PID 6079 Comando y control de neuroprótesis motoras por ... · PDF fileTABERNIG,...
14
Universidad Nacional de Entre Ríos. ISSN 2250-4559. Eva Perón 24; 3260 FIB Concepción del Uruguay, Entre Ríos, Argentina. http://www.revistacdyt.uner.edu.ar/suplemento/ PID 6079 Comando y control de neuroprótesis motoras por Electromiografía de Superficie Tabernig, Carolina; Escobar, Sergio; Bonell, Claudia; Reta, Juan Manuel; Cherniz, Analía; Spaich, Erika; Cerrato, Marina; Massafra, Alejandro; Zunino, Fernando; Caamaño, Marcelo Autores: Laboratorio de Ingeniería en Rehabilitación e Investigaciones Neuromusculares y Sensoriales (L.I.R.I.N.S.), Facultad de Ingeniería (Bioingeniería), Oro Verde (Entre Ríos, Argentina). Contacto: [email protected] Resumen Las neuroprótesis motoras basadas en estimulación neuromuscular funcional restauran la función motora disminuida o paralizada de personas con lesiones en el sistema nervioso central, a través de la aplicación de trenes de pulsos eléctricos en las vías nerviosas periféricas. Su comando voluntario puede realizarse mediante la señal de electromiografía (EMG) del mismo músculo electroestimulado. Uno de los sistemas mas empleados corrige la caída del pie durante la fase de balanceo de la marcha hemipléjica al lograr la contracción funcional del músculo tibial anterior (TA) parético. En este proyecto, se caracterizó y procesó EMG del TA de personas con y sin secuelas de hemiparesia, en condiciones de registro estáticas y durante la marcha. Se propusieron algoritmos de filtrado, acondicionamiento y detección de cambios de la señal de EMG proveniente del músculo electroestimulado. Se diseñó e implementó en prototipo un sistema de electroestimulación comandado por el EMG del mismo músculo estimulado y se dejaron sentadas las bases tecnológicas y de conocimiento para cuantificar los cambios plásticos que, a nivel medular, produce el uso cotidiano de estas neuroprótesis. Esto se logró mediante el diseño y construcción de un sistema para la evocación del reflejo de Hoffmann, su evaluación y empleo para registro de estas señales. Palabras clave: neuroprótesis motoras, electromiografía de superficie, comando, control, estimulación neuromuscular funcional, reflejo H Introducción Las neuroprótesis motoras basadas en estimulación neuromuscular funcional (FNS, por sus siglas en inglés) logran contracciones musculares por medio de pulsos eléctricos comandados en forma voluntaria por un paciente con lesión del sistema nervioso central [31]. La activación de la mayoría de los sistemas de FNS utilizados clínicamente es realizada por medio de señales bajo el control voluntario de sistemas distantes: microllaves o pulsadores [2][45], electromiografía de músculos sanos [24][25][27], voz [27], soplido [23], inclinómetros [26] y acelerómetros [48], entre otros [31]. Entre las aplicaciones más difundidas de la FNS se encuentra la corrección de la caída del antepié en personas con secuelas de hemiplejías. Estos sistemas producen la dorsiflexión del pie mediante la estimulación eléctrica del tibial anterior (TA) parético durante la fase de balanceo [9]. De esta manera se busca imitar la contracción fisiológica de este músculo correspondiente a la marcha no patológica, que normalmente se produce durante la etapa de oscilación correspondiente al despegue del pie y avance de la pierna y es la encargada de mantener una adecuada distancia pie- suelo al momento de iniciar el paso [40]. Usualmente, el inicio de la estimulación del TA es disparado utilizando micro-pulsadores colocados en plantillas [32]. Pero existe evidencia clínica que indica que los procesos plásticos involucrados en el re-aprendizaje motor se facilitan si la señal de comando de los sistemas de FNS provienen del mismo músculo que está siendo estimulado eléctricamente [11][12][28]. En este sentido, puede utilizarse el electromiograma de superficie (EMG) del músculo parético (músculo con cierta debilidad pero que puede aún ser contraído a voluntad) para comandar
Transcript of PID 6079 Comando y control de neuroprótesis motoras por ... · PDF fileTABERNIG,...

Universidad Nacional de Entre Ríos. ISSN 2250-4559. Eva Perón 24; 3260 FIB Concepción del Uruguay, Entre Ríos, Argentina. http://www.revistacdyt.uner.edu.ar/suplemento/
PID 6079
Comando y control de neuroprótesis motoras por Electromiografía de Superficie Tabernig, Carolina; Escobar, Sergio; Bonell, Claudia; Reta, Juan Manuel; Cherniz, Analía; Spaich, Erika; Cerrato, Marina; Massafra, Alejandro; Zunino, Fernando; Caamaño, Marcelo Autores: Laboratorio de Ingeniería en Rehabilitación e Investigaciones Neuromusculares y Sensoriales (L.I.R.I.N.S.), Facultad de Ingeniería (Bioingeniería), Oro Verde (Entre Ríos, Argentina). Contacto: [email protected]
Resumen Las neuroprótesis motoras basadas en estimulación neuromuscular funcional restauran la función motora disminuida o paralizada de personas con lesiones en el sistema nervioso central, a través de la aplicación de trenes de pulsos eléctricos en las vías nerviosas periféricas. Su comando voluntario puede realizarse mediante la señal de electromiografía (EMG) del mismo músculo electroestimulado. Uno de los sistemas mas empleados corrige la caída del pie durante la fase de balanceo de la marcha hemipléjica al lograr la contracción funcional del músculo tibial anterior (TA) parético. En este proyecto, se caracterizó y procesó EMG del TA de personas con y sin secuelas de hemiparesia, en condiciones de registro estáticas y durante la marcha. Se propusieron algoritmos de filtrado, acondicionamiento y detección de cambios de la señal de EMG proveniente del músculo electroestimulado. Se diseñó e implementó en prototipo un sistema de electroestimulación comandado por el EMG del mismo músculo estimulado y se dejaron sentadas las bases tecnológicas y de conocimiento para cuantificar los cambios plásticos que, a nivel medular, produce el uso cotidiano de estas neuroprótesis. Esto se logró mediante el diseño y construcción de un sistema para la evocación del reflejo de Hoffmann, su evaluación y empleo para registro de estas señales.
Palabras clave: neuroprótesis motoras, electromiografía de superficie, comando, control, estimulación neuromuscular funcional, reflejo H
Introducción Las neuroprótesis motoras basadas en estimulación neuromuscular funcional (FNS, por sus siglas en inglés) logran contracciones musculares por medio de pulsos eléctricos comandados en forma voluntaria por un paciente con lesión del sistema nervioso central [31]. La activación de la mayoría de los sistemas de FNS utilizados clínicamente es realizada por medio de señales bajo el control voluntario de sistemas distantes: microllaves o pulsadores [2][45], electromiografía de músculos sanos [24][25][27], voz [27], soplido [23], inclinómetros [26] y acelerómetros [48], entre otros [31].
Entre las aplicaciones más difundidas de la FNS se encuentra la corrección de la caída del antepié en personas con secuelas de hemiplejías. Estos sistemas producen la dorsiflexión del pie mediante la estimulación eléctrica del tibial anterior (TA) parético durante la fase de balanceo [9]. De esta manera se busca imitar la contracción fisiológica de este músculo correspondiente a la marcha no patológica, que normalmente se produce durante la etapa de oscilación correspondiente al despegue del pie y avance de la pierna y es la encargada de mantener una adecuada distancia pie-suelo al momento de iniciar el paso [40]. Usualmente, el inicio de la estimulación del TA es disparado utilizando micro-pulsadores colocados en plantillas [32]. Pero existe evidencia clínica que indica que los procesos plásticos involucrados en el re-aprendizaje motor se facilitan si la señal de comando de los sistemas de FNS provienen del mismo músculo que está siendo estimulado eléctricamente [11][12][28]. En este sentido, puede utilizarse el electromiograma de superficie (EMG) del músculo parético (músculo con cierta debilidad pero que puede aún ser contraído a voluntad) para comandar

