Modelado y Control de Sistemas Basados en Pilas de … · 2007-05-25 · condensación y...
43
Modelado y Control de Sistemas Basados en Pilas de Combustible Carlos Bordóns Alba Dpto. Ingeniería de Sistemas y Automática Escuela Técnica Superior de Ingenieros Universidad de Sevilla Jornadas de Ingeniería de Control Madrid, mayo de 2007
Transcript of Modelado y Control de Sistemas Basados en Pilas de … · 2007-05-25 · condensación y...
Modelado y Control de Sistemas Basados en Pilas de Combustible
Carlos Bordóns AlbaDpto. Ingeniería de Sistemas y Automática
Escuela Técnica Superior de IngenierosUniversidad de Sevilla
Jornadas de Ingeniería de ControlMadrid, mayo de 2007
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 2
Índice
1. Motivación2. Modelo de pila PEM3. Estrategias de control
de pilas PEM4. Sistemas basados en
pilas de combustible

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 3
1. Motivación
• Sistema electroquímico que genera electricidad a partir de H2• Sector de gran desarrollo en los últimos años• Muchos campos abiertos, relacionados con materiales,
fabricación, mantenimiento, etc. siendo el control automático uno de los más importantes
• Control de la pila:– Cómo operar la pila de manera segura y eficiente– Una buena regulación de variables (presiones, caudales) es crucial
para la funcionalidad y vida útil de la pila• Control de sistemas que contienen una pila
– La pila forma parte de un sistema híbrido– Conexión/desconexión y generación de una potencia deseada
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 4
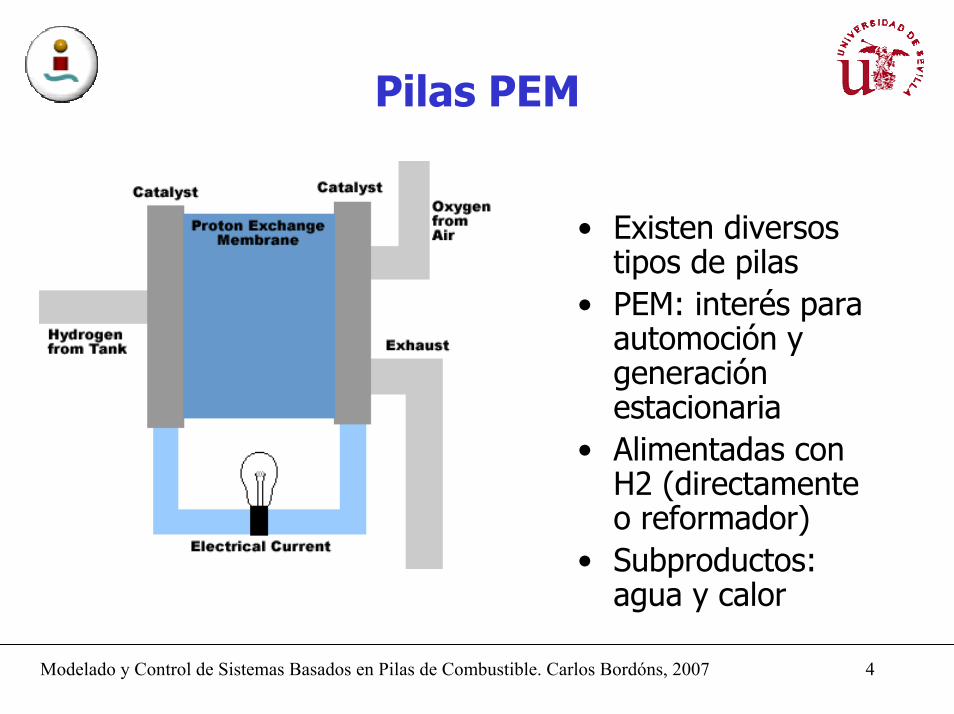
Pilas PEM
• Existen diversostipos de pilas
• PEM: interés paraautomoción y generaciónestacionaria
• Alimentadas con H2 (directamenteo reformador)
• Subproductos: agua y calor
2. Modelo de pila PEM
Ecuacionesfluido
dinámicas
Efectostérmicos
Característicaeléctro-química
Agua Gases
• Desarrollo y validación experimental de un modelo matemático para pilas de combustible tipo PEM
• Alcance del modelo:• Régimen permanente• Transitorios: cargas variables, ‘flooding’, purgas en el ánodo…
• Complejidad matemática:• Gran número de ecuaciones (100 aprox.), aunque la mayoría de
carácter algebraico (11 estados en total)• Implementación abordable computacionalmente, resultando un
modelo muy completo orientado principalmente al control• Software de simulación realizado en MATLAB Simulink
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 6
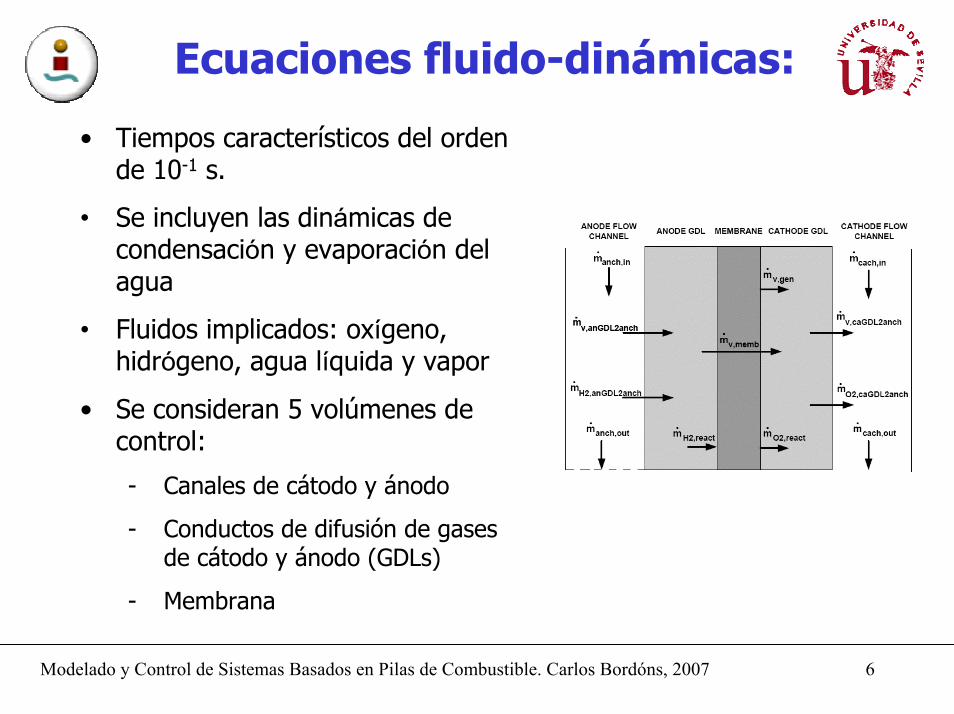
Ecuaciones fluido-dinámicas:
• Tiempos característicos del orden de 10-1 s.
