NEUMÁTICA E HIDRÁULICA PARA · PDF fileno están diseñados para...
156
Transcript of NEUMÁTICA E HIDRÁULICA PARA · PDF fileno están diseñados para...


NEUMÁTICA E HIDRÁULICAPARA INGENIEROS
INTRODUCCIÓN A LA
POTENCIA FLUIDA

Tabla de contenidos
Introducción XIAlgunas advertencias sobre la obra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XIIIUnidades del sistema internacional y de uso común . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XIVBreve historia de los sistemas de potencia fluida: agua, aceite y aire . . . . . . . . . . . . . . . . . . . . . . . . . . XVIIReferencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XIX
Capítulo 1. Conceptos básicos de sistemas de potencia 11. Cargas externas y sistemas de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21. 1.1. Desplazamiento de la carga externa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22. Composición de un sistema de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41. 2.1. Sistema exclusivamente mecánico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41. 2.2. Sistema electromecánico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71. 2.3. Sistema con un vehículo fluido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81. 2.4. Presión de un fluido y caudal desplazado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103. Construcción de un sistema de potencia fluida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121. 3.1. Subsistema de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141. 3.2. Subsistema de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154. Sistemas simples de potencia fluida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201. 4.1. Sistema neumático simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211. 4.2. Sistema hidráulico simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245. Ventajas de los sistemas de potencia fluida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Capítulo 2. Máquinas de desplazamiento positivo: bombas y compresores 351. Máquinas fluidas de desplazamiento positivo y rotodinámicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361. 1.1. Comportamiento de la bomba en los sistemas hidráulicos de potencia . . . . . . . . . . . . . . . . . 371. 1.1. 1.1.1. Bombas centrífugas o rotodinámicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371. 1.1. 1.1.2. Bombas de desplazamiento positivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402. Bomba de desplazamiento positivo y válvula de alivio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463. Compresores de desplazamiento positivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511. 3.1. Compresor alternativo de una etapa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 531. 3.2. Compresor alternativo de dos etapas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 541. 3.3. Compresores rotatorios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574. Cuantificación del caudal en un sistema neumático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
V

VI Tabla de contenidos
Capítulo 3. Actuadores lineales, neumáticos e hidráulicos 671. Conversión de la presión fluida en una fuerza mecánica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 681. 1.1. Multiplicación de una fuerza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 691. 1.1. 1.1.1. Intensificación de presión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 712. Actuadores lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 741. 2.1. Tipos comunes de actuadores lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 753. Variables iniciales de diseño y dimensionado del sistema de potencia . . . . . . . . . . . . . . . . . . . . . . 791. 3.1. Selección básica de un actuador lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 791. 3.2. Efecto de la contrapresión sobre la fuerza desarrollada por el actuador . . . . . . . . . . . . . . . . . 831. 1.1. 3.2.1. Carrera de extensión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 831. 1.1. 3.2.2. Carrera de retroceso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 841. 3.3. Factor empírico de diseño para los actuadores lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 854. Selección completa de las dimensiones del actuador lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 891. 4.1. Deformación del vástago . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 891. 4.2. Tubo de detención . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 931. 4.3. Selección de un diámetro estándar para el vástago y el tubo de detención . . . . . . . . . . . . . . 941. 1.1. 4.3.1. Procedimientos simplificados para determinar el diámetro de vástago . . . . . . . . . . . . 941. 1.1. 4.3.2. Montajes normalizados para los actuadores lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . 951. 1.1. 4.3.3. Carta de selección del diámetro del vástago y el tubo de detención . . . . . . . . . . . . . . . 991. 4.4. Desaceleración de la carga en movimiento en los actuadores lineales . . . . . . . . . . . . . . . . . . 1071. 4.5. Aceleración y desaceleración en los actuadores hidráulicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1101. 4.6. Capacidad de amortiguamiento en los actuadores neumáticos . . . . . . . . . . . . . . . . . . . . . . . . 1201. 1.1. 4.6.1. Determinación de la energía cinética que se debe disipar . . . . . . . . . . . . . . . . . . . . . . . . 1211. 1.1. 4.6.2. Verificación de la capacidad de amortiguamiento del actuador . . . . . . . . . . . . . . . . . . 126Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Capítulo 4. Actuadores rotatorios y motores fluidos 1411. Selección básica de motores y actuadores rotatorios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1421. 1.1. Par torsor desarrollado por un motor o un actuador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1432. Actuadores y motores neumáticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1461. 2.1. Motores de paletas deslizables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1471. 1.1. 2.1.1. Regulación de velocidad en los motores de paletas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1541. 2.2. Motores de pistones radiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1571. 1.1. 2.2.1. Motores compactos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1581. 1.1. 2.2.2. Motores de trabajo pesado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1601. 2.3. Motores de turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1611. 2.4. Actuadores rotatorios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1631. 1.1. 2.4.1. Determinación del par para desplazar la carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1683. Actuadores y motores hidráulicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1741. 3.1. Motores hidráulicos con desplazamiento invariable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1751. 3.2. Motores hidráulicos de engranes, paletas y pistones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1761. 1.1. 3.2.1. Motores de engranes externos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1761. 1.1. 3.2.2. Motores de engranes internos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1781. 1.1. 3.2.3. Motores de paletas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1831. 1.1. 3.2.4. Motores con pistones axiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1881. 3.3. Actuadores rotatorios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196

Tabla de contenidos VII
Capítulo 5. Válvulas de control direccional 1991. Funcionamiento de las válvulas de control direccional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2001. 1.1. Válvulas neumáticas con conmutador deslizante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2001. 1.2. Formas de actuación de las válvulas de control direccional . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2051. 1.3. Válvulas de dos o tres vías, dos posiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2061. 1.1. 1.3.1. Posición normal de las válvulas 2/2 y 3/2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2061. 1.1. 1.3.2. Aplicaciones de las válvulas 3/2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2071. 1.4. Válvula de cuatro vías dos posiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2091. 1.5. Válvula de cinco vías dos posiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2111. 1.6. Notación para los puertos de una válvula de control direccional hidráulica . . . . . . . . . . . . . . 2132. Válvulas de control direccional actuadas por solenoide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2141. 2.1. Actuación por solenoide de acción directa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2161. 2.2. Válvulas actuadas por piloto, controladas por solenoide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2181. 1.1. 2.2.1. Construcción de las válvulas hidráulicas actuadas por solenoide . . . . . . . . . . . . . . . . . . 2213. Posición central de las válvulas hidráulicas de control direccional . . . . . . . . . . . . . . . . . . . . . . . . . . 2261. 3.1. Conmutador con condición central abierta (centro “H”) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2281. 3.2. Conmutador con condición central cerrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2291. 3.3. Conmutador con condición central tándem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2311. 3.4. Conmutador con condición central flotante (centro “4”) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2324. Capacidad de las válvulas de control direccional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2341. 4.1. Coeficiente de capacidad de caudal para válvulas hidráulicas . . . . . . . . . . . . . . . . . . . . . . . . . . 2351. 4.2. Coeficiente de capacidad de caudal para válvulas neumáticas . . . . . . . . . . . . . . . . . . . . . . . . . 240Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
Capítulo 6. Válvulas para regulación de caudal 2551. Válvulas para regulación de caudal con orificio variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2561. 1.1. Variables que influyen sobre el caudal que fluye a través de un pasaje estrecho . . . . . . . . . . 2591. 1.2. Procedimientos para regulación de caudal en un sistema de potencia fluida . . . . . . . . . . . . . 2602. Regulación por obstrucción en un sistema neumático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2631. 2.1. Regulación de velocidad en los motores neumáticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2661. 2.2. Sistema con velocidad múltiple (amortiguamiento externo) . . . . . . . . . . . . . . . . . . . . . . . . . . . 2691. 2.3. Válvula de escape rápido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2703. Regulación de caudal en los sistemas hidráulicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2731. 3.1. Regulación de caudal por obstrucción. Alimentación regulada . . . . . . . . . . . . . . . . . . . . . . . . . 2741. 1.1. 3.1.1. Un sistema hidráulico sin regulación de caudal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2741. 1.1. 3.1.2. Una válvula establece la velocidad de extensión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2761. 1.1. 3.1.3. Se abre y cierra la apertura del orificio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2771. 1.1. 3.1.4. Se modifica la diferencia de presiones en el orificio de la válvula . . . . . . . . . . . . . . . . . . 2791. 3.2. Regulación de caudal por obstrucción. Descarga regulada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2861. 3.3. Válvula para regulación de caudal por obstrucción, compensada por presión . . . . . . . . . . . . 2871. 1.1. 3.3.1. Funcionamiento del conjunto compensador de presión . . . . . . . . . . . . . . . . . . . . . . . . . . 2891. 1.1. 3.3.2. Aplicación de la válvula compensada por presión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2901. 3.4. Regulación de caudal por derivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2941. 1.1. 3.4.1. Aplicación de la válvula por derivación, compensada por presión . . . . . . . . . . . . . . . . . 2981. 3.5. Selección de una opción para regular la velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3001. 1.1. 3.5.1. Regulación de velocidad por obstrucción con alimentación regulada . . . . . . . . . . . . . . 3001. 1.1. 3.5.2. Regulación de velocidad por obstrucción con descarga regulada . . . . . . . . . . . . . . . . . . 3021. 1.1. 3.5.3. Regulación de velocidad por derivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303

VIII Tabla de contenidos
1. 3.6. Válvula de desaceleración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3051. 3.7. Regulación de velocidad en los motores hidráulicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
Capítulo 7. Válvulas para regulación de la presión 3231. Reguladores de presión neumáticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3241. 1.1. Funcionamiento de un regulador de presión neumático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3241. 1.1. 1.1.1. Regulador de presión sin orificio de venteo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3251. 1.1. 1.1.2. Regulador de presión con venteo o alivio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3271. 1.1. 1.1.3. Regulador de presión operado por piloto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3292. Capacidad de un regulador de presión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3301. 2.1. Ahorro de energía mediante la reducción de la presión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3351. 2.2. Unidades de mantenimiento neumáticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3371. 1.1. 2.2.1. Filtro de aire de línea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3391. 1.1. 2.2.2. Selección de la talla de un filtro de aire de línea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3411. 1.1. 2.2.3. Lubricador de línea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3431. 1.1. 2.2.4. Selección de la talla de un lubricador de línea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3443. Aplicación de los reguladores de presión en los circuitos neumáticos . . . . . . . . . . . . . . . . . . . . . . . 3464. Válvulas hidráulicas de presión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3521. 4.1. Válvula de alivio y descarga para control de presión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3521. 1.1. 4.1.1. Respuesta lineal de la válvula de alivio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3531. 1.1. 4.1.2. Selección de la talla de una válvula de alivio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3551. 4.2. Válvula secuenciadora hidráulica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3581. 4.3. Válvula hidráulica reductora de presión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371
Capítulo 8. Unidades de potencia neumáticas e hidráulicas 3731. Selección de la unidad de compresión en los sistemas neumáticos . . . . . . . . . . . . . . . . . . . . . . . . . 3741. 1.1. Unidades de compresión de pistones alternativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3741. 1.2. Unidades de compresión de tornillos helicoidales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3761. 1.3. Funcionamiento del tanque recibidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3771. 1.1. 1.3.1. Dimensionado del tanque recibidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3792. Determinación y control de la capacidad del compresor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3851. 2.1. Control tradicional mediante un interruptor de presión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3861. 1.1. 2.1.1. Consumo total del sistema y capacidad del compresor . . . . . . . . . . . . . . . . . . . . . . . . . . 3881. 2.2. Otros procedimientos de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3901. 1.1. 2.2.1. Carga y descarga del compresor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3901. 1.1. 2.2.2. Modulado de la succión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3911. 1.1. 2.2.3. Variación del desplazamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3921. 1.1. 2.2.4. Variación de la velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3923. Sistema de distribución de aire comprimido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3921. 3.1. Distribución en anillos o celdas cerradas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3951. 1.1. 3.1.1. Construcción de la red de distribución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3951. 3.2. Enfriadores en la descarga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396

Tabla de contenidos IX
4. Unidad de potencia en los sistemas hidráulicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3981. 4.1. Dimensionado del tanque de reserva del líquido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4041. 4.2. Selección de la bomba . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411Ejercicios propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 417Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422
Apéndice A. Dimensiones de la tubería de acero y acero inoxidable 425
Apéndice B. Coeficiente de caudal C para flujo compresibleVV 429
Índice de materias 435


Introducción
Los sistemas de potencia fluida, en su concepción moderna, tienen poco más de cienL años de evolución y perfeccionamiento tecnológico. Al despuntar el siglo XX yaabundaban las máquinas que funcionaban con base en un caudal presurizado de aire oaceite, tanto en la minería, la construcción, los ferrocarriles, las instalaciones militaresy las empresas de manufacturas metálicas.
Fue a partir de 1950 que floreció la integración del control electrónico con la neu-mática y la hidráulica. En la actualidad son incontables las aplicaciones de la potenciafluida en los más variados procesos de manufactura. Gran variedad de máquinas auto-máticas ejecutan ciclos de trabajos repetitivos, precisos, veloces y confiables, sin reque-rir la presencia de operarios que deban gobernar su marcha. Ahí es donde la potenciafluida establece la mejor interrelación con el control electrónico.
La importancia tecnológica de las máquinas hidroneumáticas es irrefutable, de ma-nera que resulta poco prudente omitir su aprendizaje en los programas contemporá-neos de varias licenciaturas de ingeniería. Uno de los textos más populares en nuestrocontinente, para el aprendizaje de sistemas de potencia fluida, es el libro de Russell W.Henke, «Fluid power systems & circuits». En el prefacio de la primera edición, publicadaen 1983, Henke afirma que su texto «fue concebido y escrito para salvar la brecha en-tre los tratados elementales de circuitos de potencia fluida y las muy sofisticadas obrasanalíticas sobre teoría de los sistemas».
Con este libro no pretendemos cumplir un objetivo tan trascendental como el pro-puesto por Henke. Pero sí esperamos aminorar las dificultades que aparecen en el pro-ceso de enseñanza aprendizaje de los estudiantes de ingeniería. Así como de los co-legas, que aunque ya se desempeñan en la profesión se acercan por vez primera a lasaplicaciones de la potencia fluida. Si bien existen textos muy variados sobre neumáticae hidráulica, la mayoría están publicados en otros idiomas y sin traducción al español;e independientemente de su calidad en su mayoría resultan inapropiados para nuestrapráctica docente.
Algunas empresas, que han tenido una presencia prolongada en México, vendentanto la tecnología de potencia fluida como servicios de capacitación para emplear esatecnología. Son muchos los que se formaron acudiendo a esos cursos y ahora traba-jan con sistemas hidráulicos y neumáticos. Sin embargo, la mayor parte de los cursosno están diseñados para ingenieros o estudiantes avanzados de ingeniería, sino parapersonal técnico con una preparación conceptual diferente.
XI

XII Introducción
En el diseño de libros de texto, o de cursos de capacitación, frecuentemente se im-pone una división que envía por rutas separadas el aprendizaje de la neumática y el dela hidráulica. Esta división no concuerda con nuestros propósitos ni nuestra experien-cia docente. Esta obra se diseñó para formar ingenieros, capacitados en las aplicacionescontemporáneas de la potencia fluida, con las aptitudes para concebir neumática e hi-dráulica como partes de un campo tecnológico unificado. Los alumnos que acuden alos cursos de potencia fluida en nuestra institución están inscritos en los programas detres licenciaturas de ingeniería. Para satisfacer los objetivos trabajan 66 horas en el aulay el laboratorio, y así suman nueve créditos en sus áreas de especialidad. Tienen una for-mación previa en el trabajo experimental en laboratorios y talleres de ingeniería, hanavanzado al menos 70% en su programa de estudios y no son ajenos a los conceptosbásicos de la Mecánica, la Termodinámica de los gases ideales, los procesos de conver-sión de la energía y los conceptos básicos de Mecánica de los Fluidos. Sus herramientasde análisis les permiten acercarse a la solución de problemas y al trabajo con sistemascomplejos.
En cualquier institución de educación superior, que forme ingenieros, se tienenalumnos que reúnen las cualidades descritas en el párrafo anterior. Para facilitar suaprendizaje hemos incluido cincuenta y un ejercicios resueltos y numerosos proble-mas propuestos al final de cada capítulo. No se ha escatimado en la minuciosidad delas explicaciones y cálculos numéricos. En las diferentes secciones del libro se inclu-yeron aclaraciones complementarias, que se presentan enmarcadas en un rectángu-lo. Cada uno de estos recuadros presenta detalles históricos, establece conexiones conotros campos tecnológicos de la ingeniería o incluye alguna demostración minuciosapara dar más claridad a la aplicación de algún concepto.
La obra está desarrollada en ocho capítulos. En el primero se establecen los concep-tos básicos de los sistemas de potencia fluida, se analiza la configuración del subsistemade potencia y del subsistema de control, se enfatiza la similitud de los sistemas neumá-ticos e hidráulicos y se propone la construcción de un sistema simple de potencia. En elsegundo capítulo se exponen los principios de funcionamiento de las máquinas de des-plazamiento positivo, bombas y compresores, y las implicaciones que estas máquinasimponen sobre la operación de los sistemas hidráulicos y neumáticos.
Los capítulos tres y cuatro son muy semejantes, pero el primero está dedicado alos actuadores lineales y el segundo a los rotatorios y los motores fluidos. En ellos seestablece cómo es que los actuadores transforman la potencia fluida en trabajo mecá-nico, ejecutado con cierto ritmo en el tiempo. También se exponen los procedimientospara dimensionar y elegir estos actuadores, en función de la tarea concreta que debedesempeñar el sistema de potencia fluida.
Para regular el desempeño de un sistema de potencia fluida se deben gobernar—en todo momento— tres variables del sistema: la presión del fluido, el caudal des-plazado y la dirección del flujo de fluido. Por ello es que los capítulos cinco, seis y sieteestán dedicados, respectivamente, a las válvulas de control direccional, válvulas para

Introducción XIII
regulación de caudal y válvulas para regulación de presión. Además de describir suconstrucción y funcionamiento, se establecen los procedimientos —con frecuencia re-gidos por una o varias normas— para definir sus características y elegir el tamaño apro-piado.
Por último, en el capítulo ocho se proporcionan los métodos para configurar y se-leccionar las unidades de potencia, neumáticas e hidráulicas, incluyendo el motor pri-mario del sistema. También se indica cómo trazar e instalar las redes de suministropara conducir flujos de fluidos presurizados. El texto cierra con dos apéndices; el pri-mero con las dimensiones normalizadas de la tubería de acero y acero inoxidable, elsegundo con la derivación de la igualdad que define el coeficiente de caudal para flujocompresible.
Febrero de 2014
Algunas advertencias sobre la obra
Esta obra se complementa con el libro «Taller de dispositivos hidroneumáticos. Intro-ducción a la potencia fluida», escrito por los mismos autores y publicado por la Univer-sidad Autónoma Metropolitana, Unidad Azcapotzalco, en 2003. Ese texto fue diseñadopara guiar a los alumnos en el trabajo experimental, que se efectúa en un laboratorioequipado con sistemas de potencia fluida. Ahí es de importancia capital el contactocon los sistemas, su ensamble, mantenimiento, detección de fallas, y la evaluación desu funcionamiento.
Este segundo libro no está concebido para el laboratorio, sino para el trabajo de di-seño y dimensionado de los sistemas de potencia fluida. A partir de principios básicosde la Mecánica de Fluidos, la Termodinámica de gases ideales, y rudimentos de Trans-ferencia de Calor, se abordan los detalles de funcionamiento de los actuadores, válvulasde control, unidades de potencia y demás componentes que permiten efectuar trabajoútil a partir de la energía transportada por un vehículo fluido: aire comprimido o unlíquido presurizado.
Las posibilidades para emplear sistemas de potencia fluida, en la ejecución de ta-reas útiles, son muy amplias; tanto que no hay cómo agotarlas en una sola obra. Muchomenos en un texto como éste, que se dedica a exponer los fundamentos. La evolucióntecnológica de la neumática y la hidráulica está en manos de una miríada de empresas,dispersas por todo el mundo, que aportan cada año nuevas invenciones y proponenproductos y soluciones inéditas.
Puesto que formamos ingenieros para trabajar en los procesos productivos, tene-mos un interés enfático en lo concreto. Por eso —junto con los principios básicos y losprocedimientos para diseñar, seleccionar y dimensionar— en el texto también se ana-

XIV Introducción
liza lo que existe en el mercado. Se han incluido numerosas referencias y ejemplos decomponentes que fabrican las empresas dedicadas al aprovechamiento de la potenciafluida; son las piezas que un ingeniero debe seleccionar para configurar una amplísimavariedad de sistemas, construidos a la medida que necesita el usuario.
En el texto —cada vez que se incluyó una figura, se adaptó una tabla o algún nomo-grama— hemos sido cuidadosos en indicar su procedencia y reconocer los derechosde autor (pero la mayoría de las figuras es creación nuestra). La mayor parte de las ve-ces estas herramientas de trabajo proceden de catálogos, folletos y publicaciones conacceso libre, ofrecidas por las empresas fabricantes para difundir sus productos. En lasreferencias listadas al final de cada capítulo —junto con los libros, artículos publica-dos en revistas especializadas y nombres de normas— el lector encontrará un amplioconjunto de publicaciones industriales, que se pueden obtener en forma gratuita y casisiempre con facilidad.
Uno de los indicadores de la importancia y creciente diversificación de este campotecnológico, es la existencia de abundantes normas que rigen o modulan la actuaciónde los fabricantes, diseñadores y usuarios de los sistemas de potencia fluida. Para losingenieros involucrados en el diseño y selección resulta necesario, en una multitud deaspectos, proceder con la guía de estos documentos.
La actuación profesional de los ingenieros está sujeta, en todos los sectores de laindustria, a los procedimientos normalizados publicados por varias entidades nacio-nales e internacionales. Para diseñar, construir y operar un sistema de potencia fluidase deben atender las indicaciones de muchas de estas instituciones. Para quien se iniciaen este campo de la ingeniería puede resultar muy complicada la multitud de acróni-mos, que se invoca cada vez que un profesional trabaja con los componentes de unsistema neumático o hidráulico: ISO, NFPA, ANSI, ASTM, DIN, NMX, NOM, ASME, ISA,FCI, etcétera, en esta obra hemos incluido las explicaciones necesarias para conocer yemplear, sin sufrimiento, las principales referencias normalizadas.
Unidades del sistema internacional y de uso común
Los autores hemos querido enfatizar el uso sistemático y ordenado de las unidades quecorresponden a cada magnitud física, al igual que la consistencia dimensional de todaslas igualdades. Las unidades básicas y derivadas del sistema internacional (SI) se mues-tran siempre encerradas entre paréntesis rectangulares ([W], [M], [K], [m3/s], [MPa], et-cétera), con el propósito de destacarlas. Salvo el uso de estos paréntesis rectangulares,para la escritura de los símbolos de las unidades del SI se han seguido las reglas gene-rales que están indicadas en la tabla 20 de la Norma Oficial Mexicana NOM-008-SCFI-2002, Sistema General de Unidades de Medida.
Además de las unidades del sistema internacional, aquí es necesario emplear las deuso común en los Estados Unidos de América (llamadas frecuentemente unidades del

Introducción XV
«sistema inglés», como lo haremos en este libro), junto con otras de uso cotidiano. Ungran número de fabricantes continúa ocupándolas y dimensionando sus productos conestas unidades, que en otros campos de la tecnología podrían parecer obsoletas o ya deltodo relegadas. No es así con la neumática y la hidráulica, pues son muy abundanteslos catálogos, folletos, libros de texto, reglas empíricas de diseño, tablas y nomogramasque todavía imponen el uso de unidades ajenas al SI.
Para identificar estas unidades de uso común hemos recurrido a las abreviaturasque se enlistan alfabéticamente a continuación, también encerradas entre paréntesisrectangulares aunque no se hace con las unidades de temperatura de uso frecuente,como ◦C, ◦F o ◦R.
[bar] 1 bar= 1 ·105 [Pa][cSt] centiStoke ◦ grado, desplazamiento angular
[gal] galón ◦C grados Celsius
[gpm] galones por minuto ◦F grados Farenheit
[hp] caballo de potencia ◦R grados Rankine
[h] hora
[kgf] kilogramos fuerza
[lbf] libra fuerza
[lbm] libra masa
[lps] litros por segundo
[lpm] litros por minuto
[L] litros
[min] minuto
[pie] 1 pie= 12 [pulg][psi] libras fuerza entre pulgada cuadrada, manométrica
[psia] libras fuerza entre pulgada cuadrada, absoluta
[pulg] pulgada
[rpm] revoluciones por minuto
[St] Stoke
[SUS] segundos universales Saybolt
[ton] tonelada
La nomenclatura utilizada para las principales variables —con sus correspondien-tes unidades SI, salvo algunas excepciones con unidades de uso común y las variablesadimensionales— es como sigue.
A Puerto de un actuador hidráulico
A Área transversal m2
B Puerto de un actuador hidráulicoCV Coeficiente de capacidad de caudal

XVI Introducción
D Diámetro md Distancia mE Módulo de elasticidad PaEc Energía cinética JF Fuerza Nfc Factor de carrerafe Factor de exceso
g Aceleración gravitacional m/s2
I Momento de inercia kg/m2
I Segundo momento de área m4
Kv Factor de caudal
L Longitud mM Par torsor Nmm Flujo másico kg/sn Revoluciones por minuto rpm
p Presión Pa
P Puerto de presión en una válvula hidráulica
Pc Carga de pandeo de Euler N
PCM Caudal expresado en [pie3/min] de aire libre pie3/min
Q Caudal m3/sR Constante de gas ideal J/kgK
R Fuerza de reacción NRC Relación de compresión
r Radio ms Carrera del pistón m
s Densidad relativasf Factor de seguridad
T Puerto para retorno al tanque en una válvula hidráulica
T Temperatura K, EC
V Velocidad m/sVol Volumen m3
W Potencia Ww Peso Nx Coordenada de posición m
z Factor de compresibilidad de un gas
α Giro angular rad
β Módulo de expansión volumétrica Pa
Δp Diferencia de presión Pa
η Eficiencia
θ Tiempo s

Introducción XVII
μ Coeficiente de fricción
μ Viscosidad kg/ms
ν Viscosidad cinemática (μ/ρ) m2/s
ρ Densidad kg/m3
ω Velocidad angular rad/s
Breve historia de los sistemas de potencia fluida: agua, aceite y aire
Toda la tecnología de la potencia fluida está relacionada con el empleo de un líquido ode un gas, como medio para transportar energía e información. El agua y el aire fueronlos primeros fluidos usados desde hace más de dos mil años. La elección no ha cam-biado para los sistemas neumáticos, pues el aire atmosférico sigue siendo el fluido detrabajo por excelencia. Con la hidráulica, en cambio, se dio una sustitución enfática.Aunque el nombre se conservó, al inicio del siglo XX se abandonó el agua para emplearaceite derivado del petróleo como vehículo fluido.
En 1646, el matemático y filósofo francés Blaise Pascal explicó el principio de laprensa hidráulica como sigue [1] y [2]: «Por ejemplo se hacen dos aberturas en la paredde un recipiente que está lleno con agua y cerrado en todos lados, siendo una de es-tas aberturas cien veces más grande que la otra. Ambas aberturas están provistas conun pistón que en esto ajusta en forma precisa. Si un hombre entonces desplaza el pis-tón más pequeño, él gana la fuerza de cien hombres». Aquí está la clave que explica elpoderoso desarrollo de los sistemas de potencia fluida.
El inglés Joseph Bramah fue el primer hombre que tuvo éxito en convertir el princi-pio de Pascal en máquinas que realmente funcionaban [3]. En 1795 construyó y patentóuna prensa hidráulica que empleaba agua para aumentar la presión en más de dos milveces. Aproximadamente 50 años más tarde, la revolución industrial en Gran Bretañacondujo a un desarrollo adicional de la prensa hidráulica y de otras máquinas industria-les, trabajando siempre con agua. El crecimiento fue tan rápido que al final de la décadade 1860 las grandes ciudades tenían estaciones centrales para la generación de poten-cia fluida, a partir de las cuales se bombeaba líquido presurizado hacia las fábricas.
La hidráulica se desarrolló vigorosamente durante el siglo XIX, pero perdió su pri-macía tecnológica con la llegada de la energía eléctrica. Alrededor del año 1900 tuvo lu-gar un intenso desarrollo de las redes para el suministro de la potencia eléctrica, lo cualfavoreció el empleo de los motores eléctricos. El uso extendido del control y potenciahidráulicos se retrasó, y en algunos casos incluso se revirtió, durante varias décadas [4].
Pero, al iniciar el siglo XX, dos ingenieros norteamericanos le dieron un nuevo im-pulso a la potencia fluida. En 1901 Harvey Williams y Reynolds Janney, dos empleadosde la compañía «Waterbury Tools Mg.», comenzaron a trabajar con la idea de hacer mó-vil la potencia hidráulica. En 1906 Williams y Janney emplearon por vez primera aceite

XVIII Introducción
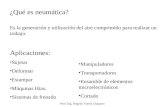
� Máquina perforadora neumática de George Sommellier, 1857; [12].
mineral como fluido de trabajo en vez de agua. Construyeron una transmisión hidrostá-tica de pistones axiales que se instaló en la nave de combate U.S.S. Virginia, para elevary apuntar los cañones [5]. Actualmente se considera que con sus invenciones fundaronla hidráulica moderna.
Denis Papin, Christiaan Huygens, Robert Hooke y Robert Boyle estuvieron involu-crados con los primeros experimentos con la neumática, entre 1660 y 1690. Se le atri-buye a Papin la presentación de un trabajo intitulado «Double Pneumatic Pump», antela Royal Society of London en 1686, así como la ejecución de varios experimentos pa-ra mostrar cómo se podía transferir potencia de un lugar a otro mediante una tuberíallena con líquido.
En 1810, el inglés George Medhurst publicó un opúsculo en el que proponía el usode aire en un sistema para transferir cartas y objetos [7]. Entre 1812 y 1827 Medhurstexperimentó, publicó y construyó prototipos para el transporte de pasajeros con me-dios neumáticos [8]. En 1880 John Nelson Wanamaker instaló un sistema neumáticoen la tienda departamental que poseía en la ciudad de Philadelphia, para transportardinero y documentos de una a otra sección [9]. En 1886 los ingleses empleaban cápsu-las impulsadas por aire comprimido, que viajaban dentro de un tubo para enviar losmensajes de una a otra estación telegráfica. Cuando Wanamaker fue designado jefe ge-neral de correos de los Estados Unidos de América, en 1889, aplicó el mismo sistemaen la oficina postal. En 1893 ya había un sistema neumático que funcionaba entre dosoficinas postales de Philadelphia [10].
Durante la construcción del túnel ferroviario Fréjus —a través del Mont-Cenis enlos Alpes, para conectar Modane en Francia con Bardonecchia en Italia— se utilizó unaperforadora de aire comprimido por vez primera en 1857 [11], [12] y [13]. Esta máquina,

Introducción XIX
desarrollada por Germain Sommeiller, trabajaba con aire comprimido a seis atmósferasy permitía alcanzar una velocidad de avance de dos metros diarios, frente a los sesentacentímetros que se obtenían con los medios tradicionales.
Los 100 dB de los ruidosos martillos neumáticos indicaron el progreso tecnológicodurante la revolución industrial, pues durante el siglo XIX se desarrollaron más aplica-ciones prácticas del aire comprimido, en la minería, la construcción y los ferrocarriles.En 1869, el ingeniero norteamericano George Westinghouse patentó un freno neumá-tico para ferrocarriles, que posteriormente fue adoptado prácticamente en forma uni-versal [14]. Pero fue hasta el siglo XX, más o menos a partir de 1950, que se diversificanlas aplicaciones industriales de la neumática en los procesos de manufactura.
Referencias
[1] The Physical Treatises of Pascal: The Equilibrium of Liquids and the Weight of theMass of the Air (English translation by IHB and AGH Spiers, New York, ColumbiaUniversity Press, 1937. Records of civilization, sources and studies..., No. XXVIII.p. 6.
[2] Shea, William R. Designing experiments & games of chance: the unconventional scien-ce of Blaise Pascal. Canton MA, Watson Publishing International, 2003. pp. 129-136.
[3] HANSA-FLEX Hydraulik GmbH. Did you know...? A history of oil hydraulics. Hydrau-likpresse. Issue february 2009, 15th year. Bremen, 06/2009. p. 26.
[4] Trostmann, Erik. Water hydraulics control technology. New York, Marcel Dekker, Inc.,2006. pp. 4-5.
[5] Akers A., Gassman, M. & Smith R. Hydraulic Power System Analysis. Boca Raton FL,CRC Press. Taylor & Francis Group, 2006. pp. 2-3.
[6] Papin, Denis. A demonstration of the velocity where with the air rushes into an ex-hausted receiver lately produced before the royal society by Papin, November 24, 1686.London, Records held by Royal Society.
[7] Medhurst, George. New method of conveying letters and goods with great certaintyand rapidity by air. London, 1810.
[8] Medhurst, George. Calculations and remarks tending to prove the practicability ... ofa plan for the rapid conveyance of goods and passengers upon an iron road througha tube of 30 feet in area, by the power and velocity of air. London, 1812.
[9] Ershkowitz, Herbert. John Wanamaker: Philadelphia Merchant. Conshohocken, PA.Signpost Biographies-Da Capo Press. 1999.
[10] Cohen, Robert A. The Pneumatic Mail Tubes: New York’s Hidden Highway And ItsDevelopment. USA, The United States Postal Service, 1999.
[11] Routledge, Robert. Discoveries and Inventions of the Nineteenth Century. New York,Crescent Books, 1989.

XX Introducción
[12] Guernsey, A. H. The mount cenis railway and tunnel. Harper’s New Monthly Maga-zine. No. CCLIV, Vol. XLIII, issue 254. New York, Harper & Bros, july 1871.
[13] Whymper, Edward. Scrambles amongst the Alps: in the years 1860-69. Mineola, NY,Dover Publications, Inc., 1996.
[14] Prout, Henry G. A Life of George Westinghouse. New York, Cosimo, Inc., 2005.

1Conceptos básicos desistemas de potencia
1. Cargas externas y sistemas de potencia1. 1.1. Desplazamiento de la carga externa2. Composición de un sistema de potencia1. 2.1. Sistema exclusivamente mecánico1. 2.2. Sistema electromecánico1. 2.3. Sistema con un vehículo fluido1. 2.4. Presión de un fluido y caudal desplazado3. Construcción de un sistema de potencia fluida1. 3.1. Subsistema de potencia1. 3.2. Subsistema de control4. Sistemas simples de potencia fluida1. 4.1. Sistema neumático simple1. 4.2. Sistema hidráulico simple5. Ventajas de los sistemas de potencia fluida
En este capítulo se abordará el concepto de sistema de potencia en la forma másE general. Se denominará con este nombre a cualquier máquina, dispositivo o ar-tefacto capaz de efectuar trabajo útil, ejecutado con cierto ritmo en el tiempo. La mani-festación externa de este trabajo será —normalmente— el desplazamiento de un objetoen el espacio, en un ambiente en el que se deben superar continuamente las oposicio-nes del entorno.
Al concluir nuestra lectura se podrán reconocer las similitudes que guardan un sin-número de máquinas, cuya forma, tamaño y utilidad pueden ser muy diversas, peroque comparten conceptos de diseño y principios de funcionamiento que las hacen se-mejantes. Finalmente, se pondrá atención en una clase particular de los sistemas depotencia, a los que llamaremos sistemas de potencia fluida porque en su funcionamien-to está involucrado el desplazamiento de un caudal de fluido, que se traslada con ciertapresión elevada.
1

2 Capítulo 1 Conceptos básicos de sistemas de potencias
1. Cargas externas y sistemas de potencia
La sustancia de trabajo de este texto es el diseño y operación de cierto tipo de máqui-nas, sistemas o dispositivos, capaces de efectuar una tarea útil mediante la ejecución detrabajo con un ritmo determinado en el tiempo. Estas máquinas deben impulsar el mo-vimiento de un objeto —al que se dará el nombre de carga externa— con el propósitode desplazarlo cierta distancia necesaria, en un tiempo especificado en forma precisa.
La tarea útil efectuada sobre la carga externa puede ser elevar un objeto pesado,alimentar una máquina para que se efectúe un proceso de manufactura, abrir o cerraruna puerta, poner en movimiento las herramientas de corte para maquinar una piezade metal, extruir aluminio, alimentar plástico a una máquina sopladora o de inyección,etcétera. La lista de posibilidades es enorme.
El nombre de carga externa indica la situación que prevalece durante la ejecuciónde la tarea. Este objeto no se moverá espontáneamente por sí mismo, pues una o másfuerzas se oponen a su movimiento (por ejemplo su propio peso, o fuerzas de fricción ode inercia). Entonces, la máquina debe proporcionar la energía necesaria para vencerlas oposiciones. Se dice que el sistema efectúa trabajo sobre la carga externa.
1.1. Desplazamiento de la carga externa........................................................................................................................................................................Las posibilidades para trasladar un objeto en el espacio son prácticamente infinitas, pe-ro cualquiera que sea el desplazamiento deseado se puede obtener como una compo-sición de varios movimientos parciales, con trazos rectos y giros alrededor de diferentesejes.
En algunas aplicaciones se necesita deslizar linealmente a la carga externa, para locual se debe aplicar una fuerza F que efectúe el trabajo W (figura 1). Pero la distancia
00 : 17
ΔL
F
Inercia
Peso
Fricción
0,1,2,3, . . . ,θ
w [J]= F [N]ΔL [m] w [W]=w [J]θ [s]
= F [N]V [m/s]
� Figura 1. Desplazamiento lineal de la carga externa.

