.4. Modelo unificado . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.4. Validación del modelo . . . . . . . . . . . . . . . . . . . . . . . . . . 825.4.1. Circuito R–M . . . . . . . . . . . . . . . . . . . . . . . . . . . 825.4.2. Amplificador inversor memristivo . . . . . . . . . . . . . . . . 85
6. Conclusiones 89
A. Modelo homotópico 91A.1. Modelo de segundo orden . . . . . . . . . . . . . . . . . . . . . . . . . 91A.2. Modelo de tercer orden . . . . . . . . . . . . . . . . . . . . . . . . . . 92
B. Modelo de Kavehei 93
C. Modelo de Biolek 95
D. Modelo de Lehtonen 97
E. Solución de la ecuación de arraste no-lineal 99
F. Aproximaciones 101F.1. Aproximaciones en la zona 1© . . . . . . . . . . . . . . . . . . . . . 101F.2. Aproximaciones en la zona 2© . . . . . . . . . . . . . . . . . . . . . 102F.3. Aproximaciones en la zona 3© . . . . . . . . . . . . . . . . . . . . . 104
G. Código Verilog-A para modelo comportamental 107G.1. Modelo para dispositivos de 100nm . . . . . . . . . . . . . . . . . . . 107G.2. Modelo para dispositivos de 50nm . . . . . . . . . . . . . . . . . . . . 108
Índice de figuras 111
Índice de Tablas 115
Prefacio
Aunque aún existe polémica sobre si el memristor es en realidad un elementoadecuado en el marco de la ruta a futuro del diseño eléctronico, en los últimos años, lainvestigación de éste como elemento integrado ha tenido grandes avances.
Incluso, recientemente se ha dejado entrever que la aplicación mayormentedesarrollada para este “nuevo elemento” son las memorias no volátiles de altadensidad; lo cual era de esperarse, pues sus principales características indican efectosde memoria y además se ha comprobado que estas características aparecenespecialmente en dimensiones nanométricas.
Adicionalmente, existen otras y muy variadas aplicaciones que emanan del uso delmemristor y que de a poco comienzan a explorarse. Una de ellas —en la queinicialmente comenzó este proyecto— trata sobre el uso de las propiedadesmemristivas en el sensado de variables físicas.
En este sentido se plantean principalmente dos obstáculos:
El primero, la falta de conocimiento que se tiene de las propiedades eléctricas de estosdispositivos; pues ellas presentan un comportamiento dependiente de los materialesutilizados en la fabricación.
El segundo, el modelado del dispositivo, pues es necesario un modelo adecuado quecumpla con las características que describe el memristor, y que además sea compatiblecon los ambientes habituales de simulación de circuitos eléctricos.
Con vista a ello, el presente trabajo contribuye a resolver ambos problemas para undispositivo específico.
IX


Capítulo 1
Introducción
El memristor, introducido por Leon O. Chua en la década de los 70’s como cuartoelemento circuital básico —y fabricado en el año 2008 en los laboratorios deHewlett-Packard— ha recibido gran aceptación en el rubro del diseño electrónico,pues sus propiedades inherentes han resultado especialmente útiles en algunos tópicoscomo son la síntesis de filtros, circuitos con memoria, procesamiento de imágenes o elmodelado de sistemas biológicos. Como consecuencia, ha fomentado la investigacióny desarrollo del memristor a nivel fabricación, en el sentido de encontrar estructurasque presenten características memristivas que sean adecuadas para alguna aplicaciónen específico.
A raíz de lo anteriormente expuesto, se han encontrado diversas combinaciones deóxidos y semiconductores que presentan las características del memristor y queadicionalmente pueden ser utilizadas en diversas tareas, por ejemplo, una de ellas: elsensado de temperatura, humedad o alguna otra variable física.
Recientemente el óxido de indio y estaño (ITO por sus siglas en inglés, Indium TinOxide) ha tenido auge como material conductor transparente, útil en funciones desensado; y al ser utilizado junto con el dióxido de titanio (TiO2) ha demostrado seradecuado para la fabricación de memristores. Sin embargo, en algunos casos, elmodelado de sus características memristivas puede resultar complejo.
El presente trabajo presenta, en primera instancia, el estudio y extracción de lascaracterísticas memristivas de dispositivos planares fabricados con películas delgadasde TiO2 depositadas sobre un substrato de ITO y que utilizan contactos de plata (Ag).
Dichas características son posteriormente utilizadas para realizar un modelocomportamental, que describe las propiedades eléctricas de los dispositivos, y que esde fácil adecuación a un ambiente de simulación de circuitos eléctricos.
1

2 CAPÍTULO 1. INTRODUCCIÓN
1.1. Objetivo de la tesisEl objetivo principal de la tesis es desarrollar un modelo que describa de maneraadecuada las características memristivas de los dispositivos planares fabricados enAg/TiO2/ITO.
Para llevarlo a cabo, se plantean los siguientes objetivos específicos:
Analizar y entender las características del dispositivo; con base en esto,identificar qué mecanismo rige su comportamiento.
Obtener las características eléctricas de los dispositivos de manera experimental.
Modificar la ecuación diferencial de arrastre no-lineal acorde a lascaracterísticas del dispositivo y resolverla.
Plantear una metodología de modelado con la cual sea posible obtener lascaracterísticas deseadas.
Incluir el modelo generado en un ambiente de simulación.
1.2. Estructura de la tesisEl resto del documento está organizado como sigue: el capítulo segundo, da unacercamiento al concepto de memristor, la fabricación del memristor HP y susmodelos de arrastre lineal y no-lineal; también se presentan los dispositivos concomportamiento de transiciones resistivas, sus mecanismos físicos y suscaracterísticas. En el tercer capítulo se presentan los modelos que se consideranmayormente relacionados con el objetivo de esta tesis, especialmente el ModeloHomotópico y el Modelo de Kavehei, que sirvieron de base para el desarrollo deltrabajo. En el cuarto capítulo se muestra la metodología de caracterización eléctrica delos dispositivos, así como los resultados obtenidos de ésta. En el capítulo quinto, sedescribe el método utilizado para obtener las expresiones matemáticas cuyocomportamiento se aproxime a los resultados experimentales. Por último, se presentanalgunas conclusiones.

Capítulo 2
Conceptos teóricos
2Habían pasado más de cien años desde la concepción del último de los elementoselectrónicos básicos —el inductor en 1831— cuando el Prof. Leon O. Chua introdujola idea del memristor: un elemento que relaciona las variables eléctricasfundamentales de carga y flujo [1].
Inicialmente no se mostró mucho interés en este elemento, fue hasta su posteriorfabricación por parte de los laboratorios Hewlett-Packard que se continuó con elestudio de este tipo de sistemas no-lineales.
Actualmente, el memristor ha resultado ser un parteaguas en la teoría de circuitosconvencional, pues su modelado ha permitido explicar algunos fenómenos presentesen dispositivos semiconductores; entre ellos, el fenómeno de Transición Resistiva,cuyas causas eran desconocidas y que en su momento fue sólo presentado como“comportamiento anómalo” [2] [3] [4].
En el presente capítulo se abordan los conceptos básicos de la teoría del memristory su generalización a los sistemas memristivos. Además, se explican la estructura yfuncionamiento del memristor HP. Por último, se expone de manera fundamental elcomportamiento de los dispositivos que exhiben transiciones resistivas y sus principalescaracterísticas.
2.1. Fundamentos del memristor
El memristor ideal es un elemento de dos terminales, pasivo, cuya función constitutivade rama relaciona flujo magnético ϕ y carga eléctrica q. Fue conceptualizado por LeonO. Chua en 1971 [1] con base en un argumento de simetría que completaría el númerode relaciones posibles entre las cuatro variables circuitales fundamentales: corriente i,voltaje v, flujo magnético ϕ y carga eléctrica q.
3
4 CAPÍTULO 2. CONCEPTOS TEÓRICOS
v
q ϕ
iCapacitor
Memristor
Inductor
Resistor
Figura 2.1: Las cuatro variables eléctricas fundamentales.
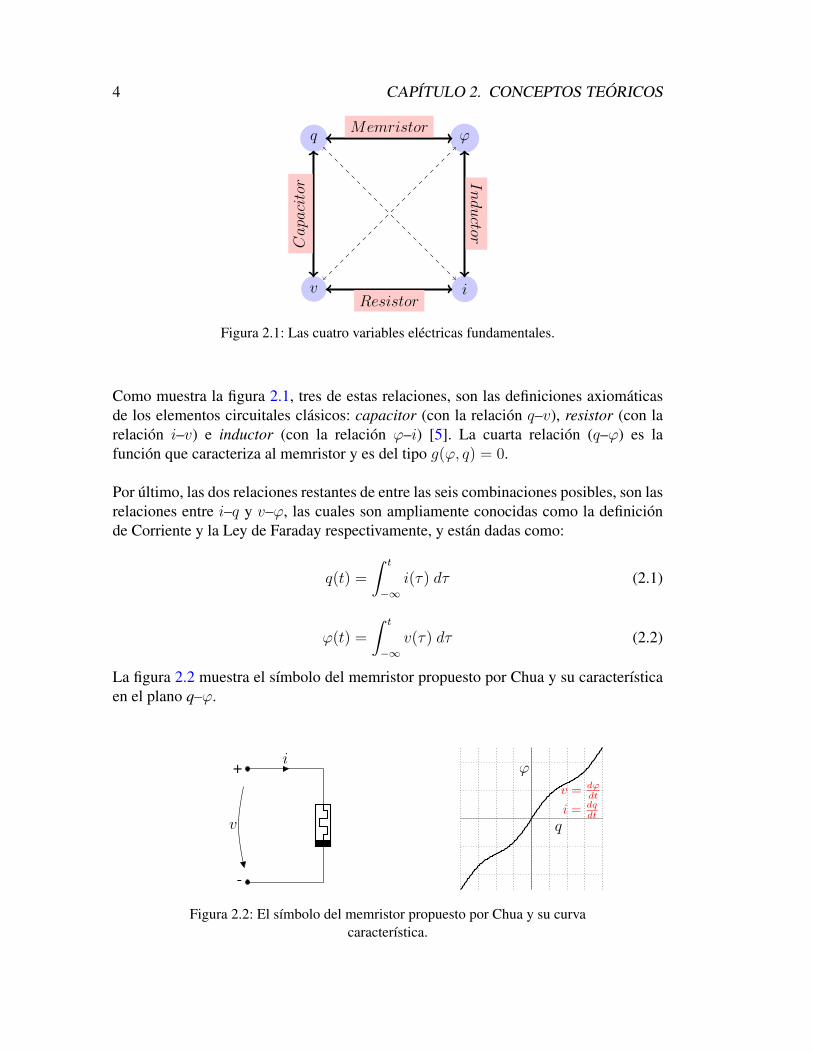
Como muestra la figura 2.1, tres de estas relaciones, son las definiciones axiomáticasde los elementos circuitales clásicos: capacitor (con la relación q–v), resistor (con larelación i–v) e inductor (con la relación ϕ–i) [5]. La cuarta relación (q–ϕ) es lafunción que caracteriza al memristor y es del tipo g(ϕ, q) = 0.
Por último, las dos relaciones restantes de entre las seis combinaciones posibles, son lasrelaciones entre i–q y v–ϕ, las cuales son ampliamente conocidas como la definiciónde Corriente y la Ley de Faraday respectivamente, y están dadas como:
q(t) =
∫ t
−∞i(τ) dτ (2.1)
ϕ(t) =
∫ t
−∞v(τ) dτ (2.2)
La figura 2.2 muestra el símbolo del memristor propuesto por Chua y su característicaen el plano q–ϕ.
i
v
+
-
q
ϕ
v = dϕdt
i = dqdt
Figura 2.2: El símbolo del memristor propuesto por Chua y su curvacaracterística.
2.1. FUNDAMENTOS DEL MEMRISTOR 5
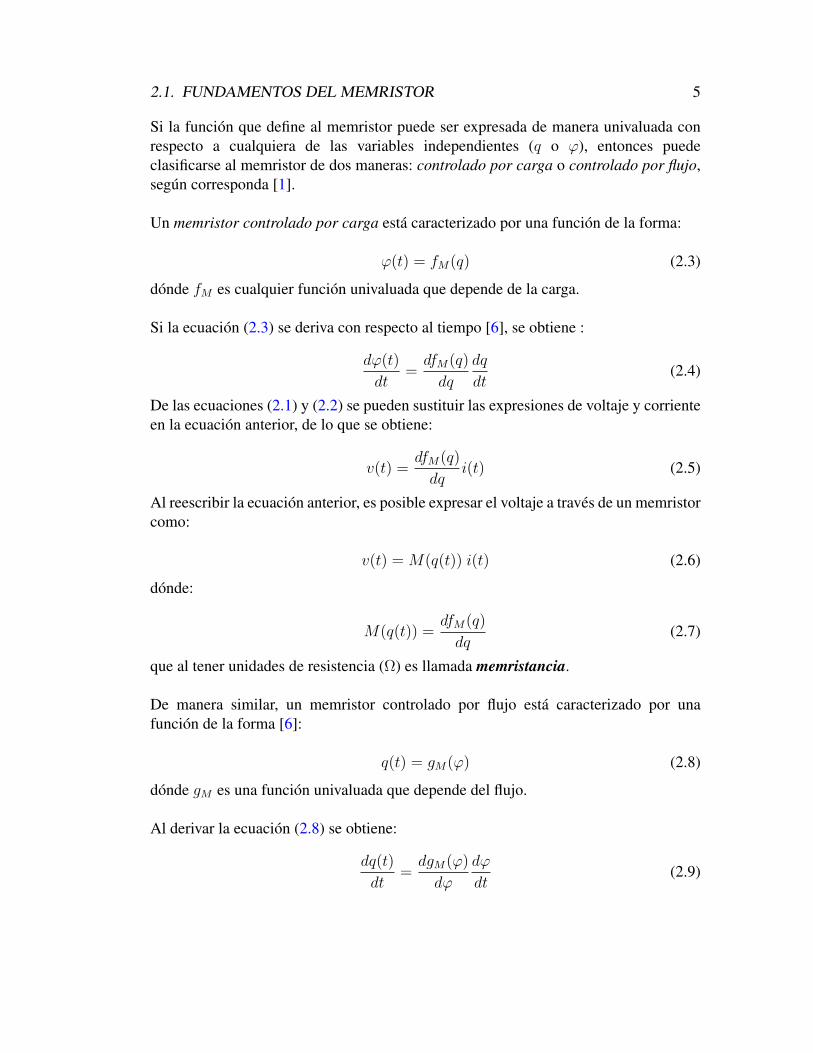
Si la función que define al memristor puede ser expresada de manera univaluada conrespecto a cualquiera de las variables independientes (q o ϕ), entonces puedeclasificarse al memristor de dos maneras: controlado por carga o controlado por flujo,según corresponda [1].
Un memristor controlado por carga está caracterizado por una función de la forma:
ϕ(t) = fM(q) (2.3)
dónde fM es cualquier función univaluada que depende de la carga.
Si la ecuación (2.3) se deriva con respecto al tiempo [6], se obtiene :
dϕ(t)
dt=dfM(q)
dq
dq
dt(2.4)
De las ecuaciones (2.1) y (2.2) se pueden sustituir las expresiones de voltaje y corrienteen la ecuación anterior, de lo que se obtiene:
v(t) =dfM(q)
dqi(t) (2.5)
Al reescribir la ecuación anterior, es posible expresar el voltaje a través de un memristorcomo:
v(t) = M(q(t)) i(t) (2.6)
dónde:
M(q(t)) =dfM(q)
dq(2.7)
que al tener unidades de resistencia (Ω) es llamada memristancia.
De manera similar, un memristor controlado por flujo está caracterizado por unafunción de la forma [6]:
q(t) = gM(ϕ) (2.8)
dónde gM es una función univaluada que depende del flujo.
Al derivar la ecuación (2.8) se obtiene:
dq(t)
dt=dgM(ϕ)
dϕ
dϕ
dt(2.9)
6 CAPÍTULO 2. CONCEPTOS TEÓRICOS
Análogamente al caso anterior, se tiene:
i(t) =dgM(ϕ)
dϕv(t) (2.10)
Por lo tanto, la corriente en el memristor puede expresarse como:
i(t) = W (φ(t)) v(t) (2.11)
dónde:
W (ϕ(t)) =dgM(ϕ)
dϕ(2.12)
que al tener unidades de conductancia (Ω−1) es llamada memductancia.
Más aún, si tomamos las ecuaciones (2.1) y (2.2) es posible reescribir la ecuación (2.3)como: ∫ t
−∞v(τ)dτ = fM
(∫ t
−∞i(τ)dτ
)(2.13)
Esto implica que el memristor ideal es un elemento que relaciona el valor de lasintegrales de voltaje y corriente a través de una relación no lineal [7]; y además, que elvalor de la memristancia en cualquier instante de tiempo t depende de la integral de lacorriente a través del memristor evaluada desde t = −∞ hasta t = t0.
En otras palabras, mientras en el tiempo to el memristor se comporta como un resistorordinario, su valor de resistencia depende de la historia de la corriente que ha fluídopor el elemento [1].
2.1.1. Sistemas MemristivosEn el año 1976, Chua y Kang expanden el concepto de memristor ideal a una clase másamplia de sistemas dinámicos definidos como Sistemas Memristivos [8]. Los sistemasmemristivos tienen la forma característica:
x = f(x, u, t)
y = g(x, u, t)u
(2.14a)(2.14b)
donde u y y denotan la entrada y la salida del sistema y x denota el estado delsistema. La función f : Rn × R × R → Rn es una función vectorial continuan-dimensional y la función g : Rn × R× R→ R es una función escalar continua [8].

2.1. FUNDAMENTOS DEL MEMRISTOR 7
Desde este punto de vista, un memristor de n-ésimo orden, de un puerto, controladopor corriente es representado por:
x = f(x, i, t)
v = R(x, i, t) · i(2.15)
De manera similar, un memristor de n-ésimo orden, de un puerto, controlado por voltajees representado por:
x = f(x, v, t)
i = G(x, v, t) · v(2.16)
donde v e i denotan el voltaje y la corriente, respectivamente; y las funciones f , R y Gse definen de manera similar a f y g en la ecuación (2.14).
De manera que, según lo anterior, el memristor ideal puede describirse con un par deecuaciones [9]:
dxdy
= u
y = g(x)u(2.17)
donde u, x e y denotan la variable controladora, la variable de estado y la variablede salida, respectivamente. Para un memristor controlado por corriente, estas variablescorresponden a [u, x, y] = [i, q, v]; mientras que para un memristor controlado porvoltaje, las variables corresponderán a [u, x, y] = [v, ϕ, i].
2.1.2. Propiedades del memristor
Las propiedades que un dispositivo debe cumplir para ser considerado memristor seconocen como marcas de identidad —cuyo término en inglés es fingerprints. Según[10] [11] y [9], son al menos tres las características que un memristor debe exhibir:
1. Lazo de Histéresis en el plano i–v.
Para un memristor pasivo con memristancia positiva y controlado por una fuentede corriente sinusoidal i(t) = A sin(ωt), se exhibe una figura de Lissajous doble-valuada en el plano i–v para todo tiempo t, excepto cuando pasa por el origen,en donde el lazo se “estrangula”. Es decir, el lazo de histéresis debe pasar por elpunto v = 0 e i = 0 para cualesquiera amplitud A y frecuencia ω.
8 CAPÍTULO 2. CONCEPTOS TEÓRICOS
v
i
Figura 2.3: Característica 1: Lazo de histéresis en el plano i–v.
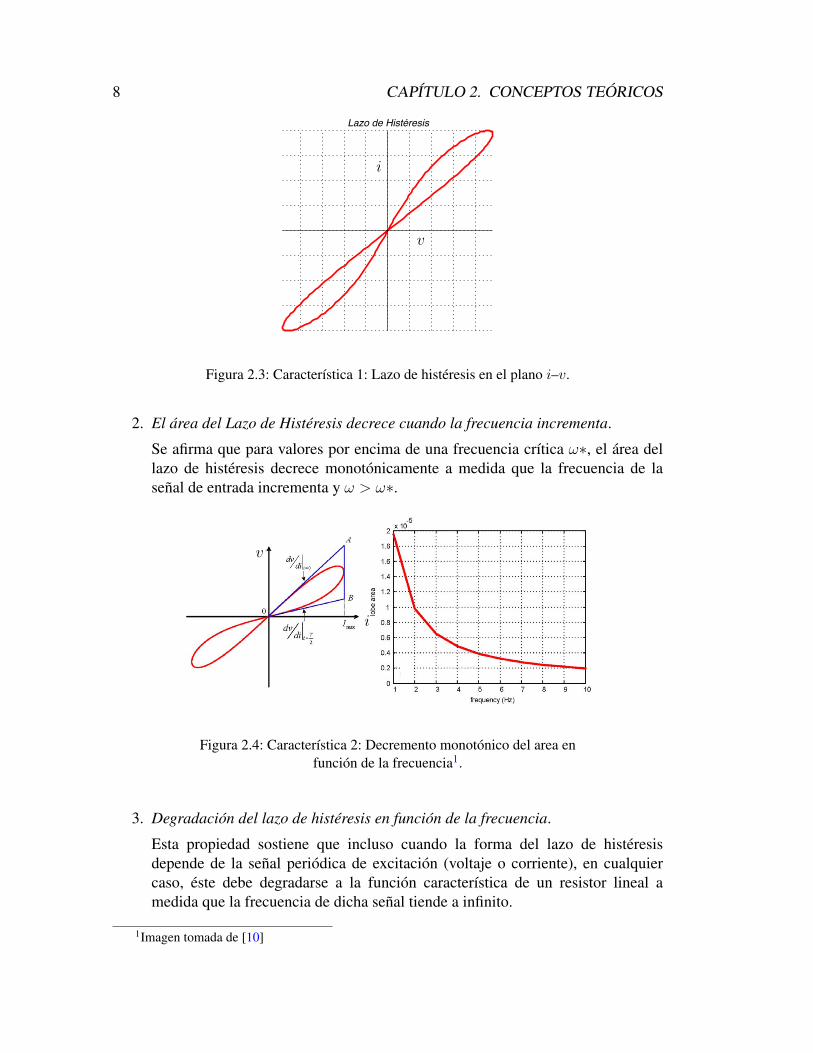
2. El área del Lazo de Histéresis decrece cuando la frecuencia incrementa.
Se afirma que para valores por encima de una frecuencia crítica ω∗, el área dellazo de histéresis decrece monotónicamente a medida que la frecuencia de laseñal de entrada incrementa y ω > ω∗.
v
i
Figura 2.4: Característica 2: Decremento monotónico del area enfunción de la frecuencia1.
3. Degradación del lazo de histéresis en función de la frecuencia.
Esta propiedad sostiene que incluso cuando la forma del lazo de histéresisdepende de la señal periódica de excitación (voltaje o corriente), en cualquiercaso, éste debe degradarse a la función característica de un resistor lineal amedida que la frecuencia de dicha señal tiende a infinito.
1Imagen tomada de [10]

2.2. LA FABRICACIÓN DEL MEMRISTOR—EL MEMRISTOR HP 9
i
v
Figura 2.5: Característica 3: Degradación del lazo de histéresis cuandoω →∞.
2.2. La fabricación del memristor—El memristor HPCasi cuatro décadas después de la concepción teórica del memristor, en el año 2008, elgrupo de trabajo de R. Stanley Williams en los laboratorios Hewlett-Packard presentaun dispositivo cuyo comportamiento exhibe el fenómeno de memristancia [12].
Físicamente, el Memristor HP es un nodo en una estructura de barras entrecruzadas,formado por una película de dióxido de titanio (TiO2) de escala nanométrica entre doselectrodos de platino (Pt). Dicha película está dividida en dos capas: la primera conuna relación oxígeno-titanio de 2:1, haciéndola aislante; la segunda con una undecremento de oxigeno del 0.5 % (TiO2−x, x = 0.005), provocando que las vacanciasde oxígeno hagan al material metálico y conductor.
Electrodosde Pt
(V +)
TiO2−x
TiO2
(V−)
(a) Con un voltaje positivo
Electrodosde Pt
(V−)
TiO2−x
TiO2
(V +)
(b) Con un voltaje negativo
Figura 2.6: Estructura del memristor HP. Modulación de la fronteraTiO2/T iO2−x.
10 CAPÍTULO 2. CONCEPTOS TEÓRICOS
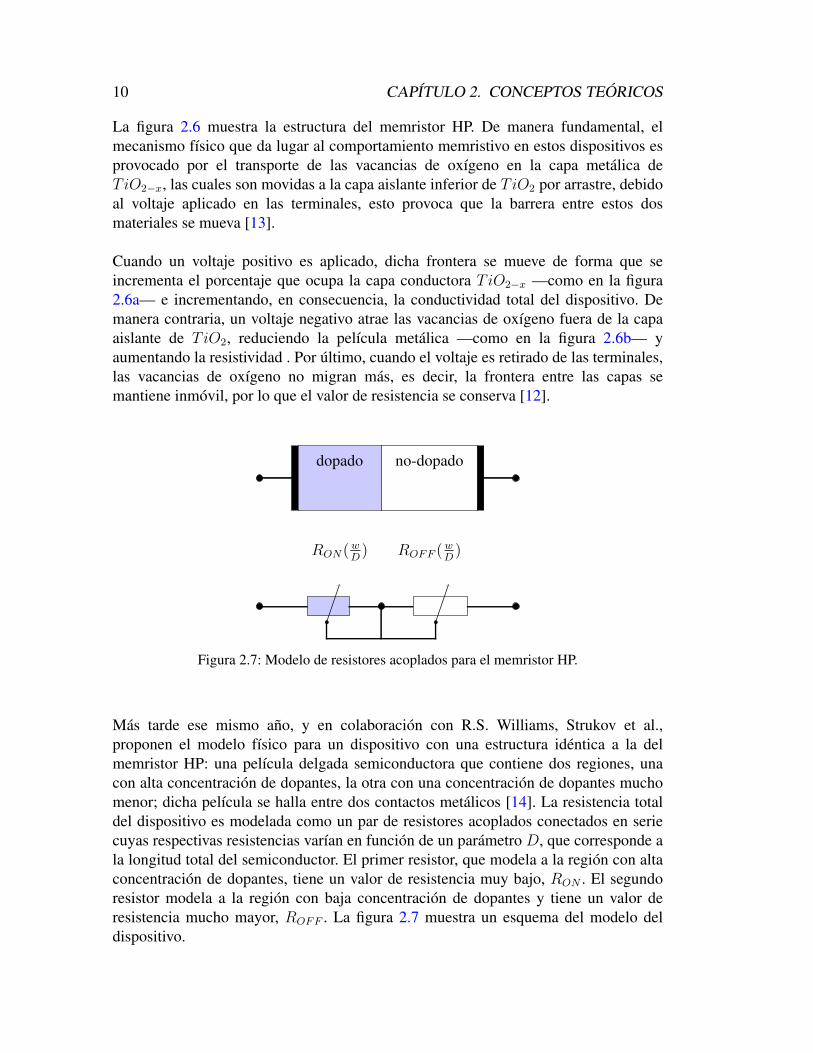
La figura 2.6 muestra la estructura del memristor HP. De manera fundamental, elmecanismo físico que da lugar al comportamiento memristivo en estos dispositivos esprovocado por el transporte de las vacancias de oxígeno en la capa metálica deTiO2−x, las cuales son movidas a la capa aislante inferior de TiO2 por arrastre, debidoal voltaje aplicado en las terminales, esto provoca que la barrera entre estos dosmateriales se mueva [13].
Cuando un voltaje positivo es aplicado, dicha frontera se mueve de forma que seincrementa el porcentaje que ocupa la capa conductora TiO2−x —como en la figura2.6a— e incrementando, en consecuencia, la conductividad total del dispositivo. Demanera contraria, un voltaje negativo atrae las vacancias de oxígeno fuera de la capaaislante de TiO2, reduciendo la película metálica —como en la figura 2.6b— yaumentando la resistividad . Por último, cuando el voltaje es retirado de las terminales,las vacancias de oxígeno no migran más, es decir, la frontera entre las capas semantiene inmóvil, por lo que el valor de resistencia se conserva [12].
dopado no-dopado
RON(wD
) ROFF (wD
)
Figura 2.7: Modelo de resistores acoplados para el memristor HP.
Más tarde ese mismo año, y en colaboración con R.S. Williams, Strukov et al.,proponen el modelo físico para un dispositivo con una estructura idéntica a la delmemristor HP: una película delgada semiconductora que contiene dos regiones, unacon alta concentración de dopantes, la otra con una concentración de dopantes muchomenor; dicha película se halla entre dos contactos metálicos [14]. La resistencia totaldel dispositivo es modelada como un par de resistores acoplados conectados en seriecuyas respectivas resistencias varían en función de un parámetro D, que corresponde ala longitud total del semiconductor. El primer resistor, que modela a la región con altaconcentración de dopantes, tiene un valor de resistencia muy bajo, RON . El segundoresistor modela a la región con baja concentración de dopantes y tiene un valor deresistencia mucho mayor, ROFF . La figura 2.7 muestra un esquema del modelo deldispositivo.

2.2. LA FABRICACIÓN DEL MEMRISTOR—EL MEMRISTOR HP 11
2.2.1. Modelo de arrastre linealPara expresar matemáticamente el mecanismo que da lugar a la memristancia, Strukovet al. plantean el caso en donde la velocidad de arrastre iónico y el campo eléctriconeto aplicado al dispositivo se relacionan de manera lineal. Este modelo, llamado deArrastre Lineal [15] (o Linear Drift, en inglés) está directamente relacionado con lamanera en que se modula la frontera entre las dos regiones resistivas del dispositivo.
Si se considera una relación de conducción óhmica, el modelo de arrastre lineal para elmemristor HP puede expresarse como:
dw(t)
dt= µV
RON
Di(t) (2.18)
v(t) = M(w) · i(t) (2.19)
M(w) =
(RON
w(t)
D+ROFF
(1− w(t)
D
))(2.20)
donde M(w) representa la memristancia, w(t) es la variable de estado en función deltiempo, µV es la movilidad promedio de los iones, RON es la resistencia de la regióndopada, ROFF es la resistencia de la región no dopada y D es el espesor total de lapelícula de TiO2.
La solución de la ecuación (2.18) muestra que la variable de estado puede expresarsecomo [6]:
w(t) = w(t0) + µVRON
Dq(t) (2.21)
Al normalizar la variable de estado con respecto a la longitud total del semiconductorcomo x(t) = w(t)
D, se pueden reescribir las ecuaciones (2.20) y (2.21) como:
M(x) =
(RON · x(t) +ROFF
(1− x(t)
))(2.22)
x(t) = x(t0) +q(t)
QD
(2.23)
donde QD = D2
RONµVrepresenta la carga necesaria para mover la frontera desde su
valor inicial en w(t0), hasta la distancia w(tD) [6].
Sustituyendo la ecuación (2.23) en (2.22), se obtiene la memristancia como:
M(q) = RON
(x(t0) +
q(t)
QD
)+ROFF
(1−
(x(t0) +
q(t)
QD
))(2.24)

12 CAPÍTULO 2. CONCEPTOS TEÓRICOS
Si se llevan a cabo las las simplificaciones adecuadas, la expresión anterior se puedereescribir como:
M(q) = M0 −∆R
(q(t)
QD
)(2.25)
dónde:
M0 = RON
[x(t0) + α
(1− x(t0)
)](2.26)
y además, ∆R = ROFF −RON y α = ROFFRON
.
Adicionalmente, si se toma en cuenta que RON ROFF , se puede aproximar M0 ≈∆R ≈ ROFF , por lo que la ecuación de la memristancia del sistema en función de lacarga se puede reescribir como:
M(q(t)) = ROFF
(1− µvRON
D2q(t)
)(2.27)
De esta manera, al sustituir la ecuación (2.25) en v(t) = M(q)i(t), se obtiene la relacióni–v del Memristor HP controlado por corriente como:
v(t) =
(M0 −∆R
(q(t)
QD
))i(t) (2.28)
Nótese cómo la memristancia en función de la carga da lugar a un memristor controladopor corriente. De manera análoga, una expresión en función del flujo corresponde a unmemristor controlado por voltaje, dicha relación se da en [6] como:
i(t) =v(t)
ROFF
(√1− 2µV
rD2ϕ(t)
) (2.29)
En cuaquier caso, la aplicación del modelo de arrastre lineal del memristor debecumplir con las propiedades que lo definen. La figura 2.8 muestra en la parte superior,el voltaje aplicado (en azul), la corriente resultante (en verde) y el comportamiento dela variable de estado (en rojo) en función del tiempo para el memristor HP. En la parteinferior se muestra, como respuesta, el lazo de histéresis que se describe en el planoi–v. El voltaje aplicado tiene la forma v(t) = v0 sin(ωt) y los parámetros utilizados semuestran en la Tabla 2.1 donde i0 y t0 se calculan como i0 ≡ v0
RON, t0 = 2π
ω0≡ D2
µV v0.

2.2. LA FABRICACIÓN DEL MEMRISTOR—EL MEMRISTOR HP 13
Figura 2.8: Resultados del modelo de arrastre lineal para el memristorHP2.
Parámetro ValorROFFRON
160
v0 1 Vi0 10 mAt0 10 ms
D = 10 10 nmµV 10−10 cm2s−1V −1
Tabla 2.1: Parámetros del memristor HP.
Es claro que en el modelo del memristor HP, la variable de estado —que representa ladistribución de dopantes en el dispositivo— debe estar acotada a valores entre [0, D],por lo que la ecuación de Arrastre Lineal sólo es válida en este intervalo.
2Imagen tomada de [14].

