Péndulo Invertido - CoffeeBraincoffeebrain.org/wikicontrol/images/9/9c/Manual_pendulo.pdf ·...
12
Péndulo Invertido Diana Jiménez Catalina Duplat Daniel Arias
Transcript of Péndulo Invertido - CoffeeBraincoffeebrain.org/wikicontrol/images/9/9c/Manual_pendulo.pdf ·...

Péndulo Invertido
Diana Jiménez
Catalina Duplat
Daniel Arias
Contenido
Componentes
- Motor Nisca NC 5475
- Encoder HEDS-9100
- Correa dentada Unitta 810 XL 037
- Arduino Mega 2560
- L293N DC Motor Driver
Presupuesto
Ensamblaje
Conexiones Eléctricas
1
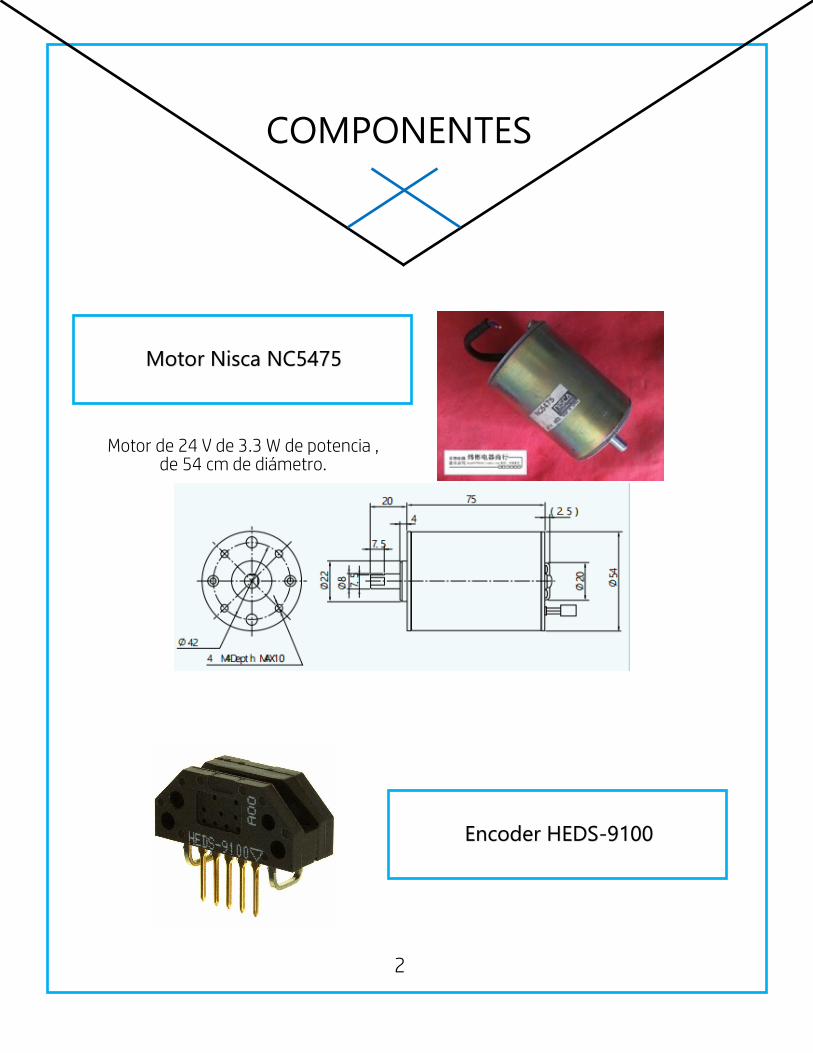
Motor de 24 V de 3.3 W de potencia , de 54 cm de diámetro.