TABERNIG, Carolina y otros I Comando y control de neuroprótesis…
la estimulación, y de esta forma, completar el desarrollo de fuerza muscular por medio de la estimulación de sus fibras nerviosas [42][29].
En los sistemas de FNS para corrección de la caída del antepié, se ha explorado la detección del inicio de contracción del TA parético durante la fase de balanceo de la marcha como alternativa de comando más fisiológico. En este sentido, Thorsen y col. [47] estudiaron la factibilidad de lograr la dorsiflexión del pie por medio de sistemas de FNS comandados por el EMG del TA parético, bajo condiciones de contracción muscular muy controladas. Estos autores encontraron que, en algunos casos, estos sistemas permiten incrementar la fuerza del TA sin comprometer el control.
A diferencia de lo que ocurre bajo condiciones controladas de laboratorio, donde las contracciones son isométricas, a fuerza y ángulo constantes; en los casos de actividad muscular no controlada, la señal de EMG no es estacionaria dado que es influenciada por la posición relativa de los electrodos, cambios en la longitud de las fibras musculares, o con la fatiga muscular [21] entre otros factores que alteran la señal [20]. Éste es el caso de la señal de EMG proveniente de la activación del TA parético durante la marcha, la cual será empleada como señal de control del mismo sistema FNS que lo está estimulando.
Varios autores estudiaron las características estocásticas de la señal en músculos sanos [43][44] y solo algunos músculos patéticos [16]. Existen modelos teóricos que suponen funciones de distribución de probabilidades (FDP) Gaussianas o Laplacianas de la amplitud de la señal de EMG de superficie, dependiendo de tipo y grado de la contracción muscular [17][3][4][33]. Por ejemplo, los métodos estadísticos con mejor desempeño en tiempo real para la detección de cambios en la señal de EMG, evaluados en experiencias con músculos sanos, modelizan la señal mediante un proceso Gaussiano [43][44]. Sin embargo, estos supuestos son válidos cuando la señal es registrada a fuerza constante, ángulo constante y sin fatiga muscular [17][50].
Entre los parámetros temporales comúnmente empleados como estimadores de cambios en la señal de EMG de músculos sanos se encuentran: el valor cuadrático medio (conocido como valor RMS), el valor medio absoluto (VMA), el valor medio absoluto de la diferencia (VMAD) y la varianza (VAR) [35][51]. El desempeño de estos estimadores depende de las propiedades estadísticas reales de la señal. Para el caso de músculos paréticos, se observó que todos los parámetros utilizados para estimar la amplitud de la señal de EMG permiten diferenciar estadísticamente los momentos de mayor actividad muscular, siendo la VAR el estimador que presenta el mejor comportamiento dado su menor variabilidad [6].
Otro problema que se presenta es que el músculo TA se activa también durante otras fases a lo largo del ciclo de la marcha [40]. Además, los patrones electromiográficos de activación de este músculo se ven alterados luego de lesiones neurológicas, en especial en aquellas que dañan el sistema nervioso central debido a las modificaciones sufridas en el control motor [8]. Bonell y col. estudiaron la señal del EMG del TA patético, con el objetivo de utilizarla para identificar la fase de oscilación de la marcha a fin de comandar un sistema de FNS [7]. Los autores analizaron el comportamiento de distintos estimadores, aplicados sobre diferentes fases del ciclo de la marcha relacionados con aumento/disminución de la actividad muscular. Ellos encontraron que es posible utilizar dichos estimadores para identificar el comienzo de la actividad del músculo TA, pero junto con otros parámetros o sensores a fin de reducir posibles falsos positivos.
Dado que la señal de EMG proveniente de un músculo parético estimulado eléctricamente, cuya componente voluntaria será empleada para el control de un dispositivo, debe ser acondicionada y filtrada, varios autores reportaron trabajos en esta línea. Bagwell et al. [1] implementaron un filtro mioeléctrico adaptativo por medio de un microcontrolador y Meek et al. [34] comprobaron el comportamiento de distintos filtros para mejorar la relación señal a ruido de los filtros mioeléctricos para control de prótesis. Clancy et al. [18] propusieron algoritmos de procesamiento no-estacionario del EMG para aplicaciones en control de prótesis. Sennels y col. [42] propusieron un método de filtrado adaptativo y Tabernig y col. [46] uno basado en SVD, ambos trabajos realizados para eliminar la onda M del EMG de músculos paréticos estimulados eléctricamente.
Además de rescatar la señal de EMG correspondiente a la contracción evocada por el estimulo eléctrico, es necesario contar con un algoritmo que permita diferenciar la señal correspondiente a una contracción de la señal de EMG voluntaria residual. Para ello, el diseño de un algoritmo destinado a la detección del inicio de la actividad del tibial anterior (TA) durante la marcha, requiere de la selección de parámetros que caractericen la señal de EMG de ese músculo y de umbrales a partir de los cuales se tome la decisión de que ha ocurrido un cambio. La selección de este umbral puede ser heurística o sistemática, es decir, basado en fórmulas empíricas o dependiente del análisis de las características estocásticas de la señal [43][44]. Con esta misma finalidad numerosos algoritmos han sido propuestos utilizando herramientas provenientes del análisis lineal y no lineal de series temporales. Los métodos más simples se basan en la selección de un umbral aplicado a una función