Sección 1 Cargas externas y sistemas de potencia 3
se debe recorrer en un tiempo conveniente θ —es decir, con cierta velocidad promedioV = ΔL/θ— de manera que el trabajo efectuado en ese tiempo define una potenciapromedio W , aplicada por la máquina.
También es posible que la carga externa deba recibir una rotación angular finitaΔα, en un tiempo determinado θ , para lo cual se debe aplicar un par M que impulse elgiro alrededor de un eje (figura 2). El recorrido angularΔα completado en el tiempo θdefine una velocidad angular promedio ω. El producto del par aplicado por la velocidadangular define una potencia promedio.
00 : 17
ΔL
Inercia
F
Fricción
Peso
0,1,2,3, . . . ,θ
Δα
r
w [J]= F [N]ΔL [m]= r [m]F [N] · ΔL [m]r [m]
w [J]=M [N-m]Δα[rad]
w [W]=w [J]θ [s]
=M [N-m]ω[rad/s]
� Figura 2. Desplazamiento angular de la carga externa.
En otras ocasiones se desea mantener girando continuamente a la carga externa,con cierta velocidad angular ω alrededor de un eje, para lo cual se debe aplicar con-tinuamente un par M que impulse este giro (ver figura 3). Por supuesto, no son infre-cuentes las tareas en las que se deben lograr estas tres formas de movimiento de la cargaexterna, en forma alternada o de manera simultánea.
Inercia M
Peso
Fricción
w [W]=M [N-m]ω[rad/s]ω
� Figura 3. Giro continuo de la carga externa.

4 Capítulo 1 Conceptos básicos de sistemas de potencias
En conclusión, para trasladar la carga externa y ejecutar la tarea útil, una máquinao dispositivo debe efectuar trabajo con un ritmo adecuado en el tiempo. Es decir, ne-cesitamos un sistema que suministre potencia en forma controlada, para impulsar elmovimiento en los términos en que se necesita. Si se suspende el suministro de poten-cia la carga externa se detendrá, o se moverá de manera descontrolada.
Para suministrar la energía a la carga externa, el sistema de potencia debe contarcon un dispositivo llamado actuador. El actuador es un componente de la máquinaque se vincula directamente con la carga externa y efectúa el trabajo sobre ella (por su-puesto, con un ritmo conveniente en el tiempo). En función del tipo de desplazamientoque se desea obtener, se puede emplear un actuador lineal, un actuador rotatorio o unmotor. El primero solamente es capaz de obtener movimientos lineales mediante laaplicación de una fuerza; el segundo consigue rotaciones angulares finitas, mediantela aplicación de un par; con el último se obtiene un giro angular continuo alrededor deun eje.
2. Composición de un sistema de potencia
Un sistema de potencia —diseñado con el propósito de ejecutar una tarea útil— puedefuncionar con base en diferentes principios físicos, o estar basado en diferentes tecno-logías. Por ejemplo, se puede construir un sistema de potencia cuyo funcionamientodependa de componentes puramente mecánicos. Otros sistemas incluyen componen-tes eléctricos o electrónicos. Como veremos, nuestra atención se enfocará a un tipo par-ticular de sistemas llamados sistemas de potencia fluida, que incluyen componentes nosolamente electromecánicos para transmitir la energía.
Cualquiera que sea la tecnología que se utilice en un sistema de potencia particular,se pueden identificar ciertos atributos y componentes comunes a todo sistema de po-tencia. Para ilustrar esta idea conviene analizar ahora algunos sistemas de potencia conlos que tenemos gran familiaridad, pues son máquinas comunes en nuestro entorno eincluso las empleamos con regularidad.
2.1. Sistema exclusivamente mecánico........................................................................................................................................................................Nuestro primer sistema es una de las máquinas más comunes en nuestro entorno: unabicicleta típica, como la que se muestra en la figura 4. Las bicicletas modernas se produ-cen en diferentes tamaños y configuraciones, pues permiten desarrollar diversas apli-caciones especializadas. Sin embargo, todas ellas tienen mucho en común, y aunquecuentan con un número muy grande de componentes las podemos analizar destacan-do las siguientes categorías:

Sección 2 Composición de un sistema de potencia 5
13. Rallos
17. Cadena de rodillos
21. Frenos
10. Biela
14. Rim
18. Cambio frontal
22. Palanca de freno
12. Masa
16. Piñones traseros
20. Palanca de cambios
9. Estrella central
1. Cuadro
20
4
5
7
8
21
22
2
12
11
10
9
18
17
1915
163
1
1314
5. Poste
2. Tijera
6. Telescopio
4. Manubrio
8. Poste del asiento
3. Amortiguador
7. Asiento
11. Pedal
15. Llanta
19. Cambio trasero
� Figura 4. Componentes de una bicicleta típica.
a ) Tarea útil efectuada. Desplazar una carga de hasta 200 [kg]—incluyendo al usuario—con una velocidad no mayor a 35 [km/h]. Por supuesto, estas cifras pueden variar deuna bicicleta a otra, pero establecen límites razonables para la mayoría de ellas.
b ) Motor primario. El propio usuario; un adulto joven, con buena salud, puede sumi-nistrar 250 [W] de potencia (más o menos 1
3 [HP]), para impulsar al vehículo apli-cando fuerza con sus piernas.
c ) Subsistema de potencia. Está formado por el conjunto de componente o eslabones—en este caso por completo mecánicos— a través de los cuales fluye la energía ne-cesaria para efectuar el trabajo.
En este subsistema se incluyen los pedales, las bielas, la estrella o catarina centralcon su eje, la cadena flexible, el piñón montado en el eje posterior y la rueda traseraque impulsa al vehículo por la fricción sobre el suelo.
d ) Subsistema de control. Por sus componentes se transmite una forma singular deenergía: la información empleada para gobernar, dosificar o modular al subsistemade potencia. Mediante los elementos de control se puede alterar la forma en que seefectúa la tarea útil.

6 Capítulo 1 Conceptos básicos de sistemas de potencias
El medio más eficiente de transporte
Una persona promedio con buena condición física puede producir cerca de3 [W/kg], por más de una hora. Un deportista aficionado con capacidades des-tacadas puede llevar esa cifra a 5 [W/kg]. Los atletas de primer nivel desarrollanhasta 6 [W/kg], en un período de tiempo similar. Por consiguiente, una personacon 70 [kg] de peso puede desarrollar cerca de 250 [W], por más de una hora.A principios de la década de los 70, en el siglo xx, se hicieron mediciones de laeficiencia mecánica de las bicicletas [1]. Las cifras sorprenden: hasta 99% de laenergía que el ciclista deposita en los pedales se transmite hacia las ruedas, aun-que el empleo de los mecanismos de transmisión con catarinas puede reduciresta cifra entre el 10 y el 15%.
Otros investigadores han comparado la energía que un humano requiere paratransportar una unidad de masa a lo largo de cierta distancia [2]. Un hombre de70 [kg] de peso consume una potencia de 100 [W] para caminar a 5 [km/h], aldesplazarse sobre terreno plano. En las mismas condiciones, el consumo de esapotencia le permite viajar a 25 [km/h]montado sobre una bicicleta. El consumode potencia, por unidad de peso y unidad de distancia recorrida, es práctica-mente un quinto en bicicleta respecto a caminar.
El consumo de energía humana está indicado por las siguientes cifras, queson aceptadas generalmente: 1,62 [kJ/km-kg] para el transporte en bicicleta;3,78 [kJ/km-kg] para caminar o correr y 16,96 [kJ/km-kg] para nadar. También,si se compara el peso de la carga transportada contra el peso total (carga másvehículo y conductor), la bicicleta es el medio más eficiente de transporte de car-ga. No existe otro medio de locomoción autopropulsada que sea más eficienteque la bicicleta, aunque un ciclista pelea continuamente contra el aire. Inclusocuando se viaja con velocidades moderadas, la mayor parte de la energía queproporciona un ciclista se gasta en vencer la oposición por el arrastre del aire.Esta oposición crece prácticamente con el cuadrado de la velocidad, de maneraque el consumo de potencia se incrementa aproximadamente con el cubo de lavelocidad desarrollada.
Por ejemplo, el sistema de frenos permite disminuir la velocidad del vehículo ollevarlo al reposo; con el manubrio, la tijera y la rueda delantera se impone cierta tra-yectoria; aún si se mantiene constante la frecuencia de pedaleo, se puede controlarla velocidad de giro de la rueda trasera cambiando la cadena de una a otra catarinaen los piñones traseros; con el cambio frontal se puede seleccionar una u otra estre-lla central, para elegir un régimen de funcionamiento diferente para el vehículo.
e ) Estructura. El cuadro —una construcción de tubos de acero, aluminio o fibra decarbono— contiene a todos los demás componentes, los sujeta en las posiciones

2 Máquinas de desplazamientopositivo: bombas y compresores
1. Máquinas fluidas de desplazamiento positivo y rotodinámicas1. 1.1. Comportamiento de la bomba en los sistemas hidráulicos de potencia1. 1.1. 1.1.1. Bombas centrífugas o rotodinámicas1. 1.1. 1.1.2. Bombas de desplazamiento positivo2. Bomba de desplazamiento positivo y válvula de alivio3. Compresores de desplazamiento positivo1. 3.1. Compresor alternativo de una etapa1. 3.2. Compresor alternativo de dos etapas1. 3.3. Compresores rotatorios4. Cuantificación del caudal en un sistema neumático
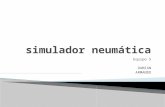
Todo sistema de potencia fluida es capaz de efectuar trabajo útil —con cierto ritmoT en el tiempo— gracias a la energía suministrada y controlada por medio de unvehículo fluido: el caudal presurizado (líquido o gas) que avanza a través de un con-ducto. El fluido recibe energía a partir una máquina fluida, un compresor cuando setrata de un gas y una bomba cuando se desplaza un líquido.
La máquina fluida es movida por un motor primario (generalmente eléctrico o decombustión interna, en ocasiones la fuerza humana o una turbina), con el propósito deinyectar energía en la masa fluida. Este incremento de la energía depositada en el fluidose puede manifestar en diferentes formas: energía cinética (un caudal que se desplazacon cierta velocidad), energía potencial gravitacional (una masa de fluido que asciendeverticalmente), un incremento de la presión (el fluido comprime con fuerzas perpen-diculares el interior del recipiente que lo contiene) y un incremento de energía interna(crecimiento de la temperatura de la sustancia fluida).
En los sistemas de potencia fluida, tanto neumáticos como hidráulicos, las máqui-nas que proporcionan energía al vehículo fluido siempre pertenecen a una familia espe-cial: las llamadas máquinas de desplazamiento positivo. El propósito de emplear estasmáquinas es impulsar un caudal presurizado —es decir, comunicar al fluido energía ci-nética y energía manifestada como presión— y no tanto obtener ganancias de energíapotencial gravitacional, mucho menos incrementos de energía interna.
35

36 Capítulo 2 Máquinas de desplazamiento positivo: bombas y compresores
Válvula deadmisión
Válvula dedescarga
Mecanismo debiela manivela
Pistónalternativo
Carrera = L
Motorprimario
ω
Áreatransversal
Ap
� Figura 21. Máquina fluida de desplazamiento positivo, con movimiento lineal.
1. Máquinas fluidas de desplazamiento positivo y rotodinámicas
Las máquinas de desplazamiento positivo reciben este nombre por la forma en quegeneran un caudal presurizado: en el interior de la máquina fluida —lo mismo si esun compresor que si se trata de una bomba— existe una superficie móvil que trata decomprimir directamente a un volumen de fluido, intentando confinarlo en un espaciodecreciente.
Existe una amplia variedad de máquinas de desplazamiento positivo con construc-ciones geométricas muy variadas. La pared móvil puede deslizarse linealmente (comose muestra en la figura 21) o bien girar alrededor de un eje (como en las máquinas delas figuras 26 y 27). La forma de la superficie que avanza para confinar al fluido puedeir desde una pared o diafragma plano —que avanza en línea recta— hasta formas máscomplicadas que giran alrededor de un eje: lóbulos, engranes, tornillos, paletas girato-rias, etcétera. En todos los casos el resultado del trabajo de la máquina es el desplaza-miento de caudal, el incremento de la presión del fluido, probablemente una gananciamodesta de altura y —sobre todo en los gases— un inevitable crecimiento de la tempe-ratura.

Sección 1 Máquinas fluidas de desplazamiento positivo y rotodinámicas 37
Cualquiera que sea la geometría de la máquina de desplazamiento positivo, com-presor o bomba, cuando funciona atrapa en su interior una dosis de fluido y luego tratade comprimirla contra un espacio decreciente. Esta compresión es del todo posible si setrata de un gas, aunque siempre viene acompañada de un indeseable crecimiento de latemperatura (como ya se mencionó en la sección 2.4 del capítulo 1). Pero tratar de com-primir una dosis de líquido a un volumen mucho menor es prácticamente imposible.
Primero se analizará el funcionamiento de las bombas y después el de los com-presores. Las bombas de desplazamiento positivo presentan una forma de funciona-miento singular, que en un principio puede resultar desconcertante. Es muy necesariocomprender a fondo este funcionamiento, pues son estas bombas las que imponen unmodo de trabajo en los sistemas hidráulicos de potencia.
1.1. Comportamiento de la bomba en los sistemas hidráulicos de potencia........................................................................................................................................................................Los sistemas hidráulicos emplean como vehículo fluido a un líquido, generalmenteaceite derivado del petróleo, pero también aceites sintéticos, alguna solución emulsio-nada e incluso agua. Cualquiera que sea el líquido de trabajo, para el intervalo de pre-siones en el que operan los sistemas hidráulicos —normalmente no superan 3500 [psi],24,1 [MPa]— su densidad es prácticamente invariable (el líquido es incompresible). Elcaudal que fluye por el sistema avanza con cierta presión elevada, porque recibió ener-gía por medio de la bomba impulsada por el motor primario del sistema.
El funcionamiento de la bomba tiene repercusiones muy importantes sobre el sis-tema de potencia, y todos los sistemas hidráulicos emplean exclusivamente bombasde desplazamiento positivo. El comportamiento de una de éstas difiere notablemen-te del comportamiento de las que pertenecen a otra familia: las bombas centrífugas orotodinámicas.
Para comprender el funcionamiento de las bombas de desplazamiento positivo,primero analizaremos el funcionamiento de las bombas centrífugas o rotodinámicas,pues este segundo tipo habitualmente nos resulta más familiar, sobre todo a quienes seacercan por vez primera a los sistemas hidráulicos de potencia.
1.1.1. Bombas centrífugas o rotodinámicas
Una bomba centrífuga típica consiste en un impulsor que gira en el interior de unacarcasa, como se muestra en la figura 22. El caudal ingresa a la bomba a través de la líneade aspiración, conectada en el puerto de entrada. La potencia del motor primario seemplea para girar el impulsor e incrementar el contenido de energía del caudal líquido,que se expulsa a través de la línea de descarga.

38 Capítulo 2 Máquinas de desplazamiento positivo: bombas y compresores
Impulsor conálabes
Carcasa
Puerto dedescarga
Puerto desucción
Sentidode giro
ω [rpm]
Q
� Figura 22. Esquema de una bomba centrífuga.
La energía del líquido expelido a través del puerto de descarga, por la acción dela fuerza centrífuga, se puede manifestar como energía cinética (caudal que viaja concierta velocidad promedio), energía potencial (ganancia de altura en el campo gravita-cional), o energía manifestada como presión.
En la instalación de la figura 23 se ha colocado una válvula para regular el caudal enla línea de descarga de la bomba. La ganancia de energía potencial entre la succión y ladescarga de la bomba es prácticamente nula, de modo que la energía suministrada alflujo líquido se reparte entre dos componentes: energía cinética y energía manifestadacomo presión. El manómetro diferencial compara la presión en la descarga con la pre-sión en la succión: Δp = pd −ps . El rotámetro indica el caudal Qb desplazado a travésde la línea de descarga.
La apertura de la válvula para regular el caudal determina cómo se divide la energíacomunicada al líquido: una fracción se convierte en energía cinética, la otra fracción semanifiesta como incremento de presión. La bomba puede funcionar entre dos regíme-nes límite:
a ) Si la válvula está por completo abierta, el caudal desplazado es máximo pero la ga-nancia de presión es mínima (máxima energía cinética, mínimo incremento de pre-sión).

Sección 1 Máquinas fluidas de desplazamiento positivo y rotodinámicas 39
Rotámetro
Manómetrodiferencial
Válvula pararegulaciónde caudal
succión descarga
Fluido de
trabajo
ρ
Fluidomanométrico
ρm
Qb
wf
ΔhΔp = (ρm −ρ)gΔh
Δp = pd −ps
� Figura 23. Instalación de prueba para caracterizar una bomba centrífuga.
b ) Si la válvula está por completo cerrada, el caudal desplazado es nulo pero la gananciade presión es máxima (nula energía cinética, máximo incremento de presión).
Todos los regímenes de operación entre los puntos extremos se obtienen con laapertura gradual de la válvula, a partir del funcionamiento con caudal cero. Los resul-tados de las mediciones se grafican en la llamada curva característica de la bomba (fi-gura 24). En el eje horizontal se grafica el caudal desplazado, en el vertical se muestra el
Qmáx
0
Δh =Δp
ρg[m]
Δpmáx
Q�
m3
s
�� Figura 24. Curva característica de una bomba centrífuga.

40 Capítulo 2 Máquinas de desplazamiento positivo: bombas y compresores
incremento de presión suministrado por la bomba. Pero tradicionalmente este incre-mento de presión se expresa como un incremento de “altura de energía”,Δh ,
Δh =Δp
ρg[m] (2.1)
La “altura de energía” expresa la ganancia de energía —manifestada como pre-sión— por unidad de peso de sustancia fluida.
Conviene insistir en lo siguiente: con una bomba centrífuga es del todo posible regu-lar el caudal desplazado. Si se restringe el caudal el incremento de presión para el fluidoaumentará, pero sólo hasta un valor límite establecido por la potencia que suministrael motor primario y por la eficiencia energética de la bomba.
1.1.2. Bombas de desplazamiento positivo
Tienen una frontera móvil que trata de confinar al líquido aspirado dentro de un volu-men decreciente. Existen muchas construcciones de estas máquinas de desplazamien-to positivo; una de las más sencillas es la que se muestra en la figura 21, con base en unpistón alternativo.
Cada vez que el pistón retrocede la bomba admite una porción de líquido para inun-dar su volumen máximo interior (al cual se le da el nombre de “desplazamiento” de labomba). Cuando el pistón avanza la frontera móvil trata de confinar a la masa líquidadentro del volumen que decrece; pero el líquido es prácticamente incompresible y, porende, debe ser desalojado forzosamente (o el pistón no podría avanzar y la máquina sefrenaría).
Entonces, con cada giro completo que da el eje del motor primario, la bomba efec-túa un ciclo en el que primero aspira una dosis de fluido —su volumen interior o des-plazamiento— para luego expulsar la misma dosis por el puerto de descarga pero conun incremento de presión. La mayor parte de las bombas de desplazamiento positivo seconstruye de tal modo que su desplazamiento es invariable y por consiguiente entreganun caudal que es prácticamente constante. Otros modelos —con una construcción máscomplicada— permiten regular el desplazamiento y modificar el caudal desalojado.
Para la bomba de la figura 21, cuyo desplazamiento es invariable, con cada golpe delpistón se admite un volumen de líquido igual al desplazamiento de la bomba,ΔVolb =π/4D 2
p s , y como el motor gira con la velocidad angular n , el caudal teórico, o ideal,desplazado es:
Qideal = nΔVolb = nπ
4D 2
p s (2.2)
En consecuencia, para las bombas con desplazamiento invariable, mientras no sealtere la velocidad angular del motor primario el caudal desalojado por la bomba se

Sección 1 Máquinas fluidas de desplazamiento positivo y rotodinámicas 41
mantendrá casi constante. Siempre se presenta una leve disminución en el caudal en-tregado por la bomba —con respecto al caudal ideal— pues existen pequeñas fugas in-ternas entre las piezas móviles que deslizan una sobre otra. Esta disminución de caudalse expresa con base en la eficiencia volumétrica de la bomba.
El caudal verdadero que la bomba entrega en su puerto de descarga está definidocomo:
Qreal
�m3
s
�=ω
2π·ΔVolb ·ηVol (2.3)
o bien
Qreal [lpm] =η ·ΔVolb ·ηVol
donde ΔVolb es el desplazamiento de la bomba —expresado en [m3] para la primeraecuación y en [lt] para la segunda—ω es la velocidad angular en [rad/s] y n es la velo-cidad angular en [rpm] ·ηVol es la eficiencia volumétrica, la cual se define como:
ηVol =descarga real
descarga teórica=
Qreal
Qideal
[m3/s][m3/s]
·100 (2.4)
Curvateórica
Curvareal
Q0
Qb
Δp
� Figura 25. Curva característica de una bomba de desplazamiento positivo.
La eficiencia volumétrica compara el caudal que la bomba desaloja en realidad—para ciertas condiciones de presión— con el caudal que debe desalojar en condi-ciones ideales sin presencia de fugas de líquido. La comparación, por supuesto, es uncociente adimensional que se expresa como un porcentaje. Se podría esperar que unabomba de desplazamiento positivo, al girar a velocidad angular invariable, entregue un

42 Capítulo 2 Máquinas de desplazamiento positivo: bombas y compresores
caudal estrictamente constante independientemente de la presión del sistema; no esasí. Al aumentar la presión desarrollada también aumentan las fugas internas, a travésde las holguras que existen entre las piezas móviles. Estas fugas disminuyen el caudaldescargado.
¿Pero a qué presión entrega su caudal una bomba de desplazamiento positivo? Lacurva característica de una de estas bombas es como se muestra en la figura 25. El cau-dal permanece prácticamente invariable (salvo la muy leve disminución por las fugasinternas), para cualquier incremento de presión. Es decir, una de estas bombas no ad-mite que se regule el caudal que se expulsa a través de la línea de descarga.
La respuesta a la pregunta del párrafo anterior es que una bomba de desplazamien-to positivo desarrolla la presión necesaria para vencer las oposiciones que el sistema lepresenta a la bomba, y así logra desalojar su caudal invariable. No hay límite para elcrecimiento de la presión, en tanto el motor primario proporcione suficiente potencia.Si el sistema presenta una gran oposición para admitir el caudal desplazado, la bombaresponderá con un gran incremento de la presión.
� Figura 26. Símbolo deuna bomba hidráulica concaudal invariable.
En la figura 26 se muestra el símbolo para una bom-ba que desplaza un caudal invariable. Esta máquina es lafuente de energía para el sistema de potencia, pues depo-sita energía hidráulica en el fluido de trabajo. El resultadode su acción es la producción de un caudal presurizado(las ganancias de energía potencial suelen ser poco impor-tantes en un sistema de potencia hidráulica).
Existen muchos tipos de bombas de desplazamientopositivo con caudal invariable, pero las que se emplean
con mayor frecuencia son las de paletas deslizables, engranes externos, engranes in-ternos y las de pistones (ver figuras 27, 28 y 29). El caudal que desplaza cualquiera de
Volu
men
crec
ien
te
Volu
men
dec
reci
ente
Puerto deaspiración
Puerto dedescargaCarcasa
Rotor Paletas
Tapa de lacarcasa
� Figura 27. Bomba de paletas deslizables.

Sección 4 Cuantificación del caudal en un sistema neumático 63
o bien:
PCM=Vol [pulg3] ·Relación de compresión
Tiempo requerido parallenar el cilindro [s] · 28,8
(2.10)
EJEMPLO 10
Un cilindro neumático recorre la carrera s = 0,80 [m]. Su diámetro de pistón es125 [mm] y el del vástago mide 36 [mm]. La extensión se debe efectuar en 2 [s]y el retroceso en 1,5 [s]. Obtenga el caudal necesario para efectuar ambos movi-mientos y el caudal promedio del ciclo. La presión disponible en los puertos deingreso del actuador es 550 [kPa]; la presión atmosférica local es de 79 [kPa].
Las áreas transversales del pistón y los volúmenes interiores para ambos lados,cabeza y tapa, son los siguientes:
At =π
4D 2
p =π
4(0,125 [m])2 = 0,0123 [m2]
Ac =π
4
�D 2
p −d 2v
�=π
4[(0,125 [m])2− (0,036 [m])2] = 0,0113 [m2]
Volt = At · s = 0,0123 [m2] ·0,80 [m] = 9,82 ·10−3 [m3]
Volc = Ac · s = 0,0113 [m2] ·0,80 [m] = 9,003 ·10−3 [m3]
La relación de compresión es:
Relación decompresión
=550 [kPa]+79 [kPa]
79 [kPa]= 7,962
y los caudales para la extensión y el retroceso:
Qt =Vol [m3] ·Relación de compresión
Tiempo requerido parala extensión [s]
=9,82 ·10−3 [m]3 ·7,962
2 [s]=
= 0,0391 [m3/s]; entra a la tapa.
Qc =Vol [m3] ·Relación de compresión
Tiempo requerido parael retroceso [s]
=9,003 ·10−3 [m]3 ·7,962
1,5 [s]=
= 0,0478 [m3/s]; entra a la cabeza.

64 Capítulo 2 Máquinas de desplazamiento positivo: bombas y compresores
El caudal promedio para un ciclo, que dura θciclo = θext+θret = 3,5 [s], es:
Qprom =Voltotal
θciclo=
Volt +Volc
θext+θret=
Qt ·θext+Qc ·θret
θext+θret
Qprom =0,0391 [m3/s] ·2,0 [s] +0,0478 [m3/s] ·1,5 [s]
3,5 [s]= 0,0428 [m3/s]
= 2568,9 [lpm] de aire libre.
Ejercicios propuestos
1. Una bomba de desplazamiento positivo entrega 32 [lpm] de aceite hidráulico, conun incremento de presión de 3170 [psi]. La eficiencia energética de la bomba es 72%.¿Qué potencia debe suministrarle el motor primario que la impulsa?
2. Una bomba hidráulica desplaza 26 [lpm] de aceite hidráulico, con un incrementode presión de 5,9 [MPa]. Se le ha acoplado un motor eléctrico que desarrolla unapotencia ideal de 2200 [W], con una eficiencia de 83%. ¿El suministro del motor essuficiente para impulsar a la bomba? De no ser así, ¿qué potencia debe entregar elmotor primario?
3. La bomba de un sistema hidráulico tiene un desplazamiento de 18 [ml] y el motorque la impulsa gira a 1750 [rpm]. Su eficiencia volumétrica es 88%; su eficiencia glo-bal es 81%. La bomba entrega su caudal a 16,4 [MPa]. Determine el caudal desplaza-do por la bomba, la demanda de potencia en la entrada de la bomba y el par torsorque le debe suministrar el motor primario.
4. Una bomba de engranes es impulsada a 1200 [rpm], para desplazar un caudal de38 [lpm] presurizado a 13,75 [MPa]. La bomba tiene una eficiencia total ηb = 0,83.¿Qué par le proporciona el motor primario? Su eficiencia energética es ηe = 0,90.¿Cuál es su desplazamiento?
5. Una bomba, cuyo caudal ideal es 35 [lpm], tiene una eficiencia volumétrica de 0,90.Se usa para impulsar a un cilindro cuyo pistón tiene el diámetro Dp = 125 [mm],su vástago dv = 56 [mm] y desarrolla una carrera s = 0,680 [m]. La bomba envía latotalidad de su caudal al actuador.
a ) Determine las velocidades de extensión y retroceso del actuador.b ) Determine el tiempo para completar un ciclo del actuador.
6. Un cilindro neumático recorre una carrera s = 27 [pulg]. Sus diámetros de pistón yvástago son 5 [pulg] y 1 3
4 [pulg], respectivamente. La extensión se efectúa en 4 [s] y el

Referencias 65
retroceso en 3,2 [s]. Obtenga el caudal necesario para efectuar ambos movimientos yel caudal promedio un ciclo. La presión disponible es 92 [psi]; la presión atmosféricalocal es de 14 [psi].
7. Un actuador rotatorio neumático, cuya carrera es de 150◦, se mueve en forma alter-nada a razón de 40 ciclos completos por minuto. El desplazamiento del actuadorrotatorio es 0,46 [L], y el tiempo que consume al girar en un sentido es el doble delque consume en el giro opuesto. Se alimenta con aire comprimido cuya relación decompresión es RC= 7,565; la presión atmosférica local es 84 [kPa].
a ) Determine el caudal consumido (en condiciones de aire libre) para ambas carre-ras y el caudal promedio del ciclo.
b ) Determine el consumo total de aire que debe satisfacer el compresor, para unajornada de 8 [hr].
8. Se instalará un actuador lineal neumático de doble efecto, para desarrollar una ca-rrera de 0,60 [m]. Los diámetros de pistón y vástago son 125 [mm] y 28 [mm], respec-tivamente. La extensión se debe ejecutar en 4 segundos y la retracción en 5 segun-dos. La presión disponible en el sistema es 520 [kPa]. La presión atmosférica local es86 [kPa]. Determine el consumo de aire para los movimientos de extensión y retro-ceso y el consumo promedio para el ciclo. ¿Cómo cambian los resultados anterioressi ahora la extensión se ejecuta en 5 segundos y la retracción en 4 segundos?
9. Se instalará una actuador lineal neumático de doble efecto. El diámetro del pistón esDp = 160 [mm] y el del vástago dv = 45 [mm]; la carrera es s = 0,76 [m]. Se cuenta conuna presión de 550 [kPa] en el sistema. El actuador efectuará 522 ciclos por hora. Laextensión se debe ejecutar en el doble de tiempo del retroceso. La presión atmosfé-rica local es 80 [kPa]. Determine el caudal promedio consumido por el actuador y eltiempo en que 4 actuadores idénticos, operando simultáneamente, agotarán 72 [m3]de aire libre.
Referencias
[1] Pinches, Michael J. y Ashby, John G. Power hydraulics. London, Prentice Hall Inter-national, 1988.
[2] Secretaria de Comercio y Fomento Industrial. Dirección General de Normas. Nor-ma mexicana NMX-H-018-1970, Símbolos, terminología y nomenclatura para en-granes. México, 1970.
[3] Sullivan, James A. Fluid power. Theory and applications. New Jersey, Prentice HallInc., 1989.
[4] IngersollRand Company Limited. IRITS-0109-006. Single-stage Air Compressors,Electric Drive. Davidson, NC, USA, 2009.

66 Capítulo 2 Máquinas de desplazamiento positivo: bombas y compresores
[5] Atlas Copco. 2935 4846 47. Compresores industriales de pistón LE/LT/LF. Lubrica-dos y exentos de aceite. Overijse, Bélgica.
[6] DV Systems Inc. HDI-09-09-3. HDI Heavy duty Pressure lubricated Industrial com-pressors. Ontario, Canada, 2009.
[7] Ingersoll-Rand Company. IRITS-0107-009-A. Reciprocating Single- and Two-stageAir Compressors 2-25 hp. NC, USA, 2009.
[8] Atlas Copco. 2935 4869 45. Compresores de tornillo rotativos con inyección de aceite.GX 2-11. Overijse, Bélgica.
[9] Ingersoll-Rand Company. IRITS-0110-001. Contact-Cooled Rotary Screw Air Com-pressors. NC, USA, 2010.
[10] Kaeser Compressors. Rotary lobe blowers and packages. Omega 2-8 series. Frede-ricksburg, Virginia, USA, 2009.

3 Actuadores lineales, neumáticose hidráulicos
1. Conversión de la presión fluida en una fuerza mecánica1. 1.1. Multiplicación de una fuerza1. 1.1. 1.1.1. Intensificación de presión2. Actuadores lineales1. 2.1. Tipos comunes de actuadores lineales3. Variables iniciales de diseño y dimensionado del sistema de potencia1. 3.1. Selección básica de un actuador lineal1. 3.2. Efecto de la contrapresión sobre la fuerza desarrollada por el actuador1. 1.1. 3.2.1. Carrera de extensión1. 1.1. 3.2.2. Carrera de retroceso1. 3.3. Factor empírico de diseño para los actuadores lineales4. Selección completa de las dimensiones del actuador lineal1. 4.1. Deformación del vástago1. 4.2. Tubo de detención1. 4.3. Selección de un diámetro estándar para el vástago y el tubo de detención1. 1.1. 4.3.1. Procedimientos simplificados para determinar el diámetro de vástago1. 1.1. 4.3.2. Montajes normalizados para los actuadores lineales1. 1.1. 4.3.3. Carta de selección del diámetro del vástago y el tubo de detención1. 4.4. Desaceleración de la carga en movimiento en los actuadores lineales1. 4.5. Aceleración y desaceleración en los actuadores hidráulicos1. 4.6. Capacidad de amortiguamiento en los actuadores neumáticos1. 1.1. 4.6.1. Determinación de la energía cinética que se debe disipar1. 1.1. 4.6.2. Verificación de la capacidad de amortiguamiento del actuador
En la sección 1.1 del capítulo 1 se discutió cómo mover un objeto en el espacio, enE una infinidad de trayectos posibles. Afortunadamente, todas estas posibilidadesse pueden obtener con la composición de varios desplazamientos parciales, con trazosrectos y giros alrededor de diferentes ejes. Para efectuar cada uno de estos movimientosparciales se necesita un tipo específico de actuador.
El actuador es el componente del sistema de potencia que se vincula directamen-te con la carga externa, y efectúa trabajo sobre ella con un ritmo conveniente en el tiem-
67

68 Capítulo 3 Actuadores lineales, neumáticos e hidráulicos
po. Tanto en los sistemas neumáticos como en los hidráulicos se pueden emplear ac-tuadores lineales, rotatorios o motores fluidos. El lineal solamente es capaz de obtenerdesplazamientos lineales mediante la aplicación de una fuerza; el rotatorio consiguegiros angulares finitos, mediante la aplicación de un par; con el motor se obtiene unarotación continua alrededor de un eje.
En este capítulo se discutirá cómo funcionan, cómo están construídos y cómo seseleccionan los actuadores que desplazan linealmente una carga.
1. Conversión de la presión fluida en una fuerza mecánica
Un actuador es un dispositivo capaz de convertir la potencia fluida (caudal presurizado)en trabajo mecánico que se ejecuta con cierto ritmo en el tiempo. Cualquiera que seael tipo de actuador fluido —lineal, rotatorio o un motor— siempre funciona medianteel desplazamiento de una frontera móvil.
En ocasiones, la frontera móvil avanza en línea recta, otras veces gira alrededor deun eje, pero siempre es impulsada por la aplicación de las fuerzas de presión fluida (verfigura 41).
Presióndel
fluido
Presióndel
fluido
FuerzaPar
Fronteramóvil
Fron
tera
móv
il
Eje
� Figura 41. La presión del fluido genera una fuerza, o un par,al actuar sobre una superficie móvil.
Probablemente los actuadores fluidos más empleados son los lineales, aunque lasalida que se obtiene es únicamente un desplazamiento lineal de la carga externa im-pulsada mediante una fuerza. Sin embargo, a través de un actuador lineal se puede lle-var a cabo una operación muy provechosa, la cual permite ejecutar una tarea útil conmayor facilidad. Se trata de multiplicar una fuerza.

