
Plan de Comunicación Universidad de Jaén -...
37
1 Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica, Geodésica y Fotogrametría Fotogrametría Digital Tema 5 - Escáneres Prof. Dr. Jorge Delgado García Dpto. Ingeniería Cartográfica, Geodésica y Fotogrametría Universidad de Jaén [email protected]
-
Upload
nguyenthien -
Category
Documents
-
view
222 -
download
0
Transcript of Plan de Comunicación Universidad de Jaén -...

1
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Fotogrametría Digital Tema 5 - Escáneres
Prof. Dr. Jorge Delgado García
Dpto. Ingeniería Cartográfica, Geodésica y Fotogrametría
Universidad de Jaén
2
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Justificación:
• Analizar las características que deben tener los escáneres para su utilización para trabajos fotogramétricos.
• Presentar las características de los sistemas comerciales más empleados. • Analizar el proceso de calibración de un escáner fotogramétrico (errores, tipo de variabilidad
de los mismos a lo largo del tiempo, …). • Análisis de la rentabilidad de este tipo de sistemas.
Objetivos:
La inclusión de este tema se justifica por el hecho de que aún, y a pesar del fuerte auge de las cámaras digitales en nuestro país, se siguen empleando los escáneres fotogramétricos como método para la digitalización de fotogramas provenientes de cámaras convencionales de película. Ejemplo de este proceso son las digitalizaciones masivas que se están llevando a cabo por diferentes instituciones cartográficas con objeto de la digitalización de sus fondos fotográficos.
3
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Estructura del Tema
5.1 Introducción 5.2 Escáneres. Conceptos básicos 5.3 Componentes de los escáneres 5.4 Análisis de las características técnicas de los escáneres
5.4.1 Iluminación 5.4.2 Rango dinámico y bits de cuantización 5.4.3 Reproducción del color 5.4.4 Velocidad de digitalización 5.4.5 Resolución geométrica óptima 5.4.6 Ruido de la imagen 5.4.7 Compresión de datos
5.5 Calibración de escáner 5.5.1 Errores y parámetros 5.5.2 Procedimiento general de calibración
5.6 Escáneres no fotogramétricos (escáneres de sobremesa) 5.6.1 Ejemplos de escáneres no fotogramétricos empleados frecuentemente en trabajos fotogramétricos de precisión baja a media 5.6.2 Resultados de calibración de escáneres no fotogramétricos
5.7 Análisis de coste y beneficios de los escáneres
4
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Bibliografía
• Baltsavias, E.P. (1996). The Agfa Horizon Scanner. Characteristics, Testing and Evaluation. IAPRS, 30, I/5. Viena.
• Baltsavias, E.P. (1998). Photogrammetric Scanners - Survey, Technological developments and requirements. IAPRS, 32, 1, 44-52.
• Baltsavias, E.P. y Bill, R. (1994) Scanners - a survey of curreent technology and future needs. IAPRS, 30, 1, 130-143.
• Baltsavias, E.P. y Waegli, B. (1996). Quality Analysis and Calibration of DTP Scanners. IAPRS, 30, I/5, Viena.
• Baltsavias, E.P.; Häring, S.; Kersten, T. y Dam, A. (1998). Geometric and Radiometric Evaluation of the DSW300 roll film scanner. ISPRS Journal of Photogrammetry and Remote Sensing, 53 (4), 217-234.
• Gruber, M.; Leberl, F.W. y Thallinger, G. (1998). Novel high-precision photogrammetric scanning. Proceedings of GIS/LIS’98. Ft. Worth, Texas, USA.
• Kölbl, O. (1994). Scanning and State of the Art in Scanners . En: Mapping and Remote Sensing Tools for the 21st Century. ASPRS. Washington, Agosto, 26-29. 1994. 7-14.
• Kölbl, O y Bach, U. (1996). Tone Reproduction of Photogrammetric Scanners. PE&RS 62(6), 687-694.

5
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Introducción. Escáneres. Conceptos Básicos
Son elementos fundamentales en el proceso fotogramétrico digital. Sistemas de captura de imágenes digitales
• Sistemas de captura directa de imágenes digitales • Digitalización de imágenes captadas con cámaras analógicas
Tipos de escáneres • Escáneres fotogramétricos • Monocomparadores o restituidores analíticos adaptados • Escáneres de documentos de gran formato • Microdensimetros • Escáneres de sobremesa (desktop scanners -DTP-) • Otros escáneres específicos, como los escáneres de diapositivas de pequeño formato, los dispositivos multifuncionales (escáner, fax, impresora), escáneres de microfichas, …
6
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Componentes de los escáneres
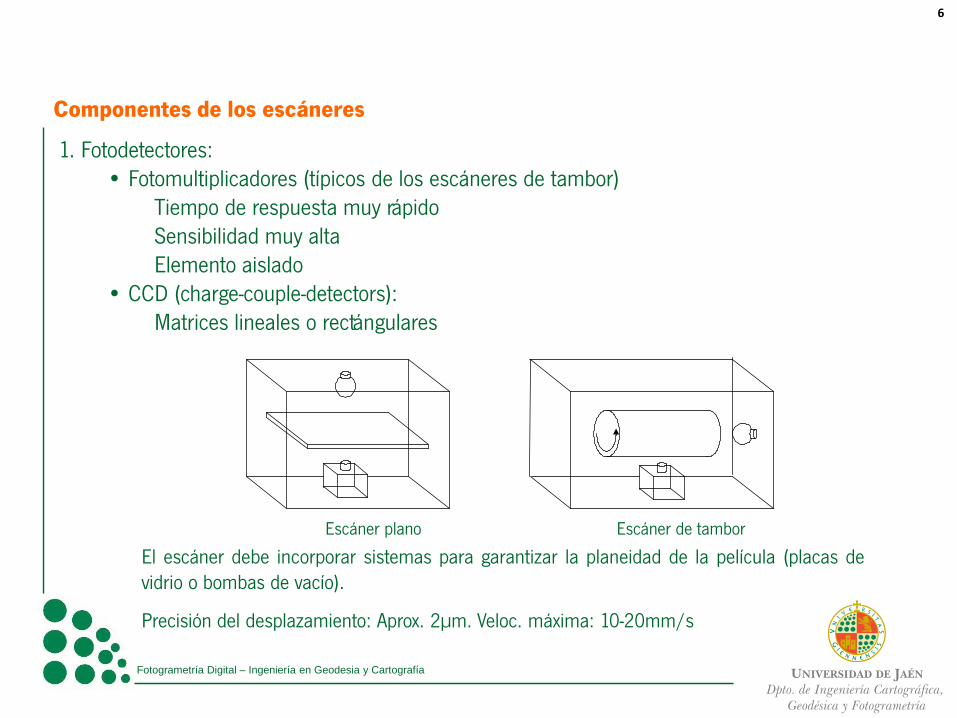
1. Fotodetectores: • Fotomultiplicadores (típicos de los escáneres de tambor)
Tiempo de respuesta muy rápido Sensibilidad muy alta Elemento aislado
• CCD (charge-couple-detectors): Matrices lineales o rectángulares
Escáner plano Escáner de tambor
El escáner debe incorporar sistemas para garantizar la planeidad de la película (placas de vidrio o bombas de vacío).
Precisión del desplazamiento: Aprox. 2µm. Veloc. máxima: 10-20mm/s