Motor Nisca NC5475
COMPONENTES
Encoder HEDS-9100
2

Correa Dentada Unitta 810 XL 037
TUBO DE PVC
Tubo pvc de 15 mm de diámetro y 350 mm de largo
3
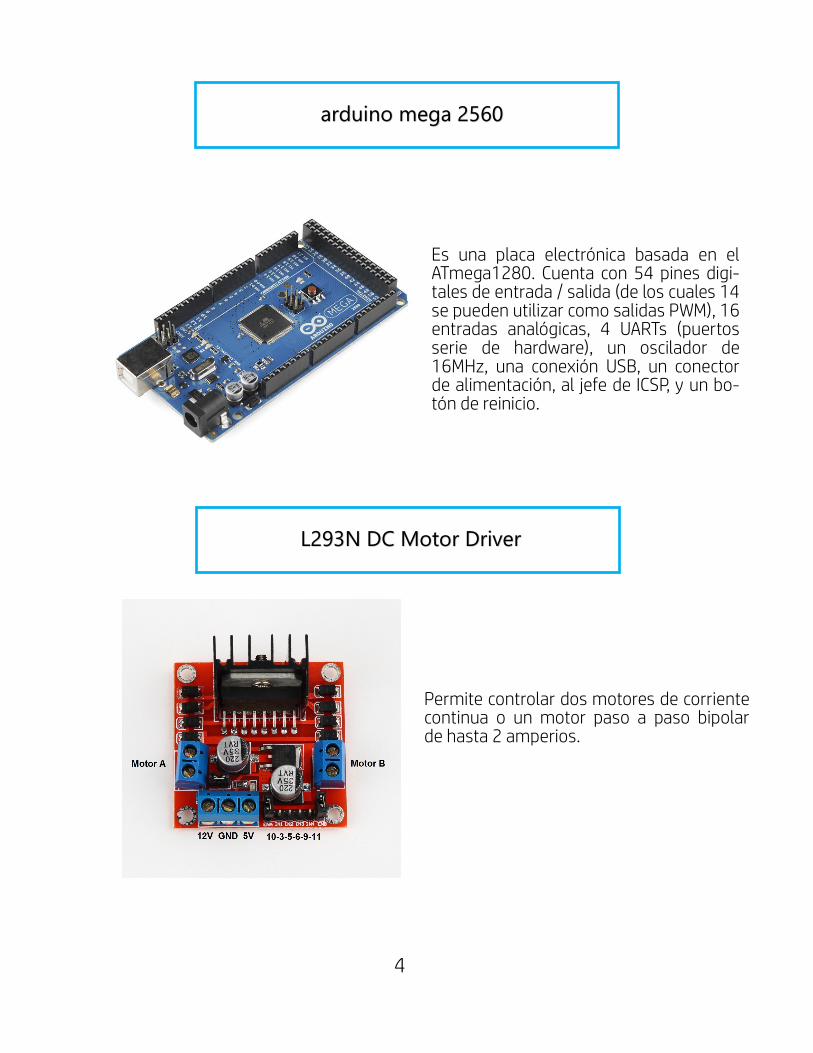
arduino mega 2560
L293N DC Motor Driver
Permite controlar dos motores de corriente continua o un motor paso a paso bipolar de hasta 2 amperios.
Es una placa electrónica basada en el ATmega1280. Cuenta con 54 pines digi-tales de entrada / salida (de los cuales 14 se pueden utilizar como salidas PWM), 16 entradas analógicas, 4 UARTs (puertos serie de hardware), un oscilador de 16MHz, una conexión USB, un conector de alimentación, al jefe de ICSP, y un bo-tón de reinicio.