• Se incluyen las dinámicas de condensación y evaporación del agua
• Fluidos implicados: oxígeno, hidrógeno, agua líquida y vapor
• Se consideran 5 volúmenes de control:
- Canales de cátodo y ánodo
- Conductos de difusión de gases de cátodo y ánodo (GDLs)
- Membrana
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 7
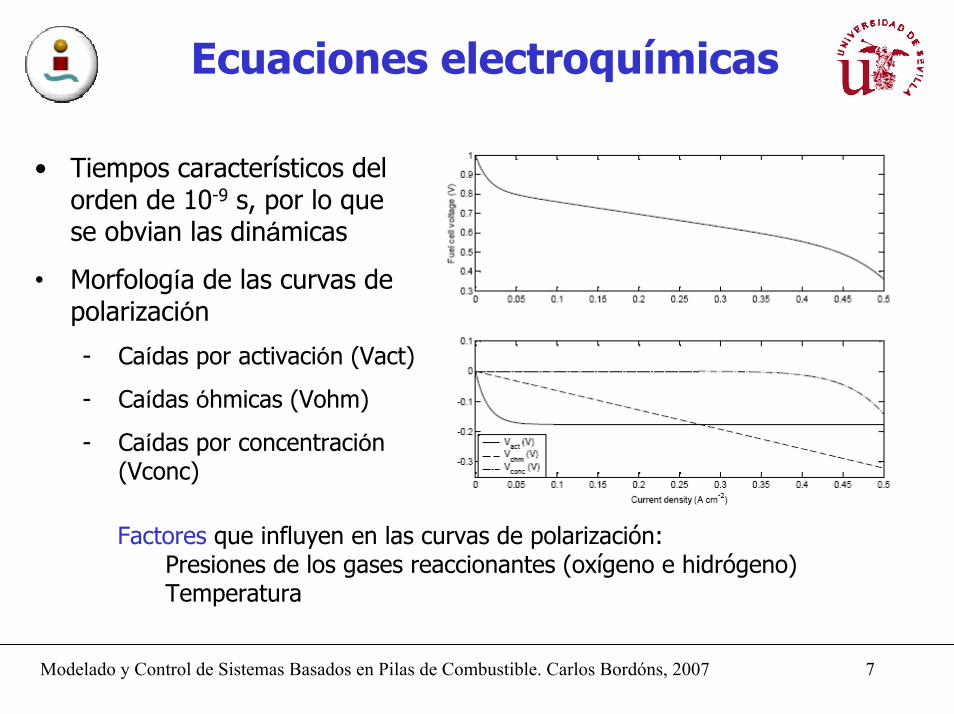
Ecuaciones electroquímicas
• Tiempos característicos del orden de 10-9 s, por lo que se obvian las dinámicas
• Morfología de las curvas de polarización
- Caídas por activación (Vact)
- Caídas óhmicas (Vohm)
- Caídas por concentración (Vconc)
Factores que influyen en las curvas de polarización:Presiones de los gases reaccionantes (oxígeno e hidrógeno)Temperatura
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 8
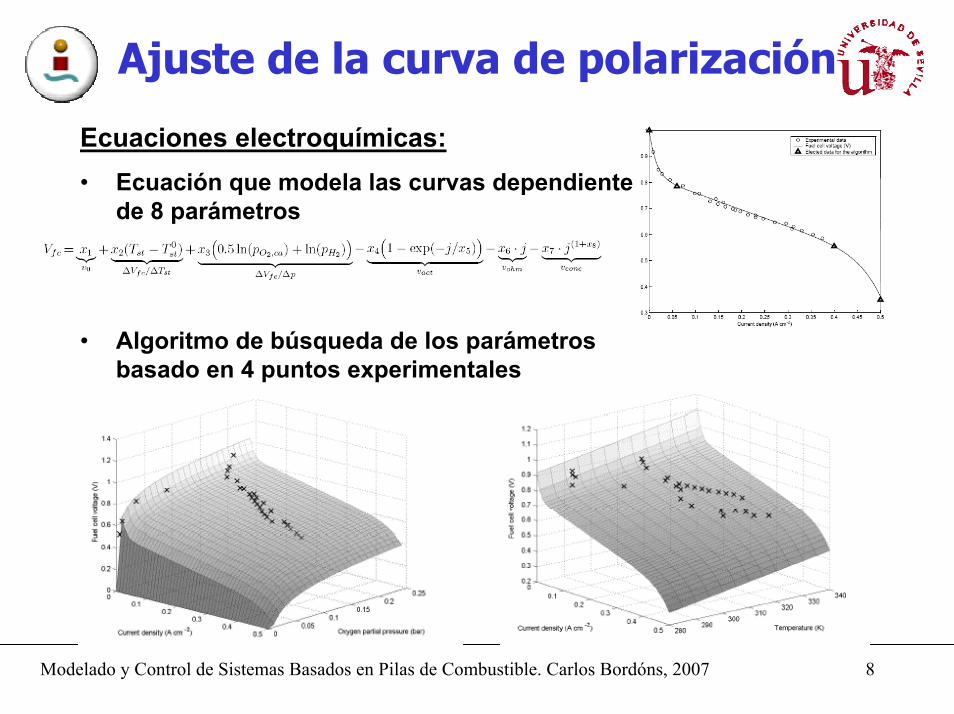
Ajuste de la curva de polarización
Ecuaciones electroquímicas:• Ecuación que modela las curvas dependiente
de 8 parámetros
• Algoritmo de búsqueda de los parámetros basado en 4 puntos experimentales

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 9
Agua y calorCantidad de agua líquida condensada en los canales de difusión de gases (encharcamiento o ‘flooding’, evacuándose el agua mediante purgas)
Ecuaciones térmicas:
• Modelo construido a partir de un balance energético del proceso
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 10
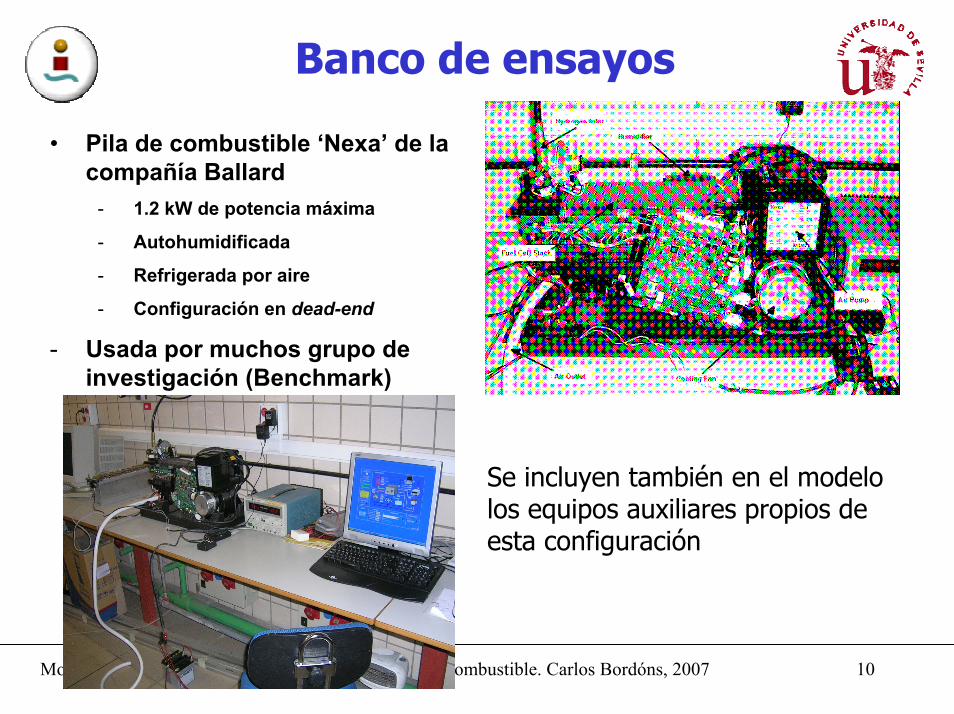
Banco de ensayos
• Pila de combustible ‘Nexa’ de la compañía Ballard
- 1.2 kW de potencia máxima
- Autohumidificada
- Refrigerada por aire
- Configuración en dead-end
- Usada por muchos grupo de investigación (Benchmark)
Se incluyen también en el modelo los equipos auxiliares propios de esta configuración

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 11
ResultadosDatos de entrada
Salidas del Modelo
Model development and validation of a PEM benchmark. A.J. Del Real, A. Arce and C. Bordons. Journal of Power Sources, 2007