7
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Escáner DSW500 con sistema de rollo de película
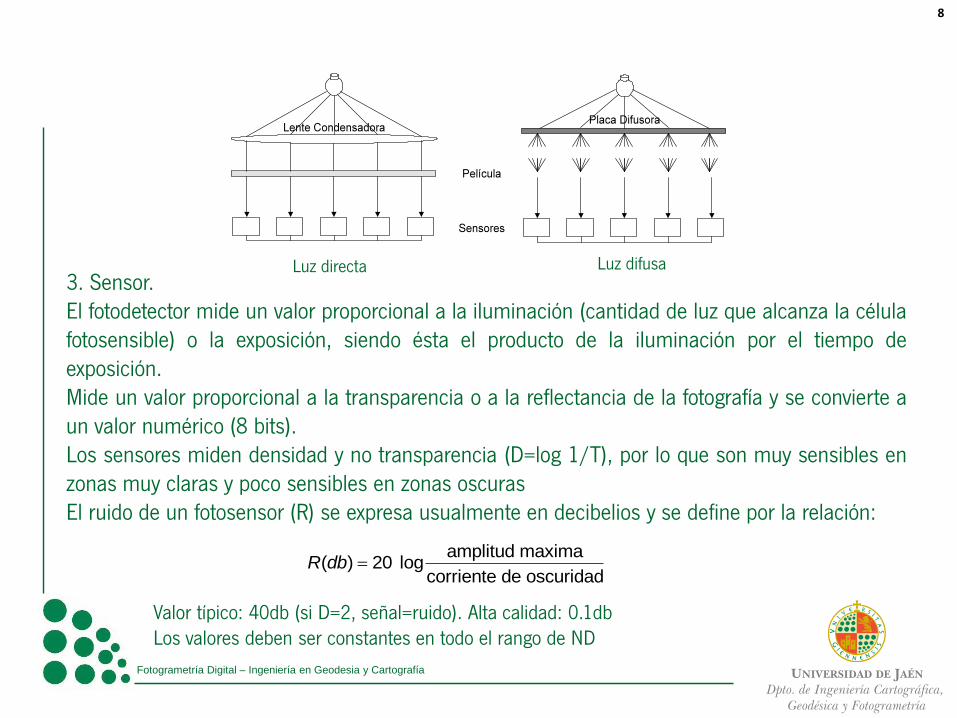
2. Sistema de iluminación a) Iluminación directa:
• Suele emplear un condensador • Bajo coste • Ángulo de apertura óptica reducido e incrementa prof.de campo • Problemas: calentamiento del original (fibra óptica)
poco sensible al desenfoque problemas de difracción b) Iluminación difusa
• Placa de vidrio difusora, luz fluorescente o Ulbritchtkugel • Es el sistema más empleado (luz más agradable)
8
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Luz directa Luz difusa 3. Sensor. El fotodetector mide un valor proporcional a la iluminación (cantidad de luz que alcanza la célula fotosensible) o la exposición, siendo ésta el producto de la iluminación por el tiempo de exposición. Mide un valor proporcional a la transparencia o a la reflectancia de la fotografía y se convierte a un valor numérico (8 bits). Los sensores miden densidad y no transparencia (D=log 1/T), por lo que son muy sensibles en zonas muy claras y poco sensibles en zonas oscuras El ruido de un fotosensor (R) se expresa usualmente en decibelios y se define por la relación:
amplitud maxima
( ) 20 logcorriente de oscuridad
R db
Valor típico: 40db (si D=2, señal=ruido). Alta calidad: 0.1db Los valores deben ser constantes en todo el rango de ND
9
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
4. Componentes electrónicos Conversor A/D Control del sensor Control de la placa Memoria Interfaz de salida
10
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Análisis de las características técnicas
Se debe comprobar tanto la calidad radiométrica como la geométrica. 1. Iluminación:
• Debe ser alta: buena calidad radiométrica y óptima relación SNR Sistema Agfa Horizon: Lámpara 400W y la superficie del sensor 100mW • Influye en la velocidad de digitalización • Problema de calentamiento del original • Buenas características radiométricas y estabilidad temporal (difusa)
2. Rango dinámico y bits de cuantización: • Rango dinámico de las películas (puede llegar a 16000:1): 16 bits • Fotografías aéreas rango menor: 10 ó 12 bits. Imágenes finales en 8 bits. • Rango dinámico entre 0.0 y 3.5D • Fotogramas aéreos: Nivel de velado 0.1-0.2 D. Imágenes en color: Fuertes densidades
11
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Análisis de las características técnicas
3. Reproducción de color: • Sistemas de capturas de color
• Instalación de filtros primarios o complementarios intercalados Problemas: Resolución y balance color azul
• Utilización de CCD de 3 chips Problema: Es el método más caro (es el más eficiente)
• Empleo de lámparas fluorescentes y filtros dicroicos Método muy empleado (problemas de smearing)
• Utilización de filtros externos al sensor Problema: Desplazamientos relativos
•El sistema determina el número de pasadas del escáner.
4. Velocidad de digitalización: Es un argumento comercial primordial que no suele reflejar la realidad. Importante: Considerar el tiempo total.