14 CAPÍTULO 2. CONCEPTOS TEÓRICOS
2.2.2. Modelo de arrastre no-lineal
La ecuación (2.23) indica que la variable de estado es directamente proporcional a lacantidad de carga que pasa por el dispositivo hasta que alcanza el valor de D. Sinembargo, debido a las dimensiones del dispositivo, esto no es del todo preciso; endimensiones nanométricas el campo eléctrico generado debido al voltaje aplicadosuele ser de grandes magnitudes, por lo que se esperarían altas no-linealidades en elarrastre iónico. Dichas no-linealidades suelen manifestarse especialmente en lasfronteras del dispositivo, en donde la velocidad de la barrera que divide las regionesdopada y no dopada se reduce gradualmente a cero [15] [16] [14] [17].
Este inconveniente ha sido abordado por algunos autores [14] [17] [18] [19]; todosellos proponen el uso de una función de ventana, F (x), que es multiplicada en eltérmino derecho de la ecuación (2.18) para considerar el comportamiento no-lineal delarrastre iónico a medida que la variable de estado se aproxima a los bordes.
La ecuación del modelo de Arrastre No-Lineal (o Non-Linear Drift, en inglés), puedeexpresarse como la ecuación:
dx(t)
dt= µV
RON
D2i(t)F (·) (2.30)
donde x(t) = w(t)D
es la variable de estado normalizada y F (·) es la función deventana.
El comportamiento de la variable de estado en los límites del memristor puedemodelarse de manera diferente según sea el tipo de función de ventana utilizado. En elcaso concreto del modelo de arrastre no-lineal para el memristor HP, se utiliza lafunción de ventana:
F (ω) =w(1− w)
D2(2.31)
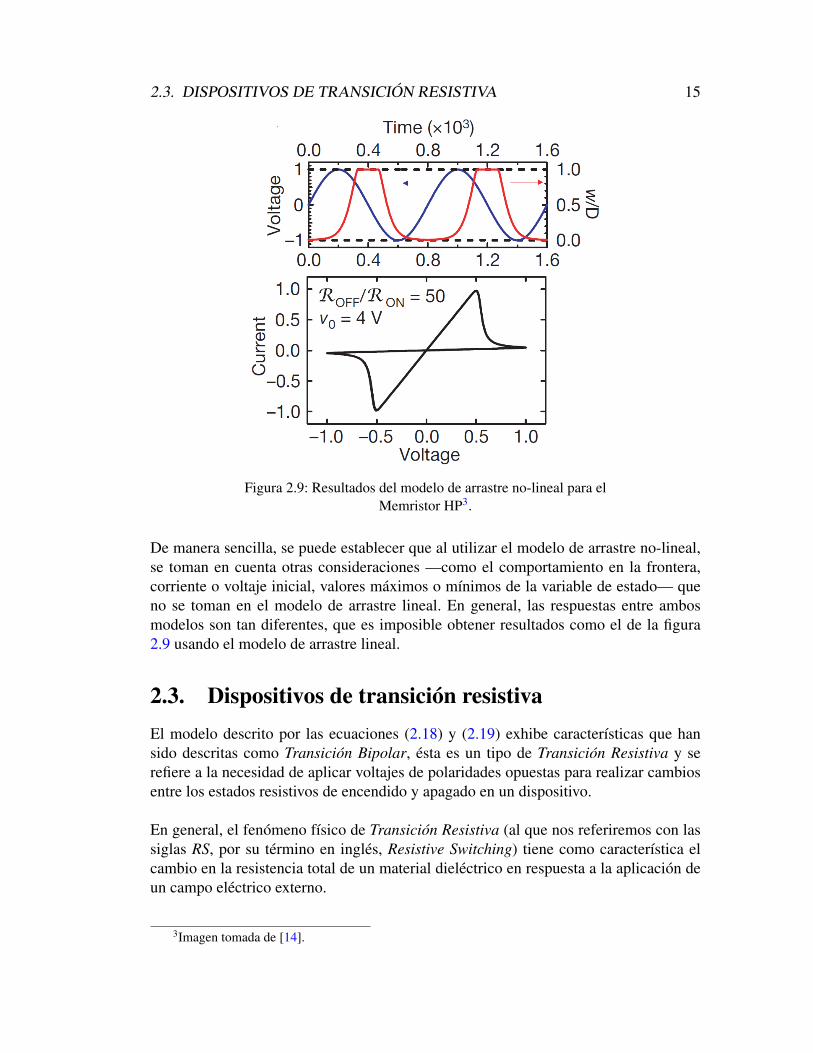
La figura 2.9 ilustra en la parte superior, el voltaje aplicado (en azul) y el cambiocorrespondiente en la variable de estado normalizada (en rojo). En la parte inferior semuestra el lazo de histéresis resultante al aplicar el modelo de arrastre no-lineal.
Mientras que en el modelo de arrastre lineal la memristancia se considerabaproporcional a la carga en todo el rango, por el contrario, en el modelo de arrastreno-lineal se requiere una mayor cantidad de carga para que se lleve a cabo latransición de estados en el memristor a medida que la variable de estado se acerca a lafrontera [14].
2.3. DISPOSITIVOS DE TRANSICIÓN RESISTIVA 15
Figura 2.9: Resultados del modelo de arrastre no-lineal para elMemristor HP3.
De manera sencilla, se puede establecer que al utilizar el modelo de arrastre no-lineal,se toman en cuenta otras consideraciones —como el comportamiento en la frontera,corriente o voltaje inicial, valores máximos o mínimos de la variable de estado— queno se toman en el modelo de arrastre lineal. En general, las respuestas entre ambosmodelos son tan diferentes, que es imposible obtener resultados como el de la figura2.9 usando el modelo de arrastre lineal.
2.3. Dispositivos de transición resistivaEl modelo descrito por las ecuaciones (2.18) y (2.19) exhibe características que hansido descritas como Transición Bipolar, ésta es un tipo de Transición Resistiva y serefiere a la necesidad de aplicar voltajes de polaridades opuestas para realizar cambiosentre los estados resistivos de encendido y apagado en un dispositivo.
En general, el fenómeno físico de Transición Resistiva (al que nos referiremos con lassiglas RS, por su término en inglés, Resistive Switching) tiene como característica elcambio en la resistencia total de un material dieléctrico en respuesta a la aplicación deun campo eléctrico externo.
3Imagen tomada de [14].
16 CAPÍTULO 2. CONCEPTOS TEÓRICOS
A diferencia del rompimiento diélectrico, el proceso RS es reversible, por lo que esposible conmutar entre dos estados de resistencia bien definidos: un estado de bajaresistencia (al que nos referiremos con las siglas LRS, por su término en inglés,Low-Resistance State) y un estado de alta resistencia (al que nos referiremos con lassiglas HRS, por su término en inglés, High-Resistance State).
A la fecha, se han observado diferentes variantes del fenómeno de RS presentes endiversos materiales como son TiO2 [20], NiO [21], Al2O3 [3], Nb2O5 [22] o SrT iO3
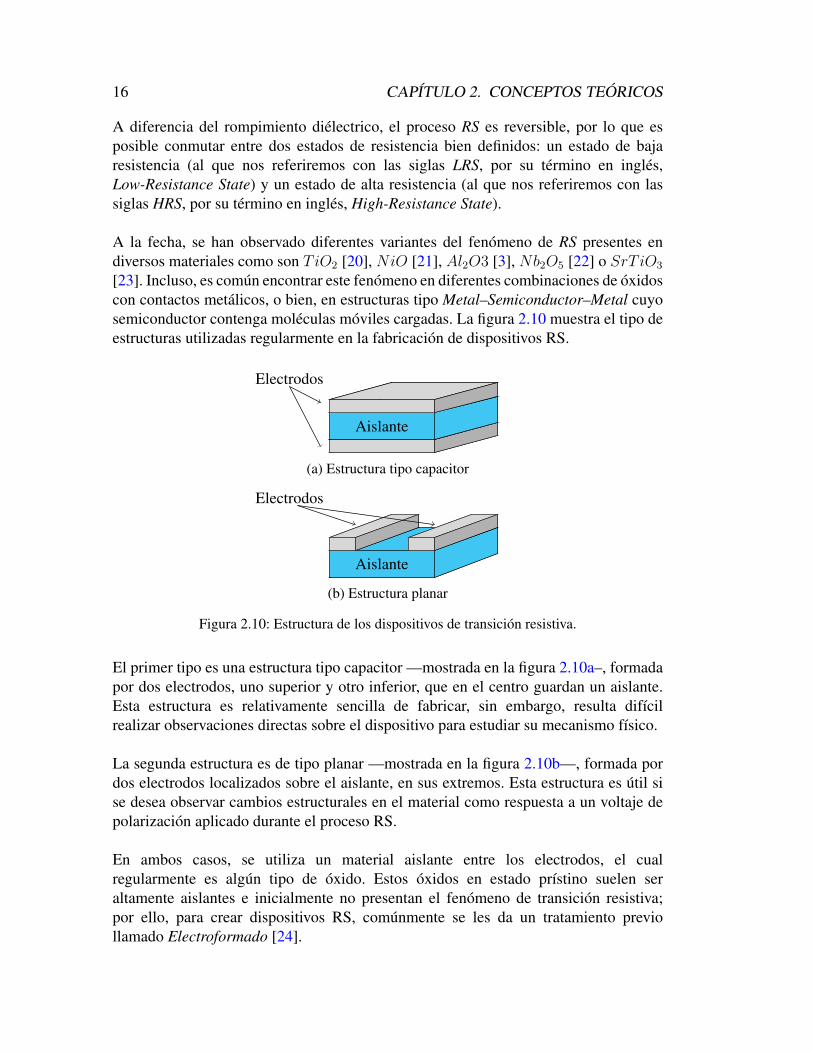
[23]. Incluso, es común encontrar este fenómeno en diferentes combinaciones de óxidoscon contactos metálicos, o bien, en estructuras tipo Metal–Semiconductor–Metal cuyosemiconductor contenga moléculas móviles cargadas. La figura 2.10 muestra el tipo deestructuras utilizadas regularmente en la fabricación de dispositivos RS.
Electrodos
Aislante
(a) Estructura tipo capacitor
Electrodos
Aislante
(b) Estructura planar
Figura 2.10: Estructura de los dispositivos de transición resistiva.
El primer tipo es una estructura tipo capacitor —mostrada en la figura 2.10a–, formadapor dos electrodos, uno superior y otro inferior, que en el centro guardan un aislante.Esta estructura es relativamente sencilla de fabricar, sin embargo, resulta difícilrealizar observaciones directas sobre el dispositivo para estudiar su mecanismo físico.
La segunda estructura es de tipo planar —mostrada en la figura 2.10b—, formada pordos electrodos localizados sobre el aislante, en sus extremos. Esta estructura es útil sise desea observar cambios estructurales en el material como respuesta a un voltaje depolarización aplicado durante el proceso RS.
En ambos casos, se utiliza un material aislante entre los electrodos, el cualregularmente es algún tipo de óxido. Estos óxidos en estado prístino suelen seraltamente aislantes e inicialmente no presentan el fenómeno de transición resistiva;por ello, para crear dispositivos RS, comúnmente se les da un tratamiento previollamado Electroformado [24].
2.3. DISPOSITIVOS DE TRANSICIÓN RESISTIVA 17
El proceso de electroformado (cuyo término en inglés es Electroforming) consiste enel suministro de un voltaje externo de gran magnitud de manera controlada sobre lasterminales del dispositivo bajo prueba.
Vext
log |I|
HRS
LRS
Reset
Set
Forming
VReset VSet VForming
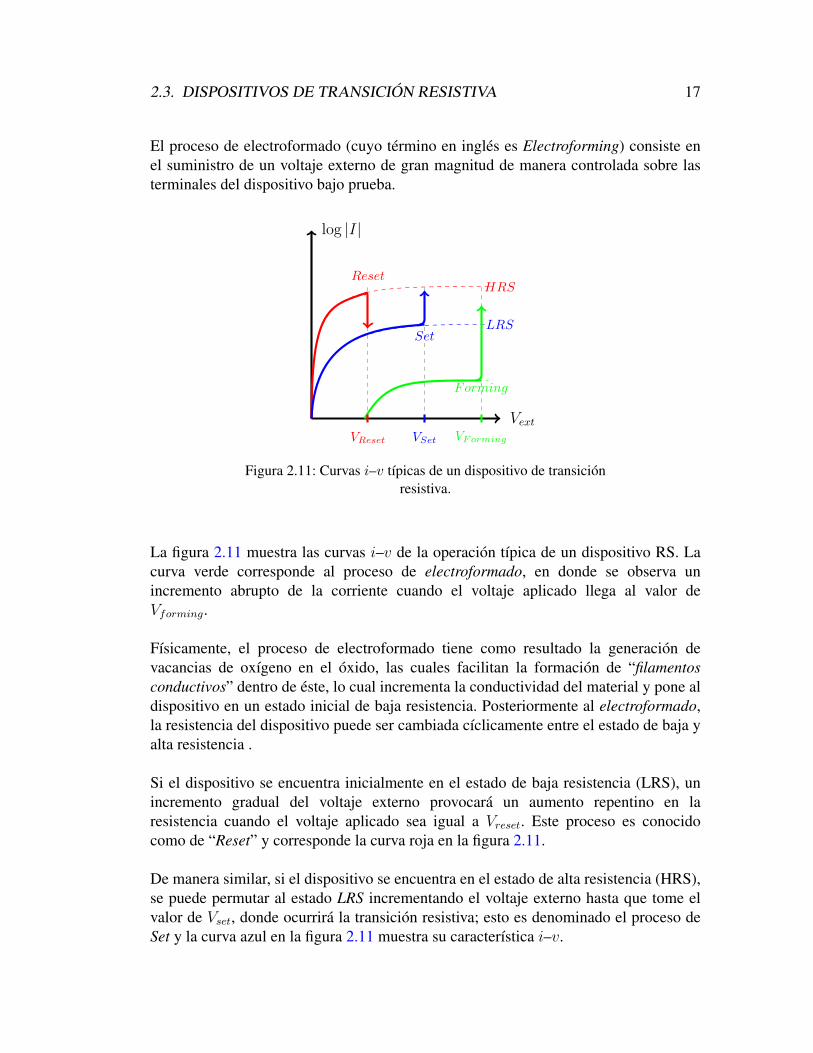
Figura 2.11: Curvas i–v típicas de un dispositivo de transiciónresistiva.
La figura 2.11 muestra las curvas i–v de la operación típica de un dispositivo RS. Lacurva verde corresponde al proceso de electroformado, en donde se observa unincremento abrupto de la corriente cuando el voltaje aplicado llega al valor deVforming.
Físicamente, el proceso de electroformado tiene como resultado la generación devacancias de oxígeno en el óxido, las cuales facilitan la formación de “filamentosconductivos” dentro de éste, lo cual incrementa la conductividad del material y pone aldispositivo en un estado inicial de baja resistencia. Posteriormente al electroformado,la resistencia del dispositivo puede ser cambiada cíclicamente entre el estado de baja yalta resistencia .
Si el dispositivo se encuentra inicialmente en el estado de baja resistencia (LRS), unincremento gradual del voltaje externo provocará un aumento repentino en laresistencia cuando el voltaje aplicado sea igual a Vreset. Este proceso es conocidocomo de “Reset” y corresponde la curva roja en la figura 2.11.
De manera similar, si el dispositivo se encuentra en el estado de alta resistencia (HRS),se puede permutar al estado LRS incrementando el voltaje externo hasta que tome elvalor de Vset, donde ocurrirá la transición resistiva; esto es denominado el proceso deSet y la curva azul en la figura 2.11 muestra su característica i–v.
18 CAPÍTULO 2. CONCEPTOS TEÓRICOS
2.3.1. Clasificación de los dispositivos RSCon base en sus características i–v, el comportamiento de los dispositivos RS puedeser clasificado en dos tipos: unipolar y bipolar. La marcada diferencia entre ambosmodos de operación indica que son provocados por distintos mecanismos físicos. Acontinuación se dará un se da un breve resumen de las particularidades de cada uno.
Comportamiento Unipolar
Un dispositivo es llamado unipolar si la conmutación entre estados resistivos nodepende de las polaridades de los voltajes Vset y Vreset, sino más bien de la amplitudde éstos. Es decir, Vset y Vreset tienen el mismo signo, y las transiciones ocurren paradistinto valor de la magnitud de estos.
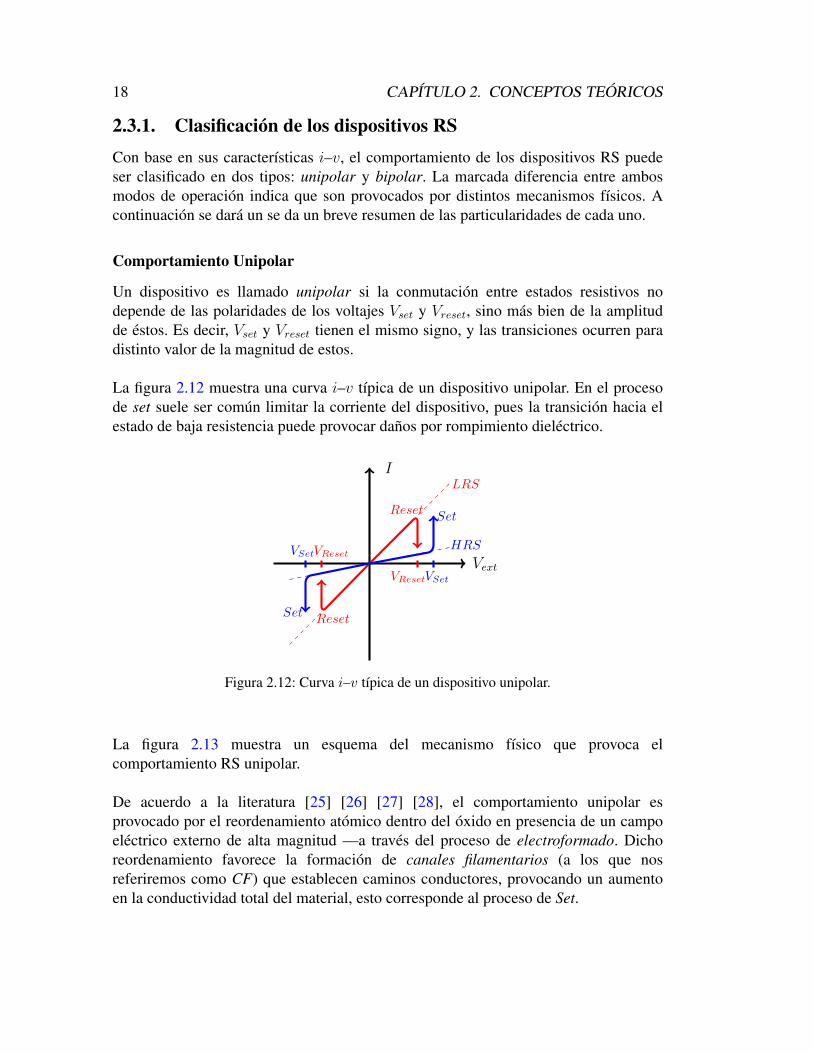
La figura 2.12 muestra una curva i–v típica de un dispositivo unipolar. En el procesode set suele ser común limitar la corriente del dispositivo, pues la transición hacia elestado de baja resistencia puede provocar daños por rompimiento dieléctrico.
Vext
ILRS
HRS
Reset Set
VResetVSet
ResetSet
VResetVSet
Figura 2.12: Curva i–v típica de un dispositivo unipolar.
La figura 2.13 muestra un esquema del mecanismo físico que provoca elcomportamiento RS unipolar.
De acuerdo a la literatura [25] [26] [27] [28], el comportamiento unipolar esprovocado por el reordenamiento atómico dentro del óxido en presencia de un campoeléctrico externo de alta magnitud —a través del proceso de electroformado. Dichoreordenamiento favorece la formación de canales filamentarios (a los que nosreferiremos como CF) que establecen caminos conductores, provocando un aumentoen la conductividad total del material, esto corresponde al proceso de Set.
2.3. DISPOSITIVOS DE TRANSICIÓN RESISTIVA 19
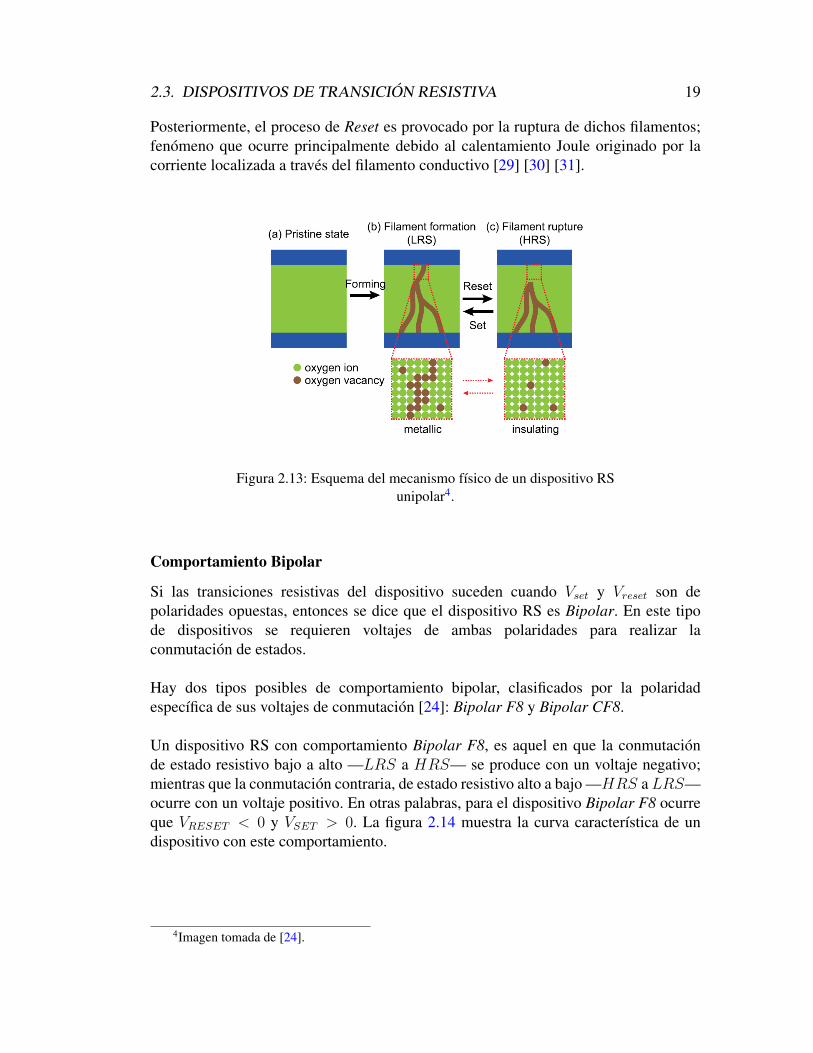
Posteriormente, el proceso de Reset es provocado por la ruptura de dichos filamentos;fenómeno que ocurre principalmente debido al calentamiento Joule originado por lacorriente localizada a través del filamento conductivo [29] [30] [31].
Figura 2.13: Esquema del mecanismo físico de un dispositivo RSunipolar4.
Comportamiento Bipolar
Si las transiciones resistivas del dispositivo suceden cuando Vset y Vreset son depolaridades opuestas, entonces se dice que el dispositivo RS es Bipolar. En este tipode dispositivos se requieren voltajes de ambas polaridades para realizar laconmutación de estados.
Hay dos tipos posibles de comportamiento bipolar, clasificados por la polaridadespecífica de sus voltajes de conmutación [24]: Bipolar F8 y Bipolar CF8.
Un dispositivo RS con comportamiento Bipolar F8, es aquel en que la conmutaciónde estado resistivo bajo a alto —LRS a HRS— se produce con un voltaje negativo;mientras que la conmutación contraria, de estado resistivo alto a bajo —HRS a LRS—ocurre con un voltaje positivo. En otras palabras, para el dispositivo Bipolar F8 ocurreque VRESET < 0 y VSET > 0. La figura 2.14 muestra la curva característica de undispositivo con este comportamiento.
4Imagen tomada de [24].

20 CAPÍTULO 2. CONCEPTOS TEÓRICOS
Vext
ILRS
HRS
Set
VSet
Reset
VReset
Figura 2.14: Curva i–v típica de un dispositivo bipolar F8.
Por otro lado, un dispositivo denominado Bipolar CF8 (Counter F8), es aquel en quela conmutación de estado resistivo bajo a alto —LRS a HRS— se produce con unvoltaje positivo; mientras que la conmutación de estado resistivo alto a bajo —-HRS aLRS— ocurre con un voltaje negativo. De manera sencilla, para el dispositivo BipolarCF8 ocurre que VRESET > 0 y VSET < 0. La figura 2.15 muestra su curva típica en elplano i–v.
Vext
ILRS
HRS
Reset
VReset
Set
VSet
Figura 2.15: Curva i–v típica de un dispositivo bipolar CF8.
En cuanto al modo bipolar, el hecho de que su comportamiento sea dependiente de losvoltajes de conmutación, Vset y Vreset, indica que hay una reacción de ciertas especiescargadas dentro del óxido que en presencia de un campo eléctrico se mueven,provocando un cambio en la resistividad del material [24].
Lo cierto es que a través de varios estudios se ha encontrado que en los mecanismosque dan lugar al modo bipolar juegan un rol importante dos tipos de partículascargadas: electrones y vacancias de oxígeno [25] [32] [33] [34] [27] [35].
2.3. DISPOSITIVOS DE TRANSICIÓN RESISTIVA 21
El primero de estos mecanismos consiste en el atrapamiento y liberación de electronesen los defectos del óxido. Jang Sung Lee et al. resumen este mecanismo en [24], el cuales usualmente descrito por tres modelos de conducción [36] [37]:
1. Emisión Pool-Frenkel: Las fluctuaciones térmicas aleatorias proporcionan a unelectrón atrapado en un estado localizado suficiente energía para escapar de dichoestado. Una vez en la banda de conducción son libres de moverse por el cristalantes de ser nuevamente atrapados en otro estado localizado. La curva i–v secomporta como I ∼ V exp(V
12 ) [38] [39] [40] [41].
2. Corriente limitada por carga espacial: Es considerada cuando los portadores decarga inyectados son más dominantes que los portadores libres dentro delmaterial. A bajo voltaje son los portadores generados térmicamente dentro delmaterial los que dominan, teniendo una relación i–v lineal, I ∼ V . Cuando seincrementa el voltaje aplicado, los portadores inyectados incrementan y loselectrones comienzan a ser atrapados por los defectos, dando lugar a unarelación i–v no lineal, I ∼ V n (n > 1). Un mayor incremento en el voltajeprovoca que los electrones sean completamente atrapados y finalmente serecupera la relación lineal inicial [42] [43] [44].
3. Tuneleo asistido por trampas: Este modelo es considerado cuando los electronespueden ser tuneleados “saltando” de trampa en trampa. Al igual que en el modeloPool-Frenkel, los electrones en una trampa dentro del óxido son emitidos a labanda de conducción por las fluctuaciones térmicas aleatorias. La conduccióntotal es dominada por tuneleo entre el cátodo y las trampas en los óxidos. Larelación i–v se comporta como ln(I/V 2) ∼ 1/V [45] [46].
El segundo mecanismo es generado por el movimiento de las vacancias de oxígeno,las cuales en principio siempre están presentes dentro de un óxido —pues songenerados térmicamente– y usualmente poseen carga positiva, por lo que estánfuertemente influenciadas a moverse en presencia de un campo eléctrico y estemovimiento, a su vez, dependerá de características propias del material, como sondefectos, dislocaciones o desorden en su estructura [24] [47] [48].
Es importante mencionar que existe un tercer mecanismo que da lugar alcomportamiento bipolar. Dicho mecanismo está relacionado al mismo tiempo con laformación de filamentos conductivos y con el movimiento de las vacancias deoxígeno, mencionados anteriormente.
Aunque el fenómeno de formación de canales filamentarios —vía el proceso deelectroformado— se asocia principalmente a dispositivos unipolares, se hademostrado que suele estar presente también en el modo bipolar [24] [49].

22 CAPÍTULO 2. CONCEPTOS TEÓRICOS
Figura 2.16: Esquema del mecanismo físico de un dispositivo RSbipolar debido a filamentos conductores5.
La figura 2.16 muestra un esquema del comportamiento bipolar debido a canalesfilamentarios. En este caso, el proceso de electroformado crea un grupo de filamentosdentro de la región del substrato semiconductor, sin embargo, sus ramificaciones nologran alcanzar el electrodo, sino que se crea una brecha entre los CFs y éste.
El comportamiento bipolar tiene lugar en esta zona, donde el campo eléctrico modularálas vacancias de oxígeno a manera que en el proceso de set se complete la formación delfilamento —y por consiguiente haya un incremento en la conductividad—, mientras queen el proceso de reset se recupera el estado aislante del semiconductor. Generalmente,los detalles de los procesos de set y reset en este mecanismo estarán dados mayormentepor las características del material.
5Imagen tomada de [24].
Capítulo 3
Modelado del Memristor
El auge del interés en el memristor, posterior a su fabricación, ha propiciado eldesarrollo de un gran número de posibles aplicaciones en circuitos y sistemas, lo que asu vez ha producido la urgente necesidad de generar modelos memristivos que no sólobusquen un mejor entendimiento de sus propiedades, sino que dichos modelos puedanconvivir con aquellos de los dispositivos tradicionales en un ambiente de simulaciónde circuitos eléctricos.
La naturaleza de la frontera entre las regiones dopada y no dopada, el mecanismofísico que provoca el fenómeno de memristancia o las características particulares en elplano i–v, son sólo algunas de las características que suelen introducir retos en elmodelado del memristor.
Aunado a esto, se suele buscar que el modelo memristivo generado, sea compatiblecon las herramientas convencionales de Diseño Asistido por Computadora, muycomúnmente utilizadas en la actualidad para el diseño de circuitos [50], y de fácilmanejo por los diseñadores.
En este capítulo se exponen los modelos memristivos que se consideran con mayorrelación al tema central de este trabajo y que han servido como base para su desarrollo,los cuales han sido principalmente dos: el Modelo Homotópico y el Modelo de Kavehei.
3.1. Modelo homotópico
Comúnmente, los Métodos Homotópicos y los Métodos de perturbación han sidoampliamente utilizados en la solución de diversos problemas de naturaleza no-lineal[51]. Sin embargo, uno de los principales inconvenientes es que éstos están basados enla existencia de pequeñas cantidades de perturbación, mismas que no siempre puedenencontrarse dentro de su formulación.
23

24 CAPÍTULO 3. MODELADO DEL MEMRISTOR
En [52] y [53], Ji-Huan He reporta la combinación del concepto de ContinuaciónHomotópica con el Método de Perturbación, dando lugar al Método de PerturbaciónHomotópica (HPM, por sus siglas en inglés, Homotopy-Perturbation Method), con locual resuelve el problema de la inclusión de dichos parámetros de perturbación.
El HPM es comúnmente aplicado a la solución de ecuaciones diferenciales ordinarias(ODE) utilizando la formulación:
H(p, ν(t)) = (1− p)ν ′(t) + p[ODE
]= 0 (3.1)
donde p es el parámetro homotópico, p ∈ [0, 1], y ODE es la ecuación diferencialordinaria a resolver expresada como:
ν(n) − F(t, ν, ν ′, ..., ν(n−1)
)= 0 (3.2)
Si la solución de (3.1) se supone como una serie de potencias de p, entonces la variableν puede escribirse como :
ν = ν0 + ν1p+ ν2p2 + ν3p
3 + ...+ νnpn (3.3)
al sustituir (3.3) en (3.1) y agrupar términos del mismo orden de p se obtiene el conjuntode ecuaciones:
p0 : ν ′0 = 0, ν0(0) = γ0
p1 : ν ′1 − f1
(ν0
)= 0, ν1(0) = γ1
p2 : ν ′2 − f2
(ν1, ν0
)= 0, ν2(0) = γ2
...
(3.4)
donde γ0, γ1, ..., γm son las condiciones iniciales.
Al resolver las ecuaciones de (3.4) se encuentran los valores de las funcionesν0, ν1, ν2, ..., νn; con los cuales se sustituye ν = ν0 + ν1p + ν2p
2 + ... + νnpn en la
formulación homotópica (3.1). Al calcular el límite cuando p → 1 el resultadoobtenido es la solución de la ecuación diferencial ordinaria original (3.2).
Nótese que ν = ν0 + ν1p + ν2p2 + ... + νnp
n tendrá tantos términos como el númerode ecuaciones resueltas de (3.4), por lo que se pueden realizar diferentes órdenes deaproximación de la solución de la ODE, tomando mayor o menor número de esostérminos.
Este método ha probado ser especialmente útil para resolver problemas expresados porecuaciones diferenciales no-lineales [54] [55], como lo es la ecuación (2.30), quedescribe el comportamiento del memristor.

3.1. MODELO HOMOTÓPICO 25
En [56], Sarmiento et al. presentan un modelo memristivo generado a partir de lasolución por HPM de la ecuación diferencial de arrastre no-lineal del memristor HP.Dicha ecuación se repite aquí por conveniencia y está dada por:
dx(t)
dt− µRON
∆2i(t)fw(x) = 0 (3.5)
donde x(t) es la variable de estado normalizada con respecto a la longitud total delsemiconductor ∆, x = w/∆. Además, µ es la movilidad de las cargas en el material,RON es la resistencia correspondiente al estado de baja resistencia, i(t) es la corrientea través del dispositivo y fw(x) es la función de ventana.
La corriente i(t) es usada como la función estímulo y está dada como:
i(t) = Ap sin(ωt) (3.6)
donde Ap es la amplitud y ω su frecuencia angular.
La función de ventana fw(x) tiene forma polinomial y está dada por:
fw(x) = a1x(t)5 − 2a1x(t)3 + a1x(t) (3.7)
La solución de la ecuación (3.5) utilizando el método de perturbación homotópica, dacomo resultado la aproximación de n-ésimo orden de la variable de estado delmemristor. Para obtener el comportamiento de la memristancia, se sustituye estavariable de estado en el modelo de resistores acoplados de la ecuación (2.19), por loque la memristancia también tendrá diferentes órdenes de aproximación. Como seexplicó anteriormente, el orden de aproximación dependerá de cuántos términos seantomados de la solución de la formulación homotópica, por ejemplo, las ecuaciones(3.8) y (3.9) son las aproximaciones de segundo (n = 2) y tercer (n = 3) orden de lamemristancia en forma simbólica, respectivamente.
MO2 = (α− 1)
− 34γ2oXo
(5 Xo2 − 1
)(Xo − 1)3 (Xo + 1)3 Ron
3
− γo Xo (Xo − 1)2 (Xo + 1)2 Ron2
+ Xo
[1+(Xo−1−1
)α]
(α−1)Ron
+ γ2oXo
(5Xo2 − 1
)(Xo − 1)3 (Xo + 1)3 Ron
3
+ γo Xo (Xo − 1)2 (Xo + 1)2 Ron2
cos (ω t)
+[− 1
4γ2oXo
(5 Xo2 − 1
)(Xo − 1)3 (Xo + 1)3 Ron
3
]cos (2ω t)
(3.8)

26 CAPÍTULO 3. MODELADO DEL MEMRISTOR
MO3 = (α− 1)
− 512
γ3oXo(45 Xo4 − 22 Xo2 + 1
)(Xo − 1)4 (Xo + 1)4 Ron
4
− 34
γ2oXo(5 Xo2 − 1
)(Xo − 1)3 (Xo + 1)3 Ron
3
− γo Xo (Xo − 1)2 (Xo + 1)2 Ron2
+ Xo
[1+(Xo−1−1
)α]
(α−1)Ron
+
58γ3oXo
(45 Xo4 − 22 Xo2 + 1
)(Xo − 1)4 (Xo + 1)4 Ron
4
+ γ2oXo(5 Xo2 − 1
)(Xo − 1)3 (Xo + 1)3 Ron
3
+ γo Xo (Xo − 1)2 (Xo + 1)2 Ron2
cos (ω t)
+− 1
4γ3oXo
(45 Xo4 − 22 Xo2 + 1
)(Xo − 1)4 (Xo + 1)4 Ron
4
− 14γ2oXo
(5 Xo2 − 1
)(Xo − 1)3 (Xo + 1)3 Ron
3
cos (2ω t)
+[124
γ3oXo(45 Xo4 − 22 Xo2 + 1
)(Xo − 1)4 (Xo + 1)4 Ron
4
]cos (3ω t)
(3.9)
donde γ0 = µApa1
∆2 , α = ROFFRON
y X0 es la condición inicial de la variable de estado. Losvalores de los parámetros utilizados en las expresiones anteriores corresponden a losvalores típicos del memristor HP y del modelo homotópico, mostrados en las Tablas3.1 y 3.2 respectivamente.
Parámetro Valorµ 10−10 cm2s−1V −1
RON 100 ΩROFF 16KΩ
∆ 10nmα 160
Tabla 3.1: Parámetros típicos del memristor HP.
Parámetro ValorX0 0.1Ap 40µAa1 3
Tabla 3.2: Parámetros típicos del modelo homotópico.
De manera general, la aproximación de n-ésimo orden de la memristancia obtenida porHPM tiene la forma:
M(t) = (α− 1)
(n∑k=0
[n+1∑j=k+1
cjPj(Xo)Rjon
]cos(kωt)
)(3.10)
donde n es el orden de la homotopía, Pj(Xo) son polinomios funcionales y cj soncoeficientes de peso en la sumatoria.
3.1. MODELO HOMOTÓPICO 27
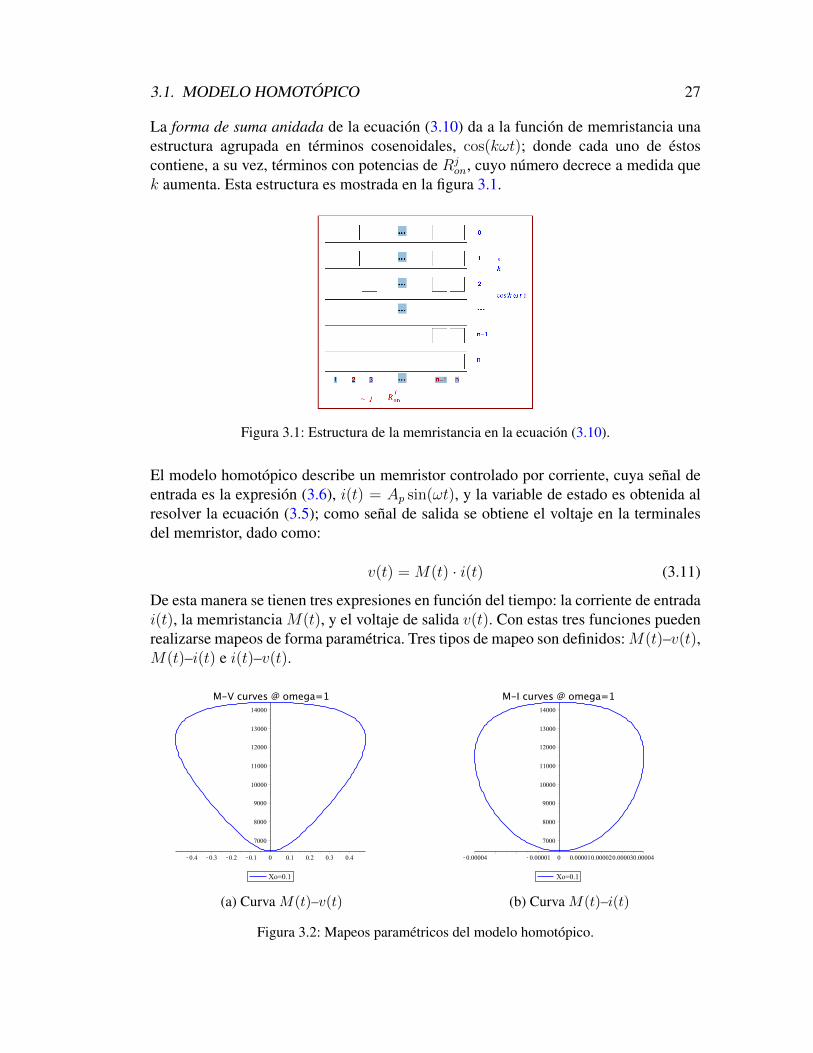
La forma de suma anidada de la ecuación (3.10) da a la función de memristancia unaestructura agrupada en términos cosenoidales, cos(kωt); donde cada uno de éstoscontiene, a su vez, términos con potencias de Rj
on, cuyo número decrece a medida quek aumenta. Esta estructura es mostrada en la figura 3.1.
Figura 3.1: Estructura de la memristancia en la ecuación (3.10).
El modelo homotópico describe un memristor controlado por corriente, cuya señal deentrada es la expresión (3.6), i(t) = Ap sin(ωt), y la variable de estado es obtenida alresolver la ecuación (3.5); como señal de salida se obtiene el voltaje en la terminalesdel memristor, dado como:
v(t) = M(t) · i(t) (3.11)
De esta manera se tienen tres expresiones en función del tiempo: la corriente de entradai(t), la memristancia M(t), y el voltaje de salida v(t). Con estas tres funciones puedenrealizarse mapeos de forma paramétrica. Tres tipos de mapeo son definidos:M(t)–v(t),M(t)–i(t) e i(t)–v(t).
(a) Curva M(t)–v(t) (b) Curva M(t)–i(t)
Figura 3.2: Mapeos paramétricos del modelo homotópico.
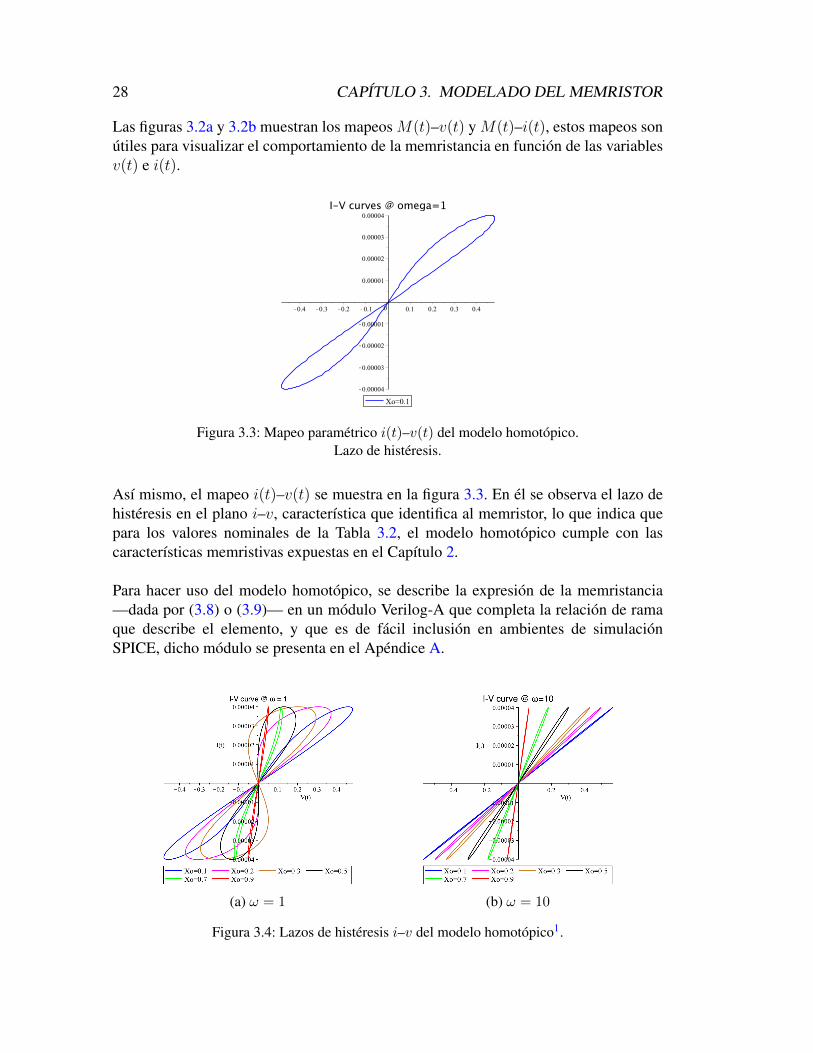
28 CAPÍTULO 3. MODELADO DEL MEMRISTOR
Las figuras 3.2a y 3.2b muestran los mapeos M(t)–v(t) y M(t)–i(t), estos mapeos sonútiles para visualizar el comportamiento de la memristancia en función de las variablesv(t) e i(t).
Figura 3.3: Mapeo paramétrico i(t)–v(t) del modelo homotópico.Lazo de histéresis.
Así mismo, el mapeo i(t)–v(t) se muestra en la figura 3.3. En él se observa el lazo dehistéresis en el plano i–v, característica que identifica al memristor, lo que indica quepara los valores nominales de la Tabla 3.2, el modelo homotópico cumple con lascaracterísticas memristivas expuestas en el Capítulo 2.
Para hacer uso del modelo homotópico, se describe la expresión de la memristancia—dada por (3.8) o (3.9)— en un módulo Verilog-A que completa la relación de ramaque describe el elemento, y que es de fácil inclusión en ambientes de simulaciónSPICE, dicho módulo se presenta en el Apéndice A.
(a) ω = 1 (b) ω = 10
Figura 3.4: Lazos de histéresis i–v del modelo homotópico1.

3.2. MODELO DE KAVEHEI 29
Adicionalmente, debido a su carácter totalmente simbólico, el modelo homotópicopuede caracterizarse fácilmente con respecto a los parámetros de interés. Por ejemplo,la figura 3.4 muestra la modificación de las curvas i–v del memristor como respuesta ala variación de la condición inicial X0 —desde X0 = 0.1 hasta X0 = 0.9— para loscasos ω = 1 y ω = 10. Esta caracterización permite visualizar fácilmente el rango devalores de los parámetros —de X0 en este caso— en el que el modelo continúa siendoválido.
3.2. Modelo de KaveheiEn [57], Kavehei et al. presentan la fabricación y modelo memristivo de un dispositivoconformado por una película de dióxido de titanio (TiO2) que se encuentra entre doselectrodos, uno de plata (Ag) y el otro de óxido de indio y estaño (ITO).
El modelo reportado se basa en la teoría de tuneleo de Simmons, que es comúnmenteusada para describir el mecanismo de conducción en estructuras MIM(Metal-Insulator-Metal) [58], [59].
Las ecuaciones que relacionan el comportamiento no-lineal de la velocidad de arrastrede los iones con la variable de estado normalizada, son:
I(t) = x(t)ION + (1− x(t))IOFF (3.12)
dx(t)
dt= vg(V, ρ(x), ϕ0) (3.13)
donde la función g(·) se describe por:
g(V, ρ(x), ϕ0) =(
1− V
2ϕ0
)exp
(ρ(x)ϕ0
(1−
√1− V
2ϕ0
))
−(
1 +V
2ϕ0
)exp
(ρ(x)ϕ0
(1−
√1 +
V
2ϕ0
)) (3.14)
y v es una constante experimental que identifica la velocidad de conmutación dentro dela distancia normalizada, ϕ0 es la altura de la barrera de equilibrio, mientras que ρ(x)es la función de factor de forma, modelado por:
ρ(x) = δ + η(1− (2x− 1)2p) (3.15)
1Imagen tomada de [56].

30 CAPÍTULO 3. MODELADO DEL MEMRISTOR
donde δ es una constante de offset para mantener el crecimiento monotónico de lafunción y η es una constante que maneja la curvatura del lazo de histéresis [57].
La relación i–v está dada por:
I = xn(aV + b) + (1− x)n(c1 exp(d1V )− c2 exp(d2V )) (3.16)
donde a, b, c1, d1, c2 y d2 son parámetros relacionados con la estructura, materiales ydimensiones del dispositivo. El parámetro n que define la no-linealidad entre la variablede estado x(t) e I . Por simplicidad se supone como n = 1. La Tabla 3.3 muestra losvalores de los parámetros utilizados en el modelo.
Parámetro Valor Parámetro ValorV ∗2 −2 V a 2 V a 1.2e− 2x Var. de Edo. b 4.3e− 6ϕ0 1.2 eV c1 3.3e− 4δ 6 c2 4.8e− 4ηON 22 d1 2.1ηOFF 28 d2 1.6p 5 v 4.0e− 3
Tabla 3.3: Valores de los parámetros del modelo de Kavehei.
Los resultados del modelo se muestran en la figura 3.5. Las curvas correspondientesa las mediciones experimentales en el décimo y centésimo ciclo son las presentadasen verde y azul respectivamente; mientras que la curva i–v descrita por el modelo espresentada en rojo.
Figura 3.5: Lazos de histéresis i–v del modelo de Kavehei3.
2El voltaje aplicado tiene forma de onda triangular, equivalente a las rampas de voltaje aplicadasdurante las mediciones.
3Imagen tomada de [57].

