Momento Angular
63
MOMENTO ANGULAR Y LA MATRIZ DE INERCIA Tabla de contenido Introducción 1. Momento Angular de N Partículas 2. Matriz de Inercia 2.1 Traslación de Ejes 2.2 Rotación de Ejes 3. Comentarios Finales Notas Introducción Partiendo de la definición para el Momento Angular para una partícula obtendremos la expresión general para el momento angular de un sistema de partículas, considerando el caso en donde todas las partículas tienen la misma velocidad angular. En la ecuación para el momento angular del sistema de partículas identificaremos los términos de momentos de inercia y los productos de inercia del sistema, de tal manera que la ecuación se pueda escribir en forma matricial. Luego, consideraremos dos operaciones con los ejes de coordenadas: traslación y rotación. A partir de la traslación obtendremos el Teorema de Ejes Paralelos o de Steiner; mientras que de la rotación de ejes determinaremos las características de los Ejes Principales.
-
Upload
michael-vargas-c -
Category
Documents
-
view
69 -
download
1
Transcript of Momento Angular

MOMENTO ANGULAR
Y
LA MATRIZ DE INERCIA
Tabla de contenido
Introducción 1. Momento Angular de N Partículas 2. Matriz de Inercia 2.1 Traslación de Ejes 2.2 Rotación de Ejes 3. Comentarios Finales Notas
Introducción
Partiendo de la definición para el Momento Angular para una partícula obtendremos la expresión general para el momento angular de un sistema de partículas, considerando el caso en donde todas las partículas tienen la misma velocidad angular. En la ecuación para el momento angular del sistema de partículas identificaremos los términos de momentos de inercia y los productos de inercia del sistema, de tal manera que la ecuación se pueda escribir en forma matricial. Luego, consideraremos dos operaciones con los ejes de coordenadas: traslación y rotación. A partir de la traslación obtendremos el Teorema de Ejes Paralelos o de Steiner; mientras que de la rotación de ejes determinaremos las características de los Ejes Principales.
Volver al principio
1. Momento Angular de N Partículas

Consideremos un sistema conformado por N partículas de masas mi, que se encuentran en las posiciones ri, como se muestra en la figura 1. El momento angular de cada partícula es:
,iii prL (1) siendo pi el momento lineal de cada partícula. De esta forma, el sistema de partículas tiene un momento angular total dado por la suma de todos los momentos angulares,
.N
1ii
LL
Z
X
Y
mi ri
i
Figura 1. Sistema de N partículas en rotación. Sustituyendo la expresión del momento angular de cada partícula, queda:
N
1iii prL
que con la expresión para el momento lineal en términos de la masa y la velocidad vi de cada partícula no lleva a la relación:
.mN
1iiii
vrL (2)
Si cada partícula está en rotación con velocidad angular i, su velocidad es escrita en la forma:
,iii rv por lo que la expresión para el momento angular del sistema de partículas queda como:
.mN
1iiiii
rrL (3)
Ahora, el vector de posición ri en coordenadas cartesianas es:
,zyx iiii kjir y el vector de velocidad angular con sus componentes cartesianas es:

i ,ziyixi kji por lo que la velocidad resulta:
iii rv .xyzxyz iyiixiixiiziiziiyi kji Entonces, el producto vectorial del vector de posición con el de velocidad, queda como:
iii rr iixiiziiiyiixii zxzxyy
jiyiixiiiziiyii xyxyzz
.yzyzxx iziiyiiixiizii k
Que al sustituir en la ecuación 3 para el momento angular, agrupando términos, se obtiene:
.mN
1iiiii
rrL
N
1iiiziiiyi
2i
2ixii zxyxzym i
jiizi2
i2
iyiiixi zyzxyx (4)
.yxzyzx 2
i2
iziiiyiiixi k
Si la velocidad angular es la misma para todas las partículas, entonces sus componentes se pueden factorizar en cada uno de los términos de la expresión anterior, de tal manera que el momento angular resulta:
.mN
1iiiii
rrL i
zi
N
1iiiiyi
N
1iiiixi
N
1i
2i
2ii zxmyxmzym
j
zi
N
1iiiiyi
N
1i
2i
2iixi
N
1iiii zymzxmyxm
(5)
.yxmzymzxm zi
N
1i
2i
2iiyi
N
1iiiixi
N
1iiii k
Puestos de esta manera los términos del momento angular se sugiere una escritura de la expresión en términos de matrices de la siguiente forma:
,TT IL (6) en donde (L) es la matriz con las componentes del momento angular:
;LLL zyxL (7)
(I) es la matriz de inercia:

,
III
III
III
zzzyzx
yzyyyx
xzxyxx
I
(8) siendo Ixx, Iyy e Izz los momentos de inercia respecto a los ejes X, Y, Z, respectivamente, definidos como:[1]
,zymIN
1i
2i
2iixx
(9)
,zxmIN
1i
2i
2iiyy
(10)
,yxmIN
1i
2i
2iizz
(11)
y los términos Ixy = Iyx, Ixz = Izx, e Iyz = Izy los productos de inercia definidos como:[2]
,yxmIN
1iiiixy
(12)
,zxmIN
1iiiixz
(13)
;zymIN
1iiiiyz
(14)
y, finalmente, ()T es la matriz transpuesta que tiene como elementos a las componentes de la velocidad angular:
T
.
z
y
x
(15)
Volver al principio
2. Matriz de Inercia
2.1 Traslación de Ejes. Consideremos un sistema de referencia S' colocado en el centro de masa del conjunto de partículas de

tal manera que sus ejes X', Y' Z', son paralelos a los ejes X, Y, Z del sistema de referencia S, como se muestra en la figura 2. De esta forma, las coordenadas x, y, z, del vector de posición ri de cada partícula desde el sistema de referencia S, se pueden escribir en términos de las coordenadas x', y', z', del vector de posición r'i desde el sistema en el centro de masa S', y de las coordenadas XCM, YCM, ZCM, del centro de masa, como:
,X'xx CMii (16)
,Y'yy CMii (17)
.Z'zz CMii (18)
Z
X
Y
mi ri
Z'
X'
Y'
S
r'i
RCM
S'
Figura 2. Sistemas de referencia S y S' con ejes paralelos. Ahora, consideremos al momento de inercia respecto al eje X (ec. 9):
,zymIN
1i
2i
2iixx
con las relaciones 17 y 18, resulta:
.Z'zY'ymIN
1i
2CMi
2CMiixx
Desarrollando los binomios al cuadrado, y agrupando términos, la expresión queda como:
,ZYmZ'zm2Y'ym2'z'ymI 2CM
2CM
N
1iiCM
N
1iiiCM
N
1iii
N
1i
2i
2iixx
en donde reconocemos al primer término de la derecha como el momento de inercia I'xx respecto al eje X':
.'z'ym'IN
1i
2i
2iixx
Por otra parte, el segundo y tercer términos son nulos, pues la posición del centro de masa respecto al sistema de referencia colocado en el centro de masa es nulo; y, en el último término la suma

representa la masa total M, y la cantidad YCM2 + ZCM
2 es el cuadrado de la distancia del centro de masa al eje X, de tal manera que el momento de inercia queda como:
.ZYM'II 2CM
2CMxxxx
De igual manera podemos proceder con los otros dos momentos de inercia (ecs. 9 y 10) para obtener resultados análogos. Es decir que el momento de inercia I respecto a un eje es igual al momento de inercia I' respecto a un eje que pasa por el centro de masa más el momento de inercia del centro de masa Md2, siendo d la distancia del centro de masa al eje,
.Md'II 2 (19) Por otra parte, el producto de inercia Ixy (ec. 11), junto con las relaciones 16 y 17 nos conducen a:
N
1iiiixy yxmI
.Y'yX'xmI CMi
N
1iCMiixy
Desarrollando el producto de los binomios, tenemos:
,YXmX'ymY'xm'y'xmI CMCM
N
1iiCMi
N
1iiCM
N
1iii
N
1iiiixy
en donde el primer término es el producto de inercia respecto al sistema S' en el centro de masa; el segundo y tercer términos son nulos, porque el centro de masa respecto al sistema S' es cero; y en el último la suma es igual a la masa total, quedando:
.YMX'II CMCMxyxy De igual forma se tienen resultados para los otros productos de inercia. En conclusión, la matriz de inercia (I) respecto al sistema S es igual a la matriz de inercia (I') desde el sistema S' más la matriz de inercia del centro de masa (ICM),
.' CMIII (20) Este resultado es el Teorema de Steiner o de los Ejes Paralelos y representa la traslación de ejes coordenados.
Volver al principio
2.2 Rotación de Ejes. La pregunta ahora es si existe un sistema de coordenadas para el cual la matriz de inercia sea diagonal, es decir que los elementos fuera de la diagonal sean nulos. De existir estos ejes se sigue que

si el sistema de partículas tiene su velocidad angular en uno de estos ejes entonces el momento angular L queda paralelo a la velocidad angular ,
,IL (21) en donde I es el momento de inercia respecto al eje de giro. Para entender un poco de las características del problema planteado, consideremos que se tiene un vector unitario,[3]
,
n
n
n
z
y
x
n
(22) y tomemos la multiplicación de las matrices
,cT nIn
donde (n)T es la matriz transpuesta de (n); y, c es la constante (escalar) que resulta del producto. Si se desarrolla explícitamente el producto se obtiene la relación:
.cnnInnInnI2nInInI zyyzzxxzyxxy2
zzz2
yyy2
xxx Esta ecuación corresponde a un elipsoide para las componentes del vector unitario (n), con los ejes de simetría girados respecto los ejes nx, ny, nz. Sea n1 = nx/c1/2, n2 = ny/c1/2, n3 = nz/c1/2, entonces la ecuación del elipsoide queda en una forma estándar:
.1nnInnInnI2nInInI 32yz31xz21xy2
3zz2
2yy2
1xx (23)
Por lo tanto podemos colocar un sistema de ejes n'1, n'2, n'3, que estén alineados con los ejes de simetría del elipsoide, como se indica en la figura 3, de tal forma que no aparezcan los términos correspondientes a los productos de inercia. Así la ecuación del elipsoide resulta como:
,1'n'I'n'I'n'I 23zz
22yy
21xx
(24) siendo I'1, I'2, I'3, los momentos de inercia en los ejes definidos por los ejes de simetría del elipsoide. Estos ejes se conocen como los Ejes Principales del sistema de partículas. En algunos casos, sobre todo en donde se tienen simetrías, es relativamente fácil identificar los Ejes Principales.

