Modelar y Simular Un Ejemplo de Un Sistema Caótico
10
3. Modelar y simular un ejemplo de un sistema caótico, y explicar donde se genera el caotismo del sistema. Para los sistemas lineales estables, pequeñas diferencias en las condiciones iniciales pueden solo causar pequeñas diferencias en las salidas. Los sistemas no lineales, sin embargo pueden mostrar un fenómeno llamado caos, mediante el cual signica que la salida del sistema es extremadamente sensible a las condiciones iniciales. La caracterstica esencial del caos es la impredecibilidad de la salida del sistema. !ncluso si tenemos un modelo exacto del sistema no lineal y una computadora extremadamente precisa, la respuesta del sistema a largo pla"o aun no puede ser predecida. #l caos se debe distinguir del mo$imiento aleatorio. #n el mo$imiento aleatorio, el modelo del sistema o entrada contiene incertidumbre y como un resultado, la $ariación del tiempo de la salida no puede ser predecida exactamente. #l mo$imiento caót ico, o de ot ra manera, el pr oblema in$olucrado es deter mins tico, y %ay una pequeña incertidumbre de la entrada o condiciones iniciales en la salida del sistema. &%ora, consideremos el siguiente sistema caótico. K 1 ( d 2 x d t 2 ) +k 2∗ ( dx dt ) +k 3 ( x 5 )=k 4∗sin ( wt ) 'onde K 1=1 ; k 2=0.2 ; k 3= 0.8 y 0.2 k 4 =5 ; w=1 #l sistema representa una estructura mec(nica con una fuer"a exterior armónica, f=A*sin (wt), con un sistema ligeramente amortiguado )*+-.+, es el coeciente de dxdt/.
-
Upload
cristianarias -
Category
Documents
-
view
216 -
download
0
Transcript of Modelar y Simular Un Ejemplo de Un Sistema Caótico

7/23/2019 Modelar y Simular Un Ejemplo de Un Sistema Caótico
http://slidepdf.com/reader/full/modelar-y-simular-un-ejemplo-de-un-sistema-caotico 1/10
3. Modelar y simular un ejemplo de un sistema caótico, y explicar donde segenera el caotismo del sistema.
Para los sistemas lineales estables, pequeñas diferencias en las condicionesiniciales pueden solo causar pequeñas diferencias en las salidas. Los sistemasno lineales, sin embargo pueden mostrar un fenómeno llamado caos, medianteel cual signica que la salida del sistema es extremadamente sensible a lascondiciones iniciales. La caracterstica esencial del caos es la impredecibilidadde la salida del sistema. !ncluso si tenemos un modelo exacto del sistema nolineal y una computadora extremadamente precisa, la respuesta del sistema alargo pla"o aun no puede ser predecida.
#l caos se debe distinguir del mo$imiento aleatorio. #n el mo$imiento aleatorio,el modelo del sistema o entrada contiene incertidumbre y como un resultado,
la $ariación del tiempo de la salida no puede ser predecida exactamente. #lmo$imiento caótico, o de otra manera, el problema in$olucrado esdeterminstico, y %ay una pequeña incertidumbre de la entrada o condicionesiniciales en la salida del sistema.
&%ora, consideremos el siguiente sistema caótico.
K 1( d2
x
d t 2 )+k 2∗( dxdt )+k 3 ( x5 )=k 4∗sin (wt )
'onde
K 1=1 ;
k 2=0.2 ;
k 3=0.8 y 0.2
k 4=5 ; w=1
#l sistema representa una estructura mec(nica con una fuer"a exteriorarmónica, f=A*sin (wt), con un sistema ligeramente amortiguado )*+-.+, es elcoeciente de dxdt/.