Universidad Nacional de Entre Ríos. ISSN 2250-4559. Eva Perón 24; 3260 FIB Concepción del Uruguay, Entre Ríos, Argentina. http://www.revistacdyt.uner.edu.ar/suplemento/
específica calculada sobre los valores que toma la señal en una ventana de tiempo determinada. Ejemplo de esto son el valor rectificado promedio, el valor cuadrático medio, u otras funciones más complejas [43]. Otros se basan en las propiedades estadísticas de la señal de EMG [5]; y algunos más avanzados utilizan clasificadores, modelos autorregresivos, coeficientes ceptrales, redes neuronales y onditas [36] [37][30][8].
Durante la evaluación de nuevas estrategias de control y comando de sistemas de FNS, es conveniente realizar los primeros ensayos de los algoritmos en forma off-line y luego evaluar su funcionamiento en tiempo real. Con este objetivo Escobar y col. [19] presentaron una plataforma hardware que permite la evaluación de algoritmos de control en cuyas estructuras generales se identifican un bloque de Acondicionamiento de señal encargado del procesamiento digital y una Unidad de Detección.
Las dificultades en el control motor voluntario son secuelas comunes posteriores a los daños medulares y cerebrales producidos por accidentes cerebro vasculares, traumas, tumores y otras disfunciones de la neurona motora superior. La gran diversidad de técnicas de rehabilitación existentes dificulta la valoración objetiva de los efectos de cada una sobre los avances logrados [40]. Más aún, no se conocen con exactitud las razones de estas mejoras siendo probable que se deban a cambios plásticos a nivel espinal y/o cerebral [38][15][22]. El reflejo de Hoffmann o reflejo H es una de las herramientas de exploración neurofisiológica que puede emplearse para valorar estos cambios plásticos [39][52][13]. La respuesta refleja, cuantificada en términos de la amplitud de la onda H, es modulada por información proveniente de otros centros medulares y supramedulares.
Con el objetivo de valorar cuantitativamente los cambios plásticos que suceden a nivel medular con el uso de una neuroprótesis motora comandada mediante el EMG del mismo músculo estimulado, se emplea el Reflejo de Hoffmann. La evocación de este reflejo requiere de estimuladores especiales con un mínimo de dos salidas de estimulación, cuya programación sea flexible y con posibilidad de sincronismo entre si y con señales externas. Estas prestaciones fueron reunidas en un estimulador para evocación del reflejo H propuesto por Zunino y col. [53].
A continuación se resumen los resultados alcanzados relacionados a la caracterización, procesamiento y filtrado de la señal de SEMG; al sistema para evocación del reflejo H diseñado y al desarrollo del primer prototipo de un sistema hardware para implementación de algoritmos de control y comando de neuroprótesis motoras. Caracterización del EMG La señal de electromiografía de superficie de músculos sanos es modelada como un proceso aleatorio cuya función de distribución de probabilidades es aproximada por medio de distribuciones Gaussianas o Laplacianas. En este proyecto se estudió el ajuste del EMG del músculo tibial anterior (TA) parético a estas distribuciones y el análisis estadístico de sus estimadores de amplitud; con vistas a la utilización de esta señal como control de un estimulador eléctrico para corrección de la caída del antepié durante la fase de oscilación (FO) de la marcha hemipléjica. Se estudiaron: el valor cuadrático medio (RMS), valor medio absoluto (VMA), valor medio absoluto de la diferencia (VMAD) y varianza (VAR). Se analizaron 40 registros electromiográficos del TA obtenidos durante distintas fases de la marcha de 2 sujetos con hemiparesia. Se observó que dicha señal puede ser aproximada, al igual que en músculos sanos, mediante distribuciones Gaussianas o Laplacianas. La distribución Laplaciana fue la que mejor ajustó a la señal durante la FO, fase de la marcha con mayor actividad del TA, lo que supone que el VMA es el mejor estimador de su amplitud. Sin embargo, todos los parámetros analizados pudieron diferenciar estadísticamente la FO del resto de las fases analizadas. La VAR es el estimador que presentó mejor comportamiento dada su menor variabilidad. En conclusión, los algoritmos de detección de cambios en músculos sanos basados en estos estimadores podrían también aplicarse para el TA parético y utilizar la señal proveniente de ese músculo como control de un estimulador eléctrico funcional. Estos resultados fueron publicados en la Revista Brasileira de Engenharia Biomédica y difundidos en congresos de la disciplina [6][7].
Procesamiento del EMG Como parte necesaria del procesamiento del EMG para su uso como señal de comando de neuroprotesis motoras, se identificó la necesidad de detectar el inicio de la contracción muscular voluntaria. Con este objetivo se exploraron e implementaron distintos algoritmos de detección de