n3
n1
n2
n'3
n'1
n'2
Figura 3. Elipsoide de los momentos de inercia en ejes rotados (ec. 24). Por otra parte, para determinar a un vector (n') que señale la dirección de un eje principal se espera que al multiplicar la matriz de inercia (I) por este vector unitario se obtenga un vector en la misma dirección de (n'), esto significa que
,'' nnI (25) siendo una constante (escalar), conocida como valor propio o característico asociado con el vector (n'), llamado vector propio o característico. En general se tienen tres valores propios, y por lo tanto tres vectores propios. La matriz inercia (ec. 8) es una matriz simétrica, por lo que los valores propios son valores reales y los vectores propios correspondientes son ortogonales.[4]
La ecuación 25 se puede escribir como:
,0'ID nII (26) en donde la matriz (IID) es la matriz identidad. La ecuación 26 en realidad representa un conjunto de ecuaciones simultáneas, homogéneas y lineales, que tienen soluciones no triviales solo si el determinante de los coeficientes es nulo,[5]
,0ID II
(27) que en forma explícita corresponde al determinante
,0
III
III
III
zzzyzx
yzyyyx
xzxyxx
(28) usualmente llamada ecuación secular, la cual produce una ecuación de tercer grado para , y por lo tanto tiene tres raíces. Para cada valor propio se obtiene un vector propio (n') al sustituir el valor propio en la ecuación 26. Por otra parte, consideremos que (n'A), (n'B), (n'C), son los tres vectores propios ortonormales asociados con los tres valores propios A, B, C, respectivamente. Sea (R) la matriz formada por los tres vectores ortonormales dispuestos en forma de columna,

.
'n'n'n
'n'n'n
'n'n'n
'''
3C3B3A
2C2B2A
1C1B1A
CBA
nnnR
(29) Entonces el producto de matrices (R)T(I)(R), siendo (R)T la matriz transpuesta de (R), dada la relación 25 para cada vector propio y valor propio, es:
CBAT
C
TB
TA
T '''
'
'
'
nnnI
n
n
n
RIR
.'''
'
'
'
CCBBAAT
C
TB
TA
T nnn
n
n
n
RIR
Como los vectores son ortonormales, (n'i)T(n'j) = 1 si i = j, y (n'i)T(n'j) = 0 si i j, por lo que el producto de matrices queda
,
00
00
00
C
B
AT
RIR
es decir en forma diagonal. Por lo tanto, la matriz (R) es la matriz de transformación, y el producto de las matrices (R)T(I)(R), produce la matriz de inercia (I') en el sistema de referencia definido por los vectores ortonormales (n'A), (n'B), (n'C), quedando
,
00
00
00
I00
0I0
00I
'
C
B
A
C
B
A
I
(30) es decir que IA = A, IB = B, IC = C, corresponden a los momentos de inercia respecto a los ejes coordenados en el sistema de referencia rotado. Si el giro del sistema de partículas ocurre alrededor del eje A, asociado con el vector unitario n'A, el momento angular resulta
,IAL (31) por lo que el vector angular y la velocidad angular son paralelos. La conclusión es análoga si el giro es alrededor del eje B o el eje C, definidos por los vectores n'B y n'C, respectivamente.
Volver al principio
3. Comentarios Finales

Cuando se estudia el movimiento de traslación el momento lineal p, definido mediante el producto de la masa m y la velocidad v,
,mvp es la característica del estado de movimiento de traslación. Si se observa la relación 31 para el momento angular, para partículas que giran con la misma velocidad angular, es natural establecer la analogía entre los términos que aparecen en esta ecuación y la del momento lineal. En otras palabras, el momento angular L es la cantidad que caracteriza el estado de movimiento de rotación; la velocidad angular en el movimiento de rotación es el equivalente a la velocidad v en el movimiento de traslación; y, finalmente, el momento de inercia I (en general matriz de inercia (I)) en el movimiento de rotación es el análogo a la masa m en el movimiento de traslación. En este sentido, la matriz de inercia representa la forma en que está distribuida la masa alrededor de un eje (eje de giro), y está relacionada con la facilidad o dificultad para cambiar el estado de movimiento de rotación. Como se indicó anteriormente, en algunos casos es fácil identificar los ejes principales que pasan por el centro de masa, y por lo tanto poder determinar los momentos de inercia respecto a estos ejes. De esta forma, si se requiere tener la matriz de inercia respecto a otros ejes paralelos, se puede realizar una traslación mediante el Teorema de Ejes Paralelos o de Steiner. También, si se requiere la matriz de inercia respecto a un sistema de ejes que están rotados respecto a los ejes principales, se puede realizar una rotación mediante la matriz de transformación, considerando la matriz inversa (R)-1, esto es la rotación inversa a la presentada anteriormente.[6]
Volver al principio
Notas
[1] Si en lugar de un sistema de N partículas se tiene un conjunto de partículas que se puede considerar como un "continuo" de masa, las sumatorias se cambian por integrales sobre todos los elementos de masa dm,
Objeto el Todo
2dmrI
siendo r la distancia de cada elemento de masa al eje respecto al cual se desea determinar el momento de inercia. Por ejemplo, el momento de inercia respecto al eje Z de un cuerpo que ocupa un volumen en el espacio, si es la densidad volumétrica de masa (masa por unidad de volumen), es:
V
22zz dvyxI
en donde la integral es sobre el volumen V del objeto, y (x2 + y2)1/2 = r es la distancia de cualquier elemento de masa al eje Z.
Volver al texto
[2] De manera similar que en caso de los momentos de inercia, los productos de inercia para objetos considerados como un "continuo" de masa pasan de sumatorias a integrales sobre todos los elementos de masa dm del cuerpo. Por ejemplo el producto