7/23/2019 Modelar y Simular Un Ejemplo de Un Sistema Caótico
http://slidepdf.com/reader/full/modelar-y-simular-un-ejemplo-de-un-sistema-caotico 2/10
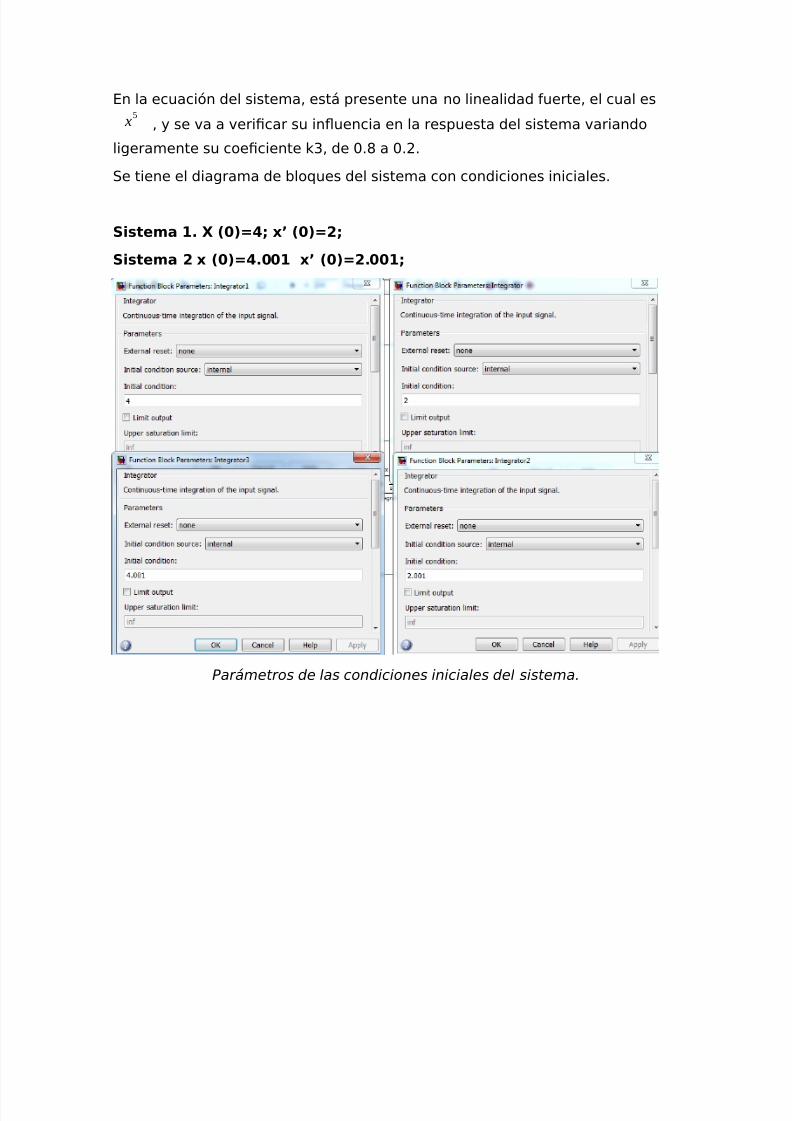
#n la ecuación del sistema, est( presente una no linealidad fuerte, el cual es
x5
, y se $a a $ericar su in0uencia en la respuesta del sistema $ariando
ligeramente su coeciente *3, de -.1 a -.+.
2e tiene el diagrama de bloques del sistema con condiciones iniciales.
Sistema 1. X (0)=4; x’ (0)=2;
Sistema 2 x (0)=4.001 x’ (0)=2.001;
Parámetros de las condiciones iniciales del sistema.