TABERNIG, Carolina y otros I Comando y control de neuroprótesis…
VPSensibilidad = *100%
VP+FN
cambios en el EMG del músculo TA parético que permitieran identificar durante la fase de balanceo de la marcha, los segmentos de contracción muscular para el comando de neuroprótesis utilizadas en la corrección de la caída del pie.
En primer lugar se implementaron dos métodos basados en umbral. El primero consistió en un método típico representativo de los métodos más comunes utilizados en dispositivos comerciales, originalmente analizado por Hodges y Bui [26], basado en el filtrado de medias móviles o filtrado FMA (método aquí rotulado como H). En este método la señal de EMG digitalizada es filtrada por medio de un filtro Butter pasa bajo de orden 6 y rectificada. A partir de allí se construye la función (función test) que se evalúa sobre una ventana deslizante de k muestras de la señal rectificada. De esta forma, se considera el músculo activo cuando esta función supera determinado umbral, el cual está relacionado a la desviación estándar SD de la señal durante un período de la misma que se considera en reposo. El segundo método implementado fue el propuesto por Bonato [5] para el estudio de los segmentos de activación muscular en análisis de marcha A (método aquí rotulado como B). Éste, a diferencia del anterior, parte de un análisis estadístico de la señal y del desempeño esperado del detector (probabilidad de detección) para el establecimiento de dos valores (umbrales) con lo cual se mejora el desempeño del mismo.
Estos métodos implementados necesitan estimar uno o más parámetros mediante el análisis de segmentos de señal de EMG en los que se pueda considerar el músculo en reposo. Para ello, se consideró EMG en reposo a un segmento de 400 datos de la señal en la fase media de apoyo (200 mseg de datos, ya que la frecuencia de muestreo es de 2kHz), de las cinco primeras pasadas de cada sujeto bajo estudio.
Para evaluar el desempeño de estos algoritmos se contó con registros realizados durante la marcha de cinco sujetos, tres de ellos sanos (identificados como sujetos-control) y dos sujetos con paresia en el TA. Estos registros fueron realizados durante la marcha en cinta, con electrodos colocados en el TA según las recomendaciones de la SENIAM [46], contándose con 20 pasos promedio por sujeto.
La evaluación del desempeño de estos algoritmos, se realizó en términos de la sensibilidad y especificidad de los mismos contrastados contra la observación de un observador experto “promedio”. La determinación del punto de inicio de un cambio en la señal SEMG indicativo de un cambio en el nivel de contracción muscular por parte de un observador experto, fue considerada un “sistema de detección” preciso, si bien es discutida su reproducibilidad [44]. A los fines de subsanar este problema, en el presente trabajo se utilizó la evaluación de tres observadores expertos, los cuales determinaron los segmentos de actividad EMG en el registro del TA, marcando inicio y fin de la actividad mediante cursores en un software diseñado con este fin. Con posterioridad, se procesaron los resultados obtenidos de forma tal de obtener un solo “experto promedio”, en el cual los segmentos de activación del EMG resultaron de los segmentos en los cuales coincidían todos o al menos dos de los expertos.
A partir de allí, tomando como referencia los segmentos de activación antes mencionados, se calcularon: Verdaderos positivos (VP): segmentos en la señal EMG donde el algoritmo y el experto coincidieron en marcarlos como segmentos de actividad. Verdaderos negativos (VN): segmentos en la señal EMG donde el algoritmo y el experto coincidieron en marcarlos como segmentos de silencio o no. Falsos positivos (FP): segmentos en la actividad de la señal EMG para el algoritmo, que fueron considerados como segmentos sin actividad por el observador experto promedio. Falsos negativos (FN): segmentos sin actividad en la señal EMG para el algoritmo, que fueron considerados como segmentos den actividad por el observador experto promedio.
Con estos índices se pudieron determinar: Sensibilidad (SEN): la capacidad del algoritmo para la detección de un segmento de actividad EMG. Se define como:

Universidad Nacional de Entre Ríos. ISSN 2250-4559. Eva Perón 24; 3260 FIB Concepción del Uruguay, Entre Ríos, Argentina. http://www.revistacdyt.uner.edu.ar/suplemento/
Especificidad (ESP): la capacidad del algoritmo para la detección de segmentos de silencio en la actividad EMG. Se define como:
Los valores de sensibilidad y especificidad calculados fueron analizados por medio de un ANOVA de forma tal de seleccionar el método que presentaba mejor desempeño.
Los valores de la sensibilidad y especificidad de estos métodos implementados para la detección de los segmentos de actividad EMG en el tibial de los sujetos control y de los sujetos con paresia en el TA, y contrastados contra la observación del “experto promedio” se reportan en la Tabla 1 y Tabla 2.
Tabla 1: Sensibilidad y especificidad del método de Hodges, para la detección de segmentos de actividad EMG en el Tibial Anterior en sujetos control (Sujetos 1, 2 y 3) y sujetos con paresia muscular (sujeto 4 y 5). Los valores de SENH1 y ESPH1 son los valores de sensibilidad y especificidad para un ancho de ventana de análisis de 25 ms y un umbral de 3 SD, mientras que SENH2 y ESPH2 corresponden a una ventana de análisis de 50 ms y un umbral de 1SD.
SENH1 SENH
2 ESPH
1 ESPH
2 Sujeto 1 0,0123 0,1512
1 1 0,9993
8 Sujeto 2 0,4391 0,7210
2 0,97176
0,87334
Sujeto 3 0,011711
0,15559
1 0,99661
Sujeto 4 0,57624 0,76655
0,96538
0,89262
Sujeto 5 0,05536 0,2887 0,99816
0,97048
Tabla 2: Sensibilidad y especificidad Sensibilidad y especificidad del método de Bonatto, para la detección de segmentos de actividad SEMG en el Tibial Anterior en sujetos control (Sujetos 1, 2 y 3) y sujetos con paresia muscular (sujeto 4 y 5). Los valores de SENBO y ESPBO son los valores de sensibilidad y especificidad para un ancho de ventana de análisis de 20 ms.
SENBO ESPBO Sujeto 1 0,46524 0,99317 Sujeto 2 0,92122 0,95786 Sujeto 3 0,41356 0,99934 Sujeto 4 0,73607 0,97955 Sujeto 5 0,16956 1
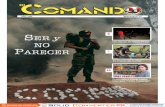
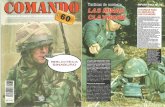
En las Figura 1 y Figura 2 se ilustran a modo de ejemplo un paso para un sujeto sano (Fig.1) y
un paso para un sujeto con paresia (Fig.2). En la primera línea de ambas figuras se ilustra el registro de la señal SEMG en el Tibial Anterior junto a los segmentos de actividad muscular indicados por el experto “promedio”. En las siguientes líneas se indican los segmentos en los cuales los algoritmos antes descriptos detectan actividad SEMG. Estos resultados fueron publicados en revistas y congresos de bioingeniería.
Especificidad = *100 %VN
VN FP+

TABERNIG, Carolina y otros I Comando y control de neuroprótesis…
Figura 1: Registro del SEMG en el Tibial Anterior en un sujeto sano, durante la fase de balanceo para un paso de marcha. En la primera línea se detalla el registro SEMG junto al segmento de actividad marcado por un observador experto ´promedio´. En la segunda línea se detallan los segmentos de actividad SEMG detectados por el método de Hodges para dos valores de umbral y ancho de ventana de análisis (H1 y H2). En la tercera línea se muestran los segmentos de actividad detectados por el algoritmo de Bonatto (BO). Para ambos algoritmos, se detallan la sensibilidad y especificidad en la detección para la pasada.
Figura 2: Registro del SEMG en el Tibial Anterior en un sujeto con paresia muscular, durante la fase de balanceo para un paso de marcha. En la primera línea se detalla el registro SEMG junto al segmento de actividad marcado por un observador experto ´promedio´. En la segunda línea se detallan los segmentos de actividad SEMG detectados por el método de Hodges para dos valores de umbral y ancho de ventana de análisis (H1 y H2). En la tercera línea se muestran los segmentos de actividad detectados por el algoritmo de Bonatto (BO). Para ambos algoritmos, se detallan la sensibilidad y especificidad en la detección para la pasada

