Para los más novatos y para que se animen a construir ... Web viewfecha de...
30
INSTITUTO TECNOLOGICO DE MATAMOROS DEPARTAMENTO DE CIENCIAS BASICAS CURSO INTERSEMESTRAL: TALLER DE PRÁCTICAS DE ELECTRONICA BASICA INSTRUCTORES: CITLALIN AURELIA ORTIZ HERMOSILLO
Transcript of Para los más novatos y para que se animen a construir ... Web viewfecha de...

INSTITUTO TECNOLOGICO DE MATAMOROS
DEPARTAMENTO DE CIENCIAS BASICAS
CURSO INTERSEMESTRAL:
TALLER DE PRÁCTICAS DE ELECTRONICA BASICA
INSTRUCTORES:
CITLALIN AURELIA ORTIZ HERMOSILLO
HECTOR HERNANDEZ MARTINEZ

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
FECHA DE REALIZACIÓN: 20 JUNIO AL 1 JULIO DE 2011
HORARIO: DE 8:00 A.M. A 11:00 A.M.
DURACIÓN: 30 HORAS
LUGAR: TALLER DE ELECTRÓNICA.
ESTRUCTURA DEL CURSO
1. NOMBRE DEL CURSO.Taller de prácticas de electrónica básica
2. OBJETIVO DEL CURSO.Fortalecer la unión entra la teoría y práctica educativa.
3. CONTENIDO SINTÉTICO DEL CURSO. PRACTICA No.1 Semáforo
PRACTICA No.2 Alarma 1
PRACTICA No.3 Alarma 2
PRACTICA No.4 micro robot 3
PRACTICA No.5 micro robot 7
PRACTICA No.6 herbie
PRACTICA No.7 micro robot18
http://www.electronica2000.com
2

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
4. A QUIEN VA DIRIGIDO.A docentes de ciencias básicas, electrónica y mecatrónica.
5. DURACIÓN.30 horas
6. INSTRUMENTACIÓN DIDÁCTICA O CARTA DESCRIPTIVA.
El taller constara de 7 prácticas que deberán llevarse a cabo en el término del mismo. El
participante distinguirá dispositivos electrónicos, leerá diagramas, construirá circuitos de forma
física y verificara resultados.
7. IMPACTO ESPERADO.Deseamos que los maestros que tomen el curso adquieran el gusto por la práctica dentro del
aula y así transmitir eso gusto para sus asignaturas, con la idea de que involucren a sus
alumnos en actividades y actividades prácticas con el uso de la tecnología.
8. MATERIAL DIDÁCTICO Y DE APOYO.El taller se llevara a cabo en el taller de electrónica para apoyarse con material del mismo
como son:
Dispositivos electrónicos.
Protoboard.
Fuente de alimentación.
Instrumentos de medición.
3

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
INDICE DE PRÁCTICAS
Pág.
No.1 Semáforo………………………………………………………………………..……. 4
No.2 Micro robot 3……………………………………………………………………….. 11
No.3 Alarma luminosa…………………………………………………………………… 12
No.4 Alarma de aproximación…………………………………………….……………. 14
No.5 micro robot 7……………………………………………………………...………. 16
No.6 Herbie……………………………………………………………….……………… 19
No.7 Micro robot18…………………………………………………….………………… 21
4

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
SEMAFORO
Las aplicaciones más comunes del C.I. 555 es como elemento temporizador. Aunque combinándolo
con otros elementos se usa como generador se señales, modulador, contador entre otros usos:
Temporizador de precisión.
Generador de pulsos.
Temporazidor secuencial.
Generador de retardos de tiempo.
Pulsos con modulación.
En general el C.I LM 555 es un controlador altamente estable capaz de producir retardos de tiempo u
oscilación bastante exactos. En el modo de operación de retardos de tiempo, el tiempo es
precisamente controlado por una resistencia y un condensador externo. En el modo de operación
astable como oscilador, la frecuencia y el ciclo de trabajo son controlados con precisión por dos
resistencias externas y un condensador.
En el circuito implementado diga si está operando en modo astable o monoestable y justifique.
De acuerdo con la hoja de especificación del circuito LM 555, en el modo de operación astable la
frecuencia de trabajo está controlada por dos resistencias y un condensador. De acuerdo con la figura
del montaje, las dos resistencias R1 de 6.8K, R2 de 82K y el condensador C1 de 10 μF son los
5

