Pim Monografia 4osem
63
UNIVERSIDADE PAULISTA ALEXANDRE DOS SANTOS SOUZA LEANDRO DE SOUZA RAIMUNDO LEONARDO PIRES LACERDA ALVES NILSON COSMO BARBOSA DOS SANTOS SUELEN TEXEIRA DOS SANTOS PROJETO INTEGRADOR MULTIDISCIPLINAR Projeto de Automação para uma Empresa de Pequeno / Médio Porte SÃO PAULO 2013
-
Upload
alexandre-dos-santos-souza -
Category
Documents
-
view
46 -
download
3
Transcript of Pim Monografia 4osem
-
UNIVERSIDADE PAULISTA
ALEXANDRE DOS SANTOS SOUZA
LEANDRO DE SOUZA RAIMUNDO
LEONARDO PIRES LACERDA ALVES
NILSON COSMO BARBOSA DOS SANTOS
SUELEN TEXEIRA DOS SANTOS
PROJETO INTEGRADOR MULTIDISCIPLINAR
Projeto de Automao para uma Empresa de Pequeno / Mdio Porte
SO PAULO
2013
-
ALEXANDRE DOS SANTOS SOUZA
LEANDRO DE SOUZA RAIMUNDO
LEONARDO PIRES LACERDA ALVES
NILSON COSMO BARBOSA DOS SANTOS
SUELEN TEIXEIRA DOS SANTOS
PROJETO INTEGRADOR MULTIDISCIPLINAR
Projeto de Automao para uma Empresa de Pequeno / Mdio Porte
Projeto Integrador Multidisciplinar para
obteno de nota para o terceiro e quarto
semestre do Curso de Tecnologia em
Automao Industrial, apresentado
Universidade Paulista UNIP.
Orientador: Professor Giovanni Rizzo
Junior
SO PAULO
2013
-
ALEXANDRE DOS SANTOS SOUZA RA: B32IHJ-5
LEANDRO DE SOUZA RAIMUNDO RA: B32HGH-5
LEONARDO PIRES LACERDA ALVES - RA: B5349F-5
NILSON COSMO BARBOSA DOS SANTOS RA: B393CJ-8
SUELEN TEIXEIRA DOS SANTOS RA: B34JAB-7
PROJETO INTEGRADOR MULTIDISCIPLINAR
Projeto de Automao para uma Empresa de Pequeno / Mdio Porte
Projeto Integrador Multidisciplinar para
obteno de nota para o terceiro e quarto
semestre do Curso de Tecnologia em
Automao Industrial, apresentado
Universidade Paulista UNIP.
Aprovao - Banca Examinadora:
________________________________ _____/_____/_____
Prof. Giovanni Rizzo Junior Universidade Paulista UNIP
________________________________ _____/_____/_____
Prof. _________________ Universidade Paulista - UNIP
________________________________ _____/_____/_____
Prof. _________________ Universidade Paulista UNIP
-
AGRADECIMENTOS
Agradecemos primeiramente a Deus que iluminou o nosso caminho durante
esta caminhada.
Ao nosso Orientador Professor Giovanni, agradecemos as cobranas,
exigncias, dinamismo, confiana e por acreditar em nossos potenciais ao longo
desse semestre.
A todos os Professores que nos auxiliaram durante o processo de
desenvolvimento do trabalho.
Aos nossos familiares, que com toda compreenso e carinho foram a base de
nossa formao.
-
RESUMO
Neste projeto do misturador de lquidos que nos foi proposto, por uma
empresa alimentcia para um novo produto, tivemos que desenvolver um sistema
automatizado para mistura de dois lquidos, conforme necessidade do cliente.
Iniciamos com a programao de um circuito simulado no software Proteus, onde foi
interligado a um microcontrolador PIC para execuo do mesmo que por sua vez foi
exemplificado as etapas atravs de figuras e um fluxo do processo.
O projeto inicia com a alimentao dos produtos nos tanques A e B liberados
por vlvulas de controle, que por sua vez encher um outro tanque (C) que aps
receber os lquidos inicia o processo de mistura e aquecimento atravs de uma
resistncia, ao chegar composio desejada, e acionado sistema de envase onde
acionar a esteira que posiciona o elemento a ser envasado. Este elemento aps
posicionado por meio de sensor de presena aciona sistema de travamento por
cilindro pneumtico onde est posicionado o bico de envase, para envasamento,
assim, finalizando o ciclo do processo.
Palavras-chave: Misturador Lquidos, Produto, Sistema, Automatizao,
Circuito, Fluxo, Processo, Envase, Alimentao, Aquecimento, Pneumtica.
-
ABSTRACT
We developed a system for a food company who want to expand their
segments. The segment chosen by the company is in the business of sports drinks.
An automated system for mixing two liquids was developed as customer need. We
started with programming a simulated circuit in Proteus software, which was
connected to a PIC microcontroller to run the same which in turn was exemplified
through the steps of figures and a process flow.
The project starts with feeding products in tanks A and B released by control
valves, which in turn will fill another tank (C) after receiving the liquid begins the
process of mixing and heating via a resistor , to get the composition desired , fires
filling system where the trigger mat positioning element to be filled. This element after
positioned by means of the presence sensor activates locking system by pneumatic
cylinder which is positioned the filling spout to filling, thus completing the process
cycle.
Keywords: Mixer, Product, System, Automation, Process, Flow, Circuit,
Filling, Food, Heating, Pneumatics.
-
SUMRIO
1. INTRODUO ...................................................................................... 9
2. APRESENTAO ............................................................................... 10
2.1. Objetivos Especficos ....................................................................... 11
3. PROJETO............................................................................................ 12
3.1. Fluxograma de processo .................................................................. 12
3.2. Diagrama fsico do processo ............................................................ 16
3.2.1. Alimentao - Tanques A e B ........................................................... 18
3.2.2. Mistura Tanque C ............................................................................ 19
3.2.3. Envase ................................................................................................ 21
3.3. Desenvolvimento ............................................................................... 22
4. MAQUINRIO ..................................................................................... 32
4.1. Motores Eltricos ............................................................................... 32
4.2. Inversor de Frequncia ..................................................................... 33
4.3. Encoder .............................................................................................. 35
4.3.1. Encoder Incremental ......................................................................... 36
4.4. PT100 .................................................................................................. 37
4.5. Atuadores Pneumticos .................................................................... 38
4.5.1. Atuadores Pneumticos Lineares Duplos Ao ............................. 39
4.5.2. Vlvula direcional 2 posies 5 vias acionamento por solenoide 39
4.6. Vlvula de Envase controlada .......................................................... 42
4.7. Sensores Capacitivos ....................................................................... 42
4.8. Sensor Flutuante ............................................................................... 43
4.9. Motoredutor ........................................................................................ 44
4.10. Resistncia ......................................................................................... 45
5. REFERENCIAL TERICO .................................................................. 47
5.1. Controle .............................................................................................. 47
5.2. Pneumtica e Hidrulica ................................................................... 47
5.3. Desenho Assistido por Computador................................................ 49
5.4. Microcontroladores ........................................................................... 50
5.5. Instrumentao .................................................................................. 50
6. APLICAO DAS MATRIAS ........................................................... 52
6.1. Aplicao De Instrumentao ........................................................... 52
-
6.2. Aplicao Microcontrolador ............................................................. 52
6.3. Aplicao Desenho Assistido Por Computador ............................. 53
6.4. Aplicao Pneumtica Hidrulica .................................................... 53
6.5. Aplicao Controle ............................................................................ 53
7. CONCLUSO ...................................................................................... 55
8. REFERNCIAS BIBLIOGRFICAS ................................................... 56
9. ANEXO ................................................................................................ 57
-
9
1. INTRODUO
A automao industrial tem um papel importante no desenvolvimento da
indstria, devido ao crescimento da produo de produtos surge a necessidade de
evoluo e aprimoramento das tecnologias, sendo assim, necessrio criar
mtodos automatizados para obter produtos em grandes quantidades garantido um
produto e um sistema de qualidade.
Neste projeto apresentaremos o processo de fabricao de isotnicos de uma
empresa de pequeno porte pertencente ao ramo de alimentcia deseja lanar novos
produtos, onde surge a necessidade de criar um sistema de automao que garanta
a qualidade de seus produtos.
Durante o desenvolvimento do processo de automatizao encontraremos a
aplicao das disciplinas estudadas ao longo do curso, onde a busca de ferramentas
e conceitos atravs de referncias nos d o conhecimento referente a aplicabilidade
da automao.
-
10
2. APRESENTAO
Uma empresa que atua no ramo alimentcio deseja ampliar seus produtos
para um segmento ainda no atuante, e o produto escolhido para o investimento so
bebidas isotnicas, querendo atacar aos jovens que praticam esportes e que procura
uma qualidade de vida mais saudvel.
Para isso surge a necessidade de desenvolver um sistema automatizado,
mas o cliente j foi ao mercado para pesquisas de mquinas j existentes, porm os
oramentos foram reprovados pela diretoria devido ao custo alto fora do oramento
atual.
Portanto ser necessrio desenvolver um sistema de automao que garanta
a qualidade do produto e que tenha um custo vivel dentro do oramento da
empresa.
O sistema atual composto por dois tanques A e B com lquidos distintos que
ser dosado para um terceiro tanque, onde ser misturado e aquecido dentro de
uma temperatura ideal, ao trmino o liquido ser envasado nas garrafas e
transportado ao fim do processo. O sistema ser composto por vlvulas solenoides,
sensores e um microcontrolador.
Abaixo segue os requisitos para o desenvolvimento:
- Automatizao do sistema de controle de temperatura dos tanques;
- Automatizao da mquina enchedora;
- Nesta mquina devero ser aplicados conceitos de pneumtica para o sistema de
dosagem e envase no frasco;
- Automatizao da esteira transportadora entre a mquina de enchimento e a
estao de fechamento do frasco. Controle da velocidade da esteira, conforme a
velocidade da enchedora;
- Nesta etapa devero ser aplicados conceitos de microcontroladores para
velocidade da esteira;
- Automatizao da estao de expedio com um sistema de pega do frasco e
colocao do mesmo em caixa de embalagem;
- O sistema dever ser desenhado em AutoCAD, ou similar;
- O trabalho escrito dever conter um captulo com uma anlise do contedo de
cada disciplina cursada ao longo do semestre e sua contribuio para o
-
11
desenvolvimento do PIM - TODAS as disciplinas, obrigatoriamente, precisam ser
utilizadas;
- O trabalho tambm dever conter um estudo para iniciar um empreendimento na
rea de projetos em automao industrial, bem como apresentar informaes sobre
o controle de qualidade utilizado na produo desses projetos.