Sección 1 Conversión de la presión fluida en una fuerza mecánica 69
Pistón
VástagoObjeto
que oponeresistencia
p =Fe
Amfp
Fe = 4900 [N]
Amf = 7 ·10−3 [m2]
Aact = 11 ·10−3 [m2]
Fs = 7700 [N]
� Figura 42. Multiplicación de una fuerza mediante un actuador lineal.
1.1. Multiplicación de una fuerza........................................................................................................................................................................Para multiplicar una fuerza basta con generar un caudal presurizado —mediante unamáquina fluida— para luego conducirlo hacia la superficie móvil de un actuador. En lafigura 42 se muestra un sistema muy sencillo que permite multiplicar la fuerza que seingresa al sistema.
El factor que determina la multiplicación de la fuerza es la relación entre dos super-ficies: la superficie móvil de la máquina fluida (de desplazamiento positivo) y la superfi-cie de la frontera móvil en el actuador. Entonces, si el pistón de un actuador lineal tienemayor superficie que la pared móvil de la máquina fluida, el actuador producirá unafuerza de salida superior a la que se aplicó en la entrada del sistema.
En la figura 42 se aplicó una fuerza de entrada Fe = 4900 [N] sobre la pared móvilde la máquina fluida, que tiene 70 [cm2] de superficie (7 ·10−3 [m2]). El fluido contenidodentro del sistema se presuriza a 700 [kPa]. La presión se manifiesta sobre el pistón delactuador, cuya superficie es 110 [cm2] (11 · 10−3 [m2]), y desarrolla una fuerza de salidamayor a la fuerza de entrada: Fs = 7700 [N].
La razón entre las dos superficies —del pistón y de la máquina fluida— es:
Apistón
Am. fluida=
110 [cm2]70 [cm2]
= 1,57

70 Capítulo 3 Actuadores lineales, neumáticos e hidráulicos
La razón entre las dos fuerzas —salida del actuador y entrada al sistema— es:
Fs
Fe=
7700 [N]4900 [N]
= 1,57
No hay límite para multiplicar una fuerza a través de la aplicación de caudal presurizadoa un actuador lineal, salvo las limitaciones de espacio que se deban respetar en cadamáquina o dispositivo.
EJEMPLO 11
Un elevador hidráulico para automóviles —llamado tradicionalmente “gato debotella”— debe aplicar una fuerza de 4170 [N] (aproximadamente 425 [kgf ]) paralevantar una esquina del vehículo y cambiar una llanta dañada. El pistón de labomba tiene un diámetro db = 14 [mm] y una carrera de 75 [mm], mientras queel diámetro del pistón elevador es Dp = 58 [mm]. Determine:
a ) la presión en el sistemab ) el número de golpes necesarios en la bomba manual, para que el pistón eleve
al vehículo 15 [cm]c ) la fuerza ejercida por el operario de la bomba.
Fe
Fs
patm
patm
At
pb
pt
Fe
Ab
� Figura e-11. Esquema de un gato hidráulico de botella.
a ) La sección transversal del pistón elevador es:
Ap =π
4D 2
p =π
4(0.058 [m])2 = 2,64 ·10−3 [m2].

Sección 1 Conversión de la presión fluida en una fuerza mecánica 71
En condiciones ideales se tiene que Fs = pt At , dando como resultado:
pt =Fs
At=
4170 [N]0,00264[m2]
= 1 578 302 [Pa]= 1,58 [MPa]
b ) Con cada golpe de la bomba se desplaza un volumen de líquido:
ΔVolb = s Ab = sπ
4d 2
b = (0,075 [m])π
4(0,014 [m])2 =
= 1,155 ·10−5 [m3] = 0,0115 [L].
Para que el pistón se eleve 15 [cm] es necesario desplazar el volumen Volp
hacia el cilindro o botella:
Volp = Ap · s = 2,64 ·10−3 [m2](0,15 [m])= 3,963 ·10−4 [m3] = 0,396 [L].
El número de golpes necesarios en la bomba es:
n =Volp
ΔVolb=
0,396 [L]0,01155 [L]
= 34,3 golpes
c ) La presión en el cilindro elevador es igual a la presión en la bomba manual,pt = pb .
Fs
Ap=
Fe
AbFe = Fs
Ab
Ap= Fs
π4 d 2
bπ4 D 2
p
= Fe
�db
Dp
2
Fe = 4170 [N]
0,014 [m]0,058 [m]
�2= 243 [N]≈ 24,8 [kgf ]
La relación de fuerzas es la misma que la relación de superficies,
Fs
Fe=
Ap
Ab= 17,2.
Se requiere una fuerza muy pequeña para accionar el elevador, pero se de-ben dar numerosos golpes para elevar la carga hasta la posición requerida.
1.1.1. Intensificación de presión
Mediante la relación de tres superficies móviles —una máquina fluida y dos superficiesmóviles unidas al vástago de un actuador— es posible intensificar sensiblemente la pre-sión de un fluido. Para ello, se emplea un dispositivo especial llamado intensificador de-

72 Capítulo 3 Actuadores lineales, neumáticos e hidráulicos
Fe = 4200 [N]
Amf = 6 ·10−3 [m2]
Aact = 9 ·10−3 [m2]Pistón del actuador
Fs = 25 200 [N]
Pb = 2800 [kPa]
F = 8400 [N]
Pistón menorAmen = 3 ·10−3 [m2]
Pistón mayorAmay = 12 ·10−3 [m2]
Pa = 700 [kPa]
Vástago
� Figura 43. Intensificador de presión colocado entre una máquina fluida y un actuador.
presión. Consiste básicamente en una carcasa que contiene un vástago, acoplado a dospistones diferentes.
El puerto de entrada del intensificador recibe el caudal presurizado que provienede una máquina fluida, por ejemplo neumática. El puerto de salida del intensificadorse conecta con el sistema cuya presión se desea intensificar. En la figura 43 se muestraun intensificador colocado entre la máquina fluida y el actuador final que desplaza a lacarga.
El intensificador de presión incrementa la presión 4 veces (por la relación entre lassuperficies de sus pistones). La relación entre las superficies móviles de la máquina flui-da y del actuador es 1,5. Entonces la fuerza neta de salida es 4 · 1,5 = 6 veces superiora la fuerza de entrada. El empleo de un sistema de intensificación de presión permitedisponer de las altas presiones de un sistema hidráulico (y por tanto de fuerzas y paresmuy intensos), a partir de la energía suministrada por un sistema neumático de bajapresión. Esta posibilidad es una solución sencilla y no muy costosa para disponer depotencia hidráulica, a partir del suministro de aire a baja presión.
En la figura 44 se muestran dos unidades hidráulicas de la empresa Enerpac [1], im-pulsadas por motores neumáticos. Son capaces de desplazar un caudal de 1.3 [lpm] deaceite hidráulico, hasta una presión de 70 [MPa], impulsadas por un motor neumáticode 3 [kW] que consume aire comprimido con presión entre 400 y 700 [kPa].

4 Actuadores rotatorios ymotores fluidos
1. Selección básica de motores y actuadores rotatorios1. 1.1. Par torsor desarrollado por un motor o un actuador2. Actuadores y motores neumáticos1. 2.1. Motores de paletas deslizables1. 1.1. 2.1.1. Regulación de velocidad en los motores de paletas1. 2.2. Motores de pistones radiales1. 1.1. 2.2.1. Motores compactos1. 1.1. 2.2.2. Motores de trabajo pesado1. 2.3. Motores de turbina1. 2.4. Actuadores rotatorios1. 1.1. 2.4.1. Determinación del par para desplazar la carga3. Actuadores y motores hidráulicos1. 3.1. Motores hidráulicos con desplazamiento invariable1. 3.2. Motores hidráulicos de engranes, paletas y pistones1. 1.1. 3.2.1. Motores de engranes externos1. 1.1. 3.2.2. 2 Motores de engranes internos1. 1.1. 3.2.3. 2 Motores de paletas1. 1.1. 3.2.4. 2 Motores con pistones axiales1. 3.3. Actuadores rotatorios
En la sección 2.1 del capítulo 3, se advirtió que los actuadores lineales permiten ge-Enerar una gran variedad de movimientos, no necesariamente rectilíneos, con baseen las articulaciones y mecanismos acoplados al vástago del actuador. Sin embargo,muchas aplicaciones exigen desarrollar un desplazamiento angular alrededor de uneje, y para lograrlo existen actuadores rotatorios que no requieren de un mecanismoexterno añadido al actuador.
En ocasiones la carga externa debe recorrer un desplazamiento angular finito Δα,en un tiempo determinado Δθ (lo cual define una velocidad angular promedioω = Δα/Δθ ). En otros casos, se debe mantener a la carga externa girando continua-mente alrededor de un eje con cierta velocidad angular ω. En ambas situaciones esnecesario aplicar un par torsor M que impulse el giro alrededor del eje, para vencer las
141

142 Capítulo 4 Actuadores rotatorios y motores fluidos
oposiciones que tratan de frenar el desplazamiento de la carga (ver la sección 1.1 delcapítulo 1). El producto del par aplicado por la velocidad angular define una potenciapromedio.
1. Selección básica de motores y actuadores rotatorios
De manera semejante a lo ya discutido para los actuadores lineales, el dimensionadoy selección de un motor o un actuador rotatorio depende de tres variables iniciales dediseño:
a ) El par torsor necesario para girar la carga en los sentidos horario y antihorario,que con frecuencia son distintos.
b ) El desplazamiento angular que se debe imponer sobre la carga.c ) El tiempo necesario para completar el desplazamiento de la carga en cada sen-
tido, generalmente distintos.
Cuando se trata de efectuar giros continuos la carrera angular y el tiempo estánreunidos en un cociente, que expresa una velocidad angular. Para impulsar a la cargaexterna se emplea un motor fluido, que se denomina de esta forma porque la ener-gía se le suministra mediante un caudal presurizado (gaseoso o líquido). En cambio,el actuador rotatorio proporciona un desplazamiento finito —alternado en uno y otrosentido— que se debe recorrer en un tiempo específico.
Tal y como sucede con los actuadores lineales, el dimensionamiento básico de unmotor o de un actuador rotatorio consiste en determinar sus dimensiones geométricas.
Giro angular ensentido antihorario
Alimentaciónde caudal
presurizado
Caudaldesalojado
Eje
Super
ficie
móvi
l
Tornilloslimitadoresde carrera
Par torsor
Carcasa
Puerto 1
Puerto 2
� Figura 72. Actuador rotatorio con una paleta plana.

Sección 1 Selección básica de motores y actuadores rotatorios 143
Volu
men
crec
ien
te
Volu
men
dec
reci
ente
Puerto deaspiración
Puerto dedescargaCarcasa
Rotor Paletas
ω
� Figura 73. Motor con paletas deslizables.
Para los actuadores lineales se determina el área transversal del pistón, que en productocon la carrera del vástago define el volumen interno de la cámara cilíndrica. En el casode los motores y los actuadores rotatorios también se determina su volumen interno: elvolumen o tamaño necesario para que el motor o actuador desempeñe adecuadamentesu trabajo.
El volumen interno de un motor o actuador rotatorio se conoce como su desplaza-miento. Para que el eje de un motor fluido de un giro completo —o el actuador rotatoriogire a lo largo de su carrera angular— su volumen interno debe ser inundado con fluidopresurizado. Una de las construcciones más sencillas de un actuador rotatorio es la quese muestra en la figura 72; en la figura 73 se muestra un esquema de la construcción deun motor rotatorio.
1.1. Par torsor desarrollado por un motor o un actuador........................................................................................................................................................................En la figura 74 se explica el funcionamiento de un motor fluido, cuya única paleta osuperficie deslizable gira con cierta velocidad angular ω [rad/s]. La paleta se desplazaalrededor de un eje porque es empujada por fuerzas de presión. La alimentación decaudal origina un desbalance de presionesΔp = pa−pb , aplicado sobre las caras planasde la paleta; pa es la presión del fluido que ingresa por el puerto de admisión y pb es lacontrapresión del fluido que se desaloja a través del puerto de descarga.
Las presiones pa y pb producen las fuerzas de presión Fa y Fb , al actuar sobre cadauna de las superficies de la paleta deslizable. Como ambas presiones son uniformessobre cada lado de la paleta, la correspondiente fuerza resultante de presión actúa sobreel centroide de la superficie rectangular. Entonces, como producto del desbalance de

144 Capítulo 4 Actuadores rotatorios y motores fluidos
presiones, el eje del motor transmite un par torsor neto, M0 [Nm], que es la diferenciaentre los pares torsores Ma y Mb :
M0 =Ma −Mb =R
2· Fa − R
2· Fb =
R
2(Fa − Fb ) =
R A
2(pa −pb )
pero el área de la superficie rectangular es A = R e , y el volumen interior del motor (sudesplazamiento) es Vol=πR 2e . Por consiguiente:
M0 =R 2e
2(pa −pb ) =
Vol
2π(pa −pb )
M0 =VolΔp
2π
Par torsor ideal desarrolladopor un motor fluido
(4.1)
Para un actuador rotatorio que no da giros completos (1 giro= 360◦ = 2π [rad]), sino quese desplaza angularmente con una carrera angular finitaΔα [rad], la igualdad anteriorcambia a la siguiente expresión:
M0 =VolΔp
Δα
Par torsor ideal desarrolladopor un actuador rotatorio
(4.2)
Las ecuaciones (4.1) y (4.2) sugieren con claridad en qué consiste la selección básicade un actuador rotatorio o un motor fluido. A partir de la magnitud del par torsor M —necesario para desplazar la carga externa con la carrera angular 2πoΔα— se determinaqué volumen (desplazamiento) debe tener el actuador, cuando se dispone de ciertodesbalance de presión que se aplicará entre sus puertos.
ω
e
R
M0
Fa
Fb R
2
� Figura 74. Balance de fuerzas en un motor con una sola paleta rectangular.

Sección 1 Selección básica de motores y actuadores rotatorios 145
Ambas ecuaciones proporcionan un resultado ideal, que supone una conversiónperfecta de la potencia fluida en trabajo mecánico efectuado por unidad de tiempo.Pero en realidad, tanto los actuadores rotatorios como los motores fluidos tienen ciertaeficiencia energética ηe < 100%, que se define como el cociente de la potencia mecá-nica suministrada por el actuador, o el motor, entre la potencia ideal:
ηe (%)=Potencia real ·100
Potencia ideal=
Wreal ·100
(M0 · w )ideal(4.3)
EJEMPLO 23
¿Qué par ideal de salida desarrolla un motor fluido si tiene un desplazamientode 225 [cm3] y recibe un caudal de aceite de 180 [lpm], presurizados a 1,65 [MPa]?¿Cuál es su velocidad angular en [rpm] y la potencia ideal desarrollada en [W]?El motor desaloja el caudal hacia el tanque con la reserva de fluido, venciendouna contrapresión de 280 [kPa].
El desplazamiento del motor es Vol = 225 [cm3] = 2,25 · 10−4 [m3] = 0,225 [L]. Elcaudal suministrado es Q = 180 [lpm] = 3 · 10−3 [m3/s]. La velocidad de rotacióndel eje del motor es:
n =60 ·Q
Vol=
60(3 ·10−3 [m3/s])2,25 ·10−4 [m3])
= 800 [rpm] = 83,78 [rad/s]
El par torsor ideal transmitido por el motor es:
�M =Δp ·Vol
2π=(1,65−0,28) ·106 [N/m2] ·2,25 ·10−4 [m3]
2π= 49,06 [Nm]
La potencia ideal desarrollada es:
W = �M · �ω= 49,06 [Nm] ·83,78 [rad/s] = 4110 [W]
o bien W = Q ·Δp = 3 · 10−3 [m3/s] · (1,65− 0,28) · 106 [N/m2] = 4110 [W], queexpresa la potencia fluida que se alimentó al motor como caudal presurizado.Ambos flujos de energía, por unidad de tiempo, son idénticos en el caso ideal,cuando ηe = 100%.
EJEMPLO 24
¿Qué desplazamiento (expresado en [cm3]) debe tener un motor hidráulico, sidesarrolla un par ideal de 40 [Nm] mientras gira a 750 [rpm]? El motor recibe

146 Capítulo 4 Actuadores rotatorios y motores fluidos
el caudal de aceite presurizado a 1,40 [MPa] y la contrapresión en la salida es0,14 [MPa]. ¿Cuál es la potencia ideal y la potencia real desarrollada en el eje delmotor, si ηe = 0,86? ¿Cuánto es el consumo ideal de aceite en el motor?
La ecuación 4.1 proporciona el par torsor ideal transmitido por el motor, de don-de se despeja:
Vol=2π �M
Δp=
2π ·40 [Nm](1,4 ·106−1,4 ·105) [N/m2]
= 2,0 ·104 [m3] = 0,2 [L] = 200 [cm3]
La velocidad angular esω= 750 [rpm] = 78,54 [rad/s]; y la potencia ideal es:
Wideal = �M · �ω= 40 [Nm] ·78,54 [rad/s] = 3141,6 [W]
y con la ecuación 4.3 se despeja:
Wreal =ηe · Wideal = 0,86 ·3141,6 [W] = 2701,8 [W]
El caudal se puede determinar con base en el desplazamiento y la velocidad delmotor. Cada revolución completa del motor consume 0,2 [L]de aceite; para girara 750 [rpm] se requiere un caudal:
Q =N ·Vol= 750 [rpm] ·0,2 [L] = 150 [lpm]
2. Actuadores y motores neumáticos
Los actuadores y motores neumáticos producen trabajo mecánico a partir de la expan-sión del aire comprimido que les suministra un sistema neumático de potencia. Al me-nos durante los doscientos años más recientes se ha propuesto y empleado una granvariedad de diseños, que van desde las diminutas turbinas de mano empleadas por losdentistas hasta unidades que desarrollan centenares de [kW]. Entre las máquinas útilesimpulsadas por motores neumáticos se cuentan las llaves de impacto, taladros, desar-madores, esmeriladoras, lijadoras, remachadoras, pulidoras, cinceladoras y martillos.
El empleo de los motores y actuadores neumáticos ofrece muchas ventajas, en com-paración con los motores eléctricos: pesan menos y tienen menor volumen (1/5 del pesoy 1/3 del volumen, en comparación a un motor eléctrico de la misma potencia); desarro-llan más potencia en proporción con su tamaño; el par desarrollado en su eje aumentacon la carga; no se dañan cuando se bloquean por una sobrecarga; se pueden arrancary parar de forma ilimitada; su arranque, paro y cambio de sentido de giro son instan-

Sección 2 Actuadores y motores neumáticos 147
táneos, incluso cuando el motor funciona bajo plena carga; el control de velocidad esinfinitamente variable, por medio de una válvula montada reguladora de caudal; el pary la potencia son regulables, variando la presión de aire suministrada [1].
Cualquiera de estos motores y actuadores tiene una o varias superficies móviles, so-bre las que actúa la fuerza de presión producida por el aire comprimido. Existen moto-res con pistones axiales, pistones radiales, paletas y engranes. Los motores neumáticostienen cierta ventaja sobre los hidráulicos: transfieren calor más fácilmente por el flujoabierto de aire que escapa a la atmósfera; por esta razón trabajan mas fríos, aunque seempleen durante largo tiempo.
� Figura 75. Algunos ejemplos de herramientas neumáticas:llave de impacto, pulidora y desarmador.
2.1. Motores de paletas deslizables........................................................................................................................................................................Los motores de paletas desarrollan un par torsor sobre su eje, cuya magnitud dependedel desbalance de presión que actúa sobre la superficie de las paletas. Las paletas seintroducen en las ranuras del rotor, el cual está montado excéntricamente dentro dela carcasa cilíndrica (figuras 73 y 76). Esta excentricidad genera un volumen crecien-te entre cada pareja de paletas, a lo largo de medio giro, lo cual permite aspirar el airecomprimido. En el siguiente medio giro el volumen decrece, lo cual desaloja el aire ha-cia la atmósfera. El número de paletas generalmente es de tres a diez, aunque puedeser mayor con el propósito de incrementar su par de arranque (ver el recuadro en la pá-gina 150).
La oferta de motores de paletas con diferentes desplazamientos es muy amplia ypueden desarrollar de 20 [W] hasta 20 [kW] de potencia. Su velocidad angular en vacíoes muy elevada; no es extraño que el rotor con las paletas gire, sin carga, entre 3000 y80 000 [rpm]. Lo habitual es que cuenten con una reducción de engranes acoplada en su

148 Capítulo 4 Actuadores rotatorios y motores fluidos
Cubierta delrodamiento
Paleta
Rotor
Carcasadel rotor
Cubierta delrodamiento
� Figura 76. Construcción de un motor de paletas, con el rotor excéntrico dentro de la carcasa.
eje. Mediante la transmisión de engranes se reduce de 3 a 1000 veces la velocidad en eleje de salida y se multiplica en igual proporción el par torsor desarrollado (el resultadopara M0 de la ecuación (4.1)).
� Figura 77. Motor neumático de paletas con reducción de engranes planetarios,
marca Modec [2]. Desarrolla 850 [W] de potencia máxima, con un peso aproximado de 2 [kg].
Es común que los motores pequeños tengan una reducción de engranes planetariosya incluida en su cuerpo (ver el recuadro en la página 149). Aún así, se trata de objetosmuy ligeros y con tamaño reducido; en la figura 77 se muestra un motor típico conreducción de engranes planetarios que desarrolla más de 1 [hp] de potencia (1 [hp] ≈746 [W]). Los motores más grandes se acoplan con reducciones externas de engraneshelicoidales o de corona helicoidal y tonillo sinfín (figura 78).
Los motores de paletas proporcionan una marcha suave, continua y sin vibracio-nes. Son ligeros y compactos, no se dañan con sobrecargas y se les puede someter ainnumerables órdenes de marcha y paro. No los afecta el calor ni las atmósferas hú-medas o corrosivas. Habitualmente requieren aire comprimido a 20 ◦C, filtrado con unelemento cuyo diámetro nominal de poro sea 40 [μm] o menor. No requiere lubricaciónsi su funcionamiento es intermitente (tiempo de servicio≤ 70%). Para funcionamientocontinuo se recomienda alimentar aceite mediante el lubricador de la unidad de man-tenimiento.

170 Capítulo 4 Actuadores rotatorios y motores fluidos
c ) Carga inercial. El actuador debe vencer la inercia de la carga para acelerarla angu-larmente. El par inercial está definido por la igualdad:
Mi = I ω= I2Δα
θ 2(4.10)
donde Mi = par inercial, [Nm]I = momento de inercia, [kg·m2]ω = aceleración angular, [rad/s2]Δα = desplazamiento angular, [rad]θ = tiempo, [s]
ω
El centro de rotación yel centro de masa de lacarga son concéntricos
ω
El eje del actuador estáen posición vertical,hacia arriba ohacia abajo
� Figura 98c. Carga inercial.
El par neto aplicado por el actuador es:
Mneto = ( f er )Mr +Me + ( f ei )Mi (4.11)
donde f er = factor de exceso de la carga resistente;1,5≤ f er ≤ 2,5 yf ei = factor de exceso de la carga inercial;2,5≤ f ei ≤ 5,0.
Estos factores de exceso toman en cuenta el posible incremento de la fuerza de fric-ción, por el desgaste progresivo del sistema, y el crecimiento de la aceleración angularsi se llega a disminuir el tiempo para efectuar el desplazamiento angular. En la tabla 4.1se proporcionan los momentos de inercia para diferentes cargas acopladas al eje de unactuador rotatorio.

Sección 2 Actuadores y motores neumáticos 171
� Tabla 4.1. Momentos de inercia de algunas cargas típicas.
w
d
Carga puntual:
I =w
gd 2
Esfera sólida:
I =2
5
w
gr 2
Disco delgado:
I =w
g
r 2
4
ab
a
b
m1
m2
c
Placa rectangular
delgada, centrada:
I =w
g
a 2 + b 2
12
Placa rectangular
delgada, descentrada:
I =w1
g
4a 2 + c 2
12+
w2
g
4b 2 + c 2
12
Disco horizontal:
I =w
g
r 2
2
Continúa

172 Capítulo 4 Actuadores rotatorios y motores fluidos
a
L
a
b
m1
m2
Placa rectangular delgada
vertical, centrada:
I =w
g
a 2
12
Varilla esbelta
centrada:
I =w
g
L 2
12
Varilla esbelta,
descentrada:
I =w1
g
a 2
3+
w2
g
b 2
3
L Número dedientes = a
Número dedientes = b
de
Eje centroidal de la carga y eje
de rotación no son concéntricos:
I = I0 +m L 2
I0 =momento de inercia centroidal de la carga
Transmisión de engranes:
Ia =� a
b
2Ib
Ib =momento de inercia de
la carga acoplada al eje b
eeeeeeeeeee

Sección 2 Actuadores y motores neumáticos 173
EJEMPLO 28
Un actuador rotatorio debe desplazar la carga inercial que se muestra en la fi-gura, recorriendo en 0,5 [s] la carrera angular de 180◦ (π [rad]). Determine el parnecesario para desplazar la carga y la energía cinética que le comunicará el ac-tuador.
4,0 [kg]
2,0 [kg]
La carga del actuador es exclusivamente inercial. El momento de inercia totales la suma de los momentos de inercia de las diferentes cargas. En este caso setrata de una placa rectangular y un cilindro, ambos descentrados respecto al ejede rotación del eje del actuador.
Para una placa que gira centrada se tiene:
I01=
w1
g
a 2+ b 2
12=m1
a 2+ b 2
12
I01= 4,0 [kg]
(0,150 [m])2+ (0,050 [m])2
12
I01= 8,333 ·10−3 [kg ·m2]
y como la placa gira descentrada:
I1 = I01+m1L 2 = 8,333 ·10−3 [kg ·m2] +4,0 [kg](0,05 [m]2) = 1,8333 ·10−2 [kg ·m2]

174 Capítulo 4 Actuadores rotatorios y motores fluidos
Para un cilindro que gira sobre su eje se tiene:
I02=
w2
g
r 2
2=m2
r 2
2= 2,0 [kg]
(0,025 [m])2
2= 6,25 ·10−4 [kg ·m2]
y como el cilindro gira descentrado:
I2 = I02+m2L 2 = 6,25 ·10−4 [kg ·m2] +2,0 [kg](0,10 [m]2) = 2,0625 ·10−2 [kg ·m2]
entonces el momento de inercia total es:
It = I1+ I2 = 1,8333 ·10−2 [kg ·m2] +2,0625 ·10−2 [kg ·m2] = 3,8958 ·10−2 [kg ·m2]
y el par inercial es:
Mi = It2Δα
θ 2= 3,8958 ·10−2 [kg ·m2]
2(π [rad])(0,5 [s])2
= 0,979 [Nm]
Con un factor de exceso f ei = 3,5 se tiene: Mneto = 3,5(0,979 [Nm]) = 3,427 [Nm];y la energía cinética comunicada a la carga es:
Ec =1
2Itω
2 =1
2It
Δα
θ
�2=
1
23,8958 ·10−2 [kg ·m2]
π [rad]0,5 [s]
�2= 0,769 [J]
3. Actuadores y motores hidráulicos
Los actuadores rotatorios y los motores hidráulicos reciben el caudal presurizado queha sido desplazado por la bomba del sistema de potencia. Unos y otros reciben po-tencia fluida y la convierten en potencia mecánica, manifestada como un eje que gira—continua o intermitentemente— para transmitir un par torsor sobre la carga y despla-zarla con cierta velocidad angular. El desplazamiento del motor o del actuador rotatorio—el volumen interior que se puede inundar con el líquido presurizado— establece ladimensión básica de cualquiera de estos actuadores. Al igual que sus equivalentes neu-máticos, los motores y actuadores hidráulicos funcionan con base en un desbalance defuerzas de presión, que da por resultado la rotación de su eje.
Todos ellos son dispositivos de desplazamiento positivo. Es decir, el desbalance defuerzas que da por resultado el giro de su eje se genera mediante la acción de las fuerzasde presión sobre una superficie móvil. Esta superficie móvil puede tener diversas for-mas —el diente de un engrane, una paleta o la cara plana de un piston— en función deldiseño del motor o actuador. Además, mientras reciban un caudal invariable de fluido,

Sección 3 Actuadores y motores hidráulicos 175
la velocidad angular de su eje permanecerá relativamente constante, de forma prácti-camente independiente de la presión.
3.1. Motores hidráulicos con desplazamiento invariable........................................................................................................................................................................La velocidad ideal de un motor, o de un actuador rotatorio, depende del caudal recibido,Q , y del desplazamiento del motor,ΔVol:
n [rpm] =Q [lpm]
ΔVol [L/rev](4.12)
y expresado en unidades del Sistema Internacional:
ω [rad/s] =2πQ [m3/s]ΔVol [m3]
(4.13)
Entonces, en condiciones ideales, la velocidad angular de un motor o actuador rotato-rio, cuyo desplazamiento es invariable, permanece constante mientras no se modifiqueel caudal que se le suministra. Al igual que todos los actuadores lineales, o los motores yactuadores rotatorios neumáticos, la velocidad de los motores y actuadores hidráulicosse establece regulando el caudal.
Pero al igual que lo sucedido con las bombas (ver la sección 1.1.2 del capítulo 2),los motores y actuadores rotatorios tienen cierta eficiencia volumétrica ηVol. Parte delcaudal que ingresa por el puerto de admisión del motor, o del actuador, no logra actuarsobre su grupo rotatorio, sino que se fuga a través de los intersticios entre las superficiesmóviles. Por consiguiente, estas fugas afectan tanto a la velocidad angular desarrollada,como a la potencia mecánica suministrada por el motor o actuador.
La eficiencia volumétrica compara el caudal ideal, que el motor necesita para desa-rrollar su velocidad angular, con el caudal verdadero que se envió hacia el motor desdela válvula de control direccional. La comparación es un cociente adimensional que seexpresa como un porcentaje:
ηVol =caudal ideal demandado
caudal real demandado
[m3/s][m3/s]
·100 (4.14)
Conforme se incrementa la presión en el motor o actuador, y con ello el par torsor desa-rrollado, se fuga algo más de caudal a través de las superficies deslizantes y ηVol dismi-nuye. Como resultado la velocidad verdadera del eje del motor disminuye ligeramentepor abajo de la velocidad teórica.
De modo semejante a las bombas hidráulicas, los motores y actuadores rotatoriostambién tienen una eficiencia energética,ηe . Esta eficiencia se define como el cociente

176 Capítulo 4 Actuadores rotatorios y motores fluidos
de la potencia mecánica, desarrollada en el eje del motor, entre la potencia hidráulicasuministrada por el sistema:
ηe (%)=Potencia mecánica desarrollada ·100
Potencia hidráulica suministrada=
M [Nm] ·ω [rad/s] ·100
Qideal [m3/s] ·ΔP [Pa](4.15)
donde M es el par torsor desarrollado en el eje, ω es la velocidad angular del motor,Δp es la diferencia de presión aplicada sobre el motor o actuador y Qideal es el caudalideal para que el motor desarrolle su velocidad. La eficiencia total de un motor es elproducto de su eficiencia volumétrica por su eficiencia energética: ηt = ηVol · ηe (ver[25] y el ejemplo 29 en este capítulo).
3.2. Motores hidráulicos de engranes, paletas y pistones........................................................................................................................................................................Los motores hidráulicos se diseñan en forma muy semejante a las bombas de desplaza-miento positivo, con las cuales comparten muchos de sus componentes. De hecho, lareversibilidad de estas máquinas permite que casi toda bomba se pueda emplear paraque funcione como motor, y viceversa. Entonces, no debe extrañar que —al igual quelas bombas hidráulicas— las geometrías más comunes sean los motores de engranes,paletas y pistones (tanto radiales como axiales).
3.2.1. Motores de engranes externos
Consisten en una carcasa con puertos de entrada y salida y un grupo rotatorio forma-do por dos engranes. Uno de los engranes, el impulsor, se encuentra acoplado al eje desalida conectado con la carga; el otro engrane es el impulsado. La presión hidráulica,aplicada sobre los dientes de los engranes, produce el par torsor que desplaza angular-mente al eje del motor (ver la figura 100). El caudal es transportado desde el puerto deadmisión hasta el puerto de descarga, viajando tangencialmente en los espacios entrecada pareja de dientes contiguos.
Los engranes se desacoplan justo frente al puerto de entrada, lo cual genera unvolumen creciente que admite el caudal que ingresa. Pero todos los dientes sujetos ala presión del líquido se encuentran balanceados hidráulicamente (cada diente tienedos caras idénticas que reciben fuerzas opuestas). En ambos engranes sólo existen tresdientes, en todo momento, que se encuentran desbalanceados; dos de ellos favorecenel giro de los engranes y el tercero se opone (el diente que está a punto de desacoplarsedel contacto con el otro engrane). La resultante es una sola fuerza desbalanceada queproduce el par torsor e impulsa el giro [4], [26]. Mientras mayor sea el diente del engraneo la presión aplicada, mayor será la magnitud del par torsor producido.

Sección 3 Actuadores y motores hidráulicos 177
Presión de la bombaPuerto de entrada
Presión del sistema Puerto de descarga
Engrane con eleje de salida
Engraneimpulsado
a favor1
en contra2
2
11
� Figura 100. Motor hidráulico de engranes externos.
Los motores de engranes externos se eligen cuando la carga se debe desplazar convelocidades relativamente altas, pero con pares de arranque bajos. Habitualmente ope-ran en el intervalo de 1000 a 2500 [rpm], pero se pueden combinar con reducciones deengranes para desarrollar velocidades menores. Por lo general, su aplicación está limi-tada a potencias no mayores a 10 [kW]. Los motores antiguos tienen eficiencia bajas pe-ro, con las tecnologías actuales de maquinado, la eficiencia volumétrica de los motoresde engranes modernos ha llegado hasta 95% y su eficiencia global suele superar 90%.
En la figura 101 se muestran cuatro motores de engranes con diferentes desplaza-mientos, de la marca italiana Casappa. Son bidireccionales, tienen cuerpos de hierrocolado y soportan una presión máxima de 33 [MPa] (4785 [psi]) [27]. Se construyen condesplazamientos que van desde 5 hasta 150 [cm3/rev] y desarrollan una velocidad má-xima de 4000 [rpm]. Además de las diferentes opciones para su montaje, pueden incluiruna válvula de alivio incorporada con los puertos de admisión.
� Figura 101. 101 Motores hidráulicos de engranes externos, de la marca Casappa.

Sección 3 Actuadores y motores hidráulicos 187
En efecto, la eficiencia total del motor esηtotal =ηVol ·ηe = 0,926·0,898= 0,832. Enlas curvas características del motor, en la figura 106, se puede leer con una buenaaproximación este mismo resultado, cuando el motor aplica el par M = 315 [Nm]y gira con la velocidad n = 375 [rpm].
En la sección 5.1 de la referencia [32] se puede consultar una exposición minu-ciosa sobre las eficiencias de los motores hidráulicos.
EJEMPLO 30
Un motor hidráulico con desplazamiento de 300 [cm3] gira a 200 [rpm], mientrasse le aplica una diferencia de presiónΔp = 20 [MPa]. Su eficiencia volumétrica esηVol = 0,90; la energética es ηe = 0,95. ¿Cuánto caudal consume el motor? ¿Cuáles el par verdadero transmitido por su eje? ¿Qué potencia real desarrolla? ¿Quépotencia hidráulica se alimenta al motor?
El consumo de caudal ideal es:
Qideal =ΔVol ·n = 300 [cm3/rev] ·200 [rpm] = 6 ·104 [cm3/min] = 60 [lpm],
y como ηVol = 0,90 se despeja
Qreal =Qideal
ηVol=
60
0,9[lpm] = 66,67 [lpm] = 1,111 ·10−3 [m3/s]
El par torsor ideal desarrollado por el motor es:
Mideal =VolΔp
2π=
3 ·10−4 [m3](20 ·106 [Pa])2π
= 954,9 [Nm]
La eficiencia energética es el cociente ηe =M · ω
Qideal ·Δp, y como
Qideal =ΔVol ·n =ΔVol · ω2π
,
se tiene
ηe =(Mreal · ω)2π(ΔVol · ω)Δp
=Mreal2π
ΔVol ·Δp=
Mreal
Mideal.
Al despejar se obtiene el resultado:
Mreal =ηe ·Mideal = 0,95 ·945,9 [Nm] = 907,2 [Nm]

188 Capítulo 4 Actuadores rotatorios y motores fluidos
La velocidad del motor es 200 [rpm] = 39,27 [rad/s] y la potencia real:
Wreal =Mreal · ω= 907,2 [Nm] ·20,94 [rad/s] = 19 000 [W]
Por último, la potencia hidráulica suministrada al motor es
Whidr = Qreal cotΔp = 1,111 ·10−3 [m3/s](20 ·106) [Pa] = 22 222 [W]
que también se obtiene con:
Whidr = Wideal =Wreal
ηVol ·ηe=
19 000
0,90(0,95)= 22 222 [W]
Al igual que con los motores neumáticos se construyen motores hidráulicos de pis-tones, tanto radiales, como axiales. En la sección 2.2.2 de este capítulo se explicó el fun-cionamiento de los motores de pistones radiales para trabajo pesado. Ahora nos con-centraremos en los motores de pistones axiales, de los cuales existen varios modelos,tanto con desplazamiento fijo, como con desplazamiento variable.
3.2.4. Motores con pistones axiales
El eje de salida del motor se impulsa con el movimiento alternativo de los pisto-nes. El caudal presurizado ingresa al motor y actúa sobre la cara plana de los pistones,contenidos en el barril o bloque de cilindros. En el diseño en línea (ver la figura 109), eleje del motor y el bloque de cilindros están alineados sobre el mismo eje; también haymotores con eje inclinado. La fuerza de presión aplicada sobre cada pistón comprimelas zapatas sobre un disco “nutante” inclinado.
1. Placa válvula
6. Disco nutante
4. Placa retenedora
5. Pistones con zapatas articuladas
3. Guía esférica2. Barril con nueve cilindros
7. Eje de salida del motor
Inmóvil Inmóvil1Inmóvil
2 3 4 5 6 7Inmóvil
� Figura 109. Ensamble de un motor con pistones axiales en línea.