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
elementos que componen el funcionamiento astable del integrado. En este modo se genera un pulso
continuo controlado por las dos resistencias y el condensador. La siguiente figura ilustra el
comportamiento del pulso en modo astable:
¿Qué tipo de señal es la que sale del pin 3 del C.I. 555?.
De acuerdo con la hoja de especificación del C.I. 555, el pin 3 es el pin de salida, es decir, el pin que
genera el resultado de la operación del temporizador. Cuando la salida es alta, el voltaje de salida
será el voltaje de alimentación (VCC) menos 1.7 voltios. Por lo tanto, la señal que sale del pin 3 del
C.I. es una señal digital.
LISTA DE COMPONENETES
Fuente: Batería 9V DC.
Resistencias: R1 (6.8 KΩ), R2 (33, 82 y 100 KΩ) y R3 (220 Ω).
Condensadores: C1 (10 y 100 μF).
Diodos LEDs.
Circuito integrado: LM 555.
DIAGRAMA
6

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
DIBUJO PICTORICO
7

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
Que pasa si cambia los elementos R1, R2 y el condensador; averigüe para el circuito implementado el periodo de oscilación y compare valor teórico con el real; realice la ecuación en Excel para calcular con diferentes valores y grafique la señal.
La variación de los elementos R1, R2 y C1 en el circuito implementado hace que el período de
oscilación sea mas corto o mas largo dependiendo de los valores de estos tres elementos, veamos:
Consideremos R1 = 6.8KΩ, R2 =82 KΩ y C1 = 10 μF
El período de oscilación está dado por la siguiente expresión:
TT = 0.693 (R1 + 2R2) C1
Entonces:
TT = 0.693 [6800Ω + 2(82000Ω)] 1 x 10-5 F
TT = 1.183644 Segundos.
En esta consideración, el período de oscilación real fue el siguiente:
TE = Tiempo Encendido + Tiempo Apagado
TE = 0.6 Segundos + 0.5 Segundos
TE = 1.1 Segundos.
Lo que indica que el valor real (1.1 Segundos) se ajusta con casi la misma exactitud al valor teórico
(1.183644 Segundos).
Consideremos R1 = 6.8KΩ, R2 =82 KΩ y C1 = 100 μF8

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
TT = 0.693 [6800Ω + 2(82000Ω)] 1 x 10-4 F
TT = 11,83644 Segundos.
En esta consideración, el período de oscilación real fue el siguiente:
TE = Tiempo Encendido + Tiempo Apagado
TE = 5.5 Segundos + 4.5 Segundos
TE = 10 Segundos.
Lo que indica que el valor real (10 Segundos) se ajusta con un valor muy aproximado al valor teórico
(11,83644 Segundos)
Consideremos R1 = 6.8KΩ, R2 =33 KΩ y C1 = 10 μF
TT = 0.693 [6800Ω + 2(33000Ω)] 1 x 10-5 F
TT = 0.504504 Segundos.
Consideremos R1 = 6.8KΩ, R2 =33 KΩ y C1 = 100 μF
TT = 0.693 [6800Ω + 2(33000Ω)] 1 x 10-4 F
TT = 5.04504 Segundos
9