2.1. Objetivos Especficos
- Identificar na prtica os principais processos industriais;
- Argumentar e discutir as tecnologias e os principais elementos dos circuitos
eltricos utilizadas nos sistemas de automao;
- Identificar o uso de bases tericas de fsica, clculo e programao em projetos de
automao industrial;
- Fomentar o hbito de trabalho em equipe e execuo de projetos envolvendo
mltiplas disciplinas.
-
12
3. PROJETO
Atendendo o objetivo proposto o projeto foi desenvolvido utilizando
ferramentas de qualidade que ajudasse no detalhamento do sistema e de todo o
circuito lgico. O sistema do misturador foi automatizado utilizando recursos e
conhecimentos adquiridos em sala de aula, pesquisas e de experincias pessoais.
3.1. Fluxograma de processo
O fluxograma uma representao do processo que utiliza smbolos grficos
para descrever passo a passo a natureza e o fluxo deste processo. O objetivo
mostrar de forma descomplicada o fluxo das informaes e elementos, alm da
sequncia operacional que caracteriza o trabalho que est sendo executado.
Dentro do projeto o fluxograma tem o objetivo de traar as operaes para
facilitar a visualizao durante a programao e execuo do sistema desde a
alimentao at o envase das garrafas. Cada etapa foi caracterizada com uma
figura, nas etapas de operao foi usada a figura de processo, a instrumentao
simbolizada com a figura de deciso, onde tem o papel de questionar o fluxo do
processo para continuar ou retornar, podendo acionar uma etapa ou retornar at
quando o processo for concludo.
O fluxograma se inicia com a alimentao dos lquidos nos tanques A e B, a
alimentao identificada com a figura de inicio e fim onde a acionada atravs
do sensor de nvel dos tanques A e B que est identificado com a figura de
deciso, ele aciona com a seguinte pergunta Nvel completo?, caso esteja com o
nvel baixo SIM a alimentao do lquido nos tanques ser acionada, caso contrrio
No ela no ser acionada.
Com lquido nos tanques A e B o prximo passo do fluxograma o processo
de dosagem A e B, nesta etapa o tanque C ir ser alimentado na dosagem correta
com os respectivos lquidos at atingir o nvel mximo suportado pelo tanque, o
sensor de nvel com o smbolo deciso receber o sinal atravs da pergunta Nvel
completo?, caso o nvel mximo seja No a dosagem continuar, e caso seja
Sim a resistncia e o motor do misturador sero ligados, no processo de ligar a
resistncia h um sensor de temperatura onde este ir ler a temperatura atual, no
fluxograma foi representado com a figura de deciso com a seguinte pergunta
-
13
Chegou temperatura?, caso Sim a temperatura chegue ao ideal ser acionado
o temporizador, caso No o fluxo ir retornar para que seja acionada a resistncia
mantendo a temperatura sempre conforme o determinado at o tempo da mistura
chegar ao fim.
Com o tempo de mistura concludo a esteira ser acionada, e o sensor de
presena representado pela figura de deciso questionar Tem garrafa?, caso
tenha garrafa Sim, desligar a esteira, acionar o bico pneumtico e ligar o
processo de envase do liquido dentro da garrafa, onde ser controlado por um
temporizador, figura de deciso, com o tempo de envase esgotado ir desligar a
vlvula de envase, o bico pneumtico ir retornar.
Enquanto houver lquido no tanque C o processo de envase ir se repetir, a
figura de deciso no fim do processo ir questionar Tem nvel no misturador?,
caso seja Sim a esteira ser acionada prosseguir o processo, caso no tenha
nvel e seja No, a resistncia e o motor sero desligados, e voltar ao processo
de dosagem dos lquidos nos tanque A e B, para que uma nova mistura seja
realizada.
-
14
Figura 3.1.1 Fluxograma do processo Parte 1 de 2
-
15
Figura 3.1.2 - Fluxograma do processo Parte 2 de 2
-
16
3.2. Diagrama fsico do processo
O diagrama um desenho que utiliza de simbologia especifica, e representa
graficamente a aplicao dos componentes do sistema de forma geral, para todos os
tipos de equipamento, para as vlvulas e os instrumentos existem convenes ou
smbolos grficos normalizados, as setas indicativas mostram o sentido do fluxo do
processo no sistema.
Para o projeto o diagrama de processo foi essencial para que tivssemos
uma visualizao do layout fsico do sistema com seus componentes visando maior
clareza das informaes, e assim a partir do diagrama dimensionar genericamente
seus componentes e dispositivos.
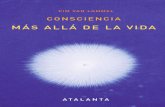
Podemos dividir o sistema em algumas etapas para exemplificar e melhor
entender (Figura 3.2.1):
-
17
Figura 3.2.1 Diagrama Fsico do processo
-
18
3.2.1. Alimentao - Tanques A e B
Estes tanques so alimentados por gravidade atravs de um sistema qualquer
conforme o sentido do fluxo da alimentao, cada tanque receber um respectivo
lquido para abastecer o tanque C da mistura, conforme figura abaixo esses tanques
alimentado e controlado pelos componentes abaixo (Figura 3.2.1.1):
Figura: 3.2.1.1 - Diagrama fsico do processo - Etapa de alimentao
Item 1. Vlvula de bloqueio tipo gaveta solenoide: Esta vlvula tem a funo de
alimentar os tanques com os respectivos lquidos ou bloquear a passagem dos
lquidos quando receberem o sinal dos sensores de nvel do tipo flutuante de que o
tanque est com o nvel abaixo do mximo.
Item 2. Sensor de nvel tipo flutuador: Este sensor atravs do movimento do
flutuador envia um sinal de sada alterando seu estado aberto ou fechado do seu
contato, acionando a vlvula caso o tanque se encontre com o lquido no nvel
abaixo do mximo.
Item 3. Vlvula esfrica manual: Esta vlvula tem a funo de esgotar o lquido do
tanque em caso de emergncia ou no caso de limpeza do tanque.
-
19
3.2.2. Mistura Tanque C
Este tanque alimentado por gravidade pelos tanques A e B com os dois
tipos de lquidos, que sero responsveis por fazer a mistura dos lquidos para o
processo final de dosagem das garrafas. Neste tanque h um misturador operado
por um moto redutor que ir realizar a mistura dos lquidos sobre o aquecimento,
conforme figura abaixo este tanque ser controlado e operado pelos seguintes
componentes (Figura 3.2.2.1):
Item 4. Vlvula de bloqueio tipo gaveta solenoide: So duas vlvulas nesta etapa e
estas vlvulas tem a funo de alimentar o tanque do misturador com os lquidos ou
bloquear a passagem dos lquidos quando receberem o sinal dos sensores
capacitivos de que o tanque est no nvel mximo ou no nvel mnimo.
Item 5. Moto redutor: Este dispositivo mecnico tem a funo de reduzir a velocidade
do motor aumentando-se o torque, no sistema ele tem a funo principal de fornecer
o movimento mecnico ou rotao ao eixo do misturador para misturar os lquidos
at a mistura chegar no ponto ideal. O motor ser acionado pelo sensor de nvel
mximo e o desligamento do motor ser realizado por um temporizador.
Figura: 3.2.2.1 - Diagrama fsico dos componentes - Etapa de mistura
-
20
Item 6. Inversor de frequncia: Este componente tem a funo de transformar a
energia eltrica CA fixa em CA varivel controlando a potncia, no nosso sistema ele
ser utilizado para controlar a velocidade de rotao do moto-redutor do misturador.
Item 7. Sensor de nvel do tipo capacitivo: Estes sensores servem para deteco
lquida ou slida atravs de uma variao de uma grandeza sobre um valor nominal,
no nosso sistema esse tipo de sensor ser utilizado para o monitoramento de nvel
do lquido do tanque C do misturador, sero instalados dois sensores ao lado de
uma rgua onde um sensor monitora o nvel mximo e o outro monitora o nvel
mnimo.
Item 8. Misturador: O misturador um dos principais componentes do sistema tem
como funo de promover uma mistura dos lquidos do tanque A e B de uma forma
homognea atravs da movimentao mecnica, ele composto por uma hlice
fixada ao um eixo motriz sobre um moto redutor controlado por um inversor de
frequncia, onde o tempo da mistura ser controlada por um temporizador.
Item 9. Resistncia: Este componente tem a funo elevar a temperatura de
aquecimento do tanque durante o processo de mistura fazendo com que os lquidos
misturados cheguem ao ponto ideal de fuso.
Item 10. Sensor de temperatura: Este componente atravs da variao da
resistncia de um condutor metlico em funo da temperatura ir monitorar a
temperatura do lquido misturado no tanque.
-
21
3.2.3. Envase
Este processo tem o objetivo de enviar o lquido misturado pelo tanque C com
preciso dentro das garrafas, este processo conforme a figura abaixo composto e
controlado pelos seguintes componentes (Figura 3.2.3.1):
Figura: 3.2.3.1 - Diagrama fsico dos componentes - Etapa de envase
Item 11. Vlvula de bloqueio tipo gaveta solenoide: Esta vlvula tem a funo de
alimentar as garrafas com o lquido ou bloquear a passagem do lquido quando
receberem o sinal do sensor capacitivo de que tem garrafa disponvel para ser
envasado.
Item 12. Bico pneumtico: O bico pneumtico composto por um dispositivo
mecnico ajustvel e um cilindro pneumtico linear de dupla ao embolo magntico
controlado por uma vlvula 5/2 vias, acionado pelo sensor capacitivo que
reconhece a presena da garrafa e aciona o cilindro que fazendo com que o bico se
adapte a entrada da garrafa. No fim de curso do pisto um sensor indutivo aciona a
vlvula para o envase do lquido na garrafa, onde o tempo de envase controlado
por um programa que ao terminar fecha a vlvula e o pisto retorna ao estado inicial.
Item 13. Sensor de presena do tipo capacitivo: Este sensor serve para deteco
lquida ou slida atravs de uma variao de uma grandeza sobre um valor nominal,
-
22
nesta etapa este sensor ter a funo de detectar a garrafa na esteira no local
correto para acionar o bico pneumtico para o envase.
Item 14. Encoder: Este dispositivo transforma o movimento rotatrio em um trem de
impulsos eltricos servindo para determinar o deslocamento linear das garrafas na
esteira at o ponto de envase.
Item 15. Moto redutor: Este dispositivo mecnico tem a funo de reduzir a
velocidade do motor aumentando-se o torque, no sistema ele tem a funo principal
de misturar os lquidos at a mistura chegar no ponto ideal. O motor ser acionado
pelo sensor de nvel mximo e o desligamento do motor ser realizado por um
temporizador.
Item 16. Inversor de frequncia: Este componente tem a funo de transformar a
energia eltrica CA fixa em CA varivel controlando a potncia. Nesta etapa ele ser
o responsvel em controlar a velocidade do moto redutor da esteira.
Item 17. Esteira: Este componente tem a funo de transportar as garrafas vazias de
liquido do ponto inicial at o fim do processo onde as garrafas j estaro cheias.