12
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
5. Resolución geométrica óptima: La indicada por los vendedores suele coincidir con la resolución del escáner que venden. Es función del tamaño de pixel. Se distinguen cuatro tamaños diferentes:
• Píxel del sensor: Tamaño de un elemento de la matriz CCD (entre 10 y 15 µm). • Píxel del escáner: Indica el tamaño de píxel del sensor proyectado sobre la fotografía que se está digitalizando. • Píxel refinado: Resultado final después del postprocesamiento de la imagen escaneada, si no existe postproceso es similar al tamaño de pixel del escáner. • Píxel de la fotografía: Se refiere a la equivalencia de la resolución de la película. Este concepto carece de sentido físico real debido a que el píxel no existe en la fotografía.
Debe estar directamente relacionado con la precisión del trabajo a realizar. Resolución imagen: 60lp/mm → Resol. 6µm → 1.5Gb/canal.
Fotointerpretación. Cámaras con resolución aprox. 30lp/mm (hasta los 60 lp/mm con IMC). Orientación interna: Precisión de 0.1píxeles (Resol: 21µm sería suficiente). Precisión de posado puntual. Precisión estática: ±2µm Precisión dinámica: ±10 a 15 µm
Errores de posado: 0.18 * tamaño de pixel (Trinder, 1994) Aerotriangulación: Errores: 5µm (imagen 15µm) y 6.5µm (imagen 30µm). Generación de MDT: Tamaños empleados: 10 y 30µm (precisión 0.1‰ H’)
13
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Ortofotografías: Precisión teórica: ±0.2mm a la escala de la presentación Precisión real: ±0.5mm, e incluso, ±1mm (elementos no rectificables) Será función de la relación entre escalas (x5, 20 a 40µm) No es aconsejable representar más de 8 pixeles/mm Importante: Que el escáner pueda escanear imágenes a diferente resolución Que pueda digitalizar a diferentes resoluciones dentro de una imagen Diferentes resoluciones:
• zoom óptico: reenfoque al cambiar de resolución, lo que implica la necesidad de componentes muy estables y autocalibración • zoom electrónico • modificación del tamaño de pixel • microdigitalización (Signum HIRES) • utilización de dos sensores de diferente resolución (DSW100) • zoom mediante software
6. Ruido de la imagen: Ruido de la película: Granularidad (±0.03-0.05D, tamaño de pixel 10µm) (0.02 - 0.03D, alta resolución)
7. Compresión de datos
14
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
8. Función de transferencia de modulación Función objetiva que determina la calidad de la imagen. Expresa la reducción de contraste para diferentes frecuencias. Se puede obtener mediante la correlación entre los pixeles próximos (función de expansión del punto - FFT - FTM). Valores de resolución aconsejados: 10x10µm (B/N) y 15 ó 20 µm (color) Relación con la resolución de la cámara y granularidad:
n= resolución cámara (lp/mm) p= resolución digitalización (µm)
9. Ruido de las imágenes digitales Factor fundamental para la determinación de la calidad del escáner Selección de zonas homogéneas en la imagen (20x20 pixeles) y calculo de 𝜎 Depende del tamaño del pixel por lo cual es necesario considerar el tamaño del pixel utilizado o en una caso utilizar la función de expansión del punto. Ruido en 20x20µm es la mitad que el ruido en una imagen de 10x10µm
1000
3.3 𝑛μ𝑚 < 𝑝 < 25
𝑔𝑟𝑎𝑛𝑢𝑙𝑎𝑟𝑖𝑑𝑎𝑑
20μ𝑚
𝑅𝑒𝑠𝑜𝑙. 𝑐á𝑚𝑎𝑟𝑎 (μ𝑚)
2 2< 𝑝 <
𝑅𝑒𝑠𝑜𝑙. 𝑐á𝑚𝑎𝑟𝑎 (μ𝑚)
2
15
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
10. Rango de densidad dinámica de los escáneres fotográmétricos Difícil de determinar depende de la sensibilidad del sensor Se obtiene mediante la digitalización de una cuña de grises calibrada
11. Distorsiones de la imagen Efectos de borde o problemas de ajuste entre los elementos de captación.
Son complicados de corregir, dan lugar a bandas en la imagen final.
16
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Calibración de escáneres
Calibración: Determinación de los errores sistemáticos de un instrumento mediante la comparación de las medidas hechas con dicho instrumento con las realizadas con un sistema que es considerado como más preciso (Glossary of Mapping Sciences, ASPRS/ASCE, 1994). Objetivo: Obtención de la corrección de la calibración que es un conjunto de valores que añadidos o restados a la lectura o medida del instrumento nos proporcionan un valor más próximo a la realidad. Es un proceso dependiente del instrumento. 1993: OEEPE “Analysis of Photo-Scanners”
ISPRS I/5 “Hardcopy Scanning and Preprocessing System” Errores y parámetros Tipos de errores: - Geométrico - Radiométrico Tiempo de variación: - Corto periodo - Largo periodo

17
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
A. Errores de periodo largo de variación 1. Errores debidos al objetivo o a otros elementos ópticos
Errores geométricos: distorsión radial simétrica y la distorsión tangencial. Errores radiométricos: bandeado (vignetting), sombras (shading) y ecos.
Líneas verticales y bandeado horizontal (Baltsavias, 1996)
2. CCD con problemas de blemishes Afecta sólo a los sensores CCD matriciales de gran tamaño. Diferencias en los ND (más de 16) en píxeles, líneas/colum, zonas Problemas de fabricación del sensor.
3. Problemas de alineamiento y solape Afecta a los CCD lineales múltiples (problemas de no colinealidad)
Problema de alineamiento entre dos sensores lineales (Baltsavias, 1996)

18
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
4. Errores de submuestreo Afecta a los sensores lineales Se producen digitalizar a una resolución inferior a la de la imagen original por lo que es necesario realizar un remuestreo en la dirección horizontal, mientras que en la dirección vertical los píxeles tienen un tamaño mayor (cambio de escala).
5. Smearing Afecta a los sensores lineales. Consiste en que las líneas horizontales aparecen más gruesas y con un contraste menor que las verticales.
Smearing de líneas horizontales. A: Dirección de barrido B: Dirección del sensor CCD

19
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
6. Enfoque El plano del sensor debe ser paralelo a la placa y el enfoque ser correcto. Problemas de astigmatismo de la lente: No coincidencia entre los elementos verticales y horizontales de la imagen.
7. Coincidencia entre canales Desplazamiento relativo entre los canales de las imágenes en color. Problemas de posicionamiento del sensor o bien a aberraciones cromáticas de la lente u otros elementos ópticos.
8. Precisión de posicionamiento geométrico, uniformidad y repetibilidad 9. Resolución geométrica
No es un error, sino un parámetro que define la calidad del sensor. Se establece en función de la FTM.
10. Falta de perpendicularidad Si las líneas/columnas del CCD no son paralelas a la dirección de digitalización, se producen efectos de escalera (shear). Este efecto también se produce si existen problemas de ortogonalidad en el sensor. Es corregido mediante la transformación afín en la orientación interna.
11. Linealidad de la escala de grises La relación entre los electrones generados en el sensor y los niveles digitales debe ser lineal (se producen errores hasta del 0.5% por el amplificación del chip).