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 12
3. Estrategias de control de pilas PEM
Necesidad:Debe existir un sistema de control para proporcionar aire y combustible necesarios para suministrar la potencia requerida, eliminar los subproductos y el calor producidos en las células y convertir la potencia DC no regulada en regulada o en AC de calidad para inyección en red
Control de alto nivel:
Integra el acondicionamiento de potencia, almacenamiento y procesamiento de fuel (en su caso)
Control a bajo nivel:
Aire/combustible, Tª y humedad

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 13
Control
Subsistemas:– Caudales de
reactivos– Gestión del calor– Gestión del agua– Gestión de
potencia– Procesamiento
del combustible (si no es H2directamente)
• Objetivos: – Respuesta transitoria rápida– Arranques y paradas ordenados– Robustez y adaptación a la potencia requerida
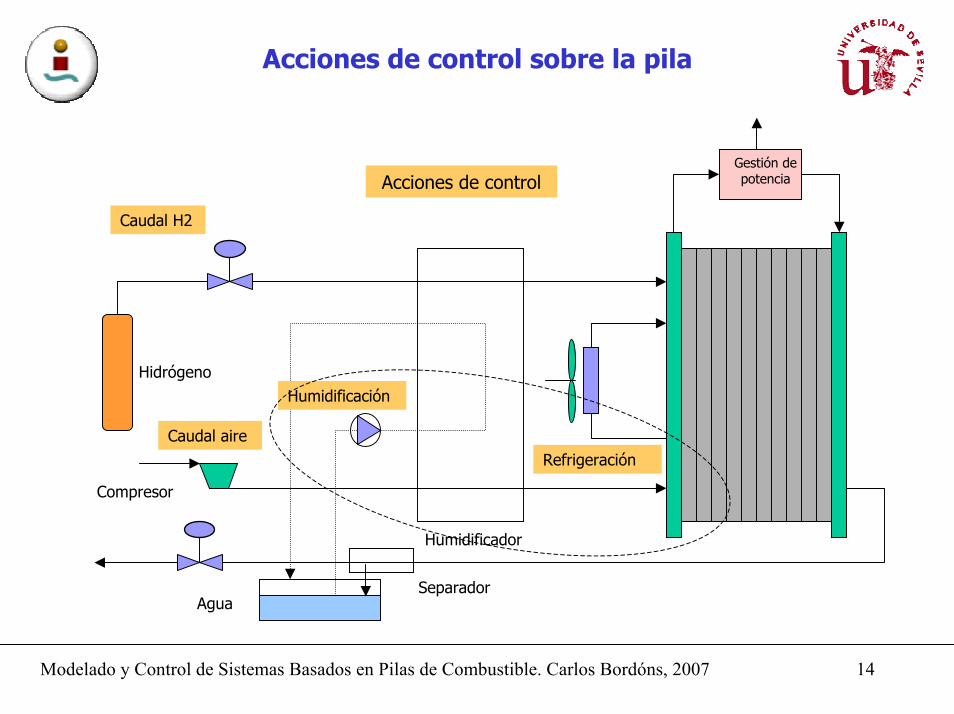
• Actuaciones:– Caudal de hidrógeno (válvula)– Caudal de oxígeno (compresor)– Refrigeración (circuito de agua con ventilador)– Humidificador (bomba)– Temperatura
• Variables a controlar:– Gases– Temperatura– Hidratación de la membrana ACC06, ECC 07, CDC 07
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 14
Acciones de control sobre la pila
Gestión de potencia
Humidificador
Agua
Compresor
Hidrógeno
Separador
Caudal H2
Caudal aireRefrigeración
Humidificación
Acciones de control
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 15
Caudales de reactivos• Objetivo: proporcionar de forma rápida los caudales de
reactivos necesarios, asegurando respuesta transitoria rápida, operación segura y minimizando el consumo auxiliar
• Se consigue aportando el caudal necesario según el requerimiento de potencia
• Temas:– La presión en el ánodo ligeramente más alta que en el cátodo.
Control por ratio (muy rápido) para que la presión de ánodo siga a la del cátodo.
