PRACTICA1 ROBOTICA.pdf
13
INSTITUTO TECNOLÓGICO DE MORELIA “JOSÉ MARÍA MORELOS Y PAVÓN” REPORTE DE LA PRÁCTICA 1 LABORATORIO DE ROBÓTICA RODRIGO SÁNCHEZ MONTES NARANJO VERDUZCO JOSE LUIS NIETO LOPEZ HÈCTOR RAFAEL
-
Upload
hector-rafael-nieto-lopez -
Category
Documents
-
view
155 -
download
3
Transcript of PRACTICA1 ROBOTICA.pdf

i
INSTITUTO TECNOLÓGICO DE MORELIA “JOSÉ MARÍA MORELOS Y PAVÓN”
REPORTE DE LA
PRÁCTICA 1 LABORATORIO DE ROBÓTICA
RODRIGO SÁNCHEZ MONTES
NARANJO VERDUZCO JOSE LUIS
NIETO LOPEZ HÈCTOR RAFAEL

2
OBJETIVO GENERAL
Conocimiento general de las estaciones de trabajo del CIM.
OBJETIVOS ESPECÍFICOS
Definición del CIM.
Conocimiento del material, herramientas y equipos que integran el laboratorio CIM.
Conocer los nombres de cada uno de las partes que lo conforman, sus estaciones y el principio de funcionamiento de cada una de estas.
Saber qué tipo de aplicación o aplicaciones podemos desempeñar con las estaciones que comprenden el sistema CIM.
Observar la manera correcta de trabajar y comprender los problemas que pudieran surgir en la manipulación de los diferentes aparatos.
MARCO TEÓRICO
El concepto CIM ”Computer Integrated System” (Manufactura integrada por
computadora), se trata de un sistema complejo, de múltiples capas diseñado con el
propósito de minimizar los gastos y crear riqueza en todos los aspectos, tiene que
ver con proporcionar asistencia computarizada, automatizar, controlar y elevar el
nivel de integración en todos los niveles de la manufactura.
Un sistema CIM incorpora algunos equipos de mini –fabricación (tales como pequeñas maquinas CNC, manipuladores, controles de proceso y pequeños robots industriales), un sistema de manipulación de materiales de alto desempeño y un sistema automatizado de control de capacidad total.
Características de un CIM
Características de producción flexibles
Equipamiento expansible y modular
Compatibilidad con el equipamiento existente
Software CIM totalmente integrado
Configuración y control de todas las secuencias de producción
Aplicaciones industriales
Características de completa seguridad
El CIM está conformado por varios módulos, lo que le permite la instalación y la operación del sistema en una amplia gama de configuraciones.

3
Software
La estación de control central contiene el software CIM-2000.Este software opera todo el sistema de operaciones, en diversos modos: modo automático, modo semi-automático y modo manual.
El sistema de control opera a través de un sistema de comunicación, que contiene dos tipos de medios de comunicación: una red de comunicación de datos serial RS-232 y la comunicación discreta por señales binarias punto a punto.
El programa permite utilizar el interruptor de energía ON/OFF de cada estación a partir de la estación central, presentando en la pantalla el estado del sistema, simulando toda la secuencia de operaciones de proceso, e indica la posición de cada estación. El software permite programaciones “on –line” y “off-line” (en línea y fuera de línea) para todas las estaciones y los siguientes dispositivos:
1. Robots 2. Máquinas CNC 3. Sistema visualizador 4. Cinta transportadora 5. Sistema automática de almacenamiento y recuperación 6. Estación neumática de alimentación de materias primas 7. Estación de control de proceso
Hardware
Todas las estaciones son controladas por PC, mediante un programa llamado “VuRun” el cual es iniciado, solo y únicamente, con el sistema WINDOWS 98.
DESARROLLO DE LA PRÁCTICA
De manera rápida se dio un vistazo a cada uno de las estaciones de trabajo como se muestra a continuación:
Estación de proceso de control
Esta estación es encargada de realizar un proceso de limpieza y revestimiento de las piezas metálicas.
Para llevar a cabo este proceso la estación PS-2800, realiza un control de flujo, nivel y temperatura, dicho proceso comienza cuando un pallet que transporta un cilindro