3.3. OTROS MODELOS MEMRISTIVOS 31
Aunque no se muestran resultados en función de la frecuencia, el modelo de Kaveheicumple con la característica más importante del memristor: el lazo de histéresis en elplano i–v.
El modelo de Kavehei es sintetizado en un subcircuito SPICE, generando unmacromodelo adecuado para simulación de circuitos eléctricos. Dicho macromodelose presenta en el Apéndice B.
3.3. Otros modelos memristivos
Los modelos anteriores han sido seleccionados por su relación con el propósito de estetrabajo de tesis, sin embargo son sólo un par dentro de la amplia gama de modelosmemristivos que existen en la actualidad.
En general, el enfoque utilizado en la síntesis de un modelo en particular —esteenfoque puede ser puramente físico, matemático, o bien, eléctricamente descriptivo—está directamente relacionado con el alcance del modelo en cuanto a sus aplicaciones.
El modelado del memristor ha ido evolucionando, sin embargo, una característica encomún que comparten los modelos generados es una sencilla integración dentro deambientes de simulación de circuitos. En esta sección se presenta una breve descripciónde otros modelos que el autor considera importantes en este rubro del modelado de lascaracterísticas eléctricas del memristor.
3.3.1. Modelo de Biolek
En [17], Biolek et al. describen las características del memristor HP haciendo uso delmodelo de arrastre no-lineal, cuyas ecuaciones se repiten aquí por conveniencia.
dx
dt= k · i · f(x), k =
µV RON
D2(3.17)
v(t) = RMEM(x) i(t) (3.18)
RMEM(x) = RON x(t) +ROFF (1− x(t)) (3.19)
La ecuación de estado (3.17) y la ecuación de puerto (3.18) se modelan con el diagramaa bloques de la figura 3.6a, donde el efecto de memoria del memristor es modelado porel integrador retroalimentado, y el efecto del arrastre no-lineal y las condiciones defrontera se modelan con la función de ventana.

32 CAPÍTULO 3. MODELADO DEL MEMRISTOR
(a) Diagrama a bloques (b) Estructura del modelo en SPICE
Figura 3.6: Estructura del modelo memristivo de Biolek4.
Posteriormente, el modelo de Biolek es implementado en un subcircuito SPICE cuyaestructura se muestra en la figura 3.6b.
Utilizando este macromodelo, es posible expresar el estado de la ecuación de arrastreno-lineal como un nodo en el circuito —el nodo x— de manera que al solucionar elcircuito, SPICE encuentra el valor de la variable de estado utilizando algún métodonumérico interno. Además, el modelo se complementa con la obtención de las variablesque originalmente describen al memristor —carga y flujo– obtenidas vía integraciónnumérica dentro del mismo simulador SPICE.
Figura 3.7: Resultados del modelo memristivo de Biolek5.
4Imagen tomada de [17].5Imagen tomada de [17].

3.3. OTROS MODELOS MEMRISTIVOS 33
Las principales características del modelo de Biolek se muestran en la figura 3.7. Losparámetros utilizados son RON = 100 y p = 10. Del lado izquierdo, en el inciso (a),se muestra la respuesta a una señal de entrada armónica con amplitud de 1.2V yfrecuencia de 1Hz. En el inciso (b), al centro, se muestra la respuesta a una señal deentrada ±Vo sin(ωot)
2 con Vo = 1.5V y fo = 1Hz. Por último, del lado derecho, elinciso (c), muestra el resultado de aplicar una señal armónica con amplitud de 2V yfrecuencia de 1Hz. Otros parámetros utilizados son: (a) ROFF = 16kΩ,RINIT = 11kΩ, (b) ROFF = 38kΩ, RINIT = 28kΩ, (c) ROFF = 5kΩ, RINIT = 1kΩ.
El modelo de Biolek es uno de los modelos memristivos de referencia obligada en laliteratura, pues muchos de los modelos actuales se basan en su método para solucionarla ecuación de estado [60] [57] [18] [61].
3.3.2. Modelo de Lehtonen-LaihoEn [60], Lehtonen y Laiho proponen un modelo memristivo adaptado para conexionesen Redes Neuronales Convolucionales (CNN, por sus siglas en inglés, ConvolutionalNeural Network).
El autor considera importante a este modelo debido a que es un claro ejemplo de cómoun modelo físico se sintetiza en un ambiente de simulación de circuitos eléctricos parausarlo en una aplicación específica.
El modelo de Lehtonen-Laiho es una extensión del modelo físico que aparece en [62],el cual está basado en la relación i–v que describen los dispositivos memristivos Metal–Óxido–Metal, dicha relación está dada como:
I = wnβsinh(αV ) + χ(exp(γV )) (3.20)
donde w es la variable de estado del memristor y las constantes α, β, χ y γ dependende las propiedades físicas del dispositivo.
En este modelo, la derivada temporal de la variable de estado se modela como:
dw
dt= a · f(w) · g(V ) (3.21)
donde a es una constante, f(w) es la función de ventana de Joglekar [16]:
f(w) = 1− (2w − 1)2p (3.22)
y g(V ) es una función del voltaje aplicado:
g(V ) = V 2j−1 (3.23)
34 CAPÍTULO 3. MODELADO DEL MEMRISTOR
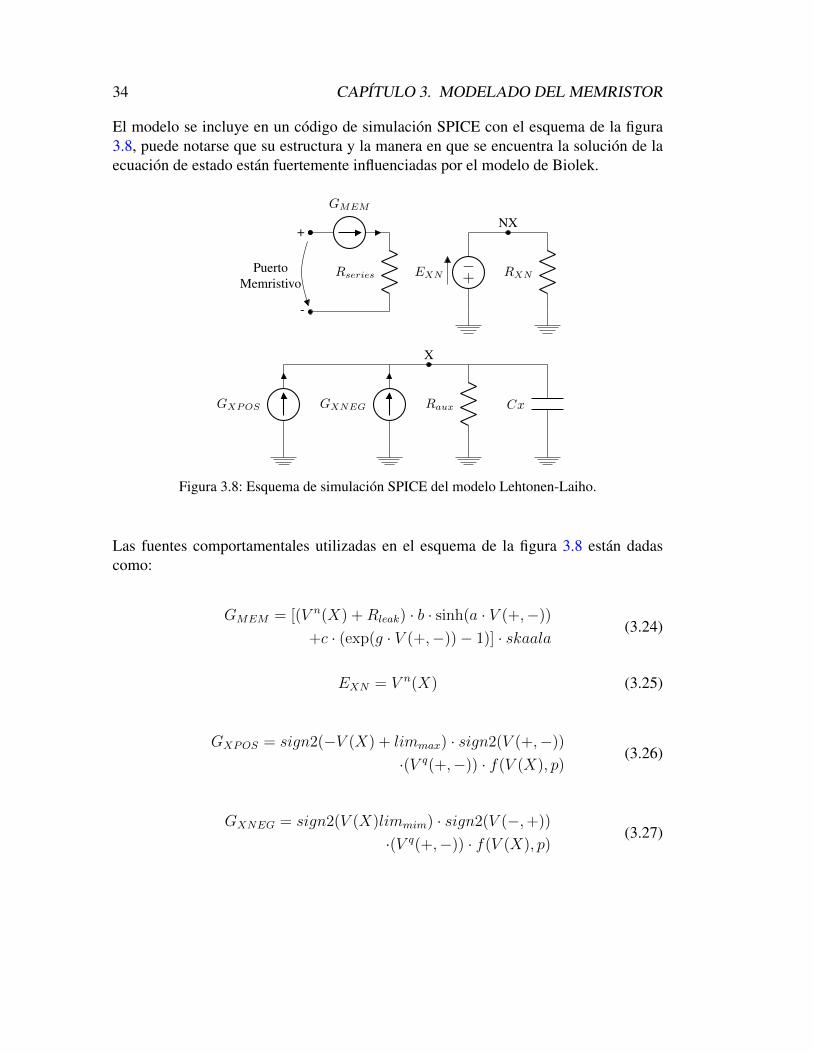
El modelo se incluye en un código de simulación SPICE con el esquema de la figura3.8, puede notarse que su estructura y la manera en que se encuentra la solución de laecuación de estado están fuertemente influenciadas por el modelo de Biolek.
GMEM
Rseries
+
-
−+EXN RXN
NX
PuertoMemristivo
GXPOS GXNEG Raux Cx
X
Figura 3.8: Esquema de simulación SPICE del modelo Lehtonen-Laiho.
Las fuentes comportamentales utilizadas en el esquema de la figura 3.8 están dadascomo:
GMEM = [(V n(X) +Rleak) · b · sinh(a · V (+,−))
+c · (exp(g · V (+,−))− 1)] · skaala(3.24)
EXN = V n(X) (3.25)
GXPOS = sign2(−V (X) + limmax) · sign2(V (+,−))
·(V q(+,−)) · f(V (X), p)(3.26)
GXNEG = sign2(V (X)limmim) · sign2(V (−,+))
·(V q(+,−)) · f(V (X), p)(3.27)

3.3. OTROS MODELOS MEMRISTIVOS 35
donde f(·) es la función de ventana en (3.22) y sign2(·) está definida como:
sign2(·) =sign(·) + 1
2(3.28)
siendo sign(·) la función signo dada como:
sign(x) =
−1, x < 0
0, x = 0
1, x > 0
(3.29)
Los valores de los parámetros utilizados en las ecuaciones (3.24) a (3.27) se muestranen la Tabla 3.4. Mientras que los valores de los elementos restantes en el esquema dela figura 3.8 se muestran en la Tabla 3.5.
Parámetro Valor Parámetro ValorRleak 0.01 Ω a 2Limmax 0.95 b 9Limmin 0.05 c 0.01skaala 10e− 9 g 4q 13 n 4p 1
Tabla 3.4: Valores de los parámetros del modelo de Lehtonen-Laiho.
Parámetro ValorRseries 0.01MΩRXN 0.01TΩRaux 0.01TΩCx 0.00008F
V (X)ini 0.15V
Tabla 3.5: Valores de los componentes del esquema 3.8.

36 CAPÍTULO 3. MODELADO DEL MEMRISTOR
La curva i–v del memristor se muestra en la figura 3.9, fue obtenida utilizando comoexcitación una señal sinusoidal v(t) = A · sin(ωt) con A = 2 V pp yω = 2π · (5000) rad/s. La aparición del lazo de histéresis demuestra que el modelodescribe un memristor para el conjunto de valores provisto.
Figura 3.9: Lazos de histéresis i–v del modelo de Lehtonen-Laiho6.
6Imagen tomada de [60].
Capítulo 4
Trabajo experimental
El fenómeno de transición resistiva (o RS, por el término Resistive Switching) ha sidoidentificado en diferentes dispositivos y sus características específicas suelen serdependientes de diversos factores como son su estructura, materiales de fabricación oincluso tratamientos eléctricos previos —como el electroformado.
En todo caso, el modelado de un dispositivo RS comienza por la extracción de suscaracterísticas. Los parámetros que suelen buscarse en este tipo de caracterizaciónsuelen ser principalmente el tipo de transición resistiva —unipolar o bipolar—, elvalor de los voltajes de conmutación Vset y Vreset, y el valor de las resistencias deestado LRS y HRS.
Para el propósito de esta tesis, el Departamento de Física de la Universidad Pública deNavarra, en colaboración con el Departamento de Física y la Unidad deNanotecnología de la Universidad de Oviedo, proporcionó una colección de muestrasconformadas por una película delgada de TiO2 —de diferentes espesores—depositada sobre un substrato de ITO, las cuales exhiben transiciones resistivas. Sinembargo, aún cuando se había identificado que este fenómeno estaba presente, no seposeía una caracterización completa de los dispositivos.
En el presente capítulo se explica el proceso de fabricación de los dispositivos y cómofueron realizadas las mediciones para determinar sus características eléctricas.
4.1. Descripción de las muestrasEl proceso de fabricación fue llevado a cabo por el Laboratorio de MembranasNanoporosas (Unidad de Nanotecnología) y el Departamento de Física, ambospertenecientes a la Universidad de Oviedo, en Asturias, España.
37
38 CAPÍTULO 4. TRABAJO EXPERIMENTAL
Las muestras son dispositivos planares formados por un substrato de óxido de indio yestaño (ITO), sobre el cual se depositaron películas delgadas de dióxido de titanio(TiO2) mediante la técnica de depósito de capas atómicas —ALD, por sus siglas eninglés, Atomic Layer Deposition— en un reactor Savannah 100 (CambridgeNanotech).
Los materiales precursores empleados en la fabricación fueron Titanio (IV)(iso-propóxido 99.999 %, TTIP, Alfa Aesar) y agua ultrapura (18.2 MΩ · cm),calentados a 70 C y 40 C respectivamente para lograr una presión de vaporsuficientemente elevada. El depósito se realizó en modo de operación del ALD tipoexposure, en el cual los precursores en estado gaseoso son introducidos en la cámarade reacción de forma pulsada, con un tiempo de duración de los pulsos de 1 s. Seemplea argón (Ar) como gas portador, con un flujo continuo de 50 sccm.
Los substratos, situados en la cámara de reacción, son calentados a una temperatura de250 C y se exponen a los distintos precursores cíclicamente, durante un tiempo de 20segundos para cada precursor. A continuación, la cámara se purga durante 80segundos para eliminar el exceso de precursores y de los subproductos de reacción. Elproceso cíclico de exposición a los distintos precursores (TTIP y agua), resulta en eldepósito de capas ultradelgadas de TiO2, con una tasa de 0, 07 nm/ciclo. El númerototal de ciclos se fijó en cada muestra de acuerdo con el espesor deseado para laspelículas delgadas de TiO2, empleándose 350, 700 y 1400 ciclos (25, 50 y 100 nm deespesor, respectivamente).
La estructura cristalina del TiO2 depositado depende de la temperatura de lossubstratos durante el proceso de ALD. Para la temperatura seleccionada (250 C), seobtienen depósitos cristalinos de TiO2, en la fase anatasa [63].
Cabe aclarar que el proceso de fabricación anteriormente descrito no fue llevado acabo por el autor de esta tesis.
En un proceso posterior por parte del Laboratorio de Materiales del Departamento deFísica de la Universidad Pública de Navarra, en Pamplona, España, se realizaroncontactos metálicos que permitieran tomar las mediciones eléctricas de las muestras.Estos contactos fueron hechos con epoxy de plata líquido, que después fue solidificadomediante un tratamiento térmico utilizando un horno de convección.

4.2. CARACTERIZACIÓN ELÉCTRICA 39
La figura 4.1 muestra un esquema de la estructura de los dispositivos.
TiO2 ITO
Ag
V idrio
Figura 4.1: Esquema de la estructura de los dispositivos.
Se utilizaron muestras con espesor de película de TiO2 de 100nm y 50nm para llevara cabo las mediciones. La metodología de caracterización y los resultados obtenidos sedescriben en las siguientes secciones.
4.2. Caracterización eléctricaEl objetivo principal de realizar la caracterización eléctrica de los dispositivos deAg/TiO2/ITO es investigar el comportamiento de su resistencia eléctrica comorespuesta a un voltaje aplicado, pues se desea averiguar si el dispositivo poseepropiedades memristivas.
Para esto, es necesario inspeccionar si estos dispositivos comparten las característicasde transición resistiva explicadas en el Capítulo 2.
Su caracterización fue dividida inicialmente en tres pasos generales:
1. Realización del proceso de electroformado.
Puesto que inicialmente se desconoce si el dispositivo es unipolar o bipolar, seoptó por realizar un tratamiento eléctrico previo, el electroformado, que se hademostrado suele ser un prerrequisito para formar dispositivos RS.
2. Búsqueda de características.
Una vez realizado el electroformado, se procede a determinar el modo deoperación de los dispositivos y sus parámetros principales: Vset, Vreset y lasresistencias de los estados resistivos de baja resistencia (LRS) y alta resistencia(HRS).

40 CAPÍTULO 4. TRABAJO EXPERIMENTAL
3. Toma de mediciones de manera continua.Puesto que en este punto se conoce el valor de ambos voltajes de transición (Vsety Vreset), se realizan barridos de forma consecutiva cuyo valor asegure el cambiode estado resistivo de manera cíclica y con ello obtener el lazo de histéresis en elplano i–v, particularidad del memristor.
Los barridos de voltaje fueron aplicados utilizando una fuente Keithley 2400SourceMeter controlada por Labview por medio de una comunicación GPIB. Cabeaclarar que al mismo tiempo que se aplica el voltaje, la fuente es capaz de tomarautomáticamente las mediciones de resistencia y corriente de los dispositivos.
A continuación se explican los detalles de los pasos de la caracterización:
1. Realización de electroformado.La figura 4.2 muestra un esquema de la realización del proceso deelectroformado.
t
V (t)
Vext
(a) Voltaje Aplicado
V (t)
I(t)
VextVef
(b) Curva i–v
Figura 4.2: Realización del electroformado.
Para realizar el electroformado se aplica una rampa de voltaje en las terminalesdel dispositivo como muestra la figura 4.2a. El voltaje aplicado debe provocarun incremento abrupto en la corriente total del dispositivo cuando V (t) = Vef ,donde Vef es llamado voltaje de electroformado, como en la figura 4.2b.
El incremento de la corriente a través del dispositivo corresponde a la reducciónde su resistencia, provocada por la formación de canales conductoresfilamentarios entre los electrodos, como se mencionó en la sección 2.3.1 delCapítulo 2. Debido a esta transición al estado LRS, es común que durante lasmediciones se limite la corriente que fluye a través del dispositivo, esto es con elmotivo de evitar daños irreversibles en el material.
4.2. CARACTERIZACIÓN ELÉCTRICA 41
2. Búsqueda de parámetros característicos.
El proceso de electroformado programó los dispositivos en el estado LRS, conlo que posteriormente puede realizarse el segundo paso de la caracterización.
En primera instancia se desea saber si el dipositivo bajo caracterización es deltipo unipolar o bipolar. Para averiguarlo se realizan barridos de voltaje quepermitan investigar bajo qué condiciones se realizan las transiciones resistivas.
Al mismo tiempo que estas características son exploradas, se obtiene el valor delos voltajes de conmutación Vset y Vreset y las resistencias de estado LRS y HRS.
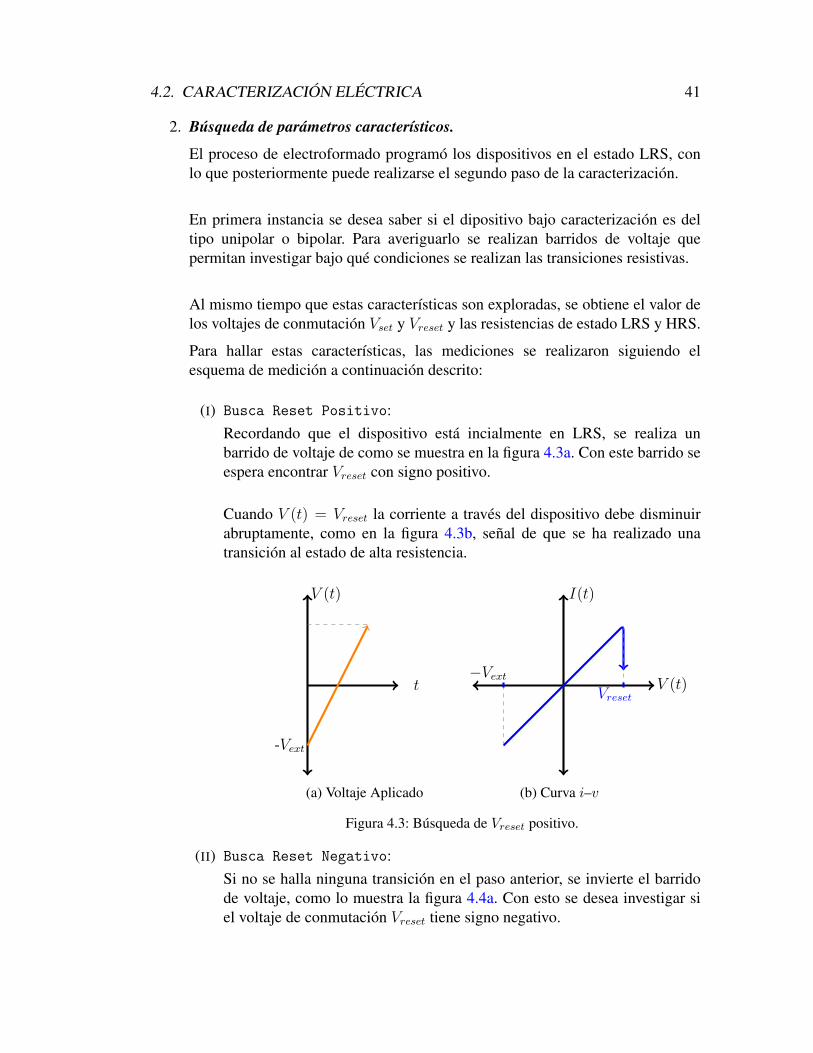
Para hallar estas características, las mediciones se realizaron siguiendo elesquema de medición a continuación descrito:
(I) Busca Reset Positivo:Recordando que el dispositivo está incialmente en LRS, se realiza unbarrido de voltaje de como se muestra en la figura 4.3a. Con este barrido seespera encontrar Vreset con signo positivo.
Cuando V (t) = Vreset la corriente a través del dispositivo debe disminuirabruptamente, como en la figura 4.3b, señal de que se ha realizado unatransición al estado de alta resistencia.
t
V (t)
-Vext
(a) Voltaje Aplicado
V (t)
I(t)
−VextVreset
(b) Curva i–v
Figura 4.3: Búsqueda de Vreset positivo.
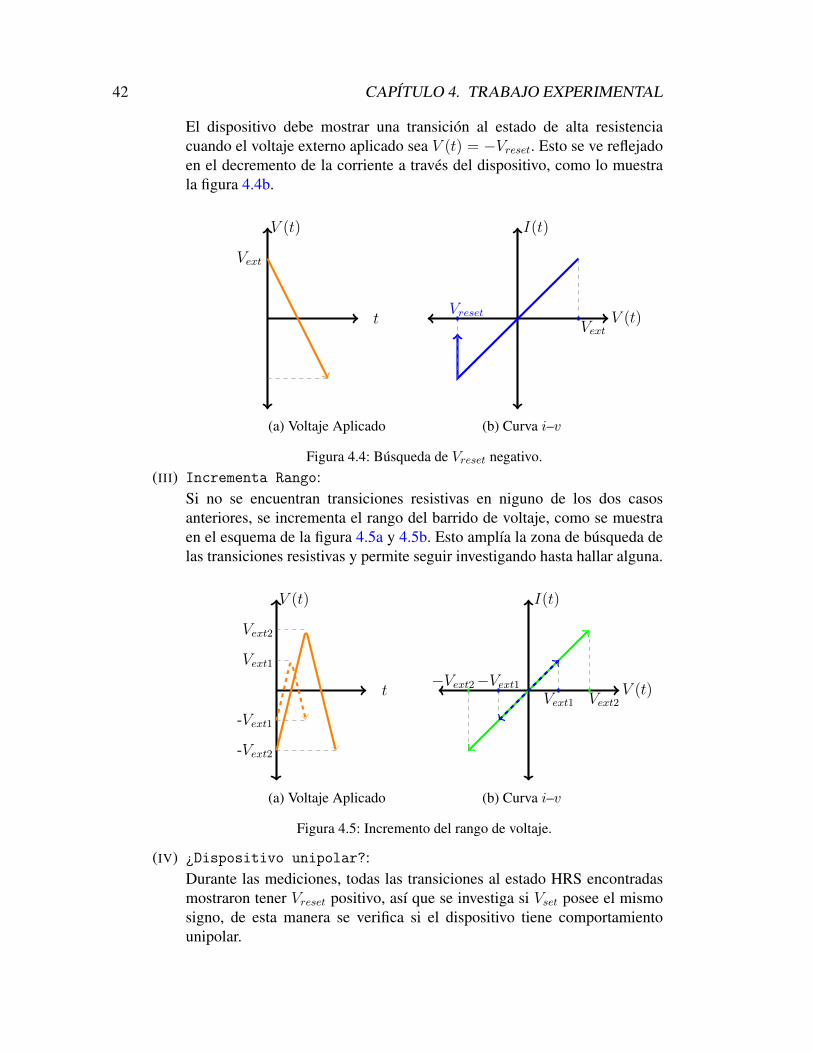
(II) Busca Reset Negativo:Si no se halla ninguna transición en el paso anterior, se invierte el barridode voltaje, como lo muestra la figura 4.4a. Con esto se desea investigar siel voltaje de conmutación Vreset tiene signo negativo.
42 CAPÍTULO 4. TRABAJO EXPERIMENTAL
El dispositivo debe mostrar una transición al estado de alta resistenciacuando el voltaje externo aplicado sea V (t) = −Vreset. Esto se ve reflejadoen el decremento de la corriente a través del dispositivo, como lo muestrala figura 4.4b.
t
V (t)
Vext
(a) Voltaje Aplicado
V (t)
I(t)
Vext
Vreset
(b) Curva i–v
Figura 4.4: Búsqueda de Vreset negativo.(III) Incrementa Rango:
Si no se encuentran transiciones resistivas en niguno de los dos casosanteriores, se incrementa el rango del barrido de voltaje, como se muestraen el esquema de la figura 4.5a y 4.5b. Esto amplía la zona de búsqueda delas transiciones resistivas y permite seguir investigando hasta hallar alguna.
t
V (t)
Vext1
-Vext1
Vext2
-Vext2
(a) Voltaje Aplicado
V (t)
I(t)
Vext2
−Vext2Vext1
−Vext1
(b) Curva i–v
Figura 4.5: Incremento del rango de voltaje.
(IV) ¿Dispositivo unipolar?:Durante las mediciones, todas las transiciones al estado HRS encontradasmostraron tener Vreset positivo, así que se investiga si Vset posee el mismosigno, de esta manera se verifica si el dispositivo tiene comportamientounipolar.

4.2. CARACTERIZACIÓN ELÉCTRICA 43
t
V (t)
-Vext1
Vext1Vext2Vext3
(a) Voltaje Aplicado
V (t)
I(t)
Vreset
−VextVset
(b) Curva i–v
Figura 4.6: Búsqueda de comportamiento unipolar.
Para ello, se realiza un barrido de voltaje, el cual debe provocar latransición de vuelta al estado LRS; en caso de no provocarla, se incrementaen 0.5V el valor máximo de dicho barrido y se vuelve a realizar. Se aplicaun criterio de paro si Vext ≈ 2Vreset y no se ha encontrado transición aLRS; este criterio es elegido para realizar una exploración adecuada, peroevitando sobrepasar el valor del voltaje de electroformado.
(V) ¿Dispositivo bipolar?:Durante las mediciones realizadas, ninguno de los dispositivos mostrócomportamiento unipolar, por lo que sólo resta verificar si poseencaracterísticas bipolares.
t
V (t)
Vext
-Vext1-Vext2-Vext3
(a) Voltaje Aplicado
V (t)
I(t)
Vreset
Vset
Vext
(b) Curva i–v
Figura 4.7: Búsqueda de comportamiento bipolar.
Puesto que se ha transitado a HRS con un voltaje Vreset positivo, ahora sebusca si Vset tiene signo contrario. Bajo la suposición que el dispositivo essimétrico, se busca inicialmente si |Vset| ≈ |Vreset|.

44 CAPÍTULO 4. TRABAJO EXPERIMENTAL
Para encontrar el valor de Vset, se aplica un barrido de voltaje de Vext a−Vext que provoque una transición al estado LRS; si ésta no aparece, seincrementa el rango del barrido en 0.5V —como lo muestra el esquema dela figura 4.7a. El proceso continúa hasta encontrar la transición resistiva queprograme al dispositivo nuevamente al estado LRS, como se muestra en lafigura 4.7b.
3. Mediciones por ciclos.
Basado en las mediciones anteriores, se encontró que los dispositivos deAg/TiO2/ITO poseen comportamiento bipolar CF8. Con esto se confirma quelos dispositivos poseen características memristivas.
Además, como se mencionó, al tiempo en que se realiza la búsqueda del modode operación, también pueden inferirse los voltajes de conmutación queprovocan las transiciones resistivas y el comportamiento de las resistencias deestado; estos valores serán presentados más adelante en la sección de resultados.
Una vez que se ha determinado el modo de operación y se tiene una estimaciónde los demás parámetros característicos de los dispositivos, se aplican barridosde voltaje de una extensión que asegure transiciones resistivas, como se muestraen el esquema de la figura 4.8.
t
V (t)
Vreset
-Vset
(a) Voltaje Aplicado
V (t)
I(t)
Vreset
Vset
(b) Curva i–v
Figura 4.8: Incremento del rango de búsqueda.
Se aplican dos barridos consecutivos como se muestra en la figura 4.8a. Lo queen el plano v–t es el periodo de una señal triangular, en el plano i–v provocalas transiciones resistivas que forman un ciclo completo del lazo de histéresisestrangulado en el origen, como se muestra en la figura 4.8b.
4.3. RESULTADOS DE LA CARACTERIZACIÓN ELÉCTRICA 45
4.3. Resultados de la caracterización eléctricaEn esta sección se muestran los resultados obtenidos después de aplicar los pasos decaracterización descritos anteriormente a los dispositivos de Ag/TiO2/ITO conespesor de película de TiO2 de 100nm y 50nm.
Como se mencionó en la sección anterior, las mediciones obtenidas fueron realizadasutilizando una fuente Keithley 2400, este tipo de fuente posee característicasespecialmente adecuadas para la caracterización eléctrica de dispositivos. Laconfiguración de la fuente fue en “modo fuente de voltaje”, cuyas características son:
Proporciona una señal de voltaje discretizada en las terminales del dispositivobajo prueba.
Deja fluir una “corriente de sensado” por el dispositivo bajo prueba, a la cual sele puede configurar un límite; si este límite es alcanzado durante las mediciones,el voltaje aplicado también estará limitado.
Con los valores medidos de corriente y voltaje se obtiene el valor de laresistencia del dispositivo bajo prueba.
Antes de presentar los resultados obtenidos, es necesario comentar los obstáculospresentes durante las mediciones —numerados a continuación— y cómo se diosolución a ellos:
1. Antes de la caracterización no se poseía conocimiento del valor numérico deninguno de los parámetros característivos: Vef , Vset, Vreset, Ron y Roff .
SOLUCIÓN: Se siguen los tres pasos de la metodología de caracterización,anteriormente planteados.
2. No se conoce el tiempo de respuesta del dispositivo.
SOLUCIÓN: El tiempo entre cada punto de voltaje aplicado es de 1 segundo, untiempo que se consideró suficiente, tomando en cuenta que regularmente algunosdispositivos tienen tiempos de respuesta en el orden de los milisegundos.
3. No se conoce el valor máximo de la corriente soportada por el dispositivo.
SOLUCIÓN: Para evitar el deterioro definitivo de los dispositivos, se configura ellímite de la corriente de sensado a un valor que permita completar el barrido devoltaje programado; el valor de ese límite se ajusta según lo requiera laamplitud del barrido de voltaje y según se encuentre el dispositivo en estadoLRS o HRS. Más especificaciones de este ajuste se darán en los apartados deresultados individuales a continuación.