3.3. Desenvolvimento
Para obtermos uma visualizao bsica do processo, foi proposto pela
equipe, o desenvolvimento de um prottipo em software de simulao. O mesmo
tm como finalidade, simular alguns componentes, e proporcionar uma visualizao
grfica do funcionamento do sistema.
Foi desenvolvido um circuito eletrnico, com leds e botes sobrepostos em
uma imagem grfica. Para o desenvolvimento do circuito eletrnico, foi utilizado o
software Labcenter PROTEUS ISIS, que conta com uma vasta biblioteca de
componentes e permite a simulao, inclusive em tempo real, de microcontroladores
e outros componentes. Foi tambm, elaborada uma rotina de programao em C,
acompanhando e tomando decises sobre todas as variveis do processo em
questo. Foi utilizado o software Microchip MPLAB IDE, com o compilador C18.
-
23
O microcontrolador utilizado, foi o PIC18F4550, que foi escolhido por ser de
fcil aquisio no comrcio, preo acessvel, encapsulamento PDIP e possuir
perifricos que permitem o desenvolvimento das mais modernas e diversas
solues, tais como, comunicao USB.
Cada componente do sistema foi emulado no software, com seu
correspondente eletrnico. Para um melhor entendimento, foi elaborada uma tabela
de referncia cruzando os componentes fsicos com seus correspondentes
eletrnicos (tabela 3.3.1).
DESCRIO FSICO SINTICO TAG
VALVULA DE ALIMENTAO DO TANQUE A VLVULA SOLENIDE LED VM Y1
VALVULA DE ALIMENTAO DO TANQUE B VLVULA SOLENIDE LED VM Y2
VLVULA DOSADORA DO PRODUTO A VLVULA SOLENIDE LED VM Y3
VLVULA DOSADORA DO PRODUTO B VLVULA SOLENIDE LED VM Y4
MOTOR DO MISTURADOR DO TANQUE C MOTOR COM INVERSOR LED VM M1
RESIST. DE AQUE. TANQUE C RESISTNCIA LED VM R1
RESIST. DE AQUEC. TANQUE C N/A LED VM L23
VALVULA DE ENVASE VLVULA SOLENIDE LED VM Y5
BICO DE ENVASE - RECUO ATUADOR PNEUMTICO
(SOLENIDE) LED VM Y6
BICO DE ENVASE - AVANO ATUADOR PNEUMTICO
(SOLENIDE) LED VM Y7
MOTOR DA ESTEIRA MOTOR COM INVERSOR LED VM M2
SENSOR DE NVEL SUP. DO TANQUE A SENSOR TIPO FLUTUANTE BOTO S1
SENSOR DE NVEL SUP. DO TANQUE B SENSOR TIPO FLUTUANTE BOTO S2
SENSOR DE NVEL SUP. DO TANQUE C SENSOR TIPO CAPACITIVO BOTO S3
SENSOR DE NVEL INF. DO TANQUE C SENSOR TIPO CAPACITIVO BOTO S4
SENSOR DE TEMP. DO TANQUE C SENSOR PT100 BOTO S5
SENSOR PRESENA GARRAFA SENSOR TIPO CAPACITIVO BOTO S6
BOTO LIGA BOTO BOTO S7
Tabela 3.3.1 Tabela de comparao de componentes x correspondente
Como podemos observar na tabela acima, na primeira coluna, temos a
descrio de funo dos componentes fsicos. Na segunda coluna temos o tipo de
atuador ou sensor que ser instalado. Na terceira coluna temos o correspondente
-
24
eletrnico que ser utilizado na simulao. Na quarta coluna temos um TAG
correspondente para cada componente, com o objetivo de facilitar a sua leitura no
diagrama.
Foram utilizados leds como visualizadores grficos dos nveis dos tanques.
Para tal, devido a quantidade de pinos disponveis no PIC, foi necessria a insero
de contadores de dcada (CI 4017) com portas AND associadas sua sada, para
acionamento dos leds. Foi elaborada uma tabela para o entendimento desta seo
(tabela 3.3.2).
DESCRIO COMPONENTE SINTICO TAG
NVEL DO TANQUE A CONTADOR DE DCADAS CI4017 C1
NVEL DO TANQUE B CONTADOR DE DCADAS CI4017 C2
FLUXO PRODUTO A CONTADOR DE DCADAS CI4017 C3
NVEL DO PRODUTO A NO TANQUE C CONTADOR DE DCADAS CI4017 C4
FLUXO PRODUTO B CONTADOR DE DCADAS CI4017 C5
NVEL DO PRODUTO B NO TANQUE C CONTADOR DE DCADAS CI4017 C6
Tabela 3.3.2 Tabela de descrio dos contadores de dcada
Como podemos observar na tabela acima, a primeira coluna, mostra a funo
grfica dos leds. Na segunda e terceira coluna, mostrado o componente que est
sendo acionado pelos pinos do PIC bem como o correspondente eletrnico que ser
utilizado na simulao. Na quarta coluna temos um TAG correspondente para cada
componente, com o objetivo de facilitar a sua leitura no diagrama.
-
25
CI4017 DESCRIO FSICO SINTICO TAG
C1
NVEL 1 DO TANQUE A N/A LED VM L1
NVEL 2 DO TANQUE A N/A LED VM L2
NVEL 3 DO TANQUE A N/A LED VM L3
NVEL 4 DO TANQUE A N/A LED VM L4
C2
NVEL 1 DO TANQUE B N/A LED VM L5
NVEL 2 DO TANQUE B N/A LED VM L6
NVEL 3 DO TANQUE B N/A LED VM L7
NVEL 4 DO TANQUE B N/A LED VM L8
C3
FLUXO 1 PRODUTO A N/A LED VM L9
FLUXO 2 PRODUTO A N/A LED VM L10
FLUXO 3 PRODUTO A N/A LED VM L11
C4
NVEL 1A DO TANQUE C N/A LED VM L12
NVEL 2A DO TANQUE C N/A LED VM L13
NVEL 3A DO TANQUE C N/A LED VM L14
NVEL 4A DO TANQUE C N/A LED VM L15
C5
FLUXO 1 PRODUTO B N/A LED VM L16
FLUXO 2 PRODUTO B N/A LED VM L17
FLUXO 3 PRODUTO B N/A LED VM L18
C6
NVEL 1B DO TANQUE C N/A LED VM L19
NVEL 2B DO TANQUE C N/A LED VM L20
NVEL 3B DO TANQUE C N/A LED VM L21
NVEL 4B DO TANQUE C N/A LED VM L22
Tabela 3.3.3 Tabela de descrio das sadas dos contadores de dcada
Na sada dos contadores de dcada, como dito anteriormente, foram ligados
as suas portas, leds, associados as portas AND. Podemos visualizar acima (tabela
3.3.3), onde cada led dever ser conectado.
Foi tambm elaborada uma tabela da verdade, onde possvel visualizar o
acionamento de cada sada de cada contador (tabela 3.3.4). Nesta tabela, a primeira
coluna est representando o tempo, sendo X a multiplicao pelo tempo de clock, ou
seja, se o clock for de 0,5s, multiplicamos por 1, ser igual a 0,5s cada clock. Na
segunda at a dcima primeira, esto sendo representadas as sadas do CI, e seu
acionamento em cada tempo. Nas colunas seguintes, esto sendo mostradas quais
leds esto sendo acionados por cada sada, em cada instante.
-
26
SADAS C1 LEDS
SADAS C2 LEDS
t S0
S1
S2
S3
S4
S5
S6
S7
S8
S9
L1 L2 L3 L4
t S0
S1
S2
S3
S4
S5
S6
S7
S8
S9
L5 L6 L7 L8
1X
1 0 0 0 0 0 0 0 0 0 0 0 0 0
1X
1 0 0 0 0 0 0 0 0 0 0 0 0 0
2
X 0 1 0 0 0 0 0 0 0 0 1 0 0 0
2
X 0 1 0 0 0 0 0 0 0 0 1 0 0 0
3X
0 0 1 0 0 0 0 0 0 0 1 1 0 0
3X
0 0 1 0 0 0 0 0 0 0 1 1 0 0
4
X 0 0 0 1 0 0 0 0 0 0 1 1 1 0
4
X 0 0 0 1 0 0 0 0 0 0 1 1 1 0
5X
0 0 0 0 1 0 0 0 0 0 1 1 1 1
5X
0 0 0 0 1 0 0 0 0 0 1 1 1 1
6X
0 0 0 0 0 1 0 0 0 0 1 1 1 0
6X
0 0 0 0 0 1 0 0 0 0 1 1 1 0
7X
0 0 0 0 0 0 1 0 0 0 1 1 0 0
7X
0 0 0 0 0 0 1 0 0 0 1 1 0 0
8X
0 0 0 0 0 0 0 1 0 0 1 0 0 0
8X
0 0 0 0 0 0 0 1 0 0 1 0 0 0
SADAS C3 LEDS
SADAS C4 LEDS
t S
0
S
1
S
2
S
3
S
4
S
5
S
6
S
7
S
8
S
9 L9
L1
0
L1
1
t S
0
S
1
S
2
S
3
S
4
S
5
S
6
S
7
S
8
S
9
L1
2
L1
3
L1
4
L1
5
1X
1 0 0 0 0 0 0 0 0 0 0 0 0
1X
1 0 0 0 0 0 0 0 0 0 0 0 0 0
2X
0 1 0 0 0 0 0 0 0 0 1 0 0
2X
0 1 0 0 0 0 0 0 0 0 1 0 0 0
3X
0 0 1 0 0 0 0 0 0 0 0 1 0
3X
0 0 1 0 0 0 0 0 0 0 1 1 0 0
4X
0 0 0 1 0 0 0 0 0 0 0 0 1
4X
0 0 0 1 0 0 0 0 0 0 1 1 1 0
5
X 0 0 0 0 1 0 0 0 0 0 1 1 1 1
6X
0 0 0 0 0 1 0 0 0 0 1 1 1 0
7X
0 0 0 0 0 0 1 0 0 0 1 1 0 0
8X
0 0 0 0 0 0 0 1 0 0 1 0 0 0
SADAS C5 LEDS
SADAS C6 LEDS
t S0
S1
S2
S3
S4
S5
S6
S7
S8
S9
L16
L17
L18
t S0
S1
S2
S3
S4
S5
S6
S7
S8
S9
L19
L20
L21
L22
1
X 1 0 0 0 0 0 0 0 0 0 0 0 0
1
X 1 0 0 0 0 0 0 0 0 0 0 0 0 0
2X
0 1 0 0 0 0 0 0 0 0 1 0 0
2X
0 1 0 0 0 0 0 0 0 0 1 0 0 0
3
X 0 0 1 0 0 0 0 0 0 0 0 1 0
3
X 0 0 1 0 0 0 0 0 0 0 1 1 0 0
4X
0 0 0 1 0 0 0 0 0 0 0 0 1
4X
0 0 0 1 0 0 0 0 0 0 1 1 1 0
5X
0 0 0 0 1 0 0 0 0 0 1 1 1 1
6
X 0 0 0 0 0 1 0 0 0 0 1 1 1 0
7X
0 0 0 0 0 0 1 0 0 0 1 1 0 0
8
X 0 0 0 0 0 0 0 1 0 0 1 0 0 0
Tabela 3.3.4 Tabelas da verdade dos contadores de dcada
-
27
Com base nestas informaes foi possvel desenvolver um circuito eletrnico,
para utilizarmos na simulao. Para facilitar a visualizao do diagrama, foram
utilizados recursos de referncia cruzada, onde so utilizados conectivos de sada e
entrada, ocultando as linhas do diagrama.