7/23/2019 Modelar y Simular Un Ejemplo de Un Sistema Caótico
http://slidepdf.com/reader/full/modelar-y-simular-un-ejemplo-de-un-sistema-caotico 3/10
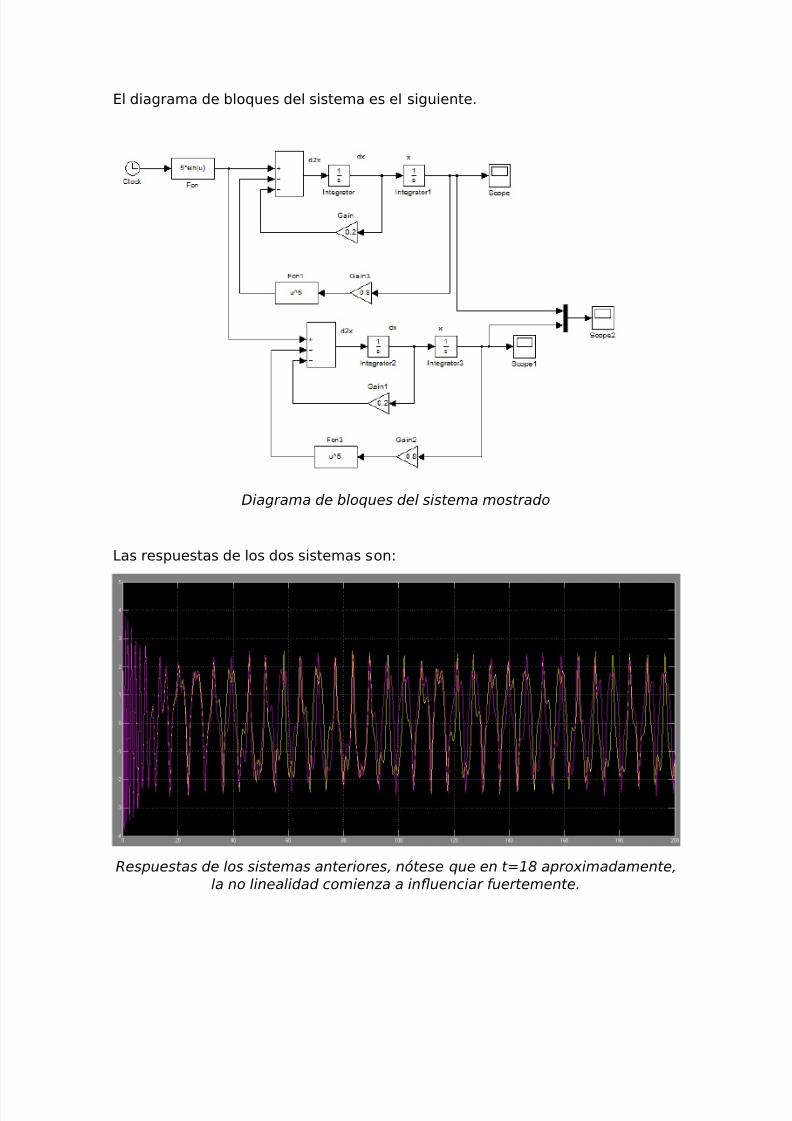
#l diagrama de bloques del sistema es el siguiente.
Diagrama de bloques del sistema mostrado
Las respuestas de los dos sistemas son
Respuestas de los sistemas anteriores, ntese que en t=!" apro#imadamente,la no linealidad comien$a a in%uenciar fuertemente.

7/23/2019 Modelar y Simular Un Ejemplo de Un Sistema Caótico
http://slidepdf.com/reader/full/modelar-y-simular-un-ejemplo-de-un-sistema-caotico 4/10
&%ora, un segundo caso, cuando *3-.+, la no linealidad presente disminuyesu in0uencia en la respuesta del sistema, y se mantiene las mismascondiciones iniciales.
Diagramade bloquesdel sistema,conk 3=0.2 para x5

7/23/2019 Modelar y Simular Un Ejemplo de Un Sistema Caótico
http://slidepdf.com/reader/full/modelar-y-simular-un-ejemplo-de-un-sistema-caotico 5/10
Respuesta de los sistemas (ba&o las mismas condiciones iniciales, ' con n=.+ los sistemas no presentan caos).
#ntonces, se puede concluir, que el sistema caótico del ejemplo, la no
linealidad x5
es el factor determinante que generaba el comportamiento
caótico del sistema, cuando este es reducido, a pesar de que las condicionesiniciales, sean estrictamente diferentes, las respuestas de los sistemas siguensiendo iguales.
4. a partir del análisis de lyapunov, apl!uelo a 2 sistemas no lineales."ise#e un $ontrolador no lineal a partir del análisis de esta%ilidad delyapunov. &odele y simule el sistema $ontrolado en &atla%.
a. 4onsiderar el primer sistema no lineal.
´ X 1=− x12+sin ( x 2 ) x2
+u
´ X 2= x 15−3∗ x23+ x1∗ x2
Y =2∗ x1
#l anterior sistema de segundo orden, no lineal. Para aplicar la estabilidad delyapuno$, se deben cumplir dos condiciones. #legir una función de lyapuno$,tal que para todo $alor de x la función de lyapuno$ es positi$a, y la segundacondición, para todo $alor de x la din(mica de la función de lyapuno$ debe sernegati$a.
2ea f ( x )= x 12+ x 22
, la función de lyapuno$.
#s positi$a para todo $alor de x.