– Mantener el exceso de O2. Peligro de Starvation. Controlar el exceso de oxígeno en el cátodo (proporción entre oxígeno que se suministra y el que se usa)
reactO
inOO W
W
,2
,22 =λ

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 16
Diversas estrategias propuestas
Feedforward estáticoFeedforward dinámicoLQ
Objetivo: evitar starvation λo2≥min.
Restricción física en los transitorios
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 17
Estrategias de Control Predictivo
• MPC puede ser un buen candidato para controlarpilas, minimizando diversos criterios de control
• Se presenta una estrategia que tiene en cuenta lasperturbaciones medibles y las restricciones de operación
• Se analizan 3 posibles criterios y se presentan lassoluciones basadas en MPC
• El controlador manipula la alimentación de aire y combustible actuando sobre el voltaje del compresory la válvula de H2

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 18
Objetivos de control
IstCompressorvoltage • Seguimiento del voltaje de
salida• Evitar Starvation• Máxima eficiencia
Fuel CellSystem
Vst
PstH2 Valve
λo2
reactedo
inoo W
W
,2
,22 =λ Exceso de oxígeno
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 19
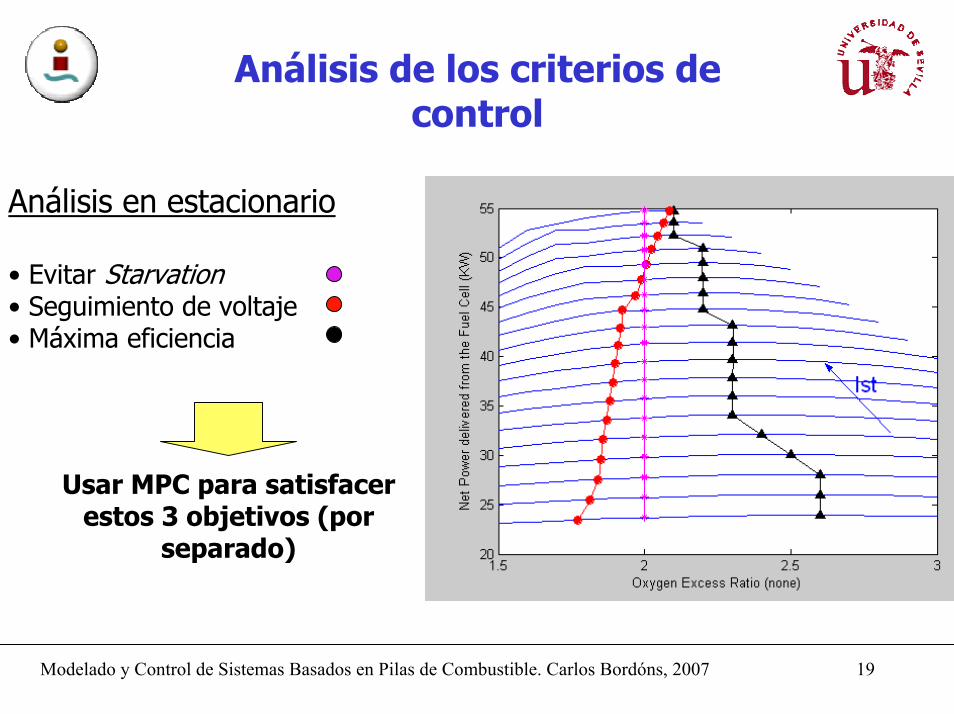
Análisis de los criterios de control
Análisis en estacionario
• Evitar Starvation• Seguimiento de voltaje• Máxima eficiencia
Usar MPC para satisfacer estos 3 objetivos (por
separado)
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 20
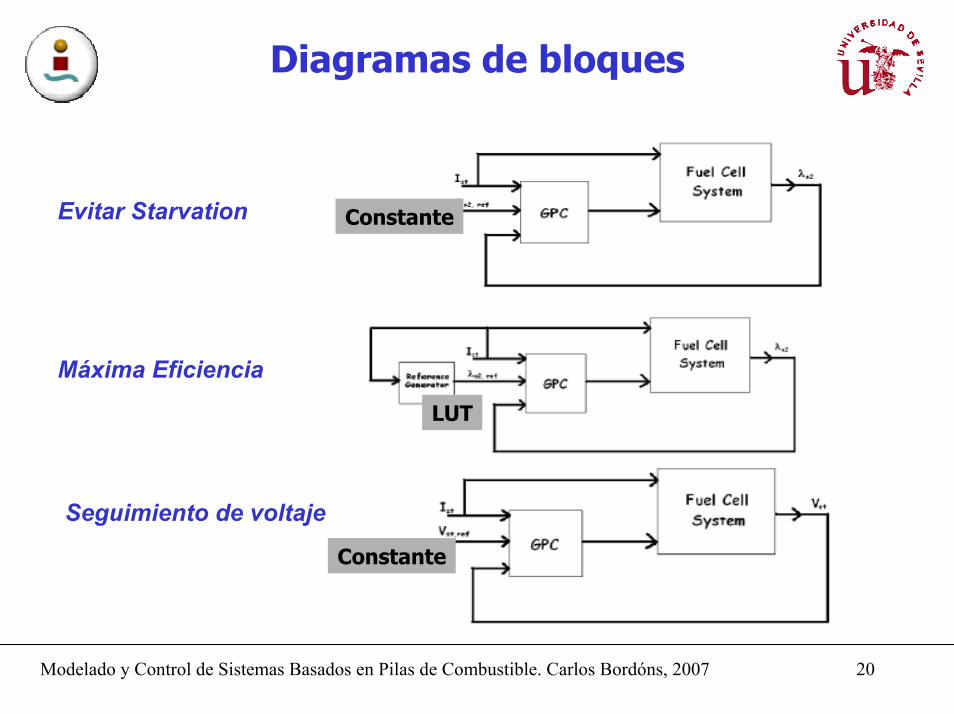
Diagramas de bloques
ConstanteEvitar Starvation
LUT
Constante
Máxima Eficiencia
Seguimiento de voltaje
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 21
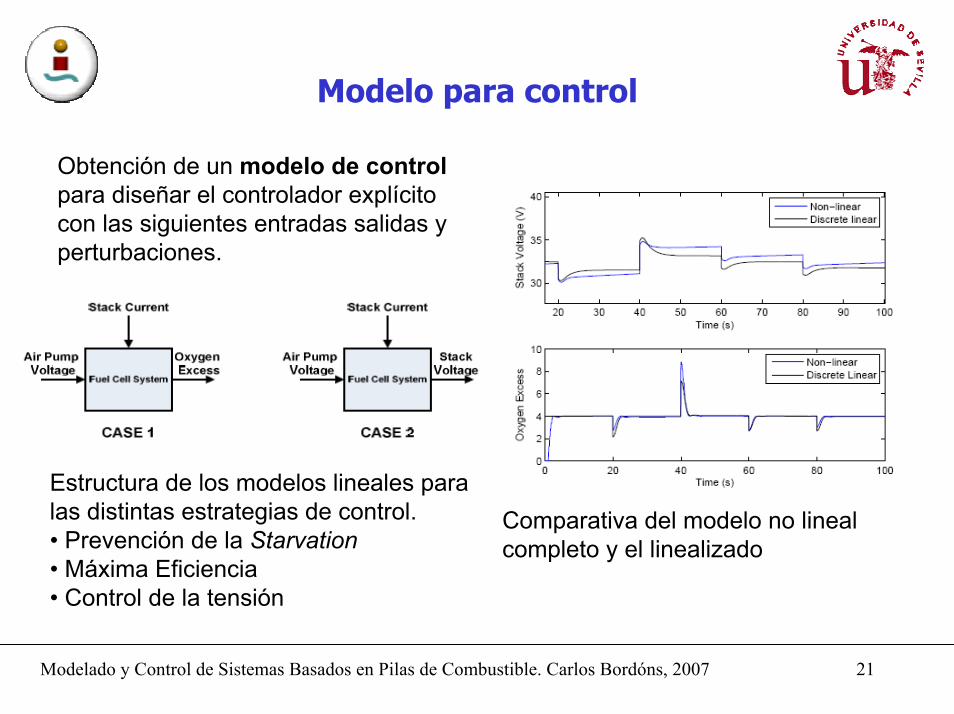
Modelo para control
Obtención de un modelo de controlpara diseñar el controlador explícito con las siguientes entradas salidas y perturbaciones.
Estructura de los modelos lineales paralas distintas estrategias de control.• Prevención de la Starvation• Máxima Eficiencia• Control de la tensión