Universidad Nacional de Entre Ríos. ISSN 2250-4559. Eva Perón 24; 3260 FIB Concepción del Uruguay, Entre Ríos, Argentina. http://www.revistacdyt.uner.edu.ar/suplemento/
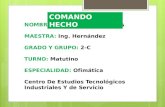
En esta misma línea de trabajo, se propuso un algoritmo de detección del inicio de la contracción muscular a través del EMG basado en la transformada ondita y el análisis de componentes principales (PCA). El sistema de detección de inicio de contracción propuesto consta de cuatro bloques, tal como se esquematiza en la Figura 3.
Figura 3. Esquema en bloques del método propuesto
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
-0.2
0
0.2a) Señal de EMG de musculo tibial anterior sano
t(seg)
mili
volts
γ
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
1
5
8
10
12
15
20
b) Descomposición del EMG
t(seg)
esca
la
Figura 4: Ejemplo de aplicación de los dos métodos de detección de inicio de contracción para una señal de EMG del músculo tibial anterior durante las fases de apoyo y balanceo de la marcha de una persona sana. La línea vertical entrecortada indica el comienzo de la contracción marcado por el experto. a) Señal de EMG. b)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7t(seg)
c) Señal U(t) y Umbral Um para γ =1.1
U(t)
Um
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
1d) Intervalos de activación
t(seg)
M. propuesto
M. control
Postprocesamiento
Descomposición
de la señal
Reducción de
características
Detección de
MUAPs
EMG(t)
U(t)
PC(t)TOC
Intervalos de activación
Postprocesamiento
Descomposición
de la señal
Reducción de
características
Detección de
MUAPs
EMG(t)
U(t)
PC(t)
Postprocesamiento
Descomposición
de la señal
Reducción de
características
Detección de
MUAPsPostprocesamiento
Descomposición
de la señal
Reducción de
características
Detección de
MUAPs
EMG(t)
U(t)
PC(t)TOC
Intervalos de activación

TABERNIG, Carolina y otros I Comando y control de neuroprótesis…
Descomposición de la señal mostrada en 2 a) mediante la TOC. c) Señal U(t) y umbral Um. d) Intervalos de activación detectados por ambos métodos.
El método fue evaluado comparándolo con otro reportado en la bibliografía y con las marcas de
inicio de contracción establecidas por un experto. Ambas técnicas se aplicaron a señales de músculo sano corrompidas con ruido aditivo a distintos niveles de SNR y a señales de músculo parético. En la Figura 4 (página precedente) se muestra un ejemplo de aplicación de los dos métodos de detección de inicio de contracción para una señal de EMG del músculo tibial anterior durante las fases de apoyo y balanceo de la marcha de una persona sana. Si bien tanto el algoritmo propuesto como el método de control realizaron la detección con similar precisión, el algoritmo presentado en este trabajo mostró menores errores y desviaciones con respecto a la marca del experto. Estos resultados fueron publicados en el IEEE Latin American Journal y difundidos en trabajos presentados en congresos, obteniendo un premio al mejor trabajo estudiantil [10].
Desarrollo, evaluación y selección de algoritmos de filtrado de la señal de SEMG En esta línea de trabajo del PID, se exploraron distintos algoritmos para eliminar la respuesta muscular evocada del electromiograma de superficie de un músculo estimulado eléctricamente. Uno de los algoritmos más trabajados fue el que realiza esta eliminación a través de la separación de las señales por el método de los subespacios implementado mediante la descomposición en valores singulares de la matriz de datos combinado con un filtro fijo pasa bajos. El algoritmo propuesto elimina el artefacto del estímulo, construye la matriz de datos, calcula y pondera sus valores singulares, y estima una nueva matriz cuyos datos son el electromiograma voluntario que refleja la intención de la persona. Este proceso se realiza de manera iterativa actualizando la matriz por cada época registrada.
El algoritmo fue evaluado con señales registradas en el músculo extensor de la muñeca de personas sanas con paresia muscular simulada, en condiciones estáticas y dinámicas, y consistió en dos etapas. La primera fue realizada con registros conformados a través de la suma de registros de electromiograma parético y de onda M. La segunda evaluación se realizó con señales reales de electromiograma compuesto. Se definieron índices de desempeño y se analizaron la evolución temporal, los espectros de potencia y las funciones de autocorrelación de las señales a la entrada y a la salida del filtro. Los resultados se compararon con los obtenidos de un filtro fijo del tipo combinador lineal. Ejemplos de ellos pueden observarse en las Figs. 5 y 6. Estos resultados fueron publicados en el Journal Medical Engineering & Physics y difundidos en congresos de la especialidad [48].
Figura 5: Ejemplo de resultados para condiciones estáticas. (a) SEMG compuesto de entrada, (b) salida del filtro fijo, (c) salida del filtro basado en SVD.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-2
-1
0
1
2a)
Am
plitu
de (m
V)
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.5
0
0.5b)
Am
plitu
de (m
V)
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.5
0
0.5
Am
plitu
de (m
V)
time (s)
c)

Universidad Nacional de Entre Ríos. ISSN 2250-4559. Eva Perón 24; 3260 FIB Concepción del Uruguay, Entre Ríos, Argentina. http://www.revistacdyt.uner.edu.ar/suplemento/
Figura 6: Ejemplo de resultados para condiciones dinámicas de incremento gradual de la intensidad de estimulación. (a) SEMG compuesto de entrada, (b) salida del filtro fijo, (c) salida del filtro basado en SVD.
Diseño, evaluación y selección de estrategias de comando y control para el sistema FNS Se trabajó en el desarrollo de una plataforma para la evaluación de algoritmos de control de estimuladores funcionales comandados por el electromiograma de superficie del mismo músculo electro-estimulado. La plataforma está compuesta por una etapa de acondicionamiento y otra de procesamiento. La primera realiza la supresión del artefacto del estímulo eléctrico y la amplificación y filtrado de la señal. La segunda etapa brinda un entorno de procesamiento para la implementación de algoritmos y permite la generación de una señal de control para el estimulador.
El diseño propuesto de la plataforma incluye dos etapas: una de acondicionamiento y otra de procesamiento, divididas a su vez en bloques, tal como se muestra en la Figura 7.
Figura 7: Etapas y bloques de la plataforma diseñada
El prototipo se ensayó con señales simuladas y reales, evaluando la supresión del artefacto, la
amplificación de la señal, la respuesta en frecuencia de los filtros, la digitalización y el almacenamiento de los datos. Los resultados obtenidos mostraron buen desempeño del supresor del artefacto, muy buena SNR de la señal acondicionada y alta confiabilidad en el almacenamiento
0.2 0.4 0.6 0.8 1 1.2-2
-1
0
1
2a)
Am
plitu
de (
mV
)
0.2 0.4 0.6 0.8 1 1.2-0.5
0
0.5b)
Am
plitu
de (
mV
)
0.2 0.4 0.6 0.8 1 1.2-0.5
0
0.5
Am
plitu
de (
mV
)
time (s)
c)