de inercia Ixy es:
,xydmIObjeto el Todo
xy
siendo x e y las coordenadas de cada elemento de masa. Si el cuerpo que ocupa un volumen en el espacio, con la densidad volumétrica de masa (masa por unidad de volumen), el producto de inercia resulta:
V
xy dvxyI
en donde la integral es sobre el volumen V del objeto.
Volver al texto
[3] Las componentes del vector unitario corresponden a los cosenos directores, es decir los cosenos de los ángulos del vector unitario respecto a los ejes coordenados X, Y, Z, respectivamente.
Volver al texto
[4] Puede ocurrir que dos o tres valores propios resulten iguales. En el caso de dos valores propios iguales se tienen dos vectores propios a partir de los cuales se puede obtener una tercer vector perpendicular a los otros dos; mientras que en el caso de tener tres volares propios iguales, se tiene un vector propio a partir del cual se puede obtener otros dos vectores perpendiculares entre sí y al primer vector. La presencia de valores propios iguales está asociado con ejes de simetría.
Volver al texto
[5] Si el determinante de los coeficientes no es nulo significa que las ecuaciones no son linealmente independientes.
Volver al texto
[6] Si los elementos de la matriz de transformación los denotamos como n' ij, con i el número de renglón, y j el número de columna, los elementos de la matriz inversa (R)-1, denotados por n'ij-1, se obtienen de la relación
,C
'n ji1ij R
siendo Cji el cofactor ji-ésimo de la matriz (R); y,R el determinante de la matriz de transformación (R). El cofactor ji-ésimo Cji se obtiene al multiplicar el signo (-1)i+j con el determinante menor Mij que surge de eliminar el renglón i-ésimo y la j-ésima columna del determinante R. Así, por ejemplo, si i = j =1, el cofactor C11, es:
;'n'n'n'n'n'n
'n'n)1(M)1(C 32233322
3332
232211ij
ji11

mientras que si i = 1 y j = 2, el cofactor C21, es:
.'n'n'n'n'n'n
'n'n)1(M)1(C 31233321
3331
232121ij
ji21
Volver al texto
Momento angularEl momento angular o momento cinético es una magnitud física importante
en todas las teorías físicas de la mecánica, desde la mecánica clásica a la
mecánica cuántica, pasando por la mecánica relativista. Su importancia en
todas ellas se debe a que está relacionada con las simetrías rotacionales de
los sistemas físicos. Bajo ciertas condiciones de simetría rotacional de los
sistemas es una magnitud que se mantiene constante con el tiempo a medida
que el sistema evoluciona, lo cual da lugar a una ley de conservación conocida
como ley de conservación del momento angular.
Tabla de contenidos
[ocultar]
1 Momento angular en mecánica clásica
1.1 Momento angular de una masa puntual
1.2 Dependencia temporal
1.3 Momento angular de un conjunto de partículas puntuales
1.4 Momento angular de un sólido rígido
1.5 Conservación del momento angular clásico
1.6 Ejemplo
2 Momento angular en mecánica relativista
3 Momento angular en mecánica cuántica
3.1 Conservación del momento angular cuántico
Momento angular en mecánica clásica [editar]
En mecánica newtoniana,la cantidad de movimiento angular de una masa puntual, es igual al producto vectorial del vector de posición (brazo), del objeto en relación a la recta considerada como eje de rotación, por la cantidad de movimiento (también llamado momento lineal o momento). Frecuentemente se lo designa con el símbolo :

En ausencia de momentos de fuerzas externos, el momento angular de un conjunto de partículas, de objetos o de cuerpos rígidos se conserva. Esto es válido tanto para partículas subatómicas como para galaxias.
Momento angular de una masa puntual [editar]
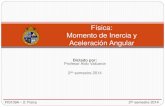
El momento angular de una partícula con respecto al punto es el producto vectorial
de su momento lineal por el vector . Aquí, el momento angular es perpendicular al
dibujo y está dirigido hacia el lector.
En el dibujo de derecha vemos una masa que se desplaza con una velocidad instantánea . El momento angular de esta partícula, con respecto a la recta perpendicular al plano que contiene y es, como ya se ha escrito:
El vector es perpendicular al plano que contiene y , luego es paralelo a la recta considerada como eje de rotación. En el caso del dibujo, el vector momento angular sale del dibujo y va hacia el observador. Véase producto vectorial y regla del sacacorchos.
El módulo del momento angular es:

Es decir, el módulo es igual al momento lineal multiplicado por su brazo ( en el dibujo), el cual es la distancia entre el eje de rotación y la recta que contiene la velocidad de la partícula. Por esta razón, algunos designan el momento angular como el "momento del momento".
Dependencia temporal [editar]
Derivemos el momento angular con respecto al tiempo:
El primero de los paréntesis es cero ya que la derivada de con respecto al tiempo no es otra cosa que la velocidad . Y como el vector velocidad es paralelo al vector cantidad de movimiento , el producto vectorial de los dos es cero. Nos queda el segundo paréntesis:
donde es la aceleración. Pero , la fuerza aplicada a la masa. Y el producto vectorial de por la fuerza es el torque o momento de fuerza aplicado a la masa:
La derivada temporal del momento angular es igual al torque aplicado a la masa puntual.
Momento angular de un conjunto de partículas puntuales [editar]
El momento angular de un conjunto de partículas es la suma de los momentos angulares de cada una:

La variación temporal es:
El término de derecha es la suma de todos los torques producidos por todas las fuerzas que actúan sobre las partículas. Una parte de esas fuerzas puede ser de origen externo al conjunto de partículas. Otra parte puede ser fuerzas entre partículas. Pero cada fuerza entre partículas tiene su reacción que es igual pero de dirección opuesta y colineal. Eso quiere decir que los torques producidos por cada una de las fuerzas de un par acción-reacción son iguales y de signo contrario y que su suma se anula. Es decir, la suma de todos los torques de origen interno es cero y no puede hacer cambiar el valor del momento angular del conjunto. Solo quedan los torques externos:
El momento angular de un conjunto de partículas se conserva en ausencia de torques externos.
Esta afirmación es válida para cualquier conjunto de partículas: desde núcleos atómicos hasta grupos de galaxias.
Momento angular de un sólido rígido [editar]
Tenemos que en un sistema inercial la ecuación de movimiento es:
Donde:

es la velocidad angular del sólido.
es el tensor de inercia del cuerpo.
Ahora bien, normalmente para un sólido rígido el tensor de inercia , depende del tiempo y por tanto en el sistema inercial generalmente no existe un análogo de la segunda ley de Newton, ya a menos que el cuerpo gire alrededor de uno de los ejes principales de inercia sucede que:
Donde es la aceleración angular del cuerpo. Por eso resulta más útil plantear las ecuaciones de movimiento en un sistema no inercial formado por los ejes principales de inercia del sólido, así se logra que , aunque entonces es necesario contar con las fuerzas de inercia:
Que resulta ser una ecuación no lineal en la velocidad angular.
Conservación del momento angular clásico [editar]
Cuando la suma de los torques externos es cero , hemos visto que:

Eso quiere decir que . Y como es un
vector, es constante tanto en módulo como en dirección.
Consideremos un objeto que puede cambiar de forma. En una de esas formas, su Momento de inercia es y su velocidad angular . Si el objeto cambia de forma (sin intervención de un torque externo) y que la nueva distribución de masas hace que su nuevo Momento de inercia sea , su velocidad angular cambiará de manera tal que:
Como el momento de inercia es un escalar, la dirección del vector velocidad angular no cambiará. Solo cambiará la velocidad de rotación.
Hay muchos fenómenos en los cuales la conservación del momento angular tiene mucha importancia. Por ejemplo:
En todos las artes y
los deportes en los

cuales se hacen
vueltas, piruetas,
etc. Por ejemplo,
para hacer una
pirueta, una
bailarina o una
patinadora toman
impulso con los
brazos y una pierna
extendida de
manera de
aumentar sus
momentos de
inercia alrededor de
la vertical.
Después, cerrando
los brazos y la
pierna, disminuyen
sus momentos de
inercia, lo cual
aumenta la
velocidad de
rotación. Para
terminar la pirueta,
la extensión de los
brazos y una
pierna, permite de
disminuir la
velocidad de
rotación. Lo mismo
para el salto de
plataforma o el
trampolín.
Para controlar la
orientación angular
de un satélite o

sonda espacial.
Como se puede
considerar que los
torques externos
son cero, el
momento angular y
luego, la orientación
del satélite no
cambian. Para
cambiar esta
orientación, un
motor eléctrico
hace girar un
volante de inercia.
Para conservar el
momento angular,
el satélite se pone a
girar en el sentido
opuesto. Una vez
en la buena
orientación, basta
parar el volante de
inercia, lo cual para
el satélite. También
se utiliza el volante
de inercia para
parar las pequeñas
rotaciones
provocadas por los
pequeños torques
inevitables, como el
producido por el
viento solar.
Algunas estrellas se
contraen
convirtiéndose en

pulsar (estrella de
neutrones). Su
diámetro disminuye
hasta unos
kilómetros, su
momento de inercia
disminuye y su
velocidad de
rotación aumenta
enormemente. Se
han detectado
pulsares con
periodos rotación
de tan sólo unos
milisegundos.
Debido a la mareas,
la luna ejerce un
torque sobre la
tierra. Este
disminuye el
momento angular
de la tierra y,
debido a la
conservación del
momento angular,
el de la luna
aumenta. En
consecuencia, la
luna aumenta su
energía alejándose
de la tierra y
disminuyendo su
velocidad de
rotación (pero
aumentando su
momento angular).