Comparativa del modelo no lineal completo y el linealizado
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 22
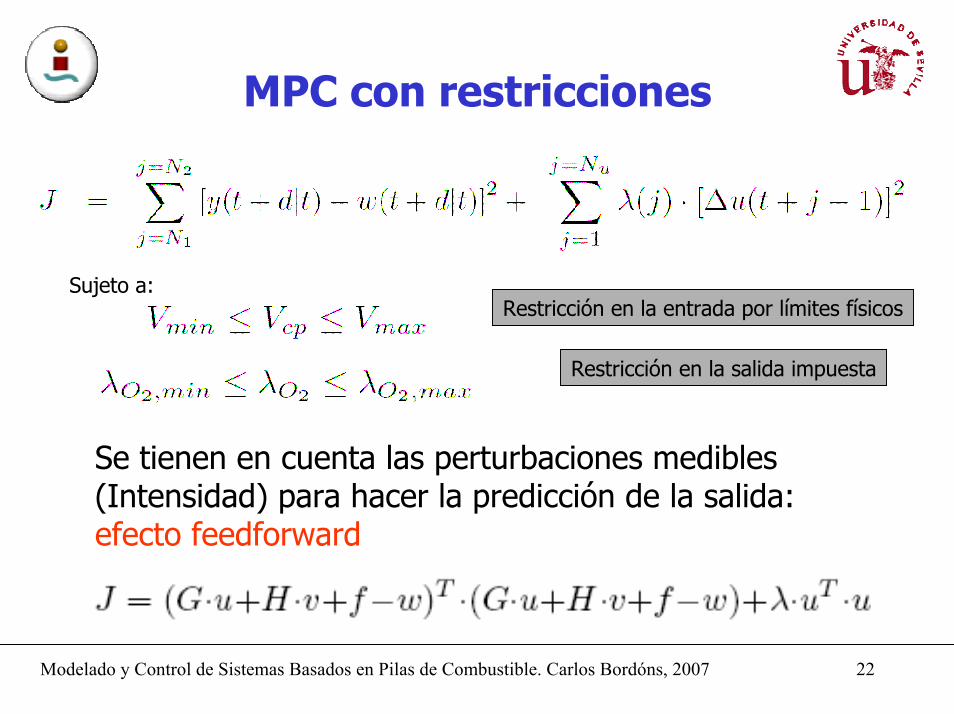
MPC con restricciones
Sujeto a:Restricción en la entrada por límites físicos
Restricción en la salida impuesta
Se tienen en cuenta las perturbaciones medibles(Intensidad) para hacer la predicción de la salida: efecto feedforward
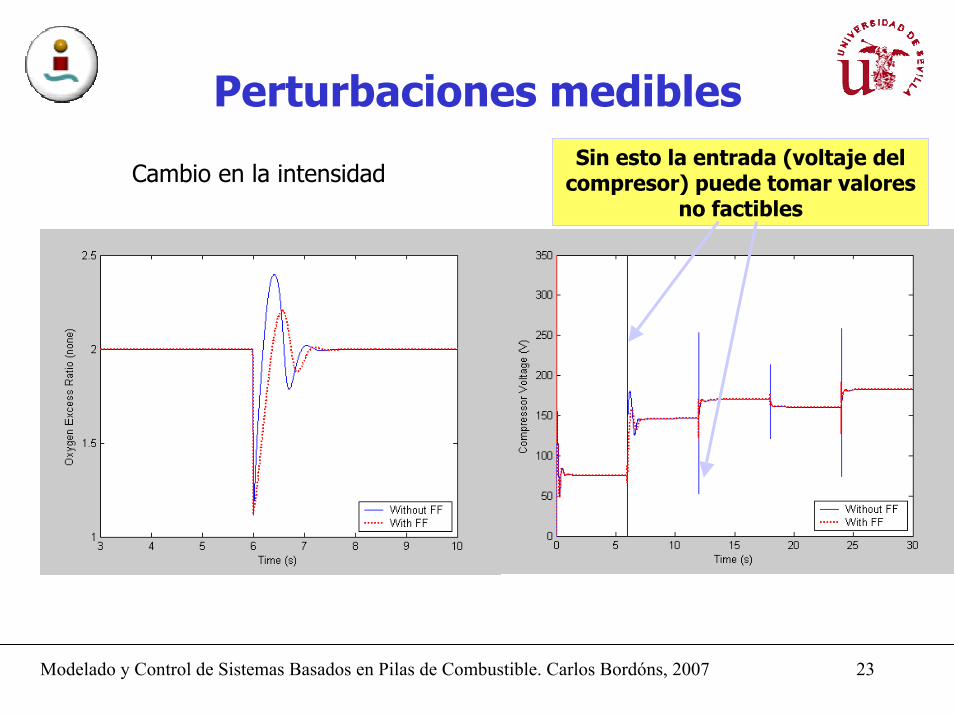
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 23
Perturbaciones mediblesSin esto la entrada (voltaje del
compresor) puede tomar valores no factibles
Cambio en la intensidad
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 24
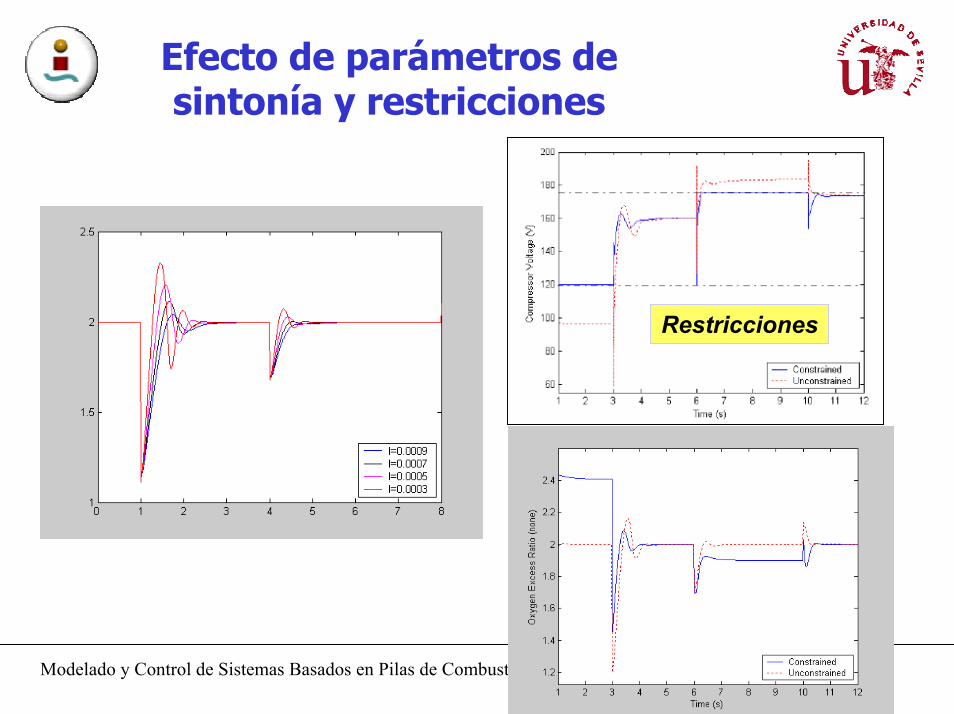
Efecto de parámetros de sintonía y restricciones
Restricciones

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 25
Comparación de los 3 criterios
Valor bajo
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 26
Problemática de aplicación
• Tiempo de muestreo 8 ms• Hay que resolver un QP• Solución: Control predictivo explícito
(Bemporad et al., 2004)– Cálculo off-line de la señal de control– Ley lineal por tramos
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 27
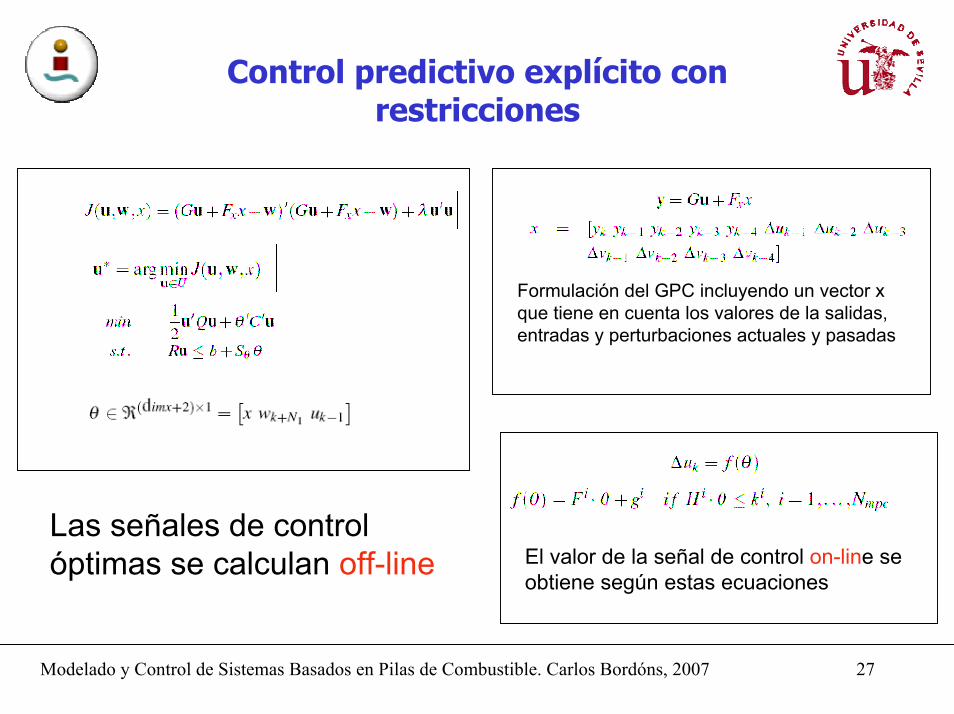
Control predictivo explícito con restricciones
Formulación del GPC incluyendo un vector x que tiene en cuenta los valores de la salidas, entradas y perturbaciones actuales y pasadas
El valor de la señal de control on-line se obtiene según estas ecuaciones
Las señales de control óptimas se calculan off-line
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 28
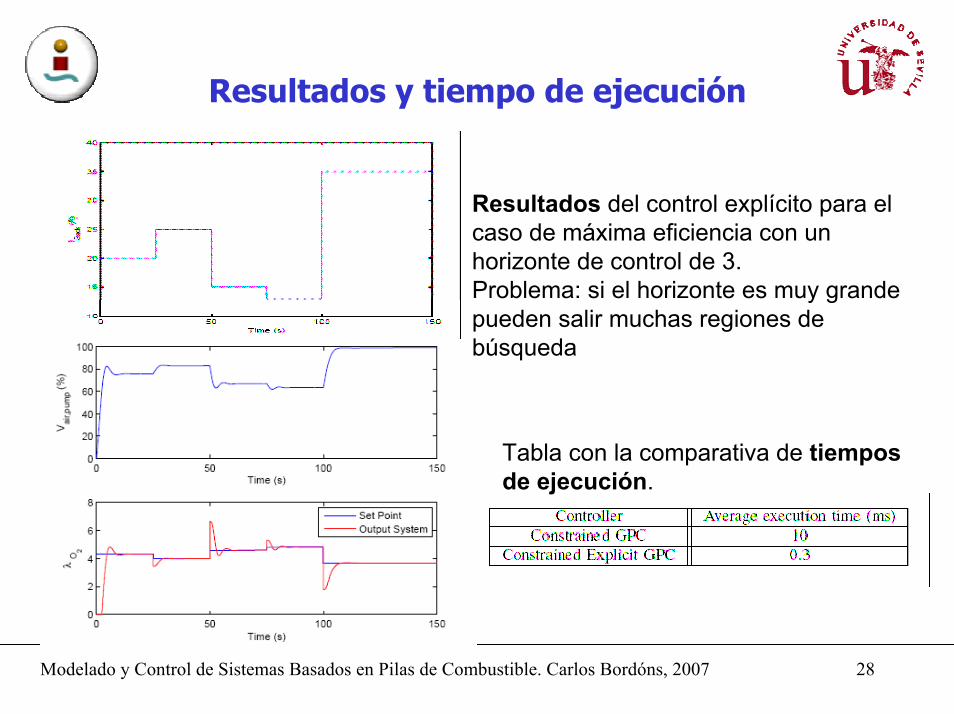
Resultados y tiempo de ejecución
Resultados del control explícito para el caso de máxima eficiencia con un horizonte de control de 3.Problema: si el horizonte es muy grande pueden salir muchas regiones de búsqueda
Tabla con la comparativa de tiemposde ejecución.