TABERNIG, Carolina y otros I Comando y control de neuroprótesis…
de los datos digitalizados, obteniéndose una herramienta adecuada para la rápida evaluación de los algoritmos. En la Figura 8 se muestra una fotografía del prototipo de la plataforma implementada conectada al estimulador con el conjunto de electrodos de estimulación y de registro, y en la Figura 9, un ejemplo de registro de la señal de EMG del extensor de los dedos correspondiente a una contracción voluntaria intensa y una imagen del trazado del período de activación del circuito reductor de artefacto, ambas obtenidas mediante el empleo del prototipo implementado. Estos resultados fueron publicados en el IEEE Latin American Journal y difundidos en congresos de bioingeniería [19].
Figura 8: Fotografía del prototipo de la plataforma implementada conectada al estimulador con el conjunto de electrodos de estimulación y de registro
Figura 9: A) Registro de la señal de EMG del extensor de los dedos correspondiente a una contracción voluntaria intensa. B) Trazo del período de activación del circuito reductor de artefacto
Reflejo de Hoffmann En esta línea, se trabajó en la construcción y puesta a punto del equipo para evocación del reflejo H. Se registraron señales evocadas con este sistema y se puso a punto la técnica de registro. En la Figura 10 se observa una fotografía del equipo desarrollado, y en la Figura 11, de una manera secuencial, ondas H evocadas a intensidades de estimulación crecientes, utilizando el equipo Estimulador H. Estos resultados fueron publicados en revistas y congresos de la especialidad [55].

Universidad Nacional de Entre Ríos. ISSN 2250-4559. Eva Perón 24; 3260 FIB Concepción del Uruguay, Entre Ríos, Argentina. http://www.revistacdyt.uner.edu.ar/suplemento/
Figura 10: Fotografía del equipo de evocación del reflejo H desarrollado en el PID: Estimulador H
(i)
(ii)
Figura 11: Ejemplos de onda H registrada en el músculo sóleo de un sujeto voluntario, a 2 intensidades crecientes de estimulación (i y ii). Se observan: artefacto del estímulo (a) y una onda H correspondiente al reflejo de Hoffmann evocado (b). Conclusiones En este proyecto se propusieron distintos algoritmos de procesamiento y filtrado de la señal de EMG del mismo músculo electroestimulado, para su uso como señal de comando de neuroprótesis motoras basadas en estimulación eléctrica funcional (FNS). Esto fue logrado a partir de la caracterización del EMG empleando un banco de señales diseñado y registrado en músculos de voluntarios sanos y con secuelas de hemiparesias. Se exploraron y propusieron estrategias de detección del inicio de la contracción como indicativo de la voluntad del usuario. Se diseñó y construyó una plataforma para la implementación en tiempo real de estas estrategias al efecto de su evaluación comparativa y programación personalizada, previa al uso cotidiano de la neuroprótesis por parte del paciente. Asimismo, se sentaron las bases tecnológicas, procedimentales y de conocimiento para emplear el reflejo H como herramienta de valoración cuantitativa de los cambios medulares que el uso de estas