46 CAPÍTULO 4. TRABAJO EXPERIMENTAL
4. A medida que se tomaban las mediciones, los dispositivos sufrían de unadegradación gradual, caracterizada principalmente por la reducción del valor deRoff ; esto provoca que la diferencia entre los estados LRS y HRS sea cada vezmenor, perdiéndose una característica importante del memristor: la claraidentificación de dos estados resistivos donde Roff Ron.
Aunado a esto, otros obstáculos presentados durante las mediciones fueron:
I Algunos barridos de voltaje no necesariamente presentaban transicionesresistivas.
II En ocasiones, el estado resistivo cambiaba de HRS a LRS cuando V = 0(aunque no se pasara por Vset), esto provocaba mediciones inconsistentes ydiscontinuas.
III El efecto de memoria de los dispositivos los hacía especialmente sensiblesal último valor de voltaje proporcionado. Por ejemplo, al realizar unbarrido que provocase la transición HRS → LRS, si el barrido nocompletaba dicha transición y se aplicaba un segundo barrido paralograrlo, el valor de resistencia inicial del segundo barrido difería de la delprimero.
IV En ocasiones se podían distinguir más de dos estados resistivos biendefinidos.
SOLUCIÓN: De todas las mediciones realizadas, se eligieron aquellas quecontenían ciclos completos (no discontinuas), de todas ellas se realizó unpromedio aritmético punto a punto, y ese promedio es el presentado en losresultados. Dicho de otra forma, las curvas presentadas son las curvaspromedio resultantes de las mediciones en cada caso, de 100nm y 50nm.
5. ¿El proceso de fabricación es repetible?
SOLUCIÓN: Sí es repetible. El proceso de fabricación fue realizado a tresunidades diferentes de cada tipo de dispositivo —es decir, tres ejemplares de100nm y tres ejemplares de 50nm— y los resultados fueron similares, salvopor las diferencias provocadas por las condiciones comentadas por el punto 4.
Resultados del proceso de electroformado
Siguiendo el primer paso de la caracterización, se realizó el proceso deelectroformado; el voltaje aplicado y los resultados de este tratamiento eléctrico semuestran en las figuras 4.9 y 4.10 para los dispositivos de 100nm y 50nmrespectivamente.
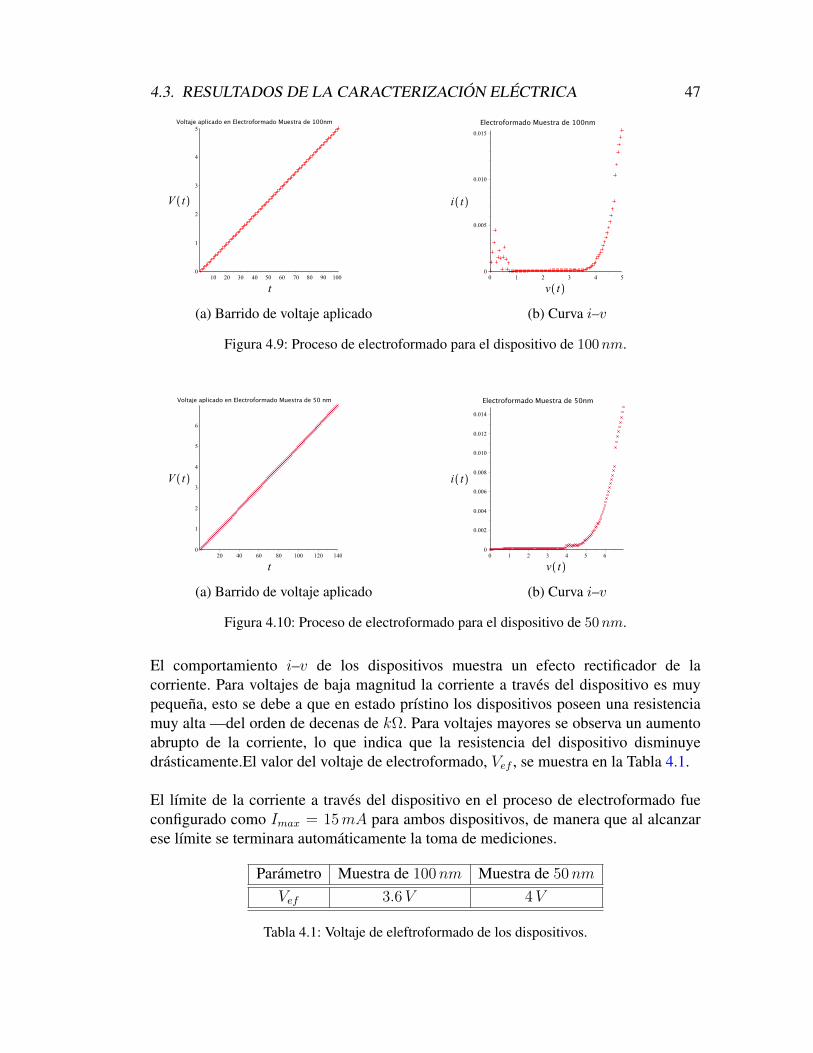
4.3. RESULTADOS DE LA CARACTERIZACIÓN ELÉCTRICA 47
(a) Barrido de voltaje aplicado (b) Curva i–v
Figura 4.9: Proceso de electroformado para el dispositivo de 100nm.
(a) Barrido de voltaje aplicado (b) Curva i–v
Figura 4.10: Proceso de electroformado para el dispositivo de 50nm.
El comportamiento i–v de los dispositivos muestra un efecto rectificador de lacorriente. Para voltajes de baja magnitud la corriente a través del dispositivo es muypequeña, esto se debe a que en estado prístino los dispositivos poseen una resistenciamuy alta —del orden de decenas de kΩ. Para voltajes mayores se observa un aumentoabrupto de la corriente, lo que indica que la resistencia del dispositivo disminuyedrásticamente.El valor del voltaje de electroformado, Vef , se muestra en la Tabla 4.1.
El límite de la corriente a través del dispositivo en el proceso de electroformado fueconfigurado como Imax = 15mA para ambos dispositivos, de manera que al alcanzarese límite se terminara automáticamente la toma de mediciones.
Parámetro Muestra de 100nm Muestra de 50nm
Vef 3.6V 4V
Tabla 4.1: Voltaje de eleftroformado de los dispositivos.
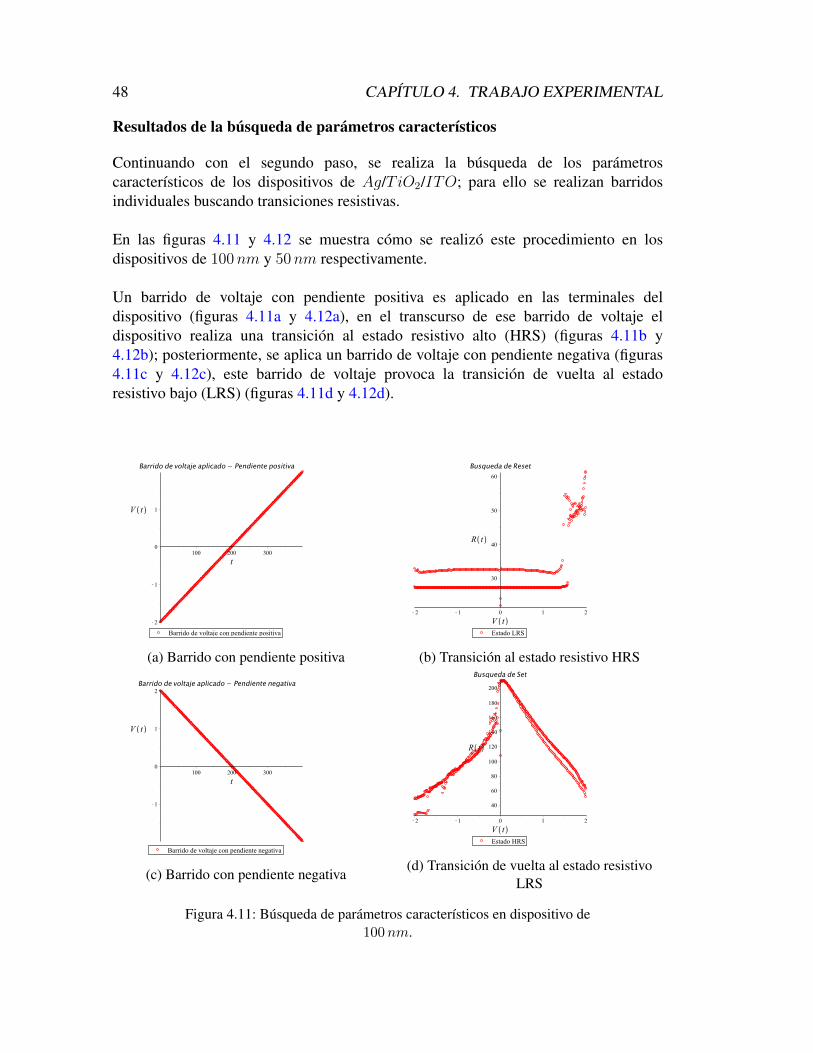
48 CAPÍTULO 4. TRABAJO EXPERIMENTAL
Resultados de la búsqueda de parámetros característicos
Continuando con el segundo paso, se realiza la búsqueda de los parámetroscaracterísticos de los dispositivos de Ag/TiO2/ITO; para ello se realizan barridosindividuales buscando transiciones resistivas.
En las figuras 4.11 y 4.12 se muestra cómo se realizó este procedimiento en losdispositivos de 100nm y 50nm respectivamente.
Un barrido de voltaje con pendiente positiva es aplicado en las terminales deldispositivo (figuras 4.11a y 4.12a), en el transcurso de ese barrido de voltaje eldispositivo realiza una transición al estado resistivo alto (HRS) (figuras 4.11b y4.12b); posteriormente, se aplica un barrido de voltaje con pendiente negativa (figuras4.11c y 4.12c), este barrido de voltaje provoca la transición de vuelta al estadoresistivo bajo (LRS) (figuras 4.11d y 4.12d).
(a) Barrido con pendiente positiva (b) Transición al estado resistivo HRS
(c) Barrido con pendiente negativa(d) Transición de vuelta al estado resistivo
LRS
Figura 4.11: Búsqueda de parámetros característicos en dispositivo de100nm.
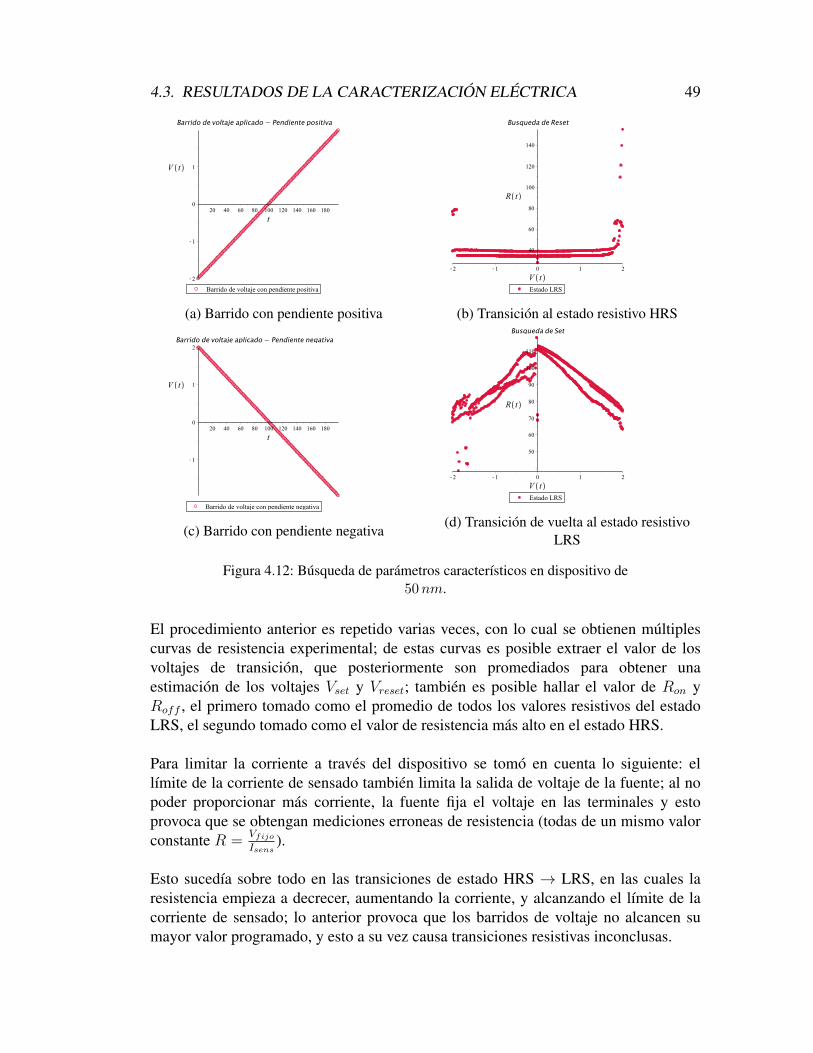
4.3. RESULTADOS DE LA CARACTERIZACIÓN ELÉCTRICA 49
(a) Barrido con pendiente positiva (b) Transición al estado resistivo HRS
(c) Barrido con pendiente negativa(d) Transición de vuelta al estado resistivo
LRS
Figura 4.12: Búsqueda de parámetros característicos en dispositivo de50nm.
El procedimiento anterior es repetido varias veces, con lo cual se obtienen múltiplescurvas de resistencia experimental; de estas curvas es posible extraer el valor de losvoltajes de transición, que posteriormente son promediados para obtener unaestimación de los voltajes Vset y Vreset; también es posible hallar el valor de Ron yRoff , el primero tomado como el promedio de todos los valores resistivos del estadoLRS, el segundo tomado como el valor de resistencia más alto en el estado HRS.
Para limitar la corriente a través del dispositivo se tomó en cuenta lo siguiente: ellímite de la corriente de sensado también limita la salida de voltaje de la fuente; al nopoder proporcionar más corriente, la fuente fija el voltaje en las terminales y estoprovoca que se obtengan mediciones erroneas de resistencia (todas de un mismo valorconstante R =
VfijoIsens
).
Esto sucedía sobre todo en las transiciones de estado HRS → LRS, en las cuales laresistencia empieza a decrecer, aumentando la corriente, y alcanzando el límite de lacorriente de sensado; lo anterior provoca que los barridos de voltaje no alcancen sumayor valor programado, y esto a su vez causa transiciones resistivas inconclusas.
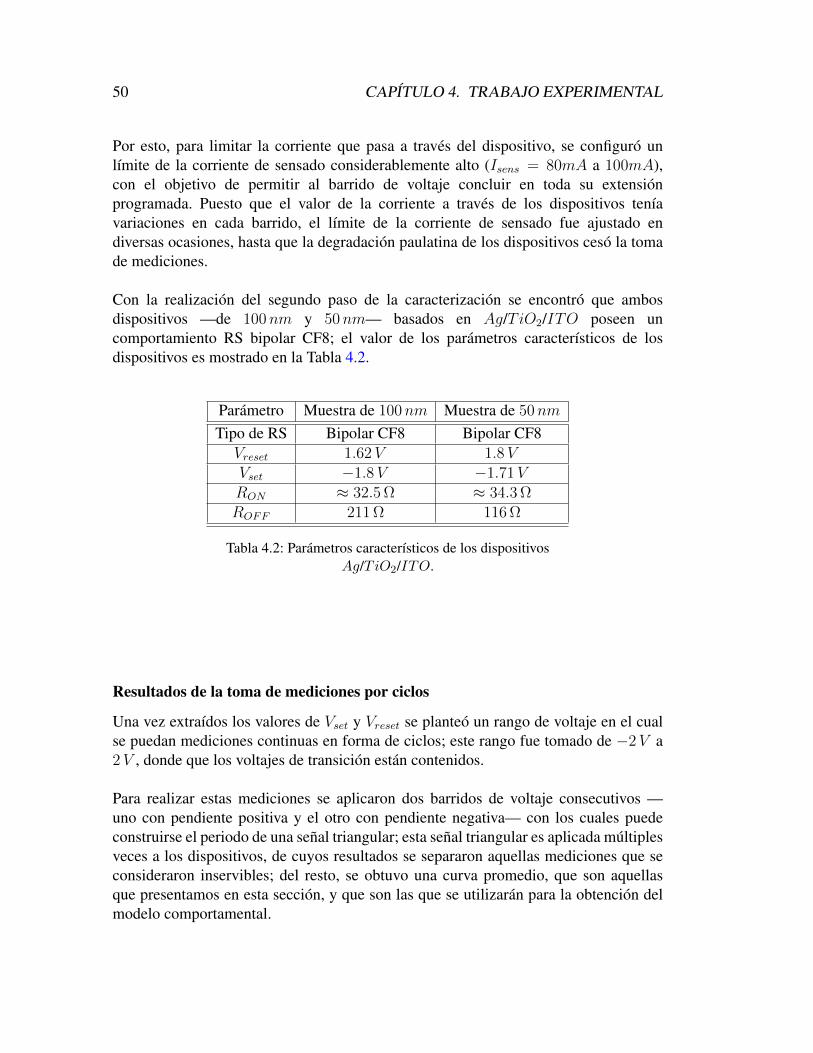
50 CAPÍTULO 4. TRABAJO EXPERIMENTAL
Por esto, para limitar la corriente que pasa a través del dispositivo, se configuró unlímite de la corriente de sensado considerablemente alto (Isens = 80mA a 100mA),con el objetivo de permitir al barrido de voltaje concluir en toda su extensiónprogramada. Puesto que el valor de la corriente a través de los dispositivos teníavariaciones en cada barrido, el límite de la corriente de sensado fue ajustado endiversas ocasiones, hasta que la degradación paulatina de los dispositivos cesó la tomade mediciones.
Con la realización del segundo paso de la caracterización se encontró que ambosdispositivos —de 100nm y 50nm— basados en Ag/TiO2/ITO poseen uncomportamiento RS bipolar CF8; el valor de los parámetros característicos de losdispositivos es mostrado en la Tabla 4.2.
Parámetro Muestra de 100nm Muestra de 50nm
Tipo de RS Bipolar CF8 Bipolar CF8Vreset 1.62V 1.8VVset −1.8V −1.71VRON ≈ 32.5 Ω ≈ 34.3 ΩROFF 211 Ω 116 Ω
Tabla 4.2: Parámetros característicos de los dispositivosAg/TiO2/ITO.
Resultados de la toma de mediciones por ciclos
Una vez extraídos los valores de Vset y Vreset se planteó un rango de voltaje en el cualse puedan mediciones continuas en forma de ciclos; este rango fue tomado de −2V a2V , donde que los voltajes de transición están contenidos.
Para realizar estas mediciones se aplicaron dos barridos de voltaje consecutivos —uno con pendiente positiva y el otro con pendiente negativa— con los cuales puedeconstruirse el periodo de una señal triangular; esta señal triangular es aplicada múltiplesveces a los dispositivos, de cuyos resultados se separaron aquellas mediciones que seconsideraron inservibles; del resto, se obtuvo una curva promedio, que son aquellasque presentamos en esta sección, y que son las que se utilizarán para la obtención delmodelo comportamental.
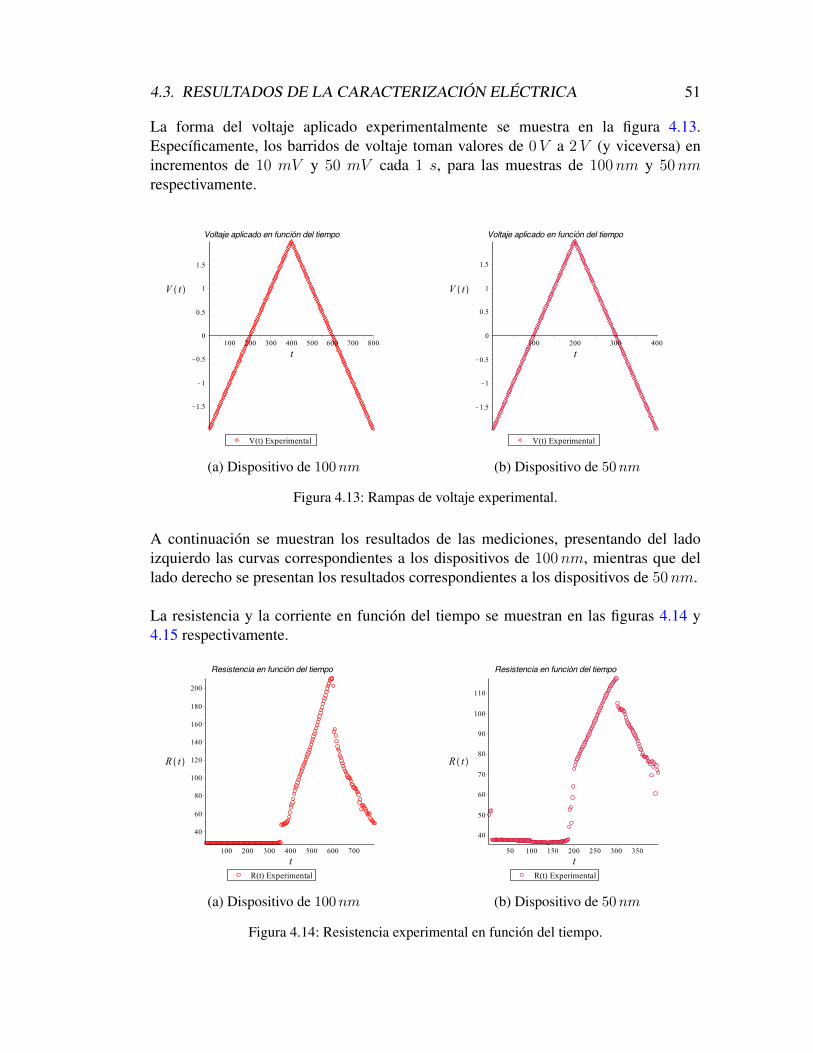
4.3. RESULTADOS DE LA CARACTERIZACIÓN ELÉCTRICA 51
La forma del voltaje aplicado experimentalmente se muestra en la figura 4.13.Específicamente, los barridos de voltaje toman valores de 0V a 2V (y viceversa) enincrementos de 10 mV y 50 mV cada 1 s, para las muestras de 100nm y 50nmrespectivamente.
(a) Dispositivo de 100nm (b) Dispositivo de 50nm
Figura 4.13: Rampas de voltaje experimental.
A continuación se muestran los resultados de las mediciones, presentando del ladoizquierdo las curvas correspondientes a los dispositivos de 100nm, mientras que dellado derecho se presentan los resultados correspondientes a los dispositivos de 50nm.
La resistencia y la corriente en función del tiempo se muestran en las figuras 4.14 y4.15 respectivamente.
(a) Dispositivo de 100nm (b) Dispositivo de 50nm
Figura 4.14: Resistencia experimental en función del tiempo.

52 CAPÍTULO 4. TRABAJO EXPERIMENTAL
(a) Dispositivo de 100nm (b) Dispositivo de 50nm
Figura 4.15: Corriente experimental en función del tiempo.
Puede distinguirse claramente que la resistencia mantiene un valor constante durantela primera mitad de su periodo, lo que se refleja en una corriente con comportamientolineal en el mismo intervalo; esta zona corresponde al estado LRS. En la segundamitad del periodo, la resistencia, al igual que la corriente, mantienen uncomportamiento no-lineal, este intervalo corresponde al estado HRS.
Con los datos experimentales de voltaje, resistencia y corriente en función del tiempoes posible realizar mapeos de forma paramétrica, estos mapeos paramétricos sonútiles para visualizar el comportamiento de la resistencia cuando se relaciona con lasvariables eléctricas restantes. Se establecen tres tipos de mapeo: resistencia vs voltaje,resistencia vs corriente y corriente vs voltaje.
Las figuras 4.16 y 4.17 muestran los mapeos R(t)–V(t) y R(t)–I(t) respectivamente
(a) Dispositivo de 100nm (b) Dispositivo de 50nm
Figura 4.16: Mapeo R(t)–V(t) experimental.
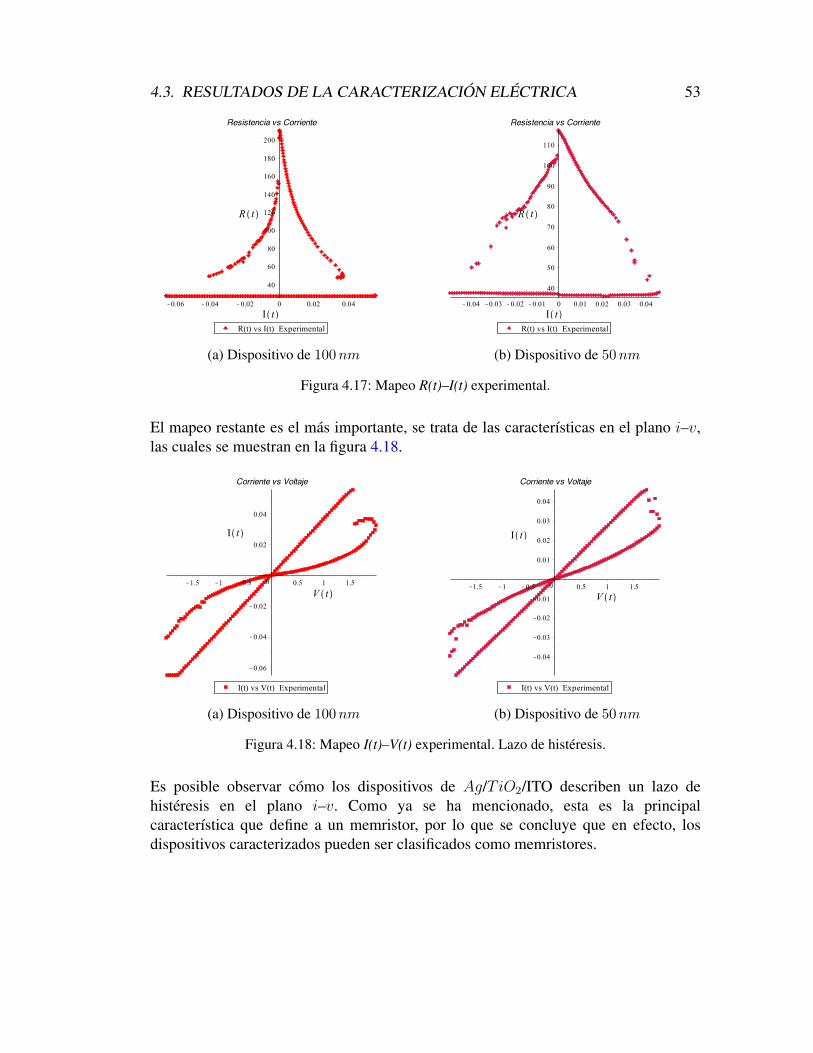
4.3. RESULTADOS DE LA CARACTERIZACIÓN ELÉCTRICA 53
(a) Dispositivo de 100nm (b) Dispositivo de 50nm
Figura 4.17: Mapeo R(t)–I(t) experimental.
El mapeo restante es el más importante, se trata de las características en el plano i–v,las cuales se muestran en la figura 4.18.
(a) Dispositivo de 100nm (b) Dispositivo de 50nm
Figura 4.18: Mapeo I(t)–V(t) experimental. Lazo de histéresis.
Es posible observar cómo los dispositivos de Ag/TiO2/ITO describen un lazo dehistéresis en el plano i–v. Como ya se ha mencionado, esta es la principalcaracterística que define a un memristor, por lo que se concluye que en efecto, losdispositivos caracterizados pueden ser clasificados como memristores.

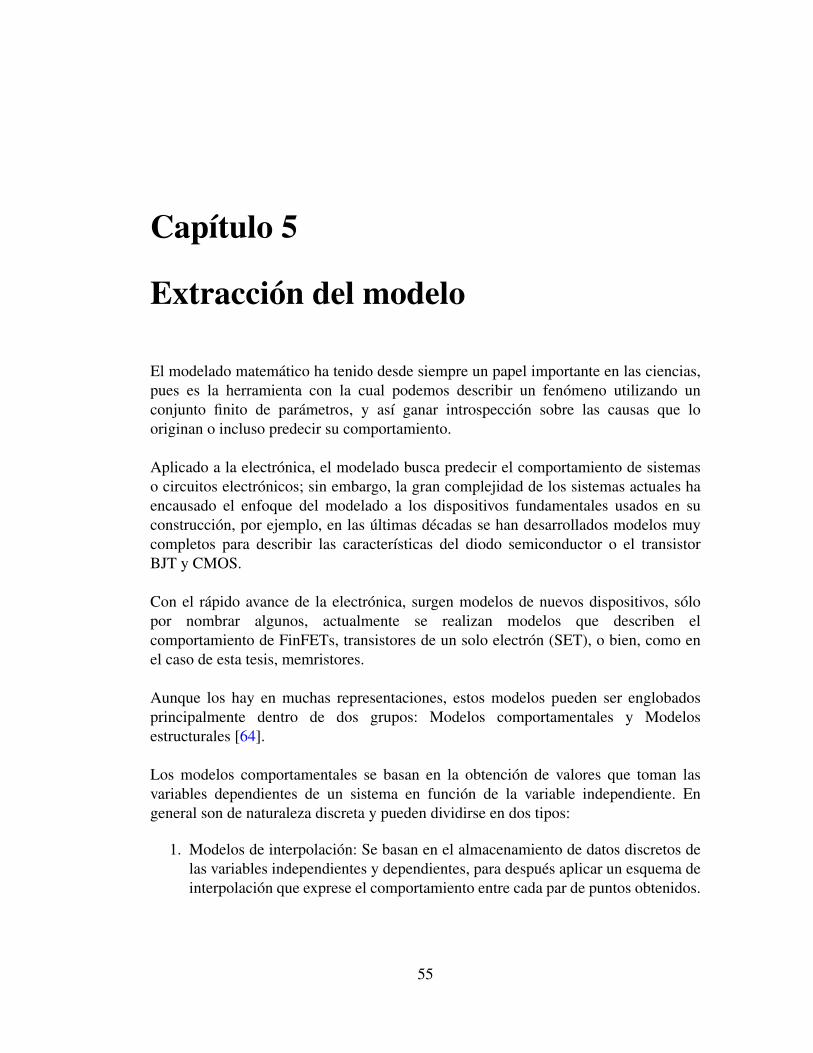
Capítulo 5
Extracción del modelo
El modelado matemático ha tenido desde siempre un papel importante en las ciencias,pues es la herramienta con la cual podemos describir un fenómeno utilizando unconjunto finito de parámetros, y así ganar introspección sobre las causas que looriginan o incluso predecir su comportamiento.
Aplicado a la electrónica, el modelado busca predecir el comportamiento de sistemaso circuitos electrónicos; sin embargo, la gran complejidad de los sistemas actuales haencausado el enfoque del modelado a los dispositivos fundamentales usados en suconstrucción, por ejemplo, en las últimas décadas se han desarrollados modelos muycompletos para describir las características del diodo semiconductor o el transistorBJT y CMOS.
Con el rápido avance de la electrónica, surgen modelos de nuevos dispositivos, sólopor nombrar algunos, actualmente se realizan modelos que describen elcomportamiento de FinFETs, transistores de un solo electrón (SET), o bien, como enel caso de esta tesis, memristores.
Aunque los hay en muchas representaciones, estos modelos pueden ser englobadosprincipalmente dentro de dos grupos: Modelos comportamentales y Modelosestructurales [64].
Los modelos comportamentales se basan en la obtención de valores que toman lasvariables dependientes de un sistema en función de la variable independiente. Engeneral son de naturaleza discreta y pueden dividirse en dos tipos:
1. Modelos de interpolación: Se basan en el almacenamiento de datos discretos delas variables independientes y dependientes, para después aplicar un esquema deinterpolación que exprese el comportamiento entre cada par de puntos obtenidos.
55
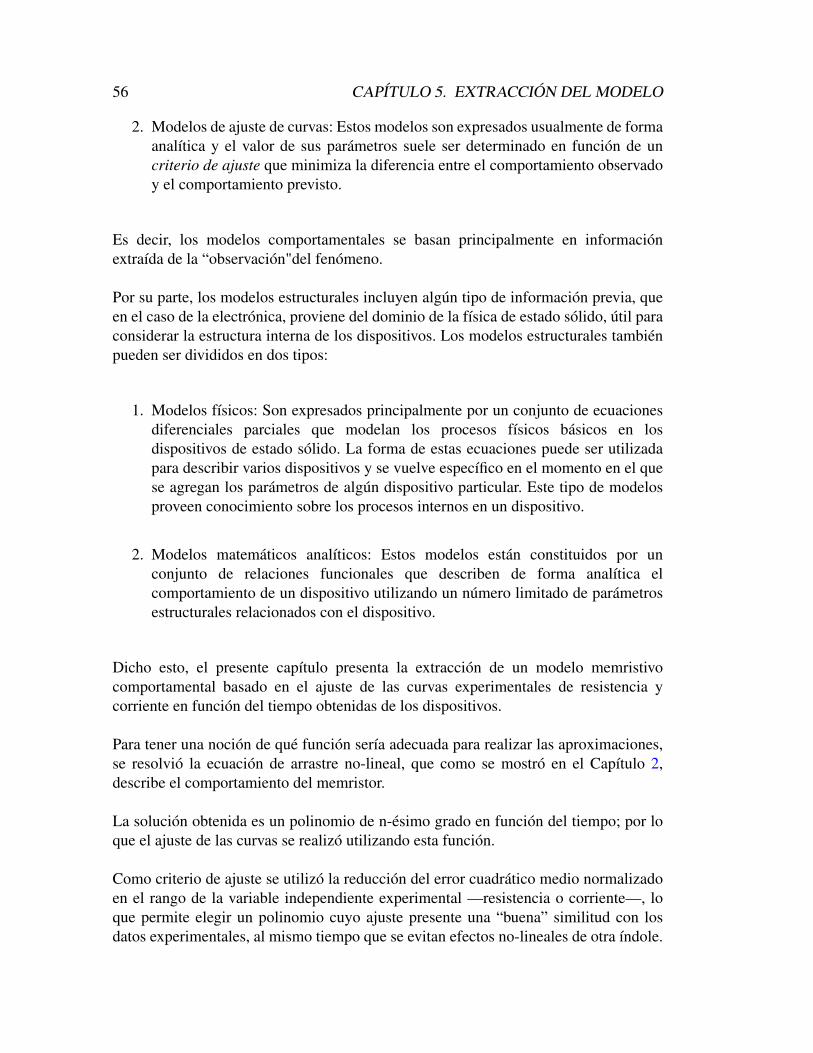
56 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
2. Modelos de ajuste de curvas: Estos modelos son expresados usualmente de formaanalítica y el valor de sus parámetros suele ser determinado en función de uncriterio de ajuste que minimiza la diferencia entre el comportamiento observadoy el comportamiento previsto.
Es decir, los modelos comportamentales se basan principalmente en informaciónextraída de la “observación"del fenómeno.
Por su parte, los modelos estructurales incluyen algún tipo de información previa, queen el caso de la electrónica, proviene del dominio de la física de estado sólido, útil paraconsiderar la estructura interna de los dispositivos. Los modelos estructurales tambiénpueden ser divididos en dos tipos:
1. Modelos físicos: Son expresados principalmente por un conjunto de ecuacionesdiferenciales parciales que modelan los procesos físicos básicos en losdispositivos de estado sólido. La forma de estas ecuaciones puede ser utilizadapara describir varios dispositivos y se vuelve específico en el momento en el quese agregan los parámetros de algún dispositivo particular. Este tipo de modelosproveen conocimiento sobre los procesos internos en un dispositivo.
2. Modelos matemáticos analíticos: Estos modelos están constituidos por unconjunto de relaciones funcionales que describen de forma analítica elcomportamiento de un dispositivo utilizando un número limitado de parámetrosestructurales relacionados con el dispositivo.
Dicho esto, el presente capítulo presenta la extracción de un modelo memristivocomportamental basado en el ajuste de las curvas experimentales de resistencia ycorriente en función del tiempo obtenidas de los dispositivos.
Para tener una noción de qué función sería adecuada para realizar las aproximaciones,se resolvió la ecuación de arrastre no-lineal, que como se mostró en el Capítulo 2,describe el comportamiento del memristor.
La solución obtenida es un polinomio de n-ésimo grado en función del tiempo; por loque el ajuste de las curvas se realizó utilizando esta función.
Como criterio de ajuste se utilizó la reducción del error cuadrático medio normalizadoen el rango de la variable independiente experimental —resistencia o corriente—, loque permite elegir un polinomio cuyo ajuste presente una “buena” similitud con losdatos experimentales, al mismo tiempo que se evitan efectos no-lineales de otra índole.
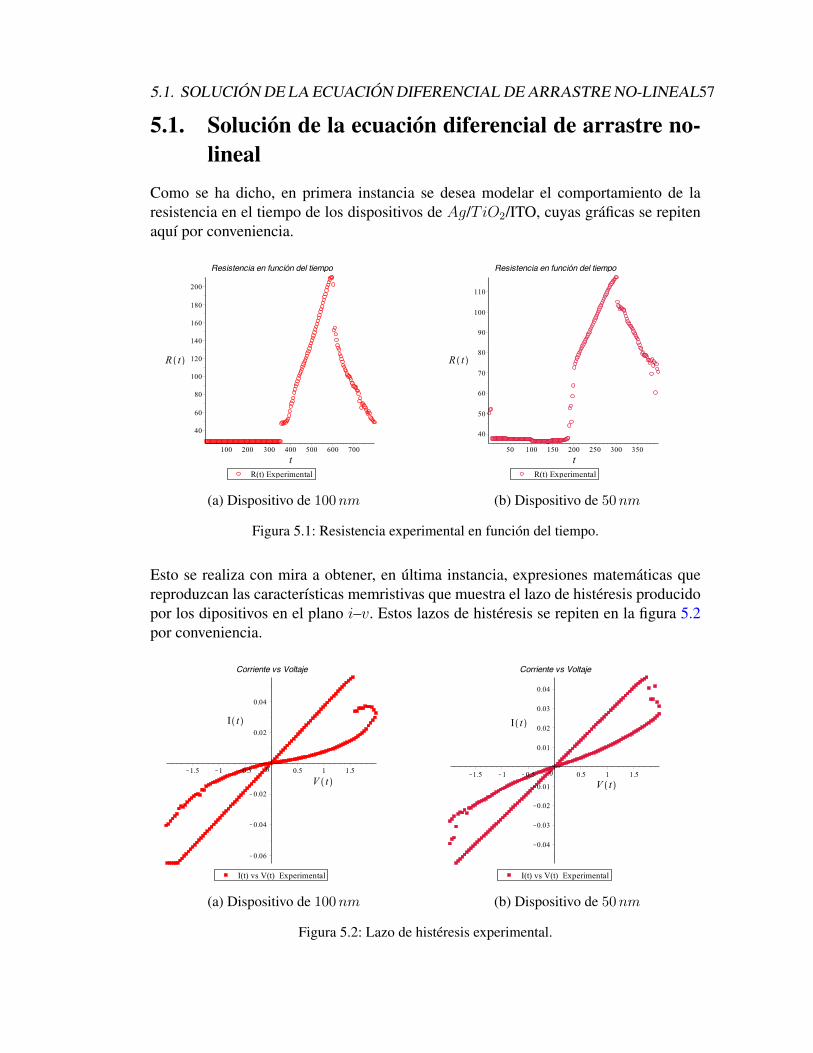
5.1. SOLUCIÓN DE LA ECUACIÓN DIFERENCIAL DE ARRASTRE NO-LINEAL57
5.1. Solución de la ecuación diferencial de arrastre no-lineal
Como se ha dicho, en primera instancia se desea modelar el comportamiento de laresistencia en el tiempo de los dispositivos de Ag/TiO2/ITO, cuyas gráficas se repitenaquí por conveniencia.
(a) Dispositivo de 100nm (b) Dispositivo de 50nm
Figura 5.1: Resistencia experimental en función del tiempo.
Esto se realiza con mira a obtener, en última instancia, expresiones matemáticas quereproduzcan las características memristivas que muestra el lazo de histéresis producidopor los dipositivos en el plano i–v. Estos lazos de histéresis se repiten en la figura 5.2por conveniencia.
(a) Dispositivo de 100nm (b) Dispositivo de 50nm
Figura 5.2: Lazo de histéresis experimental.

58 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Los dispositivos poseen comportamiento bipolar, de manera que el signo del campoeléctrico aplicado importa; esto indica que el mecanismo que genera las transicionesresistivas está basado en algún tipo de portador de carga móvil, fácilmenteinfluenciable por la polaridad del voltaje aplicado. Es por ello, que al igual que otrosautores, se ha elegido la ecuación de arrastre no-lineal para modelar las característicasdinámicas de los dispositivos.
Al tomar la ecuación de arrastre no-lineal (2.30) y ajustarla a una entrada de voltaje,ésta puede reescribirse como:
dx(t)
dt=µVD2
V (t)F (·) (5.1)
cuyos parámetros han sido definidos en la sección 3.1 del Capítulo 3.
Para resolver esta ecuación diferencial se sigue el ejemplo de [56]; se introduce laODE (5.1) en la formulación homotópica de la ecuación (3.1), obteniendo la siguienteexpresión:
H(p, ν(t)) = (1− p)ν ′(t) + p[ν ′ − µV
D2V (t)F (·)
]= 0 (5.2)
donde V (t) es el voltaje aplicado experimentalmente, el cual puede expresarsematemáticamente como:
V (t) =
4tT− 2, 0 ≤ t ≤ T
2
−4tT
+ 6, T2≤ t ≤ T
(5.3)
con V (t) = V (t+ T ), donde T es el periodo de la señal.
La solución obtenida tiene la forma:
x(t) = X0 +[P1(X0, µV ,∆)
]· t+
[P2(X0, µV ,∆)
]· t2
+[P3(X0, µV ,∆)
]· t3 + ...+
[Pn(X0, µV ,∆)
]· tn
(5.4)
donde Pi(X0, µV ,∆) son polinomios característicos en función de la movilidad µV , lalongitud del material D y la condición inicial X0. La variable de estado x(t) sepresenta de manera completa en el Apéndice E.
Puesto que los valores de µV , X0 y D son constantes, cada coeficiente característicoKi también será una constante cuando se sustituyan dichos parámetros, por lo que lasolución puede reescribirse como:
x(t) = K0 +K1t1 +K2t
2 + ...+Kntn (5.5)

5.2. METODOLOGÍA DE LAS APROXIMACIONES 59
Luego, si la resistencia cumple con la ecuación (2.24), correspondiente al modelo deresistores acoplados, entonces ésta puede expresarse como:
R(t) = Ron ·[x(t)
]+Roff ·
[1− x(t)
]= Ron ·
[K0 +K1t
1 +K2t2 + ...+Knt
n]
+ α ·Ron
[1− (K0 +K1t
1 +K2t2 + ...+Knt
n)] (5.6)
Al desarrollar la ecuación (5.6), se observa que la forma sigue siendo la de unpolinomio de n-ésimo grado con coeficientes constantes. Es decir que la resistencia delos dispositivos en función el tiempo puede expresarse por el polinomio:
R(t) =n∑i=0
Citi
R(t) = C0t0 + C1t
1 + C2t2 + ...+ Cnt
n
(5.7)
Por lo anterior, la expresión (5.7) se utilizará como ecuación base para el modelado,con la cual se realizarán las aproximaciones de la resistencia en función del tiempo.
5.2. Metodología de las aproximacionesEl desarrollo de la sección anterior indica que la resistencia de los dispositivos enfunción del tiempo puede modelarse con la ecuación (5.7). Sin embargo, debido a sucaracterística no-lineal —sobre todo el cambio abrupto en el valor de resistenciainherente a las transiciones resistivas— es difícil encontrar un solo polinomio queajuste a la curva en su totalidad.
Debido a este inconveniente, la curva de resistencia de los dispositivos obtenidaexperimentalmente —con las mediciones del capitulo anterior— ha sido dividida entres zonas de análisis, como lo muestra la figura 5.3. De esta manera, la resistenciatotal de los dispositivos de Ag/TiO2/ITO estará expresada matemáticamente por lafunción definida a trozos:
R(t) =
RZ1(t) Zona 1RZ2(t) Zona 2RZ3(t) Zona 3
(5.8)

60 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Donde cada función RZi(t) tendrá la forma polinómica de la ecuación base (5.7):
RZi(t) = C0Zit0 + C1Zit
1 + C2Zit2 + ...+ CnZit
n (5.9)
Idealmente, se busca que cada función RZi(t) se ajuste individualmente de la mejormanera a los datos experimentales en la zona de interés correspondiente. Como se verámás adelante, el grado de similitud entre la función de ajuste (5.9) y los datosexperimentales está directamente relacionado con el número de términos que contengael polinomio, y por consecuencia, relacionado también con el valor del grado de lafunción.
1 2 3
(a) Dispositivo de 100nm
1 2 3
(b) Dispositivo de 50nm
Figura 5.3: División de R(t) en tres zonas.
La corriente en función tiempo queda dividida como muestra la siguiente figura:
1 2 3
(a) Dispositivo de 100nm
1 2 3
(b) Dispositivo de 50nm
Figura 5.4: División de I(t) en tres zonas.
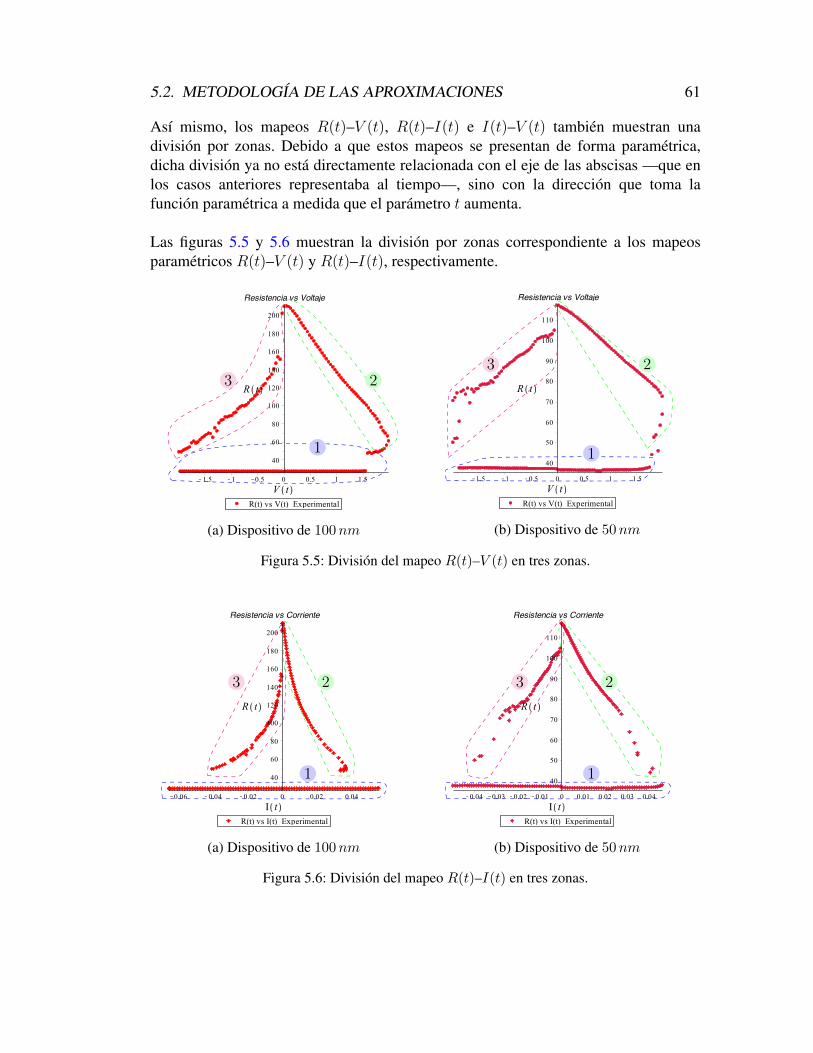
5.2. METODOLOGÍA DE LAS APROXIMACIONES 61
Así mismo, los mapeos R(t)–V (t), R(t)–I(t) e I(t)–V (t) también muestran unadivisión por zonas. Debido a que estos mapeos se presentan de forma paramétrica,dicha división ya no está directamente relacionada con el eje de las abscisas —que enlos casos anteriores representaba al tiempo—, sino con la dirección que toma lafunción paramétrica a medida que el parámetro t aumenta.
Las figuras 5.5 y 5.6 muestran la división por zonas correspondiente a los mapeosparamétricos R(t)–V (t) y R(t)–I(t), respectivamente.
1
23
(a) Dispositivo de 100nm
1
23
(b) Dispositivo de 50nm
Figura 5.5: División del mapeo R(t)–V (t) en tres zonas.
1
23
(a) Dispositivo de 100nm
1
23
(b) Dispositivo de 50nm
Figura 5.6: División del mapeo R(t)–I(t) en tres zonas.