Figura 3.3.1 Diagrama eletrnico 1
-
28
Na figura acima, podemos ver o circuito do PIC, dos contadores de dcada, e
as portas lgicas (figura 3.3.1).
Figura 3.3.2 Diagrama eletrnico 2
No circuito acima (Figura 3.3.2), podemos visualizar os resistores para queda
de tenso dos leds, e os resistores de pull-up para as entradas digitais do PIC.
-
29
Figura 3.3.3 Diagrama eletrnico 2
No circuito acima (Figura 3.3.3), podemos visualizar os leds e botes
utilizados, bem como um mostrador grfico, para melhor compreendermos o
sistema.
Toda lgica para a programao do PIC, foi baseada no funcionamento real
do processo, e para facilitar a compreenso, foram adicionados s linhas de cdigo,
comentrios, explicando e detalhando cada funo.
Para facilitar o entendimento do programa, foram utilizados tambm,
mnemnicos, que servem para facilitar a programao, reduzindo nomes extensos
-
30
de variveis. Podemos observar na tabela seguinte como cada componente foi
conectado a cada pino do PIC (tabela 3.3.5).
ITEM PORT PINO TIPO SINAL MNEMONICO DESCRIO SINTICO TAG
1 A 0 SADA DIGITAL VALVULA1 VALVULA DE ALIMENTAO DO TANQUE A LED VM Y1
2 A 1 SADA DIGITAL VALVULA2 VALVULA DE ALIMENTAO DO TANQUE B LED VM Y2
3 A 2 SADA DIGITAL VALVULA3 VLVULA DOSADORA DO PRODUTO A LED VM Y3
4 A 3 SADA DIGITAL VALVULA4 VLVULA DOSADORA DO PRODUTO B LED VM Y4
5 A 5 SADA DIGITAL MOTOR1 MOTOR DO MISTURADOR DO TANQUE C LED VM M1
6 B 0 SADA DIGITAL RESISTENCIA1 RESISTNCIA DE AQUECIMENTO TANQUE C LED VM R1
7 B 1 SADA DIGITAL RESISTENCIA2 RESISTNCIA DE AQUECIMENTO TANQUE C LED VM L23
8 B 2 SADA DIGITAL VALVULA5 VALVULA DE ENVASE LED VM Y5
9 B 3 SADA DIGITAL SOLENOIDE1 BICO DE ENVASE - RECUO LED VM Y6
10 B 4 SADA DIGITAL SOLENOIDE2 BICO DE ENVASE - AVANO LED VM Y7
11 B 5 SADA DIGITAL MOTOR2 MOTOR DA ESTEIRA LED VM M2
12 C 0 ENTRADA DIGITAL SENSOR1 SENSOR DE NVEL SUPERIOR DO TANQUE A BOTO S1
13 C 1 ENTRADA DIGITAL SENSOR2 SENSOR DE NVEL SUPERIOR DO TANQUE B BOTO S2
14 C 2 ENTRADA DIGITAL SENSOR3 SENSOR DE NVEL SUPERIOR DO TANQUE C BOTO S3
15 C 4 ENTRADA DIGITAL SENSOR4 SENSOR DE NVEL INFERIOR DO TANQUE C BOTO S4
16 C 5 ENTRADA DIGITAL SENSOR5 SENSOR DE TEMPERATURA DO TANQUE C BOTO S5
17 C 6 ENTRADA DIGITAL SENSOR6 SENSOR PRESENA GARRAFA BOTO S6
18 C 7 ENTRADA DIGITAL BOTAO1 BOTO LIGA BOTO S7
19 D 0 SADA DIGITAL NIVEL1A NVEL DO TANQUE A CI4017 C1
20 D 1 SADA DIGITAL NIVEL1B NVEL DO TANQUE B CI4017 C2
21 D 2 SADA DIGITAL FLUXO1A FLUXO PRODUTO A CI4017 C3
22 D 3 SADA DIGITAL NIVEL1AC NVEL DO PRODUTO A NO TANQUE C CI4017 C4
23 D 4 SADA DIGITAL FLUXO1B FLUXO PRODUTO B CI4017 C5
24 D 5 SADA DIGITAL NIVEL1BC NVEL DO PRODUTO B NO TANQUE C CI4017 C6
Tabela 3.3.5 Tabela de ligao do PIC
Com base nas informaes do processo, dos componentes a serem ligados, e
peculiaridades da simulao, foi possvel desenvolver o programa, observando
sempre a padronizao da escrita, utilizando o recurso de indentao, que serve
para ressaltar a estrutura do cdigo de forma que se entenda de forma mais concisa
o que est sendo escrito e lido. Foram usados tambm comentrios, em cada linha
do cdigo, afim de explicar e facilitar o entendimento do mesmo. O cdigo na ntegra
est disponvel no final do trabalho, na seo ANEXO. Abaixo segue um print-screen
-
31
da tela de programao, para termos uma visualizao do ambiente de
programao.
Figura 3.3.4 Tela de programao
-
32
4. MAQUINRIO
Constituda por um conjunto de ferramentas, cada qual referente a uma
fase de todo o processo de beneficiamento dos lquidos. Ressalva-se que, na falta
de uma dessas fases, todo o processo fica comprometido.
4.1. Motores Eltricos
Motor eltrico a mquina destinada a transformar energia eltrica em energia
mecnica. O motor de induo o mais usado de todos os tipos de motores, pois
combinam as vantagens da utilizao de energia eltrica - baixo custo, facilidade de
transporte, limpeza e simplicidade de comando - com sua construo simples, custo
reduzido, grande versatilidade de adaptao s cargas dos mais diversos tipos e
melhores rendimentos.
A maioria de motores eltricos trabalha pela interao entre
campos eletromagnticos, mas existem motores baseados em outros fenmenos
eletromecnicos, tais como foras eletrostticas. O princpio fundamental em que os
motores eletromagnticos so baseados que h uma fora mecnica em todo o fio
quando est conduzindo corrente eltrica imersa em um campo magntico. A fora
descrita pela lei da fora de Lorentz e perpendicular ao fio e ao campo magntico.
Em um motor giratrio, h um elemento girando, o rotor. O rotor gira porque os fios e
o campo magntico so arranjados de modo que um torque seja desenvolvido sobre
a linha central do rotor.
A maioria de motores magnticos giratria, mas existem tambm os tipos
lineares. Em um motor giratrio, a parte giratria (geralmente no interior) chamada
de rotor, e a parte estacionria chamada de extrator. O motor constitudo de
eletroms que so posicionados em ranhuras do material ferromagntico que
constitui o corpo do rotor e enroladas e adequadamente dispostas em volta do
material ferromagntico que constitui o extrator.
Os motores eltricos comerciais so do tipo de corrente contnua ou de corrente
alternada (Figura 4.1.1):
-
33
Figura: 4.1.1 - Motor Eltrico
4.2. Inversor de Frequncia
Um inversor de frequncia um dispositivo capaz de gerar uma tenso e
frequncia trifsicas ajustveis, com a finalidade de controlar a velocidade de um
motor de induo trifsico. Os inversores utilizam a converso CA-CC-CA. Os
inversores podem ser classificados pela sua topologia, dividida em trs partes,
sendo a primeira para o tipo de retificao de entrada, a segunda para o tipo de
controle do circuito intermedirio e a terceira para a sada. Independente da
topologia utilizada, temos uma tenso CC em nosso circuito intermedirio e
deveremos transformar em tenso CA para acionar o motor AC. Na Seo
Retificadora, seis diodos retificadores situados no circuito de entrada do inversor,
retificam a tenso trifsica da rede de entrada (L1, L2 e L3). A tenso DC resultante
filtrada pelo capacitor e utilizada como entrada para a Seo Inversora. Na Seo
Inversora, a tenso retificada DC novamente convertida em Trifsica AC. Os
transistores chaveiam vrias vezes por ciclo, gerando um trem de pulsos com
largura varivel senoidalmente (PWM). Esta sada de tenso pulsada, sendo
aplicada em um motor (carga indutiva), ir gerar uma forma de onda de corrente
bem prxima da senoidal atravs do enrolamento do motor. Didaticamente,
podemos separar o inversor em 4 blocos. O 1 bloco CPU (unidade central de
processamento) de um inversor de frequncia pode ser formada por um micro
processador ou por um micro controlador (PLC). Isso depende apenas do fabricante.
De qualquer forma, nesse bloco que todas as informaes (parmetros e dados do
-
34
sistema) esto armazenadas, visto que tambm uma memria est integrada a esse
conjunto. A CPU no apenas armazena os dados e parmetros relativos aos
equipamentos, como tambm executa a funo mais vital para o funcionamento do
inversor: Gerao dos pulsos de disparo, atravs de uma lgica de controle
coerente, para os IGBTs. O 2 bloco - IHM (interface Homem mquina). atravs
desse dispositivo que podemos visualizar o que est ocorrendo no inversor (display),
e parametriz-lo de acordo com a aplicao (teclas). O 3 bloco Interfaces. A
maioria dos inversores pode ser comandada atravs de dois tipos de sinais:
Analgicos ou digitais. Normalmente, quando queremos controlar a velocidade de
rotao de um motor AC no inversor, utilizamos uma tenso analgica de comando.