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 29
4. Sistemas basados en pilas de combustible
• Sistemas de generación eléctrica con almacenamiento– Interés: adecuar la oferta a la demanda
con almacenamiento intermedio en forma de H2 (vector energético)
– Energías renovables, capacidad de la red• Vehículos híbridos:
– Alimentados con pilas y baterías (o supercondensadores)
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 30
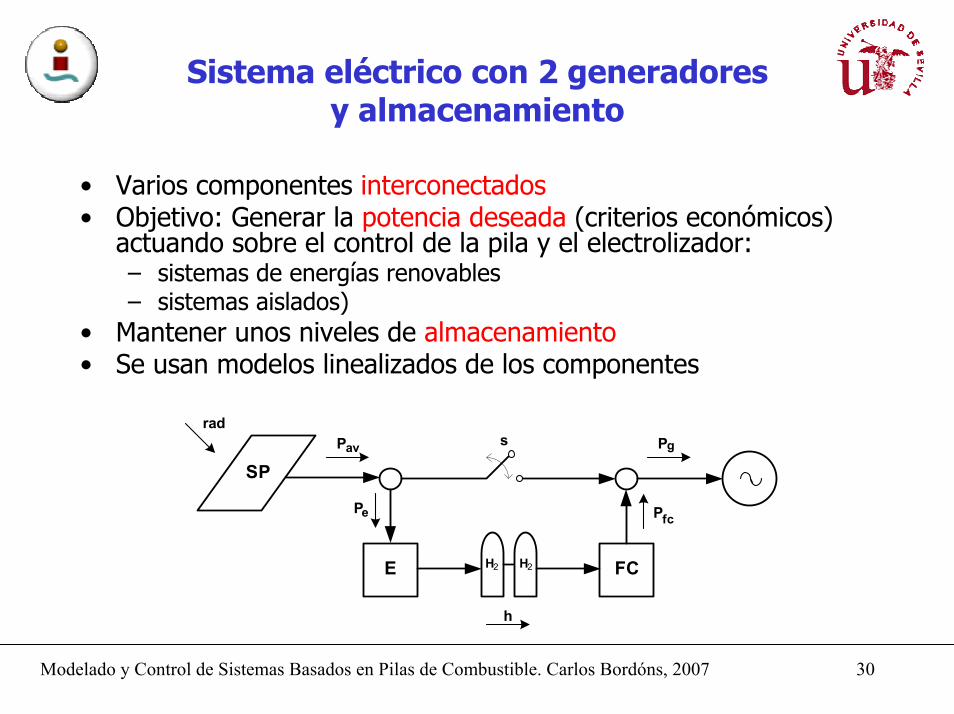
Sistema eléctrico con 2 generadores y almacenamiento
• Varios componentes interconectados• Objetivo: Generar la potencia deseada (criterios económicos)
actuando sobre el control de la pila y el electrolizador:– sistemas de energías renovables – sistemas aislados)
• Mantener unos niveles de almacenamiento• Se usan modelos linealizados de los componentes
Pav
SP
E
Pe
H2 H2 FC
h
Pfc
Pgsrad

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 31
Resolución mediante MPC parasistemas híbridos
Modelo híbrido : Automata
Restricciones:
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 32
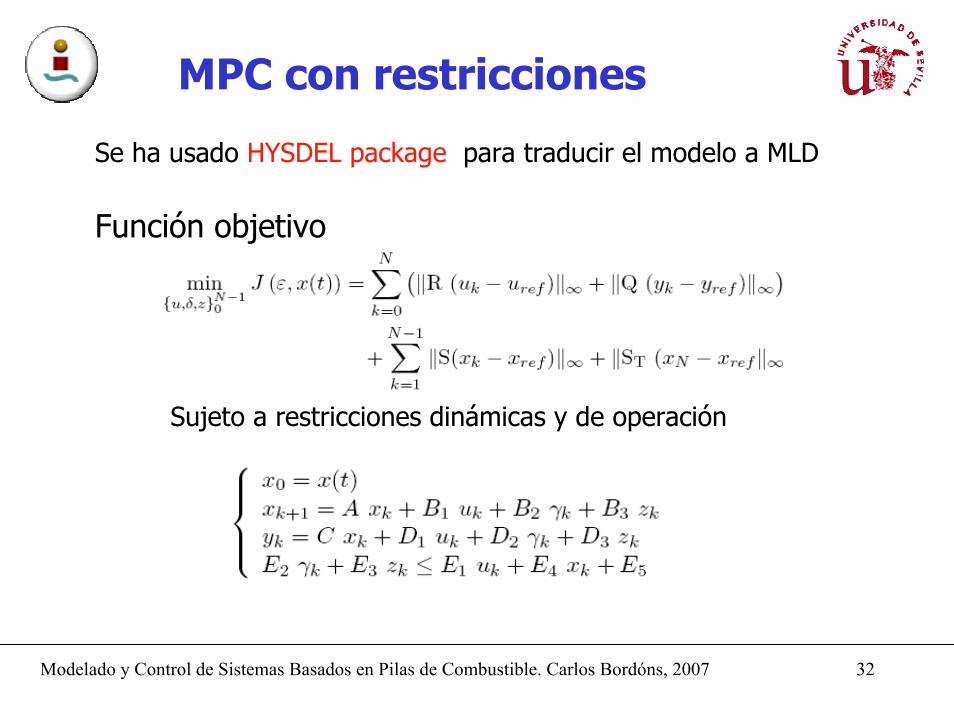
MPC con restricciones
Se ha usado HYSDEL package para traducir el modelo a MLD
Función objetivo
Sujeto a restricciones dinámicas y de operación
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 33
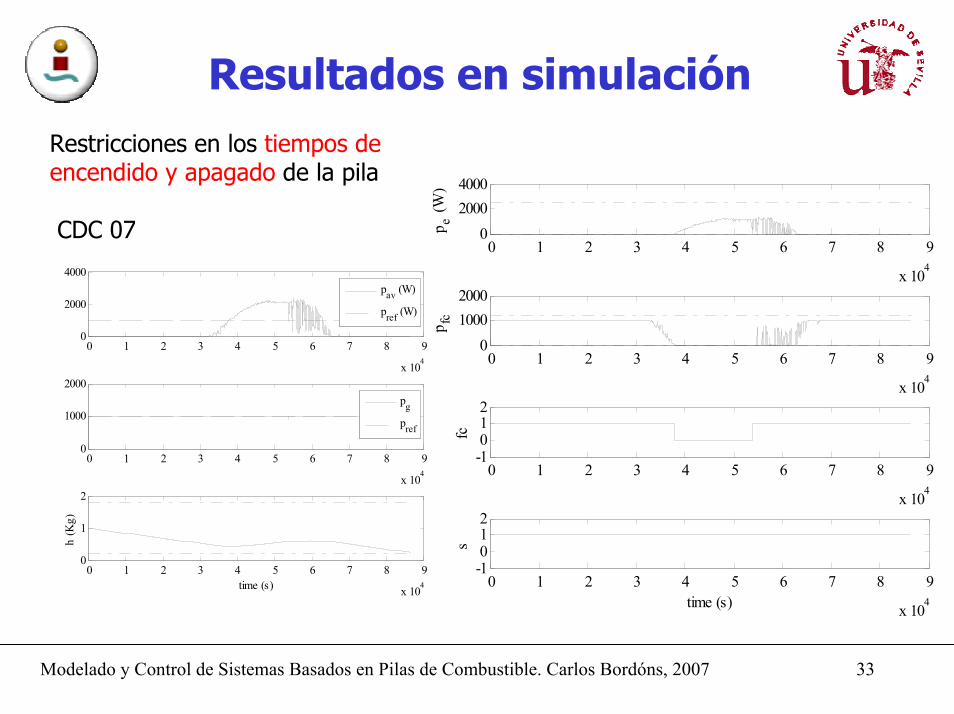
Resultados en simulaciónRestricciones en los tiempos de encendido y apagado de la pila
CDC 07
0 1 2 3 4 5 6 7 8 9
x 104
0
2000
4000
pav (W)
pref (W)
0 1 2 3 4 5 6 7 8 9
x 104
0
1000
2000
pg
pref
0 1 2 3 4 5 6 7 8 9
x 104
0
1
2
time (s)
h (K
g)
0 1 2 3 4 5 6 7 8 9
x 104
020004000
p e (W)
0 1 2 3 4 5 6 7 8 9
x 104
010002000
p fc