62 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Por último, la figura 5.7 muestra la división por zonas del mapeo I(t)–V (t).
1
2
3
(a) Dispositivo de 100nm
1
2
3
(b) Dispositivo de 50nm
Figura 5.7: División del mapeo I(t)–V (t) en tres zonas.
Como objetivo primordial, se desea encontrar una función analítica que describa elcomportamiento de la resistencia en función del tiempo. Posteriormente, a través deésta, hallar una expresión para la corriente —fácil de obtener por Ley de Ohm. Unavez obtenidas estas dos funciones, es posible realizar todos los mapeos paramétricosdescritos anteriormente, incluyendo el lazo de histéresis memristivo.
5.2.1. Aproximación de la resistencia en el tiempo
Para hallar explícitamente el comportamiento de la resistencia en cada una de las treszonas anteriormente descritas, deben calcularse los coeficientes de la función RZi(t)correspondiente, específicamente C0Zi , C1Zi , C2Zi , ..., CnZi . Para esto, es necesarioformular un sistema de ecuaciones donde las incógnitas sean dichos coeficientes.
Para plantear el sistema de ecuaciones mencionado, se toman puntos en el tiempo,t0, t1, t2, ..., tn, distribuidos equidistantemente sobre el intervalo que abarque la zonade análisis, como lo muestra la figura 5.8. Cada punto en el tiempo ti corresponde unvalor de resistencia experimental —obtenidos con las mediciones del capítulo anterior.De manera que, por cada ti se puede formular una ecuación, igualando el valor deresistencia experimental, REXP (ti), a la ecuación de ajuste en la zona de interésevaluada en ese mismo instante de tiempo, RZi(ti).
REXP (ti) = C0Ziti0 + C1Ziti
1 + C2Ziti2 + ...+ CnZiti
n (5.10)
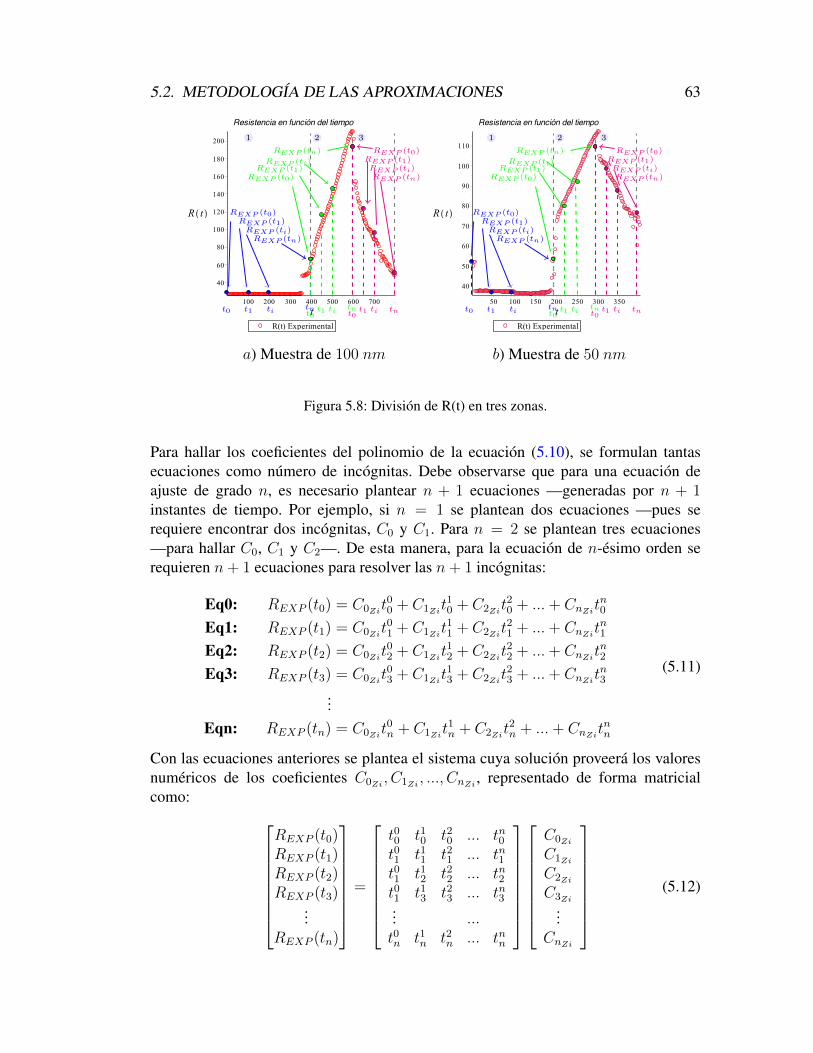
5.2. METODOLOGÍA DE LAS APROXIMACIONES 63
a) Muestra de 100 nm b) Muestra de 50 nm
1 2 3
t0 t1 ti tn
REXP (t0)REXP (t1)REXP (ti)REXP (tn)
t0t1 ti tn
REXP (tn)
REXP (ti)REXP (t1)
REXP (t0)
t0t1 ti tn
REXP (t0)REXP (t1)REXP (ti)REXP (tn)
1 2 3
t0 t1 ti tn
REXP (t0)REXP (t1)REXP (ti)REXP (tn)
t0t1 ti tn
REXP (tn)
REXP (ti)REXP (t1)
REXP (t0)
t0t1 ti tn
REXP (t0)REXP (t1)REXP (ti)REXP (tn)
Figura 5.8: División de R(t) en tres zonas.
Para hallar los coeficientes del polinomio de la ecuación (5.10), se formulan tantasecuaciones como número de incógnitas. Debe observarse que para una ecuación deajuste de grado n, es necesario plantear n + 1 ecuaciones —generadas por n + 1instantes de tiempo. Por ejemplo, si n = 1 se plantean dos ecuaciones —pues serequiere encontrar dos incógnitas, C0 y C1. Para n = 2 se plantean tres ecuaciones—para hallar C0, C1 y C2—. De esta manera, para la ecuación de n-ésimo orden serequieren n+ 1 ecuaciones para resolver las n+ 1 incógnitas:
Eq0: REXP (t0) = C0Zit00 + C1Zit
10 + C2Zit
20 + ...+ CnZit
n0
Eq1: REXP (t1) = C0Zit01 + C1Zit
11 + C2Zit
21 + ...+ CnZit
n1
Eq2: REXP (t2) = C0Zit02 + C1Zit
12 + C2Zit
22 + ...+ CnZit
n2
Eq3: REXP (t3) = C0Zit03 + C1Zit
13 + C2Zit
23 + ...+ CnZit
n3
...Eqn: REXP (tn) = C0Zit
0n + C1Zit
1n + C2Zit
2n + ...+ CnZit
nn
(5.11)
Con las ecuaciones anteriores se plantea el sistema cuya solución proveerá los valoresnuméricos de los coeficientes C0Zi , C1Zi , ..., CnZi , representado de forma matricialcomo:
REXP (t0)REXP (t1)REXP (t2)REXP (t3)
...REXP (tn)
=
t00 t10 t20 ... tn0t01 t11 t21 ... tn1t01 t12 t22 ... tn2t01 t13 t23 ... tn3... ...t0n t1n t2n ... tnn
C0Zi
C1Zi
C2Zi
C3Zi...
CnZi
(5.12)

64 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
De esta manera, una vez determinados los valores de los coeficientes, se cuenta conuna función que se aproxima a la resistencia y que necesariamente pasa por los valoresREXP (t0), REXP (t1), REXP (t2),..., REXP (tn).
Adicionalmente, nótese que dependiendo del valor del grado del polinomio de ajuste,se pueden encontrar diferentes funciones RZi que se aproximen a los datosexperimentales, pues el valor de n determinará cuántos términos posee la expresión.
RZi(t) = C0Zi + C1Zit1, n = 1
RZi(t) = C0Zi + C1Zit1 + C2Zit
2, n = 2
RZi(t) = C0Zi + C1Zit1 + C2Zit
2 + C3Zit3, n = 3
...
(5.13)
Con ello, es posible construir diferentes aproximaciones tomando distintos valores delgrado del polinomio de ajuste, n, y resolviendo el sistema de ecuacionescorrespondiente. Esto es conveniente si se decide investigar qué valor de n es óptimopara la aproximación.
5.2.2. Aproximación de la corriente en el tiempoPuesto que en cada instante de tiempo, el voltaje y la corriente se relacionan de maneraóhmica, es posible calcular la corriente a través del dispositivo como:
I(t) =V (t)
R(t)(5.14)
donde V (t) es el voltaje aplicado, expresado por la ecuación (5.3), y R(t) es laresistencia del dispositivo en función del tiempo.
Como se mencionó con anterioridad, debido a la división en zonas de la resistencia enfunción del tiempo, la corriente también queda divida, de manera que la corriente enfunción del tiempo también estará dada por una función no lineal definida a trozos:
I(t) =
IZ1(t) Zona 1IZ2(t) Zona 2IZ3(t) Zona 3
(5.15)
Cada función IZi(t), tendrá la forma:
IZi(t) =VZi(t)
RZi(t)(5.16)
Donde VZi(t) y RZi(t) son el voltaje aplicado y la resistencia en la zona de interés,respectivamente.
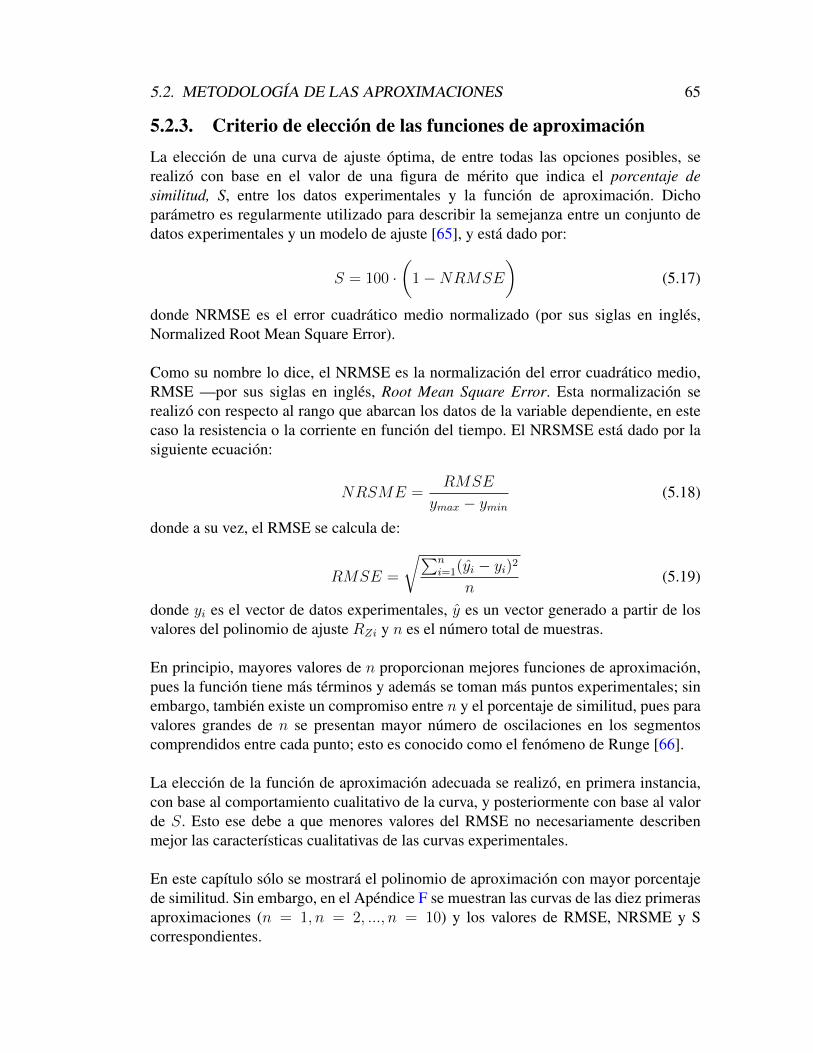
5.2. METODOLOGÍA DE LAS APROXIMACIONES 65
5.2.3. Criterio de elección de las funciones de aproximaciónLa elección de una curva de ajuste óptima, de entre todas las opciones posibles, serealizó con base en el valor de una figura de mérito que indica el porcentaje desimilitud, S, entre los datos experimentales y la función de aproximación. Dichoparámetro es regularmente utilizado para describir la semejanza entre un conjunto dedatos experimentales y un modelo de ajuste [65], y está dado por:
S = 100 ·(
1−NRMSE
)(5.17)
donde NRMSE es el error cuadrático medio normalizado (por sus siglas en inglés,Normalized Root Mean Square Error).
Como su nombre lo dice, el NRMSE es la normalización del error cuadrático medio,RMSE —por sus siglas en inglés, Root Mean Square Error. Esta normalización serealizó con respecto al rango que abarcan los datos de la variable dependiente, en estecaso la resistencia o la corriente en función del tiempo. El NRSMSE está dado por lasiguiente ecuación:
NRSME =RMSE
ymax − ymin(5.18)
donde a su vez, el RMSE se calcula de:
RMSE =
√∑ni=1(yi − yi)2
n(5.19)
donde yi es el vector de datos experimentales, y es un vector generado a partir de losvalores del polinomio de ajuste RZi y n es el número total de muestras.
En principio, mayores valores de n proporcionan mejores funciones de aproximación,pues la función tiene más términos y además se toman más puntos experimentales; sinembargo, también existe un compromiso entre n y el porcentaje de similitud, pues paravalores grandes de n se presentan mayor número de oscilaciones en los segmentoscomprendidos entre cada punto; esto es conocido como el fenómeno de Runge [66].
La elección de la función de aproximación adecuada se realizó, en primera instancia,con base al comportamiento cualitativo de la curva, y posteriormente con base al valorde S. Esto ese debe a que menores valores del RMSE no necesariamente describenmejor las características cualitativas de las curvas experimentales.
En este capítulo sólo se mostrará el polinomio de aproximación con mayor porcentajede similitud. Sin embargo, en el Apéndice F se muestran las curvas de las diez primerasaproximaciones (n = 1, n = 2, ..., n = 10) y los valores de RMSE, NRSME y Scorrespondientes.
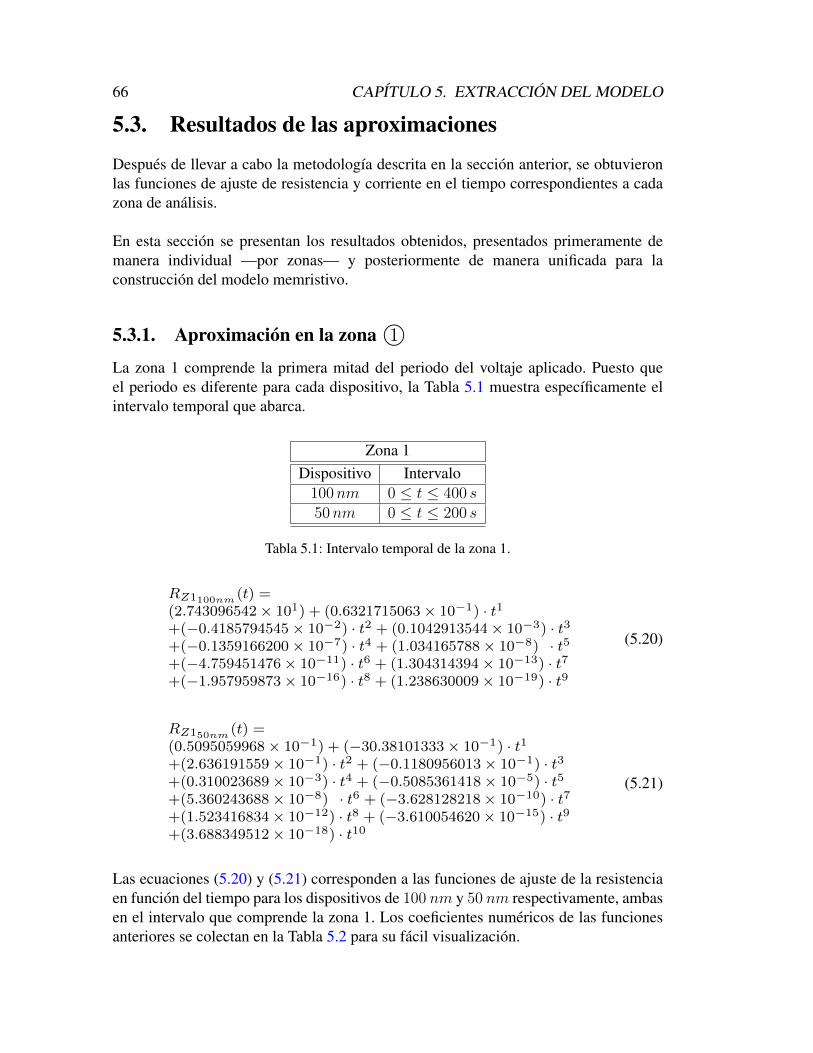
66 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
5.3. Resultados de las aproximaciones
Después de llevar a cabo la metodología descrita en la sección anterior, se obtuvieronlas funciones de ajuste de resistencia y corriente en el tiempo correspondientes a cadazona de análisis.
En esta sección se presentan los resultados obtenidos, presentados primeramente demanera individual —por zonas— y posteriormente de manera unificada para laconstrucción del modelo memristivo.
5.3.1. Aproximación en la zona 1©La zona 1 comprende la primera mitad del periodo del voltaje aplicado. Puesto queel periodo es diferente para cada dispositivo, la Tabla 5.1 muestra específicamente elintervalo temporal que abarca.
Zona 1Dispositivo Intervalo
100nm 0 ≤ t ≤ 400 s50nm 0 ≤ t ≤ 200 s
Tabla 5.1: Intervalo temporal de la zona 1.
RZ1100nm(t) =
(2.743096542× 101) + (0.6321715063× 10−1) · t1+(−0.4185794545× 10−2) · t2 + (0.1042913544× 10−3) · t3+(−0.1359166200× 10−7) · t4 + (1.034165788× 10−8) · t5+(−4.759451476× 10−11) · t6 + (1.304314394× 10−13) · t7+(−1.957959873× 10−16) · t8 + (1.238630009× 10−19) · t9
(5.20)
RZ150nm (t) =(0.5095059968× 10−1) + (−30.38101333× 10−1) · t1+(2.636191559× 10−1) · t2 + (−0.1180956013× 10−1) · t3+(0.310023689× 10−3) · t4 + (−0.5085361418× 10−5) · t5+(5.360243688× 10−8) · t6 + (−3.628128218× 10−10) · t7+(1.523416834× 10−12) · t8 + (−3.610054620× 10−15) · t9+(3.688349512× 10−18) · t10
(5.21)
Las ecuaciones (5.20) y (5.21) corresponden a las funciones de ajuste de la resistenciaen función del tiempo para los dispositivos de 100 nm y 50 nm respectivamente, ambasen el intervalo que comprende la zona 1. Los coeficientes numéricos de las funcionesanteriores se colectan en la Tabla 5.2 para su fácil visualización.
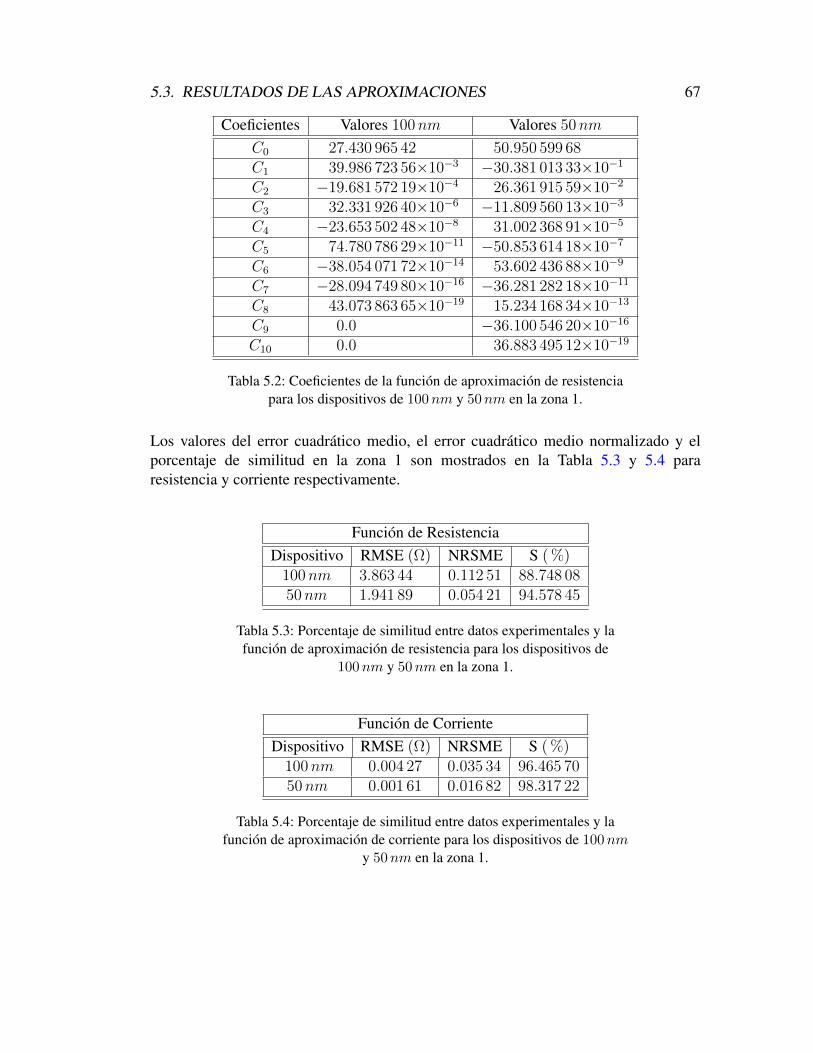
5.3. RESULTADOS DE LAS APROXIMACIONES 67
Coeficientes Valores 100nm Valores 50nm
C0 27.430 965 42 50.950 599 68C1 39.986 723 56×10−3 −30.381 013 33×10−1
C2 −19.681 572 19×10−4 26.361 915 59×10−2
C3 32.331 926 40×10−6 −11.809 560 13×10−3
C4 −23.653 502 48×10−8 31.002 368 91×10−5
C5 74.780 786 29×10−11 −50.853 614 18×10−7
C6 −38.054 071 72×10−14 53.602 436 88×10−9
C7 −28.094 749 80×10−16 −36.281 282 18×10−11
C8 43.073 863 65×10−19 15.234 168 34×10−13
C9 0.0 −36.100 546 20×10−16
C10 0.0 36.883 495 12×10−19
Tabla 5.2: Coeficientes de la función de aproximación de resistenciapara los dispositivos de 100nm y 50nm en la zona 1.
Los valores del error cuadrático medio, el error cuadrático medio normalizado y elporcentaje de similitud en la zona 1 son mostrados en la Tabla 5.3 y 5.4 pararesistencia y corriente respectivamente.
Función de ResistenciaDispositivo RMSE (Ω) NRSME S ( %)
100nm 3.863 44 0.112 51 88.748 0850nm 1.941 89 0.054 21 94.578 45
Tabla 5.3: Porcentaje de similitud entre datos experimentales y lafunción de aproximación de resistencia para los dispositivos de
100nm y 50nm en la zona 1.
Función de CorrienteDispositivo RMSE (Ω) NRSME S ( %)
100nm 0.004 27 0.035 34 96.465 7050nm 0.001 61 0.016 82 98.317 22
Tabla 5.4: Porcentaje de similitud entre datos experimentales y lafunción de aproximación de corriente para los dispositivos de 100nm
y 50nm en la zona 1.

68 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Las figuras 5.9 y 5.10 muestran el ajuste de las funciones resistencia y corriente a lacurva experimental. La curva roja corresponde a los datos experimentales, la curvaazul es el polinomio en el intervalo de la zona 1, mientras que la curva gris muestra losvalores del mismo polinomio, pero fuera de la zona de interés.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.9: Comparación entre datos experimentales y función deaproximación de la resistencia en la zona 1.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.10: Comparación entre datos experimentales y función deaproximación de la corriente en la zona 1.
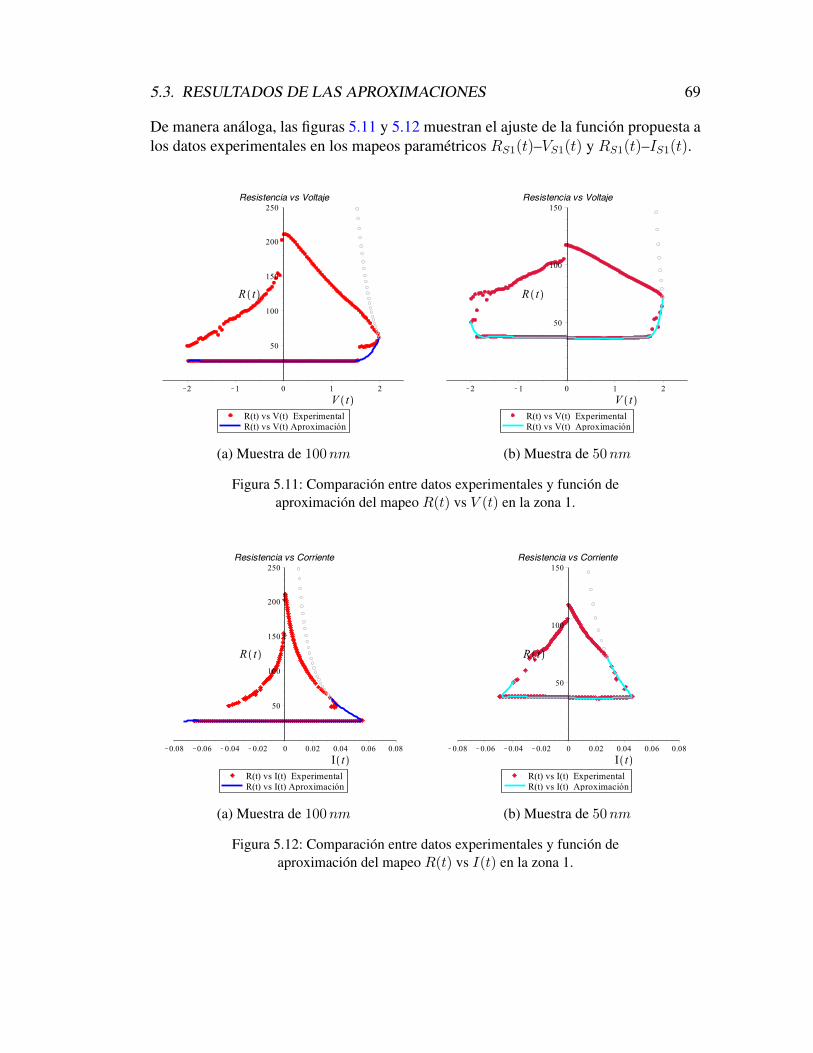
5.3. RESULTADOS DE LAS APROXIMACIONES 69
De manera análoga, las figuras 5.11 y 5.12 muestran el ajuste de la función propuesta alos datos experimentales en los mapeos paramétricos RS1(t)–VS1(t) y RS1(t)–IS1(t).
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.11: Comparación entre datos experimentales y función deaproximación del mapeo R(t) vs V (t) en la zona 1.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.12: Comparación entre datos experimentales y función deaproximación del mapeo R(t) vs I(t) en la zona 1.
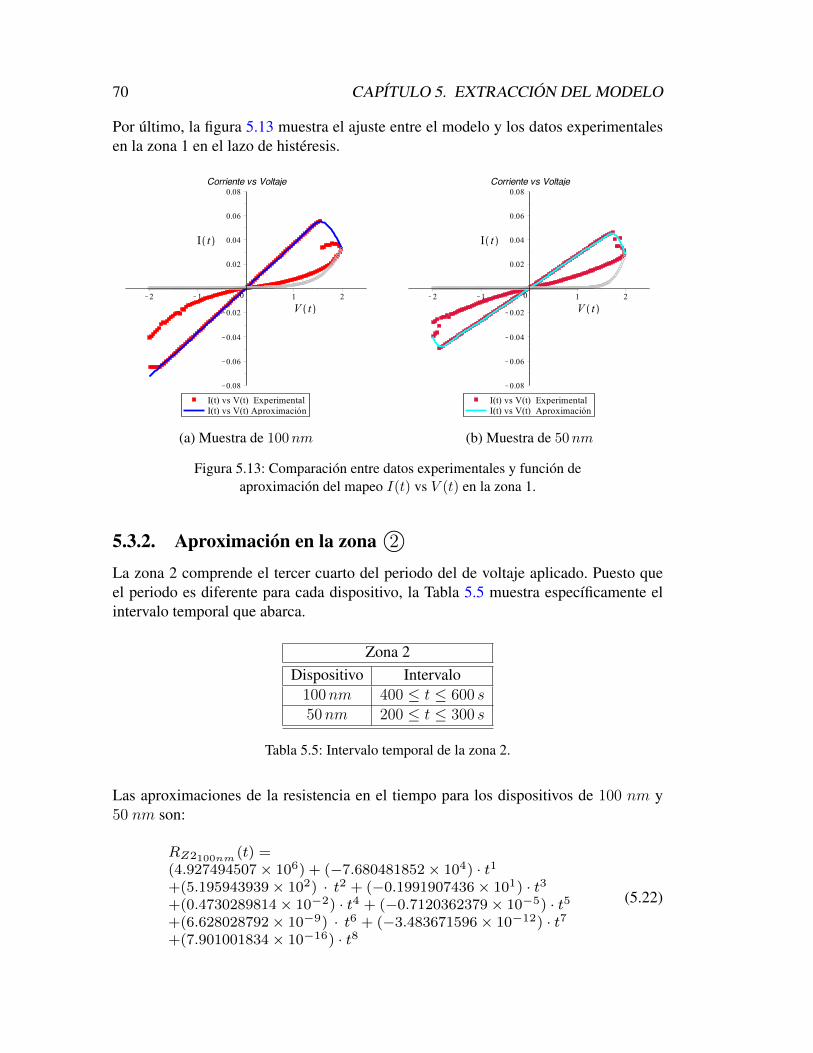
70 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Por último, la figura 5.13 muestra el ajuste entre el modelo y los datos experimentalesen la zona 1 en el lazo de histéresis.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.13: Comparación entre datos experimentales y función deaproximación del mapeo I(t) vs V (t) en la zona 1.
5.3.2. Aproximación en la zona 2©La zona 2 comprende el tercer cuarto del periodo del de voltaje aplicado. Puesto queel periodo es diferente para cada dispositivo, la Tabla 5.5 muestra específicamente elintervalo temporal que abarca.
Zona 2Dispositivo Intervalo
100nm 400 ≤ t ≤ 600 s50nm 200 ≤ t ≤ 300 s
Tabla 5.5: Intervalo temporal de la zona 2.
Las aproximaciones de la resistencia en el tiempo para los dispositivos de 100 nm y50 nm son:
RZ2100nm(t) =
(4.927494507× 106) + (−7.680481852× 104) · t1+(5.195943939× 102) · t2 + (−0.1991907436× 101) · t3+(0.4730289814× 10−2) · t4 + (−0.7120362379× 10−5) · t5+(6.628028792× 10−9) · t6 + (−3.483671596× 10−12) · t7+(7.901001834× 10−16) · t8
(5.22)
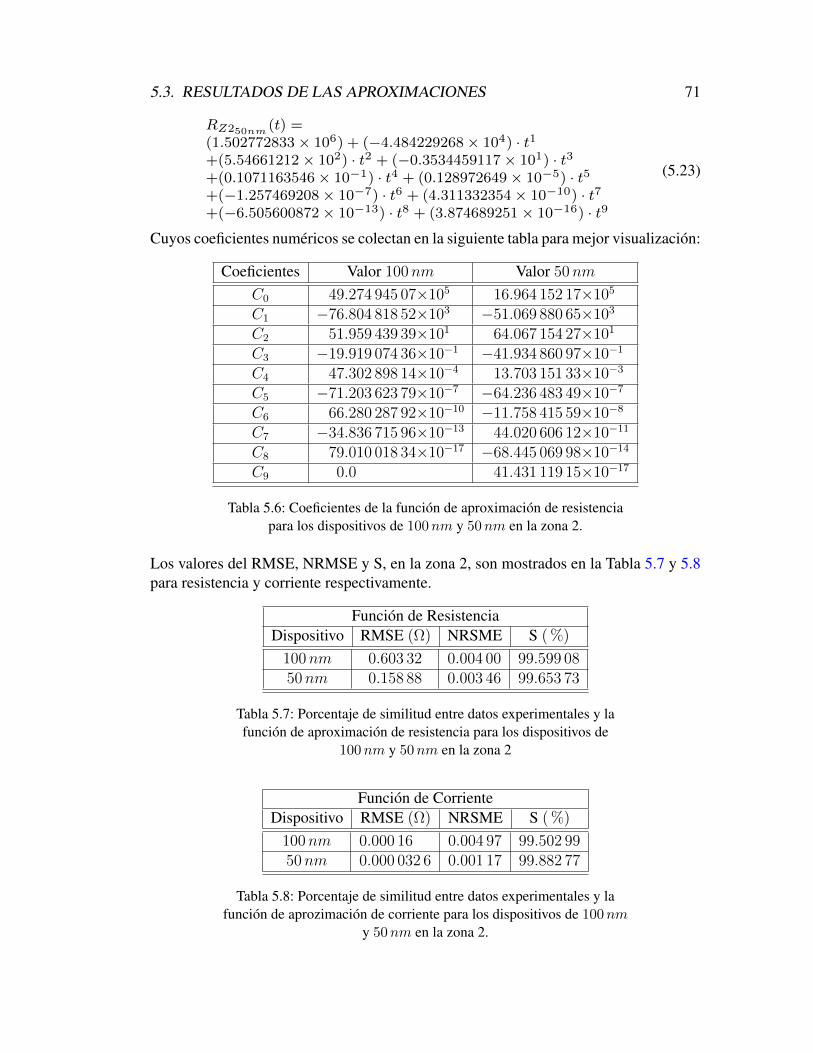
5.3. RESULTADOS DE LAS APROXIMACIONES 71
RZ250nm(t) =
(1.502772833× 106) + (−4.484229268× 104) · t1+(5.54661212× 102) · t2 + (−0.3534459117× 101) · t3+(0.1071163546× 10−1) · t4 + (0.128972649× 10−5) · t5+(−1.257469208× 10−7) · t6 + (4.311332354× 10−10) · t7+(−6.505600872× 10−13) · t8 + (3.874689251× 10−16) · t9
(5.23)
Cuyos coeficientes numéricos se colectan en la siguiente tabla para mejor visualización:
Coeficientes Valor 100nm Valor 50nm
C0 49.274 945 07×105 16.964 152 17×105
C1 −76.804 818 52×103 −51.069 880 65×103
C2 51.959 439 39×101 64.067 154 27×101
C3 −19.919 074 36×10−1 −41.934 860 97×10−1
C4 47.302 898 14×10−4 13.703 151 33×10−3
C5 −71.203 623 79×10−7 −64.236 483 49×10−7
C6 66.280 287 92×10−10 −11.758 415 59×10−8
C7 −34.836 715 96×10−13 44.020 606 12×10−11
C8 79.010 018 34×10−17 −68.445 069 98×10−14
C9 0.0 41.431 119 15×10−17
Tabla 5.6: Coeficientes de la función de aproximación de resistenciapara los dispositivos de 100nm y 50nm en la zona 2.
Los valores del RMSE, NRMSE y S, en la zona 2, son mostrados en la Tabla 5.7 y 5.8para resistencia y corriente respectivamente.
Función de ResistenciaDispositivo RMSE (Ω) NRSME S ( %)
100nm 0.603 32 0.004 00 99.599 0850nm 0.158 88 0.003 46 99.653 73
Tabla 5.7: Porcentaje de similitud entre datos experimentales y lafunción de aproximación de resistencia para los dispositivos de
100nm y 50nm en la zona 2
Función de CorrienteDispositivo RMSE (Ω) NRSME S ( %)
100nm 0.000 16 0.004 97 99.502 9950nm 0.000 032 6 0.001 17 99.882 77
Tabla 5.8: Porcentaje de similitud entre datos experimentales y lafunción de aprozimación de corriente para los dispositivos de 100nm
y 50nm en la zona 2.

72 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Las figuras 5.14 y 5.15 muestran la comparación entre los datos experimentales y lafunción de aproximación para resistencia y corriente. La curva roja corresponde a losdatos experimentales, la azul corresponde al polinomio de aproximación en elintervalo de la zona 2, mientras que la curva gris muestra los valores que toma elmismo polinomio, pero fuera de la zona de interés.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.14: Comparación entre datos experimentales y función deaproximación de la resistencia en la zona 2.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.15: Comparación entre datos experimentales y función deaproximación de la corriente en la zona 2.
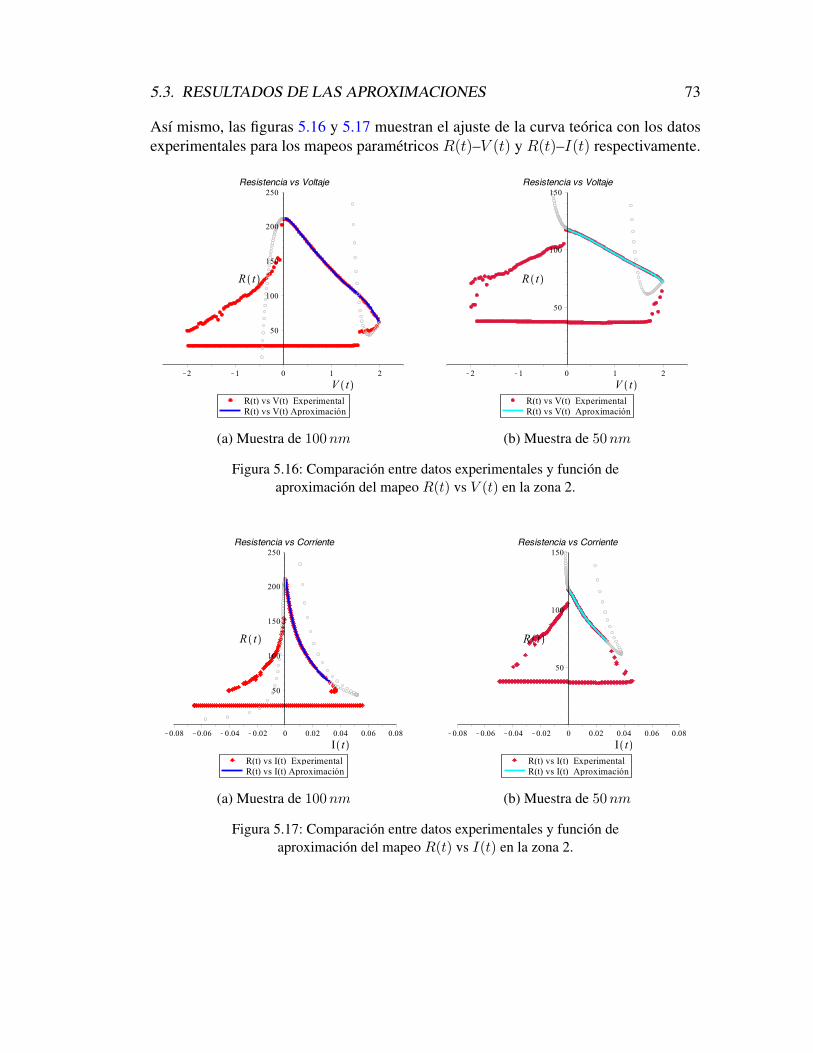
5.3. RESULTADOS DE LAS APROXIMACIONES 73
Así mismo, las figuras 5.16 y 5.17 muestran el ajuste de la curva teórica con los datosexperimentales para los mapeos paramétricos R(t)–V (t) y R(t)–I(t) respectivamente.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.16: Comparación entre datos experimentales y función deaproximación del mapeo R(t) vs V (t) en la zona 2.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.17: Comparación entre datos experimentales y función deaproximación del mapeo R(t) vs I(t) en la zona 2.
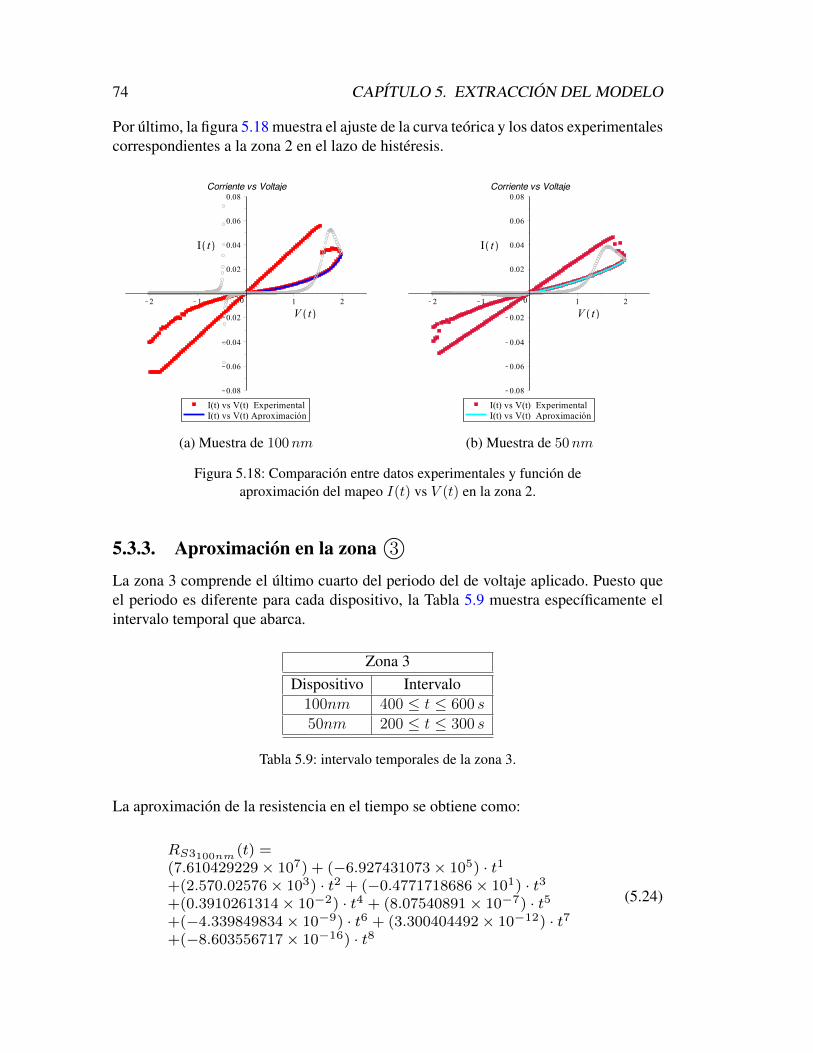
74 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Por último, la figura 5.18 muestra el ajuste de la curva teórica y los datos experimentalescorrespondientes a la zona 2 en el lazo de histéresis.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.18: Comparación entre datos experimentales y función deaproximación del mapeo I(t) vs V (t) en la zona 2.
5.3.3. Aproximación en la zona 3©La zona 3 comprende el último cuarto del periodo del de voltaje aplicado. Puesto queel periodo es diferente para cada dispositivo, la Tabla 5.9 muestra específicamente elintervalo temporal que abarca.
Zona 3Dispositivo Intervalo
100nm 400 ≤ t ≤ 600 s50nm 200 ≤ t ≤ 300 s
Tabla 5.9: intervalo temporales de la zona 3.
La aproximación de la resistencia en el tiempo se obtiene como:
RS3100nm(t) =
(7.610429229× 107) + (−6.927431073× 105) · t1+(2.570.02576× 103) · t2 + (−0.4771718686× 101) · t3+(0.3910261314× 10−2) · t4 + (8.07540891× 10−7) · t5+(−4.339849834× 10−9) · t6 + (3.300404492× 10−12) · t7+(−8.603556717× 10−16) · t8
(5.24)
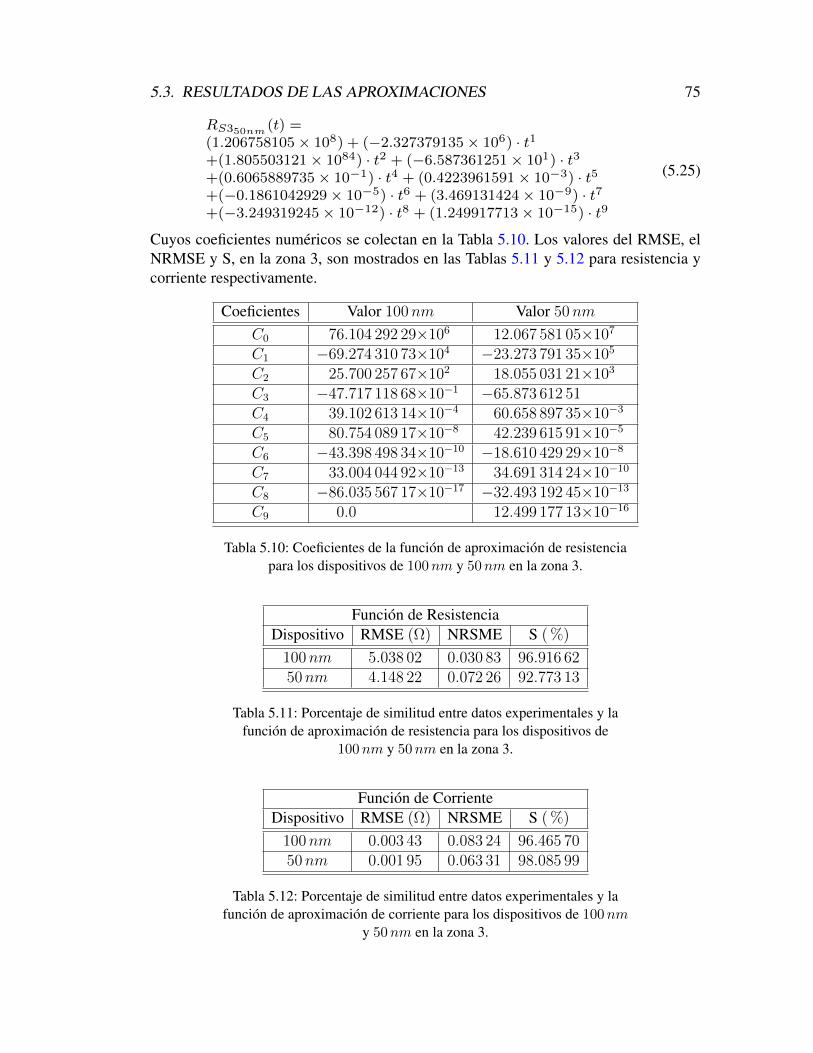
5.3. RESULTADOS DE LAS APROXIMACIONES 75
RS350nm(t) =
(1.206758105× 108) + (−2.327379135× 106) · t1+(1.805503121× 1084) · t2 + (−6.587361251× 101) · t3+(0.6065889735× 10−1) · t4 + (0.4223961591× 10−3) · t5+(−0.1861042929× 10−5) · t6 + (3.469131424× 10−9) · t7+(−3.249319245× 10−12) · t8 + (1.249917713× 10−15) · t9
(5.25)
Cuyos coeficientes numéricos se colectan en la Tabla 5.10. Los valores del RMSE, elNRMSE y S, en la zona 3, son mostrados en las Tablas 5.11 y 5.12 para resistencia ycorriente respectivamente.
Coeficientes Valor 100nm Valor 50nm
C0 76.104 292 29×106 12.067 581 05×107
C1 −69.274 310 73×104 −23.273 791 35×105
C2 25.700 257 67×102 18.055 031 21×103
C3 −47.717 118 68×10−1 −65.873 612 51C4 39.102 613 14×10−4 60.658 897 35×10−3
C5 80.754 089 17×10−8 42.239 615 91×10−5
C6 −43.398 498 34×10−10 −18.610 429 29×10−8
C7 33.004 044 92×10−13 34.691 314 24×10−10
C8 −86.035 567 17×10−17 −32.493 192 45×10−13
C9 0.0 12.499 177 13×10−16
Tabla 5.10: Coeficientes de la función de aproximación de resistenciapara los dispositivos de 100nm y 50nm en la zona 3.
Función de ResistenciaDispositivo RMSE (Ω) NRSME S ( %)
100nm 5.038 02 0.030 83 96.916 6250nm 4.148 22 0.072 26 92.773 13
Tabla 5.11: Porcentaje de similitud entre datos experimentales y lafunción de aproximación de resistencia para los dispositivos de
100nm y 50nm en la zona 3.
Función de CorrienteDispositivo RMSE (Ω) NRSME S ( %)
100nm 0.003 43 0.083 24 96.465 7050nm 0.001 95 0.063 31 98.085 99
Tabla 5.12: Porcentaje de similitud entre datos experimentales y lafunción de aproximación de corriente para los dispositivos de 100nm
y 50nm en la zona 3.
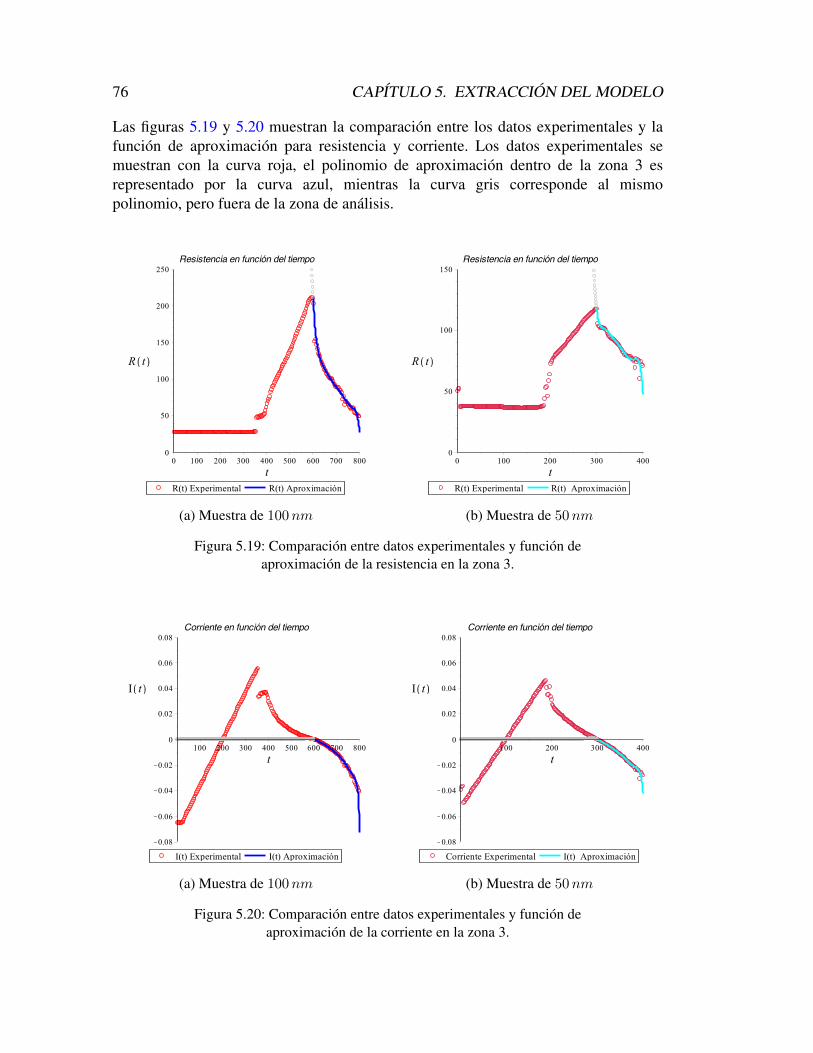
76 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Las figuras 5.19 y 5.20 muestran la comparación entre los datos experimentales y lafunción de aproximación para resistencia y corriente. Los datos experimentales semuestran con la curva roja, el polinomio de aproximación dentro de la zona 3 esrepresentado por la curva azul, mientras la curva gris corresponde al mismopolinomio, pero fuera de la zona de análisis.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.19: Comparación entre datos experimentales y función deaproximación de la resistencia en la zona 3.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.20: Comparación entre datos experimentales y función deaproximación de la corriente en la zona 3.