Sección 3 Actuadores y motores hidráulicos 189
Fpresión
Fn
Ft
paltapalta
� Figura 110. Componentes de fuerza normal y tangencial sobre el disco nutante.
El contacto de cada zapata sobre el disco transmite una fuerza con una componen-te tangencial (ver la figura 110), la cual aplica un momento y desplaza angularmente albloque de cilindros que está acoplado al eje del motor [30], [33]. La magnitud del pardesarrollado está en función del área transversal de los pistones y del ángulo de incli-nación de la placa oscilante.
La placa que funciona como válvula permanece inmóvil en la carcasa del motor.El barril con los cilindros y los pistones gira, deslizándose sobre la placa válvula. Cadacilindro coincide sucesivamente con los puertos de admisión de caudal, con lo que seproduce la extensión de los pistones. En el siguiente medio giro, después de que el pis-tón alcanza su extensión máxima, la abertura de cada cilindro coincide con los puertosde la descarga, produciéndose el retroceso del pistón correspondiente. Frecuentemen-te estos motores tienen nueve pistones, con una placa nutante inclinada 15◦ y su giroes reversible. En la figura 111 se muestran las piezas internas que los componen.
El ángulo de inclinación del disco nutante también determina cuánto se extiendenlos pistones, y por consiguiente a cuánto asciende el desplazamiento del motor. Si lainclinación del disco es invariable el desplazamiento del motor siempre será el mismo,pues cada pistón se extiende y se retrae la misma distancia en cada revolución. Perosi la inclinación del disco se puede modificar entonces el desplazamiento del motorse puede variar según convenga. En los modelos con desplazamiento variable el disconutante está montado sobre un yugo oscilante que modifica su inclinación (ver la figu-ra 112).

Ejercicios propuestos 195
construyen con diseño de simple efecto (figura 116), con retorno por resorte. Su aplica-ción más frecuente es la apertura y cierre de grandes válvulas para el control de fluidos.
Ejercicios propuestos
1. Un motor neumático de paletas, cuyas curvas características se muestran en la pá-gina 109, opera con una diferencia de presión Δp = 600 [kPa] y gira a 2000 [rpm].¿Qué par y qué potencia verdaderos desarrolla el motor? Estime el desplazamientodel motor y el caudal consumido en condiciones de aire libre (Patm = 80 [kPa]).
2. Se empleará un motor neumático cuyas curvas características se muestran en la fi-gura 79, para tres diferentes reducciones de engranes planetarios. El motor recibiráuna diferencia de presiónΔp = 600 [kPa], para que gire a 1000 [rpm] y desarrolle unpar de 8,5 [Nm]. ¿Es posible obtener este par? ¿Qué potencia desarrollaría el motor?¿Qué par desarrollaría el motor siΔp se reduce a 400 [kPa], con la misma velocidadangular y la misma reducción de engranes?
3. Un motor neumático de pistones radiales, cuyas curvas características se muestranen la figura 84, se pone en marcha con una diferencia de presiónΔp = 800 [kPa]. Elmotor desarrolla 120 [W] de potencia. ¿Cuáles pueden ser las velocidades y los parestorsores desarrollados en el eje del motor?
4. Un motor con cinco pistones radiales, cuyas curvas características se muestran enla figura 86, se pone en marcha con una diferencia de presión Δp = 700 [kPa]. Elmotor desarrolla 240 [Nm] de par en su eje. ¿A qué velocidad gira? ¿Qué potenciadesarrolla?
5. Un actuador debe desplazar un disco delgado, en posición vertical, a lo largo de 120◦en 0,8 [s]. La masa del disco es 5,2 [kg] y su diámetro 0,22 [m]. Determine el par ne-cesario para desplazarlo y la energía cinética que le comunicará el actuador.
6. Una varilla esbelta centrada, con longitud L = 0,16 [m] y masa de 3,4 [kg] debe girar45◦ en 0,6 [s]. Determine el par necesario para desplazar la carga y la energía cinéticaque le comunicará el actuador.
7. ¿Cuánto es el par torsor ideal desarrollado por un motor hidráulico, si su desplaza-miento esΔVol= 10 [cm3] y recibe una diferencia de presiónΔp = 14 [MPa]?
8. ¿Cuál es la velocidad ideal de un motor hidráulico cuyo desplazamiento es ΔVol =34 [cm3] cuando recibe un caudal de 28 [lpm]? ¿Cuál es la velocidad real si su eficien-cia volumétrica es ηVol = 0,87?
9. Un motor hidráulico tiene un desplazamiento ΔVol = 22 [cm3], gira a 3400 [rpm] ysu eficiencia volumétrica es ηVol = 0,92. ¿Cuánto caudal le demanda al sistema depotencia hidráulico?

196 Capítulo 4 Actuadores rotatorios y motores fluidos
10. El eje de un motor hidráulico transmite un par de 50 [Nm], mientras gira a 1200[rpm], consume un caudal real de 28 [lpm] y recibe una diferencia de presiónΔp =17 [MPa]. Su eficiencia volumétrica es ηVol = 0,91. ¿Cuál es su eficiencia energética?¿Y su eficiencia total?
11. Obtenga la eficiencia volumétrica de un motor hidráulico con un desplazamientoΔVol= 10 [cm3], que gira a 2400 [rpm] y recibe 25 [lpm] de aceite. Su eficiencia ener-gética es ηe = 0,93, ¿cuánto es su eficiencia total?
12. ¿Cuál es el par ideal que desarrolla un motor hidráulico con un desplazamientoΔVol= 75 [cm3] si recibe una diferencia de presiónΔp = 16 [MPa]?
13. ¿Qué diferencia de presión debe recibir un motor hidráulico para entregar un partorsor ideal M = 72 [Nm], si su desplazamiento esΔVol= 60 [cm3/rev]?
14. Un motor hidráulico de engranes externos, cuyas curvas características se muestranen la figura 102, se pone en marcha con una diferencia de presiónΔp = 16 [MPa]. Elmotor gira a 1600 [rpm]. ¿Qué par transmite su eje? ¿Cuánto caudal ingresa al mo-tor? ¿Qué potencia real desarrolla? Su desplazamiento es 16 [cm3/rev]. ¿Cuál es sueficiencia volumétrica? ¿Cuál es su eficiencia energética y su eficiencia total? Con-sultar el ejercicio 29.
15. Un motor hidráulico con desplazamiento de 120 [cm3] gira a 400 [rpm], con una dife-rencia de presiónΔp = 18 [MPa]. Su eficiencia volumétrica esηVol = 0,90 y su eficien-cia total es ηt = 0,837. ¿Cuánto caudal consume el motor? ¿Cuál es el par verdaderotransmitido por su eje? ¿Qué potencia real desarrolla? ¿Qué potencia hidráulica sealimenta al motor?
16. Un motor hidráulico de pistones axiales y desplazamiento invariable, cuyas curvascaracterísticas se muestran en la figura 113, se pone en marcha con una diferen-cia de presiónΔp = 20 [MPa]. El motor gira a 1500 [rpm]. ¿Qué par transmite su eje?¿Qué potencia real desarrolla? ¿Cuál es su eficiencia volumétrica? ¿Cuál es su eficien-cia energética y su eficiencia total? ¿Cuánto es el consumo verdadero de caudal? Sudesplazamiento es 18 [cm3/rev].
Referencias
[1] Gast Manufacturing Inc. Air Motors Handbook. Benton Harbor, MI, USA, 1986.[2] Modec moteur pneumatique. De 120 à 3000 W. La puissance sur mesure à votre
service. Les Bosses, Grenoble. France. s. f.[3] D. P. Townsend, Dudley’s Gear Handbook. The Design, Manufacture and Applica-
tion of Gears. 2nd. ed. New York, McGraw-Hill, 1991.

Referencias 197
[4] Deprag Inc. Deprag air motors. Lewisville, Texas, USA, 2008.[5] Globe Airmotors B. V. Globe pneumatic vane motors. Your Global Force In Air Power.
Eikenlaan, Netherlands. s. f.[6] Modec moteur pneumatique. Courbes de puissance MT10. Les Bosses, Grenoble.
France. s. f.[7] Gast Manufacturing Inc. Air Motors/Gearmotors. Benton Harbor, MI, USA, s. f.[8] Globe Airmotors B. V. Globe compact piston air motors. Your Global Force In Air
Power. Eikenlaan, Netherlands. s. f.[9] Ingersoll-Rand Company. Ingersoll Rand Air Motors. USA, 2009.[10] Bibus AG. Pneumatic motors and accessories. Fehraltorf, Switzerland, 2008.[11] Parker Hannifin España SA. Motores de émbolo radial Serie P1V-P. Madrid, España,
2007.[12] Krisch-Dienst Fluidtechnik. Radialkolbenmotor RM610. 6204-R62XXXA00. Korn-
westheim, Germany. s. f.[13] Ingersoll-Rand Company. ST1000 Series Air Starters. USA, 2007.[14] Ingersoll-Rand Company. Engine Starting Systems. USA, 2004.[15] Emerson Process Management. Bettis Bulletin # 25.10 Rev: 1-09. D-Series Rack &
Pinion Pneumatic Actuators. USA, 2009.[16] Parker Hannifin Corporation. Pneumatic Division. Pneumatic Actuator Products.
Cylinders, Guided Cylinders and Rotary Actuators. Catalog 0900P-5. Ohio, USA, 2008.[17] Festo Corporation. Rotary indexing tables DHTG. USA, 2009.[18] Festo AG & Co. KG. Smooth indexing. Trends in automation, No. 11, october 2007.
pp. 22-23. Esslingen, Germany, 2007.[19] Emerson Process Management. Bulletin RV-0294 Rev: 4/03. Shaffer RV-Series. Ro-
tary Vane Valve Actuators. USA, 2003.[20] Kinetrol Ltd. Kinetrol rotary actuators. England, 2006.[21] Emerson Process Management. Bettis Brochure # 20.00-6 REV: 6-08 5M/6-08. CBA-
Series Scotch-Yoke Pneumatic Actuators. USA, 2008.[22] Emerson Process Management. Bettis Brochure # 22.00-5 REV: 6-08 2.5M/6-08.
CBA-300 Series Pneumatic Actuators. USA, 2008.[23] Tyco Flow Control. Morin Series B and C actuators. MORMC-0023-US-0904. USA,
2009.[24] SMC Corporation. Cat. EUS20-197A-UK. Low-Speed Rotary Actuator. Series CRQ2X
/MSQX. Tokio, Japan. 2008.[25] Sauer Danfoss. Catalog 520L0232. Rev. B 12/02. General, Orbital motors. Technical
information. Denmark, 2002.[26] Parker Hannifin Corporation. Design Engineers Handbook. Volume 1-Hydraulics.
Motion Control Technology Series. Cleveland, USA, 2001.[27] Casappa S.p.A. Catálogo GEP 03 R A. Hydraulics pumps, motors & filters. Parma,
Italia, 2008.[28] Kracht GmbH. High Pressure Gear Motors KM1. Werdohl, Germany, 2008.

198 Capítulo 4 Actuadores rotatorios y motores fluidos
[29] Pinches, Michael J. y Ashby, John G. Power hydraulics. London, Prentice Hall Inter-national, 1988.
[30] Sullivan, James A. Fluid power. Theory and applications. New Jersey, Prentice HallInc., 1989.
[31] Rineer hydraulics. Engineered to deliver more power where you need it. 5M805. SanAntonio, TX, USA. s. f.
[32] Cundiff, John S. Fluid power circuits and controls: Fundamentals and Applications(Mechanical Engineering Series). Boca Raton, FL, CRC Press, 2001.
[33] Kawasaki Precision Machinery Ltd. M2X M5X Series. Swash-plate Type Axial PistonMotors. Kobe, Japan, 2005.
[34] Linde Hydraulics. HMF/A/V/R-02. Hydraulic motors for closed and open loop ope-ration. Asschafenburg, Germany, 2008.
[35] Comer industries Spa. Fluid power technical catalogue. Fixed displacement “M”axial piston motors. Milano, Italy. s. f.
[36] Emerson Process Management.Betis Brochure #130.10 2.5M / 10-08 / BE v2 BHHand BL Series Hydraulic Actuators. Designed for compactness and reliability. USA,2008.

5 Válvulas decontrol direccional
1. Funcionamiento de las válvulas de control direccional1. 1.1. Válvulas neumáticas con conmutador deslizante1. 1.2. Formas de actuación de las válvulas de control direccional1. 1.3. Válvulas de dos o tres vías, dos posiciones1. 1.1. 1.3.1. Posición normal de las válvulas 2/2 y 3/21. 1.1. 1.3.2. Aplicaciones de las válvulas 3/21. 1.4. Válvula de cuatro vías dos posiciones1. 1.5. Válvula de cinco vías dos posiciones1. 1.6. Notación para los puertos de una válvula de control direccional hidráulica2. Válvulas de control direccional actuadas por solenoide1. 2.1. Actuación por solenoide de acción directa1. 2.2. Válvulas actuadas por piloto, controladas por solenoide1. 1.1. 2.2.1. Construcción de las válvulas hidráulicas actuadas por solenoide3. Posición central de las válvulas hidráulicas de control direccional1. 3.1. Conmutador con condición central abierta (centro “H”)1. 3.2. Conmutador con condición central cerrada1. 3.3. Conmutador con condición central tándem1. 3.4. Conmutador con condición central flotante (centro “4”)4. Capacidad de las válvulas de control direccional1. 4.1. Coeficiente de capacidad de caudal para válvulas hidráulicas1. 4.2. Coeficiente de capacidad de caudal para válvulas neumáticas
En la sección 3.2 del capítulo 1 se discutió la conformación del subsistema de controlEde cualquier sistema de potencia fluida, diseñado para efectuar una tarea útil me-diante la aplicación de trabajo con cierto ritmo en el tiempo. Para regular el desempeñode un sistema fluido se deben gobernar —en todo momento— tres variables del siste-ma: la presión del fluido, el caudal desplazado y la dirección del flujo fluido (tabla 5.1).
Las válvulas de control direccional permiten elegir el camino a través del cual avan-za la potencia fluida y, por consiguiente, si el fluido de trabajo entra o sale del cilindrode un actuador. Así es como se determina si un actuador lineal se extiende o se retrae,o si uno rotatorio gira en el sentido horario o antihorario. Cuando la válvula de control
199

200 Capítulo 5 Válvulas de control direccional
� Tabla 5.1. Control de las variables de funcionamiento del sistema de potencia fluida.
Variable del sistema Consecuencia en el actuador Dispositivo de control
Presión del fluido Fuerza o par torsor desarrollado Válvula reguladora de presión
Caudal desplazado Velocidad de la carga Válvula para regulación de caudal
Dirección del flujo Sentido de ejecución del trabajo Válvula de control direccional
direccional adopta cierta posición de trabajo, da por resultado que la potencia fluida seconduzca por una ruta determinada o que se detenga su paso.
1. Funcionamiento de las válvulas de control direccional
En la sección 3.4 del capítulo 1 se advirtió que en este texto se emplean símbolos gráfi-cos y diagramas simbólicos, para mostrar la construcción y funcionamiento de los sis-temas de potencia fluida. El uso de estos símbolos se corresponde con las indicacionescontenidas en dos normas ISO:
• ISO 1219-1:2006 Fluid power systems and components-Graphic symbols and cir-cuit diagrams-Part 1: Graphic symbols for conventional use and data-processingapplications [1].• ISO 1219-2:1995 Fluid power systems and components-Graphic symbols and cir-
cuit diagrams-Part 2: Circuit diagrams [2].
En los siguientes párrafos se explicará la representación simbólica, la denomina-ción y la notación empleada para trabajar con las válvulas de control direccional. Lasexplicaciones iniciales se harán con sistemas de potencia neumáticos. Posteriormentese pasará a los sistemas de potencia hidráulicos.
1.1. Válvulas neumáticas con conmutador deslizante........................................................................................................................................................................Una válvula de control direccional tiene un cuerpo construido con acero al carbono,aluminio, bronce o algún otro metal. El cuerpo de la válvula tiene varios orificios, através de los cuales puede entrar o salir el flujo de líquido o de aire comprimido (figura117). En el interior del cuerpo existe una pieza móvil, llamada conmutador de émbolos,que puede deslizarse y tomar dos o tres posiciones de trabajo diferentes. El conmutadorde la válvula se desplaza en forma manual, o por la aplicación de una fuerza de presiónfluida, de origen eléctrico o por el contacto mecánico de algún dispositivo.

Sección 1 Funcionamiento de las válvulas de control direccional 201
� Figura 117. Diversos tipos de válvulas de control direccional neumáticas e hidráulicas.
La potencia fluida ingresa y sale del cuerpo de una válvula de control direccionala través de sus puertos o vías, que pueden ir de dos a cinco. En las figuras 118 y 119se muestra la construcción de dos tipos de válvulas de control direccional, en este ca-so neumáticas. Ambas pueden adoptar dos posiciones de trabajo, pero la primera sólotiene dos vías de acceso, mientras que la segunda tiene tres vías de acceso para la po-tencia fluida. En ambos casos también se muestra la representación simbólica de lasposiciones adoptadas por el conmutador de la válvula.
En los siguientes párrafos se explica la denominación, la construcción de los símbo-los para las válvulas de control direccional y la notación numérica de las vías o puertosde las válvulas neumáticas.
a ) Las válvulas de control direccional se denominan con base en dos números ente-ros, separados por una diagonal: n/m . La primera cifra, n , informa cuántas vías seencuentran en el cuerpo de la válvula, para el acceso o salida de la potencia fluida.La segunda cifra, m , informa cuántas opciones de trabajo puede adoptar la válvula,con base en las posiciones de su conmutador.
b ) Cada opción de trabajo de la válvula se representa gráficamente con un cuadrado,que incluye tapones y flechas para mostrar el camino que toma la potencia fluida al

202 Capítulo 5 Válvulas de control direccional
Construcción de las válvulas de control direccional
Las válvulas de control direccional pueden teneruna apariencia exterior muy variada, con adita-mentos externos de muchos tipos, pero siemprecon un cuerpo metálico. En cuanto a su talla, vandesde objetos que caben en la palma de la manohasta piezas voluminosas que pesan varios kilogra-mos (figura 117). Sin embargo, todas ellas compar-ten la misma función —controlar la alimentaciónde la potencia fluida— y operan con los mismosprincipios: una pieza móvil toma diferentes posi-ciones de trabajo y con ello obstruye o libera pasa-jes, para regular el avance del caudal presurizado.
Actuación
A
P
A
PT
B
Cerrada
P→BA→T
P→AB→T
Hay dos categorías diferentes de válvulas por su di-seño: de vástago (poppet, en inglés) y las deslizan-tes. Las válvulas de vástago abren o cierran al re-tirar una esfera o un disco del asiento de la válvu-la. Las válvulas deslizantes tienen un conmutadorque desliza (en forma rotatoria o lineal) dentro delcuerpo de la válvula y obstruye o hace coincidir losorificios de comunicación entre los pasajes para elflujo.
Las válvulas de vástago tienen una construcciónsencilla y poco costosa, resisten la suciedad y tie-nen vidas útiles muy prolongadas. Un resorte opri-me la esfera o el disco contra el asiento de la válvula(generalmente formado con un material elástico).Al actuar el émbolo de la válvula se obliga a la es-fera o el disco a retirarse del asiento, comunicandola alimentación de presión P con la vía de acceso al actuador A (ver la figura a laderecha). El movimiento del vástago suele ser corto y rápido, pero abre un pa-saje con sección transversal muy amplia. En ocasiones, para evitar la necesidadde aplicar grandes fuerzas durante la actuación mecánica de la válvula, a las vál-vulas de vástago se les suministra una señal piloto interna (figura 141 y sección2.2 de este capítulo).
Las válvulas deslizantes rotatorias tienen un disco con varios pasajes, que giradentro del cuerpo de la válvula por la acción de una palanca (ver la figura másarriba). Cuando la palanca está en la posición central, el paso del caudal está

Sección 1 Funcionamiento de las válvulas de control direccional 203
bloqueado. Las otras dos posiciones angulares de la palanca hacen coincidir lospasajes del disco con los pasajes de la base, estableciendo las diferentes comu-nicaciones para dirigir el caudal presurizado.
Las válvulas más abundantes y diversificadas son las válvulas deslizantes linea-les. En el interior del cuerpo de la válvula se mueve un conmutador con variosémbolos paralelos (figuras 149 y 150), que desliza dentro de una cavidad cilín-drica. El conmutador cambia de una a otra posición cuando se aplica una fuerzapara desplazarlo, lo cual abre u obstruye la comunicación entre los pasajes de laválvula.Existen tres construcciones diferentes para las válvulas deslizantes lineales, enfunción de cómo se efectúa el sello entre el conmutador y la cavidad cilíndricaque lo contiene:
a ) En las válvulas con conmutador empacado se colocan sellos elásticos (de hu-le vulcanizado o algún material artificial) alrededor de los émbolos del con-mutador; el conmutador con todos sus sellos se mueve dentro de la cavidadcilíndrica lisa.
b ) En las válvulas con cavidad empacada los sellos permanecen inmóviles, puesestán alojados en el túnel cilíndrico del cuerpo de la válvula y separan a losdiferentes puertos.
c ) Por último, las válvulas con conmutador rectificado carecen de sellos elásti-cos. Como hay contacto metal-metal entre el conmutador y la cavidad cilín-drica, ambas piezas deben estar rectificadas y acopladas con un ajuste muypreciso.
11
22
Válvula
abierta
Válvula
cerrada
� Figura 118. Válvula que puede adoptardos posiciones de trabajo y tiene 2 vías.
11
22
33
Válvula
abierta
Válvula
cerrada
� Figura 119. Válvula que puede adoptardos posiciones de trabajo y tiene 3 vías.

204 Capítulo 5 Válvulas de control direccional
transitar —o no— de una a otra vía (y por consiguiente, entrar o salir de la válvula).En el símbolo gráfico se colocan tantos cuadrados como opciones posibles puedetomar la válvula. Los cuadrados se colocan en horizontal uno al lado del otro.
c ) Las vías de acceso y salida de la potencia fluida se identifican con números enterospositivos. Los números impares identifican las vías que se conectan con las fuentesde presión: 1 para la conexión con la línea de abastecimiento, 3 para la conexión conel recipiente hacia el cual se descarga el fluido después de efectuar trabajo (normal-mente la atmósfera), 5, 7 etc., si existen más fuentes de presión. Los números paresidentifican las vías que se conectan con los puertos del actuador: 2 para la conexiónhacia la tapa, 4 para la conexión hacia la cabeza (o a los puertos izquierdo y derechode un actuador rotatorio o un motor).
En el caso de las válvulas 2/2 y 3/2 se puede construir un diagrama que atestigua suestado de funcionamiento. Se trata de un diagrama con información digital, pues estasválvulas sólo pueden tomar uno u otro estado. El número 1 designa el paso libre delcaudal presurizado a través del cuerpo de la válvula; el número 0 denota la condiciónbloqueada (figura 120).
1 2 3 4 5 6 7 8 9 10 11
Válvula1.1
0
1
Tiempo
� Figura 120. Diagrama de estado de una válvula 2/2 o 3/2.
1
2
3
4
5
� Figura 121. Símbolo gráfico deuna válvula de control direccional 5/2.
El diagrama de la figura 120 sólo tiene sentido para las válvulas de control direccio-nal con tres o menos vías. Para las válvulas de cuatro o más vías, el caudal presurizadosiempre puede fluir a través de la válvula, en uno u otro trayecto. Es decir, la válvulanunca cierra.
La figura 121, por ejemplo, muestra una válvulacon cinco vías y dos opciones de trabajo (dos po-siciones posibles del conmutador). La válvula tieneuna alimentación de presión desde la línea de abas-tecimiento —puerto 1— y dos comunicaciones in-dependientes hacia la atmósfera —puertos 3 y 5—.El puerto 2 se conecta con la tapa del actuador y el4 con la cabeza. En la posición derecha de la válvula la potencia fluye de 1 hacia 2; enla posición izquierda la potencia fluye de 1 hacia 4.

Sección 1 Funcionamiento de las válvulas de control direccional 205
A la izquierda y derecha del agrupamiento de los dos cuadrados están colocados dossímbolos más: indican los modos de actuación de la válvula. El de la izquierda indicaque la válvula modifica su posición inicial debido a la acción de un rodillo actuado porel contacto mecánico; el de la derecha indica que el conmutador recupera su posicióninicial mediante un resorte interno (cuando el rodillo ya no comunica fuerza alguna alconmutador).
1.2. Formas de actuación de las válvulas de control direccional........................................................................................................................................................................Las válvulas de control direccional pueden adoptar modos de funcionamiento diferen-tes, porque una pieza interna —su conmutador— se desplaza de una a otra posiciónbajo la acción de alguna fuerza externa. Tal fuerza puede tener un origen mecánico,eléctrico, hidráulico, neumático o humano.
Cuando una válvula se conmuta bajo la acción de una fuerza muscular se dice queestá actuada manualmente; este es el caso de los botones pulsadores, pedales y palan-cas. Esto significa que el funcionamiento de la válvula está sujeta a la voluntad de unoperario. En la parte superior izquierda de la figura 122 se muestra los símbolos gráficosque corresponden a estas formas de actuación.
La actuación de las válvulas de control direccional puede originarse en una acciónmecánica, producida mediante el contacto físico con un rodillo. Cuando el vástago sedesplaza hasta cierta posición de la carrera del actuador, algún objeto hace contactocon el rodillo de una válvula y cambia de posición su conmutador. Cuando se suspendeel contacto físico con el rodillo, un resorte retorna al conmutador de la válvula a suposición original.
La electricidad se puede emplear para energizar la bobina de un solenoide (cuyofuncionamiento se explica minuciosamente en la sección 2 de este capítulo). De es-
Botónpulsador
Palancamanual
Pedal
Rodillo
Actuaciónmanual
Pilotohidráulico
Pilotoneumático
Solenoide
Resorte
� Figura 122. Símbolos para indicar la actuación de las válvulas de control direccional.

206 Capítulo 5 Válvulas de control direccional
ta forma se genera un campo magnético que retrae a una pieza metálica, conectadamediante un eslabón con el conmutador de la válvula. Así se consigue conmutar a laválvula de control direccional mediante una señal eléctrica remota.
También es posible conmutar las válvulas de control direccional por medio de se-ñales piloto (señales de presión fluida de intensidad moderada). En este caso, una señalpresurizada —con muy baja potencia— incide sobre un diafragma o un émbolo adosa-do en el costado del cuerpo de la válvula. La presión que actúa sobre la superficie deldiafragma o émbolo aplica la fuerza que conmuta a la válvula. Las señales pueden sertanto hidráulicas como neumáticas.
1.3. Válvulas de dos o tres vías, dos posiciones........................................................................................................................................................................La válvula de control direccional más sencilla es la válvula 2/2. Su función consiste enestablecer o suspender el suministro de potencia hacia un sistema o cierta rama delsistema de potencia. La acción de los interruptores eléctricos, que permiten encendero apagar las bombillas incandescentes, semeja la función de una válvula 2/2. El inte-rruptor general de navajas en la acometida eléctrica de una edificación también tieneuna función semejante a la de una válvula 2/2.
El uso más común para una válvula 3/2 consiste en controlar el movimiento de unactuador de simple efecto. No obstante, al combinar dos o más de estas válvulas es po-sible ejecutar tareas de control para otros tipos de actuadores, por ejemplo actuadoresde doble efecto lineales y rotatorios.
1.3.1. Posición normal de las válvulas 2/2 y 3/2
Mediante un resorte se puede colocar al conmutador de una válvula 2/2 o 3/2 en unaposición inicial decidida de antemano. Se dice entonces que la válvula tiene cierta po-sición normal. La colocación del resorte puede implicar, por ejemplo, que la válvulapermita el paso del flujo presurizado en su condición por defecto; esta válvula se de-nomina como normalmente abierta. Por el contrario, si en su posición por defecto laválvula impide el paso del flujo, se le llama normalmente cerrada.
Si el conmutador de la válvula ha abandonado su posición por defecto (por la acciónde una fuerza externa), en el momento en que cesa la acción que la conmutó el resortela obliga a recuperar su posición normal. Así sucede, por ejemplo, con el interruptorde un timbre eléctrico (una válvula 2/2); cuando el usuario deja de oprimir el botón, elinterruptor recupera su posición por defecto y no conduce la energía eléctrica. La figura123 muestra un par de válvulas 2/2 con posiciones normales diferentes.

Sección 1 Funcionamiento de las válvulas de control direccional 207
Válvula 2/2, actuada por rodillo,con retorno por resorte,
normalmente abierta
Válvula 2/2, actuada por rodillo,con retorno por resorte,
normalmente cerrada
11
22
� Figura 123. Válvulas 2/2 normalmente abierta y normalmente cerrada.
Las válvulas de tres vías dos posiciones también se clasifican como normalmenteabiertas y normalmente cerradas, con base en la posición que adopta la válvula duranteel reposo (ausencia de fuerza para conmutarla), debido a la presencia de un resorte. Enla figura 124 se muestran ambas válvulas, en este caso actuadas por palanca.
Válvula 3/2, actuada por palanca,con retorno por resorte,
normalmente abierta
Válvula 3/2, actuada por palanca,con retorno por resorte,
normalmente cerrada
11
22
33
� Figura 124. Válvulas 3/2 normalmente abierta y normalmente cerrada.
1.3.2. Aplicaciones de las válvulas 3/2
Basta con enclavar la palanca de actuación de una válvula 3/2 normalmente cerrada yconmutarla a la posición abierta (conexión 1-2), para llevar el caudal de aire comprimi-do hacia la tapa de un actuador de simple efecto. Entonces el actuador lineal desarrolla-rá su carrera de extensión (figura 125). Si a continuación desenclavamos la palanca de laválvula, el resorte de su conmutador la devolverá a su posición normal. Así se suspende-rá la comunicación con la red de suministro de aire comprimido (puerto 1 bloqueado),y la cámara de la tapa del actuador se vaciará pues queda en contacto con la atmósfera(a través del puerto 3 de la válvula).
A una válvula 3/2 actuada por doble señal piloto neumático, como la que se muestraen la figura 126, se la denomina biestable. El nombre se debe a que la válvula puede per-manecer en cualquiera de sus dos posiciones, llevada por una señal piloto que la obligóa conmutar. Si la señal llega al piloto 12, la válvula permanecerá abierta (se comunica1 con 2); cuando la señal llega al piloto 23 la válvula permanece cerrada (se comunica

208 Capítulo 5 Válvulas de control direccional
450 [kPa]1
2
3
1.1
1.0
� Figura 125. Control de un actuador lineal de simpleefecto con una válvula 3/2 normalmente cerrada.
1
2
3
12 23
� Figura 126. Válvula 3/2,actuada por doble piloto
neumático, biestable.
2 con 3). Como carece de resorte, aquí no cabe la clasificación de normalmente abiertao normalmente cerrada. Nada la obliga a retornar a una posición normal.
450 [kPa]
Orden demarcha
Orden deparo
1
1 1
2
2 2
3
3 3
1.2
1.1
1.3
1.0
2312
� Figura 127. Control de un actuador de simple efectocon dos válvulas 3/2 normalmente cerradas y una 3/2 biestable.

Sección 1 Funcionamiento de las válvulas de control direccional 209
En el circuito de la figura 127 se ordena la extensión y retroceso de un actuadorlineal de simple efecto, mediante una válvula biestable 3/2. El actuador puede perma-necer indefinidamente en cualquier posición, extendido o retraído, sin necesidad deaplicar continuamente una fuerza externa sobre la válvula de potencia 1.1 (se le da estenombre porque es la válvula que suministra caudal presurizado al actuador). Las válvu-las 1.2 y 1.3 actúan como válvulas de control, para enviar las señales piloto a la válvulade potencia. Es decir, con este circuito se tienen mandos separados para la puesta enmarcha y para el paro, sensibles a un toque momentáneo.
1.4. Válvula de cuatro vías dos posiciones........................................................................................................................................................................Los actuadores de doble efecto —tanto lineales como rotatorios— tienen dos puertosdiferentes: mientras uno admite caudal presurizado el otro desaloja fluido hacia la at-mósfera. Para controlarlos es necesario decidir cuál de los dos puertos recibirá la po-tencia fluida (el otro quedará en comunicación con la atmósfera). Así, se ordena la ex-tensión o el retroceso; o el giro horario o el antihorario.
Una válvula 3/2 no es suficiente para controlar el funcionamiento de un actuador dedoble efecto, pues cuenta únicamente con un puerto (el número 2) para comunicarsecon el actuador. Se necesita al menos una válvula de 4 vías 2 posiciones. En la figura128 se muestra un ejemplo de dos válvulas 4/2 actuadas manualmente. Las válvulas4/2 permiten conducir la alimentación de potencia fluida hacia el puerto del lado dela tapa (conexión 1-2), o hacia el puerto del lado de la cabeza (conexión 1-4). Mientrastanto, el otro puerto del actuador queda en comunicación con la fuente de baja presión(la atmósfera), a través del puerto 3 de la válvula.
Válvula 4/2, actuada por palanca,con retorno por resorte
Válvula 4/2, actuada por botónpulsador, con retorno por resorte
11
22
33
44
� Figura 128. Válvulas 4/2 con diferentes actuaciones manuales.
Las válvulas de cuatro vías y dos posiciones no se clasifican con base en cierta po-sición normal; no se puede denominarlas como normalmente abiertas o normalmentecerradas, pues en ambas posiciones la válvula conduce la potencia hacia uno u otropuerto del actuador. Si una válvula 4/2 está actuada por doble señal piloto neumáti-co, como se muestra en la figura 129, también se la denomina biestable (de igual modoque con las válvulas de control direccional 3/2). La válvula puede permanecer indis-

210 Capítulo 5 Válvulas de control direccional
tintamente en cualquier posición (en ausencia delas señales de presión externa que la obligan a con-mutar), pues carece de resorte que la obligue a to-mar alguna posición normal. Como se verá más ade-lante, para gobernar una válvula 4/2 biestable se em-plean otras válvulas de control direccional con lascuales se controla las señales piloto 12 y 14 (ver cir-cuito de la figura 131).
1
2
3
41412
� Figura 129. Válvula 4/2, actuadapor doble piloto
neumático, biestable.
En el circuito de la figura 130 se controla la extensión y retroceso de un actuadorlineal de doble efecto en la forma más sencilla posible, mediante una válvula 4/2 conactuación manual. Al desplazar la palanca de 1.1, y mantenerla enclavada, el pistón yel vástago permanecerán extendidos (mientras la válvula no sea liberada). El actuadorpermanece extendido tanto tiempo como se persista en mantener actuada la válvula.La retracción se llevará a cabo al liberar la palanca de la válvula.
450 [kPa]1
2
3
41.1
1.0
� Figura 130. Control de un actuador lineal de doble efecto,inicialmente retraído, con una válvula 4/2.
El circuito de la figura 131 es semejante al circuito de la figura 127 (con un actua-dor de simple efecto). Las válvulas 1.2 y 1.3 son de tres vías dos posiciones, actuadaspor palanca, normalmente cerradas. Con estas válvulas de control se envían las señalespiloto que gobiernan a la válvula de potencia 1.1, una válvula 4/2, biestable, actuadapor doble señal piloto. Estas señales piloto deben aplicar una fuerza muy pequeña y nonecesitan una presión tan elevada como la que se envía al actuador (que hace trabajopara desplazar la carga externa). Por eso se ha incluido el regulador de presión de línea1.4, que ajusta la presión de los pilotos a sólo 150 [kPa]. En la sección 1.1 del capítulo 7

Sección 1 Funcionamiento de las válvulas de control direccional 211
150 [kPa]450 [kPa]
1
1 1
2
2 2
3
3 3
41.1
1.0
1.3
12
1.4
14
1.2
� Figura 131. Actuador lineal de doble efecto controlado con dos válvulas 3/2normalmente cerradas y una válvula 4/2 biestable.
se pueden consultar los detalles sobre el funcionamiento y la selección de este regula-dor de presión.
Para conseguir la extensión de 1.0 basta con pulsar brevemente la válvula 1.2 (no esnecesario enclavarla) para enviar el piloto 14. La válvula de potencia 1.1 conmutará ypermanecerá indefinidamente en esta nueva posición. Para suspender la extensión de1.0 se pulsa brevemente la válvula 1.3; la señal piloto en el costado 12 conmutará a laválvula de potencia 1.1 y el actuador se retraerá.
1.5. Válvula de cinco vías dos posiciones........................................................................................................................................................................En la figura 132 se muestra una válvula de control direccional con cinco vías y dos po-siciones posibles para el conmutador. Esta válvula tiene una alimentación de presióndesde la línea de abastecimiento —por el puerto 1— y dos comunicaciones indepen-dientes hacia la atmósfera —por los puertos 3 y 5— para descargar el fluido que retornadesde las cámaras de la tapa y la cabeza en el actuador. Se dice que esta válvula es una5/2 con doble escape.