4
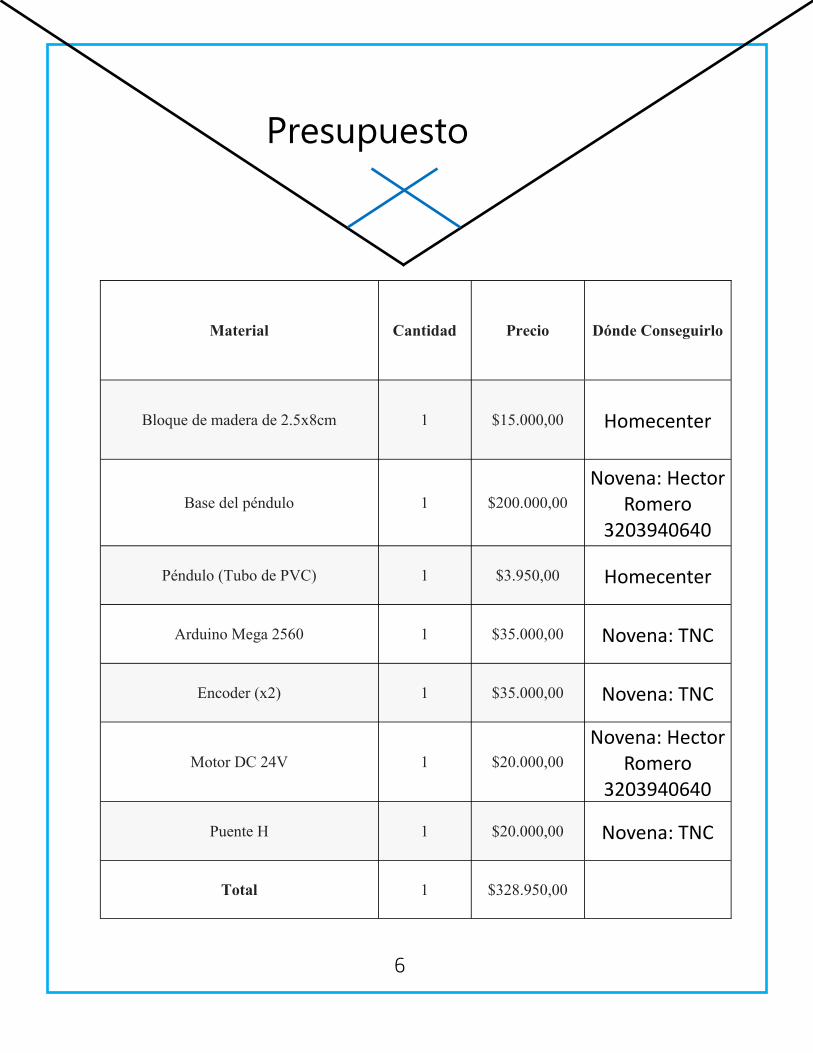
Presupuesto
Material Cantidad Precio Dónde Conseguirlo
Bloque de madera de 2.5x8cm 1 $15.000,00 Homecenter
Base del péndulo 1 $200.000,00
Novena: Hector Romero
3203940640
Péndulo (Tubo de PVC) 1 $3.950,00 Homecenter
Arduino Mega 2560 1 $35.000,00 Novena: TNC
Encoder (x2) 1 $35.000,00 Novena: TNC
Motor DC 24V 1 $20.000,00
Novena: Hector Romero
3203940640
