
Practica 4
12
ESCUELA POLIT ´ ECNICA NACIONAL FACULTAD DE INGENIER ´ IA MEC ´ ANICA LABORATORIO DE AUTOMATIZACI ´ ON INDUSTRIAL DE PROCESOS MEC ´ ANICOS LABORATORIO DE DIN ´ AMICA DE SISTEMAS INFORME 4 INTEGRANTES: Walter Arias Crishian Valladares HORARIO: Lunes 9-11. GRUPO: 1. TEMA: SISTEMAS DE PRIMER Y SEGUNDO ORDEN. 2. OBJETIVOS: Realizar la simulaci´ on de los sistemas presentes y analizar las respuestas con los diferentes m´ etodos estudiados. Encontrar las gr´ aficas que representan las soluciones y analizar los resultados. Interpretar los resultados f´ ısicamente y determinar que su resultado sea coherente. Comparar los diferentes m´ etodos num´ ericos analizados y establecer sus principales diferen- cias. 3. CUESTIONARIO: ¿En qu´ e se diferencia un sistema de primer orden con uno de segundo orden? Como indica en la gu´ ıa un sistema de primer orden se representa con una ecuaci´ on de primer orden y tambi´ en posee un ´ unico polo en el campo de Laplace y su respuesta no presenta oscilaciones, mientras que los sistemas de segundo orden est´ an representados por ecuaciones diferenciales de segundo orden y en el campo de Laplace poseen dos polos y presenta respuestas con oscilaciones. ¿Qu´ e representa la ganancia de un sistema? La ganancia hace referencia al valor en un tiempo infinito de un valor fijo, es decir el valor del sistema en estado estable. ¿Qu´ e representa la constante de tiempo en un sistema de primer orden? Indica que el sistema de primer orden al alcanzado un valor fijo de 0.63 del valor en estado estable. ¿Cu´ ando alcanza el sistema su valor final? Alcanza su valor final cuando el tiempo tienda al infinito. 1 LAIPM 2015-A
-
Upload
cristhian-valladares -
Category
Documents
-
view
219 -
download
3
description
Dinamica de sistemas
Transcript of Practica 4

ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
LABORATORIO DE DINAMICA DE SISTEMAS
INFORME 4
INTEGRANTES:
Walter Arias
Crishian Valladares
HORARIO: Lunes 9-11.
GRUPO:
1. TEMA: SISTEMAS DE PRIMER Y SEGUNDO ORDEN.
2. OBJETIVOS:
Realizar la simulacion de los sistemas presentes y analizar las respuestas con los diferentesmetodos estudiados.Encontrar las graficas que representan las soluciones y analizar los resultados.Interpretar los resultados fısicamente y determinar que su resultado sea coherente.Comparar los diferentes metodos numericos analizados y establecer sus principales diferen-cias.
3. CUESTIONARIO:
¿En que se diferencia un sistema de primer orden con uno de segundo orden?Como indica en la guıa un sistema de primer orden se representa con una ecuacion deprimer orden y tambien posee un unico polo en el campo de Laplace y su respuesta nopresenta oscilaciones, mientras que los sistemas de segundo orden estan representados porecuaciones diferenciales de segundo orden y en el campo de Laplace poseen dos polos ypresenta respuestas con oscilaciones.¿Que representa la ganancia de un sistema?La ganancia hace referencia al valor en un tiempo infinito de un valor fijo, es decir el valordel sistema en estado estable.¿Que representa la constante de tiempo en un sistema de primer orden?Indica que el sistema de primer orden al alcanzado un valor fijo de 0.63 del valor en estadoestable.¿Cuando alcanza el sistema su valor final?Alcanza su valor final cuando el tiempo tienda al infinito.
1 LAIPM 2015-A

ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
¿Que respuesta es inestable en un sistema de segundo orden? Justifique su respuesta.La respuesta inestable cuando un sistema es de segundo orden se obtiene cuando la constantede amortiguamiento es igual a cero, con esto el sistema presenta oscilaciones que no seestabilizaran.
4. EJERCICIOS:
a) En una poblacion de 5000 habitantes, diez de ellos tienen una enfermedad contagiosa.La velocidad a que se propaga la enfermedad es proporcional al producto de personascontagiadas por las no contagiadas todavıa, con una constante de proporcionalidad de 0.2.Escribir y resolver la ecuacion diferencial correspondiente.
dP
dt= kP (5000− P )
dP
dt= 0,2P (5000− P )
Para observar con mayor facilidad la solucion del sistema se cambiara la constante deproporcionalidad de 0.2 a 0.0002. y por lo tanto la ecuacion diferencial a resolver quedescrita de la siguiente manera:
dP
dt= 0,0002P (5000− P )
Diagrama de Forrester
Grafica-Simulacion en Vensim
2 LAIPM 2015-A

ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
Grafica-Simulacion en Matlab
Calculo de la constante de tiempoSe obtiene la constante de tiempo a partir de la ecuacion diferencial que rige al sistema:
dc
dt= kcs
3 LAIPM 2015-A

ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
dc
dt= kc(T − c)
Donde:k= constante de proporcionalidadc= personas contagiadas con la enfermedads= personas no contagiadasT= Poblacion Total
dc
dt= kcT − kc2
Entonces la ecuacion diferencial es:
dc(t)dt− kTc(t) + kc(t)2 = 0
Esta ecuacion no puede ser aplicada Laplace directamente por lo tanto se debe linealizar eltermino c(t)2.LinealizacionA t = 0 se tiene que ci(t) = 10 (personas contagiadas inicialmente)A t→∞ se tiene que cf (t) = 5000Utilizando el metodo de la tangente para linealizar se obtiene:
Punto−medio = ci(t) + cf (t)2 = 10 + 5000
2 = 2505
Pendiente de la recta:
m = d(c2(t))dc(t) = 2c(t)
Evaluando la pendiente en el punto medio se tiene:
m = 2(2505) = 5010
La funcion real debe igualarse a la funcion aproximada y se obtiene:
c(t)2 = mc(t) + b
c(t)2 evaluada en el punto medio es igual a:
c(t)2 = 25052 = 6275025
Entonces se despeja b y es igual a:
b = c(t)2 −mc(t)
b = 6275025− 5010(2502)
b = −6275025
4 LAIPM 2015-A

ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
La ecuacion linealizada es igual a:
c(t)2 = 5010c(t)− 6275025
Esta ecuacion se reemplaza en la ecuacion diferencial del sistema y se obtiene:
dc(t)dt− kTc(t) + k(5010c(t)− 6275025) = 0
c(t) + (5010k − kT )c(t) = 6275025k
La constante del tiempo es igual a:
τ = 1(5010k − kT )
τ = 1(5010− T )k
Reemplazando los valores de T = 5000 y k = 0,2:
τ = 1(5010− 5000)0,2
τ = 0,5
Utilizando el valor modificado de k = 0,0002 la constante de tiempo es igual a:
τ = 1(5010− 5000)0,0002
τ = 500
Analisis del comportamiento del sistemaLa propagacion de una enfermedad en una poblacion responde a un sistema de primer orden,y de igual manera la ecuacion de estado del sistema tambien es una ecuacion diferencialde primer orden. La constante de proporcionalidad se la cambio de 0.2 a 0.0002 debidoa que con el primer valor la respuesta del sistema alcanzaba su valor final en muy pocotiempo y no se puede observar claramente la grafica,al disminuir esta contante a 0.0002,se puede observar con mayor facilidad la respuesta del sistema y asi analizar de mejormanera su comportamiento. Con esta modificacion, se observa en la grafica que el numerode personas contagiadas con la enfermedad va aumentando mientras transcurre el tiempo,y aproximadamente a los doce dıas el sistema se estabiliza, es decir que todos los 5000habitantes se contagiaron con la enfermedad. En la grafica obtenida en Matlab se observasimilar comportamiento, pero, al comparar entre las curvas, obtenidas por los metodo deEuler y Runge-Kutta, se aprecia un error, por el grado de precision que poseen cada metodo,siendo la curva obtenida por el metodo de Runge Kutta la mas exacta.
5 LAIPM 2015-A

ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
b) Un paracaidista cuyo peso es de 60 kg, se deja caer de un helicoptero que se mantiene a6000 metros de altura. Suponemos que cae bajo la influencia de una fuerza gravitacionalconstante y que la resistencia del aire es proporcional a la velocidad del paracaidista. Laconstante de proporcionalidad es de 12 kg/seg cuando el paracaıdas esta cerrado y 80kg/seg cuando el paracaıdas esta abierto. Si el paracaıdas se abre a 1 min despues de queel paracaidista abandona el helicoptero, al cabo de cuanto tiempo llegara a la superficie?
mx(t) = mg − kx(t); x(t) = υ
Diagrama de Forrester
Graficas-Simulacion en Vensim
6 LAIPM 2015-A

ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
Graficas-Simulacion en Matlab
7 LAIPM 2015-A

ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
Observando la anterior grafica simulada en Matlab de posicion vs. tiempo se puede observar,que el tiempo en el cual, el paracaidista llega a la superficie es aproxidadmente igual a505.4[s].Analisis del comportamiento del sistema Las graficas obtenidas en Matlab son simi-
8 LAIPM 2015-A

ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
lares a las obtenidas en Vensim, y en cada una respectivamente se puede observar que lavelocidad y posicion del paracaidista presenta dos diferentes comportamientos por cada in-tervalo de tiempo, es decir, desde que parte de reposo su velocidad aumenta negativamentehasta adquirir una velocidad aproximada de 50[m/s], cuando transcurren 60 [s], despues deeste tiempo cambia la resistencia con el aire (se abre el paracaidas) y entonces su velocidadcomienza a disminuir hasta llegar a un punto en el que es igual a cero (llega a la superficie).Igualmente ocurre con la posicion, La funcion que describe el paracaidista posee una ma-yor pendiente negativa en el intervalo de 0-60[s], recorre aproximadamente 2750 en 60 [s],despues de esto la funcion presenta un punto de inflexion, en la cual cambia bruscamentea una menor pendiente hasta llegar a ser cero en un tiempo aproximado de 505.4 [s].
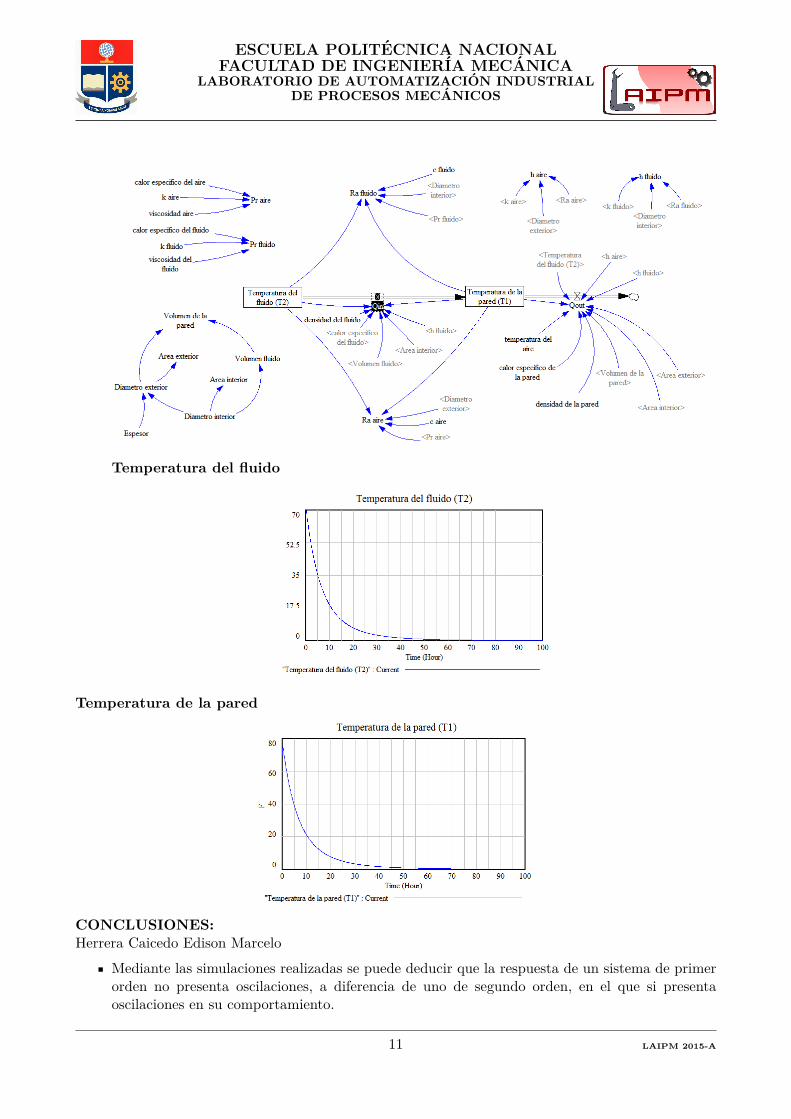
c Un uido hidraulico es almacenado en un contenedor esferico de 1[ft] de diametro interno.El contenedor y el uido estan inicialmente a 70[F] y posteriormente es llevado por los airesen un avion que vuela a una altitud de 16500 [ft], en donde la temperatura del aire es 0 [F].El espesor de las paredes del contenedor es de 0.1[pulg].Considerando que el uido esta bienmezclado, debido al movimiento del aeroplano. Ingeniese un modelo de masas concentradaspara simular el comportamiento de las temperaturas del sistema uido hidraulico y paredesdel tanque.Las propiedades del uido permanecen constantes.De la primera ley:
9 LAIPM 2015-A

ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
Diagrama de Forrester
10 LAIPM 2015-A
ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
Temperatura del fluido
Temperatura de la pared
CONCLUSIONES:Herrera Caicedo Edison Marcelo
Mediante las simulaciones realizadas se puede deducir que la respuesta de un sistema de primerorden no presenta oscilaciones, a diferencia de uno de segundo orden, en el que si presentaoscilaciones en su comportamiento.
11 LAIPM 2015-A
ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
LABORATORIO DE AUTOMATIZACION INDUSTRIALDE PROCESOS MECANICOS
En base al primer ejercicio realizado, se puede concluir que el valor de las constantes influyen demanera significativa en la respuesta de un sistema.
Las soluciones obtenidas mediante el metodo de Runge-Kutta al tener menor error en su reso-lucion, nos proporciona soluciones mas exactas, con el fin de realizar un adecuado analisis delcomportamiento de cada sistema.
Moposita Tituana Santiago Daniel
Se concluye que a partir de la practica que el sistema de segundo orden puede tener diferentesrespuestas para un solo tipo de funcion de entrada por lo que es indispensable encontrar un valorcrıtico y ası comenzar el analisis del sistema.
Se concluye que si encontramos la funcion de transferencia de un sistema de primer y segundoorden el analisis de sistema se simplifica ya que se conocerıa las principales caracterısticas ypoderobtener una correcta simulacion.
De acuerdo a las graficas obtenidas en los diferentes sistemas se observa que existe una diferenciaentre las graficas echas por el metodo de Euler y Runge-Kutta, pero de acuerdo a la teoriaanalizada el metodo que se aproxima mas es el de Runge-Kutta.
RECOMENDACIONES:Herrera Caicedo Edison Marcelo
Se recomienda cambiar el valor de la constante de proporcionalidad del primer ejercicio, tanto pa-ra observar claramente la solucion de sistema, como para que no existan errores en la simulacionprincipalmente en Vensim.
Emplear el metodo de Runge – Kutta para obtener soluciones mas cercanas a la realidad, debidoa que presenta menor error.
Manipular adecuadamente el valor de las constantes y pasos de integracion segun sea el caso,para evitar errores y contratiempos en la simulacion.
Moposita Tituana Santiago Daniel
Se recomienda que en el sistema de segundo orden es necesario encontrar el valor del coeficientede amortiguamiento para conocer el comportamiento del sistema.
Se recomienda tanto para el sistema de primer y segundo orden al calcular la funcion de trans-ferencia tomar en cuenta el tipo de funcion de la funcion de entrada ya que en un sistema deprimer orden el comportamiento del sistema sera diferente al visto en la teorıa.
Se recomienda partir de las ecuaciones ya sean de primer o de segundo orden para la soluciondel sitema a analizar con las cuales podemos dibujar nuestro diagrama de bloques y simular envemsim.
BIBLIOGRAFIA:
es.wikipedia.org/wiki/Anlisisdelarespuestatemporaldeunsistema
12 LAIPM 2015-A