Essa tenso se situa entre 0 a 10 Vcc. A velocidade de rotao (RPM) ser
proporcional ao seu valor, por exemplo: 1 Vcc = 1000 RPM, 2Vcc = 2000 RPM. Para
inverter o sentido de rotao basta inverter a polaridade do sinal analgico (de 0
10 Vcc sentido horrio, e 10 a 0 Vcc sentido anti-horrio). Esse sistema mais
utilizado em maquinas ferramenta automtico, sendo que a tenso analgica de
controle proveniente do controle numrico computadorizado (CNC). Alm da
interface analgica, o inversor possui entradas digitais. Atravs de um parmetro de
programao, podemos selecionar qual entrada vlida (Analgicas ou digitais, ou
ambas). O 4 Bloco Etapa de potncia, constituda por um circuito retificador, que
alimenta (atravs de um circuito intermedirio chamado barramento DC), o circuito
de sada inversor ,mdulo IGBT (Figura 4.2.1):
-
35
Figura: 4.2.1 - Inversor de Frequncia
4.3. Encoder
O encoder um dispositivo usado na automao industrial que transforma o
movimento rotatrio em um trem de impulsos eltricos servindo para determinar o
deslocamento de movimentos circulares ou lineares. Existem dois tipos de
encoderds: Encoder Absoluto e Encoder Incremental. O encoder incremental gera
um pulso para cada unidade de deslocamento. O encoder absoluto gera um cdigo
binrio para cada unidade de deslocamento. Os dois sistemas usam a deteco
fotoeltrica onde o trem de pulsos gerado pela passagem da luz atravs de um
disco codificado firmemente encaixado ao eixo de um motor ou em dispositivos
mecnicos que transformem o deslocamento linear em deslocamento circular. Este
sistema pode ser usado para detectar a posio de distncias superior a 0,01mm.
A conexo do encoder com o eixo do motor deve ser feita atravs de um
sistema de amortecimento que consiste em uma espcie de mola que amortecem as
aceleraes e desaceleraes do sistema evitando danificar o disco codificado do
encoder, este componente chamado de acoplamento flexvel.
-
36
4.3.1. Encoder Incremental
Encoder incremental gera certo nmero de impulsos por revoluo. O nmero
de um impulso representa medida da distncia bsica movida (angular ou linear), um
circuito eletrnico dever contar o nmero de pulsos para determinar a distncia
total percorrida.
Este tipo de encoder por gerar somente uma seqncia de pulsos ele por si
s no informa a posio, este sinal precisa ser tratado por um controle eletrnico
para a determinao da posio.
Este controle dever ter uma rotina inicial que desloque o sistema mecnico
para uma posio de referncia zero, esta rotina dever ser acionada sempre que a
mquina for ligada, pois a contagem perdida quando a mquina desligada.
A posio do sistema deve ser calculada pelo sistema atravs da soma ou
subtrao dos pulsos recebidos pelo encoder para a determinao da distncia
percorrida, para facilitar esta funo o encoder absoluto pode possuir sadas
auxiliares para permitir ao sistema de controle detectar se o encoder esta girando no
sentido horrio ou anti-horrio, alm disto alguns tipos de encoders possuem uma
sada auxiliar que indica a posio zero graus do encoder. Estas sadas auxiliares
so chamadas de: ndex 0 para indicar a posio zero, A para gerar o pulso em
quadradura e B para gerar o pulso complementar de 90 graus em relao ao sinal
A.
Ao determinar ou trocar o encoder o tcnico dever levar em conta a tenso
de sada, abaixo esto relacionadas os principais nveis de tenso usados na
industrial:
5 v DC TTL para conexo circuitos do tipo TTL usando microcontroladores ou
computadores.
10-30 v DC para aplicao em circuitos com controle usando CLP.
Outro ponto importante a frequncia mxima de acionamento acima da qual
o sinal de sada j no apresenta uma forma de onda que possa ser processada
corretamente, em geral esta frequncia fica em torno de 300 kHz (Figuras 4.3.1 e
4.3.2):
-
37
Figura 4.3.1.1 - Diagrama De um Encoder incremental Figura 4.3.2.2 - Encoder Incremental
4.4. PT100
Os termmetros de resistncia so sensores de temperatura que se baseiam
na alterao de resistncia de metais pendentes da temperatura. Com estes
termmetros de resistncia utiliza-se uma camada de platina muito fina em cima de
um portador de cermica. Com uma temperatura de 0 C a resistncia nominal
destes elementos de medio de 100 Ohm.
O sensor PT-100 um tipo de termorresistncia que mede a temperatura pela
correlao da sua resistncia eltrica com a temperatura. A maioria destes sensores
feita a partir de uma espiral de fio fino montada num suporte cermico ou de vidro.
Possuem natureza frgil e necessitam ser instalados em bainhas protetoras.
O PT-100 geralmente considerado como o mais exato sensor de
temperatura industrial disponvel, alm de proporcionar excelente estabilidade e
repetibilidade. Os mtodos de utilizao de resistncias para medio de
temperatura iniciaram-se por volta de 1835, com Faraday, porm s a partir de 1925
comearam a ser elaboradas para utilizao em processos industriais.
Os PT-100s so instrumentos notveis. Porm medir temperaturas desde 14K
at 960C, com incertezas prximas de 1 mK. Podem ser repetidamente ciclados em
algumas centenas de graus e ainda passar no teste das melhores pontes de
resistncia. Poucos materiais podem ser tratados desta maneira e continuar estveis
(Figura 4.4.1):
-
38
Figura 4.4.1 - Sensor Temperatura PT 100
4.5. Atuadores Pneumticos
Atuadores so equipamentos capazes de converter energia hidrulica e/ou
pneumtica em movimento, esto divididos principalmente em lineares e rotativos e
so utilizados nas mais diversas aplicaes e segmentos.
-
39
4.5.1. Atuadores Pneumticos Lineares Duplos Ao
Os Atuadores Dupla Ao (DA) so utilizados em situaes onde se deseja
injetar ar comprimido para abrir e fechar o atuador. Cilindro de dupla ao um
cilindro (Figura 4.5.1.1), no qual a presso do fluido aplicada ao elemento mvel
em qualquer uma das direes, onde a fora aplicada pode ser ajustada tanto no
avano quanto no retorno.
A fora do ar comprimido movimenta o pisto do cilindro de dupla ao em
dois sentidos. Haver fora disponvel para a realizao de trabalho tanto no avano
como no retorno. O curso, em princpio ilimitado, mas deve ser considerada a
deformao por flexo e flambagem.
A vedao ocorre mediante o uso de um mbolo de dupla vedao. Nas
extremidades do cilindro h um dispositivo denominado amortecedor de final de
curso, cuja finalidade amortecer a pancada de final de curso.
Atuadores/Cilindros pneumticos so utilizados em diversas reas e
aplicaes no mercado de trabalho como, por exemplo:
Robtica;
Mquinas para conformao de metal;
Mquinas da indstria de plsticos e borracha;
Figura: 4.5.1.1 - Cilindro Pneumtico
4.5.2. Vlvula direcional 2 posies 5 vias acionamento por solenoide
-
40
Tem por funo orientar a direo do fluxo que o ar deve seguir, a fim de
realizar um trabalho proposto. Para um conhecimento perfeito de uma vlvula
direcional, devem-se levar em conta alguns aspectos como: Posio Inicial, Nmero
de posies, Nmeros de Vias, Tipo de Acionamento, Tipo de Retorno, Vazo.
Nmero de Posies:
a quantidade de manobras distintas que uma vlvula direcional pode
executar ou permanecer sob a ao de seu acionamento.
O numero de quadros representados na simbologia igual ao numero de
posies da vlvula, representando a quantidade de movimentos que executa atravs de
acionamento.
Figura: 4.5.2.1 - Diagramas de Posies da Vlvula
Nmero de Vias
o nmero de conexes que a vlvula possui. So consideradas como vias a
conexo de entrada de presso, conexes de utilizao e de escape.
Direo do Fluxo
Nos quadros representativos das posies, encontram-se smbolos distintos:
As setas indicam a interligao interna das conexes, mas no
necessariamente o sentido de fluxo.
Figura: 4.5.2.2 - Diagramas de interligao interna
Passagem bloqueada
-
41
Figura: 4.5.2.3 - Diagramas de interligao
Escape
Figura: 4.5.2.4 - Diagrama de interligao
Possui vrios tipos de acionar essas vlvulas como, por exemplo:
Acionamentos Musculares; Mecnicos; Pneumtico; Eltricos.
Quando eliminado o acionamento nessa vlvula ela retorna para o seu
estado de origem por uma mola, mais conhecida como: como vlvula de retorno por
mola.
Vlvulas solenoide so acionamentos e operao das vlvulas efetuada por
meio de sinais eltricos, provenientes de chaves fim de curso, pressostatos,
temporizadores, bobinas, etc.
So de grande utilizao onde a rapidez dos sinais de comando o fator
importante, quando os circuitos so complicados e as distncias so longas entre o
local emissor e o receptor.
A vlvula principal pode ser comandada por meio da eletricidade, a qual cria
um campo eletromagntico, causando o afastamento induzido do assento e
liberando a presso que aciona a vlvula.
Simbologia:
Figura: 4.5.2.5 - Vlvula 5 vias 2 posies.
-
42
4.6. Vlvula de Envase controlada
Variam a quantidade de energia, material ou Fluido, em resposta ao sinal
enviado pelo controlador, a fim de manter a varivel controlada em um valor ou faixa
de valores predeterminados.
A funcionalidade de uma Vlvula de Envase variar a rea de passagem do
fluido manipulado. A vlvula de Envase controla e manipula a vazo fluido por um
meio de sensores para alterar a sua abertura e atender as necessidades do
processo.
A vlvula s liberada quando um sensor de presena detecta que possui um
vasilhame no local onde ser injetado o fluido, aps essa deteco a vlvula
liberada por um determinado tempo at alcanar o nvel total de fluido determinado
no vasilhame.
Figura: 4.6.1 - Vlvulas de Envase
Possui variadas Vlvulas desse modelo e aplicao de envase e diversos
fabricantes dos mesmos, cada uma com as suas prprias caractersticas tcnicas e
valores de mercado.
4.7. Sensores Capacitivos
Um sensor ou transdutor capacitivo um condensador que exibe uma
variao do valor nominal da capacidade em funo de uma grandeza no eltrica,
uma vez que um condensador consiste basicamente num conjunto de duas placas
-
43
condutoras separadas por um dieltrico, as variaes no valor nominal da
capacidade podem ser provocadas por reduo da rea frente a frente e da
separao entre as placas, ou por variao da constante dieltrica do material.
Os sensores capacitivos permitem medir com grande preciso um grande
nmero de grandezas fsicas, tais como a posio, o deslocamento, a velocidade e a
acelerao linear ou angular de um objeto; a umidade, a concentrao de gases e o
nvel de lquidos ou slidos; a fora, o torque, a presso e a temperatura; mas
tambm detectar a proximidade de objetos, a presena de gua e de pessoas, etc.
Figura: 4.7.1 - Sensores Capacitivos
4.8. Sensor Flutuante
Detecta o nvel atravs de lquidos nos reservatrios, funciona atravs do
movimento do flutuador que gera um sinal magntico. Este sinal transmitido a um
sensor magntico. O sinal de sada um contato N.A. e N.F., dependendo da
posio em que for instalado, que pode acionar um contato auxiliar, um rele ou um
clp.