20
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
12. Rango dinámico Es un parámetro (no un error) que debe ser determinado y optimizado. Capacidad del sensor para detectar diferencias de nivel de gris y capturar imágenes de contraste alto. El rango dinámico depende del nivel de ruido y este depende a su vez de la densidad (debe ser calculado para diferentes niveles de densidad).
13. Balance de color Los CCD no presentan una respuesta uniforme en el espectro visible es necesario ajustar diferentes parámetros (ajuste de iluminación, velocidad de digitalización, tiempo de integración, …) para cada canal y de esta forma, obtener una imagen compensada.
14. Precisión radiométrica Análisis de los tipos de ruido: ruido térmico, blooming, smearing, tailing, … El análisis se suele realizar de una forma conjunta. Análisis basado en el análisis de la uniformidad de la respuesta fotométrica.
15. Tamaño de pixel 16. Calidad cromática

21
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
B. Errores de periodo corto de variación 1. Variaciones radiométricas temporales
Estimación de la variación de ND en patrones homogéneos a lo largo del tiempo. 2. Bandas
Se produce en los sensores de tipo lineal (tanto simple como multiple). Aparición de bandeado como consecuencia del ruido de corriente de oscuridad, los problemas de falta de uniformidad y de sensibilidad.
3. Ecos Se produce en los sensores lineales multiples y matriciales de gran tamaño con alta velocidad de lectura mediante la incorporación de sistemas múltiples.
Ecos en la imagen digital (Baltsavias, 1996)
4. Diferencias en los patrones de ruido y respuesta entre los CCD adyacentes Se produce en los sensores lineales múltiples. Se deben a diferencias constructivas entre los elementos del sensor múltiple.
22
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
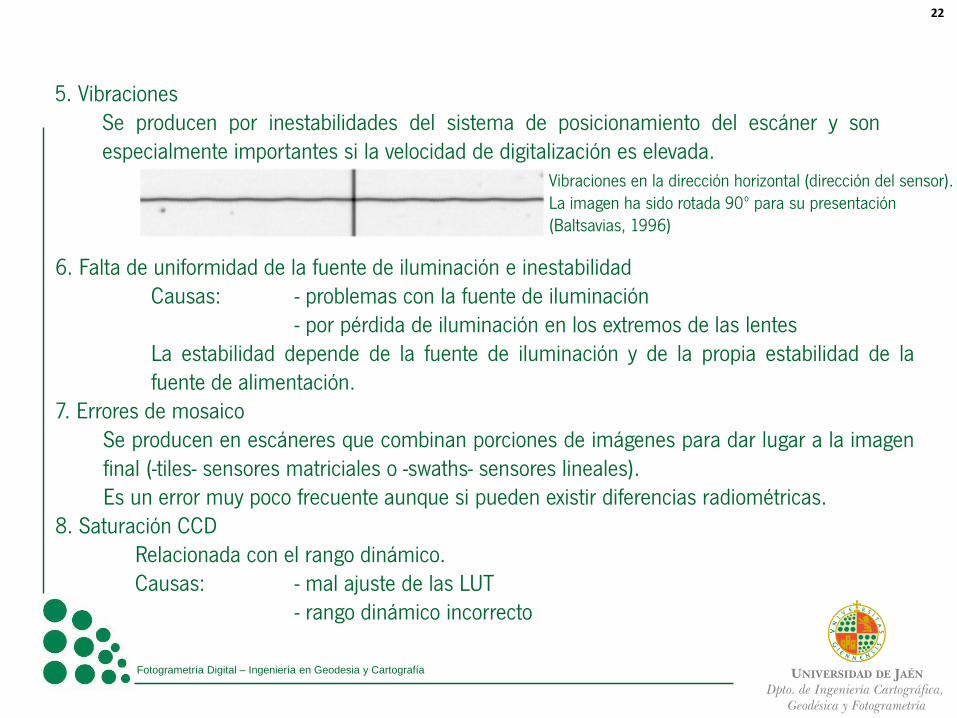
5. Vibraciones Se producen por inestabilidades del sistema de posicionamiento del escáner y son especialmente importantes si la velocidad de digitalización es elevada.
Vibraciones en la dirección horizontal (dirección del sensor). La imagen ha sido rotada 90º para su presentación (Baltsavias, 1996)
6. Falta de uniformidad de la fuente de iluminación e inestabilidad Causas: - problemas con la fuente de iluminación
- por pérdida de iluminación en los extremos de las lentes La estabilidad depende de la fuente de iluminación y de la propia estabilidad de la fuente de alimentación.
7. Errores de mosaico Se producen en escáneres que combinan porciones de imágenes para dar lugar a la imagen final (-tiles- sensores matriciales o -swaths- sensores lineales). Es un error muy poco frecuente aunque si pueden existir diferencias radiométricas.
8. Saturación CCD Relacionada con el rango dinámico. Causas: - mal ajuste de las LUT - rango dinámico incorrecto

23
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
9. Linejitter Se produce en los sensores matriciales o por problemas de sincronización entre los píxeles. Su magnitud es en torno a 0.1 píxeles.
10. Polvo, desperfectos de la película, etc.
24
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Procedimiento general de calibración 1. Materiales necesarios para la calibración a) Patrones de calibración de resolución Las placas de calibración de resolución se deben construir en vidrio y pueden encontrarse en positivo o en negativo. Los patrones más frecuentemente empleados son:
• Placa de calibración de la USAF. Patrones de 3 pares de líneas con resolución entre 0.25 y 228 lp/mm con incrementos de 1.12 con líneas horizontales y verticales.
• Placa de calibración NBS. Patrones de 5 pares de líneas con resolución entre 1 y 500 lp/mm con incrementos de 1.12 con líneas horizontales y verticales.
• Placa de patrones de 15 pares de líneas empleadas para el cálculo de funciones de transferencia de modulación, con dos tipos de resoluciones de 1 a 1000 lp/mm ó de 1 a 625 lp/mm con incrementos de 1.26. Este tipo de patrones sólo incorporan líneas verticales.

25
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Placa de calibración de la resolución geométrica de la USAF
Las placas a utilizar se deben elegir en función del escáner (resultados a priori). Otras placas:
• placas de grupos de patrones paralelos con un número de pares de líneas igual o mayor que 3 con frecuencia creciente.
• placas de Fresnel que consisten en anillos concéntricos con simetría radial y distribución de intensidad sinusoidal.
En todos los casos es fundamental el que las placas sean de alta calidad, en especial, en los aspectos relativos al contraste, la definición de bordes y planeidad de la placa.