212 Capítulo 5 Válvulas de control direccional
1
2
3
4
5
� Figura 132. Válvula de controldireccional 5/2, con doble escape.
1
2
3
4
5
� Figura 133. Válvula 5/2, condoble señal de presión.
También es posible emplear una válvula 5/2 como válvula de control direccionalcon doble señal de presión; en la figura 133 se muestra esta válvula. El puerto 1 se co-necta únicamente con la tapa del actuador a través del puerto 2. Para llevar presión a lacabeza del actuador, el puerto 3 se conecta con el puerto 4. Ambos lados del actuadorcomparten el mismo escape: el puerto 5.
150 [kPa] 280 [kPa]
450 [kPa]
1
1 1
2
2 23
3 3
4
5
1.1
1.0
1.3
1.4
1.2
23 14
1.5
� Figura 134. Control de un actuador lineal de doble efecto con una válvula 5/2,biestable, con doble señal de presión.
En el circuito de la figura 134 se emplea una válvula de potencia 5/2 biestable, ac-tuada por doble señal piloto, con doble alimentación de presión. Con esta válvula seenvía fluido presurizado hacia el actuador lineal con dos presiones diferentes: una alta

Sección 1 Funcionamiento de las válvulas de control direccional 213
para la tapa y otra baja para la cabeza. De este modo se puede ajustar con mayor preci-sión —y en forma independiente— las fuerzas desarrolladas durante la extensión y elretroceso del pistón del actuador. En este circuito también se colocó un tercer reguladorde presión, para mantener las señales piloto a 150 [kPa].
1.6. Notación para los puertos de una válvula de control direccional hidráulica........................................................................................................................................................................Con las válvulas de control direccional hidráulicas se emplea una representación sim-bólica, denominación y notación muy semejante a la empleada con las válvulas neu-máticas. Sólo existe una diferencia importante con la notación; para identificar las víaso puertos de la válvula no se emplea una notación numérica sino alfabética. Se empleala letra P para la conexión que recibe el caudal presurizado desplazado por la bombadel sistema. La letra T identifica la conexión que desaloja el líquido hacia el recipiente otanque, que funciona como la reserva de fluido. Las vías que se conectan con los puer-tos del actuador se llaman A para la conexión hacia la tapa y B para la conexión haciala cabeza (o a los puertos izquierdo y derecho de un actuador rotatorio o un motor).
En la sección 3 de este capítulo se explicará otra diferencia muy importante, quecaracteriza a las válvulas de control direccional hidráulicas. Generalmente las válvulasneumáticas sólo pueden adoptar dos posiciones de trabajo diferentes. En cambio, lasválvulas hidráulicas adoptan, normalmente, tres posiciones de trabajo distintas. La po-sición central puede tener diseños muy variados y, según se haya elegido uno u otrodiseño, afecta sustancialmente el comportamiento del sistema hidráulico de potencia.
M
1.1
1.0
1.2P1
P
A B
T
� Figura 135. Actuador hidráulico de doble efecto controlado por una válvula 4/3,actuada por palanca, centrada por resortes.

214 Capítulo 5 Válvulas de control direccional
En la figura 135 se muestra un sistema hidráulico con una válvula de control direc-cional 4/3, actuada por palanca y centrada por resortes, en este caso con una condicióncentral que se denomina abierta (sección 3.1 de este capítulo). La posición izquierdade la válvula ordena la extensión del actuador; la posición derecha ordena el retroce-so. Cuando la válvula adopta la posición central, porque no se aplica fuerza sobre lapalanca, el actuador no efectúa ningún trabajo sobre la carga externa.
2. Válvulas de control direccional actuadas por solenoide
Uno de los procedimientos más frecuentes para actuar las válvulas de control direccio-nal, en los sistemas modernos de potencia fluida, es mediante solenoides eléctricos.Un solenoide es un dispositivo electromecánico formado por una bobina de alambrede cobre, arrollada alrededor de un espacio de aire con forma cilíndrica. Dentro de esteespacio de aire se coloca una barra de hierro que puede deslizarse axialmente: la arma-dura. Cuando fluye una corriente eléctrica a través de la bobina se genera un campomagnético que se puede concentrar con ayuda de una pieza exterior de láminas de hie-rro, llamada «núcleo laminado C» por su forma [3].
El campo magnético induce una fuerza sobre la armadura central de hierro y la des-plaza linealmente. La armadura se puede eslabonar con el conmutador de una válvulade control direccional y así se consigue conmutar la válvula mediante una señal eléc-trica remota. Los solenoides empleados habitualmente en las válvulas de control direc-cional son de dos tipos: solenoides con entrehierro de aire y solenoides con armaduraen baño de aceite.
En la figura 136 se muestra un solenoide con entrehierro de aire, empleado habi-tualmente en las válvulas de control direccional neumáticas. Consiste en un electro-
Bobina
Entrehierro Núcleo C de hierro
Varilla deempuje
ArmaduraT
� Figura 136. Solenoide con entrehierro de aire. La armadura T se retraecuando se energiza la bobina de alambre de cobre.

Sección 2 Válvulas de control direccional actuadas por solenoide 215
imán formado por la armadura en forma de T, la bobina de alambre de cobre con barnizaislante (llamado alambre magneto) y el núcleo C exterior de hierro dulce laminado.
Cuando este solenoide no recibe corriente eléctrica la armadura T se encuentra par-cialmente fuera de la bobina. En el momento en que circula corriente por la bobina, elcampo magnético resultante atrae a la armadura T hacia el interior del solenoide. Alpenetrar, la armadura hace contacto con una varilla de empuje que está enlazada me-cánicamente con el conmutador de la válvula. La varilla desplaza al conmutador y loobliga a cambiar de posición. Entonces, la armadura T se asienta totalmente dentro dela bobina y el campo magnético viaja por completo a través del trayecto de hierro, quees mucho mejor conductor que el espacio de aire.
Los solenoides con armadura en baño de aceite son más modernos que los de en-trehierro de aire. Son más confiables por su mayor capacidad para transferir calor yporque no necesitan sellos en la varilla de empuje; por ello se les prefiere para su usoen sistemas hidráulicos. Tienen una bobina, un núcleo laminado rectangular, la vari-lla de empuje, armadura y un tubo que contiene a la armadura (figura 137). El núcleolaminado rodea a la bobina y ambos están encapsulados en una cubierta plástica. A lolargo del conjunto encapsulado corre un tubo, que atraviesa la bobina y los costadosdel núcleo laminado. El tubo se acopla en el cuerpo de la válvula direccional, atornilla-do en un orificio roscado. Dentro del tubo se mueve la armadura, bañada por el líquidodel sistema (que penetra a través del conducto hacia el tanque que tiene la válvula di-reccional).
En la actualidad, en las válvulas de control direccional se emplean solenoides deservicio continuo, que se pueden mantener energizados por tiempo indefinido sin quese sobrecalienten. Estos solenoides pueden disipar el calor generado por la baja co-rriente de retención que circula por la bobina, una vez que la armadura se ha asentadoplenamente en su interior.
BobinaVarilla deempuje
Tubo
Núcleo laminado Armadura
� Figura 137. Solenoide con armadura en baño de aceite. La armadura se retraeal energizar la bobina de alambre de cobre.

216 Capítulo 5 Válvulas de control direccional
2.1. Actuación por solenoide de acción directa........................................................................................................................................................................Las válvulas de control direccional se pueden conmutar mediante un solenoide, aco-plado directamente con su conmutador de émbolos. La varilla de empuje del solenoidehace contacto físico con el conmutador y lo desplaza cuando la bobina se energiza. Enla figura 138 se muestra una válvula neumática de cuatro vías dos posiciones, actuadapor solenoide de acción directa El retorno del conmutador a su posición normal de-pende de un resorte o de una presión piloto (figura 141).
1
1
2
2
3
3
4
4
� Figura 138. Válvula neumática 4/2 conmutada por la acción directade un solenoide con entrehierro de aire.
En las válvulas de tres posiciones, empleadas en los sistemas hidráulicos, el conmu-tador de la válvula puede tener un solenoide acoplado en cada extremo [4]. Se energizala bobina de uno u otro solenoide para desplazar el conmutador hacia cualquiera delas posiciones extremas. Para centrar el conmutador de la válvula se emplea un par deresortes colocados en los extremos (figuras 139 y 140). Así, si ninguna de las bobinasrecibe energía eléctrica, los resortes mantienen al conmutador en la posición centralpermanentemente.
Las válvulas actuadas por solenoide de acción directa ofrecen ciertas ventajas:
a ) La válvula tomará cierta posición con base en una señal eléctrica que energiza unou otro solenoide, sin importar si existe o no suministro de presión en el circuito o enla entrada de la válvula. Es decir, no es necesario contar con cierta presión mínimapara operar la válvula.
b ) La válvula permanece en la posición deseada mientras el solenoide esté energizado,aunque la presión del sistema fluctúe a valores muy bajos o se desvanezca.

Sección 2 Válvulas de control direccional actuadas por solenoide 217
A
A
B
B
P
P
T
T
� Figura 139. Válvula hidráulica 4/3 actuada directamente por doble solenoide,centrada por resortes.
Sin embargo, existen limitaciones para conmutar una válvula de control direccionalmediante solenoides de acción directa. En ocasiones, conforme el conmutador transi-ta de una a otra posición, se manifiesta un desbalance de presión sobre los émbolosdel conmutador. Existe entonces una fuerza resultante de presión, que se opone a laconmutación y que puede ser excesiva para las posibilidades de un solenoide.
� Figura 140. Válvula hidráulica 4/3 marca Continental, con actuación directa por doblesolenoide [5]. Encima del cuerpo de la válvula está la caja de conexiones eléctricas.

218 Capítulo 5 Válvulas de control direccional
Por otro lado, en las válvulas de mayor talla (sección 2.2) se requiere una fuerzabastante grande para mover el conmutador. Un solenoide de acción directa no puedegenerar la fuerza suficiente para actuar a las válvulas de gran capacidad, sin emplearotro procedimiento que proporciones una fuerza mayor. Si la bobina de un solenoiderecibe energía eléctrica, y su armadura está impedida para desplazarse hacia el interiordel solenoide, la bobina se sobrecalentará y se quemará.
2.2. Válvulas actuadas por piloto, controladas por solenoide........................................................................................................................................................................Las limitaciones de la acción directa dan pie a unacombinación apropiada para conmutar a las válvu-las que presentan desbalance de presión o que tie-nen una talla muy grande: emplear una señal pilotode presión que se desencadena mediante la actua-ción de un solenoide. Este recurso suele ser emplea-do en las grandes válvulas de los sistemas hidráuli-cos, que pueden conducir caudales muy amplios ytrabajar con presiones mucho más elevadas que lasde un sistema neumático.
Puerto para la señalde presión piloto
1
1
2
2
3
3
� Figura 141. Válvula 3/2 actuadapor piloto neumático, con retornopor resorte, normalmente cerrada.
Una válvula actuada por piloto emplea la pre-sión de una señal fluida —neumática o hidráulica—para desplazar su conmutador (figura 141). Estas válvulas pueden ser actuadas desdelugares remotos, de modo que la señal piloto viaje hasta la válvula y la conmute. Lafuerza disponible para desplazar al conmutador de émbolos puede ser tan grande co-mo sea necesario, pues la señal piloto se puede regular fácilmente —con un reguladorde presión— para que la válvula conmute con seguridad.
Estas válvulas pueden ser de piloto externo, (cuando la señal piloto proviene de unafuente externa a la válvula), o de piloto interno (cuando la señal piloto proviene del mis-mo caudal presurizado suministrado a la válvula para poner en movimiento al actua-dor).
Cuando la señal piloto que conmuta a la válvula de control direccional se liberamediante un solenoide, se habla de una válvula actuada por piloto controlada por so-lenoide. Esta solución es la que se emplea para conmutar a las válvulas hidráulicas degran talla, que dirigen caudales elevados y requieren grandes fuerzas para desplazar susconmutadores. En la figura 142 se muestra una de estas válvulas. En realidad, se tratade dos válvulas de control direccional, ensambladas una sobre la otra.
La válvula secundaria, de talla más pequeña y colocada en la parte superior, estáactuada por un solenoide de acción directa y tiene retorno por resorte. El propósito deesta válvula es liberar las señales piloto que conmutan a la válvula principal colocadaen la parte inferior; la presión que llega por su puerto P es dirigida hacia los puertos A

Sección 2 Válvulas de control direccional actuadas por solenoide 219
A
A
A
B
B
B
PP
P
TT
T
� Figura 142. Válvula 4/2 actuada por piloto hidráulico,controlada por solenoide con retorno por resorte.
o B, y de esa forma se conduce hacia las cámaras piloto en los extremos de la válvulaprincipal.
La válvula principal —de gran tamaño, pues conduce un caudal elevado— es la en-cargada de alimentar la potencia fluida hacia el actuador en un sistema hidráulico. Apartir de su posición central puede tomar dos posiciones, al conmutar a uno u otrocostado por la acción de las señales piloto.
A
A
B
B
P
P
T
T
� Figura 143. Válvula 4/3 actuada por doble piloto hidráulico,centrada por resortes controlada por doble solenoide.

220 Capítulo 5 Válvulas de control direccional
� Figura 144. Válvula 4/3 marca Oilgear actuada por doble piloto, centrada por resortes.En la parte superior está acoplada la válvula secundaria con doble solenoide [6].
En las figura 143 y 144 se muestran válvulas hidráulicas de control direccional quetoman tres posiciones de trabajo. Su conmutador se desplaza hacia las posiciones ex-tremas de fuerza, cuando las señales piloto manifiestan su presión sobre alguno de loscostados. En ausencia de señales piloto, los resortes en los costados mantienen cen-trado al conmutador de émbolos. Las señales piloto se controlan mediante la válvulaauxiliar montada en la parte de arriba; esta válvula se actúa mediante un par de sole-noides de acción directa, montados en los extremos de su conmutador. En este caso, lapresión piloto es interna (es decir, proviene de la misma alimentación de presión quellega al puerto P de la válvula principal, para ordenar los movimientos del actuador).
En la figura 145 se muestra el símbolo extendido y el símbolo simplificado de estaválvula. Cuando se traza el circuito de un sistema hidráulico, que incluye a esta válvu-la, se prefiere usar el símbolo simplificado por su sencillez (sólo se muestra la válvulaprincipal que gobernará los movimiento del actuador, con sus atributos de actuaciónpor piloto y control por solenoide).
AA
A
B B
BP
P
P
T
T
T
� Figura 145. Símbolo extendido (izquierda)y símbolo simplificado (derecha) de la válvula de la figura 142.

Sección 2 Válvulas de control direccional actuadas por solenoide 221
Las válvulas actuadas por piloto, controladas por solenoide, ofrecen ciertas venta-jas:
a ) Con estas válvulas se emplean habitualmente solenoides de corriente alterna, quefuncionan con un voltaje elevado, 110 o 220 [V], y demandan poca corriente eléctri-ca (aunque también se emplean solenoides para 12 o 24 [V] cd; [7]). En consecuen-cia, los contactos de los relevadores del circuito eléctrico tienen mayor vida útil.
b ) La baja demanda de corriente eléctrica implica que el solenoide disipará poco ca-lor y su temperatura será moderada. Estas características disminuyen el riesgo deincendio en un sistema que opera con un aceite combustible derivado del petróleo.
c ) Los solenoides son de talla pequeña, pues no se requiere gran fuerza para conmutara la válvula auxiliar. Los elementos móviles que se desplazan en la válvula auxiliartambién son de talla menuda y presentan menor riesgo a fallar por la suciedad quepueda acumularse en el sistema.
2.2.1. Construcción de las válvulas hidráulicas actuadas por solenoide
Es una práctica común que las válvulas hidráulicas de control direccional se empotrensobre una base, con la forma de una placa rectangular. Esta placa base incluye los ori-ficios roscados que recibirán la conexión de las líneas de distribución del sistema [5], [8].
Placa base
Placabase
NPS 1/4NPS 3/8 NPS 1/2
NPS 11/4NPS 3/4
� Figura 146. Tamaño proporcional de varias tallas de válvulas actuadas por doble solenoide.Las tres primeras son de acción directa; las dos últimas son actuadas por señal piloto.
La anotación indica el tamaño nominal de la tubería que se puede acoplar en los puertos,en la placa base de la válvula (esta cifra no indica la talla de la válvula).

222 Capítulo 5 Válvulas de control direccional
Conexiones roscadas en la placa de puertos de las válvulas de controldireccional
En los puertos roscados de la placa base seacoplan las tuberías de acero o las mangue-ras flexibles —de caucho, o de algún polímeroartificial— para conducir el líquido presuriza-do que ingresa o sale de la válvula. Los extre-mos de las tuberías rígidas tienen maquinadauna rosca y las mangueras flexibles tienen en-gargolados conectores roscados de metal, quese acoplan enroscándolos en los orificios de laplaca base. Estos orificios pueden tener unoentre varios tipos de rosca, que debe concordarcon la rosca de las tuberías o de los conectoresque se hayan elegido para un sistema hidráuli-co determinado.
Roscarecta
Arosello
Superficie de contacto con la válvula
Cavidadroscada
Orificio roscado en la placa base
Tuercalibre
Codo 90orientable
O
Por un lado, están los conectores con rosca rec-ta, como los descritos en los estándares ISO11926-1 (también denominada SAE J1926-1),ISO 9974-1, ISO 6149-1 y ISO 1179. Con estos conectores el sello estanco que im-pide la fuga del caudal no se establece con los hilos de la rosca. Los conectoresincluyen un arosello elástico (un o-ring), que queda oprimido entre el conectory la placa base y así forma el sello que impide la fuga del caudal presurizado (verla figura a la derecha). La rosca del conector puede ser métrica o dimensionadaen pulgadas.
Por otra parte, están los conectores con rosca cónica. Tienen perfil cónico, co-mo el extremo de un lápiz que se ha afilado con un sacapuntas, al igual que elorificio roscado que los recibirá. El sello se forma por la fricción entre los hilosde las roscas, que se aprietan cada vez más entre sí, conforme se gira el conec-tor dentro del orificio. La unión se puede hacer con la adición de un compuestosellador o mediante un sello seco.
Existe un conjunto muy amplio de niples, coples, reductores, tees, codos a 45◦ y90◦, conectores y crucetas, que permiten pasar de una a otra talla y convertir deun sistema de conexión a otro. En la referencia [9] se puede consultar la ampliaexistencia de acoplamientos para tubería. Junto con los conectores de rosca rec-ta se emplean tres tipos principales de roscas cónicas [10], usadas comúnmenteen las aplicaciones industriales para formar sellos en las uniones de conductospresurizados:

Sección 2 Válvulas de control direccional actuadas por solenoide 223
• NPT (American Standard Pipe Taper Thread) definida en los estándaresANSI B1.20.1-1983 Pipe Threads, General Purpose y ANSI B1.20.3-1976(R2003) Dryseal Pipe Threads.• BSPT (British Standard Pipe Taper) definida en los estándares BS EN
10226-1:2004 Pipe threads where pressure tight joints are made on the th-reads. Taper external threads and parallel internal threads. Dimensions, to-lerances and designation o ISO 7-1:1994 Part 1 con el mismo nombre.• Cónica métrica, por ejemplo la definida por el estándar DIN 158-
1:1997 Metric taper external and mating parallel internal screw threads-Dimensions, tolerances and inspection.
Rosca externade la tubería
Rosca internade un cople
1◦47′24′′
1◦47′24′′
60◦
60◦
El principio por el cual se forma el sello, mediante el contacto metal contra me-tal, es el mismo en estas tres roscas cónicas. Aunque son muy similares no sonintercambiables, pues no coinciden en sus dimensiones, paso y ángulo del flan-co. En el continente americano se emplea preferentemente la rosca cónica NPTpara sello seco (dry seal, denominada con frecuencia NPTF; ver la figura másarriba) [11]. Tiene hilos triangulares de 60◦, con crestas y valles planos, en tallasnominales que van desde 1/16 hasta 24. El ángulo de la conicidad es 1◦47′24′′ o1,7899◦, medido desde el eje central (pendiente de 1/16).
Si resulta necesario dar mantenimiento a la válvula —por ejemplo cambiar los sellosdel conmutador de émbolos o sustituir un solenoide dañado— simplemente se desaco-pla el cuerpo y se retira de la placa base, sin que sea forzoso remover las líneas de dis-tribución que se quedan conectadas con la placa base. Esta forma de ensamble ofreceuna gran ventaja, pues la instalación de las líneas de distribución P, T, A y B —con tu-berías rígidas de acero o mangueras flexibles— es una labor engorrosa que convieneevitar repetir.
En las válvulas de gran talla —frecuentemente aquellas que tienen puertos roscadospara acoplar tuberías con talla NPS de 1/2 o mayor (consulte el segundo recuadro, másadelante)— se acostumbra colocar una válvula auxiliar pequeña en la parte superior de

224 Capítulo 5 Válvulas de control direccional
la válvula principal. Esta válvula auxiliar es actuada por solenoides de acción directa, ysus puertos corresponden a la conexión roscada de una tubería con talla NPS de 1/4 o3/8. La válvula principal, más voluminosa, es actuada por señales piloto.
En la figura 146 se muestra un esquema con las dimensiones proporcionales dediferentes tallas de válvulas (las cinco figuras están trazadas con la misma escala). Lamás pequeña tiene puertos roscados para acoplar tuberías con talla NPS de 1/4. Las dosmás grandes —con puertos roscados para acoplar tuberías con talla NPS de 3/4 y de 11/4,respectivamente— tienen una válvula auxiliar montada sobre la válvula principal.
Dimensiones de la rosca cónica para tuberías NPT
En la siguiente tabla se proporcionan las dimensiones de las diferentes tallas derosca NPT. Conviene recordar que las cifras de la talla nominal, fraccionarias oenteras, son sólo etiquetas para denominar cada talla y no tienen significado fí-sico. Las tallas de rosca NPT más empleadas, en tuberías y conexiones metálicas,son 1/8, 1/4, 3/8, 1/2, 3/4, 1, 11/4, 11/2 y 2. Las tallas mayores a 2 se emplean con menorfrecuencia, pues existen otros métodos más prácticos para formar una unión se-llada.
Talla nominal Diámetro exterior Hilos por Paso de la roscaNPT [pulgadas] [mm] pulgada [pulgadas] [mm]
1/16 0,3125 7,94 27 0,03704 0,9411/8 0,405 10,29 27 0,03704 0,9411/4 0,540 13,72 18 0,05556 1,4113/8 0,675 17,15 18 0,05556 1,4111/2 0,840 21,34 14 0,07143 1,8143/4 1,050 26,67 14 0,07143 1,814
1 1,315 33,40 111/2 0,08696 2,209
11/4 1,660 42,16 111/2 0,08696 2,209
11/2 1,900 48,26 111/2 0,08696 2,209
2 2,375 60,33 111/2 0,08696 2,209
21/2 2,875 73,02 8 0,0125 3,175
3 3,500 88,90 8 0,0125 3,1754 4,500 114,30 8 0,0125 3,1755 5,563 141,30 8 0,0125 3,1756 6,625 168,27 8 0,0125 3,175
10 10,750 273,05 8 0,0125 3,17512 12,750 323,85 8 0,0125 3,17514 14 355,60 8 0,0125 3,17516 16 406,40 8 0,0125 3,17518 18 457,20 8 0,0125 3,17520 20 508,00 8 0,0125 3,17524 24 609,60 8 0,0125 3,175

Sección 2 Válvulas de control direccional actuadas por solenoide 225
Talla nominal de la tubería de acero
El tamaño nominal de tubería (NPS, por las palabras nominal pipe size) esun sistema norteamericano de tallas estandarizadas para tuberías de acero yacero inoxidable, definido por las normas ANSI/ASME B36.10M-2004 [12], yANSI/ASME B36.19M-2004. El tamaño de la tubería se especifica con dos nú-meros adimensionales: a) un tamaño nominal de tubería, desde 1/8 hasta 48; yb) una cédula que establece el espesor de la pared de la tubería (en la actualidadse fabrican hasta 18 cédulas diferentes: 5, 5S, 10, 10S, 20, 30, 40, 40S, 60, 80, 80S,100, 120, 140, 160, y STD, XS, XXS) [13]. Conviene recordar lo siguiente:
• Para las tallas de 1/8 a 12, los valores del NPS y del diámetro exterior verda-dero son diferentes. Por ejemplo, el diámetro exterior de una tubería 3 NPSrealmente mide 3.5 [pulgadas].• Para las tallas por encima de 14 los valores del NPS y los valores verdaderos
del diámetro exterior son iguales.• Para un NPS dado, el diámetro exterior permanece constante y el espesor de
pared aumenta con una cédula más grande. El diámetro interior dependerádel grueso de pared, especificado por el número de cédula.• La Organización Internacional para la Estandarización (ISO) también emplea
un sistema con una designación adimensional [14]. El diámetro nominal in-dica el tamaño estándar de una tubería en el sistema métrico, con las siglasDN seguidas de un número desde 6 hasta 1200 (sin el símbolo de milímetros;por ejemplo DN 65).
En el apéndice A puede consultar una tabla con las tallas nominales y las dimen-siones verdaderas de las tuberías de acero.
� Figura 147. Placa de puertos individualy múltiple para el montaje simultáneo
de 4 válvulas hidráulicasde control direccional.
Junto con las placas base individuales también se dispone de placas múltiple, quepermiten montar varias válvulas a la vez (figura 147), [5], [8]. La placa base de las válvulasse construye con dos diseños básicos: con los cuatro orificios roscados (P. T, A y B) unoen cada cara vertical de la placa y con los cuatro orificios en la base rectangular de laplaca.

226 Capítulo 5 Válvulas de control direccional
3. Posición central de las válvulas hidráulicas de control direccional
En las figuras 143 y 145 se mostró un ejemplo con la construcción y el símbolo gráfico deuna válvula de control direccional para uso hidráulico. Las válvulas hidráulicas puedentomar tres posiciones de trabajo y cuentan con cuatro vías para que la potencia fluidaentre o salga del cuerpo de la válvula. Por consiguiente, se les denomina como válvulas4/3.
Conviene recordar que la notación de los puertos de una válvula hidráulica no es lamisma que la empleada con las válvulas neumáticas. Las vías de acceso y salida de lapotencia fluida se identifican con letras mayúsculas: A y B para los puertos que comuni-can con el actuador (colocadas en la parte superior del símbolo gráfico de la válvula); Ppara la línea de alimentación de presión y T para el retorno al tanque (ambas colocadasen la parte inferior del símbolo gráfico de la válvula).
Las dos posiciones en los extremos de la válvula se conocen como las posicionesde fuerza; cuando el conmutador de la válvula adopta cualquiera de estas posiciones lapotencia fluida se envía hacia uno u otro de los puertos del actuador. Con las posicionesde fuerza se ordena la extensión o el retroceso de un actuador lineal, o el giro horario yel antihorario de un motor o actuador rotatorio (es decir, la ejecución de trabajo por elactuador sobre la carga externa).
Las posiciones de fuerza siempre son las mismas en cualquier válvula hidráulica4/3. Sin embargo, la posición central puede cambiar entre varias opciones. Las válvulasse construyen con el mismo cuerpo de válvula y las mismas formas de actuación, perocontienen un conmutador de émbolos diferente (que podría sustituirse para convertirla válvula de una posición central a otra).
A A
AAA
B B
BBB
P P
PPP
T T
TTT
� Figura 148. Algunas condiciones centrales de válvulas hidráulicas 4/3.
Las condiciones centrales se han diseñado para ejecutar una función lógica o parasatisfacer una necesidad o condición del sistema. En la figura 148 se muestran los sím-bolos de algunas válvulas de control direccional 4/3, que corresponden a conmutadorescon diferentes condiciones centrales. Todas ellas están disponibles con los fabricantesde equipo para potencia fluida y existen más (en la referencia [15] se explica el funcio-

Sección 3 Posición central de las válvulas hidráulicas de control direccional 227
Solenoideizquierdo
Solenoidederecho
Cámara delpiloto izquierdo
Cámaradel pilotoderecho
� Figura 149. Ensamble de una válvula hidráulica de control direccional típica.En el cuerpo de la válvula principal se puede montar cualquier conmutador
con diferente condición central.
Conmutador decentro abierto
Conmutador decentro tándem
Conmutador decentro cerrado
Conmutador decentro flotante
A
A
A
A
B
B
B
B
P
P
P
P
T
T
T
T
� Figura 150. Las cuatro condiciones centrales más empleadas son el centroabierto, cerrado, tándem y el flotante.

228 Capítulo 5 Válvulas de control direccional
namiento de 15 diseños diferentes de conmutador). Como ya se dijo, las posicionesde fuerza siempre son las mismas y las válvulas se ensamblan con el mismo cuerpo,acopladas sobre una placa de puertos en la que se harán las conexiones de las tuberíaso mangueras para conducir el caudal, pero pueden contener uno u otro conmutadorde émbolos (figura 149).
Aunque existen muchos diseños de conmutador son cuatro las condiciones cen-trales que se emplean con mayor frecuencia. Se trata de los centros abierto, cerrado,tándem y flotante. En la figura 150 se muestran estas cuatro construcciones de conmu-tadores con diferentes condiciones centrales.
3.1. Conmutador con condición central abierta (centro “H”)........................................................................................................................................................................En esta condición central los puertos A, B, P y T se mantienen comunicados (figura151). Las válvulas con centro abierto se emplean en los sistemas de potencia que tienensólo un actuador, donde no se efectúa alguna otra operación con la misma unidad depotencia y no es necesario sostener al actuador en cierta posición aplicándole presión.En estos sistemas, cuando el actuador no está efectuando trabajo en la extensión o elretroceso, la válvula permite que el caudal desplazado por la bomba regrese al tanque abaja presión —a través de su puerto T, figura 152— sin que sea necesario abrir la válvulade alivio y descarga de presión.
Los conmutadores con centro abierto permiten reducir al mínimo los golpes de pre-sión en un sistema. Estos golpes se presentan cuando un conmutador se desliza de unaa otra posición, pasando por la posición central. Se obtiene la condición más suave, conel mínimo posible de golpe de presión, cuando se permite descargar el líquido presuri-zado hacia el tanque mientras el conmutador transita por la posición central.
Hay una ventaja más: la posición central permite mover manualmente el vástagocon el pistón, pues entra o sale caudal libremente a través de los puertos A y B. Así sepueden hacer ajustes para poner a punto una pieza de trabajo como mejor convenga,y después aplicarle la fuerza desarrollada por el actuador.
A BPT
� Figura 151. Conmutador de válvula hidráulica 4/3 con condición central abierta.

Sección 3 Posición central de las válvulas hidráulicas de control direccional 229
M
1.1
1.2
1.0
PVA
A B
P T
� Figura 152. El caudal de la bomba retorna al tanque a travésdel centro abierto de la válvula 1.1.
Se deben tener presentes las limitaciones impuestas por esta condición central:
a ) mientras la válvula permanezca en su posición central, no se dispone de presiónsuficiente para que un segundo actuador efectúe trabajo; y
b ) si la válvula se regresa a la posición central, el pistón, el vástago y la carga no sepueden mantener en una posición fija a media carrera del actuador.
3.2. Conmutador con condición central cerrada........................................................................................................................................................................Con un centro cerrado se mantienen bloqueados los cuatro puertos de la válvula: A,B, P y T (figura 153). Este diseño de conmutador permite detener el movimiento delvástago y sostener la carga a media carrera del actuador, pues los puertos de cabezay tapa permanecen bloqueados. Además, si se emplean válvulas con centro cerrado,es posible operar en forma independiente varios actuadores que comparten la mismaunidad de potencia (figura 154).
Las desventajas de emplear un centro cerrado son dos:
a ) Mientras la válvula permanezca en su posición central, la bomba desarrollará la pre-sión máxima del sistema (la necesaria para la apertura de la válvula de alivio y des-carga de presión).

230 Capítulo 5 Válvulas de control direccional
A BPT
� Figura 153. Conmutador de válvula hidráulica 4/3 con condición central cerrada.
Entonces, mientras los actuadores permanecen inmóviles sin hacer trabajo, la bom-ba demandará mucha potencia al motor primario, el sistema trabajará más calientey su consumo de energía será más cuantioso.
M
1.1
1.2
1.0
2.1
2.0
PVA
AA BB
PP TT
� Figura 154. Las válvulas con centro cerrado permiten enviar potencia a varios actuadores,a partir de una fuente de potencia única.
b ) Un conmutador con centro cerrado presentará pequeñas fugas, como sucede demanera normal con cualquier válvula de control direccional, y después de unos mi-nutos se incrementará la presión en las líneas que salen de los puertos A y B.
Por esta última causa, si se abandona la válvula en posición central, en el pistón sepuede generar una fuerza desbalanceada (ambas caras del pistón reciben la misma

Sección 3 Posición central de las válvulas hidráulicas de control direccional 231
presión, pero una superficie es mayor que la otra). Esta fuerza tiende a extenderlentamente el vástago. El movimiento lento que se produce se denomina “arrastredel vástago”.
3.3. Conmutador con condición central tándem........................................................................................................................................................................Con un centro tándem se combinan las dos principales ventajas de los centros abier-to y cerrado. Si la válvula de control direccional permanece en su posición central, laválvula de alivio y descarga no es forzada a abrir. El caudal desplazado por la bombapuede regresar al tanque —con muy baja presión— a través del puerto T de la válvula(figura 155). Además, esta condición central permite detener el movimiento del vástagoy sostener momentáneamente la carga a media carrera del actuador, pues los puertosA y B permanecen bloqueados.
A BPT
� Figura 155. Conmutador de válvula hidráulica 4/3 con condición central tándem.
La denominación para esta condición central es por la posibilidad de conectar va-rias válvulas en serie (figura 156). El puerto T de una válvula queda conectado con elpuerto P de la siguiente. Con este arreglo, los actuadores controlados por las válvulasen serie pueden funcionar en forma individual o simultáneamente (siempre y cuandola fuente de potencia tenga capacidad suficiente).
Se tiene un inconveniente menor al emplear las válvulas conectadas en serie. Enlos períodos de descanso de los actuadores, mientras las válvulas permanecen en laposición central, el caudal de la bomba regresa al tanque cruzando a través de todaslas válvulas. La bomba debe esforzarse a una presión mayor que la necesaria con unaválvula con centro abierto, pues cada válvula en serie produce una caída de presión quese va sumando.
En las válvulas con centro tándem los puertos P y T se interconectan por medio deun pasaje que corre por el eje del conmutador. Como este pasaje es estrecho el eje seconstruye un poco más grueso que en los otros diseños de condición central. Entonces,cuando circula el caudal nominal de diseño a través de la válvula, la caída de presiónsuele ser algo mayor (un valor típico es 350 [kPa]≈ 50 [psi]).

232 Capítulo 5 Válvulas de control direccional
M
350 [kPa]700 [kPa]1050 [kPa]
1.1
1.2
1.0
2.1
2.0
3.1
3.0
P1 P2 P3
AAA BBB
PPP TTT
PVA
� Figura 156. El conmutador con centro tándem permite conectar varias válvulas en serie.
Conviene tener presente otra peculiaridad de esta condición central. Debido a suconstrucción, cuando un conmutador con centro tándem se desplaza hacia la derechael caudal pasa de P hacia A; en cambio, en los otros conmutadores el flujo pasa de Phacia B cuando el conmutador se desplaza hacia la derecha. Por ello es necesario mo-dificar las líneas de distribución que van hacia el actuador cuando se sustituye otrocentro por uno tándem.
3.4. Conmutador con condición central flotante (centro “4”)........................................................................................................................................................................Las válvulas con condición central flotante mantiene el puerto P bloqueado, mientraslos puertos A, B y T están comunicados (figura 157). Con este centro se pueden operaren forma independiente varios actuadores, que están conectados a la misma fuentede potencia. El centro flotante también permite que el vástago y la carga del actuadorse muevan manualmente —que se floten— para hacer ajustes en su posición antes deefectuar el trabajo (figura 158).
Una ventaja más de este centro es que no se presenta arrastre del vástago, puesla presión en las líneas A y B no aumenta aunque se presenten pequeñas fugas en elconmutador (en contraste con lo que sucede con el centro cerrado).
Por supuesto, no es posible mantener una carga inmóvil a media carrera del actua-dor en la posición central de la válvula. Para resolver esta situación se debe emplear una

Sección 3 Posición central de las válvulas hidráulicas de control direccional 233
A BPT
� Figura 157. Conmutador de válvula hidráulica 4/3 con condición central flotante.
válvula antirretorno operada por piloto en conjunto con la válvula de control direccio-nal (figura 159). La presión desarrollada por la bomba llega a la antirretorno a través deun pasaje piloto, para retirar el tapón y desbloquear la válvula (lo cual permite la exten-sión del vástago en la posición izquierda de la válvula de la figura 159). Por esta causa,se acostumbra denominar a estos conmutadores con el nombre de conmutadores an-tirretorno operados por piloto.
M
1.1
1.2
1.0
2.1
2.0
AA BB
PP TT
PVA
� Figura 158. El centro tándem permite alimentar dos o más actuadores con sólouna unidad de potencia y hacer ajustes manuales de la posición de los vástagos.