-
44
Figura: 4.8.1 - Sensores Flutuantes
4.9. Motoredutor
Nem sempre as unidades geradoras Moto redutores podem ser acopladas
diretamente em determinados dispositivos, algumas situaes podem ser
mencionadas como bombas, ventiladores entre outras, porem a grande maioria dos
processos existe a necessidade de se modificar algumas caractersticas como
velocidade, rotao ou torque. Para esta finalidade os Moto redutores foram
desenvolvidos.
O Moto redutor convencional que podem ser acoplado em motor trifsico ou
monofsico de 4 ou 6 polos, com rotaes de entrada de 1750 ou 1100 RPM,
respectivamente. O Moto redutor pode ser simples (redues de 1:10 a 1:100) ou
duplo (redues 1:100 a 1:10.000), admitindo motores com potncias de at 5 CV,
conforme dimensionamento
Moto redutor composto por motor eltrico e redutor de engrenagens que
consiste num conjunto de eixos com engrenagens cilndricas de dentes retos,
helicoidais, cnicas ou somente com uma coroa com parafuso sem fim, que tem
como funo reduzir a velocidade de rotao do sistema de acionamento do
equipamento. Consequentemente com a reduo da velocidade tem-se um aumento
significativo no torque transmitido. Pode ser empregado nas mais diversas
aplicaes, desde equipamentos industriais como: esteiras, furadeiras,
compressores, bombas hidrulicas, ventiladores e sistemas de refrigerao,
Mquinas: de papel e celulose, alimentcia, madeira, plstico, petroqumica,
siderurgia e at em mquinas de parques de diverso.
-
45
O objetivo do moto redutor fornecer movimento rotativo (rpm)
com torque elevado (Nm). Sua construo pode ser feita em alumnio ou ferro
fundido, sendo o engrenamento em ao e/ou bronze.
Figura: 4.9.1 - Motoredutor
4.10. Resistncia
As resistncia eltrica de imerso foram desenvolvidas de um modo bem
preciso e especificamente para o aquecimento de solues como por exemplo o
aquecimento de gua, materiais viscosos, operaes de limpeza. Cada resistncia
de imerso compreende uma unidade independente, possibilitando um modo preciso
de controle de temperatura para diversas solues.
Estas resistncias de imerso para tanques encontram numerosas e variadas
aplicaes. Centenas de modelos compem a linha normal de fabricao, alm de
haver possibilidade de adaptao sobmedida para quaisquer dimenses de
tanques, pela variao de dimenses de elemento, comprimento aquecido e altura
do elemento.
Uma das formas mais comuns de aquecimento de fluido nos processos
industriais a utilizao de resistncias eltricas de imerso. Esse tipo de
resistncia largamente utilizado na indstria petroqumico e alimentcio para
solues de sistemas de aquecimento, tanto para gases como para lquidos. Elas
normalmente so projetadas para serem utilizadas em tanques e tubos
pressurizados, e a sua instalao pode ser feita por conexes roscveis do conjunto
do aquecedor sobre um flange liso soldado na tubulao, ou poder ser feito atravs
-
46
de rosca. Uma vez inseridas dentro da tubulao, ou tanque o aquecimento se
diretamente no fluido, diminuindo assim as perdas de energia e tornando o sistema
mais eficiente.
Figura: 4.10.1 - Resistncias
-
47
5. REFERENCIAL TERICO
a etapa do projeto que apresenta uma breve discusso terica do problema, na
perspectiva de fundament-lo nas teorias existentes. As teorias e tericos utilizados
na pesquisa devem estar alinhados com a linha de pensamento e de investigao da
pesquisa.
5.1. Controle
o ramo da engenharia que desenvolve e executa projetos de automao
industrial. Controle e automao projetam e operam equipamentos utilizados nos
processos automatizados de indstrias em geral, alm de fazer sua manuteno.
Ocupa-se do gerenciamento de projetos de automao industrial e comercial. o
responsvel pela programao das mquinas e pela adaptao de softwares aos
processos industriais. Em empresas que j esto automatizadas, redimensiona,
opera e mantm os sistemas e equipamentos j instalados. Essa disciplina envolve
algumas matrias como:
- Limite, Funo do 1 e do 2 grau, Derivada, Integral, Teorema de Laplace,
Funo de transferncia, Diagramas de blocos, polos e zeros, Fluxos de sinais,
Estabilidade e Amplificadores operacionais.
5.2. Pneumtica e Hidrulica
o estudo e aplicao do ar comprimido na transformao e transmisso de
energia para mquinas e equipamentos, O ar comprimido gerado mediante a
compresso do ar atmosfrico. As mquinas usadas para gerao de ar comprimido
so chamadas de compressores, que so mquinas onde determinada quantidade
de gs ocupa um determinado espao confinado, resultando em um correspondente
aumento de presso. A pneumtica industrialmente falando trabalha com uma
presso entre 7 a 9 bar.
Um circuito pneumtico composto por diversas ferramentas de trabalho que
interligados em um sistema lgico realizara um trabalho de acordo com a
necessidade de cada cliente.
Segue alguns componentes mais utilizados para um circuito Pneumtico:
-
48
- Compressor, Vlvulas, Atuadores/Cilindros, resfriador, Reservatrio, secador,
Filtro, Lubrifil.
Existem duas frmulas bsicas para clculos, de presso e de envase que so:
Presso Vazo
Figura: 5.2.1 - Formulas Presso/Vazo
Hidrulica uma palavra que vem do grego e a unio de hydor = gua, e aulos
= conduo/cano/tubo , portanto, uma parte da fsica que se dedica a estudar o
comportamento dos lquidos em movimento e em repouso. responsvel pelo
conhecimento das leis que regem o transporte, a converso de energia, a regulagem
e o controle do fluido agindo sobre suas variveis (presso, vazo, temperatura,
viscosidade, etc.).
A hidrulica pode ser tambm dividida em: terica e prtica. A hidrulica terica
tambm conhecida na fsica como Mecnica dos Fluidos e a hidrulica prtica ou
hidrulica aplicada , normalmente, tambm intitulada de Hidrotcnica. Dentre as
aplicaes da hidrulica destacam-se as mquinas hidrulicas (bombas e turbinas).
Uma bomba hidrulica eltrica um dispositivo acionado por um motor eltrico
destinado a comprimir um fluido, tipicamente um grau especial de leo, utilizado
para acionar um mecanismo secundrio. A maior parte dos recursos das
engrenagens das bombas ou do lbulo do tipo mecanismos internos de
bombeamento e normalmente so executados em velocidades de operao
relativamente baixas. A bomba hidrulica eltrica pode ser impulsionada por motores
de corrente alternada (CA) ou corrente contnua (CC) de acordo com as
especificidades da aplicao. Na maioria dos casos, a bomba e o motor formam uma
unidade integral sem funcionamento dos eixos externos e um flange tipo juno
-
49
entre os dois. Uma grande variedade de tamanhos de bomba e capacidades est
disponvel como unidades disponveis imediatamente ou peas de substituio
padro para aplicaes especficas.
5.3. Desenho Assistido por Computador
O desenho mecnico, como linguagem tcnica, tem necessidade fundamental
do estabelecimento de regras e normas. evidente que o desenho mecnico de
uma determinada pea possibilita a todos que intervenham na sua construo,
mesmo que em tempos e lugares diferentes, interpretar e produzir peas
tecnicamente iguais. Isso, naturalmente, s possvel quando se tm estabelecidas,
de forma fixa e imutvel, todas as regras necessrias para que o desenho seja uma
linguagem tcnica prpria e autntica, e que possa cumprir a funo de transmitir ao
executor da pea as ideias do desenhista. Por essa razo, fundamental e
necessrio que o desenhista conhea com segurana todas as normas do desenho
tcnico mecnico. Como em outros pases, existe no Brasil uma associao (ABNT)
que estabelece, fundamenta e recomenda as normas do desenho Tcnico
Mecnico, as quais sero expostas gradativamente no desenvolvimento deste curso,
como tambm as normas DIN.
Normas ABNT
Editadas e distribudas pela ABNT - Associao Brasileira de
Normas Tcnicas.
Normas ISO
Editadas e distribudas pela ISO - Insternational Organization for Standardization.
Norma DIN
DIN - Deutsche Normen (antigamente Deutsche Industrie - Normen).
Editada pelo DIN - Deutsche Institut fur Normung Instituto Alemo para
Normalizao.
Representante no Brasil: ABNT - que possui na sua sede no Rio de Janeiro e
na Delegacia de So Paulo colees completas e em dia de todas as normas DIN.
-
50
5.4. Microcontroladores
Um microcontrolador um sistema computacional completo, no qual esto
includos uma CPU (Central Processor Unit), memria de dados e programa, um
sistema de clock, portas de I/O (Input/Output), alm de outros possveis perifricos,
tais como, mdulos de temporizao e conversores A/D entre outros, integrados em
um mesmo componente. As partes integrantes de qualquer computador, e que
tambm esto presentes, em menor escala, nos microcontroladores so:
- Unidade Central de Processamento (CPU);
- Sistema de clock para dar sequencia s atividades da CPU;
- Memria para armazenamento de instrues e para manipulao de dados;
- Entradas para interiorizar na CPU informaes do mundo externo;
- Sadas para exteriorizar informaes processadas pela CPU para o mundo
externo;
- Programa (firmware) para definir um objetivo ao sistema;
O que existe hoje, quando se trata de microcontroladores, deve-se ao
desenvolvimento da tecnologia dos circuitos integrados. Os microcontroladores so
microprocessadores que podem ser programados para funes especficas.
Em geral, eles so usados para controlar circuitos e, por isso, so comumente
encontrados dentro de outros dispositivos, sendo conhecidos como "controladores
embutidos". A estrutura interna de um microcontrolador apresenta um processador,
bem como circuitos de memria e perifricos de entrada e sada.
5.5. Instrumentao
definida como a cincia que estuda, desenvolve e aplica instrumentos de
medio e controle de processos.
A instrumentao utilizada para se referir rea de trabalho dos tcnicos e
engenheiros que lidam com processos industriais (tcnicos de operao,
instrumentao, engenheiros de processamento, de instrumentao e de
automao), mas tambm pode estar relacionada aos vrios mtodos e tcnicas
possveis aplicadas aos instrumentos.
A instrumentao tambm associada ao estudo terico e prtico dos
instrumentos e seu princpio cientfico, utilizado para monitorar de uma forma
-
51
continua, ou discreta, o comportamento de uma varivel de controle que de alguma
forma venha interessar ao homem nas diversas reas do conhecimento humano
aplicado, ou seja, no apenas nos processos produtivos industriais. atravs da
instrumentao, principalmente, que um operador faz o acompanhamento do
processo, para controlar um processo industrial (independentemente de qual seja o
produto fabricado ou a sua rea de atuao) necessria a medio e o controle de
uma srie de variveis fsicas e qumicas; para isso, utilizada a instrumentao.