26
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
b) Cuñas de escalas de grises Ejemplo: Kodak SR37 Tamaño: 21x2 cm Densidad: 0.0 a 1.8D (incremento 0.05D) Conservación medioambiental adecuada. Comprobación con microdensitómetro.
c) Patrones para la comprobación de la falta de uniformidad de la respuesta fotométrica d) Patrones de comprobación de registro de puntos y líneas
e) Patrones para la comprobación tonal y de reproducción de color Placa UGRA/FOGRA Tamaño: 20x27cm Determinación granularidad y calidad de la imagen
27
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
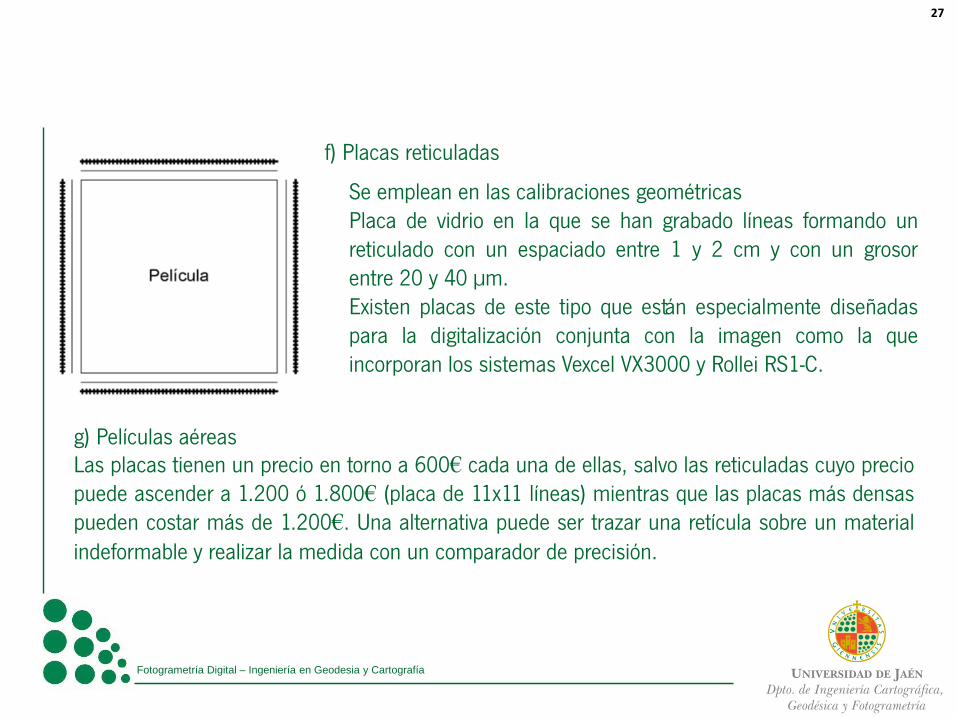
f) Placas reticuladas
Se emplean en las calibraciones geométricas Placa de vidrio en la que se han grabado líneas formando un reticulado con un espaciado entre 1 y 2 cm y con un grosor entre 20 y 40 µm. Existen placas de este tipo que están especialmente diseñadas para la digitalización conjunta con la imagen como la que incorporan los sistemas Vexcel VX3000 y Rollei RS1-C.
g) Películas aéreas Las placas tienen un precio en torno a 600€ cada una de ellas, salvo las reticuladas cuyo precio puede ascender a 1.200 ó 1.800€ (placa de 11x11 líneas) mientras que las placas más densas pueden costar más de 1.200€. Una alternativa puede ser trazar una retícula sobre un material indeformable y realizar la medida con un comparador de precisión.
28
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Condiciones de realización de la calibración y procedimiento La calibración se debe realizar a la mayor resolución geométrica posible. Se debe emplear un rango dinámico muy amplio (o posterior realce). Precalentamiento del escáner y limpieza exhaustiva. Se debe repetir el proceso varias veces (a diferentes velocidades). Precisión geométrica: Transformación afín
Análisis de residuos (global y local) Precisión radiométrica: Empleo de las cuñas de grises y patrones.
Zonas homogéneas. Corrección de errores por sustitución.
Errores de alineación: Digitalización de líneas horizontales Errores de submuestreo: Patrón de líneas y puntos (0 y 90º) Error de smearing: Patrón de líneas horizontales y verticales
Estimación de anchura y contraste. Enfoque: Digitalización de patrón
Perfiles de niveles digitales Correspondencia canales: Separación de imagen en canales y coincidencia. Resolución geométrica: Patrones de resolución
Cálculo de FTM (nunca de forma visual)
29
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
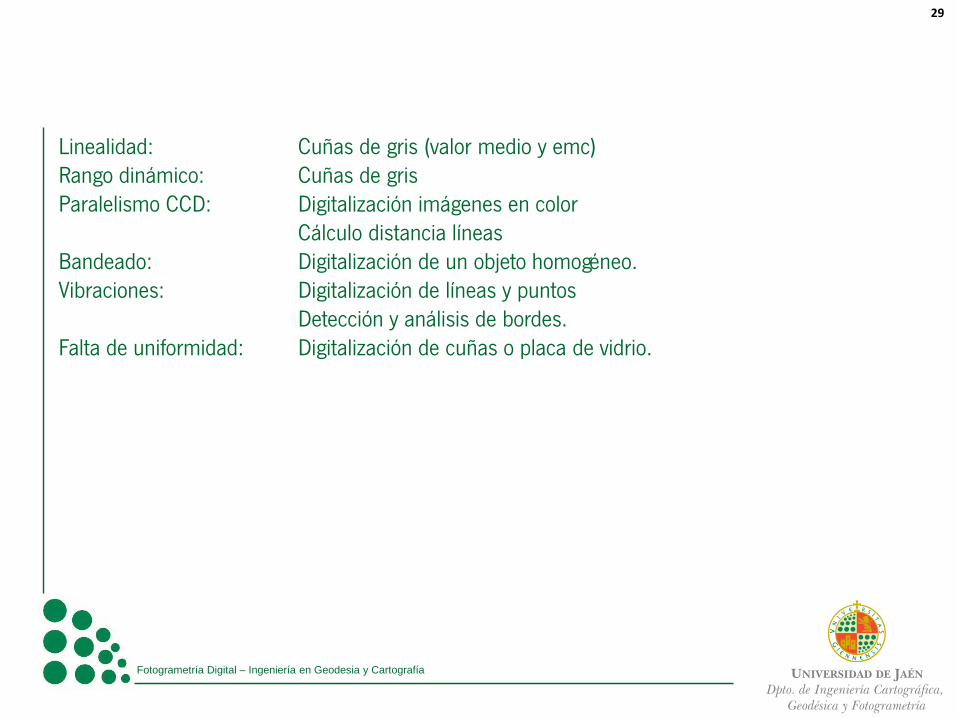
Linealidad: Cuñas de gris (valor medio y emc) Rango dinámico: Cuñas de gris Paralelismo CCD: Digitalización imágenes en color Cálculo distancia líneas Bandeado: Digitalización de un objeto homogéneo. Vibraciones: Digitalización de líneas y puntos Detección y análisis de bordes. Falta de uniformidad: Digitalización de cuñas o placa de vidrio.
30
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
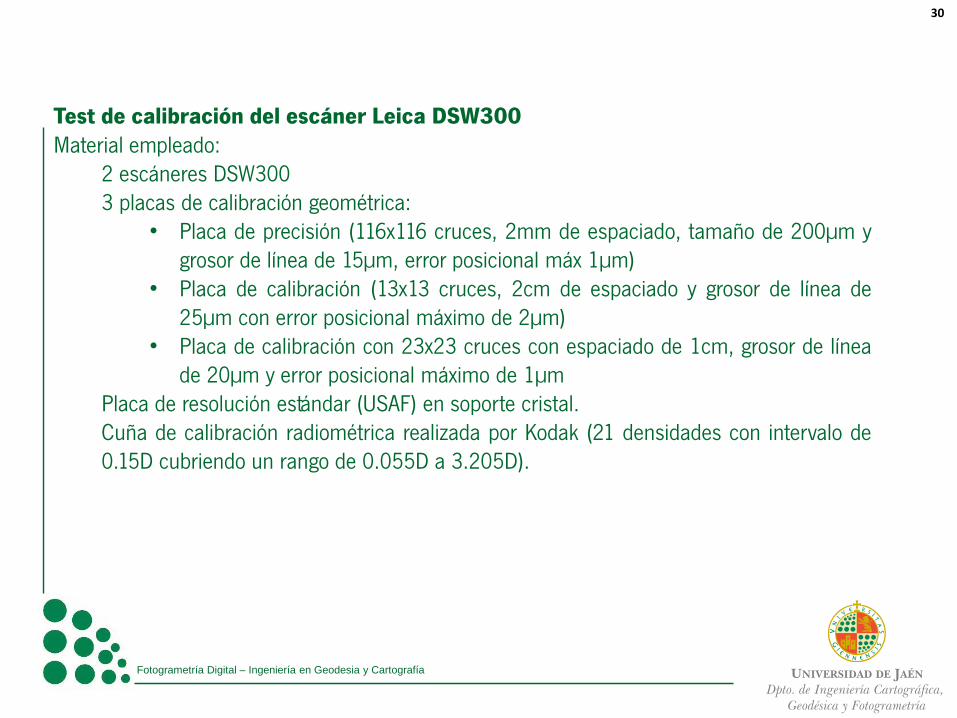
Test de calibración del escáner Leica DSW300 Material empleado:
2 escáneres DSW300 3 placas de calibración geométrica:
• Placa de precisión (116x116 cruces, 2mm de espaciado, tamaño de 200µm y grosor de línea de 15µm, error posicional máx 1µm)
• Placa de calibración (13x13 cruces, 2cm de espaciado y grosor de línea de 25µm con error posicional máximo de 2µm)
• Placa de calibración con 23x23 cruces con espaciado de 1cm, grosor de línea de 20µm y error posicional máximo de 1µm
Placa de resolución estándar (USAF) en soporte cristal. Cuña de calibración radiométrica realizada por Kodak (21 densidades con intervalo de 0.15D cubriendo un rango de 0.055D a 3.205D).