234 Capítulo 5 Válvulas de control direccional
M
1.1
1.2
1.0
A B
P T
PVA
� Figura 159. Válvula 4/3 con condición central flotante,combinada con una antirretorno operada por piloto.
4. Capacidad de las válvulas de control direccional
Las válvulas de control direccional se fabrican en varias tallas o capacidades diferentes.Existen válvulas desde las más pequeñas —diseñadas para recibir caudales reducidos—hasta válvulas de gran peso y dimensiones que son capaces de conducir caudales muycuantiosos. Cada talla mayor de válvula es una amplificación proporcional de la tallaanterior.
La capacidad, tamaño o talla de una válvula se establece por el caudal que puedefluir a través de ella, produciendo una caída de presión que no supera cierta magnituddeterminada. Es decir, la válvula se dimensiona para asegurar que producirá una caídade presión limitada, cuando a través de su cuerpo circule cierto caudal establecido porlas necesidades del sistema.

Sección 4 Capacidad de las válvulas de control direccional 235
Q Δp� Figura 160. La capacidad de una válvula de control direccional establece cuánto
caudal puede fluir a través de la válvula, para una caída de presión determinada.
Un tipo particular de válvula se puede construir con cinco o más tallas diferentes.Todas ellas hacen justo la misma función de control direccional, pero cada talla estápreparada para funcionar bajo un límite máximo de caudal (y producir la misma caídade presión). En la figura 146 se muestra un esquema con las dimensiones proporciona-les de diferentes tallas de válvulas hidráulicas. Antiguamente era muy común emplearel tamaño de los puertos para designar su capacidad. Sin embargo, este procedimiento espoco confiable y ya no se emplea. Dos válvulas del mismo tipo e idéntico tamaño nomi-nal de puertos —pero de diferente fabricante o diferente modelo— no necesariamentemanejan el mismo caudal con idéntica caída de presión.
4.1. Coeficiente de capacidad de caudal para válvulas hidráulicas........................................................................................................................................................................Actualmente se emplea un procedimiento normalizado para definir la capacidad deflujo de las válvulas de control direccional. Se trata de una talla numérica conocida co-mo coeficiente de capacidad de caudal, representado por las siglas CV . El coeficienteCV fue introducido en 1944 por la empresa fabricante de válvulas Masoneilan, original-mente para el flujo de líquidos [16]. En corto tiempo se adoptó universalmente comouna forma práctica para indicar la capacidad de una válvula, incluso con las válvulasneumáticas y las que conducen otros gases y vapor.
El coeficiente de capacidad de caudal es una indicación de cuánto caudal puedeconducir la válvula, para producir una caída de presión claramente delimitada. A ma-yor CV mayor capacidad para conducir caudal, con una caída de presión determinada.Varias válvulas con diferente tamaño o diámetro nominal de puertos, pero con el mis-mo CV , tienen justo la misma capacidad de caudal; es decir, al conducir cierto caudalQ producen justo la misma caída de presiónΔp .
La propuesta original de Masoneilan define el coeficiente de capacidad de caudalcomo el flujo de agua a 60◦F, expresado en galones por minuto, que cruza por la válvulay produce una caída de presión de 1 [psi]. Por ejemplo, si una válvula de control en suposición totalmente abierta tiene un coeficiente máximo CV = 12, su área efectiva depuertos permite pasar 12 [gpm]de agua con una caída de presión de 1 [psi]. El coeficien-te CV fue definido originalmente en unidades inglesas, aunque se puede construir uncoeficiente semejante en unidades métricas. Algunos autores suelen distinguir el coe-ficiente en unidades métricas con la denominación “factor de caudal” y lo representancon las siglas KV [17].

236 Capítulo 5 Válvulas de control direccional
Determinación del coeficiente C V para flujo líquido
Diferentes empresas fabricantes, organismos e investigadores han propuesto yemplean procedimientos para determinar experimentalmente el coeficiente decapacidad de caudal, tanto para líquidos [18], [19], como para flujo de gas y va-por a través de válvulas [20], [21]. En estos trabajos se emplean igualdades paradefinir el coeficiente de caudal CV , muy similares a la que propuso originalmen-te Masonelian para líquidos y Driskell para gases en 1969 [22]. Sin embargo, deuna empresa fabricante a otra, los resultados que se obtienen al determinar ex-perimentalmente CV no necesariamente coinciden o significan lo mismo, puespueden estar basados en diferentes procedimientos de prueba [23].
Dos normas definen con precisión las ecuaciones y los procedimientos de prue-ba, para obtener experimentalmente el coeficiente de capacidad de caudal CV
de una válvula: ANSI/ISA-75.02.01-2008 Control Valve Capacity Test Procedures[24] y ANSI/ISA-75.01.01-2012 Flow Equations for Sizing Control Valves [25]. Deacuerdo con estas normas, el coeficiente CV se determina experimentalmentepor medio de una medición —en condiciones de similitud dinámica— de la ca-pacidad de la válvula.
Para flujo líquido la medición se efectúa haciendo pasar a través de la válvulaun caudal de agua a 60 ◦F (15,55 ◦C), para producir una caída de presión de sólo1 [psi] (6893 [Pa]). El caudal medido de este modo —expresado en [gpm]— esel coeficiente CV . La similitud dinámica para hacer la medición se establece através del número de Euler. El número de Euler es un cociente adimensional delas fuerzas de inercia entre las fuerzas de presión que actúan en el fluido [26]. ElEuler del modelo (la válvula que se prueba, con el caudal de agua a 60 ◦F) debeser igual al Euler del prototipo (la misma válvula, funcionando en condicionesreales en un sistema de potencia hidráulico):
E um = E up
V m
(2Δp/ρ)1/2m
=V p
(2Δp/ρ)1/2p
donde V es la velocidad promedio del flujo, ρ es la densidad del fluido y Δpes la caída de presión. Para agua a 60 ◦F se tiene ρm ≈ 1000 [kg/m3]. El fluidohidráulico en el prototipo tiene la densidad ρp . Entonces se tiene:
V p =V m
(2Δp/ρ)1/2p
(2Δp/ρ)1/2m
= V m
�Δpp ρm
Δpm ρp
1/2

Sección 4 Capacidad de las válvulas de control direccional 237
Pero
ρp
ρm≈ ρp [kg/m3]
1000 [kg/m3]= s
es la densidad relativa del fluido hidráulico. Además, por la definición de CV ,Δpm = 1 [psi]. Entonces:
V p = V m
1
s
Δpp
Δpm
�1/2=V m
Δpp
s
�1/2
El caudal que fluye por la válvula es Q = V A, donde A es el área transversal alflujo; como modelo y prototipo son la misma válvula entonces Ap = Am . Porconsiguiente:
V p Ap =V m Am
Δpp
s
�1/2
Qp = Qm
Δpp
s
�1/2
Pero Qm es el caudal de agua que cruza por el modelo para producir la caída depresión de sólo 1 [psi], al cual se le denomina coeficiente de capacidad de caudalCV . Entonces:
Qp =CV
Δpp
s
�1/2(5.1)
y al despejar se tiene:
CV =QpΔpp
s
�1/2
La medición en el laboratorio, con agua a 60 ◦F, permite predecir el caudal de flui-do hidráulico que la válvula puede conducir, para una caída de presión determinada.El ensayo para determinar el CV se lleva a cabo en un banco de pruebas como el queestá esbozado en la figura 161. El caudal desplazado por la bomba, a través de la vál-vula que se desea caracterizar, se regula hasta conseguir la lectura en el manómetroΔpm = 1 [psi]. La lectura del rotámetro en [gpm] es el valor numérico del Cv de la vál-vula.
Las válvulas hidráulicas se dimensionan, en condiciones ideales, para producir unacaída depresión entre sus puertos no mayor a 40 [psi] (276 [kPa]), cuando a través de la

238 Capítulo 5 Válvulas de control direccional
Rotámetrograduadoen [gpm]
Manómetrodiferencial
Bomba
Válvula pararegulaciónde caudal
Válvula
Agua a 60 ◦Fρm
Qm [gpm] =CV
Fluido
manométrico
ρ0 >ρm
Wb Δpm = p1−p2
Δh
Δpm = (ρ0 −ρm )gΔh
Δpm = 1 [psi]
� Figura 161. Instalación para determinar el CV de una válvula que conduce líquidos.
válvula circula el mayor caudal esperado en el sistema. Es decir, habitualmenteΔpp = 40 [psi] (en la práctica se llega a tolerar de 50 a 100 [psi]). Como el coeficientede capacidad de caudal se define con la ecuación (5.1):
CV =QpΔpp
s
�1/2
al sustituir el valor deseado paraΔpp en [psi], la magnitud del caudal máximo que atra-vesará la válvula Qp en [gpm] y la densidad relativa s del fluido hidráulico, se obtiene elvalor numérico de CV (el tamaño de válvula) que se debe instalar en el sistema hidráu-lico de potencia.
EJEMPLO 31
¿Qué coeficiente de caudal corresponde a una válvula hidráulica de control di-reccional 4/3, que conduce 184 [lpm]de aceite cuya densidad esρ = 814 [kg/m3]?La caída de presión en la válvula no debe exceder Δp = 325 [kPa]. ¿Cuál será lacaída de presión si el caudal se incrementa a 260 [lpm]?
El caudal es 184 [lpm] = 48,6 [gpm]. La caída de presión es Δpp = 325 [kPa] =47,15 [psi]. La densidad relativa del fluido es s = 0,814. El coeficiente de caudales:

Sección 4 Capacidad de las válvulas de control direccional 239
CV =QpΔpp
s
�1/2 = 48,6 [gpm]47,15 [psi]
0,814
�1/2 = 6,39
El coeficiente de caudal de la válvula siempre es el mismo, aunque el caudal quela atraviesa aumente a 260 [lpm] = 68,7 [gpm]. Con este caudal mayor se tendrála caída de presión:
Δp =Q 2 s
C 2V
=(68,7 [gpm])20,814
6,392= 94,1 [psi] = 648,6 [kPa]
EJEMPLO 32
Un cilindro hidráulico, con diámetro de pistón Dp = 160 [mm] y diámetro devástago dv = 56 [mm], desplaza su carga a lo largo de la carrera s = 60 [cm].Durante la extensión aplica 312 [kN]de fuerza y termina el recorrido enθe = 3 [s].Para el retroceso la fuerza es 148 [kN] y el tiempo es θr = 2 [s].
a ) ¿Cuánta potencia hidráulica transmite el actuador en cada movimiento?b ) ¿Cuánto caudal sale y entra del actuador en cada movimiento?c ) ¿Qué coeficiente de caudal debe tener la válvula de control direccional que
alimenta al actuador, para que su caída de presión no supere 410 [kPa]? Ladensidad del aceite hidráulico del sistema es 820 [kg/m3]?
Las dimensiones del actuador son las siguientes:
At =π
4D 2
p =π
4(0,160 [m])2 = 0,0201 [m2]
Ac =π
4
�D 2
p −d 2v
�=π
4[(0,160 [m])2− (0,056 [m])2] = 0,0176 [m2]
y al multiplicar por la carrera s = 0,60 [m], se obtienen los volúmenes:
Volt = At · s = 0,0201 [m2] ·0,60 [m] = 0,0121 [m3]
Volc = Ac · s = 0,0176 [m2] ·0,60 [m] = 0,0106 [m3]
a ) La potencia desarrollada durante la extensión es:
Wext =Fext · sθext
=312 000 [N] ·0,6 [m]
3 [s]= 62,4 [kW]
y para el retroceso: Wret =Fret · sθret
=148 000 [N] ·0,6 [m]
2 [s]= 44,4 [kW]

240 Capítulo 5 Válvulas de control direccional
b ) En cada movimiento del actuador entra y sale caudal, de la tapa o de la ca-beza. Los cuatro caudales son dirigidos por la válvula de control direccional.Para la extensión se tiene:
Qt =ΔVolt
θext=
0,0121 [m3]3 [s]
= 4,021 ·10−3 [m3/s] = 241,27 [lpm]
caudal que entra a la tapa.
Qc =ΔVolc
θext=
0,0106 [m3]3 [s]
= 3,529 ·10−3 [m3/s] = 211,72 [lpm]
caudal que sale de la cabeza.
y para el retroceso:
Qc =ΔVolc
θret=
0,0106 [m3]2 [s]
= 5,293 ·10−3 [m3/s] = 317,58 [lpm]
caudal que entra a la cabeza.
Qt =ΔVolt
θret=
0,0121 [m3]2 [s]
= 6,032 ·10−3 [m3/s] = 361,91 [lpm]
caudal que sale de la tapa.
c ) El caudal que sale de la tapa, durante el retroceso, es el mayor de los cua-tro que cruzan a través de la válvula (361,91 [lpm] = 95,62 [lpm]; 1 [gpm] =3,785 [lpm]). Se debe dimensionar la válvula para este caudal, que ocasionarála mayor caída de presión.
Se tiene Δp = 410 [kPa] = 59,6 [psi]; s = ρ/1000 = 0,82; al sustituir estosvalores numéricos
CV =QΔp
s
�1/2 = 95,6 [gpm]59,6 [psi]
0,82
�1/2 = 11,2
Se debe adquirir e instalar una válvula con CV ≥ 11,2.
4.2. Coeficiente de capacidad de caudal para válvulas neumáticas........................................................................................................................................................................La talla o capacidad de una válvula neumática se establece de manera semejante alprocedimiento que se sigue con las válvulas hidráulicas. El coeficiente de capacidad de

Sección 4 Capacidad de las válvulas de control direccional 241
caudal indica cuánto caudal puede conducir la válvula, sin rebasar una caída de presiónque se considera conveniente. Entre mayor sea el CV puede fluir mayor caudal a travésde la válvula, sin rebasar la caída de presión elegida.
Para las válvulas que conducen fluidos compresibles, el coeficiente CV también seobtiene con las ecuaciones y los procedimientos descritos en las normas ANSI/ISA-75.02.01-2008 y ANSI/ISA-75.01.01-2012 (ver el recuadro en la página siguiente).Conlas ecuaciones propuestas en estas normas ISA se obtienen resultados confiables paraun intervalo muy amplio de caídas de presión, sin importar el medio o el tipo de laválvula, incluyendo las válvulas de apertura continuamente variable.
El caso de las válvulas neumáticas de control direccional es relativamente sencillo,pues se trata de válvulas con orificios de área constante. La National Fluid Power Asso-ciation publicó una norma compatible con las normas ISA, apropiada para caracterizarválvulas neumáticas con orificios fijos (su apertura no es continuamente variable). Setrata de la norma ANSI/(NFPA)T3.21.3 R1-2008 (R2013), Pneumatic fluid power-Flowrating test procedure and reporting method-For fixed orifice components [27].
La norma ANSI/(NFPA)T3.21.3 indica cómo medir el CV para válvulas neumáticascon caídas de presión reducidas. Para efectuar la determinación experimental del CV ,el estándar limita la caída de presión a través de la válvula, Δp = p1 − p2, al intervalo1,0 [psi] ≤ Δp ≤ 2,0 [psi] (7 [kPa] ≤ Δp ≤ 14 [kPa]) [28]. La mayoría de los cálculospara determinar el caudal en componentes neumáticos dan por hecho que el fluidoes incompresible, pero esta suposición es válida solamente con caídas de presión bajas(tal y como se recomienda en la prueba de ANSI/(NFPA)T3.21.3).
La ecuación propuesta en la ANSI/(NFPA)T3.21.3 se puede emplear tanto con uni-dades inglesas (figura 162):
CV =Q
22,48
T1s
p2 ·Δp
�1/2(5.2)
como con unidades del Sistema Internacional:
CV =Q
114,5
T1s
p2 ·Δp
�1/2(5.3)
donde: CV = Coeficiente de capacidad de caudal [adimensional]Q = Caudal de aire en condiciones estándar (60 ◦F, 14,7 [psia] o 15,6 ◦C,
101,325 [kPa], 36% de humedad relativa), en pies cúbicos por minuto,[pcme] o litros por segundo [lps].
s = Densidad relativa1del gas que cruza por la válvula [adimensional].Δp = Caída de presión producida por la válvula,Δp = p1−p2, [psig] o [bar].
1 La densidad relativa de un gas se define como el cociente de la densidad del gas respecto a la
densidad del aire, ambas en condiciones estándar.

242 Capítulo 5 Válvulas de control direccional
donde: p1 = Presión absoluta a la entrada de la válvula, [psia] o [bar].p2 = Presión absoluta a la salida de la válvula, [psia] o [bar].T1 = Temperatura absoluta del aire en ◦R (◦R= 460+ ◦F) o [K]
([K] = 273,15+ ◦C).22,48 y 114,5 son constantes de conversión de unidades.
1.1
1.0
1
2
3
4
p1
p2
Δp = p1−p2
Qt
Vext
� Figura 162. Caída de presión en una válvula neumática.
Coeficiente de caudal para flujo compresible
La caída de presión a través de un orificio o de una válvula provoca una reduc-ción en la densidad de un gas, pues el gas se expande con la disminución dela presión. No sucede así con los líquidos, para los cuales no hay cambios per-ceptibles en su densidad. En condiciones de estado permanente el flujo másicom = ρ �V At no cambia a lo largo de la trayectoria del flujo, de manera que si elgas se expande también se debe acelerar a una velocidad mayor.
Anteriormente los fabricantes de válvulas evitaban el empleo de ecuaciones y delos coeficientes de capacidad de caudal. Preferían presentar gráficos o nomogra-mas con la caída de presión para flujo de agua, aire y vapor, para cada tamañode válvula. Este sistema prevaleció hasta 1944, cuando la empresa Masoneilanintrodujo el coeficiente de capacidad de caudal CV que se emplea en la actuali-dad [23].
Durante las décadas 50 y 60 del siglo XX había un amplio desacuerdo entre los fa-bricantes de válvulas, con respecto a qué ecuación para flujo compresible se de-bía utilizar. Algunos usuarios en las industrias de proceso notaron que las ecua-

Sección 4 Capacidad de las válvulas de control direccional 243
ciones para flujo compresible, empleadas en ese entonces, daban resultados queestaban en desacuerdo y podían llevar a cometer errores serios en el dimensio-nado. Válvulas con el mismo coeficiente CV pero formas distintas podían tenercaracterísticas de flujo gaseoso radicalmente diferentes, lo cual causaba el pro-blema. Se hizo evidente que un solo coeficiente de capacidad de caudal CV , de-terminado experimentalmente, era insuficiente para describir el flujo líquido ygaseoso a través de válvulas para la gama completa de caídas de presión.
En julio de 1969, Leslie Driskell publicó un artículo en la revista HydrocarbonProcessing [22], en el que proponía ecuaciones y procedimientos para determi-nar el comportamiento del flujo compresible a través de válvulas. Driskell reco-noció que el flujo a través de válvulas era muy similar al flujo a través de placasdelgadas con orificios para la medición de flujos. Al siguiente año publicó otroartículo en ISA Transactions [29], y en 1983 su libro de texto Control Valve Selec-tion and Sizing [20]. Su trabajo está sólidamente sustentado sobre muchos añosde investigación, conducida sobre orificios con borde afilado para la mediciónprecisa del flujo.
La ecuación para determinar el coeficiente de caudal CV para flujo fluido com-presible, que se convirtió en el estándar ISA (International Society of Automa-tion), procede de los trabajos de Driskell. La norma ANSI/ISA-75.01.01-2012Flow Equations for Sizing Control Valves [25]proporciona las ecuaciones para di-mensionar una válvula, tanto para fluidos compresibles como incompresibles.Con estas ecuaciones se obtienen resultados confiables para la gama completade caídas de presión, sin importar el medio o el tipo de la válvula, incluyendo lasválvulas de apertura variable.
Para el flujo turbulento no crítico de un gas o un vapor, la norma ANSI/ISA-75.01.01-2012 proporciona la ecuación:
CV =Qe
Fp Y N7 p1
s T1 z
x
�1/2(5.4)
donde Qe = caudal del gas o vapor en condiciones estándar (lo que en neumá-tica se llama “condiciones de aire libre”)
Fp = factor geométrico de la tubería, por los posibles cambios de formao de sección.
Y = factor de expansión; cociente del coeficiente de flujo para un gasentre el correspondiente a un líquido, para el mismo número deReynolds.
N7 = constante numérica, diferente para cada sistema de unidades;N7 = 22,667 si Qe [pcm], p1 [psia] y T1
◦R

244 Capítulo 5 Válvulas de control direccional
p1 = presión absoluta del gas a la entrada de la válvula.s = densidad relativa del gas (cociente de la densidad del gas respecto
a la densidad del aire, ambas en condiciones estándar).T1 = temperatura absoluta del gas a la entrada de la válvula.z = factor de compresibilidad del gas.x = cociente de la caída de presión Δp entre la presión absoluta del
gas a la entrada de la válvula, p1.
En el apéndice b se proporciona una demostración de la igualdad (5.4).
Sobre estas dos ecuaciones se debe tener en cuenta las siguientes observaciones[30]:
a ) La predicción del CV es exacta con ±10%, para caídas de presión no mayores a2,0 [psi] (14 [kPa]). El error crecerá para caídas de presión mayores.
b ) Las ecuaciones son válidas para flujo subsónico, lo cual se verifica si el límite decaída de presión está en el intervalo 0,85 < p2/p1 ≤ 1,0 (ambas presiones en valorabsoluto).
c ) La influencia de la humedad relativa del aire sobre el valor de la densidad relativaes muy pequeña, por lo cual se puede ignorar.
d ) El resultado para el CV es el mismo, sin importar en cuál sistema de unidades sehagan las operaciones (y qué ecuación se emplee para los cálculos numéricos, (5.2)o (5.3)).
EJEMPLO 33
Un cilindro neumático, con diámetro de pistón Dp = 6 [pulg] y carrera s =25 [pulg], recibe aire comprimido que ingresa a la válvula a 50 [psi]. Durante elmovimiento de extensión efectúa su recorrido en θe = 5 [s]. ¿Qué coeficientede caudal debe tener la válvula de control direccional que alimenta al actuador,para que su caída de presión no supere 2 [psi]? La presión atmosférica local es14,7 [psia] y la temperatura 60 ◦F.
El área transversal del pistón, del lado de la tapa, es:
At =π
4D 2
p =π
4(6 [pulg])2 = 28,274 [pulg2]
y al multiplicar por la carrera s = 25 [pulg], se obtiene el volumen de la tapa:
Volt = At · s = 28,274 [pulg2] ·25 [pulg] = 706,86 [pulg3]

Sección 4 Capacidad de las válvulas de control direccional 245
La relación de compresión es:
RC=50 [psi] +14,7 [psi]
14,7 [psi]= 4,4
y el caudal en condiciones de aire libre:
PCMt =
Vol[pulg3]
· Relación decompresión
Tiempo requerido parallenar el cilindro [s]
·28,8
=706,86 [pulg]3 ·4,4
5 [s] ·28,8= 21,61 [pcm]
Para emplear la ecuación (5.2) se tiene Δp = 2 [psi]; p2 = p1 −Δp = 48 [psi] =62,7 [psia]; s = 1, pues la válvula conduce aire (ver la nota posterior a la ecuación(5.3)); T1 = 60 ◦F= 520 ◦R. Al sustituir valores:
CV =Q
22,48
T1s
p2 ·Δp
�1/2=
21,61 [pcm]22,48
520 ◦R ·1
62,7 [psi] ·2 [psi]
�1/2= 1,96
EJEMPLO 34
Un cilindro neumático, con diámetro de pistón Dp = 15 [cm] y carrera s =63,5 [cm], recibe aire comprimido que ingresa a 344 [kPa] a la válvula de con-trol direccional. Durante la extensión efectúa su recorrido en θe = 5 [s]. ¿Quécoeficiente de caudal debe tener la válvula de control direccional que alimentaal actuador, para que su caída de presión no supere 14 [kPa]? La presión atmos-férica local es 101,33 [kPa] y la temperatura 16 ◦C.
El área transversal del pistón, del lado de la tapa, es:
At =π
4D 2
p =π
4(0,15 [m])2 = 0,01767[m2]
y al multiplicar por la carrera s = 0,635 [m], se obtiene el volumen de la tapa:
Volt = At · s = 0,01767 [m2] ·0,635 [m] = 0,0112 [m3]
La relación de compresión es:
RC=345 [kPa] +101,33 [kPa]
101,33 [kPa]= 4,4

246 Capítulo 5 Válvulas de control direccional
y el caudal en condiciones de aire libre:
Qt =
Volt
[m3]· Relación decompresión
Tiempo requerido parala extensión [s]
=0,0112 [m]3 ·4,4
5 [s]= 9,885 ·10−3 [m3/s] = 9,885 [lps]
Para emplear la ecuación (5.3) se tieneΔp = 14 [kPa] = 0,14 [bar]; p2 = p1−Δp =330 [kPa] = 431,33 [kPa] absoluta = 4,31 [bar] absoluta; s = 1, pues la válvulaconduce aire (ver la nota posterior a la ecuación 5.3); T1 = 16 ◦C = 289,15 [K]. Alsustituir valores:
CV =Q
114,5
T1 · s
p2 ·Δp
�1/2=
9,885 [lps]114,5
289,15 [K] ·1
4,31 [bar] ·0,14 [bar]
�1/2= 1,9
Las igualdades (5.2) y (5.3) incluyen variables con valores conocidos para las con-diciones habituales de una válvula neumática. La temperatura T1 es la temperaturaambiental en valor absoluto (tradicionalmente se toma 15,6 ◦C = 289,15 [K] = 60 ◦F =520 ◦R); la densidad relativa del gas aspirado por el compresor es s = 1 (ver la nota a piede página vinculada con la ecuación (5.3)); la presión absoluta a la salida de la válvula,p2, es p1 −Δp . Por consiguiente —aunque las dos igualdades se pueden emplear sindificultades para evaluar el CV — no es difícil modificar las ecuaciones con el propósitode facilitar los cálculos numéricos [31]. Tomemos la ecuación (5.2):
CV =Q
22,48
T1 · s
p2 ·Δp
�1/2=
Q
22,48
520
(p1−Δp ) ·Δp
�1/2= Q ·A
donde
A =1
22,48
520
(p1−Δp ) ·Δp
�1/2= f (p1,Δp ) (5.5)
Se puede preparar una tabla de resultados para la variable A, para varias opciones decaída de presión en la válvula,Δp [psi], y diversos valores de la presión de entrada a laválvula p1 [psi]. Leyendo en la tabla la magnitud de A se obtiene el coeficiente de caudalCV con el producto:
CV = A ·Q [pcme] (5.6)
En la tabla 5.3 se proporcionan tres valores posibles para la caída de presión Δp =p1 −p2, que corresponden a situaciones típicas del funcionamiento de los sistemas depotencia con aire comprimido:

Sección 4 Capacidad de las válvulas de control direccional 247
[2 [psi]:] Para sistemas en los que se necesita una gran eficiencia en el empleo de laenergía o tiempos de respuesta muy breves para el actuador.
5 [psi]: Para sistemas típicos.10 [psi]: Para sistemas sencillos, en los cuales no hay preocupación por las pérdidas
de energía y conviene ahorrar en la talla de las válvulas.
� Tabla 5.3. Variable A(p1,Δp ) para la obtención del coeficiente de capacidad de caudalcon la ecuación (5.6); operaciones en el sistema inglés de unidades.
p1 = presión manométricaa la entrada de la
válvula, [psi]
Variable A para diferentescaídas de presión
2 [psi] 5 [psi] 10 [psi]
10 0,155 0,102
20 0,129 0,083 0,066
30 0,113 0,072 0,055
40 0,097 0,064 0,048
50 0,091 0,059 0,043
60 0,084 0,054 0,040
70 0,079 0,050 0,037
80 0,075 0,048 0,035
90 0,071 0,045 0,033
100 0,068 0,043 0,031
110 0,065 0,041 0,030
120 0,062 0,039 0,029
130 0,060 0,038 0,028
140 0,058 0,037 0,027
150 0,056 0,036 0,026
160 0,055 0,035 0,026
170 0,054 0,034 0,025
180 0,052 0,033 0,024
190 0,051 0,032 0,024
200 0,050 0,031 0,023
De igual modo, la ecuación (5.3) se prepara para facilitar los cálculos numéricos enSistema Internacional, con T1 = 289,15 [K] y s = 1:
CV =Q
114,5
T1 · s
p2 ·Δp
�1/2=
Q
114,5
289,15
(p1−Δp ) ·Δp
�1/2= Q ·AM

248 Capítulo 5 Válvulas de control direccional
donde
AM =1
114,5
289,15
(p1−Δp ) ·Δp
�1/2= f (p1,Δp ) (5.7)
y
CV = AM ·Q [lps] (5.8)
En la tabla 5.4 se proporcionan tres opciones típicas para la caída de presiónΔp = p1−p2
en la válvula: 14 [kPa], 35 [kPa] y 70 [kPa] (0,14 [bar], 0,35 [bar] y 0,7 [bar]).
� Tabla 5.4. Variable AM (p1,Δp ) para la obtención del coeficiente de capacidad de caudalcon la ecuación (5.8); operaciones en el Sistema Internacional de unidades.
p1 = presión manométricaa la entrada de la válvula
Variable AM para diferentescaídas de presión
[kPa] [bar]14 [kPa]
0,14 [bar]35 [kPa]
0,35 [bar]70 [kPa]0,7 [bar]
75 0,75 0,311 0,211 0,172
150 1,5 0,257 0,171 0,132
225 2,25 0,224 0,147 0,111
300 3,0 0,202 0,131 0,097
375 3,75 0,184 0,119 0,088
450 4,5 0,171 0,110 0,081
525 5,25 0,160 0,103 0,075
600 6,0 0,151 0,097 0,071
675 6,75 0,144 0,092 0,067
750 7,5 0,137 0,088 0,063
825 8,25 0,131 0,084 0,061
900 9,0 0,126 0,081 0,058
975 9,75 0,122 0,078 0,056
1050 10,05 0,120 0,077 0,055
1125 11,25 0,114 0,073 0,052
1200 12,0 0,111 0,071 0,051
1275 12,75 0,112 0,068 0,049
1350 13,5 0,105 0,067 0,048
1425 14,25 0,102 0,065 0,046
1500 15,0 0,100 0,063 0,045

Sección 4 Capacidad de las válvulas de control direccional 249
EJEMPLO 35
Repita los cálculos de los ejercicios 33 y 34, pero con ayuda de las ecuaciones 5.6y 5.8 y las tablas 5.3 y 5.4 para obtener las variables A y AM .
En el ejercicio 33 se obtuvo el caudal que ingresa a la tapa del actuador durantela extensión:
PCMt =Volt [pulg3] ·RC
θext [s] ·28,8=
706,86 [pulg3] ·4,4
5 [s] ·28,8= 21,61 [pcm]
Para la presión a la entrada de la válvula p1 = 50 [psi] y la caída de presiónΔp = 2 [psi], en la tabla 5.3 se obtiene la variable A = 0,091. La ecuación (5.6)proporciona el coeficiente de caudal:
CV = A ·Q [pcm] = 0,091 ·21,61 [pcm] CV = 1,97
Del ejercicio 34 se tiene el caudal que ingresa a la tapa del actuador durante laextensión:
Qt =Volt [m3] ·RC
θext [s]=
0,0112 [m3] ·4,4
5 [s]= 9,885 ·10−3 [m3/s] = 9,885 [lt/s]
En la tabla 5.4 se interpola linealmente para la presión a la entrada de la válvulap1 = 344 [kPa] (3,44 [bar]) y la caída de presión Δp = 14 [kPa] (0,14 [bar]); seobtiene la variable AM = 0,191. La ecuación (5.8) proporciona el coeficiente decaudal:
CV = AM ·Q [lps] = 0,191 ·9,885 [lps] CV = 1,89
EJEMPLO 36
En el ejemplo 10 del capítulo 2 se trabajó con un actuador lineal neumático,cuyos diámetros de pistón y de vástago son 125 [mm] y 36 [mm]. La carrera es0,80 [m] y los tiempos de extensión y retroceso son 2 [s] y 1,5 [s], respectivamente.Determine el coeficiente de capacidad de caudal de la válvula de control direc-cional, de manera que la caída de presión no supere 35 [kPa]. La presión dis-ponible en el ingreso del actuador es 550 [kPa]; la presión atmosférica local es79 [kPa].
En el ejemplo 10 se obtuvieron algunos resultados útiles. La relación de compre-sión es:

250 Capítulo 5 Válvulas de control direccional
Relación decompresión
=550 [kPa] +79 [kPa]
79 [kPa]= 7,962
y los caudales para la extensión y el retroceso:
Qt =
Volt
[m3]· Relación decompresión
Tiempo requerido parala extensión [s]
=9,82 ·10−3 [m3] ·7,962
2 [s]= 0,0391 [m3/s];
entra a la tapa.
Qc =
Volc
[m3]· Relación decompresión
Tiempo requerido parael retroceso [s]
=9,003 ·10−3 [m3] ·7,962
1,5 [s]= 0,0478 [m3/s];
entra a la cabeza.
El mayor de los caudales es el que ingresa a la cabeza durante el retroceso; laválvula se debe dimensionar con este resultado.
Qmax = 0,0478 [m3/s] = 47,8 [lps]
La presión en los puertos del actuador es p2 = 550 [kPa] y comoΔp = 35 [kPa] =0,35 [bar] se tiene p1 = 585 [kPa] = 5,85 [bar] en la entrada de la válvula. En la tabla5.4 se interpola linealmente entre las lecturas 6 y 5,25 [bar], paraΔp = 0,35 [bar],y se obtiene:
AM = 0,0982
La ecuación (5.7) proporciona el coeficiente de caudal:
CV = AM ·Q [lps] = 0,0982 ·47,8 [lps] CV = 4,69
Ejercicios propuestos
1. En el ejemplo 12 del capítulo 3 se eligió un actuador lineal neumático. Su carrera es20 [pulg] y los tiempos de extensión y retroceso son 4 [s] y 2,6 [s], respectivamente.Determine los caudales que se deben alimentar al actuador en cada movimiento y elcaudal promedio para un ciclo de extensión y retroceso. Obtenga el coeficiente CV

Referencias 251
de la válvula de control direccional, para que la caída de presión no supere 10 [psi].La presión atmosférica local es 13,8 [psia].
2. En el ejemplo 16 del capítulo 3 se dimensionó un actuador lineal hidráulico. De-termine los cuatro caudales que entran y salen del actuador y cruzan la válvula decontrol direccional; los tiempos para la extensión y el retroceso son 8 y 4,5 segundos,respectivamente. Establezca la talla de la válvula para que su caída de presión no seamayor a 0,34 [MPa]. La densidad del aceite hidráulico del sistema es 796 [kg/m3].
3. En el ejemplo 22 del capítulo 3 se determinaron las dimensiones adecuadas de unactuador lineal neumático. Calcule el coeficiente de caudal de la válvula de controldireccional, para que la caída de presión no supere 0,35 [bar]. La presión atmosféricalocal es 78 [kPa].
4. Para el ejercicio propuesto 8, en el capítulo 3, considere los tiempos de extensión yretroceso 12 [s] y 4,6 [s], respectivamente. Establezca los caudales que entran y salendel actuador en cada movimiento. Determine el coeficiente de caudal de la válvulapara que su caída de presión no supere a 420 [kPa]. La densidad del aceite hidráulicodel sistema es 810 [kg/m3].
5. Para el ejercicio propuesto 10, en el capítulo 3, defina la talla de la válvula de con-trol direccional neumática, para que su caída de presión no sea mayor a 5 [psi]. Lapresión atmosférica local es 11,6 [psi].
6. Una máquina automática opera con tres cilindros neumáticos de doble efecto. Ca-da actuador tiene un pistón con 40 [mm] de diámetro, 15 [cm] de carrera y vástagocon 14 [mm] de diámetro. Los cilindros reciben aire comprimido a 550 [kPa] paraefectuar la extensión y a 420 [kPa] para el retroceso. Los actuadores efectúan —cadauno— 5000 ciclos en una hora. La presión atmosférica local es 86 [kPa]. a) ¿Cuálesson las velocidades y los consumos de caudal para cada actuador, durante la ex-tensión y la retracción? La extensión consume el doble del tiempo de la retracción.b) Obtenga el coeficiente de capacidad de caudal de la válvula, para que su caída depresión no supere 35 [kPa].
7. Calcule el coeficiente CV de la válvula de control direccional para el motor del ejem-plo 26, en el capítulo 4. La caída de presión no debe superar los 70 [kPa].
8. Evalúe la talla de la válvula para el motor hidráulico del ejemplo 30, en el capítulo 4.Su caída de presión no debe ser mayor a 0,4 [MPa].
Referencias
[1] International Organization for Standardization. ISO 1219-1:2006 Fluid power sys-tems and components-Graphic symbols and circuit diagrams-Part 1: Graphic sym-bols for conventional use and data-processing applications.