5.3. RESULTADOS DE LAS APROXIMACIONES 77
Análogamente, las figuras 5.21 y 5.22 muestran el ajuste entre la función teórica y losdatos experimentales en los mapeos paramétricos R(t)–V (t) y R(t)–I(t).
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.21: Comparación entre datos experimentales y función deaproximación del mapeo R(t) vs V (t) en la zona 3.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.22: Comparación entre datos experimentales y función deaproximación del mapeo R(t) vs I(t) en la zona 3.
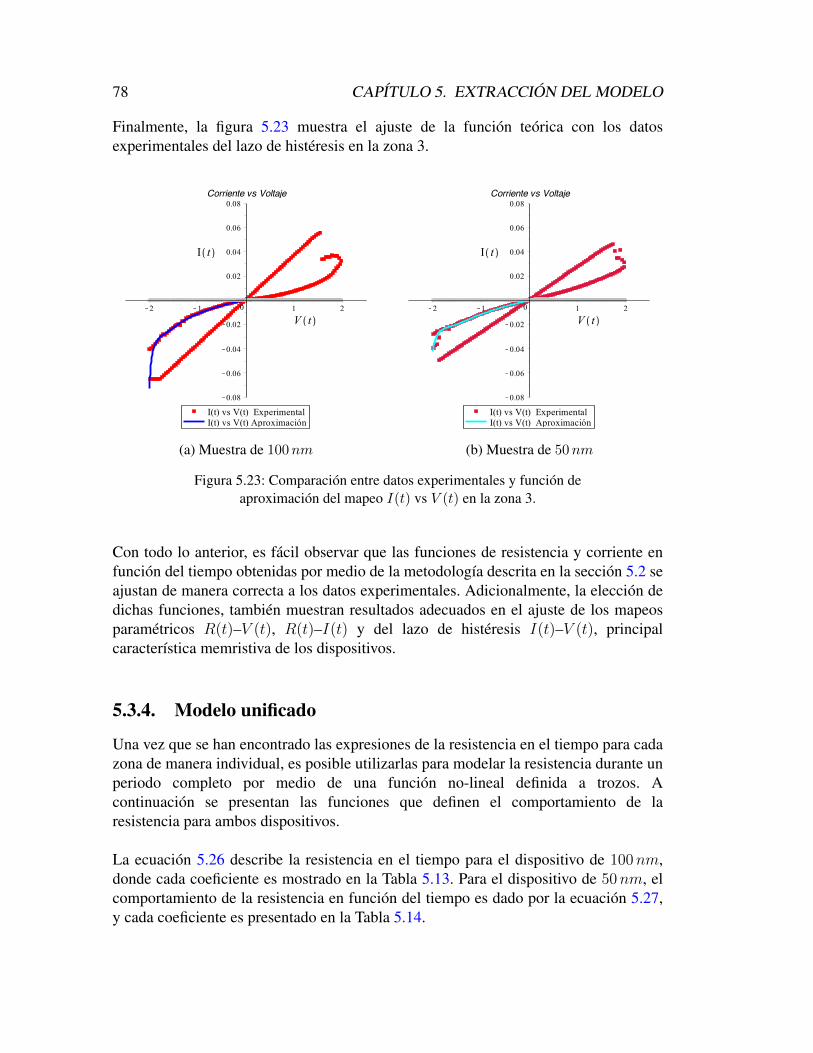
78 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Finalmente, la figura 5.23 muestra el ajuste de la función teórica con los datosexperimentales del lazo de histéresis en la zona 3.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.23: Comparación entre datos experimentales y función deaproximación del mapeo I(t) vs V (t) en la zona 3.
Con todo lo anterior, es fácil observar que las funciones de resistencia y corriente enfunción del tiempo obtenidas por medio de la metodología descrita en la sección 5.2 seajustan de manera correcta a los datos experimentales. Adicionalmente, la elección dedichas funciones, también muestran resultados adecuados en el ajuste de los mapeosparamétricos R(t)–V (t), R(t)–I(t) y del lazo de histéresis I(t)–V (t), principalcaracterística memristiva de los dispositivos.
5.3.4. Modelo unificado
Una vez que se han encontrado las expresiones de la resistencia en el tiempo para cadazona de manera individual, es posible utilizarlas para modelar la resistencia durante unperiodo completo por medio de una función no-lineal definida a trozos. Acontinuación se presentan las funciones que definen el comportamiento de laresistencia para ambos dispositivos.
La ecuación 5.26 describe la resistencia en el tiempo para el dispositivo de 100nm,donde cada coeficiente es mostrado en la Tabla 5.13. Para el dispositivo de 50nm, elcomportamiento de la resistencia en función del tiempo es dado por la ecuación 5.27,y cada coeficiente es presentado en la Tabla 5.14.

5.3. RESULTADOS DE LAS APROXIMACIONES 79
R100nm(t) =
C0Z1 + C1Z1 t+ C2Z1 t2 + C3Z1 t
3 + C4Z1 t4 0 ≤ t ≤ 400
+C5Z1 t5 + C6Z1 t
6 + C7Z1 t7 + C8Z1 t
8
C0Z2 + C1Z2 t+ C2Z2 t2 + C3Z2 t
3 + C4Z2 t4 400 ≤ t ≤ 600
+C5Z2 t5 + C6Z2 t
6 + C7Z2 t7 + C8Z2 t
8
C0Z3 + C1Z3 t+ C2Z3 t2 + C3Z3 t
3 + C4Z3 t4 600 ≤ t ≤ 800
+C5Z3 t5 + C6Z3 t
6 + C7Z3 t7 + C8Z3 t
8
(5.26)
Dispositivo de 100nm
Coeficientes Zona 1 Zona 2 Zona 3C0 27.430 965 42 49.274 945 07×105 76.104 292 29×106
C1 39.986 723 56×10−3 −76.804 818 52×103 −69.274 310 73×104
C2 −19.681 572 19×10−4 51.959 439 39×101 25.700 257 67×102
C3 32.331 926 40×10−6 −19.919 074 36×10−1 −47.717 118 68×10−1
C4 −23.653 502 48×10−8 47.302 898 14×10−4 39.102 613 14×10−4
C5 74.780 786 29×10−11 −71.203 623 79×10−7 80.754 089 17×10−8
C6 −38.054 071 72×10−14 66.280 287 92×10−10 −43.398 498 34×10−10
C7 −28.094 749 80×10−16 −34.836 715 96×10−13 33.004 044 92×10−13
C8 43.073 863 65×10−19 79.010 018 34×10−17 −86.035 567 17×10−17
Tabla 5.13: Coeficientes de las funciones de aproximación paradispositivos de 100nm.
R50nm(t) =
C0Z1 + C1Z1 t+ C2Z1 t2 + C3Z1 t
3 + C4Z1 t4 + C5Z1 t
5 0 ≤ t ≤ 200
+C6Z1 t6 + C7Z1 t
7 + C8Z1 t8 + C9Z1 t
9 + C9Z1 t10
C0Z2 + C1Z2 t+ C2Z2 t2 + C3Z2 t
3 + C4Z2 t4 + C5Z2 t
5 200 ≤ t ≤ 300
+C6Z2 t6 + C7Z2 t
7 + C8Z2 t8 + C8Z2 t
9
C0Z3 + C1Z3 t+ C2Z3 t2 + C3Z3 t
3 + C4Z3 t4 + C5Z3 t
5 300 ≤ t ≤ 400
+C6Z3 t6 + C7Z3 t
7 + C8Z3 t8 + C8Z3 t
9
(5.27)
Dispositivo de 50nm
Coeficientes Zona 1 Zona 2 Zona 3C0 50.950 599 68 16.964 152 17×105 12.067 581 05×107
C1 −30.381 013 33×10−1 −51.069 880 65×103 −23.273 791 35×105
C2 26.361 915 59×10−2 64.067 154 27×101 18.055 031 21×103
C3 −11.809 560 13×10−3 −41.934 860 97×10−1 −65.873 612 51C4 31.002 368 91×10−5 13.703 151 33×10−3 60.658 897 35×10−3
C5 −50.853 614 18×10−7 −64.236 483 49×10−7 42.239 615 91×10−5
C6 53.602 436 88×10−9 −11.758 415 59×10−8 −18.610 429 29×10−8
C7 −36.281 282 18×10−11 44.020 606 12×10−11 34.691 314 24×10−10
C8 15.234 168 34×10−13 −68.445 069 98×10−14 −32.493 192 45×10−13
C9 −36.100 546 20×10−16 41.431 119 15×10−17 12.499 177 13×10−16
C10 36.883 495 12×10−19 0.0 0.0
Tabla 5.14: Coeficientes de las funciones de aproximación paradispositivos de 50nm.

80 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
La comparación entre el modelo y las curvas experimentales de resistencia y corrientese muestran en las figuras 5.24 y 5.25 respectivamente. En el extremo izquierdo sepresentan las curvas correspondientes al dispositivo de 100nm, mientras que en elextremo derecho se presentan las curvas del dispositivo de 50nm; en ambos casos, lacurva roja corresponde a los datos experimentales, mientras que la curva azulcorresponde al modelo comportamental.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.24: Comparación entre datos experimentales y función deresistencia en el tiempo.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.25: Comparación entre datos experimentales y función decorriente en el tiempo.

5.3. RESULTADOS DE LAS APROXIMACIONES 81
Una vez obtenidos los modelos de resistencia y corriente, es posible realizar losmapeos paramétricos R(t)–V (t), R(t)–I(t) e I(t)–V (t). Los primeros dos mapeosson mostrados en las figuras 5.26 y 5.27 respectivamente.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.26: Correspondencia entre el mapeo R(t) vs V (t)experimental y del modelo.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.27: Correspondencia entre el mapeo R(t) vs I(t)experimental y del modelo.
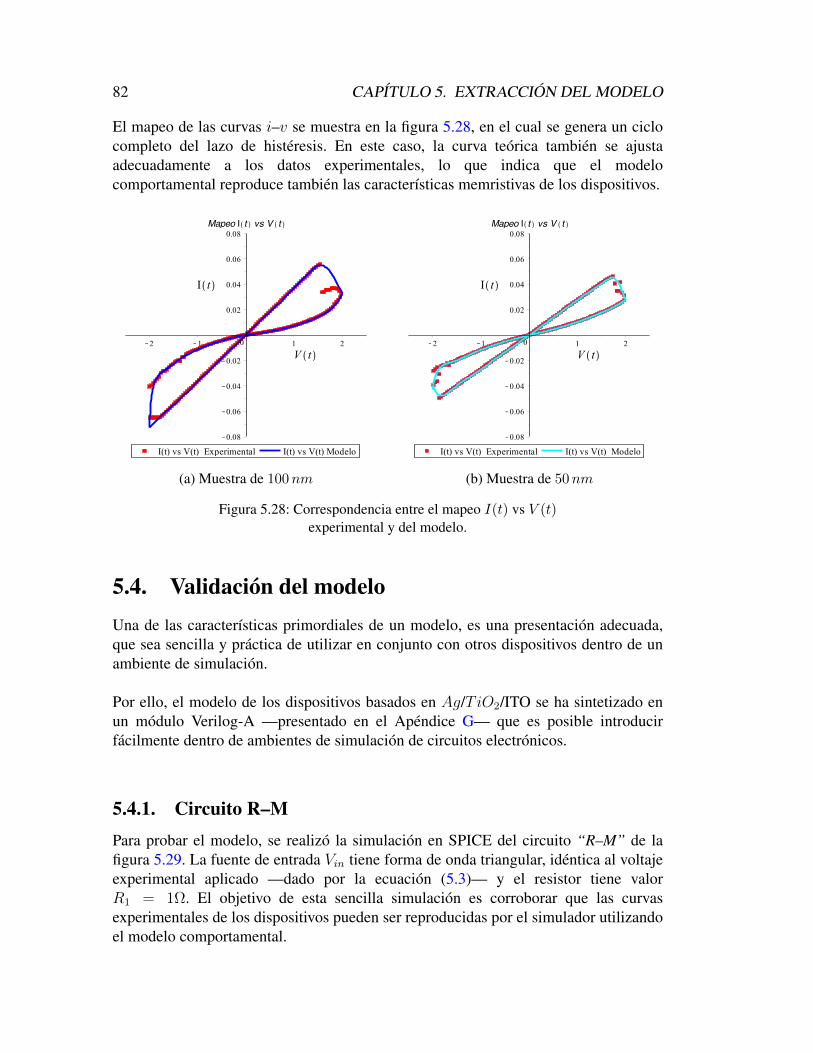
82 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
El mapeo de las curvas i–v se muestra en la figura 5.28, en el cual se genera un ciclocompleto del lazo de histéresis. En este caso, la curva teórica también se ajustaadecuadamente a los datos experimentales, lo que indica que el modelocomportamental reproduce también las características memristivas de los dispositivos.
(a) Muestra de 100nm (b) Muestra de 50nm
Figura 5.28: Correspondencia entre el mapeo I(t) vs V (t)experimental y del modelo.
5.4. Validación del modeloUna de las características primordiales de un modelo, es una presentación adecuada,que sea sencilla y práctica de utilizar en conjunto con otros dispositivos dentro de unambiente de simulación.
Por ello, el modelo de los dispositivos basados en Ag/TiO2/ITO se ha sintetizado enun módulo Verilog-A —presentado en el Apéndice G— que es posible introducirfácilmente dentro de ambientes de simulación de circuitos electrónicos.
5.4.1. Circuito R–MPara probar el modelo, se realizó la simulación en SPICE del circuito “R–M” de lafigura 5.29. La fuente de entrada Vin tiene forma de onda triangular, idéntica al voltajeexperimental aplicado —dado por la ecuación (5.3)— y el resistor tiene valorR1 = 1Ω. El objetivo de esta sencilla simulación es corroborar que las curvasexperimentales de los dispositivos pueden ser reproducidas por el simulador utilizandoel modelo comportamental.
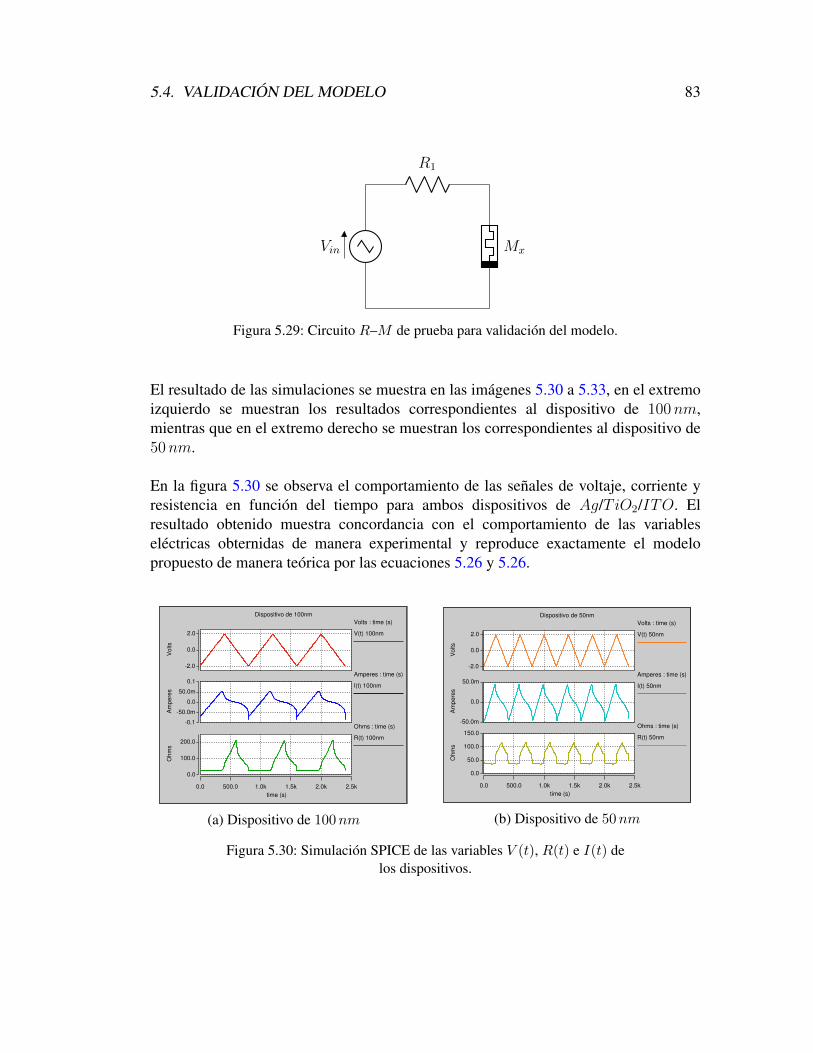
5.4. VALIDACIÓN DEL MODELO 83
Vin
R1
Mx
Figura 5.29: Circuito R–M de prueba para validación del modelo.
El resultado de las simulaciones se muestra en las imágenes 5.30 a 5.33, en el extremoizquierdo se muestran los resultados correspondientes al dispositivo de 100nm,mientras que en el extremo derecho se muestran los correspondientes al dispositivo de50nm.
En la figura 5.30 se observa el comportamiento de las señales de voltaje, corriente yresistencia en función del tiempo para ambos dispositivos de Ag/TiO2/ITO. Elresultado obtenido muestra concordancia con el comportamiento de las variableseléctricas obternidas de manera experimental y reproduce exactamente el modelopropuesto de manera teórica por las ecuaciones 5.26 y 5.26.
Dispositivo de 100nm
O
hm
s
0.0
100.0
200.0
A
mperes
−0.1
−50.0m
0.0
50.0m
0.1
V
olts
−2.0
0.0
2.0
time (s)
0.0 500.0 1.0k 1.5k 2.0k 2.5k
Ohms : time (s)
R(t) 100nm
Amperes : time (s)
I(t) 100nm
Volts : time (s)
V(t) 100nm
(a) Dispositivo de 100nm
Dispositivo de 50nm
O
hm
s
0.0
50.0
100.0
150.0
A
mp
ere
s
−50.0m
0.0
50.0m
V
olts
−2.0
0.0
2.0
time (s)
0.0 500.0 1.0k 1.5k 2.0k 2.5k
Ohms : time (s)
R(t) 50nm
Amperes : time (s)
I(t) 50nm
Volts : time (s)
V(t) 50nm
(b) Dispositivo de 50nm
Figura 5.30: Simulación SPICE de las variables V (t), R(t) e I(t) delos dispositivos.

84 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Adicionalmente, se verificó que el modelo satisfaga el comportamiento de los mapeosparamétricos R(t)–V (t) y R(t)–I(t). Las figuras 5.31 y 5.32 presentan la simulaciónde dichos mapeos, correspondientes a los dispositivos de 100nm y 50nm. En amboscasos puede observarse una reproducción acorde a los resultados experimentalespresentados con anterioridad.
R(t) vs V(t) 100nm
O
hm
s
0.0
100.0
200.0
Volts
−2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0
Ohms : Volts
R(t) vs V(t) 100nm
(a) Dispositivo de 100nm
R(t) vs V(t) 50nm
O
hm
s
50.0
100.0
150.0
Volts
−2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0
Ohms : Volts
R(t) vs V(t)
(b) Dispositivo de 50nm
Figura 5.31: Simulación SPICE del mapeo R(t) vs V (t) de losdispositivos.
R(t) vs I(t) 100nm
O
hm
s
0.0
100.0
200.0
Amperes
−0.1 −50.0m 0.0 50.0m 0.1
Ohms : Amperes
R(t) vs I(t) 100nm
(a) Dispositivo de 100nm
R(t) vs I(t) 50nm
O
hm
s
50.0
100.0
150.0
Amperes
−60.0m −40.0m −20.0m 0.0 20.0m 40.0m 60.0m
Ohms : Amperes
R(t) vs I(t)
(b) Dispositivo de 50nm
Figura 5.32: Simulación SPICE del mapeo R(t) vs I(t) de losdispositivos.

5.4. VALIDACIÓN DEL MODELO 85
Por último, la simulación del mapeo I(t)–V (t) da como resultado el lazo de histéresis,el cual cuenta con las mismas características obtenidas que en el modelo teórico.
I(t) vs V(t) 100nm
A
mperes
−0.1
−50.0m
0.0
50.0m
0.1
Volts
−2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0
Amperes : Volts
I(t) vs V(t) 100nm
(a) Dispositivo de 100nm
I(t) vs V(t) 50nm
A
mperes
−60.0m
−40.0m
−20.0m
0.0
20.0m
40.0m
60.0m
Volts
−2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0
Amperes : Volts
I(t) vs V(t)
(b) Dispositivo de 50nm
Figura 5.33: Simulación SPICE del mapeo I(t) vs V (t) de losdispositivos.
5.4.2. Amplificador inversor memristivoUna vez corroborada la respuesta del modelo comportamental utilizando estadescripción de alto nivel, es posible incluir el modelo de los dispositivosAg/TiO2/ITO como un elemento más en el simulador.
Como ejemplo de ello, se realizó la simulación de un amplificador inversormemristivo, mostrado en el circuito de la figura 5.34. Este circuito es un sencilloamplificador operacional en configuración inversora, pero que utiliza un memristor enlazo de retroalimentación.
−
+Vin
R1
Vout
Mx
Figura 5.34: Amplificador inversor memristivo.
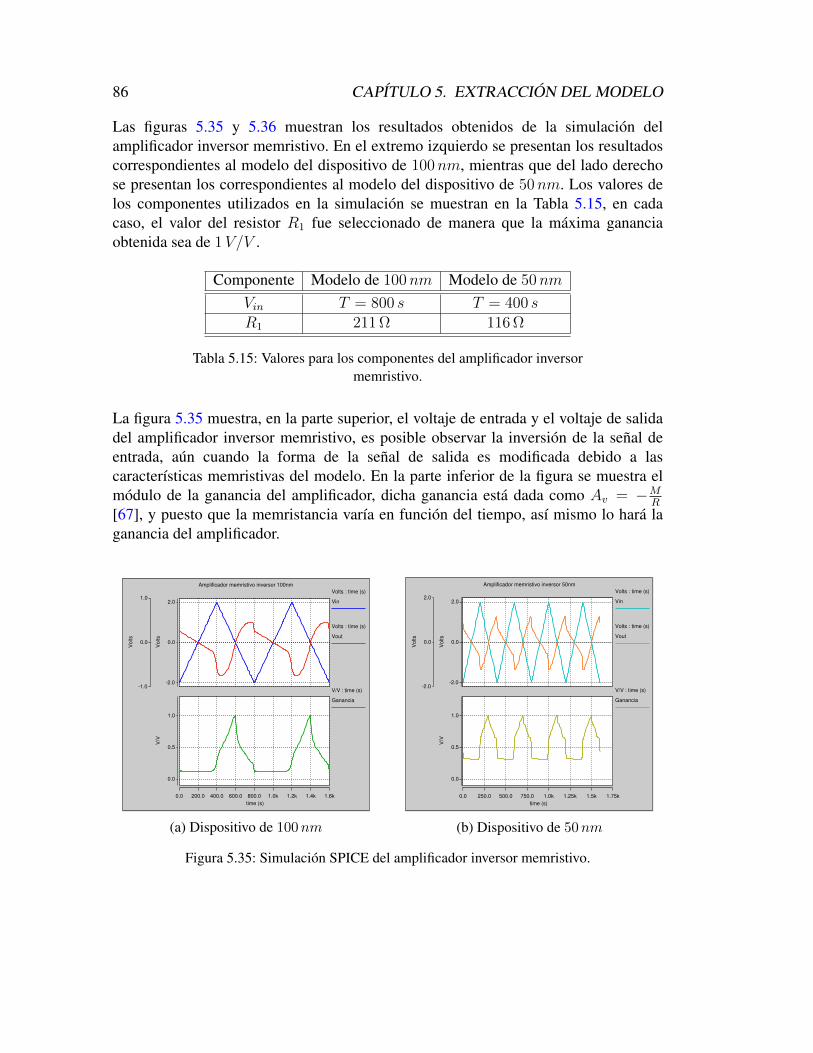
86 CAPÍTULO 5. EXTRACCIÓN DEL MODELO
Las figuras 5.35 y 5.36 muestran los resultados obtenidos de la simulación delamplificador inversor memristivo. En el extremo izquierdo se presentan los resultadoscorrespondientes al modelo del dispositivo de 100nm, mientras que del lado derechose presentan los correspondientes al modelo del dispositivo de 50nm. Los valores delos componentes utilizados en la simulación se muestran en la Tabla 5.15, en cadacaso, el valor del resistor R1 fue seleccionado de manera que la máxima gananciaobtenida sea de 1V/V .
Componente Modelo de 100nm Modelo de 50nm
Vin T = 800 s T = 400 sR1 211 Ω 116 Ω
Tabla 5.15: Valores para los componentes del amplificador inversormemristivo.
La figura 5.35 muestra, en la parte superior, el voltaje de entrada y el voltaje de salidadel amplificador inversor memristivo, es posible observar la inversión de la señal deentrada, aún cuando la forma de la señal de salida es modificada debido a lascaracterísticas memristivas del modelo. En la parte inferior de la figura se muestra elmódulo de la ganancia del amplificador, dicha ganancia está dada como Av = −M
R
[67], y puesto que la memristancia varía en función del tiempo, así mismo lo hará laganancia del amplificador.
Amplificador memristivo inversor 100nm
V
/V
0.0
0.5
1.0
time (s)
0.0 200.0 400.0 600.0 800.0 1.0k 1.2k 1.4k 1.6k
V
olts
−2.0
0.0
2.0
V
olts
−1.0
0.0
1.0
V/V : time (s)
Ganancia
Volts : time (s)
Vin
Volts : time (s)
Vout
(a) Dispositivo de 100nm
Amplificador memristivo inversor 50nm
time (s)
0.0 250.0 500.0 750.0 1.0k 1.25k 1.5k 1.75k
V
/V
0.0
0.5
1.0
V
olts
−2.0
0.0
2.0
V
olts
−2.0
0.0
2.0
V/V : time (s)
Ganancia
Volts : time (s)
Vin
Volts : time (s)
Vout
(b) Dispositivo de 50nm
Figura 5.35: Simulación SPICE del amplificador inversor memristivo.

5.4. VALIDACIÓN DEL MODELO 87
Adicionalmente, la figura 5.36 presenta el lazo de histéresis obtenido en la simulacióndel amplificador inversor memristivo. En este caso el lazo de histéresis se encuentrarotado 180 con respecto al original, muestra de la operación inversora del amplificador.
Lazo de histeresis en inversor 100nm
A
mperes
−10.0m
−7.5m
−5.0m
−2.5m
0.0
2.5m
5.0m
7.5m
10.0m
Volts
−0.75 −0.5 −0.25 0.0 0.25 0.5
Amperes : Volts
I(t) vs V(t)
(a) Dispositivo de 100nm
Lazo de histeresis en inversor 50nm
A
mperes
−20.0m
−15.0m
−10.0m
−5.0m
0.0
5.0m
10.0m
15.0m
20.0m
Volts
−1.5 −1.0 −0.5 0.0 0.5 1.0 1.5
Amperes : Volts
I(t) vs V(t)
(b) Dispositivo de 50nm
Figura 5.36: Lazo de histéresis del amplificador inversor memristivo.


Capítulo 6
Conclusiones
Se realizó la caracterización de dispositivos planares constituidos por una película dedióxido de titanio (TiO2) depositada sobre un substrato de óxido de indio y estaño(ITO) y utilizando contactos de plata (Ag).
Dos tipos de dispositivos fueron caracterizados, clasificados por el espesor de lapelícula de TiO2; de 100nm y 50nm. Dicha caracterización consistió en untratamiendo previo de electroformado, y posteriormente la búsqueda de sucomportamiento RS y valores característicos.
Los resultados de esta caracterización muestran que ambos dispositivos poseen uncomportamiento bipolar CF8; también se estimaron los valores de sus parámetroscaracterísticos, los cuales se presentan en el Capítulo 2. Además, el mapeoparamétrico i–v muestra que los dispositivos poseen comportamiento memristivo.
La necesidad del proceso de electroformado del dispositivo, que crea los filamentosconductores que hacen posible el comportamiento RS —y su comportamientobipolar— indica que hay especies cargadas influenciadas por el campo eléctrico,sugieren que el mecanismo físico por el que se rigen los dispositivos es unacombinación de ambos procesos.
Para modelar el comportamiento memristivo de los dispositivos, se adaptó y resolvióla ecuación de arrastre no-lineal utilizando el método de perturbación homotópica. Lasolución muestra que la resistencia puede expresarse en forma de un polinomio degrado n en función del tiempo con coeficientes constantes.
Para hallar una función analítica que describa el comportamiento de la resistencia seseccionó la curva de resistencia en tres zonas, y cada zona fue aproximada con elpolinomio mencionado.
89