0 1 2 3 4 5 6 7 8 9
x 104
-1012
fc
0 1 2 3 4 5 6 7 8 9
x 104
-1012
s
time (s)
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 34
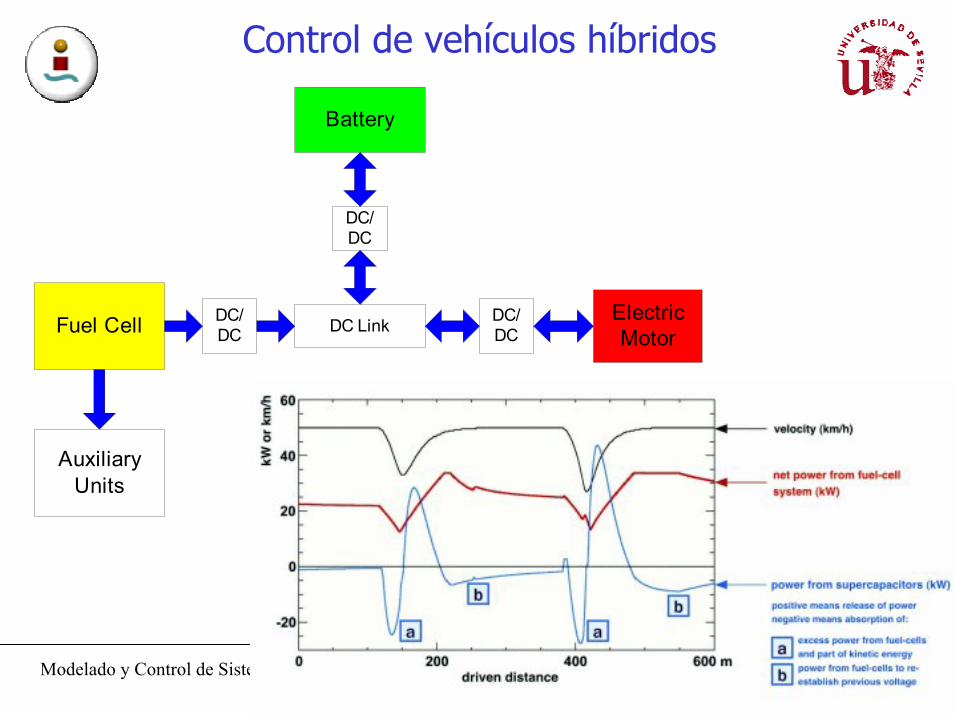
Control de vehículos híbridos
Fuel Cell
AuxiliaryUnits
DC/DC DC Link DC/
DCElectricMotor
DC/DC
Battery

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 35
Descripción del problema
• El sistema de control debe satisfacer la demanda del motor eléctrico usando dos fuentes de potencia: – Pila PEM (fuente primaria) – Batería:
• Para picos de potencia (aceleración) • Almacenar energía durante el frenando• Permite optimizar la eficiencia del vehículo
• Control en tiempo real de la distribución de potenciaentre la pila de combustible y el dispositivo de almacenamiento para optimizar el consumo de combustible manteniendo las prestaciones del vehículo
• Convertidores de potencia• La pila lleva su controlador local
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 36
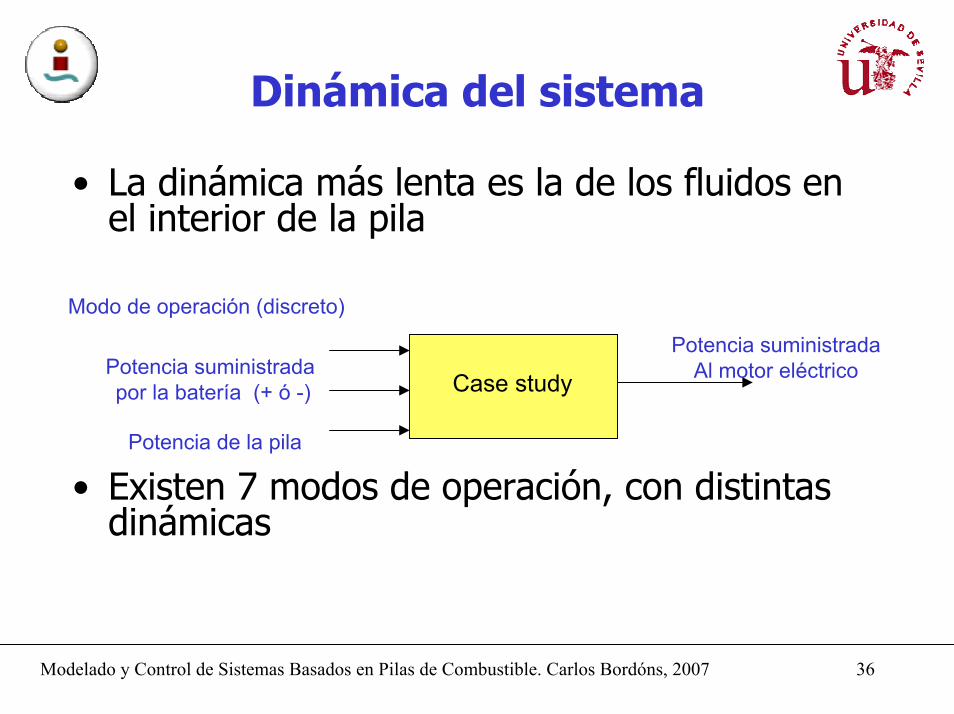
Dinámica del sistema
• La dinámica más lenta es la de los fluidos en el interior de la pila
• Existen 7 modos de operación, con distintasdinámicas
Modo de operación (discreto)
Potencia suministrada por la batería (+ ó -)
Potencia de la pila
Potencia suministradaAl motor eléctricoCase study
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 37
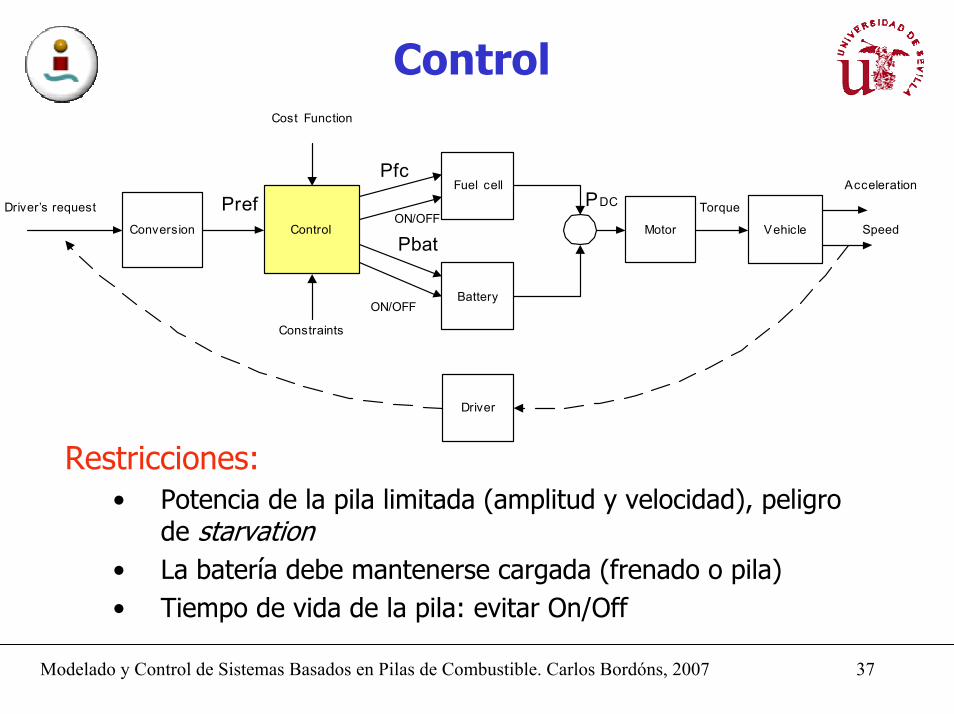
Control
Driver’s request
Acceleration
SpeedConversion Control
Fuel cell
Battery
Motor Vehicle
Driver
Pref
Pfc
PbatON/OFF
ON/OFF
PDC Torque
Cost Function
Constraints
Restricciones:• Potencia de la pila limitada (amplitud y velocidad), peligro
de starvation• La batería debe mantenerse cargada (frenado o pila)• Tiempo de vida de la pila: evitar On/Off