Um instrumento Industrial : Todo dispositivo usado para direta ou
indiretamente medir e/ou controlar uma varivel.
As vantagens da instrumentao:
- Obteno de um produto com melhor qualidade;
- menor custo;
- Permitiu uma produo com Segurana;
- Maior Produo;
- Obteno de produtos mais complexos, inviveis de serem obtidos com
processos manuais;
- A centralizao de informaes em uma "casa de controle".
-
52
6. APLICAO DAS MATRIAS
Embasado no referencial terico, aplicamos no projeto os clculos, conceitos
e mtodos adquiridos atravs do mesmo.
6.1. Aplicao De Instrumentao
No nosso projeto a Instrumentao uma das partes mais importantes,
atravs de conceitos na aplicao de metrologias e medidas.
A cincia que trata das medies a metrologia. A metrologia abrange todos
os aspectos tericos e prticos relativos s medies, em quaisquer campos da
cincia ou da tecnologia. Medir comparar uma grandeza com outra, de mesma
natureza, tomada como padro. Medio , portanto, o conjunto de operaes que
tem por objetivo determinar o valor de uma grandeza.
Esse aspecto nos concedeu totais condies de determinar os nveis
mximos de lquido no tanque A e B e os nveis Maximo e mnimo do liquido no
tanque C variao da temperatura de aquecimento da matria prima a ser misturada
e da presena de materiais na esteira.
O sensor de que adotamos para medir a temperatura da resistncia que
aquece a matria prima o PT100.
O sensor que adotamos para medir os nveis de tanques A e B do tipo
flutuante e o sensor para medir os nveis do tanque C do tipo Capacitivo.
6.2. Aplicao Microcontrolador
Para o nosso projeto usaremos um Circuito Integrado PIC da familia18 que
PIC18F4550, esse componente aplicado no nosso trabalho com a finalidade de
realizar o controle de nveis, dos tanques A, B e C, controlar o tempo de enchimento
dos referidos tanques, controlar a temperatura do liquido no tanque C, acionar o
motor de mistura no tanque C, vai acionar motor da esteira de transporte dos
recipientes a serem envasados, e por fim o PIC ira realizar o controle do tempo em
que os recipientes a serem enchidos pelo tanque C atravs de uma vlvula de
envase.
-
53
Todo esse trabalho que o PIC esta designado a realizar, vai ser feito por uma
linguagem de programao chamada Linguagem C, atravs de aulas em
laboratrio e aulas tericas temos totais condies de realizar essa programao
para o nosso projeto.
6.3. Aplicao Desenho Assistido Por Computador
Utilizamos o recurso AUTOCAD e o COREL DRAW para demonstrar nosso
projeto graficamente atravs de desenhos de forma de enterterimento de uma forma
animada e mais bem apresentvel, fizemos o Layout e o Diagrama de
funcionamento com esses recursos, na parte prtica iremos utilizar o Layout para
poder apresentar e simular nosso trabalho com uma animao de melhor
entendimento para o leitor. As aulas praticas em laboratrio foi muito produtiva para
entender melhor os comandos e realizar de uma forma criativa o nosso Layout e o
Diagrama de funcionamento.
6.4. Aplicao Pneumtica Hidrulica
Utilizamos a Pneumtica nos acionamentos das vlvulas de abastecimento
dos tanques A e B, no acionamento do bico dosador e no envase dos recipientes.
6.5. Aplicao Controle
Atravs da metodologia de diagrama de blocos e fluxo de sinais, que por
consequncia engloba Limite, Funo do 1 e do 2 grau, Derivada, Integral,
Teorema de Laplace, Funo de transferncia, forneceu total condies de
determinar e controlar os sensores do sistema apresentado referentes ao nivel
mximo de liquido nos tanques A e B e os nveis Maximo e mnimo do liquido no
tanque C, variao da temperatura de aquecimento da matria prima a ser
misturada, da presena de materiais na esteira e motores.
O sensor utilizado no projeto desenvolvido pelo sistema de malha fechada
conforme diagrama de fluxo a seguir:
-
54
Figura: 6.5.1 - Malha fechada
-
55
7. CONCLUSO
Conclui-se, segundo necessidades do cliente, foi desenvolvido um sistema de
linha de produo automatizada alcanando um projeto satisfatrio para o mesmo,
atravs de estudos e planejamentos, foi superado expectativas do grupo que
utilizamos os conhecimentos adquiridos no decorrer do semestre, nos possibilitou
desenvolver a programao do sistema atravs do software MPLAB e a simulao
no software PROTEUS, a parte de instrumentao que controla os nveis dos
tanques e a temperatura determinada com sensores especficos, e a parte de
pneumtica onde envolve alguns tipos de vlvulas, para abertura e fechamento com
a finalidade de liberar passagem de liquido ou bloquear a passagem do mesmo.
Tambm foi importante as aulas prticas em laboratrio onde adquirimos
conhecimento na prtica de como funciona e um aprendizado para o mercado de
trabalho.
-
56
8. REFERNCIAS BIBLIOGRFICAS
http://www.unipac.br/bb/tcc/tcc-f6cceedfa3f6307211208b80c790c6e3.pdf
Acessado em 01/11/2013.
http://www.mecanicaindustrial.com.br/conteudo/404-para-que-serve-uma-bomba-
hidraulica-eletrica. Acessado em 23/10/2013
http://www.cpdee.ufmg.br/~torres/fundamentos.pdf. Acessado em 07/11/2013
http://eletricistamazinho.files.wordpress.com/2010/09/instrumentacao.pdf
Acessado em 05/11/2013.
[Stewart] Stewart, Harry L., Pneumtica, 3.ed. Curitiba Parana, Hermus, 2013.
[Taub] Taub, Herbert, Microprocessadores, So Paulo, McGraw-Hill, 1984.
[French] French, Thomas E., Desenho Tcnico, So Paulo, Ed. Globo, 1995.
-
57
9. ANEXO
Cdigo fonte da programao em C:
#include
// MICROCONTROLADOR UTILIZADO
#include
// ROTINAS DE DELAY
#pragma config FOSC= HS
// OSCILADOR DO CLOCK EM MODO HIGH SPEED
#pragma config WDT= OFF
// WATCHDOG TIMER DESABILITADO
#define VALVULA1 LATAbits.LATA0
// LED - VALVULA DE ALIMENTAO DO TANQUE A
#define VALVULA2 LATAbits.LATA1
// LED - VALVULA DE ALIMENTAO DO TANQUE B
#define VALVULA3 LATAbits.LATA2
// LED - VLVULA DOSADORA DO PRODUTO A
#define VALVULA4 LATAbits.LATA3
// LED - VLVULA DOSADORA DO PRODUTO B
#define MOTOR1 LATAbits.LATA5
// LED - MOTOR DO MISTURADOR DO TANQUE C
#define RESISTENCIA1 LATBbits.LATB0
// LED - RESISTNCIA DE AQUECIMENTO TANQUE C
#define RESISTENCIA2 LATBbits.LATB1
// LED - RESISTNCIA DE AQUECIMENTO TANQUE C
#define VALVULA5 LATBbits.LATB2
// LED - VALVULA DE ENVASE
#define SOLENOIDE1 LATBbits.LATB3
// LED - ATUADOR BICO DE ENVASE - RECUO
#define SOLENOIDE2 LATBbits.LATB4
// LED - ATUADOR BICO DE ENVASE - AVANO
#define MOTOR2 LATBbits.LATB5
// LED - MOTOR DA ESTEIRA
#define SENSOR1 PORTCbits.RC0
// BOTO - SENSOR DE NVEL SUPERIOR DO TANQUE A
#define SENSOR2 PORTCbits.RC1
// BOTO - SENSOR DE NVEL SUPERIOR DO TANQUE B
#define SENSOR3 PORTCbits.RC2
// BOTO - SENSOR DE NVEL SUPERIOR DO TANQUE C
#define SENSOR4 PORTCbits.RC4
// BOTO - SENSOR DE NVEL INFERIOR DO TANQUE C
#define SENSOR5 PORTCbits.RC5
-
58
// BOTO - SENSOR DE TEMPERATURA DO TANQUE C
#define SENSOR6 PORTCbits.RC6
// BOTO - SENSOR PRESENA GARRAFA
#define BOTAO1 PORTCbits.RC7
// BOTO - BOTO LIGA SISTEMA
#define NIVEL1A LATDbits.LATD0
// CLOCK - NVEL DO TANQUE A
#define NIVEL1B LATDbits.LATD1
// CLOCK - NVEL DO TANQUE B
#define FLUXO1A LATDbits.LATD2
// CLOCK - FLUXO PRODUTO A
#define NIVEL1AC LATDbits.LATD3
// CLOCK - NVEL DO PRODUTO A NO TANQUE C
#define FLUXO1B LATDbits.LATD4
// CLOCK - FLUXO PRODUTO B
#define NIVEL1BC LATDbits.LATD5
// CLOCK - NVEL DO PRODUTO B NO TANQUE C
int loop1=0;
// VARIVEL - LOOP DOS LEDS DO TANQUE A E TANQUE B INICIALMENTE EM NIVEL LGICO BAIXO
int loop2=0;
// VARIVEL - LOOP DOS LEDS DO TANQUE C INICIALMENTE EM NIVEL LGICO BAIXO
int sistema=0;
// VARIVEL - SISTEMA INICIALMENTE EM NIVEL LGICO BAIXO
int envase=0;
// VARIVEL - ROTINA DE ENVASE INICIALMENTE EM NIVEL LGICO BAIXO
int nivelsupab=0;
// VARIVEL - NIVEL SUPERIOR DO TANQUE A E TANQUE B INICIALMENTE EM NIVEL LGICO BAIXO
int nivelsupc=0;
// VARIVEL - NIVEL SUPERIOR DO TANQUE C INICIALMENTE EM NIVEL LGICO BAIXO
int fimenvase=0;
// VARIVEL - FIM DA ROTINA DO ENVASE INICIALMENTE EM NIVEL LGICO BAIXO
int aquec=0;
// VARIVEL - ROTINA DO AQUECIMENTO DO TANQUE C EM NIVEL LGICO BAIXO
int batelada=0;
// VARIVEL - ROTINA DA BATELADA EM NIVEL LGICO BAIXO
void main( void )
// ROTINA PRINCIPAL DO PROGRAMA
{
ADCON1= 0b00001111;
// PINOS EM MODO DIGITAL
TRISA= 0b00000000;
// TODOS OS PINOS DO PORTA CONFIGURADOS COMO SADA
LATA= 0x00;
// SADAS DO PORTA INICIALMENTE EM NVEL LGICO BAIXO
-
59
TRISB= 0b00000000;
// TODOS OS PINOS DO PORTB CONFIGURADOS COMO SADA
LATB= 0x00;
// SADAS DO PORTB INICIALMENTE EM NVEL LGICO BAIXO
TRISC= 0b11111111;
// TODOS OS PINOS DO PORTC CONFIGURADOS COMO ENTRADA
LATC= 0x00;
// SADAS DO PORTC INICIALMENTE EM NVEL LGICO BAIXO
TRISD= 0b00000000;
// TODOS OS PINOS DO PORTD CONFIGURADOS COMO SADA
LATD= 0x00;
// SADAS DO PORTD INICIALMENTE EM NVEL LGICO BAIXO
while ( 1 )
// LAO PRINCIPAL DO PROGRAMA
{
if ( ! BOTAO1 || batelada>=1 && nivelsupab==0)
// SE O BOTO LIGA SISTEMA FOR PRESSIONADO OU VARIVEL DE ROTINA DE BATELADA FOR
MAIOR OU IGUAL A 1 E A VARIVEL DE NIVEL SUPERIOR DO TANQUE A E TANQUE B ESTIVER EM NIVEL LGICO
BAIXO...