EsV ( X )=f ( X )= x12+ x 22>0∀ x
&%ora para la segunda condición.
V́ ( x )<0

7/23/2019 Modelar y Simular Un Ejemplo de Un Sistema Caótico
http://slidepdf.com/reader/full/modelar-y-simular-un-ejemplo-de-un-sistema-caotico 6/10
V́ ( x )=2∗ x1∗ ´ x1+2∗ x2∗ ´ x2<0
2∗ x 1∗
[− x12+
sin ( x2 )
x 2
+u
]+2∗ x 2∗[ x 15−3 x2
3+ x1∗ x2 ]<0
2∗ x 1∗[− x12+
sin ( x2 ) x 2
+u]<−2∗ x 2∗[ x15−3 x23+ x1∗ x2 ]
[− x1
2
+sin ( x2 ) x 2 +u]<
−2∗ x2∗[ x15−3 x 23+ x 1∗ x 2 ]
2∗ x 1
u=− x2∗[ x 15−3 x2
3+ x 1∗ x2 ] x1
+ x12−sin ( x2 ) x2
− x 1
2e agrega el x5 para garanti"ar que sea 6)x/ 7-
La ecuación anterior representa el control para el sistema no lineal. &%ora paracomprobar la segunda condición.
2∗ x 1∗ − x12+sin ( x2 ) x 2
+u +2∗ x 2∗[ x 15−3 x23+ x1∗ x2 ]<0
2e reempla"a el $alor de u
V́ ( x )=2∗ x1∗[− x12+sin ( x 2 ) x2
+− x2∗[ x 15−3 x2
3+ x 1∗ x2 ] x1
+ x12−sin ( x2 ) x 2
− x 1]+2∗ x 2∗[ x 15−3 x2
7/23/2019 Modelar y Simular Un Ejemplo de Un Sistema Caótico
http://slidepdf.com/reader/full/modelar-y-simular-un-ejemplo-de-un-sistema-caotico 7/10
V́ ( x )=2∗ x1∗[− x 2∗[ x 15−3 x23+ x1∗ x2 ]
x1− x1]+2∗ x 2∗[ x15−3 x 2
3+ x1∗ x 2 ]<0
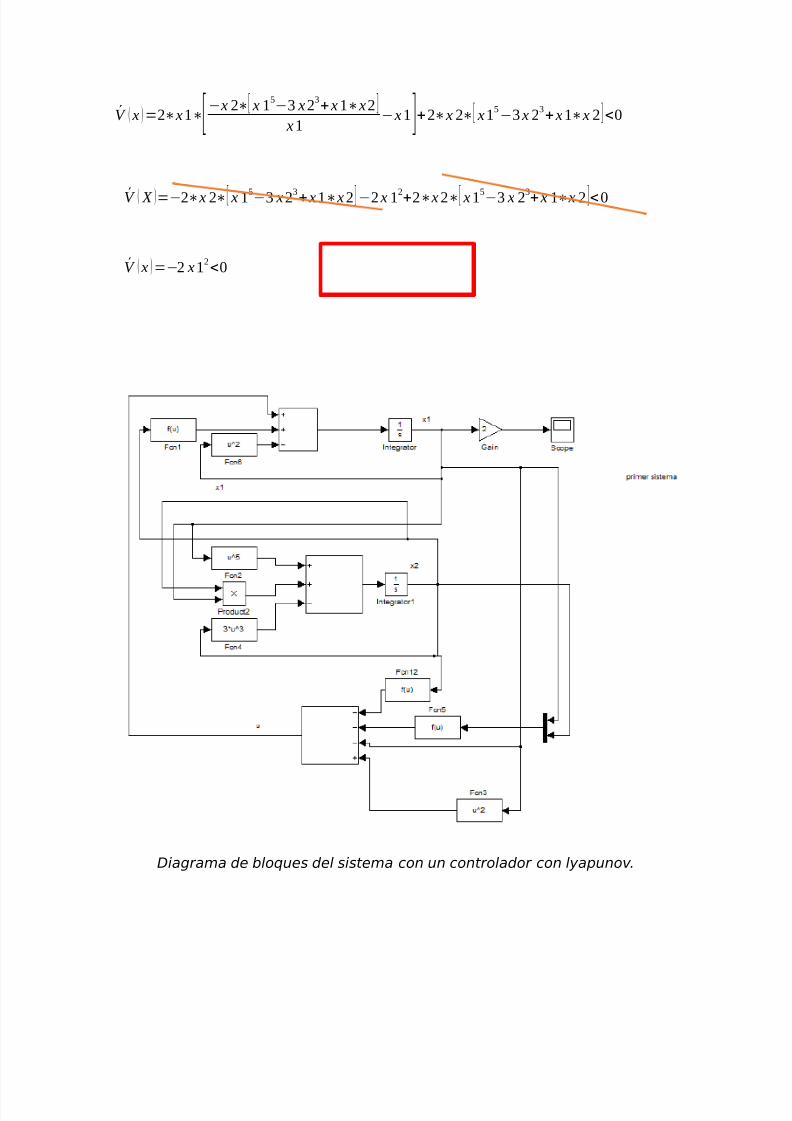
V́ ( X )=−2∗ x 2∗[ x 15
−3 x23
+ x1∗ x2 ]−2 x 12
+2∗ x2∗[ x15
−3 x 23
+ x 1∗ x 2 ]<0
V́ ( x )=−2 x12<0
Diagrama de bloques del sistema con un controlador con l'apuno.