TABERNIG, Carolina y otros I Comando y control de neuroprótesis…
neuroprótesis produce en el sistema nervioso. Por otro lado, se formaron recursos humanos de grado y posgrado y se consolidó en la FI-UNER la línea de investigación en Ingeniería de Rehabilitación.
Los resultados alcanzados fueron difundidos en 14 artículos en revistas con referato, 6 artículos en memorias de congresos con referato de artículos completos y 4 artículos completos en congresos con referato de resumen. Se presentaron los resultados en numerosos eventos de la especialidad y se llegó al público general a través de artículos y entrevistas otorgadas a medios de difusión. Se dieron los primeros pasos para la transferencia de tecnología. Así es que puede afirmarse que se alcanzaron los objetivos generales y específicos planteados para el proyecto a la vez que se dejaron iniciadas futuras líneas de trabajo a través del inicio reciente de nuevas tesis de posgrado.
Referencias bibliográficas [1] Bagwell, P. y Chappell P. “Real time microcontroller implementation of an adaptive myoelectric
filter”. Med. Eng. Phys., vol. 17, nro. 2, pag. 151-160, 1995. [2] Bajd T., Kralj A. y Turk R. "Standing-Up of a Healthy Subject and Paraplegic Patient". J.
Biomechanics, vol. 15, nro.1, pag. 1-10, 1982. [3] Bilodeau, M., Cincera, M., Gervais, S., Arsenault, A. y Gravel, A. “Normality and Stationarity of
EMG Signals of Elbow Flexor Muscles During Ramp and Step Isometric Contractions”. Journal of Electromyography and Kinesiology, vol. 7, pag. 87-96, 1997.
[4] Bilodeau, M., Cincera, M., Gervais, S., Arsenault, A. y Gravel, A., Lepage, Y. y McKinley, P. “Changes in the electromyographic spectrum power distribution caused by a progressive increase in the force level”. European Journal of Applied Physiolog, vol. 71, pag. 2-3, 1995.
[5] Bonato, P., D’Alessio, T. y Knaflitz, M. “A statistical method for the measurement of muscle activation intervals from surface myoelectric signal during gait”. IEEE Trans. Biomed. Eng., vol. 45, pag. 287–298, 1998.
[6] Bonell, C., Cherniz, A. y Tabernig, C. “Estudio de las características temporales del electromiograma del músculo tibial anterior durante la marcha hemiparética”. Revista Brasileira de Engenharia Biomédica, vol. 23, nro. 3, pag. 253-262, diciembre, 2007.
[7] Bonell, C., Cherniz, A., Tabernig, C. “Analysis of EMG temporal parameters from the tibialis anterior during hemiparetic gait”. 16th Argentine Bioengineering Congress and the 5th Conference of Clinical Engineering, Journal of Physics: Conference Series, vol. 90, 2007.
[8] Burridge,J., Wood, D.,Taylor, P., McLellan, D. “Indices to describe different muscle activation patterns, identified during treadmill walking, in people with spastic drop-foot”. Medical Engineering & Physics, vol. 23, pag. 427-434, 2001.
[9] Byrne, C., O’Keeffe, D., Donnelly, A. y Lyons, G. “ Effect of walking speed changes on tibialis anterior EMG during healthy gait for FES envelope design in drop foot correction”. Journal of Electromyography and Kinesiology, vol. 17, nro. 5, pag. 605-616, octubre 2007.
[10] Caamaño, M., Bonell, C., Cherniz, A. y Tabernig, C. “Detección del inicio de la contracción muscular mediante electromiografía de superficie para el comando de estimuladores funcionales”. XII Jornadas Internacionales de Ingeniería Clínica y Tecnología Médica, agosto, 2008.
[11] Cauraugh, J., Ligth, K., Sangbum, K., Thigpen, M. Behrman, A. “Chronic motor dysfunction after stroke. Recovering wrist and finger extension by electromiography-triggered neuromuscular stimulation”. Stroke, vol. 31, pag. 1360-1364, 2000.
[12] Cauraugh, J., Kim, S. “Two Coupled Motor Recovery Protocols Are Better Than One: Electromyogram-Triggered Neuromuscular Stimulation and Bilateral Movements”. Stroke, vol. 33, pag. 1589-1594, 2002.
[13] Cerrato, M., Bonell, C., Tabernig, C. “Factores que afectan el reflejo de Hoffmann en su uso como herramienta de exploración neurofisiológica”. Revista de Neurología, vol. 41, nro. 6, pag. 354-360, 2005.
[14] Chae, J., Sheffler L., Knutson J. ”Neuromuscular electrical stimulation for motor restoration in hemiplegia”. Topics in stroke rehabilitation, vol.15, nro. 5, pag. 412-26, 2008.
[15] Chae, J., Tzehsia, Y. “Neuromuscular electrical stimulation for motor restoration in hemiparesis”. Stroke rehabilitation, vol. 8, nro. 4, pag.24-39, 2002.
[16] Cherniz, A., Bonell, C. y Tabernig, C. “Study of the SEMG probability distribution of the paretic tibialis anterior muscle”. 16th Argentine Bioengineering Congress and the 5th Conference of Clinical Engineering, Journal of Physics: Conference Series, vol. 90, 2007.
[17] Clancy, E., Hogan, N. “Probability Density of the Surface Electromyogram and Its Relation to Amplitude Detectors”. IEEE Transactions on Biomedical Engineering, vol. 46, pag.730-739, 1999.

Universidad Nacional de Entre Ríos. ISSN 2250-4559. Eva Perón 24; 3260 FIB Concepción del Uruguay, Entre Ríos, Argentina. http://www.revistacdyt.uner.edu.ar/suplemento/
[18] Clancy, E. y Bouchard, D. “Estimation and Application of EMG Amplitude During Dynamic Contractions”. IEEE Eng. Med. & Biol. Mag., vol. 20, nro. 6, pag. 47-54, 2001.
[19] Escobar, S., Reta, J. y Tabernig, C. “Platform for evaluation of control strategies of functional stimuators through the EMG of the same stimulated muscle”. Enviado para su Revisión y Pubicación a IEEE Latina, diciembre, 2008. En evaluación. Paper Submission #722 for Revista IEEE.
[20] Farina, D., Merletti, R., Enoka. R. “The extraction of neural strategies from the surface EMG“. J. Appl. Physiol., vol. 96, pag. 1486-1495, 2004.
[21] Fernandez, J., Acevedo, R. y Tabernig, C. “Influencia de la fatiga muscular en la señal electromiográfica de músculos estimulados eléctricamente”. Revista EIA, Escuela de Ingeniería de Antioquia, Medellín (Colombia), nro. 7, pag. 111-119, junio, 2007.
[22] Golaszewski, S., Kremse, C., Wagner, M., Felber, S., Aichmer, F. y Dimitrijevic, M. “Functional MRI of the human motor cortex before and after whole-hand afferent electrical stimulation”. Scand. J. Rehabil. Med., vol. 31, pag. 165-173, 1998.
[23] Goldfrab, M. y Durfee W. “Design of a Controlled-brake orthosis for FES-Aided Gait”, IEEE Trans. Rehab. Eng., vol. 4, nro. 1, pag.13-24, 1996.
[24] Hefftner, G., Zucchini, W. y Jaros, G. “The electromyogram as a control signal for functional neuromuscular stimulation – part II: practical demostration of the EMG signature descrimination system”. IEEE Trans. Biomed. Eng., vol. 3, nro. 4, pag. 238-242, 1998.
[25] Hefftner, G., Zucchini, W. y Jaros, G. “The electromyogram as a control signal for functional neuromuscular stimulation – part I: autoregressive modeling as a means of EMG signature descrimination”. IEEE Trans. Biomed. Eng., vol. 3, nro. 4, pag. 230-237, 1998.
[26] Hodges, P. y Bui, B. “A comparison of computer-based methods for the determination of onset of muscle contraction using electromyography”. Electroencephalography and clinical Neurophysiology, vol. 101, pag. 511-519, 1996.
[27] Hoshimiya, N., Naito, A., Yajima, M. y Handa, Y. “A Multichannel FES System for the Restoration of Motor Functions in High Spinal Cord Injury Patients: A Respiration-Controlled System for Multijoint Upper Extremity”, IEEE Trans. Biomed. Eng., vol. 36, nro. 7, pag. 754-760, 1989.
[28] Keller, T., Popovic, M., Pappas, I. y Muller, P. “Transcutaneous functional electrical situmulator Compex Motion”, Artificial Organs, vol. 23, nro. 3, pag. 219-223, 2002.
[29] Krakauer, J. “Motor learning: its relevance to stroke recovery and neurorehabilitation”. Current Opinion in Neurology, vol. 19, pag. 84-90, 2006.
[30] Langzam, E., Isakov, E. y Mizrahi, J. “Evaluation of methods for extraction of the volitional EMG in dynamic hybrid muscle activation”. Journal of NeuroEngineering and Rehabilitation, vol. 3, pag. 27, 2006.
[31] Laterza, F. y Olmo G. “Analysis of EMG signals by means of the matched wavelet transform”. Electronic Letters, vol. 33, nro. 5, pag. 357-359, 1997.
[32] Loeb, G. y Davoodi, R. “The functional reanimation of paralyzed muscles”. IEEE Engineering in Medicine and Biology, vol. 5, pag. 45-51, 2005.
[33] Lyons, G., Sinkjær, T., Burridge, J., Wilcox, D. “A Review of Portable FES-Based Neural Orthoses forthe Correction of Drop Foot”. IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 10, nro. 4, pag. 260-279, 2002.
[34] Maiianas, M., Guillkn, M., Fig, J., Morera, J. y Camina, P. “Analysis of stationarity and statistical changes in myographic signals from respiratory muscles”. Proceedings of the 22nd Annual EMBS International Conference, vol. 2, pag. 1337-1340, 2000.
[35] Meek, S. y Fetherson, S. “Comparison of signal-to-noise of myoelectric filters for prosthesis control”. J. Rehab. Res. Dev, vol.4, nro. 29, 1992.
[36] Merletti, R., Parker, P., Akay, M. “Electromyography. Physiology, Engineering, and Noninvasive Applications”. Eds.: IEEE Press Series in Biomedical Engineering, 2004.
[37] Merlo, A., Farina, D. y Merletti, R. “A Fast and Reliable Technique for Muscle Activity Detection From Surface EMG Signals”. IEEE Trans. on Biomedical Engineering, vol. 50, nro. 3, pag. 316-323, marzo 2003.
[38] Micera, S., Sabatini, A., Dario, P. y Rossi, B. “A hybrid approach to EMG pattern analysis for classification of arm movements using statistical and fuzzy techniques”. Medical Engineering & Physics. vol. 21, pp 303-311, junio 1999.