90 CAPÍTULO 6. CONCLUSIONES
La elección de la mejor aproximación fue hecha en función de la minimización delerror cuadrático medio normalizado. Las aproximaciones utilizadas muestran unasimilitud entre los datos experimentales y las funciones de ajuste de al menos 88 %para la curva de resistencia y arriba del 95 % para la curva de corriente en función deltiempo.
El resultado del proceso de extracción ha permitido generar un modelocomportamental para los dispositivos memristivos utilizando un conjunto de funcionesno-lineales a trozos.
El modelo ha sido codificado en un módulo en el lenguaje de alto nivel Verilog-A, elcual puede ser utilizado en el ambiente de simulación eléctrica SPICE, lo cual permiterealizar simulaciones que contengan tanto los dispositivos convencionales como losdispositivos memristivos Ag/TiO2/ITO de 100nm o de 50nm.
Trabajo futuroDurante el desarrollo de esta tesis se han identificado algunos puntos en los que sepodría ampliar o mejor este trabajo. Algunos de ellos son:
1. Realizar un proceso confiable que permita tomar mediciones durante múltiplesciclos sin degradación de las muestras.
2. Caracterización en frecuencia
3. Extracción de los parámetros físicos del modelo.
4. Utilizar métodos de aproximación por interpolación que permitan describir laresistencia en función del tiempo con una sola función continua.
5. Utilizar los dispositivos fabricados en un circuito de propósito específico, demanera que se pueda comparar su desempeño real con las simulaciones.
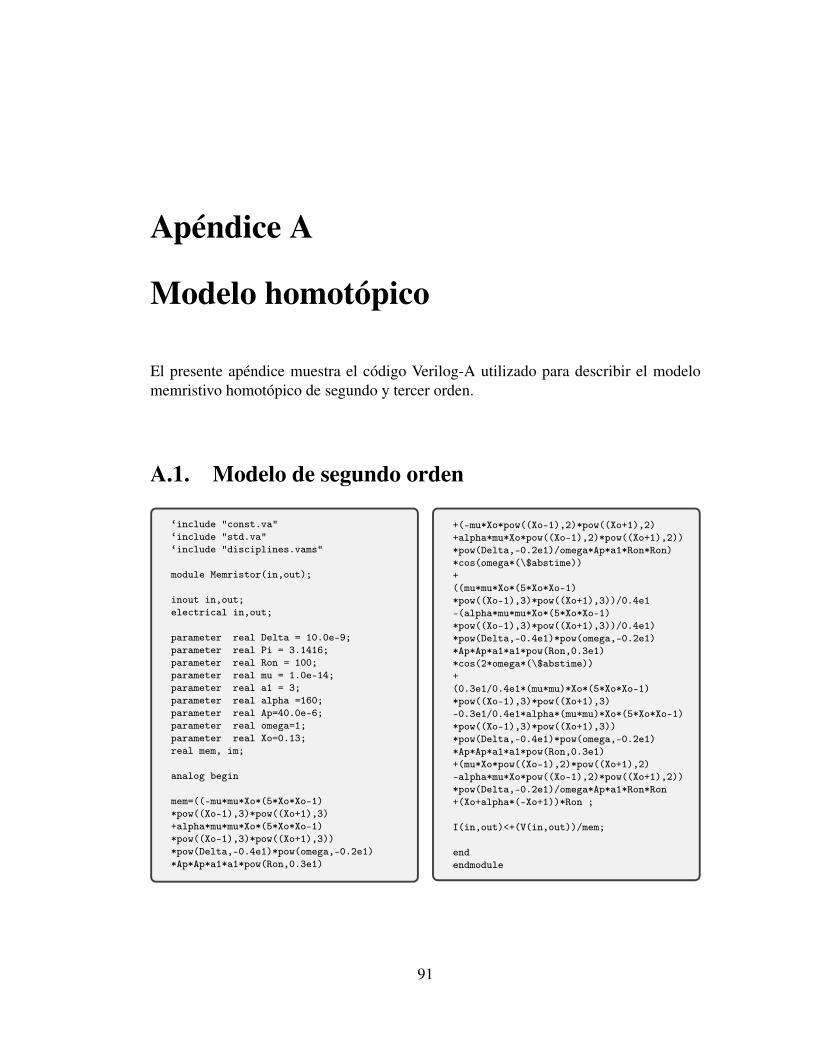
Apéndice A
Modelo homotópico
El presente apéndice muestra el código Verilog-A utilizado para describir el modelomemristivo homotópico de segundo y tercer orden.
A.1. Modelo de segundo orden
‘include "const.va"‘include "std.va"‘include "disciplines.vams"
module Memristor(in,out);
inout in,out;electrical in,out;
parameter real Delta = 10.0e-9;parameter real Pi = 3.1416;parameter real Ron = 100;parameter real mu = 1.0e-14;parameter real a1 = 3;parameter real alpha =160;parameter real Ap=40.0e-6;parameter real omega=1;parameter real Xo=0.13;real mem, im;
analog begin
mem=((-mu*mu*Xo*(5*Xo*Xo-1)*pow((Xo-1),3)*pow((Xo+1),3)+alpha*mu*mu*Xo*(5*Xo*Xo-1)*pow((Xo-1),3)*pow((Xo+1),3))*pow(Delta,-0.4e1)*pow(omega,-0.2e1)*Ap*Ap*a1*a1*pow(Ron,0.3e1)
+(-mu*Xo*pow((Xo-1),2)*pow((Xo+1),2)+alpha*mu*Xo*pow((Xo-1),2)*pow((Xo+1),2))*pow(Delta,-0.2e1)/omega*Ap*a1*Ron*Ron)*cos(omega*(\$abstime))+((mu*mu*Xo*(5*Xo*Xo-1)*pow((Xo-1),3)*pow((Xo+1),3))/0.4e1-(alpha*mu*mu*Xo*(5*Xo*Xo-1)*pow((Xo-1),3)*pow((Xo+1),3))/0.4e1)*pow(Delta,-0.4e1)*pow(omega,-0.2e1)*Ap*Ap*a1*a1*pow(Ron,0.3e1)*cos(2*omega*(\$abstime))+(0.3e1/0.4e1*(mu*mu)*Xo*(5*Xo*Xo-1)*pow((Xo-1),3)*pow((Xo+1),3)-0.3e1/0.4e1*alpha*(mu*mu)*Xo*(5*Xo*Xo-1)*pow((Xo-1),3)*pow((Xo+1),3))*pow(Delta,-0.4e1)*pow(omega,-0.2e1)*Ap*Ap*a1*a1*pow(Ron,0.3e1)+(mu*Xo*pow((Xo-1),2)*pow((Xo+1),2)-alpha*mu*Xo*pow((Xo-1),2)*pow((Xo+1),2))*pow(Delta,-0.2e1)/omega*Ap*a1*Ron*Ron+(Xo+alpha*(-Xo+1))*Ron ;
I(in,out)<+(V(in,out))/mem;
endendmodule
91
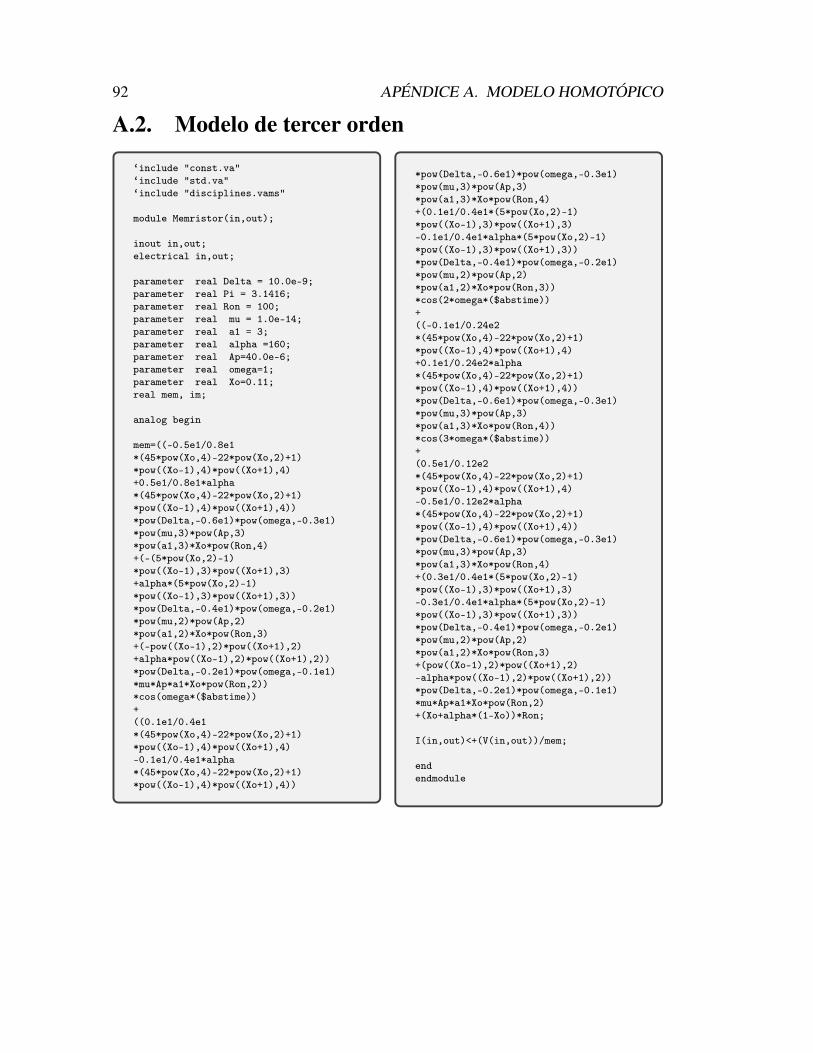
92 APÉNDICE A. MODELO HOMOTÓPICO
A.2. Modelo de tercer orden
‘include "const.va"‘include "std.va"‘include "disciplines.vams"
module Memristor(in,out);
inout in,out;electrical in,out;
parameter real Delta = 10.0e-9;parameter real Pi = 3.1416;parameter real Ron = 100;parameter real mu = 1.0e-14;parameter real a1 = 3;parameter real alpha =160;parameter real Ap=40.0e-6;parameter real omega=1;parameter real Xo=0.11;real mem, im;
analog begin
mem=((-0.5e1/0.8e1*(45*pow(Xo,4)-22*pow(Xo,2)+1)*pow((Xo-1),4)*pow((Xo+1),4)+0.5e1/0.8e1*alpha*(45*pow(Xo,4)-22*pow(Xo,2)+1)*pow((Xo-1),4)*pow((Xo+1),4))*pow(Delta,-0.6e1)*pow(omega,-0.3e1)*pow(mu,3)*pow(Ap,3)*pow(a1,3)*Xo*pow(Ron,4)+(-(5*pow(Xo,2)-1)*pow((Xo-1),3)*pow((Xo+1),3)+alpha*(5*pow(Xo,2)-1)*pow((Xo-1),3)*pow((Xo+1),3))*pow(Delta,-0.4e1)*pow(omega,-0.2e1)*pow(mu,2)*pow(Ap,2)*pow(a1,2)*Xo*pow(Ron,3)+(-pow((Xo-1),2)*pow((Xo+1),2)+alpha*pow((Xo-1),2)*pow((Xo+1),2))*pow(Delta,-0.2e1)*pow(omega,-0.1e1)*mu*Ap*a1*Xo*pow(Ron,2))*cos(omega*($abstime))+((0.1e1/0.4e1*(45*pow(Xo,4)-22*pow(Xo,2)+1)*pow((Xo-1),4)*pow((Xo+1),4)-0.1e1/0.4e1*alpha*(45*pow(Xo,4)-22*pow(Xo,2)+1)*pow((Xo-1),4)*pow((Xo+1),4))
*pow(Delta,-0.6e1)*pow(omega,-0.3e1)*pow(mu,3)*pow(Ap,3)*pow(a1,3)*Xo*pow(Ron,4)+(0.1e1/0.4e1*(5*pow(Xo,2)-1)*pow((Xo-1),3)*pow((Xo+1),3)-0.1e1/0.4e1*alpha*(5*pow(Xo,2)-1)*pow((Xo-1),3)*pow((Xo+1),3))*pow(Delta,-0.4e1)*pow(omega,-0.2e1)*pow(mu,2)*pow(Ap,2)*pow(a1,2)*Xo*pow(Ron,3))*cos(2*omega*($abstime))+((-0.1e1/0.24e2*(45*pow(Xo,4)-22*pow(Xo,2)+1)*pow((Xo-1),4)*pow((Xo+1),4)+0.1e1/0.24e2*alpha*(45*pow(Xo,4)-22*pow(Xo,2)+1)*pow((Xo-1),4)*pow((Xo+1),4))*pow(Delta,-0.6e1)*pow(omega,-0.3e1)*pow(mu,3)*pow(Ap,3)*pow(a1,3)*Xo*pow(Ron,4))*cos(3*omega*($abstime))+(0.5e1/0.12e2*(45*pow(Xo,4)-22*pow(Xo,2)+1)*pow((Xo-1),4)*pow((Xo+1),4)-0.5e1/0.12e2*alpha*(45*pow(Xo,4)-22*pow(Xo,2)+1)*pow((Xo-1),4)*pow((Xo+1),4))*pow(Delta,-0.6e1)*pow(omega,-0.3e1)*pow(mu,3)*pow(Ap,3)*pow(a1,3)*Xo*pow(Ron,4)+(0.3e1/0.4e1*(5*pow(Xo,2)-1)*pow((Xo-1),3)*pow((Xo+1),3)-0.3e1/0.4e1*alpha*(5*pow(Xo,2)-1)*pow((Xo-1),3)*pow((Xo+1),3))*pow(Delta,-0.4e1)*pow(omega,-0.2e1)*pow(mu,2)*pow(Ap,2)*pow(a1,2)*Xo*pow(Ron,3)+(pow((Xo-1),2)*pow((Xo+1),2)-alpha*pow((Xo-1),2)*pow((Xo+1),2))*pow(Delta,-0.2e1)*pow(omega,-0.1e1)*mu*Ap*a1*Xo*pow(Ron,2)+(Xo+alpha*(1-Xo))*Ron;
I(in,out)<+(V(in,out))/mem;
endendmodule

Apéndice B
Modelo de Kavehei
En el presente apéndice se presenta el macromodelo memristivo de Kavehei sintetizadocomo un subcircuito para simulaciones en ambientes SPICE.
** MACROMODELO MEMRISTOR KAVEHEI **
.SUBCKT memristor Plus Minus
.param phi=1.2
.param delta=6
.param Non=22
.param Noff=28
.param p=5
.param a=1.2e-2
.param b=4.3e-4
.param c1=3.3e-4
.param c2=4.8e-4
.param d1=2.1
.param d2=1.6
.param nv=4.0e-3
.param n=1
*MODELADO DE LA ECUACION DIFERENCIAL*
* La funcion p(x) es: ** (delta + Non*(1-(2*V(x)-1)^(2*p))) *
Gchar 0 x value=’(nv)*(1-(V(plus,minus)/(2*phi)))*(exp((delta +Non*(1-(2*V(x)-1)^(2*p)))*phi*(1-sqrt(1-(V(plus,minus)/(2*phi))))))’
Gdis x 0 value=’(nv)*(1+(V(plus,minus)/(2*phi)))*(exp((delta +Noff*(1-(2*V(x)-1)^(2*p)))*phi*(1-sqrt(1+(V(plus,minus)/(2*phi))))))’
Cx x 0 1
.IC V(x) .15
** RESISTIVE PORT OF MEMRISTOR **
Gmem plus minus value=’(V(x)^n)*(a*V(plus,minus)+b)+((1-V(x))^n)*(c1*exp(d1*V(plus,minus))-c2*exp(d2*V(plus,minus)))’
.ENDS memristor
93


Apéndice C
Modelo de Biolek
El presente apéndice muestra el modelo memristivo de Biolek descrito en unsubcircuito para su uso en ambientes de simulación SPICE.
* HP Memristor SPICE Model* For Transient Analysis only* created by Zdenek and Dalibor Biolek*************************** Ron - Resistance in ON State* Roff - Resistance in OFF State* Rinit - Resistance at T=0* D - Width of the thin film* uv - Migration coefficient* p - Parameter of the WINDOW-function*for modeling nonlinear boundary*conditions* x - W/D Ratio, W is the actual width*of the doped area (from 0 to D)*.SUBCKT memristor Plus Minus
.param Ron=100
.param Roff=16k
.param Rinit=14.4k
.param D=10N
.param uv=10F
.param p=10
************************************ DIFFERENTIAL EQUATION MODELING ************************************
Gx 0 x CUR=’(I(Emem)*uv*Ron/D^2)*(1-(V(x)-(1-SGN(I(Emem)))/2)^(2*p))’
Cx x 0 1 IC=’(Roff-Rinit)/(Roff-Ron)’Raux x 0 1T
* RESISTIVE PORT OF THE MEMRISTOR *Emem plus aux VOL=’-I(Emem)*V(x)*(Roff-Ron)’Roff aux minus Roff************************************
*Flux computation*Eflux flux 0 VOL=’SDT(V(plus,minus))’
*************************************
*Charge computation**Echarge charge 0 VOL=’SDT(I(Emem))’
*************************************
* WINDOW FUNCTIONS* FOR NONLINEAR DRIFT MODELING **window function, according to Joglekar.func f(x,p)=1-(2*x-1)^(2*p)*proposed window function*.func f(x,i,p)=1-(x-stp(-i))^(2*p)
.ENDS
95


Apéndice D
Modelo de Lehtonen
* MACROMODELO MEMRISTOR LEHTONEN-LAIHO *
.SUBCKT memristor Plus Minuss 0
.param a=2
.param b=9
.param c=0.01
.param g=4
.param n=4
.param q=13
.param p=1
.param lim_max=0.95
.param lim_min=0.05
.param skaala=10n
.param rleak=0.01
*MODELADO DE LA ECUACION DIFERENCIAL*
Rseries Minuss Minus 0.01Meg
Gypos 0 x value=’((sgn(-V(x)+lim_max)+1)*0.5)*((sgn(V(plus,minus))+1)*0.5)*((V(Plus,Minus))^q)*(1-(2*V(x)-1)^(2*p))’
Gyneg 0 x value=’((sgn(V(x)-lim_min)+1)*0.5)*((sgn(V(minus,plus))+1)*0.5)*((V(Plus,Minus))^q)*(1-(2*V(x)-1)^(2*p))’
Cx x 0 0.00008Raux x 0 0.01T
.IC V(x) 0.8
*PUERTO RESISTIVO DEL MEMRISTOR*
Gmem plus minus value=’(((V(x)^n)+rleak)*b*sinh(a*V(plus,minus))+c*(exp(g*V(plus,minus))-1))*skaala’
Exn xn 0 value=’(V(x))^n’Rxn xn 0 0.01T
*Window function, according to Joglekar*
*.func f(x,p)=1-(2*x-1)^(2*p)*.func sign2(val)=(sign(val)+1)/2
.ENDS memristor
97

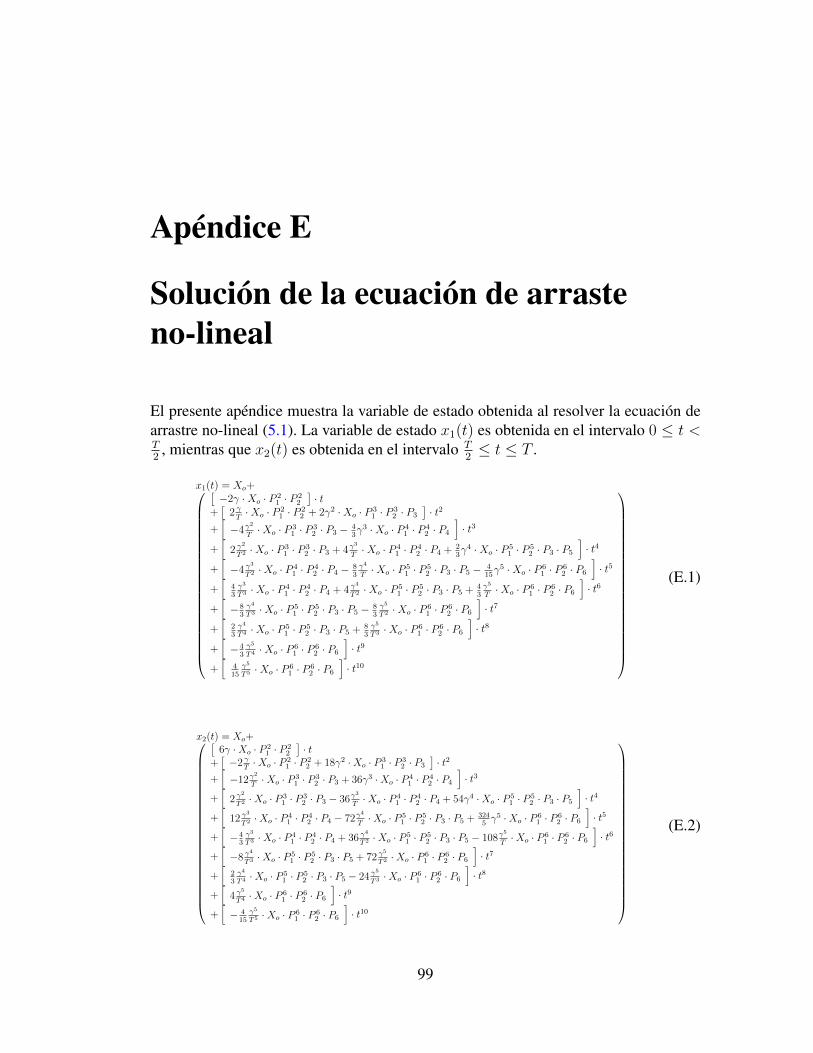
Apéndice E
Solución de la ecuación de arrasteno-lineal
El presente apéndice muestra la variable de estado obtenida al resolver la ecuación dearrastre no-lineal (5.1). La variable de estado x1(t) es obtenida en el intervalo 0 ≤ t <T2
, mientras que x2(t) es obtenida en el intervalo T2≤ t ≤ T .
x1(t) = Xo+
[−2γ ·Xo · P 2
1 · P 22
]· t
+[
2 γT·Xo · P 2
1 · P 22 + 2γ2 ·Xo · P 3
1 · P 32 · P3
]· t2
+[−4γ
2
T·Xo · P 3
1 · P 32 · P3 − 4
3γ3 ·Xo · P 4
1 · P 42 · P4
]· t3
+[
2 γ2
T 2 ·Xo · P 31 · P 3
2 · P3 + 4γ3
T·Xo · P 4
1 · P 42 · P4 + 2
3γ4 ·Xo · P 5
1 · P 52 · P3 · P5
]· t4
+[−4 γ
3
T 2 ·Xo · P 41 · P 4
2 · P4 − 83γ4
T·Xo · P 5
1 · P 52 · P3 · P5 − 4
15γ5 ·Xo · P 6
1 · P 62 · P6
]· t5
+[
43γ3
T 3 ·Xo · P 41 · P 4
2 · P4 + 4 γ4
T 2 ·Xo · P 51 · P 5
2 · P3 · P5 + 43γ5
T·Xo · P 6
1 · P 62 · P6
]· t6
+[−8
3γ4
T 3 ·Xo · P 51 · P 5
2 · P3 · P5 − 83γ5
T 2 ·Xo · P 61 · P 6
2 · P6
]· t7
+[
23γ4
T 4 ·Xo · P 51 · P 5
2 · P3 · P5 + 83γ5
T 3 ·Xo · P 61 · P 6
2 · P6
]· t8
+[−4
3γ5
T 4 ·Xo · P 61 · P 6
2 · P6
]· t9
+[
415
γ5
T 5 ·Xo · P 61 · P 6
2 · P6
]· t10
(E.1)
x2(t) = Xo+
[6γ ·Xo · P 2
1 · P 22
]· t
+[−2 γ
T·Xo · P 2
1 · P 22 + 18γ2 ·Xo · P 3
1 · P 32 · P3
]· t2
+[−12γ
2
T·Xo · P 3
1 · P 32 · P3 + 36γ3 ·Xo · P 4
1 · P 42 · P4
]· t3
+[
2 γ2
T 2 ·Xo · P 31 · P 3
2 · P3 − 36γ3
T·Xo · P 4
1 · P 42 · P4 + 54γ4 ·Xo · P 5
1 · P 52 · P3 · P5
]· t4
+[
12 γ3
T 2 ·Xo · P 41 · P 4
2 · P4 − 72γ4
T·Xo · P 5
1 · P 52 · P3 · P5 + 324
5γ5 ·Xo · P 6
1 · P 62 · P6
]· t5
+[−4
3γ3
T 3 ·Xo · P 41 · P 4
2 · P4 + 36 γ4
T 2 ·Xo · P 51 · P 5
2 · P3 · P5 − 108γ5
T·Xo · P 6
1 · P 62 · P6
]· t6
+[−8 γ
4
T 3 ·Xo · P 51 · P 5
2 · P3 · P5 + 72 γ5
T 2 ·Xo · P 61 · P 6
2 · P6
]· t7
+[
23γ4
T 4 ·Xo · P 51 · P 5
2 · P3 · P5 − 24 γ5
T 3 ·Xo · P 61 · P 6
2 · P6
]· t8
+[
4 γ5
T 4 ·Xo · P 61 · P 6
2 · P6
]· t9
+[− 4
15γ5
T 5 ·Xo · P 61 · P 6
2 · P6
]· t10
(E.2)
99

100 APÉNDICE E. SOLUCIÓN DE LA ECUACIÓN DE ARRASTE NO-LINEAL
Donde γ = a1µVD2 y los polinomios característicos están dados como:
P1 = Xo + 1 (E.3)
P2 = Xo − 1 (E.4)
P3 = 5X2o − 1 (E.5)
P4 = 45X4o − 22X2
o + 1 (E.6)
P5 = 117X4o − 70X2
o + 1 (E.7)
P6 = 9945X8o − 11100X6
o + 3310X4o − 236X2
o + 1 (E.8)
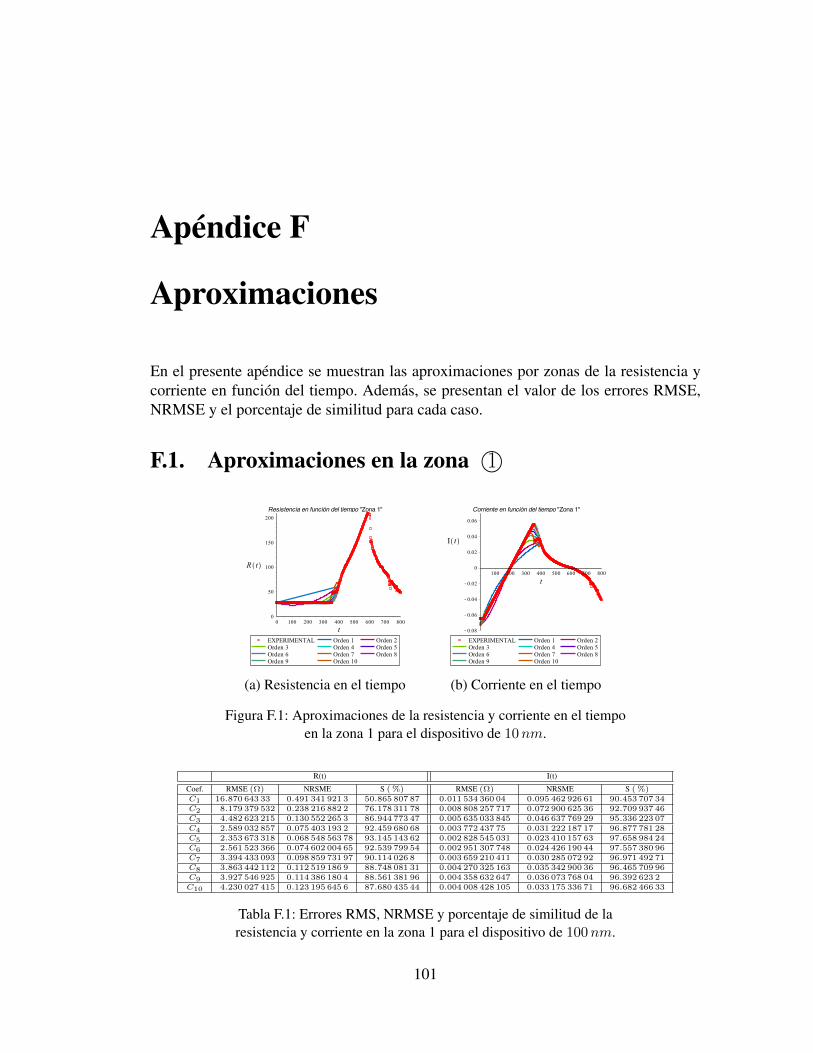
Apéndice F
Aproximaciones
En el presente apéndice se muestran las aproximaciones por zonas de la resistencia ycorriente en función del tiempo. Además, se presentan el valor de los errores RMSE,NRMSE y el porcentaje de similitud para cada caso.
F.1. Aproximaciones en la zona 1©
(a) Resistencia en el tiempo (b) Corriente en el tiempo
Figura F.1: Aproximaciones de la resistencia y corriente en el tiempoen la zona 1 para el dispositivo de 10nm.
R(t) I(t)
Coef. RMSE (Ω) NRSME S ( %) RMSE (Ω) NRSME S ( %)C1 16.870 643 33 0.491 341 921 3 50.865 807 87 0.011 534 360 04 0.095 462 926 61 90.453 707 34C2 8.179 379 532 0.238 216 882 2 76.178 311 78 0.008 808 257 717 0.072 900 625 36 92.709 937 46C3 4.482 623 215 0.130 552 265 3 86.944 773 47 0.005 635 033 845 0.046 637 769 29 95.336 223 07C4 2.589 032 857 0.075 403 193 2 92.459 680 68 0.003 772 437 75 0.031 222 187 17 96.877 781 28C5 2.353 673 318 0.068 548 563 78 93.145 143 62 0.002 828 545 031 0.023 410 157 63 97.658 984 24C6 2.561 523 366 0.074 602 004 65 92.539 799 54 0.002 951 307 748 0.024 426 190 44 97.557 380 96C7 3.394 433 093 0.098 859 731 97 90.114 026 8 0.003 659 210 411 0.030 285 072 92 96.971 492 71C8 3.863 442 112 0.112 519 186 9 88.748 081 31 0.004 270 325 163 0.035 342 900 36 96.465 709 96C9 3.927 546 925 0.114 386 180 4 88.561 381 96 0.004 358 632 647 0.036 073 768 04 96.392 623 2C10 4.230 027 415 0.123 195 645 6 87.680 435 44 0.004 008 428 105 0.033 175 336 71 96.682 466 33
Tabla F.1: Errores RMS, NRMSE y porcentaje de similitud de laresistencia y corriente en la zona 1 para el dispositivo de 100nm.
101

102 APÉNDICE F. APROXIMACIONES
(a) Resistencia en el tiempo (b) Corriente en el tiempo
Figura F.2: Aproximaciones de la resistencia y corriente en el tiempoen la zona 1 para el dispositivo de 50nm.
R(t) I(t)
Coef. RMSE (Ω) NRSME S ( %) RMSE (Ω) NRSME S ( %)C1 24.042 376 27 0.671 236 048 32.876 395 2 0.010 701 840 39 0.111 301 243 4 88.869 875 66C2 10.249 656 22 0.286 158 849 6 71.384 115 04 0.007 008 505 734 0.072 889 837 09 92.711 016 29C3 8.730 835 935 0.243 755 099 75.624 490 1 0.006 502 356 697 0.067 625 787 63 93.237 421 24C4 5.083 682 657 0.141 930 690 1 85.806 930 99 0.004 244 783 52 0.044 146 582 88 95.585 341 71C5 4.208 853 637 0.117 506 449 9 88.249 355 01 0.003 690 874 772 0.038 385 823 04 96.161 417 7C6 3.695 400 695 0.103 171 422 4 89.682 857 76 0.003 049 890 327 0.031 719 458 83 96.828 054 12C7 4.404 350 917 0.122 964 513 6 87.703 548 64 0.003 185 250 984 0.033 127 236 26 96.687 276 37C8 1.789 766 56 0.049 968 265 16 95.003 173 48 0.001 664 703 102 0.017 313 239 44 98.268 676 06C9 2.474 011 897 0.069 071 623 78 93.092 837 62 0.001 840 359 355 0.019 140 099 98.085 990 1C10 1.941 890 908 0.054 215 405 5 94.578 459 45 0.001 618 024 407 0.016 827 771 84 98.317 222 82
Tabla F.2: Errores RMS, NRMSE y porcentaje de similitud de laresistencia y corriente en la zona 1 para el dispositivo de 50nm.
F.2. Aproximaciones en la zona 2©
(a) Resistencia en el tiempo (b) Corriente en el tiempo
Figura F.3: Aproximaciones de la resistencia y corriente en el tiempoen la zona 2 para el dispositivo de 100nm.

F.2. APROXIMACIONES EN LA ZONA 2© 103
R(t) I(t)
Coef. RMSE (Ω) NRSME S ( %) RMSE (Ω) NRSME S ( %)C1 4.339 676 957 0.028 837 606 52 97.116 239 35 0.000 745 815 723 2 0.022 811 173 01 97.718 882 7C2 3.740 065 2 0.024 853 123 79 97.514 687 62 0.000 673 113 812 1 0.020 587 546 15 97.941 245 38C3 2.765 540 851 0.018 377 307 73 98.162 269 23 0.000 450 459 723 5 0.013 777 551 7 98.622 244 83C4 0.929 747 137 8 0.006 178 266 814 99.382 173 32 0.000 144 456 970 9 0.004 418 293 759 99.558 170 62C5 0.789 013 223 7 0.005 243 075 26 99.475 692 47 0.000 148 076 723 2 0.004 529 005 82 99.547 099 42C6 0.770 324 418 3 0.005 118 886 196 99.488 111 38 0.000 144 169 962 2 0.004 409 515 445 99.559 048 46C7 0.641 405 628 1 0.004 262 207 374 99.573 779 26 0.000 148 322 906 6 0.004 536 535 471 99.546 346 45C8 0.603 328 729 8 0.004 009 182 409 99.599 081 76 0.000 162 496 223 6 0.004 970 033 957 99.502 996 6C9 0.683 230 221 7 0.004 540 136 166 99.545 986 38 0.000 165 216 766 2 0.005 053 243 208 99.494 675 68C10 7.828 432 263 0.052 020 749 83 94.797 925 02 0.000 610 505 084 0.018 672 624 7 98.132 737 53
Tabla F.3: Errores RMS, NRMSE y porcentaje de similitud de laresistencia y corriente en la zona 2 para el dispositivo de 100nm.
(a) Resistencia en el tiempo (b) Corriente en el tiempo
Figura F.4: Aproximaciones de la resistencia y corriente en el tiempoen la zona 2 para el dispositivo de 50nm.
R(t) I(t)
Coef. RMSE (Ω) NRSME S ( %) RMSE (Ω) NRSME S ( %)
C1 1.594 516 544 0.034 750 629 38 96.524 937 06 27.396 568 49 ×10−5 0.009 838 993 047 99.016 100 7
C2 0.680 196 183 8 0.014 824 082 93 98.517 591 71 15.901 599 78 ×10−5 0.005 710 778 331 99.428 922 17
C3 0.619 837 137 6 0.013 508 627 88 98.649 137 21 17.091 032 36 ×10−5 0.006 137 942 006 99.386 205 8
C4 0.301 519 529 6 0.006 571 266 672 99.342 873 33 7.656 811 559×10−5 0.002 749 808 456 99.725 019 15
C5 0.164 723 304 3 0.003 589 952 402 99.641 004 76 4.469 835 243×10−5 0.001 605 262 276 99.839 473 77
C6 0.540 947 327 1 0.011 789 316 42 98.821 068 36 5.411 667 378×10−5 0.001 943 504 63 99.805 649 54
C7 0.334 445 727 3 0.007 288 854 769 99.271 114 52 6.161 717 853×10−5 0.002 212 871 993 99.778 712 8
C8 0.876 464 194 9 0.019 101 515 45 98.089 848 46 3.820 194 630×10−5 0.001 371 955 339 99.862 804 47
C9 0.158 883 367 6 0.003 462 677 789 99.653 732 22 3.263 996 714×10−5 0.001 172 206 694 99.882 779 33
C10 0.524 558 422 0.011 432 139 34 98.856 786 07 5.153 545 070×10−5 0.001 850 804 568 99.814 919 54
Tabla F.4: Errores RMS, NRMSE y porcentaje de similitud de laresistencia y corriente en la zona 2 para el dispositivo de 50nm.
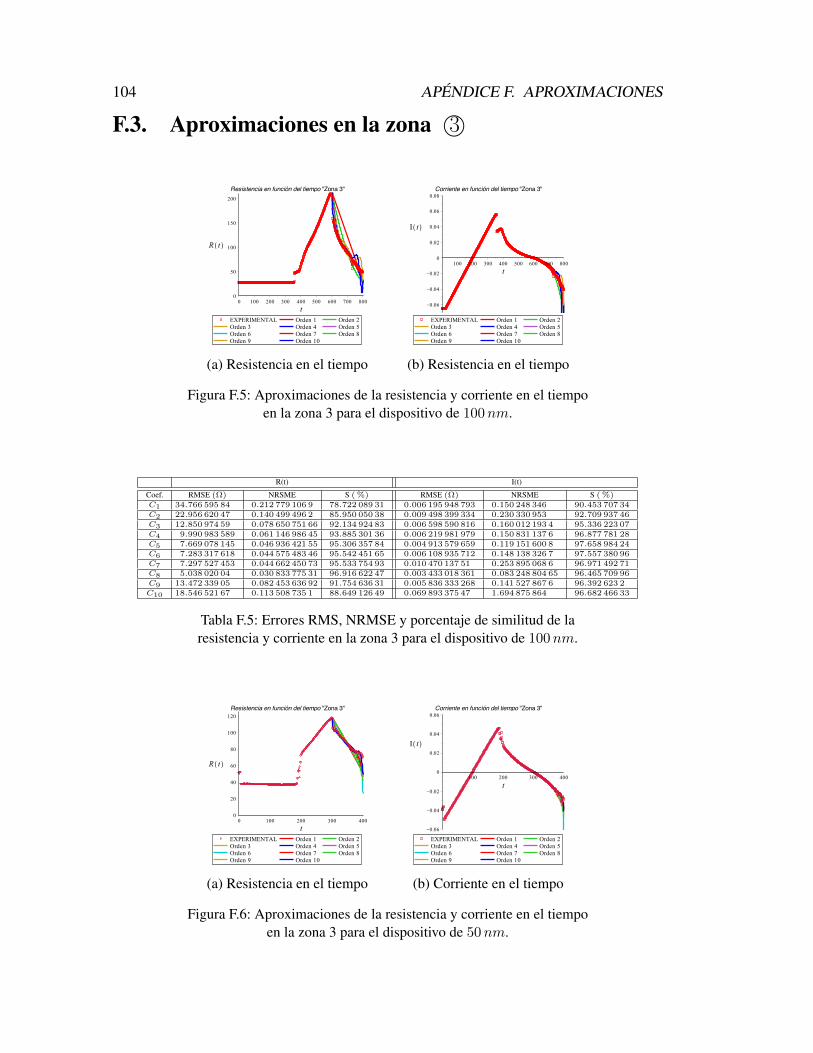
104 APÉNDICE F. APROXIMACIONES
F.3. Aproximaciones en la zona 3©
(a) Resistencia en el tiempo (b) Resistencia en el tiempo
Figura F.5: Aproximaciones de la resistencia y corriente en el tiempoen la zona 3 para el dispositivo de 100nm.
R(t) I(t)
Coef. RMSE (Ω) NRSME S ( %) RMSE (Ω) NRSME S ( %)C1 34.766 595 84 0.212 779 106 9 78.722 089 31 0.006 195 948 793 0.150 248 346 90.453 707 34C2 22.956 620 47 0.140 499 496 2 85.950 050 38 0.009 498 399 334 0.230 330 953 92.709 937 46C3 12.850 974 59 0.078 650 751 66 92.134 924 83 0.006 598 590 816 0.160 012 193 4 95.336 223 07C4 9.990 983 589 0.061 146 986 45 93.885 301 36 0.006 219 981 979 0.150 831 137 6 96.877 781 28C5 7.669 078 145 0.046 936 421 55 95.306 357 84 0.004 913 579 659 0.119 151 600 8 97.658 984 24C6 7.283 317 618 0.044 575 483 46 95.542 451 65 0.006 108 935 712 0.148 138 326 7 97.557 380 96C7 7.297 527 453 0.044 662 450 73 95.533 754 93 0.010 470 137 51 0.253 895 068 6 96.971 492 71C8 5.038 020 04 0.030 833 775 31 96.916 622 47 0.003 433 018 361 0.083 248 804 65 96.465 709 96C9 13.472 339 05 0.082 453 636 92 91.754 636 31 0.005 836 333 268 0.141 527 867 6 96.392 623 2C10 18.546 521 67 0.113 508 735 1 88.649 126 49 0.069 893 375 47 1.694 875 864 96.682 466 33
Tabla F.5: Errores RMS, NRMSE y porcentaje de similitud de laresistencia y corriente en la zona 3 para el dispositivo de 100nm.
(a) Resistencia en el tiempo (b) Corriente en el tiempo
Figura F.6: Aproximaciones de la resistencia y corriente en el tiempoen la zona 3 para el dispositivo de 50nm.

F.3. APROXIMACIONES EN LA ZONA 3© 105
R(t) I(t)
Coef. RMSE (Ω) NRSME S ( %) RMSE (Ω) NRSME S ( %)C1 8.644 566 246 0.150 601 963 4 84.939 803 66 0.003 292 108 612 0.106 747 347 5 88.869 875 66C2 8.414 002 607 0.146 585 181 5 85.341 481 85 0.003 097 547 511 0.100 438 660 9 92.711 016 29C3 6.664 432 55 0.116 104 914 7 88.389 508 53 0.002 835 012 641 0.091 925 909 86 93.237 421 24C4 5.682 945 94 0.099 005 871 66 90.099 412 83 0.002 369 582 185 0.076 834 224 72 95.585 341 71C5 4.349 324 705 0.075 772 088 65 92.422 791 14 0.001 843 936 028 0.059 790 032 2 96.161 417 7C6 8.121 610 833 0.141 491 256 2 85.850 874 38 0.006 274 300 965 0.203 445 592 96.828 054 12C7 5.746 322 058 0.100 109 983 5 89.989 001 65 0.002 722 024 277 0.088 262 237 25 96.687 276 37C8 7.956 146 404 0.138 608 605 1 86.139 139 49 0.004 379 841 169 0.142 017 315 4 98.268 676 06C9 4.148 224 231 0.072 268 601 56 92.773 139 84 0.001 952 572 547 0.063 312 595 28 98.085 990 1C10 6.010 680 473 0.104 715 523 6 89.528 447 64 0.002 312 038 772 0.074 968 366 87 98.317 222 82
Tabla F.6: Errores RMS, NRMSE y porcentaje de similitud de laresistencia y corriente en la zona 3 para el dispositivo de 50nm.