7/23/2019 Modelar y Simular Un Ejemplo de Un Sistema Caótico
http://slidepdf.com/reader/full/modelar-y-simular-un-ejemplo-de-un-sistema-caotico 8/10
#s un ejemplo pedagógico, ya que no se considera el uso del obser$ador nolineal.
b. 2egundo sistema no lineal.
#l siguiente sistema no lineal.
´ x+sin2( x) – cos ( x )+sin (u)+√ x
Y =1
2∗ x
2e elige la función de lyapuno$.
V ( X )=si n2( x)
La cual es positi$a para todo $alor de 8.
&%ora la segunda condición.
V ( x)=2∗sin ( x)∗cos( x )∗´ x
x
−sin2 ( x )+cos ( x )−sin (u )−√ ¿
¿V ( x )=2∗sin ( x )∗cos ( x )¿
(−sin2 ( x )+cos ( x )−sin (u)−√ x )<0
(−sin2 ( x )+cos ( x )−√ x )<sin (u)
−sin2 ( x )+cos ( x )−√ x+
x2
cos ( x )∗sin ( x )¿¿
sin−1¿

7/23/2019 Modelar y Simular Un Ejemplo de Un Sistema Caótico
http://slidepdf.com/reader/full/modelar-y-simular-un-ejemplo-de-un-sistema-caotico 9/10
Llamaremos al t9rmino
!= x
2
cos ( x )∗sin ( x )
&%ora reempla"ando la señal de control en la ecuación.
V́ ( x )=2∗sin ( x )∗cos ( x )[−sin2 ( x )+cos ( x )−sin (u )−√ x]<0
V́ ( x )=2∗sin ( x )∗cos ( x )[−sin2 ( x )+cos ( x )−sin (sin−1 (−sin ( x )2+cos ( x )+cos ( x )−√ x− ! ) )−√ x ]<0
V́ ( x )=2∗sin ( x )∗cos ( x )[−sin2 ( x )+cos ( x )−[−sin ( x )2+cos ( x )−√ x+ ! ]−√ x ]<0
x
V́ ( x )=2∗sin ( x )∗cos ( x )[−sin2 ( x )+cos ( x )+sin ( x )2−cos ( x )+√ x− ! ]−√ ¿¿<0
x
V́ ( x )=2∗sin ( x )∗cos ( x )[−sin2 ( x )+cos ( x )+sin ( x )2−cos ( x )+√ x− ! ]−√ ¿¿<0
V́ ( x )=−2∗sin ( x )∗cos ( x )∗ !
4omo
!= x
2
cos ( x )∗sin ( x )
V́ ( x )=−2∗sin ( x )∗cos ( x )∗ x2
cos ( x )∗sin ( x)
V́ ( x )=−2 x2

7/23/2019 Modelar y Simular Un Ejemplo de Un Sistema Caótico
http://slidepdf.com/reader/full/modelar-y-simular-un-ejemplo-de-un-sistema-caotico 10/10
La cual es una función negati$a para todo 8.
Diagrama de bloques del sistema +, con el controlador no lineal por l'apuno