31
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Calibración geométrica 6 digitalizaciones (3 primer y 3 segundo día).Tamaño pixel: 12.5 µm (color y gris) Medida mediante matching de patrones con ajuste por mm.cc. (0.02-0.03 pix) Revisión manual 1. Test geométrico global. Transformación afín (todas las cruces, 4 esquinas, 8 -esquinas+lados-) Empleo de todas las placas. 2. Errores de desplazamiento entre canales. Comparación de las coordenadas de las cruces entre pares de canales 3. Test geométrico local. Este escáner escanea en porciones. Se analiza el comportamiento en cada porción (placa de precisión) Permite obtener distorsión radial del sensor 4. Repetibilidad. Análisis de las diferentes medidas 5. Estabilidad y robustez. Análisis de las medidas de la misma placa 6. Resolución geométrica. Inspección visual de la placa de resolución geométrica (3 ensayos)

32
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Calibración radiométrica Cuña de densidades (gris y color) Dos resoluciones de digitalización LUT de tipo lineal y logarítmico.
1. Estimación del nivel de ruido. Media y desviación típica de cada densidad de la cuña de densidades, escogiéndose siempre la misma porción dentro de la zona de nivel de densidad.
2. Linealidad y rango dinámico. Representación del logaritmo del nivel de gris medio frente a la densidad calibrada respectiva, los puntos de la representación deben estar dispuestos sobre una línea recta y ser equidistantes.
3. Rango dinámico. Nivel de densidad mínima no saturada: Nivel que proporciona un nivel digital no nulo. Nivel de densidad máximo: Distancia del valor medio de gris de una densidad detectable a partir de los valores medios de sus dos niveles de densidad vecinos debe ser igual a la suma de la desviación típica de la densidad detectable y las desviaciones de los vecinos, es decir:
Mi-1 + SDi-1 + SDi < Mi < Mi+1 + SDi+1 + SDi
donde: M media del nivel de densidad de la cuña SD desviación típica del nivel de densidad de la cuña i nivel de valor de densidad creciente
33
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
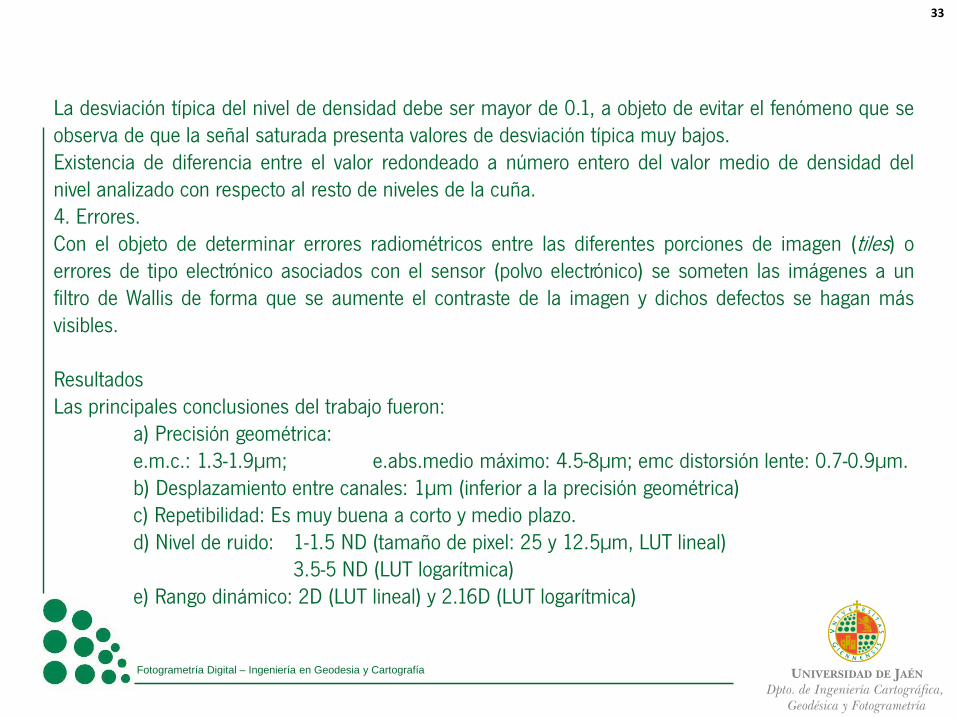
La desviación típica del nivel de densidad debe ser mayor de 0.1, a objeto de evitar el fenómeno que se observa de que la señal saturada presenta valores de desviación típica muy bajos. Existencia de diferencia entre el valor redondeado a número entero del valor medio de densidad del nivel analizado con respecto al resto de niveles de la cuña. 4. Errores. Con el objeto de determinar errores radiométricos entre las diferentes porciones de imagen (tiles) o errores de tipo electrónico asociados con el sensor (polvo electrónico) se someten las imágenes a un filtro de Wallis de forma que se aumente el contraste de la imagen y dichos defectos se hagan más visibles. Resultados Las principales conclusiones del trabajo fueron: a) Precisión geométrica:
e.m.c.: 1.3-1.9µm; e.abs.medio máximo: 4.5-8µm; emc distorsión lente: 0.7-0.9µm. b) Desplazamiento entre canales: 1µm (inferior a la precisión geométrica) c) Repetibilidad: Es muy buena a corto y medio plazo. d) Nivel de ruido: 1-1.5 ND (tamaño de pixel: 25 y 12.5µm, LUT lineal) 3.5-5 ND (LUT logarítmica) e) Rango dinámico: 2D (LUT lineal) y 2.16D (LUT logarítmica)
34
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
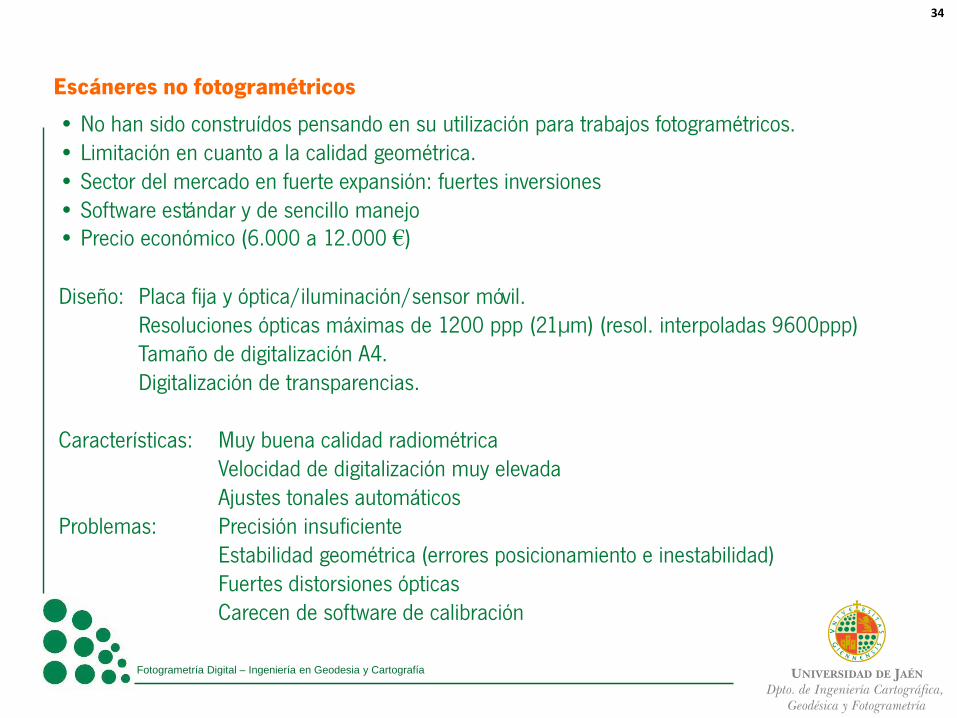
Escáneres no fotogramétricos
• No han sido construídos pensando en su utilización para trabajos fotogramétricos. • Limitación en cuanto a la calidad geométrica. • Sector del mercado en fuerte expansión: fuertes inversiones • Software estándar y de sencillo manejo • Precio económico (6.000 a 12.000 €) Diseño: Placa fija y óptica/iluminación/sensor móvil. Resoluciones ópticas máximas de 1200 ppp (21µm) (resol. interpoladas 9600ppp) Tamaño de digitalización A4. Digitalización de transparencias. Características: Muy buena calidad radiométrica Velocidad de digitalización muy elevada Ajustes tonales automáticos Problemas: Precisión insuficiente Estabilidad geométrica (errores posicionamiento e inestabilidad) Fuertes distorsiones ópticas Carecen de software de calibración
35
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
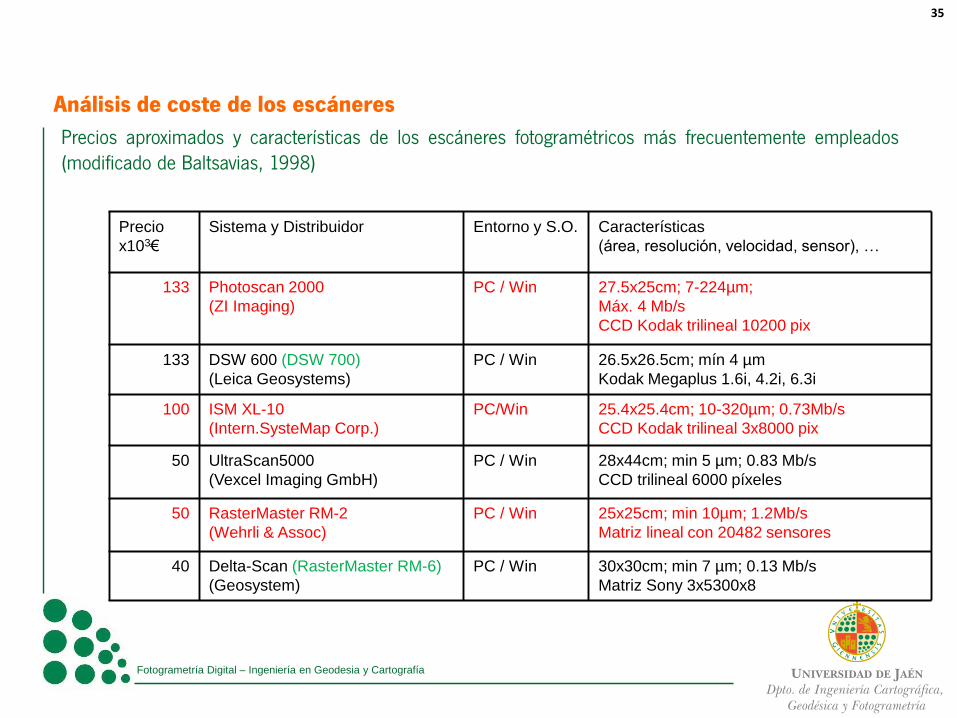
Análisis de coste de los escáneres
Precios aproximados y características de los escáneres fotogramétricos más frecuentemente empleados (modificado de Baltsavias, 1998)
Precio
x103€
Sistema y Distribuidor Entorno y S.O. Características
(área, resolución, velocidad, sensor), …
133 Photoscan 2000
(ZI Imaging)
PC / Win 27.5x25cm; 7-224µm;
Máx. 4 Mb/s
CCD Kodak trilineal 10200 pix
133 DSW 600 (DSW 700)
(Leica Geosystems)
PC / Win 26.5x26.5cm; mín 4 µm
Kodak Megaplus 1.6i, 4.2i, 6.3i
100 ISM XL-10
(Intern.SysteMap Corp.)
PC/Win 25.4x25.4cm; 10-320µm; 0.73Mb/s
CCD Kodak trilineal 3x8000 pix
50 UltraScan5000
(Vexcel Imaging GmbH)
PC / Win 28x44cm; min 5 µm; 0.83 Mb/s
CCD trilineal 6000 píxeles
50 RasterMaster RM-2
(Wehrli & Assoc)
PC / Win 25x25cm; min 10µm; 1.2Mb/s
Matriz lineal con 20482 sensores
40 Delta-Scan (RasterMaster RM-6)
(Geosystem)
PC / Win 30x30cm; min 7 µm; 0.13 Mb/s
Matriz Sony 3x5300x8