La luna se aleja y
los días y los
meses lunares se
alargan.
Ejemplo [editar]
La masa gira tenida por
un hilo que puede
deslizar a través de un
tubito delgado. Tirando
del hilo se cambia el
radio de giro sin
modificar el momento
angular.
En el dibujo de derecha tenemos una masa que gira, tenida por un hilo de masa despreciable que pasa por un tubito fino. Suponemos el conjunto sin frotamientos y no tenemos cuenta de la gravedad.
La fuerza que el hilo ejerce sobre la masa es radial y no puede ejercer un torque sobre la masa. Si tiramos del

hilo, el radio de giro disminuirá. Como, en ausencia de torques externos, el momento angular se conserva, la velocidad de rotación de la masa debe aumentar.
Un tirón sobre el hilo
comunica una velocidad
radial a la masa. La
nueva velocidad es la
suma vectorial de la
velocidad precedente y
En el dibujo siguiente aparece la masa que gira con un radio en el momento en el cual se da un tirón del hilo. El término correcto del "tirón" física es un impulso, es decir una fuerza aplicada durante un momento. Ese impulso comunica

una velocidad radial a la masa. La nueva
velocidad será la suma vectorial de la velocidad precedente
con . La dirección de esa nueva velocidad no es tangencial, sino entrante. Cuando la masa pasa por el punto más próximo del centro, a una distancia
, cobramos el hilo suelto y la masa continuará a girar con el nuevo radio . En el dibujo, el triángulo amarillo y el triángulo rosado son semejantes. Lo cual nos permite de escribir:
o sea:
Y, si multiplicamos por la masa , obtenemos que el momento angular se ha conservado, como lo esperábamos:

Vemos como el momento angular se ha conservado: Para reducir el radio de giro hay que comunicar una velocidad radial, la cual aumenta la velocidad total de la masa.
También se puede hacer el experimento en el otro sentido. Si se suelta el hilo, la masa sigue la tangente de la trayectoria y su momento angular no cambia. A un cierto momento frenamos

el hilo para que el radio sea constante de nuevo. El hecho de frenar el hilo, comunica una velocidad radial (hacia el centro) a la masa. Esta vez esta velocidad radial disminuye la velocidad total y solo queda la componente de la velocidad tangencial al hilo en la posición en la cual se lo frenó.
No es necesario de hacer la experiencia dando un tirón. Se la

puede hacer de manera continua, ya que la fuerza que se hace recobrando y soltando hilo puede descomponerse en una sucesión de pequeños impulsos.
Momento angular en mecánica relativista [editar]
En mecánica newtoniana el momento angular es un pseudovector o vector

axial, por lo que en mecánica relativista debe ser tratado como el dual de Hodge de las componentes espaciales de un tensor antisimétrico. Una representación del momento angular en la teoría especial de la relatividad es por tanto como cuadritensor antisimétrico:
Puede verse que

las 3 componentes espaciales forman el momento angular de la mecánica newtoniana
y el resto de componentes
describen el momiviento del centro de masas relativista.
Momento ang

ular en mecánica cuántica [
editar]
En mecánica cuántica, se transforma en un operador, análogamente al momento lineal:
Usando coordenadas cartesianas las

tres componentes del momento angular se expresan en el espacio de Hilbert usual para las funciones de onda,
, como:
En cambio en coordenadas angulares esféricas el cuadrado del

momento angular y la componente Z se expresan como:
Las vectores propios o estados propios del momento angular cuántico dependen de dos números cuánticos enteros l y m, se

designan como
y satisfacen las relaciones:
Estos vectores propios expresados en términos de las coordenadas angulares esféricas son los llamados armónicos esféricos Yl,m(θ,φ), que se

construyen a partir de los polinomios de Legendre:
Tienen especial importancia por ser la componente angular de los orbitales atómicos. Finalmente las relaciones de conmutación canónicas para

los operadores momento angular son:
donde εijk es el símbolo de Levi-Civita.
Conservación del momento angular cuántico [
editar]

Es importante notar que si el hamiltoniano no depende de las variables angulares, como sucede por ejemplo en problemas con potencial de simetría esférica entonces todas las componentes del momento angular conmutan

con el hamiltoniano:
y, como consecuencia, el cuadrado del momento angular también conmuta con el Hamiltoniano:
.
Y tenemos que el momento angular se conserva,

eso significa que a lo largo de la evolución en el tiempo del sistema cuántico la distribución de probabilidad de los valores del momento angular no variará. Nótese sin embargo que como las componentes del momento angular no

conmutan entre si no se pueden definir simultáneamente. Sin embargo, si se pueden definir simultáneamente el cuadrado del momento angular y una de sus componentes (habitualmente se elije la component

e Z). En particular si tenemos estados cuánticos de momento bien definido estos seguirán siendo estados cuánticos de momento bien definido con los mismos valores de los números cuánticos l y m