{
sistema=1;
// VARIVEL DO SISTEMA PASSA PARA NIVEL LGICO ALTO
SOLENOIDE1=1;
// LED ATUADOR BICO DE ENVASE - RECUO PASSA PARA NIVEL LGICO ALTO
VALVULA1=1;
// LED VALVULA DE ALIMENTAO DO TANQUE A PASSA PARA NIVEL LGICO ALTO
VALVULA2=1;
// LED VALVULA DE ALIMENTAO DO TANQUE B PASSA PARA NIVEL LGICO ALTO
for ( loop1 ; loop1
-
60
NVEL SUPERIOR DO TANQUE A FOR PRESSIONADO E A VARIVEL DE NIVEL SUPERIOR DO TANQUE A E TANQUE B
PASSA ESTIVER NIVEL LGICO ALTO...
{
VALVULA1=0;
// LED VALVULA DE ALIMENTAO DO TANQUE A PASSA PARA NIVEL LGICO BAIXO
}
if ( sistema==1 && ! SENSOR2 && nivelsupab==1 )
// SE A VARIVEL DO SISTEMA ESTIVER EM NIVEL LGICO ALTO E O BOTO SENSOR DE
NVEL SUPERIOR DO TANQUE B FOR PRESSIONADO E A VARIVEL DE NIVEL SUPERIOR DO TANQUE A E TANQUE B
PASSA ESTIVER NIVEL LGICO ALTO...
{
VALVULA2=0;
// LED VALVULA DE ALIMENTAO DO TANQUE B PASSA PARA NIVEL LGICO BAIXO
}
if ( sistema==1 && VALVULA1==0 && VALVULA2==0 && nivelsupc==0 && aquec==0 )
// SE A VARIVEL DO SISTEMA ESTIVER EM NIVEL LGICO ALTO E O BOTO SENSOR DE
NVEL SUPERIOR DO TANQUE B FOR PRESSIONADO E AS VARIVEIS DE NIVEL SUPERIOR DO TANQUE C E DE
ROTINA DO AQUECIMENTO DO TANQUE C ESTIVEREM EM NIVEL LGICO BAIXO...
{
VALVULA3=1;
// LED VLVULA DOSADORA DO PRODUTO A PASSA PARA NIVEL LGICO ALTO
VALVULA4=1;
// LED VLVULA DOSADORA DO PRODUTO B PASSA PARA NIVEL LGICO ALTO
}
if ( sistema==1 && VALVULA3==1 && VALVULA4==1 )
// SE A VARIVEL DO SISTEMA E OS LEDS DAS VALVULAS DOSADORAS DOS PRODUTOS A E B
ESTIVEREM EM NIVEL LGICO ALTO...
{
for ( loop2 ; loop2
-
61
// SE A VARIVEL DO SISTEMA ESTIVER EM NIVEL LGICO ALTO E O BOTO SENSOR DE
NVEL SUPERIOR DO TANQUE C FOR PRESSIONADO E A VARIVEL DO LOOP DOS LEDS DO TANQUE C FOR =8...
{
VALVULA3=0;
// LED VLVULA DOSADORA DO PRODUTO A PASSA PARA NIVEL LGICO BAIXO
VALVULA4=0;
// LED VLVULA DOSADORA DO PRODUTO B PASSA PARA NIVEL LGICO BAIXO
Delay10KTCYx(50);
// DELAY DE 0,5 SEGUNDO
MOTOR1=1;
// MOTOR DO MISTURADOR DO TANQUE C PASSA PARA NIVEL LGICO ALTO
RESISTENCIA1=1;
// RESISTNCIA DE AQUECIMENTO TANQUE C PASSA PARA NIVEL LGICO ALTO
RESISTENCIA2=1;
// RESISTNCIA DE AQUECIMENTO TANQUE C PASSA PARA NIVEL LGICO ALTO
nivelsupc=1;
// VARIVEL FINAL ROTINA DO ENCHIMENTO DO TANQUE C PASSA PARA NIVEL
LGICO ALTO
}
if ( sistema==1 && ! SENSOR5 && fimenvase==0 )
// SE A VARIVEL DO SISTEMA ESTIVER EM NIVEL LGICO ALTO E O BOTO SENSOR DE
TEMPERATURA DO TANQUE C FOR PRESSIONADO E A VARIVEL DE FIM DE ROTINA DO ENVASE ESTIVER EM NIVEL
LGICO BAIXO...
{
RESISTENCIA1=0;
// RESISTNCIA DE AQUECIMENTO TANQUE C PASSA PARA NIVEL LGICO BAIXO
RESISTENCIA2=0;
// RESISTNCIA DE AQUECIMENTO TANQUE C PASSA PARA NIVEL LGICO BAIXO
Delay10KTCYx(300);
// DELAY DE 3 SEGUNDOS (REPOUSO DA MISTURA)
Delay10KTCYx(200);
// DELAY DE 2 SEGUNDOS (REPOUSO DA MISTURA)
MOTOR2=1;
// MOTOR DA ESTEIRA PASSA PARA NIVEL LGICO ALTO
aquec=1;
// VARIVEL DE ROTINA DO AQUECIMENTO DO TANQUE C PASSA PARA NIVEL LGICO
ALTO
}
if ( sistema==1 && ! SENSOR6 && aquec==1 && fimenvase
-
62
Delay10KTCYx(50);
// DELAY DE 0,5 SEGUNDO
SOLENOIDE1=0;
// LED ATUADOR BICO DE ENVASE - RECUO PASSA PARA NIVEL LGICO
BAIXO
Delay10KTCYx(50);
// DELAY DE 0,5 SEGUNDO
SOLENOIDE2=1;
// LED ATUADOR BICO DE ENVASE - AVANO PASSA PARA NIVEL LGICO
ALTO
Delay10KTCYx(50);
// DELAY DE 0,5 SEGUNDO
VALVULA5=1;
// LED DA VALVULA DE ENVASE PASSA PARA NIVEL LGICO ALTO
Delay10KTCYx(200);
// DELAY DE 2 SEGUNDOS
NIVEL1AC=!NIVEL1AC;
// CLOCK - NVEL DO PRODUTO A NO TANQUE C (ESVAZIANDO)
NIVEL1BC=!NIVEL1BC;
// CLOCK - NVEL DO PRODUTO B NO TANQUE C (ESVAZIANDO)
Delay10KTCYx(200);
// DELAY DE 2 SEGUNDOS
VALVULA5=0;
// LED DA VALVULA DE ENVASE PASSA PARA NIVEL LGICO BAIXO
Delay10KTCYx(50);
// DELAY DE 0,5 SEGUNDO
SOLENOIDE2=0;
// LED ATUADOR BICO DE ENVASE - AVANO PASSA PARA NIVEL LGICO
BAIXO
Delay10KTCYx(50);
// DELAY DE 0,5 SEGUNDO
SOLENOIDE1=1;
// LED ATUADOR BICO DE ENVASE - RECUO PASSA PARA NIVEL LGICO
ALTO
Delay10KTCYx(50);
// DELAY DE 0,5 SEGUNDO
MOTOR2=1;
// MOTOR DA ESTEIRA PASSA PARA NIVEL LGICO ALTO
fimenvase++;
// INCREMENTO NA VARIVEL DE FIM DE ROTINA DO ENVASE
}
envase=0;
// VARIVEL DE ROTINA DE ENVASE PASSA PARA NIVEL LGICO BAIXO
}
if ( sistema==1 && ! SENSOR4 && fimenvase==8 )
// SE A VARIVEL DO SISTEMA ESTIVER EM NIVEL LGICO ALTO E O BOTO DO SENSOR DE
NVEL INFERIOR DO TANQUE C FOR PRESSIONADO E A VARIVEL DE FIM DE ROTINA DO ENVASE FOR =8...
{
-
63
Delay10KTCYx(100);
// DELAY DE 1 SEGUNDO
MOTOR1=0;
// MOTOR DO MISTURADOR DO TANQUE C PASSA PARA NIVEL LGICO BAIXO
MOTOR2=0;
// MOTOR DA ESTEIRA PASSA PARA NIVEL LGICO BAIXO
sistema=0;
// VARIVEL DO SISTEMA PASSA PARA NIVEL LGICO BAIXO
NIVEL1A=!NIVEL1A;
// REINICIA CLOCK - NVEL DO TANQUE A
NIVEL1B=!NIVEL1B;
// REINICIA CLOCK - NVEL DO TANQUE B
loop1=0;
// VARIVEL DE LOOP DOS LEDS DO TANQUE A E TANQUE B PASSA PARA NIVEL
LGICO BAIXO
loop2=0;
// VARIVEL DE LOOP DOS LEDS DO TANQUE C PASSA PARA NIVEL LGICO BAIXO
fimenvase=0;
// VARIVEL DE FIM DE ROTINA DO ENVASE PASSA PARA NIVEL LGICO BAIXO
nivelsupab=0;
// VARIVEL DE NIVEL SUPERIOR DO TANQUE A E TANQUE B PASSA PARA NIVEL
LGICO BAIXO
nivelsupc=0;
// VARIVEL FINAL ROTINA DO ENCHIMENTO DO TANQUE C PASSA PARA NIVEL
LGICO BAIXO
aquec=0;
// VARIVEL DE ROTINA DO AQUECIMENTO DO TANQUE C PASSA PARA NIVEL LGICO
BAIXO
batelada++;
// INCREMENTO NA VARIVEL DE ROTINA DE BATELADA
if ( batelada==4 )
// SE A VARIVEL DE ROTINA DE BATELADA FOR =4...
{
batelada=0;
// VARIVEL DE ROTINA DE BATELADA PASSA PARA NIVEL LGICO BAIXO
}
}
}
} // FIM DO PROGRAMA