36
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
Información de los escáneres Leica http://www.erdas.com Vexcel http://www.gtbi.net Deltascan http://www.vingeo.com/scaner.html Rastermaster http://www.wehrliassoc.com
37
Fotogrametría Digital – Ingeniería en Geodesia y Cartografía UNIVERSIDAD DE JAÉN Dpto. de Ingeniería Cartográfica,
Geodésica y Fotogrametría
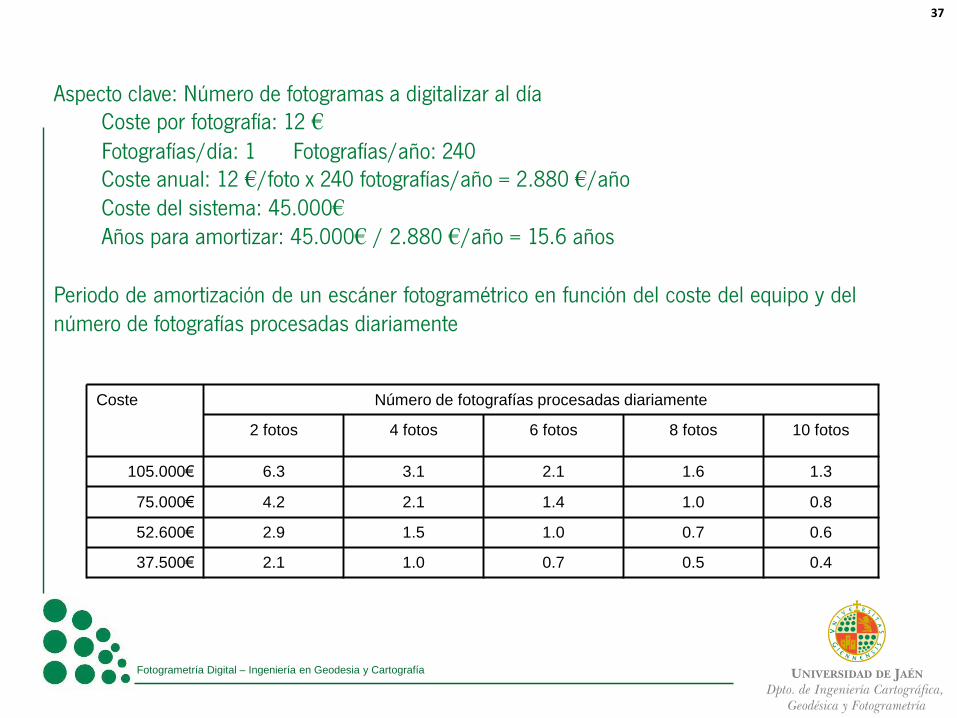
Aspecto clave: Número de fotogramas a digitalizar al día Coste por fotografía: 12 € Fotografías/día: 1 Fotografías/año: 240 Coste anual: 12 €/foto x 240 fotografías/año = 2.880 €/año Coste del sistema: 45.000€ Años para amortizar: 45.000€ / 2.880 €/año = 15.6 años
Periodo de amortización de un escáner fotogramétrico en función del coste del equipo y del número de fotografías procesadas diariamente
Coste Número de fotografías procesadas diariamente
2 fotos 4 fotos 6 fotos 8 fotos 10 fotos
105.000€ 6.3 3.1 2.1 1.6 1.3
75.000€ 4.2 2.1 1.4 1.0 0.8
52.600€ 2.9 1.5 1.0 0.7 0.6
37.500€ 2.1 1.0 0.7 0.5 0.4


