4
llega a la estación PS-2800. El manipulador cartesiano toma la pieza y la transporta hacia la línea de procesamiento. El proceso de revestimiento comprende 7 etapas de limpieza y revestimiento.
Las etapas por las cuales tiene que pasar la pieza metálica se describen brevemente a continuación:
1. Primera etapa.- limpieza de suciedad y pintura, mediante agua jabonosa alcalina a 50 ° C.
2. Segunda etapa.- lavado de residuos de suciedad. 3. Tercera etapa.- inmersión en ácido fosfórico para corrosión de la pieza
(corrosión es el proceso de quitar una capa delgada de la superficie). 4. Cuarta etapa.- enjuague bajo agua corriente. 5. Quinta etapa.- revestimiento del aluminio. 6. Sexta etapa.- enjuague bajo agua corriente 7. Séptima etapa.- secado del aluminio revestido.
La remoción de la pieza revestida y su traslado para tratamientos posteriores es nuevamente efectuada por el manipulador.
Estación FMS-2101
Un FMS consta de varias máquinas-herramientas controladas numéricamente por un computador, donde cada una de ellas es capaz de realizar muchas operaciones debido a la versatilidad de las mismas y a la capacidad de intercambiar herramientas de corte con rapidez. Estos sistemas son relativamente flexibles respecto al número de tipos de piezas que se pueden reproducir de manera simultánea y en lotes de tamaño reducido.

5
En esta parte de las estaciones de trabajo es la parte que tiene que ver con la transformación directa de la pieza, ya que consta de un brazo robótico MITSUBISHI el cual recoge la pieza desde la banda transportadora a la fresadora DYNA MYTE 1007 o al torno DYNA 3300-A según sea la pieza a maquinar.
En un sistema de FMS existen cuatro partes principales, y cada una con sus respectivas funciones:
1. Estaciones de trabajo
Carga/descarga
Maquinado
2. Sistema de manejo de materiales
Funciones del sistema de manejo
Movimiento independiente de piezas entre estaciones o máquinas
Manejar una variedad de configuraciones de piezas
Acceso conveniente para carga y descarga de piezas
Compatibilidad con el control computacional
3. Sistemas de control computarizado
Estación de controles
Distribución
Control de producción
Control de trafico
Monitoreo de piezas
Control de herramientas
Existe un área más que podría o no considerarse debido a que requiere para su funcionamiento un operario humano quien es que proporciona a las máquinas los comandos de maquinado para una pieza y además es quien dirige el brazo robótico para mover las piezas de un sitio a otro. Esta área sería la de recursos humanos.

6
4. Recursos humanos
Carga de materias primas al sistema
Descarga de piezas terminadas
Cambio y ajuste de herramientas
Mantenimiento y reparación
Programar los sistemas de maquinado
Administrar el sistema en general
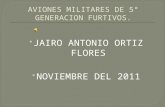
En la imagen de abajo se muestra la disposición de la fresadora, el brazo robótico, a la izquierda la banda transportadora y al lado derecho el torno CNC.

7
Como dato adicional, el centro de maquinado o fresadora tiene un programa en el cual se puede simular la pieza a maquinar, con lo que nos da la posibilidad de corroborar que nuestro código insertado es adecuado y se tendrán las piezas con las especificaciones adecuadas.
Estación Neumática PN-2800
Esta estación cumple con la función principal de proporcionar la materia prima para la ejecución de los diversos procesos dentro del CIM, para lo cual mantiene un sistema completamente autónomo, en relación a la ejecución de los pasos necesarios para el despacho de la materia prima que se solicita para las operaciones siguientes.

8
La estación neumática está constituida por los siguientes accesorios:
Bandeja de almacenamiento/despacho de prismas.- esta bandeja es mejor conocida como alimentador deslizante y está equipada con un sensor de presencia, el cual envía una señal cuando está lleno o si ya no existen prismas.
Bandeja de almacenamiento y despacho de paletas.- este alimentador, deslizante, es el que se encarga de proporcionar las paletas correspondientes al sistema. Consta de un sensor inductivo con la finalidad de detectar la presencia de las paletas, y un pistón horizontal de doble acción que impulsa a las paletas al sistema.

9
Bandeja de alimentación de cilindros.- es una bandeja inclinada que provee al sistema con dos tipos de cilindros. Está compuesta por dos rampas y equipada de un par de pistones por rampa.
Plataforma receptora de cilindros.- éste es un receptor horizontal en forma de V, el cual consta de un pistón de doble acción que es el encargado de empujar el cilindro en el lugar asignado para que el manipulador lo coloque en la bandeja de traslado.
Manipulador neumático de cilindros.- está compuesto por un cilindro axial de doble acción, un cilindro de eje giratorio y un gripper neumático. Este es el componente que traslada los cilindros de aluminio de una posición 1 a una posición 2.
Manipulador neumático de pallets.- está compuesto por los mismos componentes que el manipulador de cilindros. Sin embargo, éste se encarga de agarrar los pallets cargados con material y llevarlos fuera del sistema.

10
Gabinete eléctrico.- la alimentación de toda la estación neumática llega a esta gabinete que dispone de la energía necesaria por todos los componentes utilizados. En esta parte del tablero contamos con 3 botones, el verde para encender los PLC´s, rojo para apagarlos y finalmente un rojo pero de paro de emergencia, el cual detiene el equipo de manera súbita, en este último botón hay que cuidar que no esté activado ya que se puede presentar el caso de que no funcione la estación neumática si por error queda sostenido este botón.

11
Unidad de servicio.- consiste en un regulador de presión, un manómetro y una válvula manual. La presión de trabajo debe ser al menos de 6 atm. La válvula es utilizada para cortar la alimentación que entra de presión de aire.
Estación de Control CIM
Incluye los controladores de equipo, los cuales permiten automatizar el funcionamiento de las máquinas. Entre estos se encuentran los controladores de ro ots (RC s controles l gicos programa les ( C s C C s y microcomputadores, los cuales habilitan a las máquinas a comunicarse con las demás estaciones.

12
Para utilizar esta estación es necesario primero que nada energizar el módulo de los PLC´s girando la perilla ubicada en la parte posterior del módulo, posteriormente encender la computadora, seguido de esto tenemos que tener instalado algún programa para hacer que nuestra versión de Windows funcione con una versión anterior en este caso Windows 98 mediante una máquina virtual. Al abrir la máquina virtual debemos entrar al programa VuRun y correrlo.
ulsamos el oton “Main Program” y ponemos en color verde las casillas de sistema
neumático, de tal manera que una vez que se haya seleccionado la estación
neumática se debe encender una luz de aviso que la estación está trabajando, esta
es una lámpara intermitente que prende y apaga situada en la parte alta de la
estación neumática.
Una vez hecho esto, se procede a seleccionar la casilla de “PNEUMATIC” al lado
derecho de “MAIN PROGRAM”, seleccionamos el modo manual y damos clic en
“Palette Stock” para mover nuestra pinza y que tome una paleta y comience a
desplazarla de acuerdo a los movimientos que nosotros queramos, bajo algunas
condiciones de uso y listo.

13
CONCLUSIÓN
Este tipo de sistemas es muy conveniente en producciones a gran escala ya que las máquinas no se cansan y pueden estar sin parar por muchas horas y aumentar la producción, de modo que mayor producción mayor ganancia, sin dejar de lado el factor humano que es necesario para verificar que las tareas se realicen de manera satisfactoria.
BIBLIOGRAFÍA
http://www.itsncg.edu.mx/cim/index_archivos/Page986.htm
http://repositorio.espe.edu.ec/handle/21000/258
http://repositorio.espe.edu.ec/bitstream/21000/171/6/T-ESPE-027399.pdf