Practica 01 Robotica
4
Valor de la Cátedra: INTEGRIDAD 1 INSTRUCCIONES: A. Lea cuidadosamente el material, desarróllelo con bolígrafo, escriba claramente su nombre, carnet. B. Sea ordenado en el desarrollo de la prueba, evitando las tachaduras y enmendaduras que dejen duda de sus respuestas. C. Puede anexar hojas extras para dar sus respuestas, pero no olvide colocarles su nombre a cada anexo que haga. PRACTICA #01 Servomotor y Arduino. Objetivo: Manejar correctamente los puertos digitales de Arduino, con actuadores de tipo servomotor. INDICACIONES: 1. Formar equipos de trabajo, dependiendo, el recurso que haya disponible. 2. La guía se presentara de forma individual, aunque se trabaje en equipo. 3. Armar los circuitos propuesto, compilar el código y cargarlo a la placa ARDUINO, luego llamar al instructor para que le asigne el visto bueno del funcionamiento, y le califique. UNIVERSIDAD TECNOLÓGICA DE EL SALVADOR FACULTAD DE INFORMÁTICA Y CIENCIAS APLICADAS ESCUELA DE INFORMÁTICA CÁTEDRA DE ELECTRÓNICA ASIGNATURA : PRINCIPIOS DE ROBOTICA DOCENTE : TEC. GERMAN ROSA C. EVALUACIÓN : UNIDAD II SEC. 01 CICLO 02/2015 AULA LAB. ELEC NOTA: EVALUACIÓN PRACTICA LAB. 01 No. DE LISTA: ESTUDIANTE: CARNÉ: FECHA: AVISO: La nota de la evaluación esta dividida en las siguientes actividades. PRACTICA LAB. COMPETENCIA: Manejo de tipos de actuadores, el servomotor a través de una placa ARDUINO.
-
Upload
gersonrodriguez -
Category
Documents
-
view
1 -
download
0
description
roboitca ejerccios
Transcript of Practica 01 Robotica

Valor de la Cátedra: INTEGRIDAD
1
INSTRUCCIONES:
A. Lea cuidadosamente el material, desarróllelo con bolígrafo, escriba claramente su nombre, carnet.
B. Sea ordenado en el desarrollo de la prueba, evitando las tachaduras y enmendaduras que dejen
duda de sus respuestas.
C. Puede anexar hojas extras para dar sus respuestas, pero no olvide colocarles su nombre a cada
anexo que haga.
PRACTICA #01 Servomotor y Arduino. Objetivo: Manejar correctamente los puertos digitales de Arduino, con actuadores de tipo servomotor.
INDICACIONES:
1. Formar equipos de trabajo, dependiendo, el recurso que haya disponible.
2. La guía se presentara de forma individual, aunque se trabaje en equipo.
3. Armar los circuitos propuesto, compilar el código y cargarlo a la placa ARDUINO,
luego llamar al instructor para que le asigne el visto bueno del funcionamiento, y le
califique.
UNIVERSIDAD TECNOLÓGICA DE EL SALVADOR
FACULTAD DE INFORMÁTICA Y CIENCIAS APLICADAS
ESCUELA DE INFORMÁTICA
CÁTEDRA DE ELECTRÓNICA
ASIGNATURA : PRINCIPIOS DE ROBOTICA
DOCENTE : TEC. GERMAN ROSA C.
EVALUACIÓN : UNIDAD II
SEC.
01
CICLO
02/2015
AULA
LAB.
ELEC
NOTA:
EVALUACIÓN PRACTICA LAB. 01 No. DE LISTA:
ESTUDIANTE:
CARNÉ:
FECHA:
AVISO: La nota de la evaluación esta dividida en las siguientes actividades.
PRACTICA LAB.
COMPETENCIA: Manejo de tipos de actuadores, el servomotor a través de una placa ARDUINO.

Valor de la Cátedra: INTEGRIDAD
2
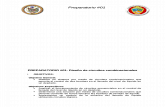
EJEMPLO MSV01: En el siguiente ejemplo se demostrara el manejo de un servomotor
por medio de Arduino, se usara la conexión del circuito de la figura 1, en este Sketch se usa
comandos dentro del Sketch para manipular la posición del servomotor. (35%)
Figura 1. Conexión para el control de un servomotor
/*
* Ejemplo MSV0 - Manejo de la posicion de
* un servo motor desde el Sketch
* conectado al PIN9 de arduino
*/
// Incluir la libreria, ya incluida en la
// distribucion estandar del IDE arduino
#include <Servo.h>
// Defiir un objeto llamado miServo
Servo miServo;
void setup()
{
miServo.attach(9); // asocia el servo al pin 9
}
void loop()
{
// posicionar el servo en 179º
miServo.write(179);
delay(2000);
// posicionar el servo en 90º
miServo.write(90);
delay(2000);
// posicionar el servo en 0º
miServo.write(0);
delay(2000);
}
// fin del sketch
NOTA:
Funcionamiento: ________

Valor de la Cátedra: INTEGRIDAD
3
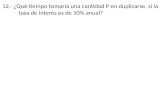
EJEMPLO.MSV02: PARA el siguiente ejemplo se usara el esquema de conexión de la figura
2, en este Sketch se programara el Arduino para gobernar el servomotor a partir de los
movimientos sobre un potenciómetro, el programa leerá el sensor y accionara el servo
según esta lectura. (35%)
Figura 2. Conexión para el control de un servomotor desde un potenciómetro.
/*
* Ejemplo MSV02 -
* Controlando la posición de un servo usando un potenciómetro (resistencia variable)
* Por Michal Rinott
*/
// Incluir la libreria, ya incluida en la
// distribucion estandar del IDE arduino
#include <Servo.h>
Servo miServo; // Crea un objeto servo para controlar el servomotor
int potPin = 0; // Pin analógico usado para conectar el potenciómetro
int valorPot; // variable para leer el valor del pin analógico AO
void setup()
{
miServo.attach(9); // asocia el servo al pin 9
}
void loop()
{
// lee el valor del potenciómetro (valor
//entre 0 y 1023)
valorPot = analogRead(potPin);
// escala el valor para usarlo con el
// servo (valor entre 0 y 180), investigar el uso de
// la fucion MAP
valorPot = map(valorPot, 0, 1023, 0, 179);
// accionar el servo
miServo.write(valorPot);
delay(25);
}
// fin del sketch
NOTA: Funcionamiento: ________

Valor de la Cátedra: INTEGRIDAD
4
Cuestionario: (30%) [5% X 6]
1. Según lo visto en clase teórica, escriba una breve descripción de lo que es un
SERVOMOTOR.
___________________________________________________________________
___________________________________________________________________
___________________________________________________________________
_______________________________________________________
2. Enliste los números de pines del ARDUNO, que son útiles para el manejo de
servomotores, teniendo en cuenta que deben ser con salida PWM.
________________________________________________________________
3. ¿Qué librería nombre recibe la librería en ARDUINO, para manejo de
servomotores?
______________________________________________________________
4. Describa las siguientes funciones enlistadas, dando una breve descripción de su
aplicación en un sketch:
miServo.attach(9);
_________________________________________________________________________
_________________________________________________________________________
___________________________________________________________
miServo.write(valorPot);
_________________________________________________________________________
_________________________________________________________________________
_______________________________________________________________
5. Proponga una aplicación práctica utilizando el servomotor, puede ser en distintas
áreas, como lo es la industria, el hogar, la robótica, la educación. etc.
___________________________________________________________________
___________________________________________________________________
__________________________________________________________
6. Conclusiones sobre la practica:
___________________________________________________________________
___________________________________________________________________
___________________________________________________________________
______________________________________________________