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 38
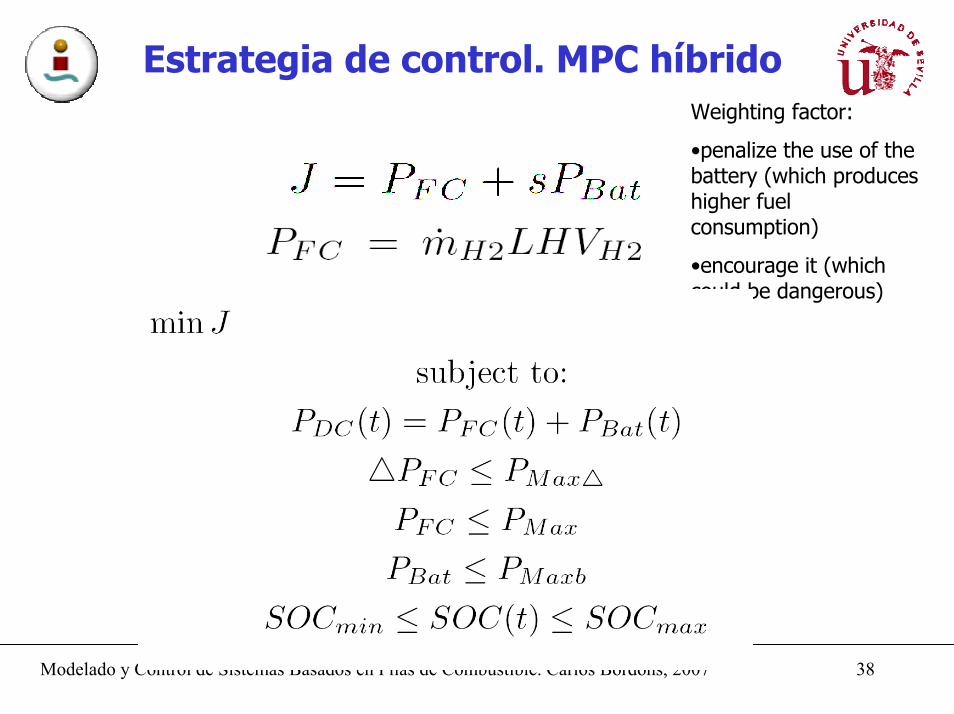
Estrategia de control. MPC híbridoWeighting factor:
•penalize the use of the battery (which produces higher fuel consumption)
•encourage it (whichcould be dangerous)
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 39
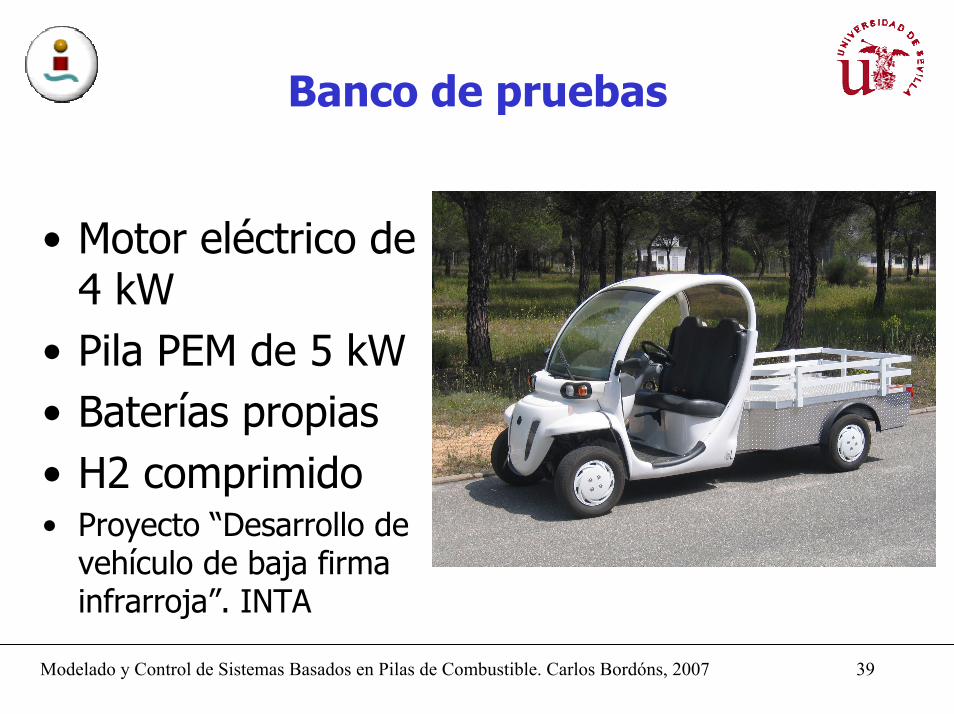
Banco de pruebas
• Motor eléctrico de 4 kW
• Pila PEM de 5 kW• Baterías propias• H2 comprimido• Proyecto “Desarrollo de
vehículo de baja firma infrarroja”. INTA

Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 40
Banco depruebas
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 41
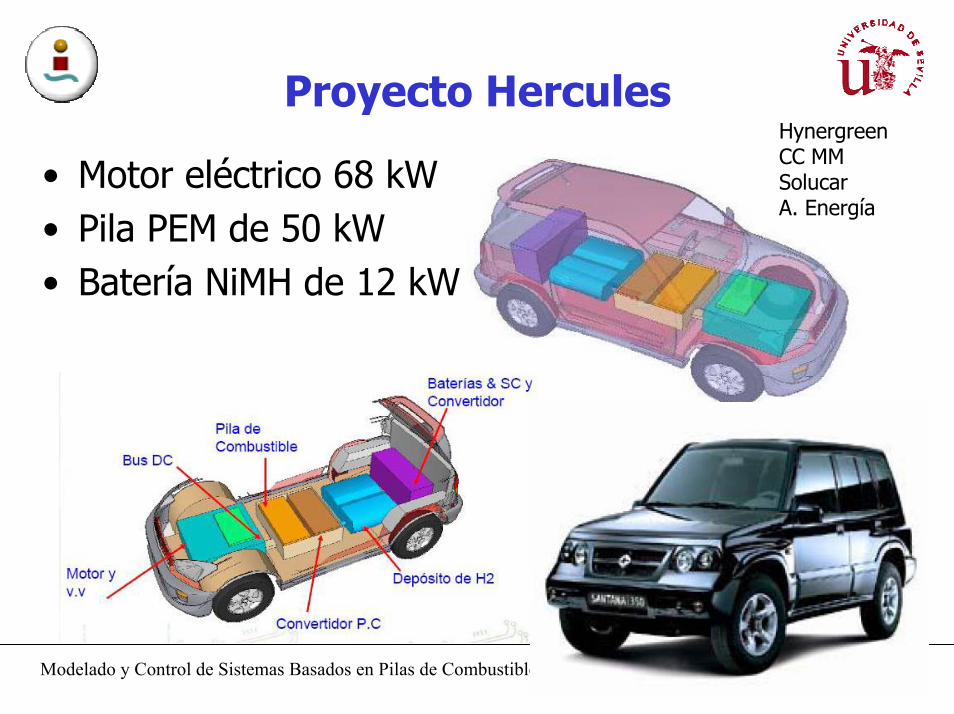
Proyecto Hercules
• Motor eléctrico 68 kW• Pila PEM de 50 kW• Batería NiMH de 12 kW
HynergreenCC MMSolucarA. Energía
Modelado y Control de Sistemas Basados en Pilas de Combustible. Carlos Bordóns, 2007 42
Conclusiones• Es un campo abierto y multidisciplinar• Modelado: simulador disponible• Control de la pila en sí:
– El criterio de máxima eficiencia es el más adecuado– El MPC considera perturbaciones medibles y restricciones– El transitorio se puede mejorar usando dispositivos de
almacenamiento (supercondensadores o baterías)– El tiempo de cálculo es adecuado si se usa una formulación
explícita• Sistemas con varios componentes: control híbrido• Muchos temas :
– Estrategias de control– Implementación– Integración
Modelado y Control de Sistemas Basados en Pilas de Combustible
Carlos Bordóns AlbaDpto. Ingeniería de Sistemas y Automática
Escuela Técnica Superior de IngenierosUniversidad de Sevilla
Jornadas de Ingeniería de ControlMadrid, mayo de 2007