Puente H 1 $20.000,00 Novena: TNC
Total 1 $328.950,00
6
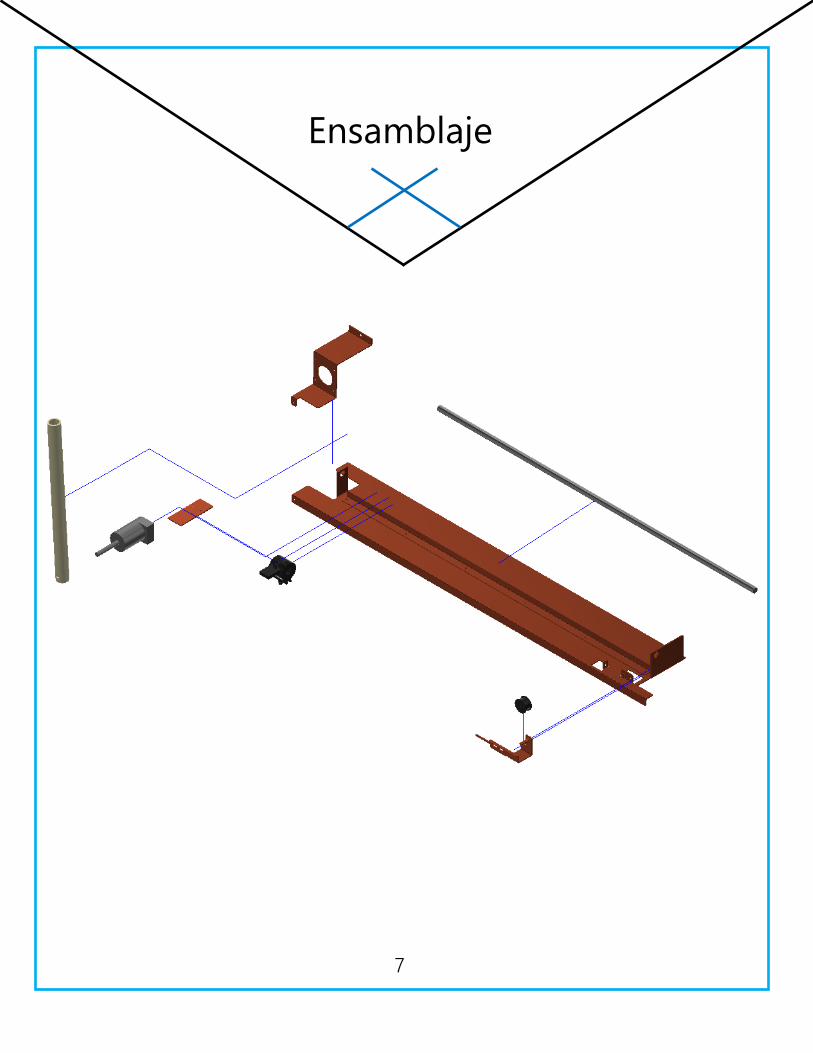
Ensamblaje
7
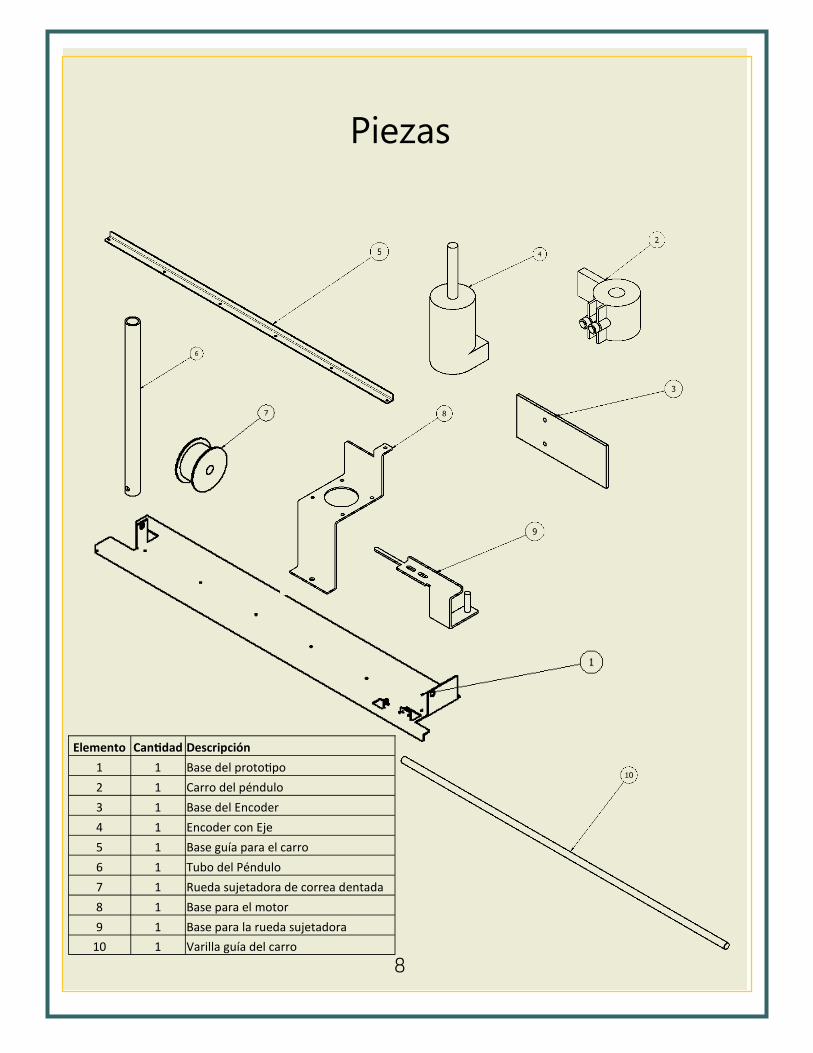
Elemento Cantidad Descripción
1 1 Base del prototipo
2 1 Carro del péndulo
3 1 Base del Encoder
4 1 Encoder con Eje
5 1 Base guía para el carro
6 1 Tubo del Péndulo
7 1 Rueda sujetadora de correa dentada
8 1 Base para el motor
9 1 Base para la rueda sujetadora