252 Capítulo 5 Válvulas de control direccional
[2] International Organization for Standardization. ISO 1219-2:1995 Fluid power sys-tems and components-Graphic symbols and circuit diagrams-Part 2: Circuit dia-grams.
[3] Detroit coil company. Bulletin 502. What is a solenoid? Ferndale, Michigan, USA.s.f.
[4] [4] Oilgear. Bulletin 80340-A. WE series directional control valves ISO4401 size 03.Milwaukee, WI USA, 2001.
[5] Continetal Hydraulics. Form No. 260087. PowrFlowTM. Directional Control Valves.Savage, MN, USA, 2003.
[6] Oilgear. Bulletin 80305. Type AVDC@ 3- and 4- way manifold connected valves. Mil-waukee, WI USA
[7] Detroit coil company. Bulletin 502. How a DC solenoid works? Ferndale, Michigan,USA. s. f.
[8] Parker Hannifin Corporation. Catalog HY142502/US. Industrial Hydraulic Valves.Elyria, Ohio, USA, 2006.
[9] Parker Hannifin Corporation. Catalog 4300. Industrial Tube Fittings, Adapters andEquipment. Columbus, Ohio, USA, 2006.
[10] Bailey, Burleigh. Name that thread. Four basic steps identify threads on industrialhydraulic fittings. Machine Design, Vol. 76, No. 20, 21 de octubre de 2004. pp. 68-71.Cleveland, OH, USA. http://machinedesign.com/article/name-that-thread-1021
[11] Colder Products Company. Pipe Thread Types and Designations. St. Paul, MN, USA.2007.
[12] American National Standars Institute. ANSI/ASME B36.10M-2004 Welded andSeamless Wrought Steel Pipe.
[13] Sölken, Werner. Explore the world of piping. 2008. www.wermac.org (consultadaen octubre de 2009).
[14] International Organization for Standardization. ISO 6708:1995 Pipework compo-nents-Definition and selection of DN (nominal size).
[15] Vickers Eaton. Overhaul Manual 5007.01/EN/1099/M. Directional Control Valves.DG3V-10/DG5V-10 Solenoid Pilot Operated. Eden Prairie, MN, USA, 1999.
[16] Dresser Masoneilan. Bulletin OZ1000 03/04. Masoneilan Control Valve Sizing Hand-book. Dresser Industries, Inc. USA, 2004.
[17] Fluid Controls Institute. FCI 84-1-1985. Metric Definition of the Valve Flow Coeffi-cient Cv. Cleveland, OH, USA, 1985.
[18] Rahmeyer, William J. “Control valve testing procedures and equations for liquidflows”. Utah Water Research Laboratory. Utah, USA. s.f.
[19] Semiconductor Equipment and Materials Institute. SEMI F32-0706. “Test Methodfor Determination of Flow Coefficient for High Purity Shutoff Valves”. Aprobada parasu publicación en mayo de 2006. http://www.semi.org/
[20] Driskell, Leslie R. Control-valve selection and sizing. Unidad 7, pp. 115-128. NC Ins-trument Society of America-Research Triangle Park, NC. USA, 1983.

Referencias 253
[21] Fu, Wu Shung y Ger, Jia Shyang. A concise method for determining a valve flowcoefficient of a valve under compressible gas flow. Experimental Thermal and FluidScience. Vol. 18, No. 4, 1998. pp. 307-313.
[22] Driskell, L.R., New Approach to Control Valve Sizing. Hydrocarbon Processing, Vol.48, No. 7, July 1969, pp. 131-134.
[23] Thomas, John H. Proper Valve Size Helps Determine Flow. Control Engineering. No.3, 1 de septiembre, 2000.
[24] ANSI/ISA-75.02.01-2008. Control Valve Capacity Test Procedures. Aprobada el 1 deOctubre de 1996, ISA.
[25] ANSI/ISA-01.01-2012. Flow Equations for Sizing Control Valves. Aprobada el 8 deAbril de 2002, ISA.
[26] White, Frank M. Fluid mechanics. McGraw-Hill Science/Engineering/Math; 6thed., 2006.
[27] American National Standards Institute. ANSI/(NFPA)T3.21.3 R1-2008, Pneumaticfluid power-Flow rating test procedure and reporting method-For fixed orifice com-ponents.
[28] Fleischer, H., Forster, K. y Franson D. C. Clearing the air on pneumatic valve ra-tings. Machine Design, 5 de octubre de 2000. pp. 97-100. Cleveland, OH, USA. http://machinedesign.com/article/clearing-the-air-on-pneumatic-valve-ratings-1005
[29] Driskell, L. R., Sizing Valves for Gas Flow. ISA Transactions, Vol. 9, No. 4, 1970, pp.325-331.
[30] Lansky, Zdenek J. y Schrader Lawrence F. Industrial pneumatic control. Marcel Dek-ker Inc. New York, 1986.
[31] Landis, Chris. Sizing pneumatic cylinders and ISO valves. Machine Design, Vol.79, No. 22, 21 de noviembre de 2007. pp. 54-57. Cleveland, OH, USA. http://ma-chinedesign.com/article/sizing-pneumatic-cyclinders-and-iso-valves-1121


6 Válvulas pararegulación de caudal
1. Válvulas para regulación de caudal con orificio variable1. 1.1. Variables que influyen sobre el caudal que fluye a través de un pasaje estrecho1. 1.2. Procedimientos para regulación de caudal en un sistema de potencia fluida2. Regulación por obstrucción en un sistema neumático1. 2.1. Regulación de velocidad en los motores neumáticos1. 2.2. Sistema con velocidad múltiple (amortiguamiento externo)1. 2.3. Válvula de escape rápido3. Regulación de caudal en los sistemas hidráulicos1. 3.1. Regulación de caudal por obstrucción. Alimentación regulada1. 1.1. 3.1.1. Un sistema hidráulico sin regulación de caudal1. 1.1. 3.1.2. Una válvula establece la velocidad de extensión1. 1.1. 3.1.3. Se abre y cierra la apertura del orificio1. 1.1. 3.1.4. Se modifica la diferencia de presiones en el orificio de la válvula1. 3.2. Regulación de caudal por obstrucción. Descarga regulada1. 3.3. Válvula para regulación de caudal por obstrucción, compensada por presión1. 1.1. 3.3.1. Funcionamiento del conjunto compensador de presión1. 1.1. 3.3.2. Aplicación de la válvula compensada por presión1. 3.4. Regulación de caudal por derivación1. 1.1. 3.4.1. Aplicación de la válvula por derivación, compensada por presión1. 3.5. Selección de una opción para regular la velocidad1. 1.1. 3.5.1. Regulación de velocidad por obstrucción con alimentación regulada1. 1.1. 3.5.2. Regulación de velocidad por obstrucción con descarga regulada1. 1.1. 3.5.3. Regulación de velocidad por derivación1. 3.6. Válvula de desaceleración1. 3.7. Regulación de velocidad en los motores hidráulicos
La velocidad con la que un actuador recorre su carrera y desplaza su carga se esta-Lblece con una o más válvulas para regulación de caudal. Al imponer un control so-bre el flujo que avanza a través del sistema se define el ritmo con el que se ejecuta eltrabajo. Lo más frecuente es que la carga se desplace con velocidades diferentes en ca-da sentido de su recorrido, extensión y retroceso o giros izquierdo y derecho. Por eso sedebe controlar en forma independiente el caudal relacionado con cada movimiento.
255

256 Capítulo 6 Válvulas para regulación de caudal
La forma más simple de limitar el caudal que fluye a través de un conducto es conuna restricción, un orificio con sección transversal menor al del conducto. Pero si larestricción tiene una sección transversal invariable no será posible hacer ajuste algunosobre el flujo restringido que logra cruzarla. Entonces se necesita una válvula de controlque permita modificar la magnitud de la restricción, una válvula con orificio variable.
Cada día solemos operar válvulas para regulación de caudal con orificio variable,pues la dotación de agua en los espacios habitables se controla con estas válvulas. Perolas válvulas empleadas en los sistemas de potencia fluida son algo más refinadas quelas de uso casero, aunque comparten los mismos principios de funcionamiento y suconstrucción es muy semejante.
1. Válvulas para regulación de caudal con orificio variable
Para establecer una velocidad definida en el movimiento de un actuador se emplea unaválvula para regulación de caudal o de control de flujo. Esta válvula controla la magni-tud del caudal que fluye a través de una línea de distribución, para luego acceder a unode los puertos del actuador e inundarlo (o bien el caudal que abandona un actuador;ver la sección 1.2 más adelante). Entre más rápido se inunde el volumen interno delactuador —es decir, entre mayor sea el caudal que llega a su puerto— mayor será lavelocidad con la cual se desplace su frontera móvil.
1 2
� Figura 163. Válvula de aguja pararegulación de caudal con orificio variable.
En potencia fluida se regula el caudal por medio de una válvula reguladora de ori-ficio variable. El principio de funcionamiento de esta válvula es semejante al de unaválvula para regular el caudal de agua en cualquier toma hidráulica casera. El vástagode la válvula es un elemento móvil, que sale o penetra en el cuerpo de la válvula cuandoel usuario lo gira por medio de un maneral. En elextremo del vástago existe un tapón —un discoplano y flexible— el cual obstruye parcial o total-mente un orificio de paso para el flujo. Entre másamplio el orificio de paso, mayor sección trans-versal dispuesta para que cruce el fluido.
Las válvulas reguladoras de caudal para po-tencia fluida son más refinadas que una válvu-la de lavabo. El elemento de control gradúa laabertura del orificio mediante un vástago cuyoextremo tiene forma de aguja, como se mues-tra en la figura 163. Así, el control de la seccióntransversal dispuesta para el paso del fluido va-ría en forma gradual y muy precisa con el giro delmaneral.

Sección 1 Válvulas para regulación de caudal con orificio variable 257
Flujo libre
Flujo regulado
� Figura 164. Válvula para regulación de caudal con orificio variable.El símbolo a la izquierda es una válvula bidireccional; en el lado derecho,
al añadirle una antirretorno en paralelo, la válvula es unidireccional.
En la figura 164 se muestran dos símbolos gráficos normalizados (ver ISO 1219-1:2006 [1] y ISO 1219-2:1995 [2]); ambos corresponden a una válvula para regulaciónde caudal con orificio variable. El símbolo a la izquierda es de una válvula bidireccio-nal; es decir, esta válvula regula el caudal en ambos sentidos de flujo. El símbolo enel costado derecho corresponde a una válvula para regulación de caudal que incluyeuna válvula antirretorno en paralelo (ver el recuadro a continuación). Por consiguiente,la válvula para regulación funciona de modo unidireccional.
La válvula unidireccional tiene un sentido de flujo libre —a través de la antirre-torno— y un sentido regulado —a través del orificio en la válvula para regular el caudal.Con frecuencia, las válvulas para regulación de caudal ya incluyen una antirretorno enel mismo cuerpo de la válvula (ver el recuadro en la sección 1.2).
Válvula antirretorno
La válvula antirretorno se emplea como un elemento de control, ensambladoen paralelo con algún otro dispositivo para controlar la potencia fluida. De es-ta forma el dispositivo de control se convierte en un elemento unidireccional.Es decir, funciona exclusivamente en un sentido, pues en el sentido contrario elflujo avanza por la antirretorno y evita pasar por el dispositivo.
La válvula antirretorno cuenta exclusivamente con dos puertos, a través de loscuales entra o sale el caudal fluido. En el interior de la válvula existe un tapón,el cual obstruye o libera el paso a través del cuerpo de la válvula (en función delas fuerzas que se manifiesten sobre él). Este tapón puede ser una esfera que semueve fácilmente dentro de la válvula, pero permanece colocada contra los bor-des de un orificio mediante un resorte débil. En otras ocasiones el tapón tieneforma de cono truncado, el cual está articulado en su extremo superior y cuelgade la bisagra que lo sostiene. La figura 165 muestra la construcción interna deuna válvula antirretorno; el tapón es una esfera metálica.
Si la presión p1 del fluido —manifestada en el puerto 1 de la válvula— es ma-yor en magnitud a la presión p2 —manifestada en el puerto 2— las fuerzas de

258 Capítulo 6 Válvulas para regulación de caudal
presión sobre el tapón vencen la oposición del débil resorte; entonces la válvulapermite el paso del caudal, pues el tapón se retira del orificio de paso. Por el con-trario, si la presión p1 es menor en magnitud a la presión p2, la válvula se bloqueay permanece cerrada. Entre mayor sea la magnitud de p2 con respecto a p1, máseficazmente cerrará el tapón.
1 2
Flujo libre
� Figura 165. Construcción interna de una válvula antirretorno.
Cuando una válvula antirretorno se pone en paralelo con otro elemento de con-trol, este segundo elemento se convierte en un dispositivo con funcionamientounidireccional. En la figura 166 se muestra un dispositivo cualquiera de controlpara potencia fluida, denominado válvula V, con una válvula antirretorno en pa-ralelo. Cuando cierto caudal fluido avance a través de estos dispositivos en pa-ralelo, impulsado por una fuerza de presión, encontrará dos caminos posibles.
Si la presión p1 del fluido es menor que la presiónp2, el caudal fluido avanzará de abajo hacia arribaimpulsado por las fuerzas de presión. Sin embargo,cuando p1 < p2 la válvula antirretorno se bloquea,de modo que la única posibilidad es que el caudalfluya a través de la válvula de control V.
Por el contrario, si la presión p1 del fluido es ma-yor que la presión p2, el caudal fluido avanzará dearriba hacia abajo. Entonces, como p1 > p2, la vál-vula antirretorno se abre y permite el paso del flu-jo. Cualquier dispositivo de control fluido presentamayor oposición para que el fluido avance (es decir,presenta mayor caída de presión), que la que oponeuna antirretorno. Por consiguiente, para el caudal fluido será más sencillo cruzara través de la válvula antirretorno que a través de la otra válvula de control. Deeste modo, con una antirretorno en paralelo, el dispositivo de control es unidi-reccional. Esta posibilidad es de enorme importancia en la regulación de caudal,como se verá más adelante.
V
p1
p2
1
2
� Figura 166. Válvulaantirretorno en paralelo
con un dispositivo decontrol fluido.

Sección 1 Válvulas para regulación de caudal con orificio variable 259
1.1. Variables que influyen sobre el caudal que fluye a través de un pasaje estrecho........................................................................................................................................................................Al colocar una válvula reguladora de caudal con un orificio estrecho, en una línea dedistribución de potencia, se está emplazando una resistencia adicional al paso del flui-do presurizado. Para vencer esta oposición, se consumirá cierta cantidad de la energíapotencial (la presión del fluido) para impulsar el caudal a través de la válvula reguladorade flujo.
El flujo a través de un pasaje estrecho depende de varios factores, de los cuales sepuede distinguir cuatro principales (figura 167):
Q
ALμ= f (T )
pe ps
� Figura 167. El caudal que fluye a través de un pasaje estrechodepende de cuatro variables principales.
a ) El tamaño del orificio. Entre más reducida es la sección transversal A del orificio —dela cual dispone el flujo para cruzar a través de una válvula o cualquier restricción—mayor velocidad promedio corresponderá a cierto caudal. La caída de presión en unflujo fluido depende, aproximadamente, del cuadrado de su velocidad. Entonces, siel caudal permaneciera invariable, a menor área transversal mayor velocidad, y portanto mayor caída de presión. El resultado es que se establece un equilibrio con uncaudal más reducido fluyendo a través del orificio.
En una válvula para regulación de caudal el tamaño del orificio es la única va-riable que se ajusta a voluntad del operario. Así se establece un caudal en la líneade distribución (y con ello una velocidad conveniente para el actuador). Entre másabierta la posición de la aguja —es decir, mayor sección transversal del orificio—mayor caudal logrará avanzar a través de la válvula.
b ) La diferencia de presión entre la entrada y salida del orificio, Δp = pe − ps . En unsistema de potencia fluida, la presión es una forma de energía potencial. Entre ma-yor es la diferencia entre la presión antes del orificio y la presión después de él, másenergía potencial se está transformada en energía cinética. Es decir, a mayor dife-rencia de presión mayor caudal cruza por la restricción (para una posición fija de laaguja que controla al orificio).
c ) La temperatura del fluido. Las propiedades térmicas de cualquier fluido varían enfunción de su temperatura, entre ellas destaca su densidad y —sobre todo— su vis-

260 Capítulo 6 Válvulas para regulación de caudal
Q
Aμ= f (T )
pe
ps
� Figura 168. En un orificio de borde afilado la longitud del pasaje es nula.
cosidad. Para cualquier líquido, a mayor temperatura menor viscosidad (y lo opues-to para los gases). Si la viscosidad de un líquido o un gas disminuye por los cambiosde temperatura, entonces avanzará mayor caudal a través de un orificio (para unaapertura de orificio determinada y cierta diferencia de presión establecida).
d ) La longitud del pasaje estrecho. La restricción al flujo es proporcional a la longituddel pasaje. Entre más largo el pasaje estrecho, más energía potencial (presión delfluido) se gasta en impulsar un caudal a través de la restricción. Las válvulas pararegulación de caudal modernas tienen orificios para regulación con longitud nula.Estas válvulas cuentan con un orificio de “cresta aguda” o “de bordes afilados”, comose muestra en la figura 168. De este modo, se evita la influencia de la longitud delpasaje y se tiene Q = f (A,Δp ,T ).
Tanto la diferencia de presión como la temperatura del fluido de trabajo son va-riables que no se puede controlar con facilidad, pero que influyen notablemente en elajuste de las velocidades de un actuador. Solamente la sección transversal del orificiose puede ajustar a voluntad del operario.
1.2. Procedimientos para regulación de caudal en un sistema de potencia fluida........................................................................................................................................................................Las válvulas de aguja con orificio variable permiten regular el caudal mediante dos pro-cedimientos diferentes: “por obstrucción” y “por derivación”. Las válvulas que funcionanpor obstrucción constituyen un obstáculo interpuesto al paso del fluido; la caída de pre-sión producida por la válvula disminuye el caudal que logra avanzar a través de la líneadonde se colocó la válvula. Las válvulas por derivación controlan el caudal que se derivapor una tercera vía de flujo, de manera que reducen el caudal neto que se envía haciael puerto del actuador.
Un actuador efectúa trabajo porque posee una frontera móvil que se desplaza im-pulsada por fuerzas de presión. Para que esta frontera avance, se debe alimentar fluidopresurizado hacia el volumen creciente que se genera con su desplazamiento. En for-ma simultánea, es necesario descargar hacia la atmósfera o hacia el tanque el fluidocontenido del otro lado de la frontera móvil. Por consiguiente, se puede regular la ve-

Sección 1 Válvulas para regulación de caudal con orificio variable 261
Válvulas de aguja unidireccionales para regulación de caudal
Basta con ensamblar una válvula antirretorno en paralelo con una válvula deaguja, para que el resultado sea una válvula que controla el caudal solamenteen un sentido de flujo. De esta manera se pueden colocar dos válvulas de agujaunidireccionales —una en cada puerto del actuador— para controlar en formaindependiente las velocidades de sus dos desplazamientos (extensión y retroce-so o giros horario y antihorario).
En ocasiones se acoplan la antirretorno y laválvula de aguja usando las conexiones apro-piadas para formar el paralelo. Pero esta solu-ción es usada tan frecuentemente que la ma-yoría de las válvulas para regulación de cau-dal —sobretodo las neumáticas— ya tienenincorporada la antirretorno dentro del cuer-po de la válvula. Es decir, son unidirecciona-les por construcción, como se muestra en lafigura a la derecha.
Flujo libre
Flujo regulado
Las válvulas para regulación de caudal con orificio variable se construyen enmuchas tallas, para elegir el tamaño apropiado en función del caudal que atra-vesará por la válvula. En la figura más abajo se muestran varios ejemplos. Lasválvulas hidráulicas se construyen con el cuerpo metálico, de acero al carbono ode bronce, por la presión elevada que deben soportar [3]. Las válvulas neumáti-cas son mucho más ligeras y se construyen con latón o con materiales plásticos,sobre todo las de talla menuda [4].
Cuando la válvula es uni-direccional suele tener al-guna indicación estam-pada en su cuerpo, pa-ra distinguir el sentidocon flujo libre del sentidocon flujo regulado. Bas-taría invertir la orienta-ción de una de estas vál-vulas para modificar radi-calmente las consecuen-cias del control sobre elactuador (en las figuras 169 y 170 se ilustran estas consecuencias).

262 Capítulo 6 Válvulas para regulación de caudal
Vext
1.021.011.03
1.0
A B
P T1.1
� Figura 169. Tres modos diferentes para regular la velocidad de extensión en un actuador linealhidráulico. Las válvulas 1.01 y 1.02 funcionan por obstrucción; la primera regula la alimentación a la
tapa y la segunda regula la descarga de la cabeza. La válvula 1.03 regula la alimentación a la tapapor derivación.
Vext
1.02 1.01 1.03
1.0
A B
P T1.1
� Figura 170. Tres modos diferentes para regular la velocidad de retroceso en un actuador linealhidráulico. Las válvulas 1.01 y 1.02 funcionan por obstrucción; la primera regula la alimentación a lacabeza y la segunda regula la descarga de la tapa. La válvula 1.03 regula la alimentación a la cabeza
por derivación.

Sección 2 Regulación por obstrucción en un sistema neumático 263
locidad del actuador mediante el control de uno de dos caudales: el alimentado haciael actuador o el descargado hacia la atmósfera o el tanque que sirve como reserva dellíquido.
Cuando se emplea la regulación por obstrucción, la velocidad del actuador se puedeestablecer en dos formas diferentes:
a ) controlar el caudal que ingresa al actuador para proporcionarle potencia fluida (lla-mada alimentación regulada o “meter in” en idioma inglés); o
b ) controlar el caudal que es expulsado del actuador, hacia la atmósfera o hacia el tan-que de reserva del líquido hidráulico (llamada descarga regulada o “meter out” eninglés).
Cuando se regula por derivación siempre se controla el caudal que ingresa al ac-tuador (es decir, se tiene alimentación regulada). Las figuras 169 y 170 muestran lastres alternativas aplicadas en un sistema hidráulico, para controlar las velocidades deextensión y retroceso de un actuador lineal.
El uso de válvulas para regulación de caudal unidireccionales, con una antirretornoen paralelo, asegura que la válvula sólo afectará la velocidad de uno de los movimien-tos del actuador (en la figura 169 cualquiera de las válvulas afecta exclusivamente lavelocidad de extensión, pero no la de retroceso; en la 170 sucede lo contrario). Con lossistemas neumáticos se emplea casi exclusivamente la obstrucción con descarga regu-lada (y muy raramente se emplea la alimentación regulada; ver la sección 2.1). Pero enlos sistemas hidráulicos se emplean las tres formas de control de velocidad, las dos porobstrucción y la regulación por derivación.
2. Regulación por obstrucción en un sistema neumático
En el sistema de la figura 171 se muestra una posibilidad para regular la velocidad deretroceso del vástago de un actuador neumático de simple efecto. El actuador eleva envertical una carga positiva. La válvula de aguja unidireccional se orientó de tal modoque el caudal de aire ingresa libre a la tapa del actuador, a través de la antirretorno.Por el contrario, cuando el aire escapa hacia la atmósfera —a través del puerto 3 de laválvula de control direccional— fluye en forma regulada a través del orificio. De estamanera se impide que la carga se desboque durante el retroceso.
Esta forma de control de la velocidad se conoce como descarga regulada. El diagra-ma de movimientos del actuador se muestra en la figura 172.
En el caso de un regulador de doble efecto es posible controlar ambas velocidades—de extensión y de retroceso— en forma independiente. En el sistema mostrado en lafigura 173 se han colocado un par de reguladores de caudal entre la válvula de controldireccional y los puertos del actuador lineal de doble efecto. Ambas válvulas de aguja

264 Capítulo 6 Válvulas para regulación de caudal
400 [kPa]
1.01
1.0
1
2
3
1.1
� Figura 171. Regulación de la velocidad de retroceso de un actuador de simple efecto.
1 2 3 4 5 6 7 8 9 10 11
Actuador1.0
0
1
retraído
extendido
� Figura 172. Diagrama de movimientos del actuador de la figura 171.
con orificio variable son unidireccionales y están orientadas para regular la descarga.Se debe notar que la válvula 1.01 regula la velocidad de extensión, mientras que la 1.02regula la velocidad de retroceso. El funcionamiento de ambas válvulas, por supuesto,es por completo independiente el uno del otro.
Si se colocara una válvula para regular la alimentación, el aire comprimido que in-gresa al actuador (para mover su frontera móvil y desplazar a la carga externa), sufri-ría una caída de presión y se expandiría al pasar por el orificio. Entonces el actuador

Sección 2 Regulación por obstrucción en un sistema neumático 265
450 [kPa]
Flu
jo li
bre
Flu
jo li
bre
1.021.01
1.0
1
2
3
41.1
� Figura 173. Control de ambas velocidades en un actuador de doble efecto,mediante descarga regulada.
450 [kPa]
170 [kPa]
Girohorario
Giroantihorario
1.021.01
1.0
1
1 1
2
2 2
3
3 3
4
5
1.2 1.3
14 12
1.1
� Figura 174. Regulación de la velocidad de un actuador de doble efecto. Se emplea unaválvula 5/2 con doble escape y dos reguladores de caudal bidireccionales.

7 Válvulas pararegulación de la presión
1. Reguladores de presión neumáticos1. 1.1. Funcionamiento de un regulador de presión neumático1. 1.1. 1.1.1. Regulador de presión sin orificio de venteo1. 1.1. 1.1.2. Regulador de presión con venteo o alivio1. 1.1. 1.1.3. Regulador de presión operado por piloto2. Capacidad de un regulador de presión1. 2.1. Ahorro de energía mediante la reducción de la presión1. 2.2. Unidades de mantenimiento neumáticas1. 1.1. 2.2.1. Filtro de aire de línea1. 1.1. 2.2.2. Selección de la talla de un filtro de aire de línea1. 1.1. 2.2.3. Lubricador de línea1. 1.1. 2.2.4. Selección de la talla de un lubricador de línea3. Aplicación de los reguladores de presión en los circuitos neumáticos4. Válvulas hidráulicas de presión1. 4.1. Válvula de alivio y descarga para control de presión1. 1.1. 4.1.1. Respuesta lineal de la válvula de alivio1. 1.1. 4.1.2. Selección de la talla de una válvula de alivio1. 4.2. Válvula secuenciadora hidráulica1. 4.3. Válvula hidráulica reductora de presión
En los capítulos 5 y 6 se abordó el funcionamiento y la selección de las válvulas deE control direccional y las válvulas para regular el caudal. Con esas familias de válvu-las se determina el sentido del desplazamiento y la velocidad de ejecución del trabajo,respectivamente, cuando un actuador recibe caudal presurizado y desplaza su fronteramóvil. Ahora se pondrá atención en las válvulas para regular la presión. Con estas vál-vulas se controla, establece o limita la magnitud de la presión —con frecuencia de lasvarias presiones— que se manifiestan sobre los actuadores y las válvulas de control deun sistema de potencia fluida.
La principal consecuencia de establecer una magnitud para la presión es que asíse define la fuerza, o el par torsor, que un actuador aplica sobre su carga externa. Y lomás común es alimentar presiones diferentes a cada uno de los puertos de un actuadorde doble efecto, para así ajustar en forma independiente la fuerza o par torsor en ca-da uno de los sentidos de desplazamiento. Además, junto con las presiones que definen
323

324 Capítulo 7 Válvulas para regulación de la presión
la magnitud del trabajo efectuado por los actuadores, también se regulan señales depresión que conducen información para el subsistema de control.
Por consiguiente, en un sistema de potencia fluida pueden instalarse varias válvulaspara regular múltiples niveles de presión. En los sistemas neumáticos se les llama regu-ladores de presión de línea; en los sistemas hidráulicos se trata de las válvulas de alivioy descarga para el control de presión. Junto con estas dos válvulas también se analiza-rán otros dispositivos de control, que ayudan en la organización de las operaciones queefectúan los actuadores del sistema.
1. Reguladores de presión neumáticos
El aire comprimido que se alimenta al sistema de potencia, a una de sus ramas o a cadapuesto de trabajo, proviene de una unidad de mantenimiento (ver la sección 4.1 delcapítulo 1), que lo acondiciona para los requisitos específicos de cada aplicación. Launidad de mantenimiento siempre incluye tres elementos arreglados en serie y con elmismo orden.
Primero se coloca el filtro para retener las impurezas, tanto sólidas como líquidas,transportadas por el caudal de aire. A continuación, el regulador de presión permiteajustar la presión suministrada al puesto de trabajo; así es como se determina la fuerzao el par torsor que los actuadores neumáticos son capaces de aplicar. Por último, launidad de mantenimiento incluye un lubricador, el cual deposita una dosis controladade aceite lubricante, proporcional a la magnitud del caudal de aire.
Los reguladores de presión también se emplean para ajustar la presión de las señalespiloto, por medio de las cuales no se transmite potencia, sino la información necesariapara el sistema de control. El ajuste de la presión a los valores adecuados para cadacomponente, sin incurrir en excesos innecesarios, influye notablemente en el ahorrode energía y la eficiencia global del sistema de potencia.
Un regulador de presión consiste en un cuerpo de válvula con dos puertos. El puertoprimario recibe el caudal presurizado que proviene desde el tanque de almacenamien-to con cierta presión elevada. El secundario entrega aire a una presión menor, relati-vamente invariable, sin importar las variaciones de presión en el puerto primario. Elregulador tiene cierta capacidad limitada para entregar caudal con presión regulada,que depende de su talla o capacidad.
1.1. Funcionamiento de un regulador de presión neumático........................................................................................................................................................................El número de fabricantes que producen reguladores de presión de línea es casi incon-table, al igual que las variaciones en la forma externa, colores y acabados. Sin embargo,

Sección 1 Reguladores de presión neumáticos 325
Puertoprimario
Puertosecundario
Resorte
Perilla deltornillo de
ajuste
Diafragma
Ensamblede la válvula
interior
Puerto parael manómetro
� Figura 214. Construcción típica de un regulador de presión de línea.
los diferentes modelos tienen muchas características comunes, y su apariencia y cons-trucción es muy semejante a la que se muestra en la figura 214 [1].
Los reguladores de presión de línea se construyen con un cuerpo exterior metáli-co (aluminio, acero, zinc o latón) o de plástico, en varias tallas apropiadas para sumi-nistrar hasta cierto caudal máximo a través de su puerto secundario (desde 40 hasta25 000 [L/min] de aire libre; ver la sección 4 del capítulo 2). Los puertos están roscados(comúnmente con diámetros nominales desde 1/16 hasta 11/2 NPT; ver los recuadros dela sección 2.2.1 del capítulo 5), para acoplarles tuberías o mangueras flexibles y un ma-nómetro. La presión de alimentación en el puerto primario puede ser tan alta como3500 [kPa] (500 [psi]), pero los modelos típicos para los sistemas neumáticos de poten-cia suelen estar diseñados para recibir no más de 1700 [kPa] (250 [psi]) y entregar entre14 y 1000 [kPa] en el puerto secundario [2].
1.1.1. Regulador de presión sin orificio de venteo
Es el regulador con la construcción más sencilla. Está diseñado para suministrar unapresión muy precisa a la salida, preestablecida en la fábrica. Tiene un conjunto móvil—formado por un diafragma flexible o un pistón, el tapón y un vástago que los une aambos— cuyo propósito es regular el tamaño de la abertura dispuesta para que fluya

326 Capítulo 7 Válvulas para regulación de la presión
Resorteajustable
Pistón
Cuerpo delregulador
Tornillo deajuste
Puertoprimario
Puertosecundario
Pasajepiloto
Tapón
� Figura 215. Construcción interna de unregulador de presión sin venteo.
Caudal apresiónelevada
Caudalcon
presiónregulada
Fresorte
� Figura 216. El tapón cerró parcialmentey se regula la presión en el secundario.
el aire hacia el puerto primario (figura 215). El conjunto pistón-tapón está obligado apermanecer desplazado hacia abajo, por medio de un resorte ajustable que actúa sobrela cara superior del pistón (o el diafragma).
El regulador funciona como una válvula normalmente abierta y permite la circula-ción libre del aire comprimido. Sin embargo, cuando el aire pasa hacia el puerto secun-dario, la presión se comunica a la parte baja del pistón (que tiene una superficie am-plia) a través de un pasaje piloto. Entonces, el pistón se eleva hasta que se equilibranlas fuerzas de presión y la fuerza del resorte. El tapón se acerca a su asiento y disminuyeparcialmente el tamaño de la abertura para que fluya el aire (figura 216), producien-do una reducción controlada de la presión —y una expansión del aire— en el puertosecundario.
El tapón abre o cierra parcialmente en función del equilibrio de fuerzas que se ma-nifiesta sobre el pistón o diafragma. Así es como el regulador de presión ejerce un con-trol dinámico sobre la presión del caudal que fluye a través del puerto secundario, ape-gándose a un valor relativamente constante de presión aunque el caudal demandadofluctúe.
Un regulador sin venteo —como el mostrado en las figuras 215 a 217— no está dise-ñado para que el usuario ajuste la presión de salida en el puerto secundario. Esta limi-tación puede ocasionar una dificultad durante su operación: si el resorte del reguladorse ajustara para disminuir la presión (mientras el regulador está en funcionamiento), elregulador puede bloquearse. Si las fuerzas de presión superan la fuerza ejercida por el

Sección 1 Reguladores de presión neumáticos 327
� Figura 217. La presión en el secundariovence al resorte y bloquea al regulador.
Resorteajustable
Cuerpo delregulador
Perilla deajuste
Puertoprimario
Puertosecundario
Pasajepiloto
Orificio dealivio
TapónTapón y resorte
Pistón
� Figura 218. Regulador de presióncon orificio de venteo.
resorte, el pistón subirá excesivamente, el tapón se cerrará sobre su asiento y bloquearápor completo el paso del aire (figura 217).
Para que el tapón vuelva a abrir será necesario que la presión aguas abajo del regu-lador disminuya, hasta equilibrar de nuevo la fuerza del resorte. Si la presión no dismi-nuye, el regulador se mantendrá cerrado sin posibilidad de que se restablezca su ope-ración. Esta dificultad se puede evitar si se emplea un regulador de presión con venteoo alivio de presión, pensado para que el usuario efectué ajustes ilimitados en la presiónde salida en el puerto secundario mientras el regulador está en marcha.
1.1.2. Regulador de presión con venteo o alivio
El regulador de presión con venteo funciona de modo semejante al regulador sin ori-ficio de venteo, pero con una gran ventaja: el orificio actúa como una válvula de alivioque libera la presión excesiva de la línea corriente abajo del regulador. Por ello, el tapónno permanecerá bloqueado en caso de que el regulador se haya cerrado, por la acciónde las fuerzas de presión que actúan sobre el lado inferior del pistón.
La construcción interna del regulador con venteo o alivio de presión es muy pare-cida a la del regulador sin venteo. Tiene tres diferencias importantes: la existencia delorificio de venteo en el cuerpo del regulador, la presencia de un resorte bajo el tapón yel acoplamiento libre entre el pistón (o el diafragma) y el vástago del tapón (figura 218).

328 Capítulo 7 Válvulas para regulación de la presión
Caudal apresiónelevada
Caudalcon
presiónregulada
Fresorte
� Figura 219. Regulación de presiónen el puerto secundario.
Alivio de lapresión excesivaen el secundario
� Figura 220. El exceso de presióndesfoga por el orificio de alivio.
Los reguladores de presión con orificio de venteo mantienen una presión relativa-mente constante en el puerto secundario, mediante el control dinámico del tapón quesube empujado por su propio resorte y obstruye parcialmente el área de paso del flu-jo de aire (figura 219). El ascenso del tapón está limitado por la posición que tomó elpistón (o diafragma), en función del equilibrio de las fuerzas de presión y la del resorte.
Sin embargo, el pistón no está acoplado en forma rígida con el vástago del tapóny las dos piezas se pueden separar (figura 220), lo cual modifica el comportamientodel regulador en caso de quedar bloqueado por una presión excesiva aguas abajo delpuerto secundario. Si la presión del aire en la línea del secundario es excesiva —por suexpansión térmica, porque la carga del actuador empuja al pistón y comprime el aireo simplemente porque el resorte del regulador se reajustó a una presión inferior— elpistón y el tapón subirán hasta bloquear el área de paso (figura 220). Pero ahora las dospiezas no tienen una conexión rígida, de modo que cuando el tapón choca contra suasiento el pistón continúa subiendo y descubre el orificio de alivio en el pistón.
Por consiguiente, el exceso de presión se desfoga hacia la atmósfera a través del ori-ficio de venteo o alivio. Cuando la presión corriente abajo del regulador ha descendidoal nivel seleccionado mediante el ajuste del resorte, el pistón desciende y se asienta so-bre el vástago del tapón. Así se reanuda el control de la presión, sin que el reguladorpermanezca bloqueado.