TABERNIG, Carolina y otros I Comando y control de neuroprótesis…
[39] Patel, S., Ho, J., Kumar, R., Lai, K., Ahangar, B., Burgar, C., Scremin, A. “Changes in motoneuron excitability in hemiplegic subjects after passive exercise when using a robotic arm”. Archives of physical medicine and rehabilitation, vol. 87, nro. 9, pag. 1257-61, 2006.
[40] Pierrot-Deseilligny, E. y Mazevet, D. “The monosynaptic reflex: a tool to investigate motor control in humans. Interest and limits”. Neurophysiol Clin., vol. 30, pag. 67 -80, 2000.
[41] Popovic, D., Popovic. M., Sinkjær T. “Neurorehabilitation of Upper Extremities in Humans with Sensory-Motor Impairment”. Neuromod, vol. 5, nro. 1, pag. 54-67, 2002.
[42] Prat, J. “Biomecánica de la marcha humana normal y patológica”. Eds: Instituto de Biomecánica de Valencia, España, 1993.
[43] Sennel, S., Sorensen, F., Andersen, O. y Hansen, S. “Functional neuromuscular stimulation controlled by surface electromyographic signals produced by volitional activation of the same muscle: adaptive removal of the muscle response from the recorded EMG-signal”, IEEE Trans. on Rehab. Eng., vol. 5, nro. 2, pag. 195-206, 1997.
[44] Staude, G., Flachenecker, C., Daumer, M., Wolf, W. “Onset Detection in Surface Electromyographic Signals: A Systematic Comparison of Methods”. EURASIP Journal on Applied Signal Processing, vol. 2, pag. 67-81, 2001.
[45] Staude, G., Wolf, W. “Objective motor response onset detection in surface myoelectric Signals”. Medical Engineering & Physics, vol. 21, pag. 449-467, 1999.
[46] Surface Electromyography for the Non-Invasive Assessment of Muscles (SENIAM). Disponible en www.seniam.org/, asesado en mayo 2007.
[47] Tabernig, C., Rufiner, A., Schiaffino, L., Escobar, S. y Bonfils, E. “Sistema de Estimulación eléctrica funcional para bipedestación y marcha”. Proc. XVI Con. Anual Soc. Esp. Ing. Biom., pag. 397-399, 1998.
[48] Tabernig, C. y Acevedo, R. “M-wave elimination from surface electromyogram of electrically stimulated muscles using singular value decomposition: Preliminary results”. Medical Engineering & Physics, vol.30, nro. 6, pag. 800-803, Julio, 2008.
[49] Thorsen, R., Ferrarin, M. y Veltink, P. “Enhancement of Isometric Ankle Dorsiflexion by Automyoelectrically Controlled Functional Electrical Stimulation on Subjects with Upper Motor Neuron Lesions”. Neuromodulation, vol. 5, nro. 4, pag. 256-263, 2002.
[50] Wang, F. “Sensors, stimulators, and controllers in FNS: a case study with general discussion”. Phys. Meas. Med., pag. 1-22, 1993.
[51] Willemsen, A. “Lower extremity angle measurement with accelerometers - error and sensivity analisys”. IEEE Trans. Biol. Med. Eng., vol. 38, nro.12, pag. 1186-1193, 1991.
[52] Yuan, D., Zhang, Y. y Herzog, W. “The probability density function of vibromyographic and electromyographic signals for different levels of contraction of human quadriceps muscles“. Engineering in Medicine and Biology Society. Engineering Advances: New Opportunities for Biomedical Engineers. Proceedings of the 16th Annual International Conference of the IEEE, vol.1, pag. 351-352, 1994.
[53] Zecca, M., Micera, S., Carrozza, M., Dario, P. “Control of Multifunctional Prosthetic Hands by Processing the Electromyographic Signal“. Critical Reviews in Biomedical Engineering, vol. 30, pag. 459-485, 2002.
[54] Zehr, E. “Considerations for use of the Hoffmann reflex in exercise studies”. Eur. J. Appl. Physiol., vol. 86, pag. 455-468, 2002.
[55] Zunino, F., Escobar, S., Bonell, C. y Tabernig, C. “Estimulador eléctrico para la evocación del reflejo de Hoffmann”. Revista Argentina de Bioingeniería, vol 14, pp: 22-28, Junio, 2008.




![Neuroprótesis: Hacia un futuro de cuerpos cibernéticosfresno.ulima.edu.pe/sf/sf_bdfde.nsf/imagenes/105977FBB1325E100525756D... · [251] Neuroprótesis: Hacia un futuro de cuerpos](https://static.fdocuments.es/doc/165x107/5e70fb8f8fea0f49965d6a61/neuroprtesis-hacia-un-futuro-de-cuerpos-cibern-251-neuroprtesis-hacia.jpg)