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
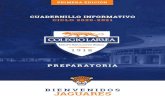
Consideremos R1 = 6.8KΩ, R2 =100 KΩ y C1 = 10 μFTT = 0.693 [6800Ω + 2(100000Ω)] 1 x 10-5 F
TT = 1.433124 Segundos
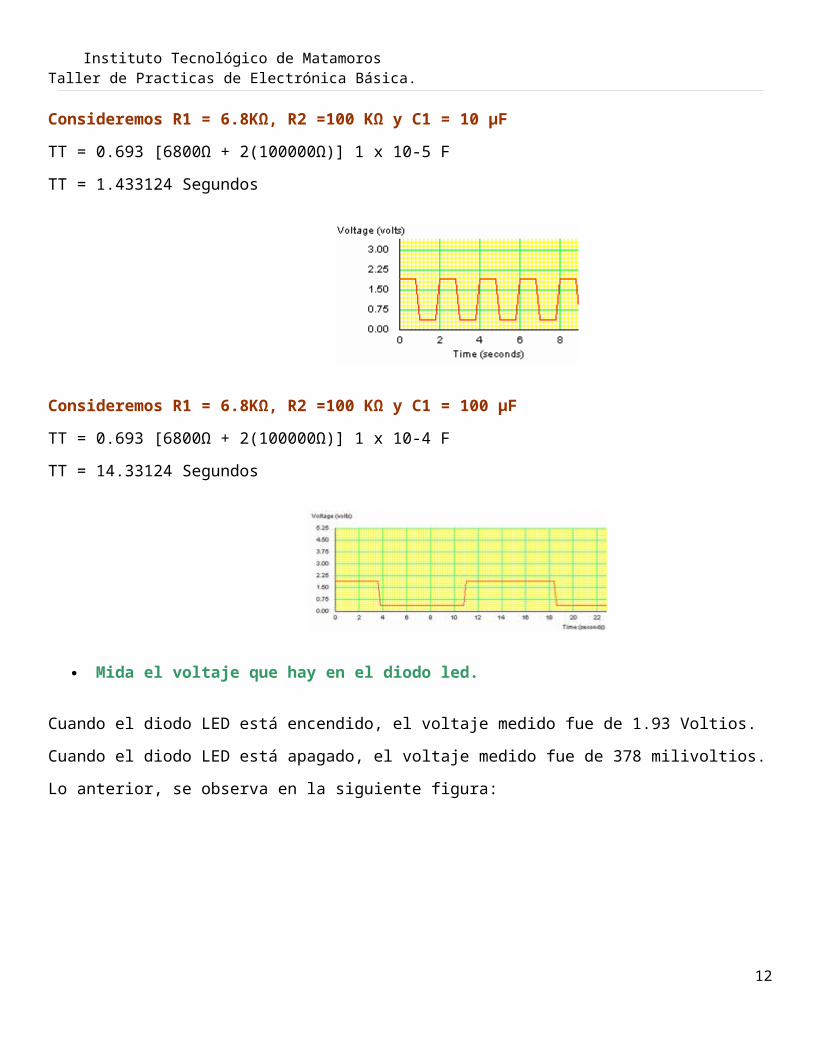
Consideremos R1 = 6.8KΩ, R2 =100 KΩ y C1 = 100 μFTT = 0.693 [6800Ω + 2(100000Ω)] 1 x 10-4 F
TT = 14.33124 Segundos
Mida el voltaje que hay en el diodo led.
Cuando el diodo LED está encendido, el voltaje medido fue de 1.93 Voltios. Cuando el diodo LED
está apagado, el voltaje medido fue de 378 milivoltios. Lo anterior, se observa en la siguiente figura:
10