Sección 1 Reguladores de presión neumáticos 329
Pistón
Cuerpo delregulador
Puertoprimario
Puertosecundario
Pasajepiloto
Orificio para laseñal piloto
Tapón y resorte
� Figura 221. Regulador de presióncon señal de presión piloto.
Caudal apresiónelevada
Presión piloto
Caudalcon
presiónregulada
� Figura 222. Balance de fuerzassobre el pistón del regulador.
1.1.3. Regulador de presión operado por piloto
Un tercer tipo de regulador de presión ofrece ciertas ventajas con respecto a los regula-dores con resorte ajustable. Su construcción y funcionamiento son muy semejantes alos de los reguladores con resorte (figura 221), pero el balance de fuerzas sobre el pistón—o sobre un diafragma flexible— se establece entre dos fuerzas de presión. Sobre la ca-ra inferior actúa la presión proveniente del secundario; sobre la cara superior actúa lafuerza producida por una señal de presión piloto.
La sustitución del resorte ajustable por una señal de presión piloto le otorga dosventajas al regulador. Por un lado, la presión en la línea secundaria del regulador seajusta mediante un comando remoto (a través de la señal de presión piloto). De hecho,si se suspende la señal de presión piloto, el regulador se puede bloquear cerrando el ta-pón sobre su asiento (es decir, funciona como una válvula de dos vías, dos posiciones).De esta forma es posible suspender el suministro de aire comprimido a la línea aguasabajo del regulador.
Por otro lado, sin importar que el conjunto pistón-tapón haya subido o bajado unpoco más, la fuerza que actúa sobre la cara superior del pistón o el diafragma es prác-ticamente constante (figura 222). En cambio, en los reguladores con resorte ajustablecuando el pistón sube o baja se comprime o extiende un poco el resorte. El resorte opo-ne una fuerza que varía linealmente con los cambios en su longitud, de manera que alcomprimirlo un poco se endurece más y al liberarlo se hace más suave; por lo tanto, laregulación de la presión en el secundario puede no ser muy precisa.

330 Capítulo 7 Válvulas para regulación de la presión
Presión piloto
Orificiopara
venteo
Cuerpo delregulador
Puertoprimario
Puertosecundario
Pasajepiloto
Tapón y resorte
� Figura 223. Regulador operado por piloto con venteo.
Al igual que los reguladores con resorte, existen reguladores de presión operadospor piloto que tienen venteo o alivio (figura 223). Ofrecen las mismas prestaciones quelos reguladores con resorte y orificio de venteo, más las características ventajosas queya se mencionaron en los párrafos anteriores.
2. Capacidad de un regulador de presión
En la sección 1 ya se explicó que los reguladores de presión se construyen en variastallas o tamaños. Entre más grande es su talla el regulador tiene mayor capacidad parasuministrar caudal, a la presión regulada que se haya elegido con el ajuste del resorte,sin que se presente una caída de presión excesiva con respecto al ajuste que se hizoen condiciones de caudal cero. El caudal de aire se entrega en el puerto secundario apresión constante, entre 14 y 1000 [kPa] (2 y 150 [psi]), el intervalo de presiones típicode las aplicaciones neumáticas.
Las compañías fabricantes de equipo neumático suelen nombrar las diferentes ta-llas de sus reguladores con etiquetas nominales que sugieren capacidades crecientes.Por ejemplo “sub miniatura”, “miniatura”, “compacto”, “gran flujo” [2]; o bien “micro”,“mini”, “midi” y “maxi” [3], o con cifras en millares: 1000, 2000,..., 5000 [4]. Otros fabri-cantes simplemente denominan las tallas de reguladores con cifras en fracciones, 1/4,3/8, 1/2, ..., hasta 11/2, que identifican los puertos con rosca NPT del cuerpo del regulador.
La empresa Parker Hannifin solía emplear una denominación para la capacidad desus reguladores que combinaba dos cifras en fracciones [5]. La primera cifra identifi-

Sección 2 Capacidad de un regulador de presión 331
caba el tamaño del cuerpo del regulador de presión (cuerpo de 1/8′′, 1/4′′, 1/2′′, 1′′ y 2′′);entre mayor es la cifra mayor la capacidad para suministrar caudal. La segunda cifraidentificaba la conexión con rosca NPT de los puertos en el cuerpo del regulador. Unmodelo con cierto tamaño de cuerpo podía tener los puertos preparados para acoplar-se con diferentes diámetros nominales de tubería (ver los recuadros de la sección 2.2.1del capítulo 5). Por ejemplo, se podía solicitar un regulador con cuerpo de 1/2, y elegirlos puertos para conexiones roscadas NPT de 1/4, 3/8, 1/2 o 3/4.
Posteriormente esta empresa modificó la denominación del tamaño de cuerpo pa-ra emplear etiquetas [6]: “miniatura”, “economía”, “compacto”, “estándar” y “gran flu-jo”, combinados con puertos desde 1/8 hasta 2 NPT. Entre más grande es el tamaño decuerpo —y para un tamaño de cuerpo, entre más grande es el diámetro nominal delos puertos— el regulador tiene mayor capacidad para suministrar caudal regulado a lapresión secundaria.
La capacidad de cada modelo de regulador de presión se define mediante su gráficacon las características de alivio y flujo, como la mostrada en la figura 224 que correspon-de al regulador Fairchild con resorte, modelo 10262, que se muestra en la figura 214 [1].
Las curvas de la figura 224 se obtuvieron experimentalmente, con una alimentaciónde 688 [kPa] (100 [psi]) en el puerto primario, la presión máxima de suministro habitualen los sistemas neumáticos de potencia. Es común que se preparen dos gráficas para
0
10
20
30
40
50
60
70
80
90
100
110
0 5-5 10-10 15-15 20 25 30 35 40 45 50 55 60 65 700
50
100
150
200
250
300
350
400
450
500
550
600
650
700
750
Pre
sió
n d
e sa
lida
[psi
]
Pre
sió
n d
e sa
lida
[kPa
]
Caudal de aire [pie /min]3libre
Caudal de aire [L/min]libre
0-250 250 500 750 1000 1250 1500 1750
Presión suministrada = 100 [psi] (688 [kPa])
Ajuste a 90 [psi] (619 [kPa])
Ajuste a 75 [psi] (516 [kPa])
Ajuste a 60 [psi] (413 [kPa])
Ajuste a 45 [psi] (310 [kPa])
Ajuste a 30 [psi] (206 [kPa])
� Figura 224. Curvas de alivio y flujo para diferentes presiones ajustadas en elpuerto secundario en condiciones de caudal cero.

332 Capítulo 7 Válvulas para regulación de la presión
cada regulador, aplicando presiones diferentes en el puerto primario: 690 [kPa](≈100 [psi]) y 1000 [kPa] (150 [psi]), el límite de máximo de almacenamiento en el tan-que del sistema neumático (ver el recuadro de la sección 3 del capítulo II).
En las gráficas de la figura 225 se exponen las características de alivio y flujo de un re-gulador marca Parker controlado por piloto, modelo 10R115PA (talla de cuerpo de 1/4′′)con puertos de 1/4 NPT [7]. La primera gráfica describe el comportamiento del regula-dor cuando el primario recibe 690 [kPa]≈ 100 [psi]. La segunda gráfica es válida cuandoel puerto primario recibe 1000 [kPa] ≈ 150 [psi].
0
15
30
45
60
75
90
105
120
0
100
200
300
400
500
600
700
800
Pre
sió
n s
ecu
nd
aria
[psi
]
Pre
sió
n s
ecu
nd
aria
[kPa
]
Características de alivio y flujo. 10R115PA
0 10 20 30 40 50 60 7010
10 15 20 25 305 0 5
Caudal [pie /min]3
Caudal [dm /s]3
Puertos de 1/4 NPTPresión primaria
100 [psi] (690 [kPa])
70 80 900 10 20 30 40 50 6010
30 35 4010 15 20 255 0 5
0
15
30
45
60
75
90
105
120
0
100
200
300
400
500
600
700
800
Pre
sió
n s
ecu
nd
aria
[psi
]
Pre
sió
n s
ecu
nd
aria
[kPa
]
Caudal [pie /min]3
Caudal [dm /s]3
Características de alivio y flujo. 10R115PA
Puertos de 1/4 NPTPresión primaria
150 [psi] (1000 [kPa])
� Figura 225. Curvas de alivio y flujo para un regulador operado con presión piloto.Presión en el primario: 690 y 1000 [kPa] (100 y 150 [psi]).

8 Unidades de potencianeumáticas e hidráulicas
1. Selección de la unidad de compresión en los sistemas neumáticos1. 1.1. Unidades de compresión de pistones alternativos1. 1.2. Unidades de compresión de tornillos helicoidales1. 1.3. Funcionamiento del tanque recibidor1. 1.1. 1.3.1. Dimensionado del tanque recibidor2. Determinación y control de la capacidad del compresor1. 2.1. Control mediante un interruptor de presión1. 1.1. 2.1.1. Consumo total del sistema y capacidad del compresor1. 2.2. Otros procedimientos de control1. 1.1. 2.2.1. Carga y descarga del compresor1. 1.1. 2.2.2. Modulado de la succión1. 1.1. 2.2.3. Variación del desplazamiento1. 1.1. 2.2.4. Variación de la velocidad3. Sistema de distribución de aire comprimido1. 3.1. Distribución en anillos o celdas cerradas1. 1.1. 3.1.1. Construcción de la red de distribución1. 3.2. Enfriadores en la descarga4. Unidad de potencia en los sistemas hidráulicos1. 4.1. Dimensionado del tanque de reserva del líquido1. 4.2. Selección de la bomba
Los sistemas de potencia fluida funcionan con la ayuda de un vehículo fluido, a tra-L vés del cual se hace llegar la información y la energía hasta las válvulas de controly los actuadores que efectúan trabajo sobre la carga externa. El caudal presurizado quecircula a través de los componentes del sistema proviene de la unidad de potencia. Enel corazón de la unidad de potencia está una máquina de desplazamiento positivo —uncompresor o una bomba— impulsada por un motor primario, la mayoría de las veceseléctrico o de combustión interna.
En el capítulo 2 centramos nuestra atención sobre el funcionamiento de estas dosmáquinas fluidas de desplazamiento positivo. Ahí se describió su construcción y semostró algunos de los principales modelos de bombas y compresores. También se es-tableció la importante vinculación de la bomba con la válvula de alivio y descarga para
373

374 Capítulo 8 Unidades de potencia neumáticas e hidráulicas
control de presión, y del compresor con su presostato y el tanque almacenamiento deaire comprimido.
En este capítulo se expone el procedimiento para seleccionar la unidad de potenciacon la talla apropiada para satisfacer los requisitos de un sistema, neumático o hidráu-lico. No se trata solamente de elegir el modelo y la talla del compresor o la bomba, sinotambién de los motores primarios y los elementos periféricos que controlan su fun-cionamiento y permiten distribuir el caudal presurizado hacia el sistema de potenciafluida. La discusión está enfocada no sólo a los sencillos modelos con los que se dimen-sionan los componentes, sino también a la oferta de las soluciones comerciales entrelas que se debe llevar a cabo la selección de las unidades de potencia.
1. Selección de la unidad de compresión en los sistemas neumáticos
La compresión del aire atmosférico se efectúa mediante un compresor de desplaza-miento positivo, movido por un motor primario que suele ser eléctrico para los equiposfijos y de combustión interna para los equipos móviles. Los compresores de desplaza-miento positivo reciben este nombre por la forma en que efectúan el trabajo de com-presión: una superficie móvil comprime directamente a la masa de gas, para confinarlaen un volumen decreciente.
Existe una amplia variedad de compresores de desplazamiento positivo, cuya pa-red móvil se desliza linealmente o gira alrededor de un eje. La forma de la superficieque confina y comprime al gas va desde una pared o diafragma plano —que avanza enlínea recta— hasta formas muy complicadas que giran alrededor de un eje: lóbulos, en-granes, tornillos, paletas giratorias, etc. En todos los casos, el resultado del trabajo decompresión es el incremento de la presión, la temperatura y la densidad del gas.
1.1. Unidades de compresión de pistones alternativos........................................................................................................................................................................En la sección 3 del capítulo 2 se mencionó que el compresor de pistón alternativo—sobre todo el de dos etapas— es el más empleado en los sistemas de compresiónde capacidad moderada (motores por abajo de 19 [kW], 25 [hp]). Son los compresoresmás robustos, con una tecnología de manufactura más sencilla, menor costo y ampliadistribución de refacciones. También son tolerantes a las condiciones agresivas de tra-bajo, como la presencia de suciedad en el aire y el mantenimiento infrecuente. Entresus desventajas debe destacarse que son voluminosos, pesados y ruidosos.
Como se explicó en la sección 3.1 del capítulo 2, para disminuir la energía requeridaen la compresión se prefiere emplear un compresor de dos etapas (y acercar el procesode compresión a uno isotérmico). Este compresor consiste básicamente en un cilindro

Sección 1 Selección de la unidad de compresión en los sistemas neumáticos 375
Bielas y pistonesde hierro colado
Cilindros dehierro colado
Cojinetesde babbitt
Rodamientosde bolas
Relevadorcentrífugo para
arranque sin carga
Válvulas maquinadasen acero al carbono
Cabezaaletada
Volante conaspas de
ventilador
Enfriadorescon aletas
perimetrales
Cigüeñalbalanceado
� Figura 249. Construcción de un compresor de dos etapas con pistones alternativos, [1].
grande y otro pequeño, cada uno con su propio pistón, acoplados al mismo cigüeñal,con sus respectivas válvulas de admisión y descarga además de un enfriador intermedioy un enfriador en la descarga (figura 249; adaptada a partir de [1]).
� Figura 250. Modelos comerciales de unidades de compresión para sistemasneumáticos de potencia.

376 Capítulo 8 Unidades de potencia neumáticas e hidráulicas
Los sistemas de compresión con pistones alternativos se construyen con una am-plia variedad de tamaños, con dos, tres o cuatro pistones arreglados en una y dos etapasde compresión. Tienen motores primarios de 0,37 a 448 [kW] (0,5 a 600 [hp]), capacida-des de caudal de 0.94 a 614 [lt/s] (en condiciones de aire libre; 2 a 1300 [pcm]) y tanquesde almacenamiento horizontales o verticales con capacidad de 0,11 a 0,76 [m3] (30 a200 [gal]). Están preparados para su montaje en piso o para desplazarlos (figura 250).Las unidades de compresión se pueden elegir para desarrollar diversos ciclos de traba-jo: para uso ligero (aplicaciones ocasionales), uso industrial normal y uso pesado confuncionamiento continuo.
En cada una de estas unidades de compresión está instalado un control de presión,o presostato, para gobernar la puesta en marcha y el paro del motor primario; un ma-nómetro; una válvula de alivio de seguridad; sistemas de enfriamiento del aire, entre lasetapas y en la descarga; una válvula para drenar los líquidos acumulados en el tanque;el sistema de alimentación para el motor eléctrico; la transmisión por conexión direc-ta o por bandas entre el compresor y el motor primario; patas para anclar la unidad alpiso o ruedas para desplazarlo y, por supuesto, el tanque de almacenamiento del airecomprimido.
1.2. Unidades de compresión de tornillos helicoidales........................................................................................................................................................................Los sistemas de compresión tecnológicamente más modernos están basados, en su ma-yoría, en compresores de tornillos helicoidales, tanto de una como de dos etapas (figu-ra 251). Son más costosos que las unidades de pistones alternativos, pero ofrecen variasventajas en su funcionamiento. La relación de compresión depende de la longitud, elperfil del tornillo y la forma del puerto de la descarga. Los tornillos no están equipa-dos con válvulas y no hay fuerzas mecánicas que pudieran crear algún desequilibrio.Por lo tanto, estos compresores trabajan con una velocidad angular muy alta, libres devibraciones y proporcionan un flujo grande, no obstante sus pequeñas dimensionesexteriores.
� Figura 251. Compresores de tornillo Ingersoll Rand, de una y dos etapas de compresión [2].

Sección 1 Selección de la unidad de compresión en los sistemas neumáticos 377
� Figura 252. Unidades de compresión de tornillos de lóbulos.
Estas unidades de compresión son tan silenciosas que suelen instalarse en el mis-mo cuarto donde se ubica el sistema neumático de potencia, lo que no se podría hacercon un ruidoso compresor de pistones alternativos. También son más eficientes en elconsumo de energía, pues su descarga de caudal se controla con procedimientos dife-rentes a la tradicional marcha y paro del motor primario mediante un interruptor depresión [3] (ver las secciones 2.1 y 2.2, más adelante).
Los sistemas de compresión con tornillos helicoidales, figura 252, pueden estar arre-glados con una y dos etapas de compresión. Suelen tener motores eléctricos de 2,2 a485 [kW] (3,0 a 650 [hp]), capacidades de caudal de 0,94 a 1510 [lt/s] (en condiciones deaire libre; 2 a 3200 [pcm]) y tanques de almacenamiento con capacidad de 0,2 a 0,5 [m3](53 a 132 [gal]). Existen diseños preparados para su montaje en piso o como vehículospara el trabajo en campo (impulsados entonces por motores de combustión interna,de gasolina o diesel).
1.3. Funcionamiento del tanque recibidor........................................................................................................................................................................La descarga de caudal directamente desde un compresor alternativo puede tener fuer-tes pulsaciones, especialmente si cuenta sólo con una etapa de compresión y está co-nectado cerca del sistema que consume el aire. Para disminuir las pulsaciones en elsuministro, el aire se dirige a un tanque recibidor cuando sale del enfriador en la des-carga. Este recipiente almacena la masa de aire comprimido y funciona como un acu-mulador de energía potencial; así proporciona un suministro permanente de caudal,sin excesivas pulsaciones en la línea o frecuentes arranques y paros del compresor.

378 Capítulo 8 Unidades de potencia neumáticas e hidráulicas
Compresor
Motor
Tapastoriesféricas
Enfriador enla descarga
Válvulade alivio
Drenaje decondensados
Manómetro
Presostato
Línea desuministro
� Figura 253. Tanque recibidor de acero para almacenar el aire comprimidoque descarga el compresor.
Los compresores rotatorios entregan un caudal más uniforme, sin pulsaciones depresión tan enfáticas como sucede con los alternativos. Es común que se instalen tan-ques de almacenamiento con menor volumen, y —cuando se emplean los sistemas decontrol más refinados, que equilibran la descarga del compresor con la demanda delsistema— se puede prescindir incluso del tanque de almacenamiento tradicional, parasustituirlo con un recipiente muy pequeño.
El tanque recibidor es un recipiente de acero provisto con puertos para el ingre-so y salida del aire, un puerto para colocar un manómetro y el interruptor de presiónque controla la marcha y paro del motor del compresor (a menos que se emplee otraforma de control; ver las secciones 2.1 y 2.2 más adelante) y una válvula de alivio pararesguardar la integridad del recipiente en caso de sobrepresión (figura 253). Tambiéndebe contar con un drenaje, con funcionamiento manual o automático, para separarlos condensados que se precipitan al fondo; de lo contrario el agua contaminará al sis-tema neumático y producirá corrosión en el recipiente. El drenaje se coloca en el puntomás bajo del recipiente. Si el recibidor se monta horizontalmente —como sucede conmuchas unidades de compresión con tanque recibidor— es conveniente inclinarlo le-vemente para asegurar un drenaje adecuado.

Sección 1 Selección de la unidad de compresión en los sistemas neumáticos 379
La válvula de alivio debe ser capaz de descargar —en caso de emergencia— el cau-dal total del compresor. Con frecuencia, las válvulas de seguridad se ajustan a 69 [kPa](10 [psi]) por arriba de la presión máxima de almacenamiento en el tanque recibidor(pero por debajo de la presión máxima de trabajo para la cual se diseñó el recipiente).
La mayoría de los fabricantes de recipientes para almacenar aire comprimido —almenos en el continente americano— se guían por las indicaciones de la sección VIIIdel código para calderas y recipientes a presión de la ASME [4]. Este código proporcio-na reglas de seguridad que gobiernan el diseño, fabricación e inspección de calderas yrecipientes a presión. La división 1 de la sección VIII proporciona requisitos aplicablespara el diseño, fabricación, inspección, prueba y certificación de recipientes a presiónque operan con presiones internas o externas que exceden 15 [psi] (0,1 [MPa]).
Los tanques recibidores se dimensionan de acuerdo con el caudal proporcionadopor el compresor, la demanda de caudal consumido por el sistema y la adopción de unciclo de paro y marcha para gobernar al motor del compresor.
1.3.1. Dimensionado del tanque recibidor
Se debe recordar que el tanque recibidor es un almacén de energía potencial. Amortigualos pulsos de presión en la descarga del compresor y proporciona un caudal de aire conpresión uniforme. Sobre todo, el tanque proporciona el caudal que consume el sistemade potencia durante los períodos de descanso del compresor.
Los tanques recibidores se dimensionan para satisfacer las exigencias del sistemaneumático. Para ello se toma en cuenta las siguientes variables:
a ) La presión de almacenamiento en el tanque. Inicia en el valor p1, cuando el tan-que está lleno por completo, y termina en el valor p2, una presión menor porqueel sistema de potencia ha consumido aire comprimido mientras el compresor es-tá sin funcionar. Para la mayoría de los sistemas neumáticos de potencia se tie-ne p1 ≤ 1 [MPa] (aproximadamente 150 [psi]) y p2 ≥ 410 [kPa] (aproximadamente60 [psi]).
b ) La demanda de caudal promedio del sistema de potencia, Qs , expresado en condi-ciones de aire libre en [m3/s] o [pcm].
c ) El caudal promedio entregado por el compresor, Qc , expresado en condiciones deaire libre en [m3/s] o [pcm]. Es forzoso que se cumpla Qs < Qc , para que sea posibleacumular aire comprimido dentro del tanque recibidor.
d ) El ciclo de funcionamiento y paro del compresor, definido por la suma de dos valo-res de tiempo: θciclo = θfunc+θparo (figura 254).
El tiempo θfunc establece el intervalo de funcionamiento del compresor, que sumi-nistra el caudal Qc necesario para incrementar la presión dentro del tanque recibidor

380 Capítulo 8 Unidades de potencia neumáticas e hidráulicas
El sistema de control del compresor ordenaque se detenga el motor primario
El sistema de control del compresor ordenaque se reanude la marcha del motor primario
Tiempo θ
ptanque
p1
p2
psist
θparo θfunc θciclo = θparo+θfunc θparo θfunc
� Figura 254. Operación del tanque de almacenamiento entre las presiones p1 y p2.
desde la presión baja p2 hasta la alta p1 (todo ello mientras el sistema de potencia fun-ciona y consume aire). Durante el tiempo θparo el tanque suministra al sistema el caudalpromedio de aire Qs , necesario para hacer funcionar los actuadores, mientras el com-presor permanece en reposo. Entonces el tanque se descarga paulatinamente—iniciando a la máxima presión de almacenamiento, p1, y concluyendo a cierta presiónmínima aceptable, p2— hasta que el compresor se pone en marcha de nueva cuenta.
Para definir los valores correctos de p1 y p2 es necesario conocer cuál es la mayorpresión que se debe suministrar a los actuadores del sistema de potencia neumático,ps i s t ; de ello depende la fuerza o par torsor que desarrollan los actuadores. Por supues-to, se debe cumplir p1 > p2 > psist.
En el recuadro de la página 382 se puede consultar un balance de masa muy sencillo,que permite despejar el volumen del tanque recibidor necesario para suministrar lademanda del sistema durante el tiempo θparo:
Vr = θparo QsPatm
(p2−p1)(8.6)
donde: θparo = tiempo de suministro, [s] ([min])
Vr = volumen del tanque recibidor, [m3] ([pie3])
Qs = caudal consumido por el sistema,en condiciones de aire libre [m3/s] ([pcm])
p1 = presión manométrica inicial de almacenamiento (máxima), [Pa] ([psi])

Sección 1 Selección de la unidad de compresión en los sistemas neumáticos 381
donde: p2 = presión manométrica final de almacenamiento (mínima), [Pa] ([psi])
Patm = presión atmosférica local, [Pa] ([psi])
En ocasiones un sistema neumático de potencia pasa por períodos breves de con-sumo excesivo de caudal (por ejemplo, porque se pone en marcha un grupo de actuado-res de una máquina que sólo funcionan un tiempo breve θexc durante el día). Es posiblesuministrar este caudal excesivo para mantener operando el sistema de potencia du-rante el tiempo θexc, si previamente se almacenó un volumen extra de aire en un tanqueauxiliar que tiene el volumen Vr ex.
Durante este tiempo de consumo excesivo, θexc —si el compresor está en marchay proporciona un caudal Qc al tanque recibidor— la igualdad (8.6) se modifica comosigue (por supuesto, se debe tener Qs exc > Qc y si el compresor está apagado entoncesQc = 0):
Vr ex = θexc
�Qs exc−Qc
� Patm
(p2−p1)(8.7)
donde: θexc = tiempo de suministro para consumo excesivo, [s] ([min])
Vr ex = volumen de almacenamiento extraordinario en el tanquerecibidor, [m3] (pie3)
Qs exc = demanda excesiva de caudal, en condiciones deaire libre [m3/s] ([pcm])
Qc = caudal suministrado por el compresor, en condiciones deaire libre [m3/s] ([pcm])
Un tanque con mayor volumen de almacenamiento reduce la frecuencia de funcio-namiento del compresor. Así se disminuyen los costos de operación y el desgaste por losfrecuentes arranques y paros de la unidad compresora. Conviene más seleccionar untanque recibidor mayor de lo necesario que uno demasiado pequeño. El sobredimen-sionado del tanque incrementa poco los costos de instalación y provoca que la veloci-dad del aire en su interior disminuya, lo cual mejora la precipitación del condensado yla remoción de gotas de aceite.
Algunos fabricantes de compresores alternativos solían recomendar reglas empíri-cas, para decidir la talla correcta del tanque recibidor [5], [6] y [7]. Vale la pena conocer-las para comparar con el resultado numérico de la ecuación (8.6) y estimar la posibili-dad de elegir el mayor de los tres resultados:
a ) El tanque debe tener un [gal] de volumen por cada [pcm] consumido por el sistemade potencia (aire libre; 8 [m3] por cada [m3/s]). Un [gal] = 3,785 [L].
b ) El tanque debe tener 4 [gal] de volumen por cada [hp] de potencia proporcionadopor el motor primario del compresor (20,3 [litro]por cada [kW]). Un [hp] = 0,746 [kW].

382 Capítulo 8 Unidades de potencia neumáticas e hidráulicas
Balance de masa para la descarga del tanque recibidor
Con un sencillo balance y la ecuación de los gases ideales se puede definir la tallaadecuada para el tanque recibidor. En el estado inicial 1, cuando el compresorrecién se ha detenido y el tanque suministra por sí solo el caudal Qc hacia elsistema, se tiene la masa de aire m1 almacenada en el tanque recibidor:
p1 ·Vr =m1 ·R ·Tatm ∴m1 =P1 ·Vr
R ·Tatm(8.1)
Vr es el volumen del tanque recibidor. Cuando ha pasado θparo se reinicia la mar-cha del compresor, pues la presión en el tanque disminuyó al valor p2 y ya sóloqueda una masa m2 almacenada en el tanque:
m2 =P2 ·Vr
R ·Tatm(8.2)
La constante de gas ideal, R , y el volumen geométrico del tanque, Vr , son inva-riables. Si el proceso de vaciado del tanque es isotérmico (sucede lentamente),la temperatura T también es constante. Entonces se tiene:
m1
P1=
m2
P2=
Vr
R ·Tatmo bien, m2 =m1
P2
P1(8.3)
La masa de aire que salió del tanque es:
Δm =m2−m1 =m1
P2
P1−1�=
P1 ·Vr
R ·Tatm
P2−P1
P1
�=
Vr
R ·Tatm(P2−P1) (8.4)
y expresada en condiciones de aire libre, tiene la densidad
ρlibre =m
V=
Patm
R ·Tatm
∴ 1
ρlibre=
R ·Tatm
Patm(8.5)
y comoΔm =ρlibreΔVol, a partir de (8.4) se tiene:
ΔVol=1
ρlibre
Vr
R ·Tatm(P2−P1) =
R ·Tatm
Patm
Vr
R ·Tatm(P2−P1) = Vr
(P2−P1)Patm
=
= Vr(p2−p1)
Patm
donde P denota una presión absoluta y p la correspondiente presión manomé-trica.

A Dimensiones de la tuberíade acero y acero inoxidable
Tomado de las normas:
• ANSI/ASME B36.10M-2004 Welded and Seamless Wrought Steel Pipe; y• ANSI/ASME B36.19M-2004 Stainless Steel Pipe.
� Tabla a.1. Dimensiones y pesos de tubería de acero forjado soldada y sin costura.
ANSI/ASME B36.10M-2004.
Unidades inglesasEstándar (STD); Extra fuerte
(XS); Doble extra fuerte (XXS)Unidades métricas
Tallanominal
Diámetroexterior[pulg]
Espesorde pared[pulg]
Peso [1][lbf/pie]
API [2]Designación
comercialCédula
Diámetroexterior[mm]
Espesorde pared[mm]
Peso[kg/m]
1/8 0,405 0,068 0,24 5L STD 40 10,3 1,73 0,37
1/8 0,405 0,095 0,31 5L XS 80 10,3 2,41 0,47
1/4 0,540 0,088 0,42 5L STD 40 13,7 2,24 0,63
1/4 0,540 0,119 0,54 5L XS 80 13,7 3,02 0,80
3/8 0,675 0,091 0,57 5L STD 40 17,1 2,31 0,84
3/8 0,675 0,126 0,74 5L XS 80 17,1 3,20 1,10
1/2 0,840 0,109 0,85 5L STD 40 21,3 2,77 1,27
1/2 0,840 0,147 1,09 5L XS 80 21,3 3,73 1,621/2 0,840 0,188 1,31 ... ... 160 21,3 4,78 1,95
1/2 0,840 0,294 1,71 5L XXS ... 21,3 7,47 2,55
3/4 1,050 0,113 1,13 5L STD 40 26,7 2,87 1,69
3/4 1,050 0,154 1,47 5L XS 80 26,7 3,91 2,203/4 1,050 0,219 1,94 ... ... 160 26,7 5,56 2,90
3/4 1,050 0,308 2,44 5L XXS ... 26,7 7,82 3,64
1 1,315 0,133 1,68 5L STD 40 33,4 3,38 2,50
1 1,315 0,179 2,17 5L XS 80 33,4 4,55 3,24
1 1,315 0,250 2,84 ... ... 160 33,4 6,35 4,24
1 1,315 0,358 3,66 5L XXS ... 33,4 9,09 5,45
1 1/4 1,660 0,140 2,27 5L STD 40 42,2 3,56 3,39
1 1/4 1,660 0,191 3,00 5L XS 80 42,2 4,85 4,47
1 1/4 1,660 0,250 3,76 ... ... 160 42,2 6,35 5,61
1 1/4 1,660 0,352 5,21 5L XXS ... 42,2 9,70 7,77
Continúa
425

B Coeficiente de caudal Cpara flujo compresible
V
La norma ANSI/ISA-75.01.01-2007 Flow Equations for Sizing Control Valves propor-L ciona las ecuaciones para dimensionar una válvula, tanto para fluidos compresi-bles como incompresibles, para diferentes regímenes de flujo. Con estas ecuaciones seobtienen resultados confiables para la gama completa de caídas de presión, sin impor-tar el medio o el tipo de la válvula, incluyendo las válvulas de apertura variable.
Para el flujo turbulento no crítico de un gas o un vapor, la norma proporciona laecuación:
CV =Qe
Fp Y N7p1
s T1z
x
�1/2
donde Qe = caudal del gas o vapor en condiciones estándar (lo que en neumáticase llama «condiciones de aire libre»)
Fp = factor geométrico de la tubería (por los posibles cambios de forma o desección).
Y = factor de expansión; cociente del coeficiente de flujo para un gas entreel correspondiente a un líquido, para el mismo número de Reynolds.
N7 = constante numérica, diferente para cada sistema de unidades;N7 = 22.667 si Q e en [pcm], p1 en [psi] y T1 en ◦R.
p1 = presión absoluta del gas a la entrada de la válvula.
s = densidad relativa del gas (cociente de la densidad del gas respecto a ladensidad del aire, ambas en condiciones estándar).
T1 = temperatura absoluta del gas a la entrada de la válvula.
z = factor de compresibilidad del gas.
x = cociente de la caída de presión Δp entre la presión absoluta del gas ala entrada de la válvula, p1.
Esta ecuación se puede obtener estableciendo la similitud dinámica entre un pro-totipo y un modelo, a través del número de Euler. En la demostración se empleará ladenominación y la notación que se describe en seguida:
429

Índice de materias
actuadores, 4, 15, 68− carrera, 74− caudal desplazado, 17− montaje, 91− presión aplicada, 16− y motores hidráulicos, 174− − eficiencia energética, 175− − eficiencia total, 176− − eficiencia volumétrica, 175− y motores neumáticos, 146actuadores con pistones en serie, 75actuadores de doble vástago, 75actuadores hidráulicos− aceleración sobre la carga, 111− aceleración y desaceleración, 110− contrapresiones, 110− intensificación de la presión, 110actuadores lineales, 4, 67, 74− collar del amortiguador, 108, 114− contrapresiones, 83, 80, 118− de simple efecto, 75− desaceleración de la carga, 107− diámetro del pistón, 80− doble efecto, 75− efecto de la contrapresión, 83− factor de carrera, 98, 99− factor empírico de diseño, 85− fuerza de extensión ideal, 83− fuerza necesaria para desplazar la carga, 78− fuerza neta de extensión, 83− fuerza neta de retroceso, 84− longitud básica, 99− montajes normalizadas NFPA, 95, 96− pistón, 74− presión máxima de operación, 113− punta del amortiguador, 108, 114− selección básica, 79
− selección completa de las dimensiones, 89
− sistema de amortiguamiento interno, 108, 118
− tipos de, 75, 76
− vástago, 74
actuadores neumáticos
− capacidad de amortiguamiento, 120, 124, 126
− contrapresiones, 120, 121, 126
− de doble efecto, regulación de la velocidad,263
− de simple efecto, regulación de la velocidad,263
− determinación de la energía cinética, 121, 123
− peso de las partes móviles, 122
− velocidad máxima, 122
actuadores rotatorios, 4, 141
− carga estática, 169
− carga inercial, 170
− carga resistente, 168
− desplazamiento, 143, 144
− eficiencia energética, 145
− momento de inercia de la carga, 170
− par torsor, 143, 144, 163, 168
− par torsor neto, 170
− selección básica, 142
actuadores rotatorios hidráulicos, 193
− velocidad ideal, 175
actuadores rotatorios neumáticos, 163
− cuarto de vuelta, 168
− de paletas, 165
ascensores de cables, 7
− subsistema de control, 8
− subsistema de potencia, 8
bicicleta, 4
− eficiencia mecánica, 6
− subsistema de control, 5
435

436 Índice de materias
− subsistema de potencia, 5
bidireccional, válvulas para regulación decaudal, 257
biestables, válvulas de control direccional, 207
bombas, 12
− desplazamiento, 40
− eficiencia volumétrica, 41
bombas centrífugas (o rotodinámicas), 37
− curva característica, 39
− instalación de prueba, 39
bombas de desplazamiento positivo, 24, 40
− caudal teórico o ideal, 40
− curva característica, 41
− eficiencia energética, 44
− eficiencia total, 44
− presión desarrollada, 42
bombas de engranes externos, 43
bombas de engranes internos, 43
bombas de paletas deslizables, 42
bombas hidráulicas
− capacidad de potencia máxima, 413
− intervalos de presión típicos, 412
− valores típicos de eficiencia, 414
bombas rotodinámicas o centrífugas, 37. Véasebombas centrífugas
capacidad de amortiguamiento, actuadoresneumáticos, 124, 126
capacidad de las válvulas de controldireccional, 234
carga crítica de Euler, 93
carga de pandeo de Euler, 90
cargas externas, 2
− desplazamiento angular, 3
− desplazamiento lineal, 2
− giro continuo, 3
− y sistemas de potencia, 2
carrera del actuador, 74
caudal (o flujo volumétrico), 12
− condiciones de aire libre, 62
− desplazado, 10
− en un sistema neumático, 60
− regulación de en los sistemas hidráulicos, 273
− − influencia de la apertura del orificio, 277
− − influencia de la diferencia de presiones, 279
− regulación por derivación, 260, 263, 294
− regulación por obstrucción, 260, 263
− − alimentación regulada, 274− − descarga regulada, 286− − válvula compensada por presión, 287− válvulas para regulación, 255− − de aguja, 256− − por derivación, compensada por presión,
296coeficiente de capacidad de caudal− determinación del, flujo compresible, 242− para válvulas hidráulicas, 235− para válvulas neumáticas, 240− − sistema inglés de unidades, 247− − sistema internacional de unidades, 248collar del amortiguador, actuadores lineales,
108, 114composición de un sistema de potencia, 4compresión del aire, proceso isotérmico y
proceso adiabático, 56compresores, 12− ciclo de funcionamiento, 387− consumo total del sistema neumático, 388− control mediante un interruptor de presión,
386− de desplazamiento positivo, 51− de dos etapas, 54− de lóbulos, 58− de paletas deslizables, 58− de pistones alternativos, 53− de tornillos helicoidales, 57− de una etapa, 53− determinación de la capacidad, 385− enfriadores en la descarga, 396− procedimientos de control, 390− rotatorios, 57conmutador de émbolos, válvulas de control
direccional, 200construcción de− válvulas de control direccional, 202− válvulas hidráulicas actuadas por solenoide,
221control, subsistema de, 19control de la velocidad− alimentación regulada, 263− descarga regulada, 263control de presión− válvula de alivio y descarga, 352− − efectos de la viscosidad del aceite, 356− − respuesta lineal, 353− − selección de la talla, 355control del compresor