Apéndice G
Código Verilog-A para modelocomportamental
El presente apéndice muestra el código Verilog-A utilizado para describir el modelomemristivo comportamental de los dispositivos de Ag/TiO2/ITO de los dispositivos de100nm y 50nm.
G.1. Modelo para dispositivos de 100nm
// Modelo comportamentalpara dispositivo de 100nm
‘include "const.va"‘include "std.va"‘include "disciplines.vams"‘include "constants.vams"
module Memristor100nm(in,out);
inout in,out;electrical in,out;
parameter real To=800;
//Para la Zona 1
parameter real C0_S1=27.43096542;parameter real C1_S1=0.03998672356;parameter real C2_S1=-0.001968157219;parameter real C3_S1=0.00003233192640;parameter real C4_S1=-2.365350248e-7;parameter real C5_S1=7.478078629e-10;parameter real C6_S1=-3.805407172e-13;parameter real C7_S1=-2.809474980e-15;parameter real C8_S1=4.307386365e-18;
//Para la Zona 2
parameter real C0_S2=4.927494507e6;parameter real C1_S2=-76804.81852;parameter real C2_S2=519.5943939;
parameter real C3_S2=-1.991907436;parameter real C4_S2=0.4730289814e-2;parameter real C5_S2=-0.7120362379e-5;parameter real C6_S2=6.628028792e-9;parameter real C7_S2=-3.483671596e-12;parameter real C8_S2=7.901001834e-16;
//Para la Zona 3
parameter real C0_S3=7.610429229e7;parameter real C1_S3=-6.927431073e5;parameter real C2_S3=2570.02576;parameter real C3_S3=-4.771718686;parameter real C4_S3=0.003910261314;parameter real C5_S3=8.07540891e-7;parameter real C6_S3=-4.339849834e-9;parameter real C7_S3=3.300404492e-12;parameter real C8_S3=-8.603556717e-16;
real Req;real n;
analog begin
if ($abstime<To)n=1;else if ($abstime>=To && $abstime<2*To)n=2;else if ($abstime>=2*To && $abstime<3*To)n=3;elsen=4;
107
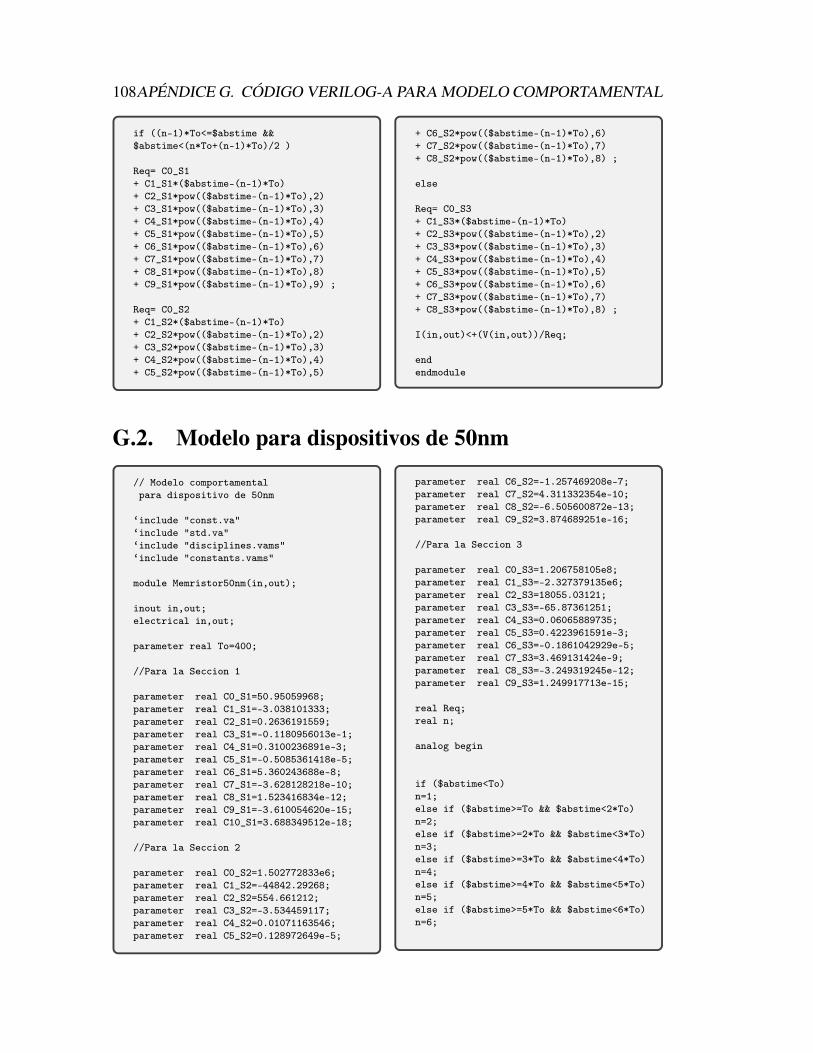
108APÉNDICE G. CÓDIGO VERILOG-A PARA MODELO COMPORTAMENTAL
if ((n-1)*To<=$abstime &&$abstime<(n*To+(n-1)*To)/2 )
Req= C0_S1+ C1_S1*($abstime-(n-1)*To)+ C2_S1*pow(($abstime-(n-1)*To),2)+ C3_S1*pow(($abstime-(n-1)*To),3)+ C4_S1*pow(($abstime-(n-1)*To),4)+ C5_S1*pow(($abstime-(n-1)*To),5)+ C6_S1*pow(($abstime-(n-1)*To),6)+ C7_S1*pow(($abstime-(n-1)*To),7)+ C8_S1*pow(($abstime-(n-1)*To),8)+ C9_S1*pow(($abstime-(n-1)*To),9) ;
Req= C0_S2+ C1_S2*($abstime-(n-1)*To)+ C2_S2*pow(($abstime-(n-1)*To),2)+ C3_S2*pow(($abstime-(n-1)*To),3)+ C4_S2*pow(($abstime-(n-1)*To),4)+ C5_S2*pow(($abstime-(n-1)*To),5)
+ C6_S2*pow(($abstime-(n-1)*To),6)+ C7_S2*pow(($abstime-(n-1)*To),7)+ C8_S2*pow(($abstime-(n-1)*To),8) ;
else
Req= C0_S3+ C1_S3*($abstime-(n-1)*To)+ C2_S3*pow(($abstime-(n-1)*To),2)+ C3_S3*pow(($abstime-(n-1)*To),3)+ C4_S3*pow(($abstime-(n-1)*To),4)+ C5_S3*pow(($abstime-(n-1)*To),5)+ C6_S3*pow(($abstime-(n-1)*To),6)+ C7_S3*pow(($abstime-(n-1)*To),7)+ C8_S3*pow(($abstime-(n-1)*To),8) ;
I(in,out)<+(V(in,out))/Req;
endendmodule
G.2. Modelo para dispositivos de 50nm
// Modelo comportamentalpara dispositivo de 50nm
‘include "const.va"‘include "std.va"‘include "disciplines.vams"‘include "constants.vams"
module Memristor50nm(in,out);
inout in,out;electrical in,out;
parameter real To=400;
//Para la Seccion 1
parameter real C0_S1=50.95059968;parameter real C1_S1=-3.038101333;parameter real C2_S1=0.2636191559;parameter real C3_S1=-0.1180956013e-1;parameter real C4_S1=0.3100236891e-3;parameter real C5_S1=-0.5085361418e-5;parameter real C6_S1=5.360243688e-8;parameter real C7_S1=-3.628128218e-10;parameter real C8_S1=1.523416834e-12;parameter real C9_S1=-3.610054620e-15;parameter real C10_S1=3.688349512e-18;
//Para la Seccion 2
parameter real C0_S2=1.502772833e6;parameter real C1_S2=-44842.29268;parameter real C2_S2=554.661212;parameter real C3_S2=-3.534459117;parameter real C4_S2=0.01071163546;parameter real C5_S2=0.128972649e-5;
parameter real C6_S2=-1.257469208e-7;parameter real C7_S2=4.311332354e-10;parameter real C8_S2=-6.505600872e-13;parameter real C9_S2=3.874689251e-16;
//Para la Seccion 3
parameter real C0_S3=1.206758105e8;parameter real C1_S3=-2.327379135e6;parameter real C2_S3=18055.03121;parameter real C3_S3=-65.87361251;parameter real C4_S3=0.06065889735;parameter real C5_S3=0.4223961591e-3;parameter real C6_S3=-0.1861042929e-5;parameter real C7_S3=3.469131424e-9;parameter real C8_S3=-3.249319245e-12;parameter real C9_S3=1.249917713e-15;
real Req;real n;
analog begin
if ($abstime<To)n=1;else if ($abstime>=To && $abstime<2*To)n=2;else if ($abstime>=2*To && $abstime<3*To)n=3;else if ($abstime>=3*To && $abstime<4*To)n=4;else if ($abstime>=4*To && $abstime<5*To)n=5;else if ($abstime>=5*To && $abstime<6*To)n=6;

G.2. MODELO PARA DISPOSITIVOS DE 50NM 109
if ((n-1)*To<=$abstime &&$abstime<(n*To+(n-1)*To)/2 )
Req= C0_S1+ C1_S1*($abstime-(n-1)*To)+ C2_S1*pow(($abstime-(n-1)*To),2)+ C3_S1*pow(($abstime-(n-1)*To),3)+ C4_S1*pow(($abstime-(n-1)*To),4)+ C5_S1*pow(($abstime-(n-1)*To),5)+ C6_S1*pow(($abstime-(n-1)*To),6)+ C7_S1*pow(($abstime-(n-1)*To),7)+ C8_S1*pow(($abstime-(n-1)*To),8)+ C9_S1*pow(($abstime-(n-1)*To),9)+ C10_S1*pow(($abstime-(n-1)*To),10) ;
else if ((n*To+(n-1)*To)/2 <=$abstime &&$abstime<(3*n*To+(n-1)*To)/4)
Req= C0_S2+ C1_S2*($abstime-(n-1)*To)+ C2_S2*pow(($abstime-(n-1)*To),2)+ C3_S2*pow(($abstime-(n-1)*To),3)
+ C4_S2*pow(($abstime-(n-1)*To),4)+ C5_S2*pow(($abstime-(n-1)*To),5)+ C6_S2*pow(($abstime-(n-1)*To),6)+ C7_S2*pow(($abstime-(n-1)*To),7)+ C8_S2*pow(($abstime-(n-1)*To),8)+ C9_S2*pow(($abstime-(n-1)*To),9) ;
else
Req= C0_S3+ C1_S3*($abstime-(n-1)*To)+ C2_S3*pow(($abstime-(n-1)*To),2)+ C3_S3*pow(($abstime-(n-1)*To),3)+ C4_S3*pow(($abstime-(n-1)*To),4)+ C5_S3*pow(($abstime-(n-1)*To),5)+ C6_S3*pow(($abstime-(n-1)*To),6)+ C7_S3*pow(($abstime-(n-1)*To),7)+ C8_S3*pow(($abstime-(n-1)*To),8)+ C9_S3*pow(($abstime-(n-1)*To),9) ;
I(in,out)<+(V(in,out))/Req;
endendmodule


Índice de figuras
2.1. Las cuatro variables eléctricas fundamentales. . . . . . . . . . . . . . . 42.2. El símbolo del memristor propuesto por Chua y su curva característica. . 42.3. Característica 1: Lazo de histéresis en el plano i–v. . . . . . . . . . . . 82.4. Característica 2: Decremento monotónico del area en función de la
frecuencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.5. Característica 3: Degradación del lazo de histéresis cuando ω →∞. . . 92.6. Estructura del memristor HP. Modulación de la frontera TiO2/T iO2−x. 92.7. Modelo de resistores acoplados para el memristor HP. . . . . . . . . . . 102.8. Resultados del modelo de arrastre lineal para el memristor HP. . . . . . 132.9. Resultados del modelo de arrastre no-lineal para el Memristor HP. . . . 152.10. Estructura de los dispositivos de transición resistiva. . . . . . . . . . . . 162.11. Curvas i–v típicas de un dispositivo de transición resistiva. . . . . . . . 172.12. Curva i–v típica de un dispositivo unipolar. . . . . . . . . . . . . . . . 182.13. Esquema del mecanismo físico de un dispositivo RS unipolar. . . . . . 192.14. Curva i–v típica de un dispositivo bipolar F8. . . . . . . . . . . . . . . 202.15. Curva i–v típica de un dispositivo bipolar CF8. . . . . . . . . . . . . . 202.16. Esquema del mecanismo físico de un dispositivo RS bipolar debido a
filamentos conductores. . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.1. Estructura de la memristancia en la ecuación (3.10). . . . . . . . . . . . 273.2. Mapeos paramétricos del modelo homotópico. . . . . . . . . . . . . . . 273.3. Mapeo paramétrico i(t)–v(t) del modelo homotópico. Lazo de histéresis. 283.4. Lazos de histéresis i–v del modelo homotópico. . . . . . . . . . . . . . 283.5. Lazos de histéresis i–v del modelo de Kavehei. . . . . . . . . . . . . . 303.6. Estructura del modelo memristivo de Biolek. . . . . . . . . . . . . . . 323.7. Resultados del modelo memristivo de Biolek. . . . . . . . . . . . . . . 323.8. Esquema de simulación SPICE del modelo Lehtonen-Laiho. . . . . . . 343.9. Lazos de histéresis i–v del modelo de Lehtonen-Laiho. . . . . . . . . . 36
4.1. Esquema de la estructura de los dispositivos. . . . . . . . . . . . . . . . 394.2. Realización del electroformado. . . . . . . . . . . . . . . . . . . . . . 404.3. Búsqueda de Vreset positivo. . . . . . . . . . . . . . . . . . . . . . . . 414.4. Búsqueda de Vreset negativo. . . . . . . . . . . . . . . . . . . . . . . . 42
111

112 ÍNDICE DE FIGURAS
4.5. Incremento del rango de voltaje. . . . . . . . . . . . . . . . . . . . . . 424.6. Búsqueda de comportamiento unipolar. . . . . . . . . . . . . . . . . . 434.7. Búsqueda de comportamiento bipolar. . . . . . . . . . . . . . . . . . . 434.8. Incremento del rango de búsqueda. . . . . . . . . . . . . . . . . . . . . 444.9. Proceso de electroformado para el dispositivo de 100nm. . . . . . . . . 474.10. Proceso de electroformado para el dispositivo de 50nm. . . . . . . . . 474.11. Búsqueda de parámetros característicos en dispositivo de 100nm. . . . 484.12. Búsqueda de parámetros característicos en dispositivo de 50nm. . . . . 494.13. Rampas de voltaje experimental. . . . . . . . . . . . . . . . . . . . . . 514.14. Resistencia experimental en función del tiempo. . . . . . . . . . . . . . 514.15. Corriente experimental en función del tiempo. . . . . . . . . . . . . . . 524.16. Mapeo R(t)–V(t) experimental. . . . . . . . . . . . . . . . . . . . . . . 524.17. Mapeo R(t)–I(t) experimental. . . . . . . . . . . . . . . . . . . . . . . 534.18. Mapeo I(t)–V(t) experimental. Lazo de histéresis. . . . . . . . . . . . . 53
5.1. Resistencia experimental en función del tiempo. . . . . . . . . . . . . . 575.2. Lazo de histéresis experimental. . . . . . . . . . . . . . . . . . . . . . 575.3. División de R(t) en tres zonas. . . . . . . . . . . . . . . . . . . . . . . 605.4. División de I(t) en tres zonas. . . . . . . . . . . . . . . . . . . . . . . . 605.5. División del mapeo R(t)–V (t) en tres zonas. . . . . . . . . . . . . . . 615.6. División del mapeo R(t)–I(t) en tres zonas. . . . . . . . . . . . . . . . 615.7. División del mapeo I(t)–V (t) en tres zonas. . . . . . . . . . . . . . . . 625.8. División de R(t) en tres zonas. . . . . . . . . . . . . . . . . . . . . . . 635.9. Comparación entre datos experimentales y función de aproximación de
la resistencia en la zona 1. . . . . . . . . . . . . . . . . . . . . . . . . 685.10. Comparación entre datos experimentales y función de aproximación de
la corriente en la zona 1. . . . . . . . . . . . . . . . . . . . . . . . . . 685.11. Comparación entre datos experimentales y función de aproximación
del mapeo R(t) vs V (t) en la zona 1. . . . . . . . . . . . . . . . . . . . 695.12. Comparación entre datos experimentales y función de aproximación
del mapeo R(t) vs I(t) en la zona 1. . . . . . . . . . . . . . . . . . . . 695.13. Comparación entre datos experimentales y función de aproximación
del mapeo I(t) vs V (t) en la zona 1. . . . . . . . . . . . . . . . . . . . 705.14. Comparación entre datos experimentales y función de aproximación de
la resistencia en la zona 2. . . . . . . . . . . . . . . . . . . . . . . . . 725.15. Comparación entre datos experimentales y función de aproximación de
la corriente en la zona 2. . . . . . . . . . . . . . . . . . . . . . . . . . 725.16. Comparación entre datos experimentales y función de aproximación
del mapeo R(t) vs V (t) en la zona 2. . . . . . . . . . . . . . . . . . . . 735.17. Comparación entre datos experimentales y función de aproximación
del mapeo R(t) vs I(t) en la zona 2. . . . . . . . . . . . . . . . . . . . 735.18. Comparación entre datos experimentales y función de aproximación
del mapeo I(t) vs V (t) en la zona 2. . . . . . . . . . . . . . . . . . . . 74
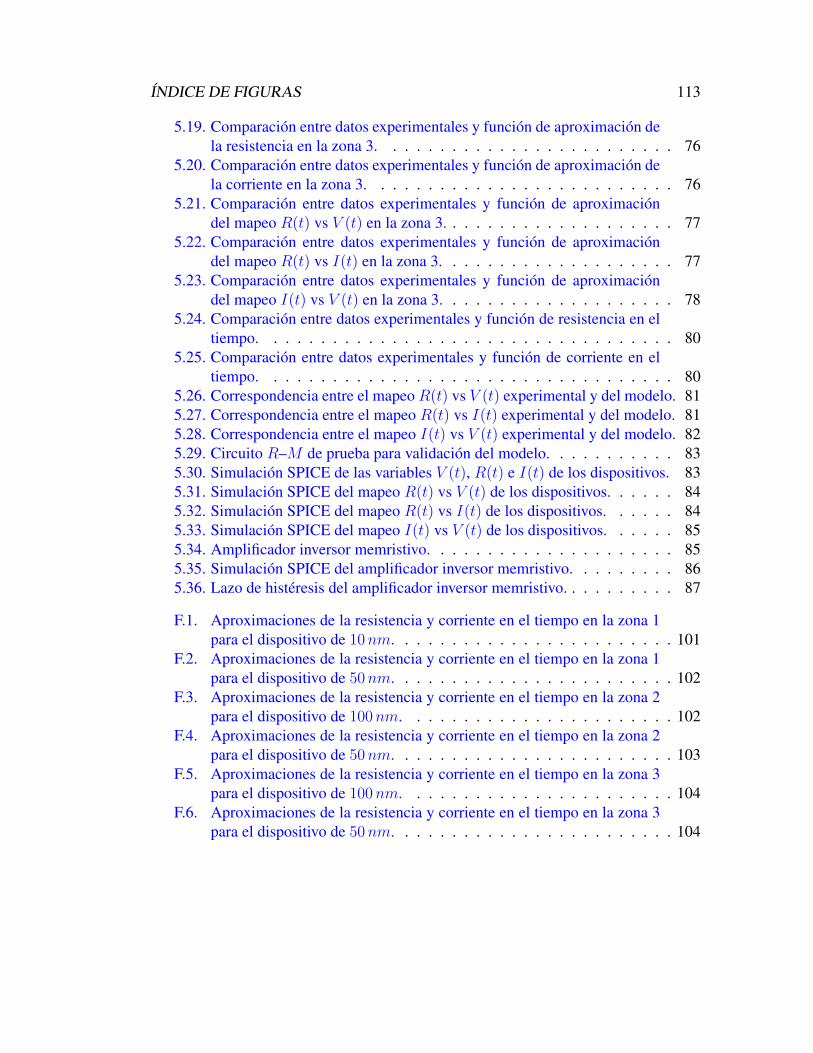
ÍNDICE DE FIGURAS 113
5.19. Comparación entre datos experimentales y función de aproximación dela resistencia en la zona 3. . . . . . . . . . . . . . . . . . . . . . . . . 76
5.20. Comparación entre datos experimentales y función de aproximación dela corriente en la zona 3. . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.21. Comparación entre datos experimentales y función de aproximacióndel mapeo R(t) vs V (t) en la zona 3. . . . . . . . . . . . . . . . . . . . 77
5.22. Comparación entre datos experimentales y función de aproximacióndel mapeo R(t) vs I(t) en la zona 3. . . . . . . . . . . . . . . . . . . . 77
5.23. Comparación entre datos experimentales y función de aproximacióndel mapeo I(t) vs V (t) en la zona 3. . . . . . . . . . . . . . . . . . . . 78
5.24. Comparación entre datos experimentales y función de resistencia en eltiempo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.25. Comparación entre datos experimentales y función de corriente en eltiempo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.26. Correspondencia entre el mapeo R(t) vs V (t) experimental y del modelo. 815.27. Correspondencia entre el mapeo R(t) vs I(t) experimental y del modelo. 815.28. Correspondencia entre el mapeo I(t) vs V (t) experimental y del modelo. 825.29. Circuito R–M de prueba para validación del modelo. . . . . . . . . . . 835.30. Simulación SPICE de las variables V (t), R(t) e I(t) de los dispositivos. 835.31. Simulación SPICE del mapeo R(t) vs V (t) de los dispositivos. . . . . . 845.32. Simulación SPICE del mapeo R(t) vs I(t) de los dispositivos. . . . . . 845.33. Simulación SPICE del mapeo I(t) vs V (t) de los dispositivos. . . . . . 855.34. Amplificador inversor memristivo. . . . . . . . . . . . . . . . . . . . . 855.35. Simulación SPICE del amplificador inversor memristivo. . . . . . . . . 865.36. Lazo de histéresis del amplificador inversor memristivo. . . . . . . . . . 87
F.1. Aproximaciones de la resistencia y corriente en el tiempo en la zona 1para el dispositivo de 10nm. . . . . . . . . . . . . . . . . . . . . . . . 101
F.2. Aproximaciones de la resistencia y corriente en el tiempo en la zona 1para el dispositivo de 50nm. . . . . . . . . . . . . . . . . . . . . . . . 102
F.3. Aproximaciones de la resistencia y corriente en el tiempo en la zona 2para el dispositivo de 100nm. . . . . . . . . . . . . . . . . . . . . . . 102
F.4. Aproximaciones de la resistencia y corriente en el tiempo en la zona 2para el dispositivo de 50nm. . . . . . . . . . . . . . . . . . . . . . . . 103
F.5. Aproximaciones de la resistencia y corriente en el tiempo en la zona 3para el dispositivo de 100nm. . . . . . . . . . . . . . . . . . . . . . . 104
F.6. Aproximaciones de la resistencia y corriente en el tiempo en la zona 3para el dispositivo de 50nm. . . . . . . . . . . . . . . . . . . . . . . . 104

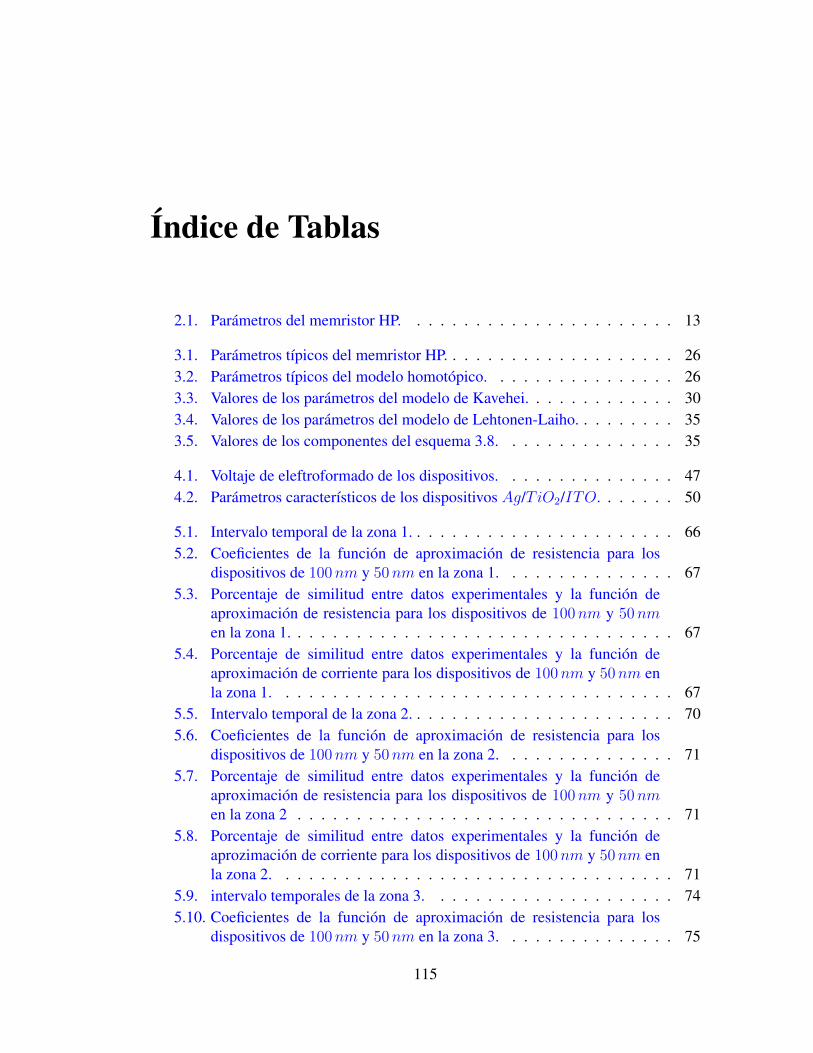
Índice de Tablas
2.1. Parámetros del memristor HP. . . . . . . . . . . . . . . . . . . . . . . 13
3.1. Parámetros típicos del memristor HP. . . . . . . . . . . . . . . . . . . . 263.2. Parámetros típicos del modelo homotópico. . . . . . . . . . . . . . . . 263.3. Valores de los parámetros del modelo de Kavehei. . . . . . . . . . . . . 303.4. Valores de los parámetros del modelo de Lehtonen-Laiho. . . . . . . . . 353.5. Valores de los componentes del esquema 3.8. . . . . . . . . . . . . . . 35
4.1. Voltaje de eleftroformado de los dispositivos. . . . . . . . . . . . . . . 474.2. Parámetros característicos de los dispositivos Ag/TiO2/ITO. . . . . . . 50
5.1. Intervalo temporal de la zona 1. . . . . . . . . . . . . . . . . . . . . . . 665.2. Coeficientes de la función de aproximación de resistencia para los
dispositivos de 100nm y 50nm en la zona 1. . . . . . . . . . . . . . . 675.3. Porcentaje de similitud entre datos experimentales y la función de
aproximación de resistencia para los dispositivos de 100nm y 50nmen la zona 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.4. Porcentaje de similitud entre datos experimentales y la función deaproximación de corriente para los dispositivos de 100nm y 50nm enla zona 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.5. Intervalo temporal de la zona 2. . . . . . . . . . . . . . . . . . . . . . . 705.6. Coeficientes de la función de aproximación de resistencia para los
dispositivos de 100nm y 50nm en la zona 2. . . . . . . . . . . . . . . 715.7. Porcentaje de similitud entre datos experimentales y la función de
aproximación de resistencia para los dispositivos de 100nm y 50nmen la zona 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.8. Porcentaje de similitud entre datos experimentales y la función deaprozimación de corriente para los dispositivos de 100nm y 50nm enla zona 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.9. intervalo temporales de la zona 3. . . . . . . . . . . . . . . . . . . . . 745.10. Coeficientes de la función de aproximación de resistencia para los
dispositivos de 100nm y 50nm en la zona 3. . . . . . . . . . . . . . . 75
115
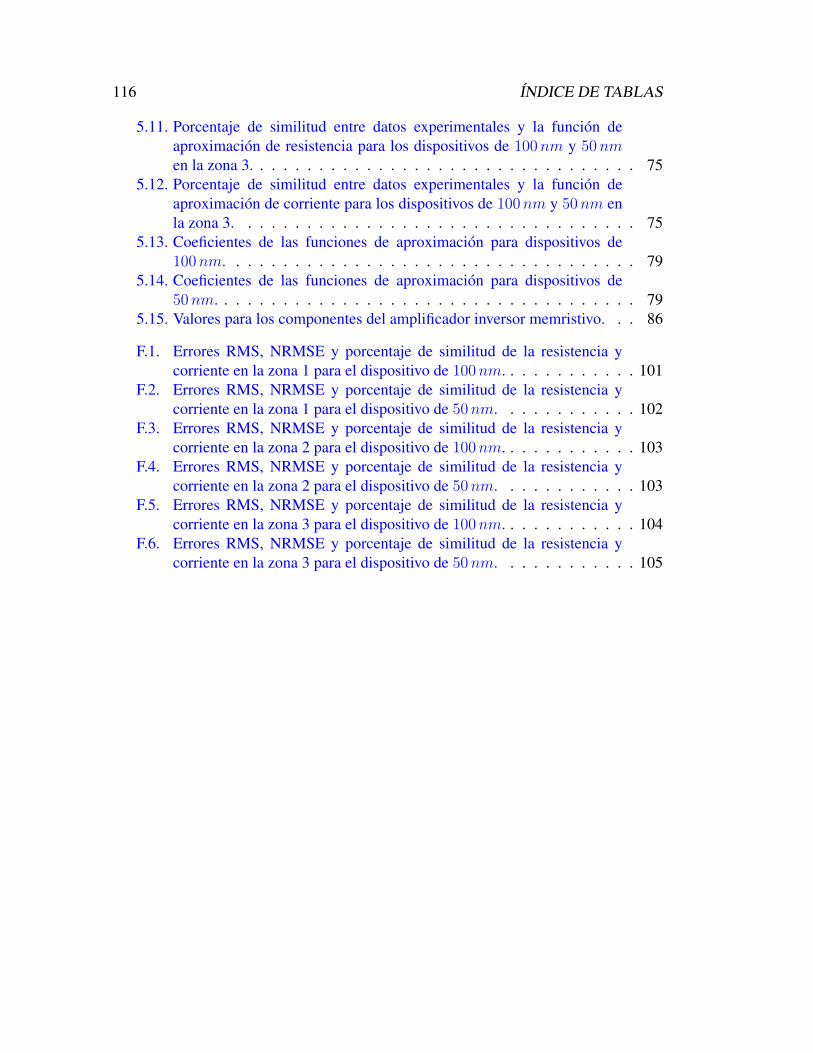
116 ÍNDICE DE TABLAS
5.11. Porcentaje de similitud entre datos experimentales y la función deaproximación de resistencia para los dispositivos de 100nm y 50nmen la zona 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.12. Porcentaje de similitud entre datos experimentales y la función deaproximación de corriente para los dispositivos de 100nm y 50nm enla zona 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.13. Coeficientes de las funciones de aproximación para dispositivos de100nm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.14. Coeficientes de las funciones de aproximación para dispositivos de50nm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.15. Valores para los componentes del amplificador inversor memristivo. . . 86
F.1. Errores RMS, NRMSE y porcentaje de similitud de la resistencia ycorriente en la zona 1 para el dispositivo de 100nm. . . . . . . . . . . . 101
F.2. Errores RMS, NRMSE y porcentaje de similitud de la resistencia ycorriente en la zona 1 para el dispositivo de 50nm. . . . . . . . . . . . 102
F.3. Errores RMS, NRMSE y porcentaje de similitud de la resistencia ycorriente en la zona 2 para el dispositivo de 100nm. . . . . . . . . . . . 103
F.4. Errores RMS, NRMSE y porcentaje de similitud de la resistencia ycorriente en la zona 2 para el dispositivo de 50nm. . . . . . . . . . . . 103
F.5. Errores RMS, NRMSE y porcentaje de similitud de la resistencia ycorriente en la zona 3 para el dispositivo de 100nm. . . . . . . . . . . . 104
F.6. Errores RMS, NRMSE y porcentaje de similitud de la resistencia ycorriente en la zona 3 para el dispositivo de 50nm. . . . . . . . . . . . 105

Bibliografía
[1] Leon Chua. “Memristor-the missing circuit element”. En: IEEE Transactions oncircuit theory 18.5 (1971), págs. 507-519.
[2] Alexander Mauro. “Anomalous impedance, a phenomenological property oftime-variant resistance: An analytic review”. En: Biophysical journal 1.4(1961), pág. 353.
[3] TW Hickmott. “Low-frequency negative resistance in thin anodic oxide films”.En: Journal of Applied Physics 33.9 (1962), págs. 2669-2682.
[4] G Dearnaley, AM Stoneham y DV Morgan. “Electrical phenomena inamorphous oxide films”. En: Reports on Progress in Physics 33.3 (1970),pág. 1129.
[5] Leon O Chua. Linear, and nonlinear circuits. 1987.
[6] Omid Kavehei et al. “The fourth element: Insights into the memristor”. En:Communications, Circuits and Systems, 2009. ICCCAS 2009. InternationalConference on. IEEE. 2009, págs. 921-927.
[7] Giovanni E Pazienza y Jordi Albo-Canals. “Teaching memristors to EEundergraduate students [class notes]”. En: IEEE Circuits and Systems magazine11.4 (2011), págs. 36-44.
[8] Leon O Chua y Sung Mo Kang. “Memristive devices and systems”. En:Proceedings of the IEEE 64.2 (1976), págs. 209-223.
[9] Dalibor Biolek et al. “Some fingerprints of ideal memristors”. En: 2013 IEEEInternational Symposium on Circuits and Systems (ISCAS2013). IEEE. 2013,págs. 201-204.
[10] Shyam Prasad Adhikari et al. “Three fingerprints of memristor”. En: IEEETransactions on Circuits and Systems I: Regular Papers 60.11 (2013),págs. 3008-3021.
[11] Hyongsuk Kim, Maheshwar Pd Sah y Shyam Prasad Adhikari. “Pinchedhysteresis loops is the fingerprint of memristive devices”. En: arXiv preprintarXiv:1202.2437 (2012).
[12] R Stanley Williams. “How we found the missing memristor”. En: IEEE spectrum45.12 (2008), págs. 28-35.
117

118 BIBLIOGRAFÍA
[13] Joseph Blanc y David L Staebler. “Electrocoloration in srti o 3: Vacancy drift andoxidation-reduction of transition metals”. En: Physical Review B 4.10 (1971),pág. 3548.
[14] Dmitri B Strukov et al. “The missing memristor found”. En: nature 453.7191(2008), págs. 80-83.
[15] Omid Kavehei et al. “The fourth element: characteristics, modelling andelectromagnetic theory of the memristor”. En: Proceedings of the Royal Societyof London A: Mathematical, Physical and Engineering Sciences. The RoyalSociety. 2010, rspa20090553.
[16] Yogesh N Joglekar y Stephen J Wolf. “The elusive memristor: properties of basicelectrical circuits”. En: European Journal of Physics 30.4 (2009), pág. 661.
[17] D Biolek, V Biolkova y Z Biolek. “SPICE model of memristor with nonlineardopant drift”. En: Radioengineering (2009).
[18] S Benderli y TA Wey. “On SPICE macromodelling of TiO2 memristors”. En:Electronics letters 45.7 (2009), pág. 377.
[19] Dmitri B Strukov y R Stanley Williams. “Exponential ionic drift: fast switchingand low volatility ofáthin-film memristors”. En: Applied Physics A 94.3 (2009),págs. 515-519.
[20] K Tsunoda et al. “Bipolar resistive switching in polycrystalline TiO2 films”. En:Applied physics letters 90.11 (2007), pág. 113501.
[21] S Seo et al. “Reproducible resistance switching in polycrystalline NiO films”.En: Applied Physics Letters 85.23 (2004), págs. 5655-5657.
[22] Hyunjun Sim et al. “Resistance-switching characteristics of polycrystalline Nb 2O 5 for nonvolatile memory application”. En: IEEE electron device letters 26.5(2005), págs. 292-294.
[23] Y Watanabe et al. “Current-driven insulator–conductor transition andnonvolatile memory in chromium-doped SrTiO3 single crystals”. En: AppliedPhysics Letters 78.23 (2001), págs. 3738-3740.
[24] Jae Sung Lee, Shinbuhm Lee y Tae Won Noh. “Resistive switching phenomena:A review of statistical physics approaches”. En: Applied Physics Reviews 2.3(2015), pág. 031303.
[25] Rainer Waser et al. “Redox-based resistive switching memories–nanoionicmechanisms, prospects, and challenges”. En: Advanced materials 21.25-26(2009), págs. 2632-2663.
[26] Akihito Sawa. “Resistive switching in transition metal oxides”. En: Materialstoday 11.6 (2008), págs. 28-36.
[27] Doo Seok Jeong et al. “Emerging memories: resistive switching mechanisms andcurrent status”. En: Reports on Progress in Physics 75.7 (2012), pág. 076502.

BIBLIOGRAFÍA 119
[28] Daniele Ielmini, Rainer Bruchhaus y Rainer Waser. “Thermochemical resistiveswitching: materials, mechanisms, and scaling projections”. En: PhaseTransitions 84.7 (2011), págs. 570-602.
[29] Gyeong-Su Park et al. “Observation of electric-field induced Ni filamentchannels in polycrystalline NiOx film”. En: Applied Physics Letters 91.22(2007), págs. 222103-222103.
[30] Kohei Fujiwara et al. “Resistance switching and formation of a conductivebridge in metal/binary oxide/metal structure for memory devices”. En:Japanese Journal of Applied Physics 47.8R (2008), pág. 6266.
[31] Jun Yao et al. “In situ imaging of the conducting filament in a silicon oxideresistive switch”. En: arXiv preprint arXiv:1110.3755 (2011).
[32] Seonghyun Kim et al. “Effect of Scaling-Based RRAMs on Their ResistiveSwitching Characteristics”. En: IEEE Electron Device Letters 32.5 (2011),págs. 671-673.
[33] Jae Sung Lee et al. “Two opposite hysteresis curves in semiconductors withmobile dopants”. En: Applied Physics Letters 102.25 (2013), pág. 253503.
[34] Sang Ho Jeon et al. “First-principles modeling of resistance switching inperovskite oxide material”. En: Applied physics letters 89.4 (2006),pág. 042904.
[35] Kazuki Nagashima et al. “Intrinsic mechanisms of memristive switching”. En:Nano letters 11.5 (2011), págs. 2114-2118.
[36] Fu-Chien Chiu. “A review on conduction mechanisms in dielectric films”. En:Advances in Materials Science and Engineering 2014 (2014).
[37] Simon M Sze y Kwok K Ng. Physics of semiconductor devices. John wiley &sons, 2006.
[38] Shuxiang Wu et al. “Bipolar resistance switching in transparentITO/LaAlO3/SrTiO3 memristors”. En: ACS applied materials & interfaces 6.11(2014), págs. 8575-8579.
[39] Gunther Jegert et al. “Modeling of leakage currents in high-dielectrics:Three-dimensional approach via kinetic Monte Carlo”. En: Applied PhysicsLetters 96.6 (2010), pág. 062113.
[40] Yu-Ting Chen et al. “Improvement of Resistive Switching Characteristics byThermally Assisted Forming Process for-Based Structure”. En: IEEE ElectronDevice Letters 34.2 (2013), págs. 226-228.
[41] Kuyyadi P Biju et al. “Resistive switching characteristics and mechanism ofthermally grown WOx thin films”. En: Journal of Applied Physics 110.6(2011), pág. 064505.
120 BIBLIOGRAFÍA
[42] T Harada et al. “Trap-controlled space-charge-limited current mechanism inresistance switching at Al/Pr0. 7Ca0. 3MnO3 interface”. En: Applied PhysicsLetters 92.22 (2008), pág. 2113.
[43] Yidong Xia et al. “Field-induced resistive switching based onspace-charge-limited current”. En: Applied physics letters 90.2 (2007),pág. 2907.
[44] Myoung-Sun Lee et al. “Conduction mechanism and low frequency noiseanalysis in Al/Pr0. 7Ca0. 3MnO3 for bipolar resistive switching”. En: JapaneseJournal of Applied Physics 50.1R (2011), pág. 011501.
[45] XG Chen et al. “Trap-assisted tunneling resistance switching effect in CeO2/La0.7 (Sr0. 1Ca0. 9) 0.3 MnO3 heterostructure”. En: Applied Physics Letters 101.15(2012), pág. 153509.
[46] Shimeng Yu, Ximeng Guan y H-S Philip Wong. “Conduction mechanism ofTiN/HfOx/Pt resistive switching memory: a trap-assisted-tunneling model”. En:Applied Physics Letters 99.6 (2011), pág. 063507.
[47] Javier Garcia-Barriocanal et al. “Colossal ionic conductivity at interfaces ofepitaxial ZrO2: Y2O3/SrTiO3 heterostructures”. En: Science 321.5889 (2008),págs. 676-680.
[48] Ying-Hui Hsieh et al. “Electrical modulation of the local conduction at oxidetubular interfaces”. En: ACS nano 7.10 (2013), págs. 8627-8633.
[49] Krzysztof Szot et al. “Switching the electrical resistance of individualdislocations in single-crystalline SrTiO3”. En: Nature materials 5.4 (2006),págs. 312-320.
[50] Kamran Eshraghian et al. “Memristive device fundamentals and modeling:applications to circuits and systems simulation”. En: Proceedings of the IEEE100.6 (2012), págs. 1991-2007.
[51] Shijun Liao. “On the homotopy analysis method for nonlinear problems”. En:Applied Mathematics and Computation 147.2 (2004), págs. 499-513.
[52] Ji-Huan He. “Homotopy perturbation method: a new nonlinear analyticaltechnique”. En: Applied Mathematics and computation 135.1 (2003),págs. 73-79.
[53] Ji-Huan He. “A coupling method of a homotopy technique and a perturbationtechnique for non-linear problems”. En: International journal of non-linearmechanics 35.1 (2000), págs. 37-43.
[54] Moustafa El-Shahed. “Application of He’s homotopy perturbation method toVolterra’s integro-differential equation”. En: International Journal of NonlinearSciences and Numerical Simulation 6.2 (2005), págs. 163-168.
[55] L Cveticanin. “Homotopy–perturbation method for pure nonlinear differentialequation”. En: Chaos, Solitons & Fractals 30.5 (2006), págs. 1221-1230.
BIBLIOGRAFÍA 121
[56] Arturo Sarmiento-Reyes et al. “A fully symbolic homotopy-based memristormodel for applications to circuit simulation”. En: Analog Integrated Circuitsand Signal Processing 85.1 (2015), págs. 65-80.
[57] Omid Kavehei et al. “Fabrication and modeling of Ag/TiO 2/ITO memristor”.En: 2011 IEEE 54th International Midwest Symposium on Circuits and Systems(MWSCAS). IEEE. 2011, págs. 1-4.
[58] J. G. Simmons. “Generalized formula for the electric tunnel effect betweensimilar electrodes separated by a thin insulating film”. En: J. Appl. Phys 34.6(1963), pág. 1.
[59] Ayelet Vilan. “Analyzing molecular current-voltage characteristics with theSimmons tunneling model: scaling and linearization”. En: The Journal ofPhysical Chemistry C 111.11 (2007), págs. 4431-4444.
[60] Eero Lehtonen y Mika Laiho. “CNN using memristors for neighborhoodconnections”. En: Proc. Int. Workshop Cell. Nanoscale Netw. Their Appl. 2010,págs. 1-4.
[61] Chris Yakopcic et al. “A memristor device model”. En: IEEE electron deviceletters 32.10 (20011), págs. 1436-1438.
[62] J Joshua Yang et al. “Memristive switching mechanism for metal/oxide/metalnanodevices”. En: Nature nanotechnology 3.7 (2008), págs. 429-433.
[63] Xiangbo Meng et al. “Controllable atomic layer deposition of one-dimensionalnanotubular TiO 2”. En: Applied Surface Science 266 (2013), págs. 132-140.
[64] Martin Guido Middelhoek. The identification of analytical device models. TUDelft, Delft University of Technology, 1992.
[65] Goodness of fit beetween test and reference data. https://www.mathworks.com/help/ident/ref/goodnessoffit.html?requestedDomain=www.mathworks.com. Acceso: 2016-11-28.
[66] Endre Süli y David F Mayers. An introduction to numerical analysis. Cambridgeuniversity press, 2003.
[67] Carlos Manuel Hernandez Mejıa. “Development of a modeling methodology forcircuits with memristors”. En: (2015).