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
MICRO ROBOT 3
Para los más novatos y para que se animen a construir pequeños robot, aquí está el micro robot 3
LISTA DE COMPONENTES
Semiconductores:
Q1: C945 (NTE85)
Resistores:LDR1: fotorresistencia pequeña.
VR1: 5KΩ (potenciómetro)
Otros:B1: 2 batería de 1.5 voltios.
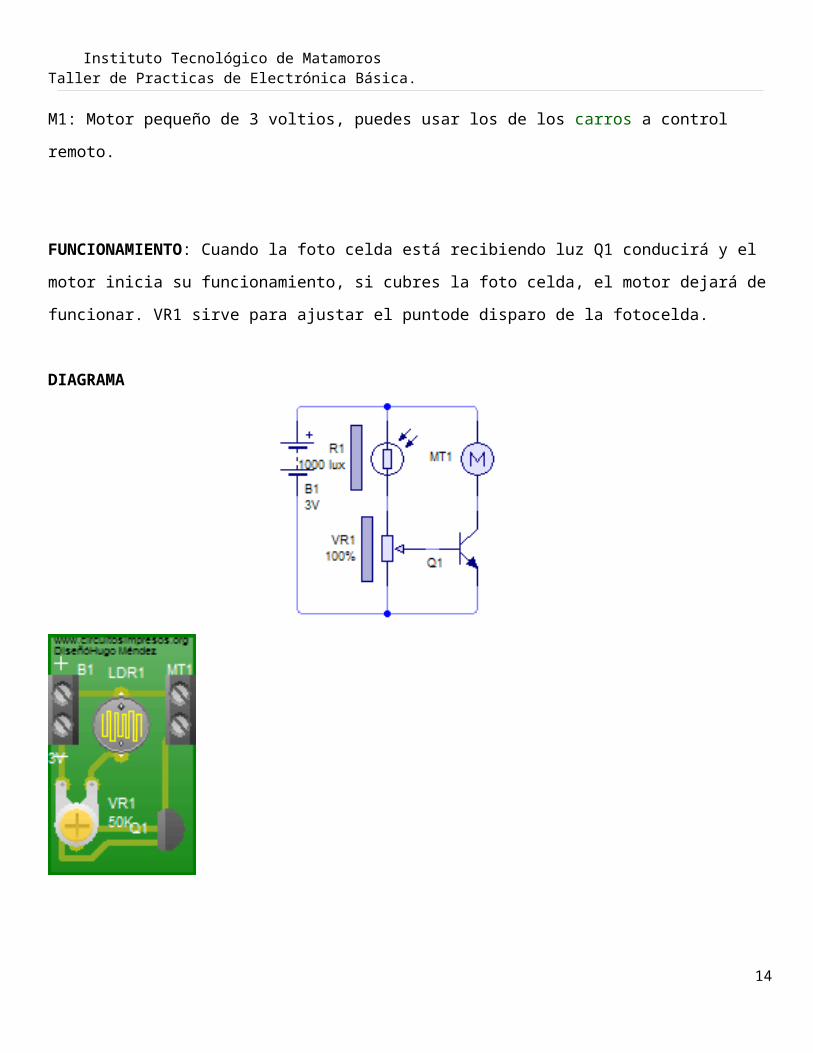
M1: Motor pequeño de 3 voltios, puedes usar los de los carros a control remoto.
FUNCIONAMIENTO: Cuando la foto celda está recibiendo luz Q1 conducirá y el motor inicia su
11
Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
funcionamiento, si cubres la foto celda, el motor dejará de funcionar. VR1 sirve para ajustar el
puntode disparo de la fotocelda.
DIAGRAMA
ALARMA LUMINOSA
Esta alarma se activa cuando el haz de luz sobre la fotocelda es interrumpido (puedes usar la luz de
una bombilla de linterna a la cual se le hará una fuente para que permanezca encendida, esta puede
ser de 3 voltios, no importa si es alterna o directa).
Cuando la fotocelda esta recibiendo luz, presenta baja resistencia, bloqueando así el voltaje positivo
que le proporciona R4 al terminal 4 del IC 555, manteniendo al multivibrador desactivado y la bocina
no suena, cuando la fotocelda deja de recibir luz,
su resistencia aumenta en fracción de segundos, lo que hace que le llegue el voltaje positivo al
terminal antes mencionado, lo que activa la alarma.
NOTA: La fotocelda no debe de recibir otra luz que no sea la que le sirve para activarse.
LISTA DE COMPONENTESCapacitores:
12