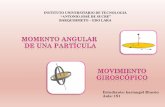
Mecánica del sólido rígido
Movimiento complejo de un sólido rígido, que presenta precesión alrededor de la
dirección del momento angular además rotación según su eje de simetría
La mecánica de un sólido rígido es aquella que estudia el movimiento y equilibrio de sólidos materiales ignorando sus deformaciones. Se trata, por tanto, de un modelo matemático útil para estudiar una parte de la mecánica de sólidos, ya que todos los sólidos reales son deformables. Se entiende por sólido rígido un conjunto de puntos del espacio que se mueven de tal manera que no se alteran las distancias entre ellos, sea cual sea la fuerza actuante (matemáticamente, el movimiento de un sólido rígido viene dado por un grupo uniparamétrico de isometrías).
Tabla de contenidos
[ocultar]
1 Cinemática del sólido rígido
1.1 Centro de gravedad
1.2 Velocidad angular
1.3 Momento angular o cinético
1.4 Espacio de Configuración de un sólido rígido
2 Tensor de inercia
3 Ecuaciones del movimiento
3.1 Ángulos de Euler
3.2 Ecuaciones de Euler
3.3 Peonza simétrica
3.4 Peonza asimétrica
4 Sólido rígido en mecánica cuántica
5 Bibliografía
6 Véase también

Cinemática del sólido rígido [editar]
Centro de gravedad [editar]
El centro de gravedad o centro de masas de un sistema continuo es el punto geométrico definido como:
(1)
En mecánica del sólido rígido, el centro de masa se usa porque tomando un sistema de coordenadas centrado en él, la energía cinética total K puede
expresarse como , siendo M la masa total del cuerpo, V la velocidad de traslación del centro de masas y Krot la energía de rotación del cuerpo, expresable en términos de la velocidad angular y el tensor de inercia.
Velocidad angular [editar]
Sea una partícula cualquiera de un sólido rígido el cual se desplaza girando. Dado que todos los puntos están rígidamente conectados podemos hacer la siguiente descomposición de posición y velocidades, tomando un punto de referencia arbitrario :
(2a)
(2b)
(2c)
Donde
es vector posición del punto o partícula

es la posición de un punto de referencia del sólido
es la orientación, que viene dada por una matriz ortogonal
es la posición de la partícula con respecto al punto de referencia del
cuerpo a lo largo del tiempo con una orientación variable.
es la posición de la partícula con respecto al punto de referencia del
cuerpo en la orientación de referencia inicial.
es la velocidad angular
es la velocidad total de la partícula
is la velocidad "traslacional" o velocidad del punto de referencia.
Momento angular o cinético [editar]
Artículo principal: momento angular
El momento angular es una magnitud física importante porque en muchos sistemas físicos constituye una magnitud conservada, a la cual bajo ciertas condiciones sobre las fuerzas es posible asociarle una ley de conservación. El hecho de que el momento angular sea bajo ciertas circunstancias una magnitud cuyo valor permanece constante puede ser aprovechado en la resolución de las ecuaciones de movimiento. En un instante dado, y fijado un punto del espacio en un punto del espacio O, se define el momento angular LO de un sistema de partículas respecto a ese punto como la integral siguiente:
Donde son el volumen del sólido y la densidad másica en cada punto, y son la velocidad de una partícula del cuerpo y el vector de posición respecto a O. Conviene recordar que el valor de la magnitud anterior depende de qué punto O se elija. Para el estudio de sólidos rígidos en movimiento conviene escoger un "punto móvil" (es decir, para cada instante del tiempo consideraremos un punto diferente del espacio). Por ejemplo podemos evaluar el momento angular respecto al centro de masas G del sólido:
(3)

Donde se ha introducido la abreviación .
Espacio de Configuración de un sólido rígido [editar]
La mecánica lagrangiana para describir un sistema mecánico con un grado finito de grados de libertad se define como una variedad diferenciable llamada espacio de configuración. El movimiento del sistema o evolución con el tiempo se describe como un conjunto de trayectorias a lo largo del espacio de configuración. Para un sólido rígido con un punto inmóvil (sólo existe rotación) el espacio de configuración viene dado por la variedad diferenciable del grupo de rotación SO(3). Cuando el sólido tiene traslación y rotación de todos sus puntos el espacio de configuración es E+(n), el subgrupo de isometría del grupo euclídeo (combinaciones de traslaciones y rotaciones.
Tensor de inercia [editar]
Artículo principal: Tensor de inercia
Cuando se estudia el movimiento de un sólido rígido resulta conveniente descomponerlo en un movimiento de traslación más un movimiento de rotación:
1. Para describir la traslación sólo necesitamos calcular las fuerzas
resultantes y aplicar las leyes de Newton como si se tratara de
puntos materiales.
2. En cambio la descripción de la rotación es más compleja, ya que
necesitamos alguna magnitud que de cuenta de como está
distribuida la masa alrededor de cierto punto o eje de rotación (por
ejemplo un eje que pase por el centro de masa). Esa magnitud es el
tensor de inercia que caracteriza la inercia rotacional del sólido.
Ese tensor de inercia sólido rígido se define como un tensor simétrico de segundo orden tal que la forma cuadrática construida a partir del tensor y la velocidad angular ω da la energía cinética de rotación, es decir:
(4)