10 1 Varilla guía del carro
Piezas
8
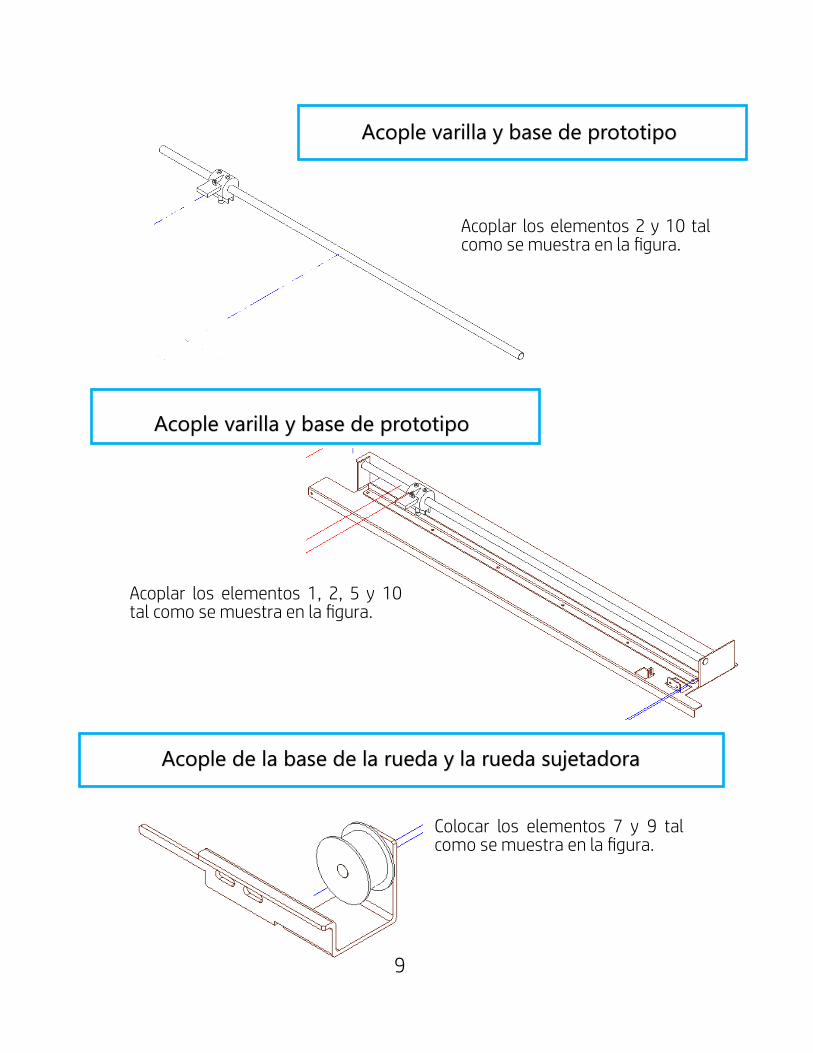
Acople varilla y base de prototipo
Acople de la base de la rueda y la rueda sujetadora
Acoplar los elementos 1, 2, 5 y 10 tal como se muestra en la figura.
Colocar los elementos 7 y 9 tal como se muestra en la figura.
Acople varilla y base de prototipo
Acoplar los elementos 2 y 10 tal como se muestra en la figura.
9
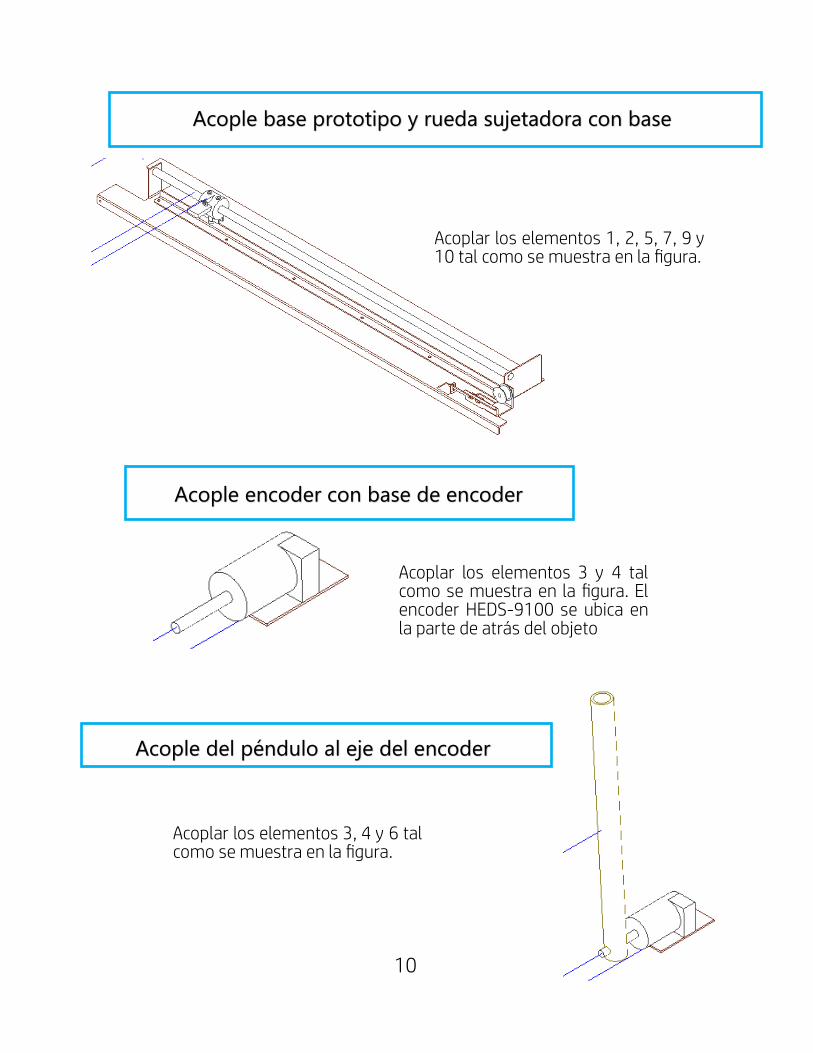
Acople encoder con base de encoder
Acople del péndulo al eje del encoder
Acoplar los elementos 3 y 4 tal como se muestra en la figura. El encoder HEDS-9100 se ubica en la parte de atrás del objeto
Acoplar los elementos 3, 4 y 6 tal como se muestra en la figura.
Acople base prototipo y rueda sujetadora con base
Acoplar los elementos 1, 2, 5, 7, 9 y 10 tal como se muestra en la figura.
10
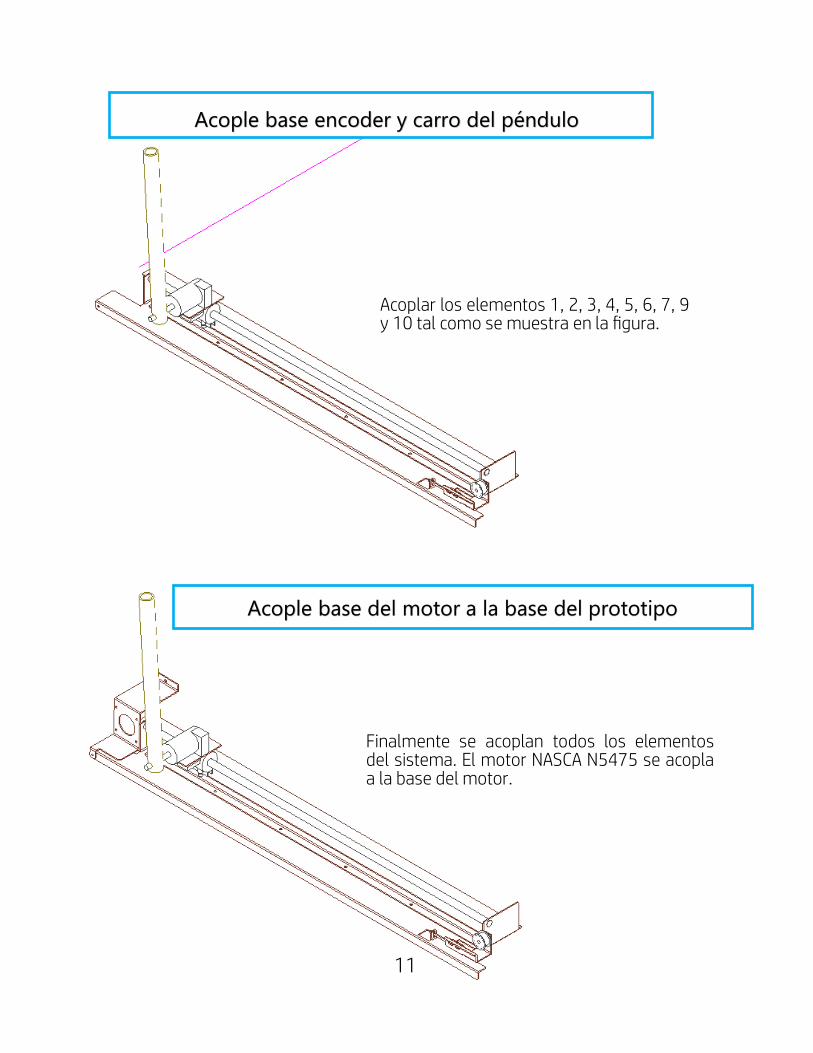
Acople base del motor a la base del prototipo
Acople base encoder y carro del péndulo
Acoplar los elementos 1, 2, 3, 4, 5, 6, 7, 9 y 10 tal como se muestra en la figura.
Finalmente se acoplan todos los elementos del sistema. El motor NASCA N5475 se acopla a la base del motor.
11
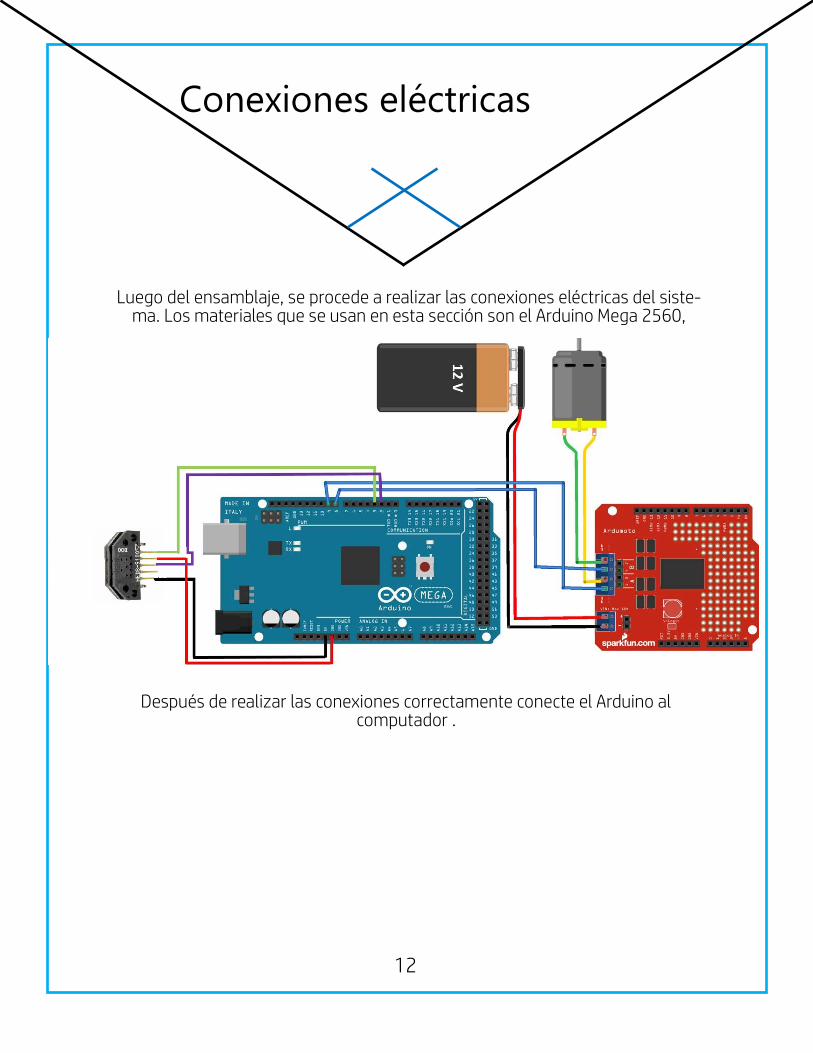
Conexiones eléctricas
Luego del ensamblaje, se procede a realizar las conexiones eléctricas del siste-ma. Los materiales que se usan en esta sección son el Arduino Mega 2560,
Después de realizar las conexiones correctamente conecte el Arduino al computador .
12