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
C1: .1 µF.
Resistores:R1: 100K (pot)
R2: 1K
R3: 47K
R4: 100K
R5. 27 ohmios
R6: 220 ohmios
Semiconductores:IC1: 555
TR1: 2N3055, C1060 ò C1226
D1: 1N4002
Otros:Bocina de 8 á 16 ohmios
1 fotocelda(fotoresistencia)
13
Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
ALARMA DE APROXIMACION
El sensor puede ser un pedazo de metal, este se conectará al circuito con cable coaxial, el blindaje
del coaxial se conectará a una malla ( formando una especie de antena parabólica rectangular ),
estas partes formarán una especie de capacitor.
La malla debe conectarse a tierra física para que sea mayor el área de detección. También lo puedes
hacer tal como se muestra el sensor en el circuito.
Lista de componentesCapacitores:C1: 1 pF. 25V
C2: 47 nF. 25V.
C3: 100 µF. 25V.
Resistores:14

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
P1: 100k
R1: 3.9K
R2: 47K (pot.)
R3: 47K
R4: 180 ohmios
R5. 47K
R6: 1K
Semiconductores:IC1: 741
Q1: MPF102
Q2-Q3: BC548 Z1: 2.7V 400 mW.
DIAGRAMA
15

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
MICROROBOT 7
Apenas se usaron 2 transistores 2N3904, 2 resistores, 2 fotoceldas, y 2 mini motores como los de la
imagen que funcionan desde 1.5 a 3 voltios y para hacer la cola, la suma de 5 capacitores, para un
total de 3300 µF. El cuerpo del alacrán está formado por un capacitor de 2200 µF. y el portabaterías
de una pistola laser de juguete, la base para las patas la desarrollamos con el alambre de cobre de
cable coaxial. Está pensado para usarlo con una celda solar de 3 o 4.8 voltios, pero de momento lo
operamos con 2 pilas alcalinas de 1.5 tipo botón AG13.
FUNCIONAMIENTO: Este alacrán sigue a la luz, aunque detecta varios niveles y, dependiendo del
nivel, puede caminar rápido o despacio y en total oscuridad, se detiene. Espero que les guste u lo
ensamblen para seguir practicando con este tipo de robots y especialmente en el desarrollo de
insectos; pueden darle forma de mosquito, araña, libélula, etc.
Si lo desean pueden usar una parte del diagrama, o sea, 1 transistor, 1 resistor, 1 fotocelda y el juego
de capacitores, pueden usar el motor vibrador de un teléfono celular o biper.
16
Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
Lista de componentes
Capacitores:C1: 5 capacitores que sumen 3300 µF. 16 voltios para que forme la cola.
Semiconductores:
Q1, Q2: 2N3904
Resistores:R1, R4: 1.2KΩ
R2, R3: Fotoceldas pequeñas (fotorresistencias)
Otros:SW1: Interruptor de 1 polos 1 posición.
B1: 2 baterías alcalinas de 1.5 voltios tipo botón AG13.
MT1, MT2: Motores pequeñs de 3 o 6 voltios, (puedes usar los del carros a control remoto).
DIAGRAMA
17

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
18

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
19
Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
HERBIE
Otra característica de este robot es que cuando alguna de las antenas topa en un ostáculo también puede retroceder durante varios segundos. El tiempo de inversión puede cambiarse en este se ha usado un resistor de 2M2 y un capacitor de 3,3 uF, esto le dará un tiempo de in versión de unos 5 segundos. Usando un capacitor de un valor más alto más alto, 6,8 uF) por ejemplo, o de un resistor de mayor valor, por ejemplo, 3M3, estos cambios permitirán un tiempo mayor de duración en el retroceso.
Para los interruptores parachoques ( bumberswitches ) se utilizaron dos interruptores de final de carrera conectados en paralelo.
Para la alimentación se usaron 6 baterías recargables de 250 mAh. Para darle más velocidad se puede utilizar una batería de 9 V. La colocación de las baterías en la parte de atrás le da estabilidad.
La construcción es muy fácil. Para el montaje de los servos y el circuito puede usarse plexiglás de 8 mm. de espesor (1 / 3 de pulgada). Asegúrese de que los servos queden bien alineados.
Solo necesitas un poco de paciencia para llevar a cabo el ensamble de este robot, no es difícil y te agradaran los resultados. A continuación una pequeña descripción de cómo trabaja:
La mitad superior del 74HC14 (pines 8-13) invierten la señal proveniente del capacitor de 3,3 uF. La salida, o sea los pines 8, 10 y 12 se conectan a la entrada de la mitad inferior (pines 1-6).
El LM386 es un OPAM (amplificador Operacional). Este compara la señal del voltaje del pin 2 con la señal del pin 3.
También mide la salida (pines 8-10-12) y la salida 2-4-6. Si la señal en los pines 8-10-12 es alta, entonces 2-4-6 debe ser baja.Cuando el robot tropieza con algo, el capacitor de 3,3, se descargará, esto es = inversa o retroceso. Este capacitor será cargado por el resistor de 2M2, esta acción tomará algún tiempo, por lo que todavía sigue siendo inversa. Luego el robot dará marcha hacia adelante.
LISTA DE COMPONENTES
Capacitores:C1: 3.30 µF. electrolíticoResistores:
20

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
VR1: 100 KΩ minipot.R1: 2.2 MΩSemiconductoresIC1: LM386IC2: 74HC14D1, D2: SFH205, pueden sustituirlos por foto diodos o bien, leds rojos normalesOtrosSW1: interruptor de 1 polo una posición para encendido y apagadoB1: batería de 9 voltios1 clip para la batería de 9 voltios.
21

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
MICROROBOT 18
En este caso se trata de un seguidor de luz, está diseñado con el 555 como el cerebro, por así
decirlo, ya que basado en los pulsos generados por este y de acuerdo a grado de luz que afecte a las
fotorresistencias o fotoceldas, componente que actúa como sensor, podrá girar o seguir hacia
adelante.
Es muy sensible ya que con una mínima sombra pueden detenerse los motores y luego, de haber la
luz suficiente, este iniciará su marcha hacia adelante.
Como dijimos al principio, el cerebro es el popular LM555, NE555, etc. el cual generará los pulsos
necesarios cuando el resistor dependiente de la luz (Light Dependent Resistor - LDR), sea afectado,
VR1 y VR2 se encarga del ajuste del largo de los pulsos con la ayuda de C1 y C2. D1 y D2, son
diodos emisores de luz (LEDs) para darle un aspecto visual más interesante a nuestro seguidor de
luz.
NOTA: Si deseas el comportamiento inverso, entonces coloca los resistores R2 y R7 entre el positivo
y los pines 2 del los 555, y las fotoceldas entre los pines 2 y el negativo.
Lista de componentes
Capacitores:
C1, C2: Entre 10 y 100 µF. electrolítico
Resistores:
VR1, VR2: 100 KΩ minipot.
R2, R3, R7, R8: 10 KΩ
R4, R9: 1 K Ω
R5, R10: 330 Ω
LDR1, LDR2: Fotorresistencias (LDR, fotoceldas) comunes
SemiconductoresIC1, IC2: LM555, NE555, 7555
D1, D2: Leds del color que gustes
OtrosSW1: interruptor de 1 polo una posición
22
Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
B1: batería de 9 voltios
1 clip para la batería de 9 voltios.
DIAGRAMA
23

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
24

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
BIBLIOGRAFIA
http://www.electronica2000.com/alarmas/alarma1.htm
http://www.electronica2000.com/alarmas/alarmas2.htm
http://www.electronica2000.com/robotica/micro_robot7.htm
http://www.electronica2000.com/robotica/herbie_retroceso.htm
http://www.electronica2000.com/robotica/micro_robot3.htm
http://www.electronica2000.com/robotica/minirobot18.htm
http://juanfmunoz.wordpress.com/2008/08/04/practica-1-aplicacion-del-circuito-integrado-555-
semaforo/
25

Instituto Tecnológico de Matamoros Taller de Practicas de Electrónica Básica.
26