No sólo la energía cinética se puede expresar sencillamente en términos del tensor de inercia, si reescribimos la expresión (3) para el momento angular introduciendo en ella la definición del tensor de inercia, tenemos que este tensor es la aplicación lineal que relaciona la velocidad angular y el momento angular:
(5)
Ecuaciones del movimiento [editar]
Ángulos de Euler [editar]
Artículo principal: ángulos de Euler
Los ángulos de Euler son tres coordenadas angulares que permiten relacionar la orientación de un sistema de ejes respecto a otro. En mecánica del sólido rígido se consideran normalmente dos sistemas de referencia un móvil respecto al suelo pero solidario con el sólido rígido y otro sistema de ejes fijo o asociado a un observador inercial. Aunque técnicamente es posible plantear las ecuaciones de Newton para el sistema inercial relacionando las magnitudes del sistema asociado al sólido rígido mediante la matriz de rotación asociada a los ángulos de Euler, resulta un sistema de ecuaciones poco práctico debido a que en ese sistema el tensor de inercia varía con el tiempo. Por otro lado, los ángulos de Euler proporcionan tres coordenadas generalizadas adecuadas para describir el movimiento de sólidos rígidos mediante los métodos de la mecánica lagrangiana.
Ecuaciones de Euler [editar]
Artículo principal: Ecuaciones de Euler (sólidos)
Cuando las ecuaciones del movimiento de un sólido rígido se expresan en un sistema de referencia no inercial solidario con los ejes principales de inercia del sólido rígido toman una fórmula particularmente simple conocida como ecuaciones de Euler. En general, en este sistema de referencia es mucho más sencillo integrar las ecuaciones de movimientos que en un sistema de referencia inercial y no solidario con el cuerpo. Las ecuaciones de Euler para el movimiento de un sólido rígido tienen la forma:

donde son las componentes vectoriales del momento o torque
total aplicado, son los momentos principales de inercia y ωk son las componentes del vector velocidad angular según los ejes principales de inercia.
Peonza simétrica [editar]
Se llama peonza simétrica a un sólido rígido de revolución, con dos
de sus momentos de inercia principales iguales . Como en una peonza simétrica se pueden escoger arbitrariamente los ejes 1 y 2, conviene aprovechar ese hecho para simplificar las expresiones tomando el eje 1 paralelo a la línea nodal de los ángulos de Euler lo cual equivale a que ψ = 0. Lo cual lleva a que las velocidades angulares en el sistema de referencia no inercial vengan dadas por:
La energía cinética de rotación una peonza simétrica puede expresarse en términos de los ángulos de Euler sencillamente:
Por otro lado si se toma el eje Z del sistema de referencia alineado con el momento angular del sólido rígido se tiene que las componentes del momento angular y la relación con la velocidad angular son:

Escribiendo componente a componente estas ecuaciones se tiene que:
La primera ecuación nos dice que en el movimiento libre de una peonza simétrica esta no cabecea, es decir, no hay movimiento de nutación ya que el ángulo formado por eje de rotación y el momento angular se mantiene constante en el movimiento. La segunda describe el movimiento de precesión de acuerdo con el cual el eje de rotación (que coincide con la dirección de la velocidad angular) gira alrededor de la dirección del momento angular (eje Z). La tercera ecuación da la velocidad de rotación del sólido alrededor de su tercer eje de inercia.
Peonza asimétrica [editar]
Una peonza asimétrica es un sólido rígido tal que ninguno de sus tres momentos principales de inercia tiene el mismo valor, es común nombrarlos en orden ascendente como: I1 < I2 < I3. En el movimiento de giro libre de una peonza tiene dos integrales de movimiento:
(6a)
(6b)
Como sólo existen tres coordenadas angulares y existen esas dos restricciones las componentes del momento angular sólo pueden variar a lo largo de una curva dada por la intersección del elipsoide (6a) y la esfera (6b). Así mismo puede verse que el giro alrededor de los ejes de inercia asociado a los

momentos I1,I3 es estable mientras que el asociado a I2 es inestable, es decir, cualquier pequeña perturbación cambia drásticamente las trayectorias del movimiento. Para L2 > 2EI2 las ecuaciones paramétricas de variación de las velocidades angulares vienen dadas por las funciones elípticas de Jacobi:
con:
Si L2 < 2EI2 basta intercambiar los subíndices 1 y 3 en las anteriores expresiones.
Finalmente conviene observar que
cuando las funciones elípticas de Jacobi se reducen a funciones trigonométricas ordinarias, y las ecuaciones del movimiento se reducen a las de una peonza simétrica: